Как уменьшить обороты электродвигателя шкивами
Некоторые ситуации требуют изменения оборотов двигателя от номинальных. Иногда требуется уменьшить обороты электродвигателя, потому что их увеличение негативно сказывается на подшипниковом аппарате. Способы изменения вращения зависят от модели электрической машины.
Характеристики электрических машин отличаются: постоянного и переменного тока, однофазные, трехфазные. Поэтому говорить нужно о каждом случае отдельно.
- Простейший вариант
- В цепи якоря
- Для низкого напряжения
Простейший вариант
Легче всего изменять обороты электродвигателя постоянного тока. Они меняются простым изменением напряжения питания. Причем неважно где: на якоре или на возбуждении, но это касается только маломощных машин с минимальной нагрузкой. В основном управление скоростью вращения производят по цепи якоря. Более того, здесь возможно реостатное регулирование, если мощность мотора небольшая, или есть довольно мощный реостат.
Более того, здесь возможно реостатное регулирование, если мощность мотора небольшая, или есть довольно мощный реостат.
Это самый неэкономичный вариант. Механические характеристики двигателя с независимым возбуждением самые невыгодные из-за больших потерь, результатом чего является падение механической мощности, КПД.
Еще одна возможность – введение реостата в обмотку возбуждения. Рассматривая характеристики двигателя с независимым возбуждением, увидим, что регулирование скорости вращения возможно только в сторону увеличения оборотов. Это происходит ввиду насыщения обмотки.
Итак, реостатное регулирование скорости вращения аппарата независимого возбуждения оправдано в системах с минимальной нагрузкой. Лучше всего, когда работа при таком включении буде периодической.
В цепи якоря
Это лучший вариант регулирования скорости мотора с независимым возбуждением. Частота вращения прямо пропорциональна подводимому к якорю напряжению. Механические характеристики не меняют своего угла наклона, а перемещаются параллельно друг другу.
Механические характеристики не меняют своего угла наклона, а перемещаются параллельно друг другу.
Для осуществления этой схемы нужно цепь якоря подключить к источнику напряжения, которое можно менять.
Это возможно в электрических машинах малой или средней мощности. Двигатель большой мощности целесообразно подключить в схему с генератором напряжения независимого возбуждения.
В качестве привода для генератора используют обычный трехфазный асинхронник. Чтобы уменьшить обороты, достаточно на якоре понизить напряжение. Оно меняется от номинального и вниз. Эта схема имеет название «двигатель-генератор». Таким образом можно менять параметры на двигателе 220в.
Для низкого напряжения
Управление агрегатами на 12в проще из-за более низкого напряжения и как следствие, более доступных деталей. Вариантов подобных схем множество, поэтому важно понять сам принцип.
Такой двигатель имеет ротор, щеточный механизм и магниты. На выходе у него всего два провода, контролирование скорости идет по ним.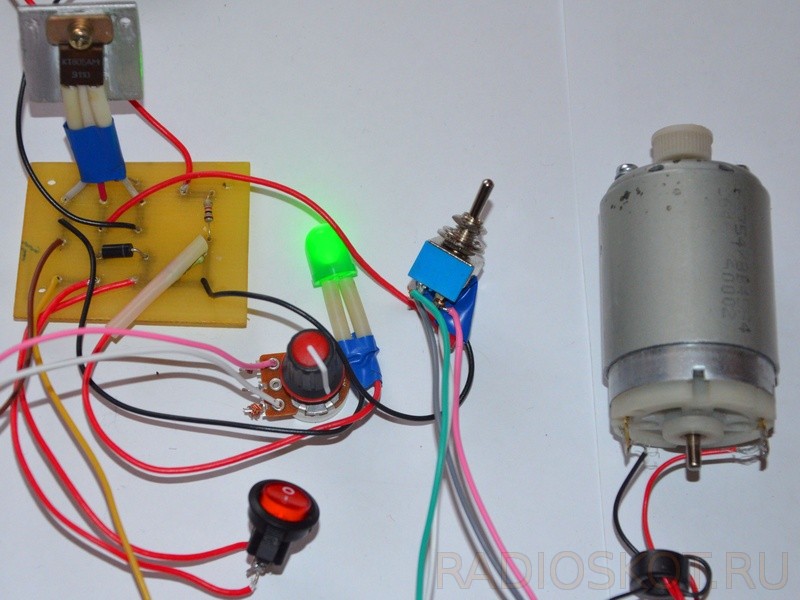 Питание может быть 12, 24, 36в, или другое. Что нужно – это его менять. Лучше, когда в пределах от нуля до максимума. В более простых вариантах 12–0в не получится, другие варианты дают такую возможность.
Питание может быть 12, 24, 36в, или другое. Что нужно – это его менять. Лучше, когда в пределах от нуля до максимума. В более простых вариантах 12–0в не получится, другие варианты дают такую возможность.
Кто-то паяет радиоэлементы навесным монтажом, кто-то набирает печатную плату – это уже зависит от желания и возможностей каждого человека.
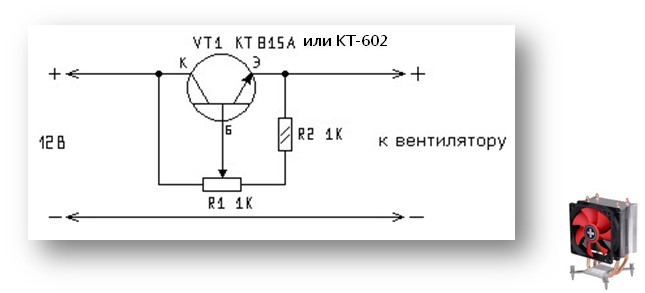
Этот вариант подойдет, если точность неважна: например, вентилятор. Напряжение меняется от 0 до 12 вольт, пропорционально меняется крутящий момент.
Другой вариант – со стабилизацией оборотов независимо от нагрузки на валу.
Питание 12 вольт, схема очень проста. Двигатель набирает обороты плавно, и также плавно их сбавляет так как напряжение на выходе меняется в пределах 12–0в. Как результат – можно убратькрутящий момент практически до нуля. Если потенциометр крутить в обратном направлении, мотор так же постепенно набирает обороты до максимума.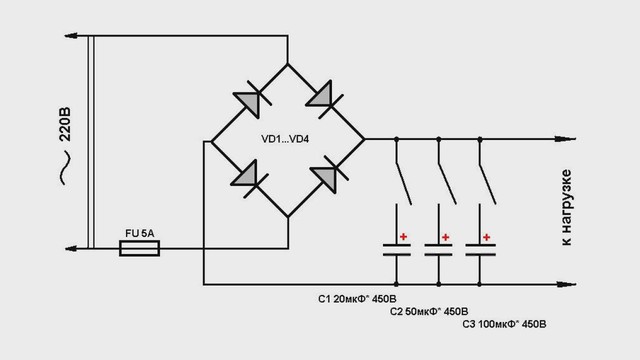 Микросхема очень распространенная, ее характеристики тоже подробно описаны. Питание 12–18в.
Микросхема очень распространенная, ее характеристики тоже подробно описаны. Питание 12–18в.
Есть еще один вариант, только это уже не для 12, а для 24в питания.
Двигатель постоянного тока, питание – переменное, так как стоит диодный мост. При желании можно мост выбросить и запитывать постоянкой от своего блока питания.
От сети
Однофазн
Как уменьшить обороты однофазного электродвигателя 220в
Плавная работа двигателя, без рывков и скачков мощности – это залог его долговечности. Для контроля этих показателей используется регулятор оборотов электродвигателя на 220В, 12 В и 24 В, все эти частотники можно изготовить своими руками или купить уже готовый агрегат.
Зачем нужен регулятор оборотов
Регулятор оборотов двигателя, частотный преобразователь – это прибор на мощном транзисторе, который необходим для того, чтобы инвертировать напряжение, а также обеспечить плавную остановку и пуск асинхронного двигателя при помощи ШИМ. ШИМ – широко-импульсное управление электрическими приспособлениями. Его применяют для создания определенной синусоиды переменного и постоянного тока.
ШИМ – широко-импульсное управление электрическими приспособлениями. Его применяют для создания определенной синусоиды переменного и постоянного тока.
Фото – мощный регулятор для асинхронного двигателя
Самый простой пример преобразователя – это обычный стабилизатор напряжения. Но у обсуждаемого прибора гораздо больший спектр работы и мощность.
Частотные преобразователи используются в любом устройстве, которое питается от электрической энергии. Регуляторы обеспечивают чрезвычайно точный электрический моторный контроль, так что скорость двигателя можно изменять в меньшую или большую сторону, поддерживать обороты на нужном уровне и защищать приборы от резких оборотов. При этом электродвигателем используется только энергия, необходимая для работы, вместо того, чтобы запускать его на полной мощности.
Фото – регулятор оборотов двигателя постоянного тока
Зачем нужен регулятор оборотов асинхронного электродвигателя:
- Для экономии электроэнергии. Контролируя скорость мотора, плавность его пуска и остановки, силы и частоты оборотов, можно добиться значительной экономии личных средств.
 В качестве примера, снижение скорости на 20% может дать экономию энергии в размере 50%.
В качестве примера, снижение скорости на 20% может дать экономию энергии в размере 50%. - Преобразователь частоты может использоваться для контроля температуры процесса, давления или без использования отдельного контроллера;
- Не требуется дополнительного контроллера для плавного пуска;
- Значительно снижаются расходы на техническое обслуживание.
Устройство часто используется для сварочного аппарата (в основном для полуавтоматов), электрической печки, ряда бытовых приборов (пылесоса, швейной машинки, радио, стиральной машины), домашнего отопителя, различных судомоделей и т.д.
Фото – шим контроллер оборотов
Принцип работы регулятора оборотов
Регулятор оборотов представляет собой устройство, состоящее из следующих трех основных подсистем:
- Двигателя переменного тока;
- Главного контроллера привода;
- Привода и дополнительных деталей.
Когда двигатель переменного тока запускается на полную мощность, происходит передача тока с полной мощностью нагрузки, такое повторяется 7-8 раз.
Фото – схема регулятора для коллекторного двигателя
В зависимости от входящего напряжения, частотный регулятор числа оборотов трехфазного или однофазного электродвигателя, происходит выпрямление тока 220 или 380 вольт. Это действие осуществляется при помощи выпрямляющего диода, который расположен на входе энергии. Далее ток проходит фильтрацию при помощи конденсаторов. Далее формируется ШИМ, за это отвечает электросхема. Теперь обмотки асинхронного электродвигателя готовы к передаче импульсного сигнала и их интеграции к нужной синусоиде. Даже у микроэлектродвигателя эти сигналы выдаются, в прямом смысле слова, пачками.
Как выбрать регулятор
Существует несколько характеристик, по которым нужно выбирать регулятор оборотов для автомобиля, станочного электродвигателя, бытовых нужд:
- Тип управления.
 Для коллекторного электродвигателя бывают регуляторы с векторной или скалярной системой управления. Первые чаще применяются, но вторые считаются более надежными;
Для коллекторного электродвигателя бывают регуляторы с векторной или скалярной системой управления. Первые чаще применяются, но вторые считаются более надежными; - Мощность. Это один из самых важных факторов для выбора электрического преобразователя частот. Нужно подбирать частотник с мощностью, которая соответствует максимально допустимой на предохраняемом приборе. Но для низковольтного двигатель лучше подобрать регулятор мощнее, чем допустимая величина Ватт;
- Напряжение. Естественно, здесь все индивидуально, но по возможности нужно купить регулятор оборотов для электродвигателя, у которого принципиальная схема имеет широкий диапазон допустимых напряжений;
- Диапазон частот. Преобразование частоты – это основная задача данного прибора, поэтому старайтесь выбрать модель, которая будет максимально соответствовать Вашим потребностям. Скажем, для ручного фрезера будет достаточно 1000 Герц;
- По прочим характеристикам. Это срок гарантии, количество входов, размер (для настольных станков и ручных инструментов есть специальная приставка).

Хорошо себя зарекомендовали приборы марки Sinus, E-Sky и Pic.
При этом также нужно понимать, что есть так называемый универсальный регулятор вращения. Это частотный преобразователь для бесколлекторных двигателей.
