Дифференциальная форма. Дифференциал от кинетической энергии материальной точки равен элементарной работе силы, действующей на точку,
Теорема об изменении кинетической энергии:
 .
.
Интегральная (конечная) форма. Теорема об изменении кинетической энергии материальной точки: изменение кинетической энергии материальной точки на некотором ее перемещении равно алгебраической сумме работ всех действующих на эту точку сил на том же перемещении.
Теорема об изменении кинетической энергии механической системы формулируется: изменение кинетической энергии механической системы при ее перемещении из одного положения в другое равно сумме работ всех внешних и внутренних cuл, приложенных к системе, на этом перемещении:
 .
.
В случае неизменяемой системы сумма работ внутренних сил на любом перемещении равна нулю ( ), тогда
), тогда
 ,
,
Закон сохранения механической энергии. При движении механической системы под действием сил, имеющих потенциал, изменения кинетической энергии системы определяются зависимостями:
 , откуда
, откуда  ,
,
т.е.

Сумму кинетической и потенциальной энергий системы называют полной механической энергией системы.
Таким образом, при движении механической системы в стационарном потенциальном поле полная механическая энергия системы при движении остается неизменной.
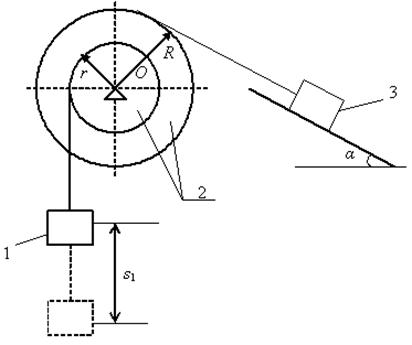
Задача. Механическая система под действием сил тяжести приходит в движение из состояния покоя. Учитывая трение скольжения тела 3, пренебрегая другими силами сопротивления и массами нитей, предполагаемых нерастяжимыми, определить скорость и ускорение тела 1 в тот момент, когда пройденный им путь станет равным s (рис. 3.70).
В задаче принять:

Решение. На механическую систему действуют активные силы 
 ,
,  . Применяя принцип освобождения от связей системы, покажем реакции шарнирно-неподвижной опоры 2 и шероховатой наклонной поверхности. Направления скоростей тел системы изобразим с учетом того, что тело 1 спускается.
. Применяя принцип освобождения от связей системы, покажем реакции шарнирно-неподвижной опоры 2 и шероховатой наклонной поверхности. Направления скоростей тел системы изобразим с учетом того, что тело 1 спускается.Задачу решим, применяя теорему об изменении кинетической энергии механической системы:
 ,
,
где Т и  – кинетическая энергия системы в начальном и конечном положениях;
– кинетическая энергия системы в начальном и конечном положениях;  — алгебраическая сумма работ внешних сил, приложенных к системе, на перемещении системы из начального положения в конечное;
— алгебраическая сумма работ внешних сил, приложенных к системе, на перемещении системы из начального положения в конечное; 
Для рассматриваемой системы, состоящей из абсолютно твердых тел, соединенных нерастяжимыми нитями:
.
Так как в начальном положении система покоилась, то  . Следовательно:
. Следовательно:
 .
.
а)
б)

Кинетическая энергия системы представляет собой сумму кинетических энергий тел 1, 2, 3:
 .
.
Кинетическая энергия груза 1, движущегося поступательно, равна:
 .
.
Кинетическая энергия блока 2, совершающего вращение вокруг оси Оz, перпендикулярной плоскости чертежа:
 .
.
Кинетическая энергия тела 3 в его поступательном движении:
 .
.
Таким образом,
 .
.
Выражение кинетической энергии содержит неизвестные скорости всех тел системы. Начать определение необходимо с 
Уравнения связей это не что иное, как кинематические соотношения между скоростями и перемещениями точек системы. При составлении уравнений связей выразим все неизвестные скорости и перемещения тел системы через скорость и перемещение груза 1.
Скорость любой точки обода малого радиуса  равна скорости тела 1, а также произведению угловой скорости тела 2 и радиуса вращения r:
равна скорости тела 1, а также произведению угловой скорости тела 2 и радиуса вращения r:
 .
.
Отсюда выразим угловую скорость тела 2:
 . (а)
. (а)
Вращательная скорость любой точки обода блока большого радиуса 
 .
.
Подставив значение угловой скорости, получим:
 . (б)
. (б)
Проинтегрировав при начальных условиях выражения (а) и (б), запишем соотношение перемещений точек системы:
 . (в)
. (в)
Зная основные зависимости скоростей точек системы, вернемся к выражению кинетической энергии и подставим в него уравнения (а) и (б):
 .
.
Момент инерции тела 2 равен:
 .
.
Подставляя значения масс тел и момента инерции тела 2, запишем:
 .
.
Определение суммы работ всех внешних сил системы на заданном перемещении.
 .
.
Работа силы тяжести тела 1
 .
.
Работа сил  равна нулю, так как эти силы приложены к неподвижной точке.
равна нулю, так как эти силы приложены к неподвижной точке.
 .
.
Работа силы тяжести тела 3
 .
.
Работа нормальной реакции тела 3 равна нулю, так как сила перпендикулярна направлению движения

Работа силы трения скольжения
 ,
,
так как
 ,
,
тогда
 .
.
Сумма работ внешних сил
 .
.
Подставляя значения масс тел, соотношения перемещений (в) и числовые параметры, запишем:

