Управление электродвигателями переменного тока | Полезные статьи
Современная схема управления электродвигателем переменного тока чаще всего включает в себя преобразователь частоты. Данная система управления начала набирать популярность благодаря развитию микропроцессорной электроники, на принципах которой и работают современные частотные преобразователи. Такой блок управления асинхронным двигателем отличается высокой надежностью и приемлемой ценой. Кроме того, установка таких систем управления может сэкономить около 40 % потребляемой энергии. Трехфазные двигатели переменного тока могут управляться с применением двух различных принципов:
- вольт-частотное регулирование;
- векторный метод управления.
Вольт-частотное управление асинхронным электродвигателем еще называют скалярным. Изменение скорости вращения вала при этом достигается изменением частоты и напряжения в обмотке статора. При этом одновременно изменяется модуль данного напряжения.
Векторное управление электродвигателем переменного тока позволяет осуществлять не только скалярное управление, но и работать с магнитным потоком. В основе данной системы лежит представление об основных параметрах электромагнитной системы двигателей как о векторах, расположенных в пространстве. Микросхемы для управления электродвигателя позволяют контролировать и изменять не только амплитуду, но и фазу статорного тока, фактически изменяя его вектор. В результате появляется возможность управления вращающим моментном электродвигателя.
В основе данной системы лежит представление об основных параметрах электромагнитной системы двигателей как о векторах, расположенных в пространстве. Микросхемы для управления электродвигателя позволяют контролировать и изменять не только амплитуду, но и фазу статорного тока, фактически изменяя его вектор. В результате появляется возможность управления вращающим моментном электродвигателя.
Для эффективного управления фазой тока, а значит, и магнитным потоком относительно ротора, необходимо знать его точное состояние в любой момент времени. Для решения этой проблемы используется либо внешний датчик положения ротора, либо система определения его положения по параметрам напряжения и токов обмоток статора. Управление электродвигателем переменного тока с устройством контроля обратной связи скорости позволяют ее регулирование в диапазоне 1–1000. При этом точность контроля скорости составляет сотые доли процента. Точность регулирования момента несколько ниже — около 2 процентов.
Для оформления заказа позвоните менеджерам компании Кабель.РФ® по телефону +7 (495) 646-08-58 или пришлите заявку на электронную почту [email protected] с указанием требуемой модели электродвигателя, целей и условий эксплуатации. Менеджер поможет Вам подобрать нужную марку с учетом Ваших пожеланий и потребностей.
Управление электродвигателями
Исследования Мирового Энергетического Совета в 2013 году, говорят о том, что около 45% глобального потребления электроэнергии приходится на электродвигатели. Они являются неотъемлемой частью нашей повседневной жизни. Электродвигатели можно встретить в бытовой технике, инструментах, электромобилях, поездах, на нефтяных платформах и дамбах.
Со времен промышленной революции мы постоянно сокращаем трудозатраты и время, внедряя электродвигатели во всевозможное оборудование. Масса устройств с электроприводом сделала наши домашние дела проще и удобнее, а наши рабочие места стали более эффективными и рентабельными. Но какой ценой?
Но какой ценой?
Энергопотребление и окружающая среда
В современном мире, где сокращаются запасы ископаемых видов топлива, где внимательно следят за экологией и окружающей средой, производителям любых изделий с моторами приходится нелегко. Пока не существует достойной альтернативы по получению электроэнергии из возобновляемых источников, проблема усугубляется стремительным увеличением спроса в связи с экономическим ростом в Африке, Азии и Южной Америке и быстрорастущей численностью мирового населения. Во всем мире правительства все более активно внедряют законодательные меры, направленные на сокращение потребления энергии. В ответ на это промышленные заказчики стараются инвестировать в более эффективное оборудование. Не желают отставать и дальновидные розничные потребители, которые ищут изделия с низким энергопотреблением.
Компактные двигатели
Помимо сокращения энергопотребления, инженеры также сталкиваются с необходимостью сокращения размеров моторов, приводов и их контроллеров./F036M_(6-90V-15A)-02.JPG) Так, например, для потребителя большой объем барабана в стиральной машинке является дополнительным критерием выбора, но тем не менее машинка по-прежнему должна соответствовать стандартным размерам. Сокращение пространства для электронных компонентов усложняет терморегулирование и охлаждение и порождает некоторые трудности для инженеров-разработчиков. Добавление механизмов охлаждения только увеличивает потребление энергии, поэтому двигатели должны быть спроектированы таким образом, чтобы выделять меньше тепла.
Так, например, для потребителя большой объем барабана в стиральной машинке является дополнительным критерием выбора, но тем не менее машинка по-прежнему должна соответствовать стандартным размерам. Сокращение пространства для электронных компонентов усложняет терморегулирование и охлаждение и порождает некоторые трудности для инженеров-разработчиков. Добавление механизмов охлаждения только увеличивает потребление энергии, поэтому двигатели должны быть спроектированы таким образом, чтобы выделять меньше тепла.
Архитектура систем управления двигателями
Системы управления двигателем
На приведенной выше схеме показаны стандартные блоки системы управления двигателем в зависимости от типа двигателя, области его применения, уровня управления и мониторинга.
Контроллер – это устройство управления, микроконтроллер или ЦСП, который воспринимает такие команды, как направление, скорость и крутящий момент. Он необходим для генерации одного или нескольких сигналов для приведения в действие мотора. Управление обычно осуществляется посредством ШИМ. Контроллер также может быть снабжен обратной связью в виде измерения тока и положения, чтобы обеспечить более точное управление, защиту двигателя и обнаружение неисправности.
Управление обычно осуществляется посредством ШИМ. Контроллер также может быть снабжен обратной связью в виде измерения тока и положения, чтобы обеспечить более точное управление, защиту двигателя и обнаружение неисправности.
Привод — в большинстве случаев привод необходим для усиления сигналов, образуемых контроллером для обеспечения достаточной мощности двигателя.
Датчики — шунты и датчики с эффектом Холла могут использоваться для измерения фактического тока, тем самым обеспечивая обратную связь. Получение данных о положении двигателя осуществляется через индуктивный датчик, датчик Холла или энкодер. Затем эта обратная связь может использоваться для реализации более сложного управления «замкнутым контуром» и получения актуальной информации об условиях работы электродвигателя, что обеспечивает улучшенный контроль над выходными параметрами электродвигателя.
Фильтрация — используется в системах управления двигателями для подавления источников электромагнитных помех.
Изоляция — гальваническая развязка часто используется для изоляции контроллера двигателя от остальной системы, которая может быть чувствительна к импульсным помехам, а также иметь различный потенциал земли.
Двигатель с замкнутым и разомкнутым контуром
Разомкнутые системы управления характеризуются тем, что в них задается необходимое значение регулируемой величины, но в процессе работы значение регулируемой величины не контролируется, и система не реагирует на отклонение регулируемой величины от заданного значения. Другими словами, разомкнутая система управления не имеет обратной связи.
В замкнутых системах производится непрерывный контроль выходной величины, и система управления при помощи цепи обратной связи реагирует на отклонение выходного сигнала от заданной величины. Хорошим примером этого является позиционный двигатель на телескопе, который будет постоянно перестраиваться, чтобы отслеживать требуемые координаты./F036M_(6-90V-15A)-03.JPG)
Бесщеточные двигатели постоянного тока (БДПТ)
Автор: Эльвир Кахриманович, старший системный инженер-разработчик компании Infineon.
От аккумуляторных электроинструментов до средств промышленной автоматизации, от электрических велосипедов до дистанционно управляемых «беспилотников», в настоящее время бесщеточные двигатели постоянного тока (БДПТ) пользуются все большей популярностью. Для решений БДПТ требуется более сложное устройство привода, такие моторы обладают рядом эксплуатационных преимуществ, включая высокую эффективность и удельную мощность. Это позволяет использовать меньшие по размеру, более легкие и менее дорогие двигатели. Уменьшается механический износ, что приводит к повышению надежности, увеличению срока службы, а также исключает необходимость постоянного техобслуживания. Двигатели БДПТ работают с более низким звуковым и электрическим шумом, чем их щеточные аналоги.
Обычный БДПТ имеет трехфазный статор, который осуществляет вращение ротора через систему электронного управления. Такая система включает в себя трехфазный инвертор напряжения. Она постоянно переключает токи в обмотках статора синхронно с положением ротора, которое может быть установлено с помощью датчиков или посредством расчетов, основанных на обратной электродвижущей силе (ЭДС) в конкретный момент. Поток, генерируемый в статоре, взаимодействует с потоком ротора, который определяет крутящий момент и скорость двигателя.
Такая система включает в себя трехфазный инвертор напряжения. Она постоянно переключает токи в обмотках статора синхронно с положением ротора, которое может быть установлено с помощью датчиков или посредством расчетов, основанных на обратной электродвижущей силе (ЭДС) в конкретный момент. Поток, генерируемый в статоре, взаимодействует с потоком ротора, который определяет крутящий момент и скорость двигателя.
При разработке средств БДПТ инженеры выбирают между использованием дискретных компонентов и интегрированных решений, которые объединяют ряд важных функций привода и управления в одном устройстве.
Более подробную информацию можно найти в материалах компании Infineon: «Потери мощности и оптимизированный выбор MOSFET в конструкциях инверторов двигателей БДПТ» на сайте DesignSpark.
Робот от Infineon Technologies побил рекорд по сборке кубика Рубирка
Компоненты для бесщеточных двигателей
Компоненты для систем управления двигателями
Постройте компактный, надежный и эффективный моторный привод с использованием встроенных силовых модулей от компании ON Semiconductor.
Типы двигателей и как подобрать нужный двигатель
Существует две основные категории двигателей: переменного тока (AC) и постоянного тока (DC).
Двигатели постоянного тока были изобретены первыми и по-прежнему являются самым простым видом двигателей. DC двигатели приводятся в движение путем пропуска тока через проводник внутри магнитного поля. Основными типами электродвигателей постоянного тока являются щеточные двигатели постоянного тока и бесщеточные двигатели постоянного тока. Энергия щеточных двигателей генерируется подключением противоположных полюсов источника питания для подачи отрицательных и положительных зарядов в коммутатор при его физическом контакте с щетками. Такие электродвигатели отличаются своей простотой и низкой стоимостью, но требуют частого техобслуживания, так как щетки нуждаются в регулярной чистке и замене. Для того, чтобы работа приборов была более надежной, эффективной и менее шумной, используют бесщеточные двигатели постоянного тока. Они легче по сравнению с щеточными двигателями при одной и той же выходной мощности, практически не требуют техобслуживания, но значительно дороже.
Для того, чтобы работа приборов была более надежной, эффективной и менее шумной, используют бесщеточные двигатели постоянного тока. Они легче по сравнению с щеточными двигателями при одной и той же выходной мощности, практически не требуют техобслуживания, но значительно дороже.
Двигатели переменного тока можно разделить на два основных типа: асинхронные и синхронные. Выделяют ещё один, менее распространенный тип — линейные AC двигатели.
Можно сказать, что AC двигатели состоят из двух основных частей: внешняя часть (статор) и внутренняя (ротор). Статор – это стационарная часть двигателя с катушками, на которые подается переменный ток для создания вращающегося магнитного поля. А ротор соединен с валом, который создает другое вращающееся магнитное поле. Линейные двигатели схожи с вращающимися двигателями, но в них движущиеся и неподвижные части расположены по прямой линии, и в итоге они создают линейное движение.Индукционные (асинхронные) электродвигатели называются таковыми, поскольку крутящий момент создается с помощью электромагнитной индукции. Они известны также как двигатели с короткозамкнутым ротором или фазным ротором.
Они известны также как двигатели с короткозамкнутым ротором или фазным ротором.
Синхронные двигатели отличаются от асинхронных тем, что они работают с точной синхронизацией с частотой сети. Напротив, асинхронные двигатели используют индуктивный ток для создания магнитного поля и требуют некоторого «скольжения» (немного более медленного вращения), чтобы вызвать ток.
На что следует обратить внимание при выборе электродвигателя?| Тип электродвигателя: | Двигатель постоянного тока (DC) или переменного тока (AC). |
|---|---|
| Скорость: | На какой скорости должен работать ваш двигатель? От этого напрямую зависит регулирование числа оборотов. Вам требуется выбор из нескольких режимов времени набора оборотов двигателя? |
| Крутящий момент: | Это показатель, характеризующий силу вращения, обычно измеряется в Н·м (Ньютон-метр). |
| Встроенный редуктор: | Встроенные редукторы снижают скорость и увеличивают крутящий момент. |
| Требования по нагрузке: | Какая нагрузка вам требуется – предельная нагрузка, нормальная нагрузка или легкий режим нагрузки? |
| Номинальная мощность: | Как правила, указывается в Ваттах (Вт) или лошадиных силах (л. с.). Проверьте характеристики при нормальной работе и перегрузках. |
| Питание: | Проверьте требования к электропитанию – к напряжению, току. |
| Конфигурация: | Размер и габариты двигателя будут определяться приложением, для которого он предназначен.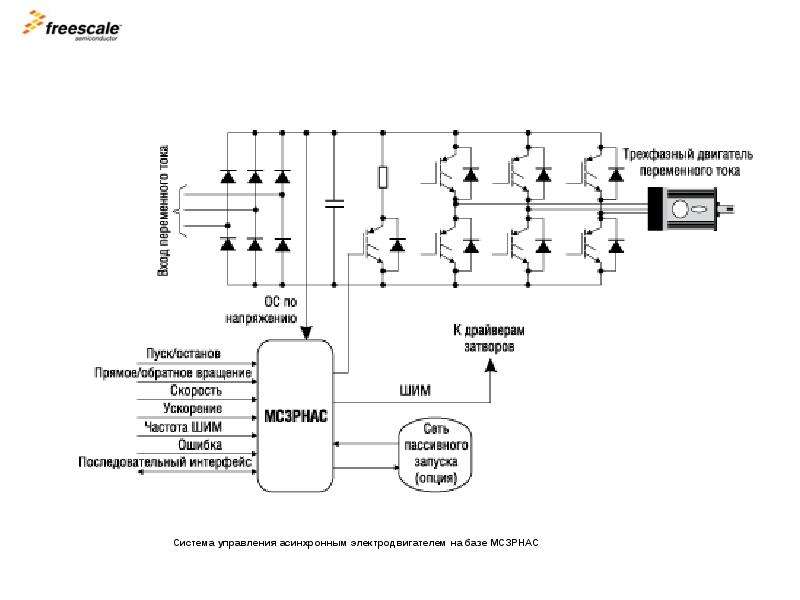 Размер вала, тип монтажа и вес также должны быть учтены. Размер вала, тип монтажа и вес также должны быть учтены. |
Ведущие бренды
Статьи на сайте DesignSpark
Векторное управление электродвигателем «на пальцах» / Хабр
— Что такое векторное управление?— Держать ток под 90 градусов.
