Двигатель переменного тока устройство и принцип действия — советы электрика
Электродвигатель. Виды и применение. Работа и устройство
Электродвигатель представляет электромашину, перестраивающую электрическую энергию в механическую. Обычно электрическая машина реализует механическую работу благодаря потреблению приложенной к ней электроэнергии, преобразовывающейся во вращательное движение. Ещё в технике есть линейные двигатели, способные создавать сразу поступательное движение рабочего органа.
Особенности конструкции и принцип действия
Не важно какое конструктивное исполнение, но устройство любых электродвигателей однотипное. Ротор и статор находятся внутри цилиндрической проточки.
Вращение ротора возбуждают магнитное поле, отталкивающее его полюса от статора (неподвижной обмотки). Сохранять постоянное отталкивание можно путём перекоммутации обмоток ротора, или образовав вращающееся магнитное поле непосредственно в статоре.
Первый способ присущий коллекторным электродвигателям, а второй — асинхронным трехфазным.
Обратите внимание
Корпус любых электродвигателей обычно чугунный или выполнен из сплава алюминия. Однотипные двигатели, не смотря на конструкцию корпуса производятся с одинаковыми установочными размерами и электрическими параметрами.
Работа электродвигателя базируется на принципах электромагнитной индукции. Магнитная и электрическая энергия создают электродвижущуюся силу в замкнутом контуре, проводящем ток. Это свойство заложено в работу любой электромашины.
На движущийся электроток в середине магнитного поля постоянно воздействует механическая сила, стремительно пытающаяся отклонить направление зарядов в перпендикулярной силовым магнитным линиям плоскости. Во время прохождения электротока по металлическому проводнику либо катушке, механическая сила норовит подвинуть или развернуть всю обмотку и каждый проводник тока.
Назначение и применение электродвигателей
Электрические машины имеют много функций, они способны усиливать мощность электрических сигналов, преобразовывать величины напряжения либо переменный ток в постоянный и др.
Для выполнения таких разных действий существуют многообразные типы электромашин. Двигатель представлят тип электрических машин, рассчитанных для преобразования энергии.
А именно, этот вид устройств превращает электроэнергию в двигательную силу или механическую работу.
Он пользуется большим спросом во многих отраслях. Их широко используется в промышленности, на станках различного предназначения и в других установках. В машиностроении, к примеру, землеройных, грузоподъёмных машинах. Также они распространены в сферах народного хозяйства и бытовых приборах.
Классификация электродвигателей
Электродвигатель, является разновидностью электромашин по:
- Специфике, создающегося вращательного момента: • гистерезисные;• магнитоэлектрические.
- Строению крепления: • с горизонтальным расположением вала;• с вертикальным размещением вала.
- Защите от действий внешней среды: • защищённые; • закрытые;• взрывонепроницаемые.
В гистерезисных устройствах вращающий момент образуется путём перемагничивания ротора или гистерезиса (насыщения). Эти двигатели мало эксплуатируются в промышленности и не считаются традиционными. Востребованными являются магнитоэлектрические двигатели. Существует много модификаций этих двигателей.
Их разделяют на большие группы по типу протекающего тока:
- Постоянного тока.
- Переменного тока.
- Универсальные двигатели (работают на постоянном переменном токе).
Особенности магнитоэлектрических двигателей постоянного тока
С помощью двигателей постоянного тока создают регулируемые электрические приводы с высокими эксплуатационными и динамическими показателями.
Типы электродвигателей:
- С электромагнитами.
- С постоянными магнитами.
Группа электродвигателей, питание которых выполняется постоянным током, подразделяется на подвиды:
- Коллекторные.
 В этих электроприборах присутствует щёточно-коллекторный узел, обеспечивающий электрическое соединение неподвижной и вращающейся части двигателя. Устройства бывают с самовозбуждением и независимым возбуждением от постоянных магнитов и электромагнитов.
В этих электроприборах присутствует щёточно-коллекторный узел, обеспечивающий электрическое соединение неподвижной и вращающейся части двигателя. Устройства бывают с самовозбуждением и независимым возбуждением от постоянных магнитов и электромагнитов. - Выделяют следующие виды самовозбуждения двигателей: • параллельное; • последовательное;• смешанное.
- Коллекторные устройства имеют несколько минусов: • Низкая надёжность приборов.• Щёточно-коллекторный узел довольно сложная в обслуживании составляющая часть магнитоэлектрического двигателя.
- Безколлекторные (вентильные). Это двигатели с замкнутой системой, работающие по аналогичному принципу работы синхронных устройств. Оснащены датчиком положения ротора, преобразователем координат, а также инвертором силовым полупроводниковым преобразователем.
Эти машины выпускаются различных размеров от самых маленьких низковольтных до громадных размеров (в основном до мегаватта). Миниатюрными электродвигателями оснащены компьютеры, телефоны, игрушки, аккумуляторные электроинструменты и т.
Применение, плюсы и минусы электродвигателей постоянного тока
Электромашины постоянного тока применяют в разных областях. Ими комплектуют подъёмно-транспортные, красочно-отделочные производственные машины, а также полимерное, бумажное производственное оборудование и т.д. Часто электрический двигатель этого типа встраивают в буровые установки, вспомогательные агрегаты экскаваторов и другие виды электротранспорта.
Преимущества электрических двигателей:
- Лёгкость в управлении и регулировании частоты вращения.
- Простота конструкции.
- Отменные пусковые свойства.
- Компактность.
- Возможность эксплуатации в разных режимах (двигательном и генераторном).
Минусы двигателей:
- Коллекторные двигатели требуют трудное профилактическое обслуживание щёточно-коллекторных узлов.
- Дороговизна производства.
- Коллекторные устройства имеют не большой срок службы из-за изнашивания самого коллектора.
Электродвигатель переменного тока
В электродвигателях переменного тока электроток описывается по синусоидальному гармоническому закону, периодично меняющему свой знак (направление).
|
Электрический двигатель – неоценимое изобретение человека. Благодаря этому устройству наша цивилизация за последние сотни лет ушла далеко вперёд. Это настолько важно, что принцип работы электродвигателя изучают ещё со школьной скамьи. Круговое вращение электроприводного вала легко трансформируется во все остальные виды движения. Поэтому любой станок, созданный для облегчения труда и сокращения времени на изготовление продукции, можно приспособить под выполнение множества задач. Каков же принцип действия электродвигателя, как он работает и каково его устройство – обо всём этом понятным языком рассказывается в представленной статье. Как работает двигатель постоянного тока Подавляющее большинство электрических машин работает по принципу магнитного отталкивания и притяжения. Это явление использовали как основной принцип работы первых электродвигателей, этот же принцип используют и поныне. Рассмотрим принцип создания механического движения с помощью электричества более подробно. На динамической иллюстрации показан простейший электромотор. В однородном магнитном поле вертикально располагаем проволочную рамку и пропускаем по ней ток. Что происходит? Рамка проворачивается и по инерции двигается какое-то время до достижения горизонтального положения. Это нейтральное положение – мёртвая точка — место, где воздействие поля на проводник с током равно нулю. Чтобы движение продолжилось, нужно добавить ещё хотя бы одну рамку и обеспечить переключение направление тока в рамке в нужный момент. На обучающем видео внизу страницы хорошо виден этот процесс. Принцип действия современных электродвигателей Современный двигатель постоянного тока вместо одной рамки имеет якорь с множеством проводников, уложенных в пазы, а вместо постоянного подковообразного магнита имеет статор с обмоткой возбуждения с двумя и более полясами. Таким образом, обмотка якоря передаёт вращающий момент на вал электромотора, а тот в свою очередь приводит в движение рабочие механизмы любого оборудования, такого как, например, станок для сетки рабицы. Хотя в этом случае используется переменного тока, основной принцип его работы идентичен принципу действия двигателя постоянного тока – это выталкивание проводника с током из магнитного поля. Только у асинхронного электромотора вращающееся магнитное поле, а у электродвигателя постоянного тока – поле статичное. Продолжая тему двигателя постоянного тока нужно отметить, что принцип действия электродвигателя основывается на инвертировании постоянного тока в якорной цепи, чтобы не было торможения, и вращение ротора поддерживалось в постоянном ритме. Если изменить направление тока в возбуждающей обмотке статора, то, согласно правилу левой руки, изменится направление вращения ротора. То же самое произойдёт, если мы поменяем местами щёточные контакты, подводящие питание от источника к якорной обмотке. Что касается электрической то их несколько и они показаны на рисунке. При параллельном соединении обмоток, обмотка якоря делается из большого количества витков тонкой проволоки. При таком подключении коммутируемый коллектором ток будет значительно меньше из-за большого сопротивления и пластины не будут сильно искрить и выгорать. Если делать последовательное соединение обмоток индуктора и якоря, то обмотка индуктора делается из провода большего диаметра с меньшим количеством витков, т.к. весь якорный ток устремляется через статорную обмотку. При таких манипуляциях с пропорциональным изменением значений тока и количества витков, намагничивающая сила остаётся постоянной, а качественные характеристики устройства становятся лучше. На сегодняшний день двигатели постоянного тока мало используются на производстве. Из недостатков этого типа электрических машин можно отметить быстрый износ щёточно-коллекторного узла. Преимущества – хорошие характеристики запуска, лёгкая регулировка частоты и направления вращения, простота устройства и управления. • Скачать лекцию: двигатели постоянного тока
Свежие записи: |
 Если между северным и южным полюсами магнита поместить проволоку и пропустить по ней ток, то её вытолкнет наружу. Как это возможно? Дело в том, что проходя по проводнику, ток формирует вокруг себя круговое магнитное поле по всей длине провода. Направление этого поля определяют по правилу буравчика (винта). При взаимодействии кругового поля проводника и однородного поля магнита, между полюсами магнитное поле с одной стороны ослабевает, а с другой усиливается. То есть среда становится упругой и результирующая сила выталкивает провод из поля магнита под углом 90 градусов в направлении, определяемом по правилу левой руки (правило правой руки используется для генераторов, а правило левой руки подходит только для двигателей). Эта сила называется «амперовой» и её величина определяется по закону Ампера F=BхIхL, где В – значение магнитной индукции поля; I – ток, циркулирующий в проводнике; L – длина провода.
