Технические характеристики трехфазных асинхронных двигателей с короткозамкнутым ротором производства ОАО «ВЭМЗ»
Технические характеристики двигателей основного исполнения, степень защиты IP54, класс нагревостойкости изоляции «F», 2р=12; n=500 об/мин
| Тип двигателя | Ном. мощ ность, кВт | Ном. частота враще ния, об/мин | КПД, % | Коэф. мощ ности | Ном. ток при 380 В, А | Ном. момент, Нм | Мпуск/ Мном | Iпуск/ Iном | Ммакс/ Мном | Дина мический момент инерции ротора, кг*м2 | Масса, кг |
| 5АМ315S12e | 45 | 490 | 93,0 | 0,79 | 93,2 | 876 | 1,8 | 5,6 | 2,0 | 5,97 | 888 |
| 5АМ315МА12e | 55 | 490 | 93,0 | 0,79 | 114 | 1071 | 1,8 | 5,6 | 2,0 | 6,78 | 927 |
| 5АМ315МВ12 | 75 | 490 | 92,2 | 0,8 | 155 | 1460 | 1,6 | 5,3 | 2,0 | 6,78 | 975 |
Технические характеристики двигателей основного исполнения, степень защиты IP54, класс нагревостойкости изоляции «F», 2р=10; n=600 об/мин
| Тип двигателя | Ном. мощ мощность, кВт | Ном. частота враще ния, об/мин | КПД, % | Коэф. мощ | Ном. ток при 380 В, А | Ном. момент, Нм | Мпуск/ Мном | Iпуск/ Iном | Ммакс/ Мном | Дина мический момент инерции ротора, кг*м2 | Масса, кг |
| 5АМ280S10e | 37 | 590 | 93 | 0,79 | 76,6 | 598 | 1,5 | 6,5 | 2,5 | 3,14 | 710 |
| 5АМ280М10e | 45 | 590 | 93,5 | 0,8 | 91,6 | 728 | 1,5 | 6,5 | 2,5 | 4,07 | 760 |
| 5АМ315S10e | 55 | 590 | 93,5 | 0,82 | 109 | 890 | 1,6 | 6,5 | 2,2 | 5,97 | 885 |
| 5АМ315МА10e | 75 | 590 | 93,5 | 0,85 | 143 | 1,9 | 6,1 | 2,2 | 6,78 | 927 | |
| 5АМ315МВ10 | 90 | 590 | 93,0 | 0,81 | 182 | 1456 | 2,1 | 5,8 | 2,2 | 6,78 | 975 |
Технические характеристики двигателей основного исполнения, степень защиты IP54, класс нагревостойкости изоляции «F», 2р=8; n=750 об/мин
| Тип двигателя | Ном.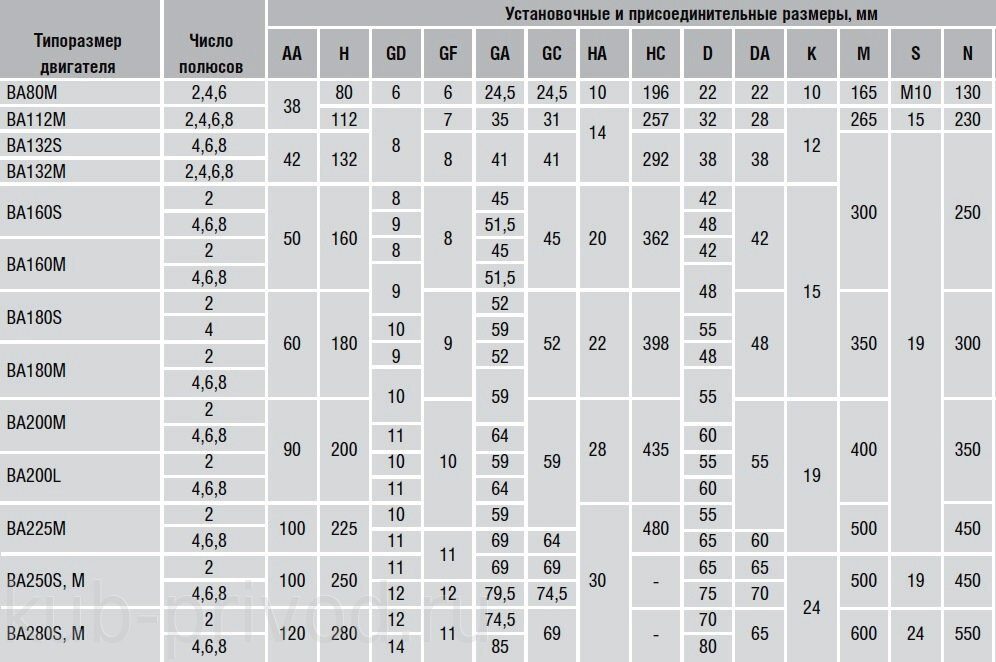 мощ мощность, кВт | Ном. частота враще ния, об/мин | КПД, % | Коэф. мощности | Ном. ток при 380 В, А | Ном. момент, Нм | Мпуск/ Мном | Iпуск/ Iном | Ммакс/ Мном | Дина мический момент инерции ротора, кг*м2 | Масса, кг |
| 5А80МА8 | 0,37 | 695 | 56 | 0,62 | 1,6 | 5,1 | 2,0 | 3,5 | 2,2 | 0,0036 | 13,5 |
| 5А80МВ8 | 0,55 | 700 | 58 | 0,6 | 2,4 | 7,5 | 2,0 | 3,5 | 2,2 | 0,0047 | 15,7 |
| 5АМ112МА8 | 2,2 | 710 | 79 | 0,7 | 6,0 | 29 | 2,0 | 4,8 | 2,5 | 0,024 | 50 |
| 5АМ112МВ8 | 3,0 | 710 | 79 | 0,7 | 8,3 | 40 | 2,2 | 4,6 | 2,5 | 0,029 | 54,5 |
| АИРМ132S8 | 4,0 | 715 | 82 | 0,7 | 10,6 | 53,4 | 2,0 | 4,8 | 2,5 | 0,053 | 68,5 |
| АИРМ132M8 | 5,5 | 83 | 0,73 | 13,8 | 73,4 | 2,0 | 5,3 | 2,5 | 0,074 | 82 | |
| 5А160S8 | 7,5 | 725 | 86 | 0,72 | 18,4 | 99 | 1,6 | 5,0 | 2,2 | 0,11 | 120 |
| 5А160М8 | 11 | 725 | 87 | 0,74 | 26 | 145 | 1,6 | 5,0 | 2,2 | 0,15 | 145 |
| АИР180М8 | 15 | 730 | 88 | 0,78 | 33 | 196 | 1,6 | 5,3 | 2,2 | 0,27 | 180 |
| 5А200М8 | 18,5 | 735 | 90 | 0,76 | 41,0 | 240 | 2,0 | 6,4 | 2,7 | 0,41 | |
| 5А200L8 | 22 | 735 | 90 | 0,77 | 48,5 | 286 | 2,0 | 6,2 | 2,6 | 0,46 | 260 |
| 5А225М8 | 30 | 735 | 91 | 0,78 | 64,5 | 389 | 2,1 | 5,5 | 2,2 | 0,70 | 340 |
| 5АМ250S8 | 37 | 740 | 92 | 0,73 | 84,0 | 477 | 1,8 | 6,5 | 2,6 | 1,20 | 430 |
| 5АМ250М8 | 45 | 740 | 93 | 0,75 | 98,0 | 580 | 1,8 | 6,8 | 2,6 | 1,40 | 460 |
| 5АМ280S8e | 55 | 740 | 93,6 | 0,83 | 108 | 709 | 1,9 | 5,9 | 2,0 | 3,29 | 705 |
| 5АМ280М8e | 75 | 740 | 94,0 | 0,82 | 148 | 967 | 2,0 | 6,0 | 2,1 | 4,00 | 790 |
| 5АМ315S8e | 90 | 740 | 94,5 | 0,85 | 170 | 1161 | 1,4 | 6,0 | 2,1 | 5,21 | 965 |
| 5АМ315МА8e | 110 | 740 | 94,5 | 0,86 | 206 | 1419 | 1,4 | 5,9 | 2,1 | 6,03 | 1,1 |
| 5АМ315МВ8e | 132 | 740 | 94,5 | 0,84 | 253 | 1702 | 1,7 | 6,5 | 2,3 | 1130 | — |
Технические характеристики двигателей основного исполнения, степень защиты IP54, класс нагревостойкости изоляции «F», 2р=6; n=1000 об/мин
| Тип двигателя | Ном. мощ мощность, кВт | Ном. частота враще ния, об/мин | КПД, % | Коэф. мощности | Ном. ток при 380 В, А | Ном. момент, Нм | Мпуск/ Мном | Iпуск/ Iном | Ммакс/ Мном | Дина мический момент инерции ротора, кг*м2 | Масса, кг |
| 5А80МА6 | 0,75 | 930 | 70,0 | 0,68 | 2,4 | 7,7 | 2,0 | 4,5 | 2,3 | 0,0033 | 14 |
| 5А80МВ6 | 1,1 | 930 | 71,0 | 0,69 | 3,4 | 11,3 | 2,0 | 4,5 | 2,3 | 0,0048 | 16 |
| 5АМ112МА6 | 3 | 950 | 81,0 | 0,8 | 7,0 | 30 | 2,3 | 5,5 | 2,6 | 0,024 | 50,5 |
| 5АМ112МВ6 | 4 | 955 | 82,0 | 0,81 | 9,2 | 40 | 2,3 | 5,5 | 2,6 | 0,029 | 55 |
| АИРМ132S6 | 5,5 | 960 | 84,5 | 0,8 | 12,4 | 54,7 | 2,0 | 5,8 | 2,5 | 0,048 | 68,5 |
| АИРМ132M6 | 7,5 | 960 | 85,5 | 0,8 | 16,7 | 74,6 | 2,2 | 6,3 | 2,8 | 0,067 | 81,5 |
| 5А160S6 | 11 | 970 | 87,0 | 0,82 | 23,4 | 108 | 1,9 | 6,5 | 2,5 | 0,11 | 122 |
| 5А160М6 | 15 | 970 | 88,5 | 0,83 | 31,0 | 148 | 2,0 | 6,8 | 2,7 | 0,15 | 150 |
| АИР180М6 | 18,5 | 980 | 89,5 | 0,84 | 37,5 | 180 | 1,9 | 6,5 | 2,7 | 0,27 | 180 |
| 5А200М6 | 22 | 975 | 90,5 | 0,83 | 44,5 | 215 | 2,2 | 6,0 | 2,2 | 0,41 | 245 |
| 5А200L6 | 30 | 975 | 90,5 | 0,84 | 60,0 | 294 | 2,4 | 6,0 | 2,2 | 0,46 | 280 |
| 5А225М6 | 37 | 980 | 91,5 | 0,84 | 73,0 | 360 | 2,3 | 6,2 | 2,5 | 0,65 | 330 |
| 5АМ250S6 | 45 | 985 | 93,0 | 0,84 | 87,5 | 436 | 2,0 | 6,2 | 2,0 | 1,20 | 430 |
| 5АМ250М6 | 55 | 985 | 92,5 | 0,84 | 108 | 533 | 2,0 | 6,2 | 2,0 | 1,30 | 450 |
| 5АМ280S6e | 75 | 990 | 94,5 | 0,85 | 142 | 723 | 1,9 | 6,2 | 2,0 | 3,04 | 720 |
| 5АМ280М6e | 90 | 990 | 94,5 | 0,85 | 171 | 868 | 1,9 | 6,2 | 2,2 | 3,25 | 780 |
| 5АМ315S6e | 110 | 990 | 94,8 | 0,88 | 201 | 1060 | 1,8 | 6,9 | 2,6 | 4,54 | 913 |
| 5АМ315МА6e | 132 | 990 | 95,0 | 0,9 | 235 | 1273 | 1,6 | 6,6 | 2,4 | 5,13 | 1010 |
| 5АМ315МВ6e | 160 | 990 | 95,1 | 0,89 | 288 | 1543 | 2,0 | 7,5 | 2,4 | 5,88 | 1090 |
Технические характеристики двигателей основного исполнения, степень защиты IP54, класс нагревостойкости изоляции «F», 2р=4; n=1500 об/мин
| Тип двигателя | Ном. мощ мощность, кВт | Ном. частота враще ния, об/мин | КПД, % | Коэф. мощности | Ном. ток при 380 В, А | Ном. момент, Нм | Мпуск/ Мном | Iпуск/ Iном | Ммакс/ Мном | Дина мический момент инерции ротора, кг*м2 | Масса, кг |
| 5А80МА6 | 0,75 | 930 | 70,0 | 0,68 | 2,4 | 7,7 | 2,0 | 4,5 | 2,3 | 0,0033 | 14 |
| 5А80МВ6 | 1,1 | 930 | 71,0 | 0,69 | 3,4 | 11,3 | 2,0 | 4,5 | 2,3 | 0,0048 | 16 |
| 5АМ112МА6 | 3 | 950 | 81,0 | 0,8 | 7,0 | 30 | 2,3 | 5,5 | 2,6 | 0,024 | 50,5 |
| 5АМ112МВ6 | 4 | 955 | 82,0 | 0,81 | 9,2 | 40 | 2,3 | 5,5 | 2,6 | 0,029 | 55 |
| АИРМ132S6 | 5,5 | 960 | 84,5 | 0,8 | 12,4 | 54,7 | 2,0 | 5,8 | 2,5 | 0,048 | 68,5 |
| АИРМ132M6 | 7,5 | 960 | 85,5 | 0,8 | 16,7 | 74,6 | 2,2 | 6,3 | 2,8 | 0,067 | 81,5 |
| 5А160S6 | 11 | 970 | 87,0 | 0,82 | 23,4 | 108 | 1,9 | 6,5 | 2,5 | 0,11 | 122 |
| 5А160М6 | 15 | 970 | 88,5 | 0,83 | 31,0 | 148 | 2,0 | 6,8 | 2,7 | 0,15 | 150 |
| АИР180М6 | 18,5 | 980 | 89,5 | 0,84 | 37,5 | 180 | 1,9 | 6,5 | 2,7 | 0,27 | 180 |
| 5А200М6 | 22 | 975 | 90,5 | 0,83 | 44,5 | 215 | 2,2 | 6,0 | 2,2 | 0,41 | 245 |
| 5А200L6 | 30 | 975 | 90,5 | 0,84 | 60,0 | 294 | 2,4 | 6,0 | 2,2 | 0,46 | 280 |
| 5А225М6 | 37 | 980 | 91,5 | 0,84 | 73,0 | 360 | 2,3 | 6,2 | 2,5 | 0,65 | 330 |
| 5АМ250S6 | 45 | 985 | 93,0 | 0,84 | 87,5 | 436 | 2,0 | 6,2 | 2,0 | 1,20 | 430 |
| 5АМ250М6 | 55 | 985 | 92,5 | 0,84 | 108 | 533 | 2,0 | 6,2 | 2,0 | 1,30 | 450 |
| 5АМ280S6e | 75 | 990 | 94,5 | 0,85 | 142 | 723 | 1,9 | 6,2 | 2,0 | 3,04 | 720 |
| 5АМ280М6e | 90 | 990 | 94,5 | 0,85 | 171 | 868 | 1,9 | 6,2 | 2,2 | 3,25 | 780 |
| 5АМ315S6e | 110 | 990 | 94,8 | 0,88 | 201 | 1060 | 1,8 | 6,9 | 2,6 | 4,54 | 913 |
| 5АМ315МА6e | 132 | 990 | 95,0 | 0,9 | 235 | 1273 | 1,6 | 6,6 | 2,4 | 5,13 | 1010 |
| 5АМ315МВ6e | 160 | 990 | 95,1 | 0,89 | 288 | 1543 | 2,0 | 7,5 | 2,4 | 5,88 | 1090 |
Технические характеристики двигателей основного исполнения, степень защиты IP54, класс нагревостойкости изоляции «F», 2р=2; n=3000 об/мин
| Тип двигателя | Ном. мощ мощность, кВт | Ном. частота враще ния, об/мин | КПД, % | Коэф. мощности | Ном. ток при 380 В, А | Ном. момент, Нм | Мпуск/ Мном | Iпуск/ Iном | Ммакс/ Мном | Дина мический момент инерции ротора, кг*м2 | Масса, кг |
| 5А80МА2 | 1,5 | 2850 | 80,0 | 0,84 | 3,4 | 5,0 | 2,4 | 6,5 | 2,5 | 0,0018 | 14,0 |
| 5А80МВ2 | 2,2 | 2850 | 81,0 | 0,85 | 4,9 | 7,4 | 2,7 | 6,5 | 2,8 | 0,0021 | 15,5 |
| 5АМ112М2 | 7,5 | 2895 | 87,5 | 0,89 | 14,6 | 24,7 | 2,9 | 7,5 | 3,3 | 0,0131 | 56,5 |
| АИРМ132М2 | 11 | 2915 | 88,5 | 0,9 | 21,0 | 36 | 2,5 | 8,0 | 3,3 | 0,024 | 77,5 |
| 5А160S2 | 15 | 2920 | 90,0 | 0,89 | 28,5 | 49 | 2,2 | 6,8 | 3,0 | 0,039 | 122 |
| 5А160М2 | 18,5 | 2920 | 90,5 | 0,89 | 34,9 | 60,5 | 2,2 | 7,0 | 3,0 | 0,045 | 133 |
| АИР180S2 | 22 | 2930 | 90,5 | 0,89 | 41,5 | 72 | 2,0 | 6,8 | 2,9 | 0,063 | 160 |
| АИР180М2 | 30 | 2940 | 91,5 | 0,89 | 56,3 | 97 | 2,4 | 8,0 | 3,3 | 0,076 | 180 |
| 5А200М2 | 37 | 2940 | 93,0 | 0,9 | 67,0 | 120 | 2,3 | 7,4 | 3,0 | 0,13 | 235 |
| 5А200L2 | 45 | 2940 | 93,4 | 0,9 | 81,5 | 146 | 2,4 | 7,4 | 3,0 | 0,15 | 255 |
| 5А225М2 | 55 | 2950 | 93,4 | 0,91 | 98,5 | 178 | 2,3 | 7,5 | 2,8 | 0,21 | 340 |
| 5АМ250S2 | 75 | 2960 | 93,6 | 0,92 | 133 | 242 | 2,0 | 7,5 | 3,0 | 0,47 | 475 |
| 5АМ250М2 | 90 | 2955 | 93,5 | 0,93 | 157 | 290 | 1,8 | 7,0 | 2,7 | 0,52 | 505 |
| 5АМ280S2 | 110 | 2965 | 93,5 | 0,92 | 195 | 354 | 1,6 | 6,5 | 2,3 | 0,85 | 685 |
| 5АМ280М2 | 132 | 2965 | 94,5 | 0,92 | 232 | 425 | 1,8 | 7,2 | 2,5 | 1,02 | 770 |
| 5АМ315S2 | 160 | 2970 | 94,0 | 0,93 | 278 | 515 | 1,7 | 7,0 | 2,5 | 1,42 | 970 |
| 5АМ315МА2 | 200 | 2970 | 95,0 | 0,93 | 344 | 643 | 1,8 | 8,0 | 2,7 | 1,78 | 1110 |
| 5АМ315МВ2 | 250 | 2975 | 95,7 | 0,93 | 427 | 802 | 2,0 | 8,5 | 2,7 | 2,05 | 1190 |
Общие характеристики электродвигателей ВЭМЗ
Присоединительные размеры и чертежи электродвигателей ВЭМЗ
Технические характеристики электродвигателей
В данном разделе представлены электродвигатели российских производителей и производителей стран СНГ.
Технические характеристики асинхронных двигателей | Официальный сайт компании «АС и ПП»
Технические характеристики асинхронных двигателей
Технические характеристики электродвигателей:
- Мощность от 0,18 до 11 кВт;
- Напряжение питания – любое до 1000 В;
- Двигатели пригодны для эксплуатации в условиях климатических исполнений: У2, У1, УХЛ2, УХЛ1, Т2, Т1 по ГОСТ 15150.
- Номинальные значения климатических факторов внешней среды по ГОСТ 15543.1 (п.2; 5 ¸14) и ГОСТ 15150 (п.1¸4), при этом
- высота над уровнем моря не более 1200 м;
- запылённость воздуха не более 1,3 г/м3;
- окружающая среда не взрывоопасна, не содержит токопроводящей пыли, не содержит паров веществ, вредно влияющих на изоляцию.
- Степень защиты двигателей – IP 55 и IP54 по ГОСТ 17494.
- Двигатели могут быть оборудованы встроенной температурной защитой.
- Группа механического воздействия по стойкости к воздействию механических внешних воздействующих факторов – М3 по ГОСТ 17516.
 1 (п.1¸3; 6; 15).
1 (п.1¸3; 6; 15). - Способ охлаждения двигателей IC0141 по ГОСТ 20459 (п.6).
- Изоляция маслостойкая класса нагревостойкости F (155оС) или Н (180оС) по ГОСТ 8865 (п.1¸5).
- Режим работы – продолжительный S1 и повторно-кратковременный S3 по ГОСТ 183. Повторно-кратковременный режим работы с ПВ от 0 % до 50 %. Допускается работа с ПВ от 50 % до 100 % в течение двух часов, но не чаще одного раза за 3 часа эксплуатации. Среднее количество пусков электродвигателя не более 30 в час. Количеством пусков в течение суток не более 200. Суммарное количество пусков в течение года не более 30000.
- Двигатели при рабочей температуре выдерживают в течение 2 мин без повреждений и видимых остаточных деформаций повышение частоты вращения до 120% номинальной.