Термин «векторное управление» электродвигателями знаком всем, кто хоть как-то интересовался вопросом, как с помощью микроконтроллера управлять двигателем переменного тока. Однако обычно в любой книге по электроприводу глава про векторное управление находится где-нибудь ближе к концу, состоит из кучи волосатых формул с отсылками ко всем остальным главам книги. Отчего разбираться в этом вопросе совсем не хочется. И даже самые простые объяснения всё равно держат путь через дифференциальные уравнения равновесия, векторные диаграммы и кучу другой математики. Из-за чего появляются примерно вот такие вот попытки как-то закрутить двигатель без использования мат.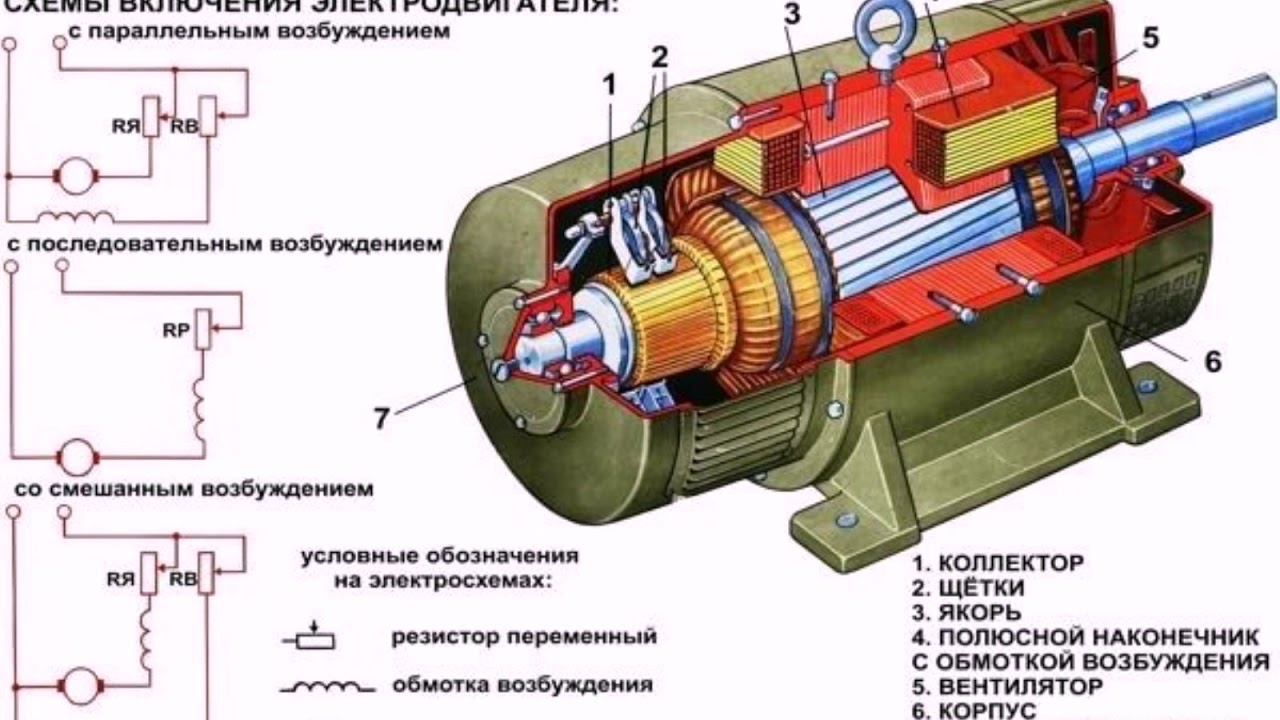 части. Но на самом деле векторное управление – это очень просто, если понимать принцип его работы «на пальцах». А там уже и с формулами разбираться в случае надобности будет веселее.
части. Но на самом деле векторное управление – это очень просто, если понимать принцип его работы «на пальцах». А там уже и с формулами разбираться в случае надобности будет веселее.
Рассмотрим принцип работы самого простого двигателя переменного тока – синхронной машины с постоянными магнитами. Удобный пример – компас: его магнитная стрелка представляет из себя ротор синхронной машины, а магнитное поле Земли – магнитное поле статора. Без внешней нагрузки (а в компасе её нет, если не считать трение и жидкость, гасящую колебания стрелки) ротор всегда ориентируется по полю статора. Если мы будем держать компас и вращать под ним Землю, то стрелка будет крутиться вслед, совершая работу по перемешиванию жидкости внутри компаса. Но есть и чуть более простой способ – можно взять внешний магнит, например, в виде стержня с полюсами на концах, поле которого значительно сильнее магнитного поля Земли, поднести его к компасу сверху и вращать магнит. Стрелка будет двигаться вслед за вращающимся магнитным полем. В настоящем синхронном двигателе поле статора создается электромагнитами – катушками с током. Схемы обмоток там сложные, но принцип один – они создают статором магнитное поле, направленное в нужную сторону и имеющее нужную амплитуду. Посмотрим на следующий рисунок (Рисунок 1). В центре изображен магнит – ротор синхронного двигателя («стрелка» компаса), а по бокам два электромагнита – катушки, создающие каждая свое магнитное поле, одна в вертикальной оси, другая в горизонтальной.
В настоящем синхронном двигателе поле статора создается электромагнитами – катушками с током. Схемы обмоток там сложные, но принцип один – они создают статором магнитное поле, направленное в нужную сторону и имеющее нужную амплитуду. Посмотрим на следующий рисунок (Рисунок 1). В центре изображен магнит – ротор синхронного двигателя («стрелка» компаса), а по бокам два электромагнита – катушки, создающие каждая свое магнитное поле, одна в вертикальной оси, другая в горизонтальной.
Рисунок 1. Принцип действия синхронной электрической машины
Магнитный поток катушки пропорционален току в ней (в первом приближении). Нас будет интересовать магнитный поток от статора в том месте, где расположен ротор, т.е. в центре рисунка (краевыми эффектами, рассеянием и всем прочим пренебрегаем). Магнитные потоки двух перпендикулярно расположенных катушек векторно складываются, образуя для взаимодействия с ротором один общий поток. Но так как поток пропорционален току в катушке, удобно рисовать непосредственно вектора токов, сонаправив их с потоком. На рисунке показаны некоторые токи Iα и Iβ, создающие магнитные потоки по осям α и β соответственно. Суммарный вектор тока статора Is создает сонаправленый ему магнитный поток статора. Т.е. по сути Is символизирует внешний магнит, который мы подносили к компасу, но созданный электромагнитами – катушками с током.
На рисунке показаны некоторые токи Iα и Iβ, создающие магнитные потоки по осям α и β соответственно. Суммарный вектор тока статора Is создает сонаправленый ему магнитный поток статора. Т.е. по сути Is символизирует внешний магнит, который мы подносили к компасу, но созданный электромагнитами – катушками с током.
На рисунке ротор расположен в произвольном положении, но из этого положения ротор будет стремиться повернуться согласно магнитному потоку статора, т.е. по вектору Is (положение ротора в этом случае показано пунктирной линией). Соответственно, если подать ток только в фазу α, скажем, Iα = 1А, ротор встанет горизонтально, а если в β, вертикально, а если приложить Iβ = -1А то перевернется на 180 градусов. Если запитать ток Iα по закону синуса, а Iβ по закону косинуса от времени, то будет создано вращающееся магнитное поле. Ротор будет следовать за ним и крутиться (как стрелка компаса следует за вращением магнита руками). Это базовый принцип работы синхронной машины, в данном случае двухфазной с одной парой плюсов.
Ротор будет следовать за ним и крутиться (как стрелка компаса следует за вращением магнита руками). Это базовый принцип работы синхронной машины, в данном случае двухфазной с одной парой плюсов.
Давайте нарисуем график момента двигателя в зависимости от углового положения вала ротора и вектора тока Is статора – угловую характеристику синхронного двигателя. Эта зависимость синусоидальная (Рисунок 2).
Рисунок 2. Угловая характеристика синхронной машины (здесь есть некоторая историческая путаница со знаками момента и угла, из-за чего часто рисуют характеристику перевернутой относительно горизонтальной оси).
Чтобы получить этот график на практике, можно поставить на вал ротора датчик вращающего момента, затем включить любой вектор тока, например, просто подать ток в фазу α. Ротор повернется в соответствующее положение, которое нужно принять за ноль. Потом через датчик момента «руками» нужно поворачивать ротор, фиксируя на графике в каждой точке угол θ, на который повернули, и момент, который показал датчик. Т.е. нужно растягивать «магнитную пружину» двигателя через датчик момента. Самый большой момент окажется при угле в 90 градусов от вектора тока (от начала). Амплитуда получившегося максимального момента Ммакс пропорциональна амплитуде приложенного вектора тока. Будет приложен 1А, получим, скажем, Ммакс = 1 Н∙м (ньютон*метр, единица измерения вращающего момента), если подадим 2А, получим Ммакс = 2 Н∙м.
Т.е. нужно растягивать «магнитную пружину» двигателя через датчик момента. Самый большой момент окажется при угле в 90 градусов от вектора тока (от начала). Амплитуда получившегося максимального момента Ммакс пропорциональна амплитуде приложенного вектора тока. Будет приложен 1А, получим, скажем, Ммакс = 1 Н∙м (ньютон*метр, единица измерения вращающего момента), если подадим 2А, получим Ммакс = 2 Н∙м.
Из этой характеристики следует, что двигатель развивает наибольший момент, когда ротор находится под 90° к вектору тока. Так как мы при создании системы управления на микроконтроллере хотим получить от двигателя наибольший момент при минимуме потерь, а потери, в первую очередь, это ток в обмотках, то рациональнее всего ставить вектор тока всегда под 90° к магнитному полю ротора, т.е. перпендикулярно магниту на рисунке 1. Нужно поменять всё наоборот – не ротор едет к задаваемому нами вектору тока, а мы задаем вектор тока всегда под 90° к ротору, как бы он там не вращался, т. е. «прибить» вектор тока к ротору. Регулировать же момент двигателя будем амплитудой тока. Чем больше амплитуда – тем выше момент. А частота вращения, частота тока в обмотках это уже «не наше» дело – какая получится, как ротор будет вращаться, так и будет – мы управляем моментом на валу. Как ни странно, именно это и называется векторным управлением – когда мы управляем вектором тока статора так, чтобы он был под 90° к магнитному полю ротора. Хотя некоторые учебники дают более широкие определения, вплоть до такого, что векторным управлением называют вообще любые законы управления, где задействованы «вектора», но обычно под векторным управлением понимается именно приведенный выше способ управления.
е. «прибить» вектор тока к ротору. Регулировать же момент двигателя будем амплитудой тока. Чем больше амплитуда – тем выше момент. А частота вращения, частота тока в обмотках это уже «не наше» дело – какая получится, как ротор будет вращаться, так и будет – мы управляем моментом на валу. Как ни странно, именно это и называется векторным управлением – когда мы управляем вектором тока статора так, чтобы он был под 90° к магнитному полю ротора. Хотя некоторые учебники дают более широкие определения, вплоть до такого, что векторным управлением называют вообще любые законы управления, где задействованы «вектора», но обычно под векторным управлением понимается именно приведенный выше способ управления.
Но как векторное управления достигается на практике? Очевидно, для начала понадобится знать положение ротора, чтобы было относительно чего отмерять 90°. Это проще всего сделать установив, собственно, датчик положения на вал ротора. Потом нужно разобраться, как создать вектор тока, поддерживая желаемые токи в фазах
αи
β. На двигатель-то мы прикладываем напряжение, а не ток… Но раз мы хотим что-то поддерживать, то нужно это измерять. Поэтому для векторного управления понадобятся датчики токов фаз. Далее нужно собрать структуру векторного управления в виде программы на микроконтроллере, которая будет делать всё остальное. Чтобы такое объяснение не было похоже на инструкцию «как нарисовать сову», давайте продолжим погружение.
На двигатель-то мы прикладываем напряжение, а не ток… Но раз мы хотим что-то поддерживать, то нужно это измерять. Поэтому для векторного управления понадобятся датчики токов фаз. Далее нужно собрать структуру векторного управления в виде программы на микроконтроллере, которая будет делать всё остальное. Чтобы такое объяснение не было похоже на инструкцию «как нарисовать сову», давайте продолжим погружение.
Поддерживать ток микроконтроллером можно использовав программный ПИ (пропорционально-интегральный) регулятор тока и ШИМ. Например, структура с регулятором тока для одной фазы α показана ниже (Рисунок 3).
Рисунок 3. Замкнутая по току структура управления для одной фазы
Здесь задание тока iα_зад – некая константа, тот ток, который мы хотим поддерживать для этой фазы, например 1А. Задание поступает на сумматор регулятора тока, раскрытая структура которого показана выше. Если читатель не знает, как работает ПИ-регулятор – то увы и ах. Могу лишь посоветовать что-то из этого. Регулятор тока на выходе задает напряжение фазы Uα. Напряжение поступает на блок ШИМ, который рассчитывает задания скважностей (уставок сравнения) для таймеров ШИМ микроконтроллера, формирующих ШИМ на мостовом инверторе из четырех ключей, чтобы сформировать это Uα. Алгоритм может быть разный, например, для положительного напряжения ШИМим правой стойкой пропорционально заданию напряжения, на левой замкнут нижний ключ, для отрицательного ШИМим левой, на правой замкнут нижний. Не забываем добавить мёртвое время! В итоге такая структура делает программный «источник тока» за счет источника напряжения: мы задаем нужное нам значение iα_зад, а данная структура с определенным быстродействием его реализует.
Регулятор тока на выходе задает напряжение фазы Uα. Напряжение поступает на блок ШИМ, который рассчитывает задания скважностей (уставок сравнения) для таймеров ШИМ микроконтроллера, формирующих ШИМ на мостовом инверторе из четырех ключей, чтобы сформировать это Uα. Алгоритм может быть разный, например, для положительного напряжения ШИМим правой стойкой пропорционально заданию напряжения, на левой замкнут нижний ключ, для отрицательного ШИМим левой, на правой замкнут нижний. Не забываем добавить мёртвое время! В итоге такая структура делает программный «источник тока» за счет источника напряжения: мы задаем нужное нам значение iα_зад, а данная структура с определенным быстродействием его реализует.
Дальше, возможно, некоторые читатели уже подумали, что до векторной структуры управления осталось дело за малым – нужно поставить два регулятора тока, на каждую фазу по регулятору, и формировать на них задание в зависимости от угла с датчика положения ротора (ДПР), т. е. сделать что-то типа такой структуры (Рисунок 4):
е. сделать что-то типа такой структуры (Рисунок 4):
Рисунок 4. Неправильная (наивная) структура векторного управления
Так делать нельзя. При вращении ротора переменные iα_зад и iβ_зад будут синусоидальными, т.е. задание на регуляторы тока будет всё время меняться. Быстродействие регулятора не бесконечно, поэтому при изменении задания он не мгновенно его отрабатывает. Если задание постоянно менять, то регулятор будет всё время его догонять, никогда не достигая. И с ростом скорости вращения двигателя отставание реального тока от заданного будет всё больше и больше, пока желаемый угол в 90° между током и магнитом ротора совсем не перестанет на него быть похожим, а векторное управление не перестанет быть таковым. Поэтому делают по-другому. Правильная структура следующая (Рисунок 5):
Рисунок 5. Структура векторного датчикового управления для двухфазной синхронной машины
Здесь добавились два блока – БКП_1 и БКП_2: блоки координатных преобразований. Они делают очень простую вещь: поворачивают вектор на входе на заданный угол. Причем БПК_1 поворачивает на +ϴ, а БКП_2 на —ϴ. Это вся разница между ними. В иностранной литературе их называют преобразованиями Парка (Park transformation). БКП_2 делает преобразование координат для токов: от неподвижных осей α и β, привязанных к статору двигателя, к вращающимся осям d и q, привязанных к ротору двигателя (используя для этого угол положения ротора ϴ). А БКП_1 делает обратное преобразование, от задания напряжения по осям d и q делает переход к осям α и β. Формул для преобразования координат не привожу, но они простые и очень легко ищутся. Собственно, в них нет ничего сложнее школьной геометрии (Рисунок 6):
Они делают очень простую вещь: поворачивают вектор на входе на заданный угол. Причем БПК_1 поворачивает на +ϴ, а БКП_2 на —ϴ. Это вся разница между ними. В иностранной литературе их называют преобразованиями Парка (Park transformation). БКП_2 делает преобразование координат для токов: от неподвижных осей α и β, привязанных к статору двигателя, к вращающимся осям d и q, привязанных к ротору двигателя (используя для этого угол положения ротора ϴ). А БКП_1 делает обратное преобразование, от задания напряжения по осям d и q делает переход к осям α и β. Формул для преобразования координат не привожу, но они простые и очень легко ищутся. Собственно, в них нет ничего сложнее школьной геометрии (Рисунок 6):
Рисунок 6. Координатные преобразования из неподвижных осей α и β, привязанных к статору двигателя, к вращающимся осям осям d и q, привязанных к ротору
То есть вместо «вращения» задания регуляторов (как было в прошлой структуре), вращаются их входы и выходы, а сами регуляторы работают в статическом режиме: токи d, q и выходы регуляторов в установившемся режиме постоянны. Оси d и q вращаются вместе с ротором (так их вращает сигнал с датчика положения ротора), при этом регулятор оси q регулирует как раз тот ток, который в начале статьи я называл «перпендикулярным полю ротора», то есть это моментообразующий ток, а ток d сонаправлен с «магнитом ротора», поэтому он нам не нужен и мы задаём его равным нулю. Такая структура избавлена от недостатка первой структуры – регуляторы токов даже не знают, что что-то где-то крутится. Они работают в статическом режиме: отрегулировали каждый свой ток, вышли на заданное напряжение – и всё, как ротор от них не убегай, они про это даже не узнают: всю работу по повороту делают блоки координатных преобразований.
