Частотный преобразователь, инвертор для асинхронного двигателя
!!!Частотники всегда в наличии на складе в Ставрополе. Звоните, уточняйте цены!!!Многие технологические процессы, протекающие при непосредственном участии электродвигателей, требуют регулировки каких-либо параметров. Это может быть скорость подачи бревна на пилораме, давление или скорость потока в трубопроводе, скорость движения подъемника или транспортера и многое другое.
Наиболее эффективный способ управления скоростью привода – изменение скорости вращения двигателя. В случае асинхронного двигателя это можно сделать при помощи изменения частоты напряжения питания. Для этого и нужен преобразователь частоты (инвертор). Частотное регулирование скорости вращения тем более актуально, что асинхронные электродвигатели сегодня составляют основную массу промышленных электроприводов благодаря своей надежности, компактности и дешевизне. Наша компания может предложить частотный преобразователь разных производителей (Lenze, Omron, Innovert), которые представлены ниже:
Простейший и, пожалуй, самый яркий пример эффективности частотного преобразователя – это управление подачей воды в водопроводной сети. Чаще всего подача воды регулируется с помощью задвижек, которые просто ограничивают пропускную способность трубопровода в определенной точке. При этом насос, подающий воду, продолжает работать с обычной скоростью, потребляя количество энергии, не соответствующее полезной работе.
Чаще всего подача воды регулируется с помощью задвижек, которые просто ограничивают пропускную способность трубопровода в определенной точке. При этом насос, подающий воду, продолжает работать с обычной скоростью, потребляя количество энергии, не соответствующее полезной работе.
Включив электродвигатель насоса через частотный преобразователь, например Innovert ISD222M43B, можно получить существенную экономию электроэнергии (до 50%). В этом случае для уменьшения скорости потока нужно уменьшить частоту вращения насоса. При этом соответственно уменьшается и энергопотребление. Современный частотник способен автоматически регулировать частоту вращения двигателя при помощи встроенного PID-регулятора. Для этого в нем предусматривается возможность управления от внешнего датчика по аналоговому сигналу (4-20 мА или 0-10 В). В нашем случае это датчик давления в напорном трубопроводе.
Используя частотный преобразователь для насоса, можно не только экономить электроэнергию. Плавная регулировка частоты вращения позволяет существенно снизить пусковые токи, уменьшить или вовсе исключить гидроудары, чреватые авариями, обеспечить более стабильное и оптимальное водоснабжение. В результате получается дополнительная экономия ресурсов, не связанных напрямую с расходом энергии.
Плавная регулировка частоты вращения позволяет существенно снизить пусковые токи, уменьшить или вовсе исключить гидроудары, чреватые авариями, обеспечить более стабильное и оптимальное водоснабжение. В результате получается дополнительная экономия ресурсов, не связанных напрямую с расходом энергии.
Все сказанное для водопровода справедливо и для систем вентиляции. Частотный преобразователь для вентилятора позволит обеспечить постоянную подачу воздуха с учетом текущих потребностей.
Невзирая на довольно высокую стоимость систем частотного управления электроприводами, их применение дает хороший экономический эффект. Установка частотных регуляторов на электроприводы окупается от нескольких месяцев до двух лет, в зависимости от условий эксплуатации и загруженности электродвигателя. После этого они приносят чистую прибыль в виде экономии.
Благодаря развитию элементной базы и применению микропроцессоров частотный преобразователь для асинхронного двигателя может выполнять множество функций, связанных с регулированием скорости и крутящего момента на валу.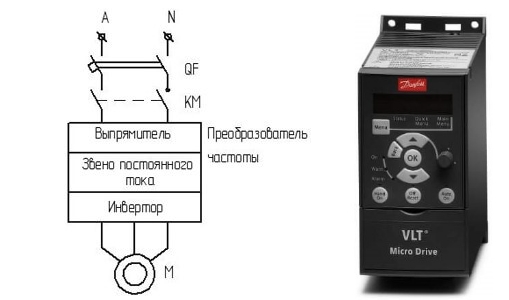
- собственно регулирование скорости или параметра, от нее зависящего;
- экономия электроэнергии по сравнению с другими способами регулирования;
- уменьшение величины пусковых токов до минимально необходимых;
- снижение пиковых нагрузок на механизмы при пуске;
- защита двигателя от перегрузки и перегрева.
Обслуживая двигатель и защищая электропривод от перегрузок, частотный преобразователь и сам нуждается в защите от импульсных скачков напряжения. Для защиты частотника применяется входной дроссель, сглаживающий импульсы, которые может генерировать работающее вблизи мощное оборудование: сварочный трансформатор, электродвигатель, промышленный выпрямитель и пр.
С другой стороны, в силу своего устройства инвертор сам является источником импульсного напряжения. Неидеальная «зазубренная» синусоида его выходного напряжения сглаживается индуктивностью обмоток самого двигателя. Однако при установке мотора на большом расстоянии от преобразователя необходимо использовать выходной дроссель в качестве фильтра между инвертором и двигателем. Обязательна установка дросселя и при «веерном» подключении нескольких электромоторов к преобразователю.
Обязательна установка дросселя и при «веерном» подключении нескольких электромоторов к преобразователю.
В идеале преобразователь должен располагаться непосредственно возле двигателя. Так как большинство частотных преобразователей имеют степень защиты IP20, то он должен устанавливаться в шкаф. Но некоторые модели частотников имеют корпус с высокой пылевлагозащитой. Например, преобразователь частоты Lenze-ACTech, серии SMV, имеют вариант корпуса с IP65, обеспечивая полную пылевлагозащиту.
Обратившись в нашу компанию, Вы получите ответы на все интересующие Вас вопросы касательно применения частотных регуляторов. Также, на нашем складе в г. Ставрополь постоянно поддерживаются все основные мощности инверторов.
Также на нашем сайте вы найдете мотор-редуктор, регулятор температуры, пневмоцилиндр и другое оборудование.
Частотный преобразователь асинхронного двигателя в промышленности
Хотя еще рано сбрасывать со счетов электропривод постоянного тока, в промышленности и бытовой сфере в практически любых технических системах используется сочетание асинхронного двигателя и преобразователя частоты.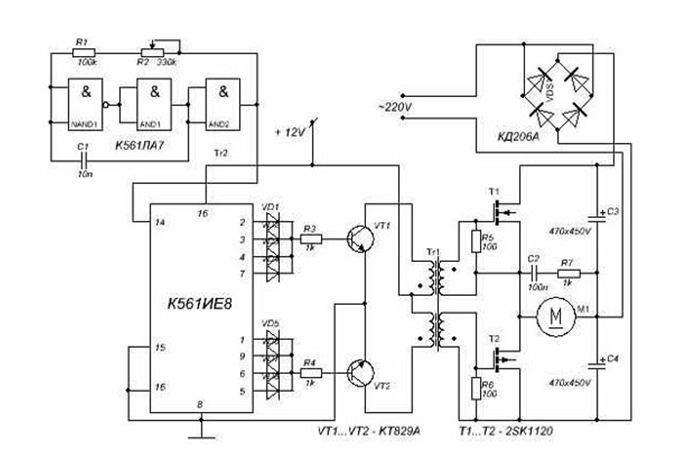 Несмотря на очевидные преимущества асинхронного двигателя перед двигателем постоянного тока, его слабой стороной являлась сложность регулирования скорости вращения. В настоящее время данная проблема устранена благодаря современным частотным преобразователям.
Несмотря на очевидные преимущества асинхронного двигателя перед двигателем постоянного тока, его слабой стороной являлась сложность регулирования скорости вращения. В настоящее время данная проблема устранена благодаря современным частотным преобразователям.
ЧТО ТАКОЕ ЧАСТОТНЫЙ ПРЕОРАЗОВАТЕЛЬ
Говоря простым языком — частотный преобразователь – устройство для управления асинхронным двигателем. Возможно регулирование скорости вращения и другими методами — установкой вариатора, редуктора, муфты, но это не позволяет менять скорость в широком диапазоне, усложнят монтаж и не является энергосберегающим решением.
ЗАЧЕМ НУЖЕН ЧАСТОТНЫЙ ПРЕОБРАЗОВАТЕЛЬ
Частотный преобразователь в случае асинхронных электродвигателей самых различных агрегатах как промышленного, так и потребительского назначения используется для оптимизации управления двигателем, приводящей в итоге к экономии электроэнергии, увеличению срока службы устройства. Использование частотных преобразователей позволяет произвести эффективную, простую и надёжную автоматизацию процесса управления оборудованием.
Основные задачи, которые решает преобразователь частоты, кроме увеличения/уменьшения скорости вращения это:
- Плавный пуск и плавный останов двигателя, что позволяет избежать высоких механических нагрузок на оборудование.
- Уменьшение затрат электроэнергии, что актуально не только для больших промышленных предприятий, но при бытовом использовании в составе насосной станции на даче, например.
- Защита от перегрузки двигателя, что продлевает срок его эксплуатации.
- Сохранение высокого крутящего момента на низких оборотах, что очень важно при тяжелом пуске (например, в составе оборудования дробилок для щебня)
И как говорилось выше, всё, что связано с управлением скоростью вращения – изменяемое или адаптивное вращение (пример: линии конвейера, где вращение может быть задано с непостоянной скоростью). Высокая точность вращения – что важно при использовании на различных обрабатывающих станках.
УСТРОЙСТВО ЧАСТОТНОГО ПРЕОБРАЗОВАТЕЛЯ
Как на заре появления транзисторных радиоприёмников в народе их стали называть просто “транзисторами”, по названию основного электронного компонента этих устройств, так и название “частотный преобразователь” нельзя считать совсем точным.
На самом деле мы рассматриваем устройство, состоящее из выпрямительного модуля, преобразующего переменный ток на входе в постоянный, и модуля преобразователя частоты, преобразующего полученный на выходе выпрямительного модуля постоянный ток в переменный заданной частоты и амплитуды, возможно ШИМ-модулированный.
Само же это устройство в целом является одним из компонентов электропривода.
ПРИНЦИП РАБОТЫ ЧАСТОТНОГО ПРЕОБРАЗОВАТЕЛЯ
В зависимости от технических деталей принципа управления, частотные преобразователи условно подразделяются на “векторные” и “скалярные”. Первые отличаются в основном более стабильным поддержанием момента вращения двигателя в широком диапазоне частот (числа оборотов).
Скалярное управление наиболее распространено и максимально удовлетворяет требованиям таких механизмов, как насосы, вентиляторы, компрессоры, а также тех, для которых важно поддерживать скорость вращения. Метод довольно прост, но имеет небольшой диапазон регулирования скорости и требует установки дополнительных датчиков для реализации управления по скорости и моменту.
Разнообразие векторных вариантов управления впечатляет, но может быть условно разделено на две группы:
- Управление по вектору тока (довольно простой метод, присущий абсолютному большинству преобразователей)
- Управление по вектору напряжения. Основано на том, что напряжение пропорционально моменту, что позволяет без дополнительных пересчетов получить управление последней характеристикой.
Все остальные методы, по большому счету, являются их дополнением, каждый производитель совершенствует по своему усмотрению расчеты и измерения таких показателей, как индуктивность, намагниченность, вектор электромагнитного поля и т. д.
д.
Собственно детали методов управления являются весьма сложными, а сами методы постоянно совершенствуются. Важным моментом при выборе частотного преобразователя является знание потенциальным потребителем минимальных требований, которые налагает объект управления (вентилятор, насос, конвейер и т.д.). Это позволит с одной стороны не переплачивать за преобразователь с ненужными свойствами, а с другой – не оказаться в ситуации, когда привод, скомпонованный из частотника и асинхронного двигателя, не обеспечивает должное функционирование объекта управления.
ВИДЫ ЧАСТОТНЫХ ПРЕОБРАЗОВАТЕЛЕЛЕЙ
Помимо определения способа управления, который определяется техническими требованиями оборудования и стоимостью частотного преобразователя, необходимо знать мощность и тип подключения к двигателю, то есть количество фаз на входе и выходе.
На предприятиях используется напряжение 380В, соответственно частотник подбирается 3 фазы вход 380В, 3 фазы выход 380В.
Для бытового использования, где напряжение 230В, подходит преобразователь частоты с 1 фазой вход 230, 3 фазы выход 230В. Максимально допустимая мощность таких частотников 3,7 кВт. https://www.technowell.ru/catalog/innovert/odnofaznye_INNOVERT/chastotnyy-preobrazovatel-innovert-2-…
Так же большинство производителей выпускает линейки подготовленные для специального использования, например с вентиляторами: https://www.technowell.ru/catalog/innovert/seriya-dlya-ventilyatsii/chastotnyy-preobrazovatel-innove…
Или насосами: https://www.technowell.ru/catalog/innovert/seriya-dlya-nasosov/trekhfaznye-INNOVERT-IHD/chastotnyy-p… где уже выставлены определенные настройки, характерные при использовании с данным оборудованием.
Преобразователь частоты для асинхронного двигателя
a:2:{s:4:»TEXT»;s:13510:»Назначение частотного преобразователя для асинхронных двигателейИспользование механических устройств для регулирования может привести к ударным пусковым нагрузкам, которые окажут отрицательное влияние на их эксплуатационный срок, а также приведут к существенным энергопотерям.

Чтобы исключить перечисленные отрицательные влияния на промышленное оборудование, была создана возможность заменить механическое регулирование на электронное. Достичь этого удалось в результате серьезных исследовательских работ.
Так, появился преобразователь частот нового класса, предназначенный специально для асинхронных двигателей.
Это https://techtrends.ru/catalog/preobrazovateli-chastoty/» target=»_blank»>частотные преобразователи для асинхронных двигателей с широтно-импульсным управлением (ШИМ), которые снижают пусковой ток в 4-5 раз. А также позволяют осуществить плавный пуск асинхронного двигателя. При этом управление приводом осуществляется по формуле напряжение/частота.
Преобразователь частоты для асинхронного двигателя позволяет экономить электроэнергию на 50%. Также благодаря использованию частотника становится возможной обратная связь между смежными приводами, следовательно, оборудование самонастраивается на выполнение поставленных задач и изменяются условия работы всей системы.

Принцип работы
Преобразователь частоты для асинхронного двигателя с ШИМ, по сути, является инвентором с двойным преобразованием напряжения.
