Бесколлекторные двигатели с датчиками Холла (Sensored brushless motors) — Avislab
Мы уже ознакомились с устройством бесколлекторного двигателя и теперь разберемся, как ним управлять.
Мостовая схема ключей
Двигатель имеет три вывода (три фазы) на которые нам придется подавать в разные моменты времени «+» или «-» питания. Это реализуется с помощью электронных ключей, включенных по мостовой схеме: Замыкая ключ SW1 подаем «+» на фазу А, а замыкая SW6 подаем «-» на фазу С. Таким образом, ток потечет от «+» батареи через фазы А и С. Для обеспечения обратного направления, открываем SW5 и SW2. В этом случае ток потечет от «+» батареи через фазы С и А в обратном направлении. При работе двигателя одновременно должен быть открыт только один верхний ключ и один нижний ключ. При смене состояния нужно сразу выключить пару ключей, выждать время, необходимое для закрытия ключей, и только после этого включить другую пару ключей.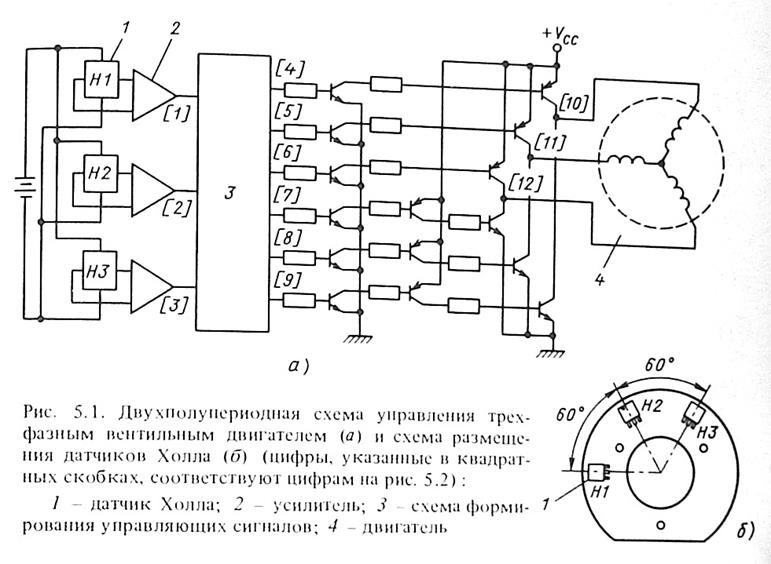
Диаграмма включения ключей
Напряжение на обмотки нужно подавать в зависимости от положения двигателя. Рассмотрим управление двигателем, где в качестве датчиков положения используются датчики Холла. Всего используют 3 датчика с дискретными выходами. Ниже приведена схема, согласно которой нужно подавать напряжение на обмотки в зависимости от сигналов с датчиков. Временная диаграмма:Таблица включения ключей в зависимости от сигналов датчиков Холла:
Анимированная демонстрация работы 4 полюсного двигателя:
ШИМ (PWM), частота, переходные процессы
При включении ключей, как показано выше, на двигатель подается полное напряжение питания. При этом двигатель развивает максимальные обороты (мощность). Чтобы обеспечить управление двигателем нужно регулировать напряжение питания двигателя. Изменение действующего напряжения осуществляется с помощью широтно-импульсной модуляции (ШИМ). Т.е. ключи открыты не все время, а открываются, и закрываются с фиксированной частой, но изменяемой скважностью: Таким образом, изменяется действующее напряжение от нулевого до напряжения питания..JPG.7cbfb0466d442a368ac4258bdbe51da3.JPG) Чтобы добиться управления оборотами двигателя нужно наложить сигнал ШИМ на сигналы, подаваемые на ключи. Это можно реализовать, например, такой схемой:
Чтобы добиться управления оборотами двигателя нужно наложить сигнал ШИМ на сигналы, подаваемые на ключи. Это можно реализовать, например, такой схемой:Некоторые микроконтроллеры могут аппаратно формировать ШИМ сигнал на нескольких своих выводах. Можно формировать ШИМ для каждого из ключей программно. В этом случае схему можно упростить, и не использовать логических элементов. Частота ШИМ сигнала обычно бывает от 4 до 80 килогерц.
Во время включения и выключения ключей происходят переходные процессы, вследствие чего на ключах выделяется дополнительное тепло. Чем выше частота ШИМ сигнала, тем больше количество переходных процессов за единицу времени, и тем выше потери на ключах. Слишком малая частота может быть не эффективной или не обеспечивать необходимой плавности регулирования.
В случае с двигателями без датчиков, которые будут рассматриваться в следующих статьях, выбор частоты ШИМ сигнала играет очень важную роль.
Потери на ключах
Для уменьшения потерь вследствие переходных процессов на ключах ШИМ сигнал можно подавать только на нижние или только на верхние ключи. Прямые потери на ключах (без учета переходных процессов) можно рассчитать по формуле:
Прямые потери на ключах (без учета переходных процессов) можно рассчитать по формуле:P=R*I2
где:
P — теряемая мощность, которая выделяется в виде тепла R — прямое сопротивление открытого ключа I — ток, протекаемый через ключ.
Очевидно, что чем меньше сопротивление ключей, тем меньше потери на ключах. Уменьшение сопротивления ключей ведет к повышению общего КПД и уменьшению тепловыделения на ключах.
Уровень потерь на ключах имеет квадратичную зависимость от тока. Уменьшить ток, сохранив при этом общую мощность, можно повысив напряжение питания двигателя. В качестве примера рассмотрим два варианта:
1. Питание: 50В, ток: 100А, сопротивление ключей: 0,001 Ом. Потери на ключах = 0,001 * 1002 = 10 Вт
2. Питание: 100В, ток: 50А, сопротивление ключей: 0,001 Ом. Потери на ключах = 0,001 * 502 = 2,5 Вт
Т.е. снизив ток вдвое потери на ключах падают в 4 раза.
Угол опережения фаз (timing)
При приложении напряжения к обмотке двигателя, ток в обмотке не может вырасти мгновенно, поскольку обмотка двигателя представляет собой индуктивность. От момента подачи напряжения до достижения тока максимального значения пройдет некоторое время. Аналогично при снятии напряжения понадобится некоторое время пока ток будет уменьшаться до нуля. Это время зависит от индуктивности обмотки двигателя и других конструктивных особенностей двигателя. Таким образом, действие обмотки двигателя несколько запаздывает за управляющим сигналом. На малых скоростях точность установки угла опережения не столь критична.
На малых скоростях точность установки угла опережения не столь критична.Настройка угла опережения (timing) выполняется либо перемещением датчиков (некоторые двигатели оборудованы специальным приспособлением) либо корректируется программно средствами регулятора. Если двигатель имеет реверсивный режим (должен обеспечивать вращение в обе стороны), разумнее прибегнуть к программному методу.
Для лучшего понимания смысла угла опережения можно провести аналогию с двигателем внутреннего сгорания, где после подачи искры проходит некоторое время до воспламенения топлива. За это время вал двигателя успевает провернуться на некоторый угол. Для компенсации такой задержки устанавливают угол опережения зажигания.
Статьи по бесколлекторным моторам:
Управление бесколлекторным двигателем по сигналам обратной ЭДС – понимание процесса
Когда я начал разрабатывать блок управления бесколлекторным двигателем (мотор-колесом), было много вопросов о том, как сопоставить реальный двигатель с абстрактной схемой из трех обмоток и магнитов, на которой, как правило, все объясняют принцип управления бесколлекторными двигателями.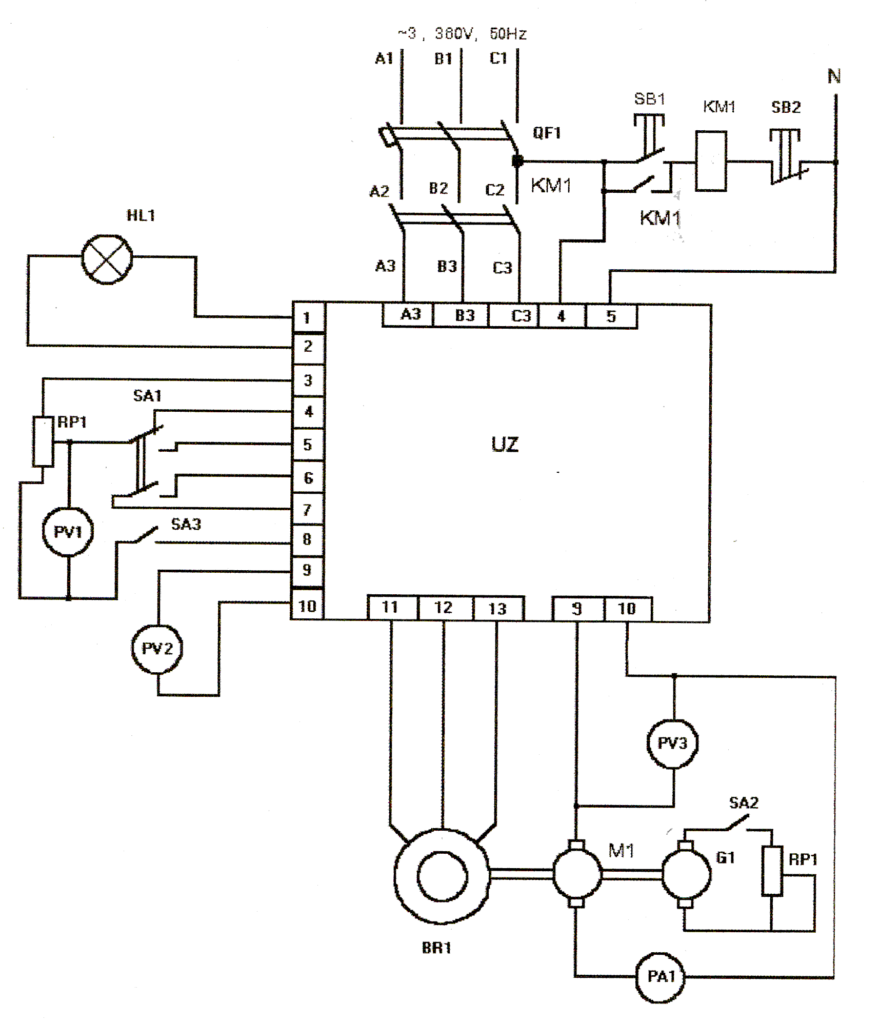
Когда я реализовал управление по датчикам Холла я еще не очень понимал, что происходит в двигателе дальше абстрактных трех обмоток и двух полюсов: почему 120 градусов и почему алгоритм управления именно такой.
Все встало на место, когда я начал разбираться в идее бездатчикового управления бесколлекторным двигателем — понимание процесса, происходящего в реальной железке, помогло разработать аппаратную часть и понять алгоритм управления.
Ниже я постараюсь расписать свой путь к пониманию принципа управления бесколлекторным двигателем постоянного тока.
Для работы бесколлекторного двигателя необходимо чтобы постоянное магнитное поле ротора увлекалось за вращающемся электромагнитным полем статора, как и в обычном ДПТ.
Вращение магнитного поля статора осуществляется коммутацией обмоток с помощью электронного блока управления.
Конструкция бесколлекторного двигателя схожа с конструкцией синхронного двигателя, если подключить бесколлекторный двигатель в трехфазную сеть переменного тока, удовлетворяющую электрическим параметрам двигателя, он будет работать.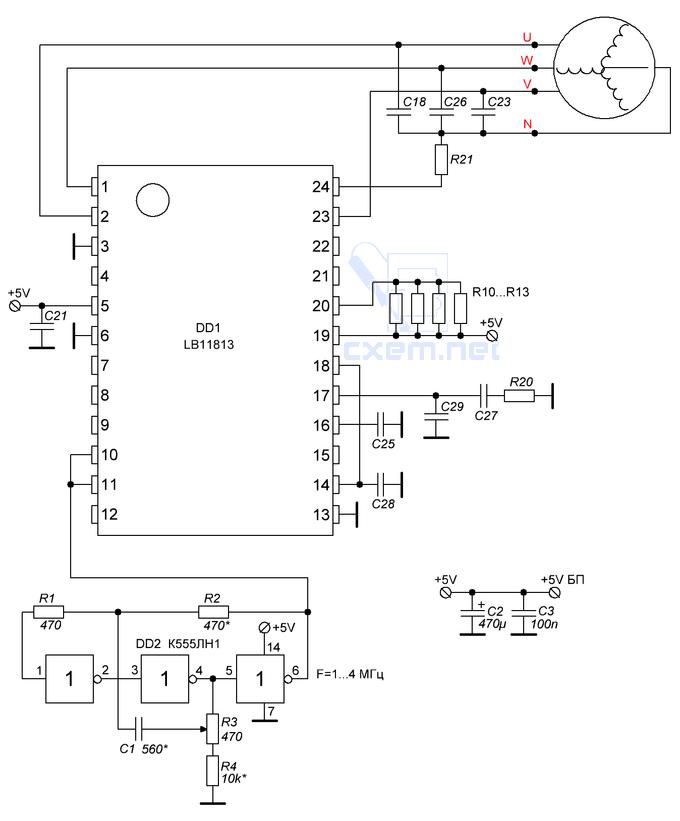
Определенная коммутация обмоток бесколлекторного двигателя позволяет управлять им от источника постоянного тока. Чтобы понять, как составить таблицу коммутаций бесколлекторного двигателя необходимо рассмотреть управление синхронной машиной переменного тока.
Синхронная машина
Синхронная машина управляется от трехфазной сети переменного тока. Двигатель имеет 3 электрические обмотки, смещенные между собой на 120 электрических градусов.
Запустив трехфазный двигатель в генераторном режиме, постоянным магнитным полем будет наводиться ЭДС на каждую из обмоток двигателя, обмотки двигателя распределены равномерно, на каждую из фаз будет наводиться синусоидальное напряжение и данные сигналы будут смещены между собой на 1/3 периода (рисунок 1). Форма ЭДС меняется по синусоидальному закону, период синусоиды равен 2П(360), поскольку мы имеем дело с электрическими величинами (ЭДС, напряжение, ток) назовем это электрическими градусами и будем измерять период в них.
При подаче на двигатель трехфазного напряжения в каждый момент времени на каждой обмотке будет некое значение силы тока.
Рисунок 1. Вид сигнала трехфазного источника переменного тока.
Каждая обмотка формирует вектор магнитного поля пропорциональный току на обмотке. Сложив 3 вектора можно получить результирующий вектор магнитного поля. Так как с течением времени ток на обмотках двигателя меняется по синусоидальному закону, меняется величина вектора магнитного поля каждой обмотки, а результирующий суммарный вектор меняет угол поворота, при этом величина данного вектора остается постоянной.
Рисунок 2. Один электрический период трехфазного двигателя.
На рисунке 2 изображен один электрический период трехфазного двигателя, на данном периоде обозначено 3 произвольных момента, чтобы построить в каждом из этих моментов вектора магнитного поля отложим данный период, 360 электрических градусов, на окружности. Разместим 3 обмотки двигателя сдвинутые на 120 электрических градусов относительно друг друга (рисунок 3).
Разместим 3 обмотки двигателя сдвинутые на 120 электрических градусов относительно друг друга (рисунок 3).
Рисунок 3. Момент 1. Вектора магнитного поля каждой обмотки (слева) и результирующий вектор магнитного поля (справа).
Вдоль каждой из фаз построен вектор магнитного поля, создаваемый обмоткой двигателя. Направление вектора определяется направлением постоянного тока в обмотке, если напряжение, прикладываемое к обмотке положительно, то вектор направлен в противоположную сторону от обмотки, если отрицательное, то вдоль обмотки. Величина вектора пропорциональна величине напряжения на фазе в данный момент.
Аналогично построение для второго и третьего моментов времени.
Рисунок 4. Момент 2. Вектора магнитного поля каждой обмотки (слева) и результирующий вектор магнитного поля (справа).
Так, с течение времени, результирующий вектор плавно меняет свое направление, на рисунке 5 изображены получившиеся вектора и изображен полный поворот магнитного поля статора за один электрический период.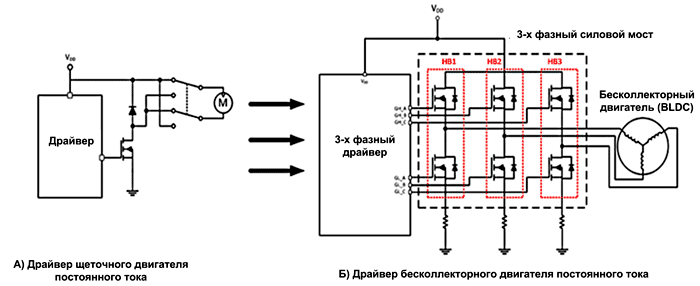
Рисунок 5. Вид вращающегося магнитного поля формируемого обмотками на статоре двигателя.
За этим вектором электрического магнитного поля увлекается магнитное поле постоянных магнитов ротора в каждый момент времени (рисунок 6).
Рисунок 6. Постоянный магнит (ротор) следует направлению магнитного поля формируемого статором.
Так работает синхронная машина переменного тока.
Имея источник постоянного тока необходимо самостоятельно формировать один электрический период со сменой направлений тока на трех обмотках двигателя. Поскольку бесколлекторный двигатель по конструкции такой же, как синхронный, в генераторном режиме имеет идентичные параметры, необходимо отталкиваться от рисунка 5, где изображено сформированное вращающееся магнитное поле.
Постоянное напряжение
Источник постоянного тока имеет только 2 провода «плюс питания» и «минус питания» это значит, что есть возможность подавать напряжение только на две из трех обмоток. Необходимо аппроксимировать рисунок 5 и выделить все моменты, при которых возможно скоммутировать 2 фазы из трех.
Число перестановок из множества 3 равняется 6, следовательно, имеется 6 вариантов подключения обмоток.
Изобразим возможные варианты коммутаций и выделим последовательность, при которой вектор будет шаг за шагом проворачиваться далее пока не дойдет до конца периода и не начнет сначала.
Электрический период будем отсчитывать от первого вектора.
Рисунок 7. Вид шести векторов магнитного поля которые можно создать от источника постоянного тока коммутацией двух из трех обмоток.
На рисунке 5 видно, что при управлении трехфазным синусоидальным напряжением имеется множество векторов плавно проворачивающихся с течением времени, а при коммутации постоянным током возможно получить вращающееся поле только из 6 векторов, то есть переключение на следующий шаг должно происходить каждые 60 электрических градусов.
Результаты из рисунка 7 сведены в таблицу 1.
Таблица 1. Полученная последовательность коммутаций обмоток двигателя.
| Плюс питания | Минус питания | Обмотка не подключена |
| W | U | V |
| W | V | U |
| U | V | W |
| U | W | V |
| V | W | U |
| V | U | W |
Вид получившегося управляющего сигнала в соответствии с таблицей 1 изображен на рисунке 8. Где -V коммутация на минус источника питания (GND), а +V коммутация на плюс источника питания.
Рисунок 8. Вид управляющих сигналов от источника постоянного тока для бесколлекторного двигателя. Желтый – фаза W, синий – U, красный – V.
Однако реальная картина с фаз двигателя будет похожа на синусоидальный сигнал из рисунка 1. У сигнала образуется трапециевидная форма, так как в моменты, когда обмотка двигателя не подключена, постоянные магниты ротора наводят на нее ЭДС (рисунок 9).
Рисунок 9. Вид сигнала с обмоток бесколлекторного двигателя в рабочем режиме.
На осциллографе это выглядит так:
Рисунок 10. Вид окна осциллографа при измерении одной фазы двигателя.
Конструктивные особенности
Как было сказано ранее за 6 переключений обмоток формируется один электрический период 360 электрических градусов.
