Драйверы и контроллеры шагового двигателя
Для управления приводами требуется специальный драйвер шагового двигателяДрайвер представляет собой силовую часть со встроенным простейшим интерфейсом, основанным на комбинации ШАГ–НАПРАВЛЕНИЕ.
Драйвер шагового двигателя еще и усилитель мощности, который преобразует импульсы, получаемые от источника электрического тока, в перемещение вала. При этом каждый импульс вызывает перемещение вала на 1 шаг (или на 1 микрошаг).
Драйвер шагового двигателя снабжён специальной схемой, которая служит для выполнения трёх основных задач:
- Включать и выключать ток в обмотках, а также менять его направление. При выполнении этой задачи системы управления электроприводом работают без сбоев.
- Поддерживать заданное значение тока.
- Обеспечивать как можно более быстрое нарастание и спад тока для достижения требуемых скоростных характеристик. Скоростные характеристики в свою очередь качественным образом влияют на управление шаговым двигателем.

Драйверы подразделяются на несколько типов, каждый из которых определяет мощность вала двигателя.
Следует отметить, что современные технологии, по которым изготавливается привод шагового двигателя, постоянно совершенствуются. Смысл совершенствования в том, чтобы обеспечить получение наибольшего момента на валу при минимальных габаритах двигателя, широких скоростных возможностях, высокого КПД и улучшенной точности. Важным звеном этой технологии является применение микрошагового режима.
Кроме того, одной из основных деталей является контроллер управления шаговым двигателем. Как правило, контроллеры для шагового двигателя изготавливаются на базе промышленных микроконтроллеров и могут быть как программными, так и аппаратными. Программные контроллеры для шагового двигателя применяются тогда, когда круг решаемых ими задач небольшой. Цена такого программного контроллера намного ниже аппаратного.
Контроллеры для шагового двигателя могут предназначаться как для униполярных двигателей, так и для двигателей других типов.
Контроллер шагового двигателя представляет собой комплект из силовой части (драйвер) и устройство, расширяющее возможности управления двигателем (интеллектуальная часть).
Данный компонент шагового двигателя обладает рядом достоинств. Прежде всего, контроллер управления шаговым двигателем имеет возможность передавать сигналы ШАГ–НАПРАВЛЕНИЕ.
Преимущества использования контроллеров для шагового двигателя:
- Возможность подключения к компьютеру. В зависимости от модели и конструкции контроллер управления шаговым двигателем подключается к компьютеру и регулируется с его помощью.
- Многократное перепрограммирование. В настоящее время достаточно купить только один контроллер шагового двигателя. При этом при переориентации производства или расширении перечня задач его можно перепрограммировать для выполнения новых функций.
- Широкий модельный ряд контроллеров как отечественных, так и зарубежных производителей позволяет купить контроллер шагового двигателя с расширенными функциями.
 Контроллеры с расширенными функциями имеют в своем составе программируемый логический контроллер (привод работает в автономном режиме по записанной в него программе, это позволяет получить готовое устройство для выполнения определённого технологического процесса на основе одного только контроллера шагового двигателя).
Контроллеры с расширенными функциями имеют в своем составе программируемый логический контроллер (привод работает в автономном режиме по записанной в него программе, это позволяет получить готовое устройство для выполнения определённого технологического процесса на основе одного только контроллера шагового двигателя).
Устройство управления электроприводом, оснащенное контроллером, решает следующие задачи:
- Достижение высокой точности. Это связано с конструкцией, благодаря которой устройства управления шаговыми двигателями делают до 20000 шагов за оборот за счет микрошага.
- Работа с программным обеспечением. К ним относятся производственные программы типа Kcam и Mach.
- Работа в различных режимах.
Устройства управления шаговыми двигателями могут функционировать как on-line (то есть подчиняясь командам компьютера) так и off-line (при помощи программы с внешнего устройства, например, флеш-накопителя). Применяется также совмещённый режим (он особенно выгоден при управлении одинаковыми процессами с меняющимися параметрами, управлении контрольными процедурами и опросе параметров, осуществляемом с вашего компьютера)
Блок управления шаговым двигателем.
Вместе с шаговым двигателем работает блок управления шаговым двигателем, который является источником тока для двигателя, осуществляет при необходимости дробление основного углового шага и выполняет коммутацию фаз двигателя. Блок управления обычно поддерживает как ручное, так и автоматическое управление электроприводами.
Современный блок управления электроприводом одновременно является и многофункциональным устройством – с возможностью программирования и синхронизации с другими устройствами, а также с возможностью включить автоматическое управление электроприводами. Существуют решения, при которых блок управления электроприводом программируемый.
В частности, блок управления шаговым двигателем может управляться с помощью компьютера. Подключение происходит через LPT-порт (в том числе и с программами для станков с ЧПУ), через COM-порт – получая специальные команды для определения характера (и алгоритма) движения шагового двигателя, в автономном автоматическом режиме без помощи компьютера или внешнего контроллера (если требуется автоматическое управление электроприводами технологических процессов) или в ручном режиме, когда скорость движения регулируется потенциометром, а направление движения – датчиком реверса.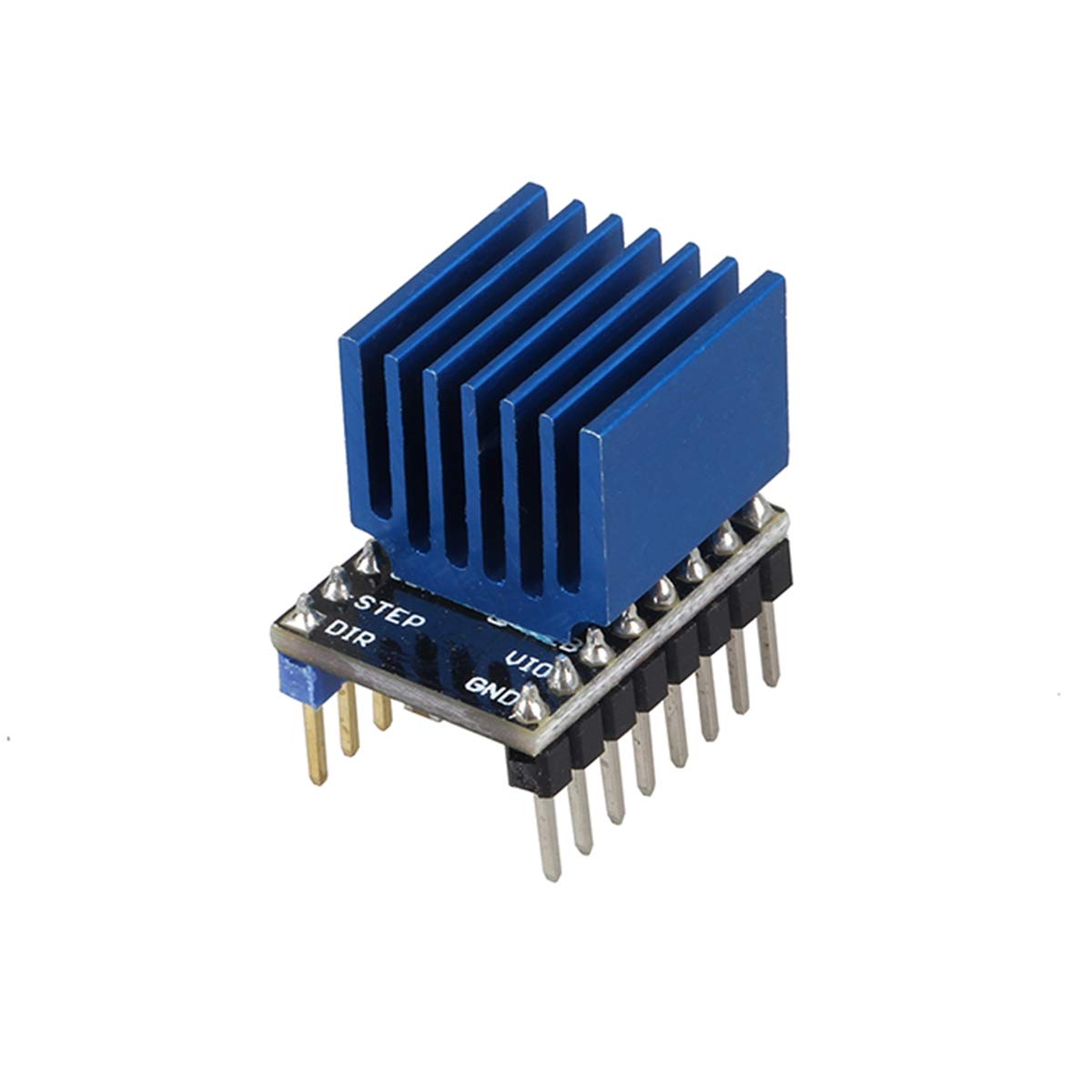
Учитывая разнообразие шаговых двигателей, их управление зависит от типа самого двигателя. И в соответствии с этим и выбирается блок управления электроприводом.
Биполярный привод шагового двигателя и его управление.
Помимо биполярных двигателей существуют так же униполярные двигатели, обмотки которых имеют средние отводы, служащие для подключения к общему проводу – «земле».
Полный оборот выходного вала двигателя состоит из N-ного количества шагов. Большинство двигателей рассчитаны на шаг 1,8 градуса, таким образом, полный оборот выходного вала будет совершён за 360/1,8 = 200 шагов.
Привод шагового двигателя меняет положение выходного вала на один шаг при подаче на одну из обмоток напряжения питания. Направление протекания тока через обмотку при этом указывает на направление вращения. Для совершения следующего шага необходимо выключить первую обмотку и подать питание на вторую, соблюдая направление тока через обмотку. Итого за 100 полных циклов поочерёдной запитки обмоток мотор сделает ровно один оборот выходного вала.
Поэтому для направления токов требуются устройства управления шаговыми двигателями.
Способы управления электроприводом.
Для управления приводами существует ряд способов, применяемых в зависимости от характера решаемых задач и назначения шагового двигателя в разных областях промышленности.
- Одиночные импульсы. Данный способ управления электроприводом считается самым простым. Он основан на одновременном подключении только одной катушки. Для совершения полного оборота ротора требуется 48 импульсов. При этом каждый перемещает ротор на 7,5 градусов.
- Двойной импульс. В этом случае системы управления шаговыми двигателями основаны на одновременном подключении двух соседних катушек. Для полного оборота ротора требуется также 48 импульсов. Каждый импульс перемещает ротор на 7,5 градусов.
- Комбинированные импульсы. Суть в том, что устройство управления электроприводом чередует первый и второй способы. Двигателю требуется 96 импульсов, чтобы совершить один оборот.
 Каждый импульс перемещает ротор на 3,75 градуса.
Каждый импульс перемещает ротор на 3,75 градуса.
Остались вопросы касательно управления электроприводом? Задайте их сотрудникам компании «Степмотор» и примите решение о приобретении системы управления шаговыми двигателями! Ведь купить контроллер шагового двигателя именно у нас – значит, получить качественный промышленный продукт за разумную цену.
Драйвер шагового двигателя Bigtreetech TMC2209 v1.2
Плата с драйвером TMC2209 служит для эффективного управления двухфазным шаговым двигателем. Вращение мотора с микрошагом 1/256 в сочетании с умным контролем питания позволяет сделать 3D-принтер практически бесшумным и прецизионно рулить шаговыми моторами без дрожания и пропущенных шагов.
Особенности
- Предельно тихий режим работы шагового двигателя.
- Плавное вращение мотора с разрешением до 256 микрошагов.
- Драйвер не допускает рывков и пропусков шагов при вращении двигателя.
- Определение заклинивания и нагрузки на валу двигателя для диагностики.

- Управление по интерфейсу STEP/DIR или UART.
- Эффективное охлаждение модуля с крупным терморассеивателем и радиатором.
Применение
Драйвер TMC2209 часто используют для апгрейда характеристик 3D-принтера. В этом случае модуль ставится вместо штатного драйвера шагового двигателя на отдельной оси, а затем в прошивку принтера вносятся соответствующие изменения.
Драйвер шагового двигателя TMC2209 отлично подойдёт для управляющей платы BTT SKR v1.4, если вы собираете собственную начинку 3D-принтера с кастомной прошивкой.
Модуль TMC2209 обратно совместим по габаритам и распиновке с драйвером на базе TMC2208, поэтому существующие проекты можно перевести на TMC2209 с минимальными изменениями.
Питание
Модуль TMC2209 питается постоянным током с напряжением от 4,75 до 28 В, которое также поступает на обмотки шагового двигателя. Поэтому для связки «драйвер+двигатель» можно обойтись одним источником питания.
- В 3D-принтере модуль берёт питание напрямую от материнской платы.
- В остальных случаях вам понадобится дополнительный блок питания.
Комплектация
- 1× Драйвер шагового двигателя
- 1× Радиатор
- 1× Провод-джампер
Характеристики
- Модель: Bigtreetech TMC2209 v1.2
- Напряжение питания: 4,75–28 В
- Напряжение логических уровней: 3,3–5 В
- Номинальный выходной ток: 2 А
- Пиковый выходной ток: до 2,8 А
- Режим управления: STEP/DIR или UART
- Количество микрошагов: до 256
- Определение нагрузки и обнаружение остановки: есть
- Размеры: 20,4×15,2×22,3 мм
Статьи о роботах » Драйверы шаговых двигателей A4988 и DVR8825
В статье мы разберем режимы управления вращением шаговых двигателей. Подробно рассмотрим подключение драйвера A4988.
Шаговые моторы имеют три режима управления вращением: полношаговый, полушаговый и микрошаговый.