Входной диодный мост выпрямляет сетевое напряжение 220 или 380В, а затем сглаживает и фильтрует его посредством конденсатора.
Далее посредством входных мостовых ключей и микросхем из постоянного напряжения формируется последовательность электрических сигналов определенной частоты и скважности. Таким образом, на выходе из частотного преобразователя образуются пучки прямоугольных импульсов. Однако, благодаря индуктивности обмоток асинхронного двигателя, они превращаются в напряжение, схожее с синусоидным.
В устройстве также имеется микропроцессор, который дает возможность выполнять такие задачи, как:
контроль выходных параметров;
защита системы;
диагностика состояния подаваемого тока.
Большинство преобразователей частоты для асинхронных двигателей построены на основе двойного преобразования.
с созданием промежуточного звена;
с непосредственной связью.
Каждый из видов частотников предназначен для работы в определенных условиях, которые диктуют выбор и целесообразность использования в конкретной ситуации.
Выпрямители управляемого типа обеспечивают непосредственную связь, отпирая группы тиристоров, и обеспечивают подвод напряжения к обмотке электродвигателя.
Преобразование напряжения в данном случае осуществляется посредством вырезания синусоид из входного тока. При этом полученная частота находится в диапазоне от 0 до 30Гц. Для регулируемых приводов этот вариант использования не подходит.
Для использования незапираемых тиристоров необходимо создание более сложной системы управления, которая повышает стоимость создаваемой цепи.
В противном случае, синусоида при входе может привести:
к появлению гармоник;
к потерям в электродвигателе;
к перегреву электродвигателя;
к снижению показателя крутящего момента;
к образованию сильных помех.

Помимо этого, компенсаторы повышают стоимость цепи, габаритов и веса, а потери снижают КПД.
К другому классу относятся цепи питания, где используются частотные преобразователи для асинхронных двигателей с промежуточным звеном. Они обеспечивают преобразование электрического тока в два этапа.
На первом этапе синусоидное напряжение с постоянной частотой и амплитудой преобразуется посредством выпрямления. При этом применяются специальные фильтры, сглаживающие показатели.
На втором этапе посредством инвертора на выходе происходит преобразование энергии с изменяемым показателем частоты и амплитуды.
Это приводит:
к снижению КПД;
к ухудшению показателей соотношения массы и габаритов устройства.
Частотные преобразователи для асинхронных двигателей, работающие как тиристор, имеют следующие преимущества:
обеспечивают возможность работы в системах с большими показателями тока;
такая система предназначена для использования там, где имеются большие показатели тока;
они устойчивы к большим нагрузкам и импульсному воздействию;
обеспечивают высокий КПД, достигающий 98 %.

Мы перечислили все особенности каждого типа преобразователей частоты для асинхронных двигателей, теперь, попробуем выяснить, на чем следует основываться при выборе частотника.
Критерии выбора
Преобразователи частоты для асинхронных двигателей следует использовать лишь с учетом их технических характеристик.
Важными характеристиками, на которые необходимо обратить внимание, являются следующие:
Диапазон напряжения подаваемого тока. Сегодня существуют модели частотников, работающие при различном напряжении. Диапазон напряжения может составлять 100-120В или 200-240В. Исходя из этого показателя, следует выбирать преобразователь.
Номинальная мощность электродвигателя, которая измеряется в кВт.
Полная мощность электродвигателя.
Номинальный выходной ток.
Выходное напряжение, которое часто не превышает показатель напряжения источника питания, а иногда бывает и меньше.
Диапазон выходной частоты.

Допустимая сила тока на выходе.
Частота тока при входе.
Максимальный показатель отклонений, который допускается при определенных условиях.
Эти параметры указываются в документации к преобразователю, и их необходимо учитывать. В противном случае, например, если не учтен показатель напряжения подаваемого тока, то устройство выйдет из строя.
Способы подключения
Выбор варианта подключения преобразователя частоты для асинхронных двигателей зависит от цели его применения, например, необходимости обеспечения более легкого пуска или необходимости регулировки частоты вращения двигателя.
Наиболее простой схемой подключения является установка автомата отключения перед частотником. При этом автомат должен быть рассчитан на номинальную величину напряжения, потребляемого электродвигателем.
Поскольку большинство двигателей питаются от трехфазной сети, то можно выбрать трехфазный автомат, который обеспечивает отключение двух фаз в случае, когда происходит короткое замыкание в одной из фаз.

При использовании однофазного частотного преобразователя для асинхронных двигателей, следует установить автомат, рассчитанный на утроенный ток в одной фазе.
После установки автомата, следует осуществить подключение фазных проводов к клеммам двигателя, а также подключить в цепь тормозной ресивер. После частотного преобразователя в цепь устанавливается вольтметр, который измеряет напряжение на выходе.
Для того чтобы осуществить правильное подключение частотного преобразователя, следует изучить инструкцию, которая прилагается к моделям частотников. Точное соблюдение инструкции позволит легко осуществить подключение преобразователя частоты к электродвигателю.
«;s:4:»TYPE»;s:4:»HTML»;}
Частотный регулятор скорости для асинхронного электродвигателя
Асинхронный двигатель одно- или трехфазного тока – один из самых распространенных как в промышленности, так и среди бытовых пользователей, где он может являться основой насосов и маломощных агрегатов различного назначения. К его достоинствам относят:
· надежность, связанную с отсутствием щеточного узла;
· простоту изготовления;
· невысокую стоимость;
· высокий КПД в штатном режиме работы.
О надежности этого оборудования лучше всяких слов говорит то, что на многих объектах можно встретить исправно работающие моторы, которые введены в эксплуатацию более 50 лет назад. Есть у электродвигателей этого типа и ряд недостатков. К самым существенным относятся:
· низкий крутящий момент на старте;
· ограничение максимальной скорости вращения, зависящее от частоты питающей электросети;
· сложность регулировки скорости вращения электромотора.
Применение частотных преобразователей для двигателей, рассчитанных на работу с напряжением 220В, 380В и выше устраняет или уменьшает все перечисленные недостатки и позволяет добавить в систему с такими двигателями новый функционал.
До применения частотного принципа управления асинхронным мотором при необходимости регулировать скорость использовалось несколько вариантов управления скоростью вращения таких двигателей:
· механическое с помощью редуктора. Своеобразная коробка передач – решение сложное, дорогое, требующее регулярного обслуживания и ремонта. Также понижает общий КПД системы;
· ступенчатое изменение питающего напряжения с помощью трансформатора. Позволяет управлять мощностью двигателя, однако вводит его в нештатный режим, вызывает нагрев. Точная установка скорости вращения в таких системах практически невозможна;
· электронное с отсеканием части полупериода питающего напряжения с помощью тиристорной схемы. Позволяет регулировать мощность, однако такой принцип управления создает вибрации и также не позволяет точно управлять частотой вращения.
Современные технологии регулировки частоты вращения и мощности предусматривают, в большинстве случаев, использование частотного регулятора на полупроводниковых ключах.
Принцип работы частотного регулятора
Принцип, положенный в основу работы любого современного частотного преобразователя, очень прост:
-
во-первых, нужно выпрямить входное напряжение;
-
во-вторых, его следует отфильтровать и стабилизировать;
-
и, в-третьих, нужно сгенерировать питающее напряжение, по форме близкое к синусоидальному, требуемой частоты и амплитуды.
Этот подход позволяет исключить изменение режима работы привода при колебаниях напряжения в сети и получить возможность точной регулировки скорости вращения и выходной мощности. Такой принцип регулировки применим как к однофазным электромоторам, для которых требуется одна такая схема, так и к трехфазным асинхронным электродвигателям, требующих три группы таких выпрямителей-преобразователей с синхронизацией их работы для получения трехфазного выходного напряжения с заданным сдвигом.
Схемотехника современных преобразователей частоты
С появлением мощных полупроводниковых компонентов, способных управлять высоким напряжением и большими токами схемотехнические решения блоков регулировки частоты стали строиться достаточно просто. Так, для работы в цепях с напряжением на выходе инвертора до 690 В, с успехом применяются схемы на тиристорах и IGBT-транзисторах, которые стоят дороже, но обеспечивают более «чистый» выход. В таких схемах управления на каждую фазу устанавливают по два ключа с соответствующей управляющей обвязкой. Для удешевления конструкции на выходе обычно не используют фильтры для подавления гармоник, поскольку к выходу подключается индуктивная нагрузка.
Для высоковольтных электродвигателей может использоваться такой же принцип с усложненной схемотехникой. Питание на выходе каждой фазы формируется последовательно подключенными модулями, каждый из которых формирует свой участок выходной синусоиды, а общее напряжение формируется как сумма напряжений на выходе каждого модуля.
Существуют также бестрансформаторные преобразователи и прямые преобразователи частоты без блока выпрямления и фильтрации. Каждое схемотехническое решение имеет свои достоинства и недостатки, которые следует учитывать при выборе. Однако сам блок преобразователя, по какой бы схеме он не был построен, требует еще достаточно сложной автоматики управления режимами работы.
Автоматика управления работой частотного преобразователя
Регулирование режимом работы двигателя через частотный преобразователь выполняется сложной автоматикой управления, которая в большинстве моделей современных частотников строится на основе микроконтроллера или микропроцессора.
Система управления выполняет целый ряд функций, которые значительно расширяют возможности систем на основе асинхронных двигателей. К ним могут относиться:
· программы плавного пуска и остановки электромотора;
· защитное отключение при перегрузках, перегреве и заклинивании;
· модули сопряжения с системой централизованной диспетчеризации;
· возможность подключения внешних датчиков обратной связи, позволяющих управлять работой двигателя для поддержания стабильного состояния системы, например, скорости потока воздуха или давления воды;
· возможность работы по заранее заданной программе.
На рынке сегодня представлены сотни моделей частотных преобразователей для управления асинхронными электромоторами. Причем представлены как универсальные серии, так и специализированные, например, для лифтового, насосного или вентиляционного оборудования, что несколько упрощает выбор. Если вам необходима помощь в выборе оптимальной модели частотного преобразователя для управления асинхронным двигателем, вы всегда можете обратиться к сотрудникам нашей компании.
вернуться в блог
Что такое преобразователь частоты и для чего он нужен?
Для регулирования работы асинхронного двигателя с целью не допустить снижения его КПД применяют специальные устройства – частотные преобразователи. Их работа заключается в том, что они плавно изменяют скорость вращения двигателя, с помощью смены частоты питающего напряжения.
В данной статье мы постараемся рассмотреть ряд незаметных, на первый взгляд, особенностей в работе асинхронного электродвигателя и проанализируем, насколько важно в ходе его эксплуатации использовать частотный преобразователь.
Что может привести к неисправности?
В асинхронном двигателе напряжение для работы чаще всего поступает через последовательно включенный автоматический выключатель. То сесть данный способ запуска двигателя по другому называется — плавный пуск. Таким образом это провоцирует высокий рост тока пусковой обмотки, что для оборудования закончится весьма плачевно.
Частотный преобразователь имеет к этому важное отношение – он контролирует ток электродвигателя. Формируя необходимое напряжение нужной амплитуды и частоты, частотник подает их на двигатель. Поясним – в процессе его запуска преобразователь отдает не полную частоту, скажем, в 50 Герц, а где-то 0,1Гц (или чуть больше). То же самое и с напряжением – не все 220 В или 380 В, а около 20-30 (смотря, какие выставлены настройки).
Принцип работы преобразователя частоты для электродвигателя
Все это позволяет пропускать через обмотку статора ток оптимального значения, не выше номинального показателя, чтобы создать магнитное поле, которое, в свою очередь, вместе с созданным в обмотке током создаст крутящий момент. Что касается принципов изменения характеристик напряжения, то подробно об этом, а также о критериях выбора частотника, вы можете прочесть здесь, в одной из других наших статей. Кстати, если говорить о критериях выбора, то отметим также, что выходные токи преобразователя частоты должны быть ниже тока полного режима нагрузки.
Что касается принципов изменения характеристик напряжения, то подробно об этом, а также о критериях выбора частотника, вы можете прочесть здесь, в одной из других наших статей. Кстати, если говорить о критериях выбора, то отметим также, что выходные токи преобразователя частоты должны быть ниже тока полного режима нагрузки.
Выше мы описывали старт двигателя. Что касается разгона, то в ходе этого процесса преобразователь плавно повышает частоту и величину поступаемого напряжения, тем самым разгоняя двигатель. Главное – настроить частотник таким образом, чтобы времени на разгон уходило как можно меньше, а ток обмотки статора не был выше её номинального значения. Кроме того, важно поддерживать достаточный крутящий момент на валу.
Почему без преобразователя не обойтись? Главные преимущества его использования
Итак, преобразователь частоты дает следующие преимущества при управлении асинхронным двигателем:
- Плавный пуск и остановка электропривода
- Управление производительностью оборудования
- Установка оптимальных режимов работы
- Взаимное согласование электроприводов в сложных системах
Самые важные – это 1 и 2 пункты. Почему именно они?
Почему именно они?
Плавный пуск позволяет наращивать скорость постепенно, что позволяет не допустить скачков тока. Неконтролируемые скачки опасны, так как при прямом пуске они превышают номинальные показатели в 5-7 раз, что может спровоцировать высокую нагрузку на электросеть, защитит оборудование от перегрузок и сэкономит деньги на затратах электроэнергии.
Что касается управления производительностью, то в этом случае преобразователь частоты контролирует скорость работы электродвигателя с учетом «реальных нужд» в системе в целом. Это также помогает напрасно не тратить энергию и гарантирует её экономию в 30-60%.
Помимо 4-х основных преимуществ описанных выше, использование преобразователя обеспечивает следующие преимущества:
- Понижение величины пусковых токов в 4-6 раз
- Регулировка частоты и напряжения с экономией до 50% электроэнергии
- Самостоятельное выключение контактора, снятие напряжения и с его плавной подачей в звено постоянного тока
- Устранение ударных нагрузок, защита двигателя от механической перегрузки, либо недогрузки
- Понижение общего числа ненужных отключений при ударных нагрузках
- Обеспечение нужной величины и частоты при запуске оборудования, поддержание обратной связи смежных приводов
- Контроль скорости вращения ротора и анализ работы двигателя
Классификация частотных преобразователей
В первую очередь, данные устройства различаются по режимам работы:
- Амплитудно-частотное регулирование (скалярное) – применяются в обычных установках с вентиляторами, насосами, тележками, транспортерами и т.