Необходимо связать данный период с реальным углом вращения ротора. Двигатели с одной парой полюсов и трехзубым статором применяются крайне редко, двигатели имеют N пар полюсов.
На рисунке 11 изображены модели двигателя с одной парой полюсов и с двумя парами полюсов.
а. б.
Рисунок 11. Модель двигателя с одной (a) и с двумя (б) парами полюсов.
Двигатель с двумя парами полюсов имеет 6 обмоток, каждая из обмоток парная, каждая группа из 3 обмоток смещена между собой на 120 электрических градусов.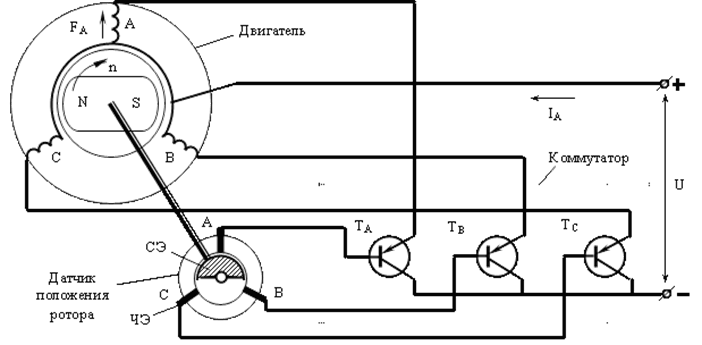 На рисунке 12б. отложен один период для 6 обмоток. Обмотки U1-U2, V1-V2, W1-W2 соединены между собой и в конструкции представляют 3 провода вывода фаз. Для простоты рисунка не отображены соединения, но следует запомнить, что U1-U2, V1-V2, W1-W2 одно и то же.
На рисунке 12б. отложен один период для 6 обмоток. Обмотки U1-U2, V1-V2, W1-W2 соединены между собой и в конструкции представляют 3 провода вывода фаз. Для простоты рисунка не отображены соединения, но следует запомнить, что U1-U2, V1-V2, W1-W2 одно и то же.
На рисунке 12, исходя из данных таблицы 1, изображены вектора для одной и двух пар полюсов.
а. б.
Рисунок 12. Схема векторов магнитного поля для двигателя с одной (a) и с двумя (б) парами полюсов.
На рисунке 13 изображены вектора, созданные 6 коммутациями обмоток двигателя с одной парой полюсов. Ротор состоит из постоянных магнитов, за 6 шагов ротор провернется на 360 механических градусов.
На рисунке обозначены конечные положения ротора, в промежутках между двумя соседними положениями ротор проворачивается от предыдущего к следующему скоммутированному состоянию. Когда ротор достигает данного конечного положения, должно происходить следующее переключение и ротор будет стремиться к новому заданному положению, так чтобы его вектор магнитного поля стал сонаправлен с вектором электромагнитного поля статора.
Когда ротор достигает данного конечного положения, должно происходить следующее переключение и ротор будет стремиться к новому заданному положению, так чтобы его вектор магнитного поля стал сонаправлен с вектором электромагнитного поля статора.
Рисунок 13. Конечные положения ротора при шестиступенчатой коммутации бесколлекторного двигателя с одной парой полюсов.
В двигателях с N парами полюсов необходимо пройти N электрических периодов для полного механического оборота.
Двигатель с двумя парами полюсов будет иметь два магнита с полюсами S и N, и 6 обмоток (рисунок 14). Каждая группа из 3 обмотки смещены друг относительно друга на 120 электрических градусов.
Рисунок 14. Конечные положения ротора при шестиступенчатой коммутации бесколлекторного двигателя с двумя парами полюсов.
Определение положения ротора бесколлекторного двигателя
Как было сказано ранее для работы двигателя необходимо в нужные моменты времени подключать напряжение на нужные обмотки статора.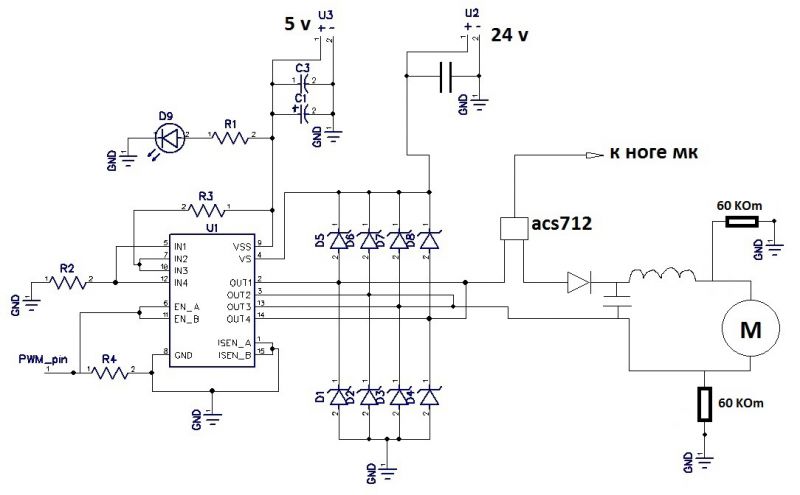 Подавать напряжение на обмотки двигателя нужно в зависимости от положения ротора, так чтобы магнитное поле статора всегда опережало магнитное поле ротора. Для определения положения ротора двигателя и коммутаций обмоток используют электронный блок управления.
Подавать напряжение на обмотки двигателя нужно в зависимости от положения ротора, так чтобы магнитное поле статора всегда опережало магнитное поле ротора. Для определения положения ротора двигателя и коммутаций обмоток используют электронный блок управления.
Отслеживание положения ротора возможно несколькими способами:
1. По датчикам Холла
2. По обратной ЭДС
Как правило, датчиками Холла производители оснащают двигатель при выпуске, поэтому это самый распространённый метод управления.
Коммутирование обмоток в соответствии с сигналами обратной ЭДС позволяет отказаться от датчиков встроенных в двигатель и использовать в качестве датчика анализ свободной фазы двигателя, на которую будет наводиться магнитным полем противо-ЭДС.
Управление бесколлекторным двигателем с датчиками Холла
Чтобы коммутировать обмотки в нужные моменты времени необходимо отслеживать положение ротора в электрических градусах. Для этого применяются датчики Холла.
Поскольку имеется 6 состояний вектора магнитного поля необходимо 3 датчика Холла, которые будут представлять один абсолютный датчик положения с трехбитным выходом. Датчики Холла устанавливаются также как обмотки, смещенные между собой на 120 электрических градусов. Это позволяет использовать магниты ротора в качестве воздействующего элемента датчика.
Рисунок 15. Сигналы с датчиков Холла за один электрический оборот двигателя.
Для вращения двигателя необходимо чтобы магнитное поле статора опережало магнитное поле ротора, положение, когда вектор магнитного поля ротора сонаправлен с вектором магнитного поля статора является конечным для данной коммутации, именно в этот момент должно происходить переключение на следующую комбинацию, чтобы не давать ротору зависать в стационарном положении.
Cопоставим сигналы с датчиков Холла с комбинацией фаз которые необходимо скоммутировать (таблица 2)
Таблица 2. Сопоставление сигналов датчиков Холла с коммутацией фаз двигателя.
| Положение двигателя | HU(1) | HV(2) | HW(3) | U | V | W |
| 0 | 0 | 0 | 1 | 0 | — | + |
| 1 | 0 | 1 | + | — | 0 | |
| 1 | 0 | 0 | + | 0 | — | |
| 1 | 1 | 0 | 0 | + | — | |
| 0 | 1 | 0 | — | + | 0 | |
| 360/N | 0 | 1 | 1 | — | 0 | + |
При равномерном вращении двигателя с датчиков поступает сигнал смещенный на 1/6 периода, 60 электрических градусов (рисунок 16).
Рисунок 16. Вид сигнала с датчиков Холла.
Управление с помощью сигнала обратной ЭДС
Существуют бесколлекторный двигатели без датчиков положения. Определение положения ротора осуществляется с помощью анализа сигнала ЭДС на свободной фазе двигателя. В каждый момент времени к одной из фаз подключен «+» к другой «-» питания, одна из фаз остается свободной. Вращаясь, магнитное поле ротора наводит ЭДС в свободной обмотке. По мере вращения напряжение на свободной фазе изменяется (рисунок 17).
Рисунок 17. Изменение напряжения на фазе двигателя.
Сигнал с обмотки двигателя разбит на 4 момента:
1. Обмотка подключена к 0
2. Обмотка не подключена (свободная фаза)
3. Обмотка подключена к питающему напряжению
4. Обмотка не подключена (свободная фаза)
Сопоставив сигнал с фаз с управляющим сигналом, видно, что момент перехода на следующее состояние можно детектировать пересечением средней точки (половины питающего напряжения) с фазой, которая в данный момент не подключена (рисунок 18).
Рисунок 18. Сопоставление управляющего сигнала с сигналом на фазах двигателя.
После детектирования пересечения необходимо выдержать паузу и включать следующее состояние. По данному рисунку составлен алгоритм переключений состояний обмоток (таблица 3).
Таблица 3. Алгоритм переключения обмоток двигателя
| Текущее состояние | U | V | W | Следующее состояние |
| 1 | — | Ожидание пересечения средней точки из + в — | + | 2 |
| 2 | Ожидание пересечения средней точки из — в + | — | + | 3 |
| 3 | + | — | Ожидание пересечения средней точки из + в — | 4 |
| 4 | + | Ожидание пересечения средней точки из — в + | — | 5 |
| 5 | Ожидание пересечения средней точки из + в — | + | — | 6 |
| 6 | — | + | Ожидание пересечения средней точки из — в + | 1 |
Пересечение средней точки проще всего детектировать компаратором, на один вход компаратора подается напряжение средней точки, а на второй текущее напряжение фазы.
Рисунок 19. Детектирование средней точки компаратором.
Компаратор срабатывает в момент перехода напряжения через среднюю точку и генерирует сигнал для микроконтроллера.
Обработка сигнала с фаз двигателя
Однако сигнал с фаз при регулировании скорости ШИМ отличается видом, и имеет импульсный характер (рисунок 21), в таком сигнале невозможно детектировать пересечение со средней точкой.
Рисунок 20. Вид сигнала фазы при регулировании скорости ШИМ.
Поэтому данный сигнал следует отфильтровать RC фильтром чтобы получить огибающую, а так же разделить под требования компаратора. По мере увеличения скважности шим сигнал будет возрастать по амплитуде (рисунок 22).
Рисунок 21. Схема делителя и фильтра сигнала с фазы двигателя.
Рисунок 22. Огибающая сигнала при изменении скважности ШИМ.
Схема со средней точкой
Рисунок 23. Вид виртуальная средней точки. Картинка взята с avislab.com/
С фаз снимаются сигналы через токограничительные резисторы и объединяются, получается вот такая картина:
Рисунок 24. Вид осциллограммы напряжения виртуальной средней точки.
Из-за ШИМ, напряжение средней точки не постоянно, сигнал так же необходимо фильтровать. Напряжение средней точки после сглаживания будет достаточно большим (в районе питающего напряжения двигателя), его необходимо разделить делителем напряжения до значения половины питающего напряжения.
После прохождения сигнала через фильтр колебания сглаживается и получается ровное напряжение относительно которого можно детектировать пересечение обратной ЭДС.
Рисунок 26. Напряжение после делителя и фильтра низких частот.
Средняя точка будет менять свое значение в зависимости от напряжения (скважности ШИМ), так же как и огибающая сигнала.
Полученные сигналы с компараторов заводятся на микроконтроллер, который их обрабатывает по алгоритму выше.
Пока на этом все.
Контроллер трехфазного бесколлекторного двигателя
Каковы должны быть минимальные ресурсы микроконтроллера, работающего в составе привода трехфазного BLDC-мотора? Для ответа на этот вопрос необходимо соотнести возможности чипсета с принципами управления указанного двигателя и предъявляемыми к устройству функциональными требованиями. Если мы рассматриваем рынок простых и дешевых схем управления скоростью в таких применениях, как вентиляторы и насосы, то проблема может быть существенно упрощена. Эти устройства работают при наличии или отсутствии датчиков (необходимых для определения положения ротора), что имеет ряд аргументов «за» и «против». Однако по количеству контактов I/O существенный выигрыш получается в случае, если сигнал положения ротора может быть снят с одного вывода. Кроме того, наличие многофункциональных выходов в пользовательском интерфейсе позволяет изменять их назначение. Благодаря этому, используя определенную технику минимизации, можно сократить количество задействованных контактов процессора и снизить таким образом требования к его ресурсам.
Система управления BLDC-мотором
На рис. 1 приведена блок-схема управления BLDC-мотором, содержащая датчик Холла для формирования обратной связи по положению ротора (как правило, используется три датчика), потенциометр задания скорости, кнопки включения и выключения системы, датчик перегрузки по току и трехфазный силовой каскад, соединенный с мотором.
Рис. 1. Блок-схема управления BLDC-мотором
Общее количество независимых подключений контроллера составляет 11 (пять входов и шесть выходов). Это число можно минимизировать в случае, если микроконтроллер поддерживает многофункциональность выводов и имеет развитую периферию.
Технология минимизации ресурсов
В случае, если используется стандартный шестиступенчатый алгоритм управления BLDC-мотором, в каждый момент времени только два транзистора инвертора (один в верхнем плече и один в нижнем) находятся во включенном состоянии. Управление ключами трехфазного силового каскада не является комплиментарным, транзисторы открываются в т. н. «диагональном режиме». С точки зрения минимизации логики это является преимуществом, поскольку два из трех ключей верхнего уровня закрыты при нормальной работе привода. Сигнал управления третьим транзистором может быть извлечен из двух других с помощью нескольких резисторов и транзисторного инвертора, подключенного к третьему входу верхнего уровня моста (см. рис. 4 — принципиальная схема). Таким образом удается сократить количество использованных выводов контроллера с шести до пяти.
Существует несколько различных путей оптимизации количества системных входов, предназначенных для подключения датчиков Холла, потенциометра, сенсоров тока перегрузки и ключей «Пуск/ Стоп». Датчики Холла, как правило, встраиваются в BLDC-двигатель, поэтому целесообразно интегрировать в мотор и схему, формирующую цифровой интерфейс для их связи с микроконтроллером. Выход подобной схемы выполняется в виде откры- того коллектора с «подтягивающим» резистором. В этом случае требуется один датчик Холла и один цифровой вход микросхемы семейства PIC12F.
Для запуска мотора и задания скорости при включении системы один из входов верхнего плеча трехфазного инвертора может быть сконфигурирован как аналоговый вход. Для реализации данной задачи этот вывод подключается к резистивному делителю и потенциометру уставки, что позволяет задать и считать значение скорости перед пуском мотора.
Ключ «Пуск» кроме основной задачи может нести и дополнительную функцию снижения уставки скорости ниже минимального значения. В аналоговом режиме работы входа, несмотря на то, что один из транзисторов верхнего плеча открывается, это не приводит к появлению тока в двигателе, поскольку все ключи нижнего плеча закрыты. Далее, при пуске мотора, данный контакт конфигурируется как выход управления транзистором верхнего плеча, а резисторы делителя начинают выполнять функцию «подтягивающих» или заземляющих.
Функцию остановки запущенного двигателя удобно выполнять в комбинированном режиме «Пуск/Стоп» в ходе цикла коммутации. Таким образом, остановка мотора реализуется программно-аппаратным методом в процессе выбега. Когда ключ «Стоп» нажимается при вращении, все сигналы управления транзисторами верхнего уровня блокируются, программа анализирует состояние мотора и запускает режим торможения. В простейшем случае функция остановки может выполняться нормально-разомкнутым тумблером, подключенным параллельно описанной выше цепи защиты от токовой перегрузки.
В схеме защиты от перегрузки по току не задействован ни один из выводов I/O микроконтроллера, для этой цели используется цепь подключения питания микросхемы семейства PIC12, позволяющая включить схему в режим перезагрузки при возникновении аварии. Этот тип PIC-контроллера имеет встроенный параллельный стабилизатор, соединенный с источником питания через резистор, номинал которого выбирается в зависимости от условий работы. Таким образом, в случае перегрузки питание микросхемы может быть отключено схемой защиты по току, подключенной параллельно стабилизатору.
В результате проведенной оптимизации системе требуется один выделенный цифровой вход, а также один цифровой/аналоговый и четыре цифровых вывода, выполняющих функции выходов. Здесь не учтен тот факт, что для управления скоростью необходима широтно-импульсная модуляция напряжения, поступающего на BLDC-мотор. В нашем случае контрольные импульсы должны поступать на транзисторы нижнего уровня. В реальности, поскольку в системе используется режим шестиступенчатого управления, ШИМ-сигнал в любой момент времени подается только на один из трех нижних ключей инвертора.
Некоторые PIC-контроллеры обладают особой периферией, способной формировать программный «моторный» ШИМ-сигнал, в то время как другие могут вырабатывать ШИМ-напряжение только на одном из n выходов. В последнем случае полный сигнал управления формируется с помощью, например, периферии ECCP (Enhanced Capture/ Compare Peripheral). В микросхеме PIC12F допускается комбинированное формирование ШИМ-сигнала посредством периферии ECCP или в режиме альтернативной конфигурации выводов (APCFG). Подобная возможность представляется очень удобной, поскольку импульсы могут вырабатываться через ECCP только по двум выводам, в то время как для работы схемы их требуется три, что доступно в режиме APCFG. На сегодняшний день в описанном режиме могут работать два контроллера семейства: PIC12F615 и PIC12HV615 (рис. 2).
Рис. 2. Аппаратная реализация схемы
Программа управления использует сигнал одного датчика Холла для синхронизации импульсов управления транзисторами инвертора, а также для определения моментов времени коммутации по так называемой технологии точного расчета траектории. Помимо всего прочего, это позволяет сформировать замкнутый контур управления скоростью при помощи простейшего ПИД-регулятора, на который поступает сигнал ошибки по скорости (рис. 3).
Рис. 3. Блок-схема управления скоростью мотора
Выход PI-контроллера загружается в регистр коэффициента заполнения импульсов CCPR1, занимая восемь старших разрядов. Выход подсистемы формирования ШИМ-сигнала коммутируется вместе с одним из трех транзисторов нижнего плеча инвертора, что позволяет осуществлять управление мотором и контроль скорости.
Три встроенных таймера PIC12 используются для измерения скорости двигателя по сигналу датчика Холла (TMR1), задания периода коммутации (TMR2) и генерации прерывания после окончания периода предварительного расчета (TMR0).
При включении питания считывается уставка скорости, после чего система может быть запущена с помощью ключа «Пуск». После подачи команды на запуск привода происходит оценка положения ротора и активируется программа формирования короткой разомкнутой петли регулирования. Она работает до тех пор, пока не будет продетектировано появление следующего сигнала датчика Холла. С этого момента времени коммутация инвертора синхронизируется с положением ротора. После успешной обработки двух сигналов датчика Холла программа переключается в режим работы с замкнутой обратной связью по скорости. При возникновении перегрузки по току активируется режим перезапуска питания POR (Power On Reset).
Аппаратная реализация системы управления включает трехфазный BLDC-мотор, низковольтный силовой модуль инвертора и контроллер PIC12F615, подключенный к модифицированной демо-плате Microchip. Было показано, что данная топология схемы позволяет использовать шесть I/O контактов микроконтроллера с многофункциональными выводами. Гибкая внутренняя периферия PIC12HV615 и встроенный параллельный регулятор дают возможность создать схему (рис. 4), выполняющую все необходимые для данного применения функции. Таким образом, создана основа для проектирования простых и дешевых систем управления скоростью в случаях, когда не требуется высокая точность работы привода.