Во время полношагового режима шаговые моторы для поворота мотора на 360 градусов делают 200 шагов, во время полушагового — 400, а во время микрошагового возможно делить шаг на 4, 8 и даже 16 частей.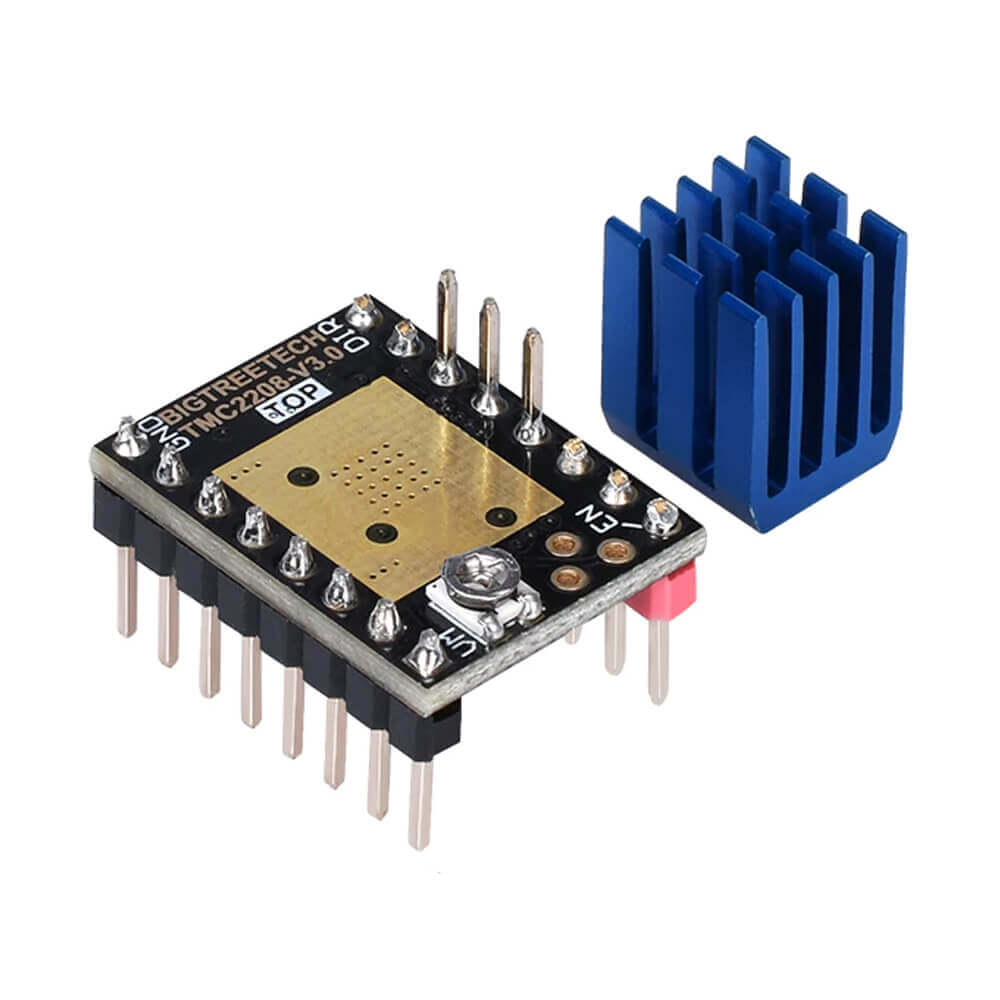 Техника управления микрошаговым режимом сложна, поэтому многие производители станков ЧПУ (CNC) и качественных 3D принтеров стали изготавливать специальные контроллеры для управления шаговыми двигателями, часто называемых драйверами шаговых моторов. Ещё их называют StepStick.
Техника управления микрошаговым режимом сложна, поэтому многие производители станков ЧПУ (CNC) и качественных 3D принтеров стали изготавливать специальные контроллеры для управления шаговыми двигателями, часто называемых драйверами шаговых моторов. Ещё их называют StepStick.
Функционирование специальных контроллеров управления (драйверов шаговых двигателей) происходит следующим образом: вначале напряжение питания поступает на шаговый двигатель, затем на логическую часть драйвера шаговика, после этого задается направление вращения и команда (ШАГ) по управляющим контактам на двигателе. Во время команды (ШАГ) шаговый мотор получает необходимое напряжение, которого достаточно для передвижения ротора на один микрошаг (полушаг или шаг) – это зависит от предварительных установок, заданных заранее специальными перемычками на RAMPS 1.4.
Зачастую у продаваемых контроллеров шаговых двигателей (например: RAMPS 1.4) предустановлен режим микрошага 1/16. Чтобы регулировать подаваемое на шаговый мотор напряжение питания, на котроллере RAMPS 1. 4 установлен специальный переменный резистор. Он является важным элементом, поскольку шаговики могут быть под 8V, 4V, 12V и д.р.
4 установлен специальный переменный резистор. Он является важным элементом, поскольку шаговики могут быть под 8V, 4V, 12V и д.р.
Для платы RAMPS 1.4 выпускают два вида драйверов A4988 и DVR8825. Они отличаются током, выдаваемым на шаговый двигатель и минимальным микрошагом.
И не только. Выпускаются несколько других драйверов шаговых двигателей, которые могут быть использованы в качестве альтернативы. Например, у драйвера шагового двигателя Pololu A4988 Black Edition производительность на 20% выше. Есть также большая версия драйвера на A4988, которая имеет защиту от обратной мощности на главном входе питания, а также встроенной 5 В и 3.3 В стабилизаторы напряжения, которые устраняют необходимость в покупке отдельного питания для логики и двигателей. Платы на DRV8825 предлагают на около 50% более высокую производительность в более широком диапазоне напряжений и с несколькими дополнительными функциями, в то время как платы на DRV8834 работают с двигателями с напряжением питания от 2. 5 В. Любую из этих плат можно использовать в качестве драйвера во многих приложениях.
5 В. Любую из этих плат можно использовать в качестве драйвера во многих приложениях.
Рассмотрим драйвер A4988.
Характеристики драйвера A4988
- Максимальный ток 2 A
- Минимальный микрошаг 1/16 шага
Величина тока регулируется подстроечным резистором на драйвере. Вращение по часовой стрелке — повышение тока. Вращение против часовой стрелки — понижение величины тока.
Установка микрошага производится перемычками установленными на RAMPS 1.4
Схема драйвера A4988
Подключение драйвера A4988
Для работы с драйвером A4988 необходимо питание логического уровня (3 — 5.5 В), подаваемое на выводы VDD и GND, а также питание двигателя (8 — 35 В) на выводы VMOT и GND. Чтобы обеспечить необходимый потребляемый ток (при пиковых до 4 А), необходимо поставить конденсаторы для гальванической развязки как можно ближе к плате.
Внимание: В плате используются керамические конденсаторы с низким эквивалентным последовательным сопротивлением, что делает её уязвимой для индуктивно-ёмкостных скачков напряжения, особенно если питающие провода длиннее нескольких сантиметров. В некоторых случаях, эти скачки могут превысить максимально допустимое значение (35 В для A4988) и повредить плату. Одним из способов защиты платы от подобных скачков является установка большого (не меньше 47 мкФ) электролитического конденсатора между выводом питания (VMOT) и землёй близко к плате.
В некоторых случаях, эти скачки могут превысить максимально допустимое значение (35 В для A4988) и повредить плату. Одним из способов защиты платы от подобных скачков является установка большого (не меньше 47 мкФ) электролитического конденсатора между выводом питания (VMOT) и землёй близко к плате.
При правильном подключении, через Pololu A4988 можно управлять четырёх-, шести- и восьми- проводными шаговыми двигателями.
Внимание: Соединение или разъединение шагового двигателя при включённом драйвере может привести к поломке двигателя.
Установка микрошага
У шаговых двигателей обычно установлена конкретная величина (например 1,8° или 200 шагов на оборот), при которой достигается полный оборот в 360°. Микрошаговый драйвер, такой как A4988 позволяет увеличить разрешение за счёт возможности управления промежуточными шагами. Это достигается путём возбуждения обмоток средней величины тока. Например, управление мотором в режиме четверти шага даст двигателю с величиной 200-шагов-за-оборот уже 800 микрошагов при использовании разных уровней тока.
Разрешение (размер шага) задаётся комбинациями переключателей на входах (MS1, MS2, и MS3). С их помощью можно выбрать пять различных шагов, в соответствии с таблицей ниже. На входы MS1 и MS3 переключателя установлены 100 кОм подтягивающие на землю резисторы, а на MS2 — 50 кОм, и если оставить их не подключёнными, двигатель будет работать в полношаговом режиме. Для правильной работы в режиме микрошага необходим слабый ток (см. ниже), который обеспечивается ограничителями по току. В противном случае, промежуточные уровни будут некорректно восприниматься, и двигатель будет пропускать микрошаги.
Обычно для домашних 3D принтеров и станков ЧПУ используются драйверы A4988 с микрошагом 1/16. Для этого все перемычки на плате RAMPS 1.4 должны быть установлены на свои гнезда.
Входы управления
Каждый импульс на входе STEP соответствует одному микрошагу двигателя, направление вращения которого зависит от сигнала на выводе DIR. Обратите внимание, что выводы STEP и DIR не подтянуты к какому-либо конкретному внутреннему напряжению, поэтому вы не должны оставлять эти выводы плавающими при создании приложений.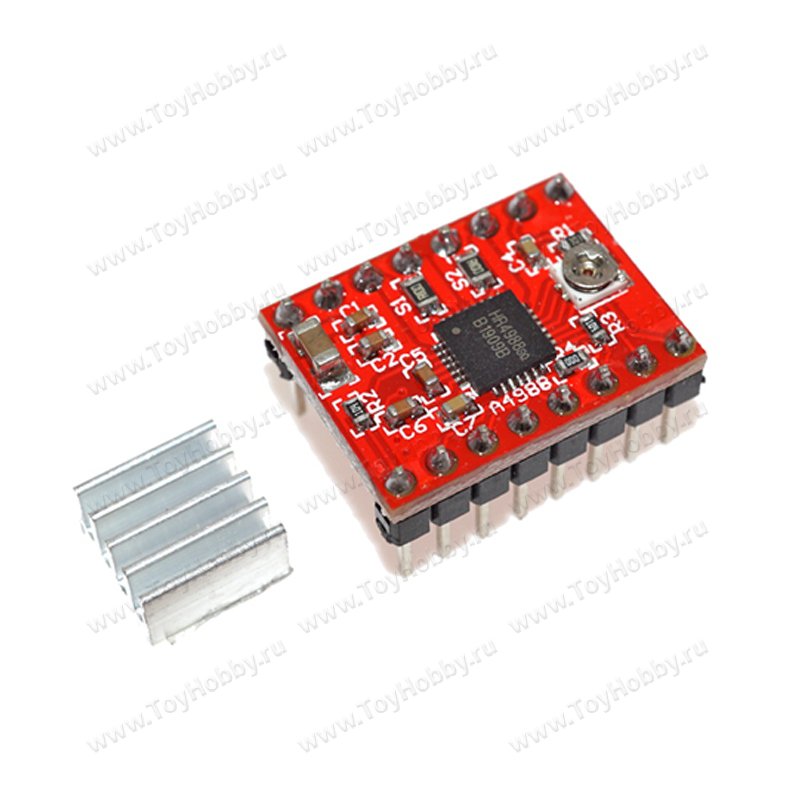 Если вы просто хотите вращать двигатель в одном направлении, вы можете соединить DIR непосредственно с VCC или GND. Чип имеет три различных входа для управления состоянием питания: RST, SLP и EN. Обратите внимание, что вывод RST плавает; если вы его не используете, вы можете подключить его к соседнему контакту SLP на печатной плате, чтобы подать на него высокий уровень и включить плату.
Если вы просто хотите вращать двигатель в одном направлении, вы можете соединить DIR непосредственно с VCC или GND. Чип имеет три различных входа для управления состоянием питания: RST, SLP и EN. Обратите внимание, что вывод RST плавает; если вы его не используете, вы можете подключить его к соседнему контакту SLP на печатной плате, чтобы подать на него высокий уровень и включить плату.
Ограничение тока
Для достижения высокой скорости шага, питания двигателя, как правило, гораздо выше, чем это было бы допустимо без активного ограничения тока. Например, типичный шаговый двигатель может иметь максимальный ток 1 А с 5 Ом; сопротивлением обмотки, отсюда максимально допустимое питание двигателя равно 5 В (U=I*R). Использование же такого двигателя с питанием 12 В позволит повысить скорость шага. Однако чтобы предотвратить повреждение двигателя, необходимо ограничить ток до уровня ниже 1 А.
Драйвер A4988 поддерживает активное ограничение тока, которое можно установить подстроечным потенциометром на плате.
Один из способов установить предельный ток — подключить драйвер в полношаговый режим и измерять ток, протекающий через одну обмотку двигателя без синхронизации по входу STEP. Измеренный ток будет равен 0,7 части предельного тока (так как обе обмотки всегда ограничиваются примерно на 70% от текущей настройки предельного тока в полношаговом режиме). Учтите, что при изменении логического напряжения Vdd, на другое значение, изменит предельный ток, поскольку напряжение на выводе «ref» является функцией Vdd.
Еще один способ установить предельный ток – измерить напряжение на выводе «ref» и вычислить полученное ограничение тока (резисторы SENSE равны 0,05 Ом). Напряжение вывода доступно через металлизированное сквозное отверстие (в кружке на шёлкографии печатной платы). Ограничение тока относится к опорному напряжению следующим образом:
Current Limit = VREF × 2,5
Например: опорное напряжение равно 0,3 В, предельный ток 0,75 А. Как упоминалось выше, в режиме полного шага, ток через катушки ограничен 70% от текущего предела, поэтому, чтобы получить полный шаг тока катушки в 1 А, текущий предел должен быть 1 A / 0,7 = 1,4 А, что соответствует VREF 1,4 A / 2,5 = 0,56 В. Смотрите спецификацию A4988 для получения дополнительных сведений.
Смотрите спецификацию A4988 для получения дополнительных сведений.
Примечание: Ток обмотки может сильно отличаться от тока источника питания, поэтому не следует измерять ток на источнике питания, чтобы установить ограничение тока. Подходящим местом для измерения тока является одна из обмоток вашего шагового двигателя.
Величину тока на драйвере шагового мотора настроить и опытным путём. Необходимо устроить прогон 3D принтера на высокой скорости по всем координатам. Оптимальным считается, когда шаговые двигатели уже не гудят и ещё не пропускают шаги.
Внимание: При регулировке тока подстроечным резистором на драйвере A4988. Вращение по часовой стрелке — повышение тока. Вращение против часовой стрелки — понижение величины тока.
Максимально допустимый ток подаваемый на обмотку, у микросхемы A4988 равен 2 A. Фактический ток, который можно подать на плату, зависит от качества охлаждения микросхемы. Плата разработана с учётом отвода тепла от микросхемы, но при токе выше 1 A на обмотку необходим теплоотвод или другое дополнительное охлаждение.
Внимание: плата драйвера может нагреться так, что можно получить ожог, задолго до того как перегреется сама микросхема. Будьте осторожны при обращении с платой и со всеми подключёнными к ней устройствами.
Обратите внимание, что ток, измеренный на источнике питания, как правило, не соответствует величине тока на обмотке. Так как напряжение, подаваемое на драйвер, может быть значительно выше напряжения на обмотке, то, соответственно, измеряемый ток на источнике питания может быть немного ниже, чем ток на обмотке (драйвер и обмотка в основном работают в качестве переключаемого источника с пошаговым понижением питания). Кроме того, если напряжение питания намного выше необходимого двигателю уровня для достижения требуемого тока, то скважность будет очень низкой, что также приводит к существенным различиям между средним и RMS током (среднеквадратичное значение переменного тока).
