Асинхронный Двигатель Переменного Тока: Подключение, Ремонт
Строение такого двигателя не отличается большой сложностью
Электрические моторы заняли в жизни человека почетное место и применяются в приборах различной мощности и габаритов. Встретить их можно повсеместно, начиная от электрических зубных щеток, стиральных машин микроволновых печей до беговых дорожек, промышленного оборудования или огромных автомобилях.
Причина популярности предельно ясна даже неспециалисту – простота устройства, легкость в обслуживании, рентабельность производства и многое другое, включая повсеместную электрификацию. Исключение, пожалуй, составляют автомобили, так как подать к ним ток по проводам нельзя, если это не троллейбус, но и то, в этом направлении сегодня ведется множество разработок.
Сегодня мы с вами поговорим о том, что представляет собой асинхронный двигатель переменного тока. Узнаем, как он устроен, и за счет каких принципов работает. Погнали!
Что такое асинхронный двигатель
Классический двигатель переменного тока асинхронный
Трехфазный асинхронный двигатель мало чем отличается от своих собратьев и состоит из двух основных частей – вращающейся и неподвижной, или другими словами ротора и статора.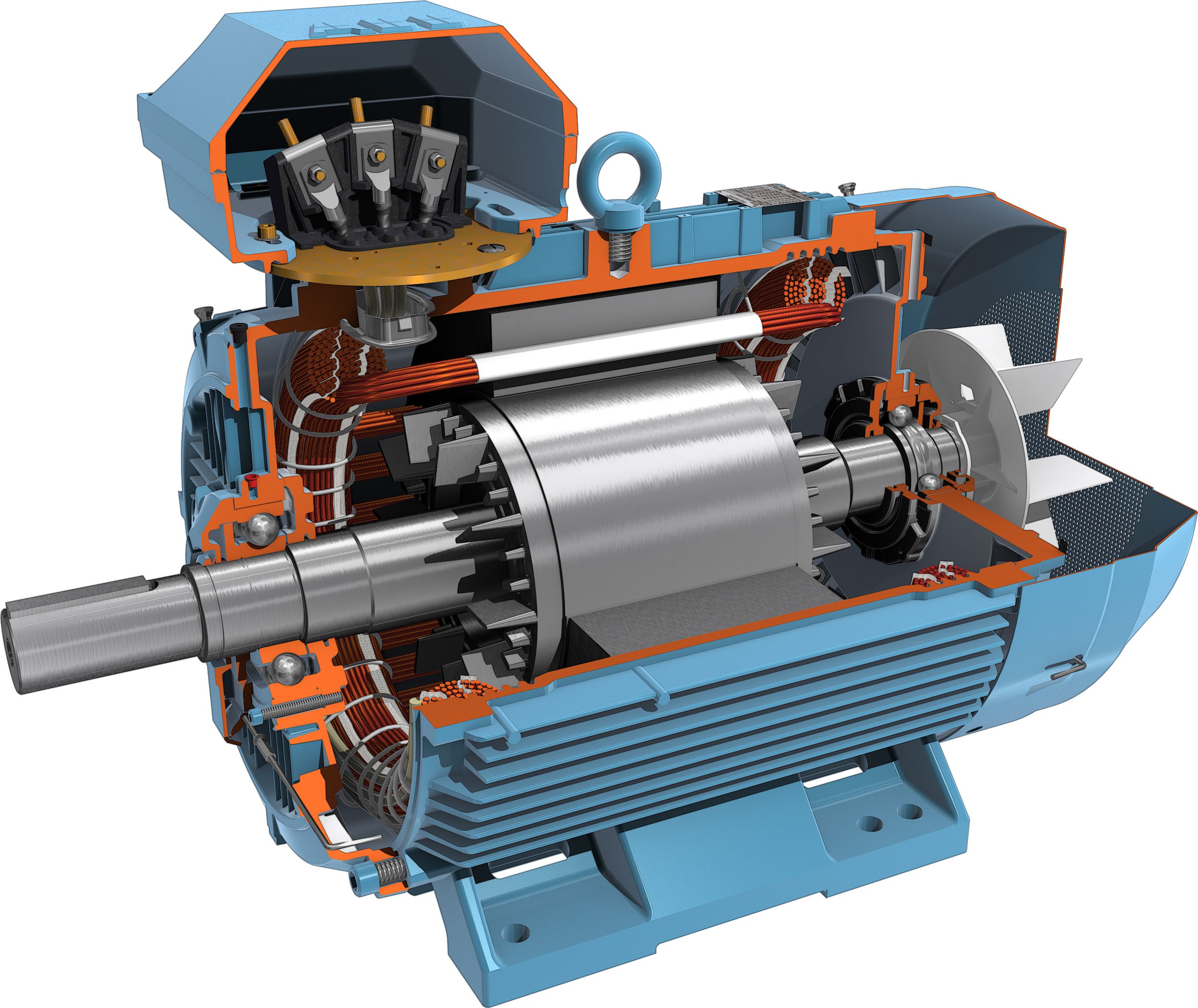 Располагаются они один в другом при этом, не касаясь друг друга. Между деталями имеется небольшой воздушный зазор от 0,5 до 2 миллиметров, в зависимости от конструкции двигателя.
Располагаются они один в другом при этом, не касаясь друг друга. Между деталями имеется небольшой воздушный зазор от 0,5 до 2 миллиметров, в зависимости от конструкции двигателя.
Схематическое строение
Однако это не все детали. Давайте разберем строение более подробно.
Схематическое строение трехфазного двигателя
- Статор – фактически главная рабочая часть, являющаяся мощным электромагнитом. Состоит он их сердечника, выполненного из тонколистовой технической стали, толщиной всего лишь 0,5 миллиметров, которая покрывается токоизоляционным лаком, и обмотки, сделанной из медной проволоки, которая также изолирована и располагается продольных пазах сердечника
Строение статора прекрасно видно на представленной выше схеме, где показано, что сердечник собран из множества пластин совмещенных друг с другом.
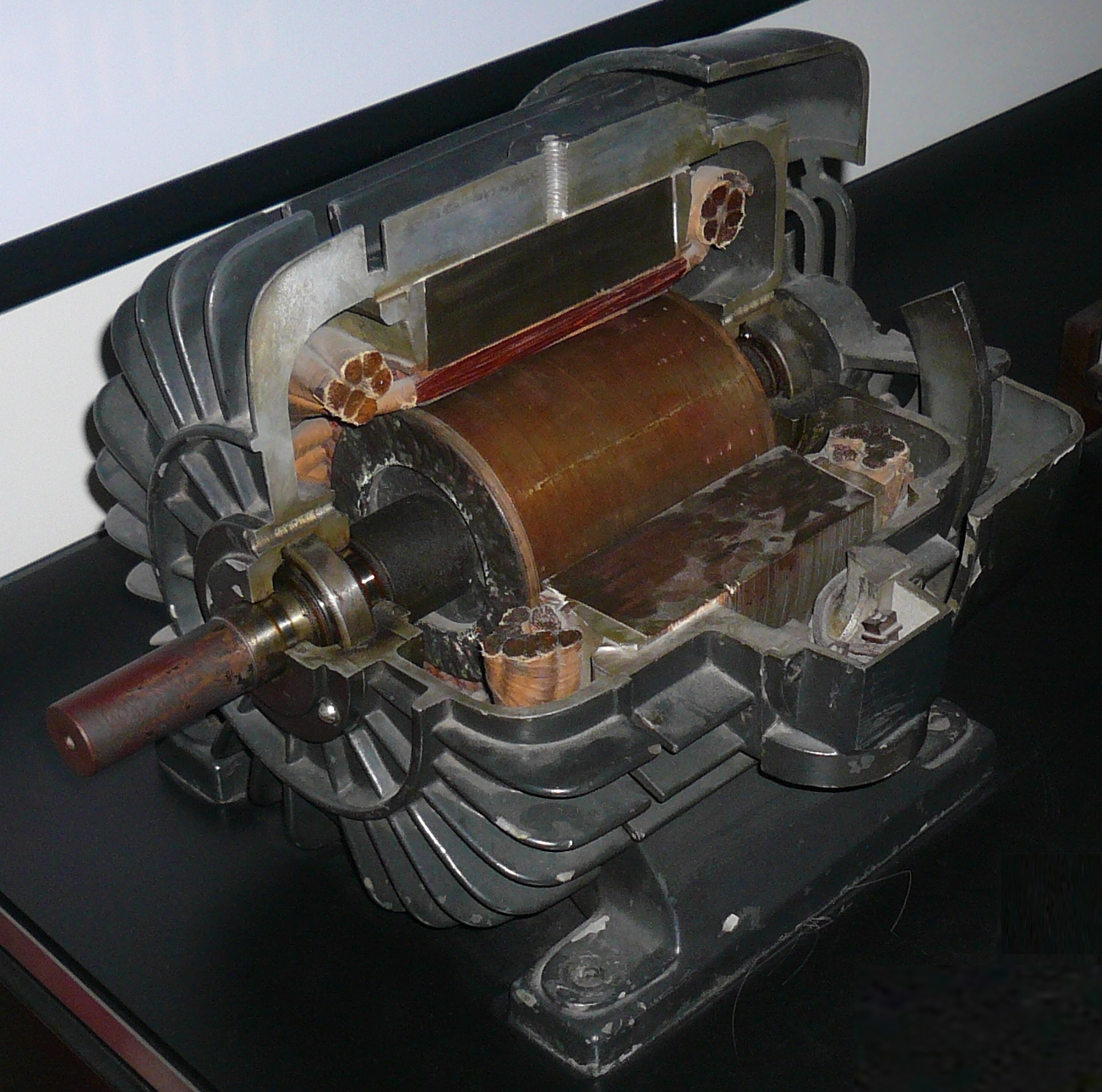
Цилиндр на валу снизу – это и есть ротор
- Ротор – данный элемент также состоит из сердечника, обмотка которого короткозамкнута (хотя бывает и другое строение), который располагается на валу.
 Сердечник этого элемента также представлена в виде шихтованной детали, однако сталь не покрывается лаком, так как ток, протекающий внутри, будет очень слабым, и естественной оксидной пленки будет вполне достаточно, чтобы ограничить вихревые токи.
Сердечник этого элемента также представлена в виде шихтованной детали, однако сталь не покрывается лаком, так как ток, протекающий внутри, будет очень слабым, и естественной оксидной пленки будет вполне достаточно, чтобы ограничить вихревые токи. - Вал мотора представляет собой центральную ось, вокруг которой и происходит вращение электромотора. С разных концов на этом элементе располагаются подшипники качения, за счет которых обороты происходят максимально плавно и легко. Сами подшипники запрессованы в боковые крышки, в которых имеются посадочные места под них.
Совет! Подшипники должны сидеть очень плотно, при этом они должны быть отцентрованы, смазаны, легко вращаться, то есть быть исправными, иначе при высоких оборотах двигатель очень быстро выйдет из строя.
Разбитая и новые крыльчатки
- На конце вала, противоположном приводу, располагается небольшая крыльчатка, которая при включенном двигателе выполняет функцию его охлаждения.
 Кстати, данный элемент тоже может стать причиной появления вибрации в двигателе, если его лопасти отломаются, что негативно сказывается на сроке службы агрегата. Пример разбитого вентилятора можно увидеть на фото выше.
Кстати, данный элемент тоже может стать причиной появления вибрации в двигателе, если его лопасти отломаются, что негативно сказывается на сроке службы агрегата. Пример разбитого вентилятора можно увидеть на фото выше. - Идем по цепочке. Боковые крышки корпуса крепятся к станине, которая удерживает все вышеназванное вместе.
Также любой двигатель имеет пусковую аппаратуру и силовые цепи, о чем мы подробнее поговорим немного позже.
Принцип вращение электромагнитного поля
Электромагнитная индукция в моторах
Главной особенностью любого электрического двигателя является то, что он способен переводить электрическую энергию в кинетическую, то есть механическую. При этом, разобрав его строение, вы можете увидеть, что никакого прямого или передаточного привода он не имеет. Как же тогда происходит вращение двигателя?
Вся фишка в том, что обмотка статора способна создавать сильное вращающееся магнитное поле, которое увлекает за собой ротор, при включении мотора в электрическую сеть.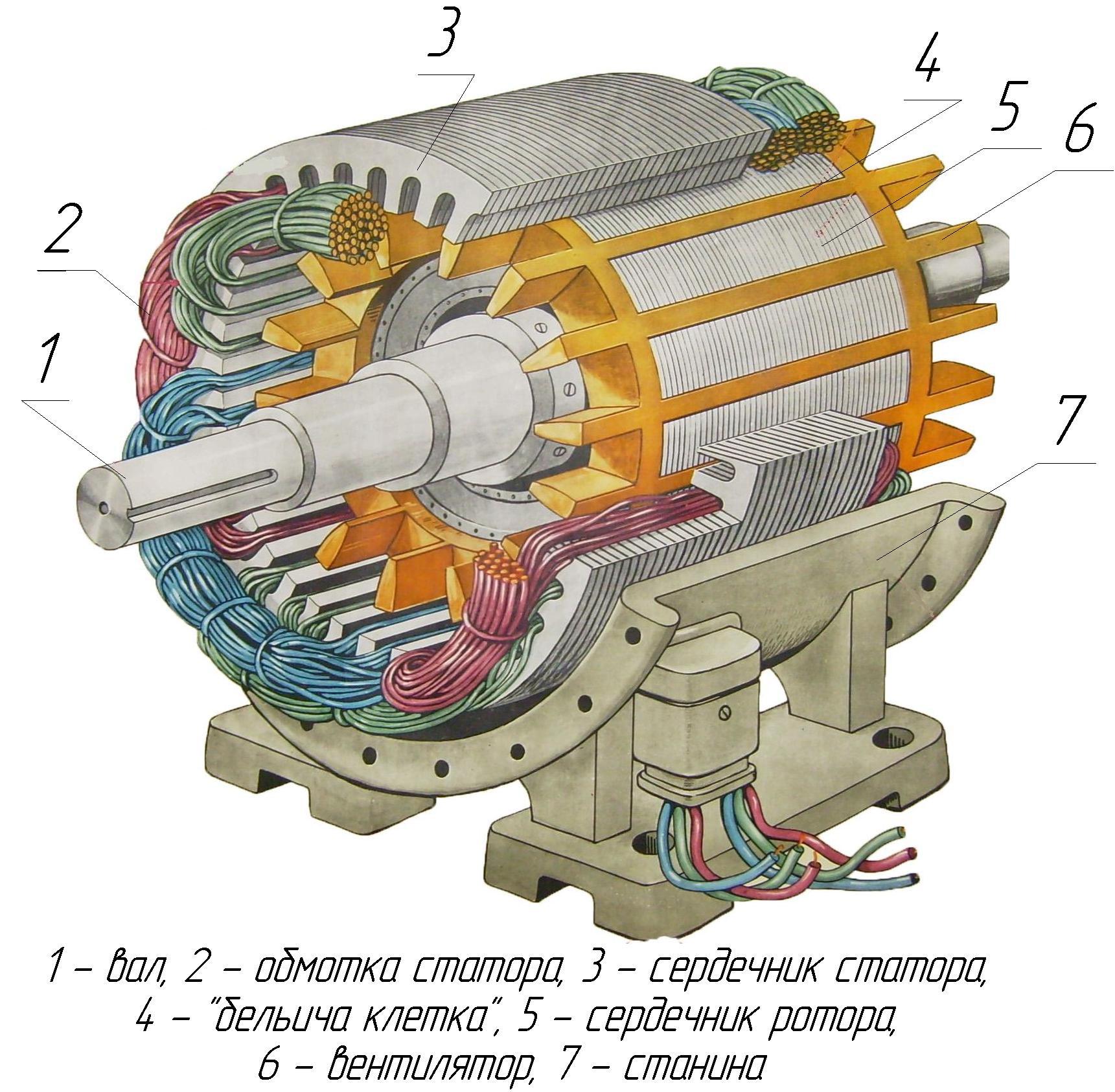 Данное магнитное поле имеет определенную частоту вращения, которая прямопропорциональна частоте переменного тока, и имеет обратную пропорциональность числу пар полюсов обмотки.
Данное магнитное поле имеет определенную частоту вращения, которая прямопропорциональна частоте переменного тока, и имеет обратную пропорциональность числу пар полюсов обмотки.
То есть данную частоту можно вычислить по формуле: n1 = f1*60/p, где: n1 – частота вращения магнитного поля; f1 – частота переменного тока в Герцах; p – количество пар полюсов.
Строение асинхронного двигателя переменного тока
Пока ничего не понятно?
Ничего, сейчас во всем разберемся.
- Чтобы наглядно себе представить принцип вращения магнитного поля, давайте рассмотрим примитивную трехфазную обмотку, имеющую всего три витка.
Пример того, как вращается магнитное поле в электрическом двигателе
- Витки – это проводники, по которым при включении в сеть протекает электрический ток. Во время этого процесса вокруг проводника возникает электромагнитное поле.
- Мы знаем, что показатели переменного тока изменяются со временем – сначала он нарастает, затем падает до нуля, потом течет в обратном направлении по тому же принципу, и так до бесконечности.
 Именно поэтому переменный ток изображают в виде синусоиды.
Именно поэтому переменный ток изображают в виде синусоиды.
Графическое изображение переменного тока
- В то время как изменяются показатели тока, меняются и параметры магнитного поля, вызываемого им.
- Особенностью трехфазных двигателей и генераторов является то, что в один момент времени по обмотке статора ток протекает в фазах со смещением на 120 градусов, то есть на треть времени одного такта.
- Такт – это 1 Герц, то есть прохождение переменным током одного полного цикла колебания синусоиды. Схематически это будет выглядеть вот так.
Смещение между фазами составляет ровно 120 градусов
- В результате в статоре двигателя одновременно образуется несколько магнитных полей, которые, взаимодействуя, дают результирующее поле.
Изменение магнитного поля в разные моменты времени
- Когда происходит изменение параметров токов, протекающих в фазах, начинает изменяться и результирующее магнитное поле. Выражается это в смене его ориентации, при том, что амплитуда остается одинаковой.
- В результате получается так, что магнитное поле вращается вокруг некой центральной оси.
А что будет, если внутрь данного магнитного поля поместить проводник?
Принцип электромагнитной индукции
Согласно закону об электромагнитной индукции, который мы подробно описывали в статье про генераторы постоянного и переменного тока, в проводнике возникает электродвижущая сила, сокращенно ЭДС. Если этот проводник замкнут на внешнюю цепь или на себя, то в нем потечет ток.
Согласно закону Ампера, на проводник с током, помещенным в магнитное поле, начинает действовать сила, и контур начинает вращаться. По этому принципу и работают асинхронные двигатели переменного тока, однако вместо рамки в магнитном поле находится короткозамкнутый ротор, который своим внешним видом напоминает беличье колесо.
Строение короткозамкнутого ротора
- Как видно из схемы выше, такой ротор состоит из параллельно расположенных стержней, которые с торцов замкнуты двумя кольцами.

- При подключении статора к электрической сети, он начинает формировать вращающееся магнитное поле, которое индуктирует во всех стержнях ротора ЭДС, из-за чего ротор начнет вращаться.
- При этом в разных стержнях будет отличаться направление текущего тока и его величина, в зависимости от того, в каком положении они находятся относительно полюсов магнитного поля. Опять-таки, если не понятно, то отсылаем вас снова к закону об электромагнитной индукции.
Изменение ЭДС на примере генератора переменного тока
Интересно знать! Стержни на роторе наклоняют относительно оси его вращения. Делается это для того, чтобы пульсация момента и высшие гармоники ЭДС, сокращающие эффективность двигателя, были меньше.
Особенности асинхронного двигателя
Итак, давайте разбираться с тем, какие двигатели переменного тока называются асинхронными.
Скольжение ротора
Главной особенностью таких агрегатов является то, что частота вращения ротора отличается от этого же показателя у магнитного поля.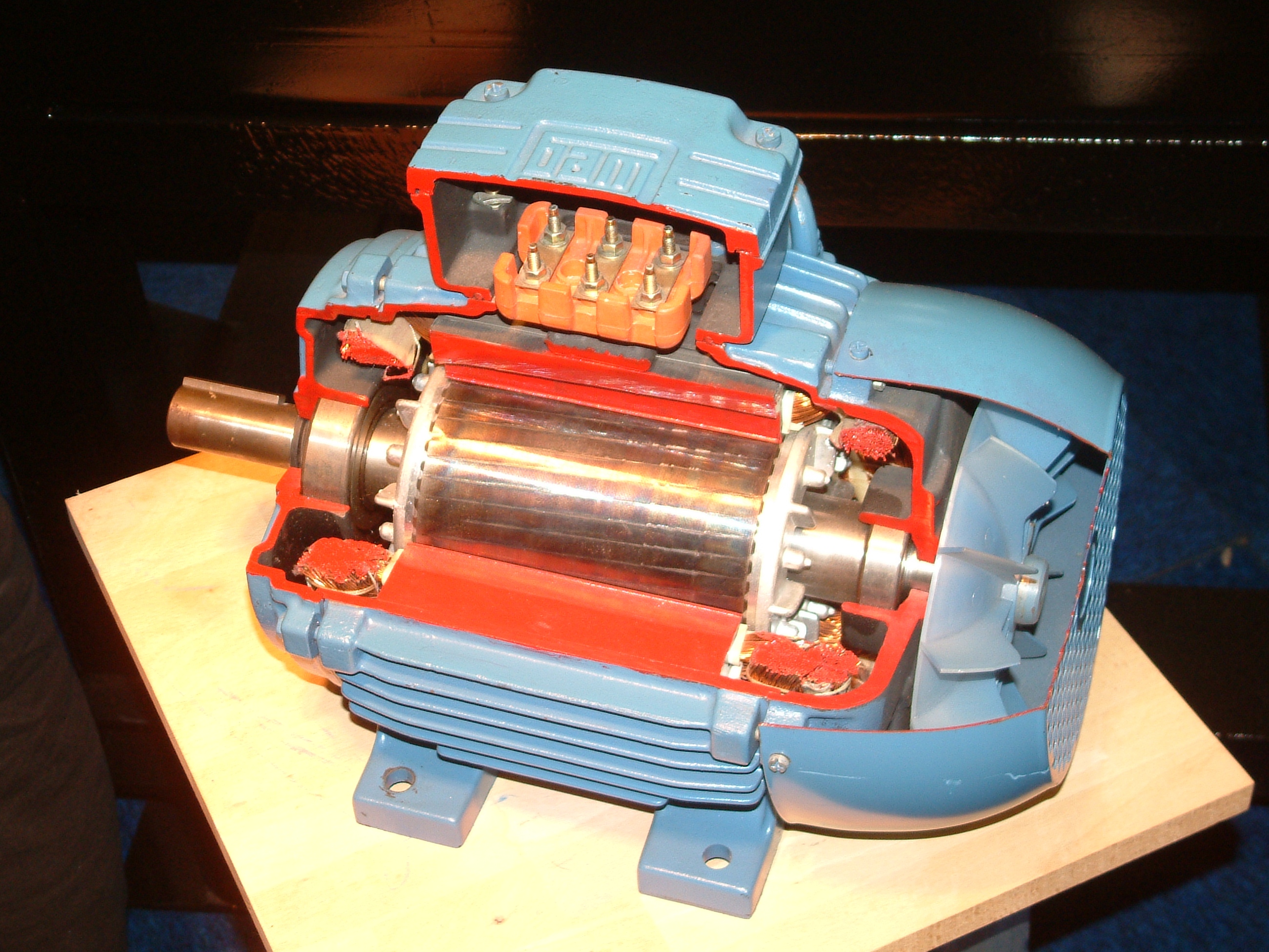 Назовем условно эти значения n2 и n1, соответственно.
Назовем условно эти значения n2 и n1, соответственно.
Объяснить это можно тем, что индуцироваться ЭДС может только при этом неравенстве – n2 должна быть меньше n1. Разница в частотах этих вращений называется частотой скольжения, а сам эффект отставания ротора и называется скольжением, которое обозначается как «s». Высчитать этот параметр можно по следующей формуле: s = (n1-n2)/n1.
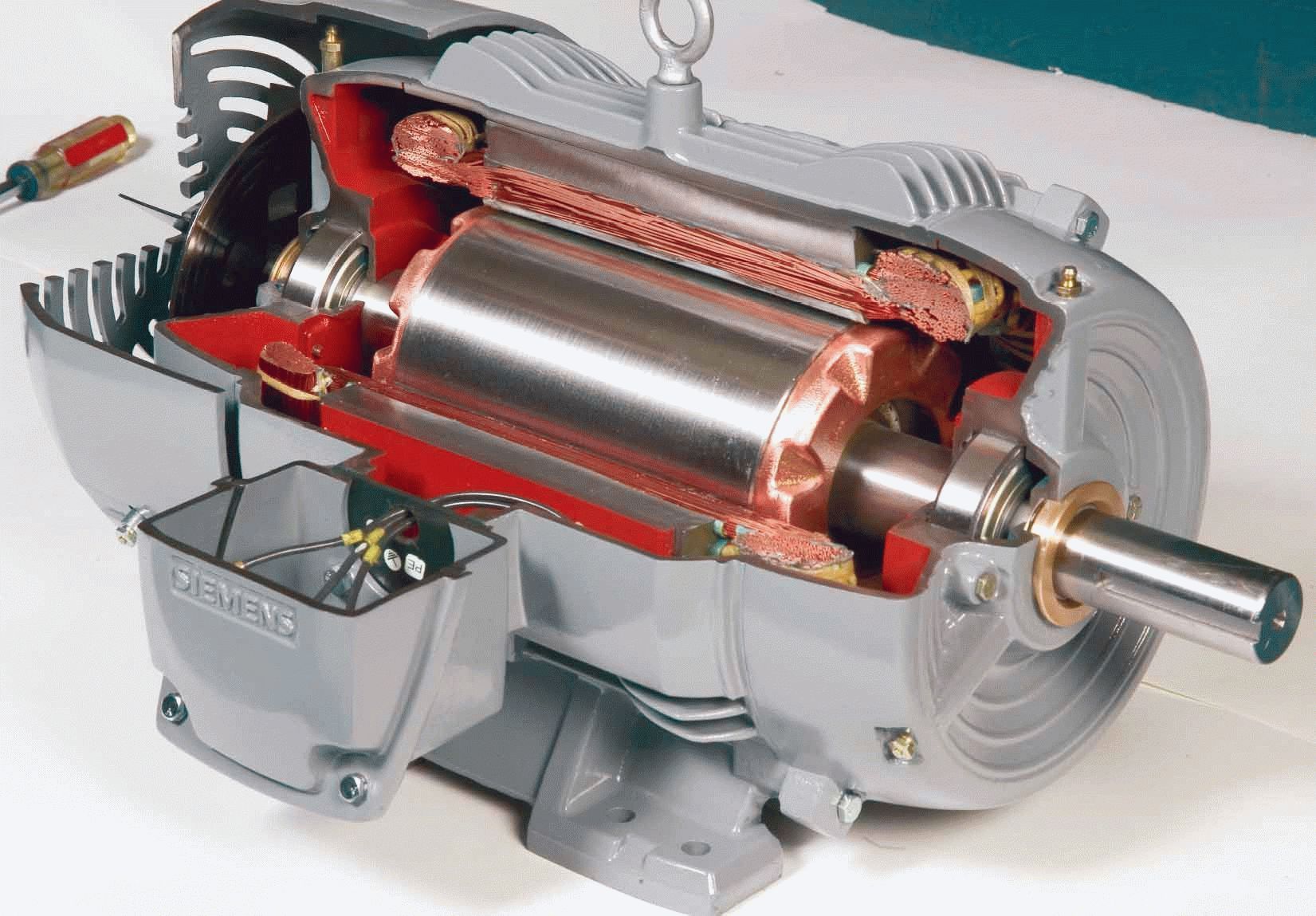
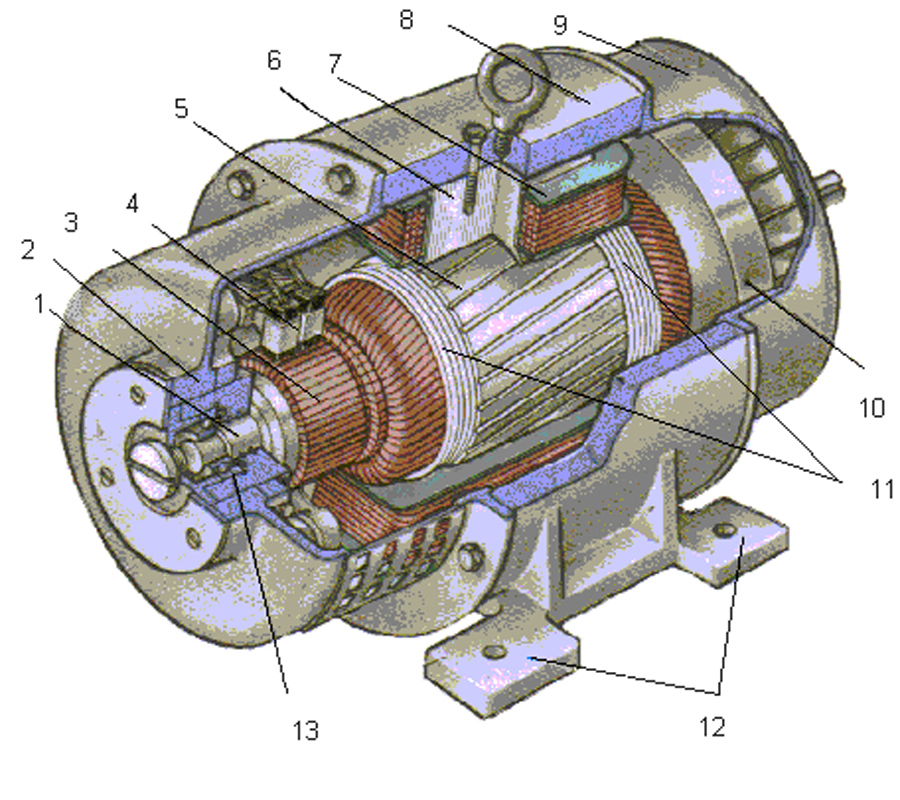
Асинхронный двигатель в разрезе
- Давайте представим себе ситуацию, в которой частоты n1 и n2 будут одинаковыми. В этом случае положение стержней ротора относительно магнитного поля будет неизменным, а значит, движение проводников относительно магнитного поля происходить не будет, то есть ЭДС не индуктируется, и ток не течет. Отсюда следует вывод, что сил приводящих ротор в движение возникать не будет.
