История создания электродвигателя переменного тока
Двигатель переменного тока — электрический двигатель, питание которого осуществляется переменным током.
Введение
По принципу работы эти двигатели разделяются на синхронные и асинхронные двигатели. Асинхронная машина — это электрическая машина переменного тока, частота вращения ротора которой не равна (в двигательном режиме меньше) частоте вращения магнитного поля, создаваемого током обмотки статора.
Второе название асинхронных машин
В ряде стран к асинхронным машинам причисляют также коллекторные машины. Второе название асинхронных машин — индукционные вследствие того, что ток в обмотке ротора индуцируется вращающимся полем статора. Асинхронные машины сегодня составляют большую часть электрических машин. В основном они применяются в качестве электродвигателей и являются основными преобразователями электрической энергии в механическую.
Достоинства и недостатки
Достоинства:
- Лёгкость в изготовлении.

- Отсутствие механического контакта со статической частью машины.
Недостатки:
- Небольшой пусковой момент.
- Значительный пусковой ток.
История
Приоритет в создании асинхронного двигателя принадлежит Николе Тесле
Вклад в развитие асинхронных двигателей внес Галилео Феррарис, который в 1885 г. в Италии построил модель асинхронного двигателя мощностью 3 Вт. В 1888 г. Феррарис опубликовал свои исследования в статье для Королевской Академии Наук в Турине (в том же году, Тесла получил патент США 381,968 от 01.05.1888 (U.S. Patent 0 381 968|заявка на изобретение № 252132 от 12.10.1887), в которой изложил теоретические основы асинхронного двигателя. Заслуга Феррариса в том, что сделав ошибочный вывод о небольшом к.п.д. асинхронного двигателя и о нецелесообразности применения систем переменного тока, он привлек внимание многих инженеров к проблеме совершенствования асинхронных машин.
Доливо-Добровольский установил, что для создания вращающегося магнитного поля — основы работы асинхронного двигателя — технически и экономически целесообразно применение симметричной трехфазной магнитной системы, со сдвигом фаз на 120 электрических градусов. Трехфазный асинхронный электродвигатель, изготовленный Доливо-Добровольским в 1889 г., продемонстрировал высокую эффективность и неоспоримые преимущества перед двухфазными двигателями Феррариса и Тесла. По словам изобретателя: «уже при первом включении выявилось ошеломляющее для представлений того времени действие… попытка остановить его торможением за конец вала от руки блестяще провалилась, и только при особой ловкости было возможно воспрепятствовать таким способом его запуску при включении.
Первая демонстрация
Первой демонстрацией практического применения асинхронного двигателя и трехфазной системы стала Международная электротехническая выставка 1891 г. во Франкфурте-на-Майне. Выставку с гидроэлектростанцией на реке Неккар в городе Лауфен соединила 170-километровая линия электропередачи. А 25 августа на выставке зажглась тысяча электроламп, питаемых током от Лауфенской электростанции.
Трехфазный асинхронный электродвигатель типа «DR8O» мощностью 6 л.с. (4 кВт) выпуска 90-х гг. XIX в. из собрания Политехнического музея является одним из первых серийных трехфазных двигателей фирмы AEG. Об этом свидетельствует наличие кольцевой обмотки на статоре. Впоследствии от таких обмоток отказались, перейдя на более совершенные — барабанные.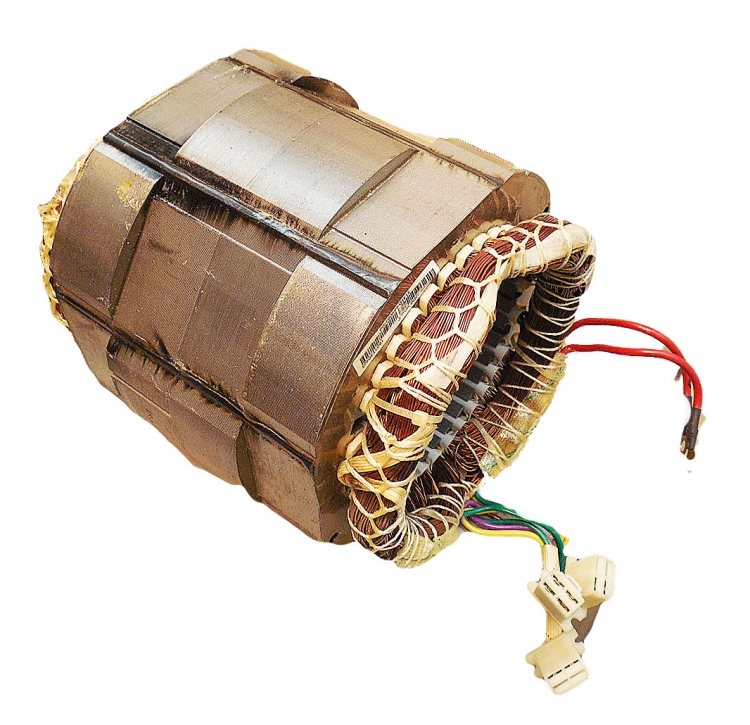
Заключение
Основные элементы двигателя — трехфазная обмотка статора, шихтованный ротор с короткозамкнутой обмоткой типа «беличья клетка» — предложены и разработаны Доливо-Добровольским. Работа асинхронного двигателя основана на электромагнитном взаимодействии между статором и ротором. Токи статорных обмоток создают вращающееся магнитное поле, которое, в свою очередь, индуцируют токи в короткозамкнутой обмотке ротора. В результате взаимодействия токов ротора с магнитным полем статора создается вращающий момент.
Связанное оборудование (products tags):
Асинхронные электродвигатели
Трехфазный асинхронный двигатель с короткозамкнутым ротором
Статор асинхронного двигателя (рис. 187) состоит из сердечника 2, обмотки 3 и корпуса (станины) 1. Сердечник статора является частью магнитопровода и собран из отдельных стальных пластин 4 толщиной 0,35-0,5 мм. Чтобы снизить до минимума потери энергии на вихревые токи, пластины изолируют друг от друга (чаще всего тонким слоем специального лака).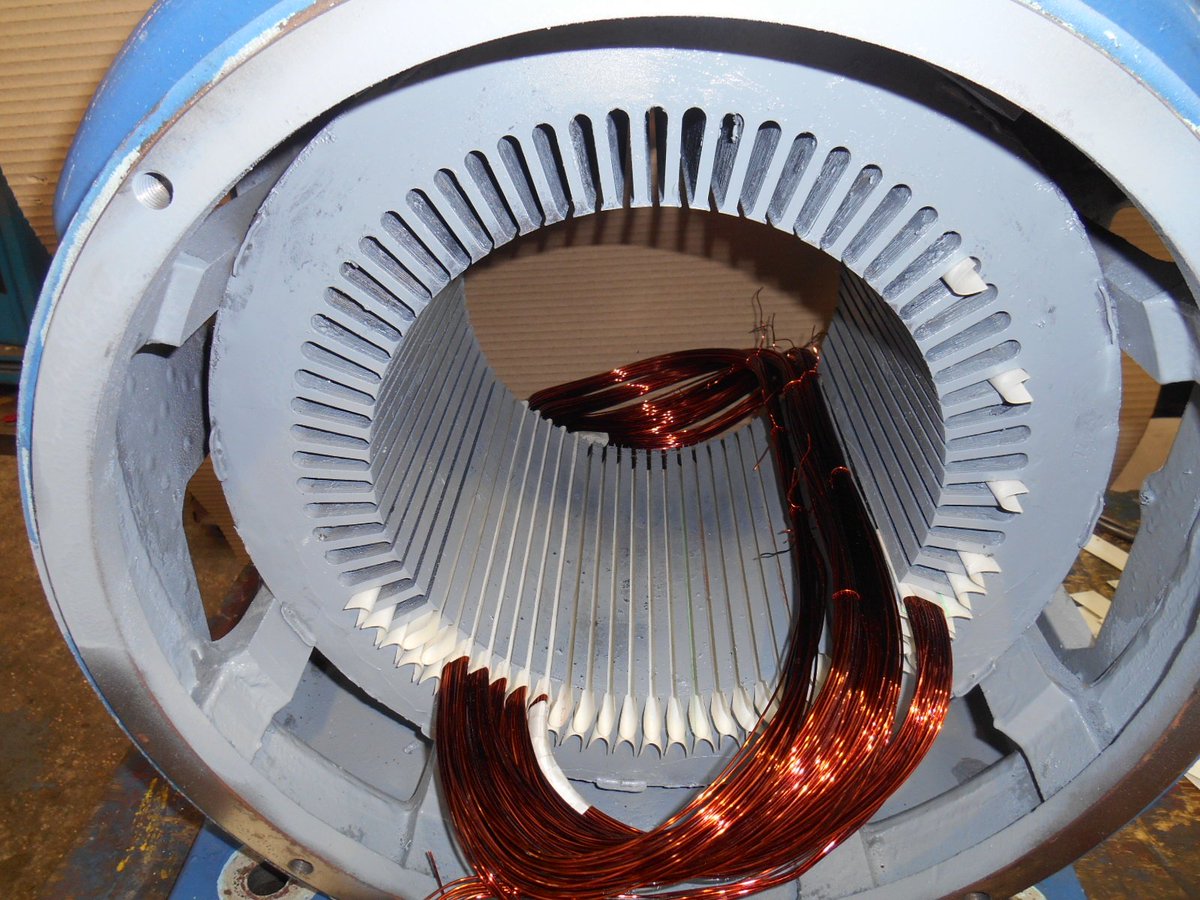 В пазах стального статора укладывают провода, образующие трехфазную обмотку статора. Каждая фазная обмотка состоит из одной или нескольких катушек и рассчитана на определенное номинальное фазное напряжение. На двигателе указывается два номинальных напряжения (например, 380 и 220 В), отличающихся в j/З раз.
В пазах стального статора укладывают провода, образующие трехфазную обмотку статора. Каждая фазная обмотка состоит из одной или нескольких катушек и рассчитана на определенное номинальное фазное напряжение. На двигателе указывается два номинальных напряжения (например, 380 и 220 В), отличающихся в j/З раз.
При большем напряжении сети фазные обмотки статора соединяют звездой, а при меньшем напряжении — треугольником. В том и другом случае к каждой фазной обмотке подводится одинаковое напряжение, являющееся номинальным фазным напряжением двигателя. Начала обмоток статора обозначают CI, С2, СЗ, а концы — С4, С5, С6.
Расположение выводов обмоток на щитке (рис. 188) удобно для соединения обмоток звездой или треугольником. Сердечник статора с обмоткой расположен (обычно запрессован) внутри корпуса, кото-
Рис. 187. Статор асинхронного двигателя
рый отливают из чугуна или алюминиевого сплава. С боков сердечник статора закрывается крышками, в которых имеются подшипники.
Ротор двигателя представляет собой цилиндр, набранный из листовой электротехнической стали. Обмотка ротора состоит из нескольких медных стержней, соединенных на концах медными кольцами, и называется «беличьим колесом» (рис. 189, а). В новых асинхронных электродвигателях короткозамкнутая обмотка образуется путем заливки пазов ротора алюминием (рис. 189, б).
При прохождении по обмоткам статора трехфазного переменного тока создается магнитное поле, вращающееся с частотой пх = 6011/Д где 1 — частота подводимого к двигателю тока; р — число пар полюсов, которое зависит от числа катушек.
Если имеются три катушки, то вращающийся магнитный поток имеет два полюса (/7=1) и пх — — 3000 об/мин. Если число катушек увеличить в 2 раза, то р = 2, а пх = = 1500 об/мин.
Магнитные линии поля статора пересекают обмотку ротора и в ней возникает ток, создающий свое магнитное поле. В результате взаимодействия магнитных полей ротор начинает вращаться в направлении магнитного поля статора с частотой п.
Ротор и поле статора вращаются с различными частотами. В противном случае не было бы пересечения ротора силовыми линиями магнитного поля статора. Отношение разности частот вращающегося поля статора п
Во время холостого хода двигатель имеет минимальное скольжение (1-2%). С увеличением нагрузки уменьшается частота вращения ротора и увеличивается скольжение при номинальной нагрузке, достигая 5-6%.
Электромагнитная связь обмоток ротора и статора аналогична электромагнитной связи обмоток трансформатора. Поэтому с увеличением скольжения, когда линии магнитного поля статора чаще пересекают ротор, увеличивается ток в обмотках ротора и статора.
Частота тока в обмотке ротора зависит от скольжения: /2 = /х5. При пуске 5=1 и /2 = /х = 50 Гц.
Рис. 188. Расположение выводов обмоток на щитке (а) и соединение обмоток звездой (б) и треугольником (е)
Рис. 189. Короткозамкнутая обмотка ротора (а) и короткозамкнутая обмотка ротора, выполненная в виде алюминиевой отливки (б):
/- короткозамыкающие кольца; 2 — листы магнитопривода; 3 — вентиляционные лопатки; 4 — стержни ния ротора п уменьшается скольжение S и частота /2. При холостом ходе двигателя /2 = ІЧ-4 Гц.
Благодаря простоте устройства, дешевизне и большой надежности в работе короткозамкнутые асинхронные двигатели получили широкое распространение. К недостаткам короткозамкнутых асинхронных двигателей относятся: значительное потребление тока в момент пуска; слабый пусковой вращающий момент; потребление реактивного тока из-за индуктивности обмоток статора, вызывающее снижение cos ф.
При пуске двигателя магнитное поле статора с максимальной частотой пересекает неподвижный ротор и в нем наводится наибольшая э. д. с. В результате этого ток в обмотках ротора и статора больше номинального в 5-8 раз. Пусковые токи не успевают нагреть машину до высокой температуры, но вызывают снижение напряжения в сети, что отрицательно влияет на работу других потребителей, включенных в эту же сеть.
д. с. В результате этого ток в обмотках ротора и статора больше номинального в 5-8 раз. Пусковые токи не успевают нагреть машину до высокой температуры, но вызывают снижение напряжения в сети, что отрицательно влияет на работу других потребителей, включенных в эту же сеть.
Вращающий момент М асинхронного двигателя образуется в результате взаимодействия магнитного потока Ф статора с активной составляющей тока ротора /а2 = /2cos ф2. Следовательно, М = = C®/2cos ф2, где С — коэффициент, зависящий от конструкции двигателя; ф2 — разность фаз э. д. с. ?2 и тока /2 ротора.
При пуске в короткозамкнутом роторе асинхронного двигателя возникает ток наибольшей частоты /2. Поэтому индуктивное сопротивление ротора XL2 = 2лf2L2 значительно больше активного г2. Активная составляющая тока ротора /2cos ф2 = /2г2/]/г\ х?2 и вращающий момент не достигают максимального значения.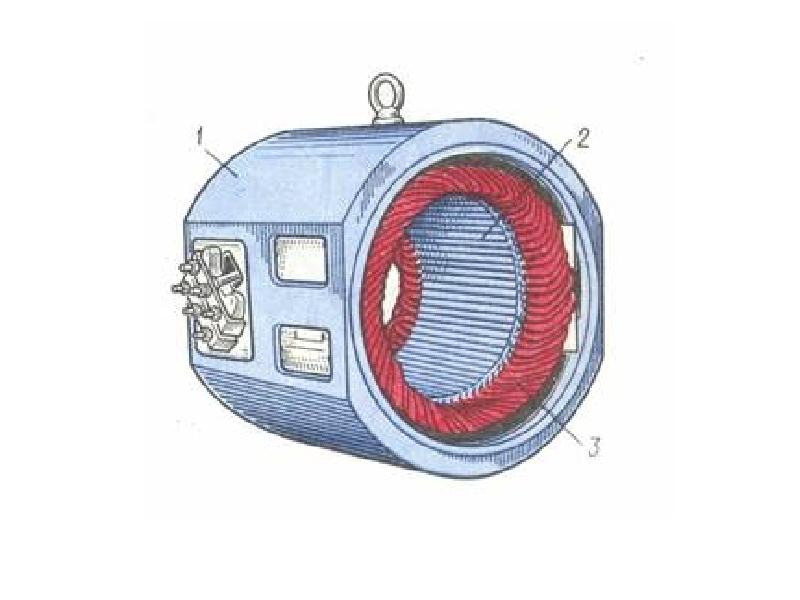 С увеличением скорости частота /2 тока в роторе и его индуктивное сопротивление начнут уменьшаться, что в свою очередь вызовет увеличение активной составляющей тока ротора и вращающего момента двигателя. Вращающий момент асинхронного двигателя достигает наи большего значения при равенстве активного и индуктивного сопротивлений ротора, т. е. при г2 = ХЬ2.
С увеличением скорости частота /2 тока в роторе и его индуктивное сопротивление начнут уменьшаться, что в свою очередь вызовет увеличение активной составляющей тока ротора и вращающего момента двигателя. Вращающий момент асинхронного двигателя достигает наи большего значения при равенстве активного и индуктивного сопротивлений ротора, т. е. при г2 = ХЬ2.
При дальнейшем увеличении частоты вращения это равенство нарушается, т. е.
< г2 и вращающий момент вновь начнет уменьшаться.
При скольжении 5 = 1 (рис. 190) двигатель развивает пусковой момент /Ип, при номинальном скольжении 5Н = 0,02+-0,06- номинальный момент Мн. Максимальный момент /ИтаХ двигатель развивает при скольжении, называемом критическим (5кр я» 0,2).
Трехфазные асинхронные электродвигатели с короткозамкнутым ротором типа МСТ применяют в стрелочных электроприводах. Основные характеристики этих электродвигателей приведены в табл.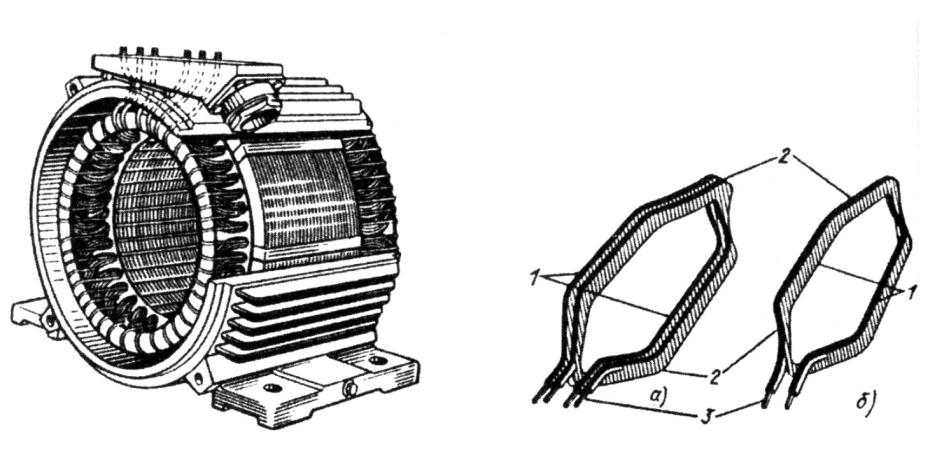 11.
