Скольжение асинхронного двигателя
В процессе взаимодействия магнитного поля и тока в роторе асинхронного электродвигателя создается вращающий момент, который позволяет уровнять скорость статора, ротора и вращения электромагнитного поля. Величина скольжения электродвигателя характеризуется скоростью вращения ротора, статора и магнитного поля.
Блок: 1/3 | Кол-во символов: 311
Источник: https://www.rosdiler-electro.ru/skolzhenie-jelektrodvigatelja.html
Режим холостого хода
Холостой ход асинхронного двигателя подразумевает отсутствие на валу нагрузки в виде рабочего органа или редуктора. В режиме холостого хода скольжение составляет
.
В режиме холостого хода ротор вращается с частотой лишь немного меньшей синхронной частоты вращения и скольжение весьма мало отличается от нуля.
Следует заметить, что так же существует режим идеального холостого хода, при котором , что практически реализовать невозможно, даже если учесть отсутствие силы трения в подшипниках.
Блок: 2/6 | Кол-во символов: 755
Источник: https://ru.wikipedia.org/wiki/%D0%A1%D0%BA%D0%BE%D0%BB%D1%8C%D0%B6%D0%B5%D0%BD%D0%B8%D0%B5_%D0%B0%D1%81%D0%B8%D0%BD%D1%85%D1%80%D0%BE%D0%BD%D0%BD%D0%BE%D0%B3%D0%BE_%D0%B4%D0%B2%D0%B8%D0%B3%D0%B0%D1%82%D0%B5%D0%BB%D1%8F
От чего зависит величина скольжения электродвигателя
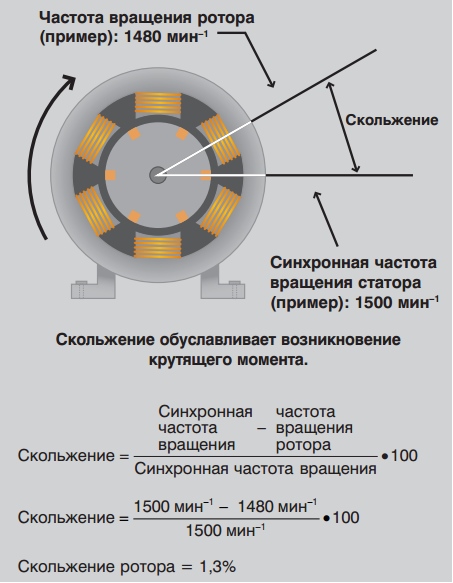
- Как правило, скольжение относительно невелико при работе электродвигателя с номинальной нагрузкой. Например, при работе электромотора 1500 оборотов в минуту скольжение равно 2,7%.
- Асинхронные электродвигатели не могут достичь синхронной скорости даже, если отсоединить механизм. Проводники ротора никогда не будут пересекаться с магнитным полем, в них не будет ЭДС, соответственно не будет и тока.
 При этом асинхронный момент будет равен нулю.
При этом асинхронный момент будет равен нулю.
- В момент пуска в обмотку ротора поступает ток, соответствующий частоте сети. По мере ускорения частота тока будет определена скольжением. При этом сопротивление ротора будет зависеть от частоты тока. Индуктивное сопротивление будет возрастать по мере увеличения частоты тока.
- Величины эквивалентного сопротивления изменяются в соответствии с законами физики. Если скольжение электродвигателя уменьшается, сопротивление соответственно увеличивается.
- При пусковом моменте до развития скольжения в пределах 0,15 сила сопротивления уменьшается незначительно. При дальнейшей работе наоборот – быстро уменьшается. Величина момента вращения определяется соответствующей величиной магнитного потока, поступающего тока и сдвигом между параметрами ЭДС, тока в роторе. Зависимость момента скольжения и напряжения с частотой устанавливается в ходе проведения исследования технических характеристик производителями электромоторов.

Блок: 2/3 | Кол-во символов: 1421
Источник: https://www.rosdiler-electro.ru/skolzhenie-jelektrodvigatelja.html
Генераторный режим
Если обмотку статора включить в сеть, а ротор посредством приводного двигателя вращать в направлении вращения магнитного поля с частотой , то направление движения ротора относительно поля статора изменится на обратное (по сравнению с двигательным режимом), так как ротор будет обгонять поле статора. При этом скольжение станет отрицательным, а ЭДС, наведенная в обмотке ротора изменит свое направление. Таким образом, в генераторном режиме скольжение может изменяться в диапазоне , то есть оно может принимать любые отрицательные значения.
Блок: 3/6 | Кол-во символов: 561
Источник: https://wiki2.org/ru/%D0%A1%D0%BA%D0%BE%D0%BB%D1%8C%D0%B6%D0%B5%D0%BD%D0%B8%D0%B5_%D0%B0%D1%81%D0%B8%D0%BD%D1%85%D1%80%D0%BE%D0%BD%D0%BD%D0%BE%D0%B3%D0%BE_%D0%B4%D0%B2%D0%B8%D0%B3%D0%B0%D1%82%D0%B5%D0%BB%D1%8F
От чего зависит величина скольжения электродвигателя
- Как правило, скольжение относительно невелико при работе электродвигателя с номинальной нагрузкой.