- Если предположить, что изначально двигатель был в движении, то теперь ротор начнет замедляться, отставая от магнитного поля, а значит, стержни сместятся относительно магнитного поля и снова начнет расти ЭДС и движущая сила, то есть вращение снова возобновится.

- Приведенное описание довольно грубое. В реальности ротор асинхронного двигателя никогда не может догнать скорость вращения магнитного поля, поэтому крутится равномерно.
- Уровень скольжения тоже величина непостоянная, и может изменяться от 0 до 1, или другими словами, от 0 до 100 процентов. Если скольжение близко к 0, что соответствует холостому режиму работы двигателя, то есть ротор не будет испытывать противодействующий момент. Если значение этого параметра близко к 1 (режим короткого замыкания), то ротор будет неподвижен.
- Отсюда можно сделать вывод, что скольжение напрямую будет зависеть от механической нагрузки на вал двигателя, и чем она больше, тем выше и коэффициент.
Принцип работы асинхронного двигателя
- Для асинхронных двигателей средней и малой мощности допустимый коэффициент скольжения находится в диапазоне от 2 до 8%.
Мы уже написали, что такой двигатель преобразует электрическую энергию с обмоток статора в кинетическую, однако стоит понимать, что эти силы не равны друг другу. Всегда при преобразовании происходят потери на гистерезисе, нагреве, трении и вихревых токах.
Всегда при преобразовании происходят потери на гистерезисе, нагреве, трении и вихревых токах.
Данная часть энергии рассеивается в виде тепловой, поэтому двигатель и оборудуется вентилятором для охлаждения.
Питание двигателя
Схема подключения
Давайте теперь разберемся с тем, как происходит подключение асинхронного электродвигателя переменного тока.
- Мы уже вкратце описывали, как протекает ток в трехфазной сети, но не совсем понятно, какие выгоды такое питание имеет перед однофазными или двухфазными аналогами.
- В первую очередь можно отметить экономичность системы с таким подключением.
- Также для нее характерна большая эффективность.
Фазы подключаются к обмотке статора по определенным схемам, называемым звезда и треугольник, каждая из которых имеет свои особенности. Соединения эти могут быть выполнены как внутри двигателя, так и снаружи, в распределительной коробке. В первом случае из корпуса выходит три провода, а во втором шесть.
Для лучшего понимания принципов работ схем давайте введем некоторые понятия:
- Фазное напряжение – напряжение в одной фазе, то есть разница потенциалов между ее концами.
- Линейное напряжение – это разница в потенциалах разных фаз.
Эти значения очень важны, так как позволяют рассчитать потребляемую мощность электромотора.
Вот формулы, предназначенные для этого:
Формулы расчета мощности двигателя
Данные формулы вычисления мощности двигателя справедливы для подключения и звездой, и треугольником. Однако стоит всегда учитывать, что подключение одного и того же двигателя разными способами будет сказываться на его энергопотреблении.
А если потребляемая мощность не соответствует параметрам двигателя, то может произойти расплавление обмотки статора, и моментальный выход из строя агрегата.
Чтобы понять это лучше, давайте разберем один наглядный пример:
- Представьте двигатель, подключенный по схеме «звезда», который подключен в сеть переменного тока.
 Линейное напряжение будет составлять 380В, а фазовое 220В. Потребляет при этом он 1А.
Линейное напряжение будет составлять 380В, а фазовое 220В. Потребляет при этом он 1А. - Высчитываем мощность: 1,73*380*1 = 658 Вт – 1,73 является корнем из 3.
- Если сменить схему подключения на треугольник, то получится следующее. Линейное напряжение останется без изменений и составит 380В, а вот фазовое напряжение (вычисляем по первой формуле) увеличится и станет таким же 380В.
- Увеличенное в корень из 3 раз фазовое напряжение, приведет к увеличению в такое же количество раз фазового тока. То есть Iл будет равно не 1, а 1,73*1,73, что приблизительно равняется 3
- Повторяем расчет мощности: 1,73*380*3 = 1975 Вт.
Как видно из примера, потребляемая мощность стала намного больше, и если двигатель не рассчитан на работу в таком режиме, то он неизбежно перегорит.
Как выглядят схематично разбираемые подключения обмотки
Подключение трехфазного двигателя асинхронного типа к однофазной сети
Разобрав принцип работы трехфазного асинхронного двигателя переменного тока, становится понятным, что напрямую подключить его к общественным сетям, в который «царит» одна фаза, не так просто. Выполнить такое подключение становится возможным, если применить фазосдвигающие элементы.
Выполнить такое подключение становится возможным, если применить фазосдвигающие элементы.
Варианты подключения трехфазного двигателя к однофазной сети
При таком подключении двигатель может работать в двух режимах:
- Первый ничем не отличается от работы однофазных двигателей (смотреть рисунки а, б и г, где применяется пусковая обмотка). При таком режиме работы двигатель способен выдать лишь 40-50% от своей номинальной мощности.
- Второй (в, д, е) – режим конденсаторного двигателя, при котором агрегат способен выдать до 80-ти% мощности (в схему включен постоянно работающий конденсатор).
Совет! Емкость конденсатора рассчитывается по специальным формулам, согласно выбранной схеме.
Как управлять электродвигателем
Управление асинхронным электродвигателем переменного тока может быть реализовано тремя способами:
Магнитный пускатель
- Прямое подключение к питающей сети – для этого применяются магнитные пускатели, с помощью которых можно реализовать нереверсивные и реверсивные режимы работы мотора.
 Отличие, думаем понятно – во втором случае двигатель мотет вращаться в другом направлении. Недостатком такого подключения является то, что в цепи присутствуют большие пусковые токи, что не очень хорошо для самого агрегата. Цена такого устройства будет самой низкой
Отличие, думаем понятно – во втором случае двигатель мотет вращаться в другом направлении. Недостатком такого подключения является то, что в цепи присутствуют большие пусковые токи, что не очень хорошо для самого агрегата. Цена такого устройства будет самой низкой
Устройство плавного пуска
- Плавный пуск двигателя – такие устройства для управления применяются тогда, когда вам требуется возможность регулировки скорости вращения вала при запуске двигателя. Показанный прибор уменьшает пусковые токи, в результате чего защищает двигатель от больших пусковых токов. Оно обеспечивает плавный старт и остановку вала.
Частотный преобразователь
- Самым дорогим и сложным подключением электрического двигателя является применение частотного преобразователя. Такое решение используется тогда, когда требуется регулировка скорости вращения вала двигателя не только при старте и торможении. Данное устройство способно менять частоту и напряжение подаваемого на двигатель тока.

- Его применение имеет следующие плюсы: во-первых сокращается энергопотребление мотора; во-вторых, как и устройство плавного пуска, двигатель защищается от ненужных перегрузок, что благотворно сказывается на его состоянии и сроке службы.
Частотные преобразователи могут реализовать следующие методы регулирования:
Скалярное управление
- Управление скалярного типа. Наиболее простой и недорогой в реализации, обладающий медленным откликом на изменение нагрузки в сети и небольшим диапазоном регулировки, в виде недостатков. Из-за того подобное управление применимо лишь там, где изменение нагрузки происходит по определенному закону, например, переключение режимов в фене.
- Управление векторного типа. Данная схема применяется там, где требуется обеспечить независимое управление вращением электродвигателя, например, в лифте. Она позволяет сохранять одинаковые обороты даже при изменяющихся параметрах нагрузки.
Асинхронный двигатель с фазным ротором
Более сложная конструкция асинхронного двигателя
До того момента, как частотные преобразователи получили широкое распространение, асинхронные двигатели большой и средней мощности изготавливались с фазным ротором. Такая конструкция дает двигателю лучшие свойства по плавному пуску и регулировке оборотов, однако эти агрегаты намного сложнее в плане строения.
Такая конструкция дает двигателю лучшие свойства по плавному пуску и регулировке оборотов, однако эти агрегаты намного сложнее в плане строения.
- Статор такого мотора ничем не отличается от того, что устанавливается в двигателях с короткозамкнутым ротором, но вот сам ротор устроен по-другому.
- Также как и статор, он имеет трехфазную обмотку, которая подключается «звездой» к контактным кольцам. Обмотка укладывается в пазы стального сердечника, от которого она изолируется.
Кольца контактные
- Контактные кольца соединяются через графитовые щетки с трехфазным пусковым или регулировочным реостатом, с помощью которого и производится пуск ротора.
Реостат жидкостного типа
- Реостаты бывают металлическими и жидкостными. Первые (их еще называют проволочными) – ступенчатые, которые управляются механическим переключением своими руками рукояти контроллера, либо автоматически, при помощи контроллера с электроприводом. Вторые представляют собой некие сосуды с электролитом, в который опущены электроды.
 Изменение сопротивления такого реостата осуществляется за счет глубины их погружения.
Изменение сопротивления такого реостата осуществляется за счет глубины их погружения.
Интересно знать! Отдельные модели АДФР, с целью увеличения КПД и ресурса щеток, после запуска ротора поднимают щетки и за счет короткозамкнутого механизма замыкают кольца.
На сегодняшний день устройства с фазными роторами практически не применяются, так как их эффективно заменяют асинхронные двигатели с короткозамкнутым ротором, оснащенные частотным преобразователем.
На этом подведем итог. Мы узнали строение асинхронного трехфазного двигателя и принцип его работы. Материал для большинства читателей будет теоретическим, но, думаем, все равно интересным. Если вам нужно узнать, как выполнить ремонт асинхронного двигателя переменного тока, то прочтите предыдущую статью на нашем сайте. Там будет дана инструкция по разбору, и рассказано, что можно диагностировать и исправить самостоятельно, не обращаясь в мастерскую.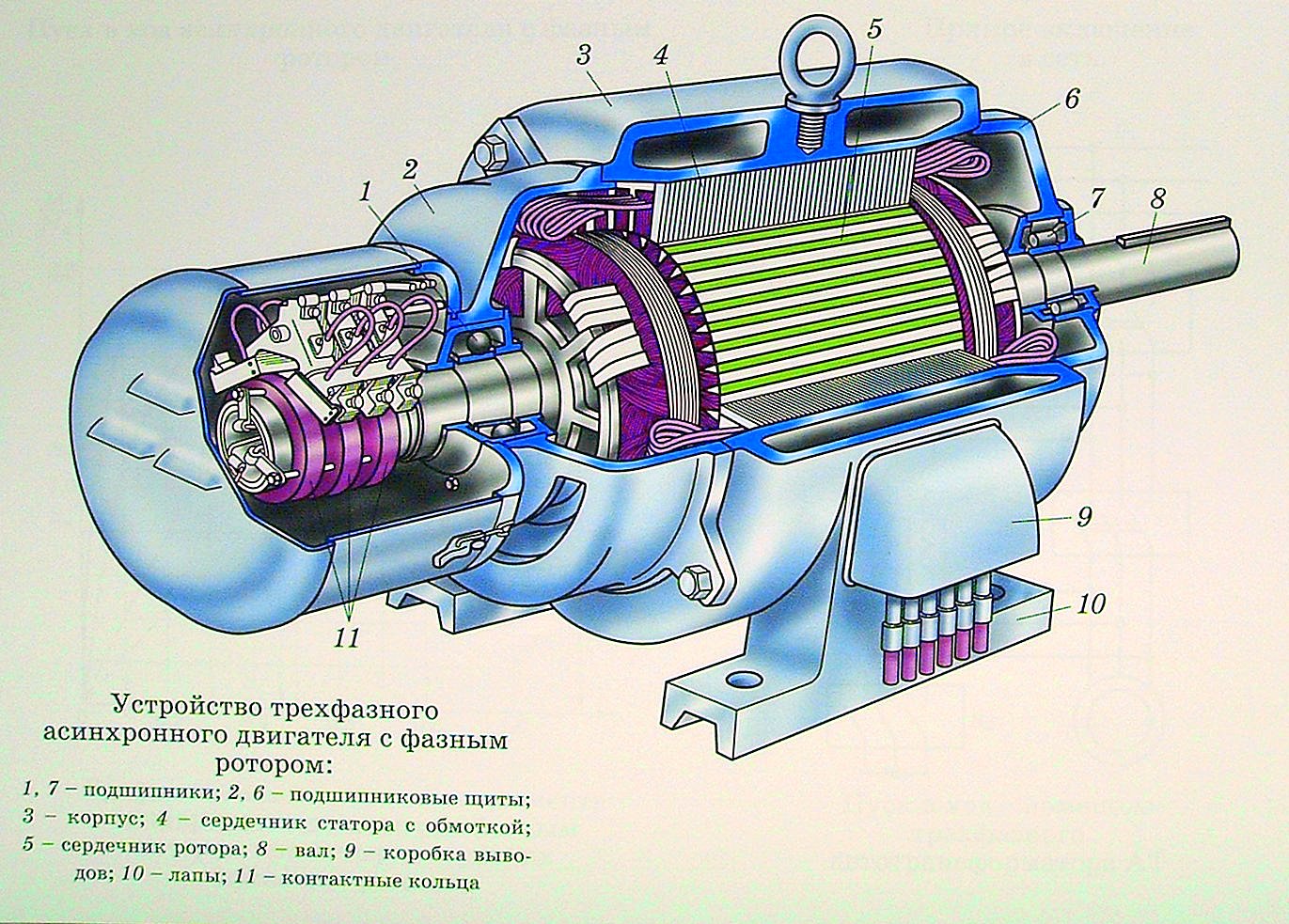 Также рекомендуем к просмотру подобранное нами видео.
Также рекомендуем к просмотру подобранное нами видео.
Асинхронный двигатель- Принцип работы и устройство… Motoran.ru
В какой бы сфере не участвовал человек, повсюду применяются электрические моторы. Сегодня изделия задействованы как в промышленности, так и в быту. Механизмы несут массу положительных качеств: простота, надёжность, долговечность, экологическая чистота. Характеристики дают моторам охватывать большее количество незанятых ниш, изделия уже вплотную используются в автомобилестроении.
Среди разновидностей, по количеству произведённых электрических машин, асинхронный двигатель занимает первое место. Относительная дешевизна и универсальность мотора при эксплуатации стали решающим фактором, повлиявшим на массовость выпуска. Перспективы развития агрегатов увеличиваются, поскольку сегодня нет, чище способа получить механическую работу, чем использовать электричество. В реалиях, целесообразность экологических аспектов растёт с каждым годом в геометрической прогрессии, поэтому рассмотрим установку детально.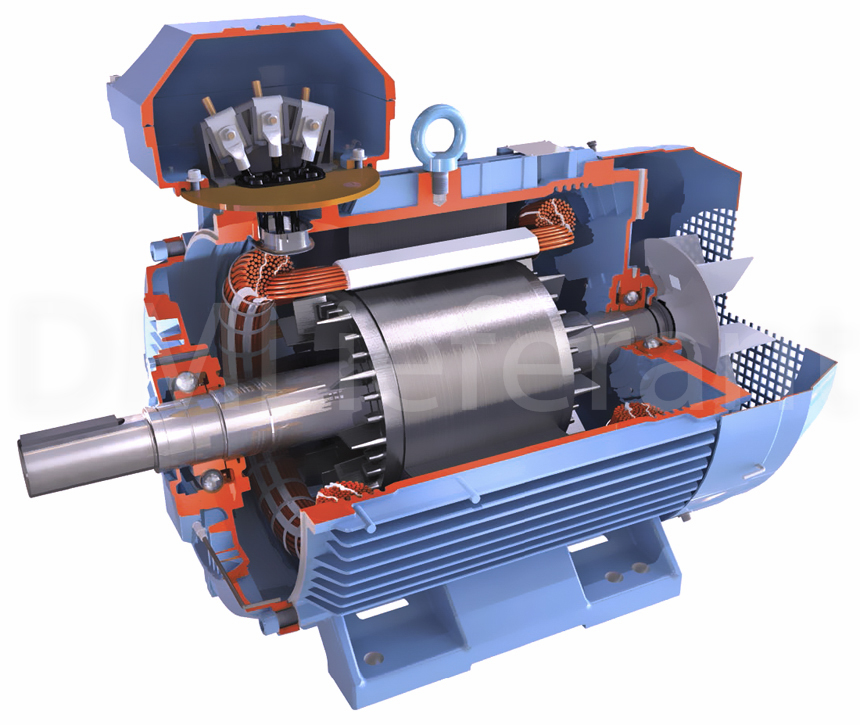
Асинхронный двигатель в разрезе:
История асинхронного двигателя
Начало развития асинхронных двигателей было положено в 88 году девятнадцатого века, когда итальянский электротехник Галилео Феррарис опубликовал в Турине статью о теоретических основах асинхронного электродвигателя. Ошибочные выводы итальянца о небольшом коэффициенте полезного действия асинхронных двигателей вызвало большой интерес среди других инженеров. Силы большинства учёных направлены на усовершенствование изделия.
Итальянский электротехник Галилео Феррарис (1847-1897 года жизни):
После того, как в том же году статью перепечатал английский журнал, её прочитал выпускник Дармштадтского технического училища, М.О. Доливо-Добровольский. Через год, талантливый выходец из Российской Империи получил патент на трёхфазный асинхронный двигатель с короткозамкнутым ротором.
Русский электротехник Доливо-Добровольский (1862-1919 года жизни):
Труды изобретателя положили начало массовому применению электрических двигателей. Так, в Новороссийске в третьем году двадцатого века, под руководством учёного, построен первый в мире элеватор, использовавший промышленную сеть переменного трёхфазного тока с трёхфазными трансформаторами и синхронными двигателями с фазным ротором. Сегодня, трёхфазный асинхронный двигатель Добровольского, самая распространённая электрическая машина.
Так, в Новороссийске в третьем году двадцатого века, под руководством учёного, построен первый в мире элеватор, использовавший промышленную сеть переменного трёхфазного тока с трёхфазными трансформаторами и синхронными двигателями с фазным ротором. Сегодня, трёхфазный асинхронный двигатель Добровольского, самая распространённая электрическая машина.
Устройство асинхронного двигателя
Назначение асинхронного двигателя, это преобразование энергии электричества в механическую работу. Выполнить эту задачу установке помогают две детали: статор и ротор.
Устройство статора представлено в виде неподвижной части мотора, которая взаимодействует с подвижной частью, ротором. Между ротором и статором воздушный зазор, разделяющий механизмы. Активной частью механизмов является обмотка и детали сердечника, проводящие магнитный поток, возбуждаемый электрическим током, проходящим по обмотке. С целью минимизировать магнитные потери, при перемагничивании сердечника, деталь набирают из пластин, изготовленных из электротехнической стали. Обмотка статора конструктивно равномерно укладывается проводниками в пазы сердечника, угловое расстояние 120°. Схема соединения фаз обмотки статора «треугольник» или «звезда». В целом, статор представляет собой большой электрический магнит, цель которого, создать магнитное поле.
Обмотка статора конструктивно равномерно укладывается проводниками в пазы сердечника, угловое расстояние 120°. Схема соединения фаз обмотки статора «треугольник» или «звезда». В целом, статор представляет собой большой электрический магнит, цель которого, создать магнитное поле.
Статор и ротор асинхронного двигателя:
Схема подключения «звезда» или «треугольник» выбирается в зависимости от напряжения питания сети. Существенную роль играют такие понятия:
Фазное напряжение, соответствует разности потенциалов между началом и концом одной фазы, или разница потенциалов между линейным и нейтральным проводом.
Линейное напряжение, разность потенциалов между двумя линейными проводами (фазами)
| Значение символов | Схема «звезда» | Схема «треугольник» |
| Uл, Uф – напряжения (линейные и фазовые), В; Iл, Iф – ток (линейный и фазовый), А; S – мощность, Вт; P – мощность активная, Вт. | ; ; ; . | ; ; ; . |
Важно! Мощность для соединения «звезда» и «треугольник» рассчитывается по одной формуле. Однако, подключение одного и того же асинхронного двигателя разными соединениями в одну и ту же сеть, приведёт к разной потребляемой мощности. Неправильное подключение способно расплавить обмотки статора.
Схемы подключений:
Поскольку асинхронный двигатель широко распространён повсеместно, на его долю приходится потребление от 45% до 50% вырабатываемой электроэнергии. Что бы снизить расход электроэнергии (почти на 50%) и не потерять в мощности и цене двигателя, в конструкции механизма используют применение совмещённых обмоток. Принцип заключается в схеме подключения нагрузки к сети. Совмещение обмоток «звезда» «треугольник» при последующем подключении к трёхфазной сети даёт в итоге систему из шести фаз, угол между магнитными потоками в которой равен 30°. Метод сглаживает кривую магнитного поля между ротором и статором, это положительно сказывается на показателях электродвигателя.
В зависимости от конструкции ротора, асинхронный двигатель условно делят на виды: короткозамкнутый ротор, фазный ротор. Статор обоих механизмов одинаков, отличительная черта, обмотка. Сердечник ротора так же выполнен из электротехнической стали, методом комбинирования прямых и косых стыков пластин.
Составные детали двигателя размещаются в корпусе. Для небольших моторов корпус делают цельнолитым, материал изделия, чугун. Кроме того, применяют сплав алюминия, либо сталь. Некоторые корпуса в маленьких двигателях совмещают функцию сердечника, в мощных двигателях корпус выполняется из составных частей.
Поскольку асинхронный мотор относится к электрической машине, изделие применяется как в режиме двигателя, так и в режиме генератора. Однако, как генератор, асинхронный механизм имеет ряд недостатков, которые не позволили машине использоваться массово в этом качестве.
Тип подвижной части
Как уже упоминалось, в зависимости от того, в каком виде выполнена подвижная часть, асинхронные двигатели делят:
- Асинхронный двигатель с короткозамкнутым ротором.
Такая конструкция носит название «беличья клетка» за внешнюю схожесть. Конструктивно механизм состоит из стержней, которые замкнуты по торцам кольцами. Материал детали, медь или алюминий. В двигателях малой и средней мощности конструкцию выполняют, заливая расплавленный алюминий в пазы сердечника ротора, заодно выполняются кольца и торцевые лопасти. Назначение лопастей, вентилировать мотор. В мощных двигателях стержни клетки делают из меди, торцы стержней приваривают к кольцам.
Наличие зубцов с низким магнитным сопротивлением, в сравнении с сопротивлением обмотки, вызывает пульсацию магнитного потока. Пульсация приводит к росту гармонических токов напряжения электродвижущей силы. Чтобы снизить это явление, а так же уменьшить шум, пазы ротора или статора делают скошенными.
Недостаток короткозамкнутого ротора в том, что пусковой момент двигателя этой конструкции небольшой, наряду со значительным показателем пускового тока. Применение этих моторов целесообразно в случаях, если не требуются большие пусковые моменты. Достоинство: простота изготовления, низкая инерция, нет контакта со статической частью, как следствие, долговечность и приемлемая стоимость обслуживания.
Достоинство: простота изготовления, низкая инерция, нет контакта со статической частью, как следствие, долговечность и приемлемая стоимость обслуживания.
Короткозамкнутый ротор асинхронного двигателя:
- Асинхронный двигатель с фазным ротором.
Чаще конструкция имеет трёхфазную обмотку, иногда многофазную. Как правило, обмотка соединена по схеме «звезда» с выводом на кольца контакта, вращающиеся с валом двигателя. По кольцам контакта скользят щётки, выполненные из металла и графита. С помощью этих щёток, в цепь обмотки ротора встраивают реостат, отвечающий за регулировку пуска. Регулировка возможна, поскольку реостат играет роль добавочного активного сопротивления для каждой фазы.
Фазный ротор асинхронного двигателя:
Фазный ротор двигателя при включении максимально увеличивает момент пуска и уменьшает ток, это возможно из-за применения реостата. Такие характеристики приводят в действие механизмы, для которых характерна большая нагрузка в момент пуска.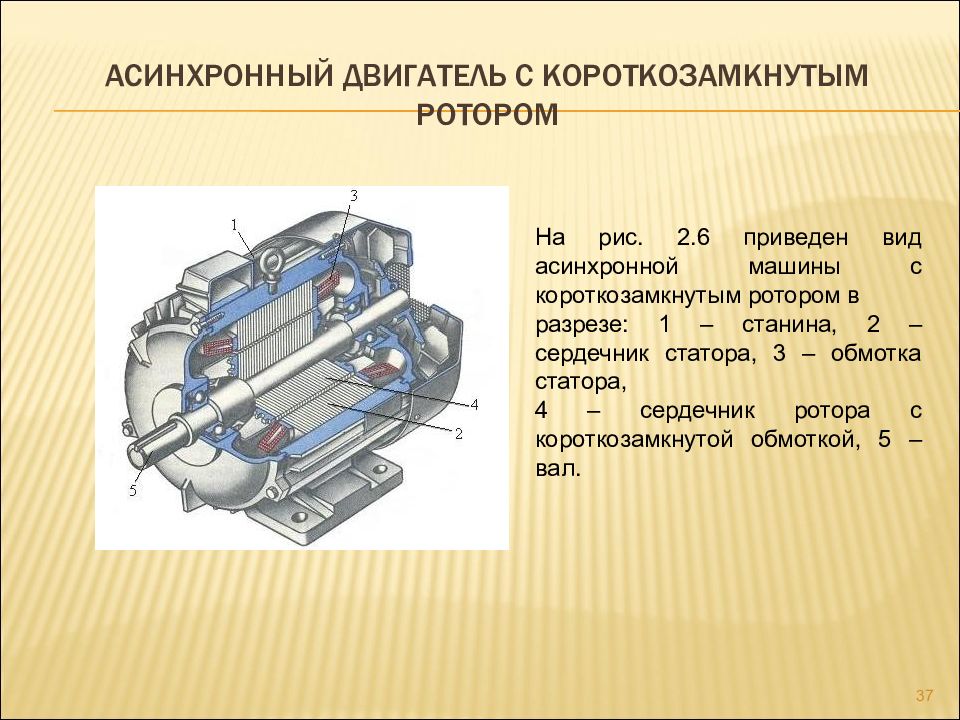
Принцип работы
Рассмотрим асинхронный двигатель принцип работы и устройство. Для корректного подключения агрегата к сети, обмотки соединяются по схеме «звезда» или «треугольник». Действие механизма основано на использовании вращающегося магнитного поля статора. Частота вращения многофазной обмотки переменного поля (n1) определяется по формуле:
Здесь:
- f – частота сети в Герцах;
- p – Количество пар полюсов (как правило, 1-4 пары, поскольку чем их больше, тем ниже мощность и КПД, использование полюсов даёт возможность не применять редуктор, при низкой частоте вращения).
Магнитное поле, пронизывающее статор с обмоткой пронизывает и обмотку ротора. За счёт этого индуцируется электродвижущая сила. Электродвижущая сила самоиндукции в обмотке статора (Е1) направлена навстречу приложенному напряжению сети, ограничивая величину тока в статоре. Поскольку обмотка ротора замкнута, или идёт через сопротивление (короткозамкнутый ротор в первом случае, фазный ротор во втором случае), то под действием электродвижущей силы ротора (Е2) в ней образуется ток.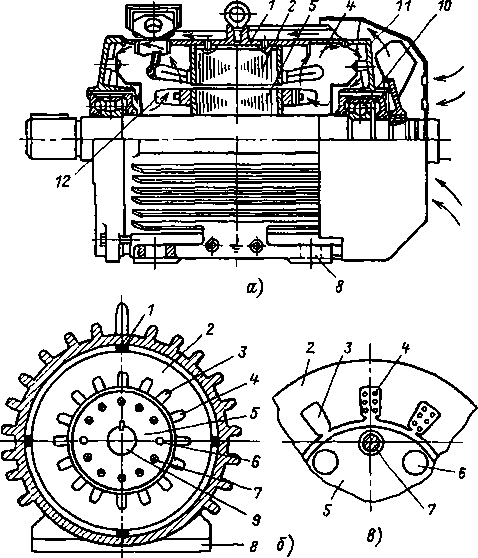 Взаимодействие индуцируемого тока в обмотке ротора и магнитного поля статора создаёт электромагнитную силу (Fэл). Направление силы определяется по правилу левой руки.
Взаимодействие индуцируемого тока в обмотке ротора и магнитного поля статора создаёт электромагнитную силу (Fэл). Направление силы определяется по правилу левой руки.
Согласно правилу: левая рука устанавливается таким образом, что бы магнитно силовые линии входили в ладонь, а вытянутые четыре пальца направлялись вдоль движения тока в обмотке. Тогда отведённый большой палец покажет направление действия электромагнитной силы для конкретного проводника с током.
