Устройства управления электродвигателями
Устройство (система) управления электродвигателем (контроллер двигателя) — устройство или группа устройств, которые предназначены для управления электродвигателем.
Устройство управления электродвигателем может включать ручные или автоматические средства для запуска и остановки двигателя, средства выбора прямого или обратного направления вращения, выбора и регулирования скорости вращения, регулирования или ограничения момента, защиту от перегрузки и от неисправности.
Каждый электродвигатель должен иметь своего рода систему управления (контроллер). Система управления электродвигателем в зависимости от задачи будет иметь различные характеристики и сложность.
Простейшим случаем управления электродвигателем является выключатель который соединяет электродвигатель с источником энергии, например как в небольших бытовых приборах или электроинструменте (дрели и др.). Переключение может осуществляться вручную, с помощью реле или контактора подсоединенного к датчику для автоматического запуска или остановки электродвигателя.
Более сложные системы управления электродвигателями могут использоваться для точного управления скорости и момента электродвигателя, могут быть частью системы для точного управления угловым положением управляемого механизма.
Устройства управления электродвигателями могут управляться вручную, удаленно или автоматически. Они могут иметь, как только функции старта и остановки двигателя, так и многие другие функции.
Устройства управления двигателями можно классифицировать по типам управляемых электродвигателей (таких как СДПМ, КДПТ и др.) или по назначению.
Устройства для прямого подключения
Устройства с помощью которых электродвигатель напрямую подключается к источнику питания. Самый простой способ подключения. Небольшие электродвигатели некоторых типов могут быть включены: напрямую в розетку, с использованием выключателя, через автоматический выключатель. Такой способ подключения мгновенно соединяет электродвигатель с сетью питания.
Такой способ подключения мгновенно соединяет электродвигатель с сетью питания.Устройство плавного пуска
Используется для уменьшения пусковых токов асинхронных электродвигателей, что позволяет существенно продлить срок службы двигателя. Устройство плавного пуска используется в задачах, где не требуется управлять скоростью вращения или моментом электродвигателя. При этом для двигателей одинаковой мощности устройство плавного пуска дешевле частотного преобразователя.Сервопривод
Устройство позволяет точно контролировать угловое положение, скорость и ускорение исполнительного механизма посредством управления синхронным электродвигателем (обычно СДПМ).Контроллер для электровелосипеда и электроскутера Об электроскутерах
 Без контроллера электродвигатель не сможет даже запуститься, не говоря о его полноценной работе. Аккумуляторная батарея имеет 2 полюса – положительный и отрицательный, а мотор-колесо – 3 фазных провода. Поэтому подключить аккумулятор и двигатель напрямую невозможно. Для этого используется дополнительное звено – контроллер управления.
Без контроллера электродвигатель не сможет даже запуститься, не говоря о его полноценной работе. Аккумуляторная батарея имеет 2 полюса – положительный и отрицательный, а мотор-колесо – 3 фазных провода. Поэтому подключить аккумулятор и двигатель напрямую невозможно. Для этого используется дополнительное звено – контроллер управления.Выполняемые функции
Именно контроллер формирует в обмотке статора мотор-колеса вращающееся магнитное поле и получает ответные сигналы о позиции ротора. Сигналы поступают от датчиков Холла, а при управлении моторами без датчиков позиция роторов определяется по противо-ЭДС.
К тому же, контроллер управляет электродвигателем:
- позволяет менять скорость движения – при смене положения ручки газа меняется число импульсов напряжения, подаваемых за секунду на обмотки, и вращение колеса ускоряется или замедляется;
- обеспечивает рекуперацию энергии при торможении двигателем.
Контроллер выступает в роли понижающего преобразователя, поэтому проходящий по обмоткам мотора фазный ток может быть гораздо выше батарейного тока, поступающего от АКБ к контроллеру. Именно от него зависит мощность, поступающая на двигатель. Например, при использовании мотор-колеса номинальной мощностью 1000 Вт можно кратковременно получать значения до 2000–2500 Вт. Главное – использовать подходящий контроллер и постоянно контролировать температуру, чтобы не допустить перегрева двигателя.
Именно от него зависит мощность, поступающая на двигатель. Например, при использовании мотор-колеса номинальной мощностью 1000 Вт можно кратковременно получать значения до 2000–2500 Вт. Главное – использовать подходящий контроллер и постоянно контролировать температуру, чтобы не допустить перегрева двигателя.
Схема контроллера для электровелосипеда или электроскутера
Контроллер для электрического велосипеда или скутера имеет алюминиевый корпус, из которого выходят разноцветные провода с разъемами для подключения разных устройств. Внутри скрыты:
- главный узел – микроконтроллер;
- силовые компоненты – шунты для измерения тока, конденсаторы, транзисторы;
- понижающие преобразователи на 12 В и 5 В – обеспечивающие питание микроконтроллера и периферических устройств (датчиков положения, рычага газа).
Схема подключения
Контроллер для электроскутера, е-байка или электросамоката подключается в соответствии с прилагаемой к нему схемой. Главное – не спешить и внимательно разобраться с назначением проводов. Лучше всего покупать контроллер в комплекте с мотор-колесом, тогда их разъемы будут гарантированно совместимыми.
Главное – не спешить и внимательно разобраться с назначением проводов. Лучше всего покупать контроллер в комплекте с мотор-колесом, тогда их разъемы будут гарантированно совместимыми.
Общий принцип подключения выглядит так:
- Толстые провода черного и красного цвета – с соблюдением полярности подводятся к аккумуляторной батарее. При этом может появиться «искра», и даже возможно подгорание разъемов. Это нормально – так заряжаются конденсаторы на входе контроллера. Чтобы исключить искрение, достаточно ненадолго соединить контроллер и АКБ через резистор с сопротивлением в десятки Ом или воспользоваться лампочкой. Когда конденсаторы зарядятся, контроллер можно спокойно соединить с АКБ без посредников.
- Тройка толстых проводов разных цветов – обеспечивают подключение к фазным проводам 3-фазного электромотора.
- Связка из 5 тоненьких разноцветных проводов – идет к проводкам мотор-колеса, обеспечивают питание и передачу сигналов от датчиков положения.
- Отдельный красный проводок – «зажигание».
 При его замыкании на «плюс» АКБ происходит включение контроллера.
При его замыкании на «плюс» АКБ происходит включение контроллера. - Тройка тонких проводов (обычно – черный, красный и зеленый) – для подключения ручки газа.
Разновидности контроллеров управления
Критерий сравнения | Типы | Особенности |
По принципу взаимодействия с электромотором | Для использования с датчиками Холла | Совместимы с мотор-колесами, оснащенными датчиками Холла. |
Для работы без датчиков | Совместимы с моторами без датчиков, определяют позицию роторов по противо-ЭДС. | |
Универсальные | Могут работать и с датчиками положения, и без них. | |
| По виду выходного сигнала | Создающие сигналы прямоугольного вида (меандр) | Цена таких моделей – ниже. При их использовании обеспечивается увеличенная скорость, но из-за вибрации обмоток двигатель шумит сильнее. |
Создающие чистые синусоидальные сигналы. | Дороже. Обеспечивают тихую работу мотора и небольшое снижение максимальной скорости – по сравнению с меандровым контроллером при том же напряжении АКБ. | |
Сознающие сигналы в виде «модифицированной синусоиды» или сглаженного меандра. | Менее популярны. | |
По принципу реагирования на сигналы ручки газа | Обеспечивающие управление скоростью, мощностью или крутящим моментом. | |

Как выбрать контроллер для электровелосипеда?
При выборе контроллера для электровелосипеда или другого транспорта на электротяге нужно оценить рабочие характеристики устройства. Ключевые параметры обычно указаны в маркировке. По ней можно узнать:
Ключевые параметры обычно указаны в маркировке. По ней можно узнать:
- рабочее напряжение батареи и мощность мотора (номинал), для применения с которыми предназначено устройство;
- предельный ток АКБ;
- минимум напряжения АКБ, когда происходит отключение контроллера;
- подходящее расположение датчиков Холла в электромоторе – в электрических градусах по отношению друг к другу.
Для расчета предельной мощности контроллера находим произведение допустимых величин напряжения и силы тока. Диапазон мощности у таких приборов широкий. Для велосипедов на электротяге обычно используются модели с номиналом мощности от 350 до 2000 Вт. Для электрических скутеров – от 1000 до 4000 Вт. Для электромотоциклов – от 5000 до 10 000 Вт. Для электромобилей – от 10 000 до 50 000 Вт и более.
О совместимости
Контроллер, рассчитанный на использование с батареей напряжением 36 В, не стоит подключать к АКБ большего вольтажа. Вначале необходимо вскрыть контроллер и проверить, рассчитаны ли на увеличенное напряжение его компоненты, включая транзисторы и конденсаторы.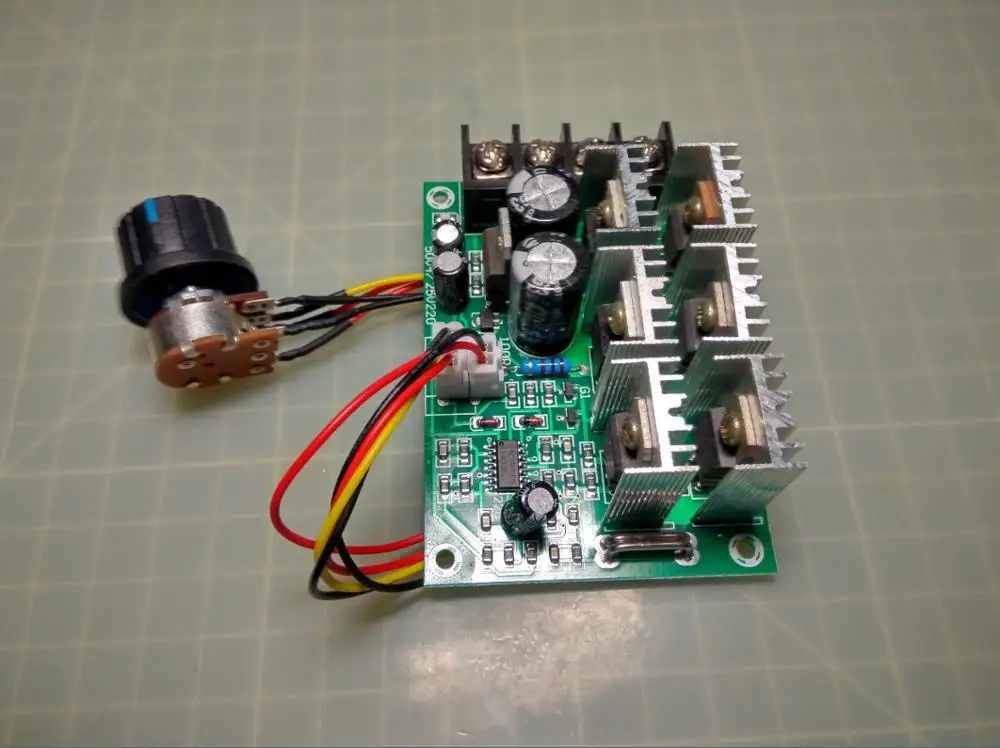 Возможно, понадобится заменить и резистор в делителе напряжения. Но в продаже встречаются универсальные контроллеры с большим разбросом допустимых входных напряжений, к примеру, от 48 до 72 В или от 24 до 100 В.
Возможно, понадобится заменить и резистор в делителе напряжения. Но в продаже встречаются универсальные контроллеры с большим разбросом допустимых входных напряжений, к примеру, от 48 до 72 В или от 24 до 100 В.
Программируемые модели и их задачи
Программируемые контроллеры соединяются по Bluetooth со смартфоном и позволяют настраивать рабочие характеристики – от значений аккумуляторного и фазного токов до углов фазного опережения.
При выборе управляющих контроллеров учитывается и наличие второстепенных функций:
- круиз-контроля;
- обратного хода;
- возможности выбора скоростного режима или мощности;
- рекуперации энергии при торможении;
- отдельного выхода для электропитания фары и габаритных огней.
Расширение функционала
Широкий ассортимент контроллеров позволяет выбрать прибор, по максимуму подходящий под конкретные цели. Наряду с интернет-магазинами, есть специализированные мастерские, для которых не составляет проблемы вывести из контроллера управления провода под нужные заказчику функции.
Многие печатные платы имеют большой функционал, но в серийно поставляемых моделях он используется только частично. К примеру, у многих моделей не выведен провод для круиз-контроля, заднего хода, рекуперации энергии и других возможностей. Но специалисты мастерской VoltBikes могут вывести провода под конкретные задачи непосредственно при покупке контроллера.
О цене
Контроллеры можно купить в разных категориях:
- Дешевые модели, предназначенные для внутреннего китайского рынка. Они не имеют расширенного функционала и просто позволяют ехать. Как правило, бывают 2-режимные, могут работать совместно с датчиками Холла и без них.
- Китайские модели, ориентированные на экспорт. Позволяют подключать дисплеи и обеспечивать беспроводное управление по Bluetooth.
- Устройства производства Германии и США – самые дорогие.
В предыдущей статье нашего блога рассказывается о возможности установки на электросамокат дополнительной батареи.
Контроллер электродвигателя igus D1 dryve
Контроллер управления электродвигателем igus® D1 dryve позволяет автоматизировать различные задачи без использования программирования.
В отличии от модели D3 dryve, которую мы рассматривали ранее, контроллер D1 dryve имеет ряд преимуществ: вы легко управляете перемещением, позиционированием, скоростью и временем работы.
Преимушества контроллера D1 dryve motor control system
- не требуется программное обеспечение
- возможно управлять со смартфона, планшета или ноутбука через браузер
- простой и интуитивно понятный интерфейс пользователя
- совместимость с большим количеством промышленных контроллеров
- настройка системы управления всего за несколько минут
- 2 аналоговых и 10 цифровых входов
- 5 цифровых выходов
- датчик Холла
- напряжение 12-24 В, напряжение под нагрузкой 12-48 В
- габаритные размеры 124 x 31 x 139 мм
- тепмература эксплуатации -20 .
 .. +45 °C
.. +45 °C
Система управления электродвигателем D1 dryve (drylin® E dryve motor control system D1) подходит для двигателей постоянного тока и шаговых двигателей. Достаточно просто подключится к источнику питания 24 В и настроить параметры рабочего режима.
D1 dryve может подключаться к вашей сети, либо вы можете подключиться непосредственно к компьютеру с помощью сетевого кабеля, благдаря наличию разъёма Ethernet. Вы можете запустить систему управления непосредственно в браузере без установки программного обеспечения. При этом настройки можно выполнить за минуту.
Питающее напряжение до 48 В позволяет электродвигателю развивать значительную скорость. Номинальная сила тока 7 A (максимальная достигает 20 A) обеспечивает мощность и динамичное перемещение.
Номинальная сила тока 7 A (максимальная достигает 20 A) обеспечивает мощность и динамичное перемещение.
LED-индикатор состояния передает информацию о состоянии систем управления: отображаются предупреждения, либо сообщения об ошибках. Так же он отображает IP-адрес контроллера D1 dryve.
Контроллер электрического двигателя — это… Что такое Контроллер электрического двигателя?
| Информация в этой статье или некоторых её разделах устарела. Вы можете помочь проекту, обновив её и убрав после этого данный шаблон. |
Контро́ллер — многоступенчатый, многоцепной коммутационный аппарат с ручным управлением, предназначенный для изменения схемы главной цепи электрического двигателя или цепи возбуждения, включения и выключения электрической цепи с возможностью одновременно производить сложные переключения схемы управления с помощью одной рукоятки (маховика).
