Применение асинхронных электродвигателей в промышленности | Полезные статьи
Агрегат, преобразующий электрическую энергию в механическую, называется электродвигателем. Эти машины могут применяться в бытовой технике (маломощные асинхронные двигатели) и в промышленности (краны и лебедки общепромышленного значения и прочее).
Рисунок 1. Классический пример трехфазного асинхронного электродвигателя — двигатель серии АИР Наибольшее распространение получили трехфазные асинхронные электродвигатели — они используются во всех сферах народного хозяйства (станки и оборудование, автоматика, телемеханика и т. д.).
На сегодняшний день именно этот тип электрических машин наиболее распространен. Объясняется это простотой эксплуатации, надежностью этих машин, небольшим весом и удачными габаритными размерами.
Электродвигатель с короткозамкнутым ротором используется в электроприводах разных станков (металлообрабатывающих, грузоподъемных, ткацких, деревообрабатывающих), в вентиляторах, землеройных машинах, в лифтах, насосах, бытовых приборах и т.
Электродвигатель асинхронный с короткозамкнутым ротором позволяет значительно снизить энергопотребление оборудованием, которое он питает, обеспечить высокий уровень его надежности, увеличить срок службы. Совокупность этих характеристик, как правило, сразу положительно отражается на модернизации всего производства.
Основные виды и некоторые характеристики электродвигателя асинхронного однофазного и трехфазного
Сегодня самыми востребованными в разных отраслях промышленности и любого производства являются следующие виды машин:
- общепромышленные — применяются на производстве и в агропромышленном секторе;
- взрывозащищенные — предназначены для использования в отраслях промышленности взрывоопасной: химическая, добыча нефти, газовая и угледобывающая промышленность;
- электродвигатели крановые, подходящие для работы в составе любых поворотных и крановых механизмов.
Рисунок 2. Двигатель с фазным ротором — крановый серии МТF. Электродвигатели прочно вошли в современную промышленность. От их надежности и качества зависит все производство. Не важно, стиральная машина или ткацкий станок, складское оборудование или система вентиляции — работа многих машин невозможна без исправной работы электромотора. В этой связи важно не просто купить электродвигатель, например у надежного поставщика, но и неукоснительно соблюдать все указанные в сопроводительных документах условия эксплуатации. Для северного сурового климата, к примеру, требуются специальные двигатели, которые рассчитаны на эксплуатацию в условиях низких температур. Для эффективной работы в электродвигателях может использоваться встроенная температурная защита. Такое конструктивное решение позволяет отключить двигатель от сети, если температура обмоток или подшипников превысит норму, или включить дополнительные вентиляторы обдува.
Электродвигатели прочно вошли в современную промышленность. От их надежности и качества зависит все производство. Не важно, стиральная машина или ткацкий станок, складское оборудование или система вентиляции — работа многих машин невозможна без исправной работы электромотора. В этой связи важно не просто купить электродвигатель, например у надежного поставщика, но и неукоснительно соблюдать все указанные в сопроводительных документах условия эксплуатации. Для северного сурового климата, к примеру, требуются специальные двигатели, которые рассчитаны на эксплуатацию в условиях низких температур. Для эффективной работы в электродвигателях может использоваться встроенная температурная защита. Такое конструктивное решение позволяет отключить двигатель от сети, если температура обмоток или подшипников превысит норму, или включить дополнительные вентиляторы обдува.
Для оформления заказа позвоните менеджерам компании Кабель.РФ® по телефону +7 (495) 646-08-58 или пришлите заявку на электронную почту zakaz@cable.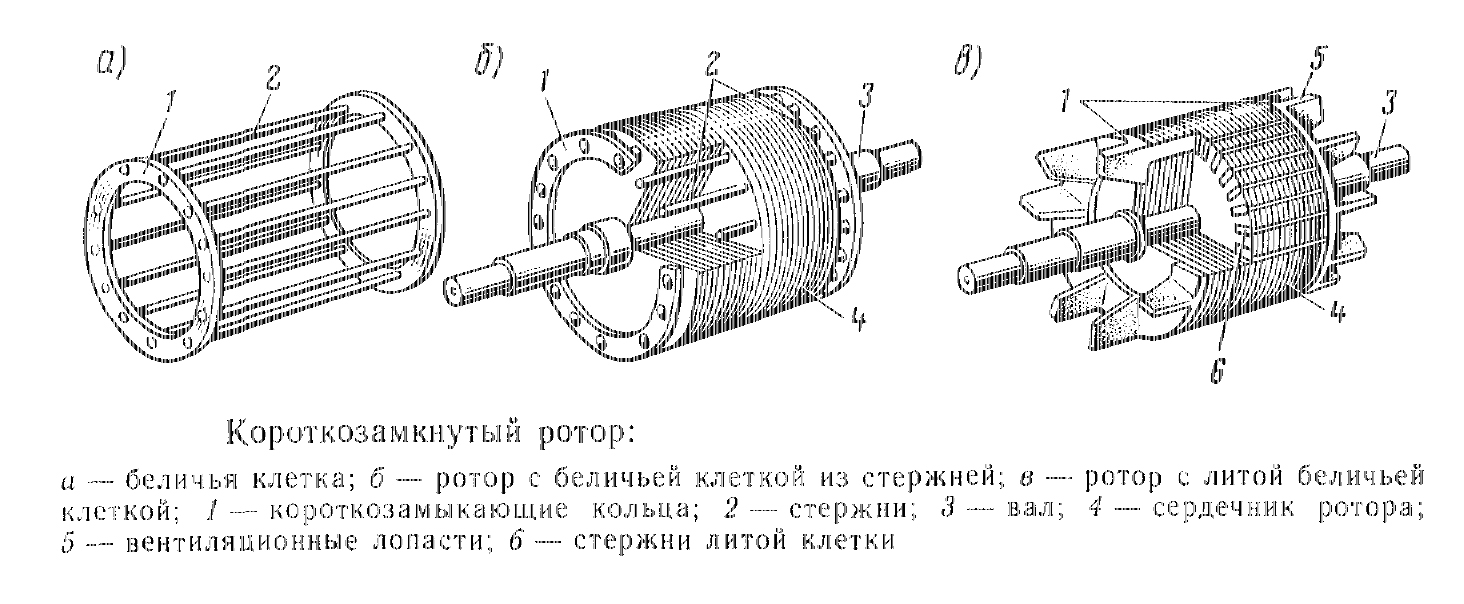 ru с указанием требуемой модели электродвигателя, целей и условий эксплуатации. Менеджер поможет Вам подобрать нужную марку с учетом Ваших пожеланий и потребностей.
ru с указанием требуемой модели электродвигателя, целей и условий эксплуатации. Менеджер поможет Вам подобрать нужную марку с учетом Ваших пожеланий и потребностей.
Электродвигатели асинхронные с короткозамкнутым ротором
Асинхронные электродвигатели с короткозамкнутым ротором сохраняют почти постоянную скорость вращения вала при разных нагрузках и переносят большие перегрузки. Их устройство и пуск просты, а к.п.д. достаточно высок. [c.75]
Асинхронный электродвигатель с короткозамкнутым ротором состоит из двух основных узлов неподвижного статора и подвижного ротора. В пазы собранного сердечника уложена трехфазовая обмотка. Сердечник статора укреплен в чугунном корпусе двигателя. На общий клеммник, укрепленный снаружи на корпусе, выведены три фазы обмотки статора. В пазы ротора заложены медные стержни или они залиты под давлением алюминием. Стержни с двух сторон припаяны к медным коль- [c. 31]
31]
На рис. 33 показан асинхронный электродвигатель с короткозамкнутым ротором в разобранном виде. Дви- [c.74]
Наибольшее распространение получили асинхронные электродвигатели с короткозамкнутым ротором, наиболее простые и надежные в эксплуатации. Но они не допускают экономичного изменения числа оборотов уменьшение числа оборотов реостатом в цепи статора столь же неэкономично, как и регулирование дросселированием. [c.171]
Магнитный пускатель представляет собой аппарат, состоящий из одного или двух контакторов, иногда содержащий реле и предназначенный для запуска и останова асинхронных электродвигателей с короткозамкнутым ротором, В схемах оборудования электровакуумного производства весьма часто используется как пусковой и коммутационный прибор дистанционного действия при ручном и автоматическом управлении энергоемкими процессами. Промышленностью выпускаются нереверсивные и реверсивные магнитные пускатели.  46]
46]
Аппараты, не требующие регулирования частоты вращения внутренних устройств, должны комплектоваться синхронными и асинхронными электродвигателями с короткозамкнутым ротором. Электродвигатели постоянного тока могут применяться только в тех случаях, когда электродвигатели переменного тока не обеспечивают требуемых характеристик или неэкономичны. [c.265]
Экранированный электропривод (рис. 6.4) представляет собой взрывозащищенный асинхронный трехфазный электродвигатель с короткозамкнутым ротором, с защитными гильзами, предохраняющими активные части ротора и статора от воздействия среды, заполняющей полость ротора электродвигателя. Полость статора заполнена трансформаторным сухим маслом по ГОСТ 982—80. На одном конце вала ротора установлено перемешивающее устройство, на другом — центробежный насос для обеспечения циркуляции жидкости в автономном контуре электропривода, необходимой для смазки подшипников и охлаждения электропривода. [c. 161]
161]
Тепловые реле предназначены для защиты от перегрузок асинхронных электродвигателей с короткозамкнутым ротором. Так как они не защищают от коротких замыканий и сами нуждаются в такой защите, то на ответвлении к электродвигателю перед пускателем ставится автоматический выключатель с электромагнитным расщепителем.
В отличие от обычного асинхронного электродвигателя с короткозамкнутым ротором у экранированного двигателя в зазор между ротором и статором вводится цилиндрический экран. Это приводит к тому, что зазор между железом статора и ротора в экранированном двигателе больше, чем в обычном. При этом экран устанавливается вплотную к железу статора, что позволяет делать экран достаточно тонким даже при больших давлениях в аппарате. Статор в этом случае является для экрана опорой. Конструкция такого двигателя будет рассмотрена в настоящей главе. [c.43]
Асинхронные электродвигатели с короткозамкнутым ротором обладают почти постоянной скоростью вращения вала при разных нагрузках, переносят большие перегрузки, пуск и устройство их просты, к.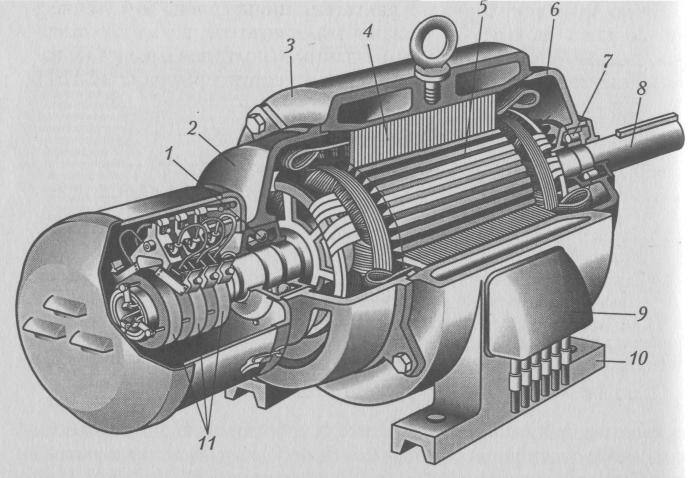 п. д. их выше, чем двигателей с фазным ротором. [c.233]
п. д. их выше, чем двигателей с фазным ротором. [c.233]
Агрегаты этой серии оснащены двухполюсными асинхронными электродвигателями с короткозамкнутым ротором. Электродвигатели могут иметь либо однофазную, либо [c.324]
Защита от поражения электрическим током при трехфазных несимметричных, двух- и однофазных замыканиях на землю, а также при однофазных касаниях к токоведущим частям. Защита электрических цепей от перегрузок и токов короткого замыкания, в том числе для защиты при пуске и остановке асинхронных электродвигателей с короткозамкнутым ротором [c.
На схемах всем элементам одного аппарата дают одинаковое буквенное обозначение, которое указывает на основную функцию, выполняемую этим аппаратом, например РВ — реле времени РН — реле напряжения Л — линейный контактор В и Я — контакторы направления вперед и назад и т. п. В качестве примера на рис. 31 показана схема пуска асинхронного электродвигателя с короткозамкнутым ротором. На схеме буквой Л обозначены катушка пускателя, его главные контакты в цепи электродвига- [c.73]
Управление в функции времени показано на схеме включения асинхронного электродвигателя с короткозамкнутым ротором (рис. 33, а). Поскольку пуск одного и того же двигателя при одинаковой нагрузке происходит за одно и то же время, для автоматизации процесса пуска используют реле времени с определенной выдержкой времени. При нажатии на кнопку Я (пуск) включается линейный контактор Л, который своими главными контактами включает электродвигатель через сопротивление R. Параллельно катушке контактора Л включена катушка реле времени РУ (которое называют реле ускорения).
Привод агрегатов этой серии осуществляется от двухполюсных асинхронных электродвигателей с короткозамкнутым ротором. Электродвигатели устойчивы к воздействию короткого замыкания и поэтому не требуют никакой внешней защиты. [c.321]
Для пуска насоса необходимо, чтобы по крайней мере нижняя секция его была полностью погружена в воду. Число секций напорного трубопровода и приводного вала зависит от глубины погружения насоса. Насос приводится в действие асинхронным электродвигателем с короткозамкнутым ротором. Двигатель соединяется с приводным валом насоса эластичной муфтой. Направление вращения вала против часовой стрелки, если смотреть на агрегат сверху.
На рис. 126 показан асинхронный электродвигатель с короткозамкнутым ротором в разобранном виде. Двигатель состоит из двух основных узлов неподвижного статора 7 и подвижного ротора 2. [c.232]
Двигатель состоит из двух основных узлов неподвижного статора 7 и подвижного ротора 2. [c.232]
Асинхронные короткозамкнутые и синхронные электродвигатели. При небольших мощностях (0,5—12 кет) и при отсутствии необходимости регулирования числа оборотов обычно применяются асинхронные электродвигатели с короткозамкнутым ротором. Для пуска короткозамкнутого двигателя требуется только прямое подключение его к сети через рубильники, пусковые ящики или магнитные пускатели, управляемые от кнопочной станции. [c.144]
Асинхронные электродвигатели трехфазного тока (насосные станции в СССР работают почти исключительно на трехфазном токе) можно применять с короткозамкнутым и фазовым ротором. Первый тип электродвигателя в последнее время нашел широкое распространение, так как запуск его осуществляется непосредственным подключением к сети при автоматизации пуска двигатель можно включать и выключать на расстоянии (дистанционное управление). К тому же электродвигатель е короткозамкнутым ротором меньше по габаритам и значительно дешевле двигателей других типов. [c.185]
[c.185]
Благодаря простоте и экономичности этот метод широко применяется в компрессорах с асинхронными электродвигателями с короткозамкнутым ротором мощностью до 100 кВт. [c.211]
Подключение трехфазных асинхронных электродвигателей с короткозамкнутым ротором. Эти двигатели выпускаются промышленностью на напряжение 380/220 или 220/127 в. Конструкцией предусматривается возможность переключения обмоток двигателя на рабочее напряжение, соответствующее сети. Включение обмоток по схеме треугольник (А) всегда соответствует меньшему напряжению сети из указанных в паспорте двигателя, а включение по схеме звезда (л)— большему. [c.125]
Более широкое применение нашел способ герметизации электродвигателей по внутреннему диаметру статора фиг. 21, а, так как в этом случае активные части статора отделены от рабочей среды, чем и обеспечивается их надежная защита. Наиболее просто герметизация по внутреннему диаметру статора обеспечивается у асинхронных электродвигателей с короткозамкнутым ротором за счет постановки экранирующей гильзы, поэтому такие электродвигатели уже нашли широкое применение при разработке герметических машин и аппаратов. [c.52]
[c.52]
Асинхронные электродвигатели с короткозамкнутыми роторами применяются для компрессоров с мощностями от самой малой до 2200 кет. Однака для мощностей до 40—50 кет эти двигатели являются наиболее рациональными. [c.142]
Пуск в ход асинхронных электродвигателей с короткозамкнутым ротором может быть осуществлен от полного или от пониженного напряжения сети. [c.27]
Примечания. I. Нормативы приведены для асинхронных электродвигателей с короткозамкнутым ротором нормального исполнения напряжением до 660 В включительно. Для определения трудоемкости одного ремонта и времени простоя электрических машин различных конструкций введены следующие коэффициенты для электрических машин (электродвигателей и генераторов) с частотой вращения 3000 об/мин — 0,8 1500 — 1,0 1000— 1,1 750 —1,2 600— 1,4 500 и ниже —1,5 коллекторных машин постоянного н переменного тока — 1,8 синхронных электродвигателей — 1,2 электродвигателей с фазным ротором, взрывозащищенных, крановых, погружных и многоскоростных — 1,3 электрических машин напряжением 0,66—3,3 кВ — 1,7 6,6 кВ, 10 кВ —2,1. [c.130]
[c.130]
Существуют следующие способы пуска асинхронных электродвигателей с короткозамкнутым ротором и синхронных электродвигателей с пусковой короткозамкнутой клеткой [c.149]
Во взрывоопасных наружных установках класса В-1г рекомендуется установка закрытых асинхронных электродвигателей в любом взрывозащищенном исполнении, соответствующем категориям и группам данных взрывоопасных смесей. Допускается также применение взрывонезащищенных асинхронных электродвигателей с короткозамкнутым ротором, пригодных для установки вне зданий (на открытом воздухе). [c.127]
Тихоходные мапшны барабанного тина (грануляторы, сушилки, печи и т. п.) часто приводят от электродвигателя через редукторы и зубчатую передачу, гс ик.овое колесо которой связано с барабаном. Если не требуется изменение частоты вращения барабана во время работы, используют асинхронные электродвигатели с короткозамкнутым ротором. Направление вращения вепцового зубчатого колеса должно обеспечивать разгрузку опорных станций от составляющей окружного усилия. При значительных габаритах машины венцоЕое колесо выполняют из двух частей и кренят к барабану упругими связями (см. гл. 12, 2), что обеспечивает плавность работы зубчатой передачи и удовлетворительную работу футеровки при температурной дефорлгации корпуса. [c.138]
При значительных габаритах машины венцоЕое колесо выполняют из двух частей и кренят к барабану упругими связями (см. гл. 12, 2), что обеспечивает плавность работы зубчатой передачи и удовлетворительную работу футеровки при температурной дефорлгации корпуса. [c.138]
Для барабанных машин перспективен дугостаторный электрический привод — современный безредукторный привод, позволяющий плавно регулировать частоту вращения барабана. Он представляет собой асинхронный электродвигатель с короткозамкнутым ротором. Функцию последнего выполняет сварной, бандаж, жестко связанный с барабаном, во внешние пазы которого уложены алюминиевые стержни статор имеет форму дуги с центральным углом менее 90°, что позволяет уменьшить число пар полюсов и частоту вращения ротора. Частоту враш,ения регулируют изменением частоты напряжения двигатель,в этом случае имеет преобразователь частоты на тиристорах с независимым регулированием выходных частоты и напряжения. [c.138]
Электронасосы типа ОМПВ представляют собой погружной агрегат моноблочного типа, состоящий из встроенного герметизированного водозаполненного асинхронного электродвигателя с короткозамкнутым ротором и насосной части. [c.770]
[c.770]
Магнитные пускатели иредназначены для дистанционного управления трехфазными асинхронными электродвигателями с короткозамкнутым ротором и другими ириемниками энергии. Включение магнитных пускателей может производиться вручную с помощью кнопочного поста и автоматически с помощью датчиков автоматики неносредственно или через промежуточные реле с помощью блок-контактов других пускателей. Отключение пускателей производится вручную или автоматически, ири аварийных режимах с помощью тепловых реле или реле максимального тока, нри отключе- [c.815]
В приводах для аппаратов с перемешивающими устройствами применяются асинхронные электродвигатели с короткозамкнутым ротором. В пусковой период при сильных перегрузках электродвигателей вследствие увеличения силы тока происходит интенсивное тепловыделение в обмотках. При длительном пусковом периоде в этом случае может выйти из строя изоляция и перегореть обмотка двигателя. Допускаемое время пускового периода зависит от типа двигателя, класса изоляции и теплового состояния двигателя перед пуском. Для трехфазных асинхронных двигателей серии А02 и BAO мощностью от 0,6 до 100 кВт при классе изоляции не ниже В для пуска двигателя в на-грето состоянии (илн при двукратном пуске в холодном состоянии) допускаемая продолжительность пускового периода Тдоп = 10 с [6]. [c.245]
Для трехфазных асинхронных двигателей серии А02 и BAO мощностью от 0,6 до 100 кВт при классе изоляции не ниже В для пуска двигателя в на-грето состоянии (илн при двукратном пуске в холодном состоянии) допускаемая продолжительность пускового периода Тдоп = 10 с [6]. [c.245]
Асинхронные электродвигатели с короткозамкнутым ротором выпускают мощ ностью от 0,6 до 125 квт. Такие электродвигатели выполняют в чугунном или алю миниевом корпусе с соответствующим различием в весе. Для привода компрессоро при пуске под нагрузкой в р име автоматической работы применяют электродви гатели с повышенным пусковым моментом, имеющие отношение начального пуско вого момента к номинальному 1,7—2,0. При переменной нагрузке компрессорО применяют также многоскоростные электродвигатели с переключением числа па полюсов и соответствующим изменением числа оборотов. [c.260]
Привод циркуляционных насосов ТР серии 200 осущ е-ствляется от двух или четырехполюсных асинхронных электродвигателей с короткозамкнутым ротором. Электродвигатели с одной ступенью частоты вращ,ения закрытого исполнения с поверхностным обдувом и подшипником со стороны привода могут иметь либо однофазную, либо трехфазную схему подключения к сети. [c.343]
Электродвигатели с одной ступенью частоты вращ,ения закрытого исполнения с поверхностным обдувом и подшипником со стороны привода могут иметь либо однофазную, либо трехфазную схему подключения к сети. [c.343]
Д—асинхронный электродвигатель с короткозамкнутым ротором КВО, J B3 —путевые микровыключатели МП 1101 открытия и закрытия KBI, —дополнительные путевые микровыключатели МП 1101 ВМО, BjM3 —моментные микровыключатели МП 1101 открытия и закрытия О, 3 —магнитные пускатели открытия и закрытия ЛО, ЛЗ, ЛМ —сигнальные лампы Открыто , Закрыто и Муфта КО, КЗ, КС — кнопки управления Открыто , Закрыто и Стоп П —потенциометр ППЗ—20 (20 кОм) Яр —предохранитель Д—автомат J—4—контакты микровыключателей. [c.85]
Продолжительность простоя в ремонте и трудозатраты на ремонт асинхронных электродвигателей с короткозамкнутых ротором нормального исполнения приведены в таблице- Для электродвигателей с фазным ротором, взрывозащищенных и крановых нормативы простоя в ремонте и трудозатраты на трудзатраты на ремонт увеличиваются в 1,3 раза, для двигателей напряжением более 1000 в — в 1,2 по сравнению с аналогичными двигателями напряжением менее 1000 в.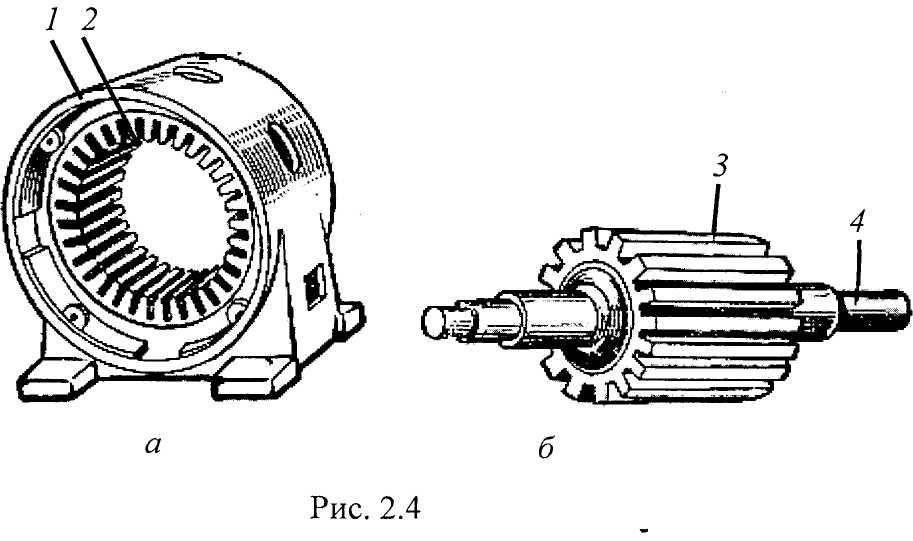 [c.136]
[c.136]
Асинхронные электродвигатели являются электрическими машр1 нами переменного тока и состоят из неподвижной части — статора и вращающейся части — ротора, на которых расположены обмотки. Асинхронный электродвигатель может быть с фазным илн с короткозамкнутым ротором. У электродвигателей с фазным ротором обмотки последнего выведены на кольца, расположенные на валу машины, и допускают присоединение дополнительных регулируемых сопротивлений. Сопротивления эти при пуске электродвигателя постепенно выводятся, после чего все три фазы замыкаются накоротко специальным приспособлением — короткозамы-кателем. Электродвигатели с короткозамкнутым ротором изготовляют с обмоткой, заранее замкнутой накоротко. [c.24]
Преимущества и недостатки асинхронного двигателя
Подавляющее большинство электродвигателей, используемых в промышленности – асинхронные двигатели с короткозамкнутым ротором. В новом оборудовании их доля составляет более 95%, остальное – серводвигатели, шаговые двигатели, щеточные двигатели постоянного тока и некоторые другие специфические виды приводов.