Рис. 4. Принципиальная схема привода BLDC-мотора с контроллером PIC12HV615
Запускаем трехфазный двигатель от HDD (контроллер бесколлекторного двигателя)
То о чем много спрашивают и никто толком не говорит. Разобрал жесткий диск, нарыл там двигатель интересной конструкции. Разобрать не получилось, да и особо не старался. Оказалось что есть такие двигатели, у которых три обмотки и которых необходимо как-то по особому питать чтобы они крутится начали.
В чем прелесть спросите?
Ответ: столько оборотов в минуту из известных мне двигателей дает только движок от формулы 1 🙂
Не зря трехфазные бесколлекторные двигатели нашли широкое применение в авиамоделизме.
Стандартный бесколлекторный двигатель выглядит примерно так:
Двигатели из CD-ROM/DVD-ROM приводов выглядят так:
В интернете есть даже статьи по переделке бесколлекторного двигателя от CD-ROM для дальнейшего его применения в авиамоделизме.
В переделку обычно входят:
— перемотка другим проводом(тоньше или толще диаметром),
— изменение схемы намотки (звезда или треугольник),
— замена обычных магнитов на ниодимовые.
После чего трехфазный двигатель приобретает дополнительные обороты и мощность.
Я в эксперименте использовал обычный бесколлекторный двигатель от HDD привода, виглядит он так:
Предварительно конечно лучше закрепить его на чем-то, я использовал корпус от того самого HDD привода.
Сам двигатель, который я использовал имеет четыре вывода, что говорит о том, что схема намотки у него в виде звезды с отводом от центра, то есть что-то примерно такое:
Схема управления простая, и состоит из не большого числа элементов. В виде управляющего устройства использован микроконтроллер ATmega8. Схема устройства показана на рисунке:
В схеме использованы драйверы полевых транзисторов IR4427 и сами полевые транзисторы IRFZ44.
Управляющая программа была написана не мною, автор Дмитрий(Maktep) за что ему отдельное спасибо.Как исключение программа написана на Си для CV-AVR.
ПРограмма транслирована под компилятор WIN GCC.
Частота кварца 8МГц, для устройств с связью по UART рекомендую использовать внешний кварц, так как при тактировании от внутреннего генератора могут появляться ошибки в виду его нестабильной работы при изменении температуры окружающей среды.
#include <avr/io.h>
#include <avr/interrupt.h>
#include <stdio.h>
void USART_Init( unsigned int ubrr);
void USART_Transmit( unsigned char data );
char status,data;
char state;
unsigned int lvl=65530/4;
// USART Receiver interrupt service routine
ISR(USART_RXC_vect)
{
status=UCSRA;
data=UDR;
if (lvl<3000)
{ if (data=='+')
lvl--;
else
if (data=='-')
lvl++;}
else
{if (data=='+')
lvl-=lvl/500;
else
if(data=='-')
//if (lvl,/)
lvl+=lvl/500;
}
}
// Timer1 output compare A interrupt service routine
ISR(TIMER1_COMPA_vect)
{
switch (state)
{
case 0: PORTC=1; break;
case 1: PORTC=3; break;
case 2: PORTC=2; break;
case 3: PORTC=6; break;
case 4: PORTC=4; break;
case 5: PORTC=5; break;
}
if (state<5)
state++;
else
state=0;
}
void USART_Init( unsigned int ubrr)
{
/* Set baud rate */
UBRRH = (unsigned char)(ubrr>>8);
UBRRL = (unsigned char)ubrr;
/* Enable receiver and transmitter */
UCSRB=(1<<RXEN)|(1<<TXEN);
UCSRB |= (1<< RXCIE);
/* Set frame format: 8data, 2stop bit */
UCSRC=0x86;//
UCSRC = (1<<URSEL)|(1<<USBS)|(3<<UCSZ0);
}
void USART_Transmit( unsigned char data ) //
{
while ( !(UCSRA & (1<<UDRE)) ); //
UDR = data; //
}
int main(void)
{
PORTC=0x00;
DDRC=0x07;
// Timer/Counter 1 initialization
// Clock source: System Clock
// Clock value: 8000,000 kHz
// Mode: CTC top=OCR1A
// OC1A output: Discon.
// OC1B output: Discon.
// Noise Canceler: Off
// Input Capture on Falling Edge
// Timer1 Overflow Interrupt: Off
// Input Capture Interrupt: Off
// Compare A Match Interrupt: On
// Compare B Match Interrupt: Off
TCCR1A=0x00;
TCCR1B=0x09;
TCNT1H=0x00;
TCNT1L=0x00;
ICR1H=0x00;
ICR1L=0x00;
OCR1AH=0xFF;
OCR1AL=0xFF;
OCR1BH=0x00;
OCR1BL=0x00;
// Timer(s)/Counter(s) Interrupt(s) initialization
TIMSK=0x10;
USART_Init (8);//28800 4MHz
USART_Transmit('O');
USART_Transmit('k');
USART_Transmit('!');
USART_Transmit(0x0d);
USART_Transmit(0x0a);
// Global enable interrupts
sei();
while (1)
{
OCR1A=lvl;
};
}
Скачать проект Win AVR
Алгоритм работы построен так, что при нажатии на клавиатуре кнопки «+» передается по UART в микроконтроллер, который увеличивает скорость коммутации обмоток. И при нажатии на кнопку «—» все выполняется наоборот, то есть обороты двигателя уменьшаются. Для работы устройства дополнительно понадобится UART-RS232 конвертер.
Эксперимент показал что при данной программе и данной схеме включения можно разогнать двигатель до приличных оборотов, точное число не известно, думаю в пределах 30 000 оборотов в минуту. Но к сожалению сила двигателя недостаточная для раскручивания пластикового пропеллера, верней с пропеллером двигатель набирает обороты, но при нагрузке происходит сбой и остановка двигателя.
Для избежания данного недостатка применяются датчики Холла, устройства контролирующие положение ротора бесколлекторного двигателя. Это сделано для того, чтобы импульс на обмотку двигателя подавать именно в тот момент когда ротор проходит конец обмотки, то есть для смещения момента силы ближе к концу прохождения сектора обмотки. Это даст прирост мощности двигателя и он не будет глохнуть при нагрузках.
Видео работы устройства:
В видеоролике показано как я закрепил два кусочка пластика вырезанных из телефонной карточки в виде лепестка и прикрученных к ротору двигателя.
В планах попробовать применить ШИМ для коммутации обмоток. Рассчитываю на повышение мощности, улучшение характеристик разгона двигателя (в частности скорости разгона), повышение КПД.
3-фазное бесщеточное управление двигателем постоянного тока с датчиками холла
Трехфазное бесшумное управление двигателем постоянного тока с датчиками Холла
В этой статье описывается, как управлять трехфазным бесщеточным двигателем постоянного тока с использованием GreenPAK.
Бесщеточные электродвигатели постоянного тока (BLDC), также известные как электронно-коммутируемые двигатели (ECM, EC двигатели) или синхронные двигатели постоянного тока, являются синхронными двигателями, питаемыми от постоянного тока через инвертор или импульсный источник питания, который производит электрический ток переменного тока для управления каждой фазой двигателя через контроллер замкнутого контура. Контроллер обеспечивает импульсы тока к обмоткам двигателя, которые управляют скоростью и крутящим моментом двигателя.
Преимущества бесколлекторного двигателя на щетковом двигателе — это отношение высокой мощности к весу, высокая скорость и электронное управление. Бесщеточные двигатели находят применение в таких местах, как компьютерная периферия (дисковые накопители, принтеры), ручные электроинструменты и транспортные средства, которые варьируются от моделей самолетов до автомобилей.
Принцип построения и эксплуатации
Конструкция и работа двигателя BLDC очень похожи на асинхронные двигатели переменного тока и моторы постоянного тока. Как и все другие двигатели, двигатели BLDC также состоят из ротора и статора, что видно на рисунке 1.
Рисунок 1. Конструкция двигателя BLDCСтатор двигателя BLDC изготовлен из многослойной стали, сложенной для переноса обмоток. Обмотки в статоре могут быть расположены в двух шаблонах: звездный рисунок (Y) или дельта-шаблон (Δ). Основное различие между двумя шаблонами заключается в том, что Y-образная диаграмма дает высокий крутящий момент при низких оборотах, а диаграмма Δ дает низкий крутящий момент при малой скорости вращения. Это связано с тем, что в конфигурации Δ половина напряжения подается на обмотку, которая не приводится в движение, что увеличивает потери и, в свою очередь, эффективность и крутящий момент. Двигатели BLDC управляются с использованием электрических циклов. Один электрический цикл имеет 6 состояний. На фиг. 2 показана последовательность коммутации двигателя на основе датчика Холла.
Рисунок 2. Временная диаграмма последовательности коммутации двигателя на датчике ХоллаОсновополагающие принципы работы двигателя BLDC такие же, как и с мотором постоянного тока. В случае мостового двигателя постоянного тока обратная связь реализуется с использованием механического коммутатора и щетки. В двигателе BLDC обратная связь достигается за счет использования нескольких датчиков обратной связи. Наиболее часто используемые датчики — датчики Холла и оптические датчики.
В трехфазном BLDC количество зубьев (полюсов) кратно 3, а количество магнитов кратно 2. В зависимости от количества магнитов и зубьев каждый двигатель имеет различное количество зубцов (т.е. магнитные аттракционы между роторы и статоры), шаг за ход. Чтобы вычислить количество шагов (N), нам нужно знать, сколько зубов и сколько магнитов используется в двигателе. Мотор, используемый в этой заявке, имеет 12 зубьев (полюсов) и 16 магнитов.
Итак, чтобы сделать 1 оборот, нам нужно сгенерировать 48 электрических шагов.
Проектирование трехфазного бесщеточного двигателя постоянного тока
Основная блок-схема и типичная схема приложения показаны на рис. 3 и рис. 4 соответственно.
Рисунок 3. Блок-схемаРисунок 4. Типичная схема приложенияЭта конструкция имеет 2 входа для управления скоростью и направлением двигателя. PIN № 8 контролирует направление; уровень HIGH на выводе № 8 показывает, что вращение двигателя по часовой стрелке, а уровень LOW указывает, что он против часовой стрелки. PIN № 2 используется для управления скоростью через входную частоту. Отсутствие сигнала частоты на этом контакте отключит драйвер, и двигатель остановится. Применяя частоту к этому выводу, он запустит двигатель в течение первых 500 мс. Использование входной частоты позволяет очень точно контролировать скорость двигателя. Для расчета RPM нам нужно знать, сколько электрических шагов содержит мотор:
Двигатель в этом приложении имеет 48 шагов, поэтому на частоте 5 кГц двигатель будет работать со скоростью 6250 об / мин.
Конструкцию можно разделить на 4 части (рисунок 5): блок обработки датчиков Холла, блок управления затвором, блок управления PWM или блок управления скоростью и блок защиты.
Рисунок 5. ДизайнБлок обработки датчиков Холла включает в себя ACMP (ACMP0, ACMP3, ACMP4), фильтры деформирования (DLY1, DLY5, DLY6) и DFF (DFF6, DFF7, DFF8). Датчики Холла, используемые в этом проекте, имеют 4 контакта; VDD, GND и 2 дифференциальных выхода, которые подключены к входам IN + и IN для ACMP. Внутренний компонент Vref, установленный в 1, 2 В, используется как VDD для датчиков Холла. Отфильтрованные сигналы от ACMP поступают в D-входы DFF. Входная частота синхронизирует эти DFF и устанавливает скорость вращения. Сигналы от этих DFF переходят к драйверу ворот и 3-бит LUT14, который настроен как XNOR. Результат состоит в том, что выход чередуется на уровень каждый раз, когда любой датчик Холла меняет свою полярность. Оба краевых детектора генерируют фактическую частоту частоты (частота Холла), которая сравнивается с входной частотой для генерации сигнала ШИМ для управления скоростью вращения.
Блок драйвера ворот включает 12 3-битных LUT, которые коммутируют внешние транзисторы в зависимости от обратной связи датчиков Холла. 6 для LUT (3-бит LUT8 — 3-бит LUT13) используются для направления CW, а для переключения в направлении CCW используются еще 6 (3-бит LUT1 — 3-бит LUT6). Этот блок также включает 3 2-битных LUT (2-бит LUT4, 2-бит LUT5 и 2-бит LUT6) для смешивания сигналов для PMOS-транзисторов каждой фазы с PWM, чтобы гарантировать, что скорость вращения не зависит от нагрузки.
Контроллер PWM включает в себя компонент PWM2, счетчик CNT8, конечный автомат FSM1, 3-бит LUT15, 2 DFF (DFF0 и DFF1), детектор переднего фронта PDLY0 и инвертор INV0. DFF0 и DFF1 вместе работают как частотный компаратор; Выход DFF0 nQ выходит за пределы LOW, когда входная частота выше, чем частота Холла, а выход DFF1 nQ выходит за пределы LOW, когда входная частота ниже частоты Холла.
На уровне LOW на входе «+» выход PWM2 OUT + генерирует сигнал ШИМ с рабочим циклом, который колеблется от 256/256 до 1/256. На уровне LOW на входе «-» PWM2 OUT + генерирует PWM с изменяющимся рабочим циклом от 1/256 до 256/256. Частота ШИМ составляет ~ 100 кГц, а рабочий цикл IC установлен на 0% при запуске.
Двигатель останавливается до тех пор, пока не будет применена входная частота до PIN2. После подачи частоты на PIN2 выход DFF0 nQ будет гореть LOW, а PWM увеличит рабочий цикл от 0 до 99, 6%. Двигатель будет продолжать вращаться, пока датчики Холла превысят входную частоту. На этом этапе вывод DFF0 nQ будет ВЫСОКИЙ, и выход DFF1 nQ будет гореть LOW. Эта инверсия приводит к тому, что рабочий цикл PWM уменьшается до приемлемого значения при непосредственном VDD и нагрузке, наблюдаемой на двигателе. Эта система будет постоянно работать, чтобы сбалансировать рабочий цикл ШИМ. Функциональность FSM1, CNT8, 3-бит LUT15 и PWM2 описана более подробно в примечании к применению AN-1052.
Защитный блок включает в себя 2 задержки (DLY2 и DLY9), счетчик CNT0 и 2-бит LUT0, сконфигурированный как вентиль XOR. Эта часть конструкции используется для защиты от выгорания двигателя и внешних полевых транзисторов. Если двигатель застревает или не может запуститься, датчики Холла не смогут дать обратную связь, необходимую для выключения двигателя. Если после 100 мс DLY2 выход не поступит, то обратный сигнал LOW и 2-бит LUT0 отключит двигатель. Если это происходит, CNT0 и DLY9 пытаются запустить двигатель каждые 500 мс в течение 8 мс. Этот период достаточен для запуска двигателя, но он недостаточно длинный, чтобы вызвать повреждение двигателя.
Рисунок 6. Объем работы двигателя BLDCВывод
В этой статье показано, как пользователи могут управлять трехфазным бесщеточным двигателем постоянного тока с использованием SLG46620 GreenPAK CMIC и датчиков эффекта Холла. SLG46620 также содержит другие функции, которые могут быть использованы для этого проекта. Например, АЦП внутри GreenPAK может интерпретировать входное напряжение постоянного тока и генерировать импульс ШИМ от значения, а не использовать входную частоту.
Раньше, если разработчик хотел бы управлять двигателем BLDC, они были бы ограничены как электрическими характеристиками, так и функциями выделенных готовых решений IC. Это вынудило дизайнеров выбирать фиксированную функцию и потенциально избыточное или дорогостоящее решение, которое часто ограничивало бы IO своей системы.
Диалог GreenPAK отменяет этот процесс проектирования, возвращая конфигурацию обратно в руки дизайнера. Используя это приложение GreenPAK как универсально-применимую (и настраиваемую) трехфазную схему управления двигателем BLDC, дизайнер может выбрать распиновку и внешние полевые транзисторы, которые отвечают уникальным электрическим характеристикам своего проекта. Кроме того, даже учитывая внешние полевые транзисторы, решение Dialog GreenPAK по-прежнему достаточно мало, чтобы дизайн системы и стоимость спецификации были чрезвычайно конкурентоспособными по сравнению с выделенными ИС.
Рекомендации
Для соответствующих документов и программного обеспечения вы можете посетить страницу Гринпака.
Загрузите бесплатное программное обеспечение GreenPAK Designer (1), чтобы открыть .gp-файлы (2) и просмотреть предлагаемый дизайн схемы. Используйте инструменты разработки GreenPAK (3), чтобы заморозить дизайн в индивидуальную микросхему за считанные минуты. Dialog Semiconductor предоставляет полную библиотеку примечаний к приложениям (4) с примерами дизайна, а также объяснения функций и блоков в IC Dialog.
(1) Программное обеспечение GreenPAK Designer, Загрузка программного обеспечения и руководство пользователя
(2) .gp, файл дизайна GreenPAK (загрузка файла zip)
(3) Инструменты разработки GreenPAK
(4) Замечания по применению GreenPAK
Отраслевые статьи — это форма контента, которая позволяет отраслевым партнерам делиться полезными новостями, сообщениями и технологиями с читателями All About Circuits таким образом, что редакционный контент не очень подходит. Все отраслевые статьи подчиняются строгим редакционным правилам с целью предоставления читателям полезных новостей, технических знаний или историй. Точки зрения и мнения, выраженные в отраслевых статьях, являются точками партнера, а не обязательно для All About Circuits или его авторов.
Управление бесколлекторным двигателем постоянного тока, принцип работы
Бесколлекторные двигатели применяются в самых разных областях, так как это надежные, долговечные и стойкие к поломкам агрегаты. В быту чаще всего используется двигатель постоянного тока на 12 вольт, но бывают модели с большей мощностью.
Преимущества бесколлекторного двигателя
По сравнению со своими коллекторными «собратьями» бесколлекторные механизмы обладают некоторыми преимуществами:
- Компактность и небольшой вес. Двигатели можно установить на маленькие устройства.
- Очень высокий КПД. Их использование выгодно.
- Отсутствие контактов переключения и крутящего момента. Поскольку функции постоянных магнитов выполняют транзисторы МОП, источники потерь отсутствуют.
- Отсутствие стирающихся и ломающихся элементов.
- Широкий диапазон изменения скорости вращения.
- Способность переносить большую нагрузку по моменту.
Бесколлекторный двигатель оснащается электронным блоком управления, который стоит достаточно дорого – это, пожалуй, единственный его недостаток.
Как работает бесколлекторный двигатель постоянного тока
Принцип работы бесколлекторного двигателя постоянного тока тот же, что и у агрегатов других моделей. Но, как видно из названия, основная особенность механизма – отсутствие коллектора (этот узел сложен, тяжел, требует обслуживания и может искрить). Роль ротора выполняет шпиндель, вокруг которого установлены проволочные обмотки с разными магнитными полями. Количество прямоугольных магнитов, установленных у ротора, может быть разным, но обязательно четным (как и число полюсов). В случае если несколько магнитов составляют один полюс, число полюсов меньше числа магнитов.
Вращение достигается благодаря смене направления магнитного поля в определенной последовательности. Взаимодействуя с магнитными полями ротора, постоянные магниты приводят статор в движение. От их мощности зависит момент силы.
Управление бесколлекторным двигателем постоянного тока
В двигателях подобного типа управление коммутацией осуществляется с помощью электроники. Регуляторы хода бывают двух видов:
- Без датчиков, используемые при отсутствии существенного изменения пускового момента или необходимости в управлении позиционированием (в вентиляторе). Широкое распространение этого вида регуляторов объясняется простотой их изготовления.
- С датчиками, устанавливаемые в агрегатах с существенным варьированием пускового момента (в низкооборотистых механизмах).