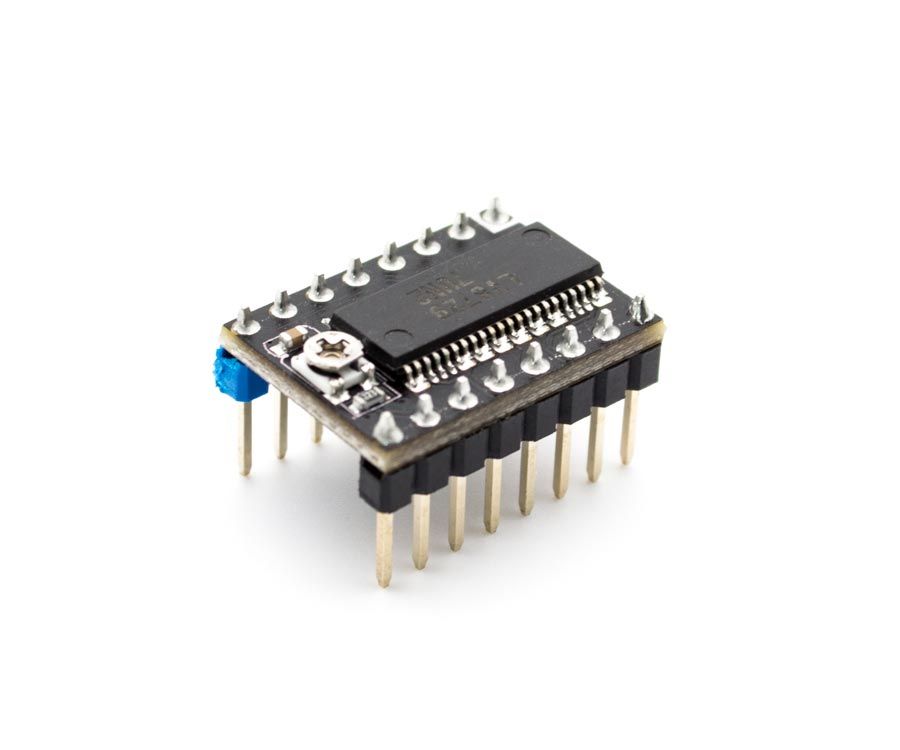
Драйвер шагового двигателя. Тестируем микросхему L9110 / Хабр
Откуда «ножки» растут
В настоящее время стали доступны и приобрели популярность различные станки с программным управлением.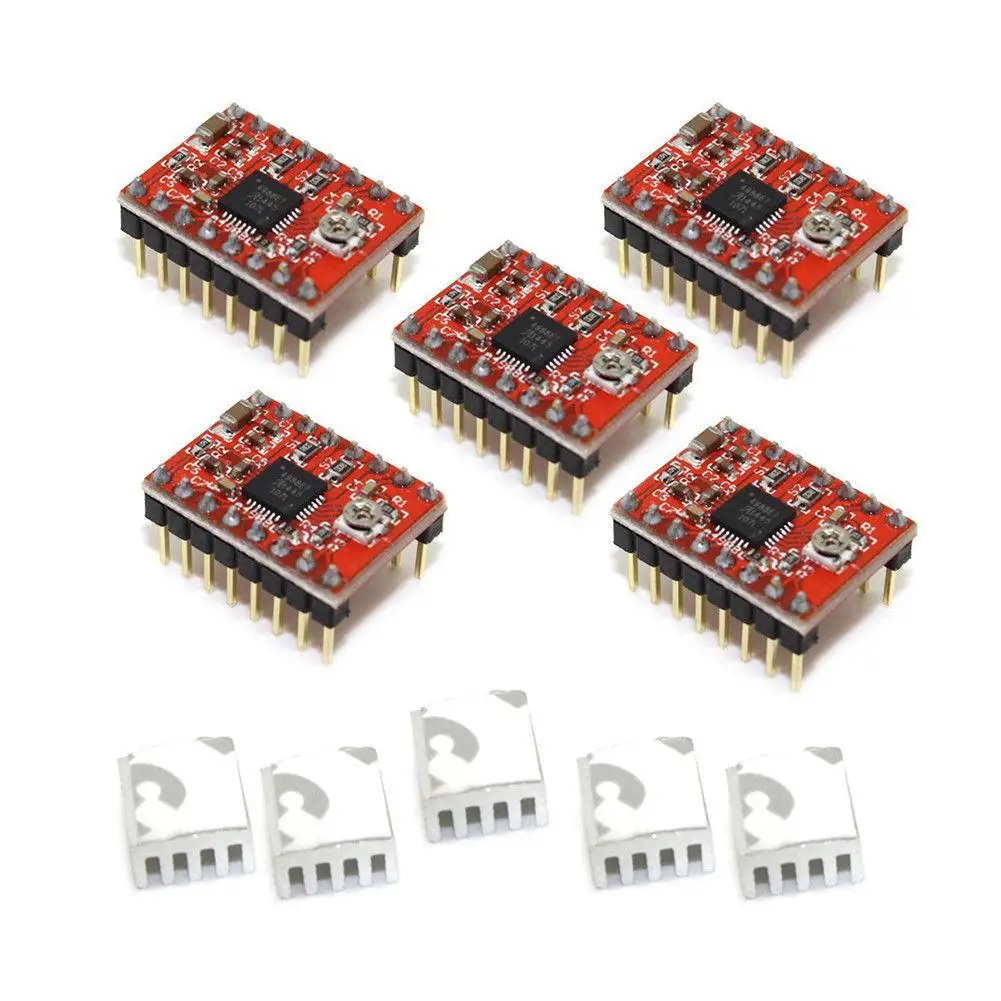 Это лазерные и фрезерные резчики и гравёры. А так же 3D принтеры. Все эти станки имеют один общий узел — шаговый двигатель.
Это лазерные и фрезерные резчики и гравёры. А так же 3D принтеры. Все эти станки имеют один общий узел — шаговый двигатель.
И этому двигателю нужен драйвер.
Принцип работы двигателя не является предметом этой статьи. Мы рассмотрим только драйвер. Всё, что нам нужно знать в данном контексте — это какие управляющие сигналы нам нужно формировать для управления шаговым двигателем. Оказывается, это самые обычные прямоугольные импульсы.
Существует некоторое количество решений драйверов от различных компаний. В нашей статье мы рассмотрим самое доступное решение драйвера L9110 и его аналог HG7881 Это решение часто используется в Arduino
Теория и практика
Я решил применить микросхему L9110 в своём проекте.
Довольно легко нагуглил datasheet. Прочитал. Всё предельно понятно. Характеристики, распиновка, таблица истинности… По всем параметрам драйвер, вроде бы подходит. Напряжение коммутации — 12 вольт, выходной ток 800 ма. — всего хватает.
А что на деле?
Не откладывая в «долгий ящик» я сделал плату, написал и запустил тестовую программу…
Первое, на что я обратил внимание в своём устройстве — то, что микросхема драйвера сильно греется.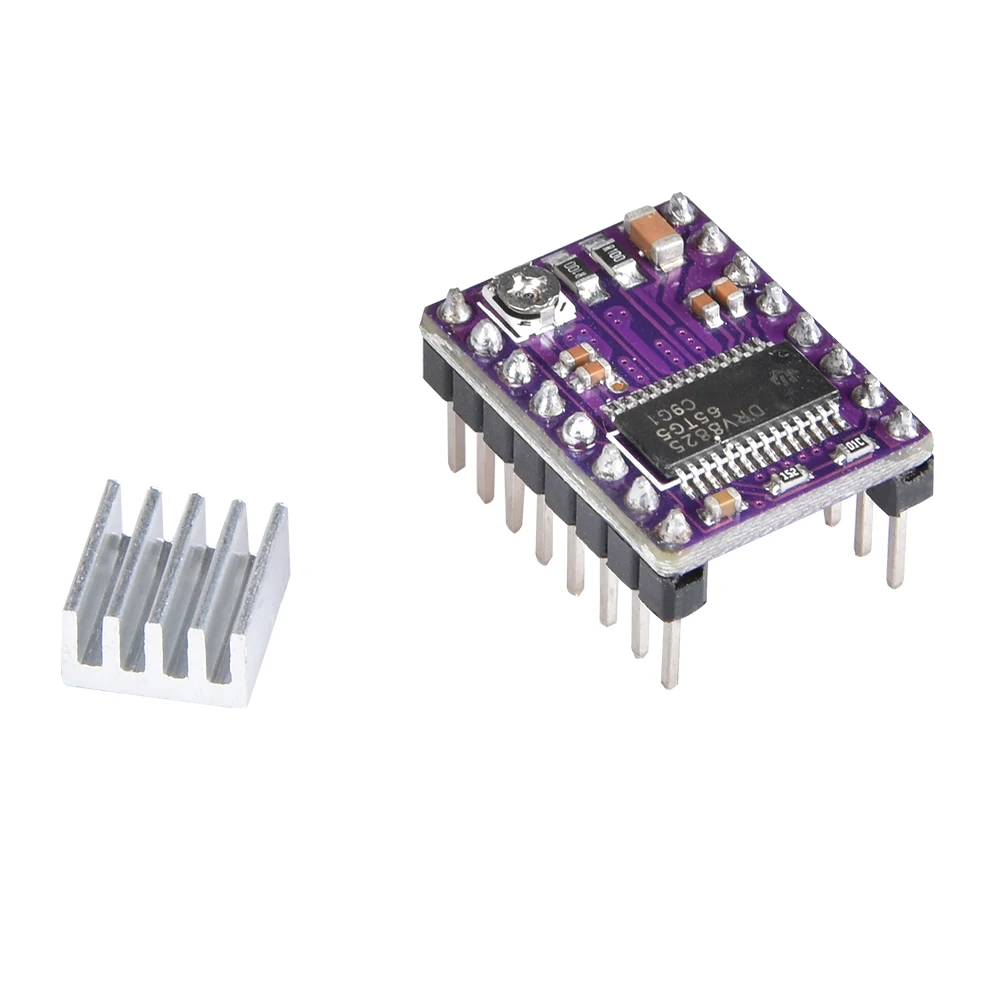 Внимание! НА ХОЛОСТОМ ХОДУ. Без нагрузки. Это что за чудеса схемотехники?
Внимание! НА ХОЛОСТОМ ХОДУ. Без нагрузки. Это что за чудеса схемотехники?
Может у меня микросхема бракованная?
Пришла в голову идея рассмотреть сей девайс поподробнее. И не один, а кучу.
Сказано — сделано.
Хорошо, что у меня была припасена панелька SO-8 и плата для моделирования.
Ну, и контроллер на базе STM32.
Собран стенд и произведены измерения.
Да, кстати, кроме непосредственно, силового узла в микросхеме заложена логика исключающее ИЛИ. В даташите это описано.
Поскольку я изучаю эффект нагрева микросхемы, лучше не ограничиваться логическими единицами и нулями, а снять реальные напряжения.
В результате измерений получилась табличка:
Рассмотрим строчки 2 и 3. Что мы здесь видим?
- Падение напряжения на выходных транзисторах, при наличии нагрузки, около полутора вольт, что при токе 0,33 ампера даёт 0,5 ватт на канал.
- На холостом ходу микросхема потребляет 0,05 А, что при напряжении 12 В даёт 0,6 ватт на канал.
Другими словами, независимо от нагрузки она потребляет около 0,5 Вт на канал. Теперь понятно, почему я об неё обжигал пальцы.
Сильный нагрев — это, конечно недостаток. Но может свою функцию микросхема выполняет хорошо? Тут пригодился недавно подаренный себе 4-х лучевой осциллограф приставка. Не ожидал, что мне так скоро потребуются все 4 луча. Для тестирования написал простенькую программку на stm32, который давно использую в различных проектах. Программа, просто, генерирует 2 прямоугольных сигналы с трёхкратной разницей частот.
Поскольку один раз увидеть лучше чем много раз прочитать — прикладываю развёртку сигналов управления.
Ничего особо сложного. Просто прямоугольные импульсы сдвинутые с разницей частоты в 3 раза.
Верхняя часть экрана — входные сигналы — нижняя — выходные.
Сразу бросается в глаза, что при различающихся значениях сигналов на входах, значения на выходах вполне чёткие Устанавливаются без задержек и с резкими фронтами.
Если же сигналы на входах совпадают — то фронт пологий. похож на разряд конденсатора.
Просмотрев документацию я не увидел ничего такого, что предвещало бы такое поведение.
Может я задал слишком высокую частоту входных сигналов? В даташите лимит не указан.
Уже зная, что у этого драйвера есть почти стопроцентный аналог HG7881 я обратился к его документации.
Она пролила больше света на эту загадочную ситуацию. Оказывается, логика работы драйвера немного шире. Две единицы на входе — это торможение ( то есть на выходе оба сигнала должно быть низкого уровня.) А два нуля на входе — это «висящие» контакты. Разрыв.
Значит два нуля на входе должны «подвешивать» выходы. Тогда, поведение разряжающегося конденсатора вполне предсказуемо. Однако две единицы на входах — должны быть надёжным нулём на выходе. А фактически это не так.
Я мог бы списать этот дефект на «китайского производителя». Однако, я тестировал микросхему по честному выпаянную из ардуиновской платы.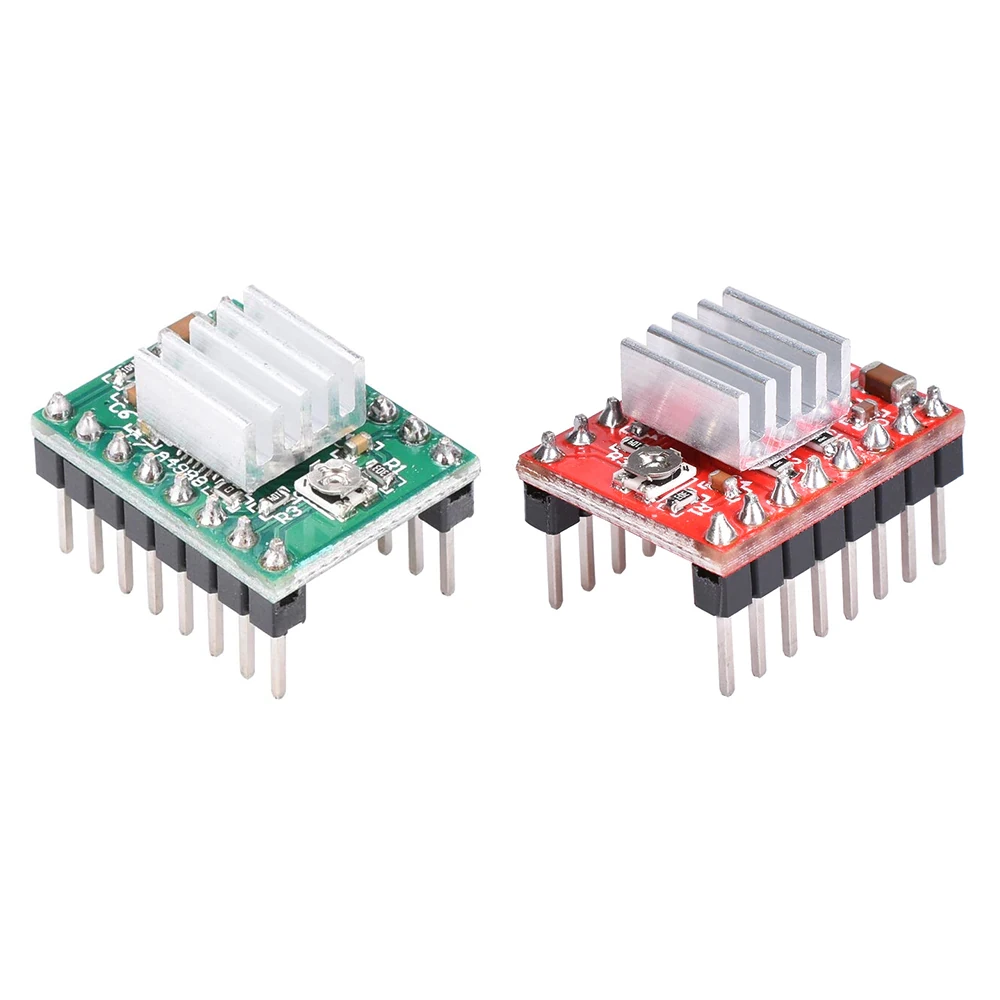 При чём — не одну микросхему. Из нескольких плат. То есть, вероятность брака сильно снижена.
