|
Bosch Rexroth KEB Control Techniques Parker Частотные преобразователи Широкий спектр качественных частотных преобразователей, услуги по подбору и модернизации станков и механизмов. Осуществляем официальные поставки по наилучшим ценам. Официальная поддержка клиентов и официальная гарантия. |
Motovario Wittenstein Alpha KEB Apex Мотор редукторы и редукторы Осуществляем поставки редукторов и мотор-редукторов разных типов от ведущих производителей. Производим полный комплекс услуг по подбору редукторов, оказываем консультации для клиентов. |
||
|
Абсолютные энкодеры Инкрементальные энкодеры Магнитные линейки Энкодеры, счетчики импульсов, токосъемники, индикаторы и пр. Поставляем официально все типы высокоэффективных энкодеров и индикаторов всех типов. Осуществляем оперативный подбор энкодеров под задачи заказчика. |
СТМЛ-1, ШМ-2, СТМ-2 СТМТ-2, MP-25, MTP-1 Системы линейного перемещения и модули линейного перемещения Разрабатываем и производим широкий спектр модулей и систем линейного перемещения. Производим системы линейных перемещений по индивидуальным заказам. Оказываем полный комплекс услуг по разработке и производству. |
||
Техника линейных перемещенийРельсовые направляющие SBC Цилиндрические направляющие Миниатюрные направляющие MID ШВП Техника и механические компоненты для систем линейных перемещений Разрабатываем и поставляем комплектующие для систем линейного перемещения. |
Винтовые домкраты ZIMM Компоненты привода и трансмиссии ZIMM Домкраты и подъемно-транспортные механизмы Осуществляем поставки промышленных домкратов для производственных нужд, прецизионные домкраты. Предлагаем компоненты приводов и трансмиссии. |
||
Системы управленияКонтроллеры Fatek ЧПУ Delta Tau ЧПУ «СервоКон 2000» Системы управления, панели операторов Цифровые системы управления, современные системы ЧПУ, HMI и пр. Оказываемо полный комплекс услуг для систем ЧПУ. Осуществляем разработки и модернизации собственной высокоэффективной системы ЧПУ «Сервокон». |
Гибкие кабель-каналы CPS Гофрозащита CPS Flex Системы защиты кабелей, кабель-каналыШирокий спектр систем защиты кабелей, высоконадежные кабель-каналы для промышленного производства, гибкие кабель-каналы для жестких условий эксплуатации или специального назначения. |

 Производим системы линейных перемещений по индивидуальным проектам.
Производим системы линейных перемещений по индивидуальным проектам.
НИОКР
Производим НИОКР, осуществляем услуги по разработке, проектированию, пуско-наладке широкого спектра механизмов, узлов, оборудования и станков. Осуществляем разработку, доработку, модернизацию и производство станков и механизмов, в том числе специального назначения (с уникальными характеристиками и/или функционалом) на базе собственного производства в России. Опыт работы более 15 лет.
НИОКР (что такое НИОКР?), определения, основные понятия, эффективность НИОКР.
НИОКР. Проекты НИОКР. Услуги НИОКР.
Заказать услуги НИОКР. Осуществление НИОКР.
НИОКР — Получить более подробную информацию о реализованных проектах.
Электродвигатель с переменной скоростью вращения
Изобретение относится к области электротехники и может быть использовано для регулирования скорости вращения электродвигателей. Техническим результатом является уменьшение помех и ограничение размеров устройства регулирования. Электродвигатель с переменной скоростью вращения содержит статор, с которым соединена по меньшей мере одна катушка магнитного возбуждения, и ротор, на котором сформированы по меньшей мере два магнитных полюса противоположной полярности. Указанная катушка предназначена для формирования на указанном статоре по меньшей мере двух магнитоиндукционных полюсов противоположной полярности. Кроме того, двигатель содержит регулирующее устройство, предназначенное для регулировки скорости вращения ротора и включающее противопомеховый фильтр.
Настоящее изобретение относится к электродвигателю, снабженному устройством для регулировки скорости вращения. В частности, настоящее изобретение относится к электродвигателю, имеющему устройство для регулировки скорости вращения, соединенное с индукционной катушкой самого двигателя.
Известно, что регулировку скорости вращения электродвигателей и мощности переменного напряжения обычно производят с использованием двух основных систем.
Первая система предусматривает прерывание синусоидального переменного тока, подаваемого в индукционные катушки двигателя, с использованием симисторных или тринисторных переключающих элементов, где длительностью открытого состояния управляют, разрешая прохождение только части синусоиды. Хотя эта система эффективна, когда необходима непрерывность управления, она вносит значительную по величине гармонику вследствие резкого прерывания тока.
Вторая известная система, обычно называемая «чоппером» (импульсным прерывателем), осуществляет регулировку путем преобразования отрицательной полуволны переменного тока, подаваемого в индукционную катушку двигателя, в положительную.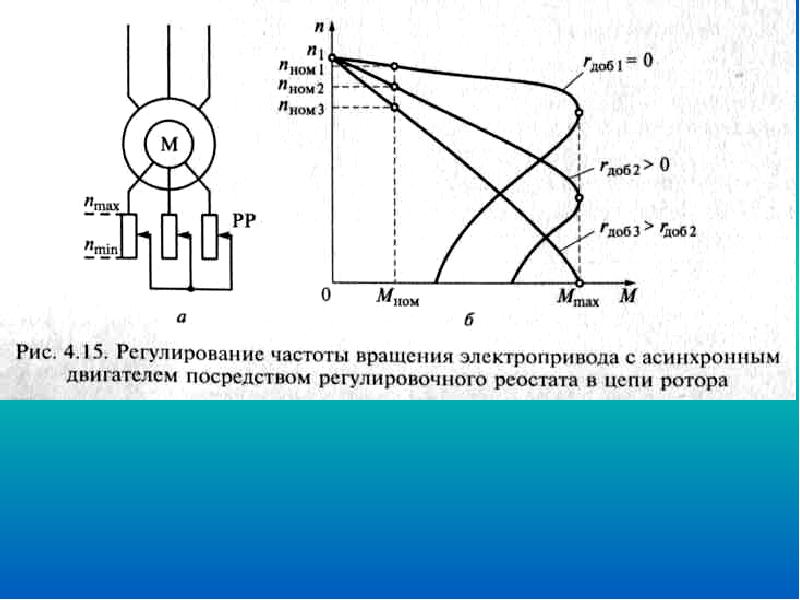
Несмотря на то, что вторая система создает меньше гармонических искажений, чем первая система, и позволяет уменьшить потери в обмотках, в ней необходимо применение фильтра для подавления ультразвуковой частоты переключения. Фактически, для обеспечения соответствия современным нормам и стандартам все переключающие цепи должны содержать противопомеховые фильтры. В первой системе противопомеховый фильтр также необходим для ограничения вышеупомянутой гармоники, обусловленной наличием симисторного переключателя, в токе, подаваемом в индукционные катушки двигателя.
Цель изобретения состояла в уменьшении помех, создаваемых устройствами регулировки скорости вращения двигателя, простым и экономичным способом, при ограничении размеров такого устройства, располагаемого внутри самого двигателя. Для достижения указанной цели был создан двигатель, снабженный устройством для регулировки скорости вращения двигателя, в котором часть по меньшей мере одной индукционной катушки двигателя используется в качестве индуктивности противопомехового фильтра для ограничения помех, обусловленных переключением регулирующего устройства. В частности, указанная индукционная катушка двигателя может быть разделена на две последовательные части, предпочтительно одинаковые, а регулирующее устройство может быть включено между этими двумя частями.
В частности, указанная индукционная катушка двигателя может быть разделена на две последовательные части, предпочтительно одинаковые, а регулирующее устройство может быть включено между этими двумя частями.
Один из аспектов настоящего изобретения касается двигателя с переменной скоростью вращения, содержащего статор, связанный по меньшей мере с одной катушкой магнитного возбуждения, и ротор, на котором сформированы по меньшей мере два магнитных полюса противоположной полярности, причем указанная по меньшей мере одна катушка выполнена так, чтобы сформировать на указанном статоре по меньшей мере два магнитоиндукционных полюса противоположной полярности. Регулирующее устройство для регулировки скорости вращения ротора содержит противопомеховый фильтр, который включает в себя по меньшей мере часть указанной магнитоиндукционной катушки.
Характеристики и преимущества конструкции, выполненной согласно настоящему изобретению, станут понятнее из последующего описания, в котором приведены примеры одного из вариантов выполнения изобретения, которым оно не ограничивается, со ссылками на сопровождающие чертежи, где:
на фиг.
на фиг.2 схематично представлено регулирующее устройство, установленное в электродвигателе, выполненном согласно настоящему изобретению;
на фиг.3 представлена возможная электрическая схема регулирующего устройства согласно настоящему изобретению.
Как показано на чертежах, согласно предпочтительному варианту выполнения изобретения двигатель содержит статор 2, снабженный по меньшей мере одной магнитоиндукционной катушкой 3а и 3b, и ротор 4.
Указанная по меньшей мере одна индукционная катушка предназначена для создания на указанном статоре по меньшей мере двух магнитных полюсов противоположной полярности. Указанный ротор также имеет по меньшей мере два магнитных полюса противоположной полярности. Указанные полюсы ротора могут быть созданы одним из способов, применяемых в данной области техники, например, с использованием по меньшей мере одного постоянного магнита, прикрепленного к указанному ротору, или с использованием по меньшей мере одной катушки, возбуждаемой электрическим током, который подается в ротор через скользящие контакты, например, с помощью щеток или с использованием витков самоиндукции, что типично для асинхронных двигателей.
Указанный двигатель содержит устройство 5 для регулировки скорости вращения, соединенное с указанной по меньшей мере одной индукционной катушкой.
На фиг.2 поясняется вариант выполнения настоящего изобретения, в котором регулирующее устройство 5 соединено с индукционной катушкой двигателя, питание которой осуществляется переменным током, подаваемым на клеммы 6 и 7. Согласно настоящему изобретению указанная катушка разделена на первую часть 3a и вторую часть 3b, соединяемые последовательно. Предпочтительно, чтобы эти первая и вторая части были идентичны.
Регулирующее устройство 5 включено последовательно между первой частью 3а и второй частью 3b, так что через него течет такой же ток I.
Таким образом, регулирующее устройство 5 как с одной, так и с другой стороны защищено по меньшей мере одной частью индукционной катушки 3а и 3b, которые действуют как индуктивности противопомехового фильтра, предназначенные для значительного ограничения помех, создаваемых в процессе переключения, и для уменьшения механических вибраций, связанных с внезапными выбросами вращающего момента в двигателях, в отношении скорости вращения, источников шума и нежелательных резонансов.
Следовательно, согласно настоящему изобретению, по меньшей мере одна часть индукционной катушки заменяет собой индуктивность фильтра, выполненного в виде обмотки на ферритовом стержне, который в настоящее время используется в данной области техники.
На фиг.3 показана электрическая схема регулирующего устройства согласно настоящему изобретению, которая включает управляющую схему 51, формирующую управляющий сигнал для указанных индукционных катушек и включенную параллельно противопомеховому фильтру 52.
Указанная управляющая схема имеет известную конструкцию и содержит симистор Т1 и двунаправленный диодный тиристор D1, блок 511 переменного сопротивления (резистор R2 и включенные параллельно друг другу потенциометры Р1 и Р2) и RC-блок 521 (резистор R3 и конденсатор С2).
RC-блок 521 и блок 511 переменного сопротивления определяют время отпирания симистора Т1, когда после интервала времени, зависящего от постоянной времени заряда конденсатора С2, оказывается превышенным напряжение включения диодного тиристора D1.
Электрическая мощность, которая проходит через симистор и подается в индукционные катушки, определяет скорость вращения двигателя. Эта мощность увеличивается с уменьшением постоянной времени заряда конденсатора С2. Поэтому при изменении постоянной времени заряда этого конденсатора скорость вращения двигателя также изменяется. Для изменения указанной постоянной времени предназначены потенциометры Р1 и Р2.
Противопомеховый фильтр 52 состоит из RC-схемы (резистор R1 и конденсатор С1, соединенные последовательно). Согласно настоящему изобретению противопомеховый фильтр включает также часть индукционной катушки 3a и/или 3b. Известно, что индуктивность L для переменного тока представляет импеданс Z=2nπfL, где f — частота переменного тока. Поэтому на высокой частоте индукционная катушка имеет высокий импеданс. RC-схема ведет себя противоположным образом, поскольку на высокой частоте конденсатор ведет себя как короткозамкнутая цепь.
Управляющая схема вносит высокочастотные гармоники вследствие переключений симистора, что создает токи, значительно влияющие на правильную работу двигателя. Двигатель, в котором, помимо прочего, имеется рассматриваемая фильтрующая система, блокирует эти токи, в противном случае поступающие в источник питания. Было обнаружено, что эта фильтрующая система дополнительно способствует уменьшению шума пульсаций механического вращающего момента, а также снижает электромагнитные помехи в асинхронных двигателях с обмотками со сдвигом фаз, поскольку регулировку можно проводить только для одной части.
Двигатель, в котором, помимо прочего, имеется рассматриваемая фильтрующая система, блокирует эти токи, в противном случае поступающие в источник питания. Было обнаружено, что эта фильтрующая система дополнительно способствует уменьшению шума пульсаций механического вращающего момента, а также снижает электромагнитные помехи в асинхронных двигателях с обмотками со сдвигом фаз, поскольку регулировку можно проводить только для одной части.
Хотя данный вариант выполнения изобретения относится к управляющей схеме с запиранием фазы, аналогичные соображения касаются управляющих схем, в которых используются «чопперные» системы. Фактически, высокая частота сигнала переключения в «чопперной» управляющей схеме требует использования противопомехового фильтра, подобного описанному в настоящем изобретении.