Барабанный контроллер
Барабанные контроллеры применяются для управления электрическим двигателем до 60 кВт (включение, выключение, изменение направления вращения и частоты вращения) при редких включениях (до 240 включений в час). Недостатком барабанного контроллера является невысокая износостойкость.
Конструкция барабанного контроллера
Барабанный контроллер состоит из вращающегося вала и группы неподвижных контактов. На изолированном валу крепятся металлические сегменты разного размера, расположенные под разными углами друг к другу и являющиеся подвижными контактами контроллера. Отдельные сегменты могут быть электрически соединены между собой.
Неподвижные контакты (контактные пальцы) крепятся на неподвижном основании и изолированы друг от друга. Каждый контактный палец соответствует сегменту вращающейся части контроллера. К ним подключаются внешние проводники.
При повороте вала контактные пальцы соприкасаются с сегментами в последовательности, определяемой взаимным расположением, размерами сегментов и наличием соединений между ними.
Кулачковый контроллер
Управляется с помощью рычага, число включений в час достигает 600. Особенностью является то, что включение происходит за счёт пружины, а выключения за счет кулачка, поэтому контакты разводятся даже при сваривании.
Плоский контроллер
Предназначены для плавного регулирования поля возбуждения крупных генераторов и для пуска двигателей большой мощности, так как имеют много ступеней для переключения. Управляется с помощью винтов, которые приводятся в движение с помощью электрического двигателя через червячную передачу. При ремонтных работах контроллер приводится в движение вручную, с помощью рукоятки. Недостаток — малая износостойкость.
См. также
Литература
- Касаткин А. С., Немцов М. В. Электротехника: Учебное пособие для вузов. — 4-е изд. — М.: Энергоатомиздат, 1983. — С. 424—426. — 440 с., ил. — 240 000 экз.
Серия контроллеров положения электродвигателей EPOS4
Серия контроллеров EPOS2, впервые появившаяся в каталоге maxon motor 2008–2009 гг.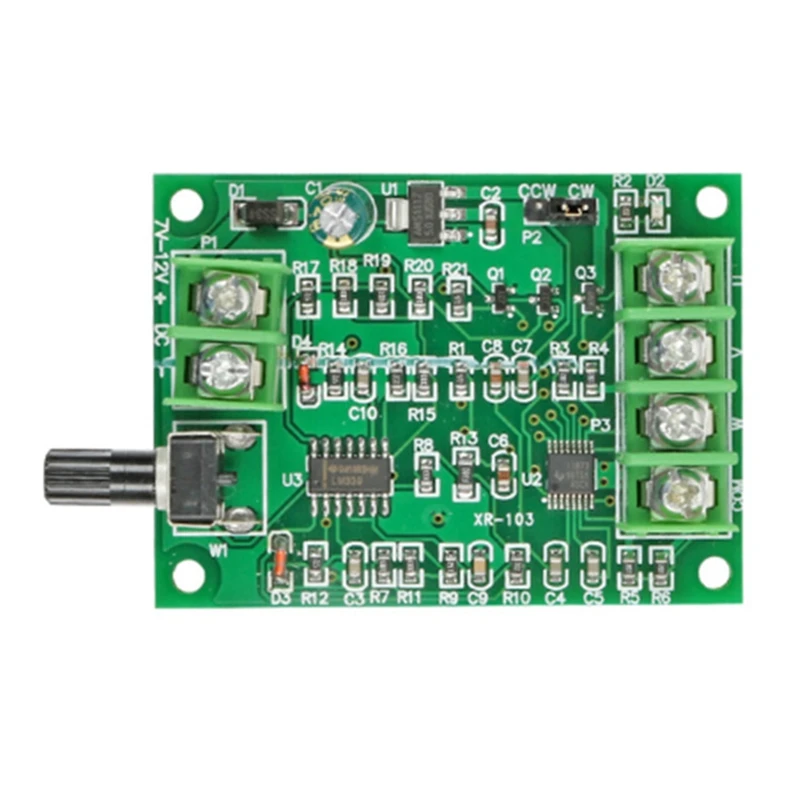 , представлена семью моделями различной мощности, которые позволяют работать практически со всеми двигателями, в настоящее время перечисленными в каталоге maxon. Из промышленных шин контроллерами EPOS2 поддерживается только шина CANopen, что позволяет реализовывать сложные многоосевые системы.
, представлена семью моделями различной мощности, которые позволяют работать практически со всеми двигателями, в настоящее время перечисленными в каталоге maxon. Из промышленных шин контроллерами EPOS2 поддерживается только шина CANopen, что позволяет реализовывать сложные многоосевые системы.
Серия контроллеров положения MAXPOS входит в состав каталога с 2014 г. и содержит контроллеры положения повышенного быстродействия с поддержкой высокопроизводительной промышленной шины EtherCAT, однако выпускается пока в очень ограниченном количестве моделей.
Новая серия контроллеров положения EPOS4, чей выпуск начался три года назад, занимает промежуточное место по производительности между EPOS2 и MAXPOS и не уступает им по функциональности. В этой серии выпускаются контроллеры в четырех типоразмерах нескольких разных исполнений. Кроме этого, контроллерами данной линейки поддерживаются различные промышленные шины: и CANopen, и EtherCAT.
При разработке серии контроллеров EPOS4 одним из приоритетных требований, наряду с улучшением характеристик и унификацией возможностей по всем устройствам серии, было обеспечение гибкости решения. С этой целью в рамках серии все типоразмеры изготавливаются в нескольких конструктивных исполнениях. Исполнения различаются конструкцией, способом подключения электрических цепей, а также поддержкой ряда функций и возможностей.
С этой целью в рамках серии все типоразмеры изготавливаются в нескольких конструктивных исполнениях. Исполнения различаются конструкцией, способом подключения электрических цепей, а также поддержкой ряда функций и возможностей.
У контроллеров EPOS4 исполнение Module имеет вид открытой печатной платы с двумя линейками штыревых разъемов (рис. 1). Контроллер такого исполнения может помещаться на специально разведенную базовую плату с установленными ответными разъемами, а базовая плата должна разводиться силами самого клиента. С одной стороны, это требует дополнительных затрат времени и ресурсов, с другой — есть возможность учесть размеры и геометрию пространства, доступного для размещения контроллера, а также установить разъемы определенного количества и вида, необходимые для конкретного проекта. В результате можно получить контроллер положения с испытанной и отлаженной функциональностью серийного продукта, который оптимально вписывается в конструкцию конечного изделия.
Рис. 1. EPOS4 Module
1. EPOS4 Module
Исполнение Compact (рис. 2) является более удобной в практическом повседневном использовании версией Module. К контроллеру EPOS4 в исполнении Module добавляется плата разъемов, на которой установлены разъемы, подходящие для подключения при помощи кабелей. В большинстве случаев контроллер EPOS4 Module сохраняет габаритные размеры по ширине и длине, увеличиваясь лишь по высоте. Плата разъемов доступна и в качестве самостоятельного изделия, которое можно закупить отдельно и установить на контроллер исполнения Module своими силами. Такая конструкция позволяет клиенту удобно подключаться к контроллеру при помощи проводов и кабелей, что предусматривает быстрое начало работы, без проектирования своих печатных плат. Это важно при освоении данного семейства контроллеров, при прототипировании, макетировании и отладке. С другой стороны, размеры такого решения больше, чем в исполнении Module, особенно с учетом места для размещения подключаемых кабелей и ответных частей разъемов.
Рис. 2. EPOS4 Compact
Помимо двух названных вариантов исполнения, контроллеры EPOS4 выпускаются и в металлическом корпусе (рис. 3), аналогичном применявшимся в старших моделях предыдущего поколения контроллеров — EPOS2. Кроме наружного корпуса, в контроллерах данного исполнения предусмотрена установка плат расширения, увеличивающих возможности контроллера. Так, в контроллер может быть добавлена поддержка промышленной сети EtherCAT или таких интерфейсов абсолютных энкодеров, как BiSS или EnDat. Контроллер в этом исполнении так же, как и в исполнении Compact, оснащается удобными разъемами для подключения кабелей.
Рис. 3. EPOS4 в металлическом корпусе
Основные различия исполнений EPOS4 приведены в таблице 1.
Параметр | Module | Compact | В корпусе |
Шина CANopen | Есть | Есть | Есть |
Шина EtherCAT | Есть | Есть | Есть |
Интерфейс энкодера BiSS-C | Есть | Нет | Есть |
Интерфейс энкодера EnDat 2. | Нет | ||
Встроенные дроссели | Нет | Есть | Есть |
 2
2Кроме конструктивного исполнения, модели контроллеров различаются по значениям номинального тока и напряжения, а контроллеры исполнения Compact — еще и типом поддерживаемой локальной сети.
Достаточно большое количество выпускаемых вариантов контроллеров EPOS4 вместе с возможностью переходить от одной версии контроллера к другой простой заменой платы разъемов или платы расширения, поддерживаемой во всей серии, дает большую гибкость семейству контроллеров EPOS4 при построении приводных систем.
Возможности контроллеров EPOS4
Контроллеры семейства EPOS4 оснащены всеми необходимыми режимами работы. Как и в предшествующем поколении, в EPOS4 имеются режимы профиля положения и профиля скорости, а также режим выхода в начальное положение. К ним добавлена группа циклических синхронных режимов: положения, скорости и момента.
Различие между обеими группами режимов работы — в способе организации взаимодействия между ведущим устройством и ведомыми контроллерами EPOS4.
Режимы профиля положения и профиля скорости ориентированы на применение в одноосевых приводных системах. В такой приводной системе с ведущего устройства на ведомые задание передается по последовательному интерфейсу или промышленной шине только в виде координаты конечной точки перемещения, максимальной скорости и ускорения. Задающее воздействие на контуры управления контроллера формируется внутри ведущего устройства при помощи генератора траектории. Генератор траектории позволяет получать промежуточные точки на каждом такте работы контроллера, для узкого набора предварительно запрограммированных типовых траекторий.
Режим интерполяции положения, присутствовавший в контроллерах предыдущего поколения EPOS2, может решать более сложные задачи в многоосевых приводных системах. Для каждой оси траектория, которую должен отработать привод, предварительно обрабатывается, выделяется набор опорных точек, и для каждой опорной точки формируются тройки значений — положение, скорость, время. Именно массив троек значений и передается с ведущего устройства на ведомые контроллеры при настройке режима. На ведомом контроллере при помощи сплайн-интерполяции исходно заданная траектория восстанавливается, и рассчитывается задающее воздействие на контуры управления на каждом такте работы контроллера. Такое построение позволяет с минимальной нагрузкой на сеть гибко формировать различные траектории. Низкая загрузка сети позволяет широко использовать данный режим работы в многоосевых приводных системах с системной шиной с низкой пропускной способностью (например, CANopen).
Именно массив троек значений и передается с ведущего устройства на ведомые контроллеры при настройке режима. На ведомом контроллере при помощи сплайн-интерполяции исходно заданная траектория восстанавливается, и рассчитывается задающее воздействие на контуры управления на каждом такте работы контроллера. Такое построение позволяет с минимальной нагрузкой на сеть гибко формировать различные траектории. Низкая загрузка сети позволяет широко использовать данный режим работы в многоосевых приводных системах с системной шиной с низкой пропускной способностью (например, CANopen).
Новые режимы, появившиеся в EPOS4, — циклические синхронные режимы работы — позволяют реализовать другой подход к построению многоосевых систем. В рамках этого подхода задающее воздействие на каждом такте работы ведомого контроллера для всех ведомых контроллеров, включенных в систему, формируется на ведущем устройстве. На ведомом устройстве не ведется интерполяция и не включен генератор траектории. Задающее воздействие поступает на контроллер непосредственно на вход контуров регулирования и воспроизводится двигателем. Здесь обращает на себя внимание необходимость часто передавать задание на все ведомые контроллеры в системе. Это создает достаточно большую нагрузку на системную шину, даже если количество контроллеров относительно невелико, что является одной из причин, по которой циклические синхронные режимы работы чаще всего присутствуют в контроллерах, оснащенных промышленной сетью высокого быстродействия, например EtherCAT.
Здесь обращает на себя внимание необходимость часто передавать задание на все ведомые контроллеры в системе. Это создает достаточно большую нагрузку на системную шину, даже если количество контроллеров относительно невелико, что является одной из причин, по которой циклические синхронные режимы работы чаще всего присутствуют в контроллерах, оснащенных промышленной сетью высокого быстродействия, например EtherCAT.
Контроллеры семейства EPOS4 могут работать со всеми типами двигателей, выпускаемыми maxon: с коллекторными и бесколлекторными двигателями постоянного тока. Переключение между типами двигателей осуществляется программно — изменением настроек контроллера.
В рамках серии контроллеров EPOS4 имеются модели, рассчитанные на различные номинальные токи и напряжения. В настоящее время изготавливается пять типоразмеров контроллеров EPOS4: от моделей на 24 В и 1,5 А до устройств на 70 В и 15 А. Ассортимент выпускаемых исполнений и типоразмеров представлен в таблице 2. Можно видеть, что количество вариантов достаточно велико, хотя, например, модели в корпусированном исполнении выпускаются не для всех типоразмеров.
EPOS4 | 24/1.5 | 50/5 | 50/8 | 50/15 | 70/15 |
Module | Есть | Есть | Есть | Есть |
|
Compact | Есть | Есть | Есть | Есть |
|
В корпусе |
| Есть |
|
| Есть |
Ассортимент доступных моделей контроллеров EPOS4 по номинальным токам и номинальным напряжениям полностью соответствует номенклатуре двигателей, представленных в каталоге. Здесь можно видеть отличие от предыдущего поколения контроллеров — EPOS2, в котором номинальные токи контроллеров были ограничены 10 А, что было недостаточно для некоторых самых мощных моделей двигателей с низким номинальным напряжением.
Силовая часть контроллеров EPOS4 выполнена по мостовой схеме с ШИМ-модуляцией. Частота ШИМ равна 50 кГц для всех моделей, кроме EPOS4 24/1.5, у которой она составляет 100 кГц. Такая высокая частота коммутации выбрана, поскольку контроллеры EPOS4 рассчитаны на работу с двигателями с низкоиндуктивными обмотками без стального сердечника, в частности с двигателями maxon. Высокая частота ШИМ-модуляции позволяет чаще обновлять значение управляющего воздействия — напряжения, подаваемого на двигатель, благодаря чему появляется возможность для увеличения быстродействия контуров регулирования контроллера и привода в целом. Так, частота выборки контура тока контроллеров EPOS4 увеличилась до 25 кГц по сравнению с 10 кГц у EPOS2. Кроме того, высокая частота ШИМ позволяет лучше сглаживать пульсации тока с частотой ШИМ за счет собственной индуктивности обмотки. Это помогает несколько снизить уровень дополнительных потерь от высших гармоник тока и уровень электромагнитных помех. Тем не менее в контроллерах EPOS4 (во всех исполнениях, кроме Module) в цепи обмоток двигателя устанавливается сглаживающий дроссель, чтобы максимально сгладить ток и минимизировать дополнительные потери в двигателе.
