Регулятор скорости двигателя постоянного тока
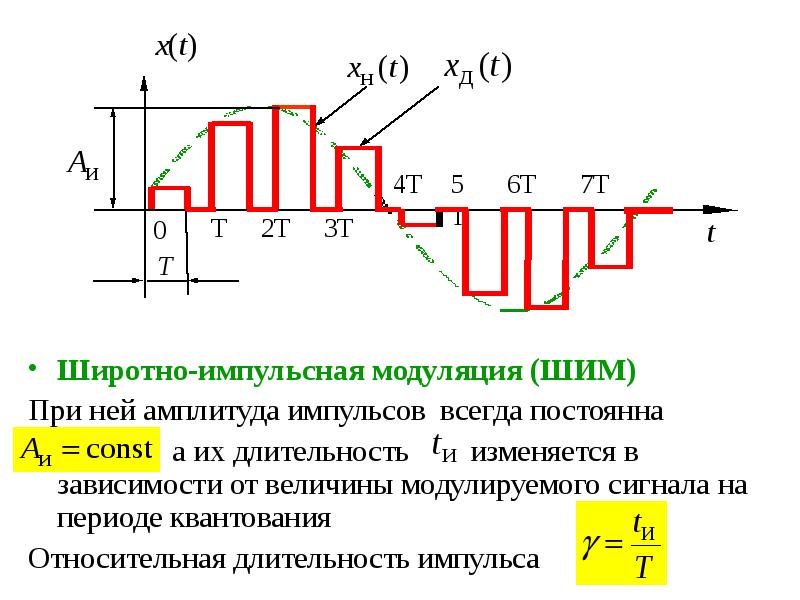
Наиболее простой метод регулирования скорости вращения двигателя постоянного тока основан на использовании широтно-импульсной модуляции (ШИМ или PWM). Суть этого метода заключается в том, что напряжение питания подается на двигатель в виде импульсов. При этом частота следования импульсов остается постоянной, а их длительность может меняться.
ШИМ сигнал характеризуется таким параметром как коэффициент заполнения или Duty cycle. Это величина обратная скважности и равна отношению длительности импульса к его периоду.
D = (t/T) * 100%
На рисунках ниже изображены ШИМ сигналы с различными коэффициентами заполнения.
При таком методе управления скорость вращения двигателя будет пропорциональна коэффициенту заполнения ШИМ сигнала.
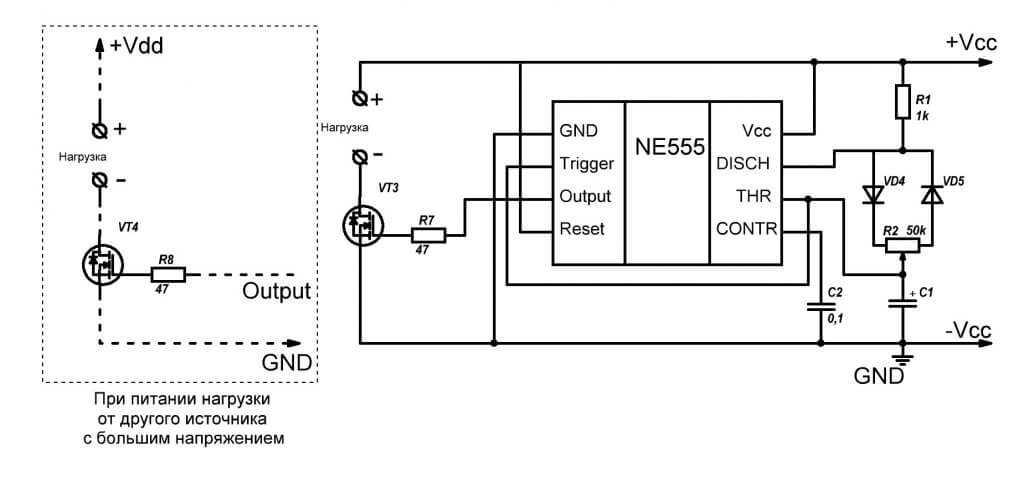
Простейшая схема управления двигателем постоянного тока состоит из полевого транзистора, на затвор которого подается ШИМ сигнал. Транзистор в данной схеме выполняет роль электронного ключа, коммутирующего один из выводов двигателя на землю. Транзистор открывается на момент длительности импульса.