Положение ротора при подаче токовых сил на обмотки определяется электронной системой и датчиком положения. Наиболее распространены следующие типы датчиков:
- Датчик Холла. Этот узел изменяет свои выводы при переключении обмоток. Для измерения тока и частоты вращения применяется устройство с разомкнутым контуром. К датчику присоединяются три ввода. При изменении показаний запускается переработка прерывания. Если нужно обеспечить быстрое реагирование обработки прерывания, датчик следует подключить к младшим выводам порта.
- Датчик положения с микроконтроллером. Управление бесколлекторным двигателем постоянного тока осуществляется с помощью AVR ядра (чипа для выполнения тех или иных задач). Программа, вшитая в плату AVR, максимально быстро запускает двигатель при отсутствии дополнительных внешних приборов и управляет скоростью.
- Система arduino. Эта аппаратная вычислительная платформа представляет собой плату, состоящую из микроконтроллера Atmel AVR и элементарной обвязки программирования. Ее задача – конвертирование сигналов с одного уровня на другой. Нужную программу можно установить через USB.
Для устранения погрешностей в определении положении ротора, провода при подключении контроллера делают максимально короткими (12-16 см). Среди программных настроек контроллеров можно перечислить:
- смену направления;
- плавное выключение и торможение;
- ограничение тока;
- опережение КПД и мощности;
- жесткое/плавное выключение;
- быстрый/жесткий/мягкий старт;
- режим газа.
Некоторые модели контроллеров содержат драйвера двигателя, что дает возможность его запуска напрямую, без установки дополнительных драйверов.
Драйверы от TI: Управляй любым электродвигателем
26 мая 2016
В ассортименте полупроводниковых компонентов производства компании Texas Instruments широко представлены микросхемы драйверов для управления всеми типами электродвигателей, которые, совершенствуясь, находят все более широкое применение в самом различном оборудовании. Компания предлагает решения для создания приводов, работающих в широком диапазоне токов и напряжений, обеспечивающих надежную и удобную эксплуатацию коллекторных, бесколлекторных и шаговых двигателей с полным комплексом защит по току, напряжению и температуре.
Электродвигатели находят широчайшее применение в современном высокотехнологическом укладе жизни. Этот тип электромеханического привода по-прежнему является одним из наиболее распространенных и востребованных. Электродвигатели самого разного назначения являются одной из основных составляющих любого производства, повсеместно используются в офисной и домашней технике, в системах мониторинга и управления зданий и объектов. Очень широкое распространение электродвигатели нашли на современном транспорте. Еще более впечатляющее будущее уготовано электродвигателям в электромобилях и роботах.
С развитием технологий традиционные двигатели совершенствуются и находят все новые области применения. Современные высокоточные станки и робототехника немыслимы без электродвигателей с интеллектуальными системами управления. На земле, в воздухе и под водой электродвигатели остаются широко востребованным преобразователем электрической энергии в механическую.
Типы электродвигателей, способы управления и возникающие сложности
Впервые созданный в 1834 году русским ученым Якоби преобразователь электрической энергии во вращательное движение получил название электродвигатель. С тех пор он был серьезно усовершенствован – появилось множество новых вариантов, но использованные при его создании принципы электромагнетизма по-прежнему являются основой всех модификаций современных электродвигателей.
Проводник с проходящим по нему током (рисунок 1) создает вокруг себя магнитное поле, интенсивность (магнитная индукция) которого пропорциональна количеству витков, в случае использования катушки (N), и величине проходящего по ней тока (I), где, В – вектор магнитной индукции, К – магнитная постоянная, N – число витков, I – сила тока.
Рис. 1. Электромагнетизм в основе работы электродвигателя
Изменение направления тока влияет и на направление магнитного поля проводника.
При этом на помещенный во внешнее магнитное поле проводник с током действует сила Лоренца, вызывающая его вращательное перемещение. Направление вращения легко определяется с помощью известного правила правой руки для проводника с током в магнитном поле (рисунок 2). Сила (F), действующая на проводник в магнитном поле, равна произведению силы тока (I) в проводнике на вектор магнитной индукции поля (B) и длину проводника (L). F = LIB.
Рис. 2. Перемещение проводника с током в магнитном поле (Сила Лоренца)
Коллекторные двигатели
Коллекторные двигатели постоянного тока (Brushed DC или BDC, по терминологии TI) сегодня относятся к одним из наиболее распространенных механизмов электромагнитного вращения.
В магнитном поле собранного из постоянных магнитов статора вращается многосекционный ротор с катушками, которые попарно и попеременно подключаются через коммутируемые коллекторные ламели на оси ротора (рисунок 3). Выбор пары активируемых катушек выполняется на основании закона Лоренца в соответствии с правилом Буравчика. Источник тока всегда подключен к катушкам, силовые линии магнитного поля которых смещены на угол, близкий к 90°, относительно магнитного поля статора.
Рис. 3. Принцип действия коллекторного электродвигателя (BDC)
Электродвигатели подобного типа часто используют статор с постоянными магнитами. Они позволяют легко регулировать скорость вращения и отличаются невысокой стоимостью.
Также широко используется вариант 2-обмоточного электродвигателя подобного типа, но со статорной обмоткой вместо постоянного магнита. Такие модели обладают большим пусковым моментом и могут работать не только на постоянном, но и на переменном токе. Электродвигатели подобного типа почти повсеместно используются в различной бытовой технике.
К недостаткам этой конструкции BDC стоит отнести износ щеточно-коллекторного узла в процессе эксплуатации. Кроме того, из-за искрообразования при коммутации отдельных обмоток ротора отмечается повышенный уровень электромагнитных помех, что не позволяет использовать такие двигатели во взрывоопасных средах.
Особенностью двигателей BDC также является повышенный нагрев ротора, охлаждение которого затруднено в силу конструктивных особенностей двигателя.
Достоинства коллекторных двигателей:
- малая стоимость;
- простая система управления;
- 2-обмоточные коллекторные двигатели, обладающие высоким крутящим моментом и способные работать на постоянном и переменном токе.
Особенности эксплуатации коллекторных двигателей:
- щетки требуют периодического обслуживания, понижают надежность двигателя;
- в процессе коммутации возникают электрические искры и электромагнитные помехи;
- затруднен отвод тепла от перегревающегося ротора.
Бесколлекторные двигатели
Несколько менее распространенными среди двигателей постоянного тока являются модели с бесщеточной конструкцией (BrushLess DC или BLDC), использующие ротор с постоянными магнитами, которые вращаются между электромагнитами статора (рисунок 4). Коммутация тока здесь выполняется электронным способом. Переключение обмоток электромагнитов статора заставляет магнитное поле ротора следовать за его полем.
Рис. 4. Принцип действия бесколлекторного электродвигателя (BLDC)
Текущее положение ротора обычно контролируется энкодерами или датчиком на основе эффекта Холла, либо применяется технология с измерением напряжения противо-ЭДС на обмотках без использования в этом случае отдельного датчика положения ротора (SensorLess).
Коммутация тока обмоток статора выполняется с помощью электронных ключей (вентилей). Именно поэтому бесколлекторные двигатели BLDC часто называют «вентильными». Очередность подключения пары обмоток двигателя происходит в зависимости от текущего положения ротора.
Принцип работы BLDC основан на том, что контроллер коммутирует обмотки статора так, чтобы вектор магнитного поля статора всегда был сдвинут на угол, близкий к 90° или -90° относительно вектора магнитного поля ротора. Вращающееся при переключении магнитное поле заставляет перемещаться вслед за ним ротор с постоянными магнитами.
При использовании трехфазного сигнала управления подключенными к источнику тока всегда оказываются только две пары обмоток, а одна – отключена. В результате последовательно используется комбинация из шести состояний (рисунок 5).
Рис. 5. Чередование фаз при вращении BLDC
Электродвигатели без датчиков положения ротора отличаются повышенной технологичностью процесса изготовления и более низкой стоимостью. Подобная конструкция упрощает герметизацию внешних подключаемых выводов.
В качестве датчиков скорости и положения ротора в BLDC могут использоваться датчики Холла, которые отличаются небольшой стоимостью, но также и достаточно невысоким разрешением. Повышенное разрешение обеспечивают вращающиеся трансформаторы (резольверы). Они отличаются высокой стоимостью и требуют использования ЦАП, так как выходной сигнал у них синусоидальный. Высоким разрешением, но пониженной надежностью, обладают оптические датчики. На рисунке 6 представлены выходные сигналы датчиков разного типа при вращении ротора двигателя.
Рис. 6. Датчики положения ротора электродвигателей
Преимущества двигателей BLDC:
- высокая эффективность;
- отсутствие щеток, обеспечивающее повышенную надежность, снижение затраты на обслуживание;
- линейность тока/крутящего момента;
- упрощенный отвод тепла.
Особенности применения двигателей BLDC:
- более сложная система управления с обратной связью по положению ротора;
- пульсации крутящего момента.
Шаговые двигатели
Шаговые двигатели (ШД) получили достаточно широкое распространение в системах автоматики и управления. Они являются еще одним типом бесколлекторных двигателей постоянного тока. Конструктивно ШД состоят из статора, на котором размещены обмотки возбуждения, и ротора, выполненного из магнитных материалов. Шаговые двигатели с магнитным ротором позволяют обеспечить больший крутящий момент и жесткую фиксацию ротора при обесточенных обмотках.
В процессе вращения ротор ШД перемещается шагами под управлением подаваемых на обмотки статора импульсов питания. Шаговые двигатели удобны для использования в приводах машин и механизмов, работающих в старт-стопном режиме. Их диапазон перемещения задается определенной последовательностью электрических импульсов. Такие двигатели отличаются высокой точностью, не требуют датчиков и цепей обратной связи. Угол поворота ротора зависит от количества поданных импульсов управления. Точность позиционирования (величина шага) зависит от конструктивных особенностей двигателя, схемы подключения обмоток и последовательности подаваемых на них управляющих импульсов.
В зависимости от конфигурации схемы подключения обмоток шаговые двигатели делятся на биполярные и униполярные. Биполярный двигатель имеет в каждой из двух фаз единую обмотку для обоих полюсов статора, которая для изменения направления магнитного поля должна переполюсовываться драйвером. Биполярный двигатель имеет две обмотки и, соответственно, четыре вывода. Для управления таким ШД требуется мостовой драйвер или полумостовая схема с 2-полярным питанием. При биполярном управлении одновременно работают две обмотки и крутящий момент примерно на 40% больше. На рисунке 7 представлена последовательность сигналов управления при вращении биполярного ШД.
Рис. 7. Последовательность сигналов управления биполярным ШД
Униполярный двигатель использует в каждой фазе одну обмотку со средним выводом и позволяет использовать более простую схему управления с одним ключом на каждую из четырех полуобмоток.
Четырех обмоточные ШД могут использоваться как в биполярной, так и в униполярной конфигурации.
При протекании тока по одной из катушек ротор стремится изменить положение так, чтобы противоположные полюса ротора и статора установились друг против друга. Для непрерывного вращения ротора катушки попеременно переключают.
На практике используются разные способы подачи питания на четыре обмотки статора. Чаще всего применяют попарное подключение с полношаговым или полушаговым режимом работы. В полношаговом режиме ротор с двумя полюсами, вращающийся в переключаемом магнитном поле двух пар катушек, может занимать четыре положения (рисунок 8).
Рис. 8. Полношаговый режим управления ШД
Получить удвоенную точность позиционирования и восемь позиций позволяет полушаговый режим работы (рисунок 9). Для его реализации добавляется промежуточный шаг с одновременной запиткой всех четырех катушек.
Рис. 9. Полушаговый режим управления ШД
Значительно увеличить количество промежуточных положений и точность позиционирования позволяет режим микрошага. Идея микрошага заключается в подаче на обмотки шагового двигателя вместо импульсов управления непрерывного сигнала, напоминающего по форме ступенчатую синусоиду (рисунок 10). Полный шаг в этом случае делится на маленькие микрошаги, а вращение становится более плавным. Режим микрошага позволяет получить наиболее точное позиционирование. Кроме того, в этом режиме значительно снижается присущая шаговым двигателям вибрация корпуса.
Рис. 10. Управление ШД в режиме микрошага
Достоинства шаговых двигателей:
- невысокая стоимость благодаря отсутствию схем контроля скорости вращения и позиционирования;
- высокая точность позиционирования;
- широкий диапазон скоростей вращения;
- простой интерфейс управления с цифровыми контроллерами;
- очень высокая надежность;
- хороший удерживающий момент.
Особенности применения шаговых двигателей:
- ШД присуще явление резонанса;
- из-за отсутствия обратной связи возможна потеря контроля положения;
- потребление энергии не уменьшается даже при работе без нагрузки;
- затруднена работа на очень высоких скоростях;
- невысокая удельная мощность;
- достаточно сложная схема управления.
Традиционные решения для управления электродвигателями
Современная прецизионная система управления электродвигателем постоянного тока включает в себя микроконтроллер для обработки данных и блок управления питанием обмоток двигателя, часто называемый драйвером. В состав драйвера входит логическая схема для преобразования кодированных посылок в цифровые управляющие сигналы, из которых в блоке Gate Driver формируются аналоговые сигналы для управления силовыми ключами на основе полевых транзисторов (FET). FET могут входить в состав драйвера или размещаться в отдельном блоке. Кроме того, в состав драйвера входят схемы защиты силовых цепей и цепи обратной связи для контроля работы двигателя.
На рисунке 11 представлены варианты блок-схем для интегрированного и предварительного драйверов. Каждое из решений имеет свои преимущества и особенности. Предварительный драйвер (Pre-Driver) имеет значительно облеченный температурный режим, позволяет выбирать внешние силовые ключи в соответствии с мощностью подключаемого двигателя. Полнофункциональный интегрированный драйвер позволяет создавать более компактные системы управления, минимизирует внешние соединения, но значительно усложняет обеспечение необходимого температурного режима.
Рис. 11. Блок-схемы систем управления двигателем
Так, у интегрированного драйвера TI DRV8312 максимальная рабочая температура отдельных элементов на плате может достигать 193°С, а у предварительного драйвера DRV8301 этот показатель не превышает 37°С.
Рис. 12. Смена направления вращения коллекторного двигателя
Одной из наиболее распространенных схем для коммутации обмоток двигателей является мост типа “H”. Название схемы связано с конфигурацией подключения, которая похожа на букву “H”. Эта электронная схема позволяет легко изменять направление тока в нагрузке и, соответственно, направление вращения ротора. Напряжение, прикладываемое к обмоткам через транзисторы моста, может быть как постоянным, так и модулированным с помощью ШИМ. H-мост предназначен, в первую очередь, для смены полярности питания двигателя – реверса (рисунок 12), но также позволяет тормозить вращение, коротко замыкая выводы обмоток (рисунок 13).
Рис. 13. Режимы вращения, быстрого и медленного торможенияс
Важнейшей характеристикой силовых элементов моста, в качестве которых сегодня часто используют полевые транзисторы с изолированным затвором, является величина сопротивления открытого канала между истоком и стоком транзистора – RDSON. Значение RDSON во многом определяет тепловые характеристики блока и энергетические потери. С увеличением температуры RDSON также растет, а ток и напряжение на обмотках уменьшаются.
Использование управляющих сигналов с ШИМ позволяет уменьшить пульсации крутящего момента и обеспечить более плавное вращение ротора двигателя. В идеале частота ШИМ должна быть выше 20 кГц, чтобы избежать акустического шума. Но с увеличением частоты растут потери на транзисторах моста в процессе коммутации.
Из-за индуктивных свойств нагрузки в виде обмоток форма тока в ней не соответствует форме подаваемого напряжения ШИМ. После подачи импульса напряжения ток нарастает постепенно,а в паузах ток плавно затухает из-за возникновения в обмотках противо-ЭДС. Наклон кривой на графике тока, амплитуда и частота пульсаций влияют на рабочие характеристики двигателя (пульсации крутящего момента, шум, мощность и так далее).
Для ускоренного затухания в обмотках электродвигателей возбуждаемого эффектом противо-ЭДС тока используют диоды в обратном включении, шунтирующие переходы «сток-исток» транзисторов, либо закорачивают обмотки через переходы «сток-исток» двух транзисторов, одновременно включенных в разных плечах моста. На рисунке 13 представлены три состояния моста: рабочее, быстрого торможения (Fast Decay) и медленного торможения (Slow Decay).
А наиболее эффективным считается комбинированный режим (Mixed Decay), при котором в паузе между рабочими импульсами сначала работают диоды, шунтирующие сток-исток транзисторов, а затем включаются транзисторы в нижних плечах моста.
Решения для управления электродвигателями от TI
Среди полупроводниковых компонентов, выпускаемых компанией TI, представлен обширный ассортимент различных драйверов для управления электродвигателями постоянного тока. Все они требуют минимума внешних компонентов, позволяют создавать компактные решения для управления двигателями с рабочим напряжением до 60 В, отличаются повышенной надежностью, обеспечивают быстрое и простое проектирование систем привода электродвигателями.
Встроенные в драйверы интеллектуальные функции требуют минимальной поддержки внешнего управляющего микроконтроллера (MCU), обеспечивают расширенные коммутационные возможности для обмоток, поддерживают внешние датчики и цифровые контуры управления. Комплекс защитных функций включает ограничение напряжения питания, защиту от превышения тока и короткого замыкания, понижения напряжения и повышения рабочей температуры.
Весь модельный ряд драйверов TI разбит на три раздела: шаговые, коллекторные и бесколлекторные двигателей постоянного тока. В каждом из них на сайте компании действует удобная система подбора по целому ряду параметров. Есть отдельные драйверы, предназначенные для использования с двигателями разных типов.
Драйверы TI для шаговых двигателей
Большой раздел решений TI для управления двигателями включает драйверы для ШД (рисунок 14), которые выпускаются как со встроенными силовыми ключами на основе FET, так и в виде предварительных драйверов, предоставляющих пользователю подбор необходимых силовых ключей. Всего в модельном ряду компании более 35 драйверов для ШД.
Рис. 14. Драйверы TI для управления шаговыми двигателями
TI предлагает широкий выбор наиболее современных решений для управления перемещением и точным позиционированием с использованием микрошаговых схем управления, обеспечивающих электродвигателей плавным перемещением в широком диапазоне напряжения и тока.
Отдельные драйверы, используя один управляющий контроллер, позволяют управлять сразу двумя двигателями, имея для этого четыре встроенных моста на основе FET. Есть драйверы с встроенными FET, например, DRV8834, которые можно подключить для управления к двум обмоткам шагового двигателя или использовать эти же выводы для управления двумя электродвигателями постоянного тока (рисунок 15).
Рис. 15. Блок-схема драйвера DRV8834
Для более плавного перемещения ротора в драйверах для ШД используется настраиваемый механизм сглаживания импульсов тока (режимы Slow, Fast, Mixed Decay). Система расчета микрошага может быть следующих типов:
- встроенной в драйвер;
- с использованием внешнего опорного сигнала.
Не требуют внешнего контроллера для микрошагового перемещения драйверы DRV881, DRV8818, DRV8821, DRV8824 и DRV8825. Здесь шаг перемещения и алгоритм коммутации обмоток рассчитываются схемой, встроенной в драйвер.
Более простые драйверы DRV8812, DRV8813, DRV8828, DRV8829, DRV8841, DRV8842 и DRV8843 обеспечивают микрошаговое вращение с использованием получаемого от внешнего контроллера опорного напряжения (Vref). Уровень дробления основного шага может достигать 1/128 или 1/256.
Для управления ШД с униполярным подключением обмоток TI предлагает драйверы DRV8803, DRV8804, DRV8805 и DRV8806.
