Асинхронный двигатель
Если поместить во вращающееся магнитное поле короткозамкнутую медную или алюминиевую рамку на валу электродвигателя, то она вместе с валом придет во вращение по направлению вращения поля. Явление это объясняется следующим образом. Пусть угловая скорость вращения рамки n несколько меньше угловой скорости вращения поля no (асинхронное вращение). В этом случае рамка «проскальзывает» относительно поля. Величину s = (n0—n)/n0 называют скольжением. Относительно магнитного поля рамка вращается с угловой скоростью, пропорциональной скольжению. Поэтому в ней возникает индукционный ток, пропорциональный относительной скорости вращения рамки, т. е. скольжению. По закону Ленца, индуцированный ток взаимодействует с полем так, что рамка увлекается полем.
А так как магнитное поле вращается, то это приводит к вращению рамки. Вращающий момент, действующий на рамку, пропорционален индуцированному току и тем самым скольжению. Этот вращающий момент уравновешивается внешней нагрузкой. Таким образом, в установке данного типа рамка всегда вращается несколько медленнее вращения поля. Такое вращение называют асинхронным (т. е. неодновременным, несогласованным). Сам двигатель получил название асинхронного.
Таким образом, в установке данного типа рамка всегда вращается несколько медленнее вращения поля. Такое вращение называют асинхронным (т. е. неодновременным, несогласованным). Сам двигатель получил название асинхронного.
Асинхронный двигатель наиболее распространен в качестве электропривода различных механизмов благодаря своей простоте и надежности. Их применяют для привода машин и механизмов, не требующих строго постоянной частоты вращения и ее регулировки. Важнейшими достоинствами данного двигателя являются простота его устройства и большая надежность, вызванная отсутствием скользящих контактов. Двигатель имеет достаточный пусковой момент, легко реверсируется (т. е. в нем легко меняется направление вращения ротора). В результате этого асинхронные двигатели являются самыми распространенными в технике электрическими машинами. Более 60 % всей вырабатываемой в мире энергии преобразуется в механическую, в основном, с помощью асинхронных двигателей. Мощность двигателей колеблется от десятков ватт до сотен киловатт.
Асинхронный двигатель изготавливается в однофазном, двухфазном и трехфазном исполнении.
Принцип работы
Рассмотрим вращающееся поле переменного тока трехфазной цепи короткозамкнутого асинхронного двигателя с тремя обмотками, сдвинутыми по окружности на 120° и соединенными звездой .
Обмотки статора питаются симметричным трехфазным напряжением. Начальную фазу тока в обмотке А-х принимаем равной нулю. Тогда:
Конструкция
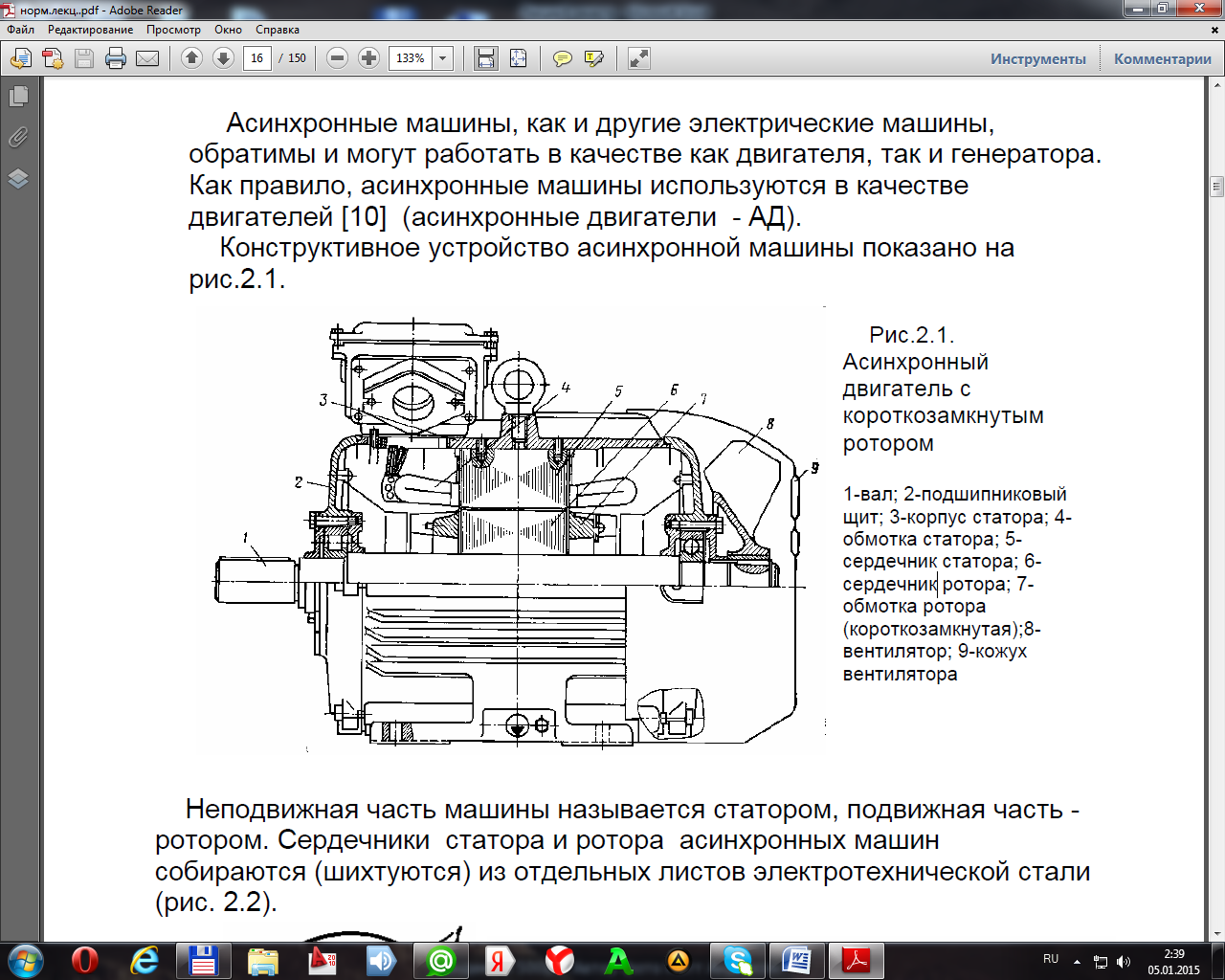
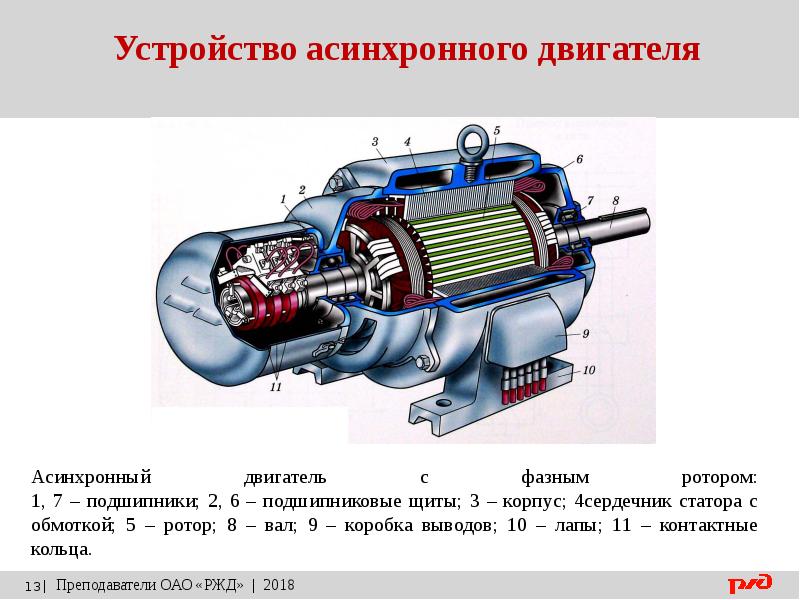
Асинхронный двигатель состоит из статора и ротора. Статор представляет собой литой корпус (стальной или чугунный) цилиндрической формы. Внутри статора располагается магнитопровод с вырубленными пазами, в которые укладывается статорная обмотка. Концы обмоток выводятся в клеммную коробку и могут быть соединены как треугольником, так и звездой. Корпус статора с торцов закрыт подшипниковыми щитами, в которые запрессовываются подшипники вала ротора. Ротор состоит из стального вала с напрессованным на него магнитопроводом.
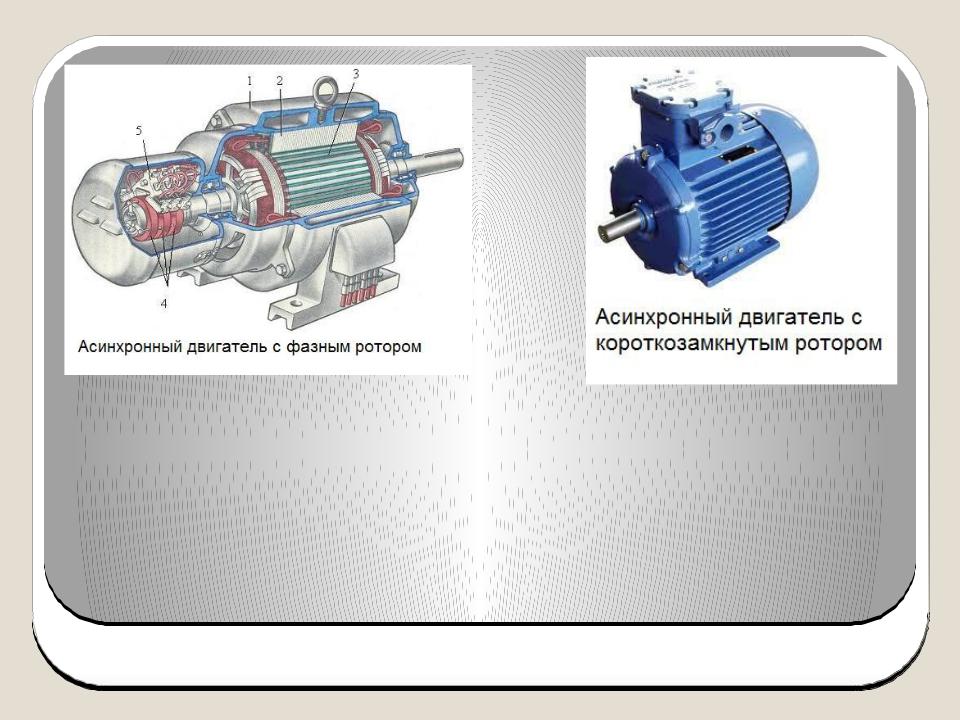
По конструкции роторов двигатели делятся на две группы. Первая — с короткозамкнутым ротором и вторая — с фазным. У двигателя с короткозамкнутым ротором в пазы заливаются алюминиевые стержни и накоротко замыкаются по торцам. У фазового ротора имеются три обмотки, соединенные в звезду. Выводы обмоток присоединены к кольцам, закрепленным на валу. К кольцам при пуске прижимаются неподвижные щетки, к которым подключаются сопротивления. В начальный момент пуска ротор находится в заторможенном состоянии, затем сопротивление уменьшается и двигатель плавно запускается, что позволяет снизить пусковой ток.
Первая — с короткозамкнутым ротором и вторая — с фазным. У двигателя с короткозамкнутым ротором в пазы заливаются алюминиевые стержни и накоротко замыкаются по торцам. У фазового ротора имеются три обмотки, соединенные в звезду. Выводы обмоток присоединены к кольцам, закрепленным на валу. К кольцам при пуске прижимаются неподвижные щетки, к которым подключаются сопротивления. В начальный момент пуска ротор находится в заторможенном состоянии, затем сопротивление уменьшается и двигатель плавно запускается, что позволяет снизить пусковой ток.
К обмоткам статора подводится трехфазное напряжение, а ротор вращается посредством вращающегося магнитного поля, создаваемого системой трехфазного тока.
В момент времени t1: . Если ток фазы А положителен, т.е. течет от начала к концу, то, пользуясь правилом правоходового винта, можно найти картину распределения магнитного поля для времени t1.
В момент времени t2 вектор результирующей магнитной индукции Вm развернется на угол α1 и далее по часовой стрелке с периодом обращения 360°. Для данного примера угол α1 = 60°.
Для данного примера угол α1 = 60°.
Таким образом, магнитная индукция представляет собой вращающееся поле с амплитудой
За период поле делает один оборот, , (где f = 50 Гц), и является промышленной частотой питающего переменного напряжения и тока.
При синусоидальном характере вращающегося поля его скорость no равна отношению αf/p (где р — число пар полюсов). В рассматриваемом примере р = 1 и частота вращения равна соответственно 3000 оборотам в минуту. Если число катушек в каждой фазе увеличить в два раза, а сдвиг фаз между токами сохранить 120°, то частота вращения уменьшится в два раза за счет увеличения числа пар полюсов. Особенностью короткозамкнутого асинхронного двигателя является наличие постоянной частоты вращения поля статора, определяемой числом пар полюсов.
Если поменять местами любые две фазы, то возникнет поле обратной последовательности и ротор начнет вращаться в другую сторону. Еще одной особенностью асинхронных двигателей является разность частоты вращения полей статора no и ротора n, что делает возможным их электромагнитное взаимодействие. При этом поле ротора будет как бы скользить относительно поля статора
Еще одной особенностью асинхронных двигателей является разность частоты вращения полей статора no и ротора n, что делает возможным их электромагнитное взаимодействие. При этом поле ротора будет как бы скользить относительно поля статора
где s — скольжение, при номинальной мощности двигателя скольжение составляет 0,01-0,03.
Основное вращающееся магнитное поле индуцирует в обмотках статора и ротора ЭДС, аналогично трансформатору, так как при разомкнутом роторе асинхронный двигатель представляет собой трансформатор в режиме холостого хода:
где индекс 1 относится к параметрам статора, а 2 — к параметрам ротора; Kобм — обмоточные коэффициенты, определяемые способом укладки обмоток (петлевая или волновая). Kобм=0,92-0,98; E2s=E2s; E2 — действующее значение ЭДС неподвижного ротора при s = 1; f2=f1s.
В асинхронном двигателе кроме основного магнитного потока создаются потоки рассеяния.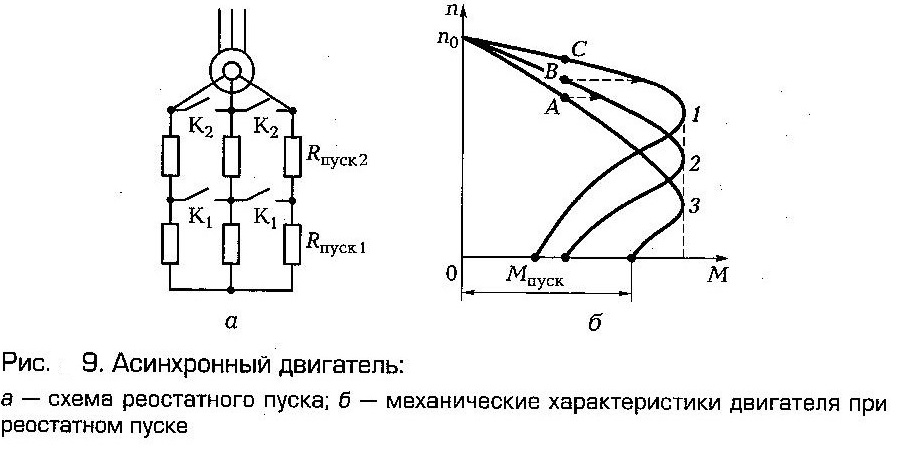 Один охватывает проводники статора, другой — ротора. Потоки рассеяния характеризуются соответствующими индуктивными сопротивлениями X1 и X2s.
Один охватывает проводники статора, другой — ротора. Потоки рассеяния характеризуются соответствующими индуктивными сопротивлениями X1 и X2s.
Уравнения электрического состояния фаз обмоток статора и ротора:
Момент асинхронного двигателя
Вращающий электромагнитный момент двигателя в соответствии с законом электромагнитных сил
где
Cм — конструктивная постоянная;
φ2s — фазовый сдвиг между током и магнитным потоком.
Отношение максимального момента Mmax к номинальному Mн определяет перегрузочную способность двигателя и составляет 2,0-2,2 (дается в каталожных данных). Максимальный момент соответствует критическому скольжению sк, определяемому активными и индуктивными сопротивлениями двигателя, и пропорционален активному сопротивлению цепи ротора.
Потери в асинхронном двигателе
Потери делятся на потери в статоре и в роторе. Потери в статоре состоят из электрических потерь в обмотке Рэ1 и потерь в стали Рст, а потери в роторе — из электрических Рэ2 и механических Рмех плюс добавочные потери на трение и вентиляцию Рдоб.
Потери в статоре состоят из электрических потерь в обмотке Рэ1 и потерь в стали Рст, а потери в роторе — из электрических Рэ2 и механических Рмех плюс добавочные потери на трение и вентиляцию Рдоб.
где К = 2,9-3,6 определяется диаметром статора D1.
Потери в стали в рабочем режиме во много раз меньше электрических потерь в роторе и ими обычно пренебрегают.
КПД асинхронного двигателя составляет от 0,75 до 0,95.
Рабочий момент двигателя пропорционален квадрату напряжения, что необходимо учитывать при включении двигателя в протяженных распределительных сетях. Номинальному моменту соответствует номинальное скольжение, а пусковому — sп.
Зависимость момента двигателя от скольжения М=f(s) приведена на рисунке.
На участке от 0 до Mmax двигатель работает в устойчивом режиме, а участок от Sk называется режимом опрокидывания двигателя, при котором двигатель в результате перегрузки останавливается и не может вернуться в рабочий режим без очередного запуска. Пусковые свойства двигателя определяются соотношением пускового момента Mп и номинального. В соответствии с каталожными данными оно составляет 1,6-1,7. При пуске асинхронного двигателя cosj очень мал и пусковой ток в обмотке статора может возрастать в 5-7 раз по сравнению с номинальным. Ограничение его осуществляется изменением частоты питающего напряжения для двигателя с короткозамкнутым ротором и увеличением активного сопротивления в цепи ротора для двигателя с фазовым ротором. Для механизмов, имеющих тяжелые условия пуска, где желательно использовать асинхронный двигатель с короткозамкнутым ротором, применяются двигатели с улучшенными пусковыми свойствами: с большим пусковым моментом и меньшим пусковым током, чем у двигателей общего назначения.
Пусковые свойства двигателя определяются соотношением пускового момента Mп и номинального. В соответствии с каталожными данными оно составляет 1,6-1,7. При пуске асинхронного двигателя cosj очень мал и пусковой ток в обмотке статора может возрастать в 5-7 раз по сравнению с номинальным. Ограничение его осуществляется изменением частоты питающего напряжения для двигателя с короткозамкнутым ротором и увеличением активного сопротивления в цепи ротора для двигателя с фазовым ротором. Для механизмов, имеющих тяжелые условия пуска, где желательно использовать асинхронный двигатель с короткозамкнутым ротором, применяются двигатели с улучшенными пусковыми свойствами: с большим пусковым моментом и меньшим пусковым током, чем у двигателей общего назначения.