11.
Электродвигатели типов МСТ-0,25 и МСТ-0,3 устанавливают в электроприводах тяжелых и обычных стрелок электрической централизации, типа МСТ-0,6 — в электроприводах стрелок маневровых районов.
Для увеличения начального вращающего момента, необходимого для перевода стрелок, короткозамкнутую обмотку ротора стрелочных электродвигателей выполняют с повышенным активным сопротивлением. Изменение направления вращения ротора электродвигателя осуществляется переменой мест двух линейных проводов, подводящих ток к электродвигателю. При этом изменяется направление вращения магнитного поля статора, а следовательно, и ротора. Асинхронные электродвигатели малой мощности включают в сеть перемен
Г!лс. 190. Зависимость вращающего момента асинхронного двигателя от скольжения
Таблица 11
Тип электро- | МОЩНОСТЬ, | Напряжение питання, В, при соединении обмоток | Потребляе- | Частота вращения ротора, об/мин | |
двигателя | Вт | звездой | треугольни ком | мый ток, А | |
МСТ-0,25 | 250 | 220 | 127 | 1,4/2,4* | 1250±50 |
МСТ-0,3 | 300 | 190+5,? — 9,5 | но±53?5 | 2,1/3,6 | 850+42,5 |
МСТ-0. | 300 | 330±|?,6 | 190±и. | 1,2/2,1 | 850+42,5 |
МСТ-0,6 | 600 | 190±в”6 | Н0±1;\ | 2,8/4,85 | 2850+285 |
МСТ-0.6А | 600 | ззо±ї“,5 | юо±и. | 2/3,46 | 2850+285 |
 3А
3А* В числителе указывается потребляемый ток при соединении обмоток звездой, в зна-менатсле — при соединении обмоток треугольником.
ного тока без пусковых приспособлений. При значительных мощностях (более 5 кВт) пусковой ток ограничивают.
Существуют два способа пуска в ход короткозамкнутых асинхронных электродвигателей. Непосредственный (прямой) пуск применяют в случае, если мощность двигателя значительно меньше мощности сети. Пуск переключением обмоток со звезды на треугольник можно использовать в том случае, если обмотки статора двигателя постоянно должны быть соединены треугольником. Для того чтобы снизить пусковой ток, на период пуска обмотки статора соединяют звездой (рис. 191, а). Благодаря этому напряжение на каждой обмотке снизится в ]1 3 раз, а линейный ток уменьшится в 3 раза. Когда двигатель разовьет скорость, переключают рубильник Р2 и обмотки соединяют треугольником.
Для того чтобы снизить пусковой ток, на период пуска обмотки статора соединяют звездой (рис. 191, а). Благодаря этому напряжение на каждой обмотке снизится в ]1 3 раз, а линейный ток уменьшится в 3 раза. Когда двигатель разовьет скорость, переключают рубильник Р2 и обмотки соединяют треугольником.
Для снижения пускового тока последовательно с обмоткой статора можно включать элементы с активным или индуктивным сопротивлением (рис. 191, б и в). После пуска эти элементы шунтируются.
Однофазный асинхронный двигатель. Обмотка статора однофазного асинхронного двигателя состоит из одной катушки. Ток, проходящий по этой катушке, создает пульсирующий магнитный поток, который можно разложить на два вращающихся магнитных потока Фх и Ф2, имеющих одинаковую величину, но разное направление вращения.
Первый магнитный поток вращается (относительно неподвижного ротора) с частотой пх по движению часовой стрелки, а второй — с такой же частотой — в противоположном направлении. При пуске моменты Мх и М2, создаваемые каждым вращающимся потоком, равны, но направлены в противоположные стороны. В результате пусковой вращающий момент М — Мх — М2 = 0. Если ротору сообщить первоначальное движение, например по движению часовой стрелки, то вращающийся в этом же направлении магнитный поток Фх будет
При пуске моменты Мх и М2, создаваемые каждым вращающимся потоком, равны, но направлены в противоположные стороны. В результате пусковой вращающий момент М — Мх — М2 = 0. Если ротору сообщить первоначальное движение, например по движению часовой стрелки, то вращающийся в этом же направлении магнитный поток Фх будет
Рис. 191. Схемы пуска асинхронного двигателя:
а переключением обмоток статора со звезды на треугольник; б, в — с коротко-замкнутым роторам с помощью соответственно активных и индуктивных элементов действовать на ротор, как и в трехфазном короткозамкнутом двигателе. Магнитный поток Ф2, вращающийся относительно ротора в противоположном направленні!, будет индуцировать в роторе токи большей частоты. Индуктивное сопротивление ротора для этой частоты возрастет и еще больше будет отличаться от активного сопротивления. В результате этого вращающий момент Л42 уменьшится.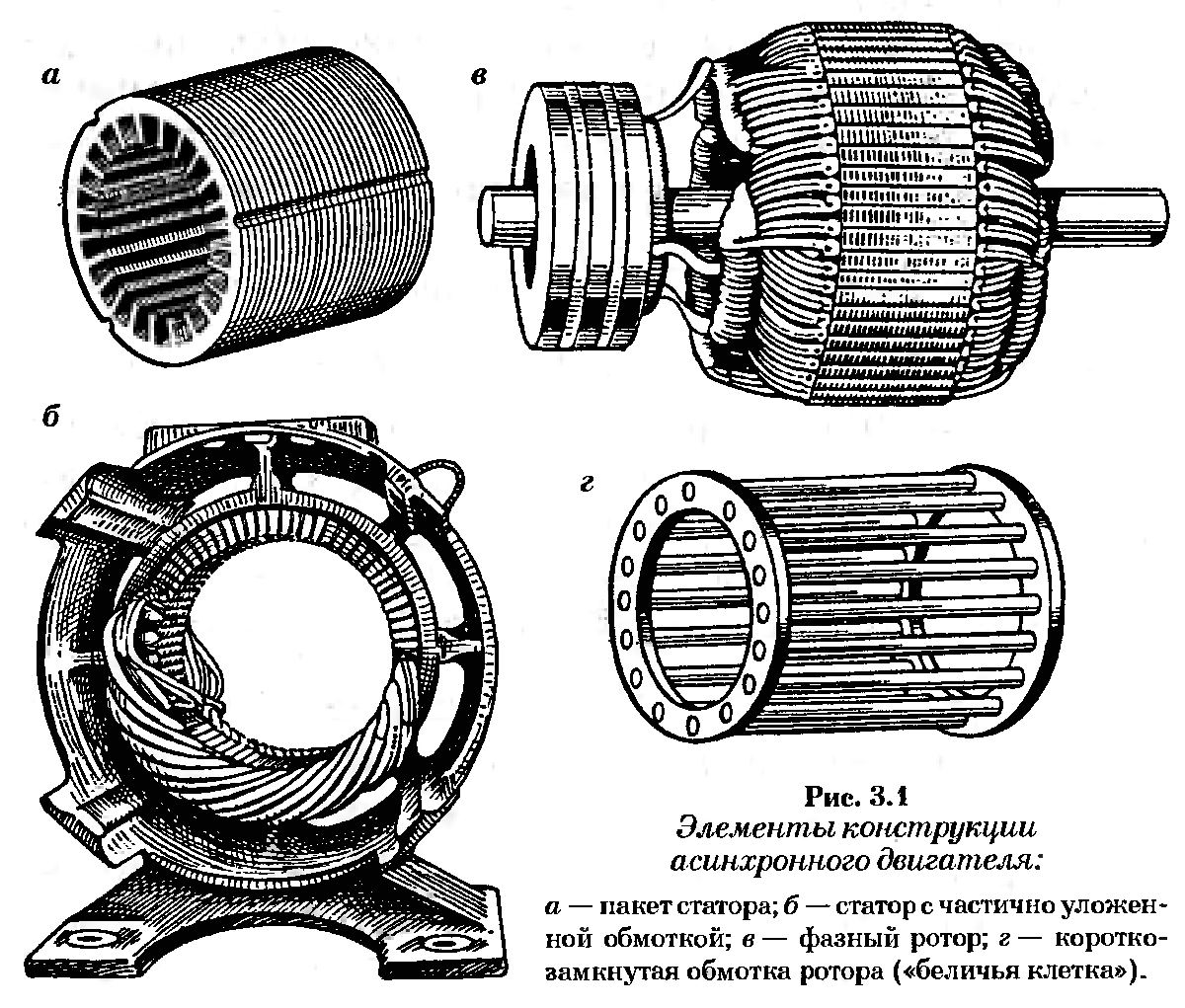 Результирующий вращающий момент М = М, — М2 будет направлен в сторону первоначального движения ротора.
Результирующий вращающий момент М = М, — М2 будет направлен в сторону первоначального движения ротора.
Пусковой вращающий момент в однофазном асинхронном двигателе (рис. 192) может быть получен за счет дополнительной пусковой обмотки ПО, которую укладывают в пазах статора под углом 90° к главной обмотке ГО. Ток !х главной обмотки отстает по фазе от напряжения и на угол чд. Последовательно с пусковой обмоткой включен конденсатор С, и ток /2 опережает по фазе напряжение на угол <р2. Поэтому токи в обмотках сдвинуты на угол ф1 — <р2 = 90е и в машине возникает вращающееся магнитное поле, которое создает пусковой момент. Однофазные асинхронные конденсаторные двигатели типа АСОМ-48 устанавливают в кодовых путевых трансмиттерах, которые применяют в устройствах кодовой автоблокировки и автоматической локомотивной сигнализации. Электродвигатель может питаться от источника с переменным напряжением 110 В частотой 50 и 75 Гц.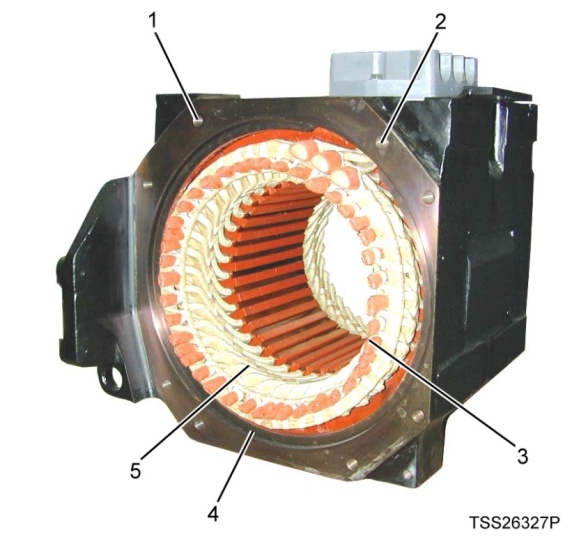 При частоте 50 Гц в электрическую схему двигателя включают конденсатор емкостью 6 мкФ (рис. 193, а), при частоте 75 Гц — конденсатор емкостью 2 мкФ (рис. 193, б). Основные характеристики электродвигателя типа АСОМ-48: полная мощность 16,5 В — А; полезная мощность 3,5 Вт; к. п. д. 0,3; частота вращения якоря при частоте 50 Гц 982 об/мин, при частоте 75 Гц — 1473 об/мин.
При частоте 50 Гц в электрическую схему двигателя включают конденсатор емкостью 6 мкФ (рис. 193, а), при частоте 75 Гц — конденсатор емкостью 2 мкФ (рис. 193, б). Основные характеристики электродвигателя типа АСОМ-48: полная мощность 16,5 В — А; полезная мощность 3,5 Вт; к. п. д. 0,3; частота вращения якоря при частоте 50 Гц 982 об/мин, при частоте 75 Гц — 1473 об/мин.
В однофазную сеть можно включать трехфазные асинхронные двигатели (рис. 194).
Рабочие характеристики асинхронного двигателя. На щитке асинхронного двигателя указывают номинальные значения мощности Рн, напряжения {/„, частоты вращения пп и к. п. д. т]н. На рис. 195 показаны рабочие характеристики двигателя, которые показывают при
неизменном номинальном напряжении зависимость частоты вращения п, вращающего момента М, коэффициента мощности cos ф, потребляемого тока 1 и к. п. д. г] от полезной мощности двигателя Р.г. С увеличением нагрузки частота вращения асинхронного двигателя уменьшается незначительно, поэтому характеристика п 1 (Р-. -0,9.
-0,9.
⇐Путевые дроссель-трансформаторы | Электропитающие устройства и линейные сооружения автоматики, телемеханики и связи железнодорожного транспорта | Синхронные генераторы⇒
Электромагнитные дефекты | Спектральная вибродиагностика
«Диагностика дефектов вращающегося оборудования по вибрационным сигналам» 2012 г.
3.2. Дефекты оборудования уровня «механизм»
Анализируя сигналы с датчиков вибрации, установленных
на опорных подшипниках электрических машин, можно выявить достаточно много
специфических дефектов состояния, возникающих только в электродвигателях и
генераторах различного типа. Причиной повышенной вибрации электрических машин могут
являться как различные внутренние электромагнитные дефекты электрических машин,
так некоторые специфические особенности проявления электромагнитных процессов в
обмотках и сердечниках, т. е. это просто может отражать особенности нормальной
работы электродвигателей и генераторов во вращающихся агрегатах.
е. это просто может отражать особенности нормальной
работы электродвигателей и генераторов во вращающихся агрегатах.
Применение вибрационных методов диагностики дефектов состояния электродвигателей и генераторов обычно является первым этапом в оценке их состояния. Так происходит потому, что они позволяют оперативно анализировать состояние оборудования непосредственно во время его работы, или как это принято называть в литературе, реализуют диагностику и мониторинг технического состояния в режиме «on-line».
После
применения вибрационного анализа для диагностики дефектов в электрических
машинах, и выявления основных характерных признаков существования того или иного
дефекта, можно, а иногда даже необходимо, применять другие, специализированные
и, естественно, более точные методы диагностики состояния электрических машин.
Очевидно, что описание этих методов выходит за рамки данной работы, и ознакомиться с ними можно, если обратиться к другой, более специализированной литературе. Частично, но все равно более широко, чем это обычно делается в «обычной» литературе по вибрационной диагностике, эти методы рассмотрены в данном разделе. Некоторые аспекты диагностики электротехнического оборудования приведены ниже, в соответствующем разделе.
При
выборе дефектов, которые мы описываем в данном разделе, мы исходили из простого
определения. Если дефект можно диагностировать при помощи установки датчиков
вибрации на опорных подшипниках, то его описание включено в данный раздел. Если
же для диагностики необходимо устанавливать датчики вибрации в других точках
контролируемой электрической машины, то описание диагностики таких дефектов
вынесено в особый раздел данного методического руководства.
Обычные, достаточно широко распространенные причины повышенной вибрации электрических машин «не электромагнитного характера», такие как небаланс, проблемы подшипников, наличие изогнутого вала, и т. д. в данном разделе методического руководства никак не рассматриваются. По вопросам диагностики этих дефектов в двигателях и генераторах вибрационными методами следует обращаться к соответствующим разделам данного руководства.
Для проведения диагностики различных
электромагнитных дефектов в электрических машинах необходимо использовать
измерительное оборудование, имеющее достаточно высокие эксплуатационные параметры.
Не все приборы, хорошо подходящие для диагностики дефектов механической природы
возникновения, такие как небаланс, расцентровка, и т. д., могут быть
использованы для анализа технического состояния электрических машин переменного
тока.
Для успешной диагностики различных электромагнитных проблем в электрических двигателях и генераторах необходим анализатор спектров вибросигналов с очень высокой разрешающей способностью, с числом спектральных линий, не меньшем, чем 3200, а желательно и лучше. Кроме того, такой прибор должен иметь возможность проводить регистрацию вибрационных сигналов в течение достаточно длительного интервала времени, не менее 10 — 20 секунд. Это необходимо делать для эффективного разделения проблем механической и электромагнитной природы возникновения, что возможно сделать только в момент отключения контролируемого агрегата от питающей сети.
Измерение
вибрации на подшипниках электродвигателей и генераторов нужно всегда проводить
в трех направлениях — вертикальном, поперечном и осевом, иначе потом будет невозможно
провести полную диагностику состояния. Идеальным является синхронная регистрация
(не путать с синхронизированной регистрацией, которая гораздо менее эффективна)
сразу шести вибросигналов с двух подшипников электрической машины. Обычно это
повышает достоверность диагнозов дополнительно не менее чем на 10 %.
3.2.6.1. Описание физических процессов в электрических машинах
Вопросами
диагностики текущего технического состояния и поиска дефектов в электрических машинах
обычно занимаются специальные электротехнические службы, знакомые с
особенностями физических процессов в двигателях и генераторах. Для тех, кто
раньше не был практически связан с процедурой оценки состояния электротехнического
оборудования, необходимо обязательно ознакомиться со специальной литературой,
описывающей основные особенности его работы.
Дело в том, что существует несколько типов электрических машин, процессы в которых значительно отличаются друг от друга. Кроме того, в каждом типе электрических машин существует несколько специфических особенностей, не зная которые очень сложно проводить корректную оценку их технического состояния.
В самом начале данного раздела, на первом этапе описаний, кратко вспомним некоторые основные определения и понятия из минимального, по объему, курса электрических машин. Сделаем это для простоты объяснения причин возникновения вибрации в электрических машинах, а так же для того, чтобы не загромождать эти объяснения в дальнейшем, Знание этих основополагающих понятий совершенно необходимо для проведения корректного диагностирования дефектов электрических машин, для правильного толкования спектрального состава регистрируемых вибрационных сигналов.
По принципу действия различают три основных типа широко применяемых электрических машин:
- Синхронные машины переменного тока, в которых частота вращения ротора совпадает с частотой вращения электромагнитного поля в зазоре. Эти машины могут работать в режимах двигателя и генератора, в практике встречаются и те, и другие.
- Асинхронные машины переменного тока, в которых ротор вращается несколько медленнее. Величина отставания ротора от статора составляет несколько процентов, и характеризуется термином «скольжение». Теоретически также могут работать в режимах двигателя и генератора, но на практике встречаются практически одни двигатели.
- Машины постоянного тока. Это также обратимые электрические машины, допускающие двигательный и генераторный режимы работы. На практике встречаются и те, и другие исполнения машин постоянного тока.
В данном разделе методического руководства будут рассмотрены основные способы диагностики состояния и поиска дефектов состояния электрических машин переменного тока, синхронных и асинхронных, как наиболее распространенных в промышленности и в быту. Электромагнитные проблемы машин постоянного тока очень сложно поддаются диагностике, в основе которой лежит анализ вибрационных сигналов с опорных подшипников, поэтому рассматриваться здесь не будут.
Синхронные и асинхронные машины являются по своему принципу действия обратимыми, т. е. могут работать в как режиме двигателя, так и в режиме генератора. В дальнейшем диагностика дефектов статоров синхронных и асинхронных машин, двигателей и генераторов, не будет подразделяться, т. к. они имеют одинаковые по конструкции статоры. Синхронные машины отличаются от асинхронных только конструкцией ротора, что найдет отражение в специальном подразделе, где будут описаны наиболее часто встречающиеся дефекты короткозамкнутых роторов.
