Драйверы двигателя L298N, L293D и Arduino Motor Shield
Драйвер двигателя выполняет крайне важную роль в проектах ардуино, использующих двигатели постоянного тока или шаговые двигатели. C помощью микросхемы драйвера или готового шилда motor shield можно создавать мобильных роботов, автономные автомобили на ардуино и другие устройства с механическими модулями. В этой статье мы рассмотрим подключение к ардуино популярных драйверов двигателей на базе микросхем L298N и L293D.
Драйвер двигателя в проектах ардуино
Для чего нужен драйвер двигателя?
Как известно, плата ардуино имеет существенные ограничения по силе тока присоединенной к ней нагрузки. Для платы это 800 mA, а для каждого отдельного вывода – и того меньше, 40mA. Мы не можем подключить напрямую к Arduino Uno, Mega или Nano даже самый маленький двигатель постоянного тока. Любой из этих двигателей в момент запуска или остановки создаст пиковые броски тока, превышающие этот предел.
Как же тогда подключить двигатель к ардуино? Есть несколько вариантов действий:
Использовать реле. Мы включаем двигатель в отдельную электрическую сеть, никак не связанную с платой Arduino. Реле по команде ардуино замыкает или размыкает контакты, тем самым включает или выключает ток. Соответственно, двигатель включается или выключается. Главным преимуществом этой схемы является ее простота и возможность использовать Главным недостатком данной схемы является то, что мы не можем управлять скоростью и направлением вращения.
Использовать силовой транзистор. В данном случае мы можем управлять током, проходящим через двигатель, а значит, можем управлять скоростью вращения шпинделя. Но для смены направления вращения этот способ не подойдет.
Использовать специальную схему подключения, называемую H-мостом, с помощью которой мы можем изменять направление движения шпинделя двигателя. Сегодня можно без проблем найти как микросхемы, содержащие два или больше H-моста, так и отдельные модули и платы расширения, построенные на этих микросхемах.
В этой статье мы рассмотрим последний, третий вариант, как наиболее гибкий и удобный для создания первых роботов на ардуино.
Микросхема или плата расширения Motor Shield
Motor Shield – плата расширения для Ардуино, которая обеспечивает работу двигателей постоянного тока и шаговых двигателей. Самыми популярными платами Motor Shield являются схемы на базе чипов L298N и L293D, которые могут управлять несколькими двигателями. На плате установлен комплект сквозных колодок Ардуино Rev3, позволяющие устанавливать другие платы расширения. Также на плате имеется возможность выбора источника напряжения – Motor Shield может питаться как от Ардуино, так и от внешнего источника. На плате имеется светодиод, который показывает, работает ли устройство. Все это делает использование драйвера очень простым и надежным – не нужно самим изобретать велосипеды и решать уже кем-то решенные проблемы. В этой статье мы будем говорить именно о шилдах.
Принцип действия H-моста
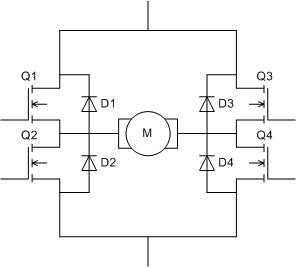 Принцип работы драйвера двигателя основан на принципе работы H-моста. H-мост является электронной схемой, которая состоит из четырех ключей с нагрузкой. Название моста появилось из напоминающей букву H конфигурации схемы.
Принцип работы драйвера двигателя основан на принципе работы H-моста. H-мост является электронной схемой, которая состоит из четырех ключей с нагрузкой. Название моста появилось из напоминающей букву H конфигурации схемы.
Схема моста изображена на рисунке. Q1…Q4 0 полевые, биполярные или IGBT транзисторы. Последние используются в высоковольтных сетях. Биполярные транзисторы практически не используются, они могут присутствовать в маломощных схемах. Для больших токов берут полевые транзисторы с изолированным затвором. Ключи не должны быть замкнуты вместе одновременно, чтобы не произошло короткого замыкания источника. Диоды D1…D4 ограничительные, обычно используются диоды Шоттки.
С помощью изменения состояния ключей на H-мосте можно регулировать направление движения и тормозить моторы. В таблице приведены основные состояния и соответствующие им комбинации на пинах.
| Q1 | Q2 | Q3 | Q4 | Состояние |
| 1 | 0 | 0 | 1 | Поворот мотора вправо |
| 0 | 1 | 1 | 0 | Поворот мотора влево |
| 0 | 0 | 0 | 0 | Свободное вращение |
| 0 | 1 | 0 | 1 | Торможение |
| 1 | 0 | 1 | 0 | Торможение |
| 1 | 1 | 0 | 0 | Короткое замыкание |
| 0 | 0 | 1 | 1 | Короткое замыкание |
Драйвер двигателя L298N
Модуль используется для управления шаговыми двигателями с напряжением от 5 до 35 В. При помощи одной платы L298N можно управлять сразу двумя двигателями. Наибольшая нагрузка, которую обеспечивает микросхема, достигает 2 А на каждый двигатель. Если подключить двигатели параллельно, это значение можно увеличить до 4 А.
Плата выглядит следующим образом:

Распиновка микросхемы L298N:
- Vcc – используется для подключения внешнего питания;
- 5В;
- Земля GND;
- IN1, IN2, IN3, IN4 – используется для плавного управления скоростью вращения мотора;
- OUT1, OUT2 – используется для выхода с первого двигателя;
- OUT3, OUT4 – используется для выхода со второго двигателя;
- S1 – переключает питание схемы: от внешнего источника или от внутреннего преобразователя;
- ENABLE A, B – требуются для раздельного управления каналами. Используются в двух режимах – активный, при котором каналами управляет микроконтроллер и имеется возможность изменения скорости вращения, и пассивный, в котором невозможно управлять скоростью двигателей (установлено максимальное значение).

При подключении двух двигателей, нужно проверить, чтобы у них была одинаковая полярность. Если полярность разная, то при задании направления движения они будут вращаться в противоположные стороны.
Драйвер двигателя L293D
L293D – является самой простой микросхемой для работы с двигателями. L293D обладает двумя H-моста, которые позволяют управлять двумя двигателями. Рабочее напряжение микросхемы – 36 В, рабочий ток достигает 600 мА. На двигатель L293D может подавать максимальный ток в 1,2 А.
В схеме имеется 16 выходов. Распиновка:
- +V – питание на 5 В;
- +Vmotor – напряжение питания для мотором до 36 В;
- 0V – земля;
- En1, En2 –включают и выключают H-мосты;
- In1, In2 – управляют первым H-мостом;
- Out1, Out2 – подключение первого H-моста;
- In3, In4 – управляют вторым H-мостом;
- Out3, Out4 – подключение второго H-моста.
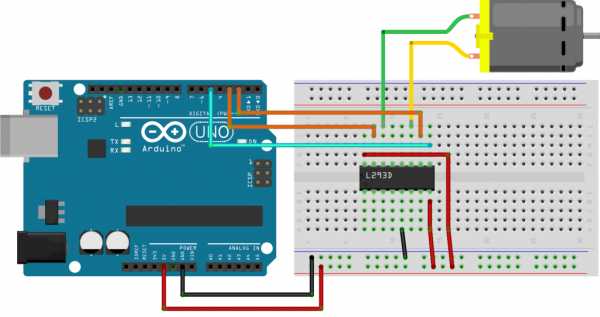
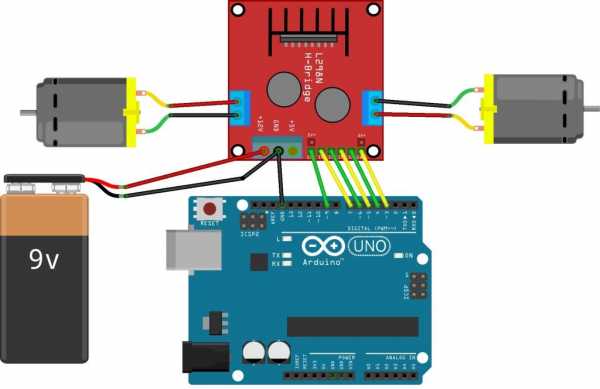
Для подключения к микроконтроллеру Arduino Uno нужно соединить выходы In1 на L293D и 7 пин на Ардуино, In2 – 8, In3 – 2, In4 – 3, En1 – 6, En2 – 5, V – 5V, Vmotor – 5 V, 0V – GND. Пример подключения одного двигателя к Ардуино показан на рисунке.
Драйвер двигателя на микросхеме HG7881
HG7881 – двухканальный драйвер, к которому можно подключить 2 двигателя или четырехпроводной двухфазный шаговый двигатель. Устройство часто используется из-за своей невысокой стоимости. Драйвер используется только для изменения направления вращения, менять скорость он не может.
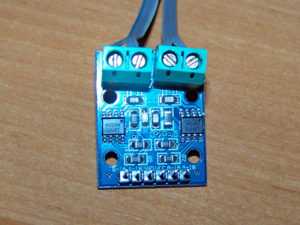
Плата содержит 2 схемы L9110S, работающие как H-мост.
Характеристики драйвера HG7881:
- 4-контактное подключение;
- Питание для двигателей от 2,5 В до 12 В;
- Потребляемый ток менее 800 мА;
- Малые габариты, небольшой вес.
Распиновка:
- GND – земля;
- Vcc – напряжение питания 2,5В – 12В;
- A-IA – вход A(IA) для двигателя A;
- A-IB – вход B (IB) для двигателя A;
- B-IA – вход A(IA) для двигателя B;
- B-IB – вход B (IB) для двигателя B.