Преимущества асинхронного двигателя
Конструкция. По сравнению с другими типами электродвигателей асинхронный двигатель имеет наиболее простую конструкцию. С одной стороны это объясняется использованием стандартной трехфазной системы электроснабжения, с другой – принципом действия агрегата. Данная особенность обуславливает еще одно важное преимущество — невысокую цену асинхронных приводов. Среди двигателей разных типов одинаковой мощности асинхронный будет самым дешевым.
Подключение. Благодаря тому, что в стандартной трехфазной системе питания фазы сдвинуты на 120°, для формирования вращающегося поля не нужны дополнительные элементы и преобразования. Вращение поля внутри статора и, как следствие, вращение ротора обусловлены самой конструкцией асинхронного двигателя. Достаточно обеспечить подачу напряжения через коммутационный аппарат (контактор или пускатель), и двигатель будет работать.
Эксплуатация. Затраты на эксплуатацию асинхронного электродвигателя крайне малы, а обслуживание не представляет никаких сложностей. Нужно лишь время от время проводить чистку от пыли и по необходимости протягивать контакты подключения. При правильной установке и эксплуатации двигателя замена подшипников производится раз в 15-20 лет.
Недостатки асинхронных двигателей
Скорость вращения ротора. Скорость вращения вала двигателя зависит от частоты питающей сети (стандартные значения в промышленности – 50 и 60 Гц) и от количества полюсов обмоток статора.
Это можно считать недостатком в том случае, когда необходимо в процессе работы менять скорость вращения. Для решения данной проблемы были разработаны многоскоростные асинхронные двигатели, у которых имеется возможность переключения обмоток.
Кроме того, в современном оборудовании управление скоростью реализуется за счет преобразователей частоты.
Скольжение. Эффект скольжения проявляется в том, что частота вращения ротора всегда будет меньше частоты вращения поля внутри статора. Это заложено в принцип работы асинхронного двигателя и отражено в его названии. Скольжение также зависит от механической нагрузки на валу.
При необходимости скольжение можно скомпенсировать, а скорость вращения сделать независимой от нагрузки при помощи преобразователя частоты.
Величина напряжения питания. В сырых и влажных помещениях, где действуют повышенные требования к электробезопасности, применение асинхронного электродвигателя может быть невозможным. Дело в том, что из-за конструктивных особенностей такие двигатели практически не производятся на напряжение питания менее 220 В. В таких случаях применяют приводы постоянного тока, рассчитанные на напряжение 48 В и менее, либо используют гидравлические или пневматические приводы.
Чувствительность к напряжению питания. При отклонении напряжения питания более чем на 5% параметры двигателя могут отличаться от номинальных, а сам агрегат может перегреваться. Кроме того, при понижении напряжения падает момент электродвигателя, который квадратически зависит от напряжения.
При использовании преобразователя частоты скорость вращения меняется путем изменения величины и частоты питающего напряжения. Принципиально, что отношение напряжения к частоте должно быть константой.
Пусковой ток. Большой пусковой ток – проблема асинхронных двигателей мощностью более 10 кВт. При пуске ток может превышать номинальный в 5-8 раз и длиться несколько секунд. Из-за этого негативного эффекта мощные двигатели нежелательно подключать напрямую.
Чаще всего для понижения пускового тока применяют схему «Звезда-Треугольник», устройства плавного пуска и преобразователи частоты. Также можно использовать асинхронные двигатели с фазным ротором.
Пусковой момент. В силу электрических и механических переходных процессов в момент пуска двигатель обладает крайне низким КПД и большой реактивностью. Из-за низкого пускового момента привод может не справиться с началом вращения тяжелых механизмов. Этот же недостаток приводит к нагреву двигателя при пуске. Отсюда возникает другая проблема – ограничение количества пусков в единицу времени.
При использовании частотного преобразователя момент при пуске и на низких частотах может быть увеличен за счет повышения напряжения.
Вывод
Плюсы асинхронных двигателей значительно перевешивают минусы. В большинстве случаев недостатки компенсируются путем применения преобразователей частоты и других устройств пуска.
Другие полезные материалы:
Способы защиты электродвигателей
Когда не нужен плавный пуск
Когда нецелесообразно ремонтировать двигатель
Строение ротора асинхронного двигателя — Морской флот
Немало техники — бытовой, строительной, производственной имеют двигатели. Если задаться целью и проверить тип мотора, в 90% окажется, что стоит асинхронный двигатель. Это обусловлено простотой конструкции, высоким КПД, отсутствием электрического контакта с движущейся частью (в моделях с короткозамкнутым ротором). В общем, причин достаточно.
Что такое асинхронный двигатель и принцип его действия
Любой электродвигатель — устройство для преобразования электрической энергии в механическую. Электрический двигатель состоит из неподвижной (статор) и подвижной части (ротор). Строение статора таково, что он имеет вид полого цилиндра, внутри которого имеется обмотка. В это цилиндрическое отверстие вставляется подвижная часть — ротор. Он также имеет вид цилиндра, но меньшего размера. Между статором и ротором имеется воздушный зазор, позволяющий ротору свободно вращаться. Ротор вращается из-за наводимых магнитным полем статора токов. По способу вращения двигатели делят на синхронные и асинхронные.
Так выглядит разобранный асинхронный двигатель с короткозамкнутым ротором
Асинхронный электродвигатель отличается тем, что частота вращения ротора и магнитного поля, создаваемого статором, у него неравны. То есть, ротор вращается несинхронно с полем, что и дало название этому типу машин. Характерно, в рабочем режиме скорость его вращения меньше. Второе название этого типа двигателей — индукционные. Это название связано с тем, что движение происходит за счёт наводимых на нём токов индукции.
Асинхронный двигатель в разобранном виде: основные узлы и части
Коротко описать принцип работы асинхронного двигателя можно так. При включении мотора на обмотки статора подаётся ток, из-за чего возникает переменное магнитное поле. В область действия силовых линий этого попадает ротор, который начинает вращаться вслед за переменным полем статора.
Статор
Статор асинхронного двигателя состоит из трёх частей: корпуса, сердечника и обмотки. Корпус статора служит в качестве опоры для электродвигателя. Изготавливают его из стали или чугуна, сваркой или литьём. К прочности корпуса предъявляются высокие требования, так как при работе возникают вибрации в результате которых может сместиться ротор, что приведёт к заклиниванию мотора и выходу его из строя.
Статор асинхронного двигателя
Есть и ещё одно требование — геометрия корпуса должна быть идеальной. Между обмоткой статора и ротором зазор делают в несколько миллиметров, так что малейшие отклонения могут быть критичны.
Сердечник статора
Сердечник статора асинхронного электродвигателя изготавливают из наборных металлических пластин. Так как сердечник является магнитопроводом, металл используется магнитная электротехническая сталь. Для уменьшения потерь из-за вихревых потоков сердечник набирается из пластин, покрытых слоем диэлектрика (лак).
Сердечник статора набирается из тонких металлических изолированных пластин
Толщина одной пластины — 0,35-0,5 мм. Они собираются в единый пакет, так чтобы пазы всех пластин совпадали. В эти пазы затем укладываются витки обмотки.
Обмотка статора и количество оборотов электродвигателя
Статор асинхронного электромотора чаще всего имеет трёхфазную обмотку возбуждения. Она называется так, потому что является причиной движения ротора. Обмотка статора состоит из катушек, навитых из медной проволоки которые укладываются в пазы сердечника. Каждая обмотка может состоять из нескольких витков проволоки или из одного витка. Провод используется специальный, с лаковым покрытием, которое изолирует витки друг от друга и от стенок сердечника.
Как уже говорили, чаще всего обмотка статора асинхронного двигателя имеет три фазы. В этом случае оси катушек расположены со сдвигом 120°. При таком строении магнитное поле имеет два полюса и делает один полный оборот за один цикл трёхфазного питания. При частоте в электросети равной 50 Гц, скорость вращения поля (и ротора) 50 об/сек или 3000 об/мин.
Укладка катушек обмотки статора асинхронного двигателя
Для уменьшения скорости вращения ротора в асинхронном двигателе обмотку делают с большим количеством полюсов. Так с четырехполюсным стартером скорость вращения будет вдвое меньше — 1500 об/мин. Обмотка с шестью полюсами статора даёт втрое меньшую скорость — 1000 об/мин. С восемью полюсами — в четыре раза меньше, т. е. 750 об/мин. Ещё более «медленные» электромоторы делают очень редко.
Концы обмоток статора выводятся на клеммную коробку корпуса. Тут они могут соединяться по принципу «звезда» или «треугольник» в зависимости от типа подаваемого питания (220 В или 380 В).
Ротор
Ротор асинхронного электродвигателя бывает двух видов: короткозамкнутым и фазным. Чаще всего встречаются машины с короткозамкнутым ротором. Их преимущество в простоте конструкция и несложной технологии изготовления. Что еще важно, в таких моторах отсутствует контакт с динамической конструкцией. Это повышает долговечность, делает обслуживание более редким и простым.
Асинхронный двигатель может быть с короткозамкнутым и фазным
Асинхронные электромоторы с фазным ротором имеют более сложную конструкцию. Но они позволяют плавно регулировать скорость без дополнительных устройств, со старта имеют высокий крутящий момент. Так что приходится выбирать: более простая конструкция или возможность регулировки скорости вращения.
Устройство короткозамкнутого ротора
Ротор состоит из вала и цилиндрической конструкции из короткозамкнутых стержней. Внешне эта конструкция очень напоминает беличье колесо, поэтому так часто называют короткозамкнутую обмотку ротора.
Устройство короткозамкнутого ротора
Изначально и стержни, и замыкающие кольца изготавливались из меди. Роторы современных асинхронных двигателей мощностью до 100 кВт делают из алюминиевых стержней, с алюминиевыми же замыкающими дисками. Расстояние между стержнями заливается снова-таки алюминиевым сплавом. Получается короткозамкнутый ротор, но уже со сплошным покрытием.
Так как при работе выделяется значительное количество тепла, для охлаждения перемычки «беличьего колеса» делают с дополнительными вентиляционными лопатками. Так во время работы происходит самоохлаждение. Оно работает тем эффективнее, чем выше скорость вращения.
Как устроен асинхронный двигатель: устройство и компоновка деталей
Ротор устанавливается в статор, концы вала фиксируются при помощи крышек с вмонтированными подшипниками. Это двигатель без щеток (безщеточный). Никаких дополнительных контактов и электрических соединений. Подвижная часть мотора начинает вращаться при наличии магнитного поля на статоре. Оно возникает после подачи питания. Это поле вращается, заставляя вращаться и предметы, которые находятся в его поле. Простая и надёжная конструкция, которая обусловила популярность электрических двигателей этого типа.
Как сделан фазный ротор
Устройство фазного ротора мало чем отличается от обмотки статора. Те же наборные кольца с пазами под укладку медных катушек. Количество обмоток ротора три, соединены они обычно «звездой».
Так выглядит фазный ротор асинхронного двигателя
Концы роторных обмоток крепят к контактным кольцам из меди. Эти кольца жёстко закреплены на валу. Кроме того, они обязательно изолированы между собой, не имеют электрического контакта со стальным валом (крепятся к стержню через диэлектрические прокладки). Так как наличие колец отличительная черта этого типа движков, иногда их называют кольцевыми.
Асинхронный двигатель с фазным ротором
Для фиксации ротора к корпусу статора делают две крышки с подшипниками. На одной из крышек закрепляются щетки, которые прижимаются к кольцам на валу, за счёт чего имеют с ними хороший контакт. Для регулировки скорости вращения щетки соединены с реостатом. Изменяя его сопротивление, меняем напряжение, а с ним и скорость вращения.
Что лучше короткозамкнутый или фазный?
Несмотря на то что двигатели с фазовым ротором лучше стартуют, позволяют в процессе работы плавно менять скорость при помощи обычного реостата, чаще применяется моторы короткозамкнутого типа. В этой конструкции отсутствуют щетки, которые выходят из строя первыми. Кроме того, более простое устройство подвижной части снижает стоимость двигателя, агрегат служит дольше, уход и техобслуживание проще.
Какой лучше: короткозамкнутый ротор или фазный
Тем не менее стоит более подробно ознакомиться с достоинствами и недостатками обоих типов асинхронных двигателей. Итак, достоинства короткозамкнутого асинхронного двигателя:
- Простая конструкция.
- Лёгкое обслуживание.
- Более высокий КПД.
- Нет искрообразования.
- Малый пусковой крутящий момент.
- Высокий пусковой ток (в 4-7 раз выше номинального).
- Нет возможности регулировать скорость.
Магнитное поле трехфазного статора толкает ротор
Из-за высокого пускового тока прямое включение допускается для двигателей мощностью до 200 кВт. Более мощные требуют пускорегулирующей аппаратуры. Обычно используют частотный преобразователь, который плавно увеличивает ток, обеспечивая плавный старт без перегрузок.
Преимущество асинхронного фазного двигателя:
- Быстрый и беспроблемный старт.
- Позволяет менять скорость в процессе работы.
- Прямое подключение возможно, практически без ограничения мощности.
Недостатки тоже есть: наличие щёток, возможность искрения, сложное и частое обслуживание.
Как регулируется частота вращения
Как уже писали, частота вращения ротора зависит от количества полюсов статора. Чем больше количество полюсов, тем меньше скорость. Но это не только так можно регулировать скорость вращения. Она еще зависит от напряжения и частоты питания.
Способы регулирования частоты асинхронного двигателя
Напряжение можно регулировать, установив потенциометр на входе. Частоту регулируют поставив частотный преобразователь. Частотник — более выгодное решение, так как он ещё и снижает стартовые токи и может быть программируемым.
Однофазный асинхронный двигатель
Выше рассматривался трехфазный асинхронный двигатель, в однофазном асинхронном двигателе их две. Одна рабочая, вторая вспомогательная. Вспомогательная нужна для того, чтобы придать первоначальное вращение ротору. Потому может называться ещё пусковой или стартовой.
Однофазный асинхронный двигатель имеет две обмотки: рабочую и вспомогательную (стартовую или пусковую)
Когда в статоре включена одна обмотка, она создаёт два равных магнитных поля, вращающихся в разные стороны. Если ввести в это поле ротор, который уже имеет какое-то начальное вращение, магнитное поле будет поддерживать это вращение. Но как запустить ротор на старте? Как придать ему вращение, ведь от одной обмотки возникают два равноценных магнитных поля, направленные в разные стороны. Так что с их помощью заставить вращаться ротор невозможно. В простейшем варианте вращение задаётся вручную — механически. Затем вращение подхватывает поле.
