Тяговый электродвигатель постоянного тока
Тяговые электродвигатели (ТЭД) постоянного тока ставят на электрические автомобили, электрички, трамваи, троллейбусы и т.д. Запуск электродвигателя происходит от электричества, которое поступает из линии электропередачи или аккумуляторов. Тяговый электродвигатель имеет ряд отличительных характеристик по сравнению с обычными дизельными или бензиновыми двигателями.
Особенности тяговых электродвигателей
Тяговые электродвигатели имеют сравнительно небольшой размер, все детали крепятся особым образом, используется тонкая, но надежная обмотка, а также устанавливаются дополнительные элементы, обеспечивающие работу посредством использования дополнительных крепежных элементов на корпусе.
Электродвигатели тяговые соответствуют ГОСТу, поэтому производятся из прочных, трудновоспламеняемых материалов которые соответствуют всем требованиям безопасности. Это положительно сказывается на характеристиках ТЭД постоянного тока, которые зачастую эксплуатируются в экстремальных условиях:
- при повышенных температурных режимах воздуха;
- высоком уровне влажности;
- длительном промежутке времени без остановки;
- минимальных температурных режимах зимой и прочих неблагоприятных факторах, на которые сильно влияет погода.

Каждый электродвигатель постоянного тока снабжен вентиляцией, которая препятствует его перегреву, а, соответственно, защищает ТЭД от сгорания или возгорания. При нарушении вентиляции возможно возникновение внештатных ситуаций, к котором всегда должен быть готов водитель общественного транспорта, чтобы вовремя их устранить.
Если будет нарушен процесс сборки тягового электродвигателя постоянного тока или его монтаж, возможны частые поломки. Этого можно избежать, приобретая электродвигатели в проверенных компаниях. У нас в наличии продукция от проверенных производителей, которая имеет все сертификаты, а также гарантийный срок обслуживания.
В настоящий период времени производством тяговых электродвигателей постоянного тока занимается множество заводов, в том числе и зарубежных. Наша компания выбирает лучших производителей тяговых электродвигателей для сотрудничества. Мы можем помочь подобрать электродвигатель по тел. (495) 668 32 90.
Просмотров: 2874
Дата: Пятница, 06 Сентябрь 2013
Тяговые электродвигатели постоянного тока типа ЭД
Электродвигатели типов ЭД118А, ЭД118Б, ЭД120, ЭД133, ЭД121, ЭД126 предназначены для привода колесных пар тепловозов и дизель-поезда.
Электродвигатели типов ЭД140, ЭД141, ЭД143 предназначены для установки на электровозах постоянного тока.
Электродвигатели типов ЭД131А,Б и ЭД136 предназначены для привода колес карьерных самосвалов.
Электродвигатели типов ЭД137, ЭД138, ЭД139 предназначены для городского транспорта (трамвай, троллейбус, метро), ЭД-147(трамвай).
Тяговые двигатели постоянного тока реверсивные, защищенного исполнения на щитовых подшипниках, с независимой системой вентиляции либо самовентиляцией.
Двигатели эксплуатируются в продолжительном или часовом режиме при температуре окружающего воздуха в пределах от -50 С до +40 С (исполнение У), для исполнения УХЛ от -60 С до +40 С .
| Серия, тип марка | Мощность, кВт | Напряжение, В | Частота вращения, об/мин | Масса, кг | Обозначение ТУ, ТЗ |
| ЭД-118АУ2 | 305 | 463/700 | 585/2290 | 3100 | ТУ 16-514. 058-72 058-72 |
| ЭД-118БУ1 | 305 | 463/700 | 585/2290 | 3350 | ТУ 16-515.235-80 |
| ЭД-120АУ1 | 412 | 517/750 | 655/2320 | 3000 | ТУ 16-515.126-77 |
| ЭД-121АУ1 | 412 | 512/780 | 615/2320 | 2950 | ТУ 16-516.223-78 |
| ЭД-126АУХЛ1 | 448 | 518/850 | 482/1835 | 3400 | ТУОТХ.515.135-76 |
| ЭД-137АУ1 | 65 | 275 | 2010/4100 | 350 | БИЛТ.652411.001 ТУ |
| ЭД-138АУ2 | 132 | 550 | 1750/3900 | 750 | БИЛТ.652421.001 ТУ |
| ЭД-139АУ2 | 140 | 550 | 1600/3900 | 750 | БИЛТ. |
| ЭД-133УХЛ1 | 414 | 506/780 | 600/2320 | 3350 | ИАКВ.652331.003 ТУ |
| ЭД-136УХЛ2 | 593 | 775 | 1010/2600 | 3000 | БИЛТ.652441.001 ТУ |
| ЭД-131АУХЛ | 366 | 610/900 | 875/2500 | 2000 | ТУ 16-90ИАКВ.652431.008-04 ТУ |
| ЭД-131БУХЛ2 | 366 | 610/900 | 875/2500 | 2000 | ТУ16-90 ИАКВ.652431.008-04 ТУ |
| ЭД-140У1 | 515 | 1475 | 670/1530 | 4600 | БИЛТ.652341.001 ТУ |
| ЭД-141АУ1 | 785 | 1500 | 840/1690 | 4800 | БИЛТ.652341.002 ТУ |
| ЭД-143У1 | 820 | 1500 | 970/1690 | 4000 | БИЛТ. 652451.001 ТУ 652451.001 ТУ |
| ЭД-147У1 | 46 | 300 | 1720/4350 | 297 | ТУ У31.1-00213121-118-2003 |
Электродвигатели тяговые серии ЭД, ЭДП, АД
Общие технические характеристики тяговых электродвигателей
Тяговые электродвигатели постоянного и переменного тока реверсивные, защищенного исполнения на щитовых подшипниках, с независимой системой вентиляции либо самовентиляцией. Двигатели эксплуатируются в продолжительном или часовом режиме при температуре окружающего воздуха в пределах от -50°С до +40°С (исполнение У), для исполнения УХЛ от -60°С до +40°С
Электродвигатели ЭД-118А, ЭД-118Б, ЭД-120А, ЭД 133, ЭД 133БУ1, ЭД 151Т1, ЭД 121А, ЭД 126А, ЭД 150АУ1, АД-901, АД-906 используются для привода колесных пар тепловозов и дизель-поездов.
Электродвигатели типов ЭД 140, ЭД 141 А, ЭД 143, ЭД 153У1, ЭДП 810У1 предназначены для установки на электровозах постоянного тока, АД-914 на электровозах переменного тока.
Электродвигатели типов ЭД131А.Б и ЭД136 предназначены для привода колес карьерных самосвалов.
Электродвигатели типов ЭД137А, ЭД147, ЭД138А, ЭД139А и АД-902 предназначены для городского транспорта (трамвай, троллейбус, метро).
Электродвигатель ЭД 118 |
Электродвигатель ЭДП 810 |
Электродвигатель ЭД 153 У3 |
Электродвигатель АД-902 |
Основные технические характеристики электродвигателей тяговых
Код ДКПП |
Серия, тип, марка |
Мощность, кВт |
Напряжение, В |
Частота вращения,об/мин |
Масса, кг |
31. |
ЭД-118АУ2 |
305 |
463/700 |
585/2290 |
3100 |
31.10.10.700 |
ЭД-П8БУ1 |
305 |
463/700 |
585/2290 |
3350 |
31.10.10.800 |
ЭД-120АУ1 | 412 |
517/750 |
655/2320 |
3000 |
31.10,10.800 |
ЭД-121АУ1 |
412 |
512/780 |
615/2320 |
2950 |
|
ЭД-150У1 |
437 |
565/780 |
700/2200 |
2700 |
|
ЭД 150АУ1 |
417 |
511/780 |
600/2320 |
2700 |
|
ЭД-126АУХЛ1 |
448 |
518/850 |
482/1835 |
3400 |
|
ЭД131АУХЛ2 |
366 |
610/900 |
875/2500 |
2000 |
|
ЭД131БУХЛ2 |
366 |
610/900 |
875/2500 |
2000 |
31. |
ЭД133УХЛ1 |
414 |
506/780 |
600/2320 |
3350 |
|
ЭД133БУ1 |
414 |
506/180 |
600/2320 |
3350 |
|
ЭД136УХЛ2 |
593 |
775 |
1010/2600 |
3000 |
|
ЭД137АУ1 |
65 |
275 |
1950/4100 |
350 |
|
ЭД138АУ2 |
132 |
550 |
1750/3900 |
750 |
|
ЭД139АУ2 |
140 |
550 |
1650/3900 |
750 |
|
ЭД140У1 |
515 |
1475 |
670/1530 |
4600 |
|
ЭД141АУ1 |
785 |
1500 |
840/1690 |
4800 |
|
ЭД143У1 |
820 |
1500 |
970/1690 |
4000 |
31. |
ЭД147У1 |
46 |
300 |
1720/4350 |
297 |
|
ЭДП810У1 |
810 |
1500 |
750/1800 |
4650 |
|
ЭД 153У1 |
800 |
1500 |
945/1720 |
3860 |
|
ЭД151Т1 |
255 |
432/750 |
560/2685 |
2600 |
|
АД-901УХЛ1 |
417 |
724/1160 |
470/2550 |
2300 |
|
АД-902У2 |
170 |
570 |
1240/3410 |
750 |
|
АД-906У1 |
240 |
1150 |
1000/2800 |
1600 |
|
АД-914У1 |
1200 |
1870 |
1140/2900 |
2400 |
 10.10.700
10.10.700 10.10.800
10.10.800.png) 10.10.550
10.10.550Тяговый электродвигатель купить по лучшей цене у нас — это просто!
СпецЭлектро — доступная цена на электродвигатели и электрооборудование.
Каталог — тяговые электродвигатели
При оформлении заказа обеспечивается доставка оборудования по всей России (полный список регионов России)
Многолетний опыт работы на рынке электротехнического оборудования, сотрудничество с заводами-изготовителями, а также наличие продукции на наших складах, позволяет осуществлять покупку и доставку электрооборудования и комплектующих в кратчайшие сроки. Специалисты компании «СпецЭлектро» помогут найти оптимальное решение по техническим характеристикам, цене и времени доставки электродвигателя или оборудования для Вашей задачи. Наши специалисты подберут замену для устаревшей серии оборудования и ответят на все интересующие Вас вопросы, помогут купить электродвигатель и подходящее вам оборудование.
Купить электрооборудование с доставкой — это просто!
При покупке электрооборудования, компания обеспечит постгарантийное обслуживание
Конструкция тяговых двигателей постоянного тока
КОНСТРУКЦИЯ тяговых двигателей постоянного ТОКА [1] [c. 468]
468]КОНСТРУКЦИЯ тяговых ДВИГАТЕЛЕЙ ПОСТОЯННОГО ТОКА [c.469]
На электровозах переменного тока со статическими преобразователями тяговые двигатели пульсирующего тока по конструкции мало отличаются от двигателей электровозов постоянного [c.214]
Тяговые электродвигатели должны обеспечивать в условиях жестко ограниченного габарита широкий диапазон изменения частоты вращения, значительные вращающие моменты, надежно работать в условиях многократных и одиночных ударов, вибрации (неизбежных при движении тепловоза) и изменения температуры окружающей среды в диапазоне от — 50 до+ 40° С, а в специальном исполнении от — 60 до + 40° С. В тяговые электродвигатели через неплотности и выходные отверстия для охлаждающего воздуха может попадать снег (особенно на стоянках), песок и пыль, поэтому конструкция всех узлов двигателей должна обеспечивать их герметичность. Все двигатели постоянного тока имеют независимую вентиляцию осевого типа с подачей воздуха со стороны коллектора. [c.39]
[c.39]
Тяговые двигатели электровозов переменного тока, которые часто называют двигателями пульсирующего тока, по своей конструкции и схеме включения несколько отличны от обычных двигателей постоянного тока. Для снижения пульсационных потерь в магнитной системе машины обмотки возбуждения постоянно шунтированы активным сопротивлением как показано на рис. 39 и 41. [c.48]
Изменение магнитного потока, создаваемого главными полюсами тягового двигателя, также используют для регулирования частоты вращения якоря, а следовательно, и скорости движения. Этот способ регулирования не связан со значительными потерями энергии и поэтому широко применяется на ЭПС не только постоянного, но и переменного тока, а также на тепловозах. Магнитный поток можно регулировать, изменяя ток в обмотке возбуждения либо число витков обмотки, участвующих в создании магнитного потока. Последнее Приводит к усложнению конструкции тягового двигателя, так как необходимо иметь дополнительные отводы обмотки возбуждения,
[c. 78]
78]
Для питания применяется постоянный ток при напряжении 500—600 в. Тяговые двигатели подвесного типа или — в новейших конструкциях — с независимой подвеской. Двигатели сериесные, редко применяются компаунд-ные для осуществления рекуперации. [c.442]
Максимальная скорость ограничивается максимальной конструктивной скоростью электроподвижного состава, зависящей от конструкции ходовых частей, и максимальной скоростью вращения тяговых двигателей, допустимой по прочности коллектора и креплений обмотки якоря. Нормально конструктивная скорость выше максимальной по двигателю. Последняя зависит от передаточного числа передачи и диаметра колёс. Максимальная скорость по двигателю для постоянного тока обычно равна 2v , а для современных быстроходных двигателей малой мощности (трамвай,троллейбус) она доходит до (2,5-н-З) г/ . [c.457]
Тяговые электродвигатели переменного тока. Асинхронные двигатели, особенно с короткозамкнутым ротором, из всех видов электродвигателей являются наиболее простыми по конструкции, дешевыми в изготовлении, самыми надежными в эксплуатации, требуют небольших затрат на обслуживание и ремонт, имеют минимальную массу на единицу мощности и высокий к. п. д. Учитывая тяжелые условия работы тяговых электродвигателей и рост секционной мощности тепловозов, использование асинхронных двигателей для тяги постоянно привлекало к себе внимание ученых и конструкторов подвижного состава.
[c.45]
п. д. Учитывая тяжелые условия работы тяговых электродвигателей и рост секционной мощности тепловозов, использование асинхронных двигателей для тяги постоянно привлекало к себе внимание ученых и конструкторов подвижного состава.
[c.45]
Кинематические схемы и конструкции передаточных механизмов при индивидуальном приводе в основном определяются способом подвешивания тяговых двигателей и описаны в разделе Подвижной состав постоянного тока . [c.570]
Конструкция тягового двигателя в значительной степени определяется системой его подвески на локомотиве и системой привода. Однако все тяговые двигатели постоянного тока имеют очень много общего. Их делают с последовательным возбуждением и закрытого типа. Тяговые двигатели, установленные на электровозах, как правило, имеют независимую вентиляцию. Основными частями тягового двигателя (см. рис. 113) являются остов, главные и дополнительные полюсы, якорь, щеткодержатели с кронштейнахми, два подшипниковых щита и шапки моторно-осевых подшипников (при опорно-осевой подвеске двигателей). [c.209]
[c.209]
Глава Тяговые двигатели охватывает все тяговые двигатели постоянного тока электроподвижного состава железных дорог Советского Союза. В ней приведены, основные конструктивные и расчетные дан 1ые тяговых двигателей (типов НБ-406А, ДПЭ-400, ДПЗ-340 и Др.), их характеристики (электротяговые, нагрузочные, тепловые и аэродинамические) и чертежи основных узлов. В конце главы описаны особенности конструкции двигателей различных модификаций. [c.7]
Согласно правилам Госгортехнадзора барабанные лебедки не должны применятся в лифтах, в которых скорость движения кабины превышает 0,63 м/с. Широкое распространение в лифтах находят лебедки с канатоведущими шкивами (рис. 6), в которых тяговая сила создается за счет трения между канатом и ручьем шкива. Передачи от электродвигателя к канатоведущему шкиву лебедки могут быть редукторные и безредук-торные. В редукторных лебедках вал шкива за счет применения зубчатых или червячных передач вращается со значительно меньшей частотой, чем вал электродвигателя. В безредуктор-ных лебедках канатоведущий шкив и шкив тормозного устройства размещаются на валу ротора тихоходного электродвигателя постоянного тока, работающего по так называемой схеме генератор — двигатель. Благодаря отсутствию механических передач конструкция безредукторной лебедки получается более компактной, несмотря на то, что тихоходный электродвигатель имеет значительно большие размеры, чем обычный электродвигатель той же мощности. Безредукторные лебедки получили йирокое применение при скоростях движения кабины от 2 м/с и выше. Для меньших скоростей предпочтительней редукторные лебедки.
[c.318]
В безредуктор-ных лебедках канатоведущий шкив и шкив тормозного устройства размещаются на валу ротора тихоходного электродвигателя постоянного тока, работающего по так называемой схеме генератор — двигатель. Благодаря отсутствию механических передач конструкция безредукторной лебедки получается более компактной, несмотря на то, что тихоходный электродвигатель имеет значительно большие размеры, чем обычный электродвигатель той же мощности. Безредукторные лебедки получили йирокое применение при скоростях движения кабины от 2 м/с и выше. Для меньших скоростей предпочтительней редукторные лебедки.
[c.318]
Наиболее характерными примерами модернизации отечественного тягового подвижного состава являются оборудование электровозов и электропоездов переменного тока кремниевыми (взамен ртутных) выпрямителями замена тяговых двигателей на электровозах постоянного и переменного тока на более мощные (электровозы ВЛ22, ВЛ60) улучшение конструкции тележек электровоза ВЛ8 и др. На тепловозах ТЭЗ, 2ТЭ10Л проводится тепловая модернизация за счет замены дизелей на более экономичные, а также улучшается конструкция тяговых электродвигателей для повышения их эксплуатационной надежности. Иногда модернизация той или иной техники не может дать должного эффекта. В этих случаях проводят реконструкцию или перевооружение данной отрасли техники. Так, например, взамен паровой тяги с 1956 г. на железных дорогах СССР начали широко внедрять электрическую и тепловозную тягу.
[c.189]
На тепловозах ТЭЗ, 2ТЭ10Л проводится тепловая модернизация за счет замены дизелей на более экономичные, а также улучшается конструкция тяговых электродвигателей для повышения их эксплуатационной надежности. Иногда модернизация той или иной техники не может дать должного эффекта. В этих случаях проводят реконструкцию или перевооружение данной отрасли техники. Так, например, взамен паровой тяги с 1956 г. на железных дорогах СССР начали широко внедрять электрическую и тепловозную тягу.
[c.189]
Электродвигатели постоянного тока при целесообразно разработанной конструкции представляют собой идеальный тип тягового двигателя. Они имеют высокий к. п. д. в противоположность двигателям внутреннего сгорания, сила тяги и крутящий момент с уменьшением числа оборотов двигателя увеличиваются крутящий момент и число оборотов двигателя автомагически саморегулируются в широких пределах преодоление двигателем повышенного сопротивления качению происходит надежнее (если обеспечивается необходимое питание его электроэнергией) допускается кратковременная перегрузка, доходящая до трехкратного значения номинальной мощности рабочая температура-двигате. чя может ыспян ся в широких пределах
[c.850]
чя может ыспян ся в широких пределах
[c.850]
Тяговые электродвигатели. По сравнению с другими электрическими машинами тяговые электродвигатели работают в более тяжелых условиях. Они размещены внутри рам тележек тепловоза, т. е. имеют офаниченные габаритные размеры, не защищены кузовом и при движении тепловоза подвержены постоянным динамическим воздействиям из-за неровности рельсового пути. Все это обусловливает особенности их конструкции (высокую прочность, герметичность, не допускающую зафязнения внутренних частей двигателя, усиленное охлаждение, большую способность к перефуз-кам и надежную изоляцию). На тепловозах установлены тяговые электродвигатели типа ТЕ-006, представляющие собой четырехполюсные машины постоянного тока с последовательным возбуждением, принудительной вентиляцией и опорно-осевой (трамвайной) подвеской. Применение двигателей с последовательным возбуждением позволяет получить хорошую тяговую характеристику тепловоза (наибольший вращающий момент на валах якорей создается при трогании с места и движении с минимальной скоростью).
 [c.202]
[c.202]|
Завод производитель |
Назначение двигателя |
Серия двигателя |
Примечание |
|
Псковский электромашиностроительный завод |
для железнодорожного транспорта |
П |
Электродвигатели постоянного тока серии П |
|
Псковский электромашиностроительный завод |
для городского электротранспорта |
ДПУР |
Электродвигатель постоянного тока ДПУР-1,5-У2 |
|
Псковский электромашиностроительный завод |
для большегрузных самосвалов |
ДПТВ |
Электродвигатель постоянного тока ДПТВ-16,25-О2 для самосвалов БелАЗ |
|
Татэлектромаш |
для большегрузных самосвалов |
ЭК, ДК |
Электродвигатели тяговые постоянного тока предназначены для мотор — колес большегрузных автосамосвалов «БЕЛАЗ» |
|
Татэлектромаш |
для железнодорожного транспорта |
ЭК-235 ЭК-260
|
Тяговый электродвигатель постоянного тока ЭК-235 предназначен для привода колесных пар электропоездов |
|
Татэлектромаш |
для железнодорожного транспорта |
ДК-263 ВМ
|
Электродвигатель тяговый постоянного тока предназначен для привода колес путевых машин на железнодорожном ходу |
|
Татэлектромаш |
для железнодорожного транспорта |
ДТК-800Ч
|
электродвигатель тяговый постоянного тока ДТК-800Ч |
|
Татэлектромаш |
для железнодорожного транспорта |
ЭДУ-133
|
Электродвигатели тяговые постоянного тока предназначены для привода колесных пар магистральных и маневровых тепловозов |
|
Татэлектромаш |
для железнодорожного транспорта |
ЭК-810Ч |
Электродвигатели тяговые постоянного тока ЭК-810Ч, 810А предназначены для привода колесных пар грузовых электровозов постоянного тока |
|
Татэлектромаш |
для экскаваторов |
Д-812 |
Электродвигатели постоянного тока Д-812 предназначены для работы в электроприводах подъемно-транспортных машин и металлургических агрегатов |
|
Татэлектромаш |
для экскаваторов |
ДЭ-812 |
Электродвигатель тяговый постоянного тока ДЭ-812 предназначен для привода хода карьерного экскаватора ЭКГ-10 |
|
Татэлектромаш |
для экскаваторов |
ЭК-814ЭВ, ЭК-816Э, ЭК-818Э
|
Электродвигатель тягового постоянного тока ЭК-814ЭВ предназначен для привода поворота карьерного экскаватора ЭКГ-10 |
|
Татэлектромаш |
для экскаваторов |
ЭК
|
Электродвигатели постоянного тока предназначены для комплектации механизмов экскаватора |
|
Татэлектромаш |
для экскаваторов |
ДЭВ-812 |
Электродвигатель постоянного тока ДЭВ-812 вертикального исполнения предназначен для привода механизмов поворота и напора экскаватора. |
|
Кросна-Мотор |
Для кранов |
Д |
Металлургические и крановые двигатели постоянного тока серии Д |
|
Кросна-Мотор |
для экскаваторов |
ДПЭ, ДПВ, ДЭ, КРЭ |
Двигатели постоянного тока типа ДПЭ, ДПВ для экскаваторов |
|
Кросна-Мотор |
Для судов |
ДПМ, ТДП |
Судовые двигатели постоянного тока серии ДПМ без тормозов и с тормозами типа ТДП |
|
Кросна-Мотор |
Для городского транспорта |
КР |
Двигатели тяговые постоянного тока типа КР251, КР252 для транспорта |
|
Кросна-Мотор |
для буровых станков |
КР661Б1, ДК410Р |
Двигатели постоянного тока вспомогательные для транспорта ДК, КР |
|
Кросна-Мотор |
для буровых станков |
КР251Б, КР411Б |
Двигатели постоянного тока для буровых станков гусеничного хода типа КР251Б, КР411Б |
|
Кросна-Мотор |
для буровых станков |
Д808Б, КР808Б |
Двигатели постоянного тока для буровых станков шарошечного бурения типа Д808Б, КР808Б |
|
Кросна-Мотор |
общего применения |
КР250 |
Двигатели постоянного тока общего применения КР250 с самовентиляцией и независимой вентиляцией |
|
Кросна-Мотор |
общего применения |
Д808К |
Двигатели постоянного тока общего применения типа Д808К с самовентиляцией |
|
Кросна-Мотор |
для городского электротранспорта
|
КР4367 |
Двигатель тяговый постоянного тока с полностью шихтованным магнитопроводомтипа КР4367 для трамвая с низким полом |
|
Кросна-Мотор |
общего применения |
КР225 |
Двигатель тяговый постоянного тока типа КР225 с самовентиляцией и независимой вентиляцией |
|
Кросна-Мотор |
для кранов
|
Д908 |
Двигатель тяговый постоянного тока краново-металлургический типа Д908 |
|
Кросна-Мотор |
для городского электротранспорта
|
|
Двигатель тяговый постоянного тока типа KP4389tD для троллейбуса с низким полом |
|
Карпинский электромашиностроительный завод |
для экскаваторов
|
ДПЭ, ДПВ |
Электродвигатели постоянного тока |
|
Карпинский электромашиностроительный завод |
для шахт
|
ДПТ |
Электродвигатель постоянного тока рудничный тяговый |
|
Карпинский электромашиностроительный завод |
для шахт
|
ДАТВ и ДАКВ |
Электродвигатели асинхронные взрывобезопасные |
|
Карпинский электромашиностроительный завод |
для буровых установок |
ДПБ |
Электродвигатели постоянного тока серии |
|
Карпинский электромашиностроительный завод |
для железнодорожного транспорта |
ДПТ |
Электродвигатель постоянного тока тяговый ДПТ |
|
Динамо Энерго |
для железнодорожного транспорта |
ДК |
Электродвигатели постоянного тока типа ДК |
|
Силовые машины |
для буровых установок для прокатных станов |
4П |
Двигатели постоянного тока серии 4П |
|
Силовые машины |
для привода механизмов шахтных подъемников, доменных печей |
МП, МПС |
Электродвигатели постоянного тока для скипового подъема, трубопрокатных станов, для прокатных станов и специальные |
|
Силовые машины |
для кранов |
МПЭ |
Электродвигатели постоянного тока для привода металлургических кранов |
|
Силовые машины |
для привода бурового станка |
МПБ |
Двигатели постоянного тока для привода бурового станка СБШ-270 |
|
Сибэлектропривод |
для железнодорожного транспорта
|
ЭДК |
Электродвигатель постоянного тока ЭДК-37 для привода компрессора тепловоза |
|
Сибэлектропривод |
для железнодорожного транспорта
|
ЭДТ |
Электродвигатель тяговый постоянного тока ЭДТ для привода колесных пар магистральных и маневровых тепловозов |
|
Сибэлектропривод |
для большегрузных самосвалов |
ЭДП |
Электродвигатель тяговый типа ЭДП для работы в качестве привода мотор-колеса карьерных автосамосвалов «БелАЗ» |
|
Белгородский электротехнический завод |
для кранов
|
Д |
Краново-металлургические электродвигатели постоянного тока серии Д |
|
Белгородский электротехнический завод |
для экскаваторов
|
ДЭ (В), ДПЭ (ДПВ), ДМПЭ |
Экскаваторные электродвигатели постоянного тока серий ДЭ (В), ДПЭ (ДПВ), ДМПЭ (аналог двигателей серии МПЭ) |
|
Белгородский электротехнический завод |
общепромышленное применение |
4П |
Электродвигатели общепромышленного назначения постоянного тока серии 4П (мощностью от 8 кВт до 500 кВт с высотой вращения вала от 180 до 500 мм) |
|
Белгородский электротехнический завод |
для железнодорожного транспорта
|
4ПНЖ (В, К) |
Электродвигатели постоянного тока серии 4ПНЖ (В, К) (аналог ДТ-51, ДТ-53, ЭТВ-20) для тяговых агрегатов железных дорог |
|
Островский завод электрических машин |
общепромышленное применение |
2П, 4П |
Электрические машины постоянного тока серии 2П, 4П |
|
Островский завод электрических машин |
|
ДП-112, ДК-112, ДКУ-112, МУН |
Электродвигатели постоянного тока ДП-112, ДК-112, ДКУ-112, МУН |

Тяговый электродвигатель постоянного тока | Авто Брянск
Существующие электрические машины способны выполнять множество разных функций. Они преобразуют механическую энергию в электрический ток и наоборот. Подавляющее большинство электрических устройств работают по простой схеме: под действием механической энергии вырабатывается электричество, которое в свою очередь вызывает движение станков, машин, механизмов, подвижного состава. В транспортной отрасли хорошо известен тяговый электродвигатель, приводящий в действие колесные пары вагонов.
