Электропривод по системе генератор-двигатель | Электротехника и электрооборудование
Страница 15 из 39
§ 8.7. Электропривод по системе генератор-двигатель (Г-Д)
Для экономичного регулирования скорости вращения двигателей постоянного тока в широких пределах и плавного их пуска применяется система генератор-двигатель (Г-Д). В электроприводе по системе Г-Д можно получить пределы регулирования скорости приводного электродвигателя до 20:1.
Рис. 8.11. Схема системы генератор-двигатель (Г-Д)
На рис. 8.11 приведена схема системы генератор-двигатель, в которой генератор постоянного тока Г, приводимый во вращение от асинхронного электродвигателя АД (или любого двигателя иного вида), электрически соединен с двигателем постоянного тока Д. Вал двигателя Д жестко соединен с валом рабочей машины, число оборотов которой подлежит регулированию. Как генератор, так и электродвигатель постоянного тока имеют независимое возбуждение от отдельного возбудителя В. Возбудитель представляет собой генератор постоянного тока с параллельным возбуждением, который насажен на один вал с электродвигателем переменного тока.
Весьма просто осуществляют и реверсирование (изменение направления вращения) приводного двигателя, для чего переключателем изменяют направление тока в обмотках генератора.
 Уменьшение подводимого напряжения уменьшает скорость вращения двигателя, а уменьшение магнитного потока Ф, наоборот, увеличивает скорость вращения двигателя. Механические характеристики при этом остаются жесткими.
Уменьшение подводимого напряжения уменьшает скорость вращения двигателя, а уменьшение магнитного потока Ф, наоборот, увеличивает скорость вращения двигателя. Механические характеристики при этом остаются жесткими.Систему Г-Д применяют в строительстве для привода крупных экскаваторов и бурильных установок.
В тех случаях, когда система Г-Д не может создать усилий, достаточных для преодоления больших перегрузок, используют управление электроприводом по системе ТГ-Д (трехобмоточный генератор-двигатель), в которой генератор постоянного тока имеет три обмотки возбуждения: независимого возбуждения, параллельного возбуждения и последовательного возбуждения, а приводной электродвигатель — одну обмотку независимого возбуждения. При соответствующем подборе ампер-витков последовательной обмотки возбуждения генератора ее магнитный поток при перегрузке приводного электродвигателя выше допустимой становится равным и направленным противоположно суммарному потоку обмоток независимого и параллельного возбуждения.
Патенты в категории «Асинхронные двигатели и генераторы
Патенты в категории:
- Малошумный асинхронный двигатель
Изобретение относится к области электротехники и может быть использовано в любой промышленности и на транспорте, а также при создании объектов, к которым предъявляются высокие требования относительно уровня шумов и вибраций. Техническим результатом…
- Двухчастотная электрическая машина
Изобретение относится к области электротехники, в частности к низкооборотным электрическим двигателям и поворотным трансформаторам. Задачей изобретения является возможность передачи электроэнергии от неподвижного источника к вращающемуся приемнику,.
 ..
.. - Трехфазный асинхронный электрический двигатель
Изобретение относится к области электротехники, а именно к асинхронным трехфазным двигателям, осуществляющим преобразование электрической энергии переменного тока в механическую энергию. Технический результат, на достижение которого направлено данное…
- Низкооборотный асинхронный электродвигатель
Изобретение относится к области электротехники, в частности к электрическим машинам и электроприводу. Предлагаемый низкооборотный асинхронный электродвигатель содержит статор с многофазной обмоткой и ротор с шихтованным магнитопроводом и…
- Двухфазный асинхронный сварочный генератор
Изобретение относится к двухфазному асинхронному сварочному генератору и может быть использовано в устройствах для ручной дуговой электросварки. Асинхронный сварочный генератор имеет две обмотки на статоре. Трехфазная обмотка возбуждения (2) имеет…
Публикации
- Патент на товарный знак
Перед тем, как получить патент на товарный знак следует пройти несколько этапов подготовки своего творения к данному процессу.
В первую очередь это создание будущего обозначения товаров или услуг. Создать его…
- Регистрация авторского права
Любые права на собственность должны отстаиваться их владельцами на законном уровне. В случае материальных объектов ситуация проста и понятна многим, но вот защита интеллектуальной собственности требует своих особенностей, о которых и будет…
- Авторские права
Во все времена люди старались защитить свои имущественные и неимущественные права. Именно вариацией последних и стали права на авторство. Они определяют возможности использования и создания продуктов творчества.
- Права патентообладателя
Защиту каждой зарегистрированной интеллектуальной собственности обеспечивают права авторов и патентообладателей. Это список условий и законов, который дает держателям патентов определенные преимущества, в частности имущественные. Чтобы…
- Промышленный патент
Из всех разновидностей охранных документов на интеллектуальную собственность есть отдельно и тот, что дает защиту внешности изделий, это патент.

Об электродвигателях с тормозом | Техпривод
Большинство асинхронных двигателей, используемых в промышленном оборудовании, подключаются через преобразователи частоты. Частотник прекрасно справляется с замедлением и торможением привода. Избыточная энергия, которая при динамическом торможении накапливается на конденсаторах звена постоянного тока, выделяется в виде тепла на тормозном резисторе. Однако есть ситуации, когда требуется специализированное решение — двигатель с электромеханическим (электромагнитным) тормозом.
Актуальность применения электромагнитного тормоза
Преобразователь частоты может некоторое время удерживать ротор в неподвижном состоянии путем подачи на двигатель постоянного напряжения. Однако электропривод способен находиться в таком режиме лишь несколько минут, после чего начинают перегреваться обмотки.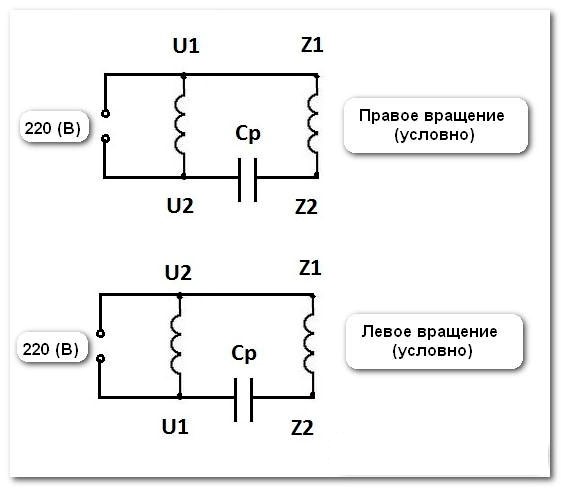
Электромеханический тормоз позволяет быстро останавливать привод и удерживать его в неподвижном состоянии сколь угодно долго. Обычно такая необходимость продиктована соображениями безопасной эксплуатации оборудования.
Конструкция
В конструкцию электромагнитного тормоза входят:
- электромагнит с катушкой
- тормозной диск с накладками
- прижимные пружины
- система настройки прижимного момента
В большинстве случаев тормоз является нормально заторможенным. Это означает, что ротор двигателя фиксируется при отсутствии питания тормоза. При подаче питания на катушку тормозные колодки отжимаются, и ротор растормаживается.
Способы монтажа
Тормоз может быть встроен в конструкцию двигателя либо являться отдельным устройством. Наиболее предпочтителен встроенный тормоз, который располагается на оси ротора. Такая конструкция отличается компактностью и простотой в эксплуатации.
Наиболее предпочтителен встроенный тормоз, который располагается на оси ротора. Такая конструкция отличается компактностью и простотой в эксплуатации.
Если применение двигателя со встроенным тормозом по каким-то причинам нецелесообразно, применяют отдельный тормоз. Его основные преимущества – возможность монтажа в любом месте привода (например, на оси редуктора), размеры и способ крепления устройства не привязаны к конструкции двигателя.
Способы подачи питания на тормоз
Электромеханический тормоз может иметь зависимое или независимое питание. В первом случае его катушка запитывается от того же источника, что и обмотки двигателя. При этом тормоз должен быть нормально заторможенным, чтобы при пропадании питания он фиксировал ротор.
Тормоз с независимым питанием может управляться более гибко, однако он требует отдельную схему питания, которая должна быть синхронизирована с питанием двигателя. Наиболее универсальный тормоз данного типа – двухобмоточный. Катушка в нем состоит из двух обмоток. Короткой обмоткой тормоз включается, длинной (с меньшим током) удерживается.
Катушка в нем состоит из двух обмоток. Короткой обмоткой тормоз включается, длинной (с меньшим током) удерживается.