 Например, при работе электромотора 1500 оборотов в минуту скольжение равно 2,7%.
Например, при работе электромотора 1500 оборотов в минуту скольжение равно 2,7%.
- Асинхронные электродвигатели не могут достичь синхронной скорости даже, если отсоединить механизм. Проводники ротора никогда не будут пересекаться с магнитным полем, в них не будет ЭДС, соответственно не будет и тока. При этом асинхронный момент будет равен нулю.
- В момент пуска в обмотку ротора поступает ток, соответствующий частоте сети. По мере ускорения частота тока будет определена скольжением. При этом сопротивление ротора будет зависеть от частоты тока. Индуктивное сопротивление будет возрастать по мере увеличения частоты тока.
- Величины эквивалентного сопротивления изменяются в соответствии с законами физики. Если скольжение электродвигателя уменьшается, сопротивление соответственно увеличивается.
- При пусковом моменте до развития скольжения в пределах 0,15 сила сопротивления уменьшается незначительно. При дальнейшей работе наоборот – быстро уменьшается.
 Величина момента вращения определяется соответствующей величиной магнитного потока, поступающего тока и сдвигом между параметрами ЭДС, тока в роторе. Зависимость момента скольжения и напряжения с частотой устанавливается в ходе проведения исследования технических характеристик производителями электромоторов.
Величина момента вращения определяется соответствующей величиной магнитного потока, поступающего тока и сдвигом между параметрами ЭДС, тока в роторе. Зависимость момента скольжения и напряжения с частотой устанавливается в ходе проведения исследования технических характеристик производителями электромоторов.
Блок: 3/5 | Кол-во символов: 1415
Источник: https://les74.ru/coefficient-of-motor-slip-the-great-encyclopedia-of-oil-and-gas.html
Определение величины скольжения электродвигателя
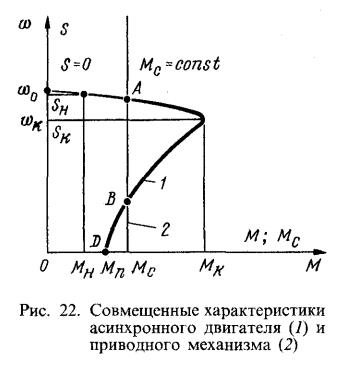
Предопределяющим моментом в прямой зависимости от скольжения является начальное значение того момента, когда электродвигатель остается еще в неподвижном состоянии. Максимальное значение скольжения называется критическим.
Конкретные расчеты производят специалисты завода-изготовителя, и они указаны в соответствующих технических характеристиках, прилагаемых к электродвигателю при покупке. При увеличении активного сопротивления только ротора увеличивается значение критического скольжения и уменьшается скорость вращения вала. Изменить данные параметры можно путем использования дополнительного сопротивления, которое вводится в цепь обмотки ротора.
Изменить данные параметры можно путем использования дополнительного сопротивления, которое вводится в цепь обмотки ротора.
Как известно, ротор асинхронного двигателя вращается в ту же сторону, что и магнитное поле со скоростью, несколько меньшей скорости вращения поля, так как только при этом условии в обмотке ротора будут индуцироваться ЭДС и токи и на ротор будет действовать вращающий момент.
Обозначим скорость вращения поля (синхронная скорость) через а скорость вращения ротора через 2Тогда разность 3называемая скоростью скольжения, будет представлять собой скорость ротора относительно поля, а отношение скорости скольжения к синхронной скорости, выраженное в процентах, называют скольжением 4
Выразим скольжение s через угловые скорости вращения поля и ротора
Полученные выражения подставим в формулу скольжения (5.7)
Выясним влияние скольжения на мощность, развиваемую двигателем.
Пусть мощность, потребляемая двигателем, мощность, развиваемая ротором при его вращении. Тогда
Тогда
длина окружности ротора, R — его радиус, и — силы, действующие на ротор (соответственно электромагнитная и механическая). Тогда
Взяв отношение получим:
но (обе силы электромагнитные и в установившемся режиме вращения действие равно противодействию), тогда
откуда окончательно имеем:
Из полученного соотношения следует, что мощность развиваемая ротором асинхронного двигателя, зависит от скольжения 5.
Если скольжение выражать в процентах, то от мощности потребляемой двигателем из сети, преобразуется в механическую мощность, а остальные мощности расходуются на покрытие потерь в двигателе, поэтому для получения высокого КПД двигателя скольжение необходимо делать возможно меньшим.
На практике у двигателей мощностью от 1 до 1000 кВА при номинальной нагрузке скольжение составляет 3-6%, а при больших мощностях — 1-3%. Так, при скоростях вращения магнитного поля 3000, 1500 и 1000 об/мин скорости вращения ротора обычно имеют соответственно значения 2800,1410 и 930 об/мин.