Кроме того, размещение регулирующего устройства между двумя частями индукционной катушки обеспечивает наличие двух фильтрующих катушек: одной — до управляющей схемы, а другой — после нее, что повышает суммарный импеданс для высокочастотных токов помех.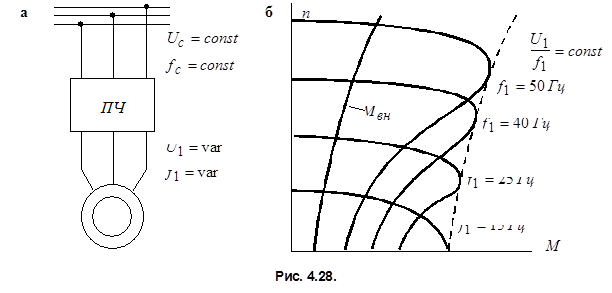
Настоящее изобретение позволяет исключить традиционную индуктивность фильтра, что обеспечивает значительное уменьшение стоимости и объема ручных операций при изготовлении двигателя, а также сокращение пространства, занимаемого печатной платой, и позволяет использовать переключающие элементы (такие как симистор, тринистор, транзистор, МОП-транзистор или транзистор с изолированным затвором) меньшей мощности, поскольку они включаются внутри электрического соединения последовательно с обмотками двигателя и работают при более низком напряжении, нежели напряжение источника питания.
Кроме того, поскольку традиционная индуктивность фильтра представляет собой компонент, который занимает большую часть пространства в устройстве для регулировки скорости, ее исключение приводит к созданию намного более компактных и малогабаритных двигателей по сравнению с двигателями, в которых индуктивность фильтра намотана на ферритовом сердечнике.
1. Электродвигатель с переменной скоростью вращения, содержащий статор (2), соединенный по меньшей мере с одной индукционной катушкой, ротор, на котором сформированы по меньшей мере два магнитных полюса противоположной полярности, причем указанная по меньшей мере одна индукционная катушка выполнена так, чтобы сформировать на указанном статоре по меньшей мере два магнитоиндукционных полюса противоположной полярности, противопомеховый фильтр и регулирующее устройство для регулирования скорости вращения указанного ротора, которое соединено с индукционной катушкой и включает управляющую схему, формирующую управляющий сигнал для указанной индукционной катушки и включенную параллельно противопомеховому фильтру, который включает по меньшей мере часть указанной индукционной катушки.
2. Электродвигатель по п.1, в котором индукционная катушка разделена на первую часть (3а) и вторую часть (3b), соединенные последовательно, а указанное регулирующее устройство (5) включено между указанной первой частью и указанной второй частью.
3. Электродвигатель по п.2, в котором указанные первая и вторая части идентичны.
4. Электродвигатель по п.1, в котором указанный противопомеховый фильтр (52) включает RC-схему.
5. Электродвигатель по п.1, в котором указанное регулирующее устройство включает управляющую схему с запиранием фазы.
6. Электродвигатель по п.1, в котором указанное регулирующее устройство включает «чопперную» управляющую схему.
Все о частотных преобразователях
Частотные преобразователи — это устройства для плавного изменения частоты вращения синхронных и асинхронных двигателей посредством изменения частоты питающего тока.
В современной технике благодаря простоте конструкции и обслуживания, небольшим габаритам, высокой надёжности, и низкой стоимости огромное распространение получили именно асинхронные электродвигатели.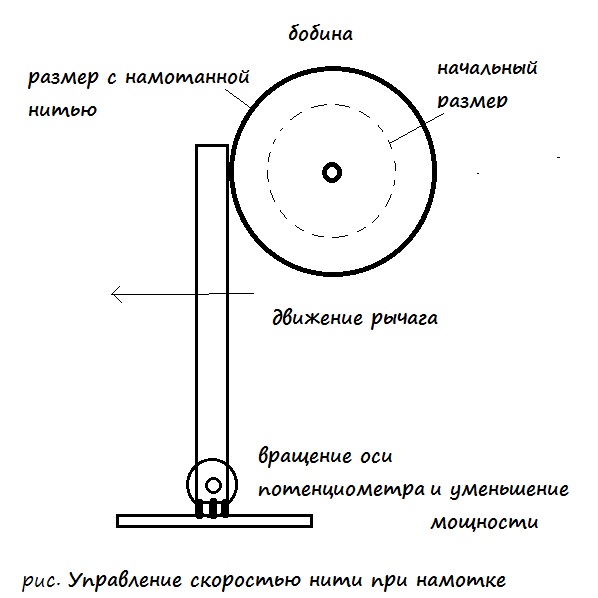
При работе различных устройств, в качестве привода которых применяются асинхронные электродвигатели, часто возникает необходимость в регулировании их скорости вращения.
Исходя из формулы n = (1 — S)60f/p где n — скорость вращения ротора, S — скольжение, f- частота питающей сети, p — количество пар полюсов.
Существует три способа регулирования скорости вращения асинхронного двигателя:
- — изменение скольжения. Этот способ используется в двигателях с фазным ротором. В цепь фазного ротора вводится регулировочный реостат. При использовании этого способа можно получить большой диапазон регулирования частоты вращения в сторону понижения. Однако этот способ имеет, и ряд недостатков, основным из которых является большие потери на регулировочном реостате (нагрев) т.е. снижение КПД. Как следствие этот способ применяют для кратковременного снижения частоты вращения.
- — изменение числа пар полюсов. Этот способ предполагает использование специальных двигателей (многоскоростных) имеющих более сложную обмотку статора, позволяющую изменять число пар полюсов, и короткозамкнутый ротор.
 Недостатком этого метода является ступенчатое регулирование (3000, 1500, 1000, 750, 600 об/мин – 1,2,3,4,5 обмотки с 1,2,3,4,5 парами полюсов соответственно), большая стоимость и громоздкость двигателя.
Недостатком этого метода является ступенчатое регулирование (3000, 1500, 1000, 750, 600 об/мин – 1,2,3,4,5 обмотки с 1,2,3,4,5 парами полюсов соответственно), большая стоимость и громоздкость двигателя. - — изменение частоты питающего тока (напряжения). На практике этот метод, в общем случае (самый простой), предполагает вместе с частотой изменять и действующее значение подведенного напряжения таким образом, что бы отношение U/f было постоянно. Это (изменение входного напряжения) делается для сохранения перегрузочной способности двигателя с изменением частоты сети.
В приводах центробежных насосов и вентиляторов, которые являются типичными представителями переменной механической нагрузки (момент нагрузки возрастает с увеличением скорости вращения) используется функция напряжения к квадрату частоты U/f 2 = сonst.
В более совершенных частотных регуляторах для управления скоростью вращения и электромагнитным моментом двигателя независимо, используется так называемое векторное управление. При этом виде управления необходимо управлять амплитудой и фазой статорного тока (т.е. вектором) в зависимости от положения ротора относительно обмотки статора в каждый момент времени.
Применение частотных регуляторов. Зачем нужен частотный регулятор?
Асинхронные двигатели имеют ряд недостатков (сложность регулирования скорости вращения, большие пусковые токи, относительно малый пусковой момент). Однако благодаря своей простоте, надежности и дешевизне получили огромное распространение в промышленности и быту. Применение же частотных регуляторов «устраняет» недостатки асинхронных двигателей и кроме этого позволяет избежать установки различного дополнительного оборудования, уменьшить потери в технологическом процессе, увеличить КПД самого двигателя, уменьшить износ, как самого двигателя, так и оборудования использующегося в данном технологическом процессе.
Рассмотрим более детально применение частотных регуляторов на примере насосного оборудования. Потери в технологической системе зависят от нагрузки создаваемой потребителями (на неё мы влиять не можем) и гидравлическим сопротивлением элементов этой системы. Так поддержание давления у потребителей на постоянном уровне при изменяющейся нагрузке, возможно только при использовании дополнительного оборудования (различных регуляторов давления, мембранных баков, дроссельных задвижек). Использование этого оборудования создает дополнительное гидравлическое сопротивление и как следствие снижает КПД системы в целом. При использовании частотного регулятора двигатель сам регулирует давление в сети посредством изменения частоты вращения. Кроме того при снижении технологической нагрузки уменьшая частоту вращения насоса, КПД самого насоса тоже возрастает. Таким образом достигается как бы двойной эффект увеличивается КПД системы в целом, за счёт исключения из системы лишнего гидравлического сопротивления и увеличение КПД самого насоса как агрегата.
Применение частотного регулятора также значительно снижает эксплуатационные затраты связанные с износом оборудования. Плавное регулирование вращения (и плавный пуск) практически полностью позволяют избежать как гидравлических ударов, так и скачков напряжения в электросети (особенно актуально в системах, где предусмотрен частый пуск/остановка насоса).
| о компании | |||||||
Приводные Технологии — развивающаяся компания малого бизнеса, основным видом деятельности которой является производство, маркетинг и промоушинг, бытовой и промышленной, доступной и надежной приводной техники. Интеграция новейших технологий современного редукторостроения к отечественным условиям производства, — особенность наших технических решений, предлагаемых рынку. Современные запросы приводов стали более требовательны к механической передаточной части, к подводимому электрическому оборудованию, к последующим приводным муфтам и др. Наши предложения редукторных мини-моторов, редукторных узлов и силовых передаточных машин предназначены для эксплуатации в разных отраслях, для достижения различных целей, с любым набором требований и т.д. Помимо всего этого, имеется широкий выбор электрических устройств для оперативного контроля и регулирования режимов работы привода, — так называемая, область приводной электроники. | |||||||
| |||||||
 подробнее
подробнее .. 200 об/мин
.. 200 об/минВыбор электродвигателя для промышленных применений
При выборе электродвигателя следует учитывать множество факторов, в том числе целевое назначение, требующиеся эксплуатационные и механические характеристики, а также предполагаемые внешние воздействия. Возможные варианты таковы: электродвигатель переменного тока, электродвигатель постоянного тока (рис. 1) или серводвигатель (шаговый электродвигатель). Конечный выбор в основном зависит от того, для какого промышленного изделия подбирается электродвигатель, и от наличия особых потребностей.
Рис. 1. Электродвигатели постоянного тока хорошо подходят для применения в изделиях с невысокой стоимостью, низкой частотой вращения ротора или постоянным крутящим моментом — например, таких, как этот ленточный транспортер
В зависимости от характера нагрузки это может быть электродвигатель с постоянной или переменной частотой вращения и мощностью. Крутящий момент и мощность определяются величиной нагрузки, необходимой частотой вращения, а также разгоном и торможением (особенно если они быстрые и/или частые). Кроме того, следует учитывать требования к регулированию частоты вращения и управлению положением ротора.
Типы нагрузок электродвигателей
Существует четыре типа нагрузок электродвигателей промышленной автоматики:
- переменная мощность и постоянный крутящий момент;
- переменный крутящий момент и постоянная мощность;
- переменные мощность и крутящий момент;
- управление положением ротора или регулирование крутящего момента.

К изделиям с переменной мощностью и постоянным крутящим моментом относятся транспортеры, краны и редукторные насосы. Крутящий момент у них постоянен, так как нагрузка не меняется. Требующаяся мощность может различаться в зависимости от типа изделия, поэтому хорошим выбором в этом случае будут электродвигатели постоянного тока с постоянной частотой вращения ротора.
Пример изделия с переменным крутящим моментом и постоянной мощностью — станок для перемотки бумаги. Скорость подачи материала постоянна, поэтому мощность не меняется. Нагрузка, однако, меняется по мере увеличения диаметра рулона. Для небольших систем такого рода хорошо подойдут электродвигатели постоянного тока или серводвигатели. Другой важный фактор в этом случае — энергия рекуперации, которую следует учитывать при выборе размера электродвигателя или метода регулирования мощности. В более крупных системах, возможно, целесообразнее будет использовать электродвигатели переменного тока с датчиками перемещений, регулирование с обратной связью и приводы, работающие в четырех квадрантах.
Для вентиляторов, центробежных насосов и мешалок требуются переменные мощность и крутящий момент. С увеличением частоты вращения ротора электродвигателя растет и мощность на нагрузке, а с нею требующиеся номинальная мощность и крутящий момент. При нагрузках такого типа начинает играть важную роль КПД двигателя. В подобных изделиях применяются электродвигатели переменного тока с инверторным управлением и частотно-регулируемые приводы.
В линейных приводах, которые должны обеспечивать точное перемещение во множество положений, требуется управление положением или регулирование крутящего момента ротора с малой погрешностью, а зачастую и обратная связь для проверки правильности положения. Для этих целей лучше всего подходят серводвигатели и шаговые двигатели, но наряду с ними часто применяются электродвигатели постоянного тока с обратной связью или электродвигатели переменного тока с инверторным управлением и датчиком перемещения, которые позволяют с малой погрешностью регулировать крутящий момент на металлургических и бумагоделательных линиях, а также в других аналогичных применениях.
Типы электродвигателей
Электродвигатели бывают двух основных разновидностей — переменного и постоянного тока, но они, в свою очередь, разделяются более чем на три десятка типов.
Несмотря на большое разнообразие, промышленные применения электродвигателей имеют между собой много общего, и под влиянием рыночных механизмов практический ассортимент типов электродвигателей в большинстве применений сузился. Шесть наиболее распространенных типов электродвигателей, которые можно использовать в подавляющем большинстве изделий, — это бесколлекторные и коллекторные электродвигатели постоянного тока, электродвигатели переменного тока с короткозамкнутым и фазным ротором, серводвигатели и шаговые электродвигатели. Прочие типы электродвигателей применяются только в изделиях специального назначения.
Три основных типа изделий по режиму работы электродвигателя
Три основных типа изделий по режиму работы электродвигателя — это изделия с постоянной частотой вращения, переменной частотой вращения и управлением положением (или регулированием крутящего момента) ротора.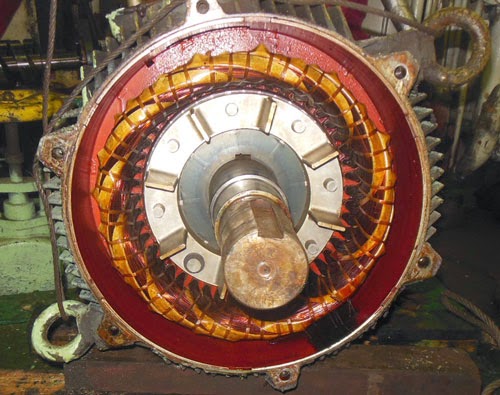 В различных изделиях промышленной автоматики требуются разные режимы, и набор вопросов, на который приходится отвечать при выборе электродвигателя, может также различаться (рис. 2).