Они преобразуют механическую энергию в электрический ток и наоборот. Подавляющее большинство электрических устройств работают по простой схеме: под действием механической энергии вырабатывается электричество, которое в свою очередь вызывает движение станков, машин, механизмов, подвижного состава. В транспортной отрасли хорошо известен тяговый электродвигатель, приводящий в действие колесные пары вагонов.
Использование этих устройств в режиме генератора дает возможность затормозить состав. Процесс торможения происходит за счет нагрузки, образующейся в процессе превращения механической энергии состава, находящегося в движении, в электрический ток.
Появление и развитие тяговых устройств
В самом начале, когда электрический транспорт только начал использоваться, на всех видах подвижного состава устанавливались коллекторные тяговые электродвигатели. При этом передача энергии осуществлялась по самой простой схеме, поэтому агрегатами можно было легко управлять в любом рабочем режиме. Технические и механические характеристики полностью отвечали всем требованиям транспортной специфики.
Технические и механические характеристики полностью отвечали всем требованиям транспортной специфики.
Тем не менее, в процессе эксплуатации тяговый электродвигатель постоянного тока обнаружил ряд недостатков. В первую очередь, это сам коллектор, оборудованный подвижными контактами – щетками, требующий регулярного технического обслуживания. Принимаемые меры по снижению искрения, повышению надежности коммутации, во многом усложнили устройство двигателя. В результате, его размеры заметно увеличились, а максимальная скорость вращения осталась на прежнем уровне.
Постепенно развивалось направление силовой техники на основе быстродействующих полупроводников. Это позволило заменить реостатную систему, применяемую в коллекторных агрегатах, импульсной, отличающейся повышенной надежностью и экономичностью. В дальнейшем, в вагонных парах стал устанавливаться асинхронный тяговый двигатель в качестве приводного механизма.
Основными проблемами, с которыми пришлось столкнуться при эксплуатации асинхронных двигателей, считаются сложные регулировки. Определенные трудности возникают при использовании электрического торможения, когда для этих целей служат моторы на основе короткозамкнутого ротора. В данный период идет разработка более современных тяговых приводов на основе синхронных агрегатов, в которых установлен ротор на постоянных магнитах.
Определенные трудности возникают при использовании электрического торможения, когда для этих целей служат моторы на основе короткозамкнутого ротора. В данный период идет разработка более современных тяговых приводов на основе синхронных агрегатов, в которых установлен ротор на постоянных магнитах.
Поскольку на железнодорожном транспорте до сих пор широко используются именно коллекторные агрегаты, следует более подробно рассмотреть их общее устройство и порядок работы.
Коллекторный агрегат на постоянном токе
Любой коллекторный агрегат является своеобразной электрической машиной, которая в зависимости от своего предназначения выполняет функции генератора или электродвигателя. Отличительной чертой этих устройств считается соединение якорной обмотки с коллектором.
Основным источником питания коллекторных движков служит постоянный ток. Сейчас уже выпускаются модификации многофункциональных агрегатов с невысокой мощностью, способных работать не только от постоянного, но и от переменного тока.
Стандартный тяговый электродвигатель состоит из коллектора (1), щеток (2), сердечника ротора или якоря (3), сердечника главного полюса (4), обмотки возбуждения (5), станины (6). Кроме того, сюда же включены подшипниковый щит (7), вентилятор (8), якорная обмотка (9).
Все детали соединяются в несколько конструктивных элементов. Прежде всего, это магнитная система, под влиянием которой появляется магнитное поле, а также якорь с обмоткой, вращающийся с помощью подшипников. Коллектор и другие детали разъединяются между собой воздушной прослойкой.
В агрегатах постоянного тока возникновение магнитного поля происходит с участием обмоток возбуждения. Они располагаются на полюсных сердечниках и подключены к постоянному току. Количество полюсов может быть разным, в зависимости от мощности двигателя и его использования в транспортной единице. Их число чаще всего находится в рамках от 2 до 12. Стандартная магнитная система представляет собой монолитную металлическую станину, в которой присутствуют съемные шихтованные сердечники. Чтобы понять, как взаимодействуют узлы и детали между собой, необходимо более подробно рассмотреть устройство каждого компонента.
Чтобы понять, как взаимодействуют узлы и детали между собой, необходимо более подробно рассмотреть устройство каждого компонента.
Назначение и устройство станины
Каждый тяговый электродвигатель оборудуется станиной, используемой прежде всего в качестве магнитопровода, по которому осуществляется прохождение магнитных потоков основных и дополнительных полюсов. Еще она служит местом расположения и крепления полюсов и подшипниковой защиты.
При наличии больших нагрузок станина обычно бывает отлита из стали или сварена из толстых электротехнических стальных листов. Благодаря такой конструкции создается требуемая механическая устойчивость и высокая магнитная проницаемость. Стенки обычно имеют толщину, обеспечивающую установленный уровень магнитной индукции, а ее размеры ориентированы на поперечное сечение главных полюсов и составляют не ниже 50% этого размера.
На представленном рисунке отмечено расположение станины (1), относительно других деталей и компонентов – сердечника полюса (2), катушки обмотки возбуждения (3) и полюсного башмака (4). Между всеми элементами и якорем существует воздушная прослойка (5). Размеры диаметра изнутри станины рассчитываются так, чтобы в этом пространстве мог разместиться якорь, полюса главные и дополнительные и их обмотки.
Между всеми элементами и якорем существует воздушная прослойка (5). Размеры диаметра изнутри станины рассчитываются так, чтобы в этом пространстве мог разместиться якорь, полюса главные и дополнительные и их обмотки.
Тяговый электродвигатель локомотива может иметь стальную литую станину с уменьшенной массой и пониженным поперечным сечением, ориентированным на оси главных полюсов. Это дает возможность равномерно распределить магнитный поток, поступающий к станине от главного полюса.
Частично станина, не выполняющая функции магнитопровода, образует коллекторное пространство с незначительной толщиной стенок, достаточной для обеспечения необходимой механической прочности. В некоторых конструкциях это место закрывается отдельными ребрами жесткости, прикрытыми тонким защитным кожухом.
Главные полюса
Тяговый электродвигатель, работающий на постоянном токе, включает в свою конструкцию обмотку возбуждения, где и появляется магнитодвижущая сила, создающая, в свою очередь, магнитное поле. В состав обмотки входят катушки, надеваемые на сердечники основных полюсов. На стороне сердечника, направленной к якорю, устанавливается полюсный наконечник, он же башмак. С его помощью осуществляется равномерное распределение магнитного потока по всей поверхности якоря. Перечисленные детали отмечены на предыдущем рисунке вместе со станиной.
В состав обмотки входят катушки, надеваемые на сердечники основных полюсов. На стороне сердечника, направленной к якорю, устанавливается полюсный наконечник, он же башмак. С его помощью осуществляется равномерное распределение магнитного потока по всей поверхности якоря. Перечисленные детали отмечены на предыдущем рисунке вместе со станиной.
На практике довольно редко используется схема, включающая в себя полюсный сердечник и полюсный башмак. Как правило, они объединяются в единое целое и образуют главный полюс. За счет этого в сердечнике полюса наступает снижение вихревых потоков, вызываемых действием пульсаций магнитной индукции в наконечниках из-за зубчатой поверхности якоря.
Для сборки полюса используются стальные лакированные листы, которые затем попадают под пресс высокого давления. Сквозь сердечник пропускаются болты или специальные заклепки, чтобы стянуть всю конструкцию. Их равномерное распределение позволяет успешно выдерживать упругость сжатых полос. Крепление полюсов к станине осуществляется с помощью болтов или шпилек.
Назначение и устройство добавочных полюсов
Каждый тяговый электродвигатель мощностью более 1 кВт оборудуется дополнительными полюсами, для того чтобы снизить количество искр, появляющихся на щетках. Их устройство очень простое, включающее в себя сердечник (1) и катушку (2), где использован медный проводник в изоляции. Его сечение рассчитывается по рабочему току двигателя, поскольку эта катушка и обмотка якоря последовательно подключаются друг к другу.
Стальной сердечник изготавливается в виде монолитной конструкции, по причине отсутствия в нем вихревых токов, так как магнитная индукция имеет очень малую величину. Местом монтажа дополнительных полюсов определен промежуток между главными полюсами, а крепление к станине выполняется специальными болтами. Величина воздушной прослойки под ними существенно превышает зазор под главными полюсами. Его регулировка выполняется при помощи специальных пластин из материалов магнитного или немагнитного типа, а окончательная величина определяется, когда тяговый двигатель постоянного тока настраивается на коммутацию при достижении минимального количества искр.
Якорь и коллектор
В состав якоря входит вал, сердечник, обмотки и коллектор. Конфигурация сердечника выполнена в форме цилиндра, а сам он изготовлен из тонких штампованных листов электротехнической стали. Для изоляции листов используется лак или бумага. В сжатом виде после сборки сердечник фиксируется нажимными шайбами. Благодаря устройству сердечника, удается компенсировать влияние вихревых токов и снизить в нем утечку электроэнергии. Охлаждение ТЭД выполняется за счет специальных каналов вентиляции, устроенных в сердечнике.
Для якорных обмоток используется медный проводник круглого или прямоугольного сечения. Он закладывается в выемки сердечника и качественно изолируется от него. Вся обмотка делится на секции, концы каждой из них соединяются с коллектором путем пайки.
В конструкцию каждого коллектора входит активная составляющая и система крепления. Изоляция медных коллекторных пластинок (7) выполняется с помощью специальных прокладок. Провода якорной обмотки припаиваются к выступу в конце элемента (5). Край пластин, расположенный снизу (6) после сборки зажимается с помощью двух нажимных колец (3). Эти кольца также изолируются, а сама изоляция утапливается на 1,5 мм внутрь скользящей поверхности коллектора.
Край пластин, расположенный снизу (6) после сборки зажимается с помощью двух нажимных колец (3). Эти кольца также изолируются, а сама изоляция утапливается на 1,5 мм внутрь скользящей поверхности коллектора.
Тяговые электродвигатель асинхронного типа
На железнодорожном транспорте асинхронный тяговый двигатель долгое время не мог использоваться из-за отсутствия в электроснабжении подвижного состава переменного трехфазного тока. Постепенно развивающееся электротехническое производство позволило создать и усовершенствовать электронику полупроводникового типа.
Таким образом, были созданы преобразователи тока и напряжения, обладающие мощностью, достаточной, чтобы обеспечить энергией асинхронный тяговый двигатель. Ведущую роль в этом деле сыграли мощные транзисторы.
Данные устройства оказались просты и надежны в эксплуатации. У них заметно снизились габаритные размеры и вес в сравнении с двигателями постоянного тока. Асинхронный тяговый двигатель не требует особого технического обслуживания, способен переходить в генераторный режим без специального переключения, а лишь под действием повышенной частоты вращения ротора. Подобная схема существенно упрощает использование системы электрического торможения.
Подобная схема существенно упрощает использование системы электрического торможения.
Тяговый электродвигатель для электромобиля Tesla Model S
Неотвратимым будущим автомобилестроения, хотим мы того или нет, являются электрические автомобили. Производители авто во всем мире вкладывают огромные средства в их разработку, желая снизить концентрацию вредных веществ выбрасываемых автомобилями традиционными, сделать поездки безопасными и комфортными, а также экономичными. Работа по их созданию проводится в двух направлениях – создание новых моделей и реконструкция серийных, которая более предпочтительна, поскольку менее затратная. Электромобили, по сравнению с традиционными, более надежны, поскольку более просты по конструкции, т.е. отличаются минимумом движущихся частей.
Крупнейшими рынками электрических автомобилей являются сегодня: США и Норвегия, Япония и Германия, Китай и Франция, Великобритания и др.
Наша страна пока от производства и использования новых средств передвижения находится в стороне, исключая энтузиастов, разработавших Lada Ellada. Но, это случай пока единичный, поэтому он не в счет, тем более, что собрано авто на импортных комплектующих.
Понятие «электрический автомобиль» означает средство передвижения, приводимое в движение несколькими (или одним) электродвигателями. Теоретически питание мотора может быть от аккумулятора, топливных элементов или солнечных батарей. Тем не менее, большее распространение получил вариант первый. Батарея, питающая двигатель требует зарядки, осуществлять которую можно при помощи внешних источников, рекуперации или генератора, установленного на борту автомобиля. Электродвигатель, являющийся основным элементом электромобиля, питается, как правило, от литий — ионной батареи. Он же, в режиме рекуперации, играет роль генератора, заряжающего батарею.
Назначение тягового электродвигателя
Электродвигатель тяговый (ТЭД) предназначен для приведения в движение транспортного средства, т. е. он преобразует в механическую, энергию электрическую. Их классифицируют по способу питания, роду тока, конструктивному исполнению, типу привода колесных пар. В большинстве экологичных машин: гибридных авто, серийных электромобилях, авто на топливных элементах, которые в наши дни приобретают завидную популярность, они являются основной движущей силой.
е. он преобразует в механическую, энергию электрическую. Их классифицируют по способу питания, роду тока, конструктивному исполнению, типу привода колесных пар. В большинстве экологичных машин: гибридных авто, серийных электромобилях, авто на топливных элементах, которые в наши дни приобретают завидную популярность, они являются основной движущей силой.
В качестве двигателя используют в них моторы тяговые постоянного тока, которые работают в двух режимах – двигательном и генераторном.
Видео: Как устроен двигатель электромобиля Tesla Model S
Принцип работы
Принцип работы электромобиля Golf blue-e-motion с тяговым электродвигателем
В основе их работы лежит принцип электромагнитной индукции, т. е. возникновение в замкнутом контуре электродвижущей силы при изменении магнитного потока. От традиционной машины электромеханической ТЭД отличается большей мощностью, более компактными размерами, а кроме этого, у него более высокий КПД.
е. возникновение в замкнутом контуре электродвижущей силы при изменении магнитного потока. От традиционной машины электромеханической ТЭД отличается большей мощностью, более компактными размерами, а кроме этого, у него более высокий КПД.
По способу питания моторы делятся на двигатели постоянного и переменного тока. По числу фаз – на однофазные (с одной обмоткой, подключаемой к сети однофазной переменного тока), двухфазные (две обмотки, расположенные под углом девяносто градусов), трехфазные (три обмотки с магнитными полями через 120 градусов).
По исполнению конструктивному двигатели могут быть: коллекторными, преимущественно работающие на постоянном токе (универсальные современные могут также работать и на токе переменном), бесколлекторными, синхронными, асинхронными. Наконец, по способу возбуждения они делятся на: двигатели с последовательным, параллельным, последовательно-параллельным возбуждением и от постоянных магнитов.
Основные характеристики тягового электродвигателя электрического автомобиля
В современных авто электродвигатель может быть от переменного или постоянного тока. Основной его задачей является передача на движитель авто крутящего момента. Основными характеристиками ТЭД помимо максимального крутящего момента и мощности, являются: частота вращения, ток и напряжение.
В автомобилях чаще используют коллекторные двигатели (один из них благодаря способности вращаться в обратную сторону, может работать как генератор). Но, в отдельных моделях устанавливают электрические моторы и других типов – магнитоэлектрические моторы, подразделяющиеся на двигатели переменного и постоянного тока. Тяговые двигатели электрические, установленные в электромобилях, от других электромоторов не отличаются по конструкции.
Мотор-колесо
Если вначале использовали один тяговый электродвигатель для электромобиля, редуктор которого соединен с трансмиссией, то сегодня все чаще обращаются к мотор-колесу. Суть концепции состоит в том, что компьютерная программа управляет при помощи отдельных моторов каждым из колес. Главным преимуществом является отсутствие трансмиссии, из-за которой силовая установка теряет значительную часть энергии. Помимо этого удается ликвидировать тормозную гидравлическую систему, функцию которой берут на себя электромоторы, а также отдельные механизмы ESP и ABS.
Суть концепции состоит в том, что компьютерная программа управляет при помощи отдельных моторов каждым из колес. Главным преимуществом является отсутствие трансмиссии, из-за которой силовая установка теряет значительную часть энергии. Помимо этого удается ликвидировать тормозную гидравлическую систему, функцию которой берут на себя электромоторы, а также отдельные механизмы ESP и ABS.
Тяговый электродвигатель — электрическая машина, преобразующая электрическую энергию в механическую для привода в движение колёсных пар вагонов. Тяговые двигатели используют также для торможения поезда, переводя их в генераторный режим. При этом механическая энергия движущегося поезда преобразуется в электрическую.
Содержание
Развитие конструкции тяговых двигателей тесно связано с совершенствованием конструкции систем управления ими. Исторически подвижной состав всех видов электрического транспорта строился с коллекторными тяговыми двигателями. Это объясняется, в первую очередь, простотой простотой передачи энергии и управления режимами его работы. Такие двигатели обладают удобными для использования на транспорте механическими характеристиками. Однако, коллекторные двигатели имеют и ряд недостатков, связанных, в основном, с наличием коллектора. Коллектор, имеющий подвижные контакты (щетки), требует регулярного обслуживания. Для обеспечения надежной коммутации, снижения искрения усложняется конструкция электродвигателя. Кроме того, это ограничивает максимальную скорость вращения, что приводит к увеличению габаритов двигателя.
Такие двигатели обладают удобными для использования на транспорте механическими характеристиками. Однако, коллекторные двигатели имеют и ряд недостатков, связанных, в основном, с наличием коллектора. Коллектор, имеющий подвижные контакты (щетки), требует регулярного обслуживания. Для обеспечения надежной коммутации, снижения искрения усложняется конструкция электродвигателя. Кроме того, это ограничивает максимальную скорость вращения, что приводит к увеличению габаритов двигателя.
Развитие силовой полупроводниковой техники, обладающей высоким быстродействием, позволило в 1960-х — 80-х годах сначала отказаться от реостатной системы управления коллекторными тяговыми двигателями, заменив её более надежной и экономичной импульсной, а затем и перейти к выпуску вагонов с асинхронным тяговым приводом. На отечественных метрополитенах первым серийно выпускавшимся типом вагонов с импульсным регулированием стал тип 81-718/719 в 1991 году, а первым серийно выпускаемым типом вагонов с асинхронными двигателями — «Яуза» 81-720. 1/721.1 в 1998 году.
1/721.1 в 1998 году.
Основными недостатками асинхронных двигателей являются сложность регулирования и сложность осуществления электрического торможения при использовании двигателей с короткозамкнутым ротором. Поэтому в настоящее время разрабатываются конструкции тяговых приводов, использующих синхронные двигатели с ротором на постоянных магнитах, вентильно-индукторные двигатели.
Коллекторные тяговые двигатели
В России существует единая унифицированная серия коллекторных тяговых двигателей постоянного тока, в которую вошли и двигатели электропоездов метрополитена. Все они имеют общий принцип компоновки и много унифицированных узлов и деталей. При изготовлении унифицированных тяговых двигателей можно использовать однотипное станочное оборудование, что снижает их стоимость. На вагонах метрополитена широко используют тяговые двигатели постоянного тока. Такие двигатели обладают хорошими тяговыми характеристиками, сравнительно просты по конструкции и надежны в эксплуатации. По конструкции тяговые двигатели электроподвижного состава существенно отличаются от стационарных двигателей постоянного тока, что объясняется особенностями их расположения и условиями работы. Размеры тягового двигателя, подвешенного под кузовом вагона, ограничены подвагонными габаритами. Диаметр его определяется диаметром колеса, так как должно быть выдержано определенное расстояние от нижней точки двигателя до уровня головки рельсов. Длина тягового двигателя ограничена габаритными размерами тележки. На вагонах установлены четыре тяговых двигателя: по одному на каждую колесную пару. Нумерация их идет по осям, считая от кабины управления. Тяговый двигатель работает в тяжелых условиях, так как на него попадают грязь с железнодорожного полотна, пыль от тормозных колодок, дождь и снег на открытых участках трассы. Поэтому все детали, расположенные в его корпусе, должны быть защищены. Для лучшего отвода тепла, выделяющегося при работе тягового двигателя, на валу якоря установлен вентилятор, засасывающий воздух со стороны коллектора и прогоняющий его через двигатель.
По конструкции тяговые двигатели электроподвижного состава существенно отличаются от стационарных двигателей постоянного тока, что объясняется особенностями их расположения и условиями работы. Размеры тягового двигателя, подвешенного под кузовом вагона, ограничены подвагонными габаритами. Диаметр его определяется диаметром колеса, так как должно быть выдержано определенное расстояние от нижней точки двигателя до уровня головки рельсов. Длина тягового двигателя ограничена габаритными размерами тележки. На вагонах установлены четыре тяговых двигателя: по одному на каждую колесную пару. Нумерация их идет по осям, считая от кабины управления. Тяговый двигатель работает в тяжелых условиях, так как на него попадают грязь с железнодорожного полотна, пыль от тормозных колодок, дождь и снег на открытых участках трассы. Поэтому все детали, расположенные в его корпусе, должны быть защищены. Для лучшего отвода тепла, выделяющегося при работе тягового двигателя, на валу якоря установлен вентилятор, засасывающий воздух со стороны коллектора и прогоняющий его через двигатель. В паспорте стационарных электрических машин обычно указывает их номинальную мощность продолжительного режима, то есть такую мощность, которую машина должна отдавать неограниченно долгое время, причем температура его узлов и деталей не должна превышать значений, допускаемых нормами для изоляционных материалов. Режим работы тяговых двигателей резко меняется в зависимости от профиля пути и веса поезда. Это не позволяет характеризовать работоспособность тягового двигателя только значением номинальной мощности продолжительного режима. Поэтому характеристики тяговых двигателей даны для часового и максимального режимов.