Блок: 4/5 | Кол-во символов: 2529
37. Регулирование частоты вращения асинхронных двигателей
Частота вращения асинхронного двигателя
n = n 1 (1 – s) = (60f 1 /p) (1-s) (85)
Из этого выражения видно, что ее можно регулировать, изменяя частоту f 1 питающего напряжения, число пар полюсов р и
Рис. 266. Схема переключения катушек обмотки статора (одной фазы) для изменения числа полюсов: а — при четырех полюсах; б — при двух полюсах
скольжение s. Последнее при заданных значениях момента на валу М вн и частоты f 1 можно изменять путем включения в цепь обмотки ротора реостата.
Регулирование путем изменения числа пар полюсов. Этот способ позволяет получить ступенчатое изменение частоты вращения. Для этой цели отдельные катушки 1, 2 и 3, 4, составляющие одну фазу (рис.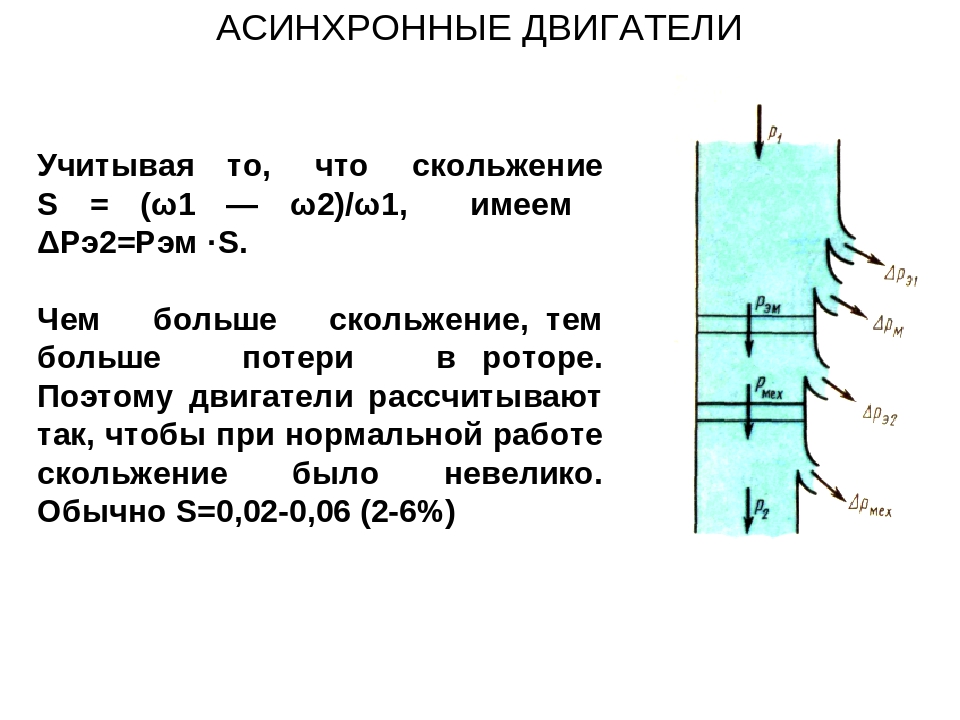
В асинхронном двигателе число полюсов ротора должно быть равно числу полюсов статора. В короткозамкнутом роторе это условие выполняется автоматически и при переключении обмотки статора никаких изменений в обмотке ротора выполнять не требуется.
В короткозамкнутом роторе это условие выполняется автоматически и при переключении обмотки статора никаких изменений в обмотке ротора выполнять не требуется.
Рис. 267. Механические характеристики двухскоростных асинхронных двигателей с постоянным наибольшим моментом (а) и постоянной мощностью (б)
Рис. 268. Механические характеристики асинхронного двигателя при регулировании частоты вращения путем включения реостата в цепь обмотки ротора
Рис. 269. Схемы подключения асинхронного двигателя к сети при изменении направления его вращения
Блок: 5/5 | Кол-во символов: 2315
Источник: https://les74.ru/coefficient-of-motor-slip-the-great-encyclopedia-of-oil-and-gas.html
Количество использованных доноров: 4
Информация по каждому донору:
- https://ru.wikipedia.org/wiki/%D0%A1%D0%BA%D0%BE%D0%BB%D1%8C%D0%B6%D0%B5%D0%BD%D0%B8%D0%B5_%D0%B0%D1%81%D0%B8%D0%BD%D1%85%D1%80%D0%BE%D0%BD%D0%BD%D0%BE%D0%B3%D0%BE_%D0%B4%D0%B2%D0%B8%D0%B3%D0%B0%D1%82%D0%B5%D0%BB%D1%8F: использовано 1 блоков из 6, кол-во символов 755 (8%)
- https://wiki2.