Фото – схема регулятора для бесколлекторных двигателей
В данной схеме есть две части – одна логическая, где на микросхеме расположен микроконтроллер, а вторая – силовая. В основном такая электрическая схема используется для мощного электрического двигателя.
Видео: регулятор оборотов электродвигателя с ШИро V2
Как сделать самодельный регулятор оборотов двигателя
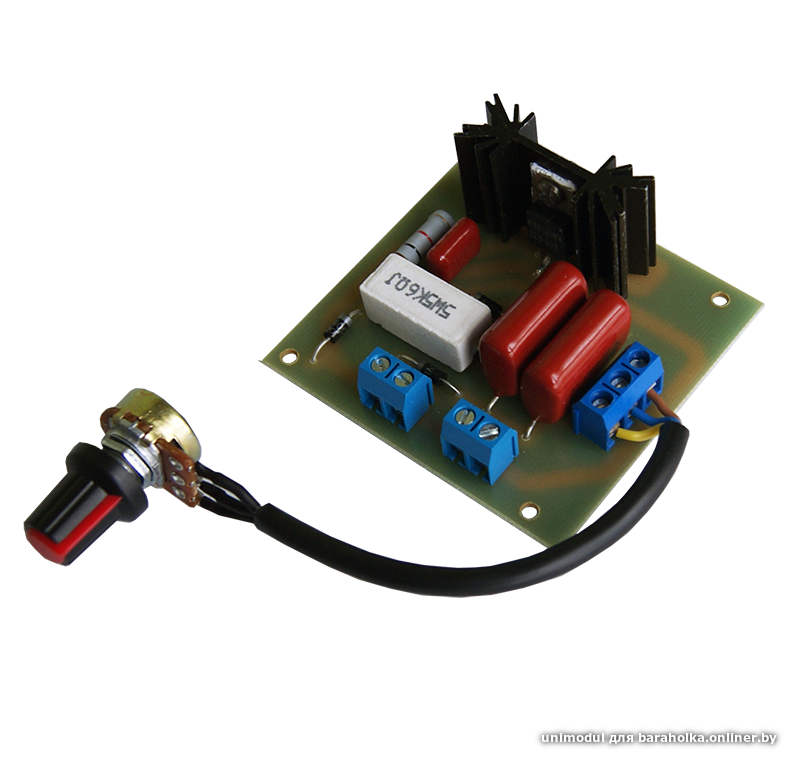
Можно сделать простой симисторный регулятор оборотов электродвигателя, его схема представлена ниже, а цена состоит только из деталей, продающихся в любом магазине электротехники.
Для работы нам понадобится мощный симистор типа BT138-600, её советует журнал радиотехники.
Фото – схема регулятора оборотов своими руками
В описанной схеме, обороты будут регулироваться при помощи потенциометра P1. Параметром P1 определяется фаза входящего импульсного сигнала, который в свою очередь открывает симистор. Такая схема может применяться как в полевом хозяйстве, так и в домашнем. Можно использовать данный регулятор для швейных машинок, вентиляторов, настольных сверлильных станков.
Параметром P1 определяется фаза входящего импульсного сигнала, который в свою очередь открывает симистор. Такая схема может применяться как в полевом хозяйстве, так и в домашнем. Можно использовать данный регулятор для швейных машинок, вентиляторов, настольных сверлильных станков.
Принцип работы прост: в момент, когда двигатель немного затормаживается, его индуктивность падает, и это увеличивает напряжение в R2-P1 и C3, то в свою очередь влечет более продолжительное открытие симистора.
Тиристорный регулятор с обратной связью работает немного по-другому. Он обеспечивает обратный ход энергии в энергетическую систему, что является очень экономным и выгодным. Данный электронный прибор подразумевает включение в электрическую схемы мощного тиристора. Его схема выглядит вот так:
Здесь для подачи постоянного тока и выпрямления требуется генератор управляющего сигнала, усилитель, тиристор, цепь стабилизации оборотов.
Однофазные асинхронные двигатели питаются от обычной сети переменного напряжения 220 В.
Наиболее распространённая конструкция таких двигателей содержит две (или более) обмотки – рабочую и фазосдвигающую. Рабочая питается напрямую, а дополнительная через конденсатор, который сдвигает фазу на 90 градусов, что создаёт вращающееся магнитное поле. Поэтому такие двигатели ещё называют двухфазные или конденсаторные.
Регулировать скорость вращения таких двигателей необходимо, например, для:
- изменения расхода воздуха в системе вентиляции
- регулирования производительности насосов
- изменения скорости движущихся деталей, например в станках, конвеерах
В системах вентиляции это позволяет экономить электроэнергию, снизить уровень акустического шума установки, установить необходимую производительность.
Способы регулирования
Рассматривать механические способы изменения скорости вращения, например редукторы, муфты, шестерёнчатые трансмиссии мы не будем. Также не затронем способ изменения количества полюсов обмоток.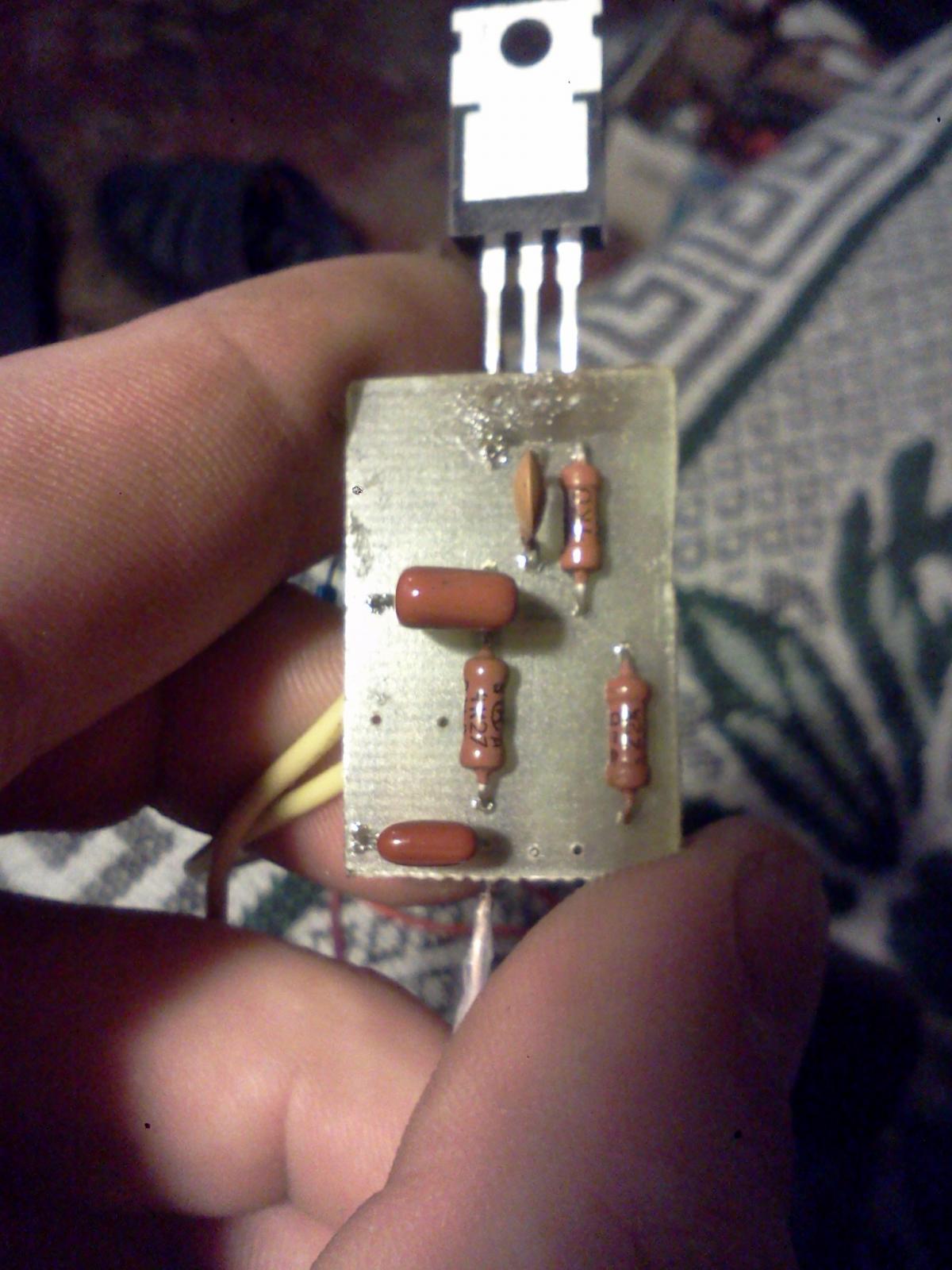
Рассмотрим способы с изменением электрических параметров:
- изменение напряжения питания двигателя
- изменение частоты питающего напряжения
Регулирование напряжением
Регулирование скорости этим способом связано с изменением, так называемого, скольжения двигателя – разностью между скоростью вращения магнитного поля, создаваемого неподвижным статором двигателя и его движущимся ротором:
n1 – скорость вращения магнитного поля
n2– скорость вращения ротора
При этом обязательно выделяется энергия скольжения – из-за чего сильнее нагреваются обмотки двигателя.
Данный способ имеет небольшой диапазон регулирования, примерно 2:1, а также может осуществляться только вниз – то есть, снижением питающего напряжения.
При регулировании скорости таким способом необходимо устанавливать двигатели завышенной мощности.
Но несмотря на это, этот способ используется довольно часто для двигателей небольшой мощности с вентиляторной нагрузкой.
На практике для этого применяют различные схемы регуляторов.
Автотрансформаторное регулирование напряжения
Автотрансформатор – это обычный трансформатор, но с одной обмоткой и с отводами от части витков. При этом нет гальванической развязки от сети, но она в данном случае и не нужна, поэтому получается экономия из-за отсутствия вторичной обмотки.
На схеме изображён автотрансформатор T1, переключатель SW1, на который приходят отводы с разным напряжением, и двигатель М1.
Регулировка получается ступенчатой, обычно используют не более 5 ступеней регулирования.
Преимущества данной схемы:
- неискажённая форма выходного напряжения (чистая синусоида)
- хорошая перегрузочная способность трансформатора
Недостатки:
- все недостатки присущие регулировке напряжением
Тиристорный регулятор оборотов двигателя
В данной схеме используются ключи – два тиристора, включённых встречно-параллельно (напряжение переменное, поэтому каждый тиристор пропускает свою полуволну напряжения) или симистор.
Схема управления регулирует момент открытия и закрытия тиристоров относительно фазового перехода через ноль, соответственно “отрезается” кусок вначале или, реже в конце волны напряжения.
Таким образом изменяется среднеквадратичное значение напряжения.
Данная схема довольно широко используется для регулирования активной нагрузки – ламп накаливания и всевозможных нагревательных приборов (так называемые диммеры).
Ещё один способ регулирования – пропуск полупериодов волны напряжения, но при частоте в сети 50 Гц для двигателя это будет заметно – шумы и рывки при работе.
Для управления двигателями регуляторы модифицируют из-за особенностей индуктивной нагрузки:
- устанавливают защитные LRC-цепи для защиты силового ключа (конденсаторы, резисторы, дроссели)
- добавляют на выходе конденсатор для корректировки формы волны напряжения
- ограничивают минимальную мощность регулирования напряжения – для гарантированного старта двигателя
- используют тиристоры с током в несколько раз превышающим ток электромотора
Достоинства тиристорных регуляторов:
Недостатки:
- можно использовать для двигателей небольшой мощности
- при работе возможен шум, треск, рывки двигателя
- при использовании симисторов на двигатель попадает постоянное напряжение
- все недостатки регулирования напряжением
Регулировка оборотов электродвигателя 220в без потери мощности. Как уменьшить обороты электродвигателя
Как уменьшить обороты электродвигателя
Плавная работа двигателя, без рывков и скачков мощности – это залог его долговечности. Для контроля этих показателей используется регулятор оборотов электродвигателя на 220В, 12 В и 24 В, все эти частотники можно изготовить своими руками или купить уже готовый агрегат.
Регулятор оборотов двигателя, частотный преобразователь – это прибор на мощном транзисторе, который необходим для того, чтобы инвертировать напряжение, а также обеспечить плавную остановку и пуск асинхронного двигателя при помощи ШИМ. ШИМ – широко-импульсное управление электрическими приспособлениями. Его применяют для создания определенной синусоиды переменного и постоянного тока.
