Зависимость момента шагового двигателя от скорости
Момент, создаваемый шаговым двигателем, зависит от скорости, тока в обмотках и схемы драйвера. На рис. 1а показана зависимость момента от угла поворота ротора.
Рис. 1. Возникновение мертвых зон в результате действия тренияУ идеального шагового двигателя эта зависимость синусоидальная. Точки S являются положениями равновесия ротора для негруженного двигателя и соответствуют нескольким последовательным шагам. Если к валу двигателя приложить внешний момент, меньший момента удержания, то угловое положение ротора изменится на некоторый угол Ф.
купить шаговый двигатель
купить блок управления шаговым двигателем
Ф = (N/(2*pi))*sin(Ta/Th),где Ф – угловое смещение,
N – количество шагов двигателя на оборот,
Ta – внешний приложенный момент,
Th – момент удержания.

Угловое смещение Ф является ошибкой позиционирования нагруженного двигателя. Если к валу двигателя приложить момент, превышающий момент удержания, то под действием этого момента вал провернется. В таком режиме положение ротора является неконтролируемым.
На практике всегда имеется приложенный к двигателю внешний момент, хотя бы потому, что двигателю приходится
преодолевать трение. Силы трения могут быть расделены на две категории: статическое трение или трение покоя,
для
преодоления которого требуется постоянный момент и динамическое трение или вязкое трение, которое зависит от
скорости.
Рассмотрим статическое трение. Предположим, что для его преодоления требуется момент в половину от пикового.
На рис.
1а штриховыми линиями показан момент трения. Таким образом, для вращения ротора остается только момент,
лежащий на
графике за пределами штриховых линий.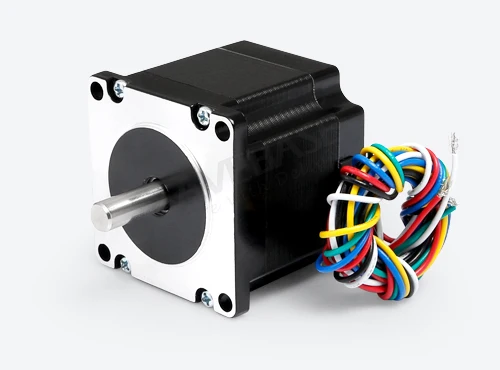
d = 2 (S / (pi/2)) arcsin(Tf /Th) = (S / (pi/4)) arcsin(Tf / Th),где d – ширина мертвой зоны в радианах,
S – угол шага в радианах,
Tf – момент трения,
Th – момент удержания.
Мертвые зоны ограничивают точность позиционирования. Например, наличие статического трения в половину от пикового момента двигателя с шагом 90 град. вызовет наличие мертвых зон в 60 град. Это означает, что шаг двигателя может колебаться от 30 до 150 град., в зависимости от того, в какой точке мертвой зоны остановится ротор после очередного шага.
Наличие мертвых зон является очень важным для микрошагового режима. Если, например, имеются мертвые зоны
величиной d,
то микрошаг величиной менее d вообще не сдвинет ротор с места. Поэтому для систем с использованием
микрошагов очень
важно минимизировать трение покоя.
Поэтому для систем с использованием
микрошагов очень
важно минимизировать трение покоя.
Когда двигатель работает под нагрузкой, всегда существует некоторый сдвиг между угловым положением ротора и ориентацией магнитного поля статора. Особенно неблагоприятной является ситуация, когда двигатель начинает торможение и момент нагрузки реверсируется. Нужно отметить, что запаздывание или опережение относится только к положению, но не к скорости. В любом случае, если синхронность работы двигателя не потеряна, это запаздывание или опережение не может превышать величины двух полных шагов. Это весьма приятный факт.
Каждый раз, когда шаговый двигатель осуществляет шаг, ротор поворачивается на S радиан. При этом
минимальный момент
имеет в место, когда ротор находится ровно между соседними положениями равновесия (рис. 2).
2).