В зависимости от поданного сигнала на выходах IA и IB будет разное состояние для двигателей. Возможные варианты для одного из моторов приведены в таблице.
| IA | IB | Состояние мотора |
| 0 | 0 | Остановка |
| 1 | 0 | Двигается вперед |
| 0 | 1 | Двигается назад |
| 1 | 1 | Отключение |
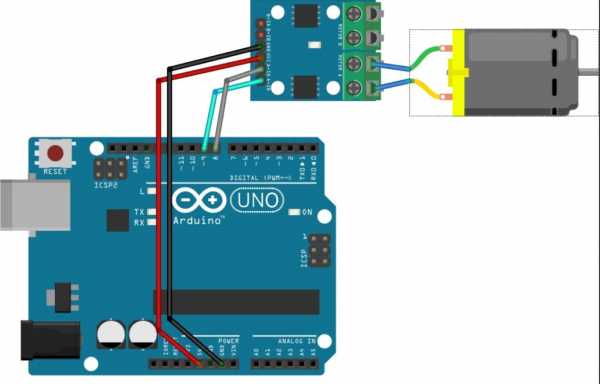
Подключение одного двигателя к Ардуино изображено на рисунке.
Сравнение модулей
Модуль L293D подает максимальный ток в 1,2А, в то время как на L298N можно добиться максимального тока в 4 А. Также L293D обладает меньшим КПД и быстро греется во время работы. При этом L293D является самой распространенной платой и стоит недорого. Плата HG7881 отличается от L293D и L298N тем, что с ее помощью можно управлять только направлением вращения, скорость менять она не может. HG7881 – самый дешевый и самый малогабаритный модуль.
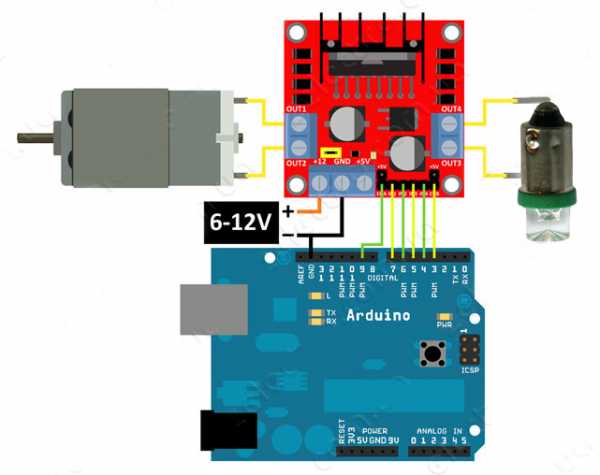
Подключение L298N к Arduino
Как уже упоминалось, в первую очередь нужно проверить полярность подключенных двигателей. Двигатели, вращающиеся в различных направлениях, неудобно программировать.
Нужно присоединить источник питания. + подключается к пину 4 на плате L298N, минус (GND) – к 5 пину. Затем нужно соединить выходы с L298N и пины на Ардуино, причем некоторые из них должны поддерживать ШИМ-модуляцию. На плате Ардуино они обозначены ~. Выходы с L298N IN1, IN2, IN3 и IN4 подключить к D7, D6, D5 и D4 на Ардуино соответственно. Подключение всех остальных контактов представлено на схеме.
Направление вращения задается с помощью сигналов HIGH и LOW на каждый канал. Двигатели начнут вращаться, только когда на 7 пине для первого мотора и на 12 пине для второго на L298N будет сигнал HIGH. Подача LOW останавливает вращение. Чтобы управлять скоростью, используются ШИМ-сигналы.
Для управления шаговым двигателем в Arduino IDE существует стандартная библиотека Stepper library. Чтобы проверить работоспособность собранной схемы, можно загрузить тестовый пример stepper_oneRevolution. При правильной сборке вал двигателя начнет вращаться.
При работе с моторами Ардуино может периодически перезагружаться. Это возникает из-за того, что двигателям требуются большие токи при старте и в момент торможения. Для решения этой проблемы в плату встроены конденсаторы, диоды и другие схемы. Также для этих целей на шидле имеется раздельное питание.
arduinomaster.ru
Корпус: Multiwatt15
| L2938N — представляет собой двойной мостовой драйвер для управления двунаправленными нагрузками с токами до 2А и напряжением от 4.5 V до 46 V. Микросхема разработана для управления реле, соленоидами, двигателями постоянного тока и шаговыми двигателями. L298N имеет TTL совместимые входы. В L298 существует разделение электропитания для логической схемы и для нагрузки, что позволяет подключить нагрузку с меньшим или большим напряжением питания, чем у микросхемы, а также уменьшает помехи. Микросхемы L298N имеют встроенную защиту от перегрева. Выходы микросхемы отключаются при нагреве до температуры около +70°С. | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
Расположение выводов L298N: 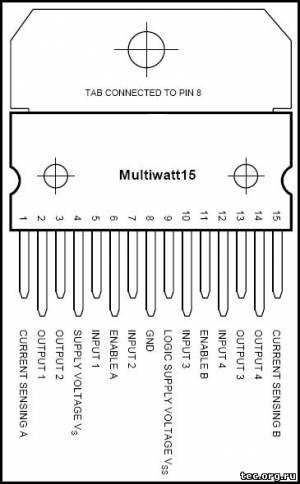 | Назначение выводов L298N:
Логическая таблица работы L298N
| ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
Структурная схема L298N 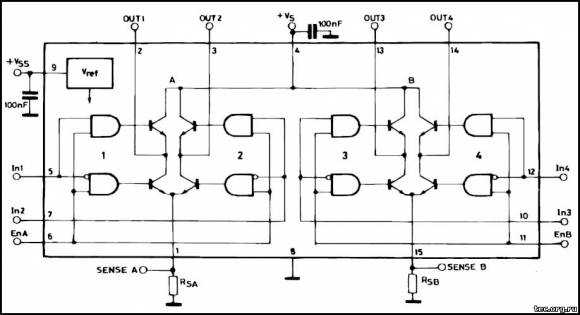
| |||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
Предельно допустимые режимы L298
| Основные параметры L298:
| ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
Типовые схемы использования драйвера L298N Использование внешних диодов для индуктивных нагрузок (моторов, реле, электромагнитов) обязательно! | |||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
Управление однонаправленными двигателями 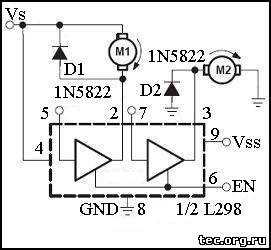
H — высокий уровень, L — низкий уровень, X — произвольно.
|
Управление двунаправленным двигателем 
| ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
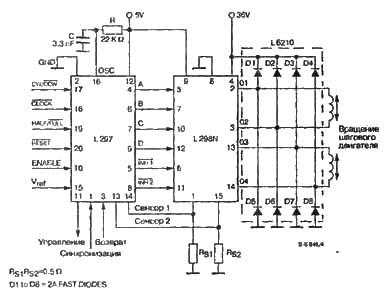
Типовая схема управления шаговым двигателем с помощью комплекта микросхем L297 и L298N: 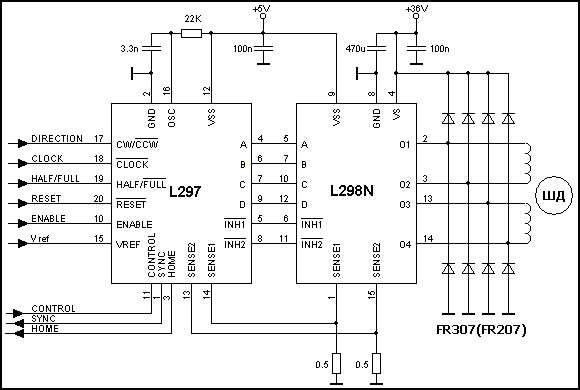 (Рекомендуется использовать быстрые диоды с Tвосст.
| |||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
Более подробное описание микросхемы L298N с электрическими характеристиками и диаграммами работы и схемами включения Вы можете получить скачав файл документации ниже (Datasheet на английском языке). | Ссылки: | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
tec.org.ru
L298N подключение к Ардуино — RadioRadar
Справочник
Главная Справочник Энциклопедия радиоинженера
«Справочник» — информация по различным электронным компонентам: транзисторам, микросхемам, трансформаторам, конденсаторам, светодиодам и т.д. Информация содержит все, необходимые для подбора компонентов и проведения инженерных расчетов, параметры, а также цоколевку корпусов, типовые схемы включения и рекомендации по использованию радиоэлементов.
Нет так давно мы рассматривали алгоритм сборки ЧПУ своими руками, где затрагивалась тема управления шаговыми двигателями, ведь именно они позволяют просто и точно спозиционировать фрезу в заданной точке.
Конечно, шаговые двигатели (ШД) используются не только в ЧПУ и 3D-принтерах, им есть масса и других применений. Например, вкупе с популярным «конструктором для взрослых», Arduino, на базе которого можно создать всё что угодно. Однако, связка «Ардуино – шаговый двигатель» требует дополнительный элемент – драйвер.
Из-за того, что двигатель требует повышенного напряжения и силы тока, непосредственное подключение его к микроконтроллеру невозможно, напряжения логического нуля в +5В и силы тока в 40 мА не хватит для работы любого шагового двигателя. Функцию усилителя/переключателя берет на себя драйвер.
О нём мы и поговорим подробнее ниже.