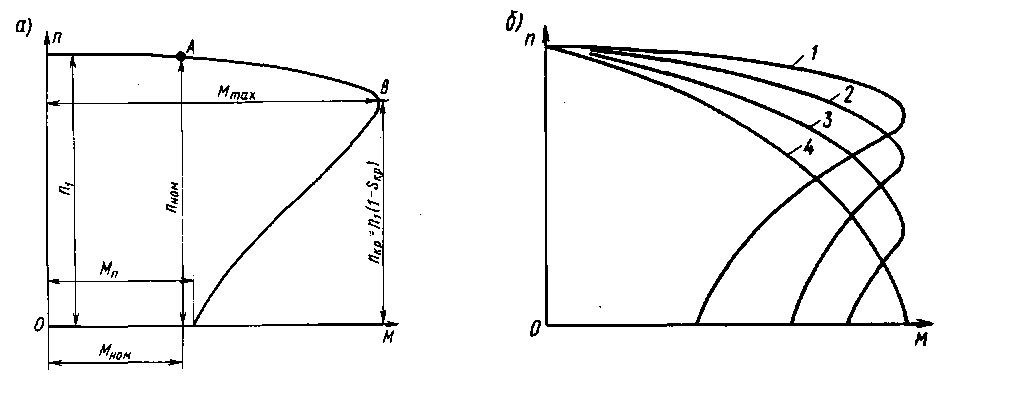
Механическая характеристика асинхронного двигателя
Зависимость скорости вращения от нагрузки на валу двигателя называется механической характеристикой асинхронного двигателя.
Участок АВ механической характеристики соответствует устойчивому режиму работы асинхронного двигателя.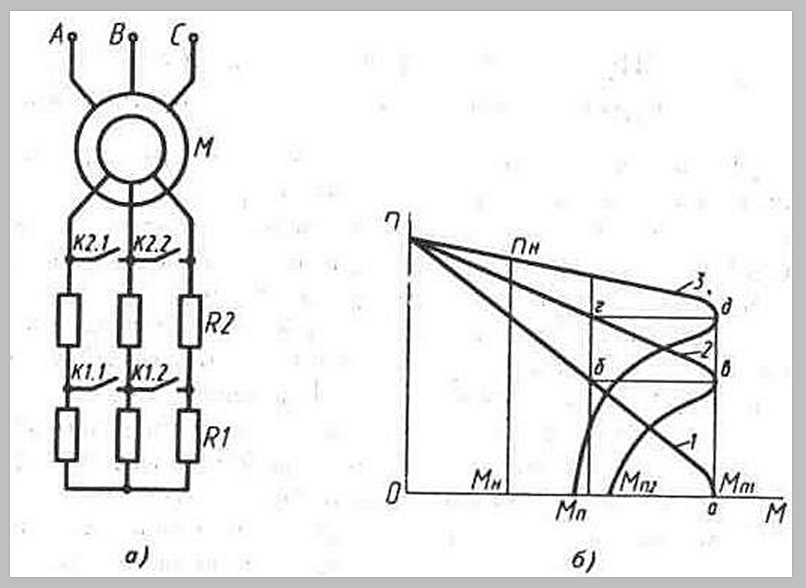 Увеличение нагрузки (тормозного момента) ведет к некоторому снижению частоты вращения ротора, что вызывает увеличение вращающего момента. При превышении тормозным моментом критического, двигатель останавливается. Точка В на графике соответствует точке критического или опрокидывающего момента.
Увеличение нагрузки (тормозного момента) ведет к некоторому снижению частоты вращения ротора, что вызывает увеличение вращающего момента. При превышении тормозным моментом критического, двигатель останавливается. Точка В на графике соответствует точке критического или опрокидывающего момента.
Регулирование частоты вращения
Регулирование частоты вращения может быть осуществлено тремя способами: изменением частоты питающего напряжения, переключением числа пар полюсов и изменением скольжения.
Для регулирования частоты вращения двигателей с короткозамкнутым ротором в настоящее время широко используются частотные преобразователи с микропроцессорным управлением.
Тормозные режимы
Тормозные режимы возникают в машине при определенных условиях или создаются искусственно с целью ускорения процесса остановки двигателя. Торможение может быть:
- генераторное с отдачей энергии в сеть;
- противовключением;
- динамическое.
Генераторным тормозным режимом называется режим работы двигателя, когда под действием внешнего момента ротор двигателя вращается в том же направлении, что и магнитное поле, но с большей скоростью.
Тормозной режим противовключения возникает в том случае, когда под действием внешнего момента, приложенного к валу двигателя, ротор вращается в противоположную сторону относительно вращающегося магнитного поля.
Динамический тормозной режим получается при отключении обмотки статора от сети трехфазного тока и подключении ее на время торможения к источнику энергии постоянного тока.
Выбор двигателя
Расчетные формулы для выбора двигателя имеют вид:
Выбор двигателя по каталогу осуществляется следующим образом. По заданному моменту рабочего механизма и частоте вращения определяется необходимая мощность. После этого определяются условия окружающей среды, выбирается исполнение по типу монтажа и высоте оси рабочего вала двигателя. Зная эти параметры, по каталогу проверяют необходимую перегрузочную способность, КПД, массу и момент инерции.
Для шахтных условий используются двигатели взрывозащищенного исполнения; для крановых механизмов — двигатели с повышенным скольжением и т. д.
д.
В бытовых приборах используются однофазные двигатели. Однофазный двигатель отличается от трехфазного тем, что его статорная обмотка подключается к однофазному источнику питания. Ротор выполняется короткозамкнутым. На статоре размещаются две обмотки, оси которых смещены друг относительно друга на 90 электрических градусов. Одна называется рабочей, а другая -пусковой.
Рабочие характеристики асинхронного двигателя
Рабочими характеристиками асинхронного двигателя являются зависимости от мощности на валу Р2 таких параметров, как момент, частота вращения, ток статора, КПД и cosφ. Анализ характеристик показывает, что частота вращения ротора падает с увеличением нагрузки, а момент пропорционален ей. Ток статора изменяется по нелинейному закону, что связано с магнитной системой двигателя и при Р2=0 определяется током холостого хода, составляющего до 40% его номинального значения.
В системах управления используются двигатели, в которых одна из обмоток статора постоянно подключена к сети переменного тока (обмотка возбуждения), а ко второй (обмотка управления) подводится напряжение управления. Такие двигатели относятся к классу микромашин.
Такие двигатели относятся к классу микромашин.
Микромашины используются в информационных системах, где они выполняют функции первичных преобразователей для вычислительных операций в системах автоматики и телемеханики.
Одним из примеров является сельсин, предназначенный для передачи на расстояние угловых перемещений валов, механически не связанных друг с другом. По конструкции сельсины делятся на контактные и бесконтактные. Контактные сельсины выполняются в двух вариантах. В одном обмотка возбуждения располагается на роторе, а трехфазная обмотка, называемая обмоткой синхронизации, в пазах статора. В другом варианте наоборот. При включении обмотки возбуждения сельсина на однофазное напряжение ток создает пульсирующее магнитное поле, которое индуцирует в каждой фазе обмотки синхронизации переменную ЭДС. Действующее значение ЭДС каждой фазы зависит от расположения осей этих фаз относительно оси потока возбуждения.
В простейшем случае схема дистанционной передачи угловых перемещений состоит из двух одинаковых сельсинов, у которых одноименные зажимы обмоток синхронизации соединены проводами линии связи, а на обмотки возбуждения подается напряжение сети. Один из сельсинов называют сельсин-датчиком, другой — сельсин-приемником.
Один из сельсинов называют сельсин-датчиком, другой — сельсин-приемником.
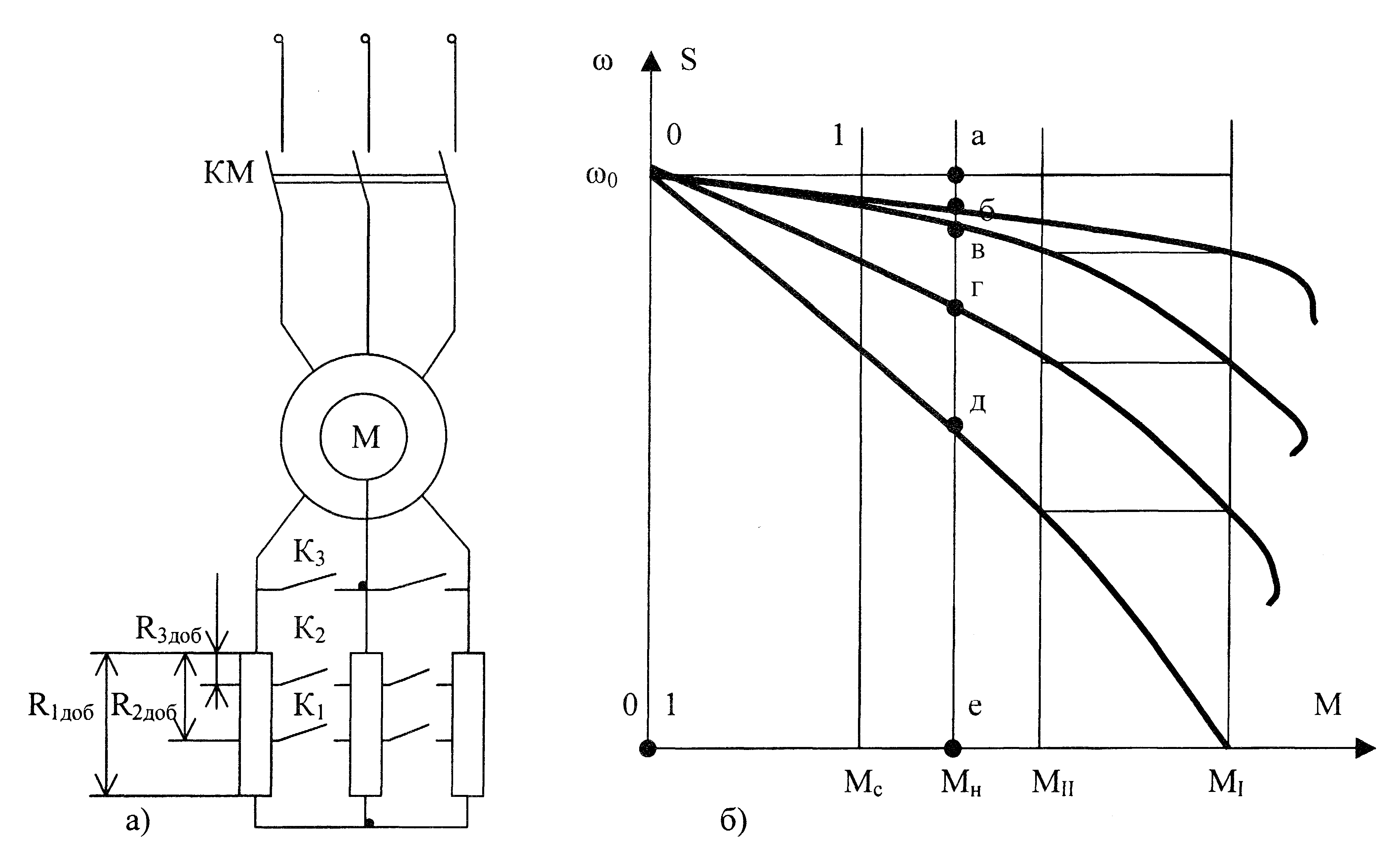
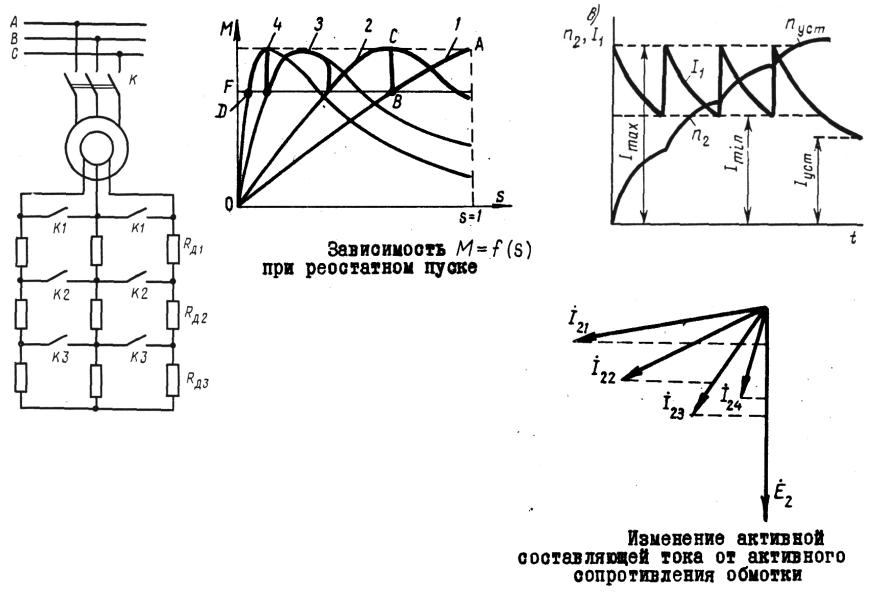
Механическая характеристика трехфазного асинхронного двигателя с фазным ротором
Схема подключения двигателя к сети показана на рис. 7.3, а. В отличие от электродвигателя с короткозамкнутым ротором, двигатель с, фазным ротором имеет фазную обмотку на роторе, концы которой выведены на кольца, закрепленные на валу ротора. При замыкании колец накоротко двигатель работает как короткозамкнутый.
Если между кольцами обмотки ротора включить дополнительное активное сопротивление R (как показано на рис. 7.2, а), то механическая характеристика станет более мягкой (рис. 7.2, б, кривая 2), при сохранении той же величины М,(. Чем больше по величине сопротивление R, тем при большем значении s двигатель будет иметь максимальный (критический) момент Мк. При этом изменится и величина пускового момента в сторону увеличения его.
Можно подобрать такое значение R, при котором пусковой момент станет равен критическому. Если в процессе работы сопротивление R не будет выведено, то двигатель будет работать при моменте сопротивления, равном номинальному моменту, с частотой вращения ni и скольжением S. При этом пх будет меньше лном (соответственно Si sHom)- Если для данного случая построить скоростную характеристику, то окажется, что при сопротивлении в цепи ротора Rpnт + R пусковой ток меньше, чем при работе двигателя только с сопротивлением R&л (т. е. при работе двигателя с короткозамкнутым ротором). Таким образом, включая в цепь ротора асинхронного двигателя с фазным ротором различные по величине дополнительные сопротивления, можно увеличить пусковой момент, одновременно уменьшая величину пускового тока, а также получать различную частоту вращения при заданном моменте сопротивления.
Если в процессе работы сопротивление R не будет выведено, то двигатель будет работать при моменте сопротивления, равном номинальному моменту, с частотой вращения ni и скольжением S. При этом пх будет меньше лном (соответственно Si sHom)- Если для данного случая построить скоростную характеристику, то окажется, что при сопротивлении в цепи ротора Rpnт + R пусковой ток меньше, чем при работе двигателя только с сопротивлением R&л (т. е. при работе двигателя с короткозамкнутым ротором). Таким образом, включая в цепь ротора асинхронного двигателя с фазным ротором различные по величине дополнительные сопротивления, можно увеличить пусковой момент, одновременно уменьшая величину пускового тока, а также получать различную частоту вращения при заданном моменте сопротивления.
Указанные особенности асинхронного двигателя с фазным ротором дают возможность применять его в установках, где требуется большой пусковой момент, небольшой пусковой ток и регулирование частоты вращения.
Асинхронный двигатель с фазным ротором имеет ограниченное применение потому, что у него коэффициент мощности меньше, чем у таких же двигателей с коротко- замкнутым ротором, включение дополнительного сопротивления в цепь ротора вызывает неоправданные потери электрической энергии (на нагрев реостата), двигатель имеет искрящие части.
Снятие рабочих характеристик трехфазного асинхронного электродвигателя с короткозамкнутым ротором
лабораторная работа 3Снятие рабочих характеристик трехфазного асинхронного электродвигателя с короткозамкнутым ротором
Цель работы. 1. Изучить устройство трехфазного асинхронного двигателя с короткозамкнутым ротором.
2. Испытать асинхронный двигатель с помощью электро-магнитного тормоза.
3. Построить по опытным данным рабочие характеристики асинхронного двигателя.
Общие теоретические положения.
Асинхронный двигатель
Двигатель имеет две основные части: неподвижную — статор
вращающуюся —ротор
Статор состоит из чугунного, стального или
алюминиевого корпуса, внутри которого
находится полый цилиндр, собранный из
тонких изолированных друг от друга
листов электротехнической стали. На
внутренней поверхности цилиндра
имеются пазы, в которых размещается
трехфазная обмотка статора, состоящая
из трех одинаковых частей, называемых
фазами. Выводы начала и конца одной
фазы сдвинуты в пространстве относительно
аналогичных выводов другой фазы иа
120°.
На
внутренней поверхности цилиндра
имеются пазы, в которых размещается
трехфазная обмотка статора, состоящая
из трех одинаковых частей, называемых
фазами. Выводы начала и конца одной
фазы сдвинуты в пространстве относительно
аналогичных выводов другой фазы иа
120°.
На корпусе двигателя имеется панель с зажимами, с помощью которых обмотка присоединяется к трехфазной сети. К каждому зажиму подключен соответствующий вывод обмотки. Для зажимов приняты следующие обозначения: зажимы, к которым подключены начала обмоток, обозначают С1 — С3; зажимы, к которым подсоединены концы обмоток, — С4 — С6
Обмотки двигателей малой и средней
мощности изготовляют на напряжения
380/220 и 220/127 В. Напряжение, указанное в
числителе, соответствует соединению
обмоток звездой, в знаменателе—треугольником.
Таким образом, один и тот же двигатель
при соответствующей схеме соединения
его обмоток может быть включен в сеть
на любое указанное в паспорте напряжение.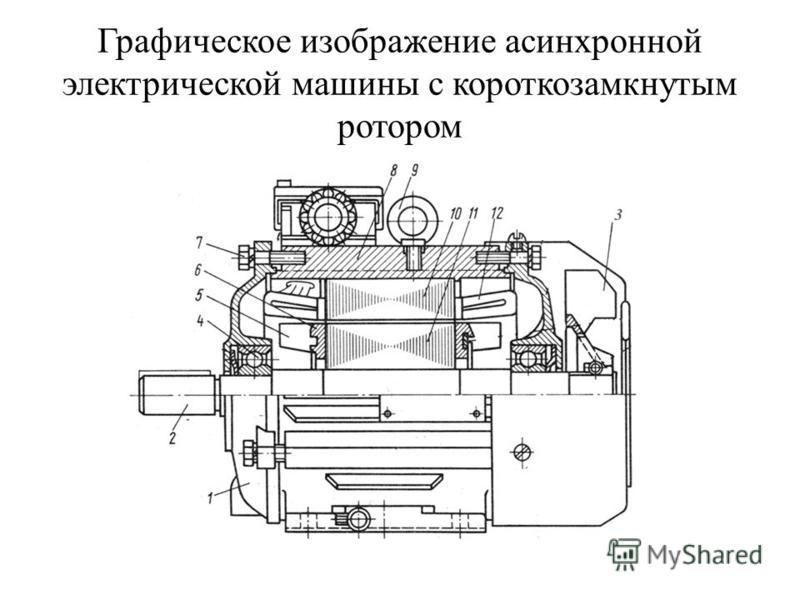
Ротор представляет собой цилиндр, собранный, так же как и сердечник статора, из отдельных листов электротехнической стали, надежно укреплен на валу машины и имеет в пазах, расположенных вблизи его поверхности, короткозамкнутую обмотку.
