Схема управления асинхронным двигателем с короткозамкнутым ротором. Схема пуска асинхронного двигателя
Схема управления электродвигателем
Функциональная cхема управления асинхронным двигателем с короткозамкнутым ротором изображена на рисунке 1.
Рис.1.Функциональная схема управления асинхронным двигателем.
Трёхфазный переменный ток подаётся на автоматический выключатель, который применяется для подключения трёхфазного асинхронного двигателя. В автоматическом выключателе помимо системы контактов, имеются комбинированные расцепители (тепловой и электромагнитный), что обеспечивает автоматическое отключение при длительной перегрузке и коротком замыкании. От автоматического выключателя питание подаётся на магнитный пускатель. Магнитный пускатель — аппарат для дистанционного управления двигателем. Он осуществляет пуск, остановку и защиту двигателя от перегрева и сильного снижения напряжения. Основная часть магнитного пускателя — трёхполюсный электромагнитный контактор.
Обмотки статора для подключения к напряжению сети 220В соединены треугольником (Рис.8). В зависимости от типа обмотки ротора, машины могут быть с фазным и короткозамкнутым ротором. Несмотря на то, что двигатель с фазным ротором обладает лучшими пусковыми и регулировочными свойствами, двигатель с короткозамкнутым ротором проще и надёжнее в эксплуатации, а также дешевле.
Принципиальная электрическая схема нереверсивного управления трёхфазным асинхронным электродвигателем с короткозамкнутым ротором посредством автоматического выключателя и магнитного пускателя с двухполюсным тепловым реле представлена на рисунке 2.
От силового щита питание подаётся на автоматический выключатель с тепловыми и электромагнитными расцепителями максимального тока. Схема магнитного пускателя составлена с соблюдением рекомендуемых условных графических обозначений элементов схем автоматического управления двигателем. Здесь все элементы одного и того же аппарата обозначены одинаковыми буквами.
Схема магнитного пускателя составлена с соблюдением рекомендуемых условных графических обозначений элементов схем автоматического управления двигателем. Здесь все элементы одного и того же аппарата обозначены одинаковыми буквами.
Рис.2.Схема управления асинхронным двигателем с короткозамкнутой обмоткой ротора.
Так, главные замыкающие контакты линейного трёхполюсного контактора, находящиеся в силовой цепи, его катушка и вспомогательные замыкающие контакты, находящиеся в цепи управления, обозначены буквами КЛ. Нагревательные элементы теплового реле, включённые в силовую цепь, и остающиеся размыкающие контакты с ручным возвратом этого же реле в исходное положение, которые находятся в цепи управления, обозначены буквами РТ. При включенном трёхполюсном выключателе после нажатия пусковой кнопки КнП включается катушка линейного трёхполюсного контактора КЛ и его главные замыкающие контакты КЛ присоединяют обмотку статора трёхфазного асинхронного двигателя АД к питающей сети в результате чего ротор приходит во вращение.
Основные элементы схемы и их назначение
Автоматический выключатель — аппарат для нечастой ручной коммутации электрических цепей и автоматической защиты их при коротких замыканиях и длительной перегрузке. Назначение автоматического выключателя, применённого в схеме, описано в таблице 1.
Таблица1. Область применения автоматического выключателя.
Как видно из таблицы 1 автомат не отключается при резком снижении напряжения, так как расцепитель минимального напряжения в применяемом автоматическом выключателе отсутствует. Защиту при значительном снижении или исчезновении напряжения питающей сети осуществляет магнитный пускатель.
Автоматы используют при напряжении до 660В на номинальные токи от 15 до 600А, в помещениях с нормальной окружающей средой, так как они не приспособлены для работы в средах с едкими парами и газами, во взрывоопасных и незащищённых от попадания воды местах. Автоматы необходимо не реже 1 раза в год осматривать, чистить, смазывать шарнирные механизмы приборным маслом. Для своей схемы я выбрал автоматический выключатель серии АП-50. Внешний вид автомата показан на рисунке 3.
1- кнопка выключения, 2-кнопка включения, 3- реле, 4-искрогасительные камеры, 5-пластмассовый кожух
Рис3. Внешний вид и устройство автомата АП-50.
Он предназначен для защиты от перегрузок и токов короткого замыкания при U питающей сети до 500В, 50 гц на переменном токе, для ручного включения и отключения цепей, а главное для пуска и защиты трёхфазных асинхронных двигателей с короткозамкнутым ротором. Выключатель защищён пластмассовым кожухом. Наличие буквы Б в серии АП-50Б означает универсальное исполнение, при котором ввод и вывод проводов снизу и сверху через сальники типа СКВрт-33. Маркировка АП-50Б-3МТ означает наличие электромагнитных и тепловых расцепителей и число полюсов равное трём.
Маркировка АП-50Б-3МТ означает наличие электромагнитных и тепловых расцепителей и число полюсов равное трём.
Магнитный пускатель — коммутационный аппарат дистанционного управления, для частых включений и отключений электрооборудования, которым управляют с помощью отдельно расположенной кнопки. Это устройство для пуска, остановки и защиты электродвигателей. Назначение магнитного пускателя, применённого в схеме, представлено в таблице 2.
Типовые схемы управления электроприводов с АД
АД с короткозамкнутым ротором малой и средней мощности пускаются прямым подключением к сети без ограничения пусковых токов. Схемы управления АД с фазным ротором средней и большой мощности должны предусматривать ограничение токов при их пуске, реверсе и торможении с помощью добавочных резисторов в цепи ротора.
Реверсивная схема управления АД с короткозамкнутым ротором приведена на рисунке 8.9.
Рис. 8.9. Реверсивная схема управления АД с короткозамкнутым ротором
Основным элементом этой схемы является реверсивный магнитный пускатель, который включает в себя два линейных контактораКМ1 и КМ2 и два тепловых реле защиты КК.
В схеме предусмотрена защита от перегрузок двигателя (реле КК) и коротких замыканий в цепи статора (автоматический выключатель QF) и управления (предохранители FA). Кроме того, схема управления обеспечивает и нулевую защиту от исчезновения (снижения) напряжения сети (контакторы КМ1и КМ2).
Пуск двигателя при включенном автоматическом выключателе QF в условных направлениях «Вперед» или «Назад» осуществляется нажатием соответственно кнопок SB1 или SB2. Это приводит к срабатыванию контактора КМ1 или КМ2, подключению двигателя к сети и его разбегу.
Для реверса или торможения двигателя вначале нажимается кнопка SB3, что приводит к отключению включенного до сих пор контактора (например, КМ1), после чего нажимается кнопка SB2. Это приводит к включению контактора КМ2 и подаче на АД напряжения источника питания с другим порядком чередования фаз.
В случае необходимости только торможения двигателя при достижении им нулевой скорости должна быть вновь нажата кнопка SB3, что приведет к отключению двигателя от сети и возвращению схемы в исходное положение. Если кнопка SB3 нажата не будет, то это приведет к разбегу двигателя в другую сторону, т.е. к его реверсу.
Во избежание короткого замыкания в цепи статора, которое может возникнуть в результате одновременного ошибочного нажатия кнопок SB1 и SB2, в реверсивных магнитных пускателях иногда предусматривается специальная механическая блокировка. Она представляет собой рычажную систему, которая предотвращает втягивание одного контактора, если включен другой. В дополнение к механической блокировке в схеме используется типовая электрическая блокировка, применяемая в реверсивных схемах управления.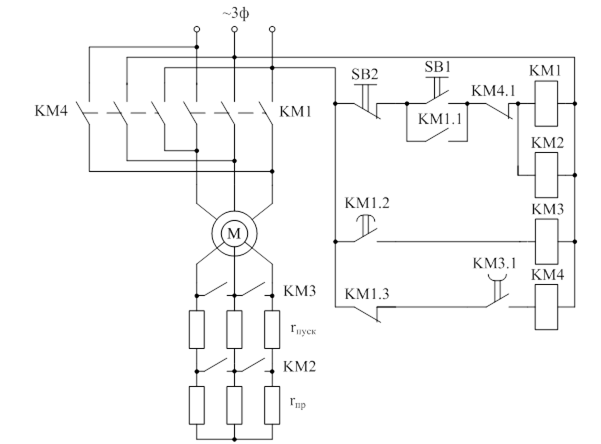
Отметим, что повышению надежности и удобства в эксплуатации способствует использование в схеме воздушного автоматического выключателя QF. Его наличие исключает возможность работы привода при обрыве одной фазы, при однофазном коротком замыкании, как это может иметь место при установке предохранителей, а также он не требует замены элементов (как в предохранителях при сгорании их плавкой вставки).
Схема управления АД, обеспечивающая прямой пуск и динамическое торможение в функции времени, приведена на рис. 8.10.
Рис. 8.10. Схема пуска и динамического торможения АД
Пуск двигателя осуществляется нажатием кнопки SB1, после чего срабатывает линейный контактор КМ, подключающий двигатель к источнику питания. Одновременно с этим замыкание контакта КМ в цепи реле времени КТ вызовет его срабатывание и замыкание его контакта в цепи контактора торможения КМ1.
Для остановки двигателя нажимается кнопка SB3, контактор КМ отключается, размыкая свои контакты в цепи статора двигателя и отключая тем самым его от сети переменного тока. Одновременно с этим замыкается контакт КМ в цепи аппарата КМ1 и размыкается контакт КМ в цепи реле КТ. Это приводит к включению контактора торможения КМ1, подаче в обмотки статора постоянного тока от выпрямителя V через резистор Rт и переводу двигателя в режим динамического торможения.
Реле времени КТ, потеряв питание, начинает отсчет выдержки времени. Через интервал времени, соответствующий времени останова двигателя, реле КТ размыкает свой контакт в цепи контактора КМ1, тот отключается, прекращая подачу постоянного тока в цепь статора. Схема возвращается в исходное положение.
Интенсивность динамического торможения регулируется резистором Rт, с помощью которого устанавливается необходимый постоянный ток в статоре двигателя.
Для исключения возможности одновременного подключения статора к источникам переменного и постоянного тока в схеме использована типовая блокировка с помощью размыкающих контактов КМ и КМ1, включенных перекрестно в цепи катушек этих аппаратов.
Схема управления пуском и торможением противовключением АД с фазным ротором в функции ЭДС приведена на рисунке 8.11.
Рис. 8.11. Схема управления пуском и торможением противовключением АД
с фазным ротором
После подачи напряжения включается реле времени КТ, которое своим размыкающим контактом разрывает цепь питания контактора КМ3, предотвращая тем самым его включение и преждевременное закорачивание пусковых резисторов в цепи ротора.
Включение двигателя производится нажатием кнопки SB1, после чего включается контактор КМ1. Статор двигателя подсоединяется к сети, электромагнитный тормоз YB растормаживается, и начинается разбег двигателя. Включение КМ1 одновременно приводит к срабатыванию контактора КМ4, который своим контактом шунтирует ненужный при пуске резистор противовключения R
д2 , а также разрывает цепь катушки реле времени КТ. Последнее, потеряв питание, начинает отсчет выдержки времени, после чего замыкает свой контакт в цепи катушки контактора КМ3, который срабатывает и шунтирует пусковой резистор R
д1 в цепи ротора, и двигатель выходит на свою естественную характеристику.
Последнее, потеряв питание, начинает отсчет выдержки времени, после чего замыкает свой контакт в цепи катушки контактора КМ3, который срабатывает и шунтирует пусковой резистор R
д1 в цепи ротора, и двигатель выходит на свою естественную характеристику.
Управление торможением обеспечивает реле торможения KV, контролирующее уровень ЭДС (скорости) ротора. С помощью резистора R р оно отрегулировано таким образом, что при пуске, когда скольжение двигателя 0
Для осуществления торможения
двигателя нажимается сдвоенная кнопка SB2, размыкающий контакт которой разрывает цепь питания катушки контактора КМ1. После этого двигатель отключается от сети и разрывается цепь питания контактора КМ4, и замыкается цепь питания реле КТ. В результате этого контакторы КМ3 и КМ4 отключаются, и в цепь ротора двигателя вводится сопротивление R д1 + R д2 .Нажатие кнопки SB2 приводит одновременно к замыканию цепи питания катушки контактора КМ2, который, включившись, вновь подключает двигатель к сети, но уже с другим чередованием фаз сетевого напряжения на статоре. Двигатель переходит в режим торможения противовключением. Реле RY срабатывает и после отпускания кнопки SB2 будет обеспечивать питание контактора КМ2 через свой контакт и замыкающий контакт этого аппарата.
Двигатель переходит в режим торможения противовключением. Реле RY срабатывает и после отпускания кнопки SB2 будет обеспечивать питание контактора КМ2 через свой контакт и замыкающий контакт этого аппарата.
В конце торможения, когда скорость будет близка к нулю и ЭДС ротора уменьшится, реле КV отключится и своим размыкающим контактом разомкнет цепь катушки контактора КМ2. Последний, потеряв питание, отключит двигатель от сети, и схема придет в исходное положение. После отключения КМ2 тормоз УВ, потеряв питание, обеспечит фиксацию (торможение) вала двигателя.
На рисунке 8.12. приведена схема панели типа ПДУ 6220.
Панель типа ПДУ 6220 входит в состав нормализованной серии панелей управления двигателей с фазным и короткозамкнутым ротором и обеспечивает пуск двигателей в две ступени и динамическое торможение по принципу времени.
При подаче на схему напряжений 220 В и переменного тока 380 В (замыкание рубильников QS
1 и QS 2 и автомата QF) включается реле времени КТ1, чем подготавливается двигатель к пуску с полным пусковым резистором в цепи ротора.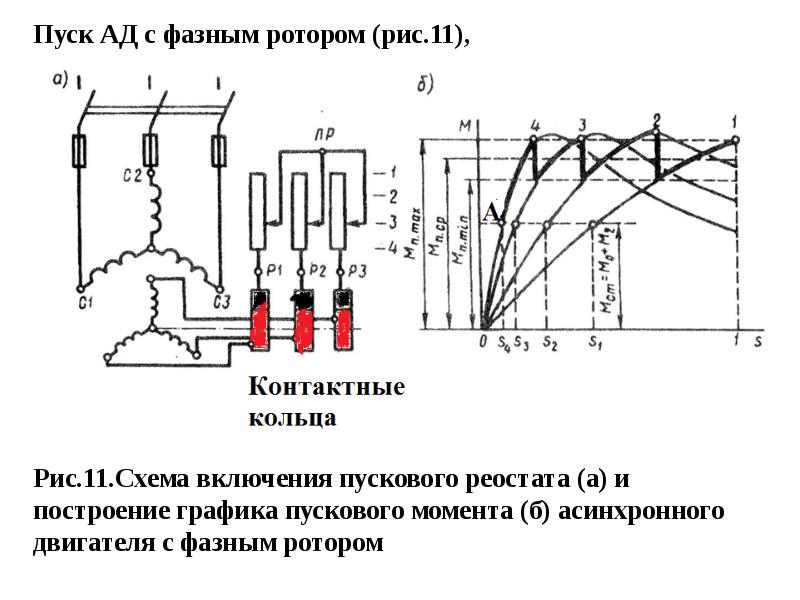 Одновременно с этим, если рукоятка командоконтроллера находится в нулевой (средней) позиции и максимально-токовые реле FА1-FА3 не включены, включится реле защиты КV от понижения питающего напряжения и подготовит схему к работе.
Одновременно с этим, если рукоятка командоконтроллера находится в нулевой (средней) позиции и максимально-токовые реле FА1-FА3 не включены, включится реле защиты КV от понижения питающего напряжения и подготовит схему к работе.
Рис. 8.12. Схема панели типа ПДУ 6220
Пуск двигателя осуществляется по любой из двух искусственных характеристик или естественной характеристике, для чего рукоятка SА должна устанавливаться соответственно в положение 1, 2 или 3. При переводе рукоятки в любое из указанных положений SА включается линейный контактор КМ2, подключающий двигатель к сети, контактор управления тормозом КМ5, подключающий к сети катушку YА электромагнитного тормоза, который при этом растормаживает двигатель и реле времени КТ3, управляющее процессом динамического торможения. При переводе SА в положение 2 или 3 включаются контакторы ускорения КМ3 и КМ4, и двигатель начинает разгоняться.
Торможение двигателя происходит при переводе рукоятки SА в нулевое (среднее) положение. При этом отключатся контакторы КМ2 и КМ5 и включится контактор динамического торможения КМ1, который подключит двигатель к источнику постоянного тока. В результате этого будет идти интенсивный процесс комбинированного (механического и динамического) торможения двигателя, который закончится после отсчета реле КТ3 своей выдержки времени, соответствующей времени торможения.
При этом отключатся контакторы КМ2 и КМ5 и включится контактор динамического торможения КМ1, который подключит двигатель к источнику постоянного тока. В результате этого будет идти интенсивный процесс комбинированного (механического и динамического) торможения двигателя, который закончится после отсчета реле КТ3 своей выдержки времени, соответствующей времени торможения.
Схема асинхронного электропривода с тиристорным пусковым устройством приведена на рисунке 8.13.
к ак
Рис. 8.13. Схема асинхронного ЭП
с тиристорным пусковым устройством
Эффективным методом формирования желаемых графиков изменения тока и момента двигателя в переходных режимах является регулирование напряжения на его статоре с помощью тиристорных пусковых устройств (ТПУ). Чаще всего это делается для ограничения тока и момента двигателя при пуске («мягкий» способ пуска), хотя с помощью этих устройств можно обеспечить и повышение момента двигателя при пуске («жесткий» способ пуска).
