Высокое качество бесщеточный мотор 10kw по отличным ценам
Хороший. бесщеточный мотор 10kw помогает вашему устройству эффективно работать без каких-либо проблем. На Alibaba.com вы найдете самые продаваемые. бесщеточный мотор 10kw по доступным ценам. Эти эффективные. бесщеточный мотор 10kw изготовлены из качественных материалов, повышающих надежность при работе даже в тяжелых условиях. Независимо от того, какое устройство вы используете, вы можете найти лучший продукт, который выполняет эту работу.В прошлом эти. бесщеточный мотор 10kw раньше были огромных размеров, что делало их громоздкими и не универсальными. Со временем технология значительно улучшилась, и в настоящее время это происходит. бесщеточный мотор 10kw бывают разных размеров с более широким набором функций. Здесь вы найдете широкий выбор. бесщеточный мотор 10kw, который идеально подходит для вашего устройства.

Продукты на этой платформе обеспечивают качество и эффективность в зависимости от различных потребностей и бюджетов. Продукты на платформе соответствуют установленным стандартам, обеспечивая эффективное функционирование. Производители этих. бесщеточный мотор 10kw имеют опыт производства и предлагают продукты, которые адаптируются к меняющимся потребностям рынка. Файл. Представленные здесь бесщеточный мотор 10kw предлагают большой набор функций на выбор: крутящий момент, количество оборотов в минуту, бесщеточные двигатели и размер, что позволяет вам покупать лучшее. бесщеточный мотор 10kw в соответствии с вашими требованиями и бюджетом.
На Alibaba.com вы можете получить. бесщеточный мотор 10kw предложения и предложения с учетом вашего бюджета. Получите качественную долговечность. бесщеточный мотор 10kw для удовлетворения всех ваших потребностей в обширном ассортименте продуктов, предлагаемых на продажу, в зависимости от ваших требований к размеру, номинальной мощности и простоте обслуживания.

Как отремонтировать бесколлекторный мотор Velineon PRO Хобби – интернет-журнал о моделизме
вторник, 16 октября 2018 г.
Все знают о том, что бесколлекторные двигатели более мощные и производительные, если сравнивать их с коллекторными. Однако не все знают, что эти моторы и более требовательны к обслуживанию и эксплуатации.
Что делать, если вдруг вы заметили, что ваш подопечный перестал работать или стал вести себя странно?
Выбрасывать и покупать новый? — Не торопитесь, возможно, удастся обойтись “малой кровью” и минимальными финансовыми вложениями. Как? — Отремонтировать его своими руками!
Бесколлекторные RC двигатели, такие как Velineon® 3500, обеспечивают превосходную производительность и эффективность по сравнению с их коллекторными аналогами. Они также могут быть перебраны и отремонтированы, что позволит их эксплуатировать в течение многих лет без ущерба для производительности.
Данный экземпляр принесли в нашу сервисную мастерскую с симптомами перегрева и нестабильной работы. Поверхностная ржавчина видна на спуре, при попытке вращения вала вручную чувствуется сопротивление и рывки. Как правило, все это — признак неисправного подшипника.
Начнем с разборки двигателя. Используйте 2 мм биту для винтов, крепящих мотораму и 1.5 мм биту для демонтажа пиньона.
Отщелкните пластиковую заглушку. Используйте 1.5 мм биту для четырех винтов, крепящих торцевую деталь.
Осторожно извлеките ее. Необходимости снимать подшипник нет, так как ремкомплект включает в себя новую деталь целиком. Не потеряйте тонкие шайбы, которые могут находиться на валу двигателя. Они будут установлены повторно.
Ротор удерживается на месте сильным магнитным полем. Надавите на вал двигателя, используя твердую поверхность (например, стол). Это позволит извлечь ротор. Держите его плотно и достаньте из корпуса. Будьте осторожны при снятии ротора! Действие электромагнитных сил может привести к тому, что ротор попытается вернуться на свое место и ваши пальцы могут пострадать.
Демонтировав ротор, самое время извлечь передний подшипник из корпуса двигателя. Здесь могут возникнуть некоторые трудности. Постарайтесь использовать похожую по размеру оправку, чтобы извлечь подшипник целиком.
Детальный осмотр подшипников позволяет подтвердить проблему. Они сильно заржавели, что негативно сказывается на двигателе — он работает с повышенной нагрузкой, что вызывает перегрев узла в целом. Именно поэтому очень важно после каждого катания, когда происходит контакт подшипников с влагой, использовать WD-40, чтобы вытеснить из них влагу и предотвратить образование ржавчины. Это избавит вас от проблем в будущем. К счастью, даже если произошло то, что произошло, этот двигатель можно отремонтировать, восстановив полностью его производительность.
Именно поэтому очень важно после каждого катания, когда происходит контакт подшипников с влагой, использовать WD-40, чтобы вытеснить из них влагу и предотвратить образование ржавчины. Это избавит вас от проблем в будущем. К счастью, даже если произошло то, что произошло, этот двигатель можно отремонтировать, восстановив полностью его производительность.
Ремкомплект для Velineon 3500 содержит все детали, необходимые для восстановления двигателя. Используйте специальный очиститель для электронных контактов электродвигателя или продуйте сжатым воздухом корпус двигателя. Обязательно надевайте защитные очки во время данной процедуры. Замените два подшипника и установите новую латунную втулку на задней части вала двигателя. Повторно используйте тонкие шайбы на валу двигателя. Они должны быть максимально близко к центру.
Аккуратно вставьте ротор в корпус двигателя, берегите пальцы. Установите на место торцевую деталь, закрепите ее винтами из ремнабора. Наконец, очистите поверхность корпуса двигателя и установите пластиковую заглушку. Теперь ваш мотор полностью восстановлен и готов к действию!
Двигатель, показанный в этой статье, не получил должного внимания и технического обслуживания, необходимого после запуска и эксплуатации в воде. Обязательно ознакомьтесь с советами по уходу за моделью в условиях повышенной влажности, приведенными в руководстве вашего автомобиля, для обеспечения надлежащего ухода. Помните, что при должном обслуживании ваш Velineon будет работать долго и обеспечит модель запасом мощности и динамичности, а вас — потрясающими эмоциями от любимого хобби!
В любом случае, если у вас остались вопросы — смело звоните + 7 (495) 411-90-19, +7 (495) 419-16-90 или пишите — [email protected], приходите к нам! Наши менеджеры и продавцы с радостью помогут разобраться и проконсультируют по любым вопросам, а сервис-мастер окажет техническую поддержку. Ждем вас! Ждем вас! |
Бесщеточный двигатель с внешним ротором 45мм | Электродвигатель
Применение
Бесщеточный двигатель постоянного тока с внешним ротором 45мм, серии FL45BLW, может быть применен в робототехнике, автоматически управляемых транспортных средствах, устройствах виртуальной реальности, турникетах, кофемашинах и так далее.
