Схема используется для привода механизмов, не требующих реверса, длительность торможения которых после отключения двигателя не имеет существенного значения.
И если Вас не затруднит, ответ пишите на xnnn tut.
Поскольку вращающееся магнитное поле отсутствует, то и ротор останется неподвижным, ибо нет сил, приложенных к нему для начала вращения. Для повышения надежности работы релейных контакторных аппаратов, большей частью рассчитанных на низкое напряжение, и для повышения безопасности эксплуатации применяются схемы с питанием цепей управления от источника пониженного напряжения.
Вентилятор напольный, китайский. Ремонт, схема, параметры.

Схемы управления асинхронным двигателем с короткозамкнутым ротором с реверсивным магнитным пускателем.
Трехфазный переменный ток Электрическая сеть трехфазного переменного тока получила наиболее широкое распространение среди электрических систем передачи энергии.
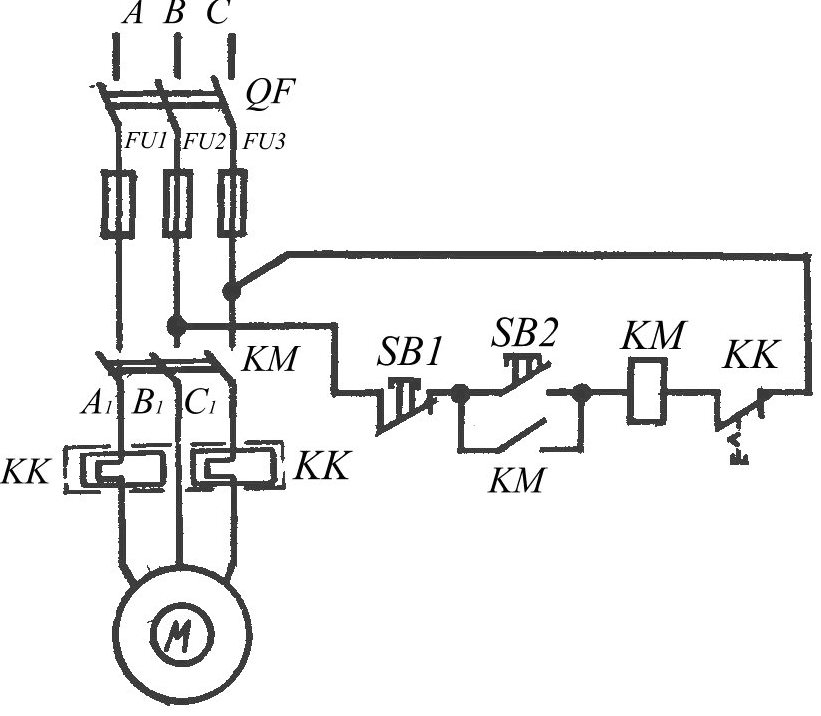
Схема включает блок управления тиристорами БУ и релейно-контактный узел управления. Поскольку вращающееся магнитное поле отсутствует, то и ротор останется неподвижным, ибо нет сил, приложенных к нему для начала вращения.

Двигатель вращается расторможенным.
Тиристоры выполняют роль силовых коммутаторов и, кроме того, легко позволяют осуществлять необходимый темп изменения напряжения на статоре двигателя регулированием угла включения тиристоров. Наиболее часто в станках, установках и машинах применяются три электрические схемы: схема управления нереверсивным двигателем с использованием одного электромагнитного пускателя и двух кнопок «пуск» и «стоп», схема управления реверсивным двигателем с использованием двух пускателей или одного реверсивного пускателя и трех кнопок.

Нетрадиционное подключение асинхронного двигателя.Правда или миф.
Устройство двигателя
В перпендикулярной плоскости, представленной магнитопроводом, вокруг проводника возникают магнитные потоки Ф. По ней проходит переменный синусоидальный ток, имеющий положительные и отрицательные полуволны. Достаточно подать на статор двигателя трехфазное напряжение и двигатель сразу запускается.
В этих схемах вместо установки на вводе рубильников с предохранителями применяют воздушные автоматы. Динамическое торможение, в отличие от торможения противовключением и фрикционного метода, является плавным, мягким торможением.
Таким образом, также как было описано ранее, в стержнях ротора будет индуцироваться ток, в результате чего ротор начнет вращаться.
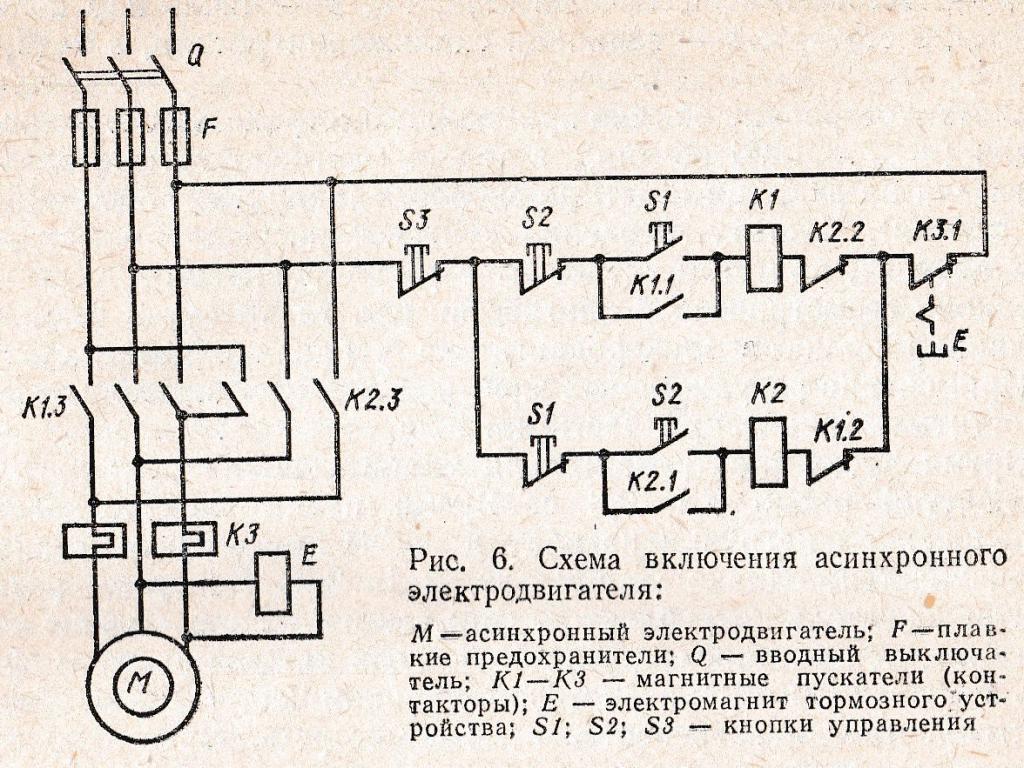
Кнопка S2 освобождается и принимает исходное положение, контактор К2М обесточивается, контакты К2 1—2 М размыкаются. Благодаря этому при отпускании кнопки катушка пускателя не теряет питание, так как ток в этом случае идет через блокировочный контакт.
Поэтому для защиты электродвигателей от длительных перегрузок при использовании автомата с электротепловым расцепителем такого типа применяются дополнительные электротепловые реле, как и при использовании автоматического выключателя с электромагнитным расцепителем.

Одновременно закроется вспомогательный контакт K1A. Схема подключения такого двигателя показана на рисунке справа.
Скольжение асинхронного двигателя может изменяться в диапазоне от 0 до 1, т. Пользователей: Устройство однофазного асинхронного двигателя Однофазные асинхронные двигателя выпускают от 5Вт до 10кВт.
Определение схемы обмоток и рабочего напряжения асинхронного электродвигателя
9 комментариев
Изготовление таких электродвигателей производится в очень широком диапазоне мощностей, где номинал устройства может составлять всего лишь несколько ватт, а может иметь мощность и в десятки мегаватт. Разберем принцип работы всех этих схем.

Типовые схемы разомкнутых систем управления электродвигателями
После размыкания контакта реле времени РДТ схема приходит в исходное состояние, двигатель плавно останавливается. Концы трехфазной обмотки могут быть: соединены внутри электродвигателя из двигателя выходит три провода , выведены наружу выходит шесть проводов , выведены в распределительную коробку в коробку выходит шесть проводов, из коробки три.
Буду знать, куда зайти, если нужна будет информация по запуску двигателя. При неподвижном роторе магнитные поля Фа и Фв создают одинаковые по величине, но противоположны по знаку крутящиеся моменты М1 и М2. Обмотка создает неподвижный в пространстве магнитный поток.

Во время преодоления однофазным двигателем номинальной нагрузки создается небольшое скольжение с основной долей прямого крутящего момента Мпр. В этом случае используются электромагнитные пускатели с катушками на напряжение , 48, 36 или 24 В. Основными положительными характеристиками короткозамкнутых асинхронных электродвигателей являются их высокая надежность, незначительная масса, компактность, более высокий срок службы, чем у двигателей внутреннего сгорания аналогичной мощности. Такая схема изображена на рис.
Реостатный пуск асинхронного двигателя с кз ротором.
Возможно использование понижающего трансформатора для понижения напряжения в схеме управления. Анимация процессов, протекающих в схеме показана ниже. Рассмотренная схема является основой построения схем управления электродвигателями двухскоростных транспортеров подачи раскряжевочных агрегатов, сортировочных конвейеров и т.
Такие схемы также часто дополняются различными контактами реле, выключателей, переключателей и датчиков. Схема подключения двигателя по реверсивной схеме.
Эти двигатели просты в устройстве, обслуживании и ремонте. Запустить Вращающееся магнитное поле пронизывающее короткозамкнутый ротор Магнитный момент действующий на ротор Вы также можете заметить, что стержни ротора наклонены относительно оси вращения. Привод может иметь две скорости. По этому возможно нужно использовать какое-то устройство для плавного запуска, чтобы избавиться от пусковых токов. Это делается для того чтобы уменьшить высшие гармоники ЭДС и избавиться от пульсации момента.
схемы включения асинхронного двигателя
Особенности электрических двигателей
Такая схема показана на рис. Это энергия рассеивается как тепло.
Поэтому контактор К2М в этот период не включается. Шаговый режим работы двигателя создает благоприятные условия наладки.
Фазное напряжение — разница потенциалов между началом и концом одной фазы. При замыкании контакта К1А.
Схема управления асинхронным электродвигателем с коротко-замкнутым ротором с использованием магнитного пускателя и воздушного автоматического выключателя. Подвижная часть пускателя притягивается к неподвижной, замыкая при этом свои контакты. Одной из преимуществ использования асинхронных двигателей с короткозамкнутым ротором является простота их включения в сеть. Таким образом, в магнитном поле будет находиться замкнутый проводник с током, на который согласно закону Ампера будет действовать сила, в результате чего контур начнет вращаться.
Нереверсивная схема управления асинхронного двигателя.
Они во многом играют важную роль, например, подшипники качения, обеспечивают возможность плавности хода, корпус защищает от механического воздействия на основные рабочие части, вентилятор обеспечивает обдув двигателя и отвод тепла, выделяемого при работе, но на принцип преобразования электрической энергии в механическую не влияют. Применение синхронных электродвигателей не допускает частых пусков, поэтому, как правило, их используют в условиях относительно неизменной нагрузки, при необходимости обеспечения постоянной скорости вращения. Реверсивный пуск асинхронного двигателя с короткозамкнутым ротором Такая схема запуска приведена на рис.
Это позволяет проводить смену инструмента, наладку станка с легким поворотом приводного вала и ротора электродвигателя. Особенности электрических двигателей Устройство синхронных электродвигателей очень напоминает синхронный генератор. Изменение направления вращения реверс ротор двигателя меняет при изменении порядка чередования фаз на его статоре.
Главные вкладки
Поэтому асинхронный электродвигатель имеет вентилятор для охлаждения. Применение двухцепных кнопок позволяет осуществить дополнительную электрическую блокировку, исключающую одновременное включение контакторов K1 и К2, а также К3 и К4. Дополнительные контакты в цепях пускателей не дают пускателям включится одновременно, так как какой-либо из пускателей при нажатии на обе кнопки «Пуск» включиться на секунду раньше и разомкнет свой контакт в цепи другого пускателя. Поэтому Д2М не сразу включится и его размыкающий контакт Д2А. Электродвигатель подключается к сети при помощи кнопки S1, контакта K1A и силовых контактов К1 1—3 М.
Реверсивная схема подключения электродвигателя Как изменить направление вращения электродвигателя? Обычно реверсивный магнитный пускатель состоит из двух контакторов, заключенных в один корпус. Двигатель вращается расторможенным. В таком случае относительное магнитное поле ротора будет постоянным, таким образом в стержнях ротора не будет создаваться ЭДС, а следовательно и ток. В частности, на базе этой схемы создаются схемы управления главным электродвигателем лесопильных рам.
Реверсивная схема подключения магнитного пускателя

Здравствуйте, дорогие читатели! Сегодня поговорим про управление асинхронным двигателем, а так же рассмотрим три простые схемы, которые применяются наиболее часто.
Все электрические принципиальные схемы станков, установок и машин содержат определенный набор типовых блоков и узлов, которые комбинируются между собой определенным образом. В релейно-контакторных схемах главными элементами управления двигателями являются электромагнитные пускатели и реле.
Наиболее часто в качестве привода в станках и установках применяются трехфазные асинхронные двигатели с короткозамкнутым ротором. Эти двигатели просты в устройстве, обслуживании и ремонте. Они удовлетворяют большинству требований к электроприводу станков. Главными недостатками асинхронных двигателей с короткозамкнутым ротором являются большие пусковые токи (в 5-7 раз больше номинального) и невозможность простыми методами плавно изменять скорость вращения двигателей.
С появлением и активным внедрением в схемы электроустановок преобразователей частоты такие двигатели начали активно вытеснять другие типы двигателей (асинхронные с фазным ротором и двигатели постоянного тока) из электроприводов, где требовалось ограничивать пусковые токи и плавно регулировать скорость вращения в процессе работы.