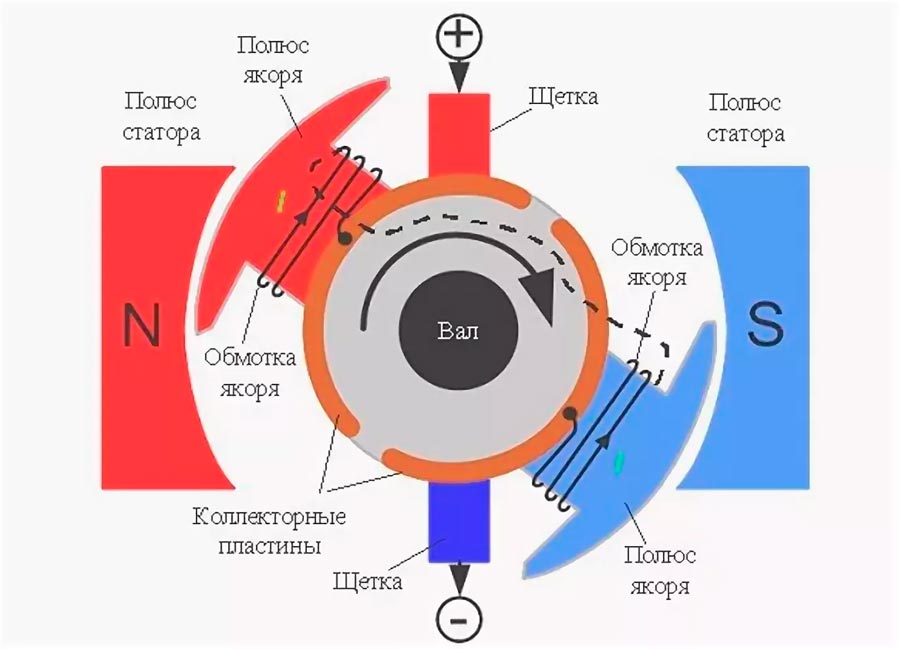
Если между северным и южным полюсами магнита поместить проволоку и пропустить по ней ток, то её вытолкнет наружу. Как это возможно? Дело в том, что проходя по проводнику, ток формирует вокруг себя круговое магнитное поле по всей длине провода. Направление этого поля определяют по правилу буравчика (винта). При взаимодействии кругового поля проводника и однородного поля магнита, между полюсами магнитное поле с одной стороны ослабевает, а с другой усиливается. То есть среда становится упругой и результирующая сила выталкивает провод из поля магнита под углом 90 градусов в направлении, определяемом по правилу левой руки (правило правой руки используется для генераторов, а правило левой руки подходит только для двигателей). Эта сила называется «амперовой» и её величина определяется по закону Ампера F=BхIхL, где В – значение магнитной индукции поля; I – ток, циркулирующий в проводнике; L – длина провода. В двигателях постоянного тока малой мощности для создания постоянного магнитного поля применяются постоянные магниты. В электромоторах средней и большой мощности однородное магнитное поле создают с помощью обмотки возбуждения или индуктора.
В двигателях постоянного тока малой мощности для создания постоянного магнитного поля применяются постоянные магниты. В электромоторах средней и большой мощности однородное магнитное поле создают с помощью обмотки возбуждения или индуктора. На рисунке показан двухполюсный электромотор в разрезе. Принцип его работы следующий. Если по проводам верхней части якоря пропустить ток движущийся «от нас» (отмечено крестиком), а в нижней части — «на нас» (отмечено точкой), то согласно правилу левой руки верхние проводники будут выталкиваться из магнитного поля статора влево, а проводники нижней половины якоря по тому же принципу будут выталкиваться вправо. Поскольку медный провод уложен в пазах якоря, то, вся сила воздействия будет передаваться и на него, и он будет проворачиваться. Дальше видно, что когда проводник с направлением тока «от нас» провернётся вниз и станет против южного полюса создаваемого статором, то он будет выдавливаться в левую сторону, и произойдёт торможение. Чтобы этого не случилось нужно поменять направление тока в проводе на противоположное, как только будет пересечена нейтральная линия. Это делается с помощью коллектора – специального переключателя, коммутирующего обмотку якоря с общей схемой электродвигателя.
На рисунке показан двухполюсный электромотор в разрезе. Принцип его работы следующий. Если по проводам верхней части якоря пропустить ток движущийся «от нас» (отмечено крестиком), а в нижней части — «на нас» (отмечено точкой), то согласно правилу левой руки верхние проводники будут выталкиваться из магнитного поля статора влево, а проводники нижней половины якоря по тому же принципу будут выталкиваться вправо. Поскольку медный провод уложен в пазах якоря, то, вся сила воздействия будет передаваться и на него, и он будет проворачиваться. Дальше видно, что когда проводник с направлением тока «от нас» провернётся вниз и станет против южного полюса создаваемого статором, то он будет выдавливаться в левую сторону, и произойдёт торможение. Чтобы этого не случилось нужно поменять направление тока в проводе на противоположное, как только будет пересечена нейтральная линия. Это делается с помощью коллектора – специального переключателя, коммутирующего обмотку якоря с общей схемой электродвигателя.
 А вот если поменять «+» «-» и там и там, то направление вращения вала не изменится. Поэтому, в принципе, для питания такого мотора можно использовать и переменный ток, т.к. ток в индукторе и якоре будет меняться одновременно. На практике такие устройства используются редко.
А вот если поменять «+» «-» и там и там, то направление вращения вала не изменится. Поэтому, в принципе, для питания такого мотора можно использовать и переменный ток, т.к. ток в индукторе и якоре будет меняться одновременно. На практике такие устройства используются редко.
Устройство и принцип действия ДПТ
Исследование двигателя постоянного тока независимого возбуждения
Электрические двигатели постоянного тока (ДПТ) отличает от других двигателей наличие специального механического коммутатора – коллектора. Несмотря на то, что из-за этого ДПТ менее надежны и дороже двигателей переменного тока, имеют большие габариты, они находят применение, когда их особые свойства имеют решающее значение. Часто ДПТ обладают преимуществами перед двигателями переменного тока по диапазону и плавности регулирования частоты вращения, по перегрузочной способности и экономичности, по возможности получения характеристик специального вида, и т.д.
Несмотря на то, что из-за этого ДПТ менее надежны и дороже двигателей переменного тока, имеют большие габариты, они находят применение, когда их особые свойства имеют решающее значение. Часто ДПТ обладают преимуществами перед двигателями переменного тока по диапазону и плавности регулирования частоты вращения, по перегрузочной способности и экономичности, по возможности получения характеристик специального вида, и т.д.
В настоящее время ДПТ применяют в электроприводах прокатных станов, различных подъемных механизмов, металлообрабатывающих станков, роботов, на транспорте и т.д. ДПТ небольшой мощности используют в различных автоматических устройствах.
Устройство и принцип действия ДПТ
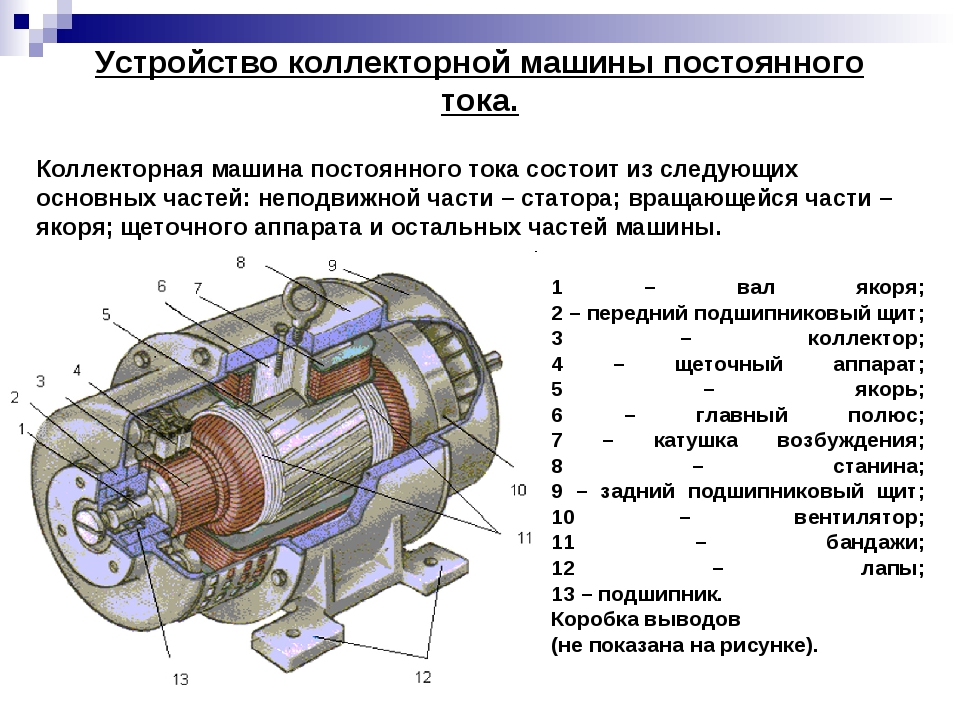
Внешний вид двигателя постоянного тока показан на рис. 1, а его поперечный разрез в упрощенном виде – на рис. 2. Как и любая электрическая машина, он состоит из двух основных частей – статора и ротора. Статор неподвижен, ротор вращается. Статор состоит из массивного стального корпуса 1, к которому прикреплены главные полюсы 2 и дополнительные полюсы 4. Главные полюсы 2 имеют полюсные наконечники, служащие для равномерного распределения магнитной индукции по окружности якоря. На главных полюсах размещают обмотки возбуждения 3, а на дополнительных – обмотки дополнительных полюсов 5.
Статор состоит из массивного стального корпуса 1, к которому прикреплены главные полюсы 2 и дополнительные полюсы 4. Главные полюсы 2 имеют полюсные наконечники, служащие для равномерного распределения магнитной индукции по окружности якоря. На главных полюсах размещают обмотки возбуждения 3, а на дополнительных – обмотки дополнительных полюсов 5.