 org/ru/%D0%A1%D0%BA%D0%BE%D0%BB%D1%8C%D0%B6%D0%B5%D0%BD%D0%B8%D0%B5_%D0%B0%D1%81%D0%B8%D0%BD%D1%85%D1%80%D0%BE%D0%BD%D0%BD%D0%BE%D0%B3%D0%BE_%D0%B4%D0%B2%D0%B8%D0%B3%D0%B0%D1%82%D0%B5%D0%BB%D1%8F: использовано 1 блоков из 6, кол-во символов 561 (6%)
org/ru/%D0%A1%D0%BA%D0%BE%D0%BB%D1%8C%D0%B6%D0%B5%D0%BD%D0%B8%D0%B5_%D0%B0%D1%81%D0%B8%D0%BD%D1%85%D1%80%D0%BE%D0%BD%D0%BD%D0%BE%D0%B3%D0%BE_%D0%B4%D0%B2%D0%B8%D0%B3%D0%B0%D1%82%D0%B5%D0%BB%D1%8F: использовано 1 блоков из 6, кол-во символов 561 (6%) - https://les74.ru/coefficient-of-motor-slip-the-great-encyclopedia-of-oil-and-gas.html: использовано 3 блоков из 5, кол-во символов 6259 (67%)
- https://www.rosdiler-electro.ru/skolzhenie-jelektrodvigatelja.html: использовано 2 блоков из 3, кол-во символов 1732 (19%)
§78. Режимы работы асинхронных двигателей
Режимы работы асинхронных двигателей.
Холостой ход.
Если пренебречь трением и магнитными потерями в стали (идеализированная машина), то ротор асинхронного двигателя при холостом ходе вращался бы с синхронной частотой n=n1 в ту же сторону, что и поле статора; следовательно, скольжение было бы равно нулю. Однако в реальной машине частота вращения ротора n при холостом ходе никогда не может стать равной частоте вращения n1, так как в этом случае магнитное поле перестанет пересекать проводники обмотки ротора и в них не возникнет электрический ток.
Поэтому двигатель в этом режиме не может развить вращающего момента и ротор его под влиянием противодействующего момента сил трения начнет замедляться. Замедление ротора будет происходить до тех пор, пока вращающий момент, возникший при уменьшенной частоте вращения, не станет равным моменту, создаваемому силами трения. Обычно при холостом ходе двигатель работает со скольжением s = 0,2-0,5 %.
При холостом ходе в асинхронном двигателе имеют место те же электромагнитные процессы, что и в трансформаторе (обмотка статора аналогична первичной обмотке трансформатора, а обмотка ротора—вторичной обмотке). По обмотке статора проходит ток холостого хода I0, однако его значение в асинхронном двигателе из-за наличия воздушного зазора между ротором и статором значительно больше, чем в трансформаторе (20—40 % номинального тока по сравнению с 3—10 % у трансформатора). Для уменьшения тока I0 в асинхронных двигателях стремятся выполнить минимально возможные по соображениям конструкции и технологии зазоры.
Например, у двигателя мощностью 5 кВт зазор между статором и ротором обычно равен 0,2—0,3 мм. Ток холостого хода, так же как и в трансформаторе, имеет реактивную и активную составляющие. Реактивная составляющая тока холостого хода (намагничивающий ток) обеспечивает создание в двигателе требуемого магнитного потока, а активная составляющая — передачу в обмотку статора из сети энергии, необходимой для компенсации потерь мощности в машине в этом режиме.
Нагрузочный режим.
Чем больше нагрузочный момент на валу, тем больше скольжение и тем меньше частота вращения ротора. Увеличение скольжения при возрастании момента объясняется следующим образом. При увеличении нагрузки на валу ротора он начинает тормозиться и частота его вращения т уменьшается.
Но одновременно увеличивается частота n1— n персечения вращающимся полем проводников обмотки ротора, а следовательно, э. д. с. Е2, индуцированная в этой обмотке, ток в роторе I2 и образованный им электромагнитный вращающий момент М. Этот процесс будет продолжаться до тех пор, пока электромагнитный момент двигателя M не сравняется с нагрузочным моментом Мвн.
Этот процесс будет продолжаться до тех пор, пока электромагнитный момент двигателя M не сравняется с нагрузочным моментом Мвн.
При достижении равенства моментов М = Мвн торможение прекратится и двигатель будет снова вращаться с постоянной частотой вращения, но меньшей, чем до увеличения нагрузки. При уменьшении нагрузочного момента Мвн частота вращения ротора по той же причине будет увеличиваться. Обычно при номинальной нагрузке скольжение для двигателей средней и большой мощности составляет 2—4 %, а для двигателей малой мощности от 5 до 7,5 %.