С точки зрения системы управления серия контроллеров EPOS4 реализует систему подчиненного управления с внутренним контуром тока и охватывающим его контуром скорости или контуром положения (применяется или один, или другой в зависимости от режима работы). Все три контура одновременно используются только в режиме работы с двумя датчиками положения. При этом датчик, установленный на валу двигателя, применяется в контуре скорости, а датчик, установленный на валу редуктора или на валу полезной нагрузки, — в контуре положения. Такое включение датчиков необходимо в тех случаях, когда между двигателем и валом полезной нагрузки имеется одна или несколько механических передач, привносящих погрешности в процесс передачи движения. Включение в контур регулирования положения датчика, расположенного после дополнительных механических передач, позволяет контролировать перемещение целевой оси, включая все неточности и погрешности, а значит, дает возможность полностью или частично их скомпенсировать. В то же самое время наличие в контуре скорости датчика, установленного непосредственно на валу двигателя, позволяет качественно регулировать скорость и производить коммутацию обмоток бесколлекторных двигателей.
В то же самое время наличие в контуре скорости датчика, установленного непосредственно на валу двигателя, позволяет качественно регулировать скорость и производить коммутацию обмоток бесколлекторных двигателей.
Работа с датчиками положения и скорости электроприводов является непременной функцией контроллеров положения. Но работа с ними невозможна, если интерфейс датчиков не поддерживается контроллером. Поэтому всегда при работе с контроллерами положения актуален вопрос о поддерживаемых типах датчиков. В контроллерах EPOS4 предусмотрена одновременная работа с двумя разными датчиками и, соответственно, есть два порта подключения датчиков. Порт основного датчика поддерживает только инкрементные энкодеры с прямоугольными выходными импульсами. Порт дополнительного датчика наряду с инкрементными энкодерами поддерживает и другие типы датчиков: абсолютные энкодеры с интерфейсом SSI и энкодеры с аналоговым выходом sin/cos. Также запланирована поддержка абсолютных энкодеров с интерфейсами EnDat 2.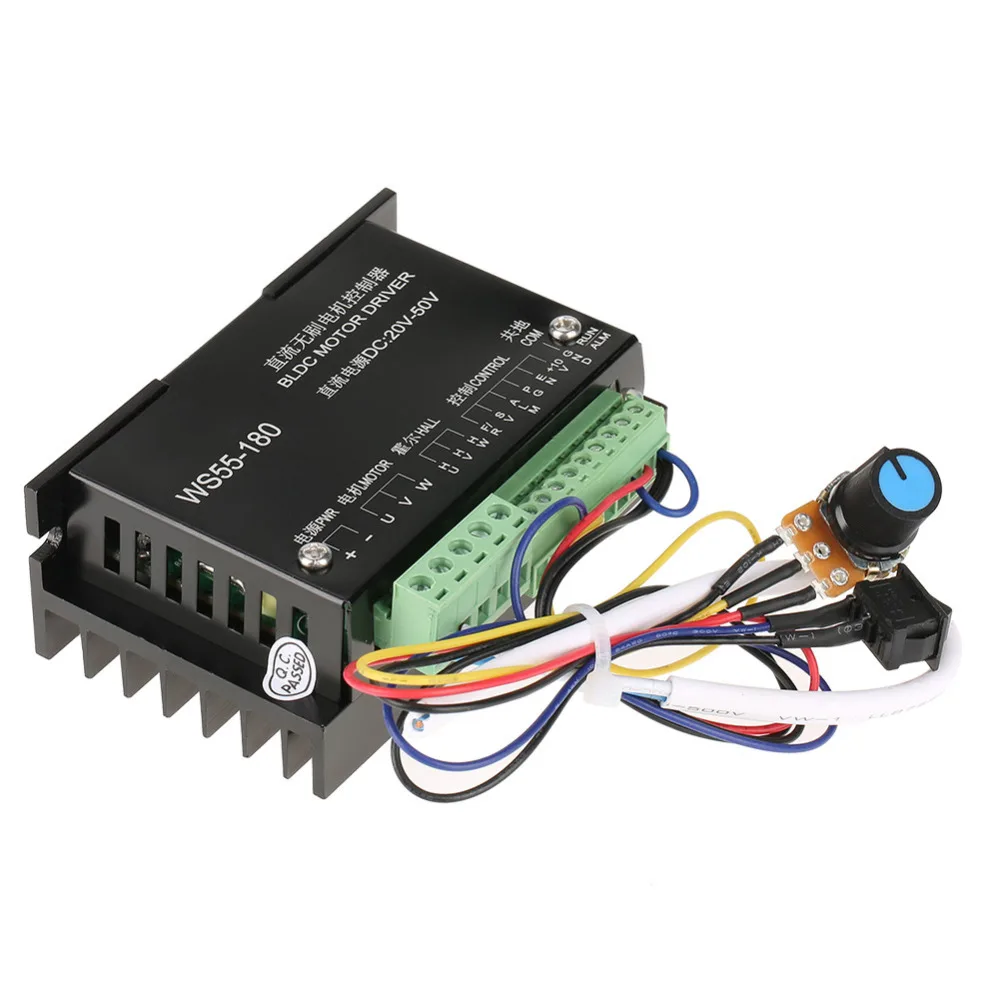 2 и BiSS. Все эти датчики поддерживаются в качестве датчиков обратной связи в контурах скорости и положения. Еще одна функция контроллера, для которой требуется информация с датчиков положения, — определение моментов переключения обмоток бесколлекторных двигателей. Особенно это важно в тех случаях, когда предполагается работать в режиме синусоидальной коммутации. Для этого нужен или абсолютный датчик высокой точности, или сочетание — датчики Холла и инкрементный датчик высокой точности. Оба варианта могут обеспечить достаточно информации для работы алгоритмов коммутации обмоток в EPOS4. В качестве примеров допустимых датчиков и сочетаний датчиков можно привести следующие варианты: абсолютный энкодер с интерфейсом SSI, датчики Холла + инкрементный энкодер, датчики Холла + энкодер sin/cos.
2 и BiSS. Все эти датчики поддерживаются в качестве датчиков обратной связи в контурах скорости и положения. Еще одна функция контроллера, для которой требуется информация с датчиков положения, — определение моментов переключения обмоток бесколлекторных двигателей. Особенно это важно в тех случаях, когда предполагается работать в режиме синусоидальной коммутации. Для этого нужен или абсолютный датчик высокой точности, или сочетание — датчики Холла и инкрементный датчик высокой точности. Оба варианта могут обеспечить достаточно информации для работы алгоритмов коммутации обмоток в EPOS4. В качестве примеров допустимых датчиков и сочетаний датчиков можно привести следующие варианты: абсолютный энкодер с интерфейсом SSI, датчики Холла + инкрементный энкодер, датчики Холла + энкодер sin/cos.
Возможности входов и выходов контроллера
Контроллер, управляющий электродвигателем, не всегда может ограничиться в своей работе лишь датчиками обратной связи. В ряде случаев возникает необходимость подключать и другие датчики: цифровые или аналоговые датчики, а также получать с контроллера цифровые или аналоговые сигналы для местного управления периферийными устройствами в составе приводной системы. Для того чтобы предоставить пользователю приводов такие возможности, контроллеры EPOS4 оснащены цифровыми входами и выходами. Все контроллеры семейства имеют четыре цифровых входа и два цифровых выхода с открытым коллектором, которые выдерживают ток до 500 мА и могут использоваться для непосредственного управления тормозной муфтой. Два аналоговых входа способны обрабатывать как несимметричные, так и дифференциальные сигналы с разрешением 12 бит. Аналоговые выходы — их также два — могут формировать только несимметричные сигналы с тем же разрешением. Кроме этого, контроллеры оснащены входами защитных блокировок STO. При срабатывании датчиков, подключенных к этим входам, происходит аварийная остановка электродвигателя. Типовой сценарий использования данных входов — датчики, срабатывающие при открывании защитного ограждения рабочей зоны станка.
Для того чтобы предоставить пользователю приводов такие возможности, контроллеры EPOS4 оснащены цифровыми входами и выходами. Все контроллеры семейства имеют четыре цифровых входа и два цифровых выхода с открытым коллектором, которые выдерживают ток до 500 мА и могут использоваться для непосредственного управления тормозной муфтой. Два аналоговых входа способны обрабатывать как несимметричные, так и дифференциальные сигналы с разрешением 12 бит. Аналоговые выходы — их также два — могут формировать только несимметричные сигналы с тем же разрешением. Кроме этого, контроллеры оснащены входами защитных блокировок STO. При срабатывании датчиков, подключенных к этим входам, происходит аварийная остановка электродвигателя. Типовой сценарий использования данных входов — датчики, срабатывающие при открывании защитного ограждения рабочей зоны станка.
Для работы с входами и выходами в контроллерах EPOS4 имеется возможность использовать ряд предварительно сконфигурированных функций. Эти функции определяют, как будет использована информация, поступающая на входы, или то, как формируется информация, поступающая на выходы. Цифровые входы можно сконфигурировать на выполнение следующих функций: концевой выключатель положительного или отрицательного направления, выключатель начального положения, быстрый останов или вход разрешения. В этом случае сигналы, поступающие на такие входы, будут обработаны и использованы локально на контроллере для выполнения соответствующих функций. В случае если для входа выбрана функция — вход общего назначения, то величина поданного сигнала может быть прочитана по сети и передана на ведущее устройство, локального использования для выполнения иных функций в данном случае не будет. Аналогичным образом обстоит дело и с цифровыми выходами: для них доступна функция управления удерживающим тормозом, функция сигнализации «Готов/Ошибка» или функция выхода общего назначения.
Цифровые входы можно сконфигурировать на выполнение следующих функций: концевой выключатель положительного или отрицательного направления, выключатель начального положения, быстрый останов или вход разрешения. В этом случае сигналы, поступающие на такие входы, будут обработаны и использованы локально на контроллере для выполнения соответствующих функций. В случае если для входа выбрана функция — вход общего назначения, то величина поданного сигнала может быть прочитана по сети и передана на ведущее устройство, локального использования для выполнения иных функций в данном случае не будет. Аналогичным образом обстоит дело и с цифровыми выходами: для них доступна функция управления удерживающим тормозом, функция сигнализации «Готов/Ошибка» или функция выхода общего назначения.
Для связи с внешним миром контроллеры серии EPOS4 оснащены рядом последовательных интерфейсов. В первую очередь это промышленные шины EtherCAT и CANopen, выполняющие роль основного рабочего интерфейса. В контроллере может присутствовать только одна из этих двух шин.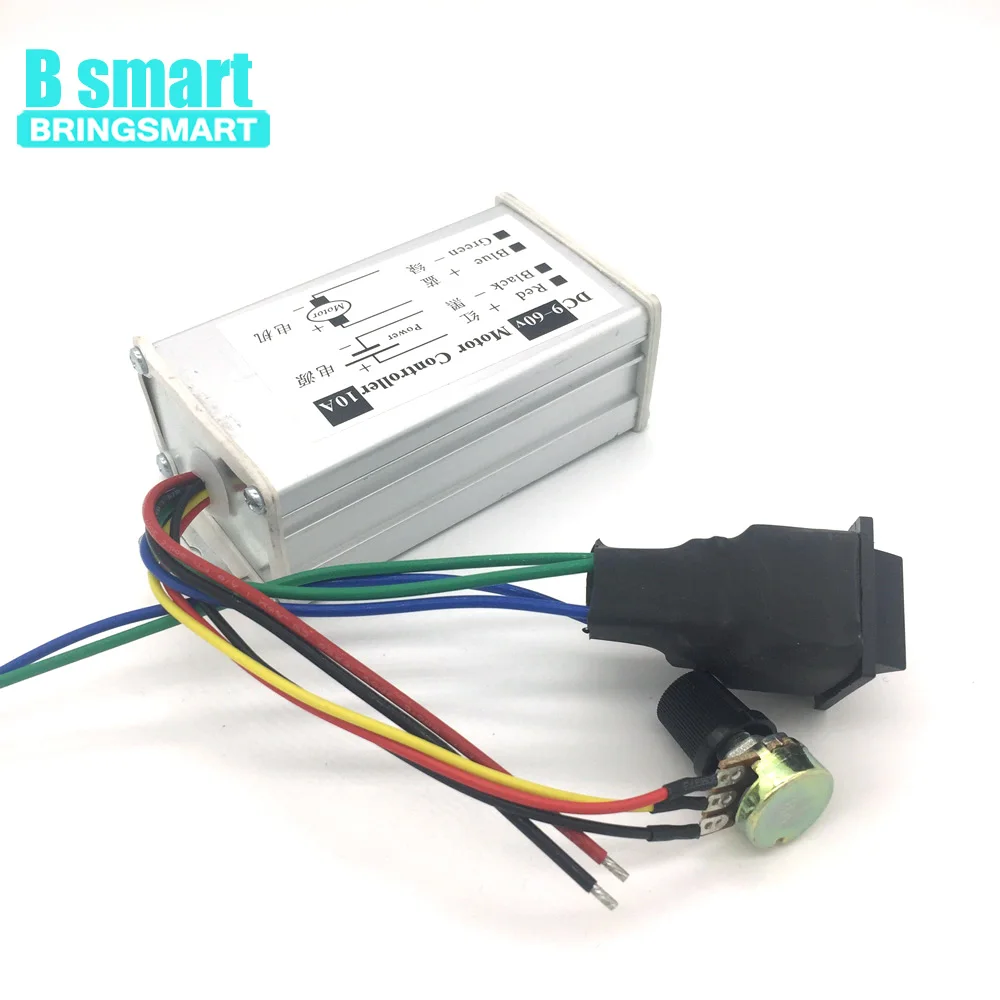 Корпусированные контроллеры, а также контроллеры исполнений Module имеют поддержку интерфейса CANopen, а для получения поддержки шины EtherCAT к контроллерам нужно добавить плату расширения для этого интерфейса, также имеющуюся в каталоге maxon (рис. 4). И если у корпусированных контроллеров плата расширения устанавливается в специальный слот внутри корпуса контроллера, то для исполнения Module слот нужно поместить на материнскую плату, сделав соответствующую разводку. В случае исполнений Compact дело обстоит несколько проще: контроллеры с поддержкой CANopen и EtherCAT одного типоразмера различаются лишь коммутационной платой и имеют разные коды заказа.
Корпусированные контроллеры, а также контроллеры исполнений Module имеют поддержку интерфейса CANopen, а для получения поддержки шины EtherCAT к контроллерам нужно добавить плату расширения для этого интерфейса, также имеющуюся в каталоге maxon (рис. 4). И если у корпусированных контроллеров плата расширения устанавливается в специальный слот внутри корпуса контроллера, то для исполнения Module слот нужно поместить на материнскую плату, сделав соответствующую разводку. В случае исполнений Compact дело обстоит несколько проще: контроллеры с поддержкой CANopen и EtherCAT одного типоразмера различаются лишь коммутационной платой и имеют разные коды заказа.
Рис. 4. Контроллер EPOS4, снабженный платой расширения для интерфейса EtherCAT
Помимо промышленной шины, контроллеры EPOS4 оснащены и интерфейсами для прошивки и наладки: USB и RS-232. Каждый контроллер имеет на борту оба этих интерфейса.
Работать с контроллерами EPOS4 можно при помощи ПО EPOS Studio, которое позволяет провести настройку, обслуживание и проверить все режимы функционирования контроллера (рис. 5).
5).