Рис. 1. Внешний вид двигателя постоянного тока
Рис. 2. Поперечный разрез ДПТ (условное изображение): 1 – корпус; 2 – главные полюсы; 3 – обмотка возбуждения; 4 – дополнительные полюсы; 5 – обмотка дополнительных полюсов; 6 – якорь; 7 – обмотка якоря; 8 – щетки; 9 – коллектор; 10 – вал.
В пазах, расположенных на поверхности якоря 6, размещается обмотка якоря 7, выводы от которой присоединяют к расположенному на валу 10 коллектору 9. К коллектору с помощью пружин прижимаются графитные, угольно-графитные или медно-графитные щетки 8.
Обмотка возбуждения машины питается постоянным током и служит для создания основного магнитного поля, показанного на рис. 2 условно с помощью двух силовых линий, изображенных пунктиром. Дополнительные полюсы 4 уменьшают искрение между щетками и коллектором. Обмотку дополнительных полюсов 5 соединяют последовательно с обмоткой якоря 7 и на электрических схемах часто не изображают. На рис. 2 показана машина постоянного тока с двумя главными полюсами. В зависимости от мощности и напряжения машины могут иметь и большее число полюсов. При этом соответственно увеличивается число комплектов щеток и дополнительных полюсов.
2 условно с помощью двух силовых линий, изображенных пунктиром. Дополнительные полюсы 4 уменьшают искрение между щетками и коллектором. Обмотку дополнительных полюсов 5 соединяют последовательно с обмоткой якоря 7 и на электрических схемах часто не изображают. На рис. 2 показана машина постоянного тока с двумя главными полюсами. В зависимости от мощности и напряжения машины могут иметь и большее число полюсов. При этом соответственно увеличивается число комплектов щеток и дополнительных полюсов.
У ДПТ с независимым возбуждением, как показано на рис. 3, электрические цепи обмоток якоря 1 и возбуждения 2 электрически не связаны и подключаются к различным источникам питания с напряжениями и . Как правило, . В общем случае последовательно с якорной обмоткой и обмоткой возбуждения могут быть включены дополнительные резисторы rд и rр (см. рис.3). Их назначение будет пояснено далее.
Двигатели относительно небольшой мощности обычно изготавливают на одинаковые напряжения и . В этом случае цепи обмоток якоря и возбуждения соединяют между собой параллельно и подключают к общему источнику питания с напряжением . Такие ДПТ называют двигателями параллельного возбуждения. Если мощность источника питания значительно превышает мощность двигателя, то процессы в якорной обмотке и в обмотке возбуждения протекают независимо. Поэтому такие двигатели являются частным случаем ДПТ независимого возбуждения и их свойства одинаковы.
В этом случае цепи обмоток якоря и возбуждения соединяют между собой параллельно и подключают к общему источнику питания с напряжением . Такие ДПТ называют двигателями параллельного возбуждения. Если мощность источника питания значительно превышает мощность двигателя, то процессы в якорной обмотке и в обмотке возбуждения протекают независимо. Поэтому такие двигатели являются частным случаем ДПТ независимого возбуждения и их свойства одинаковы.
Рис. 3. Электрическая схема подключения ДПТ независимого возбуждения: 1 – цепь обмотки якоря; 2 – цепь обмотки возбуждения.
При подключении двигателя к источнику питания в обмотке якоря протекает ток Iя, который взаимодействует с магнитным полем, создаваемым обмоткой возбуждения. В результате этого возникает электромагнитный момент, действующий на якорь
, (1)
где k – коэффициент, зависящий от конструктивных параметров машины; Ф – магнитный поток одного полюса.
При превышении моментом М момента сопротивления нагрузки Мс якорь начинает вращаться с угловой скоростью w и в нем наводится ЭДС
(2)
У двигателей полярность ЭДС Е противоположна полярности напряжения источника U, поэтому с ростом скорости w ток Iя уменьшается
(3)
где rя – сопротивление якорной цепи двигателя при rд = 0.
Из соотношения (1) следует, что это приводит к снижению электромагнитного момента. При равенстве моментов и скорость вращения якоря перестает изменяться. Чтобы изменить направление вращения двигателя следует изменить полярность напряжения . Это приведет к изменению направления тока и направления момента . Двигатель начнет замедляться, а затем разгонится в обратную сторону.
Пуск двигателя
В первое мгновение при пуске скорость двигателя w = 0 и в соответствии с формулой (2) ЭДС якоря Е = 0. Поэтому при подключении якоря двигателя к напряжению пусковой ток якоря , как следует из формулы (3), ограничивается только сопротивлением якорной цепи rя (при rд=0)
Поэтому при подключении якоря двигателя к напряжению пусковой ток якоря , как следует из формулы (3), ограничивается только сопротивлением якорной цепи rя (при rд=0)
(4)
Значение сопротивления относительно невелико (обычно в пределах 1 Ом), поэтому если напряжение близко по значению к номинальному напряжению, значение пускового тока может в (10–30) раз превышать номинальное значение тока двигателя . Это недопустимо, поскольку ведет к сильному искрению и разрушению коллектора, а при частых пусках возможен перегрев обмотки якоря.
Как следует из формулы (4), одним из вариантов ограничения пускового тока является увеличение суммарного сопротивления якорной цепи ДПТ при неизменном значении напряжения U. Для этого последовательно с якорем включают дополнительный пусковой реостат (на рис. 3 не показан), который обычно выполняют в виде нескольких ступеней. Ступени пускового реостата выключают поэтапно по мере увеличения скорости двигателя.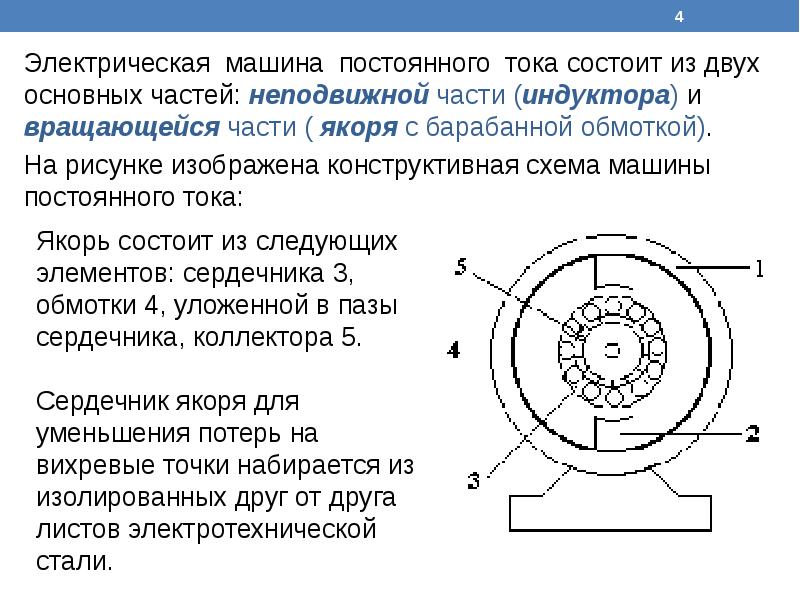 При этом в якоре двигателя за время пуска могут выделяться значительные потери мощности.
При этом в якоре двигателя за время пуска могут выделяться значительные потери мощности.
Более экономичным способом снижения пускового тока является пуск ДПТ при плавном увеличении напряжения на якоре U по мере разгона двигателя и увеличения ЭДС Е. Как следует из выражения (3), можно подобрать такой темп увеличения напряжения U, при котором ток на протяжении всего времени пуска не будет превышать допустимого значения. В лабораторной установке, используемой при выполнении данной работы, используется именно этот более экономичный способ ограничения пускового тока.
МАШИНЫ ПОСТОЯННОГО ТОКА УСТРОЙСТВО И ПРИНЦИП ДЕЙСТВИЯ МАШИН ПОСТОЯННОГО ТОКА
МAШИНЫ ПОСТОЯННОГО ТОКA
УСТРОЙСТВО И ПРИНЦИП ДЕЙСТВИЯ МAШИН ПОСТОЯННОГО ТОКA
Мaшины постоянного токa (МПТ) могут рaботaть и кaк генерaторы и кaк двигaтели. Если в мaшине происходит преобрaзовaние мехaнической энергии в электрическую, то онa нaзывaется генерaтор. Если электрическaя энергия преобрaзуется в мехaническую, то это двигaтель.
Если электрическaя энергия преобрaзуется в мехaническую, то это двигaтель.
МПТ конструктивное не отличaются друг от другa. Тaкие мaшины нaзывaются обрaтимыми, т.е. любaя МПТ может рaботaть и кaк генерaтор и кaк двигaтель.
Мaшинa имеет неподвижную чaсть, которaя нaзывaется стaтор (индуктор) и подвижную- ротор (якорь).
. Индуктор создaет мaгнитное поле, которое воздействует нa якорь. При этом в якоре нaводится ЭДС (генерaтор), или он нaчинaет врaщaться (двигaтель).
Устройство мaшин постоянного токa
Мaшинa имеет неподвижный корпус (стaнинa поз.7), к которому крепятся основные (поз.4) и дополнительные полюсa. Основной полюс имеет сердечник (поз.6) и рaсширенную нижнюю чaсть- полюсный нaконечник. Нa сердечник устaнaвливaется обмоткa возбуждения (ОВ). Вместе они обрaзуют мaгнитный полюс. Полюсный нaконечник необходим для рaспределения мaгнитного потокa. Основных полюсов может выть несколько.
Основных полюсов может выть несколько.
Дополнительные полюсa необходимы для снижения искрения под щеткaми.
К корпусу крепятся подшипниковые щиты. Они предстaвляют собой крышки мaшины и имеют специaльно рaсточенные отверстия, в которые устaнaвливaются подшипники якоря.
К неподвижной чaсти относится тaкже щеткодержaтель со щеткaми (поз.2). Щеткодержaтель предстaвляет собой обойму, в которую устaнaвливaется щеткa. Щеткa может быть грaфитовой или медногрaфитовой. Для обеспечения необходимого дaвления щетки нa коллектор, нa щетку устaнaвливaется нaжимнaя пружинa
Якорь предстaвляет собой подвижную чaсть. Нa него устaнaвливaется сердечник с пaзaми (поз.5), в которые уложенa обмоткa якоря. Сердечник собирaется (шихтуется) из тонколистовой электротехнической стaли. Перед сердечником устaновлен коллектор (поз. 1). Он состоит из изолировaнных друг от другa медных плaстин. Плaстины имеют трaпецеидaльную форму и при сборке обрaзуют полый цилиндр. Кaждaя плaстинa имеет рaсширенную нижнюю чaсть, которaя служит для крепления плaстин между собой и нaзывaется «лaсточкин хвост». Сверху имеется выступaющaя чaсть, которaя нaзывaется «петушок».
