Устройство асинхронного двигателя
5.2. Устройство асинхронного двигателя
Асинхронный двигатель состоит из двух основных частей, разделенных воздушным зазором: неподвижного статора и вращающегося ротора. Каждая из этих частей имеет сердечник и обмотку. При этом обмотка статора включается в сеть и является как бы первичной, а обмотка ротора — вторичной, так как энергия в нее поступает из обмотки статора за счет магнитной связи между этими обмотками.
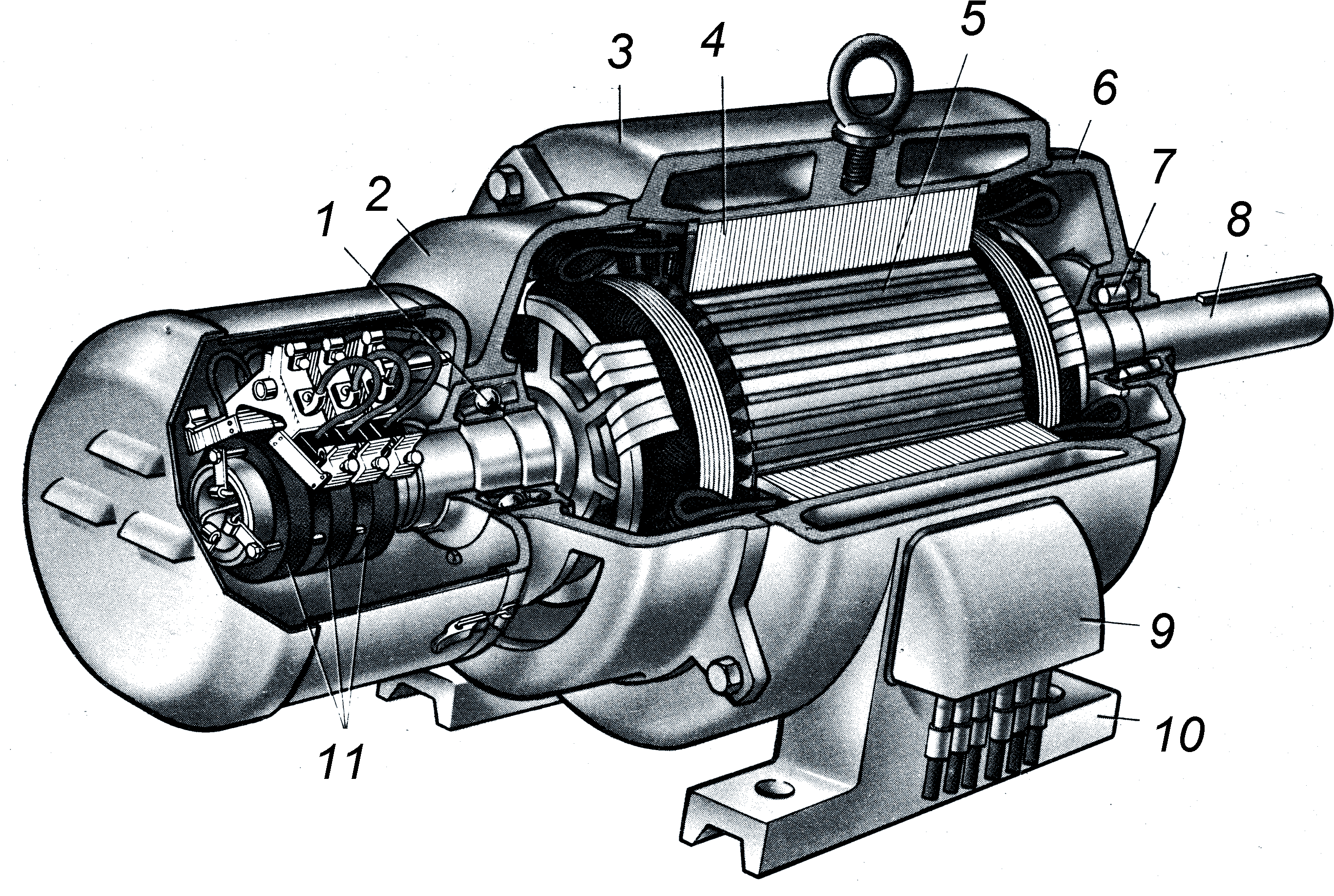
По своей конструкции асинхронные двигатели разделяются на два вида: двигатели с короткозамкнутым ротором и двигатели с фазным ротором. Рассмотрим устройство трехфазного асинхронного двигателя с короткозамкнутым ротором (рис.5.2). Двигатели этого вида имеют наиболее широкое применение.
Рис.5.2. Устройство трехфазного асинхронного двигателя
с короткозамкнутым ротором:
1 — вал; 2, 6 — подшипники; 3, 7 — подшипниковые щиты; 4 — коробка выводов;
5 — вентилятор; 8 — кожух вентилятора; 9 — сердечник ротора с короткозамкну-
той обмоткой; 10 — сердечник статора с обмоткой; 11 — корпус; 12 — лапы
Неподвижная часть двигателя — статор — состоит из корпуса // и сердечника 10 с трехфазной обмоткой. Корпус двигателя отливают из алюминиевого сплава или из чугуна либо делают сварным. Рассматриваемый двигатель имеет закрытое обдуваемое исполнение. Поэтому поверхность его корпуса имеет ряд продольных ребер, назначение которых состоит в том, чтобы увеличить поверхность охлаждения двигателя.
Корпус двигателя отливают из алюминиевого сплава или из чугуна либо делают сварным. Рассматриваемый двигатель имеет закрытое обдуваемое исполнение. Поэтому поверхность его корпуса имеет ряд продольных ребер, назначение которых состоит в том, чтобы увеличить поверхность охлаждения двигателя.
В корпусе расположен сердечник статора 10, имеющий шихтованную конструкцию: отштампованные листы из тонколистовой электротехнической стали толщиной обычно 0,5 мм покрыты слоем изоляционного лака, собраны в пакет и скреплены специальными скобами или продольными сварными швами по наружной поверхности пакета. Такая конструкция Сердечника способствует значительному уменьшению вихревых токов, возникающих в процессе перемагничивания сердечника вращающимся магнитным полем. На внутренней поверхности сердечника статора имеются продольные пазы, в которых расположены пазовые части обмотки статора, соединенные в определенном порядке лобовыми частями, находящимися за пределами сердечника по его торцовым сторонам.
Рис.5.3. Конструкция короткозамкнутого ротора: а — беличья клетка; б — ротор с медной стержневой обмоткой; в — ротор с алюминиевой литой обмоткой;
1 — сердечник ротора; 2 — стержни; 3 — замыкающие кольца;
4 — лопасти вентилятора
Обмотка статора асинхронного электродвигателя может быть соединена звездой или треугольником. Схемы соединения представлены на рис.5.4
Рис.5.4. Схемы соединения выводов трехфазных обмоток электродвигателя:
а — звезда; б — треугольник
5.3. Принцип образования вращающегося магнитного поля
Принцип образования вращающегося магнитного поля рассмотрим на примере простейшей трехфазной двухполюсной обмотки, каждая фаза которой состоит из одной секции, фазы обмотки соединены звездой (рис.5.5). При этом секции тока в фазных обмотках (по времени) относительно друг друга на электрический угол 120° (рис.5.5, б). Проведем ряд построений вектора МДС трехфазной обмотки Fm, соответствующих различным моментам времениt0, t1, t2,t3отмеченным на графике рис.
В момент времени t0ток в фазе А равен 0, в фазе В ток имеет отрицательное, а в фазе С — положительное направления. Эти направления тока отмечаем на рис.5.5, б в сечениях обмоток статора для данного момента времени. При этом следует помнить, что за положительное направление тока
Рис.5.5. Получение вращающегося магнитного поля: а — трехфазная обмотка статора;
б — вращение МДС; в — модель магнитного поля статора;
1-4 — обмотка фазы А; 3-6 — обмотка фазы В;
5—2 — обмотка фазы С (первая цифра — начало обмотки)
в фазной обмотке принимается направление тока от начала обмотки к ее концу и обозначается х, а, следовательно, отрицательное направление тока в обмотке соответствует направлению тока от конца к началу и обозначается •. Затем в соответствии с указанными на рис. 5, б направлениями токов определяем (по правилу буравчика) направление вектора МДС трехфазной обмотки статора (вектор Fmнаправлен вниз).
В момент времени t1т.е. через (1/3) Т, ток в фазе В равен нулю, в фазе А имеет положительное, а в фазе С — отрицательное направление.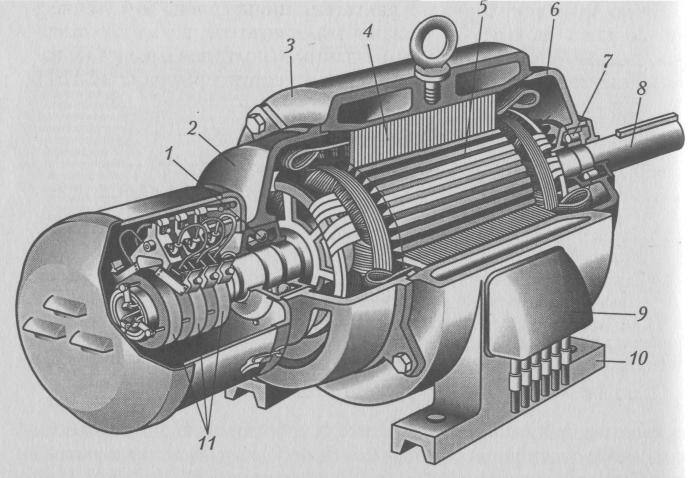 Сделав построения, аналогичные моменту времени t0, заметим, что вектор МДС обмотки статора Fmпо сравнению с его положением в момент времени t0повернулся на 120° в направлении движения часовой стрелки.
Сделав построения, аналогичные моменту времени t0, заметим, что вектор МДС обмотки статора Fmпо сравнению с его положением в момент времени t0повернулся на 120° в направлении движения часовой стрелки.
Проведя аналогичные построения вектора МДС обмотки статора для момента t2и t3, видим, что каждый раз при переходе от одного момента времени к другому вектор Fmповорачивается на 120°, а за один период изменения токов в обмотках (с t0до t3) делает полный оборот (360°) и будет, таким образом, вращающимся. Вращающаяся МДС создает вращающееся магнитное поле, эквивалентное полю магнита N — S с индукцией Во (рис.5, в). Это поле вращается с синхронной частотойn0которая пропорциональна частоте переменного токаfи обратно пропорциональна числу пар полюсов обмоток статора р, т.е.
,
Зависимость n0 от р и f представлена в табл.5.2.
Таблица 5.2
f = 50 Гц | Р | 1 | 2 | 3 | 4 | 5 | 6 |
n0, об/мин | 3000 | 1500 | 1000 | 750 | 600 | 500 | |
р=1 | f. | 50 | 100 | 200 | 400 | 500 | 1000 |
 ГЦ
ГЦКруговое вращающееся магнитное поле характеризуется тем, что пространственный вектор магнитной индукции этого поля Во вращается равномерно (n0= const).
При необходимости изменить направление вращения магнитного поля статора нужно поменять порядок следования токов в фазных обмотках статора, для чего переключают фазы на зажимах двигателя (рис.5.6).
Рис.5.6. Изменение направления вращения магнитного поля.
Устройство и принцип действия асинхронных электродвигателей
Всем привет. Рад вас видеть у себя на сайте. Тема сегодняшней статьи: устройство и принцип действия асинхронных электродвигателей. Так же я бы хотел немного сказать о способах регулировки их частоты вращения, и перечислить их основные преимущества и недостатки.
Раньше, я уже писал статьи, касающиеся асинхронных электродвигателей. Если кому интересно, то можете почитать.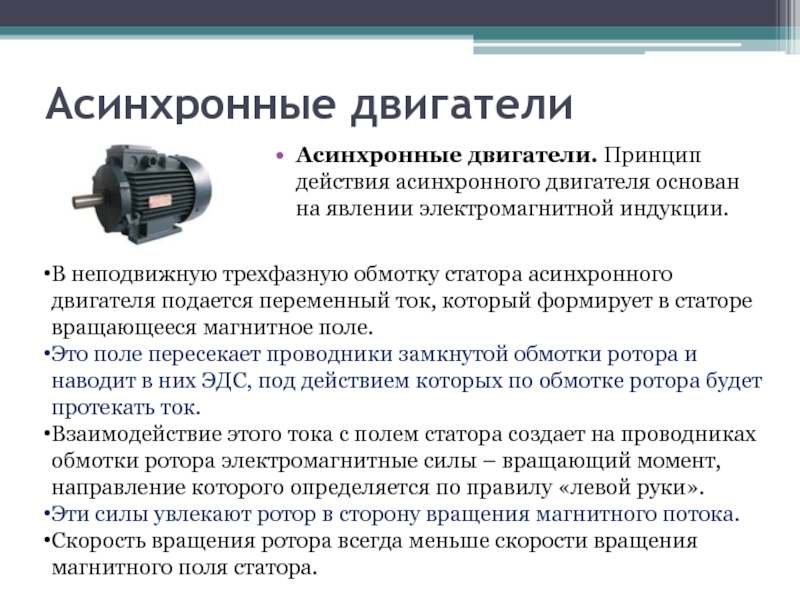 Вот список:
Вот список:
Схема пуска асинхронного двигателя.
Расчёт тока электродвигателя.
Реверсивное управление асинхронным электродвигателем с короткозамкнутым ротором.
Ну а теперь давайте перейдём к теме сегодняшней статьи.
В нынешнее время, очень трудно представить, как бы существовали все промышленные предприятия, если бы не было асинхронных машин. Эти двигателя установлены практически везде. Даже дома у каждого человека есть такой двигатель. Он может стоять на вашей стиральной машинке, на вентиляторе, на насосной станции, в вытяжке и так далее.
Вообще асинхронный электродвигатель – это колоссальный прорыв в мировой промышленности. Во всём мире их выпускают более 90 процентов от количества всех выпускаемых двигателей.
Асинхронный электродвигатель – это электрическая машина, которая преобразовывает электрическую энергию в механическую. То есть потребляет электрический ток, а взамен дают крутящий момент, с помощью которого можно вращать многие агрегаты.
А само слово «асинхронный» — означает неодновременных или не совпадающий по времени. Потому что у таких двигателей частота вращения ротора немного отстаёт от частоты вращения электромагнитного поля статора. Ещё это отставанием называют – скольжением.
Обозначается это скольжение буквой: S
А вычисляется скольжение по такой формуле: S = ( n1 — n2 )/ n1 — 100%
Где, n1 – это синхронная частота магнитного поля статора;
n2 – это частота вращения вала.
Устройство асинхронного электродвигателя.
Двигатель состоит из таких частей:
1. Статор с обмотками. Или станина внутри которой находится статор с обмотками.
2. Ротор. Это если короткозамкнутый. А если фазный, то можно сказать, что это якорь или даже коллектор. Я думаю, ошибки не будет.
3. Подшипниковые щиты. На мощных двигателях ещё спереди стоят подшипниковые крышки с уплотнителями.
4. Подшипники. Могут стоять скольжения или качения, в зависимости от исполнения.
5. Вентилятор охлаждения. Изготавливается из пластмассы или металла.
Вентилятор охлаждения. Изготавливается из пластмассы или металла.
6. Кожух вентилятора. Имеет прорези для подачи воздуха.
7. Борно или клеммная коробка. Для подключения кабелей.
Это все его основные детали, но в зависимости от вида, типа и исполнения может немного изменяться.
Асинхронные электродвигателя в основном выпускают двух видов: трёхфазные и однофазные. В свою очередь трёхфазные ещё подразделяются на подвиды: с короткозамкнутым ротором или фазным ротором.
Самые распространённые – это трёхфазные с короткозамкнутым ротор.
Статор имеет круглую форму и набирается с листов специальной стали, которые изолированы между собой, и эта собранная конструкция образует сердечник с пазами. В пазы сердечника укладываются обмотки, со специального обмоточного, изолированного лаком провода. Провод это отливают в основном из меди, но также есть и с алюминия. Если двигатель очень мощный, то обмотки делаю шиной. Обмотки укладывают так, чтобы они были сдвинуты относительно друг друга на 120 градусов.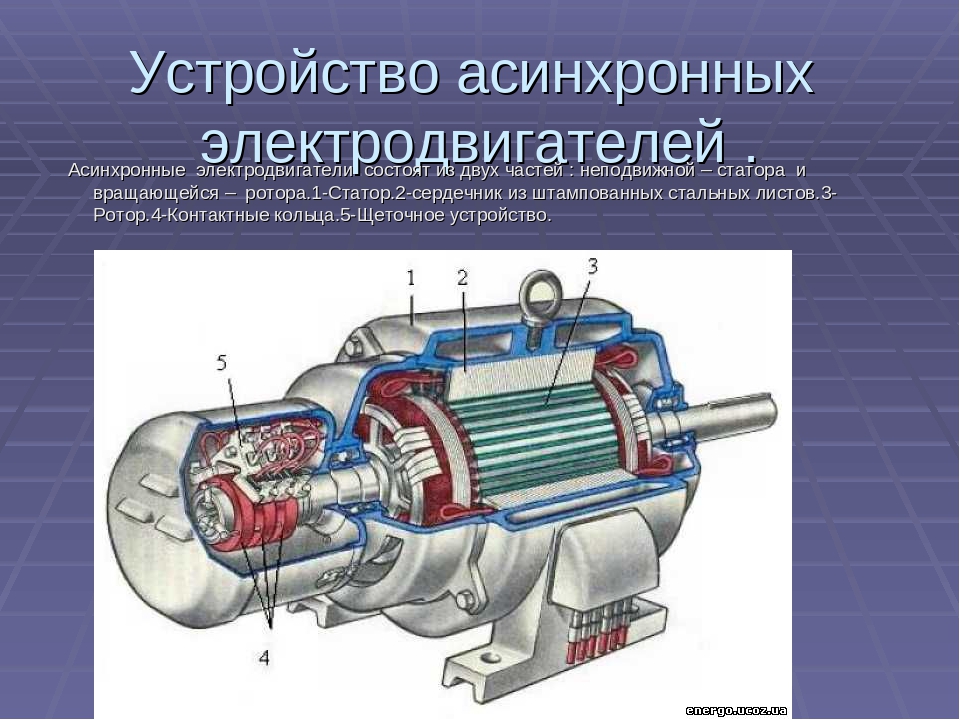
Ротор, как выше я уже писал выше, бывает короткозамкнутый или фазный.