Этот момент называют рабочим моментом, он означает, какой наибольший момент может преодолевать двигатель
при вращении
с малой скоростью. При синусоидальной зависимости момента от угла поворота ротора, этот момент Tr =
Th/(2
Параметры привода на основе шагового двигателя сильно зависят от характеристик нагрузки. Кроме трения,
реальная
нагрузка обладает инерцией. Инерция препятствует изменению скорости. Инерционная нагрузка требует от
двигателя больших
моментов на разгоне и торможении, ограничивая таким образом максимальное ускорение. С другой стороны,
увеличение
инерционности нагрузки увеличивает стабильность скорости.
Такой параметр шагового двигателя, как зависимость момента от скорости является важнейшим при выборе типа двигателя, выборе метода управления фазами и выборе схемы драйвера. При конструировании высокоскоростных драйверов шаговых двигателей нужно учитывать, что обмотки двигателя представляют собой индуктивность. Эта индуктивность определяет время нарастания и спада тока. Поэтому если к обмотке приложено напряжение прямоугольной формы, форма тока не будет прямоугольной. При низких скоростях (рис. 3а) время нарастания и спада тока не способно сильно повлиять на момент, однако на высоких скоростях момент падает. Связано это с тем, что на высоких скоростях ток в обмотках двигателя не успевает достигнуть номинального значения (рис. 3б).
Рис. 3. Форма тока в обмотках двигателя на разных скоростях работы. Для того, чтобы момент падал как можно меньше, необходимо обеспечить высокую скорость нарастания тока в
обмотках
двигателя, что достигается применением специальных схем для их питания.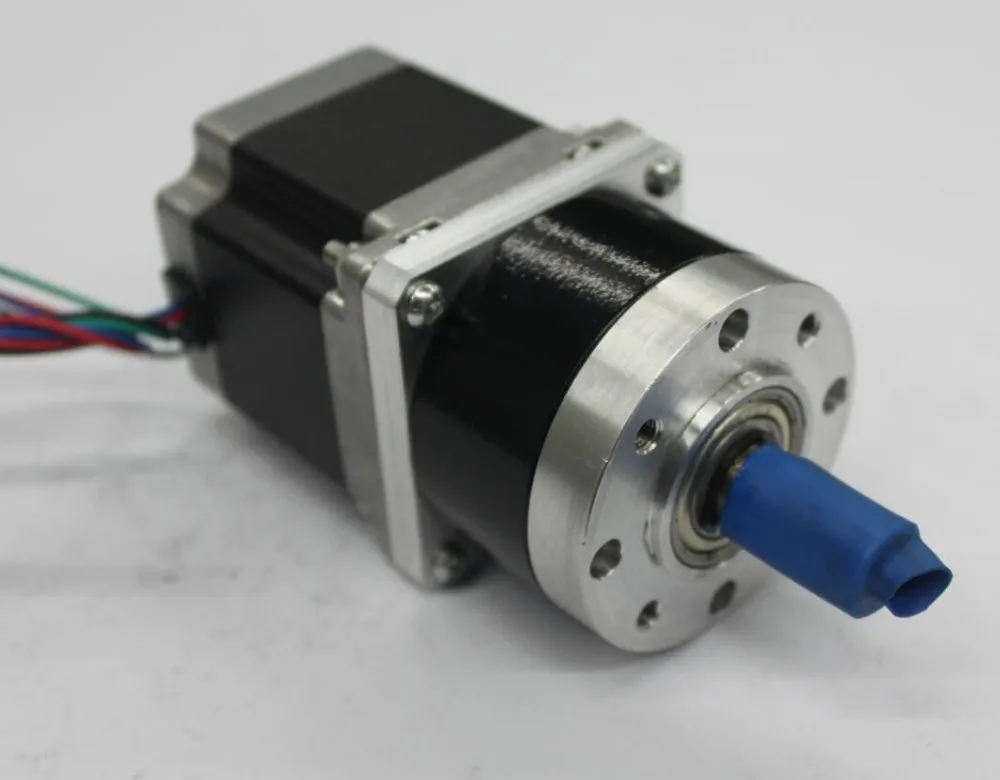
Поведение момента при увеличении частоты коммутации фаз примерно таково: начиная с некоторой частоты среза момент монотонно падает. Обычно для шагового двигателя приводятся две кривые зависимости момента от скорости (рис. 4).