Подключим обмотку статора к сети трехфазного переменного тока (рис. 10.1).
Внутри статора возникает магнитное поле, вращающееся с частотой
n0 = 60f/p ,
где f — частота токов в обмотке статора;
р— число пар полюсов обмотки статора.
Магнитные линии поля пересекают обмотку неподвижного ротора и индуцируют в ней ЭДС. Под действием ЭДС в обмотке ротора протекает ток. Ток ротора, взаимодействуя с вращающимся магнитным полем, создает вращающий момент, под действием которого ротор начинает вращаться в ту же сторону, что и поле с частотой
n = n0 (1 — s),
где s — скольжение, определяемое по формуле: s = (n0 — n)/n0 При
работе электродвигателя без нагрузки
(холостой ход) скольжение очень мало.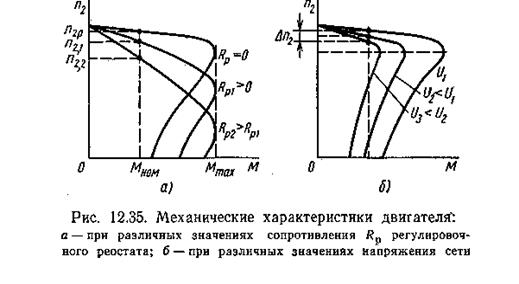 С
увеличением нагрузки на валу двигателя
частота вращения ротора уменьшается,
а скольжение увеличивается. Скольжение
асинхронного двигателя в зависимости
от нагрузки меняется незначительно
(1—6 %). Чем больше мощность двигателя,
тем меньше его скольжение. Частота
вращения ротора может быть измерена с
помощью тахометра. Для изменения
направления вращения (реверсирование)
асинхронного двигателя следует поменять
местами два любых провода из трех,
идущих к обмоткам статора двигателя.
С
увеличением нагрузки на валу двигателя
частота вращения ротора уменьшается,
а скольжение увеличивается. Скольжение
асинхронного двигателя в зависимости
от нагрузки меняется незначительно
(1—6 %). Чем больше мощность двигателя,
тем меньше его скольжение. Частота
вращения ротора может быть измерена с
помощью тахометра. Для изменения
направления вращения (реверсирование)
асинхронного двигателя следует поменять
местами два любых провода из трех,
идущих к обмоткам статора двигателя.
Зависимость между вращающим моментом M и скольжением s называют механической характеристикой (рис. 10.2). В начальный момент пуска s =1 и
А В С
Рис 10.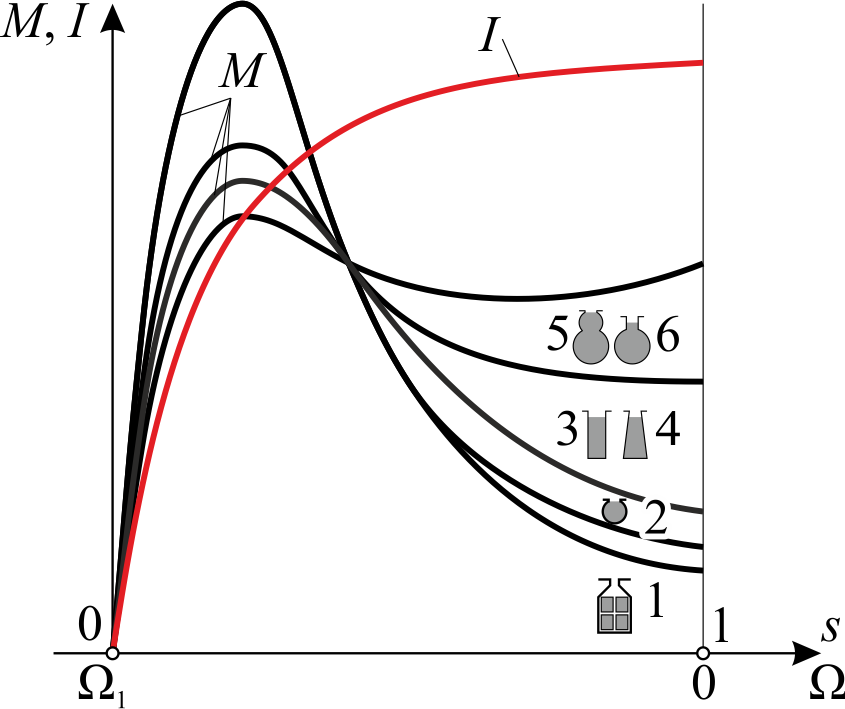 1. Схема
присоединения трехфазного асинхронного
двигателя с корот-козамкнутым ротором
к питающей сети
1. Схема
присоединения трехфазного асинхронного
двигателя с корот-козамкнутым ротором
к питающей сети
Рис. 10.2. График зависимости вращающего момента асинхронного двигателя от скольжения
Мном М
Рис. 10.3. Характеристики асинхронного двигателя:
а — механическая; б — рабочие
рактеристике. При скольжении Sном двигатель развивает номинальный момент, значение которого (Н-м) вычисляют по формуле:
Мном = 9550 Р2ном / nном
где Р2ном — номинальная мощность двигателя, кВт;
nном — номинальная частота вращения ротора, мин-1
Свойства
асинхронного двигателя определяют по
его механической характеристике п
= f (М) (рис. 10.3, а) и по рабочим характеристикам п
= f (Р2),
10.3, а) и по рабочим характеристикам п
= f (Р2),
s = f(Рг), М = f (Р2), I = f(Р2), cos = f (Р2), — f(Р2) при напряжении U = const и частоте тока I = const (рис. 10.3, б), где М и Р — соответственно момент и мощность на валу двигателя.
Прямой
пуск асинхронного двигателя с
короткозамкнутым ротором можно
производить включением рубильника
(магнитного пускателя) и т.п. (см. рис.
10. 1). При прямом пуске на двигатель
подается полное напряжение сети. При
таком способе пуска возникают большие
пусковые токи, в 2—7 раз превышающие
номинальные токи двигателей. Однако в
этом случае на валу дви-
1). При прямом пуске на двигатель
подается полное напряжение сети. При
таком способе пуска возникают большие
пусковые токи, в 2—7 раз превышающие
номинальные токи двигателей. Однако в
этом случае на валу дви-
Рис. 10.4. Устройство электромагнитного (индукционного) тормоза:
1 — электромагниты; 2 — стальной диск; 3 — груз; 4—шкала: 5— стрелка; 6 — вал испытуемой машины
—Тормоз
Тахометр
Рис. 10.5. Схема для исследования трехфазного асинхронного двигателя с короткозамкнутым ротором
гателя развивается начальный вращающий момент М п, составляющий 1,2— 2,2 номинального момента
Трехфазный асинхронный двигатель с короткозамкнутым ротором характеризуется такими номинальными величинами:
мощностью Р2НОМ на валу,
линейным напряжением Uном ,
линейным током Iном.
типом соединения фаз статора,
частотой переменного тока fном,
частотой вращения ротора nном,
коэффициентом мощности cos ном
КПД ном — которые приведены на табличке машины.
Для
нагрузки электродвигателей широко
применяют электромагнитные
(индукционные)
тормозные устройства (рис. 10.4, где 1—
электромагниты,
2 —
стальной диск, 3 —
груз, 4—
шкала, 5 — стрелка, 6—
вал испыту
емой машины). При некотором
угле поворота груза со стрелкой вращающий
и
При некотором
угле поворота груза со стрелкой вращающий
и
противодействующий моменты
уравновешиваются и по заранее
проградуиро-
ванной шкале в ньютон-метрах
определяют вращающий момент, развиваемый
на
валу электродвигателя.
Мощность Р2 на валу (кВт) определяется по формуле: Р2 = Мn / 9550
Коэффициент мощности вычисляют по формуле: cos = Р1 / 3 UI
КПД определяют по формуле: = Р2 / Р1,
где Р1 — активная мощность, потребляемая двигателем электрической энергии из трехфазной сети;
U
и I —линейные
напряжения и ток.
Приборы и оборудование:
источники- питания (трехфазная сеть переменного тока; сеть постоянного тока),
трехфазный асинхронный двигатель с короткозамкнутым ротором,
амперметр и вольтметр электромагнитной системы,
двухэлементный ваттметр ферродинамической системы,
реостат,
тахометр,
электромагнитный тормоз,
трехполюсный и двухполюсный автоматические выключатели,
соединительные провода.
Порядок выполнения работы.
Ознакомиться с приборами, аппаратурой и оборудованием, предназ-наченными для выполнения лабораторной работы, записать их технические характеристики.
Собрать электрическую схему для исследования асинхронного двига-
теля (рис.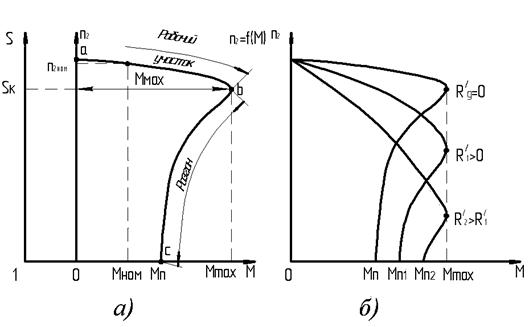 10.5)
и представить ее для проверки
преподавателю.
10.5)
и представить ее для проверки
преподавателю.Произвести пуск двигателя без нагрузки на его валу (холостой ход).
Показания всех приборов записать в табл. 10.1Постепенно нагружать двигатель с помощью электромагнитного тор-
моза, для этого ступенями изменять ток в обмотках электромагнитов тормоза с помощью делителя напряжения R. Записать показания всех приборов в табл. 10.1 для 6—7 различных случаев возрастающей нагрузки.
5.
Произвести необходимые расчеты,
результаты записать в табл. 10.1.
Используя
полученные результаты, построить в
одной системе координат рабочие
характеристики: п
= f (Р2), s = f(Рг), М = f (Р2),
I = f(Р2), cos = f (Р2), — f(Р2)
Составить отчет по результатам выполненной работы.

Таблица 10.1.
№ п/п | Режим работы | Данные наблюдений | Результаты вычислений | ||||||||
U, В | I. А | Р, кВт | n, мин-1 | М, Нм | n0–n мин-1 | S, % | cos | Р2, кВт | | ||
1. | |||||||||||
2. | |||||||||||
3. | |||||||||||
4. | |||||||||||
5. | |||||||||||
6. | |||||||||||
7. | |||||||||||
Контрольные вопросы.
Из каких двух основных частей состоит асинхронный электродвигатель?
Каков принцип действия асинхронного двигателя?
Что следует предпринять, чтобы осуществить реверсирование двигателя?
Как рассчитать номинальный момент асинхронного двигателя по его номинальным данным?
Во сколько раз можно кратковременно перегружать асинхронный двигатель, не опасаясь затормаживания ротора?
Какими номинальными величинами характеризуется трехфазный асинхронный двигатель с короткозамкнутым ротором?
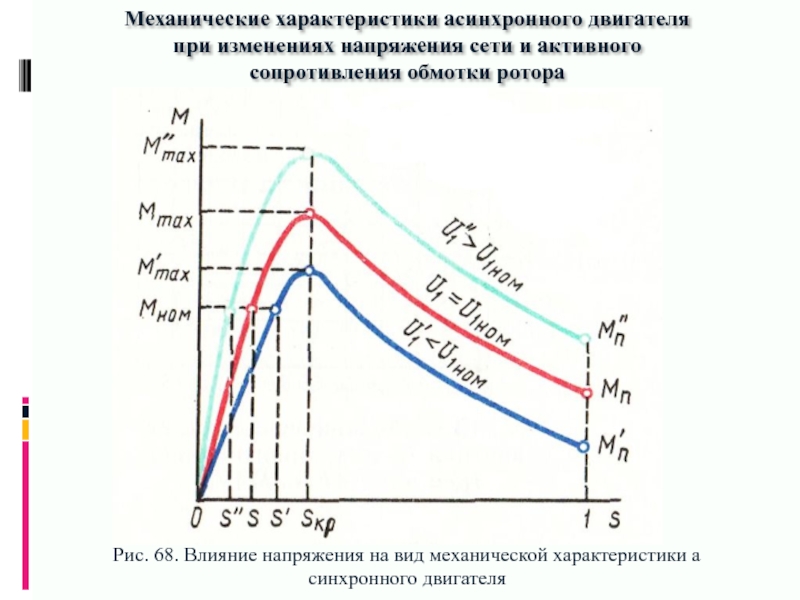
Механические характеристики асинхронного электродвигателя
Анализ работы асинхронного электродвигателя удобно проводить на основе его механических характеристик, представляющих собой графически выраженную зависимость вида п = f(М).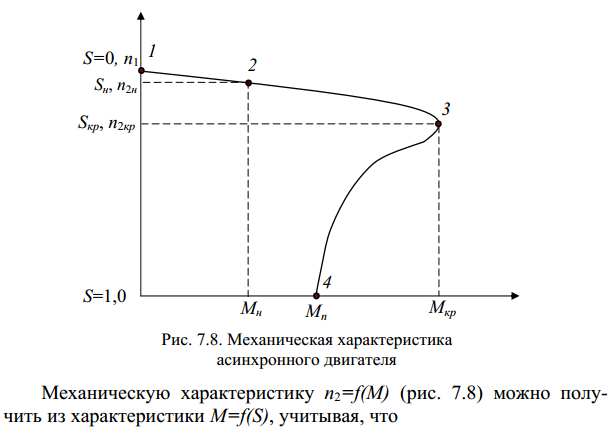 Скоростными характеристиками в этих случаях пользуются весьма редко, так как для асинхронного электродвигателя скоростная характеристика представляет собой зависимость числа оборотов от тока ротора, при определении которого встречается ряд трудностей, особенно, в случае асинхронных электродвигателей с короткозамкнутым ротором.
Скоростными характеристиками в этих случаях пользуются весьма редко, так как для асинхронного электродвигателя скоростная характеристика представляет собой зависимость числа оборотов от тока ротора, при определении которого встречается ряд трудностей, особенно, в случае асинхронных электродвигателей с короткозамкнутым ротором.
Для асинхронных электродвигателей, так же как и для электродвигателей постоянного тока, различают естественные и искусственные механические характеристики. Асинхронный электродвигатель работает на естественной механической характеристике в том случае, если его статорная обмотка подключена к сети трехфазного тока, напряжение и частота тока которой соответствует номинальным значениям, и если в цепь ротора не включены какие-либо дополнительные сопротивления.
На рис. 42 была приведена зависимость М = f(s), которая позволяет легко перейти к механической характеристике n = f(M), так как, согласно выражению (82), от величины скольжения зависит скорость вращения ротора.
Подставив формулу (81) в выражение (91) и решив полученное уравнение относительно п2 получим следующее уравнение механических характеристик асинхронного электродвигателя
Член r1s опущен, ввиду его малости. Механические характеристики, соответствующие этому уравнению, приведены на рис. 44.
Для практических построений уравнение (95) неудобно, поэтому на практике обычно пользуются упрощенными уравнениями. Так, в случае работы электродвигателя на естественной характеристике при вращающем моменте, не превышающем 1,5 его номинального значения, скольжение обычно не превышает 0,1. Поэтому для указанного случая в уравнении (95) можно пренебречь членом x2 s2 /kr’2·M , в результате чего получим следующее упрощенное уравнение естественной характеристики:
являющееся уравнением прямой линии, наклоненной к оси абсцисс.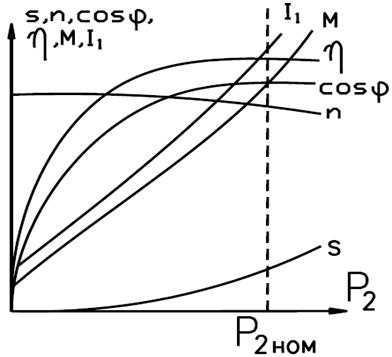
Хотя уравнение (97) является приближенным, опыт показывает, что при изменениях момента в пределах от М = 0 до М=1,5Мн характеристики асинхронных электродвигателей действительно прямолинейны и уравнение (97) дает результаты, хорошо согласующиеся с опытными данными.
При введении в цепь ротора дополнительных сопротивлений характеристику п = f(М) с достаточной для практических целей точностью также можно считать прямолинейной в указанных пределах для вращающего момента и производить ее построение по уравнению (97).