Очень важно уже на самом первом этапе диагностики, заранее, определиться с диапазоном численных значений частоты вращения ротора и электромагнитного поля в зазоре. Для этого необходимо знать оборотную частоту вращения электромагнитного поля статора и оборотную частоту вращения ротора электрической машины переменного тока. Именно они определяют требования к приборам вибрационного контроля.
Максимальная частота вращения ротора электрической машины переменного тока определяется в размерности «обороты в минуту». В иностранной литературе широко используется термин RPM, что является сокращением стандартного параметра «Rotation Per Minute», т. е. те же «обороты в минуту». Эта максимальная частота вращения также является и номинальной, так как в нормальных условиях частота вращения машины переменного тока редко регулируется, а если и регулируется, то практически всегда с использованием преобразователей частоты.
Частота вращения ротора численно равна произведению частоты питающей сети, измеряемой в [Гц], умноженной на переводной коэффициент, равный 60 (количество секунд в одной минуте). В России принят стандарт частоты питающей сети в 50 Гц. Поэтому максимально возможная частота вращения роторов двигателей и генераторов переменного тока составляет 3000 об/мин. При частоте питающей сети в 60 Гц, что являющейся стандартной в Америке и в Японии, максимальная частота вращения ротора машины переменного тока составит 3600 об/мин.
В зависимости от особенностей конструкции статоров машин переменного тока частота вращения электромагнитного поля в зазоре может изменяться. Для определения этой частоты формула определения частоты вращения поля должна быть дополнена еще одним сомножителем «Р», находящимся в знаменателе:
N0 = 60 * F1 / P
Таким образом, частота вращения электромагнитного поля в зазоре электрической машины N0 равняется частному от деления максимальной частоты вращения электромагнитного поля в зазоре на число «пар полюсов статора – Р». Это конструктивный параметр обмотки статора, и он может принимать только целые значения, равные 1, 2, 3, 4, 5 и т. д. При этом частота вращения поля в зазоре электрической машины будет равна соответственно 3000 об/мин, 1500, 1000, 750, 600 и т. д.
При числе пар полюсов, отличном от единицы, частота вращения поля в зазоре электрической машины отлична от частоты питающей сети, причем в меньшую сторону от стандартных 3000 об/мин. Это очень важно учитывать при первой диагностике состояния «мало знакомых» электрических машин по спектрам вибросигналов.
В синхронных электрических машинах переменного тока частота вращения ротора всегда совпадает с частотой вращения электромагнитного поля в зазоре. Именно поэтому такие машины называются синхронными. Такие электрические машины имеют достаточно большую мощность, что связано с особенностями их конструкции. Можно смело утверждать, что «встретить» синхронную машину с мощностью менее 1000 кВт на практике очень сложно. Их мало, но они имеют большую единичную мощность, генераторы достигают мощностей до 800 МВт и более.
В асинхронных машинах переменного тока частота вращения ротора всегда меньше частоты вращения электромагнитного поля в зазоре на небольшую величину, ротор отстает от электромагнитного поля. Это отставание обычно называется скольжением «s» и измеряется в долях от единицы или в процентах. Имеющаяся небольшая разница в частотах вращения поля и ротора называется частотой скольжения ротора, которая измеряется в герцах или в процентах. В диагностике дефектов ротора асинхронного двигателя эта частота имеет большое значение.
Стандартный ряд рабочих частот вращения роторов асинхронных двигателей, в зависимости от числа пар полюсов обмотки статора, можно примерно представить в виде последовательности чисел — 2900 об/мин, 1450 об/мин, 970 об/мин.
Из этого ряда» хорошо видно, что частота вращения ротора асинхронной электрической машины всегда отстает от частоты вращения электромагнитного поля в зазоре электрической машины. Для сравнения напомним, что в синхронных машинах переменного тока, где частота вращения ротора совпадает с частотой вращения поля в зазоре, этот ряд рабочих частот вращения электрических машин составляет 3000, 1500, 1000 об/мин.
Отдельно необходимо остановиться на термине, который практические диагносты достаточно широко используют на практике, но, может быть, не совсем корректно понимают его смысл. В самом общем случае этот термин звучит примерно как «электромагнитные вибрации и электромагнитные гармоники в спектре вибрационного сигнала».
В электрических машинах переменного тока возможно возникновение специфических вибраций двух типов. Конечно, реальных причин повышения вибрации в электродвигателях и генераторах может быть гораздо больше, но при измерении вибрационных сигналов на опорных подшипниках реально зарегистрировать можно только «отклики» от этих двух причин. В другом разделе нашего руководства мы частично затронем некоторые другие аспекты вибрационной диагностики состояния электротехнической составляющей электрических машин, здесь же мы рассмотрим только способы диагностики возможных «механических дефектов» электрических машин.
Для начала дадим определение основным электромагнитным вибрациям, которые можно зарегистрировать на опорных подшипниках синхронных и асинхронных электрических машин. Как мы уже говорили, они могут возникать по нескольким причинам.
Во-первых, это электромагнитные вибрации ферромагнитных сердечников и стальных конструктивных элементов электротехнического оборудования, по которым во время работы оборудования протекает переменный магнитный поток.
Эти вибрации возникают за счет специфического процесса, который в литературе называется магнитострикцией. Этот эффект обусловлен тем, что при перемагничивании ферромагнитных материалов сердечника происходит изменение внутренней ориентации элементарных намагниченных частиц, доменов. При каждом перемагничивании сердечника происходит поворот доменов на 180 градусов, что в итоге и приводит к небольшому «линейному расширению» ферромагнитного материала. Чем больше величина магнитного потока в сердечнике, тем больше размеры элементарных доменов в ферромагнитном сердечнике, и тем больше будут вибрации сердечника электрической машины.
Поскольку перемагничивание сердечника магнитным потоком происходит дважды за один период питающей сети, то и частота вибрации, обусловленная эффектом магнитострикции, равняется удвоенной частоте питающей сети, т. е. она равняется 100 Гц. Мы обращаем дополнительное внимание читателя на то, что вне зависимости от оборотной частоты вращения ротора электрической машины, частота вибрации сердечника (пакета стали статора) всегда равняется 100 Гц.
Если оборотная частота ротора равняется 50 Гц, то гармоника электромагнитной вибрации располагается на спектре «в том месте», где может находиться вторая гармоника оборотной частоты. Если же оборотная частота ротора равняется, например, 25 Гц, то гармоника электромагнитной вибрации на спектре будет располагаться на месте четвертой гармоники оборотной частоты. Этими двумя простыми примерами мы еще раз подчеркнули, что электромагнитная гармоника не связана с частотой вращения ротора электрической машины, а зависит только от частоты питающей сети.
Во-вторых, вибрации в электрической машине вызываются специфическими электродинамическими силами, которые в литературе принято называть «амперовыми силами», т. к. их величина определяется по закону Ампера. Смысл закона Ампера звучит следующим образом – на два проводника с током действует сила взаимного притяжения, пропорциональная квадрату протекающего по проводникам тока, и обратно пропорциональная расстоянию между проводниками. Если направление тока в обоих проводниках одинаковое, то проводники притягиваются друг к другу. Если токи в параллельных проводниках текут в разные стороны, то проводники отталкиваются друг от друга.
Самое важное для нас в этом законе заключается в том, что в числителе стоит произведение токов в проводниках, т. е. квадрат тока промышленной частоты. Из тригонометрии следует известное соотношение, гласящее, что квадрат синусоидального сигнала есть другой гармонический сигнал, но имеющий удвоенную частоту. Таким образом, мы аналогично получаем, что сила электродинамического воздействия между двумя проводниками с синусоидальными токами промышленной частоты имеет удвоенную частоту, относительно частоты питающей сети.
Таким образом, мы определили, что вибрации электрической машины, не вызванные механическими проблемами, имеют удвоенную частоту относительно частоты питающей сети, т. е. равную 100 Гц. Это определение относится как к электромагнитным причинам повышенной вибрации, возникающим в сердечниках электрических машин силами магнитострикции, так и к электродинамическим силам взаимодействия проводников друг с другом, возникающим при протекании токов по обмоткам электрической машины.
Все это можно сказать несколько иначе. Основная, или, говоря терминами, принятыми в вибрационной диагностике, оборотная частота электромагнитных сил и вибраций в электрической машине равна удвоенной частоте питающей сети. Это совершенно отдельная сила, не связанная с частотой вращения ротора, что может быть легко выяснено при помощи средств кепстрального анализа. Она просто имеет частоту, равную удвоенной частоте питающей сети. Гармоники основной частоты этой силы имеют значения 200 Гц, 300, 400 и т. д. В чистом виде эта сила очень явно проявляется в статическом электрооборудовании. Примером этого является трансформатор, в котором гармоника вибрации с частотой питающей сети в 50 Гц практически отсутствует, а максимальное значение имеет гармоника вибрации с частотой 100 Гц.
Есть еще и третья (по порядку нашего повествования, а не по порядковому номеру в спектре) гармоника вибрации, имеющая электромагнитную природу возникновения. Она называется зубцово – пазовой гармоникой. Она не всегда столь значительна, как первые две, но сказать о ней все равно нужно.
Зубцово – пазовая гармоника вызывается особенностями конструктивного исполнения электрической машины переменного тока. У нее на статоре и на роторе обмотка всегда укладывается в пазах. При вращении ротора в зазоре статора возникает периодическое чередование ферромагнитных зубцов и пазов на статоре и роторе. Это приводит к модуляции магнитного потока в зазоре частотой, связанной с количеством пазов на роторе и статоре электрической машины.
При разработке электрических машин принимаются все меры, чтобы исключить влияние зубцово — пазовой структуры на работу машины. На статоре и роторе всегда различное число пазов, на роторе применяется «скос» пазов, когда ось паза идет не вдоль оси ротора, а как бы немного закручена вокруг оси и т. д. Тем не менее, существуют типы электрических машин, в которых «пазовая» гармоника оборотной частоты ротора является явно выраженной на спектре.
Необходимо хорошо понимать, что все эти три гармоники в спектре вибросигнала, имеющие электромагнитную природу возникновения, не всегда являются признаками наличия дефектов в контролируемой электрической машине, они практически всегда сопровождают ее работу. Признаком наличия дефекта обычно является увеличение амплитуд электромагнитных гармоник выше некоторого уровня, являющегося порогом нормального состояния оборудования.
Основной признак того, что анализируемая гармоника в спектре сигнала вибрации имеет электромагнитную причину возникновения — мгновенное исчезновение этой гармоники сразу после отключения электрической машины от сети.
Очень важным является то, что диагностика причин повышенной вибрации электрических машин должна проводиться при возможно большей нагрузке двигателя. Если исследования будут проводиться на холостом ходу, или же при небольшой нагрузке, то диагностика дефектов будет затруднена.
3.2.6.2. Сводка электромагнитных проблем ротора и статора
Приведем краткую сводку по электромагнитным проблемам электрических машин, которые можно эффективно диагностировать по спектрам вибросигналов. Здесь же приведем все характерные признаки каждого вида дефекта.
Для описания дефектов здесь и далее будем использовать термины:
F1 — частота питающей сети, в России равна 50 Гц.
FЭМ — частота электромагнитных сил в электрических машинах, равна удвоенной частоте сети, в России 100 Гц.
N0 — частота вращения поля в зазоре электрической машины, численно равна частному от деления 3000 на число пар полюсов Р, которое может принимать целые значения от единицы и более (об/мин).
F0 — частота электромагнитного поля в зазоре, Гц.
FP — собственная частота вращения ротора электрической машины. Для синхронных машин она равна частоте вращения поля. Для асинхронных машин она меньше на величину скольжения ротора.
FP = F0 (1 — s)
s - скольжение ротора относительно электромагнитного поля в асинхронных машинах, безразмерная величина, численно равняется разнице между частотой вращения поля в зазоре и частотой вращения ротора, отнесенной к частоте вращения поля в зазоре
s = (N0 — FP) / N0
FП — зубцово — пазовая частота вибрации, численно равная произведению числа пазов (на роторе или статоре) на частоту электромагнитного поля в зазоре. Может быть повышенной относительно статора, относительно ротора, может быть разностная или суммарная частота биений пазовых частот ротора и статора.
Наиболее важные проблемы статора, которые можно диагностировать на основе анализа вибрационных сигналов:
- Ослабление прессовки пакета стали, обрыв или замыкание стержней, витков, или даже секций в обмотке статора. Соответствующие вибрации проявляются на частоте действия электромагнитных сил FЭМ, равной удвоенной частоте питающей сети. Особое внимание при диагностике такого дефекта следует уделять наличию дробных гармоник электромагнитной частоты — 1/2, 3/2, 5/2 и т. д. от основной частоты. По значению частоты эти гармоники соответствуют основной и нечетным гармоникам питающей сети. Появление этих гармоник в спектре вибрационного сигнала говорит об опасной степени развития дефекта, о необходимости оперативного принятия соответствующих мер.
- Эксцентриситет, эллипсность внутренней расточки статора относительно оси вращения ротора. Возникает обычно как дефект монтажа подшипниковых стоек, дефект состояния подшипниковых щитов или при общей деформации корпусных элементов самого статора. В вибрации проявляется на частоте вращения поля в зазоре, а также и на частоте действия электромагнитных сил в электрической машине, равной 100 Гц. Иногда сопровождается появлением боковых гармоник вблизи частоты 100 Гц. Дефект обычно сопровождается неравенством вертикальной и поперечной составляющих соответствующих гармоник. Пространственный максимум гармоник соответствует направлению эксцентриситета смещения оси статора. Наиболее просто направление смещения оси статора относительно оси ротора диагностируется при снятии «розы вибраций», когда датчик последовательно перемещается по огибающей вокруг подшипника со смещением при каждом измерении на угол 30 — 45 градусов.
- Неправильный взаимный осевой монтаж активных пакетов ротора и статора. Иногда для данного дефекта используется термин: «неправильная установка электромагнитных осевых разбегов». При работе электрической машины, в результате сил магнитного притяжения, пакет ротора всегда стремится к положению точно под пакетом статора.
Если этому стремлению будут препятствовать неправильно смонтированные в осевом направлении подшипники, то в них будут возникать компенсирующие осевые усилия, которые и вызовут осевые вибрации подшипников. Подшипники достаточно быстро нагреются и выйдут из строя. Иногда ротор двигателя «утягивается» в осевом направлении валом механизма, что возможно при неправильном осевом монтаже приводного механизма, сопровождающемся малой осевой подвижностью в соединительной муфте.
Основные проблемы ротора, диагностируемые по вибрации:
- Эксцентриситет внешней поверхности ротора относительно оси его вращения. На спектре вибросигнала этот дефект проявляется в усилении первой гармоники частоты вращения ротора. Усиливается частота действия электромагнитной силы, вокруг которой иногда появляются боковые гармоники, сдвинутые друг от друга на частоту скольжения ротора, умноженную на число полюсов.
- Обрыв или нарушение контакта в стержнях или кольцах «беличьей клетки» в асинхронном двигателе. Обычно проявляется на спектре вибрационного сигнала вблизи частоты вращения вала ротора. Кроме того, этот дефект всегда сопровождается появлением вблизи основной гармоники частоты вращения ротора боковых гармоник, сдвинутых относительно гармоники частоты вращения ротора на интервал, равный произведению частоты скольжения на число полюсов двигателя. Очевидно, что этот дефект присущ только асинхронным двигателям, а в синхронных машинах он никак не проявляется.
- Ослабление прессовки всего пакета стали ротора или только в области зубцов. Сопровождается усилением второй гармоники питающей сети или, при ослаблении стали в области зубцов, появлением пазовой частоты ротора с боковыми полосами, сдвинутыми друг от друга на частоту, равную двойной питающей частоте. Такой дефект на практике диагностируется достаточно сложно, так как его спектральные признаки напоминают признаки других дефектов, и проявляются не очень сильно, чаще всего неявно.
3.2.6.3. Диагностика электромагнитных проблем статора
При всех проблемах статора синхронной или асинхронной электрической машины, имеющих в своей основе первопричину электромагнитной природы, в спектре вибросигнала возникает весьма специфическая картина. В основном она сопровождается возникновением высокой амплитуды основной гармоники на частоте электромагнитных процессов FЭМ. Как уже неоднократно говорилось выше, ее частота равна удвоенной частоте питающей сети, т. е. всегда равняется 100 Гц. Еще раз напоминаем, что эта частота никак не связана с оборотной частотой вращения ротора.
Этот эффект достаточно хорошо объясняется с точки зрения физики происходящих в стали статора процессов. Силы взаимного притяжения, действующие между «распрессоваными» листами электротехнического железа или элементами крепления пакета стали, имеют максимум амплитуды дважды за один период изменения питающей сети — во время абсолютного минимума и максимума магнитного потока. Чем сильнее будет распрессован пакет статора электрической машины, тем большую амплитуду в спектре будет иметь основная электромагнитная гармоника.
Аналогично выглядит картина взаимодействия между элементами обмотки статора. Математически это объясняется тем, что электромагнитные силы пропорциональны квадрату тока или магнитного потока. Поскольку и тот и другой синусоидальны, то их произведение также пропорционально синусоиде, но изменяющейся уже с удвоенной частотой, относительно исходной частоты питающей сети.
На спектре вибрационного сигнала, приведенном на рисунке 3.2.6.1., картина появления электромагнитных проблем в статоре выражается в усилении пика на электромагнитной частоте. При значительных дефектах в стали могут появиться и вторая (200 Гц) гармоника электромагнитной частоты FЭМ, и даже третья (300 Гц).
Кроме того, в спектре может появиться также целый ряд дробных гармоник, имеющих кратность 1/2 от электромагнитной гармоники. В данной ситуации, по своей частоте, эти гармоники будут численно соответствовать нечетным целым гармоникам частоты питающей сети. Такое совпадение двух семейств гармоник усложняет их разделение частоте, требуя большей внимательности и применения дополнительных диагностических средств.
Очень важно хорошо понимать и помнить основное различие синхронных и асинхронных электрических машин, значительно влияющих на диагностику дефектов по спектрам вибрационных сигналов.
Гармоники вибрации от электромагнитных процессов в статоре синхронной машины, по своей физической природе, являются синхронными относительно частоты вращения ротора. В асинхронном двигателе эти же семейства гармоник являются несинхронными, т. к. частота вращения ротора и частота питающей сети не кратны между собой, а различаются между собой пропорционально частоте скольжения. В данном определении под коэффициентом кратности соотношений частот мы понимаем влияние числа пар полюсов обмотки, уложенной в пазах статора.
Ослабление прессовки активного железа статора в электрической машине обуславливается, в основном, двумя часто встречающимися причинами — или общим ослаблением элементов крепления железа статора, или же явлением «отслоения» крайних листов и пакетов стали.