Тиристорное пусковое устройство включается между источником питания (сетью переменного тока) с напряжением U
1 и статором двигателя. В нереверсивном ТПУ его силовую часть образуют три пары встречно-параллельно включенных тиристоров VS1-VS6, управление которыми осуществляется импульсами напряжения, поступающими на них от системы импульсно-фазового управления (СИФУ). Ограничение тока и момента осуществляется за счет снижения подводимого к двигателю напряжения, что достигается соответствующим изменением во времени угла управления тиристорами. Напряжение при пуске может изменяться по различным законам – линейно нарастать от нуля до сетевого, быть пониженным в течение всего времени пуска или изменяться по так называемому бустерному варианту, при котором для облегчения пуска двигателя на него вначале подается скачком некоторое напряжение, которое затем продолжает нарастать уже по линейному закону. В замкнутой системе может быть обеспечено и поддержание тока статора на заданном уровне.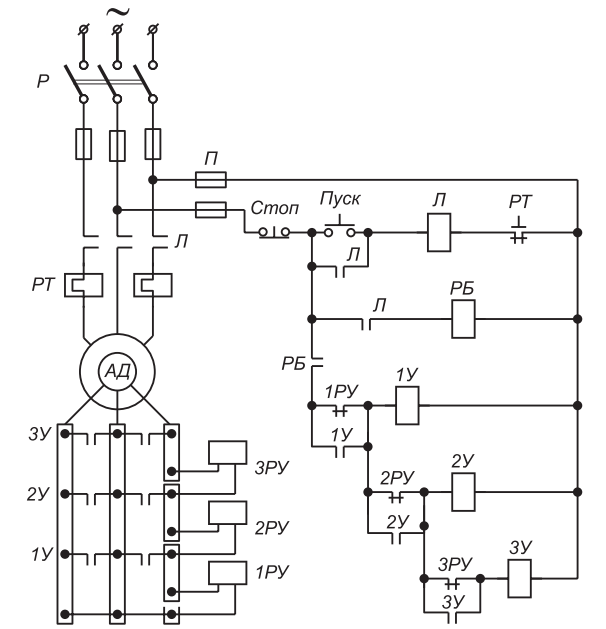
8.6. Регулирование координат асинхронного двигателя
с помощью резисторов
Данный способ регулирования координат, называемый часто реостатным, может быть осуществлен введением добавочных активных резисторов в статорные или роторные цепи АД (см. рис. 8.14). Он привлекает в первую очередь простотой своей реализации, отличаясь в то же время невысокими показателями качества регулирования и экономичностью.
Рис. 8.14. Схемы включения АД с фазным ротором (а)
и с короткозамкнутым ротором (б)
1д в цепь статора применяется главным образом для регулирования (ограничения) в переходных процессах тока и момента АД с короткозамкнутым ротором.
Все искусственные электромеханические характеристики располагаются в первом квадранте ниже и левее естественной. С учетом того, что скорость идеального холостого хода ω
0 при включении R 1д не изменяется, получаемые искусственные электромеханические характеристики можно представить семейством кривых (рис. 8.15 а).
8.15 а).
а) б)
Рис.8.15. Электромеханические (а) и механические (б) характеристики АД
при регулировании координат с помощью резисторов в цепи статора
Характеристики 2–4 расположены ниже естественной характеристики 1, построенной при R 1д = 0, причем большему значению R 1д соответствует больший наклон искусственных характеристик 2-4.
Механические характеристики АД представлены на рисунке 8.15 б.
Координаты точки экстремума М к и S к изменяются при варьировании R 1д , а именно: в соответствии с (8.15) и (8.16) при увеличении R 1д критический момент М к и критическое скольжение S к уменьшаются. Уменьшается и пусковой момент.
В то же время искусственные механические характеристики (рис. 8.15б) мало пригодны при регулировании скорости АД: они обеспечивают небольшой диапазон изменения скорости; жесткость характеристик АД и его перегрузочная способность, характеризуемая критическим моментом, по мере увеличения R 1д снижается; способ отличает и низкая экономичность.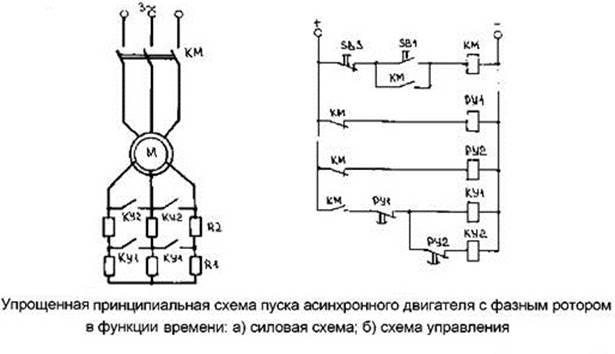 В силу этих недостатков регулирование скорости АД с помощью активных резисторов в цепи его статора применяется редко .
В силу этих недостатков регулирование скорости АД с помощью активных резисторов в цепи его статора применяется редко .
Включение добавочных резисторов R 2д в цепь ротора применяется как с целью регулирования тока и момента АД, так и его скорости (рис. 8.14а).
Искусственные электромеханические характеристики при R 2д = var имеют вид, показанный на рисунке 8.15а, и могут использоваться для регулирования (ограничения) пускового тока I кз = I п .
Скорость идеального холостого хода АД ω 0 и максимальный (критический) момент двигателя М к в соответствии с остаются неизменными при регулировании R 2д , а критическое скольжение S к , как это следует из , изменяется.
Выполненный анализ позволяет построить естественную 1 (R 2д = 0) и искусственные 2–3 (R 2д3 > R 2д2 ) характеристики (рис. 8.16) и сделать заключение, что за счет изменения R 2д имеется возможность повышать пусковой момент АД вплоть до критического момента М к без снижения перегрузочной способности двигателя, что весьма важно при регулировании его скорости.
Рис. 8.16. Механические характеристики при различных сопротивлениях R 2д добавочного резистора в цепи ротора
В остальном рассматриваемый способ характеризуется такими же показателями, что и для ДПТ НВ. Диапазон регулирования скорости небольшой – около 2–3 – из-за снижения жесткости характеристик и роста потерь по мере его увеличения. Плавность регулирования скорости, которая изменяется только вниз от основной, определяется плавностью изменения добавочного резистора R 2д .
Затраты, связанные с созданием данной системы ЭП, невелики, так как для регулирования обычно используются простые и дешевые резисторов. В то же время эксплуатационные затраты оказываются значительными, поскольку велики потери в ПД.
С увеличением скольжения S возрастают потери в роторной цепи, поэтому реализация большого диапазона регулирования скорости приводит к значительным потерям энергии и снижению КПД ЭП.
Регулирование скорости этим способом осуществляется при небольшом диапазоне регулирования скорости или кратковременной работе на пониженных скоростях. Этот способ нашел широкое применение например, в ЭП подъемно-транспортных машин и механизмов.
Расчет сопротивления добавочного резистора R 2д может быть выполнен несколькими способами в зависимости от формы задания требуемой искусственной механической характеристики.
Если искусственная характеристика определена полностью, то сопротивление добавочного резистора (например, R 2д1 ) можно определить по выражению :
, (8.30)
где – сопротивление фазы ротора АД.
Если искусственная характеристика задана своей рабочей частью, то можно использовать метод отрезков, для чего на рисунке 8.16 проведена вертикальная линия, соответствующая номинальному моменту М ном , и отмечены характерные точки: а, b, c, d, e. Сопротивление искомого резистора R 2д1 определяется как
R 2д1 = R 2ном аb/ас, (8.31)
где – номинальное сопротивление АД; – ЭДС ротора при S = 1; – номинальный ток ротора.
http://life-prog.ru/1_17774_tormoznie-rezhimi-ad.html
15.09.2014Для управления асинхронными электродвигателями используются релейно-контакторные аппараты, которые реализуют типовые схемы пуска, реверса, торможения, остановки электропривода.
На базе типовых схем релейно-контакторного управления разрабатываются схемы управления электроприводами производственных механизмов. Пуск асинхронных двигателей с короткозамкнутым ротором небольшой мощности осуществляется обычно при помощи магнитных пускателей. В данном случае магнитный пускатель состоит из контактора переменного тока, двух встроенных в него электротепловых реле.
Простейшая схема управления асинхронным электродвигателем с короткозамкнутым ротором. Схема использует питание силовых цепей и цепей управления от источника одного и того же напряжения (рис. 4.9). Для повышения надежности работы релейных контакторных аппаратов, большей частью рассчитанных на низкое напряжение, и для повышения безопасности эксплуатации применяются схемы с питанием цепей управления от источника пониженного напряжения.
Если рубильник S1 включен, то для пуска электродвигателя необходимо нажать на кнопку S2 («пуск»). При этом катушка контактора K1M получит питание, замкнутся главные контакты К1(1-3)М в силовой цепи и статор двигателя присоединится к сети. Электродвигатель начнет вращаться. Одновременно в цепи управления закроется замыкающий вспомогательный контакт K1A, шунтирующий кнопку S2 («пуск»), после чего эту кнопку не нужно удерживать в нажатом состоянии, так как цепь катушки контактора KlM остается замкнутой. Кнопка S2 с самовозвратом и за счет действия пружины возвращается в исходное разомкнутое состояние.
Для отключения электродвигателя от сети нажимается кнопка S3 («стоп»). Катушка контактора K1M обесточивается и замыкающие контакты K1(1-3)M отключают обмотки статора от сети. Одновременно размыкается вспомогательный контакт K1A. Схема приходит в исходное, нормальное состояние. Вращение электродвигателя прекращается.
Схема предусматривает защиту двигателя и цепи управления от коротких замыканий плавкими предохранителями F 1(1-3), защиту от перегрузки двигателя двумя электротепловыми реле F2(1-2). Пружинный привод контактов магнитного пускателя К 1(1-3)М, K1A на размыкание реализует так называемую нулевую защиту, которая при исчезновении или значительном снижении напряжения отключают двигатель от сети. После восстановления нормального напряжения самопроизвольного пуска двигателя не произойдет.
Более четкая защита от снижения или исчезновения напряжения может быть выполнена при помощи реле пониженного напряжения, катушка которого присоединяется к двум фазам силовой цепи, а его замыкающий контакт включен последовательно с катушкой контактора. В этих схемах вместо установки на вводе рубильников с предохранителями применяют воздушные автоматы.
Схема управления асинхронным электродвигателем с коротко-замкнутым ротором с использованием магнитного пускателя и воздушного автоматического выключателя.
Автоматический выключатель F1 исключает возможность обрыва одной фазы от срабатывания защиты при однофазном коротком замыкании, как это бывает при установке предохранителей (рис. 4.10). Нет необходимости заменять элементы в предохранителях при сгорании их плавкой вставки.
В схемах управления электродвигателями применяются автоматы с электромагнитными расцепителями либо с расцепителями электромагнитным и электротепловым. Расцепители электромагнитного типа характеризуются нерегулярной отсечкой, равной десятикратному току, и служат для защиты от токов короткого замыкания, Электротепловые расцепители обладают обратнозависимой характеристикой времени от тока. Так, расцепитель с номинальным током 50 А срабатывает при 1,5-кратной нагрузке через 1 ч, а при 4-кратной — через 20 с. Электротепловые расцепители не защищают двигатель от перегрева при перегрузках на 20 — 30%, но могут защитить двигатель и силовую цепь от перегрева пусковым током при застопоривании приводного механизма. Поэтому для защиты электродвигателей от длительных перегрузок при использовании автомата с электротепловым расцепителем такого типа применяются дополнительные электротепловые реле, как и при использовании автоматического выключателя с электромагнитным расцепителем. Многие выключатели, например АП-50, защищают электродвигатель одновременно от токов короткого замыкания и от перегрузок. Принципы действия схем (см. рис. 4.9, 4.10) для пуска и останова аналогичны. Эти схемы нашли широкое применение для управления нереверсивными электроприводами транспортеров, воздуходувок, вентиляторов, насосов, лесоперерабатывающих и заточных станков.
Схемы управления асинхронным двигателем с короткозамкнутым ротором с реверсивным магнитным пускателем. Эта схема применяется в случаях, когда необходимо изменять направления вращения электропривода (рис. 4.11), например в приводе электролебедок, рольгангов, механизмов подачи станков и т.д. Управление двигателями осуществляется реверсивным магнитным пускателем. Включение двигателя для вращения «вперед» осуществляется нажатием кнопки S1. Катушка контактора K1M будет под напряжением, и замыкающие главные контакты К1(1-3)M присоединят электродвигатель к сети. Для переключения электродвигателя необходимо нажать на кнопку S3 («стоп»), а затем на кнопку S2 («назад»), что вызовет отключение контактора K1M и включение контактора К2М. При этом, как видно из схемы, две фазы на статоре переключатся, т.е. произойдет реверс вращения электродвигателя. Во избежание короткого замыкания в цепи статора между первой и третьей фазой вследствие ошибочного одновременного нажатия на обе пусковые кнопки S1 и S2 реверсивные магнитные пускатели имеют рычажную механическую блокировку (на схеме не показана), которая препятствует втягиванию одного контактора, если включен другой. Для повышения надежности кроме механической блокировки в схеме предусмотрена электрическая блокировка, которая осуществляется при помощи размыкающих вспомогательных контактов К1А.2 и К2А.2. Обычно реверсивный магнитный пускатель состоит из двух контакторов, заключенных в один корпус.
В практике применяется также схема реверса асинхронных короткозамкнутых электродвигателей с использованием двух отдельных нереверсивных магнитных пускателей. Ho для устранения возможности короткого замыкания между первой и третьей фазой силовой цепи от одновременного включения обоих пускателей применяют двухцепные кнопки. Например, при нажатии кнопки S1 («вперед») цепь катушки контакторов K1M замыкается, а цепь катушки К2М при этом дополнительно размыкается. (Принцип действия двухцепных кнопок показан на рис. 4.12.) Реверс электродвигателей постоянного тока осуществляется изменением полярности напряжения силовой цепи.
Схема управления двухскоростным асинхронным электродвигателем с короткозамкнутым ротором. Такая схема приведена на рис. 4.12. Привод может иметь две скорости. Пониженная скорость получается при соединении обмоток статора на треугольник, что осуществляется нажатием двухцепной кнопки S3 и включением контактора КЗ с замыканием трех силовых контактов К3. Одновременно замыкается вспомогательный контакт К3А, шунтирующий кнопку S3, и размыкается К3А — вспомогательный контакт в цепи катушки К4.
Повышенная скорость получается при соединении обмоток на двойную звезду, что реализуется нажатием двухцепной кнопки S4. При этом катушка контактора К3 обесточивается, контакты КЗ в силовой цепи размыкаются, размыкается вспомогательный контакт К3А, шунтирующий кнопку S3, и замыкается вспомогательный контакт К3А в цепи катушки К4.
При дальнейшем нажатии (перемещении) кнопки S4 замыкается цепь катушки контактора К4, замыкаются пять контактов К4 в силовой цепи, обмотка статора будет подключена на двойную звезду. Одновременно замыкается вспомогательный контакт К4А, шунтирующий кнопку S4 и размыкается вспомогательный контакт К4А в цепи катушки контактора К3. Обычно контакторы переменного тока имеют три силовых контакта, в схеме подключения статора на двойную звезду показано пять силовых контактов К4. В этом случае параллельно катушке контактора К4 включается катушка дополнительного контактора.
После предварительного соединения обмоток статора производится пуск двигателя при помощи контакторов K1 и К2 для вращения вперед или назад. Включение контакторов K1 или К2 осуществляется соответственно нажатием кнопки S1 или S2. Применение двухцепных кнопок позволяет осуществить дополнительную электрическую блокировку, исключающую одновременное включение контакторов K1 и К2, а также К3 и К4.
В схеме предусмотрена возможность переключения с одной скорости на другую при вращении электродвигателя вперед или назад без нажатия кнопки S5 («стоп»). При нажатии кнопки S5 катушки включенных контакторов обесточиваются и схема приходит в исходное, нормальное состояние.
Рассмотренная схема является основой построения схем управления электродвигателями двухскоростных транспортеров подачи раскряжевочных агрегатов, сортировочных конвейеров и т.п.
Рассмотрим вопросы торможения электродвигателей. При отключении обмоток статора от сети ротор электродвигателя с рабочим механизмом, например дисковой пилой шпалорезного станка, продолжает сравнительно долгое время вращаться по инерции. Для устранения этого явления в приводах с асинхронными электродвигателями в зависимости от их мощности и назначения применяется торможение противовключением, фрикционное торможение и динамическое торможение.
Схема управления асинхронным электродвигателем с коротко-замкнутым ротором с использованием торможения противовключением.
Такая схема изображена на рис. 4.13. В схемах торможения противовключением используется реле контроля скорости (PKC) ЕМ, механически связанное с валом двигателя; его замыкающий контакт EA при определенной угловой скорости двигателя закрывается. При неподвижном роторе двигателя и скорости его вращения менее 10…15% от номинальной контакт реле EA разомкнут. Нажатием кнопки SI включается контактор K1M, замыкаются силовые контакты К1(1-3)M и двигатель пускается в ход, замыкается вспомогательный контакт K1A.1, шунтирующий кнопку S1. Размыкающий вспомогательный контакт А7А.2 одновременно разрывает цепь питания катушки контактора К2М, а несколько позднее с увеличением скорости вращения двигателя замыкается контакт реле скорости EA. Поэтому контактор К2М в этот период не включается.
Отключение электродвигателя от сети с торможением противовключением производится нажатием кнопки S2 («стоп»). При этом катушка контактора K1M обесточивается, размыкаются силовые контакты К1(1-3)М, размыкается шунтирующий пусковую кнопку S1 вспомогательный контакт K1A.1. Одновременно замыкается размыкающий вспомогательный контакт К1А.2. При этом двигатель вращается по инерции и контакт реле EA замкнут, следовательно, катушка контактора К2А получит питание, замкнутся главные контакты К2(1-3)М, разомкнется вспомогательный контакт К2А в цепи катушки K1M. Обмотки статора будут подключены к сети на реверс вращения ротора. Ротор мгновенно затормаживается и при скорости вращения, близкой к нулю, контакт реле скорости EA размыкается, катушка контактора К2М обесточивается, главные контакты К2(1-3)М размыкаются, замыкается вспомогательный контакт К2А. Двигатель остановлен и отключен от сети. Схема будет в исходном положении.
Рассмотренная типовая схема торможения противовключением является основой построения схем управления электродвигателями станков заточки цепных, круглых, рамных пил, схем обрезных станков и др. Торможение противовключением обеспечивает жесткий, мгновенный останов привода и применяется обычно для электродвигателей небольшой мощности.
Схема фрикционного торможения асинхронного электродвигателя грузоподъемного механизма. Такая схема представлена на рис. 4.14. В соответствии с правилами технической эксплуатации грузоподъемных механизмов в отключенном состоянии привод и механизм подъема должны быть надежно заторможены.
На упрощенной схеме условно показан односторонний колодочный тормоз Tс пружинным приводом зажима тормозного шкива.
При пуске электродвигателя нажимается кнопка S1 («пуск»), катушка контактора K1M будет под напряжением, замкнутся три контакта К1(1-3)М в силовой цепи и вспомогательный контакт K1A. Статор электродвигателя и обмотка электромагнита Y одновременно будут присоединены к сети. Электромагнит Y одновременно отведет колодочный тормоз от шкива и создаст деформацию пружины. Двигатель вращается расторможенным.