Асинхронный двигатель с короткозамкнутым ротором
Одной из преимуществ использования асинхронных двигателей с короткозамкнутым ротором является простота их включения в сеть. Достаточно подать на статор двигателя трехфазное напряжение и двигатель сразу запускается. В самом простом варианте для включения можно использовать трехфазный рубильник или пакетный выключатель. Но эти аппараты при своей простоте и надежности являются аппаратами ручного управления.
В схемах же станков и установок часто должна быть предусмотрена работа того или иного двигателя в автоматическом цикле, обеспечиваться очередность включения нескольких двигателей, автоматическое изменение направления вращения ротора двигателя (реверс) и т.д.
Обеспечить все эти функции с аппаратами ручного управления невозможно, хотя в ряде старых металлорежущих станков тот же реверс и переключение числа пар полюсов для изменения скорости вращения ротора двигателя очень часто выполняется с помощью пакетных переключателей. Рубильники и пакетные выключатели в схемах часто используются как вводные устройства, подающие напряжение на схему станка. Все же операции управления двигателями выполняются электромагнитными пускателями.
Включение двигателя через электромагнитный пускатель обеспечивает кроме всех удобств при управлении еще и нулевую защиту. Что это такое будет рассказано ниже.

Электромагнитный пускатель
Наиболее часто в станках, установках и машинах применяются три электрические схемы:
схема управления нереверсивным двигателем с использованием одного электромагнитного пускателя и двух кнопок «пуск» и «стоп»,
схема управления реверсивным двигателем с использованием двух пускателей (или одного реверсивного пускателя) и трех кнопок.
схема управления реверсивным двигателем с использованием двух пускателей (или одного реверсивного пускателя) и трех кнопок, в двух из которых используются спаренные контакты.
Разберем принцип работы всех этих схем.
1. Управление асинхронным двигателем с помощью одного магнитного пускателя
Схема показана на рисунке.

Управление асинхронным двигателем с помощью магнитного пускателя
При нажатии на кнопку SB2 «Пуск» катушка пускателя попадает под напряжение 220 В, т.к. она оказывается включенной между фазой С и нулем (N). Подвижная часть пускателя притягивается к неподвижной, замыкая при этом свои контакты. Силовые контакты пускателя подают напряжение на двигатель, а блокировочный замыкается параллельно кнопке «Пуск». Благодаря этому при отпускании кнопки катушка пускателя не теряет питание, т.к. ток в этом случае идет через блокировочный контакт.
Если бы блокировочный контакт не был бы подключен параллельно кнопки (по какой-либо причине отсутствовал), то при отпускании кнопки «Пуск» катушка теряет питание и силовые контакты пускателя размыкаются в цепи двигателя, после чего он отключается. Такой режим работы называют «толчковым». Применяется он в некоторых установках, например в схемах кран-балок.
Остановка работающего двигателя после запуска в схеме с блокировочным контактом выполняется с помощью кнопки SB1 «Стоп». При этом, кнопка создает разрыв в цепи, магнитный пускатель теряет питание и своими силовыми контактами отключает двигатель от питающей сети.
В случае исчезновения напряжения по какой-либо причине магнитный пускатель также отключается, т.к. это равносильно нажатию на кнопку «Стоп» и созданию разрыва цепи. Двигатель останавливается и повторный запуск его при наличии напряжения возможен только при нажатии на кнопку SB2 «Пуск». Таким образом, магнитный пускатель обеспечивает т.н. «нулевую защиту». Если бы он в цепи отсутствовал и двигатель управлялся рубильником или пакетным выключателем, то при возврате напряжения двигатель запускался бы автоматически, что несет серьезную опасность для обслуживающего персонала.
2. Схема управления реверсивным двигателем с помощью двух магнитных пускателей
Схема работает аналогично предыдущей. Изменение направления вращения (реверс) ротор двигателя меняет при изменении порядка чередования фаз на его статоре. При включении пускателя КМ1 на двигатель приходят фазы — A, B, С, а при включении пускателя KM2 — порядок фаз меняется на С, B, A.
Схема показана на рис. 2.

Управление асинхронным двигателем с помощью двух магнитных пускателей
Включение двигателя на вращение в одну сторону осуществляется кнопкой SB2 и электромагнитным пускателем KM1. При необходимости смены направления вращения необходимо нажать на кнопку SB1 «Стоп», двигатель остановится и после этого при нажатии на кнопку SB3 двигатель начинает вращаться в другую сторону. В этой схеме для смены направления вращения ротора необходимо промежуточное нажатие на кнопку «Стоп».
Кроме этого, в схеме обязательно использование в цепях каждого из пускателей нормально-закрытых (размыкающих) контактов для обеспечения защиты от одновременного нажатия двух кнопок «Пуск» SB2 — SB3, что приведет к короткому замыканию в цепях питания двигателя. Дополнительные контакты в цепях пускателей не дают пускателям включится одновременно, т.к. какой-либо из пускателей при нажатии на обе кнопки «Пуск» включиться на секунду раньше и разомкнет свой контакт в цепи другого пускателя.
Необходимость в создании такой блокировки требует использования пускателей с большим количеством контактов или пускателей с контактными приставками, что удорожает и усложняет электрическую схему.
3. Схема управления реверсивным двигателем с помощью двух магнитных пускателей и трех кнопок (две из которых имеют контакты с механической связью)
Схема показана на рисунке.

Управление асинхронным двигателем с помощью двух магнитных пускателей и трех кнопок (две из которых имеют контакты с механической связью)
Отличие этой схемы от предыдущей в том, что в цепи каждого пускателя кроме общей кнопки SB1 «Стоп»включены по 2 контакта кнопок SB2 и SB3, причем в цепи КМ1 кнопка SB2 имеет нормально-открытый контакт (замыкающий), а SB3 — нормально-закрытый (размыкающий) контакт, в цепи КМ3 — кнопка SB2 имеет нормально-закрытый контакт (размыкающий), а SB3 — нормально-открытый. При нажатии каждой из кнопок цепь одного из пускателей замыкается, а цепь другого одновременно при этом размыкается.
Такое использование кнопок позволяет отказаться от использования дополнительных контактов для защиты от одновременного включения двух пускателей (такой режим при этой схеме невозможен) и дает возможность выполнять реверс без промежуточного нажатия на кнопку «Стоп», что очень удобно. Кнопка «Стоп» нужна для окончательной остановки двигателя.
Приведенные в статье схемы являются упрощенными. В них отсутствуют аппараты защиты (автоматические выключатели, тепловые реле), элементы сигнализации. Такие схемы также часто дополняются различными контактами реле, выключателей, переключателей и датчиков. Также возможно питание катушки электромагнитного пускателя напряжение 380 В. В этом случае он подключается от двух любых фаз, например, от А и B. Возможно использование понижающего трансформатора для понижения напряжения в схеме управления. В этом случае используются электромагнитные пускатели с катушками на напряжение 110, 48, 36 или 24 В.
Смотрите также по этой теме:
Короткозамкнутый и фазный ротор. В чем различие?
Асинхронный двигатель. Устройство и принцип работы.
Как работает электродвигатель. Преимущества и недостатки разных видов.
Асинхронный двигатель. Устройство и принцип работы.
Принцип работы электродвигателя. Простыми словами о сложном.
Будем рады, если подпишетесь на наш Блог!
[wysija_form id=»1″]
 Всем привет. Рад вас видеть у себя на сайте. Тема сегодняшней статьи: Реверсивное управление асинхронным электродвигателем с короткозамкнутым ротором.
Всем привет. Рад вас видеть у себя на сайте. Тема сегодняшней статьи: Реверсивное управление асинхронным электродвигателем с короткозамкнутым ротором.
В наше время асинхронные двигателя очень широко используются на производственных предприятиях. Их устанавливают практически на всём оборудование. А ещё бы и не ставить, ведь они самые простые в конструкции, имеют самую простую схему запуска и практически не требуют профилактических ремонтов.
Но мы сегодня не будем говорить о достоинствах и преимуществах этих двигателей, давайте лучше поговорим, о том, как же изменить направления движения этих электрических машин.
Но прежде чем рассматривать схему реверса, я советую вам почитать такие статьи:
Схема пуска асинхронного двигателя.
Расчёт тока электродвигателя.
Думаю, эти статьи будут вам очень полезны.
Теперь, переходим к практике. Специально для читателей своего сайта, я нарисовал схему реверса на листке бумаги, сфотографировал её, и делюсь с вами. Картинка получилась неплохо, и все основные элементы на ней видно. Но если вдруг вам что-то не понятно, то задавайте свои вопросы в комментариях. Я с радостью на них отвечу.
Схема запуска и реверсивного управления трёхфазного асинхронного электродвигателя с короткозамкнутым ротором.
Давайте для начала рассмотрим все элементы схемы.
QF – автоматический выключатель. Нужен для коммутации электрической схемы и для защиты от токов короткого замыкания.
KM1, KM2 – электромагнитные пускатели. Нужны для дистанционного запуска электродвигателя, и в данной схеме используются для реверса.
KK – тепловое реле. Используется для защиты электропривода от перегруза.
FU – предохранитель. Нужен для защиты цепей управления от токов короткого замыкания. И так же выступает в роли защиты от самопроизвольного включения привода в работу.
SB3 – кнопка стоп
SB1 – кнопка пуск «вперёд» или «вправо» и так далее.
SB2 – кнопка пуск «назад» или «влево» и так далее.
KM1, KM2 – блок-контакты электромагнитных пускателей. Нужны для подхвата.
KM1, KM2 – дополнительные блок-контакты пускателей. Выступают в роли блокировки от включения двух пускателей одновременно.
KM1, KM2 – катушки пускателей. Нужны для управления электромагнитными пускателями.
К – контакт теплового реле.
М – мотор
По элементам разобрались. Теперь давайте поговорим о том, как работает эта схема.
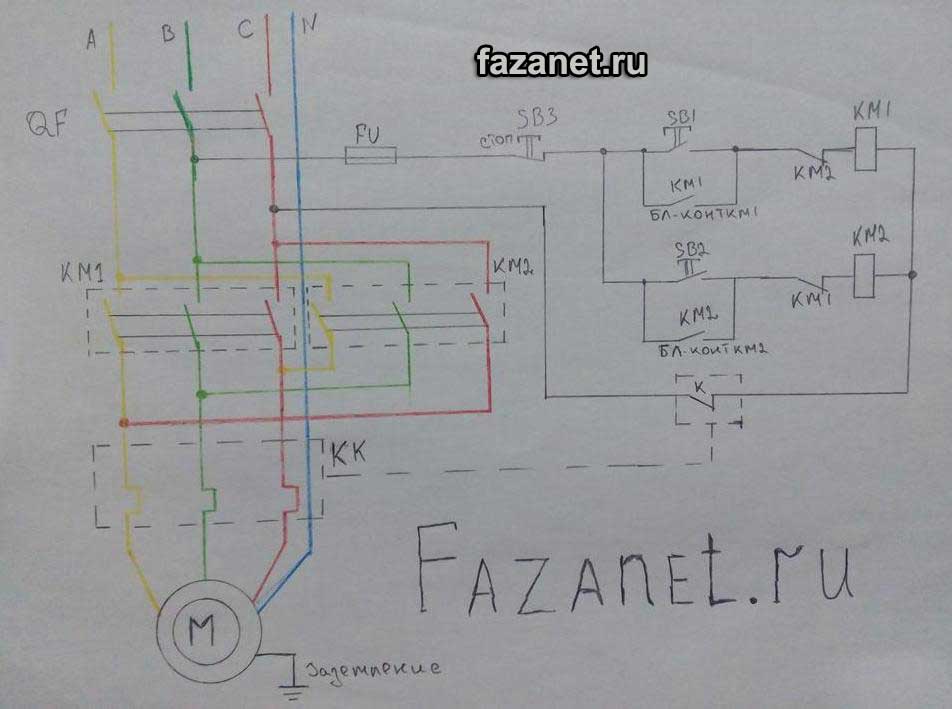
Для того чтобы запустить в работу электродвигатель, мы должны подать на него напряжение. Для этого включаем автоматический выключатель QF. Напряжение подаётся на контакты пускателей, и на цепь управления.
Теперь, чтобы двигатель начал вращаться нажимаем кнопку SB1. Этим действием мы подаём напряжение на катушку пускателя КМ1, пускатель втягивается, замыкаются силовые контакты и так же замыкается блок-контакт КМ1, а блок-контакт КМ2 размыкается. Двигатель при этом начинает вращаться
Теперь, чтобы запустить двигатель в другую сторону, нам нужно его сначала остановить. Для этого нажимаем кнопку SB3. Этим движением мы прекращаем подачу напряжения на цепь управления, и двигатель в любом случае остановиться, независимо от того в какую сторону он вращался.
Теперь для запуска электродвигателя в противоположную сторону. Нажимаем кнопку SB2. Напряжение подаются на катушку второго пускателя, он втягивается, замыкаются силовые контакты, замыкаются блок-контакты для подхвата, и размыкаются дополнительные блок-контакты. Двигатель начинает вращаться.
По сути, если разобраться, то схема очень простая. Главное понять принцип действия, и тогда вы легко сможете эту схему, переделать под свой какой-то вариант.
На этом у меня всё. Если есть вопросы, то задавайте их в комментариях. Если статья была вам полезной, то поделитесь нею со своими друзьями в социальных сетях, вступайте в группу и подписывайтесь на обновления сайта. Пока.
С уважением Александр!
Читайте также статьи:
На сегодняшний день чаще всего применяются релейно-контакторные схемы управления. В таких системах главными приборами являются электромагнитные пускатели и реле. Кроме того, в качестве привода для станков и других установок чаще всего применяется такое устройство, как асинхронный двигатель трехфазного тока с короткозамкнутым ротором.
Описание двигателей
Такие типы приводов стали активно использоваться из-за того, что они просты в эксплуатации, обслуживании, ремонте и устройстве. У них имеется лишь один серьезный минус, который заключается в том, что пусковой ток превышает номинальный примерно в 5-7 раз, а также отсутствует возможность простыми способами управления плавно изменять скорость вращения ротора.

