Бесколлекторный двигатель постоянного тока: особенности и принцип работы
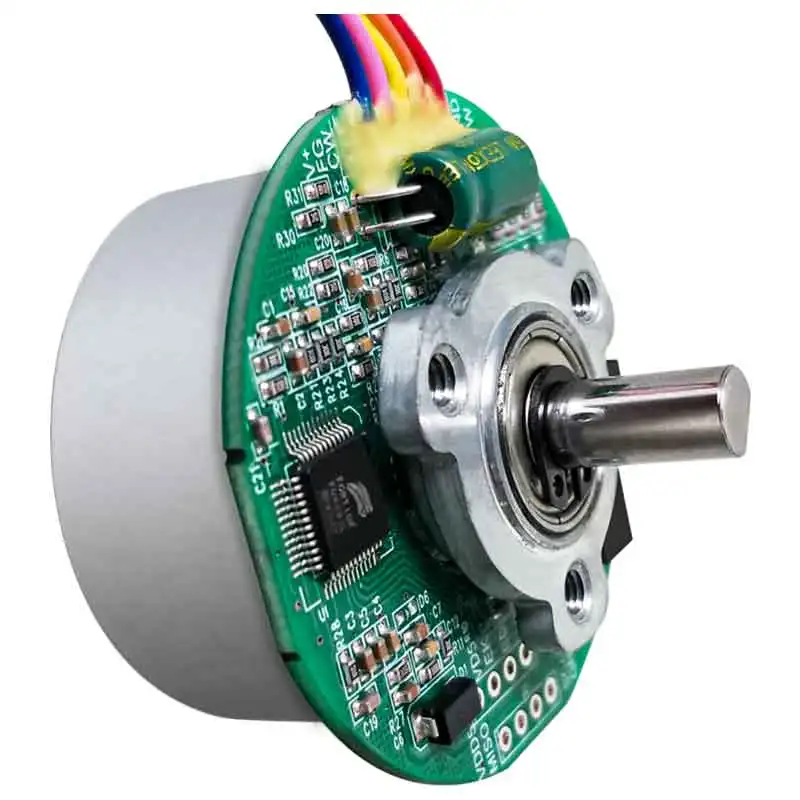
Как работает бесколлекторный двигатель?Бесколлекторный двигатель постоянного тока имеет на статоре трёхфазную обмотку, и постоянный магнит на роторе. Вращающееся магнитное поле создаётся обмоткой статора, при взаимодействии с которым магнитный ротор приходит в движение. Для создания вращающегося магнитного поля на обмотку статора подаётся система трёхфазных напряжений, которая может иметь различную форму и формируется различными способами. Формирование питающих напряжений (коммутация обмоток) для бесколлекторного двигателя постоянного тока производиться специализированными блоками электроники – контроллером двигателя.
Заказать бесколлекторный двигатель в нашем каталоге
В простейшем случае обмотки попарно подключаются к источнику постоянного напряжения и по мере того как ротор поворачивается в направлении вектора магнитного поля обмотки статора производится подключение напряжения к другой паре обмоток. Вектор магнитного поля статора при этом занимает другое положение и вращение ротора продолжается. Для определения нужного момента подключения следующих обмоток используется датчик положения ротора, чаще других используются датчики Холла.
Вектор магнитного поля статора при этом занимает другое положение и вращение ротора продолжается. Для определения нужного момента подключения следующих обмоток используется датчик положения ротора, чаще других используются датчики Холла.
Выпускаемые сейчас бесколлекторные двигатели могут иметь самую разную конструкцию.
По исполнению статорной обмотки можно выделить двигатели с классической обмоткой, намотанной на стальной сердечник, и двигатели с полой цилиндрической обмоткой без стального сердечника. Классическая обмотка обладает значительно большей индуктивностью, чем полая цилиндрическая обмотка, и соответственно большей постоянной времени. Из-за этого с одной стороны, полая цилиндрическая обмотка допускает более динамичное изменение тока (а, следовательно, и момента), с другой стороны при работе от контроллера двигателя, использующего ШИМ-модуляцию невысокой частоты для сглаживания пульсаций тока, требуются фильтрующие дроссели большего номинала (а соответственно и большего размера).