В различных изделиях промышленной автоматики требуются разные режимы, и набор вопросов, на который приходится отвечать при выборе электродвигателя, может также различаться (рис. 2).
Рис. 2. Асинхронные электродвигатели переменного тока часто выбирают для промышленных машин с вращательным движением рабочего органа
Например, если требующаяся максимальная частота вращения ротора меньше номинальной, может понадобиться редуктор. Возможно, для этой цели удастся подобрать более компактный электродвигатель, частота вращения ротора которого будет обеспечивать более высокий КПД. В Интернете есть большое количество информации о том, как выбирать электродвигатель по размеру, но пользователям необходимо принимать во внимание и другие факторы. Для расчета момента инерции нагрузки, крутящего момента и частоты вращения ротора требуется знать такие параметры, как полная масса и размер (радиус) нагрузки, а также коэффициент трения, потери на редукторе и цикл работы машины. Кроме того, во избежание перегрева электродвигателя необходимо учитывать изменение нагрузки, темп разгона или торможения и рабочий цикл изделия.
Определившись с типом и размером электродвигателя, пользователю нужно также учесть влияние внешних факторов и выбрать исполнение — например, открытое или в кожухе из нержавеющей стали для работы во влажной среде.
Выбор электродвигателя: три вопроса
Даже после того, как все эти решения приняты, пользователю необходимо ответить на следующие три вопроса, прежде чем сделать окончательный выбор.
Требуется ли постоянная частота вращения ротора?
В изделиях с постоянной частотой вращения ротора электродвигатель часто работает на приблизительно установленной частоте, а характеристики разгона и торможения роли практически не играют. В этом случае обычно применяется релейное управление с питанием непосредственно от сети. Цепи управления часто состоят из ответвления с предохранителем и контактором, устройства защиты от перегрузки при пуске и ручного регулятора электродвигателя или устройства плавного пуска.
Для изделий с постоянной частотой вращения ротора подходят электродвигатели переменного и постоянного тока. Электродвигатели постоянного тока обеспечивают номинальный крутящий момент при нулевой частоте вращения; этот тип электродвигателей очень популярен. Электродвигатели переменного тока — тоже хороший выбор, так как они характеризуются высоким коэффициентом мощности и нетребовательны в обслуживании. Серводвигатель или шаговый двигатель с высокими эксплуатационными характеристиками был бы излишним для простого изделия.
Требуется ли переменная частота вращения ротора?
Изделия с переменной частотой вращения ротора обычно требуют изменения линейной скорости и частоты вращения с малой погрешностью, а также четко определенных характеристик разгона и ускорения. Уменьшение частоты вращения ротора в таких изделиях, как вентиляторы и центробежные насосы, часто позволяет повысить КПД за счет согласования мощности с нагрузкой вместо работы на максимальной частоте с пропорциональным регулированием или демпфированием. Это важно для конвейерных систем, например линий бутылочного розлива.
Это важно для конвейерных систем, например линий бутылочного розлива.
Электродвигатели как переменного, так и постоянного тока с приводами соответствующего типа эффективно работают в изделиях с переменной частотой вращения ротора. На протяжении длительного времени привод с электродвигателем постоянного тока был единственным вариантом для изделий с переменной частотой вращения ротора, и компоненты для этой комбинации хорошо отработаны и проверены временем. Даже сейчас электродвигатели постоянного тока широко применяются в маломощных (менее 1 л. с.) изделиях этого типа, а также оказываются полезными в изделиях с низкой частотой вращения ротора, так как обеспечивают номинальный крутящий момент на низкой частоте вращения и постоянный крутящий момент в широком диапазоне частот.
Слабой стороной электродвигателей постоянного тока может быть обслуживание, так как во многих из них для коммутации используются щетки, которые со временем изнашиваются от контакта с подвижными частями.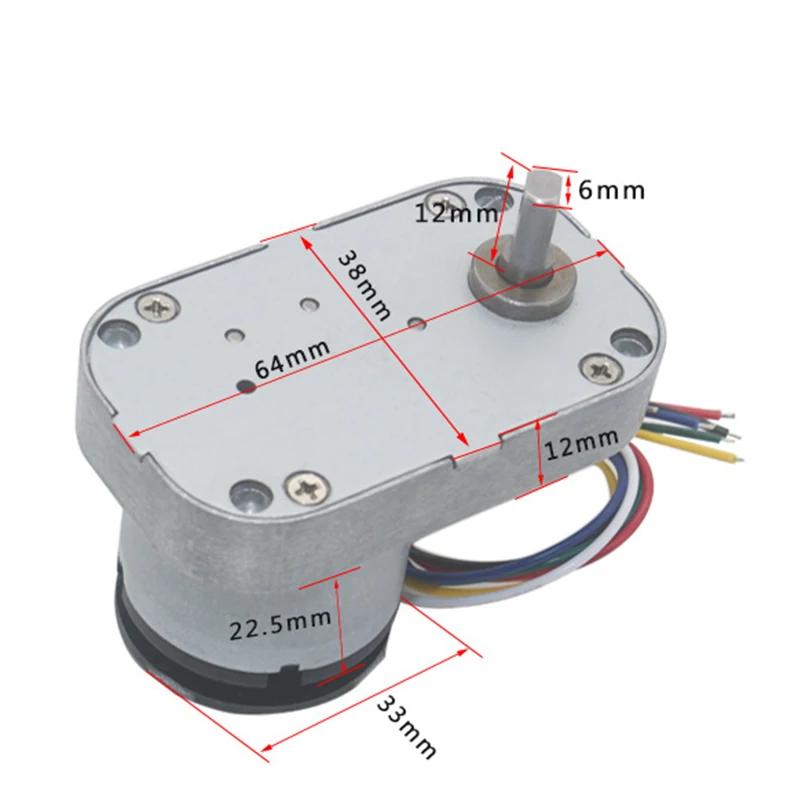 Бесколлекторные электродвигатели постоянного тока свободны от этого недостатка, но дороже в приобретении, а их ассортимент — уже.
Бесколлекторные электродвигатели постоянного тока свободны от этого недостатка, но дороже в приобретении, а их ассортимент — уже.
Избавлены от этой проблемы и асихронные электродвигатели переменного тока, а вкупе с частотно-регулируемым приводом (рис. 3) они позволяют получить более высокий КПД в изделиях мощностью более 1 л. с., таких как вентиляторы и насосы. Некоторые типы приводов предусматривают обратную связь по положению. Если этого требует характер изделия, можно дополнить электродвигатель датчиком перемещений и выбрать привод, использующий сигнал от этого датчика для обратной связи. Такая конфигурация может обеспечить такое же регулирование частоты вращения ротора, как в серводвигателе.
Рис. 3. Сочетание электродвигателя постоянного тока с частотно-регулируемым приводом широко применяется для повышения КПД и эффективно работает в разнообразных изделиях с переменной частой вращения ротора
Требуется ли управление положением ротора?
Управление положением ротора электродвигателя с малой погрешностью обеспечивается путем непрерывной проверки его положения в процессе вращения. В изделиях, где требуется, например, задавать положение линейного привода, можно применять шаговый электродвигатель с обратной связью или без таковой, а также серводвигатель со встроенной обратной связью.
В изделиях, где требуется, например, задавать положение линейного привода, можно применять шаговый электродвигатель с обратной связью или без таковой, а также серводвигатель со встроенной обратной связью.
Шаговый электродвигатель предназначен для перемещения в заданное положение на умеренной скорости с последующим сохранением этого положения. Шаговый электродвигатель без обратной связи по положению обеспечивает весьма точное управление положением ротора, если правильно выбрать его размер, а также перемещение на точно заданное число шагов (если только он не столкнется с изменением нагрузки, превышающим его возможности).
С ростом требуемой частоты вращения и динамических нагрузок шаговый привод без обратной связи может уже не обеспечить нужных характеристик системы, и тогда понадобится шаговый привод с обратной связью или сервопривод.
Система с обратной связью обеспечивает точное высокоскоростное перемещение по заданному профилю и регулирование положения ротора. Серводвигатель обеспечивает больший крутящий момент на высоких частотах вращения в сравнении с шаговым электродвигателем, а также эффективнее работает в изделиях, характеризующихся высокими динамическими нагрузками или сложным характером перемещения.
Для быстрого и/или резкого перемещения с малым перерегулированием по положению момент инерции нагрузки должен быть как можно лучше согласован с моментом инерции серводвигателя. Рассогласование в пропорции до 10:1 приемлемо в некоторых применениях, но оптимальным является согласование 1:1.
Уменьшение частоты вращения посредством редуктора — оптимальный способ решить проблему рассогласования моментов инерции, поскольку момент инерции нагрузки обратно пропорционален квадрату передаточного отношения редуктора. При этом в расчетах необходимо учитывать момент инерции редуктора.
Знание особенностей изделия и электродвигателя
Производители предлагают широкий ассортимент электродвигателей для промышленных применений. Шаговые электродвигатели, серводвигатели, электродвигатели переменного и постоянного тока пригодны для использования в большинстве типов изделий промышленной автоматики, но оптимальный выбор электродвигателя зависит от характера изделия. Пользователям следует выбирать электродвигатель для своего изделия, учитывая, какой требуется режим работы — постоянная частота вращения, переменная частота вращения или управление положением ротора, — и в тесном взаимодействии с поставщиками электродвигателя и привода.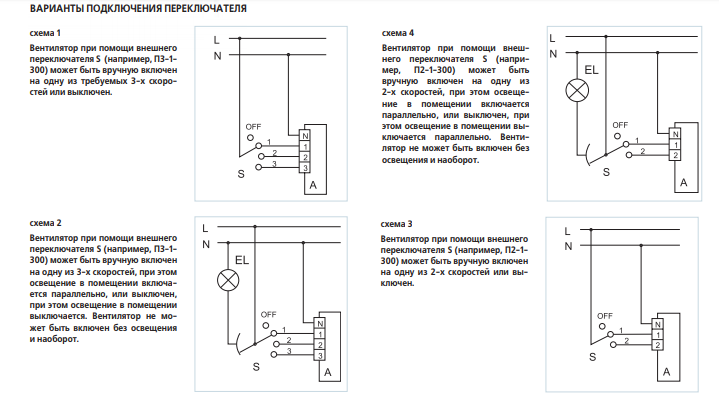
Вконтакте
Google+
Частота вращения электродвигателя | Полезные статьи
Частота вращения электродвигателя напрямую влияет на его производительность и уровень энергопотребления. Поэтому регулирование частоты вращения электродвигателя является востребованной в промышленности функцией, которая стала доступной с появлением специальных силовых полупроводниковых приборов — тиристоров, а также транзисторов IGBT.
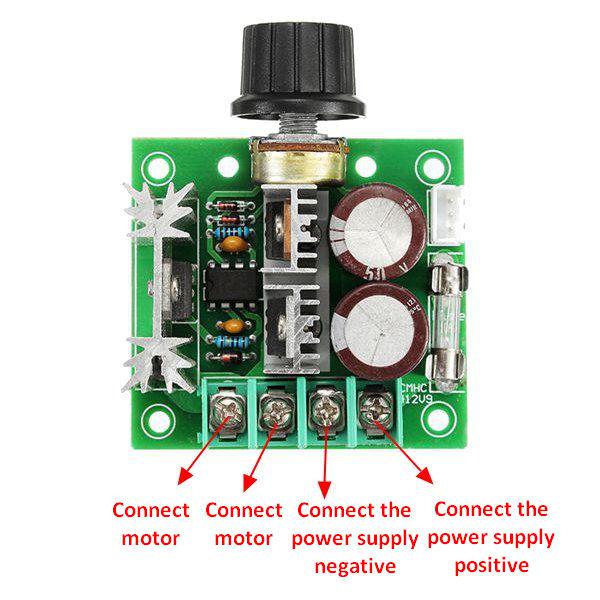
Рисунок 1. Один из видов преобразователей частоты вращения электродвигателей На сегодняшний день различные способы управления асинхронными электромоторами широко применяются в промышленности, ведь изменяемая частота вращения электродвигателя позволяет не только экономить энергию, но и существенно усовершенствовать управление различными технологическими процессами.
Стоит отметить, что если требуется регулировка скорости, гораздо чаще используются двигатели постоянного тока.
Поэтому использовать преобразователь частоты электродвигателя в данном случае нет необходимости. Управление такого двигателя осуществляется регулированием напряжения, благодаря чему он отличается простотой эксплуатации. При этом двигатели постоянного тока отличаются высокой стоимостью, сложной конструкцией и не всегда подходящими для промышленной эксплуатации характеристиками.
Управление такого двигателя осуществляется регулированием напряжения, благодаря чему он отличается простотой эксплуатации. При этом двигатели постоянного тока отличаются высокой стоимостью, сложной конструкцией и не всегда подходящими для промышленной эксплуатации характеристиками.
С асинхронными двигателями все наоборот: они надежны, сравнительно недороги и имеют хорошие эксплуатационные характеристики. Но с ними можно использовать только гораздо более дорогостоящие и сложные регуляторы скорости вращения. Впрочем, с появлением биполярных транзисторов с изолированным затвором данная проблема стала гораздо менее острой, поэтому асинхронные двигатели с регулируемой частотой вращения также довольно широко применяются в промышленных масштабах.
Самостоятельное определение частоты вращения электродвигателя
Не зная частоты вращения электродвигателя, во многих случаях нет возможности эксплуатировать его. Если документация к мотору отсутствует, приходится думать, как определить частоту вращения электродвигателя самостоятельно.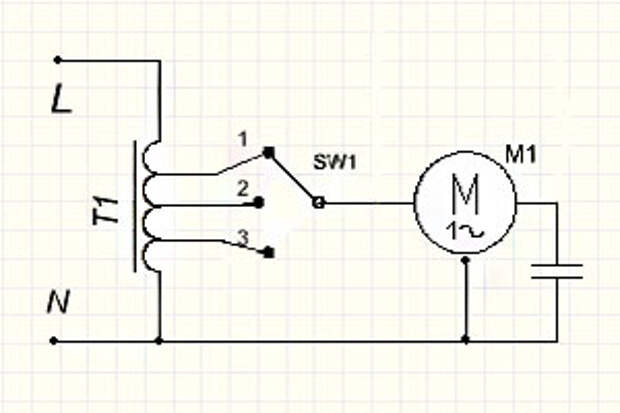 Сделать это можно, воспользовавшись пошаговой инструкцией:
Сделать это можно, воспользовавшись пошаговой инструкцией:
- Современные асинхронные электродвигатели делятся на три группы, по количеству оборотов в минуту. Первая группа — двигатели с частотой до 1000 об/мин. Вторая группа — до 1500 оборотов. Третья группа — до 3000 оборотов в минуту.