Рис. 4. Зависимость момента от скорости. Внутренняя кривая (кривая старта, или pull-in curve) показывает, при каком максимальном моменте трения для
данной
скорости шаговый двигатель способен тронуться. Эта кривая пересекает ось скоростей в точке, называемой
максимальной
частотой старта или частотой приемистости. Она определяет максимальную скорость, на которой ненагруженный
двигатель
может тронуться. На практике эта величина лежит в пределах 200 – 500 полных шагов в секунду. Инерционность
нагрузки
сильно влияет на вид внутренней кривой. Большая инерционность соответствует меньшей области под кривой.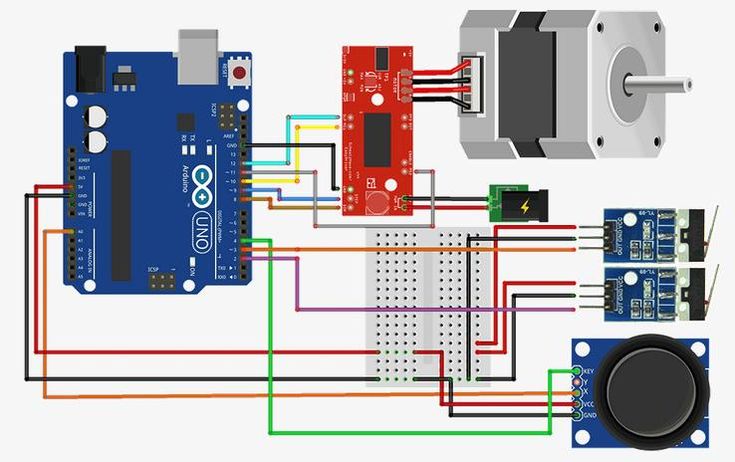
Измерение крутящего момента двигателя VSS42-200-1.2
В ходе «внезапно обнаруженных особенностей» шаговых двигателей, которые предполагается использовать в криостате ИК-спектрометра (в пиковом режиме работы они выделяют 50 Вт!), а также для изучения, насколько драйвер ШД L6208N хуже драйвера TB6560AHQ, я на этой неделе провел кое-какие испытания.
Для затравки — видео:
это позорище — «измерительная установка», использующаяся в эксперименте.