- Двигатели выдерживают стоянку под током короткого замыкания после установившегося номинального режима работы при номинальном напряжении не менее 10 с.
- Изоляция обмотки статора относительно корпуса и между обмотками выдерживает в течение 1 минуты испытательное напряжение 2500 В частоты 50 Гц.

- Изоляция обмотки статора между смежными ее витками выдерживает в режиме холостого хода в течение 5 минут испытательное напряжение выше номинального значения на 50% с увеличенной частотой напряжения питания на 20%.
- Двигатели выдерживают 50% перегрузку по току в течение 2 минут.
- Двигатели, начиная с высоты вращения 80, имеют приспособления для подъема и транспортирования.
- Двигатели имеют коробку выводов с двумя сальниковыми вводами, допускающую возможность поворота на 180º с целью подвода кабелей с двух сторон.
- По способу защиты человека от поражения электрическим током двигатели имеют класс 1 по ГОСТ 12.2.007.0. В части пожаробезопасности двигатели соответствуют требованиям ГОСТ 12.1.004. Вероятность возникновения пожара не превышает 10-6 в год.
Технические характеристики двигателей серии АДЭМ
Каталог электродвигателей АИР — таблица, справочник двигателей
Техническая информация, обзоры производителей, цены, крепежные размеры, массы, особенности и тонкости к каждому электродвигателю АИР:Габариты и чертежи всех электродвигателей АИРЭлектродвигатель с тормозомО плохих электродвигателях АИРДоставка по Украине. Расчет цены и сроковОТЗЫВЫ Прочитать/оставить
Расчет цены и сроковОТЗЫВЫ Прочитать/оставить
Что вы найдете в каталоге двигателей АИР?
Каталог электродвигателей АИР – навигационная страница сайта с легким доступом ко всей детальной технической и рыночной информации, которая может Вам понадобиться. Как о каждой модели электромотора, так и о всей линейке.
- Каталог моделей электродвигателей АИР с детальными описаниями;
- Таблица габаритно-присоединительных размеров двигателей;
- Каталог двигателей с Электромагнитным тормозом;
- Популярная статья «Что прячется в дешевом электродвигателе АИР»;
- Доставка электродвигателей по Украине;
- Отзывы покупателей о компании ТОВ «Системы качества, ЛТД» и поставляемых ею двигателях.
Прежде чем приобрести электродвигатель, вникайте в тонкости и технические особенности. Стоимость на двигатели может колебаться в пределах 100%, а надежность и качество — отличаться в разы.
Характеристики и справочные данные двигателей
Под каждой ссылкой в таблице «каталог» находится страница, посвященная одной модели электродвигателя:
- Таблица технических характеристик двигателя
- Чертеж и размеры
- Что важно знать, чтоб не ошибиться в выборе двигателя
- Слабые места дешевых трехфазных электромоторов
- Строение и комплектующие асинхронных электромоторов
- Подробный обзор производителей
Что скачать паспорт кликните на ссылку паспорт электродвигателей АИР
Сайт АИР. com.ua и специалисты компании предоставят подробный ответ о качестве и стоимости любого запрошенного электродвигателя АИР любого производителя.
com.ua и специалисты компании предоставят подробный ответ о качестве и стоимости любого запрошенного электродвигателя АИР любого производителя.
Сертификаты дилера
Общие сведенияНиже приведены технические показатели и основные конструктивные размеры электродвигателей, обычно применяемых для укомплектования вентиляторов и насосов в промышленных, жилых и общественных зданиях. Это — асинхронные электродвигатели трехфазного переменного тока единой серии типов А, АЛ, АО, АОЛ, МА-140 и ТАГ. По способу монтажа они относятся к горизонтальным электродвигателям со станиной на лапах. Таблица 1. Выбор типа электродвигателей в зависимости от состояния воздушной среды помещений
Таблица 2.
Шкивы к электродвигателям
Шкивы типа ШР для плоскоременной передачи к электродвигателям единой серии (см. рис. 1)
Шкивы типа ШК для клиноременной передачи к электродвигателям единой серии (см.
Назад | ||||||||||||||||
.jpg) Технические данные и основные габаритные размеры асинхронных электродвигателей с короткозамкнутым ротором мощностью до 100 кВт
Технические данные и основные габаритные размеры асинхронных электродвигателей с короткозамкнутым ротором мощностью до 100 кВт 1
1 рис. 2)
рис. 2)Технические характеристики асинхронных электродвигателей | Компания «Вольт»
Асинхронные двигатели представляют собой наиболее надежный и дешевый электрический двигатель по себестоимости, в сравнении с остальными электрическими машинами, в том числе и с машинами переменного тока.
Конструкция АД включает две главных основные части, это: неподвижный статор и вращающийся в нем – ротор. Между ними существует, разделяющий их воздушный зазор. И ротор, и статор имеют обмотку. Обмотка статора двигателя подключается к электрической сети переменного напряжения и считается первичной. Обмотка ротора считается вторичной, так получает электроэнергию от статора за счет создаваемого магнитного потока.
Устройство асинхронного двигателя
Корпус статора, который является одновременно корпусом всего электродвигателя, состоит из запрессованного в него сердечника, в его пазы укладываются, изолированные друг от друга электротехническим лаком, проводники обмотки.
Обмотка статора подразделяется на секции, соединяемые в катушки, составляющих фазы двигателя к которым подключены фазы электросети.
Конструкция ротора АД включает вал и сердечник, набранный из пластин электротехнической стали, с симметрично расположенными пазами для укладки проводников обмотки. Вал предназначен для передачи крутящего момента от вала двигателя к приводному механизму.
Вал предназначен для передачи крутящего момента от вала двигателя к приводному механизму.
По конструктивным особенностям ротора, электродвигатели подразделяются на двигатель с короткозамкнутым или фазным ротором.
Короткозамкнутый ротор состоит из алюминиевых стержней, которые расположены в сердечнике и замкнуты на торцах кольцами так называемое беличье колесо. В двигателях высокой мощности, до 400кВт, пазы между пластинами ротора и шихтованным сердечником залиты алюминием под высоким давлением, благодаря чему создается повышенная прочность.
Фазный ротор АД включает некоторое число катушек от 3, 6, 9 и т. д. в зависимости от количества пар полюсов. Катушки сдвинуты на угол 120о, 60о и т. д. по отношению друг к другу. Количество пар полюсов ротора должны соответствовать количеству пар полюсов статора. Обмотки фазного ротора соединены в «звезду», концы, которой выводят к контактным токосъемным кольцам, соединенным с помощью щеточного механизма пусковым реостатом.
По какому принципу работает асинхронный двигатель?
При подаче на трехобмоточный статор двигателя трехфазного напряжения от электрической сети переменного тока, происходит возбуждение магнитного поля, оно вращается со скоростью большей, чем скорость, с которой вращается ротор, в (n2<n1). Пересечение линий вращающегося поля статора полем ротора способствует созданию электродвижущей силы (ЭДС). Под воздействием индутируемой ЭДС, в закороченной роторной обмотке, происходит возникновение электрического тока. Когда происходит взаимодействие электрического тока в роторе машины и магнитного поля статора происходит возникновение крутящего момента, который заставляет двигатель работать.
Основные технические характеристикиГлавные условия, соответствующие качественной работе асинхронной машины, определенны ГОСТ. В них входят:
- Соответствие размеров и мощности – ГОСТу.

- Соответствие степени защиты – условиям эксплуатации.
- Высокий уровень изоляции, относительно устойчивости к нагреву.
- Климатическое исполнение электродвигателя должно соответствовать региону использования.
- Соответствие режимам работы.
- В должной мере представлены способы охлаждения.
- Уровень шума при работе двигателя на (ХХ) холостом ходу должен соответствовать по ГОСТ, и не превышать 2-й класс.
Параметры и режимы работы асинхронного двигателя
На основании вышеприведенных признаков подразумеваются следующие режимы работы, всего их 9.
- Продолжительный или длительный режим с постоянной нагрузкой– S
- Кратковременный, с полной нагрузкой – в течение заданного времени – S
- Периодический кратковременный – в течение определенного по времени чередующимися периодами с полной нагрузкой – S
- Режим с длительным периодом пуска, с определенными циклами работы в течение заданного периода времени– S
- С быстрым торможением при помощи электрического способа – S
- С кратковременной полной величиной нагрузки, режим включает циклы с полной токовой нагрузкой и холостым ходом – S
- Режим с торможением электрическим способом, в течение длительного непрерывного периода работы – S
- С изменением величины токовой нагрузки и значения скорости вращения, происходящими одновременно, с различными по протяженности периодами и с разной частотой вращения двигателя – S
- Изменение скорости вращения нагрузки, происходящее в неопределенные периоды времени, изменение величины токовой нагрузки и скорости вращения соответственно рабочему диапазону.
 – S
– S
Основные параметры – это: напряжение по номинальному пределу, частота, ток номинальный, мощность на валу двигателя, количество оборотов вращения вала, КПД (коэффициент полезного действия), коэффициент мощности. При соединении обмоток электродвигателя в треугольник или звезду дается параметр их напряжения и тока при обоих этих соединениях.
Короткая заметка: Компания «Стальинвест» оказывает полный комплекс услуг по производству и монтажу зданий из сэндвич панелей.
При пуске АД на полное значение напряжения создается высокий пусковой ток, в это время значение пускового момента невелико, для его увеличения применяется повышение активного сопротивления вторичной цепи.
Режимы торможенияАсинхронный двигатель имеет три режима торможения.
- Во время торможения происходит отдача электрической энергии в сеть, характеризуется тем, что скорость вращения ротора выше скорости магнитного поля.
- Противовключение, этот режим возникает за счет увеличения статического момента или при переключении обмоток статора для другого направления вращения.

- Динамическое торможение, наведенная ЭДС создает ток, который взаимодействуя с полем, создает тормозной момент.
Основные типы асинхронных двигателей
Кроме подразделения по признаку, разделяющему двигатели в зависимости от устройства ротора на короткозамкнутый или фазный, электродвигатели делятся по конструктивным признакам, базового и модифицированного изготовления.
В базовое исполнение входят электродвигатели монтажного IM1001 (1081) или климатического УЗ, для работы в режиме S1, исполнения с требуемыми стандартами по ГОСТ.
В модифицированном исполнении присутствуют некоторые конструктивные отличия, соответствующие особенностям монтажа, усиленной степени защиты, характерному климатическому исполнению, предназначенные для использования в определенном регионе.
Асинхронные двигатели высокой мощности, со степенью защиты характерной для закрытого электродвигателя, от попадания влаги и брызг, IP23 — 4А, 5А
Взрывозащищенные двигатели, используемые для предприятий первой категории по электробезопасности.
АД специального предназначения, используются в узкоспециализированном профиле, например, для лифтов, подъемных механизмов, транспорта.
Энергоэффективные асинхронные электродвигателиИзготовление двигателей для специальных и строго определенных условий эксплуатации, положительно сказывается на энергосбережении, это позволяет адаптировать электродвигатель к определенному электроприводу, что позволяет достичь наибольшего коэффициента экономической эффективности при эксплуатации. Проектирование асинхронного электродвигателя к регулируемому электроприводу обеспечивает эффективное энергосбережение.
Энергоэффективность достигается, за счет увеличения длины сердечника статора, без изменения величины и геометрии поперечного сечения, а также за счет уменьшения количества витков статорной обмотки для электропривода с возможностью регулирования. В результате получается значительное энергосбережение.
Пишите комментарии, дополнения к статье, может я что-то пропустил.Загляните на карту сайта, буду рад если вы найдете на моем сайте еще что-нибудь полезное.Всего доброго.
- Печать
- по электронной почте
Электродвигатели АИР
Электродвигатели АИР
Асинхронные общепромышленные электродвигатели серии АИР — механизмы, преобразующие электрическую энергию в энергию механическую и применяющиеся в работе различных строительных и промышленных агрегатов (вентиляторы промышленные, дымососы, лебедки, конвейеры, краны, лифты и т.д.). Электродвигатель состоит из корпуса, ротора, статора, обмотки, подшипникового узла, вентиляторного узла. Понятие «асинхронный» означает, что вращение электродвигателя осуществляется посредством переменного тока, образующегося переменными магнитными полями статора и ротора, которые взаимодействуют между собой. У нас вы можете ознакомиться с полным техническим каталогом и купить электродвигатели АИР по низким ценам.Асинхронные
электродвигатели АИР выпускаются двумя исполнениями:Основное (базовое) исполнение
Двигатель монтажного исполнения IМ1001 (1081), степень защиты IР55 в закрытом обдуваемом исполнении, класс изоляции Р, климатическое исполнение У2, для режима работы 81, с типовыми техническими характеристиками, соответствующими требованиям стандартов.
Модифицированное исполнение
Двигатель, изготовленный на основе узлов основных (базовых) двигателей с необходимыми конструктивными отличиями по способу монтажа, степени защиты, климатическому исполнению и другими отличиями.
Маркировки, обозначения и основные параметры электродвигателей АИР
Тип | Мощность, кВт | Частота об./мин. | Тип | Мощность, кВт | Частота об./мин. | Тип | Мощность, кВт | Частота об./мин. |
0,18 | 3000 | 5,5 | 1500 | 75 | 1500 | |||
0,25 | 3000 | 3 | 1000 | 90 | 1500 | |||
0,12 | 1500 | 4 | 1000 | 45 | 1000 | |||
0,18 | 1500 | 2,2 | 750 | 55 | 1000 | |||
0,37 | 3000 | 3 | 750 | 37 | 750 | |||
0,25 | 1500 | АИР112М2ЖУ2 | 7,5 | 3000 | 45 | 750 | ||
0,55 | 3000 | 7,5 | 1500 | 110 | 3000 | |||
0,37 | 1500 | 5,5 | 1000 | 132 | 3000 | |||
0,18 | 1000 | 4 | 750 | 110 | 1500 | |||
0,25 | 1000 | 11 | 3000 | 132 | 1500 | |||
0.75 | 3000 | 11 | 1500 | 75 | 1000 | |||
1,1 | 3000 | 7,5 | 1000 | 90 | 1000 | |||
0.55 | 1500 | 5,5 | 750 | 55 | 750 | |||
0.75 | 1500 | 15 | 3000 | 75 | 750 | |||
0.37 | 1000 | 15 | 1500 | 160 | 3000 | |||
0.55 | 1000 | 11 | 1000 | 200 | 3000 | |||
0,25 | 750 | 7,5 | 750 | 160 | 1500 | |||
1,5 | 3000 | 18,5 | 3000 | 200 | 1500 | |||
2,2 | 3000 | 18,5 | 1500 | 110 | 1000 | |||
1,1 | 1500 | 15 | 1000 | 132 | 1000 | |||
1,5 | 1500 | 11 | 750 | 90 | 750 | |||
0,75 | 1000 | АИР160S2ЖУ2 | 15 | 3000 | 110 | 750 | ||
1,1 | 1000 | АИР160М4ЖУ2 | 18,5 | 1500 | 55 | 600 | ||
0,37 | 750 | 22 | 3000 | 75 | 600 | |||
0,55 | 750 | 22 | 1500 | 250 | 3000 | |||
АИР80В2ЖУ2 | 2,2 | 3000 | 30 | 3000 | 315 | 3000 | ||
АИРЕ80D2 220В | 2,2 | 3000 | 30 | 1500 | 250 | 1500 | ||
2,2 | 3000 | 18,5 | 1000 | 315 | 1500 | |||
АИРЕ80А2 220В | 1,5 | 3000 | 15 | 750 | 160 | 1000 | ||
1,5 | 3000 | АИР180М2ЖУ2 | 30 | 3000 | 200 | 1000 | ||
3 | 3000 | 37 | 3000 | 250 | 1000 | |||
2,2 | 3000 | 37 | 1500 | 132 | 750 | |||
2,2 | 1500 | 22 | 1000 | 160 | 750 | |||
1,5 | 1000 | 18,5 | 750 | 200 | 750 | |||
АИР90LА8 | 0,75 | 750 | 45 | 3000 | ||||
АИР90LВ8 | 1,1 | 750 | 45 | 1500 | ||||
4 | 3000 | 30 | 1000 | |||||
5,5 | 3000 | 22 | 750 | |||||
3 | 1500 | 55 | 3000 | |||||
4 | 1500 | 55 | 1500 | |||||
2,2 | 1000 | 37 | 1000 | |||||
1,5 | 750 | 30 | 750 | |||||
АИР100L2ЖУ2 | 5,5 | 3000 | 75 | 3000 | ||||
7,5 | 3000 | 90 | 3000 |
Расшифровка обозначений электродвигателей АИР
Серия (тип) электродвигателя
А — асинхронный
И — ИнтерЭлектро (разработка)
Р, С — варианты привязки мощности к установочным размерам согласно РС3031-71
АИР (аналоги А, 5А, 5АИ, 4А, АД) — электродвигатели, изготавливаемые по ГОСТ
АИС (аналоги 6А, IMM, RA) — электродвигатели, изготавливаемые по евростандарту DIN (CENELEC) Электрические модификации
М — модернизированный электродвигатель : АИРМ, 5АМ
Н — электродвигатель защищенного исполнения с самовентиляцией : 5АН
Ф — электродвигатель защищенного исполнения с принудительным охлаждением : 5АФ
К — электродвигатель с фазным ротором : 5АНК
С — электродвигатель с повышенным скольжением : АИРС, АС, 4АС, 5АС, АДМС и др.
Е — однофазный электродвигатель : АИРЕ, АДМЕ, 5АЕУ
В — встраиваемый электродвигатель : АИРВ
П — электродвигатель для привода осевых вентиляторов : АИРП
Габарит электродвигателя
равен расстоянию от низа лап до центра вала в миллиметрах
50, 56, 63, 71, 80, 90, 100, 112, 132, 160, 180, 200, 225, 250, 280, 315, 355, 400, 450 и выше
Длина сердечника или длина станины
А, В, С — длина сердечника (первая длина, вторая длина, третья длина)
XK, X, YK, Y — длина сердечника статора высоковольтных двигателей
S, M, L — установочные размеры по длине станины (S — короткая станина, M — средняя станина, L- длинная станина)
Количество полюсов электродвигателя
2, 4, 6, 8, 10, 12, 4/2, 6/4, 8/4, 8/6, 12/4, 12/6, 6/4/2, 8/4/2, 8/6/4, 12/8/6/4 и др.