Данный тип машин стал активно использоваться из-за того, что в схемы электроустановок начали активно внедряться такие приборы, как преобразователи частоты. Еще одно весомое преимущество асинхронного двигателя с трехфазным током и коротко замкнутым ротором в том, что он обладает достаточно простой схемой подключения в сеть. Для его включения в работу потребуется лишь подать трехфазное напряжение на статор, и устройство тут же запустится. В наиболее простых схемах управления для его запуска используется такое устройство, как пакетный выключатель или же трехфазный рубильник. Однако данные приборы, несмотря на свою простоту и удобство в эксплуатации, являются элементами ручного управления.
Это является огромным минусом, так как в схемах большинства установок необходимо использовать схему включения двигателя именно в автоматическом режиме. Также необходимо предусматривать автоматическое изменение направления вращения ротора двигателя, то есть его реверс и очередность включения в работу нескольких двигателей.
Основные схемы подключения
Чтобы обеспечить все необходимые функции, которые были описаны выше, необходимо использовать именно автоматические режимы работы, а не элементы ручного управления приводом. Однако справедливо будет отметить, что некоторые старые образцы станков для резки металла все еще используют пакетные переключатели для смены числа пар полюсов или же для обеспечения реверса.
Применение в схемах подключения асинхронных двигателей (АД) не только пакетных выключателей, но и рубильников возможно, но они выполняют лишь одну функцию — подключение схемы к подаче напряжения. Все остальные операции, которые предусматривает схема управления двигателем, выполняются под руководством электромагнитного пускателя.

При подключении схемы АД с короткозамкнутым ротором через такой тип пускателя обеспечивается не только удобный режим управления, но и создается еще и нулевая защита. Чаще всего в качестве схем управления двигателем в станках, установках и других машинах используется три метода включения:
- первая схема применяется для управления нереверсивным двигателем, использует лишь один пускатель электромагнитного типа и две кнопки — «Пуск» и «Стоп»;
- вторая схема управления двигателем реверсивного типа предусматривает использование трех кнопок и двух пускателей обычного типа или одного реверсивного типа;
- третья схема управления отличается от предыдущей лишь тем, что из трех кнопок управления две имеют спаренные контакты.
Схема с пускателем электромагнитного типа
Пуск асинхронного двигателя в такой схеме подключения осуществляется с нажатия соответствующей кнопки. Когда она нажимается, то на катушку пускателя подается ток с напряжением в 220 В. У пускателя имеется подвижная часть, которая при подаче напряжения притягивается к неподвижной, из-за чего контакты устройства замыкаются. Данные силовые контакты подают входящее напряжение на двигатель. Параллельно этому процессу замыкается также и блокировочный контакт. Его включение осуществляется параллельно кнопке «Пуск». Именно благодаря этой функции при отпускании данной кнопки катушка все еще остается под напряжением и продолжает питать двигатель, чтобы он функционировал.
Если по какой-либо причине во время пуска асинхронного двигателя, то есть при нажатии на «Пуск», блокировочный контакт не замыкался бы или, к примеру, отсутствовал, то сразу при отпускании ток переставал бы подаваться на катушку, силовые контакты пускателя размыкались бы, и работа двигателя тут же прекращалась. Такой режим работы называется «толчковым». Он имеет место, к примеру, при управлении кран-балкой.
Для того чтобы остановить трехфазный асинхронный двигатель с короткозамкнутым ротором, необходимо нажать на кнопку «Стоп». Принцип работы в таком случае достаточно прост и основан на том, что нажатие кнопки создает разрыв в цепи, разъединяя силовые контакты пускателя, останавливая тем самым работу двигателя. Если в момент работы исчезнет напряжение на источнике питания, то двигатель также остановится, так как такой дефект равносилен нажатию на «Стоп» и дальнейшему созданию разрыва в цепи прибора.
После того как устройство было остановлено отключением или пропажей питания, запустить его повторно можно лишь с кнопки. Именно это и называется нулевой защитой в схемах управления двигателем. Если бы вместо пускателя здесь был установлен переключатель или рубильник, то при повтором возникновении напряжения в источнике двигатель автоматически бы запустился и продолжил работу. Это считается небезопасным для обслуживающего персонала.
Применение двух пускателей в реверсивном устройстве
Схема управления асинхронным двигателем такого типа, по сути, работает таким же образом, как и предыдущая. Основное отличие здесь заключается в том, что появляется возможность при необходимости изменять направление вращения ротора. Чтобы это осуществить, необходимо изменить работающие фазы, имеющиеся на обмотке статора. К примеру, если нажать на кнопку «Пуск» КМ1, то порядок рабочих фаз будет А-В-С. Если же включить устройство со второй кнопки, то есть с КМ2, то порядок работающих фаз сменится на противоположный, то есть С-В-А.
Таким образом получается, что для управления асинхронным двигателем схемой такого типа необходимо две кнопки «Пуск», одна кнопа «Стоп» и два пускателя.
При нажатии на первую кнопку, которая в схеме обычно обозначается как SB2, произойдет включение первого контактора и вращение ротора в одну из сторон. Если возникает необходимость смены направления вращения на противоположную, необходимо нажать на «Стоп», после чего запуск двигателя осуществляется кнопкой SB3 и включением в работу второго контактора. Другими словами, чтобы использовать данную схему, необходимо промежуточное нажатие на кнопку остановки.
Так как управление работой двигателя с такой схемой усложняется, возникает необходимость в дополнительной защите. В данном случае речь идет об эксплуатации в пускателе нормально-закрытых (размыкающих) контактов. Они необходимы для того, чтобы обеспечить защиту от одновременного нажатия на обе кнопки «Пуск». Их нажатие без остановки приведет к возникновению короткого замыкания. Дополнительные контакты в таком случае препятствуют одновременному включению обоих пускателей. Это происходит из-за того, что при одновременном нажатии один из них включится на секунду позже второго. За это время первый контактор успеет разомкнуть свои контакты.
Недостаток управления электрическим двигателем с такой схемой заключается в том, что пускатели должны обладать большим количеством контактов или же контактными приставками. Любой из этих двух вариантов не только усложняет всю электрическую конструкцию, но еще и удорожает ее сборку.
Третья разновидность схемы управления
Основное отличие данной схемы системы управления двигателем от предыдущей в том, что в цепи каждого из контакторов, кроме общей кнопки «Стоп», имеется еще по два контакта. Если рассматривать первый контактор, то в его цепи имеется дополнительный контакт у SB2 — это нормально-открытый (замыкающий), а SB3 имеет нормально-закрытый (размыкающий) контакт. Если рассматривать схему подключения второго электромагнитного пускателя, то его кнопка «Пуск» будет иметь те же контакты, но расположенные наоборот относительно первого.
Таким образом удалось добиться того, что при нажатии на одну из них при работающем двигателе цепь уже эксплуатирующейся будет размыкаться, а другая, наоборот, замыкаться. У такого типа подключения имеется несколько преимуществ. Во-первых, данная схема не нуждается в защите от одновременного включения, а значит, отпадает необходимость в наличии дополнительных контактов. Во-вторых, появляется возможность выполнения реверсом без промежуточного нажатия на «Стоп». При таком подключении эта контактор используется лишь для полной остановки работающего АД.
Стоит отметить, что рассмотренные схемы управления пуском двигателя являются несколько упрощенными. В них не рассматривается наличие различных дополнительных аппаратов защиты, элементов сигнализации. Кроме того, в некоторых случаях возможно осуществлять питание электромагнитной катушки пускателя от источника в 380 В. В таком случае появляется возможность подключения лишь от двух фаз, к примеру А и В.

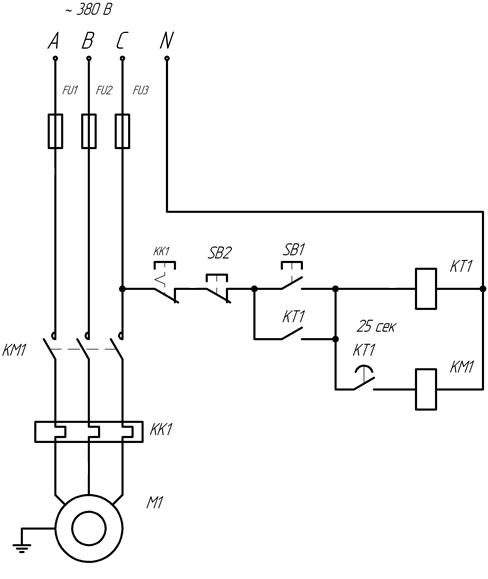
Схема управления с прямым пуском и функцией времени
Запуск двигателя осуществляется как обычно — кнопкой, после чего напряжение будет подаваться на катушку пускателя, которая подключит АД к источнику питания. Особенность схемы состоит в следующем: вместе с замыканием контактов у пускателя (КМ) произойдет замыкание одного из его контактов в другой цепи (КТ). Из-за этого происходит замыкание цепи, в которой располагается контактор торможения (КМ1). Но его срабатывание в этот момент не осуществляется, так как перед ним располагается размыкающий контакт КМ.
Для отключения служит другая кнопка, размыкающая цепь КМ. В это время осуществляется отключение устройства от сети переменного тока. Однако же вместе с этим происходит замыкание контакта, который находился в цепи реле торможения, который ранее упоминался как КМ1, а также осуществляется отключение цепи в реле времени, которое обозначается как КТ. Именно это приводит к тому, что в работу включается контактор КМ1. В этом случае осуществляется переход схемы управления двигателем на постоянный ток. То есть подача питающего напряжения осуществляется от встроенного источника через выпрямитель, а также резистор. Все это приводит к тому, что агрегат осуществляет динамическое торможение.
Однако на этом работа схемы не заканчивается. В цепи имеется реле времени (КТ), которое начинает отсчет времени торможения сразу после того, как отключается от питания. Когда отведенное время на отключение двигателя истекает, КТ размыкает свой контакт, который имеется в цепи КМ1, он отключается, из-за чего подача тока постоянного типа на двигатель также останавливается. Только после этого происходит полная остановка, и можно считать, что схема управления двигателем вернулась в начальное положение.
Что касается интенсивности торможения, то ее можно регулировать силой постоянного тока, который следует через резистор. Для этого нужно выставить необходимое сопротивление на данном участке.
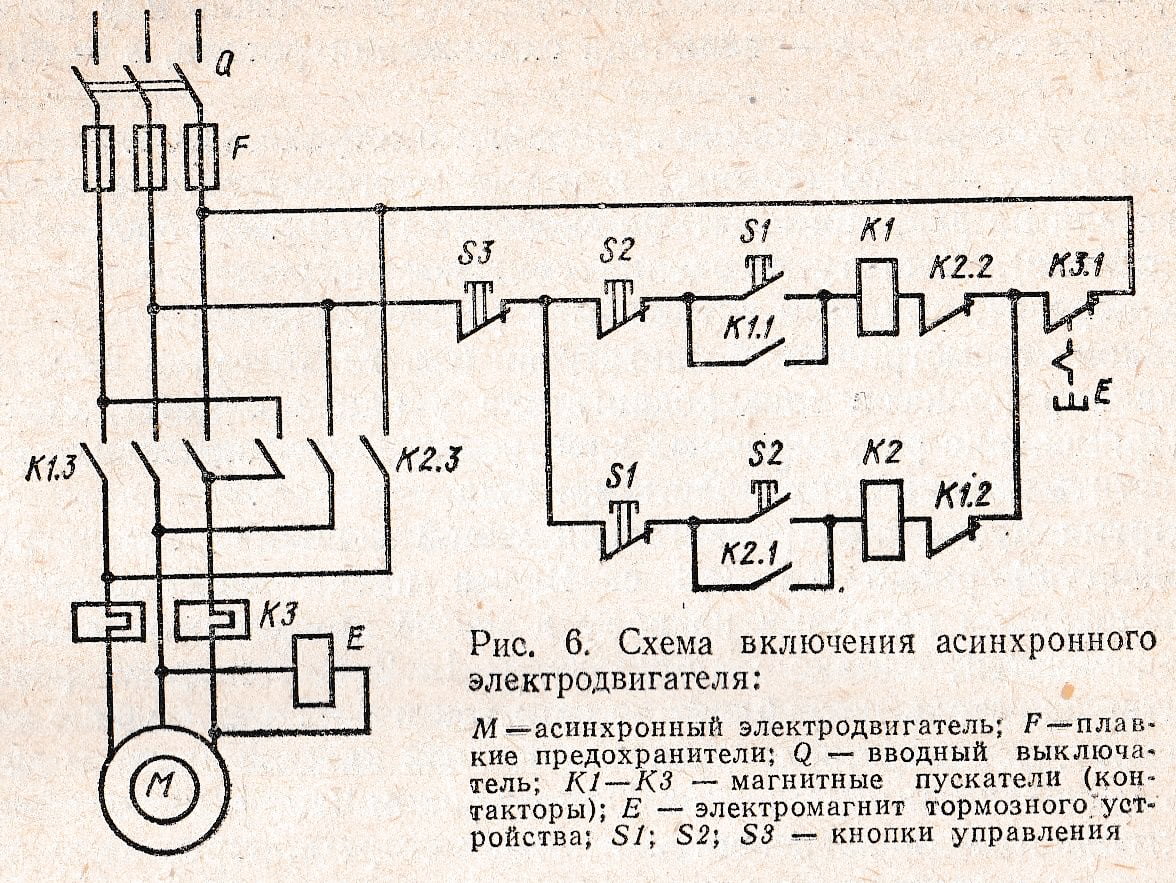
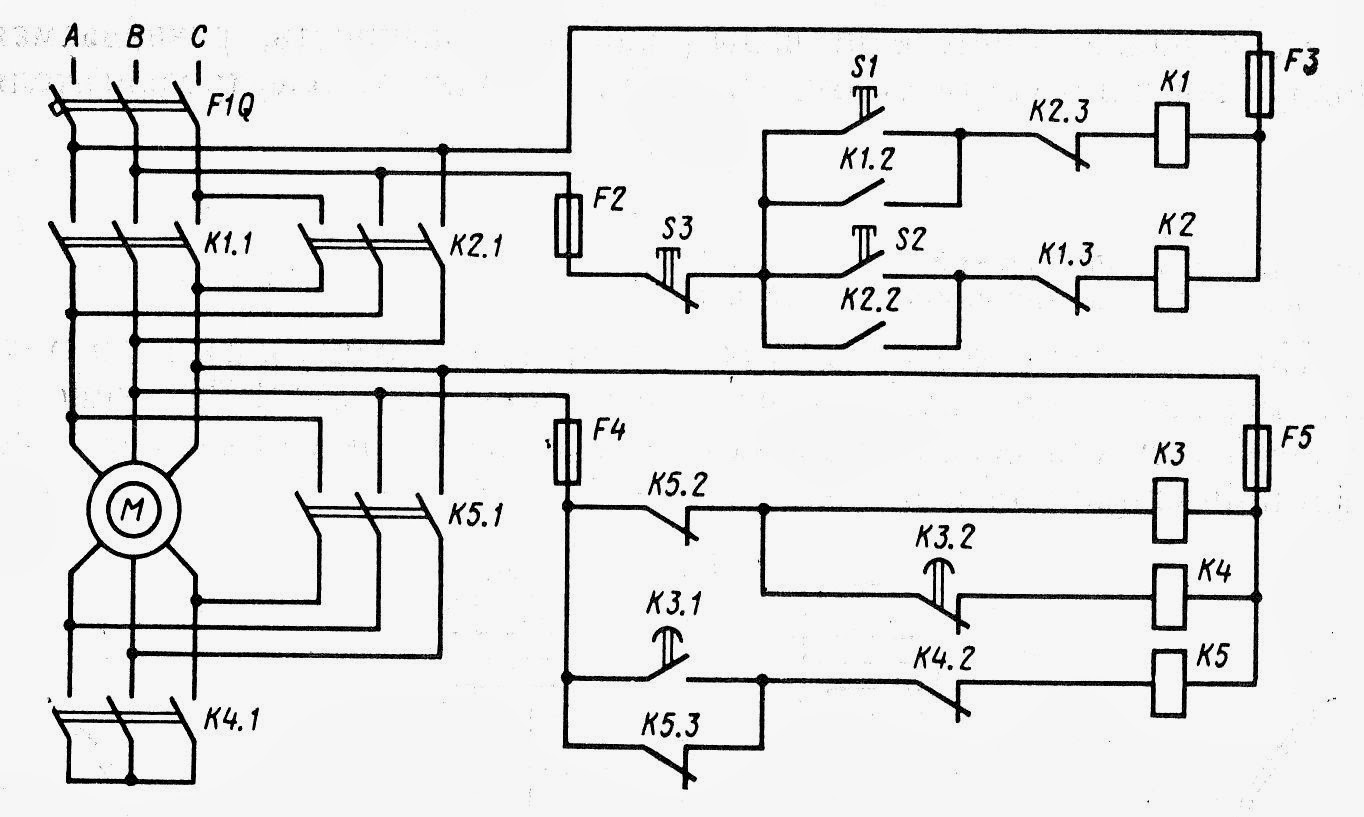
Схема для работы многоскоростного двигателя
Такая схема управления может обеспечить возможность получения двух скоростей двигателя. Для этого осуществляется подключение секций полуобмоток статора в двойную звезду или же в треугольник. Кроме того, в таком случае также обеспечивается возможность реверсирования. Чтобы избежать неисправностей системы управления двигателем, в такой сложной цепи имеется два тепловых реле, а также предохранитель. На схемах они обычно маркируются как КК1, КК1 и FA соответственно.
Изначально возможен пуск ротора с низкой частотой вращения. Для этого в схеме обычно предусмотрена кнопка, которая помечается как SB4. После ее нажатия происходит запуск на низкой частоте. Статор прибора в таком случае подключается по схеме обычного треугольника, а имеющееся реле замыкает два контактора и подготавливает двигатель к подключению питания от источника. После этого нужно нажать на кнопку SB1 или SB2, чтобы определить направление вращения — «Вперед» или «Назад» соответственно.
Когда разбег до низких частот осуществлен, появляется возможность разогнать двигатель до высоких показателей вращения. Для этого нажимается кнопка SB5, которая отключает один из контакторов от схемы и подключает другой. Если рассматривать это действие с точки зрения работы цепи, то подается команда на переход от треугольника на звезду двойного типа. Для того чтобы полностью остановить работу, имеется кнопка «Стоп», которая на схемах маркируется как SB3.
Кнопочный пост
Данное оборудование предназначается для коммутации, то есть соединения цепей, в которых протекает переменный ток с максимальным напряжением в 660 В и частотой 50 или 60 Гц. Можно эксплуатировать такие устройства и в сетях с постоянным током, но тогда максимальное рабочее напряжение ограничивается 440 В. Возможно применение даже в качестве пульта управления.