 д. где не требуется стабилизация оборотов двигателя
д. где не требуется стабилизация оборотов двигателя - Векторное регулирование – используются на любом оборудовании, где возможны резкие изменения крутящего момента на валу, причем в большом диапазоне и где нужна высокая стабильность оборотов на валу электродвигателя.
По типу питания:
- Низковольтный 0,4 кВ
- Среднее напряжение 0,69 кВ
- Высоковольтный 6 и 10 кВ
Также данные устройства бывают с промежуточным звеном (связью) и без него. О характере работы таких устройств читайте тут, в ещё одной нашей статье.
Настройка
Настройка преобразователей выполняется строго по инструкции производителя и с учетом особенностей задачи, которая решается посредством оборудования, в котором установлен двигатель.
Например, если применяется асинхронный двигатель скалярного типа, то амплитуду сигнала и выходную частоту устанавливают по определенной формуле. Для других видов двигателя обычно используют датчики скорости вращения вала двигателя. Последовательность этапов алгоритма настройки мы перечислили здесь, в другом нашем материале.
Для других видов двигателя обычно используют датчики скорости вращения вала двигателя. Последовательность этапов алгоритма настройки мы перечислили здесь, в другом нашем материале.
Можно ли отказаться от частотных преобразователей?
Можно. Но лучше этого не делать. Безусловно, скорость вращения можно также регулировать и при помощи гидравлической муфты или механического вариатора и других. Но данные приспособления неэкономичны (а в промышленности это крайне важно!), у них узкий диапазон регулирования, что доставляет серьезные неудобства в ходе эксплуатации, а также они гораздо быстрее выйдут из строя.
Итоги: почему нужно использовать преобразователи частоты?
Вот основной перечень преимуществ для работы оборудования, которые вы получаете, используя преобразователи:
- Плавный пуск и плавную остановку оборудования
- Эффективную защиту от перегрузок и бросков напряжения
- Возможность эксплуатации оборудования с большими номинальными сетевыми напряжениями и токами
- Понижение энергопотребления
- Стабильность технологического процесса и улучшение КПД
Итак, это наиболее важная информация о частотных преобразователях, которую мы хотели до вас донести. В завершение скажем о том, от чего зависит стоимость и на что стоит обращать внимание при выборе. Это такие факторы, как марка производителя, модель и тип управления преобразователем. Также стоит обращать внимание при выборе на тип и уровень мощности двигателя, его диапазон и точность, а также степень точности поддержки крутящего момента.
В завершение скажем о том, от чего зависит стоимость и на что стоит обращать внимание при выборе. Это такие факторы, как марка производителя, модель и тип управления преобразователем. Также стоит обращать внимание при выборе на тип и уровень мощности двигателя, его диапазон и точность, а также степень точности поддержки крутящего момента.
Преобразователи частоты | INSTART
Данная политика конфиденциальности относится к сайту под доменным именем instart-info.ru. Эта страница содержит сведения о том, какую информацию мы (администрация сайта) или третьи лица могут получать, когда вы пользуетесь нашим сайтом.
Данные, собираемые при посещении сайта
Персональные данные
Персональные данные при посещении сайта передаются пользователем добровольно, к ним могут относиться: имя, фамилия, отчество, номера телефонов, адреса электронной почты, адреса для доставки товаров или оказания услуг, реквизиты компании, которую представляет пользователь, должность в компании, которую представляет пользователь, аккаунты в социальных сетях; поля форм могут запрашивать и иные данные.
Эти данные собираются в целях оказания услуг или продажи товаров, связи с пользователем или иной активности пользователя на сайте, а также, чтобы отправлять пользователям информацию, которую они согласились получать.
Мы не проверяем достоверность оставляемых данных, однако не гарантируем качественного исполнения заказов или обратной связи с нами при некорректных данных.
Данные собираются имеющимися на сайте формами для заполнения (например, регистрации, оформления заказа, подписки, оставления отзыва, обратной связи и иными).
Формы, установленные на сайте, могут передавать данные как напрямую на сайт, так и на сайты сторонних организаций (скрипты сервисов сторонних организаций).
Также данные могут собираться через технологию cookies (куки) как непосредственно сайтом, так и скриптами сервисов сторонних организаций. Эти данные собираются автоматически, отправку этих данных можно запретить, отключив cookies (куки) в браузере, в котором открывается сайт.
Не персональные данные
Кроме персональных данных при посещении сайта собираются не персональные данные, их сбор происходит автоматически веб-сервером, на котором расположен сайт, средствами CMS (системы управления сайтом), скриптами сторонних организаций, установленными на сайте. К данным, собираемым автоматически, относятся: IP адрес и страна его регистрации, имя домена, с которого вы к нам пришли, переходы посетителей с одной страницы сайта на другую, информация, которую ваш браузер предоставляет добровольно при посещении сайта, cookies (куки), фиксируются посещения, иные данные, собираемые счетчиками аналитики сторонних организаций, установленными на сайте.
К данным, собираемым автоматически, относятся: IP адрес и страна его регистрации, имя домена, с которого вы к нам пришли, переходы посетителей с одной страницы сайта на другую, информация, которую ваш браузер предоставляет добровольно при посещении сайта, cookies (куки), фиксируются посещения, иные данные, собираемые счетчиками аналитики сторонних организаций, установленными на сайте.
Эти данные носят неперсонифицированный характер и направлены на улучшение обслуживания клиентов, улучшения удобства использования сайта, анализа посещаемости.
Предоставление данных третьим лицам
Мы не раскрываем личную информацию пользователей компаниям, организациям и частным лицам, не связанным с нами. Исключение составляют случаи, перечисленные ниже.
Данные пользователей в общем доступе
Персональные данные пользователя могут публиковаться в общем доступе в соответствии с функционалом сайта, например, при оставлении отзывов, может публиковаться указанное пользователем имя, такая активность на сайте является добровольной, и пользователь своими действиями дает согласие на такую публикацию.
По требованию закона
Информация может быть раскрыта в целях воспрепятствования мошенничеству или иным противоправным действиям; по требованию законодательства и в иных случаях, предусмотренных законом.
Для оказания услуг, выполнения обязательств
Пользователь соглашается с тем, что персональная информация может быть передана третьим лицам в целях оказания заказанных на сайте услуг, выполнении иных обязательств перед пользователем. К таким лицам, например, относятся курьерская служба, почтовые службы, службы грузоперевозок и иные.
Сервисам сторонних организаций, установленным на сайте
На сайте могут быть установлены формы, собирающие персональную информацию других организаций, в этом случае сбор, хранение и защита персональной информации пользователя осуществляется сторонними организациями в соответствии с их политикой конфиденциальности.
Сбор, хранение и защита полученной от сторонней организации информации осуществляется в соответствии с настоящей политикой конфиденциальности.
Как мы защищаем вашу информацию
Мы принимаем соответствующие меры безопасности по сбору, хранению и обработке собранных данных для защиты их от несанкционированного доступа, изменения, раскрытия или уничтожения, ограничиваем нашим сотрудникам, подрядчикам и агентам доступ к персональным данным, постоянно совершенствуем способы сбора, хранения и обработки данных, включая физические меры безопасности, для противодействия несанкционированному доступу к нашим системам.
Ваше согласие с этими условиями
Используя этот сайт, вы выражаете свое согласие с этой политикой конфиденциальности. Если вы не согласны с этой политикой, пожалуйста, не используйте наш сайт. Ваше дальнейшее использование сайта после внесения изменений в настоящую политику будет рассматриваться как ваше согласие с этими изменениями.
Отказ от ответственности
Политика конфиденциальности не распространяется ни на какие другие сайты и не применима к веб-сайтам третьих лиц, которые могут содержать упоминание о нашем сайте и с которых могут делаться ссылки на сайт, а также ссылки с этого сайта на другие сайты сети Интернет. Мы не несем ответственности за действия других веб-сайтов.
Мы не несем ответственности за действия других веб-сайтов.
Изменения в политике конфиденциальности
Мы имеем право по своему усмотрению обновлять данную политику конфиденциальности в любое время. В этом случае мы опубликуем уведомление на главной странице нашего сайта. Мы рекомендуем пользователям регулярно проверять эту страницу для того, чтобы быть в курсе любых изменений о том, как мы защищаем информацию пользователях, которую мы собираем. Используя сайт, вы соглашаетесь с принятием на себя ответственности за периодическое ознакомление с политикой конфиденциальности и изменениями в ней.
Как с нами связаться
Если у вас есть какие-либо вопросы о политике конфиденциальности, использованию сайта или иным вопросам, связанным с сайтом, свяжитесь с нами:
8 800 222 00 21
Частотные преобразователи | Компания ЭЛИТА
Чтобы сделать заказ быстро, по самым низким ценам, свяжитесь с нами по указанным телефонам:
Вся Россия 8 (800) 550-00-82
Москва 8 (495) 648-78-02
Санкт-Петербург 8 (812) 334-42-04
Электронная почта: electrika@elitacompany. ru
ru
Частотные преобразователи
Частотный преобразователь — устройство, которое в комплекте с асинхронным двигателем переменного тока способно служить полноценной заменой двигателю постоянного тока. Как известно, частота вращения ротора двигателя постоянного тока достаточно просто регулируется, но сам двигатель ненадежен в эксплуатации, энергозатратен и имеет большие габариты и стоимость. Асинхронный электродвигатель, в отличие от двигателя постоянного тока, дешев, надежен, имеет небольшие размеры и может эксплуатироваться в сильно запыленной и взрывоопасной среде. При этом асинхронные двигатели имеют существенные недостатки – невозможность регулирования частоты вращения ротора и пусковой ток, в несколько раз превышающий номинальный. Известные механические схемы ликвидации этих проблем (с использованием вариаторов, редукторов, дросселей), приводят к резкому увеличению стоимости электропривода, большим потерям энергии и низкой эффективности. Поэтому чаще всего для регулирования частоты асинхронного двигателя и избавления от пусковых токов используют частотный преобразователь.
Поэтому чаще всего для регулирования частоты асинхронного двигателя и избавления от пусковых токов используют частотный преобразователь.
Современный частотный преобразователь двигателя высокотехнологичен, имеет невысокую стоимость, прост в эксплуатации, и, благодаря широкому модельному ряду и вариативности способов электронного управления, легко встраивается в любую технологическую схему. Кроме того, он уменьшает энергопотребление и механическую нагрузку на электродвигатель, что увеличивает срок его эксплуатации.
Частотный преобразователь двигателя имеет несколько видов классификации.
По типу преобразования энергии он может быть одноступенчатым и двухступенчатым. Второй тип более распространен и включает частотные преобразователи, в которых электрическая знергия преобразуется два раза. Вначале с помощью выпрямителя, преобразующего переменный ток в постоянный, а затем — инвертора, делающего обратное преобразование.
В зависимости от способа управления асинхронным двигателем, преобразователи частоты делятся на скалярные и векторные.
В преобразователе частоты со скалярным методом управления отношение максимального момента двигателя к моменту сопротивления на валу поддерживается постоянным, а любое изменение частоты приводит к изменению напряжения. Преобразователь частоты такого типа имеет диапазон регулирования скорости вращения ротора 1:40 и чаще всего используется в вентиляторных, насосных системах или системах управления несколькими двигателями.
Векторный частотный преобразователь может не только увеличить диапазон регулирования скорости ротора до 1:1000, но также точность и быстродействие управления. Принцип действия такого преобразователя частоты связан с непосредственным управлением вращающим моментом асинхронного двигателя, при котором учитывается не только фаза и амплитуда статорного тока, но и его вектор.
Стандартная электрическая схема частотного преобразователя включает выпрямитель и инвертор — для прямого и обратного преобразования переменного тока, а также микропроцессоры и IBGT-транзисторы для широтно-импульсной модуляции (ШИМ), которая позволяет регулировать выходное напряжение без изменения входного. Такая схема преобразователя относится к наиболее распространенной среди компаний – производителей, так как использует новую элементную базу, позволяющую снизить цену частотного преобразователя.
Такая схема преобразователя относится к наиболее распространенной среди компаний – производителей, так как использует новую элементную базу, позволяющую снизить цену частотного преобразователя.
К ведущим мировым производителям преобразователей частоты относятся компании Schneider Electric и Danfoss, продукция которых широко представлена в нашем прайс каталоге. Цена частотного преобразователя не превышает стоимостной предел, обычный для приборов этого класса, и быстро окупается. Это связано, в первую очередь с высокой эффективностью частотного преобразователя и 50% экономией энергии при его использовании.
Вся предлагаемая продукция компаний Danfoss и Schneider Electric сертифицирована.
Данные обновлены 14.08.21 Рублевые цены расcчитаны по курсу ЦБ +5% 1€ = 90,663 р. 1$ = 77,2455 р.
Зачем двигателю переменного тока преобразователь частоты?
Что такое преобразователь частоты?
Проще говоря, преобразователь частоты — это устройство преобразования энергии.
 Преобразователь частоты преобразует базовую синусоидальную мощность с фиксированной частотой и фиксированным напряжением (сетевое питание) в выходной сигнал переменной частоты и переменного напряжения, используемый для управления скоростью асинхронных двигателей.
Преобразователь частоты преобразует базовую синусоидальную мощность с фиксированной частотой и фиксированным напряжением (сетевое питание) в выходной сигнал переменной частоты и переменного напряжения, используемый для управления скоростью асинхронных двигателей.Зачем нужен преобразователь частоты?
Основная функция преобразователя частоты в водной среде — экономия энергии.За счет управления скоростью насоса вместо регулирования потока с помощью дроссельных клапанов можно значительно сэкономить энергию. Например, снижение скорости на 20% может дать экономию энергии на 50%. Ниже описывается снижение скорости и соответствующая экономия энергии. Помимо экономии энергии, значительно увеличивается срок службы крыльчатки, подшипников и уплотнений.
Преобразователи частоты
Доступные во многих различных типах преобразователи частоты предлагают оптимальный метод согласования производительности насоса и вентилятора с требованиями системы.Чаще всего используется преобразователь частоты.