L298N описание
Модуль L298N выполняет роль Н-моста (напряжение, прикладываемое к двигателю постоянного тока, может менять полярность для того, чтобы изменить направление вращения в противоположную сторону) и универсального драйвера для независимого управления сразу двумя двигателями постоянного тока или для одного шагового двигателя.
Модуль собирается на основе одноименной микросхемы (L298N).
К L298N можно подключить двигатели, питающиеся напряжением от 5 до 35 вольт. Управление может быть реализовано в активном или пассивном режимах.
1. Активный – доступно не просто включение и отключение вращения мотора, но и управление его скоростью.
2. Пассивный – контроллер будет понимать только логику «включить/выключить двигатель». Управление уровнем выходного напряжения будет недоступно.
L298N – это облегчённая версия платы L293D. По сравнению с последней на L298N отсутствуют защитные диоды (их можно установить самостоятельно при необходимости защиты от скачков тока в процессе пуска двигателей).
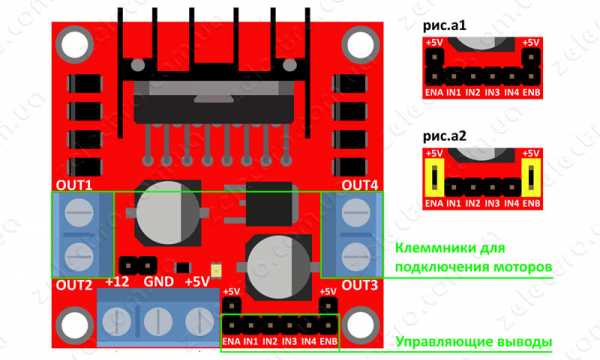
Подключение
Чтобы логика управления была понятнее, сначала разберёмся с джамперами и клеммами на плате.
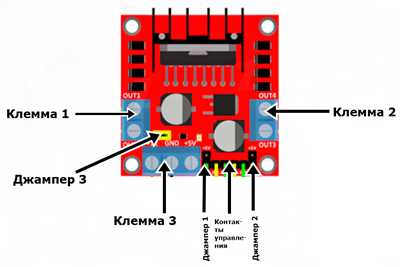
Рис. 1. Джамперы и клеммы на плате
К клеммникам 1 и 2 подключаются двигатели, логика подключения зависит от моделей двигателей и логики их работы.
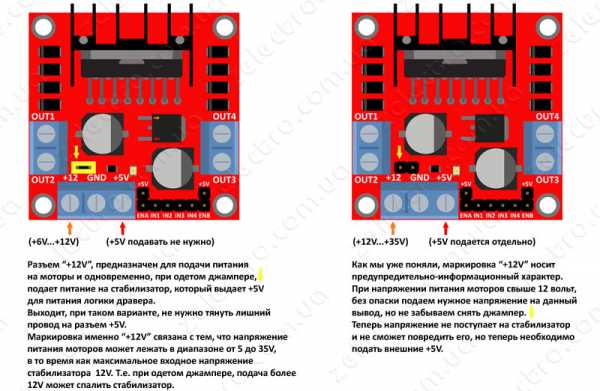
Блок клемм 3 отвечает за подключение питания двигателей. Первый контакт — +12. На него подаётся питание от 5 до 12 вольт, если джампер 3 одет, и от 12 до 35 воль, если джампер 3 снят.
При питании до +12В встроенный стабилизатор сам генерирует питание для логической части схемы, поэтому контакт +5В можно не использовать.
Если джампер 3 снят, то контакт +5В требуется запитать отдельно.
Управляющие сигналы от Ардуино или с другого микроконтроллера должны подаваться на контакты IN1-IN4, ENA, ENB. В зависимости от логических уровней и конфигурации джамперов 1,2 будет подаваться питание на двигатели/двигатель.
Джамперы 1 и 2 отвечают за переключение между активным и пассивным режимами работы драйвера. Если джампер одет, то реализуется логика «пассивного» управления.
Теперь для наглядности рассмотрим пару реальных схем подключения.
Управление двумя двигателями постоянного тока
Схема соединения будет выглядеть следующим образом.
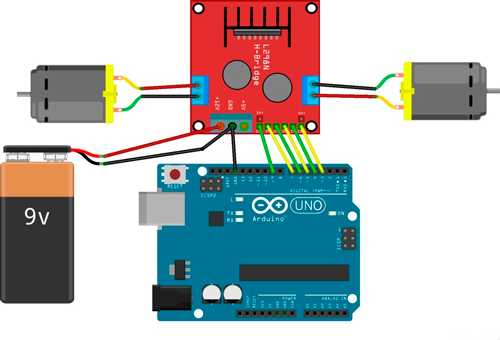
Рис. 2. Схема соединения
Напряжение питания двигателей ниже 12 вольт, значит джампер 3 установлен, джамперы 1 и 2 на контактах ENA и ENB сняты.
Стоит особое внимание уделить пинам на Ардуино с ШИМ-модуляцией (рядом с цифровым значением есть специальный символ «~»). Они необходимы для управления скоростью вращения вала (чем выше уровень напряжения, тем выше скорость).
Теперь о логике, на примере левого двигателя (см. изображение выше).
Таблица
Логический уровень на контакте ENA | Логический уровень на контакте IN1 | Логический уровень на контакте IN2 | Результат работы двигателя |
1 | 1 | 0 | Вращается по часовой стрелке |
1 | 0 | 1 | Вращается против часовой |
0 | 1 | 0 | Не вращается |
0 | 0 | 1 | Не вращается |
Логический уровень на контакте ENA Логический уровень на контакте IN1 Логический уровень на контакте IN2 Результат работы двигателя
Получается, что контакт ENA отвечает за разрешение работы двигателя. А от комбинации на входах IN1, IN2 зависит направление вращения.
Если на контакт ENA подать не логическую единицу, а заданный уровень напряжения из доступного диапазона (0-255), то изменится скорость вращения.
Управление шаговым двигателем
Соединение схемы управления, включающей в себя драйвер, двигатель Nema17 и Arduino Nano, выглядит следующим образом.
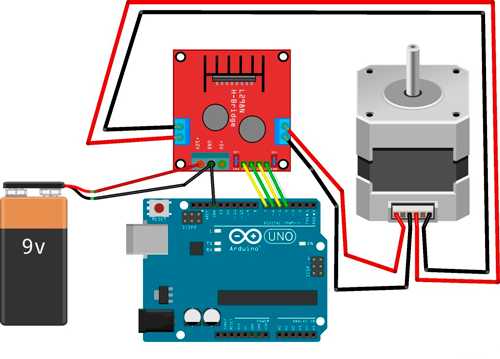
Рис. 3. Соединение схемы управления,
Назначение контактов A+, A-, B+ и B- может отличаться на вашей модели привода, поэтому необходимо изучить документацию для определения правильного назначения.
Ввиду того, что логика работы данной схемы предполагает наличие на выходах только логических нулей и единиц, то джамперами 1 и 2 модуль L298N переключается в пассивный режим.
Скетч для работы с шаговым двигателем есть во встроенной библиотеке IDE для Ардуино (называется Stepper Library, найти её можно так — File -> Examples -> Stepper).
Константа stepsPerRevolution отвечает за количество шагов в одном обороте, по умолчанию установлено значение 200. Его необходимо изменить, если модель вашего двигателя имеет другой показатель.
Метод myStepper.setSpeed() отвечает за настройку скорости вращения, по умолчанию в скетче указан показатель 60, его можно изменить под свои требования.
Вызов функции, инициализирующей вращение, осуществляется через метод step с параметром stepsPerRevolution, при отрицательном параметре вращение осуществляется в обратную сторону.
Пример с использованием этой библиотеки можно найти ниже во вложениях. Полную документацию по API можно найти на официальном сайте проекта.
Скетчи двигателей постоянного тока и шаговых двигателей можно найти здесь.
Автор: RadioRadar
Дата публикации: 30.05.2018
Мнения читателей
Нет комментариев. Ваш комментарий будет первый.