Драйверы TI для BDC
Для управления – коллекторными электродвигателями постоянного тока – предназначено специальное семейство драйверов DRV8x, ряд представителей которого изображен на рисунке 16. Они обеспечивает полную защиту от превышения напряжения и тока, короткого замыкания и перегрева. Благодаря возможностям интерфейса управления эти драйверы обеспечивают простую и эффективную эксплуатацию двигателей. Пользователи могут с помощью одного чипа управлять одним или несколькими двигателями c рабочим напряжением 1,8…60 В.
Рис. 16. Драйверы TI для управления коллекторными двигателями
Драйверы семейства выпускаются как с интегрированными силовыми ключами, так и как предварительные драйверы. Они требуют минимум дополнительных компонентов, обеспечивают компактность решений, сокращают время разработки и позволяют быстрее выпустить новые продукты на рынок.
Спящий режим (Sleep) позволяет минимизировать потребление энергии в режиме простоя и обеспечивает ускоренную активизацию при запуске двигателя. Для управления скоростью вращения могут использоваться внешние сигналы ШИМ или сигналы PHASE/ENABLE для выбора направления вращения и включения ключей выходного моста.
Имеющий четыре выходных моста драйвер DRV8823 способен управлять двумя ШД или одним ШД и двумя BDC, или же четырьмя BDC, используя при этом управляющий интерфейс SPI.
На рисунке 17 представлена функциональная схема простого драйвера DRV8837 для управления одним коллекторным двигателем.
Рис. 17. Блок-схема драйвера DRV8837
Драйверы TI для BLDC
Драйверы TI для бесколлекторных двигателей, или BLDC, могут включать интегрированный силовой мост или использовать внешние силовые транзисторы. Схема формирования 3-фазных сигналов управления также может быть внешней или встроенной.
Семейство драйверов для управления бесколлекторными электродвигателями включает модели c разным принципом управления и с различным крутящим моментом. Эти драйверы, обеспечивающие разные уровни шума при управлении BDLС, идеально подойдут для использования в промышленном оборудовании, автомобильных системах и другой технике. Чтобы гарантировать надежную эксплуатацию электродвигателей, драйверы обеспечивают всеобъемлющий набор защит от превышения тока, напряжения и температуры. На рисунке 18 представлены лишь некоторые из 3-фазных драйверов для BLDC в обширном и постоянно пополняющемся модельном ряду компании TI.
Рис. 18. Драйверы TI для управления бесколлекторными двигателями
Для контроля текущего положения вращающегося ротора могут использоваться внешние датчики разных типов или схема управления с определением позиции ротора по величине противо-ЭДС (Back Electromotive Force, BEMF).
Управление может выполняться с помощью ШИМ, аналоговых сигналов или через стандартные цифровые интерфейсы. Наборы настраиваемых параметров для управления вращением могут храниться во внутренней энергонезависимой памяти.
На рисунке 19 представлен работающий в широком диапазоне температур 40…125°C интеллектуальный драйвер для BLDC со встроенными силовыми ключами на полевых транзисторах, с сопротивлением открытого канала лишь 250 мОм. При диапазоне рабочих напряжений 8…28 В драйвер может обеспечивать номинальный ток 2 А и пиковый ток 3 А.
Рис. 19. Блок-схема драйвера DRV10983
Драйвер не требует внешнего датчика для контроля положения ротора, но может использовать внешний резистор для контроля потребляемой двигателем мощности. DRV10983 отличается незначительным энергопотреблением, составляющим всего 3 мА, в дежурном режиме. А в модели DRV10983Z этот показатель доведен до уровня 180 мкА.
Встроенный интерфейс I2C обеспечивает диагностику и настройку, доступ к регистрам управления работой логической схемы и хранящимся в памяти EEPROM рабочим профилям драйвера.
Расширенный комплект защитных функций обеспечивает остановку двигателя в случае превышения тока и понижения напряжения. Предусмотрено ограничение входного напряжения. Защита по превышению тока работает без использования внешнего резистора. Методы использования защиты настраиваются через специальные регистры.
Заключение
Электродвигатели находят все более широкое применение в самом различном оборудовании, совершенствуются и получают новые возможности во многом благодаря современным системам электропривода.
В ассортименте полупроводниковых компонентов производства компании Texas Instruments широко представлены микросхемы драйверов для управления всеми типами двигателей постоянного тока. На их основе компания предлагает масштабируемые в зависимости от требований по точности, мощности и функциональности решения для создания приводов, работающих в широком диапазоне токов и напряжений, обеспечивающих надежную и удобную эксплуатацию коллекторных, бесколлекторных и шаговых двигателей с полным комплексом защит по току, напряжению и температуре.
Получение технической информации, заказ образцов, заказ и доставка.
•••
Наши информационные каналы
Двигатель BLDC с датчиком Холла по сравнению с двигателем BLDC без датчика Холла
Если бесщеточный двигатель постоянного тока без датчика Холла сломан, его нельзя заменить на бесщеточный двигатель постоянного тока с датчиком Холла. Аппаратная схема управления этими двумя двигателями отличается, как и программный код, поэтому двигатели bldc не будут работать после замены. АТО скажет, почему.
1. Аппаратная схема двигателя с датчиком Холла и двигателя без датчика Холла отличается.
Для трехфазного двигателя bldc бесщеточный двигатель постоянного тока с датчиками Холла имеет восемь проводов: 3 провода трехфазного двигателя, 3 провода Холла и 2 провода питания Холла. Внутри бесщеточного двигателя постоянного тока с датчиком Холла находятся три микросхемы Холла. Когда двигатель работает, положение ротора в реальном времени может отображаться на плате управления в форме сигнала. На основе формы сигнала положение ротора и ритм запуска бесщеточного двигателя постоянного тока будут определяться платой управления.
Бесщеточный двигатель постоянного тока без датчика Холла имеет только три провода, то есть фазные провода бесщеточного двигателя постоянного тока. Положение Холла определяется платой управления посредством обратной электродвижущей силы фазовой линии бесщеточного двигателя постоянного тока. На плате управления имеется схема обработки с компаратором в качестве сердечника, функция которого заключается в определении положения ротора в соответствии с обратной индуцированной электродвижущей силой.
Следовательно, схема обработки бесщеточного двигателя постоянного тока с датчиком Холла и бесщеточного двигателя постоянного тока без датчика Холла совершенно разные, поэтому их нельзя заменить.
2. Программный код двигателя с датчиком Холла и двигателя без датчика Холла отличается.
Как упоминалось ранее, аппаратные схемы этих двух двигателей различаются, поэтому соответствующие программные коды также полностью различаются. Для бесщеточных двигателей постоянного тока с датчиками Холла сигнал Холла, выводимый микросхемой Холла, может быть захвачен и проанализирован функцией CCP микроконтроллера. Для бесщеточных двигателей постоянного тока без датчиков Холла положение ротора определяется обратной электродвижущей силой, которая требует, чтобы микроконтроллер обрабатывал выходной сигнал компаратора, поэтому код относительно сложен.
3. Бесщеточные двигатели и контроллеры с датчиком Холла стабильны в использовании, с большим крутящим моментом при запуске и без аномального шума. Бесщеточные двигатели и контроллеры без датчика Холла в настоящее время не очень стабильны из-за технических проблем, особенно на начальном этапе, плохая стабильность и недостаточная мощность.
4. Большинство двигателей без датчика Холла — это щеточные двигатели, которые потребляют много энергии. Большинство двигателей с датчиком Холла — это бесщеточные двигатели, которые приводятся в действие переключателями, с энергосбережением и относительно большой мощностью привода.
5. Бесщеточный двигатель с датчиком Холла в настоящее время является относительно зрелым продуктом с более стабильной работой. Однако элемент Холла — это компонент, который может выгореть, поэтому особенно важно выбрать подходящего производителя и квалифицированный элемент Холла.
Произошла ошибка
Повторите попытку позже или попробуйте нашу домашнюю страницу еще раз.
Bitte versuchen Sie es später oder schauen Sie ob die Homepage funktioniert.
Ошибка: E1020
Австралия Электронная почта
Максон Мотор Австралия Пти Лтд
Unit 1, 12-14 Beaumont Road
Гора Куринг-Гай Новый Южный Уэльс 2080
Австралия
Benelux Электронная почта
Максон Мотор Бенелюкс Б.В.
Йосинк Колквег 38
7545 PR Enschede
Нидерланды
Китай Электронная почта
maxon motor (Suzhou) Co., ООО
江兴东 路 1128 号 1 号楼 5 楼
215200 江苏 吴江
中国
Германия Электронная почта
максон мотор gmbh
Truderinger Str. 210
81825 Мюнхен
Deutschland
Индия Электронная почта
maxon precision motor India Pvt. ООО
Niran Arcade, No.563/564
Новая Бел-Роуд,
RMV 2-я ступень
Бангалор — 560 094
Индия
Италия Электронная почта
maxon motor italia S.r.l.
Società Unipersonale
Via Sirtori 35
20017 Rho MI
Италия
Япония Электронная почта
マ ク ソ ン ジ ャ パ ン 株式会社
東京 都 新宿 区 新宿 5-1-15
〒 160-0022
日本
Корея Электронная почта
㈜ 맥슨 모터 코리아
서울시 서초구
반포 대로 14 길 27, 한국 137-876
Португалия Электронная почта
maxon motor ibérica s.а
C / Polo Norte № 9
28850 Торрехон-де-Ардос
Испания
Швейцария Электронная почта
максон мотор аг
Брюнигштрассе 220
Постфах 263
6072 Sachseln
Schweiz
Испания Электронная почта
maxon motor ibérica s.a. Испания (Барселона)
C / Polo Norte № 9
28850 Торрехон-де-Ардос
Испания
Тайвань Электронная почта
maxon motor Тайвань
8F.-8 №16, переулок 609 сек. 5
П. 5, Chongxin Rd.
Sanchong Dist.
Нью-Тайбэй 241
臺灣
Великобритания, Ирландия Электронная почта
максон мотор великобритания, лтд
Maxon House, Hogwood Lane
Finchampstead
Беркшир, RG40 4QW
Соединенное Королевство
США (Восточное побережье) Электронная почта
Прецизионные двигатели maxon, inc.
125 Девер Драйв
Тонтон, Массачусетс 02780
США
США (Западное побережье) Электронная почта
Прецизионные двигатели maxon, inc.
1065 East Hillsdale Blvd,
Люкс 210
Фостер-Сити, Калифорния 94404
США
Электроника | Бесплатный полнотекстовый | Разработка и реализация бессенсорного электроинструмента на базе микроконтроллера
1.Введение
В последние годы электроинструменты, также известные как электрические ручные инструменты, нашли применение во многих областях машиностроения и механической промышленности. Благодаря удобству и простоте эксплуатации, они широко используются при ремонте автомобилей, строительстве и домашнем ремонте, а также при обрезке растений и садов. Ожидается, что мировой рынок электроинструментов будет расти со средним годовым темпом роста 5,5% и достигнет 41,7 млрд долларов США в период с 2019 по 2024 год [1].Таким образом, технические характеристики и удобство эксплуатации в конструкции электроинструмента становятся все более важными, включая такие факторы, как меньший размер, более надежная работа, возможность управления более высоким напряжением аккумуляторной батареи и более высокая скорость. Кроме того, электроинструменты необходимы для обеспечения возможности прямого и обратного вращения, а также для работы с различными скоростями. Для таких применений используются двигатели постоянного тока (DC) с прерывателем из-за их превосходных характеристик крутящего момента и скорости и простоты управления.Однако при использовании щеточных двигателей постоянного тока для управления током требуется механическая система, известная как система коллекторных щеток. Это означает, что щеточный электродвигатель постоянного тока имеет короткий срок службы, поскольку щетки со временем требуют более частого обслуживания и замены. Эти недостатки могут быть преодолены за счет использования бесщеточных двигателей, таких как реактивные реактивные двигатели (SRM) и двигатели BLDC. Удивительно, но характеристики двигателя BLDC практически такие же, как у щеточных двигателей постоянного тока.Более того, двигатель BLDC имеет более высокий КПД и меньший размер, чем щеточный двигатель постоянного тока [2,3], тогда как SRM аналогичны типам бесщеточных двигателей. В двигателе не используются постоянные магниты, а его ротор содержит только железо. Следовательно, он имеет низкую стоимость изготовления, а также надежность [4,5] и может работать на чрезвычайно высоких скоростях [5]. Его характеристики крутящий момент-скорость легче адаптировать к требованиям приложения по сравнению с двигателями с постоянными магнитами [5]. Однако, поскольку на его роторе нет постоянного магнита, это означает, что магнитное поле создается только на основе обмоток статора, что приводит к увеличению потерь в меди [4,5].Хотя SRM могут облегчить достижение плавного крутящего момента на низких скоростях, у них есть самый большой недостаток — пульсация крутящего момента в широком диапазоне рабочих скоростей, которая вызывает большие пульсации тока в источнике постоянного тока [5]. Более того, учитывая его небольшой размер и удельную мощность, характеристики двигателя BLDC выше, чем у двигателя SRM [5]. Следовательно, в последние несколько десятилетий появился интерес к двигателям BLDC, и они были применены в многие аппараты и ремонт и обслуживание автомобилей из-за их выдающихся характеристик [2,3,6,7,8].Однако для двигателя BLDC с его трапецеидальной формой сигнала обратной электродвижущей силы (BEMF) обычно требуются датчики положения на эффекте Холла для определения положения ротора для операции переключения инвертора. Это приводит к увеличению стоимости и снижает его надежность, поскольку датчики Холла чувствительны к колебаниям температуры и суровым условиям окружающей среды, и для установки датчика требуется точность [9]. Кроме того, отсутствие датчиков положения может сэкономить место для приложений, в которых его объем ограничен.Для решения этих проблем за последние три десятилетия многие решения для бессенсорных двигателей для двигателей с BLDC были предложены во многих исследованиях, и этот обзор подробно рассмотрен в [10]. Эти методы можно классифицировать как: (1) прямое обнаружение BEMF от плавающей фазы, (2) метод интегрирования BEMF, (3) метод обнаружения проводимости свободного диода, (4) обнаружение составляющих напряжения третьей гармоники статора и (5) метод определения среднего напряжения на клеммах [9,10,11,12,13,14].Следовательно, бессенсорное управление положением становится важной проблемой для приводов с BLDC [8,11]. Как правило, для высокоскоростного бессенсорного моторного привода необходимо удовлетворить два требования: генерация бессенсорных сигналов коммутации (SCS) и уменьшение ошибок коммутации между фактическими коммутирующими сигналами и идеальными коммутирующими сигналами, которые должны быть как можно меньшими [10 ]. В [11] показан бессенсорный алгоритм коммутации сигналов на основе межфазного (L2L) BEMF, который рассчитывается на основе математической модели двигателя BLDC.Точки пересечения нуля (ZCP) выводятся путем дроби между двумя подходящими BEMF L2L и решаются с помощью кода во встроенном программном обеспечении. Кроме того, в [15], вместо того, чтобы определять ZCP BEMF двигателя в подвешенной фазе, расчетные сигналы коммутации берутся непосредственно из соответствующих средних напряжений L2L путем сравнения двухфазного напряжения на клеммах двигателя BLDC и пропускания его через фильтры нижних частот (LPF) и компараторы для генерации требуемых коммутационных выходных сигналов. Соответственно, сигналы коммутации должны соответствовать ZCP среднего напряжения L2L.Эти L2L ZCP отстают на 30 электрических градусов по сравнению с фазой BEMF. Преимущества этого метода заключаются в следующем: не требуется виртуальное напряжение нейтрали двигателя, снижение синфазного шума и отсутствие необходимости иметь схему фазового сдвига, которая может вызвать сложность схемы. Однако для высокоскоростного двигателя BLDC сигналы коммутации могут иметь большую задержку, которая может составлять более 90 электрических градусов в широком диапазоне скоростей [10]. Более того, для режима проводимости 180 градусов SCS, полученные с помощью этого метода, являются неправильными, потому что средние напряжения L2L, полученные от инвертора, отличаются от таковых для режима проводимости 120 градусов.Поэтому в этой статье предлагается новая бессенсорная схема для режима проводимости на 180 градусов. Кроме того, чтобы улучшить скорость обоих переходных краев SCS и уменьшить подавление шума и повысить стабильность системы привода двигателя, в этой статье для обоих режимов проводимости используется новая схема с триггером Шмитта. Вышеупомянутое обсуждение бессенсорных приводов двигателя BLDC по существу основано на шестиступенчатом интервальном переключении. Это включает в себя трехфазный двигатель BLDC с Y-подключением, применяемый для обоих режимов проводимости.То есть для режима проводимости при 120 градусах две фазы всегда включены, а оставшаяся фаза приостановлена, и каждая фаза активируется на два цикла коммутации. Следовательно, в этой приостановленной фазе крутящий момент не создается. Напротив, для режима проводимости на 180 градусов каждая фаза коммутируется в любое время в течение электрического цикла. Его способность передавать мощность со стороны инвертора на сторону двигателя больше, чем у 120-проводной схемы с источником питания того же напряжения [16].Кроме того, в этой 180-градусной проводящей системе максимальный крутящий момент больше, чем у 120-градусной проводящей системы, до 33% [16,17,18]. Кроме того, эта схема управления не была исследована должным образом из-за ее сложной природы по сравнению со схемой управления 120 градусов [19]. То есть в 180-градусном режиме во время включения силовые транзисторы на стороне высокого и низкого уровня перекрываются на короткий период, и это называется перекрестной проводимостью. Это приводит к потенциальному короткому замыканию между положительной клеммой и клеммой заземления источника питания [20].Для решения этой серьезной проблемы в данной статье было разработано и реализовано решение, объединяющее аппаратное обеспечение и режим мягкого прерывания на основе алгоритма управления с широтно-импульсной модуляцией (ШИМ) для привода двигателя электроинструмента. должны были выполнить управление скоростью высокоскоростного двигателя BLDC для электроинструмента на основе новой бессенсорной схемы для метода 180-градусной ШИМ-проводимости и проанализировать роль схемы триггера Шмитта, используемой в этой бессенсорной схеме.Таким образом, этот документ организован следующим образом: динамическая модель двигателя BLDC описана в Разделе 2. В Разделе 3 описывается системное оборудование привода двигателя электроинструмента на основе встроенного ARM (усовершенствованный RISC «компьютер с сокращенным набором команд»). ) микроконтроллер с другими периферийными устройствами, а также прошивка и программное обеспечение моторного привода. Результаты экспериментов проиллюстрированы и описаны в Разделе 4. Наконец, в Разделе 5 сделан вывод о превосходных характеристиках электроинструмента с бессенсорным моторным приводом.4. Экспериментальные результаты и обсуждение
