Как уменьшить обороты двигателя без потери мощности
При использовании электродвигателя в инструментах, одной из серьёзных проблем является регулировка скорости их вращения. Если скорость недостаточно высока, то действие инструмента является недостаточно эффективным.
Если же она излишне высока, то это приводит не только к существенному перерасходу электрической энергии, но и к возможному пережогу инструмента. При слишком высокой скорости вращения, работа инструмента может стать также менее предсказуемой. Как это исправить? Для этой цели принято использовать специальный регулятор скорости вращения.
Двигатель для электроинструментов и бытовой техники обычно относится к одному из 2 основных типов:
- Коллекторные двигатели.
- Асинхронные двигатели.
В прошлом, вторая из указанных категорий имела наибольшее распространение. Сейчас, примерно 85% двигателей, которые употребляются в электрических инструментах, бытовой или кухонной технике, относятся к коллекторному типу. Объясняется это тем, что они имеют большую степень компактности, они мощнее и процесс управления ими является более простым.
Объясняется это тем, что они имеют большую степень компактности, они мощнее и процесс управления ими является более простым.
Действие любого электродвигателя построено на очень простом принципе: если между полюсами магнита поместить прямоугольную рамку, которая может вращаться вокруг своей оси, и пустить по ней постоянный ток, то рамка станет поворачиваться. Направление вращения определяется согласно «правилу правой руки».
Эту закономерность можно использовать для работы коллекторного двигателя.
Важным моментом здесь является подключение тока к этой рамке. Поскольку она вращается, для этого используются специальные скользящие контакты. После того, как рамка повернётся на 180 градусов, ток по этим контактам потечёт в обратном направлении. Таким образом, направление вращения останется прежним. При этом, плавного вращения не получится. Для достижения такого эффекта принято использовать несколько десятков рамок.
Устройство
Коллекторный двигатель состоит обычно из ротора (якоря), статора, щёток и тахогенератора:
- Ротор — это вращающаяся часть, статор — это внешний магнит.

- Щётки, сделанные из графита – это основная часть скользящих контактов, через которую на вращающийся якорь подаётся напряжение.
- Тахогенератор – это прибор, который отслеживает характеристики вращения. В случае нарушения равномерности движения, он корректирует поступающее в двигатель напряжение, тем самым делая его более плавным.
- Статор может содержать не один магнит, а, например, 2 (2 пары полюсов). Также, вместо статических магнитов, здесь могут быть использованы и катушки электромагнитов. Работать такой мотор может как от постоянного, так и от переменного тока.
Простота регулировки скорости коллекторного двигателя определяется тем, что скорость вращения прямо зависит от величины поданного напряжения.
Кроме этого, важной особенностью является то, что ось вращения непосредственно можно присоединять к вращающемуся инструменты без использования промежуточных механизмов.
Если говорить об их классификации, то можно говорить о:
- Коллекторных двигателях постоянного тока.

- Коллекторных двигателях переменного тока.
В этом случае, речь идёт о том, каким именно током происходит питание электродвигателей.
Разница состоит в том, как организованы эти подключения.
Тут принято различать:
- Параллельное возбуждение.
- Последовательное возбуждение.
- Параллельно-последовательное возбуждение.
Регулировка
Теперь расскажем о том, как можно регулировать обороты коллекторных двигателей. В связи с тем, что скорость вращения мотора просто зависит от величины подаваемого напряжения, то любые средства регулировки, которые способны выполнять эту функцию для этого вполне пригодны.
Перечислим несколько такого рода вариантов для примера:
- Лабораторный автотрансформатор (ЛАТР).
- Заводские платы регулировки, используемые в бытовых приборах (можно использовать в частности те, которые применяются в миксерах или в пылесосах).

- Кнопки, используемые в конструкции электроинструментах.
- Бытовые регуляторы освещения с плавным действием.
Однако, все вышеперечисленные способы имеют очень важный изъян. Вместе с уменьшением оборотов, одновременно уменьшается и мощность работы мотора. В некоторых случаях, его можно остановить даже просто рукой. В некоторых случаях, это может быть приемлемо, но большей частью, это является серьёзным препятствием.
Хорошим вариантом является выполнение регулировки оборотов посредством использования тахогенератора. Его обычно устанавливают на заводе. При отклонениях в скорости вращения мотора, через симисторы в мотор передаётся уже откорректированное электропитание, соответствующее требуемой скорости вращения. Если в эту схему встроить регулировку вращения мотора, то потери мощности здесь происходить не будет.
Как это выглядит конструктивно? Наиболее распространены реостатная регулировка вращения, и сделанная на основе использования полупроводников.
В первом случае, речь идёт о переменном сопротивлении с механической регулировкой. Она последовательно подключается к коллекторному электродвигателю. Недостатком является дополнительное выделение тепла и дополнительная трата ресурса аккумулятора. При таком способе регулировк, происходит потеря мощности вращения мотора. Является дешёвым решением. Не применяется для достаточно мощных моторов по упомянутым причинам.
Во втором случае, при использовании полупроводников, происходит управление мотором путём подачи определённых импульсов. Схема может менять длительность таких импульсов, что в свою очередь, меняет скорость вращения без потери мощности.
Как изготовить своими руками?
Существуют различные варианты схем регулировки. Приведём один из них более подробно.
Вот схема его работы:
Первоначально, это устройство было разработана для регулировки коллекторного двигателя на электротранспорте. Речь шла о таком, где напряжение питания составляет 24 В, но эта конструкция применима и для других двигателей.
Речь шла о таком, где напряжение питания составляет 24 В, но эта конструкция применима и для других двигателей.
Слабым местом схемы, которое было определено при испытаниях её работы, является плохая пригодность при очень больших значениях силы тока. Это связано с некоторым замедлением работы транзисторных элементов схемы.
Рекомендуется, чтобы ток составлял не более 70 А. В этой схеме нет защиты по току и по температуре, поэтому рекомендуется встроить амперметр и контролировать силу тока визуально. Частота коммутации составит 5 кГц, она определяется конденсатором C2 ёмкостью 20 нф.
При этом, рекомендуется подобрать величину R1 таким образом, чтобы правильно настроить работу регулятора. С выхода микросхемы, управляющий импульс поступает на двухтактный усилитель на транзисторах КТ815 и КТ816, далее идёт уже на транзисторы.
Печатная плата имеет размер 50 на 50 мм и изготавливается из одностороннего стеклотекстолита:
На этой схеме дополнительно указаны 2 резистора по 45 ом. Это сделано для возможного подключения обычного компьютерного вентилятора для охлаждения прибора. При использовании в качестве нагрузки электродвигателя, необходимо схему заблокировать блокирующим (демпферным) диодом, который по своим характеристикам соответствует удвоенному значению тока нагрузки и удвоенному значению питающего напряжения.
Это сделано для возможного подключения обычного компьютерного вентилятора для охлаждения прибора. При использовании в качестве нагрузки электродвигателя, необходимо схему заблокировать блокирующим (демпферным) диодом, который по своим характеристикам соответствует удвоенному значению тока нагрузки и удвоенному значению питающего напряжения.
Работа устройства при отсутствии такого диода может привести к поломке вследствие возможного перегрева. При этом, диод нужно будет поместить на теплоотвод. Для этого, можно воспользоваться металлической пластиной, которая имеет площадь 30 см2.
Регулирующие ключи работают так, что потери мощности на них достаточно малы. В оригинальной схеме, был использован стандартный компьютерный вентилятор. Для его подключения использовалось ограничительное сопротивление 100 Ом и напряжение питания 24 В.
Собранное устройство выглядит следующим образом:
При изготовлении силового блока (на нижнем рисунке), провода должны быть присоединены таким образом, чтобы было минимум изгибов тех проводников по которым проходят большие токи. Мы видим, что изготовление такого прибора требует определённых профессиональных знаний и навыков. Возможно, в некоторых случаях имеет смысл воспользоваться покупным устройством.
Мы видим, что изготовление такого прибора требует определённых профессиональных знаний и навыков. Возможно, в некоторых случаях имеет смысл воспользоваться покупным устройством.
Критерии выбора и соимость
Для того, чтобы правильно выбрать наиболее подходящий тип регулятора, нужно хорошо представлять себе, какие есть разновидности таких устройств:
- Различные типы управления. Может быть векторная или скалярная система управления. Первые применяются чаще, а вторые считаются более надёжными.
- Мощность регулятора должна соответствовать максимально возможной мощности мотора.
- По напряжению удобно выбирать устройство, имеющее наиболее универсальные свойства.
- Характеристики по частоте. Регулятор, который вам подходит, должен соответствовать наиболее высокой частоте, которую использует мотор.

- Другие характеристики. Здесь речь идёт о величине гарантийного срока, размерах и других характеристиках.
В зависимости от назначения и потребительских свойств, цены на регуляторы мог
Как уменьшить обороты однофазного электродвигателя 220в
Благодаря надежности и простоте конструкции асинхронные двигатели (АД) получили широкое распространение. В большинстве станков, промышленном и бытовом оборудовании применяются электродвигатели такого типа. Изменение скорости вращения АД производится механически (дополнительной нагрузкой на валу, балластом, передаточными механизмами, редукторами и т.д.) или электрическими способами. Электрическое регулирование более сложное, но и гораздо более удобное и универсальное.
Для многих агрегатов применяется именно электрическое управление. Оно обеспечивает точное и плавное регулирование пуска и работы двигателя. Электрическое управление производится за счет:
- изменения частоты тока;
- силы тока;
- уровня напряжения.
В этой статье мы рассмотрим популярные способы, как может осуществляться регулировка оборотов асинхронного двигателя на 220 и 380В.
Изменение скорости АД с короткозамкнутым ротором
Существует несколько способов:
- Управление вращением за счет изменения электромагнитного поля статора: частотное регулирование и изменение числа пар полюсов.
- Изменение скольжения электромотора за счет уменьшения или увеличения напряжения (может применяться для АД с фазным ротором).
Частотное регулирование
В данном случае регулировка производится с помощью подключенного к двигателю устройства для преобразования частоты. Для этого применяются мощные тиристорные преобразователи. Процесс частотного регулирования можно рассмотреть на примере формулы ЭДС трансформатора:
Данное выражение означает, что для сохранения постоянного магнитного потока, означающего сохранение перегрузочной способности электромотора, следует одновременно с преобразованием частоты корректировать и уровень питающего напряжения. Если сохраняется выражение, вычисленное по формуле:
Если сохраняется выражение, вычисленное по формуле:
то это означает, что критический момент не изменен. А механические характеристики соответствуют рисунку ниже, если вы не понимаете, что значат эти характеристики, то в этом случае регулировка происходит без потери мощности и момента.
Достоинствами данного метода являются:
- плавное регулирование;
- изменение скорости вращения ротора в большую и меньшую сторону;
- жесткие механические характеристики;
- экономичность.
Недостаток один — необходимость в частотном преобразователе, т.е. увеличение стоимости механизма. К слову, на современном рынке представлены модели с однофазным и трёхфазным входом, стоимость которых при мощности 2-3 кВт лежит в диапазоне 100-150 долларов, что не слишком дорого для полноценной регулировки привода станков в частной мастерской.
Переключение числа пар полюсов
Данный метод применяется для многоскоростных двигателей со сложной обмоткой, позволяющей изменять число пар ее полюсов.
В четырехскоростном электродвигателе обмотка выполнена в виде двух независимых друг от друга частей. При изменении числа пар полюсов первой обмотки производится изменение скорости работы электромотора с 3000 до 1500 оборотов в минуту. При помощи второй обмотки производится регулировка вращения 1000 и 500 оборотов в минуту.
При изменении числа пар полюсов происходит и изменение критического момента. Для его сохранения неизменным, требуется одновременно с изменением числа пар полюсов регулировать и питающее напряжение, например, переключением схемы звезда-треугольник и их вариациями.
Достоинства данного метода:
- жесткие механические характеристики двигателя;
- высокий КПД.

- ступенчатая регулировка;
- большой вес и габаритные размеры;
- высокая стоимость электромотора.
Способы управления скоростью АД с фазным ротором
Изменение скорости вращения АД с фазным ротором производится путем изменения скольжения. Рассмотрим основные варианты и способы.
Изменение питающего напряжения
Этот способ также применяется для АД с КЗ ротором. Асинхронный двигатель подключается через автотрансформатор или ЛАТР. Если уменьшать напряжение питания, частота вращения двигателя снизится.
Но такой режим уменьшает перегрузочную способность двигателя. Этот способ применяется для регулирования в пределах напряжения не выше номинального, так как увеличение номинального напряжения приведет к выходу электродвигателя из строя.
Активное сопротивление в цепи ротора
При использовании данного метода в цепь ротора подключается реостат или набор постоянных резисторов большой мощности. Данное устройство предназначено для плавного увеличения сопротивления.
Скольжение растет пропорционально увеличению сопротивления, а скорость вращения вала электромотора при этом снижается.
- большой диапазон регулирования в сторону понижения скорости вращения.
- снижение КПД;
- увеличение потерь;
- ухудшение механических характеристик.
Асинхронный вентильный каскад и машины двойного питания
Изменение скорости работы асинхронных электромоторов в данных случаях выполняется путем изменения скольжения. При этом скорость вращения электромагнитного поля неизменна. Напряжение подается напрямую на обмотки статора. Регулировка происходит за счет использования мощности скольжения, которая трансформируется в цепь ротора, и образует добавочную ЭДС. Такие методы используются только в специальных машинах и крупных промышленных устройствах.
Плавный пуск асинхронных электродвигателей
АД кроме безусловных преимуществ, обладают существенными недостатками. Это рывок на старте и большие пусковые токи, в 7 раз превышающие номинальные. Для мягкого старта электродвигателя используются следующие методы:
- переключение обмоток по схеме звезда – треугольник;
- включение электродвигателя через автотрансформатор;
- использование специализированных устройств для плавного пуска.
В большинстве частотных регуляторов есть функция плавного пуска двигателя. Это не только снижает пусковые токи, но и уменьшает нагрузки на исполнительные механизмы. Поэтому регулирование частоты и плавный пуск довольно сильно связаны между собой.
Как сделать устройство для изменения скорости вращения электродвигателя своими руками
Для регулировки маломощных однофазных АД можно использовать диммеры. Однако этот способ ненадежен и обладает серьезными недостатками: снижением КПД, серьезным перегревом устройства и опасностью повреждения двигателя.
Для надежного и качественного регулирования оборотов электродвигателей на 220В, лучше всего подходит частотное регулирование.
Приведенная ниже схема позволяет собрать частотное устройство для регулировки электромоторов мощностью до 500 Вт.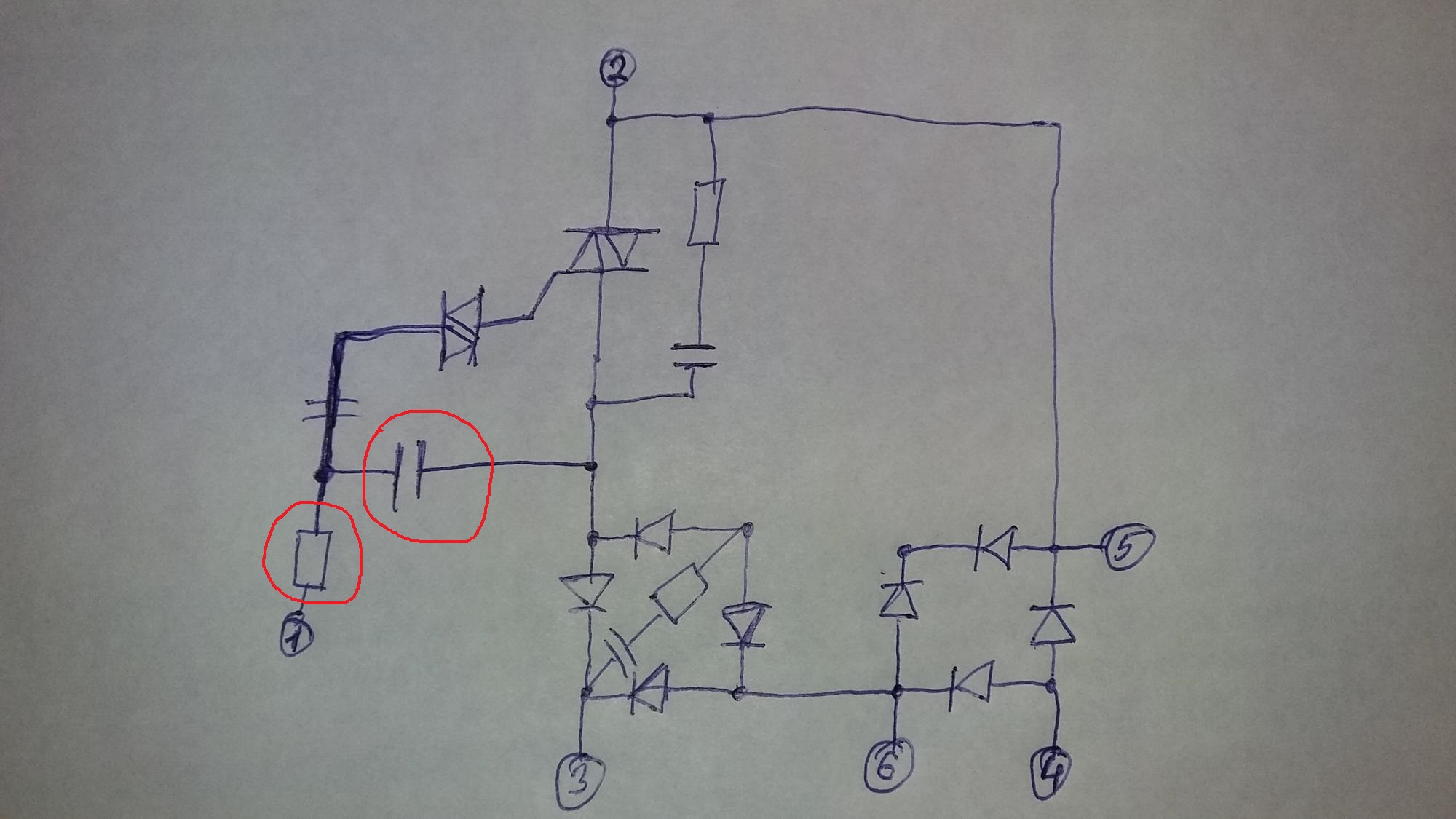 Изменение скорости вращения производится в границах от 1000 до 4000 оборотов в минуту.
Изменение скорости вращения производится в границах от 1000 до 4000 оборотов в минуту.
Устройство состоит из задающего генератора с изменяемой частотой, состоящего из мультивибратора, собранного на микросхеме К561ЛА7, счетчика на микросхеме К561ИЕ8, полумоста регулятора. Выходной трансформатор Т1 выполняет развязку верхнего и нижнего транзисторов полумоста.
Демпфирующая цепь С4, R7 гасит всплески напряжения опасные для силовых транзисторов VT3, VT4. Выпрямитель, удвоитель напряжения питающей сети, включает в себя диодный мост VD9, с конденсатором фильтра на которых происходит удвоение напряжения питания полумоста.
Напряжение первичной обмотки: 2х12В, вторичной обмотки 12В. Первичная обмотка трансформатора управления ключами, состоит из 120 витков медного провода сечением 0,7мм, с отводом от середины. Вторичная – две обмотки, каждая по 60 витков повода сечением 0,7 мм.