Совокупность электромагнитных сил двигателя будет равна общему электромагнитному моменту (М), который приводит в действие вал электродвигателя с частотой (n2). Скорость ротора не равна скорости вращения поля, поэтому эта скорость называется асинхронной скоростью. Вращающий момент в асинхронном двигателе развивается только при асинхронной скорости, когда скорость вращения ротора не равна скорости вращения магнитного поля. Важно, что бы при работе двигателя скорость ротора была меньше скорости поля (n2< n1). Для определения величины отставания введён термин «скольжение», показатель определяется по формуле:
Таким образом, частота вращения ротора (обороты) будет равна:
Принцип работы асинхронного электрического двигателя легко объясняется с помощью устройства, называющегося диск Арго – Ленца.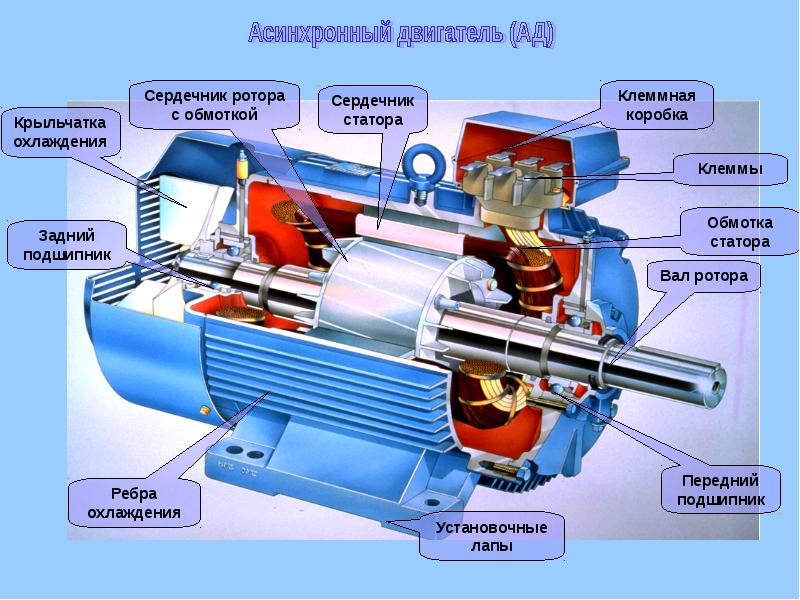
Постоянный магнит закрепляют на оси, которая устанавливается в устройстве, способном обеспечить её вращение. Перед полюсами магнита (N-S) помещают диск, выполненный из меди. Диск так же крепится на оси и свободно вращается вокруг неё.
Если вращать магнит за рукоятку, диск тоже будет вращаться в том же направлении. Эффект объясняется тем, что магнитные линии поля, создаваемые магнитом, замыкаются от северного полюса к южному полюсу, пронизывая диск. Эти линии образуют в диске вихревые токи, которые взаимодействуя с полем, приводят к возникновению силы, вращающей диск. Закон Ленца гласит, что направление всякого индукционного тока противодействует величине, вызвавшей его. Вихревые токи пытаются остановить магнит, но поскольку это не возможно, диск следует за магнитом.
Примечательно, что скорость вращения диска всегда меньше скорости вращения магнита. В асинхронных электродвигателях магнит заменяет вращающееся магнитное поле, созданное токами трёхфазной обмотки статора.
Подключение двигателя
До того, как подключить асинхронный двигатель, ознакомьтесь с его паспортом. Обмотки статора двигателя соединены «звездой» или «треугольником», в зависимости от напряжения сети. Если в паспорте указано, что механизм рассчитан на применение 220/380В, это означает, что при подключении мотора на 220В обмотки соединяют схемой «треугольник», если напряжение сети 380В, обмотки соединяют схемой «звезда».
Маркировка на коробке для клемм:
Сбор схем проводится в коробке для клемм, расположенной на корпусе электродвигателя, перед выполнением работ, коробку разбирают. Начало каждой обмотки именуется U1, V1, W1 соответственно. Концы обмоток подписываются так же U2, V2, W2. При отсутствии в коробке для клемм маркировки выводов, начало и конец обмотки определяют, используя мультиметр.
Процедура выполняется следующим образом:
- Подписываем бирки, которыми будем маркировать выводы обмоток;
- Определяем принадлежность шести выводов к трём обмоткам.
 Для этого берём мультиметр, переключаем в положение «200 Ом». Один щуп подключаем к любому из шести проводов, второй щуп используем, что бы прозвонить оставшиеся пять выводов. При нахождении искомого провода показания прибора будут отличными от «0».
Для этого берём мультиметр, переключаем в положение «200 Ом». Один щуп подключаем к любому из шести проводов, второй щуп используем, что бы прозвонить оставшиеся пять выводов. При нахождении искомого провода показания прибора будут отличными от «0». - Эти два провода — первая обмотка двигателя. Надеть на провода бирки (U1, U2) в произвольном порядке.
- Проделываем аналогичную процедуру со второй и третьей обмоткой. Выводы второй обмотки маркируем (V1, V2), выводы третьей обмотки маркируем (W1, W2).
- Определяем вид подключения обмоток (согласованный или встречный).
Важно! Согласованное подключение создаёт электродвижущую силу, которая будет равна сумме сил обмоток. Встречное подключение даст электродвижущей силе нулевое значение, поскольку силы будут направлены друг навстречу другу.
- Катушку (U1, U2) соединяем с катушкой (V1, V2), после чего на выводы (U1, V2) подаём переменное напряжение 220 вольт.

- На выводах (W1, W2) меряем переменное напряжение. Если значение напряжения равно нулю, то обмотки подключены встречно, если прибор показывает некоторое значение, обмотки (U1, U2) и (V1, V2) подключены согласованно.
- Аналогичным образом определяем правильность подключения третьей обмотки.
- В зависимости от типа двигателя подключаем промаркированные концы проводов схемой «звезда» или «треугольник».
- Подаём питание на двигатель, проверяем работу.
При необходимости обратного вращения асинхронного двигателя, для этого меняют местами два провода подключаемого источника трёхфазного напряжения.
Подключение двигателя на одну фазу
Для бытовых нужд использование трёхфазного мотора проблематично, поскольку отсутствует требуемое напряжение. Решение проблемы, использовать однофазный асинхронный двигатель. Такой мотор оснащен статором, однако конструктивно изделие отличается количеством и расположением обмоток, а так же схемой их запуска.
Схема подключения однофазного двигателя:
Так, однофазный асинхронный двигатель со статором из двух обмоток будет располагать их со смещением по окружности под углом 90°. Соединение катушек будет параллельным, одна — пусковая, вторая — рабочая. Что бы создать вращающееся магнитное поле, дополнительно вводят активное сопротивление, или конденсатор. Сопротивление создаёт сдвиг фаз токов обмотки, близкий к 90°, что помогает создать вращающее магнитное поле.
Соединение катушек будет параллельным, одна — пусковая, вторая — рабочая. Что бы создать вращающееся магнитное поле, дополнительно вводят активное сопротивление, или конденсатор. Сопротивление создаёт сдвиг фаз токов обмотки, близкий к 90°, что помогает создать вращающее магнитное поле.
При использовании статором асинхронного двигателя одной катушки, подключение источника питания в одну фазу создаст пульсирующее магнитное поле. В обмотке ротора появится переменный ток, который создаст магнитный поток, как следствие работа двигателя не произойдёт. Для запуска такого агрегата создают дополнительный толчок, подключив конденсаторную схему пуска.
Асинхронный двигатель, рассчитанный на подключение к трёхфазному источнику питания, работает и от одной фазы. Пользователей интересует вопрос, как подключить асинхронный двигатель на 220В. Помните, что подключение снизит коэффициент полезного действия двигателя, а так же повлияет на мощность и показатели пуска. Для выполнения задачи надо из трёх обмоток статора собрать схему, сделав так, что бы обмоток было две.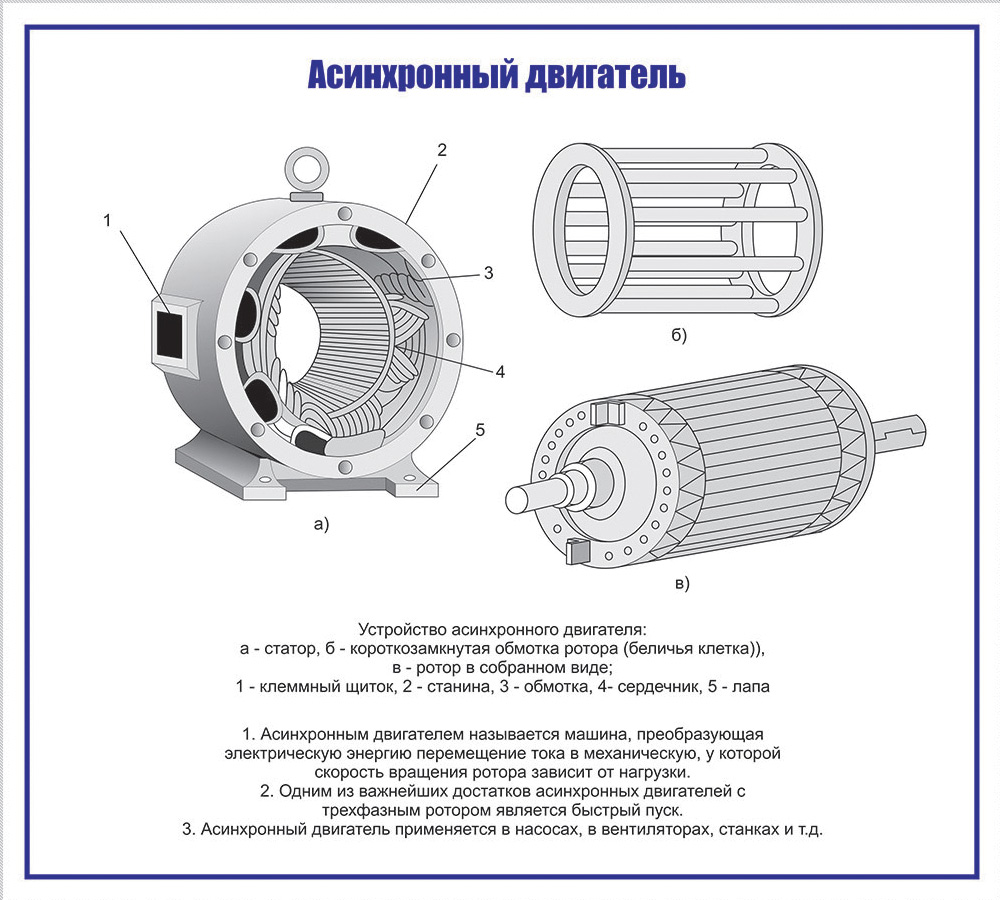 Одна обмотка будет рабочей, вторая используется для запуска агрегата. Как пример, предположим, что есть три катушки с начальными выходами (U1, V1, W1) и конечными выходами (U2, V2, W2). Создаём первую рабочую обмотку, объединив концы (V2, W2), а начало (V1, W1) подключаем к сети в 220В. Пусковой обмоткой будет оставшаяся катушка, которую подключают к питанию через конденсатор, соединив её с ним последовательно.
Одна обмотка будет рабочей, вторая используется для запуска агрегата. Как пример, предположим, что есть три катушки с начальными выходами (U1, V1, W1) и конечными выходами (U2, V2, W2). Создаём первую рабочую обмотку, объединив концы (V2, W2), а начало (V1, W1) подключаем к сети в 220В. Пусковой обмоткой будет оставшаяся катушка, которую подключают к питанию через конденсатор, соединив её с ним последовательно.
Асинхронный двигатель с двумя скоростями
Иногда необходимо изменить скорость асинхронного двигателя. Механизмы с управлением от электронного блока дорогие, поэтому применяют двухскоростной асинхронный двигатель. Принцип такого механизма в том, что обмотку в этом моторе подключают особым образом, по схеме Даландера, что меняет скорость вращения.
Схема подключения Даландера:
Подключая выводы U1, V1, W1 к напряжению в три фазы, двигатель вписывается в схему «треугольник» и работает на пониженной скорости. Если выводы (U1, V1, W1) замкнуть, а питание кинуть на (U2, V2, W2), то получится двухскоростной электродвигатель, работающий по схеме «двойная звезда», увеличивающей скорость в два раза.
В чем разница между щеточными и бесщеточными двигателями? — Worx Tools Russia
Все чаще на просторах интернет-магазинов можно найти инструменты с двумя типами двигателей. Инструменты и садовая техника WORX также не отстают от современных трендов при производстве техники, так что на нашем сайте вы тоже можете найти специальную характеристику двигателя — щеточный или бесщеточный. Так что же это за характеристика, на что она влияет и в чем принципиальные отличия инструментов с тем или иным двигателем? Давайте разбираться.
Устройство и принцип действия щеточного двигателя
Щеточный двигатель по-другому еще называется коллекторным. Состоит двигатель из нескольких важных частей.
Ротор — по-другому, якорь. Как раз он вращается внутри и преобразует электрическую энергию в механическую. Якорь обмотан медной проволокой (обмоткой) с разных сторон ротора. За счет прохождения тока через проволоку создается магнитное поле, которое в свою очередь и создает вращение элемента.
На обмотке в бесщеточном двигателе установлен коммутатор, который используется для переключения с одной обмотки на другую, что позволяет менять направление вращения ротора. Этот коммутатор и есть коллектор, от которого взял свое название двигатель.
Чтобы напряжение передалось на обмотки, а ток прошел через коллектор в двигатель устанавливаются специальные щетки. Щетки обычно состоят из графита; они всегда контактируют с коммутатором и обеспечивают подачу энергии к катушкам с обмоткой. Есть две щетки, и каждая из них подключается к противоположному полюсу батареи. Это гарантирует, что при вращении ротора ток, протекающий к катушкам, постоянно меняет направление. Это приводит к необходимому изменению магнитного поля, которое позволяет ротору продолжать вращаться.
Все вышеописанные элементы установлены в статор. Статор — неподвижных элемент двигателя, в котором могут быть либо еще одна катушка с проволокой, либо постоянный магнит. За счет того или другого элемента и создается магнитное поле обратной полярности ротору, из-за чего тот вращается.
За счет того или другого элемента и создается магнитное поле обратной полярности ротору, из-за чего тот вращается.
Коллекторные двигатели могут работать от переменного напряжения, так как при смене полярности ток в обмотках возбуждения и якоря также меняет направление, в результате чего вращательный момент не меняет своего направления.
Плюсы и минусы щеточного двигателя
Так мы с вами вкратце разобрались с устройством щеточного двигателя. Теперь в чем же его плюсы и минусы?
Плюсы
- Первым плюсом инструментов со щеточными двигателями стоит отметить более низкую стоимость в отличие бесщеточных. Это связано с технологиями производства и более бюджетными материалами.
- Вторым плюсом специалисты отмечают упрощенную конструкцию двигателя, что влияет на стоимость ремонта. Проще поменять щетки, чем весь мотор в целом.
-
Также к плюсам можно отнести относительно малый вес и размер инструментов.

Минусы
- На высоких оборотах увеличивается трение щёток. Отсюда вытекает проблема их быстрого износа. Помимо износа самих щеток, в процессе работы они стираются. Стертый графит может засорить коллектор и привести в полную негодность инструмент.
- Также к минусам можно отнести более низкую мощность щеточных инструментов, в отличие от бесщеточных моделей. Это связано с тем, что щеточные двигатели физически не могут выдавать мощность выше 3 000 об./мин. Но такой мощности вполне достаточно для домашнего обихода.
-
Еще одним минусом щеточных двигателей мы можем отметить наличие искрения во время работ. Обратите внимание, что при запуске инструмента щетки трутся о коллектор и создают видимые искры. Это значит, что работать щеточными инструментами нужно более аккуратно — убирать на расстояние все возможные легковоспламеняющиеся вещества и предметы, а также периодически делать перерывы в работе, во избежание перегрева двигателя.
- Последним минусом отметим не очень высокий КПД инструментов с коллекторным двигателем — всего 60%. Это значит, что инструменты несколько хуже справляются с прочными материалами (например, с металлом) и выполняют меньший объем работы за то же время, что бесщеточный инструмент.
Устройство и принцип действия бесщеточного двигателя
Теперь давайте разберем принцип работы бесщеточного двигателя. Как понятно из названия, его принципиальное отличие в отсутствии щеток. Но как же он тогда работает? Как нужная энергия поступает в двигатель?
В устройстве бесщеточного двигателя также присутствует ротор и статор — основные элементы любого мотора. Но при этом отсутствует коллектор, соответственно и двигатель по-другому называется бесколлекторным. Если у щеточного двигателя работа происходит за счет электро-механической смены полярности, то в бесщеточном двигателе все работает благодаря электромагнитной индукции. Также отличается местоположение обмотки — здесь она располагается на статоре, в отличие от предыдущего вида двигателя.
Также отличается местоположение обмотки — здесь она располагается на статоре, в отличие от предыдущего вида двигателя.
Вместо щеток и коллектора в бесщеточном двигателе установлены датчики Холла и контроллер, который контролирует подачу напряжения на катушки для создания индуктивности, а также положение ротора и скорость его вращения.
Когда плата подает на обмотку ток, создается тоже противоположное магнитное поле, и магниты на роторе начинают вращаться.
Еще одной особенностью бесщеточных двигателей нужно назвать их типы. Двигатели бывают двух типов — синхронный и асинхронный. В синхронном двигателе частота вращений ротора равна частоте вращений магнитного поля — то есть один оборот ротор совершает после одного полного прохождения тока через катушку. А в асинхронном двигателе обратная ситуация — частота вращений ротора меньше, чем частота вращения магнитного поля. То есть ток проходит через катушку быстрее.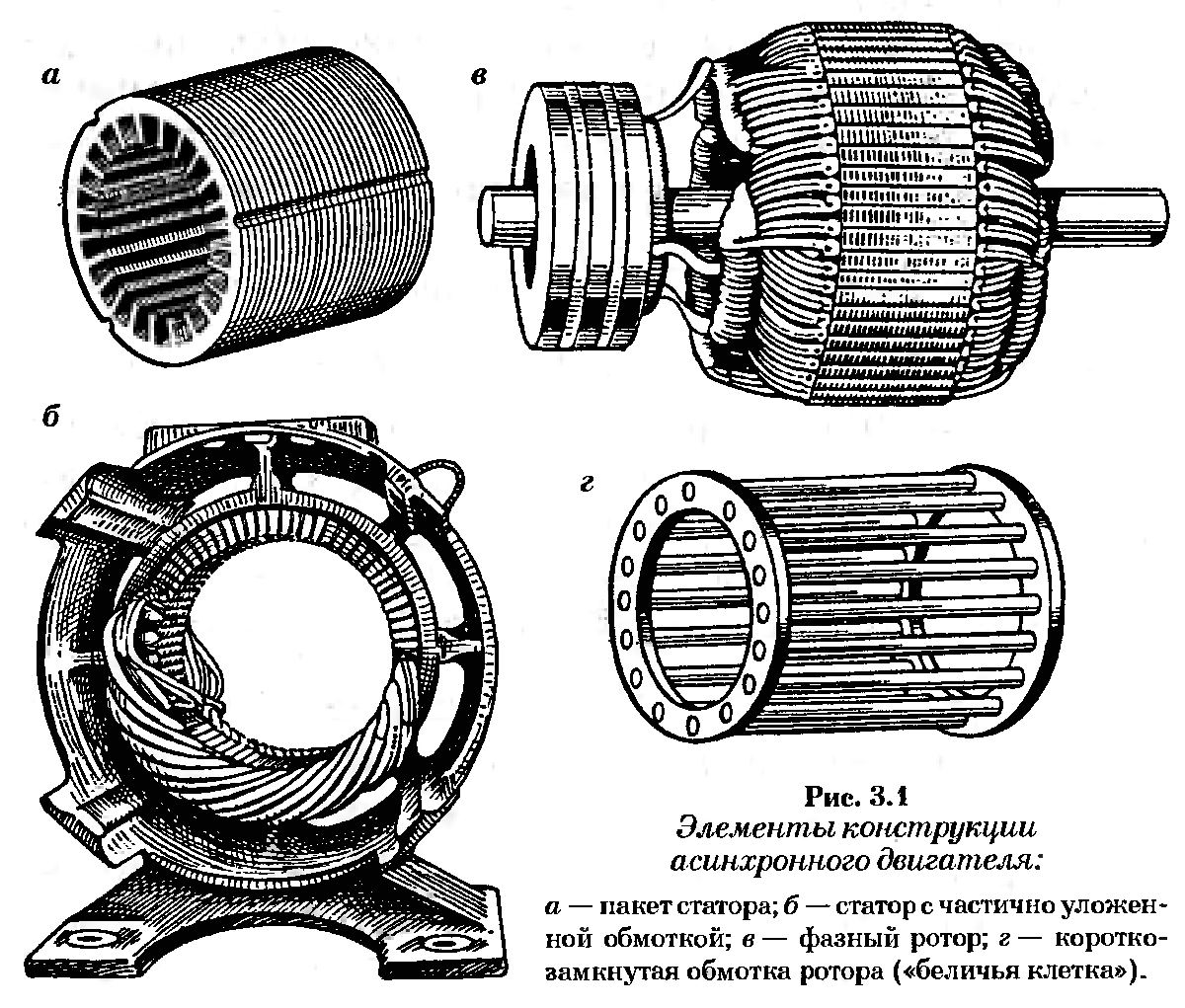
Плюсы и минусы бесщеточного двигателя
Если с устройством бесщеточного двигателя мы разобрались, то теперь давайте рассмотрим положительные и отрицательные стороны инструментов с бесщеточными моторами.
Плюсы:
- У инструментов с бесщеточным двигателем отсутствуют многие проблемы, которые встречаются у щеточных моделей. Так, первым плюсом специалисты отмечают бо́льшую износостойкость инструментов. Ввиду отсутствия щеток не создается трение внутри двигателя, соответственно нет внутренних загрязнений. Также отсутствие щеток снижает пожароопасность инструмента — при работе нет искрения, а значит можно работать практически в любых условиях.
-
Вторым плюсом стоит отметить упрощенную регулировку крутящего момента — в отличие от щеточных моделей, у бесколлекторных инструментов достаточно просто нажать соответствующую кнопку на инструменте. Причем регулировка может иметь до 15 уровней и переключаться в одно мгновение.
- Одним из ключевых преимуществ бесщеточных моделей нужно отметить экономию расходуемой энергии. Этот пункт особенно актуален для аккумуляторных инструментов. Благодаря экономии инструменты работают до 50% дольше, чем модели со щеточным двигателем. Также КПД бесколлекторных инструментов намного выше — инструмент выполняет 90% поставленных задач, против 60% у коллекторных моделей. Это значит, что бесщеточными инструментами можно работать практически с любым материалом без потери мощности.
- Помимо вышеуказанных преимуществ инструментов с бесщеточным двигателем, они еще могут разгоняться до максимальных показателей и имеют быстрый запуск сразу с больших скоростей, чем не могут похвастаться щеточные инструменты.
Минусы:
Но не бывает все настолько радужно. Даже у инструментов с бесщеточными двигателями есть и свои недостатки. Так сказать, ложка дегтя в бочке меда.
Так сказать, ложка дегтя в бочке меда.
- К минусам, в первую очередь стоит отнести стоимость инструментов. Техника с бесщеточным мотором в цене дороже, чем упрощенные модели со щеточным двигателем.
- Вторым недостатком бесколлекторных инструментов может быть сложное и дорогое техническое обслуживание. Бесщеточный двигатель — технологичное устройство, для работы с которым нужны знания в микроэлектронике. К счастью, в сотрудники наших сервисных центров знают и умеют обслуживать бесколлекторные двигатели.
Итоги сравнения щеточного и бесщеточного двигателей
Если сравнивать инструменты с разными видами двигателей, то можно смело сказать, что техника с бесщеточным двигателем надежнее и мощнее. Но нужно учитывать тот факт, что ориентирована такая техника больше на профессиональные работы. В быту же и инструменты со щеточным двигателем отлично справятся со своими задачами. Потому перед покупкой инструмента заранее определите цели, для которых вы будете использовать инструменты.
В ассортименте компании WORX есть инструменты и со щеточными и с бесщеточными двигателями. Чтобы определить какой именно тип двигателя установлен в инструменте, обратите внимание на иллюстрацию в карточке товара — в бесщеточных моделях есть специальная пометка «BRUSHLESS MOTOR».
Асинхронные двигатели — MirMarine
Асинхронными называются двигатели, у которых число оборотов ротора отстает от скорости вращения магнитного поля статора при прохождении в его обмотках трехфазного тока. При прохождении в обмотках статора трехфазной машины трехфазного тока возникает вращающееся магнитное поле, под действием которого в роторе индуктируется электрический ток. В результате взаимодействия вращающегося магнитного поля статора стоками, индуктируемыми в проводниках ротора, возникает механическое усилие, действующее на проводник с током, которое и создает вращающий момент, приводящий в движение ротор. При этом число оборотов ротора у асинхронного двигателя всегда меньше числа оборотов вращающегося магнитного поля статора за счет скольжения ротора, которое у современных двигателей составляет примерно 2—5%.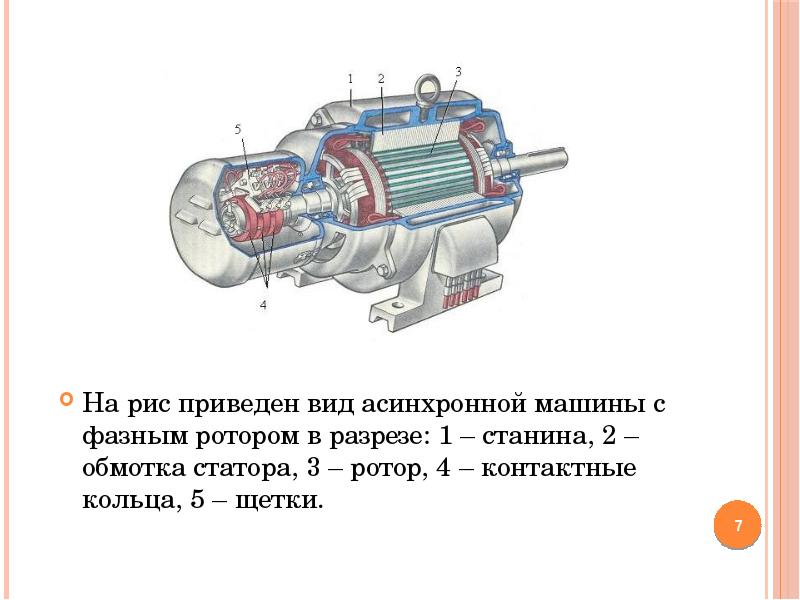
Таким образом, асинхронный двигатель получает энергию, подводимую к ротору вращающимся магнитным потоком (индуктивно) в отличие от двигателей постоянного тока, у которых энергия подводится по проводам.
Асинхронные двигатели в отличие от синхронных возбуждаются переменным током.
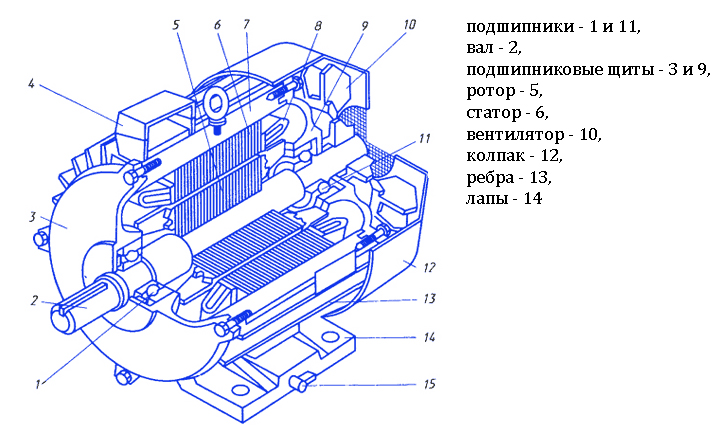
Асинхронный двигатель, так же как и синхронный, состоит из двух основных частей: статора с фазными обмотками, по которым проходит трехфазный переменный ток, и ротора, ось которого уложена в подшипниках. Ротор может быть коротко-замкнутым и фазным (рис. 175).
Короткозамкнутый ротор(рис. 175, в) представляет из себя цилиндр, по окружности которого параллельно его оси расположены проводники, замкнутые между собой с обеих сторон ротора кольцами (в виде беличьего колеса).
Асинхронный двигатель с таким ротором называется короткозамкнутым. К недостаткам их относятся малый пусковой момент и большой ток в обмотках статора при пуске.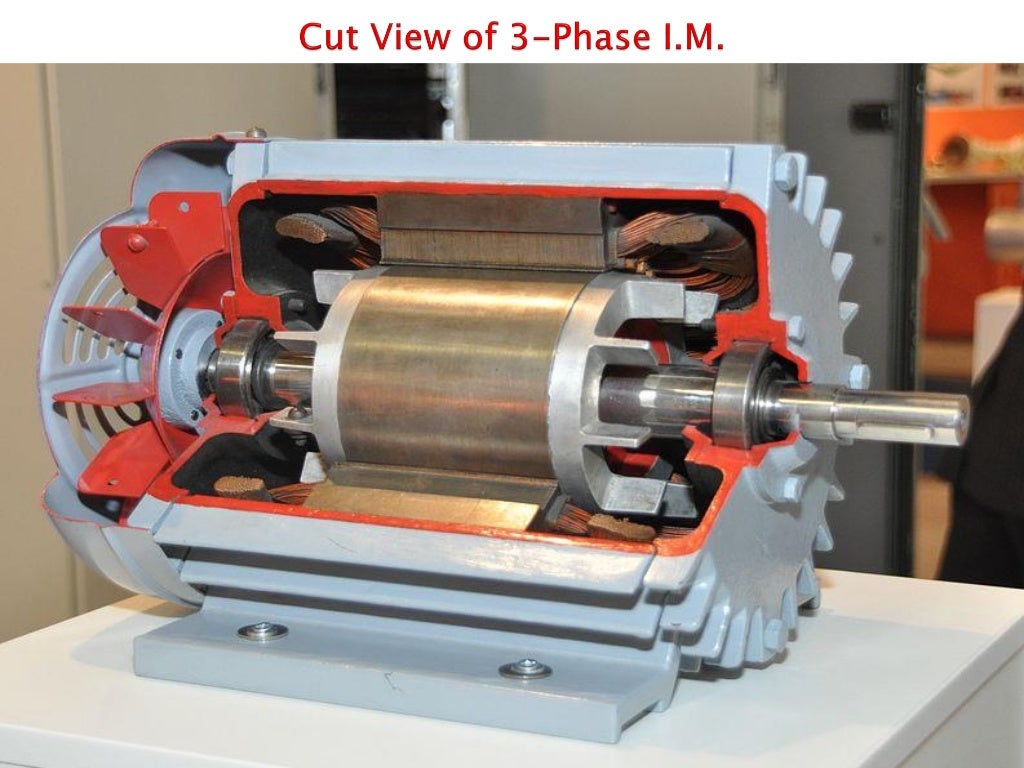 Если хотят увеличить пусковой момент или уменьшить пусковой ток, применяют асинхронные двигатели с фазным ротором (рис. 175,г).