Фото – мощный регулятор для асинхронного двигателя
Самый простой пример преобразователя – это обычный стабилизатор напряжения. Но у обсуждаемого прибора гораздо больший спектр работы и мощность.
Частотные преобразователи используются в любом устройстве, которое питается от электрической энергии. Регуляторы обеспечивают чрезвычайно точный электрический моторный контроль, так что скорость двигателя можно изменять в меньшую или большую сторону, поддерживать обороты на нужном уровне и защищать приборы от резких оборотов. При этом электродвигателем используется только энергия, необходимая для работы, вместо того, чтобы запускать его на полной мощности.
Регуляторы обеспечивают чрезвычайно точный электрический моторный контроль, так что скорость двигателя можно изменять в меньшую или большую сторону, поддерживать обороты на нужном уровне и защищать приборы от резких оборотов. При этом электродвигателем используется только энергия, необходимая для работы, вместо того, чтобы запускать его на полной мощности.
Фото – регулятор оборотов двигателя постоянного тока
Зачем нужен регулятор оборотов асинхронного электродвигателя:
- Для экономии электроэнергии. Контролируя скорость мотора, плавность его пуска и остановки, силы и частоты оборотов, можно добиться значительной экономии личных средств. В качестве примера, снижение скорости на 20% может дать экономию энергии в размере 50%.
- Преобразователь частоты может использоваться для контроля температуры процесса, давления или без использования отдельного контроллера;
- Не требуется дополнительного контроллера для плавного пуска;
- Значительно снижаются расходы на техническое обслуживание.

Устройство часто используется для сварочного аппарата (в основном для полуавтоматов), электрической печки, ряда бытовых приборов (пылесоса, швейной машинки, радио, стиральной машины), домашнего отопителя, различных судомоделей и т.д.
Фото – шим контроллер оборотов
Принцип работы регулятора оборотов
Регулятор оборотов представляет собой устройство, состоящее из следующих трех основных подсистем:
- Двигателя переменного тока;
- Главного контроллера привода;
- Привода и дополнительных деталей.
Когда двигатель переменного тока запускается на полную мощность, происходит передача тока с полной мощностью нагрузки, такое повторяется 7-8 раз. Этот ток сгибает обмотки двигателя и вырабатывает тепло, которое будет выделяться продолжительное время. Это может значительно снизить долговечность двигателя. Иными словами, преобразователь – это своеобразный ступенчатый инвертор, который обеспечивает двойное преобразование энергии.
Фото – схема регулятора для коллекторного двигателя
В зависимости от входящего напряжения, частотный регулятор числа оборотов трехфазного или однофазного электродвигателя, происходит выпрямление тока 220 или 380 вольт. Это действие осуществляется при помощи выпрямляющего диода, который расположен на входе энергии. Далее ток проходит фильтрацию при помощи конденсаторов. Далее формируется ШИМ, за это отвечает электросхема. Теперь обмотки асинхронного электродвигателя готовы к передаче импульсного сигнала и их интеграции к нужной синусоиде. Даже у микроэлектродвигателя эти сигналы выдаются, в прямом смысле слова, пачками.
Фото – синусоида нормальной работы электродвигателя
Как выбрать регулятор
Существует несколько характеристик, по которым нужно выбирать регулятор оборотов для автомобиля, станочного электродвигателя, бытовых нужд:
- Тип управления. Для коллекторного электродвигателя бывают регуляторы с векторной или скалярной системой управления.
 Первые чаще применяются, но вторые считаются более надежными;
Первые чаще применяются, но вторые считаются более надежными; - Мощность. Это один из самых важных факторов для выбора электрического преобразователя частот. Нужно подбирать частотник с мощностью, которая соответствует максимально допустимой на предохраняемом приборе. Но для низковольтного двигател
изменение скорости вращения и схемы на тиристорах
При пуске электродвигателя происходит превышение потребления тока в 7 раз, что способствует преждевременному выходу из строя электрической и механической частей мотора. Для предотвращения этого следует применять регулятор оборотов электродвигателя. Существует много моделей заводского плана, но для того чтобы сделать такое устройство самостоятельно, необходимо знать принцип действия электродвигателя и способы регулирования оборотов ротора.
Общие сведения
Электродвигатели переменного тока получили широкое распространение во многих сферах жизнедеятельности человека, а именно — модели асинхронного типа. Основное назначение двигателя как электрической машины — трансформация электрической энергии в механическую. Асинхронный в переводе означает неодновременный, так как частота вращения ротора отличается от частоты переменного напряжения (U) в статоре. Существует две разновидности асинхронных двигателей по типу питания:
Основное назначение двигателя как электрической машины — трансформация электрической энергии в механическую. Асинхронный в переводе означает неодновременный, так как частота вращения ротора отличается от частоты переменного напряжения (U) в статоре. Существует две разновидности асинхронных двигателей по типу питания:
- Однофазные.
- Трехфазные.
Однофазные применяются для домашних бытовых нужд, а трехфазные используются на производстве. В трехфазных асинхронных двигателях (далее ТАД) используются два вида роторов:
- замкнутые;
- фазные.
Замкнутые составляют около 95% от всех применяемых двигателей и обладают значительной мощностью (от 250 Вт и выше). Фазный тип конструктивно отличается от АД, но применяется достаточно редко по сравнению с первым. Ротор представляет собой стальную фигуру цилиндрической формы, которая помещается внутрь статора, причем на его поверхность напрессован сердечник.
Короткозамкнутый и фазный роторы
Впаянные или залитые в поверхность сердечника и накоротко замкнутые с торцов двумя кольцами высокопроводящие медные (для машин большой мощности) или алюминиевые стержни (для машин меньшей мощности) играют роль электромагнитов с полюсами, обращенными к статору.
Стержни обмотки не имеют какой-либо изоляции, так как напряжение в такой обмотке нулевое.
Более часто используемый для стержней двигателей средней мощности алюминий отличается малой плотностью и высокой электропроводностью.
Для уменьшения высших гармоник электродвижущей силы (ЭДС) и исключения пульсации магнитного поля стержни ротора имеют определенным образом рассчитанный угол наклона относительно оси вращения. Если используется электромотор маленькой мощности, то пазы представляют собой закрытые конструкции, которые отделяют ротор от зазора с целью увеличения индуктивной составляющей сопротивления.
Ротор в виде фазного исполнения или типа характеризуются обмоткой, концы ее соединены по типу «звезда» и присоединены к контактным кольцам (на валу), по которым скользят графитовые щетки. Для устранения вихревых токов поверхность обмоток покрывается оксидной пленкой. Кроме того, в цепь обмотки ротора добавляется резистор, позволяющий изменять активное сопротивление (R) роторной цепи для уменьшения значений пусковых токов (Iп). Пусковые токи отрицательно влияют на электрическую и механическую части электромотора. Переменные резисторы, используемые для регулирования Iп:
- Металлические или ступенчатые с ручным переключением.
- Жидкостные (за счет погружения на глубину электродов).
Щетки, выполненные из графита, изнашиваются, и некоторые модели оборудованы короткозамкнутым конструктивным исполнением, которое поднимает щетки и замыкает кольца после запуска мотора. АД с фазным ротором являются более гибкими в плане регулирования Iп.
Конструктивные особенности
Асинхронный двигатель не имеет выраженных полюсов в отличие от электромотора постоянного тока. Число полюсов определяется количеством катушек в обмотках неподвижной части (статор) и способом соединения. В асинхронной машине с 4-мя катушками проходит магнитный поток.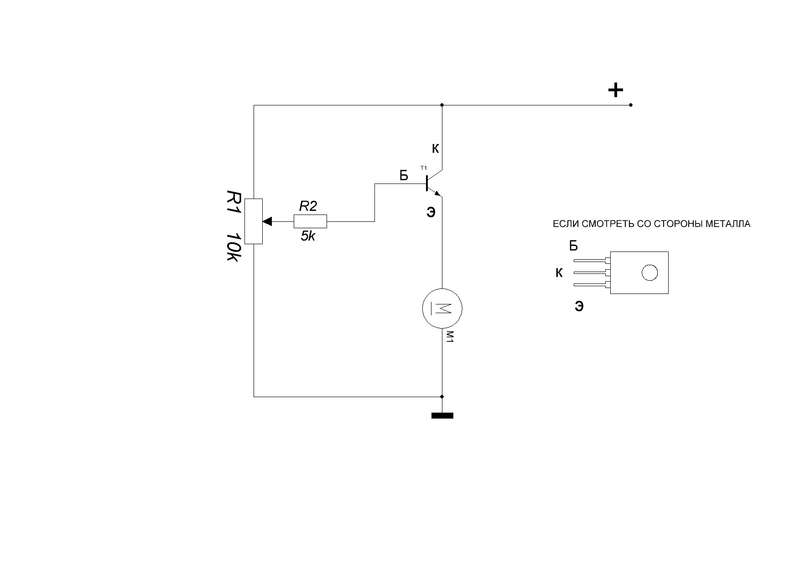 Статор выполняется из листов спецстали (электротехническая сталь), сводящих к нулю вихревые токи, при которых происходит значительный нагрев обмоток. Он приводит к массовому межвитковому замыканию.
Статор выполняется из листов спецстали (электротехническая сталь), сводящих к нулю вихревые токи, при которых происходит значительный нагрев обмоток. Он приводит к массовому межвитковому замыканию.
Железняк или сердечник ротора напрессовывается непосредственно на вал. Между ротором и статором существует минимальный воздушный зазор. Обмотка ротора выполняется в виде «беличьей клетки» и сделана из медных или алюминиевых стержней.
В электромоторах мощностью до 100 кВт применяется алюминий, обладающий незначительной плотностью — для заливки в пазы сердечника ротора. Но несмотря на такое устройство, двигатели этого типа греются. Для решения этой проблемы используются вентиляторы для принудительного охлаждения, которые насаживаются на вал. Эти двигатели просты и надежны. Однако двигатели потребляют при пуске большой ток, в 7 раз больше номинального. Из-за этого они имеют низкий пусковой момент, так как большая часть энергии электричества идет на нагрев обмоток.
Электромоторы, у которых повышенный момент пуска, отличаются от обыкновенных асинхронных конструкцией ротора. Ротор изготавливается в виде двойной «беличьей клетки». Эти модели имеют сходство с фазными типами изготовления ротора. Он состоит из внутренней и наружной «беличьих клеток», причем наружная является пусковой и обладает большим активным и малым реактивным R. Наружная обладает незначительным активным и высоким реактивным R. При увеличении частоты вращения I переключается на внутреннюю клетку и работает в виде короткозамкнутого ротора.
