Регулятор оборотов электродвигателя: принцип действия
Регулятор оборотов электродвигателя необходим для плавного разгона и торможения. Широкое применение получили такие устройства в промышленности. С их помощью изменяют скорость движения лент конвейера, вращения вентиляторов. Двигатели на 12 Вольт используются в системах управления и автомобилях. Все видели переключатели, которыми изменяется скорость вращения вентилятора печки в машинах. Это один из типов регуляторов. Только он не предназначен для плавного запуска. Изменение скорости вращения происходит ступенчато.
Применение частотных преобразователей
В качестве регуляторов оборотов электродвигателей 220В и 380В используются частотные преобразователи. Это высокотехнологичные электронные устройства, которые позволяют кардинально изменить характеристики тока (форму сигнала и частоту). В их основе находятся мощные полупроводниковые транзисторы и широтно-импульсный модулятор. Вся работа прибора управляется блоком на микроконтроллере. Изменение скорости вращения ротора двигателя происходит плавно.

Поэтому частотные преобразователи используются в нагруженных механизмах. Чем медленнее разгон, тем меньшие нагрузки будет испытывать конвейер или редуктор. Все частотники оснащены несколькими степенями защиты – по току, нагрузке, напряжению и прочими. Некоторые модели частотных преобразователей питаются от однофазного напряжения (220 Вольт), делают из него трехфазное. Это позволяет подключать асинхронные моторы дома без использования сложных схем. И не потеряется мощность при работе с таким устройством.
Для каких целей используются регуляторы
В случае с асинхронными двигателями регуляторы оборотов необходимы для:
- Существенной экономии электроэнергии. Ведь не в каждом механизме требуется большая скорость вращения мотора – порой ее можно уменьшить на 20-30%, а это позволит сократить расходы на электроэнергию вдвое.
- Защиты механизмов и электронных цепей. С помощью преобразователей частоты можно осуществлять контроль температуры, давления и многих других параметров. Если двигатель работает в качестве привода насоса, то в емкости, в которую он накачивает воздух или жидкость, нужно установить датчик давления. И при достижении максимального значения мотор просто отключится.
- Совершения плавного пуска. Нет необходимости использовать дополнительные электронные устройства – все можно сделать с помощью изменений настроек частотного преобразователя.
- Снижения расходов на техническое обслуживание. При помощи подобных регуляторов оборотов электродвигателей 220В снижается риск выхода из строя привода и отдельных механизмов.

Схема, по которой построены частотные преобразователи, широко распространена во многих бытовых приборах. Нечто подобное можно встретить в источниках бесперебойного питания, сварочных аппаратах, стабилизаторах напряжения, блоках питания компьютеров, ноутбуков, зарядниках телефонов, блоках розжига ламп подсветки современных ЖК-телевизоров и мониторов.
Как работают регуляторы вращения
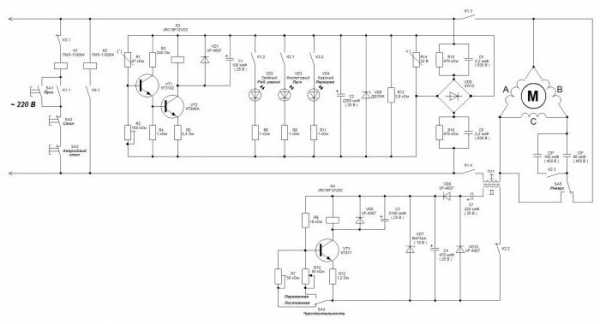
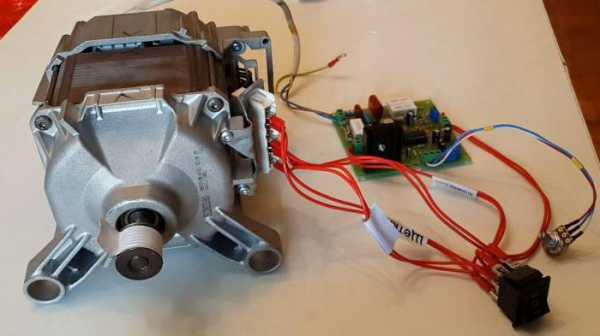
Можно сделать своими руками регулятор оборотов электродвигателя, но для этого потребуется изучить все технические моменты. Конструктивно можно выделить несколько основных компонентов, а именно:
- Электродвигатель.
- Микроконтроллерную систему управления и блок преобразователя.
- Привод и механизмы, связанные с ним.
В самом начале работы, после подачи напряжения на обмотки, происходит вращение ротора двигателя с максимальной мощностью. Именно эта особенность отличает асинхронные машины от других. К этому прибавляется нагрузка от механизма, который приводится в движение. В итоге на начальном этапе мощность и потребляемый ток возрастают до максимума.
Выделяется очень много тепла. Перегреваются и обмотки, и провода. Применение частотного преобразователя поможет избавиться от этого. Если установить плавный пуск, то до максимальной скорости (которая также регулируется устройством и может быть не 1500 об./мин, а всего 1000) двигатель будет разгоняться не сразу, а на протяжении 10 секунд (каждую секунду по 100-150 оборотов прибавлять). При этом нагрузка на все механизмы и провода уменьшится в разы.
Самодельный регулятор
Самостоятельно можно сделать регулятор оборотов электродвигателя 12В. Для этого потребуется переключатель на несколько положений и проволочные резисторы. С помощью последних меняется напряжение питания (а вместе с ним и частота вращения). Аналогичные системы можно использовать и для асинхронных двигателей, но они менее эффективны. Много лет назад широко применялись механические регуляторы – на основе шестеренчатых приводов или вариаторов. Но они были не очень надежными. Электронные средства намного лучше себя показывают. Ведь они не такие громоздкие и позволяют более тонко настраивать привод.
Для изготовления регулятора вращения электродвигателя потребуется несколько электронных устройств, которые можно либо приобрести в магазине, либо снять со старых инверторных приборов. Неплохие результаты показывает симистор ВТ138-600 в схемах таких электронных устройств. Чтобы произвести регулировку, потребуется включить в схему переменный резистор. С его помощью изменяется амплитуда входящего на симистор сигнала.
Внедрение системы управления

Чтобы улучшить параметры даже самого простого устройства, потребуется в схему регулятора оборотов электродвигателя включить микроконтроллерное управление. Для этого нужно выбрать процессор с подходящим числом входов и выходов – для подключения датчиков, кнопок, электронных ключей. Для экспериментов можно применить микроконтроллер AtMega128 – самый популярный и простой в использовании. В свободном доступе можно найти множество схем с использованием этого контроллера. Самостоятельно их отыскать и применить на практике не составит труда. Чтобы он правильно работал, потребуется в него записать алгоритм – отклики на определенные действия. Например, при достижении температуры в 60 градусов (замер происходит на радиаторе прибора) должно произойти отключение питания.
В заключение
Если решите не делать самостоятельно устройство, а приобрести готовое, то обратите внимание на основные параметры, такие как мощность, тип системы управления, рабочее напряжение, частоты. Желательно произвести расчет характеристик механизма, в котором планируется использовать регулятор напряжения электродвигателя. И не забудьте сопоставить с параметрами частотного преобразователя.
fb.ru
Регулирование скорости вращения асинхронных двигателей
Под регулированием скорости двигателя понимается изменение скорости его вращения, производимое вручную или автоматически. Регулирование скорости вращения двигателя вызывается необходимостью изменения режимов работы литейных машин. Например, скорость вращения изложницы машины для центробежного литья необходимо изменять при переходе к новому изделию или даже при изготовлении одного изделия, если технологически требуется спокойное заполнение изложницы при небольшой скорости ее вращения и повышенное давление в металле (высокая скорость вращения изложницы) при кристаллизации. С целью измельчения зерна иногда во время кристаллизации периодически резко изменяют скорость вращения изложницы.