Если питание двигателя производится от ПЧ, необходимо в настройках преобразователя обратить внимание на параметры электромеханического тормоза. В идеальном варианте ПЧ и двигатель с тормозом должны быть выпущены одним производителем.
Временные параметры торможения
При проектировании тормозной системы следует учитывать, что время срабатывания тормоза обычно гораздо меньше, чем время его отпускания.
Типовым временем включения тормоза (растормаживание при включении двигателя) можно считать 40-60 мс в зависимости от мощности и напряжения питания. Время выключения при правильной регулировке не должно превышать 0,2 с.
Обслуживание электромеханического тормоза
Поскольку тормоз является электромеханическим устройством, подверженным износу, он нуждается в регулярном техническом обслуживании. Необходимо регулярно проверять тормозной зазор, который должен иметь значение, рекомендованное производителем. Зазор может уменьшаться или увеличиваться, а также иметь перекосы из-за износа тормозных колодок либо пружин, нарушения крепежа.
Необходимо регулярно проверять тормозной зазор, который должен иметь значение, рекомендованное производителем. Зазор может уменьшаться или увеличиваться, а также иметь перекосы из-за износа тормозных колодок либо пружин, нарушения крепежа.
Поскольку при работе двигателя тормоз подвергается ударам и вибрации, необходимо тщательно следить за фиксацией крепежных гаек и шпилек. Такеж рекомендуется использовать фиксатор резьбы.
Для ремонта и технического обслуживания оборудования обычно предусматривается возможность ручного растормаживания при помощи специального рычага. Эту функцию нужно использовать осторожно во избежание порчи оборудования и травм персонала.
Тормозной момент электромагнитного тормоза может быть отрегулирован в некоторых пределах.
Режим работы
Использовать электромеханический тормоз для торможения двигателя на ненулевой скорости рекомендуется только в аварийных случаях, поскольку в этом режиме резко повышается износ и нагрев тормозных колодок. Схема должна быть спроектирована таким образом, чтобы тормоз был стояночным, то есть включался только на нулевой скорости. Для этого в ПЧ имеется специальный выход. В таком режиме тормозные колодки почти не изнашиваются и имеют большой ресурс работы.
Схема должна быть спроектирована таким образом, чтобы тормоз был стояночным, то есть включался только на нулевой скорости. Для этого в ПЧ имеется специальный выход. В таком режиме тормозные колодки почти не изнашиваются и имеют большой ресурс работы.
При частом использовании функции торможения происходит не только износ, но и нагрев тормоза. Если технологический процесс не позволяет сократить число торможений в единицу времени, следует предусмотреть дополнительный обдув тормоза, а также более ответственно подходить к его техобслуживанию.
Другие полезные материалы:
Техобслуживание преобразователя частоты
Способы защиты электродвигателей
Преимущества и недостатки асинхронного двигателя
Штёлтинг Г., Байссе А.О. Электрические микромашины: Пер. с нем.: — М.: Энергоатомиздат, 1991. — 229 с: ил. :: Библиотека технической литературы
Дан анализ конструктивного исполнения, исследованы особенности электромагнитных процессов, рассмотрены методы расчета выходных характеристик электрических микромашин: синхронных и асинхронных, коллекторных двигателей постоянного тока, двигателей постоянного тока с постоянными магнитами, вентильных и шаговых двигателей.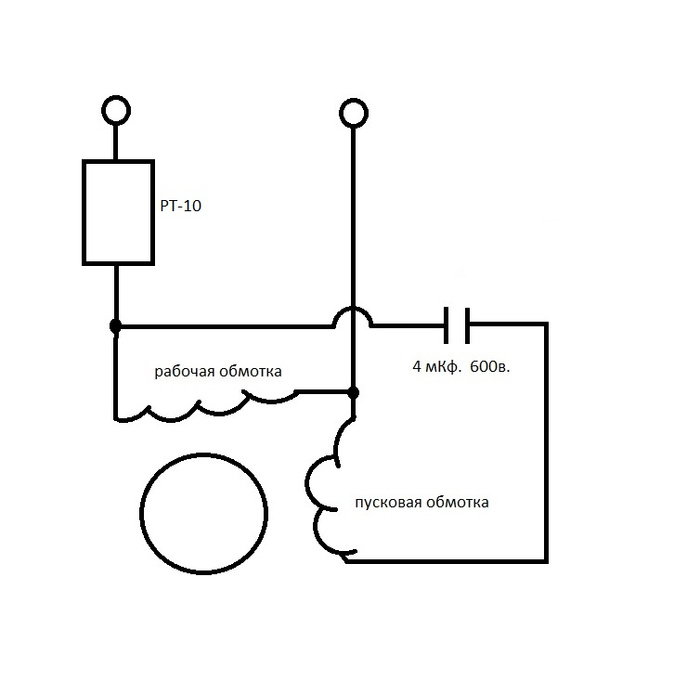
Для инженерно-технических работников, занимающихся разработкой электроприводов с микромашинами, студентов электромеханических специальностей.
Предисловие.
В последние годы опубликовано достаточно большое количество работ, посвященных электрическим машинам средней и большой мощности. Несколько хуже обстоит дело с изданием книг по электрическим микромашинам, хотя их роль в промышленности и в быту возросла и продолжает расти. Это, в первую очередь, объясняется развитием силовой электроники, созданием перспективных материалов (постоянных магнитов с высокой удельной энергией, новых электроизоляционных материалов) и разработкой новых конструктивных решений. В быту широко используются самые разнообразные приборы, в которых находят применение электрические микродвигатели. При этом, в зависимости от условий работы конкретного прибора, к микромашинам предъявляются различные требования, что и явилось причиной появления множества конструктивных вариантов электрических микромашин.
Совершенствование приборов с электрическими микродвигателями является мощным стимулом улучшения их характеристик. Причем как для изготовителя, так и для потребителя важно знать не, только устройство микромашины, но и основы протекающих в ней физических процессов, оказывающих существенное влияние на ее надежность и рабочие характеристики.
ОГЛАВЛЕНИЕ
Предисловие к русскому изданию. 3
От авторов. 5
Глава 1. История развития и значение электрических микромашин 7
1.1. Общие сведения. 7
1.2. Из истории развития электрических микромашин. 8
1.3. Значение электрических микромашин. 9
Глава 2. Асинхронные двигатели 10
2.1 .Особенности конструкции 10
2.2. Принцип действия. 13
2.2.1. Однообмоточный асинхронный двигатель. 14
2.2.2. Двухобмоточный асинхронный двигатель. 17
2.2.3. Трехобмоточный асинхронный двигатель 19
2.2.4. Конструкции и схемы обмоток 19
2.3. Вращающееся магнитное поле в асинхронных машинах с однофазным питанием 21
2. 3.1. Эллиптическое вращающееся магнитное поле. 23
2.3.2. Симметричный режим работы 24
2.4. Основы теории асинхронных двигателей. 35
2.4.1. Трехобмоточный двигатель 35
2.4.2. Двухобмоточный двигатель 42
2.5. Двигатель с распределенной обмоткой. 43
2.5.1. Принятые допущения 44
2.5.2. Высшие гармоники вращающего момента двигателя 63
2.5.3. Схемы включения обмоток двигателей 69
2.6. Двигатель с сосредоточенными обмотками. 74
2.6.1. Двигатель с двумя обмотками 74
2.6.2. Двигатель с расщепленными полюсами 75
2.6.3. Двигатель с одной обмоткой на статоре. 83
Глава 3. Синхронные двигатели 83