Теперь согласно теореме об изменении кинетической энергии механической системы приравняем значения Т и
 . (г)
. (г)
Скорость тела 1 получим из выражения (г)
 .
.
Ускорение тела 1 можно определить, продифференцировав по времени равенство (г):
 ,
,
где  .
.
Тогда
 .
.
Условие задачи
Механическая система состоит из грузов 1 и 2, ступенчатого шкива 3 с радиусами ступеней R3 = 0,3 м, r3 = 0,1 м и радиусом инерции относительно оси вращения ρ3 = 0,2 м, блока 4 радиуса R4 = 0,2 м и подвижного блока 5. Блок 5 считать сплошным однородным цилиндром. Коэффициент трения груза 2 о плоскость f = 0,1. Тела системы соединены друг с другом нитями, перекинутыми через блоки и намотанными на шкив 3. Участки нитей параллельны соответствующим плоскостям. К подвижному блоку 5 прикреплена пружина с коэффициентом жесткости с = 280 Н/м.
Под действием силы F = f(s) = 80(6 + 7s) Н, зависящей от перемещения s точки ее приложения, система приходит в движение из состояния покоя. Деформация пружины в момент начала движения равна нулю. При движении на шкив 3 действует постоянный момент M = 1,6 Н·м сил сопротивления (от трения в подшипниках). Массы тел: m1 = 0, m2 = 5 кг, m3 = 6 кг , m4 = 0, m5 = 4 кг.
Определить значение центра масс тела 5 VC5 в тот момент времени, когда перемещение s груза 1 станет равным s1 = 0,2 м.
Указание. При решении задачи использовать теорему об изменении кинетической энергии.
Решение задачи
Дано: R3 = 0,3 м, r3 = 0,1 м, ρ3 = 0,2 м, R4 = 0,2 м, f = 0,1, с = 280 Н/м, m1 = 0, m2 = 5 кг, m3 = 6 кг , m4 = 0, m5 = 4 кг, F = f(s) = 80(6 + 7s) Н, s1 = 0,2 м.
Найти: VC5.
Обозначения переменных
R3 , r3 – радиусы ступеней шкива 3;
ρ3 – радиус инерции шкива 3 относительно оси вращения;
R5 – радиус блока 5;
V1, V2 – скорости тел 1 и 2;
ω3 – угловая скорость вращения шкива 3;
VC5 – скорость центра масс C5 блока 5;
ω5 – угловая скорость вращения блока 5;
s1, s2 – перемещение тел 1 и 2;
φ3 – угол поворота шкива 3;
sC5 – перемещение центра масс C5 блока 5;
sA, sB – перемещение точек A и B.
Установление кинематических соотношений
Установим кинематические соотношения. Поскольку грузы 1 и 2 связаны одной нитью, то их скорости равны:
V2 = V1.
Поскольку нить, соединяющая грузы 1 и 2 намотана на внешнюю ступень шкива 3, то точки внешней ступени шкива 3 движутся со скоростью V2 = V1. Тогда угловая скорость вращения шкива:
.
Скорость центра масс VC5 блока 5 равна скорости точек внутренней ступени шкива 3:
.
Скорость точки K равна нулю. Поэтому она является мгновенным центром скоростей блока 5. Угловая скорость вращения блока 5:
.
Скорость точки B – свободного конца пружины – равна скорости точки A:
.
Выразим скорости через VC5.
;
;
.
Теперь установим связи между перемещениями тел и углами поворота шкива и блока. Поскольку скорости и угловые скорости являются производными по времени от перемещений и углов поворота
,
то такие же связи будут между перемещениями и углами поворота:
s2 = s1;
;
;
.
Определение кинетической энергии системы
Найдем кинетическую энергию системы. Груз 2 совершает поступательное движение со скоростью V2. Шкив 3 совершает вращательное движение с угловой скоростью вращения ω3. Блок 5 совершает плоскопараллельное движение. Он вращается с угловой скоростью ω5 и его центр масс движется со скоростью VC5. Кинетическая энергия системы:
.
Поскольку радиус инерции шкива относительно оси вращения задан, то момент инерции шкива относительно оси вращения определяется по формуле:
J3 = m3 ρ23.
Поскольку блок 5 является сплошным однородным цилиндром, то его момент инерции относительно центра масс равен
.
С помощью кинематических соотношений выражаем все скорости через VC5 и подставляем выражения для моментов инерции в формулу для кинетической энергии.
,
где мы ввели постоянную
кг.
Итак, мы нашли зависимость кинетической энергии системы от скорости центра масс VC5 подвижного блока:
, где m = 75кг.
Определение суммы работ внешних сил
Рассмотрим внешние силы, действующие на систему.
При этом мы не рассматриваем силы натяжения нитей, поскольку нити нерастяжимые и, поэтому, они не производят работу. По этой причине мы не рассматриваем внутренние напряжения, действующие в телах, поскольку они являются абсолютно твердыми.
На тело 1 (с нулевой массой) действует заданная сила F.
На груз 2 действует сила тяжести P2 = m2 g, сила давления поверхности N2 и сила трения FT.
На шкив 3 действует сила тяжести P3 = m3 g, сила давления оси N3 и момент сил трения M.
На шкив 4 (с нулевой массой) действует сила давления оси N4.
На подвижный блок 5 действует сила тяжести P5 = m5 g, сила упругости Fy пружины и сила натяжения нити TK в точке K.
Работа, которую совершает сила при перемещении точки ее приложения на малое смещение равна скалярному произведению векторов , то есть произведению модулей векторов F и ds на косинус угла между ними. Заданная сила , приложенная к телу 1, параллельна перемещению тела 1. Поэтому работа, которую совершает сила , при перемещении тела 1 на расстояние s1 равна:
Дж.
Рассмотрим груз 2. На него действуют сила тяжести P2, сила давления поверхности N2, силы натяжения нитей T23, T24 и сила трения FT. Поскольку груз не совершает перемещения в вертикальном направлении, то проекция его ускорения на вертикальную ось равна нулю. Поэтому сумма проекций сил на вертикальную ось равна нулю:
N2 – P2 = 0;
N2 = P2 = m2 g.
Сила трения:
FT = f N2 = f m2 g.
Силы P2 и N2 перпендикулярны перемещению s2, поэтому они работу не производят.
Работа силы трения:
Дж.
Если рассматривать груз 2 как изолированную систему, то нужно учитывать работу, произведенную силами натяжения нитей T23 и T24. Однако нас интересует вся система, состоящая из тел 1, 2, 3, 4 и 5. Для такой системы силы натяжения нитей являются внутренними силами. А поскольку нити нерастяжимые, то сумма их работ равна нулю. В случае с грузом 2, нужно еще учесть силы натяжения нитей, действующих на шкив 3 и блок 4. Они равны по величине и противоположны по направлению силам T23 и T24. Поэтому работа, производимая силами натяжения нитей 23 и 24 над грузом 2 равна по величине и противоположна по знаку работе, производимой силами натяжения этих нитей над шкивом 3 и блоком 4. В результате сумма работ, производимая силами натяжения нитей равна нулю.
Рассмотрим шкив 3. Поскольку его центр масс не перемещается, то работа силы тяжести P3 равна нулю.
Поскольку ось C3 неподвижна, то сила давления оси N3 работу не производит.
Работа, произведенная моментом сил , вычисляется аналогично работе, произведенной силой :
.
В нашем случае, векторы момента сил трения и угла поворота шкива направлены вдоль оси вращения шкива, но противоположны по направлению. Поэтому работа момента сил трения:
Дж.
Рассмотрим блок 5.
Поскольку скорость точки K равна нулю, то сила TK работу не производит.
Центр масс блока C5 переместился на расстояние sC5 вверх. Поэтому работа силы тяжести блока равна:
Дж.
Работа силы упругости пружины равна изменению потенциальной энергии пружины со знаком минус. Поскольку вначале пружина не деформирована, то
Дж.
Сумма работ всех сил:
Дж.
Применение теоремы об изменении кинетической энергии системы
Применим теорему об изменении кинетической энергии системы в интегральной форме.
.
Поскольку в начале система покоилась, то ее кинетическая энергия в начале движения
T0 = 0.
Тогда
.
Отсюда
м/с.
Ответ
м/с.
Автор: Олег Одинцов. Опубликовано:
Кинетическая
энергия материальной точки — скалярная
положительная величина, равная половине
произведения массы точки на квадрат
ее скорости, т. е. 
Кинетическая энергия механической системы — арифметическая сумма кинетических энергий всех материальных точек этой системы
 .
.
Кинетическая энергия системы, состоящей из п связанных между собой тел, равна арифметической сумме кинетических энергий всех тел этой системы:
 .
.
Теорема Кенига. Кинетическая энергия механической системы в общем случае ее движения равна сумме кинетической энергии движения системы вместе с центром масс и кинетической энергии системы при ее движении относительно центра масс:
 ,
,
где  —
скоростьk — й точки
системы относительно центра масс.
—
скоростьk — й точки
системы относительно центра масс.
Поступательное движение.
При поступательном
движении тела 
 .
.
Вращение тела вокруг неподвижной оси .
 .
.
 ,
,
где  — момент инерции тела относительно оси
вращения.
— момент инерции тела относительно оси
вращения.
Плоскопараллельное движение.
 ,
,
где  — момент инерции плоской фигуры
относительно оси, проходящей через
центр масс.
— момент инерции плоской фигуры
относительно оси, проходящей через
центр масс.
Задача
1.
Вычислить кинетическую энергию
однородного диска массы М =10 кг,
катящегося без скольжения со скоростью  =
5м/с.
=
5м/с.
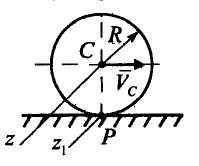
Решение. Диск совершает плоскопараллельное движение .

 .
.
3. Теорема об изменении кинетической энергии точки
Теорема в дифференциальной форме. Дифференциал от кинетической энергии материальной точки равен элементарной работе силы, действующей на точку.
Доказательство:
 .
.
Подставим в выражение второго закона динамики
 ;
;
 .
.
Теорема интегральной (конечной) форме. Изменение кинетической энергии материальной точки на некотором перемещении равно работе силы, действующей на точку, на том же перемещении.
Доказательство
Дифференциал от кинетической энергии точки равен элементарной работе:
 .
.
Проинтегрируем
 .
.
4. Теорема об изменении кинетической энергии механической системы.
Теорема в дифференциальной форме. Дифференциал от кинетической энергии механической системы равен сумме элементарных работ внешних и внутренних сил, действующих на систему.
Доказательство: Для k — й точки системы
 .
.
где  и
и соответственно — элементарная работа
внешней и внутренней сил, приложенных
кk—
й точке.
соответственно — элементарная работа
внешней и внутренней сил, приложенных
кk—
й точке.
Для всей системы
 .
.
где  — кинетическая энергия системы;
— кинетическая энергия системы; — соответственно элементарная работа
всех внешних и внутренних сил, приложенных
к системе. Таким образом,
— соответственно элементарная работа
всех внешних и внутренних сил, приложенных
к системе. Таким образом,
 .
.
Для системы твердых тел
 .
.
Тогда
 .
.
Разделим на dt
 ,
,
где  — мощность внешних сил;
— мощность внешних сил; — мощность внутренних. Тогда
— мощность внутренних. Тогда
 .
.
 .
.
Теорема в интегральной (конечной) форме. Изменение кинетической энергии механической системы на некотором перемещении равно сумме работ внешних и внутренних сил, приложенных к системе, на том же перемещении.
Доказательство: Запишем теорему в интегральной форме для k— й точки системы:
 ,
,
где  и
и — соответственно работа внешней и
внутренней сил, приложенных кk-й
точке, на некотором перемещении.
— соответственно работа внешней и
внутренней сил, приложенных кk-й
точке, на некотором перемещении.
Суммируя по всем точкам системы, получим

Для системы твердых
тел  (по свойству внутренних сил). Тогда
(по свойству внутренних сил). Тогда
 .
.
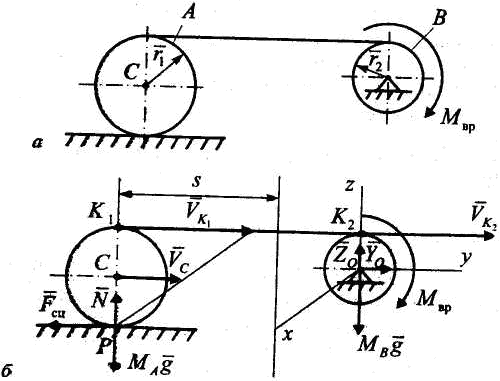
Задача
2. Каток А приводится в движение из состояния
покоя посредством троса, который
одним концом намотан на каток, а вторым
— на барабан В.
Каток А считать однородным цилиндром массы  = 50кг и радиуса
= 50кг и радиуса  = 0,4м.
Масса барабана
= 0,4м.
Масса барабана  = 20кг распределена по его ободу радиуса
= 20кг распределена по его ободу радиуса  = 0,2м.
К барабану приложен вращающий момент
= 0,2м.
К барабану приложен вращающий момент  = 100Нм.
Пренебрегая скольжением и трением
качения катка по горизонтальной плоскости
и весом троса, определить скорость
катка, когда он переместится на расстояние s = 2 м.
= 100Нм.
Пренебрегая скольжением и трением
качения катка по горизонтальной плоскости
и весом троса, определить скорость
катка, когда он переместится на расстояние s = 2 м.
Решение. Применим теорему об изменении кинетической энергии механической системы в интегральной форме:
 ,
,
где  — система движется из состояния покоя
— система движется из состояния покоя
 —по свойству
внутренних сил. Тогда
—по свойству
внутренних сил. Тогда  .
. .
КатокА совершает плоскопараллельное движение.
.
КатокА совершает плоскопараллельное движение.
 .
.
Барабан В совершает вращательное движение.
 .
.
 .
.
Внешними силами
являются силы тяжести  ,
нормальная реакция
,
нормальная реакция ,
сила сцепления
,
сила сцепления ,
вращающий момент
,
вращающий момент ,
реакции
,
реакции и
и .
.