Если хотят увеличить пусковой момент или уменьшить пусковой ток, применяют асинхронные двигатели с фазным ротором (рис. 175,г).
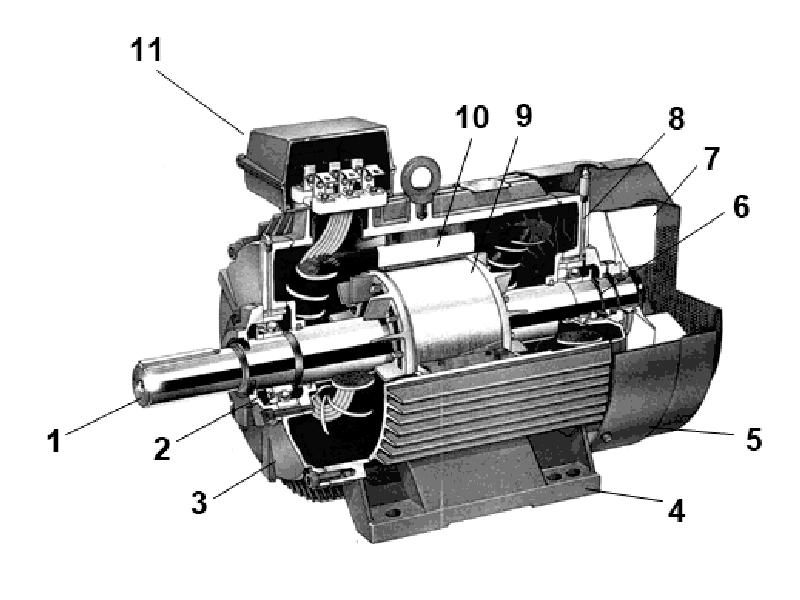
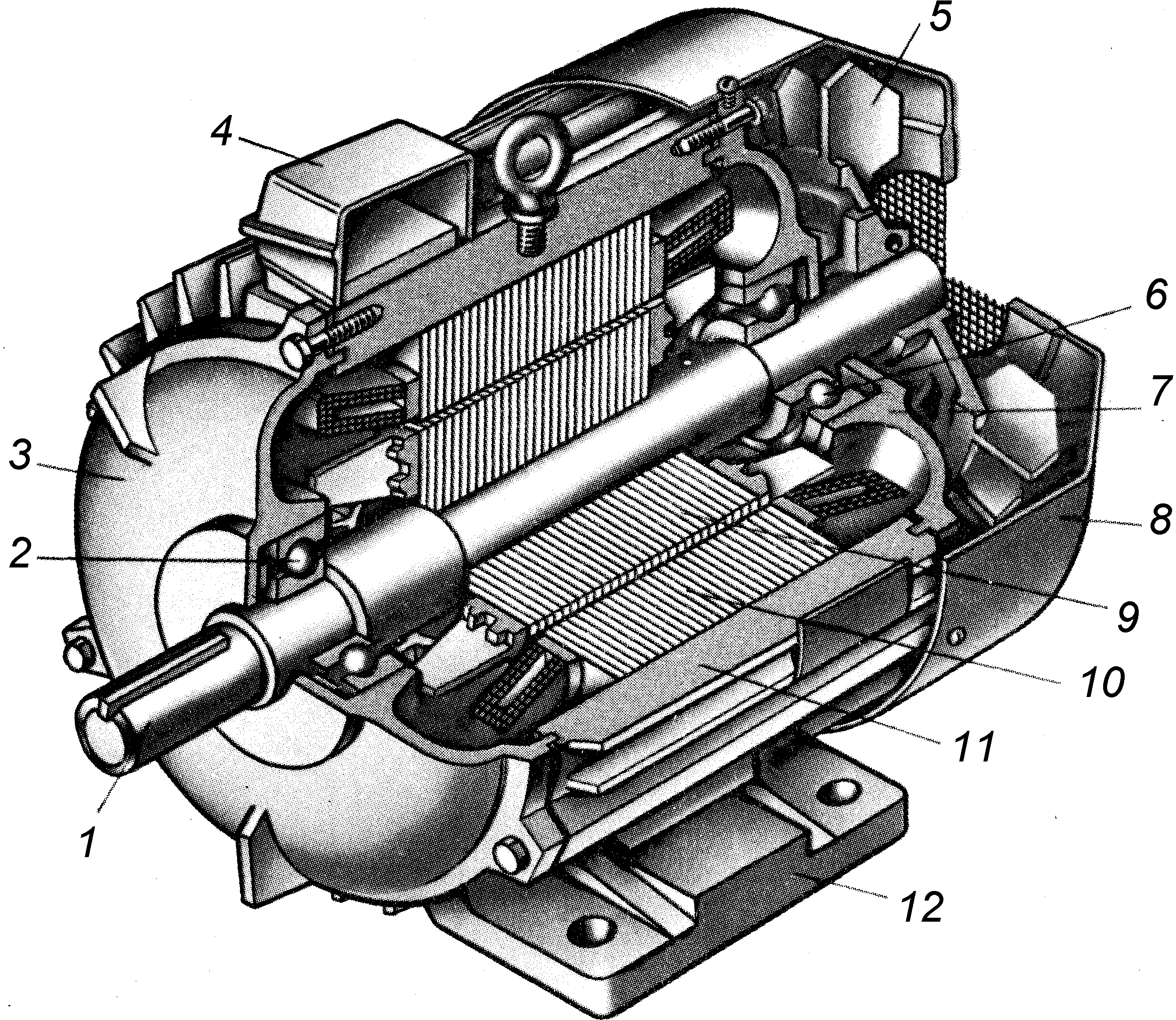
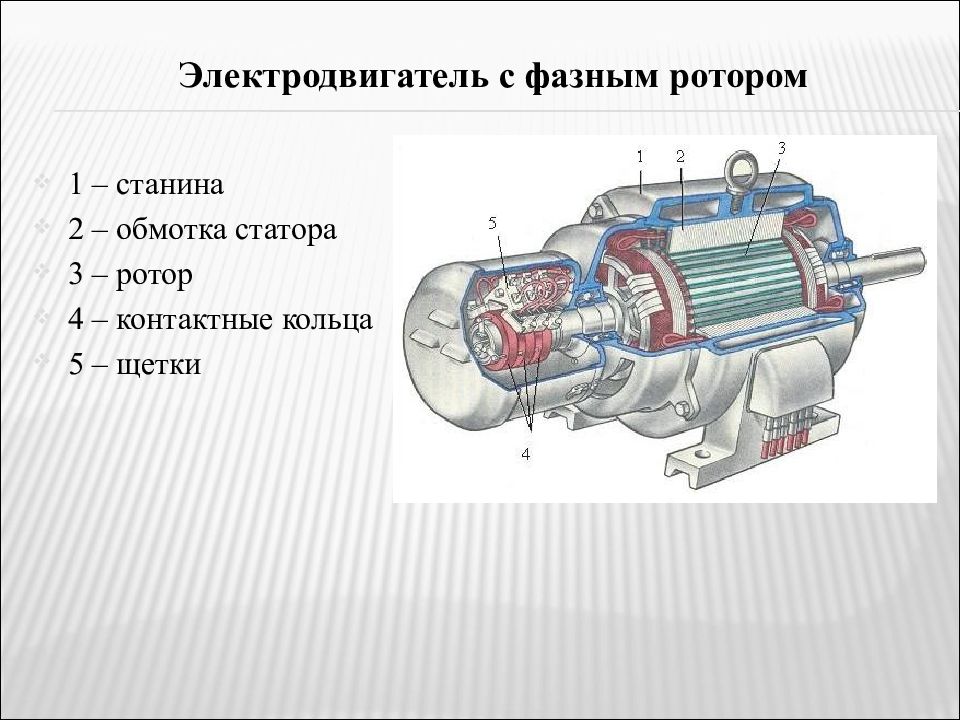
У этих двигателей на роторе размещают такую же обмотку, как и на статоре. При этом концы обмоток соединяют с контактными кольцами (рис. 175, д), расположенными на валу двигателя. Контактные кольца при помощи щеток соединяются с пусковым реостатом. Для пуска двигателя в питающую сеть включают статор, после чего постепенно выводят из цепи ротора сопротивление пускового реостата. Когда двигатель пущен в ход, контактные кольца при помощи особых приспособлений замыкаются накоротко, а щетки поднимаются над кольцами. Остановка электродвигателя производится простым выключением рубильника. После остановки двигателя необходимо опустить щетки и разомкнуть контактные кольца. На рис. 176 показан продольный разрез асинхронного двигателя с фазным ротором. На валу 1 двигателя имеется механизм для замыкания контактных колец 8 и подъема щеток ручкой 7. В корпусе 6 статора помещена обмотка 5, уложенная в пазы 4 стали статора. В пазах 2 стали ротора лежит обмотка 3 ротора.
В пазах 2 стали ротора лежит обмотка 3 ротора.
Пуск в ход электродвигателя с короткозамкнутым ротором может быть осуществлен непосредственным включением рубильника на полное рабочее напряжение сети (способ прямого пуска.) Однако вследствие резкого возрастания индуктируемой э. д. с. и величины пускового тока напряжение в сети в пусковой момент снижается, что отрицательно сказывается на работе приводного двигателя и других потребителей, питающихся от этой сети. В случае большой величины пускового тока, для его уменьшения асинхронные двигатели с короткозамкнутым ротором обычно пускают двумя способами: переключением обмоток статора в момент пуска со звезды на треугольник, если обмотки статора при нормальной работе электродвигателя соединены треугольником или включением электродвигателя через пусковое сопротивление (или автотрансформатор) в цепи статора.
Остановка электродвигателя производится выключением рубильника. После остановки электродвигателя пусковой реостат или автотрансформатор полностью вводится.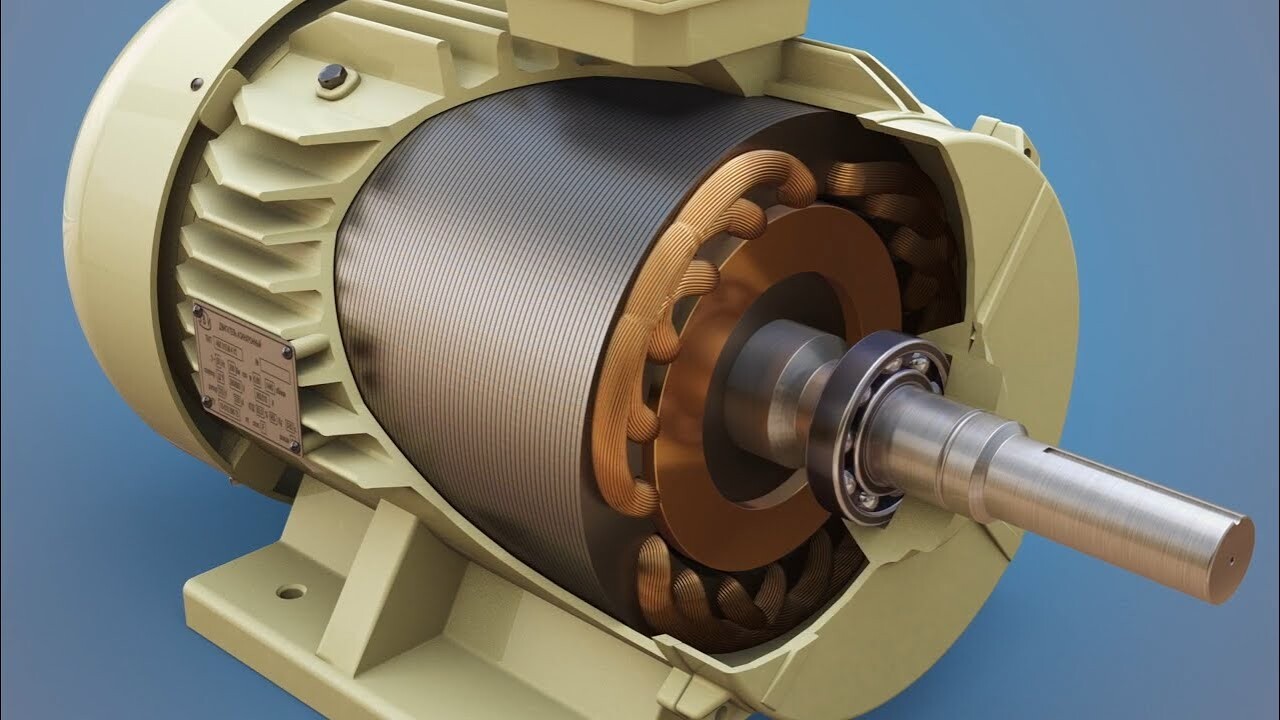 Скорость вращения асинхронных двигателей регулируют, изменяя сопротивление реостата, включенного в цепь ротора (у электродвигателей с фазным ротором) и переключением статорных обмоток для изменения числа пар полюсов (у электродвигателей с коротко-замкнутым ротором).
Скорость вращения асинхронных двигателей регулируют, изменяя сопротивление реостата, включенного в цепь ротора (у электродвигателей с фазным ротором) и переключением статорных обмоток для изменения числа пар полюсов (у электродвигателей с коротко-замкнутым ротором).
Изменение направления вращения асинхронных электродвигателей достигается изменением направления вращающегося магнитного поля статора путем переключения любых двух из трех фаз обмотки статора (с помощью проводов, соединяющих зажимы статорной обмотки с сетью) при помощи обычного двухполюсного переключателя.
Асинхронные двигатели
- просты по конструкции
- обладают по сравнению с двигателями постоянного тока меньшими габаритами и весом, вследствие чего он значительно дешевле
- более надежны в эксплуатации
- требуют меньшего внимания при обслуживании из-за отсутствия у них вращающегося коллектора и щеточного аппарата
- обладают более высоким к.
 п. д.
п. д. - аппаратура управления ими значительно проще и дешевле, чем у двигателей постоянного тока
- Асинхронные двигатели работают без искрообразования, которое возможно в машинах постоянного тока с нарушенной коммутацией, поэтому они более безопасны в пожарном отношении.
Перечисленными основными преимуществами асинхронных двигателей объясняется современная тенденция повсеместного внедрения переменного тока на морских судах. Следует отметить, что в промышленности асинхронные двигатели давно завоевали господствующее положение по сравнению с другими типами электродвигателей. Асинхронные двигатели строятся мощностью от долей киловатта до многих тысяч киловатт. На судах морского флота в основном применяются асинхронные двигатели с короткозамкнутым ротором, которые выпускаются в водозащищенном и брызгозащищенном исполнении и рассчитаны на напряжение 380/220 в.
Похожие статьи
Чем отличается синхронный двигатель от асинхронного
Двигатель является устройством, преобразующим энергию в механический тип работы. Только зная функции и технические характеристики мотора, можно правильно резюмировать, чем отличается синхронный двигатель от асинхронного вида устройства.
Только зная функции и технические характеристики мотора, можно правильно резюмировать, чем отличается синхронный двигатель от асинхронного вида устройства.
Принцип работы синхронных и асинхронных моторов
Функционирование синхронных электродвигателей базируется на взаимодействии полюсов статора и индуктора. В пусковой момент происходит ускорение мотора до показателей вращательной скорости магнитного потока. В таких условиях устройство действует в синхронном режиме, а магнитными полями образуется особое пересечение, в результате чего происходит синхронизация.
Синхронный двигатель в разрезе
Асинхронные моторы имеют частоту роторного вращения, отличную от частоты, с которой вращается магнитное поле, создаваемое в результате действия питающего напряжения. Такие двигатели не обладают автоматической регулировкой токового возбуждения.
Асинхронный двигатель в разрезе
Основные отличия
Наличие обмоток на якоре является одним из основных отличий между двумя типами двигателей
Несмотря на внешнее сходство, асинхронные двигатели и устройства синхронного типа имеют несколько принципиальных отличий:
- ротор асинхронных моторов не нуждается в токовом питании, а индукция полюсов зависит от магнитного поля статора;
- ротор в синхронном двигателе обладает обмоткой возбуждения в условиях независимого питания;
- обороты в асинхронном моторе под нагрузкой отстают по величине скольжения от вращений магнитного поля внутри статора;
- обороты в синхронных двигателях соответствуют частоте «оборотов» магнитного поля в статоре и постоянны в условиях разных нагрузок.

Статоры в двигателях асинхронного и синхронного типа характеризуются одинаковым устройством и создают вращающееся магнитное поле.
Синхронные двигатели способны работать с одновременным совмещением функций мотора и генератора.
Такие устройства относятся к категории современных двигателей, обладающих высоким КПД и постоянной частотой вращения. Асинхронные моторы сложнее регулировать, а их коэффициент полезного действия недостаточно высокий. Тем не менее, второй вариант более доступен по цене.
Оцените статью: Поделитесь с друзьями!Управление частотным преобразователем, векторное, скалярное.
Компания Русэлком производит и поставляет преобразователи частоты для управления асинхронными двигателями. Поэтому для понимания принципа частотного управления рассмотрим более детально работу асинхронного двигателя и методы его частотного регулирования
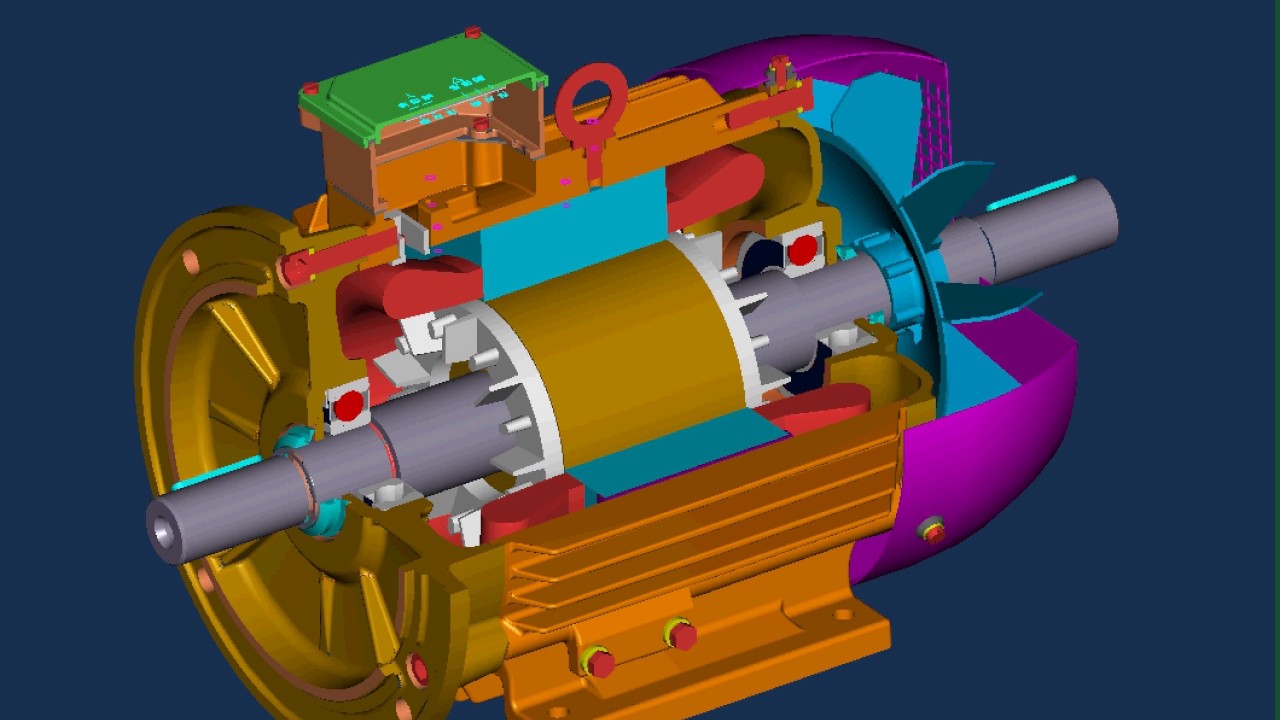
Конструкция асинхронного двигателя схематически изображена на рис. 2. Двигатель состоит из неподвижной части, которая называется статор и подвижной (вращающейся) части называемой ротор.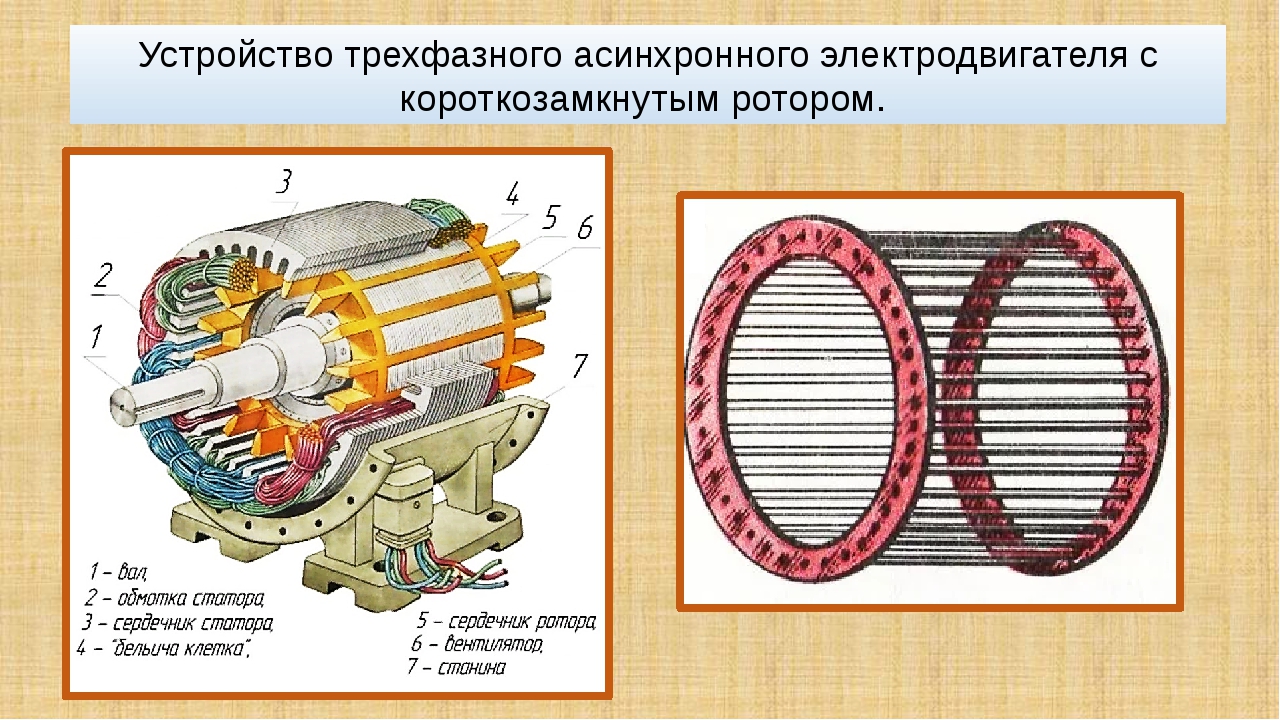
В пазах статора уложены три группы обмоток А-В-С. Обмотки статора сдвинуты друг относительно друга в пространстве на угол 120°. Это является одним из двух обязательных условий для создания вращающегося магнитного поля статора.
Ротор двигателя изготовлен в виде цельного цилиндра из специальной электротехнической стали с короткозамкнутой обмоткой.
Рис.2. Схематический разрез асинхронного двигателя.
На обмотки статора от источника питания подается трехфазное напряжение uа, uв, uс с частотой
Напряжения uа, uв, uс сдвинуты друг относительно друга по фазе на 120°. Это является вторым обязательным условием для создания вращающегося магнитного поля статора.
При питании обмоток статора электрического двигателя трехфазным напряжением с частотой создается вращающееся магнитное поле. Угловая скорость вращения этого поля в радианах определяется по известной формуле
– число пар полюсов статора.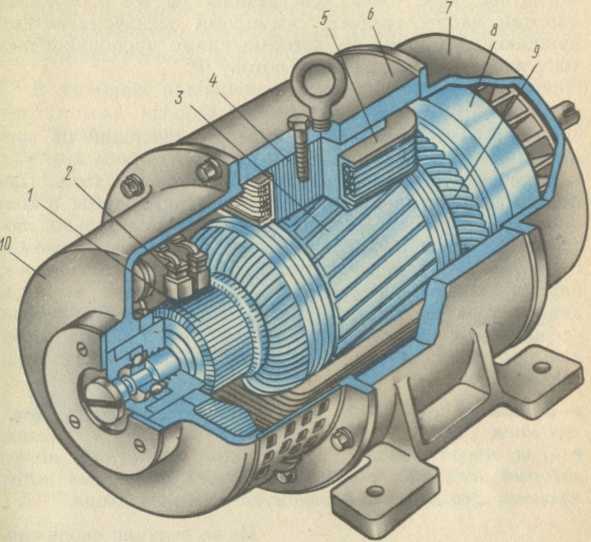
Переход от угловой скорости вращения поля измеряемой в радианах, к частоте вращения выраженной в оборотах в минуту, осуществляется по следующей формуле
где 60 – коэффициент пересчета размерности.
Подставив в это уравнение скорость вращения поля, получим, что
Из формулы видно, что частота вращения магнитного поля статора зависит от частоты напряжения питания и числа пар полюсов.
К примеру, в двигателе с одной парой полюсов при частоте питающего напряжения 50 Гц частота вращения магнитного поля равна 3000 об/мин.
В синхронном электрическом двигателе частота вращения ротора на установившемся режиме равна частоте вращения магнитного поля статора
В асинхронном электрическом двигателе частота вращения ротора на установившемся режиме отличается от частоты вращения на величину скольжения . Для примера в асинхронном двигателе с одной парой полюсов при частоте питающего напряжения 50 Гц и при скольжении 5% частота вращения ротора равна 2850 об/мин.
Таким образом, частота вращения ротора синхронного и асинхронного двигателей зависит от частоты напряжения питания.
На этой зависимости и основан метод частотного регулирования.
Изменяя с помощью преобразователя частоту на входе двигателя, мы регулируем частоту вращения ротора.
В наиболее распространенном частотно регулируемом приводе на основе асинхронных двигателей с короткозамкнутым ротором применяются скалярное и векторное частотное управление.
При скалярном управлении по определенному закону изменяют амплитуду и частоту приложенного к двигателю напряжения. Изменение частоты питающего напряжения приводит к отклонению от расчетных значений максимального и пускового моментов двигателя, к.п.д., коэффициента мощности. Поэтому для поддержания требуемых рабочих характеристик двигателя необходимо с изменением частоты одновременно соответственно изменять и амплитуду напряжения.
В существующих преобразователях частоты при скалярном управлении чаще всего поддерживается постоянным отношение максимального момента двигателя к моменту сопротивления на валу. То есть при изменении частоты амплитуда напряжения изменяется таким образом, что отношение максимального момента двигателя к текущему моменту нагрузки остается неизменным. Это отношение называется перегрузочная способность двигателя.
То есть при изменении частоты амплитуда напряжения изменяется таким образом, что отношение максимального момента двигателя к текущему моменту нагрузки остается неизменным. Это отношение называется перегрузочная способность двигателя.
При постоянстве перегрузочной способности номинальные коэффициент мощности и к.п.д. двигателя на всем диапазоне регулирования частоты вращения практически не изменяются.
Максимальный момент, развиваемый двигателем, определяется следующей зависимостью
где — постоянный коэффициент.
Поэтому зависимость напряжения питания от частоты определяется характером нагрузки на валу электрического двигателя.
Для постоянного момента нагрузки поддерживается отношение U/f = const, и, по сути, обеспечивается постоянство максимального момента двигателя. Характер зависимости напряжения питания от частоты для случая с постоянным моментом нагрузки изображен на рис. 2. Угол наклона прямой на графике зависит от величин момента сопротивления и максимального крутящего момента двигателя.
Вместе с тем на малых частотах, начиная с некоторого значения частоты, максимальный момент двигателя начинает падать. Для компенсации этого и для увеличения пускового момента используется повышение уровня напряжения питания.
В случае вентиляторной нагрузки реализуется зависимость U/f2 = const. Характер зависимости напряжения питания от частоты для этого случая показан на рис.3. При регулировании в области малых частот максимальный момент также уменьшается, но для данного типа нагрузки это некритично.
Используя зависимость максимального крутящего момента от напряжения и частоты, можно построить график U от f для любого типа нагрузки.
Важным достоинством скалярного метода является возможность одновременного управления группой электродвигателей.
Скалярное управление достаточно для большинства практических случаев применения частотно регулируемого электропривода с диапазоном регулирования частоты вращения двигателя до 1: 40.
Векторное управление позволяет существенно увеличить диапазон управления, точность регулирования, повысить быстродействие электропривода. Этот метод обеспечивает непосредственное управление вращающим моментом двигателя.
Вращающий момент определяется током статора, который создает возбуждающее магнитное поле. При непосредственном управлении моментом необходимо изменять кроме амплитуды и фазу статорного тока, то есть вектор тока. Этим и обусловлен термин «векторное управление».
Для управления вектором тока, а, следовательно, положением магнитного потока статора относительно вращающегося ротора требуется знать точное положение ротора в любой момент времени. Задача решается либо с помощью выносного датчика положения ротора, либо определением положения ротора путем вычислений по другим параметрам двигателя. В качестве этих параметров используются токи и напряжения статорных обмоток.