 Он преобразует стандартную мощность предприятия (220 В или 380 В, 50 Гц) в регулируемое напряжение и частоту для питания двигателя переменного тока. Частота, применяемая к двигателю переменного тока, определяет скорость двигателя. Двигатели переменного тока обычно представляют собой такие же стандартные двигатели, которые могут быть подключены к сети переменного тока. За счет включения байпасных пускателей работа может поддерживаться даже в случае выхода инвертора из строя. Преобразователи частоты
Он преобразует стандартную мощность предприятия (220 В или 380 В, 50 Гц) в регулируемое напряжение и частоту для питания двигателя переменного тока. Частота, применяемая к двигателю переменного тока, определяет скорость двигателя. Двигатели переменного тока обычно представляют собой такие же стандартные двигатели, которые могут быть подключены к сети переменного тока. За счет включения байпасных пускателей работа может поддерживаться даже в случае выхода инвертора из строя. Преобразователи частоты также обладают дополнительным преимуществом — увеличенным сроком службы подшипников и уплотнений насоса. Поддерживая в насосе только давление, необходимое для удовлетворения требований системы, насос не подвергается воздействию более высоких давлений, чем необходимо.Следовательно, компоненты служат дольше.
Те же преимущества, но в меньшей степени, применимы и к вентиляторам, работающим от преобразователей частоты.
Для достижения оптимальной эффективности и надежности многие специалисты по спецификациям получают от производителей подробную информацию об эффективности преобразователя частоты, требуемом техническом обслуживании, диагностических возможностях преобразователя частоты и общих рабочих характеристиках. Затем они проводят подробный анализ, чтобы определить, какая система даст наилучшую окупаемость инвестиций.
Затем они проводят подробный анализ, чтобы определить, какая система даст наилучшую окупаемость инвестиций.
Дополнительные преимущества преобразователей частоты
Помимо экономии энергии и лучшего управления технологическим процессом преобразователи частоты могут обеспечить и другие преимущества:
- Преобразователь частоты может использоваться для управления технологической температурой, давлением или расходом без использования отдельного контроллера. Соответствующие датчики и электроника используются для сопряжения управляемого оборудования с преобразователем частоты.
- Затраты на техническое обслуживание могут быть снижены, поскольку более низкие рабочие скорости приводят к увеличению срока службы подшипников и двигателей.
- Устранение дроссельных клапанов и заслонок также устраняет необходимость обслуживания этих устройств и всех связанных с ними элементов управления.
- Устройство плавного пуска для двигателя больше не требуется.

- Контролируемая скорость нарастания в жидкостной системе может устранить проблемы гидравлического удара.
- Способность преобразователя частоты ограничивать крутящий момент до уровня, выбранного пользователем, может защитить приводимое оборудование, которое не может выдерживать чрезмерный крутящий момент.
Анализировать систему в целом
Поскольку процесс преобразования входящей мощности с одной частоты на другую приведет к некоторым потерям, экономия энергии всегда должна происходить за счет оптимизации производительности всей системы. Первым шагом в определении потенциала энергосбережения системы является тщательный анализ работы всей системы. Чтобы обеспечить экономию энергии, необходимы подробные знания о работе оборудования и технологических требованиях. Кроме того, следует учитывать тип преобразователя частоты, предлагаемые функции и общую пригодность для применения.
Внутренняя конфигурация преобразователя частоты
Преобразователь частоты состоит из трех основных частей:
- Схема выпрямителя — состоит из диодов, тиристоров или биполярных транзисторов с изолированным затвором.
 Эти устройства преобразуют мощность сети переменного тока в постоянный ток.
Эти устройства преобразуют мощность сети переменного тока в постоянный ток. - Шина постоянного тока — состоит из конденсаторов, которые фильтруют и накапливают заряд постоянного тока.
- Инвертор — состоит из высоковольтных мощных транзисторов, которые преобразуют мощность постоянного тока в выход переменного тока с переменной частотой и напряжением, подаваемый на нагрузку.
Преобразователи частоты также содержат мощный микропроцессор, который управляет схемой инвертора для создания почти чистого синусоидального напряжения переменной частоты, подаваемого на нагрузку. Микропроцессор также управляет конфигурациями ввода / вывода, настройками преобразователя частоты, состояниями неисправности и протоколами связи.
Какие типы двигателей можно использовать с частотно-регулируемыми приводами?
Различные типы промышленных двигателей, которые могут использоваться с частотно-регулируемыми приводами:- Электродвигатель постоянного тока: электродвигатели постоянного тока все еще производятся, хотя количество активных производителей значительно сократилось, особенно тех, которые все еще производят большие электродвигатели постоянного тока (> 1 МВт).

- Асинхронный двигатель переменного тока с короткозамкнутым ротором: Этот тип двигателя является наиболее часто используемым двигателем в промышленных процессах с частотно-регулируемыми приводами.
- Асинхронный двигатель с фазным ротором: этот тип двигателя традиционно использовался в частотно-регулируемом приводе, когда нагрузка требовала высокого пускового момента, а мощность сети электропитания была недостаточной для прямого пуска от сети (DOL). Работа с переменной скоростью достигается за счет изменения эффективного сопротивления в цепи ротора.
- Синхронный двигатель переменного тока с бесщеточным или щеточным возбуждением.
- Синхронный двигатель переменного тока с возбуждением от постоянных магнитов: этот тип двигателя специально разработан для работы с частотно-регулируемым приводом. Синхронные двигатели используются в основном в диапазонах высокой мощности для минимизации затрат за счет минимизации номинального тока преобразователя частоты и из-за отсутствия асинхронных двигателей с короткозамкнутым ротором.

Диапазон мощности частотно-регулируемых приводов типа VSI простирается от дробных кВт, таких как 0,18 кВт до 2 000 кВт в диапазоне низкого напряжения и от 200 кВт до 30 МВт в диапазоне среднего напряжения. Низкие напряжения, представляющие интерес для местного рынка, представляют собой стандартные напряжения IEC (Международной электротехнической комиссии), а именно: однофазное 230 В, трехфазное 400 В и трехфазное 690 В при входной частоте 50 Гц. Чтобы удовлетворить потребности рынка 525 В, используются частотно-регулируемые приводы с номинальным напряжением 600 В и 690 В.На уровне среднего напряжения представляющие интерес напряжения составляют 3 300 В, 6 600 В и 11 000 В. Экономические факторы должны быть определяющим фактором в отношении номинального напряжения привода при требуемой номинальной мощности, хотя это не всегда так.
(PDF) Моделирование преобразователя частоты, используемого для управления скоростью асинхронного двигателя
[1]
Моделирование и моделирование преобразователя частоты
, используемого для управления скоростью асинхронного двигателя
Sarvesh Prattipati Dileep Kumar Mandala
Электроника и коммуникации, Университет электротехники и электроники KL, Университет KL
Виджаявада, Индия Виджаявада, Индия
Эл. почта: sarvesh378 @ gmail.com E-mail: [email protected]
Аннотация — Управление скоростью асинхронного двигателя
очень важно в современной промышленности. Обычно коробка передач Gear
используется для управления скоростью, которая потребляет больше энергии.
В этой статье представлено моделирование преобразователя частоты
, используемого для управления скоростью асинхронного двигателя
с помощью цифрового подхода, который имеет высокую надежность
и энергосбережение с помощью MATLAB / SimulinkTM.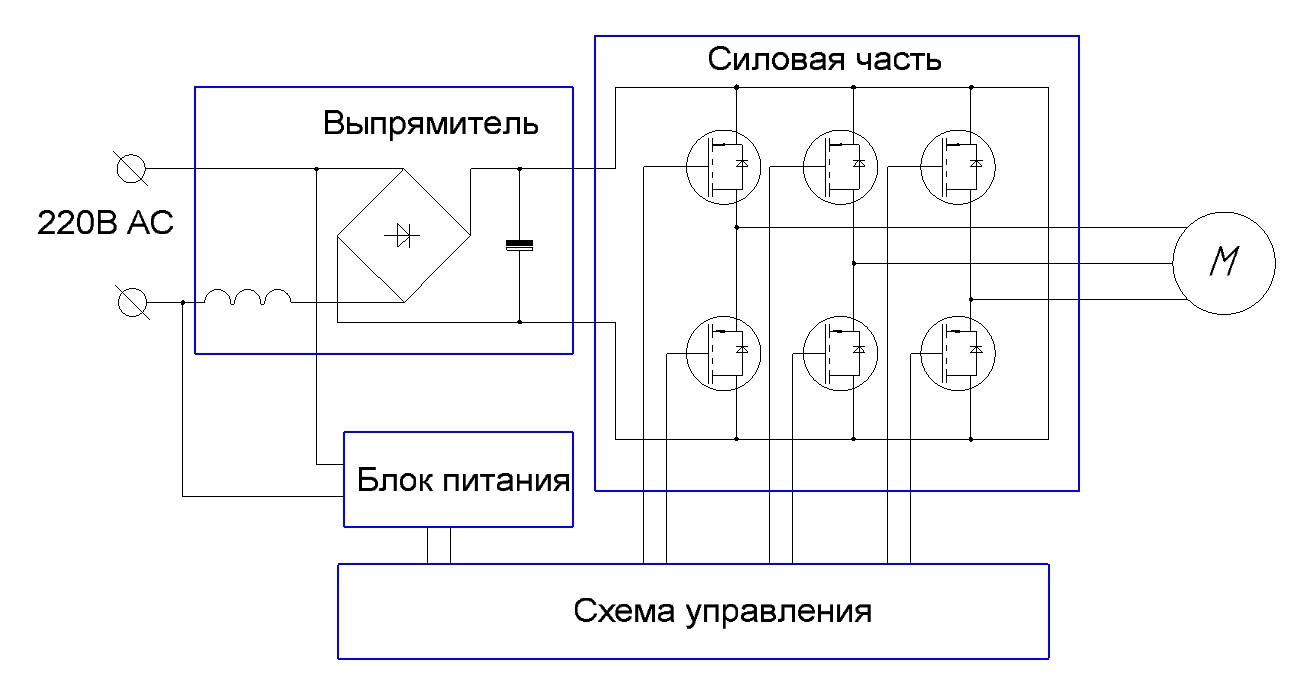
Преобразователь частоты в основном используется в качестве источника переменной частоты
для регулировки скорости асинхронных двигателей
. Схема преобразователя частоты состоит из трехфазного выпрямителя
, модуля IGBT, звена постоянного тока и трехфазного инвертора
. Транзисторный трехфазный инвертор преобразует напряжение постоянного тока
в источник питания переменного напряжения и переменной частоты
(VVVF). Обычно используемую батарею конденсаторов
заменяет LC-фильтр.Индуктор и конденсатор
,используются для снижения коммутационных напряжений, так что
во время включения инвертора источника напряжения защищается от пусковых токов
. Схема смоделирована и получены выходные результаты
.
Ключевые слова — Асинхронный двигатель, ширина импульса
Модуляция (ШИМ), MATLAB / SimulinkTM, источник питания переменного напряжения и частоты (VVVF)
.
И.ВВЕДЕНИЕ
Трехфазные асинхронные двигатели — это первичные двигатели
во всех промышленных применениях в
на каждой стадии обработки и производства.
Обычно эти асинхронные двигатели
реализованы из-за низкой стоимости и надежности. Этот преобразователь
преобразует фиксированную частоту линии электропередачи
в постоянное напряжение постоянного тока через диодный трехфазный выпрямитель
.Затем инвертор преобразует фиксированную частоту
линии электропередачи в источник питания переменного напряжения и переменной частоты
(VVVF). Привод переменного тока VVVF
— это силовой электронный контроллер, используемый для управления скоростью
двигателей переменного тока мощностью 3 л.с. (синхронных или индукционных)
путем изменения частоты и напряжения, подаваемого на клеммы двигателя
.
Кроме того, этот преобразователь может поддерживать высокий коэффициент мощности
и значительно снижает помехи от источника переменного тока
для линии электропередачи сети.
Проект моделируется с использованием MATLAB /
SimulinkTM с использованием различных компонентов, таких как трехфазный выпрямитель
, звено постоянного тока и модуль IGBT
, которые составляют работу инвертора. Инвертор
Инвертор
должен выдавать ток двигателя в пределах допустимого уровня пульсаций тока
, который должен быть ниже
5% для большинства приложений. МОП-транзистор
может использоваться для малой мощности (до нескольких
кВт) и эффективно работать на частотах до 50 кГц.Этот
работает с низкой индуктивностью до нескольких сотен мкГн. В
, чтобы поддерживать высокие уровни мощности, такие как десятки
кВт, модули IGBT используются в качестве переключающих устройств
и могут переключаться на частоте до 20 кГц. Они доступны в двух- или шестикомпонентных модулях
. Используемый здесь метод модуляции
— это широтно-импульсная модуляция (ШИМ).
II. МОДЕЛИРОВАНИЕ ПРОТОТИПА
Прототип в основном состоит из трехфазного выпрямителя
, промежуточного звена постоянного тока инвертора, трехфазного инвертора и асинхронного двигателя
.Конструктивный аспект состоит из:
A. Трехфазный выпрямитель
Выпрямители часто используются в качестве компонентов
источников питания постоянного тока и систем передачи электроэнергии постоянного тока высокого напряжения
. Входные трехфазные
Входные трехфазные
напряжения (1) — (3) приведены ниже:
Частотные регуляторы скорости ВФЭД -…- ТА — официальный сайт ВЕНТС
Частотные регуляторы скорости являются энергосберегающими устройствами, которые обеспечивают максимальное использование мощности привода при минимальном потреблении энергии.
Особенности модели
- Описание
- Модификации
- Загрузки
Описание
Описание
| ПРИМЕНЕНИЕ | ПРОЕКТИРОВАНИЕ И УПРАВЛЕНИЕ |
|
|
| КРЕПЛЕНИЕ | |
| |
| УПРАВЛЕНИЕ С ПОМОЩЬЮ ВНЕШНЕГО УСТРОЙСТВА | |
| |
| Рабочее положение прибора | |

Зачем использовать преобразователь частоты вместе с электродвигателем? — Леонардо Энергия
Стефан Фассбиндер (DKI)
Электродвигатель и электрогенератор — это в основном одно и то же .