Транзистор открывается на момент длительности импульса.
Как будет вести себя двигатель в таком включении? Если частота ШИМ сигнала будет низкой (единицы Гц), то двигатель будет поворачиваться рывками. Это будет особенно заметно при маленьком коэффициенте заполнения ШИМ сигнала.
При частоте в сотни Гц мотор будет вращаться непрерывно и его скорость вращения будет изменяться пропорционально коэффициенту заполнения. Грубо говоря, двигатель будет «воспринимать» среднее значение подводимой к нему энергии.
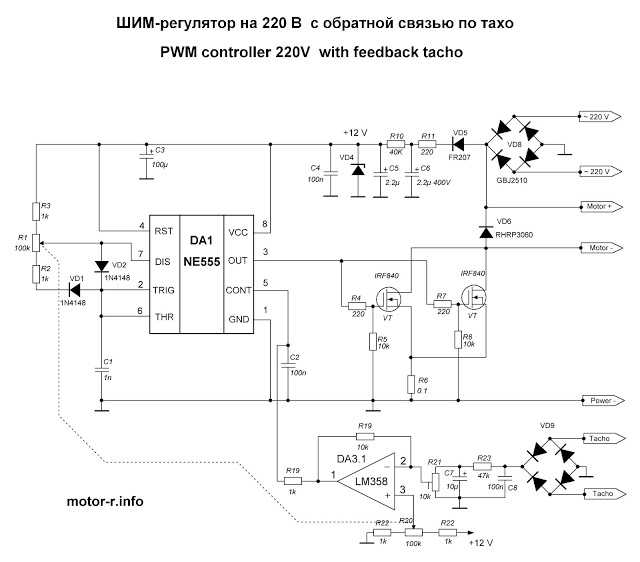
Существует много схем для генерации ШИМ сигнала. Одна из самых простых — это схема на основе 555-го таймера. Она требует минимум компонентов, не нуждается в настройке и собирается за один час.
Напряжение питания схемы VCC может быть в диапазоне 5 — 16 Вольт. В качестве диодов VD1 — VD3 можно взять практически любые диоды.
Если интересно разобраться, как работает эта схема, нужно обратиться к блок схеме 555-го таймера. Таймер состоит из делителя напряжения, двух компараторов, триггера, ключа с открытым коллектором и выходного буфера.
Вывод питания (VCC) и сброса (Reset) у нас заведены на плюс питания, допустим, +5 В, а земляной (GND) на минус. Открытый коллектор транзистора (вывод DISCH) подтянут к плюсу питания через резистор и с него снимается ШИМ сигнал. Вывод CONT не используется, к нему подключен конденсатор. Выводы компараторов THRES и TRIG объединены и подключены к RC цепочке, состоящей из переменного резистора, двух диодов и конденсатора. Средний вывод переменного резистора подключен к выводу OUT. Крайние выводы резистора подключены через диоды к конденсатору, который вторым выводом подключен к земле. Благодаря такому включению диодов, конденсатор заряжается через одну часть переменного резистора, а разряжается через другую.
В момент включения питания на выводе OUT низкий логический уровень, тогда на выводах THRES и TRIG, благодаря диоду VD2, тоже будет низкий уровень. Верхний компаратор переключит выход в ноль, а нижний в единицу. На выходе триггера установится нулевой уровень (потому что у него инвертор на выходе), транзисторный ключ закроется, а на выводе OUT установиться высокий уровень (потому что у него на инвертор на входе). Далее конденсатор С3 начнет заряжаться через диод VD1. Когда она зарядится до определенного уровня, нижний компаратор переключится в ноль, а затем верхний компаратор переключит выход в единицу. На выходе триггера установится единичный уровень, транзисторный ключ откроется, а на выводе OUT установится низкий уровень. Конденсатор C3 начнет разряжаться через диод VD2, до тех пор, пока полностью не разрядится и компараторы не переключат триггер в другое состояние. Далее цикл будет повторяться.
