принцип работы, схемы подключения, характеристики
В современных станках и высокоточном оборудовании, где важно контролировать положение конструктивных элементов устанавливается индуктивный датчик. Для чего применяется данное устройство, какие разновидности и способы подключения существуют, как оно работает, мы рассмотрим в данной статье.
Назначение
Индуктивный датчик предназначен для контроля перемещения рабочего органа без непосредственного контакта с ним. Основной сферой применения для него является станочное оборудование, точные медицинские приборы, системы автоматизации технологических процессов, измерения и контроля формы изделия. В соответствии с положениями п.2.1.1.1 ГОСТ Р 50030.5.2-99 это датчик, который создает электромагнитное поле в области чувствительности и обладает полупроводниковым коммутатором.
Сфера применения индуктивных датчиков во многом определяется их высокой надежностью и устойчивостью к воздействию внешних факторов.
Устройство
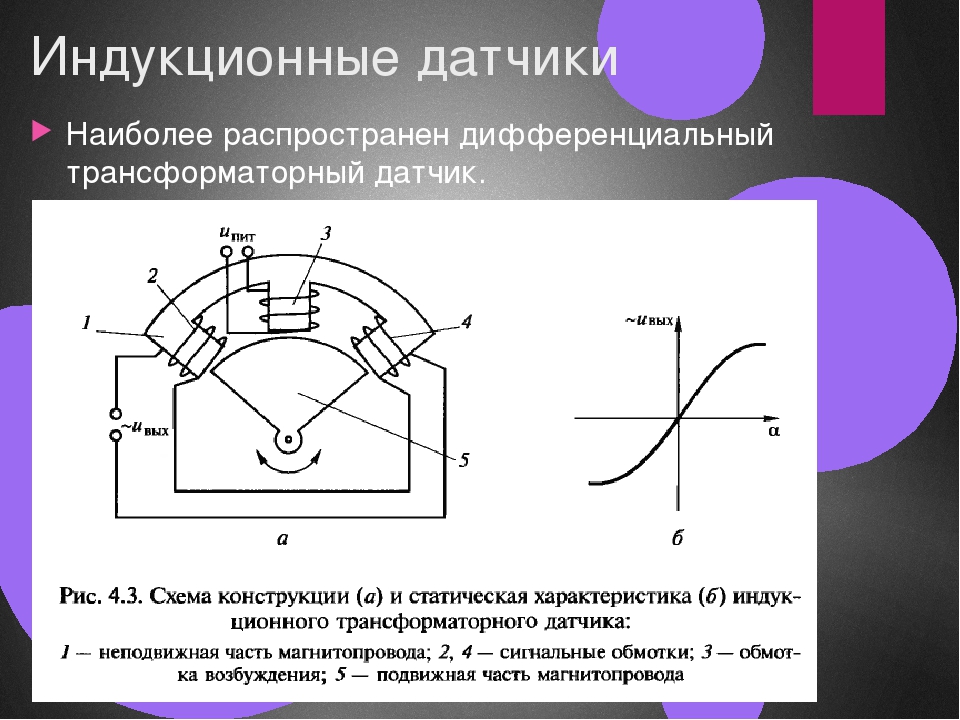
Развитие сегмента радиоэлектроники привело не только к совершенствованию первоначальных механизмов, но и к возникновению принципиально новых индуктивных датчиков. В качестве примера рассмотрим один из простейших вариантов (рисунок 1):
Рис. 1. Устройство индуктивного датчикаКак видите на рисунке, в его состав входят:
- магнитопровод или ярмо (1) – предназначен для передачи электромагнитного поля от генератора в зону чувствительности;
- катушка индуктивности (2) – создает переменное электромагнитное поле при протекании электрического тока по виткам;
- объект измерения (3) – металлический якорь, вводимый или перемещаемый в области чувствительности, неметаллические предметы не способные влиять на состояние электромагнитного поля, поэтому они не используются в качестве детектора;
- зазор между объектом измерения и основным магнитопроводом (4) – обеспечивает меру взаимодействия в качестве магнитного диэлектрика, в зависимости от модели датчика и способа перемещения может оставаться неизменным или колебаться в заданном диапазоне;
- генератор (5) — предназначен для генерации электрического напряжения заданной частоты, которое будет создавать переменное магнитное поле в заданной области.
Принцип работы
Принцип действия индуктивного датчика заключается в способности электромагнитного поля изменять свои параметры, в зависимости от значения магнитной проводимости на пути протекания потока. В основе его работы лежит классический вариант катушки, намотанной на сердечник.
При протекании электрического тока I по виткам этой катушки генерируется магнитное поле (см. рисунок 2), результирующий вектор магнитной индукции B которого определяется по правилу Правой руки. При движении магнитного поля по сердечнику, ферромагнитный материал обеспечивает максимальную пропускную способность. Но, как только линии магнитной индукции попадают в воздушное пространство, магнитная проводимость существенно ухудшается и часть поля рассеивается.
Рис. 3. Магнитное поле при введении объекта срабатыванияПри внесении в область действия поля индуктивного датчика объекта срабатывания (рисунок 3), изготовленного из металла, напряженность линий индукции резко изменяется. В результате чего усиливается поток и меняется его значение, а это, в свою очередь, приводит к изменению электрической величины в цепи катушки за счет явления взаимоиндукции. На практике этот сигнал слишком мал, поэтому для расширения предела измерения индуктивного датчика в их схему включается усилитель.
В результате чего усиливается поток и меняется его значение, а это, в свою очередь, приводит к изменению электрической величины в цепи катушки за счет явления взаимоиндукции. На практике этот сигнал слишком мал, поэтому для расширения предела измерения индуктивного датчика в их схему включается усилитель.
Расстояние срабатывания и объект воздействия
В зависимости от конструкции и принципа действия индуктивного датчика объект воздействия может иметь вертикальное или горизонтальное перемещение относительно самого измерителя. Однако реакция сенсора на начало движения контролируемого объекта может начинаться не сразу, что обуславливается номинальным расстоянием, при котором обеспечивается зона чувствительности датчика и техническими параметрами объекта.
Рис. 4. Область и объект срабатыванияКак видите на рисунке 4, в первом положении контролируемый объект находится на таком удалении, где электромагнитные линии не достигают его поверхности. В таком случае с индуктивного датчика сигнал сниматься не будет, так как он не фиксирует перемещения в зоне чувствительности.
Также расстояние срабатывания будет зависеть от геометрических размеров, формы и материала. Следует заметить, что в качестве объекта срабатывания индуктивного датчика применяются только металлические предметы, но от конкретного типа будет отличаться и момент перехода датчика в противоположное состояние, что изображено на диаграмме:
Рис. 5. Зависимость расстояния срабатывания от материалаВиды
На практике существует огромное разнообразие индуктивных датчиков, всех их можно разделить на две большие категории, в зависимости от рода питающего тока – переменного и постоянного. В зависимости от состояния контактов в соответствии с таблицей 1 р.3 ГОСТ Р 50030.5.2-99 индуктивные датчики бывают:
- замыкающий – при перемещении контролируемого объекта происходит перевод во включенное положение;
- размыкающий – в случае воздействия индуктивный датчик переводит контакты в отключенное положение;
- переключающий – одновременно объединяет оба предыдущих варианта, за одну коммутацию переводит один вывод во включенное, второй, в отключенное положение.
По количеству измерительных цепей индуктивные датчики подразделяются на одинарные и дифференциальные. Первый из них обладает одной катушкой и одной цепью измерения. Второй тип подразумевает наличие двух сенсоров, измерительные цепи которых включаются в противофазу для сравнения показаний.
Рис. 6. Одинарый и дифференциальный датчикПо способу передачи данных индуктивные датчики подразделяются на аналоговые, электронные и цифровые. В первом случае применяются те же катушки и ферромагнитные сердечники. Электронные используют триггер Шмидта вместо ферромагнетиков для получения гистерезисной составляющей. Цифровые выполняются в формате печатных плат на микросхемах. Помимо этого виды подразделяются по количеству выводов датчика: два, три, четыре или пять.
Характеристики (параметры)
При выборе индуктивного датчика для решения конкретной задачи руководствуются параметрами цепи, в которых он будет функционировать и основной логикой схемы. Поэтому обязательно проверяется соответствие их параметров:
- напряжение питания – определяет допустимый минимум и максимум разности потенциалов, при которой индуктивный датчик нормально работает;
- минимальный ток срабатывания – наименьшее значение нагрузки, при котором произойдет переключение;
- расстояние срабатывания – допустимый промежуток удаления, при котором будет происходить коммутация;
- индуктивное и магнитное сопротивление – определяет проводимость электрического тока и линий магнитной индукции для конкретной модели;
- поправочный коэффициент – применяется для внесения поправки, в зависимости от дополнительных факторов;
- частота переключений – максимально возможное количество раз коммутации в течении секунды;
- габаритные размеры и способ установки.
Примеры подключения на схемах
Конструктивные особенности индуктивных датчиков определяют количество их выводов и способ дальнейшего подключения. В виду того, что существует четыре наиболее распространенных типа, рассмотрим примеры схем их подключения.
Двухпроводных датчиков индуктивности
Рис. 7. Схема подключения двухпроводного датчикаКак видите на схеме выше, двухпроводные индуктивные датчики применяются исключительно для непосредственной коммутации нагрузки: контакторов, пускателей, катушек реле в качестве электронного выключателя. Это наиболее простая схема и модель, но работа конкретной модели сильно зависит от параметров подключаемой нагрузки.
Трехпроводных датчиков индуктивности
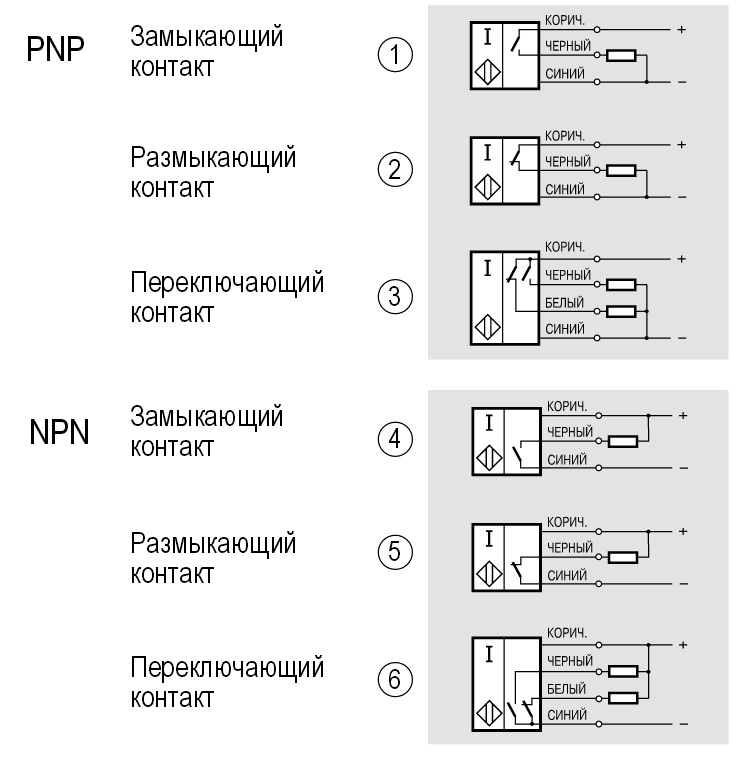
Рис. 8. Схема подключения трехпроводного датчика индуктивностиВ трехпроводной схеме присутствует два вывода на питание самого индуктивного датчика, а третий, предназначен для подключения нагрузки к нему. По способу коммутации их подразделяют на PNP и NPN, первый вид коммутирует положительный вывод, откуда и происходит название, второй тип коммутирует отрицательный вывод.
Четырехпроводных датчиков индуктивности
Рис. 9. Схема подключения четырехпроводного датчика индуктивностиПо аналогии с предыдущим датчиком, четырехпроводный также использует два вывода 1 и 3 для получения питания. А вот 2 и 4 вывод используется для подключения нагрузки с той разницей, что коммутация для обеих нагрузок будет противоположной.
Пятипроводных датчиков индуктивности
Рис. 10. Схема подключения пятипроводного датчика индуктивности В пятипроводном индуктивном датчике два вывода применяются для подачи напряжения на чувствительный элемент датчика, в рассматриваемом примере это 1 и 3. Два вывода 2 и 4 подают питание на разные нагрузки, а управляющий вывод 5 позволяет выбирать различные режимы работы и менять логику переключений.Преимущества и недостатки
В сравнении с другими типами сенсорных устройств индуктивные датчики продолжают занимать весомую нишу, наращивая темпы внедрения в различные сферы промышленности и отрасли народного хозяйства. Такое частое применение объясняется рядом весомых преимуществ:
Такое частое применение объясняется рядом весомых преимуществ:
- высокая надежность за счет простой конструкции и отсутствия подвижных контактов;
- может функционировать как от бытовой сети, так и от специальных генераторов, преобразователей и прочих источников питания;
- способны обеспечивать значительную мощность на выходе — порядка нескольких десятков Ватт;
- характеризуются высокой чувствительностью в зоне измерения.
Но, вместе с тем, существуют и недостатки индуктивных датчиков, которые не позволяют использовать их повсеместно. Среди наиболее существенных минусов являются громоздкие размеры, не позволяющие монтировать их в любых устройствах. Также к недостаткам относится зависимость параметров работы от температурных и других факторов, вносящих поправку на точность.
Использованная литература
- Алейников А.Ф., Гридчин В.А., Цапенко М.П. «Датчики» 2001
- Келим Ю. М. «Типовые элементы систем автоматического управления» 2002.

- В.В. Литвиненко, А.П. Майструк. «Автомобильные датчики, реле и переключатели» 2004
- Соснин Д. А. «Автотроника. Электрооборудование и системы бортовой автоматики современных легковых автомобилей» 2001
Принцип работы индуктивных датчиков перемещения
Предлагаем Вам ознакомиться с физическими основами работы индуктивных датчиков перемещения производства компании RDP Electronics Ltd (United Kingdom), с их основными параметрами, преимуществами и сферами применения.
Сам термин LVDT (Linear Variable Differential Transformer) — означает линейный дифференциальный трансформатор с переменным коэффициентом передачи.
Рассмотрим принцип работы датчиков на LVDT технологии.
Первичная возбуждающая обмотка
Вторичная обмотка 1
Вторичная обмотка 2
Результирующий сигнал от суммы вторичных обмоток
В принципе имеется две схемы работы — с выходным напряжением и выходным током.
|
Схема работы с выходным током (4-20мА) |
Схема работы с выходным напряжением |
Рассмотрим более детально сам процесс измерения перемещения.
Датчик перемещения, работающий по технологии LVDT, состоит из трех обмоток трансформатора — одной первичной и двух вторичных. Степень передачи тока между первичной и двумя вторичными обмотками определяется положением подвижного магнитного сердечника, штока. Вторичные обмотки трансформатора соединены в противофазе.
При нахождении штока в середине трансформатора, напряжение на двух вторичных обмотках равны по амплитуде, а т. к. они соединены противофазно, суммарное напряжение на выходе равно нулю — перемещения нет.
Если шток перемещается от серединного положения в какую либо сторону — происходит увеличение напряжения в одной из вторичных обмоток и уменьшение в другой. В результате суммарное напряжение будет не нулевым — датчик будет фиксировать смещение штока.