Экспериментальная испытательная платформа электроинструмента на базе микроконтроллера ARM была разработана и успешно реализована в этой статье, как показано на рисунке 19. Она состояла из платы разработки ARM с использованием микроконтроллера TM4C123XXX, a спроектированный моторный привод, высокоскоростной двигатель BLDC, система нагрузки-момента с пружинной шкалой и источник напряжения питания шины постоянного тока. Технические характеристики двигателя BLDC для электроинструментов перечислены в таблице 3. Система привода двигателя BLDC как для управления на основе эффекта Холла, так и для бессенсорного управления изображена на рисунке 13.На рисунке 20 показаны трапециевидные формы сигналов BEMF электроинструмента. Ch2, Ch3 и Ch4 представляют формы сигналов BEMF A-фазы, B-фазы и C-фазы соответственно. Чтобы проверить предложенную бессенсорную схему, в первом испытании были выполнены экспериментальные результаты SCS с предложенной схемой и без нее для сравнения с теоретическим анализом. На рисунке 21 показаны сигнал Холла и SCS фазы A, а напряжение на клемме L2L было измерено с использованием и без использования предложенной бессенсорной схемы.Можно видеть, что как нарастающий, так и спадающий фронт сигнала коммутации можно пройти раньше, вместо того, чтобы замедляться примерно на 15 электрических градусов, как показано на рисунке 21a. Рисунок 21b показывает улучшенный сигнал SCS после применения предложенной бессенсорной схемы. Эти результаты подходят для теоретического анализа. Было замечено, что SCS проходил через буфер, чтобы получить резкие переходы для удобства мониторинга. Кроме того, на рисунке 22 показано сравнение сигнала Холла и SCS в контрольных точках S1A и S2A, реализованных с использованием и без предложенной схемы, как показано на рисунке 12.Видно, что сигнал коммутации от предложенного бессенсорного алгоритма был правильным. На стабильность и производительность системы повлияли качества SCS, которые были связаны с передним и задним фронтом сигналов. Во втором испытании, чтобы улучшить эти факторы, схема триггера Шмитта была принята для разработанной бессенсорной схемы. На рисунке 23 показаны SCS, измеренные с включением и без включения схем триггера Шмитта. Ch2, Ch3 и Ch4 указывают на отличные SCS, полученные путем включения триггерного действия Шмитта в соответствии с фазой A, фазой B и фазой C, соответственно.SCS канала Ch5 был извлечен из фазы A, которая не была реализована с помощью операции триггера Шмитта. Видно, что сигналы с триггером Шмитта имели резкую форму по обоим фронтам и время нарастания 1,68 мкс и время спада 1,6 мкс соответственно. Напротив, без использования схемы триггера Шмитта время нарастания и спада составляло 196,5 мкс и 134,5 мкс соответственно. Более того, бессенсорные сигналы Холла, которые не были изменены действием триггера Шмитта, могли вызвать нестабильную работу микроконтроллера, чтобы генерировать неподходящие сигналы ШИМ для переключения.Чтобы проверить реализацию схемы триггера Шмитта, на рисунке 24 показаны результаты SCS и сбой запуска двигателя без триггера Шмитта. На рисунке 24b показано, что фактическая скорость значительно колебалась в интервале времени между 801 и 1001 секундами. В этом случае отказ двигателя при запуске был вызван нестабильными SCS, как показано на рисунке 24a. Можно видеть, что нестабильные SCS были вызваны шумом на клеммах напряжения двигателя во время процедуры запуска, который работал с частотой отсечки LPF, равной 1.5931 кГц, тогда как противоположные результаты были достигнуты при включении триггера Шмитта, как показано на рисунке 23. Однако запуск двигателя был успешным на частоте среза 35,4543 Гц без триггера Шмитта. Следовательно, для определенных приложений следует тщательно продумывать конструкцию ФНЧ. Это открытие может быть полезно для исследователей, которые рассматривают возможность реализации схемы триггера Шмитта для бессенсорной конструкции двигателя. Краткое описание некоторых случаев с разными частотами среза, которые исследовались со схемой триггера Шмитта и без нее, показано в таблице 4.Чтобы отличить характеристики скорости с датчиками положения на эффекте Холла от характеристик без датчиков Холла, на рисунке 25 показан профиль реакции на скачок скорости от 5000 до 9000 об / мин, соответственно, для двух случаев. Сплошная прямая линия представляет команду скорости, а линия колебаний представляет скорость в реальном времени для каждого значения. Время, за которое фактическая скорость достигала командной скорости, составляло около 0,4 с для двух случаев. Это указывает на то, что бессенсорное управление положением, рассматриваемое в этой статье, могло бы заменить датчик положения на эффекте Холла в конструкции приводов двигателей BLDC электроинструмента.Более того, для проверки скоростного отклика спроектированной системы с бессенсорным управлением положением, в котором профили отклика скорости одинаковы для повышения и понижения, она была протестирована с различными скоростями 5000 об / мин, 6500 об / мин, 8000 об / мин. и 9500 об. / мин. Результаты сравнивались с результатами контроля положения на эффекте Холла. На рисунке 26 показаны характеристики скорости для обоих случаев с использованием датчиков положения на эффекте Холла и без них, соответственно. Интервал времени был установлен равным 10 с. Наблюдая за обоими рисунками, можно обнаружить, что фактические скорости могут сравняться с командами скорости и оставаться стабильными в рабочем диапазоне.Это по сути указывает на то, что бессенсорное управление положением, предложенное в этой статье, возможно и надежно. Однако наблюдались колебания фактической скорости на высокой скорости, и это является проблемой для режима проводимости на 180 градусов [17]. Это также недостаток обычного ПИД-регулирования. Следовательно, в этом случае следует использовать интеллектуальный ПИД-регулятор. Как упоминалось в разделе 2.2.1, для проверки и сравнения значений токов между 120-градусным и 180-градусным режимами проводимости, в которых 180-градусный Ожидалось, что режим даст более высокую мощность при том же источнике питания [16], испытание проводилось при разных рабочих скоростях для обоих режимов при управлении положением на основе эффекта Холла и бессенсорном управлении положением.Значение напряжения на шине постоянного тока составляло 24 В. Среднеквадратичные значения тока (среднеквадратичное значение) тока были проверены в одинаковых условиях для обоих случаев с датчиками Холла и без них. Легкая нагрузка TL = 0,0181 Нм была приложена к валу двигателя, как показано на рисунке 15. Результаты показаны в таблице 5. Соответственно, было обнаружено, что значения тока в режиме проводимости на 180 градусов были больше, чем моды 120-градусной проводимости примерно в 1,3333 раза [16]. Это произошло потому, что среднеквадратичное значение фазного напряжения в режиме 120 градусов было меньше, чем в режиме 180 градусов.Во-вторых, общие импедансы для режима 180 градусов были меньше, чем у режима 120 градусов, в котором две фазы A и B были соединены последовательно для режима 120 градусов, а для режима 180 градусов фаза А был подключен последовательно с фазой B и фазой C параллельно.5. Выводы
Режим проводимости 180 градусов, а не режим проводимости 120 градусов, для бессенсорного моторного привода электроинструмента, основанного на микроконтроллере ARM, был разработан и успешно реализован в этой статье.
Чтобы получить стабильные бессенсорные коммутационные сигналы от бессенсорного метода среднего напряжения на клемме L2L, в этой статье была разработана и успешно реализована усовершенствованная схема триггера Шмитта. Результаты экспериментов показывают, что бессенсорные коммутационные сигналы, генерируемые предлагаемым методом, имели не только более резкий край, но и уменьшали шумовые сигналы, а также повышали стабильность работы системы. Этот вывод может быть полезен для исследователей, которые рассматривают возможность реализации схемы триггера Шмитта для конструкции бессенсорного двигателя.Более того, невозможно измерить фазу BEMF с клеммы двигателя непосредственно для режима проводимости на 180 градусов, потому что в этом режиме нет плавающей фазы. Следовательно, бессенсорный метод измерения напряжения на клемме L2L подходит для режима проводимости на 180 градусов. Однако напряжение на его клемме L2L отличается от режима проводимости при 120 градусах. Это приводит к тому, что ZCP бессенсорных сигналов коммутации, генерируемых традиционным методом напряжения на клеммах L2L, нестабильны или некорректны.Следовательно, в этом исследовании предлагается новая бессенсорная схема клеммы L2L, которая справится с этим явлением. Результаты экспериментов показывают, что предложенный метод дал хорошие характеристики и заменил установку датчиков положения на эффекте Холла. Другими словами, это не только помогает устранить недостатки моторного привода, установленного с датчиками положения на эффекте Холла, такие как снижение производительности из-за колебаний температуры и суровых условий окружающей среды, но также может снизить общую стоимость положения ротора. датчики для моторного привода.Кроме того, было обсуждено сравнение различий между двумя схемами управления для режимов проводимости 120 и 180 градусов. Наконец, экспериментальные результаты подтверждают осуществимость и надежность бессенсорного моторного привода с режимом проводимости 180 градусов для электроинструментов, который был разработан и эффективно реализован в этой статье.
Amazon.com: Laliva Tool — плата контроллера бесщеточного двигателя мощностью 380 Вт (без / без датчика Холла) Плата драйвера ПЛК BLDC PWM DC 6-50 В: Industrial & Scientific
Модель: ZS-X11D
BLDC с широким напряжением 6-50 В, высокая мощность 380 Вт, трехфазный бесщеточный неиндуктивный контроллер, поддержка PLC 0-5 В, управление сигналом PWM. Интерфейс .MA MB MC фазный выходной двигатель
2. Материнская плата 5 В GND с собственным источником питания (ток не превышает 30 мА)
3. VCC GND Источник питания основного двигателя (внешний источник постоянного тока)
4. Выход импульсного сигнала скорости SC
5 . Прямой и обратный интерфейс прямого и обратного управления (также может приводить к внешнему переключателю)
6. Вход сигнала скорости VR (встроенный потенциометр управления скоростью также может быть подключен к внешнему аналоговому ШИМ-циклу 0-5 В с поддержкой двойного входного сигнала управления скоростью)
Материнская плата Технические характеристики:
Наименование продукта: Бесщеточный двигатель постоянного тока мощностью 380 Вт
Модель: ZS-X11D
Рабочее напряжение: 6-50 В
Максимальный ток: номинальный пик 16 А 20 А
Максимальная мощность: 380 Вт
Защита от перегрузки по току: Да
Максимальная скорость : 1.5–2 миллиона оборотов (консервативное справочное значение, связанное с числом полюсов двигателя)
Размер продукта: длина 63 мм * ширина 45 мм * высота 30 мм
Вес: около 93 г
Меры предосторожности:
1. Схема источника питания на основной плате не имеет предохранителя, а встроенная функция самодополнения приведет к необратимому повреждению микросхемы на плате (даже если это займет 2 секунды).
2. Во время нормальной работы на выходе двигателя имеется максимальная токовая защита. Поскольку мощность и ток модуля очень велики, не допускайте короткого замыкания, когда модуль не работает нормально.Как только короткое замыкание имеет возможность сжечь линию, первая машина для тестирования проводки, пожалуйста, используйте испытание на малый ток и низкое напряжение, после ОК, затем пропустите высокий ток и высокое напряжение, потому что это голый модуль платы для продажи, обратите внимание на изоляция линии электропроводки, сильное напряжение не должно касаться частей платы.
3. Не подключайте двигатель, напряжение и ток которого явно не соответствуют модулю привода.
и его роль в контроллере двигателя
Датчик Холла — широко используемый датчик, который обеспечивает обратную связь по положению ротора с контроллером двигателя.Давайте поймем значение этого датчика в системе управления автомобильным двигателем.
Система управления двигателем BLDC представляет собой сложную схему, в которой несколько компонентов работают в тандеме, чтобы заставить двигатель двигаться желаемым образом. Эффективность, долговечность и производительность — вот атрибуты, которые больше всего волнуют инженеров при проектировании такой системы.
В то время как магниты и катушки заботятся об электрическом аспекте, микроконтроллер действует как мозг, который управляет двигателем.Но даже самый острый мозг нуждается в сенсорной информации.
Два сенсорных входа, которые здесь имеют большое значение, — это Speed и Position . Давайте разберемся с ними в контексте коммутации двигателей.
Коммутация — это процесс переключения тока в фазах двигателя для облегчения вращения двигателя.
В щеточных двигателях щетки контактируют с коммутатором и переключают ток для движения двигателей.Двигатели BLDC не имеют щеток; таким образом, они должны приводиться в движение электроникой с помощью системы управления двигателем.
Контроллер двигателя BLDC подает прямоугольные сигналы (напряжение) на магниты ротора и создает магнитное поле, которое приводит в движение двигатель.
Важность скорости и положения ротора при коммутации двигателя:
Коммутация в двигателе BLDC — это 6-этапный процесс . 3-фазный H-Bridge используется для создания 6 векторов потока , каждый из которых вызывает вращение двигателя на 60 градусов (соответствует следующему положению), таким образом совершая полный оборот на 360 градусов.
- Чтобы двигать двигатель, контроллер двигателя пропускает ток через катушку статора. Это создает магнитное поле, которое, в свою очередь, развивает крутящий момент на роторе (постоянный магнит). В результате ротор начинает двигаться.
- Теперь, если ротор приблизится к движущемуся магнитному полю, ротор будет иметь тенденцию останавливаться из-за изменения полярности. В этом случае магнитное поле начнет притягивать ротор и останавливать движение. Чтобы избежать этого, система управления двигателем переключает ток, подаваемый на статор, и создается новое магнитное поле, и ротор продолжает свое движение.Таким образом, процесс коммутации сводится к переключению тока в правом экземпляре .
- Понятие скорости и положения проявляется в картине, поскольку этот «правильный экземпляр» должен быть обнаружен, когда он прибывает.
- Датчик необходим для обратной связи с системой управления двигателем, указывающей, когда ротор достиг желаемого положения. Если коммутация выполняется быстрее или медленнее, чем скорость ротора, магниты не синхронизируются с магнитным полем статора.Это заставляет ротор вибрировать и останавливаться вместо вращения.
- После одной коммутации необходимо определить положение ротора относительно статора, чтобы можно было инициировать следующую коммутацию. Следовательно, определение местоположения также является важным параметром.
В производстве электродвигателей используется множество типов датчиков, таких как энкодеры, переключатели и потенциометры. Однако наиболее широко используемый и применяемый датчик — это датчик Холла .
В следующих разделах мы подробно поговорим о датчике Холла и его роли в системе управления двигателем.
Что такое датчик Холла?
Датчик на эффекте Холла — это, по сути, преобразователь, основанный на принципе эффекта Холла.
Эффект получения измеримого напряжения, когда проводник или полупроводник с током, текущим в одном направлении, вводится перпендикулярно магнитному полю, называется эффектом Холла.
Проще говоря, напряжение создается на электрическом проводнике, когда к нему прикладывается магнитное поле в направлении, перпендикулярном потоку тока.
Датчик Холла — это твердотельное устройство, которое применяет этот принцип для определения положения, скорости и различных других атрибутов, необходимых для эффективной работы двигателя BLDC.
Увеличенный вид датчика Холла
Через полосу Холла постоянно проходит небольшой ток. Как уже упоминалось, переменное поле от этого магнита ротора будет создавать напряжение на полосе Холла. Затем напряжение подается на цифровую схему (показанную на диаграмме выше), которая, в свою очередь, выдает цифровой сигнал в качестве выхода датчика Холла.
Как работает датчик эффекта Холла в двигателе BLDC
Обычно двигатель BLDC имеет три датчика Холла, установленных на роторе или статоре. Эти датчики Холла расположены на расстоянии 120 градусов друг от друга, что дает угловое положение от 0 до 360 градусов.
Когда эти датчики Холла входят в контакт с магнитным полем ротора, он генерирует соответствующий цифровой импульс в единицах 1 и 0, как показано на схеме ниже.
За шесть шагов эти датчики Холла могут определять положение двигателя (угол).На диаграмме прямоугольные формы сигналов демонстрируют положительный и отрицательный импульс, генерируемый под соответствующим углом всеми тремя датчиками эффекта Холла — A, B и C.
Соответствующий график также показывает, как одна коммутация завершается за 6 шагов, когда угол достигает 360 градусов.
Следующее объяснение внесет большую ясность.
Когда магнит ротора пересекает один из датчиков, он выдает низкий или высокий сигнал в зависимости от того, прошел ли он через северный полюс или южный полюс ротора.Когда ротор пересекает все три датчика, эти датчики переключаются между низким и высоким, таким образом, выявляя положение ротора каждые 60 градусов.
На схеме ниже показан типичный контроллер двигателя BLDC. Три линии, идущие от двигателя к контроллеру, отображают сигнал, посылаемый тремя датчиками Холла.
Датчик Холла способен различать положительный и отрицательный заряд, движущийся в противоположном направлении. Магнитное поле, обнаруженное датчиком на эффекте Холла, преобразуется в подходящий аналоговый или цифровой сигнал, который может быть считан электронной системой, обычно системой управления двигателем.
Ниже представлена таблица истинности, полученная на основе показаний трех датчиков Холла. Как видите, состояние транзистора H-моста зависит от сигнала, обнаруживаемого датчиком. Стрелка вниз показывает движение по часовой стрелке (CW), а стрелка вверх показывает движение против часовой стрелки (CCW).
Теперь, когда у нас есть таблица истинности и график, угол (положение) и скорость ротора можно легко вычислить.
Преимущества использования датчика Холла в контроллере двигателя BLDC
- Датчик Холла — это очень простое устройство, состоящее из магнитов, поэтому оно очень экономично для систем управления двигателями.
- По той же причине эти датчики легко внедрить в передовые системы управления двигателями для электромобилей и других автомобильных решений.
- Большинство двигателей BLDC оснащены этими датчиками. Датчики на эффекте Холла
- в основном невосприимчивы к таким условиям окружающей среды, как влажность, температура, пыль и вибрация.
Завершение
Многое происходит внутри системы управления двигателем BLDC. Есть алгоритм FOC, схемы H-Bridge, эффективная коммутация и многое другое.Среди множества компонентов внутри системы управления двигателем BLDC очень маленький и скромный датчик — датчик эффекта Холла — дает о себе знать.
Будучи экономичными и простыми в использовании, эти датчики сделали новые решения для управления двигателями BLDC более эффективными и удобными в использовании в автомобильной промышленности.
Посмотрите это пространство, чтобы узнать о других таких компонентах, которые играют жизненно важную роль в контроллере двигателя BLDC.
Анахайм Автоматизация | Тысячи двигателей BLDC на складе по низким ценам
Что такое бесщеточный двигатель постоянного тока?
Бесщеточный двигатель постоянного тока (также известный как двигатель BLDC) — это синхронный электродвигатель, работающий от постоянного тока.Как следует из названия, бесщеточный двигатель постоянного тока не работает с щетками; скорее он работает с контроллером через электронную коммутацию.
Блок-схема бесщеточного двигателя постоянного тока
Как работает бесщеточный двигатель постоянного тока?
Бесщеточный двигатель постоянного тока приводится в действие посредством электронной шестиступенчатой системы коммутации. В отличие от своих коллег с щеточным электродвигателем постоянного тока, бесщеточный электродвигатель постоянного тока не содержит угольных щеток.Вместо этого электромагниты внутри двигателя остаются неподвижными вместе с якорем, в то время как заключенные в него постоянные магниты вращаются, создавая крутящий момент. Бесщеточный двигатель постоянного тока синхронный; и статор, и магнитное поле генерируют одну и ту же частоту, что позволяет избежать любого типа «скольжения», который наблюдается у большинства асинхронных двигателей.
Что такое шестиступенчатая коммутация?
Шестиступенчатая коммутация является экономичным средством электронной коммутации благодаря простым и относительно недорогим устройствам обратной связи и привода.При шестиступенчатой коммутации одновременно используются только две из трех обмоток бесщеточного двигателя постоянного тока. Шаги эквивалентны 60 электрическим градусам, поэтому шесть шагов составляют полный поворот на 360 градусов. Один полный цикл на 360 градусов может управлять током благодаря тому, что существует только один путь тока. Шестиступенчатая коммутация обычно полезна в приложениях, требующих высоких скоростей и частот коммутации. Шестиступенчатый бесщеточный двигатель постоянного тока обычно имеет более низкий КПД крутящего момента, чем двигатель с синусоидальной коммутацией.
Как управляется бесщеточный двигатель постоянного тока?
