Асинхронный электродвигатель: устройство и принцип работы
Самым эффективным устройством, превращающим электрическую энергию в механическую, является асинхронный двигатель, изобретенный инженером Доливо-Добровольским в конце 19 века. Учитывая возрастающий интерес современников к разработке и сборке станков, самодвижущихся аппаратов и прочих механизмов, мы постараемся объяснить, как работает асинхронный электродвигатель, чтобы вы могли понять принцип его действия и результативно его использовать.
Устройство асинхронного электродвигателя
В его конструкцию входят следующие элементы:
- Статор цилиндрической формы, собранный из стальных листов. Сердечник статора имеет пазы, в которые уложены обмотки. Их оси сдвинуты на 120 градусов по отношению друг к другу.
- Ротор (короткозамкнутый или фазный). Первый вариант представляет собой сердечник с алюминиевыми стержнями, накоротко замкнутыми торцевыми кольцами (беличья клетка).

- Конструктивные детали – вал, подшипники, лапы, подшипниковые щиты, крыльчатка и кожух вентилятора, коробка выводов — обеспечивающие вращение, охлаждение и защиту механизма.
Схему асинхронного двигателя с указанием его деталей легко найти в интернете или в пособиях.
Принцип работы асинхронного двигателя
Принцип действия асинхронного электродвигателя заложен в его названии (не синхронный). То есть статор и ротор при включении создают вращающиеся с разной частотой магнитные поля. При этом частота вращения магнитного поля ротора всегда меньше частоты вращения магнитного поля статора.
Чтобы более наглядно представить себе этот процесс, возьмите постоянный магнит и покрутите его вокруг своей оси возле медного диска. Диск с небольшим отставанием начнет вращаться вслед за магнитом. Дело в том, что при вращении магнита в структуре диска возбуждаются токи Фуко (индукционные токи), движущиеся по замкнутому кругу.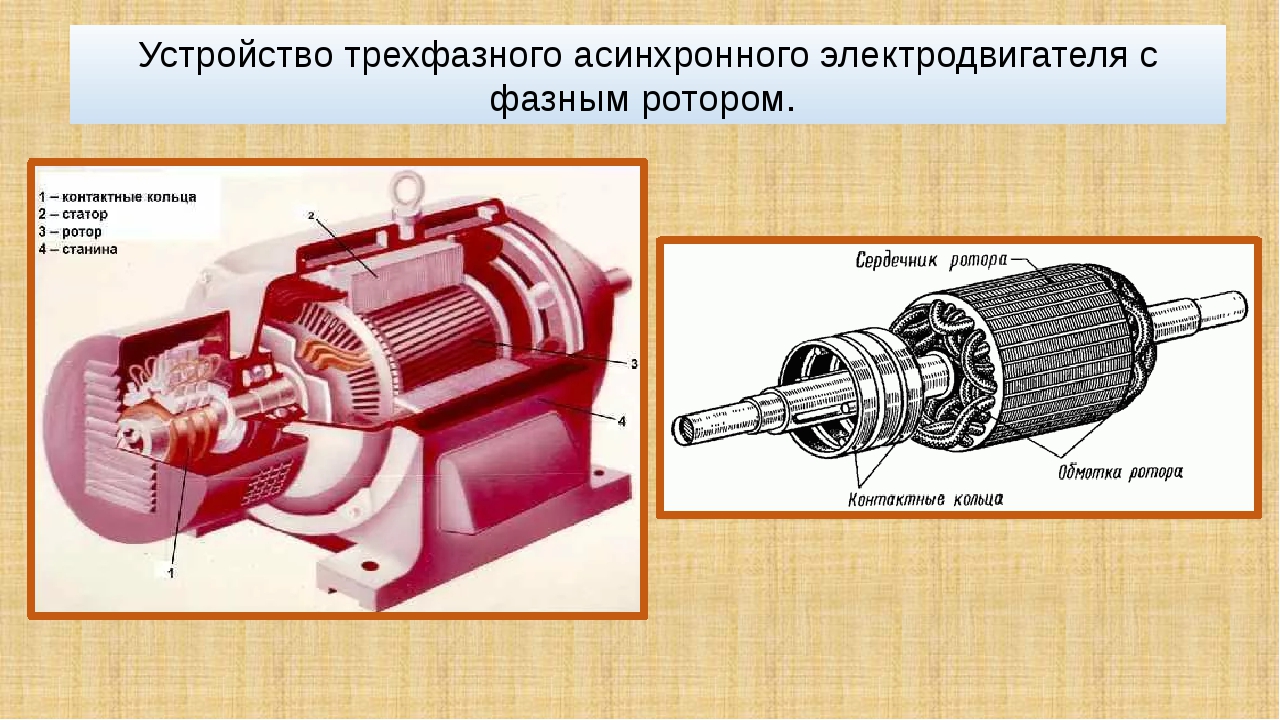
В асинхронном двигателе для получения вращающегося поля используются обмотки статора. Магнитный поток, образованный ими, создает ЭДС в проводниках ротора. При взаимодействии магнитного поля статора и индуцируемого тока в обмотке ротора создается электромагнитная сила, приводящая во вращение вал электродвигателя.
Пошагово процесс выглядит следующим образом:
- При запуске двигателя магнитное поле статора пересекается с контуром ротора и индуцирует электродвижущую силу.
- В накоротко замкнутом роторе возникает переменный ток.
- Два магнитных поля (статора и ротора) создают крутящий момент.
- В тот момент, когда частоты вращения магнитного поля статора и ротора совпадут, электромагнитные процессы в роторе затухают и крутящий момент становится равным нулю.

- Магнитное поле статора возбуждает контур ротора, который к этому моменту снова отстает.
То есть ротор всегда медленнее магнитного поля статора, что и обеспечивает асинхронность.
Поскольку ток в роторе индуцируется бесконтактно, отпадает необходимость установки скользящих контактов, что делает асинхронные двигатели более надежными и эффективными. Изменяя направление тока в одной из обмоток (для этого нужно поменять фазы на клеммах), вы можете «заставить» мотор вращаться в ту или другую сторону.
Направление электромагнитной силы легко определить, вспомнив школьный курс физики и воспользовавшись «правилом левой руки».
На частоту вращения магнитного поля статора влияет частота питающей сети и число пар полюсов. Поскольку число пар полюсов зависит от типа двигателя и остается неизменным, то, если вы хотите изменить частоту вращения поля, необходимо изменить частоту питающей сети с помощью преобразователя.
Преимущества асинхронных двигателей
Благодаря тому, что устройство и принцип работы асинхронного электродвигателя достаточно просты, он обладает массой преимуществ и широко применяется во всех сферах народного хозяйства и в быту.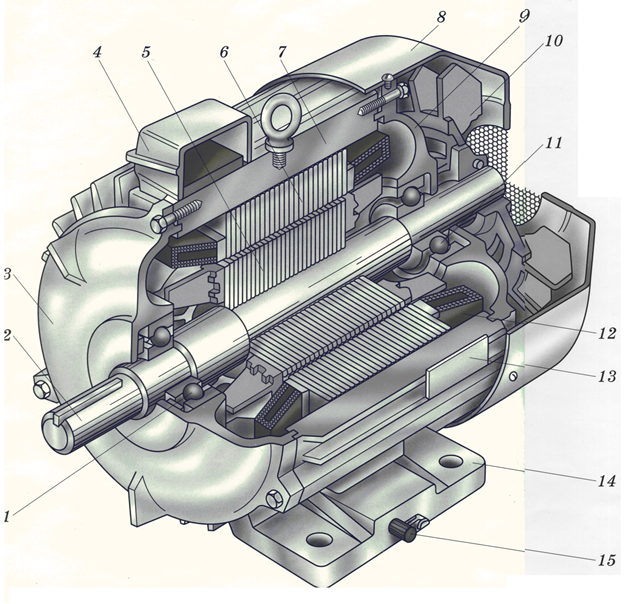 Двигатели этого типа характеризуются:
Двигатели этого типа характеризуются:
- Надежностью и долговечностью. Отсутствие контакта между подвижными и неподвижными деталями сводит к минимуму возможность износа и поломок.
- Низкой стоимостью. Они доступны (не зря 90% от всех выпускающихся в мире двигателей именно асинхронные).
- Простотой эксплуатации. Для того чтобы использовать их, не обязательно иметь специальные знания и навыки.
- Универсальностью. Их можно установить практически на любое оборудование.
Изобретение асинхронного электродвигателя было значимым вкладом в развитие науки, промышленности и сельского хозяйства. С ним наша жизнь стала более комфортной.
Асинхронный двигатель — принцип работы и устройство
8 марта 1889 года величайший русский учёный и инженер Михаил Осипович Доливо-Добровольский изобрёл трёхфазный асинхронный двигатель с короткозамкнутым ротором.
Современные трёхфазные асинхронные двигатели являются преобразователями электрической энергии в механическую. Благодаря своей простоте, низкой стоимости и высокой надёжности асинхронные двигатели получили широкое применение. Они присутствуют повсюду, это самый распространённый тип двигателей, их выпускается 90% от общего числа двигателей в мире. Асинхронный электродвигатель поистине совершил технический переворот во всей мировой промышленности.
Благодаря своей простоте, низкой стоимости и высокой надёжности асинхронные двигатели получили широкое применение. Они присутствуют повсюду, это самый распространённый тип двигателей, их выпускается 90% от общего числа двигателей в мире. Асинхронный электродвигатель поистине совершил технический переворот во всей мировой промышленности.
Огромная популярность асинхронных двигателей связана с простотой их эксплуатации, дешивизной и надежностью.
Асинхронный двигатель — это асинхронная машина, предназначенная для преобразования электрической энергии переменного тока в механическую энергию. Само слово “асинхронный” означает не одновременный. При этом имеется ввиду, что у асинхронных двигателей частота вращения магнитного поля статора всегда больше частоты вращения ротора. Работают асинхронные двигатели, как понятно из определения, от сети переменного тока.
Устройство
На рисунке: 1 — вал, 2,6 — подшипники, 3,8 — подшипниковые щиты, 4 — лапы, 5 — кожух вентилятора, 7 — крыльчатка вентилятора, 9 — короткозамкнутый ротор, 10 — статор, 11 — коробка выводов.
Основными частями асинхронного двигателя являются статор (10) и ротор (9).
Статор имеет цилиндрическую форму, и собирается из листов стали. В пазах сердечника статора уложены обмотки статора, которые выполнены из обмоточного провода. Оси обмоток сдвинуты в пространстве относительно друг друга на угол 120°. В зависимости от подаваемого напряжения концы обмоток соединяются треугольником или звездой.
Роторы асинхронного двигателя бывают двух видов: короткозамкнутый и фазный ротор.
Короткозамкнутый ротор представляет собой сердечник, набранный из листов стали. В пазы этого сердечника заливается расплавленный алюминий, в результате чего образуются стержни, которые замыкаются накоротко торцевыми кольцами. Эта конструкция называется «беличьей клеткой«. В двигателях большой мощности вместо алюминия может применяться медь. Беличья клетка представляет собой короткозамкнутую обмотку ротора, откуда собственно название.
Фазный ротор имеет трёхфазную обмотку, которая практически не отличается от обмотки статора. В большинстве случаев концы обмоток фазного ротора соединяются в звезду, а свободные концы подводятся к контактным кольцам. С помощью щёток, которые подключены к кольцам, в цепь обмотки ротора можно вводить добавочный резистор. Это нужно для того, чтобы можно было изменять активное сопротивление в цепи ротора, потому что это способствует уменьшению больших пусковых токов. Подробнее о фазном роторе можно прочитать в статье — асинхронный двигатель с фазным ротором.
Принцип работы
При подаче к обмотке статора напряжения, в каждой фазе создаётся магнитный поток, который изменяется с частотой подаваемого напряжения. Эти магнитные потоки сдвинуты относительно друг друга на 120°, как во времени, так и в пространстве. Результирующий магнитный поток оказывается при этом вращающимся.
Результирующий магнитный поток статора вращается и тем самым создаёт в проводниках ротора ЭДС. Так как обмотка ротора, имеет замкнутую электрическую цепь, в ней возникает ток, который в свою очередь взаимодействуя с магнитным потоком статора, создаёт пусковой момент двигателя, стремящийся повернуть ротор в направлении вращения магнитного поля статора. Когда он достигает значения, тормозного момента ротора, а затем превышает его, ротор начинает вращаться. При этом возникает так называемое скольжение.
Так как обмотка ротора, имеет замкнутую электрическую цепь, в ней возникает ток, который в свою очередь взаимодействуя с магнитным потоком статора, создаёт пусковой момент двигателя, стремящийся повернуть ротор в направлении вращения магнитного поля статора. Когда он достигает значения, тормозного момента ротора, а затем превышает его, ротор начинает вращаться. При этом возникает так называемое скольжение.
Скольжение s — это величина, которая показывает, насколько синхронная частота n1 магнитного поля статора больше, чем частота вращения ротора n2, в процентном соотношении.
Скольжение это крайне важная величина. В начальный момент времени она равна единице, но по мере возрастания частоты вращения n2 ротора относительная разность частот n1-n2 становится меньше, вследствие чего уменьшаются ЭДС и ток в проводниках ротора, что влечёт за собой уменьшение вращающего момента. В режиме холостого хода, когда двигатель работает без нагрузки на валу, скольжение минимально, но с увеличением статического момента, оно возрастает до величины sкр — критического скольжения. Если двигатель превысит это значение, то может произойти так называемое опрокидывание двигателя, и привести в последствии к его нестабильной работе. Значения скольжения лежит в диапазоне от 0 до 1, для асинхронных двигателей общего назначения оно составляет в номинальном режиме — 1 — 8 %.
Если двигатель превысит это значение, то может произойти так называемое опрокидывание двигателя, и привести в последствии к его нестабильной работе. Значения скольжения лежит в диапазоне от 0 до 1, для асинхронных двигателей общего назначения оно составляет в номинальном режиме — 1 — 8 %.
Как только наступит равновесие между электромагнитным моментом, вызывающим вращение ротора и тормозным моментом создаваемым нагрузкой на валу двигателя процессы изменения величин прекратятся.
Выходит, что принцип работы асинхронного двигателя заключается во взаимодействии вращающегося магнитного поля статора и токов, которые наводятся этим магнитным полем в роторе. Причём вращающий момент может возникнуть только в том случае, если существует разность частот вращения магнитных полей.
Рекомендуем к прочтению — однофазный асинхронный двигатель.
Асинхронные электродвигатели: схема, принцип работы и устройство
Асинхронный электродвигатель – это электрический агрегат с вращающимся ротором. Скорость вращения ротора отличается от скорости, с которой вращается магнитное поле статора. Это – одна из важных особенностей работы агрегата, так как если скорости выровняются, то магнитное поле не будет наводить в роторе ток и действие силы на роторную часть прекратится. Именно поэтому двигатель называется асинхронным (у синхронного показатели скоростного вращения совпадают).
Скорость вращения ротора отличается от скорости, с которой вращается магнитное поле статора. Это – одна из важных особенностей работы агрегата, так как если скорости выровняются, то магнитное поле не будет наводить в роторе ток и действие силы на роторную часть прекратится. Именно поэтому двигатель называется асинхронным (у синхронного показатели скоростного вращения совпадают).
В данной статье мы сфокусируемся на том, что представляет собой схема работы такого двигателя и – самое главное, насколько она эффективна при его эксплуатации.
Устройство и принцип действия
Ток в обмотках статора создает вращающееся магнитное поле. Это поле наводит в роторе ток, который начинает взаимодействовать с магнитным полем таким образом, что ротор начинает вращаться в ту же сторону, что и магнитное поле.
Относительная разность скоростей вращения ротора и частоты переменного магнитного поля называется скольжением. В установившемся режиме скольжение невелико: 1-8% в зависимости от мощности.
Асинхронный двигатель
Подробнее о принципах работы асинхронного электродвигателя – в частности, на примере агрегата трехфазного тока, вы можете прочесть здесь, на сайте, в одном из наших материалов. Далее же мы разберем, какие бывают разновидности асинхронных электрических машин.
Виды асинхронных двигателей
Можно выделить 3 базовых типа асинхронных электродвигателей:
- 1-фазный – с короткозамкнутым ротором
- 3-х фазный – с короткозамкнутым ротором
- 3-х фазный – с фазным ротором
Схема устройства асинхронного двигателя с короткозамкнутым ротором
То есть, двигатели классифицируются по количеству фаз (1 и 3) и по типу ротора – с короткозамкнутым и с фазным. При этом число фаз с установленным типом ротора никак не взаимосвязано.
Ещё одна разновидность – асинхронный двигатель с массивным ротором. Ротор сделан целиком из ферромагнитного материала и фактически представляет собой стальной цилиндр, играющий роль как магнитопровода, так и проводника (вместо обмотки).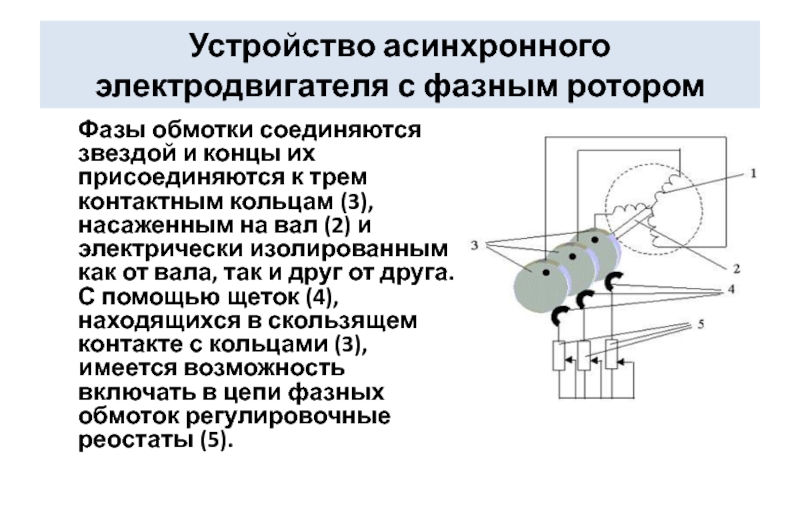 Такой вид двигателя очень прочный и обладает высоким пусковым моментом, однако в роторе могут возникать большие потери энергии, а сам он может сильно нагреваться.
Такой вид двигателя очень прочный и обладает высоким пусковым моментом, однако в роторе могут возникать большие потери энергии, а сам он может сильно нагреваться.
Какой ротор лучше, фазный или короткозамкнутый?
Преимущества короткозамкнутого:
- Более-менее постоянная скорость вне зависимости от разных нагрузок
- Допустимость кратковременных механических перегрузок
- Простая конструкция, легкость пуска и автоматизации
- Более высокие cos φ (коэффициент мощности) и КПД, чем у электродвигателей с фазным ротором
Недостатки:
- Трудности в регулировании скорости вращения
- Большой пусковой ток
- Низкий мощностной коэффициент при недогрузках
Преимущества фазного:
- Высокий начальный вращающий момент
- Допустимость кратковременных механических перегрузок
- Более-менее постоянная скорость при разных перегрузках
- Меньший пусковой ток, чем у двигателей с короткозамкнутым ротором
- Возможность использования автоматических пусковых устройств
Недостатки:
- Большие габариты
- Коэффициент мощности и КПД ниже, чем у электродвигателей с короткозамкнутым ротором
Какой двигатель лучше выбрать?
Асинхронный или коллекторный? Синхронный или асинхронный? Сказать однозначно, что определенный тип двигателя лучше, точно нельзя. В пользу асинхронных моделей говорят их следующие преимущества.
В пользу асинхронных моделей говорят их следующие преимущества.
- Относительно небольшая стоимость
- Низкие эксплуатационные затраты
- Отсутствие необходимости в преобразователях при включении в сеть (только для нагрузок, не нуждающихся в регулировании скорости)
- Отсутствие потребности в дополнительном источнике питания – в отличие от синхронных аналогов
Тем не менее, у асинхроников есть недостатки. А именно:
- Малый пусковой момент
- Высокий пусковой ток
- Отсутствие возможности регулировки скорости при подключении к сети
- Ограничение максимальной скорости частотой сети
- Высокая зависимость электромагнитного момента от напряжения питающей сети
- Низкий мощностной коэффициент – в отличие от синхронных агрегатов
Тем не менее, все перечисленные недостатки можно устранить, если питать асинхронный двигатель от статического частотного преобразователя. Кроме того, если соблюдать правила эксплуатации и не перегружать агрегаты, то они исправно прослужат длительный срок.
Но даже несмотря на то, что синхронные машины обладают довольно конкурентными преимуществами, большинство двигателей сегодня – именно асинхронные. Промышленность, сельское хозяйство, ЖКХ и многие другие отрасли используют именно их за счет высокого КПД. Но коэффициент полезного действия может значительно снижаться за счет таких параметров, как:
- Высокий пусковой ток
- Слабый пусковой момент
- Рассинхрон между механическим моментом на валу привода и механической нагрузкой (это провоцирует высокий рост силы тока и избыточные нагрузки при запуске, а также снижение КПД при пониженной нагрузке)
- Невозможность точной регулировки скорости работы прибора
Другими факторами, от которых зависит КПД асинхронного электродвигателя, являются:
- степень загрузки двигателя по отношению к номинальной
- конструкция и модель
- степень износа
- отклонение напряжения в сети от номинального.
Как избежать снижения КПД?
- Обеспечение стабильного уровня загрузки – не ниже 75%
- Увеличение мощностного коэффициента
- Регулировать напряжение и частоту подаваемого тока
Для этого используются:
- Частотные преобразователи – они плавно изменяют скорость вращения двигателя путем изменения частоты питающего напряжения
- Устройства плавного пуска – они ограничивают скорость нарастания пускового тока и его предельное значение, как одни из факторов, из-за которых падает КПД
Итак, асинхронный двигатель имеет довольно широкую область использования и применяется во многих хозяйственных и производственных сферах деятельности. У нас, в компании РУСЭЛТ, представлен широкий выбор электродвигателей данного типа, приобрести который вы можете по ценам, которые ощутимо выгоднее, чем у конкурентов.
У нас, в компании РУСЭЛТ, представлен широкий выбор электродвигателей данного типа, приобрести который вы можете по ценам, которые ощутимо выгоднее, чем у конкурентов.
Принцип работы асинхронного электродвигателя | Русэлт
Асинхронные электродвигатели – это устройства, главным назначением которых является преобразование энергии переменного электротока в механическую. Своим названием двигатель обязан асинхронному типу вращения ротора относительно частоты вращения магнитного поля, индуцирующего электроток в обмотке статора.