Чтобы автоматизировать запуск однофазного асинхронного двигателя и сделана вспомогательная обмотка. Она сконструирована так, что подавляет одну из составляющих магнитного поля основной обмотки и усиливает вторую. Соответственно, одна из составляющих перевешивает, задавая вращение ротора. Затем стартовая обмотка отключается, вращение поддерживает основная.
Широкое распространение асинхронного электродвигателя (АД) вызвано его надежностью и простотой конструкции. Статор такого двигателя стандартный, представляет собой изготовленный из пластин электростатической стали полый цилиндр с трехфазной обмоткой. Ротор же может быть короткозамкнутым и фазным. Последний вариант получил более широкое распространение по ряду причин, хотя его конструкция намного сложнее, чем у короткозамкнутого ротора.
Конструкция фазного ротора
Фазный ротор АД конструктивно напоминает его статор. Основа ротора набирается из пластин электростатической стали, которые насаживаются на вал. Конструкция имеет продольные пазы, в которые укладываются витки катушек фазной обмотки. Количество фаз ротора строго соответствует количеству фаз статора. Для подключения обмотки ротора к цепи, на валу последнего устанавливаются 3 контактных кольца, к которым подведены концы обмотки, находящиеся в соприкосновении с токопроводящими щетками. В свою очередь щетки имеют выходы в коробку корпуса, что позволят подключать внешнее дополнительное сопротивление.
В зависимости от напряжения сети, фазы обмотки соединяются “треугольником” или “звездой”. Оси катушек двухполюсного электродвигателя смещены на 120 градусов относительно друг друга.
Контактные кольца изготавливаются из латуни или стали. На вал они посажены с обязательной изоляцией между собой. Щетки расположены на щеткодержатле, изготовлены из металлографита, к кольцам прижимаются посредством пружин.
Зачем нужно добавочное сопротивление?
Добавочное сопротивление служит для запуска двигателя с нагрузкой на его валу. Как только достигаются номинальные обороты вала, сопротивление отключается за ненадобность, а кольца закорачиваются. В противном случае работа электродвигателя будет нестабильной, возникнут потери КПД.
Роль добавочного внешнего сопротивления, как правило, выполняет ступенчатый реостат. В этом случае двигатель будет разгонятся тоже ступенчато. Часто используются устройства, способные поднять КПД двигателя, при этом избавляя щетки от излишнего трения о кольца. После разгона устройство поднимает щетки и замыкает кольца.
Для реализации автоматического пуска электродвигателя используется подключенная индуктивность к обмотке ротора. Дело в том, что в тот момент, когда осуществляется пуск, в роторе показатели индуктивности и частоты тока максимальны. При разгоне двигателя эти показатели падают, а в конечном итоге двигатель выходит на нормальный рабочий режим.
Отличие короткозамкнутого ротора от фазного
В короткозамкнутом роторе электродвигателя, в отличие от фазного варианта, нет обмоток. Их заменяют замкнутые с торцов между собой кольцами стержни, изготовленные из алюминия или меди. Визуально конструкция такого ротора напоминает беличье колесо, от чего он и получил свое название – “беличья клетка”.
Короткозамкнутый ротор приводится во вращение за счет наведения тока магнитным полем статора. Чтобы исключить пульсирование магнитного поля в роторе, стержни “беличьей клетки” располагаются параллельно между собой, но под наклоном относительно оси вращения. АД с короткозамкнутым ротором обладают высокой надежностью за счет отсутствия щеток, которые со временем перетираются. Кроме того, их стоимость меньше, чем у вариантов с фазным ротором.
Преимущества и недостатки электродвигателя с фазным ротором
Широкое распространение АД с фазным ротором получил за счет ряда серьезных преимуществ перед другими машинами подобного рода. Среди них следует отметить большой вращающий момент при запуске, а также относительно постоянную скорость вращения даже при высоких нагрузках. Такие электродвигатели для запуска требуют меньший пусковой ток, а конструкция позволяет использовать автоматические пусковые устройства. Кроме того, эти электрические машины хорошо переносят продолжительные перегрузки.
Как и любой электрический механизм, электродвигатели с фазным ротором имеют ряд недостатков:
- Чувствительность к перепадам напряжения;
- Большие габаритные размеры
- Высокая стоимость;;
- Более сложная конструкция за счет цепи ротора с добавочным сопротивлением;
- Меньшие показатели коэффициента мощности и КПД (относительно АД с короткозамкнутым ротором).
Область применения электродвигателей с фазным ротором
Ад с фазным ротором, за счет высокого крутящего момента, низких пусковых токов и способности долговременно работать при повышенных нагрузках, используются там, где необходима большая мощность электродвигателя, но нет необходимости плавно регулировать скорость вращения в широких диапазонах. Кроме того, эти машины отлично приспособлены под пуск с нагрузкой на валу.
За счет высокой производительности, наиболее часто АД с фазным ротором используются на различном серьезном, тяжелом силовом оборудовании, например, подъемных кранах, лифтовых приводах, станках, различных подъемниках. Иными словами, эти двигатели используются там, где есть необходимость запуска под нагрузкой, а не на холостом ходу.
Проверка электродвигателя с фазным ротором
Для проверки обмоток статора трехфазного АД на целостность, необходимо добраться до клемм их подключения. Затем нужно произвести замеры сопротивлений между фазными клеммами по отдельности, предварительно сняв перемычки. Если сопротивление какой-либо обмотки меньше, чем у других, это свидетельствует о замыкании между ее витками. В этом случае двигатель отдается на перемотку.
Для проверки обмоток ротора, необходимо отыскать выводы от контактных колец. Затем нужно убедиться, что сопротивления обмоток совпадают. Если конструкция электродвигателя предусматривает наличие системы отключения обмоток ротора, отсутствие контакта может быть обусловлено именно поломкой данного механизма, а не обрывом витков.
О наличие какой-либо неисправности АД могут свидетельствовать следующие факторы:
- Снижение скорости вращения при нагрузке. Характерно для высокого сопротивления в цепи ротора, слабого контакта в его обмотке, низкого напряжения электросети
- Разворачивание АД, когда цепь ротора разомкнута – КЗ в обмотке ротора
- Чрезмерное равномерное повышение температуры двигателя – длительная перегрузка АД или его недостаточное охлаждение
- Нагрев статорной обмотки местного характера – двойное замыкание катушек статора на корпус или между фазами, КЗ между витками, неверное подключение катушек в фазе между собой
- Нагрев стали статора местного характера – нарушение изоляции между листами стали, их оплавление и выгорание, замыкание
- Посторонний шум при работе АД. Может быть вызван как выходом из строя подшипников, так и недостаточной запрессовкой активной стали. Определяется на слух по характеру постороннего шума
- Перегорание в обмотке якоря предохранителей, отсутствие контакта в подводящей проводке, выход из строя реостата
Для самостоятельной диагностики и исправления неисправностей электродвигателя необходимыми являются хотя-бы минимальные познания в устройстве АД и электрических цепях в целом. Все же крайне не рекомендуется самостоятельно заниматься ремонтом электродвигателя с фазным ротором, так как это может привести к поражению электрическим током.
Асинхронный двигатель представляет собой мотор переменного тока, скорость вращения которого не равна частоте напряжения в обмотках статора. Эти электродвигатели получили широкое распространение, потому что являются достаточно выносливыми. Асинхронный однофазный, трехфазный моторы могут работать при значительной нагрузке продолжительное время, не перегреваясь, держать свой крутящий момент. Работа асинхронного двигателя проста, но при этом его характеристики напрямую зависят от параметров обмоток и технологии их укладки.
Область применения
Асинхронный двигатель получил широкое распространение в качестве тягового, второстепенного и прочих видов силовых компонентов. Учитывая особенности его конструкции, отсутствие скользящих контактов, эксплуатация такого мотора намного проще. Также, схема подключения не требует сложных устройств управления, если говорить о простом режиме работы с постоянной частотой. Плюс ко всему и срок службы до сервисного обслуживания намного дольше, так как внутреннее пространство и обмотки не загрязняются графитом.
Применяется асинхронный электродвигатель во многих сферах:
- Системы вентиляции – благодаря выносливости и неприхотливости при эксплуатации моторы с короткозамкнутыми роторами достаточно часто используются в качестве вентиляторов. Они хорошо переживают продолжительную работу на максимальных оборотах, обеспечивая пользователей или технологическое оборудование интенсивным воздушным потоком.
- Конвейеры – благодаря высокому моменту, способности его поддерживать при нагрузках моторы асинхронного типа стали идеальным вариантом для реализации управления подвижными производственными линиями.
- Следящие системы и приводные устройства – особо часто применяют асинхронные двигатели в приводных системах на технологическом оборудовании. Но для организации управления таким типом двигателя потребуется особая схема подключения и частотный блок управления, а ротор асинхронного двигателя оснащается неодимовыми магнитами. Такие моторы рассчитаны на работы с частотой до 400 Гц.
- Бытовая сфера. Из такого мотора можно сделать различные рабочие агрегаты бытового назначения или для небольшой мастерской: вентилятор, управляемые заслонки, циркулярная пила, фуганок, прочее оборудование.
Разновидности моторов
От типа питающей сети асинхронные электродвигатели подразделяются на:
- Трехфазные. Обмотки асинхронных двигателей такого типа состоят из 3 катушек, специальным образом уложенных в пазах статора. Они предназначены для работы в промышленности, так как имеют высокий КПД и cosφ приближенный к 1, а для обеспечения дополнительной экономии работают с системой рекуперации энергии при торможении, выступая генератором.
- Однофазный асинхронный двигатель. Применяется в быту и промышленности: старые стиральные машины, бытовые вентиляторы, холодильное и прочие виды оборудования. Имеют меньший КПД, мощность, по сравнению с трехфазными, что объясняется потерями в статоре из-за отсутствия дополнительной фазы.
Устройство асинхронного двигателя
Устройство асинхронного двигателя является достаточно простым:
- Статор – является неподвижной частью электрического двигателя, который снабжен обмотками возбуждения.
- Ротор – вращающийся элемент мотора, который крутится под действием магнитного поля, создаваемым обмотками возбуждения, расположенными на статоре. Различают 2 типа двигателя от конструкции ротора: короткозамкнутые и фазные.
- Фланцы – статическая часть электрического двигателя, в которой находятся опорные подшипники, удерживающие ротор и являющиеся своего рода крепежом для статора. Он зажимается между двумя фланцами-крышками стяжными болтами. Либо они прикручены к корпусу статора.
- Клеммная коробка – часть статической конструкции двигателя, в которую выводятся концы обмоток со статора. Посредством его осуществляется подключение двигателя к схеме управления.
- Крыльчатка и защитный кожух – используется для обеспечения принудительной вентиляции, а кожух предохранит обслуживающий персонал от травматизма.
- Дополнительные сервисные обмотки – при необходимости совместно с обмоткой возбуждения на статоре может быть дополнительная, предназначенная для контроля и измерения рабочих параметров мотора во время его работы.
- Термодатчики – промышленные асинхронные двигателя, кроме обмоток, также имеются датчики температуры, контролирующие перегрев на случай резкого возрастания тока потребления.
Также двигателя могут быть оборудованными планарными редукторами и изготовленными в едином корпусе. Это преимущественно промышленные типы агрегатов, применяемые на станках, конвейерах и прочих видах оборудования.
Особенности устройства каждого из элементов
Статор асинхронного электродвигателя представляет собой цилиндр, изготовленный из листов специальной электротехнической стали толщиной до 0.5 мм, покрытых лаком. Этот цилиндр является сердечником, с внутренней стороны имеются пазы, куда укладываются обмотки. В трехфазных, соответственно, сдвинутые на 120 градусов, в однофазных – на 90. Обмотки могут быть уложены несколькими способами в зависимости от схемы их подключения и эксплуатационных требований. Именно от этого зависит такой показатель, как момент и мощность на валу. А при наличии количества полюсов более, чем 2 пары, то он может использоваться в следящих системах управления приводными механизмами.
Статор запрессован в корпус либо же расположен между фланцами. Корпус и боковые крышки изготовлены из чугуна или сплава алюминия. На них имеются ребра для увеличения площади и повышения эффективности отведения тепла при работе. Такое устройство позволяет лучше охлаждать двигатель, обеспечивая продолжительную работу при предельных нагрузках.
Однополюсная обмотка такого электродвигателя наматывается из 3-х катушек. Каждая из них называется фазой. Для достижения требуемых параметров работы мотора обмотка укладывается в противоположных пазах сердечника. Катушки соединяются между собой специальным образом в соответствии со схемой подключения и ожидаемых характеристик, обеспечивая возбуждение магнитного поля и необходимый момент при вращении.
Все концы датчиков выводятся в клеммную коробку, что позволяет их соединять в звезду или треугольник, что зависит от схемы подключения системы управления, величины питания. 3-фазный электродвигатель является универсальным, при необходимости его можно подключать к однофазному питанию с линейным напряжением. При соединении обмоток треугольником напряжение обмоток равно линейному Uф, а при подключении по схеме звезды – √3Uф.
Ротор
Ротор в асинхронном электродвигателе представляет собой вал, на котором закрепляется сердечник, набранный из листов электротехнической стали. Что трехфазный, что однофазный мотор, ротор имеет практически одинаковую конструкцию. В качестве обмотки в обычных асинхронных моторах на рабочую частоту 50Гц используются куски медного или алюминиевого провода большой толщины или стержни, соединенные между собой торцевыми замыкающими кольцами.
Для того чтобы обмотка надежно удерживалась в сердечнике, имеются специальные пазы, куда она запрессована. Торцевые кольца могут быть снабжены вентиляционными лопатками, предназначенными для улучшения интенсивности охлаждения внутреннего пространства. Вал закреплен на подшипниках, впрессованных во фланцы или плитах, закрепленных к станине в зависимости от устройства.
Между валом и статором имеется зазор, величина которого зависит от пусковых параметров мотора. Если необходимо увеличить мощность и момент, то он должен быть как можно меньше. Одновременно с ростом мощности увеличиваются и добавочные потери в верхних слоях статора и ротора.
Принцип работы
Асинхронный двигатель принцип работы имеет достаточно простой. Он основан на двух физических явлениях:
- При подаче напряжения на статорные обмотки в двигателе возникает вращающееся магнитное поле.
- Поле оказывает воздействие на ток, индуцируемый в роторе. А это создает крутящий момент, поворачивающий вал двигателя относительно полюсов.
За каждый поворот вала полюса меняются полярностью с частотой сети. Поэтому напряжение обмотки статора имеет стандартную частоту, а скорость вращения зависит от:
- нагрузки на валу;
- количества пар полюсов;
- особенностей намотки статора.
Маркировка электродвигателя
Для упрощения процесса подключения и выбора схемы асинхронного 3-фазного ЭД на каждом из них имеется соответствующая маркировка. В ней указываются такие характеристики, как:
- крутящий момент;
- мощность;
- максимальная скорость вращения;
- cosφ.
Также в зашифрованной маркировке имеется указание типа двигателя, количества полюсов. Их необходимо учитывать при выборе мотора для тех или для других нужд. А для облегчения процесса подключения все концы сводятся в клеммную коробку, где подписаны следующим образом:
Если мотор подключается к сети 380 В с линейным напряжением обмоток 220В, то его схема обмоток должна быть треугольником. Но если двигатель подключается к стандартной сети 380В, то схема включения обмоток должна быть звездой.
Скольжение
При рассмотрении принципа работы асинхронного электрического двигателя применяют такое понятие, как скольжение, и обозначается параметр буквой «s». Оно возникает из-за разницы в скоростях вращения магнитного поля статора и реальной частоты вращения ротора. При этом первый показатель на порядок больше. Следовательно, чем выше разница, тем сильнее скольжение.
Скольжение позволяет объяснить принцип работы. За счет отставания частоты вращения ротора от магнитного поля статора и обеспечивается наведение ЭДС в короткозамкнутом роторе. Но если бы поле вращалось со скоростью частоты ЭДС в роторе, то собственно вращения не происходило.
Скольжение, являясь относительной величиной, измеряется в %. И становится больше при увеличении нагрузки на валу двигателя.
Двигателя с фазным ротором
Когда речь идет о моторах с фазным ротором, то он имеет немного иное устройство. Также имеется 3 обмотки, которые соединены в звезду, а их начала выведены на подводящие кольца. Сравнивая два типа двигателя с короткозамкнутым и фазным роторами, то у второго развивается момент сразу же под высокой нагрузкой. Такие моторы получили применение в системах, где требуется сделать мощный приводной агрегат с высокой тягой. Также такие моторы являются более удобными для регулируемого управления посредством регулятора частоты.
Недостатки асинхронных электродвигателей
В стандартном исполнении без магнитов на роторе асинхронные электродвигатели являются маломощными. Они неспособны сразу обеспечить высокий крутящий момент. А также для их запуска требуется большое количество электрической мощности, которая может превышать предельно допустимые показатели системы питания. Поэтому их пуск должен выполняться без нагрузки. Кроме этого, асинхронные электродвигатели являются мощными источниками электромагнитных помех, сопровождающимися сбоями в работе различных других устройств, находящихся вблизи. Для снижения их влияния необходимо предусматривать качественное заземление и обязательное экранирование.
конструкция с короткозамкнутым ротором, работа трёхфазного варианта
Сегодня трудно встретить механическое электрооборудование без использования асинхронного двигателя с короткозамкнутым ротором. Изобретение позапрошлого века до сих пор активно применяется и совершенствуется. В любой машине есть такое устройство. Благодаря ему жизнь людей вышла на новый уровень. Она стала немыслимой без электромоторов. Не удивительно, что многие желают узнать, как всё это работает.
Немного истории
В конце позапрошлого века итальянский учёный Г. Феррарис написал статью с теоретическими выкладками асинхронного электродвигателя. В то же время в 1988 году американский учёный с австро-венгерскими корнями Н. Тесла запатентовал это устройство. А на следующий год российский изобретатель М. О. Доливо-Добравольский придумал и создал первый асинхронный двигатель с короткозамкнутым ротором.
Принцип действия этого устройства до наших дней является основополагающим в работе всех электродвигателей. Сам Михаил Осипович первым применил своё изобретение в деле. В Новороссийске была построена первая электросеть с использованием устройства на трёхфазном асинхронном двигателе. Местный элеватор был оборудован трансформаторами и машинами новой, по тем временам, технологии.
В наши дни трудно представить электромеханику без изобретения Доливо-Добровольского. На разработанных им принципах работают все современные электродвигатели. Вот основные ключи успеха данного изобретения:
- невероятная простота и лёгкость в изготовлении;
- коммерческая выгода. Малые затраты и большой спрос на такие изделия;
- большая эффективность и надёжность — всегда привлекают и обеспечивают постоянный спрос;
- лёгкость в эксплуатации и большой диапазон сфер применения.
Судя уже по этим ключам, спрос на подобные изделия будет большим ещё долгие годы. К тому же прогресс не стоит на месте, многие изобретатели продолжают усовершенствовать конструкцию двигателя.
Основное устройство
Если внимательно рассмотреть схему асинхронного двигателя, то сразу станет заметным наличие в ней двух основных деталей.
Без статора и ротора этот агрегат просто немыслим. Благодаря им образуется электромагнитное поле и вырабатывается электроток.
Статор обычно имеет статическое положение. Он всегда цилиндрической формы. Делают его из стали. Внутри имеются пазы с уложенной в них обмоткой. Применяют угол в 120 градусов для смещения обмоток относительно друг друга. Соединяют концы обмоток звездой или треугольником — это зависит от подаваемого на прибор напряжения.
Ротор — вращающаяся часть. Он тоже имеет пазы и обмотку. Они бывают двух видов: фазные и короткозамкнутые. Фазные обмотаны как статоры и подсоединяются так же, а короткозамкнутые имеют алюминевый заливной сердечник. «Беличье колесо» — так его называют со времён изобретения.