В результате суммарное напряжение будет не нулевым — датчик будет фиксировать смещение штока.
Соотношение выходной фазы сигнала по сравнению с фазой возбуждающего сигнала дает возможность электронике понять, в какой части обмотки находится в данный момент шток.
Основная особенность принципа работы индуктивных датчиков перемещения состоит в том, что прямой электрический контакт между чувствительным элементом и трансформатором отсутствует (связь осуществляется через магнитное поле), что дает пользователям абсолютные данные по перемещению, теоретически бесконечную точность разрешения и очень долгий срок службы датчика.
Особенности схемы работы с выходным током — т. к. цепь генератор/демодулятор встроена в сам датчик перемещения и питается от выходного тока 4-20 мА, то нет необходимости во внешнем оборудовании для формирования сигнала.
Особенности схемы работы с выходным напряжением — цепь генератор/демодулятор, встроенная в датчик перемещения обеспечивает возбуждение и преобразует сигнал обратной связи в напряжение постоянного тока. При этом так же не требуется внешнее оборудование для формирования сигнала.
При этом так же не требуется внешнее оборудование для формирования сигнала.
Особенности измерения выходного сигнала.
1) Если выходное напряжение измеряется не фазочувствительным (среднеквадратичным) вольтметром, то отклонение штока в любую сторону от центрального положения в трансформаторе датчика будет соответствовать увеличению выходного напряжения.
Заметим, что кривая не касается горизонтальной оси. Это происходит из-за остаточного выходного напряжения.
2) Если используется фазочувствительная демодуляция, то по выходному сигналу можно судить, в какой части трансформатора находится шток в данный момент.
Для формирования сигнала всегда используется фазочувствительная демодуляция, т.к. это исключает влияние на выходной сигнал остаточного выходного напряжения и позволяет пользователю знать положение штока в трансформаторе.
Диапазон линейности индуктивного датчика перемещения.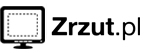
Если мы рассмотрим выходную кривую вне механического диапазона типичного LVDT датчика, то можно заметить, что на краях диапазона кривая изгибается. Это значит, что механический диапазон существенно шире линейного участка работы.
При калибровке датчика, важно, что электрическая нулевая точка используется в качестве ссылки, и что датчик используется в пределах ± FS (полного диапазона) вокруг электрического нулевом положения.
Если проводить калибровку не беря за основу точку ноля вольт, одно из положений полного диапазона будет за пределами линейного диапазона и, следовательно, может привести к ошибке линейности.
Типы индуктивных датчиков перемещения
Тип 1 — несвязанные преобразователи, которые имеют якорь, который отделен от тела корпуса. Части датчика должны быть установлены таким образом, что якорь не прикасался к внутренней трубке корпуса. Сделав это, можно получить абсолютное отсутствие трения при движении чувствительного элемента датчика.
Тип 2 — монолитные преобразователи, которые имеют тефлоновый подшипник, который направляет якорь (шток) по внутренней трубке.
Тип 3 — монолитные преобразователи с возвратной пружиной, которая толкает якорь (шток) наружу.
Внутреннее строение типичного индуктивного датчика перемещения LVDT
Преимущества индуктивных датчиков перемещения LVDT
1. Преимущества над линейными потенциометрами (POTS).
- Не имеют контакта корпуса и внутренних деталей с чувствительным элементом, что означает, что нет никакого износа при движении штока. POTS датчики имеют контакт с чувствительным элементом и могут быстро изнашиваются, особенно под воздействием вибрации.
-
Можно легко обеспечить защиту от влаги и пыли на требуемом уровне, даже стандартные версии LVDT датчиков обычно имеют гораздо лучший уровень защиты от внешний воздействий, чем POTS.

- Вибрация не вызывает влияния на пропадание сигнала, в отличие от POTS, где скользящий бегунок может прервать контакт с проводником при вибрации.
2. Преимущества над магнитострикционными датчиками.
- Не восприимчивы к ударам и вибрации.
- Менее восприимчивы к паразитным магнитным полям окружающей среды.
- Система формирования сигнала может быть удалена от чувствительного элемента на некоторое расстояние, что позволяет использовать датчики при работе с высокой температурой и высоким уровнем радиации.
- Магнитострикционные датчики не имеют короткого штока ±100мм или менее, а это как раз наиболее востребованный диапазон технического применения датчиков перемещения.
3. Преимущества над кодерами (датчиками положения).
- Имеют лучший аналоговый частотный отклик.
-
Имеют более прочный корпус.
- Сразу после включения «знают» положение штока, в отличии от кодеров, которым надо указывать постоянную ссылку на известное положение.
4. Преимущества над переменными векторными резистивными преобразователями (VRVT)
- LVDT датчики как правило более дешевы.
- Имеют меньший диаметр корпуса.
- Более прочные и не изнашиваются.
- Могут использоваться значительно дольше.
5. Преимущества над линейными емкостными датчиками
- LVDT датчики как правило более дешевы.
- Менее восприимчивы к внешним условиям эксплуатации.
- Значительно более прочные.
Особенности индуктивных датчиков перемещения LVDT
- Максимальная рабочая температура 600°C.
-
Минимальная рабочая температура –220°C (для справки, температура жидкого азота -196°C, температура жидкого гелия -269°С).

- Могут работать при уровне радиации 100,000 рад.
- Могут работать при давлении 200Бар.
- Могут работать под водой, при этом вода может попадать внутрь датчика не причиняя ему вреда. Существует специальная серия подводных датчиков, которые могут без тех. осмотра работать под водов в течении 10-ти лет, работать под водой на глубине до 2,2км. Кабельные разъемы могут подсоединяться так же под водой.
Основные сферы применения LVDT датчиков
Промышленные измерительные системы
- Регулирующие вентили — везде, где существуют регулирующие вентили индуктивные датчики перемещения могут быть использованы для контроля положения штока вентиля. Особенно, где есть ответственные участки работы, например, в клапанах пара для турбин на электростанциях.
-
Контроль положения шлюзов — погружные датчики перемещения подходят для измерения положения шлюзов в водохозяйственных и канализационных системах.

-
Измерение зазора между валками.
Для поддержания равномерной толщины проката зазор между валками часто измеряется на обоих концах. - Контроль перемещения штоков вентилей на подводных нефте/газо проводах.
- Контроль работы гидравлических активаторов — измерение перемещения объекта, который передвигает активатор. Благодаря очен высокой износостойкости, данные LVDT датчики перемещения могут выдерживать миллионы циклов перемещения.
- Контроль положения/перемещения режущих инструментов, отрезающих рулонные материалы.
- Измеряет положение/смещение роликов, которые используется для выпрямления полосового проката перед штамповкой.
-
Могут быть использованы для динамического измерения размеров (диаметров) рулонов продукта, например, инициировать сигнал к системе управления, когда рулон достигает максимального/минимального размера при наматывании/сматывании материала.

Станки
- Могут быть использованы в испытательных приспособлениях для измерения круглости, плоскостности и т.д. частей машин для анализа качества их изготовления.
- Могут быть использованы для оценки и контроля взаимного расположения компонентов деталей в сборке, когда требуется юстировка/подгонка размеров взаимного расположения деталей.
Авиация/космонавтика
- Могут быть использованы для оценки реакции привода на действие активатора. Например, преобразователь измеряет положение отклонения закрылков крыла самолета при техническом обслуживании. Тут очень важно измерить скорость срабатывания активатора после подачи на него управляющего сигнала, а так же скорость изменения положения закрылков.
-
Анализ Ротора вертолета
Датчики LVDT используются на вертолетах, чтобы измерить угол наклона лопастей ротора. -
Могут быть использованы для оценки смещения корпуса двигателя при нагревании.
- Могут быть использованы для измерения смещения (деформации) лопасти турбины при внешнем воздействии.
- Могут быть использованы для измерения отклонения диафрагмы сопла реактивного двигателя.
- Могут быть использованы для испытания крыльев самолетов для измерения их отклонения при нагрузке.
Строительство / Проектирование зданий и сооружений
- Могут быть использованы для измерения вибрации или деформации мостов при изменении трафика движения или порывов ветра.
- Могут быть использованы для измерения смещения грунта при строительстве, контроля оползней и насыпных дамб.
- Могут быть использованы при испытании крупногабаритных строительных конструкций, балок, пролетов моста и т. д. на силовую деформацию.
Автомобилестроение
- Могут быть использованы для контроля смещения корпуса двигателя при его испытаниях.
- Идеальным применением LVDT датчиков может быть тестирование компонентов подвески автотранспорта.
- Могут быть использованы для контроля изготовления прецизионных компонентов.
- Могут быть использованы для настройки компонентов двигателя, таких как дизельные форсунки.
- Могут быть использованы для тестирования сидений, дверей, педалей и ручек транспортных средств для моделирования продления их срока службы.
- Могут быть использованы для измерения профиля поверхности заготовки, например стекла или других площадных объектов.
Выработка энергии
- Могут быть использованы для измерения биения вала турбины.
- Могут быть использованы для контроля положения главного парового клапана, который регулирует поток пара в турбину. Клапан постоянно корректирует свое положения для поддержания постоянной скорости вращения турбины. LVDT датчики идеально подходят для работы в зоне высоких температур, грязи и постоянной вибрации.
- Могут быть использованы для контроля положения перепускного клапана. Когда откроется перепускной клапан, датчик может испытать температуру 200°C.
Принцип работы индуктивного датчика
В отличие от популярных в прошлом электромеханических выключателей индуктивные датчики относятся к оборудованию с бесконтактным принципом работы, т. е. для срабатывания датчику не требуется физический контакт с объектом. Это означает отсутствие механического износа, что оказывает существенное влияние на время жизни компонентов и исключает необходимость их обслуживания. В силу принципа действия индуктивные датчики используются в случаях, когда требуется определять металлический, либо изготовленный из магнитных/ферромагнитных материалов объект или предмет. Неметаллические объекты датчиком игнорируются.
В общем случае индуктивный датчик состоит из нескольких основных компонентов:
— металлический (чаще всего латунный или стальной), либо пластиковый корпус, в котором помещаются все компоненты датчика;
— катушка колебательного контура, находящаяся непосредственно за пластиковой или металлической т. н. чувствительной поверхностью датчика;
— генератор, создающий электромагнитное поле;
— триггер Шмитта, преобразующий аналоговый сигнал в логический дискретный;
— усилитель, обеспечивающий достаточный уровень выходного сигнала для дальнейшей его передачи;
— один или несколько светодиодных индикаторов – чаще всего для индикации срабатывания, но в отдельных случаях также указывающий на наличие питания датчика и статус конфигурирования;
— компаунд, которым заливается всё внутреннее пространство датчика для защиты электронных компонентов от попадания влаги и мелких частиц;
— кабель, клеммная коробка, либо разъём для подключения датчика.
Принцип действия индуктивного датчика основывается на изменении индуктивности катушки и сердечника – потому датчик и называется индуктивным. Он сводится к нескольких основным этапам:
— на датчик подаётся питание
— генератор вырабатывает магнитное поле в области катушки
— при попадании в область действия датчика металлического, магнитного или ферромагнитного объекта в нём наводятся вихревые токи, изменяющие амплитуду колебаний генератора
— изменение амплитуды обеспечивает выходной аналоговый сигнал
— триггер Шмитта преобразует аналоговый сигнал в логический дискретный
— усилитель повышает уровень сигнала до необходимого значения
Как и любое другое электронное устройство, индуктивный датчик обладает рядом основных и второстепенных параметров. Первые являются основными при подборе датчика для решения конкретной задачи, в то время как вторые позволяют установить пригодность датчика для использования в специфических условиях.
Индуктивные датчики приближения | SICK
Индуктивные датчики приближения | SICKIMM: индуктивные миниатюрные датчики
Миниатюризация на высочайшем уровне
Благодаря небольшим размерам, незначительному весу, а также точному и быстрому переключению датчики IMM идеально подходят для высокодинамичных и быстрых процессов. Другими отличительными чертами этих миниатюрных датчиков являются трёхкратное расстояние срабатывания, встроенное вспомогательное настроечное устройство и интерфейс IO-Link 1.1.
Выбор изделияIMI: Прочные цельнометаллические датчики
Твердые, тверже, самые твердые.
Цельнометаллические датчики IMI от SICK в закрытых корпусах из нержавеющей стали были разработаны для сложных случаев применения с высокими механическими и химическими нагрузками. Большие расстояния срабатывания и связь через интерфейс IO-Link обеспечивают высокую стабильность процессов и эксплуатационную готовность оборудования.
Выбор изделияIMS: прочность для мобильных технологических машин
Максимальное время работы Вашей машины
Индуктивные датчики приближения IMS с сертификатом соответствия типа Е1 оптимально подходят для использования в мобильных технологических машинах и в любых погодных условиях: защита от сброса нагрузки, высокая электромагнитная совместимость, большой диапазон напряжения и температуры, исключительная прочность и герметичность.
Выбор изделияДатчики с тройным расстоянием срабатывания
Стабильные процессы и высокая степень готовности оборудования благодаря 3хSn
Благодаря трёхкратному расстоянию срабатывания даже небольшие размеры достигают экстремальных диапазонов сканирования в несколько сантиметров. Это позволяет сэкономить место в вашей машине и снизить риск механического повреждения из-за большего расстояния до обнаруживаемого объекта. Результатом является высокая эксплуатационная готовность оборудования.
Выбор изделияИндуктивный аварийный выключатель
Контроль безопасного положения до PL е
Для контроля безопасного положения, например, в автоматически управляемых транспортных средствах, компактные индуктивные защитные выключатели от SICK играют решающую роль. Они не только миниатюрные и универсальные, но и работают бесконтактно и поэтому имеют особенно малый износ.
Выбор изделияИндуктивные датчики приближения
Готов для решения любых задач. в любой окружающей среде.
Индуктивные датчики приближения от SICK регистрируют, считают или позиционируют металлические предметы с максимальной точностью и надёжностью — практически без износа и независимо от воздействий окружающей среды.
Они впечатляют своей точностью и максимальной эксплуатационной готовностью на протяжении длительного срока службы.
подробнееIMA: аналоговые датчики
Пополнение в семействе изделий
Аналоговые индуктивные датчики приближения IMA прекрасно подходят для экономичного и надёжного контроля маршрутов передвижения и положения объектов.
Наряду с вариантами с трёхкратным расстоянием срабатывания до 40 мм теперь доступны и варианты с однократным расстоянием срабатывания до 15 мм.
Выбор изделияSmart Sensors
Поставщики информации для Индустрии 4.0
Smart Sensors генерируют и принимают данные и информацию, которые выходят за рамки классических сигналов переключения или измеренных параметров процесса. Благодаря этому, они обеспечивают значительное повышение эффективности, дают большую гибкость и улучшенную надёжность планирования для профилактического обслуживания оборудования.