Вторичные обмотки необходимо максимально надежно заизолировать друг от друга, так как разница потенциалов между ними доходит до 640 В. Подключение выходных обмоток к затворам ключей производится в противофазе.
Подключение выходных обмоток к затворам ключей производится в противофазе.
Вот мы и рассмотрели способы регулировки оборотов асинхронных двигателей. Если возникли вопросы, задавайте их в комментариях под статьей!
Благодаря надежности и простоте конструкции асинхронные двигатели (АД) получили широкое распространение. В большинстве станков, промышленном и бытовом оборудовании применяются электродвигатели такого типа. Изменение скорости вращения АД производится механически (дополнительной нагрузкой на валу, балластом, передаточными механизмами, редукторами и т.д.) или электрическими способами. Электрическое регулирование более сложное, но и гораздо более удобное и универсальное.
Для многих агрегатов применяется именно электрическое управление. Оно обеспечивает точное и плавное регулирование пуска и работы двигателя. Электрическое управление производится за счет:
- изменения частоты тока;
- силы тока;
- уровня напряжения.
В этой статье мы рассмотрим популярные способы, как может осуществляться регулировка оборотов асинхронного двигателя на 220 и 380В.
Изменение скорости АД с короткозамкнутым ротором
Существует несколько способов:
- Управление вращением за счет изменения электромагнитного поля статора: частотное регулирование и изменение числа пар полюсов.
- Изменение скольжения электромотора за счет уменьшения или увеличения напряжения (может применяться для АД с фазным ротором).
Частотное регулирование
В данном случае регулировка производится с помощью подключенного к двигателю устройства для преобразования частоты. Для этого применяются мощные тиристорные преобразователи. Процесс частотного регулирования можно рассмотреть на примере формулы ЭДС трансформатора:
Данное выражение означает, что для сохранения постоянного магнитного потока, означающего сохранение перегрузочной способности электромотора, следует одновременно с преобразованием частоты корректировать и уровень питающего напряжения. Если сохраняется выражение, вычисленное по формуле:
то это означает, что критический момент не изменен.
Достоинствами данного метода являются:
- плавное регулирование;
- изменение скорости вращения ротора в большую и меньшую сторону;
- жесткие механические характеристики;
- экономичность.
Недостаток один — необходимость в частотном преобразователе, т.е. увеличение стоимости механизма. К слову, на современном рынке представлены модели с однофазным и трёхфазным входом, стоимость которых при мощности 2-3 кВт лежит в диапазоне 100-150 долларов, что не слишком дорого для полноценной регулировки привода станков в частной мастерской.
Переключение числа пар полюсов
Данный метод применяется для многоскоростных двигателей со сложной обмоткой, позволяющей изменять число пар ее полюсов. Самое широкое применение получили двухскоростные, трехскоростные и четырехскоростные АД.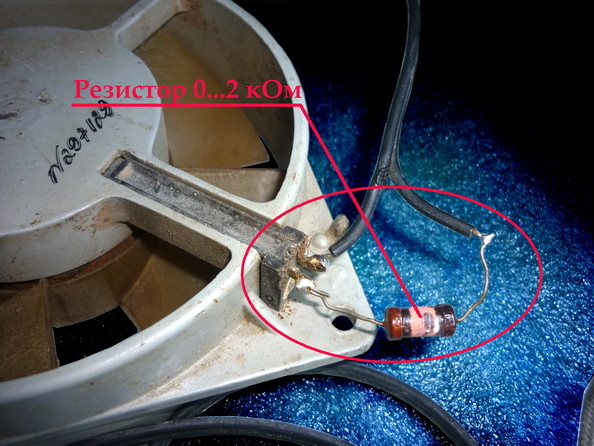 Принцип регулировки проще всего рассмотреть на основе двухскоростного АД. В такой машине обмотка каждой фазы состоит из двух полуобмоток. Скорость вращения изменяется при подключении их последовательно или параллельно.
Принцип регулировки проще всего рассмотреть на основе двухскоростного АД. В такой машине обмотка каждой фазы состоит из двух полуобмоток. Скорость вращения изменяется при подключении их последовательно или параллельно.
В четырехскоростном электродвигателе обмотка выполнена в виде двух независимых друг от друга частей. При изменении числа пар полюсов первой обмотки производится изменение скорости работы электромотора с 3000 до 1500 оборотов в минуту. При помощи второй обмотки производится регулировка вращения 1000 и 500 оборотов в минуту.
При изменении числа пар полюсов происходит и изменение критического момента. Для его сохранения неизменным, требуется одновременно с изменением числа пар полюсов регулировать и питающее напряжение, например, переключением схемы звезда-треугольник и их вариациями.
Достоинства данного метода:
- жесткие механические характеристики двигателя;
- высокий КПД.
- ступенчатая регулировка;
- большой вес и габаритные размеры;
- высокая стоимость электромотора.
Способы управления скоростью АД с фазным ротором
Изменение скорости вращения АД с фазным ротором производится путем изменения скольжения. Рассмотрим основные варианты и способы.
Изменение питающего напряжения
Этот способ также применяется для АД с КЗ ротором. Асинхронный двигатель подключается через автотрансформатор или ЛАТР. Если уменьшать напряжение питания, частота вращения двигателя снизится.
Но такой режим уменьшает перегрузочную способность двигателя. Этот способ применяется для регулирования в пределах напряжения не выше номинального, так как увеличение номинального напряжения приведет к выходу электродвигателя из строя.
Активное сопротивление в цепи ротора
При использовании данного метода в цепь ротора подключается реостат или набор постоянных резисторов большой мощности. Данное устройство предназначено для плавного увеличения сопротивления.
Скольжение растет пропорционально увеличению сопротивления, а скорость вращения вала электромотора при этом снижается.
- большой диапазон регулирования в сторону понижения скорости вращения.
- снижение КПД;
- увеличение потерь;
- ухудшение механических характеристик.
Асинхронный вентильный каскад и машины двойного питания
Изменение скорости работы асинхронных электромоторов в данных случаях выполняется путем изменения скольжения. При этом скорость вращения электромагнитного поля неизменна. Напряжение подается напрямую на обмотки статора. Регулировка происходит за счет использования мощности скольжения, которая трансформируется в цепь ротора, и образует добавочную ЭДС. Такие методы используются только в специальных машинах и крупных промышленных устройствах.
Плавный пуск асинхронных электродвигателей
АД кроме безусловных преимуществ, обладают существенными недостатками. Это рывок на старте и большие пусковые токи, в 7 раз превышающие номинальные. Для мягкого старта электродвигателя используются следующие методы:
- переключение обмоток по схеме звезда – треугольник;
- включение электродвигателя через автотрансформатор;
- использование специализированных устройств для плавного пуска.

В большинстве частотных регуляторов есть функция плавного пуска двигателя. Это не только снижает пусковые токи, но и уменьшает нагрузки на исполнительные механизмы. Поэтому регулирование частоты и плавный пуск довольно сильно связаны между собой.
Как сделать устройство для изменения скорости вращения электродвигателя своими руками
Для регулировки маломощных однофазных АД можно использовать диммеры. Однако этот способ ненадежен и обладает серьезными недостатками: снижением КПД, серьезным перегревом устройства и опасностью повреждения двигателя.
Для надежного и качественного регулирования оборотов электродвигателей на 220В, лучше всего подходит частотное регулирование.
Приведенная ниже схема позволяет собрать частотное устройство для регулировки электромоторов мощностью до 500 Вт. Изменение скорости вращения производится в границах от 1000 до 4000 оборотов в минуту.
Устройство состоит из задающего генератора с изменяемой частотой, состоящего из мультивибратора, собранного на микросхеме К561ЛА7, счетчика на микросхеме К561ИЕ8, полумоста регулятора. Выходной трансформатор Т1 выполняет развязку верхнего и нижнего транзисторов полумоста.
Выходной трансформатор Т1 выполняет развязку верхнего и нижнего транзисторов полумоста.
Демпфирующая цепь С4, R7 гасит всплески напряжения опасные для силовых транзисторов VT3, VT4. Выпрямитель, удвоитель напряжения питающей сети, включает в себя диодный мост VD9, с конденсатором фильтра на которых происходит удвоение напряжения питания полумоста.
Напряжение первичной обмотки: 2х12В, вторичной обмотки 12В. Первичная обмотка трансформатора управления ключами, состоит из 120 витков медного провода сечением 0,7мм, с отводом от середины. Вторичная – две обмотки, каждая по 60 витков повода сечением 0,7 мм.
Вторичные обмотки необходимо максимально надежно заизолировать друг от друга, так как разница потенциалов между ними доходит до 640 В. Подключение выходных обмоток к затворам ключей производится в противофазе.
Вот мы и рассмотрели способы регулировки оборотов асинхронных двигателей. Если возникли вопросы, задавайте их в комментариях под статьей!
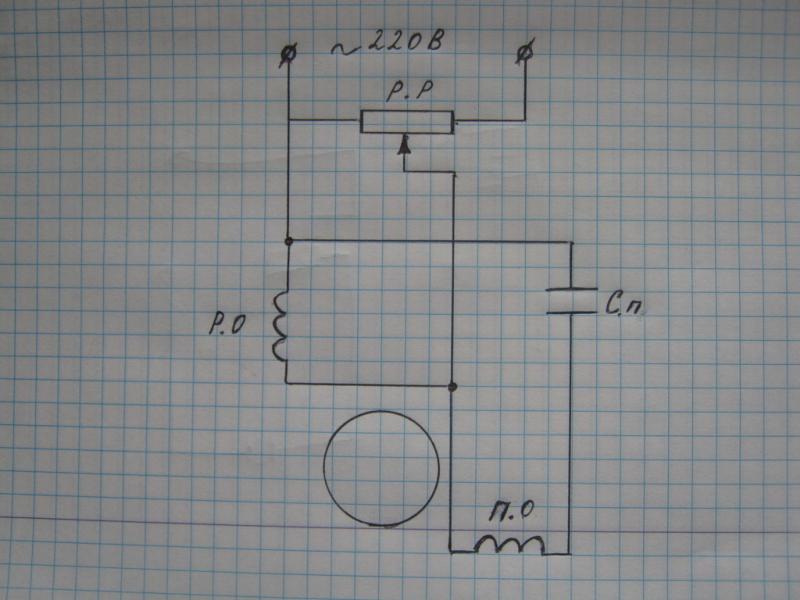
Однофазные асинхронные двигатели питаются от обычной сети переменного напряжения 220 В.
Наиболее распространённая конструкция таких двигателей содержит две (или более) обмотки – рабочую и фазосдвигающую. Рабочая питается напрямую, а дополнительная через конденсатор, который сдвигает фазу на 90 градусов, что создаёт вращающееся магнитное поле. Поэтому такие двигатели ещё называют двухфазные или конденсаторные.
Регулировать скорость вращения таких двигателей необходимо, например, для:
- изменения расхода воздуха в системе вентиляции
- регулирования производительности насосов
- изменения скорости движущихся деталей, например в станках, конвеерах
В системах вентиляции это позволяет экономить электроэнергию, снизить уровень акустического шума установки, установить необходимую производительность.
Способы регулирования
Рассматривать механические способы изменения скорости вращения, например редукторы, муфты, шестерёнчатые трансмиссии мы не будем. Также не затронем способ изменения количества полюсов обмоток.
Рассмотрим способы с изменением электрических параметров:
- изменение напряжения питания двигателя
- изменение частоты питающего напряжения
Регулирование напряжением
Регулирование скорости этим способом связано с изменением, так называемого, скольжения двигателя – разностью между скоростью вращения магнитного поля, создаваемого неподвижным статором двигателя и его движущимся ротором:
n1 – скорость вращения магнитного поля
n2– скорость вращения ротора
При этом обязательно выделяется энергия скольжения – из-за чего сильнее нагреваются обмотки двигателя.
Данный способ имеет небольшой диапазон регулирования, примерно 2:1, а также может осуществляться только вниз – то есть, снижением питающего напряжения.
При регулировании скорости таким способом необходимо устанавливать двигатели завышенной мощности.
Но несмотря на это, этот способ используется довольно часто для двигателей небольшой мощности с вентиляторной нагрузкой.
На практике для этого применяют различные схемы регуляторов.
Автотрансформаторное регулирование напряжения
Автотрансформатор – это обычный трансформатор, но с одной обмоткой и с отводами от части витков. При этом нет гальванической развязки от сети, но она в данном случае и не нужна, поэтому получается экономия из-за отсутствия вторичной обмотки.
На схеме изображён автотрансформатор T1, переключатель SW1, на который приходят отводы с разным напряжением, и двигатель М1.
Регулировка получается ступенчатой, обычно используют не более 5 ступеней регулирования.
Преимущества данной схемы:
- неискажённая форма выходного напряжения (чистая синусоида)
- хорошая перегрузочная способность трансформатора
Недостатки:
- большая масса и габариты трансформатора (зависят от мощности нагрузочного мотора)
- все недостатки присущие регулировке напряжением
Тиристорный регулятор оборотов двигателя
В данной схеме используются ключи – два тиристора, включённых встречно-параллельно (напряжение переменное, поэтому каждый тиристор пропускает свою полуволну напряжения) или симистор./F036M_(6-90V-15A)-02.JPG?1513880782167385)
Схема управления регулирует момент открытия и закрытия тиристоров относительно фазового перехода через ноль, соответственно «отрезается» кусок вначале или, реже в конце волны напряжения.
Таким образом изменяется среднеквадратичное значение напряжения.
Данная схема довольно широко используется для регулирования активной нагрузки – ламп накаливания и всевозможных нагревательных приборов (так называемые диммеры).
Ещё один способ регулирования – пропуск полупериодов волны напряжения, но при частоте в сети 50 Гц для двигателя это будет заметно – шумы и рывки при работе.
Для управления двигателями регуляторы модифицируют из-за особенностей индуктивной нагрузки:
- устанавливают защитные LRC-цепи для защиты силового ключа (конденсаторы, резисторы, дроссели)
- добавляют на выходе конденсатор для корректировки формы волны напряжения
- ограничивают минимальную мощность регулирования напряжения – для гарантированного старта двигателя
- используют тиристоры с током в несколько раз превышающим ток электромотора
Достоинства тиристорных регуляторов:
Недостатки:
- можно использовать для двигателей небольшой мощности
- при работе возможен шум, треск, рывки двигателя
- при использовании симисторов на двигатель попадает постоянное напряжение
- все недостатки регулирования напряжением
Стоит отметить, что в большинстве современных кондиционеров среднего и высшего уровня скорость вентилятора регулируется именно таким способом.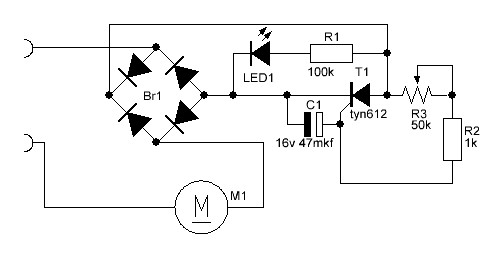
Транзисторный регулятор напряжения
Как называет его сам производитель – электронный автотрансформатор или ШИМ-регулятор.
Изменение напряжения осуществляется по принципу ШИМ (широтно-импульсная модуляция), а в выходном каскаде используются транзисторы – полевые или биполярные с изолированным затвором (IGBT).
Выходные транзисторы коммутируются с высокой частотой (около 50 кГц), если при этом изменить ширину импульсов и пауз между ними, то изменится и результирующее напряжение на нагрузке. Чем короче импульс и длиннее паузы между ними, тем меньше в итоге напряжение и подводимая мощность.
Для двигателя, на частоте в несколько десятков кГц, изменение ширины импульсов равносильно изменению напряжения.
Выходной каскад такой же как и у частотного преобразователя, только для одной фазы – диодный выпрямитель и два транзистора вместо шести, а схема управления изменяет выходное напряжение.
Плюсы электронного автотрансформатора:
- Небольшие габариты и масса прибора
- Невысокая стоимость
- Чистая, неискажённая форма выходного тока
- Отсутствует гул на низких оборотах
- Управление сигналом 0-10 Вольт
Слабые стороны:
- Расстояние от прибора до двигателя не более 5 метров (этот недостаток устраняется при использовании дистанционного регулятора)
- Все недостатки регулировки напряжением
Частотное регулирование
Ещё совсем недавно (10 лет назад) частотных регуляторов скорости двигателей на рынке было ограниченное количество, и стоили они довольно дорого. Причина – не было дешёвых силовых высоковольтных транзисторов и модулей.
Причина – не было дешёвых силовых высоковольтных транзисторов и модулей.
Но разработки в области твердотельной электроники позволили вывести на рынок силовые IGBT-модули. Как следствие – массовое появление на рынке инверторных кондиционеров, сварочных инверторов, преобразователей частоты.
На данный момент частотное преобразование – основной способ регулирования мощности, производительности, скорости всех устройств и механизмов приводом в которых является электродвигатель.
Однако, преобразователи частоты предназначены для управления трёхфазными электродвигателями.
Однофазные двигатели могут управляться:
- специализированными однофазными ПЧ
- трёхфазными ПЧ с исключением конденсатора
Преобразователи для однофазных двигателей
В настоящее время только один производитель заявляет о серийном выпуске специализированного ПЧ для конденсаторных двигателей – INVERTEK DRIVES.
Это модель Optidrive E2
Для стабильного запуска и работы двигателя используются специальные алгоритмы.
При этом регулировка частоты возможна и вверх, но в ограниченном диапазоне частот, этому мешает конденсатор установленный в цепи фазосдвигающей обмотки, так как его сопротивление напрямую зависит от частоты тока:
f – частота тока
С – ёмкость конденсатора
В выходном каскаде используется мостовая схема с четырьмя выходными IGBT транзисторами:
Optidrive E2 позволяет управлять двигателем без исключения из схемы конденсатора, то есть без изменения конструкции двигателя – в некоторых моделях это сделать довольно сложно.
Преимущества специализированного частотного преобразователя:
- интеллектуальное управление двигателем
- стабильно устойчивая работа двигателя
- огромные возможности современных ПЧ:
- возможность управлять работой двигателя для поддержания определённых характеристик (давления воды, расхода воздуха, скорости при изменяющейся нагрузке)
- многочисленные защиты (двигателя и самого прибора)
- входы для датчиков (цифровые и аналоговые)
- различные выходы
- коммуникационный интерфейс (для управления, мониторинга)
- предустановленные скорости
- ПИД-регулятор
Минусы использования однофазного ПЧ:
Использование ЧП для трёхфазных двигателей
Стандартный частотник имеет на выходе трёхфазное напряжение. При подключении к ему однофазного двигателя из него извлекают конденсатор и соединяют по приведённой ниже схеме:
При подключении к ему однофазного двигателя из него извлекают конденсатор и соединяют по приведённой ниже схеме:
Геометрическое расположение обмоток друг относительно друга в статоре асинхронного двигателя составляет 90°:
Фазовый сдвиг трёхфазного напряжения -120°, как следствие этого – магнитное поле будет не круговое , а пульсирующее и его уровень будет меньше чем при питании со сдвигом в 90°.
В некоторых конденсаторных двигателях дополнительная обмотка выполняется более тонким проводом и соответственно имеет более высокое сопротивление.