Короткозамкнутый представляет собой вал, на который надеваются листы, из тоже специальной, стали. Эти наборные листы образую сердечник, в пазы которого заливают расплавленный алюминий. Этот алюминий равномерно растекается по пазам и образует стержни. А по краям эти стержни замыкают алюминиевыми кольцами. Получается своего рода «беличья клетка».
Фазный ротор представляет собой вал с сердечником и тремя обмотками. Одни концы, которых обычно соединяют в звезду, а вторые три конца присоединяют к токосъемным кольцам. А на эти кольца, с помощью щёток подают электрический ток.
Если в цепь фазных обмоток добавить нагрузочный реостат, и при пуске двигателя увеличивать активное сопротивление, то таким способ можно уменьшить большие пусковые токи.
Принцип действия.
Когда на обмотки статора подаются электрический ток, то в этих обмотках возникает электрический поток. Как вы помните, из выше написанных слов, фазы у нас смещены относительно друг друга на 120 градусов. И вот этот поток в обмотках начинает вращаться.
Как вы помните, из выше написанных слов, фазы у нас смещены относительно друг друга на 120 градусов. И вот этот поток в обмотках начинает вращаться.
И при вращении магнитного потока статора, в обмотках ротора появляется электрический ток, и своё магнитное поле. Два этих магнитных поля начинают взаимодействовать и заставляют вращаться ротор электродвигателя. Это если ротор короткозамкнутый.
По принципу роботы вот посмотрите видео ролик.
Ну а с фазным ротором, по сути, принцип тот же. Напряжение подаётся на статор и на ротор. Появляются два магнитных поля, которые начинают взаимодействовать и вращать ротор.
Достоинства и недостатки асинхронных двигателей.
Основные достоинства асинхронного электродвигателя с короткозамкнутым ротором:
1. Очень простое устройство, что позволяет сократить затраты на его изготовление.
2. Цена намного меньше по сравнению с другими двигателями.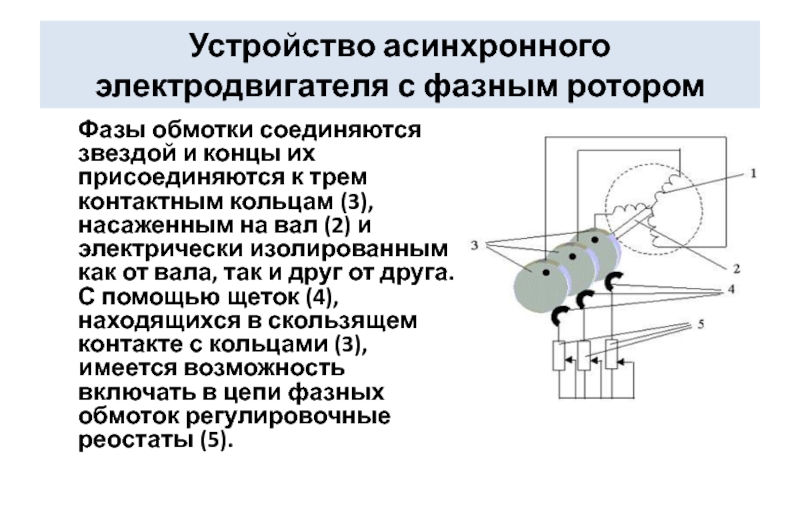
3. Очень простая схема запуска.
4. Скорость вращения вала практически не меняется с увеличением нагрузки.
5. Хорошо переносит кратковременные перегрузы.
6. Возможность подключения трёхфазных двигателей в однофазную сеть.
7. Надёжность и возможность эксплуатировать практически в любых условиях.
8. Имеет очень высокий показатель КПД и cos φ.
Недостатки:
1. Не возможности контролировать частоту вращения ротора без потери мощности.
2. Если увеличить нагрузку, то уменьшается момент.
3. Пусковой момент очень мал по сравнению с другими машинами.
4. При недогрузе увеличивается показатель cos φ
5. Высокие показатели пусковых токов.
Достоинства двигателей с фазным ротором:
1. По сравнению с короткозамкнутыми двигателями, имеет достаточно большой вращающий момент. Что позволяет его запускать под нагрузкой.
2. Может работать с небольшим перегрузом, и при этом частота вращения вала практически не меняется.
3. Небольшой пусковой ток.
4. Можно применять автоматические пусковые устройства.
Недостатки:
1. Большие габариты.
2. Показатели КПД и cos φ меньше, чем у двигателей с короткозамкнутым ротором. И при недогрузе эти показатели имеют минимальное значение
3. Нужно обслуживать щёточный механизм.
На этом буду заканчивать свою статью. Если она была вам полезной, то поделитесь нею со своими друзьями в социальных сетях. Если есть вопросы, то задавайте их в комментариях и подписывайтесь на обновления. Пока.
С уважением Александр!
Устройство и принцип действия асинхронных двигателей
Асинхронным двигателем называют устройство, предназначенное для превращения электрической энергии в механическую. Асинхронным именуют потому, что процессы внутри него протекают неодновременно: частота вращения ротора постоянно опережает частоту вращения магнитного поля, образуемого статором. Рассмотрим подробнее принцип действия и конструкцию машины, а также ее отличия от синхронного собрата.
Погружаемся в теорию
Работа электродвигателя переменного тока основана на свойстве магнитного поля, заключающемся во взаимодействии с другими полями. Так, если первое поле содержится внутри второго, вращающегося вокруг своей оси, то оно тоже начнет вращаться. Это явление доказывается опытным путем.
Дугообразный магнит укреплен так, чтобы его можно было приводить в движение с помощью ручки. Между северным и южным полюсом помещается цилиндр, выполненный из меди. Он может вращаться.
Если крутить ручку, то магнит начнет обращаться вокруг своей оси. Поэтому магнитный поток, проходящий через цилиндр, будет меняться. А это главное условие для образования вихревых токов внутри самого цилиндра. А электрический ток всегда создает вокруг магнитное поле. Поля магнита и цилиндра начинают взаимодействовать друг с другом, результатом чего становится вращение этого цилиндра в том же направлении, что и подковообразный магнит.
Так как вращение цилиндра – результат воздействия вращающегося магнитного поля, то он будет отставать на некоторую величину, которую называют скольжением. Оно рассчитывается по формуле (выражается в процентах):
Оно рассчитывается по формуле (выражается в процентах):
Где s – скольжение, n – скорость вращения постоянного магнита (называют синхронной), n0 – медного цилиндра (называют асинхронной). Именно разница в этих скоростях – необходимое условие для работы электродвигателя.
Конструкция
Проделанный опыт демонстрировал вращение цилиндра за счет вращения постоянного магнита. Поэтому конструкция еще не имеет права называться электродвигателем. Надо изменить ее так, чтобы магнитное поле, необходимое для вращения ротора, создавалось электричеством. И это возможно при использовании трехфазного тока.
Асинхронная машина снабжается:
- Статором;
- Ротором;
- Осью, на которой сидит ротор.
На рисунке внешнее кольцо – это железный статор электродвигателя, состоящий из корпуса со станиной и железного сердечника. На его полюсах размещаются три обмотки (Н – начало, К – конец). Между двумя соседними намотками соблюдается угол – 120 градусов.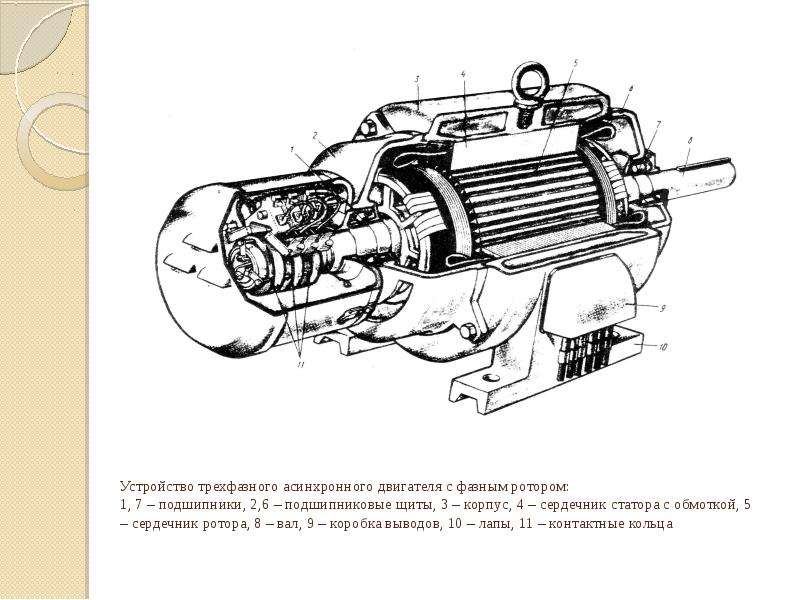 Каждая из них подключена к одной из фаз трехфазного тока.
Каждая из них подключена к одной из фаз трехфазного тока.
Внутри статорного кольца – металлический цилиндр, посаженный на ось, относительно которой он может вращаться. Это ротор асинхронного мотора. Он может быть короткозамкнутым или фазным.
Короткозамкнутый ротор
Это устройство выглядит как сердечник, собранный из листовой стали. Он имеет пазы, в которых находится алюминий, залитый в растопленном состоянии. Металл образует стержни, замыкающиеся торцевыми кольцами накоротко (отсюда и название). С короткозамкнутым ротором сравнивают беличью клетку, потому что у них прослеживается внешнее сходство.
Важно! Для электродвигателей с короткозамкнутым ротором высокой мощности вместо алюминия заливают медь.
Фазный ротор
Конструкция асинхронной машины с фазным ротором сложна. Однако у них есть преимущество перед короткозамкнутым устройством. Заключается оно в возможности плавно менять скорость вращения.
Фазным ротором представляется вал, укрепленный на шихтованном сердечнике, имеющем трехфазную обмотку.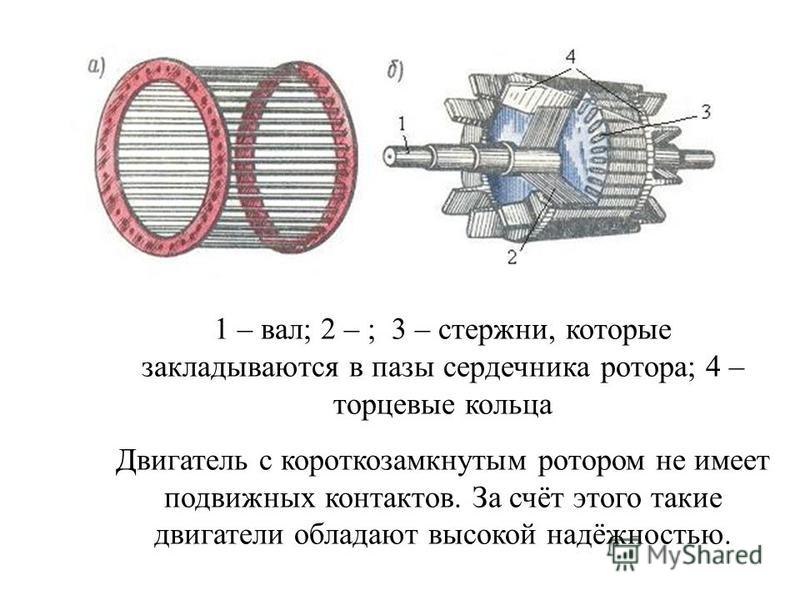 Этим он напоминает конструкцию статора. Начала намоток соединяют по схеме звезда, а концы объединяются с помощью контактных колец. Они изолируются между собой и располагаются на роторном вале.
Этим он напоминает конструкцию статора. Начала намоток соединяют по схеме звезда, а концы объединяются с помощью контактных колец. Они изолируются между собой и располагаются на роторном вале.
Чтобы кольца соприкасались с фазным ротором, для каждого из них предусмотрена пара щеток, изготовленных из металла и графита. Они закрепляются в специальных держателях, которые прижимают их к кольцам с помощью пружин.
В случае с фазным ротором трехфазная намотка подсоединяется к пусковому реостату. Поэтому в роторной электроцепи образуется дополнительное сопротивление.
Принцип действия
Понять принцип действия асинхронного двигателя поможет график с рисунком, изображенные ниже.
На графике выделено 4 положения (а, б, в и г), каждому из которых соответствует схема (А, Б, В или Г). Линии связаны с фазным током: l1 – первая, l2 – вторая, l3 – третья фаза. Во время работы электродвигателя происходят следующие изменения:
- Положение а. Значение тока в l1 – 0, в l2 – отрицательное число, в l3 – положительное.
 На схеме направление, в котором будет течь ток, указано с помощью стрелок. Будет создан магнитный поток, направленность линий которого можно установить, применив правило правой руки, образует южный полюс (обозначен Ю) на конце полюса 3-ей катушки внутри статора. При этом на 2-ой катушке будет создан северный полюс (С). Это говорит о том, что линии магнитного потока направляются через ротор от 2-ой обмотки к 3-ей.
На схеме направление, в котором будет течь ток, указано с помощью стрелок. Будет создан магнитный поток, направленность линий которого можно установить, применив правило правой руки, образует южный полюс (обозначен Ю) на конце полюса 3-ей катушки внутри статора. При этом на 2-ой катушке будет создан северный полюс (С). Это говорит о том, что линии магнитного потока направляются через ротор от 2-ой обмотки к 3-ей. - Положение б. Значение переменного тока в l2 – 0, в l1 – положительное число, в l3 – отрицательное. Возникший магнитный поток на 1-ой катушке статора создает южный полюс, а на 3-ей – северный. Поэтому он меняется направление ровно на 120 градусов и направляется через ротор от 3-ей обмотки к 1-ой.
- Положение в. Значение переменного тока в l3 – 0, в l2 – положительное число, в l1 – отрицательное. Теперь северный полюс соответствует 1-ой катушке, а южный – 2-ой. Это значит, что магнитный поток снова повернулся на 120 градусов и теперь проходит через ротор от 1-ой обмотки ко 2-ой.

- Положение г. Все значения переменного тока на каждой из фаз, а также направление магнитного потока соответствуют положению а.
Видно, что работа асинхронного электродвигателя возможна благодаря изменению направления переменного тока в статорных обмотках. Каждому периоду изменения тока будет соответствовать один оборот магнитного потока, который будет заставлять ротор вращаться. И неважно, как соединены обмотки, звездой или треугольником.
Однофазные асинхронные машины
Обычно асинхронная машина питается от трехфазного переменного тока. Но был разработан однофазный мотор. Он менее распространен, потому что обладает малой мощностью и требует дополнительной силы для разгона.
Устройство однофазного электрического двигателя включает в себя одну рабочую обмотку. Потому он и называется – однофазный. Но по сути это двухфазная машина, которая работает благодаря тому, что во время пуска в ход в цепь включается вспомогательная, или пусковая обмотка.
Однофазный мотор оснащается короткозамкнутым ротором.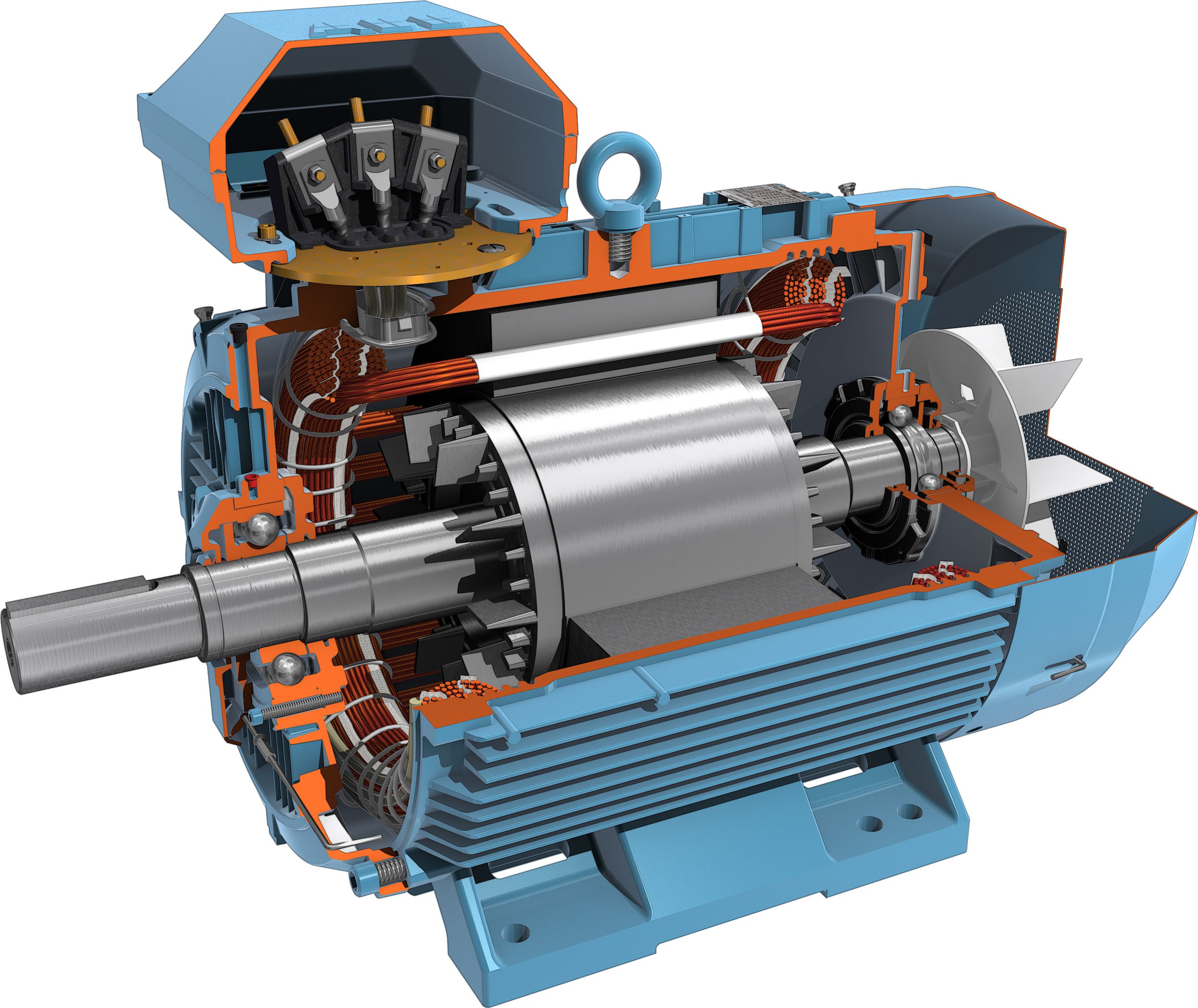 Это одно из преимуществ – простота конструкции. Однако у однофазного электродвигателя есть недостаток – это отсутствие пускового момента и малый КПД.