В паспорте стационарных электрических машин обычно указывает их номинальную мощность продолжительного режима, то есть такую мощность, которую машина должна отдавать неограниченно долгое время, причем температура его узлов и деталей не должна превышать значений, допускаемых нормами для изоляционных материалов. Режим работы тяговых двигателей резко меняется в зависимости от профиля пути и веса поезда. Это не позволяет характеризовать работоспособность тягового двигателя только значением номинальной мощности продолжительного режима. Поэтому характеристики тяговых двигателей даны для часового и максимального режимов.
Асинхронные тяговые двигатели
Тяговые двигатели ДАТЭ-170 входят в комплект тягового привода КАТП-1, устанавливаемого на вагонах 81-720.1/721.1 и 81-740/741. Их основные параметры:
- Номинальная мощность — 170 кВт
- Минимальное напряжение — 530 В
- Номинальная частота тока статора — 43 Гц
- Номинальная частота вращения — 1290 об/мин
- Максимальная частота вращения — 3600 об/мин
- Масса — 805 кг
Кроме того, в эксплуатации на метрополитенах Казани, Киева, Праги находятся вагоны отечественного производства с асинхронным приводом производства фирмы «Шкода».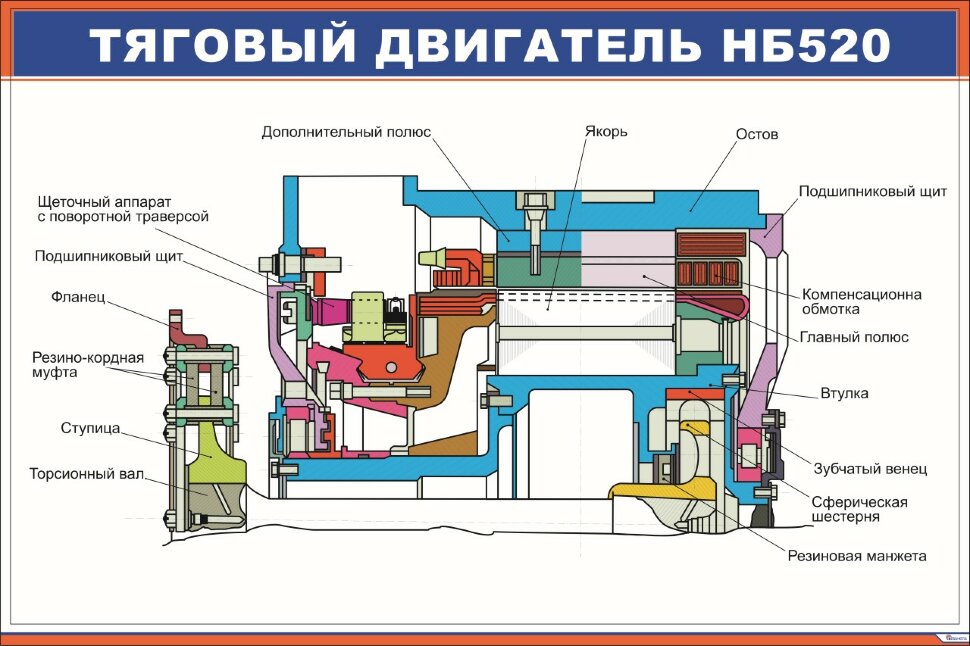
Устройство тягового двигателя постоянного тока
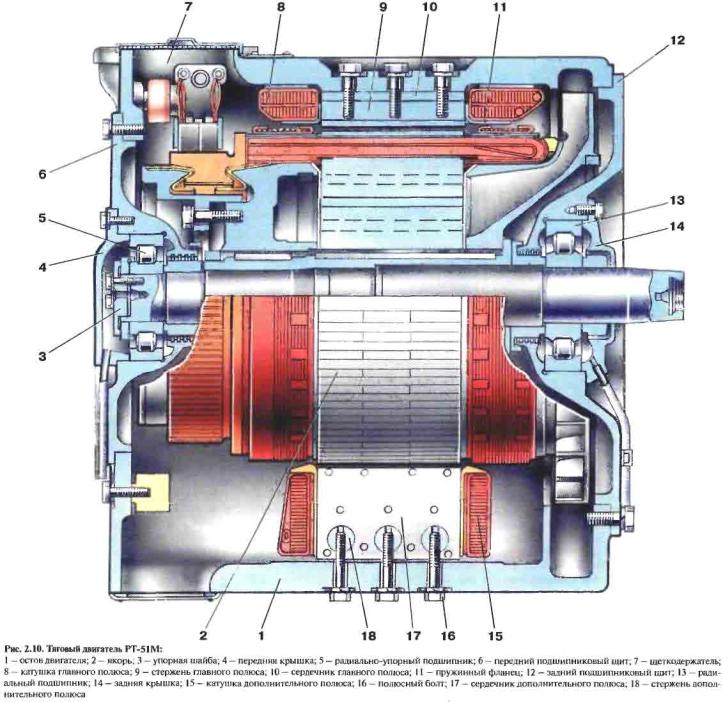
Все тяговые двигатели постоянного тока вагонов метрополитена имеют в основном одинаковое устройство. Двигатель состоит из остова, четырех главных и четырех добавочных полюсов, якоря, подшипниковых щитов, щеточного аппарата, вентилятора.
Остов двигателя
Он выполнен из электромагнитной стали имеет цилиндрическую форму и служит магнитопроводом. Для жесткого крепления к поперечной балке рамы тележки на остов предусмотрены три прилива-кронштейна и два предохранительных ребра. В остове имеются отверстия для крепления главных и добавочных полюсов, вентиляционные и коллекторные люки. Из остова двигателя выходят шесть кабелей. Торцовые части остова закрыты подшипниковыми щитами. В остове укреплена паспортная табличка с указанием завода-изготовителя, заводского номера, массы, тока, частоты вращения, мощности и напряжения.
Главные полюсы
Они предназначены для создания основного магнитного потока. Главный полюс состоит из сердечника и катушки. Катушки всех главных полюсов соединены последовательно и составляют обмотку возбуждения. Сердечник набран из листов электротехнической стали толщиной 1,5 мм для Уменьшения вихревых токов. Перед сборкой листы прокрашивают изоляционным лаком, сжимают прессом и скрепляют заклепками. Часть сердечника, обращенная к якорю, выполнена более широкой и называется полюсным наконечником. Эта часть служит для поддержания катушки, а также для лучшего распределения магнитного потока в воздушном зазоре. В тяговых двигателях ДК-108А, установленных на вагонах Е (по сравнению с ДК-104 на вагонах Д), увеличен зазор между якорем и главными полюсами, что, с одной стороны, дало возможность увеличить скорость в ходовых режимах на 26 %, а с другой стороны, уменьшилась эффективность электрического торможения (медленное возбуждение двигателей в генераторном режиме из-за недостаточного магнитного потока). Для увеличения эффективности электрического торможения в катушках главных полюсов кроме двух основных обмоток, создающих основной магнитный поток в тяговом и тормозном режимах, имеется третья — подмагничивающая, которая создает дополнительный магнитный поток при работе двигателя только в генераторном режиме.
Главный полюс состоит из сердечника и катушки. Катушки всех главных полюсов соединены последовательно и составляют обмотку возбуждения. Сердечник набран из листов электротехнической стали толщиной 1,5 мм для Уменьшения вихревых токов. Перед сборкой листы прокрашивают изоляционным лаком, сжимают прессом и скрепляют заклепками. Часть сердечника, обращенная к якорю, выполнена более широкой и называется полюсным наконечником. Эта часть служит для поддержания катушки, а также для лучшего распределения магнитного потока в воздушном зазоре. В тяговых двигателях ДК-108А, установленных на вагонах Е (по сравнению с ДК-104 на вагонах Д), увеличен зазор между якорем и главными полюсами, что, с одной стороны, дало возможность увеличить скорость в ходовых режимах на 26 %, а с другой стороны, уменьшилась эффективность электрического торможения (медленное возбуждение двигателей в генераторном режиме из-за недостаточного магнитного потока). Для увеличения эффективности электрического торможения в катушках главных полюсов кроме двух основных обмоток, создающих основной магнитный поток в тяговом и тормозном режимах, имеется третья — подмагничивающая, которая создает дополнительный магнитный поток при работе двигателя только в генераторном режиме. Подмагничивающая обмотка включена параллельно двум основным и получает питание от высоковольтной цепи через автоматический выключатель, предохранитель и контактор. Изоляция катушек главных полюсов кремнийорганическая. Главный полюс крепится к остову двумя болтами, которые ввертывают в квадратный стержень, расположенный в теле сердечника.
Подмагничивающая обмотка включена параллельно двум основным и получает питание от высоковольтной цепи через автоматический выключатель, предохранитель и контактор. Изоляция катушек главных полюсов кремнийорганическая. Главный полюс крепится к остову двумя болтами, которые ввертывают в квадратный стержень, расположенный в теле сердечника.
Добавочные полюсы
Они предназначены для создания дополнительного магнитного потока, который улучшает коммутацию и уменьшает реакцию якоря в зоне между главными полюсами. По размерам они меньше главных полюсов и расположены между ними. Добавочный полюс состоит из сердечника и катушки. Сердечник выполнен монолитным, так как вихревые токи в его наконечнике не возникают из-за небольшой индукции под добавочным полюсом. Крепится сердечник к остову двумя болтами. Между остовом и сердечником для меньшего рассеяния магнитного потока установлена диамагнитная латунная прокладка. Катушки добавочных полюсов соединены последовательно одна с другой и с обмоткой якоря.
Якорь
Машина постоянного тока имеет якорь, состоящий из сердечника, обмотки, коллектора и вала. Сердечник якоря представляет собой цилиндр, набранный из штампованных листов электротехнической стали толщиной 0,5 мм. Для уменьшения потерь от вихревых токов, возникающих при пересечении якорем магнитного поля, листы изолируют один от другого лаком. В каждом листе имеется отверстие со шпоночной канавкой для насадки на вал, вентиляционные отверстия и пазы для укладки обмотки якоря. В верхней части пазы имеют форму ласточкиного хвоста. Листы насаживают на вал и фиксируют шпонкой. Собранные листы прессуются между двумя нажимными шайбами. Обмотка якоря состоит из секций, которые укладывают в пазы сердечника и пропитывают асфальтовым и бакелитовым лаками. Чтобы обмотка не выпадала из пазов, в пазовую часть забивают текстолитовые клинья, а переднюю и заднюю части обмотки укрепляют проволочными бандажами, которые после намотки пропаивают оловом. Назначение коллектора машины постоянного тока в различных режимах работы неодинаково. Так, в генераторном режиме коллектор служит для преобразования переменной электродвижущей силы (э.д.с), индуцируемой в обмотке якоря, в постоянную э.д.с. на щетках генератора, в двигательном — для изменения направления тока в проводниках обмотки якоря, чтобы якорь двигателя вращался в какую-либо определенную сторону. Коллектор состоит из втулки, коллекторных медных пластин, нажимного конуса. Коллекторные пластины изолированы друг от друга миканитовыми пластинами, от втулки и нажимного конуса — изоляционными манжетами. Рабочую часть коллектора, имеющую контакт со щетками, протачивают на станке и шлифуют. Чтобы при работе щетки не касались миканитовых пластин, коллектор подвергают «продорожке». При этом миканитовые пластины становятся ниже коллекторных примерно на 1 мм. Со стороны сердечника в коллекторных пластинах предусмотрены выступы с прорезью для впаивания проводников обмотки якоря. Коллекторные пластины имеют клинообразное сечение, а для удобства крепления — форму «ласточкин хвост».
Так, в генераторном режиме коллектор служит для преобразования переменной электродвижущей силы (э.д.с), индуцируемой в обмотке якоря, в постоянную э.д.с. на щетках генератора, в двигательном — для изменения направления тока в проводниках обмотки якоря, чтобы якорь двигателя вращался в какую-либо определенную сторону. Коллектор состоит из втулки, коллекторных медных пластин, нажимного конуса. Коллекторные пластины изолированы друг от друга миканитовыми пластинами, от втулки и нажимного конуса — изоляционными манжетами. Рабочую часть коллектора, имеющую контакт со щетками, протачивают на станке и шлифуют. Чтобы при работе щетки не касались миканитовых пластин, коллектор подвергают «продорожке». При этом миканитовые пластины становятся ниже коллекторных примерно на 1 мм. Со стороны сердечника в коллекторных пластинах предусмотрены выступы с прорезью для впаивания проводников обмотки якоря. Коллекторные пластины имеют клинообразное сечение, а для удобства крепления — форму «ласточкин хвост». Коллектор насаживают на вал якоря прессовой посадкой и фиксируют шпонкой. Вал якоря имеет разные посадочные диаметры. Кроме якоря и коллектора, на вал напрессована стальная втулка вентилятора. Внутренние кольца подшипников и подшипниковые втулки насажены на вал в горячем состоянии.
Коллектор насаживают на вал якоря прессовой посадкой и фиксируют шпонкой. Вал якоря имеет разные посадочные диаметры. Кроме якоря и коллектора, на вал напрессована стальная втулка вентилятора. Внутренние кольца подшипников и подшипниковые втулки насажены на вал в горячем состоянии.
Подшипниковые щиты
В щитах установлены шариковые или роликовые подшипники — надежные и не требующие большого ухода. Со стороны коллектора стоит упорный подшипник; его наружное кольцо упирается в прилив подшипникового щита. Со стороны тяговой передачи установлен свободный подшипник, который позволяет валу якоря удлиняться при нагреве. Для подшипников применяют густую консистентную смазку. Чтобы смазка при работе двигателей не выбрасывалась из смазочных камер, предусмотрено гидравлическое (лабиринтное) уплотнение. Вязкая смазка, попав в небольшой зазор между канавками-лабич рингами, проточенными в щите, и втулкой, насаженной на вал, под действием центробежной силы отбрасывается к стенкам лабиринта, где самой смазкой создаются гидравлические перегородки. Подшипниковые щиты крепят к обеим сторонам остова.
Подшипниковые щиты крепят к обеим сторонам остова.
Щеточный аппарат
Для соединения коллектора двигателя с силовой цепью вагона используют электрографитные щетки марки ЭГ-2А, которые обладают хорошими коммутирующими свойствами, высокой механической прочностью и способны выдерживать большие перегрузки. Щетки представляют собой прямоугольные призмы размером 16 х 32 х 40 мм. Рабочую поверхность щеток пришлифовывают к коллектору для обеспечения надежного контакта. Щетки устанавливают в обоймы, называемые щеткодержателями, и соединяют с ними гибкими медными шунтами: в каждом щеткодержателе по две щетки, число щеткодержателей — четыре. Нажим на щетку осуществляется пружиной, упирающейся одним концом через палец в щетку, другим — в щеткодержатель. Нажатие на щетку должно быть отрегулировано в строго определенных пределах, так как чрезмерный нажим вызывает быстрый износ щетки и нагрев коллектора, а недостаточный не обеспечивает надежного контакта между щеткой и коллектором, вследствие чего возникает искрение под щеткой. Нажатие не должно превышать 25Н (2,5 кгс) и быть менее 15Н (1,5 кгс). Щеткодержатель укрепляют на кронштейне и с помощью двух шпилек, запрессованных в кронштейн, крепят непосредственно к подшипниковому щиту. Кронштейн от щеткодержателя и подшипникового шита изолируют фарфоровыми изоляторами. Для осмотра коллектора и щеткодержателей в остове двигателя имеются люки с крышками, обеспечивающими достаточную защиту от проникновения воды и грязи.
Нажатие не должно превышать 25Н (2,5 кгс) и быть менее 15Н (1,5 кгс). Щеткодержатель укрепляют на кронштейне и с помощью двух шпилек, запрессованных в кронштейн, крепят непосредственно к подшипниковому щиту. Кронштейн от щеткодержателя и подшипникового шита изолируют фарфоровыми изоляторами. Для осмотра коллектора и щеткодержателей в остове двигателя имеются люки с крышками, обеспечивающими достаточную защиту от проникновения воды и грязи.
Вентилятор
В процессе работы необходимо охлаждать двигатель, так как с повышением температуры его обмоток снижается мощность двигателя. Вентилятор состоит из стальной втулки и силуминовой крыльчатки, скрепленных восемью заклепками. Лопатки крыльчатки расположены радиально для выброса воздуха в одном направлении. Вентилятор вращается вместе с якорем двигателя, создавая в нем разрежение. Потоки воздуха засасываются внутрь двигателя через отверстия со стороны коллектора. Часть воздушного потока омывает якорь, главные и добавочные полюса, другая проходит внутри коллектора и якоря по вентиляционным каналам. Воздух выталкивается наружу со стороны вентилятора через люк остова.
Устройство асинхронного двигателя с короткозамкнутым ротором
Асинхронный двигатель состоит из двух основных узлов: статора и ротора. На статоре размещают трехфазную обмотку, создающую вращающееся магнитное поле. Скорость вращения магнитного поля определяется частотой питающего двигатель тока и числом пар полюсов.
Обмотку ротора выполняют в виде так называемой «беличьей клетки». Она является короткозамкнутой и не имеет выводов. Беличья клетка состоит из медных или алюминиевых стержней, замкнутых накоротко с торцов двумя кольцами. Стержни этой обмотки вставляют в пазы сердечника ротора, набранного из листов электротехнической стали, без какой-либо изоляции. По торцам ротора устанавливают лопасти, образующие центробежный вентилятор. Ток в роторе наводится движущимся относительно него полем статора. Таким образом, для работы двигателя необходима разность скоростей вращения ротора и поля статора, что и отражено в его названии.
В таблице приведены технические характеристики коллекторных тяговых двигателей вагонов метрополитена:
| Тип двигателя | ДПМ-151 | ДК-102А…Г | SL-104n | USL-421 | ДК-104А | ДК-104Г, Д | ДК-108А | ДК-108А1 | ДК-108Г | ДК-108Д | ДК-112А | ДК-115Г | ДК-116А | ДК-117А | ДК-117ДМ | ДК-120АМ |
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Тип вагонов | А | Г | В2 | В3 | В1 | Д | Е | Е | Еж | И | Еж3 | 81-717/714 | 81-717.5/714.5 | 81-720/721 | ||
| Год начала производства | 1935 | 1940 | 1930 | 1930 | 1948 | 1949 | 1959 | 1959 | 1970 | 1973 | 1973 | 1975 | 1987 | 1991 | ||
| Часовая мощность, кВт | 153 | 83 | 100 | 70 | 80 | 73 | 64 | 68 | 66 | 66 | 68 | 90 | 72 | 110 | 112-114 | 115 |
| Номинальное напряжение, В | 750 | 375 | 750 | 375 | 375 | 375 | 375 | 375 | 375 | 375 | 375 | 375 | 375 | 375 | ||
| Рабочее ослабление поля, % | 65 | 44,5 | 40 | 40 | 35 | 28 | ||||||||||
| Часовой ток, А | 225 | 248 | 220 | 220 | 195 | 210 | 202 | 205 | 210 | 270 | 218 | 330 | 330-340 | 345 | ||
| Часовая частота вращения, об/мин | 950 / 968 | 1160 | 1300 | 1355 | 1530 | 1450 | 1510 | 1600 | 1600 | 1600 | 1360 | 1480 | 1480 | 1500 | ||
| Длительный ток, А | 173 | 205 | 185 | 175 | 182 | 178 | 178 | 185 | 230 | 185 | 295 | 290 | 295 | |||
| Длительная частота вращения, об/мин | 1075 | 1320 | 1455 | 1580 | 1600 | 1740 | 1220 | |||||||||
| Наибольший ток, А | 450 | 500 | 440 | 420 | 420 | 440 | ||||||||||
| Масса, кг | 2340 | 1490 | 700 | 615 | 630 | 630 | 625 | 625 | 765 | 760 | 770 | |||||
| Число пар полюсов | 2 | 2 | 2 | 2 | 2 | 2 | 2 | 2 | 2 | 2 | 2 | 2 | 2 | |||
| Число коллекторных пластин | 185 | 238 | 141 | 175 | 175 | 175 | 175 | 175 | 175 | 210 | 210 | |||||
| Возбуждение | Посл. | Посл. | Посл. | Посл. с подм. | Посл. с подм. | Посл. | Посл. с подм. | Посл. | Посл. | Посл. | ||||||
| Число витков обмотки ГП | 38 | 16+16 | 33 | 30С+530Ш | 30С | 30 | 40 | 40 | 32 | 26 | 26 | |||||
| Сопротвиление обмотки якоря, Ом | 0,066 | 0,041 | 0,068 | 0,086 | 0,078 | 0,092 | 0,092 | 0,092 | 0,066 | 0,034 | 0,0285 | |||||
| Сопротивление обмотки возбуждения, Ом | 0,0615 | 0,0269 | 0,064 | 0,062+165 | 0,067+? | 0,067 | 0,108 | 0,098 | 0,044 | 0,048 | 0,0312 | |||||
| Сопротивление добавочных полюсов, Ом | 0,0338 | 0,0215 | 0,028 | 0,035 | 0,034 | 0,037 | 0,049 | 0,049 | 0,022 | 0,015 | 0,0103 | |||||
| Воздушный зазр под центром/краем полюса, мм | 5 / 9 | 2,2 / 5 | 1,5 / 5,7 | 3,25 / 9 | 2,9 | 2,5 | 4 / 9 |
Конструкция используемых в настоящее время коллекторных тяговых двигателей ДК-117 и ДК-120 регламентируется техническими условиями ТУ 3355-029-05758196-02.
Характеристики коллекторных электродвигателей, применяемых на наземном городском транспорте:
- Э. М. Добровольская «Электропоезда метрополитена»
Найдите эффективный и мощный тяговые электродвигатели Certified Products
Alibaba.com предлагает обширную коллекцию высококачественных, надежных и эффективных. тяговые электродвигатели продается, подходит для использования в промышленном и бытовом оборудовании. Файл. тяговые электродвигатели могут быть однофазными или трехфазными, с разным размером корпуса, частотой вращения и номинальной мощностью. Найдите блоки с фланцевым креплением, с высоким крутящим моментом, на лапах, с двойным напряжением и низким крутящим моментом от различных ведущих поставщиков и брендов.
В продаже есть высокопроизводительные и эффективные устройства постоянного тока. или AC. тяговые электродвигатели доступны в уникальных стилях, таких как последовательный, индукционный, синхронный, асинхронный, PMDC, шунтирующий и составной намотки.
Эти агрегаты, спроектированные в соответствии с последними механическими и электрическими требованиями к характеристикам двигателей, отличаются надежностью, долгим сроком службы и универсальностью. Они имеют высококачественные и высокопроизводительные компоненты, в том числе прочную алюминиевую раму, опоры на лапах, стандартные валы, конденсаторный пуск, ротор и ход.
Откройте для себя. тяговые электродвигатели с высокоэффективной конструкцией, превосходным пусковым моментом, быстрым откликом и простотой в использовании, работающей на чрезвычайно высоких скоростях. Существуют устройства с разной выходной мощностью и мощностью, а также различные размеры и конструкции, специально разработанные для небольших бытовых приборов или электроинструментов. Независимо от машины, устройства или устройств, делайте покупки на Alibaba.com, чтобы найти продукты, отличающиеся надежной работой, превосходной производительностью, простотой обслуживания и интересным внешним видом.
Найдите на Alibaba.
com информацию. тяговые электродвигатели и покупайте товары с функциями и функциями, подходящими для различных бытовых приборов и электроинструментов. Выбирайте из разных производителей и поставщиков, которым доверяют в мире. Просматривайте товары разных брендов, чтобы фильтровать и находить высококачественные товары, соответствующие бюджетам и ожиданиям уникальных покупателей.
AC Traction vs DC Traction — Гринвилл, Южная Каролина
AC TRACTION
Привод переменного тока, также известный как частотно-регулируемый привод, был стандартом в промышленности на протяжении многих лет. Хотя он использовался в локомотивах более двух десятилетий (особенно в Европе), только недавно цена приводов позволила использовать их в большинстве новых дизель-электрических локомотивов в Соединенных Штатах. Привод переменного тока работает, преобразуя выход тягового генератора переменного тока в постоянный ток (постоянный ток) и повторно преобразовывая его в переменный ток переменной частоты, который питает тяговые двигатели переменного тока. Поскольку двигатели переменного тока работают приблизительно с частотой тока, приводы должны регулировать частоту так, чтобы двигатели могли иметь диапазон скорости от нуля до максимальных оборотов в минуту.