подробнееQuick Filter Filter
Цилиндрический с резьбой
Цилиндрический, гладкий
Материал корпуса
Специальные случаи применения
Прямоугольный корпус (Ш x В x Г)
Особые свойства
Фильтровать по:
Расстояние срабатывания, макс.— 0 … 1 mm (3) 1 … 2 mm (10) 2 … 4 mm (17) 4 … 8 mm (14) 8 … 10 mm (5) 10 … 20 mm (12) 20 … 60 mm (5)
Применить фильтр
Температура окружающей среды работа до— 60 °C (1) 70 °C (9) 75 °C (8) 80 °C (5) 85 °C (5) 90 °C (2) 95 °C (2) 100 °C (4) 120 °C (1)
Применить фильтр
Коммуникационный интерфейс, детальное описание— IO-Link V1.0 (3) IO-Link V1.1 (1) COM2 (38,4 kBaud) (1)
Применить фильтр
Вид подключения— Кабель (16) Кабельный ввод (2) Кабель с разъемом (10) Кабель с разъемом и гайкой с накаткой (4) Разъем (20)
Применить фильтр
23 результатов:
Результаты 1 — 8 из 23
Компактные прямоугольные исполнения для применения в тяжелых условиях окружающей среды
- Размеры: 40 x 40 мм
- Увеличенное расстояние срабатывания: от 20 до 40 мм
- Электрическое исполнение: пост. ток, 3-/4-проводное
- Степень защиты: IP 68, IP 69K
- Диапазон температур: от –25 до 85 °C
- Пластмассовый корпус
- Система монтажа «замок с защелкой»
- Головка датчика, поворачивается в пяти направлениях
Простой и надёжный контроль положения до PL d
- Типоразмеры от M12 до M30
- Увеличенные области срабатывания: 4 — 15 мм
- Два выхода безопасности устройства переключения выходного сигнала.
- Класс защиты корпуса: IP67
- Диапазон температур: –25 … +70 °C
- Корпус из никелированной латуни, активная поверхность из пластмассы
- Максимальный уровень производительности PL d (EN ISO 13849)
- Варианты подключения: штекер M12, кабель или кабель со штекером M12
Простой и надёжный контроль положения до PL d
- Прямоугольная конструкция: 12 мм x 26 мм x 40 мм
- Область срабатывания: 4 мм
- Два выхода безопасности устройства переключения выходного сигнала.
- Класс защиты корпуса: IP67
- Диапазон температур: –25 … +70 °C
- Прочный корпус VISTAL®
- Максимальный уровень производительности PL d (EN ISO 13849)
- Варианты подключения: штекер M8, кабель или кабель со штекером M12
Надёжные датчики для использования в мобильных машинах
- Размеры резьбы: от М12 до М30
- Большие расстояния срабатывания: от 4 до 20 мм
- Электрическое исполнение: пост. ток, 3-проводное
- Класс защиты: IP68, IP69K
- Температура окружающей среды: от –40 °C до + 100 °C
- Прочный корпус из нержавеющей стали, активная поверхность из пластмассы
- Защита от падения нагрузки и высокая электромагнитная совместимость 100 В/м
- Сертификат соответствия E1
Датчики с коэффициентом понижения 1 для применения в сварке
- Конструкции: от M8 до M30, 40 x 40 мм и 80 x 80 мм
- Увеличенное расстояние срабатывания: до 75 мм
- Электрическое исполнение: пост. ток, 3-/4-проводное
- Класс защиты корпуса: IP68
- Диапазон температур: от –30 °C до + 85 °C
- Покрытие из политетрафторэтилена для метрических исполнений
- Коэффициент понижения 1 на всех металлах
Экономичное стандартное изделие для применения в пищевой промышленности
- Типоразмеры от M8 до M30
- Увеличенное расстояние срабатывания: от 2 до 20 мм
- Электрическое исполнение: пост. ток, 3-/4-проводное
- Степень защиты: IP 68, IP 69K
- Диапазон температур: от −40 до 100 °C
- Безопасный для пищевых продуктов корпус из нержавеющей стали, активная поверхность из пластмассы
- Визуальная сигнализация при настройке, IO-Link-ready
- Стойкость к моющим средствам, сертификат Ecolab
Прочные цельнометаллические датчики для применения в вариантах с повышенными требованиями
- Типоразмеры от M8 до M30
- Большие расстояния срабатывания: от 2 до 40 мм
- Класс защиты: IP68, IP69K
- Диапазон температур: от –25 °C до +85 °C
- На выбор, прочный или пригодный для использования в пищевой промышленности корпус, полностью изготовленный из нержавеющей стали
- IO-Link и средство визуальной настройки
- Стойкость к маслам, смазочно-охлаждающим жидкостям и чистящим средствам
Экономический стандарт для применения в промышленных условиях
- Типоразмеры от M8 до M30
- Увеличенное расстояние срабатывания: от 1,5 до 38 мм
- Электрическое исполнение: пост. ток, 3-/4-проводное, пост. ток: 2-проводное
- Степень защиты: IP 67
- Диапазон температур: от –25 до 75 °C
- Корпус из никелированной латуни, активная поверхность из пластмассы
Результаты 1 — 8 из 23
Преимущества
Надежные, высокопроизводительные, прочные. индуктивные датчики приближения фирмы «SICK»
Миллионы индуктивных датчиков приближения используются практически в любой отрасли промышленности. Они распознают металлические объекты бесконтактным способом. Индуктивные датчики — чрезвычайно надежные устройства с долгим сроком службы. Благодаря применению современной технологии ASIC, датчики фирмы «SICK» обеспечивают максимальную точность и надежность. Идет ли речь о датчиках цилиндрической или прямоугольной формы, с одинарным, двойным или тройным расстоянием срабатывания или о специальных датчиках для работы во взрывоопасных зонах — фирма «SICK» всегда предлагает подходящие решения, отвечающие поставленным требованиям. Тем самым, отраслевые и индивидуальные задачи автоматизации становятся интеллигентными и надежными.
Широкий выборМаленький или большой, цилиндрический или квадратный: широкая гамма индуктивных датчиков приближения предлагает подходящий датчик для любого случая применения. Выбирайте из большого числа различных конструктивных форм и материалов, таких как нержавеющая сталь, VISTAL®, металл, пластмасса или с тефлоновым покрытием (PTFE). В области электроустановок и технике электрических соединений в Вашем распоряжении находятся различные варианты для использования в промышленном секторе. И если среди них все-таки не окажется подходящего Вам датчика, фирма «SICK» — даже при специфических пожеланиях заказчика — быстро и несложно предложит Вам датчики, изготовленные по Вашему специальному заказу.
Надёжное обнаружение в любых условиях эксплуатации
Индуктивные датчики приближения от SICK всегда работают надёжно независимо от сложности условий эксплуатации. Они обеспечивают надёжные результаты обнаружения даже в самых жёстких условиях. Благодаря чрезвычайно прочной конструкции они стойко переносят высокие механические нагрузки от ударов или вибраций, а также устойчивы к электромагнитным помехам. Будь то пыль, грязь, экстремальные температуры или изменение температуры, влажная и мокрая среда или контакт с химикатами, такими как чистящие средства: датчикам от SICK можно доверять.
Прецизионные, высокопроизводительные и удобные для коммуникации
Благодаря новейшей технологии SICK-ASIC процессы с неисправностями и ошибками относятся к далекому прошлому. Датчики с этой технологией обладают гораздо лучшими характеристиками, чем когда-либо прежде. Все равно, о каком расстоянии срабатывания идет речь: от однократного до четырехкратного, индуктивные датчики приближения фирмы «SICK» с наивысшей точностью и надежно обнаруживают объекты. Как бы то ни было, фирма «SICK» ежедневно движется дальше в направлении будущего. Расширенные возможности диагностики, а также коммуникация через IO-Link 1.1 превращают датчики в надежные поставщики данных для «Индустрии 4.0». Благодаря интеллигентной сенсорной технике комплексные постановки задач, которые до сих пор решались в системе управления, теперь могут просто решаться непосредственно в датчике. Это упрощает профилактическое техническое обслуживание и сокращает время простоев.
Загрузки
Пожалуйста, подождите…
Ваш запрос обрабатывается, это может занять несколько секунд.
Индуктивный датчик. Принцип работы и подключение
Индуктивный датчик (inductive sensor) – это датчик бесконтактного типа, предназначенный для контроля положения объектов из металла.
Принцип работы
Работа индуктивного датчика основана на взаимодействии магнитного поля катушки, расположенной внутри датчика, и металла, из которого состоит объект.
При приближении металлического объекта (5) к катушке (3), магнитное поле (4) изменяется, что в свою очередь заставляет компаратор (2) сформировать сигнал, который впоследствии поступит на усилитель (1) и далее в цепь управления.
Параметры
Напряжение питания – диапазон напряжения, при котором датчик работает корректно.
Максимальный ток переключения — количество непрерывного тока, которое пропускаясь через датчик, не вызывает повреждение датчика.
Минимальный ток переключения — минимальное значение тока, которое должно протекать через датчик, чтобы гарантировать работу.
Рабочее расстояние (Sn) – максимальное расстояние от поверхности датчика, до квадратного куска железа толщиной 1 мм в осевом направлении. Расстояние будет уменьшаться для других материалов, зависимость Sn от материала представлена в таблице.
|
Железо |
1 x Sn |
|
Нержавеющая сталь |
0,9 х Sn |
|
Латунь — бронза |
0,5 x Sn |
|
Алюминий |
0,4 x Sn |
|
Медь |
0,4 x Sn |
Частота переключения — максимальное количество переключений датчика в секунду.
Способ подключения
Способ подключения зависит от типа индуктивного датчика.
Трехпроводные – два вывода отвечают за питание датчика, а третий подключается к нагрузке. В зависимости от структуры (NPN или PNP) нагрузка подключается к положительному (NPN) или отрицательному (PNP) полюсу источника постоянного напряжения.
Четырехпроводные – два вывода питания, два вывода подключаются к нагрузке.
Существуют также двух и пятипроводные датчики, но используются они реже из-за особенностей подключения.
Индуктивный датчик LJ12A3-4-Z/BX
Рассмотрим стандартный датчик, который наиболее часто используется в ЧПУ-станках или 3d-принтерах в качестве концевого выключателя. Датчик имеет 3 вывода и NPN структуру. Размеры датчика 12×50мм, расстояние обнаружения 4мм. Напряжение питания 6-36 В.
На реальном примере продемонстрируем работу датчика. В качестве нагрузки подключаем светодиод с токоограничивающим резистором, а затем подносим металлическую пластину к датчику.
На расстоянии менее 4 мм от пластины, датчик срабатывает и подает напряжение на нагрузку через нормально разомкнутый контакт (NO).
виды, принцип работы, схема подключения, как проверить
Работа на промышленных предприятиях требует внедрения автоматической системы управления. С этой целью применяется разное оборудование, способное обеспечить бесперебойное функционирование производственных машин. Для контроля металлических объектов не редко используют бесконтактные индуктивные датчики, обладающие как положительными, так и отрицательными качествами. Но главное, что они отличаются небольшими размерами и прекрасно выполняют возложенные функции, поэтому пользуются популярностью и у производителей бытовой и даже медицинской техники.
Общее описание и назначение
Индуктивным датчиком принято называть устройство, способное преобразовывать механические перемещений контролируемых объектов в электрический сигнал. Представляет собой одну или несколько катушек индуктивности, объединенных с магнитопроводом и подвижным якорем, который регистрирует измерения линейного или углового размера и, перемещаясь, влияет на показатель индуктивности, изменяя ее в одну или другую сторону. Благодаря такой особенности, бесконтактные датчики активно используются в качестве элементов контроля положения металлических объектов.
Виды
По схеме построения индукционные датчики принято разделять только на 2 отдельных вида: одинарные и дифференцированные.
Одинарные
Устройства только с одним магнитопроводом. Такая схема обычно применяется при разработке бесконтактных выключателей.
Дифференциальные
Отличаются наличием сразу 2-ух магнитопроводов, каждый из которых специально сделанных в виде «ш». Это позволяет взаимокомпенсировать воздействие, оказываемое на сердечник, повышая таким образом точность производимых измерений. По сути, схема представляет из себя систему из 2-ух датчиков, соединенных общим якорем.
Устройство и схема
Индукционный датчик, как и любое электронное устройство, состоит из связанных друг с другом узлов, обеспечивающих бесперебойность его работы. В качестве основных элементов аппарата можно выделить следующее.
Генератор
Ключевой задачей генератора является создание магнитного поля, на основе которого, в частности, строится принцип действия индукционного датчика, а также образуются зоны активности с объектом.
Триггер Шмидта
Триггер Шмидта представляет собой отдельный элемент, основным назначением которого считается обеспечение гистерезиса в процессе переключения устройства.
Усилитель
Усилительное устройство используется в качестве элемента, способного повышать значение амплитуды импульса, что позволяет сигналу быстрее достигать необходимого параметра.
Специальный индикатор
Диодный индикатор, свидетельствующий о фактическом состоянии контроллера. Кроме того, светодиод используется для обеспечения достаточного контроля функционирования индукционного датчика, а также, чтобы обеспечить достаточную оперативность в процессе настройки.
Компаунд
Компаунд предназначается для защиты устройства, поскольку может предотвратить попадание жидкости, в частности воды, внутрь корпуса индукционного датчика, а также снижает риск загрязнения оборудования, так как пыль может спровоцировать его поломку.
Принцип работы
Принцип действия основывается на изменениях амплитудного значения колебаний генераторного узла при попадании в активную зону устройства объекта определенных размеров. В процессе подачи электропитания на концевик оборудования в районе его чувствительной части формируется изменяющееся магнитное поле. Оно наводит в находящемся в рабочей зоне датчика материале вихревые токи, ведущие к изменению амплитуды электромагнитных колебаний.
В результате начнет вырабатываться выходной сигнал, который в процессе может изменяться в зависимости от фактического расстояния между устройством и объектом контроля.
Параметры
Чтобы контролировать функциональность индукционного датчика, а также определять уровень его сигналов, надо разбираться в параметрах устройства.
Напряжение питания
Представляет собой диапазон допустимого напряжения, в рамках которого устройство работает корректно.
Минимальный ток переключения
Это минимально возможное значение электрического тока, которое обязательно должно поступать к датчику для обеспечения его работы.
Рабочие расстояния
Это максимально допустимое расстояние от устройства до железного квадрата миллиметровой толщины. При этом данное значение уменьшается, если используется другой материал.
Частота переключения
Это максимально возможное количество переключений, которые можно сделать в течение одной секунды.
Способ подключения
Вариант подключения любого бесконтактного датчика зависит от примененной в процессе его производства схемы построения.
Трехпроводные
Трехпроводные имеют 3 проводника, 2 из которых предназначаются для обеспечения устройства питанием, а третий применяется для подключения к нагрузке. Она, в зависимости от использованной при разработке структуры, может подсоединяться к аноду либо катоду источника напряжения электрического тока.
Четырехпроводные
Четырехпроводные индукционные датчики отличаются наличием четырех проводников: 2 провода идут на питание, а другие 2 — на загрузку.
Двухпроводные
Двухпроводные устройства подключаются прямо в нагрузочную цепь. Это самый элементарный вариант, но и он обладает отдельными особенностями. Данный способ для нагрузки требует номинальное сопротивление, если же его значение окажется больше или меньше, тогда индукционный датчик не сможет корректно работать.
Внимание! При подключении устройства к источнику постоянного тока следует помнить о полярности выводов.
Пятипроводные
Пятипроводной отличается от четырехпроводного только наличием пятого проводника, который позволяет выбирать режим работы устройства.