Таким образом, механические характеристики асинхронного электродвигателя в диапазоне от М = 0 до М = 1,5 Мн при различных сопротивлениях роторной цепи представляют семейство прямых, пересекающихся в одной точке, соответствующей синхронному числу оборотов (рис. 45). Как показывает уравнение (97), наклон каждой характеристики к оси абсцисс определяется величиной активного сопротивления роторной цепи r’2.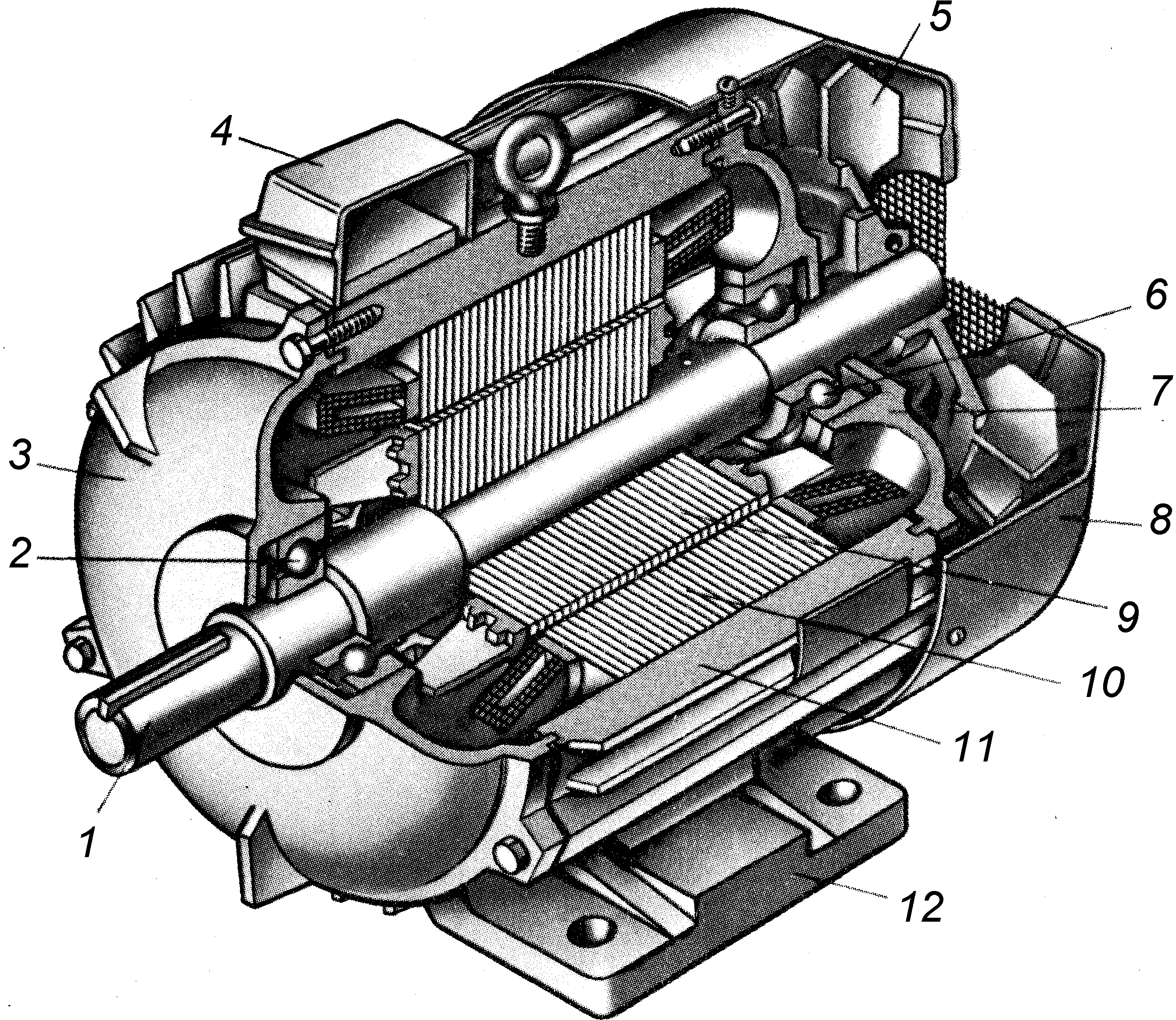 Очевидно, чем больше сопротивление, введенное в каждую фазу ротора, тем больше наклонена к оси абсцисс характеристика.
Очевидно, чем больше сопротивление, введенное в каждую фазу ротора, тем больше наклонена к оси абсцисс характеристика.
Как указывалось, обычно на практике скоростными характеристиками асинхронных электродвигателей не пользуются. Расчет же пусковых и регулировочных сопротивлений производят с помощью уравнения (97). Построение естественной характеристики можно выполнить по двум точкам — по синхронной скорости n1= 60f /р при нулевом моменте и по номинальной скорости при номинальном моменте.
Следует иметь в виду, что для асинхронных электродвигателей зависимость момента от тока ротора I2 носит более сложный характер, чем зависимость момента от тока якоря для
электродвигателей постоянного тока. Поэтому скоростная характеристика асинхронного двигателя неидентична механической характеристике. Характеристика п = f(I2) имеет вид, показанный на рис.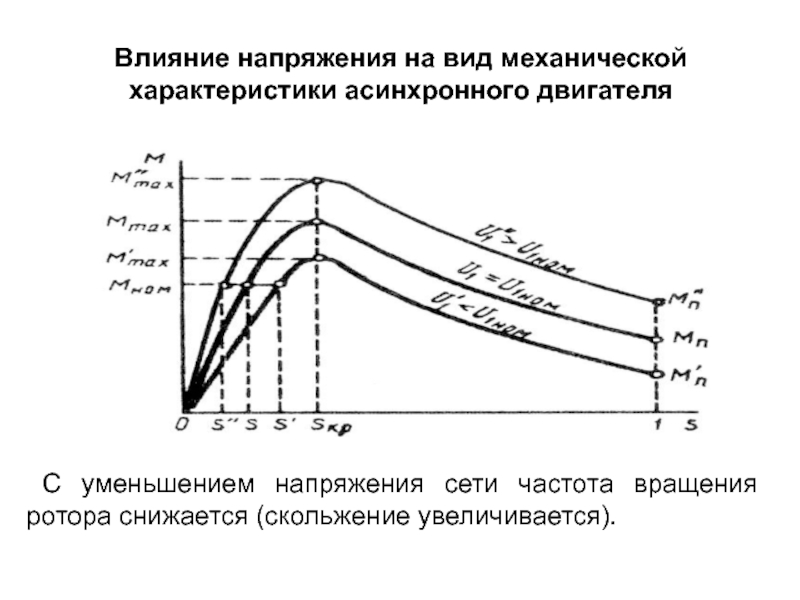 46. Там же дана характеристика n = f (I1).
46. Там же дана характеристика n = f (I1).
Рабочие характеристики асинхронного двигателя | мтомд.инфо
Рабочие характеристики асинхронного двигателя представляют собой графически выраженные зависимости частоты вращения n2, КПД асинхронного двигателя η, полезного момента (момента на валу) М2, коэффициента мощности cos φ, и тока статора I1 от полезной мощности Р2 при U1 = const f1 = const.
Расчет рабочих характеристик асинхронного двигателя
Скоростная характеристика n2 = f(P2). Частота вращения ротора асинхронного двигателя n2 = n1(1 — s).
Скольжение s = Pэ2/Pэм, то есть скольжение асинхронного двигателя, а следовательно, и его частота вращения определяются отношением электрических потерь в роторе к электромагнитной мощности. Пренебрегая электрическими потерями в роторе в режиме холостого хода, можно принять Рэ2 = 0, а поэтому s ≈ 0 и n2 ≈ n1.
По мере увеличения нагрузки на валу асинхронного двигателя отношение s = Pэ2/Pэм растет, достигая значений 0,01 — 0,08 при номинальной нагрузке. В соответствии с этим зависимость n2 = f(P2) представляет собой кривую, слабо наклоненную к оси абсцисс. Однако при увеличении активного сопротивления ротора двигателя r2′ угол наклона этой кривой увеличивается. В этом случае изменения частоты асинхронного двигателя n2 при колебаниях нагрузки Р2 возрастают. Объясняется это тем, что с увеличением r2′ возрастают электрические потери в роторе.
Рабочие характеристики асинхронного двигателя
Зависимость М2 = f(P2). Зависимость полезного момента на валу асинхронного двигателя М2 от полезной мощности Р2 определяется выражением M2 = Р2/ω2 = 60 P2/(2πn2) = 9,55Р2/n2, где Р2 — полезная мощность, Вт; ω2 = 2πf2/60 — угловая частота вращения ротора.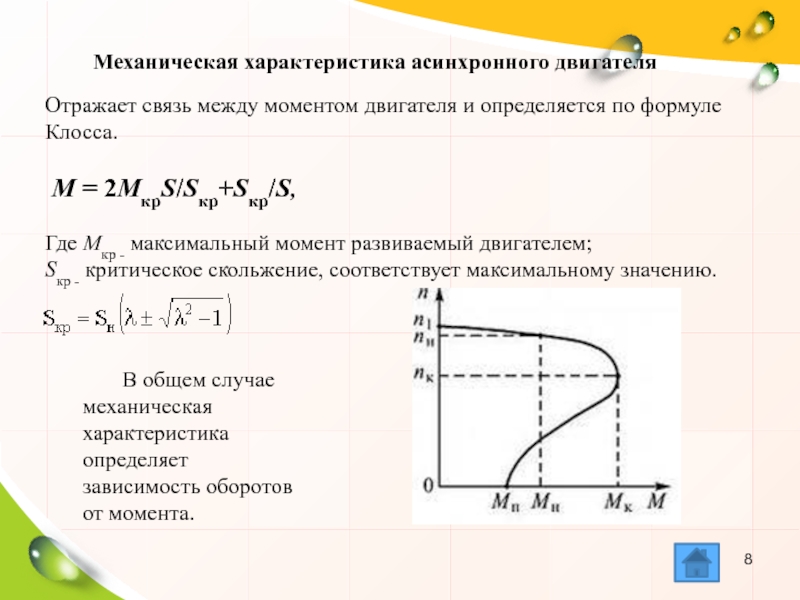
Из этого выражения следует, что если n2 = const, то график М2 = f2(Р2) представляет собой прямую линию. Но в асинхронном двигателе с увеличением нагрузки Р2 частота вращения ротора уменьшается, а поэтому полезный момент на валу М2 с увеличением нагрузки возрастает не сколько быстрее нагрузки, а следовательно, график М2 = f (P2) имеет криволинейный вид.
Зависимость cos φ1 = f (P2). В связи с тем что ток статора асинхронного двигателя I1 имеет реактивную (индуктивную) составляющую, необходимую для создания магнитного поля в статоре, коэффициент мощности асинхронных двигателей меньше единицы. Наименьшее значение коэффициента мощности соответствует режиму холостого хода. Объясняется это тем, что ток холостого хода электродвигателя I0 при любой нагрузке остается практически неизменным. Поэтому при малых нагрузках двигателя ток статора невелик и в значительной части является реактивным (I1 ≈ I0).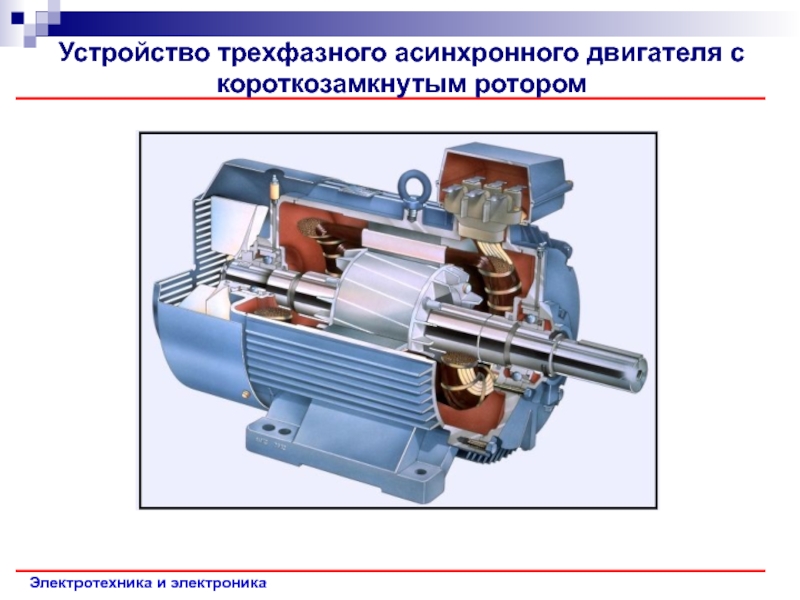 В результате сдвиг по фазе тока статора относительно напряжения получается значительным (φ1 ≈ φ0), лишь немногим меньше 90°.
В результате сдвиг по фазе тока статора относительно напряжения получается значительным (φ1 ≈ φ0), лишь немногим меньше 90°.
Коэффициент мощности асинхронных двигателей в режиме холостого хода обычно не превышает 0,2. При увеличении нагрузки на валу двигателя растет активная составляющая тока I1 и коэффициент мощности возрастает, достигая наибольшего значения (0,80 — 0,90) при нагрузке, близкой к номинальной. Дальнейшее увеличение нагрузки на валу двигателя сопровождается уменьшением cos φ1 что объясняется возрастанием индуктивного сопротивления ротора (x2s) за счет увеличения скольжения, а следовательно, и частоты тока в роторе.
В целях повышения коэффициента мощности асинхронных двигателей чрезвычайно важно, чтобы двигатель работал всегда или по крайней мере значительную часть времени с нагрузкой, близкой к номинальной. Это можно обеспечить лишь при правильном выборе мощности двигателя. Если же двигатель работает значительную часть времени недогруженным, то для повышения cos φ1, целесообразно подводимое к двигателю напряжение U1 уменьшить.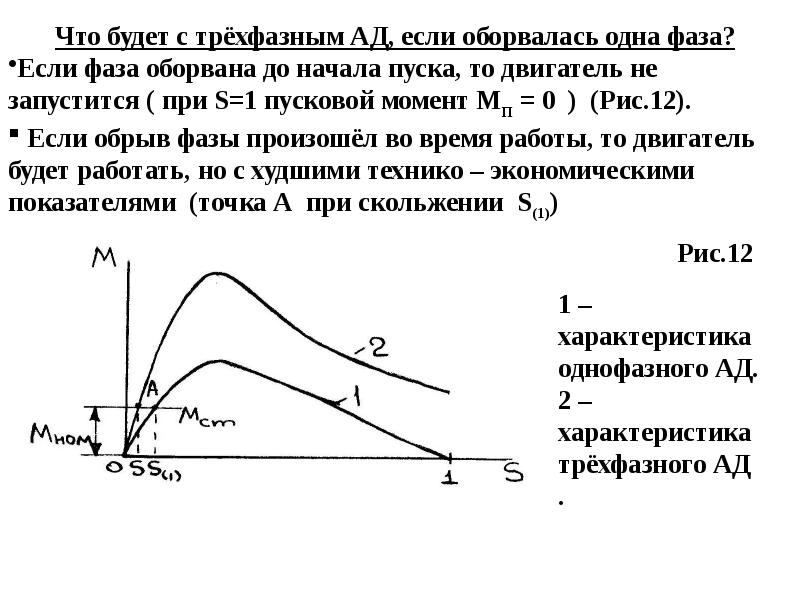 Например, в двигателях, работающих при соединении обмотки статора треугольником, это можно сделать пересоединив обмотки статора в звезду, что вызовет уменьшение фазного напряжения в раз. При этом магнитный поток статора, а следовательно, и намагничивающий ток уменьшаются примерно в раз. Кроме того, активная составляющая тока статора несколько увеличивается. Все это способствует повышению коэффициента мощности двигателя.
Например, в двигателях, работающих при соединении обмотки статора треугольником, это можно сделать пересоединив обмотки статора в звезду, что вызовет уменьшение фазного напряжения в раз. При этом магнитный поток статора, а следовательно, и намагничивающий ток уменьшаются примерно в раз. Кроме того, активная составляющая тока статора несколько увеличивается. Все это способствует повышению коэффициента мощности двигателя.
Механическая характеристика асинхронного двигателя | Онлайн журнал электрика
Механической чертой мотора именуется зависимость частоты вращения ротора от момента на валу n = f (M2). Потому что при нагрузке момент холостого хода мал, то M2 ≈ M и механическая черта представляется зависимостью n = f (M). Если учитывать связь s = (n1 — n) / n1, то механическую характеристику можно получить, представив ее графическую зависимость в координатах n и М (рис. 1).
Рис. 1. Механическая черта асинхронного мотора
Естественная механическая черта асинхронного мотора соответствует основной (паспортной) схеме его включения и номинальным характеристикам питающего напряжения. Искусственные свойства получаются, если включены какие-либо дополнительные элементы: резисторы, реакторы, конденсаторы. При питании мотора не номинальным напряжением свойства также отличаются от естественной механической свойства.
Искусственные свойства получаются, если включены какие-либо дополнительные элементы: резисторы, реакторы, конденсаторы. При питании мотора не номинальным напряжением свойства также отличаются от естественной механической свойства.
Механические свойства являются очень комфортным и полезным инвентарем при анализе статических и динамических режимов электропривода.
Пример расчета механической свойства асинхронного мотора
Трехфазный асинхронный движок с короткозамкнутым ротором питается от сети с напряжением = 380 В при = 50 Гц. Характеристики мотора: Pн= 14 кВт, nн= 960 об/мин, cosφн= 0,85, ηн= 0,88, кратность наибольшего момента kм= 1,8.
Найти: номинальный ток в фазе обмотки статора, число пар полюсов, номинальное скольжение, номинальный момент на валу, критичный момент, критичное скольжение и выстроить механическую характеристику мотора.
Решение. Номинальная мощность, потребляемая из сети
P1н =Pн / ηн = 14 / 0,88 = 16 кВт.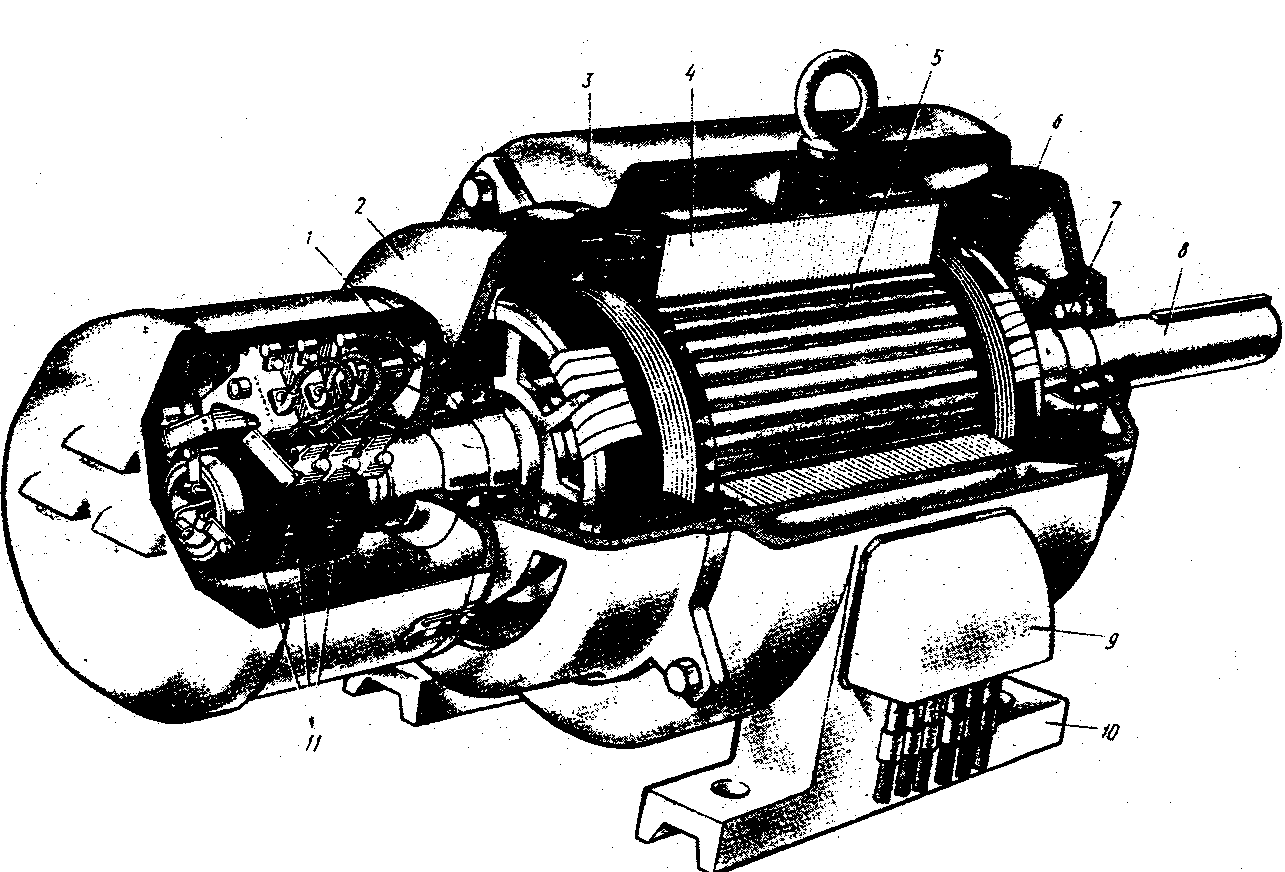
Номинальный ток, потребляемый из сети
Число пар полюсов
p = 60 f / n1 = 60 х 50 / 1000 = 3,
где n1 = 1000 – синхронная частота вращения, наиблежайшая к номинальной частоте nн= 960 об/мин.