Менее дорогим является частотно регулируемый электропривод с векторным управлением без датчика обратной связи скорости, однако векторное управление при этом требует большого объема и высокой скорости вычислений от преобразователя частоты.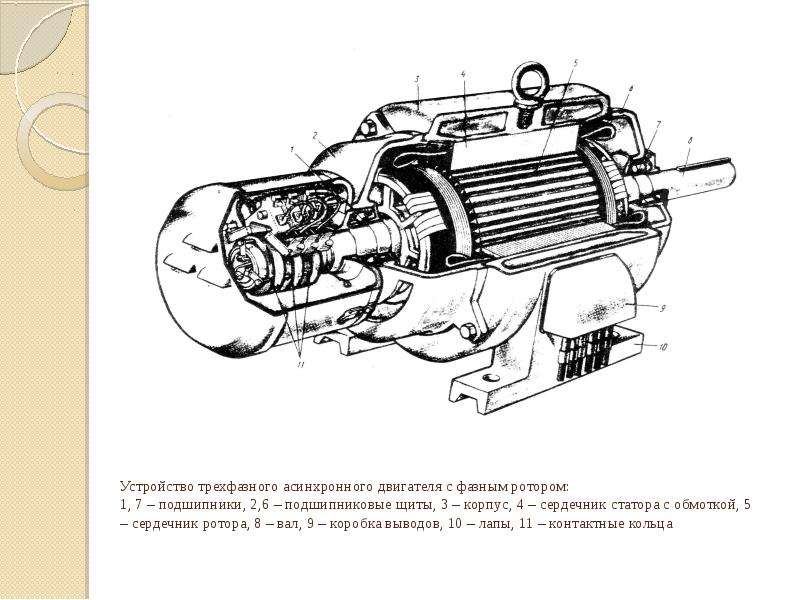
Кроме того, для непосредственного управления моментом при малых, близких к нулевым скоростям вращения работа частотно регулируемого электропривода без обратной связи по скорости невозможна.
Векторное управление с датчиком обратной связи скорости обеспечивает диапазон регулирования до 1:1000 и выше, точность регулирования по скорости – сотые доли процента, точность по моменту – единицы процентов.
В синхронном частотно регулируемом приводе применяются те же методы управления, что и в асинхронном.
Однако в чистом виде частотное регулирование частоты вращения синхронных двигателей применяется только при малых мощностях, когда нагрузочные моменты невелики, и мала инерция приводного механизма. При больших мощностях этим условиям полностью отвечает лишь привод с вентиляторной нагрузкой. В случаях с другими типами нагрузки двигатель может выпасть из синхронизма.
Для синхронных электроприводов большой мощности применяется метод частотного управления с самосинхронизацией, который исключает выпадение двигателя из синхронизма. Особенность метода состоит в том, что управление преобразователем частоты осуществляется в строгом соответствии с положением ротора двигателя.
Особенность метода состоит в том, что управление преобразователем частоты осуществляется в строгом соответствии с положением ротора двигателя.
Типы электродвигателей — Однофазные электродвигатели , электродвигатели постоянного тока, асинхронные двигатели
Электродвигатель – это электрическая машина, служащая для преобразования электрической энергии в механическую энергию. Электродвигатель работает на основе принципа электромагнитной индукции.
Существует множество видов электродвигателей, различающихся по конструкции, принципу действия, исполнению и другим характеристикам. Различают основные виды электродвигателей:
По типу протекающего тока двигатели различают:
- Электродвигатели постоянного тока. Широко используют в качестве промышленного оборудования, привода электротранспорта и микропривода исполнительных механизмов.
- Электродвигатели переменного тока. Нашли широкое применение для приводов всех типов технологического оборудования, автоматических регуляторов, электроинструментов.

По конструкции электрические машины различают с вертикально и горизонтально расположенным валом. Электродвигатели также классифицируют по мощности, климатическому исполнению, степени защиты, назначению и другим характеристикам.
Со всеми типами электродвигателей вы можете познакомиться на информационном портале по электродвигателям electrodvigatel.com. Здесь вы найдете преимущества и недостатки, того или иного электродвигателя, полный список производителей электродвигателей, а также сможете узнать стоимость на электродвигатели.
Виды электродвигателей
Стоимость электродвигателя в основном зависит от следующих параметров:
- Габарит (высота оси вращения)
- Мощность
- Климатическое исполнение
Стоит отметить, что с увеличением габарита электродвигателя усложняется технология изготовления электрических машин, уменьшается серийность выпуска и, соответственно, меняется экономика и ценообразование двигателей. Чем больше габарит двигателя – тем меньше производителей на рынке.
Чем больше габарит двигателя – тем меньше производителей на рынке.
Конструкция электродвигателя
Вращающийся электродвигатель состоит из двух главных деталей:
- статора — неподвижная часть
- ротора — вращающаяся часть
У большинства двигателей внутри статора располагается ротор. Электродвигатели у которых ротор находится снаружи статора называются электродвигателями обращенного типа.
Электродвигатель в разрезе — 1 статор, 2 ротор, 3 подшипник
Условное обозначение электродвигателей
1 – тип электродвигателя:
общепромышленные электродвигатели:
АИ — обозначение серии общепромышленных электродвигателей
Р, С (АИР и АИС) — вариант привязки мощности к установочным размерам, т.е.
АИР (А, 5А, 4А, АД) — электродвигатели, изготавливаемые по ГОСТ
АИС (6А, IMM, RA) — электродвигатели, изготавливаемые по евростандарту DIN (CENELEC)
взрывозащищенные электродвигатели: ВА, АВ, АИМ, АИМР, 2В, 3В и др
2 — электрические модификации:
|
Электрические модификации |
Определение |
|
М |
модернизированный электродвигатель: 5АМ |
|
Н |
электродвигатель защищенного исполнения с самовентиляцией: 5АН |
|
Ф |
электродвигатель защищенного исполнения с принудительным охлаждением: 5АФ |
|
К |
электродвигатель с фазным ротором: 5АНК |
|
С |
электродвигатель с повышенным скольжением: АС, 4АС и др. |
|
Е |
однофазный электродвигатель 220V: АДМЕ, 5АЕУ |
|
В |
встраиваемый электродвигатель: АИРВ 100S2 |
|
П |
электродвигатель для привода осевых вентиляторов в птицеводческих хозяйствах и т. д. |
3 — габарит электродвигателя (высота оси вращения):
габарит электродвигателя равен расстоянию от низа лап до центра вала в миллиметрах
50, 56, 63, 71, 80, 90, 100, 112, 132, 160, 180, 200, 225, 250, 280, 315, 355, 400, 450 и выше
4 — длина сердечника и/или длина станины:
|
Длина сердечника |
Определение |
|
А, В, С |
длина сердечника (первая длина, вторая длина, третья длина) |
|
XK, X, YK, Y |
длина сердечника статора высоковольтных двигателей |
|
S, L, М |
установочные размеры по длине станины |
5 — количество полюсов электродвигателя:
2, 4, 6, 8, 10, 12, 4/2, 6/4, 8/4, 8/6, 12/4, 12/6, 6/4/2, 8/4/2, 8/6/4, 12/8/6/4 и др.
6 — конструктивные модификации электродвигателя:
|
Модификации электродвигателя |
Определение |
|
Л |
электродвигатель для привода лифтов: 5АФ 200 МА4/24 НЛБ УХЛ4 |
|
Е |
электродвигатель с встроенным электромагнитным тормозом и ручкой расторможения: АИР 100L6 Е2 У3 |
|
Е2 |
со встроенным датчиком температурной защиты: АИР 180М4 БУ3 |
|
Б |
со встроенным датчиком температурной защиты: АИР 180М4 БУ3 |
|
Ж |
электродвигатель со специальным выходным концом вала для моноблочных насосов: АИР 80В2 ЖУ2 |
|
П |
электродвигатель повышенной точности по установочным размерам: АИР 180М4 ПУ3 |
|
Р3 |
электродвигатель для мотор-редукторов: АИР 100L6 Р3 |
|
С |
электродвигатель для станков-качалок: АИР 180М8 СНБУ1 |
|
Н |
электродвигатель малошумного исполнения: 5АФ 200 МА4/24 НЛБ УХЛ4 |
7 — климатическое исполнение электродвигателя:
|
Категория размещения |
Определение |
|
У |
умеренного климатического исполнения |
|
Т |
тропического исполнения |
|
УХЛ |
умеренно холодного климата |
|
ХЛ |
холодного климата |
|
ОМ |
для судов морского и речного флота |
8 — категория размещения:
|
Категория размещения |
Определение |
|
1 |
на открытом воздухе |
|
2 |
на улице под навесом |
|
3 |
в помещении |
|
4 |
в помещении с искусственно регулируемыми климатическими условиями |
|
5 |
в помещении с повышенной влажностью |
9 — степень защиты электродвигателя:
первая цифра: защита от твердых объектов
вторая цифра: защита от жидкостей
|
Степень защиты IP |
Определение первой цифры — защита от твердых объектов |
Определение второй цифры — защита от жидкостей |
|
0 |
без защиты |
без защиты |
|
1 |
защита от твердых объектов размерами свыше 50мм (например, от случайного касания руками) |
защита от вертикально падающей воды (конденсация) |
|
2 |
защита от твердых объектов размерами свыше 12 мм (например, от случайного касания пальцами) |
защита от воды, пдпющей под углом 15º к вертикали |
|
3 |
защита от твердых объектов размерами свыше 2,5 мм (например, инструментов, проводов) |
защита от воды, падающей под углом 60º к вертикали |
|
4 |
защита от твердых объектов размерами свыше 1мм (например, тонкой проволоки) |
защита от водяных брызг со всех сторон |
|
5 |
защита от пыли (без осаждения опасных материалов) |
защита от водяных струй со всех сторон |
10 – мощность электродвигателя
11 – обороты электродвигателя
12 — Монтажное исполнение электродвигателя
Двигатели переменного тока
Двигатели переменного тока подразделяются на две группы: асинхронные и синхронные. Синхронные двигатели в свою очередь делятся на основные исполнения групп двигателей:
Синхронные двигатели в свою очередь делятся на основные исполнения групп двигателей:
- общепромышленное
- специальное (крановые, для дробилок, лифтовые и другие)
- взрывозащищенное. Дальнейшее подразделение — для химической отрасли и рудничные, рудничные специальные.
Асинхронными двигателями (АД) называют машины переменного тока, в которых основное магнитное поле создается переменным током и частота вращения ротора, не связанная жестко с частотой тока в обмотке статора, меняется с нагрузкой. Наибольшее применение получили бесколлекторные асинхронные машины, используемые главным образом в качестве электродвигателей. Значительно реже применяются коллекторные асинхронные электродвигатели — более дорогие и менее надежные в эксплуатации, чем бесколлекторные.
По количеству фаз двигатели переменного тока подразделяются:
Асинхронные двигатели наиболее распространены в настоящее время, чем другие виды электродвигателей.
Синхронные и асинхронные машины переменного тока обладают свойством обратимости — они могут работать как в режиме генератора, так и в режиме двигателя.
В чем разница между асинхронными и синхронными двигателями?
Загрузить статью в формате .PDF
Растущее значение энергоэффективности побудило производителей электродвигателей продвигать различные схемы, улучшающие характеристики электродвигателей. К сожалению, терминология, связанная с моторными технологиями, может сбивать с толку, отчасти потому, что несколько терминов иногда могут использоваться взаимозаменяемо для обозначения одной и той же базовой конфигурации двигателя. Среди классических примеров этого явления — асинхронные двигатели и асинхронные двигатели.
Все асинхронные двигатели являются асинхронными двигателями. Асинхронный характер работы асинхронного двигателя происходит из-за скольжения между скоростью вращения поля статора и несколько меньшей скоростью ротора. Более конкретное объяснение того, как возникает это проскальзывание, касается деталей внутреннего устройства двигателя.
Большинство современных асинхронных двигателей содержат вращающийся элемент (ротор), известный как беличья клетка. Цилиндрическая беличья клетка состоит из тяжелых медных, алюминиевых или латунных стержней, вставленных в канавки и соединенных с обоих концов токопроводящими кольцами, которые электрически замыкают стержни вместе.Твердый сердечник ротора состоит из пакетов пластин электротехнической стали. В роторе меньше пазов, чем в статоре. Количество пазов ротора также должно быть нецелым числом, кратным пазам статора, чтобы предотвратить магнитную блокировку зубцов ротора и статора при запуске двигателя.
Цилиндрическая беличья клетка состоит из тяжелых медных, алюминиевых или латунных стержней, вставленных в канавки и соединенных с обоих концов токопроводящими кольцами, которые электрически замыкают стержни вместе.Твердый сердечник ротора состоит из пакетов пластин электротехнической стали. В роторе меньше пазов, чем в статоре. Количество пазов ротора также должно быть нецелым числом, кратным пазам статора, чтобы предотвратить магнитную блокировку зубцов ротора и статора при запуске двигателя.
Также можно найти асинхронные двигатели, содержащие роторы, состоящие из обмоток, а не из короткозамкнутого ротора. Смысл этой конфигурации с фазным ротором состоит в том, чтобы обеспечить средство уменьшения тока ротора, когда двигатель сначала начинает вращаться.Обычно это достигается путем последовательного подключения каждой обмотки ротора к резистору. Обмотки получают ток через некое контактное кольцо. Когда ротор достигает конечной скорости, полюса ротора замыкаются на короткое замыкание, таким образом, электрически они становятся такими же, как ротор с короткозамкнутым ротором.
Неподвижная часть обмоток двигателя называется якорем или статором. Обмотки статора подключаются к источнику переменного тока. Подача напряжения на статор вызывает прохождение тока в обмотках статора.Прохождение тока индуцирует магнитное поле, которое воздействует на ротор, создавая напряжение и ток в элементах ротора.
Северный полюс статора индуцирует южный полюс ротора. Но полюс статора вращается при изменении амплитуды и полярности переменного напряжения. Индуцированный полюс пытается следовать за вращающимся полюсом статора. Однако закон Фарадея гласит, что электродвижущая сила создается, когда петля из проволоки перемещается из области с низкой напряженностью магнитного поля в область с высокой напряженностью магнитного поля, и наоборот.Если бы ротор точно следовал за движущимся полюсом статора, напряженность магнитного поля не изменилась бы. Таким образом, ротор всегда отстает от вращения поля статора. Поле ротора всегда на некоторую величину отстает от поля статора, поэтому он вращается со скоростью, несколько меньшей, чем у статора.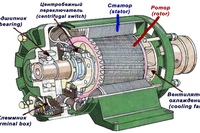 Разница между ними называется скольжением.
Разница между ними называется скольжением.
Размер скольжения может быть разным. Это зависит главным образом от нагрузки двигателя, но также зависит от сопротивления цепи ротора и напряженности поля, создаваемого магнитным потоком статора.
Несколько простых уравнений проясняют основные взаимосвязи.
Когда на статор изначально подается переменный ток, ротор неподвижен. Напряжение, индуцируемое в роторе, имеет ту же частоту, что и на статоре. Когда ротор начинает вращаться, частота индуцируемого в нем напряжения f r падает. Если f — частота напряжения статора, то скольжение, s, связывает эти два через f r = s f .Здесь s выражается в виде десятичной дроби.
Когда ротор неподвижен, ротор и статор фактически образуют трансформатор. Таким образом, напряжение E , индуцированное в роторе, определяется уравнением трансформатора
E = 4,44 f N № м
, где N = количество проводников под одним полюсом статора (обычно небольшое для двигателя с короткозамкнутым ротором) и № м = максимальный магнитный поток по Веберсу. Таким образом, напряжение E r , индуцируемое при вращении ротора, зависит от скольжения:
Таким образом, напряжение E r , индуцируемое при вращении ротора, зависит от скольжения:
E r = 4,44 s f N Ñ „ m = s E
Описание синхронных двигателейСинхронный двигатель имеет особую конструкцию ротора, которая позволяет ему вращаться с одинаковой скоростью, то есть синхронно, с полем статора. Одним из примеров синхронного двигателя является шаговый двигатель, широко используемый в приложениях, связанных с управлением положением.Однако недавние достижения в схемах управления мощностью привели к появлению конструкций синхронных двигателей, оптимизированных для использования в таких ситуациях с более высокой мощностью, как вентиляторы, нагнетатели и ведущие мосты внедорожных транспортных средств.
Существует два основных типа синхронных двигателей:
• Самовозбуждение — использует принципы, аналогичные принципам асинхронных двигателей, и
• С прямым возбуждением — обычно с постоянными магнитами, но не всегда
Самовозбуждающийся синхронный двигатель, также называемый реактивным электродвигателем, содержит ротор, отлитый из стали, который имеет выемки или зубцы, называемые выступающими полюсами. Это выемки, которые позволяют ротору блокироваться и работать с той же скоростью, что и вращающееся магнитное поле.
Это выемки, которые позволяют ротору блокироваться и работать с той же скоростью, что и вращающееся магнитное поле.
Чтобы перемещать ротор из одного положения в другое, схема должна последовательно переключать питание на последовательные обмотки / фазы статора аналогично тому, как это происходит в шаговом двигателе. Синхронный двигатель с прямым возбуждением можно называть разными именами. Обычные названия включают ECPM (постоянный магнит с электронной коммутацией), BLDC (бесщеточный двигатель постоянного тока) или просто бесщеточный двигатель с постоянным магнитом.В этой конструкции используется ротор, содержащий постоянные магниты. Магниты могут устанавливаться на поверхности ротора или вставляться в узел ротора (в этом случае двигатель называется внутренним двигателем с постоянными магнитами).
Постоянные магниты являются основными полюсами этой конструкции и предотвращают скольжение. Микропроцессор управляет последовательным переключением питания на обмотки статора в нужное время с помощью твердотельных переключателей, сводя к минимуму пульсации крутящего момента.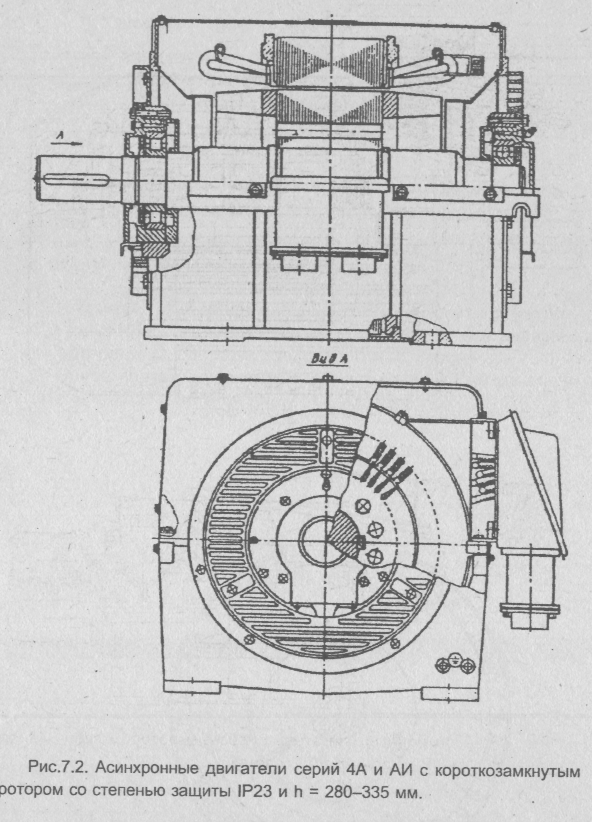 Принцип действия всех этих типов синхронных двигателей в основном одинаков.Электроэнергия подается на катушки, намотанные на зубья статора, которые заставляют значительный магнитный поток пересекать воздушный зазор между ротором и статором. Поток течет перпендикулярно воздушному зазору. Если явный полюс ротора идеально совмещен с зубом статора, крутящий момент не создается. Если зуб ротора находится под некоторым углом к зубу статора, по крайней мере, часть потока пересекает зазор под углом, не перпендикулярным поверхностям зуба. Результатом является крутящий момент на роторе. Таким образом, переключение мощности на обмотки статора в нужное время вызывает структуру магнитного потока, которая приводит к движению либо по часовой стрелке, либо против часовой стрелки.
Принцип действия всех этих типов синхронных двигателей в основном одинаков.Электроэнергия подается на катушки, намотанные на зубья статора, которые заставляют значительный магнитный поток пересекать воздушный зазор между ротором и статором. Поток течет перпендикулярно воздушному зазору. Если явный полюс ротора идеально совмещен с зубом статора, крутящий момент не создается. Если зуб ротора находится под некоторым углом к зубу статора, по крайней мере, часть потока пересекает зазор под углом, не перпендикулярным поверхностям зуба. Результатом является крутящий момент на роторе. Таким образом, переключение мощности на обмотки статора в нужное время вызывает структуру магнитного потока, которая приводит к движению либо по часовой стрелке, либо против часовой стрелки.
% {[data-embed-type = «image» data-embed-id = «5df27717f6d5f267ee27f7d9» data-embed-element = «aside» data-embed-align = «left» data-embed-alt = «Eetweb Com Sr Двигатель «data-embed-src =» https://base.imgix.net/files/base/ebm/machinedesign/image/2013/01/eetweb_com_SR_motor. png?auto=format&fit=max&w=1440 «data-embed-caption = «»]}% Еще один тип синхронного двигателя называется реактивным электродвигателем с переключаемым сопротивлением (SR).
png?auto=format&fit=max&w=1440 «data-embed-caption = «»]}% Еще один тип синхронного двигателя называется реактивным электродвигателем с переключаемым сопротивлением (SR).
Его ротор состоит из многослойных стальных пластин с рядом зубцов.Зубы магнитопроницаемы, а окружающие их области слабо проницаемы из-за прорезанных в них щелей. Таким образом, ротор не требует обмоток, редкоземельных материалов или магнитов.
В отличие от асинхронных двигателей, здесь нет стержней ротора, и, следовательно, в роторе отсутствует ток, создающий крутящий момент. Отсутствие проводов какой-либо формы на роторе SR означает, что общие потери в роторе значительно ниже, чем в других двигателях, содержащих роторы, несущие проводники. Крутящий момент, создаваемый двигателем SR, регулируется путем регулировки величины тока в электромагнитах статора.Затем скорость регулируется путем регулирования крутящего момента (через ток в обмотке). Этот метод аналогичен тому, как скорость регулируется током якоря в традиционном щеточном двигателе постоянного тока.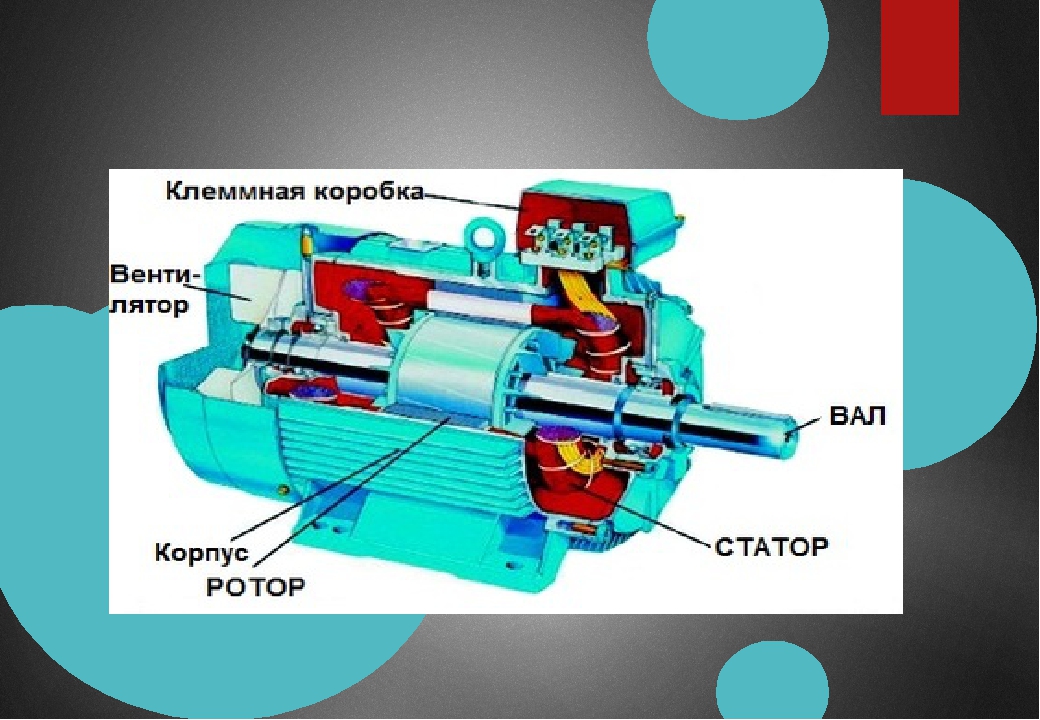
Двигатель SR создает крутящий момент, пропорциональный величине тока, подаваемого на его обмотки. На производство крутящего момента не влияет скорость двигателя. Это отличается от асинхронных двигателей переменного тока, в которых при высоких скоростях вращения в области ослабления поля ток ротора все больше отстает от вращающегося поля по мере увеличения скорости вращения двигателя.
Асинхронный двигатель | Асинхронный двигатель
Наиболее часто используемый двигатель в мире — это асинхронный двигатель или асинхронный двигатель. Это двигатель, который может работать без электрического подключения к ротору. В этом посте будет обсуждаться асинхронный двигатель (асинхронные двигатели), его типы, то есть однофазный, трехфазный, беличий корпус, контактное кольцо и т. Д., Особенности, принцип работы, применение, преимущества и недостатки.
Что такое асинхронный двигатель (асинхронный двигатель) Асинхронный двигатель или асинхронный двигатель — это самый основной и распространенный тип электродвигателя, который имеет только обмотку Armortisseur , что означает вспомогательную обмотку только на якоре. В асинхронном двигателе (или асинхронном двигателе) статорная часть двигателя передает электромагнитное поле своей обмоткой на роторную часть двигателя. Это генерирует электрический ток в роторе. Электрический ток создает крутящий момент, который приводит в движение.
В асинхронном двигателе (или асинхронном двигателе) статорная часть двигателя передает электромагнитное поле своей обмоткой на роторную часть двигателя. Это генерирует электрический ток в роторе. Электрический ток создает крутящий момент, который приводит в движение.
Рис. 1 — Введение в асинхронный двигатель (асинхронный двигатель)
Он упоминается как «Асинхронный двигатель », поскольку он всегда будет работать со скоростью, меньшей, чем его синхронная скорость.Синхронная скорость определяется как скорость магнитного поля вращающейся машины, которая снова определяется количеством полюсов и частотой в машине.
Поскольку в этом типе двигателя ротор получает поток и вращение за счет магнитного поля в статоре, существует задержка между токами в статоре и роторе. Из-за этого ротор никогда не достигает своей синхронной скорости. Отсюда термин «асинхронный двигатель». На рис. 2 показаны части асинхронного двигателя.
Рис.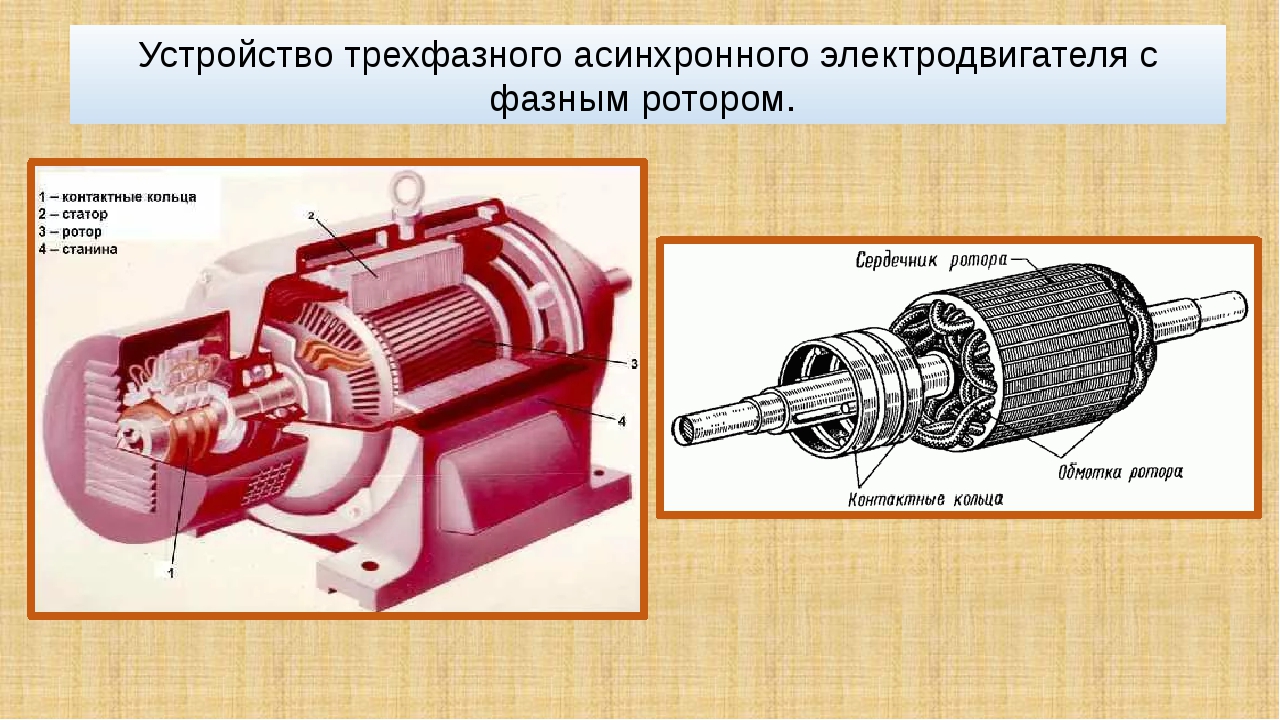 2 — Детали асинхронного двигателя (асинхронный двигатель)
2 — Детали асинхронного двигателя (асинхронный двигатель)
Конструкция асинхронного двигателя (асинхронный двигатель)
Он состоит в основном из двух частей, а именно:
Статор
Это неподвижная часть электродвигателя. Эта часть обеспечивает электромагнитное поле, необходимое для вращения вращающейся части двигателя. Он состоит из ряда штамповок с прорезями для трехфазной обмотки. Каждая обмотка отделена от другой обмотки на 120 градусов.
Ротор
Это вращающаяся часть двигателя.Более распространенный тип ротора в асинхронных двигателях (или асинхронных двигателях) — это ротор с короткозамкнутым ротором. Ротор имеет форму якоря с сердечником цилиндрической формы. Вокруг сердечника есть параллельные прорези, через которые проходит ток. Сердечник имеет стержень из алюминия, меди или сплава.