При работе двигателя под нагрузкой по обмоткам его статора и ротора проходят токи i1 и i2. Частота тока в обмотках статора f1 и ротора f2 определяется частотой пересечения вращающимся магнитным полем проводников соответствующей обмотки. Обмотка статора пересекается магнитным полем с частотой n1, а обмотка вращающегося ротора — с частотой n1 — n. Следовательно,
Следовательно,
f2/f1 = (n1— n)/n1= s или f2 = f1s (83)
Передача электрической энергии из статора в ротор происходит так же, как и в трансформаторе. Двигатель потребляет из сети электрическую мощность Pэл = 3U1I1cosφ1 и отдает приводимому им во вращение механизму механическую мощность Рмх (рис. 260).
Рис. 260. Энергетическая диаграмма асинхронного двигателя
В процессе преобразования энергии в машине имеют место потери мощности: электрические в обмотках статора ΔРэл1 и ротора ΔРэл2, магнитные ΔРм от гистерезиса и вихревых токов в ферромагнитных частях машины и механические ΔРмх от трения в подшипниках и вращающихся частей о воздух.
Из статора в ротор вращающимся электромагнитным полем передается электромагнитная мощность Pэм роторе она превращается в механическую мощность ротора Р’мх. Полезная механическая мощность на валу двигателя Pмх меньше мощности Р’мх на значение потерь мощности на трение ?Рмх.
Полезная механическая мощность на валу двигателя Pмх меньше мощности Р’мх на значение потерь мощности на трение ?Рмх.
При возрастании механической нагрузки на валу двигателя увеличивается ток I2. В соответствии с этим возрастает и ток I1 в обмотке статора.
Электромагнитный момент М создается в асинхронном двигателе в результате взаимодействия вращающегося магнитного поля с током I2, индуцируемым им в проводниках обмотки статора. Однако в создании его участвует не весь ток I2, а только его активная составляющая I2cosφ2 (здесь φ2 — угол сдвига фаз между током I2 и э. д. с. Е2 в обмотке ротора).
Поэтому
M = cмФтI2 cosφ2 (84)
где
Фт — амплитуда магнитного потока, созданного обмоткой статора;
cм — постоянная, определяемая конструктивными параметрами данной машины и не зависящая от режима ее работы.
Поясним физический смысл формулы (84). На рис. 261 изображен ротор двухполюсного асинхронного двигателя в развернутом виде, на котором кружками показаны поперечные сечения проводников.
Крестики и точки внутри проводников обозначают направление в них тока i2, а под проводниками — направление индуцированных э. д. с. e2, которые пропорциональны индукции В в данной точке воздушного зазора между статором и ротором. Кривая В показывает распределение вдоль окружности ротора индукции, создаваемой вращающимся магнитным полем, кривая i2 — распределение тока в проводниках, а кривая f — распределение электромагнитных сил, возникающих в результате взаимодействия тока (а с вращающимся магнитным полем.
Электромагнитный вращающий момент М, создаваемый в результате совместного действия всех сил f, будет пропорционален среднему значению электромагнитной силы fср. Легко заметить, что к проводникам, лежащим на дуге, равной 180° — φ2, приложены силы f, увлекающие ротор за вращающимся магнитным полем, а на дуге φ2 — тормозящие силы. Поэтому при неизменном токе I2 среднее значение электромагнитной силы fср, а следовательно, и электромагнитный момент М будут тем больше, чем меньше угол φ2. Электромагнитный момент М зависит от скольжения s.
Поэтому при неизменном токе I2 среднее значение электромагнитной силы fср, а следовательно, и электромагнитный момент М будут тем больше, чем меньше угол φ2. Электромагнитный момент М зависит от скольжения s.
Рис. 261. Распределение индукции В, тока i2 и электромагнитных сил f, действующих на проводники асинхронного двигателя
Так, при увеличении скольжения возрастает э. д. с. Е2 в обмотке ротора и ток I2. Однако одновременно уменьшается cosφ2, так как активное сопротивление обмотки ротора R2 остается неизменным, а реактивное Х2 увеличивается (возрастает частота тока f2 в обмотке ротора).
При s < 10-20% увеличение скольжения приводит к незначительному уменьшению cos φ2, вследствие чего активная составляющая тока в обмотке ротора I2cos φ2 и электромагнитный момент М возрастают.
При некотором критическом скольжении sкр двигатель развивает наибольший момент Мmax, который определяет его перегрузочную способность. При дальнейшем увеличении скольжения (большем sкр) происходит резкое уменьшение cos ?2, поэтому активная составляющая тока I2cos φ2 и электромагнитный момент М уменьшаются.
При дальнейшем увеличении скольжения (большем sкр) происходит резкое уменьшение cos ?2, поэтому активная составляющая тока I2cos φ2 и электромагнитный момент М уменьшаются.
Номинальный вращающий момент Мном двигатели средней и большой мощности развивают при скольжении Sном = 2-4%.
Согласно государственным стандартам на асинхронные двигатели отношение Mmax/Mном = 1,8-2,5. Критическое скольжение sкр для мощных двигателей составляет 5—10%, для двигателей средней и малой мощности — от 10 до 20 %.