- Чтобы определить частоту вращения электродвигателя, нужно выявить, к какой группе он относится. Для этого необходимо открыть его крышку и найти катушку обмотки.
- Далее нужно примерно определить размеры катушки по отношению к кольцу статора. Точные расчеты и замеры здесь не требуются.
- Если катушка по размеру способна закрыть собой примерно половину кольца статора, частота вращения электродвигателя составляет 3000 об/мин. Если катушка покрывает около трети самого кольца, то электродвигатель относится ко второй группе. Если размер катушки равен четверти кольца — число оборотов не превышает 1000.
Это только примерный подсчет, но даже такие данные уже помогут определить основные характеристики, возможности, а значит, и сферу применения исследуемого электродвигателя.
Управление скоростью вращения однофазных двигателей
Однофазные асинхронные двигатели питаются от обычной сети переменного напряжения 220 В.
Наиболее распространённая конструкция таких двигателей содержит две (или более) обмотки — рабочую и фазосдвигающую. Рабочая питается напрямую, а дополнительная через конденсатор, который сдвигает фазу на 90 градусов, что создаёт вращающееся магнитное поле. Поэтому такие двигатели ещё называют двухфазные или конденсаторные.
Регулировать скорость вращения таких двигателей необходимо, например, для:
- изменения расхода воздуха в системе вентиляции
- регулирования производительности насосов
- изменения скорости движущихся деталей, например в станках, конвеерах
В системах вентиляции это позволяет экономить электроэнергию, снизить уровень акустического шума установки, установить необходимую производительность.
Способы регулирования
Рассматривать механические способы изменения скорости вращения, например редукторы, муфты, шестерёнчатые трансмиссии мы не будем.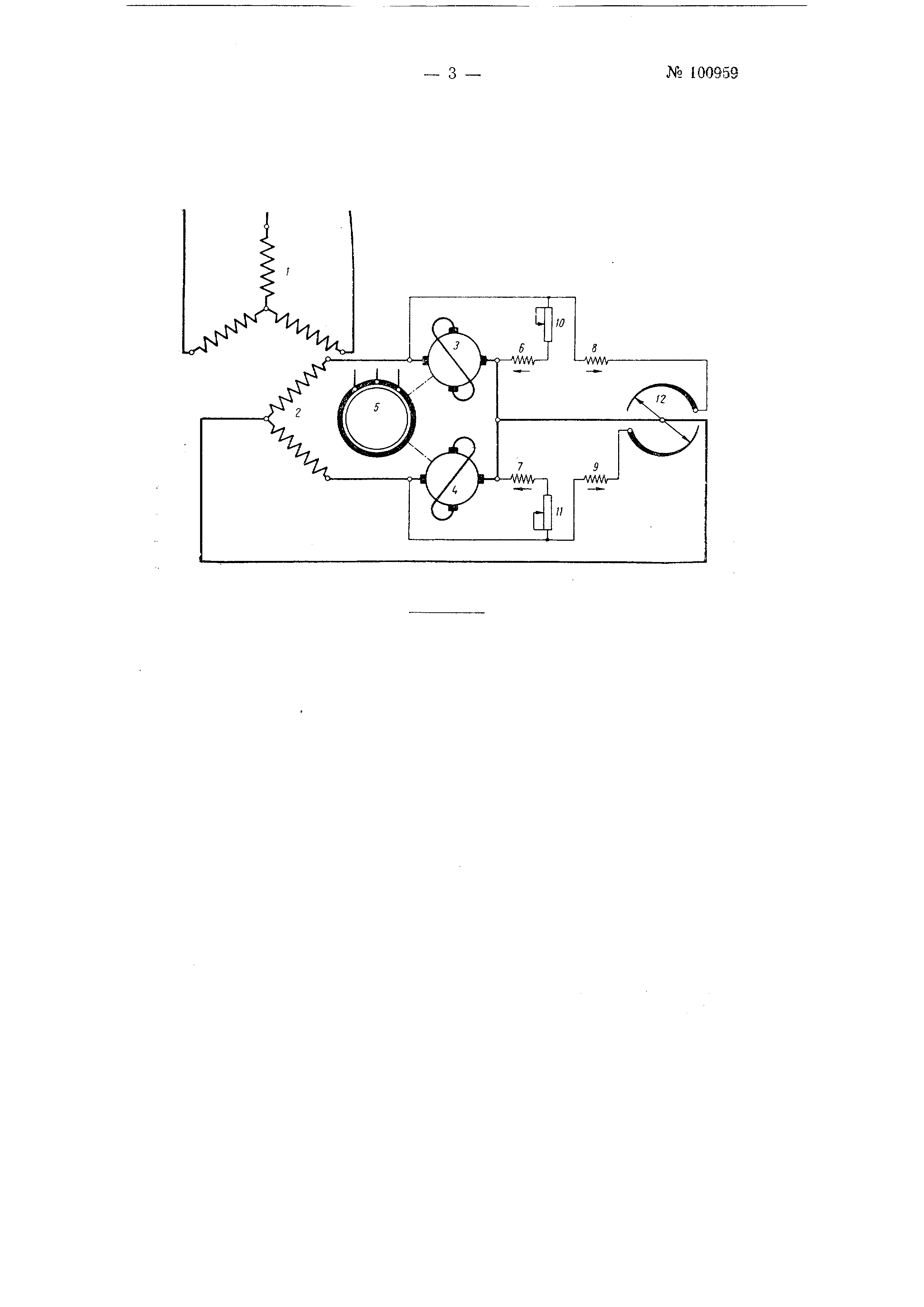 Также не затронем способ изменения количества полюсов обмоток.
Также не затронем способ изменения количества полюсов обмоток.
Рассмотрим способы с изменением электрических параметров:
- изменение напряжения питания двигателя
- изменение частоты питающего напряжения
Регулирование напряжением
Регулирование скорости этим способом связано с изменением, так называемого, скольжения двигателя — разностью между скоростью вращения магнитного поля, создаваемого неподвижным статором двигателя и его движущимся ротором:
S=(n1-n2)/n2
n1 — скорость вращения магнитного поля
n2 — скорость вращения ротора
При этом обязательно выделяется энергия скольжения — из-за чего сильнее нагреваются обмотки двигателя.
Данный способ имеет небольшой диапазон регулирования, примерно 2:1, а также может осуществляться только вниз — то есть, снижением питающего напряжения.
При регулировании скорости таким способом необходимо устанавливать двигатели завышенной мощности.
Но несмотря на это, этот способ используется довольно часто для двигателей небольшой мощности с вентиляторной нагрузкой.
На практике для этого применяют различные схемы регуляторов.
Автотрансформаторное регулирование напряжения
Автотрансформатор — это обычный трансформатор, но с одной обмоткой и с отводами от части витков. При этом нет гальванической развязки от сети, но она в данном случае и не нужна, поэтому получается экономия из-за отсутствия вторичной обмотки.
На схеме изображён автотрансформатор T1, переключатель SW1, на который приходят отводы с разным напряжением, и двигатель М1.
Регулировка получается ступенчатой, обычно используют не более 5 ступеней регулирования.
Преимущества данной схемы:
- неискажённая форма выходного напряжения (чистая синусоида)
- хорошая перегрузочная способность трансформатора
Недостатки:
- большая масса и габариты трансформатора (зависят от мощности нагрузочного мотора)
- все недостатки присущие регулировке напряжением
Тиристорный регулятор оборотов двигателя
В данной схеме используются ключи — два тиристора, включённых встречно-параллельно (напряжение переменное, поэтому каждый тиристор пропускает свою полуволну напряжения) или симистор.
Схема управления регулирует момент открытия и закрытия тиристоров относительно фазового перехода через ноль, соответственно «отрезается» кусок вначале или, реже в конце волны напряжения.
Таким образом изменяется среднеквадратичное значение напряжения.
Данная схема довольно широко используется для регулирования активной нагрузки — ламп накаливания и всевозможных нагревательных приборов (так называемые диммеры).
Ещё один способ регулирования — пропуск полупериодов волны напряжения, но при частоте в сети 50 Гц для двигателя это будет заметно — шумы и рывки при работе.
Для управления двигателями регуляторы модифицируют из-за особенностей индуктивной нагрузки:
- устанавливают защитные LRC-цепи для защиты силового ключа (конденсаторы, резисторы, дроссели)
- добавляют на выходе конденсатор для корректировки формы волны напряжения
- ограничивают минимальную мощность регулирования напряжения — для гарантированного старта двигателя
- используют тиристоры с током в несколько раз превышающим ток электромотора
Достоинства тиристорных регуляторов:
- низкая стоимость
- малая масса и размеры
Недостатки:
- можно использовать для двигателей небольшой мощности
- при работе возможен шум, треск, рывки двигателя
- при использовании симисторов на двигатель попадает постоянное напряжение
- все недостатки регулирования напряжением
Стоит отметить, что в большинстве современных кондиционеров среднего и высшего уровня скорость вентилятора регулируется именно таким способом.
Транзисторный регулятор напряжения
Как называет его сам производитель — электронный автотрансформатор или ШИМ-регулятор.
Изменение напряжения осуществляется по принципу ШИМ (широтно-импульсная модуляция), а в выходном каскаде используются транзисторы — полевые или биполярные с изолированным затвором (IGBT).
Выходные транзисторы коммутируются с высокой частотой (около 50 кГц), если при этом изменить ширину импульсов и пауз между ними, то изменится и результирующее напряжение на нагрузке. Чем короче импульс и длиннее паузы между ними, тем меньше в итоге напряжение и подводимая мощность.
Для двигателя, на частоте в несколько десятков кГц, изменение ширины импульсов равносильно изменению напряжения.
Выходной каскад такой же как и у частотного преобразователя, только для одной фазы — диодный выпрямитель и два транзистора вместо шести, а схема управления изменяет выходное напряжение.
Плюсы электронного автотрансформатора:
- Небольшие габариты и масса прибора
- Невысокая стоимость
- Чистая, неискажённая форма выходного тока
- Отсутствует гул на низких оборотах
- Управление сигналом 0-10 Вольт
Слабые стороны:
- Расстояние от прибора до двигателя не более 5 метров (этот недостаток устраняется при использовании дистанционного регулятора)
- Все недостатки регулировки напряжением
Частотное регулирование
Ещё совсем недавно (10 лет назад) частотных регуляторов скорости двигателей на рынке было ограниченное количество, и стоили они довольно дорого. Причина — не было дешёвых силовых высоковольтных транзисторов и модулей.
Причина — не было дешёвых силовых высоковольтных транзисторов и модулей.
Но разработки в области твердотельной электроники позволили вывести на рынок силовые IGBT-модули. Как следствие — массовое появление на рынке инверторных кондиционеров, сварочных инверторов, преобразователей частоты.
На данный момент частотное преобразование — основной способ регулирования мощности, производительности, скорости всех устройств и механизмов приводом в которых является электродвигатель.
Однако, преобразователи частоты предназначены для управления трёхфазными электродвигателями.
Однофазные двигатели могут управляться:
- специализированными однофазными ПЧ
- трёхфазными ПЧ с исключением конденсатора
Преобразователи для однофазных двигателей
В настоящее время только один производитель заявляет о серийном выпуске специализированного ПЧ для конденсаторных двигателей — INVERTEK DRIVES.
Это модель Optidrive E2
Для стабильного запуска и работы двигателя используются специальные алгоритмы.
При этом регулировка частоты возможна и вверх, но в ограниченном диапазоне частот, этому мешает конденсатор установленный в цепи фазосдвигающей обмотки, так как его сопротивление напрямую зависит от частоты тока:
Xc=1/2πfC
f — частота тока
С — ёмкость конденсатора
В выходном каскаде используется мостовая схема с четырьмя выходными IGBT транзисторами:
Optidrive E2 позволяет управлять двигателем без исключения из схемы конденсатора, то есть без изменения конструкции двигателя — в некоторых моделях это сделать довольно сложно.
Преимущества специализированного частотного преобразователя:
- интеллектуальное управление двигателем
- стабильно устойчивая работа двигателя
- огромные возможности современных ПЧ:
- возможность управлять работой двигателя для поддержания определённых характеристик (давления воды, расхода воздуха, скорости при изменяющейся нагрузке)
- многочисленные защиты (двигателя и самого прибора)
- входы для датчиков (цифровые и аналоговые)
- различные выходы
- коммуникационный интерфейс (для управления, мониторинга)
- предустановленные скорости
- ПИД-регулятор
Минусы использования однофазного ПЧ:
- ограниченное управление частотой
- высокая стоимость
Использование ЧП для трёхфазных двигателей
Стандартный частотник имеет на выходе трёхфазное напряжение. При подключении к ему однофазного двигателя из него извлекают конденсатор и соединяют по приведённой ниже схеме:
При подключении к ему однофазного двигателя из него извлекают конденсатор и соединяют по приведённой ниже схеме:
Геометрическое расположение обмоток друг относительно друга в статоре асинхронного двигателя составляет 90°:
Фазовый сдвиг трёхфазного напряжения -120°, как следствие этого — магнитное поле будет не круговое , а пульсирующее и его уровень будет меньше чем при питании со сдвигом в 90°.
В некоторых конденсаторных двигателях дополнительная обмотка выполняется более тонким проводом и соответственно имеет более высокое сопротивление.
При работе без конденсатора это приведёт к:
- более сильному нагреву обмотки (срок службы сокращается, возможны кз и межвитковые замыкания)
- разному току в обмотках
Многие ПЧ имеют защиту от асимметрии токов в обмотках, при невозможности отключить эту функцию в приборе работа по данной схеме будет невозможна
Преимущества:
- более низкая стоимость по сравнению со специализированными ПЧ
- огромный выбор по мощности и производителям
- более широкий диапазон регулирования частоты
- все преимущества ПЧ (входы/выходы, интеллектуальные алгоритмы работы, коммуникационные интерфейсы)
Недостатки метода:
- необходимость предварительного подбора ПЧ и двигателя для совместной работы
- пульсирующий и пониженный момент
- повышенный нагрев
- отсутствие гарантии при выходе из строя, т.