Итак, на видео выше показано, как проводились измерения момента: испытуемый
шаговый двигатель был зафиксирован при помощи струбцины, на вал двигателя через
жесткую муфту был надет цилиндр диаметром 50мм, на который наматывалась нить
с подвешенным к ней грузом. Таким образом, изменяя массу подвешенного груза
можно было изменять момент силы, приложенной к валу двигателя.
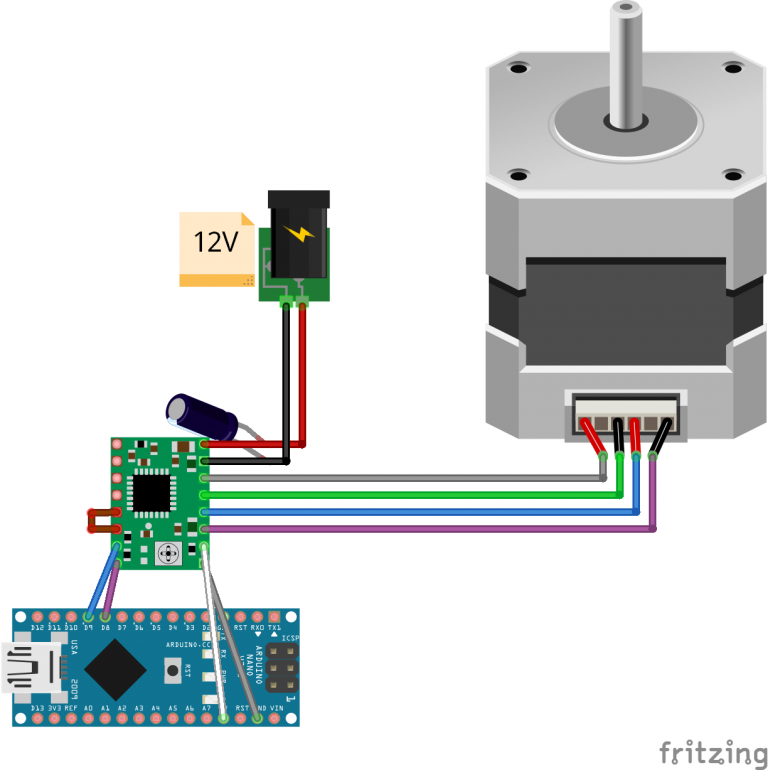
Куча соплей, торчащих из макетки на столе — привычный для меня способ «наколенного макетирования» (я уже ранее выкладывал видео с управлением механикой криостата, там сопли еще страшней были). На макетке была собрана полноценная схемка с драйвером L6208N. Правда, в работе наблюдались «косяки» из-за того, что токи там довольно большие протекают, а элементы просто натыканы в разъемы макетки… Вот все это безобразие крупным планом:
Система управления двигателем была запитана от 12-вольтового китайского блока питания с регулировкой.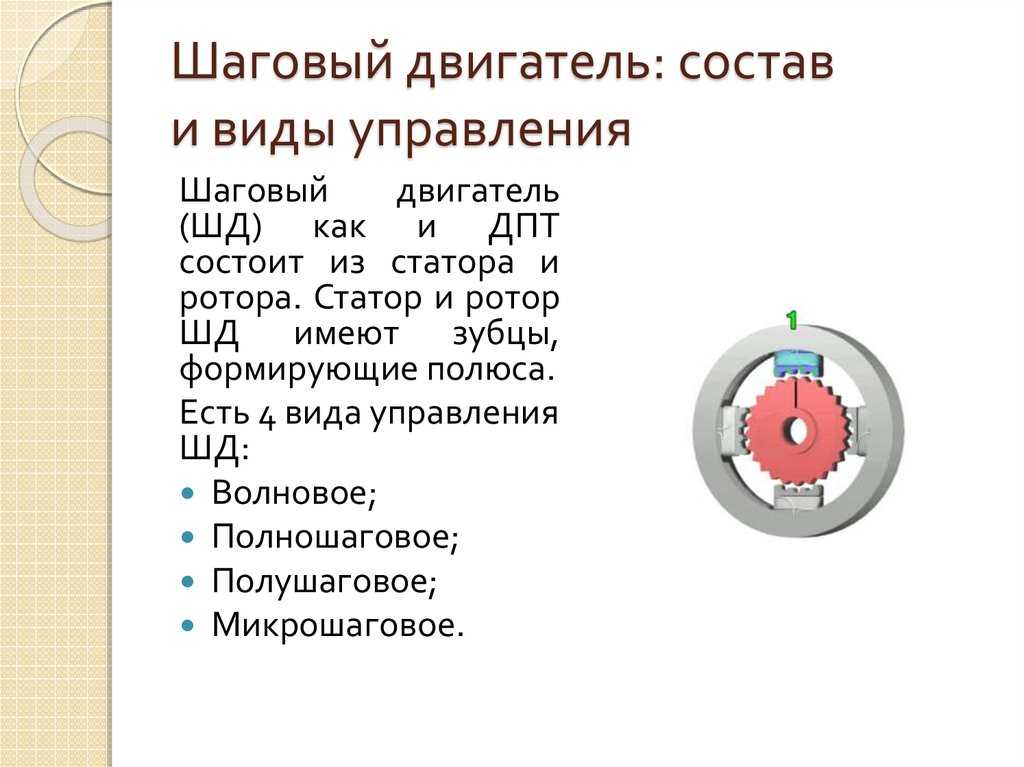 Уровень напряжения был установлен на минимум (10.6 В).
Уровень напряжения был установлен на минимум (10.6 В).
