Принцип действия асинхронного двигателя ~ Электропривод
Самым распространенным электродвигателем, используемым в быту, промышленности, строительстве и сельском хозяйстве, на сегодняшний день, является асинхронный двигатель с короткозамкнутым ротором (АД с КЗ ротором). Основным его преимуществом, перед другими типами двигателей является простота, надежность и дешевизна.
Принцип действия трехфазного асинхронного двигателя с короткозамкнутым ротором
Принцип действия трехфазного АД с КЗ ротором основан на взаимодействии вращающегося магнитного поля и расположенного в этом поле проводника. Вращающееся магнитное поле создается статором асинхронного двигателя, которая является неподвижной частью двигателя. Статор асинхронного электродвигателя представляет собой стальной сердечник, с пазами в которых расположена обмотки, намотанная медным изолированным проводом.
Это поле пересекая обмотку ротора наводит в ней ЭДС. Под действием этой ЭДС по обмотке будет протекать ток.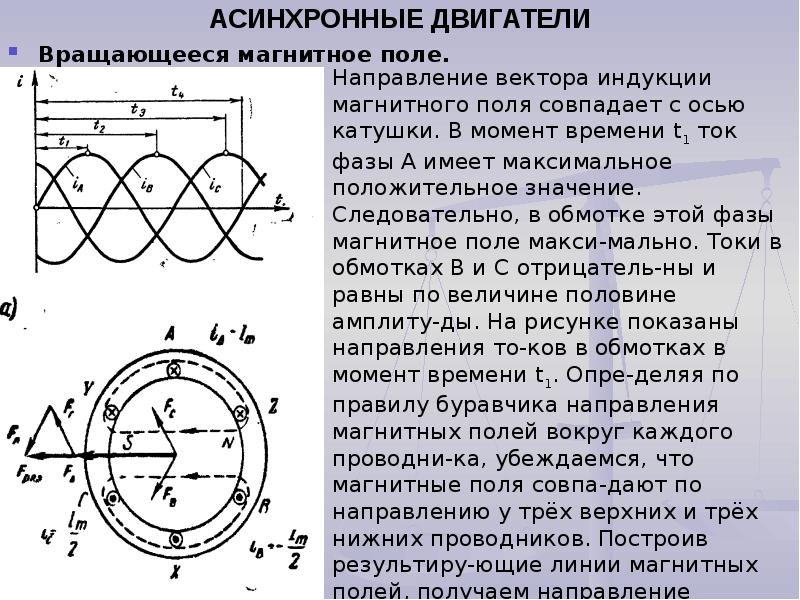
Обмотки статора намотаны таким образом, что образуют три катушки, смещенные друг, относительно друга на 120°. Между собой их соединяют либо в «звезду», либо в «треугольник» и пропускают трехфазный переменный ток. При частоте тока 50 Гц, магнитное поле будет вращаться со скоростью 3000 об./мин. Магнитное поле, образованное тремя катушками, называется двухполюсным.
Особенностью асинхронного двигателя является то, что появление ЭДС в роторной обмотке ротора возможно только при различии частоты вращения магнитного поля ротора, обозначаемое букой n и магнитного поля статора n0. Разница n0 и n создает электромагнитный момента асинхронного двигателя. Характеризует эту разность скольжение S, определяемое по формуле:
где n0=60f/P синхронная частота вращения магнитного поля статора об/мин, f- частота питающей сети, Гц, p-число пар полюсов статора.
В такой конструкции двигателя, магнитное поле статора опережает скорость вращения ротора. Т.е. поле ротора вращается асинхронно со скоростью вращения поля статора. Отсюда и пошло название двигателя асинхронный двигатель переменного тока.
Если нагрузка на валу двигателя отсутствует, частота вращения поля ротора n, стремиться достичь частоты вращения поля ротора, но никогда не достигает ее, так как если n0-n=0, то и электромагнитный момент двигателя М будет равен 0.