При пескометной формовке для уменьшения износа модели первый слой формовочной смеси желательно наносить при невысокой скорости вращения ротора метательной головки, а заполнять и уплотнять форму необходимо при другой, более высокой скорости и т. д.
В литейных машинах скорости их рабочих органов регулируются как специальными передаточными механизмами (вариаторами и др.), так и электрическим способом, т. е. изменением скорости вращения двигателя. Электрическое регулирование, как правило, позволяет упростить конструкцию машины и уменьшить ее стоимость.
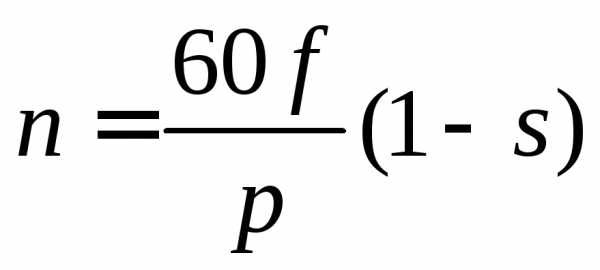
Скорость вращения асинхронного двигателя определяется соотношением:
 (6)
(6)
где f – частота тока;
р – число пар полюсов обмотки статора.
Из соотношения (6) следует, что скорость вращения асинхронного двигателя можно регулировать тремя способами: изменением частоты тока, скольжения или числа пар полюсов.
Регулирование скорости вращения асинхронных двигателей путем изменения частоты тока с энергетической точки зрения достаточно экономично и может быть бесступенчатым. Однако ввиду сложности и дороговизны аппаратуры для изменения частоты тока в литейных машинах этот способ регулирования распространения не получил.
Регулировать скорость вращения изменением скольжения можно только у асинхронных двигателей с фазовым ротором, например, с помощью дополнительного реостата в цепи ротора (см. рис. 3). Энергетически этот способ регулирования неэкономичен, так как часть электроэнергии, потребляемой двигателем из сети, бесполезно рассеивается на реостате. Кроме того, вследствие использования мягких характеристик при таком регулировании скорость вращения двигателя резко изменяется при колебаниях нагрузки, а при холостом ходе или малых нагрузках регулирование становится вообще невозможным. Этот способ регулирования целесообразно применять для небольших двигателей, работающих с постоянной или маломеняющейся нагрузкой, особенно если их пуск производится под нагрузкой (питатели, конвейеры, транспортные системы и т. д.).
В машиностроении наибольшее распространение получило регулирование скорости вращения асинхронных двигателей с короткозамкнутым ротором изменением числа пар полюсов. Это регулирование грубоступенчатое. Для такого регулирования требуются двигатели специальной конструкции: с особой обмоткой статора и нормальным короткозамкнутым ротором.
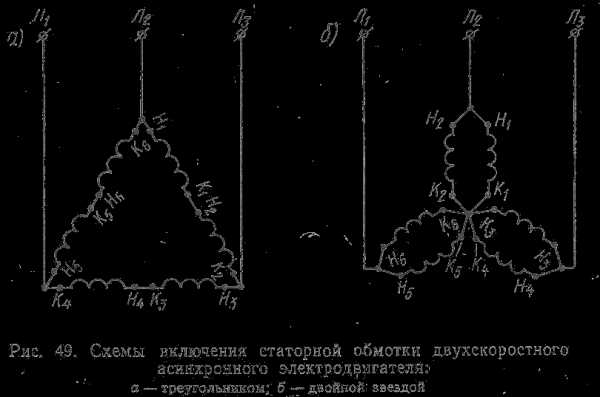
Внаиболее простом случае у многоскоростного двигателя на статоре уложены две независимые обмотки, каждая из которых создает разное число полюсов. Необходимую скорость вращения двигателя получают включением соответствующей обмотки. Существуют схемы переключения обмоток статора, при которых одна и та же обмотка, выполненная секционированной, может создавать различное число полюсов. Например, при последовательном включении секций фазовой обмотки статора образуются две пары полюсов (рис. 6,а). Те же секции обмотки, включенные параллельно, образуют одну пару полюсов (рис. 6, б).
Фазовые обмотки двигателя могут быть включены в трехфазную сеть звездой или треугольником (рис. 7). Наиболее широко применяются схемы, показанные на рис. 7, а и б.
Для получения меньшей скорости обмотка статора двигателя включается треугольником с последовательным соединением секций фазовых обмоток (рис. 7, а), а для получения большей скорости – звездой с параллельным соединением секций фазовых обмоток (так называемой двойной звездой – рис. 7,6). Путем специальных переключений при одной обмотке статора можно получить три или четыре скорости вращения.
Однообмоточные двигатели имеют меньшие размеры по сравнению с двухобмоточными; их энергетические показатели выше, а трудоемкость изготовления ниже. Недостаток многоскоростных однообмоточных двигателей заключается в большом числе выводов и относительно сложном переключении.
При выборе способа регулирования скорости двигателя необходимо учитывать, что с изменением скорости вращения двигателя изменяются также и развиваемые им момент или мощность (или оба параметра одновременно). Вращающий момент асинхронного двигателя можно выразить через ток ротора I2 и магнитный поток Ф:
(7)
где ψ – угол между векторами тока и э. д. с. ротора;
k – коэффициент пропорциональности.
Наибольший продолжительно допустимый ток ротора определяется условиями нагрева и поэтому при изменении скорости вращения двигателя остается неизменным. Если регулирование скорости двигателя ведется при постоянном магнитном потоке, то и развиваемый двигателем момент согласно выражению (7) будет величиной постоянной. Такое регулирование скорости называется регулированием с постоянным моментом. Регулирование скорости изменением сопротивления цепи ротора относится, к регулированию с постоянным моментом, так как магнитный поток машины не изменяется.
При переключении обмоток статора для изменения числа пар полюсов может измениться магнитный поток двигателя и, следовательно, момент, развиваемый им. Предельно допустимая мощность на валу двигателя определяется по формуле
(8)
где IФ – фазовый ток, предельно допустимый по условиям нагрева;
UФ – фазовое напряжение статора;
η – к. п. д. двигателя.
При переключении обмотки статора двигателя с треугольника с последовательным соединением секций фазовой обмотки (рис. 7, а) на двойную звезду (рис. 7,
При переключении обмотки статора двигателя со звезды с последовательным соединением секций фазовых обмоток (рис. 7, в) на двойную звезду (рис. 7, б) предельно допустимая .мощность двигателя согласно формуле (8) увеличивается вдвое. Но так как скорость двигателя также возрастает в 2 раза, то предельно допустимый момент двигателя остается неизменным, т. е. регулирование осуществляется с постоянным моментом.