Принцип работы на примере асинхронного электродвигателя трехфазного тока
Этот тип электрического двигателя наиболее часто применяется в различных сферах промышленности. Двигатель имеет 3-и обмотки на статоре, со смещением на 120 градусов. Обмотки запитаны переменным током и объединены по схеме «звезда» или «треугольник». При подаче напряжения на обмотку статора во всех трёх фазах появится магнитный поток.
Вместе с изменением частоты напряжения на обмотке статора, изменяется и магнитный поток.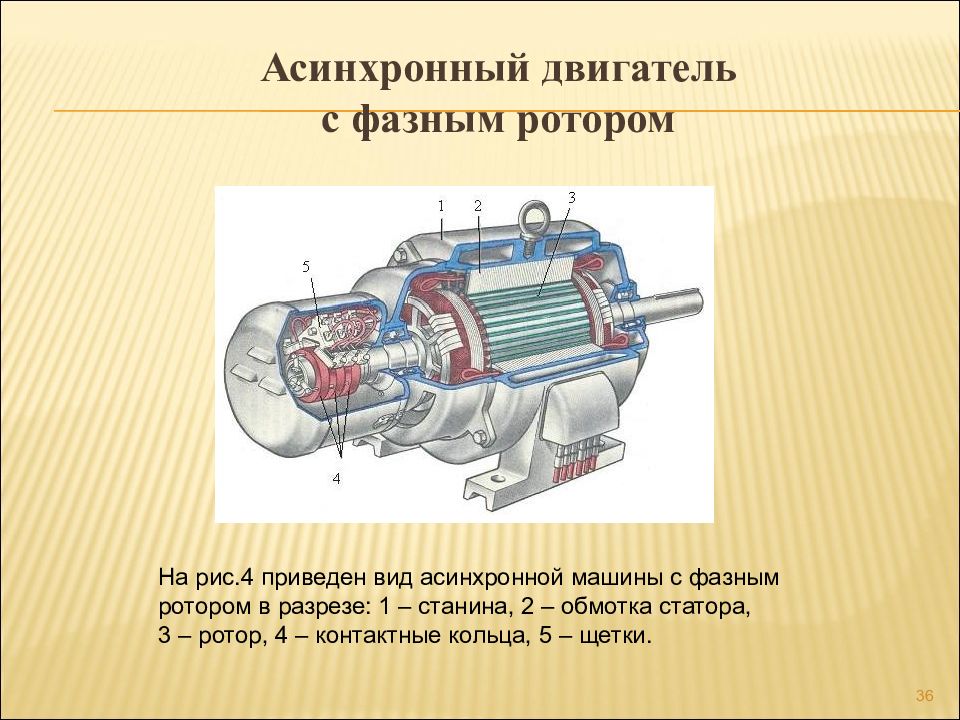 Фазы и магнитные потоки смещены относительно друг друга на сто двадцать градусов. Суммарный магнитный поток и будет вращающимся магнитным потоком, создающим электродвижущую силу (ЭДС). ЭДС, в замкнутой электроцепи обмотки ротора, индуцирует электроток. Во взаимодействии с магнитным потоком статора, ток создает пусковой момент электрического двигателя. Ротор начинает вращение в таком же направлении, что и магнитное поле статора при превышении пусковым моментом двигателя его тормозного момента.
Фазы и магнитные потоки смещены относительно друг друга на сто двадцать градусов. Суммарный магнитный поток и будет вращающимся магнитным потоком, создающим электродвижущую силу (ЭДС). ЭДС, в замкнутой электроцепи обмотки ротора, индуцирует электроток. Во взаимодействии с магнитным потоком статора, ток создает пусковой момент электрического двигателя. Ротор начинает вращение в таком же направлении, что и магнитное поле статора при превышении пусковым моментом двигателя его тормозного момента.
Преимущества и недостатки асинхронных электродвигателей
Простота эксплуатации и хорошая ремонтопригодность – главные достоинства асинхронного двигателя, сделавшие его наиболее востребованным в очень разных сферах машиностроения и приборостроения. Привлекает и:
- Сравнительно невысокая цена;
- Надёжность
- Несложность подсоединения в общую электроцепь устройств.
Асинхронные электродвигатели имеют и ряд недостатков:
- Трудности с точным регулированием скорости;
- Большой пусковой ток;
- Относительно невысокий коэффициент мощности.

По типу обмотки ротора, короткозамкнутой или фазной, асинхронные двигатели, подразделяются на 2 типа:
- Электродвигатели с короткозамкнутым ротором имеют обмотку, замыкающуюся на сам ротор;
- Электродвигатели с фазным ротором – обмотку с концами, выведенными на щеточно-коллекторный узел.
Преимущество двигателя с фазным ротором в том, что скорость вращения можно регулировать путем подключения дополнительных сопротивлений (реостатного регулирования).
Асинхронный электродвигатель. Устройство и принцип действия. – www.motors33.ru
Асинхронный электродвигатель имеет две основные части – статор и ротор. Неподвижная часть двигателя называется статор. С внутренней стороны статора сделаны пазы, куда укладывается трехфазная обмотка, питаемая трехфазным током. Вращающаяся часть машины называется ротор, в пазах его тоже уложена обмотка. Статор и ротор собираются из отдельных штампованных листов электротехнической стали толщиной 0,35-0,5 мм. Отдельные листы стали изолируются один от другого слоем лака. Воздушный зазор между статором и ротором делается как можно меньше (0,3-0,35 мм в машинах малой мощности и 1-1,5 мм в машинах большой мощности).
Отдельные листы стали изолируются один от другого слоем лака. Воздушный зазор между статором и ротором делается как можно меньше (0,3-0,35 мм в машинах малой мощности и 1-1,5 мм в машинах большой мощности).
В зависимости от конструкции ротора асинхронные двигатели бывают с короткозамкнутым и с фазным роторами. Наибольшее распространение получили двигатели с короткозамкнутым ротором, они просты по устройству и удобны в эксплуатации.
Трехфазная обмотка статора помещается в пазы и состоит из ряда катушек, соединенных между собой. Каждая катушка сделана из одного или нескольких витков, изолированных между собой и от стенок паза.
Рис. 1. Различные виды обмотки статора асинхронных электродвигателей
На рис. 1, а) показана обмотка статора асинхронного электродвигателя. У этой обмотки каждая катушка состоит из двух проводников. Обмотка, состоящая из трех катушек, создает магнитное поле с двумя полюсами. За один период трехфазного тока магнитное поле сделает один оборот. При частоте 50 Гц это будет соответствовать 50 об/сек, или 3000 об/мин.
При частоте 50 Гц это будет соответствовать 50 об/сек, или 3000 об/мин.
На рис. 1, б) показана обмотка, у которой каждая сторона катушки состоит из двух проводников.
Скорость вращения магнитного поля четырехполюсного статора вдвое меньше скорости вращения поля двухполюсного статора, т. е. 1500 об/мин (при 50 Гц). Обмотка четырехполюсного статора с одним проводником на полюс и фазу показана на рис. 1, в), а с двумя проводниками на полюс и фазу – на рис. 1, г). Магнитное поле шестиполюсного статора имеет втрое меньшую скорость, чем двухполюсного, т. е. 1000 об/мин (при 50 Гц). Обмотка шестиполюсного статора с одним проводником на полюс и фазу представлена на рис. 1, д). Число всех пазов на статоре равно утроенному произведению числа полюсов статора на число пазов, приходящееся на полюс и фазу.
Асинхронный электродвигатель с короткозамкнутым ротором является самым распространенным из электрических двигателей, применяемых в промышленности. Рассмотрим его устройство. На неподвижной части двигателя – статоре 1 – размещается трехфазная обмотка 2 (рис. 2), питаемая трехфазным током. Начала трех фаз этой обмотки выводятся на общий щиток, укрепленный снаружи на корпусе электродвигателя.
На неподвижной части двигателя – статоре 1 – размещается трехфазная обмотка 2 (рис. 2), питаемая трехфазным током. Начала трех фаз этой обмотки выводятся на общий щиток, укрепленный снаружи на корпусе электродвигателя.
Рис. 2. Асинхронный электродвигатель с короткозамкнутым ротором
Собранный сердечник статора укрепляют в чугунном корпусе 3 двигателя. Вращающуюся часть двигателя – ротор 4 – собирают также из отдельных листов стали. В пазы ротора закладывают медные стержни, которые с двух сторон припаивают к медным кольцам
Рис. 3. Короткозамкнутый ротор
а — ротор с короткозамкнутой обмоткой, б — «беличье колесо»,
в — короткозамкнутый ротор, залитый алюминием;
1 — сердечник ротора, 2 — замыкающие кольца, 3 — медные стержни,
4 — вентиляционные лопатки
Таким образом, все стержни оказываются замкнутыми с двух сторон накоротко. Если представить себе отдельно обмотку такого ротора, то она по внешнему виду будет напоминать «беличье колесо». В настоящее время у всех двигателей мощностью до 100 кВт «беличье колесо» делается из алюминия путем заливки его под давлением в пазы ротора. Вал 6 вращается в подшипниках, закрепленных в подшипниковых щитах 7 и 8. Щиты при помощи болтов крепятся к корпусу двигателя. На один конец вала ротора насаживается шкив для передачи вращения рабочим машинам или станкам.
В настоящее время у всех двигателей мощностью до 100 кВт «беличье колесо» делается из алюминия путем заливки его под давлением в пазы ротора. Вал 6 вращается в подшипниках, закрепленных в подшипниковых щитах 7 и 8. Щиты при помощи болтов крепятся к корпусу двигателя. На один конец вала ротора насаживается шкив для передачи вращения рабочим машинам или станкам.
Устройство статора асинхронного двигателя с фазным ротором и его обмотка не отличаются от устройства статора двигателя с короткозамкнутым ротором. Различие между этими электродвигателями заключается в устройстве ротора.
Рис. 4. Разрез асинхронного двигателя с фазным ротором
1 — вал двигателя, 2 — ротор, 3 — обмотка ротора, 4 — статор, 5 — обмотка статора, 6 — корпус, 7 — подшипниковые крышки, 8 — вентилятор, 9 — контактные кольца
Фазный ротор имеет три фазные обмотки, соединенные между собой звездой (реже треугольником). Концы фазных обмоток ротора присоединяют к трем медным кольцам, укрепленным на валу ротора и изолированным как между собой, так и от стального сердечника ротора, вследствие чего этот двигатель получил также название двигателя с контактными кольцами. Три кольца жестко насажены на вал ротора (через изоляционные прокладки). На кольца накладываются щетки, которые размещены в щеткодержателях, укрепленных на одной из подшипниковых крышек.
Три кольца жестко насажены на вал ротора (через изоляционные прокладки). На кольца накладываются щетки, которые размещены в щеткодержателях, укрепленных на одной из подшипниковых крышек.
Щетки, скользящие по поверхности колец ротора, все время имеют с ними хороший электрический контакт и соединены, таким образом, с обмотками ротора. Щетки соединены с трехфазным реостатом.
Источник: Кузнецов М. И. Основы электротехники. Учебное пособие.
Изд. 10-е, перераб. «Высшая школа», 1970.
Принцип работы и устройство асинхронного двигателя
Асинхронный (индукционный) двигатель – механизм, превращающий силу переменного тока в механическую. Под асинхронным подразумевают, что скорость движения магнитной силы статора выше аналогичной величины оборотов ротора.
Для того, чтобы получше представлять, что такое асинхронный двигатель и принцип действия трехфазного асинхронного двигателя, где он используется и как работает, необходимо разобраться в его составных частях и деталях, исследовать технические характеристики. Кроме того, не лишним будет понять, как происходит преобразование силы во время пуска и где используется асинхронный двигатель на практике.
В сегодняшней статье мы попробуем ответить на самые интересные вопросы, связанные с асинхронными двигателями, разобраться в том, что такое устройство однофазного асинхронного двигателя, рассмотрим принципы работы, а также плюсы и минусы данного типа устройств.
Немного истории
Первый подобный механизм электродвигателей появился еще в 1888 году и представил его американский инженер Никола Тесла. Однако, его опытный образец устройства и был не самым удачным, так как был двух фазным или много фазным и рабочие характеристики асинхронного двигателя не удовлетворяли потребителей. Поэтому широкого распространения не получил.
А вот благодаря российскому ученому Михаилу Доливо-Доброволь скому в изобретение удалось вдохнуть новую жизнь. Именно ему принадлежит первенство в деле создания первого в мире трехфазного асинхронного мотора. Такое усовершенствование конструкции стало революционным, так как принцип работы трехфазного асинхронного двигателя позволял использовать для работы всего три провода, а не четыре. Так что для плавного пуска устройства в массовое производство препятствий больше не оставалось.
Сегодня, благодаря своей простоте эти машины получили широкое распространение, а механическая характеристика асинхронного двигателя устраивает всех водителей.
Каждый год доля асинхронных двигателей, среди всех двигателей мира, составляет 90%.
Простота в использовании, принцип действия асинхронного двигателя, легкий пуск, надежность и дешевизна, помогли этим моторам распространиться по всему миру и буквально совершить технический переворот в промышленности.
Принцип работы трехфазного двигателя основан на питании от трех фаз переменного тока в стандартной сети. Для работы ему требуется именно такое электричество и поэтому он назван трех фазным.
Устройство трехфазного двигателя
Любой мотор асинхронного типа, независимо от его мощности и размеров, состоит из одних и тех же частей, механическая характеристика асинхронного двигателя также одна и та же. Главными среди составляющих являются:
- статор (неподвижная часть машины)
- ротор (вращающаяся часть)
Помимо этого, в современных трех фазных двигателях можно найти следующие детали:
- вал
- подшипники
- обмотку
- заземление
- корпус (в который монтируются все детали)
Как уже указывалось выше, базовые элементы двигателя — это статор (неподвижная часть) и ротор (подвижная деталь).
Статор выполнен в виде цилиндра, составлен данный элемент из множества металлических, форменных листов. Внутренняя часть создана таким образом, чтобы расположить обмотку. Центры обмоток расположены под углом в 120 градусов, а подключение происходит, исходя из доступного напряжения и двух возможных вариантов: на три или пять контактов.
Ротором называют подвижную часть подобного мотора, которая необходима для плавного пуска. Устройство асинхронного двигателя с фазным ротором является полноценным, ведь именно во вращении ротора состоит основной принцип работы трехфазного мотора.
Принципы, использование которых лежит в работе такого приспособления, как устройство асинхронного двигателя:
- Правило левой руки буравчика.
- Закон электромагнитной индукции Фарадея.
Исходя из типа обмотки, ротор может быть короткозамкнутым или фазным.
Короткозамкнутым называют ротор, состоящий из множества стальных частей. Работа асинхронного двигателя с короткозамкнутым ротором заключается в следующем: в специальные пазы заливают алюминий, формирующий сердцевины, крепящиеся с обеих сторон стопорными кольцами, такая конструкция получила название «беличья клетка». Называется так, потому что замкнута накоротко и в ней не может использоваться сопротивление.
Фазным называют ротор, который обмотан по принципу, аналогичному статору, подходящему для трехфазной сети. Края проводки сердцевины замыкают в звезду, а оставшиеся контакты подводят к контактным частям.
Согласно принципу обратимости, любым фазным асинхронным двигателям свойственна возможность работать в качестве двигателя, генератора или электромагнитного тормоза. Электромеханическая характеристика асинхронного двигателя:
- Двигатель.
- Самый частый вид использования механизма.
- Генератор.
- Действие машины можно обратить, то есть механическую энергию, приложенную к сердцевине можно превратить в электрический ток. Для этого центральной части нужно вращаться быстрей магнитного поля. Потребляя механическую энергию генератор начнет создавать тормозной момент, возвращая электрическую энергию.
- Электромагнитный тормоз.
Изменение порядка чередования фаз приводит к тому, что магнитное поле и сердцевина вращаются в различные стороны, при этом потребляется как механическая энергия, так и напряжение сети, создавая тормозной момент. Собранная энергия приводит к нагреву машины.
Принцип работы трехфазного двигателя
Принцип работы асинхронного двигателя в следующем: подавая напряжение на статор, в его проводке возникает магнитное воздействие, которая благодаря углу размещения осей обмоток, суммируется и создает итоговый, вращающий магнитный поток.
Вращаясь, он создает в проводниках электродвижущую силу. Обмотка сердцевины, создана таким образом, что при включении в сеть, появляется сила, налаживающаяся на действие статора и создающая движение.
Устройство и принцип действия асинхронного двигателя зависит и от сердцевины. Движение сердцевины происходит, когда магнитная сила статора и пусковой момент преодолевают тормозную мощность ротора и внутренняя часть начинает движение, в этот момент проявляется такой показатель, как скольжение.
Скольжение очень важный параметр. В начале движения ротора оно равно 1, но вместе с ростом частоты движения, наблюдается выравнивание, и как следствие снижаются электродвижущие силы и ток в обмотках, это приводит к снижению вращающего момента.
Существует крайний предел скольжения, превышать это значение не стоит, ведь механизм может «опрокинуться», что приведет к нарушению его нормальной работы. Минимальное скольжение происходит на холостых оборотах мотора, при увеличении момента значение будет расти, до наступления критической отметки.
Для создания асинхронной работы нужно сделать так, чтобы напряжение статора и общий магнитный поток соответствовали значению переменного тока.
Во время пуска вектор результирующего магнитного поля неподвижной части плавно вращается с определенной частотой. Через сечение ротора проходит магнитный поток. Электроэнергия, подходящая к двигателю в момент пуска, уходит на перемагничивание статора и ротора.
Стоит заметить, что для электромоторов, в том числе асинхронных свойственно то, что во время пуска в короткий промежуток времени достигается до 150% крутящего момента. Пусковой ток превышает номинальный в 7 раз и из-за этого, в момент пуска падает напряжение во всей электрической сети. Если падение напряжения слишком большое, то даже сам двигатель может не запуститься – таков принцип его действия. Поэтому на практике используют устройство плавного пуска.
Устройство плавного пуска
Устройства плавного пуска асинхронных двигателей имеет свою специфику. Оно используется для плавного пуска или остановки электромагнитных двигателей. Может быть механическим, электромеханичес ким или полностью электронным.
Пусковая характеристика асинхронного двигателя предназначена:
- для плавного разгона асинхронного двигателя
- для плавной остановки
- для снижения тока во время пуска
- для синхронизации нагрузки и крутящего момента
Принцип работы и действия устройства плавного пуска основаны на широкой вариативности переменных. Как следствие, появляются большие возможности для управления режимами работы.
Хорошие и плохие свойства асинхронных моторов
Асинхронный двигатель принцип работы и устройство имеет достоинства и недостатки. Трансформаторы, внутри которых находится вращающийся ротор, используемый для работы двигателя, получили обширное применение так как принцип действия у них простой и понятный, а само устройство работает бесперебойно. Однако и короткозамкнутым и фазным устройствам свойственны определенные недостатки. Причем именно принцип их действия лежит в основе данных минусов.
Плюсы:
- Короткозамкнутым и фазным устройствам свойственна простота конструкции.
- Так как принцип действия очень прост, устройства получаются дешевыми.
- Простота пуска и высокие эксплуатационные характеристики.
- Простота пуска обеспечивает легкое управление.
- Принцип действия и работы таков, что асинхронные моторы могут работать в тяжелых условиях.
Минусы:
- Принцип работы основан на том, что при изменении скорости, теряется мощность.
- Когда увеличивается нагрузка, практически сразу начинает снижаться крутящий момент.
- В момент плавного пуска, мощность асинхронного мотора достаточно низкая.
Стоит отметить, что в настоящее время, отдается предпочтение устройствам с короткозамкнутым ротором. А вот устройства, в которых ротор фазный используются в редких случаях, как правило, когда достигается большая мощность.
Устройство и принцип работы трехфазных асинхронных двигателей | RuAut
Устройство трехфазных асинхронных двигателей (статор и ротор асинхронных двигателей)Трехфазный асинхронный двигатель состоит из неподвижного статора и ротора. Три обмотки размещены в пазах на внутренней стороне сердечника статора асинхронного двигателя. Обмотка же ротора асинхронного двигателя не имеет электрического соединения с сетью и с обмоткой статора. Начало и концы фаз обмоток статора присоединяют к зажимам в коробке выводов по схеме звезда или треугольник.
Асинхронные двигатели в основном различаются устройством ротора, который бывает двух типов: фазный или короткозамкнутый. Обмотка короткозамкнутого ротора асинхронного двигателя выполняется на цилиндре из медных стержней и называется «беличьей клеткой». Торцевые концы стержней замыкают металлическими кольцами. Пакет ротора набирают из электротехнической стали. В двигателях меньшей мощности стержни заливают алюминием. Фазный ротор и статор имеют трехфазную обмотку. Фазы обмотки соединяют звездой или треугольником и ее свободные концы выводят на изолированные контактные кольца.
Получение вращающегося магнитного поляОбмотка статора асинхронного двигателя в виде трех катушек уложена в пазы расположенные под углом в 120 градусов. Начало и конца катушек обозначаются соответственно буквами A, B, C и X,Y,Z. При подаче на катушки трехфазного напряжения в них установятся токи Ia, Ib, Ic и катушки создадут собственное переменное магнитное поле. Ток в любой катушке положительный, когда он направлен от начала к ее концу и отрицательный при обратном направлении. Векторы намагничивающей силы совпадают с осями катушек, а их величина определяется значениями токов, направление результирующего вектора совпадает с осью катушки. Вектор результирующей намагничивающей силы поворачивается на 120 градусов сохраняя величину совпадает с осью соответствующей катушки. Таким образом за период, результирующее магнитное поле статора совершает оборот с неизменной скоростью. Работа трехфазного асинхронного двигателя основана на взаимодействии вращающегося магнитного поля с токами наводимыми в проводниках ротора.
Принцип работы трехфазного асинхронного двигателяСовокупность моментов созданных отдельными проводниками образует результирующий вращающий момент двигателя, возникает электромагнитная пара сил, которая стремится повернуть ротор в направлении движения электромагнитного поля статора. Ротор приходит во вращение приобретает определенную скорость, магнитное поле и ротор вращаются с разными скоростями или асинхронно. Применительно к асинхронным двигателям, скорость вращения ротора всегда меньше скорости вращения магнитного поля статора.
Пуск асинхронных двигателейВ асинхронных двигателях с большим моментом инерции необходимо увеличение вращающего момента с одновременным ограничением пусковых токов — для этих целей применяют двигатели с фазным ротором. Для увеличения начального пускового момента в схему ротора включают трехфазный реостат. В начале пуска он введен полностью, пусковой ток при этом уменьшается. При работе реостат полностью выведен. Для пуска асинхронных двигателей с короткозамкнутым ротором применяют три схемы: с реактивной катушкой, с автотрансформатором и с переключением со звезды на треугольник. Рубильник последовательно соединяет реактивную катушку и статор двигателя. Когда скорость ротора приблизится к номинальной, замыкается рубильник, он закорачивает катушка и статор переключаются на полное напряжение сети. При автотрансформаторном пуске по мере разгона двигателя, автотрансформатор переводится в рабочее положение, в котором на статор подается полное напряжение сети. Пуск асинхронного двигателя с предварительным включением обмотки статора звездой и последующим переключением ее на треугольник дает трехкратное уменьшение тока.