В паспорте и на шильдике асинхронного электродвигателя производитель указывает номинальную частота вращения двигателя, замеряемую при номинальной мощности. При увеличении нагрузки на валу двигателя, частота вращения двигателя уменьшается, а ток статора увеличивается. Асинхронные двигатели могут изготовляться с 1,2,3 ,4,5,6 парами полюсов. Соответственно синхронная скорость вращения асинхронного двигателя соответственно будет составлять 3000, 1500, 1000, 750, 600 и 500 об/мин.
На смену классической конструкции асинхронного двигателя приходят энергоэффективные конструкции асинхронных двигателей обладающие более высоким КПД и технико-экономическими показателями. Применение частотно-регулируемого привода в тандеме с энергоэффективными двигателями, позволит существенно улучшить энергетические показатели и снизить затраты на электроэнергию.
Применение частотно-регулируемого привода в тандеме с энергоэффективными двигателями, позволит существенно улучшить энергетические показатели и снизить затраты на электроэнергию.
Устройство и принцип работы трехфазных асинхронных двигателей | RuAut
Устройство трехфазных асинхронных двигателей (статор и ротор асинхронных двигателей)Трехфазный асинхронный двигатель состоит из неподвижного статора и ротора. Три обмотки размещены в пазах на внутренней стороне сердечника статора асинхронного двигателя. Обмотка же ротора асинхронного двигателя не имеет электрического соединения с сетью и с обмоткой статора. Начало и концы фаз обмоток статора присоединяют к зажимам в коробке выводов по схеме звезда или треугольник.
Асинхронные двигатели в основном различаются устройством ротора, который бывает двух типов: фазный или короткозамкнутый. Обмотка короткозамкнутого ротора асинхронного двигателя выполняется на цилиндре из медных стержней и называется «беличьей клеткой». Торцевые концы стержней замыкают металлическими кольцами. Пакет ротора набирают из электротехнической стали. В двигателях меньшей мощности стержни заливают алюминием. Фазный ротор и статор имеют трехфазную обмотку. Фазы обмотки соединяют звездой или треугольником и ее свободные концы выводят на изолированные контактные кольца.
Торцевые концы стержней замыкают металлическими кольцами. Пакет ротора набирают из электротехнической стали. В двигателях меньшей мощности стержни заливают алюминием. Фазный ротор и статор имеют трехфазную обмотку. Фазы обмотки соединяют звездой или треугольником и ее свободные концы выводят на изолированные контактные кольца.
Обмотка статора асинхронного двигателя в виде трех катушек уложена в пазы расположенные под углом в 120 градусов. Начало и конца катушек обозначаются соответственно буквами A, B, C и X,Y,Z. При подаче на катушки трехфазного напряжения в них установятся токи Ia, Ib, Ic и катушки создадут собственное переменное магнитное поле. Ток в любой катушке положительный, когда он направлен от начала к ее концу и отрицательный при обратном направлении. Векторы намагничивающей силы совпадают с осями катушек, а их величина определяется значениями токов, направление результирующего вектора совпадает с осью катушки. Вектор результирующей намагничивающей силы поворачивается на 120 градусов сохраняя величину совпадает с осью соответствующей катушки. Таким образом за период, результирующее магнитное поле статора совершает оборот с неизменной скоростью. Работа трехфазного асинхронного двигателя основана на взаимодействии вращающегося магнитного поля с токами наводимыми в проводниках ротора.
Таким образом за период, результирующее магнитное поле статора совершает оборот с неизменной скоростью. Работа трехфазного асинхронного двигателя основана на взаимодействии вращающегося магнитного поля с токами наводимыми в проводниках ротора.
Совокупность моментов созданных отдельными проводниками образует результирующий вращающий момент двигателя, возникает электромагнитная пара сил, которая стремится повернуть ротор в направлении движения электромагнитного поля статора. Ротор приходит во вращение приобретает определенную скорость, магнитное поле и ротор вращаются с разными скоростями или асинхронно. Применительно к асинхронным двигателям, скорость вращения ротора всегда меньше скорости вращения магнитного поля статора.