Номинальное скольжение
sн = (n1 — nн) / n1 = (1000 — 960 ) / 1000 = 0,04
Номинальный момент на валу мотора
Критичный момент
Мк = kм х Мн = 1,8 х 139,3 = 250,7 Н•м.
Критичное скольжение находим подставив М = Мн, s = sн и Мк / Мн = kм.
Для построения механической свойства мотора при помощи n = (n1 — s) определим соответствующие точки: точка холостого хода s = 0, n = 1000 об/мин, М = 0, точка номинального режима sн = 0,04, nн = 960 об/мин, Мн = 139,3 Н•м и точка критичного режима sк = 0,132, nк = 868 об/мин, Мк =250,7 Н•м.
Для точки пускового режима sп = 1, n = 0 находим
По приобретенным данным строят механическую характеристикумотора.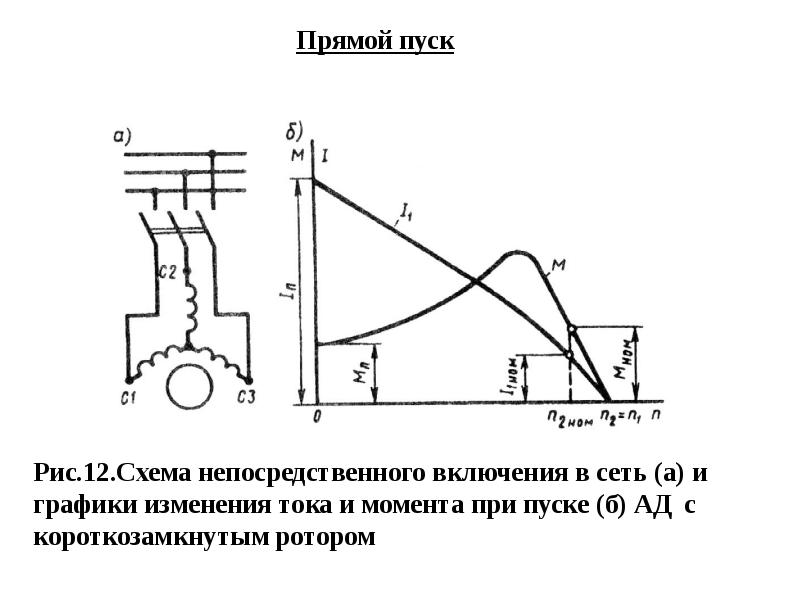 Для более четкого построения механической свойства следует прирастить число расчетных точек и для данных скольжений найти моменты и частоту вращения.
Для более четкого построения механической свойства следует прирастить число расчетных точек и для данных скольжений найти моменты и частоту вращения.
Школа для электрика
Механические характеристики асинхронных электродвигателей (лекция 4)
1. Механические характеристики асинхронных электродвигателей
Курс1.Часть2. Регулированиечастоты вращения
электроприводов постоянного и
переменного тока
Механические характеристики
асинхронных
электродвигателей
1.
2.
3.
1
Модель асинхронного электродвигателя.
Естественная механическая характеристика
асинхронного электродвигателя.
Управление пуском асинхронных
электродвигателей. Расчет пусковых реостатов
2. Модель асинхронного электродвигателя.
Достоинства асинхронного электродвигателя:простота конструкции;
низкая металлоемкость;
допускает прямой пуск от сети;
повышенная надежность;
простота в ремонте и эксплуатации.

2
3. Модель асинхронного электродвигателя.
Асинхронного электродвигателиизготавливают двух типов с фазным
и короткозамкнутым ротором.
0
3
4. Модель асинхронного электродвигателя.
Электродвигатели с короткозамкнутым роторомимеют обмотку ротора в виде «беличьей клетки». Она
постоянна замкнута в лобовых частях ротора при
помощи короткозамкнутых колец. К ним подсоединены
стержни проводники, которые размещены в пазах
сердечника ротора.
4
5. Модель асинхронного электродвигателя.
а)б)
в)
5
г)
6. Модель асинхронного электродвигателя.
Пусть на статоре расположена катушка А-Х покоторой протекает переменный ток
iА = Im sin t; = 2 f1.
МДС FА, созданная этим током, будет пульсировать по
оси обмотки
FА = Fm sin t.
6
7. Модель асинхронного электродвигателя.
Если добавить катушку В-Y, расположенную под углом900 и пропускать по ней ток
iВ = Im cos t, то
МДС FВ будет пульсировать по оси этой обмотки
FВ = Fm cos t.

7
8. Модель асинхронного электродвигателя.
Вектор результирующей МДС имеет модульF
2
FA
2
FB
Fm const .
Его фаза определится из условия
FA
tg
tg t
FB
Таким образом, вектор результирующей МДС
вращается с угловой скоростью
8
2 f 1 .
9. Модель асинхронного электродвигателя.
Частота вращения магнитного поля n1 как иугловая скорость ω1 находится в строгой зависимости от
частоты подводимого напряжения сети f1 и числа пар
полюсов р двигателя:
60 f 1
п1
,
p
9
2 f 1
1
.
p
10. Модель асинхронного электродвигателя.
Наведение в обмотке ротора ЭДС и появлениевращающего или тормозящего момента асинхронного
Двигателя возможно только при наличии разности
Между угловыми скоростями вращения магнитного
поля статора и ротора. Это различие оценивают в
относительных единицах и называют скольжением
10
1 2
S
.
1
11. Естественная механическая характеристика асинхронного электродвигателя
I1Uф
Х1
Х0
R1
I 2
Х 2
R2
S
R0
Упрощенная схема замещения асинхронного электродвигателя
11
12. Естественная механическая характеристика асинхронного электродвигателя
2Uф
R2 2
( R1
) ( X 1 X 2 )2
S
Вращающий момент асинхронного двигателя может
быть определен из выражения потерь :
1 S 3( 2
12
3( 2 ) 2 R2
) R2
.
1 S
3U ф 2 R2
2
R2 2
2
1 ( R1
) ( X 1 X 2 ) S
S
13. Естественная механическая характеристика асинхронного электродвигателя
213
1
1
2
14. Естественная механическая характеристика асинхронного электродвигателя
R2/ R12 S 2 ( X 1 X 2/ )2 S 2dM 3 U ф R2
0,
2
/
2
/
2
2
dS
1
( R1 S R2 ) ( X 1 X 2 ) S
2
/
R2/ R12 S 2 ( X 1 X 2/ )2 S 2 0 R2/ R12 S 2 ( X 1 X 2/ )2 S 2
sк
Mк
14
R2
R12 ( X 1 X 2 )2
3U 2
2 0 R1 R12 ( X 1 X 2 )2
15.
 Естественная механическая характеристика асинхронного электродвигателя Разделив уравнение механической характеристики на
Естественная механическая характеристика асинхронного электродвигателя Разделив уравнение механической характеристики навыражение для максимального момента получим
2М к ( 1 Sк )
R1
М
, /.
S Sк
R2
2 S к
Sк
S
Приняв
2 S к q ,
окончательно получаем
15
М дв
М кр ( 2 q )
S кр
S
q
S кр
S
.
16. Естественная механическая характеристика асинхронного электродвигателя
1617. Естественная механическая характеристика асинхронного электродвигателя
Характерными точками механической характеристикиявляются:
• пусковая точка – М=Мп; ω=0;
• точка провала на пусковой ветви, угловая скорость,
• в которой соответствует скольжению S=0,8; М=Ммин;
• критическая точка с координатами ωк, Мк;
• номинальная точка – ωн, Мн;
• точка холостого хода – ω=ω1; М=0.
17
18. Управление пуском асинхронных электродвигателей. Расчет пусковых реостатов
Кратность начального пускового момента двигателясоставляет
Мп
kм
1.
 ..1,8
..1,8Мн
а кратность начального пускового тока
Iп
k I 5…7
Iн
Отсутствие пропорциональности между моментом
двигателя и током статора во время пуска объясняется
значительным снижением магнитного потока.
18
19. Управление пуском асинхронных электродвигателей. Расчет пусковых реостатов
Для повышения начального пускового момента иснижения пускового тока применяются
короткозамкнутые двигатели специальных конструкций,
у которых ротор имеет две клетки, расположенные
концентрически, или глубокие пазы с высокими и
узкими стержнями.
19
20. Управление пуском асинхронных электродвигателей. Расчет пусковых реостатов
У двигателей с контактными кольцами начальныйпусковой момент увеличивается по мере возрастания
до известных пределов сопротивления реостата.
величина начального пускового момента может быть
доведена до величины критического момента.
пусковой ток при увеличении сопротивления
уменьшается.

20
21. Управление пуском асинхронных электродвигателей. Расчет пусковых реостатов
MнК расчету пускового реостата асинхронного двигателя
21
22. Управление пуском асинхронных электродвигателей. Расчет пусковых реостатов
Методика расчета:•на характеристике Мдв=f( ), наносятся границы пуска;
•через точки d и d1 естественной механической
характеристики, соответствующие значениям моментов
Мпуск макс и Мпуск мин, проводится прямая до пересечения
с линией синхронной скорости (S=0) в точке t;
•из полученной точки проводится пусковая
характеристика до точки с координатами Мпуск макс, ω=0;
22
23. Управление пуском асинхронных электродвигателей. Расчет пусковых реостатов
•в точке с координатами Мпуск мин, ω=ω3 происходитотключение первой ступени реостата;
•в точке с координатами Мпуск мин, ω=ω2 происходит
отключение второй ступени реостата;
•отрезок [ed] пропорционален величине активного
сопротивления одной фазы ротора.
 Соответственно
Соответственноотрезок [dc] в относительных единицах пропорционален
сопротивлению первой ступени пускового реостата,
отрезок [bс] – второй ступени.
23
24. Управление пуском асинхронных электродвигателей. Расчет пусковых реостатов
Измерив длины этих отрезков, определяют величинысопротивления каждой ступени пускового реостата:
R1
где
24
dc R
ed рот
R рот
U 2 н Sн
3I 2 н
.
R2
или
cb R
ed рот
R рот
Рн S н
3 2н н
2
.
25. Управление пуском асинхронных электродвигателей. Расчет пусковых реостатов
При реостатном пуске асинхронного электродвигателяс контактными кольцами поочередное закорачивание
ступеней пускового сопротивления может
производиться автоматически при помощи контакторов,
управление включением которых может осуществляться
в функции времени, частоты вращения, тока или
частоты тока ротора.
25
26. Управление пуском асинхронного электродвигателя.
 Расчет пусковых реостатов Для обеспечения заданной диаграммы пуска необходима
Расчет пусковых реостатов Для обеспечения заданной диаграммы пуска необходимафиксация моментов подачи команд на включение
контакторов. Это может осуществляться следующими
способами:
•путем отсчета промежутков времени Δt1, Δt2, Δt3,
для чего используются реле времени;
• посредством контроля значения скорости двигателя
или ЭДС ротора, что может быть сделано при помощи
датчиков скорости или ЭДС;
•применением датчиков тока;
•посредством контроля частоты тока ротора .
26
27. Управление пуском асинхронного электродвигателя. Расчет пусковых реостатов
SB1KM1
KM1
SB2
KM1
KT1
M2
KM4
M1
KM4
KM4
KT1:1
KT1:2
KM2
KM3
R31…R33
KM3
R21…R23
27
KM2
R11…R13
KT1:3
KM4
Схема электрическая принципиальная управления
пуском асинхронного двигателя в функции времени
28. Управление пуском асинхронного электродвигателя.
 Расчет пусковых реостатов Время пребывания на каждой ступени пускового
Расчет пусковых реостатов Время пребывания на каждой ступени пусковогореостата определяется по следующему соотношению:
ti
о S нi
Мн
ln
М дин 1i
М дин 2i
,
Мдин 1i=Мпуск макс–Мсi; M дин 2i=Мпуск мин–Мсi.
28
Двигатель с короткозамкнутым ротором: простое, но полезное руководство
Как вы, возможно, знаете, электродвигатели — это устройства, преобразующие электрическую энергию в механическую, и в настоящее время они доминируют в современной промышленности. Они просты в использовании, имеют простой дизайн и бывают разных форм, что позволяет им добиться успеха практически в любой ситуации. Электродвигатели могут питаться от постоянного или переменного тока. В этой статье Linquip исследует конкретный двигатель переменного тока, известный как двигатель с короткозамкнутым ротором, который представляет собой особый тип асинхронного двигателя, который использует эффект электромагнитной индукции для преобразования электрического тока в энергию вращения.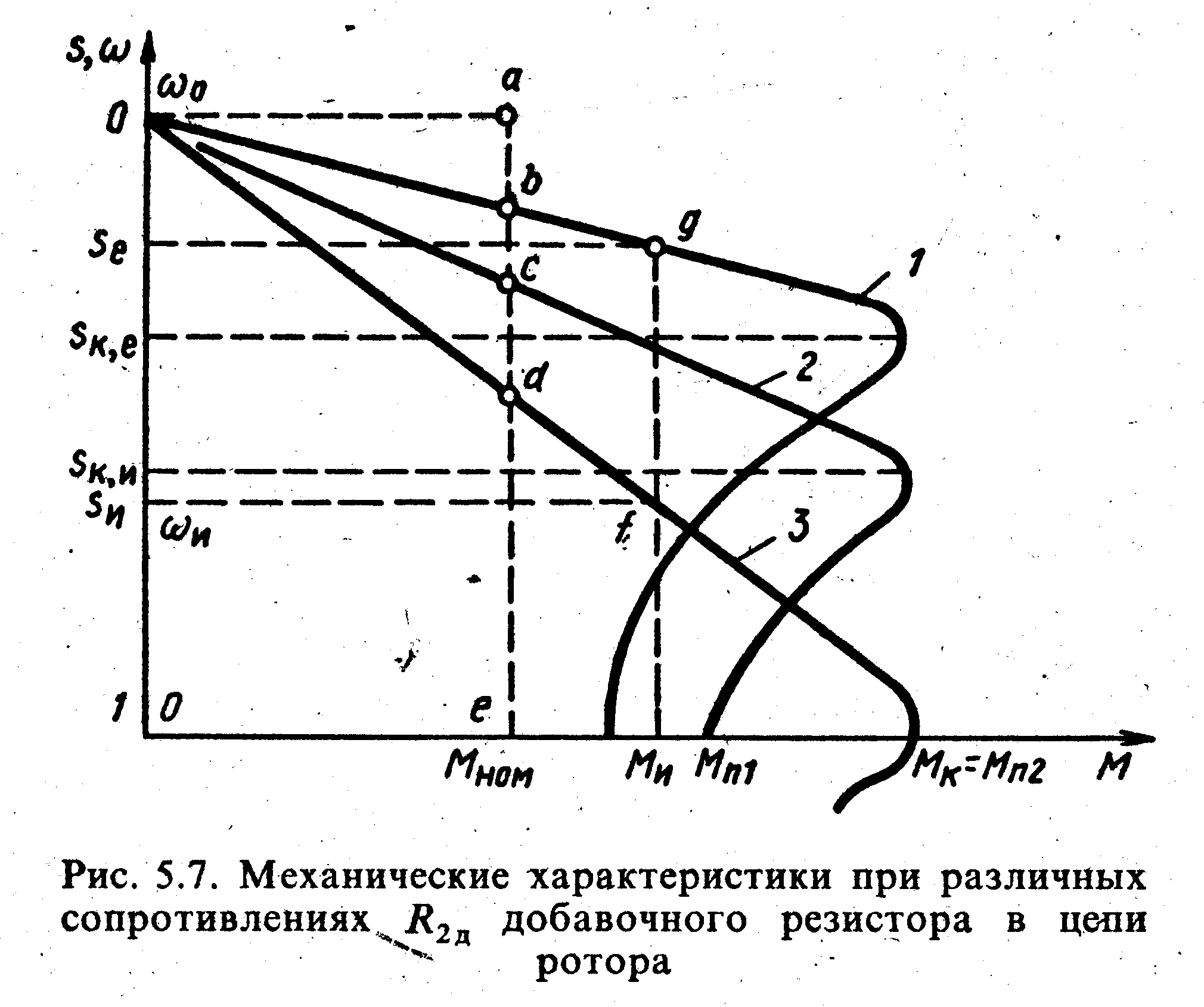 Прочтите, чтобы понять принципы работы двигателей с короткозамкнутым ротором, как они работают и для каких применений они используются.
Прочтите, чтобы понять принципы работы двигателей с короткозамкнутым ротором, как они работают и для каких применений они используются.
Что такое двигатель с короткозамкнутым ротором?
Эти двигатели представляют собой тип асинхронных двигателей, которые используют электромагнетизм для создания движения. Это так называемые двигатели с короткозамкнутым ротором, потому что форма их ротора напоминает клетку. Две круглые торцевые крышки соединены стержнями ротора, на которые действует электромагнитное поле, создаваемое статором или внешним корпусом, состоящим из многослойных металлических листов и намотки проволоки.
Статор и ротор являются двумя основными частями любого асинхронного двигателя, а беличья клетка — это просто один из методов усиления эффекта электромагнитной индукции. Переменный ток, проходящий через статор, создает электромагнитное поле, которое колеблется с частотой переменного тока, которая вращается вокруг ротора, вызывая противоположные магнитные поля в стержнях ротора, что приводит к движению.
Как работает двигатель с короткозамкнутым ротором?
Двигатели с короткозамкнутым ротором работают так же, как и большинство других асинхронных двигателей, и единственная разница между ними заключается в особом взаимодействии между ротором и статором.Эти двигатели максимизируют электромагнитную индукцию за счет использования стержней ротора для взаимодействия с электромагнитным полем статора. Статор обычно содержит обмотки из проволоки, по которым проходит переменный ток; этот ток изменяется синхронно с синусоидальным переменным, который затем изменяет направление тока в обмотках провода.
Когда ток колеблется, генерируемое электромагнитное поле будет следовать его примеру и в некоторых случаях заставит его вращаться с частотой, подобной частоте переменного тока.Это вращающееся электромагнитное поле создает противоположное напряжение и электромагнитное поле в стержнях ротора, тем самым толкая ротор, создавая вращательное движение.
Этот ротор не вращается с точной частотой переменного тока, поэтому двигатели с короткозамкнутым ротором, а также другие асинхронные двигатели считаются асинхронными. Всегда есть некоторая потеря между частотой переменного тока и частотой вращения вала, и это в первую очередь результат вращения ротора. Если бы ротор вращался с той же частотой, то величина силы, действующей на стержни ротора, была бы равна нулю, таким образом, не создавая движения.