 так как сила
так как сила  ;
; так как сила
так как сила приложена в МЦС;
приложена в МЦС; так как
так как ;
; ,
, ,
, — точка приложения сил не перемещается.
— точка приложения сил не перемещается.
 ,
где
,
где  .
.
Тогда

Кинетическая энергия
Кинетическая
энергия точки и системы. Кинетической
энергией материальной точки называют
половину произведения массы точки на
квадрат ее скорости,
т.е.  или
или ,
так как скалярный квадрат любого вектора
равен квадрату модуля этого вектора.
Кинетическая энергия является скалярной
положительной величиной.
,
так как скалярный квадрат любого вектора
равен квадрату модуля этого вектора.
Кинетическая энергия является скалярной
положительной величиной.
Кинетической
энергией системы  называют сумму кинетических энергий
всех точек механической системы,
т. е.
называют сумму кинетических энергий
всех точек механической системы,
т. е.
 . (200)
. (200)
Кинетическая энергия как точки, так и сие темы не зависит от направления скоростей точек. Кинетическая энергия может быть равна нулю для системы только при условии, если все точки системы находятся в покое.
Вычисление кинетической энергии системы (теорема Кёнига): Кинетическая энергия системы в абсолютном движении складывается из кинетической энергии центра масс, если в нем сосредоточить всю массу системы, и кинетической энергии системы относительно центра масс:
 , (201)
, (201)
где  .
.
Величина  – кинетическая энергия относительного
движения системы относительно системы
координат, движущейся поступательно
вместе с ее центром масс, или кинетическая
энергией системы относительно центра
масс.
– кинетическая энергия относительного
движения системы относительно системы
координат, движущейся поступательно
вместе с ее центром масс, или кинетическая
энергией системы относительно центра
масс.
Кинетическая энергия твердого тела. При поступательном движении твердого тела
 , (202)
, (202)
так как при
поступательном движении твердого тела
скорости всех точек тела одинаковы, т.
е.  ,
где
,
где – общая скорость для всех точек тела.
– общая скорость для всех точек тела.
Таким образом, кинетическая энергия твердого тела при поступательном движении вычисляется так же, как и для одной точки, у которой масса равна массе всего тела.
При вращении тела вокруг неподвижной оси
 , (203)
, (203)
где  – момент инерции тела относительно оси
вращения
– момент инерции тела относительно оси
вращения .
.
Следовательно, кинетическая энергия тела при вращательном движении вокруг неподвижной оси равна половине произведения момента инерции тела относительно оси вращения на квадрат угловой скорости тела.
При плоском движении твердого тела
 . (204)
. (204)
Таким образом, при плоском движении тела кинетическая энергия складывается из кинетической энергии поступательного движения тела вместе с центром масс и кинетической энергии от вращения вокруг оси, проходящей через центр масс и перпендикулярной плоскости движения.
Теорема об изменении кинетической энергии точки
Теорема об изменении кинетической энергии точки в дифференциальной форме: дифференциал кинетической энергии точки равен элементарной работе силы, действующей на точку.
 . (205)
. (205)
Если обе части
(205) разделить на  и учесть, что мощность
и учесть, что мощность ,
то теорему можно также выразить в виде
,
то теорему можно также выразить в виде
 , (205′)
, (205′)
производная по времени от кинетической энергии точки равна мощности, подводимой к этой точке.
Теорема об изменении кинетической энергии точки в конечной форме: изменение кинетической энергии точки на каком-либо перемещении равно работе силы, действующей на точку на том же перемещении
 , (206)
, (206)
Теорема об изменении кинетической энергии системы
Теорема об изменении кинетической энергии системы в дифференциальной форме: дифференциал от кинетической энергии системы равен сумме элементарных работ всех внешних и внутренних сил, действующих на систему
 , (207)
, (207)
где кинетическая
энергия системы  ,
элементарная работа внешних и внутренних
сил соответственно
,
элементарная работа внешних и внутренних
сил соответственно и
и .
.
Если обе части
(207) проинтегрировать между двумя
положениями системы – начальным и
конечным, в которых соответственно
кинетическая энергия  и
и ,
то, изменяя порядок суммирования и
интегрирования, имеем
,
то, изменяя порядок суммирования и
интегрирования, имеем
 ,
,
или
 , (208)
, (208)
где  – работа внешней силы для точки
– работа внешней силы для точки системы при ее перемещении из начального
положения
системы при ее перемещении из начального
положения в конечное положение
в конечное положение ,
, соответственно работа внутренней силы,
действующей на точку
соответственно работа внутренней силы,
действующей на точку .
.
Формула (208) выражает теорему об изменении кинетической энергии системы в конечной или интегральной форме: изменение кинетической энергии системы при ее перемещении из одного положения в другое равно сумме работ всех внешних и внутренних сил, действующих на систему, на соответствующих перемещениях точек системы при том же перемещении системы.
Частный случай. Для абсолютно твердого тела сумма работ всех внутренних сил системы равна нулю:
 .
.
Т.о., теорему об изменении кинетической энергии, например, в конечной форме можно представить в виде
 , (209)
, (209)
Изменение кинетической энергии твердого тела при каком-либо перемещении равно сумме работ всех внешних сил, действующих ни тело, на соответствующих перемещениях точек тела при том же перемещении твердого тела.
В отличие от рассмотренных других общих теорем динамики системы в теорему об изменении кинетической энергии могут входить внутренние силы.
Решение задач по теоретической механике
Здесь собраны избранные разделы теоретической механики и примеры решения задач.
Содержание
Избранные разделы по теоретической механикеПримеры решения задач по теоретической механикеСтатикаКинематикаКинематика материальной точкиПоступательное и вращательное движение твердого телаКинематический анализ плоского механизмаОпределение абсолютной скорости и абсолютного ускорения точкиДинамикаИнтегрирование дифференциальных уравнений движения материальной точки, находящейся под действием переменных силТеорема об изменении кинетической энергии механической системыПрименение общего уравнения динамики к исследованию движения механической системыПрименение принципа Даламбера к определению реакций опор вращающегося телаИзбранные разделы по теоретической механике
Примеры решения задач по теоретической механике
Статика
Условия задач

Найти графическим способом реакции опор балки AB, на которую действует сила P, приложенная в точке C.
Дано: P = 55 kH, AB = 10 м, AC = 7 м, BC = 3 м.
Решение
 Найти реакции опор для того способа закрепления, при котором момент MA в опоре A имеет наименьшее значение.
Найти реакции опор для того способа закрепления, при котором момент MA в опоре A имеет наименьшее значение.Решение

 Найти реакции опор составной конструкции.
Найти реакции опор составной конструкции.Решение
Решение
Кинематика
Кинематика материальной точки
Определение скорости и ускорения точки по заданным уравнениям ее движения
Дано: Уравнения движения точки: x = 12 sin(πt/6), см; y = 6 cos2(πt/6), см.
Установить вид ее траектории и для момента времени t = 1 с найти положение точки на траектории, ее скорость, полное, касательное и нормальное ускорения, а также радиус кривизны траектории.
Решение задачи
Поступательное и вращательное движение твердого тела

Дано:
t = 2 с; r1 = 2 см, R1 = 4 см; r2 = 6 см, R2 = 8 см; r3 = 12 см, R3 = 16 см; s5 = t3 – 6t (см).
Определить в момент времени t = 2 скорости точек A, C; угловое ускорение колеса 3; ускорение точки B и ускорение рейки 4.
Решение
Кинематический анализ плоского механизма

Дано:
R1, R2, L, AB, ω1.
Найти: ω2.
Решение с помощью
теоремы о проекциях скоростей

Плоский механизм состоит из стержней 1, 2, 3, 4 и ползуна E. Стержни соединены с помощью цилиндрических шарниров. Точка D расположена в середине стержня AB.
Дано: ω1, ε1.
Найти: скорости VA, VB, VD и VE; угловые скорости ω2, ω3 и ω4; ускорение aB; угловое ускорение εAB звена AB; положения мгновенных центров скоростей P2 и P3 звеньев 2 и 3 механизма.
Решение
Определение абсолютной скорости и абсолютного ускорения точки