Обычный кнопочный пост имеет следующие особенности своей конструкции:
- Каждая из его кнопок лишена фиксации.
- Имеется кнопка «Пуск», которая чаще всего имеет не только зеленый цвет, но и контакты нормально-разведенного типа. Некоторые модели даже обладают подсветкой, которая включается после нажатия. Предназначение — введение в работу какого-либо механизма.
- «Стоп» — это кнопка, обладающая красным цветом (чаще всего). Располагается она на замкнутых контактах, а ее основное предназначение — это отключение какого-либо прибора от источника питания с целью остановки его работы.
- Отличие между некоторыми приборами состоит в материале, который используется для изготовления каркаса. Он может быть сделан из металла или пластмассы. В данном случае корпус играет важную роль, так как имеет определенную степень защиты, зависящую от материала.
Основные преимущества
Среди основных преимуществ таких приборов выделяются следующие:
- комплектация данного прибора не всегда может быть стандартной, она может корректироваться по пожеланиям заказчика;
- корпус обычно изготавливается из негорючей тугоплавкой пластмассы или же из металла;
- имеется хорошая герметизация, которая достигается за счет наличия резиновой прокладки между крышкой и контактами внутри;
- уплотнитель для данного кнопочного поста находится под хорошей защитой от воздействия каких-либо агрессивных факторов со стороны окружающей среды;
- сбоку имеется дополнительное отверстие, чтобы было удобно вводить нужный кабель;
- все крепления, имеющиеся у поста, изготавливаются из высокопрочной нержавеющей стали.
Тип постов
Существует три типа поста — это ПКЕ, ПКТ и ПКУ. Первый обычно применяется для работы со станками для деревообработки промышленного или домашнего назначения. ПКУ применяется в промышленности, но лишь на тех объектах, где отсутствует опасность взрыва, а концентрация пыли и газа не поднимается выше того уровня, который способен вывести устройство из строя. ПКТ — это именно те посты, которые могут использоваться в схемах управления трехфазными асинхронными двигателями с короткозамкнутым ротором, а также другими двигателями электротехнического типа. Кроме того, они также активно используются для управления таким оборудованием, как кран-балки, мостовые краны и прочие устройства, предназначенные для подъема тяжелого груза.
С короткозамкнутым ротором — Студопедия
Типовые схемы управления асинхронным двигателем
Типовые схемы управления асинхронным двигателем с фазным ротором
Типовые схемы управления асинхронным двигателем с короткозамкнутым ротором
Вопросы
Асинхронными двигателями
Типовые узлы и схемы управления ЭП с
Лекция №8
Типовые схемы релейно-контакторного управления АД строятся по тем же принципам, что и ДПТ.
Двигатели этого типа малой и средней мощности обычно пускаются прямым подключением к сети без ограничения пусковых токов. В этих случаях они управляются с помощью магнитных пускателей, которые одновременно обеспечивают и некоторые виды их защиты.
 |
Рисунок 1 — Схема управления короткозамкнутым АД с магнитным пускателем
Схема управления асинхронным двигателем с использованием магнитного пускателя (рис.1) включает в себя магнитный пускатель, состоящий из контактора КМ и трех встроенных в него тепловых реле защиты КК. Схема обеспечивает прямой (без ограничения тока и момента) пуск АД, отключение его от сети, а также защиту цепей управления от коротких замыканий (предохранители FU), а электродвигателя от коротких замыканий (автоматический выключатель QF) и перегрузки (тепловые реле КК). Для пуска АД замыкают выключатель QF и нажимают кнопку пуска SB1. Получает питание катушка магнитного пускателя КМ и силовыми контактами в цепи статора АД подключает его к источнику питания, а вспомогательным контактом шунтирует кнопку SB1. Происходит разбег АД по его естественной характеристике. Для отключения АД нажимается кнопка остановки SB2, контактор КМ теряет питание и отключает АД от сети. Начинается процесс торможения АД выбегом под действием момента нагрузки на его валу.
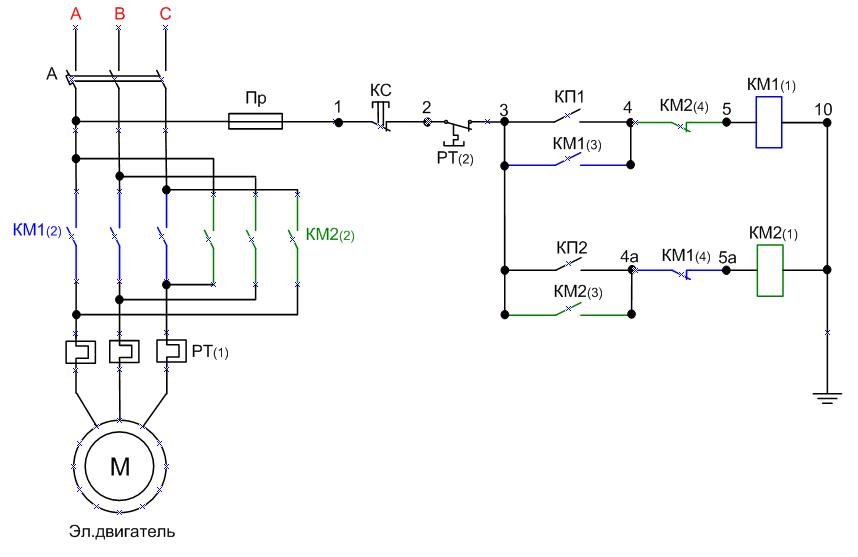
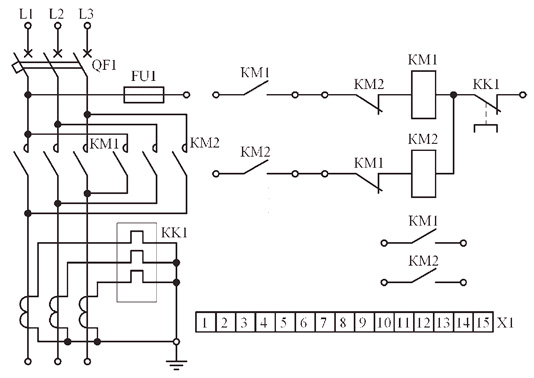
Реверсивная схема управления асинхронным двигателем. Основным элементом этой схемы является реверсивный магнитный пускатель, который включает в себя два линейных контактора КМ1 и КМ2 и тепловое реле КК (рисунок 2).
 |
Рисунок 2 — Схема управления короткозамкнутым АД с
реверсивным магнитным пускателем
Схема обеспечивает прямой пуск и реверс АД, а также торможение противовключением при ручном (неавтоматическом) управлении.
В схеме предусмотрена защита от перегрузок АД (реле КК) и коротких замыканий в цепях статора (автоматический выключатель QF) и управления (предохранители FU). Кроме того, схема управления осуществляет нулевую защиту от исчезновения напряжения сети (контакторы КМ1 и КМ2).
Пуск двигателя в условных направлениях «Вперед» или «Назад» осуществляется нажатием соответственно кнопок SB1 или SB2. Это приводит к срабатыванию контактора КМ1 или КМ2 и подключению АД к сети (при включенном автоматическом выключателе QF).
Для реверса или торможения АД вначале нажимается кнопка SB3, что приводит к отключению включенного до сих пор контактора (например, КМ1), после чего нажимается кнопка SB2. Это приводит к включению контактора КМ2 и подаче на АД напряжения источника питания с другим порядком чередования фаз. Магнитное поле АД изменяет свое направление вращения и начинается процесс реверса, состоящий из двух этапов—торможения противовключением и разбега в противоположную сторону.
В случае необходимости только затормозить АД, должна быть нажата кнопка SB3, что приведет к отключению АД от сети и возвращению схемы в исходное положение.
Во избежание короткого замыкания в цепи статора, которое может возникнуть в результате одновременного ошибочного нажатия кнопок SB1 и SB2, в реверсивных магнитных пускателях иногда предусматривается специальная механическая блокировка. Она представляет собой рычажную систему, которая предотвращает втягивание одного контактора, если включен другой. В дополнение к механической блокировки в схеме используется типовая электрическая блокировка, применяемая в реверсивных схемах управления. Она предусматривает перекрестное включение размыкающих контактов аппарата КМ1 в цепи катушки аппарата КМ2 и наоборот.
Отметим, что повышению надежности и удобства в эксплуатации способствует использование в схеме воздушного автоматического выключателя QF. Его наличие исключает возможность работы привода при обрыве одной фазы, при однофазном коротком замыкании, как это имеет место при установке предохранителей, а также он не требует замены элементов (как в предохранителях при сгорании их плавкой вставки).
Схема управления многоскоростным асинхронным двигателем обеспечивает получение двух скоростей АД путем соединения секций обмотки статора в треугольник или двойную звезду.
Типовая схема управления асинхронным двигателем, обеспечивающая прямой пуск и динамическое торможение в функции времени.
Пуск двигателя осуществляется нажатием кнопки SB1 (рис. 3), после чего срабатывает линейный контактор КМ, подключающий двигатель к источнику питания. Одновременно с этим замыкание контакта КМ в цепи реле времени КТ вызовет его срабатывание и замыкание его контакта в цепи контактора торможения КМ1. Однако последний не срабатывает, так как перед этим разомкнулся в этой цепи размыкающий контакт КМ.
 |
Рисунок 3 — Схема управления пуском и динамическим торможением
короткозамкнутого АД
Для остановки АД нажимается кнопка SB2. Контактор КМ отключается, размыкая свои контакты в цепи статора АД и отключая тем самым его от сети переменного тока. Одновременно с этим замыкается контакт КМ в цепи аппарата КМ1 и размыкается контакт КМ в цепи реле КТ. Это приводит к включению контактора торможения КМ1, подаче в обмотки статора постоянного тока от выпрямителя VD через резистор RT и переводу двигателя в режим динамического торможения. Реле времени КТ, потеряв питание, начинает отсчет выдержки времени. Через интервал времени, соответствующий времени останова АД, реле КТ размыкает свой контакт в цепи контактора КМ1, тот отключается, прекращая подачу постоянного тока в цепь статора. Схема возвращается в исходное положение.
Интенсивность динамического торможения регулируется резистором RT, с помощью которого устанавливается необходимый постоянный ток в статоре АД.
Для исключения возможности одновременного подключения статора к источникам переменного и постоянного тока в схеме использована типовая блокировка с помощью размыкающих контактов КМ и КМ1, включенных перекрестно в цепи катушек этих аппаратов.