Рис.3 — Базовый ротор и статор
Типы асинхронного двигателя (асинхронный двигатель)Он подразделяется на два типа:
- Однофазный асинхронный двигатель
- Трехфазный асинхронный двигатель
Однофазный асинхронный двигатель
Однофазный асинхронный двигатель не является самозапускающимся двигателем.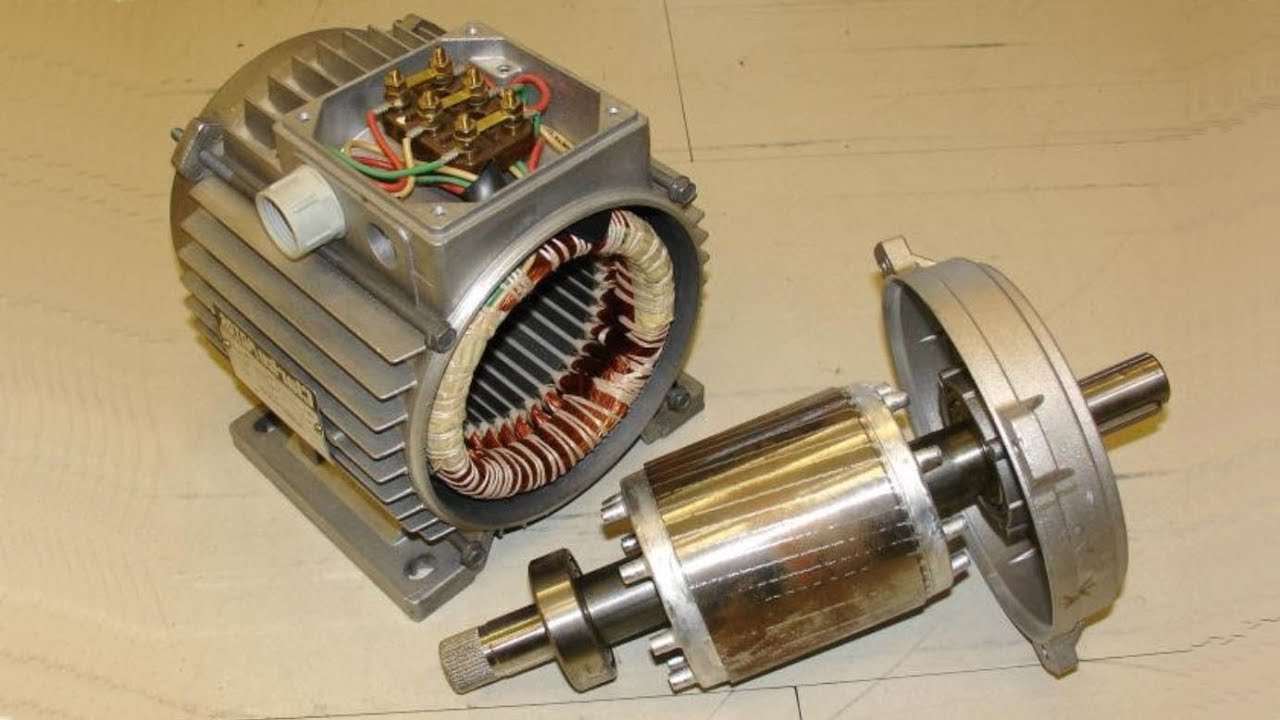 Здесь двигатель подключен к однофазному источнику питания, который передает переменный ток к основной обмотке. Поскольку источник переменного тока представляет собой синусоидальную волну, он создает пульсирующее магнитное поле в обмотке статора.
Здесь двигатель подключен к однофазному источнику питания, который передает переменный ток к основной обмотке. Поскольку источник переменного тока представляет собой синусоидальную волну, он создает пульсирующее магнитное поле в обмотке статора.
Пульсирующие магнитные поля — это два магнитных поля, вращающихся в противоположных направлениях; следовательно, крутящий момент не создается. Таким образом, после подачи тока ротор необходимо переместить в любом направлении извне, чтобы двигатель заработал. Однофазный индуктор отсюда; Могут быть разные разновидности в зависимости от устройства, которое используется для запуска двигателя, а именно:
- Двигатель с расщепленной фазой
- Двигатель с экранированными полюсами
- Конденсаторный пусковой двигатель
- Конденсаторный двигатель для запуска и запуска
Фиг.4 — Принципиальная схема (a) Однофазного (b) Трехфазного асинхронного двигателя
Трехфазного асинхронного двигателя (асинхронного двигателя)
Эти двигатели не требуют каких-либо внешних устройств, таких как конденсатор, центробежный переключатель или пусковая обмотка для начиная. Принцип работы этого двигателя основан на использовании трех однофазных фаз, разность фаз между которыми составляет 120 градусов. Таким образом, магнитное поле, вызывающее вращение, будет иметь одинаковую разность фаз между ними, это заставит ротор двигаться без какого-либо внешнего крутящего момента.
Принцип работы этого двигателя основан на использовании трех однофазных фаз, разность фаз между которыми составляет 120 градусов. Таким образом, магнитное поле, вызывающее вращение, будет иметь одинаковую разность фаз между ними, это заставит ротор двигаться без какого-либо внешнего крутящего момента.
Для дальнейшего упрощения предположим, что это три фазы: phase1, phase2 и phase3. Итак, первая фаза 1 намагничивается, и ротор начинает двигаться в этом направлении, вскоре после этого будет возбуждена фаза 2, и тогда ротор будет притягиваться к фазе 2, а затем, наконец, к фазе 3. Таким образом, ротор продолжит вращаться.
Далее они подразделяются на категории в зависимости от типа используемого ротора:
- Асинхронный двигатель с короткозамкнутым ротором
- Асинхронный двигатель с скользящим кольцом или электродвигатель с фазным ротором
Асинхронный двигатель с короткозамкнутым ротором
В этом типе ротор имеет форму Беличья клетка, отсюда и название.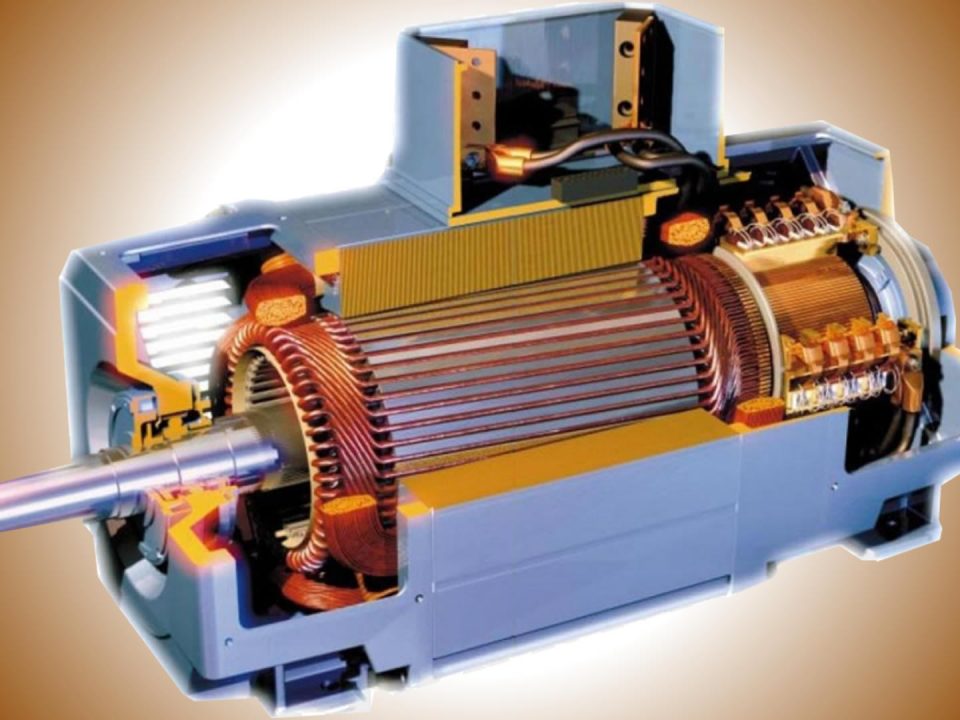 Ротор изготовлен из стали с очень токопроводящими металлами, такими как алюминий и медь на поверхности. Скорость асинхронного двигателя этого типа очень легко изменить, просто изменив форму стержней в роторе.
Ротор изготовлен из стали с очень токопроводящими металлами, такими как алюминий и медь на поверхности. Скорость асинхронного двигателя этого типа очень легко изменить, просто изменив форму стержней в роторе.
Рис. 5 — Асинхронный двигатель с короткозамкнутым ротором
Асинхронный двигатель с контактным кольцом или двигатель с фазным ротором
Он также известен как асинхронный двигатель с фазовой обмоткой. Здесь ротор подключается к внешнему сопротивлению через контактные кольца.Скорость ротора регулируется путем регулировки внешнего сопротивления. Поскольку у этого двигателя больше обмоток, чем у асинхронного двигателя с короткозамкнутым ротором, его также называют асинхронным двигателем с фазным ротором.
Рис. 6 — Асинхронный двигатель с контактным кольцом
Характеристики асинхронного двигателя (асинхронного двигателя) Ниже приведены характеристики двух различных типов асинхронных двигателей.
- Здесь мы выделим некоторые характеристики, которые применимы только к однофазным асинхронным двигателям:
- Однофазные асинхронные двигатели не самозапускаются и используют однофазное питание для вращения.
- Чтобы изменить направление вращения в однофазных двигателях, лучше всего остановить двигатель и изменить его, иначе существует вероятность повреждения двигателя из-за момента инерции, который действует против направления, на которое необходимо изменить вращение.
- Для запуска двигателя вам потребуется конденсатор и / или центробежный переключатель.
- Пусковой крутящий момент у этих двигателей низкий.
- Они в основном используются дома или в бытовых приборах из-за низкого коэффициента мощности и эффективности.
Ниже перечислены некоторые особенности трехфазного асинхронного двигателя, которые отличает его от однофазного двигателя:
- специальные закуски.

- Имеются три однофазных линии с разностью фаз 120 градусов.
- Он имеет более простое подключение и более надежен, чем однофазные асинхронные двигатели.
- Пусковой момент у этих двигателей выше, чем у однофазных двигателей.
- Они в основном используются на заводах и в промышленности из-за высокого коэффициента мощности и эффективности.
Явление, которое заставляет асинхронные двигатели работать, весьма интересно. Двигатели постоянного тока нуждаются в двойном возбуждении для вращения, одно для статора, а другое для ротора.Но в этих двигателях мы должны отдавать это только статору, что делает это уникальным. Как следует из названия, принцип работы этого двигателя основан на индукции. Давайте предпримем ряд шагов, которые происходят при вращении этого двигателя:
- Питание подается на обмотки статора, возникает ток и создается магнитный поток.

- Обмотка в роторе устроена таким образом, что каждая катушка закорачивается.
- Короткозамкнутая обмотка ротора обрезается магнитным потоком статора.
Рис. 7 — Работа асинхронного двигателя
Согласно законам электромагнитной индукции Фарадея, магнитное поле взаимодействует с электрической цепью, создавая ЭДС (электродвижущая сила). Итак, в соответствии с этим законом в катушках ротора начинает течь ток.
- Ток в роторе генерирует другой поток.
- Теперь есть два потока, один в статоре, а другой в роторе.
- Поток ротора запаздывает по отношению к потоку статора, что создает крутящий момент в роторе в направлении магнитного поля.
Области применения включают:
- Они широко используются в смесителях, игрушках, вентиляторах и т. Д.
- Они также используются в насосах и компрессорах.

- Малые асинхронные двигатели используются в электробритвах.
- Они используются в сверлильных станках, лифтах, кранах и дробилках.
- Они подходят для приводов текстильных фабрик и маслоэкстракционных заводов.
Ниже приведены некоторые из преимуществ асинхронных двигателей:
- Высокоэффективный и простой в конструкции.
- Очень прочный и может работать в любых условиях.
- Низкие эксплуатационные расходы, поскольку в них не так много деталей, как коммутаторы или щетки.
- Они могут развивать очень высокую скорость, не беспокоясь о том, что они износятся, поскольку у них нет щеток.
- Они просты в эксплуатации, поскольку к ротору не подключены электрические разъемы.
- Поскольку у них нет щеток, искры не боятся, поэтому их можно использовать в загрязненных или взрывоопасных средах.
- Скорость колебания от низкой до номинальной значительно меньше.
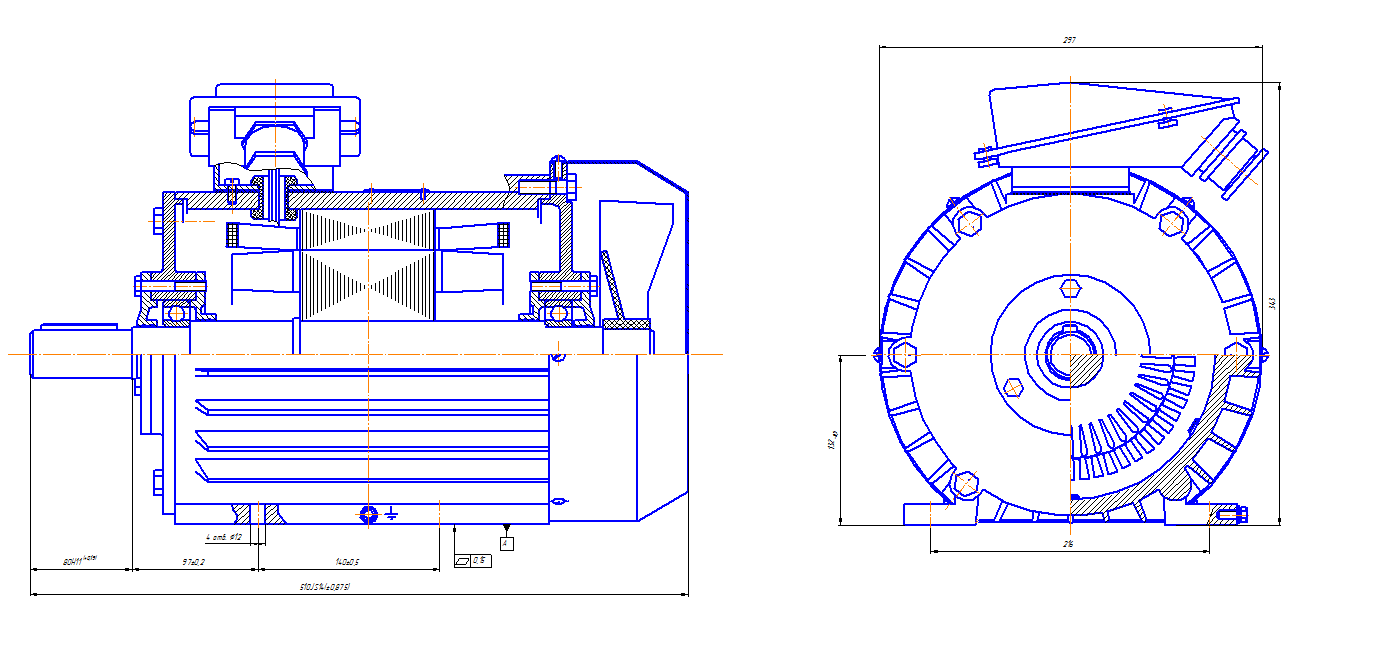
Асинхронные двигатели имеют простую конструкцию, которая может иметь несколько недостатков, перечисленных ниже:
- Трудно контролировать скорость асинхронного двигателя, поэтому его нельзя использовать в местах, где требуется точная работа. контроль скорости.
- Падение КПД при малых нагрузках.
- Они имеют высокие входные импульсные токи, что дает низкое напряжение при запуске двигателя.
См. Также: Видео на YouTube об асинхронных двигателях
Также прочтите: Маховик как накопитель энергии, расчеты и требования к роторам Повышающий трансформатор - работа, конструкция, применение и преимущества Синхронный двигатель - конструкция, принцип, типы, характеристики Что такое клещи (клещи-тестеры) - типы, принцип работы и способы эксплуатации
Laxmi — это B. E (Электроника и связь) и имеет опыт работы в RelQ Software в качестве инженера-испытателя и HP в качестве руководителя службы технической поддержки. Она является автором, редактором и партнером Electricalfundablog.
E (Электроника и связь) и имеет опыт работы в RelQ Software в качестве инженера-испытателя и HP в качестве руководителя службы технической поддержки. Она является автором, редактором и партнером Electricalfundablog.
Асинхронный двигатель и синхронный: в чем разница?
Все вращающиеся электродвигатели переменного и постоянного тока работают за счет взаимодействия двух магнитных полей. Один из них стационарный и (обычно) связан с внешним кожухом двигателя. Другой вращается и связан с вращающимся якорем двигателя (также называемым его ротором).Вращение вызвано взаимодействием двух полей.
В простом двигателе постоянного тока есть вращающееся магнитное поле, полярность которого меняется каждые пол-оборота с помощью комбинации щеточного коммутатора. Щетки — в основном проводящие углеродные стержни, которые касаются проводов на роторе при их вращении — также служат для подачи электрического тока во вращающийся якорь. В бесщеточном двигателе постоянного тока ситуация несколько иная. Вращающееся поле по-прежнему меняется на противоположное, но посредством коммутации, которая происходит в электронном виде.
Вращающееся поле по-прежнему меняется на противоположное, но посредством коммутации, которая происходит в электронном виде.
Асинхронный двигатель обладает уникальным качеством, заключающимся в отсутствии электрического соединения между неподвижной и вращающейся обмотками. Сетевой переменный ток подается на клеммы двигателя и питает неподвижные обмотки.
Все асинхронные двигатели являются асинхронными двигателями. Асинхронное название возникает из-за разницы между скоростью вращения поля статора и несколько меньшей скоростью ротора.
Ротор с короткозамкнутым ротором от асинхронного двигателя. Этот пример взят из небольшого вентилятора. Большинство современных асинхронных двигателей имеют ротор в виде беличьей клетки. Цилиндрическая беличья клетка состоит из тяжелых медных, алюминиевых или латунных стержней, вставленных в канавки и соединенных с обоих концов токопроводящими кольцами, которые электрически замыкают стержни вместе. Твердый сердечник ротора состоит из листов электротехнической стали.
Также можно найти асинхронные двигатели, содержащие роторы, состоящие из обмоток, а не из короткозамкнутого ротора. Это асинхронные двигатели с фазным ротором.Смысл конструкции состоит в том, чтобы обеспечить средство уменьшения тока ротора, когда двигатель впервые начинает вращаться. Обычно это достигается путем последовательного подключения каждой обмотки ротора к резистору. Обмотки получают ток через некое контактное кольцо. Когда ротор достигает конечной скорости, полюса ротора замыкаются на короткое замыкание, таким образом, электрически они становятся такими же, как ротор с короткозамкнутым ротором.
Стационарная часть обмоток асинхронного двигателя (статор) подключается к источнику переменного тока.Подача напряжения на статор вызывает прохождение переменного тока в обмотках статора. Прохождение тока индуцирует магнитное поле, которое воздействует на ротор, создавая напряжение и ток в элементах ротора.
Северный полюс статора индуцирует южный полюс ротора. Но положение полюса статора меняется при изменении амплитуды и полярности переменного напряжения. Индуцированный полюс в роторе пытается следовать за вращающимся полюсом статора. Однако закон Фарадея гласит, что электродвижущая сила создается, когда петля из проволоки перемещается из области с низкой напряженностью магнитного поля в область с высокой напряженностью магнитного поля, и наоборот.Если бы ротор точно следовал за движущимся полюсом статора, напряженность магнитного поля не изменилась бы. Таким образом, ротор всегда отстает от вращения поля статора, потому что поле ротора всегда на некоторую величину отстает от поля статора. Эта задержка заставляет ротор вращаться со скоростью, несколько меньшей, чем скорость поля статора. Разница между ними называется скольжением.
Но положение полюса статора меняется при изменении амплитуды и полярности переменного напряжения. Индуцированный полюс в роторе пытается следовать за вращающимся полюсом статора. Однако закон Фарадея гласит, что электродвижущая сила создается, когда петля из проволоки перемещается из области с низкой напряженностью магнитного поля в область с высокой напряженностью магнитного поля, и наоборот.Если бы ротор точно следовал за движущимся полюсом статора, напряженность магнитного поля не изменилась бы. Таким образом, ротор всегда отстает от вращения поля статора, потому что поле ротора всегда на некоторую величину отстает от поля статора. Эта задержка заставляет ротор вращаться со скоростью, несколько меньшей, чем скорость поля статора. Разница между ними называется скольжением.
Размер скольжения может быть разным. Это зависит главным образом от нагрузки двигателя, но также зависит от сопротивления цепи ротора и напряженности поля, создаваемого магнитным потоком статора.Скольжение в двигателе конструкции B составляет от 0,5% до 5%.
Когда двигатель остановлен, обмотки ротора и статора фактически являются первичной и вторичной обмотками трансформатора. Когда к статору изначально подается переменный ток, ротор не движется. Таким образом, индуцированное в роторе напряжение имеет ту же частоту, что и напряжение статора. Когда ротор начинает вращаться, частота индуцированного в нем напряжения f r падает. Если f — частота напряжения статора, то скольжение s связывает эти два значения через f r = sf.Здесь s выражается в виде десятичной дроби.
Поскольку асинхронный двигатель не имеет щеток, коллектора или подобных движущихся частей, его производство и обслуживание дешевле, чем другие типы двигателей.
Для сравнения, рассмотрим синхронный двигатель. Здесь ротор вращается с той же скоростью, то есть синхронно, с магнитным полем статора. Как и асинхронный двигатель, синхронный двигатель переменного тока также содержит статор и ротор. Обмотки статора также подключаются к сети переменного тока, как в асинхронном двигателе. Магнитное поле статора вращается синхронно с частотой сети.
Магнитное поле статора вращается синхронно с частотой сети.
Обмотка ротора синхронного двигателя может получать ток разными способами, но обычно не за счет индукции (за исключением некоторых конструкций, только для обеспечения пускового момента). Тот факт, что ротор вращается синхронно с частотой сети переменного тока, делает синхронный двигатель полезным для управления высокоточными часами.
Следует подчеркнуть, что ротор синхронного двигателя переменного тока вращается синхронно с целым числом циклов переменного тока.Это не то же самое, что сказать, что он вращается со скоростью, равной частоте сети. Частота вращения ротора двигателя, то есть синхронная скорость N, составляет:
.N = 120 футов / P = 60 кадров
Где f — частота сети переменного тока в Гц, P — количество полюсов (на фазу), а p — количество пар полюсов на фазу.
Соответственно, чем больше полюсов, тем медленнее вращается синхронный двигатель. При равной мощности дороже построить более медленный двигатель. При 60 Гц:
При 60 Гц:
- Двухполюсный / фазный синхронный двигатель переменного тока вращается со скоростью 3600 об / мин.
- Четырехполюсный / фазный синхронный двигатель переменного тока вращается со скоростью 1800 об / мин.
- Шестиполюсный / фазный синхронный двигатель переменного тока вращается со скоростью 1200 об / мин.
- Восьмиполюсный / фазный синхронный двигатель переменного тока вращается со скоростью 900 об / мин
- Десятиполюсный / фазный синхронный двигатель переменного тока вращается со скоростью 720 об / мин.
- Двенадцатиполюсный / фазный синхронный двигатель переменного тока вращается со скоростью 600 об / мин.
малой мощности полезны там, где требуется точное время.Синхронные двигатели переменного тока высокой мощности, хотя и более дорогие, чем трехфазные асинхронные двигатели, обладают двумя дополнительными качествами. Несмотря на более высокую начальную стоимость, они могут окупиться в долгосрочной перспективе, поскольку они более энергоэффективны, чем другие типы двигателей. Во-вторых, иногда одновременно, они могут работать с опережающим или единичным коэффициентом мощности, поэтому один или несколько синхронных двигателей переменного тока могут обеспечивать коррекцию коэффициента мощности, а также выполнять полезную работу.
Во-вторых, иногда одновременно, они могут работать с опережающим или единичным коэффициентом мощности, поэтому один или несколько синхронных двигателей переменного тока могут обеспечивать коррекцию коэффициента мощности, а также выполнять полезную работу.
Существует несколько различных типов синхронных двигателей переменного тока.Обычно их классифицируют по способам создания магнитного поля. Двигатели с независимым возбуждением имеют магнитные полюса, питаемые от внешнего источника. Напротив, магнитные полюса возбуждаются самим двигателем в самовозбуждаемой (также иногда называемой невозбужденной и непосредственно возбужденной) машине. Типы без возбуждения включают реактивные двигатели, двигатели с гистерезисом и двигатели с постоянными магнитами. Кроме того, существуют двигатели с возбуждением от постоянного тока.
Синхронные двигатели без возбуждения имеют стальные роторы.В процессе работы ротор намагничивается необходимыми магнитными полюсами аналогично асинхронному двигателю. Но ротор вращается с той же скоростью и синхронно с вращающимся магнитным полем статора. Причина в том, что в роторе есть прорези. Двигатели запускаются как асинхронные. Когда они приближаются к синхронной скорости, прорези позволяют синхронному магнитному полю фиксироваться на роторе. Затем двигатель вращается с синхронной скоростью до тех пор, пока требуемый крутящий момент низкий.
Но ротор вращается с той же скоростью и синхронно с вращающимся магнитным полем статора. Причина в том, что в роторе есть прорези. Двигатели запускаются как асинхронные. Когда они приближаются к синхронной скорости, прорези позволяют синхронному магнитному полю фиксироваться на роторе. Затем двигатель вращается с синхронной скоростью до тех пор, пока требуемый крутящий момент низкий.
В реактивном электродвигателе ротор имеет выступающие полюса, напоминающие отдельные зубцы.Ротора меньше, чем полюсов статора, что препятствует совмещению полюсов статора и ротора, и в этом случае вращения не будет. Реактивные двигатели не запускаются автоматически. По этой причине в ротор часто встраиваются специальные обмотки (так называемые обмотки с короткозамкнутым ротором), поэтому реактивный двигатель запускается как асинхронный.
Двигатель с гистерезисом использует широкую петлю гистерезиса в высококоэрцитивном роторе из кобальтовой стали. Из-за гистерезиса фаза намагничивания в роторе отстает от фазы вращающегося магнитного поля статора. Эта задержка создает крутящий момент. При синхронной скорости поля ротора и статора блокируются, обеспечивая непрерывное вращение. Одним из преимуществ гистерезисного двигателя является то, что он самозапускается.
Эта задержка создает крутящий момент. При синхронной скорости поля ротора и статора блокируются, обеспечивая непрерывное вращение. Одним из преимуществ гистерезисного двигателя является то, что он самозапускается.
Синхронный двигатель переменного тока с постоянными магнитами имеет постоянные магниты, встроенные в ротор. Последние лифты приводятся в действие этими двигателями, и коробка передач не требуется.
Пример двигателя с постоянными магнитами с электронной коммутацией, в данном случае от небольшого воздушного вентилятора. Этот стиль называется аутраннером, потому что ротор находится вне статора и встроен в лопасти вентилятора.Это четырехполюсный двигатель, о чем свидетельствуют четыре обмотки статора (внизу). Также виден датчик Холла, который обеспечивает часть электронной коммутации. Синхронный двигатель с прямым возбуждением может называться различными именами, включая ECPM (постоянный магнит с электронной коммутацией), BLDC (бесщеточный двигатель постоянного тока) или просто бесщеточный двигатель с постоянным магнитом.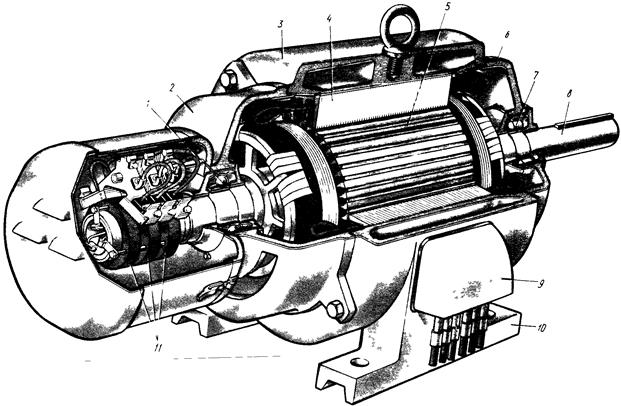 Ротор содержит постоянные магниты. Магниты могут устанавливаться на поверхности ротора или вставляться в узел ротора (в этом случае двигатель называется внутренним двигателем с постоянными магнитами).
Ротор содержит постоянные магниты. Магниты могут устанавливаться на поверхности ротора или вставляться в узел ротора (в этом случае двигатель называется внутренним двигателем с постоянными магнитами).
Компьютер контролирует последовательное включение питания обмоток статора в нужное время с помощью твердотельных переключателей. Питание подается на катушки, намотанные на зубья статора, и если выступающий полюс ротора идеально совмещен с зубом статора, крутящий момент не создается. Если зуб ротора находится под некоторым углом к зубу статора, по крайней мере, некоторый магнитный поток пересекает зазор под углом, не перпендикулярным поверхностям зуба.В результате возникает крутящий момент на роторе. Таким образом, переключение мощности на обмотки статора в нужное время вызывает структуру магнитного потока, которая приводит к движению либо по часовой стрелке, либо против часовой стрелки.
Еще один тип синхронного двигателя — это реактивный двигатель с регулируемым сопротивлением (SR).
Его ротор состоит из многослойных стальных пластин с рядом зубцов. Зубы магнитопроницаемы, а окружающие их области слабо проницаемы из-за прорезанных в них пазов.
В отличие от асинхронных двигателей, здесь нет стержней ротора, и, следовательно, в роторе отсутствует ток, создающий крутящий момент.Отсутствие проводов какой-либо формы на роторе SR означает, что общие потери в роторе значительно ниже, чем в других двигателях, содержащих роторы, несущие проводники.