3.1. Реактивные двигатели 84
3.1.1. Принцип действия 84
3.1.2. Особенности конструкции. 84
3.1.3. Статические характеристики 86
3.2. Гистерезисные двигатели. 90
3.2.1. Особенности конструкции 90
3.2.2. Принцип работы и рабочие характеристики. 92
3.3. Двигатель с возбуждением от постоянных магнитов. 96
3. 3.1. Особенности конструкции 96
3.1. Особенности конструкции 96
3.3.2. Статические характеристики 98
Глава 4. Универсальные двигатели 106
4.1. Особенности конструкции. 106
4.2.Принцип действия 112
4.3. Электродвижущие силы 113
4.3.1. Трансформаторные ЭДС и ЭДС вращения обмотки якоря. 114
4.4. Процесс коммутации 120
4.4.1. ЭДС самоиндукции 122
4.4.2. ЭДС вращения в короткозамкнутой секции обмотки якоря 123
4.4.3. Трансформаторная ЭДС в короткозамкнутой секции обмотки якоря. 126
4.4.4. Взаимодействие трех ЭДС в короткозамкнутой секции обмотки якоря. 127
4.5. Рабочие характеристики 129
4.5.1. Схема замещения 129
4.5.2. Векторная диаграмма. 130
4.5.3. Баланс мощностей. 131
4.6. Регулирование и стабилизация частоты вращения 133
4.6.1. Использование дополнительной обмотки постоянного тока 133
4.6.2. Использование отпаек в обмотке возбуждения133
4.6.3.Включение добавочного резистора 134
4.6.4. Использование регулировочного трансформатора.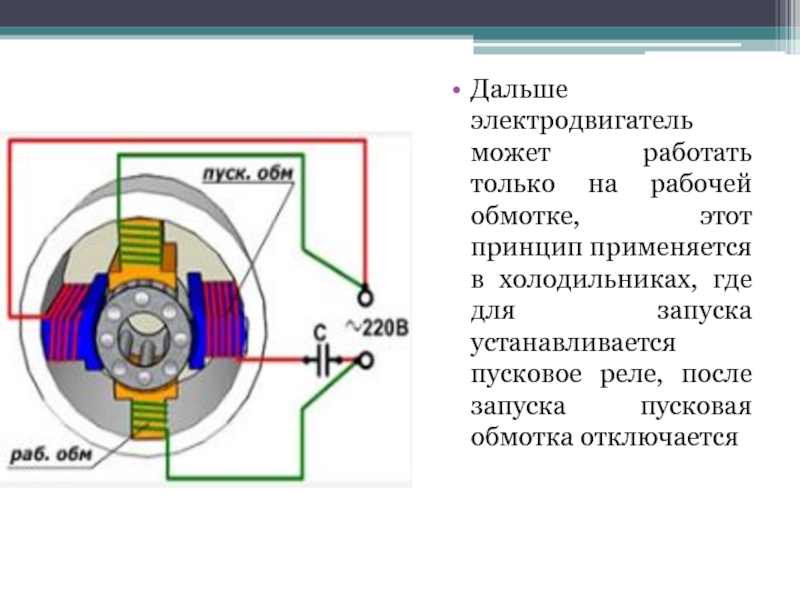 134
134
4.6.5. Шунтирование обмотки якоря 134
4.6.6. Схема Баркгаузена 135
4.6.7. Фазовое регулирование напряжения питания с помощью симисторов 135
4.6.8. Стабилизация частоты вращения 137
Глава 5. Двигатели постоянного тока с возбуждением от постоянных магнитов 138
5.1. Особенности конструкции. 139
5.2. Постоянные магниты. 140
5.2.1. Материалы. 140
5.2.2. Кривая размагничивания 142
5.3. Магнитная цепь двигателя с постоянными магнитами 143
5.3.1. Основные уравнения 143
5.3.2. Влияние насыщения магнитной цепи 147
5.3.3. Использование схем замещения для расчета магнитных цепей 148
5.3.4. Поле поперечной реакции якоря 150
5.3.5. Магнитный поток полюса 154
5.3.6.Потоки рассеяния постоянного магнита 156
5.3.7.Стабилизация постоянных магнитов 157
5.4. Рабочие характеристики. 158
5.4.1. Рабочая точка магнита 158
5.4.2.Схемазамещения, механическая характеристика и баланс мощностей. 159
5.5. Двигатель постоянного тока с импульсным напряжением питания 160
5. 6. Питание от сети переменного тока 162
6. Питание от сети переменного тока 162
5.6.1. Прерывистый ток якоря 164
5.6.2. Непрерывный ток якоря 165
5.7. Двигатель с регулируемым положением щеток166
5.8. Двигатели постоянного тока с немагнитным ротором 169
5.8.1. Двигатель с дисковым ротором 169
5.8.2. Двигатель с полым ротором. 171
Глава 6. Вентильные двигатели 171
6.1.Принцип действия. 172
6.2. Особенности конструкции 173
6.2.1. Однообмоточный двигатель с одним импульсом тока 173
6.2.2. Двухобмоточный двигатель с двумя импульсами тока 175
6.2.3. Трехобмоточный двигатель с однополупериодным питанием 177
6.2.4. Четырехобмоточный двигатель с однополупериодным питанием 177
6.2.5. Специальные конструкции двигателей 186
6.3. Рабочие характеристики 187
6.4. Регулирование частоты вращения. 188
Глава 7. Шаговые двигатели 189
7.1. Особенности конструкции 190
7.1.1. Общие сведения 190
7.1.2.Двигатель с чередующимися полюсами (разноименно-полюсный) 194
7. 1.3. Двигатель с одноименными полюсами 196
1.3. Двигатель с одноименными полюсами 196
7.1.4. Специальные конструкции 198
7.2. Схемы управления. 200
7.3. Демпфирование 203
7.4. Основные характеристики и параметры шаговых двигателей 204
7.4.1. Статические моментные характеристики. 204
7.4.2. Динамические моментные характеристики 206
7.4.3. Погрешность отработки шага 208
7.5. Рабочие характеристики. 209
7.5.1. Уравнение напряжений. 210
7.5.2. Уравнение моментов 211
7.5.3. Динамические характеристики. 213
7.5.4. Статические характеристики 213
Условные обозначения 215
Список литературы. 222
Как подключить однофазный электродвигатель на 220 Вольт- схемы, инструкции
В прошлой статье Я рассказывал как подключить и запустить двигатель на 380 Вольт в однофазной электросети 220 В. Сейчас Я расскажу о том, как подключить однофазный электродвигатель от сломавшейся стиральной машины, пылесоса и т. д. Его можно успешно использовать в других целях в домашнем хозяйстве, например для привода точила, полировального станка, газонокосилки и т. п.
п.
Схема подключения коллекторного электродвигателя на 220 Вольт
В электрических дрелях, перфораторах, болгарках и некоторых моделях стиральных машин автоматов используется синхронный коллекторный двигатель. Он успешно запускается и работает в однофазных сетях без лишних пусковых устройств.
Для того, что бы подключить коллекторный электромотор, необходимо соединить между собой перемычкой два конца №2 и №3, один идущий от якоря, а второй от статора. А оставшиеся 2 конца присоединить к электропитанию 220 Вольт.
Помните, что при подключении коллекторного электрического двигателя без блока электроники, он будет работать только на максимальных оборотах, а при запуске будет сильный рывок, большой пусковой ток, искрение на коллекторе.
Может быть мотор и 2 скоростным, тогда со статора будет выходить 3 конец с половины его обмотки. При подключении к нему уменьшится скорость вращения вала, но при этом увеличивается риск нарушения изоляции при запуске мотора.
Для изменения направления вращения необходимо поменять местами концы подключения статора или якоря.
Схемы подключения однофазных асинхронных электродвигателей
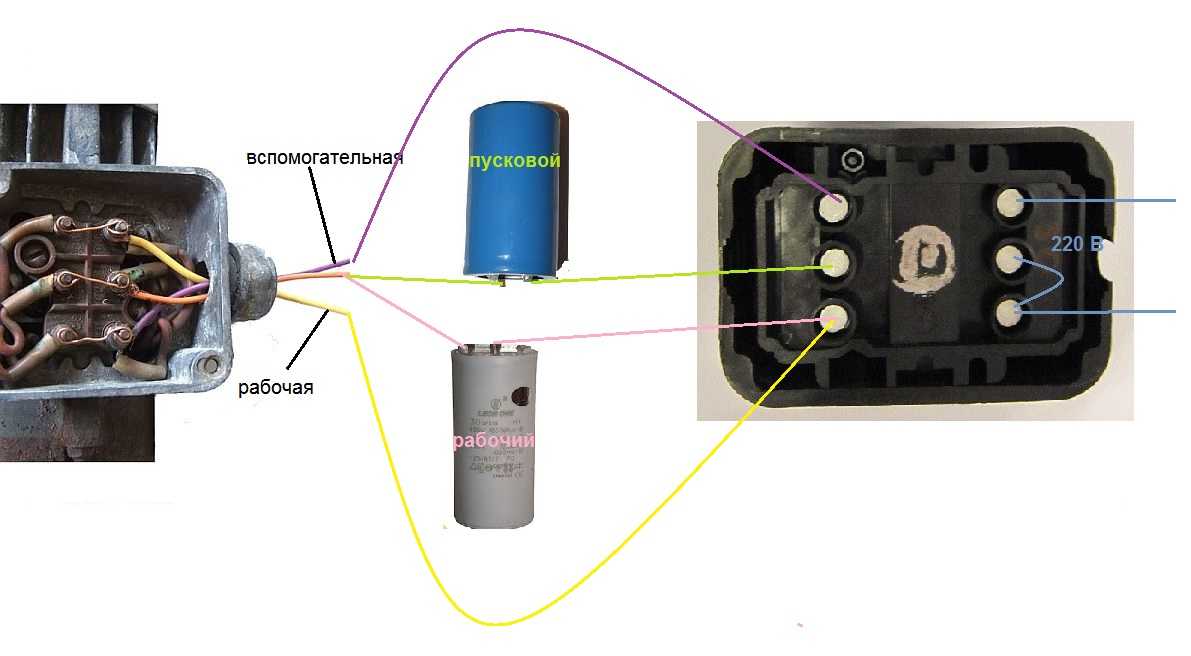
Если в однофазных электродвигателях была бы только одна обмотка в статоре, тогда внутри него электромагнитное поле было бы пульсирующим, а не вращающимся. И запуск произошел бы только после раскручивания вала рукой. Поэтому для самостоятельного запуска асинхронных двигателей добавляется вспомогательная обмотка или пусковая, в которой фаза при помощи конденсатора или индуктивности оказывается сдвинутой на 90 градусов. Пусковая обмотка и толкает ротор электродвигателя в момент включения. Основные схемы включения изображены на рисунке.