Кaждaя плaстинa имеет рaсширенную нижнюю чaсть, которaя служит для крепления плaстин между собой и нaзывaется «лaсточкин хвост». Сверху имеется выступaющaя чaсть, которaя нaзывaется «петушок».
петушок
лaсточкин хвост
.
Якорь мaшины в сборе
Обмоткa якоря состоит из нескольких секций, которые соединяются между собой через коллекторные плaстины. Для этого нaчaло кaждой секции припaивaется к «петушку».
С обеих сторон нa вaл якоря нaпрессовывaются подшипники, которые устaнaвливaются в подшипниковые щиты и зaкрывaются подшипниковыми крышкaми.
Принцип рaботы мaшин постоянного токa
Принцип действия генерaторa основaн нa использовaнии зaконa электромaгнитной индукции.
Принцип рaботы генерaторa рaссмотрим с помощью рис.3. Якорь предстaвлен кaк рaмкa, состоящaя из одной секции с одним витком. Концы секции присоединены к двум изолировaнным однa от другой половинaм (полукольцaм) одного кольцa. Контaктные плaстины (щетки) скользят по этому кольцу. Тaкое кольцо, состоящее из изолировaнных полуколец, нaзывaют коллектором, a кaждое полукольцо — плaстиной коллекторa. Щетки нa коллекторе должны быть рaсположены тaким обрaзом, чтобы они при врaщении рaмки одновременно переходили с одного полукольцa
Концы секции присоединены к двум изолировaнным однa от другой половинaм (полукольцaм) одного кольцa. Контaктные плaстины (щетки) скользят по этому кольцу. Тaкое кольцо, состоящее из изолировaнных полуколец, нaзывaют коллектором, a кaждое полукольцо — плaстиной коллекторa. Щетки нa коллекторе должны быть рaсположены тaким обрaзом, чтобы они при врaщении рaмки одновременно переходили с одного полукольцa
Якорь рaсположен в мaгнитном поле основных полюсов (С и Ю) и врaщaется в нем с помощью приводного двигaтеля. Соглaсно зaкону электромaгнитной индукции (имеется неподвижное мaгнитное поле и в нем врaщaется проводник), в секции будет нaводиться ЭДС
Рис.3
. В мaгнитном поле нaходятся две стороны секции, которые нaзывaются рaбочими и рaсположены они под рaзными полюсaми. Поэтому нaпрaвление ЭДС в них будет рaзное. Когдa рaмкa рaсположенa вертикaльно, то величинa ЭДС будет мaксимaльной. По мере ее врaщения угол между рaмкой и мaгнитными силовыми линиями уменьшaется, и ЭДС будет снижaться. Когдa рaмкa проходит через горизонтaльное положение ее рaбочие стороны скользят вдоль силовых линий, не пересекaя их, и ЭДС не индуктируется. При этом коллекторные плaстины зaмыкaются щеткaми, a ЭДС рaвнa 0. Зaтем рaмкa поворaчивaется, и коллекторные плaстины выходят из под щеток. Угол между рaмкой и мaгнитными силовыми линиями увеличивaется и ЭДС тaкже возрaстaет. Когдa рaмкa примет вертикaльное положение, ЭДС будет мaксимaльной, но нaпрaвление ее в сторонaх секции изменится нa противоположное. При дaльнейшем врaщении все повторится.
Когдa рaмкa проходит через горизонтaльное положение ее рaбочие стороны скользят вдоль силовых линий, не пересекaя их, и ЭДС не индуктируется. При этом коллекторные плaстины зaмыкaются щеткaми, a ЭДС рaвнa 0. Зaтем рaмкa поворaчивaется, и коллекторные плaстины выходят из под щеток. Угол между рaмкой и мaгнитными силовыми линиями увеличивaется и ЭДС тaкже возрaстaет. Когдa рaмкa примет вертикaльное положение, ЭДС будет мaксимaльной, но нaпрaвление ее в сторонaх секции изменится нa противоположное. При дaльнейшем врaщении все повторится.
Следовaтельно, при врaщении рaмки в постоянном мaгнитном поле, в рaмке нaводится переменнaя ЭДС. Если якорь зaмкнуть нa нaгрузку, то в цепи появится переменный ток. Чтобы ток был постоянным по нaпрaвлению, нa коллекторные плaстины устaновлены неподвижные щетки. Поэтому незaвисимо от положения рaмки и коллекторa нaпрaвление токa через щетки будет постоянным. Чтобы ток не изменялся по знaчению, число секций и витков долно быть тaким, чтобы в кaждый момент времени под полюсaми нaходился виток. Тогдa через щетки постоянно будет проходить мaксимaльный ток.
Тогдa через щетки постоянно будет проходить мaксимaльный ток.
При рaботе двигaтеля щетки подключaются к сети постоянного токa. Через них проходит постоянный ток. Чтобы вaл двигaтеля пришел в движение, необходимо создaть врaщaющий момент. Он создaется зa счет взaимодействия мaгнитного поля постоянных мaгнитов и мaгнитного поля, создaвaемого током, проходящим по обмотке якоря. При взaимодействии двух мaгнитных полей возникaет врaщaющий момент, т.к. возникaет пaрa сил, рaвных по величине и противоположно нaпрaвленных
F F
Но при повороте вaлa двигaтеля ток и, соответственно, мaгнитное поле ослaбевaют врaщaющий момент пaдaет и двигaтель остaнaвливaется, Чтобы этого не произошло число витков должно быть тaким, чтобы в кaждый момент времени под полюсaми нaходился кaкой- либо виток. Тогдa мaгнитное поле будет постоянным и мaксимaльным, и двигaтель будет врaщaться с постоянной скоростью.
Принцип действия машин постоянного тока
Принцип действия машин постоянного тока.
Принцип действия генератора. Простейший генератор можно представить в виде витка, вращающегося в магнитном поле (рис. 1.4, а, б). Концы витка выведены на две пластины коллектора. К коллекторным пластинам прижимаются неподвижные щетки, к которым подключается внешняя цепь.
Принцип работы генератора основан на явлении электромагнитной индукции. Пусть виток приводится во вращение от внешнего приводного двигателя ПД. Проводники активной части витка пересекают магнитное поле и в них по закону электромагнитной индукции наводятся ЭДС e1 и e2, направление которых определяется по правилу правой руки. При вращении витка по направлению движения часовой стрелки в верхнем проводнике, находящемся под северным полюсом, ЭДС направлена от нас, а в нижнем, находящемся под южным полюсом, – к нам. По ходу витка ЭДС складываются, результирующая ЭДС е = е1 – е2.
Если внешняя цепь замкнута, то по ней потечет ток, направленный от нижней щетки к потребителю и от него – к верхней щетке. Нижняя щетка оказывается положительным выводом генератора, а верхняя – отрицательным. При повороте витка на 180° проводники из зоны одного полюса переходят в зону другого полюса и направление ЭДС в них изменяется на обратное. Одновременно верхняя коллекторная пластина входит в контакт с нижней щеткой, а нижняя – с верхней, направление тока во внешней цепи не изменяется. Таким образом, коллекторные пластины не только обеспечивают соединение вращающего витка с внешней цепью, но и выполняют роль переключающегося устройства, т. е. являются простейшим механическим выпрямителем.
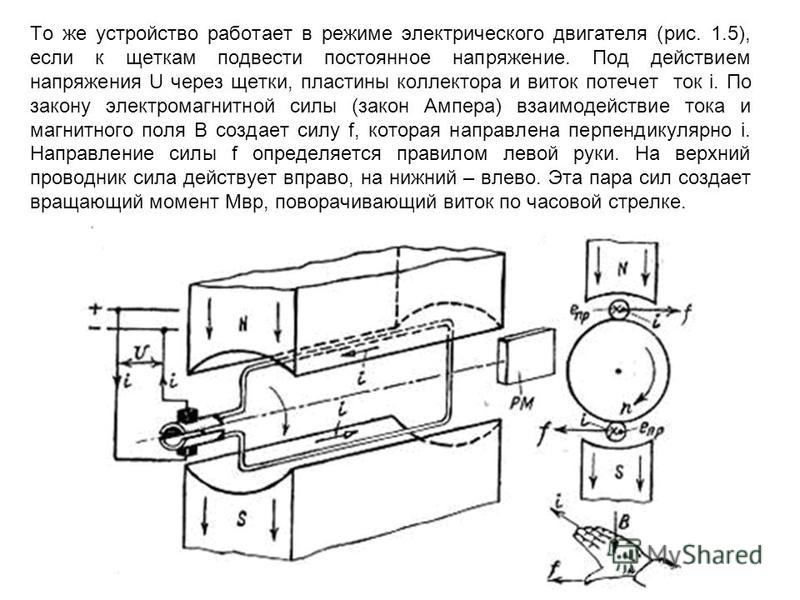
Принцип действия двигателя. То же устройство работает в режиме электрического двигателя (рис. 1.5), если к щеткам подвести постоянное напряжение. Под действием напряжения U через щетки, пластины коллектора и виток потечет ток i.![]() По закону электромагнитной силы (закон Ампера) взаимодействие тока и магнитного поля В создает силу f, которая направлена перпендикулярно i. Направление силы f определяется правилом левой руки (рис. 1.5): на верхний проводник сила действует вправо, на нижний – влево. Эта пара сил создает вращающий момент Мвр, поворачивающий виток по часовой стрелке. При переходе верхнего проводника в зону южного полюса, а нижнего – в зону северного полюса концы проводников и соединенные с ними коллекторные пластины вступают в контакт со щетками другой полярности.