Ещё одно отличие, по которому разделяются различные модели двигателей – это взаимное расположение ротора и статора – существуют двигатели с внутренним ротором и двигатели с внешним ротором. Двигатели с внутренним ротором, как правило, имеют более высокие скорости и меньший момент инерции ротора, чем модели с внешним ротором. Благодаря этому двигатели с внутренним ротором имеют более высокую динамику. Двигатели с внешним ротором часто имеют несколько больший номинальный момент при том же наружном диаметре двигателя.
Отличия от других типов двигателей
Отличия от коллекторных ДПТ. Размещение обмотки на роторе позволило отказаться от щёток и коллектора и избавиться тем самым от подвижного электрического контакта, который значительно снижает надёжность ДПТ с постоянными магнитами.
Отличия от синхронных двигателей с постоянными магнитами. Синхронные двигатели с постоянными магнитами на роторе очень похожи на бесколлекторные ДПТ по конструкции, однако есть и ряд различий. Во-первых термин синхронный двигатель объединяет в себе много различных видов двигателей, часть из которых предназначены для непосредственной работы от стандартной сети переменного тока, другая часть (например синхронные серводвигатели) может работать только от преобразователей частоты (контроллеров двигателей). Бесколлекторные двигатели, хотя и имеют на статоре трёхфазную обмотку, не допускают непосредственную работу от сетевого напряжения, и обязательно требуют наличия соответствующего контроллера.
Ответ на этот вопрос достаточно прост – в тех случаях, когда он имеет преимущество перед остальными типами двигателей. Так, например, практически невозможно обойтись без бесколлекторного двигателя в применениях, где требуются большие скорости вращения: свыше 10000 об/мин. Оправдано применение бесколлекторных двигателей также и в тех случаях, когда требуется высокий срок службы двигателя. В тех случаях, когда требуется применять сборку из двигателя с редуктором, однозначно оправдано применение низкоскоростных бесколлекторных двигателей (с большим числом полюсов). Высокоскоростные бесколлекторные двигатели в этом случае будут иметь скорость выше, чем предельно допустимая скорость редуктора, и по этой причине не будет возможности использовать их мощность полностью.
С другой стороны, в условиях повышенной температуры или повышенной радиации проявляется слабое место бесколлекторных двигателей – датчики Холла. Стандартные модели датчиков Холла имеют ограниченную стойкость к радиации и диапазон рабочих температур. Если в подобном применении всё же имеется необходимость использовать бесколлекторный двигатель, то неизбежными становятся заказные исполнения с заменой датчиков Холла на более стойкие к указанным факторам, что увеличивает цену двигателя и сроки поставки.
52 — бесколлекторные (вентильные) двигатели постоянного тока с редуктором.
- ГЛАВНАЯ
- ПРОДУКЦИЯ
- ПУБЛИКАЦИИ
- КОНТАКТЫ
(812) 703-09-81 (499) 642-60-67
Главная » Продукция » Бесколлекторные (вентильные) двигатели » МРБ‑52 с редуктором
< Вернуться к выбору бесколлекторных двигателей
МРБ‑52 — бесколлекторный двигатель с редуктором
| Параметр | Значение |
| Мощность | 40, 60Вт |
| Скорость | 10. ..822 об/мин ..822 об/мин |
| Номинальный момент | 4.2…250 кгс*см |
| Напряжение | 24В |
Мотор-редуктор серии МРБ‑52 состоит из реверсивного бесколлекторного двигателя постоянного тока с датчиками Холла и планетарного редуктора.
Относится к компактным мотор-редукторам начальной мощности, но с повышенными прочностными характеристиками. Отсюда, при мощности бесколлекторного двигателя в 40 Вт, на выходе редуктора с максимальным передаточным отношением получаем полезный крутящий момент, равный 250 кгс*см.