Поскольку двигатели переменного тока работают приблизительно с частотой тока, приводы должны регулировать частоту так, чтобы двигатели могли иметь диапазон скорости от нуля до максимальных оборотов в минуту.
Тяга переменного тока для локомотивов — серьезное улучшение по сравнению со старыми системами постоянного тока. Основными преимуществами тяги переменного тока являются уровни сцепления до 100% выше, чем у постоянного тока, а также гораздо более высокая надежность и меньшие требования к техническому обслуживанию тяговых двигателей переменного тока.
Тяговое усилие локомотива (переменного или постоянного тока) определяется уравнениями:
Тяговое усилие = Вес на водителе x сцепление
Адгезия = Коэффициент трения x Переменная сцепления локомотива
Коэффициент трения между колесом и рельсом обычно находится в диапазоне.От 40 до 0,45 для относительно чистого, сухого рельса в приемлемом состоянии и практически одинаков для всех локомотивов. Переменная сцепления локомотива представляет способность локомотива преобразовывать имеющееся трение в полезное трение на границе раздела колес и рельсов. Оно резко варьируется от примерно 0,45 для старых блоков постоянного тока до примерно 0,90 для современных блоков переменного тока. Эта переменная включает множество факторов, включая электрическую конструкцию, системы управления, тип грузовика и состояние колес.
Локомотивы постоянного тока первого поколения, такие как SW1200, GP9, SD40 и центральные кабины GE, обычно имеют уровень сцепления от 18% до 20%.Более современные устройства с контролем адгезии, такие как SD60s и Dash 8s, имеют уровень адгезии от 25% до 27%. Новые тяговые агрегаты переменного тока, такие как SD80MAC и C44AC, обычно имеют сцепление от 37% до 39%. Таким образом, новые локомотивы имеют примерно вдвое большую адгезию по сравнению со старыми единицами, а железные дороги класса I фактически заменяют два старых агрегата одним новым агрегатом переменного тока.
Есть три основные причины, по которым тяга переменного тока обеспечивает гораздо большую адгезию. Во-первых, в стандартном приводе постоянного тока, если происходит пробуксовка колеса, тяговый двигатель имеет тенденцию ускоряться и убегать, даже до точки механического отказа, если быстро не уменьшить нагрузку. По мере увеличения проскальзывания колес коэффициент трения также быстро падает до уровня 0,10 или менее, и, поскольку все двигатели соединены вместе, нагрузка на весь локомотив должна быть уменьшена. Таким образом, максимальная адгезия достигается при работе на уровне с комфортным запасом прочности ниже теоретического максимума. Более современные системы постоянного тока включают контроль пробуксовки колес, который определяет начало пробуксовки и автоматически модулирует мощность, чтобы сохранить контроль. Это позволяет локомотиву безопасно работать в точке, близкой к теоретическому максимуму.
По мере увеличения проскальзывания колес коэффициент трения также быстро падает до уровня 0,10 или менее, и, поскольку все двигатели соединены вместе, нагрузка на весь локомотив должна быть уменьшена. Таким образом, максимальная адгезия достигается при работе на уровне с комфортным запасом прочности ниже теоретического максимума. Более современные системы постоянного тока включают контроль пробуксовки колес, который определяет начало пробуксовки и автоматически модулирует мощность, чтобы сохранить контроль. Это позволяет локомотиву безопасно работать в точке, близкой к теоретическому максимуму.
Однако система переменного тока работает по-другому. Частотно-регулируемый привод создает вращающееся магнитное поле, которое вращается примерно на 1% быстрее, чем вращается двигатель. Поскольку скорость ротора не может превышать полевую скорость, любое проскальзывание колеса минимально (менее 1%) и быстро обнаруживается приводом, который мгновенно снижает нагрузку на ось.
Далее, локомотив постоянного тока обычно имеет несколько настроек дроссельной заслонки с установленным уровнем мощности для каждой из них. Хотя эта система проста и эффективна, она не обеспечивает постоянного крутящего момента двигателя, поскольку мощность является продуктом крутящего момента и скорости.Следовательно, тяговое усилие значительно меняется для каждой настройки дроссельной заслонки в зависимости от скорости, что делает невозможным получение максимального сцепления.
Хотя эта система проста и эффективна, она не обеспечивает постоянного крутящего момента двигателя, поскольку мощность является продуктом крутящего момента и скорости.Следовательно, тяговое усилие значительно меняется для каждой настройки дроссельной заслонки в зависимости от скорости, что делает невозможным получение максимального сцепления.
Локомотив переменного тока, однако, может управлять определенным уровнем крутящего момента двигателя, что позволяет тяговому усилию оставаться практически постоянным в более высоком диапазоне доступного сцепления. Этот быстродействующий регулятор проскальзывания колес может противодействовать любому проскальзыванию колеса, так что уровень крутящего момента может быть установлен близким к верхним пределам.
Третий способ, которым тяга переменного тока обеспечивает улучшенное сцепление, — это компенсация переноса веса.Когда локомотив тянет груз, вес имеет тенденцию переноситься с передней оси на заднюю ось каждого грузовика. При максимальном тяговом усилии вес ведущей оси может быть уменьшен примерно на 20%.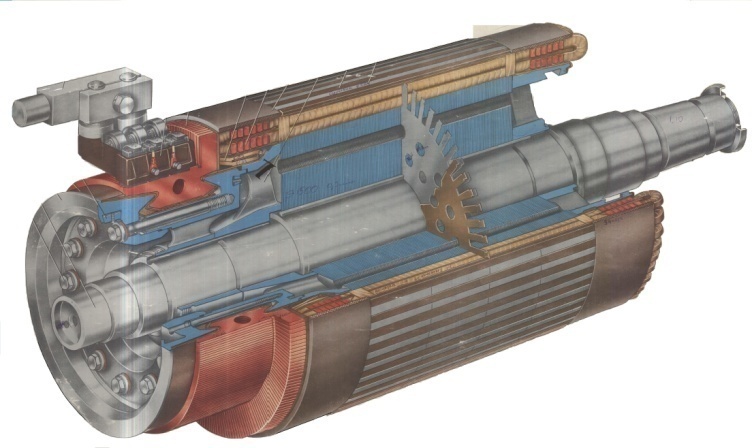 Поскольку тяговое усилие пропорционально весу водителей, то в системе постоянного тока, где двигатели питаются от общего источника, тяговое усилие будет определяться самой легкой осью. Таким образом, эквивалентная масса локомотива снижается примерно на 20%. Однако с системой переменного тока привод может компенсировать перенос веса.Когда ведущая ось гаснет, система привода переменного тока снижает мощность на эту ось и передает больше мощности на заднюю ось, не вызывая пробуксовки колес.
Поскольку тяговое усилие пропорционально весу водителей, то в системе постоянного тока, где двигатели питаются от общего источника, тяговое усилие будет определяться самой легкой осью. Таким образом, эквивалентная масса локомотива снижается примерно на 20%. Однако с системой переменного тока привод может компенсировать перенос веса.Когда ведущая ось гаснет, система привода переменного тока снижает мощность на эту ось и передает больше мощности на заднюю ось, не вызывая пробуксовки колес.
Комбинация устранения пробуксовки колес и компенсации переноса веса дает системе тяги переменного тока сцепление от 37% до 39% по сравнению с 18% до 20% у старых систем постоянного тока. Следовательно, локомотив с тягой переменного тока может обеспечивать такое же тяговое усилие, что и локомотив постоянного тока, который весит вдвое больше, или может давать в два раза больше тягового усилия при том же весе.
GE и EMD добавили тягу переменного тока к своим основным агрегатам и затем смогли заменить два старых агрегата постоянного тока одним новым локомотивом переменного тока. Республиканский локомотив пошел по другому пути и решил сделать более легкий и дешевый агрегат для промышленной коммутации. SW9 / SW1200 с питанием от постоянного тока, производившийся в больших количествах с 1951 по 1965 год и использовавшийся для переключения тяжелых станций, а также для обслуживания ответвлений, был принят в качестве стандарта производительности. При весе от 230 000 до 240 000 фунтов эти агрегаты обычно рассчитаны на постоянное тяговое усилие около 40 000 фунтов (несколько более высокое, прерывистое, но ограниченное тяговыми двигателями и генераторами).Тяговое усилие RX500 на переменном токе составляет 144 000 фунтов и консервативный уровень сцепления 35%, а постоянное тяговое усилие составляет 50 400 фунтов.
Республиканский локомотив пошел по другому пути и решил сделать более легкий и дешевый агрегат для промышленной коммутации. SW9 / SW1200 с питанием от постоянного тока, производившийся в больших количествах с 1951 по 1965 год и использовавшийся для переключения тяжелых станций, а также для обслуживания ответвлений, был принят в качестве стандарта производительности. При весе от 230 000 до 240 000 фунтов эти агрегаты обычно рассчитаны на постоянное тяговое усилие около 40 000 фунтов (несколько более высокое, прерывистое, но ограниченное тяговыми двигателями и генераторами).Тяговое усилие RX500 на переменном токе составляет 144 000 фунтов и консервативный уровень сцепления 35%, а постоянное тяговое усилие составляет 50 400 фунтов.
При тяге переменного тока также важно учитывать торможение. Как и в случае с тягой, торможение зависит от веса водителя. Следовательно, при использовании стандартного фрикционного торможения (протекторные тормоза) тормозная способность локомотива (исключая торможение поезда) пропорциональна весу локомотива. Однако с тягой переменного тока торможение может быть намного выше, потому что система привода при торможении действует так же, как привод при тяговом усилии, тем самым устраняя пробуксовку колес.Привод переводит двигатели в генераторный режим (динамическое торможение), и произведенная электроэнергия рассеивается на тормозных резисторах. Таким образом, двигатели замедляют локомотив без использования пневматических тормозов. Опять же, уровни сцепления намного выше, поэтому локомотив снова может быть значительно легче при том же количестве торможений. Динамическое торможение в тяговых локомотивах переменного тока также позволяет полностью тормозить до нулевой скорости, в отличие от динамического торможения постоянным током.
Однако с тягой переменного тока торможение может быть намного выше, потому что система привода при торможении действует так же, как привод при тяговом усилии, тем самым устраняя пробуксовку колес.Привод переводит двигатели в генераторный режим (динамическое торможение), и произведенная электроэнергия рассеивается на тормозных резисторах. Таким образом, двигатели замедляют локомотив без использования пневматических тормозов. Опять же, уровни сцепления намного выше, поэтому локомотив снова может быть значительно легче при том же количестве торможений. Динамическое торможение в тяговых локомотивах переменного тока также позволяет полностью тормозить до нулевой скорости, в отличие от динамического торможения постоянным током.
В целом тяговый локомотив переменного тока обеспечивает примерно в два раза большую адгезию, чем локомотив постоянного тока.Следовательно, современный легкий локомотив переменного тока, такой как RX500, может обеспечить такое же или большее тяговое усилие, чем старый локомотив постоянного тока, такой как SW1200, который весит на 60% больше.
HTM1230 Электродвигатель переменного токаНовый горизонтальный буровой двигатель переменного тока HTM1230 обеспечивает постоянную мощность для буровых насосов и роторных столов 1230 л.с. и периодическую мощность 1845 л.с. для буровых лебедок.Непрерывный номинальный ток составляет 600/690 В переменного тока, 1170 ампер, 40,6 Гц, 800/1400 об / мин. | |
HTM1500 Электродвигатель переменного тока Горизонтальный буровой электродвигатель переменного тока Joliet обеспечивает непрерывную мощность 1500 л.с. для буровых насосов и роторных столов и может похвастаться впечатляющей кратковременной мощностью 2250 л.с. для буровой лебедки. Непрерывный рейтинг составляет 600/690 В переменного тока, 1350 А, 45. | |
HTM1500D Электродвигатель переменного токаГоризонтальный буровой электродвигатель переменного тока Joliet обеспечивает постоянную мощность 1500 л.с. для буровых насосов и роторных столов и может похвастаться впечатляющей номинальной мощностью 2250 л.с. для буровых лебедок. Непрерывный номинальный ток составляет 600/690 В переменного тока, 1350 ампер, 45,6 Гц, 900/1800 об / мин. | |
HTM1800 Электродвигатель переменного тока Горизонтальный буровой двигатель переменного тока Joliet обеспечивает постоянную мощность 1800 л.с. для буровых насосов и поворотных столов и может похвастаться впечатляющей мощностью 2700 л.с. для буровой лебедки.Непрерывный рейтинг составляет 600/690 В переменного тока, 1570 ампер, 45,6 Гц, 900/1800 об / мин. | |
HTM2000 Электродвигатель переменного токаГоризонтальный буровой двигатель переменного тока Joliet обеспечивает постоянную мощность 2000 л.с. для буровых насосов и поворотных столов и может похвастаться впечатляющей мощностью 3045 л.с. для буровых лебедок. Непрерывный рейтинг составляет 600 В переменного тока, 1750 ампер, 45,6 Гц, 900/3000 об / мин. | |
Двигатель постоянного тока с высоким крутящим моментомНовый буровой двигатель с высоким крутящим моментом Joliet серии C75YZB с заводной головкой обеспечивает постоянную мощность для буровых насосов и роторных столов 1085 л.с. и периодическую мощность 1320 л.с. для буровых лебедок. Непрерывный номинальный ток составляет 750 В постоянного тока, 1150 ампер, 965 об / мин. Новый высокопроизводительный буровой двигатель с шунтовой обмоткой Joliet C75YZE обеспечивает постоянную мощность для буровых насосов и роторных столов мощностью 1130 л. | |
Восстановленный двигатель постоянного тока с высоким крутящим моментомВысокомоментный буровой двигатель серии Joliet C75ZB-F с восстановленной обмоткой обеспечивает постоянную мощность 1085 л.с. для буровых насосов и роторных столов и номинальную мощность 1320 л.с. для буровых лебедок. Непрерывный номинальный ток составляет 750 В постоянного тока, 1150 ампер, 965 об / мин. Восстановленный высокопроизводительный буровой двигатель с шунтовой обмоткой Joliet C75ZE-F обеспечивает постоянную мощность для буровых насосов и роторных столов мощностью 1130 л.с. и периодическую мощность для буровых лебедок мощностью 1365 л.с. Непрерывный номинальный ток составляет 750 В постоянного тока, 1185 ампер, 1040 об / мин. | |
Восстановленный буровой двигатель постоянного тока мощностью 1000 л.с.Буровой двигатель серии Joliet C75ZB с восстановленной обмоткой обеспечивает постоянную мощность 1000 л.с. для буровых насосов и поворотных столов и непостоянную мощность для буровых лебедок мощностью 1250 л.с.Непрерывный номинальный ток составляет 750 В постоянного тока, 1050 ампер, 965 об / мин. Шунтирующий восстановленный буровой двигатель Joliet C75ZE с шунтирующей обмоткой обеспечивает постоянную мощность для буровых насосов и поворотных столов мощностью 1000 л.с. и периодическую мощность для буровых лебедок мощностью 1250 л.с. Непрерывный номинальный ток составляет 750 В постоянного тока, 1050 ампер, 1040 об / мин. | |
Буровой двигатель постоянного тока, 600 л.с. Новый буровой двигатель серии Joliet C76YLB с навивкой обеспечивает постоянную мощность для буровых насосов и роторных столов мощностью 600 л. Новый буровой двигатель с шунтовой обмоткой Joliet C76YLE обеспечивает постоянную мощность для буровых насосов и роторных столов мощностью 600 л.с. и прерывистую мощность для буровых лебедок мощностью 700 л.с. Постоянный ток при 750 В постоянного тока, 640 А, 1400 об / мин, 40 ° C окружающей среды. | |
Электродвигатель переменного тока JEC-HTM400Новый горизонтальный буровой двигатель переменного тока Joliet JEC-HTM400 обеспечивает постоянную мощность 400 л.с.Непрерывный номинальный ток составляет 600 В переменного тока, 389 ампер, 39 Гц, 117/1170 об / мин. | |
JEC- EMD79 Восстановленный сверлильный двигатель постоянного тока Буровой двигатель Joliet JEC-EMD серии 79 с восстановленной обмоткой обеспечивает постоянную мощность при работе бурового насоса и роторного стола мощностью 800 л. |
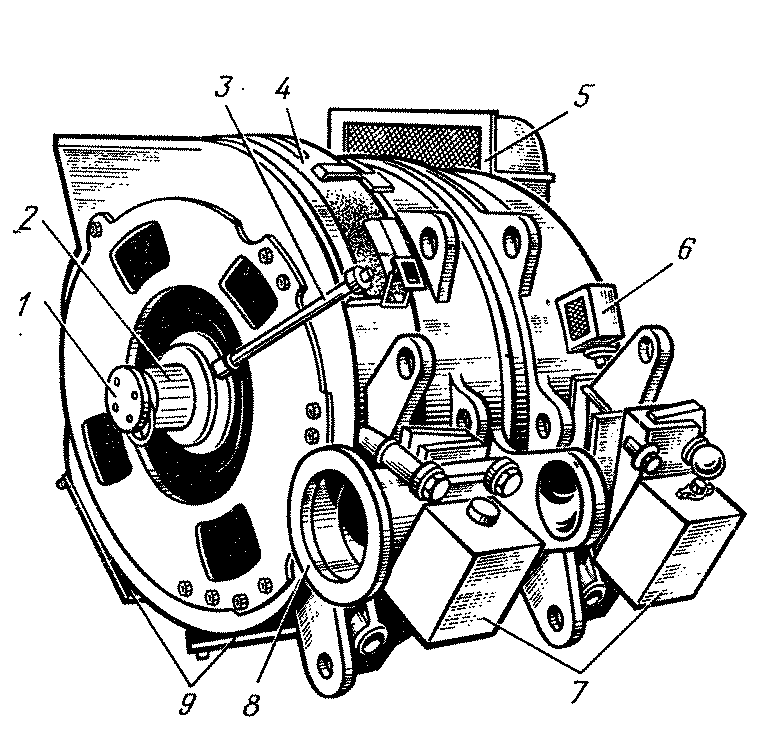 6 Гц, 900/1800 об / мин.
6 Гц, 900/1800 об / мин.
 с. и прерывистую мощность для буровых лебедок мощностью 1365 л.с.Непрерывный номинальный ток составляет 750 В постоянного тока, 1185 ампер, 1040 об / мин.
с. и прерывистую мощность для буровых лебедок мощностью 1365 л.с.Непрерывный номинальный ток составляет 750 В постоянного тока, 1185 ампер, 1040 об / мин.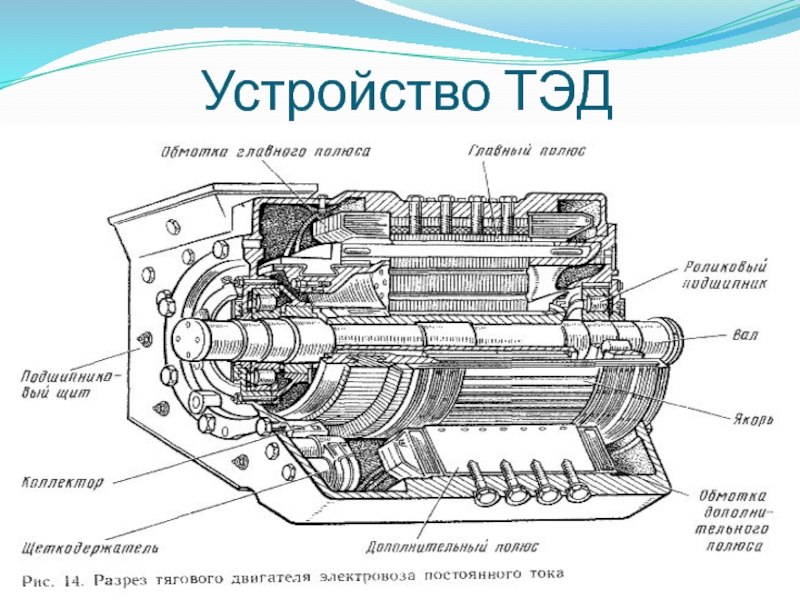
 с. и прерывистую мощность для буровых лебедок мощностью 700 л.с.Непрерывный номинальный ток при 750 В постоянного тока, 640 А, 1200 об / мин, 40 ° C окружающей среды.
с. и прерывистую мощность для буровых лебедок мощностью 700 л.с.Непрерывный номинальный ток при 750 В постоянного тока, 640 А, 1200 об / мин, 40 ° C окружающей среды. с. и прерывистую мощность при работе буровой лебедки мощностью 1000 л.с. Непрерывный номинальный ток составляет 750 В переменного тока, 850 ампер, 1000 об / мин.
с. и прерывистую мощность при работе буровой лебедки мощностью 1000 л.с. Непрерывный номинальный ток составляет 750 В переменного тока, 850 ампер, 1000 об / мин.Ранняя история тягового двигателя постоянного тока | Железнодорожный технический сайт
Источники
Трамваи и электрические железные дороги в XIX веке, электрическая железная дорога Кэссье, номер 1899.
Sprague, F.j. (1931), Электрическая тяга в трехмерном пространстве , Журнал Академии наук Мэриленда.
Sprague, F.J. (1888), The Solution of Rapid Transit , Американский институт инженеров-электриков.
Burch, E.P. (1911), Электротяга для железнодорожных поездов , Макгроу-Хилл, Нью-Йорк.
Миддлтон, У.Д. и Миддлтон, У.
Далзелл, Ф., (2010), Инженерное изобретение, Массачусетский технологический институт (ISBN: 9780262042567).
Введение
Сегодня электродвигатель является неотъемлемой частью железнодорожной техники как для дизельных, так и для электрических поездов. Еще в 1870-х годах паровозы были единственной формой тяги на железных дорогах, а электричество было новинкой в науке, но со временем она стала мейнстримом, постепенно развиваясь для освещения и двигателей. В течение 20 лет трамваи и локомотивы с электроприводом были внедрены на городских железных дорогах и проходили испытания на магистральных железных дорогах.
Еще в 1870-х годах паровозы были единственной формой тяги на железных дорогах, а электричество было новинкой в науке, но со временем она стала мейнстримом, постепенно развиваясь для освещения и двигателей. В течение 20 лет трамваи и локомотивы с электроприводом были внедрены на городских железных дорогах и проходили испытания на магистральных железных дорогах.
Во-первых, стоит помнить, что электродвигатели для трамвайных вагонов были разработаны несколькими разными инженерами, каждый из которых вносил идеи и тестировал их, в основном независимо.На раннем этапе развития производства электромоторов существовало большое соперничество, потому что люди осознавали огромный потенциал технологии и огромную прибыль, которую она могла бы принести.
Первый электродвигатель, который сегодня мы признаем работоспособной машиной, был разработан бельгийским инженером Зенобе Грамме. В 1873 году он случайно обнаружил, что изобретенная им динамо-машина вырабатывает электрический ток, который другая машина той же конструкции может преобразовать обратно во вращение. Когда якорь динамо-машины вращался в магнитном поле, чтобы произвести электрический ток, и он был подключен парой проводов к другому динамо-машине, он обнаружил, что якорь другого динамо-машины вращался.Таким образом, он обнаружил, что механическая конструкция динамо-машины (или генератора, как мы бы его назвали сегодня) была такой же, как у электродвигателя. Другие инженеры вскоре подхватили эту концепцию и улучшили ее. Хотя машины были примитивными, они были первыми электрическими машинами постоянного тока, которые имели коммерческий успех и постепенно совершенствовались по мере накопления опыта с ними.
Когда якорь динамо-машины вращался в магнитном поле, чтобы произвести электрический ток, и он был подключен парой проводов к другому динамо-машине, он обнаружил, что якорь другого динамо-машины вращался.Таким образом, он обнаружил, что механическая конструкция динамо-машины (или генератора, как мы бы его назвали сегодня) была такой же, как у электродвигателя. Другие инженеры вскоре подхватили эту концепцию и улучшили ее. Хотя машины были примитивными, они были первыми электрическими машинами постоянного тока, которые имели коммерческий успех и постепенно совершенствовались по мере накопления опыта с ними.
Машина Грамма имела «кольцевой якорь», как показано на рисунке 1. Недостатком кольцевого якоря было то, что расположение катушек якоря имело тенденцию уменьшать электоратно-магнитный эффект якоря.Эта проблема была решена путем изменения расположения обмоток в форме барабана, принятой компанией Siemens (рис. 2).