Это одно из преимуществ – простота конструкции. Однако у однофазного электродвигателя есть недостаток – это отсутствие пускового момента и малый КПД.
Течение однофазного переменного тока вызывает магнитное поле, состоящее из двух: их амплитуды равны, однако вращаются они в противоположных направлениях. С покоящимся ротором эти поля создают одинаковые по модулю пусковые моменты. Но поскольку их знаки разные, результирующий пусковой момент равен нулю. Поэтому ротор остается неподвижен. Но если заставить его вращаться с применением дополнительной силы, между двумя полями образуется скольжение – разность моментов. Будет преобладать тот момент, который направлен в сторону вращения ротора. Тогда принудительное приведение его в движение можно прекратить: дальнейшая работа обеспечивается скольжением.
Отличия асинхронных и синхронных моторов
Асинхронные машины переменного тока в большинстве снабжены не фазным, а короткозамкнутым ротором. Их отличия от синхронных двигателей:
- Малая мощность;
- Простое устройство;
- Низкая стоимость;
- Увеличенный срок работы за счет отсутствия щеток;
- Сложная регулировка скорости (но нет надобности в применении преобразователей).

Модели с фазным ротором от короткозамкнутых отличаются сложным устройством, но возможностью плавно регулировать скорость. Их стоимость и мощность выше, однако щетки часто изнашиваются.
Электрические двигатели асинхронного типа нашли широкое применение в сетях как трехфазного, так и однофазного питания. Они используются в промышленности и в быту. Но только в качестве двигателя, в генераторном режиме лучшие показатели выдают синхронные машины.
Устройство и принцип работы асинхронного двигателя
Немало техники — бытовой, строительной, производственной имеют двигатели. Если задаться целью и проверить тип мотора, в 90% окажется, что стоит асинхронный двигатель. Это обусловлено простотой конструкции, высоким КПД, отсутствием электрического контакта с движущейся частью (в моделях с короткозамкнутым ротором). В общем, причин достаточно.
Что такое асинхронный двигатель и принцип его действия
Любой электродвигатель — устройство для преобразования электрической энергии в механическую.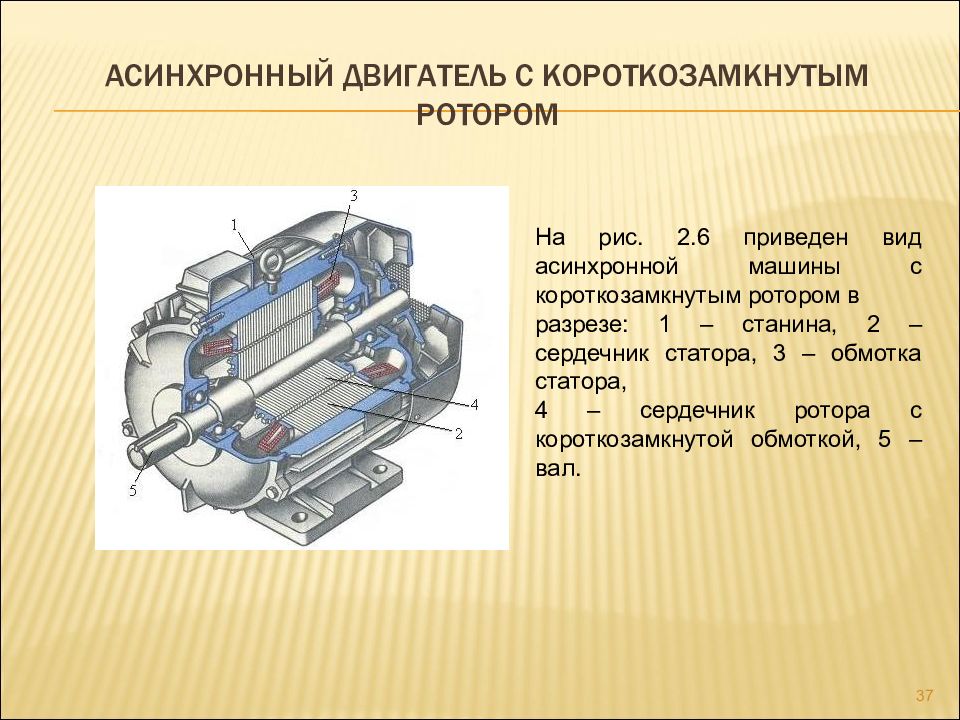 Электрический двигатель состоит из неподвижной (статор) и подвижной части (ротор). Строение статора таково, что он имеет вид полого цилиндра, внутри которого имеется обмотка. В это цилиндрическое отверстие вставляется подвижная часть — ротор. Он также имеет вид цилиндра, но меньшего размера. Между статором и ротором имеется воздушный зазор, позволяющий ротору свободно вращаться. Ротор вращается из-за наводимых магнитным полем статора токов. По способу вращения двигатели делят на синхронные и асинхронные.
Электрический двигатель состоит из неподвижной (статор) и подвижной части (ротор). Строение статора таково, что он имеет вид полого цилиндра, внутри которого имеется обмотка. В это цилиндрическое отверстие вставляется подвижная часть — ротор. Он также имеет вид цилиндра, но меньшего размера. Между статором и ротором имеется воздушный зазор, позволяющий ротору свободно вращаться. Ротор вращается из-за наводимых магнитным полем статора токов. По способу вращения двигатели делят на синхронные и асинхронные.
Так выглядит разобранный асинхронный двигатель с короткозамкнутым ротором
Асинхронный электродвигатель отличается тем, что частота вращения ротора и магнитного поля, создаваемого статором, у него неравны. То есть, ротор вращается несинхронно с полем, что и дало название этому типу машин. Характерно, в рабочем режиме скорость его вращения меньше. Второе название этого типа двигателей — индукционные. Это название связано с тем, что движение происходит за счёт наводимых на нём токов индукции.
Асинхронный двигатель в разобранном виде: основные узлы и части
Коротко описать принцип работы асинхронного двигателя можно так. При включении мотора на обмотки статора подаётся ток, из-за чего возникает переменное магнитное поле. В область действия силовых линий этого попадает ротор, который начинает вращаться вслед за переменным полем статора.
Статор
Статор асинхронного двигателя состоит из трёх частей: корпуса, сердечника и обмотки. Корпус статора служит в качестве опоры для электродвигателя. Изготавливают его из стали или чугуна, сваркой или литьём. К прочности корпуса предъявляются высокие требования, так как при работе возникают вибрации в результате которых может сместиться ротор, что приведёт к заклиниванию мотора и выходу его из строя.
Статор асинхронного двигателя
Есть и ещё одно требование — геометрия корпуса должна быть идеальной. Между обмоткой статора и ротором зазор делают в несколько миллиметров, так что малейшие отклонения могут быть критичны.
Сердечник статора
Сердечник статора асинхронного электродвигателя изготавливают из наборных металлических пластин. Так как сердечник является магнитопроводом, металл используется магнитная электротехническая сталь. Для уменьшения потерь из-за вихревых потоков сердечник набирается из пластин, покрытых слоем диэлектрика (лак).
Сердечник статора набирается из тонких металлических изолированных пластин
Толщина одной пластины — 0,35-0,5 мм. Они собираются в единый пакет, так чтобы пазы всех пластин совпадали. В эти пазы затем укладываются витки обмотки.
Обмотка статора и количество оборотов электродвигателя
Статор асинхронного электромотора чаще всего имеет трёхфазную обмотку возбуждения. Она называется так, потому что является причиной движения ротора. Обмотка статора состоит из катушек, навитых из медной проволоки которые укладываются в пазы сердечника. Каждая обмотка может состоять из нескольких витков проволоки или из одного витка. Провод используется специальный, с лаковым покрытием, которое изолирует витки друг от друга и от стенок сердечника.
Как уже говорили, чаще всего обмотка статора асинхронного двигателя имеет три фазы. В этом случае оси катушек расположены со сдвигом 120°. При таком строении магнитное поле имеет два полюса и делает один полный оборот за один цикл трёхфазного питания. При частоте в электросети равной 50 Гц, скорость вращения поля (и ротора) 50 об/сек или 3000 об/мин.
Укладка катушек обмотки статора асинхронного двигателя
Для уменьшения скорости вращения ротора в асинхронном двигателе обмотку делают с большим количеством полюсов. Так с четырехполюсным стартером скорость вращения будет вдвое меньше — 1500 об/мин. Обмотка с шестью полюсами статора даёт втрое меньшую скорость — 1000 об/мин. С восемью полюсами — в четыре раза меньше, т. е. 750 об/мин. Ещё более «медленные» электромоторы делают очень редко.
Концы обмоток статора выводятся на клеммную коробку корпуса. Тут они могут соединяться по принципу «звезда» или «треугольник» в зависимости от типа подаваемого питания (220 В или 380 В).
Ротор
Ротор асинхронного электродвигателя бывает двух видов: короткозамкнутым и фазным. Чаще всего встречаются машины с короткозамкнутым ротором. Их преимущество в простоте конструкция и несложной технологии изготовления. Что еще важно, в таких моторах отсутствует контакт с динамической конструкцией. Это повышает долговечность, делает обслуживание более редким и простым.
Асинхронный двигатель может быть с короткозамкнутым и фазным
Асинхронные электромоторы с фазным ротором имеют более сложную конструкцию. Но они позволяют плавно регулировать скорость без дополнительных устройств, со старта имеют высокий крутящий момент. Так что приходится выбирать: более простая конструкция или возможность регулировки скорости вращения.
Устройство короткозамкнутого ротора
Ротор состоит из вала и цилиндрической конструкции из короткозамкнутых стержней. Внешне эта конструкция очень напоминает беличье колесо, поэтому так часто называют короткозамкнутую обмотку ротора.
Устройство короткозамкнутого ротора
Изначально и стержни, и замыкающие кольца изготавливались из меди. Роторы современных асинхронных двигателей мощностью до 100 кВт делают из алюминиевых стержней, с алюминиевыми же замыкающими дисками. Расстояние между стержнями заливается снова-таки алюминиевым сплавом. Получается короткозамкнутый ротор, но уже со сплошным покрытием.
Так как при работе выделяется значительное количество тепла, для охлаждения перемычки «беличьего колеса» делают с дополнительными вентиляционными лопатками. Так во время работы происходит самоохлаждение. Оно работает тем эффективнее, чем выше скорость вращения.
Как устроен асинхронный двигатель: устройство и компоновка деталей
Ротор устанавливается в статор, концы вала фиксируются при помощи крышек с вмонтированными подшипниками. Это двигатель без щеток (безщеточный). Никаких дополнительных контактов и электрических соединений. Подвижная часть мотора начинает вращаться при наличии магнитного поля на статоре. Оно возникает после подачи питания. Это поле вращается, заставляя вращаться и предметы, которые находятся в его поле. Простая и надёжная конструкция, которая обусловила популярность электрических двигателей этого типа.
Оно возникает после подачи питания. Это поле вращается, заставляя вращаться и предметы, которые находятся в его поле. Простая и надёжная конструкция, которая обусловила популярность электрических двигателей этого типа.
Как сделан фазный ротор
Устройство фазного ротора мало чем отличается от обмотки статора. Те же наборные кольца с пазами под укладку медных катушек. Количество обмоток ротора три, соединены они обычно «звездой».
Так выглядит фазный ротор асинхронного двигателя
Концы роторных обмоток крепят к контактным кольцам из меди. Эти кольца жёстко закреплены на валу. Кроме того, они обязательно изолированы между собой, не имеют электрического контакта со стальным валом (крепятся к стержню через диэлектрические прокладки). Так как наличие колец отличительная черта этого типа движков, иногда их называют кольцевыми.
Асинхронный двигатель с фазным ротором
Для фиксации ротора к корпусу статора делают две крышки с подшипниками. На одной из крышек закрепляются щетки, которые прижимаются к кольцам на валу, за счёт чего имеют с ними хороший контакт. Для регулировки скорости вращения щетки соединены с реостатом. Изменяя его сопротивление, меняем напряжение, а с ним и скорость вращения.
Для регулировки скорости вращения щетки соединены с реостатом. Изменяя его сопротивление, меняем напряжение, а с ним и скорость вращения.
Что лучше короткозамкнутый или фазный?
Несмотря на то что двигатели с фазовым ротором лучше стартуют, позволяют в процессе работы плавно менять скорость при помощи обычного реостата, чаще применяется моторы короткозамкнутого типа. В этой конструкции отсутствуют щетки, которые выходят из строя первыми. Кроме того, более простое устройство подвижной части снижает стоимость двигателя, агрегат служит дольше, уход и техобслуживание проще.
Какой лучше: короткозамкнутый ротор или фазный
Тем не менее стоит более подробно ознакомиться с достоинствами и недостатками обоих типов асинхронных двигателей. Итак, достоинства короткозамкнутого асинхронного двигателя:
- Простая конструкция.
- Лёгкое обслуживание.
- Более высокий КПД.
- Нет искрообразования.
Недостатки:
Из-за высокого пускового тока прямое включение допускается для двигателей мощностью до 200 кВт. Более мощные требуют пускорегулирующей аппаратуры. Обычно используют частотный преобразователь, который плавно увеличивает ток, обеспечивая плавный старт без перегрузок.
Более мощные требуют пускорегулирующей аппаратуры. Обычно используют частотный преобразователь, который плавно увеличивает ток, обеспечивая плавный старт без перегрузок.
Преимущество асинхронного фазного двигателя:
- Быстрый и беспроблемный старт.
- Позволяет менять скорость в процессе работы.
- Прямое подключение возможно, практически без ограничения мощности.
Недостатки тоже есть: наличие щёток, возможность искрения, сложное и частое обслуживание.
Как регулируется частота вращения
Как уже писали, частота вращения ротора зависит от количества полюсов статора. Чем больше количество полюсов, тем меньше скорость. Но это не только так можно регулировать скорость вращения. Она еще зависит от напряжения и частоты питания.
Способы регулирования частоты асинхронного двигателя
Напряжение можно регулировать, установив потенциометр на входе. Частоту регулируют поставив частотный преобразователь. Частотник — более выгодное решение, так как он ещё и снижает стартовые токи и может быть программируемым.
Однофазный асинхронный двигатель
Выше рассматривался трехфазный асинхронный двигатель, в однофазном асинхронном двигателе их две. Одна рабочая, вторая вспомогательная. Вспомогательная нужна для того, чтобы придать первоначальное вращение ротору. Потому может называться ещё пусковой или стартовой.
Однофазный асинхронный двигатель имеет две обмотки: рабочую и вспомогательную (стартовую или пусковую)
Когда в статоре включена одна обмотка, она создаёт два равных магнитных поля, вращающихся в разные стороны. Если ввести в это поле ротор, который уже имеет какое-то начальное вращение, магнитное поле будет поддерживать это вращение. Но как запустить ротор на старте? Как придать ему вращение, ведь от одной обмотки возникают два равноценных магнитных поля, направленные в разные стороны. Так что с их помощью заставить вращаться ротор невозможно. В простейшем варианте вращение задаётся вручную — механически. Затем вращение подхватывает поле.
Чтобы автоматизировать запуск однофазного асинхронного двигателя и сделана вспомогательная обмотка. Она сконструирована так, что подавляет одну из составляющих магнитного поля основной обмотки и усиливает вторую. Соответственно, одна из составляющих перевешивает, задавая вращение ротора. Затем стартовая обмотка отключается, вращение поддерживает основная.
Она сконструирована так, что подавляет одну из составляющих магнитного поля основной обмотки и усиливает вторую. Соответственно, одна из составляющих перевешивает, задавая вращение ротора. Затем стартовая обмотка отключается, вращение поддерживает основная.
