Основные уравнения асинхронного двигателя
Напряжение U1, приложенное к фазе обмотки статора, уравновешивается основной ЭДС E1, ЭДС рассеяния и падением напряжения на активном сопротивлении обмотки статора:
В роторной обмотке аналогичное уравнение будет иметь вид:
Но так как роторная обмотка замкнута, то напряжение U2=0, и если учесть еще, что E2s=SE2 и x2s=Sx2 , то уравнение можно переписать в виде:
Уравнение токов асинхронного двигателя повторяет аналогичное уравнение трансформатора:
где
40. Чтобы векторы ЭДС, напряжений и токов обмоток статора и ротора можно было изобразить на одной векторной диаграмме, следует параметры обмотки ротора привести к обмотке статора, т. е. обмотку ротора с числом фаз m2, обмоточным коэффициентом ko62 и числом витков одной фазной обмоткиω2 заменить обмоткой с m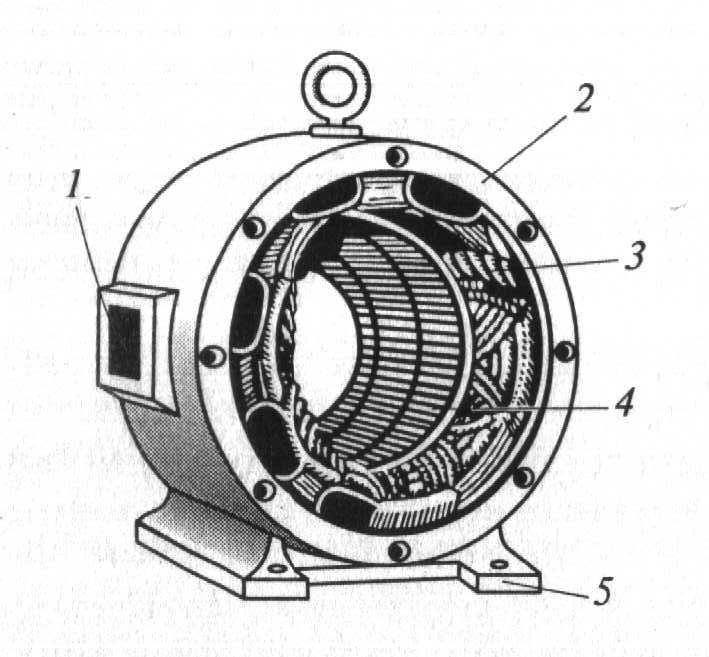 При этом мощности и фазовые сдвиги векторов ЭДС и токов ротора после приведения должны остаться такими же, что и до приведения. Пересчет реальных параметров обмотки ротора на приведенные выполняется по формулам, аналогичным формулам приведения параметров вторичной обмотки трансформатора (см. § 1.6).
При этом мощности и фазовые сдвиги векторов ЭДС и токов ротора после приведения должны остаться такими же, что и до приведения. Пересчет реальных параметров обмотки ротора на приведенные выполняется по формулам, аналогичным формулам приведения параметров вторичной обмотки трансформатора (см. § 1.6).
При s = 1 приведенная ЭДС ротора
E’2 = E2 ke, (12.17)
где ke = E1/ E2 =ko61 ω1 /(ko62/ ω2) — коэффициент трансформации напряжения в асинхронной машине при неподвижном роторе. Приведенный ток ротора
I′2 = I2/ ki, (12.18)
где ki = m1 ω1 koб1/ (m2 ω2
ko62) = m1 ke/ m2 — коэффициент трансформации тока асинхронной машины.В отличие от трансформаторов в асинхронных двигателях коэффициенты трансформации напряжения и тока не равны ( kе ≠ ki ).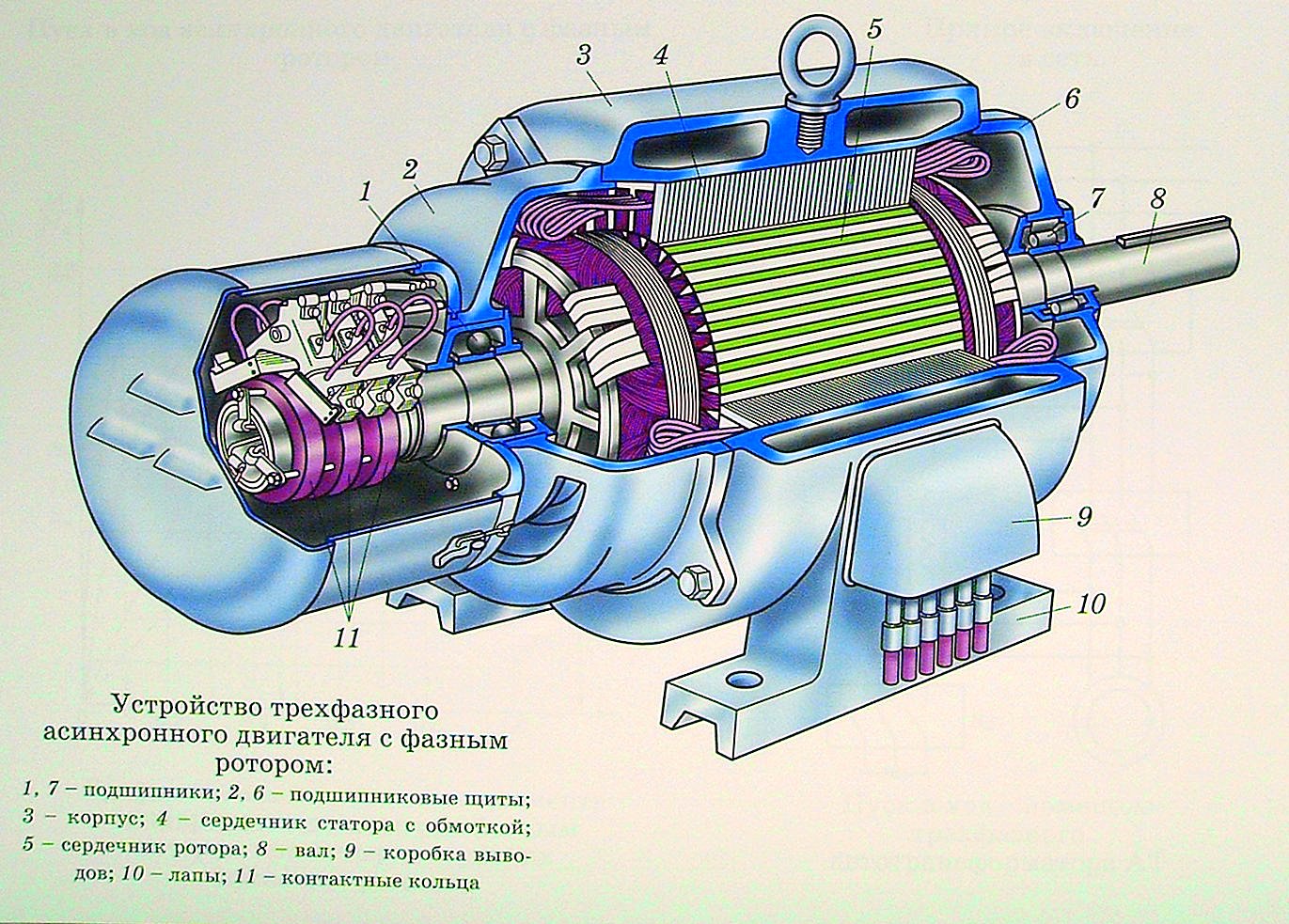 Объясняется это тем, что число фаз в обмотках статора и ротора в общем случае не одинаково ( m1 ≠ m2 ). Лишь в двигателях с фазным ротором, у которых m1 = m2, эти коэффициенты равны.
Объясняется это тем, что число фаз в обмотках статора и ротора в общем случае не одинаково ( m1 ≠ m2 ). Лишь в двигателях с фазным ротором, у которых m1 = m2, эти коэффициенты равны.
Активное и индуктивное приведенные сопротивления обмотки ротора:
r′2 = r2 ke ki ;
x′2 = x2 ke ki. (12.19)
Следует обратить внимание на некоторую специфику определения числа фаз m2 и числа витков ω2 для короткозамкнутой обмотки ротора (см. рис. 10.3). Каждый стержень этой обмотки рассматривают как одну фазу, а поэтому число витков одной фазы короткозамкнутой обмотки ротора ω
41. В обмотку статора из сети поступает мощность P1. Часть этой мощности идет на потери в стали Pсl, а также потери в обмотке статора Рэ1:
В обмотку статора из сети поступает мощность P1. Часть этой мощности идет на потери в стали Pсl, а также потери в обмотке статора Рэ1:
Оставшаяся мощность посредством магнитного потока передается на ротор и называется электромагнитной мощностью:
Часть электромагнитной мощности затрачивается на покрытие электрических потерь в обмотке ротора:
Оставшаяся мощность преобразуется в механическую, получившую название полной механической мощности:
Р2‘=Рэм-Рэ2
Воспользовавшись ранее полученной формулой
запишем выражение полной механической мощности:
тогда
или
Рэ2=SРэм,
т.е. мощность электрических потерь пропорциональна скольжению.
Мощность на валу двигателя P2 меньше полной механической мощности Р2’ на величину механических Рмех и добавочных Рдоб потерь:
Р2=Р2’-(Рмех. +Рдоб.).
+Рдоб.).
Таким образом:
Р2=Р1-SP,
SP=Pсl+Рэ1+Рэ2+Рмех.+Рдоб.
Коэффициент полезного действия есть отношение мощности на валу P2 к потребляемой мощности P1:
42. Электромагнитный момент асинхронной машины создается в результате взаимодействия тока в обмотке ротора с вращающимся магнитным полем. Связь между моментом и скоростью вращения ротора можно получить из уравнения механической мощности. Если в него подставить выражение для тока ротора, то с учетом того, что угловая частота вращения равна ,получим
Все величины, входящие в это выражение константы, кроме скольжения s. Взяв производную и приравнивая ее нулю, найдем экстремумы функции . Они наступают при критическом скольжении . К приближенному равенству для критического скольжения можно перейти с учетом того, что .
. Знак плюс в этих выражениях соответствует двигательному режиму, а минус – генераторному.
Из выражения для следует, что максимальный момент в генераторном режиме больше, чем в двигательном. Однако, пренебрегая также, как это было сделано для , мы получим упрощенное выражение для максимального момента более удобное для качественного анализа –
.
Полагая в выражении , получим выражение для пускового момента асинхронного двигателя
Полученная зависимость представлена на рисунке. Точка соответствует идеальному холостому ходу машины. Этот режим может быть получен только за счет внешнего вращающего момента.Точка соответствует пусковому режиму или режиму короткого замыкания. Устойчивая работа машины возможна только в пределах скольжений от до , т.к. вне этого участка при увеличении скольжения момент двигателя уменьшается, что приводит к дальнейшему увеличению скольжения (снижению скорости) и этот процесс будет развиваться до полной остановки двигателя.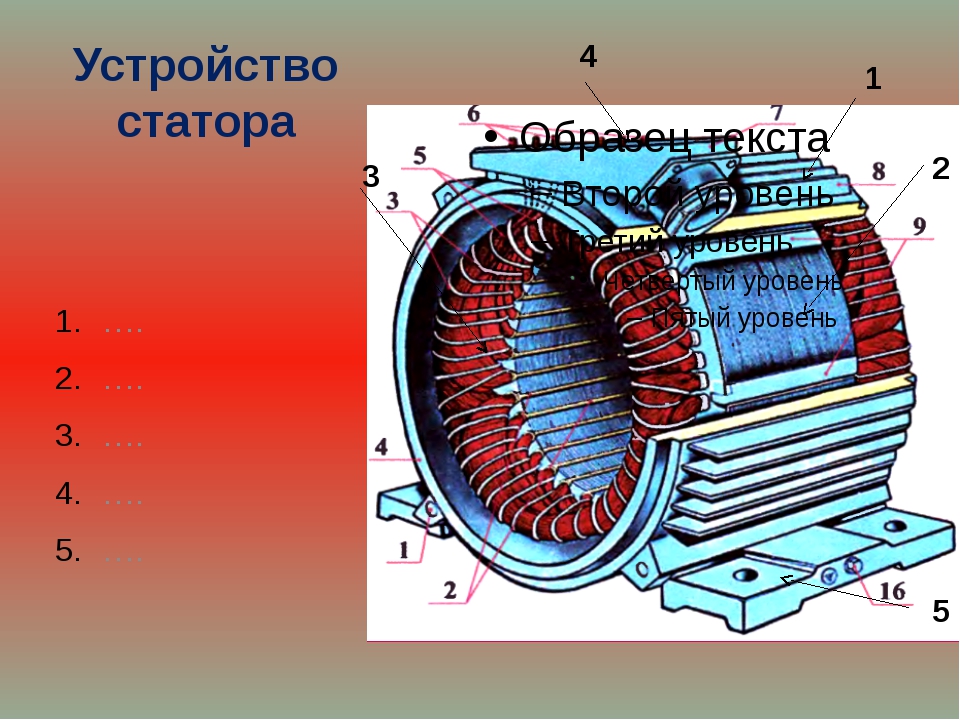
Номинальный режим работы двигателя соответствует скольжению . Отношение называется перегрузочной способностью. Превышение максимального момента над номинальным является необходимым условием надежной работы двигателя.