Рис. 5. Настройка контроллера в EPOS Studio
Разъемы и кабели
Перед началом работы с контроллерами необходимо позаботиться о том, как будет подключаться контроллер к электрическим цепям окружающей его системы (разрабатываемой системы). И если в случае контроллеров исполнения Module ответ прост и решение очевидно — две двухрядные розетки с установкой на печатную плату с подходящим шагом (1,27 мм) и количеством контактов, то в случае контроллеров исполнения Compact и в корпусе дело обстоит несколько сложнее, поскольку в них установлен широкий ассортимент разъемов. В них применяется четыре серии разъемов компании Molex: Mega-Fit, Mini-Fit Jr., Micro-Fit 3.0 и CLICK-Mate. Для того чтобы подключиться, необходимо использовать готовые кабельные сборки maxon или, используя ответные части разъемов, изготавливать собственные кабели. Применение готовых кабельных сборок очевидно проще и быстрее, но они не всегда соответствуют требованиям конкретного применения (гибкость кабелей, длина, допустимые внешние воздействия на сами кабели и разъемы). Изготовление кабельных сборок своими силами очевидно лишено этих недостатков, однако не следует забывать, что все перечисленные серии разъемов предполагают использование специального обжимного инструмента для установки контактов разъема на провода. Чаще всего обжимной инструмент различается для каждой серии разъемов и имеет достаточно внушительную цену. Подобные обстоятельства могут сделать затраты на изготовление кабельных сборок своими силами неоправданно большими при малом количестве изготавливаемых кабельных сборок. Тем не менее у разработчика системы всегда есть выбор по крайней мере из этих двух вариантов.
Изготовление кабельных сборок своими силами очевидно лишено этих недостатков, однако не следует забывать, что все перечисленные серии разъемов предполагают использование специального обжимного инструмента для установки контактов разъема на провода. Чаще всего обжимной инструмент различается для каждой серии разъемов и имеет достаточно внушительную цену. Подобные обстоятельства могут сделать затраты на изготовление кабельных сборок своими силами неоправданно большими при малом количестве изготавливаемых кабельных сборок. Тем не менее у разработчика системы всегда есть выбор по крайней мере из этих двух вариантов.
В заключение хочется остановиться на достаточно важном вопросе — о совместимости новых контроллеров EPOS4 и контроллеров предыдущего поколения EPOS2.
С одной стороны, контроллеры EPOS4 были серьезно оптимизированы, что вызвало весьма значительные различия между этими контроллерами в габаритных и присоединительных размерах. С другой стороны, контроллеры остаются совместимыми на уровне выполняемых функций и в значительной степени — на уровне режимов работы (о чем речь шла ранее). Остались такими же разъемы, используемые для подключения двигателей и датчика обратной связи на валу двигателя, хотя типы разъемов для подсоединения дополнительных входов/выходов и порта второго датчика были изменены. Чуть изменилось распределение электрических цепей и функций по разъемам: например, на отдельный разъем было выведено подключение второго датчика положения.
С точки зрения настроек контроллера ситуация аналогичная: настройки частью сохранились на прежних местах (например, касающиеся функций и режимов работы, оставшихся без изменений, а также объектов, стандартизованных поддерживаемыми стандартами, в том числе профилями устройств CANopen), а частью изменились (изменившиеся или вновь появившиеся режимы работы). Такие настройки контроллера, как значения параметров регуляторов в контурах положения, скорости и тока, должны были измениться, поскольку изменились частоты выборки в этих контурах и их динамика.
Из сказанного можно сделать вывод, что контроллеры EPOS4 хотя и не являются абсолютно совместимой заменой для более старых контроллеров EPOS2, однако достаточно близки к ним, чтобы рассматриваться в качестве первого варианта для замены при обновлении системы, построенной на контроллерах EPOS2.
Вопрос об обновлении систем, построенных на EPOS2, становится все более актуальным. Контроллеры EPOS2 были выведены из каталога уже в 2019 г. и получили статус NRND («Не для новых разработок»). В дальнейшем, по мере перехода потребителей на новые модели контроллеров, доступность старых устройств снизится, а затем производство будет прекращено. Обычно этот процесс занимает не меньше нескольких лет, что не значит, будто этого не произойдет никогда. Кроме того, есть вопрос цены, поскольку цены на контроллеры также говорят сами за себя: разница в стоимости между контроллерами EPOS2 и EPOS4 одинаковых номиналов составляет до 50% в зависимости от исполнения контроллера, и нет оснований полагать, что в дальнейшем она станет меньше.
Заключение
Контроллеры EPOS4 — новое семейство продуктов компании maxon motor, и в этом году в нем появились все изначально запланированные изделия. Основательно переработанная и значительно улучшенная начинка контроллеров позволяет им выступать в качестве надежного и технически привлекательного средства решения приводных задач. Официальный дистрибьютор группы компаний maxon в России, Беларуси и Казахстане — компания «Иннодрайв».
Официальный дистрибьютор группы компаний maxon в России, Беларуси и Казахстане — компания «Иннодрайв».
Вконтакте
Google+
Контроллеры управления бесколлекторными электроприводами постоянного тока компании Apex Microtechnology
Введение
Электроприводы с цифровым микропроцессорным управлением применяются не только в станкостроении, роботизированных отраслях, но и в бытовой, медицинской технике, в автомобилестроении. Причина широкого использования электроприводов объясняется многими факторами. Во-первых, применение алгоритмов, запрограммированных на конкретные операции, позволяет значительно повысить производительность конечных устройств. Во-вторых, гибкость, достигаемая посредством изменения программы управления либо сменой датчиков. В-третьих, качество управления объектом улучшается, поскольку современные контроллеры управления позволяют реализовывать такие алгоритмы, как фаззи-логика, скользящие режимы. Точность и диапазон регулирования электроприводом повышается.
Точность и диапазон регулирования электроприводом повышается.
Развитие цифрового регулируемого электропривода обязано появлению силовой полупроводниковой техники. Появление контроллеров управления электроприводами позволило создавать преобразователи частоты для асинхронных электродвигателей, электроприводов с вентильными и вентильно-индукторными электродвигателями. Кроме того, использование контроллеров позволяет значительно сократить затраты на электроэнергию.
Как вариант реализации управления электроприводом компания APEX Microtechnology предлагает использовать контроллеры управления серии BCxx, возможность применения которых в целях управления бесколлекторными электроприводами постоянного тока будет рассматриваться в данной статье. Компания APEX Microtechnology представляет уникальные решения для управления 3-фазными бесколлекторными электроприводами постоянного тока. Компанией выпускается три изделия данной категории (см. таблицу). Семейство устройств BC — контроллеров управления бесколлекторными электроприводами постоянного тока — обеспечивает полностью интегрированное решение 2- и 4-квадрантного управления. Мощности конечных устройств на базе данного контроллера (при их компактном размере) могут достигать 8,5 кВт.
Мощности конечных устройств на базе данного контроллера (при их компактном размере) могут достигать 8,5 кВт.
Описание контроллера управления
Контроллер управления бесколлекторными электроприводами постоянного тока BCxx (xx — значение выходного постоянного тока в амперах) обеспечивает необходимые функции управления 3-фазными ДПТ в замкнутых или разомкнутых системах (рис. 1). Контроллеры серии BC имеют 3-фазную мостовую схему с 2- или 4-квадрантной системой управления широтно-импульсной модуляцией (ШИМ) и выбираемой коммутацией 60° или 120°. BCxx способны управлять двигателями мощностью до 4,5 кВт.
Рис. 1.
Контроллеры обеспечивают управление электроприводом, генерацию сигнала ШИМ, управление коммутацией, усиление рассогласования и контроль токового считывания обмотки двигателя.
Контроллер может осуществлять 4-квадрантное управление ШИМ для приложений, обеспечивающих продолжительный переход через нулевую скорость электродвигателя или 2-квадрантное управление ШИМ, которое благодаря своей экономичности больше подходит для реализации однонаправленного вращения. Однако во втором режиме существует возможность изменения направления движения ротора путем использования входа, обеспечивающего реверс. Таким образом, возможна реализация работы со сложными алгоритмами замедления даже при использовании 2-квадрантного управления.
Однако во втором режиме существует возможность изменения направления движения ротора путем использования входа, обеспечивающего реверс. Таким образом, возможна реализация работы со сложными алгоритмами замедления даже при использовании 2-квадрантного управления.
2- и 4-квадрантное управление ШИМ
BCxx может быть сконфигурирован с помощью входной логики и действовать как контроллер управления, реализующий как 2-квадрантное, так и 4-квадрантное управление сигналом ШИМ. При 2-квадрантном управлении происходит захват одной фазы двигателя, при этом сигнал ШИМ запитывает положительной полярностью одну фазовую обмотку электродвигателя. При 4-квадрантном управлении ШИМ коммутируется две фазы двигателя. 4-квадрантное управление сигналами ШИМ имеет более широкое применение по сравнению с 2-квадрантным, особенно в таких случаях, как позиционное управление, фазовая синхронизация, скоростное управление, управление по сложному алгоритму.
Схемы защиты контроллера управления
Контроллер имеет четыре схемы защиты, необходимые для его надежной работы при различного рода нежелательных ситуациях:
- схема обнаружения пикового значения тока, которая запрограммирована на значение датчика тока, размещенного между ДМОП-источниками и обратным выходом высокого напряжения;
- схема защиты от перегрева, функции которой заключаются в прерывании работы контроллера управления при перегреве и возобновлении ее только после достаточного охлаждения до рабочей температуры;
- схема защиты от сверхтоков, прекращающая работу контроллера управления при превышении тока силового источника напряжения примерно в 1,5 раза пикового значения тока;
- обрыв цепи при обесточивании контроллера.

Пример схемной реализации на основе контроллера BC20
Ранее было оговорено, что в зависимости от вида управления ШИМ могут быть реализованы различные схемы управления электроприводом. Ниже приводится пример использования контроллера при реализации скоростного управления электроприводом в замкнутой системе, сигналы ШИМ которого использует 4-квадрантный режим управления.
Рассмотрим подробнее работу схемы (рис. 2).
Рис. 2.
Номинальное рабочее напряжение микросхемы, подаваемое на вход Vcc, составляет 15 В. На вход OE должен быть подан логически активный сигнал для разрешения работы контроллера. В начале статьи оговаривалось, что скоростной режим управления двигателем рационально реализовывать при 4-квадрантном режиме управления, чтобы обеспечивать возможность остановки ротора электропривода. Поэтому на вход 2Q, который указывает режим управления сигналами ШИМ, подается логически пассивный сигнал, то есть реализуется 4-квадрантный режим. Вход управления реверсом REV при 4-квадрантном режиме остается пассивным. Угол коммутации фаз двигателя задается логически активным сигналом, подаваемым на вход 120. В данном случае шаг ротора при каждой коммутации будет равен 120°. Выход FAULT микросхемы сообщает о нарушении работы схемы подключенным к нему световым индикатором.
Вход управления реверсом REV при 4-квадрантном режиме остается пассивным. Угол коммутации фаз двигателя задается логически активным сигналом, подаваемым на вход 120. В данном случае шаг ротора при каждой коммутации будет равен 120°. Выход FAULT микросхемы сообщает о нарушении работы схемы подключенным к нему световым индикатором.
Сигналы с датчиков Холла, установленных на двигателе, подаются на входы контроллера HS1 — HS3. За изменением уровня сигнала датчиков Холла следит выход SSC. Важно правильно подключить датчики Холла к выводам микросхемы, иначе ротор двигателя может либо двигаться в обратном направлении, либо сильно колебаться, либо вообще не двигаться. На вход REF_IN подается аналоговый управляющий сигнал, а на вход FB — сигнал с тахогенератора. С выхода MOTOR_I на вход TORQ подается аналоговое напряжение, пропорциональное току электродвигателя. Тем самым эти выводы, соединенные между собой через резистор, образуют замкнутый контур тока. Резистор стабилизирует коэффициент передачи. С выходов OUT1 — OUT3 происходит управление фазовыми обмотками двигателя. Входы-выходы S1 — S3 необходимы для замыкания рабочего контура двигателя и отслеживания значения тока при защите контроллера от сверхтоков.
С выходов OUT1 — OUT3 происходит управление фазовыми обмотками двигателя. Входы-выходы S1 — S3 необходимы для замыкания рабочего контура двигателя и отслеживания значения тока при защите контроллера от сверхтоков.
Для работы схем защиты используется вход HVRTN. Питание электродвигателя осуществляется через вход HV.
Преимущества гибридного исполнения
Контроллеры управления серии BCxx выполнены по гибридной технологии, которая позволяет относительно быстро создавать электронные устройства, выполняющие достаточно сложные функции. С использованием гибридной технологии созданы и другие продукты, такие, как ШИМ-усилители и линейные операционные усилители.
Использование уникальных технологий способствует созданию качественных продуктов. Гибридная технология сборки значительно увеличивает рассеиваемую мощность устройств при их компактном размере. Например, контроллер управления BC20 с габаритными размерами 112x51x12 мм (рис.3) обладает внутренней рассеиваемой мощностью 480 Вт, что позволяет ему управлять двигателями мощностью до 4,5 кВт. Технологии производства компании Apex повышают надежность создаваемых устройств, которые могут работать в жестких условиях окружающей среды. Гибридная технология сборки устройств значительно повысила диапазон рабочих температур (-40…+85 °С).
Технологии производства компании Apex повышают надежность создаваемых устройств, которые могут работать в жестких условиях окружающей среды. Гибридная технология сборки устройств значительно повысила диапазон рабочих температур (-40…+85 °С).
Рис. 3.
Заключение
Изделия на базе контроллера управления бесколлекторным электроприводом постоянного тока BCxx могут применяться в самом широком спектре высокопроизводительного промышленного автоматизированного оборудования, такого, как автоматические производственные линии, удаленные системы управления, роботы-манипуляторы и другие прецизионные устройства с электроприводом.
Также хотелось бы добавить, что компоненты компании Apex являются высокофункциональными устройствами, обладают уникальными техническими характеристиками и разработаны для применений в жестких условиях внешней среды. Многие из компонентов Apex дают возможность найти решение там, где другие варианты либо дорогостоящи и экономически нецелесообразны, либо вообще невозможны.
Компания Apex Microtechnology предлагает решения, упрощающие проектирование устройств и одновременно повышающие их надежность. Использование ее контроллеров существенно облегчает реализацию системы управления электроприводом и позволяет значительно снизить количество компонентов в схеме, тем самым сократив время разработки и тестирования.
Литература- PWM amplifiers, power amplifiers, motion control. Power Integrated circuit data book. Volume 11. Apex Microtechnology.
Регулятор оборотов электродвигателя — TDA1085
В себя включает:
- Плата в сборе — полностью готовая к эксплуатации.
- Резистор регулировки оборотов — в комплекте.
- Установленные клеммы — А (сеть 220 В), М (мотор), Т (таходатчик).
- Питание платы — на прямую от сети 220 вольт, 50 Гц.
- Мощность — до 3000 Вт. (стандартные двигатели от стиральных машин автомат).
- Применение — к коллекторным двигателям (двигателям с щетками).

- Габаритные размеры — длина 96 мм, ширина 96 мм, высота 32 мм.
- Система защиты — по току, предохранителем 5 А.
Дополнительные опции:
- Реверсный переключатель (on-off-on) с проводами и клеммами 16 А, 250 В.
- Измеритель числа оборотов — Тахометр (Отдельное устройство, блок питания ы комплект не входит).
- Реле времени — YYC-2 (Отдельное устройство, блок питания ы комплект не входит).
Для чего нужна эта плата: Данная плата позволяет регулировать обороты коллекторного электродвигателя (с щетками) без потери мощности независимо от нагрузки (в пределах заявленной производителем электродвигателя). С ее помощью вы сможете управлять оборотами электродвигателя от 200 до 20000 об/мин. При этом сохраняя полный момент силы на валу электродвигателя.