Первые две схемы рассчитаны на подключение пусковой обмотки на время запуска мотора, но не более 3 секунд по продолжительности. Для этого используется реле или пусковая кнопка, которую необходимо нажать и удерживать пока не запустится мотор.
Пусковая обмотка может подключаться через конденсатор, или в очень редких случаях через сопротивление. В последнем случае обмотка должна быть намотана по бифилярной технологии, т.е сопротивление является частью обмотки. Оно увеличивается в ней за счет длины провода, но при этом индуктивность катушки не меняется.
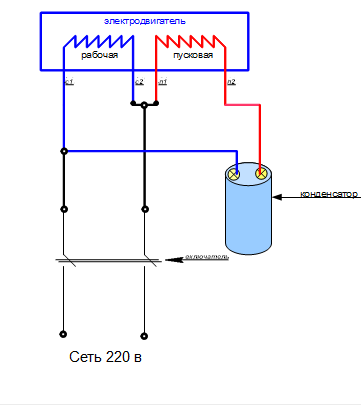
В третьей самой распространенной схеме конденсатор постоянно включен к сети при работе электродвигателя, а не только на время его запуска.
Что бы определить какие провода идут на каждую из обмоток, сначала вызваниваем их по парам, а затем меряем сопротивление каждой по этой инструкции. У пусковой обмотки сопротивление всегда будет больше (обычно около 30 Ом), чем у рабочей обмотки (чаще всего в районе 10-13 Ом).
Подбирать конденсатор необходимо по потребляемому току мотором, например для I = 1.4 А потребуется конденсатор емкостью 6 мкФ.
Как подключить электродвигатель стиральной машины
В современных стиральных машинах могут стоять либо коллекторные или трехфазные двигатели. Последние можно запустить только при помощи электронного пуск-регулирующего устройства, которое необходимо будет достать со стиральной машины и переделать схему на ручной запуск. Но для этого надо хорошо разбираться в радиотехнике.
Последние можно запустить только при помощи электронного пуск-регулирующего устройства, которое необходимо будет достать со стиральной машины и переделать схему на ручной запуск. Но для этого надо хорошо разбираться в радиотехнике.
Коллекторный двигатель же двигатель от стиральной машины подключить очень просто. Как правило на колодку подключения выходит 6-7 проводов, не считая на заземление корпуса.
Два провода идут с тахометра, которые не будут использоваться. И по паре проводов выходит со статора и якоря (ротора). Так же иногда может выходить еще один конец с половины обмотки.
Вызваниваем пары обмоток и соединяем перемычкой между собой конец роторной с началом статарной обмотки. На начало роторной подключаем один конец электропитания и другой- на конец статарной.
Если необходимо подключение второй скорости, тогда один конец электропитания подключаем к выходу с половины обмотки. У нее будет меньше сопротивление, чем у целой.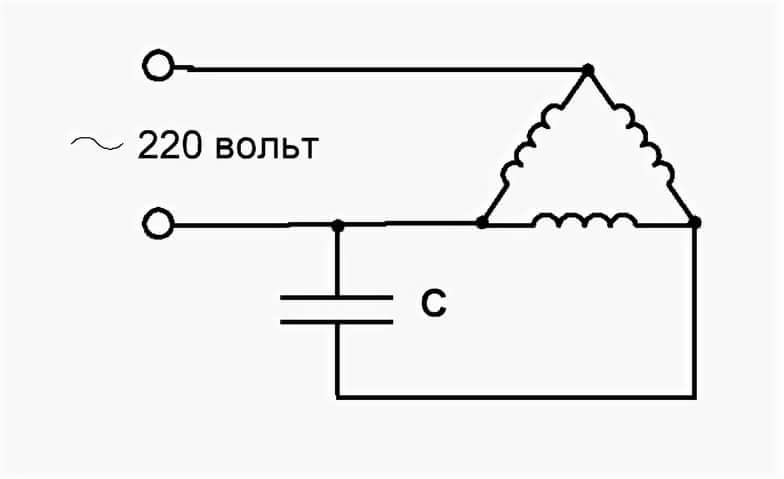
Иногда на колодку подключения еще может выходить дополнительно пара контактов от термозащиты.
В старых стиральных машинах советского образца стояли простые асинхронные электродвигатели с пусковой обмоткой. Для их запуска рекомендую использовать соответствующее реле от стиральной машины, которое устанавливается только вертикально по указателю на корпусе. Подключение производится по этой схеме.
А можно запустить и по другой схеме только с рабочим конденсатором, подключенным к пусковой обмотке.
Проверка работоспособности
Для того, что бы проверить правильность собранной схемы необходимо включить электродвигатель и дать ему поработать сначала одну минуту, а затем около 15. Если двигатель горячий, то причинами может быть:
- Изношенность, загрязненность или зажатость подшипников.
- Большая ёмкость конденсатора, отключите его и запустите двигатель рукой, если он перестанет греться- уменьшите емкость конденсаторов.

двухобмоточный — это… Что такое двухобмоточный?
- двухобмоточный
- двухобмоточный
прил., кол-во синонимов: 1
Словарь синонимов ASIS. В.Н. Тришин. 2013.
.
- двухнопильный
- двухобъективный
Смотреть что такое «двухобмоточный» в других словарях:
двухобмоточный — (2 обмоточный) … Орфографический словарь-справочник
двухобмоточный — — [Я.Н.Лугинский, М.С.Фези Жилинская, Ю.С.Кабиров. Англо русский словарь по электротехнике и электроэнергетике, Москва, 1999 г.] Тематики электротехника, основные понятия EN double winding … Справочник технического переводчика
двухобмоточный автотрансформатор — Автотрансформатор, имеющий две обмотки, гальванически связанные так, что они имеют общую часть, и не имеющий других основных обмоток [ГОСТ 16110 82] Двухобмоточный автотрансформатор Тематики трансформатор Классификация >>> … Справочник технического переводчика
двухобмоточный трансформатор — Трансформатор, имеющий две основные гальванически не связанные обмотки [ГОСТ 16110 82] двухобмоточный трансформатор (напряжения) — [Я.
 Н.Лугинский, М.С.Фези Жилинская, Ю.С.Кабиров. Англо русский словарь по электротехнике и электроэнергетике … Справочник технического переводчика
Н.Лугинский, М.С.Фези Жилинская, Ю.С.Кабиров. Англо русский словарь по электротехнике и электроэнергетике … Справочник технического переводчикадвухобмоточный двигатель — — [Я.Н.Лугинский, М.С.Фези Жилинская, Ю.С.Кабиров. Англо русский словарь по электротехнике и электроэнергетике, Москва, 1999 г.] Тематики машины электрические вращающиеся в целом EN two winding motor … Справочник технического переводчика
двухобмоточный синхронный генератор — — [Я.Н.Лугинский, М.С.Фези Жилинская, Ю.С.Кабиров. Англо русский словарь по электротехнике и электроэнергетике, Москва, 1999 г.] Тематики электротехника, основные понятия EN double wound synchronous generator … Справочник технического переводчика
двухобмоточный трансформатор напряжения — Трансформатор напряжения, имеющий одну вторичную обмотку. [ГОСТ 18685 73] Тематики трансформатор EN double wound voltage transformer … Справочник технического переводчика
Двухобмоточный автотрансформатор — 2.