При чём — не одну микросхему. Из нескольких плат. То есть, вероятность брака сильно снижена.
Вывод
Область применения микросхем L9110 уже, чем задекларирована, да и КПД низковат.
Рассеяние 0,5-0,6 ватта на одном ключе — это многовато. Не случайно это решение самое дешёвое.(10 центов за микросхему. на алиэкспрессе).
В следующих статьях будут рассмотрены альтернативные драйвера шаговых двигателей.
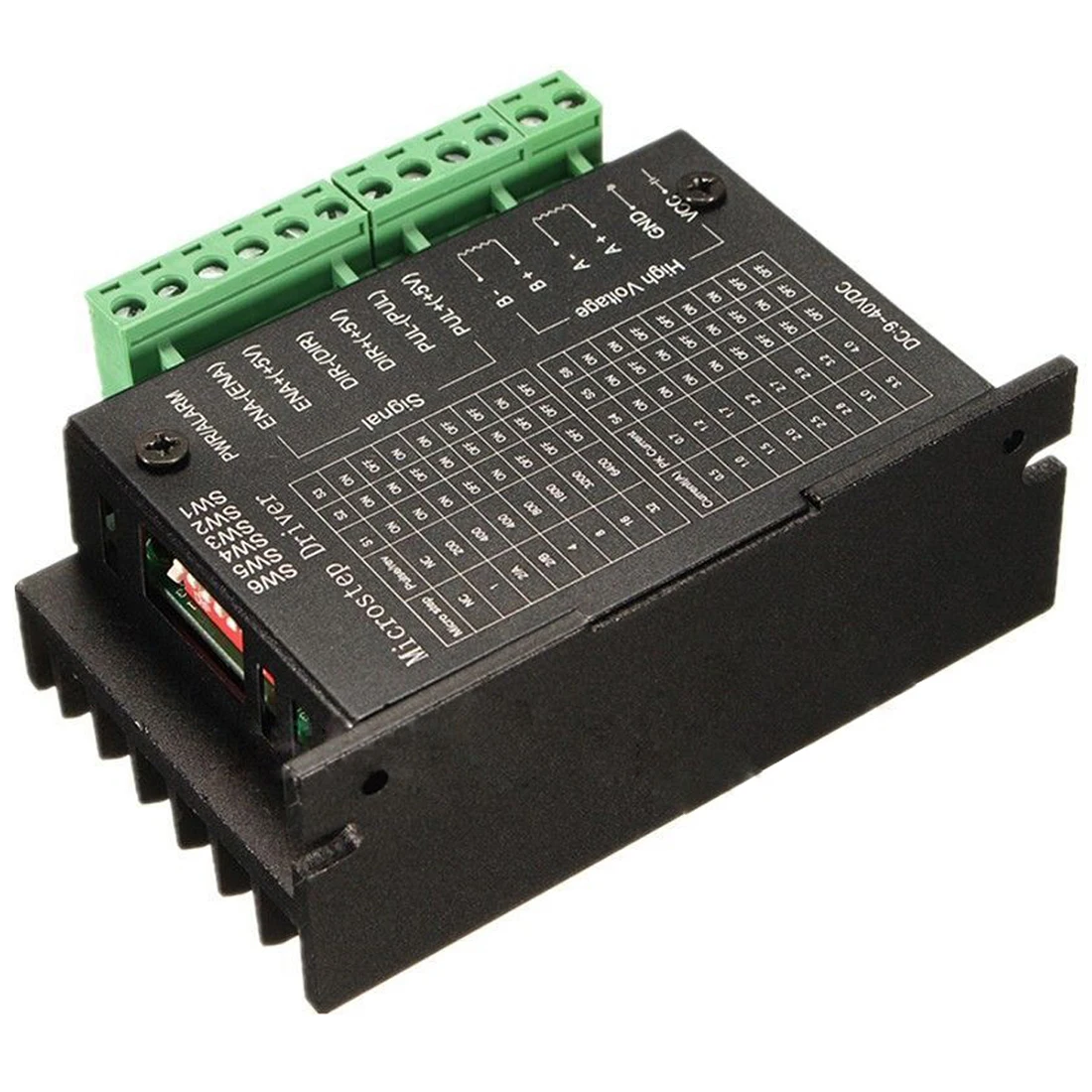
Драйверы шаговых двигателей | Драйверы шагового двигателя с ЧПУ Fulling
Драйвер шагового двигателя является усилителем мощности, который позволяет произвести запуск шагового двигателя. Он преобразует импульсный сигнал, поступающий из контроллера, в угловое смещение шагового двигателя. Скорость вращения двигателя пропорциональна частоте пульса, поэтому для точного регулирования скорости необходимо регулировать частоту импульсов. Контролируя частоту импульсов, можно точно отрегулировать скорость двигателя.
Наши драйверы могут автоматически подстраиваться под различные индукционные двигатели.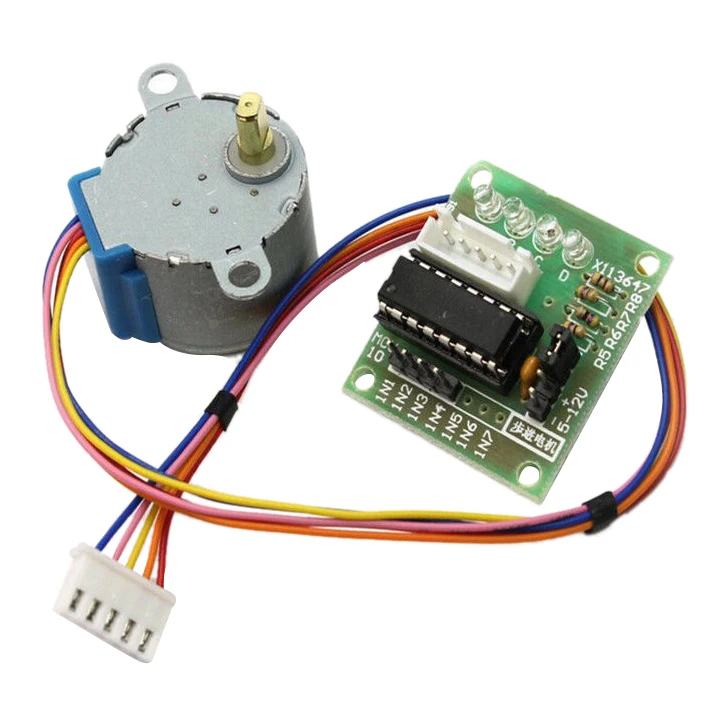 Они позволяют точно управлять электрическим током. Диапазон рабочего напряжения составляет от 24 до 120 В постоянного тока или от 18 до 80 В переменного тока. Наши драйверы отливаются высоким быстродействием (на 20% выше, чем у обычных драйверов). Продукт работает бесперебойно на низкой скорости. Существует 16 видов разделения микрошага, в том числе серии 2~256 и 5~200. Ток и число разделения микрошага устанавливаются при помощи переключателей типа «DIP».
Они позволяют точно управлять электрическим током. Диапазон рабочего напряжения составляет от 24 до 120 В постоянного тока или от 18 до 80 В переменного тока. Наши драйверы отливаются высоким быстродействием (на 20% выше, чем у обычных драйверов). Продукт работает бесперебойно на низкой скорости. Существует 16 видов разделения микрошага, в том числе серии 2~256 и 5~200. Ток и число разделения микрошага устанавливаются при помощи переключателей типа «DIP».
Наши драйверы шаговых двигателей имеют сертификаты CE и RoHS. По требованию клиента мы можем подать заявку на сертификацию UL.
Существует три режима соединения:
1. Обычный режим анода
Соединения PUL+, DIR+ и EN+ вместе в виде обычного анодного конца подключены к +5V внешней системы. Импульсный сигнал подключен к PUL-. Сигнал направления подключен к DIR-. Сигнал включения подключен к ENA-.
2. Обычный режим катода
Соединения PUL-, DIR- и ENA- вместе в виде обычного катодного конца подключены к заземлению системы. Импульсный сигнал подключен к PUL+. Сигнал направления подключен к DIR+. Сигнал включения подключен к ENA+.
Импульсный сигнал подключен к PUL+. Сигнал направления подключен к DIR+. Сигнал включения подключен к ENA+.
3. Дифференциальный режим
Подключения положительного и отрицательного концов импульсного сигнала, сигнала направления и сигнала включения к PUL+, PUL-, DIR+, DIR-, ENA+ и ENA- соединениям драйвера соответственно.
Примечания
При подключении драйвера к шаговому двигателю, пожалуйста, не ошибитесь в подключении фазы. Неверная фаза или сбой фазы вызовет неверную работу двигателя и может повредить его привод.
Схожая продукция
Драйвер шагового двигателя | Драйвер индуктивного двигателя | Драйвер для шагового электромеханического устройства | Драйвер шагового двигателя
Драйвер Шагового Двигателя
Драйвер шагового двигателя представляет собой приводное устройство, позволяющее преобразовывать импульс в сигнал углового перемещения. Такое оборудование приводит в движение шаговый мотор для поворота на определенный угол в указанном направлении.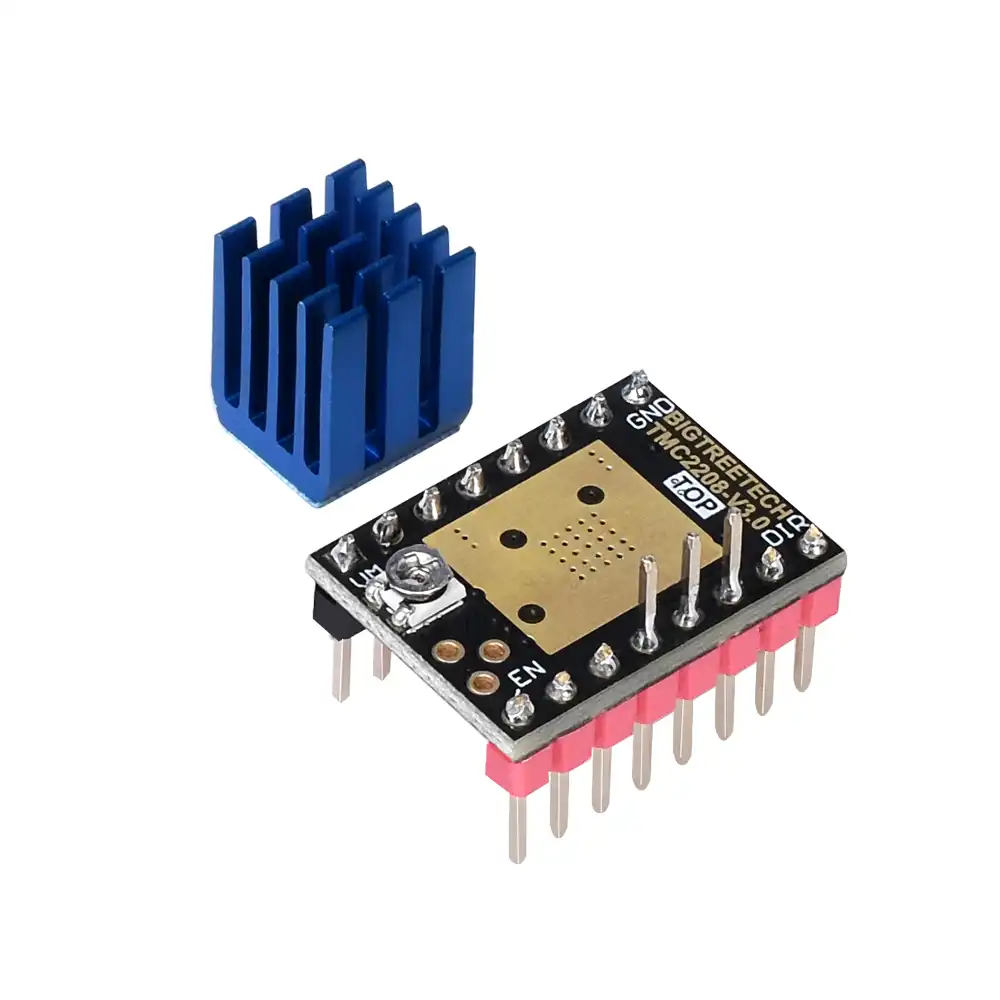 Скорость моторчика соответствует частоте сигналов, которая задана контроллером, а перемещение определяется числом сигналов, которые выдаются управляющим устройством. Драйвер управления шаговым двигателем позволяет увеличить производительность системы в целом.
Скорость моторчика соответствует частоте сигналов, которая задана контроллером, а перемещение определяется числом сигналов, которые выдаются управляющим устройством. Драйвер управления шаговым двигателем позволяет увеличить производительность системы в целом.
Есть три простых типа драйверов:
- Цифровые. Такие микросхемы созданы на базе усовершенствованного алгоритма DSP. Этот вариант оплаты оптимально подойдет для шагового оборудования.
- С замкнутым контуром. Такие моторчики оснащаются дополнительными датчиками, предназначенными для получения импульса торможения. Устройства позволяют обеспечить более высокую производительность за счет повышенных пиковых диапазонов крутящего момента и увеличенной скорости.
- Интегрированные. Встроенные драйверы биполярного двигателя могут монтироваться на шаговые устройства, и одним из основных преимуществ этого типа является высокая надежность.
Подробнее с описанием лучших моделей драйверов для 3D-принтеров и других устройств, а также с их характеристиками, включая скорость и ток, можно ознакомиться на странице с изделием. Если возникли вопросы касательно выбора товара, задавайте их нашему представителю. Специалист компании поможет сделать правильный выбор, основываясь на требованиях и пожеланиях заказчика.
Если возникли вопросы касательно выбора товара, задавайте их нашему представителю. Специалист компании поможет сделать правильный выбор, основываясь на требованиях и пожеланиях заказчика.
Преимущества сотрудничества с нашей компанией:
- мы предлагаем высококачественные товары по доступным ценам в сравнении с продукцией, предлагаемой поставщиками, работающими с прямыми производителями;
- на нашем сайте можно купить не только драйверы, но и шаговые, а также гибридные электродвигатели Nema и других брендов;
- вся продукция соответствует мировым стандартам, поскольку качество товаров проверяется внутренними специалистами компании.