Для чего нужен реверсный переключатель: Это тумблер на три положения серии «KCD» с запасом мощности до 4000 Вт., с установленными клеммами и проводами с нанесенной маркировкой к подключению.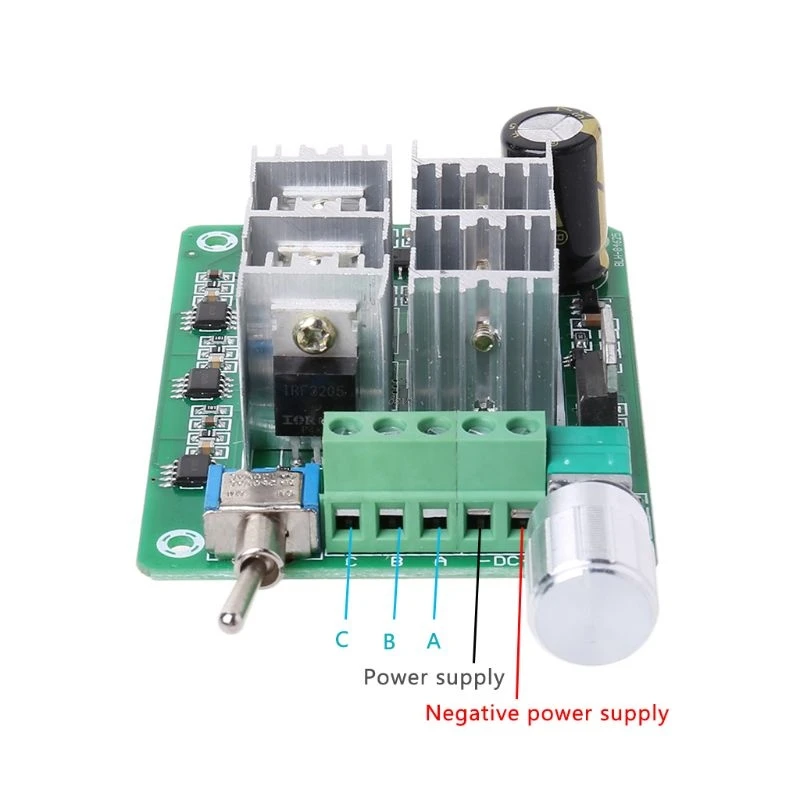 Устанавливается для изменения стороны вращения вала (ротора) электродвигателя. С его помощью Вы легко сможете изменить направление вращения ротора всего лишь одним переключение тумблера. Внимание! Переключение тумблера во время работы не желательно! На оборотах более 3000 об/мин. ЗАПРЕЩЕНО! Для увеличения срока службы электродвигателя и платы, тумблер реверсного переключателя рекомендуется переключать после полной остановки электродвигателя.
Устанавливается для изменения стороны вращения вала (ротора) электродвигателя. С его помощью Вы легко сможете изменить направление вращения ротора всего лишь одним переключение тумблера. Внимание! Переключение тумблера во время работы не желательно! На оборотах более 3000 об/мин. ЗАПРЕЩЕНО! Для увеличения срока службы электродвигателя и платы, тумблер реверсного переключателя рекомендуется переключать после полной остановки электродвигателя.
Для чего нужен измеритель числа оборотов: Тахометр просто необходим если Вам нужно замерить обороты станка или вращающегося механизма. Блок питания в комплект не входит.
Для чего нужно реле времени: Таймер времени предназначен для автоматического отключения регулятора. Вы можете выбрать время на таймере и заниматься своими делами, а реле отключит регулятор оборотов через заданное время. Блок питания в комплект не входит.
Дополнительное описание: Монтажная плата изготавливается станочным производством, на заводе в России.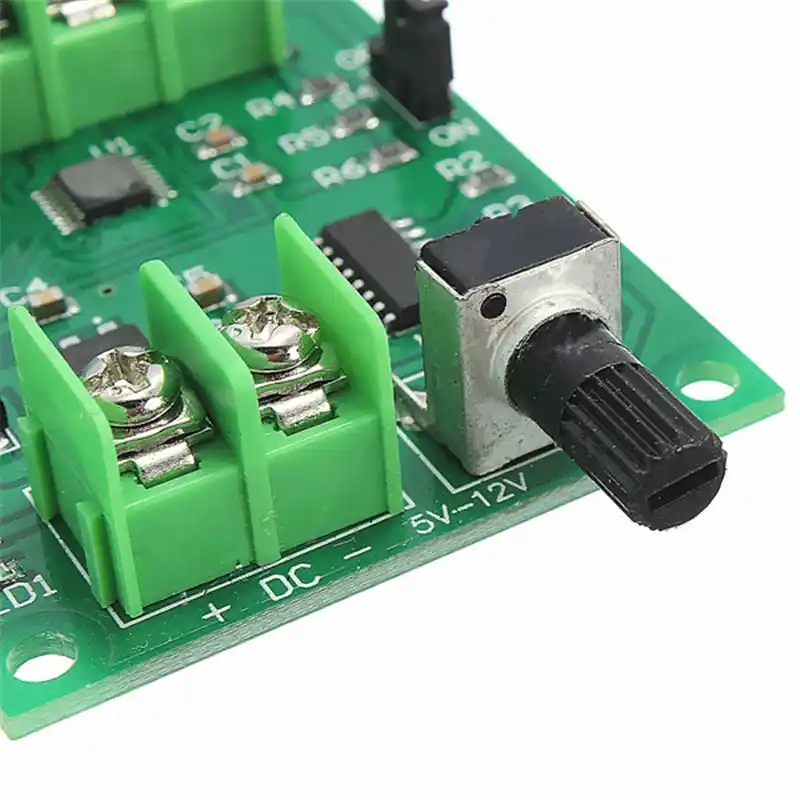 Толщина основы текстолита 1,5 мм.Толщина медной фольги 0,35 мм, с нанесенной паяльной маской. Монтаж радиокомпонентов, осуществляется заводским конвейером. Установленные детали в выводном корпусе. Активные радиокомпоненты, закупаются от фирм оригинальных производителей: On semiconductor, ST microelectronics, с целью увеличения надежности и длительного срока эксплуатации.
Толщина основы текстолита 1,5 мм.Толщина медной фольги 0,35 мм, с нанесенной паяльной маской. Монтаж радиокомпонентов, осуществляется заводским конвейером. Установленные детали в выводном корпусе. Активные радиокомпоненты, закупаются от фирм оригинальных производителей: On semiconductor, ST microelectronics, с целью увеличения надежности и длительного срока эксплуатации.
Внимание! Данная плата применима, только для коллекторных двигателей (двигателей с щетками), с обязательным наличием таходатчика. Данная плата изготавливалась для двигателей от стиральных машин автомат, мощностью до 3000 Вт.
- Каждая плата пред отправкой заказчику проходит полную проверку под нагрузкой, на предмет отсутствия дефектов и брака!
- Предоставляется гарантия и послепродажная консультация!
- При оплате на р/с +7%
Различная комплектация
| КОМПЛЕКТАЦИЯ «КОНСТРУКТОР» В себя включает:
| КОМПЛЕКТАЦИЯ «ПЛАТА МОНТАЖНАЯ» В себя включает:
|
Простые контроллеры двигателей Pololu
Простые контроллеры двигателей — это универсальные одноканальные контроллеры двигателей общего назначения для щеточных двигателей постоянного тока. Широкий диапазон рабочих напряжений и способность выдавать до нескольких сотен ватт в малом форм-факторе делают эти контроллеры подходящими для многих приложений управления двигателями. С множеством поддерживаемых интерфейсов — USB для прямого подключения к компьютеру, последовательный TTL и I²C для использования со встроенными системами, RC-импульсные сервоимпульсы для использования в качестве электронного регулятора скорости (ESC) с RC-управлением и аналоговые напряжения для использования с потенциометр или аналоговый джойстик — и широкий спектр настраиваемых параметров, эти контроллеры двигателей позволяют легко добавлять базовое управление щеточными двигателями постоянного тока в различные проекты. Бесплатная утилита конфигурации для Windows упрощает первоначальную настройку устройства и позволяет проводить внутрисистемное тестирование и мониторинг контроллера через USB.
Бесплатная утилита конфигурации для Windows упрощает первоначальную настройку устройства и позволяет проводить внутрисистемное тестирование и мониторинг контроллера через USB.
В таблице ниже перечислены все члены семейства Simple Motor Controller и показаны основные различия между ними, включая оригинальные SMC с зелеными печатными платами. Новые SMC G2 (синие) обычно можно использовать в качестве замены оригиналам, что не рекомендуется для новых дизайнов (они включены в таблицу ниже только для сравнения).
Сравнить все товары в этой категории
Продукты в категории «Простые контроллеры двигателей Pololu»
Этот мощный контроллер двигателя упрощает базовое управление щеточным двигателем постоянного тока с быстрой настройкой через USB с помощью нашего бесплатного программного обеспечения. Он поддерживает пять интерфейсов управления: USB, последовательный TTL, I²C, аналоговое напряжение (потенциометр) и радиоуправление (RC). Эта версия предлагает широкий рабочий диапазон от 6,5 В до 30 В и может обеспечивать непрерывные выходные токи до 25 А без радиатора. Штекерные разъемы и клеммные колодки включены, но не припаяны, что позволяет устанавливать их по индивидуальному заказу.
Штекерные разъемы и клеммные колодки включены, но не припаяны, что позволяет устанавливать их по индивидуальному заказу.
Этот мощный контроллер двигателя упрощает базовое управление щеточным двигателем постоянного тока с быстрой настройкой через USB с помощью нашего бесплатного программного обеспечения. Он поддерживает пять интерфейсов управления: USB, последовательный TTL, I²C, аналоговое напряжение (потенциометр) и радиоуправление (RC). Эта версия предлагает широкий рабочий диапазон от 6,5 В до 40 В и может обеспечивать непрерывный выходной ток до 19 А без радиатора.Штекерные разъемы и клеммные колодки включены, но не припаяны, что позволяет устанавливать их по индивидуальному заказу.
Этот мощный контроллер двигателя упрощает базовое управление щеточным двигателем постоянного тока с быстрой настройкой через USB с помощью нашего бесплатного программного обеспечения. Он поддерживает пять интерфейсов управления: USB, последовательный TTL, I²C, аналоговое напряжение (потенциометр) и радиоуправление (RC).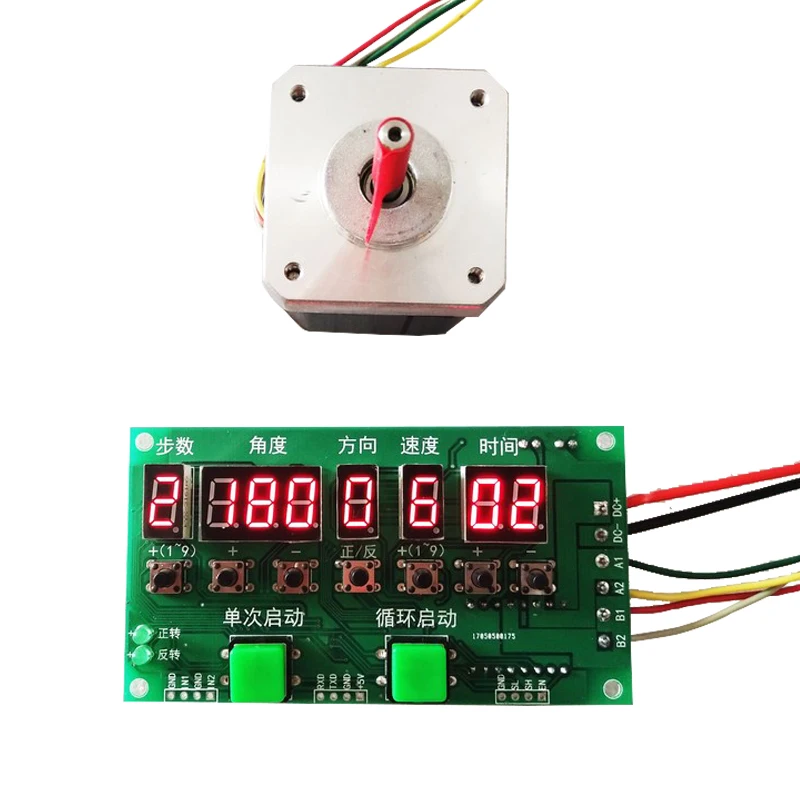 Эта версия предлагает широкий рабочий диапазон от 6,5 В до 30 В и может обеспечивать непрерывный выходной ток до 15 А без радиатора.Эта версия поставляется с припаянными штырями и клеммными колодками .
Эта версия предлагает широкий рабочий диапазон от 6,5 В до 30 В и может обеспечивать непрерывный выходной ток до 15 А без радиатора.Эта версия поставляется с припаянными штырями и клеммными колодками .
Этот мощный контроллер двигателя упрощает базовое управление щеточным двигателем постоянного тока с быстрой настройкой через USB с помощью нашего бесплатного программного обеспечения. Он поддерживает пять интерфейсов управления: USB, последовательный TTL, I²C, аналоговое напряжение (потенциометр) и радиоуправление (RC). Эта версия предлагает широкий рабочий диапазон от 6,5 В до 30 В и может обеспечивать непрерывный выходной ток до 15 А без радиатора.Штекерные разъемы и клеммные колодки включены, но не припаяны, что позволяет устанавливать их по индивидуальному заказу.
Этот мощный контроллер двигателя упрощает базовое управление щеточным двигателем постоянного тока с быстрой настройкой через USB с помощью нашего бесплатного программного обеспечения.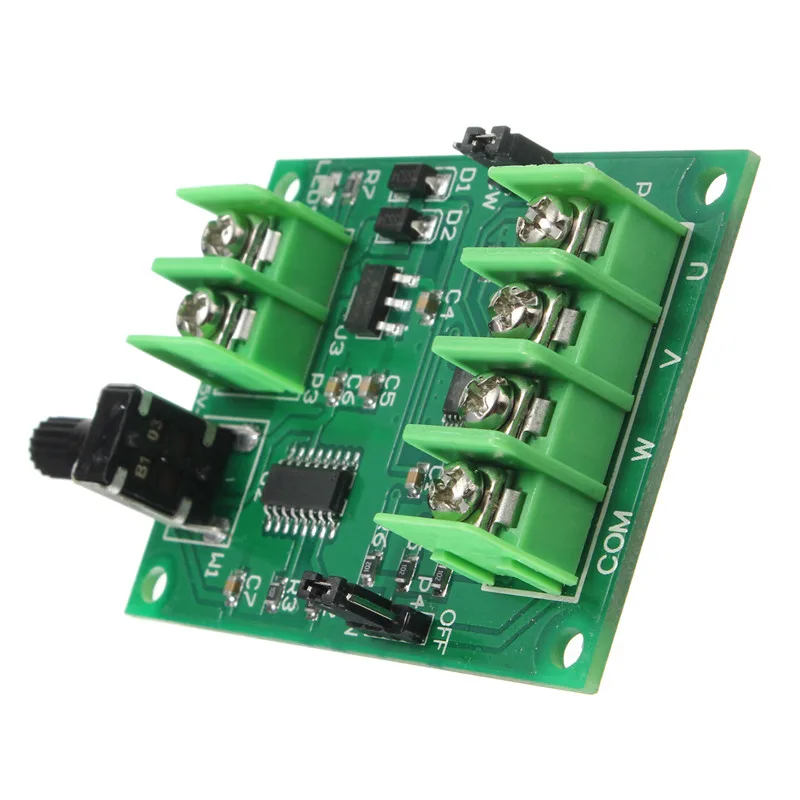 Он поддерживает пять интерфейсов управления: USB, последовательный TTL, I²C, аналоговое напряжение (потенциометр) и радиоуправление (RC). Эта версия предлагает широкий рабочий диапазон от 6,5 В до 40 В и может обеспечивать непрерывные выходные токи до 12 А, без радиатора.Эта версия поставляется с припаянными штырями и клеммными колодками .