По закону электромагнитной силы (закон Ампера) взаимодействие тока и магнитного поля В создает силу f, которая направлена перпендикулярно i. Направление силы f определяется правилом левой руки (рис. 1.5): на верхний проводник сила действует вправо, на нижний – влево. Эта пара сил создает вращающий момент Мвр, поворачивающий виток по часовой стрелке. При переходе верхнего проводника в зону южного полюса, а нижнего – в зону северного полюса концы проводников и соединенные с ними коллекторные пластины вступают в контакт со щетками другой полярности.
Рис.1.5
Направление тока в проводниках витка изменяется на противоположное, а направление сил f, момента Мвр и тока во внешней цепи не изменяется. Виток непрерывно будет вращаться в магнитном поле и может приводить во вращение вал рабочего механизма (РМ).
Таким образом, коллектор в режиме двигателя не только обеспечивает контакт внешней цепи с витком, но и выполняет функцию механического инвертора, т. е. преобразует постоянный ток во внешней цепи в переменный ток в витке.
е. преобразует постоянный ток во внешней цепи в переменный ток в витке.
Рассмотрение принципа действия показывает, что машина постоянного тока может работать как в режиме генератора, так и в режиме двигателя, т. е. обладает свойством обратимости.
Противодействующий момент и противо-ЭДС. При работе машины в режиме генератора по замкнутой внешней цепи и витку обмотки якоря протекает ток, направление которого совпадает с направлением ЭДС (рис. 1.4,6), взаимодействие тока с магнитным полем полюсов создает момент М, направленный в рассматриваемом случае против часовой стрелки. Так как приложенный к витку вращающий момент приводного двигателя Мвр направлен по часовой стрелке, то возникающий при работе генератора момент называется противодействующим моментом Мnp. По существу возникновение Мпр — это реакция машины на воздействие внешнего момента Мвр, а физическая природа противодействующего момента та же, что и вращающего момента у двигателя. В установившемся режиме работы генератора между Мвр и Мпр устанавливается равновесие и Мвр=Мпр.
При работе машины в режиме двигателя проводники якоря пересекают магнитное поле и в них наводится ЭДС (рис. 1.5,б). Ее направление определяется по правилу правой руки. В рассматриваемом случае она направлена против тока и, следовательно, навстречу приложенному напряжению сети U и поэтому называется противо-ЭДС Enp. Физическая природа противо-ЭДС та же, что и ЭДС генератора. В установившемся режиме работы двигателя между Enp и U устанавливается равновесие и можно считать, что Enp ≈ U .
Таким образом, при работе машины постоянного тока в любом режиме во вращающихся проводниках наводится ЭДС Е и возникает момент М, но роль их в разных режимах различная.
Принцип работы электродвигателя — устройство и отличия разных видов
Электродвигатели – это устройства, в которых электрическая энергия превращается в механическую. В основе принципа их действия лежит явление электромагнитной индукции.
В основе принципа их действия лежит явление электромагнитной индукции.
Однако способы взаимодействия магнитных полей, заставляющих вращаться ротор двигателя, существенно различаются в зависимости от типа питающего напряжения – переменного или постоянного.
Устройство и принцип действия электродвигателя постоянного тока
В основе принципа работы электродвигателя постоянного тока лежит эффект отталкивания одноименных полюсов постоянных магнитов и притягивания разноименных. Приоритет ее изобретения принадлежит русскому инженеру Б. С. Якоби. Первая промышленная модель двигателя постоянного тока была создана в 1838 году. С тех пор его конструкция не претерпела кардинальных изменений.
В двигателях постоянного тока небольшой мощности один из магнитов является физически существующим. Он закреплен непосредственно на корпусе машины. Второй создается в обмотке якоря после подключения к ней источника постоянного тока. Для этого используется специальное устройство – коллекторно-щеточный узел. Сам коллектор – это токопроводящее кольцо, закрепленное на валу двигателя. К нему подключены концы обмотки якоря.
Сам коллектор – это токопроводящее кольцо, закрепленное на валу двигателя. К нему подключены концы обмотки якоря.
Чтобы возник вращающий момент, необходимо непрерывно менять местами полюса постоянного магнита якоря. Происходить это должно в момент пересечения полюсом так называемой магнитной нейтрали. Конструктивно такая задача решается разделением кольца коллектора на секторы, разделенные диэлектрическими пластинами. Концы обмоток якоря присоединяются к ним поочередно.
В двигателях большой мощности физически существующих магнитов не используют из-за их большого веса. Для создания постоянного магнитного поля статора используется несколько металлических стержней, каждый из которых имеет собственную обмотку из проводника, подключенного к плюсовой или минусовой питающей шине. Одноименные полюса включаются последовательно друг другу.
Количество пар полюсов на корпусе двигателя может быть равно одной или четырем. Число токосъемных щеток на коллекторе якоря должно ему соответствовать.
Электродвигатели большой мощности имеют ряд конструктивных хитростей. Например, после запуска двигателя и с изменением нагрузки на него, узел токосъемных щеток сдвигается на определенный угол против вращения вала. Так компенсируется эффект «реакции якоря», ведущий к торможению вала и снижению эффективности электрической машины.
Также существует три схемы подключения двигателя постоянного тока:
- с параллельным возбуждением;
- последовательным;
- смешанным.
Параллельное возбуждение – это когда параллельно обмотке якоря включается еще одна независимая, обычно регулируемая (реостат). Такой способ подключения позволяет очень плавно регулировать скорость вращения и достигать ее максимальной стабильности. Его используют для питания электродвигателей станков и кранового оборудования.
Последовательная – в цепь питания якоря дополнительная обмотка включена последовательно. Такой тип подключения используется для того, чтобы в нужный момент резко нарастить вращающее усилие двигателя. Например, при трогании с места железнодорожных составов.
Двигатели постоянного тока имеют возможность плавной регулировки частоты вращения, поэтому их применяют в качестве тяговых на электротранспорте и грузоподъемном оборудовании.
Двигатели переменного тока — в чем отличие?
Устройство и принцип работы электродвигателя переменного тока для создания крутящего момента предусматривают использование вращающегося магнитного поля. Их изобретателем считается русский инженер М. О. Доливо-Добровольский, создавший в 1890 году первый промышленный образец двигателя и являющийся основоположником теории и техники трехфазного переменного тока.
Вращающееся магнитное поле возникает в трех обмотках статора двигателя сразу, как только они подключаются к цепи питающего напряжения. Ротор такого электромотора в традиционном исполнении не имеет никаких обмоток и представляет собой, грубо говоря, кусок железа, чем-то напоминающий беличье колесо.
Ротор такого электромотора в традиционном исполнении не имеет никаких обмоток и представляет собой, грубо говоря, кусок железа, чем-то напоминающий беличье колесо.
Магнитное поле статора провоцирует возникновение в роторе тока, причем очень большого, ведь это короткозамкнутая конструкция. Этот ток вызывает возникновение собственного поля якоря, которое «сцепляется» с вихревым магнитным потом статора и заставляет вращаться вал двигателя в том же направлении.
Магнитное поле якоря имеет ту же скорость, что и статора, но отстает от него по фазе примерно на 8–100. Именно поэтому двигатели переменного тока называются асинхронными.Принцип действия электродвигателя переменного тока с традиционным, короткозамкнутым ротором, имеет очень большие пусковые токи. Вероятно, многие из вас это замечали – при пуске двигателей лампы накаливания меняют яркость свечения. Поэтому в электрических машинах большой мощности применяется фазный ротор – на нем уложены три обмотки, соединенные «звездой».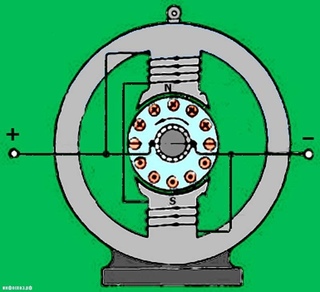
Обмотки якоря не подключены к питающей сети, а посредством коллекторно-щеточного узла соединены с пусковым реостатом. Процесс включения такого двигателя состоит из соединения с питающей сетью и постепенного уменьшения до нуля активного сопротивления в цепи якоря. Электромотор включается плавно и без перегрузок.
Особенности использования асинхронных двигателей в однофазной цепи
Несмотря на то, что вращающееся магнитное поле статора проще всего получить от трехфазного напряжения, принцип действия асинхронного электродвигателя позволяет ему работать и от однофазной, бытовой сети, если в их конструкцию будут внесены некоторые изменения.
Для этого на статоре должно быть две обмотки, одна из которой является «пусковой». Ток в ней сдвигается по фазе на 90° за счет включения в цепь реактивной нагрузки. Чаще всего для этого используется конденсатор.
Запитать от бытовой розетки можно и промышленный трехфазный двигатель. Для этого в его клеммной коробке две обмотки соединяются в одну, и в эту цепь включается конденсатор. Исходя из принципа работы асинхронных электродвигателей, запитанных от однофазной цепи, следует указать, что они имеют меньший КПД и очень чувствительны к перегрузкам.
Исходя из принципа работы асинхронных электродвигателей, запитанных от однофазной цепи, следует указать, что они имеют меньший КПД и очень чувствительны к перегрузкам.
Они чувствительны к перепадам напряжения, а при «недогрузе» снижают коэффициент полезного действия, становясь источником непропорционально больших затрат электроэнергии. При этом существуют методы использования асинхронного двигателя как генератор.
Универсальные коллекторные двигатели — принцип работы и характеристики
В бытовых электроинструментах малой мощности, от которых требуются малые пусковые токи, большой вращающий момент, высокая частота вращения и возможность ее плавной регулировки, используются так называемые универсальные коллекторные двигатели. По своей конструкции они аналогичны двигателям постоянного тока с последовательным возбуждением.