При этих локализациях дефекта железа статора важную роль начинает играть место установки вибродатчика. Чем ближе он устанавливается к дефектному месту пакета статора, чем короче будет путь прохождения «полезного» вибрационного сигнала, тем более корректно можно будет проводить диагностирование и, достаточно часто, удается даже локализовать место проявления дефекта. Наиболее эффективно датчик вибрации устанавливать не на опорных подшипниках ротора, а непосредственно на корпусе сердечника статора, а еще лучше и на самом пакете активной стали.
Аналогично обстоит дело и с особенностями проявления в спектрах вибросигналов различных дефектов обмоток статора, но поиск их и локализация происходят гораздо сложнее. Более подробно мы рассмотрим этот вопрос в другом разделе данного руководства, однако основные требования к месту установки датчика вибрации останутся прежними – как можно ближе к возможному месту возникновения предполагаемого дефекта пакета или обмотки статора.
Самое главное, что нужно помнить при диагностике дефектов, что различить тип диагностируемого в статоре электрической машины дефекта, имеет — ли он «чисто электрическую природу возникновения», или же он обусловлен одними «магнитными проблемами», методами спектральной вибрационной диагностики практически невозможно. Единственный, достаточно корректный признак наличия короткозамкнутого витка в обмотке статора (электрическая причина возникновения повышенных вибраций) — наличие боковой гармоники вблизи частоты 100 Гц, и ее чаще всего обнаружить не удается. В большинстве практических случаев необходимо применение более специализированных методов диагностики состояния электрических машин.
3.2.6.4. Проблемы эксцентричности пакета статора
Эксцентриситет статора возникает чаще всего как дефект изготовления «шихтованного» пакета стали статора, или как дефект монтажа статора. Очень высока вероятность возникновения эксцентриситета статора в процессе монтажа электрической машины, особенно, если статор и подшипниковые опоры монтируются раздельно. Данный дефект статора может возникнуть в результате ослабления фундамента или как итог тепловых и иных деформаций в агрегате и фундаменте.
Для примера на рисунке 3.2.6.2. приведен спектр вибросигнала, зарегистрированного на подшипнике асинхронного двигателя, имеющего номинальную частоту вращения ротора, равную n0 = 1480 об/мин. Этот спектр соответствует наличию в электрической машине достаточно развитого дефекта типа «эксцентриситет статора».
Эксцентриситет статора приводит, с точки зрения физики протекания электромагнитных процессов, к периодическому изменению магнитной проводимости воздушного зазора, к ее пульсации, или, говоря иными словами, к ее модуляции. Эта пульсация происходит с удвоенной частотой сети, т. е. с частотой воздействия электромагнитных сил.
Удвоение частоты пульсации относительно питающей сети возникает из — за того, что мимо зоны окружности статора, где произошло изменение величины зазора, поочередно проходят и северный, и южный полюса электромагнитного поля, вращающегося в зазоре электрической машины. Удвоенные пульсации магнитной проводимости приводят к такой же пульсации магнитного потока и, как результат, к пульсации электромагнитной силы и вибрации с частотой 100 Гц.
Дополнительно несколько возрастает амплитуда гармоники на частоте вращения электромагнитного поля в зазоре. Это позволяет в асинхронных двигателях хорошо дифференцировать эксцентричность статора от эксцентричности ротора, где вибрация идет с частотой вращения ротора. Для выявления этого различия необходимо наличие спектроанализатора с хорошим разрешением.
Для разделения эксцентриситетов статора и ротора в синхронной машине между собой, при диагностике следует помнить, что эксцентриситет статора неподвижен в пространстве и различен по амплитуде вибрации в направлениях измерения вибрации. Благодаря такой локализации эксцентриситет статора приводит к возникновению направленной в пространстве вибрации. Это можно выявить при помощи последовательного перемещения вибродатчика по контролируемому подшипнику «вокруг вала». Эксцентриситет же ротора всегда «вращается» вместе с ротором, поэтому он не имеет стационарного максимума при определенном значении угла установки датчика. При эксцентриситете статора такой максимум явно выражен.
Для исключения проявления эксцентриситета в вибрации электрических машин необходимо, чтобы воздушный зазор между статором и ротором должен быть неизменным по окружности. Обязательно должно соблюдаться требование к качеству взаимного монтажа статора и ротора, что различие в величине воздушного зазора вдоль окружности не должно превышать значение в 5% для асинхронных двигателей и генераторов, и не превышать 10 % для синхронных двигателей. Значение этого параметра жестко контролируется при помощи специальных щупов при монтаже электрической машины. Такая процедура измерения должна производиться при нескольких взаимных положениях ротора и статора.
3.2.6.5. Эксцентричный ротор
Это достаточно часто встречающаяся в практике причина повышенной вибрации асинхронных электрических машин. У синхронных электрических машин переменного тока этот дефект менее заметен из-за больших рабочих зазоров.
При наличии эксцентриситета ротора в характере распределения электромагнитного поля в зазоре двигателя возникает ряд особенностей. Плотность электромагнитного поля вдоль окружности зазора изменяется вместе с поворотом ротора. Это приводит, из-за переменного зазора, к неравномерности тягового усилия двигателя. При совпадении оси поля статора с зоной увеличенного зазора тяговое усилие несколько уменьшается, при этом возрастает величина частоты скольжения. При смещении оси поля в зону меньшего зазора тяговое усилие растет, частота скольжения падает. При числе пар полюсов статора, большем единицы, такой процесс повторяется «Р» раз.
Если бы мы имели очень чувствительные приборы для измерения частоты вращения ротора, то мы бы обнаружили следующее. В интервале перемещения ротора от зоны, с увеличенным зазором в сторону зоны, с уменьшенным зазором, ротор бы ускорился в своей частоте вращения на небольшое значение. На интервале перехода ротора обратно, к зоне с увеличенным зазором, ротор бы замедлился на то же значение. Конечно, таких приборов у нас нет, но это видно на спектре с большой разрешающей способностью, где появляются признаки таких изменений скорости.
На спектре вибросигнала, показанном на рисунке 3.2.6.3., вокруг основной частоты вращения ротора, должны появиться симметрично расположенные боковые пики, гармоники, напоминающие зубцы короны. Симметрия пиков относительно основной частоты достаточно хорошо понятна — это следствие «мини ускорений и мини замедлений» частоты вращения ротора вокруг своего среднего значения. Аналогичные зубцы, даже еще большей интенсивности, появляются и вокруг пика электромагнитной силы, на частоте, равной второй гармонике питающей сети.
Необходимо пояснить причины проявления эксцентричности ротора на этой частоте.
Вращение эксцентричного ротора модулирует проводимость зазора с удвоенной частотой. При числе пар полюсов, равном единице частота вращения поля равна 50 Гц, удвоенная частота сети, частота электромагнитной вибрации равна 100 Гц. Эксцентричность ротора приводит к модуляции электромагнитной силы. При уменьшении числа пар полюсов частота вращения поля в зазоре уменьшится в Р раз. Переменный зазор ротора за один свой оборот будет модулировать электромагнитную силу 2 х Р раз больше частоты своего вращения, что как раз и соответствует частоте электромагнитной силы.
Эксцентричный ротор генерирует вокруг FP и вокруг FЭМ семейства гармоник, представляющих из себя пики, сдвинутые на одинаковый шаг по частоте. Сдвиг между этими гармониками равен произведению частоты скольжения на число полюсов обмотки статора
DF = FS * 2 * P
Причина такого шага между зубцами на спектре по частоте достаточно корректно объясняется. Частота скольжения есть разностная частота биений между частотой вращения поля и частотой вращения ротора. В течении одного оборота эксцентриситет ротора влияет «2 х Р» раз на тяговое усилие двигателя, которое связано с частотой скольжения ротора. Сама частота скольжения FS иногда видна на спектре, на начальном участке, на самой низкой частоте. Она проявляется обычно в диапазоне от 0,3 до 2,0 Гц. Для ее регистрации нужен низкочастотный датчик.
Необходимо помнить, что во временном сигнале эксцентриситет ротора проявляется в виде пульсирующей вибрации, средняя частота которой располагается в диапазоне частот (или вблизи него) между FЭМ и гармоникой оборотной частоты ротора, по частоте чуть меньшей, чем у электромагнитной силы (порядковый номер этой гармоники ротора равен удвоенному числу пар полюсов статора). Разделить эти гармоники на спектре можно только при высоком частотном разрешении используемого анализатора вибрационных сигналов.
Эксцентричность ротора обычно проявляется и в вертикальной, и в поперечной проекции вибрации. Иногда ее удается обнаружить даже и в осевой проекции. Так бывает при наличии эксцентричности ротора не по всей его длине, а только в районе одного, если смотреть вдоль оси ротора, края пакета электротехнической стали.
Эксцентричность ротора часто носит нестационарный характер, когда в спектре работающего двигателя имеется характерная картина, а практические измерения зазора не подтверждают диагноз. Причина здесь обычно в термических процессах, когда по тем или иным причинам ротор несимметрично нагревается, изгибается и дает картину эксцентриситета.
После останова двигателя, в процессе его разборки для измерения зазора, температуры быстро выравниваются и диагноз не подтверждается. Часто так бывает при обрывах стержней или «частичных задеваниях» ротора об неподвижные элементы, когда ротор так же начинает односторонне нагреваться.
3.2.6.6. Неправильный осевой монтаж двигателя
Принцип действия всех электрических машин переменного тока примерно одинаков - вращающий момент создается за счет взаимодействия магнитного поля статора с магнитным полем ротора (синхронные машины) или с роторными проводниками с током (асинхронные машины).
Простейший аналог, характеризующий работу синхронной электрической машины переменного тока – притяжение двух постоянных магнитов, из которых один есть вращающееся магнитное поле статора, а второй жестко зафиксирован на роторе. В асинхронной машине переменного тока все выглядит немного иначе – вращающееся магнитное поле статора увлекает за собой проводники с током, которыми являются стержни короткозамкнутой клетки ротора.
В синхронном электродвигателе машине энергия подается одновременно в ротор от источника постоянного тока, и в статор из питающей промышленной сети. В асинхронном электродвигателе внешняя энергия подается только из питающей сети в статор, поэтому для работы двигателя часть энергии должна быть передана (трансформирована) через зазор во вращающийся ротор. Только в этом случае возникает электромагнитное взаимодействие между полями ротора и статора. Наличие передачи энергии через зазор объясняет необходимость максимального уменьшения воздушного зазора в асинхронных машинах, а так же их большую чувствительность этого типа электрических машин к нелинейности величины зазора между ротором и статором.
Сила взаимного притяжения между ротором и статором является векторной величиной и состоит из трех составляющих — радиальной составляющей, касательной, полезной, и осевой. Касательная составляющая электромагнитной силы в зазоре является полезной, т. к. именно она создает вращающий момент. Радиальная составляющая есть сила притяжения ротора к статору и при постоянстве величины воздушного зазора эти силы, диаметрально противоположно, взаимно компенсируются.
Рассмотрим чуть подробнее осевую составляющую сил взаимного притяжения в зазоре электрической машины. Если магнитные сердечники ротора и статора в осевом направлении расположены непосредственно друг против друга, то и суммарная осевая составляющая силы электромагнитного притяжения ротора и статора равна нулю. Иначе будет происходить в том случае, когда произойдет взаимное осевое смещении сердечников ротора и статора. При этом итоговая осевая сила не будет равна нулю, она будет стремиться вернуть ротор в исходное нейтральное положение. Чем больше будет величина осевого смещения, тем больше будет величина осевого усилия, втягивающего ротор внутрь статора.
Величина допустимого свободного осевого перемещения ротора относительно статора определяется особенностями монтажа опорных подшипников ротора. Она максимальна при использовании подшипников скольжения, и минимальна при использовании подшипников качения, особенно радиально – упорного типа.
Если осевая подвижность ротора достаточна для перемещения его в нейтральное положение, то проблем с увеличением вибраций не будет. Если же возникнет препятствие к такому осевому перемещению, то на нем возникнет значительная осевая вибрация. Частота этой вибрации, как это показано на рисунке 3.2.8.4., обычно равняется частоте электромагнитных сил. Иногда гармоники вибрации возникают и частоте вращения ротора, это зависит от состояния поверхностей в месте препятствии к осевому смещению. Наиболее часто такая проблема возникает у асинхронных электродвигателей с подшипниками качения, осевая подвижность которых почти нулевая.
Осевая вибрация в электродвигателях, оборудованных подшипниками качения, обычно возникает при следующих основных причинах:
- При осевом смещении магнитных пакетов статора и ротора, обусловленном особенностями их взаимного первичного монтажа.
- При неполной посадке подшипников на вал, или в подшипниковых щитах, после проведения ремонтных работ.
- При смещении подшипниковых щитов, или посадочных мест подшипников после выполнения ремонтных и восстановительных работ.
Вне зависимости от причины возникновения повышенных осевых усилий на опорные подшипники качения, это довольно опасный дефект. Большинство подшипников качения не предназначены для компенсации осевых усилий, и поэтому в такой ситуации достаточно быстро выходят из строя.
У подшипников скольжения обычно существует больший конструктивный «осевой разбег», поэтому осевые вибрации в них возникают гораздо реже. Кроме того, подшипники скольжения обычно используются в крупных синхронных электрических машинах, в которых вопрос компенсации осевых усилий, по причине наличия больших воздушных зазоров, стоит менее остро.
Тем не менее, и в таких условиях осевая подвижность подшипников скольжения может оказаться недостаточной для компенсации дефектов монтажа. В таком случае возникает осевая вибрация, обычно выражающаяся в возникновении трения галтели вала о торцевую поверхность подшипникового вкладыша.
Для устранения осевой вибрации в насосных агрегатах необходимо корректно и комплексно выставлять при монтаже все три так называемых в практике «осевых разбега», расположенных в насосе, в муфте и в электродвигателе.
Достаточно часто вал электродвигателя «утягивается в осевые вибрации» валом насоса при дефектах системы осевой разгрузки рабочего колеса насоса. Парадокс диагностики — дефект в насосе, а вибрация в двигателе.
На практике бывают случаи, когда для борьбы с осевыми вибрациями ротор в подшипниках скольжения, перед пуском, принудительно смещают в осевом направлении, например, при помощи лома, и после этого двигатель некоторое время хорошо работает. С течением времени, в процессе работы, ротор смещается обратно, и осевые вибрации агрегата снова возрастают до прежнего значения.
3.2.6.7. Обрыв стержней ротора
Наиболее распространенным конструктивным исполнением обмотки ротора асинхронного двигателя является короткозамкнутый ротор с «беличьей клеткой». У такого ротора в пазах, без изоляции, забиваются медные или латунные стержни, или же пазы полностью залиты сплавом алюминия. Концы стержней, по торцам ротора, объединяются замыкающими кольцами из такого же материала.
В процессе работы, а особенно при пуске асинхронного электродвигателя, по стержням беличьей клетки протекает большой ток, и они сильно нагреваются. Частой причиной выхода из строя двигателя является нарушение контакта стержней с замыкающими кольцами, называемые в практике «отгоранием стрежней». Появление такого дефекта в отдельных стержнях приводит к увеличению нагрузки на оставшиеся стержни, дополнительному перегреву их, и также к последующему «отгоранию», и т. д. Весь этот лавинообразный процесс разрушения обмотки ротора сопровождается потерей мощности электродвигателя, к его постепенному перегреву и выходу из строя.
Выявление начальных признаков повреждений стержней клетки ротора является очень актуальной задачей и позволяет повысить надежность работы асинхронных двигателей с короткозамкнутой клеткой на роторе.
Рассмотрим особенности физических процессов и вибрационных признаков этого в роторе, имеющем характерные признаки начальной стадии данного дефекта. Будем считать, что повредился один стержень короткозамкнутой клетки.
Необходимо сразу же сказать, что спектр вибрации асинхронного электродвигателя с отгоревшим стержнем во многом похож на спектр вибрации двигателя, имеющего эксцентричный ротор. На первый взгляд между этими дефектами мало общего, но при ближайшем рассмотрении можно выявить причины возникновения сходства вибрационных сигналов, зарегистрированных на опорных подшипниках.
Как и при эксцентричном роторе, отгоревший стержень приводит к модулированию величины тягового усилия двигателя. В момент прохождения зоны отгоревшего стержня мимо электромагнитного полюса (скорее наоборот, т. к. поле асинхронного электродвигателя обгоняет ротор) тяговое усилие импульсно уменьшиться, ротор чуть-чуть замедлится. В это время под полюс поля подойдет зона бездефектного стержня, в нем за счет возросшего скольжения будет несколько больший ток, тяговое усилие также импульсно возрастет, и ротор чуть-чуть ускорится.
Эти импульсные мини ускорения и мини замедления ротора на спектре будут характеризоваться возникновением боковых зубцов вокруг основной гармоники частоты вращения ротора. Такой спектр для двигателя с частотой вращения ротора 2920 об/мин показан на рис 3.2.6.5. Понятно, что зубец (гармоника) с чуть меньшей частотой будет соответствовать моменту времени с замедлением, а зубец (гармоника) с чуть большей частотой будет принадлежать участку времени с ускорением ротора.
Сразу же напрашивается аналогия, что если поврежденных стержней в роторе будет не один, а два, то боковых гармоник будет по две с каждой стороны оборотной частоты, если будет три дефектных стержня – три пары боковых гармоник, и так далее. Это так, и не так. Примерно в половине практических случаев такой эффект соответствия количества дефектных стержней и боковых гармоник будет соблюдаться, а в половине случаев такого количественного соответствия не будет.
Корректное описание такой особенности картины спектрального отображения «дефектных» стержней на спектре вибрационных сигналов является очень сложным, и мы его здесь опустим. Мы ограничимся простой констатацией факта, что если боковых гармоник на спектре более двух (пар), то на роторе находится больше двух отгоревших стержней, или, говоря точнее, стержней с дефектами контакта. Если боковых гармоник всего две, то количество стержней с дефектами точно не определено.
Разделить две причины повышенной вибрации, о которых мы начали рассуждение, это эксцентриситет ротора и отгоревшие стержни беличьей клетки, возможно, но только при наличии у диагноста «хорошего анализатора спектров вибрационных сигналов». В данном случае речь идет о хорошем спектральном разрешении прибора, он должен рассчитывать спектры с разрешением не хуже 3200 частотных линий. В этом случае дефекты можно разделить, учитывая особенности различия их спектрах вибрационных сигналов.
Это следующие различия:
- Характерная «корона» из зубцовых гармоник вокруг пика электромагнитной частоты FЭМ проявляется на спектре различно — при эксцентриситете ротора она имеется во всех режимах работы диагностируемой электрической машины. При наличии в роторе дефекта типа «дефектный стержень», корона на спектре появляется только при значительной нагрузке электрической машины, на холостом ходу она отсутствует.