Изменение частоты вращения ротора трехфазного асинхронного двигателяПараллельные обмотки двух фаз образуют одну пару полюсов сдвинутые в пространстве на 120 градусов. Последовательное соединение обмоток образует две пары полюсов, что дает возможность уменьшить скорость вращения в два раза. Для регулирования скорости вращения ротора изменением частоты тока используют отдельный источник тока или преобразователь энергии с регулируемой частотой выполненный на тиристорах.
Способы торможения двигателейПри торможении противовключением меняются два провода соединяющих трехфазную сеть с обмотками статора, изменяя при этом направление движения магнитного поля машины. При этом наступает режим электромагнитного тормоза. Для динамического торможения обмотка статора отключается от трехфазной сети и включается в сеть постоянного тока. Неподвижное поле статора заставляет ротор быстро останавливаться. Асинхронные двигатели нашли широкое применение в промышленности. В строительных механизмах, на металлообрабатывающих станках, в кузнечно-прессовом оборудовании, в силовых приводах прокатных станов, в радиолокационных станциях и многих других отраслях.
Двигатели переменного тока, контроллеры и частотно-регулируемые приводы
Что такое двигатель переменного тока?
Основы электродвигателя переменного тока
Стандартное определение двигателя переменного тока — это электродвигатель, приводимый в действие переменным током. Двигатель переменного тока используется для преобразования электрической энергии в механическую. Эта механическая энергия создается за счет использования силы, создаваемой вращающимися магнитными полями, создаваемыми переменным током, протекающим через его катушки.Двигатель переменного тока состоит из двух основных компонентов: стационарного статора, который находится снаружи и имеет катушки, на которые подается переменный ток, и внутреннего ротора, который прикреплен к выходному валу.
Как работает электродвигатель переменного тока?
Основная работа двигателя переменного тока основана на принципах магнетизма. Простой двигатель переменного тока содержит катушку с проводом и два фиксированных магнита, окружающих вал. Когда электрический заряд (переменного тока) прикладывается к катушке с проволокой, она становится электромагнитом, генерирующим магнитное поле.Проще говоря, когда магниты взаимодействуют, вал и катушка проводов начинают вращаться, приводя в движение двигатель.
Обратная связь двигателя переменного тока
ПродуктыAC Motor имеют два варианта управления с обратной связью. Этими вариантами являются либо резольвер двигателя переменного тока, либо энкодер двигателя переменного тока. И резольвер двигателя переменного тока, и энкодер двигателя переменного тока могут определять направление, скорость и положение выходного вала. Хотя и преобразователь двигателя переменного тока, и энкодер двигателя переменного тока предлагают одно и то же решение для различных приложений, они сильно отличаются.
В резольверах двигателей переменного тока используется второй набор катушек статора, называемый трансформатором, для создания напряжения на роторе в воздушном зазоре. Поскольку в резольвере отсутствуют электронные компоненты, он очень прочный и работает в широком диапазоне температур. Резольвер двигателя переменного тока также естественно устойчив к ударам благодаря своей конструкции. Резольвер часто используется в суровых условиях.
В оптическом кодировщике двигателя переменного тока используется затвор, который вращается для прерывания луча света, пересекающего воздушный зазор между источником света и фотодетектором.Вращение заслонки со временем вызывает износ энкодера. Этот износ снижает долговечность и надежность оптического кодировщика.
Тип приложения определяет, требуется ли преобразователь или кодировщик. Энкодеры двигателей переменного тока проще в реализации и более точны, поэтому им следует отдавать предпочтение в любом приложении. Резолвер следует выбирать только в том случае, если этого требует среда, в которой он будет использоваться.
Основные типы двигателей переменного тока
Электродвигатели переменного тока выпускаются трех различных типов: индукционные, синхронные и промышленные.Эти типы двигателей переменного тока определяются конструкцией ротора, используемого в конструкции. В линейке продуктов Anaheim Automation представлены все три типа.
Асинхронный двигатель переменного тока
Асинхронные двигатели переменного тока называются асинхронными двигателями или вращающимися трансформаторами. Этот тип двигателя переменного тока использует электромагнитную индукцию для питания вращающегося устройства, которым обычно является вал. Ротор в асинхронных двигателях переменного тока обычно вращается медленнее, чем его частота.Наведенный ток — это то, что вызывает магнитное поле, окружающее ротор этих двигателей. Этот асинхронный двигатель переменного тока имеет одну или три фазы.
Синхронный двигатель переменного тока
Синхронный двигатель обычно представляет собой двигатель переменного тока, ротор которого вращается с той же скоростью, что и переменный ток, который к нему подается. Ротор также может вращаться со скоростью, кратной величине подаваемого на него тока. Контактные кольца или постоянный магнит, на который подается ток, создают магнитное поле вокруг ротора.
Промышленный двигатель переменного тока
Промышленные двигатели переменного токаразработаны для применений, требующих трехфазного асинхронного двигателя большой мощности. Номинальная мощность промышленного двигателя превышает номинальную мощность стандартного однофазного асинхронного двигателя переменного тока. Anaheim Automation предлагает промышленные электродвигатели переменного тока мощностью от 220 до 2200 Вт в трехфазном режиме при 220 или 380 В переменного тока.
Где используются двигатели переменного тока?
В каких отраслях используются двигатели переменного тока?
Асинхронные двигатели в основном используются в быту из-за их относительно низких производственных затрат и долговечности, но также широко используются в промышленных приложениях.
Для чего используются двигатели переменного тока?
Асинхронные двигатели используются во многих бытовых приборах и приложениях, в том числе:
— Часы
— Электроинструменты
— Дисковые накопители
— Стиральные машины и другая бытовая техника
— Проигрыватели виниловых пластинок
— Вентиляторы
Их также можно найти в промышленности:
— Насосы
— Воздуходувки
— Конвейеры
— Компрессоры
Как управляются двигатели переменного тока?
Контроллеры переменного тока:
Основы
Контроллер переменного тока (иногда называемый драйвером) известен как устройство, которое контролирует скорость двигателя переменного тока.Контроллер переменного тока может также упоминаться как преобразователь частоты, преобразователь частоты, преобразователь частоты и т. Д. Двигатель переменного тока получает мощность, которая в конечном итоге преобразуется контроллером переменного тока в регулируемую частоту. Этот регулируемый выход позволяет точно контролировать скорость двигателя.
Компоненты контроллера переменного тока
Обычно контроллер переменного тока состоит из трех основных частей: выпрямителя, инвертора и звена постоянного тока для их соединения.Выпрямитель преобразует входной переменный ток в постоянный ток, а инвертор переключает постоянное напряжение на выходное переменное напряжение с регулируемой частотой. Инвертор также можно использовать для управления выходным током, если это необходимо. И выпрямитель, и инвертор управляются набором элементов управления для генерации определенного количества переменного напряжения и частоты, чтобы соответствовать системе двигателя переменного тока в данный момент времени.
Приложения
Контроллер переменного тока может использоваться во многих различных промышленных и коммерческих приложениях.Контроллер переменного тока, который чаще всего используется для управления вентиляторами в системах кондиционирования и отопления, позволяет лучше контролировать воздушный поток. Контроллер переменного тока также помогает регулировать скорость насосов и воздуходувок. В последнее время применяются конвейеры, краны и подъемники, станки, экструдеры, линии для производства пленки и прядильные машины для текстильного волокна.
Преимущества и недостатки
Преимущества
— Увеличивает срок службы двигателя за счет высокого коэффициента мощности
— Экономичное регулирование скорости
— Оптимизация пусковых характеристик двигателя
— Более низкие затраты на обслуживание, чем при управлении постоянным током
Недостатки
— генерирует большое количество тепла и гармоник
История
Никола Тесла изобрел первый асинхронный двигатель переменного тока в 1888 году, представив более надежный и эффективный двигатель, чем двигатель постоянного тока.Однако регулирование скорости переменного тока было сложной задачей. Когда требовалось точное управление скоростью, двигатель постоянного тока стал заменой двигателя переменного тока из-за его эффективных и экономичных средств точного управления скоростью. Только в 1980-х годах регулятор скорости переменного тока стал конкурентом. Со временем технология привода переменного тока в конечном итоге превратилась в недорогого и надежного конкурента традиционному управлению постоянным током. Теперь контроллер переменного тока может управлять скоростью с полным крутящим моментом, достигаемым от 0 об / мин до максимальной номинальной скорости.
Частотно-регулируемые приводы
Основы
Частотно-регулируемый привод — это особый тип привода с регулируемой скоростью, который используется для управления скоростью двигателя переменного тока. Чтобы управлять скоростью вращения двигателя, частотно-регулируемый привод регулирует частоту подаваемой на него электроэнергии. Добавление частотно-регулируемого привода к приложению позволяет регулировать скорость двигателя в соответствии с его нагрузкой, что в конечном итоге позволяет экономить энергию.Частотно-регулируемый привод, обычно используемый во множестве приложений, работает в системах вентиляции, насосах, конвейерах и приводах станков.
Как работает частотно-регулируемый привод
Когда полное напряжение подается на двигатель переменного тока, он сначала ускоряет нагрузку и снижает крутящий момент, сохраняя ток особенно высоким, пока двигатель не достигнет полной скорости. Частотно-регулируемый привод работает иначе; он устраняет чрезмерный ток, контролируемое повышение напряжения и частоты при запуске двигателя.Это позволяет двигателю переменного тока генерировать до 150% своего номинального крутящего момента, который потенциально может быть создан с самого начала, вплоть до полной скорости, без потерь энергии. Частотно-регулируемый привод преобразует мощность через три различных этапа. Сначала мощность переменного тока преобразуется в мощность постоянного тока, после чего включаются и выключаются силовые транзисторы, вызывая форму волны напряжения на желаемой частоте. Эта форма сигнала затем регулирует выходное напряжение в соответствии с предпочтительным обозначенным значением.
Физические свойства
Обычно система частотно-регулируемого привода включает двигатель переменного тока, контроллер и интерфейс оператора.Трехфазный асинхронный двигатель чаще всего применяется в частотно-регулируемом приводе, поскольку он обеспечивает универсальность и экономичность по сравнению с однофазным или синхронным двигателем. Хотя в некоторых случаях они могут быть полезными, в системе частотно-регулируемого привода часто используются двигатели, предназначенные для работы с фиксированной скоростью.
Интерфейсы оператора частотно-регулируемого привода позволяют пользователю регулировать рабочую скорость, а также запускать и останавливать двигатель. Интерфейс оператора может также позволить пользователю переключаться и реверсировать между автоматическим управлением или ручным регулированием скорости.
Преимущества частотно-регулируемого привода
— Температуру технологического процесса можно контролировать без отдельного контроллера
— Низкие затраты на обслуживание
— Более длительный срок службы двигателя переменного тока и другого оборудования
— Более низкие эксплуатационные расходы
— Оборудование в системе, с которым невозможно справиться чрезмерный крутящий момент защищен
Типы частотно-регулируемых приводов
Существует три распространенных частотно-регулируемых привода (VFD), которые обладают как преимуществами, так и недостатками в зависимости от приложения, для которого они используются.Три распространенных конструкции VFD включают: инвертор источника тока (CSI), инвертор источника напряжения (VSI) и широтно-импульсную модуляцию (PWM). Однако существует четвертый тип частотно-регулируемого привода, называемый векторным приводом потока, который становится все более популярным среди конечных пользователей благодаря своей функции управления с обратной связью. Каждый частотно-регулируемый привод состоит из преобразователя, звена постоянного тока и инвертора, но конструкция каждого из них зависит от привода. Хотя секции каждого частотно-регулируемого привода похожи, они требуют изменения схемы в том, как они подают частоту и напряжение на двигатель.
Инвертор источника тока (CSI)
Инвертор источника тока (CSI) — это тип преобразователя частоты (VFD), который преобразует входящее напряжение переменного тока и изменяет частоту и напряжение, подаваемое на асинхронный двигатель переменного тока. Общая конфигурация этого типа частотно-регулируемого привода аналогична конфигурации других частотно-регулируемых приводов в том, что он состоит из преобразователя, звена постоянного тока и инвертора. В преобразовательной части CSI используются кремниевые выпрямители (SCR), тиристоры с коммутацией затвора (GCT) или симметричные тиристоры с коммутацией затвора (SGCT) для преобразования входящего переменного напряжения в переменное постоянное напряжение.Чтобы поддерживать правильное соотношение напряжения к частоте (Вольт / Герц), напряжение должно регулироваться путем правильной последовательности SCR. В звене постоянного тока для этого типа частотно-регулируемого привода используется индуктор для регулирования пульсаций тока и для хранения энергии, используемой двигателем. Инвертор, который отвечает за преобразование постоянного напряжения обратно в синусоидальную форму сигнала переменного тока, состоит из SCRS, тиристоров отключения затвора (GTO) или симметричных тиристоров с коммутацией затвора (SGCT). Эти тиристоры ведут себя как переключатели, которые включаются и выключаются для создания выхода с широтно-импульсной модуляцией (ШИМ), который регулирует частоту и напряжение на двигателе.Частотно-регулируемые приводы CSI регулируют ток, для работы требуется большой внутренний индуктор и нагрузка двигателя. Важным примечанием к конструкциям ЧРП CSI является требование входных и выходных фильтров, которые необходимы из-за высоких гармоник на входе мощности и низкого коэффициента мощности. Чтобы обойти эту проблему, многие производители устанавливают либо входные трансформаторы, либо реакторы и фильтры гармоник в точке общего соединения (электрическая система пользователя, подключенная к приводу), чтобы уменьшить влияние гармоник на систему привода.Из обычных приводных систем с частотно-регулируемым приводом, частотно-регулируемые приводы CSI являются единственным типом приводов, которые имеют возможность рекуперации энергии. Возможность рекуперации энергии означает, что мощность, передаваемая от двигателя обратно к источнику питания, может быть поглощена.
Преимущества CSI
• Возможность рекуперации энергии
• Простая схема
• Надежность (операция ограничения тока)
• Чистая форма кривой тока
Недостатки CSI
• Зубцы двигателя, когда выходная мощность ШИМ ниже 6 Гц
• Используемые индукторы большие и дорогие
• Генерация больших гармоник мощности отправляется обратно в источник питания
• Зависит от нагрузки двигателя
• Низкий коэффициент входной мощности
Инвертор источника напряжения (VSI)
Секция преобразователя VSI аналогична секции преобразователя CSI в том, что входящее напряжение переменного тока преобразуется в напряжение постоянного тока.Отличие от секции преобразователя CSI и VSI заключается в том, что VSI использует выпрямитель на диодном мосту для преобразования напряжения переменного тока в напряжение постоянного тока. В звене постоянного тока VSI используются конденсаторы для сглаживания пульсаций постоянного напряжения, а также для хранения энергии для системы привода. Секция инвертора состоит из биполярных транзисторов с изолированным затвором (IGBT), тиристоров с изолированным затвором (IGCT) или транзисторов с инжекционным затвором (IEGT). Эти транзисторы или тиристоры ведут себя как переключатели, которые включаются и выключаются для создания выходного сигнала широтно-импульсной модуляции (ШИМ), который регулирует частоту и напряжение двигателя.
Преимущества VSI
• Простая схема
• Может использоваться в приложениях, требующих нескольких двигателей
• Не зависит от нагрузки
Недостатки VSI
• Генерация больших гармоник мощности в источнике питания
• Зубчатая передача двигателя, когда выходная мощность ШИМ ниже 6 Гц
• Безрегенеративный режим
• Низкий коэффициент мощности
Широтно-импульсная модуляция (ШИМ)
Частотно-регулируемый привод с широтно-импульсной модуляцией (ШИМ) является одним из наиболее часто используемых контроллеров и зарекомендовал себя как хорошо работающий с двигателями мощностью от 1/2 до 500 л.с.Большинство частотно-регулируемых приводов с ШИМ рассчитаны на работу в трехфазном режиме 230 В или 460 В и обеспечивают выходные частоты в диапазоне 2–400 Гц. Как и VSI VFD, PWM VFD использует выпрямитель на диодном мосту для преобразования входящего переменного напряжения в постоянное. В звене постоянного тока используются конденсаторы большой емкости для устранения пульсаций, возникающих после выпрямителя, и создания стабильного напряжения на шине постоянного тока. Шестиступенчатый инверторный каскад этого драйвера использует IGBT высокой мощности, которые включаются и выключаются для регулирования частоты и напряжения двигателя. Эти транзисторы управляются микропроцессором или ИС двигателя, который контролирует различные аспекты привода, чтобы обеспечить правильную последовательность.В результате на двигатель выводится сигнал синусоидальной формы. Так как же включение и выключение транзистора помогает создать синусоидальный выходной сигнал? Изменяя ширину импульса напряжения, вы получаете среднюю мощность, которая представляет собой напряжение, подаваемое на двигатель. Частота, подаваемая на двигатель, определяется количеством переходов из положительного положения в отрицательное в секунду.
Преимущество ШИМ
• Отсутствие зубчатого зацепления двигателя
• КПД от 92% до 96%
• Превосходный коэффициент входной мощности за счет фиксированного напряжения шины постоянного тока
• Низкая начальная стоимость
• Может использоваться в приложениях, требующих нескольких двигателей
Недостатки ШИМ
• Безрегенерационный режим
• Высокочастотное переключение может вызвать нагрев двигателя и пробой изоляции
Как выбрать двигатель переменного тока
Чтобы выбрать подходящий двигатель переменного тока для конкретного применения, необходимо определить основные характеристики.Рассчитайте требуемый момент нагрузки и рабочую скорость. Помните, что асинхронные и реверсивные двигатели нельзя регулировать; они требуют редуктора. Если это необходимо, выберите подходящее передаточное число. Затем определите частоту и напряжение питания двигателя.
Преимущества и недостатки
Преимущества двигателя переменного тока
— Низкая стоимость
— Длительный срок службы
— Высокая эффективность и надежность
— Простая конструкция
— Высокий пусковой момент (индукция)
— Отсутствие скольжения (синхронное)
Недостатки двигателя переменного тока
— Частота вызывает проскальзывания вращения (индукция)
— Требуется пусковой переключатель (индукция)
Поиск и устранение неисправностей двигателя переменного тока
ПОЖАЛУЙСТА, ОБРАТИТЕ ВНИМАНИЕ: Техническая помощь в отношении продуктовой линейки двигателей переменного тока, а также всех продуктов, производимых или распространяемых Anaheim Automation, предоставляется бесплатно.Эта помощь предлагается, чтобы помочь клиенту в выборе продуктов Anaheim Automation для конкретного применения. Во всех случаях ответственность за определение пригодности индивидуального двигателя переменного тока для конкретной конструкции системы лежит исключительно на заказчике. Несмотря на то, что мы прилагаем все усилия, чтобы предложить надежные рекомендации относительно линейки двигателей переменного тока, а также других продуктов для управления движением, а также для точного создания технических данных и иллюстраций, такие советы и документы предназначены только для справки и могут быть изменены без предварительного уведомления.
Для устранения неполадок в системе двигателя и контроллера переменного тока могут быть предприняты следующие шаги:
Шаг 1. Проверьте запах двигателя. При появлении запаха гари немедленно замените двигатель.
Шаг 2: Проверьте входное напряжение двигателя. Убедитесь, что провода не повреждены и подключен надлежащий источник питания.
Шаг 3. Прислушайтесь к громкой вибрации или скрипу. Такие шумы могут указывать на повреждение или износ подшипников. По возможности смажьте подшипники, в противном случае замените двигатель полностью.
Шаг 4: Проверить на перегрев. С помощью сжатого воздуха очистите двигатель от мусора, дайте ему остыть и перезапустите.
Шаг 5: Двигатели переменного тока, которые пытаются запуститься, но выходят из строя, могут быть признаком плохого пускового конденсатора. Проверьте наличие каких-либо признаков утечки масла и замените конденсатор, если это так.
Шаг 6: Убедитесь, что приложение, в котором вращается двигатель, не заблокировано. Для этого отсоедините механизм и попробуйте запустить двигатель самостоятельно.
Сколько стоят изделия с электродвигателями переменного тока?
Двигатель переменного тока может быть разумным экономичным решением для ваших требований. Конструкционные материалы и конструкция двигателя делают системы двигателей переменного тока доступным решением. Двигатель переменного тока работает с вращающимся магнитным полем и не использует щеток. Это позволяет снизить стоимость двигателя и исключает компонент, который может со временем изнашиваться. Для работы двигателей переменного тока не требуется драйвер.Это экономит начальные затраты на установку. Сегодняшние производственные процессы делают производство двигателей переменного тока проще и быстрее, чем когда-либо. Статор изготовлен из тонких пластин, которые можно прессовать или штамповать на станке с ЧПУ. Многие другие детали можно быстро изготовить и усовершенствовать, сэкономив время и деньги! Anaheim Automation предлагает на выбор полную линейку продукции для двигателей переменного тока.
Физические свойства двигателя переменного тока
Обычно двигатель переменного тока состоит из двух основных компонентов: статора и ротора.Статор — это неподвижная часть двигателя, состоящая из нескольких тонких пластин, намотанных изолированным проводом, образующих сердечник.
Ротор соединен с выходным валом изнутри. Самый распространенный тип ротора, используемый в двигателях переменного тока, — это ротор с короткозамкнутым ротором, названный в честь его сходства с колесами для упражнений на грызунах.
Статор устанавливается внутри корпуса двигателя, ротор установлен внутри, и между ними имеется зазор, отделяющий их от соприкосновения друг с другом. Кожух представляет собой станину двигателя, содержащую два подшипниковых узла.
Формулы для двигателя переменного тока
Синхронная скорость:
Частота:
Количество полюсов:
Мощность в лошадиных силах:
Пробуксовка двигателя:
Глоссарий двигателей переменного тока
Двигатель переменного тока — Электродвигатель, приводимый в действие переменным током, а не постоянным.
Переменный ток — Электрический заряд, который часто меняет направление (противоположно постоянному току, с зарядом только в одном направлении).
Центробежный переключатель — Электрический переключатель, который регулирует скорость вращения вала, работающий за счет центробежной силы, создаваемой самим валом.
Передаточное число — Передаточное число, при котором скорость двигателя уменьшается редуктором. Скорость на выходном валу равна 1 передаточному отношению x скорость двигателя.