Устройство и принцип действия асинхронного двигателя. АЭ-92
Предмет: «Электрические машины»Тема: «Устройство и принцип действия асинхронного двигателя. АЭ-92»
Профессия: «Машинист электровоза»
Ярославское подразделение Северного УЦПК
1 | Преподаватели ОАО «РЖД» Коркина И.В. | 2018
Цель
Изучить
назначение,
устройство, принцип действия и
технические
характеристики
асинхронных
двигателей
компрессоров и вентиляторов.
2 | Преподаватели ОАО «РЖД» | 2018
План занятия
1.
2.
3.
4.
5.
Устройство асинхронного двигателя.
Вращающееся магнитное поле статора.
Назначение и устройство АЭ-92.
Принцип действия асинхронного двигателя.
Скольжение асинхронного двигателя.
3 | Преподаватели ОАО «РЖД» | 2018
Устройство асинхронного двигателя
Асинхронный двигатель состоит из статора и ротора.
Статор включает в себя корпус, подшипниковые щиты,
сердечник и обмотку.
Ротор включает в себя вал, сердечник и обмотку.
электротехнической стали. В зависимости от типа обмотки
ротор может быть фазным и короткозамкнутым.
4 | Преподаватели ОАО «РЖД» | 2018
Устройство асинхронного двигателя
Обмотка статора состоит из отдельных катушек,
объединенных в группы по числу фаз. В каждой фазе катушки
электрически соединены.
Начала и концы фаз выводятся к
шести зажимам для того, чтобы
можно было подключать обмотку
статора по схеме «звезда» или
«треугольник».
При
последовательном
согласном
соединении каждые три катушки
дают пару полюсов.

5 | Преподаватели ОАО «РЖД» | 2018
Устройство асинхронного двигателя
6 | Преподаватели ОАО «РЖД» | 2018
Устройство асинхронного двигателя
7 | Преподаватели ОАО «РЖД» | 2018
Устройство асинхронного двигателя
Обмотка короткозамкнутого ротора имеет вид беличьей
клетки. Она выполнена из медных или алюминиевых стержней,
замкнутых накоротко с торцов двумя кольцами. Стержни
обмотки вставляют в пазы сердечника ротора без изоляции, т.к.
напряжение в короткозамкнутой обмотке ротора равно нулю.
Достоинствами двигателей с короткозамкнутым ротором
являются простота конструкции и надежность в эксплуатации.
Недостатки – большой пусковой ток и сравнительно малый
пусковой момент.
8 | Преподаватели ОАО «РЖД» | 2018
Устройство асинхронного двигателя
а — беличья клетка, б — ротор с беличьей клеткой из стержней, в — ротор
с литой беличьей клеткой, 1 — короткозамыкающие кольца, 2 — стержни,
3 — вал, 4 — сердечник ротора, 5 — вентиляционные лопасти, 6 —
стержни литой клетки
9 | Преподаватели ОАО «РЖД» | 2018
Устройство асинхронного двигателя
Асинхронный двигатель с
короткозамкнутым
ротором:
1 – вал ротора;
2 – крышка подшипника;
3 – подшипник;
4 – подшипниковый щит;
5 – корпус;
6 – обмотка статора;
7 – сердечник статора;
8 – короткозамкнутый
ротор;
9 – вентилятор;
10 – кожух; 11 – коробка
выводов;
12 – выводы обмотки
статора;
13 – обмотка ротора.

10 | Преподаватели ОАО «РЖД» | 2018
Устройство асинхронного двигателя
Обмотка фазного ротора состоит из трех, шести, девяти т.д.
катушек (в зависимости от числа полюсов машины), сдвинутых одна
относительно другой на 120º (в двухполюсной машине), 60º (в
четырехполюсной) и т.д.
С одной стороны контакты проводников
фазного ротора соединяются вместе в
общую точку («звезда»), а противоположные
концы выводятся на контактные кольца, к
которым посредством щеток подключают
трехфазный реостат.
Достоинством двигателей с фазным ротором
является
большой
пусковой
момент.
Недостаток – сложность конструкции
11 | Преподаватели ОАО «РЖД» | 2018
Устройство асинхронного двигателя
Подключение внешнего сопротивления в обмотку ротора используется для
облегчения пуска двигателя и для контроля скорости двигателя. По мере
пуска добавочное сопротивление в обмотке ротора уменьшают. Это
происходит или плавно, или ступенчато, в зависимости от используемой
пусковой аппаратуры.

12 | Преподаватели ОАО «РЖД» | 2018
Устройство асинхронного двигателя
Асинхронный
двигатель
с
фазным
ротором:
1, 7 – подшипники; 2, 6 – подшипниковые щиты; 3 – корпус; 4сердечник статора с
обмоткой; 5 – ротор; 8 – вал; 9 – коробка выводов; 10 – лапы; 11 – контактные
кольца.
13 | Преподаватели ОАО «РЖД» | 2018
Устройство асинхронного двигателя
14 | Преподаватели ОАО «РЖД» | 2018
Вращающееся магнитное поле
Электрические машины переменного тока подразделяются на два
основных вида: асинхронные и синхронные. Принцип действия этих машин
основан на использовании вращающегося магнитного поля.
В двухполюсной машине переменного тока вращающееся поле
создается при питании трехфазным током трех катушек (фаз) оси которых,
сдвинуты одна относительно другой в пространстве на 120°.
15 | Преподаватели ОАО «РЖД» | 2018
Вращающееся магнитное поле
16 | Преподаватели ОАО «РЖД» | 2018
Вращающееся магнитное поле
Продолжая рассматривать процесс прохождения токов,
по катушкам обмотки статора, можно легко доказать, что в
течение одного периода изменения тока магнитный поток
машины, а следовательно, и находящийся в ее поле магнит
повернутся на один оборот.

Т.о., при питании трехфазным током трех катушек,
сдвинутых одна относительно другой на угол 120°, возникает
магнитное поле, вращающееся в пространстве с постоянной
частотой вращения.
17 | Преподаватели ОАО «РЖД» | 2018
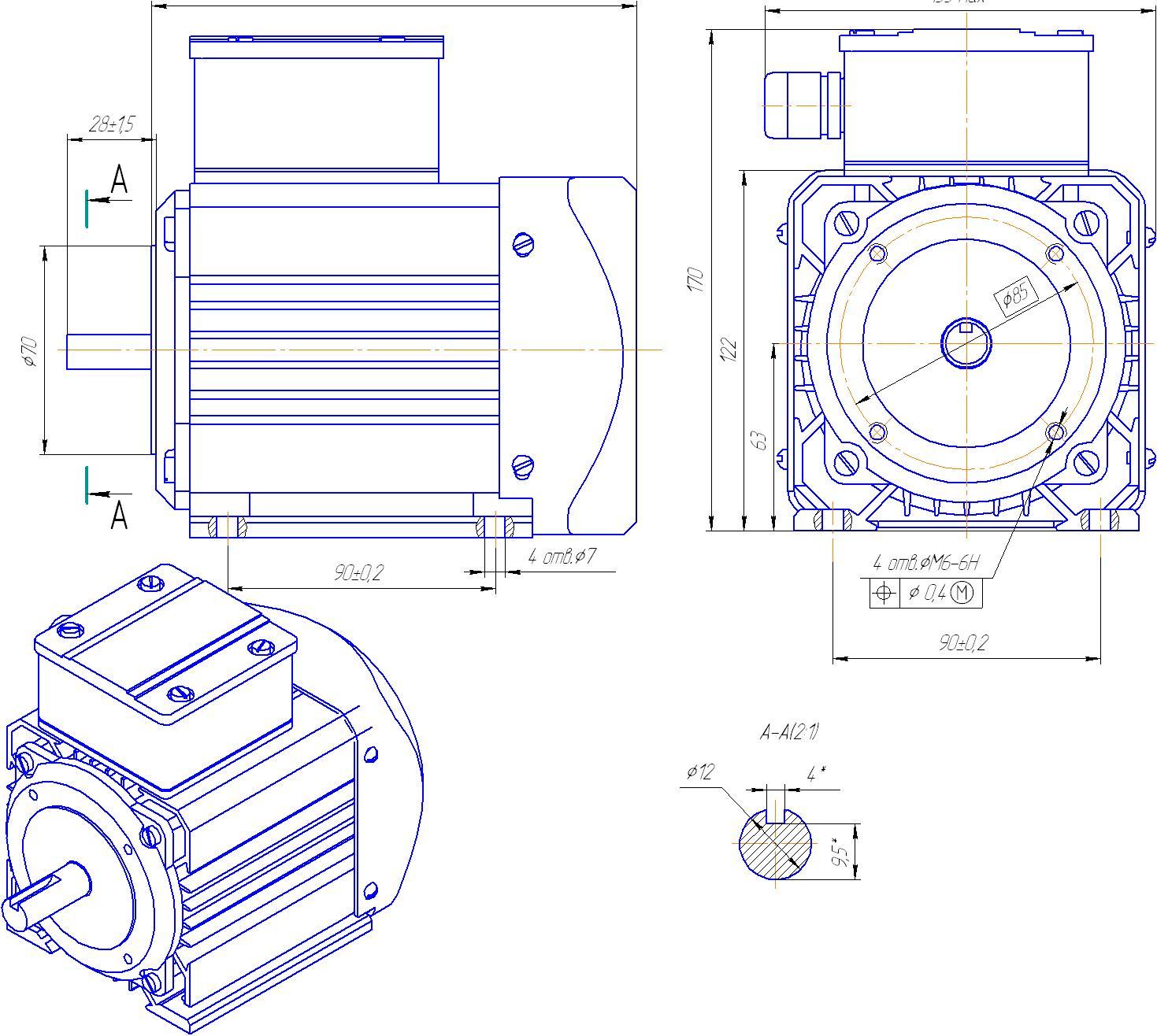
Назначение и устройство АЭ-92
Асинхронный двигатель АЭ92-4/02.
А – асинхронный;
Э – электровозный;
9 – диаметр сердечника статора 900 мм;
2 – длина сердечника статора 200 мм;
4 – число полюсов рабочих обмоток.
Асинхронный
трёхфазный
электродвигатель
с
короткозамкнутым ротором служит приводом главных
компрессоров и центробежных вентиляторов электровозов
переменного тока.
18 | Преподаватели ОАО «РЖД» | 2018
Назначение и устройство АЭ-92
Техническая характеристика:
Напряжение линейное
В
380
Ток фазный
А
90
Мощность
кВА
40
Гц
50
об/мин
1425
КПД
—
0,855
Масса
кг
390 – 400
Частота тока
Частота вращения ротора
19 | Преподаватели ОАО «РЖД» | 2018
Назначение и устройство АЭ-92
Состоит из стальной сварной станины образованной
из двух торцовых колец приваренных к продольным рёбрам и
обшивки.
 В станине закреплён сердечник статора состоящий
В станине закреплён сердечник статора состоящийиз шихтованных листов электротехнической стали, в пазах
которой уложена обмотка.
Обмотка статора состоит из жёстких пропитанных
катушек (медь прямоугольного сечения) которая в пазах
статора закреплены клиньями. Изоляция обмотки применена
класса Н, 6 выводов обмотки статора начало и конец
закреплены в коробке выводов, расположенной на станине
( две пары полюсов). Вывода соединены по схеме звезда.
20 | Преподаватели ОАО «РЖД» | 2018
Назначение и устройство АЭ-92
Ротор состоит из шихтованного сердечника так же набранного
из листов электротехнической стали. Пазы сердечника залиты
алюминиевым сплавом который образует короткозамкнутую
обмотку в виде «беличьего» колеса. В сердечнике ротора
имеются осевые вентиляционные каналы. Ротор вместе с валом
вращается в подшипниках установленных в капсулах
подшипниковых щитов.
Подшипниковые щиты крепят болтами к торцовым кольцам.

Подшипники закрывают крышками для защиты от пыли и
грязи. Подшипниковые щиты стальные, сварные, имеют
вентиляционные окна с сетками. К щиту крепятся 2
лабиринтные крышки (внутренняя и наружная) которые в
системе образуют капсулу для подшипников. В капсулу
заправляют смазку.
21 | Преподаватели ОАО «РЖД» | 2018
Назначение и устройство АЭ-92
Внутри двигатель снабжён вентилятором. Вентилятор
центробежный, с радиальными лопатками и направляющим
диском, обтекаемой формы отлит из алюминиевого сплава.
Вентилятор засасывает воздух с противоположной стороны
через окна и отверстия в подшипниковом щите. Поступающий
воздух охлаждает лобные части обмоток статора, после чего
выбрасывается наружу через окна в подшипниковом щите.
22 | Преподаватели ОАО «РЖД» | 2018
Назначение и устройство АЭ-92
23 | Преподаватели ОАО «РЖД» | 2018
Принцип действия асинхронного двигателя
U→ВМП→ЭДС в обм. ротора→iрот.→Fэл.магн.
 →М→
→М→→ ротор вращается в ту же сторону, что и МП статора
Частота вращения магнитного поля статора обозначается – n1, и
определяется по формуле:
60 f
n1
P
где: f – частота питающего тока
P – число пар полюсов
60 – коэффициент перевода единиц измерения из об/сек в
об/мин
24 | Преподаватели ОАО «РЖД» | 2018
Принцип действия асинхронного двигателя
Колтво
стат.
обм.
3
Кол-во
пар
полюсо
в (Р)
1
Подсчет Значение
n1
по n1
формуле ( об/мин)
Примечание
60×50/1
3000
2
60×50/2
1500
3
60×50/3
1000
3 обмотки по кругу занимают пространство
3600, поэтому за один период изменения
тока магнитное поле повернется на 3600.
3 обмотки из 6 по кругу занимают
пространство 1800, поэтому за один период
изменения тока магнитное поле повернется
на1800.
3 обмотки из 9 по кругу занимают
пространство 1200, поэтому за один период
изменения тока магнитное поле повернется
на1200.

6
9
Каждые 3 обмотки у асинхронного двигателя приравнивается к одной паре полюсов
25 | Преподаватели ОАО «РЖД» | 2018
Скольжение асинхронного двигателя
Частота
вращения
ротора
обозначается
–
n2
Для того, чтобы на валу ротора создавался вращающий момент,
необходимо
выполнение
данного
условия:
n2‹n1
Поэтому такие двигатели называются асинхронными. Приставка
«а» означает «не», то есть несинхронные двигатели.
Отставание ротора от магнитного поля статора характеризуется
скольжением (S). Скольжение определяется по данной
формуле:
.
n1 n2
S
100%
n1
26 | Преподаватели ОАО «РЖД» | 2018
Скольжение асинхронного двигателя
Скольжение показывает, на сколько процентов частота вращения
ротора меньше частоты вращения магнитного поля статорных
обмоток. Значение n2 при определенном скольжении для
различных асинхронных двигателей приведены в таблице:
Количест Количество
во
пар полюсов
статорных (Р)
обмоток
3
1
6
2
9
3
27 | Преподаватели ОАО «РЖД» | 2018
n1 (об/мин) S (%)
3000
1500
1000
n2 (об/мин)
4
4
4
2880
1440
960
Домашнее задание
1.
 А.В. Грищенко «Электрические машины и преобразователи
А.В. Грищенко «Электрические машины и преобразователиподвижного состава», стр. 215-220.
2. А.А. Дайлидко «Электрические машины тягового
подвижного состава », стр. 119-141, 143-146.
3. Работа с конспектом.
4. Подготовка к опросу по пройденному материалу.
28 | Преподаватели ОАО «РЖД» | 2018
Спасибо за внимание
Желаю успехов!
29
| преподаватели ОАО «РЖД» | 2018
Двухфазный асинхронный двигатель. Назначение, устройство, принцип действия.
Назначение, устройство и принцип действия двухфазных асинхронных двигателей
В двухфазных асинхронных двигателях обе фазы обмотки статора с фазными зонами по 90 эл. град являются рабочими. Они расположены в пазах магнитопровода статора так, что их магнитные оси образуют угол 90 эл. град. Эти фазы обмотки статора отличаются друг от друга не только числом витков, но и номинальными напряжениями и токами, хотя при номинальном режиме двигателя полные мощности их одинаковы.
В одной из фаз обмотки статора постоянно находится конденсатор Ср (рисунок, позиция а), который в условиях номинального режима двигателя обеспечивает возбуждение кругового вращающегося магнитного поля. Емкость этого конденсатора определяют по формуле:
Емкость этого конденсатора определяют по формуле:
Cр = I1sinφ1 / 2πfUn2
где I1 и φ1- соответственно ток и сдвиг фаз между напряжением и током цепи фазы обмотки статора без конденсатора при круговом вращающемся магнитном поле, I и U — соответственно частота переменного тока и напряжение питающей сети, n- коэффициент трансформации — отношение эффективных чисел витков фаз обмотки статора соответственно с конденсатором и без него, определяемое по формуле
n = kоб2 w2 / kоб1 w1
где kоб2 и kоб1 — обмоточные коэффициенты соответствующих фаз обмотки статора с числом витков w2 и w1.
Напряжение на зажимах конденсатора Uc, включенного последовательно с фазой обмотки статора двухфазного асинхронного двигателя, при круговом вращающемся магнитном поле выше напряжения сети U и определяется так:
Uc = U √1 + n2
Переход к нагрузке двигателя, отличной от номинальной, сопровождается изменением вращающегося магнитного поля, которое вместо кругового становится эллиптическим. Это ухудшает рабочие свойства двигателя, а при пуске снижает начальный пусковой момент до Мп < 0,3Mном, ограничивая этим применение двигателей с постоянно включенным конденсатором только в установках с легкими условиями пуска.
Это ухудшает рабочие свойства двигателя, а при пуске снижает начальный пусковой момент до Мп < 0,3Mном, ограничивая этим применение двигателей с постоянно включенным конденсатором только в установках с легкими условиями пуска.