Далее конденсатор С3 начнет заряжаться через диод VD1. Когда она зарядится до определенного уровня, нижний компаратор переключится в ноль, а затем верхний компаратор переключит выход в единицу. На выходе триггера установится единичный уровень, транзисторный ключ откроется, а на выводе OUT установится низкий уровень. Конденсатор C3 начнет разряжаться через диод VD2, до тех пор, пока полностью не разрядится и компараторы не переключат триггер в другое состояние. Далее цикл будет повторяться.
Приблизительную частоту ШИМ сигнала, формируемого этой схемой, можно рассчитать по следующей формуле:
F = 1.44/(R1*C1), [Гц]
где R1 в омах, C1 в фарадах.
При номиналах указанных на схеме выше, частота ШИМ сигнала будет равна:
F = 1.44/(50000*0.0000001) = 288 Гц.
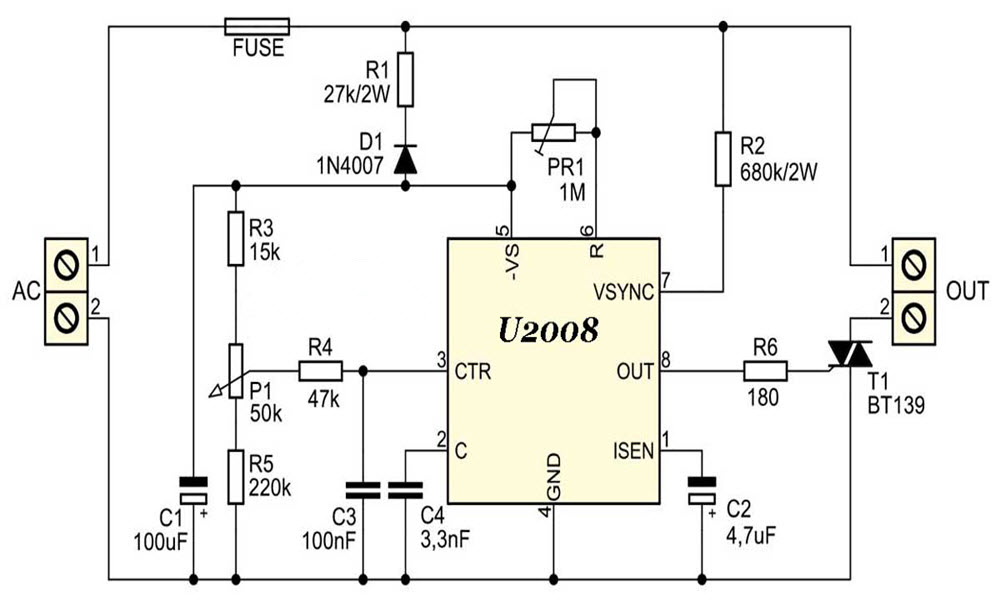
Объединим две представленные выше схемы, и мы получим простую схему регулятора оборотов двигателя постоянного тока, которую можно применить для управления оборотами двигателя игрушки, робота, микродрели и т.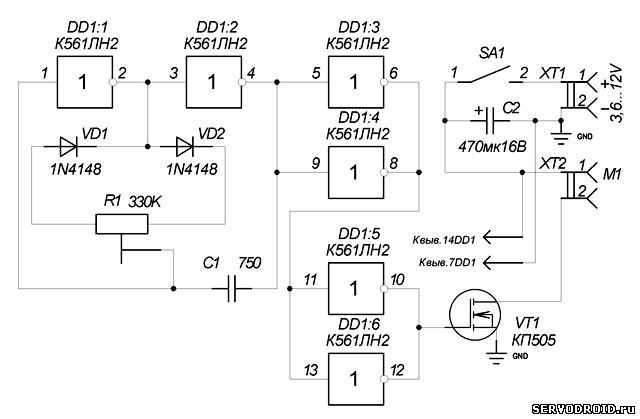 д.
д.
VT1 — полевой транзистор n-типа, способный выдерживать максимальный ток двигателя при заданном напряжении и нагрузке на валу. VCC1 от 5 до 16 В, VCC2 больше или равно VCC1.
Вместо полевого транзистора можно использовать биполярный n-p-n транзистор, транзистор дарлингтона, оптореле соответствующей мощности.