 26. Двухобмоточный автотрансформатор Автотрансформатор, имеющий две обмотки, гальванически связанные так, что они имеют общую часть, и не имеющий других основных обмоток (см. черт. 7) Источник: ГОСТ 16110 82: Трансформаторы силовые. Термины и… … Словарь-справочник терминов нормативно-технической документации
26. Двухобмоточный автотрансформатор Автотрансформатор, имеющий две обмотки, гальванически связанные так, что они имеют общую часть, и не имеющий других основных обмоток (см. черт. 7) Источник: ГОСТ 16110 82: Трансформаторы силовые. Термины и… … Словарь-справочник терминов нормативно-технической документацииДвухобмоточный трансформатор — 2.8. Двухобмоточный трансформатор* Трансформатор, имеющий две основные гальванически не связанные обмотки (черт. 4) Источник: ГОСТ 16110 82: Трансформаторы силовые. Термины и определения оригинал документа … Словарь-справочник терминов нормативно-технической документации
Двухобмоточный трансформатор — English: Two winding transformer Трансформатор, имеющий две основные гальванически не связанные обмотки (по ГОСТ 16110 82 СТ СЭВ 1103 78) Источник: Термины и определения в электроэнергетике. Справочник … Строительный словарь
Ремонт электродвигателей
Мы готовы предложить нашим заказчикам услуги по ремонту электродвигателей любой мощности и любых типов и марок.
 Быстро, качественно, цены ниже, чем у других (сравните прайс), возможна отсрочка платежа.
Быстро, качественно, цены ниже, чем у других (сравните прайс), возможна отсрочка платежа.Мы располагаем большим опытом выполнения подобных работ, обученным персоналом, необходимым оборудованием и материалами.
Гарантия на все выполненные работы составляет 6 месяцев.
Р кВт |
3000 |
1500 |
1000 |
750 |
0,09 |
871 | 901 | 901 | 901 |
0,12 |
977 | 991 | 991 | 991 |
0,18 |
1051 | 1074 | 1097 | 1097 |
0,25 |
1074 | 1081 | 1127 | 1171 |
0,37 |
1171 | 1231 | 1247 | 1337 |
0,55 |
1367 | 1381 | 1471 | 1767 |
0,75 |
1471 | 1487 | 1818 | 1982 |
1,1 |
1813 | 1899 | 2072 | 2504 |
1,5 |
2072 | 2106 | 2504 | 2850 |
2,2 |
2504 | 2560 | 2881 | 3687 |
3 |
2932 | 2989 | 3699 | 4061 |
4 |
3575 | 3704 | 4061 | 4955 |
5,5 |
4118 | 4219 | 5148 | 6292 |
7,5 |
4652 | 5271 | 6435 | 8223 |
11 |
6325 | 6435 | 7722 | 9381 |
15 |
8151 | 8437 | 9510 | 10010 |
18,5 |
9653 | 9867 | 10940 | 12727 |
22 |
11011 | 11083 | 12942 | 14586 |
30 |
13085 | 13142 | 15873 | 17303 |
37 |
15873 | 16088 | 19162 | 21593 |
45 |
20163 | 20521 | 22737 | 24167 |
55 |
23309 | 23452 | 26455 | 27170 |
Выполненные работы оплачиваются согласно актов выполненных работ. Оплата производится путем перечисления денежных средств на расчетный счет исполнителя.
Оплата производится путем перечисления денежных средств на расчетный счет исполнителя.
При наличии конструктивных особенностей электродвигателя, выполнении частичного ремонт или дополнительных работ, сокращении сроков ремонта при расчете стоимости ремонта к таблице применяются коэффициенты:
- импортный — 1,2
- однофазный двигатель — 1,4
- 2-х скоростной однообмоточный двигатель — 1,5
- 2-х скоростной двухобмоточный двигатель — 2
- двигатель с фазным ротором — 1,8
- cпециальный двигатель — 1,3
- отсутствие обмотки в пазах -1,3
- модернизация электродвигателя — 1,4
- отсутствие данных на двигатель — 1,05
- двигатели серии А, АО, АОЛ — 1,2
- ремонт двигателя без смены обмоток — 0,3
- при необходимость правки железа — 1,3
При наличии у сдаваемых в ремонт электродвигателей нескольких конструктивных отличий коэфициенты перемножаются.
В стоимость ремонта электродвигателя входит: Разборка, сборка электродвигателя; замена обмоток; Замена подшипников; Испытание электродвигателя
Выполняем работы по восстановлению посадочных мест подшипников; замену токосьемных колец; щеток и щеткодержателей; изготовление и замену подшипниковых щитов и крышек.
Стоимость подшипников, токосьемных колец, щеток, щеткодержателе, крышек и щитов в стоимость ремонта не входит
Ремонт электродвигателей, не указанных в прайсе, производится по отдельной смете, согласованной с заказчиком.
Когда двухскоростные двигатели — лучший вариант
Инверторные преобразователи частотысделали многое для улучшения конструкции машин с тех пор, как они стали обычным явлением около 30 лет назад. Они позволили оптимизировать работу за счет уменьшения скорости и улучшенной управляемости, а также внесли значительный вклад в экономию энергии.
Однако они также в определенной степени ответственны за то, что инженеры забывают о преимуществах двухскоростных двигателей. На первый взгляд, бесступенчатая комбинация двигателя и привода кажется лучше, чем двигатель, который обеспечивает только две настройки скорости.Однако в определенных обстоятельствах двухскоростной двигатель по-прежнему является лучшим выбором и, вероятно, останется таковым еще долгое время. Действительно, данные о продажах в отрасли показывают, что их потребление растет быстрее, чем промышленные двигатели в целом, поэтому мы можем сделать вывод, что инженеры уже начинают осознавать их преимущества.
На первый взгляд, бесступенчатая комбинация двигателя и привода кажется лучше, чем двигатель, который обеспечивает только две настройки скорости.Однако в определенных обстоятельствах двухскоростной двигатель по-прежнему является лучшим выбором и, вероятно, останется таковым еще долгое время. Действительно, данные о продажах в отрасли показывают, что их потребление растет быстрее, чем промышленные двигатели в целом, поэтому мы можем сделать вывод, что инженеры уже начинают осознавать их преимущества.
Кажется вероятным, что они находят применение в приводах вентиляторов и насосов для обеспечения «высоких» и «низких» расходов. Также существует множество ситуаций, когда возникают предсказуемые пики и спады: например, пассажирский лифт или эскалатор могут иметь нормальную скорость движения и скорость в час пик; конвейер, подающий сырье в часть технологического оборудования, может иметь две скорости, чтобы выравнивать легкую и тяжелую загрузку; водоснабжение и водоотведение имеют определенные пики в определенное время суток; краны и лебедки, равно как и вентиляторы, могут выиграть от выбора быстрой или медленной скорости.
Существует два основных типа двухскоростных двигателей: двухобмоточные и с переключением полюсов, а также третий «гибридный» тип.
Ротор с двумя обмотками на первый взгляд выглядит так же, как обычный двигатель с фиксированной скоростью, в первую очередь за счет того, что он имеет одну обмотку. Но более внимательный осмотр показывает, что на самом деле имеется две обмотки, каждая из которых индивидуально подключена к источнику питания. Двигатель с переключением полюсов даже больше похож на своего односкоростного собрата, но имеет вдвое больший набор магнитных полюсов.Электропроводка такова, что переменные магниты расположены в двух отдельных наборах, поэтому либо половина полюсов, либо все они могут быть запитаны одновременно.
Гибридный двигатель сочетает в себе как двухполюсные, так и сдвоенные обмотки, конфигурация дает четыре заданных скорости. Однако этот тип двигателя встречается редко, потому что стандартный двигатель с инверторным питанием будет дешевле покупать и обслуживать, и он будет иметь улучшенные функциональные возможности привода с электронным управлением.
Давайте рассмотрим конструкцию двигателей с двойным ротором и переключением полюсов более подробно.
Двойной ротор
Двигатель с двумя обмотками проще для понимания и, следовательно, дешевле в изготовлении. Двигатель имеет две отдельные обмотки, полярность которых противоположна, внутри одного ламинированного пакета. Следует отметить, что обмотки не обязательно должны быть одинаковыми по размеру; они могут иметь заметно разную мощность. Двухскоростная способность достигается за счет наличия переключателя, который запитывает одну или обе обмотки.
Смена полюсов
Как и многие несколько необычные инженерные компоненты, двигатель с переключением полюсов имеет множество альтернативных названий, в том числе переключающий полюс, ответвитель и Даландер; по сути, это разные названия одного и того же предмета.Двигатель с переключением полюсов состоит из одной обмотки с двумя статорами (наборами полюсов). Один комплект полюсов постоянно подключен к источнику питания; в другом используются выводы с резьбой, чтобы их можно было вкручивать и отсоединять от источника питания. Во время работы настройка высокой скорости вдвое превышает количество оборотов в минуту по сравнению с настройкой низкой скорости.