Электронный бесщеточный контроллер постоянного тока (также известный как драйвер или электронный контроллер скорости) заменяет механическую систему коммутации, используемую щеточным электродвигателем постоянного тока, и требуется для работы большинства бесщеточных электродвигателей постоянного тока. В контроллере бесщеточного двигателя постоянного тока для определения положения ротора используется датчик Холла или обратная ЭДС (электродвижущая сила). Понимание ориентации ротора имеет решающее значение для работы бесщеточного двигателя постоянного тока.
Эффект Холла использует три датчика Холла в бесщеточном двигателе постоянного тока, чтобы помочь определить положение ротора. Этот метод в основном используется для определения скорости, позиционирования, измерения тока и бесконтактного переключения. Магнитное поле изменяется в ответ на изменение выходного напряжения преобразователем. Обратная связь создается путем прямого возврата напряжения, поскольку датчик работает как аналоговый преобразователь. Расстояние между пластиной Холла и известным магнитным полем можно определить с помощью группы датчиков, а также определить относительное положение магнита.Датчик Холла может действовать как переключатель включения / выключения в цифровом режиме в сочетании со схемой.
Обратная ЭДС, также известная как противодействующая электродвижущая сила, вызывается изменяющимся электромагнитным полем. В бесщеточном двигателе постоянного тока обратная ЭДС — это напряжение, возникающее при движении между внешним магнитным полем и якорем двигателя. Другими словами, напряжение в катушке индуктивности создается переменным или пульсирующим током. Полярность напряжения всегда обратна входному напряжению.Этот метод обычно используется для косвенного измерения положения и скорости бесщеточного двигателя постоянного тока, и из-за отсутствия датчиков Холла в контроллере их часто называют бессенсорными контроллерами.
Оптические энкодерытакже могут быть добавлены к бесщеточному двигателю постоянного тока, что позволяет определять как направление, так и скорость. Более точные приложения могут использовать оптические энкодеры с третьим индексным сигналом для определения импульса на оборот.
Физические свойства бесщеточного двигателя постоянного тока
Бесщеточный двигатель постоянного тока состоит из вращающегося ротора, магнитов из неодима, железа и бора и статора.Бесщеточные двигатели постоянного тока считаются вывернутой наизнанку версией щеточных двигателей постоянного тока; коммутатор и щетки отсутствуют, а обмотки расположены снаружи, подключены к контроллеру. Обычно существует два различных типа конструкции для бесщеточного двигателя постоянного тока: конфигурация с внутренним и внешним подъездом. Конфигурация рабочего колеса состоит из трех обмоток статора, расположенных вокруг ротора, с постоянными магнитами как часть ротора. У бегунка обратное соотношение между магнитами и катушками.Постоянные магниты вращаются внутри подвешенного ротора, окружающего сердечник бесщеточного двигателя постоянного тока.
Внутри трехфазный двигатель может быть настроен на конфигурацию «звезда» или «треугольник». Основным преимуществом конфигурации «звезда», также известной как конфигурация «звезда», является то, что напряжение между фазой и нейтралью одинаково на всех трех ветвях. Схема представляет собой параллельную схему в форме буквы Y, где все обмотки соединены в центральной точке, а питание подается на остальные обмотки.
Конфигурация «Дельта» создает фигуру в виде треугольника, образуя последовательную цепь. Эта конфигурация подает питание на каждое из соединений.
Как выбрать бесщеточный двигатель постоянного тока
Выбор подходящего бесщеточного двигателя постоянного тока требует знания требований приложения, таких как крутящий момент, скорость, размер, мощность, длина и т. Д. При определении того, какой бесщеточный двигатель постоянного тока лучше всего соответствует требованиям, необходимо также учитывать контроллер, так как это идет рука об руку с работой бесщеточного двигателя постоянного тока.
Наконец, важно учитывать окружающую среду. Для приложений, требующих суровых влажных условий, могут потребоваться двигатели с определенными степенями защиты IP. Для получения более подробной информации по этому вопросу см. Требования к окружающей среде бесщеточного двигателя постоянного тока.
Применение бесщеточного двигателя постоянного тока
Стоимость бесщеточного двигателя постоянного тока снизилась с момента его появления из-за усовершенствования материалов и дизайна. Это снижение цены в сочетании со многими преимуществами, которые он имеет по сравнению с щеточным двигателем постоянного тока, делает бесщеточный двигатель постоянного тока популярным компонентом во многих различных приложениях.Приложения, в которых используется бесщеточный двигатель постоянного тока, включают, но не ограничиваются:
| • КИП |
| • Медицинский |
| • Бытовая техника |
| • Автомобильная промышленность |
| • Оборудование для автоматизации производства |
| • Аэрокосмическая промышленность |
| • Военный |
Преимущества бесщеточного двигателя постоянного тока
Отсутствие щеток в бесщеточном двигателе постоянного тока, возможно, является его самым большим преимуществом.Угольные щетки в щеточном двигателе постоянного тока быстро изнашиваются и нуждаются в замене, что в долгосрочной перспективе может быть дорогостоящим. Бесщеточный двигатель постоянного тока производит меньше шума и менее подвержен искрообразованию из-за отсутствия коммутатора. Бесщеточный двигатель постоянного тока обычно меньше и легче, чем щеточный двигатель постоянного тока, что делает его идеальным для приложений, где вес и пространство являются важными факторами. Бесщеточный двигатель постоянного тока чище, мощнее и требует меньшего обслуживания, чем щеточный двигатель постоянного тока. Он имеет более высокие диапазоны скоростей, более высокие динамические характеристики и, в конечном итоге, превосходит щеточный двигатель постоянного тока по общему количеству часов работы.
Недостатки бесщеточного двигателя постоянного тока
Существует множество применений, в которых используется щеточный двигатель постоянного тока, вместо которого может использоваться бесщеточный двигатель постоянного тока. Однако несколько факторов могут помешать переходу. Первый фактор — это стартовая стоимость. Хотя бесщеточный двигатель постоянного тока требует меньшего обслуживания, чем щеточный двигатель постоянного тока, первоначальная стоимость выше из-за его выгодной конструкции. Во-вторых, сложность. Для работы бесщеточного двигателя постоянного тока требуется контроллер, который обычно более сложен, чем большинство контроллеров.Бесщеточный двигатель постоянного тока также требует дополнительной системной проводки для питания схем электронной коммутации.
Срок службы бесщеточного двигателя постоянного тока
Бесщеточный двигатель постоянного тока часто считается лучшим по сравнению с щеточным двигателем постоянного тока из-за его существенно более длительного срока службы. При работе в соответствии с указанными спецификациями бесщеточный двигатель постоянного тока может проработать более 20 000 часов работы в зависимости от срока службы подшипников. Использование бесщеточного двигателя постоянного тока, выходящего за рамки его технических характеристик, сокращает этот срок службы.
Требуемое обслуживание бесщеточного двигателя постоянного тока
Из-за отсутствия щеток или коммутатора в бесщеточном двигателе постоянного тока нет ничего, что можно было бы заменить, что делает его чрезвычайно простым в обслуживании. Единственное требование — чтобы двигатель работал в соответствии с надлежащими техническими характеристиками и в чистой среде, чтобы гарантировать, что он не перегреется и не приведет к отказу системы.
Требования к окружающей среде бесщеточного двигателя постоянного тока
Пользователь должен соблюдать меры предосторожности в отношении окружающей среды системы бесщеточного двигателя постоянного тока во время эксплуатации, ремонта и обслуживания.Среда, в которой используется бесщеточный двигатель постоянного тока, должна способствовать соблюдению общих правил эксплуатации электрического оборудования. Не запускайте бесщеточный двигатель постоянного тока рядом с горючими газами, пылью, маслом, паром или влагой. Бесщеточный двигатель постоянного тока при работе на открытом воздухе должен быть защищен крышкой, обеспечивающей приток воздуха и охлаждение двигателя. Любое присутствие влаги может привести к отказу системы и / или поражению электрическим током. Поэтому следует принять соответствующие меры, чтобы избежать любого взаимодействия между бесщеточным двигателем постоянного тока и любой влагой или парами.Бесщеточный двигатель постоянного тока следует устанавливать в среде, свободной от вибрации, ударов, конденсации, пыли и электрических шумов. Anaheim Automation предлагает полную линейку герметичных бесщеточных двигателей постоянного тока со степенью защиты IP65 для работы в суровых и влажных условиях.
ПРИМЕЧАНИЕ: Любое несоблюдение вышеупомянутых мер безопасности и защиты окружающей среды нарушает производственные стандарты и предполагаемое использование бесщеточного двигателя постоянного тока, а также аннулирует гарантию.
Устранение неисправностей бесщеточного двигателя постоянного тока
ОБРАТИТЕ ВНИМАНИЕ: Anaheim Automation предлагает бесплатную техническую помощь, чтобы помочь заказчику в выборе продукта, установке и обслуживании.Однако, хотя точные указания, технические данные и иллюстрации предназначены для оказания надлежащей помощи заказчику в отношении линейки бесщеточных двигателей постоянного тока и других продуктов, такие советы и документы могут быть изменены и являются исключительно дополнительными. Заказчик несет полную ответственность за правильный выбор и работу своей системы бесщеточного двигателя постоянного тока.
Проблема: Бесщеточный двигатель постоянного тока работает неправильно или останавливается.
Решение: Проблемы с работой бесщеточного двигателя постоянного тока могут указывать на неисправность датчиков Холла.Чтобы проверить, используйте резистор, чтобы подтянуть каждый Холл до 5 вольт, и проверьте каждый Холл с помощью осциллографа, вращая вал. Следите за точкой между холлом и резистором, как показано на рисунке 2.
Повторите этот процесс для каждого отдельного зала. При вращении вала вручную на прицеле должны появиться низкий и высокий сигнал. Помните о важности того, какое значение используется для сопротивления; это зависит от силы тока, которую могут выдержать датчики Холла.
Если этот тест показывает, что датчики Холла работают правильно, следующим шагом будет проверка фаз бесщеточного двигателя постоянного тока.Подключите бесщеточный двигатель постоянного тока к контроллеру. С помощью осциллографа проверьте каждую фазу, чтобы увидеть, присутствует ли сигнал переключения. Если фазы не представляют проблемы, это может указывать на проблему с подшипником или внутреннее короткое замыкание. Если эти методы не объясняют, почему бесщеточный двигатель постоянного тока работает неправильно, следует подумать о покупке нового бесщеточного двигателя постоянного тока.
Формулы
Что такое постоянная Kt в бесщеточном двигателе постоянного тока?
Мощность намотки = Kt * Kt / R
Kv = 1000 об / мин / Vrms
Kt = унция-дюйм / ампер
Kt = Kb * 1.35 год
Ke = Vrms / 1000 об / мин
Кб = В / 1000 об / мин
Обратная ЭДС = В / КРПМ
История бесщеточного двигателя постоянного тока
Британский ученый Майкл Фарадей впервые экспериментировал с идеей электромагнитного асинхронного двигателя в начале 1800-х годов. К 1828 году был представлен двигатель постоянного тока с тремя основными компонентами: статором, ротором и коммутатором. В то время двигатели постоянного тока не имели постоянных магнитов. Вместо этого они работали так же, как сегодня щеточные двигатели постоянного тока, в которых ток протекал через обмотки двигателя.В 1837 году американцы Томас и Эмили Давенпорт преобразовали двигатель постоянного тока Фарадея в двигатель, который можно было использовать в коммерческих целях. Эти двигатели постоянного тока стали популярными в печатных станках и механических станках. Однако из-за высокой стоимости батарейного питания спрос был слишком мал, чтобы поддерживать их успех. В 1886 году Фрэнк Джулиан Спраг представил первый практический двигатель постоянного тока, который обладал постоянной скоростью при переменных нагрузках.
Со временем отказ от коммутатора и щеток уступил место внедрению электронной коммутации.Несмотря на то, что бесщеточный двигатель постоянного тока был довольно дорогим, когда впервые был представлен, усовершенствования в конструкции и материалах резко снизили затраты и сделали бесщеточный двигатель постоянного тока популярным выбором для многих различных приложений.
Бесщеточный двигатель Quiz
1. Что такое постоянное напряжение?
2. Что такое постоянный крутящий момент?
3. Что такое статор?
4. В чем разница между обмотками звезды и треугольника?
5.Как найти постоянную напряжения?
6. Что происходит при повышении напряжения?
7. Что происходит при понижении напряжения?
8. Если у вас два разных входных напряжения и одинаковый крутящий момент, что происходит с током и почему?
9. Сколько фаз у бесщеточного двигателя?
10. В чем разница между щеточным двигателем постоянного тока и бесщеточным двигателем постоянного тока?
Бонусные вопросы
11.Сколько импульсов на оборот в 4-полюсном и 8-полюсном двигателе для одного датчика Холла?
12. Как изменить направление вращения двигателя путем перестановки проводов?
Ответы на викторину по бесщеточным двигателям
1. Что такое постоянное напряжение?
об / мин
Вольт
2. Что такое постоянный крутящий момент?
Крутящий момент
Ток
3. Что такое статор?
Статор содержит катушки с проволокой, на которые будет наведено напряжение при прохождении через них магнитов.
4. В чем разница между обмотками звезды и треугольника? Обмотки типа «звезда»
обеспечивают высокий крутящий момент на низких оборотах, а обмотки треугольником — низкий крутящий момент на низких оборотах.
5. Как найти постоянную напряжения?
Возьмите скорость холостого хода и разделите на приложенное входное напряжение.
6. Что происходит при повышении напряжения?
Скорость двигателя также увеличивается.
7. Что происходит при понижении напряжения?
Скорость двигателя также уменьшается.
8. Если у вас два разных входных напряжения и одинаковый крутящий момент, что происходит с током и почему?
Ток останется прежним из-за постоянного крутящего момента. Крутящий момент зависит только от тока, а не от напряжения.
9. Сколько фаз у бесщеточного двигателя ?
Три
10. В чем разница между щеточным двигателем постоянного тока и бесщеточным двигателем постоянного тока?
Щеточному двигателю постоянного тока требуется только физический контакт, чтобы пропустить ток через его обмотки, чтобы обеспечить коммутацию.Бесщеточный двигатель постоянного тока нуждается в драйвере для переключения.
Бонусные вопросы
Сколько импульсов на оборот в 4- и 8-полюсном двигателе для одного датчика Холла?
4-полюсный двигатель имеет 2 импульса на оборот: 4/2 = 2 импульса
8-полюсный двигатель имеет 4 импульса на оборот: 8/2 = 4 импульса
12. Как изменить направление вращения двигателя?
Переключение фаз вместе с датчиками Холла.
Часто задаваемые вопросы о бесщеточном двигателе
Q: Могут ли применяться напряжения, отличные от указанного?
A: Да, вы можете применять разное напряжение, однако вы должны помнить, что существует ограничение скорости для подшипников.Если увеличить напряжение, скорость увеличится. Если вы уменьшите напряжение, то скорость уменьшится. Например, если бесщеточный двигатель постоянного тока рассчитан на работу при 3000 об / мин без нагрузки при 36 В постоянного тока, двигатель будет работать на 2000 об / мин при 24 В постоянного тока. Максимальная скорость, крутящий момент и мощность прямо пропорциональны напряжению.
В: Как достичь более высокой выходной мощности без покупки нового двигателя?
A: Этого можно достичь двумя способами: увеличить прикладываемое напряжение или увеличить ток, подаваемый на двигатель.Уравнение:
Мощность = (Oz — дюйм x ω) Мощность = Вт (Вт)
1351,2 ω = Скорость (об / мин)
В: Нужно ли использовать датчики Холла для привода бесщеточного двигателя постоянного тока?
A: Нет, датчики Холла необходимы только для систем обратной связи, требующих датчика Холла. Бесщеточный двигатель может быть бездатчиковым, если обратная ЭДС используется для запуска двигателя.
В: Что такое крутящий момент при остановке?
A: Крутящий момент при остановке — это величина крутящего момента, при которой вал перестает двигаться.
Q: Что такое номинальный крутящий момент?
A: Номинальный крутящий момент — это момент, при котором двигатель может непрерывно работать на безопасном уровне.
В: Что такое пиковый крутящий момент?
A: Пиковый крутящий момент — это момент, при котором двигатель может работать в течение короткого периода времени, но будет поврежден при длительной работе.
В: Могу ли я запустить бесщеточный двигатель постоянного тока от батареи?
A: Да, вместе с бесщеточным контроллером постоянного тока.
В: Могу ли я запустить бесщеточный двигатель постоянного тока при напряжении 110 В переменного тока?
A: Да, вместе с бесщеточным контроллером постоянного тока.
В: Будет ли бесщеточный двигатель постоянного тока замедляться при увеличении нагрузки?
A: При управлении с обратной связью бесщеточный двигатель постоянного тока не замедляется, пока крутящий момент двигателя достаточно велик. Однако при управлении с разомкнутым контуром он всегда будет замедляться.
В: Можно ли сжечь бесщеточный двигатель постоянного тока из-за слишком большой нагрузки?
A: Да. Он защищен, если в контроллере есть ограничение по току.
В: Какое рекомендуемое расстояние кабеля между двигателями Anaheim Automation BLDC и драйверами?
A: Мы рекомендуем, чтобы длина проводки между двигателями BLDC и контроллером не превышала 25 футов.Хотя это не обязательно, мы рекомендуем использовать экранированный кабель двигателя Anaheim Automation. Этот кабель идеально подходит для работы со всеми комбинациями драйверов и двигателей, которые мы предлагаем. Мы также можем добавить разъемы к кабелям. Пожалуйста, свяжитесь с инженером по приложениям для получения более подробной информации.
В: Продает ли компания Anaheim Automation энкодеры для двигателей BLDC?
A: Да. Мы поставляем энкодеры для заказов любого размера для клиентов, которым требуется полная
Двигатель / энкодер в сборе готов к установке.Мы можем установить энкодер на двигатель за номинальную плату. Для получения более подробной информации обратитесь к представителю службы поддержки клиентов.
В: Каков ожидаемый срок службы двигателей Anaheim Automation BLDC?
A: Двигатели Anaheim Automation BLDC имеют ожидаемый срок службы 20 000 часов при нормальных условиях эксплуатации. Гарантия Anaheim Automation составляет 12 месяцев с даты выставления счета. Для получения более подробной информации см. Разделы «Условия окружающей среды» руководства по двигателю BLDC.
В: Есть ли какие-либо повреждения, вызванные разобранным двигателем BLDC?
A: Да, и гарантия аннулируется! Если у вас неисправен двигатель или вы обеспокоены его работой, обратитесь в Anaheim Automation.Обратите внимание, что гарантийный срок составляет 12 месяцев с даты выставления счета.
В: Мой двигатель глохнет на высокой скорости, когда температура превышает 65 ° C. Почему?
A: Старайтесь, чтобы температура двигателя BLDC не превышала 60 градусов C, или увеличьте длину стека в вашем двигателе.
Q: Считаются ли двигатели BLDC со шпоночным пазом, плоским валом, кабелями и функциями энкодера «особенными»?
A: Да, они считаются «специальными» товарами, отсутствующими на складе, и могут потребовать оплаты NRE или SET-UP.За некоторые изменения также взимается дополнительная плата. Иногда сборы NRE и SET-UP отменяются, если объем заказа достаточно велик.
В: Могу ли я собрать двигатель BLDC и контроллер скорости вместе?
A: Да. В размерах 17 и 23 NEMA мы предлагаем интегрированный двигатель BLDC с контроллером. Ознакомьтесь с нашими сериями BLYMD, BLWR23MD, BLWR23MDA, BLWS23MD и BLWSMDA для получения более подробной информации.
В: Могу ли я добавить энкодер к двигателям BLDC?
A: Оптические энкодеры также могут быть добавлены к бесщеточному двигателю постоянного тока, что позволяет определять как направление, так и скорость.Более точные приложения могут использовать оптические энкодеры с третьим индексным сигналом для определения импульса на оборот.