Данные мотор-редукторы, применяются для вращения рекламных конструкций, небольших подиумов и витрин.
| Бесколлекторный двигатель | МРБ‑52 | |||
| Число полюсов | 8 | |||
| Напряжение | 24В | |||
| Мощность на выходном валу, Вт | 40, 60Вт | |||
| Номинальный момент, кгс*см | 4.2…250 кгс*см | |||
| Скорость, об/мин | 10…822 об/мин | |||
| Редукция | 1/3.65 | 1/14 | 1/25 | 1/302 |
| Скорость, об/мин | 822 | 222 | 122 | 10 |
| Номинальный момент, | 4.2 | 22 | 26 | 250 |
Макс. момент, момент, кгс*см | 4.2 | 22 | 26 | 250 |
| Длина L, мм | 38.6 | 54.2 | 54.2 | 69.8 |
Габаритные и присоединительные размеры:
С этим бесколлекторным двигателем рекомендуем использовать:
блок управления:
24…48В пост. тока
ток до 20А
RS-485, Modbus
ASCII или RTU
BLSD-20Modbus
блок управления:
24…48В пост. тока
ток до 20А
BLD-20DIN
соединительная муфта:
SJC
Как работает бесщеточный двигатель постоянного тока
Содержание
Бесщеточные двигатели постоянного тока Бесщеточные двигатели постоянного тока обычно могут достигать КПД 85-90 процентов, тогда как щеточные двигатели обычно имеют КПД около 75-80 процентов. Щетки со временем изнашиваются, часто вызывая искры, которые могут быть опасны и могут сократить срок службы двигателя. Рекомендуется использовать бесщеточные двигатели постоянного тока, они тише, эффективнее и служат дольше. Двигатели BLDC предлагают множество преимуществ по сравнению с другими типами электродвигателей.
Щетки со временем изнашиваются, часто вызывая искры, которые могут быть опасны и могут сократить срок службы двигателя. Рекомендуется использовать бесщеточные двигатели постоянного тока, они тише, эффективнее и служат дольше. Двигатели BLDC предлагают множество преимуществ по сравнению с другими типами электродвигателей.
Как работает бесщеточный двигатель постоянного тока
Чтобы лучше понять, как работают бесщеточные двигатели, мы должны сначала вспомнить, как работают щеточные двигатели постоянного тока, поскольку они использовались в течение некоторого времени до появления бесщеточных двигателей постоянного тока.
В этом типе двигателя электрический ток пропускается через катушки, установленные в постоянном магнитном поле. Ток генерирует магнитные поля внутри катушек. Это приводит к перемещению катушек, поскольку каждая катушка оттягивается от другого полюса, а затем притягивается к противоположной стороне магнитного поля. Чтобы катушки продолжали вращаться, необходимо постоянно изменять направление тока, чтобы полярность катушек постоянно менялась, что заставляет катушки «преследовать» другие неподвижные полюса. Питание катушек подается постоянными токопроводящими щетками, которые соприкасаются с вращающимся коммутатором; это движение коммутатора, которое меняет направление тока, протекающего через катушки. Коллектор и щетки являются основными компонентами, которые отличают щеточный двигатель постоянного тока от двигателей других типов.
Питание катушек подается постоянными токопроводящими щетками, которые соприкасаются с вращающимся коммутатором; это движение коммутатора, которое меняет направление тока, протекающего через катушки. Коллектор и щетки являются основными компонентами, которые отличают щеточный двигатель постоянного тока от двигателей других типов.
На картинке выше показана основная идея двигателя щетки. Неподвижные щетки подают электрический ток на вращающийся коммутатор. Когда коммутатор вращается, он постоянно меняет направление тока, протекающего через катушки, меняет полярность катушек, чтобы гарантировать, что они остаются в направлении по часовой стрелке. Коллектор может вращаться, потому что он соединен с ротором, на котором установлены катушки.
Почему бесщеточные двигатели постоянного тока вращаются
Как следует из названия, в бесщеточных двигателях постоянного тока щетки не используются. В щеточных двигателях щетки передают ток через коммутатор к обмоткам ротора. Как бесколлекторный двигатель передает энергию катушкам на роторе? Он не может передавать, так как катушки не размещены в роторе. Ротор действует как постоянный магнит. Катушки не вращаются, а связаны со статором. Поскольку катушки не двигаются, нет необходимости в щетках или коммутаторе.