При работе без конденсатора это приведёт к:
- более сильному нагреву обмотки (срок службы сокращается, возможны кз и межвитковые замыкания)
- разному току в обмотках
Многие ПЧ имеют защиту от асимметрии токов в обмотках, при невозможности отключить эту функцию в приборе работа по данной схеме будет невозможна
Преимущества:
- более низкая стоимость по сравнению со специализированными ПЧ
- огромный выбор по мощности и производителям
- более широкий диапазон регулирования частоты
- все преимущества ПЧ (входы/выходы, интеллектуальные алгоритмы работы, коммуникационные интерфейсы)
Недостатки метода:
- необходимость предварительного подбора ПЧ и двигателя для совместной работы
- пульсирующий и пониженный момент
- повышенный нагрев
- отсутствие гарантии при выходе из строя, т.
к. трёхфазные ПЧ не предназначены для работы с однофазными двигателями
Как снизить обороты электродвигателя 380в
Электрика своими руками
егулировка оборотов электродвигателя часто бывает необходима как в производственных, так и каких то бытовых целях. В первом случае для уменьшения или увеличения частоты вращения применяются промышленные регуляторы напряжения – инверторные частотные преобразователи. А с вопросом, как регулировать обороты электродвигателя в домашних условиях, попробуем разобраться подробнее.
Необходимо сразу сказать, что для разных типов однофазных и трехфазных электрических машин должны применяться разные регуляторы мощности. Т.е. для асинхронных машин применение тиристорных регуляторов, являющихся основными для изменения вращения коллекторных двигателей, недопустимо.
Лучший способ уменьшить обороты вашего устройства – не в регулировке частоты вращения самого движка, а посредством редуктора или ременной передачи.
При этом сохранится самое главное – мощность устройства.
Немного теории об устройстве и области применения коллекторных электродвигателей
Электродвигатели этого типа могут быть постоянного или переменного тока, с последовательным, параллельным или смешанным возбуждением ( для переменного тока применяется только первые два вида возбуждения).
Коллекторный электродвигатель состоит из ротора, статора, коллектора и щеток. Ток в цепи, проходящий через соединенные определенным образом обмотки статора и ротора, создает магнитное поле, заставляющее последний вращаться. Напряжение на ротор передается при помощи щеток из мягкого электропроводного материала, чаще всего это графит или медно-графитовая смесь. Если изменить направление тока в роторе или статоре, вал начнет вращаться в другую сторону, причем это всегда делается с выводами ротора, что бы не происходило перемагничивание сердечников.
При одновременном изменении подключения и ротора и статора реверсирования не произойдет. Существуют также трехфазные коллекторные электродвигатели, но это уже совсем другая история.
Существуют также трехфазные коллекторные электродвигатели, но это уже совсем другая история.
Электродвигатели постоянного тока с параллельным возбуждением
Обмотка возбуждения (статорная) в двигателе с параллельным возбуждением состоит из большого количества витков тонкого провода и включена параллельно ротору, сопротивление обмотки которого намного меньше. Поэтому для уменьшения тока во время запуска электродвигателей мощностью более 1 Квт в цепь ротора включают пусковой реостат. Управление оборотами электродвигателя при такой схеме включения производится путем изменения тока только в цепи статора, т.к. способ понижения напряжения на клеммах очень не экономичен и требует применение регулятора большой мощности.
Если нагрузка мала, то при случайном обрыве обмотки статора при использовании такой схемы частота вращения превысит максимально допустимую и электродвигатель может пойти “вразнос”
Электродвигатели постоянного тока с последовательным возбуждением
Обмотка возбуждения такого электродвигателя имеет небольшое число витков толстого провода, и при ее последовательном включении в цепь якоря ток во всей цепи будет одинаков. Электродвигатели этого типа более выносливы при перегрузках и поэтому наиболее часто встречаются в бытовых устройствах.
Электродвигатели этого типа более выносливы при перегрузках и поэтому наиболее часто встречаются в бытовых устройствах.
Регулировка оборотов электродвигателя постоянного тока с последовательно включенной обмоткой статора может производиться двумя способами:
- Подключением параллельно статору регулировочного устройства, изменяющего магнитный поток. Однако этот способ довольно сложен в реализации и не применяется в бытовых устройствах.
- Регулирование (снижение) оборотов с помощью уменьшения напряжения. Этот способ применяется практически во всех электрических устройствах – бытовых приборах, инструменте и т.д.
Электродвигатели коллекторные переменного тока
Эти однофазные моторы имеют меньший КПД, чем двигатели постоянного тока, но из за простоты изготовления и схем управления нашли наиболее широкое применение в бытовой технике и электроинструменте. Их можно назвать “универсальными”, т.к. они способны работать как при переменном, так и при постоянном токе. Это обусловлено тем, что при включении в сеть переменного напряжение направление магнитного поля и тока будет изменяться в статоре и роторе одновременно, не вызывая изменения направления вращения. Реверс таких устройств осуществляется переполюсовкой концов ротора.
Это обусловлено тем, что при включении в сеть переменного напряжение направление магнитного поля и тока будет изменяться в статоре и роторе одновременно, не вызывая изменения направления вращения. Реверс таких устройств осуществляется переполюсовкой концов ротора.
Для улучшения характеристик в мощных (промышленных) коллекторных электродвигателях переменного тока применяются дополнительные полюса и компенсационные обмотки. В двигателях бытовых устройств таких приспособлений нет.
Регуляторы оборотов электродвигателя
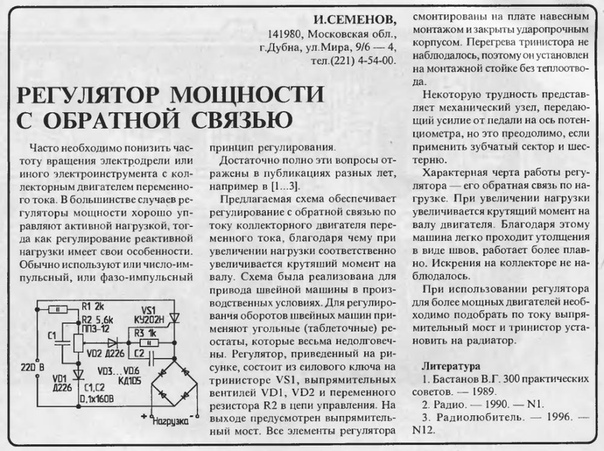
Схемы изменения частоты вращения электродвигателей в большинстве случаев построены на тиристорных регуляторах, ввиду своей простоты и надежности.
Принцип работы представленной схемы следующий: конденсатор С1 заряжается до напряжения пробоя динистора D1 через переменный резистор R2, динистор пробивается и открывает симистор D2, управляющий нагрузкой. Напряжение на нагрузке зависит от частоты открывания D2, зависящее в свою очередь от положения движка переменного сопротивления. Данная схема не снабжена обратной связью, т.е. при изменении нагрузки обороты также будут меняться и их придется подстраивать. По такой же схеме происходит управление оборотами импортных бытовых пылесосов.
Данная схема не снабжена обратной связью, т.е. при изменении нагрузки обороты также будут меняться и их придется подстраивать. По такой же схеме происходит управление оборотами импортных бытовых пылесосов.
Однофазные асинхронные двигатели питаются от обычной сети переменного напряжения 220 В.
Наиболее распространённая конструкция таких двигателей содержит две (или более) обмотки — рабочую и фазосдвигающую. Рабочая питается напрямую, а дополнительная через конденсатор, который сдвигает фазу на 90 градусов, что создаёт вращающееся магнитное поле. Поэтому такие двигатели ещё называют двухфазные или конденсаторные.
Регулировать скорость вращения таких двигателей необходимо, например, для:
- изменения расхода воздуха в системе вентиляции
- регулирования производительности насосов
- изменения скорости движущихся деталей, например в станках, конвеерах
В системах вентиляции это позволяет экономить электроэнергию, снизить уровень акустического шума установки, установить необходимую производительность.
Способы регулирования
Рассматривать механические способы изменения скорости вращения, например редукторы, муфты, шестерёнчатые трансмиссии мы не будем. Также не затронем способ изменения количества полюсов обмоток.
Рассмотрим способы с изменением электрических параметров:
- изменение напряжения питания двигателя
- изменение частоты питающего напряжения
Регулирование напряжением
Регулирование скорости этим способом связано с изменением, так называемого, скольжения двигателя — разностью между скоростью вращения магнитного поля, создаваемого неподвижным статором двигателя и его движущимся ротором:
n1 — скорость вращения магнитного поля
n2— скорость вращения ротора
При этом обязательно выделяется энергия скольжения — из-за чего сильнее нагреваются обмотки двигателя.
Данный способ имеет небольшой диапазон регулирования, примерно 2:1, а также может осуществляться только вниз — то есть, снижением питающего напряжения.
При регулировании скорости таким способом необходимо устанавливать двигатели завышенной мощности.
Но несмотря на это, этот способ используется довольно часто для двигателей небольшой мощности с вентиляторной нагрузкой.
На практике для этого применяют различные схемы регуляторов.
Автотрансформаторное регулирование напряжения
Автотрансформатор — это обычный трансформатор, но с одной обмоткой и с отводами от части витков. При этом нет гальванической развязки от сети, но она в данном случае и не нужна, поэтому получается экономия из-за отсутствия вторичной обмотки.
На схеме изображён автотрансформатор T1, переключатель SW1, на который приходят отводы с разным напряжением, и двигатель М1.
Регулировка получается ступенчатой, обычно используют не более 5 ступеней регулирования.
Преимущества данной схемы:
- неискажённая форма выходного напряжения (чистая синусоида)
- хорошая перегрузочная способность трансформатора
Недостатки:
- большая масса и габариты трансформатора (зависят от мощности нагрузочного мотора)
- все недостатки присущие регулировке напряжением
Тиристорный регулятор оборотов двигателя
В данной схеме используются ключи — два тиристора, включённых встречно-параллельно (напряжение переменное, поэтому каждый тиристор пропускает свою полуволну напряжения) или симистор.
Схема управления регулирует момент открытия и закрытия тиристоров относительно фазового перехода через ноль, соответственно «отрезается» кусок вначале или, реже в конце волны напряжения.
Таким образом изменяется среднеквадратичное значение напряжения.
Данная схема довольно широко используется для регулирования активной нагрузки — ламп накаливания и всевозможных нагревательных приборов (так называемые диммеры).
Ещё один способ регулирования — пропуск полупериодов волны напряжения, но при частоте в сети 50 Гц для двигателя это будет заметно — шумы и рывки при работе.
Для управления двигателями регуляторы модифицируют из-за особенностей индуктивной нагрузки:
- устанавливают защитные LRC-цепи для защиты силового ключа (конденсаторы, резисторы, дроссели)
- добавляют на выходе конденсатор для корректировки формы волны напряжения
- ограничивают минимальную мощность регулирования напряжения — для гарантированного старта двигателя
- используют тиристоры с током в несколько раз превышающим ток электромотора
Достоинства тиристорных регуляторов:
Недостатки:
- можно использовать для двигателей небольшой мощности
- при работе возможен шум, треск, рывки двигателя
- при использовании симисторов на двигатель попадает постоянное напряжение
- все недостатки регулирования напряжением
Стоит отметить, что в большинстве современных кондиционеров среднего и высшего уровня скорость вентилятора регулируется именно таким способом.
Транзисторный регулятор напряжения
Как называет его сам производитель — электронный автотрансформатор или ШИМ-регулятор.
Изменение напряжения осуществляется по принципу ШИМ (широтно-импульсная модуляция), а в выходном каскаде используются транзисторы — полевые или биполярные с изолированным затвором (IGBT).
Выходные транзисторы коммутируются с высокой частотой (около 50 кГц), если при этом изменить ширину импульсов и пауз между ними, то изменится и результирующее напряжение на нагрузке. Чем короче импульс и длиннее паузы между ними, тем меньше в итоге напряжение и подводимая мощность.
Для двигателя, на частоте в несколько десятков кГц, изменение ширины импульсов равносильно изменению напряжения.
Выходной каскад такой же как и у частотного преобразователя, только для одной фазы — диодный выпрямитель и два транзистора вместо шести, а схема управления изменяет выходное напряжение.
Плюсы электронного автотрансформатора:
- Небольшие габариты и масса прибора
- Невысокая стоимость
- Чистая, неискажённая форма выходного тока
- Отсутствует гул на низких оборотах
- Управление сигналом 0-10 Вольт
Слабые стороны:
- Расстояние от прибора до двигателя не более 5 метров (этот недостаток устраняется при использовании дистанционного регулятора)
- Все недостатки регулировки напряжением
Частотное регулирование
Ещё совсем недавно (10 лет назад) частотных регуляторов скорости двигателей на рынке было ограниченное количество, и стоили они довольно дорого.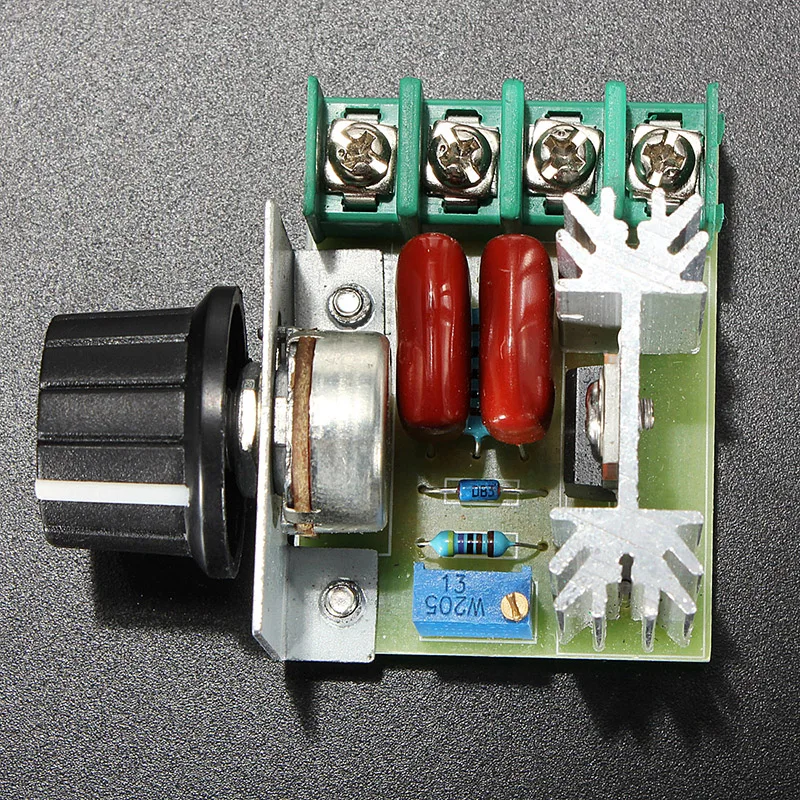 Причина — не было дешёвых силовых высоковольтных транзисторов и модулей.
Причина — не было дешёвых силовых высоковольтных транзисторов и модулей.
Но разработки в области твердотельной электроники позволили вывести на рынок силовые IGBT-модули. Как следствие — массовое появление на рынке инверторных кондиционеров, сварочных инверторов, преобразователей частоты.
На данный момент частотное преобразование — основной способ регулирования мощности, производительности, скорости всех устройств и механизмов приводом в которых является электродвигатель.
Однако, преобразователи частоты предназначены для управления трёхфазными электродвигателями.
Однофазные двигатели могут управляться:
- специализированными однофазными ПЧ
- трёхфазными ПЧ с исключением конденсатора
Преобразователи для однофазных двигателей
В настоящее время только один производитель заявляет о серийном выпуске специализированного ПЧ для конденсаторных двигателей — INVERTEK DRIVES.
Это модель Optidrive E2
Для стабильного запуска и работы двигателя используются специальные алгоритмы.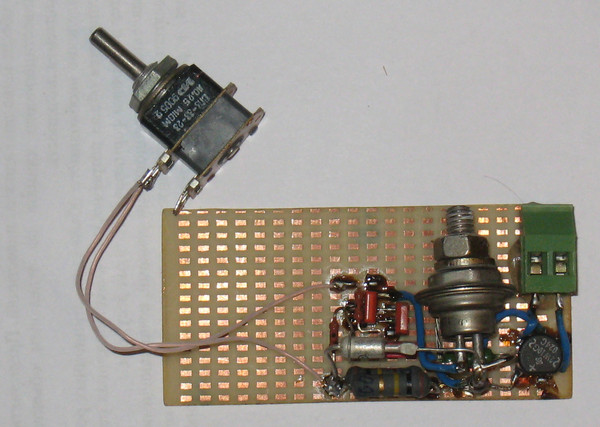
При этом регулировка частоты возможна и вверх, но в ограниченном диапазоне частот, этому мешает конденсатор установленный в цепи фазосдвигающей обмотки, так как его сопротивление напрямую зависит от частоты тока:
f — частота тока
С — ёмкость конденсатора
В выходном каскаде используется мостовая схема с четырьмя выходными IGBT транзисторами:
Optidrive E2 позволяет управлять двигателем без исключения из схемы конденсатора, то есть без изменения конструкции двигателя — в некоторых моделях это сделать довольно сложно.
Преимущества специализированного частотного преобразователя:
- интеллектуальное управление двигателем
- стабильно устойчивая работа двигателя
- огромные возможности современных ПЧ:
- возможность управлять работой двигателя для поддержания определённых характеристик (давления воды, расхода воздуха, скорости при изменяющейся нагрузке)
- многочисленные защиты (двигателя и самого прибора)
- входы для датчиков (цифровые и аналоговые)
- различные выходы
- коммуникационный интерфейс (для управления, мониторинга)
- предустановленные скорости
- ПИД-регулятор
Минусы использования однофазного ПЧ:
Использование ЧП для трёхфазных двигателей
Стандартный частотник имеет на выходе трёхфазное напряжение. При подключении к ему однофазного двигателя из него извлекают конденсатор и соединяют по приведённой ниже схеме:
При подключении к ему однофазного двигателя из него извлекают конденсатор и соединяют по приведённой ниже схеме:
Геометрическое расположение обмоток друг относительно друга в статоре асинхронного двигателя составляет 90°:
Фазовый сдвиг трёхфазного напряжения -120°, как следствие этого — магнитное поле будет не круговое , а пульсирующее и его уровень будет меньше чем при питании со сдвигом в 90°.
В некоторых конденсаторных двигателях дополнительная обмотка выполняется более тонким проводом и соответственно имеет более высокое сопротивление.
При работе без конденсатора это приведёт к:
- более сильному нагреву обмотки (срок службы сокращается, возможны кз и межвитковые замыкания)
- разному току в обмотках
Многие ПЧ имеют защиту от асимметрии токов в обмотках, при невозможности отключить эту функцию в приборе работа по данной схеме будет невозможна
Преимущества:
- более низкая стоимость по сравнению со специализированными ПЧ
- огромный выбор по мощности и производителям
- более широкий диапазон регулирования частоты
- все преимущества ПЧ (входы/выходы, интеллектуальные алгоритмы работы, коммуникационные интерфейсы)
Недостатки метода:
- необходимость предварительного подбора ПЧ и двигателя для совместной работы
- пульсирующий и пониженный момент
- повышенный нагрев
- отсутствие гарантии при выходе из строя, т.