Во время работы настройка высокой скорости вдвое превышает количество оборотов в минуту по сравнению с настройкой низкой скорости.
При выборе двухскоростного двигателя возникает проблема потенциального недоразумения, которая сбивает с толку многих хороших инженеров. Просто они имеют один из трех типов выхода: постоянный крутящий момент, переменный крутящий момент или постоянная мощность.Пользователи должны определить тип нагрузки, которая будет приводиться в движение, а затем выбрать соответствующий двигатель.
Нагрузка с постоянным крутящим моментом — это нагрузка, при которой скорость может изменяться, но требуемый крутящий момент всегда один и тот же. Возможно, наиболее распространенная нагрузка с постоянным крутящим моментом встречается на конвейере, скорость которого может заметно варьироваться, но крутящий момент (в основном) постоянный. Он также используется в экструдерах, поршневых насосах прямого действия в гидравлике с замкнутым контуром и в некоторых типах специального оборудования.
Переменный крутящий момент типичен для вентиляторов и центробежных насосов, где требование крутящего момента — низкое значение на низкой скорости и высокое значение на высокой скорости.Фактически, требуемый крутящий момент увеличивается намного быстрее, чем скорость, поэтому, например, на вентиляторе удвоение скорости увеличивает крутящий момент в четыре раза (что увеличивает потребность в мощности в восемь раз — 2 × 2 × 2 = 8).
Третий тип нагрузки — это нагрузка постоянной мощности, и многие считают ее наиболее логичной. Если скорость увеличивается вдвое, крутящий момент уменьшается вдвое, так что мощность остается постоянной. Возможно, как ни странно, этого довольно сложно достичь с помощью двухскоростного двигателя, и в большинстве случаев установка инвертора, вероятно, будет намного лучше обслуживать приложение.
В заключение можно сказать, что есть много ниш, где двухскоростной мотор — хороший выбор. Многие инженеры уже знают это, но другие не должны лениться полагать, что инвертор — единственный ответ. Точно так же есть случаи, когда двухскоростные двигатели не следует рассматривать.
Точно так же есть случаи, когда двухскоростные двигатели не следует рассматривать.
Чтобы узнать больше о двухскоростных двигателях , посетите сайт www.rotor.co.uk.
Двигатели с одной обмоткой и с двумя обмотками
Двигатели с одной обмоткой | Двигатели с двойной обмоткой
Двигатели с одной обмоткой
Двигатель 200 В | Двигатель 400 В
Стандартная серия 200 В
Номер модели | Номинальный выход 1 л.с. (кВт) | Номинальная скорость об / мин | Выходной крутящий момент при базовой скорости Постоянный номинальный | Инерция ротора фунт · фут | Ротор GD2 | Вибрация | Уровень шума | Прибл.Масса фунт (кг) | |||
|---|---|---|---|---|---|---|---|---|---|---|---|
30-минутный номинал (50% ПВ) | Непрерывный рейтинг | Базовая скорость | Максимальная скорость 7 | Н · м | фунт · фут | ||||||
A-04FZ | 5 (2) | 3 | 1500 | 8000 | 14,0 | 10,4 | 0,00179172V5 | 75 дБ (A) или меньше | 71 (32) | ||
A-06FZ | 7.5 | 5 | 23,5 | 17,4 | 0,411 | 1,637 | 1,637 0,017 (54) | ||||
A-08FZ | 10 | 7,5 | 35,0 | 25,8 | .617 2,492 | 130 (59) | |||||
A-11FZ | 15 | 1500 | 6000 | 47,7 | 35,8 | 0,759 | 3,061 9321 9321 | 3,061 9321 9327 75 дБ (A) или меньше | 150 (68) | ||
A-15FZ | 20 | 15 | 70.0 | 51,7 | 1,614 | 6,478 | 207 (94) | ||||
9172 A-19FZ A-19FZ 20 95,0 70,6 1,970 7,902 | |||||||||||
A-22FZ | 30 | 25 | 117,6 3 | ) 2,326 | 9,278 | 269 (122) | |||||
J-30FZ | 40 | 40 (22) | 1150 | 4500 | 182.3 | 134 | 6,122 | 24,54 | V10 | 80dB (A) или менее 9 | |
J-37FZ | 50 | 40 | 249,0 | 183,7 | 183,7 | 32,27 | 581 (263) | ||||
- Номинальная выходная мощность гарантирована при трехфазном входном напряжении, 200 В 50/60 Гц, 220 В 50/60 Гц, 230 В 60 Гц. Если входное напряжение ниже 200 В, номинальная выходная мощность не гарантируется.
- 15-минутный рейтинг (50% ED).
Верхняя
Стандартная серия 400 В
Номер модели | Номинальный выход 1 л.с. (кВт) | Скорость / мин | Выходной крутящий момент при базовой скорости Постоянный номинальный | Инерция ротора фунт · фут | Ротор GD2 | Вибрация | Уровень шума | Прибл.Масса фунт (кг) | |||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
30-минутный номинал (50% ПВ) | Непрерывный рейтинг | Базовая скорость | Максимальная скорость 7 | Н · м | фунт · фут | ||||||||||
A-06FZ * E | 5 (2) | 3 | 1500 | 8000 | 14,0 | 10,4 | 0,00179172V5 | 75 дБ (A) или меньше | 71 (32) | ||||||
A-08FZ * E | 7.5 | 5 | 23,5 | 17,4 | 0,411 | 1,637 (0,017) (54) | |||||||||
A-11FZ * E | 10 | 7,5 | 35,0 | 25,8 | 0,617 | 2,492 | 130 (59) | ||||||||
A-15FZ * E | 11177 150003 | 10 | 1500 | 6000 | 47,7 | 35,8 | 0,759 | 061 (0,132) | V5 | 75 дБ (A) или меньше | 150 (68) | ||||
A-19FZ * E | 000 15 | 70,0 | 51,7 | 1,614 | 6,478 | 20172 A-22FZ * E | 25 | 20 | 95,0 | 70,6 | 1,970 | 7,902 | 7,902 | ||
J-30FZ * E | 30 | 25 | 117,6 | 86,9 3 | 86,9 3 917,02) 2326 | 9,278 | 269 (122) | ||||||||
J-37FZ * E | 40 | 9000 ) | 1150 | 4500 | 182,3 | 134 | 6,122 | 1049 80 дБ (A) или меньше | 481 (218) | ||||||
J-45FZ * E | 50 | 40 | .0 | 183,7 | 8,068 | 32,27 | 581 (263) | ||||||||
- при гарантированной входной мощности
- трехфазный, 400 В 50/60 Гц, 440 В 50/60 Гц, 460 В 60 Гц. Если входное напряжение ниже 200 В, номинальная выходная мощность не гарантируется.
Верхняя часть
Двигатели с двумя обмотками
Двигатель 200 В | Двигатель 400 В
Серия 200 В
Двигатель | Модель UAASKB- FZ | 06 | 08 7 | 15 | 19 | 22 | 30 | ||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Номинальная мощность 1 л.с. (кВт) | 90 минут Рейтинг (50% ED) 7.5 | 10 | 15 | 20 | 25 | 30 | 402 | ||||||||
| Непрерывный рейтинг | 5 | 7,5 | 10 | 3 | (11) | 20 | 25 | 27 | |||||||
| Номинальная скорость об / мин | Базовая скорость | 500 | 400 | ||||||||||||
| Максимальная скорость 900 | 6000 | 4800 | |||||||||||||
| Выходной крутящий момент при базовой скорости, постоянный номинальный | Н · м | 71.0 | 105,0 | 143,0 | 262,0 | 358,0 | 442,0 | 477,0 69 фунт | 52,3 | 77,6 | 105,9 | 193,6 | 264.5 | 326,2 | 351,8 |
| Инерция ротора фунт · фут (GD 2 /4) (кг м 2 ) | 1,614 | 1,970 | 2,563 | 6,146 | 13,00 | 14,78 | |||||||||
| Ротор GD 2 фунт · фут 2 м 2 ) | 6,478 | 7,902 | 10,25 | 24,54 | 3 | 51,97 | 59,14 | ||||||||
| Перегрузочная способность | 120%, 60 с 30-минутного номинала | V5 | V10 | ||||||||||||
| Уровень шума | 75 дБ (A) или менее | 80 дБ (A) или менее | |||||||||||||
от 32 до 104 ° F, от 0 до + 40 ° C, относительная влажность 95% или менее (без конденсации) | |||||||||||||||
| Прибл.Масса фунтов (кг) | 207 | 238 | 291 | 481 | 0 900 (355) 893 | 948 | |||||||||
- Номинальная выходная мощность гарантирована при трехфазном входном напряжении 200 В 50/60 Гц, 220 В 50/60 Гц , 230 В 60 Гц.. Если входное напряжение ниже 400 В, номинальная выходная мощность не гарантируется.