Принцип работы
При протекании I по статорной обмотке в каждой из них создается магнитный поток (Ф). Эти Ф сдвинуты на 120 градусов относительно друг друга. Полученный Ф является вращающимся, создающим электродвижущую силу (ЭДС) в алюминиевых или медных проводниках. В результате этого и создается пусковой магнитный момент электромотора, и ротор начинает вращаться. Этот процесс называется еще в некоторых источниках скольжением (S), показывающим разность частоты n1 электромагнитного поля стартера, которое становится больше, чем частота, полученная при вращении ротора n2.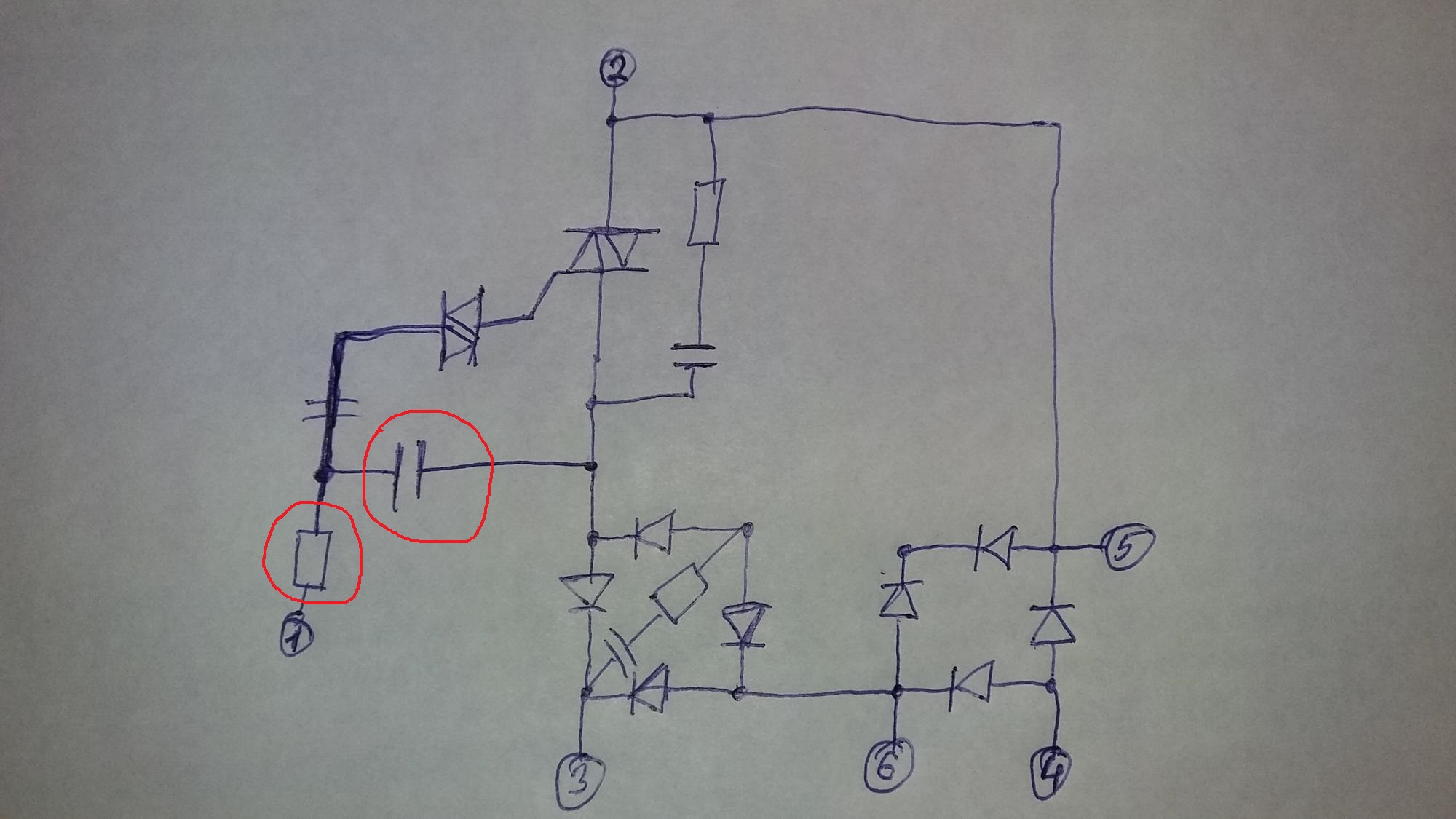 Вычисляется в процентах и имеет вид: S = ((n1-n2)/n1) * 100%.
Вычисляется в процентах и имеет вид: S = ((n1-n2)/n1) * 100%.
Значение S при начальном старте электромотора равно примерно 1, но при возрастании значений n2 становится меньше. В этот момент I в роторе уменьшается, следовательно, и ЭДС становится меньше номиналом. При холостом ходе S минимально, но при увеличении момента статического взаимодействия ротора и статора эта величина достигает критического значения. Если выполняется неравенство: S > Sкр, то мотор работает нормально, однако при превышении значения Sкр он может «опрокинуться». Опрокидывание вызывает нестабильную работу, но с течением времени исчезает.
Методы настройки оборотов
Для предотвращения отрицательного влияния во время пуска нужно уменьшить обороты электродвигателя 220 в или 380 в. Существует несколько способов достижения этой цели:
- Изменение значения R цепи ротора.
- Изменение U в обмотке статора.
- Изменение частоты U.
- Переключение полюсов.
При изменении значения R роторной части при помощи дополнительных резисторов приводит к снижению частоты вращения, но в результате этого уменьшается мощность.
Следовательно, получается значительная потеря электроэнергии. Этот тип регулирования следует применять для фазного ротора.
При изменении значений U на статорной катушке возможно механическое или электрическое управление частотой вращения ротора. В этом случае используется регулятор U. Использование такого способа позволяет применять его только при вентиляторном характере нагрузки (например, регулятор оборотов вентилятора 220в). Для всех остальных случаев применяют трехфазные автоматические трансформаторы, позволяющие плавно изменять значения U, или тиристорные регуляторы.
Исходя из формулы зависимости частоты вращения от частоты питающего U можно производить регулирование количества оборотов ротора. Частота вращающегося магнитного поля статора вычисляется по формуле: Nст = 60 * f /p (f — частота тока питающей сети, p — число пар полюсов). Этот способ обеспечивает возможность плавного регулирования частоты вращения роторной части. Для получения высокого коэффициента полезного действия нужно изменять частоту и U. Этот способ является оптимальным для двигателей с короткозамкнутым ротором, так как потери мощности минимальны. Существует два метода изменения количества пар полюсов:
Этот способ обеспечивает возможность плавного регулирования частоты вращения роторной части. Для получения высокого коэффициента полезного действия нужно изменять частоту и U. Этот способ является оптимальным для двигателей с короткозамкнутым ротором, так как потери мощности минимальны. Существует два метода изменения количества пар полюсов:
- В статор (в пазы) нужно уложить 2 обмотки с различным числом p.
- Обмотка состоит из двух частей, соединенных параллельно или последовательно.
Основным недостатком этого метода является поддержание ступенчатого характера изменения частоты электромотора с короткозамкнутым ротором.
Виды и критерии выбора
Для выбора регулятора нужно руководствоваться определенными характеристиками для конкретного случая. Среди всех критериев можно выбрать следующие:
- По типу управления. Для двигателей коллекторного типа применяются регуляторы с векторной или скалярной системой управления.
- Мощность является основным параметром, от которого нужно отталкиваться.

- По диапазону U.
- По диапазону частот. Нужно выбирать модель, которая соответствует требованиям пользователя для конкретного случая.
- Прочие характеристики, в которые включены гарантия, габариты, комплектация.
Кроме того, регулятор подбирается мощнее, чем сам электродвигатель по формуле: Pрег = 1,3 * Pдвиг (Pрег, Pдвиг — мощность регулятора и двигателя соответственно). Его нужно выбирать на разные диапазоны U, так как универсальность играет важную роль.
Устройство на тиристорах
В этой модели, представленной на схеме 1, применяются 2 тиристора, включенных встречно-параллельно, хотя их можно заменить одним симистором.
Схема 1 — Тиристорная регулировка оборотов коллекторного двигателя без потери мощности.
Эта схема производит регулирование с помощью открытия или закрытия тиристоров (симистора) при фазовом переходе через нейтраль. Для корректного управления коллекторным двигателем применяют следующие способы модификации схемы 1:
- Установка защитных LRC-цепей, состоящих из конденсаторов, резисторов и дросселей.
- Добавление на входе емкости.
- Использование тиристоров или симистора, ток которых превышает номинальное значение силы тока двигателя в диапазоне от 3..8 раз.
Этот тип регуляторов имеет достоинства и недостатки. К первым относятся низкая стоимость, маленький вес и габариты. Ко вторым следует отнести следующие:
- применение для моторов небольшой мощности;
- происходит шум и рывки мотора;
- при использовании схемы на симисторах происходит попадание постоянного U на двигатель.
Этот тип регулятора ставится в вентиляторы, кондиционеры, стиральные машины и электродрели . Отлично выполняет свои функции, несмотря на недостатки.
Транзисторный тип
Еще одним названием регулятора транзисторного типа является автотрансформатор или ШИМ-регулятор (схема 2). Он изменяет номинал U по принципу широтно-импульсной модуляции (ШИМ) при помощи выходного каскада, в котором применяются транзисторы типа IGBT.
Схема 2 — Транзисторный ШИМ-регулятор оборотов.
Коммутация транзисторов происходит с высокой частотой и благодаря этому можно изменить ширину импульсов. Следовательно, при этом изменится и значение U. Чем длиннее импульс и короче паузы, тем выше значение U и наоборот. Положительные аспекты применения этой разновидности следующие:
- Незначительный вес прибора при низких габаритах.
- Довольно низкая стоимость.
- При низких оборотах отсутствие шума.
- Управление за счет низких значений U (0..12 В).
Основной недостаток применения заключается в том, что расстояние до электромотора должно быть не более 4 метров.
Регулирование за счет частоты
Регулирование оборотов моторов различных типов за счет частоты получило широкое применение. Частотное преобразование занимает лидирующую позицию на рынке сбыта устройств-регуляторов оборотов и осуществления плавного пуска. Благодаря своей универсальности возможно влиять на мощность, производительность и скорость любого устройства с электродвигателем. Эти устройства применяются для однофазных и трехфазных двигателей. Применяются такие виды частотных преобразователей:
Эти устройства применяются для однофазных и трехфазных двигателей. Применяются такие виды частотных преобразователей:
- Специализированные однофазные.
- Трехфазные без конденсатора.
Для регулирования оборотов используется конденсатор, включенный с обмотками однофазного двигателя (схема 3). Этот преобразователь частоты (ПЧ) имеет емкостное R, которое зависит от частоты протекающего переменного тока. Выходной каскад такого ПЧ выполнен на IGBT-транзисторах.
Схема 3 — Частотный регулятор оборотов.
У специализированного ПЧ есть свои преимущества и недостатки. Преимуществами являются следующие:
- Управление АД без участия человека.
- Стабильность.
- Дополнительные возможности.
Существует возможность управлять работой электромотора при определенных условиях, а также защита от перегрузок и токов КЗ. Кроме того, возможно расширять функционал при помощи подключения цифровых датчиков, мониторинга параметров работы и использования PID-регулятора. К минусам можно отнести ограничения при управлении частотой и довольно высокую стоимость.
К минусам можно отнести ограничения при управлении частотой и довольно высокую стоимость.
Для трехфазных АД применяются также устройства регулирования частоты (схема 4). Регулятор имеет на выходе три фазы для подключения электромотора.
Схема 4 — ПЧ для трехфазного двигателя.
У этого варианта тоже есть свои сильные и слабые стороны. К первым можно отнести следующие: низкую стоимость, выбор мощности, широкий диапазон частотной регуляции, а также все преимущества однофазных преобразователей частоты. Среди всех отрицательных сторон можно выделить основные: предварительный подбор и нагрев при пуске.
Изготовление своими руками
Если нет возможности, а также желания приобретать регулятор заводского типа, то можно собрать его своими руками. Хотя регуляторы типа » tda1085 » зарекомендовали себя очень хорошо. Для этого нужно детально ознакомиться с теорией и приступить к практике. Очень популярны схемы симисторного исполнения, в частности регулятор оборотов асинхронного двигателя 220в (схема 5). Сделать его несложно. Он собирается на симисторе ВТ138, хорошо подходящем для этих целей.
Сделать его несложно. Он собирается на симисторе ВТ138, хорошо подходящем для этих целей.
Схема 5 — Простой регулятор оборотов на симисторе.
Этот регулятор может быть использован и для регулировки оборотов двигателя постоянного тока 12 вольт, так как является довольно простым и универсальным. Обороты регулируются благодаря изменению параметров Р1, определяющему фазу входящего сигнала, который открывает переход симистора.
Принцип работы прост. При запуске двигателя происходит его затормаживание, индуктивность изменятся в меньшую сторону и способствует увеличению U в цепи «R2—>P1—>C2». При разряде С2 симистор открывается в течение некоторого времени.
Существует еще одна схема. Она работает немного по-другому: путем обеспечения хода энергии обратного типа, которое является оптимально выгодным. В схему включен довольно мощный тиристор.
Схема 6 — Устройство тиристорного регулятора.
Схема состоит из генератора сигнала управления, усилителя, тиристора и участка цепи, выполняющего функции стабилизатора вращения ротора.
Наиболее универсальной схемой является регулятор на симисторе и динисторе (схема 7). Он способен плавно убавить скорость вращения вала, задать реверс двигателю (изменить направление вращения) и понизить пусковой ток.
Принцип работы схемы:
- С1 заряжается до U пробоя динистора D1 через R2.
- D1 при пробитии открывает переход симистора D2, который отвечает за управление нагрузкой.