Ротор действует как постоянный магнит. Катушки не вращаются, а связаны со статором. Поскольку катушки не двигаются, нет необходимости в щетках или коммутаторе.
Преимущества бесщеточного двигателя постоянного тока
Бесщеточный двигатель постоянного тока с тремя катушками в статоре будет иметь 6 электрических проводов (по два на каждую катушку), которые подключены к катушкам. В большинстве случаев три провода соединены внутри, а остальные три провода торчат из корпуса двигателя (в отличие от двух проводов, которые выступают из двигателя щеток, как описано ранее). Проводка внутри корпуса двигателя BLDC сложнее, чем просто подключение отрицательного и положительного проводов к аккумуляторной ячейке. Мы более подробно изучим работу этих двигателей в следующем сегменте, который мы рассмотрим в этой серии. В заключение рассмотрим преимущества двигателей BLDC.
Основным преимуществом является их эффективность, поскольку они могут работать непрерывно при максимальной силе вращения (крутящем моменте). Щеточные двигатели, напротив, могут создавать максимальный крутящий момент при низких оборотах. Чтобы электрический щеточный двигатель создавал такой же крутящий момент, что и бесщеточная версия, модели потребуются магниты гораздо большего размера. Таким образом, даже самые маленькие двигатели BLDC будут обеспечивать большую мощность.
Щеточные двигатели, напротив, могут создавать максимальный крутящий момент при низких оборотах. Чтобы электрический щеточный двигатель создавал такой же крутящий момент, что и бесщеточная версия, модели потребуются магниты гораздо большего размера. Таким образом, даже самые маленькие двигатели BLDC будут обеспечивать большую мощность.
Еще одно важное преимущество, связанное с предыдущим, — это возможность управления. Бесщеточный двигатель BLDC управляется с помощью механизмов обратной связи, которые точно обеспечивают требуемый крутящий момент и скорость. Точный контроль снижает потребление энергии, а также производство тепла. когда двигатели питаются от батарей, продлевает срок службы батарей.
Двигатели постоянного тока BLDC также могут обеспечить более длительный срок службы и меньший электрический шум благодаря отсутствию щеток. Щеточные двигатели — отличный выбор, поскольку коллектор и щетки изнашиваются из-за постоянного контакта, а также могут вызывать искрение при соприкосновении. В частности, электрический шум вызван сильными искрами, которые обычно возникают в местах, где щетки проходят через зазоры внутри коллектора. По этой причине двигатели BLDC обычно предпочтительнее в ситуациях, когда важно минимизировать электрические шумы.
В частности, электрический шум вызван сильными искрами, которые обычно возникают в местах, где щетки проходят через зазоры внутри коллектора. По этой причине двигатели BLDC обычно предпочтительнее в ситуациях, когда важно минимизировать электрические шумы.
Недостатки бесщеточного двигателя постоянного тока
К недостаткам бесщеточных устройств относятся возможность размагничивания постоянных магнитов, проблемы с контролем количества потока и высокая цена преобразователя, которая растет с ростом уровня мощности машины. Бесщеточные двигатели также страдают от пульсаций магнитного крутящего момента. Несмотря на то, что существует много исследований, посвященных двигателям BLDC, небольшое количество публикаций посвящено изучению электромагнитных явлений, таких как анализ электромагнитного поля, анализ магнитного сопротивления и температурные эффекты. Анализ пульсации крутящего момента обычно фокусируется на отставании крутящего момента.
Применение бесщеточных двигателей постоянного тока
Мы убедились, что бесщеточные двигатели постоянного тока обладают высокой эффективностью и управляемостью, а также имеют длительный срок службы. Для чего они работают? Благодаря своей эффективности и долговечности они часто используются в приборах, работающих в непрерывном режиме. Они уже давно используются в стиральных машинах, кондиционерах и других электронных устройствах для потребителей, а в последнее время они теперь используются в вентиляторах, и их эффективность позволила им резко снизить потребление энергии.
Для чего они работают? Благодаря своей эффективности и долговечности они часто используются в приборах, работающих в непрерывном режиме. Они уже давно используются в стиральных машинах, кондиционерах и других электронных устройствах для потребителей, а в последнее время они теперь используются в вентиляторах, и их эффективность позволила им резко снизить потребление энергии.