 к. трёхфазные ПЧ не предназначены для работы с однофазными двигателями
к. трёхфазные ПЧ не предназначены для работы с однофазными двигателями
Двигатели с регулируемой скоростью
— Двигатели с регулируемой скоростью
Инверторы Fuji Electric FRENIC-Mini (C2) / VFD
Новые удобные в использовании преобразователи FRENIC-Mini (C2) повышают производительность широкого спектра оборудования.
Для использования с трехфазными двигателями от 1/8 л.с. до 3 л.с.
Однофазный вход 115 или 230 В переменного тока, трехфазный вход 230 В переменного тока или трехфазный вход 460 В переменного тока.
Стандартные функции:
- Автонастройка / Повышение крутящего момента
- Гибкое дистанционное / локальное управление
- Векторное управление динамическим крутящим моментом
- Самый быстрый процессор в своем классе
- Сетевая совместимость
- Настройка КПД / Монтаж бок о бок
Трехфазные асинхронные двигатели переменного тока серии КМИС
Трехфазный двигатель серии KIIS предлагает оптимально спроектированный, высокоэффективный трехфазный двигатель следующего поколения, который включает в себя более прочные шестерни, как с параллельным валом, так и с новым типом с гипоидным прямым углом, что обеспечивает максимальную производительность двигателя. Серия KIIS доступна от 100 Вт (1/8 л.с.) до 200 Вт (1/4 л.с.) и оснащена предварительно смонтированной параллельной или гипоидной зубчатой передачей.
Высокая производительность
Характеристики были улучшены для создания высокопроизводительного двигателя с небольшим снижением скорости даже при большой нагрузке.
Безвентиляторный дизайн
Двигатель новой конструкции КМИС уменьшил тепловыделение.Благодаря более высокому КПД двигатель меньше нагревается, поэтому охлаждающий вентилятор на задней части двигателя больше не требуется. Без охлаждающего вентилятора пыль не разносится.
Асинхронные двигатели переменного тока с мотор-редукторами Brother
Эти мотор-редукторы переменного тока отличаются превосходным КПД по сравнению с гипоидными или косозубыми передачами, а также обеспечивают больший выходной крутящий момент, что позволяет использовать меньшие двигатели и большую экономию энергии.
Шестерни в этих мотор-редукторах переменного тока отличаются высокой прочностью, не требуют обслуживания и могут быть установлены в любом направлении благодаря конструкции с кольцевым уплотнением с проскальзыванием. Доступны высокие передаточные числа, фланцевое крепление или крепление на лапах, прямоугольный или полый вал с прямым углом.
Серия Premium Efficiency ie3
Новые мотор-редукторы IE3 с повышенным КПД дешевле в эксплуатации и демонстрируют явные преимущества при длительной работе (по сравнению с мотор-редукторами IE1 со стандартным КПД).
Высокоэффективные гипоидные / цилиндрические зубчатые передачи
По сравнению с широко используемыми червячными передачами, высокоэффективные мотор-редукторы оснащены технологией гипоидного / косозубого зацепления, которая может поддерживать КПД выше 85% во всем широком диапазоне скоростей двигателя.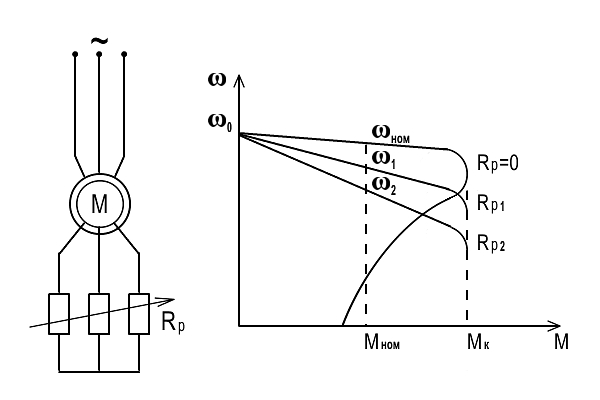
Редукторные двигатели переменного тока с промывкой IP67 серии FPW
Серия FPW — это асинхронные мотор-редукторы переменного тока с промывкой, идеально подходящие для применений, где на них попадает вода.Все мотор-редукторы переменного тока с промывкой серии FPW соответствуют стандарту IEC IP67 (признано UL). Каждый двигатель промывки и редуктор поставляются предварительно смонтированными с передаточным числом от 3: 1 до 180: 1.
Разработан и изготовлен с учетом водонепроницаемости и пыленепроницаемости
Улучшенные антикоррозионные свойства
Высокая коррозионная стойкость достигается за счет специального антикоррозионного покрытия и повторной проверки материала вала [нержавеющая сталь (тип SUS303)].
Соответствует основным стандартам безопасности и международным стандартам напряжения питания
Редукторный мотор-редуктор серии FPW признан UL и CSA и сертифицирован в соответствии с Китайской системой обязательной сертификации (система CCC). Маркировка CE используется в соответствии с Директивой по низковольтному оборудованию. Кроме того, наш широкий ассортимент продукции включает в себя те, которые соответствуют напряжениям источников питания основных стран Азии, Северной Америки и Европы.
Приводы с регулируемой скоростью— обзор
2.6 Приводы с регулируемой скоростью
Приводы с регулируемой скоростью (VSD), также называемые приводами с регулируемой скоростью (ASD), — это устройства, которые могут изменять скорость двигателя с фиксированной скоростью. В системах HVAC они используются в основном для управления вентиляторами в системах с переменным расходом воздуха вместо других устройств, таких как впускные лопатки и выпускные заслонки. Приводы с регулируемой скоростью более энергоэффективны, чем эти другие устройства (их главное преимущество), но они также снижают уровень шума при частичной нагрузке, позволяют вентиляторам работать с гораздо более низкими нагрузками, не вызывая скачков скорости вращения вентилятора (нестабильное состояние, которое может приводит к сильной пульсации и, возможно, к повреждению вентилятора), а также снижает износ механических компонентов, таких как ремни и подшипники.Приводы с регулируемой скоростью также используются для управления насосами в насосных системах с регулируемым расходом и для управления холодильными компрессорами в центробежных чиллерах.
Многие типы приводов с регулируемой скоростью использовались на протяжении многих лет, начиная с приводов постоянного тока, используемых в основном в промышленных приложениях, и до механических приводов с различным диаметром шкива. Одним из наиболее важных достижений последних лет стало развитие технологии частотно-регулируемых приводов (VFD). В этих приводах используется твердотельная электронная схема для регулировки частоты и напряжения питания двигателя, что, в свою очередь, изменяет скорость.
Наиболее распространенными частотно-регулируемыми преобразователями, используемыми в системах отопления, вентиляции и кондиционирования воздуха, являются инверторы, использующие технологию широтно-импульсной модуляции (ШИМ) с синусоидальной кодировкой. Схема ШИМ показана на Рис. 2-25 . ШИМ работает, сначала преобразуя входящую мощность переменного тока в постоянный ток с помощью выпрямителя на диодном мосту. Затем напряжение фильтруется, сглаживается и передается в секцию инвертирования ШИМ. Инвертор состоит из высокоскоростных биполярных транзисторов, которые управляют как напряжением, так и частотой, подаваемыми на двигатель.
Рисунок 2-25.Инверторный преобразователь частоты
Выход, показанный на рис. 2-26 , состоит из серии коротких импульсов напряжения. Выходное напряжение регулируется путем изменения ширины и количества импульсов напряжения, а выходная частота изменяется путем изменения длины цикла. Формируемая форма волны имеет необходимое напряжение и частоту для обеспечения желаемой скорости и крутящего момента двигателя, но она не такая гладкая, как входящий синусоидальный источник. По этой причине двигатели должны быть специально выбраны с надлежащей конструкцией и конструкцией, чтобы выдерживать менее плавный источник питания.
Рисунок 2-26. Форма сигнала ШИМ с синусоидальной кодировкой
Помните ли вы ранее в этой главе, когда мы отмечали, что, когда мы измеряем напряжение и ток в чисто синусоидальной цепи переменного тока, мы измеряем среднеквадратичное значение? В большинстве ситуаций четкое определение среднеквадратичного значения не имеет значения, поскольку форма волны близка к синусоидальной. Как вы можете видеть на рис. 2-26 , форма волны не является синусоидальной. Стандартный измеритель может показывать существенно высокие или низкие значения в этой неволновой ситуации. С выходом VFD действительно важно, чтобы вы использовали измеритель, предназначенный для получения «истинных среднеквадратичных значений».Измерители продаются как измерители с истинным среднеквадратичным значением и более дорогие, чем те, которые требуют ввода истинного синусоидального сигнала.
Преобразователи частоты (VSD) заменяют пускатель. Они имеют как пусковую способность, так и встроенную защиту от перегрузки. Фактически, микропроцессорное управление в большинстве приводов обеспечивает дополнительную защиту от других неисправностей (таких как пониженное напряжение, повышенное напряжение, замыкание на землю, потеря фазы и т. Д.). Приводы с регулируемой скоростью также обеспечивают плавный пуск двигателя (если он запрограммирован), снижая пусковой ток и уменьшая износ ремней и шкивов.
Хотя пускатель не требуется при использовании частотно-регулируемого привода / частотно-регулируемого привода, его можно использовать в качестве резервного привода, чтобы двигатель мог работать на полной скорости в случае отказа привода. Схема подключения байпасного пускателя показана на рис. 2-27 . На заре преобразователей частоты и частотно-регулируемых приводов пускатели с байпасом считались почти обязательными, но теперь, когда надежность приводов повысилась, необходимость в пускателях с байпаса стала намного менее критичной. Если требуется байпас, иногда желательно использование нескольких приводов, питаемых от одного байпаса аналогичного размера, что снижает стоимость покупки нескольких байпасов.При использовании байпасного стартера важно учитывать, насколько хорошо система будет работать на полной скорости. Например, в приложении вентилятора VAV работа вентилятора на полной скорости может вызвать очень высокое давление в воздуховоде при низкой скорости воздушного потока, потенциально повреждая систему воздуховодов. Некоторые новые преобразователи частоты имеют так называемые электронные байпасы, скорость вращения которых выбирается, и они не должны работать на полной скорости. (Эти электронные байпасы не являются независимыми; поэтому в них используются те же контакторы и перегрузки, что и в преобразователе частоты, поэтому они не являются полностью независимыми.) Должны быть предусмотрены другие средства для сброса давления воздуха или снижения скорости вентилятора. Эти сложности, наряду с дополнительными затратами, необходимо сопоставить с потенциальными преимуществами байпасных пускателей.
Рисунок 2-27. Привод с регулируемой скоростью и дополнительным стартером
Какой тип привода с регулируемой скоростью лучше всего?
Возможности электрических регулируемых приводов сейчас расширены, чем год назад. Новые концепции, в том числе все более широкое применение вентилируемого реактивного привода, в сочетании с вариантами более проверенных конструкций расширяют ваши возможности.Весь этот прогресс может сделать прошлогодние руководящие принципы устаревшими.
Эта первая часть из двух частей посвящена различным типам приводов и их общим возможностям. Во второй части обсуждаются наиболее распространенные применения приводов A-S и тип привода, который лучше всего подходит для данной области применения. Для некоторых требований приложения будет достаточно более одного типа привода. Кроме того, разные производители дисководов предлагают разные возможности для одного и того же типа дисковода A-S.
Понимание этих переменных и следующих основ поможет вам разумно продвигаться по пути принятия решений.
Приводы постоянного тока
Давняя опора для приводов с регулируемой скоростью, приводы постоянного тока общего назначения используют тиристоры (также называемые тиристорами для кремниевых выпрямителей) как для выпрямления входящего переменного тока, так и для производства регулируемого постоянного тока, который питает двигатель постоянным током,
Тиристорные приводы постоянного тока предлагают:
• Снижение затрат по сравнению с другими методами, поскольку тиристоры менее дороги для сопоставимых номиналов и их легче контролировать, чем силовые транзисторы. Как правило, тиристорные приводы постоянного тока являются самыми дешевыми приводами A-S с двигателями общего назначения с номинальной мощностью и малой мощностью.
• Аналоговый или цифровой регулятор и пусковые цепи.
• Возможность использования привода с или без обратной связи по скорости с помощью тахометра или энкодера, установленного на двигателе. Такая обратная связь дает регулирование скорости на 1% или лучше, даже с учетом других переменных (см. Вставку).
• Экономичная регенерация.
• Превосходный пусковой момент и устойчивость к периодическим перегрузкам, обычно 150% от номинального продолжительного крутящего момента в течение 1 минуты. За исключением дополнительных векторных приводов, пусковой момент большинства других приводов A-S меньше, чем у двигателя переменного тока, запускаемого через линию.
По другую сторону забора приводы постоянного тока, тиристорные и транзисторные:
• Используйте двигатели со щетками, которые требуют некоторого обслуживания.
• Дорогостоящие, если требуются водонепроницаемые, взрывозащищенные или другие специальные кожухи двигателя.
• Имеют ограничения максимальной скорости, налагаемые обмотками якоря, коммутатором и щетками. Двигатели постоянного тока общего назначения мощностью более 5 л.с. обычно ограничены до 3000 об / мин. Специальные и более дорогие серводвигатели постоянного тока рассчитаны на более высокие скорости.
Бесщеточные приводы постоянного тока
Эти приводы, часто называемые BLDC, представляют собой гибрид между обычными приводами постоянного тока и инверторами переменного тока.Они часто продаются как функциональные заменители приводов постоянного тока, но имеют «электронную коммутацию», что позволяет избежать проблем с щетками и коммутаторами.
Двигатель BLDC построен с обмотками на статоре и постоянными магнитами на роторе. Устройство обратной связи по положению ротора, которое обычно представляет собой энкодер или устройство на эффекте Холла, предоставляет контроллеру информацию о скорости вращения ротора, чтобы он мог управлять электронной коммутацией.
Силовая цепь, Рисунок 2 почти идентичен инвертору переменного тока.