Оси d и q вращаются вместе с ротором (так их вращает сигнал с датчика положения ротора), при этом регулятор оси q регулирует как раз тот ток, который в начале статьи я называл «перпендикулярным полю ротора», то есть это моментообразующий ток, а ток d сонаправлен с «магнитом ротора», поэтому он нам не нужен и мы задаём его равным нулю. Такая структура избавлена от недостатка первой структуры – регуляторы токов даже не знают, что что-то где-то крутится. Они работают в статическом режиме: отрегулировали каждый свой ток, вышли на заданное напряжение – и всё, как ротор от них не убегай, они про это даже не узнают: всю работу по повороту делают блоки координатных преобразований.
Для линейного движения пусть это будет, например, городской автобус. Он всё время то разгоняется, то тормозит, то едет назад и вообще ведёт себя как хочет: это ротор двигателя. Также есть вы на автомобиле рядом, едете параллельно: ваша задача быть ровно посредине автобуса: «держать 90°», вы – это регуляторы тока. Если автобус все время меняет скорость – вы тоже должны соответственно менять скорость и всё время её отслеживать. Но теперь сделаем для вас «векторное управление». Вы залезли внутрь автобуса, встали посередине и держитесь за поручень – как автобус не убегай, вы легко справляетесь с задачей «быть посередине автобуса». Аналогично и регуляторы токов, «катаясь» во вращающихся осях d, q ротора, живут легкой жизнью.
Если автобус все время меняет скорость – вы тоже должны соответственно менять скорость и всё время её отслеживать. Но теперь сделаем для вас «векторное управление». Вы залезли внутрь автобуса, встали посередине и держитесь за поручень – как автобус не убегай, вы легко справляетесь с задачей «быть посередине автобуса». Аналогично и регуляторы токов, «катаясь» во вращающихся осях d, q ротора, живут легкой жизнью.
Приведенная выше структура действительно работает и используется в современных электроприводах. Только в ней не хватает целой кучи мелких «улучшалок», без которых её уже не принято делать, типа компенсации перекрестных связей, разных ограничений, ослабления поля и т.п. Но базовый принцип именно такой.
А если нужно регулировать не момент привода, а всё-таки скорость (по правильному угловую скорость, частоту вращения)? Ну тогда ставим еще один ПИ-регулятор – регулятор скорости (РС). На вход подаем задание скорости, а на выходе имеем задание момента. Так как ток оси q пропорционален моменту, то можно для упрощения выход регулятора скорости подать сразу на вход регулятора тока оси q, вот так (Рисунок 7):
Рисунок 7.
 Регулятор скорости для векторного управления
Регулятор скорости для векторного управленияЗдесь ЗИ – задатчик интенсивности, плавно изменяет свой выход, чтобы двигатель разгонялся с нужным темпом, а не гнал на полном токе до задания скорости. Текущая частота вращения
ωвзята из обработчика датчика положения ротора, так как
ωэто производная от углового положения
ϴ. Ну или можно просто время между импульсами датчика засекать…
Как сделать тоже самое для трехфазного двигателя? Ну, собственно, ничего особенного, добавляем еще один блок и меняем модуль ШИМ (Рисунок 8).
Рисунок 8. Структура векторного датчикового управления для трехфазной синхронной машины
Трехфазные токи, точно так же как и двухфазные, служат для одной цели – создать вектор тока статора Is, направленный в нужную сторону и имеющий нужную амплитуду. Поэтому трехфазные токи можно просто пересчитать в двухфазные, а дальше оставить ту же систему управления, что уже была собрана для двухфазной машины. В англоязычной литературе такой «пересчёт» называют преобразованиями Кларк – Clarke transformation (Эдит Кларк – это она), у нас — фазными преобразованиями. В структуре на рисунке 8, соответственно, эта операция производится блоком фазных преобразований. Делаются они опять при помощи курса школьной геометрии (Рисунок 9):
В англоязычной литературе такой «пересчёт» называют преобразованиями Кларк – Clarke transformation (Эдит Кларк – это она), у нас — фазными преобразованиями. В структуре на рисунке 8, соответственно, эта операция производится блоком фазных преобразований. Делаются они опять при помощи курса школьной геометрии (Рисунок 9):
Рисунок 9. Фазные преобразования – из трех фаз к двум. Для удобства принимаем равенство амплитуды вектора Is амплитуде тока в фазе
Думаю, комментарии не нужны. Немного слов про ток фазы C. Туда можно не ставить датчик тока, так как три фазы двигателя соединены в звезду, и по закону Кирхгофа всё, что втекло через две фазы, должно вытечь из третьей (если, конечно, у вас в двигателе не пробита изоляция, и половина не утекла куда-то на корпус), поэтому ток фазы C вычисляют как скалярную сумму токов фаз A и B со знаком минус. Хотя третий датчик иногда ставят чтобы снизить погрешность измерений.
Также нужна полная переделка модуля ШИМ. Обычно для трехфазных двигателей используют трехфазный шестиключевой инвертор. На рисунке задание напряжения поступает всё ещё в двухфазных осях. Внутри модуля ШИМ с помощью обратных фазных преобразований можно пересчитать это в напряжения фаз A, B, C, которые надо приложить в этот момент к двигателю. А вот что делать дальше… Возможны варианты. Наивный метод – это задать на каждую стойку инвертора скважность, пропорциональную желаемому напряжению плюс 0.5. Это называется синусоидальной ШИМ. Именно такой метод применил автор в habrahabr.ru/post/128407. В этом методе всё хорошо, кроме того, что таким методом будет недоиспользован инвертор по напряжению – т.е. максимальное напряжение, которое будет получено, окажется меньше, чем вы могли бы получить, если бы использовали более совершенный метод ШИМ.
Обычно для трехфазных двигателей используют трехфазный шестиключевой инвертор. На рисунке задание напряжения поступает всё ещё в двухфазных осях. Внутри модуля ШИМ с помощью обратных фазных преобразований можно пересчитать это в напряжения фаз A, B, C, которые надо приложить в этот момент к двигателю. А вот что делать дальше… Возможны варианты. Наивный метод – это задать на каждую стойку инвертора скважность, пропорциональную желаемому напряжению плюс 0.5. Это называется синусоидальной ШИМ. Именно такой метод применил автор в habrahabr.ru/post/128407. В этом методе всё хорошо, кроме того, что таким методом будет недоиспользован инвертор по напряжению – т.е. максимальное напряжение, которое будет получено, окажется меньше, чем вы могли бы получить, если бы использовали более совершенный метод ШИМ.
Посчитаем. Пусть у вас есть классический преобразователь частоты, питающийся от промышленной трехфазной сети 380В 50Гц. Здесь 380В это линейное (между фазами) действующее напряжение. Так как в преобразователе стоит выпрямитель, он выпрямит это напряжение и на шине постоянного тока окажется напряжение, равное амплитудному линейному напряжению, т. е. 380∙√2=540В постоянного напряжения (по крайней мере без нагрузки). Если мы применим синусоидальный алгоритм расчета в модуле ШИМ, то амплитуда максимального фазного напряжения, которое получится у нас сделать, окажется равной половине от напряжения на шине постоянного тока, т.е. 540/2=270В. Пересчитаем в действующее фазное: 270/√2=191В. А теперь в действующее линейное: 191∙√3=330В. Теперь можем сравнить: вошло нам 380В, а вышло 330В… И больше с этим типом ШИМ никак нельзя. Для исправления этой проблемы используется так называемый векторный тип ШИМ. В нем на выходе будут снова 380В (в идеальном случае без учета всех падений напряжения). Метод векторной ШИМ никакого отношения к векторному управлению электродвигателем не имеет. Просто в его обосновании снова используется немного школьной геометрии, поэтому он и называется векторным. Однако его работу на пальцах не объяснить, поэтому отправлю читателя к книжкам (в конце статьи) или к википедии. Могу еще привести картинку, которая немного намекает на разницу в работе синусоидальной и векторной ШИМ (Рисунок 10):
е. 380∙√2=540В постоянного напряжения (по крайней мере без нагрузки). Если мы применим синусоидальный алгоритм расчета в модуле ШИМ, то амплитуда максимального фазного напряжения, которое получится у нас сделать, окажется равной половине от напряжения на шине постоянного тока, т.е. 540/2=270В. Пересчитаем в действующее фазное: 270/√2=191В. А теперь в действующее линейное: 191∙√3=330В. Теперь можем сравнить: вошло нам 380В, а вышло 330В… И больше с этим типом ШИМ никак нельзя. Для исправления этой проблемы используется так называемый векторный тип ШИМ. В нем на выходе будут снова 380В (в идеальном случае без учета всех падений напряжения). Метод векторной ШИМ никакого отношения к векторному управлению электродвигателем не имеет. Просто в его обосновании снова используется немного школьной геометрии, поэтому он и называется векторным. Однако его работу на пальцах не объяснить, поэтому отправлю читателя к книжкам (в конце статьи) или к википедии. Могу еще привести картинку, которая немного намекает на разницу в работе синусоидальной и векторной ШИМ (Рисунок 10):
Рисунок 10.
 Изменение потенциалов фаз для скалярной и векторной ШИМ
Изменение потенциалов фаз для скалярной и векторной ШИМКстати, а какие датчики положения используются для векторного управления? Чаще всего используются четыре типа датчиков. Это квадратурный инкрементальный энкодер, датчик на основе элементов Холла, абсолютный датчик положения и сельсинный датчик.
Квадратурный энкодер
не выдает абсолютного положения ротора – по своим импульсам он позволяет лишь определить, сколько вы проехали, но не куда и откуда (как начало и конец связаны с расположением магнита ротора). Поэтому для векторного управления синхронной машиной сам по себе он не подходит. Немного спасает ситуацию его реперная метка (индекс) – она одна на механический оборот, если до неё доехать, то абсолютное положение становится известно, а от неё можно уже отсчитывать сколько проехали квадратурным сигналом. Но как до этой метки доехать в начале работы? В общем, это не всегда удобно.
Датчик на основе элементов Холла
– это грубый датчик. Он выдает всего несколько импульсов на оборот (в зависимости от кол-ва элементов Холла, для трехфазных двигателей их обычно три, т. е. шесть импульсов), позволяя знать положение в абсолютной величине, но с низкой точностью. Точности обычно хватает, чтобы держать угол вектора тока так, чтобы двигатель по крайней мере ехал вперед, а не назад, но момент и токи будут пульсировать. Если двигатель разогнался, то можно начать программно экстраполировать сигнал с датчика по времени – т.е. строить из грубого дискретного угла линейно изменяющийся угол. Это делается на основе предположения, что двигатель вращается с примерно постоянной скоростью, как-то так (Рисунок 11):
е. шесть импульсов), позволяя знать положение в абсолютной величине, но с низкой точностью. Точности обычно хватает, чтобы держать угол вектора тока так, чтобы двигатель по крайней мере ехал вперед, а не назад, но момент и токи будут пульсировать. Если двигатель разогнался, то можно начать программно экстраполировать сигнал с датчика по времени – т.е. строить из грубого дискретного угла линейно изменяющийся угол. Это делается на основе предположения, что двигатель вращается с примерно постоянной скоростью, как-то так (Рисунок 11):
Рисунок 11. Работа датчика положения на элементах Холла для трехфазной машины и экстраполяция его сигнала
Часто для серводвигателей используется сочетание энкодера и датчика Холла. В этом случае можно сделать единый программный модуль их обработки, убирая недостатки обоих: делать экстраполяцию угла, приведенную выше, но не по времени, а по меткам с энкодера. Т.е. внутри от фронта до фронта датчика Холла работает энкодер, а каждый фронт Холла чётко инициализирует текущее абсолютное угловое положение. В этом случае неоптимальным (не под 90°) окажется лишь первое движение привода, пока он не доехал до какого-нибудь фронта датчика Холла. Отдельную проблему в этом случае представляет обработка неидеальности и того и другого датчика — симметрично и равномерно элементы Холла редко кто располагает…
В этом случае неоптимальным (не под 90°) окажется лишь первое движение привода, пока он не доехал до какого-нибудь фронта датчика Холла. Отдельную проблему в этом случае представляет обработка неидеальности и того и другого датчика — симметрично и равномерно элементы Холла редко кто располагает…
В еще более дорогих применениях используют абсолютный датчик положения с цифровым интерфейсом (абсолютный энкодер), который сразу выдает абсолютное положение и позволяет не испытывать описанных выше проблем.
Если в электродвигателе очень жарко, а также когда требуется повышенная точность измерения угла, используют «аналоговый» сельсинный датчик (резольвер, вращающийся трансформатор). Это маленькая электрическая машина, используемая как датчик. Представьте, что в рассмотренной нами синхронной машине на рисунке 1 вместо магнитов стоит еще одна катушка, на которую мы подаем высокочастотный сигнал. Если ротор стоит горизонтально, то сигнал наведется только в катушку статора фазы α, если вертикально – то только в β, если перевернуть его на 180 – то изменится фаза сигнала, а в промежуточных положениях наводится и туда и сюда по закону синуса/косинуса. Соответственно, измеряя амплитуду сигнала в двух катушках, по соотношению этой амплитуды и по фазовому сдвигу можно также определять положение. Установив такую машину как датчик к основной, можно узнавать положение ротора.
Соответственно, измеряя амплитуду сигнала в двух катушках, по соотношению этой амплитуды и по фазовому сдвигу можно также определять положение. Установив такую машину как датчик к основной, можно узнавать положение ротора.
Есть еще много экзотических датчиков положения, особенно для сверхвысокоточных применений, например, для изготовления электронных чипов. Там в ход идут уже любые физические явления, чтобы только узнать положение наиболее точно. Их рассматривать не будем.