Инвертор — Устройство, преобразующее постоянный ток в переменный. Реверс выпрямителя.
Асинхронный двигатель — Может упоминаться как асинхронный двигатель; Тип двигателя переменного тока, в котором электромагнитная индукция питает ротор. Для создания крутящего момента требуется скольжение.
Скорость холостого хода — Обычно ниже синхронной скорости, это скорость, когда двигатель не несет нагрузки.
Номинальная скорость — Скорость двигателя при номинальной выходной мощности.Обычно самая востребованная скорость.
Выпрямитель — Устройство, преобразующее переменный ток в постоянный в двигателе. Они могут использоваться в качестве компонента источника питания или могут обнаруживать радиосигналы. Обычно выпрямители могут состоять из твердотельных диодов, ртутных дуговых клапанов или других веществ. Реверс инвертора.
Выпрямление — Процесс преобразования переменного тока в постоянный с помощью выпрямителя в двигателе переменного тока.
Асинхронный двигатель с разделенной фазой — Двигатели, которые могут создавать больший пусковой крутящий момент за счет использования центробежного переключателя в сочетании со специальной пусковой обмоткой.
Момент при остановке — Максимальный крутящий момент, с которым двигатель может работать, при определенном напряжении и частоте. Превышение этого количества приведет к остановке двигателя.
Пусковой крутящий момент — крутящий момент, который мгновенно создается при запуске двигателя. Двигатель не будет работать, если нагрузка трения превышает крутящий момент.
Статический момент трения — Когда двигатель останавливается, например, тормозом, это выходной крутящий момент, необходимый для удержания нагрузки при остановке двигателя.
Синхронный двигатель — В отличие от асинхронного двигателя, он может создавать крутящий момент с синхронной скоростью без скольжения.
Синхронная скорость — Обозначается скоростью в минуту, это внутренний фактор, определяемый количеством полюсов и частотой сети.
Привод с регулируемой скоростью — Оборудование, используемое для управления частотой электроэнергии, подаваемой на двигатель переменного тока, с целью управления его скоростью вращения.
Блок-схема для систем, в которых используется двигатель переменного тока
Срок службы двигателя переменного тока
Двигатели переменного токаAnaheim Automation обычно имеют срок службы около 10 000 часов работы, если двигатели работают в надлежащих условиях и в соответствии со спецификациями.
Требуемое обслуживание двигателя переменного тока
Профилактическое обслуживание — ключ к долговечной системе электродвигателя переменного тока.Следует проводить плановую проверку. Всегда проверяйте двигатель переменного тока на предмет загрязнения и коррозии. Грязь и мусор могут закупорить воздушные каналы и уменьшить поток воздуха, что в конечном итоге приведет к сокращению срока службы изоляции и возможному отказу двигателя. Если мусор не виден явно, убедитесь, что поток воздуха постоянный и не слабый. Это также может указывать на засорение. Во влажной, влажной или влажной среде проверьте клеммы в распределительной коробке на предмет коррозии и при необходимости отремонтируйте.
Прислушайтесь к чрезмерному шуму или вибрации и почувствуйте чрезмерное нагревание.Это может указывать на необходимость смазки подшипников. Примечание: Будьте осторожны при смазке подшипников, так как чрезмерная смазка может привести к грязи и маслам, забивающим воздушный поток. Обязательно найдите и удалите источник тепла для двигателя, чтобы избежать отказа системы.
Примечание. Будьте осторожны при смазке подшипников, так как чрезмерная смазка может привести к загрязнению и засорению потоком воздуха маслом. Обязательно найдите и удалите источник тепла для двигателя, чтобы избежать отказа системы.
Электропроводка двигателя переменного тока
Следующая информация предназначена в качестве общего руководства для электромонтажа линейки двигателей переменного тока Anaheim Automation. Имейте в виду, что при прокладке силовой и сигнальной проводки на машине или системе излучаемый шум от близлежащих реле, трансформаторов и других электронных устройств может индуцироваться в двигателе переменного тока и сигналах энкодера, входных / выходных коммуникациях и других чувствительных низковольтных устройствах. сигналы. Это может вызвать сбои в системе.
ПРЕДУПРЕЖДЕНИЕ — В системе двигателя переменного тока может присутствовать опасное напряжение, способное вызвать травму или смерть. Соблюдайте особую осторожность при обращении, подключении, тестировании и регулировке во время установки, настройки, настройки и эксплуатации. Не делайте чрезмерных корректировок или изменений в параметрах системы двигателя переменного тока, которые могут вызвать механическую вибрацию и привести к поломке и / или потерям. После того, как система электродвигателя переменного тока подключена, не запускайте ее путем прямого включения / выключения источника питания. Частое включение / выключение питания приведет к быстрому старению компонентов системы, что сократит срок службы системы электродвигателя переменного тока.
Строго соблюдать следующие правила:
• Следуйте схеме подключения к каждому двигателю переменного тока и / или контроллеру.
• Прокладывайте силовые кабели высокого напряжения отдельно от силовых кабелей низкого напряжения.
• Отделите входную силовую проводку и силовые кабели двигателя переменного тока от проводки управления и кабелей обратной связи двигателя. Сохраняйте это разделение на всем протяжении провода.
• Используйте экранированный кабель для силовой проводки и обеспечьте заземленное зажимное соединение на 360 градусов к стене корпуса.Оставьте на вспомогательной панели место для изгибов проводов.
• Сделайте все кабельные трассы как можно короче.
• Обеспечьте достаточный воздушный поток
• Сохраняйте окружающую среду как можно более чистой
ПРИМЕЧАНИЕ: Кабели заводского изготовления рекомендуются для использования в наших системах двигателей переменного тока. Эти кабели приобретаются отдельно и предназначены для минимизации электромагнитных помех. Эти кабели рекомендуется использовать вместо кабелей, изготовленных заказчиком, чтобы оптимизировать работу системы и обеспечить дополнительную безопасность для системы электродвигателя переменного тока, а также для пользователя.
ПРЕДУПРЕЖДЕНИЕ — Во избежание поражения электрическим током выполните все монтажные и электромонтажные работы двигателя переменного тока перед подачей питания. После подачи питания на соединительные клеммы может присутствовать напряжение.
Монтаж двигателя переменного тока
Следующая информация предназначена в качестве общего руководства по установке и монтажу системы электродвигателя переменного тока. ПРЕДУПРЕЖДЕНИЕ — В системе двигателя переменного тока может присутствовать опасное напряжение, способное вызвать травму или смерть.Соблюдайте особую осторожность при обращении, тестировании и регулировке во время установки, настройки и эксплуатации. При установке и монтаже очень важно учитывать проводку двигателя переменного тока. Субпанели, устанавливаемые внутри корпуса для монтажа компонентов системы, должны иметь плоскую жесткую поверхность, защищенную от ударов, вибрации, влаги, масла, паров или пыли. Помните, что двигатель переменного тока выделяет тепло во время работы; поэтому при проектировании компоновки системы следует учитывать рассеивание тепла.Размер корпуса не должен превышать максимально допустимую температуру окружающей среды. Рекомендуется устанавливать электродвигатель переменного тока в положение, обеспечивающее достаточный воздушный поток. Электродвигатель переменного тока должен быть устойчиво закреплен и надежно закреплен.
ПРИМЕЧАНИЕ: Между электродвигателем переменного тока и любыми другими устройствами, установленными в системе / электрической панели или шкафу, должно быть не менее 10 мм.
Чтобы соответствовать требованиям UL и CE, система электродвигателя переменного тока должна быть заземлена в заземленном проводящем корпусе, обеспечивающем защиту, как определено в стандарте EN 60529 (IEC 529) до IP55, таким образом, чтобы они были недоступны для оператора или неквалифицированного человека. .Как и любую движущуюся часть системы, двигатель переменного тока следует держать вне досягаемости оператора. Корпус NEMA 4X превосходит эти требования, обеспечивая степень защиты IP66. Чтобы улучшить соединение между шиной питания и дополнительной панелью, сконструируйте дополнительную панель из оцинкованной (не содержащей краски) стали. Кроме того, настоятельно рекомендуется защитить систему электродвигателя переменного тока от электрических помех. Шум от сигнальных проводов может вызвать механическую вибрацию и неисправности.
Экологические аспекты двигателя переменного тока
Следующие меры по охране окружающей среды и безопасности должны соблюдаться на всех этапах эксплуатации, обслуживания и ремонта системы электродвигателя переменного тока.Несоблюдение этих мер предосторожности нарушает стандарты безопасности при проектировании, производстве и предполагаемом использовании двигателя переменного тока. Обратите внимание, что даже правильно построенная система электродвигателя переменного тока, неправильно установленная и эксплуатируемая, может быть опасной. Пользователь должен соблюдать меры предосторожности в отношении нагрузки и условий эксплуатации. В конечном итоге заказчик несет ответственность за правильный выбор, установку и работу двигателя переменного тока и / или регулятора скорости.
Атмосфера, в которой используется двигатель переменного тока, должна способствовать соблюдению общих правил работы с электрическим / электронным оборудованием.Не эксплуатируйте систему электродвигателя переменного тока в присутствии легковоспламеняющихся газов, пыли, масла, пара или влаги. При использовании вне помещений двигатель переменного тока должен быть защищен от атмосферных воздействий соответствующей крышкой, обеспечивая при этом достаточный поток воздуха и охлаждение. Влага может вызвать опасность поражения электрическим током и / или вызвать поломку системы. Следует уделять должное внимание недопущению попадания любых жидкостей и паров. Свяжитесь с заводом-изготовителем, если ваше приложение требует определенных IP-адресов. Разумно устанавливать двигатель переменного тока в среде, свободной от конденсации, электрических шумов, вибрации и ударов.
Кроме того, предпочтительно работать с системой электродвигателя переменного тока в нестатической защитной среде. Открытые цепи всегда должны быть надлежащим образом ограждены и / или закрыты для предотвращения несанкционированного контакта человека с цепями под напряжением. Никакие работы не должны выполняться при включенном питании.
ЗАПРЕЩАЕТСЯ включать и отключать питание при включенном питании. После выключения питания подождите не менее 5 минут, прежде чем проводить инспекционные работы в системе двигателя переменного тока, потому что даже после отключения питания в конденсаторах внутренней цепи системы двигателя переменного тока остается некоторое количество электроэнергии.
Спланируйте установку двигателя переменного тока в конструкции системы, свободной от мусора, такого как металлический мусор от резки, сверления, нарезания резьбы и сварки, или любого другого постороннего материала, который может контактировать с схемами системы. Если не предотвратить попадание мусора в систему двигателя переменного тока, это может привести к повреждению и / или поражению электрическим током.
История двигателя переменного тока
Изобретение двигателя переменного тока Асинхронные двигатели переменного тока
используются в отрасли уже более 20 лет.Идея двигателя переменного тока возникла у Николы Теслы в 1880-х годах. Никола Тесла заявил, что двигателям не нужны щетки для переключения ротора. Он сказал, что они могут быть вызваны вращающимся магнитным полем. Никола Тесла обнаружил использование переменного тока, который индуцирует вращающиеся магнитные поля. Тесла подал патент США номер 416194 на работу над двигателем переменного тока. Этот тип двигателя сегодня мы называем асинхронным двигателем переменного тока.
Эволюция двигателя переменного тока
Двигатель переменного тока сделал себе имя благодаря простой конструкции, простоте использования, прочной конструкции и рентабельности для множества различных применений.Достижения в области технологий позволили производителям развить идею Telsa и обеспечили большую гибкость в регулировании скорости асинхронного двигателя переменного тока. От простого фазового управления до более надежных систем с обратной связью, использующих векторно-ориентированное управление полем; Двигатель переменного тока усовершенствовался за последние сто двадцать лет.
Принадлежности для двигателей переменного тока
Для двигателей переменного тока существует широкий выбор принадлежностей. Доступные аксессуары включают тормоз, сцепление, вентилятор, разъем и кабели. Дополнительные сведения и варианты см. На странице «Аксессуары» Anaheim Automation.
Тормоза двигателя переменного тока представляют собой систему 24 В постоянного тока. Эти тормоза идеально подходят для любых удерживающих устройств, которые вы можете использовать с электродвигателем переменного тока. Тормоза электродвигателя переменного тока имеют низковольтную конструкцию для приложений, которые подвержены разряду батареи, потере энергии или длинной проводке.
Муфта двигателя переменного тока используется для управления крутящим моментом, прилагаемым к нагрузке. Муфту двигателя переменного тока также можно использовать для увеличения скорости нагрузки с высоким моментом инерции.Муфты идеально подходят для использования с электродвигателем переменного тока, когда вы хотите точно контролировать крутящий момент или медленно прикладывать мощность. Муфты электродвигателя переменного тока также помогают предотвратить резкие скачки тока.
Вентиляторы двигателя переменного тока используются для охлаждения двигателей. Обычно они не встречаются в небольших двигателях, потому что они не нужны, но чаще встречаются в более крупных асинхронных двигателях переменного тока из-за тепловыделения. Есть два типа вентиляторов, которые используются для двигателя переменного тока. Типы бывают внутренние и внешние вентиляторы. Вентиляторы электродвигателей переменного тока идеально подходят для использования, когда возникает проблема перегрева.
Кабели двигателя переменного тока могут быть изготовлены по индивидуальному заказу с поставляемым разъемом двигателя переменного тока в соответствии с заданными спецификациями. Кабели также можно приобрести в компании Anaheim Automation.
Если двигатели переменного тока не идеальны для вашего применения, вы можете рассмотреть бесщеточные двигатели постоянного тока, щеточные двигатели постоянного тока, сервоприводы или шаговые двигатели и их совместимые драйверы / контроллеры. Наряду с двигателями переменного тока Anaheim Automation предлагает коробки передач и регуляторы скорости. Дополнительные продукты Anaheim Automation предлагает: энкодеры, HMI, муфты, кабели и соединители, линейные направляющие.
Настройка двигателя переменного тока
Anaheim Automation была основана в 1966 году как производитель систем управления перемещением «под ключ». Его упор на исследования и разработки обеспечил постоянное внедрение передовых продуктов управления движением, таких как линейка продуктов AC Motor. Сегодня Anaheim Automation занимает высокое место среди ведущих производителей и дистрибьюторов продукции для управления движением, и это положение усиливается ее отличной репутацией в области качественной продукции по конкурентоспособным ценам.Линия продуктов AC Motor не является исключением из целей компании.
Anaheim Automation предлагает широкий выбор стандартных двигателей переменного тока. Иногда OEM-заказчики со средним и большим количеством требований предпочитают иметь двигатель переменного тока, который настраивается или модифицируется в соответствии с их точными требованиями к конструкции. Иногда настройка так же проста, как модификация вала, тормоз, масляное уплотнение для степени защиты IP65, установочные размеры, цвета проводов или этикетка. В других случаях заказчик может потребовать, чтобы двигатель переменного тока соответствовал идеальным характеристикам, таким как скорость, крутящий момент и / или напряжение.Для получения более подробной информации обсудите требования к вашему приложению с инженером по автоматизации в Анахайме.
Электродвигатель переменного тока Anaheim Automation
Инженерыценят то, что линейка двигателей переменного тока Anaheim Automation может удовлетворить их стремление к творчеству, гибкости и эффективности системы. Покупатели ценят простоту «универсального магазина» и экономию затрат на индивидуальную конструкцию двигателя переменного тока, в то время как инженеры довольны тем, что Anaheim Automation уделяет особое внимание их конкретным системным требованиям.
Стандартная линейка двигателей переменного тока Anaheim Automation представляет собой экономичное решение, поскольку они известны своей прочной конструкцией и отличными характеристиками. Значительный рост продаж компании явился результатом целенаправленного проектирования, дружелюбного обслуживания клиентов и профессиональной поддержки приложений, что часто превосходит ожидания клиентов в отношении выполнения их индивидуальных требований. Хотя значительная часть продаж двигателей переменного тока Anaheim Automation связана с особыми, индивидуальными требованиями или требованиями частной марки, компания гордится своей стандартной складской базой, расположенной в Анахайме, Калифорния, США.Чтобы сделать индивидуальную настройку двигателя переменного тока доступной, требуется минимальное количество и / или плата за непериодическое проектирование (NRE). Свяжитесь с заводом-изготовителем для получения подробной информации, если вам потребуется специальный двигатель переменного тока в конструкции вашей системы управления движением.
Все продажи индивидуализированного или модифицированного двигателя переменного тока не подлежат отмене и возврату, и для каждого запроса клиент должен подписывать соглашение NCNR. Все продажи, включая индивидуальный двигатель переменного тока, осуществляются в соответствии со стандартными положениями и условиями Anaheim Automation и заменяют любые другие явно выраженные или подразумеваемые условия, включая, помимо прочего, любые подразумеваемые гарантии.
Anaheim Automation заказывает линейку продуктов AC Motor разнообразно: компании, эксплуатирующие или проектирующие автоматизированное оборудование или процессы, которые включают в себя пищевую, косметическую или медицинскую упаковку, требования к этикетированию или защите от несанкционированного вскрытия, сборку, конвейер, погрузочно-разгрузочные работы, робототехнику, специальную съемку и т. Д. проекционные эффекты, медицинская диагностика, устройства контроля и безопасности, управление потоком насоса, изготовление металла (станки с ЧПУ) и модернизация оборудования. Многие OEM-заказчики просят, чтобы мы использовали двигатели переменного тока «частной торговой марки», чтобы их клиенты оставались верными им при обслуживании, замене и ремонте.
Тест двигателя переменного тока
В: Какие три основных типа электродвигателей переменного тока предлагает Anaheim Automation?
A: Индукционные, синхронные и промышленные
Q: Каковы компоненты частотно-регулируемого привода?
A: Частотно-регулируемый привод включает двигатель переменного тока, контроллер и интерфейс оператора.
В: Какой двигатель обычно используется в частотно-регулируемом приводе?
A: Трехфазный асинхронный двигатель
В: Каковы основные компоненты двигателя переменного тока?
A: Стационарный статор, который находится снаружи и имеет катушки, на которые подается переменный ток, и внутренний ротор, прикрепленный к выходному валу.
В: Почему необходимо подключать конденсатор к асинхронному двигателю переменного тока?
A: Любой двигатель ACP-M, считающийся однофазным асинхронным двигателем, является двигателем с конденсаторным приводом. Следовательно, для его запуска необходимо создать вращающееся магнитное поле. Конденсаторы создают источник питания с фазовым сдвигом, который необходим для создания необходимого вращательного магнитного поля. С другой стороны, трехфазные двигатели всегда подают питание с разными фазами, поэтому им не нужны конденсаторы.
В: Что подразумевается под реверсивным двигателем, рассчитанным на 30 минут?
A: Двигатель рассчитан на оптимальную работу не более 30 минут. Если работать постоянно, двигатель перегорит.
Часто задаваемые вопросы по двигателям переменного тока:
В: Почему следует выбрать трехфазный двигатель вместо однофазного?
A: Однофазные двигатели переменного тока мощностью более 10 л.с. (7,5 кВт) обычно не так распространены. Трехфазные двигатели менее вибрируют, что продлевает срок их службы по сравнению с однофазными двигателями той же мощности, используемыми в тех же условиях.
В: В чем разница между частотно-регулируемым приводом и частотно-регулируемым приводом?
A: Приводы с переменной частотой (VFD) обычно относятся только к приводам переменного тока, в то время как приводы с регулируемой скоростью (VSD) могут относиться либо к приводу переменного тока, либо к приводу постоянного тока. VFD управляет скоростью двигателя переменного тока, изменяя частоту двигателя. С другой стороны, преобразователи частоты изменяют напряжение для управления двигателем постоянного тока.
В: Могу ли я изменить направление вращения асинхронного двигателя переменного тока, если я подключил его, как показано в каталоге, например, ACP-M-4IK25N-AU?
A: Да, можно.Однако перед переключением направления убедитесь, что двигатель полностью остановлен. Если требуется немедленное реверсирование, реверсивный двигатель лучше подходит для данной области применения; например ACP-M-4RK25N-AU.
В: Можно ли изменить скорость асинхронных двигателей переменного тока и реверсивных двигателей?
A: Частота источника питания определяет скорость однофазных (переменного тока) асинхронных и реверсивных двигателей. Если ваше приложение требует изменения скорости, рекомендуется использовать двигатель с регулировкой скорости.
В: Будет ли временное хранение моего асинхронного двигателя переменного тока при температуре от 0 ° F до -20 ° F создавать какие-либо проблемы?
A: Резкие перепады температуры могут привести к конденсации влаги внутри двигателя. В этом случае компоненты могут заржаветь, что значительно сократит срок службы. Постарайтесь избежать образования конденсата.
В: Это плохо, если мой асинхронный двигатель переменного тока сильно нагревается?
A: При преобразовании электрической энергии во вращательное движение внутри двигателя выделяется тепло, что делает его горячим.Температура двигателя переменного тока равна повышению температуры, вызванному потерями в двигателе, плюс температура окружающей среды. Если температура окружающей среды составляет 85 ° F, а внутренние потери в двигателе составляют 90 ° F (32 ° C), поверхность двигателя будет 175 ° F (79 ° C). Это не типично для маленького мотора.
В: Почему некоторые редукторы электродвигателя переменного тока выводят выходной сигнал противоположно двигателю, а другие — в том же направлении?
A: Редукторы снижают скорость двигателя от 1/3 до 1/180 (для асинхронных двигателей переменного тока.) Это снижение скорости является результатом использования нескольких передач; количество передач в зависимости от величины снижения скорости. Однако вращение последней шестерни определяет направление выходного вала.
В: Повлияют ли на асинхронный двигатель переменного тока сильные колебания напряжения источника питания?
A: Напряжение источника питания влияет на крутящий момент, создаваемый двигателем. Крутящий момент примерно в два раза больше напряжения источника питания. Таким образом, при использовании двигателей с большими колебаниями напряжения питания важно помнить, что создаваемый крутящий момент будет изменяться.