Е — электродвигатель со встроенным электромагнитным тормозом : АИР 100L6 Е У3
Е2 — электродвигатель со встроенным электромагнитным тормозом и ручкой расторможения : АИР 100L6 E2 У3
Б — со встроенным датчиком температурной защиты : АИР 180М4 БУ3
Ж — электродвигатель со специальным выходным концом вала для моноблочных насосов : АИР 80В2 ЖУ2
П — электродвигатель повышенной точности по установочным размерам : АИР 180М4 ПУ3
Р3 — электродвигатель для мотор-редукторов : АИР 100L6 Р3
С — электродвигатель для станков-качалок : АИР 180М8 СНБУ1
Н — электродвигатель малошумного исполнения : 5АФ 200 МА4/24 НЛБ УХЛ4
Л — электродвигатель для привода лифтов : 5АФ 200МА4/24 НЛБ УХЛ4
Климатическое исполнение электродвигателей
У — умеренный климат (эксплуатация двигателя в рабочих условиях с температурой от -40°С до +40°С)
Т — тропический климат (эксплуатация двигателя в рабочих условиях с температурой от -10°С до +50°С)
УХЛ — умеренный холодный климат (эксплуатация двигателя в рабочих условиях с температурой от -60°С до +40°С)
ХЛ — холодный климат (эксплуатация двигателя в рабочих условиях с температурой от -60°С до +40°С)
ОМ — общеклиматическое морское исполнение (эксплуатация двигателя в рабочих условиях с температурой от -40°С до +45°С)
Категория размещения
5 — в помещение с повышенной влажностью
4 — в помещении с искусственным климатом
3 — в помещении
2 — на улице под навесом
1 — на открытом воздухе
Степень защиты электродвигателя (IP АВ)
Первая цифра (А) — защита от твердых объектов
0 | без защиты |
1 | защита от твердых объектов размерами свыше 50 мм |
2 | защита от твердых объектов размерами свыше 12 мм |
3 | защита от твердых объектов размерами свыше 2,5 мм |
4 | защита от твердых объектов размерами свыше 1 мм |
5 | защита от пыли (без осаждения опасных материалов) |
Вторая цифра (В) — защита от жидкостей
0 | без защиты |
1 | защита от вертикально падающей воды (конденсат) |
2 | защита от воды, падающей под углом 15° к вертикали |
3 | защита от воды, падающей под углом 60° к вертикали |
4 | защита от водяных брызг со всех сторон |
5 | защита от водяных струй со всех сторон |
Расшифровка основных монтажных исполнений электродвигателей АИР согласно ГОСТ 2479
IM — монтажное исполнение
Первая цифра — конструктивное исполнение по способу монтажа :
1 — двигатель на лапах с подшипниковыми щитами
2 — двигатель на лапах с подшипниковыми щитами и фланцем на одном подшипниковом щите
3 — двигатель без лап, с фланцем на одном подшипниковом щите
Вторая и третья цифра — пространственное положение двигателя (00 — горизонтально, 01 — валом вниз, 03 — валом вверх…цифры 08 — универсальное положение)
Четвертая цифра — исполнение вала :
1 — с одним цилиндрическим концом вала
2 — с двумя цилиндрическими концами вала
Стандартное исполнение электродвигателей АИР :
Климатическое исполнение У2 (умеренный климат, в помещении)
Номинальное напряжение 380 В или 220/380 В, 380/660 В при частоте 50 Гц — для низковольтных двигателей
Номинальное напряжение 6000 В и 10000 В при частоте 50 Гц — для высоковольтных двигателей
Режим работы S1 (продолжительный режим работы) — по ГОСТ 28173
Степень защиты IP54, IP55 (общепром, взрывозащита), IP23 (защищенного исполнения), IP10 (лифтового исполнения) по ГОСТ 17494
Технические характеристики общепромышленных электродвигателей АИР
(в зависимости от завода-изготовителя показатели могут незначительно отличаться)
Тип двигателя | Pн, кВт | n, об./мин. | КПД, % | cos φ | Iн, А | Кратности | Масса, кг | ||
Iп/Iн | Мm/Мн | Мп/Мн | |||||||
2p=2, n=3000 об./мин. | |||||||||
АИР56А2 | 0,18 | 2700 | 65,7 | 0,77 | 0.55 | 5.3 | 2.2 | 2.2 | 5,70 |
АИР56В2 | 0.25 | 2720 | 68,0 | 0.78 | 0.73 | 5.3 | 2,2 | 2.2 | 6,20 |
АИР63А2 | 0,37 | 2730 | 69,7 | 0,81 | 1.00 | 5.7 | 2.2 | 2,2 | 9,00 |
АИР63В2 | 0,55 | 2770 | 72,7 | 0,82 | 1,40 | 5,7 | 2,3 | 2,2 | 9,50 |
АИР71А2 | 0,75 | 2820 | 74,0 | 0,83 | 1,90 | 6,1 | 2,3 | 2,2 | 10,8 |
АИР71В2 | 1,1 | 2790 | 77,6 | 0,83 | 2,70 | 6,7 | 2,3 | 2,2 | 12,4 |
АИР80МА2 | 1,5 | 2830 | 78,1 | 0,84 | 3.60 | 7,0 | 2,3 | 2,2 | 15,5 |
АИР80МВ2 | 2,2 | 2840 | 80,6 | 0,85 | 5.00 | 7,0 | 2,3 | 2.2 | 19,5 |
AИP90L2 | 3,0 | 2845 | 83,4 | 0,86 | 6,50 | 7,2 | 2,3 | 2,2 | 21,0 |
AИP100S2 | 4,0 | 2870 | 83,7 | 0.88 | 8.40 | 7,5 | 2,3 | 2,2 | 30,0 |
AИP100L2 | 5,5 | 2870 | 84,8 | 0,89 | 11,0 | 7,5 | 2,3 | 2,2 | 34,0 |
АИР112М2 | 7,5 | 2880 | 85,4 | 0,88 | 15,2 | 7.2 | 2,4 | 2,2 | 53,0 |
АИР132М2 | 11.0 | 2900 | 87,4 | 0,90 | 21,8 | 7,2 | 2,3 | 2,2 | 90,0 |
AИP160S2 | 15,0 | 2925 | 88,4 | 0,88 | 30,0 | 7,1 | 2,4 | 2,2 | 120 |
АИР160М2 | 18,5 | 2925 | 89,3 | 0,89 | 36,3 | 7,1 | 2,4 | 2,2 | 140 |
AИP180S2 | 22 | 2940 | 89,8 | 0,90 | 42,7 | 7,2 | 2,5 | 2,0 | 170 |
АИР180М2 | 30 | 2940 | 90,7 | 0,90 | 56,9 | 7,3 | 2.5 | 2,1 | 203 |
АИР200М2 | 37 | 2940 | 91,2 | 0,89 | 71,0 | 7,1 | 2.4 | 2,1 | 247 |
AИP200L2 | 45 | 2945 | 91,8 | 0,89 | 84,9 | 7,1 | 2,4 | 2,1 | 255 |
АИР225М2 | 55 | 2960 | 92,0 | 0,90 | 103 | 7,1 | 2.4 | 2,1 | 325 |
AИP250S2 | 75 | 2970 | 92,6 | 0,90 | 139 | 6,9 | 2,6 | 2,0 | 450 |
АИР250М2 | 90 | 2970 | 92,5 | 0,90 | 167 | 6,4 | 2.5 | 2.0 | 530 |
AИP280S2 | 110 | 2970 | 93,4 | 0.91 | 201 | 6,7 | 2,3 | 1,9 | 650 |
АИР280М2 | 132 | 2975 | 93.5 | 0.91 | 240 | 6,4 | 2,4 | 1,9 | 700 |
AИP315S2 | 160 | 2975 | 94,4 | 0.91 | 289 | 6,7 | 2,3 | 1,9 | 1170 |
АИР315М2 | 200 | 2975 | 94,7 | 0,92 | 358 | 6.6 | 2.3 | 1.9 | 1460 |
AИP355S2 | 250 | 2980 | 95,4 | 0.92 | 433 | 6.9 | 2.2 | 1,7 | 1900 |
АИР355М2 | 315 | 2980 | 95,6 | 0,92 | 548 | 6,9 | 2,2 | 1.7 | 2300 |
2p=4, n=1500 об./мин. | |||||||||
АИР56А4 | 0.12 | 1325 | 56,5 | 0.66 | 0,50 | 4,6 | 2,2 | 2,1 | 5.70 |
АИР56В4 | 0.18 | 1325 | 61,2 | 0,68 | 0.70 | 4,9 | 2.2 | 2.1 | 6.00 |
АИР63А4 | 0.25 | 1325 | 64,5 | 0.73 | 0.82 | 5.1 | 2,2 | 2.1 | 9,00 |
АИР63В4 | 0.37 | 1325 | 66,3 | 0,76 | 1,12 | 5,1 | 2,2 | 2.1 | 9,50 |
АИР71А4 | 0,55 | 1350 | 70,0 | 0,73 | 1,75 | 5,4 | 2,3 | 2,2 | 11,0 |
АИР71В4 | 0,75 | 1360 | 71,3 | 0,77 | 2,20 | 5,7 | 2,3 | 2,2 | 12,0 |
АИР80МА4 | 1.1 | 1375 | 74,5 | 0.76 | 3,04 | 5,8 | 2,3 | 2,3 | 16,0 |
АИР80МВ4 | 1,5 | 1390 | 77,5 | 0.78 | 3.95 | 6,2 | 2,3 | 2,3 | 19,5 |
АИР90L4 | 2,2 | 1400 | 80,0 | 0,81 | 5,30 | 6,8 | 2.3 | 2,3 | 25,0 |
АИР100S4 | 3,0 | 1420 | 81,4 | 0.82 | 7.20 | 7,0 | 2.3 | 2,3 | 34,0 |
AИP100L4 | 4,0 | 1420 | 82,8 | 0.81 | 9.30 | 7,0 | 2,3 | 2,3 | 37,0 |
АИР112М4 | 5,5 | 1430 | 84,1 | 0,82 | 12,3 | 6.6 | 2.3 | 2.3 | 55,0 |
AИP132S4 | 7,5 | 1440 | 86,0 | 0.84 | 16,1 | 6,7 | 2,3 | 2.2 | 80,0 |
АИР132М4 | 11.0 | 1450 | 87,1 | 0,84 | 23,1 | 6,8 | 2,3 | 2,2 | 91,0 |
AИP160S4 | 15,0 | 1455 | 88,7 | 0,85 | 30,8 | 6,8 | 2,3 | 2,2 | 138 |
АИР160М4 | 18,5 | 1455 | 89,8 | 0,86 | 37,8 | 6,8 | 2,3 | 2,2 | 142 |
AИP180S4 | 22 | 1465 | 90,6 | 0,86 | 44,4 | 7.0 | 2,4 | 2,1 | 177 |
АИР180М4 | 30 | 1465 | 91,2 | 0.86 | 59,6 | 6,8 | 2,3 | 2,1 | 190 |
АИР200М4 | 37 | 1470 | 92,0 | 0,87 | 73,1 | 7,0 | 2.3 | 2,2 | 247 |
АИР200L4 | 45 | 1465 | 92,3 | 0,87 | 88,4 | 6,9 | 2,4 | 2,2 | 260 |
АИР225М4 | 55 | 1480 | 92,4 | 0,87 | 106 | 6,7 | 2.3 | 2,2 | 326 |
AИP250S4 | 75 | 1475 | 92,9 | 0,86 | 146 | 6,9 | 2,3 | 2,2 | 477 |
АИР250М4 | 90 | 1475 | 93,3 | 0,87 | 170 | 6,4 | 2.4 | 2,2 | 485 |
AИP280S4 | 110 | 1480 | 93,8 | 0,88 | 207 | 6,6 | 2,2 | 2,1 | 731 |
АИР280М4 | 132 | 1480 | 93,8 | 0,88 | 244 | 6,7 | 2,3 | 2,3 | 710 |
AИP315S4 | 160 | 1480 | 94,8 | 0,89 | 297 | 6,5 | 2.4 | 2,3 | 1053 |
АИР315М4 | 200 | 1480 | 95,0 | 0,89 | 369 | 6,4 | 2.4 | 2.2 | 1243 |
AИP355S4 | 250 | 1490 | 95,4 | 0,90 | 443 | 6,7 | 2,4 | 2,1 | 1745 |
АИР355М4 | 315 | 1490 | 95,6 | 0,90 | 558 | 6.7 | 2,4 | 2,1 | 1957 |
Тип двигателя | Pн, кВт | n, об./мин. | КПД, % | cos φ | Iн, А | Кратности | Масса, кг | ||||||
Iп/Iн | Мm/Мн | Мп/Мн | |||||||||||
2р=6, n=1000 об./ мин. | |||||||||||||
АИР63А6 | 0.18 | 860 | 55,5 | 0.64 | 0.80 | 4.1 | 2.0 | 1.9 | 9.50 | ||||
АИР63В6 | 0,25 | 860 | 58,3 | 0,65 | 1,10 | 4,0 | 2,0 | 1,9 | 10,0 | ||||
АИР71А6 | 0.37 | 895 | 62,8 | 0.68 | 1.33 | 4,7 | 2,0 | 1.9 | 12,4 | ||||
АИР71В6 | 0.55 | 895 | 65,7 | 0.70 | 1,90 | 4.7 | 2.0 | 1,9 | 12,2 | ||||
АИР80МА6 | 0,75 | 910 | 69,0 | 0,72 | 2,29 | 5,3 | 2,1 | 2,0 | 16,0 | ||||
АИР80МВ6 | 1.1 | 910 | 72,1 | 0.74 | 3.18 | 5.3 | 2.1 | 2,0 | 20,0 | ||||
AИP90L6 | 1,5 | 920 | 76.0 | 0,74 | 4,20 | 6,0 | 2,1 | 2,0 | 25.0 | ||||
AИP100L6 | 2,2 | 930 | 77.1 | 0,76 | 5.90 | 6,3 | 2,1 | 2.0 | 38,0 | ||||
АИР112МА6 | 3,0 | 935 | 80,1 | 0.76 | 7.90 | 5.7 | 2,2 | 2.1 | 51.0 | ||||
АИР112МВ6 | 4.0 | 935 | 80,7 | 0,77 | 10,3 | 5,7 | 2,1 | 2,1 | 52,0 | ||||
AИP132S6 | 5,5 | 955 | 82,8 | 0.78 | 13,4 | 6,3 | 2,1 | 2,1 | 71,0 | ||||
АИР132М6 | 7.5 | 960 | 84.1 | 0,80 | 17,2 | 6,2 | 2,2 | 2,1 | 78.0 | ||||
AИP160S6 | 11,0 | 965 | 86,8 | 0,79 | 24,6 | 6,3 | 2,2 | 2,0 | 141 | ||||
АИР160М6 | 15,0 | 965 | 88,2 | 0,81 | 33,0 | 6.5 | 2.2 | 2.0 | 155 | ||||
АИР180М6 | 18.5 | 970 | 88,9 | 0,82 | 39,0 | 6,6 | 2,1 | 2,1 | 200 | ||||
АИР200М6 | 22 | 975 | 89,7 | 0,83 | 45,2 | 6,3 | 2,2 | 2,1 | 233 | ||||
АИР200L6 | 30 | 975 | 89,8 | 0,84 | 61.8 | 6,5 | 2,2 | 2,1 | 250 | ||||
АИР225М6 | 37 | 980 | 91,3 | 0,85 | 73,5 | 6,6 | 2,1 | 2,1 | 360 | ||||
AИP250S6 | 45 | 980 | 92,0 | 0.85 | 90,1 | 6,7 | 2,2 | 2,1 | 465 | ||||
АИР250М6 | 55 | 985 | 92,4 | 0,84 | 110 | 6,8 | 2.3 | 2,2 | 520 | ||||
AИP280S6 | 75 | 985 | 93,0 | 0.85 | 150 | 6,6 | 2,1 | 2.0 | 800 | ||||
АИР280М6 | 90 | 985 | 92,9 | 0,85 | 177 | 6,6 | 2.2 | 2.2 | 800 | ||||
AИP315S6 | 110 | 985 | 94,2 | 0,86 | 207 | 6,3 | 2,2 | 2,0 | 1045 | ||||
АИР315М6 | 132 | 985 | 94,4 | 0,87 | 244 | 6,1 | 2,2 | 2,0 | 1103 | ||||
AИP355S6 | 160 | 990 | 94,7 | 0.87 | 292 | 6,6 | 2,2 | 1.9 | 1748 | ||||
АИР355М6 | 200 | 990 | 94,7 | 0.87 | 365 | 6,7 | 2.2 | 1.9 | 1934 | ||||
AИP355MB6 | 250 | 990 | 95,1 | 0,88 | 456 | 6.6 | 2.3 | 1.9 | 2050 | ||||
2р=8, n= 750 об./мин. | |||||||||||||
АИР71В8 | 0,25 | 655 | 54,5 | 0,60 | 1,17 | 3.7 | 1,9 | 1.8 | 10,4 | ||||
АИР80МА8 | 0,37 | 675 | 60,1 | 0,62 | 1,50 | 4,3 | 1,9 | 1.8 | 18,0 | ||||
АИР80МВ8 | 0.55 | 675 | 62,9 | 0.62 | 2.18 | 4,0 | 2,0 | 1.8 | 18,9 | ||||
AИP90LA8 | 0,75 | 685 | 72,4 | 0,70 | 2,33 | 4,0 | 2,0 | 1,9 | 30,0 | ||||
AИP90LB8 | 1.1 | 685 | 73,0 | 0,69 | 3.27 | 4.0 | 2,0 | 1.8 | 32,0 | ||||
АИР100L8 | 1,5 | 690 | 73,5 | 0,72 | 4,50 | 4,7 | 2.0 | 1.9 | 49,3 | ||||
АИР112МА8 | 2,2 | 700 | 75,6 | 0,71 | 6,40 | 4.9 | 2.1 | 2,0 | 46,0 | ||||
АИР112МВ8 | 3.0 | 700 | 76,9 | 0,71 | 8.60 | 5.0 | 2,1 | 2.0 | 53,0 | ||||
AИP132S8 | 4,0 | 715 | 81,9 | 0,78 | 10,8 | 5,6 | 2,1 | 2,1 | 92,0 | ||||
АИР132М8 | 5,5 | 715 | 80,9 | 0.74 | 14,7 | 5,6 | 2.1 | 2,1 | 86,0 | ||||
АИР160S8 | 7,5 | 720 | 85,2 | 0,74 | 19,2 | 5,8 | 2.1 | 2,0 | 148 | ||||
АИР160М8 | 11.0 | 720 | 86,4 | 0,76 | 27,3 | 5,8 | 2.1 | 2.0 | 155 | ||||
АИР180М8 | 15,0 | 725 | 87,6 | 0.78 | 34,5 | 6.2 | 2,0 | 2.0 | 210 | ||||
АИР200М8 | 18,5 | 730 | 89,0 | 0,78 | 41.6 | 6,2 | 2.1 | 1,9 | 250 | ||||
AИP200L8 | 22 | 730 | 89,6 | 0.78 | 49,4 | 6,2 | 2.1 | 2.0 | 260 | ||||
АИР225М8 | 30 | 735 | 90,6 | 0.78 | 65,3 | 6,5 | 2.1 | 2.0 | 360 | ||||
AИP250S8 | 37 | 735 | 90,5 | 0,77 | 82.1 | 6,2 | 2.3 | 2.1 | 465 | ||||
АИР250М8 | 45 | 735 | 91,5 | 0,77 | 99,1 | 6,2 | 2,3 | 2,1 | 520 | ||||
AИP280S8 | 55 | 735 | 92,0 | 0,80 | 121 | 6,0 | 2,0 | 1,9 | 725 | ||||
АИР280М8 | 75 | 740 | 92,0 | 0,81 | 154 | 5,8 | 2.1 | 1.9 | 800 | ||||
AИP315S8 | 90 | 740 | 93,8 | 0.82 | 178 | 6.2 | 2,3 | 2.0 | 1160 | ||||
АИР315М8 | 110 | 740 | 94,0 | 0,82 | 217 | 6.1 | 2,2 | 2,0 | 1175 | ||||
AИP355S8 | 132 | 740 | 93,9 | 0,82 | 261 | 6,3 | 2,2 | 1,7 | 2000 | ||||
АИР355М8 | 160 | 740 | 94,3 | 0,82 | 315 | 6.3 | 2,2 | 1.7 | 2150 | ||||
АИР355МВ8 | 200 | 740 | 94.6 | 0,83 | 388 | 6,4 | 2,3 | 1,8 | 2250 | ||||
2p=10 n=600 об./мин. | |||||||||||||
AИP315S10 | 55 | 590 | 92,0 | 0,75 | 121 | 6,2 | 2,0 | 1.5 | 1150 | ||||
АИР315М10 | 75 | 590 | 92,5 | 0,76 | 162 | 6,2 | 2,0 | 1,5 | 1220 | ||||
AИP355S10 | 90 | 590 | 93,0 | 0,77 | 188 | 6,2 | 2,0 | 1,3 | 1530 | ||||
АИР355МА10 | 110 | 590 | 93,2 | 0,78 | 230 | 6,0 | 2,0 | 1,3 | 1640 | ||||
АИР355МВ10 | 132 | 590 | 93.5 | 0,78 | 275 | 6,0 | 2,0 | 1,3 | 1690 | ||||
АИР355М10 | 160 | 590 | 93,5 | 0,78 | 334 | 6,0 | 2.0 | 1,3 | 1690 | ||||
| ||||||||
2-3-3. Характеристики асинхронных двигателей
Как описано в главе 1, синхронная скорость вращения двигателя с магнитным полем определяется по следующей формуле:
N S : Синхронная скорость вращения (оборотов в минуту) [об / мин] N 0 : Синхронная скорость вращения (оборотов в секунду) [об / сек]
f: Частота источника питания [Гц] p: Число полюсов двигателя
Накладка
Когда мы думаем об асинхронных двигателях, это важный момент.То есть катушка должна пересекать магнитное поле, чтобы через катушку протекал ток.
Для этого должна быть относительная разница скоростей между магнитным полем и катушкой.
Из-за этой разницы скоростей двигатель вращается со скоростью немного меньшей, чем синхронная скорость.
Это отличие скорости от синхронной скорости называется скольжением и обозначается символом s. Скольжение s выражается следующей формулой:
N: Скорость вращения ротора [об / мин] N S : Синхронная скорость вращения [об / мин]
Скольжение обычно выражается в процентах.Скольжение силового асинхронного двигателя составляет от 2 до 3%, когда двигатель работает при номинальной нагрузке. Вышеуказанное значение становится несколько больше для небольших однофазных двигателей.
Скорость вращения и крутящий момент
На рис. 2.40 показаны характеристики асинхронных двигателей. Когда двигатель сконструирован таким образом, что сопротивление алюминиевого проводника ротора уменьшается, его эффективность увеличивается в диапазоне высоких скоростей. И с другой стороны, когда двигатель спроектирован так, чтобы иметь высокое сопротивление, он имеет повышенный крутящий момент в диапазоне низких скоростей.
В области справа от максимального крутящего момента на характеристической кривой увеличение нагрузки не так сильно снижает скорость двигателей с низким сопротивлением. Крутящий момент увеличивается и становится стабильным.
А именно, скорость этих двигателей остается практически неизменной, несмотря на изменения нагрузки.
На рис. 2.41 показаны характеристики этих двигателей с учетом крутящего момента по горизонтальной оси и скорости вращения по вертикальной оси с добавлением тока и эффективности.
Сравнивая этот график с приведенными выше характеристиками двигателей постоянного тока, вы обнаружите следующие характеристики асинхронных двигателей.
- ● Изменения нагрузки не сильно влияют на их скорость, хотя их крутящий момент изменяется.
- ● Связь между крутящим моментом и током нелинейна.
и технические характеристики двигателя переменного тока
Обзор двигателя переменного тока
Если вам нужна исчерпывающая информация о двигателях переменного тока, вы обратились по адресу.Индивидуальные двигатели переменного тока делятся на две основные категории: синхронные и асинхронные. Наиболее распространенным типом асинхронного двигателя является асинхронный двигатель переменного тока, который производители двигателей изготавливают на заказ с использованием трансформатора переменного тока с вращающейся вторичной обмоткой. В этом типе двигателя первичная обмотка или статор подключается к источнику питания, в то время как закороченный вторичный элемент или ротор несет наведенный вторичный ток. Воздействие токов ротора на поток в воздушном зазоре создает крутящий момент. С другой стороны, асинхронный двигатель находится в отдельном классе двигателей переменного тока из-за различий в конструкции и рабочих характеристиках.Sinotech предлагает обширный каталог двигателей, изготовленных нашими производителями двигателей переменного тока, который может быть адаптирован к вашим точным спецификациям.