Для работы литейных машин требуется регулирование скорости электродвигателей как с постоянным моментом, так и с постоянной мощностью. Например, регулирование скорости вращения двигателей обдирочных станков с целью компенсации износа шлифовальных кругов должно производиться с постоянной мощностью. При изменении скорости движения конвейеров, вращающихся столов и других машин и механизмов, где основной нагрузкой двигателя являются силы трения в механизмах, остается постоянным момент на валу двигателя.
При изменении скорости вращения ротора пескометной головки одновременно изменяются мощность и момент на валу двигателя, так как мощность, потребляемая головкой, примерно пропорциональна квадрату скорости вращения ротора. Оба вида регулирования оказываются недостаточно удовлетворительными. В этом случае применяют регулирование с постоянным моментом, как более экономичное. Такое регулирование, например, применено в пескомете модели 2А96С1.
studfiles.net
Регулирование скорости вращения и реверсирование асинхронных электродвигателей
Категория:
Электрооборудование строительных машин
Публикация:
Регулирование скорости вращения и реверсирование асинхронных электродвигателей
Читать далее:
Регулирование скорости вращения и реверсирование асинхронных электродвигателей
Из этого уравнения следует, что скорость вращения можно регулировать путем:
а) изменения скольжения s;
б) изменения числа пар полюсов статорной обмотки р;
в) изменения частоты тока питающей сети f.
Регулирование скорости путем изменения скольжения.
Наиболее простым и распространенным способом регулирования скорости двигателей с контакными кольцами является введение в цепь ротора дополнительного сопротивления. В результате этого изменяется величина скольжения и, следовательно .изменяется и скорость. Величина максимального момента ММакс остается постоянной, а величина соответствующего ему скольжения и наклон характеристики меняются. Таким образом, скорость можно регулировать только вниз от номинальной скорости с диапазоном (2—3) : 1. Плавность регулирования скорости зависит от числа ступеней включаемого сопротивления. Регулировочные сопротивления должны быть рассчитаны на длительную нагрузку током.
Рекламные предложения на основе ваших интересов:
Регулируя скорость таким образом, следует иметь в виду, что при мощности, уменьшающейся пропорционально скорости вращения, работа допускается в течение коротких отрезков времени (не свыше 0,5 ч) с интервалами, превышающими длительность рабочего периода в 3—4 раза. Длительная работа двигателя на пониженной скорости допустима только при соответствующем снижении момента вращения.
Регулирование скорости с помощью добавочного сопротивления в цепи ротора имеет недостатки: при нем неизбежны значительные потери энергии и снижение жесткости механической характеристики. Кроме того, оно приводит к неустойчивой работе электродвигателя на малых оборотах; в этом случае приходится включать большие сопротивления, что увеличивает крутизну характеристик и влечет за собой колебания скорости вращения при небольших изменениях момента сопротивления нагрузки. Вместе с тем данный способ регулирования скорости находит сравнительно широкое применение для электропривода механизмов с повторно-кратковременным режимом работы, как, например, в крановых установках, а также в приводах с вентиляторным моментом.
Искусственные механические характеристики при различных сопротивлениях в цепи ротора были приведены на рис. 25.
Регулирование скорости вращения двигателя изменением числа пар полюсов. Переключая обмотки статора на различные соединения, дающие разное число пар полюсов, можно изменять ступенями скорость вращения двигателя. Такое регулирование скорости экономично и дает механические характеристики, обладающие большой жесткостью, вследствие чего двигатели с изменением числа полюсов — многоскоростные — находят широкое применение в приводных, не требующих плавного регулирования скорости. Переключение числа пар полюсов достигается изменением схемы соединений статорной обмотки. Чтобы не производить переключений в роторной обмотке, двигатели с переключением полюсов выполняются с короткозамкнутым ротором. Промышленность выпускает двух-, трех- и четырехскоростные двигатели с короткозамкнутым ротором.
При выборе многоскоростного двигателя следует обращать внимание на характер изменения номинального момента и номинальной мощности при переходе от одной скорости к другой.
Для четырехскоростных двигателей можно получать следующие синхронные скорости вращения в об/мин: 3000/1500/1000/500; 3000/1500/750/375; 1500/1000/750/500; 1000/750/500/375. Диапазон регулирования скорости достигает (6: 1) — (8: 1). На рис. 29 приведены механические характеристики двухскоростных асинхронных двигателей. При переходе с высшей скорости вращения на низшую двигатель переходит в генераторный режим с отдачей энергии в сеть.
Регулирование скорости изменением частоты питающего тока. Регулирование скорости двигателя путем изменения частоты питающего тока позволяет иметь плавное регулирование в широком диапазоне (10: 1). Механические характеристики двигателя при этом достаточно жесткие и обеспечивают стабильную работу привода. В случае поддержания магнитного потока двигателя неизменным регулирование его скорости производится при постоянном моменте. Для этого необходимо при изменении частоты в том же направлении и в той же кратности изменять и величину напряжения, т. е. обеспечивать постоянство отношения —.
Рассматриваемый способ регулирования скорости может быть применен для одного или нескольких асинхронных двигателей, работающих в одном и том же режиме.
Рис. 29. Механические характеристики двухскоростных асинхронных двигателей трехфазного тока а — при постоянном моменте и различных номинальных мощностях при высшей и низшей скоростях; б — постоянная номинальная мощность, но различные номинальные
Ток различной частоты получается при помощи независимого источника энергии, частота которого может быть регулируемой. К таким источникам относятся преобразователи частоты электромашинные, электронно-ионные и полупроводниковые.
Несмотря на высокие начальные затраты на оборудование и сложную схему, частотный принцип регулирования скорости применяется в некоторых случаях в промышленности, главным образом для одновременного регулирования скорости вращения группы асинхронных двигателей одного производственного механизма. В электроприводах строительных машин этот способ регулирования скорости пока еще не нашел применения.
Регулирование скорости при помощи дросселей насыщения. Основным элементом управления при этом способе регулирования является дроссель насыщения (рис.30). На сердечнике дросселя имеется обмотка постоянного тока, включаемая в цепь управления. Вторая обмотка переменного тока находится в силовой цепи, подающей питание к обмотке статора двигателя. При изменении величины постоянного тока в обмотке управления дросселя изменяется индуктивное сопротивление его основной обмотки переменного тока, включенной в цепь статора. Вследствие этого изменяется напряжение, подводимое к статору двигателя. Мощность, потребляемая в цепи управления постоянного тока, незначительна, порядка одного или нескольких процентов от мощности силовой цепи.
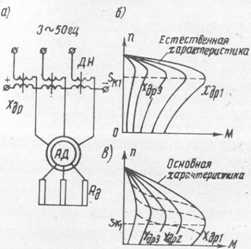
Рис. 30. Схема асинхронного двигателя
а — с дросселями насыщения в цепи статора; б — механические характеристики двигателя без добавочного сопротивления; в — то же, с добавочным сопротивлением в цепи ротора двигателя
Большие преимущества дроссельное регулирование имеет при управлении кранами. Они заключаются в том, что эта система управления обеспечивает: широкий диапазон регулирования скорости, плавность изменения скорости при спуске груза и торможении, достаточную независимость регулирования скорости от нагрузки, контроль за величиной ускорения. Кроме того, она ограничивает величину поднимаемого груза и позволяет управление мощным силовым приводом выполнять путем изменения небольшого по величине тока в цепи намагничивания дросселя. Дроссельное управление целесообразно применять для строительных и других видов кранов с большой высотой подъема в тех случаях, когда наряду с высокой скоростью, необходимой для обеспечения достаточной производительности, требуются малые посадочные скорости, а толчки и раскачивание грузов недопустимы.