Вы можете оставить свой комментарий, мнение или вопрос по приведенному вышематериалу:
www.radioradar.net
Контроллер на L297 и L298
 |
|
Технические характеристики контроллера шаговых двигателей на L297 и L298
Управление через LPT интерфейс, посредством логических сигналов — Step & Direction
Тип двигателя -шаговый биполярный четырехфазный
Допустимые параметры двигателей- 46 В, 2А
Колличество подключаемых двигателей-3
Максимальная входная частота сигнала Step — 16 кГц
Частота ШИМ- 20кГц
Размер 90Х110 мм
Посмотреть описание L298N datasheet
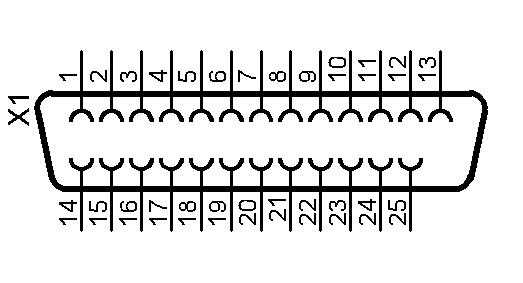 |
| Интерфейсный разъем DRB-25 |
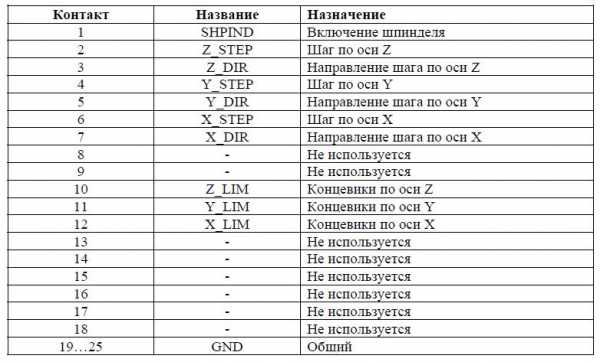 |
Названия осей X, Y, Z условно. Оси абсолютно равнозначны и могут использоваться на Ваше усмотрение
 |
 |
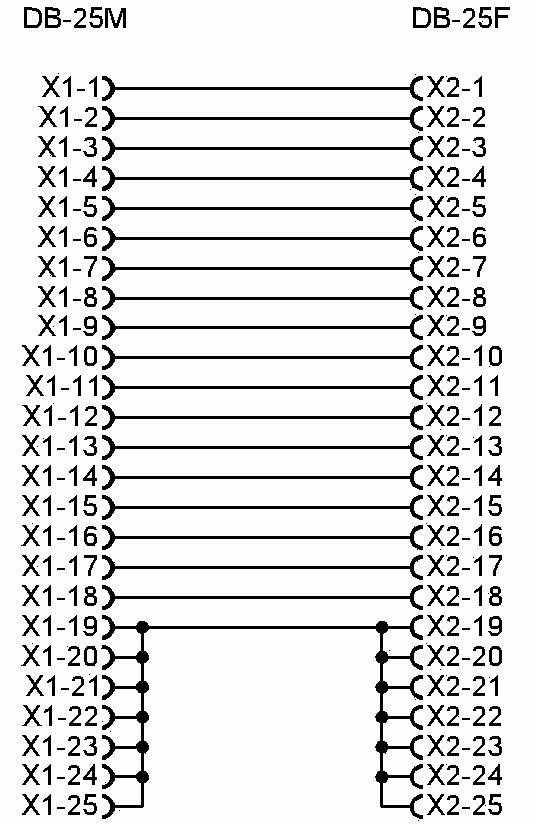
| Кабель называется «Удлинитель принтера» |
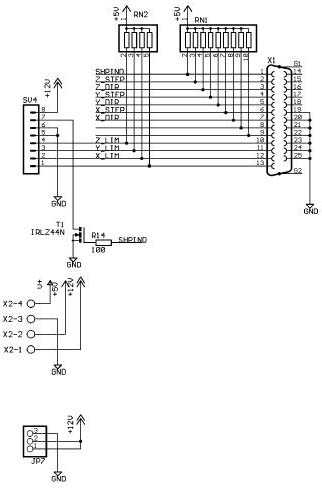
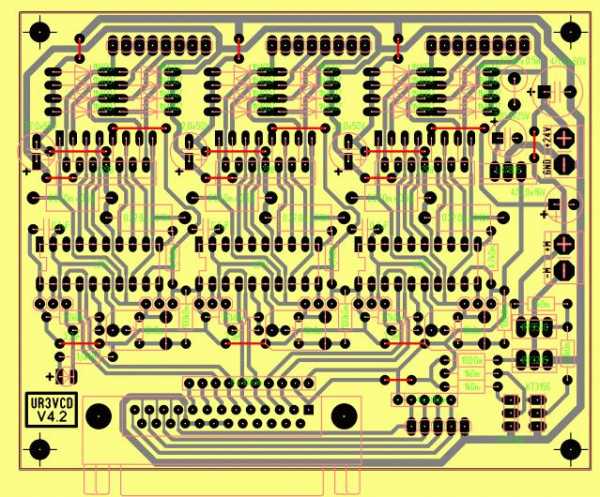
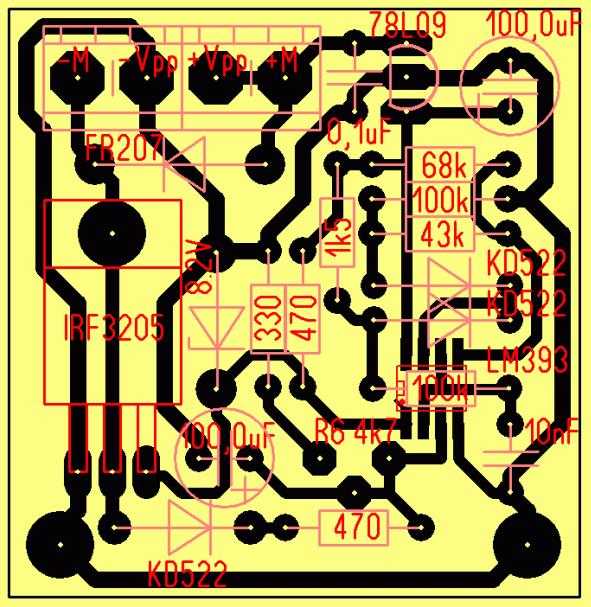
Размещение элементов и перемычек на плате
Использование L297 и L298 приводит к упрощению конструкции платы и минимизации числа компонентов. Кроме того, соединение этих двух чипов образует мощную плату контроллера, способную выдерживать до 36 В и 2 А на канал. На основании этого можно применить электродвигатели, рассчитанные на напряжение питания 4,5 В при токе 1,4 А на канал с разрешением 2° на шаг. Номинальная мощность находится в допустимых пределах.
Для активизации схемы сигнал, задающий направление вращения, от параллельного порта компьютера подается на вывод 17 микросхемы L297, а задающий количество шагов — на вывод 18. На вход микросхемы L298 подаются управляющие сигналы от L297, которые задают последовательность переключения обмоток, что определяет вращение двигателя, а микросхема L298 обеспечивает питание моторных обмоток в надлежащем порядке. Обратите внимание, что для питания обеих микросхем необходимо наличие питания напряжением 5 В. Восемь диодов FR304 подключают обмотки двигателя к соответствующим выводам микросхемы L298. Заметим, что необходимо использовать диоды с накоплением заряда, что защитит микросхему от наведенных высоких напряжений, возникающих в момент, когда какая-либо из обмоток выключена. По своим параметрам диоды могут различаться в зависимости от мощности, потребляемой электродвигателем. Мощность, в свою очередь, определяет ток, протекающий через диоды.
|
С1,C8,C9 — 3,3pF C5,C6,C7 — 470mF C2,C3, C4 — 100pF R1, R2, R6, R7, R8, R9 — 200 Om R3,R18,19 — 22k D1-21-1N1001(FR304) R5, R10, R12 — 22k R4, R11,R13 — 10kOm (переменные) R15, R16, R17 — 4.7k T1 — IRLZ24N R14 — 100 Om RN1-RN2- 4,7kOm |
Таблица Назначение выводов
|
№ |
Обозначение |
Функция |
|
1 |
SYNC |
Вывод на чипе генератора прерывателя. SYNC соединены у всех L297s, которые для синхронизации связаны вместе, и компоненты генератора удалены на всех кроме одного. Если используется внешний источник часов, это учтено |
|
2 |
GND |
Заземление |
|
3 |
НОМЕ |
Открытый вывод коллектора, который указывает, когда L297 находится в его начальном состоянии (ABCD=0101). Транзистор является открытым, когда сигнал активный |
|
4 |
А |
Фаза А двигателя возбуждает сигнал для мощного каскада |
|
5 |
Активный низкий уровень запрещает управление драйвером фаз А и В. При задействовании биполярного моста этот сигнал может использоваться, чтобы гарантировать быстрый спад тока нагрузки, когда обмотка не возбуждена. Также используется прерыватель, чтобы регулировать ток нагрузки, если уровень вывода CONTROL низок |
|
|
6 |
В |
Фаза В двигателя возбуждает сигнал для мощного каскада |
|
7 |
С |
Фаза С двигателя возбуждает сигнал для мощного каскада |
|
8 |
Активный низкий уровень запрещает управление возбуждением фаз С и D. Функции аналогичны INh2 |
|
|
9 |
D |
Фаза D двигателя возбуждает сигнал для мощного каскада |
|
10 |
ENABLE |
Чип допускает ввод. Когда уровни INh2, INh3 низкие (неактивные), уровни А, В, С и D также низкие |
|
11 |
CONTROL |
Вывод управления, определяющий действие прерывателя. При низком уровне прерыватель действует на INh2 и INh3; при высоком прерыватель выравнивает фазы А, В, С, D |
|
12 |
VS |
Вход напряжения питания +5 В |
|
13 |
SENS2 |
Ввод для тока нагрузки считывает напряжение от мощных каскадов фаз С и D |
|
14 |
SENS1 |
Ввод для тока нагрузки считывает напряжение от мощных каскадов фаз А и В |
|
15 |
Vref |
Опорное напряжение для схемы прерывателя. Напряжение, приложенное к этому штырьку определяет пиковый ток нагрузки . |
|
16 |
OSC |
Цепь RC (R, Vcc, С к земле), связанная с этой клеммой, определяет норму прерывателя. Клемма заземлена на всех соединенных микросхемах L297 кроме одной. f≈1/0,69rc |
|
17 |
CW/ |
Направление почасовой или против часовой стрелки управляется входом. Физически направление вращения двигателя также зависит от подключения обмоток. Поэтому при внутренней синхронизации направление может быть изменено в любое время |
|
18 |
Время шага. Активный отрицательный импульс на этом входе продвигает моторное приращение. Шаг происходит на положительном перепаде этого сигнала |
|
|
19 |
HALF/ |
Этот вход определяет режим. Высокий уровень выбирает режим половины шага, низкий уровень — полного шага. Одна фаза в режиме полного шага получается при выборе FULL, когда преобразователь L297s — в четной позиции. Две фазы в режиме полного шага, при выборе FULL, когда преобразователь — в нечетной позиции. |
|
20 |
Сброс ввода. Активный импульс низкого уровня на этом вводе возвращает преобразователь в исходную позицию (положение 1, ABCD=0101). |
Выводы 1 и 15 микросхемы L298 подключены через два силовых резистора сопротивлением 0,2 Ом к общему проводу. Резистор, подключенный к выводу 1, соединен с одной из двух обмоток возбуждения, а подключенный к выводу 15 — со второй обмоткой. Это дает возможность контроллеру L297 измерять ток, который протекает внутри двигателя. Микросхема L297 также измеряет напряжение между этими резисторами и на его основе задает режим модуля ШИМ, используемого для контроля тока в обмотках электродвигателя.