Цветовая маркировка
Все электротехническое оборудование, в том числе проводники, обязательно имеет цветовую маркировку. Ее принято наносить для удобства последующих монтажных работ и дальнейшего обслуживания. Это правило должно соблюдаться и в случае с индукционными датчиками. Их выходные проводники маркируются следующими цветами:
- минус обычно указывается синим;
- плюс — красным;
- выход — черным;
- белый — дополнительный выход или же вход управления, что определяется типом используемого датчика.
Погрешности
Погрешности в процессе преобразования диагностических значений оказывают влияние на способности индукционных датчиков выдавать достоверную информацию. К основным из них можно отнести следующие.
Электромагнитная
Данную погрешность принято учитывать только в качестве случайной величины. Как правило, она возникает в ходе индуцирования ЭДС в индукционной катушке в результате внешнего воздействия сторонними магнитными полями. Это происходит в процессе производства из-за силовых электроустройств. Они образуют магнитные поля, что впоследствии и формирует электромагнитную погрешность.
От температуры
Эта погрешность тоже выступает в качестве случайного значения, поскольку работа большого числа элементов индукционного датчика напрямую зависит от температурных показателей, поэтому это ключевая величина, которая даже учитывается в процессе проектировки подобного оборудования.
Магнитной упругости
Обычно такая погрешность может проявляться как следствие нестабильности деформации магнитопровода устройства в процессе сборки самого датчика, а также при деформационных изменениях во время работы. Кроме того, оказываемое нестабильным электронапряжением воздействие на магнитопровод оборудования вызывает снижение качества передаваемого сигнала на выходе.
Деформация элементов
Данная погрешность, как правило, проявляется в результате воздействия измеряющей силы на значение деформации частей индукционного датчика, а также под влиянием усилий, оказываемых на нестабильные деформирующие процессы. Кроме того, не меньшее влияние на нее могут оказывать люфты и зазоры, образовавшиеся в подвижных элементах конструкции устройства.
Кабеля
Такая погрешность обычно проявляется от непостоянного значения сопротивления, в случае деформации самого провода и под влиянием температуры. Также подобным образом может сказаться наводка внешними полями ЭДС в кабеле.
Старение
Данная погрешность может проявляться при износе движущихся элементов самого устройства, а также в случае постоянно изменяющихся магнитных свойств используемого магнитопровода. Ее принято считать, строго говоря, случайным значением. В процессе определения данной погрешности учитывают кинематику конструкции индукционного датчика, а во время проектирования подобного оборудования максимальный эксплуатационный срок рекомендуется определять только при работе в обычном режиме, чтобы при этом износ не успел превысить установленного значения.
Технологии
Погрешности технологии проявляются в случае отклонений от технического процесса производства, при явном разбросе технических параметров катушек и остальных элементов во время сборки, влиянии допущенных зазоров при соединении устройства. Для ее измерения принято использовать механическое измерительное оборудование.
Сферы использования
Возможная область применения индукционных датчиков настолько велика, что позволяет использовать их не только в быту и автомобилестроении, но и в промышленности с робототехникой, а также медицине.
Медицинские аппараты
Индуктивные датчики широко используются при производстве медицинского оборудования, поскольку магнитные свойства устройства позволяют регистрировать легочную вентиляцию, параметры вибрации, а также снимать баллистокардиограммы.
Бытовая техника
В бытовом плане датчики могут выступать в качестве приспособления контроля водоснабжения, уровня освещения и положения двери (закрыта или открыта), поэтому используются при производстве, к примеру, стиральных машин и другой бытовой техники. Кроме того, устройства применяются в процессе создания элементов «умного дома».
Автомобильная промышленность
Используется индукционный датчик и в автостроении, выступая в роли контроллера, определяющего положение коленчатого вала. При приближении металлического объекта, в данном случае, зуба шестерни, к устройству, генерируемое встроенным постоянным магнитом магнитное поле увеличивается, что приводит к наведению в катушке переменного напряжения.
Внимание! Некоторые производители для повышения эффективности стараются изменить конструкцию индукционного датчика, к примеру, используя внешние магниты для его активации.
Робототехническое оборудование
В случае с робототехникой, индуктивным датчикам нашли применение в производстве беспилотных аппаратов и промышленных роботов для повышения их чувствительности к препятствиям и способности распознавать объекты, а также устройствах, для которых важна самобалансировка.
Промышленная техника регулирования и измерения
Широко используются в работе систем транспортеров, упаковочных аппаратов и сборочных линий, а еще в составе всех видов станкового оборудования и запорной арматуры. Также индуктивные датчики помогают контролировать мелкие и крупные элементы промышленной техники (зубцы шестеренок, стальные флажки, штампы), объекты производства (металлические изделия, листы металла, крышки) и т.п. Кроме того, при их подключении к импульсным счетчикам можно в результате получить элементарное, но крайне эффективное считывающее устройство.
Индукционные датчики следующего поколения
Благодаря новым разработкам в этой области, были созданы усовершенствованные модели индукционных датчиков следующего поколения. Принцип работы остался прежним, однако подверглась тщательной переработке конструкция устройства. В результате датчики теперь оснащаются тонкими платами, распечатанными на 3D-принтерах, и современной цифровой электроникой. Кроме того, их производят на гибких подложках, что избавляет от необходимости использования традиционных кабелей и разъемов. Так что пользоваться устройствами можно даже в тяжелых погодных условиях.
К преимуществам новых разработок можно отнести следующее:
- снижение стоимости и веса, более компактные размеры;
- возможность выбора практически любых форм-факторов;
- повышение точности реагирования на металлические объекты;
- возможность проведения замеров, связанных со сложной геометрией, в двух или трех измерениях;
- упрощение конструкции;
- возможность устанавливать несколько индукционных датчиков близко друг к другу из-за высокой электромагнитной совместимости.
Все это позволило увеличить эффективность и доступность устройства, а также расширить сферу его применения.
Индуктивные датчики. Виды. Устройство. Параметры и применение
Индуктивные датчики – преобразователи параметров. Их работа заключается в изменении индуктивности путем изменения магнитного сопротивления датчика.
Большую популярность индуктивные датчики получили на производстве для измерения перемещений в интервале от 1 микрометра до 20 мм. Индуктивный датчик можно применять для замера уровней жидкости, газообразных веществ, давлений, различных сил. В этих случаях диагностируемый параметр преобразуется чувствительными компонентами в перемещение, далее эта величина поступает на индуктивный преобразователь.
Для замера давления применяются чувствительные элементы. Они играют роль датчиков приближения, предназначенные для выявления разных объектов бесконтактным методом.
Виды и устройство
Индуктивные датчики разделяются по схеме построения на 2 вида:
- Одинарные датчики.
- Дифференциальные датчики.
Первый вид модели имеет одну ветвь измерения, в отличие от дифференциального датчика, у которого две измерительные ветви.
В дифференциальной модели при изменении диагностируемого параметра изменяются индуктивности 2-х катушек. При этом изменение осуществляется на одинаковое значение с противоположным знаком.
Индуктивность катушки вычисляется по формуле:
L = WΦ/IГде W– количество витков; Ф – магнитный поток; I – сила тока, протекающего по катушке. Сила тока взаимосвязана с магнитодвижущей силой следующим отношением: I = Hl/W
Из этой формулы получаем:
L = W²/RmГде R m = H*L/Ф – магнитное сопротивление.
Работа одинарного датчика заключается в свойстве дросселя, изменять индуктивность при увеличении или уменьшении воздушного промежутка.
Конструкция датчика включает в себя ярмо (1), витки обмотки (2), якорь (3), который фиксируется пружинами. По сопротивлению поступает переменный ток на обмотку. Сила тока в нагрузочной цепи вычисляется:
L – индуктивность датчика, rd – активное дроссельное сопротивление. Оно является постоянной величиной, поэтому изменение силы тока I может осуществляться только путем изменения составляющей индуктивности XL=IRн, зависящей от размера воздушного промежутка δ.
Каждой величине зазора соответствует некоторое значение тока, определяющего падение напряжения на резисторе Rн: Uвых=I*Rн – является сигналом выхода датчика. Можно определить следующую зависимость U вых = f (δ), при одном условии, что зазор очень незначительный и потоки рассеивания можно не учитывать, как и магнитное сопротивление металла Rмж в сравнении с магнитным сопротивлением зазора воздуха Rмв.
Окончательно получается выражение:
На практике активное сопротивление цепи несравнимо ниже индуктивного. Поэтому формула принимает вид:
Из недостатков одинарных можно отметить:
- При эксплуатации датчика на якорь воздействует сила притяжения к сердечнику. Эта сила не уравновешена никакими методами, поэтому она снижает точность функционирования датчика, и вносит некоторый процент погрешности.
- Сила нагрузочного тока зависит от амплитуды напряжения и ее частоты.
- Чтобы измерить перемещение в двух направлениях, нужно установить первоначальное значение зазора, что доставляет определенные неудобства.
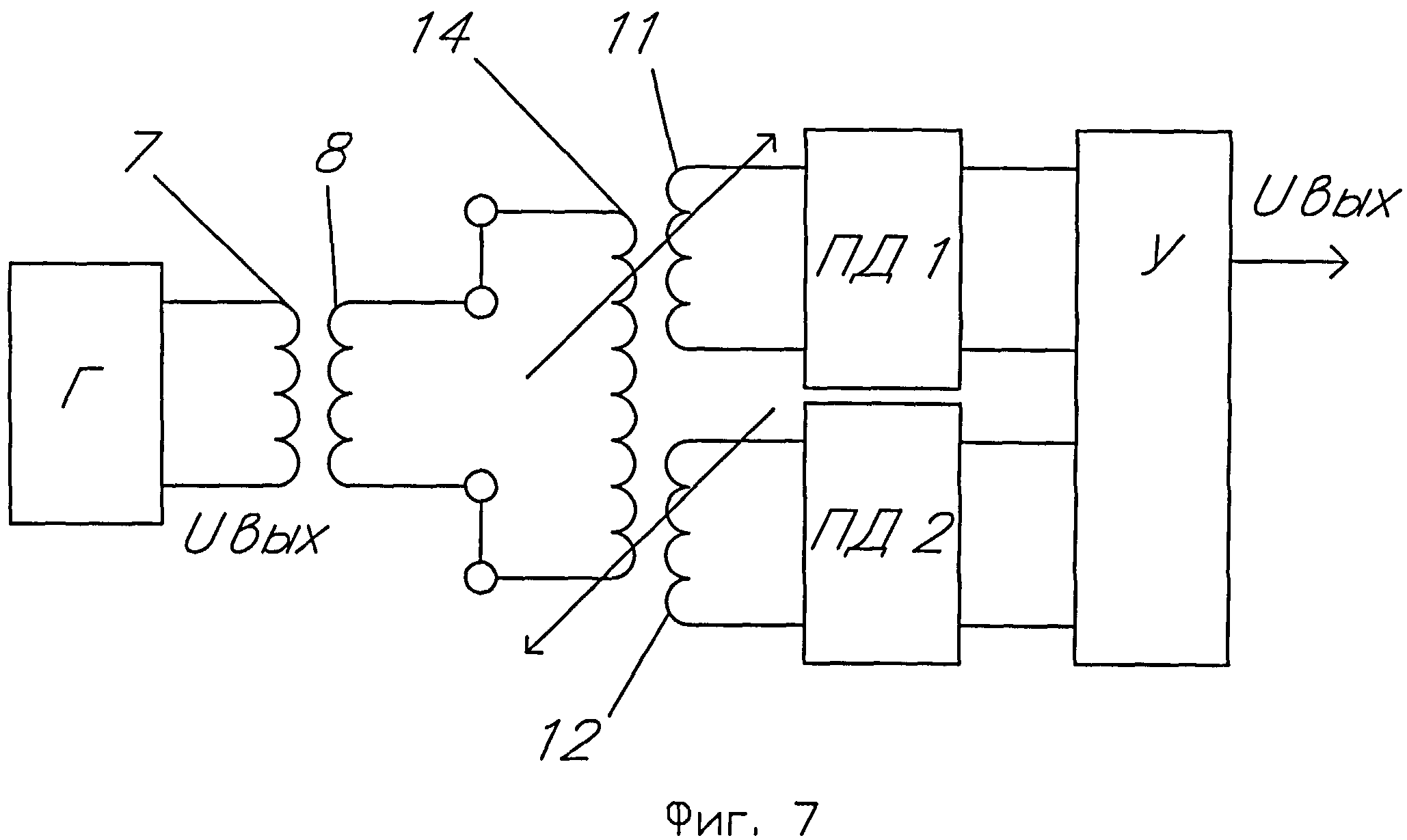
Дифференциальные индуктивные датчики объединяют в себе два нереверсивных датчика и изготавливаются в виде некоторой системы, которая состоит из 2-х магнитопроводов, имеющих два отдельных источника напряжения. Для этого чаще всего применяется разделительный трансформатор (5).
Дифференциальные датчики классифицируются по форме сердечника:
- Индуктивные датчики с Ш-образной формой магнитопровода, выполненного в виде листов электротехнической стали. При частоте более 1 килогерца для сердечника используют пермаллой.
- Цилиндрические индуктивные датчики с круглым магнитопроводом.
Форму датчика выбирают в зависимости от конструкции и ее сочетания с механизмом. Использование магнитопровода Ш-образной формы является удобным для сборки катушки и снижения габаритных размеров индуктивного датчика.
Для функционирования дифференциального датчика применяют питание от трансформатора (5), который имеет вывод от средней точки. Между этим выводом и общим проводом катушек подключают прибор (4). При этом воздушный промежуток находится в пределах от 0,2 до 0,5 мм.
При расположении якоря в средней позиции при равных промежутках индуктивные сопротивления обмоток (3 и 3′) равны. Значит, значения токов катушек также одинаковы, и общий полученный ток в устройстве равен нулю.
При малом отклонении якоря в любую сторону изменяется значение воздушных промежутков и индуктивностей. Поэтому прибор определяет ток разности I1-I2, который определен функцией перемещения якоря от средней позиции. Разность токов чаще всего определяется магнитоэлектрическим устройством (4), выполненным по типу микроамперметра со схемой выпрямления (В) на входе.
Полярность тока не зависит от изменения общего сопротивления катушек. При применении фазочувствительных схем выпрямления можно определить направление перемещения якоря от средней позиции.
Параметры- Одним из параметров индуктивных датчиков является диапазон срабатывания. По этому параметру выбирают датчики, однако он не настолько важен. В инструкции по датчику даны номинальные параметры питания при эксплуатации устройства при температуре +20 градусов. Постоянное напряжение для датчика – 24 В, а переменное 230 В. Обычно датчик работает в совершенно других условиях.
- На практике при подборе датчика важны два показателя интервала срабатывания:
— Полезный.
— Эффективный.
Показания первого вычисляются как +10% от 2-го при температуре 25-70 градусов. Показания 2-го отличаются от номинала на 10%. Интервал температуры при этом увеличивается с 18 до 28 градусов. Если при втором параметре применяется номинальное напряжение, то при первом есть разброс 85-110%.
- Другим параметром является гарантированный предел срабатывания. Он колеблется от нуля до 81% от номинала.
- Также следует учитывать параметры: повторяемость и гистерезис, который равен расстоянию между конечными позициями работы датчика. Его оптимальная величина равна 20% от эффективного интервала срабатывания.