| Способ соединение обмотки | Звезда |
| Угол Холла | 120° |
| Радиальный зазор | 0.02мм при 4N |
| Торцевой зазор | 0.04мм при 4N |
Макс. Радиальное усилие Радиальное усилие | 28Н |
| Макс. Осевое усилие | 10Н |
| Класс изоляции | Класс B |
| Диэлектрическая прочность | 500В постоянного тока течении 1 минуты |
| Сопротивление изоляции | 100MΩ мин., 500Впст |
| Соеденитель | Номер | Функция | Примечание |
| CN1 | 1 | Фаза U | |
| 2 | Фаза V | ||
| 3 | Фаза W | ||
| CN2 | 1 | GND | Отверстие GND |
| 2 | Vcc | Отверстие входа | |
| 3 | Отверстие A | +5VDC—+24VDC | |
| 4 | Отверстие B | ||
| 5 | Отверстие C |
| Еденица измерения | Допустимое отклонение | FL45BLW18-24V-6530A | FL45BLW21-24V-6750A | FL45BLW27-24V-6170A | |
| Кол-во полюсов | 16 | 16 | 16 | ||
| Кол-во фаз | 3 | 3 | 3 | ||
| Номинальное напряжение | Впст | 24 | 24 | 24 | |
| Обороты холостого хода | Об/мин | ±10% | 6500 | 6700 | 6100 |
| Ток холостого хода | А | <0. 4A 4A | 0.27 | 0.33 | 0.38 |
| Номинальная скорость | Об/мин | ±10% | 5000 | 5260 | 4840 |
| Номинальный крутящий момент | мН·м | 50 | 84 | 130 | |
| Номинальная мощность | Вт | 30 | 50 | 70 | |
| Макс. Крутящий момнт | мН·м | 150 | 250 | 390 | |
| Максимальный ток | A | ±10% | 4.8 | 7.8 | 11 |
| Междуфазное сопротивление | Ω при 25℃ | ±10% | 1.42Ω | 0.71Ω | 0.56Ω |
| Междуфазная индуктивность | мГн | ±20% | 0.59 | 0.43 | 0.27 |
| Моментный коэффициент | мНм/А | ±10% | 35.3 | 34.2 | 37. 2 2 |
| Коэффициент противоЭДС | В / об/мин | ±10% | 2.61 | 2.34 | 2.75 |
| Момент инерции ротора | г·см2 | 99 | 135 | 181 | |
| Вес | г | 80 | 120 | 150 |
Особоенности:
Сравнивая двигатель с внутренним ротором, бесщеточный двигатель с внешним ротором имеет более компактные габариты и ниже пульсацию крутящего момента Бесщеточный двигатель с внешним ротором выдает больший крутящий момент, чем двигатель с внутренним ротором.
— Бесщеточный серводвигатель постоянного тока RapidPower ™ Xtreme
Бесщеточные двигатели постоянного тока ElectroCraft (BLDC) разработаны для обеспечения высокой производительности.
Просмотрите наши базовые семейства продуктов и не стесняйтесь
свяжитесь с нашим приложением BLDC
инженеры по вопросам, касающимся ваших потребностей в двигателе BLDC. ЭлектроКрафт
специализируется на разработке индивидуальных решений для самых требовательных движений
контролировать проекты. В дополнение к нашей линейке продуктов BLDC посетите
наш
Справочник и руководство по применению высокопроизводительных бесщеточных двигателей.
ЭлектроКрафт
специализируется на разработке индивидуальных решений для самых требовательных движений
контролировать проекты. В дополнение к нашей линейке продуктов BLDC посетите
наш
Справочник и руководство по применению высокопроизводительных бесщеточных двигателей.
Преимущества бесщеточных двигателей постоянного тока
- Высокая производительность и эффективность — BLDC в целом более эффективны, чем их чистые аналоги.В них используются электронные возможности, позволяющие быстро и точно контролировать скорость и положение двигателя.
- Долговечность — количество движущихся частей, управляющих бесщеточными двигателями, меньше, чем у PMDC, что делает их более устойчивыми к износу и ударам.
 Они не склонны к выгоранию из-за искр, с которыми часто сталкиваются щеточные двигатели, что значительно увеличивает срок их службы.
Они не склонны к выгоранию из-за искр, с которыми часто сталкиваются щеточные двигатели, что значительно увеличивает срок их службы. - Низкий уровень шума — двигатели BLDC работают тише, потому что у них нет щеток, которые постоянно контактируют с другими компонентами.
Бесщеточные двигатели постоянного тока | Двигатели BLDC от NANOTEC
Бесщеточные двигатели постоянного тока, сокращенно двигатели BLDC, несмотря на свое название, являются трехфазными синхронными машинами: ротор следует за магнитным полем вращения, и движение синхронно с напряжением переменного тока, приложенным к обмоткам. Этот тип двигателя часто называют «бесщеточным двигателем постоянного тока», потому что во многих случаях он заменяет двигатели постоянного тока щеточными (щеточные двигатели постоянного тока или коллекторные двигатели).В щеточном двигателе постоянного тока подается напряжение постоянного тока, генерирующее переменный ток, не зависящий от скорости, с помощью механического инвертора в двигателе — щеток.
Вместе с электронным контроллером привода, который берет на себя управление работой щеток и преобразует подаваемый постоянный ток в переменный, двигатель BLDC обеспечивает производительность, сравнимую с производительностью щеточного двигателя постоянного тока — без щеток, которые имеют ограниченный срок службы. Поэтому двигатели BLDC также называют двигателями EC (с электронной коммутацией), чтобы отличать их от двигателей с механической коммутацией и щетками.
Другой широко используемый термин — PMSM, что означает синхронный двигатель с постоянными магнитами. Здесь «постоянный магнит» используется, чтобы отличать себя от других синхронных двигателей, которые работают с обмоткой возбуждения на роторе, тогда как BLDC находится под постоянным напряжением. Другими словами, ротор двигателя создает магнитное поле с помощью постоянного магнита, даже если статор не находится под напряжением.
Термины PMSM и BLDC часто противопоставляются, чтобы различать двигатели PMSM с синусоидальным наведенным напряжением (противо-ЭДС) и двигатели BLDC с трапецеидальным наведенным напряжением (см. Ниже).Сегодня большинство двигателей BLDC демонстрируют синусоидальную обратную ЭДС.
Ниже).Сегодня большинство двигателей BLDC демонстрируют синусоидальную обратную ЭДС.
1. Конструкция / Типы
Большинство двигателей BLDC — это «двигатели с внутренним ротором», в которых ротор вращается с помощью постоянных магнитов на валу в неподвижном статоре с катушками. В двигателях с внешним ротором статор расположен внутри, а ротор состоит из вращающегося снаружи колоколообразного корпуса, в котором установлены магниты.
Преимущества двигателей с внутренним ротором заключаются в их низкой инерции ротора и превосходном рассеивании потерянного тепла.Напротив, в двигателях с внешним ротором тепловыделяющие катушки изолированы от окружающей среды корпусом ротора и магнитами. Из-за высокого момента инерции ротора и того факта, что корпус ротора трудно сбалансировать, двигатели с внешним ротором не подходят для очень высоких скоростей вращения.
Соответственно, двигатели с внутренним ротором используются в большинстве промышленных приложений. Двигатели с внешним ротором демонстрируют свои преимущества при массовом производстве, поскольку их производство дешевле. Они также могут быть короче и обычно имеют более низкий крутящий момент в состоянии покоя, а также более высокий крутящий момент — благодаря большему диаметру ротора при той же магнитной силе.
Они также могут быть короче и обычно имеют более низкий крутящий момент в состоянии покоя, а также более высокий крутящий момент — благодаря большему диаметру ротора при той же магнитной силе.
Оба двигателя обычно изготавливаются с тремя фазами. Однако есть и конструкции с одной или двумя фазами. Далее будут рассмотрены только трехфазные двигатели BLDC, потому что Nanotec производит только их.
Двигатели с внутренним и внешним ротором производятся с шлицевыми обмотками; здесь обмоточный провод наматывается на полюсные наконечники статора (железный сердечник), что позволяет линиям магнитного поля обмотки вытекать и концентрироваться в определенной форме.Статор состоит из тонких, взаимно смещенных изолированных металлических пластин, чтобы свести к минимуму потери на вихревые токи.