- При эксцентриситете ротора «корона» практически симметрична по величинам зубцовых гармоник относительно центрального пика, а при дефектах стержней пик на меньшей частоте всегда меньше «зеркального» пика на большей частоте. Этот факт достаточно хорошо сообразуется с картиной физических процессов. Уменьшение скорости происходит при нормальном скольжении и нормальном токе в последнем (перед дефектным) «хорошем» стержне клетки. Ускорение же ротора происходит при увеличенном скольжении, большем токе в первом «хорошем» стержне и, как результат, с большим ускорением.
- За счет колебательного «успокоения» пульсации частоты вращения ротора, после прохождения стержня с дефектом, что может возникать при определенных параметрах нагрузки на валу электродвигателя, на спектре вибрационного сигнала может возникнуть несколько гармоник частоты вращения ротора, и обычно все они окружены «коронами». Такая же картина может возникать при наличии механических или электромагнитных ослаблений в электрической машине. Параметр «электромагнитное ослабление» раскрывать мы не будем из-за его специфичности, оставив его для исследования специалистам по электрическим машинам.
В качестве численного ограничения степени проявления этого дефекта можно считать, что «короны» у исправного двигателя быть не должно. Если она появилась, и наибольший пик «короны» превысил 10 % от центрального пика — вероятность существования отгоревших стержней в обмотке ротора очень большая. Для контроля количественного значения признаков этого дефекта лучше использовать спектры с логарифмической шкалой по амплитуде. Если на нем пики «короны» будут меньше основного пика менее, чем на 20 dВ, то предполагаемый дефект имеет место.
В заключение, подчеркивая особенности диагностики данной причине повышенной вибрации, необходимо еще раз указать, что такая диагностика возможно только с применением анализаторов спектров с высокой разрешающей способностью. Это нужно для разделения на спектре частот вращения поля, ротора и боковых гармоник. Центральный пик «короны» должен соответствовать частоте вращения ротора, а не быть равным частоте вращения поля в зазоре.
3.2.6.8. Дефекты зубцово — пазовой структуры
Такая неисправность не очень часто встречается в практике, но, тем не менее, ее можно достаточно просто описать и успешно диагностировать.
Условно эту неисправность можно представить в виде ротора, у которого отсутствует один ферромагнитный зуб. Это приводит к тому, что мимо пазов статора перемещается «магнитный непериодический» элемент, наводящий в обмотке статора импульсы, число которых за один оборот будет численно равно числу пазов на статоре. На спектре вибрационного сигнала это будет представлено пиком на частоте, равной произведению частоты вращения ротора на число пазов статора.
Не вдаваясь в тонкости физического описания, следует также сказать, что дефектный зуб будет модулировать и электромагнитную силу статора. Это будет происходить потому, что дважды за свой один оборот вращающееся поле «будет натыкаться» на дефект магнитной проводимости воздушного зазора двигателя, на «отсутствующий» зуб ротора. На спектре вблизи пика зубцовой частоты появятся два зеркально расположенных пика, сдвинутых относительно своего «главного пика» на частоту электромагнитной силы FЭМ, как уже неоднократно говорилось равную удвоенной частоте питающей сети.
Наиболее сложным для диагностики будет спектр вибрации при наличии магнитных дефектов на роторе и статоре одновременно, причем дефектов множественных. На спектре будут присутствовать зубцовые частоты ротора и статора, а также будут частоты их биения, зашумленные множественными «зеркальными» пиками.
«Положительным» при этом будет то, что при таком дефекте обычно сильно падает тяговое усилие, возрастает потребляемый ток и двигатель очень быстро выходит из строя, обычно раньше, чем персоналу удается записать спектры и выявить множественный магнитный дефект методами вибрационной диагностики.
Приборы нашего производства для диагностики электромагнитных дефектов
- ViAna-4 – универсальный 4-хканальный регистратор и анализатор вибросигналов, диагностика электромагнитных дефектов по току
Статор — асинхронный двигатель — Большая Энциклопедия Нефти и Газа, статья, страница 1
Статор — асинхронный двигатель
Cтраница 1
Статор асинхронного двигателя конструктивно не отличается от статора синхронной машины. Он состоит из корпуса, сердечника и обмотки. [2]
Статор асинхронного двигателя с короткозамкнутым ротором ( рис. 69, а) состоит из чугунной станины 10, в которую впрессован стальной сердечник 12, состоящий из пакета пластин электротехнической стали. В пластинах сердечника имеются вырезы, которые в собранном пакете образуют пазы для укладки в них катушек 11 статорной обмотки. Пластины пакета сердечника современных двигателей изолированы лаковой пленкой, а двигателей старых конструкций — оклеечной бумагой. [3]
Статор асинхронного двигателя с короткозамкнутым ротором ( рис. 70, а) состоит из чугунной станины 10, в которую впрессован собранный на оправку стальной сердечник 12, состоящий из спрессованных листов электротехнической стали. В стальных листах сердечника имеются вырезы, которые в собранном пакете образуют пазы для укладки в них катушек 11 статорной обмотки. Листы пакета сердечника современных двигателей изолированы лаковой пленкой, а двигателей старых конструкций — оклеечной бумагой. [4]
Статоры асинхронных двигателей и синхронных генераторов мощностью до 100 кВт, как правило, имеет всыпную обмотку. [5]
Статор асинхронного двигателя ( рис. 8.4, а) состоит из сердечника 1; обмотки 2, уложенной в пазах сердечника; корпуса ( ста-нины) 3 и двух торцевых подшипниковых щитов. [6]
Статор асинхронного двигателя ничем не отличается от статора синхронного генератора или двигателя. Тело ротора собирается из стальных пластин с выштампо-ванными пазами. Обмоткой ротора служат медные или алюминиевые стержни, заложенные в пазы и запаянные с обоих торцов в кольца. Обмотка, взятая отдельно, имеет форму беличьего колеса. [7]
Статор асинхронного двигателя ( рис. 99), независимо от устройства ротора, состоит из корпуса 1, в который запрессован сердечник 2, имеющий пазы. Сердечник собран из стальных штампованных листов, изолированных друг от друга. Внешняя сторона корпуса для увеличения поверхности охлаждения выполнена ребристой. В пазах сердечника помещена трехфазная обмотка статора. [9]
Статоры асинхронных двигателей малой и средней мощности имеют в основном всыпную обмотку. [10]
Обмотки статоров асинхронного двигателя и генератора питаются током частоты 50 Гц при напряжении 380 / 220 В. [11]
Пропитку статоров асинхронных двигателей со всыпной обмоткой производят на установках УПС, которые работают следующим образом. Пропитываемый статор устанавливают в наклонное положение и нагревают до 80 — 160 С током либо подключением обмотки статора к сети, либо с помощью индукторов, смонтированных на приспособлениях для установки статоров. Лак, попадая на нагретый статор, разжижается и проникает внутрь пазов между проводниками. Во время подачи лака нагрев обмотки продолжается, но температура ее не. После прекращения подачи лака статор поворачивается в горизонтальное положение. [12]
Обмотку статора асинхронных двигателей с / г 280 мм пр: напряжении до 660 В выполняют эмалированными проводами прямоугольного сечения. При этом предварительно отформованные полукатушки укладывают в полуоткрытые пазы статора. Предварительно проводники в пазовой и лобовой частях скрепляются специальным обволакивающим покрытием. [13]
Обмотка статора асинхронного двигателя соединяется звездой или треугольником и подключается к сети трехфазного тока. [15]
Страницы: 1 2 3 4 5
Асинхронные электродвигатели
Трехфазный асинхронный двигатель с короткозамкнутым ротором
Статор асинхронного двигателя (рис. 187) состоит из сердечника 2, обмотки 3 и корпуса (станины) 1. Сердечник статора является частью магнитопровода и собран из отдельных стальных пластин 4 толщиной 0,35-0,5 мм. Чтобы снизить до минимума потери энергии на вихревые токи, пластины изолируют друг от друга (чаще всего тонким слоем специального лака). В пазах стального статора укладывают провода, образующие трехфазную обмотку статора. Каждая фазная обмотка состоит из одной или нескольких катушек и рассчитана на определенное номинальное фазное напряжение. На двигателе указывается два номинальных напряжения (например, 380 и 220 В), отличающихся в ]/3 раз.
При большем напряжении сети фазные обмотки статора соединяют звездой, а при меньшем напряжении — треугольником. В том и другом случае к каждой фазной обмотке подводится одинаковое напряжение, являющееся номинальным фазным напряжением двигателя. Начала обмоток статора обозначают CI, С2, СЗ, а концы — С4, С5, С6.
Расположение выводов обмоток на щитке (рис. 188) удобно для соединения обмоток звездой или треугольником. Сердечник статора с обмоткой расположен (обычно запрессован) внутри корпуса, который отливают из чугуна или алюминиевого сплава. С боков сердечник статора закрывается крышками, в которых имеются подшипники.
Рис. 187. Статор асинхронного двигателя
Ротор двигателя представляет собой цилиндр, набранный из листовой электротехнической стали. Обмотка ротора состоит из нескольких медных стержней, соединенных на концах медными кольцами, и называется «беличьим колесом» (рис. 189, а). В новых асинхронных электродвигателях короткозамкнутая обмотка образуется путем заливки пазов ротора алюминием (рис. 189, б).
При прохождении по обмоткам статора трехфазного переменного тока создается магнитное поле, вращающееся с частотой пг = 60/7/7, где 1 — частота подводимого к двигателю тока; р — число пар полюсов, которое зависит от числа катушек.
Если имеются три катушки, то вращающийся магнитный поток имеет два полюса (/7=1) и п1 = —р° = 3000 об/мин.X х100%. При пуске двигателя п = 0, а 5 = 1, или 100%.
Во время холостого хода двигатель имеет минимальное скольжение (1-2%). С увеличением нагрузки уменьшается частота вращения ротора и увеличивается скольжение при номинальной нагрузке, достигая 5-6%.
Электромагнитная связь обмоток ротора и статора аналогична электромагнитной связи обмоток трансформатора. Поэтому с увеличением скольжения, когда линии магнитного поля статора чаще пересекают ротор, увеличивается ток в обмотках ротора и статора.
Частота тока в обмотке ротора зависит от скольжения: 12 = 1і5. При пуске 5=1 и 12 = 1і = 50 Гц. С возрастанием частоты враще-
Рис. 188. Расположение выводов обмоток на щитке (а) н соединение обмоток звездой (б) и треугольником (в)
Рис. 189. Короткозамкнутая обмотка ротора (а) и короткозамкнутая обмотка ротора, выполненная в виде алюминиевой отливки (б):
1 — короткозамыкающие кольца; 2 — листы магиитопривода; «3 — вентиляционные лопатки; 4 — стержни ния ротора п уменьшается скольжение 5 и частота 12. При холостом ходе двигателя 12 = 1ч-4 Гц.
Благодаря простоте устройства, дешевизне и большой надежности в работе короткозамкнутые асинхронные двигатели получили широкое распространение. К недостаткам короткозамкнутых асинхронных двигателей относятся: значительное потребление тока в момент пуска; слабый пусковой вращающий момент; потребление реактивного тока из-за индуктивности обмоток статора, вызывающее снижение cos ф.
При пуске двигателя магнитное поле статора с максимальной частотой пересекает неподвижный ротор и в нем наводится наибольшая э. д. с. В результате этого ток в обмотках ротора и статора больше номинального в 5-8 раз. Пусковые токи не успевают нагреть машину до высокой температуры, но вызывают снижение напряжения в сети, что отрицательно влияет на работу других потребителей, включенных в эту же сеть.
Вращающий момент М асинхронного двигателя образуется в результате взаимодействия магнитного потока Ф статора с активной составляющей тока ротора 1а2 = 12cos ф2. Следовательно, М = — СФ/2созф2, где С — коэффициент, зависящий от конструкции двигателя; ф2 — разность фаз э. д. с. ?2 и тока 12 ротора.
При пуске в короткозамкнутом роторе асинхронного двигателя возникает ток наибольшей частоты 12. Поэтому индуктивное сопротивление ротора Xl2 — 2ji/2L2 значительно больше активного 1у Активная составляющая тока ротора 12cosip2= 12г2/]/г| + х[2 и вращающий момент не достигают максимального значения. С увеличением скорости частота 12 тока в роторе и его индуктивное сопротивление начнут уменьшаться, что в свою очередь вызовет увеличение активной составляющей тока ротора и вращающего момента двигателя. Вращающий момент асинхронного двигателя достигает наи большего значения при равенстве активного и индуктивного сопротивлений ротора, т. е. при г2 = ХЬ2.
При дальнейшем увеличении частоты вращения это равенство нарушается, т. е.
< г2 и вращающий момент вновь начнет уменьшаться.
При скольжении 5 = 1 (рис. 190) двигатель развивает пусковой момент Мп, при номинальном скольжении 5Н = 0,024-0,06- номинальный момент Ма. Максимальный момент Мтах двигатель развивает при скольжении, называемом критическим (5кр г» 0,2).
Трехфазные асинхронные электродвигатели с короткозамкнутым ротором типа МСТ применяют в стрелочных электроприводах. Основные характеристики этих электродвигателей приведены в табл. 11.
Электродвигатели типов МСТ-0,25 и МСТ-0,3 устанавливают в электроприводах тяжелых и обычных стрелок электрической централизации, типа МСТ-0,6 — в электроприводах стрелок маневровых районов.
Для увеличения начального вращающего момента, необходимого для перевода стрелок, короткозамкнутую обмотку ротора стрелочных электродвигателей выполняют с повышенным активным сопротивлением. Изменение направления вращения ротора электродвигателя осуществляется переменой мест двух линейных проводов, подводящих ток к электродвигателю. При этом изменяется направление вращения магнитного поля статора, а следовательно, и ротора. Асинхронные электродвигатели малой мощности включают в сеть перемен
Таблица 11
Тип электро- |
Мощность, |
Напряжение питания, В, при соединении обмоток |
Потребляв- |
Частота вращения ротора, об/мии |
|
двигателя |
Вт |
звездой |
треугольни ком |
мый ток, А |
|
МСТ-0,25 |
250 |
220 |
127 |
1,4/2,4* |
1250±50 |
МСТ-0,3 |
300 |
190+6,7 — 9 , б |
1 10- 5 ,Я5 |
2,1/3,6 |
850±42,5 |
МСТ-0,ЗА |
300 |
ззо±?2,6 |
190±|75 |
1,2/2,1 |
850±42,5 |
МСТ-0,6 |
600 |
190+Г, |
2,8/4,85 |
2850±285 |
|
МСТ-0.6А |
600 |
3301?« ,6 |
1901»?, |
2/3,46 |
2850±285 |
* В числителе указывается потребляемый ток при соединении обмоток звездой, в знаменателе — при соединении обмоток треугольником.
ного тока без пусковых приспособлений. При значительных мощностях (более 5 кВт) пусковой ток ограничивают.
Существуют два способа пуска в ход короткозамкнутых асинхронных электродвигателей. Непосредственный (прямой) пуск применяют в случае, если мощность двигателя значительно меньше мощности сети. Пуск переключением обмоток со звезды на треугольник можно использовать в том случае, если обмотки статора двигателя постоянно должны быть соединены треугольником. Для того чтобы снизить пусковой ток, на период пуска обмотки статора соединяют звездой (рис. 191, а). Благодаря этому напряжение на каждой обмотке снизится в УЗ раз, а линейный ток уменьшится в 3 раза. Когда двигатель разовьет скорость, переключают рубильник Р2 и обмотки соединяют треугольником.
Для снижения пускового тока последовательно с обмоткой статора можно включать элементы с активным или индуктивным сопротивлением (рис. 191, б и в). После пуска эти элементы шунтируются.
Однофазный асинхронный двигатель. Обмотка статора однофазного асинхронного двигателя состоит из одной катушки. Ток, проходящий по этой катушке, создает пульсирующий магнитный поток, который можно разложить на два вращающихся магнитных потока Фх и Ф2, имеющих одинаковую величину, но разное направление вращения.
Первый магнитный поток вращается (относительно неподвижного ротора) с частотой пг по движению часовой стрелки, а второй — с такой же частотой — в противоположном направлении. При пуске моменты 1И, и М2, создаваемые каждым вращающимся потоком, равны, но направлены в противоположные стороны. В результате пусковой вращающий момент М = Мх — М2 = 0. Если ротору сообщить первоначальное движение, например по движению часовой стрелки, то вращающийся в этом же направлении магнитный поток Фх будет
Рис. 191. Схемы пуска асинхронного двигателя:
а — переключением обмоток статора со звезды на треугольник; б, в — с короткозамкнутым роторам с помощью соответственно активных и индуктивных элементов действовать на ротор, как и в трехфазном короткозамкнутом двигателе. Магнитный поток Ф2, вращающийся относительно ротора в противоположном направлении, будет индуцировать в роторе токи большей частоты. Индуктивное сопротивление ротора для этой частоты возрастет и еще больше будет отличаться от активного сопротивления. В результате этого вращающий момент М2 уменьшится. Результирующий вращающий момент М = М1 — М2 будет направлен в сторону первоначального движения ротора.
Пусковой вращающий момент в однофазном асинхронном двигателе (рис. 192) может быть получен за счет дополнительной пусковой обмотки ПО, которую укладывают в пазах статора под углом 90° к главной обмотке ГО. Ток 1Х главной обмотки отстает по фазе от напряжения и на угол ер!. Последовательно с пусковой обмоткой включен конденсатор С, и ток 12 опережает по фазе напряжение на угол <р2. Поэтому токи в обмотках сдвинуты на угол Фі + <р2 = 90° и в машине возникает вращающееся магнитное поле, которое создает пусковой момент. Однофазные асинхронные конденсаторные двигатели типа АСОМ-48 устанавливают в кодовых путевых трансмиттерах, которые применяют в устройствах кодовой автоблокировки и автоматической локомотивной сигнализации. Электродвигатель может питаться от источника с переменным напряжением ПО В частотой 50 и 75 Гц. При частоте 50 Гц в электрическую схему двигателя включают конденсатор емкостью 6 мкФ (рис. 193, а), при частоте 75 Гц — конденсатор емкостью 2 мкФ (рис. 193, б). Основные характеристики электродвигателя типа АСОМ-48: полная мощность 16,5 В • А; полезная мощность 3,5 Вт; к. п. д. 0,3; частота вращения якоря при частоте 50 Гц 982 об/мин, при частоте 75 Гц — 1473 об/мин. 0,2. С увеличением нагрузки коэффициент мощности cos ф быстро увеличивается, при номинальной нагрузке достигая значения 0,8-0,9. По мере нагрузки двигателя к. п. д. увеличивается и при нагрузке, близкой к номинальной, достигает р — 0,8ч-0,9.