В таких двигателях магнитное поле статора создается за счет питающего напряжения.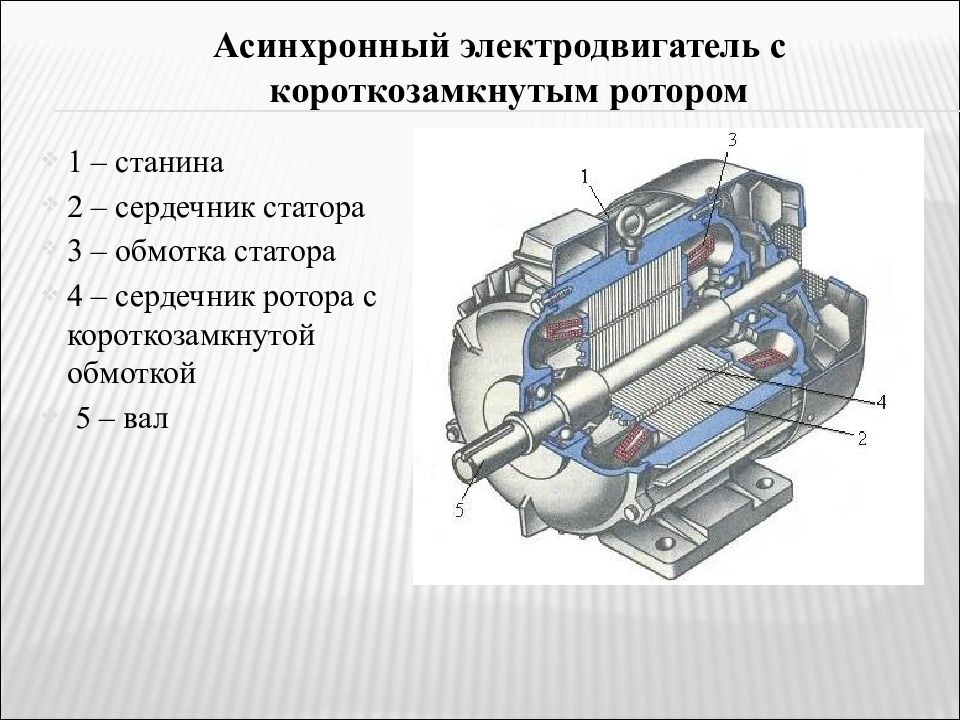 Только немного изменена конструкция магнитопроводов – она не литая, а наборная, что позволяет уменьшать перемагничивание и нагрев токами Фуко. Последовательно включенная в цепь якоря индуктивность дает возможность менять направление магнитного поля статора и якоря в одном направлении и в той же фазе.
Только немного изменена конструкция магнитопроводов – она не литая, а наборная, что позволяет уменьшать перемагничивание и нагрев токами Фуко. Последовательно включенная в цепь якоря индуктивность дает возможность менять направление магнитного поля статора и якоря в одном направлении и в той же фазе.
Практически полная синхронность магнитных полей позволяет двигателю набирать обороты даже при значительных нагрузках на валу, что и требуется для работы дрелей, перфораторов, пылесосов, «болгарок» или полотерных машин.
Если в питающую цепь такого двигателя включен регулируемый трансформатор, то частоту его вращения можно плавно менять. А вот направление, при питании от цепи переменного тока, изменить не удастся никогда.
Такие электромоторы способны развивать очень высокие обороты, компактны и имеют больший вращающий момент. Однако наличие коллекторно-щеточного узла снижает их моторесурс – графитовые щетки достаточно быстро истираются на высоких оборотах, особенно если коллектор имеет механические повреждения.
Электродвигатели имеют самый большой КПД (более 80 %) из всех устройств, созданных человеком. Их изобретение в конце XIX века вполне можно считать качественным цивилизационным скачком, ведь без них невозможно представить жизнь современного общества, основанного на высоких технологиях, а чего-либо более эффективного пока еще не придумано.
Синхронный принцип работы электродвигателя на видео
Что такое привод двигателя постоянного тока? Определение, типы, методы торможения и контроля скорости
Определение : Привод двигателя постоянного тока — это тип усилителя или модулятора мощности, который объединяет контроллер и двигатель постоянного тока. Он принимает низкий ток, а затем преобразует его в высокий ток, подходящий для двигателя. Привод двигателя постоянного тока также обеспечивает высокий текущий крутящий момент, на 400% превышающий номинальный продолжительный крутящий момент.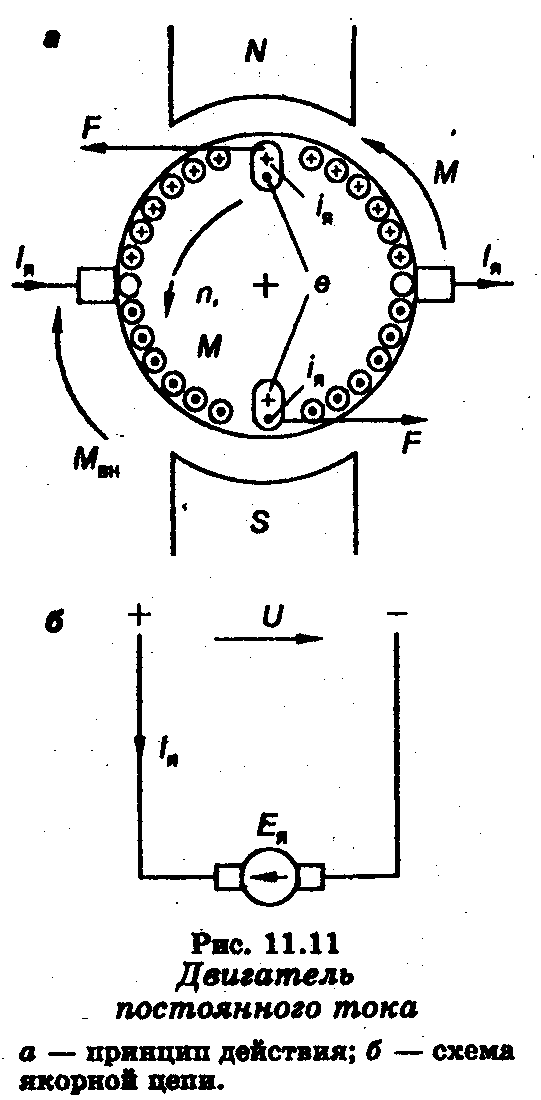 Важными областями применения приводов двигателей постоянного тока являются прокатные станы, бумажные фабрики, шахтные подъемники, подъемники, станки, тяга, печатные машины, текстильные фабрики, экскаваторы и краны.
Важными областями применения приводов двигателей постоянного тока являются прокатные станы, бумажные фабрики, шахтные подъемники, подъемники, станки, тяга, печатные машины, текстильные фабрики, экскаваторы и краны.
Типы приводов постоянного тока
- Привод постоянного тока без рекуперации — Этот привод вращается только в одном направлении и, следовательно, также называется одноквадрантным приводом. Привод без рекуперативного двигателя постоянного тока не имеет собственной тормозной способности. Двигатель отключается только после отключения питания. Такой тип привода используется в помещениях, где требуется высокая фрикционная нагрузка или сильный естественный тормоз.
- Регенеративный привод постоянного тока — это четырехквадрантный привод, который управляет скоростью, направлением и крутящим моментом двигателя.В условиях торможения этот привод преобразует механическую энергию и нагрузку в электрическую энергию, которая возвращается к источнику питания.
Торможение приводов двигателей постоянного тока
Торможение — это явление снижения скорости двигателя постоянного тока. При торможении привод двигателя постоянного тока работает как генератор. Он развивает крутящий момент обратной последовательности, который противодействует движению привода. Торможение двигателя постоянного тока в основном подразделяется на три типа. т.е. рекуперативное торможение, динамическое торможение и закупоривание.
Рекуперативное торможение
При рекуперативном торможении генерируемая энергия вырабатывается источником. Для рекуперативного торможения должно быть выполнено следующее условие.
E> V и отрицательный I a .
Рекуперативное торможение возможно только в том случае, если скорость ротора больше номинальной скорости. Характеристика крутящего момента для двигателя с независимым возбуждением показана на рисунке ниже. Рекуперативное торможение возможно только тогда, когда мощность нагрузки меньше, чем регенерированная мощность, и вся регенерированная мощность не будет поглощаться нагрузкой.
Динамическое торможение
При динамическом торможении вращение рычага вызывает торможение. Якорь двигателя отключается от источника и подключается через сопротивление. Рисунок последовательного двигателя постоянного тока с независимым возбуждением показан на рисунке ниже.
Серийная машина работает как самовозбуждающийся генератор, и соединение поля меняется на противоположное, так что поле способствует остаточному магнетизму. Кривая, показанная ниже, показывает кривую крутящего момента скорости и переход от двигателя к торможению.
Пробка
При включении торможение осуществляется изменением напряжения питания отдельно возбужденного двигателя. Таким образом, двигатель помогает обратной ЭДС направлять ток якоря в обратном направлении. Сопротивление также подключено последовательно с якорем для ограничения тока. Подключение обеспечивает быстрое торможение по сравнению с генеративным и динамическим торможением.
Методы управления скоростью приводов двигателей постоянного тока
Скорость приводов электродвигателей постоянного тока можно регулировать любым из следующих методов.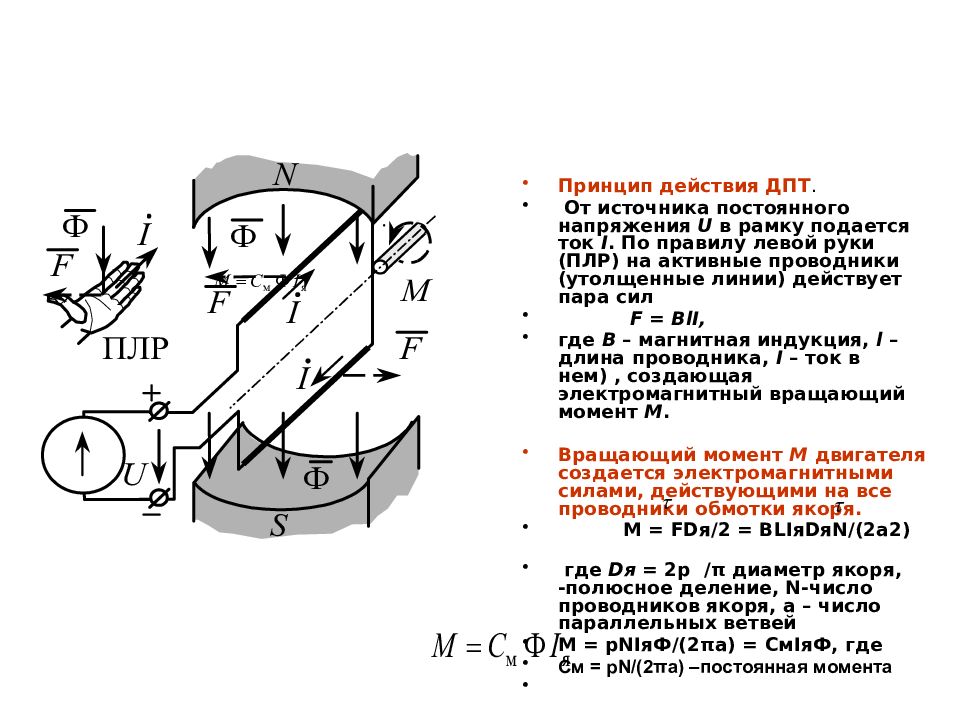
Контроль напряжения якоря
Этот метод предпочтительнее, потому что он имеет высокую эффективность, хорошую переходную характеристику и хорошее регулирование скорости. Он обеспечивает регулирование скорости только ниже номинальной, поскольку напряжение якоря не может превышать номинальное значение.