Пуск асинхронных двигателейВ асинхронных двигателях с большим моментом инерции необходимо увеличение вращающего момента с одновременным ограничением пусковых токов — для этих целей применяют двигатели с фазным ротором.
Параллельные обмотки двух фаз образуют одну пару полюсов сдвинутые в пространстве на 120 градусов. Последовательное соединение обмоток образует две пары полюсов, что дает возможность уменьшить скорость вращения в два раза. Для регулирования скорости вращения ротора изменением частоты тока используют отдельный источник тока или преобразователь энергии с регулируемой частотой выполненный на тиристорах.
Последовательное соединение обмоток образует две пары полюсов, что дает возможность уменьшить скорость вращения в два раза. Для регулирования скорости вращения ротора изменением частоты тока используют отдельный источник тока или преобразователь энергии с регулируемой частотой выполненный на тиристорах.
При торможении противовключением меняются два провода соединяющих трехфазную сеть с обмотками статора, изменяя при этом направление движения магнитного поля машины. При этом наступает режим электромагнитного тормоза. Для динамического торможения обмотка статора отключается от трехфазной сети и включается в сеть постоянного тока. Неподвижное поле статора заставляет ротор быстро останавливаться. Асинхронные двигатели нашли широкое применение в промышленности. В строительных механизмах, на металлообрабатывающих станках, в кузнечно-прессовом оборудовании, в силовых приводах прокатных станов, в радиолокационных станциях и многих других отраслях.
Назначение и принцип действия асинхронного двигателя
Назначение асинхронного электродвигателя
Система трехфазного переменного тока, позволившая создать устройства для получения вращающегося магнитного потока, вызвала появление наиболее распространенного в данное время электродвигателя, называемого асинхронным. Это название обусловлено тем, что вращающаяся часть машины — ротор — всегда вращается со скоростью, не равной скорости магнитного потока, т.е. не синхронно с ним. Изготовляемый на мощности от долей ватта до тысяч киловатт при напряжениях 127, 220, 380, 500, 600, 3000, 6000, 10000 В, этот электродвигатель прост по конструкции, надежен в эксплуатации и дешев по сравнению с другими типами. Он применяется во всех видах работ, где не требуется поддержания постоянной скорости вращения, а также в быту, в однофазном исполнении для малой мощности.
Принцип действия асинхронного двигателя
Рассмотрим устройство, показанное на рис. Оно состоит из постоянного магнита 1, медного диска 2, рукоятки 3 и подшипников 4. Если вращать магнит при помощи рукоятки, то медный диск начинает вращаться в ту же сторону, но с меньшей частотой. Медный диск можно рассматривать как бесчисленное множество замкнутых витков; при вращении магнита 1 его магнитные силовые линии (м.с.л.) пересекают витки диска, и в витках наводится электродвижущая
Оно состоит из постоянного магнита 1, медного диска 2, рукоятки 3 и подшипников 4. Если вращать магнит при помощи рукоятки, то медный диск начинает вращаться в ту же сторону, но с меньшей частотой. Медный диск можно рассматривать как бесчисленное множество замкнутых витков; при вращении магнита 1 его магнитные силовые линии (м.с.л.) пересекают витки диска, и в витках наводится электродвижущая
Модель асинхронного двигателя
Обозначим:
п, — частота вращения магнита (синхронная частота), об/мин;
п2 — частота вращения диска, об/мин; п — разность частот вращения магнита и диска, об/мин.
Частота вращения диска меньше частоты вращения магнита, и, следовательно, диск вращается с несинхронной (асинхронной) частотой. Разница частот магнита и диска представляет собой частоту, с которой м.с.л. пересекают витки диска. Отношение разницы частот к синхронной частоте называется скольжением. Скольжение может быть выражено в долях единицы или в процентах:
В двигателях вращающееся магнитное поле создается трехфазным током, протекающим по обмотке статора, а роль диска выполняет обмотка ротора. Активная сталь статора и ротора служит магнитопроводом, уменьшающим в сотни раз сопротивление магнитному потоку.