- Нагрузочный ток. Изготовители иногда производят датчики специального исполнения на 500 миллиампер.
- Частота отклика. Этот параметр определяет наибольшую величину возможности переключения в герцах. Основные промышленные датчики имеют частоту отклика 1000 герц.
Имеется несколько видов индуктивных датчиков с различным числом проводов для подключения. Рассмотрим основные виды подключений разных индуктивных датчиков.
- Двухпроводные индуктивные датчики подключаются непосредственно в нагрузочную цепь. Это наиболее простой способ, однако в нем есть особенности. Для такого способа для нагрузки требуется номинальное сопротивление. Если это сопротивление будет больше или меньше, то устройство функционирует некорректно. При включении датчика на постоянный ток нельзя забывать о полярности выводов.
- Трехпроводные индуктивные датчики наиболее популярны. В них имеется два проводника для подключения питания, а один для нагрузки.
- Четырехпроводные и пятипроводные индуктивные датчики. У них два провода на питание, другие два на нагрузку, пятый проводник для выбора режима эксплуатации.
Маркировка проводников цветом является очень удобной для осуществления обслуживания и монтажа датчиков. Их выходные проводники промаркированы определенным цветом:
- Минус – синий.
- Плюс – красный.
- Выход – черный цвет.
- Второй проводник выхода – белый цвет.
Погрешность преобразования диагностируемого параметра влияет на способность выдачи информации индуктивным датчиком. Суммарная погрешность состоит из множества различных погрешностей:
- Электромагнитная погрешность является случайной величиной. Она появляется вследствие индуцирования ЭДС в катушке датчика наружными магнитными полями. На производстве возле силовых электрических устройств существуют магнитные поля чаще всего частотой 50 герц.
- Погрешность от температуры также является случайным значением, так как работа большого количества элементов датчика зависит от температуры и является значительной величиной, учитываемой при проектировании датчиков.
- Погрешность магнитной упругости. Она появляется от нестабильности деформаций сердечника при сборке прибора, а также из-за изменения деформаций при работе. Влияние нестабильности напряжений в магнитопроводе образует нестабильность сигнала на выходе.
- Погрешности устройства появляются по причине влияния измеряющей силы на деформации элементов датчика, а также влияния скачка усилия измерения на нестабильность деформации. Также на погрешность влияют люфты и зазоры в подвижных частях конструкции датчика.
Погрешность кабеля образуется от непостоянной величины сопротивления, деформации кабеля и его температуры, наводок электродвижущей силы в кабеле от внешних полей.
- Тензометрическая погрешность случайная величина и зависит от качества намотки витков провода. При намотке возникают механические напряжения, изменение которых при функционировании датчика приводит к изменению сопротивления обмотки постоянному току, а значит, изменению сигнала на выходе. Чаще всего в качественных датчиках эту погрешность не учитывают.
- Погрешность старения датчика появляется от износа движущихся частей устройства датчика, а также постоянного изменения электромагнитных свойств магнитопровода. Такую погрешность считают также случайным значением. При определении погрешности износа учитывается кинематика устройства датчика. При проектировании датчика рекомендуется определять его срок эксплуатации в нормальном режиме, за период которого погрешность от износа не превзойдет заданного значения.
- Погрешность технологии появляется при отклонениях от техпроцесса изготовления датчика, разброса параметров катушек и элементов при сборке, от влияния натягов и зазоров при сопряжении деталей. Оценка погрешности технологии производится простыми механическими измерителями.
Электромагнитные параметры материалов и их свойства со временем меняются. Чаще всего процессы изменения свойств материалов происходят в первые 200 часов после термообработки сердечника магнитопровода. Далее эти свойства остаются теми же, и не влияют на полную погрешность датчика.
Достоинства
- Большая чувствительность.
- Повышенная мощность выхода, до нескольких десятков Вт.
- Возможность подключения к промышленным источникам частоты.
- Прочное и простое устройство.
- Нет трущихся контактов.
Недостатки
- Способны функционировать только на переменном напряжении.
- Стабильность питания и частота влияют на точность работы датчика.
- Медицинские аппараты.
- Бытовая техника.
- Автомобильная промышленность.
- Робототехническое оборудование.
- Промышленная техника регулирования и измерения.
Похожие темы:
Как работают индуктивные датчики
- 3 декабря 2012 г.
- Характеристика
Сводка
- Марк Ховард, Zettlex
Терминология и методы использования индуктивных датчиков могут сбивать с толку.В этой статье объясняются различные типы и принципы работы, а также их сильные и слабые стороны.
Декабрь 2012 г.
Марк Ховард, Zettlex
Индуктивные датчики широко используются для измерения положения или скорости, особенно в суровых условиях. Однако для многих инженеров терминология и методы индуктивных датчиков могут сбивать с толку. Индуктивные датчики положения и скорости бывают самых разных форм, размеров и конструкций.Можно сказать, что все индуктивные датчики работают по принципу трансформатора, и все они используют физическое явление, основанное на переменных электрических токах. Это впервые заметил Майкл Фарадей в 1830-х годах, когда он обнаружил, что первый проводник с током может «индуцировать» ток, протекающий во втором проводнике. Открытия Фарадея привели к созданию электродвигателей, динамо-машин и, конечно же, индуктивных датчиков положения и скорости. К таким датчикам относятся простые бесконтактные переключатели, датчики переменной индуктивности, датчики переменного сопротивления, синхронизаторы, резольверы, поворотные и линейно регулируемые дифференциальные трансформаторы (RVDT и LVDT). Различные типы В простом датчике приближения (иногда называемом датчиком приближения или прокси-переключателем) на устройство подается электроэнергия, которая заставляет переменный ток течь в катушке (иногда называемой петлей, катушкой или обмоткой). Когда проводящая или магнитопроницаемая цель, такая как стальной диск, приближается к катушке, это изменяет импеданс катушки. Когда порог пройден, это действует как сигнал о наличии цели. Датчики приближения обычно используются для обнаружения простого присутствия или отсутствия металлической цели, а электрический выходной сигнал часто имитирует переключение.Эти датчики широко используются во многих промышленных приложениях, где электрические контакты в традиционном переключателе в противном случае могут оказаться проблематичными, особенно там, где присутствует много грязи или воды. Вы увидите множество индуктивных датчиков приближения в следующий раз, когда будете мыть машину. Датчики переменной индуктивности и переменного магнитного сопротивления обычно вырабатывают электрический сигнал, пропорциональный смещению проводящего или магнитопроницаемого объекта (обычно стального стержня) относительно катушки.Как и в случае с датчиком приближения, импеданс катушки изменяется пропорционально смещению цели относительно катушки, на которую подается переменный ток. Такие устройства обычно используются для измерения смещения поршней в цилиндрах, например, в пневматических или гидравлических системах. Поршень может проходить по внешнему диаметру змеевика. Синхросигналы измеряют индуктивную связь между катушками при их движении относительно друг друга. Обычно они вращаются и требуют электрических соединений как с движущимися, так и с неподвижными частями (обычно называемыми ротором и статором).Они могут предложить чрезвычайно высокую точность и используются в промышленной метрологии, в радиолокационных антеннах и телескопах. Синхросигналы, как известно, дороги и в настоящее время встречаются все реже, в основном их заменяют (бесщеточные) резольверы. Это еще одна форма индуктивного детектора, но электрические соединения выполняются только с обмотками статора. LVDT, RVDT и резольверы измеряют изменение индуктивной связи между катушками, обычно называемыми первичной и вторичной обмотками. Первичная обмотка передает энергию во вторичные обмотки, но соотношение энергии, подводимой к каждой из вторичных обмоток, изменяется пропорционально относительному смещению магнитопроницаемой мишени.В LVDT это обычно металлический стержень, проходящий через отверстие обмоток. В RVDT или резольвере это обычно ротор или полюсный наконечник определенной формы, который вращается относительно обмоток, расположенных по периферии ротора. Типичные применения LVDT и RVDT включают гидравлические сервоприводы в аэрокосмических элеронах, двигателях и элементах управления топливной системой. Типичные области применения резольверов включают переключение бесщеточных электродвигателей. Существенным преимуществом индуктивных датчиков является то, что соответствующие схемы обработки сигналов не должны располагаться в непосредственной близости от чувствительных катушек.Это позволяет размещать чувствительные катушки в суровых условиях, что в противном случае могло бы помешать другим методам измерения, таким как магнитные или оптические, поскольку они требуют размещения относительно чувствительной электроники на основе кремния в точке измерения. Приложения Индуктивные датчики имеют большой опыт надежной работы в сложных условиях. Следовательно, они часто являются автоматическим выбором для приложений, связанных с безопасностью, критических с точки зрения безопасности или приложений с высокой надежностью.Такие приложения распространены в военной, аэрокосмической, железнодорожной и тяжелой промышленности. Причина такой солидной репутации связана с базовой физикой и принципами работы, которые, как правило, не зависят от:
- подвижные электрические контакты
- температура
- влажность, вода и конденсат
- посторонних веществ, таких как грязь, жир, песок и песок.
Сильные и слабые стороны Из-за природы основных рабочих элементов — обмоток и металлических деталей — большинство индуктивных датчиков чрезвычайно надежны.Учитывая их солидную репутацию, возникает очевидный вопрос: «Почему индуктивные датчики не используются чаще?» Причина в том, что их физическая надежность работает как сильная сторона, так и слабость. Индуктивные датчики, как правило, точные, надежные и прочные, но при этом большие, громоздкие и тяжелые. Большой объем материала и необходимость в тщательно намотанных катушках делают их производство дорогостоящим, особенно высокоточные устройства, требующие прецизионной намотки. Помимо простых датчиков приближения, более сложные индуктивные датчики непомерно дороги для многих основных, коммерческих или промышленных приложений.Другая причина относительной редкости индуктивных датчиков заключается в том, что инженеру-конструктору может быть сложно их указать. Это связано с тем, что для каждого датчика часто требуется отдельная спецификация и покупка соответствующей схемы генерации переменного тока и обработки сигналов. Это часто требует значительных навыков и знаний в области аналоговой электроники. Поскольку молодые инженеры, как правило, сосредоточены на цифровой электронике, они будут рассматривать такие дисциплины как нежелательное «черное искусство», которого следует избегать. Устройства нового поколения Однако в последние годы на рынке появилось новое поколение индуктивных датчиков, которое пользуется растущей репутацией не только на традиционных рынках, но также в промышленном, автомобильном, медицинском, коммунальном, научном, нефтегазовом секторах. В этом новом поколении индуктивных датчиков используются те же основы физики, что и в традиционных устройствах, но используются печатные платы и современная цифровая электроника, а не громоздкие конструкции трансформаторов и аналоговая электроника.Этот элегантный подход также открывает ряд приложений для индуктивных датчиков, включая датчики 2D и 3D, линейные устройства с коротким ходом (<1 мм), криволинейные геометрии и высокоточные датчики угла. Использование печатных схем позволяет печатать датчики на тонких гибких подложках, что также может устранить необходимость в традиционных кабелях и разъемах. Гибкость этого подхода - как физическая, так и благодаря способности быстро предоставлять индивидуальные конструкции для OEM-производителей - является основным преимуществом этого нового подхода.Как и в случае с традиционными индуктивными методами, этот подход предлагает надежные и точные измерения в суровых условиях. Есть также несколько важных преимуществ:
- Стоимость снижена
- Повышенная точность
- Пониженная масса
- Упрощенное машиностроение, например, удаление подшипников, уплотнений и втулок.
- Компактный размер — особенно с длиной хода по сравнению с традиционными LVDT.
- Упрощение электрического интерфейса — обычно источник постоянного тока и абсолютный цифровой сигнал.
О Zettlex UK Ltd: Zettlex — это сенсорная компания. Линейка датчиков компании точно и надежно измеряет положение или скорость даже в суровых условиях. Zettlex разрабатывает и производит датчики; поставляет компоненты датчиков и интегральные схемы. Компания предлагает индивидуальный дизайн и разработку датчиков для конкретных приложений клиентов.
Выучить большеВам понравилась эта замечательная статья?
Ознакомьтесь с нашими бесплатными электронными информационными бюллетенями, чтобы прочитать больше замечательных статей.
ПодписатьсяОбзор датчиков приближения | OMRON Промышленная автоматизация
1.Датчики приближения обнаруживают объект, не касаясь его, и поэтому не вызывают истирания или повреждения объекта.
Такие устройства, как концевые выключатели, обнаруживают объект, соприкасаясь с ним, но датчики приближения могут обнаруживать присутствие объекта электрически, не касаясь его.
2. Для вывода контактов не используются, поэтому датчик имеет более длительный срок службы (за исключением датчиков, в которых используются магниты).
В датчиках приближенияиспользуются полупроводниковые выходы, поэтому нет контактов, влияющих на срок службы.
3. В отличие от оптических методов обнаружения, датчики приближения подходят для использования в местах, где используется вода или масло.
Обнаружение происходит практически без воздействия грязи, масла или воды на обнаруживаемый объект. Также доступны модели с футлярами из фторопласта, обеспечивающими превосходную химическую стойкость.
4. Датчики приближения обеспечивают высокую скорость отклика по сравнению с переключателями, требующими физического контакта.
Для получения информации о быстродействии см. «Разъяснение терминов».
5. Датчики приближения могут использоваться в широком диапазоне температур.
Датчики приближениямогут использоваться в диапазоне температур от -40 до 200 ° C.
6. На датчики приближения цвета не влияют.
Датчики приближенияобнаруживают физические изменения объекта, поэтому на них почти не влияет цвет поверхности объекта.
7. В отличие от переключателей, которые полагаются на физический контакт, на датчики приближения влияют температура окружающей среды, окружающие предметы и другие датчики.
На индуктивные и емкостные датчики приближения влияет взаимодействие с другими датчиками. Из-за этого при их установке необходимо соблюдать осторожность, чтобы не допустить взаимного вмешательства. (См. Меры предосторожности для правильного использования в Мерах безопасности для всех датчиков приближения.)
Также необходимо соблюдать осторожность, чтобы не допустить воздействия окружающих металлических предметов на индуктивные датчики приближения и предотвратить воздействие всех окружающих объектов на емкостные датчики приближения.
8. Есть двухпроводные датчики.
Линия электропередачи и сигнальная линия совмещены. Если подключена только линия питания, внутренние элементы могут быть повреждены.
Всегда вставляйте груз. (См. Меры предосторожности для безопасного использования в Мерах безопасности для всех датчиков приближения.)
Функциональность и технология индуктивных датчиков
Индуктивные датчики положения Baumer — это бесконтактные электронные датчики. Индуктивные датчики распознают любую проводящую металлическую цель.
Генератор создает высокочастотное электромагнитное поле, которое исходит от чувствительной поверхности переключателя. Когда проводящий металлический объект попадает в это электромагнитное поле, в металле индуцируются вихревые токи, вызывающие изменение амплитуды колебаний.Результатом является изменение напряжения на выходе генератора, которое заставляет триггер изменять состояние и изменять состояние выхода.
Расстояние срабатывания
Международный стандарт EN 60947-5-2 определяет расстояние срабатывания следующим образом: расстояние срабатывания — это расстояние, на котором стандартная цель, движущаяся к чувствительной поверхности бесконтактного переключателя, вызывает изменение сигнала.