— обзор
1 Введение
Географическое разнообразие даже сегодня является наиболее сложной характеристикой для ввода в эксплуатацию линий электропередачи в удаленных сельских районах по всему миру. Несмотря на то, что было сделано очень много планирования для подключения небольших деревень к сетям, экономика, техническое обслуживание и мониторинг являются предметами озабоченности для линий электропередач, подключенных к сети. Мировой энергетический сектор переходит на использование возобновляемых источников энергии, и поэтому производство энергии на основе возобновляемых источников продвигается почти во всех странах.В литературе возобновляемые источники энергии в основном представлены как распределенные генераторы (ДГ) в существующей энергосистеме из-за их гибкости с точки зрения установленной мощности от кВт до МВт. Существует несколько исследований по оптимизации размера и распределению ГД. Ветряные электростанции — одни из самых приемлемых ДГ в мире. Согласно отчету Всемирной ассоциации ветроэнергетики (WWEA), мощность ветровой энергии во всем мире достигает 597 ГВт, из которых только Китай и США установили ветряные электростанции мощностью 200 и 100 ГВт соответственно.Ref. [1] опубликовал данные, полученные от Министерства новых и возобновляемых источников энергии Индии, согласно которым установленная мощность ветряных электростанций в Индии достигла 34,605 ГВт в 2018 году. Ветряная электрическая система является ведущей системой возобновляемой энергетики. поколение по всему миру. Однако высокие начальные капитальные затраты по-прежнему являются большим препятствием на пути продвижения ветроэнергетических возобновляемых источников энергии [2]. Помимо капитальных затрат, прерывистый и непостоянный характер вводимых ресурсов снова является серьезной проблемой для непрерывного и надежного производства электроэнергии с помощью ветряных электростанций.Дизельные генераторы — лучший выбор для изолированной электрической системы, потому что хорошо зарекомендовавшая себя технология, низкая стоимость установки и капитальных затрат, проста в обслуживании и просто доступна для рынка конечных пользователей, расположенных в удаленных районах, где нет коммунальных услуг [3]. Однако доступность, стоимость и экологические проблемы дизельных генераторов вынуждают пользователей переходить на возобновляемые источники энергии. Чтобы повысить надежность системы для непрерывного энергоснабжения, особенно в изолированной электрической системе, ветрогенератор может быть соединен с дизельным генератором.Гибридная электрическая система ветро-дизельного двигателя является очень безопасной и надежной системой, поскольку во время изменения скорости ветра дизельное топливо действует как дополнительный источник энергии [4]. Такая интеграция невозобновляемых и возобновляемых источников энергии называется изолированной гибридной электрической системой (IHES) [5]. Ref. [6] предполагает, что использование гибридных электрических систем снижает общую стоимость жизненного цикла автономных генераторов и, что важно, обеспечивает более надежную подачу электроэнергии за счет комбинации источников энергии.
Включая индукционные машины, генераторы постоянного тока и синхронные генераторы также используются для работы ветряных электростанций. Генератор ветровой турбины может работать с использованием любого одного механизма, как указано ниже:
- (i)
Индукционный генератор с короткозамкнутым ротором (SCIG)
- (ii)
Индукционный генератор с двойным питанием (DFIG)
- (iii)
Генератор постоянного тока (DCG)
- (iv)
Синхронный генератор с постоянными магнитами (PMSG)
- (v)
Синхронный генератор с электрическим возбуждением (EESG)
Однако предпочтительно в изолированных ветро-дизельных гибридных электрических системах дизельные установки представляют собой синхронный генератор с возбуждением постоянным током (SG), а ветряные установки — индукционные генераторы с короткозамкнутым ротором.- (i)
Для повышения напряжения в SCIG
- (ii)
Для удовлетворения потребности в реактивной мощности нагрузки
- (iii)
Для удовлетворения потребности в реактивной мощности из-за изменений входа и нагрузки
- (iv)
Для балансировки реактивной мощности в системе во время нагрузки и возмущений на входе
- Две пары катушек электромагнита, показанные здесь красным и синим цветом, поочередно запитываются источником переменного тока (не показан, но подаются к выводам справа).Две красные катушки соединены последовательно и запитаны вместе, а две синие катушки катушки подключаются таким же образом. Поскольку это переменный ток, ток в каждой катушке не включается и не выключается внезапно (как предполагает эта анимация), а плавно повышается и падает в форме синусоидальной волны: когда красные катушки наиболее активны, синие катушки полностью неактивны, и наоборот. Другими словами, их токи не совпадают (не совпадают по фазе на 90 °).
- Когда катушки находятся под напряжением, магнитное поле, которое они создают между ними, индуцирует электрический ток в роторе.Этот ток создает собственное магнитное поле, которое пытается противодействовать тому, что его вызвало (магнитное поле от внешних катушек). Взаимодействие между двумя полями заставляет ротор вращаться.
- Когда магнитное поле чередуется между красной и синей катушками, оно эффективно вращается вокруг двигателя. Вращающееся магнитное поле заставляет ротор вращаться в одном направлении и (теоретически) почти с одинаковой скоростью.
- Электричество для молодых людей: забавные и легкие проекты «Сделай сам» Марка де Винка.Maker Media / O’Reilly, 2017. Отличное практическое введение в электричество, включая несколько занятий, связанных с созданием электродвигателей с нуля. Возраст 9–12 лет.
- Эксперименты с электродвигателем Эда Соби. Enslow, 2011. Это отличное общее введение в электродвигатели с большим количеством более широкого научного и технологического контекста. Однако по очевидным практическим соображениям и соображениям безопасности он ориентирован только на проекты с двигателями постоянного тока и лучше всего подходит для детей в возрасте от 11 до 14 лет.
- Сила и энергия Криса Вудфорда.Факты в файле, 2004. Одна из моих книг, рассказывающих об усилиях человека по использованию энергии с древних времен до наших дней. Возраст 10+.
- Никола Тесла: Разработчик электроэнергии Крис Вудфорд, в «Изобретатели и изобретения», том 5. Нью-Йорк: Маршалл Кавендиш, 2008. Краткая биография Теслы, которую я написал несколько лет назад. На момент написания все, кажется, было доступно в Интернете по этой ссылке Google Книги. Возраст 9–12 лет.
- Патент США 381 968: Электромагнитный двигатель Николы Тесла, 1 мая 1888 г. Оригинальный патент на асинхронный двигатель переменного тока.
- Патент США 2,959,721: Многофазные асинхронные двигатели, Томас Бартон и др., Lancashire Dynamo & Crypto Ltd, 8 ноября 1960 г. Асинхронный двигатель с улучшенным контролем скорости.
- Патент США 4311932: Жидкостное охлаждение для асинхронных двигателей, Рэймонд Н. Олсон, Sundstrand Corporation, 19 января 1982 г.Эффективный метод жидкостного охлаждения двигателя без чрезмерного сопротивления жидкости вращающимся компонентам.
- Патент США 5,751,082: Асинхронный двигатель с высоким пусковым моментом, разработанный Умешом К. Гупта, Vickers, Inc., 12 мая 1998 г. Современный двигатель с высоким начальным крутящим моментом.
- Две пары катушек электромагнита, показанные здесь красным и синим цветом, поочередно запитываются источником переменного тока (не показан, но подаются к выводам справа).Две красные катушки соединены последовательно и запитаны вместе, а две синие катушки катушки подключаются таким же образом. Поскольку это переменный ток, ток в каждой катушке не включается и не выключается внезапно (как предполагает эта анимация), а плавно повышается и падает в форме синусоидальной волны: когда красные катушки наиболее активны, синие катушки полностью неактивны, и наоборот. Другими словами, их токи не совпадают (не совпадают по фазе на 90 °).
- Когда катушки находятся под напряжением, магнитное поле, которое они создают между ними, индуцирует электрический ток в роторе.Этот ток создает собственное магнитное поле, которое пытается противодействовать тому, что его вызвало (магнитное поле от внешних катушек). Взаимодействие между двумя полями заставляет ротор вращаться.
- Когда магнитное поле чередуется между красной и синей катушками, оно эффективно вращается вокруг двигателя. Вращающееся магнитное поле заставляет ротор вращаться в одном направлении и (теоретически) почти с одинаковой скоростью.
- Электричество для молодых людей: забавные и легкие проекты «Сделай сам» Марка де Винка.Maker Media / O’Reilly, 2017. Отличное практическое введение в электричество, включая несколько занятий, связанных с созданием электродвигателей с нуля. Возраст 9–12 лет.
- Эксперименты с электродвигателем Эда Соби. Enslow, 2011. Это отличное общее введение в электродвигатели с большим количеством более широкого научного и технологического контекста. Однако по очевидным практическим соображениям и соображениям безопасности он ориентирован только на проекты с двигателями постоянного тока и лучше всего подходит для детей в возрасте от 11 до 14 лет.
- Сила и энергия Криса Вудфорда.Факты в файле, 2004. Одна из моих книг, рассказывающих об усилиях человека по использованию энергии с древних времен до наших дней. Возраст 10+.
- Никола Тесла: Разработчик электроэнергии Крис Вудфорд, в «Изобретатели и изобретения», том 5. Нью-Йорк: Маршалл Кавендиш, 2008. Краткая биография Теслы, которую я написал несколько лет назад. На момент написания все, кажется, было доступно в Интернете по этой ссылке Google Книги. Возраст 9–12 лет.
- Патент США 381 968: Электромагнитный двигатель Николы Тесла, 1 мая 1888 г. Оригинальный патент на асинхронный двигатель переменного тока.
- Патент США 2,959,721: Многофазные асинхронные двигатели, Томас Бартон и др., Lancashire Dynamo & Crypto Ltd, 8 ноября 1960 г. Асинхронный двигатель с улучшенным контролем скорости.
- Патент США 4311932: Жидкостное охлаждение для асинхронных двигателей, Рэймонд Н. Олсон, Sundstrand Corporation, 19 января 1982 г.Эффективный метод жидкостного охлаждения двигателя без чрезмерного сопротивления жидкости вращающимся компонентам.
- Патент США 5,751,082: Асинхронный двигатель с высоким пусковым моментом, разработанный Умешом К. Гупта, Vickers, Inc., 12 мая 1998 г. Современный двигатель с высоким начальным крутящим моментом.
- Две пары катушек электромагнита, показанные здесь красным и синим цветом, поочередно запитываются источником переменного тока (не показан, но подаются к выводам справа).Две красные катушки соединены последовательно и запитаны вместе, а две синие катушки катушки подключаются таким же образом. Поскольку это переменный ток, ток в каждой катушке не включается и не выключается внезапно (как предполагает эта анимация), а плавно повышается и падает в форме синусоидальной волны: когда красные катушки наиболее активны, синие катушки полностью неактивны, и наоборот. Другими словами, их токи не совпадают (не совпадают по фазе на 90 °).
- Когда катушки находятся под напряжением, магнитное поле, которое они создают между ними, индуцирует электрический ток в роторе.Этот ток создает собственное магнитное поле, которое пытается противодействовать тому, что его вызвало (магнитное поле от внешних катушек). Взаимодействие между двумя полями заставляет ротор вращаться.
- Когда магнитное поле чередуется между красной и синей катушками, оно эффективно вращается вокруг двигателя. Вращающееся магнитное поле заставляет ротор вращаться в одном направлении и (теоретически) почти с одинаковой скоростью.
- Электричество для молодых людей: забавные и легкие проекты «Сделай сам» Марка де Винка.Maker Media / O’Reilly, 2017. Отличное практическое введение в электричество, включая несколько занятий, связанных с созданием электродвигателей с нуля. Возраст 9–12 лет.
- Эксперименты с электродвигателем Эда Соби. Enslow, 2011. Это отличное общее введение в электродвигатели с большим количеством более широкого научного и технологического контекста. Однако по очевидным практическим соображениям и соображениям безопасности он ориентирован только на проекты с двигателями постоянного тока и лучше всего подходит для детей в возрасте от 11 до 14 лет.
- Сила и энергия Криса Вудфорда.Факты в файле, 2004. Одна из моих книг, рассказывающих об усилиях человека по использованию энергии с древних времен до наших дней. Возраст 10+.
- Никола Тесла: Разработчик электроэнергии Крис Вудфорд, в «Изобретатели и изобретения», том 5. Нью-Йорк: Маршалл Кавендиш, 2008. Краткая биография Теслы, которую я написал несколько лет назад. На момент написания все, кажется, было доступно в Интернете по этой ссылке Google Книги. Возраст 9–12 лет.
- Патент США 381 968: Электромагнитный двигатель Николы Тесла, 1 мая 1888 г. Оригинальный патент на асинхронный двигатель переменного тока.
- Патент США 2,959,721: Многофазные асинхронные двигатели, Томас Бартон и др., Lancashire Dynamo & Crypto Ltd, 8 ноября 1960 г. Асинхронный двигатель с улучшенным контролем скорости.
- Патент США 4311932: Жидкостное охлаждение для асинхронных двигателей, Рэймонд Н. Олсон, Sundstrand Corporation, 19 января 1982 г.Эффективный метод жидкостного охлаждения двигателя без чрезмерного сопротивления жидкости вращающимся компонентам.
- Патент США 5,751,082: Асинхронный двигатель с высоким пусковым моментом, разработанный Умешом К. Гупта, Vickers, Inc., 12 мая 1998 г. Современный двигатель с высоким начальным крутящим моментом.
- Частота сети переменного тока
- Количество катушек, составляющих статор
- Нагрузка на двигатель
- Увеличенный срок службы двигателя переменного тока
- Экономичный контроль скорости
- Меньше обслуживания, чем двигатель с постоянным током
Предполагается, что в ветродизельной системе SG работает в нормальном режиме. Это означает, что основная мощность, потребляемая от него, является активной мощностью, а реактивная мощность — только его дополнительной выходной мощностью. Другими словами, SG не используется в качестве поставщика реактивной мощности, хотя может ее развивать. Потому что для этого пользователям приходится идти на компромисс с реальной мощностью, производимой SG. Читателям также должно быть ясно, что этот SG используется в качестве резервного варианта для выработки электроэнергии, а индукционный генератор с короткозамкнутым ротором, управляемый ветряной турбиной, является основным источником выработки электроэнергии.Роли реактивной мощности в изолированной электрической системе на основе ветро-дизельного двигателя следующие:
Таким образом, реактивная мощность должна питаться от других поддерживающих устройств, и эти устройства известны как компенсаторы реактивной мощности (RPC).RPC состоят из широкого набора компонентов с разными характеристиками. Стоимость устройств также является важным фактором при выборе подходящего устройства в качестве RPC наряду с их характеристиками. Поскольку реактивная мощность от этих устройств бывает разной по времени отклика. Использование более одного RPC может дать экономичное решение для обеспечения компенсации реактивной мощности. Такое участие более одного RPC называется гибридным участием компенсации реактивной мощности. Гибридное участие, необходимость и метод использования также объясняются в этой главе.
Таким образом, в этой главе рассматриваются три основных вопроса, а именно: компенсаторы гибридного участия, изолированная ветровая электрическая система и, наконец, влияние входного сигнала и / или проникновения нагрузки.
Асинхронные двигатели переменного тока | Как работают электродвигатели переменного тока Асинхронные электродвигатели переменного тока
| Как работают двигатели переменного тока — объясните это Рекламное объявлениеКриса Вудфорда. Последнее изменение: 28 июня 2021 г.
Вы знаете, как работают электродвигатели? Ответ, наверное, да и нет! Хотя многие из нас узнали, как базовые моторные работы, из простых научных книг и веб-страниц, таких как эта, многие из двигатели, которые мы используем каждый день — от заводских машин до электропоезда — вообще-то так не работают.Какие книги рассказывают нам о простых двигателях постоянного тока (DC), которые имеют петля из проволоки, вращающаяся между полюсами постоянного магнита; в реальной жизни, в большинстве двигателей большой мощности используется переменный ток (AC) и работают совершенно по-другому: это то, что мы называем индукцией двигатели, и они очень изобретательно используют вращающееся магнитное поле. Давайте посмотрим поближе!
Фотография: Обычный асинхронный двигатель переменного тока со снятыми корпусом и ротором, демонстрирующий медные обмотки катушек, составляющих статор (статическая, неподвижная часть двигателя).Эти катушки предназначены для создания вращающегося магнитного поля, которое вращает ротор (подвижную часть двигателя) в пространстве между ними. Фото Дэвида Парсонса любезно предоставлено Министерством энергетики США / NREL.
Как работает обычный двигатель постоянного тока?
Простые двигатели, которые вы видите в научных книгах, основаны на кусок проволоки, согнутый в прямоугольную петлю, которая подвешена между полюса магнита. (Физики назвали бы это проводник с током сидит в магнитном поле.) Когда вы подключаете такой провод к батарее, через него течет постоянный ток (DC), создавая вокруг него временное магнитное поле. Это временное поле отталкивает исходное поле от постоянного магнита, в результате чего провод перевернуть. Обычно провод останавливался в этой точке, а затем снова переворачивался, но если мы воспользуемся оригинальным вращающимся соединением называется коммутатором, мы можем сделать обратный ток каждый раз, когда проволока переворачивается, а это значит, что проволока будет продолжать вращаться в в том же направлении, пока течет ток.Это суть простого электродвигателя постоянного тока, задуманного в 1820-е годы Майкла Фарадея и превратился в практическое изобретение о десять лет спустя Уильям Стерджен. (Более подробную информацию вы найдете в нашей вводной статье об электродвигателях.)
Иллюстрации: Электродвигатель постоянного тока основан на проволочной петле, вращающейся внутри фиксированного магнитного поля, создаваемого постоянным магнитом. Коммутатор (разрезное кольцо) и щетки (угольные контакты к коммутатору) меняют направление электрического тока каждый раз, когда провод перекручивается, что позволяет ему вращаться в одном направлении.
Прежде чем перейти к двигателям переменного тока, давайте быстро резюмируйте, что здесь происходит. В двигателе постоянного тока магнит (и его магнитное поле) фиксируется на месте и образует внешнюю статическую часть двигатель (статор), а катушка с проводом, несущая электрический ток формирует вращающуюся часть двигателя (ротор). Магнитное поле исходит от статора, который представляет собой постоянный магнит, пока вы подаете электроэнергию на катушку, которая составляет ротор. Взаимодействие между постоянными магнитами поле статора и временное магнитное поле, создаваемое ротором, равно что заставляет мотор крутиться.
Рекламные ссылкиКак работает двигатель переменного тока?
В отличие от игрушек и фонариков, большинство домов, офисов, фабрики и другие здания не питаются от маленьких батареек: они питаются не постоянным током, а переменным током (AC), который меняет направление примерно 50 раз в секунду. (с частотой 50 Гц). Если вы хотите запустить двигатель от домашней электросети переменного тока, вместо батареи постоянного тока нужна другая конструкция двигателя.
В двигателе переменного тока есть кольцо электромагнитов расположены снаружи (составляя статор), которые предназначены для создания вращающегося магнитного поля.Внутри статора находится цельная металлическая ось, проволочная петля, катушка, беличья клетка из металлических стержней и межсоединений (например, вращающиеся клетки, которым иногда удается развлечь мышей), или другая свободно вращающаяся металлическая деталь, которая может проводить электричество. В отличие от двигателя постоянного тока, где вы посылаете энергию во внутренний ротор, в двигателе переменного тока вы посылаете энергию на внешние катушки, которые составляют статор. Катушки запитываются попарно, последовательно, создает магнитное поле, вращающееся вокруг двигателя.
Фото: Статор создает магнитное поле с помощью туго намотанных катушек из медной проволоки, которые известны как обмотки. Когда электродвигатель изнашивается или перегорает, можно заменить его другим электродвигателем. Иногда легче заменить обмотки двигателя новым проводом — это умелая работа, называемая перемоткой, что и происходит здесь. Фото Сета Скарлетта любезно предоставлено ВМС США.
Как это вращающееся поле заставляет двигатель двигаться? Помните, что ротор, подвешенный внутри магнитное поле, является электрическим проводником.Магнитное поле постоянно меняется (потому что оно вращается), поэтому согласно законам электромагнетизма (точнее, закону Фарадея), магнитное поле создает (или индуцирует, если использовать термин Фарадея) электрический ток внутри ротора. Если проводник представляет собой кольцо или провод, ток течет вокруг него по петле. Если проводник представляет собой просто цельный кусок металла, вместо этого вокруг него циркулируют вихревые токи. В любом случае индуцированный ток производит собственное магнитное поле и, согласно другому закону электромагнетизма (Закон Ленца) пытается остановить то, что вызывает это — вращающееся магнитное поле — также вращаясь.(Вы можете думать о роторе отчаянно пытается «догнать» вращающееся магнитное поле, пытаясь устранить разница в движении между ними.) Электромагнитная индукция — это ключ к тому, почему такой двигатель вращается, и поэтому он называется асинхронным.
Фото: эффективный асинхронный двигатель переменного тока. Фото Аль-Пуэнте любезно предоставлено NREL.
Как работает асинхронный двигатель переменного тока?
Вот небольшая анимация, чтобы подвести итог и, надеюсь, прояснить все:
Асинхронные двигатели на практике
Что контролирует скорость двигателя переменного тока?
Фотография: Двигатель с регулируемой частотой.Фото Уоррена Гретца любезно предоставлено NREL.
В синхронных двигателях переменного тока ротор вращается с той же скоростью, что и вращающееся магнитное поле; в асинхронном двигателе ротор всегда вращается с меньшей скоростью, чем поле, что делает его примером так называемого асинхронного двигателя переменного тока. Теоретическая скорость ротора в асинхронном двигателе зависит от частоты источника переменного тока и количества катушек, составляющих статор, и без нагрузки на двигатель приближается к скорости вращающегося магнитного поля.На практике нагрузка на двигатель (независимо от того, чем он управляет) также играет роль, замедляя ротор. Чем больше нагрузка, тем больше «пробуксовка» между скоростью вращающегося магнитного поля и фактической скоростью ротора. Чтобы контролировать скорость двигателя переменного тока (чтобы он работал быстрее или медленнее), вы должны увеличивать или уменьшать частоту источника переменного тока, используя так называемый частотно-регулируемый привод. Поэтому, когда вы регулируете скорость чего-то вроде заводской машины, питаемой от асинхронного двигателя переменного тока, вы на самом деле управляете цепью, которая изменяет частоту тока, приводящего в движение двигатель, вверх или вниз.
Что такое «фаза» двигателя переменного тока?
Нам не обязательно приводить в движение ротор с четырьмя катушками (двумя противоположными парами), как показано здесь. Можно построить асинхронные двигатели с любым другим расположением катушек. Чем больше у вас катушек, тем плавнее будет работать мотор. Количество отдельных электрических токов, возбуждающих питание катушек независимо, не в такте, известно как фаза двигателя, поэтому конструкция, показанная выше, представляет собой двухфазный двигатель (с двумя токами, питающими четыре катушки, которые работают не в шаге в двух парах. ).В трехфазном двигателе мы могли бы иметь три катушки, расположенные вокруг статора в виде треугольника, шесть равномерно расположенных катушек (три пары) или даже 12 катушек (три набора по четыре катушки) с одной, двумя или четырьмя катушками. включается и выключается одновременно тремя отдельными противофазными токами.
Анимация: трехфазный двигатель, питаемый тремя токами (обозначенными красным, зеленым и синие пары катушек), сдвиг по фазе на 120 °.