Особый формат конструкции внутренних роторов, который особенно важен для очень маленьких двигателей, — это бесшумные двигатели BLDC. Его статоры состоят только из металлических пластин кольцевой формы, а с внутренней стороны прикреплена плоская, склеенная или герметизированная обмотка. Поскольку здесь нет железного сердечника, индуктивность двигателя очень мала, а ток в обмотках увеличивается быстро.Кроме того, значительно снижаются потери в стали, а двигатели имеют высокий КПД. При медленной работе отсутствие пульсаций крутящего момента имеет положительный эффект. В отличие от стандартных двигателей BLDC, магнитное поле не усиливается на полюсных наконечниках и отсутствует зубцовый момент. Этот тип конструкции особенно важен для двигателей диаметром менее 40 мм, поскольку их удельная мощность значительно выше, чем у щелевых двигателей. Это связано с тем, что в результате производства у щелевых двигателей относительно большая часть статора всегда остается пустой между обмотками.С другой стороны, у двигателей с неработающим двигателем это монтажное пространство может быть полностью заполнено медной обмоткой. Чем меньше диаметр двигателей, тем больше проявляется преимущество бесшумных двигателей.
Поскольку здесь нет железного сердечника, индуктивность двигателя очень мала, а ток в обмотках увеличивается быстро.Кроме того, значительно снижаются потери в стали, а двигатели имеют высокий КПД. При медленной работе отсутствие пульсаций крутящего момента имеет положительный эффект. В отличие от стандартных двигателей BLDC, магнитное поле не усиливается на полюсных наконечниках и отсутствует зубцовый момент. Этот тип конструкции особенно важен для двигателей диаметром менее 40 мм, поскольку их удельная мощность значительно выше, чем у щелевых двигателей. Это связано с тем, что в результате производства у щелевых двигателей относительно большая часть статора всегда остается пустой между обмотками.С другой стороны, у двигателей с неработающим двигателем это монтажное пространство может быть полностью заполнено медной обмоткой. Чем меньше диаметр двигателей, тем больше проявляется преимущество бесшумных двигателей.
2. Контроллер привода / Коммутация
Двигатель BLDC вращается, потому что постоянный магнит на роторе пытается выровняться в направлении магнитного поля, создаваемого электромагнитами статора.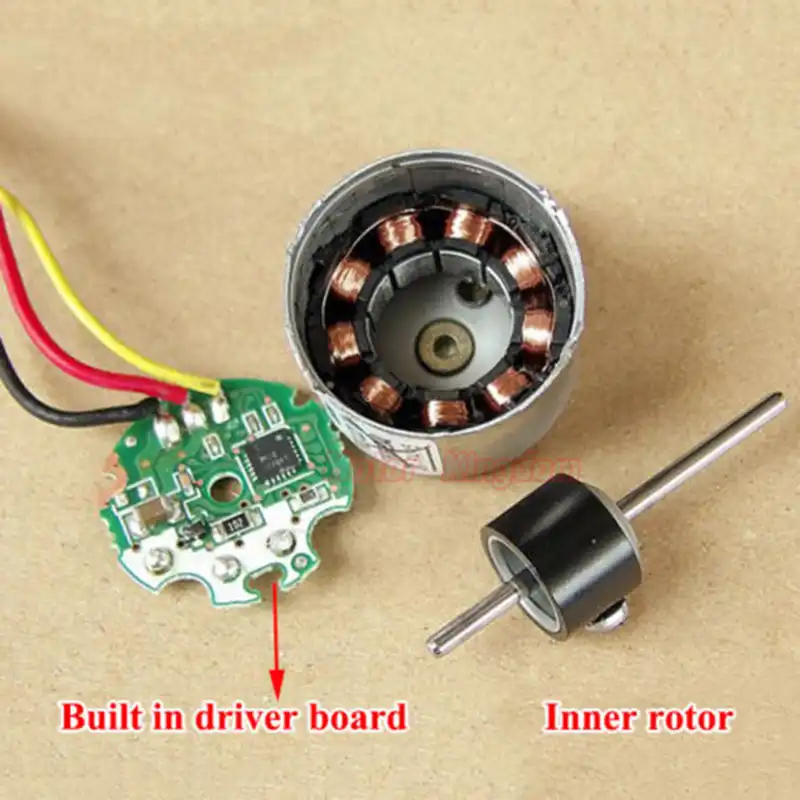 При этом крутящий момент достигает максимума, когда оба магнитных поля перпендикулярны друг другу.Тип контроллера привода различают двумя способами: по форме подачи питания на обмотки (блочно или синусоидальный) или по способам определения положения ротора. Необходимо определить положение ротора, потому что токи в обмотках должны быть синхронизированы для переключения таким образом, чтобы магнитное поле статора всегда было перпендикулярно магнитному полю ротора, то есть он продолжал вращаться с желаемой скоростью.
При этом крутящий момент достигает максимума, когда оба магнитных поля перпендикулярны друг другу.Тип контроллера привода различают двумя способами: по форме подачи питания на обмотки (блочно или синусоидальный) или по способам определения положения ротора. Необходимо определить положение ротора, потому что токи в обмотках должны быть синхронизированы для переключения таким образом, чтобы магнитное поле статора всегда было перпендикулярно магнитному полю ротора, то есть он продолжал вращаться с желаемой скоростью.
2.1 Блочная коммутация
Положение ротора можно легко определить с помощью датчиков Холла в двигателе.Затем они могут быть переключены соответствующим образом выровненным магнитом на роторе в то время, когда необходимо переключить обмотку. Таким образом, три обмотки соответствуют трем датчикам Холла; их состояния определяют, как должны быть подключены обмотки. Если три обмотки переключаются цифровым способом, то есть на обмотках отсутствует ток или полный ток, это называется блочной коммутацией. Эта комбинация датчиков Холла и коммутации блоков технически является самым простым методом приведения в действие двигателя BLDC. Недостатком этого метода является то, что магнитное поле статора из-за дискретного переключения не всегда перпендикулярно магнитному полю ротора.Это происходит из-за того, что выравнивание магнитного поля статора остается постоянным до 60 °, тогда как ротор вращается дальше до следующей точки переключения. Датчики Холла расположены таким образом, что магнитное поле статора в середине перпендикулярно между двумя точками переключения, что приводит к соответствующей угловой погрешности в 30 ° в точках переключения. В результате крутящий момент на 13,4% (1 косинус [30 °]) ниже. Следовательно, при блочной коммутации на этом пике возникает пульсация крутящего момента, в шесть раз превышающая частоту электрического вращения двигателя.Это приводит к вибрациям и шумам; особенно на низких оборотах двигатель не будет вращаться равномерно. Вот почему блочная коммутация не подходит для приложений, в которых двигатели должны — по крайней мере периодически — работать медленно (менее примерно 10% от номинальной скорости).
Эта комбинация датчиков Холла и коммутации блоков технически является самым простым методом приведения в действие двигателя BLDC. Недостатком этого метода является то, что магнитное поле статора из-за дискретного переключения не всегда перпендикулярно магнитному полю ротора.Это происходит из-за того, что выравнивание магнитного поля статора остается постоянным до 60 °, тогда как ротор вращается дальше до следующей точки переключения. Датчики Холла расположены таким образом, что магнитное поле статора в середине перпендикулярно между двумя точками переключения, что приводит к соответствующей угловой погрешности в 30 ° в точках переключения. В результате крутящий момент на 13,4% (1 косинус [30 °]) ниже. Следовательно, при блочной коммутации на этом пике возникает пульсация крутящего момента, в шесть раз превышающая частоту электрического вращения двигателя.Это приводит к вибрациям и шумам; особенно на низких оборотах двигатель не будет вращаться равномерно. Вот почему блочная коммутация не подходит для приложений, в которых двигатели должны — по крайней мере периодически — работать медленно (менее примерно 10% от номинальной скорости). В среднем пульсация крутящего момента вызывает потерю прибл. 4,5% крутящего момента, а также соответствующее ухудшение КПД по сравнению с термически эквивалентным оптимальным питанием обмоток.