Кроме того, возможна разработка индивидуальных устройств по проектам заказчика. Мы предлагаем услугу местной доставки и возврата за счет выстроенной логистической цепочки. Оплата товара может быть произведена через систему PayPal, с использованием банковской или дебетовой карты, или прямого перевода. ф
ф
Настройка тока драйвера шагового двигателя просто и доступно на CNC-Design.ru
Драйвер шагового двигателя является достаточно важным компонентом любого ЧПУ устройства, управляя движением каждой из осей. Перед использованием необходимо убедиться, что они правильно установлены и настроены, чтобы не допустить перегорание шаговых моторов или платы контроллера Arduino Sheild.
Настройку тока драйвера необходимо сделать для решения нескольких достаточно важных моментов:
— уменьшить вероятность пропуска шагов при низком токе;
— снижение нагрева драйвера и шагового двигателя при высоком напряжении;
— снизить шум при высоких значениях тока;
Для настройки тока нам понадобится:
— контроллеры с установленными драйверами;
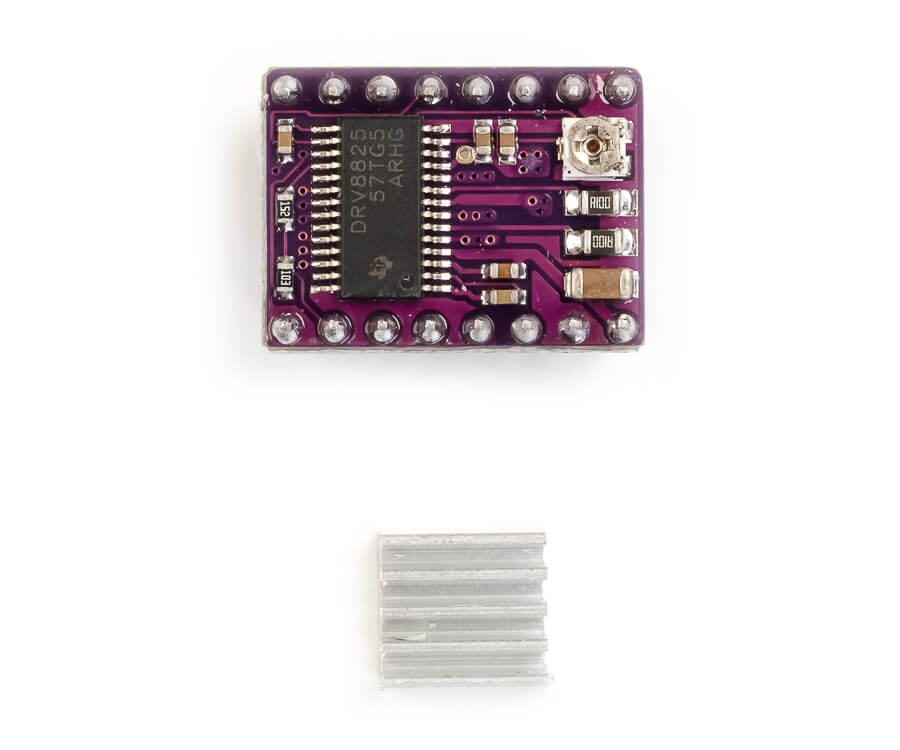
— драйвера А4988 или DRV8825;
— мультиметр;
— отвертка.
Для начала необходимо собрать и подключить всю систему в полношаговом режиме. После сборки «бутерброда» из контроллера Ардуино, ЧПУ шилда и драйверов шаговых двигателей необходимо подключить шаговые двигатели. В описании к выбранным моторам надо узнать значение максимального тока Imax (для примера у шагового двигателя 17HS8401 это значение 1,8А)
После сборки «бутерброда» из контроллера Ардуино, ЧПУ шилда и драйверов шаговых двигателей необходимо подключить шаговые двигатели. В описании к выбранным моторам надо узнать значение максимального тока Imax (для примера у шагового двигателя 17HS8401 это значение 1,8А)
Затем надо рассчитать значение опорного напряжения Vref на переменном резисторе для каждого типа драйверов, у нас их два: А4988 или DRV8825.
Формула опорного напряжения Vref для драйверов отличается.
Расчет для драйвера типа А4988.
Для A4988 формула расчета зависит от номинала резисторов, которые распаяны на плате драйвера. Если присмотреться, то можно увидеть надписи R050 или R100.
На приведенной фотографии они обведены черными кружками, их значение R100.
В общем виде формула выглядит как:
Vref = Imax * 8 * (RS)
Imax — максимальный ток на обмотках двигателя, из описания;
RS — сопротивление резистора, если резистор подписан R100, то RS=0,100, при R050 значение RS=0,05.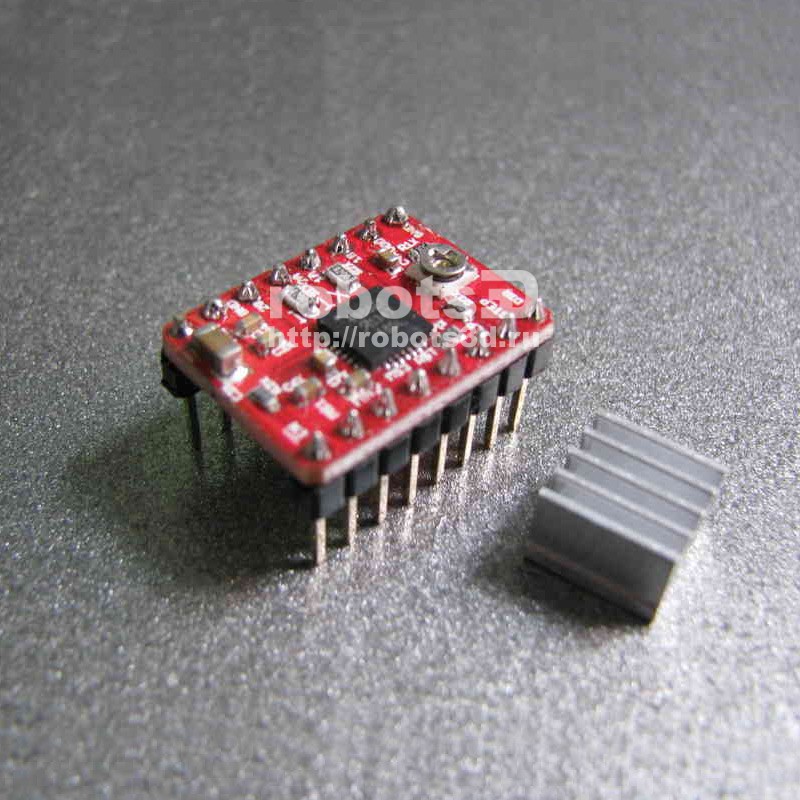
Для двигателя из нашего примера 17HS8401
Vref = 1,8 * 8 * 0,100 = 1,44 В.
Из-за того, что рабочий ток двигателя обычно рекомендуется ограничивать в 70% от максимального тока, для уменьшения перегрева двигателя, полученное значение необходимо умножить на 0,7.
Vref= 1,44*0,7 = 1,01 В.
Расчет для драйвера типа DRV8825.
Формула опорного напряжение для данного типа драйвера:
Vref = Imax/2
При рекомендованной работе на 70% от максимального тока двигателя, подставив значения для нашего примера, получим следующие значения:
Vref = 0.7*1,8 / 2 = 0.63V
Настройка тока драйвера на контроллере.
Для настройки необходимо подключить сборку плат к компьютеру,
Включить на мультиметре измерение постоянного напряжения напротив положения «20».
Для измерения напряжения необходимо минусовой щуп приложить к минусу на CNC Sheild, а положительный щуп замкнуть с подстроечным резистором, который по совместительству является «+» в данной схеме.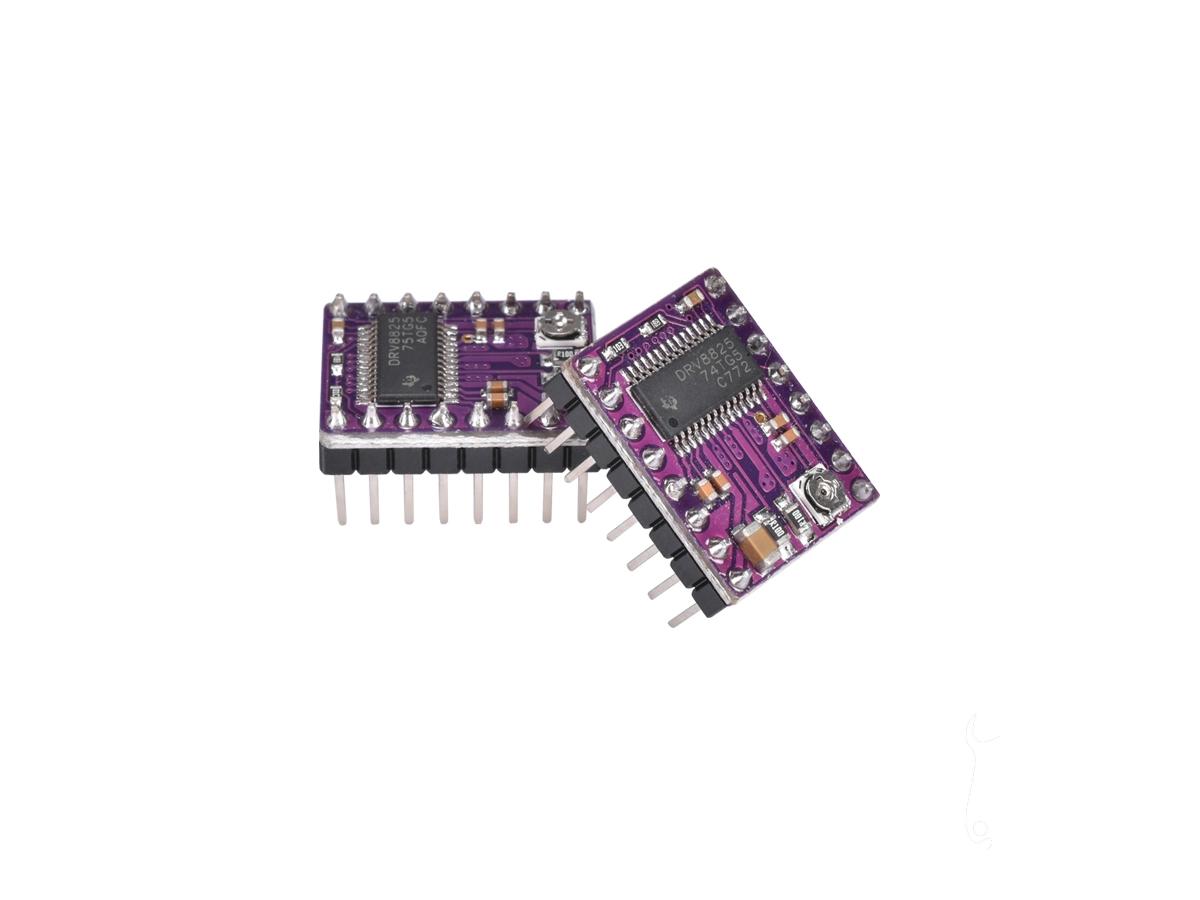
Необходимо вращать подстроечный резитор, пока мультиметр не покажет требуемое значение напряжения, при вращении по часовой стрелке, значения растут, против часовой стрелки — напряжение падает.
Настройку расчетных значений необходимо повторить это для всех активных драйверов в сборке.
Драйвер шагового двигателя| Дешевый лучший драйвер шагового двигателя оптом …
Что такое драйвер шагового двигателя?
Драйвер шагового двигателя — это привод, который может преобразовывать импульсный сигнал в сигнал углового смещения. Драйверы шагового двигателя приводят в действие шаговые двигатели для вращения на угол, называемый углом шага, в заданном направлении при получении импульсного сигнала. Скорость двигателя соответствует частоте импульсов, заданной контроллером, а смещение определяется количеством импульсов, подаваемым контроллером.Шаговая система состоит из шагового двигателя и шагового драйвера. Производительность шаговой системы зависит не только от двигателя, но и от шагового драйвера.
Типы драйверов шагового двигателя
STEPPERONLINE предлагает три типа драйверов шаговых двигателей:
Цифровой шаговый драйвер
Цифровой шаговый драйвер разработан с использованием усовершенствованного алгоритма управления DSP, основанного на новейшей технологии управления движением. Это идеальный выбор для решений с шаговыми двигателями.Его высокое качество, высокая производительность и длительный срок службы впечатляют многих клиентов.
Подробнее ►
Драйвер шагового двигателя с замкнутым контуром
Шаговые драйверы с обратной связью работают с шаговыми двигателями с обратной связью с энкодером для получения сигнала положения. Он обеспечивает более высокие диапазоны пикового крутящего момента на высокой скорости и большую производительность машины, а также более тихую работу и меньшее энергопотребление.
Подробнее ►
Интегрированный шаговый драйвер
Интегрированные шаговые драйверы — драйверы, которые могут быть установлены на шаговых двигателях. Самым большим преимуществом встроенного шагового двигателя является пространство и большая надежность. В настоящее время STEPPERONLINE предлагает три типа интегрированных шаговых двигателей:
Самым большим преимуществом встроенного шагового двигателя является пространство и большая надежность. В настоящее время STEPPERONLINE предлагает три типа интегрированных шаговых двигателей:
b. Шаговый двигатель + шаговый драйвер + контроллер
c. Шаговый двигатель + шаговый драйвер + кодировщик
STEPPERONLINE всегда предлагает драйверы шагового двигателя лучшего качества по лучшей цене. Если у вас есть какие-либо вопросы о том, как выбрать подходящий драйвер шагового двигателя, свяжитесь с нами.Мы всегда готовы дать вам наиболее подходящую рекомендацию.
Сортировать по: DefaultName (A — Z) Имя (Z — A) Цена (Низкая> Высокая) Цена (Высокая> Низкая) Рейтинг (Наивысший) Рейтинг (Наименьший) Модель (A — Z) Модель (Z — A)
Показать: 20255075100
-22%
Артикул: DM320T 17,00 долл. 13,30 долл. США Начиная с: 12,70 $
-21%
Артикул: DM332T Это цифровой шаговый привод с передовой технологией управления шаговым двигателем. Он прост в использовании и может использоваться для плавного управления 2-фазными и 4-фазными двигателями (от Nema 17-Nema 23) с меньшим тепловыделением и шумом. Оно работает ..
Он прост в использовании и может использоваться для плавного управления 2-фазными и 4-фазными двигателями (от Nema 17-Nema 23) с меньшим тепловыделением и шумом. Оно работает ..
$ 19,50 $ 15,50 Начиная с: 14,82 $
В основном используется в медицинском оборудовании, дозирующих машинах, гравировальных станках, лазерном оборудовании, этикетировочных машинах, электронном оборудовании, рекламном оборудовании и другом оборудовании для автоматизации. Особенно эффективен при применении.
16 долларов.24 Начиная с: 14,33 $
-20%
Артикул: DM542T 25,00 долл. 19,90 долл. США Начиная с: 19,05 $
В основном используется в медицинском оборудовании, дозирующих машинах, гравировальных станках, лазерном оборудовании, этикетировочных машинах, электронном оборудовании, рекламном оборудовании и другом оборудовании для автоматизации. Особенно эффективен при применении.