Преимущества и недостатки асинхронных двигателей
Преимущества
Самым большим преимуществом асинхронных двигателей переменного тока является их простота.У них есть только одна движущаяся часть, ротор, что делает их недорогими, тихими, долговечными и относительно безотказными. ОКРУГ КОЛУМБИЯ двигатели, напротив, имеют коллектор и угольные щетки, которые изнашиваются. выходят и нуждаются в замене время от времени. Трение между щетками и Коммутатор также делает двигатели постоянного тока относительно шумными (а иногда даже довольно вонючими).
Artwork: Электродвигатели чрезвычайно эффективны, обычно преобразуют около 85 процентов поступающей электроэнергии в полезную исходящую механическую работу.Даже в этом случае довольно много энергии теряется в виде тепла внутри обмоток, поэтому двигатели могут сильно нагреваться. Большинство двигателей переменного тока промышленной мощности имеют встроенные системы охлаждения. Внутри корпуса находится вентилятор, прикрепленный к валу ротора (на противоположном конце оси, который приводит в движение любую машину, к которой прикреплен двигатель), показанный здесь красным. Вентилятор всасывает воздух в двигатель, обдувая его снаружи корпуса, минуя ребра вентиляции. Если вы когда-нибудь задумывались, почему электродвигатели имеют эти выступы снаружи (как вы можете видеть на верхнем фото на этой странице), причина в том, что они охлаждают двигатель.
Недостатки
Поскольку скорость асинхронного двигателя зависит от частоты переменного тока, приводящего его в действие, он вращается со скоростью постоянная скорость, если вы не используете частотно-регулируемый привод; Скорость двигателей постоянного тока намного легче контролировать, просто повышая или понижая напряжение питания. Хотя асинхронные двигатели относительно просты, они могут быть довольно тяжелыми и громоздкими из-за их катушечной обмотки. В отличие от двигателей постоянного тока, они не могут работать от батарей или любого другого источника постоянного тока (например, солнечных батарей) без использования инвертора (устройства, которое преобразует постоянный ток в переменный).Это потому, что им нужно изменяющееся магнитное поле, чтобы вращать ротор.
Кто изобрел асинхронный двигатель?
Изображение: оригинальный дизайн Николы Теслы для асинхронного двигателя переменного тока. Он работает точно так же, как и на анимации выше, с двумя синими и двумя красными катушками, поочередно запитываемыми от генератора справа. Это произведение взято из оригинального патента Tesla, депонированного в Бюро по патентам и товарным знакам США, с которым вы можете ознакомиться в приведенных ниже ссылках.
Никола Тесла (1856–1943) был физиком. и плодовитый изобретатель, чей огромный вклад в науку и технику никогда не были полностью признаны. После того, как он приехал в Соединенные Штаты в возрасте 28 лет, он начал работал на известного пионера электротехники Томаса Эдисона. Но двое мужчин поссорились катастрофически и вскоре стали непримиримыми соперниками. Тесла твердо верил что переменный ток (AC) намного превосходил постоянный ток (DC), в то время как Эдисон думал обратное. Со своим партнером Джорджем Westinghouse, Тесла отстаивал AC, в то время как Эдисон был полон решимости управлять миром на DC и придумал всевозможные рекламные трюки, чтобы доказать, что кондиционер слишком опасен для широкого использования (изобретение электрического стула, чтобы доказать, что переменный ток может быть смертельным, и даже ударил током слона Топси с помощью переменного тока, чтобы показать, насколько это было смертельно опасно и жестоко).Битва между этими двумя очень разные взгляды на электроэнергию иногда называют Войной течений.
Несмотря на лучшие (или худшие) усилия Эдисона, Tesla победила, и теперь электричество переменного тока питает большую часть мира. Во многом именно поэтому многие электродвигатели, которые приводить в действие бытовую технику в наших домах, фабриках и офисах переменного тока асинхронные двигатели, работающие от вращающихся магнитных полей, которые Никола Тесла сконструировал в 1880-х годах (его патент, проиллюстрированный здесь, был выдан в мае 1888 года).Итальянский физик по имени Галилео Феррарис независимо друг от друга придумал ту же идею примерно в то же время, но история обошлась с ним еще более жестоко, чем Тесла и его имя теперь почти забыты.
Рекламные ссылкиУзнать больше
На этом сайте
На других сайтах
Книги
Для читателей постарше
Для младших читателей
Патенты
Патенты предлагают более глубокие технические детали и собственные идеи изобретателя о своей работе.Вот очень небольшая подборка многих патентов США, касающихся асинхронных двигателей.
Пожалуйста, НЕ копируйте наши статьи в блоги и другие сайты
статей с этого сайта зарегистрированы в Бюро регистрации авторских прав США. Копирование или иное использование зарегистрированных работ без разрешения, удаление этого или других уведомлений об авторских правах и / или нарушение смежных прав может привести к серьезным гражданским или уголовным санкциям.
Авторские права на текст © Chris Woodford 2012, 2020. Все права защищены. Полное уведомление об авторских правах и условиях использования.
Подписывайтесь на нас
Сохранить или поделиться этой страницей
Нажмите CTRL + D, чтобы добавить эту страницу в закладки на будущее, или расскажите об этом своим друзьям с помощью:
Цитируйте эту страницу
Вудфорд, Крис. (2012/2020) Асинхронные двигатели. Получено с https://www.explainthatstuff.com/induction-motors.html.[Доступ (укажите дату здесь)]
Больше на нашем сайте …
Асинхронные двигатели переменного тока| Как работают электродвигатели переменного тока Асинхронные электродвигатели переменного тока
| Как работают двигатели переменного тока — объясните это Рекламное объявлениеКриса Вудфорда. Последнее изменение: 28 июня 2021 г.
Вы знаете, как работают электродвигатели? Ответ, наверное, да и нет! Хотя многие из нас узнали, как базовые моторные работы, из простых научных книг и веб-страниц, таких как эта, многие из двигатели, которые мы используем каждый день — от заводских машин до электропоезда — вообще-то так не работают.Какие книги рассказывают нам о простых двигателях постоянного тока (DC), которые имеют петля из проволоки, вращающаяся между полюсами постоянного магнита; в реальной жизни, в большинстве двигателей большой мощности используется переменный ток (AC) и работают совершенно по-другому: это то, что мы называем индукцией двигатели, и они очень изобретательно используют вращающееся магнитное поле. Давайте посмотрим поближе!
Фотография: Обычный асинхронный двигатель переменного тока со снятыми корпусом и ротором, демонстрирующий медные обмотки катушек, составляющих статор (статическая, неподвижная часть двигателя).Эти катушки предназначены для создания вращающегося магнитного поля, которое вращает ротор (подвижную часть двигателя) в пространстве между ними. Фото Дэвида Парсонса любезно предоставлено Министерством энергетики США / NREL.
Как работает обычный двигатель постоянного тока?
Простые двигатели, которые вы видите в научных книгах, основаны на кусок проволоки, согнутый в прямоугольную петлю, которая подвешена между полюса магнита. (Физики назвали бы это проводник с током сидит в магнитном поле.) Когда вы подключаете такой провод к батарее, через него течет постоянный ток (DC), создавая вокруг него временное магнитное поле. Это временное поле отталкивает исходное поле от постоянного магнита, в результате чего провод перевернуть. Обычно провод останавливался в этой точке, а затем снова переворачивался, но если мы воспользуемся оригинальным вращающимся соединением называется коммутатором, мы можем сделать обратный ток каждый раз, когда проволока переворачивается, а это значит, что проволока будет продолжать вращаться в в том же направлении, пока течет ток.Это суть простого электродвигателя постоянного тока, задуманного в 1820-е годы Майкла Фарадея и превратился в практическое изобретение о десять лет спустя Уильям Стерджен. (Более подробную информацию вы найдете в нашей вводной статье об электродвигателях.)
Иллюстрации: Электродвигатель постоянного тока основан на проволочной петле, вращающейся внутри фиксированного магнитного поля, создаваемого постоянным магнитом. Коммутатор (разрезное кольцо) и щетки (угольные контакты к коммутатору) меняют направление электрического тока каждый раз, когда провод перекручивается, что позволяет ему вращаться в одном направлении.
Прежде чем перейти к двигателям переменного тока, давайте быстро резюмируйте, что здесь происходит. В двигателе постоянного тока магнит (и его магнитное поле) фиксируется на месте и образует внешнюю статическую часть двигатель (статор), а катушка с проводом, несущая электрический ток формирует вращающуюся часть двигателя (ротор). Магнитное поле исходит от статора, который представляет собой постоянный магнит, пока вы подаете электроэнергию на катушку, которая составляет ротор. Взаимодействие между постоянными магнитами поле статора и временное магнитное поле, создаваемое ротором, равно что заставляет мотор крутиться.
Рекламные ссылкиКак работает двигатель переменного тока?
В отличие от игрушек и фонариков, большинство домов, офисов, фабрики и другие здания не питаются от маленьких батареек: они питаются не постоянным током, а переменным током (AC), который меняет направление примерно 50 раз в секунду. (с частотой 50 Гц). Если вы хотите запустить двигатель от домашней электросети переменного тока, вместо батареи постоянного тока нужна другая конструкция двигателя.
В двигателе переменного тока есть кольцо электромагнитов расположены снаружи (составляя статор), которые предназначены для создания вращающегося магнитного поля.Внутри статора находится цельная металлическая ось, проволочная петля, катушка, беличья клетка из металлических стержней и межсоединений (например, вращающиеся клетки, которым иногда удается развлечь мышей), или другая свободно вращающаяся металлическая деталь, которая может проводить электричество. В отличие от двигателя постоянного тока, где вы посылаете энергию во внутренний ротор, в двигателе переменного тока вы посылаете энергию на внешние катушки, которые составляют статор. Катушки запитываются попарно, последовательно, создает магнитное поле, вращающееся вокруг двигателя.
Фото: Статор создает магнитное поле с помощью туго намотанных катушек из медной проволоки, которые известны как обмотки. Когда электродвигатель изнашивается или перегорает, можно заменить его другим электродвигателем. Иногда легче заменить обмотки двигателя новым проводом — это умелая работа, называемая перемоткой, что и происходит здесь. Фото Сета Скарлетта любезно предоставлено ВМС США.
Как это вращающееся поле заставляет двигатель двигаться? Помните, что ротор, подвешенный внутри магнитное поле, является электрическим проводником.Магнитное поле постоянно меняется (потому что оно вращается), поэтому согласно законам электромагнетизма (точнее, закону Фарадея), магнитное поле создает (или индуцирует, если использовать термин Фарадея) электрический ток внутри ротора. Если проводник представляет собой кольцо или провод, ток течет вокруг него по петле. Если проводник представляет собой просто цельный кусок металла, вместо этого вокруг него циркулируют вихревые токи. В любом случае индуцированный ток производит собственное магнитное поле и, согласно другому закону электромагнетизма (Закон Ленца) пытается остановить то, что вызывает это — вращающееся магнитное поле — также вращаясь.(Вы можете думать о роторе отчаянно пытается «догнать» вращающееся магнитное поле, пытаясь устранить разница в движении между ними.) Электромагнитная индукция — это ключ к тому, почему такой двигатель вращается, и поэтому он называется асинхронным.
Фото: эффективный асинхронный двигатель переменного тока. Фото Аль-Пуэнте любезно предоставлено NREL.
Как работает асинхронный двигатель переменного тока?
Вот небольшая анимация, чтобы подвести итог и, надеюсь, прояснить все:
Асинхронные двигатели на практике
Что контролирует скорость двигателя переменного тока?
Фотография: Двигатель с регулируемой частотой.Фото Уоррена Гретца любезно предоставлено NREL.
В синхронных двигателях переменного тока ротор вращается с той же скоростью, что и вращающееся магнитное поле; в асинхронном двигателе ротор всегда вращается с меньшей скоростью, чем поле, что делает его примером так называемого асинхронного двигателя переменного тока. Теоретическая скорость ротора в асинхронном двигателе зависит от частоты источника переменного тока и количества катушек, составляющих статор, и без нагрузки на двигатель приближается к скорости вращающегося магнитного поля.На практике нагрузка на двигатель (независимо от того, чем он управляет) также играет роль, замедляя ротор. Чем больше нагрузка, тем больше «пробуксовка» между скоростью вращающегося магнитного поля и фактической скоростью ротора. Чтобы контролировать скорость двигателя переменного тока (чтобы он работал быстрее или медленнее), вы должны увеличивать или уменьшать частоту источника переменного тока, используя так называемый частотно-регулируемый привод. Поэтому, когда вы регулируете скорость чего-то вроде заводской машины, питаемой от асинхронного двигателя переменного тока, вы на самом деле управляете цепью, которая изменяет частоту тока, приводящего в движение двигатель, вверх или вниз.
Что такое «фаза» двигателя переменного тока?
Нам не обязательно приводить в движение ротор с четырьмя катушками (двумя противоположными парами), как показано здесь. Можно построить асинхронные двигатели с любым другим расположением катушек. Чем больше у вас катушек, тем плавнее будет работать мотор. Количество отдельных электрических токов, возбуждающих питание катушек независимо, не в такте, известно как фаза двигателя, поэтому конструкция, показанная выше, представляет собой двухфазный двигатель (с двумя токами, питающими четыре катушки, которые работают не в шаге в двух парах. ).В трехфазном двигателе мы могли бы иметь три катушки, расположенные вокруг статора в виде треугольника, шесть равномерно расположенных катушек (три пары) или даже 12 катушек (три набора по четыре катушки) с одной, двумя или четырьмя катушками. включается и выключается одновременно тремя отдельными противофазными токами.
Анимация: трехфазный двигатель, питаемый тремя токами (обозначенными красным, зеленым и синие пары катушек), сдвиг по фазе на 120 °.
Преимущества и недостатки асинхронных двигателей
Преимущества
Самым большим преимуществом асинхронных двигателей переменного тока является их простота.У них есть только одна движущаяся часть, ротор, что делает их недорогими, тихими, долговечными и относительно безотказными. ОКРУГ КОЛУМБИЯ двигатели, напротив, имеют коллектор и угольные щетки, которые изнашиваются. выходят и нуждаются в замене время от времени. Трение между щетками и Коммутатор также делает двигатели постоянного тока относительно шумными (а иногда даже довольно вонючими).
Artwork: Электродвигатели чрезвычайно эффективны, обычно преобразуют около 85 процентов поступающей электроэнергии в полезную исходящую механическую работу.Даже в этом случае довольно много энергии теряется в виде тепла внутри обмоток, поэтому двигатели могут сильно нагреваться. Большинство двигателей переменного тока промышленной мощности имеют встроенные системы охлаждения. Внутри корпуса находится вентилятор, прикрепленный к валу ротора (на противоположном конце оси, который приводит в движение любую машину, к которой прикреплен двигатель), показанный здесь красным. Вентилятор всасывает воздух в двигатель, обдувая его снаружи корпуса, минуя ребра вентиляции. Если вы когда-нибудь задумывались, почему электродвигатели имеют эти выступы снаружи (как вы можете видеть на верхнем фото на этой странице), причина в том, что они охлаждают двигатель.
Недостатки
Поскольку скорость асинхронного двигателя зависит от частоты переменного тока, приводящего его в действие, он вращается со скоростью постоянная скорость, если вы не используете частотно-регулируемый привод; Скорость двигателей постоянного тока намного легче контролировать, просто повышая или понижая напряжение питания. Хотя асинхронные двигатели относительно просты, они могут быть довольно тяжелыми и громоздкими из-за их катушечной обмотки. В отличие от двигателей постоянного тока, они не могут работать от батарей или любого другого источника постоянного тока (например, солнечных батарей) без использования инвертора (устройства, которое преобразует постоянный ток в переменный).Это потому, что им нужно изменяющееся магнитное поле, чтобы вращать ротор.
Кто изобрел асинхронный двигатель?
Изображение: оригинальный дизайн Николы Теслы для асинхронного двигателя переменного тока. Он работает точно так же, как и на анимации выше, с двумя синими и двумя красными катушками, поочередно запитываемыми от генератора справа. Это произведение взято из оригинального патента Tesla, депонированного в Бюро по патентам и товарным знакам США, с которым вы можете ознакомиться в приведенных ниже ссылках.
Никола Тесла (1856–1943) был физиком. и плодовитый изобретатель, чей огромный вклад в науку и технику никогда не были полностью признаны. После того, как он приехал в Соединенные Штаты в возрасте 28 лет, он начал работал на известного пионера электротехники Томаса Эдисона. Но двое мужчин поссорились катастрофически и вскоре стали непримиримыми соперниками. Тесла твердо верил что переменный ток (AC) намного превосходил постоянный ток (DC), в то время как Эдисон думал обратное. Со своим партнером Джорджем Westinghouse, Тесла отстаивал AC, в то время как Эдисон был полон решимости управлять миром на DC и придумал всевозможные рекламные трюки, чтобы доказать, что кондиционер слишком опасен для широкого использования (изобретение электрического стула, чтобы доказать, что переменный ток может быть смертельным, и даже ударил током слона Топси с помощью переменного тока, чтобы показать, насколько это было смертельно опасно и жестоко).Битва между этими двумя очень разные взгляды на электроэнергию иногда называют Войной течений.
Несмотря на лучшие (или худшие) усилия Эдисона, Tesla победила, и теперь электричество переменного тока питает большую часть мира. Во многом именно поэтому многие электродвигатели, которые приводить в действие бытовую технику в наших домах, фабриках и офисах переменного тока асинхронные двигатели, работающие от вращающихся магнитных полей, которые Никола Тесла сконструировал в 1880-х годах (его патент, проиллюстрированный здесь, был выдан в мае 1888 года).Итальянский физик по имени Галилео Феррарис независимо друг от друга придумал ту же идею примерно в то же время, но история обошлась с ним еще более жестоко, чем Тесла и его имя теперь почти забыты.
Рекламные ссылкиУзнать больше
На этом сайте
На других сайтах
Книги
Для читателей постарше
Для младших читателей
Патенты
Патенты предлагают более глубокие технические детали и собственные идеи изобретателя о своей работе.Вот очень небольшая подборка многих патентов США, касающихся асинхронных двигателей.
Пожалуйста, НЕ копируйте наши статьи в блоги и другие сайты
статей с этого сайта зарегистрированы в Бюро регистрации авторских прав США. Копирование или иное использование зарегистрированных работ без разрешения, удаление этого или других уведомлений об авторских правах и / или нарушение смежных прав может привести к серьезным гражданским или уголовным санкциям.
Авторские права на текст © Chris Woodford 2012, 2020. Все права защищены. Полное уведомление об авторских правах и условиях использования.
Подписывайтесь на нас
Сохранить или поделиться этой страницей
Нажмите CTRL + D, чтобы добавить эту страницу в закладки на будущее, или расскажите об этом своим друзьям с помощью:
Цитируйте эту страницу
Вудфорд, Крис. (2012/2020) Асинхронные двигатели. Получено с https://www.explainthatstuff.com/induction-motors.html.[Доступ (укажите дату здесь)]
Больше на нашем сайте …
Асинхронные двигатели переменного тока| Как работают электродвигатели переменного тока Асинхронные электродвигатели переменного тока
| Как работают двигатели переменного тока — объясните это Рекламное объявлениеКриса Вудфорда. Последнее изменение: 28 июня 2021 г.
Вы знаете, как работают электродвигатели? Ответ, наверное, да и нет! Хотя многие из нас узнали, как базовые моторные работы, из простых научных книг и веб-страниц, таких как эта, многие из двигатели, которые мы используем каждый день — от заводских машин до электропоезда — вообще-то так не работают.Какие книги рассказывают нам о простых двигателях постоянного тока (DC), которые имеют петля из проволоки, вращающаяся между полюсами постоянного магнита; в реальной жизни, в большинстве двигателей большой мощности используется переменный ток (AC) и работают совершенно по-другому: это то, что мы называем индукцией двигатели, и они очень изобретательно используют вращающееся магнитное поле. Давайте посмотрим поближе!
Фотография: Обычный асинхронный двигатель переменного тока со снятыми корпусом и ротором, демонстрирующий медные обмотки катушек, составляющих статор (статическая, неподвижная часть двигателя).Эти катушки предназначены для создания вращающегося магнитного поля, которое вращает ротор (подвижную часть двигателя) в пространстве между ними. Фото Дэвида Парсонса любезно предоставлено Министерством энергетики США / NREL.
Как работает обычный двигатель постоянного тока?
Простые двигатели, которые вы видите в научных книгах, основаны на кусок проволоки, согнутый в прямоугольную петлю, которая подвешена между полюса магнита. (Физики назвали бы это проводник с током сидит в магнитном поле.) Когда вы подключаете такой провод к батарее, через него течет постоянный ток (DC), создавая вокруг него временное магнитное поле. Это временное поле отталкивает исходное поле от постоянного магнита, в результате чего провод перевернуть. Обычно провод останавливался в этой точке, а затем снова переворачивался, но если мы воспользуемся оригинальным вращающимся соединением называется коммутатором, мы можем сделать обратный ток каждый раз, когда проволока переворачивается, а это значит, что проволока будет продолжать вращаться в в том же направлении, пока течет ток.Это суть простого электродвигателя постоянного тока, задуманного в 1820-е годы Майкла Фарадея и превратился в практическое изобретение о десять лет спустя Уильям Стерджен. (Более подробную информацию вы найдете в нашей вводной статье об электродвигателях.)
Иллюстрации: Электродвигатель постоянного тока основан на проволочной петле, вращающейся внутри фиксированного магнитного поля, создаваемого постоянным магнитом. Коммутатор (разрезное кольцо) и щетки (угольные контакты к коммутатору) меняют направление электрического тока каждый раз, когда провод перекручивается, что позволяет ему вращаться в одном направлении.
Прежде чем перейти к двигателям переменного тока, давайте быстро резюмируйте, что здесь происходит. В двигателе постоянного тока магнит (и его магнитное поле) фиксируется на месте и образует внешнюю статическую часть двигатель (статор), а катушка с проводом, несущая электрический ток формирует вращающуюся часть двигателя (ротор). Магнитное поле исходит от статора, который представляет собой постоянный магнит, пока вы подаете электроэнергию на катушку, которая составляет ротор. Взаимодействие между постоянными магнитами поле статора и временное магнитное поле, создаваемое ротором, равно что заставляет мотор крутиться.
Рекламные ссылкиКак работает двигатель переменного тока?
В отличие от игрушек и фонариков, большинство домов, офисов, фабрики и другие здания не питаются от маленьких батареек: они питаются не постоянным током, а переменным током (AC), который меняет направление примерно 50 раз в секунду. (с частотой 50 Гц). Если вы хотите запустить двигатель от домашней электросети переменного тока, вместо батареи постоянного тока нужна другая конструкция двигателя.