 к. трёхфазные ПЧ не предназначены для работы с однофазными двигателями
к. трёхфазные ПЧ не предназначены для работы с однофазными двигателями
Обратные ссылки
- URL обратной ссылки
- Подробнее про обратные ссылки
- Закладки & Поделиться
- Отправить тему форума в Digg!
- Добавить тему форума в del.icio.us
- Разместить в Technorati
- Разместить в ВКонтакте
- разместить в Facebook
- Разместить в MySpace
- Разместить в Twitter
- Разместить в ЖЖ
- Разместить в Google
- Разместить в Yahoo
- Разместить в Яндекс.Закладках
- Разместить в Ссылки@Mail.Ru
- Reddit!
Опции темы
Надо понизить обороты на электродвигателе
Сварил бетономешалку.
Нашел 3х-фазный электродвигатель 2.2 КВатт . по рекомендации «доброжелателей» на 950 Об/мин. Приобрел конденсатор на 500 Микрофарат для сети на 220. Соединил двигатель шкивом через ремень прямо на корпус мешалки.
Запустил. и печально улыбнулся
Много оборотов песок прилипает к стенкам.
Движок менять не хочу, мощность и так на минимальном пределе ибо из-за 220 Вольт потеряна как говорят уже % на 30. Ну и дальше будет теряться.
А из опыта знаю, что движки около 1 КВатта уже не тянут и их приходится подталкивать при запуске. Этот же движок пока стартует сам даже с загруженными 5 ведрами песка.
Также узнал, что лучше всего регулировать обороты частотой несмотря на минус — перегрев движка.
Заводские частотные преобразователи со всякими примочками выравнивающими для моего движка начинаются от 6500 р. Дорого.
Найденные в нэте схемы хоть и простые с виду но для меня непостижимы (((
Найти (хоть и ищу) по близости электронщика проблематично — живу в сельской местности.
Вопрос:
— Может в природе есть готовая простецкая схемка в продаже с какого нибудь устройства для таких целей, которую я бы приобрел, прикрутил и начал работать.
Помогите хлопцы.
Заранее благодарствую.
 icio.us
icio.usРеальных вариантов три .
1. Понизить частоту сети — ДОРОГО .
2. Поставить механический редуктор — СЛОЖНО .
3. Заменить двигатель — НЕОХОТА .
Самый простой способ поставить другие шкивы. На мотор поменьше, на б.мешалку побольше.(и крутить будет сильнее) Электр. способы дорогие, сложные в изготовлении и мало вероятности, что реализуемы в Ваших условиях.
Нет денег? Лопата и корыто стоят не дорого.
Не знаю какие у ТС обороты, но песок и в фирменных мешалках прилипает к стенкам.
Просто сначала лью воду, потом щебёнку, потом песок, и в конце цемент + определённый угол наклона.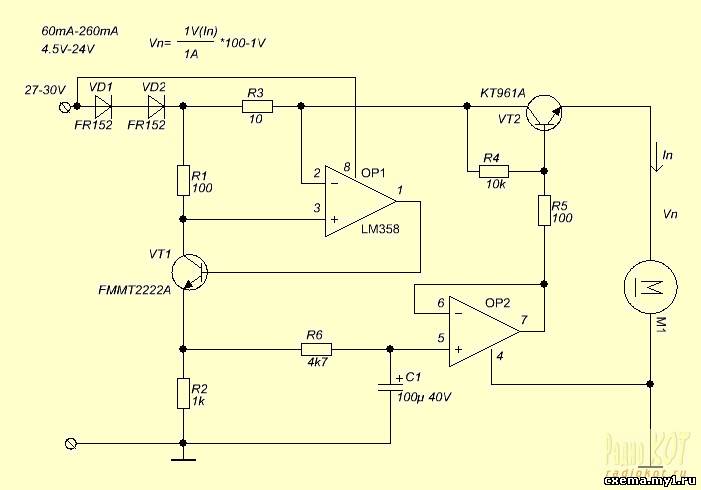
И ничего не прилипает.
Правильно делаете. Эта последовательность ускоряет и улучшает смешивание, но не гарантирует остаточного залипания на стенках плохо перемешанного раствора. Что гарантированно в моем случае.
Добавлено через 4 минуты
Лопата и корыто уже есть. Но также есть желание оставить спину здоровой, а также немного понимания того, что не стоит на эту железку навешивать оборудование которое сделает её неоправданно дорогой.
Добавлено через 7 минут
Шкивы поставить уже проблематично ибо на оси емкости не предусмотрено было место для них, ремень надевается с движка прямо на емкость. Делать отдельную понижающую группу из дополнительных 2х шкивов — тоже проблематично — фактически нет места для этого.
На движке и так стоит маленький шкив выточенный на заказ — диаметром примерно 70 мм.
Последний раз редактировалось FAI4; 10.08.2012 в 23:04 . Причина: Добавлено сообщение
Вы чего то путаете. 10-ти ведёрную бетономешалку свободно крутит 1фазный двигатель от стиралки мощностью 180ватт. Нужно просто подобрать правильно редукцию. Самое простое и надёжное,это найти венец от ЗИЛовского маховика и шестерню от бендекса и сделать ещё один редуктор на основе двух шкивов. шкив который будет на двигателе нужно применить как можно меньшего диаметра,чтобы максимально разгрузить двигатеь. Если Вам интересно,то я могу снять Все размеры со своей мешалки,но только завтра. сейчас уже поздно.
Реальных вариантов три .
1. Понизить частоту сети — ДОРОГО .
2. Поставить механический редуктор — СЛОЖНО .
3. Заменить двигатель — НЕОХОТА .
1. Более простого решения так пока и не последовало . Просто моя логика мне подсказывает, что если заводской частотный преобразователь стоит примерно 6-7 т.р., то совсем простая схема в пластиковой коробке должна как минимум раза в 2.5 стоить меньше.
2. Про механику я сказал выше.
3. Буду делать все чтобы оставить именно этот хороший на мой взгляд движок.
Добавлено через 19 минут
Спасибо, но мешалка у меня уже готова, переделывать не буду. Так что вопрос изменения редукции отпадает ((
Ну и не знаю как на 10 ведер, но у меня объем мешалки получился 0,25 м3, а это примерно около 25 ведер. 180 Ватт тут точно не хватит. Я даже в 1 Киловате сомневаюсь.
Последний раз редактировалось FAI4; 11.08.2012 в 00:03 . Причина: Добавлено сообщение
Спасибо за явные советы
Но ответа на суть вопроса так и не последовало.
Хорошо. Я нарыл схему в нэте и спрошу по другому:
— 1. Сколько будет хотябы примерно стоить вот такая рекомендованная для этих целей схема? (с учетом требуемого объема радиатора)
— 2. Подходит ли она для моего движка с учетом того что я его запускаю с конденсатором? (если да, то где его ставить — в самом начале схемы или наоборот — у двигателя?)
Последний раз редактировалось FAI4; 11.08.2012 в 00:15 . Причина: дополнение
По деталям стоимость 3-5 евро в рубли переводите сами. Но эта схема вам не подойдёт можете сразу о ней забыть.. Подобные тирристорные регуляторы работают неплохо на активную нагрузку. Допустим для регулировки освещения на лампе накаливания, или скажем регулятор температуры паяльника и т.д. Если подключите регулятор к индуктивной нагрузке , эл двигатель как раз кней относится, тирристор откроется практически полностью. Это равносильно что вы подали на эл. двигатель напряжение через диод со всеми вытекающими.. По вашему вопросу либо делайте понижающий редуктор, либо меняйте эл.двигатель .
По приведённому вами тексту: Все вышеперечисленные эл. двигатели от дрелей, шлифмашинок и т.д. так называемые коллекторные эл. двигатели. Они однофазные в них имеется так называемый «фазный» ротор с намотанными на нём обмотками, питание этот ротор получает от коллектора через щёточный механизм. Т.е. по сути эти эл. двигатели устроены как и эл. двигатели постоянного тока, некоторые такие эл . двигатели даже работают как на постоянном так и на переменном токе. Для них схема регулировки может и подойти. Но у вас двигатель 3х фазный с так называемым «короткозамкнутым ротором» это совсем другая «опера». Регулировка оборотов таких двигателей выполняется либо изменением числа пар полюсов обмотки стартера. Т.е. без перемотки двигателя не обойтись. Либо с применением преобразователя частоты.
Последний раз редактировалось DF9FXK; 11.08.2012 в 00:48 .
Регулировка оборотов двигателя от стиральной машины своими руками
Если неисправность стиральной машины вызвана не перегоранием двигателя, то в случае, когда бытовой прибор не подлежит восстановлению, мотор можно снять и использовать для различных самоделок. Мощность этой детали не слишком велика, но частота вращения может быть значительной, поэтому часто требуется дополнительная регулировка оборотов двигателя от стиральной машины. О том, какими средствами можно уменьшить этот показатель будет подробно рассказано далее.
Проверка двигателя стиральной машины и определение назначение выводов
Перед тем как собрать своими руками регулятор оборотов необходимо проверить работоспособность мотора. В стиральной машине эта деталь подключается через клеммную колодку. Как правило, в разъёме имеются следующие электрические выводы:
- 2 провода от щёток коллектора.
- 2 или 3 провода от статора.
- 2 провода от таходатчика.
Если от статора идут 3 провода, то в таком двигателе реализована возможность изменения скорости посредством попеременного подключения проводов к источнику тока. Без каких либо дополнительных приспособлений мотор с двумя обмотками можно использовать в двух режимах. Такая особенность объясняется в необходимости более высоких оборотов при работе стиральной машины при отжиме белья.
Прежде чем подключать двигатель к электрической сети рекомендуется прозвонить мультиметром каждую обмотку. Измерительный прибор необходимо перевести в режим определения сопротивления до 2 000 Ом и поочерёдно прозвонить каждую пару выводов. Если электрическая цепь не оборвана, то мультиметр покажет определённое значение этого параметра, в противном случае, устройство никак не отреагирует на подсоединение щупов к выводам.
Прозвонив обмотки и убедившись в их целостности, следует подключить прибор к сети 220 В. Для этой цели необходимо последовательно соединить коллекторную часть двигателя с внешней обмоткой, а выводы каждой из них подключить к розетке. Если всё сделано правильно, то двигатель начнёт работать на полную мощность. Чтобы убавить обороты до необходимого значения потребуется добавить схему регулировки оборотов.
Самый простой способ
Во многих электроинструментах, в которых используются коллекторные двигатели, установлен небольшой реостат, с помощью которого можно практически без потери мощности управлять частотой вращения ротора. Такой элемент можно снять с неисправной дрели, шуруповёрта или перфоратора и установить последовательно с электрическим мотором. Если подходящего реостата нет в наличии, то такую деталь можно недорого приобрести в специализированном магазине.
Небольшая сложность заключается в том, что рабочий ход такого регулировочного механизма очень небольшой и бывает очень непросто установить обороты двигателя на необходимом уровне. Эта проблема, как правило, решается установкой дополнительных механических преобразователей механической энергии. Таким образом, можно будет правильно установить частоту вращения ротора, а также обеспечить фиксацию прибора на необходимом уровне.
Кроме реостатов из ручных электрических инструментов можно использовать готовые магазинные приборы, которые достаточно подключить в розетку, а выводы двигателя подсоединить уже непосредственно к регулировочному прибору. Такие изделия позволяют осуществлять изменение напряжения в очень широком диапазоне, поэтому подобрать положение управляющего тумблера под определённые обороты двигателя не составит большого труда. Немаловажным плюсом магазинных реостатов является возможность использовать их с другими электронными приборами, то есть достаточно один раз приобрести изделие, с помощью которого можно будет осуществлять регулировку большого количества приборов, не ограничиваясь электромоторами.
Контроллер оборотов двигателя с Aliexpress
На известной торговой площадке можно приобрести недорогой и эффективный регулятор оборотов электродвигателя. При использовании такого прибора также не происходит снижение мощности мотора. Контроллер выполнен в прочном пластиковом корпусе, на передней панели которого находится кнопка включения с индикатором, а также переключатель реостата. К розетке реостат подсоединяется с помощью обычной штепсельной вилки.
На задней панели регулятора оборотов имеется шлейф проводов, в котором одна пара – это «фаза» и «ноль» и вторая пара идёт к таходатчику электронного двигателя. Если через контроллер подсоединить к двигателю от стиральной машины только 2 основных провода, то мотор будет работать при максимальных оборотах. Для того чтобы появилась возможность регулировать обороты потребуется обязательно соединить провода, идущие от таходатчика.
Подключать к такому устройству можно не только двигатели от стиральной машины, но и моторы, снятые со старых дрелей и других ненужных электроинструментов. Главное при подготовке к работе правильно осуществить монтаж электрической системы. Работа по соединению регулирующего устройства с двигателем должна осуществляться в такой последовательности:
- Соединить провода, идущие от контроллера с мотором. При этом важно не перепутать назначение каждого проводника.
- Включить вилку устройства в сеть.
- Перевести положение реостата в положение «0».
- Нажать кнопку включения.
- Плавным движением реостата выбрать оптимальный режим вращения ротора.
Если регулятор оборотов будет использоваться только с одним потребителем электроэнергии, то после окончания работ достаточно выключить устройство на передней панели, а также отключить его от сети.
Многие самодельные мастера при подключении контроллера этого типа сталкиваются с одной проблемой. Провода, идущие от реостата, оформляются в разъём, который не подходит к штатному гнезду двигателей большинства моделей стиральных машин. Решается эта проблема перепайкой подходящей штекерной колодки, которую можно приобрести в специализированных магазинах либо снять со стиралки, с который был удалён двигатель.
Советы и рекомендации
Если все работы по подключению и использованию устройства по регулировке оборотов двигателя от стиральной машины осуществляются своими руками, то необходимо при выполнении работ придерживаться следующих правил:
- Осуществлять подключение проводов мотора от стиральной машины только после того, как будут правильно определено назначение каждого проводника.
- Соблюдать осторожность при работе с электрическим током. Все провода, по которым передаётся опасное для жизни напряжение, должны быть тщательно изолированы, а корпус электромотора заземлён.
- При первом включении рекомендуется использовать сетевой фильтр со встроенным предохранителем, который сработает при допущении серьёзных ошибок в электрической схеме.
- При работе самодельного или магазинного устройства не должно наблюдаться искрений, задымления или чрезмерного нагрева. Подобные явления могут указывать на неисправность устройства либо на работу контроллера при чрезмерной нагрузке.
В общем, собрать своими руками самодельный станок с регулировкой оборотов или любое другое полезное в хозяйстве устройство не составит большого труда, конечно, при условии правильного выполнения всех изложенных в этой статье рекомендаций.
✅ Регулятор оборотов асинхронного двигателя 220в своими руками: регулирование скорости вращения электродвигателя переменного тока
2 Схемы
Принципиальные электросхемы, подключение устройств и распиновка разъёмов
Регулятор оборотов электродвигателя 220В
Качественный и надёжный контроллер скорости вращения для однофазных коллекторных электродвигателей можно сделать на распространённых деталях буквально за 1 вечер. Эта схема имеет встроенный модуль обнаружения перегрузки, обеспечивает мягкий пуск управляемого двигателя и стабилизатор скорости вращения мотора. Работает такой блок с напряжением как 220, так и 110 вольт.
Технические параметры регулятора
- напряжение питания: 230 вольт переменного тока
- диапазон регулирования: 5…99%
- напряжение нагрузки: 230 В / 12 А (2,5 кВт с радиатором)
- максимальная мощность без радиатора 300 Вт
- низкий уровень шума
- стабилизация оборотов
- мягкий старт
- размеры платы: 50×60 мм
Принципиальная электросхема
Схема модуля системы регулирования основана на генераторе ШИМ импульсов и симисторе управления мотором — классическая схемотехника для подобных устройств. Элементы D1 и R1 обеспечивают ограничение величины напряжения питания до значения безопасной для питания микросхемы генератора. Конденсатор C1 отвечает за фильтрацию напряжения питания. Элементы R3, R5 и P1 являются делителем напряжения с возможностью его регулирования, который используется для задания величины мощности, подаваемой в нагрузку. Благодаря применению резистора R2, непосредственно входящего в цепь поступления на м/с фазы, внутренние блоки синхронизированы с симистором ВТ139.
На следующем рисунке показано расположение элементов на печатной плате. Во время монтажа и запуска следует обратить внимание на обеспечение условий безопасной работы — регулятор имеет питание от сети 220В и его элементы непосредственно подключены к фазе.
Увеличение мощности регулятора
В испытательном варианте был применен симистор BT138/800 с максимальным током 12 А, что дает возможность управления нагрузкой более 2 кВт. Если необходимо управление ещё большими токами нагрузки — советуем тиристор установить за пределами платы на большом радиаторе. Также следует помнить о правильном выборе предохранителя FUSE в зависимости от нагрузки.
Кроме управления оборотами электромоторов, можно без каких-либо переделок использовать схему для регулировки яркости ламп.
Как можно регулировать обороты асинхронного двигателя: обзор способов
Благодаря надежности и простоте конструкции асинхронные двигатели (АД) получили широкое распространение. В большинстве станков, промышленном и бытовом оборудовании применяются электродвигатели такого типа. Изменение скорости вращения АД производится механически (дополнительной нагрузкой на валу, балластом, передаточными механизмами, редукторами и т.д.) или электрическими способами. Электрическое регулирование более сложное, но и гораздо более удобное и универсальное.
Для многих агрегатов применяется именно электрическое управление. Оно обеспечивает точное и плавное регулирование пуска и работы двигателя. Электрическое управление производится за счет:
- изменения частоты тока;
- силы тока;
- уровня напряжения.
В этой статье мы рассмотрим популярные способы, как может осуществляться регулировка оборотов асинхронного двигателя на 220 и 380В.
Изменение скорости АД с короткозамкнутым ротором
Существует несколько способов:
- Управление вращением за счет изменения электромагнитного поля статора: частотное регулирование и изменение числа пар полюсов.
- Изменение скольжения электромотора за счет уменьшения или увеличения напряжения (может применяться для АД с фазным ротором).
Частотное регулирование
В данном случае регулировка производится с помощью подключенного к двигателю устройства для преобразования частоты. Для этого применяются мощные тиристорные преобразователи. Процесс частотного регулирования можно рассмотреть на примере формулы ЭДС трансформатора:
Данное выражение означает, что для сохранения постоянного магнитного потока, означающего сохранение перегрузочной способности электромотора, следует одновременно с преобразованием частоты корректировать и уровень питающего напряжения. Если сохраняется выражение, вычисленное по формуле:
то это означает, что критический момент не изменен. А механические характеристики соответствуют рисунку ниже, если вы не понимаете, что значат эти характеристики, то в этом случае регулировка происходит без потери мощности и момента.
Достоинствами данного метода являются:- плавное регулирование;
- изменение скорости вращения ротора в большую и меньшую сторону;
- жесткие механические характеристики;
- экономичность.
Недостаток один — необходимость в частотном преобразователе, т.е. увеличение стоимости механизма. К слову, на современном рынке представлены модели с однофазным и трёхфазным входом, стоимость которых при мощности 2-3 кВт лежит в диапазоне 100-150 долларов, что не слишком дорого для полноценной регулировки привода станков в частной мастерской.
Переключение числа пар полюсов
Данный метод применяется для многоскоростных двигателей со сложной обмоткой, позволяющей изменять число пар ее полюсов. Самое широкое применение получили двухскоростные, трехскоростные и четырехскоростные АД. Принцип регулировки проще всего рассмотреть на основе двухскоростного АД. В такой машине обмотка каждой фазы состоит из двух полуобмоток. Скорость вращения изменяется при подключении их последовательно или параллельно.