Особенно эффективен при применении.
24,36 $ Начиная с: 21,50 $
-21%
Артикул: DM556T 28 долларов.00 22,05 долл. США Начиная с: 21,18 $
-20%
Артикул: DM860I 40,50 долл. США 32,31 долл. США Начиная с: 30,92 $
В основном используется в медицинском оборудовании, дозирующих машинах, гравировальных станках, лазерном оборудовании, этикетировочных машинах, электронном оборудовании, рекламном оборудовании и другом оборудовании для автоматизации. Особенно эффективен при применении.
27,07 долл. США Начиная с: 23,88 $
-20%
Артикул: DM860T $ 46.50 $ 37,40 Начиная с: 35,79 $
В основном используется в медицинском оборудовании, дозирующих машинах, гравировальных станках, лазерном оборудовании, этикетировочных машинах, электронном оборудовании, рекламном оборудовании и другом оборудовании для автоматизации. Особенно эффективен при применении.
Особенно эффективен при применении.
40,60 долл. США Начиная с: 35,83 $
Артикул: CL57T43,31 $ Начиная с: 38,22 $
Артикул: CL86T56,85 долл. США От 50 долларов.16
Артикул: ISD02ISD02 — это серия миниатюрных высокопроизводительных драйверов шаговых двигателей с параллельным портом управления. Самая большая их особенность — небольшой размер и высокая управляемость. Его толщина менее 14 мм. Их можно установить прямо на ..
25,48 долл. США Начиная с: 21,50 $
Артикул: ISD04ISD04 представляет собой серию миниатюрных высокопроизводительных драйверов шаговых двигателей с параллельным портом управления. Самая большая их особенность — небольшой размер и высокая управляемость.Их толщина менее 14 мм. Их можно устанавливать непосредственно на NE ..
40,76 долл. США Начиная с: 34,39 $
Артикул: ISD08 ISD08 — это серия миниатюрных высокопроизводительных драйверов шагового двигателя с параллельным портом управления. Самая большая его особенность — небольшой размер и отличная управляемость. Его толщина менее 14 мм. Их можно установить прямо на ..
Самая большая его особенность — небольшой размер и отличная управляемость. Его толщина менее 14 мм. Их можно установить прямо на ..
56,05 долл. США Начиная с: 47,29 $
-24%
Артикул: ISC02ISC02 — это встроенный микропроцессор, регулятор напряжения, миниатюрный контроллер шагового двигателя.Он полностью разработан для установки на шаговые двигатели и прост в управлении. С ISC02 скорость двигателя можно контролировать с помощью аналогового ..
26,26 долл. США 19,99 долл. США Начиная с: 19,99 $
ISC02 — это встроенный микропроцессор, регулятор напряжения, миниатюрный контроллер шагового двигателя. Он интегрально разработан для установки на шаговые двигатели и прост в управлении. С ISC02 скорость двигателя можно контролировать с помощью аналогового ..
27 долларов.07 Начиная с: 23,09 $
Артикул: ISC04 ISC04 — это встроенный микропроцессор, регулятор напряжения, миниатюрный контроллер шагового двигателя. Он интегрально разработан для установки на шаговые двигатели и прост в управлении. С ISC04 скорость двигателя можно контролировать с помощью аналогового ..
Он интегрально разработан для установки на шаговые двигатели и прост в управлении. С ISC04 скорость двигателя можно контролировать с помощью аналогового ..
40,60 долл. США Начиная с: 34,63 $
Артикул: ISC08ISC08 — это встроенный микропроцессор, регулятор напряжения, миниатюрный контроллер шагового двигателя. Он интегрально разработан для установки на шаговые двигатели и прост в управлении.С ISC08 скорость двигателя можно контролировать с помощью аналогового ..
59,55 долл. США Начиная с: 50,79 $
Шаговые двигатели, драйверы шаговых двигателей, контроллеры шаговых двигателей и шаговые двигатели с регулировкой скорости
Шаговые двигатели упрощают точное позиционирование. Они используются в различных типах оборудования для точного контроля угла поворота и скорости с помощью импульсных сигналов. Шаговые двигатели создают высокий крутящий момент с компактным корпусом и идеально подходят для быстрого ускорения и отклика. Шаговые двигатели также сохраняют свое положение при остановке благодаря своей механической конструкции. Решения с шаговыми двигателями состоят из драйвера (принимает импульсные сигналы и преобразует их в движение двигателя) и шагового двигателя.
Шаговые двигатели также сохраняют свое положение при остановке благодаря своей механической конструкции. Решения с шаговыми двигателями состоят из драйвера (принимает импульсные сигналы и преобразует их в движение двигателя) и шагового двигателя.
Oriental Motor предлагает множество решений для широкого спектра применений:
- Шаговые двигатели AlphaStep с замкнутым контуром, 2-фазные шаговые двигатели, 5-фазные шаговые двигатели
- Опции редуктора, энкодера и электромагнитного тормоза
- Драйверы шаговых двигателей переменного или постоянного тока
- Размеры рамы от 0.От 79 дюймов (20 мм) до 3,54 дюйма (90 мм)
Подробнее …
Шаговые двигатели (только двигатели)
Oriental Motor предлагает широкий спектр шаговых двигателей, включая: Шаговые двигатели AlphaStep с обратной связью, 2-фазные шаговые двигатели и 5-фазные шаговые двигатели доступны в размерах от 0,79 дюйма (20 мм) до 3,54 дюйма (90 мм). Предлагаются пять вариантов шаговых двигателей редукторного типа, опции энкодера и тормоза, а также различные обмотки двигателя.
Предлагаются пять вариантов шаговых двигателей редукторного типа, опции энкодера и тормоза, а также различные обмотки двигателя.
- 0.79 ~ 3,54 дюйма (20 ~ 90 мм) Шаговые двигатели NEMA 8 ~ NEMA 34 типоразмера
- Доступны шестерни без люфта, с низким люфтом и прямозубые шестерни
- Шаговые двигатели с замкнутым контуром AlphaStep, 2-фазные шаговые двигатели и 5-фазные шаговые двигатели
- Опции энкодера и электромагнитного тормоза
Драйверы шагового двигателя
Драйверы шагового двигателя преобразуют импульсные сигналы от контроллера в движение двигателя для достижения точного позиционирования.
- Вход переменного или постоянного тока
- Драйверы шаговых двигателей AlphaStep с замкнутым контуром, 2-фазных шаговых двигателей или 5-фазных шаговых двигателей
- Импульсный вход, встроенный контроллер или EtherNet / IP ™, EtherCAT, PROFINET Совместимые версии
- Тип платы или коробки
EtherNet / IP ™ является товарным знаком ODVA
Шаговые двигатели и драйверы с регулировкой скорости
Система управления скоростью SC серии CVK предлагает простую конфигурацию, состоящую из шагового двигателя, драйвера и программируемого контроллера.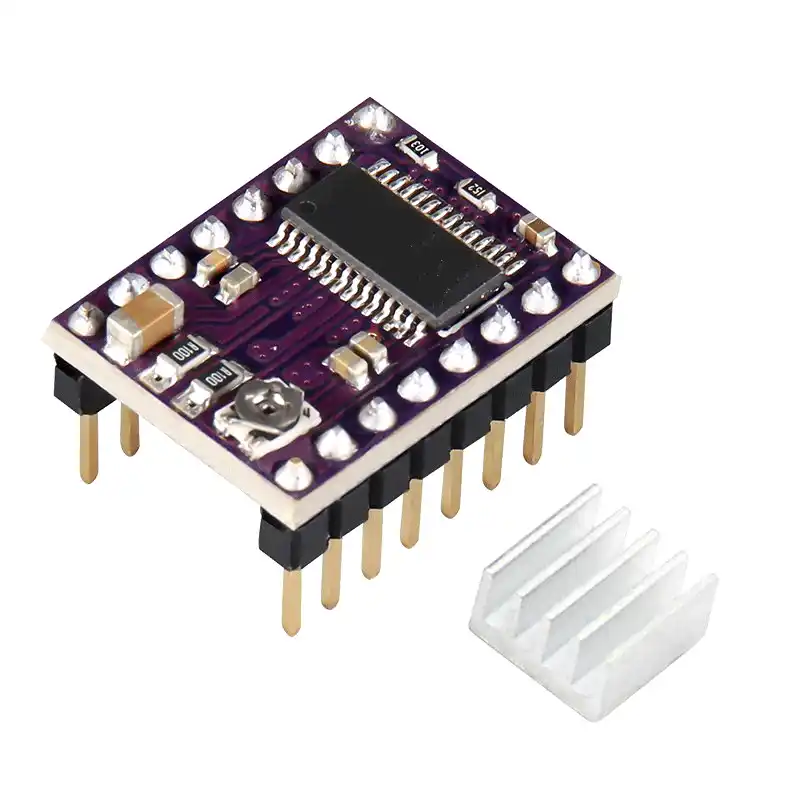 Рабочую скорость, время ускорения и замедления, рабочий ток можно установить с помощью переключателей привода, а простое переключение входа FWD (RVS) в положение ON или OFF позволяет легко управлять.
Рабочую скорость, время ускорения и замедления, рабочий ток можно установить с помощью переключателей привода, а простое переключение входа FWD (RVS) в положение ON или OFF позволяет легко управлять.
- Генератор импульсов не требуется
- Возможны 2 настройки скорости
- Компактный шаговый двигатель с высоким крутящим моментом
Контроллеры / Сетевые шлюзы
Контроллерыи сетевые шлюзы для использования с системами управления движением.
- Контроллеры для использования с драйверами импульсного входа
- Сетевые преобразователи / шлюзы (связь RS-485)
- EtherCat
- CC-Ссылка
- MECHATROLINK
Шаговые двигатели и драйверы
Шаговый двигатель используется для достижения точного позиционирования с помощью цифрового управления.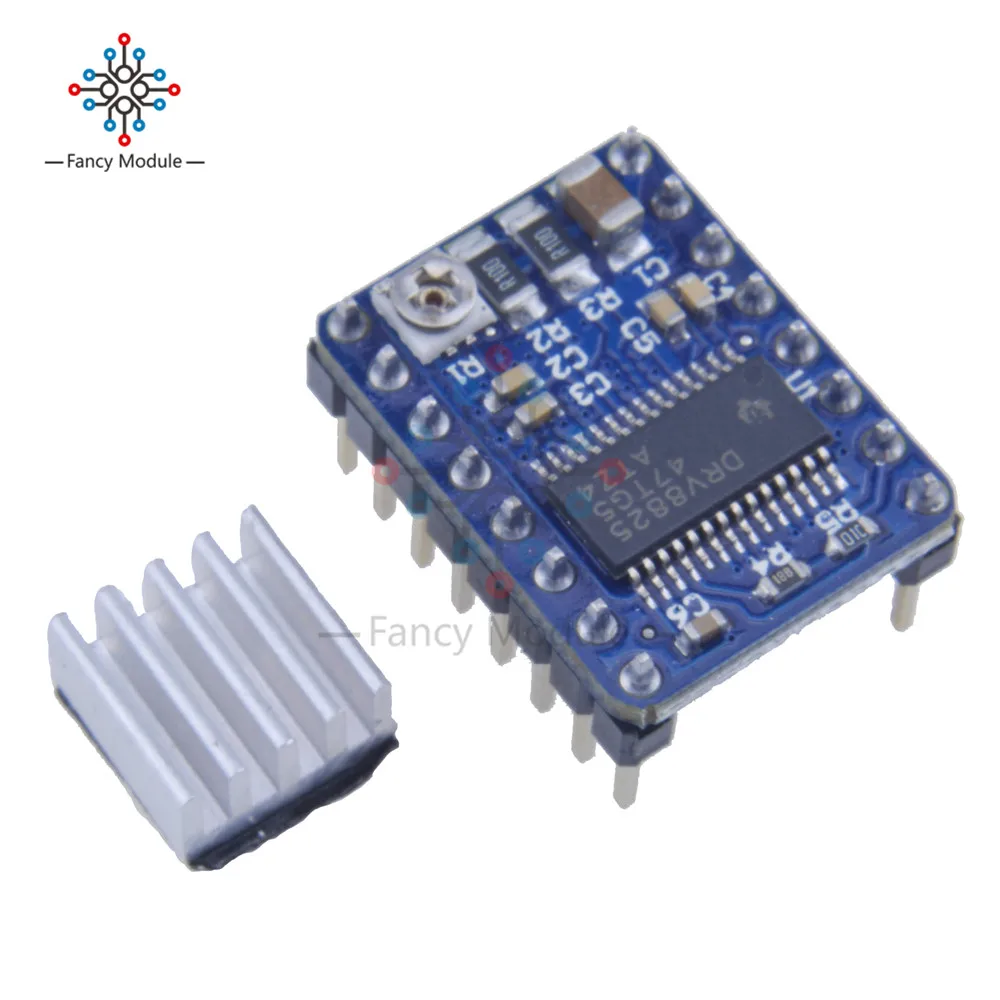 Двигатель работает за счет точной синхронизации с выходным импульсным сигналом от контроллера к драйверу. Шаговые двигатели с их способностью создавать высокий крутящий момент на низкой скорости при минимальной вибрации идеально подходят для приложений, требующих быстрого позиционирования на короткое расстояние.
Двигатель работает за счет точной синхронизации с выходным импульсным сигналом от контроллера к драйверу. Шаговые двигатели с их способностью создавать высокий крутящий момент на низкой скорости при минимальной вибрации идеально подходят для приложений, требующих быстрого позиционирования на короткое расстояние.
Точное позиционирование с точностью до шага
Шаговый двигатель вращается с фиксированным углом шага, как секундная стрелка часов. Этот угол называется «углом основного шага». Oriental Motor предлагает шаговые двигатели с базовым углом шага 0.36 °, 0,72 °, 0,9 ° и 1,8 °. 5-фазные шаговые двигатели имеют угол поворота 0,36 ° и 0,72 °, а 2-фазные шаговые двигатели — угол шага 0,9 ° и 1,8 °.