⇐Путевые дроссель-трансформаторы | Электропитающие устройства и линейные сооружения автоматики, телемеханики и связи железнодорожного транспорта | Синхронные генераторы⇒
ВЛИЯНИЕ ЗАПЫЛЕННОЙ СРЕДЫ НА СРОК СЛУЖБЫ ОБМОТОК СТАТОРА АСИНХРОННЫХ ДВИГАТЕЛЕЙ | Кривоносов
1. Ермолин, Н. П. Надежность электрических машин / Н. П. Ермолин, И. П. Жерихин. Л.: Энергия, 1976. 248 с.
2. Слоним, Н. М. Испытания асинхронных двигателей / Н. М. Слоним. М.: Энергия, 1980. 88 с.
3. Котеленец, Н. Ф. Испытания и надежность электрических машин / Н. Ф. Котеленец, Н. Л. Кузнецов. М.: Высш. шк., 1985. 232 с.
4. Воробьев, В. Е. Прогнозирование срока службы электрических машин / В. Е. Воробьев, В. Я. Кучер. СПб.: СЗТУ, 2004. 56 с.
5. Яманов, С. А. Старение, стойкость и надежность электрической изоляции / С. А. Яманов, Л. В. Яманова. М.: Энергоатомиздат, 1990. 176 с.
6. Надежность асинхронных электродвигателей / В. Б. Ванеев, [и др.]. М.: Наука, 1964. 524 с.
7. Сыромятников, И. А. Режимы работы асинхронных и синхронных двигателей / И. А. Сыромятников. М.: Энергия, 1984. 240 с.
8. Михеев, М. А. Основы теплопередачи / М. А. Михеев, И. М. Михеева. М.: Энергия, 1977. 344 с.
9. Филиппов, И. Ф. Основы теплообмена в электрических машинах / И. Ф. Филиппов. Л.: Энергия, 1974. 383 с.
10. Спосіб контролю i теплового захисту обмоток електричних машин, якi працюють у запиленому середовищі: пат. 107898 Україна: Н02Р 5/04, Н02К 15/12, Н02Н 5/10, G01K 13/08 / В. Є. Кривоносов, I. В. Жежеленко, О. В. Московець, С. В. Василенко; заявл. 26.02.2014; опубл. 25.02.2015
Какак разница между короткозамкнутым и фазным ротором
Какак разница между короткозамкнутым и фазным ротором
Ротор — вращающаяся часть двигателей и рабочих машин, на которой расположены органы, получающие энергию от рабочего тела или отдающие её рабочему телу.
Как вы знаете, асинхронные электродвигатели имеют трехфазную обмотку (три отдельные обмотки) статора, которая может формировать разное количество пар магнитных полюсов в зависимости от своей конструкции, что влияет в свою очередь на номинальные обороты двигателя при номинальной частоте питающего трехфазного напряжения. При этом роторы двигателей данного типа могут отличаться, и у асинхронных двигателей они бывают короткозамкнутыми или фазными. Чем отличается короткозамкнутый ротор от фазного ротора — об этом и пойдет речь в данной статье.
Короткозамкнутый ротор
Представления о явлении электромагнитной индукции подскажут нам, что произойдет с замкнутым витком проводника, помещенным во вращающееся магнитное поле, подобное магнитному полю статора асинхронного двигателя. Если поместить такой виток внутри статора, то когда ток на обмотку статора будет подан, в витке будет индуцироваться ЭДС, и появится ток, то есть картина примет вид: виток с током в магнитном поле. Тогда на такой виток (замкнутый контур) станет действовать пара сил Ампера, и виток начнет поворачиваться вслед за движением магнитного потока.
Так и работает асинхронный двигатель с короткозамкнутым ротором, только вместо витка на его роторе расположены медные или алюминиевые стержни, замкнутые накоротко между собой кольцами с торцов сердечника ротора. Ротор с такими короткозамкнутыми стержнями и называют короткозамкнутым или ротором типа «беличья клетка» поскольку расположенные на роторе стержни напоминают беличье колесо.
Проходящий по обмоткам статора переменный ток, порождающий вращающееся магнитное поле, наводит ток в замкнутых контурах «беличьей клетки», и весь ротор приходит во вращение, поскольку в каждый момент времени разные пары стержней ротора будут иметь различные индуцируемые токи: какие-то стержни — большие токи, какие-то — меньшие, в зависимости от положения тех или иных стержней относительно поля. И моменты никогда не будут уравновешивать ротор, поэтому он и будет вращаться, пока по обмоткам статора течет переменный ток.
К тому же стержни «беличьей клетки» немного наклонены по отношению к оси вращения — они не параллельны валу. Наклон сделан для того, чтобы момент вращения сохранялся постоянным и не пульсировал, кроме того наклон стержней позволяет снизить действие высших гармоник индуцируемых в стержнях ЭДС. Будь стержни без наклона — магнитное поле в роторе пульсировало бы.
Скольжение s
Для асинхронных двигателей всегда характерно скольжение s, возникающее из-за того, что синхронная частота вращающегося магнитного поля n1 статора выше реальной частоты вращения ротора n2.
Скольжение возникает потому, что индуцируемая в стержнях ЭДС может иметь место только при движении стержней относительно магнитного поля, то есть ротор всегда вынужден хоть немного, но отставать по скорости от магнитного поля статора. Величина скольжения равна s = (n1-n2)/n1.
Если бы ротор вращался с синхронной частотой магнитного поля статора, то в стержнях ротора не индуцировался бы ток, и ротор бы просто не стал вращаться. Поэтому ротор в асинхронном двигателе никогда не достигает синхронной частоты вращения магнитного поля статора, и всегда хоть чуть-чуть (даже если нагрузка на валу критически мала), но отстает по частоте вращения от частоты синхронной.
Скольжение s измеряется в процентах, и на холостом ходу практически приближается к 0, когда момент противодействия со стороны ротора почти отсутствует. При коротком замыкании (ротор застопорен) скольжение равно 1.
Вообще скольжение у асинхронных двигателей с короткозамкнутым ротором зависит от нагрузки и измеряется в процентах. Номинальное скольжение — это скольжение при номинальной механической нагрузке на валу в условиях, когда напряжение питания соответствует номиналу двигателя.
Фазный ротор
Асинхронные двигатели с фазным ротором, в отличие от асинхронных двигателей с короткозамкнутым ротором, имеют на роторе полноценную трехфазную обмотку. Подобно тому, как на статоре уложена трехфазная обмотка, так же и в пазах фазного ротора уложена трехфазная обмотка.
Выводы обмотки фазного ротора присоединены к контактным кольцам, насаженным на вал, и изолированным друг от друга и от вала. Обмотка фазного ротора состоит из трех частей — каждая на свою фазу — которые чаще всего соединены по схеме «звезда».
К обмотке ротора через контактные кольца и щетки присоединяется регулировочный реостат. Краны и лифты, например, пускаются под нагрузкой, и здесь необходимо развивать существенный рабочий момент. Невзирая на усложненность конструкции, асинхронные двигатели с фазным ротором обладают лучшими регулировочными возможностями касательно рабочего момента на валу, чем асинхронные двигатели с короткозамкнутым ротором, которым требуется промышленный частотный преобразователь.
Обмотка статора асинхронного двигателя с фазным ротором выполняется аналогично тому, как и на статорах асинхронных двигателей с короткозамкнутым ротором, и аналогичным путем создает, в зависимости от количества катушек (три, шесть, девять или более катушек), два, четыре и т. д. полюсов. Катушки статора сдвинуты между собой на 120, 60, 40 и т. д. градусов. При этом на фазном роторе делается столько же полюсов, сколько и на статоре.
Регулируя ток в обмотках ротора, регулируют рабочий момент двигателя и величину скольжения. Когда регулировочный реостат полностью выведен, то для уменьшения износа щеток и колец их закорачивают при помощи специального приспособления для подъема щеток.
Ранее ЭлектроВести писали, что в Атлантическом океане первый в мире телескопический ветрогенератор обеспечивает электроэнергией 5000 домохозяйств на одном из Канарских островов — Гран-Канария.
По материалам: electrik.info.
Как работает асинхронный двигатель?
26 сентября 2019
Изобретение асинхронных двигателей навсегда изменило ход человеческой цивилизации. Этот двигатель столетней давности, изобретенный великим ученым Николой Тесла, является наиболее распространенным типом двигателей даже сегодня. Фактически, около 50 процентов мирового потребления электроэнергии приходится на асинхронные двигатели. Давайте перейдем к принципам работы асинхронных двигателей или, точнее, к гениальному мышлению Николы Теслы.
Детали асинхронного двигателя
Асинхронный двигатель состоит из 2 основных частей; Статор и ротор (рис: 1).Статор — это неподвижная часть, а ротор — это вращающаяся часть. Статор в основном представляет собой трехкатушечную обмотку, на которую подается трехфазный переменный ток. Ротор находится внутри статора. Между ротором и статором будет небольшой зазор, известный как воздушный зазор. Величина радиального зазора может варьироваться от 0,5 до 2 мм.
Рис. 1 Статор и ротор асинхронного двигателяДетали конструкции статора
A Статор изготавливается путем укладки тонких высокопроницаемых стальных пластин с прорезями внутри стального или чугунного каркаса.Расположение стальных пластин внутри рамы показано на следующем рисунке. Здесь показаны только некоторые из стальных пластин. Обмотка проходит через пазы статора.
Рис. 2 Детали конструкции статораВлияние трехфазного тока, проходящего через обмотку статора
Когда через обмотку проходит трехфазный переменный ток, происходит кое-что очень интересное. Он создает вращающееся магнитное поле (RMF). Как показано на рисунке ниже, создается магнитное поле, которое по своей природе вращается.RMF — важное понятие в электрических машинах. Мы увидим, как это происходит, в следующем разделе.
Рис. 3 Вращающееся магнитное поле создается в асинхронном двигателеКонцепция вращающегося магнитного поля (RMF)
Чтобы понять явление вращающегося магнитного поля, гораздо лучше рассмотреть упрощенную трехфазную обмотку всего с 3 катушками. Провод, по которому проходит ток, создает вокруг себя магнитное поле. Теперь для этого специального устройства магнитное поле, создаваемое 3 фазами A.Ток C будет таким, как показано в конкретный момент.
Рис. 4 Магнитное поле создается вокруг одиночного провода и упрощенной обмоткиКомпоненты переменного тока изменяются со временем. Еще два примера показаны на следующем рисунке, где из-за изменения переменного тока магнитное поле также изменяется. Понятно, что магнитное поле просто принимает другую ориентацию, но его величина остается прежней. Из этих трех положений видно, что это похоже на вращающееся магнитное поле однородной силы.Скорость вращения магнитного поля называется синхронной скоростью.
Рисунок 5A Трехфазный переменный ток Рисунок 5B Здесь проиллюстрирована концепция вращающегося магнитного поляВлияние RMF на замкнутый провод
Предположим, вы помещаете замкнутый проводник внутрь такого вращающегося магнитного поля. Поскольку магнитное поле колеблется, в контуре будет индуцироваться ЭДС в соответствии с законом Фарадея. E.M.F будет производить ток через петлю. Таким образом, ситуация стала такой, как если бы петля с током находилась в магнитном поле.Это создаст магнитную силу в петле в соответствии с законом Лоренца. Таким образом, петля начнет вращаться, это ясно показано на рис. 6.
Рис: 6 Влияние RMF на замкнутый проводРабота асинхронного двигателя
Аналогичное явление также происходит внутри асинхронного двигателя. Здесь вместо простой петли используется что-то очень похожее на беличью клетку. Беличья клетка имеет стержни, которые закорочены концевыми кольцами.
Трехфазный переменный ток, проходящий через обмотку статора, создает вращающееся магнитное поле.Как и в предыдущем случае, ток будет индуцирован в стержнях беличьей клетки, и она начнет вращаться. Вы можете заметить изменение наведенного тока в стержнях с короткозамкнутым ротором. Это связано со скоростью изменения магнитного потока в одной паре беличьих стержней, которая отличается от другой из-за ее разной ориентации. Это изменение тока в полосе со временем будет меняться.
Рис. 7 RMF создает крутящий момент на роторе, как и в случае с простой обмоткой. Вот почему используется название асинхронный двигатель, электричество индуцируется в роторе за счет магнитной индукции, а не прямого электрического соединения.Чтобы способствовать такой электромагнитной индукции, внутри ротора установлена пластина с изолированным железным сердечником.
Рис. 8 Тонкие слои металлической пластины, которые упакованы в ротор. Такие маленькие кусочки слоев железа обеспечивают минимальные потери на вихревые токи. Вы можете отметить одно большое преимущество трехфазных асинхронных двигателей, поскольку они по своей сути самозапускаются.
Также можно заметить, что стержни беличьей клетки наклонены к оси вращения или имеют перекос. Это необходимо для предотвращения колебаний крутящего момента.Если бы стержни были прямыми, был бы небольшой промежуток времени для передачи крутящего момента в паре стержней ротора на следующую пару. Это вызовет колебания крутящего момента и вибрацию ротора. Обеспечивая перекос в стержнях ротора, прежде чем ослабнет крутящий момент в одной паре стержней, в действие вступит следующая пара. Таким образом предотвращается колебание крутящего момента.
Скорость вращения ротора и концепция скольжения
Здесь вы можете заметить, что и магнитное поле, и ротор вращаются.Но с какой скоростью будет вращаться ротор? Чтобы получить ответ на этот вопрос, рассмотрим разные случаи.
Рассмотрим случай, когда скорость ротора совпадает со скоростью магнитного поля. На ротор действует магнитное поле в относительной системе отсчета. Поскольку и магнитное поле, и ротор вращаются с одинаковой скоростью относительно ротора, магнитное поле является стационарным. Ротор будет находиться в постоянном магнитном поле, поэтому наведенных ЭДС и тока не будет. Это означает нулевое усилие на стержнях ротора, поэтому ротор будет постепенно замедляться.Но по мере замедления петли ротора будут испытывать изменяющееся магнитное поле, поэтому индуцированный ток и сила снова возрастут, и ротор будет ускоряться. Короче говоря, ротор никогда не сможет догнать скорость магнитного поля. Он вращается с определенной скоростью, которая немного меньше синхронной скорости. Разница в синхронной скорости и скорости ротора называется скольжением.
N
РОТОРSLIP = (N
S — N R ) / N SЗНАЧЕНИЕ СКОЛЬЖЕНИЯ = 2-6%
Рис. 9 Здесь проиллюстрирована концепция скольженияПередача энергии в двигателе
Вращательная механическая сила, полученная от ротора, передается через приводной вал.Короче говоря, в асинхронном двигателе электрическая энергия поступает через статор и выводится из двигателя, а механическое вращение передается от ротора.
Рис. 10 Передача мощности в двигателеНо между входом и выходом мощности будут многочисленные потери энергии, связанные с двигателем. К различным компонентам этих потерь относятся потери на трение, потери в меди, потери на вихревые токи и гистерезисные потери. Такие потери энергии во время работы двигателя рассеиваются в виде тепла, поэтому вентилятор на другом конце помогает охлаждать двигатель.
Рис. 11 Охлаждающий вентилятор используется для отвода тепла, выделяемого двигателемПочему асинхронные двигатели так популярны?
Теперь давайте поймем, почему асинхронные двигатели правят как в промышленном, так и в бытовом мире. Вы можете отметить, что асинхронные двигатели не требуют постоянного магнита. У них даже нет щеток, колец коммутатора или датчика положения, как у других аналогов электрических машин. Асинхронные двигатели также запускаются самостоятельно. Наиболее важным преимуществом является то, что скорость асинхронного двигателя можно легко контролировать, регулируя входную частоту питания.
Чтобы понять это правильно, давайте еще раз рассмотрим простую схему расположения катушек. Мы узнали, что вращающееся магнитное поле создается из-за трехфазной входной мощности. Совершенно ясно, что скорость RMF пропорциональна частоте входной мощности. Поскольку ротор всегда пытается догнать RMF, скорость ротора также пропорциональна частоте мощности переменного тока.
N
S ∝ fТаким образом, используя частотно-регулируемый привод, можно очень легко управлять скоростью асинхронного двигателя.Это свойство асинхронных двигателей делает их привлекательным выбором для лифтов, кранов и электромобилей. Благодаря высокоскоростному диапазону асинхронных двигателей электромобили могут работать с односкоростной коробкой передач.
Рис.12 Односкоростная коробка передач Рис. 13 Контуры КПД асинхронного двигателяЕще одно интересное свойство асинхронного двигателя состоит в том, что когда ротор приводится в движение первичным двигателем, он также может действовать как генератор. В этом случае вы должны убедиться, что скорость RMF всегда меньше скорости ротора.
Рис. 14 Скорость RMF всегда меньше, чем скорость ротораМы полагаем, что теперь вы получили четкое представление об оригинальных принципах работы асинхронного двигателя, а также о том, почему он по-прежнему доминирует в бытовом и промышленном мире.
ОБ АВТОРЕ
Сабин Мэтью, аспирант ИИТ Дели по специальности машиностроение. Основатель Lesics Engineers Pvt Ltd и YouTube-канала LESICS. Он дает качественное инженерное образование на своем канале в YouTube.А «ЛЕСИКА» охватывает огромное количество инженерных тем. Сабин очень увлечен пониманием физики сложных технологий и их объяснением простыми словами. Чтобы узнать больше об авторе, перейдите по этой ссылке
Асинхронный двигатель
— обзор
Преобразователь частотыАсинхронные и синхронные двигатели рассчитаны на определенное соотношение напряжения к частоте ( В, / Гц). Напряжение — это напряжение питания двигателя, а частота — это частота питания.Отношение В, / Гц прямо пропорционально величине магнитного потока в магнитном материале двигателя (пластинах сердечника статора и ротора). Крутящий момент, развиваемый на валу двигателя, пропорционален силе вращающегося потока. Тип и количество магнитного материала, используемого в конструкции двигателя, являются факторами, определяющими номинальную мощность двигателя.
При постоянной частоте питающей сети более высокое напряжение вызывает более высокое соотношение В и / Гц и более высокий магнитный поток. При постоянном напряжении питания более низкая частота питания приведет к более высокому соотношению В, / Гц и более высокому потоку.Более высокий магнитный поток увеличивает крутящий момент двигателя. Когда двигатель работает с напряжением В, / Гц, превышающим номинальное, возникает перенапряжение, которое может вызвать насыщение статора и магнитного сердечника ротора. Насыщение вызывает перегрев и может привести к отказу двигателя. Когда двигатель работает при В и / Гц ниже номинальной, магнитный поток уменьшается. Уменьшение магнитного потока снижает крутящий момент и влияет на способность двигателя выдерживать нагрузку.