Если за счет внешнего вращающего момента вал двигателя раскручивается до скорости выше синхронной , то скольжение становится отрицательным и машина переходит в генераторный режим.
При скольжениях скорость вращения будет отрицательной, т.е. ротор двигателя будет вращаться в направлении противоположном направлению вращения магнитного поля и машина перейдет в тормозной режим или режим противовключения.
На рисунке для наглядности критическое скольжение составляет около 0,5. Такие значения в реальных машинах нормального исполнения не бывают. Они находятся в пределах от 0,1 до 0,02, причем меньшие значения соответствуют машинам большей мощности. Поэтому рабочий участок характеристики практически линейный и может быть заменен прямой .
Они находятся в пределах от 0,1 до 0,02, причем меньшие значения соответствуют машинам большей мощности. Поэтому рабочий участок характеристики практически линейный и может быть заменен прямой .
Выражение не позволяет анализировать свойства характеристики в общем виде. Однако, если его разделить на , то получится удобное выражение в относительных единицах, называемое по имени автора формулой Клосса
.
В теории электрических машин и электропривода вместо характеристики принято пользоваться механической характеристикой. Механическая характеристика двигателя это зависимость скорости вращения от момента нагрузки на валу, т.е. . Эту характеристику легко можно получить из характеристики , если учесть, что , т.е. она получается смещением оси момента в точку и изменением масштаба оси скольжений. При этом в новой системе координат режимы работы машины (генераторный, двигательный и тормозной) оказываются в различных квадрантах плоскости , а режимы холостого хода и короткого замыкания – в точках пересечения механической характеристики с осями координат.
Линеаризованная механическая характеристика рабочего участка примет вид
43. Рабочие характеристики асинхронного двигателя представляют собой графически выраженные зависимости частоты вращения n2, КПД η, полезного момента (момента на валу) М2, коэффициента мощности cos φ, и тока статора I1 от полезной мощности Р2 при U1 = const f1 = const.
Скоростная характеристика n2 = f(P2). Частота вращения ротора асинхронного двигателя n2 = n1(1 — s).
Скольжение s = Pэ2/Pэм, т. е. скольжение асинхронного двигателя, а следовательно, и его частота вращения определяются отношением электрических потерь в роторе к электромагнитной мощности. Пренебрегая электрическими потерями в роторе в режиме холостого хода, можно принять Рэ2 = 0, а поэтому s ≈ 0 и n20 ≈ n1.
По мере увеличения нагрузки на валу асинхронного двигателя отношение s = Pэ2/Pэм растет, достигая значений 0,01 — 0,08 при номинальной нагрузке. В соответствии с этим зависимость n2 = f(P2) представляет собой кривую, слабо наклоненную к оси абсцисс.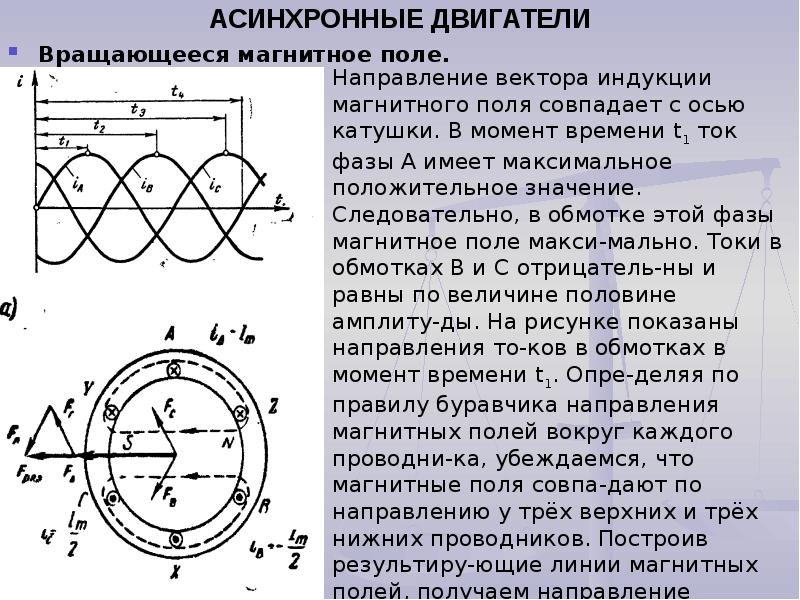 Однако при увеличении активного сопротивления ротора двигателя r2′ угол наклона этой кривой увеличивается. В этом случае изменения частоты асинхронного двигателя n2 при колебаниях нагрузки Р2 возрастают. Объясняется это тем, что с увеличением r2′ возрастают электрические потери в роторе.
Однако при увеличении активного сопротивления ротора двигателя r2′ угол наклона этой кривой увеличивается. В этом случае изменения частоты асинхронного двигателя n2 при колебаниях нагрузки Р2 возрастают. Объясняется это тем, что с увеличением r2′ возрастают электрические потери в роторе.
Рис. 1. Рабочие характеристики асинхронного двигателя двигателя
Зависимость М2 =f(P2). Зависимость полезного момента на валу асинхронного двигателя М2 от полезной мощности Р2 определяется выражением M2 = Р2/ ω2 = 60 P2/ (2πn2) = 9,55Р2/ n2,
где Р2 — полезная мощность, Вт; ω2 = 2πf 2/ 60 — угловая частота вращения ротора.
Из этого выражения следует, что если n2 = const, то график М2 =f2(Р2) представляет собой прямую линию. Но в асинхронном двигателе с увеличением нагрузки Р2 частота вращения ротора уменьшается, а поэтому полезный момент на валу М2 с увеличением нагрузки возрастает не сколько быстрее нагрузки, а следовательно, график М2 =f (P2) имеет криволинейный вид.
Рис. 2. Векторная диаграмма асинхронного двигателя при небольшой нагрузке
Зависимость cos φ1 = f (P2). В связи с тем что ток статора асинхронного двигателя I1 имеет реактивную (индуктивную) составляющую, необходимую для создания магнитного поля в статоре, коэффициент мощности асинхронных двигателей меньше единицы. Наименьшее значение коэффициента мощности соответствует режиму холостого хода.Объясняется это тем, что ток холостого хода электродвигателя I0 при любой нагрузке остается практически неизменным. Поэтому при малых нагрузках двигателя ток статора невелик и в значительной части является реактивным (I1 ≈ I0). В результате сдвиг по фазе тока статора относительно напряжения получается значительным (φ1 ≈ φ0), лишь немногим меньше 90° (рис. 2).
44. Пусковые свойства асинхронного двигателя зависят от особенностей его конструкции, в частности от устройства ротора.
Пуск асинхронного двигателя сопровождается переходным процессом машины, связанным с переходом ротора из состояния покоя в состояние равномерного вращения, при котором момент двигателя уравновешивает момент сил сопротивления на валу машины.
При пуске асинхронного двигателя имеет место повышенное потребление электрической энергии из питающей сети, затрачиваемое не только на преодоление приложенного к валу тормозного момента и покрытие потерь в самой асинхронном двигателе, но и на сообщение движущимся звеньям производственного агрегата определенной кинетической энергии. Поэтому при пуске асинхронный двигатель должен развить повышенный вращающий момент.
Для асинхронного двигателя с фазным ротором начальный пусковой момент, соответствующий скольжению sп= 1, зависит от активных сопротивлений регулируемых резисторов, введенных в цепь ротора.
Рис. 1. Пуск трехфазного асинхронного двигателя с фазным ротором: а — графики зависимости вращающего момента двигателя с фазным ротором от скольжения при различных активных сопротивлениях резисторов в цепи ротора, б — схема включения резисторов и замыкающих контактов ускорения в цепь ротора.
Так, при замкнутых контактах ускорения У1, У2, т. е. при пуске асинхронного двигателя с замкнутыми накоротко контактными кольцами, начальный пусковой момент Мп1 = (0,5 -1,0) Мном, а начальный пусковой ток Iп = (4,5 — 7) Iном и более.
Малый начальный пусковой момент асинхронного электродвигателя с фазным ротором может оказаться недостаточным для приведения в действие производственного агрегата и последующего его ускорения, а значительный пусковой ток вызовет повышенный нагрев обмоток двигателя, что ограничивает частоту его включений, а в маломощных сетях приводит к нежелательному для работы других приемников временному понижению напряжения. Эти обстоятельства могут явиться причиной, исключающей использование асинхронных двигателей с фазным ротором с большим пусковым током для привода рабочих механизмов.
45. Для пуска асинхронного двигателя с короткозамкнутым ротором применяются следующие способы:
· прямой включение,
· пуск при пониженном напряжении питания.
40.2.1.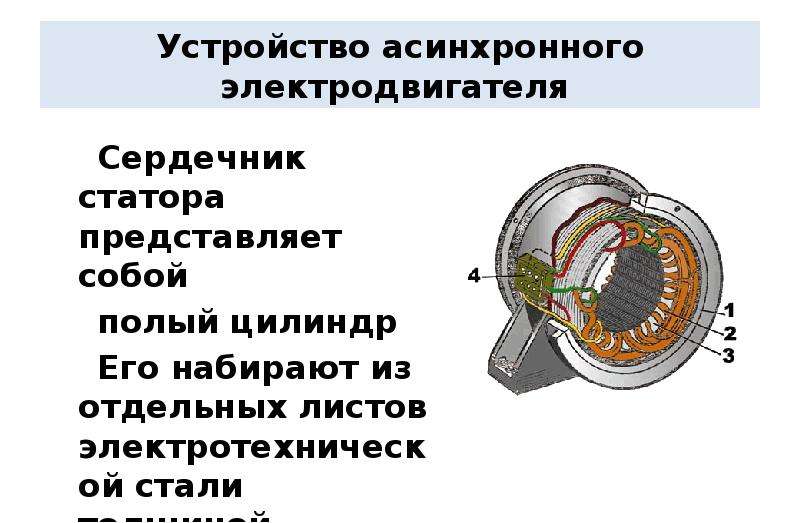 Прямое включение
Прямое включение
Прямое включениеасинхронного двигателя в сеть является наиболее простым способом пуска двигателя. В то же время в этом случае обмотки статора и ротора двигателя обтекаются большим пусковым током (током КЗ), равным 4—7-кратному значению номинального. Поэтому очень важно, чтобы время пуска двигателя было при этом как можно меньшим. Такой метод пуска применяется для небольших двигателей, или для двигателей, приводящих во вращение небольшие механические нагрузки.
40.2.2. Пуск при пониженном, напряжении
Пуск при пониженном напряжении питания осуществляется обычно в тех случаях, когда прямой пуск не допускается по условиям работы сети.
Обычно применяют один из четырех способов пуска при пониженном напряжении:
- двигателя через понижающий автотрансформатор;
- переключение обмотки статора со звезды на треугольник;
- включение двигателя через полупроводниковый регулятор напряжения.

Во всех этих случаях снижение напряжения ведет не только к пропорциональному уменьшению пускового тока (положительный эффект), но и к резкому (квадратичному) уменьшению пускового момента (отрицательный эффект).
а) Пуск асинхронного двигателя через автотрасформатор
На рис.40.1. показана схема пуска асинхронного двигателя через автотрансформатор.
Рис.40.1. Пуск асинхронного двигателя с помощью автотрансформатора
Уменьшения напряжения при пуске можно достигать включением между сетью и двигателем понижающего автотрансформатора Т(рис. 40.1). При пуске сначала замыкают рубильник QS1,и пониженное напряжение попадает на обмотки двигателя. По достижении ротором достаточной частоты вращения замыкают рубильник OS2,шунтируя автотрансформатор так, что полное напряжение сети попадает на обмотки двигателя.
б) Пуск с переключением обмоток статора со звезды на треугольник
К способам пуска с понижением напряжения можно отнести также пуск с переключением обмоток статора со звезды на треугольник (рис. 40.2).
40.2).
Рис.40.2. Схема пуска двигателя с переключением обмоток со звезды на треугольник
В режиме пуска переключатель QSнаходится в положении , причем обмотка статора включена по схеме звезды. После того как ротор достигнет установившейся частоты вращения, переключатель необходимо перевести в положение и обмотки статора будут включены по схеме треугольника.
При данном способе пуска фактически снижается напряжение, подводимое к каждой фазе двигателя, поскольку при одинаковом напряжении сети фазное напряжение в схеме звезды в раз меньше, чем в схеме треугольника. Пусковой ток в сети при соединении обмотки статора и звезду снижается в раза по сравнению с пусковым током при соединении в треугольник. Однако пусковой момент, пропорциональный квадрату напряжения, снижается в 3 раза.