Асинхронный двигатель, как и любая электрическая машина, может работать в генераторном режиме, создавая тормозной момент. Этот режим используется для электрического торможения приводов.
Режим пуска.
В начальный момент пуска ротор двигателя неподвижен: скольжение s=1, магнитное поле пересекает ротор с максимальной частотой, индуцируя в нем наибольшую э. д. с. Е2. Так как ток в роторе I2 определяется значением э. д. с. Е2, то в начальный момент пуска он будет наибольшим. Наибольшим будет и ток в статоре.
Так как ток в роторе I2 определяется значением э. д. с. Е2, то в начальный момент пуска он будет наибольшим. Наибольшим будет и ток в статоре.
Обычно пусковой ток двигателя в 5—7 раз больше номинального. Вращающий момент Мп при пуске называется пусковым. Он обычно меньше наибольшего момента, который может развить двигатель. Для двигателей различных типов и мощностей отношение Мп/Мном = 0,7 – 1,8.
Скольжение асинхронного двигателя. Скорость вращения ротора — Студопедия
Отличительный признак асинхронного двигателя состоит в том, что частота вращения ротора n2меньше синхронной частоты вращения магнитного поля статора n1.
Объясняется это тем, что ЭДС в стержнях обмотки ротора индуцируется только при неравенстве частот вращения n2<n1. Частота вращения поля статора относительно ротора определяется частотой скольжения ns=n1-n2. Отставание ротора от вращающегося поля статора характеризуется относительной величиной s, называемой скольжением:
Отставание ротора от вращающегося поля статора характеризуется относительной величиной s, называемой скольжением:
,
· где s – скольжение асинхронного электродвигателя,
· n1 – частота вращения магнитного поля статора, об/мин,
· n2 – частота вращения ротора, об/мин,
Рассмотрим случай когда частота вращения ротора будет совпадать с частотой вращения магнитного поля статора. В таком случае относительное магнитное поле ротора будет постоянным, таким образом в стержнях ротора не будет создаваться ЭДС, а следовательно и ток. Это значит что сила действующая на ротор будет равна нулю. Таким образом ротор будет замедляться. После чего на стержни ротора опять будет действовать переменное магнитное поле, таким образом будет расти индуцируемый ток и сила. В реальности же ротор асинхронного электродвигателя никогда не достигнет скорости вращения магнитного поля статора. Ротор будет вращаться с некоторой скоростью которая немного меньше синхронной скорости.
Ротор будет вращаться с некоторой скоростью которая немного меньше синхронной скорости.
Скольжение асинхронного двигателя может изменяться в диапазоне от 0 до 1, т. е. 0—100%. Если s~0, то это соответствует режиму холостого хода, когда ротор двигателя практически не испытывает противодействующего момента; если s=1 — режиму короткого замыкания, при котором ротор двигателя неподвижен (n2 = 0). Скольжение зависит от механической нагрузки на валу двигателя и с ее ростом увеличивается.
Скольжение, соответствующее номинальной нагрузке двигателя, называется номинальным скольжением. Для асинхронных двигателей малой и средней мощности номинальное скольжение изменяется в пределах от 8% до 2%.
Преобразование энергии
Асинхронный двигатель преобразует электрическую энергию подаваемую на обмотки статора, в механическую (вращение вала ротора). Но входная и выходная мощность не равны друг другу так как во время преобразования происходят потери энергии: на трение, нагрев, вихревые токи и потери на гистерезисе.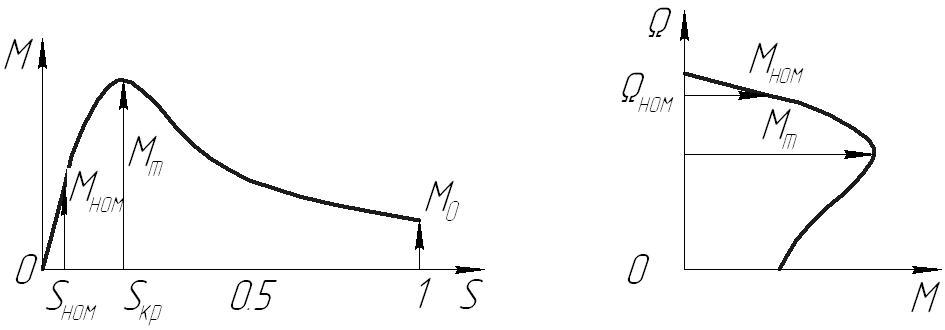 Это энергия рассеивается как тепло. Поэтому асинхронный электродвигатель имеет вентилятор для охлаждения.
Это энергия рассеивается как тепло. Поэтому асинхронный электродвигатель имеет вентилятор для охлаждения.
Асинхронный двигатель с контактным кольцом
Асинхронный двигатель с контактным кольцом системы управления скоростью
Дата: 2018-10-15 16:35:32
Весь механизм электродвигателя с фазным ротором или электродвигателя с фазным ротором зависит от системы регулирования скорости. Существует два механизма управления скоростью: первый — через реостат ротора, а второй — через каскадное управление.