Напряжение при нагрузке прямо пропорционально зависит от частотной составляющей при открытии D2, зависящего от R2. Схема применяется в пылесосах. Она содержит универсальное электронное управление, а также способность простого подключения питания 380 В. Все детали следует расположить на печатной плате, изготовленной по лазерно-утюжной технологии (ЛУТ). Подробно с этой технологии изготовления плат можно ознакомиться в интернете.
Таким образом, при выборе регулятора оборотов электродвигателя возможна покупка заводского или изготовление своими руками. Самодельный регулятор сделать достаточно просто, так как при понимании принципа действия устройства можно с легкостью собрать его. Кроме того, следует соблюдать правила безопасности при осуществлении монтажа деталей и при работе с электричеством.
Кроме того, следует соблюдать правила безопасности при осуществлении монтажа деталей и при работе с электричеством.
Лучшее соотношение цены и качества редукторный двигатель переменного тока — Отличные предложения на редукторный двигатель переменного тока от глобальных продавцов редукторов переменного тока
Отличные новости !!! Вы находитесь в нужном месте, если хотите приобрести редукторный двигатель переменного тока. К настоящему времени вы уже знаете, что что бы вы ни искали, вы обязательно найдете это на AliExpress. У нас буквально тысячи отличных продуктов во всех товарных категориях. Ищете ли вы товары высокого класса или дешевые и недорогие оптовые закупки, мы гарантируем, что он есть на AliExpress.
Вы найдете официальные магазины торговых марок наряду с небольшими независимыми продавцами со скидками, каждый из которых предлагает быструю доставку и надежные, а также удобные и безопасные способы оплаты, независимо от того, сколько вы решите потратить.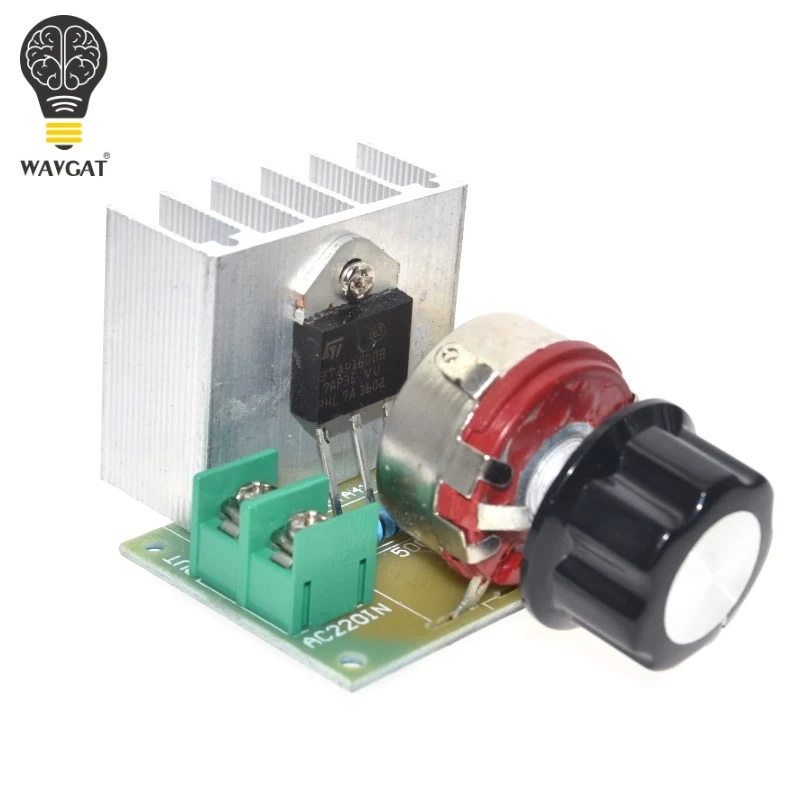
AliExpress никогда не уступит по выбору, качеству и цене.Каждый день вы будете находить новые онлайн-предложения, скидки в магазинах и возможность сэкономить еще больше, собирая купоны. Но вам, возможно, придется действовать быстро, так как этот двигатель переменного тока с редуктором с максимальной пониженной скоростью вскоре станет одним из самых востребованных бестселлеров. Подумайте, как вам будут завидовать друзья, когда вы скажете им, что приобрели понижающий редукторный двигатель переменного тока на AliExpress. Благодаря самым низким ценам в Интернете, дешевым тарифам на доставку и возможности получения на месте вы можете еще больше сэкономить.
Если вы все еще сомневаетесь в выборе двигателя переменного тока с пониженной передачей и думаете о выборе аналогичного товара, AliExpress — отличное место для сравнения цен и продавцов. Мы поможем вам разобраться, стоит ли доплачивать за высококачественную версию или вы получаете столь же выгодную сделку, приобретая более дешевую вещь. И, если вы просто хотите побаловать себя и потратиться на самую дорогую версию, AliExpress всегда позаботится о том, чтобы вы могли получить лучшую цену за свои деньги, даже сообщая вам, когда вам будет лучше дождаться начала рекламной акции. и ожидаемая экономия.AliExpress гордится тем, что у вас всегда есть осознанный выбор при покупке в одном из сотен магазинов и продавцов на нашей платформе.Реальные покупатели оценивают качество обслуживания, цену и качество каждого магазина и продавца. Кроме того, вы можете узнать рейтинги магазина или отдельных продавцов, а также сравнить цены, доставку и скидки на один и тот же продукт, прочитав комментарии и отзывы, оставленные пользователями. Каждая покупка имеет звездный рейтинг и часто имеет комментарии, оставленные предыдущими клиентами, описывающими их опыт транзакций, поэтому вы можете покупать с уверенностью каждый раз.
Мы поможем вам разобраться, стоит ли доплачивать за высококачественную версию или вы получаете столь же выгодную сделку, приобретая более дешевую вещь. И, если вы просто хотите побаловать себя и потратиться на самую дорогую версию, AliExpress всегда позаботится о том, чтобы вы могли получить лучшую цену за свои деньги, даже сообщая вам, когда вам будет лучше дождаться начала рекламной акции. и ожидаемая экономия.AliExpress гордится тем, что у вас всегда есть осознанный выбор при покупке в одном из сотен магазинов и продавцов на нашей платформе.Реальные покупатели оценивают качество обслуживания, цену и качество каждого магазина и продавца. Кроме того, вы можете узнать рейтинги магазина или отдельных продавцов, а также сравнить цены, доставку и скидки на один и тот же продукт, прочитав комментарии и отзывы, оставленные пользователями. Каждая покупка имеет звездный рейтинг и часто имеет комментарии, оставленные предыдущими клиентами, описывающими их опыт транзакций, поэтому вы можете покупать с уверенностью каждый раз.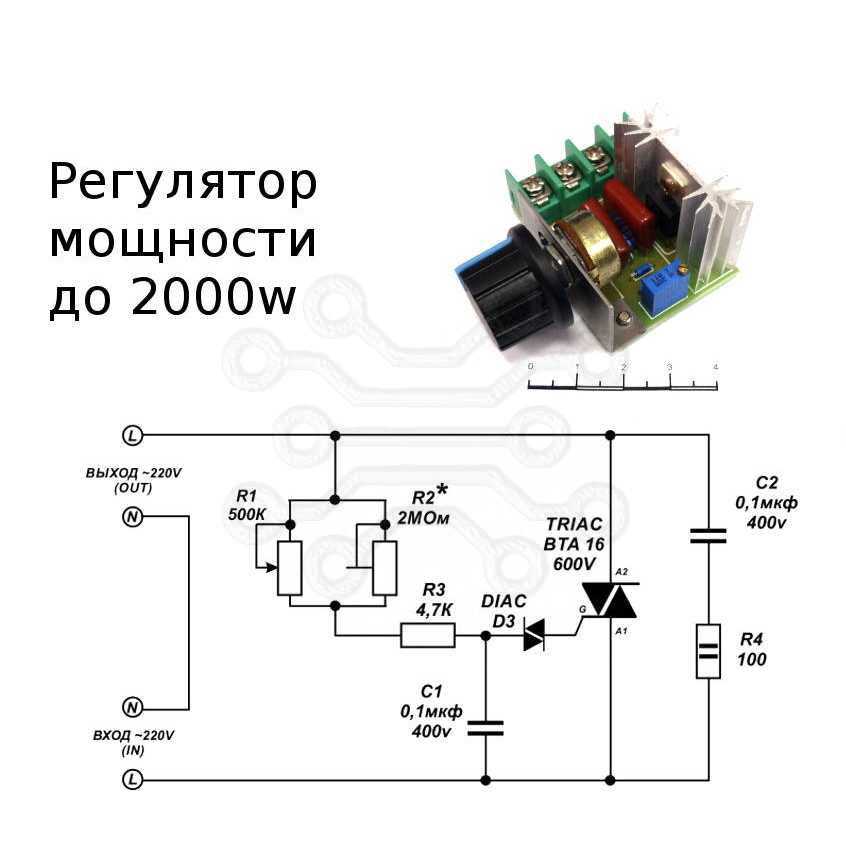 Короче говоря, вам не нужно верить нам на слово — просто слушайте миллионы наших довольных клиентов.
Короче говоря, вам не нужно верить нам на слово — просто слушайте миллионы наших довольных клиентов.
А если вы новичок на AliExpress, мы откроем вам секрет. Непосредственно перед тем, как вы нажмете «купить сейчас» в процессе транзакции, найдите время, чтобы проверить купоны — и вы сэкономите еще больше. Вы можете найти купоны магазина, купоны AliExpress или собирать купоны каждый день, играя в игры в приложении AliExpress. Вместе с бесплатной доставкой, которую предлагают большинство продавцов на нашем сайте, мы думаем, вы согласитесь, что вы получите редуктор переменного тока с редуктором по самой выгодной цене.
У нас всегда есть новейшие технологии, новейшие тенденции и самые обсуждаемые лейблы. На AliExpress отличное качество, цена и сервис всегда в стандартной комплектации. Начните самый лучший шоппинг прямо здесь.
Начните самый лучший шоппинг прямо здесь.
— мощность и крутящий момент vs.Скорость
Движущая сила электродвигателя составляет крутящий момент, — не лошадиные силы.
Крутящий момент — это крутящая сила, которая заставляет двигатель вращаться, и крутящий момент активен от 0% до 100% рабочей скорости.
Мощность, производимая двигателем, зависит от скорости двигателя и составляет
- ноль при 0% скорости и
- обычно на максимуме при рабочей скорости
Примечание ! — полный крутящий момент с нулевой скорости является большим преимуществом для электромобилей.