Когда двигатели питаются напрямую от электросети, частота питающей сети остается постоянной, а напряжение и ток изменяются во время запуска двигателя.Во время разгона двигателя до синхронной скорости (синхронные двигатели) или скорости, близкой к синхронной (асинхронные двигатели), ток сначала возрастет в несколько раз по сравнению с номинальным током и вызовет падение напряжения. Более низкое напряжение при постоянной частоте питания означает более низкое соотношение В и / Гц и меньший магнитный поток, который влияет на крутящий момент. Как только двигатель ускоряется, напряжение восстанавливается до значения, близкого к номинальному, а крутящий момент на валу двигателя достигает номинального значения. В этом случае скорость двигателя будет постоянной и синхронной (синхронные двигатели) или близкой к синхронной (асинхронные двигатели).Если двигатели подключены напрямую к электросети, скорость определяется фиксированной частотой сети и не может контролироваться. Для управления скоростью при необходимости используются дополнительные механические системы: демпферы, клапаны, коробки передач, тормоза и т. Д. Механические системы снижают общую эффективность системы. Кроме того, как объяснялось ранее, асинхронные двигатели потребляют реактивную мощность, поэтому поддержание коэффициента мощности может быть проблемой для асинхронных двигателей. Синхронные двигатели не вызывают проблем с коэффициентом мощности, они действительно могут помочь.
Существует четыре категории проблем с двигателями, подключенными непосредственно к сети электропитания: высокий пусковой ток, контроль крутящего момента, контроль скорости и коэффициент мощности (только для асинхронных двигателей). Одним из эффективных способов решения проблем является использование частотно-регулируемых приводов. При использовании частотно-регулируемых приводов питание привода осуществляется от сети, а питание двигателя — от привода.
ЧРПуправляют скоростью и крутящим моментом двигателя, контролируя частоту и величину напряжений и токов, подаваемых на двигатель.Каждый частотно-регулируемый привод имеет три секции: выпрямитель, фильтр с накопителем энергии и инвертор. Типичная концептуальная конфигурация показана на рис. 7.22.
Рис. 7.22. Типичная конфигурация ЧРП.
Выпрямитель берет синусоиду фиксированной частоты и величины напряжения из сети и выпрямляет ее в форму сигнала постоянного тока.
Фильтр принимает форму сигнала постоянного тока от выпрямителя и обеспечивает почти чистый линейный постоянный ток. Накопитель энергии используется для поддержания мгновенного энергетического баланса. Если при сбалансированной трехфазной нагрузке общая мощность остается постоянной от момента к моменту, а с идеальным преобразователем, накопление энергии не потребуется.На практике преобразователям требуется накопитель энергии для хранения энергии, достаточной для питания двигателя в течение коротких интервалов, когда мощность нагрузки превышает входную мощность. Конденсаторы и индукторы используются для хранения энергии.
Инвертор преобразует мощность постоянного тока обратно в переменный ток через набор электронных переключателей (MOSFET (металлооксидный полупроводниковый полевой транзистор), IGBT (биполярный транзистор с изолированным затвором), IGCT (встроенный тиристор с коммутацией затвора), GTO (затвор) отключающий тиристор) и др.).Эти переключатели, открывая и закрываясь с определенной скоростью и продолжительностью, могут инвертировать постоянный ток и воссоздавать выходные токи и формы сигналов напряжения, имитирующие синусоидальные формы сигналов переменного тока. Затем двигатель получает питание от выхода инвертора.
Формы выходных сигналов представляют собой сигналы с широтно-импульсной модуляцией (ШИМ). Они называются сигналами ШИМ, потому что они создаются несколькими импульсами переключателей с короткими интервалами. Величину и частоту сигналов напряжения ШИМ можно регулировать. Изменяя время, импульсы и какие переключатели срабатывают, частота может быть увеличена или уменьшена.Изменяя ширину и длительность импульсов, можно увеличивать и уменьшать среднее напряжение двигателя. Типичная форма сигнала ШИМ с аппроксимируемой синусоидой показана на рис. 7.23.
Рис. 7.23. Типичная форма сигнала ШИМ с аппроксимируемой синусоидой.
В примере с асинхронным двигателем асинхронный двигатель может эффективно работать только при скорости вращения, близкой к синхронной. Управление скоростью требует непрерывного изменения скорости вращающегося поля, что требует изменения частоты.
Когда выходное напряжение инвертора на каждой выходной частоте инвертора регулируется таким образом, чтобы соотношение В, / Гц поддерживалось постоянным до номинальной скорости, можно получить семейство кривых крутящего момента-скорости, как показано на рис. 7.24.
Рис. 7.24. График зависимости крутящего момента от частоты вращения асинхронного двигателя с частотно-регулируемым приводом с изменением напряжения и частоты и постоянным соотношением В и / Гц.
Точка «a» на рис. 7.24 соответствует крутящему моменту без нагрузки и скорости без нагрузки при частоте питания инвертора 25 Гц.От без нагрузки в точке «a» до полной нагрузки в точке «b» скорость немного снизится. Если требуется поддерживать постоянную скорость из точки «а», регулятор частотно-регулируемого привода повысит частоту, так что рабочая точка при полной нагрузке переместится в точку «с». Управление частотно-регулируемым приводом также будет повышать напряжение пропорционально увеличению частоты, чтобы поддерживать постоянное соотношение В, / Гц при полной нагрузке и, таким образом, поддерживать крутящий момент при полной нагрузке.
Из рис. 7.24 видно, что момент отрыва постоянен во всех точках ниже номинальной скорости, за исключением низких частот.На низких частотах тяговый момент уменьшается из-за влияния сопротивления статора. Когда частота приближается к нулю, падение напряжения из-за сопротивления статора становится важным, и уменьшение магнитного потока, вызывающее уменьшение крутящего момента, становится заметным. Этот эффект известен и легко смягчается с помощью низкоскоростного повышения напряжения: увеличения отношения В, / f на низких частотах для восстановления магнитного потока. На рис. 7.25 показан типичный набор кривых крутящий момент-скорость для привода с повышением напряжения на низкой скорости.
Рис. 7.25. ЧРП обеспечивает кривую крутящего момента асинхронного двигателя с изменением частоты и напряжения, постоянное соотношение В, / Гц до номинальной скорости и повышение напряжения на низкой скорости.
При превышении номинальной скорости соотношение В, / Гц больше не может поддерживаться постоянным, поскольку напряжение не может превышать номинальное напряжение двигателя, чтобы избежать пробоя изоляции двигателя. Увеличение частоты сверх номинальной частоты возможно и приведет к более высокой скорости, но при сохранении напряжения на уровне номинального напряжения и, как следствие, уменьшении соотношения В и / Гц, плотность магнитного потока и крутящий момент уменьшатся.
Преимущество двигателей, поставляемых с ЧРП, заключается в том, что двигатель может обеспечивать одинаковый максимальный крутящий момент от нулевой до номинальной скорости. Эта область характеристики крутящий момент-скорость двигателя называется областью «постоянного крутящего момента». Непрерывная работа с максимальным крутящим моментом на практике не выполняется из-за тепловых ограничений. Верхний предел крутящего момента, равный номинальному крутящему моменту двигателя, обычно устанавливается в контроллере.
С двигателями, поставляемыми с частотно-регулируемым приводом, и их наличием высокого крутящего момента на низких скоростях можно избежать проблем пуска, общих для операций с фиксированной частотой (начальное высокое скольжение, высокий пусковой ток, падение напряжения и уменьшение крутящего момента).Двигатель с ЧРП запускается с низкой частоты, которая постепенно увеличивается. Скорость скольжения ротора всегда мала, и ротор непрерывно работает с оптимальным крутящим моментом. Номинальный крутящий момент доступен на низких скоростях, а пусковой ток не превышает номинального тока полной нагрузки. Двигатель может запускаться от недельной сети электроснабжения, не вызывая нарушений напряжения в питающей сети.
Как упоминалось ранее, двигатель с частотно-регулируемым приводом может развивать любой крутящий момент до номинального крутящего момента на любой скорости вплоть до номинальной.Эта область называется областью «постоянного крутящего момента». При превышении номинальной скорости В, / Гц будет снижаться, поскольку напряжение остается постоянным при номинальном напряжении двигателя, ток статора и ротора также остаются постоянными, а скорость и частота увеличиваются, поэтому плотность магнитного потока будет уменьшаться, а крутящий момент будет уменьшаться обратно пропорционально Частота. Эта область характеристики крутящий момент-скорость двигателя называется областью «постоянной мощности». Область постоянной мощности примерно в два раза превышает номинальную скорость. За пределами области постоянной мощности находится область высоких скоростей, где предел тока совпадает с пределом крутящего момента отрыва, который уменьшается обратно пропорционально квадрату частоты, поэтому постоянная мощность не может поддерживаться дальше.Области постоянного крутящего момента, постоянной мощности и высокой скорости показаны на рис. 7.26.
Рис. 7.26. ЧРП предоставил кривую крутящего момента-скорости асинхронного двигателя в области постоянного крутящего момента, постоянной мощности и высокой скорости.
В двигателях с ЧРП важно отметить, что кривые крутящий момент-скорость показывают крутящий момент, который двигатель может создать для каждой частоты, но не то, как долго и может ли двигатель работать в каждом состоянии непрерывно. Если в приложении с двигателем, поставляемым с частотно-регулируемым приводом, используется стандартный асинхронный двигатель, необходимо учитывать ограничения по нагреву.Стандартный промышленный двигатель обычно заключен в корпус с вентилятором, установленным на внешнем валу, который обдувает воздухом внешний корпус с оребрением. Стандартная конструкция и охлаждение двигателя предназначены для непрерывной работы при фиксированной частоте и номинальной скорости, подаваемой в сеть. Когда стандартный промышленный двигатель работает, подключенный к ЧРП, который производит низкую частоту и запускает двигатель на низкой скорости, охлаждение двигателя становится проблемой. Двигатель будет способен создавать номинальный крутящий момент на низкой скорости, но в этих условиях он будет работать при более высоких температурах, что может существенно повлиять на срок службы двигателя или вызвать перегрев и отказ двигателя.
Когда двигатель используется в приложениях с частотно-регулируемым приводом, важно указать сценарии работы, соответствующим образом спроектировать охлаждение и использовать двигатели, подходящие для работы с инвертором.
Помимо охлаждения, при использовании двигателей с частотно-регулируемым приводом при проектировании необходимо учитывать и другие факторы, такие как влияние гармоник от частотно-регулируемого привода к сети, конфигурация кабеля и размер кабеля от частотно-регулируемого привода к двигателю и т. Д.
Прикладные науки | Бесплатный полнотекстовый | Оценка сопротивления статора и ротора асинхронного двигателя с использованием модели эталонной адаптивной системы оценки на основе активной и реактивной мощности
Рисунок 1. Общая идея оценщика параметров типа MRAS ( u — вектор входных сигналов, x ref — опорное значение выбранного сигнала, x adj — регулируемое (оценочное) значение выбранного сигнала, p est — расчетный параметр, ε — ошибка между эталонной и настраиваемой моделью).
Рисунок 1. Общая идея оценщика параметров типа MRAS ( u — вектор входных сигналов, x ref — опорное значение выбранного сигнала, x adj — регулируемое (оценочное) значение выбранного сигнала, p est — расчетный параметр, ε — ошибка между эталонной и настраиваемой моделью).
Рисунок 2. Схема оценщика PQ-MRAS.
Рисунок 2. Схема оценщика PQ-MRAS.
Рисунок 3. Схема системы DFOC.
Рисунок 3. Схема системы DFOC.
Рисунок 4. Работа средства оценки PQ-MRAS: ( a ) режим без обратной связи, ( b ) режим с обратной связью.
Рисунок 4. Работа средства оценки PQ-MRAS: ( a ) режим без обратной связи, ( b ) режим с обратной связью.
Рисунок 5. Работа модуля оценки PQ-MRAS: ( a ) расчетное сопротивление ротора, ( b ) эталонная и оценочная реактивная мощность, ( c ) оценочное сопротивление статора, ( d ) эталонная и расчетная активная мощность; (результаты моделирования), (ω m ref = ± 0,5 ωmN, t L = ± 0,75 tN, R r = R rN , R s = R sN ).
Рисунок 5. Работа модуля оценки PQ-MRAS: ( a ) расчетное сопротивление ротора, ( b ) эталонная и оценочная реактивная мощность, ( c ) оценочное сопротивление статора, ( d ) эталонная и расчетная активная мощность; (результаты моделирования), (ω м ref = ± 0.5 ОмН, т L = ± 0,75 тН, R r = R rN , R s = R sN ).
Рисунок 6. Переменные состояния привода: ( a ) эталонная и смоделированная скорость вращения, ( b ) электромагнитный крутящий момент и составляющая тока статора i sy , ( c ) расчетный модуль вектора потока ротора и составляющая тока статора i sx , ( d ) составляющие тока статора i sα, β ; (результаты моделирования), (ω м ref = ± 0.5 ОмН, т L = ± 0,75 тН, R r = R rN , R s = R sN ).
Рисунок 6. Переменные состояния привода: ( a ) эталонная и смоделированная скорость вращения, ( b ) электромагнитный крутящий момент и составляющая тока статора i sy , ( c ) расчетный модуль вектора потока ротора и составляющая тока статора i sx , ( d ) составляющие тока статора i sα, β ; (результаты моделирования), (ω м ref = ± 0.5 ОмН, т L = ± 0,75 тН, R r = R rN , R s = R sN ).
Рис. 7. Работа модуля оценки PQ-MRAS: ( a ) расчетное сопротивление ротора, ( b ) эталонная и оценочная реактивная мощность, ( c ) оценочное сопротивление статора, ( d ) эталонная и расчетная активная мощность; (результаты моделирования), (ω m ref = 0,5 ωmN, t L = var, R r = R rN , R s = R sN ).
Рисунок 7. Работа модуля оценки PQ-MRAS: ( a ) расчетное сопротивление ротора, ( b ) эталонная и оценочная реактивная мощность, ( c ) оценочное сопротивление статора, ( d ) эталонная и расчетная активная мощность; (результаты моделирования), (ω m ref = 0,5 ωmN, t L = var, R r = R rN , R s = R sN ).
Рисунок 8. Переменные состояния привода: ( a ) эталонная и смоделированная скорость вращения, ( b ) электромагнитный крутящий момент и составляющая тока статора i sy , ( c ) расчетный модуль вектора потока ротора и составляющая тока статора i sx , ( d ) составляющие тока статора i sα, β ; (результаты моделирования), (ω м ref = 0.5 ωmN, t L = var, R r = R rN , R s = R sN ).
Рисунок 8. Переменные состояния привода: ( a ) эталонная и смоделированная скорость вращения, ( b ) электромагнитный крутящий момент и составляющая тока статора i sy , ( c ) расчетный модуль вектора потока ротора и составляющая тока статора i sx , ( d ) составляющие тока статора i sα, β ; (результаты моделирования), (ω м ref = 0.5 ωmN, t L = var, R r = R rN , R s = R sN ).
Рисунок 9. Работа модуля оценки PQ-MRAS для различных значений параметров в механизмах адаптации: ( a ) расчетное сопротивление ротора, ( b ) эталонная и расчетная реактивная мощность, ( c ) расчетное сопротивление статора, ( d ) эталонная и расчетная активная мощность; (результаты моделирования), (ω м ref = 0.5 ОмН, т L = 0,75 тН, R r = R rN , R s = R sN ).
Рисунок 9. Работа модуля оценки PQ-MRAS для различных значений параметров в механизмах адаптации: ( a ) расчетное сопротивление ротора, ( b ) эталонная и расчетная реактивная мощность, ( c ) расчетное сопротивление статора, ( d ) эталонная и расчетная активная мощность; (результаты моделирования), (ω м ref = 0.5 ОмН, т L = 0,75 тН, R r = R rN , R s = R sN ).
Рисунок 10. Работа модуля оценки PQ-MRAS: ( a ) расчетное сопротивление ротора, ( b ) эталонная и оценочная реактивная мощность, ( c ) оценочное сопротивление статора, ( d ) эталонная и расчетная активная мощность; (результаты моделирования), (ω m ref = 0,5 ωmN, t L = 0,75 tN, R r = var, R s = var).
Рис. 10. Работа модуля оценки PQ-MRAS: ( a ) расчетное сопротивление ротора, ( b ) эталонная и оценочная реактивная мощность, ( c ) оценочное сопротивление статора, ( d ) эталонная и расчетная активная мощность; (результаты моделирования), (ω m ref = 0,5 ωmN, t L = 0,75 tN, R r = var, R s = var).
Рисунок 11. Переменные состояния привода: ( a ) эталонная и измеренная скорость вращения, ( b ) электромагнитный момент и составляющая тока статора i sy , ( c ) расчетный модуль вектора потока ротора и составляющая тока статора i sx , ( d ) составляющие тока статора i sα, β ; (результаты моделирования), (ω м ref = 0.5 ОмН, т L = 0,75 тН, R r = вар, R с = вар).
Рисунок 11. Переменные состояния привода: ( a ) эталонная и измеренная скорость вращения, ( b ) электромагнитный момент и составляющая тока статора i sy , ( c ) расчетный модуль вектора потока ротора и составляющая тока статора i sx , ( d ) составляющие тока статора i sα, β ; (результаты моделирования), (ω м ref = 0.5 ОмН, т L = 0,75 тН, R r = вар, R с = вар).
Рис. 12. Работа модуля оценки PQ-MRAS: ( a ) расчетное сопротивление ротора, ( b ) эталонная и оценочная реактивная мощность, ( c ) оценочное сопротивление статора, ( d ) эталонная и расчетная активная мощность; (результаты моделирования), (ω m ref = 0,5 ωmN, t L = 0,75 tN, R r = var, R s = var).
Рисунок 12. Работа модуля оценки PQ-MRAS: ( a ) расчетное сопротивление ротора, ( b ) эталонная и оценочная реактивная мощность, ( c ) оценочное сопротивление статора, ( d ) эталонная и расчетная активная мощность; (результаты моделирования), (ω m ref = 0,5 ωmN, t L = 0,75 tN, R r = var, R s = var).
Рисунок 13. Переменные состояния привода: ( a ) эталонная и измеренная скорость вращения, ( b ) электромагнитный момент и составляющая тока статора i sy , ( c ) расчетный модуль вектора потока ротора и составляющая тока статора i sx , ( d ) составляющие тока статора i sα, β ; (результаты моделирования), (ω м ref = 0.5 ОмН, т L = 0,75 тН, R r = вар, R с = вар).
Рисунок 13. Переменные состояния привода: ( a ) эталонная и измеренная скорость вращения, ( b ) электромагнитный момент и составляющая тока статора i sy , ( c ) расчетный модуль вектора потока ротора и составляющая тока статора i sx , ( d ) составляющие тока статора i sα, β ; (результаты моделирования), (ω м ref = 0.5 ОмН, т L = 0,75 тН, R r = вар, R с = вар).