Для повышения начального пускового момента параллельно рабочему конденсатору Ср включают пусковой конденсатор Сп (рисунок, позиция б), емкость которого намного больше емкости рабочего конденсатора и зависит от кратности начального пускового момента, которая может быть доведена до двух и более.
Схемы включения двухфазных асинхронных двигателей с короткозамкнутым ротором
а — с постоянно присоединенным конденсатором, б — с рабочим и пусковым конденсаторами
После разгона ротора до скорости 0,6 — 0,7 номинальной пусковой конденсатор отключают для избежания перехода кругового вращающегося магнитного поля в эллиптическое, ухудшающее рабочие характеристики двигателя.
Пусковой режим таких конденсаторных двигателей характеризуется такими показателями: kп = 1,7 — 2,4 и ki = 4 — 6.
Конденсаторные двигатели отличаются лучшими энергетическими показателями, чем однофазные асинхронные двигатели с пусковой фазой обмотки статора, а коэффициент мощности их, благодаря применению конденсаторов, выше, чем у трехфазных асинхронных двигателей одинаковой мощности.
Устройство асинхронного двигателя. Принцип работы
Автор Alexey На чтение 7 мин. Просмотров 898 Опубликовано Обновлено
Без электрических двигателей совершенно нереально представить себе функционирование современной жизни. Наиболее популярным и востребованным является асинхронный трёхфазный асинхронный электродвигатель с короткозамкнутым ротором в виду его простой и надёжной конструкции, которая обеспечивает отличные механические характеристики. Главным назначением асинхронных двигателей является преобразование переменного электрического тока в механическую энергию.
Главным назначением асинхронных двигателей является преобразование переменного электрического тока в механическую энергию.
Внутреннее устройство электромотора и его принцип работы вызывает резонный интерес, как в познавательном плане, так и с практической точки зрения — знание конструктивных особенностей асинхронного двигателя, влияющих на его параметры, поможет при выборе электродвигателя, его эксплуатации и обслуживании. Подробнее о теории работы асинхронного двигателя я объясняю и описываю в статье Принцип работы асинхронного электрического двигателя
Назначение основных частей трехфазных асиннхронных двигателей
В любом двигателе есть две основные составляющие – неподвижный статор, закрепляемый на станине, и вращающийся ротор, через вал которого осуществляется передача механической энергии.
В отношении электродвигателей и трансформаторов катушки с проводом принято называть обмотками из-за технологических процессов при их создании.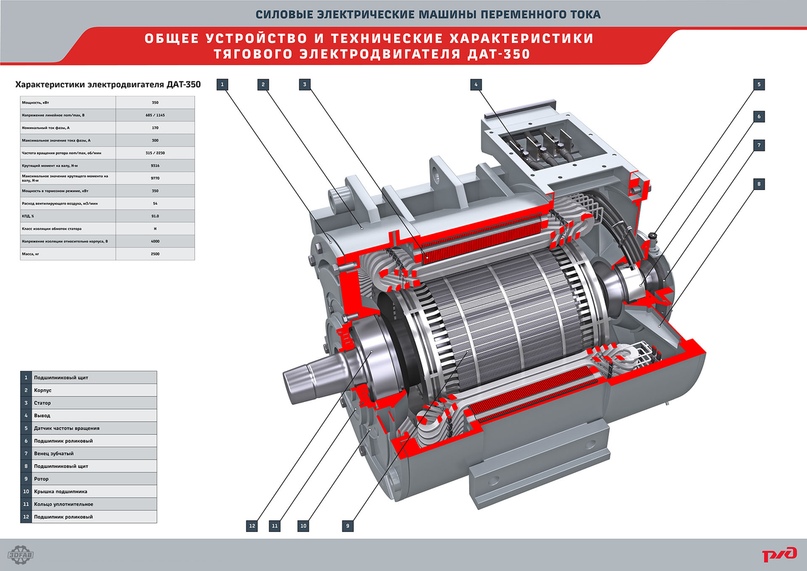 Магнитопровод статора (сердечника), в котором укладываются обмотки, помещается в защитный металлический кожух, служащий также теплоотводом с ребристой поверхностью.
Магнитопровод статора (сердечника), в котором укладываются обмотки, помещается в защитный металлический кожух, служащий также теплоотводом с ребристой поверхностью.
Ротор нигде не соприкасается со статором и вращается на подшипниках, закрепляемых на торцевых крышках, или отдельно на станине. Торцевые крышки крепятся к кожуху при помощи болтов. Механическая энергия снимается с вала в передней части двигателя при помощи шкива, шестерни или муфты.
Схема устройства асинхронного трёхфазного двигателяНа вал ротора с тыльной стороны мотора крепится защищённый кожухом вентилятор для обдува ребристого корпуса, на котором находится клеммник подключения вводного кабеля, питающего электромотор.
Виды асинхронных электродвигателей
Узнав кратко, из чего состоит большинство электродвигателей, можно перейти к рассмотрению асинхронных двигателей. Описание электромагнитных взаимодействий, происходящих в асинхронном двигателе, не входит в рамки данной статьи, но коротко можно сказать, что в статоре создаётся вращающееся магнитное поле, взаимодействующее с полем ротора.
Асинхронный – означает, что вал ротора не вращается синхронно с вращающимся магнитным полем статора. Широко используются две разновидности данного типа трехфазных электромоторов, которые имеют такие официальные названия:
- асинхронный двигатель с короткозамкнутым ротором;
- асинхронный двигатель с фазным ротором.
Конструкции статора данных типов электродвигателей являются идентичными, а различия заключаются в конструктивном исполнении ротора.
Устройство статора асинхронных двигателей
Для недопущения образования вихревых токов, возникающих при переменном электромагнитном поле, магнитопровод статора набирают из одинаковых колец специальной электротехнической стали методом шихтовки (от немецкого Schicht — набор). В кольцах с внутренней стороны на специальном оборудовании выбивают пазы сложной формы.
а) статор в сборе с обмотками , б) магнитопровод и кольцо эл. стали
сталиПри укладке колец в пакет статора добиваются полного совпадения данных пазов, предназначенных для укладки обмоток.
Набор сложенных пластинчатых колец фиксируют при помощи специальных скоб и запрессовывают в защитный кожух двигателя, который также несёт механические нагрузки и служит для охлаждения. Обмотки статора мотают на специальном станке в виде рамок, укладываемых в определённые пазы статорного магнитопровода.
Перед укладкой обмотки паз изолируют при помощи диэлектрической прокладки.
диэлектрическая прокладка в пазуРабочие осторожно помещают рамки обмоток в пазы, не допуская повреждения эмалированной изоляции проводов.
рамки статораВ зависимости от конструктивных особенностей статора, в один паз может быть помещено несколько рамок – в этом случае их также изолируют друг от друга диэлектрическими прокладками
продолговатый клин из стекловолокнаУложенные обмотки в каждом пазу фиксируют при помощи специальной вставки в форме продолговатого клина из стекловолокна.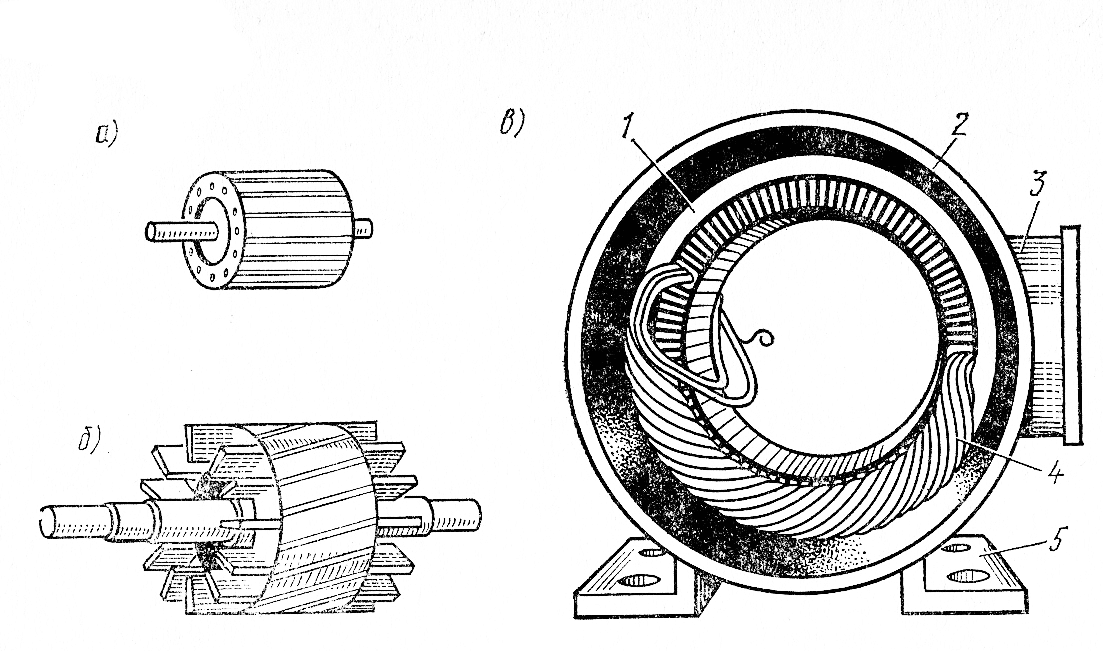
Соединения обмоток статора
Каждую уложенную в пазы обмотку проверяют на обрыв, пробой и межвитковое замыкание. После этого выводы рамок соединяют в фазные обмотки, в зависимости требуемого от количества пар полюсов.
Асинхронные электродвигатели с одной парой полюсов вращающегося магнитного поля имеют максимально возможные для частоты 50 Гц обороты идеального холостого хода – 3000 в минуту.
соединения проводов при помощи сваркиПри помощи параллельных и последовательных подключений рамок обмоток определённым способом создают дополнительные полюсы вращающегося электромагнитного поля для уменьшения оборотов вала ротора. Все электрические соединения проводов обмоток выполняют при помощи сварки, реже – пайки.
Таким способом формируют фазные обмотки, геометрические оси которых располагаются под углом 120º. Выводы от фазных обмоток выводят в коробку подключения. По другому данный клеммник называется блоком распределения начал обмоток (БРНО). Петли обмоток, выходящие из пазов магнитопровода статора, называют лобовыми обмоточными частями.
Петли обмоток, выходящие из пазов магнитопровода статора, называют лобовыми обмоточными частями.
Провода обмоток в лобовой части обматывают бандажными лентами для механической фиксации.
обмотка монтажной лентой проводовПосле выполнения всех работ, статор погружают в лак, который высыхая, придает конструкции электрическую и дополнительную механическую прочность.
Устройство короткозамкнутого ротора
Короткозамкнутый ротор также состоит их шихтованных колец, в которых по внешней окружности пробивают пазы для укладки короткозамкнутых витков, которые делают из меди (для мощных двигателей более 50 кВт) и алюминия.
С торцов ротора данные витки замыкаются накоротко при помощи колец (медных или алюминиевых).
Принципиальная схема короткозамкнутого ротораВизуально обмотка короткозамкнутого ротора без магнитопровода похожа на беличье колесо.
В данных витках благодаря трансформации индуцируется ток, возбуждающий электромагнитное поле ротора, взаимодействующее с вращающимся полем статора. Для упрощения процесса изготовления витков сложной формы используют заливку расплавленного алюминия в пазы ротора.
Для упрощения процесса изготовления витков сложной формы используют заливку расплавленного алюминия в пазы ротора.
От формы поперечного сечения короткозамкнутых витков ротора зависит такая механическая характеристика асинхронного двигателя как начальный вращательный момент запуска, увеличения которого добиваются путём добавления дополнительных пусковых витков.
Используя особенности распределения силовых линий электромагнитного поля, добиваются больших токов в пусковых обмотках ротора при запуске двигателя, которые уменьшаются при наборе оборотов. Вал ротора запрессовывается в магнитопровод по его оси. Замыкающие кольца часто имеют лопатки, которые выполняют функцию внутреннего вентилятора, обеспечивающего циркуляцию воздуха внутри электромотора.
Из-за того, что роторная электрическая цепь не контактирует с внешними цепями, не требуется контактных узлов, что делает асинхронный двигатель с короткозамкнутым ротором наиболее износоустойчивым по сравнению с другими типами электродвигателей.
Устройство фазного ротора
В пазах фазного ротора укладываются фазные обмотки, соединённые звездой, и подключённые к контактным кольцам, через которые осуществляется включение в регулирующую внешнюю цепь.
Асинхронный двигатель с фазным ротором, благодаря добавлению обмоток, в зависимости от внешней регулирующей цепи может использоваться:
- Для плавного запуска электродвигателя и уменьшения пусковых токов при помощи реостатов, подключённых к контактным кольцам. По мере запуска двигателя сопротивление реостатов уменьшается одновременно для всех фаз ротора. При наборе оборотов реостаты отключаются и кольца замыкаются.
- Для поддержания постоянных оборотов двигателя при включении в цепи фазных обмоток ротора дросселей, реактивное сопротивление которых увеличивается с увеличением оборотов, что уменьшает магнитное поле ротора и вращательный момент;
- Для увеличения пускового момента на фазные обмотки подают постоянное или переменное напряжение в противофазе статору.

Характерные поломки асинхронных двигателей
От точности выполнения ротора и статора зависит воздушный магнитный зазор, увеличение которого негативно влияет на производительность и коэффициент полезного действия электродвигателя. Поэтому, стараются данный зазор максимально уменьшить.
поперечный разрез двигателяДля предотвращения вибраций и биений ротора, его тщательно центрируют перед помещением в статор. Износ подшипников, и в частности, выход из строя сепаратора шарикоподшипников, приводит к перекосу ротора и его трению об магнитопровод статора.
укладка обмоток в пазы ротораКак правило, после замены подшипников данные повреждения не имеют значительного влияния на работоспособность мотора, но увеличится вибрация из-за разбалансировки ротора.
Обмотки статора наиболее часто подвержены межвитковому замыканию, которое происходит из-за повреждения эмалевой изоляции проводов из-за перегрева. Можно самостоятельно прозвонить обмотки и даже выявить место пробоя между витками, но перемотать обмотки в кустарных условиях не представляется возможным, и при такой поломке двигатель нужно отдавать на перемотку.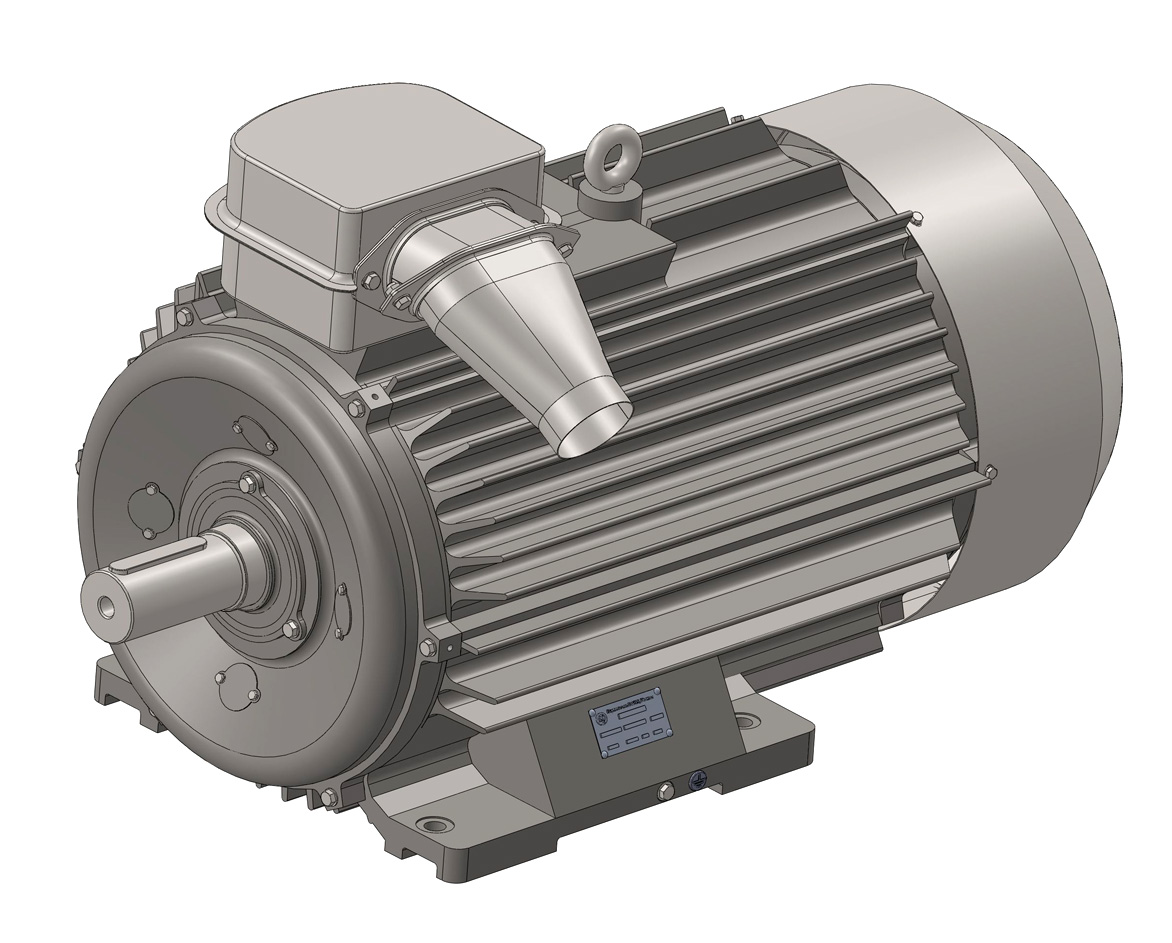
Видео: устройство трехфазного асинхронного электродвигателя
Однофазный асинхронный двигатель
В однофазном двигателе используется две обмотки. Одна рабочая, другая стартова. Стартовая нужна для того, чтобы придать первоначальное вращение ротора, затем она отключается. Более подробно принцип работы такого двигателя, смотрите в видео ниже
Принцип работы асинхронного двигателя | Заметки электрика
Здравствуйте, уважаемые посетители сайта http://zametkielectrika.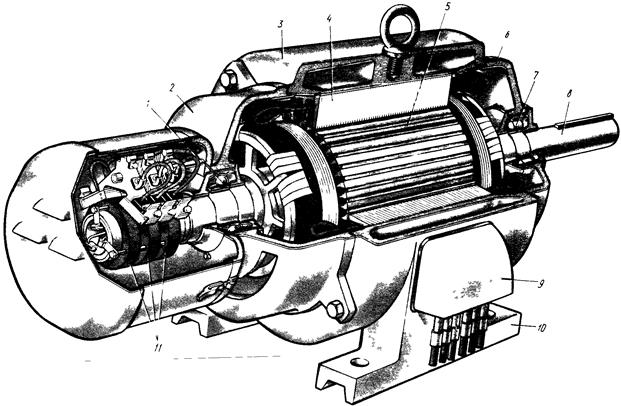 ru.
ru.