Для полного стола — поверните экран!
| Мощность | Скорость двигателя (об / мин) | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| 3450 | 2000 | 1750 | 1000 | 500 | |||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| Крутящий момент | |||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
л. с. с. | кВт | (фунт f дюйм) | (фунт f фут) | (Нм) | (фунт f дюйм) | (фунт) f фут) | (Нм) | (фунт f дюйм) | (фунт f фут) | (Нм) | (фунт на дюйм) | (фунт на фут) | (Нм) | (фунт на дюйм) 90 054 | (фунт на футов) | (Нм) | |||||||||||||||||||||||||||||||||||||||||||||
| 1 | 0.75 | 18 | 1,5 | 2,1 | 32 | 2,6 | 3,6 | 36 | 3,0 | 4,1 | 63 | 5,3 | 7,1 | 126 10187 9018 9018 900 1,5 | 1,1 | 27 | 2,3 | 3,1 | 47 | 3,9 | 5,3 | 54 | 4,5 | 6,1 | 95 | 7. 9 9 | 10,7 | 189 | 15,8 | 21,4 | |||||||||||||||||||||||||||||||
| 2 | 1,5 | 37 | 3,0 | 4,1 | 63 | 5,3 | 7,1 | 9018 9018 9018 9018 8,1 9018 12610,5 | 14,2 | 252 | 21,0 | 28,5 | |||||||||||||||||||||||||||||||||||||||||||||||||
| 3 | 2,2 | 55 | 4,6 | 6,2 | 95 | 7.9 | 10,7 | 108 | 9,0 | 12 | 189 | 15,8 | 21,4 | 378 | 31,5 | 42,7 | |||||||||||||||||||||||||||||||||||||||||||||
| 5 | 9018 9018 90189018 9018 | 158 | 13,1 | 18 | 180 | 15 | 20 | 315 | 26,3 | 36 | 630 | 52,5 | 71 | ||||||||||||||||||||||||||||||||||||||||||||||||
| 7.5 | 5,6 | 137 | 11 | 15 | 236 | 20 | 27 | 270 | 23 | 31 | 473 | 39 | 9018 9018 9018|||||||||||||||||||||||||||||||||||||||||||||||||
| 10 | 7,5 | 183 | 15 | 21 | 315 | 26 | 36 | 360 | 30 | 41 | 630 | 142 | |||||||||||||||||||||||||||||||||||||||||||||||||
| 15 | 11 | 274 | 23 | 31 | 473 | 39 | 53 | 540 | 45 | 61 | 9018 9018158 | 214 | |||||||||||||||||||||||||||||||||||||||||||||||||
| 20 | 15 | 365 | 30 | 9018 7 41630 | 53 | 71 | 720 | 60 | 81 | 1260 | 105 | 142 | 2521 | 210 | 285 | 210 | 285 | 90038 | 52 | 788 | 66 | 89 | 900 | 75 | 102 | 1576 | 131 | 178 | 3151 | 263 | 9018263 | 263 | 548 | 46 | 62 | 945 | 79 | 107 | 1080 | 90 | 122 | 1891 | 158 | 214 | 9018 9018 9018 9018 9018214 | 9018 9018 901830 | 731 | 61 | 83 | 1260 | 105 | 9018 7 1421441 | 120 | 163 | 2521 | 210 | 285 | 5042 | 420 | 570 | |
| 50 | 37 | 9018 9018 9018 9018 9018 9018 9018131 | 178 | 1801 | 150 | 204 | 3151 | 263 | 356 | 6302 | 525 | 712 | |||||||||||||||||||||||||||||||||||||||||||||||||
| 9018 9018 9018 9018 9018 9018 | 1891 | 158 | 214 | 2161 | 180 | 244 | 3781 | 315 | 427 | 7563 | 630 | 855 | 145 | 2206 | 184 | 249 | 2521 | 9 0187 210285 | 4412 | 368 | 499 | 8823 | 735 | 997 | |||||||||||||||||||||||||||||||||||||
| 80 | 60 | 1461 | 162 | 2881 | 240 | 326 | 5042 | 420 | 570 | 10084 | 840 | 1140 | |||||||||||||||||||||||||||||||||||||||||||||||||
| 90 | 67 | 1644 9018 9018 9018 | 1644 | 321 | 3241 | 270 | 366 | 5672 | 473 | 641 | 11344 | 945 | 1282 | ||||||||||||||||||||||||||||||||||||||||||||||||
| 100 | 263 | 356 | 3601 | 300 | 407 | 6302 | 525 | 712 | 12605 | 1050 | 1425 | ||||||||||||||||||||||||||||||||||||||||||||||||||
| 125 | 93 | 2283 | 2283 | 190 | 258 | 509 | 7878 | 657 | 891 | 15756 | 1313 | 1781 | |||||||||||||||||||||||||||||||||||||||||||||||||
| 150 | 112 | 2740 | 3107 | 9018 9018450 | 611 | 9454 | 788 | 1069 | 18907 | 1576 | 2137 | ||||||||||||||||||||||||||||||||||||||||||||||||||
| 175 | 131 | 31976 9018 9018 9018 | 131 9018 | 6302 | 525 | 712 | 1 1029 | 919 | 1247 | 22058 | 1838 | 2494 | |||||||||||||||||||||||||||||||||||||||||||||||||
| 200 | 149 | 3654 | 304 | 413 | 6302 9018 9018 9018 9018 9018 9018 | 814 | 12605 | 1050 | 1425 | 25210 | 2101 | 2850 | |||||||||||||||||||||||||||||||||||||||||||||||||
| 225 | 168 | 4110 | 343 | 9018 9018 9018 9018 9018 9018 9018 9018 9018 9018 9018 9018 9018 9018 9018 675 | 916 | 14180 | 1182 | 1603 | 28361 | 2363 | 3206 | ||||||||||||||||||||||||||||||||||||||||||||||||||
| 250 | 187 | 4567 | 9018 9018 9018 9018 9018 90189003 | 750 | 1018 | 15756 90 188 | 1313 | 1781 | 31512 | 2626 | 3562 | ||||||||||||||||||||||||||||||||||||||||||||||||||
| 275 | 205 | 5024 | 419 | 568 | 8667 9018 9018 9018 9018 | 8667 9018 9018 9018 9018 | 17332 | 1444 | 1959 | 34663 | 2889 | 3918 | |||||||||||||||||||||||||||||||||||||||||||||||||
| 300 | 224 | 5480 | 457 | 620 | 1221 | 18907 | 1576 | 2137 | 37814 | 3151 | 4275 | ||||||||||||||||||||||||||||||||||||||||||||||||||
| 350 | 261 | 6394 | 533 9018 9018 | 6394 | 533 9018 9018 | 1050 | 1425 | 22058 | 1838 | 2494 | 44117 | 3676 | 4987 | ||||||||||||||||||||||||||||||||||||||||||||||||
| 400 | 298 | 7307 | 609 | 826 | 12605 9018 9018 | 826 | 12605 9018 9018 | 25210 | 2101 | 2850 | 50419 | 4202 | 5699 | ||||||||||||||||||||||||||||||||||||||||||||||||
| 450 | 336 | 8221 | 685 | 929 | 1832 | 28361 | 2363 | 3206 | 56722 | 4727 | 6412 | ||||||||||||||||||||||||||||||||||||||||||||||||||
| 550 | 410 | 10047 | 837 179018 9018 | 1651 | 2239 | 34663 | 2889 | 3918 | 69326 | 5777 | 7837 | ||||||||||||||||||||||||||||||||||||||||||||||||||
| 600 | 448 | 10961 | 913 | 1239 | 913 | 1239 | 2443 | 37814 | 3151 | 4275 | 75629 | 6302 | 8549 | ||||||||||||||||||||||||||||||||||||||||||||||||
Электрический двигатель Уравнения мощности, скорости и крутящего момента дюйм-фунт = P л. с. 63025 / n (1)
с. 63025 / n (1)
где
T дюйм-фунт = крутящий момент (фунт f )
P л.с. = мощность, выдаваемая электрическим двигатель (л.с.)
n = число оборотов в минуту (об / мин)
Альтернативно
T фут-фунт = P л.с. 5252 / n (1b)
где
T фут-фунт = крутящий момент фунт
Крутящий момент в единицах СИ можно рассчитать как
T Нм = P W 9.549 / n (2)
где
T Нм = крутящий момент (Нм)
P W = мощность (Вт)
n = обороты в минуту (об / мин)
Электродвигатель — зависимость крутящего момента от мощности и скорости
мощность (кВт)
скорость (об / мин)
Электродвигатель — мощность от крутящего момента и скорости
крутящий момент (Нм)
скорость (об / мин)
Электродвигатель — Зависимость скоростиМощность и крутящий момент
мощность (кВт)
крутящий момент (Нм)
Пример — крутящий момент электродвигателя
крутящий момент, передаваемый электродвигателем мощностью 0,75 кВт (750 Вт) при скорости 2000 об / мин можно рассчитать как
T = (750 Вт ) 9,549 / (2000 об / мин)
= 3,6 (Нм)
Пример — Крутящий момент от электродвигателя
Крутящий момент, передаваемый от электродвигателя мощностью 100 л. с. при скорости 1000 об / мин можно рассчитать как
с. при скорости 1000 об / мин можно рассчитать как
T = (100 л.с.) 63025 / (1000 об / мин)
= 6303 (фунт f дюйм)
Для преобразования в фунт-сила-фут — разделите крутящий момент на 12 .
Скорость
Поиск
английский- Deutsch (Deutschland)
- английский
- português (Бразилия)
- 한국어 (대한민국)
- 中文 (中国)
- 日本語 (日本)
Поиск дистрибьюторов Служба поддержки Связаться с нами- Продукция
- Бесщеточные двигатели постоянного тока
- Все двигатели BLDC
- Двигатели Ultra EC
- Хирургические двигательные решения
- Щеточные двигатели постоянного тока
- Щеточный двигатель постоянного тока
- Athlonix Motors
- Шаговые двигатели
- Может складывать моторы
- Линейные шаговые двигатели
Электродвигатель | Британника
Самый простой тип асинхронного двигателя показан на рисунке в разрезе. Трехфазный набор обмоток статора вставлен в пазы в железе статора. Эти обмотки могут быть соединены либо по схеме звезды, обычно без внешнего подключения к нейтральной точке, либо по схеме треугольник. Ротор состоит из цилиндрического стального сердечника с проводниками, размещенными в пазах по всей поверхности. В наиболее обычной форме эти проводники ротора соединены вместе на каждом конце ротора проводящим концевым кольцом.
Трехфазный набор обмоток статора вставлен в пазы в железе статора. Эти обмотки могут быть соединены либо по схеме звезды, обычно без внешнего подключения к нейтральной точке, либо по схеме треугольник. Ротор состоит из цилиндрического стального сердечника с проводниками, размещенными в пазах по всей поверхности. В наиболее обычной форме эти проводники ротора соединены вместе на каждом конце ротора проводящим концевым кольцом.
Поперечное сечение трехфазного асинхронного двигателя.
Encyclopædia Britannica, Inc. Основы работы асинхронного двигателя можно разработать, сначала предположив, что обмотки статора подключены к трехфазному источнику питания и что набор из трех синусоидальных токов, показанных на рисунке, протекает в обмотках статора. На этом рисунке показано влияние этих токов на создание магнитного поля в воздушном зазоре машины в течение шести моментов цикла. Для простоты показана только центральная токопроводящая петля для каждой фазной обмотки. В момент t 1 на чертеже ток в фазе a является максимально положительным, тогда как ток в фазах b и c составляет половину отрицательного значения. Результатом является магнитное поле с приблизительно синусоидальным распределением вокруг воздушного зазора с максимальным значением наружу вверху и максимальным значением внутрь внизу. В момент времени t 2 на рисунке (т.е. одна шестая цикла позже), ток в фазе c является максимально отрицательным, в то время как в фазе b и фазе a составляет половину значения положительный.В результате, как показано на рисунке для t 2 , снова будет синусоидально распределенное магнитное поле, но повернутое на 60 ° против часовой стрелки. Исследование распределения тока для t 3 , t 4 , t 5 и t 6 показывает, что магнитное поле продолжает вращаться с течением времени.
В момент t 1 на чертеже ток в фазе a является максимально положительным, тогда как ток в фазах b и c составляет половину отрицательного значения. Результатом является магнитное поле с приблизительно синусоидальным распределением вокруг воздушного зазора с максимальным значением наружу вверху и максимальным значением внутрь внизу. В момент времени t 2 на рисунке (т.е. одна шестая цикла позже), ток в фазе c является максимально отрицательным, в то время как в фазе b и фазе a составляет половину значения положительный.В результате, как показано на рисунке для t 2 , снова будет синусоидально распределенное магнитное поле, но повернутое на 60 ° против часовой стрелки. Исследование распределения тока для t 3 , t 4 , t 5 и t 6 показывает, что магнитное поле продолжает вращаться с течением времени. Поле совершает один оборот за один цикл токов статора. Таким образом, совокупный эффект трех равных синусоидальных токов, равномерно смещенных во времени и текущих в трех обмотках статора, равномерно смещенных в угловом положении, должен создать вращающееся магнитное поле с постоянной величиной и механической угловой скоростью, которая зависит от частоты электроснабжение.
Поле совершает один оборот за один цикл токов статора. Таким образом, совокупный эффект трех равных синусоидальных токов, равномерно смещенных во времени и текущих в трех обмотках статора, равномерно смещенных в угловом положении, должен создать вращающееся магнитное поле с постоянной величиной и механической угловой скоростью, которая зависит от частоты электроснабжение.
Оформите подписку Britannica Premium и получите доступ к эксклюзивному контенту.