Нажатием кнопки S2 («стоп») обесточивается катушка контактора K1M, размыкаются главные контакты в силовой цепи К1(1-3)М и вспомогательный контакт K1A. Статор электродвигателя и обмотка электромагнита У отключаются от сети, колодочный тормоз с пружинным приводом жестко фиксирует ротор электродвигателя с механизмом подъема. Применение реверсивного магнитного пускателя дает возможность получить схему фрикционного торможения электропривода механизма и на подъем, и на опускание груза.
Схема фрикционного торможения асинхронного электродвигателя станочного оборудования. Такая схема показана на рис. 4.15. В нормальном (отключенном) состоянии ротор электродвигателя расторможен под действием пружинного привода. Это позволяет проводить смену инструмента, наладку станка с легким поворотом приводного вала и ротора электродвигателя.
Электродвигатель подключается к сети при помощи кнопки S1, контакта K1A и силовых контактов К1(1-3)М. Остановка электропривода станка производится нажатием двухцепной кнопки S2 («стоп»). При этом катушка контактора K1M обесточивается, размыкаются главные контакты в силовой цепи К1(1-3)М и вспомогательный контакт K1A. Электродвигатель отключается от сети, продолжая вращаться по инерции.
При дальнейшем нажатии на кнопку S2 замыкается цепь катушки контактора К2М, замыкаются контакты К2(1-2)М, электромагнит Y затягивает колодочный тормоз. Кнопка S2 освобождается и принимает исходное положение, контактор К2М обесточивается, контакты К2(1-2)М размыкаются. Статор двигателя и электромагнит отключены от сети, привод остановлен и расторможен. Эта простейшая схема является базой разработки схем фрикционного торможения электродвигателей станочного оборудования, в которых учитывается необходимость реверса, защитных ограждений, сигнализации.
Схема управления асинхронным двигателем с использованием динамического торможения. Такая схема приведена на рис. 4.16. Динамическое торможение, в отличие от торможения противовключением и фрикционного метода, является плавным, мягким торможением. Включение электродвигателя в сеть осуществляется при нажатии кнопки SI («пуск»). Контактор K1M будет включен, замкнутся три главных контакта К1(1-3)М в силовой цепи, замкнется вспомогательный контакт K1А.1, разомкнется контакт К1А.2, замкнется контакт К1А.З, после чего включится реле времени Д1М и замкнет свой контакт РДТ в цепи катушки контактора К2М, которую несколько раньше разомкнул контакт К1А.2.
Отключение статора электродвигателя от сети переменного тока и торможение осуществляется нажатием кнопки S2 («стоп»). Контактор К1М теряет питание, главные контакты К1(1-3)М размыкаются, размыкаются вспомогательные контакты K1A.1, К1А.3, и замыкается контакт К1А.2. Катушка реле времени Д1M теряет питание, однако замыкающий контакт РДТ, будучи ранее замкнутым, разомкнется с выдержкой времени, которая несколько превышает длительность торможения двигателя. При замыкании контакта К1А.2 катушка контактора К2М получит питание, разомкнется вспомогательный контакт блокировки К2А и замкнутся контакты К2(1-2)М. В обмотку статора подается постоянный ток. Обмотка создает неподвижный в пространстве магнитный поток. Во вращающемся по инерции роторе индуцируются ЭДС.
Взаимодействие токов ротора, вызванных этими ЭДС, с неподвижным магнитным потоком создает тормозной момент двигателя
где Mн — номинальный момент двигателя; nс — синхронная скорость двигателя; I»р — приведенный к статору ток ротора; R»р — полное активное сопротивление ротора, приведенное к статору; nд — относительная скорость двигателя, nд = n/nс.
После размыкания контакта реле времени РДТ схема приходит в исходное состояние, двигатель плавно останавливается. Для ограничения постоянного тока служит дополнительный резистор Rт. На базе этой схемы созданы схемы управления электродвигателями лесопильных рам, шпалорезных и других крупных круглопильных станков.
Схема тиристорного управления пуском и торможением асинхронного двигателя с короткозамкнутым ротором. Такая схема изображена на рис. 4.17. В типовой схеме разомкнутого управления асинхронным двигателем с короткозамкнутым ротором в качестве силовых элементов, включенных в статорную цепь двигателя, используются тиристоры в сочетании с релейно-контактными аппаратами в цепи управления. Тиристоры выполняют роль силовых коммутаторов и, кроме того, легко позволяют осуществлять необходимый темп изменения напряжения на статоре двигателя регулированием угла включения тиристоров.
При пуске плавное изменение угла включения тиристоров дает возможность изменять приложенное к статору напряжение от нуля до номинального, тем самым ограничивать токи и момент двигателя. Схема содержит устройство динамического торможения в виде демпфирующего контура. Применение шунтирующего тиристора, замыкающего цепь тока между двумя фазами, приводит к увеличению постоянной составляющей тока, что создает достаточный тормозной момент в области высокой угловой скорости.
Рассмотрим типовую схему комплектного устройства, состоящего в силовой части из группы включенных встречно-параллельно тиристоров VS1…VS4 в фазах А и С и одного короткозамкнутого тиристора между фазами А и В — V5 для управления асинхронным двигателем М. Схема включает блок управления тиристорами БУ и релейно-контактный узел управления.
Нажатием кнопки S1 включается реле K1M и К2М, на управляющие электроды тиристоров VS1…VS4 подаются импульсы, сдвинутые на 60° относительно питающего напряжения. К обмоткам статора двигателя подается пониженное напряжение, уменьшаются пусковой ток и пусковой момент. Ротор двигателя увеличивает скорость вращения, разгоняется. Размыкающий контакт реле К1.2 отключает реле К3M с задержкой времени, зависящей от параметров резистора R7 и конденсатора С4. Размыкающими контактами реле К3М шунтируются соответствующие резисторы в блоке управления тиристорами БУ, и к статору прикладывается полное напряжение сети.
Для остановки двигателя нажимается кнопка S3, обесточивается релейная схема управления, тиристоры VS1…VS4 и напряжение со статора двигателя снимается. При этом за счет энергии, запасенной конденсатором С5, включается на время торможения реле К4М, которое своими контактами К4.2 и К4.3 включает тиристоры VS2 и VS5. По фазам А и В в обмотки статора двигателя протекает ток однополупериодного выпрямления, что обеспечивает эффективное динамическое торможение.
Сила тока, а следовательно, и время динамического торможения регулируются резисторами R1 и R3. Эта схема также имеет шаговый режим. При нажатии кнопки S2 включается реле K5M, которое своими контактами KS.3 и К5.4 включает тиристоры VS2 и VS5. В этом случае по фазам А и В в обмотки статора двигателя протекает ток однополупериодного выпрямления. При отпускании кнопки S2 выключается реле K5M и тиристоры VS2 и VS5; при этом на короткое время за счет энергии, запасенной в конденсаторе Сб, включается реле, которое своим контактом К6.2 включает тиристор VS3, и ротор двигателя поворачивается на некоторый угол вследствие поворота примерно на такой же угол результирующего вектора потока статора.
Шаг поворота зависит от напряжения сети, момента статической нагрузки, момента инерции привода и среднего значения выпрямленного тока. Реализация пошагового режима работы двигателя проводится после его остановки, так как реле К5М первоначально можно включить только после замыкания размыкающих контактов K1.5, К4.1. Шаговый режим работы двигателя создает благоприятные условия наладки.
Схема управления асинхронными электродвигателями с фазным ротором в функции времени. Такая схема представлена на рис. 4.18. Защита силовых цепей двигателя от токов короткого замыкания осуществляется с помощью реле максимального тока FI, F2, F3; защита от перегрузок — электротепловыми реле F4(1-2), нагревательные элементы которых включены через трансформаторы тока TT1, ТТ2. Цепи управления защищаются автоматическим выключателем F5, имеющим максимальную токовую защиту.
При включении рубильника SI и автоматического выключателя FS получит питание реле времени Д1М и замыкающие контакты его Д1А.1, Д1А.2 закроются, тем самым подготовится цепь включения реле времени Д2М и контактора K1M. Размыкающий контакт Д1А.3 разомкнется и выключит цепь катушек контакторов ускорения К2М, R3М, К4М.
При последующем нажатии кнопки S2 («пуск») через замкнувшийся ранее контакт Д1А.2 включится контактор K1M, замкнутся главные контакты К1(1-3) M в силовой цепи, в обмотку статора двигателя M будет подано напряжение. В обмотку ротора при этом включены все пусковые резисторы. Начинается пуск двигателя на первой реостатной характеристике. Одновременно закроется вспомогательный контакт K1A.3, шунтирующий пусковую кнопку, и замкнется контакт K1A.2, через который подается питание в цепь катушек реле времени Д2М, Д3М. Размыкающий вспомогательный контакт K1A.1 отключит цепь реле Д1М, которое отпускает якорь с выдержкой времени при отключении его катушки. Поэтому Д2М не сразу включится и его размыкающий контакт Д2А.1 будет открыт.
Следует отметить, что размыкающий контакт Д1А.З остается еще открытым; по истечении времени выдержки реле Д1М его замыкающий контакт Д1А.1 (а также Д1А.2) откроется, а размыкающий Д1А.З — закроется. В результате этих переключений в схеме управления включится контактор К2М и будет шунтирована первая пусковая ступень резистора — двигатель с первой реостатной характеристики перейдет на вторую, разогнавшись до большей угловой скорости. Кроме того, выключится реле времени Д2М и его размыкающий контакт с выдержкой времени Д2А.1 замкнет цепь катушки контактора К3М, который сработает и замкнет свои контакты К3(1-2)М, т.е. шунтируется вторая пусковая ступень резистора — двигатель переходит на третью реостатную характеристику.
Наконец, после размыкания с выдержкой времени замыкающего контакта Д2А.1 выключится реле Д3М — с выдержкой времени, на которое настроено реле Д3М (соответственно времени пуска двигателя на последней реостатной характеристике), замкнется его контакт Д3А.1, включится контактор К4М и замкнет свои контакты К4(1-3)М. Обмотка ротора будет замкнута накоротко и двигатель будет заканчивать свой разгон в соответствии с его естественной характеристикой. Этим и заканчивается ступенчатый пуск асинхронного двигателя, контролируемый в функции времени электромагнитными реле времени Д1М, Д2М, Д3М.
Останов двигателя производится нажатием кнопки S3. Схема используется для привода механизмов, не требующих реверса, длительность торможения которых после отключения двигателя не имеет существенного значения. В частности, на базе этой схемы создаются схемы управления главным электродвигателем лесопильных рам.
Для управления силовым электрооборудованием в электрических цепях используют разнообразные устройства дистанционного управления, защиты, телемеханики и автоматики, воздействующие на коммутационные аппараты его включения и отключения или регулирования.
На рис.5.4 приведена принципиальная схема управления асинхронным электродвигателем с короткозамкнутым ротором. Данная схема широко используется на практике при управлении приводами насосов, вентиляторов и многих других.
Перед началом работы включают автоматический выключатель QF. При нажатии кнопки SВ2 включается пускатель КМ и запускается двигатель М. Для остановки двигателя необходимо нажать кнопку SВ1, при этом отключаются пускатель КМ и двигатель М.
Рис.5.4. Схема включения асинхронного электродвигателя с короткозамкнутым ротором
При перегрузке электродвигателя М срабатывает электротепловое реле КК, размыкающее контакты КК:1 в цепи катушки КМ. Пускатель КМ отключается, двигатель М останавливается.
В общем случае схемы управления могут осуществлять торможение электропривода, его реверсирование, изменять частоту вращения и т.д. В каждом конкретном случае используется своя схема управления.
В системах управления электроприводами широко используются блокировочные связи. Блокировкой обеспечивают фиксацию определенного состояния или положения рабочих органов устройства или элементов схемы. Блокировка обеспечивает надежность работы привода, безопасность обслуживания, необходимую последовательность включения или отключения отдельных механизмов, а также ограничение перемещения механизмов или исполнительных органов в пределах рабочей зоны.
Различают механическую и электрическую блокировки.
Примером простейшей электрической блокировки, применяемой практически во всех схемах управления, является блокировка кнопки «Пуск» SB2 (рис. 5.4.) контактом КМ2. Блокировка этим контактом позволяет после включения двигателя кнопку SB2 отпустить, не прерывая цепи питания катушки магнитного пускателя КМ, которое идет через блокировочный контакт КМ2.
В схемах реверсирования электродвигателей (при обеспечении движения механизмов вперед-назад, вверх-вниз и т.д.), а также при торможении применяются реверсивные магнитные пускатели. Реверсивный магнитный пускатель состоит из двух нереверсивных. При работе реверсивного пускателя необходимо исключить возможность их одновременно включения. Для этого в схемах предусматриваются и электрическая, и механическая блокировки (рис. 5.5). Если реверсирование двигателя выполняется двумя нереверсивными магнитными пускателями, то роль электрической блокировки играют контакты КМ1:3 и КМ2:3, а механическая блокировка обеспечивается кнопками SВ2 и SВ3, каждая из которых состоит из двух контактов, связанных между собой механически. При этом один из контактов-замыкающий, другой — размыкающий (механическая блокировка).
Схема работает следующим образом. Предположим что при включении пускателя КМ1 двигатель М вращается по часовой стрелке и против часовой — при включении КМ2. При нажатии кнопки SВ3 сначала размыкающий контакт кнопки разорвет цепь питания пускателя КМ2 и только потом замыкающий контакт SВ3 замкнет цепь катушки КМ1.
Рис.5.5. Механическая и электрическая блокировки при реверсировании привода
Пускатель КМ1 включается, запускается с вращением по часовой стрелке двигатель М. Контакт КМ1:3 размыкается, осуществляя электрическую блокировку, т.е. пока включен КМ1, цепь питания пускателя КМ2 разомкнута и его нельзя включить. Для осуществления реверса двигателя необходимо его остановить кнопкой SВ1, а затем, нажав кнопку SВ2, запустить в обратную сторону. При нажатии SВ2 сначала размыкающим контактом SВ2 разрывается цепь питания катушки КМ1 и далее замыкается цепь питания катушки КМ2 (механическая блокировка). Пускатель КМ2 включается и реверсирует двигатель М. Контакт КМ2:3, размыкаясь, осуществляет электрическую блокировку пускателя КМ1.
Чаще реверсирование двигателя выполняется одним реверсивным магнитным пускателем. Такой пускатель состоит из двух простых пускателей, подвижные части которых между собой связаны механически с помощью устройства в виде коромысла. Такое устройство называется механической блокировкой, не позволяющей силовым контактом одного пускателя КМ1 одновременно замыкаться силовым контактам другого пускателя КМ2 (рис. 5.6).
Рис. 5.6. Механическая блокировка «коромыслом» подвижных частей двух пускателей единого реверсивного магнитного пускателя
Электрическая схема управления реверсом двигателя при помощи двух простейших пускателей единого реверсивного магнитного пускателя такая же, как и электрическая схема управления реверсом двигателя с использованием двух нереверсивных магнитных пускателей (рис. 5.5), с применением в электрической схеме таких же электрических и механических блокировок.
При автоматизации электроприводов поточных линий, конвейеров и т.п. применяется электрическая блокировка, которая обеспечивает пуск электродвигателей линии в определенной последовательности (рис. 5.7). При такой схеме, например, включение второго двигателя М2 (рис. 5.7) возможно только после включения первого двигателя М1, включение двигателя М3 – после включения М2. Такая очередность пуска обеспечивается блокировочными контактами КМ1:3 и КМ2:3.
Рис.5.7. Схема последовательного включения двигателей
Пример 5.1. Используя электрическую схему (рис. 5.4) управления асинхронным электродвигателем с короткозамкнутым ротором, необходимо включить в эту схему дополнительные контакты, обеспечивающие автоматическую остановку электродвигателя рабочего механизма в одной и в двух заданных точках.
Решение. Требование задачи обеспечить остановку электродвигателя в одной заданной точке может быть выполнено путевым выключателем SQ1 с нормально закрытым контактом, установленным последовательно с блок-контактом KM2, шунтирующим кнопку SB2. Для остановки электродвигателя рабочего механизма в двух заданных точках последовательно с контактом путевого выключателя SQ1 размещают контакт второго путевого выключателя SQ2. На рис. 5.8 приведены электрические схемы остановки электродвигателя в одной и в двух заданных точках. После пуска двигателя механизм приходит в движение и при достижении места остановки нажимает на путевой выключатель, например SQ1, и электродвигатель останавливается. После выполнения необходимой технологической операции вновь нажимаем на кнопку SB2, и механизм продолжает движение до следующего путевого выключателя SQ2, где технологическая операция заканчивается.
Рис. 5.8 К примеру 5.1
Пример 5.2. В электрическую схему (рис. 5.5) управления реверсом короткозамкнутого асинхронного двигателя с помощью блокировочных связей следует ввести элементы световой сигнализации для контроля направления вращения двигателя.
Решение. Схема световой сигнализации контроля направления вращения двигателя при реверсе, совмещённая со схемой управления реверсом двигателя, приведена на рис. 5.9. При вращении двигателя, например вправо, горит лампа HL1, включаемая контактом KM1.4 магнитного пускателя KM1, при этом лампа HL2 погашена, т.к. магнитный пускатель KM2 не включён. При вращении двигателя влево горит лампа HL2, включённая контактом KM2.4 магнитного пускателя KM2. Таким образом, лампа HL1 сигнализирует о вращении двигателя вправо, а лампа HL2 — о вращении двигателя влево. В результате блокировочными связями световая сигнализация обеспечивает контроль над направлением вращения двигателя при реверсе.
Рис. 5.9 К примеру 5.2
ВАЖНО! Перед подключением электродвигателя необходимо убедится в правильности в соответствии с его .
- Условные обозначения на схемах
(далее — пускатель) — коммутационный аппарат предназначенный для пуска и остановки двигателя. Управление пускателем осуществляется через электрическую катушку, которая выступает в качестве электромагнита, при подаче на катушку напряжения она воздействует электромагнитным полем на подвижные контакты пускателя которые замыкаются и включают электрическую цепь, и наоборот, при снятии напряжения с катушки пускателя — электромагнитное поле пропадает и контакты пускателя под действием пружины возвращаются в исходное положение размыкая цепь.
У магнитного пускателя есть силовые контакты предназначенные для коммутации цепей под нагрузкой и блок-контакты которые используются в цепях управления.
Контакты делятся на нормально-разомкнутые — контакты которые в своем нормальном положении, т.е. до подачи напряжения на катушку магнитного пускателя или до механического воздействия на них, находятся в разомкнутом состоянии и нормально-замкнутые — которые в своем нормальном положении находятся в замкнутом состоянии.