Крутящий момент, создаваемый двигателем SR, регулируется путем регулировки величины тока в электромагнитах статора. Затем скорость регулируется путем регулирования крутящего момента (через ток в обмотке). Этот метод аналогичен способу регулирования скорости с помощью тока якоря в традиционном щеточном двигателе постоянного тока.
Двигатель SR создает крутящий момент, пропорциональный величине тока, подаваемого на его обмотки.На производство крутящего момента не влияет скорость двигателя. Это отличается от асинхронных двигателей переменного тока, в которых при высоких скоростях вращения в области ослабления поля ток ротора все больше отстает от вращающегося поля по мере увеличения числа оборотов двигателя.
И, наконец, синхронный двигатель переменного тока с возбуждением постоянным током. Для создания магнитного поля требуется выпрямленный источник питания. Эти двигатели обычно имеют мощность, превышающую одну лошадиную силу.
Разница между синхронным и асинхронным двигателем (со сравнительной таблицей)
Разница между синхронным двигателем и асинхронным двигателем объясняется с учетом таких факторов, как его тип, скольжение, потребность в дополнительном источнике питания, требования к контактным кольцам и щеткам, их стоимость, эффективность, коэффициент мощности, источник тока, скорость, самозапуск , влияние на крутящий момент из-за изменения напряжения, их рабочей скорости и различных применений как синхронного, так и асинхронного двигателя.
Различия между синхронным и асинхронным двигателем объясняются ниже в виде таблицы.
| BASIS | СИНХРОННЫЙ ДВИГАТЕЛЬ | АСИНХРОННЫЙ ДВИГАТЕЛЬ |
|---|---|---|
| Определение | Синхронный двигатель — это машина, скорость ротора которой равна скорости магнитного поля статора. N = NS = 120f / P | Асинхронный двигатель — это машина, ротор которой вращается со скоростью, меньшей, чем синхронная скорость. N |
| Тип | Бесщеточный двигатель, двигатель с переменным сопротивлением, двигатель с регулируемым сопротивлением и двигатель с гистерезисом являются синхронными двигателями. | Асинхронный двигательпеременного тока известен как асинхронный двигатель. |
| Скольжение | Без проскальзывания. Значение скольжения равно нулю. | Имеют пробуксовку, поэтому величина пробуксовки не равна нулю. |
| Дополнительный источник питания | Требуется дополнительный источник постоянного тока для первоначального вращения ротора, близкого к синхронной скорости. | Не требует дополнительных источников запуска. |
| Контактное кольцо и щетки | Требуются контактное кольцо и щетки | Контактное кольцо и щетки не требуются. |
| Стоимость | Синхронный двигатель дороже асинхронного | Менее затратный |
| КПД | КПД выше, чем у асинхронного двигателя. | Менее эффективный |
| Коэффициент мощности | Изменяя возбуждение, коэффициент мощности может быть соответственно отрегулирован как отстающий, опережающий или единичный. | Асинхронный двигатель работает только с отстающим коэффициентом мощности. |
| Электропитание | Ток подается на ротор синхронного двигателя | Ротор асинхронного двигателя не требует тока. |
| Скорость | Скорость двигателя не зависит от изменения нагрузки. Это постоянно. | Скорость асинхронного двигателя уменьшается с увеличением нагрузки. |
| Самозапуск | Синхронный двигатель не самозапускается | Самозапуск |
| Влияние на крутящий момент | Изменение приложенного напряжения не влияет на крутящий момент синхронного двигателя | Изменение приложенного напряжения влияет на крутящий момент асинхронного двигателя |
| Рабочая скорость | Они работают плавно и относительно хорошо на низкой скорости, ниже 300 об / мин. | Двигатель со скоростью выше 600 об / мин работает отлично. |
| Приложения | Синхронные двигатели используются на электростанциях, обрабатывающей промышленности и т. Д. Они также используются в качестве регулятора напряжения. | Используется в центробежных насосах и вентиляторах, воздуходувках, бумажных и текстильных фабриках, компрессорах и подъемниках. и т. д. |
Синхронный двигатель — это двигатель, который работает с синхронной скоростью, то есть скорость ротора равна скорости статора двигателя.Отсюда следует соотношение N = N S = 120f / P, где N — скорость ротора, а Ns — синхронная скорость.
Асинхронный двигатель — это асинхронный двигатель переменного тока. Ротор Асинхронного двигателя вращается со скоростью меньше синхронной, т.е. N
Разница между синхронным и асинхронным двигателем
- Синхронный двигатель — это машина, скорость ротора которой равна скорости магнитного поля статора. Асинхронный двигатель — это машина, ротор которой вращается со скоростью меньше синхронной.
- Бесщеточный двигатель, двигатель с регулируемым сопротивлением, двигатель с регулируемым сопротивлением и двигатель с гистерезисом являются синхронными двигателями. Асинхронный двигатель переменного тока известен как асинхронный двигатель.
- Синхронный двигатель не имеет скольжения. Значение скольжения равно нулю. Асинхронный двигатель имеет скольжение, поэтому значение скольжения не равно нулю.
- Синхронному двигателю требуется дополнительный источник постоянного тока для первоначального вращения ротора, близкого к синхронной скорости. Асинхронный двигатель не требует дополнительного источника пуска.
- Контактное кольцо и щетки необходимы в синхронном двигателе, тогда как асинхронный двигатель не требует контактного кольца и щеток. Только асинхронный двигатель с обмоткой требует и контактного кольца, и щеток.
- Синхронный двигатель дороже асинхронного двигателя.
- КПД синхронного двигателя больше, чем у асинхронного двигателя.
- Путем изменения возбуждения коэффициент мощности синхронного двигателя может быть соответственно отрегулирован как отстающий, опережающий или единичный, тогда как асинхронный двигатель работает только с отстающим коэффициентом мощности.
- Ток подается на ротор синхронного двигателя. Ротор асинхронного двигателя не требует тока.
- Скорость синхронного двигателя не зависит от изменения нагрузки. Это постоянно. Скорость асинхронного двигателя уменьшается с увеличением нагрузки.
- Синхронный двигатель не запускается автоматически, тогда как асинхронный двигатель запускается автоматически.
- Изменение приложенного напряжения не влияет на крутящий момент синхронного двигателя, но влияет на крутящий момент асинхронного двигателя.
- Синхронный двигатель работает плавно и относительно хорошо на низкой скорости, которая ниже 300 об / мин, тогда как скорость выше 600 об / мин работа асинхронного двигателя превосходна. Асинхронные двигатели используются в центробежных насосах и вентиляторах, воздуходувках, бумажных и текстильных фабриках, компрессорах и лифтах. и т. д.
- Синхронный двигатель используется в различных сферах применения на электростанциях, обрабатывающей промышленности и т. Д. Он также используется в качестве регулятора напряжения.
Таким образом, синхронный двигатель отличается от асинхронного двигателя.
Электродвигатель | Британника
Самый простой тип асинхронного двигателя показан на рисунке в разрезе. Трехфазный набор обмоток статора вставлен в пазы в железе статора. Эти обмотки могут быть подключены по схеме «звезда», обычно без внешнего подключения к нейтральной точке, или по схеме «треугольник». Ротор состоит из цилиндрического стального сердечника с проводниками, размещенными в пазах по всей поверхности. В наиболее обычной форме эти проводники ротора соединены вместе на каждом конце ротора токопроводящим концевым кольцом.
Принцип работы асинхронного двигателя может быть разработан, сначала предположив, что обмотки статора подключены к трехфазному источнику питания и что набор из трех синусоидальных токов, показанных на рисунке, протекает в обмотках статора. На этом рисунке показано влияние этих токов на создание магнитного поля в воздушном зазоре машины в течение шести мгновений цикла. Для простоты показана только центральная токопроводящая петля для каждой фазной обмотки. В момент t 1 на чертеже ток в фазе a является максимально положительным, тогда как ток в фазах b, и c, составляет половину отрицательного значения.Результатом является магнитное поле с приблизительно синусоидальным распределением вокруг воздушного зазора с максимальным значением наружу вверху и максимальным значением внутрь внизу. В момент времени t 2 на рисунке (т.е. одна шестая цикла позже), ток в фазе c является максимально отрицательным, в то время как в фазе b и фазе a составляет половину значения. положительный. Результатом, как показано на рисунке для t 2 , снова является синусоидально распределенное магнитное поле, но повернутое на 60 ° против часовой стрелки.Исследование распределения тока для t 3 , t 4 , t 5 и t 6 показывает, что магнитное поле продолжает вращаться с течением времени. Поле совершает один оборот за один цикл токов статора. Таким образом, совокупный эффект трех равных синусоидальных токов, равномерно смещенных во времени и протекающих в трех обмотках статора, равномерно смещенных в угловом положении, должен создать вращающееся магнитное поле с постоянной величиной и механической угловой скоростью, которая зависит от частоты электроснабжение.
Получите подписку Britannica Premium и получите доступ к эксклюзивному контенту. Подпишитесь сейчасВращательное движение магнитного поля относительно проводников ротора вызывает индуцирование в каждом из них напряжения, пропорционального величине и скорости поля относительно проводников. Поскольку проводники ротора закорочены вместе на каждом конце, в результате в этих проводниках будут протекать токи. В простейшем режиме работы эти токи будут примерно равны индуцированному напряжению, деленному на сопротивление проводника.На этом рисунке показана диаграмма токов ротора за момент времени t 1 рисунка. Видно, что токи приблизительно синусоидально распределены по периферии ротора и расположены так, чтобы создавать вращающий момент против часовой стрелки на роторе (то есть вращающий момент в том же направлении, что и вращение поля). Этот крутящий момент ускоряет ротор и вращает механическую нагрузку. По мере увеличения скорости вращения ротора его скорость относительно скорости вращающегося поля уменьшается.Таким образом, индуцированное напряжение снижается, что приводит к пропорциональному уменьшению тока в проводнике ротора и крутящего момента. Скорость ротора достигает постоянного значения, когда крутящий момент, создаваемый токами ротора, равен крутящему моменту, необходимому на этой скорости для нагрузки, без избыточного крутящего момента, доступного для ускорения объединенной инерции нагрузки и двигателя.
Вращающееся поле и токи, которые оно создает в короткозамкнутых проводниках ротора.
Британская энциклопедия, Inc.Механическая выходная мощность должна обеспечиваться входной электрической мощностью. Первоначальных токов статора, показанных на рисунке, достаточно для создания вращающегося магнитного поля. Чтобы поддерживать это вращающееся поле в присутствии токов ротора, показанных на рисунке, необходимо, чтобы обмотки статора несли дополнительную составляющую синусоидального тока такой величины и фазы, чтобы нейтрализовать влияние магнитного поля, которое в противном случае могло бы возникнуть. токами ротора на рисунке.Общий ток статора в каждой фазной обмотке складывается из синусоидальной составляющей для создания магнитного поля и другой синусоиды, опережающей первую на четверть цикла, или 90 °, для обеспечения необходимой электроэнергии. Вторая, или силовая, составляющая тока находится в фазе с напряжением, приложенным к статору, в то время как первая, или намагничивающая, составляющая отстает от приложенного напряжения на четверть цикла или 90 °. При номинальной нагрузке эта намагничивающая составляющая обычно находится в диапазоне 0.От 4 до 0,6 величины силовой составляющей.
Большинство трехфазных асинхронных двигателей работают с обмотками статора, подключенными непосредственно к трехфазному источнику питания постоянного напряжения и постоянной частоты. Типичное напряжение питания находится в диапазоне от 230 вольт между фазами для двигателей относительно небольшой мощности (например, от 0,5 до 50 киловатт) до примерно 15 киловольт между фазами для двигателей большой мощности до примерно 10 мегаватт.
За исключением небольшого падения напряжения на сопротивлении обмотки статора, напряжение питания согласуется со скоростью изменения магнитного потока в статоре машины во времени.Таким образом, при питании с постоянной частотой и постоянным напряжением величина вращающегося магнитного поля остается постоянной, а крутящий момент примерно пропорционален силовой составляющей тока питания.
В асинхронном двигателе, показанном на предыдущих рисунках, магнитное поле совершает один оборот за каждый цикл частоты питания. Для источника с частотой 60 Гц скорость поля составляет 60 оборотов в секунду или 3600 оборотов в минуту. Скорость ротора меньше скорости поля на величину, достаточную для того, чтобы индуцировать необходимое напряжение в проводниках ротора для создания тока ротора, необходимого для момента нагрузки.При полной нагрузке скорость обычно на 0,5–5 процентов ниже полевой скорости (часто называемой синхронной скоростью), причем более высокий процент применяется к двигателям меньшего размера. Эта разница в скорости часто называется скольжением.
Другие синхронные скорости могут быть получены с источником постоянной частоты, построив машину с большим количеством пар магнитных полюсов, в отличие от двухполюсной конструкции, показанной на рисунке. Возможные значения скорости магнитного поля в оборотах в минуту: 120 f / p , где f — частота в герцах (циклов в секунду), а p — количество полюсов (которое должно быть четное число).Данный железный каркас может быть намотан для любого из нескольких возможных количеств пар полюсов с помощью катушек, охватывающих угол приблизительно (360/ p ) °. Крутящий момент, доступный от рамы машины, останется неизменным, поскольку он пропорционален произведению магнитного поля и допустимого тока катушки. Таким образом, номинальная мощность рамы, являющаяся произведением крутящего момента и скорости, будет примерно обратно пропорциональна количеству пар полюсов. Наиболее распространенные синхронные скорости для двигателей с частотой 60 Гц — 1800 и 1200 оборотов в минуту.
Вращающееся магнитное поле — обзор
6.6.2 Генератор самовозбуждающейся индукции
В предыдущих разделах мы подчеркивали, что вращающееся магнитное поле или возбуждение обеспечивается током намагничивания, потребляемым от источника питания, поэтому казалось бы очевидным, что двигатель не мог генерировать, если не был предоставлен источник для обеспечения тока намагничивания. Тем не менее, можно заставить машину «самовозбуждаться», если условия подходящие, и, учитывая надежность двигателя с сепаратором, это может сделать его привлекательным предложением, особенно для небольших изолированных установок.
В главе 5 мы видели, что когда асинхронный двигатель работает с нормальной скоростью, вращающееся магнитное поле, которое создает токи и крутящий момент на роторе, также индуцирует сбалансированные трехфазные наведенные ЭДС в обмотках статора, величина ЭДС ненамного меньше напряжения электросети. Итак, чтобы действовать как независимый генератор, мы хотим создать вращающееся магнитное поле без необходимости подключения к активному источнику напряжения.
Мы обсуждали аналогичный вопрос в главе 3 в связи с самовозбуждением шунта d.c. машина. Мы видели, что если после выключения машины в полюсах поля остается достаточно остаточного магнитного потока, то э.д.с. возникающий при вращении вала, мог начать подавать ток на обмотку возбуждения, тем самым увеличивая магнитный поток, дополнительно повышая ЭДС. и инициирование процесса положительной обратной связи (или начальной загрузки), который в конечном итоге стабилизировался характеристикой насыщения железа в магнитной цепи.
К счастью, того же можно добиться с помощью изолированного асинхронного двигателя.Мы стремимся извлечь выгоду из остаточного магнетизма в железе ротора и, поворачивая ротор, генерировать начальное напряжение в статоре, чтобы запустить процесс. Э.д.с. индуцированный должен затем управлять током, чтобы усилить остаточное поле и способствовать положительной обратной связи для создания бегущего поля магнитного потока. В отличие от постоянного тока Однако асинхронный двигатель имеет только одну обмотку, которая обеспечивает функции возбуждения и преобразования энергии, поэтому, учитывая, что мы хотим довести напряжение на клеммах до его номинального уровня, прежде чем подключать любую электрическую нагрузку, которую мы планируем подавать, очевидно, что необходимо обеспечить замкнутый путь для потенциального тока возбуждения.Этот путь должен способствовать нарастанию тока намагничивания и, следовательно, напряжения на клеммах.
«Возбуждение» тока означает обеспечение пути с очень низким импедансом, так что небольшое напряжение вызывает большой ток, и поскольку мы имеем дело с переменным током. величин, мы, естественно, стремимся использовать явление резонанса, размещая набор конденсаторов параллельно (индуктивным) обмоткам машины, как показано на рис. 6.17.
Рис. 6.17. Самовозбуждающийся индукционный генератор. Нагрузка подключается только после нарастания напряжения статора.
Реактивное сопротивление параллельной цепи, состоящей из чистой индуктивности ( L ) и емкости ( C ) на угловой частоте ω, определяется как X = ωL − 1ωC, поэтому на низких и высоких частотах реактивное сопротивление очень велико, но на так называемой резонансной частоте (ω0 = 1LC) реактивное сопротивление становится равным нулю. Здесь индуктивность — это намагничивающая индуктивность каждой фазы индукционной машины, а C — добавленная емкость, значение выбирается так, чтобы обеспечить резонанс на желаемой частоте генерации.Конечно, схема не идеальна из-за сопротивления в обмотках, но, тем не менее, индуктивное реактивное сопротивление можно «отрегулировать» путем выбора емкости, оставляя контур циркуляции с очень низким сопротивлением. Следовательно, вращая ротор со скоростью, при которой желаемая частота создается остаточным магнетизмом (например, 1800 об / мин для 4-полюсного двигателя, генерирующего 60 Гц), начальная умеренная ЭДС. производит непропорционально высокий ток, и поток увеличивается до тех пор, пока не будет ограничен нелинейной характеристикой насыщения железной магнитной цепи.Затем мы получаем сбалансированные трехфазные напряжения на клеммах, и нагрузка может быть приложена путем включения переключателя S (рис. 6.17).
Приведенное выше описание дает только общую схему механизма самовозбуждения. Такая схема будет удовлетворительной только для очень ограниченного диапазона приводимых скоростей и нагрузок, и на практике требуются дополнительные функции управления для изменения эффективной емкости (обычно с использованием управления симистором), чтобы поддерживать постоянным напряжение при нагрузке и / или скорость варьируется в широких пределах.
ХАРАКТЕРИСТИКИ ДВИГАТЕЛЯ — прикладное промышленное электричество
После внедрения Эдисоном в США системы распределения электроэнергии постоянного тока начался постепенный переход к более экономичной системе переменного тока. Освещение работало как на переменном, так и на постоянном токе. Передача электрической энергии на более длинные расстояния с меньшими потерями на переменном токе. Однако у двигателей была проблема с переменным током. Первоначально двигатели переменного тока были сконструированы как двигатели постоянного тока, но возникли многочисленные проблемы из-за изменения магнитных полей.
Рисунок 5.1 Схема семейства электродвигателей переменного токаЧарльз П. Стейнмец внес свой вклад в решение этих проблем, исследуя гистерезисные потери в железной арматуре. Никола Тесла представил совершенно новый тип двигателя, когда он представил вращающуюся турбину, вращающуюся не водой или паром, а вращающимся магнитным полем. Его новый тип двигателя, асинхронный двигатель переменного тока, по сей день является рабочей лошадкой в отрасли. Его прочность и простота обеспечивают долгий срок службы, высокую надежность и низкие эксплуатационные расходы.Тем не менее, небольшие щеточные электродвигатели переменного тока, подобные разнообразным электродвигателям постоянного тока, сохраняются в небольших приборах наряду с небольшими асинхронными электродвигателями Tesla. Выше одной лошадиной силы (750 Вт) царит мотор Tesla.
Современные твердотельные электронные схемы приводят в действие бесщеточные двигатели постоянного тока с формами переменного тока, генерируемыми от источника постоянного тока. Бесщеточный электродвигатель постоянного тока, фактически электродвигатель переменного тока, заменяет обычный щеточный электродвигатель постоянного тока во многих приложениях. И шаговый двигатель , цифровая версия двигателя, приводится в действие прямоугольными волнами переменного тока, опять же, генерируемыми твердотельной схемой.На рисунке выше показано генеалогическое древо двигателей переменного тока, описанных в этой главе.
Круизные лайнеры и другие крупные суда заменяют карданные валы с редукторами большими многомегаваттными генераторами и двигателями. Так было с тепловозами меньшего масштаба в течение многих лет.
Рисунок 5.2 Диаграмма уровней моторной системыНа системном уровне (рисунок выше) двигатель потребляет электрическую энергию в виде разности потенциалов и тока, преобразуя ее в механическую работу.К сожалению, электродвигатели не на 100% эффективны. Часть электроэнергии теряется на тепло, другой вид энергии, из-за потерь I2R (также называемых потерями в меди) в обмотках двигателя. Тепло — нежелательный побочный продукт этого преобразования. Его необходимо снимать с двигателя, так как это может отрицательно сказаться на долговечности. Таким образом, одна из целей — максимизировать КПД двигателя, уменьшая тепловые потери. Двигатели переменного тока также имеют некоторые потери, с которыми не сталкиваются двигатели постоянного тока: гистерезис и вихревые токи.
Большинство двигателей переменного тока являются асинхронными.Асинхронные двигатели пользуются популярностью из-за их прочности и простоты. Фактически, 90% промышленных двигателей являются асинхронными.
Никола Тесла разработал основные принципы многофазного асинхронного двигателя в 1883 году и к 1888 году создал модель мощностью в половину лошадиных сил (400 Вт). Тесла продал права на производство Джорджу Вестингаузу за 65 000 долларов. Наиболее крупные (> 1 л.с. или 1 кВт) промышленные двигатели многофазные асинхронные двигатели . Под многофазностью мы подразумеваем, что статор содержит несколько различных обмоток на каждый полюс двигателя, приводимых в действие соответствующими синусоидальными волнами со сдвигом во времени.На практике это две-три фазы. Крупные промышленные двигатели трехфазные. Хотя для простоты мы включили многочисленные иллюстрации двухфазных двигателей, мы должны подчеркнуть, что почти все многофазные двигатели являются трехфазными. Под асинхронным двигателем мы подразумеваем, что обмотки статора индуцируют ток в проводниках ротора, как трансформатор, в отличие от коллекторного двигателя постоянного тока.
Конструкция асинхронного двигателя переменного тока
Асинхронный двигатель состоит из ротора, известного как якорь, и статора, содержащего обмотки, подключенные к многофазному источнику энергии, как показано на рисунке ниже.Простой двухфазный асинхронный двигатель, представленный ниже, похож на двигатель мощностью 1/2 лошадиные силы, который Никола Тесла представил в 1888 году.
Рисунок 5.3 Многофазный асинхронный двигатель TeslaСтатор на рисунке выше намотан парами катушек, соответствующих фазам имеющейся электрической энергии. Статор двухфазного асинхронного двигателя выше имеет 2 пары катушек, по одной паре для каждой из двух фаз переменного тока. Отдельные катушки пары соединены последовательно и соответствуют противоположным полюсам электромагнита.То есть одна катушка соответствует N-полюсу, другая — S-полюсу, пока фаза переменного тока не изменит полярность. Другая пара катушек ориентирована в пространстве под углом 90 ° к первой паре. Эта пара катушек подключена к переменному току, сдвинутому во времени на 90 ° в случае двухфазного двигателя. Во времена Теслы источником двух фаз переменного тока был двухфазный генератор переменного тока. Статор на рисунке выше имеет выступающих полюсов, очевидно выступающих полюсов, которые использовались в ранних асинхронных двигателях Tesla. Эта конструкция используется по сей день для двигателей с малой мощностью (<50 Вт).Однако для более мощных двигателей меньшая пульсация крутящего момента и более высокий КПД достигается, если катушки встроены в пазы, вырезанные в пластинах статора (рисунок ниже).
Рисунок 5.4 Рама статора с пазами для обмотокПластины статора представляют собой тонкие изолированные кольца с прорезями, пробитыми из листов электротехнической стали. Набор из них закреплен концевыми винтами, которые также могут удерживать концевые кожухи.
Рисунок 5.5 Статор с обмотками 2-φ (а) и 3-φ (б)На рисунке выше обмотки двухфазного и трехфазного двигателей установлены в пазы статора.Катушки наматываются на внешнее приспособление, а затем вставляются в пазы. Изоляция, зажатая между периферией катушки и пазом, защищает от истирания. Фактические обмотки статора сложнее, чем отдельные обмотки на полюс на рисунке выше. Сравнивая двигатель 2-φ с двигателем Tesla 2-φ с выступающими полюсами, количество катушек такое же. В реальных больших двигателях обмотка полюса разделена на идентичные катушки, вставленные во множество пазов меньшего размера, чем указано выше. Эта группа называется фазовой лентой (см. Рисунок ниже).Распределенные катушки фазового пояса подавляют некоторые нечетные гармоники, создавая более синусоидальное распределение магнитного поля по полюсу. Это показано в разделе синхронного двигателя. В прорезях на краю стойки может быть меньше витков, чем в других прорезях. Краевые пазы могут содержать обмотки от двух фаз. То есть фазовые пояса перекрываются.
Рисунок 5.6 Перекрытие фазовых лентКлючом к популярности асинхронного двигателя переменного тока является его простота, о чем свидетельствует простой ротор (рисунок ниже).Ротор состоит из вала, стального пластинчатого ротора и встроенной медной или алюминиевой беличьей клетки , показанной на (b), снятой с ротора. По сравнению с якорем двигателя постоянного тока, здесь нет коммутатора. Это устраняет щетки, искрение, искрение, графитовую пыль, регулировку и замену щеток, а также повторную обработку коллектора.
Рисунок 5.7 Многослойный ротор с (а) встроенной беличьей клеткой, (б) токопроводящей клеткой, удаленной с ротораПроводники в короткозамкнутой клетке могут быть перекошены, перекручены относительно вала.Несоосность пазов статора снижает пульсации крутящего момента. Сердечники ротора и статора состоят из пакета изолированных пластин. Пластины покрыты изолирующим оксидом или лаком для минимизации потерь на вихревые токи. Сплав, используемый в пластинах, выбран из соображений низких гистерезисных потерь.
Теория работы асинхронных двигателей
Краткое объяснение работы заключается в том, что статор создает вращающееся магнитное поле, которое волочит ротор. Теория работы асинхронных двигателей основана на вращающемся магнитном поле.Один из способов создания вращающегося магнитного поля — вращение постоянного магнита. Если движущиеся магнитные линии потока разрезают проводящий диск, он будет следовать за движением магнита. Линии магнитного потока, разрезающие проводник, будут индуцировать напряжение и, как следствие, ток в проводящем диске. Этот поток тока создает электромагнит, полярность которого противодействует движению постоянного магнита — Закон Ленца . Полярность электромагнита такова, что он тянется к постоянному магниту.Диск следует с немного меньшей скоростью, чем постоянный магнит.
Рисунок 5.8 Вращающееся магнитное поле создает крутящий момент в проводящем диске Вращающееся магнитное поле создает крутящий момент в проводящем дискеКрутящий момент, развиваемый диском, пропорционален количеству силовых линий, разрезающих диск, и скорости, с которой он разрезает диск. Если бы диск вращался с той же скоростью, что и постоянный магнит, не было бы ни потока, разрезающего диск, ни индуцированного тока, ни поля электромагнита, ни крутящего момента.Таким образом, скорость диска всегда будет ниже скорости вращающегося постоянного магнита, так что линии потока, разрезающие диск, индуцируют ток, создают электромагнитное поле в диске, которое следует за постоянным магнитом. Если к диску приложена нагрузка, замедляющая его, будет развиваться больший крутящий момент, поскольку больше линий магнитного потока разрезают диск. Крутящий момент пропорционален скольжению , степени, в которой диск отстает от вращающегося магнита. Большее скольжение соответствует большему потоку, разрезающему проводящий диск, создавая больший крутящий момент.В основе аналогового автомобильного вихретокового спидометра лежит принцип, проиллюстрированный выше. Когда диск удерживается пружиной, отклонение диска и иглы пропорционально скорости вращения магнита. Вращающееся магнитное поле создается двумя катушками, расположенными под прямым углом друг к другу, которые управляются токами, которые не совпадают по фазе на 90 °. Это не должно вызывать удивления, если вы знакомы с диаграммами Лиссажу на осциллографах.
Рисунок 5.9 В противофазе (90 °) синусоидальные волны образуют круговую диаграмму ЛиссажуСмещенные по фазе (90 °) синусоидальные волны образуют круговую диаграмму Лиссажу. На приведенном выше рисунке круговая диаграмма Лиссажу создается при подаче горизонтального и вертикального входных сигналов осциллографа с отклонением фазы синусоидальных волн на 90 °.Начиная с (a) с максимальным отклонением «X» и минимальным «Y», след перемещается вверх и влево в направлении (b). Между (a) и (b) две формы волны равны 0,707 Vpk при 45 °. Эта точка (0,707, 0,707) попадает на радиус круга между (a) и (b). Трасса перемещается в (b) с минимальным отклонением «X» и максимальным «Y». При максимальном отрицательном отклонении «X» и минимальном отклонении «Y» след переместится в (c). Затем с минимальным «X» и максимальным отрицательным «Y» он переходит в (d), а затем обратно в (a), завершая один цикл.
Рисунок 5.10 Окружность синуса по оси X и косинуса по оси YНа рисунке показаны две синусоидальные волны с фазовым сдвигом на 90 °, приложенные к отклоняющим пластинам осциллографа, расположенным под прямым углом в пространстве. Комбинация фазированных синусоидальных волн на 90 ° и отклонения под прямым углом дает двумерный узор — круг. Этот круг очерчен электронным лучом, вращающимся против часовой стрелки.
Полная скорость двигателя и скорость синхронного двигателя
Скорость вращения вращающегося магнитного поля статора связана с количеством пар полюсов на фазу статора.На приведенном ниже рисунке «полная скорость» всего шесть полюсов или три пары полюсов и три фазы. Однако на каждую фазу приходится только одна пара полюсов. Магнитное поле будет вращаться один раз за цикл синусоидальной волны. В случае мощности 60 Гц поле вращается со скоростью 60 раз в секунду или 3600 оборотов в минуту (об / мин). При мощности 50 Гц он вращается со скоростью 50 оборотов в секунду или 3000 об / мин. 3600 и 3000 об / мин — это синхронная скорость двигателя. Хотя ротор асинхронного двигателя никогда не достигает этой скорости, это определенно верхний предел.Если мы удвоим количество полюсов двигателя, синхронная скорость сократится вдвое, потому что магнитное поле вращается в пространстве на 180 ° на 360 ° электрической синусоидальной волны.