Кроме основных деталей, имеются вспомогательные. Они могут различаться по строению и конструкции, но чаще всего присутствуют на всех двигателях подобного вида. Вот эти детали:
- основной вал, на который крепится ротор;
- подшипники. Без этих деталей просто невозможно сегодня представить подвижные механизмы с быстрым вращением;
- щиты для крепления подшипников;
- лапы для крепления двигателя на месте работы;
- основной кожух, срывающий внутренности двигателя;
- кожух вентилятора. Служит для укрытия лопастей;
- крыльчатка вентилятора. Её основное предназначение — не давать двигателю перегреваться;
- коробка для клемм вывода. Место подсоединения электродвигателя к электропроводке.
В зависимости от модели, устройство трёхфазного асинхронного двигателя может выглядеть по-разному, но, как правило, основные узлы в них присутствуют. Более современные модели оснащают электронными датчиками и другими приборами, улучшающими удобство их эксплуатации.
Принцип работы
Простота присуща этому двигателю во всём. В том числе и в принципе действия. Трёхфазный асинхронный двигатель использует закон электромагнитной индукции. Как видно из устройства электродвигателя, он состоит из двух электромагнитов. По закону ЭМЭ при вращении возникает движущая сила, которая по закону Ампера будет поддерживать вращение ротора в статере и продолжать вырабатывать ток.
Частоту вращения магнитного поля в статоре вычисляют, поделив частоту переменного тока (умноженную на 60 минут) на число пар полюсов трёхфазной обмотки. Имея эту величину, вычисляют скольжение электродвигателя. Для этого вычитают из частоты вращения ЭМП частоту вращения ротора и делят разность на частоту вращения ЭМП.
На холостом ходу скольжение равно 0, а в фазе короткого замыкания и полной остановки равно 1 или 100%. Чем больше механическая нагрузка на вал вращения, тем выше показатель скольжения. Для электродвигателей определяется номинальное скольжение. Для малых и средних мощностей этот показатель варьируется в пределах от 8 до 2%.
Сфера применения электродвигателей настолько обширна, что трудно представить, что станет с жизнью человека, если исчезнут все такие устройства. Однако, они не только не исчезают, но и наоборот, их становиться всё больше. Это способствует дальнейшему научному прогрессу человечества.
Асинхронный двигатель с короткозамкнутым ротором принцип работы
8 марта 1889 года величайший русский учёный и инженер Михаил Осипович Доливо-Добровольский изобрёл трёхфазный асинхронный двигатель с короткозамкнутым ротором.
Современные трёхфазные асинхронные двигатели являются преобразователями электрической энергии в механическую. Благодаря своей простоте, низкой стоимости и высокой надёжности асинхронные двигатели получили широкое применение. Они присутствуют повсюду, это самый распространённый тип двигателей, их выпускается 90% от общего числа двигателей в мире. Асинхронный электродвигатель поистине совершил технический переворот во всей мировой промышленности.
Огромная популярность асинхронных двигателей связана с простотой их эксплуатации, дешивизной и надежностью.
Асинхронный двигатель — это асинхронная машина, предназначенная для преобразования электрической энергии переменного тока в механическую энергию. Само слово “асинхронный” означает не одновременный. При этом имеется ввиду, что у асинхронных двигателей частота вращения магнитного поля статора всегда больше частоты вращения ротора. Работают асинхронные двигатели, как понятно из определения, от сети переменного тока.
Устройство
На рисунке: 1 — вал, 2,6 — подшипники, 3,8 — подшипниковые щиты, 4 — лапы, 5 — кожух вентилятора, 7 — крыльчатка вентилятора, 9 — короткозамкнутый ротор, 10 — статор, 11 — коробка выводов.
Основными частями асинхронного двигателя являются статор (10) и ротор (9).
Статор имеет цилиндрическую форму, и собирается из листов стали. В пазах сердечника статора уложены обмотки статора, которые выполнены из обмоточного провода. Оси обмоток сдвинуты в пространстве относительно друг друга на угол 120°. В зависимости от подаваемого напряжения концы обмоток соединяются треугольником или звездой.
Роторы асинхронного двигателя бывают двух видов: короткозамкнутый и фазный ротор.
Короткозамкнутый ротор представляет собой сердечник, набранный из листов стали. В пазы этого сердечника заливается расплавленный алюминий, в результате чего образуются стержни, которые замыкаются накоротко торцевыми кольцами. Эта конструкция называется «беличьей клеткой«. В двигателях большой мощности вместо алюминия может применяться медь. Беличья клетка представляет собой короткозамкнутую обмотку ротора, откуда собственно название.
Фазный ротор имеет трёхфазную обмотку, которая практически не отличается от обмотки статора. В большинстве случаев концы обмоток фазного ротора соединяются в звезду, а свободные концы подводятся к контактным кольцам. С помощью щёток, которые подключены к кольцам, в цепь обмотки ротора можно вводить добавочный резистор. Это нужно для того, чтобы можно было изменять активное сопротивление в цепи ротора, потому что это способствует уменьшению больших пусковых токов. Подробнее о фазном роторе можно прочитать в статье — асинхронный двигатель с фазным ротором.
Принцип работы
При подаче к обмотке статора напряжения, в каждой фазе создаётся магнитный поток, который изменяется с частотой подаваемого напряжения. Эти магнитные потоки сдвинуты относительно друг друга на 120°, как во времени, так и в пространстве. Результирующий магнитный поток оказывается при этом вращающимся.
Результирующий магнитный поток статора вращается и тем самым создаёт в проводниках ротора ЭДС. Так как обмотка ротора, имеет замкнутую электрическую цепь, в ней возникает ток, который в свою очередь взаимодействуя с магнитным потоком статора, создаёт пусковой момент двигателя, стремящийся повернуть ротор в направлении вращения магнитного поля статора. Когда он достигает значения, тормозного момента ротора, а затем превышает его, ротор начинает вращаться. При этом возникает так называемое скольжение.
Скольжение s — это величина, которая показывает, насколько синхронная частота n1 магнитного поля статора больше, чем частота вращения ротора n2, в процентном соотношении.
Скольжение это крайне важная величина. В начальный момент времени она равна единице, но по мере возрастания частоты вращения n2 ротора относительная разность частот n1-n2 становится меньше, вследствие чего уменьшаются ЭДС и ток в проводниках ротора, что влечёт за собой уменьшение вращающего момента. В режиме холостого хода, когда двигатель работает без нагрузки на валу, скольжение минимально, но с увеличением статического момента, оно возрастает до величины sкр — критического скольжения. Если двигатель превысит это значение, то может произойти так называемое опрокидывание двигателя, и привести в последствии к его нестабильной работе. Значения скольжения лежит в диапазоне от 0 до 1, для асинхронных двигателей общего назначения оно составляет в номинальном режиме — 1 — 8 %.
Как только наступит равновесие между электромагнитным моментом, вызывающим вращение ротора и тормозным моментом создаваемым нагрузкой на валу двигателя процессы изменения величин прекратятся.
Выходит, что принцип работы асинхронного двигателя заключается во взаимодействии вращающегося магнитного поля статора и токов, которые наводятся этим магнитным полем в роторе. Причём вращающий момент может возникнуть только в том случае, если существует разность частот вращения магнитных полей.
В промышленности наибольшее распространение получили асинхронные двигатели трехфазного тока. Рассмотрим устройство и принцип действия этих двигателей.
Принцип действия асинхронного двигателя основан на использовании вращающегося магнитного поля.
Для уяснения работы такого двигателя проделаем следующий опыт.
Укрепим подковообразный магнит на оси таким образом, чтобы его можно было вращать за ручку. Между полюсами магнита расположим на оси медный цилиндр, могущий свободно вращаться.
Рисунок 1. Простейшая модель для получения вращающегося магнитного поля
Начнем вращать магнит за ручку по часовой стрелке. Поле магнита также начнет вращаться и при вращении будет пересекать своими силовыми линиями медный цилиндр. В цилиндре, по закону электромагнитной индукции, возникнут вихревые токи, которые создадут свое собственное магнитное поле — поле цилиндра. Это поле будет взаимодействовать с магнитным полем постоянного магнита, в результате чего цилиндр начнет вращаться в ту же сторону, что и магнит.
Установлено, что скорость вращения цилиндра несколько меньше скорости вращения поля магнита.
Действительно, если цилиндр вращается с той же скоростью, что и магнитное поле, то магнитные силовые линии не пересекают его, а следовательно, в нем не возникают вихревые токи, вызывающие вращение цилиндра.
Скорость вращения магнитного поля принято называть синхронной , так как она равна скорости вращения магнита, а скорость вращения цилиндра — асинхронной (несинхронной). Поэтому сам двигатель получил название асинхронного двигателя . Скорость вращения цилиндра (ротора) отличается от синхронной скорости вращения магнитного поля на небольшую величину, называемую скольжением.
Обозначив скорость вращения ротора через n1 и скорость вращения поля через n мы можем подсчитать величину скольжения в процентах по формуле:
В приведенном выше опыте вращающееся магнитное поле и вызванное им вращение цилиндра мы получали благодаря вращению постоянного магнита, поэтому такое устройство еще не является электродвигателем . Надо заставить электрический ток создавать вращающееся магнитное поле и использовать его для вращения ротора. Задачу эту в свое время блестяще разрешил М. О. Доливо-Добровольский. Он предложил использовать для этой цели трехфазный ток.
Устройство асинхронного электродвигателя М. О. Доливо-Добровольского
Рисунок 2. Схема асинхронного электродвигателя Доливо-Добровольского
На полюсах железного сердечника кольцевой формы, называемого статором электродвигателя , помещены три обмотки, сети трехфазного тока 0 расположенные одна относительно другой под углом 120°.
Внутри сердечника укреплен на оси металлический цилиндр, называемый ротором электродвигателя.
Если обмотки соединить между собой так, как показано на рисунке, и подключить их к сети трехфазного тока, то общий магнитный поток, создаваемый тремя полюсами, окажется вращающимся.
На рисунке 3 показан график изменения токов в обмотках двигателя и процесс возникновения вращающегося магнитного поля.
Рассмотрим — подробнее этот процесс.
Рисунок 3. Получение вращающегося магнитного поля
В положении «А» на графике ток в первой фазе равен нулю, во второй фазе он отрицателен, а в третьей положителен. Ток по катушкам полюсов потечет в направлении, указанном на рисунке стрелками.
Определив по правилу правой руки направление созданного током магнитного потока, мы убедимся, что на внутреннем конце полюса (обращенном к ротору) третьей катушки будет создан южный полюс (Ю), а на полюсе второй катушки — северный полюс (С). Суммарный магнитный поток будет направлен от полюса второй катушки через ротор к полюсу третьей катушки.
В положении «Б» на графике ток во второй фазе равен нулю, в первой фазе он положителен, а в третьей отрицателен. Ток, протекая по катушкам полюсов, создает на конце первой катушки южный полюс (Ю), на конце третьей катушки северный полюс (С). Суммарный магнитный поток теперь будет направлен от третьего полюса через ротор к первому полюсу, т. е. полюсы при этом переместятся на 120°.
В положении «В» на графике ток в третьей фазе равен нулю, во второй фазе он положителен, а в первой отрицателен. Теперь ток, протекая по первой и второй катушкам, создаст на конце полюса первой катушки — северный полюс (С), а на конце полюса второй катушки — южный полюс (Ю), т. е. полярность суммарного магнитного поля переместится еще на 120°. В положении «Г» на графике магнитное поле переместится еще на 120°.
Таким образом, суммарный магнитный поток будет менять свое направление с изменением направления тока в обмотках статора (полюсов).
При этом за один период изменения тока в обмотках магнитный поток сделает полный оборот. Вращающийся магнитный поток будет увлекать за собой цилиндр, и мы получим таким образом асинхронный электродвигатель.
Напомним, что на рисунке 3 обмотки статора соединены «звездой», однако вращающееся магнитное поле образуется и при соединении их «треугольником».
Если мы поменяем местами обмотки второй и третьей фаз, то магнитный поток изменит направление своего вращения на обратное.
Такого же результата можно добиться, не меняя местами обмотки статора, а направляя ток второй фазы сети в третью фазу статора, а третью фазу сети — во вторую фазу статора.
Таким образом, изменить направление вращения магнитного поля можно переключением двух любых фаз.
Мы рассмотрели устройство асинхронного двигателя, имеющего на статоре три обмотки . В этом случае вращающееся магнитное поле двухполюсное и число его оборотов в одну секунду равно числу периодов изменения тока в одну секунду.
Если на статоре разместить по окружности шесть обмоток, то будет создано четырехполюсное вращающееся магнитное поле . При девяти обмотках поле будет шестиполюсным.
При частоте трехфазного тока f , равной 50 периодам в секунду, или 3000 в минуту, число оборотов n вращающегося поля в минуту будет:
при двухполюсном статоре n = (50 х 60 ) / 1 = 3000 об/мин,
при четырехполюсном статоре n = (50 х 60 ) / 2 = 1500 об/мин,
при шестиполюсном статоре n = (50 х 60 ) / 3 = 1000 об/мин,
при числе пар полюсов статора, равном p : n = (f х 60 ) / p ,
Итак, мы установили скорость вращения магнитного поля и зависимость ее от числа обмоток на статоре двигателя.
Ротор же двигателя будет, как нам известно, несколько отставать в своем вращении.
Однако отставание ротора очень небольшое. Так, например, при холостом ходе двигателя разность скоростей составляет всего 3%, а при нагрузке 5 — 7%. Следовательно, обороты асинхронного двигателя при изменении нагрузки изменяются в очень небольших пределах, что является одним из его достоинств.
Рассмотрим теперь устройство асинхронных электродвигателей
Статор современного асинхронного электродвигателя имеет невыраженные полюсы, т. е. внутренняя поверхность статора сделана совершенно гладкой.
Чтобы уменьшить потери на вихревые токи, сердечник статора набирают из тонких штампованных стальных листов. Собранный сердечник статора закрепляют в стальном корпусе.
В пазы статора закладывают обмотку из медной проволоки. Фазовые обмотки статора электродвигателя соединяются «звездой» или «треугольником», для чего все начала и концы обмоток выводятся на корпус — на специальный изоляционный щиток. Такое устройство статора очень удобно, так как позволяет включать его обмотки на разные стандартные напряжения.
Ротор асинхронного двигателя , подобно статору, набирается из штампованных листов стали. В пазы ротора закладывается обмотка.
В зависимости от конструкции ротора асинхронные электродвигатели делятся на двигатели с короткозамкнутым ротором и фазным ротором .
Обмотка короткозамкнутого ротора сделана из медных стержней, закладываемых в пазы ротора. Торцы стержней соединены при помощи медного кольца. Такая обмотка называется обмоткой типа «беличьей клетки». Заметим, что медные стержни в пазах не изолируются.
В некоторых двигателях «беличью клетку» заменяют литым ротором.
Асинхронный двигатель с фазным ротором (с контактными кольцами) применяется обычно в электродвигателях большой мощности и в тех случаях; когда необходимо, чтобы электродвигатель создавал большое усилие при трогании с места. Достигается это тем, что в обмотки фазного двигателя включается пусковой реостат.
Короткозамкнутые асинхронные двигатели пускаются в ход двумя способами:
1) Непосредственным подключением трехфазного напряжения сети к статору двигателя. Этот способ самый простой и наиболее популярный.
2) Снижением напряжения, подводимого к обмоткам статора. Напряжение снижают, например, переключая обмотки статора со «звезды» на «треугольник».
Пуск двигателя в ход происходит при соединении обмоток статора «звездой», а когда ротор достигнет нормального числа оборотов, обмотки статора переключаются на соединение «треугольником».
Ток в подводящих проводах при этом способе пуска двигателя уменьшается в 3 раза по сравнению с тем током, который возник бы при пуске двигателя прямым включением в сеть с обмотками статора, соединенными «треугольником». Однако этот способ пригоден лишь в том случае, если статор рассчитан для нормальной работы при соединении его обмоток «треугольником».
Наиболее простым, дешевым и надежным является асинхронный электродвигатель с короткозамкнутым ротором , но этот двигатель обладает некоторыми недостатками — малым усилием при трогании с места и большим пусковым током. Эти недостатки в значительной мере устраняются применением фазного ротора, но применение такого ротора значительно удорожает двигатель и требует пускового реостата.
Типы асинхронных электродвигателей
Основной тип асинхронных машин — трехфазный асинхронный двигатель . Он имеет три обмотки на статоре, смещенные в пространстве на 120°. Обмотки соединяются в звезду или треугольник и питаются трехфазным переменным током.
Двигатели малой мощности в большинстве случаев выполняются как двухфазные . В отличие от трехфазных двигателей они имеют на статоре две обмотки, токи в которых для создания вращающегося магнитного поля должны быть сдвинуты на угол π /2.
Если токи в обмотках равны по модулю и сдвинуты по фазе на 90°, то работа подобного двигателя ничем не будет отличаться от работы трехфазного. Однако такие двигатели с двумя обмотками на статоре в большинстве случаев питаются от однофазной сети и сдвиг, приближающийся к 90°, создается искусственным путем, обычно за счет конденсаторов.
Однофазный двигатель , имеющий только одну обмотку на статоре, практически неработоспособен. При неподвижном роторе в двигателе создается только пульсирующее магнитное поле и вращающий момент равен нулю. Правда, если ротор такой машины раскрутить до некоторой скорости, то далее она может выполнять функции двигателя.
В этом случае, хотя и будет только пульсирующее поле, но оно слагается из двух симметричных — прямого и обратного, которые создают неравные моменты — больший двигательный и меньший тормозной, возникающий за счет токов ротора повышенной частоты (скольжение относительно обратносинхронного поля больше 1).
В связи с изложенным однофазные двигатели снабжаются второй обмоткой, которая используется как пусковая. В цепь этой обмотки для создания фазового сдвига тока включают конденсаторы, емкость которых может быть достаточно велика (десятки микрофарад при мощности двигателя менее 1 кВт).
В системах управления используются двухфазные двигатели, которые иногда называют исполнительными . Они имеют две обмотки на статоре, сдвинутые в пространстве на 90°. Одна из обмоток, называемая обмоткой возбуждения, непосредственно подключается к сети 50 или 400 Гц. Вторая используется как обмотка управления.
Для создания вращающегося магнитного поля и соответствующего момента ток в обмотке управления должен быть сдвинут на угол, близкий к 90°. Регулирование скорости двигателя, как будет показано ниже, осуществляется изменением значения или фазы тока в этой обмотке. Реверс обеспечивается изменением фазы тока в управляющей обмотке на 180° (переключением обмотки).
Двухфазные двигатели изготовляются в нескольких исполнениях:
с короткозамкнутым ротором,
с полым немагнитным ротором,
с полым магнитным ротором.
Преобразование вращательного движения двигателя в поступательное движение органов рабочей машины всегда связано с необходимостью использования каких-либо механических узлов: зубчатых реек, винта и др. Поэтому иногда целесообразно выполнение двигателя с линейным перемещением ротора-бегунка (название ’’ротор” при этом может быть принято только условно — как движущегося органа).
В этом случае двигатель, как говорят, может быть развернут. Обмотка статора линейного двигателя выполняется так же, как и у объемного двигателя, но только должна быть заложена в пазы на всю длину максимального возможного перемещения ротора-бегунка. Ротор-бегунок обычно короткозамкнутый, с ним сочленяется рабочий орган механизма. На концах статора, естественно, должны находиться ограничители, препятствующие уходу ротора за рабочие пределы пути.
Среди устройств, преобразующих электрическую энергию в механическую, несомненным лидером является трехфазный асинхронный двигатель – простой и надежный в эксплуатации агрегат. Благодаря своим качествам, он получил широкое применение в промышленности и других областях, где используются механизмы. Название двигателя связано с основным принципом его работы. У этих устройств магнитное поле статора вращается с частотой, превышающей частоту вращения ротора. Работа агрегата осуществляется от сети переменного тока.
Где применяются
Асинхронные двигатели активно используются во многих отраслях промышленности и сельского хозяйства. Они потребляют примерно 70% всей энергии, предназначенной для преобразования электричества во вращательное или поступательное движение. Асинхронные двигатели зарекомендовали себя наиболее эффективными в качестве электрической тяги, без которой не обходятся многие технологические операции.