Прямоугольная пластина вращается вокруг неподвижной оси по закону φ = 6t 2 – 3t 3 . Положительное направление отсчета угла φ показано на рисунках дуговой стрелкой. Ось вращения OO 1 лежит в плоскости пластины (пластина вращается в пространстве).
По пластине вдоль прямой BD движется точка M . Задан закон ее относительного движения, т. е. зависимость s = AM = 40(t – 2t 3) – 40 (s — в сантиметрах, t — в секундах). Расстояние b = 20 см. На рисунке точка M показана в положении, при котором s = AM > 0 (при s < 0 точка M находится по другую сторону от точки A).
Найти абсолютную скорость и абсолютное ускорение точки M в момент времени t 1 = 1 с.
Решение задачи
Динамика
Интегрирование дифференциальных уравнений движения материальной точки, находящейся под действием переменных сил
Условие задачи
Груз D массой m, получив в точке A начальную скорость V0, движется в изогнутой трубе ABC, расположенной в вертикальной плоскости. На участке AB, длина которого l, на груз действует постоянная сила T(ее направление показано на рисунке) и сила R сопротивления среды (модуль этой силы R = μV2, вектор R направлен противоположно скорости V груза).
Груз, закончив движение на участке AB, в точке B трубы, не изменяя значения модуля своей скорости, переходит на участок BC. На участке BC на груз действует переменная сила F, проекция Fx которой на ось x задана.
Считая груз материальной точкой, найти закон его движения на участке BC, т.е. x = f(t), где x = BD. Трением груза о трубу пренебречь.

Скачать решение задачи
Теорема об изменении кинетической энергии механической системы
Условие задачи
Механическая система состоит из грузов 1 и 2, цилиндрического катка 3, двухступенчатых шкивов 4 и 5. Тела системы соединены нитями, намотанными на шкивы; участки нитей параллельны соответствующим плоскостям. Каток (сплошной однородный цилиндр) катится по опорной плоскости без скольжения. Радиусы ступеней шкивов 4 и 5 равны соответственно R4 = 0,3 м, r4 = 0,1 м, R5 = 0,2 м, r5 = 0,1 м. Массу каждого шкива считать равномерно распределенной по его внешнему ободу. Опорные плоскости грузов 1 и 2 шероховатые, коэффициент трения скольжения для каждого груза f = 0.1.
Под действием силы F, модуль которой изменяется по закону F = F(s), где s — перемещение точки ее приложения, система приходит в движение из состояния покоя. При движении системы на шкив 5 действуют силы сопротивления, момент которых относительно оси вращения постоянный и равен M5.
Определить значение угловой скорости шкива 4 в тот момент времени, когда перемещение s точки приложения силы F станет равным s1 = 1,2 м. 
Скачать решение задачи
См. также: Теорема об изменении кинетической энергии. Пример решения задачи
Применение общего уравнения динамики к исследованию движения механической системы
Условие задачи
Для механической системы определить линейное ускорение a1. Считать, что у блоков и катков массы распределены по наружному радиусу. Тросы и ремни считать невесомыми и нерастяжимыми; проскальзывание отсутствует. Трением качения и трением скольжения пренебречь. 
Скачать решение задачи
См. также: Общее уравнение динамики. Пример решения задачи
Применение принципа Даламбера к определению реакций опор вращающегося тела
Условие задачи
Вертикальный вал AK, вращающийся равномерно с угловой скоростью ω = 10 с-1, закреплен подпятником в точке A и цилиндрическим подшипником в точке D.
К валу жестко прикреплены невесомый стержень 1 длиной l1 = 0,3 м, на свободном конце которого расположен груз массой m1 = 4 кг, и однородный стержень 2 длиной l2 = 0,6 м, имеющий массу m2 = 8 кг. Оба стержня лежат в одной вертикальной плоскости. Точки прикрепления стержней к валу, а также углы α и β указаны в таблице. Размеры AB=BD=DE=EK=b, где b = 0,4 м. Груз принять за материальную точку.
Пренебрегая массой вала, определить реакции подпятника и подшипника.