В четырехскоростном электродвигателе обмотка выполнена в виде двух независимых друг от друга частей. При изменении числа пар полюсов первой обмотки производится изменение скорости работы электромотора с 3000 до 1500 оборотов в минуту. При помощи второй обмотки производится регулировка вращения 1000 и 500 оборотов в минуту.
При изменении числа пар полюсов происходит и изменение критического момента. Для его сохранения неизменным, требуется одновременно с изменением числа пар полюсов регулировать и питающее напряжение, например, переключением схемы звезда-треугольник и их вариациями.
Достоинства данного метода:
- жесткие механические характеристики двигателя;
- высокий КПД.
- ступенчатая регулировка;
- большой вес и габаритные размеры;
- высокая стоимость электромотора.
Способы управления скоростью АД с фазным ротором
Изменение скорости вращения АД с фазным ротором производится путем изменения скольжения. Рассмотрим основные варианты и способы.
Изменение питающего напряжения
Этот способ также применяется для АД с КЗ ротором. Асинхронный двигатель подключается через автотрансформатор или ЛАТР. Если уменьшать напряжение питания, частота вращения двигателя снизится.
Но такой режим уменьшает перегрузочную способность двигателя. Этот способ применяется для регулирования в пределах напряжения не выше номинального, так как увеличение номинального напряжения приведет к выходу электродвигателя из строя.
Активное сопротивление в цепи ротора
При использовании данного метода в цепь ротора подключается реостат или набор постоянных резисторов большой мощности. Данное устройство предназначено для плавного увеличения сопротивления.
Скольжение растет пропорционально увеличению сопротивления, а скорость вращения вала электромотора при этом снижается.
- большой диапазон регулирования в сторону понижения скорости вращения.
- снижение КПД;
- увеличение потерь;
- ухудшение механических характеристик.
Асинхронный вентильный каскад и машины двойного питания
Изменение скорости работы асинхронных электромоторов в данных случаях выполняется путем изменения скольжения. При этом скорость вращения электромагнитного поля неизменна. Напряжение подается напрямую на обмотки статора. Регулировка происходит за счет использования мощности скольжения, которая трансформируется в цепь ротора, и образует добавочную ЭДС. Такие методы используются только в специальных машинах и крупных промышленных устройствах.
Плавный пуск асинхронных электродвигателей
АД кроме безусловных преимуществ, обладают существенными недостатками. Это рывок на старте и большие пусковые токи, в 7 раз превышающие номинальные. Для мягкого старта электродвигателя используются следующие методы:
- переключение обмоток по схеме звезда – треугольник;
- включение электродвигателя через автотрансформатор;
- использование специализированных устройств для плавного пуска.
В большинстве частотных регуляторов есть функция плавного пуска двигателя. Это не только снижает пусковые токи, но и уменьшает нагрузки на исполнительные механизмы. Поэтому регулирование частоты и плавный пуск довольно сильно связаны между собой.
Как сделать устройство для изменения скорости вращения электродвигателя своими руками
Для регулировки маломощных однофазных АД можно использовать диммеры. Однако этот способ ненадежен и обладает серьезными недостатками: снижением КПД, серьезным перегревом устройства и опасностью повреждения двигателя.
Для надежного и качественного регулирования оборотов электродвигателей на 220В, лучше всего подходит частотное регулирование.
Приведенная ниже схема позволяет собрать частотное устройство для регулировки электромоторов мощностью до 500 Вт. Изменение скорости вращения производится в границах от 1000 до 4000 оборотов в минуту.
Устройство состоит из задающего генератора с изменяемой частотой, состоящего из мультивибратора, собранного на микросхеме К561ЛА7, счетчика на микросхеме К561ИЕ8, полумоста регулятора. Выходной трансформатор Т1 выполняет развязку верхнего и нижнего транзисторов полумоста.
Демпфирующая цепь С4, R7 гасит всплески напряжения опасные для силовых транзисторов VT3, VT4. Выпрямитель, удвоитель напряжения питающей сети, включает в себя диодный мост VD9, с конденсатором фильтра на которых происходит удвоение напряжения питания полумоста.
Напряжение первичной обмотки: 2х12В, вторичной обмотки 12В. Первичная обмотка трансформатора управления ключами, состоит из 120 витков медного провода сечением 0,7мм, с отводом от середины. Вторичная – две обмотки, каждая по 60 витков повода сечением 0,7 мм.
Вторичные обмотки необходимо максимально надежно заизолировать друг от друга, так как разница потенциалов между ними доходит до 640 В. Подключение выходных обмоток к затворам ключей производится в противофазе.
Вот мы и рассмотрели способы регулировки оборотов асинхронных двигателей. Если возникли вопросы, задавайте их в комментариях под статьей!
Способы регулировки оборотов вращения асинхронных двигателей
Достаточно часто режим работы вспомогательного механизированного оборудования требует понижения штатных частот вращения. Добиться такого эффекта позволяет регулировка оборотов асинхронного двигателя. Как это сделать своими руками (расчет и сборку), используя стандартные схемы управления или самодельные устройства, попробуем разобраться далее.
Что такое асинхронный двигатель?
Электродвигатели переменного тока нашли довольно широкое применение в различных сферах нашей жизнедеятельности, в подъемно транспортном, обрабатывающем, измерительном оборудовании. Они используются для превращения электрической энергии, которая поступает от сети, в механическую энергию вращающегося вала. Чаще всего используются именно асинхронные преобразователи переменного тока. В них частота вращения ротора и статора отличаются. Между этими активными элементами обеспечивается конструктивный воздушный зазор.
И статор, и ротор имеют жесткий сердечник из электротехнической стали (наборного типа, из пластин), выступающий в роли магнитопровода, а также обмотку, которая укладывается в конструктивные пазы сердечника. Именно способ организации или укладки обмотки ротора является ключевым критерием классификации этих машин.
Двигатели с короткозамкнутым ротором (АДКР)
Здесь используется обмотка в виде алюминиевых, медных или латунных стержней, которые вставляются в пазы сердечника и с обеих сторон замыкаются дисками (кольцами). Тип соединения этих элементов зависит от мощности двигателя: для малых значений используют метод совместной отливки дисков и стержней, а для больших – раздельное изготовление с последующей сваркой между собой. Обмотка статора подключается с использованием схем «треугольника» или «звезды».
Двигатели с фазным ротором
К сети подключается трехфазная обмотка ротора, посредством контактных колец на основном валу и щеток. За основу принимается схема «звезда». На рисунке внизу представлена типичная конструкция такого двигателя.
Принцип работы и число оборотов асинхронных двигателей
Данный вопрос рассмотрим на примере АДКР, как наиболее распространенного типа электродвигателей подъемно-транспортном и обрабатывающем оборудовании. Напряжение от сети подается на обмотку статора, каждая из трех фаз которой смещена геометрически на 120°. После подачи напряжения возникает магнитное поле, создающее путем индукции ЭДС и ток в обмотках ротора. Последнее вызывает электромагнитные силы, заставляющие ротор вращаться. Еще одна причина, по которой все это происходит, а именно, возникает ЭДС, является разность оборотов статора и ротора.
Одной из ключевых характеристик любого АДКР является частота вращения, расчет которой можно вести по следующей зависимости:
n = 60f / p, об/мин
где f – частота сетевого напряжения, Гц, р – число полюсных пар статора.
Все технические характеристики указываются на металлической табличке, закрепленной на корпусе. Но если она отсутствует по какой-то причине, то определить число оборотов нужно вручную по косвенным показателям. Как правило, используется три основных метода:
- Расчет количества катушек. Полученное значение сопоставляется с действующими нормами для напряжения 220 и 380В (см. табл. ниже),
Наши читатели рекомендуют! Для экономии на платежах за электроэнергию наши читатели советуют ‘Экономитель энергии Electricity Saving Box’. Ежемесячные платежи станут на 30-50% меньше, чем были до использования экономителя. Он убирает реактивную составляющую из сети, в результате чего снижается нагрузка и, как следствие, ток потребления. Электроприборы потребляют меньше электроэнергии, снижаются затраты на ее оплату.
- Расчет оборотов с учетом диаметрального шага обмотки. Для определения используется формула вида:
где 2p – число полюсов, Z1 – количество пазов в сердечнике статора, y – собственно, шаг укладки обмотки.
Стандартные значения оборотов:
- Расчет числа полюсов по сердечнику статора. Используются математические формулы, где учитываются геометрические параметры изделия:
2p = 0,35Z1b / h или 2p = 0,5Di / h,
где 2p – число полюсов, Z1 – количество пазов в статоре, b – ширина зубца, см, h – высота спинки, см, Di – внутренний диаметр, образованный зубцами сердечника, см.
После этого по полученным данным и магнитной индукции нужно определить количество витков, которое сверяется с паспортными данными двигателей.
Способы изменения оборотов двигателя
Регулировка оборотов любого трехфазного электродвигателя, используемого в подъемно-транспортной технике и оборудовании, позволяет добиться требуемых режимов работы точно и плавно, что далеко не всегда возможно, например, за счет механических редукторов. На практике используется семь основных методов коррекции скорости вращения, которые делятся на два ключевых направления:
- Изменение скорости магнитного поля в статоре. Достигается за счет частотного регулирования, переключения числа полюсных пар или коррекции напряжения. Следует добавить, что эти методы применимы для электродвигателей с короткозамкнутым ротором,
- Изменение величины скольжения. Этот параметр можно откорректировать за счет питающего напряжения, подключения дополнительного сопротивления в электрическую цепь ротора, применения вентильного каскада или двойного питания. Используется для моделей с фазным ротором.
Наиболее востребованными методами являются регулирование напряжения и частоты (за счет применения преобразователей), а также изменение количества полюсных пар (реализуется путем организации дополнительной обмотки с возможностью переключения).
Типичные схемы регуляторов оборотов
На рынке сегодня есть широкий выбор регуляторов и частотных преобразователей для асинхронных двигателей. Тем не менее, для бытовых нужд подъемного или обрабатывающего оборудования вполне можно сделать расчет и сборку на микросхеме самодельного прибора на базе тиристоров или мощных транзисторов.
Ниже представлен пример схемы достаточно мощного регулятора для асинхронного двигателя. За счет чего можно добиться плавного контроля параметров его работы, снижения энергопотребления до 50%, расходов на техническое обслуживание.
Данная схема является сложной. Для бытовых нужд ее можно значительно упростить, используя в качестве рабочего элемента симистор, например, ВТ138-600. В этом случае схема будет выглядеть следующим образом:
Обороты электродвигателя будут регулироваться за счет потенциометра, который определяет фазу входного импульса, открывающего симистор.
Как можно судить из информации, представленной выше, от оборотов асинхронного двигателя зависят не только параметры его работы, но и эффективность функционирования питаемого подъемного или обрабатывающего оборудования. В торговой сети сегодня можно приобрести самые разнообразные регуляторы, но также можно совершить расчет и собрать эффективное устройство своими руками.
Управление скоростью вращения однофазных двигателей
Однофазные асинхронные двигатели питаются от обычной сети переменного напряжения 220 В.
Наиболее распространённая конструкция таких двигателей содержит две (или более) обмотки — рабочую и фазосдвигающую. Рабочая питается напрямую, а дополнительная через конденсатор, который сдвигает фазу на 90 градусов, что создаёт вращающееся магнитное поле. Поэтому такие двигатели ещё называют двухфазные или конденсаторные.
Регулировать скорость вращения таких двигателей необходимо, например, для:
- изменения расхода воздуха в системе вентиляции
- регулирования производительности насосов
- изменения скорости движущихся деталей, например в станках, конвеерах
В системах вентиляции это позволяет экономить электроэнергию, снизить уровень акустического шума установки, установить необходимую производительность.
Способы регулирования
Рассматривать механические способы изменения скорости вращения, например редукторы, муфты, шестерёнчатые трансмиссии мы не будем. Также не затронем способ изменения количества полюсов обмоток.
Рассмотрим способы с изменением электрических параметров:
- изменение напряжения питания двигателя
- изменение частоты питающего напряжения
Регулирование напряжением
Регулирование скорости этим способом связано с изменением, так называемого, скольжения двигателя — разностью между скоростью вращения магнитного поля, создаваемого неподвижным статором двигателя и его движущимся ротором:
n1 — скорость вращения магнитного поля
n2— скорость вращения ротора
При этом обязательно выделяется энергия скольжения — из-за чего сильнее нагреваются обмотки двигателя.
Данный способ имеет небольшой диапазон регулирования, примерно 2:1, а также может осуществляться только вниз — то есть, снижением питающего напряжения.
При регулировании скорости таким способом необходимо устанавливать двигатели завышенной мощности.
Но несмотря на это, этот способ используется довольно часто для двигателей небольшой мощности с вентиляторной нагрузкой.
На практике для этого применяют различные схемы регуляторов.
Автотрансформаторное регулирование напряжения
Автотрансформатор — это обычный трансформатор, но с одной обмоткой и с отводами от части витков. При этом нет гальванической развязки от сети, но она в данном случае и не нужна, поэтому получается экономия из-за отсутствия вторичной обмотки.
На схеме изображён автотрансформатор T1, переключатель SW1, на который приходят отводы с разным напряжением, и двигатель М1.
Регулировка получается ступенчатой, обычно используют не более 5 ступеней регулирования.
Преимущества данной схемы:- неискажённая форма выходного напряжения (чистая синусоида)
- хорошая перегрузочная способность трансформатора
- большая масса и габариты трансформатора (зависят от мощности нагрузочного мотора)
- все недостатки присущие регулировке напряжением
Тиристорный регулятор оборотов двигателя
В данной схеме используются ключи — два тиристора, включённых встречно-параллельно (напряжение переменное, поэтому каждый тиристор пропускает свою полуволну напряжения) или симистор.
Схема управления регулирует момент открытия и закрытия тиристоров относительно фазового перехода через ноль, соответственно «отрезается» кусок вначале или, реже в конце волны напряжения.
Таким образом изменяется среднеквадратичное значение напряжения.
Данная схема довольно широко используется для регулирования активной нагрузки — ламп накаливания и всевозможных нагревательных приборов (так называемые диммеры).
Ещё один способ регулирования — пропуск полупериодов волны напряжения, но при частоте в сети 50 Гц для двигателя это будет заметно — шумы и рывки при работе.
Для управления двигателями регуляторы модифицируют из-за особенностей индуктивной нагрузки:
- устанавливают защитные LRC-цепи для защиты силового ключа (конденсаторы, резисторы, дроссели)
- добавляют на выходе конденсатор для корректировки формы волны напряжения
- ограничивают минимальную мощность регулирования напряжения — для гарантированного старта двигателя
- используют тиристоры с током в несколько раз превышающим ток электромотора
Достоинства тиристорных регуляторов:
Недостатки:- можно использовать для двигателей небольшой мощности
- при работе возможен шум, треск, рывки двигателя
- при использовании симисторов на двигатель попадает постоянное напряжение
- все недостатки регулирования напряжением
Стоит отметить, что в большинстве современных кондиционеров среднего и высшего уровня скорость вентилятора регулируется именно таким способом.
Транзисторный регулятор напряжения
Как называет его сам производитель — электронный автотрансформатор или ШИМ-регулятор.
Изменение напряжения осуществляется по принципу ШИМ (широтно-импульсная модуляция), а в выходном каскаде используются транзисторы — полевые или биполярные с изолированным затвором (IGBT).
Выходные транзисторы коммутируются с высокой частотой (около 50 кГц), если при этом изменить ширину импульсов и пауз между ними, то изменится и результирующее напряжение на нагрузке. Чем короче импульс и длиннее паузы между ними, тем меньше в итоге напряжение и подводимая мощность.
Для двигателя, на частоте в несколько десятков кГц, изменение ширины импульсов равносильно изменению напряжения.
Выходной каскад такой же как и у частотного преобразователя, только для одной фазы — диодный выпрямитель и два транзистора вместо шести, а схема управления изменяет выходное напряжение.
Плюсы электронного автотрансформатора:
- Небольшие габариты и масса прибора
- Невысокая стоимость
- Чистая, неискажённая форма выходного тока
- Отсутствует гул на низких оборотах
- Управление сигналом 0-10 Вольт
- Расстояние от прибора до двигателя не более 5 метров (этот недостаток устраняется при использовании дистанционного регулятора)
- Все недостатки регулировки напряжением
Частотное регулирование
Ещё совсем недавно (10 лет назад) частотных регуляторов скорости двигателей на рынке было ограниченное количество, и стоили они довольно дорого. Причина — не было дешёвых силовых высоковольтных транзисторов и модулей.
Но разработки в области твердотельной электроники позволили вывести на рынок силовые IGBT-модули. Как следствие — массовое появление на рынке инверторных кондиционеров, сварочных инверторов, преобразователей частоты.
На данный момент частотное преобразование — основной способ регулирования мощности, производительности, скорости всех устройств и механизмов приводом в которых является электродвигатель.
Однако, преобразователи частоты предназначены для управления трёхфазными электродвигателями.
Однофазные двигатели могут управляться:
- специализированными однофазными ПЧ
- трёхфазными ПЧ с исключением конденсатора
Преобразователи для однофазных двигателей
В настоящее время только один производитель заявляет о серийном выпуске специализированного ПЧ для конденсаторных двигателей — INVERTEK DRIVES.
Это модель Optidrive E2
Для стабильного запуска и работы двигателя используются специальные алгоритмы.
При этом регулировка частоты возможна и вверх, но в ограниченном диапазоне частот, этому мешает конденсатор установленный в цепи фазосдвигающей обмотки, так как его сопротивление напрямую зависит от частоты тока:
f — частота тока
С — ёмкость конденсатора
В выходном каскаде используется мостовая схема с четырьмя выходными IGBT транзисторами:
Optidrive E2 позволяет управлять двигателем без исключения из схемы конденсатора, то есть без изменения конструкции двигателя — в некоторых моделях это сделать довольно сложно.
Преимущества специализированного частотного преобразователя:
- интеллектуальное управление двигателем
- стабильно устойчивая работа двигателя
- огромные возможности современных ПЧ:
- возможность управлять работой двигателя для поддержания определённых характеристик (давления воды, расхода воздуха, скорости при изменяющейся нагрузке)
- многочисленные защиты (двигателя и самого прибора)
- входы для датчиков (цифровые и аналоговые)
- различные выходы
- коммуникационный интерфейс (для управления, мониторинга)
- предустановленные скорости
- ПИД-регулятор
Использование ЧП для трёхфазных двигателей
Стандартный частотник имеет на выходе трёхфазное напряжение. При подключении к ему однофазного двигателя из него извлекают конденсатор и соединяют по приведённой ниже схеме:
Геометрическое расположение обмоток друг относительно друга в статоре асинхронного двигателя составляет 90°:
Фазовый сдвиг трёхфазного напряжения -120°, как следствие этого — магнитное поле будет не круговое , а пульсирующее и его уровень будет меньше чем при питании со сдвигом в 90°.
В некоторых конденсаторных двигателях дополнительная обмотка выполняется более тонким проводом и соответственно имеет более высокое сопротивление.