Асинхронный электропривод с дросселями насыщения находит также применение для механизмов, работающих в тяжелых условиях (при наличии агрессивной или взрывоопасной среды), поскольку в таком приводе можно создать схемы бесконтактного управления им.
Наиболее благоприятным видом нагрузки для рассматриваемого метода регулирования является вентиляторная нагрузка (центробежные насосы и вентиляторы), так как в этом случае при снижении скорости, а следовательно, и возрастании скольжения уменьшается величина момента, благодаря чему потери в цепи ротора при расширении диапазона регулирования не увеличиваются.
Недостатком дроссельного регулирования является значительное уменьшение максимального вращающего момента двигателя при снижении напряжения в цепи статора, так как у асинхронных двигателей момент пропорционален квадрату напряжения. Кроме того, включение дросселя насыщения, обладающего большой индуктивностью, приводит к снижению коэффициента мощности установки.
Регулирование скорости вращения при помощи электромагнитной муфты скольжения. Этот метод регулирования скорости предусматривает установку между валом приводного двигателя и валом производственного механизма электромагнитной муфты скольжения. Обе части муфты вращаются, причем ведущая часть соединена с приводным двигателем, работающим практически с неизменной скоростью (рис. 31). Ведомая часть муфты соединяется с производственным механизмом, скорость которого должна регулироваться; эта часть муфты не имеет механической связи с ведущей.
При вращении ведущей части муфты магнитное поле индуктора пересекает якорь и наводит в нем токи, взаимодействие которых с магнитным полем индуктора создает вращающий момент. Таким образом, за счет магнитной связи ведущая часть муфты увлекает за собой ведомую. С целью повышения жесткости характеристик и увеличения диапазона регулирования скорости обычно вводят обратные связи по скорости с помощью центро-)ежного регулятора или тахогенератора. Рассматриваемый метод регулирования скорости обеспечивает плавное и в широком диапазоне (примерно 8 : 1) регулирование. Общий к. п. д. привода определяется произведением к. п. д. муфты и к. п. д. приводного двигателя. Потери в самой муфте определяются в основном потерями скольжения, выделяющимися в якоре муфты. Если принять за 100% мощность, потребляемую производственным механизмом, то установленная мощность электропривода с электромагнитной муфтой должна составлять 200%. В последние годы рассматриваемый способ регулирования скорости начинает широко применяться.
Рис. 31. Электромагнитная муфта скольжения
1 — ротор, связанный с валом электродвигателя; 2 — якорь; 3 — зубцы с обмоткой; 4 — контактные кольца; 5 — щетки; 6 — ведомый вал механизма
Получение устойчивых низких скоростей асинхронного привода. В подъемных и других установках иногда необходимо осуществлять достаточно плавную остановку. С этой целью важно перед полной остановкой производить торможение с малой скоростью.
Получение пониженной скорости возможно при совместной работе двух связанных асинхронных двигателей, один из которых работает в двигательном режиме, другой— в режиме противовключения. Электрическая часть и механические характеристики привода приведены на рис. 32.
Более жесткую механическую характеристику при пониженной скорости можно получить в том случае, когда первая машина работает в двигательном режиме, а вторая — в режиме динамического торможения. Режим динамического торможения второй машины осуществляется путем подключения обмоток статора к источнику постоянного тока. Электрическая схема и механическая характеристика приведены на рис. 33.
Работа на пониженной скорости может быть достигнута также и при одном асинхронном двигателе. Применяемая для этого электрическая схема и механические характеристики приведены на рис. 34. Введением полупроводникового выпрямителя ВП достигается совмещение двигательного и тормозного режимов. Результирующая характеристика 2 на рис. 34 обладает значительной жесткостью при малых скоростях.
Рассмотренные способы регулирования для получения низких скоростей обладают малым к.п.д., поэтому не применяются при длительных режимах работы.
Рис. 32. Механические характеристики двух асинхронных двигателей’ при работе одного из них в режиме противовключения
Рис. 33. Механические характеристики двух асинхронных двигателей при работе одного из них в режиме динамического торможения
Рис. 34. Механические характеристики асинхронного двигателя (работа на пониженной скорости)
1 — реостатная; 2 — при совмещении двигательного и тормозного режимов
Существуют также более сложные системы регулирования скорости вращения асинхронных двигателей, например импульсная, каскадная и некоторые другие.
Рекламные предложения:
Читать далее: Механическая и угловая характеристики синхронных электродвигателей
Категория: — Электрооборудование строительных машин
Главная → Справочник → Статьи → Форум
stroy-technics.ru
Регулирование скорости вращения асинхронных электродвигателей
Из уравнения механической характеристики (97) вытекает, что регулирование скорости вращения асинхронных электродвигателей можно осуществить:
изменением частоты питающего тока;
изменением числа «ар полюсов обмотки статора;
введением дополнительных сопротивлений в цепь обмотки ротора.
Первые два способа используются для регулирования скорости вращения электродвигателей с короткозамкнутым ротором, а последний — электродвигателей с фазным ротором (с контактными кольцами).
Регулирование скорости вращения изменением частоты питающего тока используется очень редко, так как этот способ применим лишь в случае, когда электродвигатель питается от отдельного генератора. В этом случае для регулирования скорости необходимо менять скорость вращения питающего генератора в такой же пропорции, е какой должна меняться скорость регулируемого электродвигателя. Бели же электродвигатель питается от сети трехфазного тока, то осуществить регулирование его скорости изменением частоты невозможно. На практике регулирование скорости изменением частоты применяется лишь в. гребных электрических установках переменного тока, в которых мощные гребные электродвигатели получают питание от отдельных генераторов и поэтому частоту питающего тока можно регулировать произвольно.
Наиболее часто на практике применяется второй способ, позволяющий достаточно просто осуществлять ступенчатое регулирование скорости вращения асинхронных электродвигателей с короткозамкнутым ротором. Если имеется возможность изменять число пар полюсов обмотки статора [см. формулу (80)] то, следовательно, имеется возможность ступенчатого регулирования скорости вращения электродвигателя, так как число пар полюсов может быть равно 1, 2, 3 и т. д. Электродвигатели, допускающие переключение числа пар полюсов, должны иметь в пазах статора либо несколько независимых обмоток, либо одну обмотку со специальным переключающим устройством. Отечественная промышленность выпускает двух-, трех- и четырех- скороетные электродвигатели, используемые :в основном на морском транспорте и на некоторых кранах. Когда числа полюсов значительно отличаются друг от друга, двух скор осиные электродвигатели изготовляются с двумя независимыми обмотками. Одна, например, может быть выполнена на 2р = 2, а вторая на 2р = 8 полюсов. Тогда при подключении к сети первой обмотки магнитное поле статора будет вращаться со скоростью n1 = 60·50 / 1 = 3000 об /мин, а при подключении к сети второй обмотки — со скоростью n1 = 60·50 / 4 = 750 об /мин. Соответствующим образом будет изменяться при этом и скорость вращения ротора n2 = n1 (1—s).
Часто в пазы статора двухскоростного электродвигателя закладывают одну обмотку, но выполняют ее так, чтобы можно было включать ее при необходимости треугольником (рис. 49, а) и двойной звездой (рис. 49, б). При включении такой обмотки треугольником число полюсов равно 2р = 2а, а при включении двойной звездой 2р = а (где а — любое целое число), т. е. при переходе от треугольника к двойной звезде число пар полюсов статорной обмотки уменьшается вдвое, а скорость электродвигателя возрастает вдвое.