46. Частота вращения асинхронного двигателя
n = n1 (1 – s) = (60f1/p) (1-s) (85)
Из этого выражения видно, что ее можно регулировать, изменяя частоту f1 питающего напряжения, число пар полюсов р и
Рис. 266. Схема переключения катушек обмотки статора (одной фазы) для изменения числа полюсов: а — при четырех полюсах; б — при двух полюсах
266. Схема переключения катушек обмотки статора (одной фазы) для изменения числа полюсов: а — при четырех полюсах; б — при двух полюсах
скольжение s. Последнее при заданных значениях момента на валу Мвн и частоты f1 можно изменять путем включения в цепь обмотки ротора реостата.
Регулирование путем изменения частоты питающего напряжения.Этот способ требует наличия преобразователя частоты, к которому должен быть подключен асинхронный двигатель. На основе управляемых полупроводниковых вентилей (тиристоров) созданы статические преобразователи частоты и построен ряд опытных электровозов и тепловозов с асинхронными двигателями, частота вращения которых регулируется путем изменения частоты питающего напряжения. Такой способ регулирования частоты вращения ротора асинхронного двигателя является весьма перспективным.
Регулирование путем изменения числа пар полюсов. Этот способ позволяет получить ступенчатое изменение частоты вращения.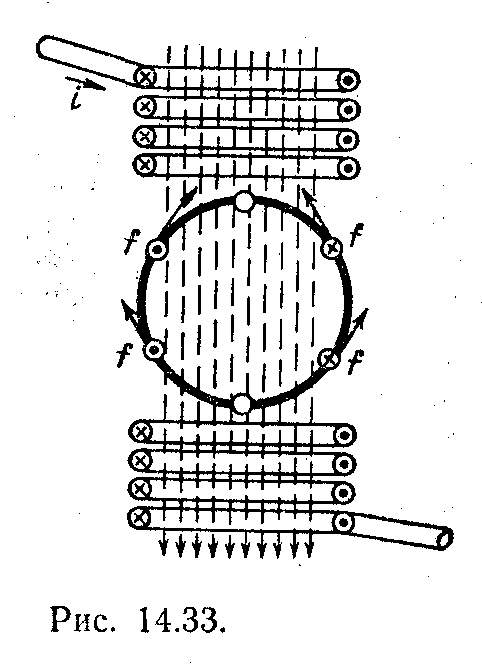 Для этой цели отдельные катушки 1, 2 и 3, 4, составляющие одну фазу (рис. 266), переключаются так, чтобы изменялось соответствующим образом направление тока в них (например, с последовательного согласного соединения на встречное). При согласном включении катушек (рис. 266, а) число полюсов равно четырем, при встречном включении (рис. 266, б) — двум. Катушки двух других фаз, сдвинутые в пространстве на 120°, соединяются таким же образом. Такое же уменьшение числа полюсов можно осуществить при переключении катушек с последовательного на параллельное соединение. При изменении числа полюсов изменяется частота вращения n1магнитного поля двигателя, а следовательно, и частота вращения n его ротора. Если нужно иметь три или четыре частоты вращения n1, то на статоре располагают еще одну обмотку, при переключении которой можно получить еще две частоты. Существуют двигатели, которые обеспечивают изменение частоты вращения n1 при постоянном наибольшем моменте или при приблизительно постоянной мощности (рис.
Для этой цели отдельные катушки 1, 2 и 3, 4, составляющие одну фазу (рис. 266), переключаются так, чтобы изменялось соответствующим образом направление тока в них (например, с последовательного согласного соединения на встречное). При согласном включении катушек (рис. 266, а) число полюсов равно четырем, при встречном включении (рис. 266, б) — двум. Катушки двух других фаз, сдвинутые в пространстве на 120°, соединяются таким же образом. Такое же уменьшение числа полюсов можно осуществить при переключении катушек с последовательного на параллельное соединение. При изменении числа полюсов изменяется частота вращения n1магнитного поля двигателя, а следовательно, и частота вращения n его ротора. Если нужно иметь три или четыре частоты вращения n1, то на статоре располагают еще одну обмотку, при переключении которой можно получить еще две частоты. Существуют двигатели, которые обеспечивают изменение частоты вращения n1 при постоянном наибольшем моменте или при приблизительно постоянной мощности (рис. 267).
267).
В асинхронном двигателе число полюсов ротора должно быть равно числу полюсов статора. В короткозамкнутом роторе это условие выполняется автоматически и при переключении обмотки статора никаких изменений в обмотке ротора выполнять не требуется.
Рис. 267. Механические характеристики двухскоростных асинхронных двигателей с постоянным наибольшим моментом (а) и постоянной мощностью (б)
Рис. 268. Механические характеристики асинхронного двигателя при регулировании частоты вращения путем включения реостата в цепь обмотки ротора
Рис. 269. Схемы подключения асинхронного двигателя к сети при изменении направления его вращения
В двигателе же с фазным ротором в этом случае надо было бы изменять число полюсов обмотки ротора, что сильно усложнило бы его конструкцию, поэтому такой способ регулирования частоты вращения используется только в двигателях с коротко-замкнутым ротором. Такие двигатели имеют большие габаритные размеры и массу по сравнению с двигателями общего применения, а следовательно, и большую стоимость.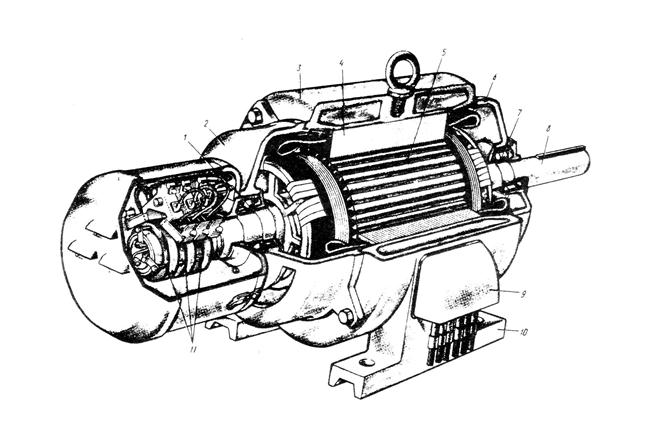 Кроме того, регулирование осуществляется большими ступенями; при частоте f1 = 50 Гц частота вращения поля n1 при переключениях изменяется в отношении 3000:1500:1000:750.
Кроме того, регулирование осуществляется большими ступенями; при частоте f1 = 50 Гц частота вращения поля n1 при переключениях изменяется в отношении 3000:1500:1000:750.
Регулирование путем включения в цепь ротора реостата. При включении в цепь обмотки ротора реостата с различным сопротивлением (Rп4, RпЗ, Rп2 и т. д.) получаем ряд реостатных механических характеристик 4, 3 и 2 двигателя. При этом некоторому нагрузочному моменту Мном (рис. 268) будут соответствовать меньшие частоты вращения n4, n3, n2 и т. д., чем частота nе при работе двигателя на естественной характеристике 1 (при Rп = 0). Это способ регулирования может быть использован только для двигателей с фазным ротором. Он позволяет плавно изменять частоту вращения в широких пределах. Недостатками его являются большие потери энергии в регулировочном реостате, поэтому его используют только при кратковременных режимах работы двигателя (при пуске и пр. ).
).
47. Конденсаторные двигатели — разновидность асинхронных двигателей, в обмотки которого включены конденсаторы для создания сдвига фазы тока.[1] Подключаются в однофазную сеть посредством специальных схем. По количеству фаз статора делятся на двухфазные и трехфазные.
Существует разные схемы подключения, больше вариантов для трёхфазных двигателей, различающиеся способом соединения обмоток двигателя и составом дополнительных элементов, но минимальная работоспособная схема содержит один конденсатор, от чего и происходит название.
Как правило, одна из обмоток («фаза двигателя») запитывается напрямую от однофазной сети, а другие обмотки запитывается через электрический конденсатор, который сдвигает фазу подводимого тока почти на +90°, или через катушку индуктивности, которая сдвигает фазу почти на −90°. Чтобы результирующее вращающееся магнитное поле не было эллиптическим, последовательно с конденсатором включается переменный проволочный резистор, с помощью которого добиваются кругового вращающегося магнитного поля.
Однофа́зный дви́гатель — электродвигатель, конструктивно предназначенный для подключения к однофазной сети переменного тока. Фактически является двухфазным, но вследствие того, что рабочей является только одна обмотка, двигатель называют однофазным.
48. Большинство синхронных машин имеет электромагнитное возбуждение. Источниками постоянного тока для обмоток возбуждения являются специальные системы возбуждения, к которым предъявляется ряд важных требований:
1) надежное и устойчивое регулирование тока возбуждения в любых режимах работы машины;
2) достаточное быстродействие, для чего применяется форсировка возбуждения, т. е. быстрое увеличение напряжения возбуждения до предельного значения, называемого потолочным. Форсировка возбуждения применяется для поддержания устойчивой работы машины во время аварий и в процессе ликвидации их последствий. Потолочное напряжение возбуждения выбирают не менее 1,8-2 номинального напряжения возбуждения. Скорость нарастания напряжения при форсировке возбуждения должна быть не менее 1,5-2 номинальных напряжений на контактных кольцах ротора в секунду;
Скорость нарастания напряжения при форсировке возбуждения должна быть не менее 1,5-2 номинальных напряжений на контактных кольцах ротора в секунду;
3) быстрое гашение магнитного поля, т. е. уменьшение тока возбуждения машины до нуля без значительного повышения напряжения на ее обхмотках. Необходимость в гашении поля возникает при отключении генератора или повреждении в нем.
Для возбуждения синхронных машин применяется несколько систем. Простейшей из них является электромашинная система возбуждения с возбудителем постоянного тока (рис. 15). В этой системе в качестве источника используют специальный генератор постоянного тока GE, называемый возбудителем; он приводится во вращение от вала синхронного генератора, а его мощность составляет 1- 3 % мощности синхронного генератора. Ток возбуждения синхронной машины Iв относительно велик и составляет несколько сотен и даже тысяч ампер. Поэтому его регулируют с помощью реостатов, установленных в цепи возбуждения возбудителя.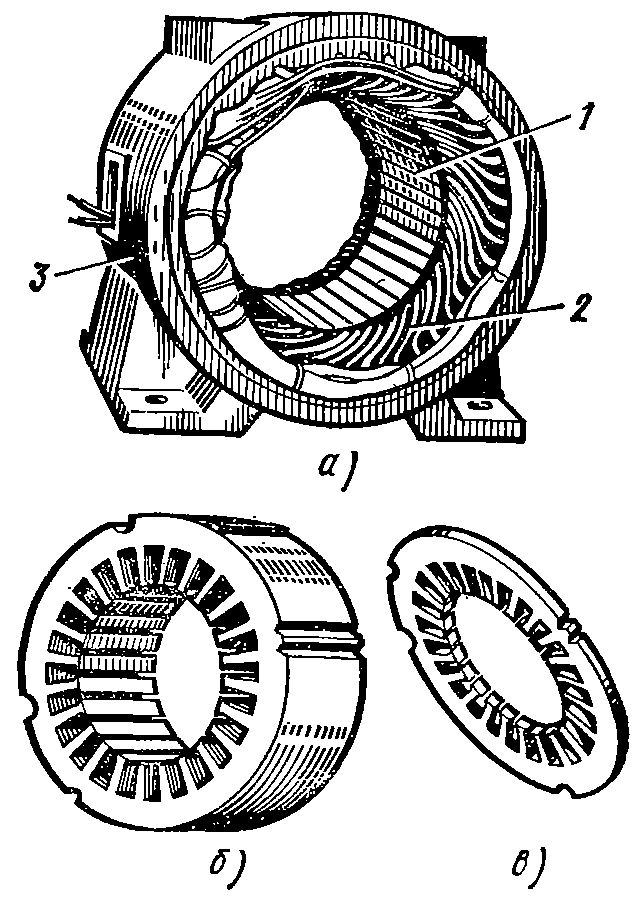 Возбуждение возбудителя осуществляют по схеме самовозбуждения (рис. 15) или независимого возбуждения от специального генератора постоянного тока GEA, называемого подвозбудителем (рис. 16). Подвозбудитель работает с самовозбуждением, и сопротивление резистора Rш2при работе генератора не изменяется.
Возбуждение возбудителя осуществляют по схеме самовозбуждения (рис. 15) или независимого возбуждения от специального генератора постоянного тока GEA, называемого подвозбудителем (рис. 16). Подвозбудитель работает с самовозбуждением, и сопротивление резистора Rш2при работе генератора не изменяется.
49. Метод асинхронного пуска. Синхронный двигатель не имеет начального пускового момента. Если его подключить к сети переменного тока, когда ротор неподвижен, а по обмотке возбуждения проходит постоянный ток, то за один период изменения тока, электромагнитный момент будет дважды изменять свое направление, т. е. средний момент за период равняется нулю. При этих условиях двигатель не сможет прийти во вращение, так как его ротор, обладающий определенной инерцией, не может быть в течение одного полупериода разогнан до синхронной частоты вращения. Следовательно, для пуска синхронного двигателя необходимо разогнать его ротор с помощью внешнего момента до частоты вращения, близкой к синхронной.