Динамическое торможение асинхронного двигателя выполняется отключением двигателя от трехфазной сети и подачи постоянного напряжения на любые две обмотки статора (AB, BC или AC). Магнитный поток в обмотках статора, взаимодействует с током ротора, создавая тормозной момент, что приводит к полному останову двигателя.
Пуск асинхронного двигателя с кз ротором
Подача напряжения на управляющую и силовую цепь осуществляется автоматическим выключателем QF. Нажатием кнопкой SB1 “Пуск” запитывается магнитный пускатель КМ1, который срабатывает и замыкает свои контакты:
- КМ1.1 в цепи статора — двигатель запускается
- КМ1.2 — шунтирует кнопку “Пуск”
- КМ1.3 -подает напряжения на реле времени КТ
и размыкает нормально замкнутый контакт КМ1.4 который не даст сработать магнитному пускателю КМ2, после срабатывания реле времени КТ.
 Рисунок.1. Схема управления асинхронным двигателем с короткозамкнутым ротором с динамическим торможением в функции времени
Рисунок.1. Схема управления асинхронным двигателем с короткозамкнутым ротором с динамическим торможением в функции времени
Осатнов асинхронного двигателя с кз ротором
При нажатии кнопки SB2 “Стоп” катушка пускателя КМ1 обесточивается и пускатель одновременно возвращает свои контакты в исходное положение:
- Размыкает КМ1.1 (прекращает подачу электрического тока на обмотку статора) – асинхронный двигатель обесточен.
- Размыкает КМ1.2 — разблокирует кнопку пуска
- Размыкает КМ1.3 — обесточивает реле времени КТ
- Замыкает нормально замкнутый контакт КМ1.4, что приводит подачи напряжения на контактор КМ2, так как контакты реле времени КТ размыкаются не сразу, а через заданный временной интервал. При срабатывании КМ2 на статор асинхронного двигателя подаётся постоянное напряжение, двигатель переходит в режим динамического торможения.
В схеме применено реле времени с выдержкой времени при размыкании. Длительность подачи постоянного напряжения на статор будет равна выдержки реле КТ. После истечении выдержки скорость вала двигателя близка к нулю, контакты КТ размыкаются и обесточивают КМ2 и двигатель отключается от сети.
Для регулировки интенсивности торможения в цепь статора включен регулировочный резистор R. В схеме применена блокировка с помощью размыкающих контактов КМ1.4 и КМ2 для невозможности включения статора двигателя одновременно в сеть постоянного и трехфазного тока.
Электропривод сегодня является основой большинства подъемно-транспортных, обрабатывающих комплексов. Одним из способов их плавной работы является векторное управление асинхронным двигателем, преобразующим электрическую энергию в механическую – вращение приводного вала и связанных с ним механизмов.
Что такое асинхронный двигатель?
Прежде чем переходить к модели, алгоритмам и системам управления электроприводом, нужно точно знать, что он собой представляет. Это позволяет выявить в его цепи такие моменты, которые можно будет использовать для организации плавного изменения ключевых характеристик (частота/скорость вращения, напряжение). Соответственно, можно определить параметры контроллера, разработать технологические карты для его размещения в шкафу и обслуживания.
Работа любого асинхронного двигателя базируется на возбуждении на контактных обмотках магнитного поля при подаче электричества от шкафа управления. Оно возникает на статоре – неподвижной части двигателя, которая состоит из кольцевого сердечника (магнитопровода), собранного из отдельных металлических пластин. Каждая из них имеет концентрические пазы на внутренней стороне кольца, которые при совмещении образуют продольные пазы. Они служат для намотки проволоки, составляющей основу статорной обмотки.

Также асинхронный двигатель имеет подвижную часть – ротор, совмещенный с приводным валом. Он также имеет пластинчатый сердечник с пазами, но уже на внешней стороне. Вместо проволоки используются медные прутки, которые по краям замыкаются пластинами (такой вариант двигателя называется с короткозамкнутым ротором).
За счет того, что частоты вращения магнитных полей статора и ротора отличаются, в обмотках последнего за счет индукции наводится электрический ток. Он, в свою очередь, побуждает электромагнитную силу, приводящую ротор в движение (вращение). Разница частот обычно называется скольжением. Его величина составляет порядка 2…10%.
Как можно управлять скоростью вращения двигателя?
Очевидно, что двигатель в обычном режиме работы от сети (электрического шкафа) имеет стандартную скорость/частоту вращения. Это ограничивает прямое его использование, вынуждая применять различные редукторные механизмы для понижения частоты до требуемой. Но даже тогда нет возможности динамично менять обороты, а вместе с ними, мощность, подачу, поскольку все равно остаются фиксированными частоты на выходе из двигателя и редуктора. Для расширения существующих рамок используют разные способы управления (частотные, импульсные, фазные и т. д), которые можно разделить на две большие группы:
- Скалярное. Как правило, используется на приводных двигателях компрессорных, вентиляторных, насосных и прочих механизмов, где требуется контроль скорости вращения или любого другого параметра, связанного с датчиками,
- Векторное. Это усовершенствованная концепция, которая предполагает раздельный, независимый контроль, изменение момента и магнитного потока. Токосцепление ротора поддерживается на постоянном уровне, что позволяет сохранить максимальный показатель момента.
Управление асинхронным двигателем
Отличие скалярного от векторного управления как раз заключается в возможности осуществления контроля возбуждения (потока). Фактически, он представляется как двигатель постоянного тока, имеющий независимые друг от друга обмотки. Такой подход позволяет создать подобную математическую модель системы работы контроллера.
Формы и схема векторного управления
Все существующие на сегодня системы векторного управления работой двигателей можно разделить на две группы:
- Датчиковые. Блок управления работой двигателя имеет с ним обратную связь по скорости, с помощью расположения на валу соответствующих датчиков,
- Бездатчиковые. Это системы, которые работают без датчиков скорости на основном валу.
Датчиковые системы являются более сложными, так как точность контроля составляет 1:10000. Бездатчиковые системы работают на уровне не более 1:100. Все частотники с учетом уровня создаваемых помех устанавливаются в центральных или отдельных шкафах.
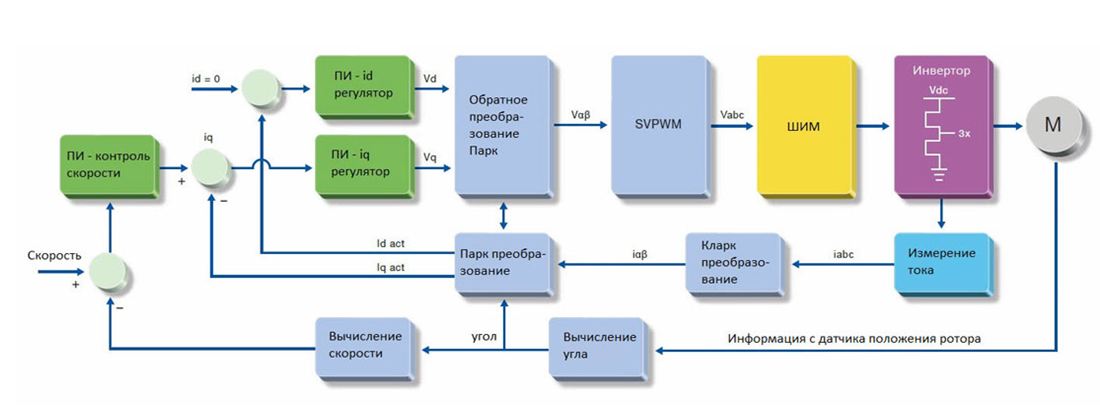
Если представить все выше сказанное как наглядную схему, то получится нечто следующее:
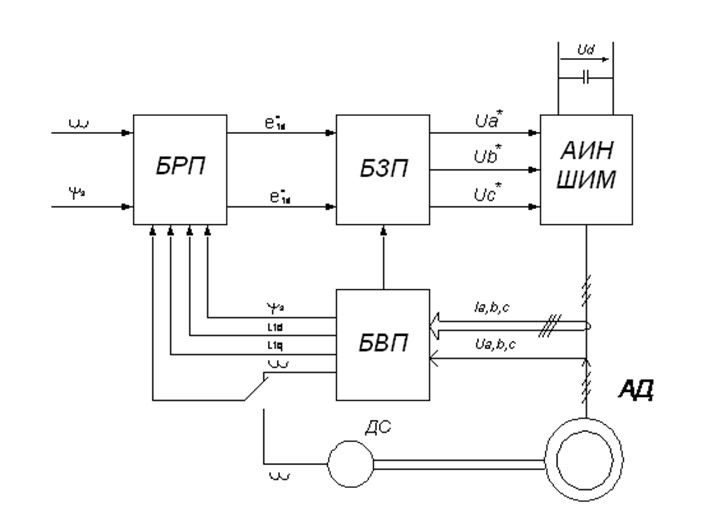
Здесь можно видеть такие ключевые компоненты системы управления, как:
- АД – собственно, асинхронный двигатель (объект контроля),
- БРП – логический блок регуляторов для переменных уравнения,
- БВП – логический блок, отвечающий за вычисления по переменным,
- БЗП – блок, задающий значения переменных,
- ДС – датчик скорости на валу двигателя,
- АИН ШИМ – блок амплитудно-импульсной/широтно-импульсной модуляции.
То, что на схеме отображено в виде блоков, на практике является всего лишь параметрическими элементами цепи управления, которая реализуется на микроконтроллере. Соответственно, сам контроллер и сопутствующие исполнительные механизмы монтируются в электрический шкаф. Для правильного монтажа разрабатывается технологическая карта.
Управление частотными контроллерами
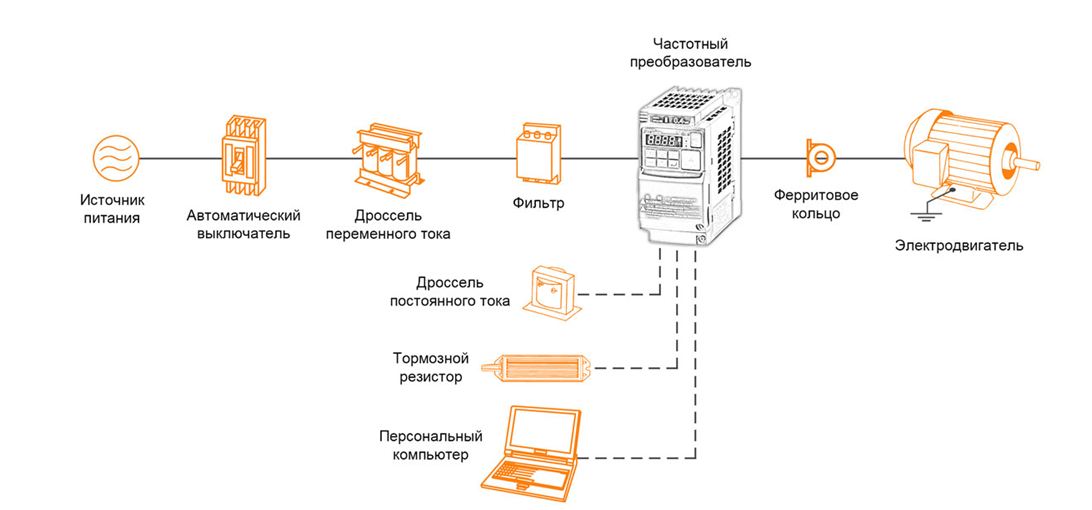
Современные преобразователи частоты тока/напряжения работают и по скалярному, и по векторному варианту, используя параметрические математические модели, реализованные в программном коде встроенного микроконтроллера. Частотники электронного типа работают на тиристорных мостовых схемах и включают следующие основные компоненты:
- Выпрямитель – тиристорный или транзисторный мост, преобразующий переменный ток в постоянный,
- Инвертор – блок АИМ/ШИМ, работающий по обратному принципу, то есть преобразующий постоянный ток в переменный.
Поскольку такой переход так или иначе влияет на форму графика выходного напряжения, то блочный контроллер/частотник может использовать в схеме дросселя и специальные ЕМС фильтры. Последние применяют для снижения интенсивности электромагнитных помех.
Управление частотными контроллерами
Центральный контроллер обеспечивает параметрическое управление схемой, а также вспомогательными задачами, например, диагностикой состояния, защитой от перегрузок и т. п. Сам частотник обычно монтируется в отдельный шкаф, чтобы уменьшить электромагнитные помехи на оборудование.
В целом, векторное управление, организованное на современном контроллере и преобразователе частоты, позволяет добиться плавного регулирования ключевых величин, а также побочных параметров работы оборудования. Ввиду наличия электромагнитных помех при работе, частотники обычно размещают отдельно от основного электрического шкафа.