При работе без конденсатора это приведёт к:
- более сильному нагреву обмотки (срок службы сокращается, возможны кз и межвитковые замыкания)
- разному току в обмотках
Многие ПЧ имеют защиту от асимметрии токов в обмотках, при невозможности отключить эту функцию в приборе работа по данной схеме будет невозможна
Преимущества:
- более низкая стоимость по сравнению со специализированными ПЧ
- огромный выбор по мощности и производителям
- более широкий диапазон регулирования частоты
- все преимущества ПЧ (входы/выходы, интеллектуальные алгоритмы работы, коммуникационные интерфейсы)
Недостатки метода:
- необходимость предварительного подбора ПЧ и двигателя для совместной работы
- пульсирующий и пониженный момент
- повышенный нагрев
- отсутствие гарантии при выходе из строя, т.к. трёхфазные ПЧ не предназначены для работы с однофазными двигателями
Как сделать регулятор оборотов электродвигателя 12в, 220в, 24в
Плавная работа двигателя, без рывков и скачков мощности – это залог его долговечности. Для контроля этих показателей используется регулятор оборотов электродвигателя на 220В, 12 В и 24 В, все эти частотники можно изготовить своими руками или купить уже готовый агрегат.
Зачем нужен регулятор оборотов
Регулятор оборотов двигателя, частотный преобразователь – это прибор на мощном транзисторе, который необходим для того, чтобы инвертировать напряжение, а также обеспечить плавную остановку и пуск асинхронного двигателя при помощи ШИМ. ШИМ – широко-импульсное управление электрическими приспособлениями. Его применяют для создания определенной синусоиды переменного и постоянного тока.
Фото — мощный регулятор для асинхронного двигателяСамый простой пример преобразователя – это обычный стабилизатор напряжения. Но у обсуждаемого прибора гораздо больший спектр работы и мощность.
Частотные преобразователи используются в любом устройстве, которое питается от электрической энергии. Регуляторы обеспечивают чрезвычайно точный электрический моторный контроль, так что скорость двигателя можно изменять в меньшую или большую сторону, поддерживать обороты на нужном уровне и защищать приборы от резких оборотов. При этом электродвигателем используется только энергия, необходимая для работы, вместо того, чтобы запускать его на полной мощности.
Фото — регулятор оборотов двигателя постоянного токаЗачем нужен регулятор оборотов асинхронного электродвигателя:
- Для экономии электроэнергии. Контролируя скорость мотора, плавность его пуска и остановки, силы и частоты оборотов, можно добиться значительной экономии личных средств. В качестве примера, снижение скорости на 20% может дать экономию энергии в размере 50%.
- Преобразователь частоты может использоваться для контроля температуры процесса, давления или без использования отдельного контроллера;
- Не требуется дополнительного контроллера для плавного пуска;
- Значительно снижаются расходы на техническое обслуживание.
Устройство часто используется для сварочного аппарата (в основном для полуавтоматов), электрической печки, ряда бытовых приборов (пылесоса, швейной машинки, радио, стиральной машины), домашнего отопителя, различных судомоделей и т.д.
Фото — шим контроллер оборотовПринцип работы регулятора оборотов
Регулятор оборотов представляет собой устройство, состоящее из следующих трех основных подсистем:
- Двигателя переменного тока;
- Главного контроллера привода;
- Привода и дополнительных деталей.
Когда двигатель переменного тока запускается на полную мощность, происходит передача тока с полной мощностью нагрузки, такое повторяется 7-8 раз. Этот ток сгибает обмотки двигателя и вырабатывает тепло, которое будет выделяться продолжительное время. Это может значительно снизить долговечность двигателя. Иными словами, преобразователь – это своеобразный ступенчатый инвертор, который обеспечивает двойное преобразование энергии.
Фото — схема регулятора для коллекторного двигателяВ зависимости от входящего напряжения, частотный регулятор числа оборотов трехфазного или однофазного электродвигателя, происходит выпрямление тока 220 или 380 вольт. Это действие осуществляется при помощи выпрямляющего диода, который расположен на входе энергии. Далее ток проходит фильтрацию при помощи конденсаторов. Далее формируется ШИМ, за это отвечает электросхема. Теперь обмотки асинхронного электродвигателя готовы к передаче импульсного сигнала и их интеграции к нужной синусоиде. Даже у микроэлектродвигателя эти сигналы выдаются, в прямом смысле слова, пачками.
Фото — синусоида нормальной работы электродвигателяКак выбрать регулятор
Существует несколько характеристик, по которым нужно выбирать регулятор оборотов для автомобиля, станочного электродвигателя, бытовых нужд:
- Тип управления. Для коллекторного электродвигателя бывают регуляторы с векторной или скалярной системой управления. Первые чаще применяются, но вторые считаются более надежными;
- Мощность. Это один из самых важных факторов для выбора электрического преобразователя частот. Нужно подбирать частотник с мощностью, которая соответствует максимально допустимой на предохраняемом приборе. Но для низковольтного двигатель лучше подобрать регулятор мощнее, чем допустимая величина Ватт;
- Напряжение. Естественно, здесь все индивидуально, но по возможности нужно купить регулятор оборотов для электродвигателя, у которого принципиальная схема имеет широкий диапазон допустимых напряжений;
- Диапазон частот. Преобразование частоты – это основная задача данного прибора, поэтому старайтесь выбрать модель, которая будет максимально соответствовать Вашим потребностям. Скажем, для ручного фрезера будет достаточно 1000 Герц;
- По прочим характеристикам. Это срок гарантии, количество входов, размер (для настольных станков и ручных инструментов есть специальная приставка).
Хорошо себя зарекомендовали приборы марки Sinus, E-Sky и Pic.
При этом также нужно понимать, что есть так называемый универсальный регулятор вращения. Это частотный преобразователь для бесколлекторных двигателей.
Фото — схема регулятора для бесколлекторных двигателейВ данной схеме есть две части – одна логическая, где на микросхеме расположен микроконтроллер, а вторая – силовая. В основном такая электрическая схема используется для мощного электрического двигателя.
Видео: регулятор оборотов электродвигателя с ШИро V2
Как сделать самодельный регулятор оборотов двигателя
Можно сделать простой симисторный регулятор оборотов электродвигателя, его схема представлена ниже, а цена состоит только из деталей, продающихся в любом магазине электротехники.
Для работы нам понадобится мощный симистор типа BT138-600, её советует журнал радиотехники.
Фото — схема регулятора оборотов своими рукамиВ описанной схеме, обороты будут регулироваться при помощи потенциометра P1. Параметром P1 определяется фаза входящего импульсного сигнала, который в свою очередь открывает симистор. Такая схема может применяться как в полевом хозяйстве, так и в домашнем. Можно использовать данный регулятор для швейных машинок, вентиляторов, настольных сверлильных станков.
Принцип работы прост: в момент, когда двигатель немного затормаживается, его индуктивность падает, и это увеличивает напряжение в R2-P1 и C3, то в свою очередь влечет более продолжительное открытие симистора.
Тиристорный регулятор с обратной связью работает немного по-другому. Он обеспечивает обратный ход энергии в энергетическую систему, что является очень экономным и выгодным. Данный электронный прибор подразумевает включение в электрическую схемы мощного тиристора. Его схема выглядит вот так:
Здесь для подачи постоянного тока и выпрямления требуется генератор управляющего сигнала, усилитель, тиристор, цепь стабилизации оборотов.
Источники:
http://2shemi.ru/regulyator-oborotov-elektrodvigatelya-220v/
http://samelectrik.ru/regulirovanie-oborotov-asinxronnogo-dvigatelya.html
http://electricvdele.ru/elektrooborudovanie/elektrodvigateli/regulirovka-oborotov-asinhronnogo-dvigatelya-svoimi-rukami.html
http://masterxoloda.ru/4/upravlenie-skorostyu-vrashheniya-odnofaznyh-dvigatelej
http://www.asutpp.ru/regulyator-oborotov-elektrodvigatelya.html
Как понизить обороты электродвигателя 380в
Электрика своими руками
егулировка оборотов электродвигателя часто бывает необходима как в производственных, так и каких то бытовых целях. В первом случае для уменьшения или увеличения частоты вращения применяются промышленные регуляторы напряжения – инверторные частотные преобразователи. А с вопросом, как регулировать обороты электродвигателя в домашних условиях, попробуем разобраться подробнее.
Необходимо сразу сказать, что для разных типов однофазных и трехфазных электрических машин должны применяться разные регуляторы мощности. Т.е. для асинхронных машин применение тиристорных регуляторов, являющихся основными для изменения вращения коллекторных двигателей, недопустимо.
Лучший способ уменьшить обороты вашего устройства – не в регулировке частоты вращения самого движка, а посредством редуктора или ременной передачи. При этом сохранится самое главное – мощность устройства.
Немного теории об устройстве и области применения коллекторных электродвигателей
Электродвигатели этого типа могут быть постоянного или переменного тока, с последовательным, параллельным или смешанным возбуждением ( для переменного тока применяется только первые два вида возбуждения).
Коллекторный электродвигатель состоит из ротора, статора, коллектора и щеток. Ток в цепи, проходящий через соединенные определенным образом обмотки статора и ротора, создает магнитное поле, заставляющее последний вращаться. Напряжение на ротор передается при помощи щеток из мягкого электропроводного материала, чаще всего это графит или медно-графитовая смесь. Если изменить направление тока в роторе или статоре, вал начнет вращаться в другую сторону, причем это всегда делается с выводами ротора, что бы не происходило перемагничивание сердечников.
При одновременном изменении подключения и ротора и статора реверсирования не произойдет. Существуют также трехфазные коллекторные электродвигатели, но это уже совсем другая история.
Электродвигатели постоянного тока с параллельным возбуждением
Обмотка возбуждения (статорная) в двигателе с параллельным возбуждением состоит из большого количества витков тонкого провода и включена параллельно ротору, сопротивление обмотки которого намного меньше. Поэтому для уменьшения тока во время запуска электродвигателей мощностью более 1 Квт в цепь ротора включают пусковой реостат. Управление оборотами электродвигателя при такой схеме включения производится путем изменения тока только в цепи статора, т.к. способ понижения напряжения на клеммах очень не экономичен и требует применение регулятора большой мощности.
Если нагрузка мала, то при случайном обрыве обмотки статора при использовании такой схемы частота вращения превысит максимально допустимую и электродвигатель может пойти “вразнос”
Электродвигатели постоянного тока с последовательным возбуждением
Обмотка возбуждения такого электродвигателя имеет небольшое число витков толстого провода, и при ее последовательном включении в цепь якоря ток во всей цепи будет одинаков. Электродвигатели этого типа более выносливы при перегрузках и поэтому наиболее часто встречаются в бытовых устройствах.
Регулировка оборотов электродвигателя постоянного тока с последовательно включенной обмоткой статора может производиться двумя способами:
- Подключением параллельно статору регулировочного устройства, изменяющего магнитный поток. Однако этот способ довольно сложен в реализации и не применяется в бытовых устройствах.
- Регулирование (снижение) оборотов с помощью уменьшения напряжения. Этот способ применяется практически во всех электрических устройствах – бытовых приборах, инструменте и т.д.
Электродвигатели коллекторные переменного тока
Эти однофазные моторы имеют меньший КПД, чем двигатели постоянного тока, но из за простоты изготовления и схем управления нашли наиболее широкое применение в бытовой технике и электроинструменте. Их можно назвать “универсальными”, т.к. они способны работать как при переменном, так и при постоянном токе. Это обусловлено тем, что при включении в сеть переменного напряжение направление магнитного поля и тока будет изменяться в статоре и роторе одновременно, не вызывая изменения направления вращения. Реверс таких устройств осуществляется переполюсовкой концов ротора.
Для улучшения характеристик в мощных (промышленных) коллекторных электродвигателях переменного тока применяются дополнительные полюса и компенсационные обмотки. В двигателях бытовых устройств таких приспособлений нет.
Регуляторы оборотов электродвигателя
Схемы изменения частоты вращения электродвигателей в большинстве случаев построены на тиристорных регуляторах, ввиду своей простоты и надежности.
Принцип работы представленной схемы следующий: конденсатор С1 заряжается до напряжения пробоя динистора D1 через переменный резистор R2, динистор пробивается и открывает симистор D2, управляющий нагрузкой. Напряжение на нагрузке зависит от частоты открывания D2, зависящее в свою очередь от положения движка переменного сопротивления. Данная схема не снабжена обратной связью, т.е. при изменении нагрузки обороты также будут меняться и их придется подстраивать. По такой же схеме происходит управление оборотами импортных бытовых пылесосов.
Благодаря надежности и простоте конструкции асинхронные двигатели (АД) получили широкое распространение. В большинстве станков, промышленном и бытовом оборудовании применяются электродвигатели такого типа. Изменение скорости вращения АД производится механически (дополнительной нагрузкой на валу, балластом, передаточными механизмами, редукторами и т.д.) или электрическими способами. Электрическое регулирование более сложное, но и гораздо более удобное и универсальное.
Для многих агрегатов применяется именно электрическое управление. Оно обеспечивает точное и плавное регулирование пуска и работы двигателя. Электрическое управление производится за счет:
- изменения частоты тока;
- силы тока;
- уровня напряжения.
В этой статье мы рассмотрим популярные способы, как может осуществляться регулировка оборотов асинхронного двигателя на 220 и 380В.
Изменение скорости АД с короткозамкнутым ротором
Существует несколько способов:
- Управление вращением за счет изменения электромагнитного поля статора: частотное регулирование и изменение числа пар полюсов.
- Изменение скольжения электромотора за счет уменьшения или увеличения напряжения (может применяться для АД с фазным ротором).
Частотное регулирование
В данном случае регулировка производится с помощью подключенного к двигателю устройства для преобразования частоты. Для этого применяются мощные тиристорные преобразователи. Процесс частотного регулирования можно рассмотреть на примере формулы ЭДС трансформатора:
Данное выражение означает, что для сохранения постоянного магнитного потока, означающего сохранение перегрузочной способности электромотора, следует одновременно с преобразованием частоты корректировать и уровень питающего напряжения. Если сохраняется выражение, вычисленное по формуле:
то это означает, что критический момент не изменен. А механические характеристики соответствуют рисунку ниже, если вы не понимаете, что значат эти характеристики, то в этом случае регулировка происходит без потери мощности и момента.
Достоинствами данного метода являются:
- плавное регулирование;
- изменение скорости вращения ротора в большую и меньшую сторону;
- жесткие механические характеристики;
- экономичность.
Недостаток один — необходимость в частотном преобразователе, т.е. увеличение стоимости механизма. К слову, на современном рынке представлены модели с однофазным и трёхфазным входом, стоимость которых при мощности 2-3 кВт лежит в диапазоне 100-150 долларов, что не слишком дорого для полноценной регулировки привода станков в частной мастерской.
Переключение числа пар полюсов
Данный метод применяется для многоскоростных двигателей со сложной обмоткой, позволяющей изменять число пар ее полюсов. Самое широкое применение получили двухскоростные, трехскоростные и четырехскоростные АД. Принцип регулировки проще всего рассмотреть на основе двухскоростного АД. В такой машине обмотка каждой фазы состоит из двух полуобмоток. Скорость вращения изменяется при подключении их последовательно или параллельно.
В четырехскоростном электродвигателе обмотка выполнена в виде двух независимых друг от друга частей. При изменении числа пар полюсов первой обмотки производится изменение скорости работы электромотора с 3000 до 1500 оборотов в минуту. При помощи второй обмотки производится регулировка вращения 1000 и 500 оборотов в минуту.
При изменении числа пар полюсов происходит и изменение критического момента. Для его сохранения неизменным, требуется одновременно с изменением числа пар полюсов регулировать и питающее напряжение, например, переключением схемы звезда-треугольник и их вариациями.
Достоинства данного метода:
- жесткие механические характеристики двигателя;
- высокий КПД.
- ступенчатая регулировка;
- большой вес и габаритные размеры;
- высокая стоимость электромотора.
Способы управления скоростью АД с фазным ротором
Изменение скорости вращения АД с фазным ротором производится путем изменения скольжения. Рассмотрим основные варианты и способы.
Изменение питающего напряжения
Этот способ также применяется для АД с КЗ ротором. Асинхронный двигатель подключается через автотрансформатор или ЛАТР. Если уменьшать напряжение питания, частота вращения двигателя снизится.
Но такой режим уменьшает перегрузочную способность двигателя. Этот способ применяется для регулирования в пределах напряжения не выше номинального, так как увеличение номинального напряжения приведет к выходу электродвигателя из строя.
Активное сопротивление в цепи ротора
При использовании данного метода в цепь ротора подключается реостат или набор постоянных резисторов большой мощности. Данное устройство предназначено для плавного увеличения сопротивления.
Скольжение растет пропорционально увеличению сопротивления, а скорость вращения вала электромотора при этом снижается.
- большой диапазон регулирования в сторону понижения скорости вращения.
- снижение КПД;
- увеличение потерь;
- ухудшение механических характеристик.
Асинхронный вентильный каскад и машины двойного питания
Изменение скорости работы асинхронных электромоторов в данных случаях выполняется путем изменения скольжения. При этом скорость вращения электромагнитного поля неизменна. Напряжение подается напрямую на обмотки статора. Регулировка происходит за счет использования мощности скольжения, которая трансформируется в цепь ротора, и образует добавочную ЭДС. Такие методы используются только в специальных машинах и крупных промышленных устройствах.
Плавный пуск асинхронных электродвигателей
АД кроме безусловных преимуществ, обладают существенными недостатками. Это рывок на старте и большие пусковые токи, в 7 раз превышающие номинальные. Для мягкого старта электродвигателя используются следующие методы:
- переключение обмоток по схеме звезда – треугольник;
- включение электродвигателя через автотрансформатор;
- использование специализированных устройств для плавного пуска.
В большинстве частотных регуляторов есть функция плавного пуска двигателя. Это не только снижает пусковые токи, но и уменьшает нагрузки на исполнительные механизмы. Поэтому регулирование частоты и плавный пуск довольно сильно связаны между собой.
Как сделать устройство для изменения скорости вращения электродвигателя своими руками
Для регулировки маломощных однофазных АД можно использовать диммеры. Однако этот способ ненадежен и обладает серьезными недостатками: снижением КПД, серьезным перегревом устройства и опасностью повреждения двигателя.
Для надежного и качественного регулирования оборотов электродвигателей на 220В, лучше всего подходит частотное регулирование.
Приведенная ниже схема позволяет собрать частотное устройство для регулировки электромоторов мощностью до 500 Вт. Изменение скорости вращения производится в границах от 1000 до 4000 оборотов в минуту.
Устройство состоит из задающего генератора с изменяемой частотой, состоящего из мультивибратора, собранного на микросхеме К561ЛА7, счетчика на микросхеме К561ИЕ8, полумоста регулятора. Выходной трансформатор Т1 выполняет развязку верхнего и нижнего транзисторов полумоста.
Демпфирующая цепь С4, R7 гасит всплески напряжения опасные для силовых транзисторов VT3, VT4. Выпрямитель, удвоитель напряжения питающей сети, включает в себя диодный мост VD9, с конденсатором фильтра на которых происходит удвоение напряжения питания полумоста.
Напряжение первичной обмотки: 2х12В, вторичной обмотки 12В. Первичная обмотка трансформатора управления ключами, состоит из 120 витков медного провода сечением 0,7мм, с отводом от середины. Вторичная – две обмотки, каждая по 60 витков повода сечением 0,7 мм.