В среднем пульсация крутящего момента вызывает потерю прибл. 4,5% крутящего момента, а также соответствующее ухудшение КПД по сравнению с термически эквивалентным оптимальным питанием обмоток.
2.2 Коммутация синуса
Оптимальной формой подачи питания является синусоидальная коммутация, при которой каждая обмотка двигателя получает питание с помощью синусоидальной волны, смещенной на 120 °, в результате чего создается непрерывно вращающееся магнитное поле статора с постоянной напряженностью. Как правило, если для определения положения ротора доступны только датчики Холла, можно также использовать синусоидальную коммутацию путем интерполяции между точками переключения. В большинстве случаев это напрямую приводит к значительному улучшению характеристик мотора.Однако в случае изменения нагрузки между двумя датчиками Холла синусоидальная волна не может быть отрегулирована, что приводит к неправильному позиционированию магнитного поля. Это можно исправить только с помощью следующего сигнала датчика Холла.
Таким образом, для синусоидальной коммутации в идеале требуется система с более высоким разрешением для определения положения ротора. Обычно он состоит из оптического или магнитного кодировщика, который всегда с достаточной точностью определяет положение ротора и, соответственно, регулирует ток.
2.3 Полевое управление
Иногда управление, ориентированное на поле, все же отличается от синусоидальной коммутации; часто, однако, оба термина используются как синонимы. Эти термины используются взаимозаменяемо, поскольку синусоидальная коммутация, как описано выше, оптимально управляет магнитным полем статора.
Пока не учитывается, как работает сам регулятор тока, разница не будет очевидна в описании синусоидальной коммутации. Выше предполагалось, что будет генерироваться значение синусоидального тока, которое с достаточной скоростью будет вводиться в обмотку регулятором тока.Обе задачи, текущее значение (которое соответствует контуру управления крутящим моментом) и управление током обмоток, таким образом, обрабатываются отдельно при коммутации синусоид или, соответственно, выполняются отдельными контроллерами. Однако в этом случае регуляторы тока обмоток получают с увеличением скорости значение тока, которое изменяется с большей частотой. В то же время необходимо компенсировать все более сильное влияние обратной ЭДС двигателя. Поскольку полоса пропускания регулятора тока имеет верхний предел, на более высоких скоростях могут наблюдаться фазовые сдвиги и искажения протекания тока, так что магнитное поле статора больше не перпендикулярно ротору.
Однако в этом случае регуляторы тока обмоток получают с увеличением скорости значение тока, которое изменяется с большей частотой. В то же время необходимо компенсировать все более сильное влияние обратной ЭДС двигателя. Поскольку полоса пропускания регулятора тока имеет верхний предел, на более высоких скоростях могут наблюдаться фазовые сдвиги и искажения протекания тока, так что магнитное поле статора больше не перпендикулярно ротору.
Управление, ориентированное на поле, решает эту проблему, управляя вектором тока непосредственно во вращающейся системе координат ротора. Для этого измеренные токи трех фаз преобразуются посредством преобразования Кларка-Парка в двухосную систему координат ротора. Таким образом, значение крутящего момента больше не будет сначала преобразовываться в значения тока, как в случае с синусоидальной коммутацией для отдельных обмоток, каждая из которых затем управляется отдельно; но вместо этого он одновременно управляется в системе координат уровня тока ротора и ориентации магнитного поля. Затем рассчитываются токи, протекающие для отдельных обмоток (посредством обратного преобразования Кларка-Парка). При использовании этого метода управление не зависит от частоты и даже при более высоких скоростях вращения всегда будет обеспечивать оптимальный синусоидальный ток.
Затем рассчитываются токи, протекающие для отдельных обмоток (посредством обратного преобразования Кларка-Парка). При использовании этого метода управление не зависит от частоты и даже при более высоких скоростях вращения всегда будет обеспечивать оптимальный синусоидальный ток.
2.4 Бездатчиковое управление
Бездатчиковое управление — это не дополнительный метод управления, а скорее термин для методов, которые могут определять положение ротора без датчиков (например, датчики Холла, энкодеры).Эти методы можно условно разделить на два класса:
Простое бессенсорное управление основано на прямом измерении обратной ЭДС в соответствующей обмотке без напряжения. Однако по сравнению со стандартным управлением этот метод требует специального оборудования и нестабилен ниже прибл. 20% от номинальной скорости двигателя, так как измерительный сигнал слишком мал. Кроме того, этот метод работает только в сочетании с блочной коммутацией, потому что при синусоидальной коммутации все три катушки всегда находятся под напряжением.
Более сложные решения основаны на так называемом «отслеживании наблюдателя», которое воспроизводит значения, которые нельзя измерить напрямую, такие как скорость или обратная ЭДС, из других значений, измеряемых контроллером тока. Ядром системы этого типа является чрезвычайно точная модель двигателя, которая параллельно с фактическим двигателем вычисляет из известных входных значений, таких как установленный ШИМ, те значения, которые также измеряются, например, текущий уровень в обмотка. Затем рассчитанные значения сравниваются с измеренными значениями в каждом цикле.Из-за ошибки наблюдения, определенной с помощью этого метода, внутренние значения модели двигателя постоянно корректируются. С помощью этого метода также получается более точная оценка для значений, которые фактически не измеряются, таких как скорость. Хотя этот метод работает только потому, что реакция обмотки изменяется в зависимости от скорости из-за индуцированного напряжения, непосредственно измеренные значения могут быть легко измерены даже на низких скоростях. Результатом является «виртуальный кодировщик», который передает информацию о положении и скорости, начиная с определенной минимальной скорости, с той же точностью, что и реальный оптический или магнитный кодировщик.Как и в этом методе, обратная ЭДС не должна измеряться напрямую, ее также можно комбинировать с синусоидальной коммутацией или полевым управлением.
Общим для обоих бессенсорных методов является то, что на холостом ходу информация о положении ротора не доступна, поэтому требуется специальный метод запуска. Как и в случае с шаговым двигателем, двигатель работает в управляемом режиме в течение нескольких циклов коммутации, пока он не достигнет требуемой скорости, и измерение без датчиков может определить положение ротора.
3. Важные параметры
| Скорость холостого хода | Макс. частота вращения ненагруженного двигателя, определяемая в первую очередь постоянной напряжением |
|---|---|
| Ток холостого хода | Ток на холостом ходу (потребление необходимо для преодоления трения) |
| Номинальная частота вращения / номинальный крутящий момент | Расчетная рабочая точка |
| Максимальный крутящий момент | Моментально достижимый крутящий момент, обычно 3-кратный номинальный крутящий момент в течение прибл.5 с, затем прекращение нагрева => I2T |
| Постоянная крутящего момента (Нм / А) | Указывает взаимосвязь между крутящим моментом и током |
| Постоянная напряжения (В / об / мин) | Наведенная обратная ЭДС на оборот |
Бесщеточные двигатели постоянного тока — мощность ниже 900 Вт
Moog предлагает широкий выбор высокопроизводительных бесщеточных двигателей и серводвигателей, используемых в самых разных областях, включая медицину, автоматизацию делопроизводства, упаковку, промышленность, аэрокосмическую промышленность и оборону.
Интегрированные двигатели
Moog расширил свои решения по перемещению, добавив линейку хорошо программируемых интегрированных двигателей.