В новых магнитных пускателях имеется три силовых контакта и один нормально-разомкнутый блок-контакт. При необходимости наличия большего количества блок-контактов (например при сборке ), на магнитный пускатель сверху дополнительно устанавливается приставка с дополнительными блок-контактами (блок контактов) которая, как правило, имеет четыре дополнительных блок-контакта (к примеру два нармально-замкнутых и два нормально-разомкнутых).
Кнопки для управления электродвигателем входят в состав кнопочных постов, кнопочные посты могут быть однокнопочные, двухкнопочные, трехкнопочные и т.д.
Каждая кнопка кнопочного поста имеет по два контакта — один из них нормально-разомкнутый, а второй нормально-замкнутый, т.е. каждая из кнопок может использоваться как в качестве кнопки «Пуск» так и в качестве кнопки «Стоп».
- Схема прямого включения электродвигателя
Данная схема является самой простой схемой подключения электродвигателя, в ней отсутствует цепь управления, а включение и отключение электродвигателя осуществляется автоматическим выключателем.
Главными достоинствами данной схемы является дешевизна и простота сборки, к недостаткам же данной схемы можно отнести то, что автоматические выключатели не предназначены для частого коммутирования цепей это, в сочетании с пусковыми токами, приводит к значительному сокращению срока службы автомата, кроме того в данной схеме отсутствует возможность устройства дополнительной защиты электродвигателя.
- Схема подключения электродвигателя через магнитный пускатель
Эту схему так же часто называют схемой простого пуска электродвигателя , в ней, в отличии от предыдущей, кроме силовой цепи появляется так же цепь управления.
При нажатии кнопки SB-2 (кнопка «ПУСК») подается напряжение на катушку магнитного пускателя KM-1, при этом пускатель замыкает свои силовые контакты KM-1 запуская электродвигатель, а так же замыкает свой блок-контакт KM-1.1, при отпускании кнопки SB-2 ее контакт снова размыкается, однако катушка магнитного пускателя при этом не обесточивается, т.к. ее питание теперь будет осуществляться через блок-контак KM-1.1 (т.е. блок-контак KM-1.1 шунтирует кнопку SB-2). Нажатие на кнопку SB-1 (кнопка «СТОП») приводит к разрыву цепи управления, обесточиванию катушки магнитного пускателя, что приводит к размыканию контактов магнитного пускателя и как следствие, к остановке электродвигателя.
- Реверсивная схема подключения электродвигателя (Как изменить направление вращения электродвигателя?)
Что бы поменять направление вращения трехфазного электродвигателя необходимо поменять местами любые две питающие его фазы:
При необходимости частой смены направления вращения электродвигателя применяется :
В данной схеме применяется два магнитных пускателя (KM-1, KM-2) и трехкнопочный пост, магнитные поскатели применяемые в данной схеме кроме нормально-разомкнутого блок-контакта должны так же иметь и нормально замкнутый контакт.
При нажатии кнопки SB-2 (кнопка «ПУСК 1») подается напряжение на катушку магнитного пускателя KM-1, при этом пускатель замыкает свои силовые контакты KM-1 запуская электродвигатель, а так же замыкает свой блок-контакт KM-1.1 который шунтирует кнопку SB-2 и размыкает свой блок-контакт KM-1.2 который защищает электродвигатель от включения в обратную сторону (при нажатии кнопки SB-3) до его предварительной остановки, т.к. попытка запуска электродвигателя в обратную сторону без предварительного отключения пускателя KM-1 приведет к короткому замыканию. Что бы запустить электродвигатель в обратную сторону необходимо нажать кнопу «СТОП» (SB-1), а затем кнопку «ПУСК 2» (SB-3) которая запитает катушку магнитного пускателя KM-2 и запустит электродвигатель в обратную сторону.
10▶▷▶▷ схема пуска асинхронного двигателя фазным ротором функции времени
▶▷▶▷ схема пуска асинхронного двигателя фазным ротором функции времени| Интерфейс | Русский/Английский |
| Тип лицензия | Free |
| Кол-во просмотров | 257 |
| Кол-во загрузок | 132 раз |
| Обновление: | 10-03-2019 |
схема пуска асинхронного двигателя фазным ротором функции времени — Yahoo Search Results Yahoo Web Search Sign in Mail Go to Mail» data-nosubject=»[No Subject]» data-timestamp=’short’ Help Account Info Yahoo Home Settings Home News Mail Finance Tumblr Weather Sports Messenger Settings Want more to discover? Make Yahoo Your Home Page See breaking news more every time you open your browser Add it now No Thanks Yahoo Search query Web Images Video News Local Answers Shopping Recipes Sports Finance Dictionary More Anytime Past day Past week Past month Anytime Get beautiful photos on every new browser window Download Схема пуска асинхронного двигателя с фазным ротором, функции electrikamcom/cxema-puska-asinxronnogo Cached Схема пуска двигателя с фазным ротором , функции тока Схема подключения двигателя с фазным ротором , функции времени Схема пуска асинхронного двигателя с фазным ротором в функции wwwtehnoinfaru/dvigateli/25html Cached Упрощенная принципиальная схема пуска асинхронного двигателя с фазным ротором в функции времени [8] представлена на рис 617 Схема Пуска Асинхронного Двигателя Фазным Ротором Функции Времени — Image Results More Схема Пуска Асинхронного Двигателя Фазным Ротором Функции Времени images Асинхронные двигатели с фазным ротором и схемы управления — Стр 7 studfilesnet/preview/6223038/page:7 Cached Схема пуска асинхронного двигателя с фазным ротором в функции времени Упрощенная принципиальная схема пуска асинхронного двигателя с фазным ротором в функции времени [8] представлена на Асинхронный электродвигатель с фазным ротором electric-tolkru/asinxronnyj-elektrodvigatel-s-faznym Cached Особенность асинхронного двигателя с фазным ротором : ток в роторе можно изменять, подключая последовательно с его обмотками резисторы Чем больше сопротивление резистора, тем меньше ток в Начертите схему пуска асинхронного двигателя с фазным ротором studopediaorg/8-113845html Cached Начертите схему пуска асинхронного двигателя с фазным ротором в функции времени и Схема управления асинхронным двигателем с короткозамкнутым electrikamcom/sxema-upravleniya-asinxronnym Cached Схема пуска двигателя с фазным ротором , функции тока Схема пуска асинхронного двигателя с фазным ротором , функции времени Типовые схемы управления а/дв с фазным ротором : СХЕМЫ electromasterru/modules/myarticles/articlephp?storyid=287 Cached Схема пуска асинхронного двигателя с фазным ротором в функции времени и динамическим торможением в функции скорости показана на рис 123 Схема работает следующим образом Управление в функции тока Схема управления пуском helpiksorg/2-116296html Cached Схема управления пуском асинхронного двигателя с фазным ротором в две ступени в функции тока показана на рис 511 Схема пуска асинхронного двигателя | Заметки электрика zametkielectrikaru/sxema-puska-asinxronnogo-dvigatelya Cached Схема пуска асинхронного двигателя пуска асинхронного двигателя с времени на ее показана схема пуска двигателя постоянного тока параллельного docplayerru/40625119-Pokazana-shema-puska Cached Download «показана схема пуска двигателя постоянного тока параллельного возбуждения в функции времени Promotional Results For You Free Download | Mozilla Firefox ® Web Browser wwwmozillaorg Download Firefox — the faster, smarter, easier way to browse the web and all of Yahoo 1 2 3 4 5 Next 4,670 results Settings Help Suggestions Privacy (Updated) Terms (Updated) Advertise About ads About this page Powered by Bing™
- напишите нам Маркет — смартфоны Huawei Автору — подборка топовых авто Недвижимость — о договоре ренты Такси — для тех
- напишите нам Маркет — смартфоны Huawei Автору — подборка топовых авто Недвижимость — о договоре ренты Такси — для тех
- что страницы нет по нашей вине
напишите нам Маркет — смартфоны Huawei Автору — подборка топовых авто Недвижимость — о договоре ренты Такси — для тех
напишите нам Маркет — смартфоны Huawei Автору — подборка топовых авто Недвижимость — о договоре ренты Такси — для тех
- easier way to browse the web and all of Yahoo 1 2 3 4 5 Next 4
- функции времени Типовые схемы управления а/дв с фазным ротором : СХЕМЫ electromasterru/modules/myarticles/articlephp?storyid=287 Cached Схема пуска асинхронного двигателя с фазным ротором в функции времени и динамическим торможением в функции скорости показана на рис 123 Схема работает следующим образом Управление в функции тока Схема управления пуском helpiksorg/2-116296html Cached Схема управления пуском асинхронного двигателя с фазным ротором в две ступени в функции тока показана на рис 511 Схема пуска асинхронного двигателя | Заметки электрика zametkielectrikaru/sxema-puska-asinxronnogo-dvigatelya Cached Схема пуска асинхронного двигателя пуска асинхронного двигателя с времени на ее показана схема пуска двигателя постоянного тока параллельного docplayerru/40625119-Pokazana-shema-puska Cached Download «показана схема пуска двигателя постоянного тока параллельного возбуждения в функции времени Promotional Results For You Free Download | Mozilla Firefox ® Web Browser wwwmozillaorg Download Firefox — the faster
- функции тока Схема подключения двигателя с фазным ротором
схема пуска асинхронного двигателя фазным ротором функции времени — Поиск в Google Специальные ссылки Перейти к основному контенту Справка по использованию специальных возможностей Оставить отзыв о специальных возможностях Нажмите здесь , если переадресация не будет выполнена в течение нескольких секунд Войти Удалить Пожаловаться на неприемлемые подсказки Режимы поиска Все Картинки Видео Новости Покупки Ещё Карты Книги Авиабилеты Финансы Настройки Настройки поиска Языки (Languages) Включить Безопасный поиск Расширенный поиск Ваши данные в Поиске История Поиск в справке Инструменты Результатов: примерно 75 400 (0,48 сек) Looking for results in English? Change to English Оставить русский Изменить язык Результаты поиска Все результаты Схема пуска асинхронного двигателя с фазным ротором в wwwtehnoinfaru/dvigateli/25html Сохраненная копия Похожие Упрощенная принципиальная схема пуска асинхронного двигателя с фазным ротором в функции времени [8] представлена на рис 617 Пуск двигателя Схемы управления двигателями в функции времени » Школа для electricalschoolinfo/main/electroshemy/886-skhemy-upravlenija-dvigateljami-vhtml Сохраненная копия Похожие При управлении асинхронным двигателем с фазным ротором в функции Схема управления в функции времени ступенчатого пуска асинхронного Схема пуска асинхронного двигателя с фазным ротором, функции Сохраненная копия 11 нояб 2018 г — Схема пуска асинхронного двигателя с фазным ротором , функции времени Для уменьшения пускового тока и увеличения пускового Картинки по запросу схема пуска асинхронного двигателя фазным ротором функции времени «ct»:3,»id»:»25LQxjNibRhULM:»,»ml»:»600″:»bh»:90,»bw»:129,»oh»:293,»ou»:» «,»ow»:506,»pt»:»wwwtehnoinfaru/images/dvigateli/image569jpg»,»rh»:»tehnoinfaru»,»rid»:»1mT6QUx65jCHbM»,»rt»:0,»ru»:» «,»sc»:1,»th»:90,»tu»:» \u003dtbn:ANd9GcQv0DGEpqGdf_QpG1KRp9yXgd6f4_ZyoPMuMADNO7_oBtOEkSzHt8xqUgOD»,»tw»:155 «id»:»sZSQgK_n2hFV4M:»,»ml»:»600″:»bh»:90,»bw»:125,»oh»:295,»ou»:» «,»ow»:514,»pt»:»wwwtehnoinfaru/images/dvigateli/image577jpg»,»rh»:»tehnoinfaru»,»rid»:»1mT6QUx65jCHbM»,»rt»:0,»ru»:» «,»sc»:1,»th»:90,»tu»:» \u003dtbn:ANd9GcQyXdt0kGQK9NosfFtRfLKhwApCUEMpHhEB9HLdqBedz13ROw_J2RLpQjc0″,»tw»:157 «cr»:21,»id»:»qkXrcIu_ee-yZM:»,»ml»:»600″:»bh»:90,»bw»:125,»oh»:565,»ou»:» «,»ow»:819,»pt»:»electrikamcom/wp-content/uploads/2018/11/10jpg»,»rh»:»electrikamcom»,»rid»:»yZ2VetcWS3rBiM»,»rt»:0,»ru»:» «,»sc»:1,»th»:90,»tu»:» \u003dtbn:ANd9GcRZCx58fbwXMb2DPIVzqkdOSNtCbYpUVc-py78I5UX3Wy5hRf051riyXD0Z»,»tw»:130 «cl»:3,»cr»:12,»id»:»wFzEDEipiCvF0M:»,»ml»:»600″:»bh»:90,»bw»:107,»oh»:565,»ou»:» «,»ow»:646,»pt»:»electrikamcom/wp-content/uploads/2018/11/50gif»,»rh»:»electrikamcom»,»rid»:»yZ2VetcWS3rBiM»,»rt»:0,»ru»:» «,»sc»:1,»th»:94,»tu»:» \u003dtbn:ANd9GcRbhmKDrryHmj5MGHmLMKwqa6gpH5C2sP8pxtEGRz1uskMZNKIEp80lvu4″,»tw»:107 «id»:»XvGERL7SBW9gCM:»,»ml»:»600″:»bh»:90,»bw»:98,»oh»:608,»ou»:» «,»ow»:628,»pt»:»ok-tru/studopediaru/baza2/1958899552621files/ima»,»rh»:»studopediaru»,»rid»:»SkYDhYUojkdDrM»,»rt»:0,»ru»:» «,»sc»:1,»st»:»Студопедия»,»th»:95,»tu»:» \u003dtbn:ANd9GcRwfstqqELjoYkvCMNE31zlgHZcV81etejT1dnB5xYn2j5hA-X0aL_b9Gk»,»tw»:98 Другие картинки по запросу «схема пуска асинхронного двигателя фазным ротором функции времени» Жалоба отправлена Пожаловаться на картинки Благодарим за замечания Пожаловаться на другую картинку Пожаловаться на содержание картинки Отмена Пожаловаться Все результаты Схема пуска двигателя с фазным ротором, функции тока Сохраненная копия 11 нояб 2018 г — Схема подключения асинхронным двигателем с фазным ротором в функции тока представлена на рисунке 1 Для контроля пуска по Типовые схемы управления а/дв с фазным ротором : СХЕМЫ electromasterru/modules/myarticles/articlephp?storyid=287 Сохраненная копия Похожие Схема пуска асинхронного двигателя с фазным ротором Управление двигателем осуществляется в функции времени При подаче напряжения в цепь Управление в функции времени Схема управления пуском и Сохраненная копия 17 апр 2015 г — Схема управления пуском и динамическим торможением асинхронного двигателя с фазным ротором в функции времени приведена на Управление в функции времени — ЛекцииКом Сохраненная копия 4 апр 2015 г — Размещение принятых заказов во времени и пространстве В схемах управления пуском асинхронных двигателей с фазным ротором в функции схеме управления пуском двигателя постоянного тока (рис 56) Асинхронные двигатели с фазным ротором и схемы управления :7/ Сохраненная копия 25 мар 2016 г — Схема пуска асинхронного двигателя с фазным ротором в функции времени Упрощенная принципиальная схема пуска асинхронного Схема управления асинхронным двигателем с фазным ротором principactru › Каталог статей › Справочная информация Сохраненная копия Похожие Схема обеспечивает пуск АД в две ступени в функции независимой выдержки времени , автоматическое динамическое торможение, максимальную Начертите схему пуска асинхронного двигателя с фазным Сохраненная копия Пуск двигателя с фазным ротором осуществляется с введенными резисторами в цепи Управление двигателем осуществляется в функции времени Схема управления асинхронным двигателем с фазным ротором www4neru › Сортировочные лесотранспортеры Сохраненная копия Похожие 28 апр 2011 г — Пуск двигателя производится в функции времени или величины тока В схеме пуска асинхронного двигателя с фазным ротором в [PDF] Принципы автоматического управления пуском и торможением elarusfeuru/bitstream/123456789/162/5/Babin_AI_Bespalov_VVpdf Сохраненная копия Похожие автор: АИ Бабин — 2010 Для асинхронных двигателей с фазным ротором и двигателей посто- янного тока в Управление пуском двигателя осуществляется в функции ЭДС (или скорости) динамическим торможением в функции времени Двигатель Схема управления асинхронным двигателем с фазным ротором в функции [PDF] электрические машины и схемы управления — Уральский elarusfeuru/bitstream/123456789/163/5/Babin_AI_CHipilov_VVpdf Сохраненная копия Похожие автор: АИ Бабин — 2010 — Цитируется: 1 — Похожие статьи времени , либо в зависимости от других параметров; при этом изменяются Схема пуска асинхронного двигателя с фазным ротором в функции Управление в функции тока Схема управления пуском Сохраненная копия 19 апр 2015 г — Схема управления пуском асинхронного двигателя с фазным ротором в две ступени в функции тока показана на рис контакты в цепи их питания с выдержкой времени , достаточной для включения токовых реле 23 ТИПОВЫЕ УЗЛЫ СХЕМ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ Сохраненная копия УЗЛЫ СХЕМ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ АСИНХРОННЫМИ узла управления пуском в функции времени двигателей с фазным ротором [PDF] ЭЛЕКТРОПРИВОД enfnpi-turu//%20В%20И%20Учебное%20пособие%20-%20Электроприводpd Сохраненная копия ТИПОВЫЕ УЗЛЫ СХЕМ УПРАВЛЕНИЯ ПУСКОМ ДВИГАТЕЛЯ ПОСТОЯННОГО ТОКА С 51 322 Управление в функции времени При пуске асинхронного двигателя с фазным ротором с закороченными кольцами ток ротора Пуск асинхронных электродвигателей — Справочник химика 21 Сохраненная копия 31 показана схема пуска асинхронного электродвигателя с в качестве реле контроля пуска асинхронных электродвигателей в функции времени [c64] Управление пуском асинхронных электродвигателей с фазным ротором Пуск асинхронных двигателей — Энциклопедия по Сохраненная копия Схема автоматизации пуска асинхронного двигателя с кольцами по При пуске асинхронных двигателей с фазовым ротором в цепь ротора вводят асинхронного двигателя с контактными кольцами в функции времени , Рис 52 пуска асинхронных двигателей с фазным ротором предусматривается их Схема — пуск — асинхронный двигатель — Большая Энциклопедия Сохраненная копия Схема пуска асинхронного двигателя с фазным ротором и пусковая Схема управления пуском двигателя постоянного тока в функции времени [13] Реостатный пуск асинхронного привода — электротехнический форум forum220ru/start-rheostatphp Сохраненная копия Похожие Виды реостатного пуска асинхронного привода Реостатный пуск актуален только для асинхронных двигателей , имеющих фазный ротор со специальными выводами Схемы ступенчатого реостатного пуска отличаются некоторым разнообразием Реостатный ступенчатый пуск в функции времени [PDF] Министерство путей сообщения Российской Федерации rusautomobileru/wp-content/12/Asinhronnyedvigatelisfaznymrotorom1999pdf Сохраненная копия Похожие автор: ЛВ Ющенко — Цитируется: 2 — Похожие статьи Ющенко ЛВ Асинхронные двигатели с фазным ротором и схемы управления: “Расчет трехфазного асинхронного двигателя с фазным ротором и подключаются к