Узнайте последние новости о двигателях переменного тока в нашем блоге.
Асинхронный VS синхронный двигатель переменного тока
Обзор асинхронных асинхронных асинхронных двигателейАсинхронные двигатели переменного тока
Все асинхронные двигатели являются асинхронными двигателями. Асинхронные двигатели переменного тока, как один из самых простых и надежных электродвигателей, имеют две основные электрические сборки: статор с обмоткой и узел ротора.Двигатель получил свое название от токов, протекающих в ротор, которые индуцируют переменные токи, протекающие в первичном элементе или статоре. Комбинированные магнитные эффекты токов статора и ротора создают силу, необходимую для вращения.
Двигателипеременного тока, в том числе асинхронные двигатели переменного тока, имеют роторы с пластинчатыми цилиндрическими железными сердечниками с прорезями для ввода проводов. Наиболее распространенный тип ротора, производимый производителями двигателей переменного тока, иногда называют «беличьей клеткой», который имеет литые алюминиевые проводники и замыкающие концевые кольца.Беличья клетка вращается, когда движущееся магнитное поле создает ток в укороченных проводниках.
В двигателе переменного тока скорость вращения магнитного поля называется синхронной скоростью (n s ). Эта скорость определяется количеством полюсов статора и частотой источника питания. Формула для расчета синхронной скорости двигателя переменного тока: n с = 120f / p.
- n с: синхронная скорость в об / мин
- f: частота сетевого напряжения в Гц
- p: количество полюсов
Синхронная скорость — это абсолютный верхний предел скорости двигателя переменного тока.Если ротор вращается с той же скоростью, что и вращающееся магнитное поле, проводники ротора не перерезают силовые линии и не создают крутящего момента.
При работе двигателя переменного тока ротор всегда вращается медленнее, чем магнитное поле. Скорость ротора достаточно мала, чтобы вызвать надлежащую величину протекания тока ротора, чтобы полученный крутящий момент был достаточным для управления нагрузкой и преодоления потерь на ветер и трение.
Разница в скорости между ротором двигателя переменного тока и магнитным полем называется «скольжением».«Скольжение — это процент от синхронной скорости. Формула для расчета скольжения: s = 100 (n s — n a ) / n s .
- s = скольжение
- n с = синхронная скорость
- n a = фактическая скорость
Синхронные двигатели Обзор
Синхронные двигателиимеют особую конструкцию ротора, которая позволяет им вращаться с той же скоростью, что и поле статора. Другими словами, они работают абсолютно синхронно с частотой сети.К основным типам синхронных двигателей относятся двигатели без возбуждения и с возбуждением от постоянного тока. Как и в случае с асинхронными двигателями переменного тока, скорость синхронных двигателей определяется количеством пар полюсов. Он рассчитывается по соотношению частот линии.
Изготовители двигателей на заказ проектируют синхронные двигатели различных размеров, от субфракционных двигателей с самовозбуждением до двигателей переменного тока большой мощности с возбуждением от постоянного тока для промышленных приводов. В диапазоне дробных лошадиных сил синхронные двигатели служат для обеспечения точной постоянной скорости.
В применении к промышленным нагрузкам синхронные двигатели большой мощности выполняют две важные функции:
- Обеспечивают высокоэффективные средства преобразования энергии переменного тока в механическую энергию
- Работает с опережающим или единичным коэффициентом мощности, обеспечивая коррекцию коэффициента мощности
Синхронные электродвигатели без возбуждения
Производители двигателей переменного тока создают невозбужденные электродвигатели, использующие конструкции реактивного сопротивления и гистерезиса.Они используют схему самозапуска и не требуют внешнего источника питания.
Синхронные электродвигатели с постоянным возбуждением
Электродвигателис возбуждением постоянным током доступны мощностью более 1 л.с. Для работы им требуется постоянный ток, подаваемый через контактные кольца для возбуждения. Двигатель получает постоянный ток от отдельного источника или генератора постоянного тока, подключенного к валу двигателя переменного тока.
Однофазные и многофазные синхронные двигатели должны приводиться в действие, или их ротор должен быть подключен по схеме самозапуска для запуска.Поскольку поле электродвигателя вращается с синхронной скоростью, электродвигатель должен быть ускорен, прежде чем он сможет синхронизироваться. Ускорение с нулевой скорости требует проскальзывания до достижения синхронизма. Следовательно, для начала важно использовать отдельные средства.
В самозапускающихся электрических двигателях переменного тока, изготовленных по индивидуальному заказу, в размерах л.с. используются методы пуска, общие для асинхронных электродвигателей, такие как двухфазный, конденсаторный, отталкивающий и затененный полюс. Двигатели автоматически переключаются на синхронную работу из-за электрических характеристик.
В двигателяхс возбуждением постоянным током для пуска используется беличья клетка, называемая амортизатором или демпферной обмоткой. Между прочим, присущий двигателю низкий пусковой момент и потребность в источнике питания постоянного тока требуют системы пуска, которая:
- Обеспечивает полную защиту электродвигателя при запуске
- Применяет возбуждение постоянного поля в нужное время
- Снимает возбуждение поля при извлечении ротора (максимальный крутящий момент)
- Защищает обмотку электродвигателя с короткозамкнутым ротором от теплового повреждения при сбоях в работе
Взгляд на крутящий момент в электродвигателях с постоянным возбуждением
Момент подъема
Крутящий момент электродвигателя определяется как минимальный крутящий момент, создаваемый от состояния покоя до точки втягивания.Этот крутящий момент должен превышать крутящий момент нагрузки в достаточной степени, чтобы поддерживать удовлетворительную скорость ускорения при нормальных условиях напряжения.
Момент сопротивления
Реактивный крутящий момент двигателя является результатом выступа полюсных наконечников ротора, что является предпочтительным направлением намагничивания. Он пульсирует на скоростях ниже синхронной.
Момент сопротивления влияет на моменты втягивания и вытягивания двигателя, поскольку невозбужденный явнополюсный ротор стремится выровняться с магнитным полем статора электродвигателя, чтобы поддерживать минимальное магнитное сопротивление.Реактивного сопротивления электродвигателя может быть достаточно, чтобы синхронизировать слегка нагруженную малоинерционную систему и развить крутящий момент отрыва примерно 30 процентов.
Синхронный момент
Синхронный крутящий момент электродвигателя — это крутящий момент, создаваемый после приложения возбуждения. Он представляет собой общий крутящий момент в установившемся режиме, доступный для привода нагрузки. Крутящий момент достигает максимума примерно при 70 отставании ротора от магнитного поля вращающегося статора. Однако максимальное значение — это момент отрыва.
Момент отрыва
Момент отрыва — это максимальный устойчивый крутящий момент, который электродвигатель развивает при синхронной скорости в течение одной минуты с номинальной частотой и нормальным возбуждением. Нормальный момент отрыва обычно составляет 150 процентов от момента полной нагрузки для электродвигателей с единичным коэффициентом мощности. Для электродвигателей с опережающим коэффициентом мощности 0,8 это составляет от 175 до 200 процентов.
Момент втягивания
Вращающий момент синхронного двигателя — это крутящий момент, развиваемый при переводе подключенной инерционной нагрузки в синхронизм при приложении возбуждения.Он разработан при переходе от скорости скольжения к синхронной скорости, когда электродвигатели переходят от индукционной к синхронной работе. Это обычно самый критический период при запуске синхронного двигателя. При синхронной скорости крутящий момент, развиваемый амортизатором и обмотками возбуждения, становится нулевым. В результате только реактивное сопротивление и синхронизирующий момент, обеспечиваемые возбуждением обмоток возбуждения, эффективны в точке втягивания.
Дополнительные типы конструкции электродвигателей переменного тока по индивидуальному заказу
Многофазные двигатели переменного тока
Многофазные двигатели переменного тока с короткозамкнутым ротором, такие как трехфазные двигатели, представляют собой машины с постоянной скоростью.Они обладают некоторой степенью гибкости в рабочих характеристиках при изменении конструкции паза ротора. Изменения в двигателях переменного тока вызывают изменения тока, крутящего момента и скорости при полной нагрузке. Стандартизация и инновации позволили получить четыре основных типа двигателей переменного тока:
Конструкции A и B Характеристики
- Электродвигатель переменного тока общего назначения с нормальным пусковым моментом и током, а также с малым скольжением
- Фракционные многофазные двигатели переменного тока обычно имеют конструкцию B
- Поскольку конструкция B имеет падающие характеристики, многофазный электродвигатель переменного тока с таким же пробоем или максимальным крутящим моментом, что и однофазный электродвигатель переменного тока, не может достичь той же точки скорости-момента для скорости полной нагрузки, что и однофазный нестандартный электродвигатель переменного тока. моторные конструкции
- Пробойный момент должен быть выше для сопоставимых скоростей полной нагрузки (минимум 140 процентов пробивного момента однофазных двигателей переменного тока общего назначения)
Конструкция C Характеристики
- Высокий пусковой момент при нормальном пусковом токе и малом скольжении
- Используется там, где отрывные нагрузки высоки при пуске, но обычно работают при номинальной полной нагрузке.
- Не подвержен высоким требованиям к перегрузке после достижения рабочей скорости
Конструкция D Характеристики
- Высокое скольжение, позволяющее снизить скорость при колебаниях нагрузки
- Низкий пусковой ток
- Низкая частота вращения при полной нагрузке
- Эту конструкцию можно разделить на несколько подгрупп, которые различаются скольжением или формой кривой скорость-крутящий момент.
Конструкция F Характеристики
- Низкий пусковой момент
- Низкий пусковой ток
- Низкое скольжение
- Изготовители двигателей на заказ создают двигатели переменного тока для получения низкого тока заторможенного ротора
- Заторможенный ротор и низкий момент пробоя
- Двигатели обычно используются при низком пусковом моменте и не возникает больших перегрузок после достижения рабочей скорости.
Электродвигатели переменного тока с фазным ротором
Двигатели переменного токас короткозамкнутым ротором относительно негибки в отношении характеристик скорости и крутящего момента.Однако специальный двигатель переменного тока с фазным ротором имеет регулируемые скорость и крутящий момент. Применение двигателей переменного тока с фазным ротором заметно отличается от двигателей переменного тока с короткозамкнутым ротором из-за доступности цепи ротора. Чтобы получить характеристики двигателя переменного тока, нужно ввести различные значения сопротивления в цепь ротора.
Вторичное сопротивление в цепи ротора обычно запускает двигатели переменного тока с фазным ротором. Затем сопротивление двигателя переменного тока последовательно снижается, чтобы двигатель разгонялся.В результате двигатели переменного тока могут развивать значительный крутящий момент при ограничении тока заторможенного ротора. Производители двигателей переменного тока могут спроектировать это вторичное сопротивление двигателя для непрерывной работы, чтобы рассеивать тепло, выделяемое при непрерывной работе на пониженных скоростях, частом ускорении или ускорении с большими инерционными нагрузками.
Внешнее сопротивление придает двигателям переменного тока характеристику, которая приводит к значительному падению оборотов в минуту при небольшом изменении нагрузки. Обеспечивается пониженная скорость двигателя переменного тока примерно до 50% от номинальной скорости, но эффективность остается низкой.
Многоскоростные электродвигатели переменного тока
Изготовители двигателей на заказ проектируют двигатели переменного тока с последовательным переключением полюсов для работы на одной скорости. Путем физического повторного подключения выводов они могут достичь соотношения скоростей 2: 1. Типичные скорости для двигателей переменного тока 60 Гц:
- 3600/1800 об / мин (2/4 полюса)
- 1800/900 об / мин (4/8 полюса)
- 1200/600 об / мин (6/12 полюсов)
Двухобмоточные двигатели переменного тока имеют две отдельные обмотки, которые производители могут наматывать на любое количество полюсов, чтобы облегчить получение других соотношений скоростей.Однако соотношение больше 1: 4 нецелесообразно из-за размера и веса двигателя переменного тока. Однофазные двигатели переменного тока обычно имеют конструкцию с регулируемым крутящим моментом. Однако также доступны двигатели переменного тока с постоянным крутящим моментом и постоянной мощностью.
Выходная мощность двигателей переменного тока может быть пропорциональна каждой скорости. Такие нестандартные конструкции электродвигателей переменного тока имеют выходную мощность в лошадиных силах в соответствии с одной из следующих нагрузочных характеристик:
- Переменный крутящий момент : Эти двигатели переменного тока имеют характеристики скорость-крутящий момент, которые изменяются пропорционально квадрату скорости.Например, электродвигатель со скоростью 1800/900 об / мин, который развивает 10 л.с. при 1800 об / мин, выдает 2,5 л.с. при 900 об / мин. Поскольку двигатели переменного тока работают с нагрузками, такими как центробежные насосы, вентиляторы и воздуходувки, их требования к крутящему моменту зависят от квадрата или куба скорости. Эта моторная характеристика в целом адекватна.
- Постоянный крутящий момент : Эти двигатели переменного тока могут развивать одинаковый крутящий момент на каждой скорости. В результате выходная мощность напрямую зависит от скорости. Например, двигатель переменного тока мощностью 10 л.с. при 1800 об / мин выдает 5 л.с. при 900 об / мин.Вы найдете эти двигатели в приложениях с требованиями к постоянному крутящему моменту, таких как смесители, конвейеры и компрессоры.
- Постоянная л.с. : Эти двигатели переменного тока развивают одинаковую мощность на каждой скорости. Крутящий момент обратно пропорционален скорости. Такие двигатели переменного тока применяются в станках, включая дрели, фрезерные станки и токарные станки.
Однофазные двигатели переменного тока
Однофазные асинхронные электродвигатели переменного тока обычно имеют дробную мощность.Однако однофазная интегральная мощность доступна в более низком диапазоне лошадиных сил. Наиболее распространенные однофазные двигатели переменного тока с дробной мощностью:
- Двухфазный
- Конденсатор-умный
- Постоянный разделительный конденсатор
- Шторка
Эта нестандартная конструкция двигателя переменного тока доступна в многоскоростных типах, но есть практические ограничения на количество получаемых скоростей. Доступны модели с двух-, трех- и четырехскоростными двигателями. Выбор скорости может сопровождаться последовательными полюсами или двумя обмотками.
Универсальные моторы
Универсальные моторы
Универсальные двигатели работают с почти эквивалентной производительностью на постоянном или переменном токе до 60 Гц. Двигатели переменного тока отличаются от двигателей постоянного тока соотношением обмоток и более тонкими слоями железа. Двигатели постоянного тока могут работать на переменном токе, но с низким КПД. Универсальные двигатели могут работать от постоянного тока с практически эквивалентными характеристиками двигателя переменного тока. Однако их коммутация и срок службы щеток ниже, чем у аналогичного двигателя постоянного тока.Важной характеристикой универсальных двигателей переменного тока является то, что они имеют самое высокое соотношение мощности на фунт среди всех двигателей переменного тока, поскольку они работают со скоростью, во много раз превышающей скорость любого электродвигателя с частотой 60 Гц.
Универсальные двигатели при работе без нагрузки имеют тенденцию к разбегу. Скорость ограничена только парусностью, трением и коммутацией. Поэтому большие универсальные двигатели почти всегда подключаются напрямую к нагрузке для ограничения скорости. На портативных инструментах, таких как электрические пилы, нагрузки на шестерни, подшипники и охлаждающий вентилятор достаточно, чтобы поддерживать скорость холостого хода на безопасном уровне.
С универсальным двигателем регулирование скорости является простым, поскольку скорость электродвигателя чувствительна к изменениям напряжения и магнитного потока. Реостат или регулируемый автотрансформатор позволяют легко изменять скорость двигателя переменного тока от максимальной до нуля.
Электродвигатели с синхронизацией по времени
Электродвигатели ГРМ мощностью менее 1/10 л.с. используются в качестве первичных двигателей для синхронизирующих устройств. Поскольку двигатель используется в качестве таймера, он должен работать с постоянной скоростью.
Электродвигателипеременного и постоянного тока могут использоваться в качестве синхронизирующих двигателей.Электрические синхронизирующие двигатели постоянного тока служат портативным приложениям или когда требуются высокое ускорение и низкое изменение скорости. Хотя требуется механический или электрический регулятор скорости в той или иной форме, такие электродвигатели обладают следующими преимуществами:
- КПД от 50 до 70 процентов
- Пусковой крутящий момент в 10 раз превышает рабочий крутящий момент
- Относительно простой контроль скорости
Серводвигатели переменного тока
Серводвигателииспользуются в сервомеханизмах и компьютерах переменного тока, которые требуют быстрого и точного отклика.Для достижения этих характеристик серводвигатели имеют роторы малого диаметра с высоким сопротивлением. Меньший диаметр обеспечивает низкую инерцию для быстрого пуска, останова и реверсирования. Высокое сопротивление обеспечивает почти линейную зависимость скорости от крутящего момента для точного управления.
Изготовители двигателей на заказ заводят серводвигатели с двумя фазами, физически расположенными под прямым углом или квадратурными в пространстве. Двигатели имеют фиксированную или опорную обмотку, которая возбуждается от источника постоянного напряжения. Управляющая обмотка возбуждается регулируемым или переменным управляющим напряжением, обычно от сервоусилителя.Инженеры проектируют обмотки серводвигателей с одинаковым соотношением напряжения и числа витков, поэтому потребляемая мощность при максимальном фиксированном возбуждении и максимальном сигнале фазы управления сбалансированы.
В идеальном серводвигателе крутящий момент на любой скорости прямо пропорционален напряжению обмотки управления двигателя. Однако эта взаимосвязь существует только при нулевой скорости из-за присущей асинхронному серводвигателю неспособности реагировать на изменения входного напряжения в условиях небольшой нагрузки.
Собственное демпфирование серводвигателей уменьшается по мере увеличения номинальных значений, и двигатели имеют разумный КПД за счет линейности скорости-момента.Многие серводвигатели большего размера имеют встроенные вспомогательные воздуходувки для поддержания температуры в безопасных рабочих диапазонах. Серводвигатели переменного тока доступны с номинальной мощностью от менее 1 до 750 Вт и размерами от 0,5 до 0,7 дюйма. Большинство серводвигателей переменного тока имеют модульные или встроенные редукторы.
Заинтересованы в линейных двигателях переменного тока? Об их истории, характеристиках и применении читайте здесь.
Sinotech разрабатывает индивидуальные двигатели переменного тока в США и производит их в нескольких местах по всему Тихоокеанскому региону, чтобы снизить ваши затраты и риски.Свяжитесь с нами сегодня и дайте нам знать, как наши услуги по производству двигателей переменного тока могут помочь вам запустить ваше приложение уже сегодня.
ХАРАКТЕРИСТИКИ ДВИГАТЕЛЯ — прикладное промышленное электричество
После введения Эдисоном в США системы распределения электроэнергии постоянного тока начался постепенный переход к более экономичной системе переменного тока. Освещение работало как на переменном, так и на постоянном токе. Передача электрической энергии на более длинные расстояния с меньшими потерями на переменном токе.Однако у двигателей была проблема с переменным током. Первоначально двигатели переменного тока были сконструированы как двигатели постоянного тока, но возникли многочисленные проблемы из-за изменения магнитных полей.
Рисунок 5.1 Схема семейства электродвигателей переменного токаЧарльз П. Стейнмец внес свой вклад в решение этих проблем, исследуя гистерезисные потери в железной арматуре. Никола Тесла представил совершенно новый тип двигателя, когда он представил вращающуюся турбину, вращающуюся не водой или паром, а вращающимся магнитным полем.Его новый тип двигателя, асинхронный двигатель переменного тока, по сей день является рабочей лошадкой в отрасли. Его прочность и простота обеспечивают долгий срок службы, высокую надежность и низкие эксплуатационные расходы. Тем не менее, небольшие щеточные электродвигатели переменного тока, аналогичные разнообразным электродвигателям постоянного тока, сохраняются в небольших приборах вместе с небольшими асинхронными электродвигателями Tesla. Выше одной лошадиной силы (750 Вт) царит мотор Tesla.
Современные твердотельные электронные схемы приводят в действие бесщеточные двигатели постоянного тока с помощью сигналов переменного тока, генерируемых источником постоянного тока.Бесщеточный электродвигатель постоянного тока, фактически электродвигатель переменного тока, заменяет обычный щеточный электродвигатель постоянного тока во многих приложениях. И шаговый двигатель , цифровая версия двигателя, приводится в действие прямоугольными волнами переменного тока, опять же, генерируемыми твердотельной схемой. На рисунке выше показано генеалогическое древо двигателей переменного тока, описанных в этой главе.
Круизные лайнеры и другие крупные суда заменяют карданные валы с редукторами большими многомегаваттными генераторами и двигателями. Так было с тепловозами меньшего масштаба в течение многих лет.
Рисунок 5.2 Диаграмма уровней моторной системыНа системном уровне (рисунок выше) двигатель потребляет электрическую энергию в виде разности потенциалов и тока, преобразуя ее в механическую работу. К сожалению, электродвигатели не на 100% эффективны. Часть электрической энергии теряется на тепло, другой вид энергии, из-за потерь I2R (также называемых потерями в меди) в обмотках двигателя. Тепло — нежелательный побочный продукт этого преобразования. Его необходимо снимать с двигателя, так как это может отрицательно сказаться на долговечности.Таким образом, одна из целей — максимизировать КПД двигателя, уменьшая тепловые потери. Двигатели переменного тока также имеют некоторые потери, с которыми не сталкиваются двигатели постоянного тока: гистерезис и вихревые токи.
Большинство двигателей переменного тока являются асинхронными. Асинхронные двигатели пользуются популярностью из-за их прочности и простоты. Фактически, 90% промышленных двигателей — это асинхронные двигатели.