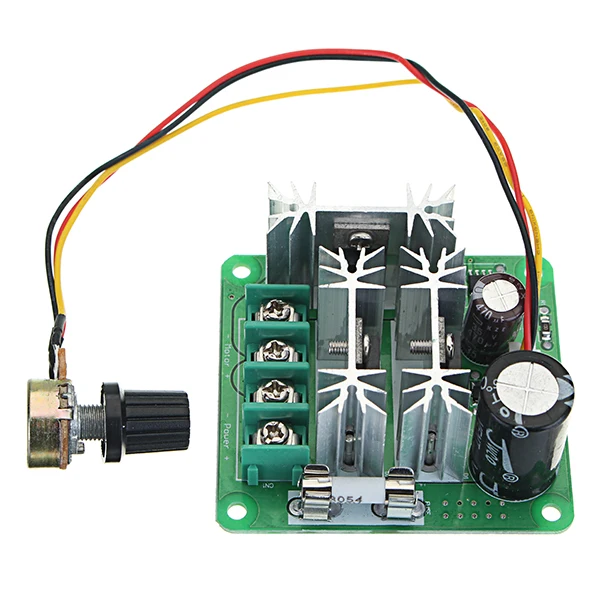
Шим контроллер двигателя постоянного тока BMD-20DIN ver2 . Регулятор оборотов двигателя постоянного тока
Заказать
Описание в PDF
Технические характеристики
| Напряжение питания, стабилизированнное, В | 12…24 |
| Максимальный номинальный ток двигателя, А | 20 |
| Аппаратная защита от короткого замыкания, А | 30 |
| Ток срабатывания защиты от перегрузки, А | 0,1. ..20 ..20 |
| Диапазон регулирования скорости | 1 : 100 |
| Габаритные размеры, мм, не более | 120 х 100 х 23 |
Скачать паспорт .pdfОписание .pdf 3D модель .step
Блок управления BMD‑20DIN ver.2 — это регулятор оборотов коллекторного двигателя постоянного тока. Блок управления BMD‑20DIN ver. 2 предназначен для управления коллекторным двигателем c напряжением питания до 30 В и мощностью до 500 Вт. Возможно управление скоростью коллекторного двигателя аналоговым сигналом 0…5В, −10…+10В, 4…20мА (токовая петля), ШИМ с частотой 50Гц, либо встроенным или внешним потенциометром. Разгон и торможение двигателя задаются внутренними регуляторами, входящими в конструкцию устройства.
Габаритные размеры блоков управления коллекторным двигателем постоянного тока BMD‑20DIN ver.
  2
 2Крепление блока BMD-20DIN ver.2 осуществляется на DIN-рейку ТН-35-7,5 ГОСТ Р МЭК 60715-2003
Схема подключения блоков управления коллекторным двигателем постоянного тока BMD‑20DIN ver. 2
При больших токах рекомендуется располагать источник питания в непосредственной близости от блока и использовать обе линии как питающих, так и фазных клемм.
Режимы работы блока управления BMD‑20DIN ver. 2
Регулирование скорости встроенным потенциометром «SPEED»
При управлении скоростью коллекторного двигателя с использованием встроенного потенциометром «SPEED» дополнительных подключений не требуется. Крайнее положение регулятора оборотов по часовой стрелке соответствует максимальной скорости вращения коллекторного двигателя. Крайнее положение регулятора против часовой стрелки соответствует минимальной скорости.
Регулирование скорости внешним потенциометром
В случае регулирования оборотов двигателя с использованием внешнего потенциометра, максимальная скорость соответствует крайнему положению регулятора, при котором на вход «SPEED» поступает напряжение 5 В. Минимальная скорость вращения соответствует положению потенциометра, при котором на вход «SPEED» подаётся напряжение 0 В. Рекомендуемое сопротивление внешнего потенциометра: 2,2…4,7 кОм.
Минимальная скорость вращения соответствует положению потенциометра, при котором на вход «SPEED» подаётся напряжение 0 В. Рекомендуемое сопротивление внешнего потенциометра: 2,2…4,7 кОм.