Электрические машины переменного тока нашли широкое распространение, как в сфере промышленности (шаровые мельницы, дробилки, вентиляторы, компрессоры), так и в домашних условиях (сверлильный и наждачный станки, циркулярная пила).
Основная их часть является бесколлекторными машинами, которые в свою очередь разделяются на асинхронные и синхронные.
Асинхронные и синхронные электрические машины обладают одним замечательным свойством под названием обратимость, т.е. они могут работать как в двигательном режиме, так и в генераторном.
Но чтобы дальше перейти к более подробному их рассмотрению и изучению, необходимо знать принцип их работы. Поэтому в сегодняшней статье я расскажу Вам про принцип работы асинхронного двигателя. После прочтения данного материала Вы узнаете про электромагнитные процессы, протекающие в электродвигателях.
Итак, поехали.
Принцип работы трехфазного асинхронного двигателя
С устройством асинхронного двигателя мы уже знакомились, поэтому повторяться второй раз не будем. Кому интересно, то переходите по ссылочке и читайте.
Кому интересно, то переходите по ссылочке и читайте.
При подключении асинхронного двигателя в сеть необходимо его обмотки соединить звездой или треугольником. Если вдруг на выводах в клеммнике отсутствует маркировка, то необходимо самостоятельно определить начала и концы обмоток электродвигателя.
При включении обмоток статора асинхронного двигателя в сеть трехфазного переменного напряжения образуется вращающееся магнитное поле статора, которое имеет частоту вращения n1. Частота его вращения определяется по следующей формуле:
- f — частота питающей сети, Гц
- р — число пар полюсов
Это вращающееся магнитное поле статора пронизывает, как обмотку статора, так и обмотку ротора, и индуцирует (наводит) в них ЭДС (Е1 и Е2). В обмотке статора наводится ЭДС самоиндукции (Е1), которая направлена навстречу приложенному напряжению сети и ограничивает величину тока в обмотке статора.
Как Вы уже знаете, обмотка ротора замкнута накоротко, у электродвигателей с короткозамкнутым ротором, или через сопротивление, у электродвигателей с фазным ротором, поэтому под действием ЭДС ротора (Е2) в ней появляется ток. Так вот взаимодействие индуцируемого тока в обмотке ротора с вращающимся магнитным полем статора создает электромагнитную силу Fэм.
Так вот взаимодействие индуцируемого тока в обмотке ротора с вращающимся магнитным полем статора создает электромагнитную силу Fэм.
Направление электромагнитной силы Fэм можно легко найти по правилу левой руки.
Правило левой руки для определения направления электромагнитной силы
На рисунке ниже показан принцип работы асинхронного двигателя. Полюса вращающегося магнитного поля статора в определенный период обозначены N1 и S1. Эти полюса в нашем случае вращаются против часовой стрелки. И в другой момент времени они будут находится в другом пространственном положении. Т.е. мы как бы зафиксировали (остановили) время и видим следующую картину.
Токи в обмотках статора и ротора изображены в виде крестиков и точек. Поясню. Если стоит крестик, то значит ток в этой обмотке направлен от нас. И наоборот, если точка, то ток в этой обмотке направлен к нам. Пунктирными линиями показаны силовые магнитные линии вращающегося магнитного поля статора.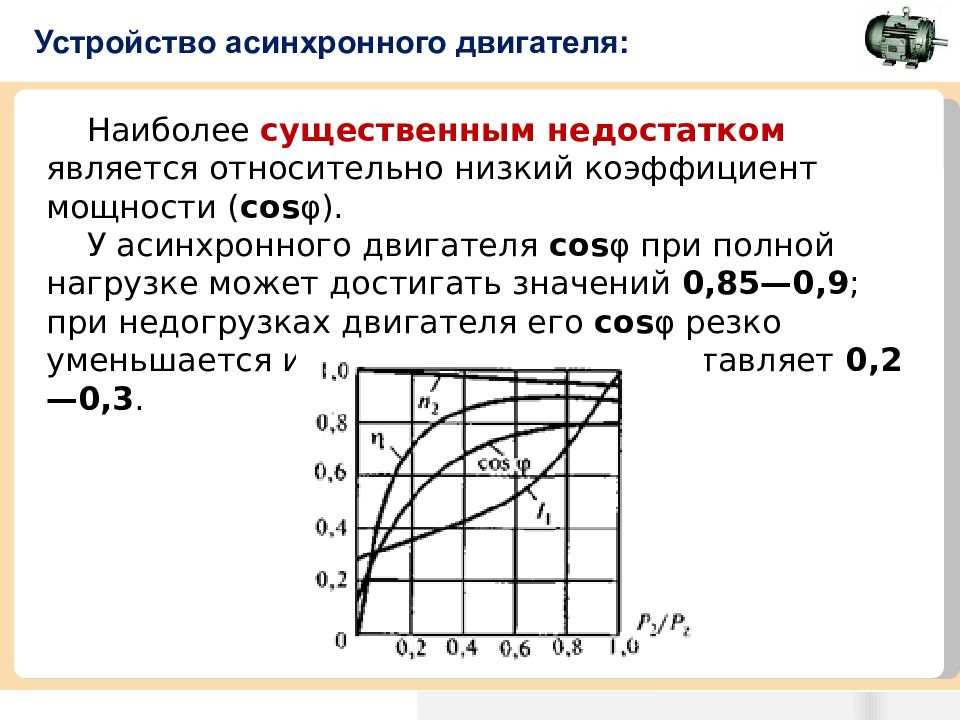
Устанавливаем ладонь руки так, чтобы силовые магнитные линии входили в нашу ладонь. Вытянутые 4 пальца нужно направить вдоль направления тока в обмотке. Отведенный большой палец покажет нам направление электромагнитной силы Fэм для конкретного проводника с током.
На рисунке показаны только две силы Fэм, которые создаются от проводников ротора с током, направленным от нас (крестик) и к нам (точка). И как мы видим, электромагнитные силы Fэм пытаются повернуть ротор в сторону вращения вращающегося магнитного поля статора.
Поясняющий рисунок для определения электромагнитной силы Fэм для проводника с током, который направлен от нас (крестик).
Поясняющий рисунок для определения электромагнитной силы Fэм для проводника с током, который направлен к нам (точка).
Совокупность этих электромагнитных сил от каждого проводника с током создает общий электромагнитный момент М, который приводит во вращение вал электродвигателя с частотой n.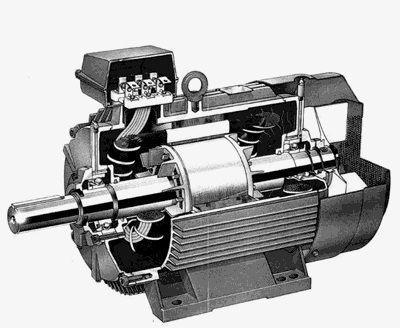
Эта частота называется, асинхронной.
Отсюда и произошло название асинхронный двигатель. Частота вращения ротора n всегда меньше частоты вращающегося магнитного поля статора n1, т.е. отстает от нее. Для определения величины отставания введен термин «скольжение», который определяется по следующей формуле:
Выразим из этой формулы частоту вращения ротора:
Пример расчета частоты вращения двигателя
Например, у меня есть двигатель типа АИР71А4У2 мощностью 0,55 (кВт):
- число пар полюсов у него равно 4 (2р=4, р=2)
- частота вращения ротора составляет 1360 (об/мин)
Вот его бирка.
Определим частоту вращения поля статора этого двигателя при частоте питающей сети 50 (Гц):
Найдем величину скольжения для этого двигателя:
Кстати, направление движения вращающегося магнитного поля статора, а следовательно, и направление вращения вала электродвигателя, можно изменить. Для этого необходимо поменять местами любые два вывода источника питающего трехфазного напряжения. Об этом я упоминал Вам в статьях про реверс электродвигателя и чередование фаз.
Принцип работы асинхронного двигателя. Выводы
Зная принцип работы асинхронного двигателя, можно сделать вывод, что электрическая энергия преобразуется в механическую энергию вращения вала электродвигателя.
Частота вращения магнитного поля статора, а следовательно и ротора, напрямую зависит от числа пар полюсов и частоты питающей сети. Если число пар полюсов ограничивается типом двигателя (р = 1, 2, 3 и 4), то частоту питающей сети можно изменить в большем диапазоне, например, с помощью частотного преобразователя.
Если в нашем примере частоту питающей сети увеличить всего на 10 (Гц), то частота вращения магнитного поля статора увеличится на 300 (об/мин).
Опыт по установке и монтажу частотных преобразователей у меня есть, но не большой. Несколько лет назад на городском водоканале мы проводили замену двух высоковольтных двигателей насосов холодной воды на низковольтные двигатели с частотными преобразователями. Но это уже отдельная тема для разговора. Сейчас покажу Вам несколько фотографий.
Вот фотография старого высоковольтного двигателя напряжением 6 (кВ).
А это новые двигатели напряжением 400 (В), установленные вместо старых высоковольтных.
Вот шкафы частотных преобразователей. На каждый двигатель свой шкаф. К сожалению, изнутри сфотографировать не успел.
Подписывайтесь на рассылку новостей с моего сайта, чтобы не пропустить самое интересное. В ближайшее время я расскажу Вам про пуск и способы регулирования частоты вращения трехфазных асинхронных двигателей двигателей, схемы их подключения и многое другое.
P.S. На этом статью про принцип работы асинхронного двигателя я завершаю. Спасибо за внимание.
Если статья была Вам полезна, то поделитесь ей со своими друзьями:
SERVAX | Технологии — ASM — Асинхронные двигатели
Крепкие рабочие лошади
Асинхронные двигатели (ASM) — это надежные и недорогие приводы для работы от сети, преобразователя частоты или сервопривода. Их можно использовать в широком диапазоне ослабления поля. В режимах работы без обратной связи их частота вращения зависит от нагрузки. Их производительность может быть улучшена за счет использования медных роторов с короткозамкнутым ротором вместо алюминиевых. Их можно использовать до класса изоляции H без каких-либо специальных мер.
SERVAX рекомендует асинхронные двигатели в качестве первого выбора, если требуются прочные, но простые в обслуживании приводы. Они подходят для широкого спектра применений — там, где требуется постоянная скорость вращения и где требуется постоянная мощность в широком диапазоне. И последнее, но не менее важное: они идеально подходят для машин и оборудования с очень высокими рабочими температурами.
Мы разработаем и изготовим асинхронные двигатели по индивидуальному заказу в следующих форматах:
- Модели с внешним диаметром от 60 до примерно 400 мм
- Как двигатель в сборе или как компоненты двигателя
- С воздушным или жидкостным охлаждением
- Внутренние или внешние роторы
- Беличьи клетки медные или алюминиевые
- Количество полюсов, соответствующее применению
- Обмотки с пропиткой или капсулой
- Класс эффективности по желанию заказчика
- Поворотное устройство обратной связи для соответствия области применения
Поперечное сечение асинхронного двигателя с медным ротором
Электродвигатели по индивидуальному заказу
Энергоэффективность
ASM — Асинхронные двигатели
Гибридная ASM с постоянными магнитами
PSM — Синхронные двигатели с постоянными магнитами
Привод для защитных дверей машин
асинхронных двигателей переменного тока | Как работают электродвигатели переменного тока Асинхронные электродвигатели переменного тока
| Как работают двигатели переменного тока — объясните это Рекламное объявлениеКриса Вудфорда.Последнее изменение: 28 июня 2021 г.
Вы знаете, как работают электродвигатели? Ответ, наверное, да и нет! Хотя многие из нас узнали, как базовые моторные работы, из простых научных книг и веб-страниц, таких как эта, многие из моторы, которые мы используем каждый день — от заводских машин до электропоезда — вообще-то так не работают. Какие книги рассказывают нам о простых двигателях постоянного тока (DC), которые имеют петля из проволоки, вращающаяся между полюсами постоянного магнита; в реальной жизни, в большинстве двигателей большой мощности используется переменный ток (AC) и работают совершенно по-другому: это то, что мы называем индукцией двигатели, и они очень изобретательно используют вращающееся магнитное поле.Давайте познакомимся поближе!
Фотография: Обычный асинхронный двигатель переменного тока со снятыми корпусом и ротором, демонстрирующий медные обмотки катушек, составляющих статор (статическая, неподвижная часть двигателя). Эти катушки предназначены для создания вращающегося магнитного поля, которое вращает ротор (подвижную часть двигателя) в пространстве между ними. Фото Дэвида Парсонса любезно предоставлено Министерством энергетики США / NREL.
Как работает обычный двигатель постоянного тока?
Простые двигатели, которые вы видите в научных книгах, основаны на кусок проволоки, согнутый в прямоугольную петлю, которая подвешена между полюса магнита.(Физики назвали бы это проводник с током сидит в магнитном поле.) Когда вы подключаете такой провод к батарее, через него течет постоянный ток (DC), создавая вокруг него временное магнитное поле. Это временное поле отталкивает исходное поле от постоянного магнита, в результате чего провод перевернуть. Обычно провод останавливался в этой точке, а затем снова переворачивался, но если мы воспользуемся оригинальным вращающимся соединением называется коммутатором, мы можем сделать обратный ток каждый раз, когда проволока переворачивается, и это означает, что проволока будет продолжать вращаться в в том же направлении, пока течет ток.Это суть простого электродвигателя постоянного тока, задуманного в 1820-е годы Майкла Фарадея и превратился в практическое изобретение о десятилетие спустя Уильямом Стердженом. (Более подробную информацию вы найдете в нашей вводной статье об электродвигателях.)
Иллюстрации: Электродвигатель постоянного тока основан на проволочной петле, вращающейся внутри фиксированного магнитного поля, создаваемого постоянным магнитом. Коммутатор (разрезное кольцо) и щетки (угольные контакты к коммутатору) меняют направление электрического тока каждый раз, когда провод перекручивается, что позволяет ему вращаться в одном и том же направлении.
Прежде чем мы перейдем к двигателям переменного тока, давайте быстро резюмируйте, что здесь происходит. В двигателе постоянного тока магнит (и его магнитное поле) фиксируется на месте и образует внешнюю статическую часть двигатель (статор), в то время как катушка с проводом, несущая электрический ток формирует вращающуюся часть двигателя (ротор). Магнитное поле исходит от статора, который представляет собой постоянный магнит, пока вы подаете электроэнергию на катушку, которая составляет ротор. Взаимодействие между постоянными магнитами поле статора и временное магнитное поле, создаваемое ротором, равно что заставляет мотор крутиться.
Рекламные ссылкиКак работает двигатель переменного тока?
В отличие от игрушек и фонариков, большинство домов, офисов, фабрики и другие здания не питаются от маленьких батареек: на них подается не постоянный ток, а переменный ток (AC), который меняет направление примерно 50 раз в секунду. (с частотой 50 Гц). Если вы хотите запустить двигатель от электросети переменного тока в вашем доме, вместо батареи постоянного тока нужна другая конструкция двигателя.
В двигателе переменного тока есть кольцо электромагнитов. расположены снаружи (составляя статор), которые предназначены для создания вращающегося магнитного поля.Внутри статора находится цельная металлическая ось, проволочная петля, катушка, беличья клетка из металлических стержней и межсоединений (например, вращающиеся клетки, которым иногда удается развлечь мышей), или другая свободно вращающаяся металлическая деталь, которая может проводить электричество. В отличие от двигателя постоянного тока, где вы посылаете энергию во внутренний ротор, в двигателе переменного тока вы посылаете мощность на внешние катушки, которые составляют статор. Катушки запитываются попарно, последовательно, создавая магнитное поле, вращающееся вокруг двигателя.
Фото: Статор создает магнитное поле с помощью туго намотанных катушек из медной проволоки, которые известны как обмотки. Когда электродвигатель изнашивается или перегорает, можно заменить его другим электродвигателем. Иногда проще заменить обмотки двигателя новым проводом — это умелая работа, называемая перемоткой, что и происходит здесь. Фото Сета Скарлетта любезно предоставлено ВМС США.