Рисунок 1: Очень упрощенная схема электродвигателя Gramme. с кольцевой арматурой. Он показывает основные части. Арматура круглая
ось, но изолирована от нее. Коммутатор (не показан, но размещен на одном конце)
якоря) соединяет проводку якоря с полем посредством
кисти.Таким образом, якорь подключается к полю «последовательно», что дает
нам «двигатели с серийным заводом». Рисунок адаптирован автором из книги Гилберта М. Мастерс «Возобновляемые и эффективные электроэнергетические системы», IEEE.
Publishing, Wiley, 2013.
с кольцевой арматурой. Он показывает основные части. Арматура круглая
ось, но изолирована от нее. Коммутатор (не показан, но размещен на одном конце)
якоря) соединяет проводку якоря с полем посредством
кисти.Таким образом, якорь подключается к полю «последовательно», что дает
нам «двигатели с серийным заводом». Рисунок адаптирован автором из книги Гилберта М. Мастерс «Возобновляемые и эффективные электроэнергетические системы», IEEE.
Publishing, Wiley, 2013.
Рисунок 2: Схема
электродвигатель с барабанным заводом. Основное отличие этого от Gramme
конструкция заключалась в том, что обмотки были снаружи якоря, а не
оборачивается вокруг кольца.Здесь показана только одна обмотка якоря, а там
на самом деле их было много. Барабанный принцип оказался более эффективной конструкцией и
вскоре стал стандартом для большинства электродвигателей. Рисунок адаптирован
автор из номера Milne, A.G., (1971), январь. IEE Power Division:
Обращение председателя. Да будет свет.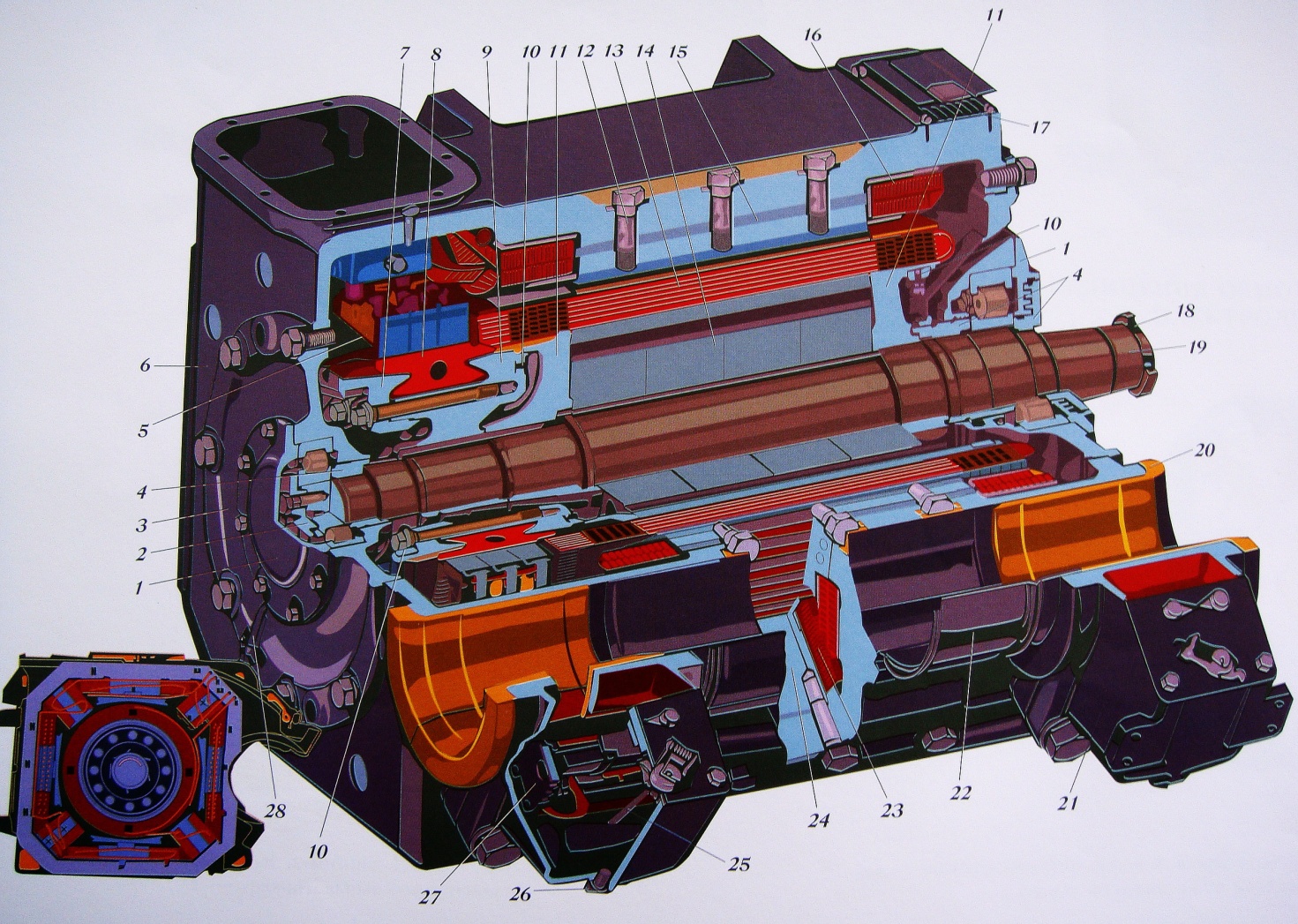 В трудах Института инженеров-электриков (Vol.118, No. 1, pp. 89-98). ИЭПП.
В трудах Института инженеров-электриков (Vol.118, No. 1, pp. 89-98). ИЭПП.
Дизайн Спрага
Двигатель Грамма работал, но не был очень эффективным, и американский инженер Фрэнк Дж. Спраг был убежден, что его можно улучшить. В конце 1883 — начале 1884 года Спраг работал над улучшенной версией двигателя. Двигатель постоянного тока состоит из вращающейся части, известной как якорь, и статической части, известной как поле. В ранних конструкциях поле обычно подключали параллельно цепи якоря для создания магнитного поля, которое генерировало вращение якоря.Это было известно как двигатель с шунтирующей обмоткой, и первые двигатели Sprague были сконструированы таким образом. Позже он добавил поле серии, чтобы создать то, что мы сейчас называем двигателем с составной обмоткой. Это сработало лучше в том, как контролировать скорость двигателя.
Рисунок 3: Двигатель Sprague № 6, показывающий двухступенчатый редукторный привод и расположение подковообразного магнита, обернутого вокруг якоря. Две опоры подковы несли обмотки возбуждения. Рама двигателя подвешена между осью и пружиной на транце тележки.Рисунок: Cassier ‘s Magazine 1899, с изменениями автора.
Две опоры подковы несли обмотки возбуждения. Рама двигателя подвешена между осью и пружиной на транце тележки.Рисунок: Cassier ‘s Magazine 1899, с изменениями автора.
Тачка
Двигатель Sprague имел разумный успех. Он использовался для привода ткацких станков и другого аналогичного оборудования с постоянной скоростью. Когда его начали продавать, Спраг также использовал эту конструкцию в качестве основы для своих экспериментальных электрических тяговых двигателей для трамвайных вагонов. В ходе этой разработки он внес еще один важный принцип в электрическую тягу. Он считал, что мотор нужно устанавливать под автомобилем как можно ближе к колесам.Раньше двигатели обычно устанавливались внутри транспортного средства и соединялись с осью цепью или ремнем. Спрэг считал, что двигатель должен располагаться как можно ближе к оси и приводить его в движение через шестерню и зубчатую передачу.
Двигатель Sprague был установлен таким образом, что один его конец поддерживался осью, а другой — транцем рамы грузовика (тележки). Спраг назвал это конструкцией «тачки». Сегодня это известно как мотор с подвеской на носу.Дизайн сохранился более 100 лет.
Спраг назвал это конструкцией «тачки». Сегодня это известно как мотор с подвеской на носу.Дизайн сохранился более 100 лет.
Улучшения
Одной из распространенных проблем для двигателей трамвая было загрязнение грязью и водой. Первые двигатели не были закрытыми, конструкторы предполагали, что они будут в достаточной мере защищены кузовом автомобиля. Однако поля и концы якоря, на которых располагались коммутаторы, были открыты для элементов и быстро повреждались водой, грязью, снегом или пылью. Чтобы минимизировать ущерб, сначала были опробованы брезентовые чехлы, но в марте 1891 года в США компания Westinghouse, которая за год до этого занялась производством двигателей, увидев успехи других поставщиков, произвела
первый тяговый электродвигатель, отвечающий большинству требований,
стали стандартом: последовательная обмотка якоря, катушки с машинной намоткой и четыре
катушки возбуждения (рисунок 4).Шесть месяцев назад компания Wenstrom произвела мотор
где обмотки якоря вставлялись в пазы, вырезанные в сердечнике, а не в
наматываться на барабан — еще одна особенность, которая станет стандартной.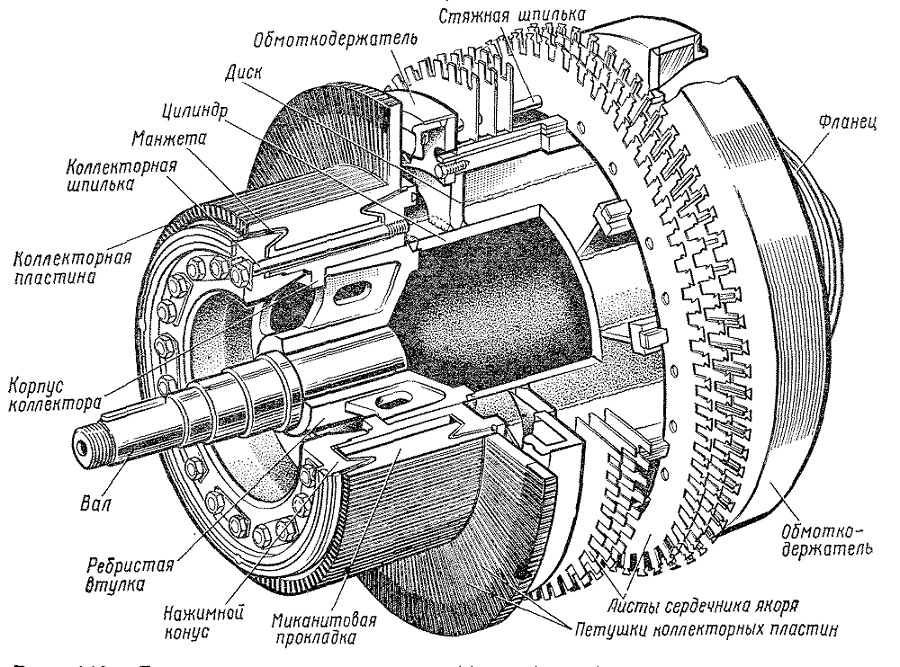
Рисунок 4: Двигатель Westinghouse № 3 1891 года, демонстрирующий различные улучшения по сравнению с двигателем Sprague № 6 1888 года. Они включали откидную крышку, содержащую обмотки возбуждения, которые закрывали якорь и обеспечивали защиту, а также лучшая производительность.Кроме того, зубчатая передача теперь одинарная, а шестерня и шестерня заключены в собственный маслонаполненный корпус. Большая часть основ современного тягового двигателя постоянного тока была создана. Фото: журнал Cassier’s 1899.
Шестерни
Было быстро признано, что для обеспечения эффективного крутящего момента на электрическом железнодорожном вагоне с двигателем, достаточно маленьким, чтобы поместиться под вагоном, привод, соединяющий двигатель с осью, должен был иметь редуктор. Выбранные соотношения изначально были довольно высокими; Первоначальное двухступенчатое передаточное число Sprague для трамваев Richmond составляло 12: 1.Ранние приводы имели две шестерни и две шестерни, но система плохо изнашивалась. Зубья шестерни изнашивались очень быстро, и они были шумными. Средний срок службы моторного редуктора трамвая составлял около двух месяцев. Иногда заедали шестерни, что приводило к блокировке колес и остановке автомобиля.
Зубья шестерни изнашивались очень быстро, и они были шумными. Средний срок службы моторного редуктора трамвая составлял около двух месяцев. Иногда заедали шестерни, что приводило к блокировке колес и остановке автомобиля.
Некоторые конструкторы пытались решить эту проблему, используя безредукторные двигатели, в которых якорь устанавливался непосредственно вокруг оси, но эти двигатели были тяжелее и менее эффективны, чем редукторные. Первый безредукторный двигатель был разработан Эдвардом Хопкинсоном для городской и южной лондонской железной дороги в 1890 году в соответствии с предложением, первоначально сделанным много лет назад Уильямом Сименсом.
К середине 1890-х годов усовершенствования конструкции двигателя и зубчатой передачи достигли стадии, когда шестерни были достаточно надежными, а передаточное число обычно составляло от 3 до 4: 1. При таком передаточном числе требовалась только одна шестерня / шестерня.
Щетки
Хотя различные инженеры создавали электромобили для использования на уличных железных дорогах, ни один из них не был действительно успешным, пока Спраг не оборудовал первый жизнеспособный уличный электрический трамвай в Ричмонде, штат Вирджиния, в 1888 году, используя свои двигатели с комбинированной обмоткой.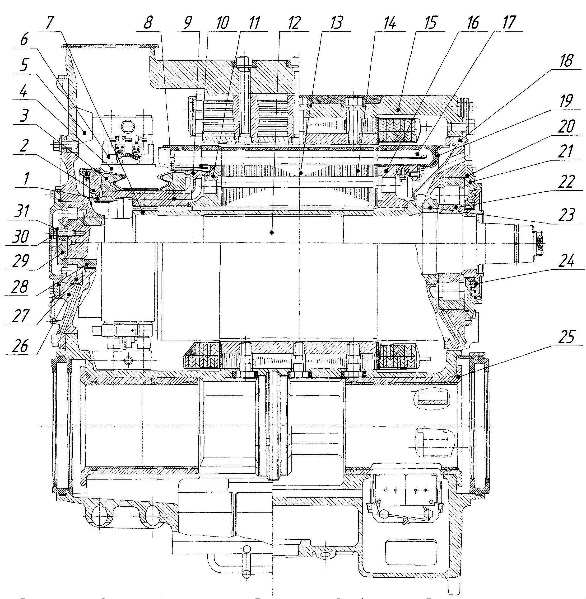 проблемы.Двумя самыми серьезными были, во-первых, недостаточная мощность двигателей на 7,5 л.с. и во-вторых, уязвимость кистей. Со временем были установлены более крупные двигатели, но щетки остались проблемой.
проблемы.Двумя самыми серьезными были, во-первых, недостаточная мощность двигателей на 7,5 л.с. и во-вторых, уязвимость кистей. Со временем были установлены более крупные двигатели, но щетки остались проблемой.
Щетки имели решающее значение для работы двигателя. Они подключили статическое поле к вращающемуся якорю. Проблема заключалась в том, что до того времени щетки делали из меди или латуни. Поскольку они были гибкими и должны были работать в обоих направлениях, они очень быстро изнашивались.Затем другой инженер из США, Чарльз ван де Поеле, в 1890 году выдвинул идею использования угольных щеток; проблема была на пути к решению, и их использование сохранилось по сей день. Угольная щетка была усовершенствована патентом Хопкинсона, также от 1890 года, который предложил поместить щетку в трубку и добавить пружину, чтобы поддерживать постоянное давление на коммутатор.
Серийный двигатель
Большинство первых тяговых двигателей имели шунтирующую обмотку, когда катушки возбуждения были подключены параллельно цепи якоря, за исключением ранних двигателей Sprague с составной обмоткой. Мощность двигателя обычно регулировалась изменением сопротивления поля. Однако в 1891 году Westinghouse произвел двигатель с последовательной обмоткой, в котором поле было подключено последовательно с якорем, а вся цепь двигателя контролировалась переменным сопротивлением, которое было вставлено последовательно с двигателем при запуске, а затем отключалось поэтапно. для увеличения скорости. Опять же, это оставалось стандартным методом управления двигателем до появления твердотельного тиристорного управления в 1980-х годах.
Конец начала
К началу 1890-х годов конструкция тягового двигателя постоянного тока в значительной степени утвердилась, и он оставался широко распространенным на протяжении всего 20 века.Он претерпел несколько усовершенствований в производстве и усовершенствовании конструкции коммутатора и проводки, но инженер с 1892 года мог взглянуть на двигатель, который до сих пор используется во многих электропоездах, и признать машину почти такой же, как и его.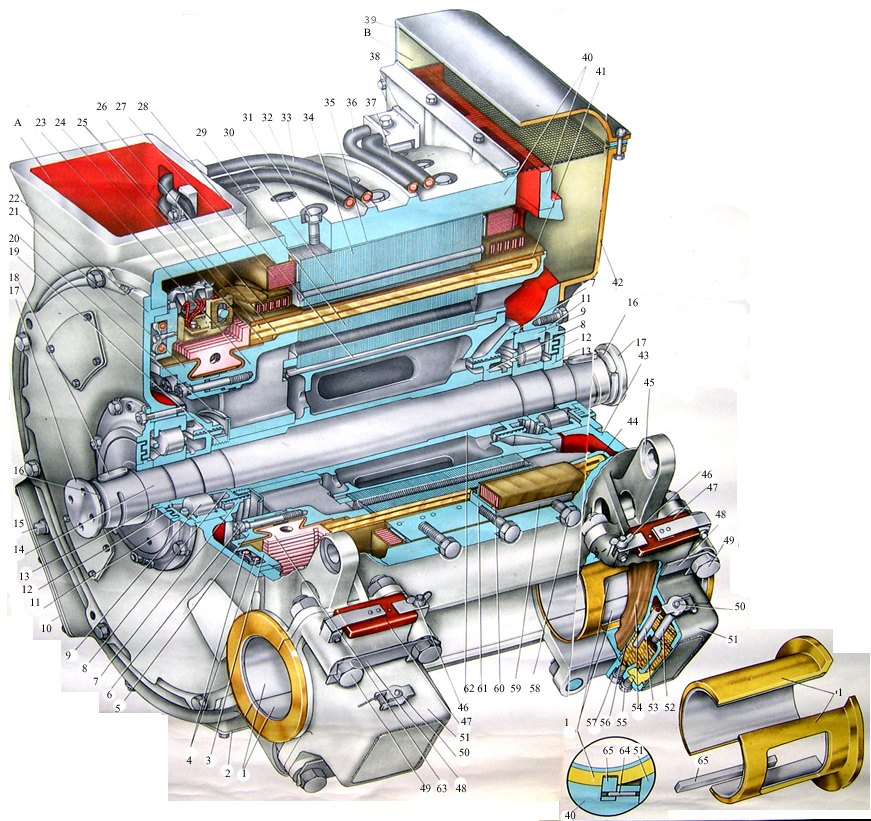
Тем не менее, с появлением твердотельной силовой электроники в 1970-х годах на стене висела надпись о двигателях постоянного тока и давно желанной цели — использовать асинхронные двигатели переменного тока с трехфазным регулированием мощности. , наконец, был в пределах видимости.В настоящее время в сфере железнодорожной тяги электродвигатели постоянного тока все еще используются только в старых поездах.
Тяговые двигатели тепловозов
14 марта 2016 г., Опубликовано в статьях: EE Publishers, Статьи: Energize, Статьи: Vector, Рекомендуемые: Energize
Майка Райкрофта, редактора функций, EE Publishers
Железнодорожный транспорт снова становится популярным для перевозки грузов на большие расстояния.В этой статье рассматривается роль электродвигателей в этом секторе транспортной отрасли.
Используются два типа локомотивов: чисто электрический, который питается от контактного провода среднего напряжения и ограничен в использовании для поездок на большие расстояния, и локомотив с приводом от дизельного двигателя, который может использоваться для всех типов операций. в том числе маневровые. В этой статье рассказывается о тепловозе.
в том числе маневровые. В этой статье рассказывается о тепловозе.
Название «тепловоз» вводит в заблуждение, поскольку тяговое усилие обеспечивается электродвигателями, приводящими в движение колеса напрямую, а электричество для питания двигателей вырабатывается генератором переменного тока, приводимым в действие дизельным двигателем.Использование дизельного двигателя освобождает локомотив от подключения к внешнему источнику электроэнергии, а использование электродвигателей и приводов позволяет контролировать тяговые возможности локомотива, что было бы невозможно при прямом приводе от дизельного двигателя.
Тяговые электродвигатели локомотивов
Двигатели могут быть установлены в нескольких различных конфигурациях:
- Управление грузовиком или тележкой : один двигатель приводит в движение все колеса грузовика или тележки, обычно четыре колеса на двигатель.
- Управление осью : Двигатель приводит в движение оба колеса на одной оси.
 Это наиболее распространенная конфигурация (см. Рис. 1).
Это наиболее распространенная конфигурация (см. Рис. 1). - Управление колесом : Каждое колесо приводится в движение собственным двигателем. Это позволяет максимально контролировать локомотив, но используется нечасто.
В локомотивах используются три типа двигателей:
- Двигатели постоянного тока.
- Двигатели переменного тока с частотно-регулируемыми приводами.
- Двигатели переменного тока с постоянными магнитами.
Основные требования к двигателю локомотива заключаются в том, что у него должна быть возможность изменять и контролировать скорость, а также он должен обеспечивать пусковой и ускоряющий крутящий момент. Ранние локомотивы использовали двигатели постоянного тока, поскольку они были единственным типом больших двигателей, которые могли обеспечивать контроль скорости и требуемый крутящий момент. Двигатели переменного тока работали с фиксированной скоростью и поэтому не могли использоваться в этом приложении. Двигатели постоянного тока имеют несколько недостатков, о которых будет сказано ниже.
Двигатели постоянного тока имеют несколько недостатков, о которых будет сказано ниже.
Разработка частотно-регулируемых приводов для больших синхронных двигателей переменного тока изменила ситуацию, и сегодня большинство локомотивов используют этот тип двигателя и комбинации привода.На рынке появились двигатели с большими постоянными магнитами (PM), которые имеют ряд преимуществ перед синхронными двигателями переменного тока с обмоткой статора для тяговых приложений. Ряд производителей используют в своих локомотивах двигатели с постоянными магнитами.
Тяговые двигатели постоянного тока
Двигатели постоянного тока используются в конфигурации с последовательной обмоткой, а скорость регулируется путем переключения последовательного сопротивления в цепи и вне ее. В ранних приложениях сопротивление регулировалось драйвером вручную, но позже были установлены релейные системы, которые делали это автоматически.При запуске через двигатель протекает максимальный ток, обеспечивая максимальный крутящий момент. По мере увеличения скорости двигателя противо-ЭДС снижает ток и крутящий момент, а последовательное сопротивление постепенно отключается, чтобы поддерживать требуемый крутящий момент, пока не будет достигнута полная скорость. Переключение сопротивления дает ступенчатое изменение крутящего момента и, следовательно, ускорения. Релейные системы были заменены электронным управлением в более поздних системах, чтобы обеспечить более плавные характеристики ускорения и замедления. В используемых сегодня системах обычно используются двигатели постоянного тока с раздельным возбуждением и тиристорные регуляторы как для возбуждения поля, так и для основного напряжения питания.Двигатели постоянного тока по-прежнему используются в приложениях, требующих постоянного запуска-останова при большой нагрузке.
По мере увеличения скорости двигателя противо-ЭДС снижает ток и крутящий момент, а последовательное сопротивление постепенно отключается, чтобы поддерживать требуемый крутящий момент, пока не будет достигнута полная скорость. Переключение сопротивления дает ступенчатое изменение крутящего момента и, следовательно, ускорения. Релейные системы были заменены электронным управлением в более поздних системах, чтобы обеспечить более плавные характеристики ускорения и замедления. В используемых сегодня системах обычно используются двигатели постоянного тока с раздельным возбуждением и тиристорные регуляторы как для возбуждения поля, так и для основного напряжения питания.Двигатели постоянного тока по-прежнему используются в приложениях, требующих постоянного запуска-останова при большой нагрузке.
Рис. 1: Мотор на оси (Railelectrica [5]). Недостаток двигателей постоянного тока серии
заключается в том, что при проскальзывании колес в стандартном приводе постоянного тока тяговый двигатель имеет тенденцию ускоряться и убегать, даже до точки механического отказа, если мощность не снижается. быстро. По мере увеличения проскальзывания колес коэффициент трения ( µ ) также быстро падает до уровня 0,10 или менее, и, поскольку все двигатели соединены вместе, нагрузка на весь локомотив должна быть уменьшена.Таким образом, максимальная адгезия достигается при работе на уровне с комфортным запасом прочности ниже теоретического максимума. Более современные системы постоянного тока включают контроль проскальзывания колес, который определяет начало скольжения и автоматически модулирует мощность для сохранения контроля. Это позволяет локомотиву безопасно работать в точке, близкой к теоретическому максимуму [4].