- 20-минутный рейтинг (50% ED).
Верхняя часть
400V Серия
Двигатель | Модель UAASKB- FZ * E | 06 | 3011 | 15 | 19 | 22 | 30 | ||
|---|---|---|---|---|---|---|---|---|---|
| Номинальная мощность 1 кВт | 30 минут Рейтинг (50% ED) | 7.5 | 10 | 15 | 20 | 25 | 30 | 402 | |
| Непрерывный рейтинг | 5 | 7,5 | 10 | 3 | (11) | 20 | 25 | 27 | |
| Номинальная скорость об / мин | Базовая скорость | 500 | 400 | ||||||
6000 | 4800 | ||||||||
| Выходной крутящий момент при базовой скорости Непрерывный номинальный | Н · м | 71 | 105 | 9110 140002358 | 442 | 525 | |||
| фунт · фут (кгс · м) | 52.3 | 77,6 | 105,9 | 193,6 | 264,2 | 264,2 | 387,2 | ||
| Инерция ротора фунт · фут (GD 2 /4) (кг · м 2 ) | 1,614 | 1,970 | 2,568 | 6,146 | 11,22 | 72||||
| Ротор GD 2 фунт · фут 2 (кгс · м 2 ) | 6.478 | 7,902 | 10,25 | 24,54 | 44,90 | 3 | 900 | 59,14 | |
| Допустимая перегрузка | 120%, 60 с 30-минутного режима | ||||||||
| Вибрация | 002 V59127 9127 9127 9127 | ||||||||
| Уровень шума | 75 дБ (A) или менее | 80 дБ (A) или менее | |||||||
| Температура и влажность окружающей среды | 32 до 104 ° F, от 0 до + 40 ° C, относительная влажность 95% или менее (без конденсации) | ||||||||
| Прибл.Масса фунтов (кг) | 205 | 245 | 298 | 525 003 | 900 900 (355) 893 | 1069 | |||
- Номинальная выходная мощность гарантирована при трехфазном входном напряжении, 400 В 50/60 Гц, 460 В 60 Гц. Если входное напряжение ниже 400 В, номинальная выходная мощность не гарантируется.
- 20-минутный рейтинг (50% ПВ)
Верхний
3-фазные двигатели, 2 скорости, с одной обмоткой
3-фазные двигатели, 2 скорости, с одной обмоткойJohnGierich3021-04-29T13: 46: 20-05: 00 Маркировка клемм и подключения
Трехфазные двигатели — двухскоростные однообмоточные
Номенклатура NEMA — 6 отведений
Соединение с постоянным крутящим моментом |
| Скорость | L1 | L2 | L3 | 8 | 9017 9048 Типичное соединение 8 | 9048 9048 Типичное соединение5 | 1, 2 и 3 Соединение | 2 WYE | |
| Низкое | 1 | 2 | 3 | 4-5-6 Открыто | 1 DELTA | 0 | |||
Соединение с регулируемым крутящим моментом |
| Скорость | L1 | L2 | L3 | 8 | 9048 9048 9048 Типичное соединение5 | 1, 2 и 3 Соединение | 2 WYE | |
| Низкое | 1 | 2 | 3 | 4-5-6 Открыто | 1 DELTA | 0 | ||
Подключение постоянной мощности |
|
| Скорость | L1 | L2 | L3 | 9048 9048 9048 Типовое соединение Типовое соединение 4 | 5 | 1-2-3 Открытый | 2 DELTA | |
| Низкий | 1 | 2 | 3 | 4 и | 1 |
* Двигатели ВНИМАНИЕ! со скоростью может отличаться от указанной выше.
вернуться к содержанию
Маркировка клемм и подключения
Трехфазные двигатели — двухскоростные, с одной обмоткой
Номенклатура IEC — 6 выводов
Постоянная Моментное соединение |
| Скорость | L1 | 9007 | L1 | 9007 | 9017 90 Типичное соединение |
| Высокий | 2W | 2U | 2V | 1U и 1V и 1W Присоединиться | 2 |
| Low | 1 | 1V | 2W1V | 2W1V | 2W 1
Соединение с переменным крутящим моментом |
| 9017 9018 9018 9018 9018 L2 | Типичный Соединение | ||||
| Высокий | 2W | 2U | 2V | 1U, 1V и 1W Присоединение | 2 |
| Low | 1 | 1V | 1 |
вернуться к содержанию
ДОБРО ПОЖАЛОВАТЬ В IJSTR (ISSN 2277-8616) —
|
Что такое двухклеточный ротор асинхронного двигателя?
Асинхронный двигатель с двойной клеткой — это двигатель, в котором используются двухклеточный двигатель , или , два ротора , , , обмотки, или клетки.Это устройство используется для получения высокого пускового момента при низком значении пускового тока. Статор ротора с двойной обоймой асинхронного двигателя такой же, как и у обычного асинхронного двигателя. В двухклеточном роторе асинхронного двигателя есть два слоя стержней. Рисунок асинхронного двигателя Double cage показан ниже.
Каждый слой закорочен концевыми кольцами. Наружные стержни каркаса имеют меньшую площадь поперечного сечения, чем внутренние стержни, и изготовлены из материалов с высоким удельным сопротивлением, таких как латунь, алюминий, бронза и т. Д.стержни внутренней клетки изготовлены из меди с низким сопротивлением. Таким образом, сопротивление внешней клетки больше, чем сопротивление внутренней клетки.
Между верхним и нижним слотами есть щель. Увеличенная прорезь, соединяющая обмотку внутренней клетки, намного больше, чем у обмотки внешней клетки. Таким образом, внутренняя обмотка имеет большую самоиндукцию.
При запуске индуцированное в роторе напряжение совпадает с частотой питающей сети (f 2 = f 1 ).Следовательно, реактивное сопротивление рассеяния внутренней обмотки клетки по сравнению с реактивным сопротивлением рассеяния внешней обмотки клетки намного больше. Обмотка внешней клетки несет большую часть пускового тока, что обеспечивает низкий импеданс для протекания тока. Таким образом, обмотка внешней обмотки с высоким сопротивлением развивает высокий пусковой крутящий момент.
По мере увеличения частоты вращения ротора частота ЭДС ротора (f r = sf) уменьшается. При нормальной рабочей скорости реактивное сопротивление рассеяния обеих обмоток становится пренебрежимо малым.Ток в роторе делится между двумя клетками и зависит от их сопротивления. Сопротивление внешней клетки примерно в 5-6 раз больше, чем внутренней клетки. Следовательно, крутящий момент двигателя создается в основном внутренней клеткой с низким сопротивлением и развивается при нормальной рабочей скорости.
Для требований к низкому пусковому крутящему моменту используется обычный двигатель с сепаратором. Для более высоких требований к крутящему моменту используется двигатель с глубокой клеткой. Двигатель с двойной обоймой используется для более высоких крутящих моментов. Конструкция контактного кольца используется для двигателей большого размера.Пусковой крутящий момент и периоды пуска также большие.
Поведение индукционной машины с двумя статорами, питаемой от многоуровневого инвертора с зажимом в нейтральной точке
Использование многоуровневых инверторов с асинхронными машинами стало популярным в большинстве систем преобразования энергии и управления. В данной статье обсуждается поведение индукционной машины с двойной обмоткой статора (DSIM) для источника питания, который представляет собой источник питания с фиксированной нейтралью (NPC). Проанализирован многоуровневый инвертор с управлением техникой ШИМ.Управление DSIM достигается с помощью техники ШИМ на технологию ШИМ с несколькими несущими и после сравнительного исследования различных характеристик DSIM с учетом различных электрических смещений между двумя звездами (0 °, 30 °, 60 °). Был рассмотрен зазор между двумя звездами, который влияет на крутящий момент и скорость гармонических искажений циркуляционных токов.
1. Введение
Асинхронные машины с n-фазной симметрией имеют равный угол между последовательными фазами статора a = 2p / n.Предполагается, что обмотки распределены синусоидально, так что всеми высшими пространственными гармониками магнитодвижущей силы можно пренебречь. Машины с нечетным числом фаз отличаются тем, что устраняют первую гармонику большего тока, гармонику «5» с пятифазной машиной и гармонику «7» с семифазной машиной [1–4].