Подпишитесь сейчас Вращательное движение магнитного поля относительно проводников ротора вызывает индуцирование напряжения в каждом из них, пропорциональное величине и скорости поля относительно проводников. Поскольку проводники ротора замкнуты накоротко на каждом конце, это приведет к протеканию токов в этих проводниках. В простейшем режиме работы эти токи будут примерно равны индуцированному напряжению, деленному на сопротивление проводника.Картина токов ротора для текущего момента t 1 рисунка показана на этом рисунке. Видно, что токи приблизительно синусоидально распределены по периферии ротора и расположены так, чтобы создавать вращающий момент против часовой стрелки на роторе (то есть вращающий момент в том же направлении, что и вращение поля). Этот крутящий момент ускоряет ротор и вращает механическую нагрузку. По мере увеличения скорости вращения ротора его скорость относительно скорости вращающегося поля уменьшается.Таким образом, индуцированное напряжение снижается, что приводит к пропорциональному снижению тока в проводнике ротора и крутящего момента. Скорость ротора достигает постоянного значения, когда крутящий момент, создаваемый токами ротора, равен крутящему моменту, необходимому на этой скорости для нагрузки, при отсутствии избыточного крутящего момента для ускорения объединенной инерции нагрузки и двигателя.
Видно, что токи приблизительно синусоидально распределены по периферии ротора и расположены так, чтобы создавать вращающий момент против часовой стрелки на роторе (то есть вращающий момент в том же направлении, что и вращение поля). Этот крутящий момент ускоряет ротор и вращает механическую нагрузку. По мере увеличения скорости вращения ротора его скорость относительно скорости вращающегося поля уменьшается.Таким образом, индуцированное напряжение снижается, что приводит к пропорциональному снижению тока в проводнике ротора и крутящего момента. Скорость ротора достигает постоянного значения, когда крутящий момент, создаваемый токами ротора, равен крутящему моменту, необходимому на этой скорости для нагрузки, при отсутствии избыточного крутящего момента для ускорения объединенной инерции нагрузки и двигателя.
Вращающееся поле и токи, которые оно создает в короткозамкнутых проводниках ротора.
Encyclopædia Britannica, Inc. Механическая выходная мощность должна обеспечиваться входной электрической мощностью. Исходные токи статора, показанные на рисунке, достаточны только для создания вращающегося магнитного поля. Чтобы поддерживать это вращающееся поле при наличии токов ротора, показанных на рисунке, необходимо, чтобы обмотки статора несли дополнительную составляющую синусоидального тока такой величины и фазы, чтобы нейтрализовать влияние магнитного поля, которое в противном случае могло бы возникнуть. токами ротора на рисунке. Общий ток статора в каждой фазной обмотке является суммой синусоидальной составляющей, создающей магнитное поле, и другой синусоиды, опережающей первую на четверть цикла, или 90 °, для обеспечения необходимой электроэнергии.Второй, или силовой, компонент тока находится в фазе с напряжением, приложенным к статору, в то время как первый, или намагничивающий, компонент отстает от приложенного напряжения на четверть цикла или 90 °. При номинальной нагрузке эта намагничивающая составляющая обычно находится в диапазоне от 0,4 до 0,6 величины составляющей мощности.
Исходные токи статора, показанные на рисунке, достаточны только для создания вращающегося магнитного поля. Чтобы поддерживать это вращающееся поле при наличии токов ротора, показанных на рисунке, необходимо, чтобы обмотки статора несли дополнительную составляющую синусоидального тока такой величины и фазы, чтобы нейтрализовать влияние магнитного поля, которое в противном случае могло бы возникнуть. токами ротора на рисунке. Общий ток статора в каждой фазной обмотке является суммой синусоидальной составляющей, создающей магнитное поле, и другой синусоиды, опережающей первую на четверть цикла, или 90 °, для обеспечения необходимой электроэнергии.Второй, или силовой, компонент тока находится в фазе с напряжением, приложенным к статору, в то время как первый, или намагничивающий, компонент отстает от приложенного напряжения на четверть цикла или 90 °. При номинальной нагрузке эта намагничивающая составляющая обычно находится в диапазоне от 0,4 до 0,6 величины составляющей мощности.
Большинство трехфазных асинхронных двигателей работают с обмотками статора, подключенными непосредственно к трехфазному источнику питания постоянного напряжения и постоянной частоты. Типичное напряжение питания составляет от 230 В между фазами для двигателей относительно небольшой мощности (например,от 0,5 до 50 киловатт) до примерно 15 киловольт между фазами для двигателей большой мощности примерно до 10 мегаватт.
Типичное напряжение питания составляет от 230 В между фазами для двигателей относительно небольшой мощности (например,от 0,5 до 50 киловатт) до примерно 15 киловольт между фазами для двигателей большой мощности примерно до 10 мегаватт.
За исключением небольшого падения напряжения на сопротивлении обмотки статора, напряжение питания согласовано со скоростью изменения магнитного потока в статоре машины во времени. Таким образом, при питании с постоянной частотой и постоянным напряжением величина вращающегося магнитного поля остается постоянной, а крутящий момент примерно пропорционален силовой составляющей тока питания.
В асинхронном двигателе, показанном на предыдущих рисунках, магнитное поле вращается на один оборот за каждый цикл частоты питания. Для источника с частотой 60 Гц скорость поля составляет 60 оборотов в секунду или 3600 оборотов в минуту. Скорость ротора меньше скорости поля на величину, достаточную для того, чтобы индуцировать необходимое напряжение в проводниках ротора для создания тока ротора, необходимого для момента нагрузки. При полной нагрузке скорость обычно на 0,5–5 процентов ниже скорости поля (часто называемая синхронной скоростью), причем более высокий процент применяется к двигателям меньшего размера.Эта разница в скорости часто называется скольжением.
При полной нагрузке скорость обычно на 0,5–5 процентов ниже скорости поля (часто называемая синхронной скоростью), причем более высокий процент применяется к двигателям меньшего размера.Эта разница в скорости часто называется скольжением.
Другие синхронные скорости могут быть получены с источником постоянной частоты путем создания машины с большим количеством пар магнитных полюсов, в отличие от двухполюсной конструкции, показанной на рисунке. Возможные значения скорости магнитного поля в оборотах в минуту: 120 f / p , где f — частота в герцах (циклов в секунду), а p — количество полюсов (которое должно быть четное число).Данный железный каркас может быть намотан для любого из нескольких возможных количеств пар полюсов, используя катушки, охватывающие угол приблизительно (360/ p ) °. Крутящий момент, поступающий от рамы машины, останется неизменным, поскольку он пропорционален произведению магнитного поля и допустимого тока катушки. Таким образом, номинальная мощность рамы, являющаяся произведением крутящего момента и скорости, будет примерно обратно пропорциональна количеству пар полюсов. Наиболее распространенные синхронные скорости для двигателей с частотой 60 Гц — 1800 и 1200 оборотов в минуту.
Таким образом, номинальная мощность рамы, являющаяся произведением крутящего момента и скорости, будет примерно обратно пропорциональна количеству пар полюсов. Наиболее распространенные синхронные скорости для двигателей с частотой 60 Гц — 1800 и 1200 оборотов в минуту.
Электрические тяговые системы |
Система, использующая электроэнергию для системы тяги, например, для железных дорог, трамваев, троллейбусов и т. Д., Называется электрической тягой. Электрификация пути относится к типу системы электроснабжения, которая используется при питании систем электровоза. Это может быть переменный или постоянный ток или композитный источник питания.
Выбор типа электрификации зависит от нескольких факторов, таких как доступность электроснабжения, тип области применения или такие услуги, как городские, пригородные и магистральные услуги и т. Д.
Существуют три основных типа электрических тяговых систем:
- Система электрификации постоянного тока (DC)
- Система электрификации переменного тока
- Композитная система.
1- Система электрификации постоянного тока
Выбор системы электрификации постоянного тока включает в себя множество преимуществ, таких как размеры и вес, быстрое ускорение и торможение электродвигателей постоянного тока, меньшая стоимость по сравнению с системами переменного тока, меньшее потребление энергии и т. Д.
В этом типе системы трехфазная мощность, полученная от электросетей, деэскалируется до низкого напряжения и преобразуется в постоянный ток выпрямителями и силовыми электронными преобразователями.
Этот тип источника постоянного тока подается на автомобиль двумя разными способами:
- 3-я и 4-я рельсовая система работают при низких напряжениях (600-1200В)
- В надземных рельсах используется высокое напряжение (1500-3000 В)
В состав систем электроснабжения электрификации постоянного тока входят;
- Питание 300-500 В для специальных систем, таких как аккумуляторные.

- 600-1200В для городских железных дорог, трамваев и легковых метро.
- 1500-3000В для пригородных и магистральных перевозок, таких как легкое и тяжелое метро.
Благодаря высокому пусковому моменту и умеренному регулированию скорости, двигатели серии постоянного тока широко используются в тяговых системах постоянного тока. Они обеспечивают высокий крутящий момент на низких скоростях и низкий крутящий момент на высоких скоростях.
Преимущества;
- В случае тяжелых поездов, требующих частых и быстрых ускорений, тяговые двигатели постоянного тока являются лучшим выбором по сравнению с двигателями переменного тока.
- Блок постоянного тока потребляет меньше энергии по сравнению с блоком переменного тока при тех же условиях эксплуатации.
- Оборудование системы тяги постоянного тока дешевле, легче и эффективнее, чем система тяги переменного тока.
- Не вызывает электрических помех на близлежащих линиях связи.

Недостатки;
- Дорогие подстанции требуются часто.
- Воздушный провод или третий рельс должны быть относительно большими и тяжелыми.
- Напряжение падает с увеличением длины.
2- Система электрификации переменного тока
Система тяги переменного тока стала очень популярной в настоящее время, и она чаще используется в большинстве систем тяги из-за ряда преимуществ, таких как быстрая доступность и генерация переменного тока, который можно легко повышать или понижать, простое управление двигателями переменного тока , меньшее количество подстанций и наличие легких контактных сетей, передающих малые токи при высоких напряжениях и т. д.
Системы электроснабжения сети переменного тока включают одно-, трехфазные и композитные системы. Однофазные системы состоят из источника питания от 11 до 15 кВ при 16,7 Гц и 25 Гц для обеспечения регулируемой скорости коммутирующих двигателей переменного тока. Он использует понижающий трансформатор и преобразователи частоты для преобразования высокого напряжения и фиксированной промышленной частоты.
Он использует понижающий трансформатор и преобразователи частоты для преобразования высокого напряжения и фиксированной промышленной частоты.
Однофазная конфигурация 25 кВ при 50 Гц — наиболее часто используемая конфигурация для электрификации переменного тока. Он используется для систем перевозки тяжелых грузов и магистральных линий, поскольку не требует преобразования частоты.Это один из широко используемых типов композитных систем, в которых питание преобразуется в постоянный ток для привода тяговых двигателей постоянного тока.
В трехфазной системе для привода локомотива используется трехфазный асинхронный двигатель, рассчитанный на 3,3 кВ, 16,7 Гц. Система распределения высокого напряжения с питанием 50 Гц преобразуется в электродвигатель этой мощности с помощью трансформаторов и преобразователей частоты. В этой системе используются две воздушные линии, а рельс является еще одной фазой, но это создает множество проблем на пересечениях и перекрестках.
Преимущества;
- Требуется меньше подстанций.

- Можно использовать более легкий провод электропитания.
- Пониженный вес опорной конструкции.
- Снижены капитальные затраты на электрификацию.
Недостатки;
- Значительные затраты на электрификацию.
- Повышенная стоимость обслуживания линий.
- Воздушные провода дополнительно ограничивают зазор в туннелях.
- Обновление требует дополнительных затрат, особенно если есть бригады и туннели.
- Железнодорожная тяга требует иммунной мощности без порезов.
3- композитная система
Поезда Composite System (или мультисистемы) используются для обеспечения непрерывного движения по маршрутам, электрифицированным с использованием более чем одной системы. Один из способов добиться этого — сменить локомотивы на коммутационных станциях. У этих станций есть воздушные провода, которые можно переключать с одного напряжения на другое. Другой способ — использовать мультисистемные локомотивы, которые могут работать при нескольких типах напряжения и тока. В Европе принято использовать четырехсистемные локомотивы. (1,5 кВ постоянного тока, 3 кВ постоянного тока, 15 кВ переменного тока 16 Гц, 25 кВ переменного тока 50 Гц).
В Европе принято использовать четырехсистемные локомотивы. (1,5 кВ постоянного тока, 3 кВ постоянного тока, 15 кВ переменного тока 16 Гц, 25 кВ переменного тока 50 Гц).