быстро. По мере увеличения проскальзывания колес коэффициент трения ( µ ) также быстро падает до уровня 0,10 или менее, и, поскольку все двигатели соединены вместе, нагрузка на весь локомотив должна быть уменьшена.Таким образом, максимальная адгезия достигается при работе на уровне с комфортным запасом прочности ниже теоретического максимума. Более современные системы постоянного тока включают контроль проскальзывания колес, который определяет начало скольжения и автоматически модулирует мощность для сохранения контроля. Это позволяет локомотиву безопасно работать в точке, близкой к теоретическому максимуму [4].Двигатели с частотно-регулируемым приводом переменного тока: асинхронные двигатели
Замена двигателей постоянного тока двигателями переменного тока стала возможной благодаря развитию мощных электронных устройств, используемых в частотно-регулируемых приводах (ЧРП).ЧРП позволяют регулировать скорость и крутящий момент в большей степени, чем двигатели постоянного тока, и позволяют реализовать больше функций управления. Тяговые двигатели переменного тока заменили двигатели постоянного тока во многих тяговых приложениях. Используемые двигатели представляют собой асинхронные или асинхронные двигатели, которые имеют характеристики, подходящие для тяги. Скорость и крутящий момент двигателя регулируются путем изменения частоты, напряжения и тока, подаваемых на катушки статора. Двигатели для типичного локомотива будут иметь мощность от 400 до 600 кВт.
Тяговые двигатели переменного тока заменили двигатели постоянного тока во многих тяговых приложениях. Используемые двигатели представляют собой асинхронные или асинхронные двигатели, которые имеют характеристики, подходящие для тяги. Скорость и крутящий момент двигателя регулируются путем изменения частоты, напряжения и тока, подаваемых на катушки статора. Двигатели для типичного локомотива будут иметь мощность от 400 до 600 кВт.
Синхронный двигатель с постоянными магнитами (PMSM)
PMSM — это трехфазный синхронный двигатель переменного тока с обычным короткозамкнутым ротором или индукционной конструкцией, замененной магнитами, закрепленными в роторе. Ротор приводится в движение вращающимся магнитным полем, реализуемым посредством трехфазного переменного тока, подаваемого на обмотку статора. Ротор будет вращаться синхронно с вращающимся полем, создаваемым статором. Для двигателя требуется сложная система управления, но он может быть на 25% меньше, чем обычный трехфазный двигатель при той же номинальной мощности. Конструкция также обеспечивает более низкие рабочие температуры, поэтому охлаждение ротора не требуется, а статор представляет собой герметичный блок со встроенным жидкостным охлаждением. Ряд различных типов поездов был оборудован двигателями с постоянными магнитами. Уменьшенный размер особенно привлекателен для автомобилей с низким полом, где ступичные двигатели могут быть эффективным способом обеспечения тяги в компактной тележке. Разработка конструкции двигателя и связанных с ним систем управления продолжается, и несомненно, что двигатель с постоянными магнитами будет использоваться на большем количестве железных дорог в будущем [3].Системы управления способны управлять как крутящим моментом, так и скоростью двигателя, что обеспечивает широкий диапазон работы, подходящий для тяги.
Конструкция также обеспечивает более низкие рабочие температуры, поэтому охлаждение ротора не требуется, а статор представляет собой герметичный блок со встроенным жидкостным охлаждением. Ряд различных типов поездов был оборудован двигателями с постоянными магнитами. Уменьшенный размер особенно привлекателен для автомобилей с низким полом, где ступичные двигатели могут быть эффективным способом обеспечения тяги в компактной тележке. Разработка конструкции двигателя и связанных с ним систем управления продолжается, и несомненно, что двигатель с постоянными магнитами будет использоваться на большем количестве железных дорог в будущем [3].Системы управления способны управлять как крутящим моментом, так и скоростью двигателя, что обеспечивает широкий диапазон работы, подходящий для тяги.
Двигатель с постоянными магнитами обеспечивает более высокий пусковой момент, чем асинхронные или асинхронные двигатели переменного тока, используемые в локомотивах, что дает возможность управлять осью напрямую, в отличие от зубчатой передачи, используемой с другими двигателями. Это снижает вес и увеличивает эффективность. PMSM использует специально разработанный инвертор / контроллер, чтобы воспользоваться преимуществами характеристик двигателя.
Это снижает вес и увеличивает эффективность. PMSM использует специально разработанный инвертор / контроллер, чтобы воспользоваться преимуществами характеристик двигателя.
Установка тягового двигателя непосредственно на колесо была целью с тех пор, как электродвигатели впервые использовались в локомотивах. Вероятно, в будущем это станет возможным благодаря модулям PMSM с высоким удельным крутящим моментом. Опытные образцы созданы успешно. Конструкции с осевым потоком были созданы для промышленности, и, возможно, эту конфигурацию можно будет использовать на локомотивах.
Генераторы
Генераторы переменного тока используются в локомотивах с приводом от постоянного и переменного тока для выработки необходимой электроэнергии.Типичный генератор переменного тока будет бесщеточным трехфазным синхронным типом. Генератор приводится в действие непосредственно дизельным двигателем и, таким образом, работает в диапазоне скоростей и, как следствие, переменной выходной частоты. Возможно, это основная причина использования комбинаций выпрямитель / инвертор. Нет причин, по которым генератор переменного тока должен работать на фиксированной частоте, поскольку он не управляет напрямую устройствами, зависящими от частоты. Рабочий диапазон частот также может быть выбран в соответствии с процессом выпрямления, при этом типичная выходная мощность составляет 3 фазы 75 Гц при работе на полных оборотах двигателя.Во многих генераторах переменного тока выпрямительный узел прикреплен к раме генератора и поставляется в виде блока, согласованного с выходом генератора. Это позволяет использовать генератор переменного тока и для тяги постоянного тока.
Возможно, это основная причина использования комбинаций выпрямитель / инвертор. Нет причин, по которым генератор переменного тока должен работать на фиксированной частоте, поскольку он не управляет напрямую устройствами, зависящими от частоты. Рабочий диапазон частот также может быть выбран в соответствии с процессом выпрямления, при этом типичная выходная мощность составляет 3 фазы 75 Гц при работе на полных оборотах двигателя.Во многих генераторах переменного тока выпрямительный узел прикреплен к раме генератора и поставляется в виде блока, согласованного с выходом генератора. Это позволяет использовать генератор переменного тока и для тяги постоянного тока.
Выпрямительные преобразователи
Для всех типов тяговых двигателей требуется питание постоянного тока, либо напрямую в случае двигателя постоянного тока, либо косвенно через частотно-регулируемый привод в случае двигателя переменного тока. Во многих современных двигателях выпрямительный блок поставляется как часть генератора переменного тока и соответствует характеристикам машины.
Органы управления локомотивом
Ранние средства управления основывались только на скорости. Современные разработки учитывают множество других факторов, чтобы максимизировать тяговую мощность локомотивов при том же размере приводного двигателя. Одним из основных факторов, влияющих на тяговую мощность, является проскальзывание или проскальзывание колес, и большинство современных систем управления предназначены для управления величиной проскальзывания между колесом и рельсом.
Сцепление и скольжение в локомотивах
Локомотив приводится в движение за счет контакта колеса с рельсом.Это контакт металл-металл, и передаваемая сила зависит от коэффициента сцепления и веса сцепления локомотива. Коэффициент сцепления означает величину веса локомотива на его ведущих колесах, которая может быть преобразована в тяговое усилие.
Пробуксовка колес происходит, когда тяговое усилие превышает адгезионную массу. Адгезионный вес определяется как сила, которую может приложить колесо без проскальзывания или скольжения. Скольжение возникает, когда окружная скорость превышает линейную скорость колеса на рельсе.
Скольжение возникает, когда окружная скорость превышает линейную скорость колеса на рельсе.
Вес клея t = µ адгезия x вес (1)
Коэффициент сцепления зависит от скорости скольжения, состояния поверхности рельса, скорости поезда и температуры в зоне контакта. Из всех параметров, которые могут влиять на коэффициент сцепления, можно изменять и контролировать только скорость поезда и скорость скольжения. Поскольку скорость поезда обычно поддерживается на требуемом уровне, можно управлять только скоростью скольжения [1].Характеристики колес немного различаются, и соединенные ведущие колеса будут иметь некоторое пробуксовку.
Рис. 2: Коэффициент адгезии зависит от скорости скольжения [1].
Даже при работе в оптимальных условиях между колесами и рельсами будет определенный процент пробуксовки. Целью современной системы управления является максимальное увеличение коэффициента сцепления за счет ограничения или контроля степени проскальзывания колес. Это достигается за счет управления двигателями многоосного грузовика или агрегата.Тяговое усилие изменяется в зависимости от скольжения, как показано на рис. 2, и цель системы управления — управлять локомотивом в зоне максимального коэффициента сцепления. Существует разница в коэффициентах сцепления, достигаемая с двигателями переменного и постоянного тока. Приводы переменного тока обеспечивают более высокие пусковые коэффициенты сцепления, а также более высокую управляемую адгезию.
Это достигается за счет управления двигателями многоосного грузовика или агрегата.Тяговое усилие изменяется в зависимости от скольжения, как показано на рис. 2, и цель системы управления — управлять локомотивом в зоне максимального коэффициента сцепления. Существует разница в коэффициентах сцепления, достигаемая с двигателями переменного и постоянного тока. Приводы переменного тока обеспечивают более высокие пусковые коэффициенты сцепления, а также более высокую управляемую адгезию. Существует ряд различных систем, используемых для управления скольжением и оптимизации коэффициента сцепления. Все используют какие-то средства сравнения скорости вращения колеса с линейной скоростью поезда и подают соответствующие средства управления на инвертор.Проскальзывание измеряется путем определения скорости локомотива с помощью доплеровского радара (вместо использования вращающихся колес) и сравнения ее с током двигателя, чтобы увидеть, соответствует ли вращение колеса скорости движения относительно земли. Если между ними существует несоответствие, ток двигателя регулируется, чтобы поддерживать скольжение в пределах диапазона «медленного движения» и поддерживать тяговое усилие на максимально возможном уровне в условиях медленного передвижения [3].
Если между ними существует несоответствие, ток двигателя регулируется, чтобы поддерживать скольжение в пределах диапазона «медленного движения» и поддерживать тяговое усилие на максимально возможном уровне в условиях медленного передвижения [3].
Еще один элемент управления, обеспечивающий улучшенное сцепление, — это компенсация переноса веса.Когда локомотив тянет груз, вес имеет тенденцию переноситься с передней оси на заднюю ось каждого грузовика. При максимальном тяговом усилии вес ведущей оси может быть уменьшен примерно на 20%. Поскольку тяговое усилие пропорционально весу водителей, тяговое усилие будет определяться самой легкой осью в системе, в которой двигатели получают питание от общего источника. Таким образом, эквивалентная масса локомотива снижается примерно на 20%. Однако с системой управления осью привод может компенсировать перенос веса.Когда ведущая ось гаснет, система привода снижает мощность на эту ось и передает больше мощности на заднюю ось, не вызывая пробуксовки колес.
Инверторы и системы управления
Инвертор, который на самом деле является моторным приводом или частотно-регулируемым приводом, подает на двигатели переменный ток различной частоты и тока. Первоначально один инвертор поставлял все двигатели, но в соответствии с новейшими технологиями, как правило, используется один инвертор на двигатель. Это дает преимущество уменьшения размера инвертора и возможности индивидуального управления двигателем.В большинстве больших локомотивов используется конфигурация с одним двигателем на ось, поэтому каждый преобразователь управляет осью и колесной парой.
Есть несколько вариантов конфигурации инверторов. Некоторые производители полагаются на один инвертор на грузовик, в то время как другие используют один инвертор на ось. Обе системы имеют свои достоинства. Система управления грузовиком соединяет оси в каждом грузовике параллельно, обеспечивая максимальное равное управление проскальзыванием колес между осями. Параллельное управление также означает более равномерный износ колес между осями.Однако, если один инвертор (например, один грузовик) выходит из строя, то агрегат может создавать только 50% своего тягового усилия. Один инвертор на ось сложнее, но есть мнение, что индивидуальное управление осью может обеспечить наилучшее тяговое усилие. Если инвертор выходит из строя, тяговое усилие для этой оси теряется, но полное тяговое усилие по-прежнему доступно через другие пять инверторов (для шестиосного агрегата). За счет индивидуального управления каждой осью отпадает необходимость в точном согласовании диаметров колес для оптимальной производительности [4].
Параллельное управление также означает более равномерный износ колес между осями.Однако, если один инвертор (например, один грузовик) выходит из строя, то агрегат может создавать только 50% своего тягового усилия. Один инвертор на ось сложнее, но есть мнение, что индивидуальное управление осью может обеспечить наилучшее тяговое усилие. Если инвертор выходит из строя, тяговое усилие для этой оси теряется, но полное тяговое усилие по-прежнему доступно через другие пять инверторов (для шестиосного агрегата). За счет индивидуального управления каждой осью отпадает необходимость в точном согласовании диаметров колес для оптимальной производительности [4].
Динамическое торможение
В системах динамического торможения двигатели работают как генераторы, а генерируемый ток подается на реостаты или переменные резисторы, установленные на шасси локомотива. Сила торможения регулируется изменением сопротивления реостата. Мощность, необходимая для торможения или замедления локомотива, такая же, как и для его ускорения, поэтому реостаты должны рассеивать большое количество энергии и, как правило, имеют принудительное воздушное охлаждение.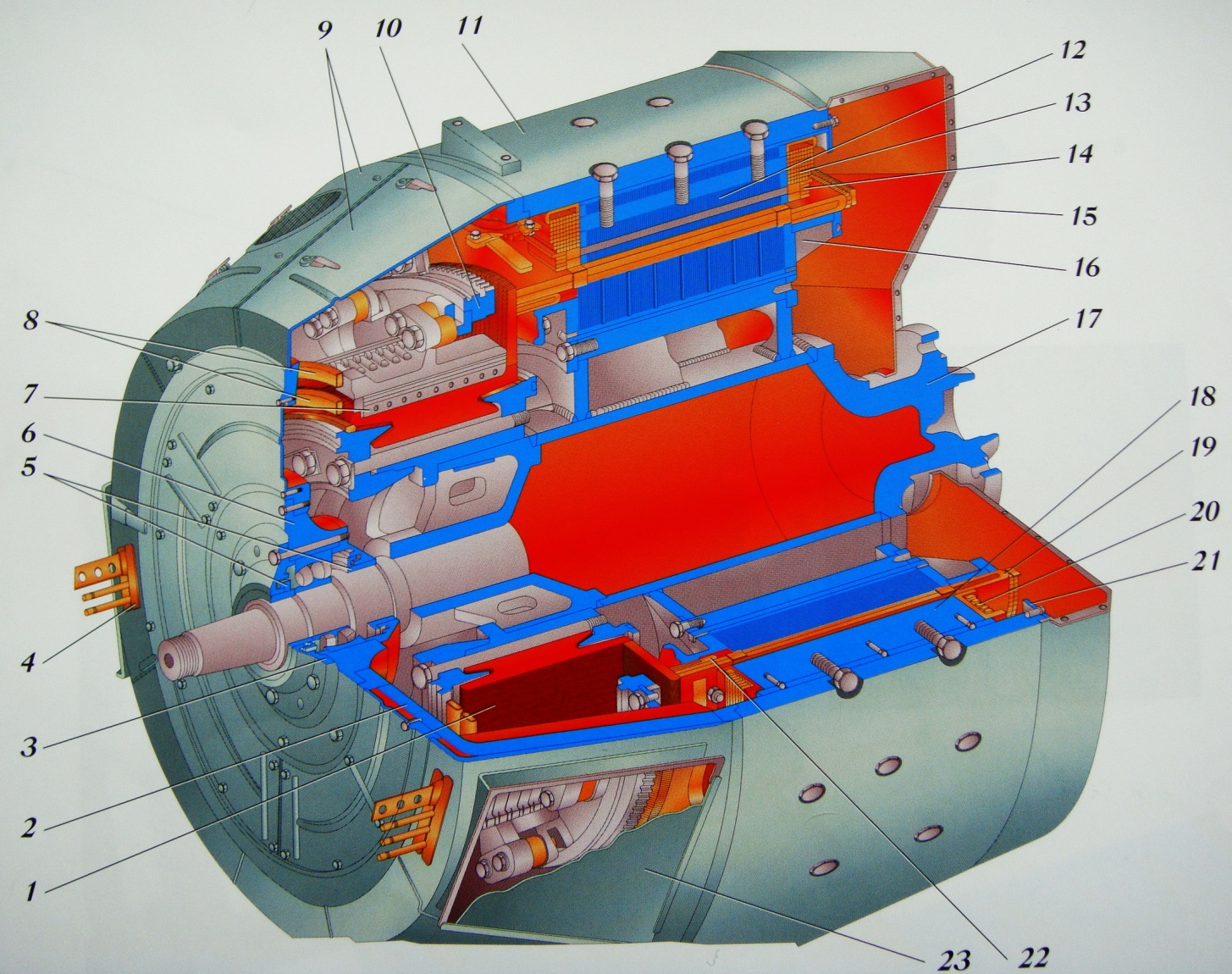 В более поздних разработках генерируемый ток использовался для зарядки аккумуляторных батарей или ультраконденсаторов, а накопленная энергия использовалась для помощи в повторном ускорении локомотива.
В более поздних разработках генерируемый ток использовался для зарядки аккумуляторных батарей или ультраконденсаторов, а накопленная энергия использовалась для помощи в повторном ускорении локомотива.
Возможности модернизации
Локомотивы— это долгосрочная инвестиция, и в Африке есть много единиц, которым более 20 лет, с использованием более старых технологий и средств управления. К счастью, можно модернизировать системы управления на старых локомотивах для повышения производительности и продления срока службы локомотива без замены основных компонентов привода.Было заявлено улучшение тягового усилия до 25%, а при любых погодных условиях или управляемом сцеплении — до 26%. Это может уменьшить количество единиц, необходимых для перевозки высоких грузов.
Накопители энергии или суперконденсаторы для ускорения при запуске
Супер- и ультраконденсаторы используются в некоторых локомотивах для обеспечения дополнительной мощности, необходимой при запуске. Это позволяет использовать двигатели и генераторы меньшего размера. Конденсаторы могут накапливать энергию рекуперативного торможения, которая в противном случае рассеивалась бы в резисторах или других устройствах.
Это позволяет использовать двигатели и генераторы меньшего размера. Конденсаторы могут накапливать энергию рекуперативного торможения, которая в противном случае рассеивалась бы в резисторах или других устройствах.
Самый южноафриканский локомотив
Локомотивы серии GE Evolution, производимые в Южной Африке, представляют собой шестиосные локомотивы (две группы по три спереди и сзади, все оси приводятся в движение), использующие технологию регулирования тягового усилия отдельных осей переменного тока, которая обеспечивает большую тяговую мощность за счет снижения проскальзывания на запуски, подъемы и в неоптимальных дорожных условиях. Эта технология обеспечивает оптимальную производительность, меньшие потери энергии и существенно снижает затраты на техническое обслуживание и связанные с ним простои в течение срока службы локомотива по сравнению с более старыми тяговыми системами постоянного и переменного тока.Локомотив оснащен сложными средствами управления оператора, которые улучшают диагностику и упрощают работу. Консолидированная архитектура управления локомотивом серии Evolution упрощает обновление программного обеспечения и загрузку данных. «Умные» дисплеи устраняют несколько дополнительных черных ящиков в пользу комбинации компьютера и дисплея, что повышает как надежность, так и эргономичность для оператора.
Консолидированная архитектура управления локомотивом серии Evolution упрощает обновление программного обеспечения и загрузку данных. «Умные» дисплеи устраняют несколько дополнительных черных ящиков в пользу комбинации компьютера и дисплея, что повышает как надежность, так и эргономичность для оператора.
Список литературы
[1] P Pichlík и J Zděnek: «Обзор методов контроля пробуксовки, используемых в локомотивах», Труды по электротехнике , Vol.3 (2014), № 2, www.transoneleng.org/2014/20142c.pdf
[2] RTWP: «Электронное питание для поездов», www.railway-technical.com / tract-02.shtml
[3] RTWP: «Технология тепловозов», www.railway-technical.com / diesel.shtml
[4] Республиканский локомотив: «Тяга переменного тока против тяги постоянного тока», www.republiclocomotive.com/ac_traction_vs_dc_traction.html
[5] Railelectrica : «Выбор подвески тяговых двигателей», www.railelectrica.com/traction-motor/selection-of-suspension-arrangement-of-traction-motors-a-right-approach-2/
Присылайте свои комментарии по адресу: vector @ ee. co.za
co.za
Статьи по теме
Локомотив | автомобиль | Британника
Полная статья
Локомотив , любая из различных самоходных машин, используемых для буксировки железнодорожных вагонов по путям.
Хотя движущая сила для состава поезда может быть встроена в вагон, в котором также есть пассажирские, багажные или грузовые помещения, она чаще всего обеспечивается отдельным блоком, локомотивом, который включает в себя механизмы для выработки (или, в корпус электровоза, чтобы преобразовать) мощность и передать ее на ведущие колеса. Сегодня у локомотива два основных источника энергии: нефть (в виде дизельного топлива) и электричество. Пар, самая ранняя форма двигателя, использовался почти повсеместно примерно до Второй мировой войны; с тех пор на смену ей пришла более эффективная дизельная и электрическая тяга.
Сегодня у локомотива два основных источника энергии: нефть (в виде дизельного топлива) и электричество. Пар, самая ранняя форма двигателя, использовался почти повсеместно примерно до Второй мировой войны; с тех пор на смену ей пришла более эффективная дизельная и электрическая тяга.
Паровоз был самодостаточной единицей, имеющей собственное водоснабжение для производства пара и угля, масла или дров для обогрева котла. Тепловоз также имеет собственный источник топлива, но мощность дизельного двигателя не может быть напрямую связана с колесами; вместо этого должна использоваться механическая, электрическая или гидравлическая трансмиссия. Электровоз не самодостаточен; он принимает ток от контактного провода или третьего рельса рядом с ходовыми рельсами. Подача третьего рельса используется только на городских скоростных железных дорогах, работающих на низковольтном постоянном токе.
В 1950-х и 60-х годах газовая турбина была принята на вооружение одной американской и некоторыми европейскими железными дорогами в качестве альтернативы дизельному двигателю. Несмотря на то, что его преимущества были сведены на нет достижениями в технологии дизельной тяги и повышением цен на нефть, он по-прежнему предлагается в качестве альтернативного средства для организации высокоскоростного железнодорожного сообщения для регионов, где отсутствует инфраструктура для производства электроэнергии.
Несмотря на то, что его преимущества были сведены на нет достижениями в технологии дизельной тяги и повышением цен на нефть, он по-прежнему предлагается в качестве альтернативного средства для организации высокоскоростного железнодорожного сообщения для регионов, где отсутствует инфраструктура для производства электроэнергии.
Узнайте, как историки узнают о прошлом, например об изобретении первого современного паровоза.
Узнайте, как историки используют различные источники для обнаружения, проверки и построения повествования о событиях, таких как изобретение паровоза — это случилось в прошлом.
© Открытый университет (издательский партнер Britannica) Посмотрите все видеоролики к этой статье Основные характеристики, которые сделали успешной ракету Rocket 1829 года Джорджа и Роберта Стивенсонов, — ее многотрубный котел и систему выпуска пара и создания сквозняков. его топка — продолжала использоваться в паровозе до конца его карьеры. Вскоре количество сцепленных ведущих колес увеличилось. У Rocket была только одна пара ведущих колес, но вскоре стали обычным явлением четыре сдвоенных колеса, и в конечном итоге некоторые локомотивы были построены с 14 сдвоенными машинами.
его топка — продолжала использоваться в паровозе до конца его карьеры. Вскоре количество сцепленных ведущих колес увеличилось. У Rocket была только одна пара ведущих колес, но вскоре стали обычным явлением четыре сдвоенных колеса, и в конечном итоге некоторые локомотивы были построены с 14 сдвоенными машинами.
Ведущие колеса паровозов были разных размеров, обычно больше для более быстрых пассажирских двигателей. Средний диаметр составлял 1829–2032 мм (72–80 дюймов) для пассажирских двигателей и 1 372–1676 мм (54–66 дюймов) для грузовых или смешанных типов.
Запасы топлива (обычно угля, но иногда и нефти) и воды могли транспортироваться на самой раме локомотива (в этом случае он назывался цистерной) или в отдельном транспортном средстве, тендере, сцепленном с локомотивом.Тендер типичного европейского магистрального локомотива имел вместимость 9 000 кг (10 тонн) угля и 30 000 литров (8 000 галлонов) воды. В Северной Америке были распространены более высокие мощности.