Регулирование скорости аналоговым сигналом — напряжение 0…5 В
В случае управления коллекторным двигателем с использованием внешнего аналогового сигнала 0…5В, В случае управления коллекторным двигателем с использованием внешнего аналогового сигнала 0…5В, скорость вращения пропорциональна уровню напряжения на входе «SPEED». Максимальная скорость двигателя соответствует уровню сигнала 5 В, минимальная скорость — 0 В.
Регулирование скоростинапряжением внешнего сигнала -10…+10В
При управлении скоростью аналоговым сигналом — 10…+10В, минимальная скорость (остановка двигателя) соответствует уровню сигнала 0 В, максимальная скорость в прямом направлении соответствует уровню сигнала +10В.
Регулирование скорости аналоговым сигналом 4…20 мА
При управлении скоростью токовым сигналом 4…20 мА, максимальная частота оборотов коллекторного двигателя соответствует уровню сигнала 20 мА, минимальная частота — уровню 4 мА. Регулирование скорости с использованием аналогового токового сигнала имеет ряд преимуществ, принципиально важных в промышленных системах: высокая помехозащищённость, точность передачи сигнала и независимость качества связи от длины линии.
Регулирование скорости скважностью внешнего сигнала ШИМ
 Минимальная скорость (остановка двигателя) соответствует длительности импульса 1540 мкс. Максимальная скорость вращения в прямом направлении соответствует длительности импульса 544 мкс. Максимальная скорость вращения в реверсном направлении соответствует длительности импульса 2400 мкс.
Минимальная скорость (остановка двигателя) соответствует длительности импульса 1540 мкс. Максимальная скорость вращения в прямом направлении соответствует длительности импульса 544 мкс. Максимальная скорость вращения в реверсном направлении соответствует длительности импульса 2400 мкс.Снятие характеристик шаговых двигателей. Зависимость крутящего момента от скорости вращения.
Применение блока управления BMD‑20DIN ver. 2 обеспечивает сохранение крутящего момента при значительном снижении скорости двигателя. На видео показана работа коллекторного двигателя постоянного тока на испытательном динамометрическом стенде НПО Электропривод. Лаболаторно измеренные значения крутящего момента двигателя не изменяются при понижении частоты вращения. Регулировка оборотов двигателя на стенде выполнялась в диапазоне 50–2000 об/мин.
С этим товаром покупают
LM18‑33016NA‑L
Индуктивные бесконтактные датчики
подробнееИсточники питания постоянного тока
подробнееОВЕН ПР200
Программируемые реле с дисплеем
Задать вопрос
Хотите узнать дополнительную информацию о продукции — задайте вопрос.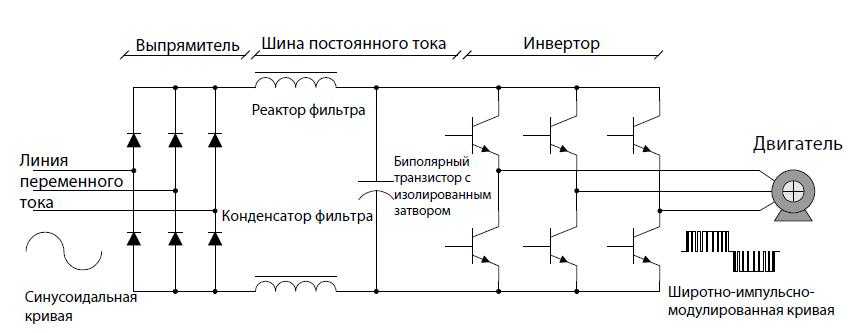 Наш специалист свяжется с вами в ближайшее время.
Наш специалист свяжется с вами в ближайшее время.
— есть ли способ узнать, какой частоты мне нужен ШИМ?
спросил
Изменено 3 года, 1 месяц назад
Просмотрено 3к раз
\$\начало группы\$
У меня есть двигатель постоянного тока 12 В, который вращается со скоростью 60 об/мин или 1 Гц. Нужен ли мне ШИМ, который соответствует частоте, чтобы он работал? Большинство из тех, что я видел, имеют частоту около 25 кГц для двигателя 12 В 20 А.