Продолжить на странице
Общие преимущества BLDC:
• Точное регулирование скорости без дополнительных затрат, поскольку всегда присутствует устройство обратной связи по скорости.
• Пусковой момент и динамический отклик сопоставимы с обычными приводами постоянного тока.
• Возможность управления несколькими приводами BLDC от общей шины постоянного тока. С другой стороны, приводы BLDC:
• Требуется подключение к устройству обратной связи по скорости, даже если жесткое регулирование скорости не требуется.
• Используйте силовые транзисторы и демпферы, что предотвратит использование недорогих возможностей регенерации линии, предлагаемых тиристорными приводами постоянного тока.Однако модули регенерации линии могут быть добавлены со значительными затратами.
• Иметь тяжелые постоянные магниты, которые увеличивают инерцию ротора и ограничивают максимальную скорость от 2 000 до 6 000 об / мин, в зависимости от материала магнита и номинальной мощности двигателя.
Стандартные инверторные приводы
Используя ту же базовую схему питания, что и привод BLDC, Рис. 2 , стандартные инверторы PWM позволяют большинству стандартных трехфазных индукционных и синхронных двигателей переменного тока производить плавный пуск и работу с регулируемой скоростью.Хотя силовые цепи одинаковы для обоих типов приводов, схемы управления сильно различаются.
Инверторы PWM предлагают:
• Выход с широтно-импульсной модуляцией (PWM), который выдает формы волны тока, близкие к синусоидальной.
• Регулировка скорости приблизительно на 1% (с компенсацией скольжения) базовой скорости двигателя для 100% изменения нагрузки без какой-либо обратной связи по скорости. То есть двигатель с базовой скоростью 1750 об / мин будет иметь падение скорости на 17,5 об / мин независимо от установленной скорости.
• Упрощенный выбор двигателя для специальных применений, таких как взрывоопасные и коррозионные среды.
• Типичный отклик 5 рад / сек, что подходит для большинства приложений. Если требуется более высокая производительность, включая время ускорения и замедления менее секунды, вам следует рассмотреть возможность использования векторного привода.
• Диапазон скорости 10: 1 без тахометра или энкодера для обратной связи по скорости. Работа в этом диапазоне обеспечивает в целом плавную работу двигателя.
• Пусковой крутящий момент равен номинальной мощности двигателя при полной нагрузке, что составляет примерно две трети мощности заблокированного ротора двигателя переменного тока. Сложные для запуска нагрузки могут потребовать выбора привода увеличенного размера для обеспечения достаточного пускового момента.
• Более высокая скорость вращения двигателя, чем у преобразователей постоянного тока или обычных приводов постоянного тока. Конечно, существуют ограничения, поэтому проконсультируйтесь с производителем оборудования и двигателя, прежде чем запускать любой двигатель со скоростью, превышающей его базовую.
Для правильного выбора инверторного привода следует также учитывать следующие факторы:
• Все типы приводов имеют ограничения, и универсальные инверторы не являются исключением. Таким образом, вы должны проявлять осторожность в любых приложениях, более требовательных, чем центробежные насосы и вентиляторы. Обратите особое внимание на требуемые значения пускового момента.
• Работа на скоростях ниже одной десятой базовой скорости может вызвать образование зубцов. Если это может быть проблемой, подумайте о векторном приводе.
Приводы переменного тока Vector
Преодолевая разрыв в производительности между приводами постоянного тока и стандартными инверторными приводами, векторные приводы переменного тока сочетают в себе стандартные двигатели с микропроцессорными контроллерами, а в некоторых случаях и с процессорами цифровых сигналов (DSP), чтобы обеспечить производительность, эквивалентную или лучше, чем приводы постоянного тока.
Вот некоторые из преимуществ векторных приводов:
• Жесткое регулирование скорости, обычно лучше, чем 0.01%, когда используется точный сигнал обратной связи по скорости. Такой сигнал обычно подается кодировщиком или резольвером. Для менее требовательных приложений некоторые векторные приводы переменного тока контролируют токи в контроллере, чтобы исключить обратную связь по скорости; но производительность близка к обычным приводам переменного тока с ШИМ.
• Широкий диапазон скоростей, включая плавный переход от нуля до базовой скорости.
• Высокий пусковой момент. Векторные приводы с обратной связью по скорости обычно могут передавать 150% крутящего момента при полной нагрузке от нуля до почти номинальной скорости в течение 1 мин.
• Динамический отклик не менее 50 рад / сек обычно для приводов мощностью 50 л.с. Несколько лет назад для этого требовались специальные диски.
• Возможность использования стандартных асинхронных двигателей переменного тока, хотя двигатели, разработанные специально для векторных приводов, обеспечивают лучшую производительность.
Недостатков немного, но они включают:
• Удерживаемый крутящий момент обеспечивается демпфером или дополнительным модулем регенерации.
• Для любого электрического торможения требуется правильная работа контроллера.
• Нагрев двигателя всегда важен для приводов, работающих с крутящим моментом более 50% в диапазоне скоростей.
Продолжить на странице 3
Сервоприводы
Подмножества приводов постоянного тока, BLDC и векторных приводов, сервоприводы разработаны для обеспечения высокой производительности с динамическим откликом от контура скорости более 500 рад / с. В процессе работы сервоприводы запускаются и останавливаются несколько раз в секунду.
Сервоприводыидеально подходят для приложений, требующих абсолютного позиционирования или координации положения. *
Импульсный реактивный привод
Разработанный много лет назад привод с переключаемым сопротивлением (SR) получает признание.Некоторые считают его конкурентом технологий, о которых говорилось ранее. И двигатель, и контроллер уникальны для этой технологии.
Мотор — это секрет приводов SR. Ротор напоминает пластинчатую шестерню, Рисунок 3 , и построен без обмоток и коммутатора. Эта конструкция обеспечивает исключительную надежность, длительную работу при остановке и работу на высоких скоростях — более 10 000 об / мин.
Обмотки статора намотаны на дискретные полюса. Рисунок 3 показывает конструкцию 6/4 с шестью полюсами статора и четырьмя полюсами ротора.Эта конструкция требует подключения шести силовых выводов к двигателю плюс провода для резольвера или другого комбинированного устройства обратной связи по положению и скорости. Контроллер привода работает от источника постоянного тока с фиксированной шиной, аналогичного тому, который используется в приводах BLDC, PWM и векторных приводах. В секции инвертора SR, которая является уникальной для привода SR, обычно биполярные транзисторы с изолированным затвором (IGBT) прерывают постоянный потенциал постоянного тока для создания переменного напряжения с регулируемой частотой переменного тока для обмоток статора, Рисунок 4 .
Общие терминыВот некоторые из общих терминов, используемых во многих типах приводов: Динамическое торможение: Неконтролируемый метод торможения.После отключения питания от якоря двигателя постоянного тока (при условии, что питание поля сохраняется), двигатель действует как генератор и преобразует кинетическую энергию вращающегося двигателя и нагрузки в электрическую энергию. Он рассеивается в резисторе в виде тепла. Нормально замкнутый контакт на пускателе двигателя соединяет цепь якоря двигателя с резистором. Вышеупомянутое описывает динамическое торможение (DB) в чистом смысле и часто используется с тиристорными приводами постоянного тока. Однако в более новых приводах, имеющих шину постоянного тока, динамическое торможение также используется для описания метода торможения для приводов, которые рассеивают энергию в резисторе, подключенном через шину постоянного тока.(См. «Выбор методов остановки без трения», PTD, 11/93, стр. 29.) Никакая форма динамического торможения не работает в качестве удерживающего тормоза. Удержание должно осуществляться механическим тормозом. Динамические характеристики: Способность привода реагировать на изменение команды. Обычно измеряется в радианах / сек при включенном двигателе. Чем выше число, тем быстрее может реагировать привод. Для многих приложений достаточно отклика от 1 до 5 рад / сек. Высокопроизводительные сервоприложения требуют отклика в сотни рад / сек.Когда отображается реакция только контроллера привода, реакция может отображаться в рад / с или в герцах (Гц). «Прочие» переменные: Часть спецификаций для приводов A-S, другие переменные включают изменения температуры, влажности, сетевого напряжения и частоты, а также дрейф. Часто эти «другие» факторы могут привести к тому, что приводы — особенно с аналоговыми и гибридными аналого-цифровыми схемами — изменяют скорость двигателя больше, чем колебания нагрузки. Регенерация: Способность привода, которая управляет замедлением нагрузки, позволяя двигателю работать как генератор и регулируя скорость возврата электроэнергии в энергосистему установки или в батареи, если они являются основным источником энергии.В отличие от динамического торможения, регенерация контролирует скорость торможения. Демпферы: Устанавливаются в приводы, использующие силовые транзисторы — приводы BLDC, сервоприводы постоянного тока и инверторы переменного тока — демпферы рассеивают выработанную мощность, в то время как привод обеспечивает удерживающий (отрицательный) крутящий момент. Демпферы обычно представляют собой резисторы или конденсаторы большой емкости. Оба типа часто рассчитаны на рабочий цикл 10%. Таким образом, им обычно не хватает непрерывных возможностей регенерации, если только крупные компоненты не добавляются извне. |
Примечания по безопасностиВ некоторых установках может потребоваться установка механического тормоза, если машина должна быть быстро остановлена во время сбоя питания и если трение машины недостаточно для остановки машины достаточно быстро. Это требование к тормозам может применяться к приводам постоянного тока с полями обмотки, а также к приводам BLDC и переменного тока, в которых используются демпферы или модули регенерации линии для обеспечения удерживающего крутящего момента. Во время этой фазы задержки эти приводы требуют правильной работы регулятора.Таким образом, мощность источника питания должна поддерживаться. Без источника питания |
Время покажет, оправдает ли реальность обещания этой новой технологии. Во второй части этой серии статей обсуждаются некоторые из распространенных приложений электрических регулируемых приводов и подробно рассматриваются требования к приводам.
* Дополнительные сведения о сервоприводах см. В статьях, перечисленных в справочнике PTD 1994, выпуск , «Указатель статей за четырехлетний период», с.A29.)
Статьи по теме
Приводы с регулируемой скоростью и др.
Приводы с регулируемой частотой
Приводы с регулируемой частотой: профилированное управление + КПД
Работа приводов с регулируемой скоростью с электродвигателем
Работа электроприводов с регулируемой скоростью. Скорость вращения электродвигателя переменного тока можно изменять с помощью преобразователя частоты. Это устройство изменяет частоту переменного тока двигателя. Затем это изменяет скорость вращения внутреннего магнитного поля двигателя.Скорость ротора реагирует соответствующим образом, что позволяет регулировать скорость подключенных элементов. При использовании этих устройств возникает ряд проблем, которые необходимо решить, чтобы обеспечить успешный выбор и долгосрочную эксплуатацию. Ключевые слова: VSD, точное регулирование скорости, превышение скорости, контроллер двигателя, преобразователь частоты. Регулирование скорости электродвигателя позволяет изменять скорость и пропускную способность приводимого оборудования. Это дает большое преимущество в ситуациях, когда необходимо контролировать сброс по мере изменения параметра процесса.Типичными примерами являются насосы, вентиляторы и приводные редукторы. Вы даже можете избавиться от регулирующего клапана, надев на насос VSD и используя его для изменения скорости насоса.
VSD изменяет выходную частоту двигателя, «инвертируя» напряжение постоянного тока в трехфазный источник питания, которое может изменяться от 0 до более 100 Гц. Преобразователь частоты принимает сетевой источник переменного тока в себя, а затем преобразует его в источник постоянного тока, выпрямляя сигнал (измельчая его и собирая в новой форме). Затем он изменяет мощность постоянного тока обратно на переменный ток, но частота теперь может контролироваться и изменяться.Двигатель переменного тока работает без выходного сигнала. Его «обманом» заставили вести себя так, как если бы источник питания переменного тока подавался прямо на него.
Некоторые операционные аспекты, которые следует учитывать
Вот некоторые проблемы, с которыми ранее сталкивались при использовании приводов с регулируемой скоростью электродвигателя в производственных процессах и на производственных предприятиях. Остерегайтесь их сами.
Электродвигатель перегревается — Вентилятор электродвигателя нагнетает воздух над корпусом для его охлаждения.Если двигатель слишком сильно замедлен, воздушного потока будет недостаточно для его охлаждения. Он перегревается и перегорает.
Это случилось с 4-полюсным двигателем насоса, который работал медленно, когда резервуар, из которого он втягивал, был полон. Высокий уровень в резервуаре производил достаточный поток, поэтому в насосе даже не было необходимости. Встроенный расходомер контролировал скорость насоса и замедлял двигатель до почти остановленного, и двигатель сгорел.
В таком случае используйте в первую очередь более медленный двигатель (один с большим количеством полюсов), предназначенный для более низких скоростей, и используйте VSD для увеличения скорости двигателя, когда это необходимо (в два раза быстрее, это нормально для электродвигателя).Или установите дополнительный охлаждающий вентилятор в задней части двигателя, который работает независимо от системы управления технологическим процессом. Это обеспечивает принудительную циркуляцию воздуха над корпусом и его охлаждение.
Гармоники вала или критические скорости — В этом случае VSD приводил в движение коробку передач мешалки. Оператор по ошибке увеличил частоту вращения двигателя вдвое больше, чем предполагалось, во время опорожнения резервуара. Это заставило длинный вал мешалки работать на одной из своих критических скоростей, и вал трясся и безумно изгибался.Повреждения подшипников из-за изменения скорости замечено не было, но если бы это было нормальной практикой, это привело бы к очень быстрому разрушению коробки передач и мешалки.
Решение заключалось в том, чтобы запрограммировать VSD так, чтобы его нельзя было заставить превышать скорость, которая была значительно ниже критической скорости вала мешалки. Чем длиннее или тоньше вал, тем больше вероятность возникновения этой проблемы.
Изменение крутящего момента
Будьте осторожны, когда преобразователь частоты используется в ситуации с тяжелым редуктором.Наибольший крутящий момент, создаваемый двигателем, возникает, когда он достигает полной скорости. Если ведущая шестерня очень высока (более 70: 1), существует вероятность того, что двигатель не сможет создать крутящий момент, необходимый для поворота шестерни, когда он наберет полную скорость. В этом случае двигатель сгорит от перегрева или просто перегрузки и остановится.