В двигателе переменного тока есть кольцо электромагнитов расположены снаружи (составляя статор), которые предназначены для создания вращающегося магнитного поля.Внутри статора находится цельная металлическая ось, проволочная петля, катушка, беличья клетка из металлических стержней и межсоединений (например, вращающиеся клетки, которым иногда удается развлечь мышей), или другая свободно вращающаяся металлическая деталь, которая может проводить электричество. В отличие от двигателя постоянного тока, где вы посылаете энергию во внутренний ротор, в двигателе переменного тока вы посылаете энергию на внешние катушки, которые составляют статор. Катушки запитываются попарно, последовательно, создает магнитное поле, вращающееся вокруг двигателя.
Фото: Статор создает магнитное поле с помощью туго намотанных катушек из медной проволоки, которые известны как обмотки. Когда электродвигатель изнашивается или перегорает, можно заменить его другим электродвигателем. Иногда легче заменить обмотки двигателя новым проводом — это умелая работа, называемая перемоткой, что и происходит здесь. Фото Сета Скарлетта любезно предоставлено ВМС США.
Как это вращающееся поле заставляет двигатель двигаться? Помните, что ротор, подвешенный внутри магнитное поле, является электрическим проводником.Магнитное поле постоянно меняется (потому что оно вращается), поэтому согласно законам электромагнетизма (точнее, закону Фарадея), магнитное поле создает (или индуцирует, если использовать термин Фарадея) электрический ток внутри ротора. Если проводник представляет собой кольцо или провод, ток течет вокруг него по петле. Если проводник представляет собой просто цельный кусок металла, вместо этого вокруг него циркулируют вихревые токи. В любом случае индуцированный ток производит собственное магнитное поле и, согласно другому закону электромагнетизма (Закон Ленца) пытается остановить то, что вызывает это — вращающееся магнитное поле — также вращаясь.(Вы можете думать о роторе отчаянно пытается «догнать» вращающееся магнитное поле, пытаясь устранить разница в движении между ними.) Электромагнитная индукция — это ключ к тому, почему такой двигатель вращается, и поэтому он называется асинхронным.
Фото: эффективный асинхронный двигатель переменного тока. Фото Аль-Пуэнте любезно предоставлено NREL.
Как работает асинхронный двигатель переменного тока?
Вот небольшая анимация, чтобы подвести итог и, надеюсь, прояснить все:
Асинхронные двигатели на практике
Что контролирует скорость двигателя переменного тока?
Фотография: Двигатель с регулируемой частотой.Фото Уоррена Гретца любезно предоставлено NREL.
В синхронных двигателях переменного тока ротор вращается с той же скоростью, что и вращающееся магнитное поле; в асинхронном двигателе ротор всегда вращается с меньшей скоростью, чем поле, что делает его примером так называемого асинхронного двигателя переменного тока. Теоретическая скорость ротора в асинхронном двигателе зависит от частоты источника переменного тока и количества катушек, составляющих статор, и без нагрузки на двигатель приближается к скорости вращающегося магнитного поля.На практике нагрузка на двигатель (независимо от того, чем он управляет) также играет роль, замедляя ротор. Чем больше нагрузка, тем больше «пробуксовка» между скоростью вращающегося магнитного поля и фактической скоростью ротора. Чтобы контролировать скорость двигателя переменного тока (чтобы он работал быстрее или медленнее), вы должны увеличивать или уменьшать частоту источника переменного тока, используя так называемый частотно-регулируемый привод. Поэтому, когда вы регулируете скорость чего-то вроде заводской машины, питаемой от асинхронного двигателя переменного тока, вы на самом деле управляете цепью, которая изменяет частоту тока, приводящего в движение двигатель, вверх или вниз.
Что такое «фаза» двигателя переменного тока?
Нам не обязательно приводить в движение ротор с четырьмя катушками (двумя противоположными парами), как показано здесь. Можно построить асинхронные двигатели с любым другим расположением катушек. Чем больше у вас катушек, тем плавнее будет работать мотор. Количество отдельных электрических токов, возбуждающих питание катушек независимо, не в такте, известно как фаза двигателя, поэтому конструкция, показанная выше, представляет собой двухфазный двигатель (с двумя токами, питающими четыре катушки, которые работают не в шаге в двух парах. ).В трехфазном двигателе мы могли бы иметь три катушки, расположенные вокруг статора в виде треугольника, шесть равномерно расположенных катушек (три пары) или даже 12 катушек (три набора по четыре катушки) с одной, двумя или четырьмя катушками. включается и выключается одновременно тремя отдельными противофазными токами.
Анимация: трехфазный двигатель, питаемый тремя токами (обозначенными красным, зеленым и синие пары катушек), сдвиг по фазе на 120 °.
Преимущества и недостатки асинхронных двигателей
Преимущества
Самым большим преимуществом асинхронных двигателей переменного тока является их простота.У них есть только одна движущаяся часть, ротор, что делает их недорогими, тихими, долговечными и относительно безотказными. ОКРУГ КОЛУМБИЯ двигатели, напротив, имеют коллектор и угольные щетки, которые изнашиваются. выходят и нуждаются в замене время от времени. Трение между щетками и Коммутатор также делает двигатели постоянного тока относительно шумными (а иногда даже довольно вонючими).
Artwork: Электродвигатели чрезвычайно эффективны, обычно преобразуют около 85 процентов поступающей электроэнергии в полезную исходящую механическую работу.Даже в этом случае довольно много энергии теряется в виде тепла внутри обмоток, поэтому двигатели могут сильно нагреваться. Большинство двигателей переменного тока промышленной мощности имеют встроенные системы охлаждения. Внутри корпуса находится вентилятор, прикрепленный к валу ротора (на противоположном конце оси, который приводит в движение любую машину, к которой прикреплен двигатель), показанный здесь красным. Вентилятор всасывает воздух в двигатель, обдувая его снаружи корпуса, минуя ребра вентиляции. Если вы когда-нибудь задумывались, почему электродвигатели имеют эти выступы снаружи (как вы можете видеть на верхнем фото на этой странице), причина в том, что они охлаждают двигатель.
Недостатки
Поскольку скорость асинхронного двигателя зависит от частоты переменного тока, приводящего его в действие, он вращается со скоростью постоянная скорость, если вы не используете частотно-регулируемый привод; Скорость двигателей постоянного тока намного легче контролировать, просто повышая или понижая напряжение питания. Хотя асинхронные двигатели относительно просты, они могут быть довольно тяжелыми и громоздкими из-за их катушечной обмотки. В отличие от двигателей постоянного тока, они не могут работать от батарей или любого другого источника постоянного тока (например, солнечных батарей) без использования инвертора (устройства, которое преобразует постоянный ток в переменный).Это потому, что им нужно изменяющееся магнитное поле, чтобы вращать ротор.
Кто изобрел асинхронный двигатель?
Изображение: оригинальный дизайн Николы Теслы для асинхронного двигателя переменного тока. Он работает точно так же, как и на анимации выше, с двумя синими и двумя красными катушками, поочередно запитываемыми от генератора справа. Это произведение взято из оригинального патента Tesla, депонированного в Бюро по патентам и товарным знакам США, с которым вы можете ознакомиться в приведенных ниже ссылках.
Никола Тесла (1856–1943) был физиком. и плодовитый изобретатель, чей огромный вклад в науку и технику никогда не были полностью признаны. После того, как он приехал в Соединенные Штаты в возрасте 28 лет, он начал работал на известного пионера электротехники Томаса Эдисона. Но двое мужчин поссорились катастрофически и вскоре стали непримиримыми соперниками. Тесла твердо верил что переменный ток (AC) намного превосходил постоянный ток (DC), в то время как Эдисон думал обратное. Со своим партнером Джорджем Westinghouse, Тесла отстаивал AC, в то время как Эдисон был полон решимости управлять миром на DC и придумал всевозможные рекламные трюки, чтобы доказать, что кондиционер слишком опасен для широкого использования (изобретение электрического стула, чтобы доказать, что переменный ток может быть смертельным, и даже ударил током слона Топси с помощью переменного тока, чтобы показать, насколько это было смертельно опасно и жестоко).Битва между этими двумя очень разные взгляды на электроэнергию иногда называют Войной течений.
Несмотря на лучшие (или худшие) усилия Эдисона, Tesla победила, и теперь электричество переменного тока питает большую часть мира. Во многом именно поэтому многие электродвигатели, которые приводить в действие бытовую технику в наших домах, фабриках и офисах переменного тока асинхронные двигатели, работающие от вращающихся магнитных полей, которые Никола Тесла сконструировал в 1880-х годах (его патент, проиллюстрированный здесь, был выдан в мае 1888 года).Итальянский физик по имени Галилео Феррарис независимо друг от друга придумал ту же идею примерно в то же время, но история обошлась с ним еще более жестоко, чем Тесла и его имя теперь почти забыты.
Рекламные ссылкиУзнать больше
На этом сайте
На других сайтах
Книги
Для читателей постарше
Для младших читателей
Патенты
Патенты предлагают более глубокие технические детали и собственные идеи изобретателя о своей работе.Вот очень небольшая подборка многих патентов США, касающихся асинхронных двигателей.
Пожалуйста, НЕ копируйте наши статьи в блоги и другие сайты
статей с этого сайта зарегистрированы в Бюро регистрации авторских прав США. Копирование или иное использование зарегистрированных работ без разрешения, удаление этого или других уведомлений об авторских правах и / или нарушение смежных прав может привести к серьезным гражданским или уголовным санкциям.
Авторские права на текст © Chris Woodford 2012, 2020. Все права защищены. Полное уведомление об авторских правах и условиях использования.
Подписывайтесь на нас
Сохранить или поделиться этой страницей
Нажмите CTRL + D, чтобы добавить эту страницу в закладки на будущее, или расскажите об этом своим друзьям с помощью:
Цитируйте эту страницу
Вудфорд, Крис. (2012/2020) Асинхронные двигатели. Получено с https://www.explainthatstuff.com/induction-motors.html.[Доступ (укажите дату здесь)]
Больше на нашем сайте …
Почему вы должны использовать трехфазный асинхронный двигатель с частотно-регулируемым приводом переменного тока
Частотно-регулируемый привод (VFD) — это тип привода с регулируемой скоростью, используемый для управления электродвигателями, приводимыми в действие переменным током (AC) . В промышленности используются два основных типа двигателей переменного тока: синхронные и индукционные. Есть несколько причин, по которым вы должны использовать трехфазный асинхронный двигатель с вашим частотно-регулируемым приводом.
Блог по теме: 5 вещей, которые необходимо знать перед проектированием центра управления двигателями
Какие типы двигателей есть у Mader?
Синхронные и асинхронные двигатели
Синхронные двигатели переменного тока работают с использованием роторов, которые вращаются с той же скоростью, что и вращающиеся магнитные поля. Двигателю требуется источник постоянного тока (DC) для создания потока электричества в обмотки статора и создания вращающегося электромагнитного поля.Полная блокировка между статором и направлением вращения ротора определяет, что двигатель работает синхронно или вообще не работает.
Асинхронные двигатели — это наиболее распространенные двигатели, используемые в промышленном оборудовании, таком как насосы, конвейеры и воздуходувки. Они также работают с использованием электромагнитных полей, но классифицируются по количеству «фаз». Фаза относится к числу отдельных электрических токов, активирующих катушки, расположенные вокруг статора.
В трехфазном двигателе три тока используются для питания трех или кратных трех катушек.Трехфазные двигатели самозапускаются и не требуют внешнего источника постоянного тока. Скорость ротора в асинхронном двигателе изменяется в зависимости от колебания магнитной индукции, и это колебание приводит к тому, что ротор вращается с меньшей скоростью, чем скорость магнитного поля статора.
Какие условия влияют на скорость ротора асинхронного двигателя?
Чем выше требования к нагрузке, тем больше разница (скольжение) между скоростью ротора и скоростью вращающегося магнитного поля.Чтобы отрегулировать скорость асинхронного двигателя переменного тока, необходимо изменить частоту источника переменного тока, что является целью преобразователя частоты.
Трехфазный асинхронный двигатель и частотно-регулируемый приводДобавление частотно-регулируемого привода к трехфазному асинхронному двигателю позволяет изменять скорость двигателя в соответствии с его нагрузкой, экономя энергию. Напряжение и частота задаются точным методом при запуске двигателя, что также исключает потери энергии. Другие преимущества, включают:
Трехфазные асинхронные двигатели широко используются во многих отраслях промышленности, поскольку они самозапускающиеся, мощные и эффективные.Двигатели, управляемые с помощью частотно-регулируемого привода, являются наиболее эффективными, плавными и энергосберегающими.
Если у вас есть какие-либо вопросы о двигателях или вы хотите поговорить со специалистом о возможных вариантах, свяжитесь с Mader Electric сегодня и поговорите с членом нашей команды.
Блог по теме: частотно-регулируемый привод (ЧРП) Часто задаваемые вопросы
Современные методы совершенствования прямого управления крутящим моментом для асинхронных двигателей — обзор | Защита и управление современными энергосистемами
Хаджиан, М., Араб Маркаде, Г. Р., Солтани, Дж., И Хосеинния, С. (2009). Энергосберегающее регулирование в скользящем режиме бессенсорных асинхронных двигателей. Преобразование энергии и управление, 50 , 2296–2306.
Артикул Google Scholar
Сараванан, К., Сатисвар, Дж., И Раджа, С. (2012). Характеристики трехфазного асинхронного двигателя с модифицированной обмоткой статора. Международный журнал компьютерных приложений, 46 , 1–4.
Google Scholar
Коста, Б. Л. Г., Грасиола, К. Л., Анджелико, Б. А., Гёдтель, А., и Кастольди, М. Ф. (2018). Оптимизация метаэвристики применительно к настройке ПИ-регуляторов привода DTC-SVM для трехфазных асинхронных двигателей. Прикладные мягкие вычисления, 62, , 776–788.
Траоре Д., Леон Д. и Глумино А. (2012). Адаптивная конструкция управления обратным шагом на основе наблюдателя для бессенсорного асинхронного двигателя. Automatica, 48 , 682–687.
MathSciNet МАТЕМАТИКА Статья Google Scholar
Карагианнис Д., Астолфи А., Ортега Р. и Хилайрет М. (2009). Контроллер нелинейного слежения для асинхронных двигателей с питанием от напряжения с неопределенным моментом нагрузки. Транзакции IEEE по технологии систем управления, 17 , 608–619.
Артикул Google Scholar
Сен, П. К. (1990). Электромоторные приводы и управление — прошлое, настоящее и будущее. Транзакции IEEE по промышленной электронике, 37 , 562–575.
Артикул Google Scholar
Трабелси, Р., Хедхер, А., Мимуни, М. Ф., и М’сахли, Ф. (2012). Управление обратным шагом для асинхронного двигателя с помощью адаптивного скользящего наблюдателя потока ротора. Исследование электроэнергетических систем, 93 , 1–15.
Артикул Google Scholar
Заафури А., Регая К. Б., Азза Х. Б. и Чаари А. (2016). Адаптивное обратное шагание на основе DSP с использованием ошибок отслеживания для высокопроизводительного бессенсорного управления скоростью привода асинхронного двигателя. Транзакции ISA, 60 , 333–347.
Артикул Google Scholar
Алсофьяни И. М. и Идрис Н. Р. Н. (2013). Обзор бессенсорных методов обеспечения устойчивой надежности и эффективности частотно-регулируемых приводов асинхронных двигателей. Обзоры возобновляемой и устойчивой энергетики, 24 , 111–121.
Артикул Google Scholar
Derouich, A., & Lagrioui, A. (2014). Моделирование и анализ в реальном времени характеристик асинхронных машин, работающих при постоянном магнитном потоке. Международный журнал Advanced Computer Science and Applications, 5 , 59–64.
Артикул Google Scholar
Джаннати, М., Анбаран, С. А., Асгари, С. Х., Гох, В. Ю., Монади, А., Джунаиди, М. А. А., и Идрис, Н. Р. Н. (2017). Обзор методов регулирования скорости для эффективного управления однофазными асинхронными двигателями: эволюция, классификация, сравнение. Обзоры возобновляемой и устойчивой энергетики, 75 , 1306–1319.
Артикул Google Scholar
Дос Сантос, Т. Х., Гёдтель, А., Да Силва, С. А. О., и Суетаке, М.(2014). Скалярное управление асинхронным двигателем с использованием нейронной бессенсорной техники. Исследование электроэнергетических систем, 108 , 322–330.
Артикул Google Scholar
Леонард В. (1994). Управление машинами с помощью микроэлектроники. В Третий симпозиум IFAC по управлению в силовой электронике и электроприводах (стр. 35–58).
Google Scholar
Перерам К., Блаабьерг Ф. и Педерсен Дж. (2003). Бессенсорный, стабильный метод управления U / F для приводов с постоянными магнитами. Транзакции IEEE по отраслевым приложениям, 39 , 783–791.
Артикул Google Scholar
Хабби, Х. М. Д., Азил, Х. Дж., И Инаам, И. А. (2016). Управление скоростью асинхронного двигателя с помощью скалярных векторных контроллеров PI и V / F. Международный журнал компьютерных приложений, 151 , 36–43.
Артикул Google Scholar
Мартинс, К. А., и Карвалью, А. С. (2001). Технологические тенденции в электроприводах с асинхронными двигателями. В деле IEEE Porto power tech traffic (Vol. 2).
Google Scholar
Амезкуита-Брукс, Л., Личеага-Кастро, Э., Лисеага-Кастро, Дж., И Угальде-Лоо, К. Э. (2015). Анализ перекрестной связи магнитного момента в схемах ВОК: Новые характеристики подавления возмущений. Транзакции ISA, 52 , 446–461.
MATH Статья Google Scholar
Эль Уанджли, Н., Деруич, А., Эль Гзизаль, А., Чебабхи, А., и Таусси, М. (2017). Сравнительное исследование между системами управления FOC и DTC асинхронного двигателя с двойным питанием (DFIM). В Международная конференция по электрическим и информационным технологиям: IEEE .
Google Scholar
Mehazzem, F., Nemmour, A. L., & Reama, A. (2017). Реализация в режиме реального времени обратного мультискалярного управления асинхронным двигателем, питаемым от инвертора источника напряжения. Международный журнал водородной энергетики, 42 , 17965–17975.
Артикул Google Scholar
Чихи, А., Джараллах, М., и Чих, К. (2010). Сравнительное исследование полевого управления и управления прямым крутящим моментом асинхронных двигателей с использованием адаптивного наблюдателя потока. Сербский журнал электротехники, 7 , 41–55.
Артикул Google Scholar
Профумо Ф., ДеДонкер Р., Феррарис П. и Пасторелли М. (1995). Сравнение универсальных полевых контроллеров (УФО) в разных системах отсчета. Транзакции IEEE по силовой электронике, 10 , 205–213.
Артикул Google Scholar
Робинс, Б., Бертро, Ф., Отье, Ж.-П., и Байз, Х. (2000). Ориентация многомодельного поля на основе нечеткой логики в непрямом ВОК асинхронного двигателя. Транзакции IEEE по промышленной электронике, 47 , 380–388.
Артикул Google Scholar
Новотны Д. В. и Липо Т. А. (1996). Векторное управление и динамика приводов переменного тока . Оксфорд: Кларендон.
Google Scholar
Такахаши И. и Ногучи Т. (1986). Новая стратегия управления асинхронным двигателем с быстрым откликом и высокой эффективностью. Транзакции IEEE по отраслевым приложениям, IA-22 (5), 820–827.
Артикул Google Scholar
Депенброк М. (1988). Прямое саморегулирование (DSC) индукционной машины с питанием от инвертора. Транзакции IEEE по силовой электронике, 3 , 420–429.
Артикул Google Scholar
Ваез-Заде, С., и Джалали, Э. (2007). Комбинированный метод векторного управления и прямого управления крутящим моментом для высокопроизводительных приводов с асинхронными двигателями. Преобразование энергии и управление, 48 , 3095–3101.
Артикул Google Scholar
Эль Уанджли, Н., Деруич, А., Эль Гзизаль, А., Эль Мурабет, Ю., Босуфи, Б., и Таусси, М. (2017). Вклад в повышение производительности асинхронной машины с двойным питанием, работающей в двигательном режиме, посредством управления DTC. Международный журнал «Силовая электроника и приводные системы», 8 , 1117–1127.
Google Scholar
Khedher, A., & Mimouni, M. F. (2010). Бездатчиково-адаптивный код неисправности асинхронного двигателя с двойной звездой. Преобразование энергии и управление, 51 , 2878–2892.
Артикул Google Scholar
Реза, К. М. Ф. С., Ислам, М. Д., & Мехилеф, С.(2014). Обзор надежных и энергоэффективных приводов асинхронных двигателей с прямым управлением крутящим моментом. Обзоры возобновляемой и устойчивой энергетики, 37 , 919–932.
Артикул Google Scholar
Кадир А., Мехилеф С. и Пинг Х. У. (2007). Синхронный двигатель с постоянным магнитом и прямым управлением крутящим моментом с асимметричным многоуровневым инверторным питанием. В Седьмая международная конференция по силовой электронике (ICPE): IEEE (стр.1196–1201).
Google Scholar
Найк В. Н., Панда А. и Сингх С. П. (2016). Трехуровневый нечеткий-2 DTC привода асинхронного двигателя с использованием SVPW. Транзакции IEEE по промышленной электронике, 63 , 1467–1479.
Артикул Google Scholar
Абош, А. Х., Чжу, З. К., и Рен, Ю. (2017). Уменьшение пульсаций крутящего момента и магнитного потока при прямом управлении крутящим моментом асимметричной синхронной машины с постоянными магнитами на основе пространственно-векторной модуляции. Транзакции IEEE по силовой электронике, 32 , 2976–2986.
Артикул Google Scholar
Гоэль, Н., Патель, Р. Н., и Чако, С. (2016). Снижение пульсаций крутящего момента привода DTC IM с помощью искусственного интеллекта. В Международная конференция по электроэнергетике и энергетическим системам .
Google Scholar
Сутикно Т., Идрис Н.Р. Н., и Джидин А. (2014). Обзор прямого управления крутящим моментом асинхронных двигателей для обеспечения устойчивой надежности и энергоэффективных приводов. Обзоры возобновляемой и устойчивой энергетики, 23 , 548–558.
Артикул Google Scholar
Панчад, В. М., Чили, Р. Х., и Патре, Б. М. (2013). Обзор стратегий управления скользящим режимом для асинхронных двигателей. Annual Reviews in Control, 37 , 289–307.