Никола Тесла разработал основные принципы многофазного асинхронного двигателя в 1883 году и к 1888 году создал модель мощностью в половину лошадиных сил (400 Вт). Тесла продал права на производство Джорджу Вестингаузу за 65 000 долларов.Наиболее крупными (> 1 л.с. или 1 кВт) промышленными двигателями являются многофазные асинхронные двигатели . Под многофазностью мы подразумеваем, что статор содержит несколько различных обмоток на каждый полюс двигателя, приводимых в действие соответствующими синусоидальными волнами со сдвигом во времени. На практике это две-три фазы. Крупные промышленные двигатели трехфазные. Хотя для простоты мы включили многочисленные иллюстрации двухфазных двигателей, мы должны подчеркнуть, что почти все многофазные двигатели являются трехфазными. Под асинхронным двигателем мы подразумеваем, что обмотки статора индуцируют ток в проводниках ротора, как трансформатор, в отличие от коллекторного двигателя постоянного тока.
Конструкция асинхронного двигателя переменного тока
Асинхронный двигатель состоит из ротора, известного как якорь, и статора, содержащего обмотки, подключенные к многофазному источнику энергии, как показано на рисунке ниже. Простой двухфазный асинхронный двигатель, представленный ниже, похож на двигатель мощностью 1/2 лошадиные силы, который Никола Тесла представил в 1888 году.
Рисунок 5.3 Многофазный асинхронный двигатель TeslaСтатор на рисунке выше намотан парами катушек, соответствующих фазам доступной электрической энергии.Статор двухфазного асинхронного двигателя выше имеет 2 пары катушек, по одной паре для каждой из двух фаз переменного тока. Отдельные катушки пары соединены последовательно и соответствуют противоположным полюсам электромагнита. То есть одна катушка соответствует N-полюсу, другая — S-полюсу, пока фаза переменного тока не изменит полярность. Другая пара катушек ориентирована в пространстве под углом 90 ° к первой паре. Эта пара катушек подключена к переменному току, сдвинутому во времени на 90 ° в случае двухфазного двигателя. Во времена Теслы источником двух фаз переменного тока был двухфазный генератор переменного тока.Статор на рисунке выше имеет выступающих полюсов, явно выступающих полюсов, которые использовались в ранних асинхронных двигателях Tesla. Эта конструкция используется по сей день для двигателей с малой мощностью (<50 Вт). Однако для более мощных двигателей меньшая пульсация крутящего момента и более высокий КПД достигается, если катушки встроены в пазы, вырезанные в пластинах статора (рисунок ниже).
Рисунок 5.4 Рама статора с пазами для обмотокПластины статора представляют собой тонкие изолированные кольца с прорезями, пробитыми из листов электротехнической стали.Набор из них закреплен концевыми винтами, которые также могут удерживать концевые кожухи.
Рисунок 5.5 Статор с обмотками 2-φ (а) и 3-φ (б)На рисунке выше обмотки двухфазного и трехфазного двигателей установлены в пазы статора. Катушки наматываются на внешнее приспособление, а затем вставляются в пазы. Изоляция, зажатая между периферией катушки и пазом, защищает от истирания. Фактические обмотки статора более сложны, чем отдельные обмотки на полюс на рисунке выше.Сравнивая двигатель 2-φ с двигателем Tesla 2-φ с выступающими полюсами, количество катушек такое же. В реальных больших двигателях обмотка полюса разделена на идентичные катушки, вставленные во множество пазов меньшего размера, чем указано выше. Эта группа называется фазовой лентой (см. Рисунок ниже). Распределенные катушки фазового пояса подавляют некоторые нечетные гармоники, создавая более синусоидальное распределение магнитного поля по полюсу. Это показано в разделе синхронного двигателя. В прорезях на краю стойки может быть меньше витков, чем в других прорезях.Краевые пазы могут содержать обмотки от двух фаз. То есть фазовые пояса перекрываются.
Рисунок 5.6 Перекрытие фазовых лентКлючом к популярности асинхронного двигателя переменного тока является его простота, о чем свидетельствует простой ротор (рисунок ниже). Ротор состоит из вала, стального пластинчатого ротора и встроенной беличьей клетки из меди или алюминия , показанной на (b), снятой с ротора. По сравнению с якорем двигателя постоянного тока, здесь нет коммутатора. Это устраняет щетки, искрение, искрение, графитовую пыль, регулировку и замену щеток, а также повторную обработку коллектора.
Рисунок 5.7 Многослойный ротор с (а) встроенной беличьей клеткой, (б) токопроводящей клеткой, удаленной с ротораПроводники в короткозамкнутой клетке могут быть перекошены, перекручены относительно вала. Несоосность пазов статора снижает пульсации крутящего момента. Сердечники ротора и статора состоят из пакета изолированных пластин. Пластины покрыты изолирующим оксидом или лаком для минимизации потерь на вихревые токи. Сплав, используемый в пластинах, выбран с учетом низких гистерезисных потерь.
Теория работы асинхронных двигателей
Краткое объяснение работы заключается в том, что статор создает вращающееся магнитное поле, которое волочит ротор. Теория работы асинхронных двигателей основана на вращающемся магнитном поле. Один из способов создания вращающегося магнитного поля — вращение постоянного магнита. Если движущиеся магнитные линии потока разрезают проводящий диск, он будет следовать за движением магнита. Линии магнитного потока, разрезающие проводник, будут индуцировать напряжение и, как следствие, ток в проводящем диске.Этот поток тока создает электромагнит, полярность которого противодействует движению постоянного магнита — Закон Ленца . Полярность электромагнита такова, что он притягивается к постоянному магниту. Диск следует с немного меньшей скоростью, чем постоянный магнит.
Рисунок 5.8 Вращающееся магнитное поле создает крутящий момент в проводящем диске Вращающееся магнитное поле создает крутящий момент в проводящем дискеКрутящий момент, развиваемый диском, пропорционален количеству силовых линий, разрезающих диск, и скорости, с которой он разрезает диск.Если бы диск вращался с той же скоростью, что и постоянный магнит, не было бы ни потока, разрезающего диск, ни индуцированного тока, ни поля электромагнита, ни крутящего момента. Таким образом, скорость диска всегда будет ниже скорости вращающегося постоянного магнита, так что линии потока, разрезающие диск, индуцируют ток, создают электромагнитное поле в диске, которое следует за постоянным магнитом. Если к диску приложена нагрузка, замедляющая его, будет развиваться больший крутящий момент, поскольку больше линий магнитного потока разрезают диск. Крутящий момент пропорционален скольжению , степени, на которую диск отстает от вращающегося магнита.Большее скольжение соответствует большему потоку, разрезающему проводящий диск, развивающему больший крутящий момент. Аналоговый автомобильный вихретоковый спидометр основан на принципе, показанном выше. Когда диск удерживается пружиной, отклонение диска и иглы пропорционально скорости вращения магнита. Вращающееся магнитное поле создается двумя катушками, расположенными под прямым углом друг к другу, которые управляются токами, которые не совпадают по фазе на 90 °. Это не должно вызывать удивления, если вы знакомы с диаграммами Лиссажу на осциллографах.
Рисунок 5.9 В противофазе (90 °) синусоидальные волны образуют круговую диаграмму ЛиссажуСмещенные по фазе (90 °) синусоидальные волны образуют круговую диаграмму Лиссажу На приведенном выше рисунке круговая диаграмма Лиссажу создается при подаче горизонтального и вертикального входных сигналов осциллографа с отклонением фазы синусоидальных волн на 90 °. Начиная с (a) с максимальным отклонением «X» и минимальным «Y», след перемещается вверх и влево в направлении (b). Между (a) и (b) две формы волны равны 0.707 Впик при 45 °. Эта точка (0,707, 0,707) попадает на радиус круга между (a) и (b). Трасса перемещается в (b) с минимальным отклонением «X» и максимальным «Y». При максимальном отрицательном отклонении «X» и минимальном отклонении «Y» след перемещается в (c). Затем с минимальным «X» и максимальным отрицательным «Y» он переходит в (d), а затем обратно в (a), завершая один цикл.
Рисунок 5.10 Окружность синуса по оси X и косинуса по оси YНа рисунке показаны две синусоидальные волны с фазовым сдвигом на 90 °, приложенные к отклоняющим пластинам осциллографа, расположенным под прямым углом в пространстве.Комбинация фазированных синусоидальных волн на 90 ° и отклонения под прямым углом дает двумерный узор — круг. Этот круг очерчен электронным лучом, вращающимся против часовой стрелки.
Полная скорость двигателя и скорость синхронного двигателя
Скорость вращения вращающегося магнитного поля статора связана с количеством пар полюсов на фазу статора. На приведенном ниже рисунке «полная скорость» всего шесть полюсов или три пары полюсов и три фазы. Однако на каждую фазу приходится только одна пара полюсов.Магнитное поле будет вращаться один раз за цикл синусоидальной волны. В случае мощности 60 Гц поле вращается со скоростью 60 раз в секунду или 3600 оборотов в минуту (об / мин). При мощности 50 Гц он вращается со скоростью 50 оборотов в секунду или 3000 об / мин. 3600 и 3000 об / мин — это синхронная скорость двигателя. Хотя ротор асинхронного двигателя никогда не достигает этой скорости, это определенно верхний предел. Если мы удвоим количество полюсов двигателя, синхронная скорость сократится вдвое, потому что магнитное поле вращается в пространстве на 180 ° на 360 ° электрической синусоидальной волны.
Рисунок 5.11 Удвоение полюсов статора уменьшает синхронную скорость вдвоеСинхронная скорость определяется по формуле:
[латекс] N_s = \ frac {120 \ cdot f} {P} [/ латекс]
Где:
Н с = Скорость магнитного поля (об / мин)
f = частота подаваемой мощности (Гц)
P = общее количество полюсов на фазу, кратное 2
На приведенном выше рисунке «половинная скорость» четыре полюса на фазу (3 фазы).Синхронная скорость для мощности 50 Гц составляет: S = 120 · 50/4 = 1500 об / мин
Краткое объяснение асинхронного двигателя состоит в том, что вращающееся магнитное поле, создаваемое статором, увлекает за собой ротор. Более длинное и более правильное объяснение состоит в том, что магнитное поле статора индуцирует переменный ток в проводниках короткозамкнутого ротора, которые составляют трансформатор. вторичный. Этот индуцированный ток ротора, в свою очередь, создает магнитное поле. Магнитное поле вращающегося статора взаимодействует с этим полем ротора.Поле ротора пытается выровняться с полем вращающегося статора. Результат — вращение ротора с короткозамкнутым ротором. Если бы не было механической нагрузки крутящего момента двигателя, подшипников, сопротивления ветра или других потерь, ротор вращался бы с синхронной скоростью. Однако проскальзывание между ротором и полем статора синхронной скорости развивает крутящий момент. Именно магнитный поток, разрезающий проводники ротора при его проскальзывании, создает крутящий момент. Таким образом, нагруженный двигатель будет скользить пропорционально механической нагрузке.Если бы ротор работал с синхронной скоростью, не было бы потока статора, разрезающего ротор, не было бы тока, индуцированного в роторе, не было бы крутящего момента.
Крутящий момент в асинхронных двигателях
При первой подаче питания на двигатель ротор находится в состоянии покоя, а магнитное поле статора вращается с синхронной скоростью N с . Поле статора режет ротор с синхронной скоростью N с . Ток, индуцированный в закороченных витках ротора, является максимальным, как и частота тока, частота сети.По мере увеличения скорости ротора скорость, с которой магнитный поток статора сокращает ротор, представляет собой разницу между синхронной скоростью N с и фактической скоростью N ротора, или (N с — N). Отношение фактического потока, разрезающего ротор, к синхронной скорости определяется как скольжение :
[латекс] s = \ frac {(N_s — N)} {N_s} [/ латекс]
Где:
Н с = синхронная скорость
N = частота вращения ротора
Частота тока, наведенного в проводники ротора, равна только частоте сети при пуске двигателя и уменьшается по мере приближения ротора к синхронной скорости. Частота ротора определяется по:
[латекс] f_r = s \ cdot f [/ латекс]
Где:
с = скольжение,
f = частота сети статора
Скольжение при 100% крутящем моменте обычно составляет 5% или меньше в асинхронных двигателях. Таким образом, для частоты сети f = 50 Гц частота наведенного тока в роторе:
f r = S (f)
= 0,05 (50 Гц)
= 2,5 Гц.
Почему он такой низкий? Магнитное поле статора вращается с частотой 50 Гц.Скорость вращения ротора на 5% меньше. Вращающееся магнитное поле режет ротор только с частотой 2,5 Гц. 2,5 Гц — это разница между синхронной скоростью и фактической скоростью ротора. Если ротор вращается немного быстрее при синхронной скорости, поток вообще не будет резать ротор, f r = 0.
Рисунок 5.12 Зависимость крутящего момента и скорости от% скольжения.На приведенном выше графике показано, что пусковой крутящий момент, известный как крутящий момент заторможенного ротора (T LR ), превышает 100% крутящего момента при полной нагрузке (T FL ), безопасного продолжительного крутящего момента.Крутящий момент заблокированного ротора составляет около 175% от T FL для приведенного выше примера двигателя. Пусковой ток, известный как , ток заторможенного ротора (I LR ) составляет 500% от тока полной нагрузки (I FL ), безопасного рабочего тока. Ток большой, потому что это аналог закороченной вторичной обмотки трансформатора. Когда ротор начинает вращаться, крутящий момент может немного уменьшиться для определенных классов двигателей до значения, известного как тяговый момент . Это самое низкое значение крутящего момента, с которым когда-либо сталкивался пусковой двигатель.Когда ротор набирает 80% синхронной скорости, крутящий момент увеличивается со 175% до 300% крутящего момента полной нагрузки. Этот пробойный момент (T BD ) происходит из-за большего, чем обычно, 20% скольжения. Сила тока в этот момент уменьшилась лишь незначительно, но после этого будет быстро уменьшаться. Когда ротор ускоряется с точностью до нескольких процентов от синхронной скорости, как крутящий момент, так и ток значительно уменьшаются. При нормальной работе скольжение будет составлять всего несколько процентов. Для работающего двигателя любой участок кривой крутящего момента ниже 100% номинального крутящего момента является нормальным.Нагрузка двигателя определяет рабочую точку на кривой крутящего момента. В то время как крутящий момент и ток двигателя могут превышать 100% в течение нескольких секунд во время запуска, продолжительная работа выше 100% может привести к повреждению двигателя. Любая крутящая нагрузка двигателя, превышающая крутящий момент пробоя, приведет к остановке двигателя. Крутящий момент, скольжение и ток будут приближаться к нулю в условиях нагрузки «без механического крутящего момента». Это состояние аналогично разомкнутому вторичному трансформатору. Существует несколько основных конструкций асинхронных двигателей, которые значительно отличаются от кривой крутящего момента выше.Различные конструкции оптимизированы для запуска и работы с различными типами нагрузок. Крутящий момент заблокированного ротора (T LR ) для двигателей различных конструкций и размеров составляет от 60% до 350% момента полной нагрузки (T FL ). Пусковой ток или ток заторможенного ротора (I LR ) может находиться в диапазоне от 500% до 1400% от тока полной нагрузки (I FL ). Этот потребляемый ток может вызвать проблемы с запуском больших асинхронных двигателей.
Классы двигателей NEMA и IEC
Различные стандартные классы (или конструкции) двигателей, соответствующие кривым крутящего момента (рисунок ниже), были разработаны для лучшего управления нагрузками различных типов.Национальная ассоциация производителей электрооборудования (NEMA) определила классы двигателей A, B, C и D для удовлетворения этих требований к приводам. Аналогичные классы N и H Международной электротехнической комиссии (IEC) соответствуют конструкциям NEMA B и C соответственно.
Рисунок 5.13 Характеристики для проектов NEMAХарактеристики для проектов NEMA
Все двигатели, за исключением класса D, работают со скольжением 5% или менее при полной нагрузке.
- Класс B (IEC Class N) Двигатели используются по умолчанию в большинстве приложений.При пусковом моменте LRT = от 150% до 170% от FLT он может запускать большинство нагрузок без чрезмерного пускового тока (LRT). КПД и коэффициент мощности высокие. Обычно он приводит в действие насосы, вентиляторы и станки.
- Пусковой момент класса A такой же, как у класса B. Пусковой момент и пусковой ток (LRT) выше. Этот двигатель справляется с кратковременными перегрузками, которые встречаются в машинах для литья под давлением.
- Класс C (IEC Class H) имеет более высокий пусковой крутящий момент, чем классы A и B при LRT = 200% от FLT.Этот двигатель применяется для тяжелых пусковых нагрузок, которые необходимо приводить в действие с постоянной скоростью, таких как конвейеры, дробилки, поршневые насосы и компрессоры.
- Двигатели класса D имеют самый высокий пусковой момент (LRT) в сочетании с низким пусковым током из-за высокого скольжения (от 5% до 13% при FLT). Высокое скольжение приводит к более низкой скорости. Регулировка скорости плохая. Тем не менее, двигатель отлично справляется с нагрузками с переменной скоростью, например с маховиком для аккумулирования энергии. Применения включают пробивные прессы, ножницы и подъемники.
- Двигатели класса E являются версией класса B с более высоким КПД.
- Двигатели класса F имеют гораздо более низкие LRC, LRT и крутящий момент, чем у класса B. Они управляют постоянными, легко запускаемыми нагрузками.
Коэффициент мощности асинхронных двигателей
Асинхронные двигатели имеют отстающий (индуктивный) коэффициент мощности от линии электропередачи. Коэффициент мощности больших полностью нагруженных высокоскоростных двигателей может достигать 90% для больших высокоскоростных двигателей. При 3/4 полной нагрузки максимальный коэффициент мощности высокоскоростного двигателя может составлять 92%.Коэффициент мощности малых тихоходных двигателей может составлять всего 50%. При запуске коэффициент мощности может находиться в диапазоне от 10% до 25%, увеличиваясь по мере достижения ротором скорости. Коэффициент мощности (PF) значительно зависит от механической нагрузки двигателя (рисунок ниже). Ненагруженный двигатель аналогичен трансформатору без резистивной нагрузки на вторичной обмотке. Небольшое сопротивление отражается от вторичной обмотки (ротора) к первичной обмотке (статору). Таким образом, в линии электропередачи присутствует реактивная нагрузка до 10% коэффициента мощности. Когда ротор нагружен, возрастающая резистивная составляющая отражается от ротора к статору, увеличивая коэффициент мощности.
Рисунок 5.14 Коэффициент мощности и КПД асинхронного двигателяКПД асинхронного двигателя
Большие трехфазные двигатели более эффективны, чем трехфазные двигатели меньшего размера, и почти все однофазные двигатели. КПД большого асинхронного двигателя может достигать 95% при полной нагрузке, хотя чаще встречается 90%. Эффективность малонагруженного или ненагруженного асинхронного двигателя низкая, потому что большая часть тока связана с поддержанием намагничивающего потока. Когда нагрузка крутящего момента увеличивается, больше тока потребляется для создания крутящего момента, в то время как ток, связанный с намагничиванием, остается фиксированным.Эффективность при 75% FLT может быть немного выше, чем при 100% FLT. Эффективность снижается на несколько процентов при FLT 50% и снижается еще на несколько процентов при FLT 25%. Эффективность становится низкой только ниже 25% FLT. Изменение КПД в зависимости от нагрузки показано на рисунке выше. Индукционные двигатели обычно имеют завышенные размеры, чтобы гарантировать, что их механическая нагрузка может быть запущена и приведена в действие при любых условиях эксплуатации. Если многофазный двигатель нагружен менее 75% номинального крутящего момента, когда КПД достигает пика, КПД снижается лишь незначительно до 25% FLT.
Корректор коэффициента мощности Nola
Фрэнк Нола из НАСА предложил корректор коэффициента мощности (PFC) в качестве энергосберегающего устройства для однофазных асинхронных двигателей в конце 1970-х годов. Он основан на предположении, что асинхронный двигатель с неполной нагрузкой менее эффективен и имеет более низкий коэффициент мощности, чем двигатель с полной нагрузкой. Таким образом, можно сэкономить энергию в частично загруженных двигателях, в частности, в двигателях 1-φ. Энергия, потребляемая для поддержания магнитного поля статора, относительно фиксирована по отношению к изменениям нагрузки.Хотя в полностью загруженном двигателе экономить нечего, напряжение на частично загруженном двигателе может быть уменьшено, чтобы уменьшить энергию, необходимую для поддержания магнитного поля. Это повысит коэффициент мощности и эффективность. Это была хорошая концепция для заведомо неэффективных однофазных двигателей, для которых она предназначалась. Эта концепция не очень применима к большим трехфазным двигателям. Из-за их высокого КПД (90% +) экономия энергии невелика. Более того, двигатель с КПД 95% по-прежнему имеет КПД 94% при 50% крутящем моменте при полной нагрузке (FLT) и 90% КПД при 25% FLT.Потенциальная экономия энергии при переходе от 100% FLT к 25% FLT составляет разницу в эффективности 95% — 90% = 5%. Это не 5% мощности при полной нагрузке, а 5% мощности при пониженной нагрузке. Корректор коэффициента мощности Nola может быть применим к 3-фазному двигателю, который большую часть времени простаивает (ниже 25% FLT), например к пробивному прессу. Срок окупаемости дорогостоящего электронного контроллера был оценен как непривлекательный для большинства приложений. Тем не менее, он может быть экономичным в составе электронного пускателя двигателя или регулятора скорости.Асинхронный двигатель может работать как генератор переменного тока, если это привод
.Асинхронные двигатели в качестве генераторов переменного тока
Асинхронный двигатель может работать как генератор переменного тока, если он приводится в действие крутящим моментом, превышающим 100% синхронной скорости (рисунок ниже). Это соответствует нескольким% «отрицательного» скольжения, скажем, -1%. Это означает, что, поскольку мы вращаем двигатель быстрее, чем синхронная скорость, ротор продвигается на 1% быстрее, чем вращающееся магнитное поле статора. Обычно он отстает в двигателе на 1%.Поскольку ротор разрезает магнитное поле статора в противоположном направлении (впереди), ротор индуцирует напряжение в статоре, подавая электрическую энергию обратно в линию электропередачи.