Для удовлетворения особых потребностей тяжелых грузовых перевозок в некоторых странах, особенно в Соединенных Штатах, было получено большее тяговое усилие за счет использования двух отдельных агрегатов двигателей под общим котлом. Передний двигатель был шарнирно соединен или шарнирно соединен с рамой заднего двигателя, так что очень большой локомотив мог преодолевать повороты.Шарнирно-сочлененный локомотив был изобретен в Швейцарии, первый из которых был построен в 1888 году. Самым большим из когда-либо построенных был Big Boy компании Union Pacific , который использовался в горных грузовых перевозках на западе Соединенных Штатов. Big Boy весил более 600 коротких тонн, включая тендер. Он мог развивать тяговое усилие 61 400 кг (135 400 фунтов) и развивать более 6000 лошадиных сил на скорости 112 км (70 миль) в час.
Одной из самых известных шарнирно-сочлененных конструкций была модель Beyer-Garratt, которая имела две рамы, каждая из которых имела собственные ведущие колеса и цилиндры, на которых были установлены резервуары для воды. Два шасси разделяла другая рама, на которой находился котел, кабина и подача топлива. Этот тип локомотива был ценен на слегка проложенных путях; он также может преодолевать крутые повороты. Широко использовался в Африке.
Два шасси разделяла другая рама, на которой находился котел, кабина и подача топлива. Этот тип локомотива был ценен на слегка проложенных путях; он также может преодолевать крутые повороты. Широко использовался в Африке.
Постепенно совершенствовался поршневой паровоз с различными доработками. Некоторые включали более высокое давление в котле (до 2 000–2060 килопаскалей [290-300 фунтов на квадратный дюйм] для некоторых из последних локомотивов по сравнению с примерно 1300 килопаскалей [200 фунтов на квадратный дюйм] для более ранних конструкций), перегрев, питательная вода предварительный нагрев, роликовые подшипники и использование тарельчатых (перпендикулярных) клапанов, а не скользящих поршневых клапанов.
Тем не менее, тепловой КПД даже самых современных паровозов редко превышал около 6 процентов. Неполное сгорание и тепловые потери из топки, котла, цилиндров и других объектов рассеивали большую часть энергии сожженного топлива. По этой причине паровоз устарел, но медленно, поскольку имел компенсирующие преимущества, в частности, его простоту и способность противостоять злоупотреблениям.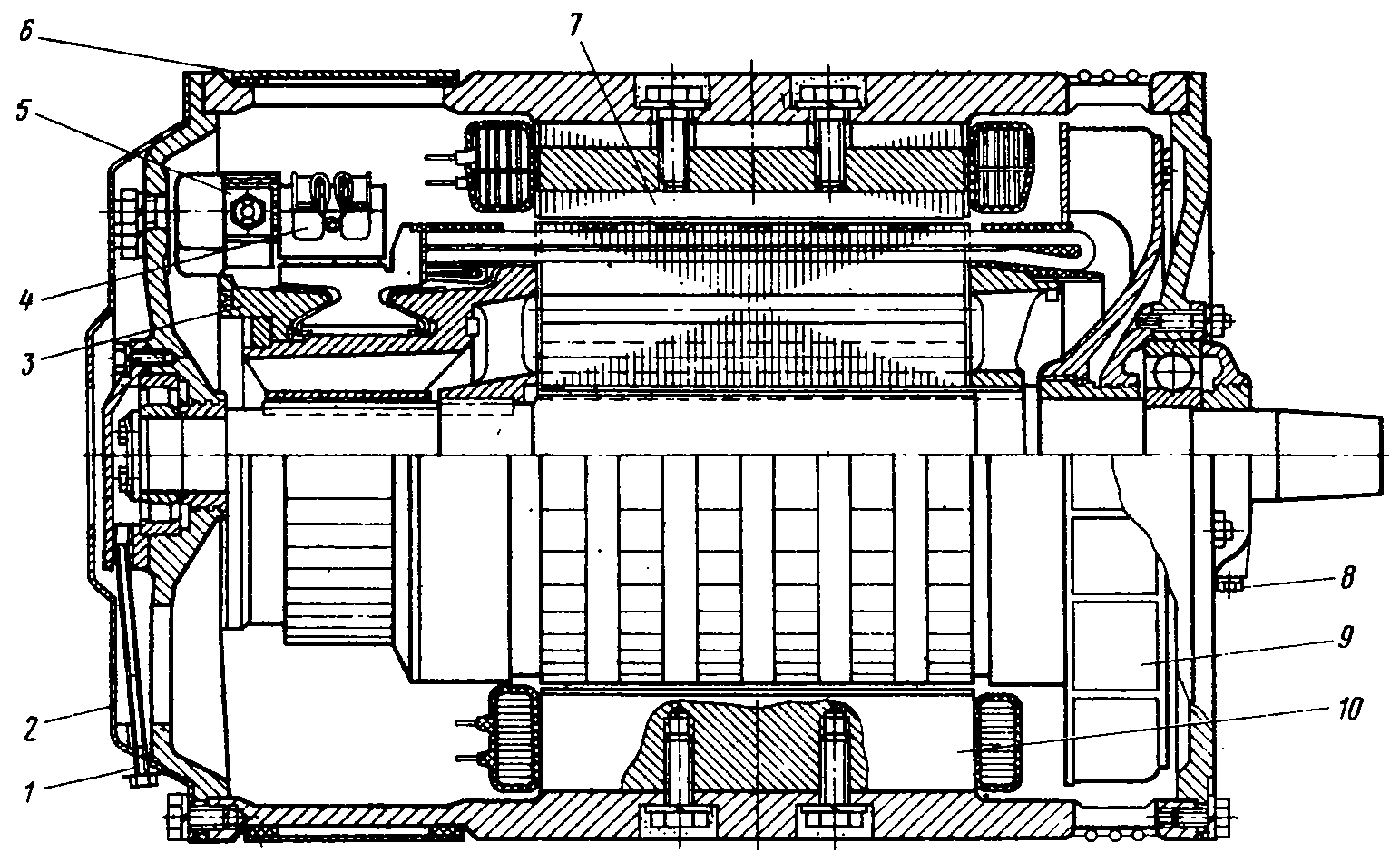
Попытки приводить в движение железнодорожные вагоны с использованием батарей относятся к 1835 году, но первое успешное применение электрической тяги было в 1879 году, когда электровоз работал на выставке в Берлине.Первые коммерческие применения электрической тяги были на пригородных и городских железных дорогах. Один из первых появился в 1895 году, когда Балтимор и Огайо электрифицировали участок пути в Балтиморе, чтобы избежать проблем с дымом и шумом в туннеле. Одной из первых стран, использовавших электрическую тягу для работы на магистральных линиях, была Италия, где система была открыта еще в 1902 году.
К Первой мировой войне несколько электрифицированных линий работали как в Европе, так и в Соединенных Штатах.После той войны были предприняты крупные программы электрификации в таких странах, как Швеция, Швейцария, Норвегия, Германия и Австрия. К концу 20-х годов почти в каждой европейской стране имелся хотя бы небольшой процент электрифицированных путей. Электротяга также была внедрена в Австралии (1919), Новой Зеландии (1923), Индии (1925), Индонезии (1925) и Южной Африке (1926). В период с 1900 по 1938 год в Соединенных Штатах был электрифицирован ряд столичных терминалов и пригородных линий, а также электрифицировано несколько магистральных линий.Появление тепловоза препятствовало дальнейшей электрификации магистральных маршрутов в Соединенных Штатах после 1938 года, но после Второй мировой войны такая электрификация была быстро распространена в других местах. Сегодня значительный процент путей стандартной колеи на национальных железных дорогах по всему миру электрифицирован, например, в Японии (100 процентов), Швейцарии (92 процента), Бельгии (91 процент), Нидерландах (76 процентов), Испании ( 76 процентов), Италия (68 процентов), Швеция (65 процентов), Австрия (65 процентов), Норвегия (62 процента), Южная Корея (55 процентов), Франция (52 процента), Германия (48 процентов), Китай (42 процента). процентов) и Соединенное Королевство (32 процента).Напротив, в Соединенных Штатах, где около 225000 км (140000 миль) путей стандартной колеи, электрифицированные маршруты практически не существуют за пределами Северо-восточного коридора, где компания Amtrak управляет 720-километровым (450-мильным) экспрессом Acela Express между Бостоном и Вашингтоном.
В период с 1900 по 1938 год в Соединенных Штатах был электрифицирован ряд столичных терминалов и пригородных линий, а также электрифицировано несколько магистральных линий.Появление тепловоза препятствовало дальнейшей электрификации магистральных маршрутов в Соединенных Штатах после 1938 года, но после Второй мировой войны такая электрификация была быстро распространена в других местах. Сегодня значительный процент путей стандартной колеи на национальных железных дорогах по всему миру электрифицирован, например, в Японии (100 процентов), Швейцарии (92 процента), Бельгии (91 процент), Нидерландах (76 процентов), Испании ( 76 процентов), Италия (68 процентов), Швеция (65 процентов), Австрия (65 процентов), Норвегия (62 процента), Южная Корея (55 процентов), Франция (52 процента), Германия (48 процентов), Китай (42 процента). процентов) и Соединенное Королевство (32 процента).Напротив, в Соединенных Штатах, где около 225000 км (140000 миль) путей стандартной колеи, электрифицированные маршруты практически не существуют за пределами Северо-восточного коридора, где компания Amtrak управляет 720-километровым (450-мильным) экспрессом Acela Express между Бостоном и Вашингтоном.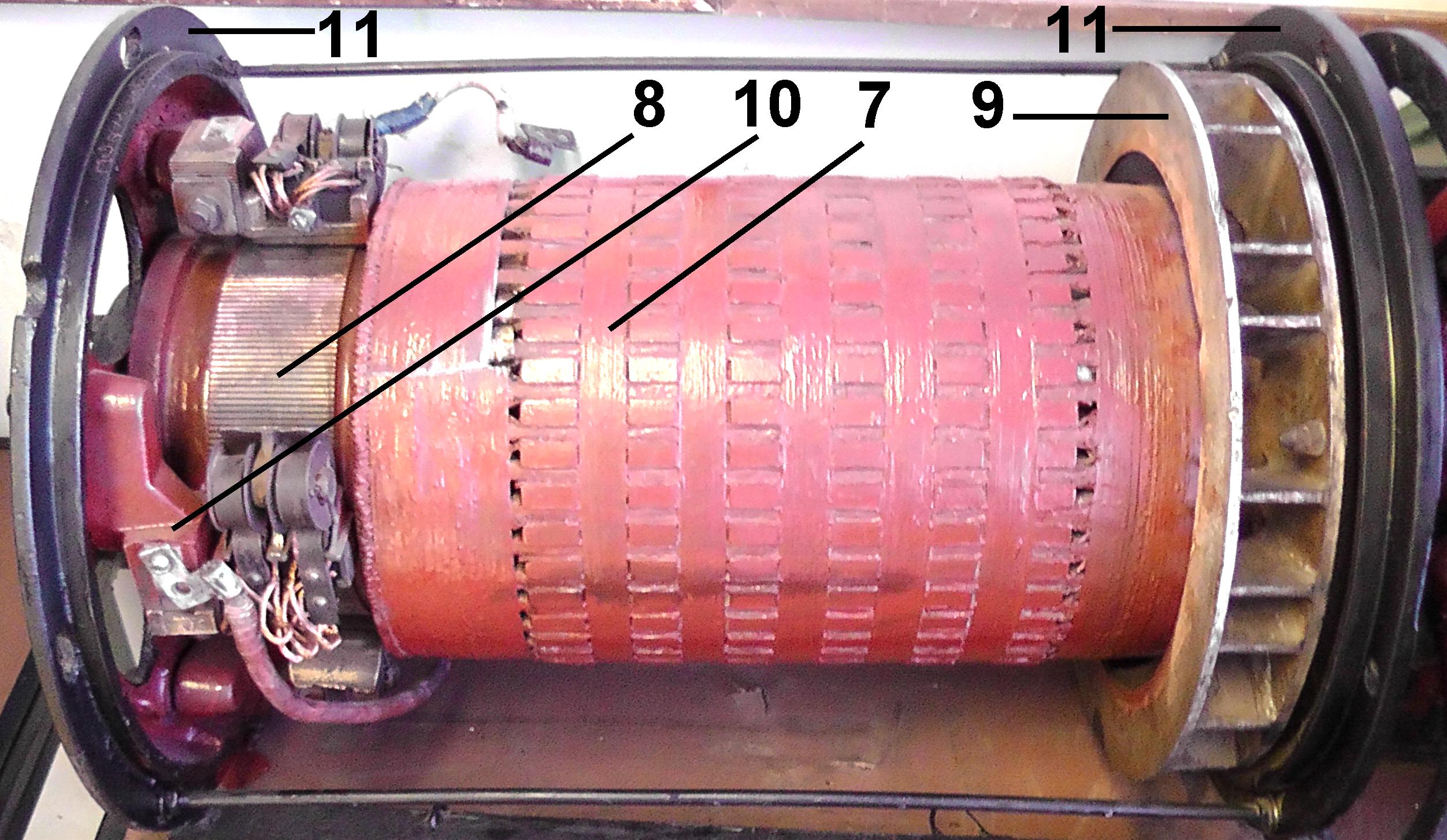 , DC
, DC
Вторая половина века также ознаменовалась созданием в городах по всему миру многих новых электрифицированных городских скоростных железнодорожных систем, а также расширением существующих систем.
Преимущества и недостатки
Электрическая тяга обычно считается наиболее экономичным и эффективным средством эксплуатации железной дороги при условии наличия дешевой электроэнергии и плотности движения, оправдывающей высокие капитальные затраты.Электровозы, являясь просто энергопреобразующими, а не генерирующими устройствами, имеют ряд преимуществ. Они могут использовать ресурсы центральной электростанции для выработки мощности, значительно превышающей их номинальные параметры, для запуска тяжелого поезда или для преодоления крутого подъема на высокой скорости. Типичный современный электровоз мощностью 6000 лошадиных сил в этих условиях в течение короткого периода времени развивает до 10000 лошадиных сил. Кроме того, электровозы работают тише, чем другие типы, и не производят дыма и дыма.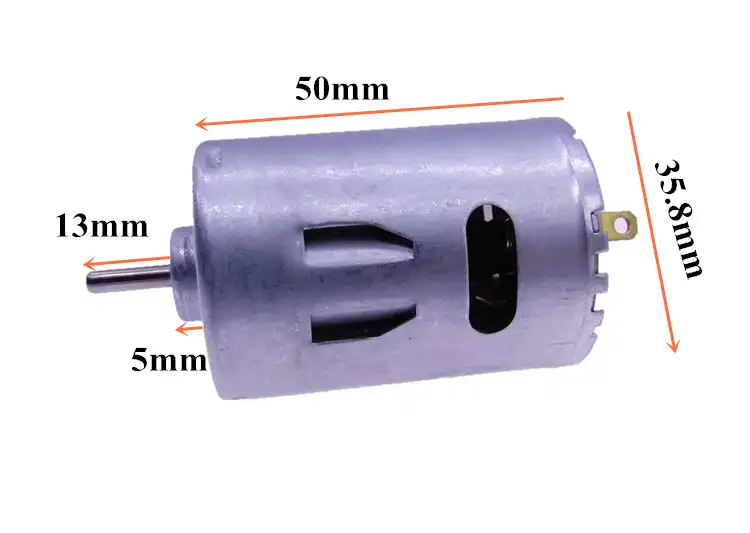 Электровозам требуется мало времени в цехе для обслуживания, затраты на их обслуживание низкие, а срок службы у них больше, чем у дизелей.
Электровозам требуется мало времени в цехе для обслуживания, затраты на их обслуживание низкие, а срок службы у них больше, чем у дизелей.
Самыми большими недостатками электрифицированной эксплуатации являются высокие капитальные вложения и затраты на техническое обслуживание стационарной установки — токоведущих проводов, конструкций и силовых подстанций — а также дорогостоящие изменения, которые обычно требуются в системах сигнализации для защиты их схем от помех от высокого напряжения. тягово-токовые напряжения и адаптировать их характеристики к превосходному ускорению и устойчивым скоростям, достигаемым с помощью электрической тяги.
Как работают электромобили?
Полностью электрические транспортные средства (электромобили), также называемые аккумуляторными электромобилями, имеют электродвигатель вместо двигателя внутреннего сгорания. В транспортном средстве используется большая тяговая аккумуляторная батарея для питания электродвигателя, и его необходимо подключать к розетке или зарядному устройству, также называемому питающим оборудованием для электромобилей (EVSE). Поскольку он работает на электричестве, автомобиль не выпускает выхлопных газов из выхлопной трубы и не содержит типичных компонентов жидкого топлива, таких как топливный насос, топливопровод или топливный бак.Узнайте больше об электромобилях.
Поскольку он работает на электричестве, автомобиль не выпускает выхлопных газов из выхлопной трубы и не содержит типичных компонентов жидкого топлива, таких как топливный насос, топливопровод или топливный бак.Узнайте больше об электромобилях.
Ключевые компоненты электромобиля
Батарея (полностью электрическая вспомогательная): В транспортном средстве с электрическим приводом вспомогательная батарея обеспечивает электроэнергией аксессуары транспортного средства.
Порт зарядки: Порт зарядки позволяет автомобилю подключаться к внешнему источнику питания для зарядки тягового аккумулятора.
Преобразователь постоянного тока в постоянный: Это устройство преобразует мощность постоянного тока высокого напряжения от тягового аккумуляторного блока в мощность постоянного тока низкого напряжения, необходимую для работы аксессуаров автомобиля и подзарядки вспомогательной аккумуляторной батареи.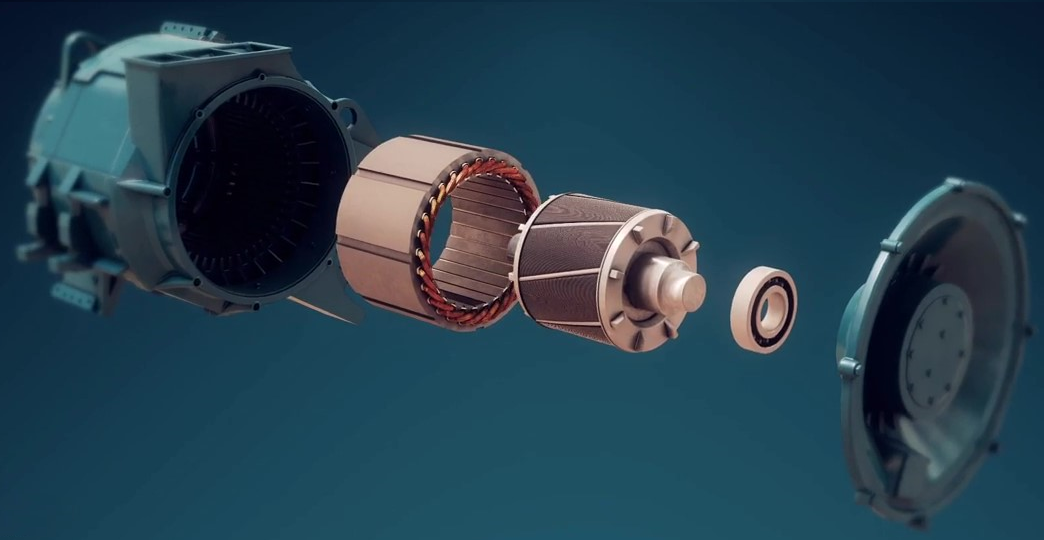
Тяговый электродвигатель: Используя мощность от тягового аккумулятора, этот электродвигатель приводит в движение колеса транспортного средства. В некоторых автомобилях используются мотор-генераторы, которые выполняют как приводную, так и регенеративную функции.
Бортовое зарядное устройство: Принимает входящую электроэнергию переменного тока, подаваемую через порт зарядки, и преобразует ее в мощность постоянного тока для зарядки тягового аккумулятора.Он также обменивается данными с зарядным оборудованием и отслеживает характеристики аккумулятора, такие как напряжение, ток, температуру и состояние заряда, во время зарядки аккумулятора.
Контроллер силовой электроники: Этот блок управляет потоком электроэнергии, подаваемой тяговой батареей, регулируя скорость электрического тягового двигателя и создаваемый им крутящий момент.
Тепловая система (охлаждение): Эта система поддерживает надлежащий диапазон рабочих температур двигателя, электродвигателя, силовой электроники и других компонентов.
Тяговый аккумулятор: Накапливает электроэнергию для использования тяговым электродвигателем.
Трансмиссия (электрическая): Трансмиссия передает механическую энергию от тягового электродвигателя для привода колес.
Влияние электрической части тягового привода на динамические характеристики железнодорожного подвижного состава на основе модели электромеханической муфты
Математическая модель системы трансмиссии
Для анализа математической модели тягового двигателя были применены следующие допущения: (1) Три- фазные обмотки двигателя симметричны, а пространственная гармоническая магнитодвижущая сила из-за ограниченного количества пазов не учитывается.(2) Влияние магнитного насыщения и потерь в сердечнике не учитывается. (3) Самоиндукция и взаимная индуктивность каждой обмотки линейны. (4) Влияние температуры и частоты на сопротивление двигателя игнорируется. В двухфазной системе координат произвольного вращения, то есть системе координат dq , математическая модель тягового двигателя может быть выражена следующим образом:
Уравнение крутящего момента
$$ T _ {{e}} = \ frac {3} {2} n _ {{p}} \ frac {{L _ {{m}}}} {{\ sigma L {\ text {s}} L {\ text {r}}}} \ left | {\ psi _ {{\ text {s}}}} \ right | \ left | {\ psi _ {{\ text {r}}}} \ right | \ sin \ theta $$
(1)
Уравнение движения
$$ T _ {{e}} = T _ {{L}} + \ frac {J} {{n _ {{p}}}}} \ frac {{d _ {{\ upomega _ {{ r}}}}}} {dt} $$
(2)
где: \ (\ psi _ {{\ text {s}}} \) — потокосцепление статора в трехфазном валу.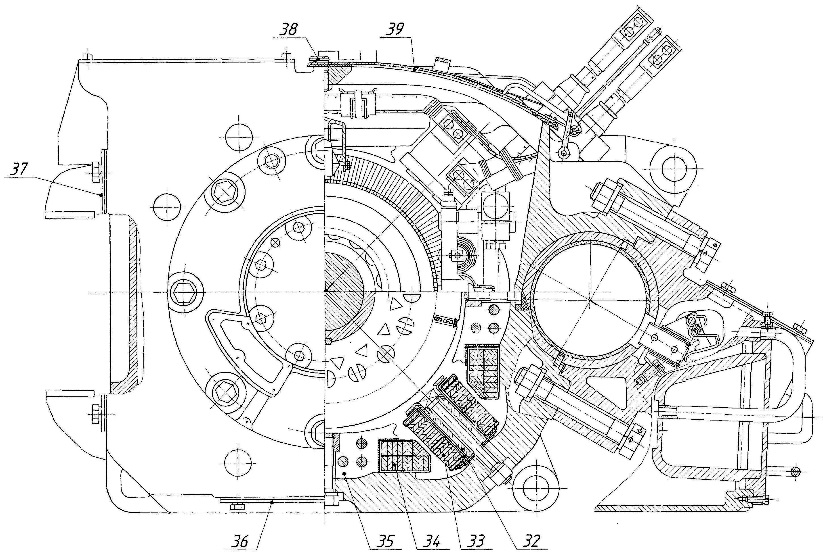 \ (\ psi _ {{\ text {r}}} \) — Потоковая связь ротора в трехфазном валу. \ (L _ {{s}} \) — Собственная индуктивность статора. \ (L _ {{r}} \) — Собственная индуктивность ротора. \ (L _ {{m}} \) — Взаимная индуктивность двухфазной обмотки. \ (n _ {{p}} \) — Полярный логарифм. \ (J \) — момент инерции. \ (\ omega _ {{r}} \) — Угловая скорость ротора двигателя. \ (\ sigma \) — Индуктивность рассеяния двигателя. \ (\ theta \) — Угол между потокосцеплением статора и потокосцеплением ротора.
\ (\ psi _ {{\ text {r}}} \) — Потоковая связь ротора в трехфазном валу. \ (L _ {{s}} \) — Собственная индуктивность статора. \ (L _ {{r}} \) — Собственная индуктивность ротора. \ (L _ {{m}} \) — Взаимная индуктивность двухфазной обмотки. \ (n _ {{p}} \) — Полярный логарифм. \ (J \) — момент инерции. \ (\ omega _ {{r}} \) — Угловая скорость ротора двигателя. \ (\ sigma \) — Индуктивность рассеяния двигателя. \ (\ theta \) — Угол между потокосцеплением статора и потокосцеплением ротора.