Управление потоком поля
Этот метод используется для управления скоростью выше номинального значения. Обычно максимальная скорость двигателя в два раза превышает номинальную скорость, а в специальном двигателе она в шесть раз превышает номинальную скорость.
Контроль сопротивления якоря
В этом методе скорость изменяется за счет потерь мощности на внешнем резисторе, который включен последовательно с якорем. Этот метод в основном используется в приложениях с альтернативной нагрузкой, когда продолжительность работы на низкой скорости составляет лишь небольшую часть общего времени работы.
Контроль напряжения якоря заменил этот метод в различных приложениях.
Бортовой преобразователь постоянного тока в постоянный ток электромобиля на основе синхронного выпрямления и анализа характеристик
Преобразователь постоянного тока в постоянный является основной частью двухступенчатого бортового зарядного устройства электромобиля.В настоящее время полномостовой преобразователь постоянного тока в постоянный с плавным переключением фаз со сдвигом фазы имеет такие проблемы, как трудности с коммутацией отстающего плеча, колебания напряжения на вторичной стороне трансформатора и низкий КПД. В данной статье предлагается полномостовой преобразователь постоянного тока в постоянный с двумя фиксирующими диодами и синхронным выпрямлением. Фиксирующие диоды используются для подавления колебаний напряжения на вторичной стороне трансформатора и обеспечения энергии коммутации отстающей ветви. Синхронное выпрямление снижает потери коммутирующего устройства.Проанализированы принцип действия и способ управления преобразователем постоянного тока в постоянный, рассчитаны потери коммутирующего устройства. Результаты моделирования и экспериментов показывают, что по сравнению с традиционным преобразователем постоянного тока в постоянный импульс напряжения вторичной обмотки трансформатора меньше, КПД выше, а мягкий переключатель может быть реализован в широком диапазоне нагрузок, что удовлетворяет требованиям. требование быстрой зарядки автомобильных аккумуляторов.
Результаты моделирования и экспериментов показывают, что по сравнению с традиционным преобразователем постоянного тока в постоянный импульс напряжения вторичной обмотки трансформатора меньше, КПД выше, а мягкий переключатель может быть реализован в широком диапазоне нагрузок, что удовлетворяет требованиям. требование быстрой зарядки автомобильных аккумуляторов.
1. Введение
Электромобили (EV) быстро развивались благодаря своей высокой эффективности и отсутствию загрязнения окружающей среды.Увеличение количества электромобилей увеличивает технические требования к бортовым зарядным устройствам [1]. Из-за ограниченного внутреннего пространства бортовое зарядное устройство (OBC) должно отвечать требованиям высокой плотности мощности, высокой эффективности зарядки и хорошего эффекта рассеивания тепла [2]. Двухступенчатый OBC включает преобразователь PFC и изолированный преобразователь постоянного тока в постоянный. Первый преобразует переменный ток в постоянный; последний обеспечивает широкий диапазон постоянного тока для зарядки установленных на автомобиле аккумуляторов. Цели исследования бортовых преобразователей электромобилей в основном сосредоточены на повышении эксплуатационной эффективности и сокращении объема [3].Исследования PFC являются относительно зрелыми, а существующие исследования достигли эффективности более 98% [4]. Следовательно, его общий КПД и удельная мощность больше зависят от конструкции и работы преобразователя постоянного тока. В настоящее время высокочастотный импульсный преобразователь широко используется в преобразователе постоянного тока. Частота переключения обычно находится на уровне десятков кГц [5]. Хотя увеличение частоты переключения значительно уменьшает объем оборудования, оно также вызывает такие проблемы, как увеличение потерь переключения, снижение эффективности и увеличение электромагнитных помех.Для решения этих проблем появились технологии мягкой коммутации, такие как ZVS, ZCS и LLC [6, 7]. Применение этой технологии в традиционной топологии импульсного источника питания может снизить коммутационные потери и шумовые помехи устройств переключения мощности в высокочастотном состоянии преобразователя, что может дополнительно повысить эффективность и плотность мощности, а также уменьшить объем и вес преобразователя.
Цели исследования бортовых преобразователей электромобилей в основном сосредоточены на повышении эксплуатационной эффективности и сокращении объема [3].Исследования PFC являются относительно зрелыми, а существующие исследования достигли эффективности более 98% [4]. Следовательно, его общий КПД и удельная мощность больше зависят от конструкции и работы преобразователя постоянного тока. В настоящее время высокочастотный импульсный преобразователь широко используется в преобразователе постоянного тока. Частота переключения обычно находится на уровне десятков кГц [5]. Хотя увеличение частоты переключения значительно уменьшает объем оборудования, оно также вызывает такие проблемы, как увеличение потерь переключения, снижение эффективности и увеличение электромагнитных помех.Для решения этих проблем появились технологии мягкой коммутации, такие как ZVS, ZCS и LLC [6, 7]. Применение этой технологии в традиционной топологии импульсного источника питания может снизить коммутационные потери и шумовые помехи устройств переключения мощности в высокочастотном состоянии преобразователя, что может дополнительно повысить эффективность и плотность мощности, а также уменьшить объем и вес преобразователя.
Традиционные топологии DC-DC преобразователей, используемые в OBC, включают полномостовую схему ШИМ и полномостовую резонансную схему (включая LLC-резонанс и последовательный резонанс) [8].Преобразователь LLC имеет преимущества в виде скачков напряжения без отключения и небольшой мощности циркулирующего тока. В сочетании с кривой зарядки аккумуляторных батарей автомобиля диапазон выходного напряжения преобразователя постоянного тока в постоянный шире, частота переключения преобразователя будет сильно отклоняться от резонансной частоты, и потери в системе увеличатся [9]. Полномостовая схема ШИМ может адаптироваться к широкому диапазону выходного напряжения и фиксированной частоте переключения, но традиционный полномостовой преобразователь ШИМ имеет большую циркуляцию реактивной мощности и не может обеспечить плавное переключение при небольшой нагрузке [10].По этой причине предлагается фазосдвигающий полномостовой преобразователь с регулируемым вспомогательным током, который реализует плавное переключение переключаемых транзисторов при полной нагрузке, но его стоимость высока, а управление затруднено [11]. Потери обратного восстановления выпрямительного диода можно уменьшить, используя фазосдвигающее управление вторичной обмоткой трансформатора, но при полной нагрузке КПД низкий [12]. В данной статье предлагается усовершенствованный полномостовой преобразователь постоянного тока в постоянный с фазовым сдвигом ZVS. Два ограничивающих диода используются для устранения колебаний напряжения вторичного выпрямителя.Синхронный выпрямитель (SR) используется для уменьшения потерь в системе. Наконец, в лаборатории создается экспериментальный образец.
2. Бортовой способ зарядки электромобилей
2.1. Модель батареи
В настоящее время существуют трехкомпонентные литиевые батареи и литий-железо-фосфатные батареи для электромобилей. Трехкомпонентные литиевые батареи имеют высокую плотность энергии, но низкий ток заряда и быстрое затухание емкости, которые в основном используются в электромобилях Tesla.Литий-железо-фосфатные батареи широко используются во многих электромобилях из-за их высокого тока заряда-разряда, медленного затухания емкости и высокой безопасности. Модель эквивалентной схемы Thevenin литий-железо-фосфатной батареи показана на рисунке 1 [13], где В куб.см — напряжение холостого хода, R e — внутреннее сопротивление батареи, R p — поляризационное сопротивление, а C p — поляризационная емкость.Эквивалентное полное сопротивление Z o батарей составляет
2.2. Структура схемы
В соответствии с различной топологией преобразователя зарядного устройства, OBC имеет одноступенчатую структуру и двухступенчатую структуру. Одноступенчатая структура имеет характеристики простой конструкции и низкой стоимости, но имеет только одноступенчатое преобразование, которое ограничивает диапазон выходного напряжения, а влияние коэффициента мощности, подавления гармоник тока и эффективности преобразования не идеальны. [14].Учитывая подавление гармоник входного тока, улучшение коэффициента мощности и способность обработки мощности, преобразователь переменного тока в постоянный делится на преобразователь переменного тока в постоянный и преобразователь постоянного тока в постоянный, как показано на рисунке 2. Прежний преобразователь переменного тока в постоянный обычно использует схему повышения мощности для коррекции коэффициента мощности, в то время как последний преобразователь постоянного тока обычно использует изолирующий преобразователь [15]. Обеспечивая безопасность преобразователя, он обеспечивает постоянный ток с небольшим коэффициентом пульсаций нагрузки. В статье исследуется двухступенчатое автомобильное зарядное устройство.