В: Требуется ли какое-либо обслуживание двигателя BLDC?
A: Из-за отсутствия щеток или коммутатора в двигателе BLDC нет ничего, что можно было бы заменить, что делает его чрезвычайно простым в обслуживании. Единственное требование — использовать двигатель в соответствии с опубликованными спецификациями и в чистой среде, чтобы гарантировать, что он не перегреется и не приведет к отказу системы.
Q: Есть ли какие-либо факторы окружающей среды, о которых я должен знать, чтобы работать с двигателем и контроллером BLDC?
A: Пользователь должен соблюдать меры предосторожности в отношении окружающей среды двигателя BLDC во время эксплуатации, ремонта и обслуживания. Среда, в которой используется двигатель BLDC, должна способствовать соблюдению общих правил работы с электрическим оборудованием. Не запускайте двигатель BLDC рядом с горючими газами, пылью, маслом, паром или влагой. Двигатель BLDC должен быть защищен крышкой при работе на открытом воздухе, чтобы обеспечить достаточный поток воздуха и охлаждение двигателя.Любое присутствие влаги может привести к отказу системы и / или поражению электрическим током. Поэтому следует проявлять адекватную осторожность, чтобы избежать любого взаимодействия между двигателем и любой влагой или парами. Двигатель BLDC следует устанавливать в среде, свободной от вибрации, ударов, конденсации, пыли и электрических шумов. Anaheim Automation предлагает полную линейку двигателей BLDC с классом защиты IP65 для работы в суровых и влажных условиях.
Глоссарий по бесщеточным двигателям
Якорь — Якорь, один из компонентов бесщеточного двигателя постоянного тока, является частью постоянного магнита или электромагнита, или подвижной металлической части соленоида или реле.Другой компонент — это обмотка возбуждения или магнит возбуждения. Роль компонента «поля» заключается просто в создании магнитного поля (магнитного потока) для взаимодействия якоря, поэтому этот компонент может содержать либо постоянные магниты, либо электромагниты, образованные проводящей катушкой.
Дополнительный вал — Вал двигателя с задней стороны, иногда называемый «двусторонним» двигателем.
Back EMF (Back ElectroMotive Force) — Напряжение или электродвижущая сила, которая противодействует току, который его индуцирует.Обратная ЭДС — это один из двух способов определения положения ротора при управлении скоростью. Тип контроллера, который использует этот метод, известен как бессенсорное управление.
Бесщеточный двигатель постоянного тока — Электронный синхронный двигатель, работающий от постоянного тока и управляемый посредством электронной коммутации.
Коммутатор — Поворотный электрический переключатель, который периодически меняет направление тока между ротором и внешней цепью.
Контроллер (иногда называемый драйвером или электронным регулятором скорости) — Электрическая цепь или другой электронный компонент, используемый для управления другой схемой.Контроллер бесщеточного двигателя постоянного тока управляет направлением и скоростью двигателя или, возможно, действует как тормоз. Контроллер бесщеточного двигателя постоянного тока имеет решающее значение для работы бесщеточного двигателя постоянного тока.
Дельта-конфигурация (или Pi) — Дельта-конфигурация дает низкий крутящий момент при низких оборотах. Сопротивление между любыми двумя точками представляет собой последовательно-параллельную комбинацию всех трех резисторов. Следовательно, эффективное сопротивление цепи будет меньше значений отдельных задействованных резисторов.Это может быть очень полезно в ситуациях, когда желательно использовать более высокие значения сопротивления, чем обычно требует схема.
Электродвигатель — Электродвигатель — это двигатель, который использует электрическую энергию для производства механической энергии.
ЭДС (электродвижущая сила) — ЭДС — это внешняя работа, затрачиваемая на единицу заряда для создания разности электрических потенциалов между двумя разомкнутыми клеммами.
Датчики на эффекте Холла — Датчик на эффекте Холла — это преобразователь, который изменяет свое выходное напряжение в ответ на изменения магнитного поля.Датчики Холла используются для бесконтактного переключения, позиционирования, определения скорости и измерения тока.
Inrunner — Inrunner Motor — это тип бесщеточного двигателя, в котором их вращающийся сердечник находится внутри корпуса двигателя, обычно используется в радиоуправляемых автомобилях и самолетах.
Outrunner — Бесщеточный двигатель этого типа вращает свою внешнюю оболочку вокруг своих обмоток, что обычно используется в радиоуправляемых автомобилях и самолетах.
Ротор — Вращающаяся часть бесщеточного двигателя постоянного тока, работающая с неподвижным элементом, называемым статором.Расположение ротора важно для управления скоростью бесщеточного двигателя постоянного тока.
Статор — Статор содержит катушки с проволокой, в которых индуцируется напряжение, когда по ним проходят магниты. Статор — это неподвижная часть бесщеточного двигателя постоянного тока.
Конфигурация «звезда» (Y или звезда) — Конфигурация «звезда» обеспечивает высокий крутящий момент на низких оборотах, но не на таких высоких максимальных оборотах. Сопротивление между любыми двумя из трех внешних соединений будет последовательной комбинацией двух из трех резисторов.
Причина и следствие: поиск и устранение неисправностей датчиков Холла
Лампа из китового масла освещала место над кухонным столом, где Эдвин работал над тонкой прямоугольной полосой из золотой фольги. Он мог видеть свое отражение в полосе, и его мысли на мгновение заблудились, когда он подумал о том, каким усталым он выглядел. Было уже очень поздно, но Эдвин задумал что-то новое, что-то очень новое. Эдвин Холл работал над теорией электронного потока Кельвина, которая была представлена примерно 30 годами ранее, в 1849 году.Во время работы он случайно заметил, что если через золотую полоску протекает ток и магнитное поле помещается перпендикулярно одной стороне полоски, то на краях полоски обнаруживается разность электрических потенциалов. Это открытие было приписано доктору Эдвину Холлу, и теперь оно называется эффектом Холла.
Как и многие другие открытия, блестящее наблюдение доктора Холла пришло не в результате его поиска, а в результате наблюдения чего-то необычного и последующего воздействия на него. Эффект Холла известен уже более 100 лет, но приложения для его использования не были разработаны до последних нескольких десятилетий.Автомобильная промышленность применила эту технологию ко многим системам, используемым в современных транспортных средствах, включая трансмиссию, систему контроля кузова, противобуксовочную систему и антиблокировочную тормозную систему. Чтобы охватить эти различные системы, датчик Холла конфигурируется несколькими способами / переключением, аналоговым и цифровым. Это датчики приближения; они не имеют прямого контакта, но используют магнитное поле для активации электронной схемы.
Эффект Холла может быть получен с помощью таких проводников, как металлы и полупроводники, и качество эффекта меняется в зависимости от материала проводника.Материал будет напрямую влиять на протекающие через него электроны или положительные ионы. В автомобильной промышленности обычно используются три типа полупроводников для изготовления элемента Холла / арсенида галлия (GaAs), антимонида индия (InSb) и арсенида индия (InAs). Самый распространенный из этих полупроводников — арсенид индия. Как и в эксперименте доктора Холла, важно, чтобы проводник был прямоугольным и очень тонким. Это позволяет протекающим через него носителям разделяться и объединяться по краям.
Теперь давайте посмотрим на принцип эффекта Холла (рис. 1 и 2 выше). Если ток течет через проводник, а магнитное поле (магнитный поток) может двигаться через проводник перпендикулярно потоку тока, заряженные частицы дрейфуют к краям прямоугольной полосы. Эти заряженные частицы собираются на краях поверхности. Магнитный поток передает силу на проводник, которая заставляет напряжение (положительную силу) дрейфовать к одному краю, в то время как электроны (отрицательная сила) дрейфуют к противоположному краю.Сила, действующая на текущий поток, называется силой Лоренца.
Пока к проводнику прикладывается магнитная сила, носители остаются на противоположных сторонах, создавая падение напряжения на проводнике. Этот перепад напряжения и есть напряжение Холла. Он пропорционален току, протекающему через него, напряженности магнитного поля и типу материала проводника. Если любая из этих трех переменных изменится, разность напряжений на проводнике также изменится. Вот почему элемент Холла должен иметь регулируемое напряжение, подаваемое на путь тока.Если ток регулируется и материал проводника задан, остается изменить только магнитную напряженность. Когда магнитная напряженность изменяется до угла 90 ° по отношению к пути тока, падение напряжения на проводнике также изменяется. Чем сильнее магнитный поток, тем больше падение напряжения на проводнике.
Генерируемое напряжение Холла является аналоговым сигналом. Этот сигнал Холла очень мал / обычно около 30 микровольт при магнитном поле 1 гаусс. Из-за небольшого генерируемого напряжения сигнал Холла должен быть усилен, если устройство будет использоваться в практических целях.
Тип усилителя, который лучше всего подходит для использования с элементом Холла, — это дифференциальный усилитель (рис. 3 на стр. 56), который усиливает только разность потенциалов между положительным и отрицательным входами. Если нет разницы напряжений между положительным и отрицательным входами усилителя, выходное напряжение усилителя не будет. Однако при наличии разности напряжений эта разница будет иметь линейное усиление. Величина усиления определяется дифференциальным усилителем, используемым в схеме.
Элемент Холла подключается непосредственно к дифференциальному усилителю, поэтому активность элемента Холла отражается усилителем. Когда магнитное поле отсутствует в элементе Холла, не создается напряжение Холла и отсутствует выходное напряжение из усилителя. Когда к элементу Холла прикладывается магнитное поле, на элементе создается напряжение Холла. Дифференциальный усилитель обнаруживает этот перепад напряжения и усиливает его.
Способ использования датчика Холла определяет изменения схемы, необходимые для обеспечения правильного вывода на устройство управления.Этот выходной сигнал может быть аналоговым, например датчик положения ускорения или датчик положения дроссельной заслонки, или цифровым, например датчик положения коленчатого вала или распределительного вала.
Давайте рассмотрим эти различные конфигурации датчика Холла. Когда элемент Холла должен использоваться для аналогового датчика, который может использоваться для шкалы температуры в системе климат-контроля или датчика положения дроссельной заслонки в системе управления трансмиссией, сначала необходимо изменить схему. Элемент Холла подключен к дифференциальному усилителю, а усилитель — к транзистору NPN (рис.4). Магнит прикреплен к вращающемуся валу. При вращении вала магнитное поле усиливается на элементе Холла. Создаваемое напряжение Холла пропорционально напряженности магнитного поля.
Если бы вал дроссельной заслонки контролировался PCM, магнит вращался бы вместе с валом дроссельной заслонки. На холостом ходу дроссельная заслонка была закрыта. В этом случае напряженность магнитного поля будет низкой, а создаваемое напряжение Холла будет низким. Дифференциальный усилитель будет иметь небольшую разность потенциалов, а выход усилителя будет низким.База транзистора NPN будет получать выходной сигнал усилителя.
Поскольку напряжение на базе низкое, усиление транзистора NPN также низкое. В этом состоянии выходное напряжение TPS будет порядка 1 вольт. Когда двигатель находится под нагрузкой, вал дроссельной заслонки вращается, открывая дроссельную заслонку. При вращении вала дроссельной заслонки магнитное поле усиливается на элементе Холла. Создаваемое напряжение Холла увеличивается пропорционально напряженности магнитного поля. По мере увеличения напряжения Холла дифференциальный усилитель получает свою разность потенциалов.Затем усилитель усиливает разницу между отрицательным и положительным входами. Этот возрастающий выходной сигнал отправляется на базу транзистора NPN, который затем усиливает сигнал, создавая выходной сигнал датчика положения дроссельной заслонки. Этот линейный выход пропорционален вращению вала дроссельной заслонки.
Выходные данные TPS отправляются в PCM, где он сообщает угол вала дроссельной заслонки. Микропроцессор PCM не может напрямую считывать аналоговое напряжение, отправляемое с TPS. Этот сигнал должен быть преобразован в двоичный формат — единицы и нули.Для этого используется устройство, называемое аналого-цифровым преобразователем. В большинстве случаев используется 8-битный аналого-цифровой преобразователь. Это устройство преобразует уровень напряжения в последовательность единиц и нулей, которые микропроцессор может декодировать и использовать для определения фактического угла вала дроссельной заслонки.
Когда элемент Холла должен использоваться для цифрового сигнала, например, в датчике положения коленчатого или распределительного вала или датчике скорости транспортного средства, сначала необходимо изменить схему. Элемент Холла подключен к дифференциальному усилителю, который подключен к триггеру Шмитта.В этой конфигурации датчик выдает цифровой сигнал включения / выключения. В большинстве автомобильных цепей датчик Холла является поглотителем тока или заземляет сигнальную цепь. Для этого к выходу триггера Шмитта подключается NPN-транзистор (рис. 5). Магнит расположен напротив элемента Холла. Спусковое колесо, или цель, расположено так, чтобы затвор мог находиться между магнитным полем и элементом Холла.
Когда затвор не находится между магнитом и элементом Холла, магнитное поле проникает через элемент Холла, создавая напряжение Холла.Это напряжение подается на положительный и отрицательный входы дифференциального усилителя. Усилитель повышает это дифференциальное напряжение и отправляет его на вход триггера Шмитта (цифрового пускового устройства). Когда напряжение от дифференциального усилителя увеличивается, оно достигает порога включения или рабочей точки. В этой точке срабатывания триггер Шмитта меняет свое состояние, позволяя отправить сигнал напряжения.
Точка срабатывания (отключения) установлена на более низкое напряжение, чем точка включения.Целью этой разницы между точками включения и выключения (гистерезис) является устранение ложного срабатывания, которое может быть вызвано незначительными отклонениями от дифференциального усилителя. Триггер Шмитта включается, и выходное напряжение отправляется на базу NPN-транзистора. Когда на базе транзистора присутствует напряжение, транзистор включается.
Регулятор напряжения блока управления подает напряжение на резистор или нагрузку. Схема резистора подключена к коллектору транзистора NPN, и когда NPN включен, ток течет в коллектор и выходит из эмиттера на землю.В этом состоянии сигнал заземлен. Поскольку резистор находится внутри блока управления, напряжение находится на плече заземления и будет падать очень близко к напряжению заземления.
При вращении спускового колеса затвор перемещается между магнитом и элементом Холла. Поскольку спусковое колесо сделано из железа, оно притягивает магнитное поле к затвору. В этот момент элемент Холла больше не имеет магнитного поля, проникающего через него, и напряжение Холла не создается. Без напряжения Холла дифференциальный усилитель не имеет выхода на триггер Шмитта.В свою очередь, триггер Шмитта не имеет выхода напряжения на базу NPN-транзистора, и транзистор изменяет состояние и закрывается. Затем земля снимается с груза. Это создает разрыв цепи. В разомкнутой цепи присутствует напряжение источника. Если бы регулятор напряжения был источником 5 вольт, то напряжение в разомкнутой цепи было бы 5 вольт. При вращении заслонка выдвигается между магнитом и элементом Холла. Включается цепь, замыкающая заземляющую ногу от нагрузки.Таким образом, напряжение сигнала падает очень близко к земле. Этот цикл повторяется для создания цифрового сигнала от датчика Холла с экранированным полем.
Зубчатый датчик Холла (рис. 6) — это еще один тип цифровых датчиков включения / выключения. Над элементом Холла помещен смещающий магнит. В этом датчике магнитное поле всегда проникает через элемент Холла, и всегда присутствует напряжение Холла. Когда зуб шестерни или цель проходит под элементом Холла, магнитное поле в элементе усиливается.По мере усиления магнитного поля напряжение Холла увеличивается. Это напряжение отправляется в схему, которая сравнивает выходное напряжение холла без зубцов с выходным напряжением холла.
Для срабатывания этого датчика цель должна пройти мимо элемента Холла. В положении без зубцов конденсатор заряжается для хранения незубчатого напряжения Холла, чтобы его можно было сравнить с зубчатым напряжением Холла. По мере приближения передней кромки зуба к датчику напряжение Холла увеличивается до заданной точки срабатывания.В этот момент компаратор отправляет сигнал в схему триггера. Триггер подает сигнал напряжения на NPN-транзистор и включает его. Транзистор NPN подключен к цепи резистора в блоке управления.
Одна сторона резистора подключена к регулятору напряжения, другая сторона — к коллектору NPN-транзистора. Когда транзистор меняет состояние и включается, сигнальное напряжение сбрасывается на землю. Когда цель вращается и задняя кромка зубца проходит через датчик Холла, напряжение падает ниже заданной точки срабатывания, и компаратор подает напряжение на схему триггера и выключает NPN-транзистор.Затем транзистор меняет состояние и размыкает цепь. Теперь в сигнальной цепи присутствует напряжение источника. Если регулятор представляет собой источник 5 В, напряжение сигнала теперь составляет 5 В. Когда зуб проходит под датчиком Холла, цепь активируется и тянет этот 5-вольтовый сигнал на землю. Этот цикл повторяется для создания цифрового выходного сигнала датчика Холла с зубчатым колесом.
Для поиска неисправностей в этих цепях (см. Рис. 7 и 8) необходимо измерить падение напряжения на питании, заземлении и сигнале.Если сигнал правильный на низком и высоком выходах, питание и заземление также будут в норме. Если источником питания является аккумуляторное напряжение, регулятор напряжения находится внутри датчика Холла. Если питание подается от электронного модуля, регулятор напряжения находится в этом модуле. Если источник питания падает из-за падения напряжения (сопротивления) или из-за проблемы регулятора, выходной сигнал также упадет. Если напряжение питания увеличится, выходной сигнал также увеличится. Если напряжение земли увеличивается из-за падения напряжения (сопротивления), выходной сигнал также увеличивается.
С аналоговым датчиком Холла, если есть падение напряжения или разрыв цепи между датчиком Холла и модулем управления, напряжение сигнала будет правильным на датчике, но неправильным на модуле. Если напряжение на модуле правильное, а напряжение на диагностическом приборе неправильное, значит, проблема в аналого-цифровом преобразователе внутри блока управления. Перед заменой блока всегда проверяйте питание, массу и сигналы на модуле управления.
Осциллограф необходим для поиска и устранения неисправностей цифрового датчика.Следующие рекомендации помогут вам поставить диагноз:
• С цифровым датчиком на эффекте Холла, если сигнал на датчике высокий, прерывистый или полностью отсутствует, цепь от модуля управления исправна.
• В разных блоках управления используются разные уровни напряжения сигнала; Обычны 5, 8, 9 и 12 вольт. Этот уровень напряжения сигнала должен быть в пределах 10% от целевого напряжения, иначе блок управления не обнаружит изменение напряжения в состоянии.
• Если сигнал низкий, прерывистый или полностью неработающий, регулятор напряжения или цепь в блоке управления могут быть неисправны, сигнальный провод может быть разомкнут или заземлен, или датчик эффекта Холла может быть неисправен и тянет сигнал на землю.
• Если уровень напряжения заземления датчика не находится в пределах 10% от напряжения заземления автомобиля, блок управления не обнаружит изменение состояния сигнала.
• Если напряжение остается высоким или низким, убедитесь, что цель движется.
• При выходе из строя нескольких датчиков Холла убедитесь, что цель не попадает в один из них.
• Когда сигнальный провод Холла закорочен или периодически или постоянно замыкается на источник питания, он сгорает в электронных схемах внутри датчика Холла и обычно приводит к замыканию сигнала на землю.Датчик Холла рассчитан на ток 20 миллиампер или меньше. Резистор расположен в сигнальной цепи, поэтому он может ограничивать ток, протекающий по этой цепи. Если сопротивление этого резистора снизится, ток увеличится, что приведет к отказу нескольких датчиков Холла.