Moog Animatics предоставляет передовые технологии, которые объединяют двигатель, кодировщик, усилитель, контроллер, связь RS232 / RS485 и вводы / выходы.SmartMotor теперь оснащен опциональной технологией Combitronic.
Узнать больше
Сервоуправление встроено в высокоэффективный бесщеточный двигатель.Обеспечивает большую свободу при проектировании машины и значительно сокращает объем проводки и пространство в шкафу.
Узнать больше
Кастом Моторс
Moog расширил свои решения по перемещению, добавив линейку высокопроизводительных бесщеточных двигателей на заказ, в том числе бесщеточные двигатели с постоянными магнитами, средства управления с интенсивным DSP и компоненты с добавленной стоимостью. Эти индивидуальные решения предлагают конкурентное преимущество как по характеристикам, так и по стоимости для широкого спектра приложений и рынков.
Moog Aspen решает проблемы управления движением OEM, используя свои инженерные возможности для разработки и производства инновационных продуктов, включая бесщеточные двигатели с постоянными магнитами, средства управления с интенсивным DSP и компоненты с добавленной стоимостью.Эти индивидуальные решения предлагают конкурентное преимущество как по характеристикам, так и по стоимости для широкого спектра приложений и рынков.
Узнать больше
Moog Aspen тесно сотрудничает с нашими крупными OEM-заказчиками, чтобы предложить «больше, чем просто двигатель.«Узлы с добавленной стоимостью охватывают широкий спектр продуктов. Мы предлагаем моторную электронику с необходимым аппаратным и программным обеспечением, элементы обратной связи, коробки передач, магнитные муфты и пластмассовые детали в комплекте с OEM-продуктами
.Узнать больше
Щелкните здесь, чтобы перейти на сайт Moog Animatics.
Щелкните здесь, чтобы ознакомиться с расширенными решениями Moog по индивидуальным двигателям.
| Portescap
Бесщеточные двигатели постоянного тока (BLDC) обеспечивают высокий КПД, крутящий момент и скорость, и доступны в размерах, подходящих для широкого спектра применений.Portescap продолжает работу над улучшением характеристик своих бесщеточных двигателей постоянного тока с прорезями и прорезями. При выборе двигателя, подходящего для вашего применения, у вас может возникнуть много вопросов. Как работает бесщеточный двигатель и в чем разница между бесщеточным и щеточным двигателями? Какие преимущества могут быть достигнуты с помощью конструкции двигателя BLDC, каковы преимущества бесщеточных двигателей в целом и бесщеточных двигателей Portescap в частности? Узнайте больше о том, какую выгоду может получить ваш бизнес от двигателей Portescap BLDC.
КАК РАБОТАЕТ БЕСЩЕТЧАТЫЙ ДВИГАТЕЛЬ ПОСТОЯННОГО ТОКА?
В обычных двигателях постоянного тока используется неподвижный магнит с вращающимся якорем, объединяющий коммутационные сегменты и щетки для обеспечения автоматической коммутации. Для сравнения, бесщеточный двигатель постоянного тока имеет обратную конструкцию: постоянный магнит вращается, тогда как обмотки являются частью статора и могут быть запитаны без использования системы коммутатора и щеток. Коммутация бесщеточного двигателя постоянного тока осуществляется электронным способом и может выполняться либо путем анализа обратной ЭДС двигателя, либо с помощью датчика положения.
Схема бесщеточного двигателя постоянного токаВ ЧЕМ РАЗНИЦА МЕЖДУ ДВИГАТЕЛЯМИ С БЕЗ ЩЕТКОЙ И ДВИГАТЕЛЯМИ?
Бесщеточные двигатели не имеют механической коммутации. Щеточные двигатели, более традиционная конструкция, используют механическую коммутацию, при которой вращающийся якорь со щетками используется для электрических соединений. Уменьшение количества движущихся частей продлевает срок службы бесщеточных двигателей, ограниченный только износом шарикоподшипников.
КОНСТРУКЦИЯ ДВИГАТЕЛЯ BLDC
На этапе проектирования бесщеточного двигателя постоянного тока инженеры Portescap стремятся оптимизировать крутящий момент бесщеточного двигателя.Крутящий момент двигателя — это величина силы вращения, которую двигатель создает во время работы. Ключевыми компонентами, участвующими в создании крутящего момента, являются магнит, обмотка и путь потока. Чем больше количество пар полюсов в магните, тем выше величина крутящего момента бесщеточного двигателя при той же рассеиваемой мощности. Медь, содержащаяся в обмотке, способствует выработке мощности двигателем, в то время как путь потока направляет все магнитное поле в используемом канале, сводя к минимуму потери. Достижение правильного баланса важно при создании двигателя с максимальным крутящим моментом бесщеточного двигателя, который не потребляет огромную мощность.Понимание всей конструкции двигателя позволяет инженерам Portescap вложить максимальную мощность в самый компактный двигатель.
ПлатформаPortescap Ultra EC ™ предлагает 3 семейства бесщеточных бесшумных двигателей, которые помогут удовлетворить широкий спектр требований к крутящему моменту и скорости бесщеточных двигателей. Запатентованная U-образная катушка обеспечивает выдающуюся производительность, включая минимальные потери в стали, повышенную эффективность и охлаждение. Ключом к выдающимся характеристикам этих мини-бесщеточных двигателей является новая катушка, разработанная Portescap в Швейцарии.Эта уникальная конструкция катушки позволяет двухполюсным двигателям, например, обеспечивать на 30% больший крутящий момент бесщеточного двигателя по сравнению с двигателем того же размера, использующим обычную конструкцию катушки, при значительном снижении потерь в стали.
ТЕХНОЛОГИЯ БЕСЩЕТЧАТОГО ДВИГАТЕЛЯ ПОСТОЯННОГО ТОКА: ПРОЗРАЧНЫЙ И БЕСПЛОТНЫЙ
Portescap предлагает в основном два типа технологий бесщеточных двигателей постоянного тока: щелевые и бесщеточные. Оба этих бесщеточных двигателя постоянного тока имеют роторы с постоянными магнитами с 2 или 4 парами полюсов. Щелевые бесщеточные двигатели постоянного тока имеют катушки, вставленные в пазы статора.Благодаря этим пазам ротор имеет предпочтительные положения равновесия, когда двигатель обесточен. Этот крутящий момент сопротивления называется зубчатым или фиксирующим моментом. Бесщеточные бесщеточные двигатели постоянного тока имеют самонесущую цилиндрическую катушку, не создающую фиксирующего крутящего момента, поэтому ротор не имеет предпочтительных положений равновесия. Обе эти технологии бесщеточных двигателей постоянного тока отличаются высокой эффективностью, высокой скоростью и датчиками Холла / бессенсорными опциями.
One технология использует статор, который состоит из многослойной стальной пластинки с обмоткой, размещенной в пазах, которые аксиально прорезаны по внутренней периферии.Это называется двигатель BLDC, железная конструкция с прорезями. В другой технологии используется самонесущая цилиндрическая катушка без сердечника, изготовленная по той же технологии намотки, что и в наших двигателях постоянного тока с ротором без железа. Это называется двигателем BLDC, гладкой железной конструкцией.
ПРЕИМУЩЕСТВА БЕСЩЕТКИХ ДВИГАТЕЛЕЙ ПОСТОЯННОГО ТОКА
Даже при работе на очень высоких скоростях бесщеточные двигатели постоянного тока обеспечивают долгий и безотказный срок службы, так как отсутствует механическая коммутация. Они имеют в основном характеристики линейного двигателя с отличным управлением скоростью и положением.В бесщеточных двигателях статические обмотки прикреплены к корпусу двигателя, что приводит к улучшенному рассеиванию тепла и перегрузочной способности. Бесщеточные двигатели отличаются высоким КПД.