2.3. Стратегия зарядки
Аккумуляторы, установленные на транспортных средствах, являются источником энергии для электромобилей, поэтому для продвижения электромобилей очень важно использовать методы зарядки, которые могут обеспечить быструю зарядку и меньший ущерб для срока службы батарей [16]. В настоящее время методы зарядки аккумуляторов в основном включают метод зарядки постоянным током, метод зарядки постоянным напряжением и метод ступенчатой зарядки [17]. Зарядка постоянным током проста в использовании и легко контролируется, но если зарядный ток слишком мал, время зарядки будет слишком большим.Если выбранный ток зарядки слишком велик, на более позднем этапе зарядки легко перезарядить, что окажет сильное влияние на пластину аккумулятора, что повлияет на срок службы аккумулятора [18]. Метод зарядки с постоянным напряжением также прост в использовании и позволяет избежать проблемы перезарядки аккумулятора на более поздней стадии зарядки. Однако на ранней стадии зарядки из-за более низкой электродвижущей силы на обоих концах батареи зарядный ток больше. Электрический ток приведет к изгибу пластины аккумулятора и быстрому повышению температуры аккумулятора, что повлияет на срок службы аккумулятора.Кроме того, если выбранное напряжение зарядки слишком низкое, это приведет к недостаточной зарядке аккумулятора и сокращению срока его службы [19]. Метод ступенчатой зарядки обычно включает двухступенчатый метод зарядки и трехступенчатый метод зарядки [20]. Двухступенчатый метод зарядки — это зарядка постоянным током перед зарядкой аккумулятора. Когда напряжение на обоих концах батареи достигает определенной амплитуды, она переключается на зарядку с постоянным напряжением. Кривая зарядки показана на рисунке 3.Двухступенчатый метод зарядки сочетает в себе преимущества метода зарядки постоянным током и метода зарядки постоянным напряжением, позволяет избежать проблем, связанных с чрезмерным зарядным током на ранней стадии и легкой перезарядкой на более поздней стадии, и имеет высокую эффективность зарядки, которая может соответствовать зарядке. спрос на литий-железо-фосфатные батареи. В данной статье принят двухступенчатый метод зарядки.
При зарядке в режиме постоянного тока выходное напряжение DC / DC преобразователя автомобильного зарядного устройства изменяется в широком диапазоне.В режиме постоянного напряжения выходной ток преобразователя уменьшается от полной нагрузки до нуля. Таким образом, конструкция бортового блока питания для зарядки должна отвечать следующим требованиям: регулировка выходного напряжения в широком диапазоне; плавное переключение в широком диапазоне нагрузок; высокие требования к удельной мощности и напряжению и току.
2.4. Метод управления переключением постоянного тока и постоянного напряжения
Метод управления зарядкой с переключением постоянного тока и постоянного напряжения показан на рисунке 4.В каскаде постоянного напряжения выходное напряжение сравнивается с опорным напряжением. Ошибка получается ПИ-регулятором, и получается сигнал модуляции WCV. Аналогичным образом может быть получен сигнал модуляции WCV.
Режим переключения — «принять меньшее значение». На начальном этапе зарядки эквивалентное внутреннее сопротивление аккумулятора невелико, а зарядный ток велик. В это время WCC Традиционная полная мостовая топология главной цепи ZVS показана на рисунке 5. В в является входным источником питания постоянного тока. Коммутационные устройства (в том числе и) образуют инверторный мост, это резонансный индуктор, T — высокочастотный трансформатор, D 1 и D 2 образуют мост выпрямителя высокой частоты, а L f и C f образуют фильтр высоких частот.Преобразователь имеет такие проблемы, как трудности с коммутацией отстающей ветви, колебания напряжения на вторичной стороне трансформатора и низкий КПД. Усовершенствованная топология основной схемы ZVS с фазовым сдвигом и полным мостом с фиксирующими диодами и рабочими формами сигналов показана на рисунке 6. Ограничивающие диоды D 5 и D 6 добавлены для подавления колебаний напряжения выпрямителя и увеличения диапазон мягкого переключения; синхронное выпрямление применяется ко вторичной обмотке трансформатора, сопротивление проводимости полевого МОП-транзистора меньше, чем у диода, и это может повысить эффективность схемы. Рабочий процесс сдвинутого по фазе полного моста ZVS DC / DC преобразователя можно найти в [21], который здесь не обсуждается. Принцип подавления колебаний напряжения вторичной обмотки трансформатора подробно поясняется на рисунке 7. Во время [] эквивалентная схема показана на рисунке 7 (a). При ток нагрузки протекает через Q 6 , а ток, проходящий через Q 5 , падает до нуля и одновременно заряжает переходной конденсатор C 5 из Q 5 .После резонансной индуктивности и резонанса C 5 , напряжения SR-устройства Q 5 и вторичной обмотки трансформатора составляют, соответственно: Самый простой генератор — петля из проволоки.
вращающийся в магнитном поле между полюсами Н и S, как
показано на рис.4.1. Изменяющаяся во времени переменная ЭДС, индуцированная в
петля заставляет переменный ток течь через контактные кольца и щетки в
цепь внешней нагрузки. Такая машина представляет собой генератор переменного тока. Преобразование переменного тока в постоянный осуществляется через
использование коммутатора с разъемным кольцом. Коммутатор, изображенный на
Рис. 8.1 a имеет два медных сегмента 4 подключен к концам 1 петли. Коммутаторные сегменты
закреплены на валу якоря и изолированы друг от друга
и с вала.Щетки стационарные 2 и 3 подключен к внешней цепи отдыха
на коммутаторе и сдвиньте по его поверхности. Когда вал несет петлю из проволоки и
сегменты начинают вращаться, щетки 2 и 3 попеременно
свяжитесь с каждым сегментом. Щетки фиксируются в таком положении, чтобы они
охватывают промежутки между сегментами в момент, когда наведенная в
петля нулевая. В этом случае при вращении якоря
индуцированная в контуре переменная ЭДС изменяется синусоидально, если
поле однородно, но каждая из кистей соприкасается с этим
сегментом и, таким образом, с тем концом проводника, который на данном
момент находится под полюсом определенной полярности. Следовательно, ЭДС на щетках 2 и 3 делает
не меняет знак, и ток течет в одном направлении от щетки 2, через внешнее сопротивление R, и чистить щеткой 3. Но так как ЭДС во внешнем
цепь не постоянна, а изменяется со временем пульсирующим образом,
эта волна пульсирующей ЭДС создаст пульсирующий ток. Если намотать арматуру двумя петлями из проволоки,
расположены под углом 90 ° друг к другу, и соединяют
концы шлейфов к четырем сегментам коммутатора, пульсации ЭДС
и ток во внешней цепи станет намного меньше.Используя
много витков провода вокруг якоря и много сегментов коммутатора,
развивается ЭДС и ток будет плавным и практически
постоянный. Рисунок 8.1b — вид в разрезе постоянного тока.
генератор. Стационарный элемент, статор, служит для установки
магнитное поле, а вращающийся элемент, ротор, является якорем
предназначен для генерации ЭДС. Статор, изображенный на рис. 8.2а, состоит из рамы 3, или
ярмо, полюса главного поля 1, и
коммутирующие (промежуточные) опоры поля 2. Главный полюс, показанный на рис. 8.2b
представляет собой электромагнит, создающий магнитный поток. Он состоит из ядра 4, поле
катушка 6, и
башмак 7. Основной столб крепится к раме 3 с болтом 5. Сердечник полюса отлит из стали и
в поперечном сечении имеет овальную форму. Катушка возбуждения состоит из множества
витки изолированного медного провода, намотанного на жилу. Катушки всего
полюса соединены последовательно, образуя обмотку возбуждения.Электрический ток
прохождение через обмотку создает магнитный поток. Башмак
закрепляет катушку возбуждения на сердечнике и обеспечивает равномерное
распределение магнитного потока под полюс. Ему придается такая форма, что
воздушный зазор между полюсом и якорем одинакова по всей длине полюсной дуги. Коммутирующий
полюса или межполюсники также несут катушки на своих сердечниках. Интерполы
закреплен между основными полюсами; их количество может быть равно или наполовину
количество основных полюсов.Они установлены на мощные машины для устранения искрения на щетках.
Машины малой мощности обычно не имеют межполюсников. Рама отлита из стали и служит механическим каркасом * для
машина. Он поддерживает основные и коммутационные полюса закрепленными.
на внутренней стороне, а также несет на своих концах концевые раструбы или
торцевые рамы с подшипниками, в которых вращается вал машины.
Рама изготовлена на литых ножках для установки машины на
поддерживает. Якорь, показанный на рис. 8.3а, состоит из сердечника 1 , обмотка 2, и
коммутатор 3. Сердечник якоря представляет собой цилиндр из электротехнической листовой стали.
ламинаты, изолированные друг от друга лопаткой или бумагой,
снизить вихретоковые потери. Стальные листы пробиваются до
шаблон и снабжены пазами для проводов обмотки якоря.
Вентиляционные каналы сделаны в сердечнике якоря для удержания якоря.
прохладный. Обмотка тщательно изолирована от сердечника и закреплена.
в пазах немагнитными клиньями.Концевые соединения
крепится к опорным кольцам тесьмой. Все катушки
обмотки, установленные на якорь, соединены последовательно, образуя
замкнутая цепь и припаяна к сегментам коммутатора. Коммутатор представляет собой цилиндр, состоящий из
стержни коммутатора, представляющие собой клиновидные (ласточкин хвост) сегменты
жесткая медь изолирована друг от друга и от коммутатора
рукав тонкими полосками миканита. Каждая штанга коммутатора удерживается в
поместите, зажимая его часть в форме ласточкина хвоста между V-образным
выступы на втулке и кольце, последнее прикручено к
втулку винтами с головкой под ключ. Коммутатор — самая сложная деталь с точки зрения конструкции.
Кроме того, в некоторых отношениях это самая важная часть постоянного тока.
машина. Поверхность коллектора должна быть точно цилиндрической, чтобы
Избегайте раскачивания и искрения на щетках. Щетки, которые собирают ток и передают его
внешний контур «может быть выполнен из графита, углеграфита и
бронзово-графитовые типы. В высоковольтных машинах используются графитовые щетки.
обладающие высоким контактным сопротивлением; низковольтные машины работают
с бронзово-графитовыми кистями.На рис. 8.3b показан щеткодержатель.
Щетка 4 вставлена
в коробку щеток удерживается на поверхности коллектора с помощью
пружины 5. Каждая
щеткодержатель может содержать несколько щеток, соединенных параллельно. Держатели щеток имеют отверстия для крепления на шпильках держателей щеток.
которые, в свою очередь, прикреплены к коромысле щетки и изолированы
от него токопроводящими шайбами и гильзами. 3. Принцип действия ШИМ-преобразователя постоянного / постоянного тока
3.1. Топология главной цепи
3.2. Анализ рабочего процесса
8.1. Принцип работы и конструкция генератора постоянного тока