Асинхронные двигатели обладают множеством положительных качеств. Простая конструкция позволяет изготавливать наиболее дешевые и надежные устройства. Минимальные расходы по эксплуатации обеспечиваются отсутствием скользящего узла токосъема, что одновременно повышает и надежность агрегата.
Данный тип электродвигателей может быть трехфазным или однофазным, в зависимости от количества питающих фаз. В случае необходимости и при соблюдении определенных условий, трехфазный агрегат может питаться и работать от однофазной сети. Эти устройства применяются не только в промышленности, но и в бытовых условиях, а также на садовых участках или домашних мастерских. Однофазные двигатели обеспечивают работу и вращение вентиляторов, стиральных машин, небольших станков, водяных насосов и электроинструмента.
Для нормального действия асинхронного агрегата необходимо выбирать наиболее рациональную схему управления. Трехфазный двигатель будет работать в однофазном режиме при условии правильного расчета конденсаторов, выбора типа и сечения проводов, аппаратуры защиты и управления.
Устройство асинхронного двигателя
Понятие асинхронный означает не совпадающий по времени, неодновременный. В связи с этим, ротор такого двигателя вращается с частотой, меньшей чем частота вращения электромагнитного поля статора.
Подобное отставание называется скольжением и обозначается символом S в формуле, применяемой для расчетов:
- S = (n1 – n2)/n1 – 100%, где n1 является синхронной частотой магнитного поля статора, а n2 – частотой вращения вала.
Конструктивно, стандартный асинхронный электродвигатель включает в себя следующие элементы и детали:
- Статор с обмотками. Эту функцию также может выполнять станина, внутри которой помещается статор с обмотками.
- Короткозамкнутый ротор. Если используется фазный – он может называться якорем или коллектором.
- Подшипники различного типа – качения или скольжения. На двигателях повышенной мощности в передней части установлены крышки для подшипников с уплотнениями.
- Металлический или пластмассовый охлаждающий вентилятор, помещенный в кожух с прорезями для подачи воздуха.
- Подключение кабелей осуществляется с помощью клеммной коробки.
Данные конструктивные элементы могут незначительно изменяться, в зависимости от модификации электродвигателя.
Как уже отмечалось, асинхронные двигатели бывают трехфазными или однофазными. Первый вариант, в свою очередь, выпускается с короткозамкнутым или фазным ротором. Наибольшее распространение получили трехфазные асинхронные электродвигатели с короткозамкнутым ротором, поэтому их следует рассмотреть более подробно.
Статор обладает круглой формой и собирается из специальных стальных листов, изолированных между собой. В результате, конструктивно образуется сердечник с пазами, в которые укладываются обмотки. Для этих целей используется обмоточный медный провод, изолированный лаком. В мощных агрегатах обмотки делаются в виде шины. При укладке они сдвигаются между собой на 120 градусов. Соединение осуществляется по схеме звезды или треугольника.
Конструкция самого короткозамкнутого ротора изготавливается в виде вала с надетыми на него стальными листами. Этот набор листов образует сердечник с пазами, заливаемые расплавленным алюминием. Равномерно растекаясь по пазам, алюминий образует стержни, края которых замыкают алюминиевые кольца.
Фазный ротор состоит из вала с сердечником и трех обмоток. С одного конца они соединяются звездой, а с другого – соединяются с токосъемными кольцами, на которые с помощью щеток подается электрический ток. Во время запуска образуется большой пусковой ток асинхронного двигателя. Его можно уменьшить путем добавления к фазным обмоткам нагрузочного реостата.
Принцип работы
Устройство и конструктивные особенности асинхронного двигателя определяют и принцип действия данного агрегата. Когда на обмотку статора подается напряжение, в ней образуется магнитное поле. Такая подача напряжения приводит к изменениям магнитного потока и всего магнитного поля статора. Измененные магнитные потоки поступают к ротору, приводят его в действие, после чего он начинает вращаться. Для того чтобы статор и ротор работали асинхронно, требуется, чтобы значения напряжения и магнитного потока были равны переменному току, используемому в качестве источника питания.
Сам двигатель работает следующим образом:
- Вращающееся магнитное поле воздействует на короткозамкнутую обмотку, специально приспособленную для вращения.
- Поле пересекает проводники роторной обмотки, индуктируя в них электродвижущую силу.
- Под воздействием силы в проводниках ротора начнется течение электрического тока, взаимодействующего с вращающимся магнитным полем. Это приводит к появлению электромагнитных сил, воздействующих на обмотку ротора.
- В сумме, действия приложенных сил вызывают появление вращающего момента, приводящего во вращение ротор в направлении магнитного поля.
Величина индуктированной ЭДС зависит от частоты пересечения проводников вращающимся магнитным полем. То есть, чем выше разница между n1 и n2, тем больше будет величина ЭДС. Ротор будет вращаться с частотой n2, которая всегда будет отставать от синхронной частоты поля статора n1. Эта разница между обеими частотами и будет частотой скольжения ∆n= n1- n2. Данное неравенство является необходимым условием появления электромагнитного вращающегося момента в асинхронном двигателе. Поэтому агрегат так и называется, поскольку вращение ротора происходит несинхронно с полем статора.
Что такое скольжение
Понятие скольжения представляет собой отношение частоты вращения к частоте поля. Данная величина S берется в процентном отношении от частоты вращения магнитного поля. В соответствии с формулой, рассмотренной ранее, частота вращения ротора, определяемая с помощью скольжения составит: n2 = n1 x (1 – S).
Ротор асинхронного двигателя вращается в том же направлении, что и его магнитное поле. В свою очередь, направление вращения поля зависит от последовательности фаз трехфазной сети. Изменить направление вращения ротора возможно за счет изменения направления вращения поля, создаваемого статором. В этом случае изменяется порядок поступления импульсов тока к отдельным обмоткам. В случае необходимости может быть задано вращение по часовой или против часовой стрелки.
Важным моментом считается пуск асинхронного двигателя, при котором происходит пересечение обмотки ротора вращающимся магнитным полем. В результате, индуктируется большая ЭДС, создающая высокий пусковой ток. Подобное состояние компенсируется специальной нагрузкой, снижающей скорость вращения ротора.
МТСТ’16
МТСТ’16
4-я Международная научная конференция «Магнитолевитационные транспортные системы и технологии» (МТСТ’16) прошла в Петербургском государственном университете путей сообщения Императора Александра I с 25 по 27 мая 2016 года.
Количество участников – 140, 20 из них – иногородние специалисты, 9 – зарубежные специалисты из Германии, Китая, Бразилии, Украины.
Конференция МТСТ’16 посвящена решению фундаментальных научных проблем: разработке фундаментальных основ развития отечественной магнитолевитационной технологии для строительства, сертификации и коммерческой эксплуатации грузовых конвейерно-магистральных, пассажирских междугородних линий и линий общественного транспорта в мегаполисах.
В рамках Конференции МТСТ’16 рассматриваются следующие вопросы:
- перманентная левитация;
- разработка и испытания унифицированного сверхпроводникового модуля для систем магнитной левитации;
- боковая стабилизация и линейная тяга грузового транспортного средства;
- устойчивость транспортного средства в замкнутом (с техническим вакуумом) и открытом пространствах.
Рассмотрены физические принципы магнитодинамической левитации и электродинамического торможения.
Исследованы варианты исполнения путевых дискретных треков левитации на примере поперечных кольцевых обмоток Грамма и распределенных беличьих клеток.
Предложены конструктивные схемы узла левитации, обеспечивающие снижение на порядок начальной скорости транспортного средства, при которой возникает левитация, с минимальным использованием активных материалов.
Обсуждено сходство узла левитации с путевым треком в виде развернутой беличьей клетки с асинхронным двигателем с короткозамкнутым (массивным) ротором, а также сходство физических процессов и режимов работы асинхронного двигателя и узла левитации.
Предложено основные теоретические положения, разработанные для асинхронного двигателя с короткозамкнутым ротором, и соответствующие расчетные формулы адаптировать для описания работы узла левитации (прежде всего, касательно развиваемого устройством левитации электромагнитного момента, который в рассматриваемом случае является тормозным). Поскольку путевой дискретный трек (обмотка) левитации неподвижно закреплен, то протекающие в устройстве левитации процессы аналогичны тем, которые имеют место в асинхронном двигателе с короткозамкнутым ротором, находящимся в заторможенном состоянии. В проекте известные из теории асинхронных машин расчетных соотношения адаптированы для описания эффекта левитации и электродинамического торможения магнитолевитационных транспортных средств.
Магнитолевитационный транспорт обычно позиционируется в качестве пассажирского. Однако анализ грузовых автомобильных перевозок, например, по маршруту Санкт-Петербург–Москва, показывает, что магнитолевитационный транспорт может быть востребован и на рынке междугородных грузовых, прежде всего, контейнерных перевозок. Объем грузопотоков в данном направлении характеризуется следующими показателями. Из морских портов Санкт-Петербурга и Ленинградской области в Москву перевозится 1,8 млн. контейнеров в год. Из них более 90% – автотранспортом. Через 5 лет количество перевозимых контейнеров достигнет 4,5 млн. контейнеров в год. Экспертными оценками установлено, что существующая наземная транспортная система на базе железнодорожного и автомобильного транспорта на ближайший период с этими грузовыми потоками справляться не будет. Транспортные проблемы, кроме того, весьма ощутимы в социальном плане. Затраты на транспортировку товара существенно сказываются на его конечной стоимости. Она может на два порядка превысить оптовые закупочные цены у производителя.
Внедрение магнитолевитационной технологии на транспорте будет стимулировать создание высокоинтеллектуального научно-производственного потенциала путем развития национальной фундаментальной и прикладной науки и профессионально-образовательной высшей школы, формирования отечественных проектных организаций и создания наукоемких производств по выпуску новейших образцов транспортного оборудования мирового уровня.
Эксплуатация магнитолевитационного транспорта предусматривает развитие и широкое внедрение спутниковой навигационной технологии для обеспечения диагностики, связи, наземного и бортового автоматического управления в соответствии с Международным стандартом IRIS, который подлежит соответствующей корректировке.
Руководители, состав программного и организационного комитетов 4-й Международной научной конференции МТСТ’16Видеоматериалы
Фотоматериалы
Основные детали трехфазного (3-) асинхронного двигателя с короткозамкнутым ротором ~ Обучение электротехнике
Пользовательский поиск
На схеме ниже показаны все основные части, из которых состоит асинхронный двигатель переменного тока. Эти основные части работают вместе, чтобы обеспечить бесперебойную работу этого высокоэффективного электрического устройства:
| Детали трехфазного асинхронного двигателя — Фото: WEG MOTORS |
Детали статора
Как показано на схеме выше, части 1, 2 и 8 составляют статор трехфазного асинхронного двигателя:
1 — Корпус двигателя.Это несущая конструкция двигателя в сборе; произведено
из чугуна, стали, литого под давлением алюминия, устойчивого к коррозии, с ребрами охлаждения.
2 — Сердцевина ламинирования. Эта часть построена из магнитных стальных пластин и вмещает
обмотки двигателя.
8 — Трехфазные обмотки. Он состоит из трех равных наборов катушек, по одному на каждую
.фаза, образующая сбалансированную трехфазную систему при подключении к трехфазной
источник питания.
Детали ротора
Ротор трехфазного асинхронного двигателя с короткозамкнутым ротором состоит из набора неизолированных стержней, соединенных между собой короткозамыкающими кольцами. Асинхронный двигатель отличается тем, что к источнику питания подключен только статор. На ротор не подается внешнее питание, и токи, протекающие через него, индуцируются электромагнитно статором, от которого происходит название асинхронного двигателя.
Части 3, 7 и 12 составляют ротор трехфазного двигателя:
7 — Вал.Он передает механическую мощность, развиваемую двигателем.
3 — Ламинированный магнитный сердечник. Пластины ротора имеют те же характеристики, что и у
.ламели статора.
12 — Стержни ротора и короткозамыкающие кольца. Это алюминиевые отливки под давлением, сформированные как единое целое
кусок. Они позволяют вращать двигатель за счет индукции электромагнитного излучения
.текущий
Другие части двигателя
Ниже перечислены другие важные части трехфазного асинхронного двигателя с короткозамкнутым ротором:
4 — Концевые щитки
5 — Вентилятор охлаждения мотора
6 — Крышка вентилятора.
9 — Клеммная коробка. Здесь находятся электрические клеммы двигателя.
10 — Клеммы двигателя
11 — Подшипники. Они поддерживают вращение ротора.
Что такое двигатель с короткозамкнутым ротором и как он работает?
Электродвигатели — это машины, преобразующие электрическую энергию в механическую, и в настоящее время они доминируют в современной промышленности. Они просты в использовании, имеют простой дизайн и бывают разных форм, что позволяет им добиться успеха практически в любой ситуации.Электродвигатели могут питаться от постоянного (DC) или переменного (AC) тока, и в этой статье будет рассмотрен конкретный двигатель переменного тока, известный как двигатель с короткозамкнутым ротором. Эти двигатели представляют собой особый тип асинхронных двигателей, которые используют эффект электромагнитной индукции для преобразования электрического тока в энергию вращения (дополнительную информацию можно найти в нашей статье об асинхронных двигателях). В этой статье будут объяснены принципы работы двигателей с короткозамкнутым ротором, как они работают и для каких применений они используются.Таким образом, дизайнеры могут сделать осознанный выбор при выборе правильного двигателя.
Что такое двигатели с беличьей клеткой?
Двигатели с короткозамкнутым ротором — это подкласс асинхронных двигателей, которые используют электромагнетизм для создания движения. Это так называемые двигатели с «короткозамкнутым ротором», потому что форма их ротора — внутреннего компонента, соединенного с выходным валом — напоминает клетку. Две круглые торцевые крышки соединены стержнями ротора, на которые действует электромагнитное поле (ЭМП), создаваемое статором, или внешним корпусом, состоящим из многослойных металлических листов и намотки проволоки.Статор и ротор являются двумя основными частями любого асинхронного двигателя, а беличья клетка — это просто один из способов использования эффекта электромагнитной индукции. Переменный ток, проходящий через статор, создает ЭДС, которая колеблется с частотой переменного тока, которая «вращается» вокруг ротора, вызывая противоположные магнитные поля в стержнях ротора, вызывая движение.
Как работают двигатели с беличьей клеткой?
По сути, двигатели с короткозамкнутым ротором работают не иначе, чем большинство других асинхронных двигателей, и отличаются только конкретным взаимодействием между ротором и статором.Наша статья об асинхронных двигателях содержит обсуждение основных законов, лежащих в основе всех асинхронных двигателей, и дает понимание того, как движение создается за счет магнетизма.
Двигателис короткозамкнутым ротором максимизируют электромагнитную индукцию за счет использования стержней ротора для взаимодействия с ЭДС статора. Статор обычно содержит обмотки из проволоки, по которым протекает переменный ток; этот ток изменяется синхронно с синусоидальной кривой (или «чередуется»), которая изменяет направление тока в обмотках провода.Когда ток колеблется, генерируемая ЭДС будет следовать его примеру и в некоторых случаях заставит его «вращаться» с частотой, подобной частоте переменного тока. Эта вращающаяся ЭДС создает противоположное напряжение и ЭДС в стержнях ротора, тем самым толкая ротор, создавая вращательное движение.
Этот ротор не вращается с точной частотой переменного тока, поэтому двигатели с короткозамкнутым ротором (как и другие асинхронные двигатели) считаются асинхронными. Всегда есть некоторая потеря или «проскальзывание» между частотой переменного тока и частотой вращения вала, и это является следствием, в первую очередь, того, почему ротор вращается.Если бы ротор вращался с той же частотой, то величина силы, действующей на стержни ротора, была бы равна нулю, таким образом, не создавая движения. Ротор всегда должен работать медленнее, чтобы почувствовать эффект электромагнитной индукции, как если бы ротор постоянно играл в магнитную игру «догонялки». Чтобы узнать больше, посетите нашу статью о типах двигателей переменного тока.
Характеристики двигателя с короткозамкнутым ротором
Наша статья об асинхронных двигателях объясняет спецификации для всех типов асинхронных двигателей и является хорошим местом, чтобы увидеть все различные характеристики асинхронных двигателей.В этой статье основное внимание будет уделено тому, что необходимо указать для асинхронных двигателей с короткозамкнутым ротором, а именно фазе, скорости, крутящему моменту и току. Поскольку эти двигатели пользуются огромной популярностью, NEMA и IEC разработали стандартизованные классы двигателей с короткозамкнутым ротором на основе их характеристик скорости и момента. Это позволяет производить взаимозаменяемые двигатели между производителями и упрощает замену двигателей. Эти принципы, а также различные классы стандартных двигателей с короткозамкнутым ротором будут кратко объяснены ниже.
Тип фазы
Асинхронные двигателимогут приводиться в действие однофазным (одна частота переменного тока) или многофазным (несколько частот переменного тока) в зависимости от входного источника питания. Некоторые из наиболее распространенных типов двигателей с короткозамкнутым ротором используют три фазы, что означает, что входной ток представляет собой три идентичных частоты переменного тока, разделенных на 120 градусов по фазе. Трехфазные двигатели являются самозапускающимися, что означает, что единственным необходимым входом является пусковое напряжение, что делает эти двигатели по существу автоматическими. Однофазные двигатели также распространены, но они не самозапускаются и требуют некоторого начального толчка.Это связано с тем, что одной частоты переменного тока недостаточно для создания действительно «вращающейся» ЭДС, и необходимо выполнить некоторую компенсацию для имитации вращающегося поля. Это можно сделать с помощью пускателей, которые могут быть конденсаторами, разделенными фазами или другими компонентами. Подробнее о пускателях можно прочитать в нашей статье о типах пускателей двигателей.
Крутящий момент двигателя и кривая крутящего момента-скорости
Хотя двигатели с короткозамкнутым ротором работают с базовыми скоростями и крутящими моментами, им необходимо достичь этого установившегося состояния посредством некоторого переходного пуска.Этот запуск, обычно визуализируемый посредством кривой крутящего момента — скорости, жизненно важен, поскольку он определяет, с какими рабочими условиями может работать двигатель. На рисунке 1 ниже показаны важные области кривой крутящий момент-скорость для любого асинхронного двигателя.
Рис. 1: Кривая крутящий момент-скорость для асинхронных двигателей с обозначенными важными участками.
Пусковой крутящий момент — это крутящий момент при запуске двигателя. Вытягивающий или разрушающий крутящий момент — это максимальный крутящий момент, достигаемый перед максимальной скоростью.Номинальный крутящий момент — это выходной крутящий момент в установившемся режиме, который обычно указан на паспортной табличке двигателя. Разница между синхронной скоростью и скоростью, достигаемой при номинальном крутящем моменте, определяет скольжение двигателя.
Классы NEMA для многофазных асинхронных двигателей с короткозамкнутым ротором
Рисунок 2: Кривые крутящий момент-скорость для двигателей стандартных классов NEMA.
Таблица 1: Обобщенные характеристики стандартных двигателей NEMA с короткозамкнутым ротором.
Стандарт NEMA С.C.I.M. | Пусковой момент | Пусковой ток | Накладка |
Класс A | нормальный | нормальный | нормальный |
Класс B | нормальный | Низкий | нормальный |
класс C | Высокая | Низкий | нормальный |
Класс D | Высокая | Низкий | Высокая |
На рис. 2 показаны кривые для двигателей с короткозамкнутым ротором различных классов NEMA.Существует четыре основных класса (A, B, C и D), хотя их больше в зависимости от специфики. Эти четыре класса приведены в таблице 1 с точки зрения их пускового момента, тока и величины скольжения. Существуют и другие нестандартные двигатели с короткозамкнутым ротором, но они обычно изготавливаются в соответствии со спецификациями покупателя.
Двигателикласса A являются наиболее популярным типом двигателей с короткозамкнутым ротором. У них нормальный пусковой момент и ток, а также скольжение менее 5% от синхронной скорости. Распространенными приложениями являются вентиляторы, компрессоры, конвейеры и другие устройства с низкой инерционной нагрузкой, которые позволяют быстро разгонять двигатель.