- двигатель
- ШИМ
- двигатель постоянного тока
- 12 В
- двигатель-контроллер
\$\конечная группа\$
3
\$\начало группы\$
Нет. Вы не сопоставляете число оборотов в секунду с частотой ШИМ. Нужно намного выше. Вы хотите, чтобы оно было достаточно высоким, чтобы двигатель работал плавно (инерция двигателя сглаживает движение, а индуктивность двигателя помогает сглаживать ток), но не настолько высоким, чтобы коммутационные потери в вашей электронике были чрезмерными. Часто не менее 8-10 кГц, но вам может понадобиться > 20 кГц, если слышимый шум является проблемой. У вас есть некоторая свобода действий, прежде чем она станет откровенно «неправильной» частотой.
Вы не сопоставляете число оборотов в секунду с частотой ШИМ. Нужно намного выше. Вы хотите, чтобы оно было достаточно высоким, чтобы двигатель работал плавно (инерция двигателя сглаживает движение, а индуктивность двигателя помогает сглаживать ток), но не настолько высоким, чтобы коммутационные потери в вашей электронике были чрезмерными. Часто не менее 8-10 кГц, но вам может понадобиться > 20 кГц, если слышимый шум является проблемой. У вас есть некоторая свобода действий, прежде чем она станет откровенно «неправильной» частотой.
\$\конечная группа\$
\$\начало группы\$
Требуется, чтобы индуктивность двигателя приводила к достаточно низким пульсациям тока во время цикла ШИМ. Вот эмпирическое правило одного производителя привода:
\$ f_{PWM} \ge \frac {0.6V_{ПИТАНИЕ} }{L_{MOTOR}\cdot I_{NOMINAL}} \$
Эта формула дает довольно небольшая пульсация, около 40% пика на пределе и D = 50%, поэтому может быть желательна немного более высокая частота, особенно если двигатель будет работать с низким рабочим циклом.
В любом случае, оптимальная частота ШИМ, таким образом, может зависеть от конструкции двигателя (для эффективности переключения и низкой стоимости вы не хотите, чтобы частота ШИМ была выше, чем необходимо. Слишком высокая частота ШИМ может вызвать чрезмерные потери в двигателя, а также в драйвере.С другой стороны, если частота слишком низкая, среднеквадратичное значение тока драйвера и двигателя будет чрезмерным, что приведет к большим потерям драйвера (и потерям меди в двигателе и проводке). также могут быть акустические эффекты, такие как раздражающий вой, если частота слышна или если он возбуждает слышимые колебательные моды, а на очень низких частотах пульсация крутящего момента может быть даже нежелательной.0005
Например, для блинных двигателей с очень низкой индуктивностью может потребоваться внешняя последовательная катушка индуктивности, чтобы иметь возможность использовать приемлемую частоту ШИМ. Несмотря на эмпирические правила и т. д., вам, вероятно, придется протестировать двигатель и привод, чтобы получить точную оценку эффективности. 20–25 кГц, вероятно, является разумной отправной точкой для обычного коллекторного двигателя постоянного тока с редуктором, как я думаю, вы описываете.
20–25 кГц, вероятно, является разумной отправной точкой для обычного коллекторного двигателя постоянного тока с редуктором, как я думаю, вы описываете.
\$\конечная группа\$
\$\начало группы\$
Выбираемая частота зависит от применяемого фильтра (например, RC-фильтра). Вашему двигателю постоянного тока, вероятно, не понадобятся никакие фильтры, потому что его инерция будет служить этой цели, пока частота ШИМ достаточно высока (должно быть достаточно нескольких кГц). В конечном итоге двигатель будет производить нежелательный шум, в этом случае вы можете добавить конденсатор для сглаживания.
Те 25 кГц, которые вы упомянули, вероятно, соответствуют стандарту Intel для фанатов ПК. Но обратите внимание: 25 кГц никоим образом не пропорциональны оборотам в минуту. При диммировании с ШИМ именно рабочий цикл определяет двигатели потребляемая мощность . Если вы хотите контролировать фактические обороты в минуту, вам необходимо реализовать контур управления.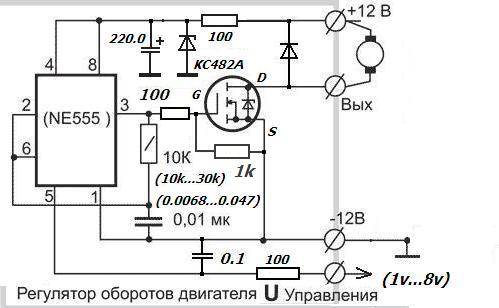 Если вы не используете один из упомянутых 4-контактных вентиляторов для ПК, установка оборотов только с помощью ШИМ невозможна.