БЕСЩЕТОЧНЫЕ ДВИГАТЕЛИ ПОСТОЯННОГО ТОКА ПОРТ. КОЛПАЧКА
Бесщеточные двигатели постоянного токаPortescap чрезвычайно надежны и созданы для обеспечения наилучших характеристик. Их высокая удельная мощность позволяет уменьшить общий размер большинства приложений. Они отличаются бесшумным ходом даже на высокой скорости. Автоклавируемый вариант идеально подходит для медицинских целей.
Они имеют максимальный продолжительный крутящий момент до 39 унций на дюйм (276 мНм). Их максимальный крутящий момент составляет до 232,7 унций на дюйм (2’278 мНм). Они могут развивать скорость до 100 000 об / мин. Стандартные диаметры варьируются от 0,5 до 2,3 дюйма (от 12,7 до 58 мм).
Portescap может предоставить индивидуальные двигатели для нужд вашего проекта. Для каждого размера кадра доступны стопки различной длины. Доступны варианты автоклавирования для устройств, требующих стерилизации.
Portescap предлагает индивидуальные обмотки, модификации вала, включая полый вал, а также специальные материалы, покрытия и гальванику.Длина, тип, цвет и разъем, редукторы и энкодеры могут быть изменены.
Большинство наших продуктов BLDC можно настроить или модифицировать с помощью специальных функций, в том числе:
- Специальные валы (более длинные или короткие, большего или меньшего диаметра, поперечные отверстия, осевые отверстия, канюлированные, специальные материалы и покрытия)
- Специальная конструкция для немедицинского применения (алюминиевый корпус / концевые раструбы, стальные детали редуктора, стальные подшипники)
- Обмотки специальные (повышенное напряжение, разные скорости)
- Концевые заделки специальных выводов (без соединений, специальные разъемы, встроенные разъемы, особые цвета)
- Особенности монтажа
- Альтернативные ленточные материалы
- Альтернативные материалы магнитов
- Возможность стерилизации
- Опции кодировщика
ПРИМЕНЕНИЕ БЕСЩЕТЧАТОГО ДВИГАТЕЛЯ ПОСТОЯННОГО ТОКА
Бесщеточные двигатели постоянного токаявляются неотъемлемой частью многих приложений, особенно в медицинских устройствах, промышленной автоматизации, аэрокосмической и оборонной промышленности, безопасности и доступе и других отраслях.
МЕДИЦИНСКАЯ
ДвигателиBLDC идеально подходят для высокоскоростных ручных хирургических и стоматологических инструментов, включая мелкие и крупные костные инструменты, а также стоматологические инструменты, такие как сверла. Они также очень эффективны для респираторов и аппаратов ИВЛ, инфузионных и инсулиновых насосов, стоматологической визуализации и анализаторов.
- Высокоскоростной ручной хирургический инструмент
- Инструмент ручной хирургический для мелких костей
- Инструмент ручной хирургический для больших костей
- Стоматологические ручные инструменты
- Респираторы и вентиляторы
- Инфузионные и инсулиновые насосы
- Стоматологическая визуализация
- Анализаторы
- Хирургическая робототехника
- Бионика и экзоскелетные системы
ПРОМЫШЛЕННАЯ АВТОМАТИЗАЦИЯ
Бесщеточные двигатели постоянного тока используются в промышленных гайковертах и отвертках, воздушных насосах, конвейерах и электронных сборочных устройствах.
- Гайковерты промышленные
- Отвертки промышленные
- Воздушные насосы
- Конвейеры
- Электронный блок
- Захваты электрические
АЭРОКОСМИЧЕСКАЯ ОБОРОНА И ОБОРОНА
Долговечность и надежность двигателей BLDC делают их хорошим выбором для бортовых приборов, гироскопов и спутников самолетов. Они также обычно используются в клапанах, системах дозирования топлива и электрических приводах.
- Бортовая аппаратура воздушных судов
- Гироскоп
- Спутников
- Клапаны
- Система учета топлива
- Электропривод
- Роботы для обнаружения и обслуживания
БЕЗОПАСНОСТЬ И ДОСТУП
Компактные размеры и низкие рабочие температуры бесщеточных двигателей постоянного тока делают их идеальными для использования в устройствах считывания штрих-кодов, камерах, замках, а также в принтерах и диспенсерах билетов.
- Сканеры штрих-кода
- Камера
- Замки
- Принтер и дозатор билетов
ДРУГОЕ
Другие области применения бесщеточных двигателей постоянного тока — робототехника, прецизионные измерительные приборы и гравировка.
- Робототехника
- Прецизионные приборы
- Гравировка
СОСТАВ И ВАРИАНТЫ БЕСЩЕТКИХ ДВИГАТЕЛЕЙ постоянного тока (BLDC)
| Детали | Характеристики | Преимущества |
|---|---|---|
| Бесщеточный двигатель постоянного тока с постоянным магнитом, конструкция | По существу линейная кривая крутящего момента / скорости (без учета потерь в стали), с крутящим моментом, пропорциональным току, и скоростью, пропорциональной напряжению | Простота управления скоростью и положением |
| Бесщеточный дизайн | Срок службы ограничен не износом щеток, а только износом шариковых подшипников | Очень долгий срок службы, высокая надежность, нечувствительность к окружающей среде.Без дуги, без пыли. Пониженный звуковой и электрический шум |
| Автоклавируемая версия | Подходящее уплотнение и оптимизированная конструкция | Выдерживают циклы автоклавирования и стерилизации. Уплотнение предотвращает загрязнение |
| Статическая обмотка на корпусе двигателя | Улучшенный отвод тепла | Перегрузочная способность |
ПРОРЕЗАННЫЙ VS.БЕСПЛОТНЫЕ МОТОРНЫЕ ТЕХНОЛОГИИ BLDC
| Детали | шлицевой | Без слота |
|---|---|---|
| Способность противостоять суровым условиям / Автоклавируемость | ++ | + |
| Соотношение крутящий момент / мощность | ++ | + |
| Высокая скорость | + | ++ |
| Срок службы батареи | + | ++ |
| Момент фиксации | – | + |
ОПЦИИ ОБРАТНОЙ СВЯЗИ
| Детали | Характеристики | Преимущества |
|---|---|---|
| Версии без датчика Холла | Обычно используется в шпинделях | Экономически выгодно.Менее чувствителен к окружающей среде. Всего три соединительных провода |
| Версии с датчиками Холла | Обычно используется в приложениях, где требуется изменение скорости или нагрузки. | Очень простая схема коммутации |
| Версии с энкодером или резольвером | Обычно используется в пошаговом режиме | Очень точное управление скоростью и положением |
| Версия со встроенной электроникой | Датчики Холла и схемы управления интегрированы в двигатель | Конфигурация Plug and Play Может работать как щеточный двигатель постоянного тока |
ДВИГАТЕЛИ BLDC С РАЗЪЕМОМ — ДОПОЛНИТЕЛЬНАЯ ИНФОРМАЦИЯ
Бесщеточные двигатели | FAULHABER
Высокая производительность в минимальном пространстве — сегодня портфолио FAULHABER охватывает от 4-полюсных серводвигателей для высоких крутящих моментов до высокоэффективных плоских двигателей и чрезвычайно маленьких бесщеточных микромоторов постоянного тока.
Благодаря особой конструкции бесщеточные двигатели FAULHABER идеально подходят для использования в высокопроизводительных приложениях в условиях перегрузки или непрерывной работы с очень высокими требованиями к сроку службы.