Местоположение, источник питания и окружающая среда
Преобразователь частоты может быть утерян из-за:
- скачки напряжения,
- плохая защита от технологической среды (пары
и пыль всасываются охлаждающим вентилятором), - перегрев в шкафу, подверженному воздействию высоких температур или прямых солнечных лучей.VSD генерируют внутри себя много тепла от многократного обращения с электроэнергией. Им также не нужны дополнительные тепловые нагрузки
от внешних источников. - вода напрямую попадает в корпус управления двигателем
(кофе из чашек, падающих на вентиляционную решетку, и слив
в электронику, приведет к их взрыву!).
Чтобы предотвратить эти непредвиденные бедствия, поместите преобразователь частоты в его собственный закрытый, охлаждаемый (по крайней мере, защищенный от теплового воздействия) и защищенный шкаф. Если это критическая установка, обеспечьте защищенный источник питания.
- В процессе прерывания электрического тока и изменения его формы выделяется большое количество тепла. Размер блоков VSD ограничен их способностью рассеивать тепло.
- По мере увеличения скорости двигателя КПД по электроэнергии падает. Увеличивается проскальзывание, увеличивается лобовое сопротивление, увеличивается трение в подшипниках. Неэффективность проявляется в увеличении тепловыделения и потребления энергии.
Майк Сондалини — инженер по долговечности оборудования, / i.
Мы (Accendo Reliability) опубликовали эту статью с любезного разрешения Feed Forward Publishing, дочерней компании BIN95.com
Интернет: trade-school.education
Эл. Почта: [email protected]
Если вам это показалось интересным, вам может понравиться электронная книга Process Control Essentials.
Испытания электродвигателей и частотно-регулируемых приводов
Основные принципы повышения эффективностиЭнергия — одна из самых высоких статей затрат на заводе или предприятии, и двигатели часто потребляют львиную долю энергии предприятия, поэтому обеспечение оптимальной работы двигателей жизненно важно.Точные измерения мощности могут помочь снизить потребление энергии, поскольку измерение всегда является первым шагом к повышению производительности, а также может помочь продлить срок службы двигателя. Небольшие смещения или другие проблемы часто невидимы невооруженным глазом, а малейшее колебание вала может отрицательно сказаться на производительности и качестве и даже сократить срок службы двигателя.
В этом документе мы обсудим основы измерения переменного, постоянного тока и мощности, а также четырехэтапный процесс проведения точных измерений электрической и механической мощности на различных двигателях и системах частотно-регулируемых приводов (VFD).Мы также покажем, как эти измерения используются для расчета энергоэффективности двигателей и приводных систем.
Электродвигатели — это электромеханические машины, которые преобразуют электрическую энергию в механическую, как показано на рисунке 1. Несмотря на различия в размере и типе, все электродвигатели работают примерно одинаково: электрический ток, протекающий через катушку с проволокой в магнитном поле, создает сила, которая вращает катушку, создавая крутящий момент.
Понимание выработки электроэнергии, потерь мощности и различных типов измеряемой мощности может быть пугающим. Ниже приведен обзор основных измерений электрической и механической мощности. Для получения более подробной информации об основных измерениях электрической мощности мы рекомендуем прочитать «Основы измерения мощности».
Рисунок 1. Двигатель преобразует электрическую энергию в механическую.
Что такое мощность? В самом простом виде мощность — это работа, выполняемая в течение определенного периода времени.В двигателе мощность передается на нагрузку путем преобразования электрической энергии в соответствии со следующими законами науки.
В электрических системах напряжение — это сила, необходимая для перемещения электронов. Ток — это скорость потока заряда в секунду через материал, к которому приложено определенное напряжение. Умножив напряжение на соответствующий ток, можно определить мощность.
Ватт (Вт) — единица мощности, определяемая как один джоуль в секунду. Определение мощности в ваттах для источника переменного тока должно включать коэффициент мощности (PF), поэтому W = V x A x PF для систем переменного тока.
Коэффициент мощности — это безразмерное соотношение в диапазоне от -1 до 1 и представляет собой количество реальной мощности, выполняемой при работе с нагрузкой. Для фактов мощности меньше единицы, что почти всегда имеет место, будут потери в реальной мощности. Это связано с тем, что напряжение и ток в цепи переменного тока имеют синусоидальную природу, при этом амплитуда тока и напряжения в цепи переменного тока постоянно смещается и обычно не идеально совмещена.
Поскольку мощность равна напряжению, умноженному на ток, мощность является максимальной, когда напряжение и ток выстраиваются вместе, так что пики и нулевые точки на формах волны напряжения и тока возникают одновременно.Это типично для простой резистивной нагрузки. В этой ситуации две формы сигналов находятся «в фазе» друг с другом, а коэффициент мощности будет равен 1. Это редкий случай, поскольку почти все нагрузки не просто обладают идеальным сопротивлением.
Говорят, что два сигнала не совпадают по фазе или сдвинуты по фазе, если два сигнала не коррелируют от точки к точке. Это может быть вызвано индуктивными или нелинейными нагрузками. В этой ситуации коэффициент мощности будет меньше 1, и реальная мощность будет меньше.
Из-за возможных колебаний тока и напряжения в цепях переменного тока мощность измеряется несколькими способами. Реальная или истинная мощность — это фактическая мощность, используемая в цепи, и измеряется в ваттах. В цифровых анализаторах мощности используются методы оцифровки сигналов входящего напряжения и тока для расчета истинной мощности.
В этом примере мгновенное напряжение умножается на мгновенный ток (I), а затем интегрируется за определенный период времени (t).Истинный расчет мощности будет работать с любым типом сигнала независимо от коэффициента мощности.
Гармоники создают дополнительную сложность. Несмотря на то, что электрическая сеть номинально работает на частоте 60 Гц, существует много других частот или гармоник, которые потенциально могут существовать в цепи, а также может быть составляющая постоянного или постоянного тока. Общая мощность рассчитывается путем рассмотрения и суммирования всего содержимого, включая гармоники.
Вышеупомянутые методы расчета используются для обеспечения точного измерения мощности и истинного среднеквадратичного (среднеквадратичного) измерения для любого типа сигнала, включая все гармонические составляющие, вплоть до полосы пропускания прибора.
Измерение мощности трехфазных двигателейВ отличие от однофазных систем, каждый проводящий провод в трехфазной системе электропитания пропускает переменный ток той же частоты и амплитуды напряжения относительно общего эталона, но с разностью фаз в одну треть периода.
Трехфазные системы имеют преимущества перед однофазными, что делает их пригодными для передачи энергии и в таких приложениях, как асинхронные двигатели.
Измерения трехфазного двигателя- Фазное напряжение — это напряжение, измеренное между обмотками двигателя до нейтральной точки.
- Фазный ток — это ток через любой компонент трехфазного источника или нагрузки.
- При соединении треугольником линейное напряжение совпадает с фазным напряжением. Для синусоидальных волн линейный ток в √3 раз больше фазного тока.
- При соединении звездой или звездой линейное напряжение в √3 раз больше фазного напряжения, а токи одинаковы.
- Величина и частота фазных токов определяют крутящий момент и скорость вращения двигателя.
При обсуждении измерения мощности с помощью ваттметров часто ссылаются на теорему Блонделя при определении количества ваттметров, необходимых для многофазного питания. Теорема утверждает, что мощность, подаваемая в систему из N проводников, равна алгебраической сумме мощности, измеренной N ваттметрами. Кроме того, если общая точка расположена на одном из проводов, счетчик этого проводника может быть удален, и потребуется только N-1 счетчик.
Трехфазное соединение звездой или звездой (3P4W)Измерение относительно просто, если объектом измерения является трехфазная 4-проводная система. Как показано на рисунке 2, трехфазный четырехпроводной включает в себя подключение ваттметров к каждой фазной обмотке на основе нейтрального проводника. Получите мощность для каждой фазной обмотки, измерив напряжение (фазное напряжение) и ток (фазный ток) для каждой фазы с помощью разных ваттметров. Суммирование даст значение трехфазной мощности. Для измерения трехфазной 4-проводной мощности требуется три ваттметра.
Рисунок 2 — Трехфазное соединение звездой (3P4W)
Трехфазное соединение треугольником (3V3A)
Большинство двигателей не имеют нейтрального соединения и поэтому требуют подключения вольтметров по схеме треугольника (3V3A). Это означает, что фазное напряжение нельзя измерить напрямую, и вместо этого вольтметры подключаются по схеме «линия-линия» (треугольник). Этот метод подключения приводит к 3-проводному измерению, и измеряются три напряжения (R к T, S к T, R к S).Схема подключения для метода соединения треугольником и векторная карта показаны на рисунке 3.
Рисунок 3 — Трехфазное соединение треугольником (3V3A)
Применяя теорему Блонделя, при вычислении полной мощности используются только 2 ваттметра. Несмотря на то, что требуется всего 2 ваттметра, использование трех ваттметров желательно, поскольку оно дает дополнительную информацию, которую можно использовать для балансировки нагрузки и определения истинного коэффициента мощности.
Основные измерения механической мощностиВ электродвигателе механическая мощность определяется как скорость, умноженная на крутящий момент.Механическая мощность обычно определяется как киловатт или лошадиные силы, при этом один Вт равен 1 Джоуля / сек или 1 Нм / сек.
Лошадиная сила — это работа, выполняемая за единицу времени. Один л.с. равен 33 000 фунт-футов в минуту. Преобразование л.с. в ватт достигается с использованием этого соотношения: 1 л.с. = 746 Вт. Однако преобразование часто упрощается, используя 746 Вт на л.с. Механическая мощность измеряется как скорость двигателя, умноженная на крутящий момент двигателя. На рынке существует множество различных типов датчиков скорости и крутящего момента, которые можно интегрировать в динамометр.Эти датчики могут использоваться для измерения скорости и крутящего момента, необходимых для получения информации о механических измерениях, чтобы вычислить измерения механической мощности в анализаторе мощности.
Расчеты двигателя и скорости могут быть выполнены непосредственно на анализаторе мощности. Подключение для этого измерения зависит от типа сигнала для скорости и крутящего момента, выводимого в виде импульсного или аналогового сигнала или трехфазного импульса энкодера, представленного фазами A, B, Z.
Рисунок 4 — Схема подключения крутящего момента и скорости для аналоговой или импульсной формы сигнала
Рисунок 5 — Подключение крутящего момента и двигателя для трехфазного энкодера 4-этапный процесс тестирования двигателей и приводных систем
Полное испытание двигателя и системы привода — это четырехэтапный процесс.
Шаг 1 — точное измерение трехфазной входной мощности для частотно-регулируемого привода (VFD).
Шаг 2 — точное измерение напряжения шины постоянного тока.
Шаг 3 — точное измерение входной мощности двигателя / выходной мощности частотно-регулируемого привода с ШИМ-управлением.
Шаг 4 — точное измерение механической мощности двигателя.
В этом разделе мы обсудим, как добиться наиболее точных измерений мощности и КПД, измерения мощности для трехфазных двигателей переменного тока и приводных систем, пройдя через точки измерения, перечисленные ниже, и как добиться наиболее точных измерений мощности и КПД. .При использовании частотно-регулируемого привода с широтно-импульсной модуляцией для управления двигателем часто необходимо измерить как входной, так и выходной сигнал частотно-регулируемого привода, а также секцию аналого-цифрового преобразования постоянного тока, чтобы получить полное представление о конструкции и эффективности привода переменного тока.
Рисунок 6 — Измерения и точки измерения двигателя переменного тока и системы привода
Шаг 1. Точное измерение трехфазной входной мощности
Измерение входной мощности важно не только для понимания того, насколько чиста мощность, которая поступает в привод переменного тока, но также важно измерять любые гармоники, которые привод может генерировать и которые возвращаются в эту сеть.Архитектура привода переменного тока состоит из секции выпрямителя, которая прерывает формы волны переменного тока и фильтрует линейное напряжение переменного тока в постоянный ток, и секции инвертора, которая преобразует постоянный ток в сигналы с импульсной модуляцией (ШИМ), которые приводят в действие двигатель. Сигналы напряжения и тока на выходных каскадах выпрямления и инвертора (точки 2 и 3) будут иметь искажения, связанные с используемыми технологиями. В этих технологиях часто используется импульсная силовая электроника, которая генерирует высокочастотные сигналы, что приводит к гармоническому содержанию во входной сети питания (точка 1).Измерение общих гармонических искажений (THD) на входе будет отражать влияние технологий, используемых в двигателе и системе привода, на качество электроэнергии в сети.
Для электромобилей или других приложений, которые снабжают систему привода источником постоянного тока, измерение изменяется, но точка измерения и важность измерения не меняются. Эта система удаляет из привода ступень преобразования переменного тока в постоянный.
Рисунок 7 — Двигатель и система привода с источником постоянного тока
Шаг 2.Измерение напряжения шины постоянного тока
Привод переменного тока использует емкостную фильтрацию для преобразования выпрямленной сети переменного тока в сигналы постоянного тока. Измерение этих уровней постоянного тока важно, потому что преобразователь AD в постоянный ток неизбежно вносит сильно искаженный входной ток, что приводит к серьезным гармоникам тока и низкому коэффициенту мощности.
Напряжение шины постоянного тока в приводе переменного тока может быть измерено для проверки условий повышенного и пониженного напряжения и может быть выполнено внутри привода на клеммах конденсаторной батареи, как показано на Рисунке 6 в контрольной точке 2.Однако более простой способ — использовать отображение формы сигнала анализатора мощности с измерением курсора. При отображении формы сигнала с помощью курсорного измерения необходимо убедиться, что курсор не находится прямо над небольшими выступами на дисплее. Вместо этого курсор должен находиться поперек осциллограммы, чтобы выполнить точное измерение.
Шаг 3. Точные измерения выходной мощности частотно-регулируемого привода / входной мощности двигателяКак и в шаге 1, измерение мощности на выходе частотно-регулируемого привода и входе в двигатель важно по нескольким причинам.Для правильного измерения эффективности привода переменного тока необходимо измерить выходную мощность привода. Кроме того, важно измерить гармоники, создаваемые приводом переменного тока, которые передаются на двигатель. Поскольку двигатель представляет собой индуктивную нагрузку, он фильтрует большую часть высокочастотной энергии. Энергия в высокочастотных сигналах представлена как реактивная мощность, которая не работает при вращении двигателя, но может проявляться в виде тепла, которое может медленно сокращать срок службы двигателя.