Всегда есть некоторая потеря между частотой переменного тока и частотой вращения вала, и это в первую очередь результат вращения ротора. Если бы ротор вращался с той же частотой, то величина силы, действующей на стержни ротора, была бы равна нулю, таким образом, не создавая движения.
Конструкция асинхронного двигателя с короткозамкнутым ротором
Детали, необходимые для конструкции двигателя с короткозамкнутым ротором, включают статор, ротор, вентилятор, подшипники. Статор состоит из механически и электрически разнесенной на 120 градусов трехфазной обмотки с металлическим корпусом и сердечником. Чтобы обеспечить путь с низким сопротивлением для потока, генерируемого переменным током, обмотка установлена на многослойном железном сердечнике.
Ротор преобразует электрическую энергию в механическую мощность. Вал, сердечник, короткозамкнутые медные шины являются частями ротора.Чтобы избежать гистерезиса и возникновения вихревых токов, приводящих к потере мощности, ротор имеет многослойное покрытие. И для предотвращения зазубрин проводники перекошены, что также помогает обеспечить хороший коэффициент трансформации. Вентилятор, прикрепленный к задней части ротора для теплообмена, помогает поддерживать заданную температуру двигателя. Для плавного вращения в двигателе предусмотрены подшипники.
И для предотвращения зазубрин проводники перекошены, что также помогает обеспечить хороший коэффициент трансформации. Вентилятор, прикрепленный к задней части ротора для теплообмена, помогает поддерживать заданную температуру двигателя. Для плавного вращения в двигателе предусмотрены подшипники.
Классификация асинхронных двигателей с короткозамкнутым ротором
Национальная ассоциация производителей электрооборудования в США и МЭК в Европе классифицировали конструкцию асинхронных двигателей с короткозамкнутым ротором на несколько классов в зависимости от их скоростных характеристик.К этим классам относятся: класс A, класс B, класс C, класс D, класс E и класс F.
Конструкция класса A
- Нормальный пусковой момент.
- Нормальный пусковой ток.
- Низкое скольжение.
- В этом классе крутящий момент отрыва всегда составляет от 200 до 300 процентов крутящего момента при полной нагрузке и происходит при небольшом скольжении (менее 20 процентов).

- Для этого класса пусковой крутящий момент равен номинальному крутящему моменту для более крупных двигателей и составляет около 200 или более процентов от номинального крутящего момента для меньших двигателей.
Конструкция класса B
- Нормальный пусковой момент
- Меньший пусковой ток
- Низкое скольжение
- Асинхронный двигатель этого класса производит примерно такой же пусковой момент, что и асинхронный двигатель класса А.
- Момент отрыва всегда больше или равен 200% номинального момента нагрузки. Но он меньше, чем у конструкции класса А, потому что имеет повышенное реактивное сопротивление ротора.
Класс C
- Высокий пусковой крутящий момент.
- Низкие пусковые токи.
- Низкое скольжение при полной нагрузке (менее 5%).
- Пусковой крутящий момент до 250% от крутящего момента при полной нагрузке соответствует этому классу конструкции.
- Момент отрыва ниже, чем у асинхронных двигателей класса А.
Конструкция класса D
- Двигатели этой конструкции класса имеют очень высокий пусковой крутящий момент (275 процентов или более от номинального крутящего момента).
- Низкий пусковой ток.
- Высокое скольжение при полной нагрузке.
- И снова в этом классе конструкции высокое сопротивление ротора смещает пиковый крутящий момент на очень низкую скорость.
- Даже при нулевой скорости (100-процентное скольжение) самый высокий крутящий момент может возникнуть в этом классе конструкции.
Конструкция класса E
- Очень низкий пусковой крутящий момент.
- Нормальный пусковой ток.
- Низкое скольжение.
- Для управления пусковым током используется компенсатор или резистивный пускатель.
Класс F
- Низкий пусковой крутящий момент, 1.25-кратный крутящий момент при полной нагрузке при подаче полного напряжения.
- Низкий пусковой ток
- Нормальное скольжение
Применение двигателя с короткозамкнутым ротором
Асинхронные двигатели с короткозамкнутым ротором обычно используются во многих промышленных приложениях. Они особенно подходят для приложений, в которых двигатель должен поддерживать постоянную скорость, самозапускаться или требовать минимального обслуживания.
Они особенно подходят для приложений, в которых двигатель должен поддерживать постоянную скорость, самозапускаться или требовать минимального обслуживания.
Эти двигатели обычно используются в:
- Центробежных насосах
- Промышленных приводах (например,грамм. для запуска конвейерных лент)
- Большие воздуходувки и вентиляторы
- Станки
- Токарные станки и другое токарное оборудование
- Центробежные насосы, вентиляторы, нагнетатели и т. д.
- Приводные воздушные компрессоры, конвейеры, поршневые насосы, дробилки, смесители , большие холодильные машины и т. д.
- Пробивные прессы, ножницы, бульдозеры, малые подъемники и т. д.
Преимущества двигателя с короткозамкнутым ротором
Некоторые преимущества асинхронных двигателей с короткозамкнутым ротором:
- Простая и прочная конструкция
- Низкая начальные, а также затраты на техническое обслуживание
- Поддержание постоянной скорости
- Высокая перегрузочная способность
- Простое пусковое устройство
- Высокий коэффициент мощности
- Низкие потери в меди в роторе
- Высокая эффективность преобразования электрической энергии в механическую (во время работы, не во время запуска)
- Маленький и легкий
- Есть лучшее регулирование нагрева
- Взрывозащищенный
Двигатель с короткозамкнутым ротором Недостатки
Недостатки асинхронного двигателя с короткозамкнутым ротором следующие.
- Очень плохое регулирование скорости
- Хотя они энергоэффективны при работе с полным током нагрузки, они потребляют много энергии при запуске.
- Они более чувствительны к колебаниям напряжения питания. Когда напряжение питания снижается, асинхронный двигатель потребляет больше тока. Во время скачков напряжения увеличение напряжения насыщает магнитные компоненты асинхронного двигателя с короткозамкнутым ротором
- У них высокий пусковой ток и плохой пусковой момент
Итак, это все, что вам нужно знать о двигателях с короткозамкнутым ротором и их применении в системе.Если вам понравилась статья в Linquip, не стесняйтесь делиться своим опытом в разделе комментариев. Есть вопросы, с которыми мы можем вам помочь? Зарегистрируйтесь на нашем сайте и получите профессиональные консультации наших специалистов.
Стандартные типы двигателей с короткозамкнутым ротором
Двигатели с короткозамкнутым ротором стандартизированы на различные типы в соответствии с их электрическими характеристиками. Эти стандартные типы называются классами A, B, C, D, E и F соответственно. Двигатели класса A называются «нормальным пусковым моментом, нормальным пусковым током, нормальным скольжением» и используются в качестве эталонных двигателей.Стандартные типы двигателей с короткозамкнутым ротором описаны ниже:
(i) Класс A — (Нормальный пусковой момент, нормальный пусковой ток, нормальное скольжение)
Класс A — самый популярный тип асинхронных двигателей с короткозамкнутым ротором . В двигателях этого типа используется короткозамкнутый ротор с относительно низким сопротивлением и реактивным сопротивлением. Его ток заблокированного ротора (при полном напряжении) обычно более чем в 6 раз превышает номинальный ток полной нагрузки. Для меньшего размера и меньшего количества полюсов пусковой момент при напряжении полной нагрузки почти вдвое превышает крутящий момент при полной нагрузке.Для большего размера и большего количества полюсов пусковой момент лишь немного больше, чем момент при полной нагрузке. Скольжение при полной нагрузке составляет менее 5%. Стержни ротора расположены близко к поверхности ротора, чтобы уменьшить реактивное сопротивление ротора. Двигатели
класса A используются в вентиляторах, компрессорах, насосах, конвейерах и т. Д., Которые имеют низкую инерционную нагрузку, поэтому двигатель может разгоняться за меньшее время.
(ii) Класс B — (Нормальный пусковой момент, низкий пусковой ток, нормальное скольжение)
Двигатели класса B могут запускаться при полной нагрузке, развивая нормальный пусковой момент при относительно низком пусковом токе.Их ток заблокированного ротора при полном напряжении обычно в 5 раз превышает ток полной нагрузки. Штанги ротора узкие и расположены глубже, чтобы обеспечить высокое реактивное сопротивление при запуске.
Эти двигатели используются там, где нагрузка имеет высокую инерцию, например, большие вентиляторы, станки, для привода электрических генераторов, центробежных насосов и т. Д.
(iii) Класс C — (высокий пусковой момент, низкий пусковой ток, нормальное скольжение)
Двигатели класса C, как правило, относятся к типу с двойным короткозамкнутым ротором. Их ток заблокированного ротора и скольжение при полном напряжении почти такие же, как у двигателей класса B.Их пусковой крутящий момент с полным приложенным напряжением обычно примерно в три раза превышает крутящий момент полной нагрузки.
Эти двигатели используются там, где требуется достаточно высокий пусковой момент при пониженном пусковом напряжении. Они используются для дробилок, компрессионных насосов, больших холодильников, текстильного оборудования, деревообрабатывающего оборудования и т. Д.
(iv) Класс D — (высокий пусковой момент, низкий пусковой ток, высокое скольжение)
В двигателях класса D стержни ротора с высоким сопротивлением используются для обеспечения высокого пускового момента при низком пусковом токе.Их ток заблокированного ротора при полном приложенном напряжении аналогичен току двигателей класса B или класса C. Скольжение при полной нагрузке может варьироваться от 5% до 20% в зависимости от области применения. Используются тонкие стержни ротора, которые уменьшают поток утечки и увеличивают полезный поток, тем самым обеспечивая высокий пусковой момент при низком пусковом токе.
Эти двигатели используются там, где требуется чрезвычайно высокий пусковой момент. Например. бульдозеры, ножницы, литейное оборудование, пробивные прессы, штамповочные машины, оборудование для волочения металла, прачечное оборудование и т. д.
(v) Класс E — (низкий пусковой момент, нормальный пусковой ток, низкое скольжение) двигатели
класса E имеют относительно низкое скольжение при номинальной нагрузке. Для двигателей мощностью более 5 кВт пусковой ток может быть высоким, поэтому для них требуется компенсатор или резистивный пускатель.
(vi) Класс F — (низкий пусковой момент, низкий пусковой ток, нормальное скольжение)
Поскольку эти двигатели имеют низкий пусковой момент при низком пусковом токе, они могут запускаться при полном напряжении. Ротор сконструирован таким образом, что он дает высокое реактивное сопротивление при запуске.Ток блокировки ротора и проскальзывание при полной нагрузке при полном приложенном напряжении аналогичны таковым у двигателей класса B или класса C. Пусковой крутящий момент при полном поданном напряжении почти в 1,25 раза превышает крутящий момент при полной нагрузке.
2-3-3. Характеристики асинхронных двигателей
Как описано в главе 1, синхронная скорость вращения двигателя с магнитным полем определяется по следующей формуле:
N S : Синхронная скорость вращения (оборотов в минуту) [об / мин] N 0 : Синхронная скорость вращения (оборотов в секунду) [об / сек]
f: Частота источника питания [Гц] p: Число полюсов двигателя
Клинья
Когда мы думаем об асинхронных двигателях, это важный момент.То есть катушка должна пересекать магнитное поле, чтобы через катушку протекал ток.
Для этого должна быть относительная разница скоростей между магнитным полем и катушкой.
Из-за этой разницы скоростей двигатель вращается со скоростью, немного меньшей, чем синхронная скорость.
Это отличие скорости от синхронной скорости называется скольжением и обозначается символом s. Скольжение s выражается следующей формулой:
N: Скорость вращения ротора [об / мин] N S : Синхронная скорость вращения [об / мин]
Скольжение обычно выражается в процентах.Скольжение силового асинхронного двигателя составляет от 2 до 3%, когда двигатель работает при номинальной нагрузке. Вышеуказанное значение становится несколько больше для небольших однофазных двигателей.
Скорость и крутящий момент
На рис. 2.40 показаны характеристики асинхронных двигателей. Когда двигатель сконструирован таким образом, что сопротивление алюминиевого проводника ротора уменьшается, его эффективность увеличивается в диапазоне высоких скоростей. И с другой стороны, когда двигатель спроектирован так, чтобы иметь высокое сопротивление, он имеет повышенный крутящий момент в диапазоне низких скоростей.
В области справа от максимального крутящего момента на характеристической кривой увеличение нагрузки не так сильно снижает скорость низкоомных двигателей. Крутящий момент увеличивается и становится стабильным.
А именно, скорость этих двигателей остается практически неизменной, несмотря на изменения нагрузки.
На рис. 2.41 показаны характеристики этих двигателей с учетом крутящего момента по горизонтальной оси и скорости вращения по вертикальной оси с добавлением тока и эффективности.
Сравнивая этот график с приведенными выше характеристиками двигателей постоянного тока, вы обнаружите следующие характеристики асинхронных двигателей.
- ● Изменения нагрузки не сильно влияют на их скорость, хотя их крутящий момент изменяется.
- ● Связь между крутящим моментом и током не линейна.
Пусковой крутящий момент может быть улучшен за счет увеличения сопротивления ротора, но в случае асинхронного двигателя с короткозамкнутым ротором внешнее сопротивление не может быть добавлено в цепь ротора во время пуска, поскольку его ротор постоянно закорочен.
Если цепь ротора сделана с высоким сопротивлением для получения высокого пускового момента, тогда двигатель будет иметь низкий КПД при нормальных условиях работы из-за больших потерь в меди в роторе.
Однако пусковой момент этого двигателя может быть улучшен за счет использования другой клетки на роторе, и двигатель называется асинхронным двигателем с двойной короткозамкнутой клеткой .
Конструкция асинхронного двигателя с двойным короткозамкнутым ротором
Асинхронный двигатель с двойным короткозамкнутым ротором состоит из ротора, который имеет две независимые обоймы, расположенные одна над другой в одном слоте. Ротор с двойной беличьей клеткой показан на рисунке.
Проводники верхнего паза от внешней клетки и проводники нижнего паза образуют внутреннюю клетку. Наружный сепаратор состоит из стержней с высоким сопротивлением, обычно используются стержни из латунного сплава с меньшей площадью поперечного сечения.
Внутренняя клетка состоит из стержней с низким сопротивлением, обычно используются стержни из металлической меди с большей площадью поперечного сечения. Поскольку внутренняя клетка глубоко внедрена в чугун, она имеет относительно больший поток утечки и высокое реактивное сопротивление.
Таким образом, внешняя клетка имеет высокое сопротивление и низкое реактивное сопротивление, тогда как внутренняя клетка имеет низкое сопротивление и высокое реактивное сопротивление.
Между верхним и нижним пазами имеется щель, обеспечивающая высокое сопротивление для поля статора.Таким образом, поле статора вместо соединения только с внешней клеткой связывает обе клетки одновременно.
Работа асинхронного двигателя с короткозамкнутым ротором как под:
- Так как максимальный крутящий момент, создаваемый каждой клеткой, не зависит от их сопротивления, но обратно пропорционален их реактивным сопротивлениям в состоянии покоя. Следовательно, значение максимального крутящего момента, создаваемого внутренней клеткой, больше, чем внешней клеткой.
- Вначале частота тока ротора равна частоте питающей сети; следовательно, реактивные сопротивления (2πfL) двух клеток высоки по сравнению с их сопротивлениями.
Разделение тока ротора между обоймами определяется их относительным импедансом (реактивным сопротивлением).
Следовательно, вначале сравнительно небольшой ток протекает через стержни внутренней клетки, в то время как большой ток протекает через внешнюю клетку, несмотря на ее высокое сопротивление.
Таким образом, в начале крутящий момент в основном создается внешней обоймой. - По мере того, как двигатель набирает скорость, частота тока ротора уменьшается и становится очень низкой при номинальной скорости.В этом состоянии реактивное сопротивление двух клеток очень низкое по сравнению с их сопротивлениями.
Следовательно, разделение тока ротора между клетками определяется их относительным сопротивлением, и большая часть тока проходит через внешнюю клетку.
Таким образом, в нормальных условиях работы крутящий момент в основном создается внутренней клеткой.
Трехфазный асинхронный двигатель | Все сообщения
© http: // www.yourelectricalguide.com/ работает асинхронный двигатель с двойным короткозамкнутым ротором.
ECE 494 — Лаборатория 5: Испытания под нагрузкой трехфазного асинхронного двигателя и измерение пускового тока
Цели
- Для измерения пускового тока при запуске двигателя.
- Для получения нагрузочных характеристик трехфазного асинхронного двигателя с короткозамкнутым ротором.
Оборудование
- Два цифровых мультиметра и измеритель качества электроэнергии Fluke с банановыми кабелями со склада
- Один тахометр со склада.
- Измеритель мощности One Black Box
- Нагрузочная стойка с одним резистором. (Регулируемая тележка HMRL)
- Один трехфазный вариак.
- Один настольный многодиапазонный источник питания постоянного тока (PSW 250-4,5)
Фон
Трехфазный асинхронный двигатель имеет трехфазную обмотку на статоре. Ротор либо намотанный, либо из меди. стержни закорочены на каждом конце, в этом случае это называется короткозамкнутым ротором.Трехфазный ток, потребляемый статором от трехфазный источник питания создает магнитное поле, вращающееся с синхронной скоростью в воздушном зазоре. Магнитный поле сокращает проводники ротора создают электродвижущие силы, которые вызывают в них токи. Согласно закону Ленца, ЭМП должны противодействовать причина, которая их производит; это означает, что ротор должен вращаться в направлении магнитного поле, созданное статор. Если бы ротор мог достигать синхронной скорости, в нем не было бы наведенной ЭДС.Но за счет потерь скорость всегда меньше синхронной скорости.
В этом эксперименте асинхронный двигатель приводит в действие генератор постоянного тока. Поле генератора постоянного тока возбуждается отдельно. Загрузка Генератор с помощью резисторной стойки нагрузки, в свою очередь, нагружает двигатель. Когда двигатель приводит в движение нагрузку, он должен создавать больший крутящий момент. Поскольку крутящий момент пропорционален произведению магнитного потока и тока, с увеличением нагрузки относительная скорость (скольжение) между ротором и вращающееся магнитное поле также должно увеличиваться.
Трехфазный асинхронный двигатель работает как трансформатор, вторичная обмотка которого может вращаться. Основное отличие состоит в том, что нагрузка механическая. Кроме того, сопротивление магнитному полю больше из-за наличия воздушного зазора, через который мощность статора передается на ротор. Ток холостого хода двигателя иногда достигает 30-40% от полной нагрузки. ценить. Производительность асинхронного двигателя может быть определена косвенно, нагружая генератор постоянного тока, подключенный к его валу, как есть. сделано в этом эксперименте.