В принципе, любой электродвигатель также может вырабатывать электричество. Электроприводы намного опережают двигатели внутреннего сгорания, поскольку, к сожалению, автомобильный двигатель, который всасывает выхлопные газы во время торможения и спусков и преобразует их в топливо и свежий воздух, все еще не готов. Электродвигатель может обеспечить это, хотя в течение первого столетия его использования его использование в значительной степени затруднялось двумя основными недостатками:
- Электродвигатель не имеет педали акселератора.
- Розетка не имеет «водопроводного крана».
Когда электродвигатель работает, он генерирует напряжение с полярностью, противоположной питающему напряжению .
Следовательно, ток чрезмерно высокий при первом включении, когда двигатель еще не работает. Для больших двигателей необходимо принять меры предосторожности, чтобы не повредить их и не сгореть предохранители. По мере увеличения скорости двигателя это индуцированное напряжение увеличивается. Фактически, при превышении скорости, при которой приложенное напряжение и напряжение сети равны, двигатель будет генерировать более высокое напряжение, чем напряжение в линии.Ток будет течь в обратном направлении, и двигатель изменит свою функцию на функцию генератора.
Фактически, при превышении скорости, при которой приложенное напряжение и напряжение сети равны, двигатель будет генерировать более высокое напряжение, чем напряжение в линии.Ток будет течь в обратном направлении, и двигатель изменит свою функцию на функцию генератора.
Это хорошо, так как предлагает отличные преимущества в области энергоэффективности. другие нагрузки, например огни, это должно быть так. Следовательно, положения должны быть предусмотрены снова, если скорость двигателя должна быть изменена .Раньше это было обременительной задачей. Приходилось использовать трансформаторы с несколькими ответвлениями, например, в локомотивах, но это было громоздкое и дорогое решение, или ограничивать ток резисторами, например, в трамваях, что было неэффективным решением.
А с двигателями переменного тока , однофазными или трехфазными, все становится еще сложнее. Принцип электродвигателя всегда заключается в создании вращательного движения за счет притяжения и отталкивания магнитных сил. В строгих терминах физики электродвигатели даже не существуют, но все они должны быть названы магнитными двигателями с точки зрения пуриста: электрический магнит притягивает другой — также электрический или постоянный — магнит, пока он не подойдет как можно ближе как может быть. Затем полярность тока в (одном из) электрического магнита (-ов) инвертируется, и сила притяжения превращается в отталкивающую. Механическая конструкция двигателя устроена так, чтобы допускать такое движение только по кругу, поскольку требуется вращательное движение.Двигатели переменного тока могут быть построены проще, чем двигатели постоянного тока, потому что периодическая смена полярности происходит в любом случае и не должна генерироваться внутри машины.
В строгих терминах физики электродвигатели даже не существуют, но все они должны быть названы магнитными двигателями с точки зрения пуриста: электрический магнит притягивает другой — также электрический или постоянный — магнит, пока он не подойдет как можно ближе как может быть. Затем полярность тока в (одном из) электрического магнита (-ов) инвертируется, и сила притяжения превращается в отталкивающую. Механическая конструкция двигателя устроена так, чтобы допускать такое движение только по кругу, поскольку требуется вращательное движение.Двигатели переменного тока могут быть построены проще, чем двигатели постоянного тока, потому что периодическая смена полярности происходит в любом случае и не должна генерироваться внутри машины.
Но становится очевидным, что изменение скорости вращения затруднительно для двигателей постоянного тока , поскольку оно в значительной степени зависит от питающего напряжения, которое приблизительно стабильно, и невозможно для двигателей переменного тока, скорость которых строго совпадает с частотой сеть, которая с технической точки зрения полностью стабильна.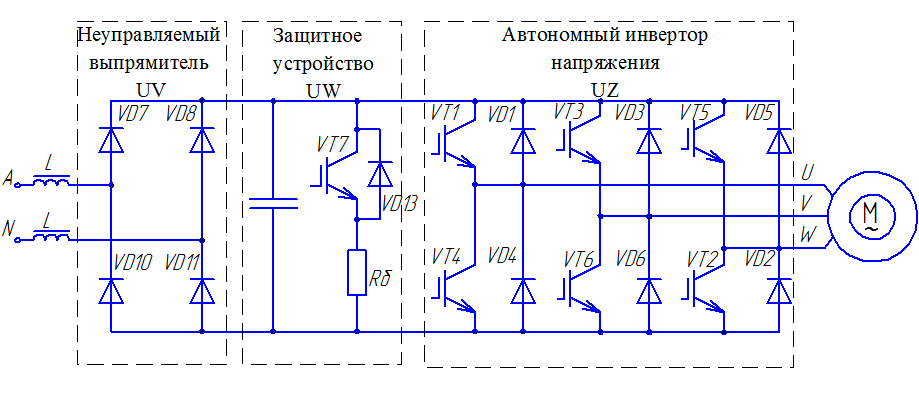
Теперь любой тип электродвигателя должен быть спроектирован таким образом, чтобы при желаемой (номинальной) скорости генерируемое в двигателе напряжение было примерно таким же, как приложенное (номинальное) рабочее напряжение.В двигателях постоянного тока индуцированное напряжение должно быть несколько ниже, чем в линии. При нагрузке двигатель постоянного тока немного теряет скорость, что приводит к дальнейшему падению наведенного напряжения и, следовательно, к большей разнице между линейным напряжением и более высокому входному току, соответствующему более высокой нагрузке. Таким образом, он адаптируется (более или менее) по своей природе к изменяющейся нагрузке.
Это преимущество перед двигателем внутреннего сгорания и одно из существенных отличий в рабочих характеристиках, которые будут обсуждаться здесь. Представьте, что вы выключаете двигатель автомобиля и кладете кирпич на педаль акселератора.Вы не должны этого делать. Электродвигатель, однако, не будет возражать против работы на полном напряжении без нагрузки — за исключением, возможно, одного конкретного типа — последовательно соединенной коллекторной машины. Большие блоки могут фактически быть разрушены центробежными силами, когда они питаются полным напряжением и без нагрузки. Небольшие единицы, например, используемые в кухонной технике и e. г. для стеклоочистителя в автомобиле иметь достаточные потери на трение, чтобы предотвратить это. Но при приложенном фиксированном питающем напряжении определенная скорость всегда будет связана с фиксированной выходной и входной мощностью.Поскольку не существует простой и понятной вещи, такой как водопроводный кран на кухне и в ванной, который можно было бы подключить к розетке для управления потоком электричества, регулирование мощности и / или скорости электродвигателя было решено. сложная задача еще до изобретения силовой электроники.
Большие блоки могут фактически быть разрушены центробежными силами, когда они питаются полным напряжением и без нагрузки. Небольшие единицы, например, используемые в кухонной технике и e. г. для стеклоочистителя в автомобиле иметь достаточные потери на трение, чтобы предотвратить это. Но при приложенном фиксированном питающем напряжении определенная скорость всегда будет связана с фиксированной выходной и входной мощностью.Поскольку не существует простой и понятной вещи, такой как водопроводный кран на кухне и в ванной, который можно было бы подключить к розетке для управления потоком электричества, регулирование мощности и / или скорости электродвигателя было решено. сложная задача еще до изобретения силовой электроники.
В большей степени это относится к двигателям переменного тока. Скорость синхронной машины абсолютно стабильна, независимо от того, используется ли машина в качестве двигателя или генератора. Что ж, он действительно немного теряет скорость в течение очень ограниченного времени, когда, например, он переключается с нейтрального режима на двигатель, как раз до тех пор, пока фазовый угол между электрической фазой и положением ротора больше не будет «синфазным». .После этого короткого периода перехода скорость двигателя и частота сети снова будут синхронизированы. Можно представить себе этот процесс так:
.После этого короткого периода перехода скорость двигателя и частота сети снова будут синхронизированы. Можно представить себе этот процесс так:
Когда машина работает без нагрузки, генерируемое ею переменное напряжение высокое, когда линейное напряжение высокое, и низкое, когда линейное напряжение низкое. Они находятся в фазе друг с другом, поэтому ток практически не течет в обоих направлениях (грубо говоря, игнорируя аспекты реактивной мощности, специалисты подчеркнут здесь).
Поскольку электрическая мощность (а также ее мгновенные значения) рассчитывается как напряжение, умноженное на ток, изменение напряжения или тока на противоположное означает изменение знака и, следовательно, изменение направления потока энергии. Теперь, когда машина работает как двигатель, генерируемое ею переменное напряжение отстает от приложенного напряжения. Оно все еще несколько ниже, когда напряжение в сети уже достигает своего пика, поэтому ток будет течь из сети в машину; так что он действует как мотор. К тому времени, когда ток, наконец, поменяет полярность, линейное напряжение также поменяется местами, поэтому мы умножаем два раза на -1 и застреваем в работе двигателя.
К тому времени, когда ток, наконец, поменяет полярность, линейное напряжение также поменяется местами, поэтому мы умножаем два раза на -1 и застреваем в работе двигателя.
Когда мы приводим вал машины в движение, чтобы она работала как генератор, генерируемое им переменное напряжение опережает приложенное напряжение. Он уже снова падает, когда напряжение в сети достигает пика, поэтому ток будет течь от машины в сеть. К тому времени, как ток поменяет полярность… и так далее.
Теперь все становится трудным, когда мы переходим к обсуждению наиболее широко используемой электрической машины , асинхронного двигателя , поскольку процессы, которые ее приводят в действие, трудно представить в иллюстративной форме.У него есть электромагниты с обеих сторон, в статоре и в роторе. Обмотки ротора закорочены и действуют как вторичные обмотки трансформатора. Магнитное поле, вращающееся в статоре, индуцирует ток в закороченных обмотках ротора, который затем создает собственное магнитное поле. Как и в синхронной машине, полюса полей статора, управляемые частотой сети, бегают по кругу и, так сказать, преследуют полюса поля ротора перед собой. Итак, ротор начинает вращаться.Асинхронный двигатель всегда будет вращаться немного медленнее, чем магнитные полюса статора. Эта небольшая разница, проскальзывание, необходима для поддержания тока в обмотках ротора и, таким образом, для сохранения магнитного поля ротора. Частота скольжения может составлять всего 1 Гц или даже меньше в большой машине, поэтому, если в 2-полюсном асинхронном двигателе, питаемом частотой 50 Гц, полюса статора вращаются со скоростью 3000 об / мин, ротор будет вращаться со скоростью 2940 об / мин. Когда вы его ускоряете, он действует как генератор. При 3060 / мин, скажем, при том же скольжении с обратным знаком выходной ток будет таким же, как и входной ток при 2940 / мин.
Как и в синхронной машине, полюса полей статора, управляемые частотой сети, бегают по кругу и, так сказать, преследуют полюса поля ротора перед собой. Итак, ротор начинает вращаться.Асинхронный двигатель всегда будет вращаться немного медленнее, чем магнитные полюса статора. Эта небольшая разница, проскальзывание, необходима для поддержания тока в обмотках ротора и, таким образом, для сохранения магнитного поля ротора. Частота скольжения может составлять всего 1 Гц или даже меньше в большой машине, поэтому, если в 2-полюсном асинхронном двигателе, питаемом частотой 50 Гц, полюса статора вращаются со скоростью 3000 об / мин, ротор будет вращаться со скоростью 2940 об / мин. Когда вы его ускоряете, он действует как генератор. При 3060 / мин, скажем, при том же скольжении с обратным знаком выходной ток будет таким же, как и входной ток при 2940 / мин.
Вместе с двигателями постоянного тока, включая последовательно соединенные коллекторные двигатели, которые могут работать как от переменного, так и от постоянного тока, асинхронный трехфазный двигатель запускается самостоятельно, как только будет подано напряжение сети. Более того: это будет происходить очень резко, с многократным превышением номинального крутящего момента и потребляемого тока, как описано выше. Это следующее отличие от двигателя внутреннего сгорания, для запуска которого требуется небольшой двигатель постоянного тока.
Синхронная машина сама по себе не может запуститься.По этой и другим причинам он обычно используется только как генератор.
Кроме того, последовательная коммутаторная машина в принципе является машиной постоянного тока, но поскольку ее статор и ротор соединены последовательно, они оба меняют полярность при изменении тока, поэтому направление вращения остается прежним. Следовательно, он также может работать как двигатель переменного тока, но при использовании в качестве генератора он будет генерировать постоянный ток, полярность которого зависит от некоторого случайного остаточного магнетизма, если он не определен специальной дополнительной катушкой.
Теперь, когда управление мощностью и скоростью двигателя внутреннего сгорания — это несложно, просто дросселируя подачу топлива, что, с другой стороны, является ужасной необходимостью, в то время как электродвигатель более или менее регулирует себя, «водопроводный кран» для электричества было наконец изобретено в семидесятых: теперь доступны инверторы, которые преобразуют переменный ток в постоянный, а постоянный снова обратно в переменный с электронными компонентами (и очень низкими дополнительными потерями) . Выход переменного тока можно регулировать как по амплитуде, так и по частоте, чтобы адаптировать его к требованиям любого двигателя в любой желаемой точке работы.Скорость и крутящий момент теперь можно контролировать независимо друг от друга. Таким образом, инвертор преодолевает практически все недостатки электродвигателя по сравнению с любым двигателем внутреннего сгорания, в то время как преимущества остаются такими же выдающимися, как и есть, включая обратную связь по мощности (инверсию потока энергии), если используется 4-квадрантный инвертор (2 направления вращения, 2 направления вращения). направления потоков энергии).
В очень простых терминах такие инверторы создают соединение между постоянным напряжением в звене постоянного тока, когда мгновенное переменное напряжение в линии выше, чем напряжение постоянного тока в звене, что позволяет потреблять энергию, и отключает оба от каждого из них. другое, когда напряжение «снаружи» ниже.Это принцип работы двигателя. Для возврата энергии в генераторном режиме инвертор, оправдывая свое название, делает обратное: подключается, когда напряжение в сети низкое, и отключается, когда оно высокое. Таким образом, энергия может идти в любом направлении, даже если линейное напряжение постоянно, а постоянное напряжение в промежуточной цепи также может поддерживаться на постоянном уровне, в зависимости от конструкции.
Другой конец, сторона двигателя силового электронного инвертора, несколько сложнее. Еще раз упрощая, принцип состоит в том, чтобы включать и выключать двигатель очень быстро, намного быстрее, чем это может сделать любой механический переключатель.Путем изменения отношения времени включения / выключения средний ток двигателя может непрерывно изменяться, даже если напряжение постоянного тока в промежуточной цепи поддерживается на постоянной амплитуде. Этот принцип намного сложнее и намного дороже, чем управление потоком воды в ванне с помощью водопроводного крана, но преимущества настолько очевидны, что этот принцип неуклонно распространяется во всем мире электрических приводов.