Он поддерживает пять интерфейсов управления: USB, последовательный TTL, I²C, аналоговое напряжение (потенциометр) и радиоуправление (RC). Эта версия предлагает широкий рабочий диапазон от 6,5 В до 40 В и может обеспечивать непрерывные выходные токи до 12 А, без радиатора.Эта версия поставляется с припаянными штырями и клеммными колодками .
Этот мощный контроллер двигателя упрощает базовое управление щеточным двигателем постоянного тока с быстрой настройкой через USB с помощью нашего бесплатного программного обеспечения. Он поддерживает пять интерфейсов управления: USB, последовательный TTL, I²C, аналоговое напряжение (потенциометр) и радиоуправление (RC). Эта версия предлагает широкий рабочий диапазон от 6,5 В до 40 В и может обеспечивать непрерывные выходные токи до 12 А, без радиатора.Штекерные разъемы и клеммные колодки включены, но не припаяны, что позволяет устанавливать их по индивидуальному заказу.
Простой высокомощный контроллер двигателя Pololu упрощает базовое управление щеточными двигателями постоянного тока с помощью нашего бесплатного программного обеспечения Simple Motor Control Center, обеспечивающего быструю настройку через USB. Контроллер поддерживает четыре режима интерфейса: USB, последовательный TTL, аналоговое напряжение и радиоуправление (RC). Эта версия работает от 5,5 до 40 В и достаточно эффективна, чтобы обеспечить непрерывную работу 23 A без радиатора.Он поставляется с включенным силовым конденсатором и разъемами, но не припаянными, что позволяет устанавливать его по индивидуальному заказу.
Простой высокомощный контроллер двигателя Pololu упрощает базовое управление щеточными двигателями постоянного тока с помощью нашего бесплатного программного обеспечения Simple Motor Control Center, обеспечивающего быструю настройку через USB. Контроллер поддерживает четыре режима интерфейса: USB, последовательный TTL, аналоговое напряжение и радиоуправление (RC).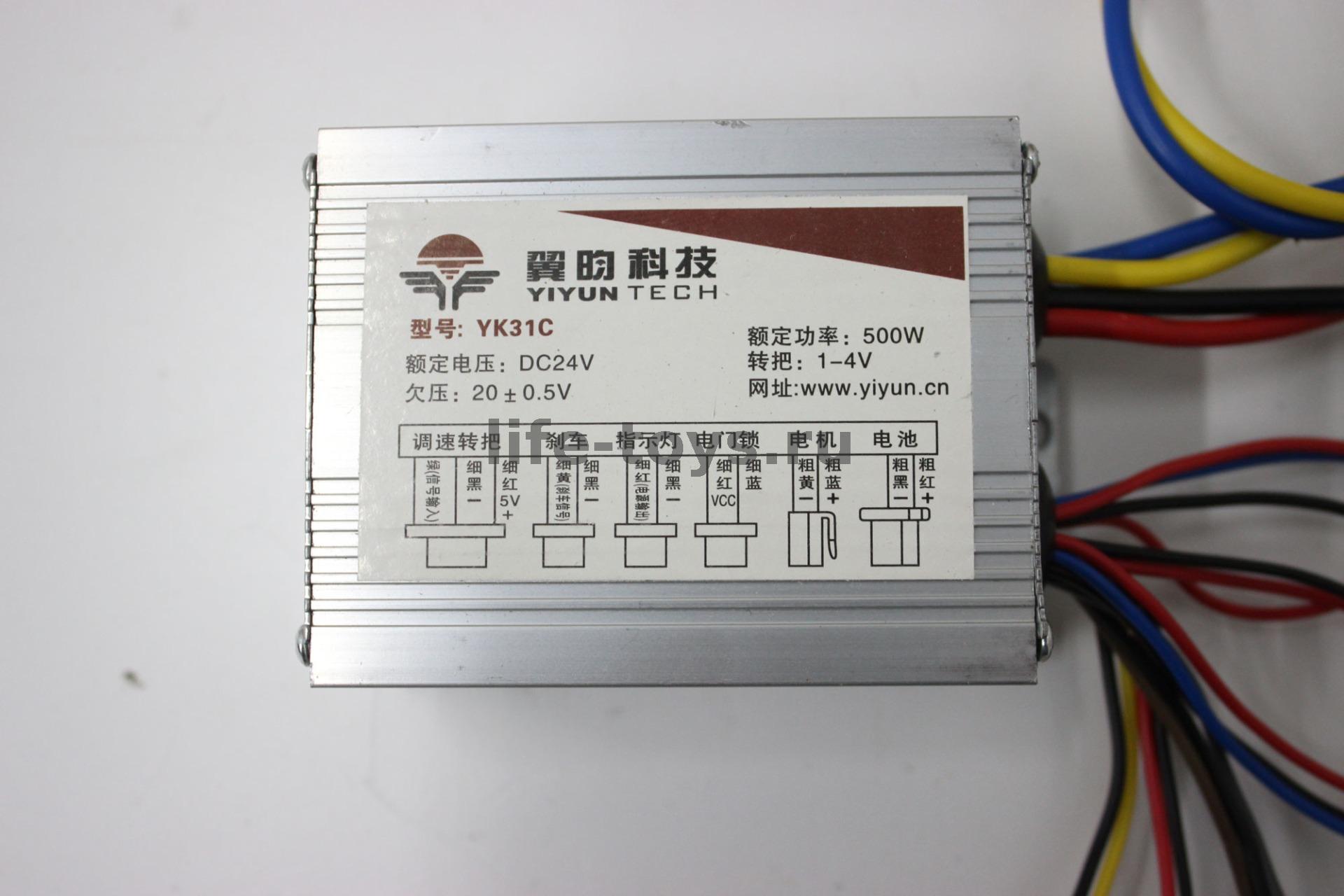 Эта версия работает от 5,5 до 30 В и достаточно эффективна, чтобы обеспечить непрерывную работу 25 А без радиатора.Он поставляется с включенным силовым конденсатором и разъемами, но не припаянными, что позволяет устанавливать его по индивидуальному заказу.
Эта версия работает от 5,5 до 30 В и достаточно эффективна, чтобы обеспечить непрерывную работу 25 А без радиатора.Он поставляется с включенным силовым конденсатором и разъемами, но не припаянными, что позволяет устанавливать его по индивидуальному заказу.
Простой высокомощный контроллер двигателя Pololu упрощает базовое управление щеточными двигателями постоянного тока с помощью нашего бесплатного программного обеспечения Simple Motor Control Center, обеспечивающего быструю настройку через USB. Контроллер поддерживает четыре режима интерфейса: USB, последовательный TTL, аналоговое напряжение и радиоуправление (RC). Эта версия работает от 5,5 до 40 В и достаточно эффективна, чтобы обеспечить непрерывную работу 12 A без радиатора.Он поставляется с установленным силовым конденсатором и разъемами, как показано на рисунке.
Простой высокомощный контроллер двигателя Pololu упрощает базовое управление щеточными двигателями постоянного тока с помощью нашего бесплатного программного обеспечения Simple Motor Control Center, обеспечивающего быструю настройку через USB. Контроллер поддерживает четыре режима интерфейса: USB, последовательный TTL, аналоговое напряжение и радиоуправление (RC). Эта версия работает от 5,5 до 40 В и достаточно эффективна, чтобы обеспечить непрерывную работу 12 A без радиатора.Он поставляется с включенным силовым конденсатором и разъемами, но не припаянными, что позволяет устанавливать его по индивидуальному заказу.
Контроллер поддерживает четыре режима интерфейса: USB, последовательный TTL, аналоговое напряжение и радиоуправление (RC). Эта версия работает от 5,5 до 40 В и достаточно эффективна, чтобы обеспечить непрерывную работу 12 A без радиатора.Он поставляется с включенным силовым конденсатором и разъемами, но не припаянными, что позволяет устанавливать его по индивидуальному заказу.
Простой высокомощный контроллер двигателя 18v15 от Pololu упрощает базовое управление щеточными двигателями постоянного тока с помощью нашего бесплатного программного обеспечения Simple Motor Control Center, позволяющего быстро настраивать их через USB. Контроллер поддерживает четыре режима интерфейса: USB, последовательный TTL, аналоговое напряжение и радиоуправление (RC). Эта версия работает от 5,5 до 30 В и достаточно эффективна, чтобы обеспечить непрерывную работу 15 A без радиатора.Он поставляется с установленным силовым конденсатором и разъемами, как показано на рисунке.
Простой высокомощный контроллер двигателя Pololu упрощает базовое управление щеточными двигателями постоянного тока с помощью нашего бесплатного программного обеспечения Simple Motor Control Center, обеспечивающего быструю настройку через USB. Контроллер поддерживает четыре режима интерфейса: USB, последовательный TTL, аналоговое напряжение и радиоуправление (RC). Эта версия работает от 5,5 до 30 В и достаточно эффективна, чтобы обеспечить непрерывную работу 15 A без радиатора.Он поставляется с включенным силовым конденсатором и разъемами, но не припаянными, что позволяет устанавливать его по индивидуальному заказу.
Простой контроллер двигателя Pololu 18v7 упрощает базовое управление щеточными двигателями постоянного тока с помощью нашего бесплатного программного обеспечения Simple Motor Control Center, обеспечивающего быструю настройку через USB. Контроллер поддерживает четыре режима интерфейса: USB, последовательный TTL, аналоговое напряжение и радиоуправление (RC). Эта версия работает от 5,5 до 30 В, и достаточно эффективна, чтобы обеспечить непрерывную работу 7 А (пиковое значение> 30 А) без радиатора.Он поставляется с установленным силовым конденсатором и разъемами, как показано на рисунке.
Эта версия работает от 5,5 до 30 В, и достаточно эффективна, чтобы обеспечить непрерывную работу 7 А (пиковое значение> 30 А) без радиатора.Он поставляется с установленным силовым конденсатором и разъемами, как показано на рисунке.
Простой контроллер двигателя Pololu упрощает базовое управление щеточными двигателями постоянного тока с помощью нашего бесплатного программного обеспечения Simple Motor Control Center, обеспечивающего быструю настройку через USB. Контроллер поддерживает четыре режима интерфейса: USB, последовательный TTL, аналоговое напряжение и радиоуправление (RC). Эта версия работает от 5,5 до 30 В, и достаточно эффективна, чтобы обеспечить непрерывную работу 7 А (пиковое значение> 30 А) без радиатора.Он поставляется с включенным силовым конденсатором и разъемами, но не припаянными, что позволяет устанавливать его по индивидуальному заказу.
Все о контроллерах двигателей постоянного тока
Двигатели постоянного тока по-прежнему актуальны в современной промышленности, даже несмотря на то, что они являются одними из старейших электродвигателей. Как они выдержали испытание временем, особенно против всех удивительных новых машин 21 века?
Как они выдержали испытание временем, особенно против всех удивительных новых машин 21 века?
Есть много потенциальных ответов на этот вопрос, но их хорошая управляемость является основной причиной того, что двигатели постоянного тока сохранились.Эта простая машина преобразует постоянный ток в механическое вращение, которым можно управлять, просто изменяя входное напряжение или меняя местами его провода. Элегантность двигателей постоянного тока привела к производству многих контроллеров двигателей постоянного тока, которые часто имеют простую конструкцию и обеспечивают адекватную производительность при их стоимости. В этой статье мы рассмотрим некоторые распространенные контроллеры двигателей постоянного тока, как они работают, и обсудим, какие приложения наиболее популярны для этих систем.
Что такое контроллеры двигателей постоянного тока?
Проще говоря, контроллер двигателя постоянного тока — это любое устройство, которое может управлять положением, скоростью или крутящим моментом двигателя постоянного тока. Существуют контроллеры для щеточных двигателей постоянного тока, бесщеточных двигателей постоянного тока, а также универсальных двигателей, и все они позволяют операторам устанавливать желаемое поведение двигателя, даже если их механизмы для этого различаются.
Существуют контроллеры для щеточных двигателей постоянного тока, бесщеточных двигателей постоянного тока, а также универсальных двигателей, и все они позволяют операторам устанавливать желаемое поведение двигателя, даже если их механизмы для этого различаются.
Наши статьи о параллельных двигателях постоянного тока, двигателях постоянного тока с последовательной обмоткой и бесщеточных двигателях постоянного тока содержат подробные объяснения того, как работают машины постоянного тока. Вкратце, кривая скорость / крутящий момент двигателей постоянного тока обратно линейна, что означает, что их крутящий момент пропорционально уменьшается с увеличением числа оборотов двигателя.Это позволяет упростить управление, так как снижение скорости приведет к увеличению крутящего момента, и наоборот. Кроме того, в отличие от некоторых двигателей переменного тока, двигатели постоянного тока легко реверсировать, просто переключая их провода, так что постоянный ток течет в противоположном направлении. Контроллеры двигателей постоянного тока используют эти характеристики уникальным образом, и в этой статье будут рассмотрены наиболее популярные методы.
Контроллеры двигателей постоянного тока используют эти характеристики уникальным образом, и в этой статье будут рассмотрены наиболее популярные методы.
Типы контроллеров двигателей постоянного тока
Ниже приведены некоторые распространенные методы управления двигателем постоянного тока. Обратите внимание, что эти методы не являются исчерпывающими и что двигателями постоянного тока можно управлять разными способами, включая контроллеры серводвигателей (подробнее см. В нашей статье о контроллерах серводвигателей):
Контроллер направления: H-мост
Н-мостовая схема — один из простейших методов управления двигателем постоянного тока.На рисунке 1 ниже показана упрощенная принципиальная схема H-моста:
Рисунок 1: Н-мостовая схема для управления направлением двигателя постоянного тока.
Четыре переключателя управляются парами (1 и 4, 2 и 3), и когда любая из этих пар замыкается, они замыкают цепь и приводят двигатель в действие. Следовательно, четырехквадрантный двигатель может быть создан путем соединения определенных переключателей вместе, при этом изменение полярности будет по-разному влиять на двигатель. По сути, эта схема переключает выводы двигателя постоянного тока, который по команде меняет направление вращения на обратное.Они легко продаются в виде микросхем и могут быть найдены в большинстве контроллеров на базе микропроцессоров, поскольку H-мост может быть уменьшен с помощью транзисторов до очень малых размеров.
Следовательно, четырехквадрантный двигатель может быть создан путем соединения определенных переключателей вместе, при этом изменение полярности будет по-разному влиять на двигатель. По сути, эта схема переключает выводы двигателя постоянного тока, который по команде меняет направление вращения на обратное.Они легко продаются в виде микросхем и могут быть найдены в большинстве контроллеров на базе микропроцессоров, поскольку H-мост может быть уменьшен с помощью транзисторов до очень малых размеров.
Н-мосты не только могут изменять направление вращения двигателя, но их также можно использовать для управления скоростью. Если требуется только направленное управление, тогда H-мост будет использоваться в качестве так называемого безрегенеративного привода постоянного тока. Однако создание рекуперативных приводов постоянного тока может быть усложнено. На рисунке 2 показан график, показывающий, как работают рекуперативные приводы:
Рис.
 2: графики, представляющие направление скорости и крутящего момента при изменении полярности двигателя постоянного тока.Обратите внимание, как создается движение, когда они работают в одном направлении, и как достигается разрыв, когда они находятся в оппозиции.