В настоящее время для этой цели применяют метод асинхронного пуска. При этом методе синхронный двигатель пускают как асинхронный, для чего его снабжают специальной коротко-замкнутой пусковой обмоткой, выполненной по типу «беличья клетка». Чтобы увеличить сопротивление стержней, клетку изготовляют из латуни. При включении трехфазной обмотки статора в сеть образуется вращающееся магнитное поле, которое, взаимодействуя с током Iпв пусковой обмотке (рис. 6.48, а), создает электромагнитные силы F и увлекает за собой ротор. После разгона ротора до частоты вращения, близкой к синхронной, постоянный ток, проходящий по обмотке возбуждения, создает синхронизирующий момент, который втягивает ротор в синхронизм.
Применяют две основные схемы пуска синхронного двигателя. При схеме, изображенной на рис. 6.48, б,обмотку возбуждения сначала замыкают на гасящий резистор, сопротивление которого Rдоб превышает в 8 — 12 раз активное сопротивление Rв обмотки возбуждения. После разгона ротора до частоты вращения, близкой к синхронной (при s ≈ 0,05), обмотку возбуждения отключают от гасящего резистора и подключают к источнику постоянного тока (возбудителю), вследствие чего ротор втягивается в синхронизм. Осуществить пуск двигателя с разомкнутой обмоткой возбуждения нельзя, так как во время разгона ротора при s > 0 в ней вращающимся магнитным полем индуцируется ЭДС Ев = 4,44f2wвФm = 4,4f1swвФm , где f2 = f1s — частота изменения тока в обмотке возбуждения; wв — число витков обмотки возбуждения; Фm — амплитуда магнитного потока вращающегося поля.
Осуществить пуск двигателя с разомкнутой обмоткой возбуждения нельзя, так как во время разгона ротора при s > 0 в ней вращающимся магнитным полем индуцируется ЭДС Ев = 4,44f2wвФm = 4,4f1swвФm , где f2 = f1s — частота изменения тока в обмотке возбуждения; wв — число витков обмотки возбуждения; Фm — амплитуда магнитного потока вращающегося поля.
В начальный момент пуска при s = 1 из-за большого числа витков обмотки возбуждения ЭДС Ев может достигать весьма большого значения и вызвать пробой изоляции. При схеме, изображенной на рис. 6.48, в, обмотка возбуждения постоянно подключена к возбудителю, сопротивление которого по сравнению с сопротивлением Rв весьма мало, поэтому эту обмотку в режиме асинхронного пуска можно считать замкнутой накоротко. С уменьшением скольжения до
s = 0,3 ÷ 0,4 возбудитель возбуждается и в обмотку возбуждения подается постоянный ток, обеспечивающий при s ≈ 0,05 втягивание ротора в синхронизм. Различие пусковых схем обусловлено тем, что не во всех случаях может быть применена более простая схема с постоянно подключенной к возбудителю обмоткой возбуждения (рис. 6.48, в), так как она имеет худшие пусковые характеристики, чем более сложная схема, приведенная на рис. 6.48,б. Главной причиной ухудшения пусковых характеристик является возникновение одноосного эффекта — влияние тока, индуцируемого в обмотке возбуждения при пуске, на характеристику пускового момента.
6.48, в), так как она имеет худшие пусковые характеристики, чем более сложная схема, приведенная на рис. 6.48,б. Главной причиной ухудшения пусковых характеристик является возникновение одноосного эффекта — влияние тока, индуцируемого в обмотке возбуждения при пуске, на характеристику пускового момента.
50. Под реакцией якоря в синхронных машинах понимают воздействие магнитного поля статора (якоря) на магнитное поле ротора. Реакция якоря оказывает сильное влияние на все электромагнитные процессы в машине. Явление реакции по определению связано с магнитным полем статора, поэтому характер и степень влияния реакции определяется током статора, т.е. нагрузкой машины.
Рассмотрим этот процесс на примере синхронного генератора. Изобразим вращающееся магнитное поле ротора вектором . При вращении оно пересекает неподвижные проводники обмоток статора и наводит в них ЭДС , отстающую от потока на . Ток статора создает магнитный поток статора , совпадающий с ним по направлению. В зависимости от характера нагрузки ток статора может иметь фазовый сдвиг по отношению к ЭДС в пределах .
В зависимости от характера нагрузки ток статора может иметь фазовый сдвиг по отношению к ЭДС в пределах .
При чисто активной нагрузке (R) ток и магнитный поток статора совпадают по фазе с и результирующий магнитный поток машины оказывается смещенным относительно потока ротора на некоторый угол в сторону запаздывания. В результате смещения потока магнитное поле ослабляется под набегающими краями полюсов ротора и усиливается под сбегающими. Несмотря на то, что в результате смещения сбегающие края полюсов подмагничиваются, результирующее поле машины ослабляется, т.к. из-за насыщения полюсов в зоне подмагничивания оно проявляется слабее, чем размагничивание на набегающих краях. В целом при активной нагрузке магнитное поле ослабляется и деформируется.
При чисто индуктивной нагрузке (L) ток статора и магнитный поток отстают от ЭДС на . Поток статора оказывается направленным встречно по отношению к потоку ротора и сильно размагничивает машину. Однако, в отличие от активной нагрузки, искажения поля за счет смещения потока не происходит.
Однако, в отличие от активной нагрузки, искажения поля за счет смещения потока не происходит.
При чисто емкостной нагрузке (C) ток статора и магнитный поток опережают ЭДС на и поле в машине усиливается потоком реакции, направленным согласно с потоком ротора. Искажения поля в этом случае также не происходит, а усиление поля вследствие насыщения оказывается выраженным слабо.
В случае активно-реактивной нагрузки (RL и RC) поток статора оказывается смещенным на угол меньший, чем , в сторону запаздывания или опережения. В этом случае магнитный поток статора , можно разложить на продольную и поперечную составляющие. Продольная составляющая будет оказывать при RL нагрузке размагничивающее действие, а при RC нагрузке – подмагничивающее. Поперечная составляющая будет вызывать деформацию поля, аналогичную деформации при активной нагрузке.
Таким образом реакция якоря в синхронной машине изменяет величину и направление магнитного потока, в отличие от асинхронной машины, у которой . Негативное влияние реакции якоря в синхронных машинах снижают увеличением рабочего зазора.
Негативное влияние реакции якоря в синхронных машинах снижают увеличением рабочего зазора.
Магнитный поток вызывает искажение магнитного поля ротора, которое проявляется в статоре в виде ЭДС . Так как поток линейно связан с током статора , то эту ЭДС можно представить в комплексной форме через некое индуктивное сопротивление в виде .
Читайте также:
Рекомендуемые страницы:
Поиск по сайту
Новости: трехфазные асинхронные двигатели
Устройство трехфазных асинхронных двигателей (статор и ротор асинхронных двигателей)
Трехфазный асинхронный двигатель состоит из неподвижного статора и ротора. Три обмотки размещены в пазах на внутренней стороне сердечника статора асинхронного двигателя. Обмотка же ротора асинхронного двигателя не имеет электрического соединения с сетью и с обмоткой статора. Начало и концы фаз обмоток статора присоединяют к зажимам в коробке выводов по схеме звезда или треугольник.
Асинхронные двигатели в основном различаются устройством ротора, который бывает двух типов: фазный или короткозамкнутый. Обмотка короткозамкнутого ротора асинхронного двигателя выполняется на цилиндре из медных стержней и называется «беличьей клеткой». Торцевые концы стержней замыкают металлическими кольцами. Пакет ротора набирают из электротехнической стали. В двигателях меньшей мощности стержни заливают алюминием. Фазный ротор и статор имеют трехфазную обмотку. Фазы обмотки соединяют звездой или треугольником и ее свободные концы выводят на изолированные контактные кольца.
Получение вращающегося магнитного поля
Обмотка статора асинхронного двигателя в виде трех катушек уложена в пазы расположенные под углом в 120 градусов. Начало и конца катушек обозначаются соответственно буквами A, B, C и X,Y,Z. При подаче на катушки трехфазного напряжения в них установятся токи Ia, Ib, Ic и катушки создадут собственное переменное магнитное поле. Ток в любой катушке положительный, когда он направлен от начала к ее концу и отрицательный при обратном направлении. Векторы намагничивающей силы совпадают с осями катушек, а их величина определяется значениями токов, направление результирующего вектора совпадает с осью катушки. Вектор результирующей намагничивающей силы поворачивается на 120 градусов сохраняя величину совпадает с осью соответствующей катушки. Таким образом за период, результирующее магнитное поле статора совершает оборот с неизменной скоростью. Работа трехфазного асинхронного двигателя основана на взаимодействии вращающегося магнитного поля с токами наводимыми в проводниках ротора.
Принцип работы трехфазного асинхронного двигателя
Совокупность моментов созданных отдельными проводниками образует результирующий вращающий момент двигателя, возникает электромагнитная пара сил, которая стремится повернуть ротор в направлении движения электромагнитного поля статора. Ротор приходит во вращение приобретает определенную скорость, магнитное поле и ротор вращаются с разными скоростями или асинхронно. Применительно к асинхронным двигателям, скорость вращения ротора всегда меньше скорости вращения магнитного поля статора.
Пуск асинхронных двигателей
В асинхронных двигателях с большим моментом инерции необходимо увеличение вращающего момента с одновременным ограничением пусковых токов — для этих целей применяют двигатели с фазным ротором. Для увеличения начального пускового момента в схему ротора включают трехфазный реостат. В начале пуска он введен полностью, пусковой ток при этом уменьшается. При работе реостат полностью выведен. Для пуска асинхронных двигателей с короткозамкнутым ротором применяют три схемы: с реактивной катушкой, с автотрансформатором и с переключением со звезды на треугольник. Рубильник последовательно соединяет реактивную катушку и статор двигателя. Когда скорость ротора приблизится к номинальной, замыкается рубильник, он закорачивает катушка и статор переключаются на полное напряжение сети. При автотрансформаторном пуске по мере разгона двигателя, автотрансформатор переводится в рабочее положение, в котором на статор подается полное напряжение сети. Пуск асинхронного двигателя с предварительным включением обмотки статора звездой и последующим переключением ее на треугольник дает трехкратное уменьшение тока.
Изменение частоты вращения ротора трехфазного асинхронного двигателя
Параллельные обмотки двух фаз образуют одну пару полюсов сдвинутые в пространстве на 120 градусов. Последовательное соединение обмоток образует две пары полюсов, что дает возможность уменьшить скорость вращения в два раза. Для регулирования скорости вращения ротора изменением частоты тока используют отдельный источник тока или преобразователь энергии с регулируемой частотой выполненный на тиристорах.
Способы торможения двигателей
При торможении противовключением меняются два провода соединяющих трехфазную сеть с обмотками статора, изменяя при этом направление движения магнитного поля машины. При этом наступает режим электромагнитного тормоза. Для динамического торможения обмотка статора отключается от трехфазной сети и включается в сеть постоянного тока. Неподвижное поле статора заставляет ротор быстро останавливаться. Асинхронные двигатели нашли широкое применение в промышленности. В строительных механизмах, на металлообрабатывающих станках, в кузнечно-прессовом оборудовании, в силовых приводах прокатных станов, в радиолокационных станциях и многих других отраслях.
Источник: http://ruaut.ru/
Возврат к списку
Методика испытания и измерения электродвигателей переменного тока
Целью проведения пуско-наладочных работ является проверка возможности включения электродвигателей в работу без предварительной ревизии и сушки, а также снятие электрических характеристик на холостом ходу и под нагрузкой .
Применяемые приборы: Мегаомметры М4100/4, Ф4102/2, мост Р333, токоизмерительные клещи Ц4505, испытательная установка АИД-70, набор щупов.
Испытания и измерения электродвигателей переменного тока может производить бригада в составе не менее 2 человек из лиц ЭТЛ. Производитель работ при высоковольтных испытаниях и измерениях должен иметь группу по электробезопасности не ниже IV, а остальные не ниже III группы.
Перед началом испытаний должен быть проведен внешний осмотр электродвигателя. При этом проверяют состояние и целостность изоляции, отсутствие вмятин на корпусе, затяжку контактных соединений, а также комплектность машины (наличие всех деталей, паспортного и клеммного щитков и необходимых указаний на них; заполнение подшипников до заданного уровня и отсутствие течи масла; состояние коллектора, токосъемных колец, щеткодержателей и щеток; наличие заземляющей проводки и качество соединения ее с электродвигателем).
1. Измерение сопротивления изоляции.
Для измерения сопротивления изоляции применяются мегаомметры на 250, 500, 1000 и 2500 В.
Измерение сопротивления изоляции вспомогательных измерительных цепей производят мегаомметром на 250 В.