Инверторы также могут использоваться в сетях постоянного тока .
В то время как старые трамваи — а многие из них все еще существуют — вполне могли использовать свои двигатели для торможения, электроэнергия не могла подаваться обратно в линии, потому что напряжение, генерируемое двигателем, было, грубо говоря, немного ниже, чем напряжение. на линии, поэтому инверсия потока мощности была невозможна.Электроэнергия, генерируемая при торможении, поглощалась резисторами и терялась в виде тепла. В настоящее время инверторы могут прерывать постоянный ток в переменный, переменный ток можно преобразовать (чем меньше трансформатор, тем выше выбирается частота прерывания), выпрямить обратно в постоянный ток и подать обратно в воздушную линию.
Двигатель внутреннего сгорания имеет определенную номинальную выходную мощность, и все. Если вы попытаетесь получить немного больше крутящего момента, чем указано на паспортной табличке, вы просто заглушите двигатель.
Какая разница в поведении электродвигателя! Он также имеет определенную максимальную мощность и максимальный крутящий момент, но что он делает, если вы хотите большего? Это дает вам больше!
Скорость двигателя постоянного тока или асинхронного двигателя немного падает, в то время как в синхронном двигателе угол между приложенным и индуцированным напряжением становится немного больше. Оба приводят к более высокому потребляемому току, что способствует более высокому выходному крутящему моменту при примерно или точно такой же скорости, соответственно.Если вы захотите, двигатель предложит вам удвоенный номинальный крутящий момент. В зависимости от конструкции и размера двигателя он может быть более чем в 5 раз выше номинального. Единственная проблема заключается в том, что это позволяет это делать только в течение ограниченного времени, потому что чрезмерный ток генерирует избыточное тепло в двигателе, и в конечном итоге двигатель сгорит. Специальные защитные выключатели двигателя, которые регулируются в соответствии с номинальным током, прерывают ток двигателя, если номинальный ток превышается слишком долго. Лучше всего контролировать фактическую температуру двигателя.Или использовать инвертор. Его электронное управление предлагает неограниченные возможности программирования.
Итак, начнем:
- Поскольку электродвигатель запускается самостоятельно, а многие типы даже предлагают самый высокий крутящий момент (тормозной момент) в режиме покоя, в электромобиле не требуется сцепление.
- Поскольку электродвигатель обеспечивает гораздо больший крутящий момент в течение ограниченного времени, чем при непрерывной работе, в электромобиле не требуется переключение передач, поскольку транспортным средствам всегда требуется максимальная сила тяги только в течение ограниченных периодов разгона и движения в гору.
Таким образом, электродвигатель — гораздо лучший и более экологичный вариант для эксплуатации транспортного средства, чем любые двигатели внутреннего сгорания. Вместе с силовым электронным инвертором они близки к идеалу, в то время как привод внутреннего сгорания — это более или менее импровизированный способ передвижения транспортного средства, который только благодаря более чем 100-летнему опыту вместе с огромным и мощным рынком можно было оптимизировать с помощью: большое состояние, которое мы наблюдаем сегодня. Дальнейшего прогресса не видно.
Все, чего сейчас не хватает, — это годный аккумулятор.Когда дело дойдет до всего наземного транспорта, сразу перейдут на электроприводы. Везде, где есть контактный провод, электропривод уже демонстрирует свое превосходство, и еще есть потенциал.
Мораль: двигатель внутреннего сгорания и электропривод не могут быть менее похожими. Если вы хотите разобраться в электрических приводах, первое, что вам нужно сделать, это забыть все о двигателе вашего автомобиля.
Что такое преобразователь частоты? Как это устроено?
Работа с переменной частотой в виде генератора переменного тока существует с момента появления асинхронного двигателя.Измените скорость вращения генератора, и вы измените его выходную частоту. До появления высокоскоростных транзисторов это был один из немногих вариантов, доступных для изменения скорости двигателя, однако изменения частоты были ограничены, поскольку снижение скорости генератора приводило к снижению выходной частоты, но не напряжения. Мы увидим, почему это важно, чуть позже. В нашей отрасли насосы с регулируемой скоростью в прошлом были намного сложнее, чем сегодня. Один из более простых методов заключался в использовании многополюсного двигателя, намотанного таким образом, чтобы переключатель (или переключатели) мог изменять количество полюсов статора, которые были активными в любой момент времени.Скорость вращения можно было изменять вручную или с помощью датчика, подключенного к переключателям. Этот метод до сих пор используется во многих насосных системах с переменным расходом. Примеры включают циркуляционные насосы горячей и охлажденной воды, насосы для бассейнов, вентиляторы и насосы градирни. В некоторых отечественных подкачивающих насосах использовались гидравлические приводы или системы ременного привода с переменным приводом (своего рода автоматическая трансмиссия) для изменения скорости насоса на основе обратной связи от напорного мембранного клапана. И несколько других были еще более сложными.Судя по обручам, через которые нам приходилось преодолевать в прошлом, становится довольно очевидно, почему появление современного преобразователя частоты произвело революцию (еще один каламбур) в среде насосов с регулируемой скоростью.Все, что вам нужно сделать сегодня, — это установить относительно простой электронный блок (который часто заменяет более сложное пусковое оборудование) на месте применения и внезапно вы можете вручную или автоматически изменить скорость насоса по своему желанию.
Итак, давайте взглянем на компоненты преобразователя частоты и посмотрим, как они на самом деле работают вместе, чтобы изменять частоту и, следовательно, скорость двигателя. Думаю, вы удивитесь простоте этого процесса. Все, что для этого потребовалось, — это созревание твердотельного устройства, известного как транзистор.
Компоненты преобразователя частоты
Выпрямитель
Поскольку трудно изменить частоту синусоидальной волны переменного тока в режиме переменного тока, первая задача преобразователя частоты — преобразовать волну в постоянный ток. Как вы увидите немного позже, относительно легко управлять постоянным током, чтобы он выглядел как переменный ток. Первым компонентом всех преобразователей частоты является устройство, известное как выпрямитель или преобразователь, оно показано слева на рисунке ниже.
Схема выпрямителя преобразует переменный ток в постоянный и делает это почти так же, как и в зарядном устройстве для аккумуляторов или в аппарате для дуговой сварки. Он использует диодный мост для ограничения распространения синусоидальной волны переменного тока только в одном направлении. В результате получается полностью выпрямленная форма волны переменного тока, которая интерпретируется цепью постоянного тока как естественная форма волны постоянного тока. Трехфазные преобразователи частоты принимают три отдельные входные фазы переменного тока и преобразуют их в один выход постоянного тока. Большинство трехфазных преобразователей частоты также могут принимать однофазное питание (230 В или 460 В), но, поскольку есть только две входящие ветви, мощность преобразователя частоты (HP) должна быть снижена, поскольку производимый постоянный ток уменьшается пропорционально.С другой стороны, настоящие однофазные преобразователи частоты (те, которые управляют однофазными двигателями) используют однофазный вход и вырабатывают выход постоянного тока, который пропорционален входу.
Есть две причины, по которым трехфазные двигатели более популярны, чем их однофазные счетчики, когда речь идет о работе с переменной скоростью. Во-первых, они предлагают гораздо более широкий диапазон мощности. Но не менее важна их способность начать вращение самостоятельно. С другой стороны, однофазный двигатель часто требует некоторого вмешательства извне, чтобы начать вращение.В этом случае мы ограничимся рассмотрением трехфазных двигателей, используемых в трехфазных преобразователях частоты.
Шина постоянного тока
Второй компонент, известный как шина постоянного тока (показанный в центре рисунка), не виден и не во всех преобразователях частоты, потому что он не вносит прямого вклада в работу с переменной частотой. Но он всегда будет там в виде высококачественных преобразователей частоты общего назначения (производимых специализированными производителями преобразователей частоты).Не вдаваясь в подробности, шина постоянного тока использует конденсаторы и катушку индуктивности для фильтрации «пульсаций» переменного напряжения от преобразованного постоянного тока до того, как оно попадет в секцию инвертора. Он также может включать фильтры, препятствующие гармоническим искажениям, которые могут возвращаться в источник питания, питающий преобразователь частоты. Преобразователи частоты более старых версий и некоторые преобразователи частоты для конкретных насосов требуют отдельных сетевых фильтров для выполнения этой задачи.
Инвертор
Справа от рисунка — «внутренности» преобразователя частоты.Инвертор использует три набора высокоскоростных переключающих транзисторов для создания «импульсов» постоянного тока, которые имитируют все три фазы синусоидальной волны переменного тока. Эти импульсы определяют не только напряжение волны, но и ее частоту. Термин инвертор или инверсия означает «реверсирование» и просто относится к движению вверх и вниз генерируемой формы волны. В современном преобразователе частоты преобразователь частоты использует метод, известный как «широтно-импульсная модуляция» (ШИМ) для регулирования напряжения и частоты. Мы рассмотрим это более подробно, когда рассмотрим выход инвертора.
Еще один термин, с которым вы, вероятно, столкнулись при чтении литературы или рекламы по преобразователям частоты, — это «IGBT». IGBT относится к «биполярному транзистору с изолированным затвором», который является переключающим (или импульсным) компонентом инвертора. Транзистор (который заменил лампу) выполняет две функции в нашем электронном мире. Он может действовать как усилитель и увеличивать сигнал, как в радио или стереосистеме, или он может действовать как переключатель и просто включать и выключать сигнал. IGBT — это просто современная версия, которая обеспечивает более высокие скорости переключения (3000 — 16000 Гц) и пониженное тепловыделение.Более высокая скорость переключения приводит к повышению точности эмуляции волн переменного тока и снижению слышимого шума двигателя. Уменьшение выделяемого тепла означает меньшие радиаторы и, следовательно, меньшую площадь основания преобразователя частоты.
Выход инвертора
На рисунке справа показана форма сигнала, генерируемого инвертором преобразователя частоты с ШИМ, по сравнению с формой истинного синусоидального сигнала переменного тока. Выход инвертора состоит из серии прямоугольных импульсов с фиксированной высотой и регулируемой шириной.В этом конкретном случае есть три набора импульсов — широкий набор в середине и узкий набор в начале и конце как положительной, так и отрицательной частей цикла переменного тока. Сумма площадей импульсов равна эффективному напряжению истинной волны переменного тока (мы обсудим эффективное напряжение через несколько минут). Если бы вы отрезали части импульсов выше (или ниже) истинной волны переменного тока и использовали их для заполнения пустых пространств под кривой, вы бы обнаружили, что они почти идеально совпадают.Таким образом, преобразователь частоты регулирует напряжение, подаваемое на двигатель.
Сумма ширины импульсов и пустых промежутков между ними определяет частоту волны (следовательно, ШИМ или широтно-импульсную модуляцию), воспринимаемую двигателем. Если бы импульс был непрерывным (то есть без пробелов), частота все равно была бы правильной, но напряжение было бы намного больше, чем у истинной синусоидальной волны переменного тока. В зависимости от желаемого напряжения и частоты преобразователь частоты будет изменять высоту и ширину импульса, а также ширину пустых промежутков между ними.Хотя внутренние компоненты, обеспечивающие это, относительно сложны, результат элегантно прост!
Некоторые из вас, вероятно, задаются вопросом, как этот «фальшивый» переменный ток (на самом деле постоянный ток) может управлять асинхронным двигателем переменного тока. В конце концов, разве не требуется переменный ток, чтобы «вызвать» ток и соответствующее ему магнитное поле в роторе двигателя? Что ж, переменный ток вызывает индукцию естественным образом, потому что он постоянно меняет направление. DC, с другой стороны, этого не делает, потому что обычно он неподвижен после активации цепи.Но постоянный ток может индуцировать ток, если его включать и выключать. Для тех из вас, кто достаточно взрослый, чтобы помнить, что автомобильные системы зажигания (до появления твердотельного зажигания) имели набор точек в распределителе. Назначение точек было «импульсное» питание от батареи в катушку (трансформатор). Это вызвало заряд в катушке, который затем увеличил напряжение до уровня, при котором свечи зажигания могли загореться. Широкие импульсы постоянного тока, показанные на предыдущем рисунке, на самом деле состоят из сотен отдельных импульсов, и именно это включение и выключение выхода инвертора позволяет возникать индукции через постоянный ток.
Действующее напряжение
Мощность переменного тока — довольно сложная величина, и неудивительно, что Эдисон почти выиграл битву за то, чтобы сделать постоянный ток стандартом в США. К счастью, для нас все сложности были объяснены, и все, что нам нужно сделать, это следовать правилам, изложенным до нас.
Один из атрибутов, делающих переменный ток сложным, заключается в том, что он непрерывно изменяет напряжение, переходя от нуля к некоторому максимальному положительному напряжению, затем обратно к нулю, затем к некоторому максимальному отрицательному напряжению, а затем снова обратно к нулю.Как определить действительное напряжение, приложенное к цепи? На рисунке слева изображена синусоида 60 Гц, 120 В. Обратите внимание, однако, что его пиковое напряжение составляет 170 В. Как мы можем назвать это волной 120 В, если ее фактическое напряжение составляет 170 В? В течение одного цикла он начинается с 0 В и повышается до 170 В, затем снова падает до 0. Он продолжает падать до –170, а затем снова повышается до 0. Оказывается, площадь зеленого прямоугольника, верхняя граница которого находится на уровне 120 В, равна сумме площадей под положительной и отрицательной частями кривой.Может ли тогда 120 В быть средним? Что ж, если бы вы усреднили все значения напряжения в каждой точке цикла, результат был бы примерно 108 В, так что это не должно быть ответом. Почему тогда значение, измеренное VOM, составляет 120 В? Это связано с тем, что мы называем «эффективным напряжением».