Высококачественные бесщеточные двигатели с длительным сроком службы
Будь то 4-полюсные серводвигатели постоянного тока с высоким крутящим моментом, высокоэффективные плоские микродвигатели постоянного тока или компактные бесшумные двигатели, FAULHABER специализируется на получении максимальной производительности из самого компактного корпуса.
Благодаря своей конструкции бесщеточные двигатели FAULHABER предназначены для тяжелых сервоприводов с частыми перегрузками, а также для продолжительных режимов работы, где требуется максимальный срок службы.
Бесщеточные серводвигатели постоянного тока: 2-полюсные или 4-полюсные?
Высокоточные двухполюсные бесщеточные серводвигатели постоянного тока FAULHABER представляют собой трехфазные электродвигатели без железа с широким диапазоном скорости и крутящего момента. Они идеально подходят для средне- и высокоскоростных приложений, требующих плавного регулирования скорости, высокой эффективности и длительного срока службы.
Для высокодинамичных сервоприводов, требующих очень высокого крутящего момента при самых компактных размерах, идеально подходят 4-полюсные серводвигатели постоянного тока FAULHABER BX4 и BP4.Их прочная конструкция с очень небольшим количеством деталей и отсутствием склеенных компонентов означает, что они чрезвычайно долговечны и хорошо подходят для суровых условий окружающей среды, таких как экстремальные температуры, высокие вибрации и ударные нагрузки.
Высокая эффективность благодаря бесщеточным двигателям FAULHABER
Плоские бесщеточные микродвигатели постоянного тока FAULHABER представляют собой трехфазные бесшумные двигатели с осевым магнитным зазором и вращающейся задней частью. Они имеют гораздо более высокий КПД, чем другие плоские бесщеточные двигатели, а их вращающаяся задняя часть обеспечивает высокую инерцию ротора, которая идеально подходит для применений, требующих низкой пульсации крутящего момента и очень точного непрерывного управления скоростью.
FAULHABER также предлагает линейку 2-полюсных бесщеточных двигателей с цилиндрической вращающейся задней частью, которые иногда называют безжелезными двигателями с внешним выносом. Что отличает двигатель FAULHABER, так это его бесшумная конструкция, исключающая зубчатый момент. Высокая инерция ротора делает эти двигатели идеальными для работы в непрерывном режиме, когда требуется очень точное регулирование скорости. Эти двигатели также имеют встроенный регулятор скорости, который можно настроить для различных профилей скорости.
Бесщеточный контроллер двигателя постоянного тока и PMSM
Решениядля двигателей и контроллеров двигателей служат автомобильной промышленности с незапамятных времен!
Постоянные инновации в двигателях и системах управления двигателями сделали двигатели неотъемлемой частью разнообразных автомобильных приложений.
Основываясь на эффективности, Motors and Motor Control Solutions оправдывают ожидания автомобильной промышленности (включая область электромобилей)
Интересно, что существует два конкретных типа двигателей, которые выдержали испытание временем и претерпели огромные изменения.
Они широко известны как:
- Двигатели BLDC — Бесщеточные двигатели постоянного тока
- PMSM Motors — Синхронные двигатели с постоянными магнитами .
В то время как BLDC Motors заменили Brushed DC Motors , PMSM Motors оказались лучшей альтернативой асинхронному двигателю переменного тока .
Оба этих двигателя находят применение в некоторых из самых инновационных автомобильных приложений. Например, PMSM теперь де-факто мотор, установленный в трансмиссии электромобилей .
Аналогичным образом, такие приложения, как рулевое управление с электроусилителем и системы HVAC , работают наилучшим образом, когда ими управляет двигатель BLDC .Однако эти двигатели иногда могут использоваться взаимозаменяемо, в зависимости от определенных конкретных сценариев использования.
Прежде чем мы углубимся в приложения, давайте немного разберемся с Как работают двигатели PMSM и BLDC ?
В ходе курса мы также попытаемся обсудить внутренние различия между этими двумя двигателями.
Как работают PMSM и бесщеточные двигатели?
- Бесщеточные двигатели постоянного тока Бесщеточные двигатели постоянного тока — это усовершенствованная версия щеточных двигателей постоянного тока.Отсутствие щеток дает двигателям BLDC возможность вращаться с высокой скоростью и повышает эффективность .
Основные характеристики двигателей BLDC:
- Он состоит из двух основных частей — ротора и статора.
- Ротор — это часть, которую перемещает , и имеет постоянные магниты в качестве магнитов ротора .
- Статор — это стационарный компонент , состоящий из обмоток катушки .
- Электрический ток через обмотки статора создает магнитное поле , которое вращает постоянный магнит ротора.
- Изменяя ток, протекающий через статор, можно изменять скорость двигателя Motor .
- В большинстве автомобильных приложений скорость двигателя регулируется электронно с помощью контроллера бесщеточного двигателя постоянного тока .
* Подробные сведения о системах управления двигателями см. В нашем блоге.
Преимущества двигателей BLDC:
- Способность работать с более высокой скоростью и обеспечивать постоянный крутящий момент
- Прочность
- КПД почти 85-90%
- Способность реагировать на управляющие механизмы на высоких скоростях
- Без искр и меньше шума, так как щетки отсутствуют
- Простота управления двигателем (с использованием решений контроллера двигателя BLDC)
- Возможность самозапуска
- Охлаждается за счет теплопроводности и не требует дополнительного охлаждающего механизма
- Синхронный двигатель с постоянными магнитами (PMSM) Переходя к синхронному двигателю с постоянными магнитами , можно сказать, что можно рассматривать как аналог переменного тока бесщеточного двигателя постоянного тока .
PMSM также состоит из постоянного магнита в качестве ротора и статора с намотанной на него катушкой . Работа двигателя PMSM также очень похожа на двигатель BLDC.
Однако изменение заключается в форме волны обратной ЭДС, которая имеет синусоидальную природу. Это так, потому что катушки намотаны на статор синусоидальным образом .
Это также означает, что PMSM требует переменного тока (синусоидального по своей природе) для достижения наилучших характеристик. Этот тип управляющего тока также снижает шум, производимый двигателем . Мы обсудим концепцию обратной ЭДС в нашем предстоящем блоге на Field Oriented Control (FOC).
Преимущества двигателей PMSM:
- Более высокий КПД , чем у Бесщеточные двигатели постоянного тока
- Отсутствие пульсаций крутящего момента при переключении двигателя
- Более высокий крутящий момент и лучшая производительность
- Более надежные и менее шумные, чем другие асинхронные двигатели
- Высокая производительность как на высокой, так и на низкой скорости работы
- Низкая инерция ротора упрощает управление
- Эффективный отвод тепла
- Мотор уменьшен.
Двигатели BLDC v / s PMSM: понимание механизма управления двигателем
Нет большой разницы в системах управления двигателями BLDC и PMSM Motors; за исключением характера управляющего тока и определения положения ротора.
Хотя мы обсудили ток возбуждения, необходимый для обоих двигателей, давайте теперь поговорим о важности определения положения ротора.
Правильное время для включения фазного тока двигателя ( коммутация двигателя ) важно для оценки правильного количества энергии. В двигателях на основе датчиков эту работу выполняют датчики эффекта Холла .
В двигателе BLDC положение ротора обычно определяется набором из 3 датчиков эффекта Холла. Коммутация осуществляется посредством шестиэтапного процесса.Это приводит к небольшим перерывам в коммутации, которые, в свою очередь, вызывают пульсации крутящего момента (периодическое увеличение / уменьшение выходного крутящего момента двигателя) в конце каждого шага.
Для двигателя PMSM, , напротив, требуется только один датчик эффекта Холла , поскольку коммутация является непрерывной. Следовательно, положение ротора контролируется в каждом случае и измеряется датчиком и передается в решение контроллера мотора PMSM .