Как вы поняли, векторное управление достаточно требовательное – и датчиков положения ему наставь, и датчиков тока, и ШИМ ему векторную, и микроконтроллер не абы какой, чтобы всю эту математику обсчитывать. Поэтому для простых применений его упрощают. Для начала можно исключить датчик положения, сделав бездатчиковое векторное управление. Для этого используют немного больше математической магии, находящейся в желтом прямоугольнике (Рисунок 12):
Рисунок 12. Структура бездатчикового векторного управления
Наблюдатель – это такой блок, на который подается информация о приложенном к двигателю напряжении (например, из задания на модуль ШИМ) и о токах в двигателе с датчиков. Внутри наблюдателя работает модель электродвигателя, которая, грубо говоря, пытается подстроить свои токи в статоре под измеренные с реального двигателя. Если у неё это получилось, то можно считать, что и положение моделируемого внутри вала ротора тоже совпадает с реальным и им можно пользоваться для нужд векторного управления. Ну это, конечно, совсем упрощённо. Видов наблюдателей таких – не пересчитать. Каждый аспирант по специальности «электропривод» пытается изобрести именно свой, который чем-то лучше других. Основной принцип – отслеживание ЭДС электродвигателя. Поэтому чаще всего бездатчиковая система управления работоспособна только на относительно высокой частоте вращения, где ЭДС большая. А также имеет еще ряд недостатков по сравнению с наличием датчика: нужно знать параметры двигателя, быстродействие привода ограничено (если частота вращения резко меняется, наблюдатель может не успеть её отследить и какое-то время «врать», а то и «развалиться» совсем), настройка наблюдателя – это целая процедура, для его качественной работы нужно точно знать напряжение на двигателе, точно измерять его токи и т.
Внутри наблюдателя работает модель электродвигателя, которая, грубо говоря, пытается подстроить свои токи в статоре под измеренные с реального двигателя. Если у неё это получилось, то можно считать, что и положение моделируемого внутри вала ротора тоже совпадает с реальным и им можно пользоваться для нужд векторного управления. Ну это, конечно, совсем упрощённо. Видов наблюдателей таких – не пересчитать. Каждый аспирант по специальности «электропривод» пытается изобрести именно свой, который чем-то лучше других. Основной принцип – отслеживание ЭДС электродвигателя. Поэтому чаще всего бездатчиковая система управления работоспособна только на относительно высокой частоте вращения, где ЭДС большая. А также имеет еще ряд недостатков по сравнению с наличием датчика: нужно знать параметры двигателя, быстродействие привода ограничено (если частота вращения резко меняется, наблюдатель может не успеть её отследить и какое-то время «врать», а то и «развалиться» совсем), настройка наблюдателя – это целая процедура, для его качественной работы нужно точно знать напряжение на двигателе, точно измерять его токи и т. п.
п.
Есть и другой вариант упрощения. Например, можно сделать так называемую «автокоммутацию». В этом случае для трехфазного двигателя отказываются от сложного метода ШИМ, отказываются от сложной векторной структуры и начинают просто включать фазы двигателя по датчику положения на элементах Холла, даже иногда без всякого токоограничения. Ток в фазах получается не синусоидальный, а трапецеидальный, прямоугольный или еще более искаженный. Но стараются сделать так, чтобы средний вектор тока был всё равно под 90 градусов к «магниту ротора» выбором момента включения фаз. При этом, включая фазу под напряжение, неизвестно, когда же в фазе двигателя нарастет ток. На низкой частоте вращения он это делает быстрее, на высокой, где мешает ЭДС машины, медленнее, еще темп нарастания тока зависит от индуктивности двигателя и т.п. Поэтому, даже включая фазы точно в нужный момент времени, совсем не факт, что средний вектор тока окажется в нужном месте и с нужной фазой – он может как опережать, так и запаздывать относительно оптимальных 90 градусов. Поэтому в таких системах вводят настройку «опережения коммутации» – по сути просто время, насколько раньше нужно на фазу двигателя подавать напряжение, чтобы в итоге фаза вектора тока получилась более близка к 90 градусам. По-простому это называют «настройка таймингов». Так как ток в электродвигателе при автокоммутации не синусоидальный, то, если взять рассмотренную выше синусоидальную машину и управлять ей таким вот образом, момент на валу будет пульсировать. Поэтому в двигателях, предназначенных для автокоммутации, часто специальным образом меняют магнитную геометрию ротора и статора, чтобы они стали более подходящими к такому типу управления: ЭДС таких машин делают трапецеидальной, благодаря чему в режиме автокоммутации они работают лучше. Синхронные машины, оптимизированные для автокоммутации, получили название бесколлекторных двигателей постоянного тока (БДПТ) или по-английски BLDC (Brushless Direct Current Motor). Режим автокоммутации также часто называют вентильным режимом, а двигатели с ним работающие – вентильные.
Поэтому в таких системах вводят настройку «опережения коммутации» – по сути просто время, насколько раньше нужно на фазу двигателя подавать напряжение, чтобы в итоге фаза вектора тока получилась более близка к 90 градусам. По-простому это называют «настройка таймингов». Так как ток в электродвигателе при автокоммутации не синусоидальный, то, если взять рассмотренную выше синусоидальную машину и управлять ей таким вот образом, момент на валу будет пульсировать. Поэтому в двигателях, предназначенных для автокоммутации, часто специальным образом меняют магнитную геометрию ротора и статора, чтобы они стали более подходящими к такому типу управления: ЭДС таких машин делают трапецеидальной, благодаря чему в режиме автокоммутации они работают лучше. Синхронные машины, оптимизированные для автокоммутации, получили название бесколлекторных двигателей постоянного тока (БДПТ) или по-английски BLDC (Brushless Direct Current Motor). Режим автокоммутации также часто называют вентильным режимом, а двигатели с ним работающие – вентильные. Но это всё просто разные названия, ничем не влияющие на суть (но матёрые электроприводчики часто страдают СПГС в вопросах, связанных с этими названиями). Есть неплохое видео, иллюстрирующее принцип работы таких машин. На нем показан обращенный двигатель, где ротор снаружи, а статор внутри:
Но это всё просто разные названия, ничем не влияющие на суть (но матёрые электроприводчики часто страдают СПГС в вопросах, связанных с этими названиями). Есть неплохое видео, иллюстрирующее принцип работы таких машин. На нем показан обращенный двигатель, где ротор снаружи, а статор внутри:
А вот
здесьесть курс статей по таким двигателям и аппаратной части системы управления.
Можно пойти даже на еще большее упрощение. Коммутировать обмотки так, чтобы одна фаза всё время оказывалась «свободна» и к ней не прикладывался ШИМ. Тогда в ней можно измерять ЭДС (наведенное в катушке фазы напряжение), и, когда это напряжение переходит через ноль, использовать это как сигнал датчика положения ротора, потому что фаза этого наведенного напряжения зависит как раз от положения ротора. Получается бездатчиковая автокоммутация, что широко используется в различных простеньких приводах, например, в «регуляторах» для пропеллеров авиамоделей. При этом надо помнить, что ЭДС машины появляется только на относительно высокой частоте вращения, поэтому для старта такие системы управления просто не спеша перебирают фазы, надеясь, что ротор двигателя будет следовать за подаваемым током. Как только ЭДС появилась, включается режим автокоммутации. Поэтому бездатчиковая система (такая простая, да и сложная чаще всего тоже) не подходит для задач, где двигатель должен уметь развивать момент на околонулевых частотах вращения, например, для тягового привода автомобиля (или его модели), сервопривода какого-то механизма и т.п. Зато бездатчиковая система с успехом подходит для насосов и вентиляторов, где как раз и применяется.
Как только ЭДС появилась, включается режим автокоммутации. Поэтому бездатчиковая система (такая простая, да и сложная чаще всего тоже) не подходит для задач, где двигатель должен уметь развивать момент на околонулевых частотах вращения, например, для тягового привода автомобиля (или его модели), сервопривода какого-то механизма и т.п. Зато бездатчиковая система с успехом подходит для насосов и вентиляторов, где как раз и применяется.
Но иногда делают даже и еще большее упрощение. Можно совсем отказаться от микроконтроллера, ключей, датчиков положения и прочего, осуществляя переключение фаз специальным механическим коммутатором (Рисунок 13):
Рисунок 13. Механический коммутатор для переключения обмоток
При вращении ротор сам переключает свои части обмоток, меняя приложенное к ним напряжение, при этом ток в роторе протекает переменный. Коммутатор располагают таким образом, чтобы магнитный поток ротора и статора снова оказывался близким к 90 градусам, дабы достичь максимума момента.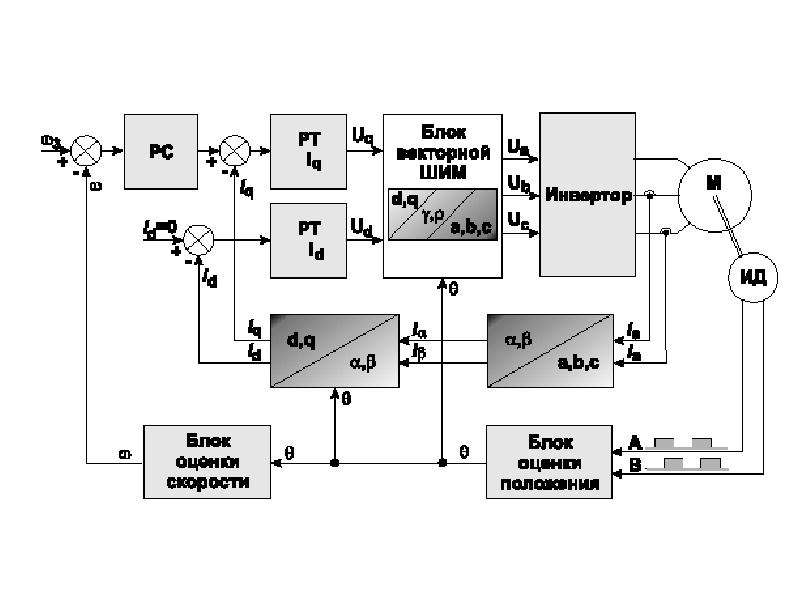 Такие двигатели по наивности называют двигателями постоянного тока, но совершенно незаслуженно: внутри-то, после коллектора, ток всё равно переменный!
Такие двигатели по наивности называют двигателями постоянного тока, но совершенно незаслуженно: внутри-то, после коллектора, ток всё равно переменный!
Все электрические машины работают схожим образом. В теории электропривода даже существует понятие «обобщенная электрическая машина», к которой сводят работу других. Показанные в статье объяснения «на пальцах» никоим образом не могут служить практическим руководством к написанию кода микроконтроллера. В статье рассмотрен хорошо если один процент информации, которая требуется для реализации настоящего векторного управления. Чтобы сделать что-то на практике, нужно, во-первых,
знать ТАУ, хотя бы на уровне понимания, как работает ПИ-регулятор. Потом нужно всё-таки изучить математическое описание как синхронной машины, так и синтеза векторного управления. Также изучить векторную ШИМ, узнать, что такое пары полюсов, познакомиться с типами обмоток машин и прочее. Это можно сделать в свежей книге «
Анучин А. С. Системы управления электроприводов. МЭИ, 2015
МЭИ, 2015», а также в «Калачев Ю. Н.
Векторное регулирование (заметки практика)». Следует предостеречь читателя от погружения в формулы «старых» учебников по приводу, где основной упор сделан на рассмотрение характеристик электродвигателей при питании напрямую от трехфазной промышленной сети, без всяких микроконтроллеров и датчиков положения. Поведение двигателей в этом случае описывается сложными формулами и зависимостями, но для задачи векторного управления они почти никакой пользы не несут (если только изучить для саморазвития). Особенно следует с осторожностью относиться к рекомендациям старых учебников, где, например, сказано, что синхронная машина не должна работать на максимуме своего момента, так как там работа неустойчива и грозит опрокидыванием – для векторного управления всё это «вредные советы».
На каком микроконтроллере можно сделать полноценное векторное управление, читайте, например, в нашей статье Новый отечественный motor-control микроконтроллер К1921ВК01Т ОАО «НИИЭТ», а как это отлаживать в статье Способы отладки ПО микроконтроллеров в электроприводе. Также заходите на наш сайт: там, в частности, выложено два занудных видео, где показано на практике, как настроить ПИ-регулятор тока, а также как работает замкнутая по току и векторная бездатчиковая структура управления. Кроме того, можно приобрести отладочный комплект с готовой датчиковой векторной структурой управления на отечественном микроконтроллере.
Также заходите на наш сайт: там, в частности, выложено два занудных видео, где показано на практике, как настроить ПИ-регулятор тока, а также как работает замкнутая по току и векторная бездатчиковая структура управления. Кроме того, можно приобрести отладочный комплект с готовой датчиковой векторной структурой управления на отечественном микроконтроллере.
Продолжение статьи, где рассказано про асинхронные двигатели здесь.
P.S.
У специалистов прошу прощения за не совсем корректное обращение с некоторыми терминами, в частности с терминами «поток», «потокосцепление», «магнитное поле» и другими – простота требует жертв…
Управление электродвигателем
Автор: admin6 Май
TC78H621FNG и TC78H611FNG от компании Toshiba выполнены по двухканальной H-мостовой схеме, использующей встроенные силовые DMOS-транзисторы в качестве выходных каскадов. Устройства способны управлять двумя коллекторными электродвигателями постоянного тока или одним биполярным шаговым двигателем.
TC78H621FNG управляется посредством сигналов разрешения (ENABLE) для каждого канала и поддерживает общие для обоих драйверов функции вращения по часовой / против часовой стрелки и останова, в то время как TC78H611FNG управляется установкой соответствующих логических уровней на входах IN1/IN2 и реализует дополнительную функцию торможения двигателя (Short Brake).
Читать далее »
25 Фев
Компания Toshiba приступила к выпуску новых контроллеров шаговых двигателей с напряжением питания 40 В и выходным током 3 А, поддерживающих работу без использования внешнего резистивного датчика тока. Интегрированная в устройство расширенная система детектирования тока (ACDS) исключает ошибки, связанные с допусками сопротивления резисторов, повышая точность и равномерность управления двигателем.
TB67S508FTG выпускается в корпусе размером 5 мм x 5 мм и, в отличие от типовых решений, имеющих размеры 7 мм x 7 мм и использующих внешние резисторы, позволяет экономить на стоимости комплектующих и уменьшить занимаемую площадь печатной платы на 34%. Встроенный силовой выходной каскад, выполненный на новейших DMOS-транзисторах, обеспечивает более высокий КПД решения, сокращает его размеры и упрощает систему охлаждения за счет меньшого выделения тепла. Эти транзисторы обладают очень низким сопротивлением открытого канала: суммарное сопротивление верхнего и нижнего плеча моста составляет 0.45 Ом.
Встроенный силовой выходной каскад, выполненный на новейших DMOS-транзисторах, обеспечивает более высокий КПД решения, сокращает его размеры и упрощает систему охлаждения за счет меньшого выделения тепла. Эти транзисторы обладают очень низким сопротивлением открытого канала: суммарное сопротивление верхнего и нижнего плеча моста составляет 0.45 Ом.
Читать далее »
- Комментарии отключены
- Рубрика: Toshiba
25 Фев
Недорогие, сверхвысоковольтные (UHV) микроконтроллеры предлагают однокристальное решение для простых систем управления электроприводом с рабочим напряжением 4.5…18 В, позволяя снизить стоимость элементной базы за счет высокой степени интеграции.
Построенные на базе ядра HS08, микроконтроллеры серии MC9S08SUx обеспечивают высокий уровень производительности и низкую стоимость решения за счет применения усовершенствованного ЦПУ S08L, 3-фазной схемы управления силовыми ключами, поддерживающей три P-канальных MOSFET-транзистора верхнего плеча и три N-канальных MOSFET-транзистора нижнего плеча, операционных усилителей для измерения токов фазы и схем защиты от перегрузок по току и перенапряжения.