Регулировка скорости через реостат
Задача управления скоростью может быть достигнута с помощью реостата, который в первую очередь используется для создания сопротивления в системе и установки фазы пуска для контактного кольца двигателя.Одна из вещей, о которой необходимо позаботиться, — это то, что стартовый рейтинг реостата должен быть записан и рассчитан для непрерывной работы. Тот же самый реостат, который добавлен изначально, можно использовать для управления скоростью.
Процесс довольно прост, поскольку мы знаем, что во время начальной фазы запуска двигателя с фазным ротором внешнее сопротивление прикладывается через внешний источник. По мере того, как ротор набирает скорость, уровень притока, если внешнее сопротивление снижается настолько, что, когда ускорение ротора достигает своего пика, внешнее сопротивление полностью отключается.
Изменение сопротивления для регулирования скорости
Теперь возникает вопрос, как изменение уровня сопротивления может быть полезно для регулирования скорости? Вот ответ, так как такая ситуация возникает, когда возникает необходимость снизить скорость, уровень внешнего сопротивления, протекающего в системе, увеличивается. В результате происходит снижение уровня разгона ротора.
Чтобы лучше понять систему управления скоростью, давайте сначала разберемся в различных отношениях между крутящим моментом и скольжением.Первое и самое важное соотношение, о котором нам нужно знать, — это крутящий момент и крутящий момент, которые задаются как T = S / R.
В приведенном выше соотношении T обозначает уровень крутящего момента, в то время как A обозначает скольжение двигателя и, наконец, R обозначает сопротивление цепи.
Соотношение проливает свет на некоторые важные факты, связанные с сопротивлением ротора, крутящим моментом и крутящим моментом. По мере увеличения отсутствия сопротивления уровень крутящего момента уменьшается.Учитывая тип нагрузки, которую это оборудование должно иметь дело как с ротором, так и с двигателем, оно должно обеспечивать постоянный уровень крутящего момента без каких-либо колебаний, в частности, снижение уровня крутящего момента может сделать ситуацию более сложной. Таким образом, для увеличения уровня крутящего момента шкала, при которой должно прилагаться внешнее сопротивление, должна постоянно увеличиваться. В результате повышения уровня сопротивления скольжение системы также увеличивается. Следует отметить, что увеличение скольжения в основном уменьшается в зависимости от скорости двигателя.
Недостаток
Однако в некоторых случаях с повышением уровня сопротивления уровень эксплуатационных характеристик снижается. Под снижением эффективности работы мы обязательно подразумеваем КПД двигателя. Учитывая фактор риска, связанный с этим методом, производители контактных колец часто используют его только в течение короткого периода времени.
Справочные детали Количество контактных колец, как показано ниже :
Капсульное контактное кольцо, широко используемое в высокоскоростных купольных камерах.
MT2586F. Контактное кольцо для сквозного отверстия.
. Контактное кольцо для высокого напряжения.
. Контактное кольцо. Для горнодобывающего оборудования.
. Серия MT200345. Контактное кольцо.
Прочие
Pri: отдельное контактное кольцо и его использование Следующее понимание контактной системы с волоконной щеткой
Другое:
Обсуждение отдельных контактных колец
Сравнение вращающихся электрических соединителей и электрического контактного кольца
Важность контактных колец на предприятиях с интенсивным инвестированием
Как беспроводные контактные кольца Работать без физического подключения?
Обсуждение контактной системы и датчика с контактным кольцом
Важность контактного кольца со сквозным отверстием по сравнению с контактным кольцом других форм
, однофазный асинхронный двигатель, поставщик асинхронного двигателя с контактным кольцом
 12 ~ 22 кВт, 0,16 ~ 30 л.с.Номинальное напряжение: 220, 380, 400, 415, 440, 460, 480, 500, 550, 660, 690, 760 В Номинальная частота: 50 Гц / 60 Гц полюсов: 2, 4, 6, 8 полюс
12 ~ 22 кВт, 0,16 ~ 30 л.с.Номинальное напряжение: 220, 380, 400, 415, 440, 460, 480, 500, 550, 660, 690, 760 В Номинальная частота: 50 Гц / 60 Гц полюсов: 2, 4, 6, 8 полюсТрехфазный асинхронный двигатель с алюминиевым корпусом серии MS
Электродвигатель с повышенным КПД серии YE3
 полюсов: 2П, 4П, 6П, 8П, 10П Трехфазный асинхронный двигатель серии
полюсов: 2П, 4П, 6П, 8П, 10П Трехфазный асинхронный двигатель серииY2
Электродвигатель серии YE4 с повышенным КПД
YE2
 12 ~ 200 кВт Номинальное напряжение: 220 В, 380 В, 400 В, 415 В, 440 В, 460 В, 480 В, 550 В Номинальная частота: 50 Гц / 60 Гц полюсов: 2, 4, 6, 8, 10 полюс
12 ~ 200 кВт Номинальное напряжение: 220 В, 380 В, 400 В, 415 В, 440 В, 460 В, 480 В, 550 В Номинальная частота: 50 Гц / 60 Гц полюсов: 2, 4, 6, 8, 10 полюсЭлектромагнитный тормозной двигатель серии YEJ2