Соответствующие уравнения
- Данные без нагрузки: I a0 = Линейный ток в амперах
- Данные нагрузочного испытания:
- Прочие данные: R a = Измеренное сопротивление статора по фазе
- Потери в сердечнике (включая потери на трение и ветер) согласно
- Выходная механическая мощность
- Поскольку одна лошадиная сила равна 746 Вт, мы используем преобразование
- Крутящий момент
- Коэффициент мощности при любой нагрузке рассчитывается с использованием
- Эффективность определяется по
(5,1)
В t = Напряжение на клеммах в вольтах.
(5,2)
P 0 = Входная мощность (сумма обоих показаний ваттметра).
(5,3)
N 0 = Скорость двигателя в об / мин.
(5,4)
I a = Линейный ток в амперах.
(5,5)
В t = Напряжение на клеммах в вольтах.
(5,6)
P = входная мощность (сумма обоих показаний ваттметра).
(5,7)
N = скорость двигателя в об / мин.
(5,8)
(5,9)
(5.10)
(5,11)
Где(5,12)
(5,13)
N с = 120 f / p синхронная скорость
(5,14)
f = частота = (60 Гц)
(5,15)
p = Количество полюсов = 4
(5,16)
(5.17)
P м (л.с.) = P м (Вт) / 746
(5,18)
(5,19)
(5.20)
Предварительная лаборатория
Асинхронным двигателямприсвоены коды NEMA, которые указывают возможный диапазон их пускового тока.
| Буквы кода NEMA KVA | ||||
| Код кВА / HP Код кВА / HP | ||||
| А | 0–3,14 | л | 9,0–9,99 | |
| B | 3,15–3,54 | M | 10,0-11,19 | |
| С | 3,55–3,99 | N | 11.2-12,49 | |
| D | 4,0–4,49 | -п. | 12,5-13,99 | |
| E | 4,5–4,99 | R | 14,0-15,99 | |
| Ф | 5,0-5,59 | S | 16,0-17,99 | |
| G | 5,6-6,29 | Т | 18.0-19,99 | |
| H | 6,3-7,09 | U | 20,0–22,39 | |
| Дж | 7,1–7,99 | В | 22.4 и выше | |
| К | 8,0–8,99 | |||
В таблице дано отношение пусковой кВА (сумма всех трех фаз) к номинальной мощности в л.с.
- Учитывая, что наши двигатели имеют номинальную мощность 3 л.с. и соответствуют коду J NEMA, рассчитайте пиковый пусковой ток на однофазный с линейным напряжением 208 В (фазное напряжение 120).
- Определите, как подключить счетчики к схеме рисунка 5.1 для измерения:
- Полная мощность (Вт) асинхронного двигателя. Показать соединения с аналоговыми ваттметрами мощности и измерителями качества электроэнергии (Fluke 43B). Подсказка: двухваттный метод измерения мощности.
- Клемма переменного напряжения В т асинхронного двигателя.
- Линейный ток I a .
- Напряжение генератора В пост. Тока
- Ток нагрузки генератора I постоянного тока
Часть I. Трехфазный асинхронный двигатель — испытания под нагрузкой
- Запишите спецификации асинхронного двигателя (IM)
- Расположите и измерьте сопротивление грузовой стойки так же, как в предыдущем эксперименте, для 6 различных чтения.Он должен находиться в диапазоне от 500 Ом до 30 Ом. Используйте последовательно две группы тележки, так как они рассчитаны на 120 В. Установки переключателей на двух банках должны быть одинаковыми.
- Подключите цепь, как показано на рисунке 5.1. и поверните реостат шунтирующего поля на панели стола на максимальное сопротивление (CW). Примечание. Убедитесь, что ваши измерители мощности могут выдерживать ток, рассчитанный вами в предварительной лаборатории. Если они не могут тогда вам нужно закоротить катушку тока до тех пор, пока двигатель не будет запущен.Если в вашем измерителе мощности есть токовые клещи и номинальный ток меньше, чем вы определили, поместите зажим вокруг измеряемого провода только после запуска двигателя.
- Подключите источник питания переменного тока от настольной панели к трехфазному вариатору и подключите его выход к цепи.
- Включите настольный источник питания постоянного тока и нажмите кнопку настройки, чтобы отрегулировать выходное напряжение до 240 В и ток (IF) до 0,275 А с помощью его ручек.Перед включением двигателя отрегулируйте выход трехфазного переменного тока на 208 В между фазами.
- Нажмите кнопку выхода источника постоянного тока, чтобы подключить источник постоянного тока 240 В к шунту возбуждения двигателя постоянного тока для генерации тока возбуждения IF.
- При отсутствии нагрузки, подключенной к стойке резисторной нагрузки, нажмите кнопку пуска на панели стенда, чтобы запустить двигатель, отсоедините провод, замыкающий токовую катушку ваттметра, или поместите токовые клещи вокруг провода, чтобы получить показания мощности.Если индикатор ваттметра отклоняется в неправильном направлении, просто поменяйте местами соединения. на стороне напряжения счетчика. Запишите напряжение переменного тока на клеммах В т , скорости, показания обоих ваттметров и напряжения нагрузки постоянного тока V dc . в таблице 5.1 (без данных нагрузки)
- Подключите стойку нагрузки резисторов к клеммам якоря генератора. Для каждого значения нагрузки запишите показания V t , I a , W 1 , W 2 , V dc скорость N и I dc (шкала 10 А) в таблице 5.1. (Данные нагрузочного теста)
- Отключить питание; отключите двигатель от источника питания. Измерьте сопротивление между двумя выводами привода асинхронный двигатель. Резистор обмотки статора R a составляет половину сопротивления значение, измеренное между клеммами источника питания асинхронного двигателя с маркировкой L 1 и L 2 на скамейке. Это происходит потому, что при соединении звездой соединяются две фазы. последовательно между клеммами L 1 и L 2 .
Отчет
- Показать характеристики асинхронного двигателя.
- Полная таблица 5.2.
- Постройте график КПД η, коэффициента мощности pf, скорости N, мощности и крутящего момента. T м против входного тока I a вкл. тот же лист графиков.
- Объясните формы графиков pf, об / мин и КПД
Часть II. Пусковой ток.
В этой части вы будете измерять пусковой ток вашего асинхронного двигателя. Буквы кода NEMA на двигателе проинформируйте пользователя о примерном пусковом токе. Убедитесь, что вы записали код NEM A и номинальную мощность машины.
Используйте USB-кабель с оптической связью для подключения глюкометра к компьютеру. Запустите программное обеспечение Flukeview на компьютере и убедитесь, что он подключен к вашему счетчику. Если нет, посмотрите в диспетчере устройств, чтобы определить порт, к которому он подключен. к, а затем выберите этот порт для программного обеспечения Flukeview.
Используйте ту же схему подключения, что и в части I. Выберите Пусковой ток в меню измерителя. Введите время измерения 1 секунду. Параметр, обозначенный как максимальный ток, на самом деле является током на деление экрана. Настройте зонд и измеритель так, чтобы Прочтите значение пускового тока, рассчитанное в вашей предварительной лаборатории.
Переместите меню пускового тока в начало. Когда вы будете готовы, нажмите на глюкометре кнопку пуска, а затем кнопку пуска двигателя. Метр не начнет измерения, пока не обнаружит текущий поток.Измеритель должен отображать кривую текущего времени. Используйте программное обеспечение Fluxview чтобы зафиксировать этот сигнал для вашего отчета. Лучше всего записать данные в электронную таблицу Excel, чтобы вы могли манипулировать графиком для лучшего просмотра.
Отчет
- Показать зафиксированную импульсную волну.
- Опишите любые характерные особенности пускового тока. Вы можете их объяснить?
- Какое максимальное абсолютное значение тока во время броска тока?
- Определите расчетный пусковой ток асинхронного двигателя (IM), используя его код NEMA.
- Как долго сохраняется пусковой ток?
| Таблица 5.1: Экспериментальные данные | ||||||||
| правый левый Ом | В т Вольт | I Ампер | Вт 1 Вт | Вт 2 Вт | P = W 1 + W 2 Ватт | I постоянного тока Ампер | В постоянного тока Вольт | N об / мин |
| Таблица 5.2: Расчетные данные | |||||
| I а | пф | N | л.с. | T м | η |
Обсуждение
- Кратко обсудите любые два метода запуска и промышленный асинхронный двигатель.
- Отчет о влиянии переключения любых двух клемм трехфазного источника питания на вращение.
Асинхронный двигатель
(Эта статья состоит из двух основных частей: принцип работы и характеристики асинхронного двигателя)Асинхронные двигатели или асинхронные двигатели часто называют рабочими лошадками отрасли. Это результат многих преимуществ асинхронного двигателя по сравнению с другими технологиями. Двигатель не требует особого обслуживания.Единственные детали, которые могут изнашиваться, — это подшипники. Если асинхронный двигатель не используется чрезмерно (из-за высокого напряжения, тока или механического воздействия), подшипники определяют жизненный цикл асинхронного двигателя. В отличие от двигателя постоянного тока нет необходимости в угольных щетках для коммутации тока. Асинхронный двигатель может быть изготовлен легко и при этом его цена довольно низкая по сравнению с другими технологиями. Асинхронный двигатель не использует процесс сгорания для передачи энергии, поэтому нет необходимости (дозаправлять) топливо или воздух.Охлаждение может быть интегрировано, так что асинхронный двигатель может работать в герметичной среде, например, под водой. Асинхронный двигатель имеет высокое отношение мощности к массе. Еще одно преимущество — высокий пусковой крутящий момент, поэтому возможен запуск под нагрузкой. С момента развития частотно-регулируемых приводов и систем векторного управления этот асинхронный двигатель также легко регулируется по скорости и крутящему моменту. Это дало много возможностей для автоматизации процессов. В следующей статье объясняются принцип, характеристики и контроль индукции.
Принцип работы асинхронного двигателя
Принцип асинхронного двигателя заключается в создании вращающегося магнитного поля в статоре и индукции тока в роторе, так что оба элемента вместе дают мощность на ротор, что приводит к круговому движению с определенной скоростью и крутящим моментом.
Статор
Теоретически статор представляет собой трехфазную обмотку, разделенную на цилиндрическую поверхность, так что при приложении трехфазного напряжения индуцируется вращающееся магнитное поле.Обмотки размещены в металлической цилиндрической конструкции для направления силовых линий магнитного поля и предотвращения движения обмоток. Эта конструкция состоит из ламинированных перфорированных пластин. Это предотвращает циркуляцию сильных вихревых токов в статоре. Идеальная ситуация — это синусоидальное магнитное поле, но для объяснения принципов работы статора достаточно одной обмотки на фазу. Это показано на следующем рисунке.
Рисунок 1: Теоретическая конструкция статора с одной обмоткой на фазу
Рисунок 2: Трехфазный ток i s1 , i s2 и i s3 , которые будут подключены к катушкам U, V и W
Здесь три обмотки смещены более чем на 120 °, так что это симметрично.Обмотки часто называют по фазам; U 1 — U 2 , V 1 — V 2 и W 1 — W 2 . На этом рисунке есть два полюса на фазу. Три обмотки могут быть соединены звездой или треугольником. Это часто делается через мостовые соединения вне асинхронного двигателя, потому что в зависимости от конфигурации меняются такие характеристики, как ток, напряжение и направление вращения.
Рисунок 3: Конфигурация звезды и треугольника с мостовыми соединениями
Рисунок 4: Асинхронный двигатель со звездой
На три обмотки подается трехфазное симметричное синусоидальное напряжение.Обмотки имеют определенную проводимость, поэтому через обмотки протекает трехфазный симметричный синусоидальный ток. Токи создают вокруг себя различные магнитные поля. На рис. 5 показана эволюция этих магнитных полей за один период.
Рисунок 5: Магнитная ситуация в момент времени с 1 по 7 (Рисунок 2)
Ток положительный, когда он течет со стороны 1 на сторону 2 (U 1 — U 2 , V 1 — V 2 и W 1 — W 2 ).Различные магнитные поля на фазу приводят к общему магнитному полю, показанному на рисунке mkl. Это магнитное поле вращается, в этом примере по часовой стрелке. Каждый период синуса напряжения магнитное поле совершает вращение на 360 ° через весь статор. Если разместить больше обмоток на фазу, так что создается 2 * p полюса на фазу, магнитные поля совершают вращение на 360 ° / p за период напряжения. Если частота системы напряжения f s , частота магнитного поля f s / p или количество оборотов в минуту
n s = (60f s ) / pКак упоминалось ранее, ситуация с одной обмоткой на фазу на полюс является упрощенной моделью.Фактическое распределение содержит больше обмоток на прорезь в статоре. По фазе это распределение выполняется как синусоида. Если линия с севера на юг в соответствии с индуцированным магнитным полем от фазы называется опорной линией статора, то оптимальное распределение N s проводов для одной фазной катушки дается выражением:
n с = (N с /2) sin αИз этого выражения в соответствии с выводом магнитной индукции в воздушном зазоре между статором и ротором получается:
B δs1 (α) = (u 0 N s i s1 cos α) / 2δТакже из нее можно записать следующую формулу для действующего значения магнитного поля в воздушной подушке:
B δ = (3 N se u 0 I u ) / 4δЧтобы найти поток статора, индуктивность намагничивания и наведенную ЭДС, воспользуйтесь предыдущими формулами и выражением для потока в одной обмотке.Итак, допустим один виток катушки U 1 — U 2 . Этот поворот составляет определенный угол α с опорной линией статора. Пусть статор имеет следующие характеристики: радиус r и осевую длину l. Тогда поток за один виток определяется по следующей формуле:
ф виток = 2 B δ I r sin αИз этого выражения можно найти максимум всего наведенного потока от катушки U 1 — U 2 , интегрировав его по всему распределению обмоток этой фазы:
Индуцированный поток ф с1 пропорционален току намагничивания I u .Это включает в себя то, что поток и ток находятся в фазе. Исходя из этого, индуктивность намагничивания может быть определена как:
Наведенная ЭДС в одной катушке такова:
Ротор
Ротор состоит из разных частей. В основном есть два типа роторов. Асинхронные двигатели с фазным ротором имеют ротор, содержащий обычные трехфазные обмотки из изолированного провода. Другой тип, который будет использоваться далее в этой статье, — это асинхронный двигатель с короткозамкнутым ротором.Он имеет ротор с короткозамкнутым ротором. Для обоих типов кожух ротора состоит из перфорированных пластин. Они содержат прорези для трехфазных обмоток или короткозамкнутого ротора. Беличья клетка изготовлена из металлических (обычно медных или алюминиевых) стержней с соединением на обоих концах металлическим кольцом короткого замыкания. Вариации обычны, но принцип остается тем же. Процесс передачи крутящего момента в роторе основан на законе Фарадея и силе Лоренца. Объяснить процесс, происходящий в роторе. Представьте себе токопроводящую лестницу, состоящую из длинных металлических сторон и проводящих ступенек, как на рисунке 6.
Рисунок 6: Лестничный эквивалент ротора
Ступени имеют длину l. Перпендикулярно плоскости, образованной ступенями и проводящей стороной, расположен постоянный магнит. Затем магнит перемещается параллельно сторонам по ступеням лестницы, не касаясь их. Магнит имеет определенное магнитное поле B и скорость v согласно лестнице. Если этот воображаемый эксперимент проводится достаточно быстро, можно заметить несколько событий. Основываясь на законе Фарадея, будет индуцироваться ЭДС, что приведет к возникновению напряжения в проводнике прямо под магнитом.
E = B.l.vЭто потому, что проводник отсекает поток. Этот проводник вместе со сторонами лестницы и соседними проводящими ступенями образует замкнутый контур. Из-за напряжения на центральной ступеньке по этому контуру будет течь ток. Направление напряжения и тока таково, что противодействует изменению поля магнетита. В этом примере, если магнит движется вправо, а его отрицательный полюс находится над лестницей, ток будет течь в центральном проводнике вперед, а в соседних ступенях — назад.
I = E / ZГде Z — импеданс, видимый потенциалом над центральным проводником. Поскольку существует магнитное поле B, пересекающее ступеньку, и электрический ток, протекающий через ступеньку, сила Лоренца будет действовать на лестницу.
F = BlI
Рисунок 7: Ротор с короткозамкнутым ротором
Эта сила действует в том же направлении, что и движение магнита, потому что это индуцированная сила, которая противодействует ее источнику !. Если лестница может двигаться свободно, она начнет ускоряться, чтобы уменьшить разницу в скорости между лестницей и магнитом.Когда разница скоростей уменьшается, ЭДС уменьшится, что приведет к снижению тока, силы и ускорения. Если лестница и магнит работают с одинаковой скоростью, сила будет равна нулю. Чтобы сделать шаг к асинхронному двигателю с короткозамкнутым ротором, ротор с короткозамкнутым ротором эквивалентен лестнице, которая изогнута к цилиндру, а движущийся магнит воспроизводится вращающимся магнитным полем из-за трех фазных обмоток. Такой цилиндр показан на рисунке 7. На этом примере объясняется принцип работы асинхронного двигателя.Исходя из формулы ЭДС в одной катушке, можно провести аналогию.
E s1 = jw s ф s1 = jw s L 0 I uЕсли пренебречь индуктивным и резистивным падением напряжения на катушке, ЭДС равна установленному напряжению U c1 . Вращающееся поле индуцирует ЭДС E r1-rest в обмотке ротора. Когда асинхронный двигатель не вращается, статор и ротор действуют как первичная и вторичная обмотки трансформатора.Обе частоты равны:
f r = f sОбмотки связаны магнитным потоком, который действует как вращательное поле. Как и в случае с настоящим трансформатором, для асинхронного двигателя можно определить коэффициент трансформации в этом случае, когда он не вращается.
k = E s1 / E r1-отдыхОсновное различие между асинхронным двигателем в этой ситуации и реальным трансформатором — это нулевой ток нагрузки.Поскольку сопротивление асинхронного двигателя намного выше из-за воздушной заслонки, ток намагничивания и, следовательно, ток нулевой нагрузки значительно выше. В асинхронном двигателе этот ток составляет 20-50% от тока полной нагрузки, тогда как в реальном трансформаторе он составляет лишь несколько процентов от тока полной нагрузки. Сила Лоренца на роторе создает на валу определенный крутящий момент.
Этот крутящий момент максимален, когда ток ротора находится в фазе с магнитным потоком статора. Ток ротора имеет большое отставание от ЭДС ротора из-за его высокой собственной индуктивности.
tan φ = (wL r ) / R rЭто ситуация, когда ротор стоит, например, когда стоит асинхронный двигатель. Создаваемый крутящий момент на роторе вызовет ускорение. По мере того как скорость ротора увеличивается по направлению к скорости вращения магнитного поля, также называемой синхронной скоростью, ЭДС E r1 уменьшается точно так же, как частота напряжения ротора f r . Если асинхронный двигатель достигнет синхронной скорости, на ротор больше не будет действовать сила, поэтому это невозможно.Вот почему асинхронный двигатель также называют асинхронным двигателем. Когда нагрузка увеличивается, скорость уменьшается, а крутящий момент увеличивается. В нагруженной ситуации, например, когда приложена номинальная нагрузка, скорость асинхронного двигателя обозначается буквой n.