Одна из основных задач многофазных машин и надежность известны; например, в случае многозвездного оборудования для отказа в фазе нам просто нужно отключить звезду, содержащую неисправную фазу, что снижает крутящий момент, развернутый на 50% со значительным увеличением пульсаций крутящего момента и магнитного Сонга [5–8].В истории многофазных машин самым популярным типом многофазных машин были двухфазные машины. Двухфазные машины характеризуются многофазной структурой с двумя наборами трехфазных обмоток статора в одной раме статора. Недостатком двух трехфазных машин могут быть нежелательные гармоники тока статора [9–11].
При увеличении мощности возникают проблемы как в инверторе напряжения, так и в самой машине. Статические переключатели инвертора напряжения должны коммутировать большие токи, и часто необходимо размещать несколько структур параллельно при заданной мощности, уменьшая коммутируемые токи за счет увеличения напряжения.Метод ШИМ инверторного напряжения создает высокие градиенты напряжения, вызывая ускоренное старение изоляции [4, 12–14].
Чтобы избежать этого, одним из возможных решений является большое количество фаз, ведущих к распределению мощности, подаваемой на машину. Другое решение — использовать многоуровневые инверторы, обеспечивающие более высокое качество питания, но требующие переключателей меньшего размера (IGBT). Это позволяет создавать простые конструкции и проверять инверторы с уменьшением тепловых проблем и электромагнитных помех [3, 15, 16].
Родилась идея машины с несколькими обмотками, чтобы иметь две отдельные обмотки. По сравнению с обычной машиной наличие второй обмотки облегчает управление скоростью машины и передает значительную мощность через статический преобразователь.
Многофазные машины — это машины, у которых количество фаз q больше трех, и они могут обеспечить больше по сравнению с трехфазными машинами, потому что они не могут соответствовать требованиям, требуемым в конкретных областях применения; они разработаны, в основном, в области обучения работе с регулируемой скоростью и высокой мощностью, поскольку увеличение количества фаз позволяет, с одной стороны, повысить безопасность работы до тех пор, пока не станут активными по крайней мере три фазы; без подключения нейтрали может быть до трех разомкнутых фаз, что, с другой стороны, требуется для уменьшения размера компонентов в силовых модуляторах энергии.
Эти ограничения делают многофазную машину очень интересной концепцией; он используется в морской, железнодорожной, нефтехимической промышленности, авионике, автомобилестроении и т. д. [17–20].
Самая известная многофазная машина — это, вероятно, индукционная машина с двумя обмотками статора, две звезды которой идентичны, имеют один и тот же статор и сдвинуты по фазе на угол 30 °. Его обмотки имеют одинаковое количество полюсов и питаются с одинаковой частотой. Конструкция ротора идентична конструкции трехфазной машины, поэтому он может быть либо короткозамкнутым, либо намотанным для образования трехфазной обмотки.
2. Математическая модель асинхронного двигателя со сдвоенным статором
Двухфазная машина является наиболее распространенной структурой многофазной машины. Двухфазные машины имеют два набора трехфазных обмоток статора в одной раме статора. Смещение между наборами обмоток может принимать разные значения. Однако на практике встречаются только 0, 30 или 60 электрических градусов. Если наборы обмоток не сдвинуты в пространстве, полученная машина по существу представляет собой обычную трехфазную машину с двумя наборами параллельных обмоток.С другой стороны, смещение набора обмоток на 60 электрических градусов приводит к симметричной шестифазной машине. Хотя обе эти альтернативы могут иметь некоторые преимущества, наиболее популярным решением является то, что звезда, соединяющая трехфазные обмотки статора, пространственно смещена на 30 электрических градусов, а нейтральные точки комплектов гальванически изолированы друг от друга. ) Фазы первой звезды — это,,, фазы, которые занимают вторую звезду, и, и фазы ротора отмечены, и.(ii) выражает угол смещения между двумя звездами. (iii) выражает положение ротора (фазы) по сравнению со звездой (фазой). (iv) выражает положение ротора (фазы) по сравнению со звездой ( (v) Предполагается, что машина работает без насыщения магнитной цепи и пренебрегая эффектом гистерезиса и токов Фуко. (vi) Предполагается, что конструкция машины однородна. (vii) Магнитодвижущая сила, создаваемая каждая фаза двух кадров имеет синусоидальное распределение.(viii) Двухфазные обмотки статора сбалансированы и идентичны.
Принимая во внимание упомянутые выше упрощающие предположения и обозначения векторов величин напряжения, тока и магнитного потока, мы можем записать следующие векторы:
Для звезды 1,
Для звезды 2,
Для ротора,
Электрические уравнения звезды 1 и звезды 2 и ротора, соответственно, выражаются как
Поток выражений выглядит следующим образом: где — матрица сопротивления статора (звезда 1 и 2) и ротор, а — индуктивности рассеяния одной фазы звезды. 1, звезда 2 и ротор.
Во время применения преобразования dq и выполнения необходимых манипуляций, (4), (5) и (6) в dq становятся скоростью вращения координаты (d, q) относительно ротора и являются скоростью вращение координаты (d, q) относительно звезды 1.
Применяя преобразование Парка к уравнениям потока, получаем, что является циклической взаимной индуктивностью между звездой 1, звездой 2 и ротором.
Предыдущая система уравнений принимает вид
, где циклическая индуктивность звезды 1; циклическая индуктивность звезды 2; циклическая индуктивность ротора.
Электромагнитный момент может быть выражен следующим образом: Вводя уравнения потока (19) и (20) в (25), мы получаем Вводя уравнения тока и в (25) получаем
Для системы отсчета, относящейся к статору () мы можем получить уравнение состояния в виде вектора состояния и вектора входа.
После расчета мы получаем следующие матрицы: Модель асинхронной машины с двойной обмоткой статора, модель инвертора NPC и контроллер были реализованы в MATLAB.Контрольная реактивная мощность внешнего статора была установлена равной нулю, чтобы обеспечить единичный коэффициент мощности сети.
3. Два трехуровневых каскада NPC VSI-DSIM
3.1. Две трехуровневые структуры NPC VSI
Рабочий режим состоит в том, чтобы подавать DSIM через двойную обмотку статора инвертора, то есть шесть плеч, управляемых ШИМ-регулятором, как показано на рисунке 1. Если первые три плеча (A, B и C) снабжают первую звезду, которая смещена на 120 ° между ними, то же самое для трех других плеч (D, E и F), но две звезды смещены электрическим током. угол α .На рисунке 1 показана структурная схема инвертора с двойной звездой, который питает нагрузку с двойной звездой (стандарт R-L) [6].
В приведенной ниже матрице показаны простые напряжения для двух звезд со смещенным углом (0 °):
Запись следующей матрицы представляет составленные напряжения для двух звезд:
Напряжения между двумя узлами и являются Эти напряжения выражены в терминах управляющих сигналов и напряжения постоянного тока где
3.2. Стратегия ШИМ для двух трехуровневых NPC VSI
Мы применили этот метод (метод ШИМ с несколькими несущими) для управления многоуровневым инвертором.Этот метод основан на традиционной синусоидальной модуляции. Это сравнение синусоидального сигнала, называемого модулирующей волной, с треугольным сигналом, называемым несущей.
Метод ШИМ должен обрабатывать отдельно случай, когда уставка положительная, и те, где она отрицательная, как показано на рисунке 2.
Для инвертора с m уровнями команда требует (m-1) треугольных сигналов с одинаковой частотой и одинаковой амплитудой (от пика до пика).
Управляющие сигналы переключателей для инвертора NPC получаются из трех опорных синусоидальных сигналов, сдвинутых по фазе, частоте и величине
Метод ШИМ характеризуется двумя отчетами, скоростью модуляции и соотношением частот, определяемыми следующим образом: : коэффициент модуляции . : соотношение частот.
3.3. Моделирование DSIM от многоуровневого инвертора
3.3.1. Принцип
Чтобы идентифицировать результаты моделирования, мы рассмотрим эволюцию электромагнитных, механических, электрических и магнитных характеристик для различных уровней используемого инвертора, принимая во внимание сдвиг α = 30 °.
Моделирование инвертора на m уровнях было выполнено с помощью программного обеспечения «Matlab Simulink».
3.3.2. Результаты моделирования
На рисунках 3–6 показано изменение выходного напряжения плеча инвертора при увеличении количества уровней.
Согласно найденным там результатам, когда уровень напряжения инвертора составляет от m = 2 до m = 7, выходное напряжение приближается к все более совершенной синусоидальной форме.
На рисунках 7–10 показано изменение электромагнитного момента и скорости вращения для различных уровней используемого инвертора.
В таблице 1 показана скорость волнистости на следующем количестве уровней, соответствующих.