Если вы не используете один из упомянутых 4-контактных вентиляторов для ПК, установка оборотов только с помощью ШИМ невозможна.
\$\конечная группа\$
3
\$\начало группы\$
Ответ Шепро показывает способ оценки нижнего предела для \$f_{PWM}\$. Я хотел бы добавить, что верхний предел обычно зависит от вашего мертвого времени, которое вводит искажение мертвого времени (DTD). В игру вступают несколько аспектов, в том числе погрешность регулирования (которая обычно компенсируется), гармоники (которые иногда необходимо отфильтровывать) и повышенное рассеивание мощности полевого МОП-транзистора (во время простоя ток двигателя протекает через диоды в корпусе МОП-транзистора, которые гораздо более высокое падение напряжения, чем у полностью открытого МОП-транзистора).
Как правило, вы хотите, чтобы ваш период ШИМ был примерно в 50 раз больше, чем мертвое время, поэтому мертвое время, которое происходит дважды во время цикла ШИМ, занимает всего 4% времени. Тогда вам нужно будет запрограммировать компенсацию мертвого времени, только если вам нужна хорошая точность, и очень простых методов компенсации (таких как добавление постоянного смещения к рабочему циклу) будет достаточно.
Тогда вам нужно будет запрограммировать компенсацию мертвого времени, только если вам нужна хорошая точность, и очень простых методов компенсации (таких как добавление постоянного смещения к рабочему циклу) будет достаточно.
Диапазон слышимости уже упоминался. Обычно вы хотите, чтобы \$f_{PWM}\$ был выше слышимых частот, чтобы избежать шума. Как правило, шум выше 16 кГц считается достаточно слабым, чтобы большинство людей не могли его различить, особенно за обычным механическим шумом работающего двигателя.
\$\конечная группа\$
Зарегистрируйтесь или войдите в систему
Зарегистрируйтесь с помощью Google
Зарегистрироваться через Facebook
Зарегистрируйтесь, используя электронную почту и пароль
Опубликовать как гость
Электронная почта
Требуется, но никогда не отображается
Опубликовать как гость
Электронная почта
Требуется, но не отображается
Нажимая «Опубликовать свой ответ», вы соглашаетесь с нашими условиями обслуживания, политикой конфиденциальности и политикой использования файлов cookie
.
mosfet — Критерии выбора частоты ШИМ для управления скоростью двигателя постоянного тока?
спросил
Изменено 5 лет, 4 месяца назад
Просмотрено 37 тысяч раз
\$\начало группы\$
Я работаю над схемой управления скоростью для коллекторного двигателя постоянного тока (24 В, 500 об/мин, 2 А, 4 кгсм).
Основными компонентами, которые я планирую использовать, являются PIC16f873, оптопара 4n25, IRFZ44N MOSFET, диод BY 500 — 800 (для свободного хода).
- Каковы критерии выбора частоты ШИМ?
- Каково влияние очень высоких и очень низких частот ШИМ на систему?
- Каковы недостатки и усовершенствования представленного здесь оборудования?
- МОП-транзистор
- ШИМ
- Двигатель постоянного тока
- Оптоизолятор
- Управление затвором
\$\конечная группа\$
\$\начало группы\$
Существует несколько проблем, связанных с частотой ШИМ при управлении двигателем:
- Импульсы должны поступать достаточно быстро, чтобы механическая система двигателя усредняла их.
 Обычно для этого достаточно от нескольких десятков Гц до нескольких 100 Гц. Это редко является ограничивающим фактором.