Когда двигатель подключен к несинусоидальному источнику питания, в воздушном зазоре двигателя будет генерироваться временная гармоническая магнитодвижущая сила, которая создаст дополнительный гармонический крутящий момент.Гармонический крутящий момент тягового двигателя 8 включает стабильный гармонический крутящий момент и гармонический крутящий момент вибрации. Когда гармонический поток в воздушном зазоре и гармонический ток ротора имеют одинаковый порядок, их взаимодействие будет давать стабильный гармонический крутящий момент. {2} \ frac {{R _ {{{\ text {r}} k}}}} {(k \ mp 1)} $$
{2} \ frac {{R _ {{{\ text {r}} k}}}} {(k \ mp 1)} $$
(3)
Когда времена гармонического потока и гармонического тока ротора различны, их взаимодействие приводит к возникновению гармонического момента вибрации.Если основная и гармоническая волны в воздушном зазоре создают вращающееся магнитное поле n , то будут ( n 2 — n ) гармонические моменты вибрации. Гармонический вибрационный крутящий момент пятой гармоники равен
$$ T_ {5 — 1} = \ frac {{3n _ {{\ text {p}}}}} {{2 \ pi f_ {1}}} I_ {25 } E_ {2} \ cos (6 \ omega t — \ phi_ {2}) = \ frac {{3n _ {{\ text {p}}}}} {{2 \ pi f_ {1}}} I_ {25 } E_ {2} \ cos (6 \ omega t + \ pi — \ phi_ {2}) $$
(4)
Гармонический крутящий момент 7-й гармоники составляет
$$ T_ {7 — 1} = \ frac {{3n _ {{\ text {p}}}}} {{2 \ pi f_ {1}}} I_ {27} E_ {2} \ cos (6 \ omega t — \ phi_ {2}) $$
(5)
Точно так же взаимодействие между токами 11-й и 13-й гармоник и основным магнитным полем создаст крутящий момент 12-й гармоники.
Система трансмиссии 40 упрощена как режим чистых крутильных колебаний, показанный на рис. 2, учитывается только передача крутящего момента между ведущей шестерней и пассивной шестерней. \ (k _ {{\ text {i}}} \) и \ (k_ {0} \) — жесткость на кручение ведущего и ведомого валов соответственно, \ (c _ {{\ text {i}}} \) и \ (c_ {0} \) — их торсионное демпфирование, \ (\ alpha _ {{\ text {i}}} \) и \ (\ alpha_ {0} \) — угловое смещение кручения, \ (n_ { {\ text {i}}} \) и \ (n_ {0} \) — угловая скорость, \ (T _ {{\ text {i}}} \) и \ (T_ {0} \) — движущий момент.
Рисунок 2Модель коробки передач (a) и ее эскизное изображение модели крутильных колебаний (b) для типичного железнодорожного поезда.
Передаточное число определяется как:
$$ N = \ frac {{n _ {\ text {i}}}}} {{n_ {0}}} $$
(6)
Динамическое уравнение передаточного момента шестерни имеет следующий вид:
$$ T = k \ left ({\ alpha_ {0} — \ frac {{\ alpha _ {{\ text {i}}}}}} { N}} \ справа) $$
(7)
Поскольку левое и правое колеса имеют одинаковую инерцию вращения, можно получить уравнение крутильных колебаний системы трансмиссии:
$$ \ left [\ begin {gather} J _ {{1 {\ kern 1pt} {\ kern 1pt}}} {\ kern 1pt} {\ kern 1pt} {\ kern 1pt} {\ kern 1pt} {\ kern 1pt} {\ kern 1pt} {\ kern 1pt} {\ kern 1pt} {\ kern 1pt} { \ kern 1pt} {\ kern 1pt} {\ kern 1pt} {\ kern 1pt} 0 \ hfill \\ {\ kern 1pt} {\ kern 1pt} {\ kern 1pt} {\ kern 1pt} 0 {\ kern 1pt} {\ kern 1pt} {\ kern 1pt} {\ kern 1pt} {\ kern 1pt} {\ kern 1pt} {\ kern 1pt} {\ kern 1pt} {\ kern 1pt} {\ kern 1pt} {\ kern 1pt} J_ {2} \ hfill \\ \ end {gather} \ right] \ left [\ begin {gather} \ ddot {\ theta} _ {1} \ hfill \\ \ ddot {\ theta} _ {2} \ hfill \\ \ end {gather} \ right] + \ left [\ begin {gather} {\ kern 1pt} {\ kern 1pt} {\ kern 1pt} {\ kern 1pt} {\ kern 1pt} {\ kern 1pt} { \ kern 1pt} {\ kern 1pt} {\ kern 1pt} {\ kern 1pt} c {\ kern 1pt} {\ kern 1pt} {\ kern 1pt} {\ kern 1pt} {\ kern 1pt} {\ kern 1pt} {\ kern 1pt} {\ kern 1pt} {\ kern 1pt} {\ kern 1pt} {\ kern 1pt} {\ k ern 1pt} {\ kern 1pt} {\ kern 1pt} {\ kern 1pt} — c_ {2} \ hfill \\ {\ kern 1pt} — c_ {1} {\ kern 1pt} {\ kern 1pt} {\ kern 1pt} {\ kern 1pt} {\ kern 1pt} {\ kern 1pt} {\ kern 1pt} {\ kern 1pt} {\ kern 1pt} {\ kern 1pt} {\ kern 1pt} {\ kern 1pt} {\ kern 1pt} {\ kern 1pt} 2c_ {2} \ hfill \\ \ end {gather} \ right] \ left [\ begin {gather} \ dot {\ theta} _ {1} \ hfill \\ \ dot {\ theta } _ {2} \ hfill \\ \ end {gather} \ right] + \ left [\ begin {gather} {\ kern 1pt} {\ kern 1pt} {\ kern 1pt} {\ kern 1pt} {\ kern 1pt} {\ kern 1pt} } k {\ kern 1pt} {\ kern 1pt} {\ kern 1pt} {\ kern 1pt} {\ kern 1pt} {\ kern 1pt} {\ kern 1pt} {\ kern 1pt} {\ kern 1pt} {\ kern 1pt} {\ kern 1pt} {\ kern 1pt} {\ kern 1pt} {\ kern 1pt} {\ kern 1pt} {\ kern 1pt} {\ kern 1pt} {\ kern 1pt} {\ kern 1pt} {\ kern 1pt} — k_ {2} \ hfill \\ — k_ {1} {\ kern 1pt} {\ kern 1pt} {\ kern 1pt} {\ kern 1pt} {\ kern 1pt} {\ kern 1pt} {\ kern 1pt} } {\ kern 1pt} {\ kern 1pt} {\ kern 1pt} {\ kern 1pt} {\ kern 1pt} {\ kern 1pt} {\ kern 1pt} {\ kern 1pt} {\ kern 1pt} 2k_ {2} \ hfill \\ \ end {собрано} \ right] \ left [\ begin {установлено} \ theta_ {1} \ hfill \\ \ theta_ {2} \ hfill \\ \ end {gather} \ right] = \ left [\ begin {gather} — \ frac {{J _ {{1 {\ kern 1pt} { \ kern 1pt}}}}} {J} T _ {{\ text {e}}} — T_ {1} {\ kern 1pt} \ hfill \\ {\ kern 1pt} {\ kern 1pt} {\ kern 1pt} {\ kern 1pt} {\ kern 1pt} {\ kern 1pt} {\ kern 1pt} {\ kern 1pt} {\ kern 1pt} {\ kern 1pt} {\ kern 1pt} {\ kern 1pt} {\ kern 1pt} {\ kern 1pt} {\ kern 1pt} T_ {1} — T_ {2} {\ kern 1pt} \ hfill \\ \ end {gather} \ right] $$
(8)
где: \ (J \) — эквивалентная инерция вращения всей системы трансмиссии, эквивалентная валу колеса. \ (J_ {1} \) — момент инерции левого колеса. \ (J_ {2} \) — момент инерции правого колеса. \ (k_ {1} \) — эквивалентная жесткость на кручение между системой трансмиссии и колесной парой. \ (k_ {2} \) — жесткость колесной пары на кручение. \ (c_ {1} \) — эквивалентное демпфирование кручения между системой трансмиссии и колесной парой. \ (c_ {2} \) — демпфирование кручения колесной пары. \ (T _ {{\ text {e}}} \) — выходной электромагнитный момент тягового двигателя. \ (T_ {1} \) — противодействующий момент рельса левому колесу.\ (T_ {2} \) — противодействующий момент рельса правому колесу. \ (\ theta_ {1} \) — смещение торсионного угла между тяговым двигателем и левым колесом. \ (\ theta_ {2} \) — смещение угла кручения между левым и правым колесами.
\ (J_ {1} \) — момент инерции левого колеса. \ (J_ {2} \) — момент инерции правого колеса. \ (k_ {1} \) — эквивалентная жесткость на кручение между системой трансмиссии и колесной парой. \ (k_ {2} \) — жесткость колесной пары на кручение. \ (c_ {1} \) — эквивалентное демпфирование кручения между системой трансмиссии и колесной парой. \ (c_ {2} \) — демпфирование кручения колесной пары. \ (T _ {{\ text {e}}} \) — выходной электромагнитный момент тягового двигателя. \ (T_ {1} \) — противодействующий момент рельса левому колесу.\ (T_ {2} \) — противодействующий момент рельса правому колесу. \ (\ theta_ {1} \) — смещение торсионного угла между тяговым двигателем и левым колесом. \ (\ theta_ {2} \) — смещение угла кручения между левым и правым колесами.
Модель управления системой тягового привода
Как правило, прямое управление крутящим моментом (DTC) предназначено для непосредственного управления состоянием переключения инвертора в соответствии со сравнением измеренного значения и наблюдаемого значения магнитного потока и крутящего момента.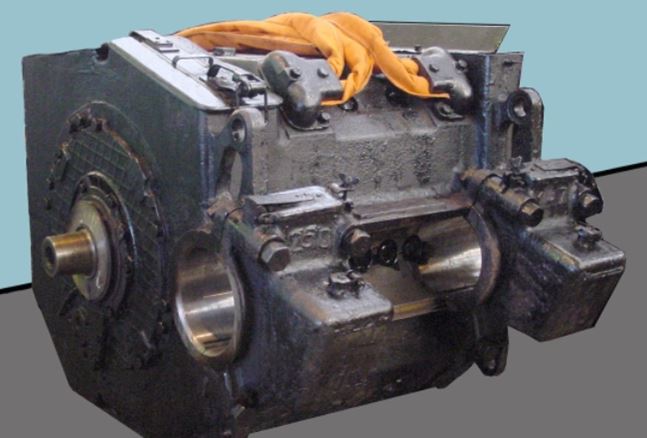 Чтобы реализовать управление с обратной связью в системе прямого управления крутящим моментом, необходимо точно оценить текущий поток статора и крутящий момент. Поток статора оценивается следующим образом:
Чтобы реализовать управление с обратной связью в системе прямого управления крутящим моментом, необходимо точно оценить текущий поток статора и крутящий момент. Поток статора оценивается следующим образом:
$$ \ left \ {\ begin {gather} \ psi _ {{{\ text {s}} \ upalpha}} {=} \ int {(u _ {{{\ text { s}} \ upalpha}} — i _ {{{\ text {s}} \ upalpha}} R _ {{\ text {s}}}) dt} \ hfill \\ \ psi _ {{{\ text {s}} \ upbeta}} {=} \ int {(u _ {{{\ text {s}} \ upbeta}} — i _ {{{\ text {s}} \ upbeta}} R _ {{\ text {s}}} ) dt} \ hfill \\ \ end {собрано} \ right.$
(9)
Наблюдаемые значения электромагнитного момента следующие:
$$ T _ {{\ text {e}}} = n _ {{\ text {p}}} (\ hat {\ psi} _ {{{\ text {s}} \ upalpha}} i _ {{{\ text {s}} \ upbeta}} — \ hat {\ psi} _ {{{\ text {s}} \ upbeta}} i _ {{{\ text { s}} \ upalpha}}) $$
(10)
Прямое управление крутящим моментом в основном состоит из нескольких частей, показанных на рис. 3, выходное напряжение и токовые сигналы тягового инвертора могут быть получены путем измерения.Поток \ (\ psi _ {\ alpha} \) и \ (\ psi _ {\ beta} \) может быть получен блоком наблюдения и вычисления потока с использованием сигналов напряжения и тока, а затем фактического значения крутящего момента, которое записывается как \ (T _ {{\ text {e}}} \) может быть получено блоком расчета крутящего момента. \ (\ psi _ {\ alpha} \) и \ (\ psi _ {\ beta} \) получат сигнал регулирования потока \ (\ psi Q \) через блок регулировки потокосцепления. В то же время, номер интервала магнитной связи может быть вычислен блоком определения положения магнитной связи.Через блок регулировки крутящего момента может быть получен сигнал регулировки крутящего момента \ (TQ \). \ (\ psi Q \), \ (TQ \) и N одновременно отправляются в блок выбора сигнала переключения в качестве входных данных для подтверждения вектора текущего напряжения и вывода сигнала переключения напряжения на тяговый инвертор. . Так можно было реализовать самоконтроль крутящего момента и магнитного потока.
3, выходное напряжение и токовые сигналы тягового инвертора могут быть получены путем измерения.Поток \ (\ psi _ {\ alpha} \) и \ (\ psi _ {\ beta} \) может быть получен блоком наблюдения и вычисления потока с использованием сигналов напряжения и тока, а затем фактического значения крутящего момента, которое записывается как \ (T _ {{\ text {e}}} \) может быть получено блоком расчета крутящего момента. \ (\ psi _ {\ alpha} \) и \ (\ psi _ {\ beta} \) получат сигнал регулирования потока \ (\ psi Q \) через блок регулировки потокосцепления. В то же время, номер интервала магнитной связи может быть вычислен блоком определения положения магнитной связи.Через блок регулировки крутящего момента может быть получен сигнал регулировки крутящего момента \ (TQ \). \ (\ psi Q \), \ (TQ \) и N одновременно отправляются в блок выбора сигнала переключения в качестве входных данных для подтверждения вектора текущего напряжения и вывода сигнала переключения напряжения на тяговый инвертор. . Так можно было реализовать самоконтроль крутящего момента и магнитного потока.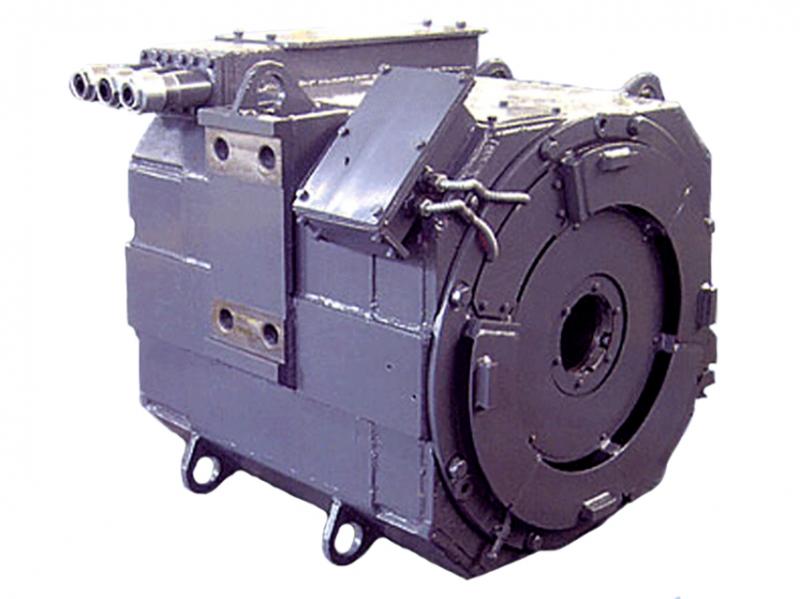 В блоке регулирования крутящего момента и блоке регулирования потокосцепления обычно используется триггер Шмидта для формирования гистерезисного компаратора.
В блоке регулирования крутящего момента и блоке регулирования потокосцепления обычно используется триггер Шмидта для формирования гистерезисного компаратора.
Блок-схема прямого управления крутящим моментом тягового двигателя.
В инверторе источника напряжения состояния переключателей одной и той же группы всегда противоположны. Если одна фаза трехфазной нагрузки подключена к положительному полюсу источника питания постоянного тока, соответствующее состояние переключателя равно 1. В противном случае, когда оно подключено к отрицательному полюсу источника питания постоянного тока, соответствующее состояние переключателя равно 0. Итак, существует восемь типов состояний переключателя, а именно: U 0 (000), U 1 (001), U 2 (010), U . 3 (011), U 4 (100), U 5 (101), U 6 (110), U 7 (111).
Модель динамики системы транспортного средства
Была создана многоместная динамическая модель рельсового транспортного средства, показанная на рис. 4. Она включала кузов вагона, две рамы тележки, четыре колесных пары 41,42 и восемь осевых ящиков. , и четыре комплекта трансмиссии. Каждая система привода состоит из тягового двигателя, подвески двигателя, муфты и коробки передач. Матричная форма дифференциального уравнения движения всей системы транспортного средства:
$$ \ left [M \ right] \ left \ {{\ ddot {x}} \ right \} + \ left [C \ right] \ left \ {{\ dot {x}} \ right \} + \ left [K \ right] \ left \ {x \ right \} = \ left \ {F \ right \} $$
(11)
где: \ (\ left [M \ right] \) — матрица качества системы.\ (\ left [C \ right] \) — Матрица демпфирования системы. \ (\ left [K \ right] \) — Матрица жесткости системы. \ (\ left \ {x \ right \} \) — Вектор смещения системы. \ (\ left \ {{\ dot {x}} \ right \} \) — Вектор скорости системы. \ (\ left \ {{\ ddot {x}} \ right \} \) — Вектор ускорения системы. \ (\ left \ {F \ right \} \) — Вектор внешней силы системы.
\ (\ left \ {{\ ddot {x}} \ right \} \) — Вектор ускорения системы. \ (\ left \ {F \ right \} \) — Вектор внешней силы системы.
Вид сбоку (a) и вид сверху (b) модели динамики автомобиля с системой трансмиссии.
Тяговый двигатель закреплялся на подвеске двигателя болтовым соединением 43 .Конец пассивной шестерни коробки передач закреплялся на валу колесной пары 44 через подшипник, а конец ведущей шестерни соединялся с рамой тележки через устройство подвески. Между коробкой и валом колесной пары была разрешена только степень свободы вращения вокруг оси Y системы координат. Пассивная шестерня и вал колесной пары были зафиксированы, и они могли синхронно вращаться вокруг оси Y системы координат. Ведущая шестерня и ротор тягового двигателя были связаны через муфту, в которой сцепление было реализовано путем ограничения синхронизации скоростей ротора и ведущей шестерни.
Уравнение связи электромеханической системы выражается следующим образом:
$$ \ left [\ begin {gather} J _ {1 {\ kern 1pt} {\ kern 1pt}}} {\ kern 1pt} {\ kern 1pt} {\ kern 1pt} {\ kern 1pt} {\ kern 1pt} {\ kern 1pt} {\ kern 1pt} {\ kern 1pt} {\ kern 1pt} {\ kern 1pt} {\ kern 1pt} {\ kern 1pt} {\ kern 1pt} 0 \ hfill \\ {\ kern 1pt} {\ kern 1pt} {\ kern 1pt} {\ kern 1pt} 0 {\ kern 1pt} {\ kern 1pt} {\ kern 1pt} { \ kern 1pt} {\ kern 1pt} {\ kern 1pt} {\ kern 1pt} {\ kern 1pt} {\ kern 1pt} {\ kern 1pt} {\ kern 1pt} J_ {2} \ hfill \\ \ end { собрано} \ right] \ left [\ begin {gather} \ ddot {\ theta} _ {1} \ hfill \\ \ ddot {\ theta} _ {2} \ hfill \\ \ end {gather} \ right] + \ left [\ begin {gather} {\ kern 1pt} {\ kern 1pt} {\ kern 1pt} {\ kern 1pt} {\ kern 1pt} {\ kern 1pt} {\ kern 1pt} {\ kern 1pt} {\ kern 1pt} {\ kern 1pt} c {\ kern 1pt} {\ kern 1pt} {\ kern 1pt} {\ kern 1pt} {\ kern 1pt} {\ kern 1pt} {\ kern 1pt} {\ kern 1pt} { \ kern 1pt} {\ kern 1pt} {\ kern 1pt} {\ kern 1pt} {\ kern 1pt} {\ kern 1pt} {\ kern 1pt} — c_ {2} \ hfill \\ {\ kern 1pt} — c_ {1} {\ kern 1pt} {\ kern 1pt} {\ kern 1pt} {\ kern 1pt} {\ kern 1pt} {\ kern 1pt} {\ kern 1pt} {\ kern 1pt} {\ kern 1pt} {\ kern 1pt} {\ kern 1pt} {\ kern 1pt} {\ kern 1pt} {\ kern 1pt} 2c_ {2} \ hfill \\ \ end {собрано} \ right] \ left [\ begin {gather} \ dot {\ theta} _ {1} \ hfill \\ \ dot {\ theta} _ {2} \ hfill \\ \ end {gather} \ right] + \ left [\ begin {gather} { \ kern 1pt} {\ kern 1pt} {\ kern 1pt} {\ kern 1pt} {\ kern 1pt} k {\ kern 1pt} {\ kern 1pt} {\ kern 1pt} {\ kern 1pt} {\ kern 1pt} {\ kern 1pt} {\ kern 1pt} {\ kern 1pt} {\ kern 1pt} {\ kern 1pt} {\ kern 1pt} {\ kern 1pt} {\ kern 1pt} {\ kern 1pt} {\ kern 1pt} {\ kern 1pt} {\ kern 1pt} {\ kern 1pt} {\ kern 1pt} {\ kern 1pt} — k_ {2} \ hfill \\ — k_ {1} {\ kern 1pt} {\ kern 1pt} { \ kern 1pt} {\ kern 1pt} {\ kern 1pt} {\ kern 1pt} {\ kern 1pt} {\ kern 1pt} {\ kern 1pt} {\ kern 1pt} {\ kern 1pt} {\ kern 1pt} { \ kern 1pt} {\ kern 1pt} {\ kern 1pt} {\ kern 1pt} 2k_ {2} \ hfill \\ \ end {gather} \ right] \ left [\ begin {gather} \ theta_ {1} \ hfill \\ \ theta_ {2} \ hfill \\ \ end {gather} \ rig ht] = \ left [\ begin {gather} — \ frac {{J _ {{1 {\ kern 1pt} {\ kern 1pt}}}}} {J} \ left ({T_ {L} + \ frac {J } {{n _ {{\ text {p}}}}} \ frac {{d \ dot {\ theta} _ {1}}} {dt} + \ frac {D} {{n _ {{\ text {p }}}}} \ dot {\ theta} _ {1}} \ right) — T_ {1} {\ kern 1pt} \ hfill \\ {\ kern 1pt} {\ kern 1pt} {\ kern 1pt} {\ kern 1pt} {\ kern 1pt} {\ kern 1pt} {\ kern 1pt} {\ kern 1pt} {\ kern 1pt} {\ kern 1pt} {\ kern 1pt} {\ kern 1pt} {\ kern 1pt} {\ kern 1pt} {\ kern 1pt} {\ kern 1pt} {\ kern 1pt} {\ kern 1pt} {\ kern 1pt} {\ kern 1pt} {\ kern 1pt} {\ kern 1pt} {\ kern 1pt} {\ kern 1pt} {\ kern 1pt} {\ kern 1pt} {\ kern 1pt} {\ kern 1pt} {\ kern 1pt} {\ kern 1pt} {\ kern 1pt} {\ kern 1pt} {\ kern 1pt} {\ kern 1pt} {\ kern 1pt} {\ kern 1pt} {\ kern 1pt} {\ kern 1pt} {\ kern 1pt} {\ kern 1pt} {\ kern 1pt} {\ kern 1pt} {\ kern 1pt} {\ kern 1pt} {\ kern 1pt} {\ kern 1pt} {\ kern 1pt} {\ kern 1pt} {\ kern 1pt} {\ kern 1pt} {\ kern 1pt} {\ kern 1pt} {\ kern 1pt} {\ kern 1pt} {\ kern 1pt} {\ kern 1pt} {\ kern 1pt} {\ kern 1pt} {\ kern 1pt} {\ kern 1pt} {\ kern 1pt} {\ kern 1pt} {\ kern 1pt} {\ кер n 1pt} T_ {1} — T_ {2} {\ kern 1pt} \ hfill \\ \ end {gather} \ right] $$
(12)
В моделировании электромеханической муфты, учитывая ожидаемую скорость ротора двигателя, с ней будет сравниваться выходной ток.