Стандартная мишень
Стандартная мишень представляет собой квадратную пластину толщиной 1 мм, изготовленную из Fe 360 (низкоуглеродистая сталь).Длина его стороны определяется как большее из диаметра чувствительной поверхности или трехкратного значения Sn (номинальное расстояние срабатывания).
Номинальное расстояние срабатывания Sn
Номинальное расстояние срабатывания Sn является параметром классификации типа и не учитывает допуски во время обработки или изменения, вызванные внешними условиями, такими как напряжение или температура.
Эффективное расстояние срабатывания Sr
Эффективное расстояние срабатывания отдельного бесконтактного переключателя, которое измеряется при определенной температуре, напряжении и условиях установки.Для индуктивных бесконтактных переключателей оно должно составлять от 90% до 110% номинального расстояния срабатывания при 23 ± 5 ° C.
Полезное расстояние срабатывания Su
Расстояние срабатывания отдельного бесконтактного переключателя, измеренное в диапазоне температур и при напряжении питания 90% и 110% от номинального значения. Для индуктивных бесконтактных переключателей оно должно составлять от 90% до 110% эффективного расстояния срабатывания.
Гарантированное расстояние срабатывания Sa
Расстояние от чувствительной поверхности, на котором срабатывание бесконтактного переключателя обеспечивается в определенных условиях.Для индуктивных бесконтактных переключателей гарантированное расстояние срабатывания составляет от 0% до 81% номинального расстояния переключения.
Особо большие расстояния срабатывания — GammaProx
Расстояния срабатывания индуктивных устройств GammaProx в пять раз превышают стандартное значение CENELEC. Это обеспечивает одинаково безопасное и надежное обнаружение стали и цветных металлов. Благодаря увеличенному расстоянию срабатывания можно выбрать, как правило, большие расстояния до движущихся объектов, что обеспечивает большие допуски при установке, предотвращает повреждение и повышает надежность установки.
Из-за увеличенного расстояния переключения сенсоры GammaProx более чувствительно реагируют на окружающий материал. По этой причине установка заподлицо возможна не для всех материалов. Точные условия установки и поправочные коэффициенты указаны в технических паспортах.
Поправочный коэффициент Cf
Если для демпфирования используются металлические материалы, отличные от Kf из стандартной измерительной пластины (Fe 360), указанные расстояния срабатывания необходимо умножить на поправочный коэффициент материала, указанный в техническом паспорте.Эти результаты следует рассматривать как ориентировочные. Если в таблице данных не указаны поправочные коэффициенты, можно использовать стандартные значения, указанные в этой таблице. Геометрия, отличная от стандартной измерительной пластины, также влияет на расстояние переключения.
При измерении алюминиевой фольги или неметаллических материалов, покрытых тонким слоем алюминия или меди, достигнутое расстояние срабатывания может быть близко к значению для мягкой стали. Фактическое содержание Sn зависит от толщины слоя, а также от состава сплава.
Фактор 1
Стандартные датчики позволяют уменьшить расстояние срабатывания до 70% по отношению к неферромагнитным металлам. Датчики фактора 1 включают микроконтроллер для компенсации. В результате у датчиков с коэффициентом 1 отсутствует недостаток уменьшения расстояния срабатывания в зависимости от материала. Они имеют незначительный температурный дрейф, а также отличаются высокой скоростью переключения, что делает их идеальными для измерений на алюминии, цветных металлах и для измерения скорости вращения относительно зубчатых колес или перфорированных дисков.
Равномерное расстояние обеспечивает исключительную гибкость в концепции системы и установке датчиков. Однако преимущества датчиков Baumer идут еще дальше: они являются самыми быстрыми в своем классе в отношении расстояния обнаружения и обладают исключительной широтой обнаружения.
Гистерезис
При приближении и удалении цели существует разница между точкой срабатывания и точкой срабатывания, которая определяется как гистерезис. Гистерезис встроен в характеристики датчика, чтобы защитить его от возможного неправильного срабатывания из-за вибрации.
Частота переключения
В соответствии со стандартами EN 60947-5-2 частота коммутации — это максимально возможное количество переключений в секунду.
Принцип работы индуктивного датчика приближенияЗдравствуйте, выродки, здесь мы обсудим принцип работы индуктивных датчиков приближения, их широкое применение в промышленности и их использование в коммерческих целях. Этот блог посвящен технологии, лежащей в основе индуктивных датчиков приближения, и подробным характеристикам.
Что такое индуктивный датчик приближения?
Индуктивный датчик приближения обнаруживает металлический объект, который находится рядом с их активной стороной. Этот датчик работает по электрическому принципу индуктивности, когда колеблющийся ток индуцирует электродвижущую силу (ЭДС) в целевом объекте. Эти бесконтактные датчики приближения обнаруживают объекты из черных металлов, в идеале — низкоуглеродистую сталь толщиной более одного миллиметра. Они состоят из четырех основных компонентов: , ферритового сердечника с катушками, генератора, триггера Шмитта и выходного усилителя .Этот датчик имеет 2 основных версии:
- Неэкранированный: электромагнитное поле, создаваемое катушкой, не ограничено, что позволяет увеличивать и увеличивать расстояние срабатывания
- Экранированный: генерируемое электромагнитное поле сосредоточено спереди, где стороны катушки датчика закрыты
ДОЛЖЕН ПРОЧИТАТЬ:
Принцип работы индуктивного датчика приближения
Генератор создает симметричное колеблющееся магнитное поле, которое излучается ферритовым сердечником и матрицей катушек на чувствительной поверхности.Когда железная цель попадает в это магнитное поле, небольшие независимые электрические токи (вихревые токи), составляющие , индуцируют на поверхности металла.
Индуктивный датчик приближения работает в диапазоне частот от 10 до 20 Гц переменного тока или от 500 Гц до 5 кГц постоянного тока. Из-за ограничений магнитного поля индуктивные датчики имеют относительно узкий диапазон чувствительности, в среднем от долей миллиметра до 60 мм.
Из-за этого на датчик будет создаваться нагрузка, уменьшающая амплитуду электромагнитного поля.Если металлический объект движется к датчику приближения, вихревой ток соответственно увеличивается. Таким образом, нагрузка на осциллятор увеличится, что уменьшит амплитуду поля.
Блок триггера Шмитта контролирует амплитуду генератора, и на определенном уровне (заданном уровне) схема триггера включает или выключает датчик. Если металлический объект или цель отодвинуть от датчика приближения, амплитуда осциллятора увеличится.
На изображении выше показана форма сигнала генератора индуктивного датчика приближения в присутствии цели и в отсутствие цели.
В настоящее время доступны индуктивные датчики приближения с различным рабочим напряжением. Эти индуктивные датчики приближения доступны в режимах переменного, постоянного и переменного / постоянного тока (универсальные режимы). Рабочий диапазон цепей датчика приближения составляет от 10 В до 320 В постоянного тока и от 20 В до 265 В переменного тока.
Преимущества индуктивных датчиков приближения
- Бесконтактное обнаружение
- Приспособляемость к окружающей среде — устойчивость к обычным условиям, наблюдаемым в промышленных зонах, таким как пыль и грязь
- Возможность и универсальность в обнаружении металлов
- Высокая частота переключения
- Отсутствие движущихся частей, продление срока службы
Недостатки индуктивных датчиков приближения
- Отсутствие дальности обнаружения, в среднем максимальная дальность до 60 мм
- Может обнаруживать только металлические предметы
- Внешние условия, такие как экстремальные температуры, смазочно-охлаждающая жидкость или химические вещества, влияют на работу датчика.
Применение индуктивных датчиков приближения
- Сборы за проезд, сборочные конвейеры, автомобильная промышленность
- Обнаружение металлических деталей в суровых условиях
- Высокоскоростные движущиеся части
Надеюсь, эта статья поможет вам понять полный принцип работы индуктивного датчика приближения.
Мы в Robu.in надеемся, что вам было интересно, и что вы вернетесь к другим нашим образовательным блогам.
% PDF-1.2 % 1 0 объект > эндобдж 3 0 obj > эндобдж 4 0 obj > эндобдж 5 0 obj > / Ж 6 0 Р >> эндобдж 8 0 объект > эндобдж 9 0 объект > эндобдж 10 0 obj > эндобдж 11 0 объект > эндобдж 12 0 объект > эндобдж 13 0 объект > эндобдж 14 0 объект > эндобдж 15 0 объект > эндобдж 16 0 объект > эндобдж 17 0 объект > эндобдж 18 0 объект > эндобдж 19 0 объект > эндобдж 20 0 объект > эндобдж 21 0 объект > эндобдж 22 0 объект > эндобдж 23 0 объект > эндобдж 24 0 объект > эндобдж 25 0 объект > эндобдж 26 0 объект > эндобдж 27 0 объект > эндобдж 28 0 объект > эндобдж 29 0 объект > эндобдж 30 0 объект > эндобдж 31 0 объект > эндобдж 32 0 объект > эндобдж 33 0 объект > эндобдж 34 0 объект > эндобдж 35 0 объект > эндобдж 36 0 объект > эндобдж 37 0 объект > эндобдж 38 0 объект > эндобдж 39 0 объект > эндобдж 40 0 объект > эндобдж 41 0 объект > эндобдж 42 0 объект > эндобдж 43 0 объект > эндобдж 44 0 объект > эндобдж 45 0 объект > эндобдж 46 0 объект > эндобдж 47 0 объект > эндобдж 48 0 объект > эндобдж 49 0 объект > эндобдж 50 0 объект > эндобдж 51 0 объект > эндобдж 52 0 объект > эндобдж 53 0 объект > эндобдж 54 0 объект > эндобдж 55 0 объект > эндобдж 56 0 объект > эндобдж 57 0 объект > эндобдж 58 0 объект > эндобдж 59 0 объект > эндобдж 60 0 объект > эндобдж 61 0 объект > эндобдж 62 0 объект > эндобдж 63 0 объект > эндобдж 64 0 объект > эндобдж 65 0 объект > эндобдж 66 0 объект > эндобдж 67 0 объект > эндобдж 68 0 объект > эндобдж 69 0 объект > эндобдж 70 0 объект > эндобдж 71 0 объект > эндобдж 72 0 объект > эндобдж 73 0 объект > эндобдж 74 0 объект > эндобдж 75 0 объект > эндобдж 76 0 объект > эндобдж 77 0 объект > эндобдж 78 0 объект > эндобдж 79 0 объект > эндобдж 80 0 объект > эндобдж 81 0 объект > эндобдж 82 0 объект > эндобдж 83 0 объект > эндобдж 84 0 объект > эндобдж 85 0 объект > эндобдж 86 0 объект > эндобдж 87 0 объект > эндобдж 88 0 объект > эндобдж 89 0 объект > эндобдж 90 0 объект > эндобдж 91 0 объект > эндобдж 92 0 объект > эндобдж 93 0 объект > эндобдж 94 0 объект > эндобдж 95 0 объект > эндобдж 96 0 объект > эндобдж 97 0 объект > эндобдж 98 0 объект > эндобдж 99 0 объект > эндобдж 100 0 объект > эндобдж 101 0 объект > эндобдж 102 0 объект > эндобдж 103 0 объект > эндобдж 104 0 объект > эндобдж 105 0 объект > эндобдж 106 0 объект > эндобдж 107 0 объект > эндобдж 108 0 объект > эндобдж 109 0 объект > эндобдж 110 0 объект > эндобдж 111 0 объект > эндобдж 112 0 объект > эндобдж 113 0 объект > эндобдж 114 0 объект > эндобдж 115 0 объект > эндобдж 116 0 объект > эндобдж 117 0 объект > эндобдж 118 0 объект > эндобдж 119 0 объект > эндобдж 120 0 объект > эндобдж 121 0 объект > эндобдж 122 0 объект > эндобдж 123 0 объект > эндобдж 124 0 объект > эндобдж 125 0 объект > эндобдж 126 0 объект > эндобдж 127 0 объект > эндобдж 128 0 объект > эндобдж 129 0 объект > эндобдж 130 0 объект > эндобдж 131 0 объект > эндобдж 132 0 объект > эндобдж 133 0 объект > эндобдж 134 0 объект > эндобдж 135 0 объект > эндобдж 136 0 объект > эндобдж 137 0 объект > эндобдж 138 0 объект > эндобдж 139 0 объект > эндобдж 140 0 объект > эндобдж 141 0 объект > эндобдж 142 0 объект > эндобдж 143 0 объект > эндобдж 144 0 объект > эндобдж 145 0 объект > эндобдж 146 0 объект > эндобдж 147 0 объект > эндобдж 148 0 объект > эндобдж 149 0 объект > эндобдж 150 0 объект > эндобдж 151 0 объект > эндобдж 152 0 объект > эндобдж 153 0 объект > эндобдж 154 0 объект > эндобдж 155 0 объект > эндобдж 156 0 объект > эндобдж 157 0 объект > эндобдж 158 0 объект > эндобдж 159 0 объект > эндобдж 160 0 объект > эндобдж 161 0 объект > эндобдж 162 0 объект > эндобдж 163 0 объект > эндобдж 164 0 объект > эндобдж 165 0 объект > эндобдж 166 0 объект > эндобдж 167 0 объект > эндобдж 168 0 объект > эндобдж 169 0 объект > эндобдж 170 0 объект > эндобдж 171 0 объект > эндобдж 172 0 объект > эндобдж 173 0 объект > эндобдж 174 0 объект > эндобдж 175 0 объект > эндобдж 176 0 объект > эндобдж 177 0 объект > эндобдж 178 0 объект > эндобдж 179 0 объект > эндобдж 180 0 объект > эндобдж 181 0 объект > эндобдж 182 0 объект > эндобдж 183 0 объект > эндобдж 184 0 объект > эндобдж 185 0 объект > эндобдж 186 0 объект > эндобдж 187 0 объект > эндобдж 188 0 объект > эндобдж 189 0 объект > эндобдж 190 0 объект > эндобдж 191 0 объект > эндобдж 192 0 объект > эндобдж 193 0 объект > эндобдж 194 0 объект > эндобдж 195 0 объект > эндобдж 196 0 объект > эндобдж 197 0 объект > эндобдж 198 0 объект > эндобдж 199 0 объект > эндобдж 200 0 объект > эндобдж 201 0 объект > эндобдж 202 0 объект > эндобдж 203 0 объект > эндобдж 204 0 объект > эндобдж 205 0 объект > эндобдж 206 0 объект > эндобдж 207 0 объект > эндобдж 208 0 объект > эндобдж 209 0 объект > эндобдж 210 0 объект > эндобдж 211 0 объект > эндобдж 212 0 объект > эндобдж 213 0 объект > эндобдж 214 0 объект > эндобдж 215 0 объект > эндобдж 216 0 объект > эндобдж 217 0 объект > ручей HWcgWT︊XE + CKe & ˾B «
Что такое индуктивный датчик?
Индуктивный датчик — это устройство для выполнения неэлектрических измерений с использованием изменения самоиндукции катушки или взаимной индуктивности.С помощью индуктивных датчиков можно измерить смещение, давление, вибрацию, деформацию, расход и другие параметры. Он имеет ряд преимуществ, таких как простая конструкция, высокая чувствительность, большая выходная мощность, малый выходной импеданс, сильная защита от помех и высокая точность измерений, поэтому он широко используется в электромеханической системе управления.