Рисунок 5.15 Отрицательный крутящий момент превращает асинхронный двигатель в генераторТакой индукционный генератор должен возбуждаться «живым» источником мощностью 50 или 60 Гц. В случае сбоя в электроснабжении энергокомпании выработка электроэнергии невозможна. Этот тип генератора не подходит в качестве резервного источника питания.Преимущество ветряного генератора вспомогательной энергии состоит в том, что он не требует автоматического выключателя отключения питания для защиты ремонтных бригад. Это безотказно.
Небольшие удаленные (от электросети) установки могут быть выполнены с самовозбуждением путем размещения конденсаторов параллельно фазам статора. Если снять нагрузку, остаточный магнетизм может вызвать небольшой ток. Этот ток может протекать через конденсаторы без рассеивания мощности. Когда генератор достигает полной скорости, ток увеличивается, чтобы подать ток намагничивания на статор.В этот момент может быть приложена нагрузка. Слабое регулирование напряжения. Асинхронный двигатель может быть преобразован в генератор с самовозбуждением путем добавления конденсаторов.
Процедура запуска заключается в доведении ветряной турбины до скорости в двигательном режиме путем подачи на статор нормального напряжения линии электропередачи. Любая вызванная ветром скорость турбины, превышающая синхронную, будет развивать отрицательный крутящий момент, возвращая мощность в линию электропередачи, изменяя нормальное направление электрического счетчика киловатт-часов.В то время как асинхронный двигатель представляет отстающий коэффициент мощности для линии электропередачи, асинхронный генератор переменного тока представляет собой ведущий коэффициент мощности. Индукционные генераторы не используются широко на обычных электростанциях. Скорость привода паровой турбины является постоянной и регулируемой в соответствии с требованиями синхронных генераторов переменного тока. Синхронные генераторы также более эффективны.
Скорость ветряной турбины трудно контролировать, и скорость ветра может изменяться порывами. Асинхронный генератор лучше справляется с этими колебаниями из-за собственного проскальзывания.Это меньше нагружает зубчатую передачу и механические компоненты, чем синхронный генератор. Однако это допустимое изменение скорости составляет всего около 1%. Таким образом, индукционный генератор, подключенный к прямой линии, считается ветряной турбиной с фиксированной скоростью (см. Асинхронный генератор с двойным питанием для истинного генератора переменного тока с регулируемой скоростью). Несколько генераторов или несколько обмоток на общем валу можно переключать для обеспечения высокой и низкой скорости, чтобы приспособиться к переменным ветровым условиям.
Асинхронные двигатели с несколькими полями
Асинхронные двигателимогут содержать несколько обмоток возбуждения, например, 4-полюсную и 8-полюсную обмотки, соответствующие синхронным скоростям вращения 1800 и 900 об / мин.Подать питание на то или иное поле менее сложно, чем на повторное подключение катушек статора.
Рисунок 5.16 Несколько полей позволяют изменять скоростьЕсли поле сегментировано с выведенными выводами, оно может быть изменено (или переключено) с 4-полюсного на 2-полюсное, как показано выше для 2-фазного двигателя. Сегменты 22,5 ° переключаются на сегменты 45 °. Для ясности выше показана только проводка для одной фазы. Таким образом, наш асинхронный двигатель может работать на нескольких скоростях. При переключении вышеуказанного двигателя 60 Гц с 4 полюсов на 2 полюса синхронная скорость увеличивается с 1800 до 3600 об / мин.
Q: Если двигатель приводится в движение частотой 50 Гц, каковы будут соответствующие 4-полюсные и 2-полюсные синхронные скорости?
А:
[латекс] N_s = \ frac {120f} {P} [/ latex] [latex] N_s = \ frac {120 * 50Hz} {4} [/ latex] [latex] = 1500 об / мин (4-полюсный) [ / латекс]
[латекс] N_s = \ frac {120f} {P} [/ latex] [latex] N_s = \ frac {120 * 50Hz} {2} [/ latex] [latex] = 3000 об / мин (2-полюсный) [ / латекс]
Двигатели асинхронные с переменным напряжением
Скорость малых асинхронных двигателей с короткозамкнутым ротором для таких применений, как приводные вентиляторы, может быть изменена путем снижения сетевого напряжения.Это снижает крутящий момент, доступный нагрузке, что снижает скорость (см. Рисунок ниже).
Рисунок 5.17 Регулирование переменного напряжения, скорость асинхронного двигателяЭлектронное регулирование скорости в асинхронных двигателях
Современная полупроводниковая электроника расширяет возможности управления скоростью. Изменяя сетевую частоту 50 или 60 Гц на более высокие или более низкие значения, можно изменить синхронную скорость двигателя. Однако уменьшение частоты тока, подаваемого на двигатель, также снижает реактивное сопротивление X L , что увеличивает ток статора.Это может привести к насыщению магнитной цепи статора с катастрофическими последствиями. На практике напряжение на двигателе необходимо уменьшать при уменьшении частоты.
Рисунок 5.18 Электронный частотно-регулируемый приводИ наоборот, частота привода может быть увеличена для увеличения синхронной скорости двигателя. Однако необходимо увеличить напряжение, чтобы преодолеть увеличивающееся реактивное сопротивление, чтобы поддерживать ток на уровне нормального значения и поддерживать крутящий момент. Инвертор приближает синусоидальные волны к двигателю с помощью выходов с широтно-импульсной модуляцией.Это прерывистый сигнал, который может быть включен или выключен, высокий или низкий, процент времени включения соответствует мгновенному напряжению синусоидальной волны.
Когда для управления асинхронным двигателем применяется электроника, становится доступно множество методов управления, от простого до сложного:
- Скалярное управление: Описанный выше недорогой метод управления только напряжением и частотой без обратной связи.
- Векторное управление: Также известно как векторное управление фазой.Компоненты тока статора, создающие магнитный поток и крутящий момент, измеряются или оцениваются в реальном времени для улучшения кривой крутящего момента двигателя. Это требует больших вычислений.
- Прямое управление крутящим моментом: Продуманная адаптивная модель двигателя обеспечивает более прямое управление потоком и крутящим моментом без обратной связи. Этот метод быстро реагирует на изменения нагрузки.
- Многофазный асинхронный двигатель состоит из многофазной обмотки, встроенной в многослойный статор, и проводящей короткозамкнутой клетки, встроенной в многослойный ротор.
- Трехфазные токи, протекающие внутри статора, создают вращающееся магнитное поле, которое индуцирует ток и, следовательно, магнитное поле в роторе. Крутящий момент ротора развивается, когда ротор немного проскальзывает за вращающимся полем статора.
- В отличие от однофазных двигателей, многофазные асинхронные двигатели самозапускаются.
- Пускатели двигателей минимизируют нагрузку на линию питания, обеспечивая при этом больший пусковой крутящий момент, чем требуется во время работы.Снижение линейного тока Пускатели требуются только для больших двигателей.
- Трехфазные двигатели при запуске будут работать от однофазных.
- Статический преобразователь фазы — это трехфазный двигатель, работающий на одной фазе без нагрузки на вал, генерирующий трехфазный выходной сигнал.
- Несколько обмоток возбуждения можно перемонтировать для работы с несколькими дискретными скоростями двигателя, изменив количество полюсов.
Трехфазный двигатель может работать от однофазного источника питания.Однако он не запускается самостоятельно. Его можно запустить вручную в любом направлении, набрав скорость за несколько секунд. Он будет развивать только 2/3 номинальной мощности 3-φ, потому что одна обмотка не используется.
Рисунок 5.19 Двигатель 3-фазн. Питается от мощности 1-фазн., Но не запускаетсяОдинарная катушка однофазного двигателя
Одиночная катушка однофазного асинхронного двигателя создает не вращающееся магнитное поле, а пульсирующее поле, достигающее максимальной напряженности при электрическом напряжении 0 ° и 180 °.
Рисунок 5.20 Однофазный статор создает невращающееся пульсирующее магнитное полеДругая точка зрения состоит в том, что одиночная катушка, возбуждаемая однофазным током, создает два вектора магнитного поля, вращающихся в противоположных направлениях, совпадающих дважды за оборот при 0 ° (рисунок выше-a) и 180 ° (рисунок e). Когда векторы поворачиваются на 90 ° и -90 °, они отменяются на рисунке c. При 45 ° и -45 ° (рисунок b) они частично складываются по оси + x и сокращаются по оси y. Аналогичная ситуация наблюдается на рисунке d.Сумма этих двух векторов — это вектор, неподвижный в пространстве, но чередующийся во времени. Таким образом, пусковой крутящий момент не создается.
Однако, если ротор вращается вперед со скоростью немного меньшей, чем синхронная скорость, он будет развивать максимальный крутящий момент при 10% скольжении относительно вектора прямого вращения. Меньший крутящий момент будет развиваться выше или ниже 10% скольжения. Ротор будет испытывать скольжение на 200-10% относительно вектора магнитного поля, вращающегося в противоположных направлениях. Небольшой крутящий момент (см. Кривую зависимости крутящего момента от скольжения), за исключением двукратной пульсации частоты, создается вектором встречного вращения.Таким образом, однофазная катушка будет развивать крутящий момент после запуска ротора. Если ротор запускается в обратном направлении, он будет развивать такой же большой крутящий момент, поскольку он приближается к скорости вращающегося в обратном направлении вектора.
Однофазные асинхронные двигатели имеют медную или алюминиевую короткозамкнутую клетку, встроенную в цилиндр из стальных пластин, типичных для многофазных асинхронных двигателей.
Двигатель с постоянным разделением конденсаторов
Одним из способов решения проблемы с однофазным двигателем является создание двухфазного двигателя, получающего двухфазное питание от однофазного.Для этого требуется двигатель с двумя обмотками, разнесенными на 90, °, , электрическими, питаемыми двумя фазами тока, смещенными во времени на 90, °, . Это называется конденсаторным двигателем с постоянным разделением.
Рисунок 5.21 Асинхронный двигатель с постоянным разделением конденсаторов Асинхронный двигатель с постоянным разделением конденсаторовЭтот тип двигателя подвержен увеличению величины тока и сдвигу во времени назад, когда двигатель набирает скорость, с пульсациями крутящего момента на полной скорости. Решение состоит в том, чтобы уменьшить емкость конденсатора (импеданс), чтобы минимизировать потери.Потери меньше, чем у двигателя с экранированными полюсами. Эта конфигурация двигателя хорошо работает до 1/4 лошадиных сил (200 Вт), хотя обычно применяется к двигателям меньшего размера. Направление двигателя легко изменить, включив конденсатор последовательно с другой обмоткой. Этот тип двигателя может быть адаптирован для использования в качестве серводвигателя, описанного в другом месте этой главы.
Рисунок 5.22 Однофазный асинхронный двигатель со встроенными катушками статораОднофазные асинхронные двигатели могут иметь катушки, встроенные в статор для двигателей большего размера.Тем не менее, меньшие размеры требуют меньшего количества сложностей для создания концентрированных обмоток с выступающими полюсами.
Асинхронный двигатель с конденсаторным пуском
На рисунке ниже конденсатор большего размера может использоваться для запуска однофазного асинхронного двигателя через вспомогательную обмотку, если он отключается центробежным переключателем, когда двигатель набирает обороты. Кроме того, во вспомогательной обмотке может быть намного больше витков из более тяжелого провода, чем в двигателе с разделенной фазой сопротивления, чтобы уменьшить чрезмерное повышение температуры.В результате для таких тяжелых нагрузок, как компрессоры кондиционеров, доступен больший пусковой крутящий момент. Эта конфигурация двигателя работает настолько хорошо, что доступна в многомощных (несколько киловаттных) размерах.
Рисунок 5.23 Асинхронный двигатель с конденсаторным пускомАсинхронный двигатель с конденсаторным двигателем
Вариант двигателя с конденсаторным запуском (рисунок ниже) заключается в запуске двигателя с относительно большим конденсатором для высокого пускового момента, но после запуска оставляют конденсатор меньшей емкости на месте для улучшения рабочих характеристик, не потребляя при этом чрезмерного тока.Дополнительная сложность конденсаторного двигателя оправдана для двигателей большего размера.
Рисунок 5.24 Асинхронный двигатель с конденсаторным двигателемПусковой конденсатор двигателя может быть неполярным электролитическим конденсатором с двойным анодом, который может представлять собой два последовательно соединенных поляризованных электролитических конденсатора + к + (или — к -). Такие электролитические конденсаторы переменного тока имеют такие высокие потери, что их можно использовать только в прерывистом режиме (1 секунда во включенном состоянии, 60 секунд в выключенном состоянии), например, при запуске двигателя. Конденсатор для работы двигателя должен иметь не электролитическую конструкцию, а полимерный конденсатор с более низкими потерями.
Асинхронный двигатель с двухфазным электродвигателем с сопротивлением
Если во вспомогательной обмотке гораздо меньше витков, меньший провод размещен под углом 90 ° к главной обмотке, он может запустить однофазный асинхронный двигатель. При более низкой индуктивности и более высоком сопротивлении ток будет испытывать меньший фазовый сдвиг, чем основная обмотка. Может быть получено около 30 ° разности фаз. Эта катушка создает умеренный пусковой крутящий момент, который отключается центробежным переключателем на 3/4 синхронной скорости.Эта простая (без конденсатора) конструкция хорошо подходит для двигателей мощностью до 1/3 лошадиных сил (250 Вт), управляющих легко запускаемыми нагрузками.
Рисунок 5.25 Сопротивление асинхронного двигателя с расщепленной фазойЭтот двигатель имеет больший пусковой крутящий момент, чем двигатель с экранированными полюсами (следующий раздел), но не такой большой, как двухфазный двигатель, построенный из тех же частей. Плотность тока во вспомогательной обмотке во время пуска настолько высока, что последующий быстрый рост температуры исключает частый перезапуск или медленные пусковые нагрузки.
Корректор коэффициента мощности Nola
Фрэнк Нола из НАСА предложил корректор коэффициента мощности для повышения эффективности асинхронных двигателей переменного тока в середине 1970-х годов. Он основан на предположении, что асинхронные двигатели неэффективны при нагрузке ниже полной. Эта неэффективность коррелирует с низким коэффициентом мощности. Коэффициент мощности меньше единицы возникает из-за тока намагничивания, необходимого для статора. Этот фиксированный ток составляет большую долю от общего тока двигателя при уменьшении нагрузки двигателя.При небольшой нагрузке полный ток намагничивания не требуется. Его можно уменьшить, уменьшив подаваемое напряжение, улучшив коэффициент мощности и эффективность. Корректор коэффициента мощности определяет коэффициент мощности и снижает напряжение двигателя, тем самым восстанавливая более высокий коэффициент мощности и уменьшая потери.
Поскольку однофазные двигатели примерно в 2–4 раза менее эффективны, чем трехфазные двигатели, существует потенциальная экономия энергии для двигателей 1-φ. Для полностью нагруженного двигателя нет экономии, поскольку требуется весь ток намагничивания статора.Напряжение не может быть уменьшено. Но есть потенциальная экономия от менее чем полностью загруженного двигателя. Двигатель с номинальным напряжением 117 В переменного тока рассчитан на работу при напряжении от 127 В переменного тока до 104 В переменного тока. Это означает, что он не полностью загружен при работе при напряжении более 104 В переменного тока, например, при работе холодильника на 117 В переменного тока. Контроллер коэффициента мощности может безопасно снизить сетевое напряжение до 104–110 В переменного тока. Чем выше начальное напряжение в сети, тем больше потенциальная экономия. Конечно, если энергокомпания подаст напряжение ближе к 110 В переменного тока, двигатель будет работать более эффективно без каких-либо дополнительных устройств.
Любой практически неработающий однофазный асинхронный двигатель с 25% FLC или менее является кандидатом на использование PFC. Однако он должен работать большое количество часов в год. И чем больше времени он простаивает, как в пилораме, штамповочном прессе или конвейере, тем выше вероятность оплаты контроллера через несколько лет эксплуатации. За него должно быть втрое легче платить по сравнению с более эффективным 3-φ-двигателем. Стоимость PFC не может быть возмещена для двигателя, работающего всего несколько часов в день.
Резюме: Однофазные асинхронные двигатели
- Однофазные асинхронные двигатели не могут запускаться самостоятельно без вспомогательной обмотки статора, приводимой в действие противофазным током около 90 ° . После запуска вспомогательная обмотка необязательна.
- Вспомогательная обмотка электродвигателя с постоянным разделением конденсаторов имеет конденсатор, включенный последовательно с ней во время пуска и работы.
- Асинхронный двигатель с конденсаторным запуском имеет только конденсатор, включенный последовательно со вспомогательной обмоткой во время запуска.
- Конденсаторный двигатель обычно имеет большой неполяризованный электролитический конденсатор, включенный последовательно со вспомогательной обмоткой для запуска, а затем меньший неэлектролитический конденсатор во время работы.
- Вспомогательная обмотка электродвигателя с разделенным фазным сопротивлением во время пуска развивает разность фаз по сравнению с основной обмоткой из-за разницы в сопротивлении.
Высокоэффективные двигатели и экологичность — Электромоторостроение
Согласно некоторым исследованиям, электродвигатели составляют около 45% от общего потребления электроэнергии [1].Если мы сосредоточим анализ на одной из наиболее энергоемких сфер, а именно на промышленной, то процент, приписываемый двигателям, возрастет примерно до двух третей.
Учитывая, что некоторые машины, которые в настоящее время используются, устарели, очевидно, что замена на новые более эффективные двигатели приведет к важным преимуществам для окружающей среды и использования ресурсов, а также производственных затрат и конкурентоспособности. Они подсчитали, например, что в единственной Европе использование передовых приводных технологий вместо устаревших может привести к сокращению годового потребления на 135 ТВтч и выбросов CO 2 на 69 миллионов тонн [2].Оценивая полный жизненный цикл двигателя при постоянной работе, мы можем убедиться, что затраты, связанные с потреблением энергии, составляют, безусловно, основной процент в общей стоимости (даже более 90%, [3]).
По этим причинам в Европейском Союзе , а также в США, Китае и других странах действуют нормативные планы, предусматривающие обязательное соблюдение требований постепенно увеличивающейся эффективности для новых установок.Согласно Стандарту минимальных энергетических характеристик (MEPS), например, двигатели, выпущенные на рынок ЕС с января 2017 года в диапазоне мощности от 0,75 до 375 кВт, должны иметь уровень эффективности IE3 или уровень эффективности IE2 при питании от инвертора (см. Рис.1), за очень немногими исключениями.
Благодаря наиболее распространенной технологии среди двигателей сегодня, асинхронному двигателю (или асинхронному двигателю , IM), требуемые в будущем улучшения будут невозможны, по крайней мере, при разумных затратах и для всех диапазонов мощности.Эти аспекты в сочетании с другими факторами, такими как растущее осознание важности снижения энергопотребления, приводят к внедрению двигателей, которые практически не распространялись до сих пор, таких как синхронные двигатели с постоянным магнитом , [4] [5]. Фактически, двигатели этого класса обладают внутренними характеристиками, которые позволяют заметно улучшить КПД и удельную мощность, в частности очень низкие потери в роторе.
Даже если уже в восьмидесятые «бесщеточные» серводвигатели (т.е.е. Surface Mount ‑ PMSM, SM ‑ PMSM) использовались в промышленной автоматизации, благодаря их превосходной управляемости и высокой динамике применение электрических синхронных машин с раскрученным ротором долгое время оставалось ограниченным конкретными приложениями. Напротив, за последние несколько лет, благодаря вышеупомянутым факторам, касающимся эффективности и снижению производственных затрат на двигатели и инверторы, внедрение этого типа двигателей заметно расширилось.
Большинство двигателей переменного тока (AC) являются трехфазными, даже если есть некоторые исключения, например, в случае однофазных и шаговых двигателей (которые обычно двухфазные).Наиболее важное различие обычно заключается между синхронными и асинхронными машинами, различие основано на том факте, что механическая скорость вращения в установившемся режиме строго связана (синхронно) или нет с частотой вращения магнитного поля статора. Это различие конкретно отражается в том факте, что для создания крутящего момента в асинхронной машине наличие индуцированных токов в роторе необходимо, тогда как в синхронных машинах это не нужно (и, наоборот, нежелательно).
Синхронные машины отличаются тем, что магнитное поле ротора геометрически связано с механическим положением самого ротора. Поле ротора может создаваться током, который проходит через обмотку (синхронные двигатели с намотанным ротором), постоянными магнитами (синхронный постоянный магнит) или самим током статора, модулируемым магнитной анизотропией ротора (синхронное сопротивление).
Конструктивно и ротор, и статор машин с радиальным потоком (которых намного больше) изготавливаются путем наложения ферромагнитных пластин своевременно заглушенных, решение, направленное на препятствование паразитным токам.Ротор обычно имеет цилиндрическую форму и может быть оборудован пространствами для размещения постоянных магнитов или проводящего материала.