Зависимость крутящего момента от силы тока в обмотках двигателя
Наибольший крутящий момент у любого шагового двигателя возникает на малых скоростях вращения (это — известный факт, справедливый для всех шаговиков с более-менее высокими сопротивлением и индуктивностью обмоток). Для нас интересны скорости вращения вала, не превышающие ~2 оборотов в секунду (400 шагов/с). В полношаговом режиме работы драйвера L6208N для смещения вала двигателя на один шаг необходимо подать на драйвер четыре тактовых импульса. В полушаговом режиме один шаг двигателя соответствует восьми тактовым импульсам.
На приведенных далее графиках указывается частота тактовых импульсов,
подающихся на драйвер шагового двигателя. Соответственно, при работе в
полношаговом режиме скорость вращения вала (в шагах в секунду) в четыре раза
меньше тактовой частоты, а при работе в полушаговом режиме скорость меньше в
восемь раз.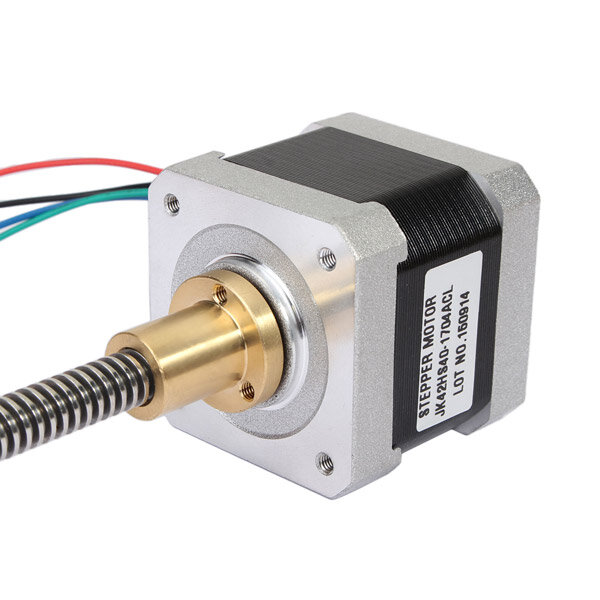
Дальше приведена картинка с зависимостью величины крутящего момента на валу испытуемого двигателя от силы тока в обмотках. Медианное усреднение серии измерений и линейная аппроксимация результата показали, что момент на валу (в г·см) вполне линейно изменяется и примерно в 450 раз превышает силу тока в обмотках двигателя (измеренную в Амперах).
Зависимость максимальной скорости вращения вала двигателя от силы тока в обмотках при постоянной величине нагрузки на вал
Для изучения предельных скоростей вращения нагруженного вала двигателя на прикрепленный к валу цилиндр подвешивались грузы массой 100, 150 и 200г, дающие постоянный момент силы в 250, 375 и 500г·см соответственно. Чтобы массу подвеса можно было быстро изменять, я просто взял обычный пакетик с застежкой-молнией, измерил его массу на лабораторных весах и подвесил на вал при помощи ниточки.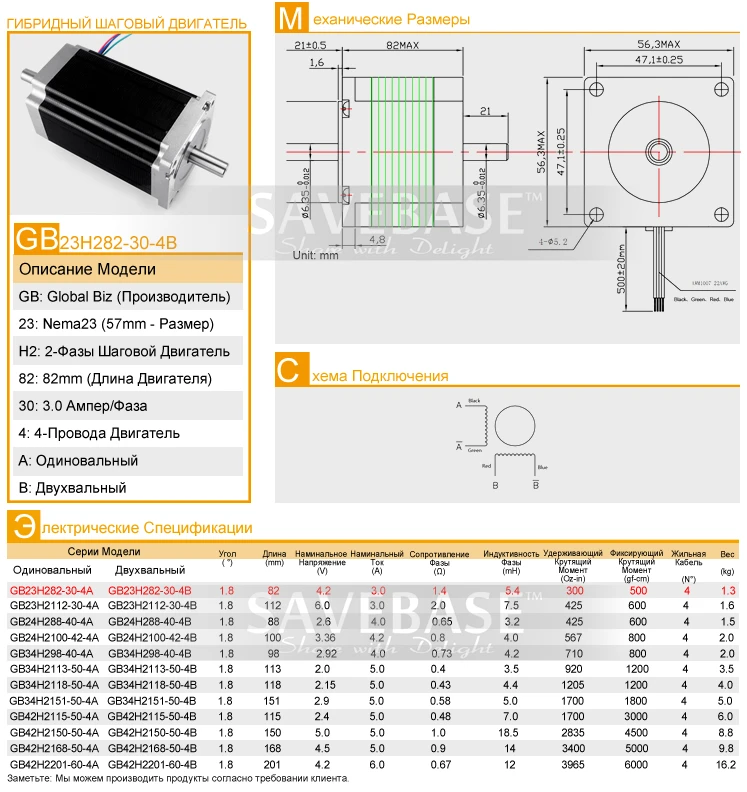 В пакет складывались гирьки от весов + при недостаче массы гирек я подкладывал болты, массу которых заранее измерил.