 Привет, друзья! Надеюсь, у вас все хорошо и все отлично. Я здесь с другой статьей об индукционных двигателях. В этой статье я поделюсь некоторыми базовыми знаниями по асинхронному двигателю с короткозамкнутым ротором. В моей предыдущей статье под названием «3-фазный асинхронный двигатель» я дал краткий обзор этого асинхронного двигателя с короткозамкнутым ротором.
Привет, друзья! Надеюсь, у вас все хорошо и все отлично. Я здесь с другой статьей об индукционных двигателях. В этой статье я поделюсь некоторыми базовыми знаниями по асинхронному двигателю с короткозамкнутым ротором. В моей предыдущей статье под названием «3-фазный асинхронный двигатель» я дал краткий обзор этого асинхронного двигателя с короткозамкнутым ротором.
3-фазный асинхронный двигатель имеет два типа, основанные на конструкции ротора, называемые: асинхронный двигатель с короткозамкнутым ротором и асинхронный двигатель с обмоточным ротором.Бывший дешевле и широко используется, так как требует меньше обслуживания, чем позже. Во-первых, я собираюсь рассказать вам о структуре асинхронного двигателя с короткозамкнутым ротором. Затем я расскажу о принципах работы и особенностях асинхронного двигателя с короткозамкнутым ротором. В последних разделах я поделюсь некоторыми преимуществами и использованием. Проще говоря, тип 3-фазного асинхронного двигателя, который использует короткозамкнутый ротор, называется короткозамкнутым асинхронным двигателем .
Конструкция асинхронного двигателя с короткозамкнутым ротором
Все асинхронные двигатели имеют ротор и статор.По сути, именно конструкция ротора отличает асинхронный двигатель с короткозамкнутым ротором от асинхронного двигателя с обмоткой. Статор одинаков в обоих типах двигателей. Давайте сначала поговорим о статоре асинхронного двигателя с короткозамкнутым ротором :
статора асинхронного двигателя с короткозамкнутым ротором
- Статор — это тот компонент двигателя, который стоит на месте.
- Это самая внешняя рама, в которой находится ротор.
- Имеет углубления на внутренней окружности для переноса электрических цепей.Эта схема возбуждается 3-фазным источником питания
- 3-фазный контур обмотки расположен на пазах. Эти обмотки находятся на расстоянии 120 градусов друг от друга и соединены в форме звезды или треугольника.
- Теперь давайте перейдем к конструкции ротора.
Ротор короткозамкнутого асинхронного двигателя
- Ротор — это вращающаяся часть двигателя. Содержит цилиндрическое ядро.
- Сердечник ротора выполнен в виде ламинирования для уменьшения вихревых токов.
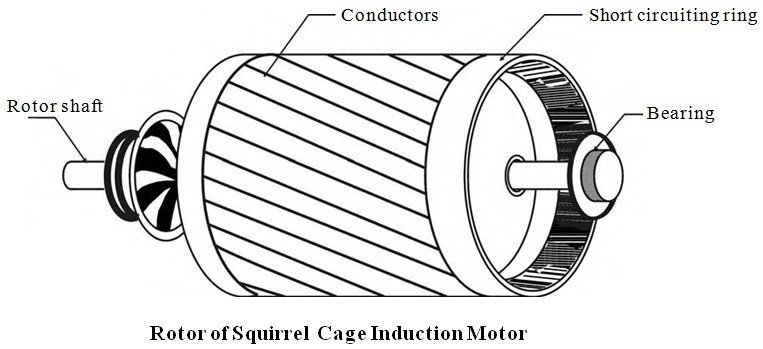
- Ротор короткозамкнутого типа состоит из медных стержней, которые мы называем проводниками.
- Медные шины или проводники длиннее ротора и закреплены в пазах сердечника ротора.
- Эти удлиненные проводники закорочены друг с другом медными кольцами с каждой стороны.
- Также ротор иногда снабжен вентиляторами с каждой стороны для охлаждения.
- Этот тип конструкции стержней и торцевых колец похож на короткозамкнутую клетку, на которой он назван.
- Это все о конструкции ротора. Помимо ротора и статора, двигатель также имеет другие детали для поддержки и защиты узла.
Работа асинхронного двигателя с короткозамкнутым ротором
В этом разделе я поделюсь с вами, ребята, работой асинхронного электродвигателя с короткозамкнутым ротором.
- Когда на обмотку статора подается трехфазное питание, через него начнет течь ток.
- Этот трехфазный переменный ток создаст вращающееся магнитное поле в роторе.
- Скорость вращения этого магнитного поля может быть найдена из частоты источника переменного тока и количества полюсов.
- Эта скорость является синхронной скоростью двигателя.
- Вращающееся магнитное поле статора будет вызывать напряжение в роторе, потому что его линии магнитного потока пересекают ротор. Это индуцированное напряжение будет индуцировать ток в обмотке ротора, и будет генерироваться другое магнитное поле, которое является магнитным полем ротора.
 Как вы все знаете, токопроводящий проводник испытывает на себе силу в присутствии магнитного поля. Ротор также будет испытывать силу, которая начнет его вращать.Эта сила будет создавать крутящий момент, и ротор будет вращаться.
Как вы все знаете, токопроводящий проводник испытывает на себе силу в присутствии магнитного поля. Ротор также будет испытывать силу, которая начнет его вращать.Эта сила будет создавать крутящий момент, и ротор будет вращаться.
Основные характеристики
Теперь я упомяну некоторые важные особенности асинхронного двигателя с короткозамкнутым ротором. Я буду говорить о скорости, пусковом токе, направлении вращения, скольжении и коэффициенте мощности. Первым в списке стоит скорость.
Скорость
Асинхронный двигатель с короткозамкнутым ротором обычно работает с постоянной скоростью. Эта скорость синхронная скорость.
Пусковой ток
Такие двигатели требуют больших пусковых токов.Что может привести к колебаниям напряжения.
Направление вращения
Направление вращения этих двигателей можно изменить, если поменять местами две линии электропередач из трех.
Слип
Как и для других асинхронных двигателей, скольжение определяется как разница в скорости вращения магнитного поля статора и скорости вращения ротора. Скорость вращения магнитного поля называется синхронной скоростью. Скольжение выражается в виде отношения с синхронной скоростью или в процентах.
Коэффициент мощности
Коэффициент мощности — это отношение фактической мощности к полной мощности. Это выражается в процентах. Коэффициент мощности низкий, когда двигатель работает без нагрузки, и высокий, когда двигатель работает с полной нагрузкой.
Преимущества
В этой части я расскажу вам, ребята, о некоторых преимуществах асинхронного двигателя с короткозамкнутым ротором.
- Асинхронные двигатели с короткозамкнутым ротором:
- Недорогие
- Надежность
- Прочный
- Требует меньше обслуживания
- Из-за конструкции ротора с сепаратором им требуется меньше материала.Таким образом, потери меди уменьшаются.
- Из-за отсутствия щеток шансы искры уменьшены.
- Эти двигатели оснащены вентиляторами, поэтому выделяется меньше тепла.
Теперь я перехожу к последнему сегменту моей статьи, где я расскажу вам об использовании асинхронных двигателей с короткозамкнутым ротором.
Использует
Этот тип двигателя находит свое применение в промышленности из-за его стоимости. Они широко используются в промышленности вместо асинхронного двигателя намоточного типа.Они используются в приложениях, где требуется низкий пусковой момент. Такие двигатели также могут быть использованы в качестве генераторов.
РазницаАсинхронный двигатель с короткозамкнутым ротором является наиболее популярным типом двигателя переменного тока. Он очень часто используется в промышленности, потому что он очень дешевый, надежный, эффективный и надежный. Двигатель с контактным кольцом имеет очень небольшое применение в промышленности. Редко 5% — 10% двигателей с контактным кольцом используются в промышленности, потому что у него есть несколько недостатков, таких как необходимость частого технического обслуживания, высокие потери в меди и т. Д.
Одно из основных отличий между токосъемным кольцом и электродвигателем с короткозамкнутым ротором заключается в том, что электродвигатель контактного кольца имеет цепь внешнего сопротивления для управления скоростью двигателя. Принимая во внимание, что в двигателе с короткозамкнутым ротором невозможно добавить какую-либо внешнюю цепь, потому что шина двигателя постоянно прорезана в конце кольца. Некоторые другие различия между ними объяснены ниже в сравнительной таблице.
Сравнительная таблица: Скользящее кольцо V / s Squirrel Cage Motor Сравнительная таблица
Основа для сравнения Двигатель с контактным кольцом Двигатель с короткозамкнутым ротором Определение Ротор двигателя выполнен в виде контактного кольца. Ротор двигателя является короткозамкнутым. Ротор Цилиндрический многослойный сердечник с параллельными пазами и каждый паз состоит из одного стержня. Прорези ротора не параллельны, а перекошены. Другое название Ротор с фазной намоткой Клеточный двигатель Строительство Сложное Простое Сопротивление Добавлен внешний по отношению к ротору Шток ротора постоянно закорочен на конце кольца, поэтому невозможно добавить какое-либо внешнее сопротивление. Стартер Можно использовать стартер сопротивления ротора. Стартер с сопротивлением ротора не может быть использован. Начальный крутящий момент Высокий Низкий Щетки Настоящее время Отсутствие Техническое обслуживание Частое техническое обслуживание требуется Меньше технического обслуживания требуется Медные потери Высокие Низкие Эффективность Низкая Высокая Speed Control Возможно Не возможно Коэффициент мощности Низкий Высокий Стоимость Дорогая Дешевая Пусковой ток Низкий Высокий Использует Используется в подъемниках, кранах, лифтах, где требуется высокий крутящий момент. Используется в токарных станках, вентиляторах, воздуходувках, прибыльных машинах и т. Д.
Определение двигателя с контактным кольцом
Двигатель, в котором используется обмоточный ротор, известен как асинхронный двигатель с контактным кольцом или двигатель с обмоткой фазы. Он состоит из многослойного цилиндрического сердечника, который имеет полузакрытый паз на внешней периферии и имеет трехфазную изолированную обмотку. Ротор намотан на то же количество полюсов, что и статор.
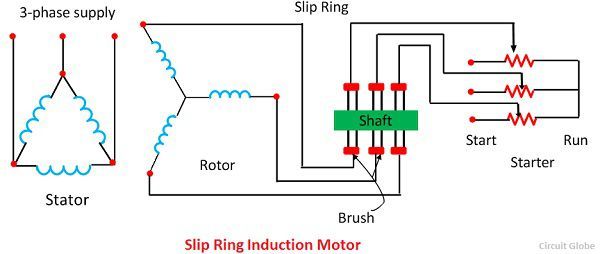
Три конечных клеммы соединены, образуя звездную точку, а три пусковых клеммы подключены к трем медным контактным кольцам, закрепленным на валу.Вал из мягкой стали пропущен через центр ротора и закреплен на ключе. Назначение вала — отправить механическую энергию.
Определение короткозамкнутого двигателя
Двигатель, в котором используется короткозамкнутый ротор типа клетки, известен как короткозамкнутый двигатель. Конструкция ротора прочная и простая. Ротор двигателя состоит из цилиндрического многослойного сердечника, имеющего полузакрытые круглые пазы и короткое замыкание на каждом конце медным или алюминиевым кольцом, называемым кольцом короткого замыкания.Невозможно добавить какое-либо внешнее сопротивление в роторе цепи.
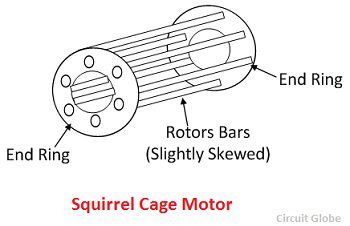
Прорези ротора не параллельны, а перекошены. Перекос ротора имеет следующие преимущества
. Моделирование и анализ асинхронного двигателя с короткозамкнутым ротором с опережающим вводом активной мощности Связи магнитного потока, как видно из уравнений напряжения, являются функциями индуктивности, и поэтому необходимо определить индуктивность в двигателе.
Индуктивности в двигателе состоят из собственной индуктивности, индуктивности рассеяния, индуктивности намагничивания и взаимной индуктивности. Уравнение связи потока показано в уравнении (12) и содержит матрицу индуктивности [L].
λasλbsλcsλarλbrλcr = LasasLasbsLascsLasarLasbrLascrLbsasLbsbsLbscsLbsarLbsbrLbscrLcsasLcsbsLcscsLcsarLcsbrLcscrLarasLarbsLarcsLararLarbrLarcrLbrasLbrbsLbrcsLbrarLbrbrLbrcrLcrasLcrbsLcrcsLcrarLcrbrLcrcr × iasibsicsiaribricrE12
Где индуктивность определяется индексом, например L АСАС относится к индуктивности между обмоткой в и извилистые , как, смысл, что это само индуктивность в обмотке в ; и L asbr относится к индуктивности между обмоткой как и обмоткой br, , означая, что это взаимная индуктивность.
3.2.1. Самоиндуктивность
Самоиндуктивность в обмотках статора состоит из намагничивания и индуктивности рассеяния. Обмотки идентичны, и поэтому собственная индуктивность всех обмоток статора будет одинаковой.
Lasas = Lbsbs = Lcscs = Lms + LlsE13
Индуктивность намагничивания (L мс ) можно выразить как в уравнении (14) (Lipo and Novotny, 1996).
Lms = μ0lrNs2π4gE14
Собственная индуктивность в обмотках ротора аналогична индуктивности обмоток статора.
Larar = Lbrbr = Lcrcr = Lmr + LlrE15
А, Lmr = μ0lrNr2π4gE16
где N с и N r — эффективное число витков обмоток статора и ротора двигателя, r — радиус радиуса, r — радиус сечение, lis длина двигателя, а g — радиальная длина воздушной прослойки.