Скачать решение задачи
Сегодня я расскажу о такой интересной штуке как операционная система реального времени(ОСРВ). Не уверен, что это будет интересно для бывалых программистов, но, думаю, новичкам понравится.
Что такое ОСРВ?
Если мы посмотрим в Википедию, то увидим аж 4 определения.
Если же говорить вкратце — то ОСРВ — это операционная система, реагирующая на внешние события в определенный промежуток времени. Отсюда мы и можем понять основное предназначение ОСРВ — приборы, в которых необходима быстрая реакция на события (однако ни в коем случае не путайте работу ОСРВ с прерываниями).
Зачем она нам нужна?
На то есть довольно много причин.
Во-первых ОСРВ поддерживает многозадачность, приоритеты процессов семафоры и многое другое.
Во-вторых она очень легкая и почти не требует ресурсов.
В-третьих все вышесказанное мы можем получить практически на любом железе (например, FreeRTOS запускается даже на 8-битных AtMega).
Ну и в-четвертых: просто поиграться и получить удовольствие.
Обзор 3 известных ОСРВ.
Внимание: дальше идет мое личное мнение.
FreeRTOS
Одна из самых популярных ОСРВ на сегодняшний день. Портирована на огромное количество железа. Оффициальный сайт.
Плюсы
1) Бесплатная
2) Портирована на большое количество железа
3) Мощный функционал
4) Есть различные библиотеки: графика, интернет и другое.
5) Хорошая документация.
Минусы
1)Довольно-таки сложный процесс портирования на новое железо.
Вывод: Это действительно профессиональная ОСРВ с хорошей документацией. Будет хороша для новичка, если на его железо уже есть порт.
KeilRTX
До последнего времени эта ОСРВ была коммерческой, но недавно стала открытой. Работает только на архитектуре arm. Оффициальный сайт.
Плюсы
1)Бесплатная
2)Легко портируется на новое железо( в пределах архитектуры arm).
3) Есть различные библиотеки: графика, интернет и другое.
Минусы
1)Работать на в Keil с ней практически нереально
2) Немного урезанный функционал
3) Поддерживается только arm.
4)(на личном опыте) Проигрывает многим ОСРВ по скорости.
Вывод: идеально подойдет для новичка и мелких проектов.
uc/os
Мощная коммерческая ОСРВ. Сайт.
Плюсы
1) Огромное количество функций и библиотек.
2) Поддерживает много железа
Минусы
1)Коммерческая.
2) Сложна в использовании.
Вывод: назвать ее ОСРВ для новичка можно с большой натяжкой.
Другие интересные ОСРВ
RTLinux ОСРВ на основе обычного Линукса.
QNX ОСРВ на основе Unix.
Особенности разработки с использованием ОСРВ
Ну во-первых надо понять следующее: ОСРВ- это не Windows. Его нельзя установить. Эта система просто компилируется с Вашей программой.
При написании программ с ОСРВ не используются функции в обычном их понимании. Вместо функций используются процессы( или таски).Отличие в том что процессы, в отличии от функций, являются бесконечными циклами и никогда не заканчиваются(если только кто-то или он сам его не убъет — то есть выгрузит из памяти).
Если включено несколько процессов, то ОСРВ переключает их, выдавая машинное время и ресурсы по очереди. Вот тут то и возникает понятия приоритета процесса- если двум процессам единовременно нужно машинное время, то ОСРВ даст его тому, у кого приоритет больше.
В ОСРВ есть специальные функции задержки- чтобы время зря не пропадало на время задержки одного процесса выполняется второй.
Теперь поговорим о такой вещи как семафор- эта такая штука, которая управляет доступом процесса к ресурсам приложения. Для каждого ресурса есть маркер — когда процессу нужен ресурс — он его забирает и пользуется данным ресурсом. Если маркера нет, то процессу придется ждать, пока его вернут. Приведу пример: разные процессы отправляют информацию по одному UART. Если бы не было семафора, то они бы отправляли байты по очереди и получилась бы неразбериха. А так первый процесс взял маркер на UART отправил сообщение и отдал второму( и так — до бесконечности).
Дополнительные библиотеки ОСРВ.
Часто ОСРВ предлагают различные библиотеки для работы, например, с графикой, интернетом и т.д. Они действительно удобны и не стоит брезгать их использовать. Однако, помните, что без ОСРВ, для которой они написаны, они работать не будут.
Вот примеры:
Для RTX графика интернет Файловая система
Во второй( и, наверное, последней ) части мы поговорим о мьютексах, буферах сообщений и попрактикуемся в их использовании.
ООО «VXI-Системы»
ООО «VXI-Системы» представляет вашему вниманию, новейшую разработку в стандарте PXIe — 14-ти слотовое шасси СН-14 PXIe-PC. Новое шасси в стандарте PXIe открывает новые возможности в создании современных измерительных систем, позволяя потребителям создавать высокопроизводительные многофункциональные системы как сбора и обработки больших Читать дальше …
ООО «VXI-Системы» представляет вашему вниманию, новейшую разработку в стандарте PXIe — 14-ти слотовое шасси СН-14 PXIe. Новое шасси в стандарте PXIe открывает новые возможности в создании современных измерительных систем, позволяя потребителям создавать высокопроизводительные многофункциональные системы как сбора и обработки больших Читать дальше …
ООО «VXI-Системы» представляет вашему вниманию, новейшую разработку, модуль НМPXI AXIe-1 носитель модулей PXIe. НМPXI AXIe-1 открывает новые возможности в создании современных измерительных систем, позволяя сочетать высочайшую производительность модулей AXIe, с компактностью и доступностью модулей PXIe. Благодаря новому модулю НМPXI AXIe-1, Читать дальше …
Уважаемые коллеги! Представляем Вам новейшую разработку — высокочастотный коммутатор Switchbox-M, работающий в диапазоне частот до 13,6 ГГц. Высокочастотный коммутатор Switchbox-M предназначен для коммутации каждой из восьми входных радиочастотных линий на шесть соответствующих выходных линий под управлением персонального компьютера. Может применяться Читать дальше …
Уважаемые коллеги! С гордостью сообщаем Вам о получении свидетельства об утверждении типа средств измерений на системы контроля электромонтажа серии ТЕСТ-9110 нового образца с кодом «РФ». В соответствии с приказом №164 от 3 февраля 2015 Министерства промышленности и торговли Российской Федерации в свидетельствах Читать дальше …
| Айк | ||
 | ||
| Айк, как видно с орбиты. | ||
| Луна Дуны | ||
| Орбитальные характеристики | ||
| Большая полуось | 3 200 000 м [Примечание 1] | |
| Апоапсис | 3 296 000 м [Примечание 1] | |
| Периапсис | 3 104 000 м [Примечание 1] | |
| Эксцентриситет орбиты | 0.03 | |
| Орбитальный наклон | 0,2 ° | |
| Аргумент о периапсисе | 0 ° | |
| Долгота восходящего узла | 0 ° | |
| Средняя аномалия | 1,7 рад (при 0 с UT) | |
| звездного орбитального периода | 65 518 с | |
| 3 д 0 ч 11 м 57,9 с | ||
| Синодический орбитальный период | 65 766.7 лет | |
| Орбитальная скорость | 298 — 316 м / с | |
| самое длинное время затмения | 2 153 с | |
| Физические характеристики | ||
| Экваториальный радиус | 130 000 м | |
| Экваториальная окружность | 816 814 м | |
| Площадь поверхности | 2.1237166 × 10 11 м 2 | |