2: графики, представляющие направление скорости и крутящего момента при изменении полярности двигателя постоянного тока.Обратите внимание, как создается движение, когда они работают в одном направлении, и как достигается разрыв, когда они находятся в оппозиции. Большинство двигателей постоянного тока замедляются за счет отключения питания двигателя; Рекуперативные приводы включают возможность торможения, когда переключение полярностей во время работы двигателя вызывает замедление. Квадранты 1 и 3 считаются «автомобильными» квадрантами, где двигатель обеспечивает ускорение в любом направлении, и это то, что контролируют нерегенеративные приводы.Квадранты 2 и 4 считаются «тормозными» квадрантами, в которых двигатель замедляется, и именно от них выигрывают рекуперативные приводы. Когда скорость двигателя противоположна крутящему моменту двигателя, двигатель становится генератором, в котором его механическая энергия направляет ток обратно к источнику питания (известное как «рекуперативное торможение»). Эта функция снижает потери энергии и может подзаряжать источник питания, эффективно увеличивая КПД двигателя. На рисунке 3 показана упрощенная принципиальная схема для каждого квадранта и показано, как квадранты 2 и 4 отправляют ток обратно в источник для регенерации энергии:
Эта функция снижает потери энергии и может подзаряжать источник питания, эффективно увеличивая КПД двигателя. На рисунке 3 показана упрощенная принципиальная схема для каждого квадранта и показано, как квадранты 2 и 4 отправляют ток обратно в источник для регенерации энергии:
Рис. 3: Принципиальные схемы для каждого квадранта, показывающие величины напряжения двигателя и напряжения питания.Обратите внимание, как направление тока (I
a ) перемещается от двигателя к источнику питания в квадрантах 2 и 4. Когда двигатель замедляется, E a (напряжение, создаваемое / используемое двигателем) больше, чем напряжение питания (V a ), и ток будет течь обратно в источник питания. В настоящее время изучается регенеративное торможение в электромобилях и других приложениях, требующих максимальной эффективности. Этот метод не только обеспечивает управление двигателем постоянного тока, но также обеспечивает разумный способ снижения энергопотребления.
Регулятор скорости: широтно-импульсная модуляция (ШИМ)
PWM может использоваться во многих типах двигателей, как показано в нашей статье о контроллерах двигателей переменного тока. По сути, схемы ШИМ изменяют скорость двигателя, моделируя уменьшение / увеличение напряжения питания. Контроллеры привода с регулируемой скоростью отправляют на двигатель периодические импульсы, которые в сочетании с эффектом сглаживания, вызванным индуктивностью катушки, заставляют двигатель работать так, как если бы он питался от более низкого / более высокого напряжения. Например, если на двигатель 12 В подается сигнал ШИМ, высокий (12 В) в течение двух третей каждого периода и низкий (0 В) в остальное время, двигатель будет эффективно работать при двух третях полного напряжения, или 8 В.Следовательно, процент снижения напряжения или «рабочий цикл» ШИМ изменяет скорость двигателя. ШИМ легко и недорого реализовать, и можно выбрать практически любой рабочий цикл, что позволяет практически непрерывно контролировать скорость двигателя. ШИМ часто сочетается с Н-мостами, чтобы обеспечить управление скоростью, направлением и торможением.
ШИМ часто сочетается с Н-мостами, чтобы обеспечить управление скоростью, направлением и торможением.
Контроллер якоря: переменное сопротивление
Другой способ повлиять на скорость двигателя постоянного тока — это изменение тока, протекающего через катушку возбуждения или якорь.Скорость выходного вала будет изменяться при изменении тока через эти катушки, так как его скорость пропорциональна силе магнитного поля якоря (продиктованного током). Переменные резисторы или реостаты, включенные последовательно с этими катушками, могут использоваться для изменения тока и, следовательно, скорости. Пользователи могут увеличивать сопротивление катушки якоря для уменьшения скорости или увеличивать сопротивление статора, чтобы увеличить ее, и все это путем регулирования сопротивления. Обратите внимание, что этот метод приводит к неэффективности двигателя, поскольку увеличение сопротивления означает потерю большего количества энергии на тепло, и именно поэтому ШИМ является предпочтительным типом контроллера двигателя постоянного тока.
Заявки и критерии выбора
При рассмотрении вопроса о покупке контроллера двигателя постоянного тока есть несколько ключевых вопросов, на которые следует ответить либо вашему исследованию, либо поставщику. Контроллеры двигателей постоянного тока может быть сложно указать из-за их разнообразия, поэтому список вопросов ниже будет надежным инструментом при выборе контроллера для вашего проекта. Обязательно найдите самую последнюю информацию о новейших доступных технологиях, связавшись с вашим поставщиком, и используйте эти вопросы, чтобы сделать осознанный выбор:
- Каков диапазон номинальных напряжений используемого двигателя и какие части этого диапазона он будет использовать?
- Какой тип управления желателен (скорость, крутящий момент, направление или все три)?
- Какой тип двигателя контролируется?
- Какой длительный ток может подавать контроллер, и соответствует ли он длительному потреблению тока двигателем под нагрузкой?
- Есть ли в системе встроенная максимальная токовая / тепловая защита?
- Какой будет метод управления при использовании микропроцессорных приводов (ШИМ, ПДУ, аналоговое напряжение и т.
 Д.))? Программное обеспечение необходимо?
Д.))? Программное обеспечение необходимо? - Вам нужен контроллер с двумя двигателями (один контроллер для двух независимых двигателей)?
Контроллеров двигателей постоянного тока доступно столько же, сколько самих двигателей постоянного тока; их изменчивость — одно из их самых сильных преимуществ. Их приложения также многочисленны, поскольку большинство разработчиков извлекают выгоду из какого-либо пользовательского ввода в их двигатель постоянного тока. В сферах робототехники, производства, военных приложений, автомобилей и многих других используются контроллеры двигателей постоянного тока с отличными результатами.В зависимости от того, как они используются, контроллеры двигателей постоянного тока могут предоставить простые средства управления с хорошей точностью по приемлемой цене.
Сводка
В этой статье представлено понимание того, что такое контроллеры двигателей постоянного тока и как они работают. Для получения дополнительной информации о сопутствующих продуктах обратитесь к другим нашим руководствам или посетите платформу Thomas Supplier Discovery Platform, чтобы найти потенциальные источники поставок или просмотреть подробную информацию о конкретных продуктах.
Источники:
- http: // srjcstaff.santarosa.edu/~lwillia2/2B/2Bch30.pdf
- https://itp.nyu.edu/physcomp/lessons/dc-motors/dc-motors-the-basics/
- https://www.ece.uvic.ca
- https://www.tigoe.com/pcomp/code/circuits/motors/controlling-dc-motors/
- https://www.elprocus.com/what-are-the-best-ways-to-control-the-speed-of-dc-motor/
- https://www.robotshop.com/community/tutorials/show/how-to-make-a-robot-lesson-5-choosing-a-motor-controller
Прочие изделия для двигателей
Больше от Instruments & Controls
Произошла ошибка
Повторите попытку позже или попробуйте нашу домашнюю страницу еще раз.
Bitte versuchen Sie es später oder schauen Sie ob die Homepage funktioniert.
Ошибка: E1020
Австралия Электронная почта
Максон Мотор Австралия Пти Лтд
Unit 1, 12-14 Beaumont Road
Гора Куринг-Гай Новый Южный Уэльс 2080
Австралия
Benelux Электронная почта
maxon motor benelux B. V.
V.
Йосинк Колквег 38
7545 PR Enschede
Нидерланды
Китай Электронная почта
Максон Мотор (Сучжоу) Ко., Лтд
江兴东 路 1128 号 1 号楼 5 楼
215200 江苏 吴江
中
Германия Электронная почта
Максон Мотор ГмбХ
Truderinger Str. 210
81825 München
Deutschland
Индия Электронная почта
maxon precision motor India Pvt.ООО
Niran Arcade, № 563/564
Новая Бел Роад,
RMV 2-я ступень
Бангалор — 560 094
Индия
Италия Электронная почта
maxon motor italia S.r.l.
Società Unipersonale
Via Sirtori 35
20017 Rho MI
Италия
Япония Электронная почта
マ ク ソ ン ジ ャ パ ン 株式会社
東京 都 新宿 区 新宿 5-1-15
〒 160-0022
000
Корея Электронная почта
㈜ 맥슨 모터 코리아
서울시 서초구
반포 대로 14 길 27, 한국 137-876
Португалия Электронная почта
maxon motor ibérica s. а
а
C / Polo Norte № 9
28850 Торрехон-де-Ардос
Испания
Швейцария Электронная почта
максон мотор аг
Брюнигштрассе 220
Постфах 263
6072 Sachseln
Schweiz
Испания Электронная почта
maxon motor ibérica s.a. Испания (Барселона)
C / Polo Norte № 9
28850 Торрехон-де-Ардос
Испания
Тайвань Электронная почта
maxon motor Тайвань
8F.-8 №16, переулок 609 сек. 5
П. 5, Chongxin Rd.
Sanchong Dist.
Нью-Тайбэй 241
000
Великобритания, Ирландия Электронная почта
максон мотор великобритания, ооо
Maxon House, Hogwood Lane,
Finchampstead
Беркшир, RG40 4QW
Соединенное Королевство
США (Восточное побережье) Электронная почта
прецизионные двигатели maxon, inc.
125 Девер Драйв
Тонтон, Массачусетс 02780
США
США (Западное побережье) Электронная почта
прецизионные двигатели maxon, inc.
1065 East Hillsdale Blvd,
Люкс 210
Фостер-Сити, CA 94404
США
| Инженерное дело360
Контроллеры двигателей получают напряжение питания и подают сигналы на приводы двигателей, которые связаны с двигателями.Они используются для запуска, остановки и запуска двигателей запрограммированным образом. Контроллеры двигателя могут использоваться для постепенного запуска или увеличения скорости двигателя, увеличения крутящего момента или изменения направления вращения двигателя в обратном направлении. Их также можно использовать для снижения затрат за счет использования проводов меньшего диаметра и устройств с пониженным током для управления двигателем. Контроллеры используются из-за требований операционной системы, требований к установке или для повышения КПД двигателя.
Существует два основных типа контроллеров: электронный и электромеханический.
- Электронные блоки очень сложны и включают такие функции, как плавный пуск и частотно-регулируемые приводы. Электронные блоки можно запрограммировать так, чтобы они реагировали на системные входные сигналы и заранее заданные рабочие условия.
- Электромеханические блоки используют электромагнитные контакторы или реле для остановки, запуска и изменения направления вращения двигателя.
Компоненты контроллера двигателя включают источник питания, усилитель, пользовательский интерфейс и схему управления положением.Ниже представлено видео, в котором описывается система контроллера мотора.
Контроллер двигателя. Кредит видео: trossenrobotics
Тип привода
Тип привода описывает категорию приводимой или управляемой двигательной системы.
- Щеточные двигатели коммутация с физическими контактами.
- Бесщеточные двигатели не используют физические контакты.
- Асинхронные двигатели индуцируют ток в обмотках ротора без какого-либо физического соединения с обмотками статора.
- Синхронные двигатели — это нескользящие устройства, которые работают с постоянной скоростью до полной нагрузки. К ним относятся как реактивные электродвигатели, так и серводвигатели.
- В двигателях с переключением полюсов (PCM) используется управление числом полюсов — метод изменения числа полюсов первичной обмотки.
- Векторные приводные двигатели обеспечивают независимое управление как напряжением, так и частотой. В некоторых конструкциях энкодеры или резольверы используются для получения обратной связи о положении и скорости.
- Линейные двигатели создают силу только в направлении движения. Общие технологии включают конструкции с подвижной катушкой и подвижным магнитом.
- Многие типы шаговых двигателей используют контроллеры двигателей
- Двигатели с полным шагом
- Полушаговые двигатели
- Мини-моторы
- Микродвигатели
- Униполярные шаговые двигатели
- Биполярные шаговые двигатели
- Пневматические системы управления перемещением
- Гидравлические системы управления перемещением
Критерии выбора
База данных Engineering360 SpecSearch позволяет промышленным покупателям выбирать контроллеры скорости двигателя по техническим характеристикам, электрическим характеристикам, рабочим параметрам и характеристикам.
Электрические характеристики
Электрические характеристики включают
- Максимальное выходное напряжение — это напряжение, которое выводит устройство. Этот вывод должен соответствовать системным процессам.
- Номинальная мощность — максимальная мощность, используемая с двигателем.
- Непрерывный выходной ток — это термин, используемый для описания тока, который устройство будет постоянно проводить в воздухе без превышения температурных пределов.
- Пиковый выходной ток — кратковременный выходной ток емкости
- Напряжение питания переменного тока — это диапазон входного напряжения переменного тока, от которого будет работать привод или контроллер.
- Напряжение питания постоянного тока — это диапазон входного напряжения постоянного тока, от которого будет работать привод или контроллер.
- Контроллеры двигателей используют 50, 60 или 400 Гц. Входная частота переменного тока . Входная частота — это частота, которую контроллер принимает от двигателя.
- Однофазные входы используются для приложений с низким напряжением и являются более распространенным выражением.
- Трехфазные входы используются для приложений с более высоким напряжением.Их можно использовать для преодоления высоких пусковых нагрузок за счет запуска двигателя с более высоким крутящим моментом. Когда первоначальная инерционная нагрузка преодолевается, они переключаются на более эффективную дельта-конфигурацию с низким крутящим моментом.
- Компьютерные контроллеры двигателей используют различные типы шин и стандарты связи .
- Типы шин включают расширенные технологии присоединения (ATA), соединение периферийных компонентов (PCI), встроенную электронику привода (IDE), промышленную стандартную архитектуру (ISA), интерфейсную шину общего назначения (GPIB), универсальную последовательную шину (USB) , и автобус VersaModule Eurocard (VMEbus).
- Стандарты связи включают ARCNET, AS-i, Beckhoff I / O, CANbus, CANopen, DeviceNet, Ethernet, интерфейс малых компьютерных систем (SCSI) и интеллектуальную распределенную систему (SDS). Также доступно множество последовательных и параллельных интерфейсов.
Рабочие параметры
Рабочие параметры включают спецификации для
- Настройка и управление описывает, как контроллер управляется пользователем.
- Ручное управление , например
- Ручки
- DIP-переключатели
- Джемперы
- Потенциометры
- Компьютерное управление или помощь , включая
- Джойстик
- Цифровая панель управления
- Компьютерный интерфейс
- Слоты для карт PCMCIA
- Ручное управление , например
- Управляющие программы хранятся на съемных энергонезависимых носителях.
- Ручные устройства предназначены для дистанционного программирования.
- Беспроводная связь и элементы управления через Интернет также доступны.
- Конфигурации для контроллеров моторов включают несколько типов монтажа . Большинство устройств монтируются на
- Шасси
- DIN-рейка
- Панель
- Стеллаж
- Стенка
- Печатная плата (PCB)
- Автономные устройства
- Интегральные микросхемы (ИС), которые устанавливаются на печатные платы
Характеристики
Контроллеры скорости двигателядоступны с несколькими различными вариантами функций.
- Плавный пуск — это управляемая схема, которая позволяет двигателю постепенно набирать скорость до полной скорости. Это часто используется в качестве меры безопасности для двигателей, перемещающих большие или хрупкие нагрузки, а также в качестве меры предотвращения чрезмерного потребления тока.
- Тормоз
Динамическое торможение — это метод торможения, при котором питание обмоток двигателя отключено. Затем двигатель по сути становится генератором, а мощность (тепло) рассеивается через резистивный шунт, проходящий через обмотки.
Инжекционное торможение применимо только к двигателям переменного тока. Питание переменного тока отключается, и мощность постоянного тока «вводится» в обмотки. Это создает магнитное поле, препятствующее вращению двигателя и замедляющее или останавливающее двигатель.