3.2.2. Взаимная индуктивность
Взаимная индуктивность существует между всеми обмотками как статора, так и ротора. Существует четыре различных типа взаимной индуктивности: статор-статор (взаимная индуктивность между двумя различными обмотками статора), ротор-ротор (взаимная индуктивность между двумя различными обмотками ротора), статор-ротор (взаимная индуктивность между статором и обмоткой ротора) и ротор-статор (взаимная индуктивность между ротором и обмоткой статора).
Взаимная индуктивность статора и статора может быть выражена уравнением (17) (Lipo and Novotny, 1996).
Lxsys = μ0lrNs2π4gcosθxsysE17
Где L xsys — индуктивность между любой обмоткой статора « x » и любой другой обмоткой статора « y» и θxsysis угол между обмоткой статора « x » ‘.
Используя уравнение (14), уравнение (17) можно изменить следующим образом:
Lxsys = LmscosθxsysE18
При рассмотрении распределения обмоток на рисунке 2 видно, что единственно возможное смещение между двумя обмотками статора составляет 120˚. и 240˚ в обе стороны.Это означает, что уравнение cosθxsysin (18) можно оценить следующим образом:
cosθxsys = cos ± 120 ° = cos ± 240 ° = -12E19
Из уравнений (18) и (19) выражение, описывающее взаимную индуктивность между любые две обмотки статора можно упростить до уравнения (20).
Lasbs = Lascs = Lbscs = Lbsas = Lcsas = Lcsbs = -12LmsE20
Взаимные индуктивности ротора-ротора аналогичны взаимным индуктивностям статора и статора и могут быть выражены как:
Larbr = Larcr = Lbrcr = Lbrar = Lcrar = Lcrbr = -12LmrE21
Взаимные индуктивности статора и ротора зависят от положения ротора в соответствии со следующим соотношением.
Lxsyr = LsrcosθxsyrE22
Где Lxsyris взаимная индуктивность между любой обмоткой статора « x » и любой обмоткой ротора « y »; и θxsyris угол между ними.
Выражение для уравнения Лсрина (22) задается уравнением (23).
Lsr = Ns2Nr2μ0πrlgE23
(Krause, 1986, Lipo and Novotny, 1996)
Теперь, используя уравнение (22) и рисунок 2, можно вывести выражения для взаимных индуктивностей статора и ротора.
Ласар = Lbsbr = Lcscr = LsrcosθrE24
Ласбр = Lbscr = Lcsar = Lsrcosθr + 2π3E25
Lascr = Lbsar = Lcsbr = Lsrcosθr-2π3E26
-й риторикаторы-й риторикаторы лекаритовских делителей
Ликэтес
-й риторикаторы Ликэтс
Ликэра = Lbrbs = Lcrcs = Lsrcos (-θr) E27
Larbs = Lbrcs = Lcras = Lsrcos2π3-θrE28
Larcs = Lbras = Lcrbs = Lsrcos4π3-θrE29
В настоящее время все индуктивности уже определены.Теперь можно построить полную матрицу индуктивности, но для упрощения работы матрица индуктивности в уравнении (12) сначала делится на подматрицы. Матрица индуктивности, как в уравнении (12), повторяется как уравнение (30).
L = LasasLasbsLascsLasarLasbrLascrLbsasLbsbsLbscsLbsarLbsbrLbscrLcsasLcsbsLcscsLcsarLcsbrLcscrLarasLarbsLarrsLarrLarbrLarcrLbrasLbrbsLbrcsLcr LBLBrLrBLrBLrBLrBLrBLBrLcr LBLBLRBLcr
L = LsLSRLRSLrE31
Где Lsis — индуктивность в обмотках статора, Lris — индуктивность в обмотках ротора, LSR — индуктивность между обмоткой статора и ротора, а LRS — индуктивность между обмоткой ротора и статора.
Использование уравнения (30) и деление в соответствии с уравнением (31) и замена индуктивностей дают следующее:
Ls = Lms + Lls-12Lms-12Lms-12LmsLms + Lls-12Lms-12Lms-12LmsLms + LlsE32
Lr = Lmr + Llr-12Lmr-12Lmr-12LmrLmr + Llr-12Lmr-12Lmr-12LmrLmr + LlrE33
LSR = Lsrcosθrcos (θr + 2π3) cos (θr-2π3) cos (θr + 2 cos3 (θr) πr 2π 2 cos (θr + 2π3) cos (θr-2π3) cosθrE34
LRS = LSRT = Lsrcosθrcos (θr-2π3) cos (θr + 2π3) cos (θr + 2π3) cosθrcos (θr-2π3) cos (θr-2π3) cos (θr + 2π3) cosθrE35
Можно доказать, что LRS = LSRT.
Очевидно, что θ существует в уравнениях (34) и (35), где θr относится к положению ротора, это положение ротора непрерывно изменяется, что означает, что в естественном состоянии индуктивности меняются со временем. Чтобы получить точную динамическую модель, разъединение должно быть выполнено с использованием теории произвольных систем отсчета, как указано в разделе 2.
Перед преобразованием индуктивностей в произвольную систему отсчета все параметры ротора должны быть отнесены к статору.
Индуктивности намагничивания (Lms, Lmr) и взаимные индуктивности (Lsr, Lrs) находятся на одной и той же траектории магнитного потока и поэтому связаны между собой.Из уравнений (14) и (23) можно сделать вывод, что:
Lms = NsNrLsrE36
При использовании эффективного отношения витков Lsr можно отнести к статору.
L’sr = NsNrLsrE37
И, следовательно,
L’sr = LmsE38
Матрица взаимной индуктивности, относящаяся к статору, теперь может быть выражена как:
L’SR = Lmscosθrcos (θr + 2π3) cos ( θr-2π3) cos (θr-2π3) cosθrcos (θr + 2π3) cos (θr + 2π3) cos (θr-2π3) cosθrE39
Используя тот же подход, индуктивности в обмотках ротора также можно упростить, так как :
L’r = L’lr + Lms-12Lms-12Lms-12LmsL’lr + Lms-12Lms-12Lms-12Lms-12LmsL’lr + LmsE40
Теперь связь потока может быть выражена как:
λabcsλ’abcr = LsL ‘SRL’SRTL’r × iabcsi’abcrE41
Уравнение (41) может быть преобразовано в произвольную систему отсчета, как указано в уравнении (42) (Krause, 1986).
λqd0sλ’qdor = KsLsKs-1KsL’SRKr-1KrL’SRTKs-1KrL’rKr-1 × iqd0si’qd0rE42
Где;
Кс = 23cosθcosθ-2π3cosθ-4π3sinθsinθ-2π3sinθ-4π3121212E43
Кз-1 = cosθsinθ1cosθ-2π3sinθ-2π31cosθ-4π3sinθ-4π31E44
Кр = 23cosβcosβ-2π3cosβ-4π3sinβsinβ-2π3sinβ-4π3121212E45
Кр-1 = cosβsinβ1cosβ-2π3sinβ -2π31cosβ-4π3sinβ-4π31E46
Где;
β = θ-θrE47
Ksis матрица преобразования и Ks-1 матрица обратного преобразования для параметров статора, Kris матрица преобразования и Kr-1 матрица обратного преобразования для параметров ротора.
Оценка уравнения (42) с помощью уравнений (43) — (46) дает связь потока в произвольной системе отсчета, как показано в уравнении (48).
Сравнивая уравнение (48) с уравнениями (32) — (35), становится ясно, что θr исключено из уравнений сцепления потоков с использованием произвольного преобразования системы отсчета. Это означает, что связь потока больше не зависит от положения ротора.
λqsλdsλ0sλ’qrλ’drλ’0r = Lls + 32Lms0032Lms000Lls + 32Lms0032Lms000Lls00032Lms00L’lr + 32Lms00032Lms00L’lr + 32Lms000000L’lr × iqsidsi0si’R0
Прямой запуск асинхронных двигателей с короткозамкнутым ротором Введение
Прямой запуск (Direct On Line, DOL) — это самый простой и экономичный способ запуска двигателя. Это предполагает, что источник питания может легко подавать с большим пусковым током и что компоненты силовой передачи и рабочая машина подходят для высоких пусковых моментов.
 Прямой запуск асинхронных двигателей с короткозамкнутым ротором
Прямой запуск асинхронных двигателей с короткозамкнутым ротором При прямом пуске полюса контактора и защитного устройства двигателя соединяются с проводниками полюсов (Рисунок 1), и через них протекает рабочий ток двигателя.
 Рисунок 1 — Пример двухкомпонентного стартера для прямого запуска, состоящего из автоматического выключателя защиты двигателя и контактора
Рисунок 1 — Пример двухкомпонентного стартера для прямого запуска, состоящего из автоматического выключателя защиты двигателя и контактора Поэтому устройство защиты двигателя должно быть настроено на номинальный рабочий ток двигателя.
Контактор выбирается в соответствии с номинальным рабочим током Ie и соответствующей категорией использования:- AC-3 Асинхронные двигатели с короткозамкнутым ротором: Запуск, выключение во время работы
- AC-4 Асинхронные двигатели с короткозамкнутым ротором: Пуск, включение, включение
Для работы AC-3 всегда необходимо учитывать на практике спорадические операции заправки, например, при вводе в эксплуатацию, в случае неисправностей или при проведении сервисных работ.
Контакторы от Rockwell Automation соответствуют этим требованиям и могут быть оценены без риска согласно значениям AC-3; для большинства устройств номинальные рабочие токи для категорий использования AC-3 и AC-4 одинаковы. Значительная часть операций AC-4 или исключительных операций AC-4 на практике встречается относительно редко. В таких случаях часто требуется высокая частота работы одновременно, и ожидается большой срок службы электричества.
Таким образом, контактор должен быть выбран в соответствии с этими двумя критериями. В большинстве случаев необходимо использовать контактор большего размера, чем это соответствует максимально допустимому номинальному рабочему току AC-4.
Время начала
Время запуска является важным параметром в разработке стартера, поскольку пусковой ток может быть во много раз выше, чем номинальные токи двигателя и распределительного устройства, и, соответственно, подвергает последний тепловой нагрузке.
Это зависит от крутящего момента двигателя и, следовательно, от выбранного способа запуска, а также от характеристики крутящего момента нагрузки.
Разница между крутящим моментом двигателя и крутящим моментом нагрузки заключается в моменте ускорения . В дополнение к резистивному крутящему моменту привода ускоряемая инерционная масса оказывает ключевое влияние на время, необходимое для запуска двигателя.
Продолжительность так называемой без нагрузки, начиная с , т.е.е. запускается без нагрузки привода, как правило, в зависимости от размера двигателя, в диапазоне времени от до 0,1 с примерно 1 с , с под нагрузкой (но без больших масс маховика) с до 5 с . Для центрифуг, шаровых мельниц, каландров, транспортных конвейеров и больших вентиляторов время запуска может быть увеличено до минут .
В случае насосов и вентиляторов следует отметить, что перекачиваемый материал (жидкость, воздух) способствует эффективной инерционной массе.
Приведенные выше приблизительные значения применяются для прямого запуска. Время соответственно увеличивается с помощью методов стартера с уменьшенным пусковым током и крутящим моментом.
Что касается допустимого времени пуска соответствующего двигателя, документация производителя является окончательной .
Реверсивные стартеры
В реверсивном пускателе двигатель переключается через два контактора, по одному для каждого направления. Если двигатель запускается из состояния покоя, контактор выбирается в соответствии с категорией использования AC-3 .
Однако часто направление двигателя изменяется во время его работы (включения), что означает соответственно более высокую нагрузку на контакторы и, следовательно, требует выбора в соответствии с категорией использования AC-4 .
 Рисунок 2 — Реверсивный пускатель с защитными выключателями двигателя и механической блокировкой: схема и схема
Рисунок 2 — Реверсивный пускатель с защитными выключателями двигателя и механической блокировкой: схема и схема Для прямого реверсирования требуется задержка реверса между контакторами — например, посредством кратковременной задержки — около 40 мс , чтобы предотвратить короткое замыкание между фазами.В дополнение к электрической блокировке контакторов реверсивных пускателей рекомендуется механическая блокировка .
Соответствующие меры предосторожности в отношении реверсивных пускателей требуются для подключения с остановкой в состоянии покоя. В этом случае, когда двигатель останавливается, тормозной контактор (например, управляемый датчиком скорости) отключается, и, следовательно, двигатель отключается от источника питания.
Squirrel Cage Motors (ВИДЕО)
Не можете увидеть это видео? Нажмите здесь, чтобы посмотреть его на Youtube.
Ресурс: Аллен Брэдли — распределительное устройство низкого напряжения и распределительное устройство
,
Связи магнитного потока, как видно из уравнений напряжения, являются функциями индуктивности, и поэтому необходимо определить индуктивность в двигателе.
Индуктивности в двигателе состоят из собственной индуктивности, индуктивности рассеяния, индуктивности намагничивания и взаимной индуктивности. Уравнение связи потока показано в уравнении (12) и содержит матрицу индуктивности [L].
λasλbsλcsλarλbrλcr = LasasLasbsLascsLasarLasbrLascrLbsasLbsbsLbscsLbsarLbsbrLbscrLcsasLcsbsLcscsLcsarLcsbrLcscrLarasLarbsLarcsLararLarbrLarcrLbrasLbrbsLbrcsLbrarLbrbrLbrcrLcrasLcrbsLcrcsLcrarLcrbrLcrcr × iasibsicsiaribricrE12