| Масса | 2.7821615 × 10 20 кг | |
| Стандартный гравитационный параметр | 1,8568369 × 10 10 м 3 / с 2 | |
| Плотность | 30 231,777 кг / м 3 | |
| Поверхностная гравитация | 1,10 м / с 2 (0,112 г ) | |
| Скорость побега | 534,48 м / с | |
| Период звездного вращения | 65 517.862 s | |
| 3 д 0 ч 11 м 57,9 с | ||
| Звездная скорость вращения | 12,467 м / с | |
| Синхронная орбита | 1 133,90 км | |
| Сфера влияния | 1 049 598,9 м [Примечание 1] | |
| Атмосферные характеристики | ||
| Атмосфера присутствует | нет | |
| Научный множитель | ||
| Поверхность | 8 | |
| плеснул | N / A | |
| Ближний космос | 7 | |
| Космическое пространство | 5 | |
| Восстановление | 5 | |
| ||
Контроль допуска звонков для IKE | 12,3 (8) T 12,2 (18) SXD1 12,4 (6) T 12,2 (33) SRA 12,2 (33) SXH | Функция контроля допуска вызовов для IKE описывает применение контроля допуска вызовов (CAC) к протоколу обмена ключами в Интернете (IKE) в программном обеспечении Cisco IOS. В Cisco IOS Release 12.3 (8) T эта функция была представлена. Эта функция была интегрирована в Cisco IOS Release 12.2 (18) SXD1 и реализована на маршрутизаторах Cisco 6500 и Cisco 7600. В Cisco IOS Release 12.4 (6) T была добавлена возможность настройки ограничения на количество соединений IKE, находящихся в процессе согласования. В следующих разделах представлена информация об этой функции: Следующие команды были введены или изменены: вызов вход предел, Чисто крипто- вызов вход статистика, крипто- вызов вход предел, шоу вызов вход статистика, шоу крипто- вызов вход статистика. | ИКЕВ1 Закалка | 15,1 (3) Т | Функция усиления IKEv1 описывает усовершенствования, внесенные в функцию контроля допуска вызовов (CAC) для IKE. В Cisco IOS Release 15.1 (3) T была представлена эта функция. В следующих разделах представлена информация об этой функции: Следующие команды были введены или изменены: крипто- вызов вход предел, шоу крипто- вызов вход статистика. |
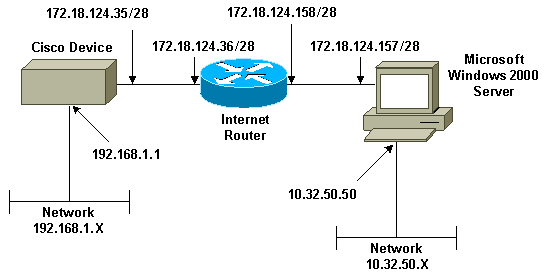
В этом документе показано, как сформировать туннель IPSec с предварительно общими ключами для соединения 2 частных сетей: частной сети (192.168.l.X) внутри устройства Cisco и частной сети (10.32.50.X) внутри сервера Microsoft 2000 Server. Мы предполагаем, что трафик изнутри устройства Cisco и внутри сервера 2000 в Интернет (представленный здесь сетями 172.18.124.X) проходит до начала этой конфигурации.
Подробную информацию о настройке сервера Microsoft Windows 2000 можно найти на веб-сайте Microsoft: http://support.microsoft.com/support/kb/articles/Q252/7/35.ASP
.Условные обозначения
Дополнительные сведения об условных обозначениях см. В документе Технические рекомендации Cisco. Условные обозначения.
Предпосылки
Для этого документа нет особых предпосылок.
Используемые компоненты
Эти конфигурации были разработаны и протестированы с использованием версий программного и аппаратного обеспечения, указанных ниже.
Microsoft Windows 2000 Server 5.00.2195
Маршрутизатор Cisco 3640 с выпуском программного обеспечения Cisco IOS® c3640-ik2o3s-mz.121-5.T.bin
Межсетевой экран Cisco Secure PIX с программным обеспечением PIX версии 5.2.1
Cisco VPN 3000 Concentrator with VPN 3000 Concentrator Версия программного обеспечения 2.5.2.F
Cisco VPN 5000 Concentrator с версией 5 программного обеспечения концентратора VPN 5000.2.19
Информация, представленная в этом документе, была создана на устройствах в определенной лабораторной среде. Все устройства, используемые в этом документе, были запущены с очищенной (по умолчанию) конфигурацией. Если вы работаете в действующей сети, убедитесь, что вы понимаете потенциальное влияние любой команды перед ее использованием.
Сетевая диаграмма
В этом документе используются настройки сети, показанные на рисунке ниже.
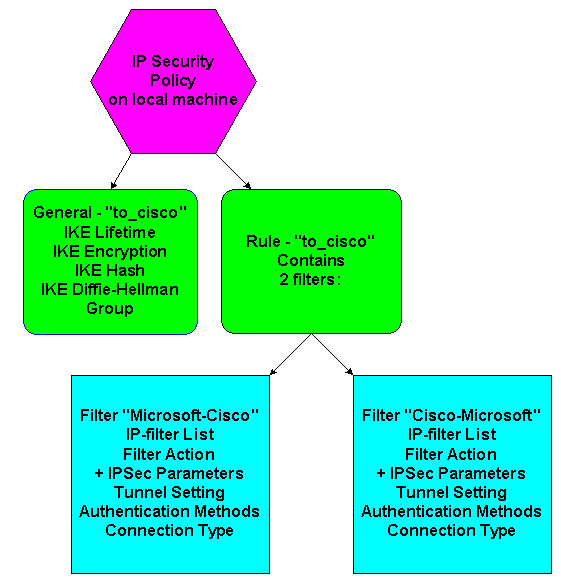
выполненных задач
На этой диаграмме показаны задачи, выполняемые в конфигурации сервера Microsoft Windows 2000:
Пошаговые инструкции
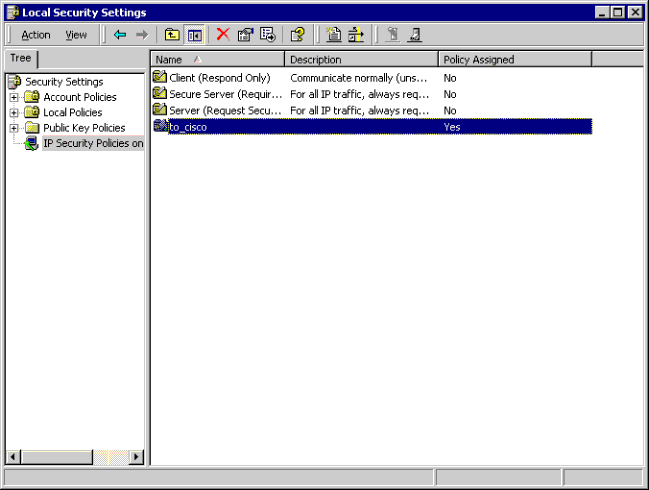
После того, как вы выполнили инструкции по настройке на веб-сайте Microsoft, выполните следующие действия, чтобы убедиться, что ваша конфигурация может работать с устройствами Cisco.Комментарии и изменения отмечены снимками экрана.
Нажмите Пуск> Выполнить> secpol.msc на сервере Microsoft Windows 2000 Server и проверьте информацию на следующих экранах.
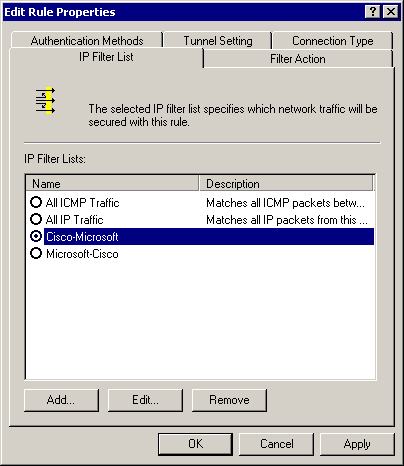
После того, как инструкции на веб-сайте Microsoft были использованы для настройки сервера 2000, была показана следующая информация о туннеле.
Примечание: Пример правила называется «to_cisco».
Это примерное правило содержит два фильтра: Microsoft-Cisco и Cisco-Microsoft.
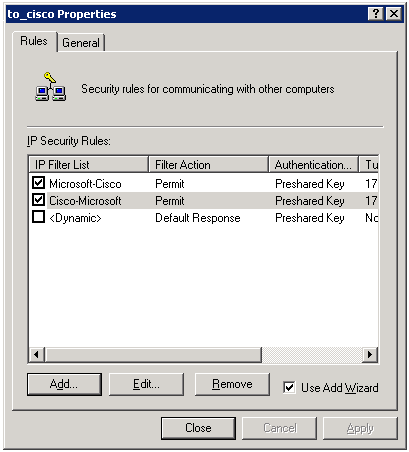
Выберите правило IP-безопасности Cisco-Microsoft, затем нажмите Изменить , чтобы просмотреть / добавить / изменить списки IP-фильтров.
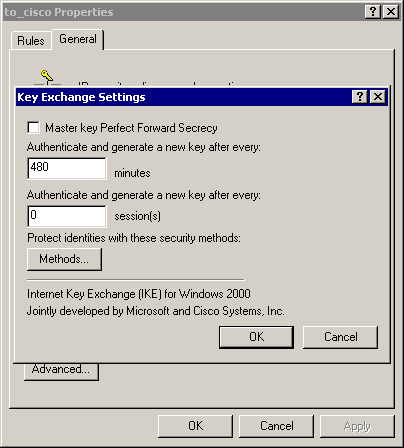
Вкладка правила Общее> Расширенное имеет срок действия IKE (480 минут = 28800 секунд):
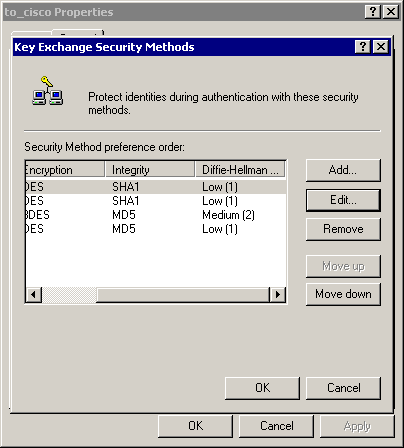
Правило Общее> Расширенное> Методы Вкладка имеет метод шифрования IKE (DES), хеширование IKE 900A (SHA1) и группу Диффи-Хелмана (низкая (1)):
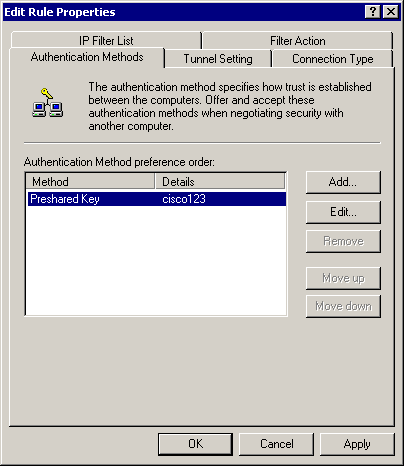
Каждый фильтр имеет 5 вкладок:
Методы аутентификации (предварительные ключи для обмена ключами в Интернете [IKE]):
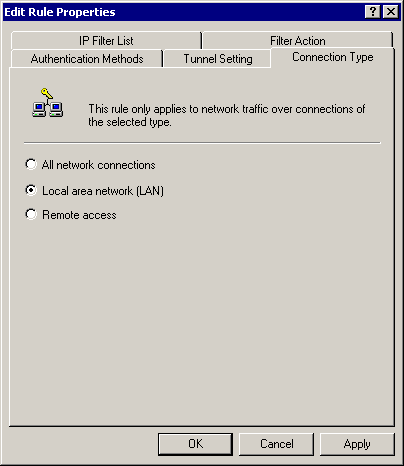
Тип подключения (LAN):
Действие фильтра (IPSec):
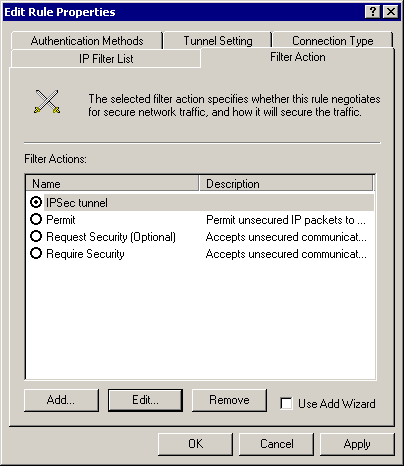
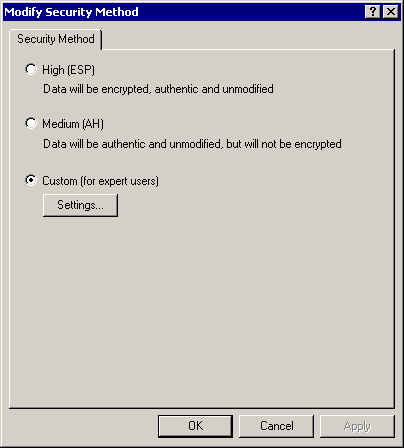
Выберите Действие фильтра> Туннель IPSec> Изменить> Изменить и щелкните Пользовательский :
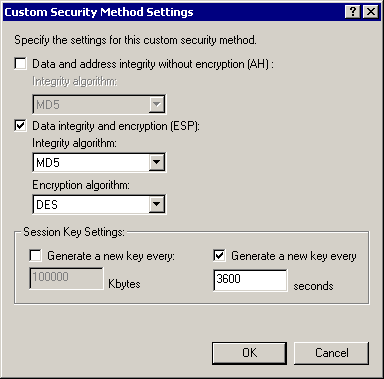
Нажмите Настройки — IPSec преобразует срок жизни и IPSec :
IP Filter List — источник и целевых сетей для шифрования:
Для Cisco-Microsoft:
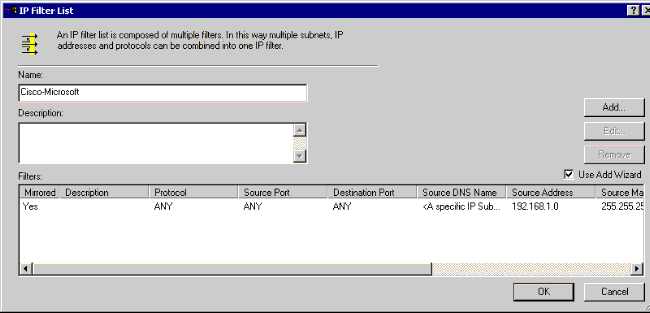
Для Microsoft-Cisco:
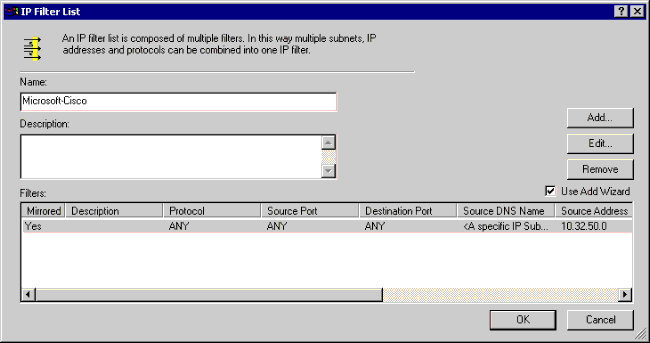
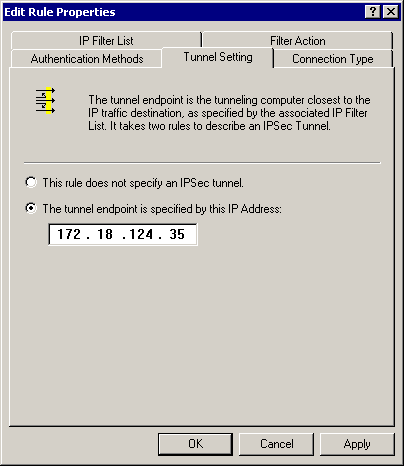
Настройка туннеля — одноранговое шифрование:
Для Cisco-Microsoft:
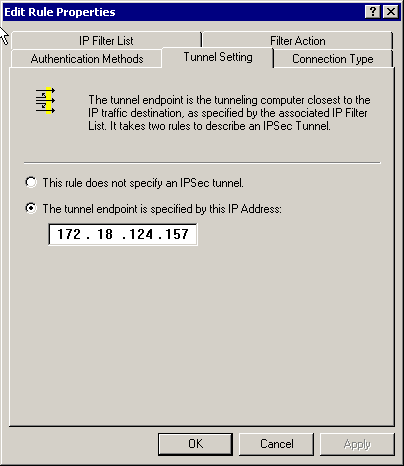
Для Microsoft-Cisco:
Настройте маршрутизатор Cisco, концентраторы PIX и VPN, как показано в примерах ниже.
Настройка маршрутизатора Cisco 3640
| Cisco 3640 Router |
|---|