В пакет складывались гирьки от весов + при недостаче массы гирек я подкладывал болты, массу которых заранее измерил.
приложенной нагрузки и силы тока в обмотках
На картинке выше изображены результаты измерений, показавшие, что снижение тока в обмотках приводит к очень резкому снижению крутящего момента двигателя, что особо хорошо заметно на высоких скоростях вращения вала. Снижение до 50% номинального тока в обмотках двигателя приводит к падению практически до нуля его нагрузочной характеристики. Снижение силы тока в обмотках на 30% лишь незначительно ухудшает нагрузочную характеристику двигателя, для увеличения величины крутящего момента в этом случае необходимо лишь снизить скорость вращения вала.
Зависимость крутящего момента от скорости вращения вала
Выше было показано, что небольшое уменьшение номинальной силы тока в обмотках двигателя не приводит к значительному ухудшению значения крутящего момента на его валу. Для определения динамических характеристик двигателя к его обмоткам был приложен ток величиной 87.5% и 75% от номинального (1.05А и 0.9А соответственно). Кроме того, изучалась возможность увеличения крутящего момента при разгоне двигателя кратковременной установкой режима работы драйвера шагового двигателя в полушаговый режи.
Для определения динамических характеристик двигателя к его обмоткам был приложен ток величиной 87.5% и 75% от номинального (1.05А и 0.9А соответственно). Кроме того, изучалась возможность увеличения крутящего момента при разгоне двигателя кратковременной установкой режима работы драйвера шагового двигателя в полушаговый режи.
Выше изображена полученная динамическая характеристика. Резкий спад крутящего момента на частотах тактовых импульсов порядка 50Гц может быть обусловлен особенностями используемого драйвера шаговых двигателей (на испытываемом ранее драйвере TB6560AHQ таких особенностей замечено не было). Похоже, либо микросхемка «захлебывается» и начинает блокироваться из-за перегрева (грелась она на малых оборотах прилично, а на скоростях выше 25шагов/с оставалась практически холодной), либо в ней установлен фильтр наводок на 50Гц, который и «дает жару» — в подробности мне вникать лень.
На скоростях ниже 50Гц в полношаговом режиме (12.5шагов/с) крутящий момент двигателя очень резко спадает до нуля (видимо, это обусловлено очень низкой индуктивностью обмоток двигателя). Наиболее оптимальной является скорость вращения двигателя около 25шагов/с (в полношаговом режиме драйвера L6208N). Динамический диапазон данного двигателя довольно узок: при увеличении скорости вращения вала до 150шагов/с (в полношаговом режиме) крутящий момент снижается в два раза. Наиболее оптимальным режимом работы двигателя является скорость от 25 до 100шагов/с (в полношаговом режиме) со стартом в полушаговом режиме драйвера. Такой режим обеспечивает высокий стартовый момент с поддержанием величины крутящего момента при дальнейшем движении с бóльшей скоростью.
Выводы
Несмотря на очень низкие величины сопротивления и индуктивности обмоток шагового двигателя VSS42-200-1.2, возможно достижение относительно высокой величины крутящего момента на его валу при снижении напряжения питания до ~10В и силы тока в обмотках до ~0. 9А (т.е. снижения энерговыделения от номинальных 50.4Вт до 9Вт) за счет варьирования режимов работы драйвера шагового двигателя.