Где индуктивность определяется индексом, например L АСАС относится к индуктивности между обмоткой в и извилистые , как, смысл, что это само индуктивность в обмотке в ; и L asbr относится к индуктивности между обмоткой как и обмоткой br, , означая, что это взаимная индуктивность.
3.2.1. Самоиндуктивность
Самоиндуктивность в обмотках статора состоит из намагничивания и индуктивности рассеяния. Обмотки идентичны, и поэтому собственная индуктивность всех обмоток статора будет одинаковой.
Lasas = Lbsbs = Lcscs = Lms + LlsE13
Индуктивность намагничивания (L мс ) можно выразить как в уравнении (14) (Lipo and Novotny, 1996).
Lms = μ0lrNs2π4gE14
Собственная индуктивность в обмотках ротора аналогична индуктивности обмоток статора.
Larar = Lbrbr = Lcrcr = Lmr + LlrE15
А,Lmr = μ0lrNr2π4gE16
где N с и N r — эффективное число витков обмоток статора и ротора двигателя, r — радиус радиуса, r — радиус сечение, lis длина двигателя, а g — радиальная длина воздушной прослойки.
3.2.2. Взаимная индуктивность
Взаимная индуктивность существует между всеми обмотками как статора, так и ротора. Существует четыре различных типа взаимной индуктивности: статор-статор (взаимная индуктивность между двумя различными обмотками статора), ротор-ротор (взаимная индуктивность между двумя различными обмотками ротора), статор-ротор (взаимная индуктивность между статором и обмоткой ротора) и ротор-статор (взаимная индуктивность между ротором и обмоткой статора).
Взаимная индуктивность статора и статора может быть выражена уравнением (17) (Lipo and Novotny, 1996).
Lxsys = μ0lrNs2π4gcosθxsysE17
Где L xsys — индуктивность между любой обмоткой статора « x » и любой другой обмоткой статора « y» и θxsysis угол между обмоткой статора « x » ‘.
Используя уравнение (14), уравнение (17) можно изменить следующим образом:
Lxsys = LmscosθxsysE18
При рассмотрении распределения обмоток на рисунке 2 видно, что единственно возможное смещение между двумя обмотками статора составляет 120˚. и 240˚ в обе стороны.Это означает, что уравнение cosθxsysin (18) можно оценить следующим образом:
cosθxsys = cos ± 120 ° = cos ± 240 ° = -12E19
Из уравнений (18) и (19) выражение, описывающее взаимную индуктивность между любые две обмотки статора можно упростить до уравнения (20).
Lasbs = Lascs = Lbscs = Lbsas = Lcsas = Lcsbs = -12LmsE20
Взаимные индуктивности ротора-ротора аналогичны взаимным индуктивностям статора и статора и могут быть выражены как:
Larbr = Larcr = Lbrcr = Lbrar = Lcrar = Lcrbr = -12LmrE21
Взаимные индуктивности статора и ротора зависят от положения ротора в соответствии со следующим соотношением.
Lxsyr = LsrcosθxsyrE22
Где Lxsyris взаимная индуктивность между любой обмоткой статора « x » и любой обмоткой ротора « y »; и θxsyris угол между ними.
Выражение для уравнения Лсрина (22) задается уравнением (23).
Lsr = Ns2Nr2μ0πrlgE23
(Krause, 1986, Lipo and Novotny, 1996)
Теперь, используя уравнение (22) и рисунок 2, можно вывести выражения для взаимных индуктивностей статора и ротора.
Ласар = Lbsbr = Lcscr = LsrcosθrE24
Ласбр = Lbscr = Lcsar = Lsrcosθr + 2π3E25
Lascr = Lbsar = Lcsbr = Lsrcosθr-2π3E26
-й риторикаторы-й риторикаторылекаритовских делителей
Ликэтес
-й риторикаторыЛикэтс
Ликэра = Lbrbs = Lcrcs = Lsrcos (-θr) E27
Larbs = Lbrcs = Lcras = Lsrcos2π3-θrE28
Larcs = Lbras = Lcrbs = Lsrcos4π3-θrE29
В настоящее время все индуктивности уже определены.Теперь можно построить полную матрицу индуктивности, но для упрощения работы матрица индуктивности в уравнении (12) сначала делится на подматрицы. Матрица индуктивности, как в уравнении (12), повторяется как уравнение (30).
L = LasasLasbsLascsLasarLasbrLascrLbsasLbsbsLbscsLbsarLbsbrLbscrLcsasLcsbsLcscsLcsarLcsbrLcscrLarasLarbsLarrsLarrLarbrLarcrLbrasLbrbsLbrcsLcr LBLBrLrBLrBLrBLrBLrBLBrLcr LBLBLRBLcr
L = LsLSRLRSLrE31
Где Lsis — индуктивность в обмотках статора, Lris — индуктивность в обмотках ротора, LSR — индуктивность между обмоткой статора и ротора, а LRS — индуктивность между обмоткой ротора и статора.
Использование уравнения (30) и деление в соответствии с уравнением (31) и замена индуктивностей дают следующее:
Ls = Lms + Lls-12Lms-12Lms-12LmsLms + Lls-12Lms-12Lms-12LmsLms + LlsE32
Lr = Lmr + Llr-12Lmr-12Lmr-12LmrLmr + Llr-12Lmr-12Lmr-12LmrLmr + LlrE33
LSR = Lsrcosθrcos (θr + 2π3) cos (θr-2π3) cos (θr + 2 cos3 (θr) πr 2π 2 cos (θr + 2π3) cos (θr-2π3) cosθrE34
LRS = LSRT = Lsrcosθrcos (θr-2π3) cos (θr + 2π3) cos (θr + 2π3) cosθrcos (θr-2π3) cos (θr-2π3) cos (θr + 2π3) cosθrE35
Можно доказать, что LRS = LSRT.
Очевидно, что θ существует в уравнениях (34) и (35), где θr относится к положению ротора, это положение ротора непрерывно изменяется, что означает, что в естественном состоянии индуктивности меняются со временем. Чтобы получить точную динамическую модель, разъединение должно быть выполнено с использованием теории произвольных систем отсчета, как указано в разделе 2.
Перед преобразованием индуктивностей в произвольную систему отсчета все параметры ротора должны быть отнесены к статору.
Индуктивности намагничивания (Lms, Lmr) и взаимные индуктивности (Lsr, Lrs) находятся на одной и той же траектории магнитного потока и поэтому связаны между собой.Из уравнений (14) и (23) можно сделать вывод, что:
Lms = NsNrLsrE36
При использовании эффективного отношения витков Lsr можно отнести к статору.
L’sr = NsNrLsrE37
И, следовательно,
L’sr = LmsE38
Матрица взаимной индуктивности, относящаяся к статору, теперь может быть выражена как:
L’SR = Lmscosθrcos (θr + 2π3) cos ( θr-2π3) cos (θr-2π3) cosθrcos (θr + 2π3) cos (θr + 2π3) cos (θr-2π3) cosθrE39
Используя тот же подход, индуктивности в обмотках ротора также можно упростить, так как :
L’r = L’lr + Lms-12Lms-12Lms-12LmsL’lr + Lms-12Lms-12Lms-12Lms-12LmsL’lr + LmsE40
Теперь связь потока может быть выражена как:
λabcsλ’abcr = LsL ‘SRL’SRTL’r × iabcsi’abcrE41
Уравнение (41) может быть преобразовано в произвольную систему отсчета, как указано в уравнении (42) (Krause, 1986).
λqd0sλ’qdor = KsLsKs-1KsL’SRKr-1KrL’SRTKs-1KrL’rKr-1 × iqd0si’qd0rE42
Где;
Кс = 23cosθcosθ-2π3cosθ-4π3sinθsinθ-2π3sinθ-4π3121212E43
Кз-1 = cosθsinθ1cosθ-2π3sinθ-2π31cosθ-4π3sinθ-4π31E44
Кр = 23cosβcosβ-2π3cosβ-4π3sinβsinβ-2π3sinβ-4π3121212E45
Кр-1 = cosβsinβ1cosβ-2π3sinβ -2π31cosβ-4π3sinβ-4π31E46
Где;
β = θ-θrE47
Ksis матрица преобразования и Ks-1 матрица обратного преобразования для параметров статора, Kris матрица преобразования и Kr-1 матрица обратного преобразования для параметров ротора.
Оценка уравнения (42) с помощью уравнений (43) — (46) дает связь потока в произвольной системе отсчета, как показано в уравнении (48).
Сравнивая уравнение (48) с уравнениями (32) — (35), становится ясно, что θr исключено из уравнений сцепления потоков с использованием произвольного преобразования системы отсчета. Это означает, что связь потока больше не зависит от положения ротора.
λqsλdsλ0sλ’qrλ’drλ’0r = Lls + 32Lms0032Lms000Lls + 32Lms0032Lms000Lls00032Lms00L’lr + 32Lms00032Lms00L’lr + 32Lms000000L’lr × iqsidsi0si’R0
Введение
Прямой запуск (Direct On Line, DOL) — это самый простой и экономичный способ запуска двигателя. Это предполагает, что источник питания может легко подавать с большим пусковым током и что компоненты силовой передачи и рабочая машина подходят для высоких пусковых моментов.
Прямой запуск асинхронных двигателей с короткозамкнутым роторомПри прямом пуске полюса контактора и защитного устройства двигателя соединяются с проводниками полюсов (Рисунок 1), и через них протекает рабочий ток двигателя.
Рисунок 1 — Пример двухкомпонентного стартера для прямого запуска, состоящего из автоматического выключателя защиты двигателя и контактораПоэтому устройство защиты двигателя должно быть настроено на номинальный рабочий ток двигателя.
Контактор выбирается в соответствии с номинальным рабочим током Ie и соответствующей категорией использования:- AC-3 Асинхронные двигатели с короткозамкнутым ротором: Запуск, выключение во время работы
- AC-4 Асинхронные двигатели с короткозамкнутым ротором: Пуск, включение, включение
Для работы AC-3 всегда необходимо учитывать на практике спорадические операции заправки, например, при вводе в эксплуатацию, в случае неисправностей или при проведении сервисных работ.
Контакторыот Rockwell Automation соответствуют этим требованиям и могут быть оценены без риска согласно значениям AC-3; для большинства устройств номинальные рабочие токи для категорий использования AC-3 и AC-4 одинаковы. Значительная часть операций AC-4 или исключительных операций AC-4 на практике встречается относительно редко. В таких случаях часто требуется высокая частота работы одновременно, и ожидается большой срок службы электричества.
Таким образом, контактор должен быть выбран в соответствии с этими двумя критериями. В большинстве случаев необходимо использовать контактор большего размера, чем это соответствует максимально допустимому номинальному рабочему току AC-4.
Время начала
Время запуска является важным параметром в разработке стартера, поскольку пусковой ток может быть во много раз выше, чем номинальные токи двигателя и распределительного устройства, и, соответственно, подвергает последний тепловой нагрузке.
Это зависит от крутящего момента двигателя и, следовательно, от выбранного способа запуска, а также от характеристики крутящего момента нагрузки.
Разница между крутящим моментом двигателя и крутящим моментом нагрузки заключается в моменте ускорения . В дополнение к резистивному крутящему моменту привода ускоряемая инерционная масса оказывает ключевое влияние на время, необходимое для запуска двигателя.
Продолжительность так называемой без нагрузки, начиная с , т.е.е. запускается без нагрузки привода, как правило, в зависимости от размера двигателя, в диапазоне времени от до 0,1 с примерно 1 с , с под нагрузкой (но без больших масс маховика) с до 5 с . Для центрифуг, шаровых мельниц, каландров, транспортных конвейеров и больших вентиляторов время запуска может быть увеличено до минут .
В случае насосов и вентиляторов следует отметить, что перекачиваемый материал (жидкость, воздух) способствует эффективной инерционной массе.
Приведенные выше приблизительные значения применяются для прямого запуска. Время соответственно увеличивается с помощью методов стартера с уменьшенным пусковым током и крутящим моментом.
Что касается допустимого времени пуска соответствующего двигателя, документация производителя является окончательной .
Реверсивные стартеры
В реверсивном пускателе двигатель переключается через два контактора, по одному для каждого направления. Если двигатель запускается из состояния покоя, контактор выбирается в соответствии с категорией использования AC-3 .
Однако часто направление двигателя изменяется во время его работы (включения), что означает соответственно более высокую нагрузку на контакторы и, следовательно, требует выбора в соответствии с категорией использования AC-4 .
Рисунок 2 — Реверсивный пускатель с защитными выключателями двигателя и механической блокировкой: схема и схемаДля прямого реверсирования требуется задержка реверса между контакторами — например, посредством кратковременной задержки — около 40 мс , чтобы предотвратить короткое замыкание между фазами.В дополнение к электрической блокировке контакторов реверсивных пускателей рекомендуется механическая блокировка .
Соответствующие меры предосторожности в отношении реверсивных пускателей требуются для подключения с остановкой в состоянии покоя. В этом случае, когда двигатель останавливается, тормозной контактор (например, управляемый датчиком скорости) отключается, и, следовательно, двигатель отключается от источника питания.
Squirrel Cage Motors (ВИДЕО)
Не можете увидеть это видео? Нажмите здесь, чтобы посмотреть его на Youtube.
Ресурс: Аллен Брэдли — распределительное устройство низкого напряжения и распределительное устройство
,