Если бы вы измерили тепло, выделяемое постоянным током, протекающим через сопротивление, вы бы обнаружили, что оно больше, чем выделяемое эквивалентным переменным током. Это связано с тем, что переменный ток не поддерживает постоянное значение на протяжении всего цикла.Если вы проделали это в лаборатории в контролируемых условиях и обнаружили, что определенный постоянный ток вызывает повышение температуры на 100 градусов, его эквивалент по переменному току приведет к увеличению на 70,7 градусов или всего 70,7% от значения постоянного тока. Следовательно, эффективное значение переменного тока составляет 70,7% от постоянного. Также оказывается, что действующее значение переменного напряжения равно квадратному корню из суммы квадратов напряжения на первой половине кривой. Если пиковое напряжение равно 1, и вы должны были измерить каждое из отдельных напряжений от 0 до 180 градусов, эффективное напряжение будет равно 0.707 пикового напряжения. 0,707 пикового напряжения 170, показанного на рисунке, равно 120 В. Это эффективное напряжение также известно как среднеквадратическое или среднеквадратичное напряжение. Отсюда следует, что пиковое напряжение всегда будет в 1,414 пикового значения от эффективного напряжения. Ток 230 В переменного тока имеет пиковое напряжение 325 В, а 460 — пиковое напряжение 650 В. Эффект пикового напряжения мы увидим немного позже.
Что ж, я, вероятно, говорил об этом дольше, чем необходимо, но я хотел, чтобы вы получили представление об эффективном напряжении, чтобы вы поняли иллюстрацию ниже.В дополнение к изменению частоты преобразователь частоты также должен изменять напряжение, даже если напряжение не имеет ничего общего со скоростью, с которой работает двигатель переменного тока.
На рисунке показаны две синусоидальные волны 460 В переменного тока. Красный — это кривая 60 Гц, а синий — 50 Гц. Оба имеют пиковое напряжение 650 В, но 50 Гц намного шире. Вы можете легко увидеть, что область под первой половиной (0–10 мс) кривой 50 Гц больше, чем площадь первой половины (0–8,3 мс) кривой 60 Гц.И, поскольку площадь под кривой пропорциональна эффективному напряжению, его эффективное напряжение выше. Это увеличение эффективного напряжения становится еще более значительным при уменьшении частоты. Если позволить двигателю 460 В работать при этих более высоких напряжениях, его срок службы может значительно сократиться. Следовательно, преобразователь частоты должен постоянно изменять «пиковое» напряжение относительно частоты, чтобы поддерживать постоянное эффективное напряжение. Чем ниже рабочая частота, тем ниже пиковое напряжение и наоборот.По этой причине двигатели 50 Гц, используемые в Европе и некоторых частях Канады, рассчитаны на напряжение 380 В. Видите ли, я говорил вам, что кондиционер может быть немного сложным!
Теперь вы должны иметь довольно хорошее представление о работе преобразователя частоты и о том, как он управляет скоростью двигателя. Большинство преобразователей частоты предлагают пользователю возможность устанавливать скорость двигателя вручную с помощью многопозиционного переключателя или клавиатуры или использовать датчики (давления, расхода, температуры, уровня и т. Д.) Для автоматизации процесса.
Диагностика неисправностей асинхронного двигателя с питанием от преобразователя частоты
Содержание
Абстрактные
Цели дипломной работы
1.Введение
План дипломной работы
2. Обзор литературы
Электрический и механический контроль с использованием методов MCSA
Методы, основанные на асимметрии
Другие методы мониторинга состояния
Обзор литературы
3. ОБЩИЕ НЕИСПРАВНОСТИ ДВИГАТЕЛЯ
Неисправности ротора
Короткие повороты
Влияние составляющей тока на неисправности двигателя, вызванные изменением индуктивности
Испытательная схема для моделирования неисправностей
4.Диагностика неисправности двигателя с помощью анализа сигнатур сигналов
Анализ сигнатуры тока двигателя с использованием БПФ
Обнаружение сломанных стержней ротора в трехфазном асинхронном двигателе с помощью быстрого преобразования Фурье
Гармоники паза ротора
Гармоники двигателя неисправности Broken Bars Fault
Обнаружение короткого замыкания статора в свою очередь с помощью анализа тока БПФ
Обнаружение эксцентриситета воздушного зазора с использованием анализа сигнатур БПФ
5. ЭКСПЕРИМЕНТАЛЬНОЕ ИССЛЕДОВАНИЕ ДИАГНОСТИКИ СТАТОРОВ И ДИАГНОСТИКИ РОТОРА ТРЕХФАЗНОЙ ИНДУКЦИИ
ДВИГАТЕЛЬ
Текущий спектральный анализ
Этапы диагностики неисправности двигателя с использованием метода БПФ
6.ОБНАРУЖЕНИЕ НЕИСПРАВНОСТЕЙ СТАНЦИИ РОТОРА С ПОМОЩЬЮ БЫСТРОГО ПРЕОБРАЗОВАНИЯ ФУРЬЕ (БПФ) и LabVIEW
программа
Экспериментальная установка
Представление системы с использованием программы LabVIEW
Параметры сбора данных
7. АНАЛИЗ И ОБСУЖДЕНИЕ СЛОМАННЫХ ОТКАЗОВ
Здоровый ротор без нагрузки, питаемый от индукционного регулятора, 50 Гц
Неисправный ротор без нагрузки, питаемый от индукционного регулятора с частотой 50 Гц
Нагруженный здоровый ротор, питаемый от индукционного регулятора, 50 Гц
Нагружен неисправный ротор от регулятора индукции при 50 Гц
Ротор без нагрузки, питаемый от преобразователя частоты, 40 Гц
Неисправный ротор без нагрузки, питаемый от преобразователя частоты при 40 Гц
Нагруженный исправный ротор, питаемый от преобразователя частоты при 40 Гц
Нагруженный неисправный ротор, питаемый от преобразователя частоты при 40 Гц
Ротор без нагрузки, питаемый от преобразователя частоты, 50 Гц
Неисправный ротор без нагрузки питается от преобразователя частоты на 50
Нагруженный исправный ротор, питаемый от преобразователя частоты, 50 Гц
Неисправный ротор под нагрузкой, питаемый от преобразователя частоты при 50 Гц
Здоровый ротор без нагрузки, питаемый от преобразователя частоты при 60 Гц
Неисправный без нагрузки ротор, питаемый от преобразователя частоты 60 Гц
Нагруженный исправный ротор питается от преобразователя частоты 60 Гц
Нагружен неисправный ротор, питаемый от преобразователя частоты 60 Гц
7.1 Обсуждение анализа неисправности ротора
Питание двигателя от регулятора напряжения 50 Гц
Ротор питается от преобразователя частоты 40 Гц
Ротор питается от преобразователя частоты 50 Гц
Ротор питается от преобразователя частоты 60 Гц
Резюме
8. ДИАГНОСТИКА НЕИСПРАВНОСТЕЙ КОРОТКОГО ЗАМЫКАНИЯ В ОБМОТКАХ СТАТОРА С ПОМОЩЬЮ ТЕХНИКИ БПФ
АНАЛИЗ И ОБСУЖДЕНИЕ НЕИСПРАВНОСТЬ СТАТОРА КОРОТКОГО ЗАМЫКАНИЯ
Нормальный статор без нагрузки питается от индукционного регулятора с частотой 50 Гц
Неисправный статор без нагрузки, запитанный от индукционного регулятора с частотой 50 Гц
Статор исправен под нагрузкой, питаемый от индукционного регулятора с частотой 50 Гц
Нагрузка неисправна Статор запитан индукционным регулятором при 50 Гц
Нормальный режим холостого хода Статор питается от преобразователя частоты 40 Гц
Неисправность холостого хода Статор питается от преобразователя частоты 40 Гц
Нагрузка исправна Статор питается от преобразователя частоты при 40 Гц
Нагрузка неисправна Статор питается от преобразователя частоты 40 Гц
Нормальный режим холостого хода Статор питается от преобразователя частоты 50 Гц
Неисправность холостого хода Статор питается от преобразователя частоты 50 Гц
Нагрузка исправна Статор питается от преобразователя частоты 50 Гц
Нагрузка неисправна Статор питается от преобразователя частоты 50 Гц
Нормальный режим холостого хода Статор питается от преобразователя частоты 60 Гц
Неисправность холостого хода Статор питается от преобразователя частоты 60 Гц
Нагрузка исправна Статор питается от преобразователя частоты 60 Гц
Нагрузка неисправна Статор питается от преобразователя частоты 60 Гц
8.1. Обсуждение анализа диагностики статора
Статор питается от индукционного регулятора 50 Гц
Статор питается от преобразователя частоты 40 Гц
Статор питается от преобразователя частоты 50 Гц
Статор питается от преобразователя частоты 60 Гц
Резюме
9. Заключение
Справочный лист
Аннотация
Трехфазные асинхронные двигателишироко используются в качестве источника механической энергии для обеспечения эффективной работы и низких затрат. Неисправности должны быть обнаружены заранее, чтобы избежать поломки двигателя и снижения затрат на производство оборудования.В этой работе обсуждаются методы спектрального анализа тока и рассеяния потока для диагностики сломанных стержней ротора и короткозамкнутых витков в асинхронном двигателе, питающемся от различных источников переменного тока. Несмотря на недавнюю разработку различных типов моделей для диагностики неисправностей двигателей и изучения различных проблем, связанных с трехфазными асинхронными двигателями, спектральный анализ сигналов считается одним из наиболее важных подходов. Большинство моделей от простой эквивалентной схемы до более сложных моделей d-q и a-b-c и, наконец, разработанных гибридных моделей, предназначены для интеграции различных форм несимметрии тока и / или напряжения.Как правило, методы, относящиеся к асимметрии, позволяют выявлять асимметричные двигательные неисправности.
Преобразователи частоты во многих приложениях питают асинхронные двигатели. Такие приложения, которые играют важную роль в промышленности, быстро развиваются, что позволяет использовать 3-фазный асинхронный двигатель в качестве приложений с регулируемой скоростью. В этой статье предлагается применение спектрального анализа сигнатур для обнаружения и диагностики аномальных электрических и механических условий, которые указывают на выбранные неисправности в асинхронном двигателе, питаемом от преобразователя частоты.
Ключевые слова; Неисправности асинхронного двигателя, преобразователь частоты, методы диагностики
Цели дипломной работы
Основная цель этой статьи — диагностировать общие неисправности, которые возникают в результате условий, связанных с током и напряжением, с помощью подходящих методов обработки сигналов. Различные сигналы в двигателе содержат уникальные частотные составляющие, связанные с неисправностями двигателя. Следовательно, вторая цель состоит в том, чтобы исследовать, как наличие общих неисправностей, таких как неисправность стержня ротора и короткое замыкание обмотки, влияет на токовые сигналы, поступающие от индукционного регулятора и преобразователя частоты.Третья цель — сформулировать необходимые условия сбора сигналов и методы обработки сигналов (быстрое преобразование Фурье — БПФ) для эффективного обнаружения поломки ротора и короткозамкнутых витков при обнаружении неисправности обмотки статора. Наконец, цель диссертации — использовать программу Matlab для обработки данных, собранных с помощью виртуального измерительного прибора LabVIEW.
1. Введение
Трехфазный асинхронный двигатель — это асинхронная машина с переменным током, мощность которой подается на ротор за счет электромагнитной индукции.Он состоит из магнитной цепи, которая связана с двумя электрическими цепями, вращающимися друг относительно друга посредством электромагнитной индукции. В трехфазном асинхронном двигателе имеется два типа обмоток ротора: с короткозамкнутым ротором и с фазным ротором. Двигатели с короткозамкнутым ротором состоят из токопроводящих стержней из меди, алюминия или сплава, встроенных в пазы ротора и закороченных на концах токопроводящим кольцом. Роторы с намоткой состоят из трехфазных обмоток, концы которых соединены с контактными кольцами, установленными на валу ротора.Трехфазные асинхронные двигатели часто испытывают различные неисправности из-за вредных условий эксплуатации, таких как недостаточное охлаждение, недостаточная смазка,
несоосность вала, перегрузка и т. д. Основные неисправности асинхронного двигателя подразделяются на две категории: электрические и механические неисправности. Электрические неисправности возникают из-за неисправностей статора, которые приводят к короткому замыканию одной или нескольких обмоток двигателя. Сломанные стержни ротора также могут быть связаны с коротким замыканием витков в обмотках статора. Как только сломанные стержни попадают в конец обмотки или сердечника статора, который является двигателем высокого напряжения на высокой скорости, они вызывают сильное механическое повреждение изоляции, что приводит к короткому замыканию витков в статоре.Кроме того, они могут возникнуть в результате неправильного соединения обмоток статора. Механические неисправности могут возникнуть в результате поломки стержней или соединительного кольца ротора, статических и динамических неровностей воздушного зазора, изгиба вала, приводящего к трению между ротором и статором, которое вызывает серьезные повреждения сердечника и обмоток статора и, наконец, из-за отказов подшипников и редуктора. Преобразователь частоты также играет важную роль в трехфазном асинхронном двигателе, поскольку он отвечает за питание трехфазного асинхронного двигателя трехфазным источником питания.Оценки показывают, что неисправности, связанные с ротором, составляют 8-10% неисправностей двигателей, а неисправности обмоток статора — 26-37%. Кроме того, частота, при которой возникают различные типы неисправностей двигателя, показана ниже на рисунке 1.
Статистическое распределение неисправностей двигателей
— Неисправности подшипников
— неисправности статора
— Сломаны стержни ротора
— Эксцентриситет
Рисунок 1. (Cusidu p.2011, статистическое распределение неисправностей двигателей).
Асинхронный двигатель, который работает при этих неисправностях, может выражать различные неопределенности, такие как повышенные пульсации крутящего момента, несбалансированные напряжения в воздушном зазоре и линейные токи, уменьшение рекомендуемого крутящего момента, чрезмерный нагрев и увеличение потерь, которые снижают эффективность двигателей.Диагностика неисправностей и защита трехфазного асинхронного двигателя имеет историю, которая восходит к началу внедрения машин. Различные методы мониторинга состояния и диагностики неисправностей двигателя разработаны для повышения эффективности установки с приводом от двигателя. Они включают в себя мониторинг радиочастотного излучения, мониторинг вибрации, мониторинг тока, анализ сигнатуры тока двигателя, тепловой мониторинг, мониторинг акустической эмиссии и химический мониторинг, который требует для эффективной работы дорогостоящих датчиков.Неспособность обнаружить неисправности двигателя может привести к нулевой мощности всей установки или даже к аварии. Большинство предлагаемых анализов нацелены на анализ тока двигателя, поскольку он оказался неинвазивным методом в промышленности.