Характеристики асинхронного двигателя
Накладка
Из предыдущей главы ясно, что ротор никогда не может достичь той же скорости вращения, что и вращательное магнитное поле статора.Резюмируя: синхронная скорость потока статора n с зависит от частоты f с приложенного напряжения и количества пар полюсов p:
n s = (60f s ) / pПоскольку ротор никогда не достигает этой скорости, определяется коэффициент, указывающий относительную разницу между обеими скоростями. Этот коэффициент, скольжение g, определяется следующим образом:
г = (п с — п) / п сПроскальзывание часто указывается в процентах.В системе координат скольжение будет иметь направление, противоположное скорости вращения ротора. Проскальзывание будет равно нулю, когда скорость ротора равна синхронной скорости, будет равняться единице, если асинхронный двигатель остановится, будет отрицательным во время генерации и будет больше единицы, когда вращающееся магнитное поле приложено в направлении, противоположном направлению вращения. ротора. Это электрическое торможение.
Характеристики ротора
Частота ротора
Частота ЭДС в роторе зависит от разницы между скоростью вращения ротора и скоростью магнитного поля в статоре:
f r = p (n s — n) / 60 = pn s g / 60 = f s gЭДС ротора
Когда ротор остановился, разница! по скорости ротора и магнитному полю статора равна синхронной скорости.В этой ситуации EMF E r1-rest выдается по:
E = Blv сКогда ротор вращается с определенной скоростью n, ЭДС, зависящая от разницы скоростей, будет ниже:
E = Bl (v s — v r ) = gBlv sТаким образом, при заданном скольжении g ЭДС в роторе определяется по формуле:
E r = gE r1-остатокСкорость магнитного поля ротора
В роторе течет ток из-за наведенного напряжения.Этот ток дает, следуя закону Гопкинсона, магнитодвижущую силу. Эта сила создает магнитное поле, которое из-за вращающегося характера текущей системы также будет вращаться. Ранее было показано, что частота напряжения системы ротора f r пропорциональна частоте частоты статора f s с коэффициентом скольжения g:
f r = gf sТаким образом, скорость вращения магнитного поля ротора w r определяется следующими формулами:
w r = gw s = 2πf rСам ротор вращается со скоростью
w = (2πn / 60) рад / сНастоящим w равно
ш = (1 — г) ш сТаким образом, когда скорость вращения ротора и его поле объединяются, в результате получается магнитное поле ротора, которое вращается с той же синхронной скоростью в соответствии с опорной линией статора.
ш с = ш + ш рМощность и крутящий момент
Активный поток мощности
Чтобы лучше понять электрические процессы в асинхронном двигателе, полезно рассмотреть эквивалентную схему асинхронного двигателя, как показано на рисунке 8. Таким образом, гальванически разделенные процессы статора и ротора объединены в одну электрическую эквивалентную схему одной фазы. Индекс s указывает количество статора, индекс r количество ротора. Акценты используются там, где количество ротора относится к статору.
Рисунок 8: Эквивалентная схема асинхронного двигателя
Помимо всех электрических параметров асинхронного двигателя, основная цель состоит в том, чтобы передать определенный крутящий момент на вал при определенной угловой скорости. Принимая во внимание электрические характеристики, можно рассмотреть блок-схему, показанную на рисунке 9. Напряжение U, приложенное к обмоткам, известно. В простых неконтролируемых приложениях это напряжение сети. В процессах с частотным регулированием это напряжение, подаваемое частотно-регулируемым приводом.Асинхронный двигатель требует определенного тока I. Асинхронный двигатель имеет индуктивный характер из-за использования различных катушек. Это означает, что ток и напряжение через обмотки не совпадают по фазе. Хотя важно знать, каково приложенное напряжение, чтобы знать влияние на изоляцию обмоток, напряжение для дальнейших отводов мощности не так важно.
Рисунок 9: Поток мощности в асинхронном двигателе
Рисунок 9 начинается с активной мощности, подаваемой на статор
P e = √3U l I l cos φ = 3U p I p cos φГде φ — угол между вектором напряжения и тока в векторном представлении.Индексы I и p указывают, является ли использованное количество линейным или фазовым количеством. Далее используются количества фаз, поскольку они согласуются с количествами статора. Первая часть активной мощности, поступающей в асинхронный двигатель, теряется в тепле в обмотках статора. Эта часть, называемая потерями в меди статора P js , зависит от сопротивления статора и тока:
P js = 3I p 2 R sДругая часть рассеивается в виде тепла в сердечнике статора.Эти потери представляют собой потери в стали из-за вихревых токов в сердечнике:
P f = 3V p 2 / R м ≈ 3V с 2 / R мОставшаяся часть мощности — это мощность зазора P r , которая передается от статора к ротору через воздушный зазор:
P r = 3 (I r ‘) 2 R s ‘ / gОт мощности зазора часть рассеивается в виде тепла в обмотках ротора, что называется потерями в меди в роторе:
P младший = 3 (I r ‘) 2 R s ‘ = gR rТеперь остается механическая мощность двигателя:
P м = (1 — г) P rЧасть механической мощности теряется из-за трения вращающихся и движущихся частей с воздухом и особенно с неподвижными частями двигателя.Эта часть, обозначенная как P v , соответствует мощности без нагрузки:
P v = P без нагрузкиИсходя из всех этих мощностей, общий КПД асинхронного двигателя можно выразить как:
η = P выход / P дюйм = (P m — P v ) / (P m + P f + P js + P fr ) = P нагрузка / P eВ таблице 1 приведены абсолютные и относительные значения нескольких асинхронных двигателей.Малые двигатели имеют мощность менее 11 кВт, большие двигатели — более 1100 кВт.
| Нагрузка | Текущий родственник | Крутящий момент относительный | Скольжение относительное | Абсолютный КПД | Абсолютный коэффициент мощности | |||||
| Размер двигателя | Маленький | Большой | Маленький | Большой | Маленький | Большой | Маленький | Большой | Маленький | Большой |
| Полная нагрузка | 1 | 1 | 1 | 1 | 0.03 | 0,004 | 0,7-0,9 | 0,96-0,98 | 0,8-0,85 | 0,87-0,9 |
| Без нагрузки | 0,5 | 0,3 | 0 | 0 | ~ 0 | ~ 0 | 0 | 0 | 0.2 | 0,05 |
| Заторможенный ротор | 5-9 | 4-6 | 1,5-3 | 0,5–1 | 1 | 1 | 0 | 0 | 0,4 | 0.1 |
Кривая зависимости крутящего момента от скорости
Когда крутящий момент вычисляется исходя из мощности зазора P r и синхронной угловой скорости w s , можно предпринять следующие шаги, чтобы найти полное выражение для крутящего момента в зависимости от скорости:
Где
X r ‘ = w s σ r ‘ L 0— индуктивность рассеяния ротора относительно статора.С этого момента все упомянутые термины … r ‘ заменены терминами … R для сохранения ясности. С
U s1 ≈ E s1 = φ s1 w sКрутящий момент становится:
T = (3pR R / w r ) φ s1 2 / ((R R / w r ) 2 + (σ R L 0 ) 2 )Максимальный крутящий момент достигается при
dT / dw r = 0 (это происходит, когда w r = R R / σ R L 0 )Когда это заполнено в формуле крутящего момента, это дает выражение максимального крутящего момента или крутящего момента пробоя:
T = 3pφ с1 2 / 2σ R L 0График зависимости крутящего момента от скорости хорошо представлен на рисунке 10.
Рисунок 10: Кривая зависимости крутящего момента от скорости асинхронного двигателя
Рисунок 10 также дает выражение для скорости при максимальном крутящем моменте. Как было доказано до пробоя крутящий момент достигается при частоте вращения ротора
w r = R R / σ R L 0Скорость ротора дает разницу между синхронной скоростью и фактической скоростью. Таким образом, пробойный момент достигается при частоте вращения
w = w s — (1 / p) R R / σ R L 0или указано в оборотах в минуту об / мин:
n b = n s — (30 / πp) R R / σ R L 0Скорость зависит от сопротивления ротора.Сама величина пробивного момента не зависит от сопротивления ротора. Когда скорость ротора в соответствии с опорной линией статора выше, чем синхронная скорость, значение скорости ротора w r становится отрицательным. Поток энергии будет идти от ротора к статору. Это происходит, когда ротор работает или асинхронная машина работает как генератор вместо двигателя. Следует принять во внимание, что крутящий момент, заданный предыдущими выражениями, является крутящим моментом на затворе, поэтому потери ротора, потери на трение и вентиляционные потери еще не принимаются во внимание.Теоретически асинхронный двигатель может передавать максимальный крутящий момент на нагрузку. Обычно номинальный крутящий момент в 1,75–3 раза меньше. Это дает несколько эффектов. Номинальный ток будет ниже, рабочая точка, вероятно, будет намного более стабильной, номинальная скорость будет почти синхронной, а асинхронный двигатель поддерживает большой момент ускорения. На рисунке 11 визуализирована концепция ускоряющего момента.
Рисунок 11: Графический пример ускоряющего момента
Из состояния покоя нагрузка с противодействующим крутящим моментом T c1 будет ускоряться до точки P, где в каждый момент времени
T — T c1 = T α = J м dw / dtФактическая причина этого последнего выражения будет более подробно объяснена в главе о механике.Если противодействующий крутящий момент 01f, нагрузка следует курсу T c2 , асинхронный двигатель не может самостоятельно разогнать нагрузку. Чтобы получить более высокий пусковой и ускоряющий момент без использования асинхронного двигателя с завышенными характеристиками, решение состоит в более высоком сопротивлении ротора.
Это может быть сделано вне асинхронного двигателя в случае асинхронного двигателя с фазным ротором или внутри двигателя с использованием двухклеточного асинхронного двигателя или стержней ротора с более высоким сопротивлением. Ротор с обмоткой и принцип стержня ротора с более высоким сопротивлением напрямую влияют на сопротивление ротора.Влияние на кривую зависимости крутящего момента от скорости показано на рисунке 12.
Рис. 12: Крутящий момент в зависимости от скорости для различных значений сопротивления ротора
На пробойный момент не влияет, как было сказано ранее, только когда сопротивление действительно велико. В роторе с обмоткой с зажимами внешнего сопротивления сопротивление можно регулировать, когда асинхронный двигатель работает на более высокой скорости, чтобы уменьшить скольжение. В двухклеточном двигателе концентрически установлены две беличьи клетки. Это показано на рисунке 13.Внутренняя клетка содержит толстые стержни и почти полностью окружена железным сердечником.
Имеет высокую индуктивность и низкое сопротивление. Наружная клетка состоит из более тонких стержней, которые размещаются рядом с воздушным зазором между ротором и статором. Сопротивление выше, чем во внутренней клетке. Поток вокруг внешних стержней частично закрывается в воздушной заслонке. Благодаря этому он имеет более низкую индуктивность. При запуске асинхронного двигателя частота вращения ротора w r максимальна.
Рисунок 5.13: Принцип двухклеточного ротора
Реактивное сопротивление ротора очень важно. Ток ротора будет высоким во внешней клетке и низким во внутренней клетке. Это клетка с более высоким сопротивлением, что означает более высокий момент ускорения. Когда асинхронный двигатель набирает скорость, скорость ротора уменьшается и достигает небольшого значения (f r ~ 1–4 Гц). Реактивное сопротивление больше не так важно, и ток будет в основном течь во внутренней клетке, потому что ее сопротивление намного ниже, чем во внешней клетке.Сопротивление ротора полностью регулируется электрически. В основном есть три возможных ситуации, как показано на рисунке 14. Первая кривая дает асинхронный двигатель с низким сопротивлением ротора, более низким пусковым моментом, но более высокой эффективностью. Вторая кривая иллюстрирует наиболее распространенный асинхронный двигатель с повышенным пусковым моментом. Третья кривая называется седловой кривой и используется, когда требуется действительно высокий пусковой крутящий момент, здесь пусковой крутящий момент может даже быть выше, чем! момент пробоя.
Рисунок 5.14: Курсы крутящего момента ротора с двойной обоймой
Пусковой ток
Когда асинхронный двигатель запускается путем прямого подключения к сети, от сети будет запрашиваться высокий пусковой ток. Кроме того, на нормальный периодический синусоидальный ток будет накладываться сильный выброс тока. Сетевое напряжение передается на статор, когда ротор неподвижен. Это эквивалентно принципу трансформатора с короткозамкнутой вторичной обмоткой. Когда асинхронный двигатель ускоряется, разница между ротором и статором уменьшается, а наведенная ЭДС в роторе (вторичная обмотка эквивалентного трансформатора) уменьшается.Подобно принципу трансформатора, вторичный ток и, следовательно, первичный ток уменьшаются. Соотношение между скачком пускового тока и номинальным током находится где-то между 3 и 7. Это сделано для ограничения воздействия на сеть и упрощения защиты асинхронного двигателя с помощью предохранителей.
с короткозамкнутым ротором — Инженерные проекты
Здравствуйте, друзья, я надеюсь, что у вас все в порядке и все отлично. Я здесь с другой статьей об асинхронных двигателях.В этой статье я делюсь некоторыми базовыми знаниями об асинхронном двигателе с беличьей клеткой. В моей предыдущей статье под названием «Трехфазный асинхронный двигатель» я дал краткий обзор этого асинхронного двигателя с короткозамкнутым ротором.
Трехфазный асинхронный двигатель имеет два типа в зависимости от конструкции ротора: асинхронный двигатель с короткозамкнутым ротором и асинхронный двигатель с фазным ротором. Бывший дешевле и широко используется, поскольку требует меньшего обслуживания, чем более поздний. Во-первых, я расскажу вам об устройстве асинхронного двигателя с короткозамкнутым ротором.Затем я расскажу о принципе работы и особенностях асинхронного двигателя с короткозамкнутым ротором. В последних разделах я расскажу о некоторых преимуществах и использовании. Проще говоря, тип трехфазного асинхронного двигателя, в котором используется ротор с короткозамкнутым ротором, называется асинхронным двигателем с короткозамкнутым ротором .
Конструкция асинхронного двигателя с короткозамкнутым ротором
Все асинхронные двигатели имеют ротор и статор. По сути, именно конструкция ротора отличает асинхронный двигатель с короткозамкнутым ротором от асинхронного двигателя с обмоткой.Статор одинаковый в обоих типах двигателей. Давайте сначала поговорим о статоре асинхронного двигателя с короткозамкнутым ротором :
Статор асинхронного двигателя с короткозамкнутым ротором
- Статор — это тот компонент двигателя, который неподвижен.
- Это крайняя внешняя рама, в которой размещен ротор.
- Он имеет канавки по внутренней окружности для размещения электрических цепей. Эта схема возбуждается трехфазным питанием.
- Цепь трехфазной обмотки размещается в пазах.Эти обмотки разнесены на 120 градусов и соединены звездой или треугольником.
- Перейдем к конструкции ротора.
Ротор асинхронного двигателя с короткозамкнутым ротором
- Ротор — это вращающаяся часть двигателя. Он содержит цилиндрический сердечник.
- Сердечник ротора изготовлен из ламината для уменьшения вихревых токов.
- Ротор с короткозамкнутым ротором состоит из медных стержней, которые мы называем проводниками.
- Медные шины или проводники длиннее ротора и закреплены в канавках сердечника ротора.
- Эти удлиненные жилы закорочены друг с другом медными кольцами с каждой стороны.
- Также ротор иногда снабжен вентиляторами с каждой стороны для охлаждения.
- Этот тип конструкции стержней и концевых колец аналогичен беличьей клетке, на которой он назван.
- Это все о конструкции ротора. Помимо ротора и статора, у двигателя есть также другие детали для поддержки и защиты узла.
Вы также можете прочитать:
Работа асинхронного двигателя с короткозамкнутым ротором
В этом разделе я поделюсь с вами работой асинхронного двигателя с короткозамкнутым ротором.
- Когда на обмотку статора подается трехфазный переменный ток, через нее начинает течь ток.
- Этот трехфазный переменный ток вызывает вращающееся магнитное поле в роторе.
- Скорость вращения этого магнитного поля может быть определена по частоте источника переменного тока и количеству полюсов.
- Эта скорость является синхронной скоростью двигателя.
- Вращающееся магнитное поле статора будет индуцировать напряжение в роторе, потому что его магнитные линии пересекают ротор.Это индуцированное напряжение будет индуцировать ток в обмотке ротора, и будет генерироваться другое магнитное поле, которое является магнитным полем ротора.
Как вы все знаете, на проводник с током действует сила в присутствии магнитного поля. Ротор также будет испытывать силу, которая начнет его вращать. Эта сила создаст крутящий момент, и ротор будет вращаться.
Основные характеристики
Теперь я упоминаю некоторые важные особенности асинхронного двигателя с короткозамкнутым ротором.Я расскажу о скорости, пусковом токе, направлении вращения, скольжении и коэффициенте мощности. Первым в списке стоит скорость.
Скорость
Асинхронный двигатель с короткозамкнутым ротором обычно работает с постоянной скоростью. Эта скорость является синхронной скоростью.
Пусковой ток
Для таких двигателей требуются высокие пусковые токи. Что может привести к колебаниям напряжения.
Направление вращения
Направление вращения этих двигателей можно изменить, если поменять местами две линии питания из трех.
Slip
Как и для других асинхронных двигателей, скольжение определяется как разница в скорости вращения магнитного поля статора и скорости вращения ротора. Скорость вращения магнитного поля называется синхронной скоростью. Скольжение выражается как отношение к синхронной скорости или в процентах.
Коэффициент мощности
Коэффициент мощности — это отношение фактической мощности к полной мощности. Выражается в процентах. Коэффициент мощности низкий, когда двигатель работает без нагрузки, и высокий, когда двигатель работает с полной нагрузкой.
Преимущества
В этой части я расскажу вам о некоторых преимуществах асинхронного двигателя с короткозамкнутым ротором.
- Асинхронные двигатели с короткозамкнутым ротором:
- Дешевые
- Прочный
- Прочный
- Требуется меньше обслуживания
- Из-за клеточной конструкции ротора они требуют меньше материала. Таким образом, потери меди уменьшаются.
- Из-за отсутствия щеток вероятность искры снижена.
- Эти двигатели оснащены вентиляторами, поэтому выделяется меньше тепла.
Теперь я перехожу к последнему сегменту моей статьи, где я расскажу вам о некоторых применениях асинхронных двигателей с короткозамкнутым ротором.
Использует
Этот тип двигателя находит применение в промышленности из-за своей стоимости. Они широко используются в промышленности вместо асинхронных двигателей с обмоткой. Они используются в приложениях, где требуется низкий пусковой момент. Такие двигатели также могут использоваться в качестве генераторов.
Автор: Сайед Зайн Насир
https: // www.theengineeringprojects.com/Меня зовут Сайед Зайн Насир, основатель инженерных проектов (TEP). Я программист с 2009 года, до этого я просто занимаюсь поиском, делаю небольшие проекты, а теперь я делюсь своими знаниями через эту платформу.