На рис. 2 схематически представлены секции только что перечисленных двигателей различных типов (за исключением синхронного с фазным ротором).
Самые темные области (щели) соответствуют обмоткам, постоянные магниты обозначены синим цветом, а серая зона секции представляет ферромагнитный материал (ламинирование). Как видите, разница между различными типами двигателей сосредоточена в роторе, тогда как статор (за исключением особых случаев) может быть реализован таким же образом. В асинхронном двигателе пазы ротора заполняются расплавом, который представляет собой так называемую «беличью клетку», обычно сделанную из алюминия или, в последнее время, из меди (с более высокими затратами, чтобы снизить потери).
В двигателях с постоянными магнитами , напротив, магниты могут быть вставлены в соответствующие резьбы внутри конструкции ротора (IPMSM и IPMSM с линейным запуском) или нанесены на поверхность в случае SM ‑ PMSM. В случае SynRM, вместо этого, резьбы внутри ротора просто пустые и называются «барьерами потока», поскольку они выполняют функцию увеличения сопротивления (т.е. способности противодействовать прохождению магнитного потока) вдоль одних направлений, отдавая предпочтение другим ( т.е. дорожки больше характеризуются наличием железа).
В свою очередь синхронные двигатели можно подразделить по принципу создания крутящего момента. В двигателях с поверхностными постоянными магнитами создание крутящего момента происходит только благодаря взаимодействию между полем, создаваемым постоянными магнитами, и током статора.
И наоборот, в реактивных двигателях , используется тенденция системы минимизировать сопротивление магнитных путей, если они подвергаются возбуждению. В двигателях с внутренним магнитом (IPMSM) обычно используются оба принципа.
При производстве постоянных магнитов используются особые материалы для достижения высоких значений индукции и предотвращения риска размагничивания (обычно связанного с высокими температурами или сильным магнитным полем). Наиболее часто используемые материалы — неодим-железо-бор, самарий-кобальт и алюминий-никель-кобальт. Особенно в случае SM ‑ PMSM, количество активного магнитного материала велико, и в общей стоимости большой вес сырья. Это состояние усугубляется сильной изменчивостью цен на так называемые «редкоземельные элементы» [7], элементы, используемые в небольших количествах, но очень важные для качества магнита.Помимо проблем со стоимостью и доступностью, эти материалы вызывают также важные экологические, политические и этические проблемы, касающиеся их добычи, торговли и утилизации. По этим причинам огромные ресурсы вкладываются в исследования и разработки различных материалов и, особенно, в проекты двигателей, которые сводят к минимуму использование постоянных магнитов [8] или позволяют использовать так называемые ферриты, т.е. керамические магнитные материалы, в которых используются менее проблемные материалы.
Отрицательный аспект синхронных двигателей заключается в том, что невозможно подключить к ним , просто подключив их к сети (Direct On-Line, DOL), как это происходит с асинхронными двигателями.Следовательно, для работы синхронных или реактивных двигателей с постоянными магнитами необходимо наличие «привода», то есть целого, состоящего из реального инвертора (чисто электронного силового привода), электронного контроллера и алгоритмов, реализованных в нем. Алгоритм управления, реализованный на цифровом устройстве, обновляется с частотой порядка 10 000 раз в секунду. Несмотря на дополнительную стоимость, стоит рассмотреть возможность изменения условий работы, в частности скорости, дает важные преимущества в нескольких приложениях (особенно в насосах и вентиляторах, где это позволяет значительно экономить энергию).
Управляя инвертором в режиме ШИМ (широтно-импульсной модуляции), можно эффективно генерировать ряд напряжений, которые характеризуются амплитудой, частотой и произвольными фазами.
Поскольку в синхронных двигателях крутящий момент зависит от амплитуды тока и его фазового соотношения с магнитной осью ротора, в алгоритмах управления обычно используется преобразование координат Парка, что приводит трехфазную систему к системе отсчета, интегральной с ось ротора (рис.6).
Знание положения ротора важно для управления синхронным двигателем. В некоторых приложениях, где не требуются особые характеристики управления, можно исключить механический датчик положения из-за его стоимости и снижения надежности. Фактически были разработаны «бессенсорные» методы управления, при которых положение ротора оценивается с использованием измерений тока и напряжения (внутри инвертора и в любом случае необходимо) и модели двигателя.
Бездатчиковые методы для синхронных двигателей, разработанные с девяностых годов, первоначально нашли применение только в некоторых конкретных случаях. В продуктах, которые в настоящее время называются «инверторами», то есть приводами общего назначения, первые алгоритмы этого типа были представлены в конце 2000-х годов, и в последние годы они стали почти стандартным оборудованием. К сожалению, эти решения все еще мало известны операторам автоматизации, даже если их применимость была продемонстрирована, особенно в таких обычных приложениях, как насосы и вентиляторы.
Поскольку данных, предоставленных производителем двигателя, часто недостаточно для калибровки всех параметров алгоритма управления, были разработаны методы «самостоятельного ввода в эксплуатацию», другими словами, ввод в эксплуатацию с минимальным вмешательством оператора. Первым шагом является автоматическая идентификация параметров («самоидентификация») методами, выполняемыми самим приводом, для перехода к реальной калибровке, то есть к выбору значений для параметров управления. И промышленность, и академический мир активно исследуют эти аспекты, с очень интересными предложениями также в итальянской сфере [10] — [14].
Как уже было сказано, самая большая разница между различными типами двигателей переменного тока в основном заключается в конструкции ротора . Фактически, существуют различные случаи синхронных двигателей, предназначенных для сохранения других частей почти неизменными по сравнению с соответствующей асинхронной машиной (в конечном итоге изменяющие витки обмотки). Такой подход распространился в последние несколько лет с целью удовлетворения общих приложений, а именно в качестве замены асинхронного двигателя.Помимо очевидных преимуществ в стоимости производства, использование эквивалентных деталей с точки зрения габаритных размеров, опор и точек внешнего крепления позволило использовать эти двигатели без изменения остальной механики. В этом отношении инновационные примеры представлены изделиями итальянских компаний, такими как серия синхронных двигателей с внутренними постоянными магнитами и реактивных двигателей, показанных на рис. 5.
Рис. 4. Изображение преобразования координат Парка в основе векторного управления. В синхронных двигателях , особенно в двигателях с постоянными магнитами, можно реализовать большое количество полюсов со снижением скорости с тем же напряжением и увеличением крутящего момента с тем же током. Эту степень свободы в проекте можно сравнить по аналогии с использованием механического редуктора скорости и, следовательно, в некоторых приложениях она позволяет использовать соединение с прямым приводом с некоторыми преимуществами с точки зрения эффективности, габаритных размеров, стоимости. , надежность и точность управления.Это решение в течение нескольких лет применялось в промышленных машинах (например, при производстве бумаги [14]), в гражданском подъемном секторе (лифты), в очистке воздуха (вентиляторы градирен, [15]) и в некоторая бытовая техника (в частности стиральные машины).
В проекте, рассмотренном в [15], пакет статора (пластинки) использовался в качестве конструктивного элемента без добавления внешнего кожуха. На рис. 6 также показана конструкция статора , ламинированная , где видно внешнее крыло для отвода тепла.Благодаря ограниченным по высоте габаритным размерам, этот двигатель устанавливается в основании градирни по оси с вентилятором, что позволяет избежать прямоугольной передачи и снижения скорости, которые вместо этого необходимы в традиционной конфигурации (с асинхронным двигателем). мотор).
Первые применения синхронных двигателей с постоянными магнитами в гражданском секторе включают системы кондиционирования, поскольку в этом случае сохраняется важность энергопотребления.В холодильнике (как промышленном, так и бытовом) постепенно растет применение синхронных двигателей. Кроме того, частным случаем являются циркуляционные насосы для тепловых станций, которые из соображений эффективности в настоящее время почти полностью основаны на синхронных двигателях с постоянными магнитами в бессенсорном управлении.
Среди бытовых приборов , в стиральных машинах использование этих типов двигателей стало обычным явлением в последние несколько лет. Использование синхронных двигателей вместо асинхронных или универсальных (со щетками) позволило, с одной стороны, уменьшить габаритные размеры и количество используемого материала, с другой стороны, улучшить управляемость, что также связано с принятием таких решений, как механическое соединение с прямым приводом.В последнем случае из-за ограничений габаритных размеров и необходимого крутящего момента ротор обычно внешний, а весь двигатель плоский и большого диаметра (рис. 7).
Деталь производства машин этого типа, также как и другие частные применения, — это обмотка на зубе (отдельная обмотка для каждого зуба статора).
У этого типа меньше простаивающих медных деталей, но становится сложнее проектировать машины с низкой пульсацией крутящего момента.Прямое соединение обеспечивает преимущества также с точки зрения работы в целом, облегчая идентификацию груза в резервуаре и его расположение в дополнение к регулированию скорости.
Из-за особого рабочего цикла стиральных машин, который включает в себя отжим-сушку, очень важна работа на высокой скорости (превышающей номинальную). Этот способ называется « дефлегмация », потому что, будучи напряжением, пропорциональным потоку и скорости, общий поток уменьшается с помощью подходящего управления, чтобы обеспечить работу на более высоких скоростях и фиксированном напряжении.В этом случае главными кандидатами являются синхронные двигатели с внутренними постоянными магнитами, поскольку их имеющийся крутящий момент не падает внезапно за пределы номинальной скорости.
Область, где синхронные двигатели получили широкое распространение, — это лифтов , особенно больших размеров. В этом случае также были реализованы специальные решения, такие как на рис. 8, позволяющие прямое движение нагрузки (без редуктора).
В данном случае это осевой двигатель, то есть зазор между статором и ротором (магнитный зазор) пересекается силовыми линиями, параллельными оси.
Другие конкретные области применения относятся к возобновляемым источникам (например, энергия ветра) и авионике , где они преследуют цель «Больше электрических самолетов» (замена гидравлических или пневматических приводов). Использование высокоэффективных и высокопроизводительных двигателей также распространяется в тяговом тракте , включая дорожную среду (от велосипедов до тяжелых транспортных средств и рабочих машин), железнодорожный / трамвайный сектор и промышленный сектор (вилочные погрузчики и аналогичные).
- Уайлд, К. У. Бруннер, «Возможности политики в области энергоэффективности для систем с приводом от электродвигателей», Международное энергетическое агентство, Рабочий документ, 2011 г.
- «Электродвигатели и частотно-регулируемые приводы — Стандарты и законодательные требования по энергоэффективности низковольтных трехфазных двигателей», ZVEI — Zentralverband Elektrotechnik- und Elektronikindustrie eV, Division Automation — Electric Drive Systems, Франкфурт, декабрь 2010 г., 2-е издание .
- «Повышение рентабельности производства с помощью энергоэффективных приводов и двигателей», брошюра ABB, 2016 г.
- Вагати, «Синхронное реактивное сопротивление: новая альтернатива в приводах переменного тока», 20-я Международная конференция по промышленной электронике, управлению и КИП, 1994. IECON ’94., Болонья, 1994, стр. 1-13, том 1.
- Липо, Т. А., «Машины с синхронным сопротивлением — жизнеспособная альтернатива приводам переменного тока», Консорциум электрических машин и силовой электроники штата Висконсин, Отчет об исследованиях, 1991.
- «Низковольтные двигатели для технологических процессов в соответствии с EU MEPS», каталог ABB, октябрь 2014 г.
- «Редкие земли», S. Geological Survey, Mineral Commodity Summaries, январь 2016 г.
- Гульельми, Б. Боаццо, Э. Армандо, Г. Пеллегрино и А. Вагати, «Минимизация магнитов в конструкции двигателя IPM-PMASR для применения в широком диапазоне скоростей», Конгресс и выставка IEEE Energy Conversion 2011, Феникс, Аризона, 2011 г., стр. 4201-4207.
- «Технологии двигателей для повышения эффективности в приложениях — Обзор тенденций и приложений», Danfoss Power Electronics — Danfoss VLT drive PE-MSMBM, ноябрь 2014 г.
- Н. Бедетти, С. Каллигаро; Р. Петрелла, «Непрерывная самоидентификация характеристик потока для синхронных машин с сопротивлением с помощью новой аппроксимирующей функции насыщения и множественной линейной регрессии», в IEEE Transactions on Industry Applications, vol. 52, нет. 4. С. 3083-3092, июль-август. 2016.
- Н. Бедетти, С. Каллигаро; Р. Петрелла, «Самостоятельный ввод в эксплуатацию компенсации простоев инвертора с помощью множественной линейной регрессии на основе физической модели», IEEE Energy Conversion Congress and Exposition (ECCE) 2014 г., т., №, стр. 242–249, 14–18 сентября 2014 г.
- Н. Бедетти, С. Каллигаро; Р. Петрелла, «Аналитический расчет контура регулирования напряжения с ослаблением потока в приводах IPMSM», Конгресс и выставка по преобразованию энергии (ECCE) IEEE, 2015, том, №, стр. 6145-6152, 20-24 сентября 2015 г.
- Н. Бедетти, С. Каллигаро; Р. Петрелла, «Анализ проблем проектирования и ошибок оценки основанного на обратной ЭДС устройства наблюдения за положением и скоростью для синхронных двигателей с SPM», в IEEE Journal of Emerging and Selected Topics in Power Electronics, vol.2, № 2, стр. 159–170, июнь 2014 г.
- S.A. Odhano, P. Giangrande, R. I. Bojoi и C. Gerada, «Самостоятельный ввод в эксплуатацию внутренних приводов синхронных двигателей с постоянными магнитами с подачей высокочастотного тока», в IEEE Transactions on Industry Applications, vol. 50, нет. 5, pp. 3295-3303, сентябрь-октябрь. 2014.
- Welin, C.-J. Фриман, «Новая система прямого привода открывает новую эру для бумагоделательных машин», Paper and Timber, Vol.83 / No. 5, 2001.
- МакЭлвин, К. Лайлс, Б. Мартин и В. Вассерман, «Надежность приводов градирни: повышение эффективности с помощью новой технологии двигателей», в журнале IEEE Industry Applications Magazine, vol.18, нет. 6, стр. 12-19, ноябрь-дек. 2012.
— обзор
Частотно-регулируемые приводы
Асинхронные и синхронные двигатели рассчитаны на определенное соотношение напряжения к частоте ( В, / Гц). Напряжение — это напряжение питания двигателя, а частота — это частота питания. Отношение В, / Гц прямо пропорционально величине магнитного потока в магнитном материале двигателя (пластинах сердечника статора и ротора). Крутящий момент, развиваемый на валу двигателя, пропорционален силе вращающегося потока.Тип и количество магнитного материала, используемого в конструкции двигателя, являются факторами, определяющими номинальную мощность двигателя.
При постоянной частоте питающей сети более высокое напряжение вызывает более высокое соотношение В и / Гц и более высокий магнитный поток. При постоянном напряжении питания более низкая частота питания приведет к более высокому соотношению В, / Гц и более высокому потоку. Более высокий магнитный поток увеличивает крутящий момент двигателя. Когда двигатель работает при более высоком напряжении В, / Гц, чем номинальное, возникает перенапряжение, которое может вызвать насыщение статора и магнитного сердечника ротора.Насыщение вызывает перегрев и может привести к отказу мотора. Когда двигатель работает при напряжении В / Гц ниже номинального, магнитный поток уменьшается. Уменьшение магнитного потока снижает крутящий момент и влияет на способность двигателя выдерживать нагрузку.
Когда двигатели питаются напрямую от электросети, частота питающей сети остается постоянной, а напряжение и ток изменяются во время запуска двигателя. Во время разгона двигателя до синхронной скорости (синхронные двигатели) или скорости, близкой к синхронной (асинхронные двигатели), ток сначала возрастет в несколько раз по сравнению с номинальным током и вызовет падение напряжения.Более низкое напряжение при постоянной частоте питания означает более низкое соотношение В и / Гц и меньший магнитный поток, который влияет на крутящий момент. Как только двигатель разгоняется, напряжение восстанавливается до значения, близкого к номинальному, а крутящий момент на валу двигателя достигает номинального значения. В этом случае скорость двигателя будет постоянной и синхронной (синхронные двигатели) или близкой к синхронной (асинхронные двигатели). Если двигатели подключены напрямую к электросети, скорость определяется фиксированной частотой сети и не может контролироваться.Для управления скоростью при необходимости используются дополнительные механические системы: демпферы, клапаны, коробки передач, тормоза и т. Д. Механические системы снижают общую эффективность системы. Кроме того, как объяснялось ранее, асинхронные двигатели потребляют реактивную мощность, поэтому поддержание коэффициента мощности может быть проблемой для асинхронных двигателей. Синхронные двигатели не вызывают проблем с коэффициентом мощности, они действительно могут помочь.
Существует четыре категории проблем с двигателями, подключенными непосредственно к сети электропитания: высокий пусковой ток, контроль крутящего момента, контроль скорости и коэффициент мощности (только для асинхронных двигателей).Одним из эффективных способов решения проблем является использование частотно-регулируемых приводов. При использовании частотно-регулируемых приводов питание привода осуществляется от сети, а питание двигателя — от привода.
ЧРПуправляют скоростью и крутящим моментом двигателя, контролируя частоту и величину напряжений и токов, подаваемых на двигатель. Каждый частотно-регулируемый привод имеет три секции: выпрямитель, фильтр с накопителем энергии и инвертор. Типичная концептуальная конфигурация показана на рис. 7.22.
Рис. 7.22. Типовая конфигурация ЧРП.
Выпрямитель берет синусоиду фиксированной частоты и величины напряжения из сети и выпрямляет ее в форму сигнала постоянного тока.
Фильтр принимает форму сигнала постоянного тока от выпрямителя и обеспечивает почти чистый линейный постоянный ток. Накопитель энергии используется для поддержания мгновенного энергетического баланса. Если при сбалансированной трехфазной нагрузке общая мощность остается постоянной от момента к моменту, а с идеальным преобразователем, накопление энергии не потребуется. На практике преобразователям требуется накопитель энергии для хранения энергии, достаточной для питания двигателя в течение коротких интервалов, когда мощность нагрузки превышает входную мощность.Конденсаторы и индукторы используются для хранения энергии.
Инвертор преобразует мощность постоянного тока обратно в переменный ток через набор электронных переключателей (MOSFET (металлооксидный полупроводниковый полевой транзистор), IGBT (биполярный транзистор с изолированным затвором), IGCT (интегрированный тиристор с коммутацией затвора), GTO (затвор) отключающий тиристор) и др.). Эти переключатели, открывая и закрываясь с определенной скоростью и продолжительностью, могут инвертировать постоянный ток и воссоздавать выходные токи и формы сигналов напряжения, имитирующие синусоидальные формы сигналов переменного тока.Затем двигатель получает питание от выхода инвертора.
Формы выходных сигналов представляют собой сигналы с широтно-импульсной модуляцией (ШИМ). Они называются сигналами ШИМ, потому что они создаются несколькими импульсами переключателей с короткими интервалами. Величину и частоту сигналов напряжения ШИМ можно регулировать. Изменяя время, импульсы и какие переключатели срабатывают, частота может быть увеличена или уменьшена. Изменяя ширину и длительность импульсов, можно увеличивать и уменьшать среднее напряжение двигателя.Типичная форма сигнала ШИМ с аппроксимируемой синусоидой показана на рис. 7.23.
Рис. 7.23. Типичная форма сигнала ШИМ с аппроксимируемой синусоидой.
При использовании в качестве примера асинхронного двигателя асинхронный двигатель может эффективно работать только при скорости, близкой к синхронной скорости вращающегося поля. Управление скоростью требует непрерывного изменения скорости вращающегося поля, что требует изменения частоты.
Когда выходное напряжение инвертора на каждой выходной частоте инвертора регулируется таким образом, чтобы соотношение В, / Гц поддерживалось постоянным до номинальной скорости, можно получить семейство кривых крутящего момента-скорости, аналогичных рис.7.24.
Рис. 7.24. VFD Поставляемая кривая крутящего момента асинхронного двигателя с изменением частоты и напряжения и постоянным соотношением В / Гц.
Точка «a» на рис. 7.24 соответствует крутящему моменту без нагрузки и скорости без нагрузки при частоте питания инвертора 25 Гц. От без нагрузки в точке «a» до полной нагрузки в точке «b» скорость немного снизится. Если требуется поддерживать постоянную скорость из точки «а», регулятор частотно-регулируемого привода повысит частоту, так что рабочая точка при полной нагрузке переместится в точку «с».«Управление частотно-регулируемым приводом также будет повышать напряжение пропорционально увеличению частоты, чтобы поддерживать постоянное соотношение В, / Гц при полной нагрузке и, таким образом, поддерживать крутящий момент при полной нагрузке.
Из рис. 7.24 видно, что момент отрыва постоянен во всех точках ниже номинальной скорости, за исключением низких частот. На низких частотах тяговый момент снижается из-за сопротивления статора. Когда частота приближается к нулю, падение напряжения из-за сопротивления статора становится важным, и уменьшение магнитного потока, вызывающее уменьшение крутящего момента, становится заметным.Этот эффект известен и легко смягчается с помощью низкоскоростного повышения напряжения: увеличения отношения В, / f на низких частотах для восстановления магнитного потока. На рис. 7.25 показан типичный набор кривых крутящий момент-скорость для привода с повышением напряжения на низкой скорости.
Рис. 7.25. График зависимости крутящего момента от частоты вращения асинхронного двигателя с частотно-регулируемым приводом с изменением напряжения и частоты, постоянное соотношение В, / Гц до номинальной скорости и повышение напряжения на низкой скорости.