9А (т.е. снижения энерговыделения от номинальных 50.4Вт до 9Вт) за счет варьирования режимов работы драйвера шагового двигателя.
Управлять двигателем возможно как посредством драйвера TB6560AHQ, так и при помощи драйвера L6208N. Правда, лично мне больше нравится первый: он показывает значительно более красивые осциллограммы (а при дроблении шага на 16 у него на выходе почти синусоида!) и имеет большее количество «настроек».
Ну, а напоследок, чтобы не утомлять почтенную публику созерцанием изображения осциллограмм, привожу видео:
Tags: octave, железяки
максимальная скорость для шаговых двигателей против Gearmotors
MAX SPEED для шаговых двигателей против GearMotors
- MAX SPEED
, когда на покупке оборудования. принятие наилучшего решения заключается в том, чтобы понять, какой тип двигателя лучше всего подходит для предполагаемого применения.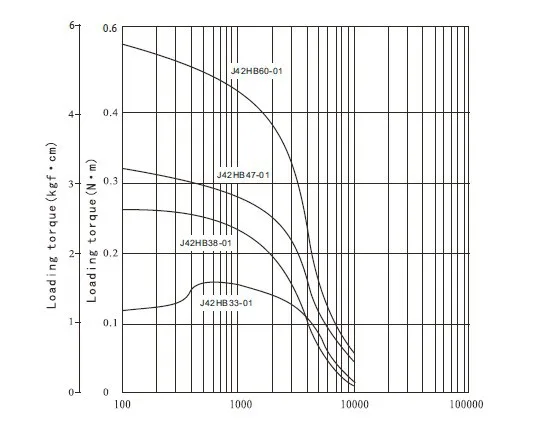
Например, если вы занимаетесь производством медицинского оборудования, такого как моторизованные больничные койки, автоматические открыватели дверей и т. п., вам необходимо инвестировать в высококачественные шаговые двигатели.
Шаговые двигатели быстрее?
Спрашивая, быстрее ли шаговые двигатели, вы должны понимать, что это несколько субъективный вопрос. Шаговые двигатели не являются самыми быстрыми двигателями, но определенные характеристики могут заставить их работать быстрее.
Шаговый двигатель можно представить как двигатель с высоким крутящим моментом и низкой скоростью. Вот почему эти двигатели хорошо подходят для конкретных применений.
Если вы хотите узнать о максимальной скорости шагового двигателя, вы должны знать, что максимальная скорость, характерная для шагового двигателя, составляет 1000 об/мин, а максимальная скорость мотор-редуктора составляет 400-550 об/мин. Тем не менее, скорость любого шагового двигателя зависит от характеристик контроллера, который поставляется с ним.
Следует иметь в виду, что в большинстве случаев вы не получите большого преимущества, увеличив скорость шагового двигателя. Это потому, что эти двигатели должны быть относительно медленными, потому что они точны. Шаговые двигатели спроектированы так, чтобы быть медленными, дискретными и точными.
Каковы характеристики шагового двигателя?
Итак, что такое шаговый двигатель и с какими функциями вам следует ознакомиться? Шаговый двигатель — это, по сути, бесщеточный двигатель постоянного тока, который разделяет вращение на равное количество шагов.
Вы можете заставить эти моторы либо удерживать положение, либо легко перемещаться в зависимости от возможностей контроллера.
Теперь, когда вы знаете больше о шаговых двигателях, вы должны знать, что не стоит покупать плохо сделанный двигатель, особенно если вы производитель. Почему? Потому что, когда вы покупаете шаговые двигатели плохого качества, вы требуете массового отзыва своей продукции. Отзыв может обойтись вам в сотни тысяч долларов и более.
Какой двигатель лучше всего подходит для вашего применения?
Чтобы определить, какой тип двигателя лучше всего подходит для вашего приложения, вам необходимо получить более глубокое представление о том, для чего обычно используются шаговые двигатели. Эти двигатели часто используются в самых разных продуктах, включая телевизоры, 3D-принтеры, оборудование для производства текстиля и станки с ЧПУ.