Обычно для этого достаточно от нескольких десятков Гц до нескольких 100 Гц. Это редко является ограничивающим фактором. - В некоторых случаях важно, чтобы на частоте ШИМ не было слышно нытья. Даже если механическая система в целом не реагирует на одиночные импульсы, отдельные обмотки катушки могут. Электродвигатель работает за счет магнитных сил, и каждый виток провода в катушке устроен таким образом, чтобы создавать эти силы. Это означает, что на каждый отрезок провода в обмотке действует боковая сила, пропорциональная току, по крайней мере, часть времени. Провод в обмотках не может двигаться далеко, но все же может достаточно вибрировать, чтобы результат был слышен. Частота ШИМ 1 кГц может быть хорошей во всех других отношениях, но если она входит в устройство конечного пользователя, нытье на этой частоте может быть неприемлемым. По этой причине ШИМ для управления двигателем конечного потребителя часто выполняется на частоте 25 кГц, что немного превышает то, что может услышать большинство людей.

- Средний ток катушки. Это может быть сложной проблемой. Отдельные катушки двигателя будут в основном индуктивными по отношению к цепи возбуждения. Вы хотите, чтобы ток через катушки был в основном таким, как вы ожидаете от среднего значения, применяемого ШИМ, и не увеличивался и не уменьшался существенно каждый импульс.
Каждая катушка будет иметь некоторое конечное сопротивление, что приводит к потере мощности, пропорциональной квадрату тока через нее. Потери будут выше при том же среднем токе, когда есть большое изменение тока в течение импульса. Рассмотрим экстремальный пример катушки, реагирующей на импульсное напряжение почти мгновенно, и вы управляете ею с прямоугольной волной 50%. Резистивное рассеяние будет составлять 1/2 полного включения катушки, при этом средний ток (следовательно, результирующий крутящий момент двигателя) также будет составлять 1/2 полного включения. Однако, если бы катушка управлялась постоянным током 1/2 вместо импульсов, резистивная диссипация составила бы 1/4 от полной шкалы, но с той же 1/2 от полной шкалы тока и, следовательно, крутящего момента.

Другой способ думать об этом состоит в том, что вы не хотите, чтобы значительный переменный ток превышал средний уровень постоянного тока. Переменный ток никак не влияет на движение двигателя, это делает только среднее значение. Таким образом, переменная составляющая вызывает резистивные потери только в катушках и других местах.
- Потери при переключении. Идеальный переключатель либо полностью включен, либо полностью выключен, что означает, что он никогда не рассеивает мощность. Реальные переключатели не переключаются мгновенно и поэтому проводят некоторое конечное время в переходной области, где они рассеивают значительную мощность. Часть работы электроники привода состоит в том, чтобы свести к минимуму это время перехода. Однако независимо от того, что вы делаете, на каждом фронте будет некоторое время, когда переключатель не идеален. Это время обычно фиксируется для каждого фронта, поэтому его доля от общего периода ШИМ увеличивается с частотой. Например, если коммутатор тратит в общей сложности 1 мкс на переход каждого импульса, то при частоте ШИМ 25 кГц, что составляет период 40 мкс, время перехода составляет 1/40 от общего времени.
 Это может быть приемлемо. Однако если бы частота коммутации была увеличена до 100 кГц, что означает период 10 мкс, то время перехода составило бы 10 %. Это, вероятно, вызовет проблемы.
Это может быть приемлемо. Однако если бы частота коммутации была увеличена до 100 кГц, что означает период 10 мкс, то время перехода составило бы 10 %. Это, вероятно, вызовет проблемы.
Что касается вашей схемы, меня больше всего беспокоит то, насколько медленно Q1 будет управляться. Оптоизоляторы, как известно, работают медленно (по сравнению с большинством других компонентов, таких как отдельные транзисторы), особенно при выключении. У вас есть только R2 (хотя я могу прочитать его значение), потянув затвор полевого транзистора, чтобы выключить его. Это будет медленно. Это может быть нормально, если вы можете терпеть медленную частоту ШИМ, учитывая все другие компромиссы, о которых я упоминал выше.
Вы могли бы подумать о том, чтобы поставить PIC со стороны двигателя опто. Вы можете общаться в цифровом виде с этим PIC через интерфейс UART или что-то, что не должно работать на частоте PWM. Затем этот PIC генерирует соответствующий PWM локально и жестко включает и выключает Q1 с помощью дополнительной схемы для этой цели.