Резисторы R4 и R6, подключенные к выводу 15 микросхемы L297, работают как делитель напряжения и задают уровень, при достижении которого на обмотках возбуждения микросхема L298 вырабатывает сигнал об их отключении, что позволяет диодам разгрузить обмотку возбуждения. Она остается выключенной до окончания временной паузы, которая задается микросхемой L297.
Резистор R3 и конденсатор С1, подключенные к выводу 16 L297, задают тактовую частоту работы микросхемы. Конденсаторы С5, С6 и С7 фильтруют цепи питания электроники и двигателей.
Х2 обеспечивает питание схемы и электродвигателей.
Для синхронизации работы всех двигателей нужно соединить перемычкой 1 ногу всех схем L297.
 |
|
Разъем питания VCC – напряжение питания двигателя |
Подключение двигателей
| Восьми выводной униполярный двигатель |
| Шести выводной униполярный двигатель |
| Четырех выводной биполярный двигатель |
|
Подключение шпинделя и концевиков |
| Подключение вентилятора |
Програмное обеспечение Kcam4, Master5, JalaCNC, Mach2 и др. с управлением по LPT
ПРЕДУПРЕЖДЕНИЕ. Все подключения выполнять при отключенном напряжении питания компьютера и контроллера.
Перед использованием контроллера необходимо его настроить под имеющиеся шаговые двигатели. Необходимо установить максимальный ток двигателей. Устанавливается подстроечными резисторами (соответствие подстроечного резистора для каждого двигателя смотрите на схеме размещения элементов).
Выполняется следующим образом.
Для начала необходимо проверить печатный монтаж (наличие непропаев, отсутствие замыкания). Потом без впайки 298-х подать 5 вольт (ток потребления не должен превышать 100 миллиампер на канал. Далее выставляешь напряжение на 15 ноге не более 0,3 вольта и уже (если все в порядке впаиваешь 298). Ток потребления на 3-х каналах не должен превышать 250 милиампер. Только потом можно подключить двигатели и подать «высокое» напряжение.
На среднем контакте подстроечника установить напряжение ( вращением движка подстроечника , двигатели пока не подключать) найденное по формуле: U=I*R, где I-максимальный ток двигателя (например, для ДШИ-200-1 1.5А), R-сопротивление резистора в омах (0.2). Настройку необходимо выполнить для каждого двигателя. К контроллеру допускается одновременно подключать шаговые двигатели разной марки. Можно подключать не все четыре двигателя, а столько сколько нужно.
скачать 3ax_lpt-l297-l298.pdf
Запуск униполярного двигателя с ИС L298N или L6202
Иногда требования дизайна ограничивают выбор двигателей, хотя такое решение не является оптимальным. Когда проектировщик ищет высокоинтегрированное устройство управления с улучшенными эксплуатационными качествами, но вынужден использовать униполярный (6-контактный) электродвигатель, возможно применение таких устройств как, L298N или L6202. Для запуска электродвигателя его центральный отвод следует оставить неподключенным, а два вывода обмоток подключить к выводам моста, как показано на рисунке. При использовании такой конфигурации происходит явное увеличение вращающего момента для того же тока катушки или получается такой же вращающий момент при меньшем токе.
 |
| Запуск униполярного двигателя с использованием биполярного привода |
Система, при которой для управления униполярным двигателем используется ИС L298N или L6202, а центральный вывод Каждой катушки подключается к источнику электропитания, работать не будет. Во-первых, защитные диоды, включенные между коллектором и эмиттером (стоком и истоком) мостовых транзисторов, будут испытывать прямое смещение от трансформаторного действия обмоток двигателя, создавая короткое замыкание источника. Во-вторых, даже если напряжения питания разделены, L298N не может использоваться без высоковольтного источника питания, так как часть тока возбуждения для выходного моста берется от этого источника.
Выбор между прерыванием сигнала или фаз
Существует несколько способов осуществления прерывистого регулирования тока в шаговом двигателе. Мостовой вывод (L6202 или L298N) может управляться прерыванием сигнала включения, однофазным или двухфазным прерыванием, как показано на рис. 2.68-2.70. Микросхема L297 обеспечивает прерывание сигнала включения или однофазное прерывание, выбранное управлением входа. Если четыре вывода присоединены к четырем входам моста, L6506 обеспечивает однофазное прерывание с контуром рециркуляции в нижней части моста, а если ко входам подключены нечетные выводы включения — прерывание включения. Выбор правильного режима прерывания является важным моментом, который влияет на стабильность системы, а также на потери энергии. В табл. показано относительное сравнение различных режимов для постоянной частоты прерывания, тока электродвигателя и его индуктивности.
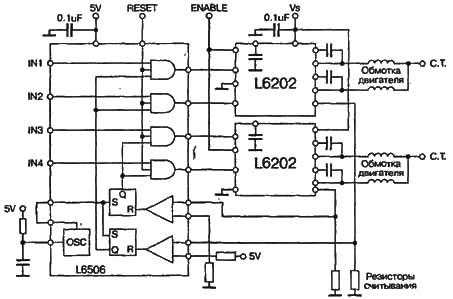 |
| Двухфазное прерывание |
| Однофазное прерывание |
Таблица Сравнительные преимущества режимов прерывания
|
Режим прерывания |
Пульсирующий ток |
Потери на электродвигателе |
Потери моста |
Минимальный ток |
|
Прерывание сигнала включения |
Сильный |
Большие |
Большие |
Низший |
|
Однофазный |
Слабый |
Маленькие |
Минимальные |
Слабый |
|
Двухфазный |
Сильный |
Маленькие |
Маленькие |
IPP/2 |
| Прерывание сигнала включения |
Прерывистый ток
Так как скорость изменения тока напрямую связана с напряжением, приложенным к катушке, соотношением прерывистый ток будет определяться частотой прерывания и напряжением на катушке. Когда катушка включена, напряжение на ней постоянно равно напряжению источника минус напряжение насыщения управляющего устройства. С другой стороны, напряжение на катушке в течение рециркуляционного периода зависит от выбранного режима прерывания.
При прерывании сигнала Включения или однофазном прерывании напряжение на катушке в течение рециркуляционного периода равно напряжению VF диодов или IR ДМОП-устройств (при использовании L6202 в режиме двухфазного прерывания). В этом случае наклоны кривых роста и спада тока примерно одинаковы, прерывистый ток может возрасти.
При использовании режима однофазного прерывания в течение рециркуляционного периода напряжение на катушке равно оставшемуся напряжению VQN (VSAT. для биполярных устройств или IxRDSon для ДМОП-устройств) транзистора плюс напряжение VF одного диода плюс падение напряжения на резисторе считывания, если он находится в контуре рециркуляции. В этом случае ток затухает намного медленнее, чем нарастает, и пульсирующий ток меньше, чем в предыдущем. Эффект становится более значимым при высоких напряжениях питания.
Потери в электродвигателе
Потери в электродвигателе включают в себя резистивные (I2R) и паразитные потери на вихревых токах. С ростом прерывистого тока и частоты последние обычно увеличиваются. Прерывание сигнала включения или двухфазное прерывание служит причиной роста температуры электродвигателя. Как правило, меньшие потери достигаются использованием однофазного прерывания.
Потери энергии в мостовой интегральной схеме
Внутренняя схема управления в микросхеме L298N обеспечивает активное выключение устройств выхода, когда они переключаются в ответ на четыре фазовых входных сигнала. Однако при переключении в ответ на сигналы включения в устройствах выхода снимается все базовое возбуждение, а в схеме нет активного элемента, который устранил бы накопленный заряд из базы. В процессе прерывания сигнала включения время спада тока в силовых устройствах дольше, чем при использовании прерывания фаз, поэтому при переключении потери также будут большими.
В ответ на входной сигнал или сигнал включения внутренняя логическая схема управления в микросхемах L6202 и L6203 действует одинаково, поэтому при использовании прерывания сигнала включения или фазового прерывания потери равны. Их можно уменьшить, применив прерывание одной фазы. Тем не менее, потери, обусловленные падениями напряжения на концах устройства, не одинаковы. Во время прерывания сигнала включения все четыре выходные ДМОП-устройства выключены, ток рециркулирует от корпуса к диодам утечки выходных ДМОП-транзисторов. При фазовом прерывании ДМОП-устройства включены и проводят ток в обратном направлении. Поскольку падение напряжения на концах ДМОП-устройств меньше прямого падения напряжения на диоде при токах менее 2 А, ДМОП-устройства отбирает значительный ток, и рассеяние мощности при использовании прерывания фаз принимает гораздо меньшие значения, чем при прерывании сигнала включения, что может быть видно из графиков в проспектах изделий.
Для этих устройств прерывание фаз всегда сопровождается меньшими потерями в устройстве. Чтобы определить, какие потери — переключения или насыщения — меньше для дискретных мостов, их необходимо вычислить.