Двигателикласса B можно запускать при полной нагрузке, что делает их полезными для высокоинерционных применений (большие вентиляторы, центробежные насосы и т. Д.). Они имеют нормальный пусковой момент, более низкий пусковой ток, чем двигатели класса A, и имеют скольжение менее 5% при полной нагрузке. Эти двигатели иногда взаимозаменяемы с двигателями класса А, особенно когда требуется пониженное пусковое напряжение.
Двигателикласса C имеют высокий пусковой момент и низкий пусковой ток благодаря конструкции ротора с двойной обоймой. Из-за этого улучшения они более дорогие, чем двигатели классов A и B, но также обладают способностью выдерживать высокие пусковые моменты, например, в нагруженных насосах, компрессорах, дробилках и т. Д.Их скольжение также обычно составляет менее 5%.
Двигателикласса D обладают наивысшими пусковыми моментами, низким пусковым током и большим скольжением при полной нагрузке (от 5% до 20% в зависимости от применения). Их крутящий момент отрыва происходит на гораздо более низкой скорости, чем у двигателей других классов, что можно увидеть, сравнив положение пиков каждой кривой на Рисунке 2. Высокое сопротивление ротора, которое делает двигатели класса D такими сильными, также отвечает за их более низкий пиковый крутящий момент. скорости, иногда вызывая пиковый крутящий момент при нулевой скорости (100% скольжение).Двигатели класса D обычно применяются в бульдозерах, литейных машинах, пробивных прессах и т. Д.
Заявки и критерии выбора
Асинхронные двигателис короткозамкнутым ротором являются популярным выбором в промышленности, отчасти из-за их низкой стоимости, простоты обслуживания, высокой эффективности, хорошего регулирования температуры и безопасности. Их самым большим недостатком является отсутствие контроля скорости, поэтому для решения этих задач были разработаны другие двигатели (двигатели с фазным ротором). Стандартные рамы NEMA позволяют легко выбрать правильный двигатель, требуя только рабочих характеристик проекта.
Так, например, если кузнечный бизнес создает новый силовой молот, который должен обеспечивать быстрые и сильные удары, им следует исследовать двигатели класса D, поскольку они обеспечивают чрезвычайно высокий пусковой момент. Точно так же, если двигатель необходим для простого вентилятора HVAC, двигатели классов A и B будут работать отлично. Определите необходимые крутящие моменты, скорости и напряжения для работы, и на рынке обязательно найдется подходящая беличья клетка.
Сводка
В этой статье представлено понимание того, что такое асинхронные двигатели с короткозамкнутым ротором и как они работают.Для получения дополнительной информации о сопутствующих продуктах обратитесь к другим нашим руководствам или посетите платформу Thomas Supplier Discovery Platform, чтобы найти потенциальные источники поставок или просмотреть подробную информацию о конкретных продуктах.
Источники:
- https://geosci.uchicago.edu
- http://hyperphysics.phy-astr.gsu.edu/hbase/mintage/indmot.html
- http://www.egr.unlv.edu/~eebag/Induction%20Motors.pdf
- https://www.controleng.com/articles/what-to-consider-when-choosing-an-ac-induction-motor/
- http: // ocw.uniovi.es
- http://people.ece.umn.edu/users/riaz/animations/sqmovies.html
Прочие изделия для двигателей
Больше от Machinery, Tools & Supplies
Модель динамики трехфазной асинхронной машины, также известной как индукционная машина, в единицах СИ или о.у.
Представлять ли крутящий момент, приложенный к валу или ротору. скорость как входной сигнал блока Simulink ® , или чтобы представить вал машины как Вращающийся механический порт Simscape ™.
Выберите Torque Tm , чтобы указать входной крутящий момент в Н · м или о.е.
а так и выставить тм порт. Скорость машины
определяется по инерции станка Дж (для СИ
станка) или постоянной инерции H (для пу станка)
и разницей между приложенным механическим крутящим моментом Tm , и внутренний электромагнитный момент, Те . Когда скорость положительная, положительный крутящий момент
сигнал указывает на режим двигателя, а отрицательный сигнал указывает на генератор
режим.
Выберите Speed w , чтобы указать скорость, в
рад / с или в о.у., и выставить порт w . Машина
скорость навязывается и механическая часть модели (автомат
инерция J ) игнорируется. Используя скорость как
механический ввод позволяет моделировать механическую связь между двумя
машины.
На рисунке показано, как смоделировать жесткое соединение валов в мотор-генераторной установке. когда в машине 2 не учитывается момент трения.Скорость вывода машина 1 (двигатель) подключена к входу скорости машины 2 ( генератор), а выход электромагнитного момента машины 2 Te применяется к механическому входу крутящего момента Tm станка 1. Коэффициент Kw учитывает единицы скорости обеих машин (рад / с или о.е.) и передаточное число коробки передач w2 / w1. Коэффициент KT учитывает единицы крутящего момента обеих машин (Н.м или пу) и номиналы машин. Также из-за инерции J2 игнорируется в машине 2, J2 относится к скорости машина 1 и должна быть добавлена к инерции машины 1 Дж1 .
Выберите Механический поворотный порт , чтобы открыть механический поворотный порт Simscape, S , который
позволяет соединять вал машины с другими блоками Simscape, имеющими механические порты вращения.
На рисунке показано, как подключить идеальный крутящий момент Исходный блок из библиотеки Simscape на вал машины для представления машины в в режиме двигателя или в режиме генератора, когда частота вращения ротора положительный.
Модель динамики трехфазной асинхронной машины, также известной как индукционная машина, в единицах СИ или о.у.
Представлять ли крутящий момент, приложенный к валу или ротору. скорость как входной сигнал блока Simulink ® , или чтобы представить вал машины как Вращающийся механический порт Simscape ™.
Выберите Torque Tm , чтобы указать входной крутящий момент в Н · м или о.е.
а так и выставить тм порт. Скорость машины
определяется по инерции станка Дж (для СИ
станка) или постоянной инерции H (для пу станка)
и разницей между приложенным механическим крутящим моментом Tm , и внутренний электромагнитный момент, Те .Когда скорость положительная, положительный крутящий момент
сигнал указывает на режим двигателя, а отрицательный сигнал указывает на генератор
режим.
Выберите Speed w , чтобы указать скорость, в
рад / с или в о.у., и выставить порт w . Машина
скорость навязывается и механическая часть модели (автомат
инерция J ) игнорируется. Используя скорость как
механический ввод позволяет моделировать механическую связь между двумя
машины.
На рисунке показано, как смоделировать жесткое соединение валов в мотор-генераторной установке. когда в машине 2 игнорируется момент трения. Выходная скорость машина 1 (двигатель) подключена к входу скорости машины 2 ( генератор), а выход электромагнитного момента машины 2 Te применяется к механическому входу крутящего момента Tm станка 1. Коэффициент Kw учитывает единицы скорости обеих машин (рад / с или о.е.) и передаточное число коробки передач w2 / w1.Коэффициент KT учитывает единицы крутящего момента обеих машин (Н.м или пу) и номиналы машин. Также из-за инерции J2 игнорируется в машине 2, J2 относится к скорости машина 1 и должна быть добавлена к инерции машины 1 Дж1 .
Выберите Механический поворотный порт , чтобы открыть механический поворотный порт Simscape, S , который
позволяет соединять вал машины с другими блоками Simscape, имеющими механические порты вращения.
На рисунке показано, как подключить идеальный крутящий момент Исходный блок из библиотеки Simscape на вал машины для представления машины в в режиме двигателя или в режиме генератора, когда частота вращения ротора положительный.
Конструкция двигателей переменного тока
Если вы читали нашу предыдущую статью Двигатели переменного тока: основная терминология, то теперь вы понимаете:
- Назначение двигателей переменного тока
- Стандарты NEMA для электрического оборудования и
- Основная концепция крутящего момента , скорость и мощность.
Теперь мы обсудим конструкцию двигателей переменного тока, чтобы вы могли определить ключевые отличия деталей двигателя и то, как каждый продукт работает для любого конкретного применения.
Конструкция двигателей переменного тока
В промышленности часто используются асинхронные двигатели переменного тока. Мы обсудим 3-фазные асинхронные асинхронные двигатели 460 В переменного тока. Когда скорость вращающегося магнитного поля больше скорости ротора, вы знаете, что это асинхронный двигатель (см. Рисунок). Двигатель переменного тока состоит из трех основных частей: статора, ротора и корпуса.
Конструкция статора
Статор и ротор на самом деле представляют собой электрические цепи, которые работают как электромагниты. Статор — это электрическая часть двигателя, которая не движется. Для двигателя NEMA сердечник статора состоит из нескольких сотен тонких пластин.
Обмотки статора
Пластины статора образуют полый цилиндр. В каждый паз сердечника статора помещается катушка изолированного провода. Электромагнит образован каждой группой катушек и окружающим их стальным сердечником.Двигатели работают благодаря электромагнетизму. Источник питания напрямую подключен к обмоткам статора.
Конструкция ротора
В электромагнитной цепи ротор — это вращающаяся часть. Ротор с короткозамкнутым ротором является наиболее распространенным типом ротора. Подумайте о вращающихся колесах для упражнений, используемых в клетках для домашних хомяков, и вы поймете, как устроен ротор клетки для беличей. Ротор состоит из пакета стальных пластин, которые включают равномерно разнесенные токопроводящие шины по периметру.
Сердечник ротора состоит из многослойных пластин. Алюминий отливается под давлением в пазах сердечника ротора, образуя серию проводников по окружности ротора. Токопроводящие шины электрически и механически соединены с концевыми кольцами. Наконец, сердечник ротора устанавливается на стальной вал.
Корпус двигателя
Корпус состоит из рамы или ярма и двух концевых кронштейнов, также называемых корпусами подшипников. Статор установлен внутри рамы. Ротор находится внутри статора, но разделен небольшим воздушным зазором, поэтому они не имеют прямого физического контакта друг с другом.Кожух предназначен для защиты рабочих и электрических частей двигателя от агрессивных сред, в которых они работают. Подшипники, установленные на валу, поддерживают ротор, что позволяет ему вращаться. На валу установлен вентилятор на тот случай, когда двигатель нужно охладить.
Теперь вы можете описать конструкцию двигателя переменного тока с короткозамкнутым ротором. Эти знания должны помочь вам, когда вам нужно выбрать правильный двигатель для вашего конкретного применения.Если у вас возникнут вопросы, мы с радостью поможем. Свяжитесь с нами через Интернет, и мы поможем вам разобраться в ваших вариантах двигателей переменного тока и решить, какой из них лучше всего подходит для вашего применения.
Обзор двигателя переменного тока и технические характеристики двигателя переменного тока
Обзор двигателя переменного тока
Если вам нужна исчерпывающая информация о двигателях переменного тока, вы обратились по адресу. Индивидуальные двигатели переменного тока делятся на две основные категории: синхронные и асинхронные. Наиболее распространенным типом асинхронного двигателя является асинхронный двигатель переменного тока, который производители двигателей изготавливают на заказ с использованием трансформатора переменного тока с вращающейся вторичной обмоткой.В этом типе двигателя первичная обмотка или статор подключается к источнику питания, в то время как закороченный вторичный элемент или ротор несет наведенный вторичный ток. Воздействие токов ротора на поток в воздушном зазоре создает крутящий момент. С другой стороны, асинхронный двигатель находится в отдельном классе двигателей переменного тока из-за различий в конструкции и рабочих характеристиках. Sinotech предлагает обширный каталог двигателей, изготовленных нашими производителями двигателей переменного тока, который может быть адаптирован к вашим точным спецификациям.
Узнайте последние новости о двигателях переменного тока в нашем блоге.
Асинхронный VS синхронный двигатель переменного тока
Обзор асинхронных асинхронных асинхронных двигателейАсинхронные двигатели переменного тока
Все асинхронные двигатели являются асинхронными двигателями. Асинхронные двигатели переменного тока, как один из самых простых и надежных электродвигателей, имеют две основные электрические сборки: статор с обмоткой и узел ротора. Двигатель получил свое название от токов, протекающих в ротор, которые индуцируют переменные токи, протекающие в первичном элементе или статоре.Комбинированные магнитные эффекты токов статора и ротора создают силу, необходимую для вращения.
Двигатели переменного тока серии, в том числе асинхронные двигатели переменного тока, имеют роторы с пластинчатым цилиндрическим железным сердечником с прорезями для ввода проводов. Наиболее распространенный тип ротора, производимый производителями двигателей переменного тока, иногда называют «беличьей клеткой», который имеет литые алюминиевые проводники и замыкающие концевые кольца. Беличья клетка вращается, когда движущееся магнитное поле создает ток в укороченных проводниках.
В двигателе переменного тока скорость вращения магнитного поля называется синхронной скоростью (n s ). Эта скорость определяется количеством полюсов статора и частотой источника питания. Формула для расчета синхронной скорости двигателя переменного тока: n с = 120f / p.
- n с: синхронная скорость в об / мин
- f: частота сетевого напряжения в Гц
- п: количество полюсов
Синхронная скорость — это абсолютный верхний предел скорости двигателя переменного тока.Если ротор вращается с той же скоростью, что и вращающееся магнитное поле, проводники ротора не перерезают силовые линии и не создают крутящего момента.
При работе двигателя переменного тока ротор всегда вращается медленнее, чем магнитное поле. Скорость ротора достаточно мала, чтобы вызвать надлежащую величину протекания тока ротора, чтобы результирующий крутящий момент был достаточным для управления нагрузкой и преодоления потерь на ветер и трение.
Разница в скорости между ротором двигателя переменного тока и магнитным полем называется «скольжением».«Скольжение — это процент от синхронной скорости. Формула для расчета скольжения: s = 100 (n s — n a ) / n s .
- s = скольжение
- n s = синхронная скорость
- n a = фактическая скорость
Синхронные двигатели Обзор
Синхронные двигателиимеют особую конструкцию ротора, которая позволяет им вращаться с той же скоростью, что и поле статора. Другими словами, они работают абсолютно синхронно с частотой сети.К основным типам синхронных двигателей относятся двигатели без возбуждения и с возбуждением от постоянного тока. Как и в случае с асинхронными двигателями переменного тока, скорость синхронных двигателей определяется количеством пар полюсов. Он рассчитывается по соотношению частот линии.
Изготовители двигателей на заказ проектируют синхронные двигатели различных размеров, от субфракционных двигателей с самовозбуждением до двигателей переменного тока большой мощности с возбуждением от постоянного тока для промышленных приводов. В диапазоне дробных лошадиных сил синхронные двигатели служат для обеспечения точной постоянной скорости.
В применении к промышленным нагрузкам синхронные двигатели большой мощности выполняют две важные функции:
- Обеспечивает высокоэффективное средство преобразования энергии переменного тока в механическую энергию
- Работают с опережающим или единичным коэффициентом мощности, обеспечивая коррекцию коэффициента мощности
Синхронные электродвигатели без возбуждения
Производители двигателей переменного тока создают невозбужденные электродвигатели, использующие конструкции с реактивным сопротивлением и гистерезисом.Они используют схему самозапуска и не требуют внешнего источника питания.
Синхронные электродвигатели с постоянным возбуждением
Электродвигателис возбуждением постоянным током доступны мощностью более 1 л.с. Для работы им требуется постоянный ток, подаваемый через контактные кольца для возбуждения. Двигатель получает постоянный ток от отдельного источника или генератора постоянного тока, подключенного к валу двигателя переменного тока.
Однофазные и многофазные синхронные двигатели должны приводиться в действие, или их ротор должен быть подключен по схеме самозапуска для запуска.Поскольку поле электродвигателя вращается с синхронной скоростью, электродвигатель должен быть ускорен, прежде чем он сможет синхронизироваться. Ускорение с нулевой скорости требует проскальзывания до достижения синхронизма. Следовательно, для начала важно использовать отдельные средства.
В самозапускающихся электрических двигателях переменного тока, изготовленных по индивидуальному заказу, в размерах л.с. используются методы пуска, общие для асинхронных электродвигателей, такие как расщепленная фаза, конденсаторный пуск, отталкивающий пуск и затененный полюс. Двигатели автоматически переключаются на синхронную работу из-за электрических характеристик.
В двигателяхс возбуждением постоянным током для пуска используется беличья клетка, называемая амортизатором или демпферной обмоткой. Между прочим, присущий двигателю низкий пусковой момент и потребность в источнике питания постоянного тока требуют системы пуска, которая:
- Обеспечивает полную защиту электродвигателя при запуске
- Применяет возбуждение постоянного поля в нужное время
- Снимает возбуждение поля при извлечении ротора (максимальный крутящий момент)
- Защищает обмотку электродвигателя с короткозамкнутым ротором от теплового повреждения при сбоях в работе
Взгляд на крутящий момент в электродвигателях с постоянным возбуждением
Момент подъема
Крутящий момент электродвигателя определяется как минимальный крутящий момент, создаваемый от состояния покоя до точки втягивания.Этот крутящий момент должен превышать крутящий момент нагрузки в достаточной степени, чтобы поддерживать удовлетворительную скорость ускорения при нормальных условиях напряжения.
Момент сопротивления
Реактивный крутящий момент двигателя является результатом выступа полюсных наконечников ротора, что является предпочтительным направлением намагничивания. Он пульсирует на скоростях ниже синхронной.
Момент сопротивления влияет на моменты втягивания и извлечения двигателя, поскольку невозбужденный явнополюсный ротор стремится выровняться с магнитным полем статора электродвигателя, чтобы поддерживать минимальное магнитное сопротивление.Реактивного сопротивления электродвигателя может быть достаточно, чтобы синхронизировать слегка нагруженную малоинерционную систему и развить крутящий момент отрыва около 30 процентов.
Синхронный момент
Синхронный крутящий момент электродвигателя — это крутящий момент, создаваемый после приложения возбуждения. Он представляет собой общий крутящий момент в установившемся режиме, доступный для привода нагрузки. Крутящий момент достигает максимума примерно при 70 отставании ротора от магнитного поля вращающегося статора. Однако максимальное значение — это момент отрыва.
Момент отрыва
Момент отрыва — это максимальный устойчивый крутящий момент, который электродвигатель развивает при синхронной скорости в течение одной минуты с номинальной частотой и нормальным возбуждением. Нормальный крутящий момент отрыва обычно составляет 150 процентов крутящего момента при полной нагрузке для электродвигателей с единичным коэффициентом мощности. Для электродвигателей с опережающим коэффициентом мощности 0,8 он составляет от 175 до 200 процентов.
Момент затяжки
Вращающий момент синхронного двигателя — это крутящий момент, развиваемый при переводе подключенной инерционной нагрузки в синхронизм при приложении возбуждения.Он разработан при переходе от скорости скольжения к синхронной скорости, когда электродвигатели переходят от индукционной к синхронной работе. Это обычно самый критический период при запуске синхронного двигателя. При синхронной скорости крутящий момент, развиваемый амортизатором и обмотками возбуждения, становится нулевым. В результате только реактивное сопротивление и синхронизирующий момент, обеспечиваемые возбуждением обмоток возбуждения, эффективны в точке втягивания.
Дополнительные типы конструкции электродвигателей переменного тока по индивидуальному заказу
Многофазные электродвигатели переменного тока
Многофазные двигатели переменного тока с короткозамкнутым ротором, такие как трехфазные двигатели, представляют собой машины с постоянной скоростью.Они обладают некоторой степенью гибкости в рабочих характеристиках при изменении конструкции паза ротора. Изменения в двигателях переменного тока вызывают изменения тока, крутящего момента и скорости при полной нагрузке. Стандартизация и инновации позволили получить четыре основных типа двигателей переменного тока:
Конструкции A и B Характеристики
- Электродвигатель переменного тока общего назначения с нормальными пусковыми моментами и токами, а также с малым скольжением
- Фракционные многофазные двигатели переменного тока обычно имеют конструкцию B
- Поскольку конструкция B имеет падающие характеристики, многофазный двигатель переменного тока с таким же пробоем или максимальным крутящим моментом, что и однофазный двигатель переменного тока, не может достичь той же точки скорости-момента для скорости полной нагрузки, что и однофазный нестандартный двигатель переменного тока. моторные конструкции
- Пробойный момент должен быть выше для сопоставимых скоростей при полной нагрузке (минимум 140 процентов пробивного момента однофазных двигателей переменного тока общего назначения)
Конструкция C Характеристики
- Высокий пусковой момент при нормальном пусковом токе и малом скольжении
- Используется там, где отрывные нагрузки высоки при пуске, но обычно работают при номинальной полной нагрузке
- Не подвержен высоким требованиям к перегрузке после достижения рабочей скорости
Конструкция D Характеристики
- Высокое скольжение, позволяющее снизить скорость при колебаниях нагрузки
- Низкий пусковой ток
- Низкая частота вращения при полной нагрузке
- Эту конструкцию можно разделить на несколько подгрупп, которые различаются скольжением или формой кривой скорость-крутящий момент.