Сопротивление изоляции измеряется при номинальном напряжении обмотки до 0,5 кВ включительно мегаомметром на напряжение 500 В, при номинальном напряжении обмотки свыше 0,5 кВ до 1 кВ мегаомметром на напряжение 1000 В, а при номинальном напряжении обмотки выше 1 кВ – мегаомметром на напряжение 2500 В.
Во время подключения прибора испытываемое оборудование должно быть заземлено. Отсчет производится через 15 и 60 секунд после нажатия кнопки «Высокое напряжение», или начала вращения рукоятки мегаомметра со скоростью 120 оборотов в минуту.
Измерение сопротивления изоляции производят при отсутствии электрического напряжения на обмотках машины по методике испытания изоляции.
После измерений сохранившийся на обмотке потенциал следует разделить на корпус проводником, предварительно соединенным с корпусом. Продолжительность разряда для обмоток с номинальным напряжением 3000 В и выше должна быть не менее 15 сек для машин до 1000 кВт и 60 сек для машин мощностью больше 1000 кВт.
Измерение сопротивления изоляции обмоток относительно корпуса машины и между обмотками производит поочередно для каждой электрически независимой цепи при соединении всех прочих цепей с корпусом машины.
Показания мегаомметра зависят от времени приложения напряжения к проверяемой обмотке. Чем больше время, предшествующее от момента приложения напряжения к изоляции до момента отчета (15 и 60с), тем больше получается измеренное значение сопротивления изоляции.
При измерении сопротивления изоляции необходимо измерять и температуру обмотки. С повышением температуры сопротивление изоляции уменьшается. Измерение изоляции следует выполнять при температуре обмотки, соответствующей номинальному режиму работы машины или привести к температуре 75°С. Температура обмотки, при которой производят измерения , не должна быть ниже 10°С. Если температура ниже указанной, то обмотку перед измерением необходимо подогреть.
Наименьшее значение сопротивления изоляции при рабочей температуре обмоток и через 60 сек. после приложения напряжения определяется по формуле:
R60 = Uн / (1000 + Pн / 100)
где Uн – номинальное напряжение обмотки, В;
Pн – номинальная мощность, кВт, для машин переменного тока, кВА.
О степени влажности изоляции судят по величине коэффициента абсорбции, который представляет собой отношение показаний мегаомметра после приложения напряжения через 15 и 60 сек:
Ка = R60 / R15
Следует учесть, что величина Ка даже при хорошем состоянии изоляции в значительной степени зависит от температуры машины и вида применяемых изоляционных материалов. С повышением температуры коэффициент абсорбции для машин, имеющих неувлажненную изоляцию, уменьшается. Для неувлажненной обмотки при температуре 10-30 °С коэффициент абсорбции Ка = 1,3¸2,0, для увлажненной обмотки коэффициент абсорбции близок к единице.
Допустимые значения сопротивления изоляции и коэффициента абсорбции приводятся в таблицах 5.1.; 5.2.; 5.3. РД 34.45-51.
Электродвигатели переменного тока включаются без сушки, если сопротивления изоляции обмоток и коэффициента абсорбции не ниже указанных в табл. 5.1. – 5.3.
2. Испытание повышенным напряжением промышленной частоты.
Испытания электрической прочности изоляции обмоток относительно корпуса и между обмотками производят синусоидальным переменным напряжением частотой 50 Гц, используя установку АИД-70. Продолжительность испытания 1 минута.
Испытательное напряжение подводится к каждой фазе обмотки, при заземленном корпусе электродвигателя и двух других фазах. При невозможности выделить испытываемую фазу производится испытание всех 3х фаз одновременно, относительно корпуса электродвигателя. Испытательные напряжения для обмоток электродвигателей переменного тока приведены в табл. 5.4. РД 34.45-51.
Испытания должны проводить лица, прошедшие специальную подготовку и имеющие практический опыт проведения испытаний.
Перед началом испытания необходимо проверить стационарное заземление корпусов испытываемого оборудования и надежно заземлить испытательную установку. Место испытаний, а также соединительные провода , находящиеся под испытательным напряжением, должны быть ограждены или у места испытания должен быть выставлен наблюдающий.
Провод, с помощью которого повышенное напряжение от испытательной установки подводится к испытываемому оборудованию, должен быть надежно закреплен с помощью промежуточных изоляторов, изолирующих подвесок и т.п., чтобы было исключено случайное приближение этого провода к находящимся под рабочим напряжением токоведущим частям или сокращения воздушных промежутков, которые должны быть не менее следующих значений:
Испытательное напряжение, кВ до 20 30 40 50 60
Расстояние до заземленных предметов, см 5 10 20 25 30
до токоведущих частей, см 25 25 30 30 35
Присоединение установки к сети напряжением 380/220 В должно осуществляться через коммутационный аппарат с видимым разрывом, допускается присоединение через штепсельную вилку, расположенную у испытательной установки.
При сборке испытательной схемы, прежде всего, выполняются защитное и рабочее заземления испытательной установки. Перед присоединением испытательной установки к сети 380/220 В на вывод высокого напряжения установки накладывается заземление с помощью специальной заземляющей штанги. Сечение медного провода, с помощью которого заземляется вывод, должно быть не менее 4 мм2.
Перед подачей испытательного напряжения на испытательную установку производитель работ обязан:
— проверить все ли члены его бригады находятся на местах, указанным им производителем работ, удалены ли посторонние лица, можно ли подавать испытательное напряжение на оборудование;
— предупредить бригаду о подаче напряжения словами «Подано напряжение» и, убедившись, что предупреждение услышано всеми членами бригады, снять заземление с вывода испытательной установки и подать на нее напряжение 280/220 В.
С момента снятия заземления вся испытательная установка, включая испытываемое оборудование и соединительные провода считается находящейся под напряжением, и проводить какие-либо пересоединения в испытательной схеме и на испытываемом оборудовании запрещается.
После окончания испытаний производитель работ должен снизить напряжение испытательной установки до нуля, отключить ее от сети 380/220 В, заземлить (или дать распоряжение о заземлении) вывод установки и сообщить об этом бригаде словами «Напряжение снято». Только после этого можно пересоединять провода на испытательной установке или в случае полного окончания испытания отсоединить их и снимать ограждения.
До испытания изоляции, а также после испытания необходимо разрядить испытываемое оборудование на землю и убедиться в полном отсутствии на нем заряда. Наложение и снятие заземления заземляющей штангой, подсоединение и отсоединение проводов от испытательной установки и испытываемого оборудования должны проводиться одним и тем же лицом и выполняться в диэлектрических перчатках.
Провод, соединяющий испытательную установку с испытуемым оборудованием должен быть удален от электрооборудования, находящегося под рабочим напряжением до 10 кВ, на расстоянии не менее 1 м.
3. Измерение сопротивления обмоток постоянному току.
3.1. Общие замечания.
Измерение сопротивлений производят с целью проверки соответствия сопротивления расчетному значению, проверки надежности паек определения повышения температуры над температурой окружающей среды. Сопротивление может быть измерено в холодном и нагретом состоянии. Холодным состоянием считают такое состояние обмотки, при котором температура обмотки и окружающей среды отличается не больше чем на 3°С. нагретое состояние – это состояние обмоток при рабочей температуре. При определении температуры в холодном состоянии или необходимо за 30 мин до испытания заложить в машину термометры. В практике наладочных работ применяют следующие методы измерения сопротивления постоянному току: амперметра-вольтметра, одинарного моста и двойного моста. Основным методом измерения является метод амперметра-вольтметра.
Для измерения применяют электроизмерительные приборы магнитоэлектрической системы: вольтметры класса не ниже 0,5 со встроенными добавочными сопротивлениями или наружным добавочным сопротивлением класса 0,1 и милливольтметры класса не ниже 0,5 с шунтами класса не ниже 0,1.
По схеме 4 а производят измерение малых сопротивлений.
Точный расчет измеряемого сопротивления, Ом, производят по формуле:
Rx = U / (I – U/ Rв)
где Rв – внутреннее сопротивление вольтметра.
Измерение больших сопротивлений рекомендуется производить по схеме 4 б. Сопротивление рассчитывают по формуле:
Rx = (U – IRа) / I
где Rа – внутреннее сопротивление амперметра.
3.2. Измерений сопротивлений обмоток машин переменного тока.
Измерение сопротивлений многофазных обмоток при наличии выводов начала и конца всех фаз следует производить пофазно. В случае, если фазы обмотки статора соединены в «звезду» и не имеют вывода нулевой точки (рис. 5 а), то измерение сопротивления производится между каждыми двумя выводами (фазами).
Результ
Модель динамики трехфазной асинхронной машины, также известна как индукционная машина
Номинальная полная мощность Pn (ВА), среднеквадратичное линейное напряжение
Vn (В) и частота fn (Гц). По умолчанию [3730 460 60] для
единицы о.е. и [1.845e + 04 400 50] для единиц СИ.
Сопротивление статора Rs (Ω или pu) и индуктивность рассеяния
Lls (H или pu).По умолчанию [0,01965 0,0397] для
единицы о.е. и [0,5968 0,0003495] для единиц СИ.
Сопротивление ротора Rr ‘(Ом или pu) и индуктивность рассеяния
Llr ‘(H или pu) оба относятся к статору. Этот параметр виден
только когда параметр Тип ротора на вкладке Конфигурация установлено значение Wound или Squirrel-cage .
По умолчанию [0,01909 0.0397] для блоков PU и [0,6258
0,005473] для единиц СИ.
Сопротивление ротора Rr1 ‘(Ом или pu) и индуктивность рассеяния
Llr1 ‘(H или pu), оба относятся к статору. Этот параметр виден
только когда параметр Тип ротора на вкладке Конфигурация установлен на Двойная беличья клетка . По умолчанию
составляет [0,01909 0,0397] для единиц о.е. и [0,4155
0.002066] для единиц СИ.
Сопротивление ротора Rr2 ‘(Ом или pu) и индуктивность рассеяния
Llr2 ‘(H или pu), оба относятся к статору. Этот параметр виден
только когда параметр Тип ротора на вкладке Конфигурация установлен на Двойная беличья клетка . По умолчанию
составляет [0,01909 0,0397] для единиц о.е. и [0,4168
0,0003495] для единиц СИ.
Намагничивающая индуктивность Lm (H или pu).По умолчанию 1,354 для
единицы о.е. и 0,0354 для единиц СИ.
Для диалогового окна единиц СИ :
комбинированный коэффициент инерции машины и нагрузки J (кг.м 2 ),
комбинированный коэффициент вязкого трения F (Н.м.с) и пары полюсов p.
Момент трения Tf пропорционален скорости вращения ротора ω
(Tf = F.w). По умолчанию [0,05 0,005879 2] .
Для диалогового окна единиц о.у. :
постоянная инерции H (s), комбинированный коэффициент вязкого трения
F (pu), а пары полюсов p.По умолчанию [0,09526 0,05479 2] .
Задает начальное скольжение s, электрический угол Θe (градусы), величина тока статора (A или pu) и фазовые углы (градусы):
[скольжение, th, i как , i bs , i cs , фаза как , фаза bs , фаза cs ]
Если параметр Тип ротора установлен на Обмотка ,
вы также можете указать необязательные начальные значения для тока ротора
величина (A или pu) и фазовые углы (градусы):
[скольжение, th, i как , i bs , i cs , фаза как , фаза bs , фаза cs , i ar , i br , i cr , фаза ar , фаза br , фаза cr ]
Когда параметр Тип ротора установлен на Беличья клетка ,
начальные условия могут быть вычислены с помощью инструмента Load Flow или
Инструмент инициализации станка в блоке Powergui.
По умолчанию [1,0 0,0,0 0,0,0] для о.у.
единиц и [0 0 0 0 0 0 0 0] для единиц СИ.
Определяет наличие магнитного насыщения ротора и статора. железо моделируется или нет. По умолчанию очищено.
Определяет параметры кривой насыщения без нагрузки. Магнитный
насыщение железа статора и ротора (насыщение взаимного
поток) моделируется кусочно-линейной зависимостью, определяющей точки
кривой насыщения без нагрузки.Первая строка этой матрицы содержит
значения токов статора. Вторая строка содержит значения соответствующих
клеммы напряжения (напряжения статора). Первая точка (первый столбец
матрицы) должно отличаться от [0,0]. Эта точка соответствует
до точки, где начинается эффект насыщения. По умолчанию [0.212,0.4201,0.8125,1.0979,1.4799,2.2457,3.2586,4.5763,6.4763
; 0,5,0,7,0,9,1,1,1,1,2, 1,3,1,4,1,5] для единиц о.у. и [14.03593122,
27.81365428, 53.79336849, 72.688, 97.98006896, 148.6815601, 215.7428561,
302.9841135, 428.7778367; 230, 322, 414, 460, 506, 552, 598, 644,
690] для единиц СИ ..
Вы должны выбрать Simulate saturation check коробка для имитации насыщенности. Если вы не выберете Simulate флажок насыщения , связь между статором ток и напряжение статора линейны.
Щелкните Plot , чтобы просмотреть указанную без нагрузки кривая насыщения.