Эти двигатели пользуются большим спросом у предприятий, производящих вышеупомянутую продукцию. Они предпочитают шаговые двигатели из-за их уникальной скорости и диапазона возможностей.
Мотор-редукторы обычно используются в монетоприемниках, перистальтических насосах и оборудовании общественного питания.
Не просто покупайте шаговый двигатель или мотор-редуктор, покупайте двигатель Telco!
Когда вы собираетесь потратить деньги на шаговый двигатель, важно найти время, чтобы найти качественный. Никто не хочет вкладывать деньги в плохо сделанный шаговый двигатель, который сломается после первых нескольких недель использования.
Telco разрабатывает шаговые двигатели для управления скоростью и высокоскоростные шаговые двигатели, которые не оправдывают ожиданий. Почему? Поскольку мы не думаем, что просто производить двигатели недостаточно, мы верим в создание самых лучших двигателей.
Хотите, чтобы шаговые двигатели или мотор-редукторы были долговечными? Тогда вам нужно проверить выбор Telco сегодня!
Источник изображения: Pixabay
Какую скорость можно получить с помощью шагового двигателя и контроллера?
Вообще говоря, максимальная скорость шагового двигателя составляет примерно 1000 об/мин. Точные возможные скорости зависят от конкретного используемого двигателя и используемого с ним контроллера. Например, можно перегрузить меньший шаговый двигатель с помощью более мощного контроллера, но это приведет к сокращению срока службы, и любые преимущества этого будут в значительной степени минимальными по сравнению с использованием бесщеточного двигателя постоянного тока на номинальной скорости. Важно помнить, что крутящий момент, создаваемый шаговым двигателем, значительно снижается по мере увеличения скорости .
Важно помнить, что крутящий момент, создаваемый шаговым двигателем, значительно снижается по мере увеличения скорости .
Если вам нужна дополнительная информация о кривых крутящего момента и скорости и о том, как они могут помочь вам выбрать лучший двигатель для вашего проекта, см. Что такое кривая крутящий момент/скорость и как она влияет на то, что мне нужно?
Если вам нужно увеличить скорость выше этой, но при этом требуется интеллектуальное управление двигателем, вам следует рассмотреть бесщеточный двигатель постоянного тока и контроллер (бесщеточный ESC).
Шаговые двигатели имеют уменьшающийся крутящий момент по мере увеличения скорости
Часто упускается из виду тот факт, что доступный крутящий момент шагового двигателя значительно уменьшается с увеличением скорости. Это часто означает, что в приложениях, где двигатель находится под определенной нагрузкой (которая, очевидно, должна быть, поскольку он что-то приводит в движение), максимальная скорость будет неотъемлемо уменьшена на величину нагрузки на двигатель.
Вот почему так важно понимать нагрузку, которую необходимо приложить к двигателю при выборе двигателя.
Мне нужна более низкая скорость и более высокий крутящий момент от шагового двигателя
Если вам нужна более низкая скорость и более высокий крутящий момент, чтобы ваш проект управления двигателем работал, не забывайте, что вы всегда можете использовать редукторные шаговые двигатели. Передаточное отношение редуктора обычно находится в диапазоне от 2:1 до примерно 50:1, и это может значительно увеличить крутящий момент, доступный от шагового двигателя (хотя и за счет значительного снижения максимальной скорости, доступной от шагового двигателя). Например, типичный шаговый двигатель NEMA 17 с драйвером шагового двигателя ZDSP сможет развивать крутящий момент 0,65 Нм. Однако, добавив к этому двигателю редуктор, например, в случае шагового двигателя с редуктором ZDSPN17G27-3 и пакета драйвера, это можно увеличить до 3 Нм.
Заключение
Подумайте об основных характеристиках, которые вам нужны, а затем решите, какой двигатель и контроллер лучше всего подходят для вашего приложения
Максимальная скорость шагового двигателя определяется комбинацией размера шагового двигателя, типа контроллера шагового двигателя, с которым он используется, а также конкретное приложение, в котором он используется.