Конструкция F Характеристики
- Низкий пусковой момент
- Низкий пусковой ток
- Низкое скольжение
- Изготовители двигателей на заказ создают двигатели переменного тока для получения низкого тока заторможенного ротора
- Заторможенный ротор и низкий момент пробоя
- Двигатели обычно используются, когда пусковой крутящий момент низкий и не возникают высокие перегрузки после достижения рабочей скорости
Двигатели переменного тока с фазным ротором
Двигатели переменного токас короткозамкнутым ротором относительно негибки в отношении характеристик скорости и крутящего момента.Однако специальный двигатель переменного тока с фазным ротором имеет регулируемые скорость и крутящий момент. Применение двигателей переменного тока с фазным ротором заметно отличается от двигателей переменного тока с короткозамкнутым ротором из-за доступности цепи ротора. Чтобы получить характеристики двигателя переменного тока, нужно ввести различные значения сопротивления в цепь ротора.
Вторичное сопротивление в цепи ротора обычно запускает двигатели переменного тока с фазным ротором. Затем сопротивление двигателя переменного тока последовательно снижается, чтобы двигатель разгонялся.В результате двигатели переменного тока могут развивать значительный крутящий момент при ограничении тока заторможенного ротора. Производители двигателей переменного тока могут спроектировать это вторичное сопротивление двигателя для непрерывной работы, чтобы рассеивать тепло, выделяемое при непрерывной работе на пониженных скоростях, частом ускорении или ускорении с большими инерционными нагрузками.
Внешнее сопротивление придает двигателям переменного тока характеристику, которая приводит к значительному падению оборотов в минуту при небольшом изменении нагрузки. Обеспечивается пониженная скорость двигателя переменного тока примерно до 50% от номинальной скорости, но эффективность остается низкой.
Многоскоростные электродвигатели переменного тока
Изготовители двигателей на заказ проектируют двигатели переменного тока с последовательным переключением полюсов для работы на одной скорости. Путем физического повторного подключения выводов они могут достичь соотношения скоростей 2: 1. Типичные скорости для двигателей переменного тока 60 Гц:
- 3600/1800 об / мин (2/4 полюса)
- 1800/900 об / мин (4/8 полюса)
- 1200/600 об / мин (6/12 полюсов)
Двухобмоточные двигатели переменного тока имеют две отдельные обмотки, которые производители могут наматывать на любое количество полюсов, чтобы облегчить получение других соотношений скоростей.Однако соотношение больше 1: 4 нецелесообразно из-за размера и веса двигателя переменного тока. Однофазные двигатели переменного тока обычно имеют конструкцию с регулируемым крутящим моментом. Однако также доступны двигатели переменного тока с постоянным крутящим моментом и постоянной мощностью.
Выходная мощность двигателей переменного тока может быть пропорциональна каждой скорости. Такие нестандартные конструкции двигателей переменного тока имеют выходную мощность в лошадиных силах в соответствии с одной из следующих нагрузочных характеристик:
- Переменный крутящий момент : Эти двигатели переменного тока имеют характеристики скорость-крутящий момент, которые изменяются пропорционально квадрату скорости.Например, электродвигатель со скоростью 1800/900 об / мин, который развивает 10 л.с. при 1800 об / мин, выдает 2,5 л.с. при 900 об / мин. Поскольку двигатели переменного тока сталкиваются с нагрузками, такими как центробежные насосы, вентиляторы и воздуходувки, их требования к крутящему моменту зависят от квадрата или куба скорости. Эта моторная характеристика в целом адекватна.
- Постоянный крутящий момент : Эти двигатели переменного тока могут развивать одинаковый крутящий момент на каждой скорости. В результате выходная мощность напрямую зависит от скорости. Например, двигатель переменного тока мощностью 10 л.с. при 1800 об / мин выдает 5 л.с. при 900 об / мин.Вы найдете эти двигатели в приложениях с требованиями к постоянному крутящему моменту, таких как смесители, конвейеры и компрессоры.
- Постоянная л.с. : Эти двигатели переменного тока развивают одинаковую мощность на каждой скорости. Крутящий момент обратно пропорционален скорости. Такие двигатели переменного тока применяются в станках, включая дрели, фрезерные станки и токарные станки.
Однофазные двигатели переменного тока
Однофазные асинхронные электродвигатели переменного тока обычно имеют дробную мощность.Однако однофазная интегральная мощность доступна в более низком диапазоне лошадиных сил. Наиболее распространенные однофазные двигатели переменного тока с дробной мощностью:
- Двухфазный
- Конденсатор-умный
- Постоянный разделенный конденсатор
- Шторка
Эта индивидуальная конструкция двигателя переменного тока доступна в многоскоростных типах, но есть практические ограничения на количество получаемых скоростей. Доступны модели с двух-, трех- и четырехскоростными двигателями. Выбор скорости может сопровождаться последовательными полюсами или двумя обмотками.
Универсальные моторы
Универсальные моторы
Универсальные двигатели работают с почти эквивалентной производительностью на постоянном или переменном токе до 60 Гц. Двигатели переменного тока отличаются от двигателей постоянного тока соотношением обмоток и более тонкими слоями железа. Двигатели постоянного тока могут работать на переменном токе, но с низким КПД. Универсальные двигатели могут работать от постоянного тока с практически эквивалентными характеристиками двигателя переменного тока. Однако их коммутация и срок службы щеток ниже, чем у аналогичного двигателя постоянного тока.Важной характеристикой универсальных двигателей переменного тока является то, что они имеют самое высокое соотношение мощности на фунт среди всех двигателей переменного тока, поскольку они работают на скоростях, во много раз превышающих скорость любого электродвигателя с частотой 60 Гц.
Универсальные двигатели при работе без нагрузки имеют тенденцию к разбегу. Скорость ограничена только парусностью, трением и коммутацией. Поэтому большие универсальные двигатели почти всегда подключаются напрямую к нагрузке для ограничения скорости. На портативных инструментах, таких как электрические пилы, нагрузки на шестерни, подшипники и охлаждающий вентилятор достаточно, чтобы поддерживать скорость холостого хода на безопасном уровне.
С универсальным двигателем регулирование скорости является простым, поскольку скорость электродвигателя чувствительна к изменениям напряжения и магнитного потока. Реостат или регулируемый автотрансформатор позволяют легко изменять скорость двигателя переменного тока от максимальной до нуля.
Приводные электродвигатели
Электродвигатели ГРМ мощностью менее 1/10 л.с. используются в качестве первичных двигателей для синхронизирующих устройств. Поскольку двигатель используется в качестве таймера, он должен работать с постоянной скоростью.
Электродвигателипеременного и постоянного тока могут использоваться в качестве синхронизирующих двигателей.Электрические синхронизирующие двигатели постоянного тока служат портативным приложениям или когда требуются высокое ускорение и низкое изменение скорости. Хотя требуется механический или электрический регулятор скорости в той или иной форме, такие электродвигатели обладают следующими преимуществами:
- КПД от 50 до 70 процентов
- Пусковой крутящий момент в 10 раз превышает рабочий крутящий момент
- Относительно простой контроль скорости
Серводвигатели переменного тока
Серводвигателииспользуются в сервомеханизмах и компьютерах переменного тока, которые требуют быстрого и точного отклика.Для достижения этих характеристик серводвигатели имеют роторы малого диаметра с высоким сопротивлением. Меньший диаметр обеспечивает низкую инерцию для быстрого пуска, останова и реверсирования. Высокое сопротивление обеспечивает почти линейную зависимость скорости от крутящего момента для точного управления.
Изготовители двигателей на заказ заводят серводвигатели с двумя фазами, физически расположенными под прямым углом или квадратурными в пространстве. Двигатели имеют фиксированную или опорную обмотку, которая возбуждается от источника постоянного напряжения. Управляющая обмотка возбуждается регулируемым или переменным управляющим напряжением, обычно от сервоусилителя.Инженеры проектируют обмотки серводвигателя с одинаковым соотношением напряжения и числа витков, поэтому потребляемая мощность при максимальном фиксированном возбуждении и максимальном сигнале фазы управления сбалансированы.
В идеальном серводвигателе крутящий момент на любой скорости прямо пропорционален напряжению обмотки управления двигателя. Однако эта взаимосвязь существует только при нулевой скорости из-за присущей асинхронному серводвигателю неспособности реагировать на изменения входного напряжения в условиях небольшой нагрузки.
Собственное демпфирование серводвигателей уменьшается по мере увеличения номинальных значений, и двигатели имеют разумный КПД за счет линейности скорости-момента.Многие серводвигатели большего размера имеют встроенные вспомогательные воздуходувки для поддержания температуры в безопасных рабочих диапазонах. Серводвигатели переменного тока доступны с номинальной мощностью от менее 1 до 750 Вт и размерами от 0,5 до 0,7 дюйма. Большинство серводвигателей переменного тока имеют модульные или встроенные редукторы.
Заинтересованы в линейных двигателях переменного тока? Об их истории, характеристиках и применении читайте здесь.
Sinotech разрабатывает индивидуальные двигатели переменного тока в США и производит их в нескольких местах по всему Тихоокеанскому региону, чтобы снизить ваши затраты и риски.Свяжитесь с нами сегодня и дайте нам знать, как наши услуги по изготовлению двигателей переменного тока могут помочь вам запустить и запустить ваше приложение уже сегодня.
Трехфазный асинхронный двигатель с короткозамкнутым ротором
ЦЕЛИ
• описание конструкции трехфазного двигателя с короткозамкнутым ротором, перечисление основные компоненты этого типа мотора.
• определите следующие элементы и объясните их важность для работы. трехфазного асинхронного двигателя с короткозамкнутым ротором: поле вращающегося статора, синхронная скорость, индуцированные напряжения ротора, регулирование скорости, проскальзывание в процентах, крутящий момент, пусковой ток, коэффициент мощности без нагрузки, коэффициент мощности при полной нагрузке, обратное вращение и контроль скорости.
• рассчитать скорость двигателя и процент скольжения.
• реверс двигателя с короткозамкнутым ротором.
• опишите, почему двигатель потребляет больше тока при нагрузке.
• нарисуйте схемы, показывающие соединения с двойным напряжением для 230/460 вольт моторный режим.
• объясните информацию на паспортной табличке двигателя.
РАБОЧИЕ ХАРАКТЕРИСТИКИ
Трехфазный асинхронный двигатель с короткозамкнутым ротором относительно мал в физический размер для данного рейтинга мощности по сравнению с другими типами моторов.Асинхронный двигатель с короткозамкнутым ротором имеет очень хорошую регулировку скорости. при различных условиях нагрузки. Благодаря прочной конструкции и надежности работы, трехфазный асинхронный двигатель с короткозамкнутым ротором широко используется для многих промышленных приложений (рис. 1).
КОНСТРУКТИВНЫЕ ДЕТАЛИ
Трехфазный асинхронный двигатель с короткозамкнутым ротором обычно состоит из статор, ротор и два торцевых щита, в которых размещены подшипники, поддерживающие вал ротора.
Для этого типа двигателя требуется минимум обслуживания, поскольку
• обмотки ротора закорочены, образуя беличью клетку.
• нет коммутатора или контактных колец для обслуживания (по сравнению с DC мотор).
• нет щеток для замены.
Корпус двигателя обычно изготавливается из литой стали. Сердечник статора запрессован прямо в кадр. Два торцевых щита, в которых размещены подшипники, прикручены болтами. к стальной литой раме.Подшипники, поддерживающие вал ротора, подшипники скольжения или шарикоподшипники. Ill 2 — это вид в разрезе собранного мотора. На рисунке 3 показаны основные части трехфазного, асинхронный двигатель с короткозамкнутым ротором.
ил. 1 Трехфазные двигатели, используемые для насосов
ил. 2 Внешний вид конструкции и особенности типового трехфазного
взрывозащищенный двигатель: ПОЛЕВЫЕ ОБМОТКИ СТАТОРА; СМАЗОЧНАЯ ПРОБКА; ПОДЪЕМНЫЙ ГЛАЗ
ил.3 Основные компоненты асинхронного двигателя с короткозамкнутым ротором: —РОТОР С
ОХЛАЖДАЮЩИЕ ПЛАСТИНЫ; КОРОБКА ПРОВОДОВ
ил. 4 Частично намотанный статор трехфазного двигателя
Статор
Типичный статор содержит трехфазную обмотку, установленную в пазах ламинированный стальной сердечник (илл. 4). Сама обмотка состоит из формованных катушки с проводом соединены так, что есть три однофазные обмотки, разнесенные 120 электрических градусов друг от друга.Три отдельные однофазные обмотки затем соединяются, обычно внутри, по схеме звезды или треугольника. Три или девять выводов от трехфазных обмоток статора выведены на клемму коробка, установленная на раме двигателя, для подключения одно- или двух напряжений.
Ротор
Вращающаяся часть двигателя состоит из стальных перфораций или пластин. расположены в цилиндрическом сердечнике (от 5 до 7). Медь или алюминий штанги устанавливаются у поверхности ротора.Прутки припаяны или приварен к двум медным концевым кольцам. В некоторых небольших асинхронных двигателях с короткозамкнутым ротором стержни и концевые кольца отлиты из алюминия как одно целое.
ил 5 показывает такой ротор. Обратите внимание, что ребра залиты в ротор. для циркуляции воздуха и охлаждения двигателя во время его работы. Отметим также, что штанги ротора между кольцами перекошены под углом к граням кольца. Благодаря такой конструкции работающий двигатель будет работать тише и плавнее.На левом конце вала видна шпоночная канавка. С помощью этого шпоночного паза можно закрепить шкив или муфту вала нагрузки.
ил. 5 ротор с короткозамкнутым ротором асинхронного двигателя; больной. 6 Вид в разрезе
обоймы ротора; больной. 7 Беличья клетка для асинхронного двигателя
ил. 8: Торцевой щиток подшипника скольжения для открытого многофазного двигателя: SLINGER
КОЛЬЦО, МАСЛЯНЫЙ СБОРНИК; больной. 9: Торцевой щиток подшипника скольжения для многофазного
Индукционный двигатель.
Подшипники вала
Типовые подшипники скольжения показаны на 8 и 9.Внутри стенки подшипников скольжения изготовлены из металла баббита, что обеспечивает гладкая, полированная и длинная изнашиваемая поверхность вала ротора. Большой маслоотражательное кольцо увеличенного размера свободно облегает вал ротора и выдвигается вниз в масляный резервуар. Это кольцо собирает и стягивает масло по вращающемуся вал и опорные поверхности. Два масляных кольца показаны на рисунке 10. Это смазывающая масляная пленка сводит к минимуму потери на трение. Смотровая чашка для масла на сторона каждого торцевого щита позволяет обслуживающему персоналу проверять уровень масла в подшипнике скольжения.
илл. С 14-11 по 14-14 иллюстрируют шарикоподшипниковые узлы. В некоторых двигателях вместо подшипников скольжения используются шариковые подшипники. Смазка, а не масло используется для смазки шариковых подшипников. Этот тип подшипника обычно составляет две трети полный смазки во время сборки мотора. Специальная фурнитура есть на концевых раструбах, чтобы можно было использовать шприц для смазки для нанесения дополнительных смазывать шарикоподшипниковые узлы через определенные промежутки времени.
При смазке роликовых подшипников снимите нижнюю заглушку, чтобы старая смазка вытесняется.Технические характеристики двигателя должны Проконсультируйтесь по поводу рекомендованного сорта смазочного материала, процедуры смазки и нагрузок на подшипники.
ил. 10 Частично собранный подшипник скольжения для полностью закрытого,
1250-сильный мотор
ил. 11 Торцевой щиток шарикоподшипника для открытого многофазного двигателя
ил. 12 Врезка однорядного шарикового подшипника:
ил. 13 Одиночный шарикоподшипник закрытого типа.
ил. 14 Подшипник шариковый двухрядный.
ПРИНЦИП РАБОТЫ ДВИГАТЕЛЯ БЛОЧКОМ
Как указано в предыдущем абзаце конструкции статора, пазы сердечника статора содержат три отдельные однофазные обмотки. Когда три токи, разнесенные на 120 электрических градусов, проходят через эти обмотки, вращающийся результаты магнитного поля. Это поле движется по внутренней части статора. основной. Скорость вращающегося магнитного поля зависит от количества полюса статора и частота источника питания.Эта скорость называется синхронная скорость и определяется по формуле:
Синхронная скорость об / мин = 120 x частота в герцах / количество полюсов
S = 120xf / p
S = синхронная скорость
f = Герцы (частота)
p = Количество полюсов на фазу
Пример 1 . Если трехфазный асинхронный двигатель с короткозамкнутым ротором имеет шесть полюсов на обмотке статора и подключен к трехфазному, 60 Гц источника, то синхронная скорость вращающегося поля составляет 1200 об / мин-оборотов В минуту.
S = 120xf / p = 120×60 / 6 = 1200 об / мин
Поскольку это магнитное поле вращается с синхронной скоростью, оно разрезает медь. стержни ротора и индуцирует напряжения в стержнях беличьей клетки обмотка. Эти наведенные напряжения создают токи в стержнях ротора, которые в свою очередь создают поле в сердечнике ротора. Это поле ротора реагирует с поле статора вызывает скручивающий эффект или крутящий момент, который вращает ротор. Ротор всегда вращается со скоростью немного меньшей, чем синхронная скорость. поля статора.Это означает, что поле статора всегда будет сокращать штанги ротора. Если ротор вращается с той же скоростью, что и поле статора, поле статора не режет стержни ротора и не будет индуцированного напряжения или крутящий момент.
Регулировка скорости и процентное скольжение
Асинхронный двигатель с короткозамкнутым ротором имеет очень хорошие характеристики регулирования скорости. (отношение разницы в скорости от холостого хода к полной нагрузке). Скорость работы измеряется в процентах скольжения.Синхронная скорость вращения поле статора используется как точка отсчета. Напомним, что синхронный скорость зависит от количества полюсов статора и рабочей частоты. Поскольку эти две величины остаются постоянными, синхронная скорость также остается постоянным. Если скорость ротора при полной нагрузке вычитается из синхронная скорость поля статора, разница в количестве оборотов в минуту, когда ротор проскальзывает за вращающимся полем статора.
Проскальзывание в процентах = [(синхронная скорость — скорость ротора) / синхронная скорость] х 100
Пример 2 . Если трехфазный асинхронный двигатель с короткозамкнутым ротором использованный в примере 1, имеет синхронную скорость 1200 об / мин и полную нагрузку. скорость 1140 об / мин, найти процент скольжения.
Синхронная скорость (Пример 1) = 1200 об / мин
Частота вращения ротора при полной нагрузке = 1140 об / мин
Процент скольжения = [(синхронная скорость — скорость ротора) / синхронная скорость] х 100
Процентное скольжение = [(1200–1140) / 1200] x 100
Процентное скольжение = 60/1200 x 100 = 0.05 х 100
Процентное скольжение = 5%
Для асинхронного двигателя с короткозамкнутым ротором, поскольку значение процентного скольжения уменьшается в сторону 0% улучшаются скоростные характеристики двигателя. Среднее Диапазон процентного скольжения для асинхронных двигателей с короткозамкнутым ротором составляет от 2% до 6 процентов.