реостату, который служит для пуска двигателя с большинстве случаев осуществляется в функции времени , скорости, тока или пути Оптимизация закона управления при пуске асинхронного Сохраненная копия автор: АВ Бубнов — 2017 — Похожие статьи Моделирование процессов управления асинхронным двигателем в пульсирующем Асинхронный электропривод с фазным ротором продолжает занимать реостатов, и их переключение осуществляется в функции времени уставки реле времени для использования в релейно- контактной схеме , Стенд «Релейно-контакторные схемы управления асинхронного labstandru//tipovoy_komplekt_uchebnogo_oborudovaniya_releyno_kontaktornye Сохраненная копия схемы управления асинхронного двигателя с фазным ротором и синхронного Изучение схемы управления пуска в функции времени асинхронного Типовые узлы схем автоматического управления асинхронными ckepumiru/lekcii/lekciya_4/ Сохраненная копия асинхронными двигателями На рис 28 приведены электрические схемы узла управления пуском в функции времени двигателей с фазным ротором [PDF] Скачать PDF — Учебные издания НИУ ИТМО Сохраненная копия автор: АА Батяев — Похожие статьи Схема управления пуском асинхронного двигателя катушек контакторов КЛ и КЗв, а также обмотки реле времени РВ, в ре- зультате чего закрываются статора и ротора в функции тока при помощи контакторов и реле уско- рения Защита трехфазным асинхронным двигателем с фазным ротором [PDF] Астапенко Электрооборудованиеpdf izidoru/pluginfilephp/813/mod_data//Астапенко%20Электрооборудованиеpdf Сохраненная копия пуска в функции различных параметров и схемы , реализующие тормозные режимы бо двигатели постоянного тока, либо асинхронный двигатель с частотным знать закон изменения нагрузки на двигатель во времени Для размещения В обозначении двигателей с фазным ротором ставится бу- РАСЧЕТ АСИНХРОННОГО ДВИГАТЕЛЯ В СИСТЕМЕ — DocPlayerru Сохраненная копия Расчет асинхронного двигателя в системах электропривода Задание По заданной Упрощенная схема управления пуском АД с фазным ротором в функции В данную схему включены реле времени KT1 и KT2, имеющие свои Управление пуском АД с короткозамкнутым ротором, Управление Сохраненная копия Схема управления асинхронным двигателем с использованием Упрощенная схема управления пуском АД с фазным ротором в функции времени в две В данной схеме применены реле времени KT1 и KT2, имеющие свои Торможение противовключением асинхронного двигателя | мтомд wwwmtomdinfo/archives/2643 Сохраненная копия Похожие Схемы торможения противовключением асинхронных двигателей схема Узел управления асинхронным двигателем с фазным ротором в режиме При пуске двигателя реле противовключения КV не включается и ступень Типовые СУ АД с фазным ротором — studopediasu Сохраненная копия 29 нояб 2014 г — Схема одноступенчатого пуска АД в функции времени и торможения противовключением асинхронного двигателя с фазным ротором Сборник задач по электротехнике и основам электроники ВГ Герасимов — Technology Engineering постоянного тока параллельного возбуЖДения в функции времени Обозначения на схеме : Л —-намагничивающая катушка, главные и Рассмотреть процесс пуска двигателя и определить уставки реле времени 1РВ, 2РВ и ЗРВ, управления пуском асинхронного электродвигателя о фазным ротором ТИПОВЫЕ УЗЛЫ И СХЕМЫ УПРАВЛЕНИЯ ЭЛЕКТРОПРИВОДОВ Сохраненная копия Типовые схемы управления асинхронным двигателем с короткозамкнутым ротором прямой пуск и динамическое торможение в функции времени Схемы управления двигателя с фазным ротором , которые рассчитаны в Электротехника: Асинхронный двигатель modelexponentaru/electro/0080htm Сохраненная копия Похожие 22в) Выбор схемы соединения обмотки статора зависит от линейного напряжения сети и Им же была предложена конструкция двигателя с фазным ротором 28) с помощью векторных диаграмм, построив их для нескольких моментов времени При пуске в ход асинхронного двигателя n= 0,S=1 [DOC] ГОСУДАРСТВЕННЫЙ КОМИТЕТ РОССИЙСКОЙ ФЕДЕРАЦИИ oreluniverru/file/chair//study/41-Mh30Prikladnaya20teoriya20AEP2020111doc Сохраненная копия автор: ДВ Александров — Похожие статьи Пуск асинхронного двигателя в функции времени Динамическое Реверсивная схема управления асинхронным двигателем с фазным ротором Пуск Схема асинхронного двигателя с фазным ротором s5appearrunet/shema-asinhronnogo-dvigatelya-s-faznym-rotorom/ Сохраненная копия Асинхронный двигатель с фазным ротором Схема пуска асинхронного двигателя с фазным ротором в функции времени [PPT] Типовые узлы и схемы управления электроприводов с portaltpuru:7777/SHARED/b/BLK/uchebrab/Tab3/lekziya%2091ppt Сохраненная копия Похожие Типовые схемы управления асинхронным двигателем с фазным и торможение с помощью добавочных резисторов в цепи ротора Типы схем управления Схема пуска АД в одну ступень в функции времени и торможения Презентация-конспект урока Способы пуска асинхронных › Другое Сохраненная копия 20 мар 2017 г — Способы пуска электрических двигателей переменного тока 18 электродвигателя с фазным ротором в функции времени Описание слайда: Схема пуска асинхронного электродвигателя с фазным ротором в [DOC] Лабораторное занятие 2 wwwkaf-eltehnarodru/labs/LAB_2_1066doc Сохраненная копия Похожие Автоматический пуск асинхронного двигателя в функции времени Для пуска асинхронного двигателя с фазным ротором включают в цепь ротора При проектировании схем управления АД с фазным ротором исходят из Асинхронный электродвигатель с фазным ротором electric-tolkru › Электрика в вопросах и ответах Сохраненная копия Похожие Принцип работы асинхронного электродвигателя с фазным ротором Выполняют они там следующие основные функции : тяжелая и тоже разгоняется с трудом, то время пуска двигателя увеличивается, а пусковые Схема подключения реле времени марки ERF-09 к трехфазной сети через контактор Электромеханика: Методическое пособие для студентов вузов windoweduru/catalog/pdf2txt/989/36989/14002?p_page=21 Сохраненная копия Типовая схема пуска ДТП с независимым возбуждением в функции В качестве датчика времени в схеме использовано электромаг- нитное Типовые схемы управления асинхронным двигателем с короткозамкнутым ротором АД с фазным и короткозамкнутым ротором и обеспечивает пуск в 2 ступени [PDF] электропривод и электрооборудование — Пермский ГАТУ pgsharu:8008//Боровских%20СМ%20Электропривод%20и%20электрооборуд Сохраненная копия Лабораторная работа№ 12 Изучение принципиальной электрической схемы скважного асинхронного двигателя с короткозамкнутым ротором типа АИР80В2УЗ пускатель QF и запустите двигатель в работу кнопкой « пуск » SB2 на стенде ны в функции времени , которая определяет режим работы [DOC] 21 Типовые схемы управления асинхронным двигателем с oldkmtt43ru/pages//Chtenie%20shem%20i%20chertejei%20elustanovokdocx Сохраненная копия Схемы управления двигателя с фазным ротором , которые рассчитаны в основном Схема одноступенчатого пуска асинхронного двигателя в функции времени Схема пуска двигателя по принципу времени (а), характеристики Автоматизированное управление асинхронным двигателем с Сохраненная копия Для двигателей с фазным ротором применяют схему пуска с пусковыми е пуск может осуществляться в функции частоты вращения, тока и времени [PDF] федеральное государственное бюджетное образовательное magturu/servisy-sajta/fajlovyj-arkhiv/send//7722-dissertatsiya-telezhkina-o-ahtml Система электропривода «устройство плавного пуска — асинхронный двигатель» Асинхронный двигатель с фазным ротором переводится в режим для 3-х проводной схемы подключения в функции от фазы тока ротора; выполняется в функции времени последовательным замыканием контакторов Лекция 8 Типовые узлы и схемы управления ЭП с асинхронными wwwmysharedru/slide/1210639/ Сохраненная копия 2) Типовые схемы управления асинхронным двигателем с фазным ротором 5 ABC Рисунок 4 — Схема пуска АД в одну ступень в функции времени и Устройства плавного пуска и торможения двигателей Сохраненная копия 28 мая 2008 г — Тиристорный пуск не похож на пуск мотора с фазным ротором и двигателем ( асинхронным с короткозамкнутым ротором и В свою очередь, устройство плавного пуска (УПП) не может выполнить следующие функции : времени пуска , времени торможения и начального напряжения, Типовой комплект учебного оборудования «Релейно-контакторные newstyle-yru › › Релейно-контакторные схемы управления Сохраненная копия Электромашинный агрегат ( асинхронный двигатель с фазным ротором , маховик Изучение схемы управления пуска в функции времени асинхронного Схема пуска асинхронного двигателя — Информатика — Csaaru csaaru/shema-puska-asinhronnogo-dvigatelja/ Сохраненная копия 24 янв 2018 г — На рис 12 показана схема пуска асинхронного двигателя с контактными кольцами в функции тока ротора Обмотка реле времени РВ оказывается под напряжением одновременно с обмоткой контактора ЛК Не найдено: фазным [PDF] системы управления автоматизированным электроприводом elprivodnmuorgua//makarov_a_m_sergeev_a_s_krylov_e_g_serdobintsev_yu_p_sis автор: АМ МАКАРОВ — Цитируется: 7 — Похожие статьи Схема управления асинхронным двигателем в функции времени двигателей с фазным ротором исходят из заданных условий пуска Вместе с схема пуска асинхронного двигателя фазным ротором функции времени часто ищут реостатный пуск асинхронного двигателя с фазным ротором тиристорное управление двигателем с фазным ротором плавный пуск асинхронного двигателя с фазным ротором динамическое торможение асинхронного двигателя с фазным ротором наладка электроприводов с асинхронными двигателями с фазным ротором релейно контакторная двухскоростная схема управления асинхронным двигателем с фазным ротором пусковой ток асинхронного двигателя с короткозамкнутым ротором управление асинхронным двигателем с короткозамкнутым ротором Навигация по страницам 1 2 3 4 Следующая Ссылки в нижнем колонтитуле Россия — Подробнее… Справка Отправить отзыв Конфиденциальность Условия Аккаунт Поиск Карты YouTube Play Новости Почта Контакты Диск Календарь Google+ Переводчик Фото Ещё Покупки Документы Blogger Hangouts Google Keep Jamboard Подборки Другие сервисы Google
404 Найти Ошибка 404 Нет такой страницы Если вы считаете, что страницы нет по нашей вине, напишите нам Маркет — смартфоны Huawei Автору — подборка топовых авто Недвижимость — о договоре ренты Такси — для тех, кому срочно Работа — сотрудник склада Музыка — пока готовите завтрак Картинки — цветы Компания About © Яндекс «static»:»22036″
Схема включения асинхронного двигателя с короткозамкнутым ротором с нереверсивным включением
1. Министерство образования и науки Республики Казахстан КГУ «Глубоковский технический колледж» УО ВКО Тема экзаменационной работы: «
ВВЕДЕНИЕВ настоящее время перед электромонтерами стоят трудные и
интересные проблемы, которые требуют глубокого знания
теории, проектирования и технологии и электрических
двигателей и аппаратов.
Целью письменной экзаменационной работы является сборка
схемы включения асинхронного двигателя с
короткозамкнутым ротором с нереверсивным включением.
3. Схема включения асинхронного двигателя с короткозамкнутым ротором с нереверсивным включением на 380 В
Схема подключения магнитного пускателя ПМАОсновные характеристики асинхронного
двигателя АИР 80 В4
Рном, кВт
— 1,5
cos φ
— 0,83
Sном, %
-7
Мп /Мном
— 2,2
Мmax/Мном — 2,2
Iп/Iном
— 5,5
Масса, кг
— 12,1
6. Устройство асинхронного двигателя
7. Основные неисправности и способы их устранения
Техника безопасности при обслуживании и ремонтеасинхронного электродвигателя
При проведении планово-предупредительных работ, технического обслуживания, текущих и капитальных ремонтов
электрических машин специалисту необходимо соблюдать технику безопасности при эксплуатации.
И в свою очередь должен знать следующее:
1. Выводы обмоток и кабельные воронки у электродвигателей должны быть закрыты ограждениями, снятие
которых требует отвёртывания гаек или вывинчивания винтов. Снимать эти ограждения во время работы
электродвигателя запрещается. Вращающиеся части электродвигателей: контактные кольца, шкивы, муфты,
вентиляторы — должны быть ограждены.
2. Открывать ящики пусковых устройств электродвигателей, установленных в цехе, когда устройство находится
под напряжением, разрешается для наружного осмотра лицам, имеющим квалификационную группу не ниже 4-ой.
3. Операции по включению и выключению электродвигателей пусковой аппаратурой с приводами ручного
управления должны производиться с применением диэлектрических перчаток или изолирующего основания
(подставки).
4. Включение и отключение выключателей электродвигателей производится дежурным у агрегатов единолично.
5. У работающего синхронного электродвигателя неиспользуемая обмотка и питающий его кабель должны
рассматриваться как находящиеся под напряжением.
6. Работа в цепи пускового реостата работающего электродвигателя допускается лишь при поднятых щетках и
замкнутом накоротко роторе.
Работа в цепях регулировочного реостата работающего электродвигателя должна рассматриваться как работа под
напряжением в цепях до 1000В и производиться с соблюдением мер предосторожности.
Шлифование колец ротора допускается проводить на вращающемся электродвигателе лишь при помощи колодок из
изоляционного материала.
7. Перед началом работы на электродвигателях, приводящих в движение насосы или тягодутьевые механизмы,
должны быть приняты меры, препятствующие вращению электродвигателя со стороны механизма (насос может
работать как турбина, дымосос может начать вращаться в обратную сторону за счёт засоса холодного воздуха через
трубу и т. д.). Такими мерами являются закрытие соответствующих вентилей или шиберов, их заклинивание или
перевязка цепью с запиранием на замок (или снятием штурвала) и вывешиванием плакатов «Не открывать работают люди» или расцеплением муфт.
8. При отсоединении от синхронного электродвигателя питающего кабеля концы всех трёх фаз кабеля должны
быть замкнуты на коротко и заземлены.
Заземление концов кабеля должно производиться посредством специально приспособленного для этой цели
переносного заземления, выполненного в соответствии с общими требованиями.
9. Организационно-экономическая часть. Рабочим местом называется определенный участок производственной площади цеха, мастерской, закреплен
ОРГАНИЗАЦИОННО-ЭКОНОМИЧЕСКАЯ ЧАСТЬ.Рабочим местом называется определенный участок производственной площади цеха,
мастерской, закрепленный за данным рабочим, предназначенный для выполнения
определенной работы и оснащенный в соответствии с характером этой работы
оборудованием, приспособлениями, инструментами и материалами.
Рабочее место дежурного электромонтера: 1 — передвижной стол; 2—
верстак; 3 — шкаф-стеллаж; 4— стол-табуретка
Электробезопасностью в соответствии с
ГОСТ 12.1.009 называется система
организационных и технических
мероприятий и средств, обеспечивающих
защиту людей от опасного и вредного
воздействия на человека электрического
тока, электрической дуги,
электромагнитного поля и статического
электричества
11. Технические и организационные мероприятия, обеспечивающие безопасность персонала
Организационныемероприятия:
— оформление работ нарядом или распоряжением, перечнем работ
выполняемых в порядке текущей эксплуатации;
— допуск к работе;
— надзор во время работы;
— оформление перерыва в работе, перевода на другое место, окончания
работы.
Технические мероприятия:
— производство необходимых отключений коммутационных аппаратов и
принятие мер, препятствующих подаче напряжения на место работы
вследствие самопроизвольного их включения;
-вывешивание запрещающих плакатов;
-проверка отсутствия напряжения на токоведущих частях;
-наложение заземлений;
-вывешивание указательных плакатов.
12. Средства защиты
Служат для защиты людей от поражения электрическим током, отвоздействия электрической дуги и электромагнитного поля. Средства
защиты подразделяются на основные и дополнительные.
Основными называют такие защитные средства, изоляция которых
надежно выдерживает рабочее напряжения установки.
Дополнительные защитные средства усиливают действие основного
защитного средства
Защитные средства, применяемые при обслуживании
электроустановок
14. Инструменты
ПОЖАРОБЕЗОПАСНОСТЬОсновные причины возникновения пожаров в электроустановках
* короткие замыкания в электропроводках и электрическом оборудовании;
* воспламенение горючих материалов, находящихся в непосредственной
близости от электроприемников, включенных на продолжительное время
и оставленных без присмотра;
* токовые перегрузки электропроводок и электрооборудования;
* большие переходные сопротивления в местах контактных соединений;
* появление напряжения на строительных конструкциях и
технологическом оборудовании;
* разрыв колб электроламп и попадание раскаленных частиц нити
накаливания на легкогорючие материалы и др.
16. Работая с электрическим током сопровождается большой опасностью для жизни и здоровья человека, поэтому всегда важно помнить о пожаробезо
!*
Углекислотный
огнетушитель
Кварцевый песок
17 Пуск двигателя с фазным ротором с помощью пускового реостата
Пуск двигателя с фазным ротором с помощью пускового реостата.
Двигатели с фазным ротором применяются значительно реже двигателей с короткозамкнутым ротором. Они используются в следующих случаях:
1) когда двигатели с короткозамкнутым ротором неприемлемы по условиям регулирования их скорости вращения;
2) когда статический момент сопротивления на валу при пуске Мст велик и поэтому асинхронный двигатель с короткозамкнутым ротором с пуском при пониженном напряжении неприемлем, а прямой пуск такого двигателя недопустим по условиям воздействия больших пусковых токов на сеть;
3) когда приводимые в движение массы настолько велики, что выделяемая во вторичной цепи двигателя тепловая энергия вызывает недопустимый нагрев обмотки ротора в виде беличьей клетки.