Текущая конфигурация: 1840 байт ! версия 12.1 нет службы для однослотовой перезагрузки временные метки обслуживания временные метки обслуживания нет службы шифрования паролей ! имя мха ! логарифмическая консоль ограничения скорости 10 кроме ошибок ! IP-подсеть-ноль ! нет IP-пальца ! журнал аудита уведомлений ip ip аудит по макс-событиям 100 ! crypto isakmp полис 1 ! --- Ниже приведены настройки IOS по умолчанию, поэтому они не отображаются:! --- Метод шифрования IKE шифрование дес ! --- IKE хеширование хаш ша ! --- группа Диффи-Хеллмана группа 1 !--- Метод проверки подлинности предварительная аутентификация ! --- IKE на всю жизнь срок службы 28800 ! --- одноранговое шифрование ключ шифрования isakmp cisco123 адрес 172.18,124,157 ! ! --- Следующее является IOS по умолчанию, поэтому оно не отображается:! --- Время жизни IPSec время жизни ассоциации безопасности crypto ipsec секунд 3600 ! ! --- IPSec преобразует набор крипто-ipsec-преобразования ! Криптографическая карта rtp 1 ipsec-isakmp ! --- Одноранговое шифрование set peer 172.18.124.157 set transform-set rtpset ! --- Определены исходные / целевые сети совпадает с адресом 115 ! вызов rsvp-sync ! интерфейс Ethernet0 / 0 IP-адрес 192.168.1.1 255.255.255.0 ip nat inside полудуплекс ! интерфейс Ethernet0 / 1 IP-адрес 172.18.124.35 255.255.255.240 ip nat outside полудуплекс Криптографическая карта rtp ! ip nat pool ИНТЕРНЕТ 172.18.124.35 172.18.124.35 маска сети 255.255.255.240 ip nat внутри исходной карты маршрутов nonat пул ИНТЕРНЕТ ip бесклассовый ip route 0.0.0.0 0.0.0.0 172.18.124.36 нет ip http сервера ! access-list 101 deny ip 192.168.1.0 0.0.0.255 10.32.50.0 0.0.0.255 access-list 101 allow ip 192.168.1.0 0.0.0.255 любой ! --- Определены исходные / целевые сети access-list 115 разрешить IP 192.168.1.0 0.0.0.255 10.32.50.0 0.0.0.255 access-list 115 deny ip 192.168.1.0 0.0.0.255 любой карта маршрута без разрешения 10 соответствует IP-адресу 101 ! линия кон 0 транспортный вход линия 65 94 линия aux 0 линия vty 0 4 ! конец |
Настройка PIX
| PIX |
|---|
PIX версия 5.2 (1) nameif ethernet0 вне безопасности0 nameif ethernet1 внутри security100 включить пароль 8Ry2YjIyt7RRXU24 в зашифрованном виде passwd 2KFQnbNIdI.2KYOU в зашифрованном виде имя хоста pixfirewall протокол исправления ftp 21 протокол исправления http 80 протокол фиксации h423 1720 протокол исправления ошибок rsh 514 протокол фиксации smtp 25 протокол исправления sqlnet 1521 протокол исправления SIP 5060 имена ! --- Определены исходные / целевые сети access-list 115 allow ip 192.168.1.0 255.255.255.0 10.32.50.0 255.255.255.0 access-list 115 deny ip 192.168.1.0 255.255.255.0 любой линии пейджера 24 залогиниться нет времени нет записи в режиме ожидания нет консоли регистрации нет монитора журналирование не буферизовано нет ловушки нет истории лесозаготовительная установка 20 очередь на регистрацию 512 интерфейс ethernet0 авто интерфейс ethernet1 10baset мту за пределами 1500 мту внутри 1500 IP-адрес за пределами 172.18.124.35 255.255.255.240 IP-адрес внутри 192.168.1.1 255.255.255.0 ip аудит инфо сигнал тревоги ip аудит атаки атака тревоги нет аварийного переключения время ожидания отработки отказа 0:00:00 отказоустойчивый опрос 15 IP-адрес аварийного переключения вне 0.0.0.0 IP-адрес аварийного переключения внутри 0.0.0.0 Тайм-аут ARP 14400 ! --- За исключением источника / адресата из трансляции сетевых адресов (NAT): нат (внутри) 0 access-list 115 маршрут за пределами 0.0.0.0 0.0.0.0 172.18.124.36 1 тайм-аут xlate 3:00:00 тайм-аут conn 1:00:00 полузакрытый 0:10:00 udp 0:02:00 rpc 0:10:00 h423 0:05:00 sip 0:30:00 sip_media 0:02:00 тайм-аут uauth 0:05:00 абсолют aaa-сервер TACACS + протокол tacacs + радиус RADIUS-сервера aaa-сервера нет расположения snmp-сервера нет контакта с snmp-сервером общественное сообщество snmp-сервера нет ловушки включения snmp-сервера защита от наводнения разрешение на подключение sysopt-ipsec нет сисопт маршрут днат ! --- IPSec преобразует crypto ipsec transform-set myset esp-des esp-md5-hmac ! --- время жизни IPSec времени жизни ассоциации безопасности crypto ipsec секунд 3600 криптокарта rtpmap 10 ipsec-isakmp ! --- Источник / Сеть назначения Криптокарта rtpmap 10 соответствует адресу 115 ! --- Одноранговое шифрование криптокарта rtpmap 10 установить равноправный узел 172.18.124.157 криптографическая карта rtpmap 10 set transform-set myset криптокарта интерфейс rtpmap снаружи isakmp включить за пределами ! --- Одноранговое шифрование ключ isakmp ******** адрес 172.18.124.157 маска сети 255.255.255.240 идентификационный адрес isakmp !--- Метод проверки подлинности isakmp policy 10 Аутентификация pre-share ! --- метод шифрования IKE isakmp policy 10 шифрование дес ! --- IKE хеширование политика isakmp 10 хэш ша ! --- группа Диффи-Хеллмана isakmp полис 10 группа 1 ! --- IKE на всю жизнь isakmp полис 10 срок службы 28800 Тайм-аут Telnet 5 Тайм-аут по SSH 5 ширина терминала 80 Cryptochecksum: c237ed11307abea7b530bbd0c2b2ec08 : конец |
Настройка концентратора VPN 3000
Используйте пункты меню и параметры, показанные ниже, чтобы настроить концентратор VPN по мере необходимости.
Чтобы добавить предложение IKE, выберите Конфигурация> Система> Туннельные протоколы> IPSec> Предложения IKE> Добавить предложение.
Название предложения = DES-SHA !--- Метод проверки подлинности Режим аутентификации = общие ключи ! --- IKE хеширование Алгоритм аутентификации = SHA / HMAC-160 ! --- метод шифрования IKE Алгоритм шифрования = DES-56 ! --- группа Диффи-Хеллмана Diffie Hellman Group = группа 1 (768 бит) Измерение продолжительности жизни = время Дата жизни = 10000 ! --- IKE на всю жизнь Время жизни = 28800
Чтобы определить туннель между локальными сетями, выберите Конфигурация> Система> Протоколы туннелирования> IPSec между локальными сетями.
Имя = до_2000 Интерфейс = Ethernet 2 (общедоступный) 172.18.124.35/28 ! --- Одноранговое шифрование Пэр = 172.18.124.157 !--- Метод проверки подлинности Цифровые сертификаты = нет (используйте предварительно общие ключи) Предварительный общий ключ = cisco123 ! --- IPSec преобразует Аутентификация = ESP / MD5 / HMAC-128 Шифрование = DES-56 ! --- Используйте предложение IKE Предложение IKE = DES-SHA Автообнаружение = выключено ! --- Определена исходная сеть Локальная сеть Список сетей = Использовать IP-адрес / маску подстановки ниже IP-адрес 192.168.1.0 Маска подстановки = 0.0.0.255 ! --- Определена сеть назначения Удаленная сеть Список сетей = Использовать IP-адрес / маску подстановки ниже IP-адрес 10.32.50.0 Wildcard Mask 0.0.0.255
Чтобы изменить сопоставление безопасности, выберите Конфигурация> Управление политиками> Управление трафиком> Связи безопасности> Изменить.
SA Name = L2L-to_2000 Наследование = от правила Параметры IPSec ! --- IPSec преобразует Алгоритм аутентификации = ESP / MD5 / HMAC-128 Алгоритм шифрования = DES-56 Режим инкапсуляции = туннель PFS = Отключено Измерение продолжительности жизни = время Время жизни данных = 10000 ! --- время жизни IPSec Время жизни = 3600 Ike Parameters ! --- Одноранговое шифрование IKE Peer = 172.18.124.157 Режим переговоров = Главный !--- Метод проверки подлинности Цифровой сертификат = Нет (используйте предварительные ключи) ! --- Используйте предложение IKE IKE Предложение DES-SHA
Настройка концентратора VPN 5000
| VPN 5000 Концентратор |
|---|