Читать далее »
- Комментарии отключены
- Рубрика: Freescale, NXP
10 Янв
Линейка высоковольтных интеллектуальных силовых устройств (HV-IPD) компании Toshiba позволяют повысить эффективность и сократить число внешних компонентов схемы управления бесколлекторными двигателями постоянного тока (BLDC).
TPD4206F представляет собой многокристальную микросхему, интегрирующую шесть силовых MOSFET-транзисторов с рабочим напряжением 500 В и выходным током 2.5 А, формирующую сигналы управления двигателем синусоидальной и трапецеидальной формы. Устройство идеально подходит для маломощных, малошумящих приложений управления электродвигателями мощностью до 80 Вт, включая промышленные вентиляторы и насосы, бытовые приборы и т.д. Высокий КПД прибора достигается за счет чрезвычайно низкого сопротивления открытого канала силовых транзисторов (RDS(ON) = 1. 7 Ом) и малого теплового сопротивления корпуса.
7 Ом) и малого теплового сопротивления корпуса.
Читать далее »
- Комментарии отключены
- Рубрика: Toshiba
10 Янв
Драйвер интегрирует два моста, каждый с независимым ШИМ-контроллером тока с постоянным временем открытого состояния силового ключа.
STSPIN240 оптимизирован для работы в системах с аккумуляторным питанием и может быть принудительно переведен в состояние с нулевым энергопотреблением, что позволяет значительно увеличить время работы от батареи. Устройство снабжено полным набором функций защиты: от перегрузок по току, перегрева и короткого замыкания.
Читать далее »
10 Янв
TLE987x и TLE986x являются частью линейки встраиваемых силовых микросхем компании Infineon. Драйверы представляют собой однокристальные схемы управления 3- и 2-фазными электродвигателями, соответственно, интегрирующие промышленно стандартный микроконтроллер на базе ядра ARM® Cortex®-M3. Встроенный микроконтроллера позволяет реализовать расширенные алгоритмы управления двигателем, например, функцию управления по ориентации магнитного поля.
Драйверы представляют собой однокристальные схемы управления 3- и 2-фазными электродвигателями, соответственно, интегрирующие промышленно стандартный микроконтроллер на базе ядра ARM® Cortex®-M3. Встроенный микроконтроллера позволяет реализовать расширенные алгоритмы управления двигателем, например, функцию управления по ориентации магнитного поля.
TLE986x интегрируют четыре, а TLE987x шесть драйверов управления затворами внешних силовых ключей на основе NFET-транзисторов, реализуя 2- или 3-фазную схему управления двигателем, а также схему накачки заряда, обеспечивающую работу прибора при низких напряжениях и возможность установки выходного тока драйвера, наряду с функцией управления длительностью фронта импульса, которая оптимизирует уровень электромагнитного излучения.
Читать далее »
- Комментарии отключены
- Рубрика: Infineon
2 Ноя
Модули интегрируют оптимизированные драйверы затворов встроенных силовых ключей на основе IGBT-транзисторов, которые обеспечивают низкий уровень электромагнитного излучения и потерь.
Помимо этого, устройства поддерживают различные функции защиты, включая блокировку при недопустимом снижении входного напряжения (UVLO), отключение при перегрузке по току (OCP), мониторинг температуры управляющей логической схемы и формирование сигнала неисправности. Встроенная быстродействующая высоковольтная схема управления работает от однополярного источника питания и преобразует входные логические сигналы в высоковольтные сильноточные импульсы, подаваемые на затворы интегрированных в модуль силовых ключей. Независимые входы отрицательного напряжения эмиттеров IGBT-транзисторов, выполненные в каждой фазе, могут использоваться для реализации самых различных алгоритмов управления.
Читать далее »
13 Окт
Концепция энергосбережения и повышение эффективности устройств при увеличении их мощности становятся всё более значимыми критериями при проектировании бытовой техники и промышленных систем. Таким образом, повышение КПД контроллеров двигателей вентиляторов является важнейшей задачей.
Однако в существующих системах управления двигателями не удается достичь идеальных характеристик эффективности, и кроме того, решение данной задачи требует применения сложных схем регулирования. Одной из причин этой проблемы является разность фаз между током и напряжением обмоток двигателя, вызванной его реактивным сопротивлением.
Читать далее »
- Комментарии отключены
- Рубрика: Toshiba
13 Окт
Устройства рассчитаны на рабочее напряжение до 650 В и могут применяться в приложениях мощностью от 2 кВт до 6 кВт.
IFCM20U60GD, IFCM30U65GD, IFCM20T65GD, IFCM30T60GD — серия высокоинтегрированных, компактных интеллектуальных силовых модулей семейства CIPOS™ Mini, разработанных для управления электродвигателями в широком спектре приложений: бытовой технике, вентиляторах, насосах и электроприводах общего назначения. Устройства выполнены на основе новейшей технологии производства силовых полупроводников и управляющих микросхем. Кроме того, в них применяются IGBT- и MOSFET-транзисторы улучшенной технологии, а также драйверы затворов следующего поколения и современные термомеханические компоненты.
Читать далее »
- Комментарии отключены
- Рубрика: Infineon
25 Июл
Компания Toshiba представляет драйвер шагового двигателя TB67S209FTG, выполненный по новой архитектуре, обеспечивающей пониженный уровень шума и вибраций. Устройство способно работать с высокоскоростными, высокопроизводительными электродвигателями в системах автоматизации зданий, банковских терминалах и бытовой технике.
Эффективное снижение уровня шума и вибраций двигателя достигается за счет точного управления током нагрузки. Специальный режим смешанного спада (MDM) и функция регулировки тока позволяют управлять током шагового двигателя и его изменением путем выбора наиболее подходящих установок режима MDM. Режим MDM дает возможность выбрать оптимальный ток двигателя в зависимости от условий его эксплуатации. Настройка тока осуществляется благодаря выбору времени спада тока из ряда: 12.5%, 37.5%, 50% и 100%.
Читать далее »
- Комментарии отключены
- Рубрика: Toshiba
Векторное управление электродвигателем для «чайников»
Понятие векторное управление электродвигателями уже известно многим кто связывался с или интересовался вопросом c помощью какого контроллера можно поддерживать момент двигателя переменного тока. Во многих пособиях по электроприводу глава про векторное управление приходится в заключительной главе, и состоит из множества формул с ссылками к предыдущем статьям пособия. И самые простые понятия всё равно идут через дифференциальные уравнения равновесия, векторные диаграммы с неизбежностью искать в голове знания по тематике электропривода. Поэтому не зная понятия многие пытаются запустить асинхронный двигатель, не разобравшись в «векторе». А векторное управление – это просто, если понимать функциональность его работы буквально. А уже с расчётом можно разобраться еще проще.
Давайте разберем работу двигателя переменного тока – синхронной машины с постоянными магнитами. Самый близкий в быту предмет – компас: его магнитная стрелка является ротором синхронной машины, а магнитное поле нашей планеты – магнитное поле статора. Без внешней нагрузки (а в компасе её нет) ротор всегда стремится к полю статора. Попробуем держать компас и вращать под ним Землю, тогда стрелка будет крутиться за ней, производя работу по перемешиванию жидкости внутри прибора. Но более верный метод это взять еще один магнит длинный на длину стрелки и поле которого сильнее магнитного поля Земли, подержать его у компаса сверху и покрутить магнит. И что мы увидем? Стрелка ходит за магнитом, а точнее за магнитным полем.
А в синхронном двигателе поле статора получается электромагнитами – медными катушками с протекающем по ним током. Их назначение – создавать статором электромагнитное поле, которое идет в нужную сторону и с определённой амплитудой.
Взглянем на рисунок (Рисунок 1). В центре показан магнит – ротор синхронного электродвигателя («стрелка» компаса), а по бокам два электромагнита – намагниченные катушки током, и каждая катушка создает магнитное поле, одна в вертикальной, а другая в горизонтальной оси.
(продолжение следует)
(PDF) ВЕКТОРНОЕ УПРАВЛЕНИЕ СИНХРОННЫМ ЭЛЕКТРОДВИГАТЕЛЕМ
Автоматизація технологічних і бізнес-процесів № 17/2014
75
самых сложных узлов системы векторного управления и его разработка в статье не рассматривается. Сам
наблюдатель будем рассматривать как «черный ящик».
Техническая реализация. Обзор рынка электронных компонентов показал, что электронной
промышленностью выпускаются специализированные интегральные микросхемы для векторного управления
электродвигателями. Первые поколения данных микросхем были реализованы на жесткой логике или ПЛИС.
Другими словами, в них был аппаратно реализован алгоритм векторного управления, причем под конкретный
тип двигателя. Они не содержали в себе вычислительного микропроцессора, для управления ими требовался
внешний микроконтроллер. Один из наиболее известных производителей данного типа микросхем –
американская фирма International Rectifier (IR), выпускающая микросхемы серии IRMCK [5].
Следующим поколением специализированных микросхем для управления электродвигателями были
микросхемы содержащие в своем составе, кроме аппаратно реализованной системы векторного управления,
еще и управляющий микропроцессор, чаще всего с ядром MSC51 [5]. Такие микросхемы также выпускаются
фирмой IR – серия IRMCF 312, фирмой Toshiba выпускаются аналогичные микросхемы. Существуют похожие
разработки и у других производителей. Преимуществом такой системы является отсутствие необходимости в
мощной вычислительной системе, т.к. все вычисления производятся аппаратно, а микроконтроллер только
управляет этим процессом. Но существенным минусом такого подхода является низкая гибкость таких систем.
Обычно они специализированы под управление конкретным типом двигателя и не дают возможности вносить
какие-либо изменения в алгоритм работы системы. При разработке встраиваемого электропривода это иногда
бывает очень важно. Фирма IR вела разработки по созданию универсального привода, который мог бы быть
легко перестроен под конкретные задачи. Однако на данный момент они не достигли существенного успеха,
т.к. подобные системы выходили сложными и дорогостоящими.
В начале 2013 года американская фирма Texas Instruments (TI) предложила новый подход к решению данной
проблемы – полная программная реализация алгоритма управления на микроконтроллере общего назначения.
Ею было разработано программное обеспечение модульной структуры InstaSpin-FOC. Данный пакет
программного обеспечения содержит все необходимые библиотеки для реализации системы векторного
управления любым типом трехфазных двигателей. Эти библиотеки содержат все модули, приведенные на
структурной схеме системы управления (рисунок 2). Данное программное обеспечение довольно гибкое и
позволяет разработчику легко вносить изменения в алгоритмы работы системы.
Элементы структурной схемы (рисунок 2), обведенные пунктиром, реализуются программно в
микроконтроллере. Широтно-импульсный модулятор (ШИМ) и аналогово-цифровой преобразователь (АЦП) –
аппаратная периферия микроконтроллера. Они работают автономно.
Естественно, для программной реализации данной системы требуются большие вычислительные мощности
микроконтроллера. Фирма TI выпускает высокопроизводительные и в то же время относительно недорогие
32-разрядные микроконтроллеры серии С2000. К примеру, самый младший процессор данной серии
TMS320F28027 работает на частоте 60 Мгц, содержит достаточно мощную периферию, такую, как 12-
разрядный АЦП и 8-канальный ШИМ высокого разрешения [3]. Данный микроконтроллер способен выполнять
алгоритм векторного управления с частотой 20 кГц, т.е. за 50 мкс выполняет все необходимые расчеты.
Оптовая стоимость данного процессора порядка 5 долларов.
Выводы: В статье были рассмотрены основные принципы построения системы векторного управления
синхронным двигателем. Из вышеописанного видно, что принцип векторного управления позволяет управлять
трехфазным синхронным двигателем так же легко, как и двигателем постоянного тока, т.е. регулируя всего
одну величину – ток (момент) двигателя. Система векторного управления также обеспечивает лучше рабочие
характеристики двигателя, по сравнению с другими методами управления. Современная элементная база
позволяет создать недорогой и в то же время высококачественный электропривод, который может быть легко
адаптирован под конкретные задачи управления.
Следующим этапом исследования будет техническая реализация системы, а именно синтез программного
обеспечения и разработка принципиальной электрической схемы электропривода, которые будут рассмотрены
в следующей статье.
Литература
1. Калачев Ю.Н. Векторное регулирование (заметки практика). ЭФО, 2013. 63 с.