Как это вращающееся поле заставляет двигатель двигаться? Помните, что ротор, подвешенный внутри магнитное поле, является электрическим проводником.Магнитное поле постоянно меняется (потому что оно вращается), поэтому согласно законам электромагнетизма (точнее, закону Фарадея), магнитное поле производит (или индуцирует, если использовать термин Фарадея) электрический ток внутри ротора. Если проводник представляет собой кольцо или провод, ток течет вокруг него по петле. Если проводник представляет собой просто цельный кусок металла, вместо этого вокруг него циркулируют вихревые токи. В любом случае индуцированный ток производит свое собственное магнитное поле и, согласно другому закону электромагнетизма (Закон Ленца) пытается остановить то, что вызывает его — вращающееся магнитное поле — в том числе вращающееся.(Вы можете думать о роторе отчаянно пытается «догнать» вращающееся магнитное поле, пытаясь устранить разница в движении между ними.) Электромагнитная индукция — это ключ к тому, почему такой двигатель вращается, и поэтому он называется асинхронным.
Фото: эффективный асинхронный двигатель переменного тока. Фото Аль-Пуэнте любезно предоставлено NREL.
Как работает асинхронный двигатель переменного тока?
Вот небольшая анимация, чтобы подвести итог и, надеюсь, прояснить все:
- Две пары катушек электромагнита, показанные здесь красным и синим цветом, поочередно получают питание от источника переменного тока (не показан, но подводится к выводам справа).Две красные катушки соединены последовательно и запитаны вместе, а две синие катушки катушки подключаются таким же образом. Поскольку это переменный ток, ток в каждой катушке не включается и не выключается внезапно (как предполагает эта анимация), а плавно повышается и падает в форме синусоидальной волны: когда красные катушки наиболее активны, синие катушки полностью неактивны, и наоборот. Другими словами, их токи не совпадают (не совпадают по фазе на 90 °).
- Когда катушки находятся под напряжением, магнитное поле, которое они создают между ними, индуцирует электрический ток в роторе.Этот ток создает собственное магнитное поле, которое пытается противодействовать тому, что его вызвало (магнитное поле от внешних катушек). Взаимодействие между двумя полями заставляет ротор вращаться.
- Когда магнитное поле чередуется между красной и синей катушками, оно эффективно вращается вокруг двигателя. Вращающееся магнитное поле заставляет ротор вращаться в одном направлении и (теоретически) почти с одинаковой скоростью.
Асинхронные двигатели на практике
Что контролирует скорость двигателя переменного тока?
Фотография: Двигатель с регулируемой частотой.Фото Уоррена Гретца любезно предоставлено NREL.
В синхронных двигателях переменного тока ротор вращается с той же скоростью, что и вращающееся магнитное поле; в асинхронном двигателе ротор всегда вращается с меньшей скоростью, чем поле, что делает его примером так называемого асинхронного двигателя переменного тока. Теоретическая скорость ротора в асинхронном двигателе зависит от частоты источника переменного тока и количества катушек, составляющих статор, и без нагрузки на двигатель приближается к скорости вращающегося магнитного поля.На практике нагрузка на двигатель (независимо от того, что он ведет) также играет роль, замедляя ротор. Чем больше нагрузка, тем больше «пробуксовка» между скоростью вращающегося магнитного поля и фактической скоростью ротора. Чтобы контролировать скорость двигателя переменного тока (чтобы он работал быстрее или медленнее), вы должны увеличивать или уменьшать частоту источника переменного тока, используя так называемый частотно-регулируемый привод. Поэтому, когда вы регулируете скорость чего-то вроде заводской машины, питаемой от асинхронного двигателя переменного тока, вы на самом деле управляете схемой, которая изменяет частоту тока, приводящего в движение двигатель, вверх или вниз.
Что такое «фаза» двигателя переменного тока?
Нам не обязательно приводить в движение ротор с четырьмя катушками (двумя противоположными парами), как показано здесь. Можно построить асинхронные двигатели с любым другим расположением катушек. Чем больше у вас катушек, тем плавнее будет работать мотор. Количество отдельных электрических токов, возбуждающих питание катушек независимо, не в шаге, известно как фаза двигателя, поэтому конструкция, показанная выше, представляет собой двухфазный двигатель (с двумя токами, питающими четыре катушки, которые работают не в шаге в двух парах. ).В трехфазном двигателе мы могли бы иметь три катушки, расположенные вокруг статора в виде треугольника, шесть равномерно расположенных катушек (три пары) или даже 12 катушек (три набора по четыре катушки) с одной, двумя или четырьмя катушками. включается и выключается одновременно тремя отдельными противофазными токами.
Анимация: трехфазный двигатель, питаемый тремя токами (обозначенными красным, зеленым и синие пары катушек), сдвиг по фазе на 120 °.
Преимущества и недостатки асинхронных двигателей
Преимущества
Самым большим преимуществом асинхронных двигателей переменного тока является их простота.У них есть только одна движущаяся часть, ротор, что делает их недорогими, тихими, долговечными и относительно безотказными. ОКРУГ КОЛУМБИЯ двигатели, напротив, имеют коллектор и угольные щетки, которые изнашиваются. выходят и нуждаются в замене время от времени. Трение между щетками и Коммутатор также делает двигатели постоянного тока относительно шумными (а иногда даже довольно вонючими).
Artwork: Электродвигатели чрезвычайно эффективны, обычно преобразовывая около 85 процентов поступающей электроэнергии в полезную исходящую механическую работу.Даже в этом случае довольно много энергии теряется в виде тепла внутри обмоток, поэтому двигатели могут сильно нагреваться. Большинство двигателей переменного тока промышленной мощности имеют встроенные системы охлаждения. Внутри корпуса находится вентилятор, прикрепленный к валу ротора (на противоположном конце оси, который приводит в движение любую машину, к которой прикреплен двигатель), показанный здесь красным. Вентилятор всасывает воздух в двигатель, обдувая его внешнюю часть корпуса, минуя теплоотводящие ребра. Если вы когда-нибудь задумывались, почему электродвигатели имеют эти выступы снаружи (как вы можете видеть на верхнем фото на этой странице), причина в том, что они охлаждают двигатель.
Недостатки
Поскольку скорость асинхронного двигателя зависит от частоты переменного тока, приводящего его в действие, он вращается со скоростью постоянная скорость, если вы не используете частотно-регулируемый привод; Скорость двигателей постоянного тока намного проще контролировать, просто повышая или понижая напряжение питания. Хотя асинхронные двигатели относительно просты, они могут быть довольно тяжелыми и громоздкими из-за их катушечной обмотки. В отличие от двигателей постоянного тока, они не могут работать от батарей или любого другого источника постоянного тока (например, солнечных батарей) без использования инвертора (устройства, которое преобразует постоянный ток в переменный).Это потому, что им нужно изменяющееся магнитное поле, чтобы вращать ротор.
Кто изобрел асинхронный двигатель?
Изображение: оригинальный дизайн Николы Теслы для асинхронного двигателя переменного тока. Он работает точно так же, как и на анимации выше, с двумя синими и двумя красными катушками, которые поочередно возбуждаются генератором справа. Это произведение искусства взято из оригинального патента Tesla, депонированного в Бюро по патентам и товарным знакам США, с которым вы можете ознакомиться в приведенных ниже ссылках.
Никола Тесла (1856–1943) был физиком. и плодовитый изобретатель, чей огромный вклад в науку и технику никогда не были полностью признаны. После того, как он приехал в Соединенные Штаты в возрасте 28 лет, он начал работал на известного пионера электротехники Томаса Эдисона. Но двое мужчин поссорились катастрофически и вскоре стали непримиримыми соперниками. Тесла твердо верил что переменный ток (AC) намного превосходил постоянный ток (DC), в то время как Эдисон думал обратное. Со своим партнером Джорджем Westinghouse, Тесла отстаивал AC, а Эдисон был полон решимости управлять миром на DC и придумал всевозможные рекламные трюки, чтобы доказать, что кондиционер слишком опасен для широкого использования (изобретение электрического стула, чтобы доказать, что переменный ток может быть смертельным, и даже ударил током слона Топси переменным током, чтобы показать, насколько это было смертельно опасно и жестоко).Битва между этими двумя очень разные взгляды на электроэнергию иногда называют Войной течений.
Несмотря на лучшие (или худшие) усилия Эдисона, Tesla победила, и теперь электричество переменного тока питает большую часть мира. Во многом именно поэтому многие электродвигатели, которые приводить в действие бытовую технику в наших домах, фабриках и офисах переменного тока асинхронные двигатели, работающие от вращающихся магнитных полей, которые Никола Тесла спроектировал его в 1880-х годах (его патент, проиллюстрированный здесь, был выдан в мае 1888 года).Итальянский физик по имени Галилео Феррарис независимо друг от друга придумал ту же идею примерно в то же время, но история обошлась с ним еще более жестоко, чем Тесла и его имя теперь почти забыты.
Рекламные ссылкиУзнать больше
На этом сайте
На других сайтах
Книги
Для читателей постарше
Для младших читателей
- Электричество для молодых людей: забавные и легкие проекты «Сделай сам» Марка де Винка.Maker Media / O’Reilly, 2017. Отличное практическое введение в электричество, включая несколько занятий, связанных с созданием электродвигателей с нуля. Возраст 9–12 лет.
- Эксперименты с электродвигателем Эда Соби. Enslow, 2011. Это отличное общее введение в электродвигатели с большим количеством более широкого научного и технологического контекста. Однако по очевидным практическим соображениям и соображениям безопасности он ориентирован только на проекты с двигателями постоянного тока и лучше всего подходит для детей в возрасте от 11 до 14 лет.
- Power and Energy Криса Вудфорда.Факты в файле, 2004. Одна из моих книг, рассказывающих об усилиях человека по использованию энергии с древних времен до наших дней. Возраст 10+.
- Никола Тесла: Разработчик электроэнергии Крис Вудфорд, в «Изобретатели и изобретения», том 5. Нью-Йорк: Маршалл Кавендиш, 2008. Краткую биографию Теслы я написал несколько лет назад. На момент написания все это было доступно в Интернете по этой ссылке в Google Книгах. Возраст 9–12 лет.
Патенты
Patents предлагает более глубокие технические детали и собственные идеи изобретателя о своей работе.Вот очень небольшая подборка многих патентов США, касающихся асинхронных двигателей.
- Патент США 381 968: Электромагнитный двигатель Николы Тесла, 1 мая 1888 г. Оригинальный патент на асинхронный двигатель переменного тока.
- Патент США 2 959 721: Многофазные асинхронные двигатели, Томас Х. Бартон и др., Lancashire Dynamo & Crypto Ltd, 8 ноября 1960 г. Асинхронный двигатель с улучшенным контролем скорости.
- Патент США 4311932: Жидкостное охлаждение для асинхронных двигателей, Рэймонд Н. Олсон, Sundstrand Corporation, 19 января 1982 г.Эффективный метод жидкостного охлаждения двигателя без чрезмерного сопротивления жидкости вращающимся компонентам.
- Патент США 5,751,082: Асинхронный двигатель с высоким пусковым моментом. Автор: Умеш К. Гупта, Vickers, Inc., 12 мая 1998 г. Современный двигатель с высоким начальным крутящим моментом.
Пожалуйста, НЕ копируйте наши статьи в блоги и другие сайты
статей с этого сайта зарегистрированы в Бюро регистрации авторских прав США. Копирование или иное использование зарегистрированных работ без разрешения, удаление этого или других уведомлений об авторских правах и / или нарушение смежных прав может привести к серьезным гражданским или уголовным санкциям.
Авторские права на текст © Chris Woodford 2012, 2020. Все права защищены. Полное уведомление об авторских правах и условиях использования.
Подписывайтесь на нас
Сохранить или поделиться этой страницей
Нажмите CTRL + D, чтобы добавить эту страницу в закладки на будущее, или расскажите об этом своим друзьям с помощью:
Цитируйте эту страницу
Вудфорд, Крис. (2012/2020) Асинхронные двигатели. Получено с https://www.explainthatstuff.com/induction-motors.html.[Доступ (укажите дату здесь)]
Больше на нашем сайте …
Асинхронный двигательAc — обзор
39.1 Введение
Высокопроизводительные моторные приводы характеризуются необходимостью плавного вращения вплоть до остановки, полного контроля крутящего момента при остановке и быстрых ускорений и замедлений. В прошлом в приводах с регулируемой скоростью использовались преимущественно двигатели постоянного тока из-за их превосходной управляемости. Однако современные высокопроизводительные моторные приводные системы обычно основаны на трехфазных двигателях переменного тока, таких как асинхронный двигатель переменного тока (ACIM) или синхронный двигатель с постоянными магнитами (PMSM).Эти машины вытеснили двигатель постоянного тока в качестве предпочтительной машины для множества применений из-за своей простой и прочной конструкции, низкой инерции, высокой удельной мощности, высокой плотности крутящего момента и хороших характеристик при высоких скоростях вращения.
Для управления этими двигателями переменного тока разработаны методы векторного управления, и в большинстве современных высокопроизводительных приводов теперь реализовано цифровое регулирование тока с обратной связью. В таких системах достижимая полоса пропускания с обратной связью напрямую связана со скоростью, с которой вычислительно интенсивные алгоритмы векторного управления и связанные с ними вращения векторов могут быть реализованы в реальном времени.Из-за этой вычислительной нагрузки многие высокопроизводительные приводы теперь используют процессоры цифровых сигналов (DSP) для реализации встроенных схем управления двигателем и векторным управлением. DSP — это специальные микропроцессоры, используемые там, где требуется обработка больших объемов цифровых данных в реальном времени для реализации сложных алгоритмов управления. Вычислительная мощность, присущая DSP, позволяет достичь очень короткого времени цикла и ширины полосы регулирования тока с обратной связью.
Полная схема управления током для этих машин также требует схемы генерации напряжения с высокоточной широтно-импульсной модуляцией (ШИМ) и аналого-цифрового (АЦП) преобразования (АЦП) с высоким разрешением для измерения моторные токи.Для обеспечения плавного регулирования крутящего момента до нулевой скорости для современных векторных контроллеров необходима обратная связь по положению ротора. Поэтому многие системы включают датчики положения ротора, такие как резольверы и инкрементальные энкодеры.
Контроллер DSP Texas Instruments TMS320LF2407 (в данной главе именуемый LF2407) представляет собой программируемый цифровой контроллер с центральным процессором (ЦП) C2xx DSP в качестве основного процессора. LF2407 содержит основной процессор DSP и полезные периферийные устройства, интегрированные в единый кремний.LF2407 сочетает в себе мощный процессор со встроенной памятью и периферийными устройствами. С ядром DSP и периферийными устройствами, ориентированными на управление, интегрированными в один чип, пользователи могут создавать очень компактные и экономичные цифровые системы управления.
Контроллер LF2407 DSP обеспечивает производительность 40 миллионов инструкций в секунду (MIPS). Эта высокая скорость обработки ЦП C2xx позволяет пользователям вычислять параметры в реальном времени, а не искать приближения из таблиц, хранящихся в памяти. Эта высокая производительность хорошо подходит для обработки параметров управления в таких приложениях, как режекторные фильтры или бессенсорные алгоритмы управления двигателями, где необходимо быстро выполнять большой объем вычислений.
В то время как «мозгом» LF2407 DSP является ядро C2xx, LF2407 содержит на плате несколько ориентированных на управление периферийных устройств (см. Рис. 39.1). Периферийные устройства LF2407 делают возможным практически любое цифровое управление. Их области применения варьируются от аналого-цифрового преобразования до генерации с широтно-импульсной модуляцией (ШИМ). Коммуникационные периферийные устройства делают возможным обмен данными с внешними периферийными устройствами, персональными компьютерами или другими процессорами DSP. Ниже представлен графический список различных периферийных устройств на плате LF2407, изображенных на рис.39.1.
Рис. 39.1. Графический обзор ядра DSP и периферийных устройств LF2407.
Предоставлено Texas Instruments.Здесь мы описываем фундаментальные принципы, лежащие в основе реализации высокопроизводительных контроллеров для трехфазных двигателей переменного тока, сочетающие в себе встроенный контроллер DSP, LF2407, гибкую генерацию ШИМ, аналого-цифровое преобразование с высоким разрешением и встроенный интерфейс энкодера.
Трехфазный асинхронный двигатель
1. Корпус из чугуна, прочный, корпус изготовлен из высокопрочной стали, инструментальное литье, а производственный процесс отличный.Установочные размеры и классы дороги соответствуют стандартам IEC.
2. Двигатель эффективный, энергосберегающий, низкий уровень шума, небольшая вибрация, длительный срок службы, простота обслуживания, большой крутящий момент двигателя, стабильная и надежная работа, хорошие пусковые характеристики.
3. Двигатель используется в широком диапазоне, широко используется в станках, вентиляторах, насосах, компрессорах и транспорте, сельском хозяйстве, промышленности и другом механическом вращающемся оборудовании. Трехфазный асинхронный двигатель серии
Y спроектирован и разработан с использованием новых технологий.Электродвигатель полностью закрытый, с внешним вентилятором для охлаждения и короткозамкнутым ротором. Полезная модель обладает такими преимуществами, как новый дизайн, красивый внешний вид, низкий уровень шума, высокая эффективность, высокий крутящий момент, хорошие пусковые характеристики, компактная конструкция, удобство использования и обслуживания и тому подобное. В двигателе применяется изоляция класса F, а конструкция резки оценивается в соответствии с международной структурой изоляции, что значительно повышает надежность и общую безопасность двигателя.
Параметры продукта
Номер рамы: 80-355
Диапазон мощности: 0.75-315 кВт
Номинальная частота: 50/60 Гц
Напряжение: 380 В (также может быть преобразовано в специальное напряжение, например 220 В, 400 В, 415 В, 660 В, 1140 В и т. Д.)
Степень защиты двигателя: IP54, IP55
Метод охлаждения: IC411,
Непрерывная рабочая система: S1 :,
Метод подключения двигателя: мощность 3 кВт или меньше для метода подключения Y, а спецификация 4 кВт или выше — метод подключения △.