Одним из преимуществ двигателя PMSM является отсутствие пульсации крутящего момента , что делает эти двигатели более эффективными, чем BLDC .
Каковы применения двигателей BLDC и PMSM в автомобильной промышленности?
Двигатели BLDC и PMSM широко используются в автомобильной промышленности, поскольку оба этих двигателя подходят для различных вариантов использования (иногда взаимозаменяемы).
Бесщеточные двигатели постоянного тока долговечные , достаточно эффективные и недорогие . Они могут работать на высокоскоростном и могут иметь электронное управление . Все эти атрибуты делают эти двигатели идеальными для автомобильных компонентов, которые находятся в эксплуатации, а — непрерывно.
С другой стороны, двигателиPMSM обладают всеми характеристиками двигателя BLDC с дополнительным преимуществом меньшего шума и более высокой эффективности.
Давайте посмотрим на некоторые распространенные применения этих двигателей, начиная с бесщеточных двигателей постоянного тока:
- Электронные системы рулевого управления с усилителем: Способность работать на высокой скорости и присущая долговечность делают двигатели BLDC предпочтительным выбором для приложений электронного усилителя рулевого управления (EPS). Двигатель на основе датчика BLDC может определять положение ротора и приложите оптимальный крутящий момент для приведения в движение рулевого колеса.
- Система HVAC (Отопление, вентиляция и кондиционирование): Решения HVAC становятся умнее благодаря внедрению автоматизации в современные автомобили. Эта автоматизация обеспечивается двигателями с электронным приводом , особенно бесщеточными двигателями постоянного тока . Эти двигатели управляются с помощью широтно-импульсной модуляции (PWM) , что делает их надежными, эффективными и экологически безопасными.
- Трансмиссия гибридного электромобиля: Большое количество гибридных транспортных средств интегрировано с контроллерами бесщеточных двигателей постоянного тока для управления трансмиссией Drivetrain .Тому же есть несколько причин. Самая важная причина — максимальная эффективность и простой метод охлаждения ротора. Двигатели
BLDC также помогают в рекуперативном торможении, то есть заряжать аккумулятор при каждом торможении. Постоянные магниты и внешний крутящий момент работают вместе как генератор для импульсной зарядки аккумулятора.
Применение двигателей PMSM в автомобилях
- Сервомеханизм в автомобилях: Сервомеханизмы — это набор двигателей и контроллеров двигателей, которые создают движение с более высоким уровнем энергии, чем применяемый входной сигнал.Двигатели PMSM — лучший выбор двигателей для поддержки такого механизма, потому что двигатели PMSM очень эффективны, производят меньше шума и устойчивы к износу. Одним из примеров является сервотормоз , который усиливает усилие, используемое водителем на педалях тормоза. Другой пример — Servo Steering , который на шаг впереди обычного рулевого управления с усилителем. Здесь также используется двигатель PMSM.
- Трансмиссия для электромобилей : Несмотря на несколько электромобилей , в которых используются двигатели BLDC, большинство OEM-производителей используют двигатели переменного тока для питания трансмиссии электромобилей .И PMSM — предпочтительный выбор. Причины — высокая удельная мощность и наличие эффективных решений для управления двигателями PMSM .
В будущее
Новые функции внедряются в автомобили с беспрецедентной скоростью. И моторы, особенно интеллектуальные моторные системы, лежат в основе таких инноваций.
Приложения, такие как ADAS, также управляются несколькими небольшими двигателями с электронным приводом.
И что еще более важно, поскольку мир все быстрее движется в сторону электромобилей, двигатели и системы управления двигателями должны развиваться с гораздо более высокой скоростью.
Потому что только так электромобили получат более широкое признание среди людей, которые так привыкли управлять транспортными средствами с двигателями внутреннего сгорания.
Как работает бесщеточный электродвигатель?
Меня несколько раз спрашивали, как работают двигатели с бесщеточным электродвигателем? В работающем двигателе постоянного тока мельницы снаружи находятся неизменные магниты, а внутри вращающийся якорь. Неизменные магниты неподвижны, поэтому они известны как статор. Оси якоря, поэтому он известен как ротор.
Якорь содержит электромагнит. Когда вы подаете питание на этот электромагнит, он создает в якоре притягивающее поле, которое втягивает и отталкивает магниты в статоре. Таким образом, якорь поворачивается на 180 градусов. Чтобы он продолжал вращаться, нужно поменять валы электромагнита. Щетки справляются с этой регулировкой до крайности. Они достигают двух вращающихся катодов, прикрепленных к якорю, и изменяют предел притяжения электромагнита при его вращении.
Эта схема работает, ее легко и несложно изготовить, но у нее много проблем:
• Щетки в конце концов изнашиваются.
• Поскольку щетки создают / разрушают ассоциации, вы получаете пусковой и электрический шум.
• Электромагнит в центральной точке двигателя затрудняет охлаждение.
• Использование щеток ограничивает количество валов якоря.
С появлением скромных электронных устройств управления и силовых транзисторов стало возможным «повернуть двигатель задом наперед» и вынуть щетки. В бесщеточном двигателе постоянного тока вы помещаете постоянные магниты на ротор и перемещаете электромагниты к статору.В этот момент вы используете интеллектуальную электронику, чтобы возбуждать электромагниты при повороте полюса. Этот фреймворк имеет широкий спектр интересных мест:
Поскольку микроконтроллер или другая интеллектуальная электроника управляет двигателем, а не механическими щетками, она становится все более точной. Электрооника также может влиять на скорость двигателя. Это делает бесщеточные двигатели более производительными.
• Отсутствует запуск и существенно меньше электрических волнений.
• Нет щеток для износа.
• С помощью электромагнитов на статоре их очень просто охладить. У вас может быть много электромагнитов на статоре для более точного управления.
Основным недостатком бесщеточного двигателя является его более высокая начальная стоимость, однако вы часто можете окупить эту стоимость за счет более примечательного мастерства в течение всего срока службы двигателя.
Бесщеточные двигатели постоянного тока широко используются в промышленности по всему миру. На самом базовом уровне существуют щеточные и бесщеточные двигатели, а также двигатели постоянного и переменного тока.Бесщеточные двигатели постоянного тока, как вы понимаете, не содержат щеток и используют постоянный ток.
Бесщеточные двигатели постоянного тока обычно имеют КПД 85-90%, в то время как щеточные двигатели обычно имеют КПД только 75-80%. Щетки со временем изнашиваются, иногда вызывая опасное искрение, ограничивая срок службы двигателя с щеткой. Бесщеточные двигатели постоянного тока тихие, легкие и имеют гораздо более длительный срок службы. Поскольку компьютеры управляют электрическим током, бесщеточные двигатели постоянного тока могут обеспечить гораздо более точное управление движением.
Благодаря всем этим преимуществам, бесщеточные двигатели постоянного тока часто используются в современных устройствах, где требуется низкий уровень шума и мало тепла, особенно в устройствах, которые работают в непрерывном режиме. Это могут быть стиральные машины, кондиционеры и другая бытовая электроника. Они могут даже быть основным источником энергии для сервисных роботов, что потребует очень тщательного контроля силы из соображений безопасности.
Бесщеточные двигатели постоянного токаобладают рядом явных преимуществ по сравнению с другими типами электродвигателей, поэтому они нашли применение во многих предметах домашнего обихода и, возможно, являются основным фактором роста сервисных роботов внутри и за пределами промышленного сектора.
Заключение
ThinGap — компания Motor Technology, которая производит легкие «бесшумные» электродвигатели, которые по своей конструкции являются бесщеточными и обеспечивают сверхэффективную работу с низким сопротивлением на любой скорости и нулевым крутящим моментом.
.