Рисунок 5.11 Удвоение полюсов статора уменьшает синхронную скорость вдвоеСинхронная скорость определяется по формуле:
[латекс] N_s = \ frac {120 \ cdot f} {P} [/ латекс]
Где:
Н с = Скорость магнитного поля (об / мин)
f = частота подаваемой мощности (Гц)
P = общее количество полюсов на фазу, кратное 2
На приведенном выше рисунке «половинная скорость» четыре полюса на фазу (3 фазы).Синхронная скорость для мощности 50 Гц составляет: S = 120 · 50/4 = 1500 об / мин
Краткое объяснение асинхронного двигателя состоит в том, что вращающееся магнитное поле, создаваемое статором, увлекает за собой ротор. Более длинное и более правильное объяснение состоит в том, что магнитное поле статора индуцирует переменный ток в проводниках короткозамкнутого ротора, которые составляют трансформатор. вторичный. Этот индуцированный ток ротора, в свою очередь, создает магнитное поле. Магнитное поле вращающегося статора взаимодействует с этим полем ротора.Поле ротора пытается выровняться с полем вращающегося статора. Результат — вращение ротора с короткозамкнутым ротором. Если бы не было механической нагрузки крутящего момента двигателя, подшипников, сопротивления ветра или других потерь, ротор вращался бы с синхронной скоростью. Однако проскальзывание между ротором и полем статора синхронной скорости развивает крутящий момент. Именно магнитный поток, разрезающий проводники ротора при его проскальзывании, создает крутящий момент. Таким образом, нагруженный двигатель будет скользить пропорционально механической нагрузке.Если бы ротор работал с синхронной скоростью, не было бы потока статора, разрезающего ротор, не было бы тока, индуцированного в роторе, не было бы крутящего момента.
Крутящий момент в асинхронных двигателях
При первой подаче питания на двигатель ротор находится в состоянии покоя, а магнитное поле статора вращается с синхронной скоростью N s . Поле статора режет ротор с синхронной скоростью N s . Ток, индуцированный в закороченных витках ротора, является максимальным, как и частота тока, частота сети.По мере увеличения скорости ротора скорость, с которой магнитный поток статора сокращает ротор, представляет собой разницу между синхронной скоростью N s и фактической скоростью N ротора, или (N s — N). Отношение фактического потока, разрезающего ротор, к синхронной скорости определяется как скольжение :
[латекс] s = \ frac {(N_s — N)} {N_s} [/ латекс]
Где:
Н с = синхронная скорость
N = частота вращения ротора
Частота тока, наведенного в проводники ротора, равна только частоте сети при пуске двигателя и уменьшается по мере приближения ротора к синхронной скорости. Частота ротора определяется по:
[латекс] f_r = s \ cdot f [/ латекс]
Где:
с = скольжение,
f = частота сети статора
Скольжение при 100% крутящем моменте обычно составляет 5% или меньше в асинхронных двигателях. Таким образом, для частоты сети f = 50 Гц частота наведенного тока в роторе:
f r = S (f)
= 0,05 (50 Гц)
= 2,5 Гц.
Почему он такой низкий? Магнитное поле статора вращается с частотой 50 Гц.Скорость вращения ротора на 5% меньше. Вращающееся магнитное поле режет ротор только с частотой 2,5 Гц. 2,5 Гц — это разница между синхронной скоростью и фактической скоростью ротора. Если ротор вращается немного быстрее при синхронной скорости, поток вообще не будет резать ротор, f r = 0.
Рисунок 5.12 Зависимость крутящего момента и скорости от% скольжения.На приведенном выше графике показано, что пусковой крутящий момент, известный как крутящий момент заблокированного ротора (T LR ), превышает 100% крутящего момента при полной нагрузке (T FL ), безопасного номинального продолжительного крутящего момента.Крутящий момент заблокированного ротора составляет около 175% от T FL для приведенного выше примера двигателя. Пусковой ток, известный как , ток заторможенного ротора (I LR ) составляет 500% от тока полной нагрузки (I FL ), безопасного рабочего тока. Ток большой, потому что это аналог закороченной вторичной обмотки трансформатора. Когда ротор начинает вращаться, крутящий момент может немного уменьшиться для определенных классов двигателей до значения, известного как тяговый момент . Это самое низкое значение крутящего момента, с которым когда-либо сталкивался пусковой двигатель.Когда ротор набирает 80% синхронной скорости, крутящий момент увеличивается со 175% до 300% крутящего момента полной нагрузки. Этот крутящий момент пробоя (T BD ) происходит из-за большего, чем обычно, 20% скольжения. Сила тока в этот момент уменьшилась лишь незначительно, но после этого будет быстро уменьшаться. Когда ротор ускоряется с точностью до нескольких процентов от синхронной скорости, как крутящий момент, так и ток значительно уменьшаются. При нормальной работе скольжение будет составлять всего несколько процентов. Для работающего двигателя любой участок кривой крутящего момента ниже 100% номинального крутящего момента является нормальным.Нагрузка двигателя определяет рабочую точку на кривой крутящего момента. В то время как крутящий момент и ток двигателя могут превышать 100% в течение нескольких секунд во время запуска, продолжительная работа выше 100% может привести к повреждению двигателя. Любая крутящая нагрузка двигателя, превышающая крутящий момент пробоя, приведет к остановке двигателя. Крутящий момент, скольжение и ток будут приближаться к нулю в условиях нагрузки «без механического крутящего момента». Это состояние аналогично разомкнутому вторичному трансформатору. Существует несколько основных конструкций асинхронных двигателей, которые значительно отличаются от кривой крутящего момента, приведенной выше.Различные конструкции оптимизированы для запуска и работы с различными типами нагрузок. Крутящий момент заблокированного ротора (T LR ) для двигателей различных конструкций и размеров составляет от 60% до 350% момента полной нагрузки (T FL ). Пусковой ток или ток заторможенного ротора (I LR ) может находиться в диапазоне от 500% до 1400% от тока полной нагрузки (I FL ). Этот потребляемый ток может вызвать проблемы с запуском больших асинхронных двигателей.
Классы двигателей NEMA и IEC
Различные стандартные классы (или конструкции) двигателей, соответствующие кривым крутящего момента (рисунок ниже), были разработаны для лучшего управления нагрузками различных типов.Национальная ассоциация производителей электрооборудования (NEMA) определила классы двигателей A, B, C и D для удовлетворения этих требований к приводам. Аналогичные классы N и H Международной электротехнической комиссии (IEC) соответствуют конструкциям NEMA B и C соответственно.
Рисунок 5.13 Характеристики для проектов NEMAХарактеристики для проектов NEMA
Все двигатели, за исключением класса D, работают со скольжением 5% или менее при полной нагрузке.
- Класс B (IEC Class N) Двигатели используются по умолчанию в большинстве приложений.При пусковом моменте LRT = от 150% до 170% от FLT он может запускать большинство нагрузок без чрезмерного пускового тока (LRT). КПД и коэффициент мощности высокие. Обычно он приводит в действие насосы, вентиляторы и станки.
- Класс A пусковой момент такой же, как у класса B. Пусковой момент и пусковой ток (LRT) выше. Этот двигатель справляется с переходными перегрузками, которые встречаются в машинах для литья под давлением.
- Класс C (IEC Class H) имеет более высокий пусковой момент, чем классы A и B при LRT = 200% от FLT.Этот двигатель применяется для тяжелых пусковых нагрузок, которые необходимо приводить в действие с постоянной скоростью, таких как конвейеры, дробилки, поршневые насосы и компрессоры.
- Двигатели класса D имеют самый высокий пусковой момент (LRT) в сочетании с низким пусковым током из-за высокого скольжения (от 5% до 13% при FLT). Высокое скольжение приводит к снижению скорости. Регулировка скорости плохая. Тем не менее, двигатель отлично справляется с нагрузками с переменной скоростью, например с маховиком для аккумулирования энергии. Применения включают пробивные прессы, ножницы и подъемники.
- Класс E Двигатели — это более эффективная версия класса B.
- Двигатели класса F имеют намного более низкие LRC, LRT и крутящий момент, чем у класса B. Они управляют постоянными, легко запускаемыми нагрузками.
Коэффициент мощности асинхронных двигателей
Асинхронные двигатели имеют отстающий (индуктивный) коэффициент мощности от линии электропередачи. Коэффициент мощности больших полностью нагруженных высокоскоростных двигателей может достигать 90% для больших высокоскоростных двигателей. При 3/4 полной нагрузки максимальный коэффициент мощности высокоскоростного двигателя может составлять 92%.Коэффициент мощности малых тихоходных двигателей может составлять всего 50%. При запуске коэффициент мощности может находиться в диапазоне от 10% до 25%, увеличиваясь по мере достижения ротором скорости. Коэффициент мощности (PF) значительно зависит от механической нагрузки двигателя (рисунок ниже). Ненагруженный двигатель аналогичен трансформатору без резистивной нагрузки на вторичной обмотке. Небольшое сопротивление отражается от вторичной обмотки (ротора) к первичной обмотке (статору). Таким образом, в линии электропередачи присутствует реактивная нагрузка до 10% коэффициента мощности. Когда ротор нагружен, возрастающая резистивная составляющая отражается от ротора к статору, увеличивая коэффициент мощности.
Рисунок 5.14 Коэффициент мощности и КПД асинхронного двигателяКПД асинхронного двигателя
Большие трехфазные двигатели более эффективны, чем трехфазные двигатели меньшего размера, и почти все однофазные двигатели. КПД большого асинхронного двигателя может достигать 95% при полной нагрузке, хотя чаще встречается 90%. Эффективность малонагруженного или ненагруженного асинхронного двигателя низкая, потому что большая часть тока связана с поддержанием намагничивающего потока. Когда нагрузка крутящего момента увеличивается, больше тока потребляется для создания крутящего момента, в то время как ток, связанный с намагничиванием, остается фиксированным.Эффективность при 75% FLT может быть немного выше, чем при 100% FLT. Эффективность снижается на несколько процентов при FLT 50% и снижается еще на несколько процентов при FLT 25%. Эффективность становится низкой только ниже 25% FLT. Изменение КПД в зависимости от нагрузки показано на рисунке выше. Индукционные двигатели обычно имеют завышенные размеры, чтобы гарантировать, что их механическая нагрузка может быть запущена и приведена в действие при любых условиях эксплуатации. Если многофазный двигатель нагружен менее 75% номинального крутящего момента, когда КПД достигает пика, КПД снижается лишь незначительно до 25% FLT.
Корректор коэффициента мощности Nola
Фрэнк Нола из НАСА предложил корректор коэффициента мощности (PFC) в качестве энергосберегающего устройства для однофазных асинхронных двигателей в конце 1970-х годов. Он основан на предположении, что асинхронный двигатель с неполной нагрузкой менее эффективен и имеет более низкий коэффициент мощности, чем двигатель с полной нагрузкой. Таким образом, в частично загруженных двигателях, в частности, в двигателях 1-φ, можно сэкономить энергию. Энергия, потребляемая для поддержания магнитного поля статора, относительно фиксирована по отношению к изменениям нагрузки.Хотя в полностью загруженном двигателе экономить нечего, напряжение на частично загруженном двигателе может быть уменьшено, чтобы уменьшить энергию, необходимую для поддержания магнитного поля. Это повысит коэффициент мощности и эффективность. Это была хорошая концепция для заведомо неэффективных однофазных двигателей, для которых она предназначалась. Эта концепция не очень применима к большим трехфазным двигателям. Из-за их высокого КПД (90% +) экономия энергии невелика. Более того, двигатель с КПД 95% по-прежнему имеет КПД 94% при 50% крутящем моменте при полной нагрузке (FLT) и 90% КПД при 25% FLT.Потенциальная экономия энергии при переходе от 100% FLT к 25% FLT составляет разницу в эффективности 95% — 90% = 5%. Это не 5% мощности при полной нагрузке, а 5% мощности при пониженной нагрузке. Корректор коэффициента мощности Nola может быть применим к 3-фазному двигателю, который большую часть времени простаивает (ниже 25% FLT), например к пробивному прессу. Срок окупаемости дорогостоящего электронного контроллера был оценен как непривлекательный для большинства приложений. Тем не менее, он может быть экономичным в составе электронного пускателя двигателя или регулятора скорости.Асинхронный двигатель может работать как генератор переменного тока, если это привод
.Асинхронные двигатели в качестве генераторов переменного тока
Асинхронный двигатель может работать как генератор переменного тока, если он приводится в действие крутящим моментом, превышающим 100% синхронной скорости (рисунок ниже). Это соответствует нескольким% «отрицательного» скольжения, скажем, -1%. Это означает, что, поскольку мы вращаем двигатель быстрее, чем синхронная скорость, ротор продвигается на 1% быстрее, чем вращающееся магнитное поле статора. Обычно он отстает в двигателе на 1%.Поскольку ротор разрезает магнитное поле статора в противоположном направлении (впереди), ротор индуцирует напряжение в статоре, возвращая электрическую энергию обратно в линию электропередачи.
Рисунок 5.15 Отрицательный крутящий момент превращает асинхронный двигатель в генераторТакой индукционный генератор должен возбуждаться «живым» источником мощностью 50 или 60 Гц. В случае сбоя в электроснабжении энергокомпании выработка электроэнергии невозможна. Этот тип генератора не подходит в качестве резервного источника питания.Преимущество ветряного генератора вспомогательной энергии состоит в том, что он не требует автоматического выключателя отключения питания для защиты ремонтных бригад. Это безотказно.
Небольшие удаленные (от электросети) установки могут быть выполнены с самовозбуждением путем размещения конденсаторов параллельно фазам статора. Если снять нагрузку, остаточный магнетизм может вызвать небольшой ток. Этот ток может протекать через конденсаторы без рассеивания мощности. Когда генератор достигает полной скорости, ток увеличивается, чтобы подать ток намагничивания на статор.В этот момент может быть приложена нагрузка. Слабое регулирование напряжения. Асинхронный двигатель может быть преобразован в генератор с самовозбуждением путем добавления конденсаторов.
Процедура запуска заключается в доведении ветряной турбины до скорости в двигательном режиме путем подачи на статор нормального напряжения линии электропередачи. Любая вызванная ветром скорость турбины, превышающая синхронную, будет развивать отрицательный крутящий момент, возвращая мощность в линию электропередачи, изменяя нормальное направление электрического счетчика киловатт-часов.В то время как асинхронный двигатель представляет отстающий коэффициент мощности для линии электропередачи, асинхронный генератор переменного тока представляет собой ведущий коэффициент мощности. Индукционные генераторы не получили широкого распространения на обычных электростанциях. Скорость привода паровой турбины является постоянной и регулируемой в соответствии с требованиями синхронных генераторов переменного тока. Синхронные генераторы также более эффективны.
Скорость ветряной турбины трудно контролировать, и скорость ветра может изменяться порывами. Асинхронный генератор лучше справляется с этими колебаниями из-за собственного проскальзывания.Это меньше нагружает зубчатую передачу и механические компоненты, чем синхронный генератор. Однако это допустимое изменение скорости составляет всего около 1%. Таким образом, индукционный генератор, подключенный к прямой линии, считается ветряной турбиной с фиксированной скоростью (см. Асинхронный генератор с двойным питанием для истинного генератора переменного тока с регулируемой скоростью). Несколько генераторов или несколько обмоток на общем валу могут быть переключены для обеспечения высокой и низкой скорости, чтобы приспособиться к переменным ветровым условиям.
Асинхронные двигатели с несколькими полями
Асинхронные двигателимогут содержать несколько обмоток возбуждения, например, 4-полюсную и 8-полюсную обмотки, соответствующие синхронным скоростям вращения 1800 и 900 об / мин.Подать питание на то или иное поле менее сложно, чем на повторное подключение катушек статора.
Рисунок 5.16 Несколько полей позволяют изменять скоростьЕсли поле сегментировано с выведенными выводами, его можно изменить (или переключить) с 4-полюсного на 2-полюсное, как показано выше для 2-фазного двигателя. Сегменты 22,5 ° переключаются на сегменты 45 °. Для ясности выше показана только проводка для одной фазы. Таким образом, наш асинхронный двигатель может работать на нескольких скоростях. При переключении вышеупомянутого двигателя 60 Гц с 4 полюсов на 2 полюса синхронная скорость увеличивается с 1800 до 3600 об / мин.
Q: Если двигатель приводится в движение частотой 50 Гц, каковы будут соответствующие 4-полюсные и 2-полюсные синхронные скорости?
А:
[латекс] N_s = \ frac {120f} {P} [/ latex] [latex] N_s = \ frac {120 * 50Hz} {4} [/ latex] [latex] = 1500 об / мин (4-полюсный) [ / латекс]
[латекс] N_s = \ frac {120f} {P} [/ latex] [latex] N_s = \ frac {120 * 50Hz} {2} [/ latex] [latex] = 3000 об / мин (2-полюсный) [ / латекс]
Асинхронные двигатели с переменным напряжением
Скорость малых асинхронных двигателей с короткозамкнутым ротором для таких применений, как приводные вентиляторы, может быть изменена путем снижения сетевого напряжения.Это снижает крутящий момент, доступный нагрузке, что снижает скорость (см. Рисунок ниже).
Рисунок 5.17 Регулирование переменного напряжения, скорость асинхронного двигателяЭлектронное регулирование скорости в асинхронных двигателях
Современная полупроводниковая электроника расширяет возможности управления скоростью. Изменяя сетевую частоту 50 или 60 Гц на более высокие или более низкие значения, можно изменить синхронную скорость двигателя. Однако уменьшение частоты тока, подаваемого на двигатель, также снижает реактивное сопротивление X L , что увеличивает ток статора.Это может привести к насыщению магнитной цепи статора с катастрофическими последствиями. На практике напряжение на двигателе необходимо уменьшать при уменьшении частоты.
Рисунок 5.18 Электронный частотно-регулируемый приводИ наоборот, частота привода может быть увеличена для увеличения синхронной скорости двигателя. Однако необходимо увеличить напряжение, чтобы преодолеть увеличивающееся реактивное сопротивление, чтобы поддерживать ток на уровне нормального значения и поддерживать крутящий момент. Инвертор приближает синусоидальные волны к двигателю с помощью выходов с широтно-импульсной модуляцией.Это прерывистый сигнал, который может быть включен или выключен, высокий или низкий, процент времени включения соответствует мгновенному напряжению синусоидальной волны.
Когда для управления асинхронным двигателем применяется электроника, становится доступно множество методов управления, от простого до сложного:
- Скалярное управление: Описанный выше недорогой метод управления только напряжением и частотой без обратной связи.
- Векторное управление: Также известно как векторное управление фазой.Компоненты тока статора, создающие магнитный поток и крутящий момент, измеряются или оцениваются в реальном времени для улучшения кривой крутящего момента двигателя. Это требует больших вычислений.
- Прямое управление крутящим моментом: Продуманная адаптивная модель двигателя обеспечивает более прямое управление потоком и крутящим моментом без обратной связи. Этот метод быстро реагирует на изменения нагрузки.
- Многофазный асинхронный двигатель состоит из многофазной обмотки, встроенной в многослойный статор, и проводящей короткозамкнутой клетки, встроенной в многослойный ротор.
- Трехфазные токи, протекающие внутри статора, создают вращающееся магнитное поле, которое индуцирует ток и, следовательно, магнитное поле в роторе. Крутящий момент ротора развивается, когда ротор немного проскальзывает за вращающимся полем статора.
- В отличие от однофазных двигателей, многофазные асинхронные двигатели самозапускаются.
- Пускатели двигателей минимизируют нагрузку на линию питания, обеспечивая при этом больший пусковой крутящий момент, чем требуется во время работы.Пускатели для понижения тока сети требуются только для больших двигателей.
- Трехфазные двигатели при запуске будут работать от однофазных.
- Статический преобразователь фазы — это трехфазный двигатель, работающий на одной фазе без нагрузки на вал, генерирующий трехфазный выходной сигнал.
- Несколько обмоток возбуждения можно перемонтировать для работы с несколькими дискретными скоростями двигателя, изменив количество полюсов.
Трехфазный двигатель может работать от однофазного источника питания.Однако он не запускается автоматически. Его можно запустить вручную в любом направлении, набрав скорость за несколько секунд. Он будет развивать только 2/3 номинальной мощности 3-φ, потому что одна обмотка не используется.
Рисунок 5.19 Двигатель 3-фазн. Питается от мощности 1-фазн., Но не запускается.Одинарная катушка однофазного двигателя
Одиночная катушка однофазного асинхронного двигателя создает не вращающееся магнитное поле, а пульсирующее поле, достигающее максимальной напряженности при электрическом напряжении 0 ° и 180 °.
Рисунок 5.20 Однофазный статор создает невращающееся пульсирующее магнитное полеДругая точка зрения состоит в том, что одиночная катушка, возбуждаемая однофазным током, создает два вектора магнитного поля, вращающихся в противоположных направлениях, совпадающих дважды за оборот при 0 ° (рисунок выше-a) и 180 ° (рисунок e). Когда векторы поворачиваются на 90 ° и -90 °, они отменяются на рисунке c. При 45 ° и -45 ° (рисунок b) они частично складываются по оси + x и сокращаются по оси y. Аналогичная ситуация существует на рисунке d.Сумма этих двух векторов — это вектор, стационарный в пространстве, но чередующийся во времени. Таким образом, пусковой крутящий момент не создается.
Однако, если ротор вращается вперед со скоростью немного меньшей, чем синхронная скорость, он будет развивать максимальный крутящий момент при 10% скольжении относительно вектора прямого вращения. Меньший крутящий момент будет развиваться выше или ниже 10% скольжения. Ротор будет испытывать скольжение на 200–10% относительно вектора магнитного поля, вращающегося в противоположных направлениях. Небольшой крутящий момент (см. Кривую зависимости крутящего момента от скольжения), за исключением двукратной пульсации частоты, создается вектором встречного вращения.Таким образом, однофазная катушка будет развивать крутящий момент после запуска ротора. Если ротор запускается в обратном направлении, он будет развивать такой же большой крутящий момент, поскольку он приближается к скорости вращающегося в обратном направлении вектора.
Однофазные асинхронные двигатели имеют медную или алюминиевую короткозамкнутую клетку, встроенную в цилиндр из стальных пластин, типичных для многофазных асинхронных двигателей.
Двигатель с постоянным разделением конденсаторов
Одним из способов решения проблемы с однофазным двигателем является создание двухфазного двигателя, получающего двухфазное питание от однофазного.Для этого требуется двигатель с двумя обмотками, разнесенными друг от друга на 90 ° , электрический, питаемый двумя фазами тока, смещенными во времени на 90 ° . Это называется конденсаторным двигателем с постоянным разделением.
Рисунок 5.21 Асинхронный двигатель с постоянным разделением конденсаторов Асинхронный двигатель с постоянным разделением конденсаторовЭтот тип двигателя подвержен увеличенной величине тока и сдвигу во времени назад, когда двигатель набирает скорость, с пульсациями крутящего момента на полной скорости. Решение состоит в том, чтобы конденсатор (импеданс) оставался небольшим, чтобы минимизировать потери.Потери меньше, чем у двигателя с экранированными полюсами. Эта конфигурация двигателя хорошо работает до 1/4 лошадиных сил (200 Вт), хотя обычно применяется к двигателям меньшего размера. Направление двигателя легко изменить, включив конденсатор последовательно с другой обмоткой. Этот тип двигателя может быть адаптирован для использования в качестве серводвигателя, описанного в другом месте этой главы.
Рисунок 5.22 Однофазный асинхронный двигатель со встроенными катушками статораОднофазные асинхронные двигатели могут иметь катушки, встроенные в статор для двигателей большего размера.Тем не менее, меньшие размеры требуют меньшего количества сложностей для создания концентрированных обмоток с выступающими полюсами.
Асинхронный двигатель с конденсаторным пуском
На рисунке ниже конденсатор большего размера может использоваться для запуска однофазного асинхронного двигателя через вспомогательную обмотку, если он отключается центробежным переключателем, когда двигатель набирает обороты. Более того, во вспомогательной обмотке может быть намного больше витков из более тяжелого провода, чем в двигателе с разделенной фазой сопротивления, чтобы уменьшить чрезмерное повышение температуры.В результате для таких тяжелых нагрузок, как компрессоры кондиционеров, доступен больший пусковой крутящий момент. Эта конфигурация двигателя работает настолько хорошо, что доступна в многомощных (несколько киловаттных) размерах.
Рисунок 5.23 Асинхронный двигатель с конденсаторным пускомАсинхронный двигатель с конденсаторным двигателем
Вариант двигателя с конденсаторным пуском (рисунок ниже) заключается в запуске двигателя с относительно большим конденсатором для высокого пускового момента, но после запуска оставляют конденсатор меньшей емкости на месте, чтобы улучшить рабочие характеристики, не потребляя чрезмерного тока.Дополнительная сложность конденсаторного двигателя оправдана для двигателей большего размера.
Рисунок 5.24 Асинхронный двигатель с конденсаторным двигателемПусковой конденсатор двигателя может быть неполярным электролитическим конденсатором с двойным анодом, который может представлять собой два последовательно соединенных поляризованных электролитических конденсатора + к + (или — к -). Такие электролитические конденсаторы переменного тока имеют такие высокие потери, что их можно использовать только в прерывистом режиме (1 секунда во включенном состоянии, 60 секунд в выключенном состоянии), например, при запуске двигателя. Конденсатор для работы двигателя должен иметь не электролитическую конструкцию, а полимерный конденсатор с более низкими потерями.
Асинхронный двигатель с двухфазным двигателем с сопротивлением
Если во вспомогательной обмотке гораздо меньше витков, меньший провод размещен под углом 90 ° к главной обмотке, он может запустить однофазный асинхронный двигатель. При более низкой индуктивности и более высоком сопротивлении ток будет испытывать меньший фазовый сдвиг, чем основная обмотка. Может быть получено около 30 ° разности фаз. Эта катушка создает умеренный пусковой крутящий момент, который отключается центробежным переключателем на 3/4 синхронной скорости.Эта простая (без конденсатора) конструкция хорошо подходит для двигателей мощностью до 1/3 лошадиных сил (250 Вт), управляющих легко запускаемыми нагрузками.
Рисунок 5.25 Сопротивление асинхронного двигателя с расщепленной фазойЭтот двигатель имеет больший пусковой крутящий момент, чем двигатель с экранированными полюсами (следующий раздел), но не такой большой, как двухфазный двигатель, построенный из тех же частей. Плотность тока во вспомогательной обмотке во время пуска настолько высока, что последующий быстрый рост температуры исключает частый перезапуск или медленные пусковые нагрузки.
Корректор коэффициента мощности Nola
Фрэнк Нола из НАСА предложил корректор коэффициента мощности для повышения эффективности асинхронных двигателей переменного тока в середине 1970-х годов. Он основан на предположении, что асинхронные двигатели неэффективны при нагрузке ниже полной. Эта неэффективность коррелирует с низким коэффициентом мощности. Коэффициент мощности меньше единицы возникает из-за тока намагничивания, необходимого для статора. Этот фиксированный ток составляет большую долю от общего тока двигателя по мере уменьшения нагрузки двигателя.При небольшой нагрузке полный ток намагничивания не требуется. Его можно уменьшить, уменьшив подаваемое напряжение, улучшив коэффициент мощности и эффективность. Корректор коэффициента мощности определяет коэффициент мощности и снижает напряжение двигателя, тем самым восстанавливая более высокий коэффициент мощности и уменьшая потери.
Поскольку однофазные двигатели примерно в 2–4 раза менее эффективны, чем трехфазные двигатели, существует потенциальная экономия энергии для двигателей 1-φ. Для полностью нагруженного двигателя экономии нет, так как требуется весь ток намагничивания статора.Напряжение не может быть уменьшено. Но есть потенциальная экономия от менее чем полностью загруженного двигателя. Двигатель с номинальным напряжением 117 В переменного тока рассчитан на работу при напряжении от 127 В переменного тока до 104 В переменного тока. Это означает, что он не полностью загружен при работе при напряжении более 104 В переменного тока, например, при работе холодильника на 117 В переменного тока. Контроллер коэффициента мощности может безопасно снизить сетевое напряжение до 104–110 В переменного тока. Чем выше начальное напряжение в сети, тем больше потенциальная экономия. Конечно, если энергокомпания подаст напряжение ближе к 110 В переменного тока, двигатель будет работать более эффективно без каких-либо дополнительных устройств.
Любой практически неработающий однофазный асинхронный двигатель с 25% FLC или менее является кандидатом на использование PFC. Однако он должен работать большое количество часов в год. И чем больше времени он простаивает, как в пилораме, штамповочном прессе или конвейере, тем выше вероятность оплаты контроллера через несколько лет эксплуатации. За него должно быть втрое легче платить по сравнению с более эффективным 3-φ-двигателем. Стоимость PFC не может быть возмещена для двигателя, работающего всего несколько часов в день.
Краткое описание: Однофазные асинхронные двигатели
- Однофазные асинхронные двигатели не могут запускаться самостоятельно без вспомогательной обмотки статора, приводимой в действие противофазным током около 90 ° . После запуска вспомогательная обмотка необязательна.
- Вспомогательная обмотка конденсаторного двигателя с постоянным разделением каналов имеет конденсатор, включенный последовательно с ней во время запуска и работы.
- Асинхронный двигатель с конденсаторным запуском имеет только конденсатор, включенный последовательно со вспомогательной обмоткой во время запуска.
- Конденсаторный двигатель обычно имеет большой неполяризованный электролитический конденсатор, включенный последовательно со вспомогательной обмоткой для запуска, а затем меньший неэлектролитический конденсатор во время работы.
- Вспомогательная обмотка электродвигателя с разделенным фазным сопротивлением развивает разность фаз по сравнению с основной обмоткой во время пуска из-за разницы в сопротивлении.