PPT — Асинхронный двигатель (асинхронный двигатель) Презентация PowerPoint, скачать бесплатно
Асинхронный двигатель (асинхронный двигатель) ЭЛЕКТРИЧЕСКИЕ МАШИНЫ Составлено профессором Митали Рэй
Результаты обучения • В конце лекции Студент должен: • Понимать принцип и природу трехфазных индукционных машин.• Выполните анализ индукционных машин, которые являются наиболее прочными и наиболее широко используемыми в промышленности.
Содержание • Обзор трехфазного асинхронного двигателя • Конструкция • Принцип работы • Эквивалентная схема • Поток мощности, потери и КПД • Характеристики крутящего момента-скорости • Регулирование скорости • Обзор однофазного асинхронного двигателя
Обзор трехфазного асинхронного двигателя • Асинхронные двигатели используются по всему миру во многих жилых, коммерческих, промышленных и коммунальных приложениях.• Асинхронные двигатели преобразуют электрическую энергию в механическую. • Он может быть частью насоса или вентилятора или подключенным к другому механическому оборудованию, например, намоточной машине, конвейеру или смесителю.
Введение Общие аспекты • Индукционная машина может использоваться как индукционный генератор или как асинхронный двигатель. • Асинхронные двигатели широко используются в промышленности. • Особое внимание уделяется трехфазным асинхронным двигателям. • Основные характеристики: дешевизна и низкие эксплуатационные расходы. • Основные недостатки: непростое регулирование скорости.
Конструкция • Три основные части двигателя переменного тока ротор, статор и корпус.• Статор и ротор представляют собой электрические цепи, работающие как электромагниты.
Ротор с короткозамкнутым ротором
Конструкция (конструкция статора) • Статор — это неподвижная электрическая часть двигателя. • Сердечник статора двигателя Национальной ассоциации производителей электрооборудования (NEMA) состоит из нескольких сотен тонких пластин. • Пластины статора сложены вместе, образуя полый цилиндр. Катушки изолированного провода вставляются в пазы сердечника статора.• Электромагнетизм — это принцип работы двигателя. Каждая группа катушек вместе со стальным сердечником, который они окружают, образуют электромагнит. Обмотки статора подключаются непосредственно к источнику питания. MZS FKEE, UMP
Конструкция (Конструкция ротора) • Ротор — это вращающаяся часть электромагнитной цепи. • Он может быть двух типов: • Беличья клетка • Ротор с обмоткой • Однако наиболее распространенным типом ротора является ротор «беличья клетка».
Конструкция (конструкция ротора) • Типы асинхронных двигателей: • Тип с короткозамкнутым ротором: • Обмотка ротора состоит из медных стержней, встроенных в пазы ротора и закороченных с обоих концов концевыми кольцами • Простой, недорогой, прочный, низкие эксплуатационные расходы • Тип ротора с обмоткой: • Обмотка ротора намотана проволокой. Выводы обмотки можно подключать к внешним цепям через контактные кольца и щетки. • Легко контролировать скорость, дороже.
Короткое замыкание всех стержней ротора./ обмотка ротора Конструкция (конструкция ротора) Ротор с короткозамкнутым ротором с короткозамкнутым ротором MZS FKEE, UMP
Статор Ротор Конструкция с воздушным зазором (корпус) • Корпус состоит из рамы (или вилки) и двух концевых кронштейнов (или подшипника) корпуса). Статор установлен внутри рамы. Ротор помещается внутри статора с небольшим воздушным зазором, отделяющим его от статора. Между ротором и статором НЕТ прямого физического соединения.• Кожух также защищает электрические и рабочие части двигателя от вредного воздействия окружающей среды, в которой двигатель работает. Подшипники, установленные на валу, поддерживают ротор и позволяют ему вращаться. Вентилятор, также установленный на валу, используется на двигателе, показанном ниже, для охлаждения.
Конструкция (корпус)
Паспортная табличка
Вращающееся магнитное поле • Когда трехфазная обмотка статора подключена к трехфазному источнику напряжения, в обмотках будет протекать трехфазный ток , который также будет индуцировать трехфазный поток в статоре.• Эти потоки будут вращаться со скоростью, называемой синхронной скоростью, нс. Поток называется вращающимся магнитным полем • Синхронная скорость: скорость вращающегося потока • Где; p = количество полюсов, f = частота питания
RMF (вращающееся магнитное поле) a Fc b ‘1,5 c’ Fa F t = t0 = t4 F 1 Fa c Fc b 0,5 Fb a ‘0 Fb -0,5 t = t0 = t4 -1,5 -93 10 113 216 F Угол наклона () в градусах Fb Fc a Fb b’ aa c ‘b’ b ‘c’ c ‘Fa cbcc F bb a’ Fc Fc a ‘a’ Fb t = t2 t = t3 t = t1 F
Статор машины переменного тока
MMF Из-за тока фазы ‘a’ 1 Ось фазы a 0.8 t0 0,6 t01 0,4 0,2 Fa a ‘a 0 a’ t12 -0,2 -0,4 -0,6 t2 -0,8 -1-90-40 10 60110160210260 Угол пространства (тета) в градусах
Токи в разных фазы машины переменного тока t01 t12 Amp t1 t2 t3 t4 t0 время 1 цикл
Ротор с контактным кольцом • Ротор содержит обмотки, подобные статору. • Соединения от ротора выводятся с помощью контактных колец, • вращающихся вместе с ротором, и угольных щеток, которые статичны.
Скольжение и скорость ротора • Скольжение • Скорость ротора индукционной машины отличается от скорости вращающегося магнитного поля.Разница в% скорости называется скольжением. • Где; ns = синхронная скорость (об / мин) nr = механическая скорость ротора (об / мин) • при нормальных условиях эксплуатации s = 0,01 ~ 0,05, что очень мало, а фактическая скорость очень близка к синхронной скорости. • Обратите внимание, что: s не является незначительным MZS FKEE, UMP
Скольжение и скорость ротора • Скорость ротора • Когда ротор движется со скоростью ротора, nr (об / с), поток статора будет циркулировать по проводнику ротора со скоростью (ns-nr) в секунду.Следовательно, частота ротора записывается как: • Где; s = скольжение f = частота питания
Принцип действия • Механизм создания крутящего момента • Когда 3-фазная обмотка статора подключена к 3-фазному источнику напряжения, 3-фазный ток будет течь в обмотках, следовательно, статор находится под напряжением . • В воздушном зазоре создается вращающийся поток Φ. Поток Φ индуцирует напряжение Ea в обмотке ротора (как в трансформаторе). • Индуцированное напряжение создает ток ротора, если цепь ротора замкнута.• Ток ротора взаимодействует с магнитным потоком Φ, создавая крутящий момент. Ротор вращается в направлении вращающегося потока.
Направление вращения ротора • В: Как изменить направление • вращения? • • A: измените последовательность фаз • источника питания.
Эквивалентная схема индукционных машин • Обычная эквивалентная схема • Примечание: • Никогда не используйте трехфазную эквивалентную схему. Всегда используйте пофазную эквивалентную схему.• Эквивалентная схема всегда основана на Y-соединении, независимо от фактического подключения двигателя. • Эквивалентная схема асинхронной машины очень похожа на однофазную эквивалентную схему трансформатора. Он состоит из цепи статора и цепи ротора.
f f Эквивалентная схема индукционных машин • Шаг 1 Обмотка ротора разомкнута (ротор не вращается) • Примечание: • частота E2 такая же, как и у E1 поскольку ротор остановлен.В состоянии покоя s = 1.
Эквивалентная схема индукционных машин
f fr Эквивалентная схема индукционных машин • Обмотка ротора Step2 закорочена (В нормальных условиях эксплуатации обмотка ротора закорочена. Проскальзывание) • Примечание: • частота E2 fr = sf, потому что ротор вращается.
Эквивалентная схема индукционных машин • Step3 Eliminatef2 Сохраняйте постоянный ток ротора:
Эквивалентная схема индукционных машин • Шаг 4 Относится к стороне статора • Примечание: • X’2 и R’2 будут даны или измерены.На практике нам не нужно рассчитывать их из приведенных выше уравнений. • Всегда относите параметры стороны ротора к стороне статора. • Rcre представляет потери в сердечнике, которые представляют собой потери в сердечнике на стороне статора. MZS FKEE, UMP
Эквивалентная схема индукционных машин • Рекомендуемая IEEE эквивалентная схема • Примечание: • Rc не указывается. Потери в сердечнике объединяются с потерями на вращение. MZS FKEE, UMP
I 1 Эквивалентная схема индукционных машин • Эквивалентная схема, рекомендованная IEEE Примечание: можно разделить на 2 ЧАСТИ • Цель: • получить разработанную механическую MZS FKEE, UMP
Is1 Im1 IR1 Zs Vs1 Zm ZR Анализ индукционных машин • Для простоты предположим, что Is = I1, IR = I2 (s = статор, R = ротор)
Is1 Im1 IR1 Zs Vs1 Zm ZR Анализ индукционных машин Примечание: 1 л.с. = 746 Вт
Штифт (двигатель) P, механический P преобразованный (Pm) штифт (ротор) Pout, Po Pair Gap (Pag) Pin (Stator) Pstator меди потери, (Pscu ) Потери в меди в проторе (Prcu) P намотки, трение и т. Д. (P — дано) Потери в сердечнике (Pc) Диаграмма мощности
9 0003 Диаграмма потока мощности • Отношение: Отношение упрощает анализ для определения значения конкретной мощности, если у нас есть другая конкретная мощность.Например:
КПД
Уравнение крутящего момента • Крутящий момент может быть получен из уравнения мощности в терминах механической или электрической мощности.
Tmax Tm Tst s = 1 нс smax smax — это скольжение, при котором возникает Tmax. Уравнение крутящего момента • Обратите внимание, что механический крутящий момент может быть записан в терминах параметров цепи. Это определяется с помощью метода аппроксимации Следовательно, график Tmvs s
Уравнение крутящего момента
Управление скоростью • Существует 3 типа управления скоростью трехфазных асинхронных машин • Изменяющееся сопротивление ротора • Изменяющееся напряжение питания • Изменяющееся напряжение питания и частота питания
T R1
T V1 V уменьшается V2 V1> V2> V3 nr1> nr2> nr3 V3 T n nr3 nr2 nr1 ns ~ nNL Изменяющееся напряжение питания • Максимальные изменения крутящего момента • Скорость, которая возникает при максимальном крутящем моменте, является постоянной (при максимальном крутящем моменте XR = RR / s • Относительно простой метод — использует схему силовой электроники для контроллера напряжения • Костюм возможность работы с вентиляторной нагрузкой • Недостатки: • Большое регулирование скорости, поскольку ~ ns
f уменьшается TT n nr3 nr2 nr1 nNL1 nNL3 nNL2 Изменение напряжения питания и частоты питания • Лучший метод, поскольку напряжение и частота питания изменяются до поддерживать постоянное напряжение / частота • Поддерживать регулирование скорости • Использует схему силовой электроники для регулятора частоты и напряжения • Постоянный максимальный крутящий момент
Двигатели переменного тока, асинхронные двигатели | SEW ‑ EURODRIVE
NL английский Открытый выбор страны и языкаЗакрыть Закрыть выбор страны и языка
Выбор страны и языка
Вы уже вошли в систему.Вы можете изменить настройки языка в разделе «Личные данные».
Страна / регион
Если вы выберете другую страну / регион, вы можете потерять несохраненные данные, например в корзине.
[# / languages.languages.length #] [# country #] [# /languages.length #]. [# # languages.length #] Хотите перейти на сайт [# country #] ? [# /languages.length #] [# # languages.length #] Язык [# #languages #] [# имя #] [# / languages #] [# / languages.длина #] [# #адрес #] [# # address.lines #][#. #]
[# /address.lines #][# # address.tel #]
тел. [# address.tel #]
[# /address.tel #] [# # address.fax #]Факс: [# address.fax #]
[# /address.fax #] [# #адрес.Эл. адрес #]Электронная почта: [# address.email #]
[# /address.email #] [# # address.url #]На сайт
[# /address.url #] [# /адрес #] [# # languages.length #] [# /languages.length #] [# /при поддержке #] [# #продажи #][# имя #] обслуживается дилером по адресу [# адрес.страна №] ..
[# #адрес #] [# # address.lines #][#. #]
[# /address.lines #][# # address.tel #]
тел. [# address.tel #]
[# /address.tel #] [# # address.fax #]Факс: [# address.fax #]
[# /адрес.факс №] [# # address.email #]Электронная почта: [# address.email #]
[# /address.email #] [# # address.url #]На сайт
[# /address.url #] [# /адрес #] [# /продажи #] [# #sales_partner #][# name #] обслуживается партнером по продажам в [# sales_partner.country #] ..
[# #адрес #] [# # address.lines #][#. #]
[# /address.lines #][# # address.tel #]
тел. [# address.tel #]
[# /address.tel #] [# # address.fax #]Факс: [# address.fax #]
[# /address.fax #] [# #адрес.Эл. адрес #]Электронная почта: [# address.email #]
[# /address.email #] [# # address.url #]На сайт
[# /address.url #] [# /адрес #] [# / sales_partner #] [# #service_partner #][# name #] обслуживается сервисным партнером в [# service_partner.country #] ..