Вторичные обмотки необходимо максимально надежно заизолировать друг от друга, так как разница потенциалов между ними доходит до 640 В. Подключение выходных обмоток к затворам ключей производится в противофазе.
Вот мы и рассмотрели способы регулировки оборотов асинхронных двигателей. Если возникли вопросы, задавайте их в комментариях под статьей!
Благодаря надежности и простоте конструкции асинхронные двигатели (АД) получили широкое распространение. В большинстве станков, промышленном и бытовом оборудовании применяются электродвигатели такого типа. Изменение скорости вращения АД производится механически (дополнительной нагрузкой на валу, балластом, передаточными механизмами, редукторами и т.д.) или электрическими способами. Электрическое регулирование более сложное, но и гораздо более удобное и универсальное.
Для многих агрегатов применяется именно электрическое управление. Оно обеспечивает точное и плавное регулирование пуска и работы двигателя. Электрическое управление производится за счет:
- изменения частоты тока;
- силы тока;
- уровня напряжения.
В этой статье мы рассмотрим популярные способы, как может осуществляться регулировка оборотов асинхронного двигателя на 220 и 380В.
Изменение скорости АД с короткозамкнутым ротором
Существует несколько способов:
- Управление вращением за счет изменения электромагнитного поля статора: частотное регулирование и изменение числа пар полюсов.
- Изменение скольжения электромотора за счет уменьшения или увеличения напряжения (может применяться для АД с фазным ротором).
Частотное регулирование
В данном случае регулировка производится с помощью подключенного к двигателю устройства для преобразования частоты. Для этого применяются мощные тиристорные преобразователи. Процесс частотного регулирования можно рассмотреть на примере формулы ЭДС трансформатора:
Данное выражение означает, что для сохранения постоянного магнитного потока, означающего сохранение перегрузочной способности электромотора, следует одновременно с преобразованием частоты корректировать и уровень питающего напряжения. Если сохраняется выражение, вычисленное по формуле:
то это означает, что критический момент не изменен. А механические характеристики соответствуют рисунку ниже, если вы не понимаете, что значат эти характеристики, то в этом случае регулировка происходит без потери мощности и момента.
Достоинствами данного метода являются:
- плавное регулирование;
- изменение скорости вращения ротора в большую и меньшую сторону;
- жесткие механические характеристики;
- экономичность.
Недостаток один — необходимость в частотном преобразователе, т.е. увеличение стоимости механизма. К слову, на современном рынке представлены модели с однофазным и трёхфазным входом, стоимость которых при мощности 2-3 кВт лежит в диапазоне 100-150 долларов, что не слишком дорого для полноценной регулировки привода станков в частной мастерской.
Переключение числа пар полюсов
Данный метод применяется для многоскоростных двигателей со сложной обмоткой, позволяющей изменять число пар ее полюсов. Самое широкое применение получили двухскоростные, трехскоростные и четырехскоростные АД. Принцип регулировки проще всего рассмотреть на основе двухскоростного АД. В такой машине обмотка каждой фазы состоит из двух полуобмоток. Скорость вращения изменяется при подключении их последовательно или параллельно.
В четырехскоростном электродвигателе обмотка выполнена в виде двух независимых друг от друга частей. При изменении числа пар полюсов первой обмотки производится изменение скорости работы электромотора с 3000 до 1500 оборотов в минуту. При помощи второй обмотки производится регулировка вращения 1000 и 500 оборотов в минуту.
При изменении числа пар полюсов происходит и изменение критического момента. Для его сохранения неизменным, требуется одновременно с изменением числа пар полюсов регулировать и питающее напряжение, например, переключением схемы звезда-треугольник и их вариациями.
Достоинства данного метода:
- жесткие механические характеристики двигателя;
- высокий КПД.
- ступенчатая регулировка;
- большой вес и габаритные размеры;
- высокая стоимость электромотора.
Способы управления скоростью АД с фазным ротором
Изменение скорости вращения АД с фазным ротором производится путем изменения скольжения. Рассмотрим основные варианты и способы.
Изменение питающего напряжения
Этот способ также применяется для АД с КЗ ротором. Асинхронный двигатель подключается через автотрансформатор или ЛАТР. Если уменьшать напряжение питания, частота вращения двигателя снизится.
Но такой режим уменьшает перегрузочную способность двигателя. Этот способ применяется для регулирования в пределах напряжения не выше номинального, так как увеличение номинального напряжения приведет к выходу электродвигателя из строя.
Активное сопротивление в цепи ротора
При использовании данного метода в цепь ротора подключается реостат или набор постоянных резисторов большой мощности. Данное устройство предназначено для плавного увеличения сопротивления.
Скольжение растет пропорционально увеличению сопротивления, а скорость вращения вала электромотора при этом снижается.
- большой диапазон регулирования в сторону понижения скорости вращения.
- снижение КПД;
- увеличение потерь;
- ухудшение механических характеристик.
Асинхронный вентильный каскад и машины двойного питания
Изменение скорости работы асинхронных электромоторов в данных случаях выполняется путем изменения скольжения. При этом скорость вращения электромагнитного поля неизменна. Напряжение подается напрямую на обмотки статора. Регулировка происходит за счет использования мощности скольжения, которая трансформируется в цепь ротора, и образует добавочную ЭДС. Такие методы используются только в специальных машинах и крупных промышленных устройствах.
Плавный пуск асинхронных электродвигателей
АД кроме безусловных преимуществ, обладают существенными недостатками. Это рывок на старте и большие пусковые токи, в 7 раз превышающие номинальные. Для мягкого старта электродвигателя используются следующие методы:
- переключение обмоток по схеме звезда – треугольник;
- включение электродвигателя через автотрансформатор;
- использование специализированных устройств для плавного пуска.
В большинстве частотных регуляторов есть функция плавного пуска двигателя. Это не только снижает пусковые токи, но и уменьшает нагрузки на исполнительные механизмы. Поэтому регулирование частоты и плавный пуск довольно сильно связаны между собой.
Как сделать устройство для изменения скорости вращения электродвигателя своими руками
Для регулировки маломощных однофазных АД можно использовать диммеры. Однако этот способ ненадежен и обладает серьезными недостатками: снижением КПД, серьезным перегревом устройства и опасностью повреждения двигателя.
Для надежного и качественного регулирования оборотов электродвигателей на 220В, лучше всего подходит частотное регулирование.
Приведенная ниже схема позволяет собрать частотное устройство для регулировки электромоторов мощностью до 500 Вт. Изменение скорости вращения производится в границах от 1000 до 4000 оборотов в минуту.
Устройство состоит из задающего генератора с изменяемой частотой, состоящего из мультивибратора, собранного на микросхеме К561ЛА7, счетчика на микросхеме К561ИЕ8, полумоста регулятора. Выходной трансформатор Т1 выполняет развязку верхнего и нижнего транзисторов полумоста.
Демпфирующая цепь С4, R7 гасит всплески напряжения опасные для силовых транзисторов VT3, VT4. Выпрямитель, удвоитель напряжения питающей сети, включает в себя диодный мост VD9, с конденсатором фильтра на которых происходит удвоение напряжения питания полумоста.
Напряжение первичной обмотки: 2х12В, вторичной обмотки 12В. Первичная обмотка трансформатора управления ключами, состоит из 120 витков медного провода сечением 0,7мм, с отводом от середины. Вторичная – две обмотки, каждая по 60 витков повода сечением 0,7 мм.
Вторичные обмотки необходимо максимально надежно заизолировать друг от друга, так как разница потенциалов между ними доходит до 640 В. Подключение выходных обмоток к затворам ключей производится в противофазе.
Вот мы и рассмотрели способы регулировки оборотов асинхронных двигателей. Если возникли вопросы, задавайте их в комментариях под статьей!
Контроллер скорости двигателя постоянного тока PWM 0-100% Защита от перегрузки по току (вторая цепь) «Бесщеточные двигатели, 3-фазные инверторы, схемы
Это самая дешевая схема контроллера скорости двигателя постоянного тока, которую вы можете найти в Интернете.
Раньше я пробовал использовать NE555 и другие схемы, но результат был каждый раз в закороченных МОП-транзисторах 😀 и невозможности остановки GO KART (не очень хорошо, когда у вас нет большого красного выключателя ) .
Далее я представлю свой контроллер скорости двигателя постоянного тока, способный регулировать скорость (ШИМ) от 0 до 100% и частоту от ~ 400 Гц до 3 кГц, на основе компаратора LM339.
Источник питания — от 14 до 30 вольт, можно расширить до практически любого значения с небольшими изменениями.
Начиная с R15 VR 10k вы можете регулировать скорость от 0 до 100%
С R14 VR 100k можно регулировать частоту.
Если перемычка JP1 закорочена, вы можете настроить частоту ШИМ от 400 Гц до 3 кГц. Если перемычка открыта, частота фиксируется на 100 Гц.
Схема разработана в Eagle cad 6.2
Вы можете использовать практически любой MOSFET канала N.Полевые транзисторы будут установлены на радиаторе, если сила тока выше 2-5 ампер.
Возможно увеличить напряжение питания до любого значения, если вы отделите питание логической схемы от питания нагрузки и МОП-транзисторов
Это мой второй прототип контроллера мотора постоянного тока
В зависимости от значения Rds ON MOSFET вам понадобится радиатор меньшего или большего размера.
Провода должны иметь диаметр не менее 12 AWG для нагрузки 30–35 А.
По любым вопросам вы можете в любое время задать мне адрес электронной почты, указанный в меню «О нас».
Успех с схемой.
Это реальное испытание схемы.
Качественный улучшенный ШИМ-контроллер на базе микросхемы MC33035.
Схема:
Дизайн Eagle 6.1.
Я использовал в качестве драйвера mosfet микросхему TC4452, способную выдавать 12 Ампер.
Я использовал эту схему в сочетании с силовым каскадом, состоящим из 10 МОП-транзисторов в параллельном соединении со всеми затворами, подключенными через резистор 10 шт. По 20 Ом к выходу драйвера IC.
Для схемы измерения тока я использовал датчик Allegro ACS758
50-200A датчик тока IC
ИС датчиков тока в корпусе Allegro CA и CB представляют собой полностью интегрированные датчики тока. Они содержат первичный провод, концентрирующий ферромагнитный сердечник и аналоговый выход с линейным эффектом Холла в одном корпусе ИС.Типичное сопротивление проводника составляет 100 мкОм для сверхнизких потерь мощности при измерении тока до 200 А. Эти датчики относятся к автомобильным устройствам, которые могут поглощать тепло и обеспечивать высокоточное измерение тока разомкнутого контура в самых суровых условиях эксплуатации.
Среднетоковые устройства Allegro намного меньше громоздких трансформаторов тока и обладают дополнительным преимуществом, позволяющим определять как переменный, так и постоянный ток. Конструкция корпуса также обеспечивает гальваническую развязку до 3000 VRMS и может использоваться во многих линейных приложениях.
Основы тестирования двигателей
Блог
Чтобы измерить работоспособность электродвигателя, инженеры должны учитывать несколько ключевых факторов, включая производительность, потребление энергии, эксплуатационные расходы, долговечность оборудования и общую надежность системы. Все это неотъемлемые компоненты моторного здоровья, которое зависит от регулярного мониторинга и диагностического тестирования. При оценке состояния двигателя необходимо тщательно проанализировать следующие аспекты: центровка, вентиляция, смазка, стабильность работы и тепловая мощность.
Но при поиске и устранении неисправностей двигателя может быть сложно определить точный источник проблемы, будь то проблема с источником питания, проводниками параллельной цепи, контроллером двигателя или нагрузкой. Таким образом, надлежащее тестирование является важным шагом в обслуживании двигателя. Ниже приведены несколько наиболее распространенных доступных моторных тестов, которые могут дать значительную экономию времени и средств, тем самым снижая потребность в обслуживании, ремонте и дополнительных трудозатратах.
Первичный анализ
Для выявления конкретных проблем с двигателем доступен ряд диагностических инструментов, таких как клещи-амперметры, датчики температуры, мегомметры (или просто мегомметры, используемые для тестов мегомметров), анализаторы обмоток и осциллографы.Однако ваши шесть чувств часто являются лучшими индикаторами потенциальных проблем. Например, двигатель может перегреваться или издавать странные звуки и запахи; используйте эти очевидные проблемы как отправные точки. А при оценке вашего двигателя начните с основных показателей его характеристик, таких как уровни тока, мощность, напряжение и сопротивление. Вам также следует использовать мультиметр — универсальный инструмент для предварительного тестирования.
Методы испытаний двигателей: устранение проблемы
Электродвигатели используются в, казалось бы, бесконечном количестве применений, от небольших электрических вентиляторов до крупномасштабного производственного и промышленного оборудования; двигатели имеют решающее значение для выполнения повседневной работы на предприятиях по всей стране и по всему миру.Вот почему отказ двигателя — такая серьезная проблема; Связанные с этим затраты, время простоя и общий сбой могут иметь катастрофические последствия для работы объекта в целом. Но уделение времени тщательному тестированию двигателя может надежно предотвратить незапланированные простои и непредвиденные расходы на техническое обслуживание, поддерживая бесперебойную и эффективную работу процессов.
Тест Hipot на диэлектрическую прочность
Hipot testing, или испытание на электрическую прочность изоляции, при испытании изоляции с использованием источника высокого напряжения. Этот тест полезен как для переменного, так и для постоянного тока, и на кабель подается постоянно изменяющееся напряжение.Напряжение меняется с положительного на отрицательное и длится от 50 до 60 полных циклов для измерения общего протекающего тока. Тестирование сопротивления изоляции Hipot выявляет причины проблем с током и может указывать на неэффективную изоляцию. Этот тест также полезен для изоляции и выявления проблем с дугой.
Испытание импульсным перенапряжением для выявления и обнаружения перегорания
Испытания на скачки напряжения — один из самых надежных методов обнаружения перегорания двигателя, так как тест может надежно предсказать будущий отказ двигателя.Испытания на скачки напряжения выявляют закороченные витки проводов двигателя и нарушение изоляции проводов, что является ранним признаком электрического пробоя. Изоляция обмоток двигателя может разрушиться в результате химических отложений, ошибок при изготовлении или перемотке, обычного движения при запуске или интенсивной эксплуатации. Для этого испытания сопротивления изоляции требуется конкретный тип машины, чтобы продемонстрировать характеристики отдельных комплектов двигателей, что позволяет пользователям анализировать характеристики каждого комплекта и сравнивать его с другими.
Узнать больше
Существует несколько тестов для оценки исправности электродвигателя и лучшего понимания его состояния и будущих потребностей в обслуживании. В зависимости от конкретного приложения и проблемы, тестирование мегомметром, проверка падения напряжения и проверка потерь в сердечнике, среди прочего, могут иметь решающее значение для обеспечения оптимальной работы и долговечности двигателя.
Чтобы узнать о других тестах, проводимых Renown Electric на электродвигателях, загрузите нашу новую электронную книгу « Основы тестирования двигателей. ”
Как определить число полюсов асинхронного двигателя?
Есть много гораздо более интересных вопросов, связанных с числом полюсов асинхронных двигателей, например:
1. Увеличивает ли асинхронный двигатель, питаемый от основной сети (скажем, 50 Гц), свой крутящий момент в «p» раз с увеличением числа полюсов. «p», поскольку его скорость уменьшается за «p» время (как в коробке передач)?
2. Пусть у нас есть асинхронный двигатель с p = 2 и питаем его от сети 50 Гц.Затем мы повторно подключаем катушки обмотки, чтобы установить p = 4, и подавать, если вырастет сеть 100 Гц. Характеристики этих двух двигателей разные или одинаковые? Обратите внимание, за исключением частоты и соединений между катушками, все осталось прежним.
Зависит от необходимой скорости. n (об / мин) = (60 x f ) / N где: — f = частота и N = количество пар полюсов. 60 предназначен для преобразования числа оборотов в секунду в число оборотов в минуту, поскольку частота выражается в циклах в секунду.Пары полюсов существуют, потому что любой полюс должен быть построен парами верхний и нижний / левый правый, поэтому за один цикл он переместится на половину расстояния.
Если вы используете 50 Гц и имеете двухполюсный двигатель 60 x 50/1 = 3000 об / мин. Асинхронный двигатель будет работать с немного меньшей скоростью из-за «скольжения», которое и дает двигателю его крутящий момент. Например, 2-полюсный двигатель мощностью 5,5 кВт, 400 В будет работать со скоростью примерно 2880 об / мин.
Для четырехполюсной машины 60 x 50/2 = 1500 об / мин, поэтому двигатель того же размера на 5.5 кВт, 400 В, но 4 полюса будут иметь номинальную скорость 1500 об / мин, но будут работать около 1455 об / мин.
При выборе трехфазного двигателя количество полюсов выбирается для достижения требуемой скорости вращения. Вот две таблицы, одна для источника питания 50 Гц и одна для источника питания 60 Гц:
Формула: n = 60 x f / p , где n = синхронная скорость; f = частота питания & p = пары полюсов на фазу.Фактическая скорость движения — это синхронная скорость за вычетом скорости скольжения.
Для трехфазной сети 50 Гц:
2 полюса или 1 пара полюсов = 3000 об / мин (минус скорость скольжения = около 2750 об / мин или 6-7% n )
4 полюса или 2 пары полюсов = 1500 об / мин
6 полюсов или 3 пары полюсов = 1000 Об / мин
8 полюсов или 4 пары полюсов = 750 об / мин
10 полюсов или 5 пар полюсов = 600 об / мин
12 полюсов или 6 пар полюсов = 500 об / мин
16 полюсов или 8 пар полюсов = 375 об / мин
Для трехфазной сети 60 Гц:
2 полюса или 1 пара полюсов = 3600 об / мин (минус скорость скольжения = около 2750 об / мин или 6-7% n )
4 полюса или 2 пары полюсов = 1800 об / мин
6 полюсов или 3 пары полюсов = 1200 Об / мин
8 полюсов или 4 пары полюсов = 900 об / мин
10 полюсов или 5 пар полюсов = 720 об / мин
12 полюсов или 6 пар полюсов = 600 об / мин
16 полюсов или 8 пар полюсов = 450 об / мин
Чтобы определить количество полюсов, вы можете напрямую прочитать табличку с техническими данными или рассчитать его по оборотам, указанным на табличке с техническими данными, или вы можете подсчитать количество катушек и разделить их на 3 (полюсов на фазу) или на 6 (пары полюсов на фазу). ).Когда мощность асинхронного двигателя постоянна, крутящий момент увеличивается со скоростью уменьшения скорости.
С появлением частотно-регулируемого привода (VFD) вы можете получить любую желаемую частоту / номинальное напряжение. Я часто вижу паспортные таблички с такими вещами, как 575 В переменного тока, 42,5 Гц и т. Д. Когда делаются эти «специальные предложения», я обычно вижу 6-полюсные машины — но это может быть просто предпочтением производителя.
Зачем нужен двигатель постоянного тока?
Двигатель постоянного тока имеет несколько преимуществ: изменение крутящего момента и скорости.
Момент
Когда вы думаете о том, что такое электродвигатель, ответ довольно прост: это объект, который преобразует электрическую энергию в механическую. Математика, лежащая в основе этого, более сложна, но для практических целей все, что он делает, это превращает одну форму энергии в другую. Чтобы быть более точным, мы могли бы сказать, что двигатель — это действительно устройство, которое генерирует крутящий момент.