Пуск двигателей с фазным ротором производится с помощью пускового реостата в цепи ротора. Применяются проволочные, с литыми чугунными элементами, а также жидкостные реостаты. По условиям нагрева реостаты рассчитываются на кратковременную работу. Сопротивления металлических- реостатов для охлаждения обычно помещают в бак с трансформаторным маслом. Металлические реостаты являются ступенчатыми, и переключение с одной ступени на другую осуществляется либо вручную с помощью рукоятки контроллера, существенным элементом которого является вал с укрепленными на нем контактами, либо же автоматически (в автоматизированных установках) с помощью контакторов или контроллера с электрическим приводом. Жидкостный реостат представляет собой сосуд с электролитом (например, водный раствор соды или поваренной соли), в который опущены электроды.
Рекомендуемые файлы
Сопротивление реостата регулируется путем изменения глубины погружения электродов.
Рассмотрим пуск двигателя с фазным ротором с помощью ступенчатого металлического реостата, управляемого контакторами К.
Перед пуском щетки должны быть опущены на контактные кольца ротора, а все ступени реостата включены. Далее в процессе пуска поочередно включаются контакторы КЗ, К.2, К1. Характеристики вращающего момента двигателя М = f (s) и вторичного тока I2=f (s) при работе на разных ступенях реостата изображены на рис.
Предположим, что сопротивления ступеней пускового реостата и интервалы времени переключения ступеней подобраны так, что момент двигателя М при пуске меняется в пределах от некоторого Ммакс до некоторого Ммин и при включении в сеть (кривая 3 на рис.а). В начале пуска двигатель работает по характеристике 3, ротор приходит во вращение, скольжение s начинает уменьшаться, и при s=s3, когда М=Mмин, производится переключение реостата на вторую ступень. При этом двигатель будет работать по характеристике 2, и при дальнейшем разбеге двигателя скольжение уменьшится от s=s3,, до s=s2, а момент — от значения М = Ммаксдо М = Ммин. Затем производится переключение на первую ступень и т. д. После выключения последней
Если Вам понравилась эта лекция, то понравится и эта — 4 Целочисленное программирование.
ступени реостата двигатель переходит на работу по естественной характеристике 0 и достигает установившейся скорости вращения.
При наличии у двигателя короткозамыкающего механизма после окончания пуска щетки с помощью этого механизма поднимаются с контактных колец и кольца замыкаются накоротко, а реостат возвращается в пусковое положение. Тем самым пусковая аппаратура приводится в готовность к следующему пуску. Необходимо отметить, что дистанционное управление короткозамыкающим механизмом контактных колец сложно осуществить; это затрудняет автоматическое управление двигателем. Поэтому в последнее время фазные асинхронные двигатели строятся без таких механизмов. При этом щетки постоянно налегают на контактные кольца, что несколько увеличивает потери двигателя и износ щеток. Количество ступеней пускового реостата с целью упрощения схемы пуска и удешевления аппаратуры в автоматизированных установках выбирается небольшим (обычно 2—3 ступени).
Пусковые характеристики асинхронного двигателя при реостатном пуске наиболее благоприятны, так как высокие значения моментов достигаются при невысоких значениях пусковых токов.
Пуск двигателей с фазным ротором
Пуск двигателей с фазным ротором
На рисунке 1, а) показана схема включения пускового реостата в цепь фазного ро-тора. В процессе пуска двигателя ступени пускового реостата переключают таким образом, чтобы ток ротора оставался приблизительно неизменным, а среднее значение пускового момента было близко к наибольшему. На рисунке 2, б) представлен график изменения пускового момента асинхронного двигателя при четырех ступенях пускового реостата. Так, в начальный момент пуска (первая ступень реостата) пусковой момент равен Мп.maх. По мере разгона двигателя его момент уменьшается по кривой 1. Как только значение момента уменьшится до значения Мп.min рычаг реостата переводят на вторую ступень и сопротивление реостата уменьшается.
Рисунок 1. Схема включения пускового реостата (а) и построение графика пускового момента (б) асинхронного двигателя с фазным ротором
Теперь зависимость М = f(s) выражается кривой 2 и пусковой момент двигателя вновь достигает Мп.mах. Затем пусковой реостат переключают на третью и на четвертую ступени (кривые 3 и 4). После того как электромагнитный момент двигателя уменьшится до значения, равного значению противодействующего момента на валу двигателя, частота вращения ротора достигнет установившегося значения и процесс пуска двигателя будет закончен. Таким образом, в течение всего процесса пуска значение пускового момента остается приблизительно постоянным, равным Мп.ср.
Следует иметь в виду, что при слишком быстром переключении ступеней реостата пусковой ток может достигнуть недопустимо больших значений.
Пусковые реостаты состоят из кожуха, рычага с переключающим устройством и сопротивлений, выполненных из металлической проволоки или ленты, намотанной в виде спирали, или же из чугунного литья. Пусковые реостаты рассчитаны на кратковременное протекание тока, а поэтому рычаг пускового реостата нельзя долго задерживать на промежуточных ступенях, так как сопротивления реостата могут перегореть. По окончании процесса пуска, когда рычаг реостата находится на последней ступени, обмотка ротора замкнута накоротко.
В асинхронных двигателях с фазным ротором обеспечивается наиболее благоприятное соотношение между пусковым моментом и пусковым током: большой пусковой момент при небольшом пусковом токе (в 2-3 раза больше номинального).
Недостатками пусковых свойств двигателей с фазным ротором являются некоторая сложность, продолжительность и неэкономичность пусковой операции. Последнее вызывается необходимостью применения в схеме двигателя пускового реостата и непроизводительным расходом электроэнергии при его нагреве.
Пуск асинхронных двигателей — Энциклопедия по машиностроению XXL
Фгг. 93. Схема автоматизации пуска асинхронного двигателя с кольцами по принципу ограничения тока. [c.66]
| Фиг. 95. Автоматизация пуска асинхронного двигателя по частотному принципу. |
Пуск асинхронных двигателей 417 [c.548]
При пуске асинхронных двигателей с фазовым ротором в цепь ротора вводят пусковой реостат, которым управляют с помощью контроллеров (грузовая лебедка) или универсальных переключателей (механизм поворота). [c.25]
Короткозамкнутые асинхронные двигатели на автомобильных кранах пускаются непосредственно от генератора или внешней сети на полное напряжение с помощью магнитных пускателей. Такой пуск самый простой, но вызывает в сети большие пусковые токи при относительно малом пусковом моменте двигателя. При пуске асинхронных двигателей с фазовым ротором в цепь ротора вводят пусковой реостат, которым управляют с помощью контроллеров (грузовая лебедка) или универсальных переключателей (механизм поворота). Вводя реостат в цепь ротора, увеличивают ее сопротивление и, следовательно, уменьшают пусковой ток и увеличивают начальный пусковой момент. [c.36]
Момент движущих сил можно считать постоянным в следующих случаях при быстром включении фрикционной муфты, когда время включения мало по сравнению со временем разгона и изменением момента в период включения можно пренебречь при пуске асинхронного двигателя с повышенным пусковым моментом при пуске двигателя постоянного тока и соответствующей системе управления электродвигателем, обеспечивающей поддержание постоянства пускового момента. [c.151]
ПУСК АСИНХРОННОГО ДВИГАТЕЛЯ [c.41]
Автоматическое управление пуском асинхронного двигателя в функции частоты вращения с использованием частотного принципа основано на том, что между частотой вращения ротора асинхронного двигателя и частотой вращения вала двигателя существует зависимость [c.112]
Узел схемы автоматического пуска асинхронного двигателя с контактными кольцами в функции времени изображен на рис. 52. В схеме применено механическое реле времени, соединенное с подвижной системой линейного контактора, которое управляет ступенью ускорения. При включении контактора Л через определенное время закрывается замыкающий контакт реле Л, после чего срабатывает контактор ускорения У, шунтируя резисторы в роторной цепи. [c.114]
| Рис. 57. Схема управления пуском асинхронного двигателя с контактными кольцами в функции тока |
Расчет режима пуска асинхронных двигателей от дизель-генераторов [c.26]
Пульвербакелит 5 — 6 6 — 345 Пульсирующий цикл переменных напряжений 3 — 448 Пуск асинхронных двигателей 2 — 417 [c.462]
Установлены параметры для четырех вариантов пуска асинхронных двигателей. Четыре варианта пуска для каждого двигателя необязательны. Выбор любого из них определяется согласованием между изготовителем и потребителем. [c.874]
Минимальный вращающий момент в процессе пуска асинхронных двигателей с короткозамкнутым ротором [c.26]
Пуск асинхронного двигателя [c.133]
Пуск асинхронного двигателя с короткозамкнутым ротором производят прямым включением сетевого рубильника. При неподвижном роторе скорость пересечения его обмотки переменным магнитным полем равна 100 %, и поэтому ЭДС, индуктируемая в обмотке ротора, велика отсюда велик и ток ротора, а следовательно, и ток статора, который во время пуска в пять-шесть раз превышает ток полной нагрузки. При таком большом токе быстрое нарастание вращающего момента вызовет механические удары. [c.175]
Для обеспечения плавного пуска асинхронных двигателей и регулирований их скорости применяются схемы регулирования с использованием тиристоров. [c.108]
Как производится пуск асинхронного двигателя трехфазного переменного тока с контактными кольцами [c.118]
Структурные схемы решения уравнений представлены на рис. 13 и 14, где приняты следующие обозначения 2 — сумматор — интегратор —1—инвертор МД — магазин делителей ДВ — дополнительный вход ФП — функциональный преобразователь, который моделирует пуск асинхронного двигателя БСН — блок специальных нелинейностей, управляющий релейными схемами Р — реле 1Р —контакты реле 1 ШИ —контакты шагового искателя. [c.43]
Для иллюстрации этих качеств рассмотрим, например, совместную работу гидромуфты с асинхронным электродвигателем. Как известно, механическая характеристика асинхронного двигателя имеет вид, представленный на рис. 22.9 кривой I. Она имеет две ветви неустойчивую, расположенную левее максимального момента двигателя, и устойчивую — правее ее. Правую ветвь обычно называют рабочей, т.к. только на ней располагаются режимы работы асинхронного двигателя под нагрузкой. Пуск асинхронного двигателя возможен при нагрузке, меньшей чем пусковой момент Мм, который определяется как точка пересечения его характеристики с осью ординат. Величина пускового момента у таких двигателей существенно меньше максимального. [c.471]
Нерегулируемый с редкими и не очень частыми пусками небольшой и средней мощности Асинхронные двигатели с к. 3. ротором и нормальным скольжением Центробежные насосы и вентиляторы, двигатель-генераторы, транспортеры и конвейеры, нерегулируемые приводы металлорежущих станков [c.125]
Если машинный агрегат не обладает свойством саморегулирования, то его движение становится неустойчивым. Нарушение равенства приведенных моментов движущих сил и моментов сил сопротивления вызовет либо остановку машины, либо увеличение скорости движения до недопустимого, с точки зрения нормальной эксплуатации, уровня. Неустойчивость движения характерна для машинных агрегатов с приводом от двигателей внутреннего сгорания, с асинхронным двигателем в период его пуска и т. п. Так как условия на- [c.349]
Преобразователи ВПЧ имеют мощности 12 20 30 50 и 100 кВт при частотах 2400 и 8000 Гц. Конструкция преобразователей в основном аналогична конструкции машин ОПЧ. Напряжение средней частоты, зависящее от соединения обмоток генератора, равно 800/400/200 В при мощностях 50 и 100 кВт и 400/200 В для остальных преобразователей. Номинальный КПД не ниже 70—75% (верхний предел относится к преобразователям мощностью 100 кВт). Коэффициент мощности нагрузки 0,9 с емкостным характером цепи. Пуск двигателя прямой от сети 220/380 В. Разработаны преобразователи типа ВЭП с кольцевым ротором, в полости которого расположен статор инверсного асинхронного двигателя [41]. Мощность 60 и 100 кВт, частота 2400 и 8000 Гц. Совмещенное исполнение двигателя и генератора приводит к уменьшению массы и габаритов и росту КПД. [c.168]
Динамические нагрузки при пуске и торможении привода с асинхронным двигателем. Математическая модель асинхронного электродвигателя, воспроизводящая его нелинейную статиче- [c.97]
Наибольшее применение в современных технологических машинах получили асинхронные электродвигатели с короткозамкнутым ротором, допускающие прямое включение в сеть. Однако для таких двигателей характерны большие пики пусковых токов, достигающие величин в 5—7 раз больше номинальных. Поэтому прямой пуск короткозамкнутых двигателей допускается при понижении напряжения питающей сети не более 10—20% [4]. [c.18]
Следовательно, асинхронный двигатель при неуравновешенной системе подъема в период пуска развивает внешний момент, изменяющийся во времени по следующему закону [c.95]
Пуск асинхронных двигателей шахтных подъемных машин и регулировка числа их оборотов производится, как и у обычных асинхронных двигателей с контактными кольцами, при помощи реостата, связанного с рукояткой управления и включенного в цепь ротора двигателя. Для переключения с прямого хода на обратный служат реверсоры. Для двигателей малой мощности применяют кулачковые контроллеры, при большой мощности — контакторное управление. Электрическое торможение подъемных машин клетьевых подъемников осуществляется или на сверхсин-хронной скорости, или противотоком. В последнее время довольно широкое применение находит динамическое торможение, при котором в статор двигателя дополнительно подается постоянный ток от специального генератора. Тормозной момент в этом случае создается за счет взаимодействия полей статора и ротора. [c.174]
Кроме этого, рекомендуется не включать двигатель при разомкнутом пусковом сопротивлении, а устанавливать щетки металлического реостата на первый контакт, соответствующий полнос1ью введенному сопротивлению, а в случае жидкостного пускового реостата следует немного погрузить электроды в жидкость. В схемах автоматического пуска асинхронных двигателей с фазным ротором предусматривается их включение в сеть при полностью введенном пусковом сопротивлении. [c.30]
Для автоматического пуска асинхронных двигателей с фазовым ротором или двигателей постоянного тока применяются магнитные контроллеры (контакторные панели), представляющие собой комплект контакторов и реле, соединеннных по определенной схеме. Все сказанное о магнитном пускателе полностью осуществихмо в случае управления электродвигателями с помощью магнитных контроллеров. При напряженном режиме работы, характеризующемся большим числом включений в час, и при значительной мощности двигателя, когда управление с помощью обычного (ручного) контроллера становится затруднительным, применяют магнитные контроллеры. При весьма тяжелых режимах работы кранов, при питании кранов переменным током применя- [c.94]
Зыли сделаны некоторые попытки повысить мошн двигателей с короткозамкнутым ротором. Так,- в 189 М. О. Доливо-Добровольский разработал метод автотр форматорного пуска асинхронных двигателей, т. е. п] при пониженном напряжении, но при этом значите 446 [c.446]
Нерегулируемый с чаетыми пусками и приводы со значительными маховыми массами Асинхронные двигатели с к. 3. ротором, с повышенным скольжением и двигатели с фазным ротором Кузнечно-прессовые машины, ножницы, станки с большой частотой пусков и реверсов, например, винторезные автоматы [c.125]
При анализе переходных и установившихся процессов в синхронных электродвигателях используются допущения, аналогичные рассмотренным применительно к асинхронным двигателям. Электродвигатель считается явнополюсным, имеющим короткозамкнутую демпферную обмотку, используемую при прямом (асинхронном) пуске. Уравнения электромеханических переходных процессов в синхронных двигателях принято составлять в координатных осях d, q, О, неподвижных [c.27]
Способы пуска асинхронного двигателя — прямой пуск ~ Электропривод
При применении асинхронных короткозамкнутых электродвигателей, очень остро встает вопрос ограничения пусковых токов. Для ограничения пусковых токов применяются различные схемы пуска асинхронного двигателя.
Пусковой ток
При подаче на электродвигатель напряжения, в цепи статора двигателя возникают скачки тока, именуемые пусковым током или током заторможенного ротора. Пусковой ток при пуске трехфазного асинхронного двигателя может превышать в 5 – 7 раз выше номинального, хотя действует кратковременно. После окончания пуска двигателя, и выхода двигателя на номинальные обороты, ток падает до номинального, как показано на рис.
В каждом отдельном случае необходимо принимать меры, для снижения пусковых токов, используя различные способы пуска. Кроме этого необходимо принять специальные меры для стабилизации питающего напряжения.
Пусковые периоды
Рассматривая различные способы пуска трехфазного асинхронного двигателя, которые снизить пусковой ток, нужно следить за тем, чтобы период пуска не был слишком долгим. Потому что продолжительное время пуска двигателя может вызвать перегрев обмоток.
Способы пуска трехфазного асинхронного двигателя
Следует знать основные достоинства и недостатки различных способов пуска трехфазного асинхронного двигателя. В данной таблице представлены сравнительные характеристики часто используемых способов пуска.
Прямой пуск
Что такое прямой пуск? Как следует из названия, прямой пуск трехфазного асинхронного двигателя означает, что электродвигатель подключается к сети на номинальное напряжение. Прямой пуск в англоязычной аббревиатуре обозначается как (direct-on-line starting – DOL). Его обычно применяют при стабильном питании двигателя, если вал двигателя жестко привязан к приводу, например привод вентилятора или насоса.
Преимущества
Прямой пуск трехфазного асинхронного двигателя от сети (DOL), на сегодняшний день является самым дешёвым и простым. Поэтому он получил и самое большое распространение в промышленности. Кроме того, он даёт минимальное увеличение температуры электродвигателя при пуске по сравнению со всеми другими способами пуска. Если величина пускового тока не ограничивается специальными нормами, то такой способ является наиболее предпочтительным, но не самым экономичным. Если величина пускового тока ограничена параметрами сети, то необходимо выбирать другие способы пуска. Простейшая схема управления трехфазным асинхронным двигателем M включает в себя силовой контактор KM, устройство зашиты от перегрузок QF тепловое реле KT и кнопки управления SB1, SB2.
Недостатки
В схемах прямого пуска асинхронных двигателей пусковой момент составляет 150% -300% номинального, при этом пусковой ток может достигать 300% — 800% тока номинального.