[# #адрес #] [# #адрес.строки #][#. #]
[# /address.lines #][# # address.tel #]
тел. [# address.tel #]
[# /address.tel #] [# # address.fax #]Факс: [# address.fax #]
[# /address.fax #] [# # address.email #]Электронная почта: [# address.email #]
[# /адрес.Эл. адрес #] [# # address.url #]На сайт
[# /address.url #] [# /адрес #] [# / service_partner #] [# #sales_service_partner #][# name #] обслуживается партнером по продажам и обслуживанию в [# sales_service_partner.country #] ..
[# #адрес #] [# #адрес.строки #][#. #]
[# /address.lines #][# # address.tel #]
тел. [# address.tel #]
[# /address.tel #] [# # address.fax #]Факс: [# address.fax #]
[# /address.fax #] [# # address.email #]Электронная почта: [# address.email #]
[# /адрес.Эл. адрес #] [# # address.url #]На сайт
[# /address.url #] [# /адрес #] [# / sales_service_partner #] [# #recommended_dealer #][# name #] обслуживается рекомендованным дилером в [# Recommended_dealer.country #] ..
[# #адрес #] [# # address.lines #][#.#]
[# /address.lines #][# # address.tel #]
тел. [# address.tel #]
[# /address.tel #] [# # address.fax #]Факс: [# address.fax #]
[# /address.fax #] [# # address.email #]Электронная почта: [# address.email #]
[# /address.email #] [# #адрес.url #]На сайт
[# /address.url #] [# /адрес #] [# / рекомендованный_дилер #] [# #расположение #]Контактные данные от [# name #]:
[# #адрес #] [# # address.lines #][#. #]
[# /address.lines #][# #адрес.тел #]
тел. [# address.tel #]
[# /address.tel #] [# # address.fax #]Факс: [# address.fax #]
[# /address.fax #] [# # address.email #]Электронная почта: [# address.email #]
[# /address.email #] [# # address.url #]Перейти на сайт
[# /address.url #] [# /адрес #] [# /расположение #] Асинхронный двигательи синхронный: в чем разница?
Все вращающиеся электродвигатели переменного и постоянного тока работают за счет взаимодействия двух магнитных полей.Один из них стационарный и (обычно) связан с внешним кожухом двигателя. Другой вращается и связан с вращающимся якорем двигателя (также называемым его ротором). Вращение вызвано взаимодействием двух полей.
В простом двигателе постоянного тока имеется вращающееся магнитное поле, полярность которого меняется каждые пол-оборота с помощью комбинации щеточного коммутатора. Щетки — в основном проводящие углеродные стержни, которые касаются проводов на роторе при их вращении — также служат для передачи электрического тока во вращающийся якорь.В бесщеточном двигателе постоянного тока ситуация несколько иная. Вращающееся поле все еще меняется на противоположное, но посредством коммутации, которая происходит в электронном виде.
Асинхронный двигатель отличается уникальным качеством, заключающимся в отсутствии электрического соединения между неподвижной и вращающейся обмотками. Сетевой переменный ток подается на клеммы двигателя и питает неподвижные обмотки.
Все асинхронные двигатели являются асинхронными. Асинхронное название возникает из-за разницы между скоростью вращения поля статора и несколько более низкой скоростью ротора.
Ротор с короткозамкнутым ротором от асинхронного двигателя. Этот пример взят из небольшого вентилятора.Большинство современных асинхронных двигателей имеют ротор в виде беличьей клетки. Цилиндрическая беличья клетка состоит из тяжелых медных, алюминиевых или латунных стержней, вставленных в канавки и соединенных с обоих концов токопроводящими кольцами, которые электрически замыкают стержни вместе. Твердый сердечник ротора состоит из пакетов листовой электротехнической стали.
Также можно найти асинхронные двигатели, у которых роторы состоят из обмоток, а не из короткозамкнутого ротора.Они называются асинхронными двигателями с фазным ротором. Смысл конструкции в том, чтобы обеспечить средство уменьшения тока ротора, когда двигатель впервые начинает вращаться. Обычно это достигается путем последовательного подключения каждой обмотки ротора к резистору. Обмотки получают ток через некое контактное кольцо. Когда ротор достигает конечной скорости, полюса ротора замыкаются на короткое замыкание, таким образом, электрически они становятся такими же, как ротор с короткозамкнутым ротором.
Стационарная часть обмоток асинхронного двигателя (статор) подключается к источнику переменного тока.Подача напряжения на статор вызывает прохождение переменного тока в обмотках статора. Поток тока индуцирует магнитное поле, которое воздействует на ротор, создавая напряжение и ток в элементах ротора.
Северный полюс статора индуцирует южный полюс ротора. Но положение полюса статора меняется при изменении амплитуды и полярности переменного напряжения. Индуцированный полюс в роторе пытается следовать за вращающимся полюсом статора. Однако закон Фарадея гласит, что электродвижущая сила создается, когда петля из проволоки перемещается из области с низкой напряженностью магнитного поля в область с высокой напряженностью магнитного поля, и наоборот.Если бы ротор точно следовал за движущимся полюсом статора, напряженность магнитного поля не изменилась бы. Таким образом, ротор всегда отстает от вращения поля статора, потому что поле ротора всегда на некоторую величину отстает от поля статора. Это отставание заставляет ротор вращаться со скоростью, несколько меньшей, чем скорость поля статора. Разница между ними называется скольжением.
Размер скольжения может быть разным. Это зависит главным образом от нагрузки двигателя, но также зависит от сопротивления цепи ротора и силы поля, создаваемого магнитным потоком статора.Скольжение в двигателе конструкции B составляет от 0,5% до 5%.
Когда двигатель остановлен, обмотки ротора и статора фактически являются первичной и вторичной обмотками трансформатора. Когда к статору сначала подается переменный ток, ротор не движется. Таким образом, индуцированное в роторе напряжение имеет ту же частоту, что и напряжение статора. Когда ротор начинает вращаться, частота наведенного в нем напряжения f r падает. Если f — частота напряжения статора, то скольжение s связывает эти два значения через f r = sf.Здесь s выражается в виде десятичной дроби.
Поскольку асинхронный двигатель не имеет щеток, коллектора или подобных движущихся частей, его производство и обслуживание дешевле, чем другие типы двигателей.
Для сравнения, рассмотрим синхронный двигатель. Здесь ротор вращается с той же скоростью, то есть синхронно, с магнитным полем статора. Как и асинхронный двигатель, синхронный двигатель переменного тока также содержит статор и ротор. Обмотки статора также подключаются к источнику переменного тока, как в асинхронном двигателе.Магнитное поле статора вращается синхронно с частотой сети.
Обмотка ротора синхронного двигателя может получать ток различными способами, но обычно не за счет индукции (за исключением некоторых конструкций, только для обеспечения пускового момента). Тот факт, что ротор вращается синхронно с частотой сети переменного тока, делает синхронный двигатель полезным для управления высокоточными часами.
Следует подчеркнуть, что ротор синхронного двигателя переменного тока вращается синхронно с целым числом циклов переменного тока.Это не то же самое, что сказать, что он вращается со скоростью, равной частоте сети. Частота вращения ротора двигателя, то есть синхронная скорость N, составляет:
N = 120 футов / P = 60 футов / точек
Где f — частота сети переменного тока в Гц, P — количество полюсов (на фазу), а p — количество пар полюсов на фазу.
Соответственно, чем больше полюсов, тем медленнее вращается синхронный двигатель. При равной мощности дороже построить более медленный двигатель. При 60 Гц:
- Двухполюсный / фазный синхронный двигатель переменного тока вращается со скоростью 3600 об / мин.
- Четырехполюсный / фазный синхронный двигатель переменного тока вращается со скоростью 1800 об / мин.
- Шестиполюсный / фазный синхронный двигатель переменного тока вращается со скоростью 1200 об / мин.
- Восьмиполюсный / фазный синхронный двигатель переменного тока вращается со скоростью 900 об / мин
- Десятиполюсный / фазный синхронный двигатель переменного тока вращается со скоростью 720 об / мин.
- Двенадцатиполюсный / фазный синхронный двигатель переменного тока вращается со скоростью 600 об / мин.
с малой мощностью используются там, где требуется точное время.Синхронные двигатели переменного тока высокой мощности, хотя и более дорогие, чем трехфазные асинхронные двигатели, обладают двумя дополнительными качествами. Несмотря на более высокую начальную стоимость, они могут окупиться в долгосрочной перспективе, поскольку они более энергоэффективны, чем другие типы двигателей. Во-вторых, иногда одновременно, они могут работать с опережающим или единичным коэффициентом мощности, поэтому один или несколько синхронных двигателей переменного тока могут обеспечивать коррекцию коэффициента мощности, а также выполнять полезную работу.
Существует несколько различных типов синхронных двигателей переменного тока.Их обычно классифицируют по способам создания магнитного поля. Двигатели с независимым возбуждением имеют магнитные полюса, питаемые от внешнего источника. Напротив, магнитные полюса возбуждаются самим двигателем в самовозбуждаемой (также иногда называемой невозбужденной или непосредственно возбужденной) машине. К невозбужденным типам относятся реактивные двигатели, двигатели с гистерезисом и двигатели с постоянными магнитами. Кроме того, существуют двигатели с возбуждением от постоянного тока.
Синхронные двигатели без возбуждения имеют стальные роторы.В процессе работы ротор намагничивается необходимыми магнитными полюсами аналогично тому, как это происходит в асинхронном двигателе. Но ротор вращается с той же скоростью и синхронно с вращающимся магнитным полем статора. Причина в том, что в роторе есть прорези. Двигатели запускаются как асинхронные. Когда они приближаются к синхронной скорости, прорези позволяют синхронному магнитному полю фиксироваться на роторе. Затем двигатель вращается с синхронной скоростью, пока требуемый крутящий момент низкий.
В реактивном электродвигателе ротор имеет выступающие полюса, напоминающие отдельные зубцы.Ротора меньше, чем полюсов статора, что препятствует совмещению полюсов статора и ротора, и в этом случае вращения не будет. Реактивные двигатели не запускаются автоматически. По этой причине в ротор часто встраивают специальные обмотки (так называемые обмотки с короткозамкнутым ротором), поэтому реактивный двигатель запускается как асинхронный.
В двигателе с гистерезисом используется широкая петля гистерезиса в роторе из кобальтовой стали с высокой коэрцитивной силой. Из-за гистерезиса фаза намагничивания в роторе отстает от фазы вращающегося магнитного поля статора.Эта задержка создает крутящий момент. При синхронной скорости поля ротора и статора блокируются для обеспечения непрерывного вращения. Одним из преимуществ гистерезисного двигателя является то, что он самозапускается.
Синхронный двигатель переменного тока с постоянными магнитами имеет постоянные магниты, встроенные в ротор. От этих двигателей питаются новейшие лифты, и коробка передач не требуется.
Пример двигателя с постоянным магнитом с электронной коммутацией, в данном случае от небольшого воздушного вентилятора. Этот стиль называется аутраннером, потому что ротор находится вне статора, встроен в лопасти вентилятора.Это четырехполюсный двигатель, о чем свидетельствуют четыре обмотки статора (внизу). Также виден датчик Холла, который обеспечивает часть электронной коммутации.Синхронный двигатель с прямым возбуждением может называться различными названиями, включая ECPM (постоянный магнит с электронной коммутацией), BLDC (бесщеточный двигатель постоянного тока) или просто бесщеточный двигатель с постоянными магнитами. Ротор содержит постоянные магниты. Магниты могут устанавливаться на поверхности ротора или вставляться в узел ротора (в этом случае двигатель называется двигателем с внутренним постоянным магнитом).
Пример того, как на катушки двигателя постоянного тока подается питание в последовательности, которая приводит в движение ротор.Компьютер контролирует последовательное включение питания обмоток статора в нужное время с помощью твердотельных переключателей. Питание подается на катушки, намотанные на зубья статора, и если выступающий полюс ротора идеально совмещен с зубом статора, крутящий момент не создается. Если зуб ротора находится под некоторым углом к зубу статора, по крайней мере некоторый магнитный поток пересекает зазор под углом, не перпендикулярным поверхностям зуба.В результате возникает крутящий момент на роторе. Таким образом, переключение мощности на обмотки статора в нужный момент вызывает структуру магнитного потока, которая приводит к движению либо по часовой стрелке, либо против часовой стрелки.
Еще один тип синхронного двигателя — это реактивный двигатель с переключаемым сопротивлением (SR).
Его ротор состоит из многослойных стальных пластин с рядом зубцов. Зубы магнитопроницаемы, а окружающие их участки слабо проницаемы из-за прорезанных в них пазов.