Использование технологии гибридных шаговых двигателей
Гибридный шаговый двигатель представляет собой комбинацию двигателей с переменным сопротивлением и двигателей с постоянными магнитами. Ротор гибридного шагового двигателя намагничен в осевом направлении, как шаговый двигатель с постоянным магнитом, а на статор подается электромагнитное питание, как у шагового двигателя с переменным магнитным сопротивлением.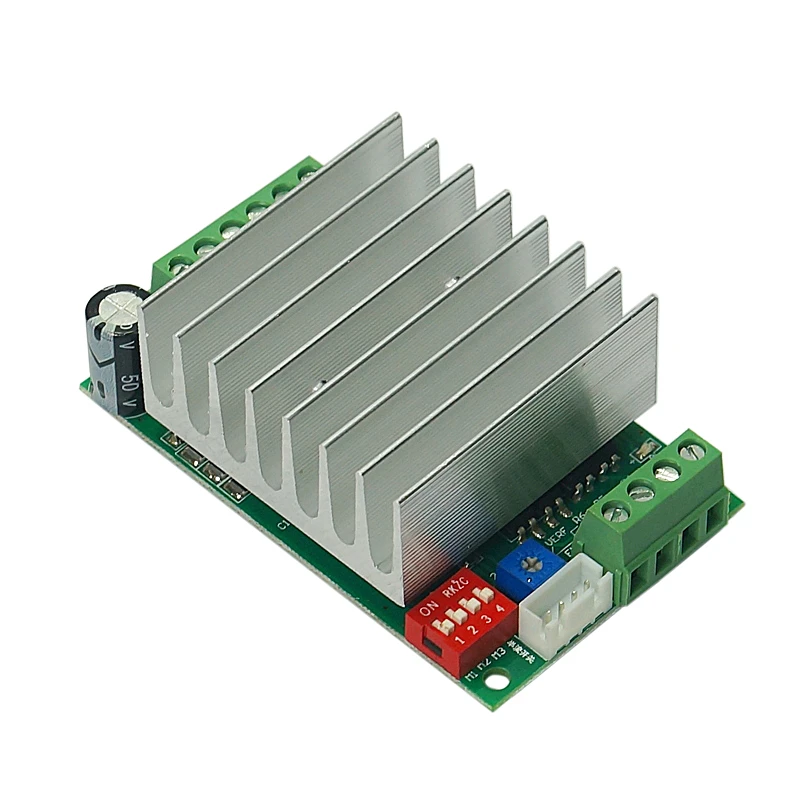 И статор, и ротор имеют несколько зубьев.
И статор, и ротор имеют несколько зубьев.
Гибридный шаговый двигатель имеет намагниченный в осевом направлении ротор, что означает, что один конец намагничен как северный полюс, а другой конец — как южный полюс. Чашки зубчатого ротора размещены на каждом конце магнита, и чашки смещены на половину шага зубьев.
Простое управление с помощью импульсных сигналов
Конфигурация системы для высокоточного позиционирования показана ниже. Угол поворота и скорость шагового двигателя можно контролировать с высокой точностью с помощью импульсных сигналов от контроллера.
Что такое импульсный сигнал?
Импульсный сигнал — это электрический сигнал, уровень напряжения которого многократно меняется между ВКЛ и ВЫКЛ. Каждый цикл включения / выключения считается одним импульсом. Команда с одним импульсом заставляет выходной вал двигателя поворачиваться на один шаг. Уровни сигнала, соответствующие состояниям включения и выключения напряжения, обозначаются как «H» и «L» соответственно.
Величина вращения пропорциональна количеству импульсов
Величина вращения шагового двигателя пропорциональна количеству импульсных сигналов (количеству импульсов), подаваемых драйверу.Соотношение вращения шагового двигателя (угла поворота выходного вала двигателя) и количества импульсов выражается следующим образом:
Скорость пропорциональна скорости импульса
Скорость шагового двигателя пропорциональна скорости импульсных сигналов (частоты импульсов), подаваемых водителю. Соотношение скорости импульса [Гц] и скорости двигателя [об / мин] выражается следующим образом:
Создание высокого крутящего момента с помощью компактного корпуса
Шаговые двигатели в компактном корпусе создают высокий крутящий момент.Эти характеристики обеспечивают им отличное ускорение и реакцию, что, в свою очередь, делает эти двигатели хорошо подходящими для приложений с высокими требованиями к крутящему моменту, когда двигатель должен часто запускаться и останавливаться. Чтобы удовлетворить потребность в увеличении крутящего момента на низкой скорости, Oriental Motor также предлагает мотор-редукторы, сочетающие компактную конструкцию и высокий крутящий момент.
Чтобы удовлетворить потребность в увеличении крутящего момента на низкой скорости, Oriental Motor также предлагает мотор-редукторы, сочетающие компактную конструкцию и высокий крутящий момент.
Двигатель удерживается в остановленном положении
Шаговые двигатели продолжают создавать удерживающий момент даже в состоянии покоя.Это означает, что двигатель можно удерживать в остановленном положении без использования механического тормоза.
При отключении питания самоудерживающийся момент двигателя теряется, и двигатель больше не может удерживаться в остановленном положении при вертикальных операциях или при приложении внешней силы. В подъемниках и подобных устройствах используйте тормоз электромагнитного типа.
Шаговые двигатели с замкнутым контуром и драйверы — AlphaStep
AlphaStep состоит из шагового двигателя и драйверов, разработанных для раскрытия максимальных характеристик шагового двигателя. Эти продукты обычно работают синхронно с импульсными командами, но когда происходит внезапное ускорение или изменение нагрузки, уникальный режим управления поддерживает операцию позиционирования. Модели AlphaStep также могут выводить сигналы завершения позиционирования и аварийные сигналы, что повышает надежность оборудования, с которым они работают.
Эти продукты обычно работают синхронно с импульсными командами, но когда происходит внезапное ускорение или изменение нагрузки, уникальный режим управления поддерживает операцию позиционирования. Модели AlphaStep также могут выводить сигналы завершения позиционирования и аварийные сигналы, что повышает надежность оборудования, с которым они работают.
Типы операционных систем
Каждый шаговый двигатель и драйвер объединяют шаговый двигатель, выбранный из различных типов, со специальным драйвером.Доступны драйверы, работающие в режиме импульсного ввода и в режиме встроенного контроллера. Вы можете выбрать желаемую комбинацию в соответствии с требуемой операционной системой.
Драйвер импульсного входа
Двигателем можно управлять с помощью генератора импульсов, предоставленного пользователем. Рабочие данные заранее вводятся в генератор импульсов. Затем пользователь выбирает рабочие данные на главном программируемом контроллере, а затем вводит операционную команду.
Драйвер встроенного контроллера
Встроенная функция генерации импульсов позволяет управлять двигателем через подключенный напрямую персональный компьютер или программируемый контроллер.Поскольку отдельный генератор импульсов не требуется, драйверы этого типа экономят место и упрощают электромонтаж.
Разница между характеристиками входа переменного и постоянного тока
Шаговый двигатель приводится в действие напряжением постоянного тока, подаваемым через драйвер. В двигателях и драйверах Oriental Motor с входным напряжением 24 В постоянного тока на двигатель подается 24 В постоянного тока. В двигателях и драйверах 100-115 В переменного тока на входе выпрямляется постоянный ток, а затем на двигатель подается примерно 140 В постоянного тока (исключение составляют некоторые изделия.)
Эта разница в напряжении, подаваемом на двигатели, проявляется как разница в характеристиках крутящего момента на высоких скоростях. Это связано с тем, что чем выше приложенное напряжение, тем быстрее будет нарастание тока через обмотки двигателя, что облегчает приложение номинального тока на более высоких скоростях. Таким образом, входной двигатель переменного тока и система привода имеют превосходные характеристики крутящего момента в широком диапазоне скоростей, от низких до высоких, обеспечивая большое передаточное отношение.
Рекомендуется, чтобы для вашего приложения были рассмотрены системы двигателя и привода переменного тока, которые совместимы в более широком диапазоне рабочих условий, чем системы ввода постоянного тока.
Драйвер шагового двигателя — Полное объяснение
В этой статье мы попытаемся объяснить все важные вещи о драйвере шагового двигателя , которые вам необходимо знать.
Что такое драйвер шагового двигателя?
Драйвер шагового двигателя — это электронное устройство, которое используется для привода шагового двигателя. Сам по себе он обычно ничего не делает и должен использоваться вместе с таким контроллером, как PoKeys57CNC.
Существует множество различных типов драйверов шаговых двигателей, но в целом все они делают одно и то же — перемещают шаговые двигатели.
Нужен ли драйвер для шагового двигателя?
Да. Шаговым двигателям требуются напряжения и / или токи, которые контроллер просто не может произвести. Поэтому нам нужно использовать драйвер шагового двигателя. Это электронное устройство преобразует наши инструкции по движению от контроллера в последовательность, в которой обмотка в шаговом двигателе будет включаться или выключаться, при этом обеспечивая ему достаточную мощность.
Все это мы, конечно, производим с помощью микроконтроллера, управляющего несколькими полевыми транзисторами, но проектирование и программирование потребуют времени.К счастью, есть уже существующие решения.
Если обобщить, контроллеры в целом представляют собой чисто цифровые устройства с малой выходной мощностью, поэтому мы используем аналоговый силовой каскад в качестве интерфейса между цифровым (контроллер) и механическим (двигатель) миром.
Как работают драйверы шагового двигателя?
Основная задача драйвера — сформировать соответствующий сигнал из входных данных для перемещения оси двигателя. Самый распространенный подход к управлению шаговым двигателем мы называем Н-мостом.Н-мостовые схемы состоят из 4 полевых транзисторов с очень низким сопротивлением между стоком и истоком (R DSon ) в активном состоянии. В общем, нам нужно как минимум два H-образных моста, так как у двигателя минимум две катушки. С помощью правильной комбинации сигналов на затворе полевого транзистора мы контролируем направление тока через катушку двигателя. Переменное возбуждение двух обмоток вызывает смещение оси двигателя.
Прямое и обратное движение катушкиКак выбрать драйвер шагового двигателя?
При выборе правильного драйвера для нашей системы нам сначала нужна информация о двигателях, которые мы будем использовать.Это основная важная информация. Мы должны выбрать драйвер в соответствии с мощностью шагового драйвера, который может поставлять двигатель. Например, более крупный двигатель, такой как NEMA 34, имеет более высокое значение удерживающего момента, чем меньший NEMA 17. Вот почему NEMA 34 потребляет больше тока, и нам нужен драйвер с более высокой амперной характеристикой.
Следующее, что нужно рассмотреть, это то, как и что мы хотим контролировать в драйвере. Обычно есть настройки на максимальный ток и микрошаги, о которых мы напишем в отдельной главе этой статьи.У нас может быть возможность настроить драйвер с перемычками или более сложное программное обеспечение, которое в большинстве случаев позволяет пользователю настраивать также другие специальные параметры, такие как параметры затухания, ограничение температуры защиты, ток холостого хода и так далее.
Некоторые драйверы мы можем использовать только с контроллером, который генерирует сигналы шага и направления. С другой стороны, мы можем использовать разные протоколы связи.
Типы драйверов
Как правило, существует два типа драйверов.Драйверы постоянного напряжения (драйверы L / R) и драйверы постоянного тока (драйверы прерывателя).
- драйверы постоянного напряжения (драйверы L / R):
- они дешевле драйверов постоянного тока
- использовать напряжение для создания крутящего момента
- обычно неэффективно
- производительность хуже, чем драйверы чоппера
- драйверы постоянного тока (драйверы прерывателя):
- дороже
- более сложные схемы
- использовать постоянный ток для создания крутящего момента
- намного лучшая производительность, чем драйверы L / R
Драйверы постоянного тока используются почти всегда, поскольку существует множество доступных ИС, обеспечивающих гораздо лучшую производительность.Вы можете найти интегральные схемы, которые уже имеют встроенные полевые транзисторы, они обычно предназначены для более низких токов (до пары А). Поскольку они маленькие, может возникнуть проблема с отводом тепла. Если мы используем внешние полевые транзисторы, максимальный ток ограничивается только характеристиками выбранного полевого транзистора и конструкции печатной платы.
Например, PoStep25-32 использует интегральную схему со встроенными полевыми транзисторами и может обеспечивать до 2,5 А, в отличие от PoStep60-256, который использует внешние полевые транзисторы и может обеспечивать до 6 ампер.
Микрошаговый
Шаговые двигатели двигаются с шагом, который обычно составляет 1,8 °, то есть 200 шагов на оборот. Это может стать проблемой, когда нам нужны небольшие движения. Один из вариантов — использовать какую-то передачу, но есть и другой способ — микрошаговый. Микрошаговый режим означает, что мы можем делать более 200 шагов за один оборот и, в свою очередь, иметь меньшие движения. Эта опция уже встроена в большинство микросхем и может быть настроена простым перемещением перемычки, как на PoStep25-32.
При управлении шаговыми двигателями на полных шагах выходной сигнал драйвера шагового двигателя выглядит как прямоугольный сигнал и производит грубые движения. Чем больше микрошаг, тем больше выходной сигнал выглядит как синусоида, и шаговый двигатель движется более плавно. Но у этого есть обратная сторона. При увеличении значения микрошага крутящий момент значительно падает, и если значение слишком велико, может случиться так, что двигатель не сможет создать достаточный крутящий момент, чтобы даже повернуться. Обычно 1/4, 1/8 или даже 1/16 могут обеспечивать удовлетворительное плавное движение, при этом обеспечивая достаточный крутящий момент.
На следующем изображении показано, как изменяется выходной сигнал при выборе различных значений микрошага. Вы можете видеть, что выходной сигнал все больше похож на синусоидальную волну.
Так что вообще означают эти значения микрошагов?
Микрошаговый режим сообщает нам, сколько микрошагов должен сделать степпер, чтобы выполнить один полный шаг. Значение 1/1 говорит нам, что шаговый двигатель должен сделать один микрошаг, чтобы произвести один полный шаг (так что микрошага нет). Значение 1/2 называется полушагом и говорит нам, что шаговый двигатель должен сделать 2 микрошага для одного полного шага.Это означает, что шаговый двигатель должен сделать 400 шагов за один полный оборот. Значение 1/8 говорит нам, что двигатель должен сделать 8 микрошагов за один полный шаг и 1600 шагов за один полный оборот. Тот же принцип применяется ко всем значениям микрошага.
Как управлять драйвером шагового двигателя?
Большинство драйверов шаговых двигателей принимают входные сигналы шага и направления. Это означает, что нам нужно только два сигнала для каждого драйвера. Шаговый сигнал используется для создания шагов и выглядит как сигнал ШИМ.Каждый импульс означает, что шаговый двигатель будет двигаться на один шаг (или микрошаг). Сигнал направления используется, чтобы указать, в каком направлении (по часовой или против часовой стрелки) будет вращаться шаговый двигатель. Есть приложения, в которых мы используем шаговый двигатель независимо, поэтому для управления драйвером используется стандартный протокол связи, такой как MODBUS, USB или I2C.
Конфигурация параметров драйвераКак подключить шаговый двигатель?
, если вы исследовали шаговые двигатели, вы могли заметить, что у них другое количество соединительных проводов.Чаще всего встречаются двигатели с двумя обмотками катушки, 4 проводами. На рисунке ниже вы можете увидеть различные варианты подключения двигателей с 4, 6 или 8 проводами.
Заключение
Мы обнаружили, что драйвер шагового двигателя необходим, если наша конструкция требует использования шагового двигателя, поскольку контроллер не может производить достаточный ток и достаточно высокое напряжение. Существуют разные типы, но драйверы измельчителя обеспечивают лучшую производительность. Также микрошаговый режим предлагает отличное решение на первый взгляд, но создает проблему снижения крутящего момента.Он по-прежнему чрезвычайно полезен, но мы должны использовать его правильно. Существует множество различных микросхем для управления шаговым двигателем, а также множество уже разработанных решений, таких как PoStep25-32 и PoStep60-256, которые обеспечивают решение plug and play и просты в использовании.