Регулирование переключением числа пар полюсов применяется только для электродвигателя с короткозамкнутым ротором, потому что у электродвигателей с фазным ротором одно
временно с переключением обмотки статора требуется переключать и обмотку ротора, что усложняет конструкцию электродвигателя и переключающего устройства. Данный способ регулирования скорости отличается высокой экономичностью, но он не лишен и недостатков. В частности, регулирование скорости происходит не плавно, а скачками, требуется довольно сложное переключающее устройство, в особенности при числе скоростей большем двух; при переходе с одной скорости на другую разрывается цепь статора, при этом неизбежны толчки тока и момента, коэффициент мощности при низших скоростях ниже, чем при высших из-за увеличения рассеяния магнитного потока.
Регулирование скорости введением дополнительных сопротивлений в цепь ротора возможно только у электродвигателей с фазным ротором. Согласно уравнению (97), при введении различных активных сопротивлений в цепь ротора жесткость характеристик изменяется (рис. 50), т. е. при одной и той же нагрузке скорость электродвигателя будет различной. Очевидно, чем выше величина дополнительного сопротивления, тем мягче искусственная характеристика и тем ниже скорость электродвигателя.
Допустим электродвигатель работает с установившейся скоростью n1 на естественной характеристике а в точке 1, развития некоторый вращающий момент М1 = Мc. При введении в цепь ротора некоторого сопротивления R1 электродвигатель перейдет на работу по характеристике b, уравнение которой
Так как в момент включения сопротивления скорость электродвигателя практически не изменится, переход с характеристики а на характеристику b произойдет по горизонтали 1—2, причем вращающий момент электродвигателя снизится до М2, который меньше момента сопротивления механизма М, поэтому скорость электродвигателя будет падать, а скольжение возрастать. При возрастании скольжения момент, согласно выражению (92), увеличивается до тех пор, пока момент электродвигателя вновь не станет равным моменту сопротивления механизма, после чего наступит равновесие моментов и двигатель будет вращаться с новой установившейся скоростью n3 (точка 3).
При необходимости дополнительно может быть включено сопротивление R2. Тогда скорость электродвигателя снизится до величины n5. При отключении сопротивлений скорость электродвигателя будет возрастать, при этом переход с одной характеристики на другую происходит в обратном порядке, как показано на рис. 50.
Последний способ позволяет получить широкий диапазон скоростей, но является крайне неэкономичным, так как при увеличении активного сопротивления цепи ротора растут потери энергии в электродвигателе, а значит уменьшается его к. п. д. Сами регулировочные реостаты, особенно для мощных электродвигателей, получаются громоздкими и выделяют много тепла.
Необходимо также иметь в виду, что большинство электродвигателей в настоящее время выполняется с самовентиляцией.
Вследствие этого при понижении скорости вращения охлаждение ухудшается и электродвигатель не может развивать номинальный вращающий момент.
vdvizhke.ru
Как повысить эффективность электродвигателя — Fluidbusiness
Большинство насосов приводятся в действие с помощью асинхронных электродвигателей, это означает, что двигатели вносят вклад в общую эффективность насосной системы.Данная статья посвящена исследованию ключевых аспектов эффективности электродвигателя, которые находятся под контролем пользователя. 2/3 всей вырабатываемой электроэнергии, потребляются электродвигателями, которые используются в различном оборудовании на промышленных площадках всего мира.
Электродвигатели развиваются на протяжении последних 150 лет. Не смотря на то, что существует большой выбор из различных конструкций двигателей (например синхронные, асинхронные или постоянного тока), наиболее используемым в промышленности на сегодняшний день является асинхронный электродвигатель переменного тока, т.к. является более надежным. Также асинхронный электродвигатель предпочтительнее при использовании частотного преобразователя. Достаточно высокая эффективность в сочетании с простотой изготовления, высокой надежностью и низкой ценой делает его самым широко-применяемым типом двигателя по всему миру.
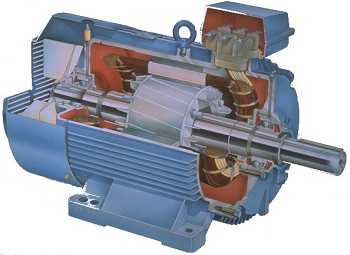
Рисунок 1: Асинхронный электродвигатель с короткозамкнутым ротором
На рисунке 1 показана обычная компоновка асинхронного электродвигателя с тремя обмотками статора, которые расположены вокруг сердечника. Обмотка ротора состоит из медных или алюминиевых стержней, торцы которых накоротко замкнуты кольцами. Кольца изолированы от ротора. В подшипниковом узле, как правило, используются шарикоподшипники с консистентной смазкой, за исключением очень больших двигателей. Смазка масляным туманом может значительно увеличить срок службы подшипников. Во всех асинхронных электродвигателях используется трехфазный ток, за исключением самых маленьких промышленных процессов (ниже 2 л.с.). Для запуска фазных двигателей необходимы другие средства, такие как щетки или конденсаторный пуск (использование конденсатора во время пуска).
Проблема эффективности двигателя
При использовании электродвигателя в качестве привода насоса потери энергии и падение давления в результате неэффективности насоса обычно гораздо больше, чем потери энергии связанные с неэффективностью электродвигателя, но они не являются незначительными. Оптимизация эффективности электродвигателя насоса может обеспечить реальную экономию стоимости рабочего цикла на протяжении всего срока службы насоса/электродвигателя. Ключевыми факторами, которые влияют на эффективность асинхронного двигателя являются:
- относительная нагрузка двигателя (негабаритные двигатели находящиеся под нагрузкой)
- скорость вращения (число полюсов)
- размер двигателя (номинальная мощность)
- класс двигателя: обычный КПД в сравнении с энергоэффективностью в с равнении с высоким КПД
Эффективность электродвигателя при частичной загрузке
Как показано на рисунке 2, эффективность асинхронного электродвигателя изменяется вместе с
относительной нагрузкой на электродвигатель по сравнению с номинальной характеристикой. Вплоть до нагрузки в 50% эффективность большинства электродвигателей остается линейной и для некоторых электродвигателей достигает пика у отметки 75%. Электродвигатели могут работать при нагрузке меньше 50% только в течение короткого промежутка времени и не могут эксплуатироваться при нагрузках меньше 20% от номинальных. Таким образом, когда отрегулированные рабочие колеса или насосы возвращаются к своим кривым «напор-подача», необходимо оценить воздействие относительной нагрузки на электродвигатель. 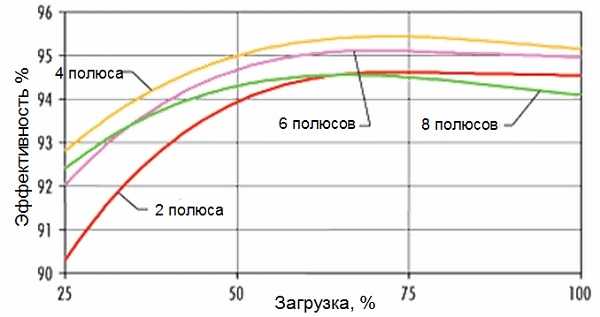
Рисунок 2: Эффективность электродвигателя для 100-сильных моторов — Обычные кривые характеристик при нормальном диапазоне нагрузок электродвигателя
Скорость вращения
На рисунке 2 также показано влияние скорости вращения на максимально-достижимую эффективность. 4-х полюсный электродвигатель при номинальных 1800 об/мин выходит на самый высокий КДП, а 2-х полюсный при номинальных 3600 об/мин дает низкую эффективность. Таким образом, хотя насосы с номинальной частотой вращения 3600 об/мин могут быть более эффективными (и иметь низкую закупочную стоимость), чем насосы со скоростью вращения 1800 об/мин, электродвигатели последних могут быть более эффективными, плюс эти насосы, как правило, имеют более низкий NPSHR и энергию всасывания, не говоря уже о более длительном сроке службы. Также следует отметить, что номинальная мощность электродвигателя влияет на его эффективность, большие электродвигатели имеют большую эффективность, чем малые.