В отличие от асинхронных двигателей, здесь нет стержней ротора, и, следовательно, в роторе отсутствует ток, создающий крутящий момент.Отсутствие проводов какой-либо формы на роторе SR означает, что общие потери в роторе значительно ниже, чем в других двигателях, содержащих роторы с проводниками.
Крутящий момент, создаваемый двигателем SR, регулируется путем регулировки величины тока в электромагнитах статора. Затем скорость регулируется путем регулирования крутящего момента (через ток в обмотке). Этот метод аналогичен способу регулирования скорости с помощью тока якоря в традиционном щеточном двигателе постоянного тока.
Двигатель SR создает крутящий момент, пропорциональный величине тока, подаваемого на его обмотки.Скорость двигателя не влияет на производство крутящего момента. Это не похоже на асинхронные двигатели переменного тока, где при высоких скоростях вращения в области ослабления поля ток ротора все больше отстает от вращающегося поля по мере увеличения числа оборотов двигателя.
И, наконец, синхронный двигатель переменного тока с возбуждением постоянным током. Для создания магнитного поля требуется выпрямленный источник питания. Эти двигатели обычно имеют мощность, превышающую одну лошадиную силу.
Бесщеточный контроллер двигателя постоянного тока и PMSM
- Перейти к содержанию
- Перейти к основной боковой панели
- Дом
- Автомобильная промышленность
- Интернет вещей и мобильность
- Цифровые услуги
- Компания
- Карьера
- Свяжитесь с нами
- Блог
- Блоки управления
- Контроллер двигателя для EV
- Разработка управления двигателем
- Блок управления кузовом
- Функциональное тестирование (HIL / MIL / SIL)
- Функциональная безопасность (ISO 26262)
- Консультации по вопросам безопасности на протяжении всего жизненного цикла
- Разработка программного обеспечения (ASIL D / ASIL C)
- Услуги по проектированию оборудования (ISO 26262)
- Тестирование и проверка (ISO 26262)
- Деятельность по анализу безопасности (ISO 26262)
- Услуги по проектированию продуктов
- Технология электромобилей
- Разработка на основе модели
- AUTOSAR
- Проектирование и разработка аппаратного обеспечения
- Решения промышленного уровня
- Пакет поддержки платы
- Загрузчик флэш-памяти
- Сетевые и диагностические стеки
- Инструмент настройки ODX
- Библиотека стеков
- Стек UDS
- Стек DoIP
- WWH-OBD Стек
- Стек OBD II
- Стек CAN
- Стек LIN
- Стек ISOBUS
- Стек CAN FD
- J1939 Стек
- Стек FlexRay
- Ресурсы
- Статистика
- Примеры из практики Партнеры
- Полный стек IoT
- Разработка шлюза
- Разработка узла датчика
- Облако и аналитика
- Разработка мобильных приложений
- Разработка веб-приложений
- Разработка настольных приложений
- Разработка HMI / UI
- Решения для мобильных устройств
- Информационно-развлекательная система Android
- Проекционный дисплей
- Телематика
(готовые к развертыванию)
- Услуги по проектированию продуктов
- Искусственный интеллект / машинное обучение
- Профилактическое обслуживание (PdM)
- Перенос Android / Linux (YOCTO)
- Перенос ядра ОСРВ
- Solar Tracker Development
- От концепции к продукту (метод PoC)
- Решения промышленного уровня
- SCADA (Промышленность 4.0)
- Беспроводная прошивка
- Ресурсы
- Примеры из практики
- Статистика
- Вебинары
- Официальные документы
- Видео
- Отзывы
- Технологии
- гибрис
- Magento
- Magento 2
- Разработка и интеграция AEM
- PIMCORE
- инструменты для торговли
- WP Engine для WordPress
- Freshworks
- Решения
- Разработка мобильных приложений
- Мобильное уведомление
- Ускорители роста
- Услуги
- Пакет услуг цифровой коммерции
- Консультации по цифровой торговле
- Дизайн платформы электронной коммерции
- Разработка платформы электронной коммерции
- Пакет услуг Digital Experience
- Управляемые услуги электронной коммерции
- Разработка облачной платформы
- Электронная коммерция, бизнес-аналитика и аналитика
- Ресурсы
- Статистика
- Примеры из практики
- Вебинары
- Технические документы Отрасли, которые мы обслуживаем Партнеры Отзывы Список клиентов
- Корпоративный профиль
- Обзор
- Менеджмент
- Миссия и видение
- Пресс
- Награды и сертификаты
- Соответствие — система информаторов
- Модель EmbiQ
- Помолвка Модель
- CMMI уровень ||| Оценка
- GDPR
- Информационная безопасность (ISO 27001)
- СМК (ISO 9001)
- Работайте с нами
- Люди на Эмбителе
- Жизнь в Эмбителе
- Автомобильная промышленность
- Блоки управления
- Контроллер двигателя для EV
- Разработка управления двигателем
- Блок управления кузовом
- Функциональное тестирование (HIL / MIL / SIL)
- Функциональная безопасность (ISO 26262)
- Консультации на протяжении всего жизненного цикла безопасности
- Разработка программного обеспечения (ASIL D / ASIL C)
- Услуги по проектированию оборудования (ISO 26262)
- Тестирование и проверка (ISO 26262)
- Деятельность по анализу безопасности (ISO 26262)
- Услуги по проектированию продукции
- Технология электромобилей
- Разработка на основе модели
- АВТОСАР
- Проектирование и разработка аппаратного обеспечения
- Решения промышленного уровня
- Пакет поддержки платы
- Загрузчик флэш-памяти
- Сетевые и диагностические стеки
- Инструмент настройки ODX
- Библиотека стеков
- Стек UDS
- Стек DoIP
- WWH-OBD Стек
- Стек OBD II
- Стек CAN
- Стек LIN
- Стек ISOBUS
- Стек CAN FD
- J1939 Стек
- Стек FlexRay
- ресурсов
- Статистика
- Примеры из практики Партнеры
- Блоки управления
- Интернет вещей
- Полный стек IoT
- Разработка шлюза
- Разработка узла датчика
- Облако и аналитика
- Разработка мобильных приложений
- Разработка веб-приложений
- Разработка настольных приложений
- Разработка HMI / UI
- Мобильные решения (готовые к развертыванию)
- Информационно-развлекательная система Android
- Проекционный дисплей
- Телематика
- Услуги по проектированию продукции
- Искусственный интеллект / машинное обучение
- Профилактическое обслуживание (PdM)
- Перенос Android / Linux (YOCTO)
- Перенос ядра ОСРВ
- Разработка солнечного трекера
- От концепции к продукту (метод PoC)
- Решения промышленного уровня
- SCADA (Промышленность 4.0)
- Прошивка по воздуху
- ресурсов
- Примеры из практики
- Статистика
- Вебинары
- Официальные документы
- Видео
- Отзывы
- Полный стек IoT
- Цифровые услуги
- Технологии
- гибрис
- Magento
- Разработка и интеграция AEM
- PIMCORE
- инструменты для торговли
- WPEngine для WordPress
- Freshworks
- Услуги
- Пакет услуг цифровой коммерции
- Консультации по цифровой торговле
- Дизайн платформы электронной коммерции
- Разработка платформы электронной коммерции
- Пакет услуг Digital Experience
- Управляемые услуги электронной коммерции
- Разработка облачной платформы
- Электронная коммерция, бизнес-аналитика и аналитика
- Решения
- Разработка мобильных приложений
- Мобильное уведомление
- Ускорители роста
- ресурсов
- Статистика
- Примеры из практики
- Вебинары
- Официальные документы
- Отрасли промышленности Мы обслуживаем
- Партнеры
- Отзывы
- Список клиентов
- Технологии
- Компания
- Корпоративный профиль
- Обзор
- Менеджмент
- Миссия и видение
- Пресс
- Награды и сертификаты Соответствие
- — Система информирования о нарушениях
Модель - EmbiQ
- Обручальная модель Уровень
- CMMI ||| Оценка
- GDPR
- Информационная безопасность (ISO 27001)
- СМК (ISO 9001)
- Корпоративный профиль
- Карьера
- Работайте с нами
- человек в Embitel
- Жизнь в Эмбителе
- Блог
- Свяжитесь с нами
Embitel
Embitel
- Пример страницы
- Блог
- Блог о цифровой торговле
- Блог об автомобильной промышленности и Интернете вещей
Разница между синхронным двигателем и асинхронным двигателем
Двигатели переменного токаделятся на два типа: синхронные двигатели и асинхронные двигатели, которые также называются асинхронными двигателями.Самая большая разница между синхронными двигателями и асинхронными двигателями (асинхронными двигателями) заключается в том, согласуется ли скорость ротора со скоростью вращающегося магнитного поля в статоре. Если скорость вращения ротора и скорость возбуждения статора одинаковы, он называется синхронным двигателем; если нет, то это асинхронный двигатель. Кроме того, между ними есть большие различия в параметрах производительности и приложениях.
Различия в конструкции
Обмотки статора синхронных и асинхронных двигателей похожи, и основное различие заключается в конструкции ротора.В роторе синхронного двигателя имеются обмотки возбуждения постоянного тока, на которые необходимо подавать внешнюю мощность возбуждения, вводимую через контактное кольцо. Однако в обмотках ротора асинхронного двигателя имеется короткое замыкание, которое производит ток за счет электромагнитной индукции. Напротив, синхронные двигатели более сложны и дороги.
- Статор
Компоненты статора синхронного двигателя в основном такие же, как и у асинхронных двигателей, они играют роль приема, вывода электрической энергии и создания вращающегося магнитного поля.По форме результата особой разницы нет. Статоры синхронного и асинхронного двигателей состоят из магнитного сердечника статора, проводящих обмоток трехфазного переменного тока, основания для фиксирующего сердечника, клеммной крышки и т. Д. - Ротор
Синхронный двигатель: полюсный сердечник ротора покрыт стальными листами, в которые вставлены стальные пластины. На полюсный сердечник устанавливаются обмотки возбуждения, намотанные изолированными медными проводами. Для синхронного двигателя с постоянными магнитами постоянный магнит на роторе является ключевым фактором, отличающим его от других двигателей.
Асинхронный двигатель: ротор состоит из стального сердечника и обмоток, он изготовлен из ламинированных стальных листов и установлен на вращающемся валу. Ротор бывает двух типов: короткозамкнутый и намотанный. Асинхронный двигатель с обмоткой также оснащен контактным кольцом и щеточным механизмом.
Разница в работе
1. Синхронный двигатель
Синхронный двигатель вращается за счет взаимодействия между вращающимся магнитным полем, создаваемым включенными обмотками статора, и магнитным полем, создаваемым ротором.В синхронном двигателе с постоянными магнитами он вращается за счет крутящего момента, создаваемого взаимодействием между вращающимся магнитным полем статора и вторичным магнитным полем ротора. Что касается обмотки ротора, то она не наводит ток при нормальном вращении двигателя, а также не участвует в работе. Он служит только для запуска мотора.
Во время установившейся работы синхронного двигателя существует постоянная зависимость между скоростью вращения ротора и частотой сети:
N = Ns = 120f / p
f — частота сети, p — число полюсов двигателя, Ns — синхронная скорость.
2. Асинхронный двигатель
Сердечник статора трехфазного асинхронного двигателя заделан трехфазными симметричными обмотками. После включения между статором и ротором возникает вращающееся магнитное поле, которое вращается с синхронной скоростью. Стержень ротора разрезается вращающимся магнитным полем, в котором возникает индуцированный ток. При включении стержень ротора подвергается воздействию электромагнитной силы во вращающемся магнитном поле, таким образом, ротор преодолевает вращение момента нагрузки и ускоряет свое вращение.Когда электромагнитный момент равен моменту нагрузки, двигатель вращается с постоянной скоростью. Скорость вращения асинхронного двигателя
(скорость статора) ниже, чем скорость вращения магнитного поля, и эта разница называется «скольжением» и выражается в процентах от синхронной скорости:
S = (Ns-N) / Ns.
S — скольжение, Ns — скорость магнитного поля, N — скорость ротора.
Разница в применении
Синхронные двигатели в основном используются в больших генераторах, в то время как асинхронные двигатели почти используются в качестве двигателей для привода машин.
Для синхронного двигателя коэффициент мощности можно гибко регулировать возбуждением. Однако коэффициент мощности асинхронного двигателя не регулируется, поэтому на некоторых крупных заводах для более применяемых асинхронных двигателей можно добавить синхронный двигатель в качестве модификатора фазы, чтобы отрегулировать коэффициенты мощности завода и интерфейса сети. Однако из-за высокой стоимости синхронных двигателей и большого объема технического обслуживания в настоящее время обычно используются конденсаторы для компенсации коэффициента мощности. Синхронный двигатель
работает не так просто, как асинхронный двигатель, потому что синхронный двигатель имеет обмотку возбуждения и контактное кольцо, которые нуждаются в высокоуровневом управлении возбуждением.Кроме того, по сравнению с необслуживаемым асинхронным двигателем, работа по обслуживанию синхронного двигателя велика. Поэтому в качестве двигателя чаще всего выбирают асинхронный двигатель.