Их также можно использовать для управления вакуумными машинами. В одном случае изменение программы управления вызвало значительное увеличение скорости двигателя, что является одним из примеров превосходных возможностей управления, предлагаемых этими двигателями.
Двигатели постоянного тока BLDC также можно использовать для вращения жестких дисков. их долговечность обеспечивает надежность приводов в течение длительного времени. Кроме того, их энергоэффективность помогает сократить потребление энергии в области, где это становится все более важным.
Мы можем ожидать, что двигатели BLDC будут использоваться чаще в ближайшем будущем.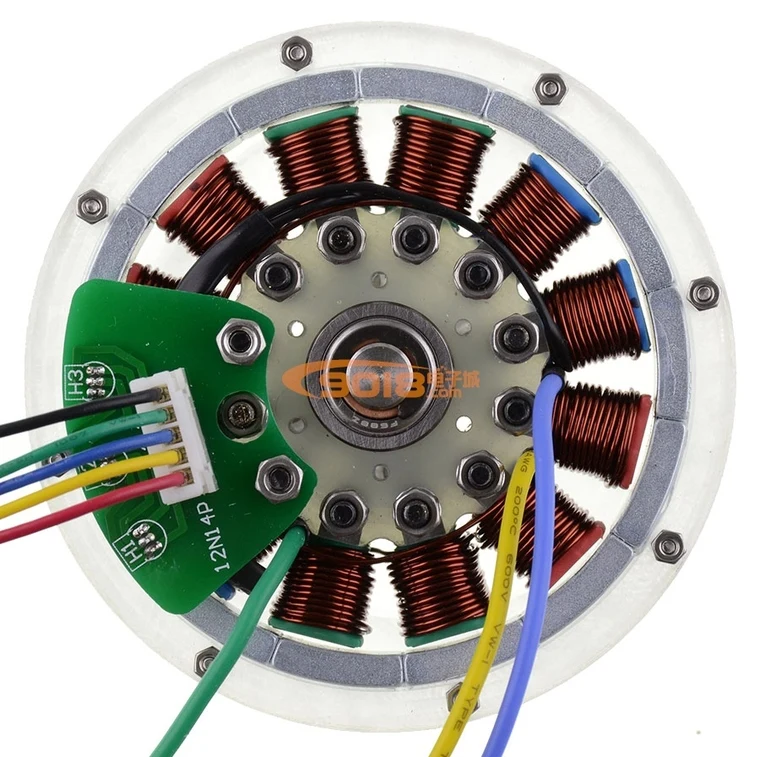 Они, вероятно, будут использоваться для управления сервисными роботами, небольшими роботами, которые предоставляют услуги вне производства. Можно предположить, что шаговые двигатели могут лучше подходить для такой работы, в которой можно использовать импульсы для обеспечения точного управления позиционированием. Однако двигатели BLDC больше подходят для управления силами. В случае с шаговым двигателем, поддерживающим положение объекта, например манипулятора робота, потребуется массивный и постоянный ток. При использовании двигателя BLDC все, что требуется, — это постоянный ток, который пропорционален внешней силе, и это позволяет более эффективно контролировать силу. Двигатели BLDC также могут заменить щеточные двигатели постоянного тока на мобильных тележках и тележках для гольфа. Наряду с более высокими характеристиками двигатели BLDC также могут обеспечивать более точное управление, что, в свою очередь, может продлить срок службы батареи.
Они, вероятно, будут использоваться для управления сервисными роботами, небольшими роботами, которые предоставляют услуги вне производства. Можно предположить, что шаговые двигатели могут лучше подходить для такой работы, в которой можно использовать импульсы для обеспечения точного управления позиционированием. Однако двигатели BLDC больше подходят для управления силами. В случае с шаговым двигателем, поддерживающим положение объекта, например манипулятора робота, потребуется массивный и постоянный ток. При использовании двигателя BLDC все, что требуется, — это постоянный ток, который пропорционален внешней силе, и это позволяет более эффективно контролировать силу. Двигатели BLDC также могут заменить щеточные двигатели постоянного тока на мобильных тележках и тележках для гольфа. Наряду с более высокими характеристиками двигатели BLDC также могут обеспечивать более точное управление, что, в свою очередь, может продлить срок службы батареи.