Вычисление мощности рассеяния на мостовых микросхемах управления
Мощность, рассеиваемая на монолитных интегральных схемах управления (L298N или L6202), является суммой трех составляющих: потерь в статическом режиме, потерь насыщения и коммутационных потерь.
Потери в статическом режиме — это потери цепей смещения в устройстве, которые можно вычислить по формуле Vsxls, где Vs — напряжение источника питания, a Is — ток смещения или покоя источника. Если в устройстве используются два напряжения питания, например для L298N, необходимо высчитать потери для каждого и сложить их для получения общих потерь в статическом режиме. Обычно ток покоя большинства микросхем при большом диапазоне входных напряжений одинаков, и его максимальное значение, указанное в проспекте, можно использовать для напряжений питания в пределах допустимого интервала.
Потери насыщения — это сумма произведений падения напряжения на протекающий ток в каждом из выходных резисторов. Для биполярных устройств (L298N): VSATxI. Для силовых ДМОП-устройств: I2xRDSon.
Третьим основным компонентом потерь является коммутационная составляющая, связанная с устройствами вывода. В общем случае она может быть вычислена как:
Vsupply х Iload x tcross x fswitch
Чтобы подсчитать общие потери, составляющие формулы, вычисленные по их соответствующим рабочим циклам, складываются. Рабочий цикл тока покоя равен 100%.
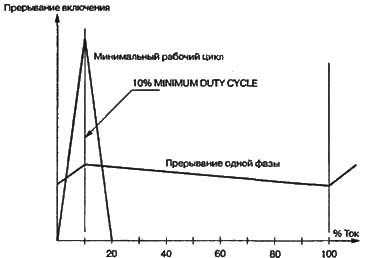
Минимальный ток
Значение минимального тока, который можно стабилизировать, является важным при работе с очень маленькими шагами, многоуровневом управлении током или попытке стабилизировать ток, очень малый по сравнению с максимальным, возникающим при прямом подключении электродвигателя к используемому напряжению питания.
При использовании прерывания сигнала включения или фазового прерывания единственной проблемой является потеря возможности регулирования тока ниже минимального значения. На рисунке показана типовая характеристика чувствительности для выходного тока как функции от опорного уровня.
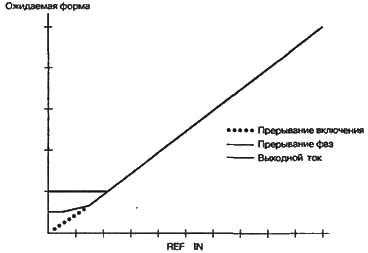 |
| Типовая характеристика чувствительности для выходного тока как функции от опорного уровня |
Минимальное значение задается характеристиками двигателя (главным образом, сопротивлением обмоток), напряжением питания и минимальным рабочим циклом, доступным при использующейся схеме управления. Минимально возможный ток течет по обмотке при запуске на минимальном рабочем цикле. Регулирование тока ниже этого значения невозможно. Когда прерывается сигнал включения, ток, текущий через катушку, может возвращаться к нулевому значению при каждом цикле, как показано на рисунке.
 |
| Зависимость тока, проходящего через электродвигатель, от времени прерывания |
При прерывании одной фазы ток может обратиться, а может и не обратиться в нулевое значение, также возможна остаточная составляющая постоянного тока.
При использовании устройств управления с постоянной частотой (L297 или L6506) минимальный рабочий цикл — это рабочий цикл генератора, поскольку триггер поддерживает выходной сигнал, пока генератор активен. В нестабильных по времени регуляторах, например PBL3717A, минимальное выходное время устанавливается по задержке распространения сигнала в цепи и его соотношению к выбранному времени нахождения в выключенном состоянии.
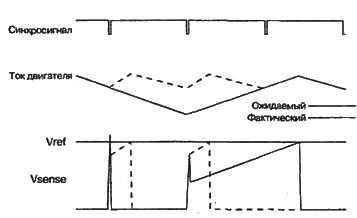
Ни одна из доступных управляющих микросхем не осуществляет режима прерывания двух фаз. Однако здесь он рассмотрен, поскольку очень легко создать токи, которые могут быть катастрофическими, если двухфазное прерывание используется совместно с методом обнаружения максимального тока. Когда максимальный ток меньше 1/2 прерывистого тока (Iрр), двухфазное прерывание может стать особенно опасным. В этом случае его реверсивная способность является причиной обратного тока в обмотке электродвигателя и потери контроля управляющей схемы. На рис. 2.73 показана форма колебания для данного случая.
| При двухфазном прерывании может быть утрачен контроль над током обмотки |
Когда ток достигает максимального значения, выключаются обе части моста, ток спадает до тех пор, пока не достигнет нулевого значения. Так как силовые транзисторы включены, он начинает расти в обратном направлении.
При новом включении триггера входы также активируются, и ток принимает положительное значение. Однако задачей единственного считывающего резистора является выпрямление тока, а компаратор учитывает только его значение, а не знак. Если абсолютное значение тока в отрицательном направлении выше заданного, компаратор будет обманут и сбросит триггер. Ток будет продолжать расти в отрицательном направлении, а схема стабилизации не сможет его контролировать.
По этой причине режим двухфазного прерывания с мостовыми схемами типа L298N и L6203 использовать не рекомендуется, он неосуществим ни в одной из легкодоступных управляющих интегральных схем. Эту проблему можно избежать, применив более сложную технику считывания, не спрямляющую обратный ток.
Стабильность прерывателя и звуковые шумы
Проблемой, с которой обычно сталкиваются при использовании прерывистой регулировки тока, является высокий уровень шума двигателя. В цепях с постоянной частотой широтно-импульсной модуляции это явление накладывает свой отпечаток на стабильность схемы управления током, в которой действующая частота прерывания сдвигается к субгармонике, задаваемой генератором. В схемах с одинаковым временем выключения оно серьезно изменяется по сравнению с устанавливаемым ждущим мультивибратором. Существуют две общие причины этого явления.
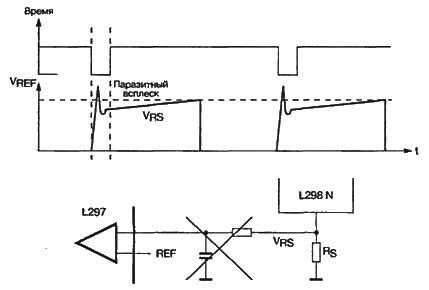
Первая причина связана с электрическими помехами и резкими увеличениями тока в системах, что может обмануть схему регулирования тока. В ШИМ-схемах детектирования максимума (L297 и L6506) ток электродвигателя контролируется путем наблюдения за падением напряжения на считывающем резисторе, соединенным с землей. При включении генератора внутренний триггер вызывает активацию выводов моста; обычно на этом резисторе происходит резкое повышение напряжения. Оно вызвано шумами в системе и восстанавливающимся обратным током рециркуляционного диода, который течет через считывающий резистор .
| Восстанавливающийся обратный ток рециркуляционного диода течет через резистор считывания, вызывая на нем повышение напряжения |
Если величины повышения достаточно для превышения эталонного напряжения, компаратор будет обманут и преждевременно сбросит триггер на нулевое значение, как показано на рисунке.
 |
| Повышение напряжения на считывающем резисторе, вызванное восстанавливающимися обратными токами и шумами, может обмануть компаратор, контролирующий ток |
При этом выход отключается, и ток продолжает спадать. Результатом является уменьшение основной частоты колебания тока, подаваемой на двигатель, к субгармонике частоты генератора, которая обычно колеблется в диапазоне звуковых частот. На практике столкнуться с примером, в котором период колебания тока равен двум, трем и даже четырем периодам колебания генератора, практически невозможно. Эта проблема более заметна при вводе в эксплуатацию макетных схем, у которых не очень хорошо расположены заземления, а фоновый шум вносит свой вклад в повышение напряжения.
При использовании микросхем L6506 и L298N величина повышения теоретически должна быть меньше, поскольку восстанавливающийся обратный ток течет на заземление, а не через считывающий резистор. Тем не менее в приложениях, использующих монолитные мостовые устройства управления (L298N), паразитные структуры часто порождают всплески восстанавливающегося тока, сходные по характеру с обратным током диода, которые могут течь через эмиттерный контакт устройства, а следовательно и через считывающий резистор.
При использовании управляющих ДМОП-устройств (L6202) восстанавливающийся обратный ток всегда течет через считывающий резистор, поскольку внутренний диод, параллельный нижнему транзистору, подключен к ДМОП-устройству, а не к заземлению. В нестабильных по времени цепях управления типа PBL3717A шумовой выброс нарушает работу компаратора и повторно включает ждущий мультивибратор, увеличивая установленное время выключенного состояния на целое число.
У данной проблемы есть два решения. Первое — установка RC фильтра нижних частот между считывающим резистором и входом компаратора. Для типового шагового двигателя это требует установки четырех дополнительных компонентов. Второе решение — использовать доминирующую установку внутреннего триггера микросхем L297 или L6506, чтобы скрыть повышение. Для этого длительность синхронизирующего импульса генератора должна быть большей, чем сумма задержки на прохождение сигнала (для L298N она равна 2-3 мкс) и длительности повышения (обычно в пределах 100 не для удовлетворительных диодов с накоплением заряда), как показано на рисунке.
 |
| Установка доминирующей фиксации на микросхеме L297 может быть использована для того, чтобы при переключении скрыть всплески напряжения на считывающем резисторе |
Когда этот импульс подается на вход триггера, любой сигнал, попадающий на вход сброса на компараторе, игнорируется. После окончания импульса компаратор сбрасывает триггер в нужный момент.