2. InstaSpin-FOC Users Guide. Texas Instruments, 2013. 426 p.
3. TMS320F28027F – Piccolo MCUs. Datasheet. Texas Instruments, 2012. 216 p.
4. URL: http://ru.wikipedia.org/wiki/Векторное_управление
5. URL: http://www.compel.ru/lib/ne/2008/18/4-konfiguriruemyie-kontrolleryi-elektroprivoda-serii-irmck/
ТЕХНІЧНІ ЗАСОБИ І ІНФОРМАЦІЙНІ ТЕХНОЛОГІЇ У СИСТЕМАХ УПРАВЛІННЯ
| ВВЕДЕНИЕ | 3 |
1. | Понятие результирующего вектора и его представление в различных системах координат | 4 |
2. | Координатные преобразования | 8 |
3. | Математическое описание асинхронной машины | 15 |
| 3.1. Математическая модель асинхронного двигателя в естественных координатах | 16 |
| 3.2. Преобразование уравнений асинхронного двигателя | 23 |
| 3.3. Запись уравнений относительно потокосцеплений статора и ротора | 30 |
| 3.4. Запись уравнений относительно тока статора и потокосцепления ротора | 33 |
| 3.5. Уравнения в преобразованных координатах для частных случаев | 34 |
| 3.6. Математическое описание АД с учетом насыщения цепи намагничивания | 35 |
| 3.7. Математическое описание АД при частотном управлении | 39 |
| 3.8. Математическое описание АД с учетом потерь в стали, поверхностного эффекта, насыщения магнитной системы основным потоком и потоками рассеяния | 44 |
4. | Математическое описание синхронного двигателя | 53 |
| 4.1. Математическое описание синхронного двигателя без демпферной обмотки | 54 |
| 4.2. Статические характеристики электропривода с синхронным двигателем | 59 |
| 4.3. Математическое описание синхронного двигателя с демпферной обмоткой | 63 |
| 4.4. Математическое описание синхронного двигателя с постоянными магнитами | 66 |
5. | Математическое описание вентильно-индукторного привода | 70 |
| 5.1. Структурная схема вентильно-индукторного привода | 70 |
| 5.2. Особенности конструкции индукторной машины | 71 |
| 5.3. Принцип действия ВИП | 73 |
| 5.4. Математическое описание m- фазного ИД с независимым управлением фазами | 76 |
| 5.5. Математическое описание 6-фазного ИД с общей точкой | 79 |
6. | Силовые преобразователи, широко применяемые в электроприводе переменного тока | 81 |
| 6.1. Непосредственные преобразователи частоты | 81 |
| 6.2. Двухзвенные ПЧ с промежуточным звеном постоянного тока | 83 |
| 6.3. Двухзвенный ПЧ с неуправляемым выпрямителем и автономным инвертором напряжения | 88 |
| 6.4. Двухзвенный ПЧ с рекуперативным выпрямителем и автономным инвертором | 91 |
7. | Широтно-импульсная модуляция сигналов управления автономным инвертором напряжения | 91 |
| 7.1. ШИМ на основе сравнения сигналов управления с опорным сигналом | 92 |
| 7.2. Принципы построения векторных широтно-импульсных модуляторов | 95 |
| 7.3. Понятие об асинхронных и синхронных ШИМ | 102 |
| 7.4. Компенсация влияния «мертвого» времени | 104 |
| 7.5. Релейно-векторное формирование алгоритмов управления инвертором напряжения в замкнутом контуре тока статора | 108 |
8. | Алгоритмы пространственно-векторного управления матричным преобразователем частоты | 118 |
| 8.1. Векторное описание состояний матричного преобразователя частоты | 119 |
| 8.2. Синтез алгоритма управления | 123 |
| 8.3. Результаты моделирования | 134 |
9. | Построение тепловой защиты преобразователя частоты на основе динамической тепловой модели IGBT-модуля | 137 |
| 9.1. Тепловая модель IGBT-модуля | 139 |
| 9.2. Перегрузочная способность преобразователя с защитой по динамической тепловой модели IGBT-модуля | 148 |
| 9.3. Экспериментальные результаты и промышленная реализация | 150 |
10. | Асинхронный электропривод при частотном управлении | 155 |
| 10.1. Механические характеристики | 155 |
| 10.2. U/f–регулирование скорости | 159 |
| 10.3. Пример реализации принципов векторной ориентации переменных в асинхронном электроприводе с частотным управлением | 167 |
11. | Системы векторного управления асинхронным электроприводом | 178 |
| 11.1. Принцип ориентации переменных по полю | 178 |
| 11.2. Система векторного управления асинхронным двигателем с непосредственным измерением потокосцепления | 183 |
| 11.3. Система векторного управления асинхронным двигателем с моделью роторной цепи | 187 |
| 11.4. Пример построения системы векторного управления в асинхронном электроприводе серии ЭПВ | 196 |
| 11.4.1. Синтез регуляторов тока | 200 |
| 11.4.2. Синтез регулятора скорости | 202 |
| 11.4.3. Формирование заданного тока статора по оси d | 204 |
| 11.5. Пример построения цифровой релейно-векторной системы управления асинхронным электроприводом | 206 |
| 11.6. Пример построения системы прямого управления моментом асинхронного двигателя | 208 |
| 11.7. Пример системы частотно-токового управления | 219 |
12. | Идентификация переменных и параметров в асинхронном электроприводе | 220 |
| 12.1. Автоматическая настройка параметров системы управления на параметры силового канала электропривода | 221 |
| 12.2. Адаптация к изменению постоянной времени ротора | 226 |
| 12.3. Адаптация к изменению параметров механической части привода | 230 |
| 12.4. Пример построения наблюдателя состояния асинхронного электропривода с адаптивно-векторным управлением без датчика на валу двигателя | 234 |
| 12.5. Бездатчиковое определение скорости в асинхронном электроприводе | 240 |
13. | Специальные режимы работы асинхронных электроприводов с частотным и векторным управлением | 244 |
| 13.1. Режим управления за счет энергии торможения | 244 |
| 13.2. Режим безударного переключения двигателя между ПЧ и питающей сетью | 248 |
| 13.3. Режим плавного пуска на вращающийся двигатель | 249 |
14. | Системы управления электроприводами на основе синхронного электродвигателя | 251 |
| 14.1. Пример построения системы векторного управления синхронным двигателем с постоянными магнитами | 252 |
| 14.2. Принцип действия электропривода с бесконтактным двигателем постоянного тока | 257 |
| 14.3. Принцип построения и математическое описание электропривода с вентильным двигателем на основе двухфазной синхронной машины | 260 |
| 14.4. Математическое описание электропривода с вентильным двигателем на основе трехфазной синхронной машины | 266 |
| 14.5. Системы управления электроприводом с вентильным двигателем | 272 |
15. | Векторное управление рекуперативным выпрямителем напряжения | 277 |
16. | Система управления вентильно-индукторным двигателем | 285 |
| ЗАКЛЮЧЕНИЕ | 289 |
| БИБЛИОГРАФИЧЕСКИЙ СПИСОК | 291 |
Обзор вариантов управления двигателями переменного тока | Library.AutomationDirect
Большинство автоматических средств управления так или иначе связаны с управлением двигателем, особенно при автоматизации производства. В таких приложениях, как насосы, вентиляторы, робототехника и конвейеры, используются двигатели. Будь то трехфазные двигатели переменного тока общего назначения, которые отлично подходят для простых систем включения / выключения, или двигатели с инверторным режимом, специально разработанные для работы с частотно-регулируемыми приводами (VFD), можно сказать, что двигатели повсеместно используются практически во всех отраслях обрабатывающей промышленности. .Ознакомьтесь с различными вариантами управления двигателями переменного тока.
Опции управления двигателем переменного тока
Несмотря на то, что существуют разные типы двигателей для разных ситуаций, размеры двигателей различаются в зависимости от нагрузки. А с двигателями разных размеров возможны разные сценарии запуска двигателей. Небольшие двигатели общего назначения обычно подключаются к основной силовой цепи с помощью главного прерывателя цепи или предохранителей. Контакторы включают и отключают питание двигателя во время перегрузки, защищая оборудование с приводом от неожиданного перегрузки по току / перегрева, которые могут быть вызваны заеданием или поломкой.
Запуск электродвигателей переменного тока через линию
Как следует из названия, линейный пускатель двигателя подает полное напряжение, ток и крутящий момент сразу на двигатель, когда цепь находится под напряжением. В промышленности пускатель двигателя является наиболее распространенным методом запуска двигателя от сети. Обычно пускатель двигателя состоит из контактора для размыкания или замыкания потока энергии к двигателю и реле перегрузки для защиты двигателя от тепловой перегрузки.
Контактор — это 3-полюсный электромеханический переключатель, контакты которого замыкаются подачей напряжения на катушку, подобно реле.Когда катушка находится под напряжением, контакты замкнуты и остаются замкнутыми до тех пор, пока катушка не будет обесточена. Поскольку двигатели являются индуктивными устройствами, отключение тока (намагничивание, или двигатель и создание крутящего момента, или нагрузка) сложнее, чем его применение. Следовательно, контактор должен быть рассчитан как на мощность, так и на ток.
Реле перегрузки имеет три токоизмерительных элемента, которые защищают двигатель от перегрузки по току — по одному на каждую фазу. Если ток перегрузки превышает уставку реле в течение достаточного времени, набор контактов размыкается, чтобы защитить двигатель от повреждения.
Реверсивные пускатели меняют направление вращения вала трехфазного двигателя, меняя местами две фазы, питающие двигатель. Реверсивные магнитные пускатели двигателей включают в себя контакторы прямого и обратного хода как часть узла. Предусмотрены электрические и механические блокировки, чтобы гарантировать, что только прямой или обратный контактор может быть включен в любой момент времени, но не одновременно.
Как правило, цепями пускателя двигателя переменного тока можно управлять с помощью простых кнопок или дистанционных сигналов, например, от программируемого логического контроллера (ПЛК).
Поперечный пуск двигателя используется, когда приложение может работать с максимальной скоростью двигателя и когда скачки / скачки скорости и напряжения не представляют проблемы. Пускатели двигателей обычно используются с двигателями меньшего размера, где пользователям не требуется электрическое и механическое смягчающее действие устройства плавного пуска.
Устройства плавного пускасводят к минимуму электрические и механические воздействия
Использование устройства плавного пуска имеет электрические и механические преимущества. Когда двигатель запускается поперек линии, внезапный удар при переходе с 0 об / мин на полную скорость 1800 или 3600 об / мин ощущается механически по линии через подключенную механическую нагрузку и обычно потребляет в 6-10 раз больше ампер полной нагрузки ( FLA) в токе.Устройства плавного пуска могут снизить нагрузку на двигатель, потребляемый им электрический ток и уменьшить ударное воздействие на оборудование, расположенное ниже по потоку. С точки зрения электричества это не имеет значения для сети при пуске двигателя мощностью 1 л.с. через линию. Но все же есть некоторые механические удары по оборудованию, находящемуся ниже по технологической цепочке. Тем не менее, запуск двигателя мощностью 300 л.с. через линию привлечет внимание энергетической компании. Плата за спрос может возникнуть из-за скачков цен, происходящих в неподходящее время суток. Более крупный двигатель оказывает еще большее механическое воздействие на оборудование, расположенное ниже по потоку. Использование устройства плавного пуска дает преимущества в том, что не повреждает оборудование ниже по потоку, и энергетическая компания не взимает плату за эти огромные пиковые пусковые токи.
Устройство плавного пуска использует напряжение для управления током и крутящим моментом. Крутящий момент двигателя пропорционален квадрату приложенного напряжения. Ток при пуске напрямую зависит от напряжения, приложенного к двигателю. В большинстве устройств плавного пуска для запуска и остановки двигателя используются три пары последовательно соединенных кремниевых выпрямителей (SCR), которые соответствуют трем фазам двигателя. Расположение тиристоров «спина к спине» позволяет управлять напряжением переменного тока, изменяя угол зажигания каждые полупериод.Напряжение либо повышается до полного напряжения, либо ограничивается для обеспечения пусков с ограничением тока.
Когда двигатель достигает рабочей скорости, включается байпасный контактор. Независимо от того, является ли это внутренним байпасом или внешним байпасом, тиристоры прекращают работу, что делает устройство плавного пуска более эффективным. После подачи команды останова двигателя тиристоры снова берут на себя управление от байпасного контактора для остановки. Контактор никогда не включает и не размыкает нагрузку, что позволяет использовать контакторы и тиристоры меньшего размера.
Устройства плавного пускамогут иметь КПД от 99,5% до 99,9%. Обычно на пару тиристоров падает менее 1 В. КПД зависит от размера устройства плавного пуска и приложенного трехфазного напряжения. В некоторых случаях после завершения процесса пуска при плавном пуске со встроенным байпасом включается внутренний байпасный контактор. SCR больше не работают, и весь рабочий ток проходит через контакты. При работе на полной скорости и при правильной нагрузке устройства плавного пуска более эффективны, чем частотно-регулируемые приводы, но, в отличие от частотно-регулируемых приводов, не могут управлять скоростью двигателя.
Устройства плавного пускаиспользуются там, где необходимо минимизировать как электрическое, так и механическое воздействие запуска двигателя. При использовании двигателей меньшего размера речь идет больше о защите последующих машин от механических ударов. С более крупными двигателями, помимо защиты оборудования, снижаются расходы на потребление.
Устройства плавного пускаобычно используются с конвейерами, насосами, вентиляторами и воздуходувками. В отличие от VFD, пользователям не нужно беспокоиться о генерации гармоник. Однако в устройствах плавного пуска нет регулятора скорости.
Управление скоростью, экономия энергии с помощью частотно-регулируемых приводов
Преобразователи частотылучше всего подходят там, где важен контроль скорости и важна энергоэффективность. Частотно-регулируемые приводы управляют скоростью и крутящим моментом двигателя переменного тока, регулируя входную частоту и напряжение в соответствии с трехфазным асинхронным двигателем, постоянным магнитом (внутренним или поверхностным) или синхронными двигателями. VFD также обеспечивают защиту от перегрузки, управление пуском / остановом и регулируемое ускорение / замедление. Программируемое ускорение и ограничение тока, управляемое процессором, могут снизить пусковой ток двигателя при запуске.
При выборе частотно-регулируемого привода важно понимать приложение и выбирать привод соответствующим образом. Сначала необходимо учитывать рабочий профиль нагрузки. Как в приложениях с постоянным крутящим моментом, таких как конвейеры, смесители и компрессоры, так и в приложениях с переменным крутящим моментом, таких как насосы, вентиляторы и воздуходувки, особое внимание следует уделять номинальным характеристикам перегрузки. Например, попытка запустить двигатель вентилятора быстрее, чем его базовая скорость, может значительно повлиять на количество требуемой мощности, потому что мощность вентилятора зависит от куба скорости.Слишком быстрый запуск вентилятора может потреблять избыточную мощность и может привести к перегрузке частотно-регулируемого привода, в то время как его работа на половинной скорости может снизить требования к мощности на 75% или более в соответствии с законами сродства, которые применяются к насосам и вентиляторам.
VFD преобразует переменное линейное напряжение в постоянное, фильтрует его, а затем инвертирует обратно в полезный сигнал. Среднеквадратичное значение инвертированного сигнала имитирует переменное напряжение. Выходная частота частотно-регулируемого привода обычно составляет от 0 Гц до частоты входной сети переменного тока. Однако при необходимости для определенных приложений возможны и более высокие частоты.Многие приводы переменного тока исторически использовали двухполупериодный диодный мост или выпрямительный мост SCR в секции преобразователя для преобразования источника переменного тока в постоянное напряжение. Однако сейчас используются частотно-регулируемые преобразователи с биполярными транзисторами с изолированным затвором (IGBT). Секция фильтра, в первую очередь конденсаторная батарея, сглаживает быстро коммутируемое постоянное напряжение, создаваемое преобразователем.
Можно добавить дроссель или индуктор для повышения коэффициента мощности и уменьшения гармоник. Сглаженное постоянное напряжение затем используется инвертором IGBT. Быстродействующее переключение из секции инвертора генерирует правильные смоделированные среднеквадратичные уровни переменного напряжения, также известные как форма волны с широтно-импульсной модуляцией (ШИМ).Старые приводы IGBT были 6-пульсными. Однако теперь доступны 12-пульсные и 18-пульсные частотно-регулируемые приводы.
Современные частотно-регулируемые приводы, такие как линейка приводов переменного тока DURApulse GS4 от AutomationDirect, обладают богатым набором функций. Например, одной из важнейших особенностей GS4 является встроенный полнофункциональный ПЛК, который позволяет пользователям программировать логические требования, связанные с приводом, такие как управление несколькими насосами. Другие функции включают в себя несколько высокоскоростных интерфейсов связи и номинальный ток короткого замыкания 100 кА (SCCR).
Преобразователи частотыпредлагают те же преимущества, что и устройства плавного пуска, с дополнительным преимуществом регулирования скорости. Двигатель наиболее эффективен при нагрузке от 80% до 100%. Двигатель увеличенного размера менее эффективен, чем двигатель надлежащего размера, но частотно-регулируемый привод помогает свести к минимуму эту неэффективность, уменьшая штраф за завышение размера до немногим больше, чем первоначальные затраты на увеличение размера привода и двигателя. Диски обычно имеют КПД от 95% до 98%. Чем больше количество импульсов в приводе, тем выше КПД. Например, 6-пульсный привод — 96.Эффективность от 5% до 97,5%. 18-пульсный привод имеет КПД от 97,5% до 98%.
Чтобы прочитать больше статей о двигателях, щелкните здесь.
| Предназначен для регулирования скорости: | ||
Эти органы управления обеспечивают бесступенчатую регулировку скорости для двигателей с экранированными полюсами и двигателей PSC. | |||
| Примечание относительно регуляторов скорости: В связи с тем, что все больше и больше людей используют дровяные печи во время обогрева, возникают некоторые проблемы, связанные с регуляторами скорости, которые изменяют выход воздуха из центробежных нагнетателей. На односкоростной воздуходувке регулятор скорости, соединенный последовательно с горячей линией, позволяет пользователю контролировать скорость нагнетателя. Многие регуляторы скорости не будут понижать напряжение ниже 60 и не позволяют колесу замедляться до 0 об / мин.Кроме того, комбинация нагнетателя и регулятора скорости часто может приводить к так называемому «гармоническому шуму» — странным вибрациям и / или шумам в устройстве заказчика. Небольшое увеличение или уменьшение скорости нагнетателя иногда может устранить эту проблему , но часто она не устраняется на 100%. Также следует проявлять осторожность при применении твердотельных устройств контроля скорости, поскольку они часто устанавливаются в общую линию, или в установка неполяризованных вилок. Таким образом, даже несмотря на то, что двигатель может не вращаться из-за того, что регулятор скорости установлен слишком низко для работы двигателя, электричество все еще подключено к регулятору скорости, и существует потенциальная опасность поражения электрическим током.Наконец, не используйте переключатели регулировки света в качестве регуляторов скорости центробежного вентилятора. Элементы управления должны быть одобрены для использования с двигателями этих устройств. | |||
Контроль скорости двигателя переменного тока — Inst Tools
Асинхронные двигателипеременного тока основаны на принципе вращающегося магнитного поля, создаваемого набором неподвижных обмоток (называемых обмотками статора), питаемых переменным током разных фаз.