[IP Ethernet 1: 0] Mode = Routed SubnetMask = 255.255.255.240 IP-адрес = 172.18.124.35 [ Общее ] IPSecGateway = 172.18.124.36 DeviceName = "Cisco" Адрес Ethernet = 00: 00: a5: f0: c8: 00 DeviceType = VPN 5002/8 Концентратор ConfiguredOn = Сервер времени не настроен ConfiguredFrom = Командная строка из консоли [IP Ethernet 0: 0] Mode = Routed SubnetMask = 255.255.255.0 IP-адрес = 192.168.1.1 [Туннельный партнер VPN 1] ! --- Одноранговое шифрование Партнер = 172.18.124.157 ! --- время жизни IPSec KeyLifeSecs = 3600 BindTo = "Ethernet 1: 0" !--- Метод проверки подлинности SharedKey = "cisco123" KeyManage = Авто ! --- IPSec преобразует Transform = esp (md5, des) Mode = Main ! --- Определена сеть назначения Пэр = "10.32.50.0 / 24" ! --- Определена исходная сеть LocalAccess = "192.168.1.0/24" [IP Static] 10.32.50.0 255.255.255.0 VPN 1 1 [IP VPN 1] Mode = Routed Нумерованный = Выкл. [Политика IKE] ! --- IKE хеширование, шифрование, группа Диффи-Хеллмана Защита = SHA_DES_G1 Размер конфигурации составляет 1088 из 65500 байт. |
В настоящее время нет процедуры проверки для этой конфигурации.
В этом разделе представлена информация, которую вы можете использовать для устранения неполадок в ваших конфигурациях.
Команды поиска и устранения неисправностей
Некоторые команды show поддерживаются Средством интерпретации выходных данных (только для зарегистрированных клиентов), которое позволяет просматривать анализ вывода команды show .
Примечание: Перед вводом команд отладки ознакомьтесь с разделом Важная информация о командах отладки.
Cisco 3640 Router
debug crypto engine — Показывает сообщения отладки о криптодвигателях, которые выполняют шифрование и дешифрование.
debug crypto isakmp — Показывает сообщения о событиях IKE.
debug crypto ipsec — Показывает события IPSec.
show crypto isakmp sa — Показывает все текущие сопоставления безопасности IKE (SA) на одноранговом узле.
show crypto ipsec sa — показывает настройки, используемые текущими сопоставлениями безопасности.
clear crypto isakmp — (из режима конфигурации) Очищает все активные соединения IKE.
clear crypto sa — (из режима конфигурации) Удаляет все сопоставления безопасности IPSec.
PIX
debug crypto ipsec — показывает переговоры IPSec фазы 2.
debug crypto isakmp — показывает переговоры об ассоциации безопасности Интернета и протоколе управления ключами (ISAKMP) этапа 1.
debug crypto engine — Показывает зашифрованный трафик.
show crypto ipsec sa — показывает сопоставления безопасности фазы 2.
show crypto isakmp sa — Показывает сопоставления безопасности фазы 1.
clear crypto isakmp — (из режима конфигурации) Удаляет ассоциации безопасности Internet Key Exchange (IKE).
clear crypto ipsec sa — (из режима конфигурации) Удаляет ассоциации безопасности IPSec.
Концентратор VPN 3000
— Запустите отладку VPN 3000 Concentrator, выбрав Конфигурация> Система> События> Классы> Изменить (Уровень важности в журнал = 1-13, Уровень важности в консоль = 1-3): IKE, IKEDBG, IKEDECODE, IPSEC, IPSECDBG, IPSECDECODE
— Журнал событий можно очистить или получить, выбрав Мониторинг> Журнал событий .
— Туннельный трафик между локальными сетями можно отслеживать в Мониторинг> Сеансы .
— Туннель можно очистить в Администрирование> Администрирование сеансов> Сеансы LAN-to-LAN> Действия — Выход из системы.
VPN 5000 Концентратор
vpn trace dump all — Показывает информацию обо всех соответствующих VPN-соединениях, включая информацию о времени, номере VPN, реальном IP-адресе узла, какие сценарии были запущены, а в случае ошибки — подпрограмма и номер строки программного кода, где произошла ошибка.
показать статистику vpn — отображает следующую информацию для пользователей, партнеров и общее для обоих. (Для модульных моделей дисплей содержит раздел для каждого слота модуля.) Текущий активный — текущие активные соединения. В Negot — в настоящее время ведутся переговоры о подключении. High Water — наибольшее количество одновременных активных подключений с момента последней перезагрузки. Промежуточный итог — общее количество успешных подключений с момента последней перезагрузки. Туннель запускается — количество туннелей начинается.Tunnel OK — количество туннелей, для которых не было ошибок. Tunnel Error — Количество туннелей с ошибками.
Показывать статистику vpn подробно — Показывает статистику согласования ISAKMP и многие другие активные статистические данные о соединении.
ключей IKE и AuthIP IPsec — Windows 10 Service
Модули ключей IKE и AuthIP IPsec — Windows 10 Service
Служба IKEEXT размещает модули ключей Internet Key Exchange (IKE) и Authenticated Internet Protocol (AuthIP). Эти модули ключей используются для аутентификации и обмена ключами в безопасности протокола IP (IPsec). Остановка или отключение службы IKEEXT отключит обмен ключами IKE и AuthIP с одноранговыми компьютерами. IPsec обычно настроен на использование IKE или AuthIP; поэтому остановка или отключение службы IKEEXT может привести к сбою IPsec и поставить под угрозу безопасность системы.Настоятельно рекомендуется, чтобы у вас была запущена служба IKEEXT.
Эта услуга также существует в Windows 7, 8 и Vista.
Тип запуска
| 1507 | Руководство | Руководство | Руководство | Руководство |
| 1511 | Руководство | Руководство | Руководство | Руководство |
| 1607 | Руководство | Руководство | Руководство | Руководство |
| 1703 | Руководство | Руководство | Руководство | Руководство |
| 1709 | Руководство | Руководство | Руководство | Руководство |
| 1803 | Руководство | Руководство | Руководство | Руководство |
| 1809 | Руководство | Руководство | Руководство | Руководство |
| 1903 | Руководство | Руководство | Руководство | Руководство |
| 1909 | Руководство | Руководство | Руководство | Руководство |
| 2004 | Руководство | Руководство | Руководство | Руководство |
Свойства по умолчанию
| Отображаемое имя: | Модули ключей IKE и AuthIP IPsec |
| Наименование услуги: | IKEEXT |
| Тип: | доля |
| Путь: | % WinDir% \ system32 \ svchost.exe -k netsvcs -p |
| Файл: | % WinDir% \ System32 \ ikeext.dll |
| Контроль ошибок: | нормальный |
| Объект: | LocalSystem |
| Привилегии: |
|
Поведение по умолчанию
Служба ключей IPK IKE и AuthIP IPsec работает как LocalSystem в общем процессе svchost.Exe. Другие службы могут работать в том же процессе. Если не удается запустить модули ключей IKE и AuthIP IPsec, регистрируется ошибка. Запуск Windows 10 продолжается, но отображается окно с сообщением о том, что служба IKEEXT не запустилась.
Зависимости
Модули ключей IKE и AuthIP IPsec не могут запуститься, если хотя бы одна из следующих служб остановлена или отключена:
Восстановить тип запуска по умолчанию для ключевых модулей IKE и AuthIP IPsec
Автоматическое восстановление
1.Выберите версию и выпуск Windows 10 и нажмите кнопку Скачать ниже.
2. Сохраните файл RestoreIKEandAuthIPIPsecKeyingModulesWindows10.bat в любую папку на жестком диске.
3. Щелкните правой кнопкой мыши загруженный пакетный файл и выберите Запуск от имени администратора .
4. Перезагрузите компьютер, чтобы сохранить изменения.
Примечание. Убедитесь, что файл ikeext.dll находится в папке % WinDir% \ System32 .Если этот файл отсутствует, вы можете попытаться восстановить его с установочного носителя Windows 10.