Скорость вращения асинхронного электродвигателя
Синхронная скорость вращения асинхронного электродвигателя рассчитывается по следующей формуле:
n = 120*f/p
где:
n = скорость вращения в об/мин
f = частота питающей сети (Гц)
p = количество полюсов (min = 2)
Для регулирования частоты вращения электродвигателя без использования внешних механических устройств необходимо регулировать напряжение и частоту подаваемого тока. Некоторые электродвигатели могут быть изготовлены с несколькими обмотками (количество полюсов) для достижения двух или более различных скоростей вращения.
Асинхронные электродвигатели вращаются со скоростью, которая меньше скорости вращения магнитного поля (на 1-3% при полной нагрузке). Разница между фактической и синхронной частотой вращения называется скольжением. Для новых более энергоэффективных электродвигателей скольжение имеет тенденцию уменьшаться в отличие от старых электродвигателей с обычным КПД. Это означает, что при заданной нагрузке энергоэффективные электродвигатели работают немного быстрее.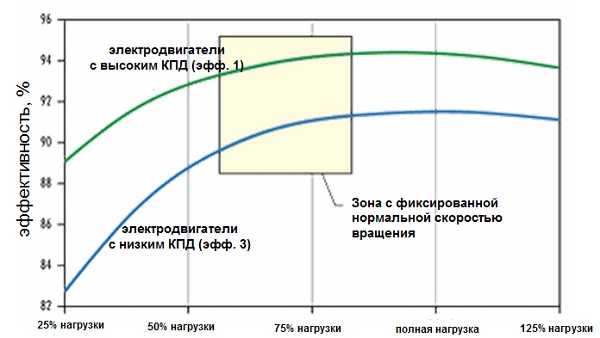
Рисунок 3. Эффективность при полной и частичной загрузке двигателя с низким и высоким КПД
Электродвигатели с высоким КПД
На рисунке 3 изображен пример возможного повышения эффективности, когда старый электродвигатель с обычной эффективностью заменяется новым, имеющим более высокий КПД. Как упоминалось ранее, электродвигатели с высоким КПД работают с меньшим скольжением, что дает некоторое увеличение скорости вращения, а следовательно напор насоса и производительность становятся несколько больше.
Однако, использование электродвигателей с высоким КПД в некоторых (с изменением подачи) процессах будет не оправданно, из-за большей скорости вращения (и напора насоса), до тех пор пока существующие электродвигатели по-прежнему слабо загружены (работающие с низким КПД). Т.к. входная мощность на валу насоса пропорциональна скорости в кубе, простая замена старого электродвигателя новым с высоким КПД не обязательно приведет к снижению потребления энергии.
С другой стороны, если немного большая подача и напор для насоса — это хорошо, замена старого
электродвигателя с обычным КПД на новый с высоким КПД может быть оправдана.
Коэффициент мощности электродвигателя
Другая проблема, которая входит в игру с характеристиками асинхронного электродвигателя (которая имеет косвенное влияние на энергопотребление) называется «Коэффициент Мощности«. Некоторые
коммунальные предприятия обязывают клиентов платить дополнительные сборы за низкие значения
коэффициентов мощности. Потери в сети происходят за счет того, что при меньшем коэффициенте
мощности требуется большее количество тока, что приводит к серьезным потерям энергии. Как и КПД,
коэффициент мощности электродвигателя также снижается с уменьшением нагрузки на него практически по линейному закону приблизительно до 50% нагрузки.
Определение коэффициента мощности:
Фазовый сдвиг (задержка) синусоидальной волны тока от синусоиды напряжения, который выбарабывает меньшее количество полезной мощности.
Сдвиг, вызванный необходимым током намагничивания двигателя
PF = Pi/KVA
Где:
KVA = VxIx(3)0.5/1,000
Нижняя формула показывает, как коэффициент мощности влияет на входную мощность трехфазного
электродвигателя (кВт). Обратите внимание, что чем ниже коэффициент мощности (больший сдвиг фазы ток-напряжение VA), тем меньше входная мощность при данном входном токе и напряжении.
Где:
Pi = VxIxPF(3)0.5/1,000
Pi= трехфазный вход кВт
V= среднеквадратичное напряжение (среднее от 3 фаз)
I= среднеквадратичное значение силы тока в амперах (берется от 3 фаз)
PF= коэффициент мощности в виде дроби
Хотя коэффициент мощности не влияет напрямую на КПД электродвигателя, он оказывает влияние на потери в сети, как это упоминалось выше. Однако, есть способы увеличения PF (коэффициента мощности), а именно:
- покупка электродвигателей с изначально высоким PF
- не покупайте слишком большие электродвигатели (коэффициент мощности падает вместе с уменьшением
- нагрузки на электродвигатель)
- установка компенсирующих конденсаторов параллельно с обмотками электродвигателя
- увеличить полную загрузку коэффициента мощности до 95% (Max)
- преобразование в привод с частотным регулированием
Пусковые конденсаторы электродвигателей являются одним из наиболее поппулярных способов увеличения коэффициента мощности и имеют следующий список преимуществ:
- увеличение PF
- меньшение реактивного тока от электрооборудования через кабели и пускатели электродвигателейменьшее тепловыделение и потери мощности кВт
- По мере уменьшения нагрузки на электродвигатель растет возможность экономии, а PF
- падает ниже 60%-70%. (возможная экономия 10%)
- Уменьшение сборов за коэффициент мощности
- Увеличение общей производительности системы
- Интеллектуальная система управления электродвигателем
- Частотно-регулируемый электропривод
Более высокое напряжение
Другим способом повышения КПД электродвигателя является повышение рабочего напряжения. Чем выше напряжение, тем ниже ток и, тем самым будут ниже потери в сети. Однако, высокое напряжение приведет к увеличению цены частотно-регулируемого привода и сделает работу более опасной.
Выводы
Таким образом, когда вы пытаетесь сократить энергопотребление насосных систем не забывайте о
КДП электродвигателя и факторах, перечисленных выше, которые на него влияют.
www.fluidbusiness.ru
Регулирование скорости вращения двигателей постоянного тока
>С увеличением нагрузки на валу двигателя увеличивается так же и ток в якоре. Это вызывает увеличение падения напряжения» сопротивлении обмотки якоря и щеточных контактах.