Каталог
Ⅰ Введение
Индуктивные датчики используют принцип электромагнитной индукции для преобразования измеренных неэлектрических величин, таких как смещение, давление, расход, вибрация и т. Д., в изменение собственной индуктивности катушки L или взаимной индуктивности M, а затем преобразовать изменение индуктивности в изменение выходного напряжения или тока.
Индуктивные датчики имеют ряд преимуществ, таких как простая конструкция, надежная работа, высокая точность измерения, стабильная нулевая точка, большая выходная мощность и т. Д. Их главный недостаток заключается в том, что чувствительность, линейность и диапазон измерения взаимно ограничены, а частота чувствительность датчика низкая, поэтому он не подходит для быстрых динамических измерений.
Существует множество типов индуктивных датчиков, включая датчики самоиндукции , датчики взаимной индуктивности и вихретоковые датчики .
Ⅱ Классификация индуктивного датчика
1 Датчик самоиндукции1) Структура датчика самоиндукции
Датчик самоиндукции состоит из катушки, сердечника и якоря. Сердечник и якорь изготовлены из кремнистой стали и других магнитных материалов.
Структура датчика самоиндукции
2) Принцип работы датчика самоиндукции
Датчик самоиндукции преобразует измеренное изменение в изменение самоиндукции L и преобразует его в напряжение или ток вывод через определенную схему преобразования.
Когда датчик используется, подвижная часть датчика соединяется с подвижным сердечником (якорем). Когда движущийся сердечник движется, толщина воздушного зазора между сердечником и якорем будет изменяться, что приведет к изменению сопротивления магнитной цепи и изменению значения индуктивности катушки.Пока измеряется изменение индуктивности, можно определить величину и направление смещения движущегося сердечника.
Принцип работы датчика самоиндукции
Когда число витков катушки постоянное, индуктивность L зависит только от сопротивления в магнитной цепи при изменении δ; или S может вызвать изменение индуктивности. Следовательно, датчик переменного магнитного сопротивления можно разделить на регулируемый воздушный зазор δ; датчик толщины и датчик S переменной площади воздушного зазора.
Если S остается неизменным, L является однозначной функцией от δ, которая может составлять датчик самоиндукции с регулируемым воздушным зазором; если δ остается неизменным, S изменяется со смещением, поэтому он может представлять собой датчик самоиндукции с переменным поперечным сечением; если цилиндрический якорь поместить в круг, а затем двигаться вверх и вниз, самоиндукция изменится соответствующим образом, образуя датчик самоиндукции соленоидного типа.
Датчик самоиндукции с регулируемым воздушным зазором
Конструкция датчика самоиндукции с регулируемым воздушным зазором
Датчик самоиндукции с переменным сечением
Датчик самоиндукции с переменным сечением структура
Индуктивный датчик соленоидного типа
Когда датчик работает, изменение длины якоря в катушке вызывает изменение индуктивности катушки.
Для катушки якоря с длинной резьбой l >> r, когда якорь работает в середине трубки якоря, напряженность магнитного поля в катушке можно считать однородной, а величина индуктивности катушки L примерно пропорциональна глубина вставки якоря l.
Индуктивный датчик соленоидного типа
Датчик прост по конструкции, прост в изготовлении и имеет низкую чувствительность, что позволяет измерять большие смещения.
3) Датчик дифференциальной самоиндукции
Поскольку в катушке присутствует переменный ток возбуждения, якорь всегда подвергается воздействию электромагнитного всасывания, что вызывает вибрацию и дополнительную ошибку. Ошибка вывода будет вызвана внешними помехами, изменением частоты напряжения источника питания и температуры.
На практике две идентичные сенсорные катушки часто используют один якорь, чтобы сформировать дифференциальный датчик самоиндукции, а электрические параметры и геометрические размеры этих двух катушек абсолютно одинаковы.
Эта структура может не только улучшить линейность и чувствительность, но также компенсировать влияние изменения температуры и изменения частоты источника питания, чтобы уменьшить ошибку, вызванную внешним воздействием.
A. Структура дифференциального датчика самоиндукции
(а) Тип переменного воздушного зазора; (b) Тип с переменной площадью; (c) Дифференциальный датчик самоиндукции соленоидного типа
B. Характеристики дифференциального датчика самоиндукции
Датчик дифференциальной индуктивности воздушного зазора состоит из двух идентичных катушек индуктивности 1, 2 и магнитных цепей.
Во время измерения якорь соединяется с измеряемым перемещением через измерительный стержень. Когда измеряемое тело движется вверх и вниз, направляющий стержень заставляет якорь двигаться вверх и вниз с одинаковым смещением, так что магнитное сопротивление в двух магнитных цепях одинаково, а направление меняется в противоположном направлении. Затем индуктивность одной катушки увеличивается, а индуктивность другой катушки уменьшается, образуя дифференциальную форму.
Характеристическая кривая коэффициента самоиндукции представлена на рисунке.
Характеристическая кривая самоиндукции
2 Датчик дифференциального трансформаторного типаДатчик, который преобразует измеренное изменение неэлектрической величины во изменение взаимной индуктивности катушки, называется датчиком взаимной индуктивности. Датчик выполнен по основному принципу трансформатора, который преобразует измеренное смещение в изменение взаимной индуктивности между первичной и вторичной обмотками.
Когда первичная катушка подключена к источнику питания возбуждения, вторичная катушка будет генерировать наведенную электродвижущую силу.Когда взаимная индуктивность между ними изменяется, соответственно изменяется и наведенная электродвижущая сила. Поскольку две вторичные обмотки используют разные методы подключения, он называется датчиком типа дифференциального трансформатора, называемым дифференциальным трансформатором.
1) Структура дифференциального трансформатора
Существует много типов дифференциальных трансформаторов, таких как тип с регулируемым зазором, тип с переменным сечением и тип спирального трубопровода.
Дифференциальные трансформаторы структур A и B имеют пластинчатую форму с высокой чувствительностью и узким диапазоном измерения, которые обычно используются для измерения механического смещения от нескольких микрон до нескольких сотен микрон.
(a) и (b) Дифференциальный трансформатор с переменным зазором
Для измерения смещения от 1 мм до сотен мм часто используются дифференциальные трансформаторы соленоидного типа с цилиндрическим якорем, такие как конструкции C и D.
(c) и (d) Соленоидные дифференциальные трансформаторы
Структуры e и F представляют собой дифференциальные трансформаторы, которые измеряют угол поворота, и обычно можно измерить крошечное смещение в несколько секунд.При измерениях Ø, не связанных с электричеством, чаще всего используется дифференциальный трансформатор спирального типа. Его можно измерить в рамках механического смещения, и он имеет высокую точность измерения, высокую чувствительность, простую конструкцию, надежную работу и т. Д.
(e), (f) Дифференциальный трансформатор с переменным сечением
2 ) Принцип работы дифференциального трансформатора
Конструкция дифференциального трансформатора состоит из стального сердечника, якоря и катушки.Его структура имеет множество форм, но принцип действия в основном тот же.
В верхнем и нижнем железных сердечниках дифференциального трансформатора находятся первичная обмотка 1 и вторичная обмотка 2. Верхняя и нижняя первичные катушки соединены последовательно с переменным напряжением возбуждения, а две вторичные катушки соединены последовательно в соответствии с потенциалом.
Принципиальная схема трехступенчатого соленоидного дифференциального трансформатора
Две вторичные обмотки с одинаковым числом витков соединены в обратном порядке.Когда на первичные обмотки подается напряжение возбуждения, в двух вторичных обмотках создается индукционный потенциал в соответствии с принципом действия трансформатора.
Когда активный якорь находится в исходном положении равновесия, выходное напряжение равно нулю, если конструкция трансформатора гарантированно полностью симметрична.
Когда активный якорь движется к вторичной катушке, магнитный поток во вторичной катушке увеличивается, что приводит к увеличению ее потенциала индукции.Дифференциальный трансформатор имеет выходное напряжение, и его величина отражает смещение активного якоря.
Кривая выходного напряжения трехступенчатого соленоидного дифференциального трансформатора показана на рисунке.
Кривая выходного напряжения дифференциального трансформатора
3 Вихретоковый датчик1) Структура вихретокового датчика
Структура вихретокового датчика проста и в основном состоит из плоской круглой формы. катушка размещена в корпусе зонда.
Внутренняя структура вихретокового датчика
2) Принцип работы вихретокового датчика
Согласно принципу электромагнитной индукции Фарадея большой металлический проводник, помещенный в изменяющееся магнитное поле, будет генерировать индуцированный ток в форме вихря, называемый вихревым током. Это явление называется эффектом вихревых токов.
Вихретоковый датчик использует эффект вихревых токов для преобразования неэлектрической величины, такой как смещение и температура, в изменение импеданса или индуктивности для измерения неэлектрической величины.
Принципиальная схема датчика вихревых токов
Блок металлический проводник помещен в магнитное поле катушки датчика с переменным током. Согласно принципу электромагнитной индукции Фарадея, из-за изменений электрического тока вокруг катушки создается переменное магнитное поле. Когда проверяемый проводник помещается в зону действия магнитного поля, в проверяемом проводе генерируется вихревой ток.Вихревой ток создаст новое магнитное поле. Новое магнитное поле находится в противоположном направлении, которое должно компенсировать часть исходного магнитного поля, что приводит к изменению индуктивности, сопротивления и добротности катушки.
III Особенности индукционного датчика
1. Преимущества индукционного датчика(1) Конструкция проста и надежна; нет подвижного электрического контакта и может прослужить долго.
(2) Высокая чувствительность, сильный выходной сигнал, чувствительность по напряжению может достигать сотен милливольт на миллиметр.Максимальное разрешение — 0,1 мкм;
(3) Высокая точность измерения, линейность выхода может достигать ± 0,1%;
(4) Выходная мощность относительно велика, в некоторых случаях ее можно напрямую подключить к вторичному счетчику без усиления.
(5) Большое разрешение: чувствуется небольшое механическое смещение и небольшое изменение угла.
(6) Хорошая повторяемость и линейность: в пределах определенного диапазона смещения линейность выходной характеристики хорошая, а выход стабильный.
2. Недостатки индуктивного датчика(1) Частотная характеристика самого датчика невысока, и он не подходит для быстрых динамических измерений;
(2) Повышенные требования к стабильности частоты и амплитуды источника питания возбуждения;
(3) Разрешение датчика зависит от диапазона измерения. Диапазон измерения большой, разрешение низкое, и наоборот.
(4) Имеется нулевой сигнал переменного тока, который не подходит для высокочастотных динамических измерений.
IV Применение индуктивного датчика
Как инструмент для сбора и получения информации, датчик играет важную роль в автоматическом обнаружении и контроле качества системы. Индуктивные датчики могут преобразовывать геометрические изменения неэлектрических физических величин, таких как длина, внутренний диаметр и внешний диаметр, вызванные смещением, вибрацией и давлением, в крошечные изменения электрических сигналов. А электрические сигналы преобразуются в измерение электрических параметров.Это своего рода высокочувствительный датчик, который имеет простую конструкцию и надежную, большую выходную мощность, высокую сопротивляемость импедансу, хорошую стабильность и ряд преимуществ, и поэтому широко используется в различных видах инженерного определения количества и автоматического управления. система.
Например: 1. Использование индуктивного датчика смещения для повышения точности изготовления подшипников; Изменение микропрецизионного размера измеряли индуктивным микрометром. Точное измерение положения открытия гидрораспределителя; 2.Гибкие датчики для интеллектуального текстильного дизайна; 3. Измеритель погрешности апертуры с датчиком индуктивности; 4. Индуктивные датчики использовались для обнаружения абразивных частиц в смазочном масле; 5. Использование индуктивного датчика для контроля направляющего колеса разбрасывателя и т. Д.
Датчик индуктивности также может использоваться в качестве магнитного переключателя скорости, измерения скорости стержня зубчатого колеса и т. Д. Этот тип датчика широко используется в текстильной, химической промышленности, станках, машиностроении, металлургии, локомотивной и автомобильной промышленности.Он широко используется для обнаружения машин, таких как определение скорости звездочки, скорости ленты цепного конвейера и определения расстояния, тахометра для подсчета срока службы шестерен и управления системой защиты автомобиля. Кроме того, этот тип датчика может использоваться для обнаружения объектов малых и средних размеров, управления выбросом объектов, контроля обрыва проволоки, разделения площадей мелких деталей, определения толщины и управления положением в системе подающих трубок.
В индуктивном датчике смещения проволока используется для создания определенной обмотки.В соответствии с изменением его смещения, белая индуктивность или взаимная индуктивность катушки обмотки изменяется, чтобы выполнить измерение смещения. Таким образом, по принципу преобразования индуктивный датчик перемещения можно разделить на две категории: тип самоиндукции и тип взаимной индуктивности.
Индуктивный датчик перемещения — это своего рода электромеханическое преобразовательное устройство, которое широко используется в современной науке и технологиях промышленного производства, особенно в системах управления белым движением, обрабатывающей и измерительной промышленности.
Рекомендуемый артикул:
Что такое емкостный датчик?
Что такое оптоволоконный датчик?
Все о датчиках положения (типы, применение и характеристики)
Датчики положения дроссельной заслонки обеспечивают обратную связь с системой впрыска топлива в автомобиле.
Изображение предоставлено: ЛЕВЧЕНКО ХАННА / Shutterstock.com
Датчики положения — это устройства, которые могут обнаруживать движение объекта или определять его относительное положение, измеренное от установленной контрольной точки.Эти типы датчиков также могут использоваться для обнаружения присутствия объекта или его отсутствия.
Существует несколько типов датчиков, которые служат аналогично датчикам положения и о которых стоит упомянуть. Датчики движения обнаруживают движение объекта и могут использоваться для запуска действия (например, включения прожектора или активации камеры наблюдения). Датчики приближения также могут обнаружить, что объект попал в зону действия датчика. Таким образом, оба датчика можно рассматривать как специализированную форму датчиков положения.Дополнительную информацию об этих датчиках можно найти в наших руководствах по датчикам приближения и датчикам света движения. Одно из отличий датчиков положения заключается в том, что они по большей части связаны не только с обнаружением объекта, но также с записью его положения и, следовательно, включают использование сигнала обратной связи, который содержит информацию о местоположении.
В этой статье будет представлена информация о различных типах датчиков положения, о том, как они работают, как они используются, а также об основных характеристиках, связанных с этим классом датчиков.Чтобы узнать больше о других типах датчиков, см. Наши соответствующие руководства, которые охватывают различные типы датчиков и их использование, а также различные типы датчиков Интернета вещей (IoT). Для целей этой статьи термины датчик положения и датчик положения считаются синонимами.
Типы датчиков положения
Общая цель датчика положения — обнаружить объект и передать его положение посредством генерации сигнала, обеспечивающего обратную связь по положению.Эта обратная связь затем может использоваться для управления автоматическими ответами в процессе, звуковыми сигналами или запуском других действий, продиктованных конкретным приложением. Вообще говоря, датчики положения можно разделить на три широких класса, которые включают датчики линейного положения, датчики поворотного положения и датчики углового положения. Есть несколько конкретных технологий, которые можно использовать для достижения этого результата, и различные типы датчиков положения отражают эти лежащие в основе технологии.