Может непрерывно работать в среде, где температура окружающей среды не выше 40 ° C.Он может быть преобразован в специальный двигатель для редуктора, специальный двигатель для водяного насоса, двухвальный удлинительный двигатель и специальный установочный двигатель в соответствии с требованиями пользователя. Продукт используется в различных областях народного хозяйства, таких как станки, насосы, вентиляторы, компрессоры, а также может использоваться в транспортировке, смешивании, печати, сельскохозяйственном оборудовании, пищевых продуктах и других местах, не содержащих горючие, взрывоопасные или агрессивные газы.
Характеристика продукта
(1) Внешний контур рамы трехфазного асинхронного двигателя серии Y квадратный и круглый, радиатор — вертикальный и горизонтально параллельный, все имеют чугунную конструкцию.Кроме того, H63 ~ 112 также имеет корпус из литого под давлением алюминиевого сплава.
(2) Трехфазный асинхронный двигатель серии Y имеет конструкцию с мелкой торцевой крышкой, которая увеличивает количество и размер внутренних ребер жесткости, все они имеют конструкцию из чугуна, а H63 ~ 112 также имеет конструкцию из литого под давлением алюминиевого сплава. Для удобства пользователей в использовании и ремонте, h280 и выше добавили устройство непрерывной смазки.
(3). Класс защиты распределительной коробки — IP55. Чтобы уменьшить вес двигателя, распределительная коробка H63 280 отлита под давлением из алюминиевого сплава (также доступны отливки из чугуна), а для h415 ~ 355 используются отливки из чугуна.В коробке есть специальное заземляющее устройство. Положение установки устройства тепловой защиты указано для моделей h260 и выше. Отверстие для подачи питания имеет впускное отверстие с двумя отверстиями и имеет две уплотняющие конструкции: одна — герметизирующая крышка, а другая — герметичная крышка. Вид замковой пломбы. Распределительная коробка обычно располагается в верхней части основания и может быть проложена со всех сторон. Кроме того, соединительная коробка чугунного основания H80 ~ 355 также может быть расположена сбоку от основания.
Использование продукта
Моторные продукты, производимые и продаваемые нашей компанией, используются во многих отраслях, таких как электроэнергетика, горнодобывающая промышленность, металлургия стали, нефтехимия, водное хозяйство, транспорт, строительные материалы и многие другие отрасли. .Оборудование для двигателя — это насос, станок, вентилятор, мельница, дробилка, прокатный стан, компрессор и многое другое промышленное оборудование.
Основной технологический процесс двигателя
Статор двигателя: обработка корпуса → штамповочный пресс → посадка с железным сердечником → изготовление рулонов → плетение → сушка краски погружением
Электронный ротор: обработка пустого вала → установка пресса с железным сердечником → литой алюминий с железным сердечником → вал колонны ротора → плетение → сушка краски погружением → динамическая балансировка
Сборка двигателя: сборка ротора статора → машинные испытания → окраска внешнего вида двигателя → хранение упаковки
Почему выбирают нас (наше преимущество в обслуживании)
1.Поставщик профессиональных услуг по производству двигателей;
2. Надежная система менеджмента качества и сертификации продукции;
3. Иметь профессиональную команду продаж и технического обслуживания;
4. Двигатель имеет идеальный технологический процесс и высокую способность к механической обработке;
5. Высококачественная система технического обслуживания продукции;
6, добросовестность и взаимная выгода, хорошая кредитная гарантия.
Синхронные двигатели и асинхронные двигатели
Электродвигатели бывают сотен размеров, форм и разновидностей, и огромное количество вариантов может парализовать при поиске лучшего варианта.
Первый шаг в поиске любого двигателя — это определение его источника питания; он питается от постоянного или переменного тока? Это разделит варианты на две большие категории: двигатели переменного тока и двигатели постоянного тока, и исключит любые двигатели, которые не будут работать с вашим источником питания. Тем не менее, обе эти категории по-прежнему содержат много видов машин, поэтому эта статья поможет еще больше дифференцировать класс двигателей переменного тока (в нашей статье о бесщеточных и щеточных двигателях постоянного тока рассматриваются основные типы двигателей постоянного тока). Двигатели переменного тока можно разделить на синхронные и асинхронные двигатели, и в этой статье мы дадим краткое объяснение обоих, а также сравним их рабочие характеристики и области применения.
Асинхронные двигатели
Асинхронные двигателисчитаются одними из самых распространенных двигателей переменного тока, используемых сегодня в промышленности. Они были одними из первых изобретенных электродвигателей, поэтому у них было достаточно времени, чтобы их оптимизировать для работы во многих приложениях. Они имеют относительно простую конструкцию, состоящую из внешнего статора и внутреннего ротора, которые взаимодействуют посредством эффекта электромагнитной индукции для создания механического вращения. Определенные типы асинхронных двигателей достигают этого вращения по-разному, и, пожалуйста, прочтите наши статьи о двигателях с короткозамкнутым ротором, двигателях с фазным ротором и однофазных промышленных двигателях, чтобы узнать больше.Вообще говоря, цель асинхронных двигателей — пропустить переменный ток через катушки в статоре, которые будут создавать магнитное поле, а частота колебаний источника переменного тока заставит это магнитное поле вращаться. Это вращающееся магнитное поле (RMF) затем будет индуцировать противоположные магнитные поля в роторе (свободно движущийся якорь, прикрепленный к выходному валу) и вызывать полезное вращение.
Эти двигатели также известны как асинхронные двигатели, поскольку частота их переменного тока напрямую не соответствует количеству оборотов выходного вала.Это явление известно как «проскальзывание» и возникает из-за того, что ротор всегда играет в магнитную игру «догонять» с RMF. Наличие проскальзывания означает, что точное время для асинхронных двигателей затруднено. Как было сказано ранее, эти двигатели можно найти в бытовых приборах, электромобилях и даже большом механизированном промышленном оборудовании, поскольку они бывают сотнями скоростей, крутящих моментов, напряжений, размеров и форм. Дополнительные сведения об этих машинах см. В нашей статье об асинхронных двигателях.
Двигатели синхронные
Синхронные двигатели охватывают основы, недоступные для асинхронных двигателей, а именно их «асинхронный» характер. Синхронные двигатели согласовывают выходную частоту вращения с входной частотой переменного тока, что позволяет разработчикам использовать эти двигатели в точно синхронизированных приложениях, таких как часы, прокатные станы, проигрыватели и т. Д. Они достигают этого, соединяя магнитные полюса (пары север-юг в каждом магнитном поле) статора и ротора, так что RMF статора вращает ротор с точной синхронной скоростью.Есть много способов заблокировать эти полюса, и в наших статьях о реактивных двигателях и бесщеточных двигателях постоянного тока приводятся конкретные примеры этих механизмов. Обратите внимание, что бесщеточный двигатель постоянного тока не является двигателем переменного тока; это связано с тем, что синхронные конструкции не обязательно должны получать питание от сети переменного тока, тогда как асинхронные двигатели обычно всегда питаются от сети переменного тока.
Синхронные двигатели не являются самозапускающимися по своей природе, то есть этим двигателям часто требуется пускатель двигателей для разгона их роторов на полную скорость.Эти пускатели не часто используются с асинхронными двигателями, потому что они могут запускаться из состояния покоя без первоначального «толчка». Чтобы узнать больше, смело читайте нашу статью о типах пускателей двигателей. Кроме того, даже несмотря на то, что их скорость является синхронной, скорость синхронных двигателей трудно изменить, и для этого требуется контроллер двигателя переменного тока, чтобы позволить разработчикам регулировать скорость двигателя (дополнительную информацию можно найти в нашей статье о контроллерах двигателей переменного тока). Синхронные двигатели, хотя обычно более дорогие, чем асинхронные, обладают более высоким КПД (> 90%) и являются отличным выбором для дробилок, мельниц, измельчителей и других низкоскоростных и высокомощных приложений.
Сравнение асинхронных и синхронных двигателей
Поскольку эти два типа двигателей переменного тока по-прежнему довольно широки, в этой статье будет дано общее сравнение рабочих характеристик каждого типа, чтобы разработчики могли использовать эту информацию для дальнейшего определения машины, наиболее подходящей для их спецификаций. Ниже, в таблице 1, показано качественное сравнение некоторых характеристик, общих для асинхронных двигателей и синхронных двигателей, и показаны преимущества и недостатки каждой конструкции двигателя переменного тока.
Таблица 1: Сравнение асинхронных двигателей и синхронных двигателей.
Характеристики | Асинхронные двигатели | Синхронные двигатели |
Сложность | Простой дизайн | Комплекс |
Самозапускающийся | В целом да | Обычно нет |
Плотность мощности | Среднее значение | Высокая |
КПД | Среднее значение | Высокая |
Регулятор коэффициента мощности | Нет (всегда с запаздыванием) | Да (может опережать и отставать) |
Стоимость | Низкий | Высокая |
Сложность (или ее отсутствие) асинхронных двигателей — лучшее преимущество, которое они имеют перед синхронными конструкциями.Их очень просто производить, эксплуатировать и обслуживать, и поэтому асинхронные двигатели в целом дешевле синхронных. И наоборот, реализация синхронной машины требует более сложного ротора, который труднее изготавливать / ремонтировать, и требует дополнительных схем, которые необходимо покупать и устанавливать, чтобы эти двигатели могли работать эффективно.
Как указывалось ранее, асинхронные двигатели обычно самозапускаются, а синхронные — нет. Это означает, что асинхронным двигателям для эффективной работы требуется меньше внешних периферийных устройств, что снижает их стоимость и сложность.
Плотность мощности — это количество мощности (обычно измеряется в лошадиных силах HP или киловаттах кВт), генерируемых на единицу объема двигателя. Синхронные двигатели обычно имеют более высокую удельную мощность, чем асинхронные двигатели сопоставимого размера, что позволяет им обеспечивать большую мощность при меньшем объеме. Это отлично подходит для приложений с ограниченными размерами и является причиной выбора синхронного двигателя вместо асинхронного.
Синхронные двигатели в некоторых случаях могут достигать КПД> 90% и, как правило, более энергоэффективны, чем асинхронные двигатели.Эффективность зависит от конкретного типа и размера двигателя, но отсутствие скольжения в синхронных двигателях означает, что при преобразовании электрической энергии в механическую энергию теряется меньше.
Коэффициент мощности — это отношение рабочей мощности к полной мощности и выражается в процентах, чтобы показать эффективность распределения мощности и связанные с этим потери. Например: завод должен работать на 1000 кВт (рабочая мощность), а электросчетчик, подключенный к источнику питания, показывает 1250 кВА (полная мощность, которая измеряется в киловольт-амперах, или кВА, и составляет используется для выражения энергии индуктивным нагрузкам, таким как катушки двигателей, провода и т. д.). Таким образом, коэффициент мощности для этого завода составляет 1000/1250 = 0,8 или 80%, что означает, что только 80% тока, подаваемого на завод, используется для полезной работы, а 20% теряется на тепло и другие виды неэффективности. Инженеры могут помочь восстановить эти потери, используя синхронные двигатели, чтобы «опередить» коэффициент мощности или вырабатывать энергию обратно в систему (помните, что двигатели также могут работать как электрические генераторы, если им дано вращение на входе). Часто синхронные двигатели соединяются в тандеме с асинхронными двигателями, чтобы скорректировать индуктивные потери мощности асинхронного двигателя, что представляет собой еще одно огромное преимущество синхронных двигателей.
Наконец, общей чертой синхронных и асинхронных двигателей является их ценовое разделение. По причинам, описанным ранее, синхронные двигатели дороже в производстве, внедрении, обслуживании и ремонте, чем асинхронные двигатели. Однако можно утверждать, что их способность к экономии энергии и коррекции коэффициента мощности может компенсировать более высокие начальные затраты. Верно ли это, будет в конечном итоге зависеть от конкретных приложений, но это следует учитывать, поскольку общие затраты жизненного цикла всегда должны быть минимизированы в любом проекте.
Сводка
В этой статье представлено краткое сравнение асинхронных двигателей переменного тока и синхронных двигателей. Для получения информации о других продуктах обратитесь к нашим дополнительным руководствам или посетите платформу Thomas Supplier Discovery Platform, чтобы найти потенциальные источники поставок или просмотреть подробную информацию о конкретных продуктах.
Источники:
- https://geosci.uchicago.edu
- http://nit-edu.org/wp-content/uploads/2019/06/ch-38-Synchronous-motor.pdf
- http: // www.egr.unlv.edu/~eebag/Synchronous%20Generator%20I.pdf
- http://hyperphysics.phy-astr.gsu.edu/hbase/mintage/indmot.html
- http://electricalacademia.com/induction-motor/torque-speed-characteristics-induction-motor/
Прочие изделия для двигателей
Больше от Machinery, Tools & Supplies
Что такое «скольжение» в асинхронном двигателе переменного тока?
AutoQuiz редактирует Джоэл Дон, менеджер сообщества ISA по социальным сетям.
Этот вопрос викторины по автоматизации исходит из программы сертификации ISA Certified Automation Professional (CAP).Сертификация ISA CAP обеспечивает непредвзятую, стороннюю, объективную оценку и подтверждение навыков профессионала в области автоматизации. Экзамен CAP ориентирован на направление, определение, проектирование, разработку / применение, развертывание, документацию и поддержку систем, программного обеспечения и оборудования, используемых в системах управления, производственных информационных системах, системной интеграции и операционном консультировании. Щелкните эту ссылку для получения дополнительной информации о программе CAP.
«Скольжение» в асинхронном двигателе переменного тока определяется как:
a) синхронная скорость минус скорость холостого хода
b) разница между скоростью поля статора и скоростью ротора
c) номинальная скорость плюс синхронная скорость
d) скорость, при которой двигатель развивает крутящий момент
e) ничего из вышеперечисленного
Скольжение обычно выражается в процентах и варьируется в зависимости от двигателя от номинального нуля.От 5 процентов для очень больших двигателей до примерно 5 процентов для небольших специализированных двигателей. Если n s — электрическая скорость статора, а n r — механическая скорость ротора, скольжение S определяется как:
S = (n s — n r ) / n s
Вращение двигателя в асинхронном двигателе переменного тока развивается под действием движущегося магнитного поля. Когда скорость ротора падает ниже скорости статора или синхронной скорости, скорость вращения магнитного поля в роторе увеличивается, вызывая больший ток в обмотках ротора и создавая больший крутящий момент.
Для создания крутящего момента требуется скольжение. Под нагрузкой скорость ротора падает, а скольжение увеличивается настолько, чтобы создать достаточный дополнительный крутящий момент для поворота нагрузки. Очень эффективный способ контролировать скольжение — использовать частотно-регулируемый привод
.Правильный ответ — B , «разница между скоростью поля статора и скоростью ротора».
Ссылка : Николас Сэндс, P.E., CAP и Ян Верхаппен, P.Eng., CAP. , Справочник по автоматизации.Чтобы прочитать краткие вопросы и ответы с авторами, а также бесплатно загрузить 116-страничный отрывок из книги, щелкните по этой ссылке.
О редакторе
Джоэл Дон — менеджер сообщества ISA и независимый консультант по контент-маркетингу, социальным сетям и связям с общественностью. До своей работы в области маркетинга и PR Джоэл работал редактором региональных газет и национальных журналов по всей территории США. Он получил степень магистра в школе Медилл Северо-Западного университета со специализацией в области науки, техники и биомедицинских маркетинговых коммуникаций, а также степень бакалавра. Имеет ученую степень Калифорнийского университета в Сан-Диего.
Связаться с Джоэлем
Асинхронные двигатели — Руководство по электрическому монтажу
Асинхронный (т.е. асинхронный) двигатель прочен и надежен и очень широко используется. 95% двигателей, установленных по всему миру, являются асинхронными. Следовательно, защита этих двигателей имеет большое значение во многих областях применения.
Введение
Асинхронные двигатели используются в большом количестве приложений.Вот несколько примеров машин с приводом:
- кондиционеры воздуха,
- чиллеры,
- лифтов,
- вентиляторы и нагнетатели,
- пожарный насос,
- центробежные насосы, Компрессоры
- ,
- дробилки, Конвейеры
- ,
- подъемники и краны,
- …
Последствия отказа двигателя из-за неправильной защиты или невозможности работы схемы управления могут включать следующее:
- Для лиц:
- Удушье из-за блокировки вентиляции мотора
- Удар электрическим током из-за нарушения изоляции двигателя
- Авария из-за того, что двигатель не остановился из-за отказа цепи управления
- Для ведомой машины и процесса:,
- Муфты валов, оси, приводные ремни,… повреждены из-за остановки ротора
- Пострадавшая продукция
- Отложенное производство
- Для самого мотора:
- Прогорание обмоток двигателя из-за остановки ротора
- Стоимость ремонта
- Стоимость замены
Таким образом, безопасность людей и товаров, а также уровень надежности и доступности во многом зависят от выбора средств защиты.
С экономической точки зрения необходимо учитывать общую стоимость отказа. Эта стоимость увеличивается с размером двигателя и трудностями доступа и замены. Потери производства — еще один, очевидно, важный фактор.
Специфические характеристики двигателя влияют на цепи питания, необходимые для удовлетворительной работы.
Цепь питания двигателя имеет определенные ограничения, которые обычно не встречаются в других (общих) схемах распределения.Это связано с особыми характеристиками двигателей, напрямую подключенных к линии, таких как:
- Высокий пусковой ток (см. Рис. N74), который в основном является реактивным и поэтому может быть причиной значительного падения напряжения
- Количество и частота пусковых операций в целом высокие
- Высокий пусковой ток означает, что устройства защиты двигателя от перегрузки должны иметь рабочие характеристики, предотвращающие срабатывание во время периода пуска.
Рис. N74 — Характеристики прямого пускового тока асинхронного двигателя
.