Рекуперативное торможение аналогично динамическому торможению. Двигатель отключается от питания, и мощность, генерируемая вращающимся двигателем, отправляется обратно в источник питания. Сгенерированная энергия может использоваться для подзарядки батареи, которая обеспечивает питание системы.
- Тормозной выход — это переключатель или реле, предназначенное для активации или управления внешним тормозом
- Исходный / конечный выключатель Входы используются для индикации положения начала, остановки или конца хода соответствующих осей.
- Дополнительные каналы ввода / вывода могут быть включены для связи с устройством или обратной связи от него
- Мониторинг состояния Функции включают сигнализацию и мониторинг одного или нескольких параметров. В случае неисправности или несоответствующей операции, такой как перенапряжение, перегрузка по току, превышение скорости производства и изменения температуры, будет сгенерирован сигнал, предупреждающий оператора.
- Самонастраивающиеся устройства или автонастройки обнаруживают рабочие условия и автоматически изменяют настройки для обеспечения оптимальной производительности системы.
- Самодиагностирующиеся контроллеры скорости двигателя могут обнаруживать проблемы в системе и сообщать о проблеме оператору или системе управления.
- Конструкция электромобиля используется для управления электродвигателями в промышленных, развлекательных или других электромобилях. Многие из них включают специальные функции, такие как выход обратной сигнализации, сигнал для спидометров и тахометров.
Заявка
Выбор контроллеров мотора требует анализа категорий приложений. Контроллеры скорости двигателя — это специализированные устройства, используемые для управления такими машинами, как конвейеры.
Многокоординатные контроллеры используются для управления и контроля нескольких независимых осей движения
Контроллеры движения роботов используют аппаратное и программное обеспечение цифрового управления движением для координированного многоосевого управления промышленными роботами и роботизированными системами
Сервоусилители — это электронные модули, преобразующие аналоговые командные сигналы низкого уровня в напряжения и токи большой мощности
Инверторные приводы преобразуют входы переменного тока в выходы постоянного тока
Высокочастотные приводы подают питание на двигатели переменного тока на частотах, значительно превышающих частоты, используемые в приложениях со стандартной мощностью
Рекуперативные приводы Поддержка торможения электродвигателя
Приводы с регулируемой скоростью поддерживают управление и регулировку скорости
Микроконтроллеры — это компьютерные системы на микросхеме, где требуется манипулирование большими объемами цифровых данных в реальном времени для их улучшения или модификации.Они используются для быстрого управления движением с высоким разрешением, а для программирования микросхемы DSP используется специальное оборудование для программирования.
Кремниевые выпрямители (SCR) используются в приводах двигателей постоянного тока для выпрямления входного переменного тока для создания привода постоянного тока.
Цифровые сигнальные процессоры (DSP) — это микропроцессоры, которые используют данные в реальном времени, такие как аудио, видео, температура, давление или положение, и математически манипулируют цифровыми данными, чтобы улучшить или изменить их.Они используются для быстрого управления движением с высоким разрешением, а для программирования микросхемы DSP используется специальное оборудование для программирования.
Широтно-импульсная модуляция (ШИМ) также известна как скалярное управление V / F. Привод PWM преобразует переменное напряжение и частоту в постоянный, а затем использует PMW для имитации синусоидальной волны. Приводы PMW не подходят для создания высокого крутящего момента на низких скоростях, поскольку крутящий момент и скорость регулируются косвенно.
Список литературы
РУКОВОДСТВО ПО ОБРАБОТКЕ ЦИФРОВЫХ СИГНАЛОВ ДЛЯ НАЧИНАЮЩИХ
Основные принципы управления двигателем
Что такое управление двигателем?
Чтение информации о контроллерах двигателей
Контроллер Roboteq SDC2160 (60 В) предназначен для преобразования команд, полученных от радиоуправляемого радио, аналогового джойстика, беспроводного модема, ПК (RS232 или USB) или микрокомпьютера в высоковольтный и сильноточный выход для управления одним или двумя двигателями постоянного тока. TE-144-060 $ 250,00 Распродано. Свяжитесь с нами, чтобы узнать о наличии. | |
Драйверы двигателей vs.Контроллеры двигателей
Если вы когда-либо создавали робота с колесами или какими-либо моторизованными частями, вы сталкивались с проблемой необходимости управлять им со своего микроконтроллера. Поскольку стандартный чип способен выдавать только небольшой ток, вы не сможете надежно управлять маленькими двигателями напрямую, не говоря уже о более крупных. Итак, вам нужен способ их водить, и здесь на помощь приходит водитель мотора.
В драйвере двигателя используется микросхема большего размера или дискретные полевые транзисторы, способные выдерживать большие токи и более высокие напряжения, чем стандартные 5 В / 3.3В с вывода микроконтроллера. Они позволяют управлять гораздо большей нагрузкой с помощью слабого сигнала. Важно отметить, что, говоря о драйверах и контроллерах двигателей, необходимо также учитывать тип двигателя. Щеточный двигатель постоянного тока является самым простым в управлении, поскольку не требуется времени или протокола, в то время как шаговый и серводвигатель требует определенного типа сигнала для правильной работы. Для простоты мы будем использовать примеры, предназначенные для простых щеточных двигателей, однако этот принцип применим ко всем типам.
Обычный вопрос, который задают те, кто впервые занимается робототехникой: «В чем разница между драйвером двигателя и контроллером двигателя?» TLDR заключается в том, что драйвер двигателя просто обрабатывает мощность для привода двигателей, тогда как логика а цифровое управление должно выполняться внешним микроконтроллером или микропроцессором, тогда как контроллер мотора имеет всю встроенную логическую схему и может управляться через интерфейс более высокого уровня, такой как сигнал ШИМ, USB, аналоговый вход и т. д.
Итак, это TLDR, но как насчет более глубокого изучения? Что ж, давайте начнем с того, что посмотрим, как работает наиболее распространенная форма управления скоростью двигателя; H-образный мост.
Драйверы двигателей
Как уже упоминалось, H-образный мост является наиболее распространенным способом управления щеточным двигателем постоянного тока, и его работа довольно проста. Он использует две пары транзисторов (обычно МОП-транзисторы) для управления направлением тока, протекающего через двигатель. При изменении направления тока (реверсирование напряжения на клеммах) направление вращения изменится. Поскольку щеточные двигатели прекрасно сочетаются с ШИМ-управлением, управление скоростью, а также управление направлением обеспечивается за счет импульсного управления полевыми МОП-транзисторами.Полевые МОП-транзисторы (или сокращенно полевые транзисторы) действуют просто как переключатели, поэтому, если вы пытаетесь осознать это, просто думайте о них как о простых переключателях включения / выключения. Я включил четыре диода, которые часто используются в конструкции Н-моста, поскольку они важны для защиты от напряжений, создаваемых двигателем при его вращении. Не беспокойтесь об этом слишком сильно, но помните о них, если планируете создавать свои собственные. Это станет более понятным на схеме H-образного моста, поэтому давайте посмотрим:
Как видите, переключение осуществляется четырьмя полевыми транзисторами.В зависимости от модели, возможно, потребуется управлять транзисторами меньшего размера, а дополнительные компоненты, такие как резисторы, не используются, чтобы их было легче читать.
Дистанционное управление
Чтобы повернуть двигатель в одном направлении, необходимо включить два полевых транзистора следующим образом. Это позволяет току течь через двигатель и создает движение:
Чтобы повернуть двигатель в другом направлении, противоположная пара полевых транзисторов включается (а остальные выключаются), меняя направление тока на обратное:
Как упоминалось ранее, управление скоростью может быть реализовано путем подачи импульсов на полевые транзисторы с помощью ШИМ, что приводит к их быстрому включению и выключению.Поскольку двигатель подчиняется законам физики (как и все мы), вращающийся ротор обладает достаточным импульсом, чтобы его инерция заставляла его вращаться, когда полевые транзисторы выключены, и в результате он усредняет скорость ШИМ. рабочий цикл. Чтобы узнать больше о ШИМ, ознакомьтесь с нашим руководством «Все о светодиодах».
Торможение
Если вы хотите, чтобы двигатель перестал вращаться, вы, конечно, можете отключить все полевые транзисторы, которые полностью отключат двигатель от источника питания. Однако двигатель все еще имеет обороты, поэтому постепенно он полностью остановится.Если вы хотите внезапно остановить двигатель, вы можете подать одинаковое напряжение с обеих сторон, известное как торможение:
Существует вариант использования, которого следует избегать всегда; то есть включение одной стороны H-моста, что создаст почти прямой путь от источника напряжения до земли. Это приведет к короткому замыканию в вашей цепи и повреждению компонентов, аккумуляторов и всего в цепи. В качестве примера ниже показана только одна сторона, но то же самое будет справедливо и для другой стороны, и если все четыре будут включены одновременно:
Итак, есть еще несколько скрытых деталей, которые необходимо учитывать при разработке драйвера двигателя с Н-образным мостом, но это общая концепция, и именно так работает большинство драйверов двигателя.Как видите, для управления драйвером двигателя необходимо реализовать цифровую логику, функции синхронизации и меры безопасности, но аппаратное обеспечение можно довольно легко связать с микроконтроллером.
Конечно, вам не обязательно строить свой следующий драйвер двигателя из отдельных компонентов (хотя это может быть отличный проект, чтобы узнать о нем, а также, если у вас есть какие-то нишевые спецификации). Существуют микросхемы драйверов двигателей, которые можно легко вставить в вашу печатную плату, а также готовые коммутационные платы и модули, которые вы можете подключить к своим проектам.Вот некоторые из наших любимых:
Контроллеры двигателей
Этот раздел будет немного короче предыдущего, поскольку создание драйвера двигателя — это просто вопрос добавления цифрового жгута для управления драйвером и реализации интерфейса для управления. Контроллеры двигателей будут иметь один или несколько из следующих входов:
- ШИМ
- Аналоговый сигнал
- USB
- Последовательный (I2C, SPI и т. Д.)
- UART
- RC (радиоприемник)
Итак, идея контроллера мотора состоит в том, что вы можете просто подключить мотор и источник питания, подключить контроллер к существующему проекту и связываться с ним так же легко, как это позволяет протокол.Цифровая связь с контроллером мотора позволяет даже получать данные обратной связи, такие как измерение тока и обнаружение ошибок.
Контроллеры двигателейс поддержкой USB позволяют управлять двигателем напрямую с USB-хоста, например компьютера! Программное обеспечение / протокол будут зависеть от самой платы, каждая марка будет отличаться, но это довольно круто. Таким образом, все, что вам нужно для управления драйвером двигателя, — это устройство, которое может связываться с ним с помощью методов, поддерживаемых платой контроллера.
Из-за дополнительных схем, встроенных в контроллеры двигателей, они являются более дорогим вариантом, но если вам просто нужна дополнительная плата, то они идеальны.
Вот несколько из наших любимых контроллеров моторов Maker:
Соответствие спецификации
И последнее, о чем нужно знать, что важно как для драйверов двигателей, так и для контроллеров, — это убедиться, что они соответствуют электрическим характеристикам двигателя. Например, некоторые моторы и совсем маленькие, и предназначены только для игрушек и вождения легких грузов.Они не потребляют слишком много тока и обычно работают при более низком напряжении (менее 12 В). Двигатели большего размера, которые могут управлять большими нагрузками, способны потреблять гораздо большие токи, особенно в условиях остановки или запуска, часто при напряжениях, равных или превышающих 12 В. Вам необходимо убедиться, что как ток (с учетом пиковых скачков), так и номинальное напряжение вашего драйвера / контроллера больше, чем у вашего двигателя.
Какой из них вам подходит?
Надеюсь, это даст вам некоторое представление о различиях между драйверами двигателей и контроллерами двигателей и поможет вам добавить движение в свой следующий проект.Что касается того, какой из них лучше всего подходит для вашего проекта, только вы можете принять это решение, но вот несколько моментов, которые следует учитывать:
- Контроллеры двигателей не требуют особого внимания, чтобы гарантировать, что они будут работать должным образом. Если вы можете с ним общаться, вы можете им пользоваться.
- Драйверы двигателя требуют большего внимания при реализации, поскольку вам необходимо создать программные (или аппаратные) функции для правильного управления полевыми транзисторами, гарантировать, что не будут подаваться неправильные управляющие сигналы, которые могут привести к короткому замыканию и т. Д…
- Драйверы двигателей обычно дешевле контроллеров, поскольку они более простые устройства. Контроллеры двигателей
- обеспечивают обратную связь, обнаружение ошибок и другие функции, которые обычно отсутствуют на базовых платах драйверов двигателей.
- Обычный старый драйвер двигателя может позволить вам точно контролировать, как двигатель приводится в действие, и дает больший объем разработки.
Если вы когда-либо создавали робота с колесами или какими-либо моторизованными частями, вы столкнетесь с проблемой в первую очередь…
Зависимость входного тока от тока двигателя, преобразование мощности — maxon Support
Тема:
Иногда обсуждают, почему ток двигателя, сообщаемый контроллером двигателя, сильно отличается от тока, сообщаемого источником питания. Это кажется удивительным для многих пользователей, особенно потому, что ток двигателя часто намного превышает входной ток контроллера двигателя.
В чем секрет этого и какое текущее значение правильное?
Решение:
Силовой каскад контроллера мотора похож на силовой преобразователь или своего рода электронный трансформатор. Это означает, что вы должны сравнить входную мощность (= «Напряжение питания» x «Входной ток»), обеспечиваемую источником питания , с выходной мощностью (= «Напряжение двигателя» x «Ток двигателя»), подаваемой на двигатель от силового каскада контроллера мотора. Если вы просто сравниваете «Входной ток» и «Ток двигателя», это вводит в заблуждение и не имеет никакого значения.
Силовой каскад современных контроллеров двигателей (таких как maxon ESCON, EPOS или MAXPOS) основан на так называемом ШИМ (широтно-импульсной модуляции), управляемом напряжением двигателя.Напряжение двигателя включается и выключается с высокой частотой (обычно 50–100 кГц) логикой контроллера двигателя. Время включения (= так называемый «рабочий цикл ШИМ») в каждом цикле ШИМ (0,01 мс в случае 100 кГц) определяет фактический текущий уровень напряжения двигателя. Результирующее напряжение двигателя может варьироваться от 0 В до почти напряжения питания в обоих направлениях. Напряжение двигателя (или рабочий цикл ШИМ) регулируется в каждом текущем цикле управления (обычно 0,1 — 0,01 мс) контроллера мотора в зависимости от текущей требуемой рабочей точки (т.е.е. скорость и крутящий момент) двигателя. На основе уравнения мощности это означает, что ток двигателя может (и обычно будет) намного выше, чем входной ток контроллера двигателя. Причина этого в том, что постоянно адаптированное к ШИМ напряжение двигателя (в зависимости от скорости и крутящего момента) ниже фиксированного напряжения питания (батареи или источника питания).
Формула преобразования мощности:
Схема системы:
Измерение мощности двигателя с помощью EPOS4 или IDX:
Пожалуйста, проверьте следующий документ Центра поддержки, чтобы найти информацию о том, как все соответствующие данные (напряжение питания, ток двигателя, рабочий цикл ШИМ) могут быть доступны объектам EPOS4 или IDX и как на основе этого можно рассчитать электрическую мощность двигателя:
-> EPOS4 / IDX: Расчет мощности электродвигателя
Вывод / Вывод:
- «Входной ток» контроллера мотора (= выходной ток источника питания или батареи) НЕ (!!) равен «Току мотора»!
- Входной ток контроллера мотора, сообщаемый источником питания, правильный.