При превышении номинальной скорости соотношение В и / Гц больше не может поддерживаться постоянным, поскольку напряжение не может превышать номинальное напряжение двигателя во избежание пробоя изоляции двигателя.Повышение частоты сверх номинальной частоты возможно и приведет к более высокой скорости, но при сохранении напряжения на уровне номинального напряжения и, как следствие, уменьшении отношения В к / Гц, плотность магнитного потока и крутящий момент уменьшатся.
Преимущество двигателей, поставляемых с частотно-регулируемым приводом, заключается в том, что двигатель может обеспечивать одинаковый максимальный крутящий момент от нулевой до номинальной скорости. Эта область характеристики крутящий момент-скорость двигателя называется областью «постоянного крутящего момента». Непрерывная работа с максимальным крутящим моментом на практике не выполняется из-за тепловых ограничений.Верхний предел крутящего момента, равный номинальному крутящему моменту двигателя, обычно устанавливается в контроллере.
Благодаря двигателям, поставляемым с частотно-регулируемым приводом, и их наличию высокого крутящего момента на низких скоростях можно избежать проблем пуска, характерных для операций с фиксированной частотой (начальное высокое скольжение, высокий пусковой ток, падение напряжения и уменьшение крутящего момента). Двигатель с ЧРП запускается с низкой частоты, которая постепенно увеличивается. Скорость скольжения ротора всегда мала, и ротор непрерывно работает с оптимальным крутящим моментом.Номинальный крутящий момент доступен на низких скоростях, а пусковой ток не превышает номинального тока полной нагрузки. Двигатель может запускаться от недельной сети электроснабжения, не вызывая нарушений напряжения в питающей сети.
Как упоминалось ранее, двигатель с частотно-регулируемым приводом может развивать любой крутящий момент до номинального крутящего момента на любой скорости вплоть до номинальной. Эта область называется областью «постоянного крутящего момента». При превышении номинальной скорости В, / Гц будет уменьшаться, поскольку напряжение остается постоянным при номинальном напряжении двигателя, ток статора и ротора также остаются постоянными, а скорость и частота увеличиваются, поэтому плотность магнитного потока будет уменьшаться, а крутящий момент — обратно пропорционально Частота.Эта область характеристики крутящий момент-скорость двигателя называется областью «постоянной мощности». Область постоянной мощности примерно в два раза превышает номинальную скорость. За пределами области постоянной мощности находится область высоких скоростей, где предел тока совпадает с пределом крутящего момента отрыва, который уменьшается обратно пропорционально квадрату частоты, поэтому постоянная мощность не может поддерживаться дальше. Области постоянного крутящего момента, постоянной мощности и высокой скорости показаны на рис. 7.26.
Рис. 7.26. ЧРП предоставил кривую крутящего момента-скорости асинхронного двигателя в области постоянного крутящего момента, постоянной мощности и высокой скорости.
В двигателях с ЧРП важно отметить, что кривые крутящий момент-скорость показывают крутящий момент, который двигатель может создать для каждой частоты, но не то, как долго и может ли двигатель работать в каждом состоянии непрерывно. Если в приложении с двигателем, поставляемым с частотно-регулируемым приводом, используется стандартный асинхронный двигатель, необходимо учитывать ограничения по нагреву. Стандартный промышленный двигатель обычно заключен в корпус с установленным на внешнем валу вентилятором, который обдувает воздухом внешний корпус с оребрением. Стандартная конструкция и охлаждение двигателя предназначены для непрерывной работы при фиксированной частоте и номинальной скорости, подаваемой в сеть.Когда стандартный промышленный двигатель работает, подключенный к ЧРП, который производит низкую частоту и запускает двигатель на низкой скорости, охлаждение двигателя становится проблемой. Двигатель будет способен создавать номинальный крутящий момент на низкой скорости, но в этих условиях он будет работать при более высоких температурах, что может существенно повлиять на срок службы двигателя или вызвать перегрев и отказ двигателя.
Когда двигатель используется в приложениях с частотно-регулируемым приводом, важно указать сценарии работы, соответствующим образом спроектировать охлаждение и использовать двигатели, подходящие для работы с инвертором.
Помимо охлаждения, при использовании двигателей с частотно-регулируемым приводом при проектировании необходимо учитывать и другие факторы, такие как влияние гармоник от частотно-регулируемого привода к сети, конфигурация кабеля и размер кабеля от частотно-регулируемого привода к двигателю и т. Д.
Технология Written-Pole® — Как мы преодолели барьер в 15 л.с.
Однофазный
Применение технологии SPPS Written-Pole® для однофазных электродвигателей дает много преимуществ по сравнению с ограничениями, налагаемыми традиционными технологиями двигателей.Однофазные двигатели SPPS Written-Pole® обладают исключительными рабочими характеристиками благодаря уникальной запатентованной конструкции и конструкции, в которой сочетаются многие сильные стороны существующих технологий и устраняются их недостатки.
Строительство
Основные элементы однофазного двигателя SPPS Written-Pole® показаны на Рисунке 1. Хотя в SPPS Written-Pole® используются конструктивные технологии, аналогичные тем, что используются в обычных асинхронных двигателях, они задаются новаторским использованием материалов и концепций. отдельно.
Конструкция статора
Статор типичного однофазного двигателя SPPS Written-Pole® будет немедленно узнаваем любым, кто знаком с асинхронными двигателями. Ламинированный пакет статора изготовлен с использованием листов электротехнической стали с низкими потерями и новейшими оксидными покрытиями. Одно- или трехфазная обмотка устанавливается в статоре с помощью медного провода инверторного класса. Обмотки аналогичны по конструкции и функциям используемым в обычном асинхронном или синхронном двигателе.При подключении к входному сетевому питанию ток в обмотках создает вращающееся магнитное поле, которое взаимодействует с ротором, прикладывая вращающую силу к валу.
Уникальной особенностью однофазных двигателей SPPS Written-Pole® является использование сосредоточенной обмотки возбуждения, расположенной в одной или двух точках статора. Обмотка возбуждения содержится внутри конструкции статора и расположена между основными обмотками статора. Эта обмотка, разработанная для создания достаточно мощного магнитного поля для полного намагничивания той части магнитного слоя ротора, которая находится непосредственно через воздушный зазор от него, используется для поддержания правильной геометрии полюсов в роторе.Энергия, необходимая для работы обмотки возбуждения, магнитно передается через сердечник статора от соседних обмоток статора, что устраняет необходимость во внешнем источнике энергии.
Конструкция ротора
Ротор типичного однофазного двигателя SPPS Written-Pole® представляет собой комбинацию индукции, гистерезиса и постоянных магнитов. Базовая платформа состоит из обычного стального вала, вставленного в ламинированный пакет, содержащий роторный сепаратор с высоким сопротивлением.Пластины ротора изготовлены из той же электротехнической стали с низкими потерями, которая используется в пластинах статора. Клетка с высоким сопротивлением является ключевым фактором ограничения пускового тока однофазных двигателей SPPS Written-Pole® и обеспечивает значительный индукционный момент на начальной стадии пуска. Общая площадь поперечного сечения и удельное сопротивление обоймы ротора выбираются таким образом, чтобы обеспечить высокое скольжение и пусковую характеристику с высоким коэффициентом мощности. Хотя такая конфигурация может отрицательно сказаться на эффективности работы обычного асинхронного двигателя, синхронный режим работы, используемый в однофазных двигателях SPPS Written-Pole®, устраняет наведенные токи в стержнях ротора и связанные с этим электрические потери.Сплошной слой полупостоянного магнитного феррита, покрывающий ламинированный пакет ротора, является одной из уникальных особенностей однофазных двигателей SPPS Written-Pole®. Ферритовый материал, используемый в роторе, во многом аналогичен магнитному материалу, используемому в обычных синхронных двигателях с постоянными магнитами, что позволяет ему сохранять намагниченность в нормальном рабочем диапазоне. Однако уникальные свойства этого запатентованного материала уменьшают силу магнитного поля, необходимого для намагничивания или переориентации материала до достаточно низкого уровня, чтобы стало практичным повторно намагничивать ротор во время его вращения.Это может быть достигнуто без потери свойств, требуемых для нормальной работы, и имеет дополнительное преимущество в виде увеличения величины гистерезисного крутящего момента, доступного во время пуска.
Эксплуатация
Однофазные двигателиSPPS Written-Pole® используют три режима работы в зависимости от скорости вращения машины. На приведенной ниже диаграмме показаны три режима работы, а также их связь со скоростью вращения двигателя.
Режим запуска
В режиме запуска однофазный двигатель SPPS Written-Pole® создает большой гистерезис и индукционный крутящий момент, которые начинают разгонять двигатель до его номинальной скорости.Гистерезис крутящего момента возникает, когда магнитные поля, создаваемые током статора, достаточно сильны для намагничивания ферритового материала на роторе, создавая полезный крутящий момент. Величина входного пускового тока и индукционный момент, создаваемый в этом режиме, определяются свойствами обоймы ротора.
Применение однофазной технологии SPPS Written-Pole® предоставляет разработчикам значительную свободу выбора этих свойств, поскольку однофазные двигатели SPPS Written-Pole® способны создавать синхронный крутящий момент в широком диапазоне скоростей, в отличие от обычных синхронных двигателей, которые полагаться на индукционный момент для разгона машины до синхронной скорости.В результате сопротивление сепаратора может быть оптимизировано для достижения желаемых пусковых характеристик, не беспокоясь о наличии индукционного момента на более высоких скоростях. Этот процесс представляет собой компромисс между плавными пусками при низком токе и быстрыми резкими пусками при высоком токе. Фактические пусковые токи, время и скорость ускорения зависят от модели и области применения с большинством однофазных двигателей SPPS Written-Pole®, оптимизированных для более низких пусковых токов.
Такой подход дает несколько долгосрочных преимуществ, включая более плавную рампу пуска, которая защищает подключенную нагрузку от разрушительного ускорения и механических ударов.Более низкий пусковой ток также снижает повышение температуры обмоток статора, позволяя более частые запуски и перезапуски, чем это возможно с обычными двигателями, при подключении к аналогичным высокоинерционным нагрузкам.
Переходный режим
Когда однофазный двигатель SPPS Written-Pole® ускоряется до своей номинальной скорости, он входит в переходный режим, во время которого обмотка возбуждения начинает влиять на магнитную геометрию ротора. Скорость вращения, с которой двигатель переключается в переходный режим, зависит от модели и области применения, но номинально находится в диапазоне от 80 до 90% нормальной синхронной скорости.При входе в переходный режим однофазный двигатель SPPS Written-Pole® становится электрически синхронным, что позволяет ему создавать синхронный крутящий момент, даже если он не достиг истинной синхронной скорости.
Поскольку электрический ток в обмотке возбуждения изменяется в течение одного полного положительного отрицательного цикла, создается переменное магнитное поле, которое индуцирует полную пару северных и южных полюсов на ферритовом магнитном слое на поверхности ротора. Эти полюса имеют правильную комбинацию электрических и механических фазовых углов для создания крутящего момента, независимо от скорости ротора или предыдущей конфигурации полюсов.В результате диаграмма магнитных полюсов, создаваемая обмоткой возбуждения, вращается в точной электромагнитной синхронизации с вращающимися полями, создаваемыми обмотками статора, даже если его механическое вращение не синхронно с полями статора.
Конструкция цепи возбуждения регулирует фазовый угол между током возбуждения и током в обмотке статора, который определяет угол момента между полюсами ротора и вращающимися полями статора. Этот фазовый угол можно использовать для максимизации доступного крутящего момента в переходном режиме или для обеспечения работы с опережающей мощностью при номинальной нагрузке.
Способность работать в качестве синхронного двигателя в широком диапазоне скоростей позволяет однофазному двигателю SPPS Written-Pole® достигать механической синхронизации в течение секунд или минут, значительно повышая способность машины запускать высокоинерционные нагрузки. Поскольку однофазные двигатели SPPS Written-Pole® не полагаются на индукционный крутящий момент для достижения почти синхронной скорости до перехода к синхронному режиму работы, статические характеристики двигателя могут быть оптимизированы без ущерба для характеристик и эффективности в установившемся режиме.
Рабочий режим
Однофазный двигатель SPPS Written-Pole® переходит в рабочий режим при достижении номинальной синхронной скорости. Поскольку в этом режиме работа обмотки возбуждения не требуется, она отключается, и двигатель продолжает работать как синхронный двигатель с постоянными магнитами, пока питание не будет отключено от входного контактора.
Еще одним примером улучшенной работы, обеспечиваемой однофазными двигателями SPPS Written-Pole®, является их способность восстанавливаться после кратковременных перегрузок.Если к выходному валу приложен достаточный крутящий момент, вызывающий остановку двигателя, он снова входит в переходный режим и пытается повторно разогнать нагрузку до синхронной скорости. В том случае, если крутящий момент нагрузки продолжает превышать возможности машины, стандартные устройства защиты от перегрузки отключают питание от двигателя, предотвращая повреждение двигателя или ведомой нагрузки.
Перезапустить работу
Еще одна важная особенность двигателя с записанным полюсом заключается в том, что он может быть повторно подключен к входной электрической мощности в любое время после потери входной мощности, в отличие от обычных электродвигателей, которые требуют задержки для минимизации генерации больших переходных процессов крутящего момента в результате фазового сдвига. между ротором и входным источником питания.
Однофазный двигатель SPPS Written-Pole® продолжает обеспечивать плавный, равномерный крутящий момент и потребляет только нормальные пусковые токи при повторной подаче питания, независимо от фазы поля ротора относительно поля статора. Стандартная конфигурация, поставляемая заводом-изготовителем, предусматривает автоматический перезапуск при повторном подаче питания на входной контактор. Двигатель возобновит работу либо в режиме запуска, либо в переходном режиме в зависимости от его скорости при повторном включении питания.
Written-Pole
Технология Written-Pole® — это революционный, но принципиально простой подход к повышению производительности электродвигателей и генераторов.Применение технологии Written-Pole® освобождает инженеров от одного из основных ограничений, с которыми сталкиваются разработчики обычных асинхронных и синхронных машин. В отличие от традиционных конструкций, в которых магнитные полюса фиксируются геометрией клетки ротора и обмоток статора, машины Written-Pole® включают в себя запатентованную концепцию, которая оптимизирует магнитную геометрию ротора для достижения максимальной производительности при изменении рабочей скорости машины.
Ограничения традиционной технологии
Скорость электродвигателя прямо пропорциональна частоте и количеству полюсов.И наоборот, выходная частота генератора прямо пропорциональна его скорости и количеству полюсов.
Требование гладкого сбалансированного выхода диктует, что обычные электрические машины должны иметь четное число магнитных полюсов с равным числом ориентаций на север и юг. В результате обычные электрические машины обычно классифицируются как 2, 4, 6 или… полюсные машины, имеющие 1, 2, 3 или… .. пары северных и южных полюсов соответственно. Отклонение от этого принципа приведет к созданию электрической машины, которая будет нестабильна в магнитном отношении при номинальной скорости и непригодна для работы в установившемся режиме.
ТехнологияWritten-Pole® освобождает проектировщиков от этого ограничения, не противореча фундаментальным правилам, регулирующим работу электрических машин. Эта технология позволяет создавать диаграмму направленности, которая напрямую коррелирует со скоростью вращения машины, повышая производительность за счет значительного диапазона скоростей.
Written-Pole® Advantage
ДвигателиWritten-Pole® содержат сплошной слой магнитного материала на поверхности ротора, который может быть намагничен в любую желаемую конфигурацию полюсов с использованием обмотки высокой плотности, содержащейся внутри обмоток статора.Когда материал магнита проходит под этой обмоткой возбуждения, он подвергается воздействию переменного магнитного поля, создаваемого переменным током, протекающим в обмотке. Сила и ориентация этого магнитного поля контролируют геометрию магнитных полюсов, наведенных на ротор. Если полярность материала магнита, проходящего под обмоткой возбуждения, не соответствует полярности магнитного поля, создаваемого обмоткой, полярность магнита меняется на противоположную, чтобы соответствовать полю, создаваемому обмоткой возбуждения.Поскольку мощность, подаваемая на обмотку возбуждения, имеет постоянную частоту 60 Гц, переменный ток синусоидальной формы, фактический размер и количество полюсов, образующихся на поверхности ротора, зависят от скорости вращения машины. Более низкие скорости приводят к большему количеству полюсов меньшего размера с более короткими пролетами, в то время как более высокие скорости приводят к меньшему количеству полюсов большего размера с более длинными пролетами. Эта концепция в принципе аналогична идее непрерывной магнитной ленты, проходящей через записывающую головку.
и nbsp
Скорость = 1600 об / мин Полюса = 4,5 размах полюсов = 85 град
Для 4-полюсного электродвигателя с частотой вращения 1800 об / мин, работающего со скоростью 1600 об / мин, требуется 4,5 полюса для поддержания синхронной работы на постоянной частоте и входной частоте 60 Гц. И наоборот, для генератора на 1800 об / мин для поддержания номинальной выходной частоты 60 Гц при 1600 об / мин также требуется 4,5 полюса. Возможность оптимизировать геометрию полюса во время движения позволяет машинам Written-Pole® приспосабливаться к значительным колебаниям скорости без ущерба для производительности.
При достижении номинальной скорости питание обмотки возбуждения отключается, позволяя машине работать как синхронная машина. Отклонение от номинальной скорости машины восстанавливает питание обмотки возбуждения, тем самым обеспечивая соответствие геометрии полюсов ротора вращающимся электродвижущим полям, создаваемым обмоткой статора.
Поистине революционная разработка, технология Written-Pole® позволяет разработчикам электрических машин впервые в истории проектирования электрических машин выйти на новый уровень производительности.
Written-Pole®Applications
Single Phase Power Solutions, LLC по соглашению с Precise Power Holdings Corporation производит и продает двигатели с письменным полюсом большой мощности до 100 л.с. Эти двигатели используются там, где раньше использовались стационарные двигатели внутреннего сгорания.
Применение технологии Written-Pole® к электродвигателям дает множество желаемых характеристик, включая очень низкие требования к пусковому току, высокий КПД, работу с единичным коэффициентом мощности, возможность мгновенного перезапуска, возможность синхронизации под нагрузкой и возможность запуска с очень высокой мощности. инерционные нагрузки без завышения размеров.
ТехнологияWritten-Pole® используется в семействе одно- и трехфазных систем тяги и защиты питания, используемых многими клиентами, включая Метеорологическую службу США, НАСА, Федеральное управление гражданской авиации, ВВС США и многих коммерческих и промышленных клиентов.
Технология, отмеченная наградами
Получив в 1994 году награду R&D 100 Award, технология Written-Pole® была признана журналом R&D Magazine одной из наиболее технологически значимых инноваций того года.Эта технология также была признана многочисленными техническими организациями, включая Профессиональное общество инженеров США.
Разработанная Джоном Розелем и Ронни Барбером при поддержке Исследовательского института электроэнергетики и многих электроэнергетических компаний, включая Manitoba Hydro, эта инновационная концепция защищена многочисленными патентами США и других стран.
Характеристики и характеристики электродвигателей
Кривая характеристик
На первой декартовой шкале показаны крутящий момент в [Нм] (ось X), скорость вращения в [об / мин] (ось Y1), потребление тока в [A] (ось Y2) , КПД (ось Y3).
— Для полноты только на этом графике представлена кривая выходной мощности в [Вт] (ось Y4). В технических паспортах нет кривой выходной мощности.
Ниже перечислены эталонные параметры и объясняется, как считывать характеристическую кривую.
| Зона непрерывного функционирования | S 1 | |
| Номинальное натяжение | V n [V] | Напряжение питания |
| Скорость холостого хода | n 0 [об / мин] | Скорость двигателя без нагрузки |
| Ток холостого хода | I 0 [A] | Ток, потребляемый двигателем без нагрузки |
| Номинальная скорость | η N [об / мин] | Минимальная скорость, с которой двигатель может работать непрерывно |
| Номинальный крутящий момент | M N [Нм] | Максимальный крутящий момент, с которым двигатель может работать непрерывно |
| Номинальный ток | I n [A] | Максимальный ток, при котором двигатель может работать непрерывно |
| Тормозной момент | M s [Нм] | Крутящий момент с заблокированным ротором |
| Стояночный ток | I с [A] | Ток при заблокированном роторе |
| Максимальная мощность | P макс. (- 1)] / [V * A]. |
Как читать характеристическую кривую
Каждому значению крутящего момента соответствует значение тока и скорости. Каждая точка, соответствующая определенной нагрузке, расположена на идеальной вертикальной линии, начинающейся от значения крутящего момента по оси «x».
Затем на диаграмме определяется область, называемая «непрерывной рабочей областью», которая охватывает все рабочие условия до линии, определяющей номинальные значения.
Номинальная рабочая нагрузка — последняя в порядке возрастания приложенной нагрузки, при которой двигатель может работать непрерывно без повреждений.
Номинальные значения, указанные в технических паспортах, являются ориентировочными значениями, и для сертификации продукта необходимо провести испытание на срок службы.
Что касается срока службы двигателя постоянного тока или редукторного двигателя постоянного тока , нет параметра, который бы точно определял, как долго может работать двигатель при определенной нагрузке и с определенным рабочим циклом.
У каждого применения есть свои особенности, такие как механическое трение, образование пиков, особые условия окружающей среды, которые также могут сильно повлиять на срок службы щеток.
Допуски характеристических кривых
Если не указано иное, это должно рассматриваться как допуск для скорости, область между двумя линиями, параллельная линии скорости, рассчитанная из значений +/- 10% скорости холостого хода.
Для тока следует учитывать допуск +/- 10% от каждого значения тока.
Эти допуски применяются, когда двигатель «холодный» (20 ° C). .