Неисправности двигателей вызвали необходимость разработки экспериментальной диагностики неисправностей для практического применения в промышленности. Основные неисправности из статистики двигателя показывают, что ротор и статор подвергаются большему риску, поэтому эффективные методы реализуются с помощью компьютерных программ, таких как LabVIEW и Matlab.Один из них — анализ обработки сигналов, сопровождаемый спектральным анализом частотных составляющих. В этой статье использовался метод обработки сигналов с быстрым преобразованием Фурье (БПФ).
иллюстрация не видна в этом отрывке
Рисунок 2. План дипломной работы
2. Обзор литературы
Электрический и механический контроль с использованием методов MCSA Для диагностики неисправностей ротора асинхронного двигателя используется множество различных методов. У большинства этих методов соответственно есть свои достоинства и недостатки.Быстрый анализ Фурье — это ключевой метод мониторинга состояния для большинства промышленных приложений, где сигналы являются стационарными, например, для диагностики неисправности шины ротора и коротких витков в обмотке статора электрических машин с приводом от двигателя. Его цель — контролировать однофазный ток статора. Эта возможность достигается за счет удаления частотной составляющей возбуждения посредством фильтрации нижних частот и дискретизации результирующего сигнала. Трансформатор тока, который подается на режекторный фильтр 50 Гц, где основная составляющая уменьшается, воспринимает однофазный ток.Затем происходит усиление сигнала вместе с фильтрацией нижних частот. Цель фильтрации состоит в том, чтобы удалить ненужные высокочастотные компоненты, ответственные за искажение дискретизированного сигнала. Целью усиления является максимальное использование входного диапазона аналого-цифрового преобразователя.
(Aderiano & Silva, 2006) признал, что спектральный анализ сигнатур, который использует спектр тока статора для обнаружения неисправности из-за сломанных стержней ротора, является одним из наиболее эффективных методов, который имеет дело с физическим явлением двигателя.Сломанные шины в двигателе приводят к колебаниям тока питания двигателя. В этом методе обычно используется принцип величин частотных составляющих токов статора и, в частности, величины определенных частотных составляющих токов статора. Первый спектр, который меньше основной частоты, называется боковой полосой, которая измеряется и сравнивается с пороговой частотой. Полученные результаты сравнили две частоты, которые помогают определить, есть ли у трехфазного асинхронного двигателя сломанные стержни ротора.Эта работа подтвердила возможность проведения текущего спектрального анализа. Кроме того, текущий метод анализа сигнатур в 3-фазном асинхронном двигателе обнаруживает такие неисправности, как поврежденный подшипник и эксцентриситет оси ротора.
(Albizu & A. Mazon, 2006) предложил онлайн-анализ асинхронного двигателя. В основном это относится к низковольтным асинхронным двигателям, у которых появление межвиткового короткого замыкания указывает на наличие неисправности двигателя. Этот метод зависит от уровня входного напряжения и включает запрограммированный шаблон, который контролирует двигатель.Это приводит к мониторингу частичного разряда. Этот метод обеспечивает высокую диагностическую эффективность таких методов, как ток обратной последовательности и полное сопротивление последовательности, но низкую эффективность для других методов диагностики неисправностей.
(Khalaf & Hew, 2011) применил вейвлет-преобразование для диагностики неисправностей ротора. Мотор был проанализирован в исправном состоянии и с выбранными неисправностями. Разностный сигнал на 11-м уровне одномерного дискретного вейвлет-анализа — вейвлет-разложения с деревом двигателя используется для обнаружения неисправности двигателя.Наблюдаются среднеквадратичные значения этого 11-го вейвлет-коэффициента dll и тех, которые получены из методов автономной диагностики, и проводится сравнение этих двух коэффициентов для обнаружения неисправностей двигателя.
Методы, основанные на асимметрии
Методы, основанные на моторной асимметрии, — это еще один подход, ориентированный на объект / части двигателя. Векторный подход Парка эффективен в процессе диагностики, так как не требует вывода нейтральной линии. Другой метод — это метод отрицательных последовательных компонентов тока статора, основанный на обнаружении асимметрии, вызванной неисправностями, и используется для обнаружения межвитковых коротких замыканий ротора.Обычно это вызывает искажения магнитного поля. Асимметрия генерирует ток обратной последовательности, который используется при обнаружении неисправности. Отрицательная последовательность выводится из векторного анализа несбалансированных трехфазных токов или напряжений, питающих двигатель (Aderiano M. & Silva B., 2006).
При токе отрицательной последовательности короткие витки обмоток статора приводят к асимметрии между тремя фазами, следовательно, к изменению составляющей отрицательной последовательности в линейном токе. При наличии закороченных витков происходит увеличение тока обратной последовательности.Ток обратной последовательности la2 рассчитывается на основе измерений трех линейных токов. Следовательно,
иллюстрация не видна в этом отрывке
Где; a = e ~ т.е. экспонента индуктивности / скольжения, la2 — ток обратной последовательности, lac — ток короткого замыкания.
Собственная асимметрия двигателя может отличаться от приборной, учитывая, что несимметричные напряжения питания производят аналогичный эффект. Это требует рассмотрения этих неидеальности в стратегии обнаружения неисправностей, поскольку результаты показали, что отрицательная последовательность возникает даже в исправном двигателе из-за этих факторов.Появление коротких поворотов увеличивает уже существующую асимметрию. Когда двигатель не симметричен, положительная и отрицательная последовательности становятся взаимозависимыми. Следовательно, будет ток обратной последовательности, даже если напряжение питания симметрично и не имеет составляющей обратной последовательности.
иллюстрация не видна в этом отрывке
Рис. 3. Схематическое изображение различных причин возникновения тока обратной последовательности
Следовательно, отрицательная последовательность la2 является вкладом компонентов дерева.Чтобы определить ток из-за неисправности Isca2, ток из-за дисбаланса напряжений (Iva2) и собственный ток (Ta2) вычитаются из измеренного тока обратной последовательности (/ a2). Увеличение la2 in указывает на короткое замыкание.
иллюстрация не видна в этом отрывке
Этот метод имеет такой предел, при котором невозможно определить серьезность ошибки. Кроме того, асимметрия мотора и датчиков значительно снижает чувствительность индикатора. Это потому, что уравнение верно только в том случае, если двигатель абсолютно симметричен.Если это не так, существует взаимодействие между компонентами последовательности.
Подход напряжения нулевой последовательности применяется к асинхронным двигателям, соединенным звездой с доступной нейтралью. В этом случае три мгновенных значения напряжения фаза-нейтраль (фазные напряжения) указывают на неисправность двигателя. Когда двигатель идеален, сумма этих напряжений равна нулю. Наличие короткого замыкания в очереди или обрыва шины увеличивает фазные напряжения, указывающие на неисправность. У этого метода есть недостатки, такие как необходимость доступа к нейтрали.Кроме того, в реально исправной машине индикатор неисправности не равен нулю из-за внутреннего дисбаланса машины и асимметрии приборов. Несмотря на то, что нагрузка и дисбаланс напряжения не представлены, этот подход зависит от симметричного импеданса машины. Следовательно, чувствительность метода снижается при несимметричном индуктивном импедансе (Albizu & A. Mazon, 2006).
Другие методы мониторинга состояния
Существуют и другие методы мониторинга состояния, такие как тепловая диагностика, диагностика крутящего момента, шума, вибрации и электрическая диагностика в случае обмоток статора, которые используются для обнаружения неисправности двигателя, которые являются специфическими для диагностики неисправности конкретного двигателя.Praiseworthyprize.com [2010] предложил два метода диагностики асинхронных двигателей, а именно оценку плотности спектра мощности (PSD) и опорные векторные машины (SVM) для диагностики и обнаружения любых неисправностей, связанных с поломкой стержня ротора, нагруженных различными нагрузками. Контроллер неисправности работает между измеренным током статора исправного двигателя и расчетным током неисправного двигателя. Методы спектральной декомпозиции Уэлча и множественной классификации сигналов применяются к току статора для анализа.Из этих методов следует отметить, что разрешение по частоте и надежность обнаружения отличаются друг от друга в зависимости от задействованных параметров. Для диагностики любых неисправностей используется многоклассовый подход классификации на основе SVM. Выбор функции ядра определяет
Производительность процесса классификации, показывающая превосходство его применения при обнаружении неисправностей в сигналах тока статора.
ВекторCurrent Park использует двумерное представление, следовательно, подходит для описания явлений трехфазного асинхронного двигателя.Компоненты векторов текущего парка (id и iq) являются функцией основных фазных токов ia, ib, ic, как показано в следующих уравнениях.
иллюстрация не видна в этом отрывке
/ — максимальное значение тока фазы питающей сети, m — частота питающей сети, t — временная переменная.
Чтобы определить неисправность двигателя, текущая составляющая парка из трех фазных переменных сравнивается с таковой из идеальных условий.
Обзор литературы
Предлагается множество методов диагностики моторики, которые отличаются диагностической эффективностью и эффективностью.Метод быстрого преобразования Фурье (БПФ) для анализа неисправностей двигателя — это метод, который позволяет обнаруживать неисправности, используя фазный ток двигателя, утечку осевого потока, электромагнитный момент и механические колебания двигателя. Это распространенный метод, созданный из-за необходимости генерировать сигналы, связанные с физическим явлением асинхронного двигателя, в отличие от подхода асимметрии, который основан на внутренних операциях асинхронного двигателя.
3. ОБЩИЕ НЕИСПРАВНОСТИ ДВИГАТЕЛЯ
Неисправности промышленного двигателя могут быть внутренними или связаны с физическим явлением двигателя.Внутренние неисправности подразделяются на механические и электрические. Электрические неисправности возникают из-за коротких витков статора, которые возникают из-за тяжелых соединительных колец, соединенных со стержнями ротора, и, следовательно, большие центробежные силы могут вызывать напряжение на стержнях.
Неисправности ротора
Существует несколько факторов, которые приводят к поломке стержней ротора или соединительного кольца, такие как рабочие циклы прямого пуска, не предназначенные для двигателя, пульсирующие механические нагрузки и плохо изготовленный кожух ротора, а также тепловые напряжения, возникающие в нем во время запуска двигателя. машина.На фото ниже изображена сломанная штанга ротора.
иллюстрация не видна в этом отрывке
Рис. 4. (Gerg.S, Edward.A & Hussein.D, P.2004 сломанные стержни ротора в асинхронных двигателях)
Короткие повороты
Нарушения изоляции вызывают большой процент отказов двигателя из-за поворотов статора. Это вызывает большой циркулирующий ток в симметричном трехфазном асинхронном двигателе, выделяя тепло в короткозамкнутых витках. Ухудшение изоляции может быть связано с механическими проблемами.Существует четыре типа короткого замыкания статора, поворотно-поворотные в катушке и короткие замыкания между катушками одной фазы, междуфазное короткое замыкание и короткое замыкание между фазой и землей, как показано на рис. Ниже
.иллюстрация не видна в этом отрывке
Рисунок 5. (Мехала П. 2010, различные типы коротких замыканий обмоток)
Влияние составляющей тока на неисправности двигателя, вызванные изменением индуктивности
Конструкция двигателя состоит из двух магнитно связанных систем, а именно статора и ротора.Это похоже на систему трансформатора, которая содержит первичную и вторичную обмотки, но вторичная обычно закорачивается. Следовательно, эквивалентную схему асинхронного двигателя можно нарисовать, как показано ниже (a) и (b)
.иллюстрация не видна в этом отрывке
Рисунок 6. Эквивалентная схема асинхронного двигателя.
Где; R1: сопротивление статора, XI: реактивное сопротивление утечки статора, Rc: сопротивление потерь в сердечнике, Xm: реактивное сопротивление намагничивания, R2: сопротивление ротора относительно статора, X2: реактивное сопротивление утечки ротора, известное как статор, и Xeq: эквивалентное реактивное сопротивление утечки {XI + Х2).
Схема ротора представлена на рис. 6
иллюстрация не видна в этом отрывке
Рисунок 7. Ток в цепи ротора.
Где:
Er — напряжение ротора, R2 — сопротивление ротора, Jx2 — индуктивность ротора.
Двигатель имеет фиксированное значение сопротивления. Следовательно, ток ротора во многом зависит от индуктивности двигателя. Увеличение индуктивности увеличивает ток ротора, тогда как уменьшение индуктивности уменьшает ток ротора.
Испытательная схема для моделирования неисправностей
иллюстрация не видна в этом отрывке
Рисунок 8. Тестовая схема для моделирования неисправностей.
На этой схеме показан регулятор напряжения, питаемый от трехфазного источника питания. Выходное напряжение — это регулируемое напряжение, которое становится входным напряжением для асинхронного двигателя. Частота
Преобразовательвыдает стабилизированную частоту питания (/ l) на асинхронный двигатель. Данные для диагностики двигателя собираются программой LabVIEW.
4. Диагностика неисправности двигателя с помощью анализа сигнатур сигналов
Различные методы диагностики, применяемые в SSA, включают анализ тока, электромагнитного момента, осевого потока утечки и анализ сигнатуры вибрации. В этой статье предлагается использовать текущий анализ сигнатур с использованием метода быстрого преобразования Фурье (БПФ) для диагностики неисправностей.
Анализ сигнатуры тока двигателя с использованием БПФ
Быстрое преобразование Фурье применяется для преобразования сигнала из временной области в частотную, что позволяет анализировать частотные компоненты сигнала.Три линейных тока, которые предпочтительны для обнаружения и диагностики неисправностей двигателя. Это связано с тем, что мониторинг тока — это неинвазивный метод из-за того, что он в основном использует анализ тока статора. Следовательно, были предприняты различные эксперименты и исследования для изучения изменений сигнатуры тока при неисправностях обмоток ротора и статора. Эти эксперименты и исследования показывают, что некоторые частотные компоненты меняют свои амплитуды или появляются несколько частот. Однако теоретические значения частоты, которые зависят от неисправности, различаются от одного исследования или эксперимента к другому.Кроме того, среди прогнозируемых частот изменения некоторые показывают более высокую чувствительность к неисправности, чем другие. В ходе экспериментов точные значения изменений в текущей сигнатуре получают с использованием техники анализа сигнатур сигналов.
[…]
.