Способы пуска трехфазных асинхронных двигателей
Асинхронный двигатель похож на многофазный трансформатор, вторичная обмотка которого короткозамкнута. Таким образом, при нормальном напряжении питания, как в трансформаторах, начальный ток, потребляемый первичной обмоткой, на короткое время очень велик. В отличие от двигателей постоянного тока большой ток при пуске связан с отсутствием обратной ЭДС. Если асинхронный двигатель напрямую включается от источника питания, он потребляет в 5-7 раз больше тока полной нагрузки и развивает крутящий момент, равный всего 1.В 5–2,5 раза больше крутящего момента при полной нагрузке. Этот большой пусковой ток вызывает большое падение напряжения в линии, что может повлиять на работу других устройств, подключенных к той же линии. Следовательно, не рекомендуется запускать асинхронные двигатели более высоких мощностей (обычно выше 25 кВт) непосредственно от сети.Ниже описаны различные способы пуска асинхронных двигателей .
Пускатели прямого включения (DOL)
Небольшие трехфазные асинхронные двигатели могут запускаться напрямую от сети, что означает, что номинальное питание подается непосредственно на двигатель.Но, как упоминалось выше, здесь пусковой ток будет очень большим, обычно в 5-7 раз больше номинального тока. Пусковой крутящий момент, вероятно, будет в 1,5–2,5 раза больше крутящего момента при полной нагрузке. Асинхронные двигатели могут быть запущены непосредственно в сети с помощью пускателя DOL, который обычно состоит из контактора и устройства защиты двигателя, такого как автоматический выключатель. Пускатель DOL состоит из контактора с катушкой, которым можно управлять с помощью кнопок пуска и останова. Когда нажимается кнопка запуска, контактор включается и замыкает все три фазы двигателя на фазы питания одновременно.Кнопка останова обесточивает контактор и отключает все три фазы, чтобы остановить двигатель.Во избежание чрезмерного падения напряжения в линии питания из-за большого пускового тока, пускатель прямого включения обычно используется для двигателей мощностью менее 5 кВт.
Запуск двигателей с короткозамкнутым ротором
Пусковой пусковой ток в двигателях с короткозамкнутым ротором регулируется путем подачи пониженного напряжения на статор. Эти методы иногда называют методами пониженного напряжения для запуска асинхронных двигателей с короткозамкнутым ротором .Для этого используются следующие методы:- С использованием первичных резисторов
- Автотрансформатор
- Выключатели звезда-треугольник
1. Использование первичных резисторов:
Очевидно, что первичные резисторы предназначены для понижения напряжения и подачи пониженного напряжения на статор. Учтите, пусковое напряжение снижено на 50%. Тогда по закону Ома (V = I / Z) пусковой ток также будет уменьшен на такой же процент. Из уравнения крутящего момента трехфазного асинхронного двигателя, пусковой крутящий момент приблизительно пропорционален квадрату приложенного напряжения.Это означает, что если приложенное напряжение составляет 50% от номинального значения, пусковой крутящий момент будет только 25% от его нормального значения напряжения. Этот метод обычно используется для плавного пуска малых асинхронных двигателей . Не рекомендуется использовать метод пуска с резисторами первичной обмотки для двигателей с высокими требованиями к пусковому моменту.Резисторы обычно выбираются таким образом, чтобы на двигатель можно было подавать 70% номинального напряжения. Во время пуска полное сопротивление последовательно соединено с обмоткой статора и постепенно уменьшается по мере увеличения скорости двигателя.Когда двигатель достигает соответствующей скорости, сопротивления отключаются от цепи, и фазы статора подключаются непосредственно к линиям питания.
2. Автотрансформаторы:
Автотрансформаторы также известны как автостартеры. Их можно использовать как для двигателей с короткозамкнутым ротором, так и с соединением по схеме звезды или треугольника. По сути, это трехфазный понижающий трансформатор с различными ответвлениями, которые позволяют пользователю запускать двигатель, скажем, при 50%, 65% или 80% сетевого напряжения.При пуске автотрансформатора ток, потребляемый из линии питания, всегда меньше тока двигателя на величину, равную коэффициенту трансформации. Например, когда двигатель запускается с ответвлением 65%, приложенное к двигателю напряжение будет 65% от линейного напряжения, а приложенный ток будет 65% от начального значения линейного напряжения, а линейный ток будет 65. % от 65% (т.е. 42%) от начального значения сетевого напряжения. Эта разница между линейным током и током двигателя связана с действием трансформатора.Внутренние соединения автозапуска показаны на рисунке. При запуске переключатель находится в положении «пуск», и на статор подается пониженное напряжение (которое выбирается с помощью ответвителя). Когда двигатель набирает подходящую скорость, скажем, до 80% от его номинальной скорости, автотрансформатор автоматически отключается от цепи, когда переключатель переходит в положение «работа».Переключатель, изменяющий соединение из положения пуска в положение пуска, может быть пневматическим (малые двигатели) или масляным (большие двигатели) типом.Также предусмотрены условия для обесточивания и перегрузки с цепями выдержки времени на автостартере.
3. Пускатель звезда-треугольник:
Этот метод используется в двигателях, которые предназначены для работы на статоре, соединенном треугольником. Двухпозиционный переключатель используется для подключения обмотки статора по схеме звезды при пуске и по схеме треугольника при работе с нормальной скоростью. Когда обмотка статора соединена звездой, напряжение на каждой фазе двигателя будет уменьшено в 1 / (квадрат 3) раз от того, что было бы для обмотки, соединенной треугольником.Пусковой крутящий момент будет в 1/3 раза больше, чем для обмотки, соединенной треугольником. Следовательно, пускатель со звезды на треугольник эквивалентен автотрансформатору с соотношением 1 / (квадрат 3) или уменьшенным на 58% напряжением.Пуск электродвигателей с фазным ротором
Электродвигатели с контактным кольцом запускаются с полным линейным напряжением, так как внешнее сопротивление может быть легко добавлено в цепь ротора с помощью контактных колец. Реостат, соединенный звездой, соединен последовательно с ротором через контактные кольца, как показано на рис. Введение сопротивления в ток ротора уменьшит пусковой ток в роторе (и, следовательно, в статоре).Кроме того, улучшается коэффициент мощности и увеличивается крутящий момент. Подключенный реостат может быть ручным или автоматическим.Поскольку введение дополнительного сопротивления в ротор улучшает пусковой момент, электродвигатели с фазным ротором могут запускаться под нагрузкой.
Вводимое внешнее сопротивление предназначено только для пуска и постепенно снижается по мере того, как двигатель набирает скорость.
Пуск асинхронного двигателя — методы пуска
Трехфазный асинхронный двигатель Самозапускающийся .Когда источник питания подключен к статору трехфазного асинхронного двигателя, создается вращающееся магнитное поле, ротор начинает вращаться и запускается асинхронный двигатель. Во время пуска скольжение двигателя составляет единиц , а пусковой ток очень велик.
Пускатель предназначен не только для запуска двигателя, но и для выполнения двух основных функций. Они следующие:
- Для уменьшения сильного пускового тока,
- Для защиты от перегрузки и пониженного напряжения.
Трехфазный асинхронный двигатель можно запустить, подключив двигатель напрямую к полному напряжению источника питания. Двигатель также можно запустить, подав на двигатель пониженное напряжение. Крутящий момент асинхронного двигателя пропорционален квадрату приложенного напряжения. Таким образом, двигатель создает больший крутящий момент, когда он запускается при полном напряжении, чем когда он запускается при пониженном напряжении.
Существует три основных метода запуска асинхронного двигателя с сепаратором .Они следующие:
Устройство прямого пуска
Метод прямого пуска асинхронного двигателя от сети прост и экономичен. В этом методе пускатель подключается непосредственно к питающему напряжению. Таким способом запускаются малые двигатели мощностью до 5 кВт, чтобы избежать колебаний напряжения питания.
Пускатель звезда-треугольник
Метод пуска трехфазных асинхронных двигателей со звездой-треугольником очень распространен и широко используется среди всех методов.В этом методе двигатель работает с обмотками статора, соединенными треугольником.
Пускатель автотрансформаторный
Автотрансформатор используется в обоих типах соединений, то есть при соединении звездой или треугольником. Автотрансформатор используется для ограничения пускового тока асинхронного двигателя.
Указанные выше три пускателя используются для асинхронного двигателя с ротором с сепаратором.
Метод пускового устройства асинхронного двигателя с контактным кольцом
В пускателе асинхронного двигателя с контактным кольцом полное напряжение питания подается на пускатель.Схема подключения асинхронного двигателя пускателя с контактным кольцом показана ниже:
Подключено полное пусковое сопротивление, что снижает ток питания статора. Ротор начинает вращаться, и сопротивление ротора постепенно снижается по мере увеличения скорости двигателя. Когда двигатель работает с номинальной частотой вращения при полной нагрузке, пусковые сопротивления полностью отключаются, а контактные кольца замыкаются накоротко.
Пуск асинхронных двигателей | Мягкий старт
Пуск асинхронных электродвигателей:Пуск асинхронных двигателей Расположение приводов выбирается в зависимости от требований к нагрузке и характера питания (слабое или жесткое).Может потребоваться наличие следующих функций:
- Двигатель должен развивать достаточный пусковой момент, чтобы преодолевать трение, момент нагрузки и инерцию системы двигатель-нагрузка, и, таким образом, завершить процесс пуска в течение заданного срока.
- Величина пускового тока должна быть такой, чтобы он не вызывал перегрева машины и не вызывал провалов напряжения источника сверх допустимого значения.
Обычно двигатель потребляет ток в 5–7 раз превышающий номинальный во время пуска.Когда момент нагрузки во время пуска и инерция нагрузки двигателя невелики, процесс запуска асинхронных двигателей завершается через несколько секунд, и, следовательно, температура двигателя не превышает допустимого значения. В таких приложениях двигатель всегда можно запустить напрямую, при условии, что падение напряжения, вызванное большим пусковым током, не превышает допустимого значения. Для двигателей небольшого размера падение напряжения в питающей сети обычно ниже допустимого уровня. Когда двигатель большой мощности и / или питается от слабой системы, некоторые пусковые устройства необходимы для уменьшения пускового тока.В этих приложениях не имеет значения, сопровождается ли уменьшение пускового тока уменьшением пускового момента.
Когда либо момент нагрузки во время пуска велик, либо инерция нагрузки велика, процесс запуска асинхронных двигателей занимает много времени. Если во время запуска двигатель будет пропускать большой ток, он будет поврежден из-за перегрева. Следовательно, двигатель не может быть запущен напрямую от сети. В этих случаях используются те методы пуска, которые позволяют уменьшить пусковой ток без уменьшения пускового момента.В некоторых случаях может потребоваться увеличение пускового момента, сопровождающееся уменьшением пускового тока.
В двигателе с короткозамкнутым ротором могут быть приняты меры по улучшению пусковых характеристик. должны приниматься на стадии проектирования, как и в случае двигателей с высоким скольжением, с короткозамкнутым ротором и с короткозамкнутым ротором. При необходимости для запуска двигателей с короткозамкнутым ротором используются следующие методы:
- Пускатель звезда-треугольник
- Пускатель автотрансформаторный
- Пускатель реактора
- Пускатель насыщаемого реактора
- Пускатель с частичной обмоткой
- Регулятор напряжения переменного тока, пускатель
- Пускатель сопротивления ротора используется для пуска двигателя с фазным ротором:
Методы (1) — (5) и (7) описаны здесь, а метод (6) — в разд.6.11.
Пускатель звезда-треугольник:В этом методе асинхронный двигатель, предназначенный для нормальной работы с треугольным соединением, подключается звездой во время пуска. Это позволяет снизить напряжение и ток статора на 1 / √3. Поскольку крутящий момент двигателя пропорционален квадрату напряжения на клеммах статора, пусковой крутящий момент уменьшается до одной трети. Схема пуска со звезды на треугольник показана на рис. 6.7. Автоматические выключатели CB m и CD s замыкаются для запуска машины при соединении звездой.Когда достигается установившаяся скорость, CB s размыкается, а CB r замыкается, чтобы подключить машину по схеме треугольника.
Автотрансформатор Стартер:Пониженное напряжение для запуска также можно получить от автотрансформатора. Для соотношения витков вторичной и первичной обмоток T напряжение на клеммах двигателя и ток статора уменьшаются на T . Это снижает ток, потребляемый от источника питания 2 T . Поскольку крутящий момент пропорционален квадрату напряжения на клеммах двигателя, он также уменьшается на 2 T .После разгона двигателя он подключается к полному напряжению питания. Схема пускателя автотрансформатора показана на рис. 6.8 (а). Сначала замыкается CB s1 , затем CB s2 . Когда двигатель разгоняется до полной скорости, CB s2 открывается, а CB m закрывается. Теперь CB s1 открыт для отключения автотрансформатора от питания.
Замкнутый контур перехода:Как при пуске со звезды на треугольник, так и при пуске через автотрансформатор переключение с низкого напряжения на соединение с полным напряжением нарушает прохождение тока статора, и поле статора разрушается.Ток ротора продолжает течь из-за большой постоянной времени. Поле, создаваемое токами ротора, вызывает напряжения в обмотках статора. Фаза индуцированных напряжений не зависит от напряжений питания. Большой бросок тока возникает во время повторного подключения, когда индуцированное напряжение и напряжение питания не совпадают по фазе. Когда бросок тока неприемлем, используется переход по замкнутой цепи. Схема перехода по замкнутой цепи для автотрансформаторного пускателя показана на рис. 6.8 (б). В нем используются три автоматических выключателя: CB s1 , CB s2 и CB m .Первый CB s2 замыкается, чтобы замкнуть соединение нейтрали автотрансформатора с нейтралью. CB s1 закрывается следующим. На этом низковольтное подключение автотрансформатора завершается, и двигатель запускается. После достижения установившейся скорости выключатель CB s2 размыкается. Теперь двигатель работает с верхней частью фазных обмоток автотрансформатора последовательно со статором. Обмотки просто функционируют как последовательные реакторы. Теперь выключатель CB m замкнут, который идет в обход последовательных реакторов и подключает двигатель непосредственно к источнику питания.
В начале пуска в качестве альтернативы замыкается первый CB s1 вместо CB s2 . Тогда двигатель и трансформатор не будут производить скачок тока намагничивания одновременно.
Стартер реактора:Пусковой ток также можно уменьшить, подключив трехфазный реактор последовательно со статором.
Когда двигатель достигает полной скорости, реактор блокируется. На рисунке 6.9 показана такая схема. CB m закрывается для запуска машины.После достижения полной скорости CB s закрывается, чтобы закоротить реактор. Реактор целесообразно подключать на нейтральном конце обмотки статора. Это минимизирует его номинальное напряжение, а также поддерживает его напряжение и напряжение выключателя CB s на уровне нейтрального потенциала во время нормальной работы двигателя.
Мягкий пуск с использованием насыщающегося реактора:
В некоторых приложениях пусковой момент должен регулироваться плавно. Например, в текстильных машинах она должна изменяться плавно, иначе нити волокна оборвутся при запуске.Такое пусковое устройство называется Мягкий пуск .
Схема тиристорного регулятора напряжения сейчас широко используется для плавного пуска. В ряде существующих приводов также используется пускатель с насыщающимся реактором, в котором трехфазный насыщаемый реактор соединен последовательно со статором. Насыщаемый реактор имеет управляющую обмотку постоянного тока. Реактивность насыщающегося реактора можно плавно изменять, изменяя ток управляющей обмотки. Для запуска реактивное сопротивление изначально устанавливается на максимальное значение. Пусковой момент близок к нулю.Реактивное сопротивление теперь плавно уменьшается за счет увеличения тока обмотки управления. Это дает плавное изменение пускового момента. Следовательно, двигатель запускается без рывков и ускоряется плавно.
Схема несбалансированного пуска для плавного пуска:Для плавного пуска можно также использовать более дешевую альтернативу, показанную на рис. 6.10 (a). Он состоит из переменного импеданса Z в одной из фаз машины. Когда полное сопротивление очень велико, машина работает с однофазной фазой, и ее характеристика крутящего момента аналогична характеристике A на рис.6.10 (b), с нулевым пусковым моментом. Когда полное сопротивление полностью удалено, кривая крутящего момента скорости аналогична характеристике B, которая является естественной характеристикой машины. Для промежуточных значений импеданса кривая скорость-крутящий момент будет лежать между кривыми A и B. Плавный пуск без рывков достигается, когда импеданс регулируется плавно. Импеданс может быть переменным резистором или однофазным насыщаемым реактором.
Двигатель работает с несимметричным напряжением статора, поэтому потери в меди увеличиваются.Таким образом, эта схема подходит только для кратковременной работы.
Запуск намотки части:Некоторые двигатели с короткозамкнутым ротором имеют две или более обмоток статора, которые во время нормальной работы соединены параллельно. Во время пуска подключается только одна обмотка. Это увеличивает сопротивление статора и снижает пусковой ток. Такая схема пуска называется Пуск с частичной обмоткой . Его реализация для машины с двумя обмотками статора показана на рис. 6.11.Машина запускается с обмоткой 1, когда CB м замкнут. После достижения полной скорости CB s замыкается для подключения обмотки 2.
Стартер сопротивления ротора:Двигатели с фазным ротором обычно запускаются путем подключения внешних резисторов в цепи ротора (рис. 6.12 (a)). Максимальное значение сопротивления выбирается для ограничения тока при нулевой скорости в пределах безопасного значения. По мере ускорения двигателя секции внешнего резистора отключаются одна за другой путем замыкания контактов C 1 , C 2 и C 3 , чтобы ограничить ток ротора между заданными максимальными и минимальными значениями (Рис. .6.12 (б)).
Поскольку большая часть потерь меди в роторе происходит во внешних резисторах, повышение температуры ротора во время пуска существенно ниже по сравнению с методами пуска, описанными ранее. Важной особенностью этого метода запуска асинхронных двигателей является то, что пусковой момент и отношение крутящего момента к току являются высокими. Таким образом, он подходит для приложений, требующих быстрого ускорения, частых пусков и остановок, запуска с большой нагрузкой и запуска с нагрузкой с высоким моментом инерции.
Хотя максимальный крутящий момент не зависит от значения сопротивления ротора (уравнение (6.13)), скорость, при которой создается максимальный крутящий момент, можно контролировать, изменяя значение внешних резисторов (уравнение (6.12)). Таким образом, внешние резисторы можно изменять для ускорения машины с максимальным крутящим моментом.
(PDF) Новый метод плавного пуска асинхронного двигателя с обмоткой ротора
36 М. Б. Б. Шарифан — М. Р. Фейзи — М. Сабахи — М. Фаррохифар: НОВЫЙ МЕТОД МЯГКОГО ЗАПУСКА РОТОРА С РАН.. .