Решением проблемы в схемах с частотной модуляцией является установка времени запирания, в течение которого ждущий мультивибратор не перезапускается.
Лучший способ оценить стабильность цепи прерывания — остановить двигатель (удерживать минимальный синхросигнал микросхемы L297 или постоянные четыре входных сигнала на L6506) и посмотреть на кривую тока, которая не должна содержать фазовых сдвигов. Такая оценка каждого уровня регулируемых токов проводится дважды. Пробник, например устройство Tektronix АМ503, дает самую точную картину тока в электродвигателе. Если цепь работает стабильно, кривая тока по времени будет совпадать с синхронизирующим сигналом схемы управления. Так как рассмотренные ранее повышения в пределах от 50 до 150 не недолговременны, для оценки схемы необходимо использовать высокочастотный осциллограф с полосой пропускания 200 МГц. ИС L297 или L6506 предоставляют наилучший запускающий сигнал.
Другим фактором, который влияет на стабильность схем с постоянной частотой широтно-импульсной модуляции, является выбранный режим прерывания. На микросхеме L297 сигнал прерывания может быть приложен либо к входному сигналу включения, либо к входам четырех фаз. При прерывании входных сигналов включения путь рециркуляции проходит от заземления к нижнему рециркуляционному диоду, на нагрузку, затем на верхний рециркуляционный диод и обратно к источнику, как показано на рисунке.
Если не учитывать противоЭДС, напряжение на катушке во время включения t1, когда ток возрастает, и во время рециркуляции t2 вычисляется по формулам:
V1=Vs-2Vsat- VRsense
и
V2 = VSS +2VF
Время изменения тока задается выражением (без учета последовательного сопротивления):
Поскольку напряжение на катушке (V2) в процессе рециркуляции больше, чем напряжение (V1) на катушке во включенном состоянии, рабочий цикл будет больше 50%, потому что Ц должно быть больше t2. Когда во внимание принимается противоЭДС двигателя, рабочий цикл увеличивается, поскольку во время включения противоЭДС препятствует нарастанию тока.
При таком условии управляющая схема может стабильно функционировать на половине частоты генератора, как показано на рисунке.
| Когда выходной рабочий цикл превышает 50%, цепь прерывания может синхронизироваться субгармоникой частоты генератора |
Выходы выключаются, когда ток достигает заданного максимума. До момента включения триггера ток спадает, а затем снова начинает расти. Но поскольку t1 больше t2, он не успевает достичь максимума, когда с генератора приходит второй импульс. Поэтому второй импульс не действует, и ток продолжает расти, пока не достигнет установленного максимального значения, при котором компаратор сбрасывает триггер. Фактически схема управления током может функционировать в одном из двух стационарных режимов в зависимости от времени, за которое ток впервые достигает максимума.
Самое простое решение — наложение прерывающего сигнала на один фазный вход в режиме прерывания фаз, что осуществимо для микросхем L297 или L6506.
Другое решение, срабатывающее в некоторых случаях, — установка минимума рабочего цикла в пределах 30% путем подачи синхронизирующего сигнала на входы L297 или L6506. При такой конфигурации в течение каждого тактового интервала схема должна производить минимальный рабочий цикл. Это задаст более поздний момент времени, когда будет засечен максимальный ток, и частота прерывания засинхронизируется основной частотой. Принципиальным недостатком данного решения является большее значение минимального тока, который можно стабилизировать. В нескольких первых циклах прерывания Ток электродвигателя также стремится выйти за допустимый предел, поскольку реальный максимум при минимальном рабочем цикле не контролируется.
Влияние противоЭДС
ПротивоЭДС в шаговых электродвигателях стремится увеличить рабочий цикл управляющих схем прерывания, так как они мешают росту тока и способствуют его спаду. В крайних случаях (когда напряжение источника питания практически несравнимо с максимальной противоЭДС двигателя) требуемый рабочий цикл может превысить 50%. При этом возникает проблема стабильности рабочей частоты, рассмотренная выше.
В данном случае методику прерывания при постоянной частоте осуществить невозможно. Остается применить метод прерывания, в котором используется нестабильная по времени частотная модуляция, подобно выполненной в устройствах PBL3717A, ТЕА3717, ТЕА3718 и L6219.
Почему электродвигатель не работает
Начинающие пользователи прерывисто управляемых приводов обнаруживают, что при включении цепи электродвигатель не действует. Причина проста — не создается достаточный вращающий момент. Если при заданной скорости двигатель способен создавать требуемый вращающий момент, причина может скрываться в схеме регулирования тока. Как было сказано в предыдущем разделе, схема, контролирующая ток, может ошибаться. Иногда шумы настолько сильны, что реальный ток в электродвигателе близок нулю, и электродвигатель не создает вращающего момента. Другой причиной может стать недостаточный ток от источника питания.
Как избежать повреждений управляющего устройства
Многие пользователи спрашивают, почему устройства выходят из строя. Почти во всех случаях повреждения являются результатом электрических перегрузок (напряжениями или токами, вышедшими за допустимые пределы). Когда устройство дает сбой, необходимо внимательно оценить режимные параметры системы.
Часто повреждения вызываются переходным напряжением, создаваемым индукцией в электродвигателе. Правильно собранная система удерживает максимальное напряжение на источнике, коллекторе и эмиттере устройств выхода, а в микросхемах — на отрезках от одного вывода к другому в пределах максимального значения. Правильная схема содержит устройства фильтрации напряжения питания, фиксирующие диоды и/или демпфирующие устройства на выходе.
Очень важно грамотно выбрать фиксирующие диоды. Подходящий диод подбирается в зависимости от скорости переключающего устройства и поддерживает VF, которое сдерживает максимальное напряжение в допустимых пределах. Необходимо, чтобы характеристики внешних дискретных диодов и выходных транзисторов совпадали. Обычно для биполярных устройств выхода (L298N) использование диодов со временем восстановления меньше 150 не допустимо. Использовать 1N4001 не рекомендуется, потому диоды этой серии низкочастотные.
Избыточный ток также может испортить устройство, хотя это случается реже. В большинстве систем избыточный ток является результатом коротких замыканий в нагрузке. Если система склонна к коротким замыканиям, конструктор может продумать установку внешней защиты.
Следующей причиной для беспокойства является сквозной ток, который течет от источника к земле и обусловлен совместной проводимостью верхних и нижних транзисторов на мостовом выходе. Конструктивное исполнение устройств L298N, L293 и L6202 включает цепи для предотвращения этого явления. Пользователь никогда не спутает восстанавливающийся обратный ток диодов или паразитных структур со сквозным.
Далее рассмотрим модификации и изменения конструкции контроллера которые улучшают характеристики схемы.