Так как ток возбуждения остается неизменным (машина нерегулируема), то магнитный поток также постоянен. Однако при увеличении тока в якоре увеличивается размагничивающее действие потока реакции якоря и магнитный поток Ф несколько уменьшится. Увеличение Iяrя вызывает уменьшение скорости двигателя, а уменьшение Ф увеличивает скорость. Обычно падение напряжения влияет на изменение скорости в несколько большей степени, чем реакция якоря, так что с увеличением тока в якоре скорость уменьшается. Изменение скорости у двигателя этого типа незначительно и не превышает 5% при изменении нагрузки от нуля до номинальной, т. е. двигатели параллельного возбуждения имеют жесткую скоростную характеристику.
При неизменном магнитном потоке зависимость момента от тока в якоре представится прямой линией. Но под воздействием
Вращающий момент двигателя реакции якоря с увеличением нагрузки происходит некоторое уменьшение магнитного потока и зависимость момента пойдет несколько ниже прямой линии.
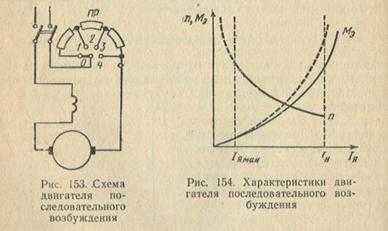
Схема двигателя последовательного возбуждения показана на рис. 153. Пусковой реостат этого двигателя имеет только два зажима, так как обмотка возбуждения и якорь образуют одну последовательную цепь. Характеристики двигателя изображены на рис. 154. Число оборотов двигателя последовательного возбуждения определяется следующим выражением:
где rс— сопротивление последовательной обмотки возбуждения. В двигателе последовательного возбуждения магнитный поток не остается постоянным, а резко изменяется с изменением нагрузки, что вызывает значительное изменение скорости. Так как падеже напряжения в сопротивлении якоря и в обмотке возбуждения очень мало в сравнении с приложенным напряжением, то число оборотов можно приближенно определить следующим выражением:
Если пренебречь насыщением стали, то можно считать магнитный поток пропорциональным току в обмотке возбуждения, который равен току в якоре. Следовательно, у двигателя последовательного возбуждения скорость вращения обратно пропорциональна току в якоре и число оборотов резко уменьшается с увеличением нагрузки, т. е. двигатель имеет мягкую скоростную характеристику. С уменьшением нагрузки скорость вращения двигателя увеличивается. При холостом ходе (Iя=0) скорость двигателя беспредельно возрастает, т. е. двигатель идет в разнос.
Таким образом, характерным свойством двигателей последовательного возбуждения является недопустимость сброса нагрузки, т. е. работы вхолостую или при малых нагрузках. Двигатель имеет минимальную допустимую нагрузку, составляющую 25—30% номинальной. При нагрузке меньше минимально допустимой скорость двигателя резко увеличивается, что может вызвать его разрушение. Поэтому, когда возможны сбросы или резкие уменьшения нагрузки, использование двигателей последовательного возбуждения является недопустимым.
В двигателях очень малых мощностей сброс нагрузки не вызывает разноса, так как механические потери двигателя будут достаточно большой нагрузкой для него.
Вращающий момент двигателя последовательного возбуждения, учитывая пропорциональную зависимость между магнитным потоком и током в якоре (Ф = С’Iя), можно определить следующим выражением:
где K’=KC’
т. е. вращающий момент пропорционален квадрату тока. Однако при больших токах сказывается насыщение стали и зависимость момента приближается к прямой линии. Таким образом двигатели этого типа развивают большие вращающие моменты при малых оборотах, что имеет существенное значение при пуске больших инерционных масс и перегрузках. Эти двигатели широко используют в транспортных и подъемных устройствах.
При смешанном возбуждении возможно как согласное, так и встречное включение обмоток возбуждения.
Двигатели со встречным включением обмоток не нашли широкого применения, так как они обладают плохими пусковыми свойствами и работают неустойчиво.
Скоростные характеристики двигателей смешанного возбуждения занимают промежуточное положение между характеристиками двигателей параллельного и последовательного возбуждения.
С увеличением тока в якоре число оборотов якоря уменьшается в большей мере, чем для двигателей параллельного возбуждения, за счет увеличения магнитного потока, вызываемого увеличением тока в последовательной обмотке возбуждения. При холостом ходе двигатель смешанного возбуждения не идет вразнос, так как магнитный поток не уменьшается до нуля из-за наличия параллельной обмотки возбуждения.
При увеличении нагрузки в двигателях смешанного возбуждения увеличивается магнитный поток и вращающий момент возрастает в большей мере, чем в двигателях параллельного возбуждения, но в меньшей мере, чем в двигателях последовательного возбуждения.
§ 116 РЕГУЛИРОВАНИЕ СКОРОСТИ ВРАЩЕНИЯ ДВИГАТЕЛЕЙ ПОСТОЯННОГО ТОКА
Двигатели постоянного тока дают возможность плавно и экономично регулировать скорость вращения в широких пределах. В результате этого весьма ценного свойства двигатели постоянного тока получили широкое распространение и часто являются незаменимыми.
Число оборотов якоря двигателя при любой схеме возбуждения определяется следующим выражением:
где rс — сопротивление последовательной обмотки возбуждения (для двигателя параллельного возбуждения rс=0). Это выражение показывает, что изменение скорости вращения двигателя можно осуществить изменением напряжения сети, сопротивления цепи якоря и магнитного потока.
Регулирование скорости вращения изменением напряжения сети осуществляется в случае, когда источником электрической энергий двигателя является какой-либо генератор.
Для регулирования скорости вращения двигателя изменением сопротивления цепи якоря используется регулировочный реостат, включенный последовательно с якорем. В отличие от пускового регулировочный реостат должен быть рассчитан на длительное прохождение тока. В сопротивлении регулировочного реостата происходит большая потеря энергии, вследствие чего резко уменьшается
п. д. двигателя.
Регулирование скорости вращения якоря двигателя изменением магнитного потока производится изменением тока в обмотке возбуждения. В двигателях параллельного и смешанного возбуждения включается регулировочный реостат. В двигателях последовательного возбуждения изменение тока в обмотке возбуждения достигается шунтированием этой обмотки каким-либо регулируемым сопротивлением. Этот способ регулирования скорости не создает дополнительных потерь и экономичен.
§ 117. ПОТЕРИ И К. П. Д. МАШИН ПОСТОЯННОГО ТОКА
В машинах постоянного тока при работе происходит потеря энергии, которая складывается из следующих потерь:
1. Потери в стали Рст на гистерезис и вихревые токи, возникающие в сердечнике якоря. При вращении якоря машины сталь его сердечника непрерывно перемагничивается. На перемагничивание стали затрачивается мощность, называемая потерями на гистерезис. Одновременно, при вращении якоря в магнитном поле в сердечнике его индуктируются вихревые токи. Потери на гистерезис и вихревые токи, называемые потерями в стали, обращаются в тепло и нагревают сердечник якоря.
Потери в стали зависят от магнитной индукции и частоты перемагничивания сердечника якоря.
Магнитная индукция зависит от э. д. с. машины или, иначе, от напряжения, а частота перемагничивания — от скорости вращения якоря. Поэтому при работе машины постоянного тока в режиме генератора или двигателя потери в стали будут постоянными, не зависящими от нагрузки, если напряжение на зажимах якоря и скорость его вращения постоянны.