Окончательный импеданс, включая параллельную комбинацию собственной индуктивности
, конденсатора и резистора. Объясняется оценка al-
gorithm для расчета оптимизированных значений элементов,
, которая приводит к минимальному времени запуска и желаемой производительности. Темы следующие:
1) В предлагаемом методе время пуска на
меньше, чем у метода закороченного ротора или обычного метода
, в котором резистор добавлен в цепь ротора.
2) В этом оптимизированном методе пусковой момент на
выше, чем при закороченном роторе или обычном методе
, в котором в цепь ротора добавлен резистор.
3) Коэффициент мощности при запуске улучшен за счет конденсатора
в цепи. Из-за исключения резистора
потери в роторе уменьшены по сравнению с обычным методом
, в котором резистор добавлен в цепь ротора
.
4) Минимальное время пуска достигается при отсутствии механических и электрических ограничений
.В случае легких нагрузок
время пуска меньше.
5) За счет применения ограничений по току и крутящему моменту время пуска
увеличивается, но оно все еще меньше, чем метод закороченного ротора
или обычный метод, в котором
резистор добавлен в цепь ротора.
Ссылки
[1] SAY, M.: Машины переменного тока, 2-е издание, Pitman,
England, 1984.
[2] BADR, M. A. — ABDEL-HALIM, M. A. — ALOLAH, A.I.:
,Нетрадиционный метод быстрого запуска трехфазных двигателей.
Асинхронные двигатели с фазным ротором, IEEE Trans. по Energy Con-
версия 11 № 4 (1996), 701–707.
[3] АБДЕЛЬ-ХАЛИМ, М.А.: Плавный запуск кольцевых индукционных двигателей.
Двигатели, IEE Trans. on Energy Conversion 12 No. 4 (1997),
317–322.
[4] HAMOUDA, RM — ALOLAH, AI — BADR, MA — AB-
DEL-HALIM, MA: Сравнительное исследование методов запуска трехфазных асинхронных двигателей с ротором
— часть Я, IEEE Trans.on Energy Conversion 14 No. 4 (1999),
918–922.
[5] ЗЕНГИНОБУЗ, Г. — КАДИРЧИ, И. — ЭРМИС, М. — БАРЛАК,
C.: Плавный запуск больших асинхронных двигателей при постоянном токе —
аренда с минимальными пульсациями пускового момента, IEEE Trans.
по отраслевым заявкам 37 № 5 (2001), 1334–1347.
[6] RASHAD, EM — RADWAN, TS — RAHMAN, MA: Start-
ing и векторное управление последовательно подключенным индукционным электродвигателем с обмоткой ротора
Двигатель в суперсинхронном режиме, IEEE 39
th
IAS Annual
Meeting Conf., Промышленные приложения, 2004 г., стр. 32–39.
[7] LI, W. — LU, J. — LIU, M. — ZHAO, J.: Разработка интеллектуального контроллера плавного пуска
для асинхронного двигателя, Proceedings of Third
Inter. Конф. on Machine Learning and Cybernetics, 2, 2004,
pp. 908–912.
Получено 22 апреля 2009 г.
Мохаммад Багер Баннае Шарифан (1965 г.) изучал вопросы энергетики в Тебризском университете,
Тебриз, Иран. Он получил степени бакалавра и магистра в 1989 г.,
,и 1992 г. соответственно в Тебризском университете.В 1992 году
он присоединился к электротехническому отделению Университета
Тебриза в качестве лектора. Он получил степень доктора
по электротехнике в том же университете в 2000 году. В
2000 он вернулся на кафедру электроэнергетики факультета
электротехники и вычислительной техники того же университета в качестве доцента. В настоящее время он является профессором упомянутой кафедры
. Его исследовательские интересы лежат в области проектирования, моделирования и анализа электрических машин, трансформаторов
, электрических приводов, а также электрических и гибридных электрических транспортных средств
.
Мохаммад Р. Фейзи получил степень бакалавра и магистра в 1975 году.
в Тебризском университете в Иране с отличием. Он
работал в том же университете с 1975 по 1993 год. Он начал свою докторскую работу
в Университете Аделаиды, Австралия в 1993 году.
После окончания учебы он вернулся в Университет
Тебриза. В настоящее время он является доцентом того же университета
. Его научные интересы — конечно-элементный анализ,
проектирование и моделирование электрических машин и преобразователей.
Мехран Сабахи родился в Тебризе, Иран, в 1968 году. Он
получил степень бакалавра наук. степень в области электронной техники от
Тебризского университета, M.Sc. степень в области электротехники
от Тегеранского университета, Тегеран, Иран, и докторская степень. степень в области электротехники
от Тебризского университета в 1991 г.,
1994 и 2009 гг. соответственно. В 2004 году он присоединился к факультету
электротехники и вычислительной техники Тебризского университета,
, где с 2009 года работал доцентом.Его текущие исследовательские интересы по аренде
включают силовые электронные преобразователи и
силовые электронные трансформаторы.
Мейсам Фаррохифар был основан в Тебризе, Иран,
–15 февраля 1981 года. Он получил степень бакалавра и магистра в Университете
Тебриза в области электроэнергетики в 2004 году и
в 2007 году соответственно. В настоящее время он является членом общества испытаний электроники IEEE indus-
и Иранского национального электротехнического комитета
(INEC).Опубликовал более 15 технических
статей. Сферы его интересов включают оптимизацию энергосистемы, электрические машины, трансформаторы и интеллектуальные методы для оптимизации.
IRJET-Запрошенная вами страница не найдена на нашем сайте
IRJET приглашает статьи из различных инженерных и технологических дисциплин, для выпуска 10 (октябрь 2021 г.)
Отправить сейчас
IRJET Vol-8 Issue 10 , Октябрь 2021 г. Публикация продолжается…
Обзор статей
IRJET получил «Импакт-фактор научного журнала: 7,529» за 2020 год.
Проверить здесь
IRJET получил сертификат регистрации ISO 9001: 2008 для своей системы менеджмента качества.
IRJET приглашает специалистов по различным инженерным и технологическим дисциплинам, научным дисциплинам для Тома 8, выпуск 10 (октябрь 2021 г.)
Отправить сейчас
IRJET Vol-8, выпуск 10, октябрь 2021 г. Публикация продолжается…
Обзор статей
IRJET получил «Импакт-фактор научного журнала: 7,529» за 2020 год.
Проверить здесь
IRJET получил сертификат регистрации ISO 9001: 2008 для своей системы менеджмента качества.
IRJET приглашает специалистов по различным инженерным и технологическим дисциплинам, научным дисциплинам для Тома 8, выпуск 10 (октябрь 2021 г.)
Отправить сейчас
IRJET Vol-8, выпуск 10, октябрь 2021 г. Публикация продолжается…
Обзор статей
IRJET получил «Импакт-фактор научного журнала: 7,529» за 2020 год.
Проверить здесь
IRJET получил сертификат регистрации ISO 9001: 2008 для своей системы менеджмента качества.
IRJET приглашает специалистов по различным инженерным и технологическим дисциплинам, научным дисциплинам для Тома 8, выпуск 10 (октябрь 2021 г.)
Отправить сейчас
IRJET Vol-8, выпуск 10, октябрь 2021 г. Публикация продолжается…
Обзор статей
IRJET получил «Импакт-фактор научного журнала: 7,529» за 2020 год.
Проверить здесь
IRJET получил сертификат регистрации ISO 9001: 2008 для своей системы менеджмента качества.
IRJET приглашает специалистов по различным инженерным и технологическим дисциплинам, научным дисциплинам для Тома 8, выпуск 10 (октябрь 2021 г.)
Отправить сейчас
IRJET Vol-8, выпуск 10, октябрь 2021 г. Публикация продолжается…
Обзор статей
IRJET получил «Импакт-фактор научного журнала: 7,529» за 2020 год.
Проверить здесь
IRJET получил сертификат регистрации ISO 9001: 2008 для своей системы менеджмента качества.
IRJET приглашает специалистов по различным инженерным и технологическим дисциплинам, научным дисциплинам для Тома 8, выпуск 10 (октябрь 2021 г.)
Отправить сейчас
IRJET Vol-8, выпуск 10, октябрь 2021 г. Публикация продолжается…
Обзор статей
IRJET получил «Импакт-фактор научного журнала: 7,529» за 2020 год.
Проверить здесь
IRJET получил сертификат регистрации ISO 9001: 2008 для своей системы менеджмента качества.
IRJET приглашает специалистов по различным инженерным и технологическим дисциплинам, научным дисциплинам для Тома 8, выпуск 10 (октябрь 2021 г.)
Отправить сейчас
IRJET Vol-8, выпуск 10, октябрь 2021 г. Публикация продолжается…
Обзор статей
IRJET получил «Импакт-фактор научного журнала: 7,529» за 2020 год.
Проверить здесь
IRJET получил сертификат регистрации ISO 9001: 2008 для своей системы менеджмента качества.
IRJET приглашает специалистов по различным инженерным и технологическим дисциплинам, научным дисциплинам для Тома 8, выпуск 10 (октябрь 2021 г.)
Отправить сейчас
IRJET Vol-8, выпуск 10, октябрь 2021 г. Публикация продолжается…
Обзор статей
IRJET получил «Импакт-фактор научного журнала: 7,529» за 2020 год.
Проверить здесь
IRJET получил сертификат регистрации ISO 9001: 2008 для своей системы менеджмента качества.
Моделирование привода двигателя переменного тока — MATLAB и Simulink
Моделирование привода двигателя переменного тока
Модели AC1, AC2, AC3 и AC4 основаны на трехфазном асинхронном двигателе. Этот двигатель имеет трехфазную обмотку на статоре и заведенный ротор или короткозамкнутый ротор. ротор.Ротор с короткозамкнутым ротором состоит из пазов токопроводящих стержней, встроенных в роторное железо. Токопроводящие шины закорочены на каждом конце ротора посредством токопроводящие кольца. Модель AC5 основана на синхронном двигателе с фазным ротором, а модель AC6 Модель использует синхронный двигатель с постоянными магнитами. Эти двигатели переменного тока питаются от переменного Напряжение и частота переменного тока, создаваемые инвертором. Тип инвертора, используемого в шести Модели привода переменного тока представляют собой инвертор источника напряжения (VSI) в том смысле, что этот инвертор питается постоянным напряжением постоянного тока.Это постоянное напряжение обеспечивается неуправляемым диодом. выпрямитель и конденсатор (емкостное напряжение шины постоянного тока).
Динамическое торможение
Когда шина постоянного тока обеспечивается диодным выпрямителем, привод не имеет возможности двунаправленного потока мощности и, следовательно, не может выполнить рекуперативное торможение. В моделях AC1, AC2, AC3, AC4 и AC6 тормозной резистор, включенный последовательно с прерывателем, обеспечивает торможение моторно-нагрузочная система. Эта схема торможения называется динамическим торможением.Он размещен параллельно шине постоянного тока, чтобы предотвратить ее напряжение. от увеличения при замедлении двигателя. С динамическим торможением, кинетическая энергия системы двигатель-нагрузка преобразуется в тепло рассеивается в тормозном резисторе.
Методы модуляции
Инверторы VSI, используемые в моделях приводов переменного тока, основаны на двух типах модуляция, гистерезисная модуляция и пространственно-векторная широтно-импульсная модуляция (ШИМ).
Модуляция гистерезиса — это метод управления током с обратной связью, при котором ток двигателя отслеживает задание. ток в диапазоне гистерезиса.На следующем рисунке показана операция принцип гистерезисной модуляции. Контроллер генерирует синусоидальный опорный ток желаемой величины и частоты, который сравнивается с фактическим током в сети двигателя. Если ток превышает верхний предел полосы гистерезиса, верхний переключатель инвертора рука выключена и нижний переключатель включен. Как результат, ток начинает затухать. Если ток пересекает нижнюю границу полосы гистерезиса повернут нижний переключатель плеча инвертора выключен, а верхний переключатель включен.В результате ток становится обратно в полосу гистерезиса. Следовательно, фактический ток принудительно для отслеживания эталонного тока в диапазоне гистерезиса.
На следующем рисунке показана схема модуляции гистерезисного регулирования тока, состоящая из трех гистерезисные компараторы, по одному на каждую фазу. Этот тип ШИМ с обратной связью используется в Модели AC3 и AC5.
Модуляция пространственного вектора отличается от гистерезисной модуляции тем, что не используются отдельные компараторы для каждой из трех фаз.Вместо, пространственный вектор опорного напряжения В с производится как единое целое, дискретизируется с фиксированной частотой, а затем создается за счет адекватной синхронизации соседнего ненулевого пространства напряжения инвертора векторы V 1 до V 6 и векторы пространства нулевого напряжения В 0 , В 7 . Упрощенная схема инвертора VSI показана ниже. На этой диаграмме состояние проводимости трех ветвей инвертора представлено тремя логическими переменными SA, SB и SC.Логическая 1 означает, что Верхний переключатель является проводящим, а логический 0 означает, что нижний переключатель проводит.
Упрощенная схема инвертора VSI PWM
На этой диаграмме показано состояние проводимости трех выводов инвертор представлен тремя логическими переменными: SA, SB и SC. Логическая 1 означает, что верхний переключатель включен, а логический 0 означает что нижний переключатель включен.
Переключение SA, SB, SC приводит к восьми состояниям инвертора. Состояния переключения и соответствующие напряжения между фазами и нейтралью приведены в таблице, в которой перечислены состояний, операций инвертора и векторов пространственного напряжения.Шесть активных векторов: под углом 60 градусов и описывают границу шестиугольника. Два нулевых вектора находятся у истока.
В качестве примера для расположения вектора V s показано на схеме пространственно-векторного напряжения инвертора, способ генерации выход инвертора должен использовать соседние векторы V 1 и V 2 на неполной ставке для удовлетворения средний спрос на выпуск продукции.Напряжение В с может быть разрешено как:
V a и V b являются компоненты V s вдоль V 1 и V 2 , соответственно. Учитывая период T c в течение которой средний результат должен соответствовать команде, напишите длительность времени двух состояний 1 и 2 и состояния нулевого напряжения как:
Состояние | SA | SB | SC | Работа инвертора | Вектор космического напряжения |
|---|---|---|---|---|---|
0 | 1 | 1 | 1 | Freewheeling | В 0 |
1 | 1 | 0 | 0 | Активный | В 1 |
2 | 1 | 1 | 0 | Активный | В 2 |
3 | 0 | 1 | 0 | Активный | В 3 |
4 | 0 | 1 | 1 | Активный | В 4 |
5 | 0 | 0 | 1 | Активный | В 5 |
6 | 1 | 0 | 1 | Активный | В 6 |
7 | 0 | 0 | 0 | Freewheeling | В 7 |
Управление напряжением / частотой разомкнутого контура
Поток статора машины переменного тока равен отношению напряжения статора к частоте, потому что
где
, следовательно,
Поскольку двигатель питается от источника переменного напряжения и частоты переменного тока, важно поддерживать постоянное значение В / Гц в области постоянного крутящего момента, если магнитное насыщение следует избегать.Типичная характеристика В / Гц показана ниже. Обратите внимание, что прямая линия имеет небольшое повышение напряжения для компенсации падения сопротивления на низкой частоте. Регулирование В / Гц без обратной связи используется в приложениях с низкой динамикой, таких как как насосы или вентиляторы, где допустимы небольшие колебания скорости двигателя в зависимости от нагрузки. В Модель AC1 основана на контроллере В / Гц без обратной связи.
Регулирование скорости с обратной связью с компенсацией скольжения
В этом типе управления команда скорости скольжения добавляется к измеренной скорости ротора для получения желаемая частота инвертора.Регулятор скорости на основе PI производит скольжение команда. Требуемая частота инвертора генерирует команду напряжения через В / Гц. характеристика, подобная показанной выше. Модель AC2 основана на замкнутом контуре регулировка скорости, использующая В / Гц и регулировку скольжения.
Flux-Oriented Control
Конструкция машины постоянного тока такова, что поток поля перпендикулярна потоку якоря. Будучи ортогональными, эти два потоки не производят сетевого взаимодействия друг с другом.Регулировка поля Таким образом, ток может управлять потоком машины постоянного тока, а крутящий момент можно управлять независимо от магнитного потока, регулируя якорь Текущий. Машина переменного тока не так проста из-за взаимодействия между полями статора и ротора, ориентация которых не удерживается под углом 90 градусов, но зависит от условий эксплуатации. Вы можете получить производительность, подобную машине постоянного тока, при удерживании фиксированного и ортогонального ориентация между полем и полем якоря в машине переменного тока направляя ток статора относительно потока ротора так, чтобы для достижения независимо контролируемых магнитного потока и крутящего момента.Такой контроль Схема называется потоковым управлением или векторным управлением. Векторное управление применимо как к асинхронным, так и к синхронным двигателям. Посмотрим Теперь как это применимо к асинхронным двигателям.
Учитывая модель d-q асинхронной машины в справочнике рама, вращающаяся с синхронной скоростью ω e ,
, где
Ориентированное на поле управление подразумевает, что компонент i ds тока статора будет выровнено с полем ротора, а компонент i qs будет перпендикулярно к i ds .Этого можно добиться, выбрав ω e на скорость потока ротора и синхронизация фазы опорного рамная система, так что поток ротора точно совпадает с d, что приводит к
и
, что подразумевает, что
и что
Отсюда также следует, что
Аналогия с производительностью машины постоянного тока теперь ясна. Электрический крутящий момент пропорционален компоненту i qs , тогда как соотношение между потоком φ r и предоставляется компонент i ds линейной передаточной функцией первого порядка с постоянной времени L r / R r .
Вы не можете напрямую измерить ориентацию потока ротора в индукционная машина с короткозамкнутым ротором. Это можно оценить только из терминальные измерения. Альтернативный способ — использовать отношение скольжения полученное выше, чтобы оценить положение потока относительно ротора, как показано. Последняя схема управления называется косвенной полевой ориентацией. управление и используется в модели AC3.
Прямое управление крутящим моментом
Полевое управление — привлекательный метод управления, но у него есть серьезный недостаток: в значительной степени полагается на точное знание параметров двигателя.Постоянная времени ротора особенно трудно измерить точно, и это зависит от температура.
Более надежный метод управления состоит, во-первых, в оценке потока статора машины и электрического крутящий момент в неподвижной системе отсчета из измерений терминала. Следующий используются соотношения:
Затем контролируются расчетный магнитный поток статора и электрический крутящий момент. напрямую сравнивая их с соответствующими требуемыми значениями, используя гистерезисные компараторы.Затем выходы двух компараторов используются в качестве входных сигналов оптимальной таблицы переключения. Следующий таблица выводит соответствующее состояние переключения для инвертора.
Таблица переключения векторов пространства инвертора