Эффект похож на серию мигающих лампочек «преследователя», которые кажутся «движущимися» в одном направлении из-за последовательности мигания.Если комплекты проволочных катушек (обмоток) возбуждаются подобным образом — каждая катушка достигает своего пикового значения напряженности поля в разное время по сравнению с соседним соседом — эффектом будет магнитное поле, которое «кажется» движущимся в одном направлении.
Если эти витки ориентированы по окружности круга, движущееся магнитное поле вращается вокруг центра круга, как показано на этой последовательности изображений (читайте слева направо, сверху вниз, как если бы вы были чтение слов в предложении):
Любой намагниченный объект, помещенный в центр этого круга, будет пытаться вращаться с той же скоростью вращения, что и вращающееся магнитное поле.
Синхронные двигатели переменного тока используют этот принцип, когда намагниченный ротор точно следует скорости магнитного поля.
Любой электропроводящий объект, расположенный в центре круга, будет испытывать индукцию при изменении направления магнитного поля вокруг проводника.
Это вызовет электрические токи внутри проводящего объекта, который, в свою очередь, будет реагировать на вращающееся магнитное поле таким образом, что объект будет «увлекать» полем, всегда немного отставая по скорости.
Асинхронные двигатели переменного токаиспользуют этот принцип, когда немагнитный (но электропроводящий) ротор вращается со скоростью, немного меньшей (примечание), чем синхронная скорость вращающегося магнитного поля.
Примечание. Разница между синхронной скоростью и фактической скоростью ротора называется скоростью скольжения двигателя.
Скорость вращения этого магнитного поля прямо пропорциональна частоте переменного тока и обратно пропорциональна количеству полюсов статора:
Где,
S = Синхронная скорость вращающегося магнитного поля, в оборотах в минуту (RPM)
f = Частота, в циклах в секунду (Гц)
n = Общее количество полюсов статора на фазу (простейшая возможная конструкция асинхронного двигателя переменного тока будет два полюса)
Взаимосвязь между синхронной скоростью, частотой и числом полюсов можно понять по аналогии: скорость, с которой кажется, что движутся огни в «охотничьей» световой матрице, является функцией частоты мигания и количества лампочек на единицу длины. .
Если количество лампочек в таком массиве удвоится путем размещения дополнительных лампочек между существующими лампочками (чтобы сохранить ту же длину массива), кажущаяся скорость будет уменьшена вдвое: с меньшим расстоянием между каждой парой лампочек, требуется больше циклов (больше «миганий»), чтобы последовательность прошла всю длину массива.
Аналогично, статор переменного тока с большим количеством полюсов по окружности потребует большего количества циклов питания переменного тока, чтобы вращающееся магнитное поле совершило один оборот..
Синхронный двигатель переменного тока вращается с той же скоростью, что и вращающееся магнитное поле: практический пример — 4-полюсный синхронный двигатель, вращающийся со скоростью 1800 об / мин с приложенной частотой сети 60 Гц.
Асинхронный двигатель переменного тока будет вращаться со скоростью, немного меньшей, чем скорость магнитного поля: практическим примером является 4-полюсный асинхронный двигатель, вращающийся со скоростью 1720 об / мин с приложенной частотой питания 60 Гц (то есть со скоростью «скольжения» 80 об / мин).
Асинхронные двигателипроще по конструкции и эксплуатации, что делает их наиболее популярными из двух типов электродвигателей переменного тока в промышленности.
Хотя количество полюсов в статоре двигателя является фиксированным6 во время изготовления двигателя, частота подаваемой мощности может быть отрегулирована с помощью соответствующей электронной схемы.
Цепь большой мощности, предназначенная для выработки переменных частот для работы двигателя переменного тока, называется частотно-регулируемым приводом или ЧРП.
Электроприводы с регулируемой частотой — невероятно полезные устройства, поскольку они позволяют тому, что обычно является электродвигателем с фиксированной скоростью, обеспечивать полезную мощность в широком диапазоне скоростей.
Преимущества работы с регулируемой скоростью включают снижение энергопотребления (только вращение двигателя с такой скоростью, с которой он должен двигаться, но не быстрее), снижение вибрации (меньшая скорость = снижение вибрационных сил) и возможность линейного увеличения скорости двигателя. и вниз для уменьшения износа механических компонентов в результате действия сил ускорения.
Еще одна общая черта большинства частотно-регулируемых приводов — это способность активно тормозить нагрузку. Это когда привод заставляет двигатель активно прикладывать отрицательный крутящий момент к нагрузке, чтобы замедлить ее.
Некоторые частотно-регулируемые приводы даже предоставляют средства для восстановления кинетической энергии груза во время процесса торможения, что приводит к дополнительной экономии энергии.
Электродвигатели переменного тока с регулируемой частотой состоят из электронных компонентов для преобразования входной мощности переменного тока постоянной частоты в выходную мощность переменного тока переменной частоты (и переменного напряжения) для работы двигателя. Обычно это происходит в трех отдельных разделах.
В секции выпрямителя используются диоды для преобразования мощности переменного тока в постоянный ток.Фильтр «сглаживает» выпрямленную мощность постоянного тока, поэтому пульсации напряжения в ней малы. Наконец, секция инвертора повторно преобразует отфильтрованную мощность постоянного тока обратно в переменный ток, только на этот раз на тех уровнях частоты и напряжения, которые необходимы для работы двигателя на разных скоростях.
Здесь показана упрощенная принципиальная схема частотно-регулируемого привода с блоком выпрямителя слева (для преобразования входной мощности переменного тока в постоянный), конденсатором фильтра для «сглаживания» выпрямленной мощности постоянного тока и транзисторным «мостом» для переключения постоянного тока. в переменный ток любой частоты, необходимой для питания двигателя.
Обратите внимание на диоды, подключенные в обратном направлении на выводах истока и стока каждого силового транзистора. Эти диоды служат для защиты транзисторов от повреждения из-за обратного падения напряжения, но они также позволяют двигателю «подавать» мощность на шину постоянного тока (действуя как генератор), когда скорость двигателя превышает скорость вращающегося магнитного поля, что может происходит, когда привод подает команду двигателю на замедление. Это приводит к интересным возможностям, таким как рекуперативное торможение с добавлением дополнительных компонентов.
Для простоты схема управления транзистором на этой схеме не показана:
Как и в приводах двигателей постоянного тока (VSD), силовые транзисторы в приводе переменного тока (VFD) включаются и выключаются очень быстро с изменяющимся рабочим циклом. Однако, в отличие от приводов постоянного тока, рабочий цикл силовых транзисторов привода переменного тока должен быстро меняться, чтобы синтезировать форму волны переменного тока из напряжения «шины» постоянного тока, следующего за выпрямителем.
Рабочий цикл ШИМ схемы привода постоянного тока контролирует мощность двигателя, поэтому он будет оставаться на постоянном значении, когда желаемая мощность двигателя постоянна.
Не так для схемы привода двигателя переменного тока: ее рабочий цикл должен изменяться от нуля до максимума и многократно возвращаться к нулю, чтобы создать форму волны переменного тока, по которой двигатель будет работать.
Эквивалентность формы волны с быстро изменяющейся широтно-импульсной модуляцией (ШИМ) и синусоидальной волны показана на следующем рисунке:
Эта концепция быстрого переключения транзисторов ШИМ позволяет приводу «вырезать» любую произвольную форму волны из отфильтрованного постоянного напряжения, которое он получает от выпрямителя.
Можно синтезировать практически любую частоту (до максимума, ограниченного частотой импульсов ШИМ) и любое напряжение (до максимального пика, установленного напряжением шины постоянного тока), что дает частотно-регулирующему модулю возможность питания асинхронного двигателя от широкий диапазон скоростей.
Хотя регулирование частоты является ключом к регулированию скорости синхронного и асинхронного двигателя переменного тока, его, как правило, недостаточно.
В то время как скорость двигателя переменного тока является прямой функцией частоты (контролирующей, насколько быстро вращающееся магнитное поле вращается по окружности статора), крутящий момент является функцией тока статора.
Поскольку обмотки статора по своей природе являются индукторами, их реактивное сопротивление изменяется в зависимости от частоты, как описано формулой XL = 2πfL. Таким образом, с увеличением частоты реактивное сопротивление обмотки увеличивается вместе с ней. Это увеличение реактивного сопротивления приведет к уменьшению тока статора, если выходное напряжение частотно-регулируемого привода останется постоянным.
Этот нежелательный сценарий может привести к потере крутящего момента на высоких скоростях и чрезмерному крутящему моменту (а также чрезмерному нагреву статора!) На низких скоростях. По этой причине выходное напряжение переменного тока частотно-регулируемым приводом изменяется (примечание) пропорционально приложенной частоте, так что ток статора остается в хороших рабочих пределах во всем диапазоне скоростей частотно-регулируемого привода.
Это соответствие называется отношением напряжения к частоте, сокращенно отношением «V / F» или отношением «V / Hz».
Примечание. Частотный преобразователь обеспечивает переменное выходное напряжение, используя тот же метод, который используется для создания переменной выходной частоты: быстрая широтно-импульсная модуляция напряжения шины постоянного тока через выходные транзисторы. Когда необходимо более низкое выходное напряжение, рабочий цикл импульсов уменьшается на протяжении всего цикла (т. Е. Транзисторы включаются на более короткие периоды времени), чтобы генерировать более низкое среднее напряжение синтезированной синусоидальной волны.
В качестве примера ЧРП, запрограммированного с постоянным соотношением V / F, если выходное линейное напряжение двигателя составляет 480 вольт RMS на полной скорости (60 Гц), то выходное линейное напряжение должно составлять 240 вольт RMS на половине скорости (30 Гц) и 120 В (среднеквадратичное значение) на четверть скорости (15 Гц).
Электроприводы с регулируемой частотой производятся для управления промышленными двигателями в широком диапазоне размеров и мощностей.
Некоторые ЧРП достаточно малы, чтобы их можно было держать в руке, в то время как другие достаточно велики, чтобы их можно было транспортировать с помощью грузового поезда.На следующей фотографии показана пара частотно-регулируемых приводов Allen-Bradley среднего размера (около 100 лошадиных сил каждый, высота около 4 футов), используемых для управления насосами на станции очистки сточных вод:
Приводы с регулируемой частотой вращения двигателя переменного тока не требуют обратной связи по скорости двигателя, в отличие от приводов двигателей постоянного тока с регулируемой частотой вращения. Причина этого довольно проста: регулируемая переменная в приводе переменного тока — это частота мощности, подаваемой на двигатель, а двигатели переменного тока с вращающимся магнитным полем по самой своей природе являются машинами с частотным регулированием.
Например, 4-полюсный асинхронный двигатель переменного тока с питанием от 60 Гц имеет базовую скорость 1728 об / мин (при условии проскальзывания 4%). Если частотно-регулируемый привод подает на этот двигатель мощность переменного тока 30 Гц, его скорость будет примерно вдвое меньше значения базовой скорости, или 864 об / мин.
На самом деле нет необходимости в обратной связи с измерением скорости в приводе переменного тока, потому что реальная скорость двигателя всегда будет ограничиваться выходной частотой привода.
Управление частотой означает управление скоростью двигателя для синхронных и асинхронных двигателей переменного тока, поэтому для привода переменного тока не требуется обратной связи от тахогенератора, чтобы «знать» приблизительно9, с какой скоростью двигатель вращается.
Отсутствие необходимости в обратной связи по скорости для приводов переменного тока устраняет потенциальную угрозу безопасности, обычную для приводов постоянного тока: возможность «разгона», когда привод теряет сигнал обратной связи по скорости и передает полную мощность на двигатель.
Как и в случае приводов с двигателями постоянного тока, цепи частотно-регулируемого привода излучают много электрических «шумов». Прямоугольные импульсные волны, создаваемые быстрым включением и выключением силовых транзисторов, эквивалентны бесконечной серии высокочастотных синусоидальных волн, некоторые из которых могут иметь достаточно высокую частоту для самораспространения в пространстве в виде электромагнитных волн.
Эти радиочастотные помехи или радиопомехи могут быть довольно серьезными, учитывая высокие уровни мощности цепей привода промышленных двигателей. По этой причине крайне важно, чтобы ни силовые проводники двигателя, ни проводники, подающие питание переменного тока в схему привода, не были проложены где-либо рядом с проводами слабого сигнала или управления, потому что индуцированный шум нанесет ущерб любым системам, использующим эти сигналы низкого уровня. .
Радиочастотные помехи в проводниках питания переменного тока можно уменьшить, направив мощность переменного тока через цепи фильтров, расположенные рядом с приводом.Цепи фильтров блокируют распространение высокочастотного шума обратно на остальную проводку распределения питания переменного тока, где он может повлиять на другое электронное оборудование. Однако мало что можно сделать с помехами радиочастотных помех между приводом и двигателем, кроме как экранировать проводники в хорошо заземленном металлическом кабелепроводе.
Управление вентиляторами переменного тока | Управление двигателем переменного тока | SmartFan
Регулятор скорости вентилятора и двигателя переменного токаControl Resources — ведущий производитель продуктов для регулирования скорости двигателей переменного тока, которые управляют двигателями, вентиляторами или насосами для различных промышленных применений с номинальным током до 18 ампер.Наши регуляторы скорости двигателя переменного тока регулируют скорость двигателя на основе входных сигналов, которые включают температуру, аналоговый (0–20 мА, 0–10 В постоянного тока) сигнал или дистанционное управление датчиком. Варианты монтажа включают DIN-рейку, открытую раму, с металлическими корпусами и без них. Control Resources — OEM (производитель оригинального оборудования), поставщик оборудования для контроля скорости вращения вентиляторов и двигателей, а также устройств сигнализации. Наши продукты не предназначены для конечных пользователей / приложений после выхода на рынок.
При наличии вентилятора или двигателя постоянного тока и питания постоянного тока ничто не сравнится с управлением постоянным током по экономии энергии, стоимости, размерам, безопасности или управляемости.Когда обстоятельства не позволяют использовать вентилятор или двигатель постоянного тока, CRI предлагает рассмотреть 3 технологии управления скоростью двигателя переменного тока; TRIAC (управление напряжением или фазой), VFD (частотно-регулируемый привод) или ECM (двигатель с электронной коммутацией).