Бесщеточные двигатели постоянного тока BLDC, подходящие для дронов. Их способность обеспечивать точное управление делает их идеальными для многороторных дронов, в которых движение дрона точно контролируется за счет контроля скорости вращения каждого двигателя.
Их способность обеспечивать точное управление делает их идеальными для многороторных дронов, в которых движение дрона точно контролируется за счет контроля скорости вращения каждого двигателя.
Каталожные номера:
https://www.ebmia.pl/wiedza/porady/automatyka-porady/silnik-bezszczotkowy-bldc-co-to-jest-jak-dziala-zastosowanie/
Бесщеточный двигатель постоянного тока (BLDC) драйверы
Максимизируйте производительность трехфазных бесщеточных двигателей и синхронных двигателей с постоянными магнитами (PMSM) с помощью нашего портфолио драйверов двигателей постоянного тока BLDC. Благодаря таким ключевым функциям, как интеллектуальный привод затвора, интегрированное управление двигателем, встроенные полевые транзисторы и пакеты для проектирования функциональной безопасности, наши устройства улучшают дизайн промышленных, персональных электронных и автомобильных приложений.
Рекомендуемые драйверы бесщеточных двигателей постоянного тока
Откройте для себя рекомендуемые приложения
Электронный усилитель рулевого управления (EPS)
Удовлетворение требований к функциональной безопасности самого высокого уровня и точному измерению тока для EPS в автомобильных приложениях с аккумуляторной батареей 12 В с надежными драйверами затвора BLDC.
Вакуумный робот
Создавайте высокоскоростные и надежные вакуумные роботы с помощью наших встроенных драйверов двигателей постоянного тока, не требующих кода.
Электроинструменты
Создание бесщеточных систем привода постоянного тока для высокопроизводительных электроинструментов.
Обеспечивает высочайший уровень функциональной безопасности и точное определение тока для EPS в автомобильных приложениях с аккумуляторными батареями 12 В с помощью надежных драйверов затворов постоянного тока BLDC.
Наши высокопроизводительные и высокоточные драйверы затворов с измерением тока помогают решить многие проблемы при проектировании систем двигателей BLDC для удовлетворения потребностей проектирования EPS.
- Функциональная безопасность — соответствует стандарту ISO 26262 для использования в системах с уровнем ASIL до D
- Точность определения тока для точной коммутации и обратной связи по крутящему моменту
- Поддерживает рабочее напряжение до 4,5 В при агрессивных условиях батареи
- Встроенная функция самотестирования (BIST), диагностика и защита от превышения/понижения напряжения, перегрузки по току и перегрева
- Мониторинг и защита VGS и VDS для предотвращения залипания и пробоя для полевых транзисторов нижнего и верхнего плеча
Избранные ресурсы
Создавайте высокоскоростные и надежные вакуумные роботы с помощью наших встроенных драйверов двигателей постоянного тока, не требующих кодирования.

Наш портфолио драйверов BLDC с интегрированным управлением предлагает удобные варианты для соответствия различным требованиям к двигателям, таким как двигатели всасывания, щетки и двигатели для мытья полов.
- Высокая мощность всасывания (электрическая скорость до 3 кГц) и высокий пусковой крутящий момент позволяют пылесосу поддерживать постоянную скорость независимо от состояния пола
- Минимальные потери мощности благодаря методам выпрямления ASR и AAR для предотвращения потерь мощности и рассеивания тепла
- Обнаружение блокировки для распознавания препятствия (носка) в щеточном стержне, которое заклинивает или блокирует вращение стержня
Рекомендуемые ресурсы
ПРОДУКТЫ
- MCT8316A – макс. 40 В, пиковый ток 8 А, бездатчиковое трапециевидное управление 3-фазный привод двигателя постоянного тока BLDC
- MCT8316Z — макс. 40 В, пиковый ток 8 А, трапециевидное управление с датчиком, драйвер трехфазного двигателя постоянного тока BLDC
- MCF8316A — макс.