ил. 15: Кривая скорости и кривая проскальзывания в процентах.
ill 15 показывает кривую скорости и процент скольжения для беличьей клетки. асинхронный двигатель, работающий от холостого хода до полной нагрузки.Скорость ротора на холостом ходу проскальзывает за синхронной скоростью вращающегося поля статора ровно столько, чтобы создать крутящий момент, необходимый для преодоления трения и ветра потери на холостом ходу. Поскольку на вал двигателя действует механическая нагрузка, ротор имеет тенденцию замедляться. Это означает, что поле статора (вращающееся при фиксированной скорости) режет стержни ротора большее количество раз за данную период. Индуцированные напряжения в стержнях ротора увеличиваются, что приводит к увеличению ток в стержнях ротора и более сильное поле ротора.Есть большая магнитная реакция между полями статора и ротора, которая вызывает более сильную скручивающий эффект или крутящий момент. Это также увеличивает ток статора, снимаемый с линия. Двигатель способен выдерживать повышенную механическую нагрузку с очень небольшое снижение скорости вращения ротора.
Показаны типичные кривые момента скольжения для асинхронного двигателя с короткозамкнутым ротором. на рисунке 16. Выходной крутящий момент двигателя в фунт-футах (фунт-фут) увеличивается. как прямая линия с увеличением значения процентного скольжения как механическая нагрузка увеличена до точки полной нагрузки.За пределами полной нагрузки, кривая крутящего момента изгибается и, наконец, достигает максимальной точки, называемой поломкой крутящий момент. Если двигатель нагружен сверх этой точки, будет соответствующий уменьшайте крутящий момент до тех пор, пока не будет достигнута точка остановки двигателя. Однако, все асинхронные двигатели имеют некоторое скольжение для нормальной работы. Пусковой момент не показан, но составляет примерно 300% рабочего крутящего момента.
Пусковой ток
Когда трехфазный асинхронный двигатель с короткозамкнутым ротором подключен через полное линейное напряжение, пусковой импульс тока мгновенно достигает от 400% до 600% или более номинального тока полной нагрузки.В момент запуска двигателя ротор остановлен. В этот момент поэтому поле статора режет стержни ротора с большей скоростью, чем когда ротор вращается. Это означает, что будет относительно высокая индуцированная напряжение в роторе, которое вызовет сильный ток ротора. Результирующий входной ток обмоток статора в момент пуска будет высоким. Из-за этого высокого пускового тока пусковая защита имеет высокий как 300 процентов от номинального тока полной нагрузки для предохранителей без задержки настройки Предусмотрено для асинхронных двигателей с короткозамкнутым ротором.
Большинство асинхронных двигателей с короткозамкнутым ротором запускаются при полном напряжении. Если там есть вопросы по запуску крупногабаритных двигателей на полную напряжения, следует проконсультироваться с электроэнергетической компанией. В случае что фидеры и защитные устройства электросети не могут для работы с большими пусковыми токами, пусковыми цепями пониженного напряжения должен использоваться с двигателем.
ил. 16 Кривые момента скольжения для работающего двигателя с короткозамкнутым ротором: ПОЛНАЯ НАГРУЗКА
МОМЕНТ, ПРОСМОТР, МОМЕНТ ПРИ НОМИНАЛЬНОМ НАПРЯЖЕНИИ, МОМЕНТ ПРОБИРАТЕЛЬНОГО МОМЕНТА
Коэффициент мощности
Низкий коэффициент мощности асинхронного двигателя с короткозамкнутым ротором на холостом ходу и при низкой нагрузке.На холостом ходу коэффициент мощности может составлять всего Отставание на 15 процентов. Однако, когда к двигателю приложена нагрузка, мощность фактор увеличивается. При номинальной нагрузке коэффициент мощности может достигать Отставание от 85 до 90 процентов.
Коэффициент мощности на холостом ходу низкий, поскольку намагничивающая составляющая входной ток составляет большую часть от общего входного тока двигателя. Когда нагрузка на двигатель увеличивается, синфазный ток подается к двигателю увеличивается, но намагничивающая составляющая тока остается практически то же самое.Это означает, что результирующий линейный ток больше почти в фазе с напряжением, и коэффициент мощности улучшается, когда двигатель загружен, по сравнению с ненагруженным двигателем, у которого есть намагничивание ток как основной компонент входного тока.
ил 17 показывает увеличение коэффициента мощности из состояния холостого хода. до полной загрузки. На диаграмме холостого хода синфазный ток (Iw) невелик. по сравнению с током намагничивания (Im), таким образом, коэффициент мощности равен плохо на холостом ходу.На диаграмме полной нагрузки синфазный ток увеличился при этом ток намагничивания остается прежним. В результате угол задержки линейного тока уменьшается, а коэффициент мощности увеличивается.
ил. 17 Коэффициент мощности на холостом ходу и при полной нагрузке. БОЛЬШОЙ УГОЛ ОТСТАВКИ —
НИЗКИЙ КОЭФФИЦИЕНТ МОЩНОСТИ, БЕЗ НАГРУЗКИ, ПОЛНАЯ НАГРУЗКА
Реверс вращения
Направление вращения трехфазного асинхронного двигателя можно реверсировать охотно.Двигатель будет вращаться в противоположном направлении, если любые два из три линейных провода перевернуты (рис. 18). Отведения поменяны местами у мотора.
ил. 18: Обратное вращение асинхронного двигателя: ВРАЩЕНИЕ ДО / ПОСЛЕ
ПОДКЛЮЧЕНИЯ ИЗМЕНЕНЫ
Контроль скорости
Асинхронный двигатель с короткозамкнутым ротором почти не изменяет скорость без внешний контроль. Напомним, что скорость двигателя зависит от частоты трехфазного источника и числа полюсов обмотки статора.
Частота питающей сети обычно 60 герц, поддерживается по этой стоимости местной энергокомпанией. Поскольку количество полюсов в двигателе также есть фиксированное значение, синхронная скорость двигателя остается постоянным. В результате невозможно получить диапазон скорость без изменения применяемой частоты. Его можно контролировать с помощью система электронного привода переменного тока с регулируемой частотой или путем изменения количества опор с помощью внешних контроллеров.
ИНДУКЦИОННЫЕ ДВИГАТЕЛИ С ДВОЙНЫМ НАПРЯЖЕНИЕМ
Многие трехфазные асинхронные двигатели с короткозамкнутым ротором предназначены для работы при двух разных номинальных напряжениях. Например, типичный номинал двойного напряжения для трехфазного двигателя 230/460 вольт.
ил 19 показывает типичную обмотку статора, соединенную звездой, которая может быть используется для трехфазного напряжения 230 В или трехфазного 460 Вольт. Каждый из трех однофазных обмоток состоят из двух обмоток катушки.Там это девять выводов, выведенных наружу из обмотки статора этого типа. Эти выводы, обозначенные как выводы с 1 по 9, заканчиваются в клеммной коробке мотор. Чтобы отметить выводы, начните с верхнего левого вывода T1 и продолжайте движение по часовой стрелке по спирали к центру, отмечая каждый вывод, как показано на рисунке.
ил. 19: Метод определения маркировки клемм.
ил. 20: соединение звездой на 460 Вольт. Катушки соединены последовательно.
ил 20 показывает соединения, необходимые для работы двигателя от 460-вольтовый, трехфазный источник. Две катушки каждой однофазной обмотки соединены последовательно, илл. 14-21 показаны соединения, позволяющие работать от трехфазного источника на 230 В.
ил. 21: соединение звездой 230 В. Катушки подключены параллельно.
Двигатели с соединением звездой
Если идентификация отведения 9-проводная (с двойным напряжением), 3-фазная, с соединением звездой двигатель был разрушен, электрик должен повторно идентифицировать их перед подключение мотора к линии.Можно использовать следующий метод. Первый, Определите внутреннюю подключенную точку звезды, проверив целостность цепи между тремя выводами, как на рисунке 22 A.
Затем идентифицируйте три других набора катушек по непрерывности между двумя ведет за один раз (илл. 22 B). Назначьте T7, T8 и T9 любому из трех выводы постоянных катушек, соединенных звездой (а). Применить более низкий рейтинг линейное напряжение для двигателя на T7, T8 и T9 и работайте, чтобы проверить направление вращения.Отключите сетевое напряжение и подключите один из неопределенных катушки на T Подключите питание, оставив линии на T7, T8 и T9. Если Катушка правильно подключена и является правильной катушкой, напряжение должно быть примерно в 1,5 раза выше линейного напряжения между свободным концом и другим две строчки. Будьте осторожны с сетевым напряжением.
Если выбрана правильная катушка, но она поменяна местами, напряжение между свободный конец и два других вывода будут составлять около 58% от линейного напряжения.Если выбрана неправильная катушка, разница напряжений между свободными конец и два других вывода линии будут неровными (см. рис. 22 C).
Когда показания равны и примерно в 1,5 раза больше напряжения сети, Пометьте провод, подключенный к T7, как T4, а другой конец катушки как T1.
Выполните те же испытания с другой катушкой, подключенной к T Отметьте эти провода. T и T Выполните тот же тест с последней катушкой, подключенной к 19, чтобы определить 13 и 16 отведения.
Подключите L1 к T1, L2 к T2, L3 к T3 и T4 к T7, T5 к T8, T6 к T9 и включите двигатель. Двигатель должен работать в том же направлении, что и раньше и работать спокойно.
ил. 22: Двигатель, подключенный звездой или звездой; A) Внутренняя маркировка выводов со звездочкой;
B) Маркировка выводов группы катушек C) Проверка правильности маркировки выводов катушек на
Двигатель с двойным напряжением, соединенный звездой
Двигатели, соединенные треугольником
Другой вариант подключения трехфазных двигателей — соединение треугольником. мотор.Он назван так потому, что получившийся схематический узор выглядит как греческая буква Дельта (символ дельты).
Метод идентификации и подключения этих выводов необходим, потому что он отличается от двигателя, подключенного звездой или звездой.
Правильное подключение выводов треугольник подключен, трехфазный, Двигатель с двойным напряжением представляет проблему, если маркировка выводов повреждена.
ил. 23: Девять выводов треугольника, трехфазного, двойного напряжения.
двигатель
Сначала электрик должен определить, подключен ли двигатель треугольником. или звезда подключена.Оба двигателя имеют девять выводов, если они двухвольтные. моторы. Однако двигатель, подключенный по схеме треугольника, имеет три комплекта по три провода. которые имеют непрерывность, а двигатель, подключенный звездой, имеет только один комплект из трех.
Для продолжения необходим чувствительный омметр, чтобы найти середину каждого группа из трех отведений. Значения сопротивления низкие при использовании постоянного тока омметр, поэтому будьте осторожны при определении центра каждой группы катушек. Обозначьте центр каждой группы T1, T2 и T3 соответственно.Использование маскировки ленты, временно обозначьте другие отведения группы T1 как T4 и T9. См. больной 23 А.
Временно отметьте концы группы T2 как T5 и T7 и отметьте концы группы Т3 как Т6 и Т8.
Подключите двигатель с более низким номинальным напряжением, используя линии 1, 2 и 3, к T1, Т4 и Т9. Остальные катушки будут иметь наведенное напряжение, поэтому будьте осторожны, прикоснуться к другим свободным проводам друг к другу или к вам!
Отключите питание и подсоедините провод с маркировкой T4 к T7.Подключите мощность, как и раньше, и считайте напряжение между T1 и T2. Если маркировка правильные, напряжение должно быть примерно в два раза выше приложенного линейного напряжения. Если он показывает примерно в 1,5 раза больше напряжения в сети, снова подключите T4 к проводу. отмечен Т5. Если напряжение T1 — T2 затем упадет до 220, повторно подключите T9 к T7. тем самым меняя обе катушки. Когда напряжение от T1 до T2 равно удвоенному значению приложенного сетевого напряжения, пометьте соединенные вместе провода как T4 от Группа T1 подключена к T7 группы T2.
Теперь используйте третью группу катушек. Оставьте нижнюю линию напряжения подключенной к первая группа по-прежнему. Проверьте и подключите провода так, чтобы при включении T9 подключенный к проводу третьей группы, напряжение T1-to-T2 в два раза больше приложенное линейное напряжение. Пометьте провод, подключенный к T9, как T6, а другой конец группы катушек как T8.
Чтобы дважды проверить, отсоедините провод линии от T9 и снова подключите к T7. отсоедините сетевой провод от T1 и снова подсоедините его к T2, отсоедините провод от T9 и снова подключите его к T5 Двигатель должен работать в том же направление как раньше.Если этого не произошло, еще раз проверьте маркировку проводов.
Для дальнейшей проверки переместите провода от T7 к T8, от T2 к T6 и от T5 к T3. Запустить мотор. Поворот должен быть таким же, как и в предыдущем. шаги. Будьте осторожны! На другие обмотки наведено напряжение. (см. илл 24).
ил. 24 Иллюстрация испытаний напряжением, используемых для определения правильного вывода
маркировка двигателя Delta
ТАБЛИЧКА ДВИГАТЕЛЯ
Таблички с паспортными данными двигателясодержат информацию, важную для правильного выбора и установки двигателя.Наиболее полезные данные, указанные на паспортной табличке, относятся к к электрическим характеристикам двигателя. Зная эту информацию и используя Национальный электротехнический кодекс, электрик может определить размеры кабелепровода, провода и пусковой и работающей защиты. (NEC дает минимальные требования.)
Данные о конструкции и производительности, указанные на паспортной табличке, полезны для технического обслуживания. персонал. Информация жизненно важна для быстрой и правильной замены. двигателя, если необходимо.Для лучшего понимания мотора типичный Информация на паспортных табличках двигателя описывается следующим образом (рис. 25).
• Название производителя
• Тип определяет тип корпуса. Это производитель система кодовой идентификации.
• Серийный номер — это конкретный идентификатор двигателя. Это человек номер, присвоенный двигателю, аналогично номеру социального страхования для человек. Он хранится у производителя.
• Номер модели является дополнительной идентификацией производителя, обычно используется для целей заказа.
• Типоразмер определяет размеры двигателя.
• Коэффициент обслуживания (или SF) — коэффициент обслуживания 1,0 означает, что нельзя ожидать, что двигатель будет обеспечивать мощность, превышающую его номинальную мощность в лошадиных силах. Мотор будет безопасно работать, если номинальная мощность в лошадиных силах умножена на коэффициент обслуживания, максимум. Общие сервисные коэффициенты от 1,0 до 1.15. Рекомендуется, чтобы двигатель не может работать непрерывно в диапазоне эксплуатационных коэффициентов. Это может сократить срок службы изоляционной системы.
Ампер означает ток, потребляемый из линии, когда двигатель работает. при номинальном напряжении и частоте при полной номинальной мощности, указанной на паспортной табличке.
• Вольт должно быть значением, измеренным на клеммах двигателя, и должно быть значением, на которое рассчитан двигатель.
• Класс изоляции относится к изоляционному материалу, используемому в обмотке. статор двигателя.Например, в системе класса B максимальная рабочая температура 130 ° С; для класса F это 155 ° C; а для класса H это 180 ° С.
• об / мин (или об / мин) означает скорость в оборотах в минуту, когда все остальные соблюдены условия паспортной таблички.
• Герцы — это частота системы питания, для которой предназначен двигатель. Производительность будет изменена, если он будет работать на других частотах.
• Режим работы — это рабочий цикл, при котором двигатель может безопасно работать.«Непрерывный» означает, что двигатель может работать с полной нагрузкой 24 часа в сутки. Если «средний» отображается временной интервал. Это означает, что двигатель может работать при полной загрузке за указанный период. Затем следует остановить двигатель и дать ему остыть перед повторным запуском.
• Температура окружающей среды указывает максимальную температуру окружающего воздуха. при которой двигатель может работать для обеспечения номинальной мощности.
• Ввод фазы указывает количество фаз напряжения, при которых двигатель предназначен для работы.
• кВА — это буквенный код, обозначающий заблокированный ротор, кВА на лошадиных сил. Это используется для определения пускового оборудования и защиты. для мотора. Таблицу кодовых букв можно найти в Национальном электротехническом ведомстве. Код.
• КПД выражается в процентах. Это значение находится в стандартном двигатели, а также двигатели с «премиальной эффективностью».
• Шум — некоторые двигатели рассчитаны на низкий уровень шума. Уровень шума Значение, указанное на паспортной табличке, измеряется в единицах звука «дБА».
• Примечания производителя — список конкретных характеристик двигателей, таких как «Термозащищенные» и / или «подшипники со шкалой».
ВЫСОТА
Гарантии производителя для стандартных двигателей обычно основаны на при работе на любой высоте до 3300 футов. Двигатели пригодные для эксплуатации на высоте более 3300 футов над уровнем моря имеют особую конструкцию и / или другой класс изоляции. Например, стандартные двигатели с коэффициентом обслуживания 1.15 может эксплуатироваться на высоте до 9900 футов, используя коэффициент обслуживания. На высоте 9900 футов коэффициент обслуживания будет 1,00. Возможно, потребуется снизить мощность двигателя. или используйте рамку большего размера.
РЕЗЮМЕ
Трехфазные асинхронные двигатели используют в роторе короткозамкнутую обмотку. Электрические соединения с ротором отсутствуют, но ток индуцируется. в обмотки ротора за счет электромагнитной индукции.Беличья клетка обмотка создает магнитное поле, которое подталкивается и притягивается статором магнитное поле.
Ротор поддерживается стальным валом, который должен вращаться. Вал допускается вращение с применением различных типов подшипников и различных смазок. Синхронная скорость, регулировка скорости и проскальзывание в процентах все расчеты используются для определения скорости ротора. Мотор электрические характеристики, такие как коэффициент мощности и пусковой ток связанных с электрической схемой двигателя.
Если маркировка выводов двигателя разрушена, выводы можно пометить заново. в соответствии с процедурами, описанными в этом блоке. Данные паспортной таблички двигателя Это важная информация, которую следует использовать при заказе двигателей на замену. Некоторые информация на паспортной табличке важна для правильной замены рабочего характеристики и другие данные используются для расчета параметров электропитания и защиты двигателя.
ВИКТОРИНА
A. Ответьте на следующие утверждения и вопросы.
1. Перечислите основные части асинхронного двигателя с короткозамкнутым ротором. ___________
2. Назовите два преимущества использования асинхронного двигателя с короткозамкнутым ротором. _______
3. Назовите два недостатка асинхронного двигателя с короткозамкнутым ротором. ________
4. Перечислите два фактора, которые определяют синхронную скорость индукции. мотор.
5. Объясните, как изменить направление вращения трехфазного, асинхронный двигатель с короткозамкнутым ротором.
6. Четырехполюсный трехфазный асинхронный двигатель с короткозамкнутым ротором, 60 Гц, скорость полной нагрузки 1725 об / мин. Определите синхронную скорость этого мотор.
7. Какой процент скольжения двигателя указан в вопросе 6? ______________
8. Почему термин «беличья клетка» применяется к этому типу трехфазной индукции? мотор?
B. Выберите правильный ответ для каждого из следующих заявления.
9.Кто или что определяет, можно ли запускать большие асинхронные двигатели при полное напряжение на линии?
а. максимальный размер двигателя
г. номинальное напряжение
г. Энергетическая компания
г. отдел строительства и безопасности
10. Коэффициент мощности трехфазного асинхронного двигателя с короткозамкнутым ротором, работающего разгружено __
а. так же, как и при полной нагрузке.
г. очень бедный.
г. очень хороший.
г. средний.
11. Коэффициент мощности трехфазного асинхронного двигателя с короткозамкнутым ротором, работающего с полной нагрузкой _____
а. улучшается без нагрузки.
г. уменьшается с холостого хода.
г. остается таким же, как и без нагрузки.
г. становится 100 процентов.
12. Асинхронный двигатель с короткозамкнутым ротором популярен благодаря своим характеристикам. из:
а. высокий процент скольжения.
г.низкий процент скольжения.
г. простая, прочная конструкция.
г. хорошая регулировка скорости.
13. Скорость асинхронного двигателя с короткозамкнутым ротором зависит от:
а. приложенное напряжение.
г. частота и количество полюсов.
г. Напряженность поля.
г. сила тока.
14. Скорость рассчитывается по формуле:
а.