Стандартные устройства SmartFan для вентиляторов переменного тока и управления скоростью двигателя| Модель | Текущий рейтинг | Тип двигателя | Техника управления | Опции управления | Диапазон входного напряжения | Опции программирования |
Stratus II | 4A при 40ºC | Однофазный или трехфазный режим работы инвертора | VFD | Температура, аналоговая (0-5 В, 0-10 В, 4-20 мА), преобразователь, потенциометр, MODBUS, фиксированная скорость | 104 — 253 В переменного тока | SmartFan Navigator Программатор MODBUS или Заводская установка |
| Нимбус II | 7.0A при 40ºC | Однофазный управляемый асинхронный двигатель с симметричным входом (TRIAC) | TRIAC | Температура, аналоговая (до 10 В постоянного тока, до 20 мА), преобразователь, фиксированная скорость | 65 — 277 В переменного тока | SmartFan Navigator |
| Нимбус | 7,5 А при 40ºC | Однофазный управляемый асинхронный двигатель с симметричным входом (TRIAC) | TRIAC | Температура, аналоговый (2-10 В постоянного тока, 4-20 мА), преобразователь, фиксированная скорость | 95–250 В переменного тока | DIP-переключатели или |
| Примечание: Nimbus не рекомендуется для новых разработок.См. Nimbus II выше. | ||||||
| Cirrus-ECM | НЕТ | ECM | ECM | Температура, аналоговая (0-10 В, 0-20 мА), преобразователь, фиксированная скорость | 22-26 В переменного тока | SmartFan Navigator Программатор или Заводская установка |
| Индивидуальный двигатель переменного тока Регулировка скорости | Control Resources специализируется на настройке существующих проектов, а также на предоставлении всех новых настраиваемых элементов управления в соответствии с вашими требованиями.Для получения дополнительной информации посетите нашу страницу Custom SmartFan Controls and Alarms или поговорите с одним из наших инженеров. Электронная почта: [email protected] или позвоните по телефону 978-486-4160. | |||||
| TRIAC Control: Nimbus II, Nimbus Если стоимость системы является проблемой номер один, выбор асинхронного двигателя [постоянного разделенного конденсатора (PSC) или экранированного полюса] и совместимого управления TRIAC может быть лучшим решением.Элементы управления TRIAC также имеют тенденцию быть более энергоэффективными на более высоких скоростях, чем VFD. Недостатки этой технологии включают относительно высокие минимальные скорости и потенциально нелинейную кривую управления (входной сигнал в зависимости от скорости двигателя). Пожалуйста, ознакомьтесь с нашей страницей совместимости с двигателями переменного тока, чтобы узнать о требованиях и рисках для двигателя переменного тока TRIAC с регулятором скорости вращения двигателя . | |
| Управление ЧРП: Stratus-II Не все двигатели переменного тока могут управляться ТРИАКом.Во многих из этих случаев инверторный двигатель можно успешно управлять с помощью частотно-регулируемого привода (VFD). ЧРП обычно более энергоэффективны, чем элементы управления TRIAC, на более низких скоростях и могут работать на более низких скоростях. К недостаткам частотно-регулируемых приводов относятся стоимость контроллера, размер и потенциальный шум подшипника. Пожалуйста, ознакомьтесь с нашей страницей совместимости двигателей переменного тока, чтобы узнать о требованиях и рисках двигателя с частотно-регулируемым приводом Управление скоростью двигателя переменного тока . | |
| Управление ЕСМ: Cirrus-ECM В последние годы доступность двигателей ECM значительно увеличилась.В основном это двигатели постоянного тока со встроенными трансформаторами, позволяющими питать их от сети переменного тока. В результате эти двигатели являются наиболее энергоэффективными и простыми (недорогими и точными) в управлении. Но, конечно, бесплатного обеда не бывает. Электродвигатели ECM могут быть дорогими и не всегда доступны в необходимом размере. |
| TRIAC / Phase Control | Частотно-регулируемый привод | Блок управления ЕСМ | |
| Энергопотребление | Хорошо * | Хорошо * | Лучшее |
| Точность регулятора | Хорошо | Лучше | Лучшее |
| Работа на низкой скорости (<50%) | Хорошо | Лучше | Лучшее |
| Наличие двигателя | Лучше | Лучшее | Низкий |
| Индуцированный шум подшипника | Лучше | Хорошо | Лучшее |
| Размер контроллера | Малый | Большой | Малый |
| Стоимость контроллера | Низкий | Высокая | Низкий |
| Стоимость двигателя | Низкий | Низкий | Высокая |
* TRIAC часто более энергоэффективны на более высоких скоростях, частотно-регулируемые приводы более эффективны на более низких скоростях.
Приложения — TRIAC, частотно-регулируемые приводы и управление скоростью двигателя переменного тока ECM| Управление насосом Устройства управления скоростью двигателя переменного тока SmartFan могут управлять небольшими насосами переменного тока. | Создание избыточного давления в чистых помещениях SmartFan Устройства управления скоростью двигателя переменного тока могут использоваться для поддержания положительного давления в чистых помещениях. | Контроль влажности SmartFan Устройство контроля скорости двигателя переменного тока может автоматически регулировать скорость вращения вентилятора при подключении к датчику влажности. | Вентиляция SmartFan Устройство контроля скорости двигателя переменного тока может использоваться с потолочным вентилятором, вентилятором чердака или канальным вентилятором для удаления горячего воздуха или вредных паров. |
Контроллеры двигателей для промышленных транспортных средств
Разнообразный набор контроллеров, предлагающих управление двигателем переменного тока, управление двигателем постоянного тока с постоянным магнитом и управление двигателем с независимым возбуждением, подходящих для широкого спектра электромобилей, таких как тележки для поддонов, штабелеры, тягачи, вилочные погрузчики или любые другие типы аккумуляторных транспортных средств.Все продукты предлагают отличное сочетание компактной и прочной конструкции, мощности, производительности, функциональности и стоимости.
65Контроллеры двигателей: Назначение
Контроллеры двигателей используются для постепенного запуска, остановки и запуска двигателей запрограммированным образом. Они подают напряжение и подают сигналы на моторные приводы. Они также могут постепенно увеличивать скорость двигателя или крутящий момент или изменять направление вращения двигателя.
Типы контроллеров двигателей
Существует два основных типа контроллеров двигателей: электронные и электромеханические.
Электронные блоки включают плавный пуск и частотно-регулируемые приводы и считаются сложными компонентами. Их можно запрограммировать так, чтобы они реагировали на системные входные сигналы и заранее заданные рабочие условия.
В электромеханических устройствах используются электромагнитные контакторы или реле для остановки, запуска и изменения направления вращения двигателя.
Контроллеры двигателей переменного тока
Контроллеры двигателей переменного токапредставляют собой электронные устройства, которые изменяют входную мощность двигателей, обычно регулируя частоту питания двигателя для регулирования выходной скорости и крутящего момента.Используемые в основном в технологических процессах для управления скоростью, они известны как приводы с регулируемой скоростью или частотно-регулируемые приводы.
Контроллеры двигателей постоянного тока
Контроллеры двигателей постоянного тока— это электрические устройства, которые изменяют входную мощность, настраивая источник постоянного или переменного тока на импульсный выход постоянного тока с изменяющейся длительностью или частотой импульса.
Контроллеры серводвигателей
Контроллеры серводвигателей— это электронные устройства, которые изменяют входную мощность, настраивая источник постоянного или переменного тока на импульсный, токовый выход с изменяющейся длительностью или частотой импульса.Серводвигатели используются во многих приложениях, включая станки, микропозиционирование и робототехнику, а также многие другие типы оборудования, такие как конвейеры или системы привода шпинделя. Контроллер, обычно интегрированный со схемами привода, подает управляющие сигналы на привод. Сервоприводы также известны как усилители серводвигателей.
Контроллеры шаговых двигателей
Контроллеры шаговых двигателей— это электронные устройства, которые изменяют входную мощность, настраивая источник постоянного или переменного тока на импульсный или «ступенчатый» выходной ток.Контроллеры шаговых двигателей используются в основном в приложениях управления движением в производственных и строительных средах, среди прочего, и управляют скоростью, крутящим моментом и положением двигателя.
Часто задаваемые вопросы:
Какие типы контроллеров мотора?
Существует четыре основных контроллера мотора и типов приводов:
- Контроллеры двигателей переменного тока
- Контроллеры бесщеточных и щеточных двигателей постоянного тока
- Контроллеры серводвигателей
- Контроллеры шаговых двигателей
Зачем мне нужен контроллер мотора?
Контроллер мотора является необходимым компонентом, потому что микроконтроллер обычно может предоставлять только 0.1 Ампер тока. Требования к большинству исполнительных механизмов (электродвигатели постоянного тока, редукторные электродвигатели постоянного тока, серводвигатели и т. Д.) Выше, чем это, и требуют нескольких ампер. Ток, который использует двигатель, зависит от крутящего момента, который он может обеспечить; например, небольшой двигатель не будет потреблять много тока, но не может перемещать большую массу.
Как выбрать контроллер мотора?
Обычно контроллеры двигателей можно выбрать только после того, как вы выбрали двигатели или приводы. Это делается так, потому что вы должны учитывать, что ток, потребляемый двигателем, связан с крутящим моментом, который он может обеспечить.Таким образом, вы должны согласовать то, что будет работать для каждого компонента.
Динамика и управление приводами переменного тока
Инструкторы
Владимир Бласко
Владимир Бласко работает в Исследовательском центре «Объединенные технологии», руководит отделом силовой электроники. Его основные интересы и знания — это приводы переменного тока, интеллектуальное управление питанием, силовая электроника, прикладная современная теория управления и технологии, а также он имеет многолетний промышленный опыт исследований и разработок в области силовой электроники и электрических приводов.Владимир ранее работал в компаниях Otis Elevators и Rockwell Automation-Allen Bradley и имеет докторскую степень в области электротехники.
Томас Янс
Томас М. Янс — профессор кафедры электротехники и вычислительной техники Университета Висконсин-Мэдисон. Ранее Янс работал с отделом исследований и разработок GE и Массачусетским технологическим институтом, а также занимался исследованиями в области электрических машин, анализа и управления приводных систем, а также силовых электронных модулей.
Рассел Керкман
Д-р Керкман — заслуженный научный сотрудник Rockwell Automation. Его карьера насчитывает 32 года в области силовой электроники и приводов с регулируемой скоростью, а его текущие интересы включают адаптивное управление, применяемое к полевым индукционным машинам, разработку двигателей переменного тока для приложений с регулируемой скоростью и электромагнитные помехи от инверторов с ШИМ. Доктор Керкман получил степени BSEE, MSEE и доктора философии в области электротехники в Университете Пердью.
Бюлент Сарлыоглу
Бюлент Сарлиоглу — доцент Джин ван Блейдел в Университете Висконсина в Мэдисоне и заместитель директора Консорциума электрических машин и силовой электроники штата Висконсин (WEMPEC). Доктор Сарлиоглу проработал более 10 лет в аэрокосмическом подразделении Honeywell International Inc. Как штатный системный инженер, он получил награду Honeywell за технические достижения и награду выдающегося инженера.Д-р Сарлиоглу участвовал в нескольких программах, в которых высокоскоростные электрические машины и приводы используются в основном для аэрокосмических и наземных транспортных средств. Доктор Сарлиоглу является изобретателем или соавтором 20 патентов США и многих других международных патентов. Вместе со своими учениками он опубликовал более 200 статей для журналов и конференций. Его область исследований — двигатели и приводы, включая высокоскоростные электрические машины, новые электрические машины, а также применение устройств с широкой запрещенной зоной в силовой электронике для повышения эффективности и удельной мощности.Он получил награду NSF CAREER Award в 2016 году и 4 th Grand Nagamori Award от Фонда Нагамори, Япония в 2019 году. Д-р Сарлиоглу стал почетным лектором IEEE IAS в 2018 году. Он был сопредседателем технической программы ECCE 2019 и генеральный председатель ITEC 2018. Он является сопредседателем специальной сессии ECCE 2020.
Майкл Харке
Майкл работал в Hamilton Sundstrand в отделе прикладных исследований в области управления двигателями и силовой электроники для аэрокосмических приложений, включая приводы двигателей и исполнительные механизмы.Работая в Danfoss Power Electronics, он сосредоточился на управлении промышленными двигателями. С тех пор он вернулся в Hamilton Sundstrand, теперь известную как UTC Aerospace Systems. Он также является адъюнкт-профессором Римского университета Ла Сапиенца, преподает курс по динамическому анализу и управлению машинами переменного тока. Майкл является членом Института инженеров по электротехнике и электронике, где он в прошлом был председателем Комитета по промышленным приводам и представителем общества в AdCom Совета по датчикам Общества промышленных приложений.Он был сопредседателем технической программы Конгресса и выставки IEEE Energy Conversion в 2013 году. Он опубликовал 25 статей на конференциях и в журналах и имеет восемь патентов. Во время учебы в области машиностроения для получения степени бакалавра, магистра и доктора наук он работал с многочисленными компаниями, включая Whirlpool, Ford Motor Company, Schneider Electric, International Rectifier и Hamilton Sundstrand.
Хао Хуан
Доктор.Хао Хуан — бывший технический директор подразделения электроэнергетики General Electric Aviation. До выхода на пенсию в 2020 году он отвечал за техническое руководство, инновационные стратегии и планы развития продуктов для нескольких поколений в подразделении электроснабжения самолетов GE. Он постоянно руководил и вносил свой вклад в инновации и изобретения в области технологий производства электроэнергии для самолетов. Доктор Хуанг — член NAE, научный сотрудник IEEE и научный сотрудник SAE. Он получил докторскую степень. Получил степень в области электротехники в Университете Колорадо в Боулдере, Боулдер, Колорадо, США, в 1987 году.Он имеет 33-летний опыт работы в авиационных электроэнергетических системах, производстве электроэнергии, пуске двигателей, силовой электронике и средствах управления, а также в приводах электромобилей. Он имеет 80 патентов США, в том числе несколько находящихся на рассмотрении, и опубликовал ряд статей. Доктор Хао Хуан является лауреатом премии IEEE Transportation Technologies Award 2019.
Управление двигателем переменного тока Основы для поиска и устранения неисправностей
Обратите внимание, что из-за потоковой передачи качество не такое хорошее, как у настоящего DVD.
Обучающая видеотека по промышленному электричеству — DVD 8
Раздел 4 —
Управление двигателями переменного тока и устранение неисправностей Часть 1 (31:44 мин)
|
Часть 2 (32:27 мин)
|
Чтобы вернуться на ГЛАВНУЮ страницу видео библиотеки обучения промышленному электричеству…
Закройте эту новую вкладку или окно, открывшееся в вашем браузере, чтобы показать вам этот образец. (Если вы нашли эту страницу через поисковую систему, нажмите «Электротехника»)
Управление двигателями переменного тока и устранение неисправностей |
«У меня была возможность оценить многие учебные материалы, и я ‘ я считаю эти промышленные видеопрограммы лучшими из тех, что я когда-либо видел.«- Боб Десото, профессор непрерывного образования, Калифорнийский университет в Фуллертоне |
Мы покажем вам, как проверить обмотки на обрыв, выявить проблему в цепи или двигателе и многое другое. Мы даже покрываем явные симптомы преждевременного отказа моторики. Нужна та же информация о двигателях постоянного тока? Наш DVD 9, посвященный управлению двигателями постоянного тока и поиску и устранению неисправностей. |
Сократить время поиска и устранения неисправностей двигателя переменного тока вдвое
|
Примечание. Международный импортер несет ответственность за уплату всех таможенных пошлин (налогов).
Кнопка автоматического заказа выше работает от защищенного PayPal. (После покупки с помощью кнопки «Добавить в корзину» выше вы сразу же получите электронное письмо с подтверждением.) Если вы предпочитаете, чтобы мы обрабатывали ваш заказ вручную или хотели бы использовать заказ на покупку (ЗП), отправив заказ по почте, нажмите «Заказ обучающего видео» Форма на наших защищенных серверах.
Щелкните изображение кредитной карты выше для обработки заказа вручную. Информация о квитанции и доставке будет отправлена по электронной почте в течение 24 часов с ручной обработкой.)
брошюра с обучающими видео лекциями (PDF), а также бланк заказа DVD с электрическим видео в формате PDF.
Того назад на ГЛАВНУЮ страницу библиотеки обучающих видео по промышленному электричеству …
Закройте эту новую вкладку или окно, открывшееся в вашем браузере, чтобы показать вам этот образец.