При измерении выхода VDF важно понимать, что использование линейного фильтра (нижних частот) ограничивает полосу пропускания измерений.Однако важно включить частотный фильтр, который не зависит от сетевого фильтра. Этот фильтр работает параллельно с АЦП и необходим для обнаружения перехода через нуль формы сигнала тока без ограничения полосы пропускания измерений. Этот фильтр помогает определить основную частоту, которая необходима для гармонического анализа и соотнесения скорости вращения магнитного поля с фактической скоростью вращения двигателя.
На рис. 8 показана форма выходного напряжения ШИМ с сильно искаженным напряжением, прерывистыми высокими частотами и большим количеством шумов на токовой стороне, что затрудняет измерение.Высокочастотное переключение сигнала напряжения создает сильно искаженную форму волны с высоким содержанием гармоник.
Рисунок 8 — Формы выходного напряжения и тока инвертора переменного тока
Для такого зашумленного сигнала нужны специальные датчики тока для измерения. Для точных измерений мощности с ШИМ также необходимы анализаторы мощности с широкой полосой пропускания, способные измерять эти сложные сигналы. На рисунке 9 показан пример содержания гармоник напряжения на выходе ШИМ. Присутствуют частоты биений, а содержание гармоник напряжения превышает 500 порядков (примерно 30 кГц).Большая часть гармоник приходится на нижние частоты на токовой стороне.
Рекомендации при измерении выходной мощности приводаНапряжение, ток и мощность инвертора обычно измеряются одним из трех методов, которые включают содержание гармоник или измерение, которое выделяет величину основной частоты.
Первый метод — использовать простой фильтр нижних частот (фильтр Iine) для удаления высоких частот. Если в анализаторе мощности есть этот фильтр, просто включите его.Правильная фильтрация приведет к измерениям напряжения, тока и мощности, отражающим вклад основной частоты инвертора. Однако важно понимать, что этот тип фильтрации не предлагает измерения полной полосы пропускания, так как таковые результирующие числа будут отсутствовать для всего высокочастотного контента.
Второй метод относится только к измерениям напряжения. Это называется методом измерения выпрямленного среднего, который выдает среднеквадратичное значение напряжения основной волны без фильтрации с использованием определения среднего значения напряжения, масштабированного до среднеквадратичного напряжения.Алгоритм выпрямленного среднего среднего за период времени обеспечит эквивалент основного напряжения, который будет очень близок к среднеквадратичному значению основной волны. Используя этот метод, можно измерить полную мощность, общий ток и основное напряжение.
Третий и наиболее полный метод — использование цифрового гармонического анализа. Эта функция может использоваться для выделения отдельных спектральных составляющих напряжения, тока и мощности с помощью быстрого преобразования Фурье (БПФ) для определения амплитуды каждой гармонической составляющей, включая основную волну.Этот метод работает параллельно с измерениями полной полосы пропускания, чтобы одновременно обеспечивать измерения тока и мощности полной полосы пропускания и напряжения основной частоты.
Привод должен поддерживать постоянное соотношение В / Гц по сравнению с рабочей скоростью двигателя. Анализатор мощности может рассчитывать В / Гц, используя среднеквадратичное значение или значение основного напряжения. Определенная пользователем математическая функция анализатора используется для построения уравнения для этого измерения.
Шаг 4. Точные измерения механической мощности двигателяМеханическая мощность измеряется как скорость двигателя, умноженная на крутящий момент двигателя.Датчики скорости и крутящего момента должны быть установлены на диномометре двигателя и интегрированы в испытательную систему. Эти датчики обычно представляют собой аналоговый выход напряжения или частотный выход. Современные анализаторы мощности могут работать с обоими типами и обеспечивать поддержку датчиков положения вращения, таких как энкодеры.
Собираем все вместе — преобразователь переменного тока в постоянный, инвертор, двигатель и КПД системы / трансмиссии КПДКПД можно выразить в простейшей форме как отношение выходной мощности к общей входной мощности или КПД = выходная мощность / входная мощность.Для двигателя с электрическим приводом выходная мощность является механической, в то время как входная мощность является электрической, поэтому уравнение эффективности выглядит следующим образом: эффективность = механическая мощность / электрическая входная мощность.
Более комплексный метод — использовать анализатор мощности с несколькими входами для одновременного измерения входа и выхода. Это приводит к более точному расчету эффективности, поскольку он использует один анализатор мощности для устранения потенциальных ошибок, вызванных измерениями временного сдвига. С помощью внутренних математических вычислений, предоставляемых анализатором, можно настроить очень простое вычисление через меню для расчета потерь привода и эффективности привода.
Рисунок 9 — Каждая измерительная секция двигателя и системы привода имеет определенные измерения эффективности.
КПД от переменного к постоянному току
Привод переменного тока состоит из двух основных секций: преобразователя аналого-цифрового сигнала в постоянный и инвертора. Выпрямление и фильтрация сигнала в постоянный ток часто приводит к сильным гармоникам тока, что приводит к потерям мощности. Понимание потерь и эффективности этого раздела может помочь улучшить конструкцию приводов переменного тока и, в конечном итоге, приведет к повышению общей эффективности.Уравнение для КПД от AD к DC представляет собой мощность постоянного тока в точке измерения 2, деленную на сумму трехфазной мощности в точке измерения 1.
КПД по переменному току КПД привода переменного тока, привода или инверторав простейшей форме рассчитывается как выходная мощность, деленная на входную мощность и представляемая в процентах. Один из методов, используемых для измерения входной и выходной мощности, заключается в простом подключении измерителей мощности на входе и выходе, при этом показания двух измерителей используются для расчета эффективности, как показано на рисунке 10.
Поскольку работа привода переменного тока заключается в регулировке скорости выходного сигнала переменного тока на двигатель для достижения оптимальной производительности, эффективность привода переменного тока важна при разработке алгоритмов контроллера. Уравнение для КПД привода показано как отношение суммы трехфазной мощности в точке измерения 3 к сумме трехфазной мощности на входе переменного тока в точке измерения 1.
КПД двигателяКПД двигателя — это мера эффективности преобразования электрической энергии в механическую.КПД двигателя можно выразить как выходную мощность, деленную на потребляемую мощность. Измерение КПД двигателя не так просто, как у
.измерения привода переменного тока, поскольку выходная мощность, обозначенная в числителе в уравнении, представляет собой преобразование механической мощности в электрическую с использованием измерителя крутящего момента, энкодера или резольвера. Уравнение может быть изменено на механическую мощность, деленную на сумму трехфазной мощности в точке измерения 3. Это измерение часто выполняется на разных скоростях при разной нагрузке, обычно отображаемой на кривой крутящего момента скорости.
Измерение КПД двигателя предназначено для количественной оценки потерь, связанных с конструкцией и работой двигателя. Топ-5 потерь в двигателях можно разделить на:
- Потери I2R статора
- Потери I2R ротора
- Паразитная нагрузка
- Потери в сердечнике в статоре и роторе
- Трение и ветер
Каждую из этих потерь можно свести к минимуму с помощью различных методов, и это цель разработчиков двигателей.
КПД трансмиссииИзмерение эффективности трансмиссии можно рассматривать как цепочку преобразования энергии, рассматривая каждую подсистему, включая преобразователь AD в постоянный ток, инвертор, двигатель и устройство механической энергии как часть уравнения. Это измерение учитывает все потери в двигателе и системе привода и полезно в новых конструкциях, где некоторые или все части привода переменного тока включены в конструкцию двигателя. Это измерение суммируется как механическая мощность в точке измерения M, деленная на сумму трехфазной мощности в точке измерения 1.
ЗаключениеПри измерении мощности электродвигателя и системы привода необходимо учитывать множество факторов, включая входную мощность, КПД инвертора, КПД двигателя, гармоники и коэффициент мощности. Эти измерения включают сложные уравнения, поэтому большинство компаний используют анализаторы мощности для автоматического получения результатов.
При выполнении четырехэтапного процесса на частотно-регулируемом приводе и системе двигателя необходимо использовать 7-фазный анализатор мощности, как показано на рисунке 10.Одновременный сбор этапов измерения 1–4 в одном приборе является преимуществом для выравнивания фаз и выравнивания между измерениями напряжения и тока, что приводит к наиболее точному измерению мощности. Это также позволяет упростить измерения эффективности.
Рисунок 10 — Двигатель и система привода, подключенные к 7-фазному анализатору мощности с механическим входом
Лучшая цена на электродвигатель с регулируемой скоростью — Отличные предложения на электродвигатель с регулируемой скоростью от мировых продавцов электродвигателей с регулируемой скоростью
Отличные новости !!! Вы попали в нужное место для электродвигателя с регулируемой скоростью.К настоящему времени вы уже знаете, что что бы вы ни искали, вы обязательно найдете это на AliExpress. У нас буквально есть тысячи отличных продуктов во всех товарных категориях. Ищете ли вы товары высокого класса или дешевые и недорогие оптовые закупки, мы гарантируем, что он есть на AliExpress.
Вы найдете официальные магазины торговых марок наряду с небольшими независимыми продавцами со скидками, каждый из которых предлагает быструю доставку и надежные, а также удобные и безопасные способы оплаты, независимо от того, сколько вы решите потратить.
AliExpress никогда не уступит по выбору, качеству и цене. Каждый день вы будете находить новые онлайн-предложения, скидки в магазинах и возможность сэкономить еще больше, собирая купоны. Но вам, возможно, придется действовать быстро, поскольку этот лучший электродвигатель с регулируемой скоростью должен стать одним из самых востребованных бестселлеров в кратчайшие сроки. Подумайте, как вам будут завидовать друзья, когда вы скажете им, что приобрели электродвигатель с регулируемой скоростью на AliExpress.Благодаря самым низким ценам в Интернете, дешевым тарифам на доставку и возможности получения на месте вы можете еще больше сэкономить.
Если вы все еще не уверены в том, что электродвигатель регулируется по скорости и думаете о выборе аналогичного товара, AliExpress — отличное место для сравнения цен и продавцов. Мы поможем вам решить, стоит ли доплачивать за высококлассную версию или вы получаете столь же выгодную сделку, приобретая более дешевую вещь.И, если вы просто хотите побаловать себя и потратиться на самую дорогую версию, AliExpress всегда позаботится о том, чтобы вы могли получить лучшую цену за свои деньги, даже сообщая вам, когда вам будет лучше дождаться начала рекламной акции. и ожидаемая экономия.AliExpress гордится тем, что у вас всегда есть осознанный выбор при покупке в одном из сотен магазинов и продавцов на нашей платформе. Реальные покупатели оценивают качество обслуживания, цену и качество каждого магазина и продавца.Кроме того, вы можете узнать рейтинги магазина или отдельных продавцов, а также сравнить цены, доставку и скидки на один и тот же продукт, прочитав комментарии и отзывы, оставленные пользователями. Каждая покупка имеет звездный рейтинг и часто имеет комментарии, оставленные предыдущими клиентами, описывающими их опыт транзакций, поэтому вы можете покупать с уверенностью каждый раз. Короче говоря, вам не нужно верить нам на слово — просто слушайте миллионы наших довольных клиентов.
И, если вы новичок на AliExpress, мы откроем вам секрет.Непосредственно перед тем, как вы нажмете «купить сейчас» в процессе транзакции, найдите время, чтобы проверить купоны — и вы сэкономите еще больше. Вы можете найти купоны магазина, купоны AliExpress или собирать купоны каждый день, играя в игры в приложении AliExpress. Вместе с бесплатной доставкой, которую предлагают большинство продавцов на нашем сайте, вы сможете приобрести электрический двигатель с регулируемой скоростью по самой выгодной цене.
Мы всегда в курсе последних технологий, новейших тенденций и самых обсуждаемых лейблов.На AliExpress отличное качество, цена и сервис всегда в стандартной комплектации. Начните самый лучший шоппинг прямо здесь.
Недорогой двигатель с регулируемой скоростью для бытовых систем отопления, вентиляции и кондиционирования воздуха
Низкозатратный электродвигатель с регулируемой скоростьюповышает энергоэффективность
В 2011 году в промышленном, коммерческом и жилом секторах США было потреблено ~ 13.5 квадратов электроэнергии, из которых примерно 7,8 квадрата (58%) потреблялись приложениями, использующими электродвигатели в машинах; технологическое охлаждение; и охлаждение, отопление, вентиляция и кондиционирование. Поскольку затраты на энергию продолжают расти, важной задачей является снижение потребления электроэнергии асинхронными двигателями с использованием передовых технологий управления мощностью, таких как привод с регулируемой скоростью. Поскольку существующие двигатели с регулируемой скоростью стоят как минимум в четыре раза дороже односкоростных двигателей, в настоящее время они используются только в 5% бытовых систем отопления, вентиляции и кондиционирования воздуха.
Компания DynaMotors Inc. при помощи гранта Программы изобретений и инноваций Министерства энергетики США разработала революционную недорогую бесщеточную технологию двигателя с регулируемой скоростью, которая имеет твердотельные переключатели на вращающемся якоре. Эти переключатели имеют оптическое управление, что позволяет контролировать крутящий момент и скорость двигателя. Предполагаемым рынком были бытовые системы HVAC, но эту технологию также можно использовать в электромобилях, самолетах и автоматизации производства. В существующих системах отопления, вентиляции и кондиционирования воздуха используются недорогие, малоэффективные односкоростные асинхронные двигатели с постоянными разделенными конденсаторами.Эти двигатели включаются и выключаются в соответствии с требованиями термостата. Двигатель с регулируемой скоростью, непрерывно работающий на половинной скорости, использует 25% мощности для перемещения того же количества воздуха. Чтобы добиться широкого распространения на рынке систем отопления, вентиляции и кондиционирования воздуха в жилых помещениях, технология должна быть конкурентоспособной по стоимости с устаревшим оборудованием. Компания DynaMotors решила эту проблему и продает свою технологию на 40-50% дешевле, чем существующие двигатели с регулируемой скоростью. В настоящее время приводной двигатель с регулируемой скоростью Dynamotors находится на заключительной стадии сертификации лаборатории андеррайтеров.