И если вы хотите узнать больше, это отличная отправная точка.
p.s .: Статья о драйвере шагового двигателя была оптимизирована для SEO с помощью словенского SEO-фрилансера Seo-Praktik.si.
Похожие сообщения
Тест контактного кольца с PoKeysТест контактного кольца? Что это нужно делать…
Integralna rešitev za optimizacijo proizvodnje: Industrial SpyderRazvoj integralnega sistema za spremljanje proizvodnje Cilj projekta je razvoj integrationnega … Контроллер ЧПУ
теперь будет поставляться быстрее с …Мы с гордостью объявляем, что теперь мы предлагаем доставку через DHL …
Драйверы шаговых двигателей: пошаговое руководство
Что такое драйвер шагового двигателя?Драйвер шагового двигателя — это схема драйвера, которая позволяет шаговому двигателю работать так, как он работает.Например, шаговые двигатели требуют достаточной и контролируемой энергии для фаз в точной последовательности. В связи с этим шаговые двигатели считаются более совершенными, чем типичный двигатель постоянного тока.
Несмотря на то, что система может показаться сверхсложной, она может быть построена с использованием нескольких транзисторов. Правильно организовав их функции включения и выключения, система может обеспечить достаточное питание фаз, а двигатель сможет выполнить этот процесс. Униполярный драйвер можно сделать в рамках приличного бюджета.Важно помнить, что этот драйвер может приводить в действие только однополярные двигатели. Если вы хотите запитать биполярный двигатель, вам понадобятся два полных моста. Это позволяет системе вернуть ток на ступеньки. Это может оказаться сложнее сделать, но вы можете приобрести чипы H-bridge, чтобы упростить процесс.
Как работают драйверы шагового двигателя?Драйверы шаговых двигателей полагаются на ввод от отдельного источника , чтобы функционировать и создавать выходные данные.
Следующие четыре сигнала управляют двигателем:
- ЧАСЫ: Тактовый сигнал дает команду шага.
- СБРОС: устанавливает сигналы конечного уровня в определенное начальное положение.
- НАПРАВЛЕНИЕ: Определяет направление вращения оси двигателя.
- HALF / FULL: Определяет, работать ли с полным или половинным шагом.
Дешевый способ питания простого шагового двигателя — через микроконтроллер. Этого достаточно, так как этим драйверам для работы требуется всего пара сигналов.Первый — это сигнал шага, а второй — сигнал направления. Последний при высоком логическом уровне +5 В указывает двигателю направление работы. Когда сигнал низкий (GND), он идет в противоположном направлении.
Обычно для полного шага требуется два прямоугольных сигнала в квадратуре . В зависимости от ведущей фазы ось двигателя будет вращаться либо по часовой стрелке, либо против часовой стрелки. Вращение пропорционально тактовой частоте, которая контролирует импульс на линии.Это GND и + 5V, о которых говорилось ранее. Таким образом, в зависимости от микропереключателей настройки шагового разрешения, двигатель будет переходить от одного шага к другому. Например, если он установлен в полношаговом режиме, будет выполнен полный шаг, половина полного шага, если двигатель установлен в полушаговый режим, и четверть шага для четвертного режима и так далее.
Из-за инерции вы должны увеличивать и уменьшать импульсы, чтобы сохранять синхронизацию с магнитным полем. В противном случае мотор может заглохнуть. Рампа также должна быть гладкой и практически не иметь движения, чтобы предотвратить остановку двигателя.
Как соединить драйверы с двигателями?Очень важно, чтобы драйвер соответствовал правильному двигателю . Если все сделать неправильно, мощность двигателя будет недостаточной, или это может привести к повреждению одной части или обоих.
При выборе подходящих двигателей и драйверов обязательно учитывайте пределы напряжения и максимальный ток, который может подавать драйвер. Обязательно учитывайте «постоянный» ток, а не «пиковый» ток, поскольку они не применимы к шаговым двигателям.Что касается двигателя, убедитесь, что он может выдерживать токи на фазу и сопротивление на фазу, которое обеспечивает драйвер. Кроме того, номинальный постоянный ток драйвера должен быть больше, чем номинальный ток двигателя.
Часто указывается напряжение, но не всегда. Вы можете использовать закон Ома , чтобы вычислить его и убедиться, что ваш процесс дает продуктивные результаты. Умножьте это на 20, чтобы получить максимальное рабочее напряжение драйвера двигателя. Если напряжение катушки не предусмотрено, корень квадратный из индуктивности двигателя (мГн) можно умножить на 32, чтобы получить напряжение источника питания.
Это показано ниже.
Например, если в технических характеристиках двигателя указано номинальное напряжение 3 В (3 В * 20 = 60 В), можно безопасно управлять двигателем с драйвером с максимальным рабочим напряжением 60 В.
Пример 2, если в технических характеристиках двигателя указан фазный ток и сопротивление 5 А и 0,6 Ом (5 А * 0,6 Ом = 3 В * 20 = 60 В).
Пример 3, если в технических характеристиках двигателя указано, что индуктивность / фаза составляет 2,5 мГн ((√2,5) * 32 = 50.6V), вы можете безопасно использовать двигатель с управляющим драйвером 50V. Реализация значения индуктивности фаз дает консервативное номинальное напряжение, так как это очень точный расчет максимального напряжения источника питания .
Управление шаговым двигателем не должно быть сложнымХотя процесс настройки шагового двигателя может показаться сложным, с терпением и правильным руководством процесс может быть довольно простым. Использование микроконтроллера — эффективный способ управления двигателем, поскольку для работы драйверу требуется всего несколько сигналов.Сопряжение двигателей с драйверами также может быть простым. Установив номинальный постоянный ток, количество ампер на фазу и используя закон Ома для расчета напряжения, вы можете успешно соединить двигатель и драйвер.
Соединив драйвер с шаговым двигателем, вы сможете посылать токи на двигатель, чтобы гарантировать, что он работает так, как вы хотите. Установив эту точность, теперь вы можете выполнять проекты, требующие строгого контроля скорости и точности.
Источники: https: // learn.adafruit.com/all-about-stepper-motors/driving-a-stepper
Нравится:
Нравится Загрузка …
Связанные10 лучших драйверов шаговых двигателей для 3D-принтеров — обзор (октябрь 2021 г.)
Как выбрать лучший драйвер шагового двигателя для 3D-принтера?
Чтобы выбрать лучший драйвер шагового двигателя, вы должны решить, какая комбинация функций лучше всего подходит для вас. Какой тип тока и напряжения вам нужен? Вам нужен радиатор? Сколько штук в наборе? Какой у меня бюджет? Это те вопросы, над которыми вам нужно задуматься.К счастью, мы сможем ответить на них здесь. Хорошо делать пометки после каждого раздела, чтобы вы могли получить идеальное соответствие для вашего принтера.
Текущий
Важно, чтобы вы получали правильный уровень тока, протекающего через шаговый двигатель, и получали драйвер, совместимый с вашей текущей настройкой. Многие из этих драйверов обеспечивают постоянный ток 1,2 А с пиковым значением 2 А, которое можно найти с BIGTREETECH TMC2208.
Если вы хотите получить драйвер с более высокими возможностями, Eryone TMC2209 будет отличным вариантом с непрерывным доступным током 2.0А и пиковый ток 2,8А. Также есть SMAKN TB6600, который может работать даже выше, чем у него, с возможным пиковым током 4А.
Диапазон напряжения
Как и в случае с током, важно убедиться, что вы получаете правильное напряжение для вашей системы. Если вы в этом уверены, то лучше снова обратиться к документации на ваши двигатели.
Плата драйвера вашего шагового двигателя будет определять величину тока, подаваемого на двигатели, а это означает, что номинальное напряжение двигателя не имеет большого значения.
Большинство драйверов шаговых двигателей находятся в одинаковом диапазоне от 3,3 В до 5 В. Если вам нужно что-то с немного большей мощностью, то SMAKN TB6600 будет идеальным вариантом от 9 до 40 В.
Радиатор
Драйвер шагового двигателя необходимо охладить. Если у вас интегрированная система, то, вероятно, у вас будет внутренний вентилятор, который будет охлаждать систему. Для большинства подключаемых драйверов им понадобится термосцинк.
Радиаторы — это очень умные инструменты, которые отводят тепло, выделяемое компонентом, через источник, а затем от него.BIGTREETECH TMC2208 — это пример драйвера с отличным теплоотводом, который будет охлаждать драйвер достаточно, чтобы предотвратить любые проблемы.
Что можно заменить?
Отличный способ обновить принтер — выбрать подходящий драйвер шагового двигателя. Это может увеличить количество ступенчатых режимов, в которых он может работать в настоящее время.
Чем больше шагов может сделать ваш мотор, тем точнее он будет. Сюда входят драйверы, которые могут делать микрошаги, что часто может дать вам более 50 000 шагов за один оборот.
Важно знать, что существуют разные типы драйверов, и если вы хотите, чтобы установка была максимально простой, вам следует искать прямую замену. Например, если вы хотите заменить драйвер H-моста, тогда SMAKN TB6600 будет отличной идеей.
шт. В упаковке
.Вам понадобится драйвер для каждого шагового двигателя, который у вас есть. В связи с этим вам нужно убедиться, что у вас достаточно драйверов, чтобы управлять ими всеми. Большинство из них будет предлагаться в комплекте из 5 штук, например, с DORHEA TMC2208, которых должно быть более чем достаточно для работы.
Другие драйверы будут поставляться в комплекте по четыре штуки, так что вам стоит еще раз проверить, достаточно ли этого для вас. Вы также получите интегрированные элементы, и здесь вам не придется беспокоиться о том, сколько элементов вы получите в наборе.
Простота настройки
Существуют различные уровни сложности установки шаговых двигателей, но большинство из них будут довольно простыми. DORHEA TMC2208 — это пример устройства, которое очень легко настроить, и у вас не должно возникнуть проблем с его установкой на место.
Драйверы других типов, возможно, потребуется припаять на место, что потребует дополнительной работы. Это может быть сложно, если у вас нет опыта, но комплекты для пайки можно приобрести довольно дешево.
Большинство представленных здесь драйверов очень просты в установке и не требуют особых экспертных знаний.
Шум
Одной из лучших особенностей шаговых драйверов является то, что они часто могут значительно снизить уровень шума, производимого вашим принтером. Многие люди комментируют свои новые драйверы, говоря, что им нужно перепроверить, что их принтер включен.
Если вы хотите добиться почти полной тишины, то BIGTREETECH TMC2208 вполне может стать для вас драйвером. Это превосходно снижает уровень звука, обеспечивая большую гибкость при печати. Если это не проблема, то вы можете взглянуть на такие драйверы, как ZR-Printing RepRap Champion Allegro A4988 StepStick.
Цены
Эти драйверы имеют несколько разных цен в зависимости от их производительности и других факторов.Примером могут служить драйверы Trinamic, которые часто дороже драйверов Pololu, поскольку последние обычно предназначены для любителей, а не для коммерческого использования.
Самым дорогим продуктом в нашем списке был комплект контроллера ЧПУ для 3D-принтера Longruner по цене около 60 долларов, но это потому, что это полный комплект с двигателями.
За драйверы шагового двигателя премиум-класса вам придется заплатить около 30 долларов, и мы видим это на примере Eryone TMC2209, обладающего фантастическими возможностями. Кроме того, вы можете получить SMAKN TB6600 немного дешевле, чем примерно за 15 долларов.
Если у вас ограниченный бюджет, есть еще несколько отличных доступных драйверов, например Bolsen A4988, который стоит менее 10 долларов.
Приводы с шаговыми двигателями| Решения Haydon Kerk Motion
Семейство программируемых контроллеров шаговых двигателей IDEA ® использует интуитивно понятный графический интерфейс пользователя (GUI), на который подана заявка на патент, который значительно упрощает настройку и использование в процессе проектирования машины. Доступны устройства с интерфейсом USB или RS-485. В дополнение к показанным автономным моделям, приводы доступны встроенными в узлы двигателя и линейного привода. Характеристики :- Соответствует RoHS
- Автономный привод или встроенный прямо в линейный привод
- Программирование осуществляется через графический интерфейс пользователя (GUI)
- Автоматическое заполнение параметров двигателя и привода
- Программируемая скорость / ток / ускорение-замедление / ускорение тока / прерывания / I / O
- Вход энкодера / обнаружение опрокидывания с компенсацией / проверкой положения
- Протоколы связи USB или RS-485
- Плоттер профиля движения
- Функция интерактивной отладки программы
| Номер детали | Входное напряжение | Постоянный ток | Пик тока | Связь |
| PCM4806E | от 12 до 48 В постоянного тока | 0.6 А среднеквадратичное значение | + 30% | USB |
| PCM4826E | от 12 до 48 В постоянного тока | 2,6 А среднеквадратичное значение | + 30% | USB |
| ACM4806E | от 12 до 48 В постоянного тока | 0,6 А, среднеквадратичное значение | + 30% | RS-485 |
| ACM4826E | от 12 до 48 В постоянного тока | 2.6 А среднеквадратичное значение | + 30% | RS-485 |
TB6600 Драйвер шагового двигателя arduino
Что такое шаговый двигатель?Шаговый двигатель — это бесщеточный электродвигатель постоянного тока, который делит полный оборот на ряд равных шагов. Затем на одном из этих шагов можно указать положение двигателя для перемещения и удержания.
Как управлять шаговым двигателем?
Самый быстрый способ управлять шаговым двигателем — это просто использовать драйвер (контроллер) шагового двигателя.И TB6600 arduino — именно то, что вам нужно.
TB6600 arduino — это простой в использовании профессиональный драйвер шагового двигателя, который может управлять двухфазным шаговым двигателем. Он совместим с Arduino и другими микроконтроллерами, которые могут выводить цифровой импульсный сигнал 5 В. Драйвер шагового двигателя TB6600 arduino имеет широкий диапазон входной мощности, источник питания 9 ~ 42 В постоянного тока. И он способен выдавать пиковый ток 4А, чего достаточно для большинства шаговых двигателей.
Драйвер шагового двигателя поддерживает управление скоростью и направлением.Вы можете установить микрошаг и выходной ток с помощью 6 DIP-переключателей. Существует 7 видов микрошагов (1, 2 / A, 2 / B, 4, 8, 16, 32) и 8 видов контроля тока (0,5 А, 1 А, 1,5 А, 2 А, 2,5 А, 2,8 А, 3,0 А). А, 3,5 А) всего. И все сигнальные терминалы используют изоляцию высокоскоростной оптопары, что увеличивает ее способность противостоять высокочастотным помехам.
Как профессиональное устройство, оно может приводить в движение двухфазный четырехфазный гибридный шаговый двигатель типа 57, 42.
Примечание: это новейшая обновленная версия драйвера шагового двигателя TB6600.
DIY Alarm с использованием Home Assistant, Konnected и Sonoff RF Bridge
TB6600 Драйвер шагового двигателя 5A и Arduino