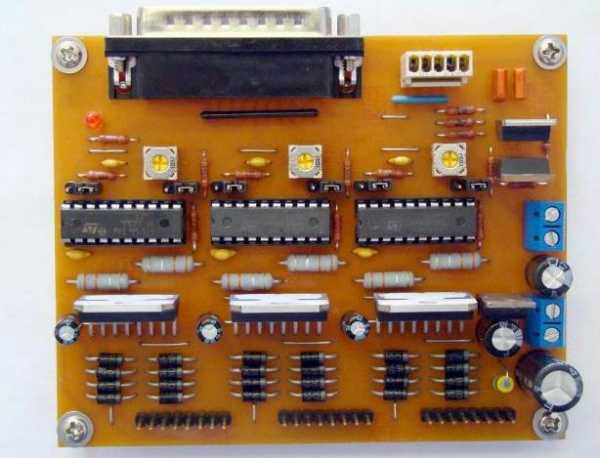
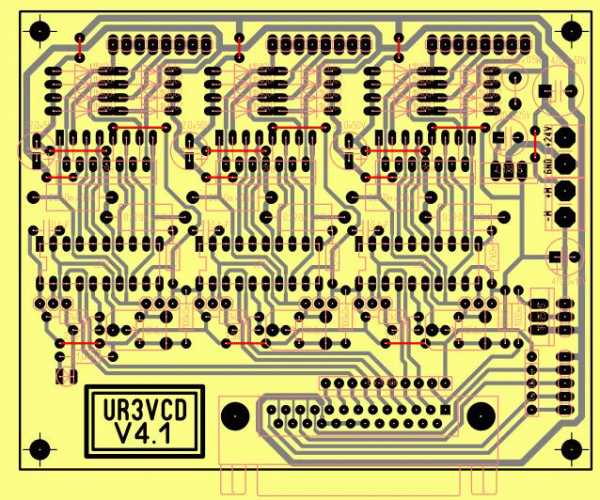 |
| Передвинуты компонентами, добавлен стабилизатор питания питания +5В и индикатор наличия питания. |
 |
| Контроллер UR3VCD V4.2 имеет основное отличие — это ключ управления шпинделем с динамическим торможением |
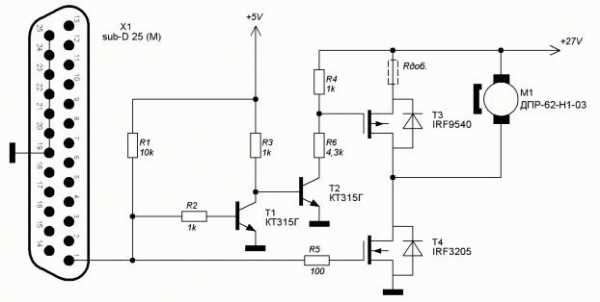 |
|
Схема ключа управления шпинделем Т1,Т2 любые маломощные транзисторы Т2 на напряжение КЭ не менее 40 В |
 |
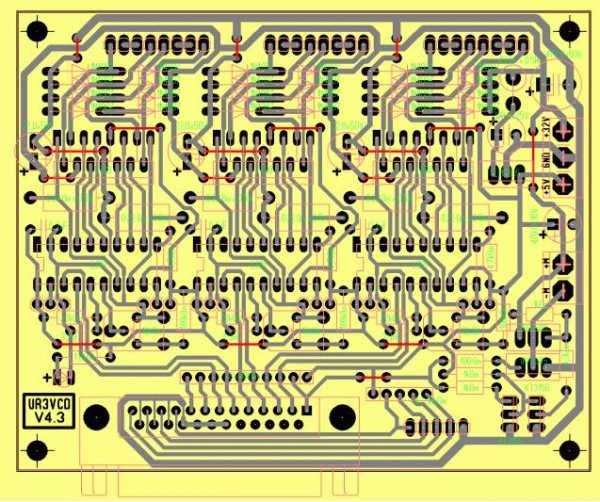 |
| Версия контроллера UR3VCD V4.3 — добавлена клемма цепи +5В, что позволяет запитать контроллер внешним напряжением +5В (исключив стабилизатор 7805 и баластный резистор), или на оборот подключить к контроллеру внешнюю слаботочную нагрузку по цепи +5В |
|
|
 |
| Стабилизатор скорости вращения двигателя шпинделя |
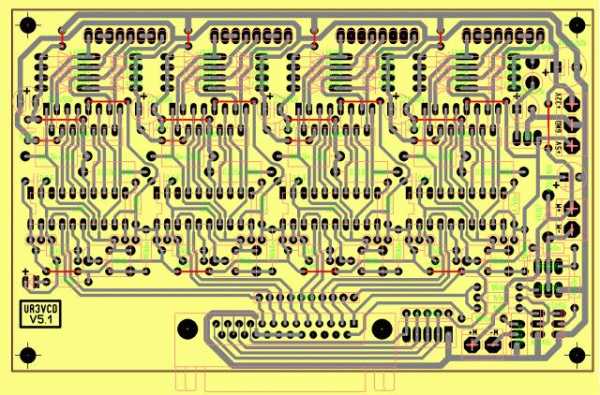 |
| Четырехканальная UR3VCD V5.1 |
graf3d.xyz
Подключение драйвера двигателей L298N к Arduino
Драйвер моторов на базе микросхемы L298N позволяет управлять двумя моторами и светодиодными лентами постоянного тока, либо шаговым двигателем с потребляемым током до 2 Ампер. Далее попробуем подключить и мотор и светодиод.
Чередование разноименных сигналов (высокий логический уровень или низкий) на парах выводов IN1, IN2 и IN3, IN4 задают направление вращения моторов.
Выводы ENABLE A, B (ENA привязан к IN1, IN2. ENB к IN3, IN4) отвечают за раздельное управление каналами. Могут использоваться в двух режимах:
- Условно «активном» режиме, когда ими будет управлять контроллер — высокий логический уровень разрешает вращение моторов, низкий запрещает вне зависимости от состояния выводов «IN». Для регулировки скорости моторов, на «EN» выводы подается ШИМ (PWM) сигнал. (рис.а1)
- Условно «пассивном» режиме, просто притянув выводы «EN» к высокому уровню (+5V). Для этого на плате, рядом с выводами ENA и ENB находятся штырьки соединенные с +5V. Замыкаем выводы с помощью джамперов (рис.а2). В данном режиме мы не сможем регулировать скорость двигателей, они будут всегда вращаться в полную скорость (за то для управления экономится 2 вывода контроллера). Направление вращения будет задаваться по-прежнему, а вот для остановки в данном варианте, состояние выводов будет уже играть роль.Для остановки нужно будет подавать одноименные сигналы на выоды «IN».
Подключение мотора и светодиода к модулю L298N
Вместо одного мотора будем подключать светодиод на 12В (см. видео ниже). Можете также использовать светодиодную ленту, только учтите что модуль при токе более более 2 ампер будет сильно греться.
Скетч
int IN1 = 7;
int IN2 = 6;
int IN3 = 5;
int IN4 = 4;
int ENA = 9; //ШИМ выход 1
int ENB = 3; //ШИМ выход 2
int i;
int spd = 10; //задержка при изменении скорости, чем меньше тем быстрее
void setup() {
pinMode (ENA, OUTPUT); //ШИМ выход 1
pinMode (IN1, OUTPUT);
pinMode (IN2, OUTPUT);
pinMode (ENB, OUTPUT); //ШИМ выход 2
pinMode (IN3, OUTPUT);
pinMode (IN4, OUTPUT);
digitalWrite (IN3, LOW); //полярность для светодиода "-"
digitalWrite (IN4, HIGH); //полярность для светодиода "+"
}
void loop() {
digitalWrite (IN2, HIGH); //полярность для мотора "-"
digitalWrite (IN1, LOW); //полярность для мотора "+"
for (i = 0; i < 250; i++) { //цикл разгона
analogWrite(ENA, i);
analogWrite(ENB, i);
delay(spd);
}
delay(2000); //ждем 2 сек
for (i = 250; i > 0; i--) { //цикл торможения
analogWrite(ENA, i);
analogWrite(ENB, i);
delay(spd);
}
analogWrite (ENA, 0);
analogWrite (ENB, 0);
delay(500);
digitalWrite (IN1, HIGH);
digitalWrite (IN2, LOW);
for (i = 0; i < 250; i++) {
analogWrite(ENA, i);
analogWrite(ENB, i);
delay(spd);
}
delay(2000);
for (i = 250; i > 0; i--) {
analogWrite(ENA, i);
analogWrite(ENB, i);
delay(spd);
}
analogWrite (ENA, 0);
analogWrite (ENB, 0);
delay(3000);
}
Видео
www.2150692.ru
Станок с ЧПУ своими руками
Подключение драйвера ШД на L298N к Ардуино, шаговому двигателю и БП
Получив множество писем с просьбами о рассмотрении возможности подключения к разрабатываемому станку простейшего драйвера ШД на L298N для биполярных двигателей, я купил на aliexpress.com драйвер ШД на L298N. Стоит он сущие копейки, работает по схеме двойного моста, соответсвенно не имеет никаких настроек, вроде режима шага, полушага, четвертьшага. Не поддерживает изменение тока удержания. Однако, как уже говорилось, он дёшев и позволяет управлять биполярными шаговыми двигателями в полношаговом режиме в том числе мощными двигателями в корпусе Nema.
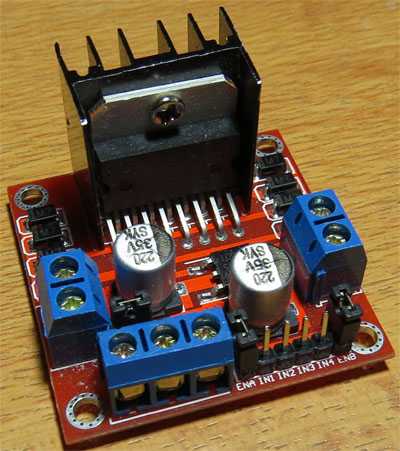
Как видно на фото, на драйвере уже установлены перемычки 12V, ENA и ENB. То есть драйвер находится в режиме 12-вольтового питания ШД, а также со всеми включенными входными пинами. Таким образом, для запуска шагового двигателя достаточно подключить ШД, питание и подавать «плюс» и «сток» в правильной последовательности на разные входы In1, In2, In3, In4.
Подключение драйвера на L298N к Ардуино, шаговому двигателю и блоку питания
Драйвер L298N к ардуино подключаем так: In1 драйвера к цифровому пину 2 Ардуино, соответсвенно In2 к пину 3, In3 к пину 4, In4 к пину 5. Провода ШД к L298N подключаем перебором. У меня заработало так: желтый к Out1, синий — Out2, зеленый — Out3, красный — Out4.
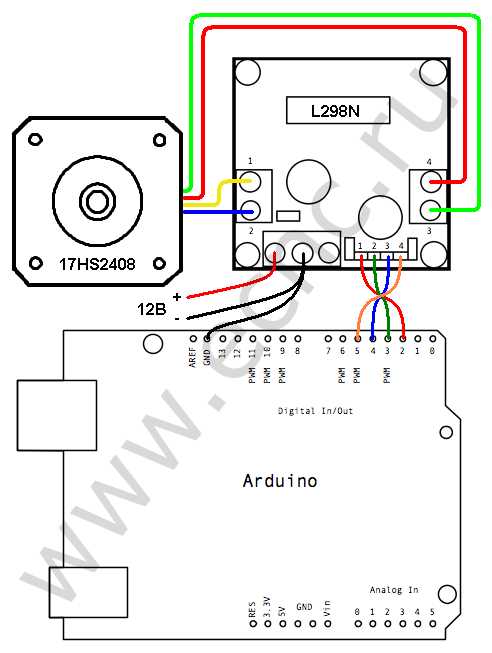
Остальные двигатели ШД подключаем к L298N аналогично. Второй драйвер подключаем начиная с пина 6 Ардуино, третий — с пина 10.
Указанная схема подключения биполярного двигателя к ардуино через драйвер ШД на L298N требует использования одной из прошивок, написанных для мощного станка с ЧПУ на L298N.
ecnc.ru