2. Потери энергии на нагревание проводов обмоток возбуждения и якоря протекающими по ним токами, называемые потерями в меди,— Роб.
fiziku5.ru
Регулирование скорости вращения трехфазных асинхронных двигателей
В двигателях с глубокими пазами на роторе коротко замкнутая обмотка ротора выполняется в виде тонких и высоких полос (рис. 119). При такой конструкции обмотки происходит оттеснение
тока к верхней части проводников вследствие того, что нижние части проводников сцеплены с большим числом магнитных линий потока рассеяния, чем верхние части.
Таким образом, ток, протекающий по проводникам, стремится сконцентрироваться преимущественно в верхней их части, что равносильно уменьшению поперечного сечения или увеличению активного сопротивления этих проводников.
Это явление оттеснения тока в верхние части проводников особенно сильно сказывается в момент включения двигателя, когда частота тока в роторе равна частоте тока сети, и, следовательно, при пуске в ход повышается активное сопротивление обмотки ротора, что увеличивает пусковой момент. При увеличении скорости вращения ротора частота тока в его обмотке уменьшается и ток более равномерно распределяется по сечению стержней, и при нормальной скорости вращения неравномерность распределения тока по поперечному сечению стержней почти полностью исчезает. Пусковой момент двигателей этого типа Мп= (1 ÷1,5) Мн, а пусковой ток Iп= (4÷5) Iн.
Таким образом, в двигателях с двойной короткозамкнутой обмоткой и с глубокими пазами пусковые моменты больше и пусковые токи меньше, чем у обычных короткозамкнутых двигателей.
Однако рабочие характеристики этих двигателей несколько хуже, чем обычных короткозамкнутых двигателей — несколько меньше соs , к. п. д. и максимальный момент, так как больше потоки рассеяния, т. е. больше индуктивные сопротивления обмоток ротора.
§ 97. РЕГУЛИРОВАНИЕ СКОРОСТИ ВРАЩЕНИЯ ТРЕХФАЗНЫХ АСИНХРОННЫХ ДВИГАТЕЛЕЙ
Число оборотов ротора в минуту определяется следующим выражением:
Из выражения (122) видно, что число оборотов ротора можно регулировать изменением любой из трех величин, определяющих число оборотов ротора, т. е. изменением частоты тока сети f1 числа пар полюсов р и скольжения S.
Регулирование скорости асинхронных двигателей изменением частоты тока сети сложно, так как необходим какой-либо регулирующий преобразователь частоты или генератор. Поэтому такой способ не имеет широкого применения.
Изменение числа полюсов машины возможно либо выполнением на статоре нескольких (обычно двух) обмоток с различным числом полюсов, либо одной обмотки, допускающей переключение на Различное число полюсов. Может быть помещено на статоре две обмотки, каждая из которых допускает переключение на различное число полюсов.
На рис 120 а схематически показаны две катушки одной фазы, соединенные последовательно. Ток, протекая по ним, создает магнитное поле с четырьмя полюсами.
Если изменить направление тока в одной из катушек, включив ее встречно с другой, то обмотка будет создавать двухполюсное магнитное поле (рис. 120, б). При изменении числа полюсов обмотки статора изменится скорость вращения его магнитного поля, а следовательно, и скорость вращения ротора двигателя. Этот способ регулирования скорости асинхронного двигателя экономичен, но недостатком его является ступенчатое изменение скорости. Кроме того, стоимость такого двигателя значительно возрастает вследствие усложнения обмотки статора и увеличения габаритов машин. Регулирование скорости изменением числа полюсов применяется в двигателях с короткозамкнутым ротором; в двигателях с контактными кольцами этот способ не используется, так как здесь одновременно с изменением числа полюсов обмотки статора необходимо в той же мере изменить число полюсов обмотки вращающегося ротора, что весьма сложно.
Заводы СССР выпускают двух-, трех — и четырехскоростные двигатели, например, на синхронные скорости вращения 500—750 — 1000—1500 об/мин. Такие двигатели имеют на статоре две обмотки, каждая из которых допускает переключение на различное число полюсов.
Изменить скольжение можно введением в цепь обмотки ротора регулировочного реостата, а также изменением напряжения сети. При изменении напряжения питающей сети изменяется вращающий момент двигателя, пропорциональный квадрату напряжения. При уменьшении вращающего момента начнет уменьшаться число оборотов ротора, т. е. увеличится скольжение.
Регулировочный реостат включается в цепь обмотки фазного ротора подобно пусковому реостату, но в отличие от пускового этот, реостат рассчитывается на длительное прохождение тока.
При включении регулировочного реостата сила тока в роторе уменьшится, что вызовет уменьшение вращающего момента двигателя и, следовательно, уменьшение скорости вращения или увеличение скольжения. При увеличении скольжения увеличивается э. д. с и ток в роторе. Скорость вращения или скольжения будет изменяться до восстановления равновесия моментов, т. е. пока сила тока в роторе не примет своего начального значения.
Этот способ регулирования скорости вращения может быть использован только в двигателях с фазным ротором и, несмотря на то, что является неэкономичным (так как в регулировочном реостате происходит значительная потеря энергии), имеет широкой применение.
§ 98. ОДНОФАЗНЫЕ АСИНХРОННЫЕ ДВИГАТЕЛИ
Однофазные асинхронные двигатели широко применяют при небольших мощностях (до 1—2 квт). Такой двигатель отличается от обычного трехфазного двигателя тем, что на статоре его помещается однофазная обмотка. Поэтому любой трехфазный асинхронный двигатель может быть использован в качестве однофазного. Ротор однофазного асинхронного двигателя может иметь фазную или короткозамкнутую обмотку.
Особенностью однофазных асинхронным двигателей является отсутствие начального или пускового момента, т. е. при включении такого двигателя в сеть ротор его будет оставаться неподвижным.
Если же под действием какой-либо внешней силы вывести ротор из состояния покоя, то двигатель будет развивать вращающий момент.
Отсутствие начального момента является существенным недостатком однофазных асинхронных двигателей. Поэтому они всегда снабжаются пусковым устройством.
Наиболее простым пусковым устройством являются две обмотки, помещенные на статоре, сдвинутые друг относительно друга на половину полюсного деления (90° электрических). Эти обмотки катушек питаются от симметричной двухфазной сети, т. е. напряжения, приложенные к обмоткам катушек, равны между собой ил сдвинуты на четверть периода по фазе. В этом случае токи, протекающие по катушкам, окажутся также сдвинутыми по фазе на четверть периода, что в дополнение к пространственному сдвигу катушек дает возможность получить вращающееся магнитное поле. При наличии вращающегося магнитного поля двигатель развивает пусковой момент.
Простейшую двухфазную обмотку можно представить в виде двух катушек (рис. 121), оси которых смещены в пространстве на 90° (электрических). Если по этим катушкам, имеющим одинаковое число витков, пропустить равные по величине и сдвинутые по фазе на четверть периода синусоидальные токи, т. е.
то магнитные поля этих катушек будут также синусоидальны и сдвинуты по фазе на четверть периода, т. е.
При этом вектор ВА направлен по оси катушки А — X, а вектор Вв — по оси катушки В — У.
В любой момент результирующее магнитное поле равно геометрической сумме магнитных полей катушек А и В, т. е.
Следовательно, в любой момент результирующее магнитное поле двухфазной обмотки имеет неизменное значение, равное амплитуде поля одной фазы.
Можно записать:
fiziku5.ru