Источники: различных презентаций slideshare.net, elprocus.com, electronicshub.org
Видео:
Методы управления скоростью двигателя постоянного тока
Основным принципом двигателя постоянного тока является устройство, преобразующее энергию постоянного тока в механическую. Когда токоведущий якорь подключается к концу питания через сегмент комментатора, щетки помещаются в пределах северных и южных полюсов постоянных или электромагнитов.При использовании этих электромагнитов принцип работы зависит от правила левой руки Флеминга для определения направления силы, действующей на проводники якоря двигателя постоянного тока.
Способы управления скоростью двигателя постоянного тока
Скорость двигателя постоянного тока можно изменять путем изменения магнитного потока, сопротивления якоря или приложенного напряжения. Существуют разные методы управления скоростью для разных шунтирующих и последовательных методов постоянного тока.
Управление скоростью параллельных двигателей
- Метод управления потоком
- Якорь и метод реостатного управления
- Метод управления напряжением
- Управление несколькими напряжениями
- Система Уорда Леонарда
Управление скоростью серийных двигателей
- Полевой переключатель
- Дивертер якоря
- Управление захватом поля
- Катушки параллельного поля
- Переменное сопротивление последовательно с двигателем
- Последовательный метод параллельного управления
Метод управления потоком
В этом методе управления потоком скорость двигателя равна обратно пропорционально потоку. Таким образом, за счет уменьшения потока и скорость можно увеличить наоборот. Чтобы контролировать поток, реостат, добавленный последовательно с обмоткой возбуждения, увеличит скорость (N), потому что поток будет уменьшаться. Таким образом, ток возбуждения относительно невелик, и, следовательно, потери I2R уменьшаются. Этот метод достаточно эффективен.
Таким образом, за счет уменьшения потока и скорость можно увеличить наоборот. Чтобы контролировать поток, реостат, добавленный последовательно с обмоткой возбуждения, увеличит скорость (N), потому что поток будет уменьшаться. Таким образом, ток возбуждения относительно невелик, и, следовательно, потери I2R уменьшаются. Этот метод достаточно эффективен.
Метод управления потоком
Таким образом, в этом методе скорость может быть увеличена за счет уменьшения потока, он устанавливает метод уменьшения потока с помощью этого метода, он переводит метод на максимальную скорость, поскольку ослабление потока сверх установленных пределов отрицательно повлияет на коммутатор.
Метод управления якорем
В методе управления якорем скорость двигателя постоянного тока прямо пропорциональна обратной ЭДС (Eb) и Eb = V-IaRa. Когда напряжение питания (В) и сопротивление якоря Ra поддерживаются постоянными, скорость прямо пропорциональна току якоря (Ia). Если мы добавим сопротивление последовательно с якорем, ток якоря (Ia) уменьшится и, следовательно, скорость уменьшится.
Этот метод управления якорем основан на том, что путем изменения напряжения на требуемом напряжении.Можно изменить обратную ЭДС двигателя (Eb) и скорость двигателя. Этот метод реализуется путем включения переменного сопротивления (Rc) последовательно с якорем.
Метод управления якорем
Основное уравнение метода управления якорем N прямо пропорционально V-ia (Ra + Rc), где Rc — сопротивление регулятора, а Ra — сопротивление якоря. За счет возврата напряжения в сопротивление контроллера уменьшается обратная ЭДС. Поскольку N прямо пропорционально Eb.
Метод управления напряжением двигателя постоянного тока
Управление множественным напряжением : В этом методе шунтирующее поле подключается к фиксированному напряжению возбуждения, а на якорь подается другое напряжение.Таким образом, напряжение на якоре изменяется с помощью подходящего распределительного устройства. Скорость якоря примерно пропорциональна напряжению на якоре.
Система Ward-Leonard : Эта система Ward-Leonard используется там, где требуется очень чувствительное управление скоростью двигателя (например, электрические экскаваторы, лифты и т. Д.). Расположение этой системы соответствует рисунку, показанному ниже.
Д.). Расположение этой системы соответствует рисунку, показанному ниже.
М2 — двигатель, он контролирует скорость генератора.M1 может быть любым двигателем переменного или постоянного тока с постоянной скоростью. G — генератор, напрямую связанный с M1. В этом методе выходной сигнал генератора G подается на якорь двигателя M2, скорость которого необходимо регулировать. Выходное напряжение генератора может быть подключено к двигателю M2, и его можно изменять от нуля до максимального значения, и, следовательно, напряжение якоря двигателя M2 изменяется очень плавно. Следовательно, этим методом можно добиться очень плавного управления скоростью двигателя.
Ward Leonard System
Управление скоростью последовательного двигателя
Полевой дивертер : Реостарт подключается параллельно последовательному полю, как показано на рис. (А).Этот переменный резистор также называется дивертером, так как через него можно отводить желаемое значение тока и, следовательно, уменьшить ток через катушку возбуждения. Следовательно, поток можно уменьшить до желаемой величины, а скорость (N) можно увеличить.
Следовательно, поток можно уменьшить до желаемой величины, а скорость (N) можно увеличить.
Дивертер якоря : Реостат (делитель) подключается к якорю катушки, как показано на рис. (B). Для заданного постоянного момента нагрузки, если ток якоря уменьшается, магнитный поток должен увеличиваться. В качестве крутящего момента якоря Ta α ØIa.Это приведет к увеличению тока, потребляемого от источника питания, и, следовательно, увеличится Ø магнитного потока, а следовательно, скорость двигателя снизится.
Полевой якорь
Полевое управление с отводом
Этот метод управления полевым отводом показан на рис. (C). В этом методе катушка возбуждения снимается с делением количества витков. Таким образом, мы можем выбрать другое значение Ø, выбрав другое количество оборотов. В этом методе поток уменьшается, а скорость увеличивается за счет уменьшения количества витков последовательной обмотки возбуждения.Переключатель S может закоротить любую часть обмотки возбуждения, тем самым уменьшая магнитный поток и увеличивая скорость (N) с полными витками катушки.
Управление полем с отводом
Параллельное соединение полевых катушек : Используется для двигателей вентиляторов. Несколько скоростей могут быть получены путем перегруппировки полевых катушек последовательно с якорем постоянного тока.
Метод переменного сопротивления последовательно с якорем
В этом методе вводимое сопротивление (R) последовательно с якорем двигателя.Напряжение на якоре можно уменьшить. Таким образом, скорость уменьшается пропорционально этому. Видно, что для 4-полюсного двигателя скорость двигателя может быть легко получена.
Метод последовательного параллельного управления : Этот тип метода может широко использоваться в электрической тяге, где используются два или более механизмов, соединенных последовательными двигателями. При необходимости низкоскоростные двигатели подключаются последовательно, а более высокоскоростные — параллельно.
Когда двигатели соединены последовательно, через них проходит одинаковый ток, хотя напряжение на каждом двигателе разделено.
T Нм = P W 9.549 / n (2)
где
T Нм = крутящий момент (Нм)
P W = мощность (Вт)
n = обороты в минуту (об / мин)
T = (750 Вт ) 9,549 / (2000 об / мин)
= 3,6 (Нм)
с. при скорости 1000 об / мин можно рассчитать какT = (100 л.с.) 63025 / (1000 об / мин)
= 6303 (фунт f дюйм)
- Бесщеточные двигатели постоянного тока
- Все двигатели BLDC
- Двигатели Ultra EC
- Хирургические двигательные решения
- Щеточные двигатели постоянного тока
- Щеточный двигатель постоянного тока
- Athlonix Motors
- Шаговые двигатели
- Может складывать моторы
- Линейные шаговые двигатели
Трехфазный набор обмоток статора вставлен в пазы в железе статора. Эти обмотки могут быть соединены либо по схеме звезды, обычно без внешнего подключения к нейтральной точке, либо по схеме треугольник. Ротор состоит из цилиндрического стального сердечника с проводниками, размещенными в пазах по всей поверхности. В наиболее обычной форме эти проводники ротора соединены вместе на каждом конце ротора проводящим концевым кольцом. В момент t 1 на чертеже ток в фазе a является максимально положительным, тогда как ток в фазах b и c составляет половину отрицательного значения. Результатом является магнитное поле с приблизительно синусоидальным распределением вокруг воздушного зазора с максимальным значением наружу вверху и максимальным значением внутрь внизу. В момент времени t 2 на рисунке (т.е. одна шестая цикла позже), ток в фазе c является максимально отрицательным, в то время как в фазе b и фазе a составляет половину значения положительный.В результате, как показано на рисунке для t 2 , снова будет синусоидально распределенное магнитное поле, но повернутое на 60 ° против часовой стрелки. Исследование распределения тока для t 3 , t 4 , t 5 и t 6 показывает, что магнитное поле продолжает вращаться с течением времени. Поле совершает один оборот за один цикл токов статора. Таким образом, совокупный эффект трех равных синусоидальных токов, равномерно смещенных во времени и текущих в трех обмотках статора, равномерно смещенных в угловом положении, должен создать вращающееся магнитное поле с постоянной величиной и механической угловой скоростью, которая зависит от частоты электроснабжение. Видно, что токи приблизительно синусоидально распределены по периферии ротора и расположены так, чтобы создавать вращающий момент против часовой стрелки на роторе (то есть вращающий момент в том же направлении, что и вращение поля). Этот крутящий момент ускоряет ротор и вращает механическую нагрузку. По мере увеличения скорости вращения ротора его скорость относительно скорости вращающегося поля уменьшается.Таким образом, индуцированное напряжение снижается, что приводит к пропорциональному снижению тока в проводнике ротора и крутящего момента. Скорость ротора достигает постоянного значения, когда крутящий момент, создаваемый токами ротора, равен крутящему моменту, необходимому на этой скорости для нагрузки, при отсутствии избыточного крутящего момента для ускорения объединенной инерции нагрузки и двигателя. Исходные токи статора, показанные на рисунке, достаточны только для создания вращающегося магнитного поля. Чтобы поддерживать это вращающееся поле при наличии токов ротора, показанных на рисунке, необходимо, чтобы обмотки статора несли дополнительную составляющую синусоидального тока такой величины и фазы, чтобы нейтрализовать влияние магнитного поля, которое в противном случае могло бы возникнуть. токами ротора на рисунке. Общий ток статора в каждой фазной обмотке является суммой синусоидальной составляющей, создающей магнитное поле, и другой синусоиды, опережающей первую на четверть цикла, или 90 °, для обеспечения необходимой электроэнергии.Второй, или силовой, компонент тока находится в фазе с напряжением, приложенным к статору, в то время как первый, или намагничивающий, компонент отстает от приложенного напряжения на четверть цикла или 90 °. При номинальной нагрузке эта намагничивающая составляющая обычно находится в диапазоне от 0,4 до 0,6 величины составляющей мощности. Типичное напряжение питания составляет от 230 В между фазами для двигателей относительно небольшой мощности (например,от 0,5 до 50 киловатт) до примерно 15 киловольт между фазами для двигателей большой мощности примерно до 10 мегаватт. При полной нагрузке скорость обычно на 0,5–5 процентов ниже скорости поля (часто называемая синхронной скоростью), причем более высокий процент применяется к двигателям меньшего размера.Эта разница в скорости часто называется скольжением. Таким образом, номинальная мощность рамы, являющаяся произведением крутящего момента и скорости, будет примерно обратно пропорциональна количеству пар полюсов. Наиболее распространенные синхронные скорости для двигателей с частотой 60 Гц — 1800 и 1200 оборотов в минуту. Он использует понижающий трансформатор и преобразователи частоты для преобразования высокого напряжения и фиксированной промышленной частоты. В Европе принято использовать четырехсистемные локомотивы. (1,5 кВ постоянного тока, 3 кВ постоянного тока, 15 кВ переменного тока 16 Гц, 25 кВ переменного тока 50 Гц). Таким образом, за счет уменьшения потока и скорость можно увеличить наоборот. Чтобы контролировать поток, реостат, добавленный последовательно с обмоткой возбуждения, увеличит скорость (N), потому что поток будет уменьшаться. Таким образом, ток возбуждения относительно невелик, и, следовательно, потери I2R уменьшаются. Этот метод достаточно эффективен. Д.). Расположение этой системы соответствует рисунку, показанному ниже.