Артикул Google Scholar
Буха, Г., Касадей, Д., и Серра, Г. (1997). Прямое управление крутящим моментом приводов асинхронных двигателей. В Труды международного симпозиума IEEE по промышленной электронике .
Google Scholar
Слемон, Г. Р. (1989). Моделирование асинхронных машин для электроприводов. Транзакции IEEE по отраслевым приложениям, 25 , 1126–1131.
Артикул Google Scholar
Хафиз М., Уддин М. Н., Рахим Н. А. и Хью В. П. (2014). Самонастраивающаяся схема DTC на основе NFC и адаптивного гистерезиса крутящего момента для привода IM. Транзакции IEEE по отраслевым приложениям, 50 , 1410–1420.
Артикул Google Scholar
Каземия М. В., Морадиб М. и Каземич Р. В. (2012). Минимизация пульсаций мощности прямого управления мощностью DFIG с помощью нечеткого контроллера и улучшенная дискретная пространственно-векторная модуляция. Исследование электроэнергетических систем, 89 , 23–30.
Артикул Google Scholar
Йен-Шин, Л., и Цзянь-Хо, К. (2001). Новый подход к прямому управлению крутящим моментом приводов асинхронных двигателей для обеспечения постоянной частоты коммутации инвертора и уменьшения пульсаций крутящего момента. Транзакции IEEE по преобразованию энергии, 6 , 220–227.
Артикул Google Scholar
Пуччи, М. (2012). Прямое управление линейными асинхронными двигателями, ориентированное на поле. Исследование электроэнергетических систем, 89 , 11–22.
Артикул Google Scholar
Бонне, Ф., Поль-Этьен, В., и Петрзак-Давид, М. (2007). Двойное прямое управление крутящим моментом асинхронной машины с двойной подачей. Транзакции IEEE по промышленной электронике, 54 , 2482–2490.
Артикул Google Scholar
Эль Мурабит Ю., Деруич А., Эль Гзизаль А., Эль Уанджли Н. и Замзум О. (2017). DTC-SVM Управление для синхронного генератора с постоянными магнитами на базе ветряной турбины с регулируемой скоростью. Международный журнал силовой электроники и приводных систем, 8 , 1732–1743.
Google Scholar
Талаэизаде, В., Кианинежад, Р., Сейфоссадат, С.Г., и Шаянфар, Х.А. (2010). Прямое управление крутящим моментом шестифазных асинхронных двигателей с помощью трехфазного матричного преобразователя. Преобразование энергии и управление, 51 , 2482–2491.
Артикул Google Scholar
Beerten, J., Verveckken, J., & Driesen, J. (2010). Прогнозирующее прямое управление крутящим моментом для уменьшения пульсаций магнитного потока и крутящего момента. Транзакции IEEE по промышленной электронике, 57 , 404–412.
Артикул Google Scholar
Локрити А., Салхи И., & Дубаби, С. (2015). Прямое управление крутящим моментом IM без искажения магнитного потока и статической ошибки крутящего момента. Транзакции ISA, 59 , 256–267.
Артикул Google Scholar
Сингх А. К., Редди К. У., Прабхакар К. К. и Правин К. (2015). Реализация FPGA прямого управления крутящим моментом асинхронного двигателя с уменьшенными колебаниями крутящего момента и магнитного потока. В Международная конференция по электрификации транспорта IEEE .
Google Scholar
Йоннала, Р. Б., и Бабу, К. С. (2018). Модифицированный многополосный управляемый гистерезисом DTC индукционной машины с 27-уровневым асимметричным CHB-MLI с модуляцией NVC. Инженерный журнал Айн Шамс, 9 , 15–29.
Артикул Google Scholar
Сутикно Т., Никидрис Н. Р., Джидин А. и Кирстеа М. Н. (2013). Улучшенная реализация прямого управления крутящим моментом на ПЛИС для асинхронных машин. Транзакции IEEE по промышленной информатике, 9 (3), 1280–1290.
Джузеппе, С. Б., & Казмерковски, М. П. (2004). Прямое управление крутящим моментом двигателей переменного тока с инверторным питанием с широтно-импульсной модуляцией — обзор. Транзакции IEEE по промышленной электронике, 51 , 744–757.
Артикул Google Scholar
Аммарн А., Бурек А. и Бенакча А. (2017). Нелинейный SVM-DTC для привода с асинхронным двигателем, использующий линеаризацию обратной связи по входу-выходу и управление скользящим режимом высокого порядка. Транзакции ISA, 67 , 428–442.
Артикул Google Scholar
Casadei, D., Profumo, F., Serra, G., & Tani, A. (2002). FOC и DTC: две жизнеспособные схемы управления крутящим моментом асинхронных двигателей. Транзакции IEEE по силовой электронике, 17 , 779–787.
Артикул Google Scholar
Аммар, А., Бенакча, А., и Бурек, А.(2017). Замкнутый контур крутящего момента SVM-DTC на основе надежного регулятора скорости сверхкручения для асинхронного двигателя с оптимизацией эффективности. Международный журнал водородной энергетики, 42 , 17940–17952.
Артикул Google Scholar
Gadoue, S. M., Giaouris, D., & Finch, J. W. (2009). Управление скоростью асинхронных двигателей DTC на основе искусственного интеллекта — сравнительное исследование. Исследование электроэнергетических систем, 79 , 210–219.
Артикул Google Scholar
Гдаим, С., Мтибаа, А., и Мимуни, М. Ф. (2010). Прямое управление крутящим моментом асинхронной машины на основе интеллектуальных технологий. Международный журнал компьютерных приложений, 10 , 0975–8887.
Артикул Google Scholar
Белкасем С., Насери Ф. и Абдессемед Р. (2011). Улучшение DTC-SVM приводов переменного тока с использованием нового надежного адаптивного алгоритма управления. Международный журнал управления, автоматизации и систем, 9 , 267–275.
Артикул Google Scholar
Родригес Дж., Понтт Дж., Силва К., Куро С. и Миранда Х. (2004). Новая схема прямого управления крутящим моментом для асинхронных машин с пространственно-векторной модуляцией. В ежегодной конференции специалистов по силовой электронике IEEE (стр. 1392–1397).
Google Scholar
Абделли Р., Рекьюа Д. и Рекьюа Т. (2011). Повышение производительности и минимизация пульсаций крутящего момента для асинхронных машин с VSI-питанием и прямым управлением крутящим моментом. Транзакции ISA, 50 , 213–219.
Артикул Google Scholar
Эль-Саадави, М., и Хатата, А. (2017). Новая схема защиты обмоток статора синхронного генератора на базе SVM. Защита и управление современными энергосистемами, 2 (1), 24.
Артикул Google Scholar
Пиццо, А. Д., Марино, П., и Вискиано, Н. (2002). Гармонические и интергармонические воздействия приводов асинхронных двигателей на основе DTC на 3-проводную сеть. В Международная конференция по промышленной электронике IEEE .
Google Scholar
Maes, J., & Melkebeek, J. (1998). Дискретное прямое управление крутящим моментом асинхронных двигателей с использованием измерения обратной ЭДС.В Тридцать третья ежегодная конференция IAS по отраслевым приложениям .
Google Scholar
Casadei, D., Serra, G., & Tani, A. (2000). Реализация алгоритма прямого управления крутящим моментом для асинхронных двигателей на основе дискретной пространственно-векторной модуляции. Транзакции IEEE по силовой электронике, 15 , 769–777.
Артикул Google Scholar
Кейхани, Х. Р., Золгадри, М. Р., и Хомаифар, А. (2004). Расширенное и улучшенное прямое управление крутящим моментом с дискретной пространственной векторной модуляцией для асинхронных двигателей. В Ежегодная конференция специалистов по силовой электронике IEEE .
Google Scholar
Дель Торо, X. Г., Ариас, А., Джейн, М. Г., Уиттинг, П. А., Сала, В. М., и Ромерал, Дж. Л. (2005). Новая схема управления DTC для асинхронных двигателей с трехуровневым инвертором. Автоматика, 46, , 73–81.
Google Scholar
Kyo-Beum, L., Joong-Ho, S., Choy, I., & Ji-Yoon, Y. (2002). Снижение пульсаций крутящего момента в DTC асинхронного двигателя с приводом от трехуровневого инвертора с низкой частотой коммутации. Транзакции IEEE по силовой электронике, 17 , 255–264.
Артикул Google Scholar
Уткин И.В. (1993).Принципы проектирования и приложения скользящего регулирования к электроприводам. Транзакции IEEE по промышленной электронике, 40 , 23–36.
Артикул Google Scholar
Бубзизи, С., Абид, Х., и Чаабан, М. (2018). Сравнительное исследование трех типов контроллеров для DFIG в системе преобразования энергии ветра. Защита и управление современными энергосистемами, 3 (1), 21.
Статья Google Scholar
Танвир А., Бейг А. Р. и Аль-Хосани К. (2013). DTC трехуровневого асинхронного двигателя с питанием от инвертора, основанный на скользящем режиме, с использованием таблицы векторов переключения. В Азиатская конференция по контролю .
Google Scholar
Айярао, Т. С. (2019). Модифицированная система ветроэнергетики DFIG с векторным управлением на основе адаптивного управления скользящим режимом барьерной функции. Защита и управление современными энергосистемами, 4 (1), 4.
Статья Google Scholar
Родич М. и Езерник К. (2002). Регулирование крутящего момента асинхронного двигателя в скользящем режиме без датчика скорости. Транзакции IEEE по промышленной электронике, 49 , 87–95.
Артикул Google Scholar
Мехмет Д. (2005). Бездатчиковое прямое управление крутящим моментом (DTC) асинхронного двигателя в скользящем режиме. В Труды международного симпозиума IEEE по промышленной электронике .
Google Scholar
Шир-Куан, Л., и Чи-Син, Ф. (2001). Прямое регулирование крутящего момента асинхронного двигателя в скользящем режиме. В Ежегодная конференция общества промышленной электроники IEEE (стр. 2171–2177).
Google Scholar
Lascu, C., Boldea, I., & Blaabjerg, F. (2004). Прямое управление крутящим моментом бессенсорных асинхронных двигателей: подход скользящего режима. Транзакции IEEE по отраслевым приложениям, 40 , 582–590.
Артикул Google Scholar
Детян С. (2010). Прямое управление крутящим моментом в скользящем режиме для асинхронного двигателя с надежным наблюдателем потока статора. В Международная конференция по интеллектуальным вычислительным технологиям и автоматизации .
Google Scholar
Камачо, Э. Ф. (1993). Ограниченный обобщенный прогнозный контроль. Транзакции IEEE по автоматическому управлению, 38 (2), 327–332.
MathSciNet МАТЕМАТИКА Статья Google Scholar
Камачо, Э. Ф., и Бордонс, К. (2007). Модель Прогностическое управление. Учебники для углубленного изучения управления и обработки сигналов , Springer-Verlag: London.
Гейер Т., Папафотиу Г. и Морари М. (2009). Модельное прогнозирующее прямое управление крутящим моментом — Часть I: Концепция, алгоритм и анализ. Транзакции IEEE по промышленной электронике, 56, , 1894–1905.
Артикул Google Scholar
Зейналы Ю., Гейер Т. и Эгардт Б. (2011). Методы продолжения траектории для прогнозирующего прямого управления крутящим моментом. В 26-я ежегодная конференция и выставка прикладной силовой электроники IEEE (APEC) (стр. 1667–1674).
Google Scholar
Папафотиу, Г., Клей, Дж., Пападопулос, К. Г., Борен, П., и Морари, М.(2009). Модель прогнозирующего прямого управления крутящим моментом — Часть II: Реализация и экспериментальная оценка. Транзакции IEEE по промышленной электронике, 56, , 1906–1915.
Артикул Google Scholar
Эзеонвумелу И., Шинде А. М. и Гадираджу В. М. (2007). Оценка эффективности методов DTC, MPDTC и DDTC для привода SPMSM. Американский научно-исследовательский журнал инженерии, технологий и наук (ASRJETS), 35 (1), 201–214.
Google Scholar
Ван Ф., Чжан З., Мэй Х., Родригес Дж. И Кеннел Р. (2018). Усовершенствованные стратегии управления асинхронной машиной: управление с ориентацией на поле, прямое управление крутящим моментом и управление с прогнозированием модели. Энергия, 11 (1), 120.
Статья Google Scholar
Гейер Т., Папафотиу Г. и Морари М. (2009). Модельное прогнозирующее прямое управление крутящим моментом — Часть I: Концепция, алгоритм и анализ. IEEE Transactions on Industrial Electronics, 56 , 6.
Статья Google Scholar
Миранда, Х., Кортес, П., и Юз, Дж. (2009). Прогнозирующее управление крутящим моментом асинхронных машин на основе моделей в пространстве состояний. IEEE Transactions on Industrial Electronics, 56 , 6.
Статья Google Scholar
Пакас, М., и Вебер, Дж.(2005). Прогнозирующее прямое управление крутящим моментом для синхронной машины с постоянным магнитом. IEEE Transactions on Industrial Electronics, 52 , 5.
Статья Google Scholar
Окумус, Х. И., и Мустафа Актас, М. (2010). Адаптивное управление полосой гистерезиса для постоянной частоты коммутации в приводах асинхронных машин DTC. Турецкий журнал электротехники и компьютерных наук, 18 , 59–69.
Google Scholar
Уддин, М. Н., и Хафиз, М. (2012). Схема DTC на основе FLC для улучшения динамических характеристик привода IM. Транзакции IEEE по отраслевым приложениям, 48 , 823–831.
Артикул Google Scholar
Jinlian, D., & Tu, L. (2006). Улучшение характеристик прямого управления крутящим моментом на низких скоростях за счет использования метода нечеткой логики. В Международная конференция IEEE по мехатронике и автоматизации .
Google Scholar
Туфути Р., Мезиан С. и Беналла Х. (2007). Прямое управление крутящим моментом асинхронного двигателя с использованием интеллектуальных технологий. Журнал теоретических и прикладных информационных технологий, 3 , 35–44.
Google Scholar
Гдаим, С., Мтибаа, А., и Мимуни, М. Ф. (2015). Разработка и экспериментальная реализация DTC индукционной машины на основе нечеткой логики управления на ПЛИС. Транзакции IEEE в нечетких системах, 23, , 644–655.
Артикул Google Scholar
Зегай, М. Л., Бенджеббар, М., Бельхадри, К., Думбия, М. Л., Хамане, Б., и Кумба, П. М. (2015). Прямое управление крутящим моментом асинхронного двигателя на основе искусственных нейронных сетей. Управление скоростью с помощью MRAS и нейронного ПИД-регулятора. В IEEE Electric Power and Energy Conference (EPEC) .
Google Scholar
Юань, Г., Цзинькуань, В., и Синьюнь, К. (2011). Улучшение работы системы DTC на нечетком управлении. Процедуры по наукам об окружающей среде, 10 , 589–594.
Артикул Google Scholar
Чжао Т., Фэнхун X., Цзяньпин В., Чжан Г. и Цзяньлинь М. (2014). Исследования в области бессенсорного нечеткого управления крутящим моментом асинхронных двигателей. В Международная конференция по электронике и системам связи .
Google Scholar
Klement, E. P., & Slany, W. (1997). Нечеткая логика в искусственном интеллекте. В книге : Энциклопедия информатики и технологий, глава (стр. 34) Доп. 19.
Google Scholar
Venugopal, C. (2010). DTC на основе нечеткой логики для управления скоростью асинхронного двигателя с матричным преобразователем. В 2010 IEEE International Conference on Power and Energy (стр.753–758). IEEE.
Эль Уанджли, Н., Деруич, А., Эль Гзизаль, А., Чебабхи, А., Таусси, М., и Босуфи, Б. (2018). Стратегия прямого управления крутящим моментом на основе контроллера с нечеткой логикой для асинхронного двигателя с двойным питанием. В серии конференций IOP: Наука о Земле и окружающей среде (Том 161, № 1, стр. 012004). IOP Publishing.
Тлемкани А., Бушида О., Бенмансур К., Будана Д. и Бушерит М. С. (2009). Стратегия прямого управления крутящим моментом (DTC) на основе контроллера нечеткой логики для привода синхронной машины с постоянными магнитами. Журнал электротехники и технологий, 4 , 66–78.
Артикул Google Scholar
Мир С.А., Зингер Д.С. и Эльбулук Э. (1993). Нечеткая реализация прямого самоконтроля асинхронных машин. В конференции IEEE на ежегодном собрании общества отраслевых приложений .
Google Scholar
Джагадиш, Х. П., & Кодад, С. Ф. (2009). Непосредственное нечеткое управление крутящим моментом привода переменного тока. В Международная конференция IEEE по достижениям в области вычислений, управления и телекоммуникационных технологий .
Google Scholar
Хафиз М., Уддин М. Н. и Ребейро Р. С. (2010). Адаптация полосы гистерезиса на основе FLC для оптимизации пульсаций крутящего момента и магнитного потока статора привода IM на основе DTC. В IEEE Electric Power and Energy Conference .
Google Scholar
Эль Уанджли, Н., Таусси, М., Деруич, А., Чебабхи, А., Эль-Гзизаль, А., и Босуфи, Б. (2018). Высокоэффективное прямое управление крутящим моментом с двойной подачей с использованием нечеткой логики. Научный журнал Университета Гази, 31 (2), 532–542.
Google Scholar
Мондал, С. К., Пинто, Дж. О., и Бимал, К. Б. (2002). ШИМ-контроллер на основе нейронной сети для трехуровневого инверторного асинхронного двигателя с питанием от напряжения. Транзакции IEEE по отраслевым приложениям, 38 , 660–669.
Артикул Google Scholar
Faa-Jeng, L., Jyh-Chyang, Y., & Mao-Sheng, T. (2001). Бессенсорный асинхронный привод шпинделя с использованием контроллера скорости нечеткой нейронной сети. Исследование электроэнергетических систем, 58 , 187–196.
Артикул Google Scholar
Алессандро Гёдтель, А., Да-Силва, И. Н., и Амарал, С. П. Дж. (2007). Идентификация момента нагрузки в асинхронном двигателе методом нейронных сетей. Исследование электроэнергетических систем, 77 , 35–45.
Артикул Google Scholar
Сингх Б., Прадип Дж., Миттал А. П. и Гупта Дж. Р. П. (2006). Привод DTC IM для силовой установки электромобиля на основе нейронной сети. В конференции IEEE по электрическим и гибридным транспортным средствам .
Google Scholar
Берраба, Ф., Салах, С., и Чебабхи, А. (2016). Технология SVM, основанная на бессенсорном управлении DTC, оптимизированном ANN, применяется к асинхронной машине с двумя статорами, питаемой от трехуровневого шестифазного инвертора. Средиземноморский журнал измерений и контроля, 12 , 571–579.
Google Scholar
Хаммуми, А., Массум, А., Меруфель, А., и Вира, П. (2012). Приложение Des Réseaux de Neurones для Commande de la Machine Asynchrone без механического захвата. Acta Electrotehnica, 53 , 99–104.
Google Scholar
Земмит, А., Мессалти, С., и Харраг, А. (2016). Инновационное улучшенное прямое управление крутящим моментом асинхронной машины с двойным питанием (DFIM) с использованием искусственной нейронной сети (ANN-DTC). Международный журнал прикладной инженерии, 11 , 9099–9105.
Google Scholar
Джадхав С., Киранкумар Дж. И Чаудхари Б. (2012). Интеллектуальное управление приводом асинхронного двигателя на основе ИНС с DTC с пространственно-векторной модуляцией. В международной конференции IEEE, посвященной силовым электронам, приводам энергетических систем (PEDES) (стр. 1–6).
Google Scholar
Grzesiak, L. M., & Ufnalski, B. (2005). Привод DTC с устройством оценки потока статора на основе ANN.В Европейская конференция по силовой электронике и приложениям .
Google Scholar
Босуфи, Б., Карим, М., Сильвиу, С., и Лагриуи, А. (2011). Искусственная нейронная сеть на основе DTC Control для высокопроизводительного привода PMSM. Журнал теоретических и прикладных информационных технологий, 33 , 165–176.
Google Scholar
Grzesiak, L.М., Меганк, В., Соболевски, Дж., И Бартломей, У. (2006). Обучаемый нейронный регулятор скорости в режиме онлайн с периодом обновления переменного веса для привода переменного тока с прямым управлением крутящим моментом. В 12-я международная конференция по силовой электронике и управлению движением (стр. 1127–1132).
Google Scholar
Кумар Р., Гупта Р., Бхангейл С. и Готвал Х. (2007). Прямое управление крутящим моментом приводов асинхронных двигателей на основе искусственной нейронной сети.В Международная конференция IET-UK по информационным и коммуникационным технологиям в электротехнике (стр. 361–367).
Google Scholar
Линь Ф. Дж., Чжоу У. Д. и Хуанг П. К. (2003). Адаптивный регулятор скользящего режима на основе генетического алгоритма реального времени для сервопривода асинхронного двигателя. В Труды ИЭЭ — электроэнергетические приложения (стр. 1–13).
Google Scholar
Мма, М. А., и Уолкотт, Б. Л. (1996). Устойчивость и оптимальность контроллеров генетических алгоритмов. В Международный симпозиум IEEE по интеллектуальному управлению .
Google Scholar
Нареш Б., Кумар М. В. и Ядаиа Н. (2011). Настройка ПИ-регулятора на основе ГА. В IEEE последние достижения в области интеллектуальных вычислительных систем .
Google Scholar
Земмит, А., Мессалти, С., и Харраг, А. (2017). Новый улучшенный DTC индукционной машины с двойной подачей питания с использованием ПИ-регулятора на основе GA. Инженерный журнал Айн Шамс, 9 (4), 1877–1885.
Gadoue, S. M., Giaouris, D., & Finch, J. W. (2007). Оптимизированный с помощью генетического алгоритма PI и нечеткий скользящий режим управления скоростью для приводов DTC. В Труды всемирного инженерного конгресса .
Google Scholar
Хао, Л., Цююнь, М., и Чжилинь, З. (2010). Исследование прямого управления крутящим моментом асинхронного двигателя на основе генетического алгоритма и нечеткого адаптивного ПИ-регулятора. В Международная конференция по измерительной технике и автоматизации мехатроники .
Google Scholar
Трипати, С. М., Тивари, А. Н., и Сингх, Д. (2015). Интегрированные в сетку системы преобразования энергии ветра на основе синхронных генераторов с постоянными магнитами: Обзор технологий. Обзоры возобновляемой и устойчивой энергетики, 51 , 1288–1305.
Артикул Google Scholar
Кумар, Р. Х., Икбал, А., и Ленин, Н. К. (2017). Обзор последних достижений в области прямого управления крутящим моментом в приводах асинхронных двигателей — десятилетие прогресса.