Рисунок 14. Работа модуля оценки PQ-MRAS: ( a ) расчетное сопротивление ротора, ( b ) эталонная и оценочная реактивная мощность, ( c ) оценочное сопротивление статора, ( d ) эталонная и расчетная активная мощность; (результаты моделирования), (ω m ref = 0,5 ωmN, t L = 0,75 tN, R r = var, R s = var).
Рисунок 14. Работа модуля оценки PQ-MRAS: ( a ) расчетное сопротивление ротора, ( b ) эталонная и оценочная реактивная мощность, ( c ) оценочное сопротивление статора, ( d ) эталонная и расчетная активная мощность; (результаты моделирования), (ω m ref = 0,5 ωmN, t L = 0,75 tN, R r = var, R s = var).
Рисунок 15. Переменные состояния привода: ( a ) эталонная и измеренная скорость вращения, ( b ) электромагнитный момент и составляющая тока статора i sy , ( c ) расчетный модуль вектора потока ротора и составляющая тока статора i sx , ( d ) составляющие тока статора i sα, β ; (результаты моделирования), (ω м ref = 0.5 ОмН, т L = 0,75 тН, R r = вар, R с = вар).
Рисунок 15. Переменные состояния привода: ( a ) эталонная и измеренная скорость вращения, ( b ) электромагнитный момент и составляющая тока статора i sy , ( c ) расчетный модуль вектора потока ротора и составляющая тока статора i sx , ( d ) составляющие тока статора i sα, β ; (результаты моделирования), (ω м ref = 0.5 ОмН, т L = 0,75 тН, R r = вар, R с = вар).
Рисунок 16. Фотография экспериментальной установки.
Рисунок 16. Фотография экспериментальной установки.
Рисунок 17. Работа модуля оценки PQ-MRAS: ( a ) расчетное сопротивление ротора, ( b ) эталонная и оценочная реактивная мощность, ( c ) оценочное сопротивление статора, ( d ) эталонная и расчетная активная мощность; (результаты экспериментов), (ω м ref = 0.5 ОмН, т L = 0,75 тН).
Рисунок 17. Работа модуля оценки PQ-MRAS: ( a ) расчетное сопротивление ротора, ( b ) эталонная и оценочная реактивная мощность, ( c ) оценочное сопротивление статора, ( d ) эталонная и расчетная активная мощность; (результаты экспериментов), (ω м ref = 0,5 ОмН, t L = 0,75 тН).
Рисунок 18. Переменные состояния привода: ( a ) эталонная и измеренная скорость вращения, ( b ) электромагнитный момент и составляющая тока статора i sy , ( c ) расчетный модуль вектора потока ротора и составляющая тока статора i sx , ( d ) составляющие тока статора i sα, β ; (результаты экспериментов), (ω м ref = 0.5 ОмН, т L = 0,75 тН).
Рисунок 18. Переменные состояния привода: ( a ) эталонная и измеренная скорость вращения, ( b ) электромагнитный момент и составляющая тока статора i sy , ( c ) расчетный модуль вектора потока ротора и составляющая тока статора i sx , ( d ) составляющие тока статора i sα, β ; (результаты экспериментов), (ω м ref = 0,5 ωmN, t L = 0.75 тН).
Рисунок 19. Работа модуля оценки PQ-MRAS: ( a ) расчетное сопротивление ротора, ( b ) эталонная и оценочная реактивная мощность, ( c ) оценочное сопротивление статора, ( d ) эталонная и расчетная активная мощность; (результаты экспериментов), (ω м ref = 0,5 ωmN, t L = var).
Рисунок 19. Работа модуля оценки PQ-MRAS: ( a ) расчетное сопротивление ротора, ( b ) эталонная и оценочная реактивная мощность, ( c ) оценочное сопротивление статора, ( d ) эталонная и расчетная активная мощность; (результаты экспериментов), (ω м ref = 0.5 ОмН, т L = вар).
Рисунок 20. Переменные состояния привода: ( a ) эталонная и измеренная скорость вращения, ( b ) электромагнитный момент и составляющая тока статора i sy , ( c ) расчетный модуль вектора потока ротора и составляющая тока статора i sx , ( d ) составляющие тока статора i sα, β ; (результаты экспериментов), (ω м ref = 0,5 ωmN, t L = var).
Рисунок 20. Переменные состояния привода: ( a ) эталонная и измеренная скорость вращения, ( b ) электромагнитный момент и составляющая тока статора i sy , ( c ) расчетный модуль вектора потока ротора и составляющая тока статора i sx , ( d ) составляющие тока статора i sα, β ; (результаты экспериментов), (ω м ref = 0,5 ωmN, t L = var).
Рисунок 21. Работа модуля оценки PQ-MRAS: ( a ) расчетное сопротивление ротора, ( b ) эталонная и оценочная реактивная мощность, ( c ) оценочное сопротивление статора, ( d ) эталонная и расчетная активная мощность; (результаты экспериментов), (ω м ref = ± 0,5 ωмН, t L = ± 0,75 тН).
Рисунок 21. Работа модуля оценки PQ-MRAS: ( a ) расчетное сопротивление ротора, ( b ) эталонная и оценочная реактивная мощность, ( c ) оценочное сопротивление статора, ( d ) эталонная и расчетная активная мощность; (результаты экспериментов), (ω м ref = ± 0.5 ОмН, т L = ± 0,75 тН).
Рисунок 22. Переменные состояния привода: ( a ) эталонная и измеренная скорость вращения, ( b ) электромагнитный момент и составляющая тока статора i sy , ( c ) расчетный модуль вектора потока ротора и составляющая тока статора i sx , ( d ) составляющие тока статора i sα, β ; (результаты экспериментов), (ω м ref = ± 0,5 ОмН, t L = ± 0.75 тН).
Рисунок 22. Переменные состояния привода: ( a ) эталонная и измеренная скорость вращения, ( b ) электромагнитный момент и составляющая тока статора i sy , ( c ) расчетный модуль вектора потока ротора и составляющая тока статора i sx , ( d ) составляющие тока статора i sα, β ; (результаты экспериментов), (ω м ref = ± 0,5 ωмН, t L = ± 0,75 тН).
Рисунок 23. Работа модуля оценки PQ-MRAS для различных значений параметров в механизмах адаптации: ( a ) расчетное сопротивление ротора, ( b ) эталонная и расчетная реактивная мощность, ( c ) расчетное сопротивление статора, ( d ) эталонная и расчетная активная мощность; (результаты экспериментов), (ω м ref = 0,5 ОмН, t L = 0,75 тН).
Рисунок 23. Работа модуля оценки PQ-MRAS для различных значений параметров в механизмах адаптации: ( a ) расчетное сопротивление ротора, ( b ) эталонная и расчетная реактивная мощность, ( c ) расчетное сопротивление статора, ( d ) эталонная и расчетная активная мощность; (результаты экспериментов), (ω м ref = 0.5 ОмН, т L = 0,75 тН).
Асинхронные двигатели переменного токас роторами с короткозамкнутым ротором — Bodine
Почему его называют «ротором с короткозамкнутым ротором?»: В асинхронных двигателях переменного тока с большей долей лошадиных сил (FHP) используется конструкция ротора, отлитого под давлением, которая состоит из скошенного ламинированного пакета с литьем под давлением штанги ротора и концевые кольца. Обычный термин для этой конструкции ротора — «беличья клетка», потому что, если вы удалите стальные пластинки после того, как ротор был отлит под давлением, вы получите скелет, очень похожий на колесо хомяка.Мы предполагаем, что в те времена, когда был изобретен этот термин, больше людей использовали в качестве домашних животных белок, чем хомяков. 🙂 Литой под давлением ротор с короткозамкнутым ротором является недорогим и относительно простым в производстве, если вы производите их в больших количествах.
В асинхронном двигателе переменного тока обмотка статора создает магнитное поле, которое взаимодействует с токонесущими проводниками ротора, создавая вращающий момент. Роторные токи индуцируются в проводниках ротора изменяющимся магнитным полем статора, а не с помощью коммутатора и щеток (как в двигателе с постоянным постоянным током).Это индукционное действие является основным принципом работы асинхронных двигателей переменного тока. Основные рабочие характеристики асинхронных двигателей переменного тока зависят от: 1) типов обмоток (расщепленная фаза, экранированные полюса, трехфазные и т. Д.) И 2) количества фаз, частоты и напряжения источника питания. источник.
Ротор типичного асинхронного двигателя состоит из ряда стальных пластин, каждая из которых имеет пазы или отверстия по периферии. Когда листы укладываются вместе и скрепляются заклепками, эти отверстия образуют каналы, которые заполняются проводящим материалом (обычно медью или алюминием) и закорачиваются друг с другом посредством проводящих концевых колец.Проводники обычно формируются методом литья под давлением. В асинхронных двигателях переменного тока с открытой рамой ротор, отлитый под давлением, обычно включает в себя встроенные лопасти вентилятора, которые обеспечивают эффективное и экономичное охлаждение двигателя. Обычный термин для этого типа ротора — «беличья клетка» (из-за сходства с взлетно-посадочной полосой старомодной беличьей клетки). Это недорогая и распространенная форма индукционного ротора переменного тока.
Когда вращающееся поле проходит мимо стержней в роторе, возникает индуцированный ток. Поскольку ток в проводнике создает магнитное поле соответствующей полярности, возникает притяжение между вращающимся магнитным полем статора и индуцированным полем в роторе.Вращение возникает в результате попытки ротора успевать за вращающимся магнитным полем (статора). Скорость изменения, с которой магнитные линии пересекают ротор, определяет индуцированное напряжение. Когда ротор неподвижен, это напряжение максимально. По мере увеличения скорости ротора ток и соответствующий крутящий момент уменьшаются. В точке синхронной скорости (скорости вращающегося поля) индуцированный ток и развиваемый крутящий момент равны нулю.
Ротор асинхронного асинхронного двигателя переменного тока всегда будет работать с некоторой скоростью, меньшей, чем синхронная, если ему не помогает какое-либо дополнительное приводное устройство.Это отставание ротора от вращающегося магнитного поля называется «скольжением» и выражается в процентах от синхронной скорости:
При разработке роторов для асинхронных двигателей форма и размеры пазов явно влияют на рабочие характеристики двигателя. Форму прорези (планки) можно увидеть на примерах ламинирования на фото. Другим конструктивным фактором, общим для большинства индукционных роторов с короткозамкнутым ротором, является преднамеренный «перекос» пазов (размещение пазов под небольшим углом к валу) во избежание зазубрин и больших колебаний пускового момента, которые могут возникнуть, если стержни расположены параллельно пазы статора.Также важно отметить, что однофазные двигатели переменного тока требуют вспомогательной схемы запуска. См. «Руководство по мотор-редукторам Bodine» для получения дополнительной информации о принципах конструкции и различных конструкциях двигателей.
(На фото ниже показаны два разных слоя ротора слева, готовый ротор асинхронного двигателя переменного тока с подшипниками, запрессованными на вал, и беличья клетка после того, как ламинированная сталь была растворена азотной кислотой.)
Авторские права Bodine Electric Company © 06/2016.Все права защищены.
Как работает ротор асинхронного электродвигателя?
Индукция протекания тока через стержни ротора асинхронного электродвигателя возникает, когда ток подается на статор. Этот приложенный ток через обмотки статора запускает вращение магнитного поля статора с линейной частотой.
Стержни неподвижного ротора затем подвергаются максимальному относительному движению магнитного поля статора к стержням.В этот момент вдоль стержней генерируется максимальный ток. Когда северный полюс статора вращается мимо стержня ротора, ток индуцируется вдоль стержня ротора. В то же время южный полюс статора вращается, проходя через стержень на 180 °, и индуцирует ток вдоль стержня в противоположном направлении. Этот круговой поток тока вдоль стержней ротора через закорачивающие кольца и вокруг пластин заставляет ротор становиться электромагнитом.
Именно в этой начальной начальной точке (заблокированный ротор) электромагнитная сила ротора наиболее высока.Электромагнитный ротор начнет разгоняться до синхронной скорости или скорости, с которой вращается магнитное поле статора. По мере увеличения скорости ротора относительное движение между стержнями ротора и вращающимся магнитным полем уменьшается. Это приводит к уменьшению тока и крутящего момента. Когда относительное движение (вращающая сила) между стержнями ротора и магнитным полем статора приближается к нулю, ток вдоль ротора прекращается. Магнетизм ротора прекратится, и ротор замедлится до тех пор, пока крутящий момент, создаваемый двигателем, не станет равным крутящему моменту ведомого оборудования.(Нагрузка)
Если нагрузка двигателя увеличивается, скорость двигателя уменьшается. Уменьшите нагрузку, и двигатель увеличит скорость. Асинхронный двигатель никогда не достигнет синхронной скорости из-за потерь на трение и сопротивление воздуха. Разница между синхронной скоростью и скоростью асинхронного ротора называется частотой скольжения.
Тодд А. Хэтфилд, вице-президент по проектированию и ремонту
HECO — Все системы идут
269-381-7200
thatfield @ hecoinc.com
Об авторе:
Тодд Хэтфилд является совладельцем HECO и вице-президентом по проектированию и ремонту. Он имеет более чем 35-летний опыт работы в области ремонта и проектирования генераторов и электродвигателей. Тодд имеет степень бакалавра в области электротехники и специализируется в следующих областях: модернизация и проектирование электрических и механических двигателей, анализ первопричин отказов и качественное восстановление электродвигателей.
Скольжение в электрических асинхронных двигателях
Асинхронный двигатель переменного тока состоит из статора и ротора, и взаимодействие токов, протекающих в стержнях ротора, и вращающегося магнитного поля в статоре создает крутящий момент, который вращает двигатель. . При нормальной работе с нагрузкой скорость ротора всегда отстает от скорости магнитного поля, позволяя стержням ротора разрезать магнитные силовые линии и создавать полезный крутящий момент.
Разница между синхронной скоростью магнитного поля электродвигателя и скоростью вращения вала составляет скольжение — измеряется в оборотах в минуту или частоте.
Скольжение увеличивается с увеличением нагрузки, обеспечивая больший крутящий момент.
Обычно скольжение выражается как отношение скорости вращения вала к скорости синхронного магнитного поля.
s = (n s — n a ) 100% / n s (1)
где
s = скольжение
n s = синхронная скорость магнитного поля (об / мин, об / мин)
n a = скорость вращения вала (об / мин, об / мин)
Когда ротор не вращается, скольжение 100% .
Пробуксовка при полной нагрузке варьируется от менее 1% для двигателей с высокой мощностью до более 5–6% для двигателей с малой мощностью.
| Размер двигателя (л. 2,5 1,7 | 0,8 | |
|---|
Число полюсов, частоты и скорость синхронного асинхронного двигателя
| No.магнитных полюсов | Частота (Гц) | ||||
|---|---|---|---|---|---|
| 50 | 60 | ||||
| 2 | 3000 | 3600 | |||
| 4 | 1000 | 1200 | |||
| 8 | 750 | 900 | |||
| 10 | 600 | 720 | |||
| 12 | 500 | 6001258 | 6001258 | ||
| 20 | 300 | 360 | |||
Скольжение и напряжение
Когда двигатель начинает вращаться, проскальзывание составляет 100% , а ток двигателя максимальный.Скольжение и ток двигателя уменьшаются, когда ротор начинает вращаться.
Частота скольжения
Частота уменьшается при уменьшении скольжения.
Скольжение и индуктивное сопротивление
Индуктивное реактивное сопротивление зависит от частоты и скольжения. Когда ротор не вращается, частота скольжения максимальна, как и индуктивное сопротивление.
Двигатель имеет сопротивление и индуктивность, и когда ротор вращается, индуктивное реактивное сопротивление низкое, а коэффициент мощности приближается к 1 .
Скольжение и полное сопротивление ротора
Индуктивное реактивное сопротивление будет изменяться с проскальзыванием, поскольку полное сопротивление ротора является суммой фаз постоянного сопротивления и переменного индуктивного реактивного сопротивления.
Когда двигатель начинает вращаться, индуктивное реактивное сопротивление высокое, а полное сопротивление в основном индуктивное. Ротор имеет низкий коэффициент мощности. Когда скорость увеличивается, индуктивное реактивное сопротивление уменьшается до уровня сопротивления.
Классификация асинхронных двигателей
Электрические асинхронные двигатели предназначены для различных применений в отношении таких характеристик, как пусковой момент, крутящий момент, скольжение и т. Д. — проверьте классификацию электрических асинхронных двигателей NEMA A, B, C и D.
Каков принцип работы трехфазного асинхронного двигателя?
Электродвигатель преобразует электрическую энергию в механическую, которая затем подается на различные типы нагрузок. Двигатели переменного тока работают от источника переменного тока и делятся на синхронные, однофазные, трехфазные асинхронные двигатели и двигатели специального назначения. Из всех типов трехфазные асинхронные двигатели наиболее широко используются в промышленности, главным образом потому, что для них не требуется пусковое устройство.
Трехфазный асинхронный двигатель получил свое название от того факта, что ток ротора индуцируется магнитным полем, а не электрическими соединениями.
Принцип действия трехфазного асинхронного двигателя основан на создании вращающегося магнитного поля (среднеквадратичное).
Создание вращающегося магнитного поля
Статор асинхронного двигателя состоит из нескольких перекрывающихся обмоток, смещенных на электрический угол 120 °.Когда первичная обмотка или статор подключены к трехфазному источнику переменного тока, создается вращающееся магнитное поле, которое вращается с синхронной скоростью.
Направление вращения двигателя зависит от последовательности фаз питающих линий и порядка, в котором эти линии подключены к статору. Таким образом, изменение мест подключения любых двух первичных клемм к источнику питания изменит направление вращения на противоположное.
Число полюсов и частота приложенного напряжения определяют синхронную скорость вращения статора двигателя.Двигатели обычно имеют 2, 4, 6 или 8 полюсов. Синхронная скорость, термин, обозначающий скорость вращения поля, создаваемого первичными токами, определяется следующим выражением.
Синхронная скорость вращения = (120 x частота питания) / Число полюсов статора
Производство магнитного потока
Вращающееся магнитное поле в статоре — это первая часть работы. Чтобы создать крутящий момент и, таким образом, вращаться, роторы должны пропускать ток.В асинхронных двигателях этот ток исходит от проводников ротора. Вращающееся магнитное поле, создаваемое в статоре, пересекает токопроводящие стержни ротора и индуцирует электродвижущую силу (ЭДС).
Обмотки ротора асинхронного двигателя либо замкнуты через внешнее сопротивление, либо напрямую закорочены. Следовательно, ЭДС, индуцированная в роторе, заставляет ток течь в направлении, противоположном направлению вращающегося магнитного поля в статоре, и приводит к скручивающему движению или крутящему моменту в роторе.
Как следствие, скорость ротора не достигает синхронной скорости среднеквадратичного значения статора. Если бы скорости совпадали, ЭДС не было бы. индуцированный в роторе, ток не будет протекать, и, следовательно, не будет создаваться крутящий момент.