В случае наших двигателей крутящий момент — это сила вращения, которая вызывает вращение выходного вала.Двигатели постоянного тока могут развивать постоянный крутящий момент в широком диапазоне скоростей.
Для двигателя постоянного тока: крутящий момент пропорционален току якоря — это означает, что для управления крутящим моментом требуется просто контролировать постоянный ток двигателя, что легко достигается с помощью простого привода постоянного тока.
Изменение скорости
Вы можете изменять скорость, изменяя напряжение возбуждения, напряжение якоря или их комбинацию. Проще говоря, если вы запустите двигатель с базовой скоростью 2000 об / мин и напряжением якоря 500 В, если вы уменьшите напряжение якоря до 250 В, ваш двигатель будет работать со скоростью 1000 об / мин.
Если мы посмотрим на управление напряжением якоря, то нам нужно поддерживать постоянное возбуждение шунтирующего поля. Крутящий момент двигателя пропорционален произведению тока якоря, магнитного потока главного полюса (поля) и машинной постоянной, которая является функцией обмоток якоря. Это означает, что если возбуждение шунтирующего поля остается постоянным, крутящий момент зависит исключительно от тока якоря.
Если мы используем управление напряжением якоря с фиксированным возбуждением поля, наш двигатель постоянного тока будет развивать номинальный крутящий момент при номинальном токе якоря независимо от скорости, это обычно называется работой с постоянным крутящим моментом.Скорость будет пропорциональна напряжению якоря.
Однако, если мы управляем напряжением, приложенным к полю шунта, с помощью контроллера поля, мы также будем контролировать скорость двигателя. Снижение напряжения в шунтирующем поле уменьшает ток возбуждения, в результате этого уменьшается магнитный поток поля и увеличивается скорость двигателя.
Нельзя увеличивать напряжение возбуждения для получения скорости ниже базовой, это может привести к перегреву поля при токе выше номинального. Двигатели постоянного тока, работающие с постоянным напряжением якоря и с ослаблением поля, имеют постоянную мощность в лошадиных силах во всем диапазоне скоростей.Значения скорости полевого управления варьируются от 1: 1 до 6: 1
Как можно видеть, использование как управления шунтирующим полем, так и управления напряжением якоря дает широкий диапазон скорости. При шунтирующем управлении полем двигатель постоянного тока может развивать скорость выше базовой и обеспечивать постоянную мощность в лошадиных силах. Регулировка напряжения якоря используется для скоростей ниже базовой, что обеспечивает постоянный крутящий момент.
Одним из преимуществ использования двигателя постоянного тока с приводом постоянного тока является то, что рекуперативная энергия может подаваться обратно в сеть.Рекуперативный привод постоянного тока (4-квадрантный привод или APSH) значительно дешевле, чем аналогичный рекуперативный привод переменного тока. Он также занимает меньше места и имеет простую конструкцию.
Drives and Automation может поставить ряд двигателей постоянного тока и является агентом Sicme Motori в Великобритании. Sicme Motori была основана в 1967 году в Турине, Италия, и с 50-летним опытом в разработке и производстве электродвигателей является одной из ведущих компаний в этом секторе. Компания Sicme Motori, располагающая двумя современными предприятиями в Турине, Италия, поставляет двигатели переменного и постоянного тока квадратной рамы мощностью от 1 до 3600 кВт в 42 страны мира.
Люди часто переоценивают требования к техническому обслуживанию двигателя постоянного тока, однако, если вы испытываете поломку двигателя постоянного тока, часто бывает более экономически выгодно заменить его другим двигателем постоянного тока. Мы являемся одним из немногих интеграторов в Великобритании, обладающих глубокими знаниями и опытом работы с двигателями постоянного тока и приводами, и можем проконсультировать по выбору двигателя и привода и интеграции в ваши производственные линии.
Как работает электродвигатель в автомобиле
Трехфазный четырехполюсный асинхронный двигатель состоит из двух основных частей: статора и ротора.Статор состоит из трех частей: сердечника статора, токопроводящего провода и рамы. Сердечник статора представляет собой группу стальных колец, которые изолированы друг от друга и затем соединены друг с другом.
Внутри этих колец есть прорези, через которые проводящий провод будет наматывать обмотки статора. Проще говоря, в трехфазном асинхронном двигателе есть три разных типа проводов. Эти типы проводов можно назвать Фазой 1, Фазой 2 и Фазой 3.
Каждый тип проводов наматывается вокруг пазов на противоположных сторонах внутренней части сердечника статора.Как только токопроводящий провод находится внутри сердечника статора, сердечник помещается внутри рамы.
Как работает электродвигатель?
Из-за сложности темы ниже приводится упрощенное объяснение того, как четырехполюсный трехфазный асинхронный двигатель переменного тока работает в автомобиле. Все начинается с аккумулятора в автомобиле, который подключен к двигателю. Электрическая энергия подается на статор через аккумуляторную батарею автомобиля. Катушки внутри статора (сделанные из токопроводящей проволоки) расположены на противоположных сторонах сердечника статора и в некотором смысле действуют как магниты.Следовательно, когда электрическая энергия от автомобильного аккумулятора подается на двигатель, катушки создают вращающиеся магнитные поля, которые тянут проводящие стержни на внешней стороне ротора за ним. Вращающийся ротор — это то, что создает механическую энергию, необходимую для вращения шестерен автомобиля, которые, в свою очередь, вращают шины. В обычном автомобиле, то есть неэлектрическом, есть и двигатель, и генератор. Аккумулятор питает двигатель, который приводит в действие шестерни и колеса. Вращение колес — это то, что затем приводит в действие генератор в автомобиле, а генератор перезаряжает аккумулятор.Вот почему вам советуют водить машину в течение некоторого времени после прыжка: аккумулятор необходимо подзарядить, чтобы он функционировал должным образом. В электромобиле нет генератора.
Итак, как же тогда перезаряжается аккумулятор? Хотя нет отдельного генератора переменного тока, двигатель в электромобиле действует как двигатель и как генератор переменного тока.
Это связано с переменным характером сигнала переменного тока, который позволяет легко повышать или понижать напряжение до различных значений.Это одна из причин, почему электромобили так уникальны.
Как упоминалось выше, аккумулятор запускает двигатель, который подает энергию на шестерни, которые вращают шины. Этот процесс происходит, когда ваша нога находится на акселераторе — ротор тянется вращающимся магнитным полем, требуя большего крутящего момента. Но что происходит, когда вы отпускаете акселератор? Когда ваша нога отрывается от акселератора, вращающееся магнитное поле останавливается, и ротор начинает вращаться быстрее (в отличие от магнитного поля).Когда ротор вращается быстрее, чем вращающееся магнитное поле в статоре, это действие перезаряжает аккумулятор, действуя как генератор переменного тока.
Переменный ток и постоянный
Концептуальные различия этих двух типов токов должны быть очевидны; в то время как один ток (постоянный) постоянный, другой (переменный) более прерывистый. Однако все немного сложнее, чем это простое объяснение, поэтому давайте разберем эти два термина более подробно.
Постоянный ток (DC)
Непрерывный ток означает постоянный и однонаправленный электрический поток. Кроме того, напряжение сохраняет полярность во времени. На батареях, по сути, четко обозначен положительный и отрицательный полюсы. Они используют постоянную разность потенциалов для генерации тока всегда в одном и том же направлении. В дополнение к батареям, топливным элементам и солнечным батареям, скольжение между определенными материалами может производить постоянный ток.
Переменный ток (AC)
Термин «переменный ток» определяет тип электричества, характеризующийся напряжением (представьте давление воды в шланге) и током (представьте скорость потока воды через шланг), которые меняются во времени (рис.1). При изменении напряжения и тока сигнала переменного тока они чаще всего следуют по форме синусоидальной волны. Поскольку форма волны является синусоидальной, напряжение и ток чередуются с положительной и отрицательной полярностью при просмотре во времени. Форма синусоидальной волны сигналов переменного тока обусловлена способом генерации электричества.
Другой термин, который вы можете услышать при обсуждении электроэнергии переменного тока, — это частота. Частота сигнала — это количество полных волновых циклов, завершенных за одну секунду времени.Частота измеряется в герцах (Гц), а в США стандартная частота в электросети составляет 60 Гц. Это означает, что сигнал переменного тока колеблется с частотой 60 полных обратных циклов каждую секунду.
Почему это важно?
Электроэнергия переменного тока — лучший способ передачи полезной энергии от источника генерации (например, плотины или ветряной мельницы) на большие расстояния.
Рис. 2. Многофазная система использует несколько напряжений для сдвига фазы отдельно от каждого из них, чтобы намеренно выйти из строя. Это связано с переменным характером сигнала переменного тока, который позволяет легко повышать или понижать напряжение до различных значений. Вот почему в розетках вашего дома будет указано 120 вольт переменного тока (более безопасно для потребления человеком), но напряжение Распределительный трансформатор, который подает электроэнергию в район (те цилиндрические серые коробки, которые вы видите на полюсах линии электропередачи), может иметь напряжение до 66 кВА (66 000 вольт переменного тока).
AC power позволяет нам создавать генераторы, двигатели и распределительные системы из электричества, которые намного более эффективны, чем постоянный ток, поэтому переменный ток является наиболее популярным током энергии для приложений.
Как работает трехфазный четырехполюсный асинхронный двигатель?
Большинство крупных промышленных двигателей представляют собой асинхронные двигатели, которые используются для питания дизельных поездов, посудомоечных машин, вентиляторов и многих других вещей. Однако что именно означает «асинхронный» двигатель?
С технической точки зрения это означает, что обмотки статора индуцируют ток, протекающий в проводники ротора.
С точки зрения непрофессионала, это означает, что двигатель запускается, потому что электричество индуцируется в роторе магнитными токами, а не прямым подключением к электричеству, как у других двигателей, таких как коллекторный двигатель постоянного тока.
Что означает многофазность? Всякий раз, когда у вас есть статор, который содержит несколько уникальных обмоток на полюс двигателя, вы имеете дело с многофазностью (рис. 2).
Обычно многофазный двигатель состоит из трех фаз, но есть двигатели, которые используют две фазы. Полифазная система использует несколько напряжений для сдвига фаз отдельно от каждого, чтобы намеренно выйти из строя.
Что означает трехфазный ? Основываясь на основных принципах Николы Теслы, определенных в его многофазном асинхронном двигателе, сформулированном в 1883 году, «трехфазный» относится к токам электрической энергии, которые подводятся к статору через аккумуляторную батарею автомобиля (рис. 3).
Эта энергия заставляет катушки проводящих проводов вести себя как электромагниты. Простой способ понять три фазы — это рассмотреть три цилиндра в форме буквы Y, использующие энергию, направленную к центральной точке, для выработки энергии.Когда энергия создается, ток течет в пары катушек внутри двигателя таким образом, что он естественным образом создает северный и южный полюсы внутри катушек, позволяя им действовать как противоположные стороны магнита.
Лучшие электромобили
По мере того, как эта технология продолжает развиваться, характеристики электромобилей начинают быстро догонять и даже превосходить их газовые аналоги. Несмотря на то, что электромобилям еще предстоит пройти определенное расстояние, шаги, предпринятые такими компаниями, как Tesla и Toyota, вселили надежду на то, что будущее транспорта больше не будет зависеть от ископаемого топлива.На данный момент мы все знаем, какой успех Tesla испытывает в этой области, выпустив седан Tesla Model S, способный проехать до 288 миль, разогнаться до 155 миль в час и иметь крутящий момент 687 фунт-фут.
Тем не менее, есть десятки других компаний, которые достигают значительного прогресса в этой области, например, Ford Fusion Hybrid, Toyota Prius и Camry-Hybrid, Mitsubishi iMiEV, Ford Focus, BMW i3, Chevy’s Spark и Mercedes B-Class Electric. (рис.4).
Электромобили и окружающая среда
Электрические двигатели воздействуют на окружающую среду как напрямую, так и косвенно, на микро- и макроуровне.Это зависит от того, как вы хотите воспринимать ситуацию и сколько энергии вам нужно. С индивидуальной точки зрения, электромобили не требуют бензина для работы, что приводит к тому, что автомобили без выбросов заполняют наши шоссе и города. Хотя это представляет собой новую проблему с дополнительным бременем производства электроэнергии, оно снижает нагрузку на миллионы автомобилей, густонаселенных в городах и пригородах, выбрасывающих токсины в воздух (рис. 5).
Примечание. Значения MPG (миль на галлон), указанные для каждого региона, представляют собой комбинированный рейтинг экономии топлива для города / шоссе бензинового автомобиля, который будет иметь глобальное потепление, эквивалентное вождению электромобиля.Рейтинги выбросов глобального потепления в регионах основаны на данных электростанций за 2012 год в базе данных EPA eGrid 2015. Сравнения включают выбросы при производстве бензина и электрического топлива. Среднее значение в 58 миль на галлон в США — это средневзвешенное значение продаж, основанное на том, где были проданы электромобили в 2014 году. С большой точки зрения, рост количества электромобилей дает несколько преимуществ.
Во-первых, снижается уровень шумового загрязнения, так как шум, исходящий от электродвигателя, намного ниже, чем от газового двигателя. Кроме того, поскольку электрические двигатели не требуют того же типа смазочных материалов и технического обслуживания, что и газовые двигатели, количество химикатов и масел, используемых в автомагазинах, будет сокращено из-за меньшего количества автомобилей, нуждающихся в проверках.
Заключение
Электродвигатель меняет ход истории точно так же, как паровой двигатель и печатный станок изменили определение прогресса.Хотя электрический двигатель не открывает новые возможности в том же духе, что и эти изобретения, он открывает совершенно новый сегмент транспортной отрасли, ориентированный не только на стиль и характеристики, но и на внешнее воздействие . Таким образом, хотя электрический двигатель, возможно, не реформирует мир из-за внедрения какого-то нового изобретения или создания нового рынка, он меняет определение того, как мы, как общество, определяем прогресс. Если больше ничего не должно произойти из-за достижений в области электродвигателя, то, по крайней мере, мы можем сказать, что наше общество продвинулось вперед с осознанием своего воздействия на окружающую среду.Это новое определение прогресса, определяемое электрическим двигателем.
(Джилл Скотт)
Управление скоростью двигателя постоянного тока: управление сопротивлением якоря и управление магнитным потоком
Двигатель постоянного тока преобразует механическую энергию в электрическую энергию постоянного тока. Одной из наиболее важных характеристик двигателей постоянного тока является то, что их скорость можно легко регулировать в соответствии с требованиями, используя простые методы. Такое управление невозможно в двигателе переменного тока.
Концепция регулирования скорости отличается от управления скоростью.При регулировании скорости скорость двигателя изменяется естественным образом, тогда как в двигателе постоянного тока скорость двигателя изменяется вручную оператором или каким-либо устройством автоматического управления. Скорость двигателя постоянного тока определяется соотношением, показанным ниже:
Здесь уравнение (1) показывает, что скорость зависит от напряжения питания V, сопротивления цепи якоря R a и потока поля ϕ, который создается током возбуждения.
В комплекте:
Для управления скоростью двигателя постоянного тока учитывается изменение напряжения, сопротивления якоря и магнитного потока поля.Существует три основных метода управления скоростью двигателя постоянного тока.
Они заключаются в следующем.
- Изменение сопротивления в цепи якоря.
Этот метод называется контролем сопротивления якоря или реостатическим контролем. - Изменение магнитного потока поля
Этот метод известен как Field Flux Control. - Изменение приложенного напряжения
Этот метод также известен как Контроль напряжения якоря.
- Изменение сопротивления в цепи якоря.
Подробное описание различных методов управления скоростью приведено ниже.
Контроль сопротивления якоря двигателя постоянного тока
Параллельный двигатель
Схема подключения шунтирующего двигателя с методом контроля сопротивления якоря представлена ниже. В этом методе в цепь якоря ставится переменный резистор R e . Изменение переменного сопротивления не влияет на поток, так как поле напрямую подключено к питающей сети.
Токовая характеристика параллельного двигателя показана ниже.
Двигатель серии
Теперь рассмотрим схему подключения управления скоростью двигателя постоянного тока методом контроля сопротивления якоря.
Изменение сопротивления цепи якоря влияет как на ток, так и на магнитный поток. Падение напряжения на переменном сопротивлении снижает приложенное к якорю напряжение и, как следствие, снижает скорость двигателя.
На рисунке ниже показана характеристика скорость-ток последовательного двигателя.
Когда значение переменного сопротивления Re увеличивается, двигатель работает с меньшей скоростью. Поскольку переменное сопротивление пропускает полный ток якоря, оно должно быть рассчитано на непрерывное протекание полного тока якоря.
Недостатки метода контроля сопротивления якоря
- Большое количество энергии тратится впустую на внешнее сопротивление Re.
- Управление сопротивлением якоря ограничено, чтобы поддерживать скорость ниже нормальной скорости двигателя, и увеличение скорости выше нормального этим методом невозможно.
- Для данного значения переменного сопротивления снижение скорости не является постоянным, а зависит от нагрузки двигателя.
- Этот метод управления скоростью используется только для небольших двигателей.
Метод управления магнитным потоком двигателя постоянного тока
Поток создается током возбуждения. Таким образом, регулирование скорости этим методом достигается за счет управления током возбуждения.
Параллельный двигатель
В шунтирующем двигателе переменный резистор R C подключен последовательно с шунтирующими обмотками возбуждения, как показано на рисунке ниже.Этот резистор R C известен как регулятор шунтирующего поля .
Шунтирующий ток возбуждения определяется уравнением, показанным ниже:
Подключение RC в поле уменьшает ток возбуждения, а значит, и магнитный поток. Это уменьшение магнитного потока увеличивает скорость, и, таким образом, двигатель работает со скоростью, превышающей нормальную скорость.
Следовательно, этот метод используется для повышения скорости двигателя выше нормы или для коррекции падения скорости из-за нагрузки.
Кривая скорость-момент для параллельного двигателя показана ниже:
Двигатель серии
В последовательном двигателе изменение тока возбуждения выполняется любым способом, т.е. либо с помощью дивертора, либо с помощью регулятора поля с отводом.
С помощью дивертора
Переменное сопротивление R d подключается параллельно последовательным обмоткам возбуждения, как показано на рисунке ниже:
Параллельный резистор называется дивертером.Часть основного тока отводится через переменное сопротивление R d . Таким образом, функция дивертора заключается в уменьшении тока, протекающего через обмотку возбуждения. Уменьшение тока возбуждения снижает величину магнитного потока и, как следствие, скорость двигателя увеличивается.
Полевое управление с резьбой
Второй метод, используемый в последовательном двигателе для изменения тока возбуждения, — это регулирование поля с отводом. Схема подключения представлена ниже:
Здесь ампер-витки изменяются путем изменения числа витков возбуждения.Такой тип устройства используется в системе электрической тяги. Скорость двигателя регулируется изменением потока поля.
Характеристика крутящего момента последовательного двигателя показана ниже.
Преимущества полевого управления потоком
Ниже приведены преимущества метода управления потоком поля.
- Метод простой и удобный.
- Поскольку поле шунта очень мало, потери мощности в поле шунта также невелики.
Обычно поток не может быть увеличен сверх его нормальных значений из-за насыщения железа.