К основным типам датчиков положения относятся следующие:
- Потенциометрические датчики положения (резистивные)
- Индуктивные датчики положения
- Вихретоковые датчики положения
- Емкостные датчики положения
- Магнитострикционные датчики положения
- Магнитные датчики положения на основе эффекта Холла
- Волоконно-оптические датчики положения
- Оптические датчики положения
- Ультразвуковые датчики положения
Потенциометрические датчики положения
Потенциометрические датчики положения— это датчики на основе сопротивления, в которых используется резистивная дорожка со скребком, прикрепленным к объекту, положение которого отслеживается.Движение объекта заставляет стеклоочиститель изменять свое положение вдоль дорожки сопротивления и, следовательно, изменять измеренное значение сопротивления между положением дворника и концом дорожки. Таким образом, измеренное сопротивление можно использовать как индикатор положения объекта. Это достигается за счет использования делителя напряжения, в котором фиксированное напряжение прикладывается к концам дорожки сопротивления, а измеренное напряжение от положения стеклоочистителя до одного конца дорожки дает значение, пропорциональное положению стеклоочистителя.Этот подход работает как для линейных, так и для вращательных перемещений.
Потенциометры, используемые для потенциометрических датчиков положения, включают проволочную обмотку, металлокерамику или пластиковую (полимерную) пленку. Эти типы датчиков положения предлагают относительно низкую стоимость, но также страдают низкой точностью и воспроизводимостью. Кроме того, конструктивные ограничения устройства ограничивают диапазон, в котором можно измерить изменение положения.
Индуктивные датчики положения
Индуктивные датчики положения определяют положение объекта по изменению характеристик магнитного поля, которое индуцируется в катушках датчика.Один из типов называется LVDT или линейно-регулируемый дифференциальный трансформатор. В датчике положения LVDT три отдельные катушки намотаны на полую трубку. Одна из них — первичная обмотка, а две другие — вторичные обмотки. Они соединены электрически последовательно, но фазовое соотношение вторичных катушек сдвинуто по фазе на 180, o по отношению к первичной катушке. Ферромагнитный сердечник или якорь помещается внутри полой трубки, и якорь соединяется с объектом, положение которого измеряется.На первичную катушку подается сигнал напряжения возбуждения, который индуцирует ЭДС во вторичных катушках LVDT. Измеряя разность напряжений между двумя вторичными катушками, можно определить относительное положение якоря (и, следовательно, объекта, к которому он прикреплен). Когда якорь находится точно по центру трубки, ЭДС компенсируются, что приводит к отсутствию выходного напряжения. Но по мере того, как якорь перемещается из нулевого положения, напряжение и его полярность изменяются. Следовательно, амплитуда напряжения вместе с его фазовым углом служит для предоставления информации, которая отражает не только величину отклонения от центрального (нулевого) положения, но и его направление.На рисунке 1 ниже показана работа линейно-переменного дифференциального трансформатора, показывающая преобразование измерения напряжения в индикацию положения.
Рисунок 1 — Работа индуктивного датчика положения LVDT
Изображение предоставлено: https://www.electronics-tutorials.ws
Эти типы датчиков положения обеспечивают хорошую точность, разрешение, высокую чувствительность и хорошую линейность во всем диапазоне измерения. Они также не имеют трения и могут быть герметизированы для использования в условиях, где может быть воздействие элементов.
В то время как LVDT функционируют для отслеживания линейного движения, эквивалентное устройство, называемое RVDT (от Rotary Voltage Differential Transformer), может обеспечивать отслеживание вращательного положения объекта. RVDT функционирует идентично LVDT и отличается только особенностями их конструкции.
Вихретоковые датчики положения
Вихревые токи — это индуцированные токи, которые возникают в проводящем материале, находящемся в присутствии изменяющегося магнитного поля, и являются результатом закона индукции Фарадея.Эти токи протекают по замкнутым контурам и, в свою очередь, приводят к генерации вторичного магнитного поля.
Если катушка возбуждается переменным током для создания первичного магнитного поля, присутствие проводящего материала, поднесенного к катушке, может быть обнаружено из-за взаимодействия вторичного поля, создаваемого вихревыми токами, которое влияет на импеданс катушка. Таким образом, изменение импеданса катушки можно использовать для определения расстояния объекта от катушки.
Вихретоковые датчики положения работают с электропроводящими объектами. Большинство вихретоковых датчиков работают как датчики приближения, предназначенные для определения приближения объекта к месту расположения датчика. Они ограничены как датчики положения, потому что они всенаправленные, что означает, что они могут определять относительное расстояние объекта от датчика, но не направление объекта относительно датчика.
Емкостные датчики положения
Емкостные датчики положения полагаются на обнаружение изменения значения емкости для определения положения измеряемого объекта.Конденсаторы состоят из двух пластин, отделенных друг от друга диэлектрическим материалом между пластинами. Есть два общих метода, которые используются для определения положения объекта с помощью емкостного датчика положения:
- Путем изменения диэлектрической проницаемости конденсатора
- Путем изменения площади перекрытия пластин конденсатора
В первом случае измеряемый объект прикреплен к диэлектрическому материалу, положение которого относительно пластин конденсатора изменяется по мере движения объекта.По мере смещения диэлектрического материала эффективная диэлектрическая проницаемость конденсатора изменяется в результате частичной площади диэлектрического материала, а баланс — диэлектрической проницаемости воздуха. Этот подход обеспечивает линейное изменение значения емкости по отношению к относительному положению объекта.
Во втором случае, вместо того, чтобы прикреплять объект к диэлектрическому материалу, он подключается к одной из обкладок конденсатора. Следовательно, когда объект перемещает свое положение, область перекрытия пластин конденсатора изменяется, что снова изменяет значение емкости.
Принцип изменения емкости для измерения положения объекта может применяться к движению как в линейном, так и в угловом направлениях.
Магнитострикционные датчики положения
Ферромагнитные материалы, такие как железо, никель и кобальт, обладают свойством, известным как магнитострикция, что означает, что материал будет изменять свой размер или форму в присутствии приложенного магнитного поля. Магниторестрикционный датчик положения использует этот принцип для определения положения объекта.
К измеряемому объекту прикреплен подвижный позиционный магнит. Волновод, который состоит из провода, по которому передается импульс тока, подключен к датчику, расположенному на конце волновода. Позиционный магнит создает аксиальное магнитное поле, силовые линии которого копланарны по отношению к магнитострикционной проволоке и волноводу. Когда по волноводу посылается импульс тока, в проводе создается магнитное поле, которое взаимодействует с осевым магнитным полем постоянного магнита (позиционного магнита).Результатом полевого взаимодействия является скручивание, известное как эффект Видемана. Это скручивание вызывает напряжение в проводе, которое генерирует звуковой импульс, который проходит по волноводу и обнаруживается датчиком на конце волновода. Путем измерения времени, прошедшего между инициированием импульса тока и обнаружением звукового импульса, магниторестрикционный датчик положения может установить относительное расположение позиционного магнита.
Поскольку звуковая волна будет распространяться от места, где расположен позиционный магнит, в двух направлениях (как по направлению к датчику датчика, так и от него), на противоположном конце волновода расположено демпфирующее устройство для поглощения импульса, распространяющегося от датчик, чтобы он не приводил к отражению мешающего сигнала обратно к датчику захвата.На рисунке 2 ниже показан принцип работы магнитострикционного датчика положения.
Рисунок 2 — Работа магниторезистивного датчика положения.
Изображение предоставлено: https://www.sensorland.com/HowPage024.html
Магниторестрикционные датчики положения по своей природе используются для определения линейного положения. Они могут быть оснащены несколькими позиционными магнитами для предоставления информации о положении нескольких компонентов вдоль одной оси.Это бесконтактные датчики, и, поскольку волновод обычно помещается в трубку из нержавеющей стали или алюминия, эти датчики могут использоваться там, где они могут быть источником загрязнения. Кроме того, магнитострикционные датчики положения могут работать даже при наличии барьера между волноводом и позиционным магнитом при условии, что барьер изготовлен из немагнитного материала.
Датчики доступны с различными выходами, включая напряжение постоянного тока, ток, сигнал PWM и цифровые импульсы start-stop.
Магнитные датчики положения на основе эффекта Холла
Эффект Холла утверждает, что когда тонкий плоский электрический проводник проходит через него и помещается в магнитное поле, магнитное поле воздействует на носители заряда, заставляя их накапливаться на одной стороне проводника относительно другой, чтобы уравновесить интерференцию магнитного поля. Это неравномерное распределение электрических зарядов приводит к созданию разности потенциалов между двумя сторонами проводника, известной как напряжение Холла.Этот электрический потенциал возникает в направлении, поперечном направлению потока электрического тока и направлению магнитного поля. Если ток в проводнике поддерживается на постоянном уровне, величина напряжения Холла будет напрямую отражать силу магнитного поля.
В датчике положения на эффекте Холла объект, положение которого измеряется, соединен с магнитом, размещенным на валу датчика. По мере движения объекта положение магнита изменяется относительно элемента Холла в датчике.Это перемещение положения затем изменяет силу магнитного поля, которое прикладывается к элементу Холла, которое, в свою очередь, отражается как изменение измеренного напряжения Холла. Таким образом, измеренное напряжение Холла становится индикатором положения объекта.
Волоконно-оптические датчики положения
В оптоволоконных датчиках положения используется оптическое волокно с набором фотодетекторов, расположенных на каждом конце волокна. Источник света прикреплен к объекту, за движением которого наблюдают.Световая энергия, которая направляется во флуоресцентное волокно в месте расположения объекта, отражается в волокне и направляется на любой конец волокна, где она обнаруживается фотодетекторами. Логарифм отношения измеренной оптической мощности, наблюдаемой на двух фотодетекторах, будет линейной функцией расстояния от объекта до конца волокна, и поэтому это значение можно использовать для получения информации о положении объекта.
Оптические датчики положения
Оптические датчики положения работают по одному из двух принципов.В первом типе свет передается от излучателя и направляется к приемнику на другом конце датчика. Во втором типе излучаемый световой сигнал отражается от контролируемого объекта и возвращается к источнику света. Изменение характеристик света (например, длины волны, интенсивности, фазы, поляризации) используется для получения информации о положении объекта. Эти типы датчиков делятся на три категории:
- Прозрачные оптические энкодеры
- Световозвращающие оптические энкодеры
- Интерференционные оптические энкодеры
Оптические датчики положения на базе энкодера доступны как для линейного, так и для вращательного движения.
Ультразвуковые датчики положения
Подобно оптическим датчикам положения, ультразвуковые датчики положения излучают высокочастотную звуковую волну, обычно генерируемую пьезоэлектрическим кристаллическим преобразователем. Ультразвуковые волны, генерируемые датчиком, отражаются от измеряемого объекта или цели обратно к датчику, где генерируется выходной сигнал. Ультразвуковые датчики могут работать как датчики приближения, когда они сообщают об объекте, находящемся в пределах указанного диапазона датчика, или как датчик положения, который предоставляет информацию о дальности.Преимущества ультразвуковых датчиков положения заключаются в том, что они могут работать с целевыми объектами из различных материалов и поверхностей, а также обнаруживать небольшие объекты на большем расстоянии, чем другие типы датчиков положения. Они также устойчивы к вибрации, окружающему шуму, электромагнитным помехам и инфракрасному излучению.
Характеристики датчика положенияКонкретные параметры, которые определяют работу датчика положения, будут варьироваться в зависимости от выбранного типа датчика, поскольку основные принципы технологии меняются от типа к типу.Некоторые ключевые характеристики, которые следует учитывать, которые применимы к большинству датчиков положения, следующие:
- Диапазон измерения — указывает диапазон расстояний от датчика, для которого можно получить измеренное значение.
- Разрешение — определяет значение наименьшего приращения положения, которое может измерить датчик.
- Точность — мера степени, в которой измеренное положение согласуется с фактическим положением измеряемого объекта.
- Повторяемость — отражает диапазон значений, полученных для измеренного положения, когда датчик выполняет идентичное измерение во времени.
- Линейность — степень отклонения от линейного поведения выходного сигнала, измеренного в диапазоне выходного сигнала датчика.
Другие рекомендации по выбору датчиков положения включают:
- Размер и вес датчика
- Предоставляет ли датчик абсолютную или инкрементную информацию о положении
- Диапазон рабочих температур для прибора
- Способность датчика противостоять другим условиям окружающей среды и эксплуатации, таким как наличие конденсата, загрязнения или механических ударов и вибрации
- Простота установки
- Начальная стоимость
Примеры применения датчика положения
Датчики положения имеют множество применений и лежат в основе многих автоматизированных процессов.Знакомая — автоматизированная автомойка. Датчики положения используются для определения местоположения автомобиля, когда он проезжает через автомойку. Это позволяет активировать уборочное оборудование в нужное время. Чтобы автомойка могла очистить шины, ей необходимо знать, где они находятся и когда они находятся в правильном положении, чтобы нанести чистящие средства или средства защиты шин. Учитывая тот факт, что автомобили бывают разных размеров, необходимы датчики положения, чтобы определять, когда начинать и останавливать процесс очистки, чтобы автомойка могла адаптироваться к различным транспортным средствам и при этом эффективно очищать их все.
Датчики положения также используются для управления оборудованием. Индуктивные датчики, которые представляют собой большие петли проводов, встроенные в дороги, используются для обнаружения присутствия транспортных средств на полосе левого поворота, чтобы система управления движением могла активировать светофор. На парковках с системами контроля доступа датчики положения используются для подъема ворот при приближении транспортных средств. Лифты используют датчики положения, чтобы определить, что лифт правильно расположен на определенном этаже и что двери лифта можно безопасно открывать.
В промышленных процессах на автоматизированных производственных линиях используются датчики положения, чтобы убедиться, что продукты правильно расположены перед автоматическим этапом процесса, таким как распыление краски на кузов автомобиля или добавление воды в бутылку с водой. В медицинских учреждениях есть сканеры МРТ, которые используют датчики положения, чтобы убедиться, что положение пациента правильное, перед сканированием или визуализацией, а также для перемещения пациента через аппарат МРТ.
Автомобильные конструкторы и инженеры используют датчики положения для измерения важных параметров двигателя, таких как положение коленчатого вала и положение дроссельной заслонки.
Камеры видеонаблюдения, которые имеют возможность сканирования и наклона, будут использовать датчики положения для определения относительного направления камеры, чтобы убедиться, что она правильно сориентирована для оптимального обзора.
Сводка
В этой статье представлен обзор датчиков положения, включая их описание, типы, основные характеристики и способы их использования. Для получения информации по другим темам обратитесь к нашим дополнительным руководствам или посетите платформу Thomas Supplier Discovery Platform, где вы можете найти потенциальные источники поставок для более чем 70 000 различных категорий продуктов и услуг.
Источники:
- https://www.electronics-tutorials.ws
- https://www.azosensors.com/article.aspx?ArticleID=308
- https://www.engineersgarage.com
- https://www.positek.com/
- https://www.te.com/usa-en/products/sensors/position-sensors.html
- https://www.sensorland.com/HowPage024.html
- https://www.celeramotion.com/zettlex/support/technical-papers/position-sensors-choosing-the-right-sensor/
- https: // www.linearmotiontips.com/how-do-magnetostrictive-sensors-work/
- http://hyperphysics.