YD
 5 ~ 50 кВт Номинальное напряжение: 380 В, 400 В, 415 В, 440 В, 460, 480 В, 550 В, 660 В, 690 В, 760 В Номинальная частота: 50 Гц / 60 Гц полюсов: 2П, 4П, 6П, 8П, 10П, 12П Низковольтный асинхронный двигатель с короткозамкнутым ротором серии
5 ~ 50 кВт Номинальное напряжение: 380 В, 400 В, 415 В, 440 В, 460, 480 В, 550 В, 660 В, 690 В, 760 В Номинальная частота: 50 Гц / 60 Гц полюсов: 2П, 4П, 6П, 8П, 10П, 12П Низковольтный асинхронный двигатель с короткозамкнутым ротором серииY ODP
Трехфазный инверторный двигатель серии YVP2
JS
Y2
Асинхронные двигатели с пониженными характеристиками | КЭБ
При рассмотрении различных приложений, в которых используются частотно-регулируемые приводы (VFD) и двигатели, есть некоторые, в которых требуется, чтобы двигатель работал на более низких скоростях, чем номинальная скорость двигателя.Одним из примеров приложения, для которого это может потребоваться, может быть относительно медленный лифт, которому не нужно работать с полной номинальной скоростью двигателя. Иногда производители двигателей предоставляют набор данных двигателя с включенными в него пониженными характеристиками. Для некоторых приложений с частотно-регулируемым приводом эти пониженные характеристики двигателя можно ввести в привод, но для других это может вызвать серьезные проблемы, особенно снижение номинальных характеристик асинхронных двигателей.
Для безредукторных двигателей с постоянными магнитами (синхронных двигателей) допустимо снижение характеристик двигателя в приводе.Эти двигатели работают с синхронной скоростью, поэтому существует линейная зависимость между номинальной скоростью двигателя, частотой и напряжением, а также между крутящим моментом и током. Если данные двигателя с пониженными характеристиками для двигателя с постоянными магнитами вводятся в привод KEB Elevator, то функция настройки двигателя может быть завершена как обычно, и привод будет работать с двигателем, как задумано. Настройка двигателя по-прежнему будет правильно измерять различные свойства двигателя и создавать внутреннюю для привода модель двигателя, которая используется для управления работой двигателя на различных скоростях.
Снижение номинальных характеристик серводвигателей относительно просто.Асинхронные двигатели (асинхронные двигатели или двигатели с короткозамкнутым ротором) ведут себя иначе, чем двигатели с постоянными магнитами. Из-за конструкции двигателя он работает на номинальной скорости меньше, чем синхронная скорость, на разницу, известную как скорость скольжения. Поскольку двигатель имеет эту скорость скольжения, нет линейной зависимости между скоростью двигателя и частотой (в зависимости от количества полюсов двигателя). Скольжение — это то, что позволяет асинхронному двигателю создавать крутящий момент.При работе асинхронного двигателя привод подает на двигатель ток намагничивания, чтобы поддерживать магнитное поле, обеспечивающее необходимый крутящий момент. Привод также подает фазный ток на двигатель, что позволяет двигателю работать. Если есть приложение, в котором в привод вводится пониженное значение номинального тока двигателя, привод соответственно ограничивает ток намагничивания в модели двигателя, встроенной в привод. Это заставляет двигатель работать с большим скольжением для компенсации более низкого магнитного поля, что фактически приводит к более высокому рабочему току.Может показаться нелогичным, что снижение номинального тока двигателя в приводе приведет к увеличению рабочего тока. Однако из-за более низкого тока намагничивания в модели двигателя снижение характеристик двигателя для асинхронного двигателя может привести к увеличению потребления фазного тока.
Для асинхронных двигателей требуется дополнительная конфигурация для работы на пониженных скоростяхЛучшее, что можно сделать с асинхронным двигателем, который предназначен для работы на более низкой скорости при использовании частотно-регулируемого привода KEB, — это ввести в привод фактические номинальные данные двигателя, включая полные номинальная скорость двигателя (не синхронная скорость), в отличие от заниженных данных приложения.
Используя эти данные, привод может создать точную модель двигателя без ограничения тока намагничивания. В этом случае размер привода должен соответствовать номинальному номинальному току двигателя. Это связано с ограничением 110% номинального выходного тока инвертора, которое может быть введено для номинального тока двигателя. Таким образом, может оказаться невозможным уменьшить размер привода из-за снижения номинального тока двигателя для асинхронных двигателей.
Если вам нужна помощь в снижении номинальных характеристик асинхронного двигателя, обратитесь к инженеру KEB America, и мы поможем вам наладить работу.
.