Активная сталь статора и ротора служит магнитопроводом, уменьшающим в сотни раз сопротивление магнитному потоку.
Рис. 2 . Работа асинхронного двигателя при cos ф2 = 1
Пусть поток вращается в направлении движения стрелки часов. Под влиянием э.д.с. Е2 в обмотке ротора пойдет ток I2, направление которого показано на рис. 2. Предположим, что он совпадает по фазе с Е2. Взаимодействие тока I2 и потока Ф создает электромагнитные силы F, приводящие ротор во вращение, вслед за вращающимся потоком. Таким образов, асинхронный двигатель представляет собой трансформатор с вращающейся вторичной обмоткой и способный поэтому превращать электрическую мощность E2I2 cos ф в механическую.
Ротор всегда отстает от вращающегося магнитного потока, так как только в этом случае может возникать э.д.с. Е2, а следовательно, ток 12 и силы F. Чтобы изменить направление вращения ротора, следует изменить направление вращения потока. Для этого меняют местами два любых провода, подводящие ток от сети к статору. В этом случае меняется порядок следования фаз ABC на АСВ или ВАС, и поток вращается в обратную сторону.
Ротор двигателя вращается с асинхронной частотой п2, поэтому и двигатель называется асинхронным. Частоту вращения магнитного потока называют синхронной частотой п1. Частота вращенияротора
Теоретически скольжение меняется от 1 до 0 или от 100% до 0, так как при неподвижном роторе в первый момент пуска п2 — 0; а если вообразить, что ротор вращается синхронно с потоком, п2 = пх.
Чем больше нагрузка на валу, тем меньше скорость ротора п2 и следовательно больше S, так как больший тормозной момент должен уравновеситься вращающим моментом; последнее возможно только при увеличении Е2 и I2, а значит и S. Скольжение при номинальной нагрузке SH у асинхронных двигателей равно от 1 до 7%; меньшая цифра относится к мощным двигателям.
Преимущества и недостатки асинхронного двигателя
Подавляющее большинство электродвигателей, используемых в промышленности – асинхронные двигатели с короткозамкнутым ротором. В новом оборудовании их доля составляет более 95%, остальное – серводвигатели, шаговые двигатели, щеточные двигатели постоянного тока и некоторые другие специфические виды приводов.
Преимущества асинхронного двигателя
Конструкция. По сравнению с другими типами электродвигателей асинхронный двигатель имеет наиболее простую конструкцию. С одной стороны это объясняется использованием стандартной трехфазной системы электроснабжения, с другой – принципом действия агрегата. Данная особенность обуславливает еще одно важное преимущество — невысокую цену асинхронных приводов. Среди двигателей разных типов одинаковой мощности асинхронный будет самым дешевым.
Подключение. Благодаря тому, что в стандартной трехфазной системе питания фазы сдвинуты на 120°, для формирования вращающегося поля не нужны дополнительные элементы и преобразования. Вращение поля внутри статора и, как следствие, вращение ротора обусловлены самой конструкцией асинхронного двигателя. Достаточно обеспечить подачу напряжения через коммутационный аппарат (контактор или пускатель), и двигатель будет работать.
Эксплуатация. Затраты на эксплуатацию асинхронного электродвигателя крайне малы, а обслуживание не представляет никаких сложностей. Нужно лишь время от время проводить чистку от пыли и по необходимости протягивать контакты подключения. При правильной установке и эксплуатации двигателя замена подшипников производится раз в 15-20 лет.
Недостатки асинхронных двигателей
Скорость вращения ротора. Скорость вращения вала двигателя зависит от частоты питающей сети (стандартные значения в промышленности – 50 и 60 Гц) и от количества полюсов обмоток статора.
Это можно считать недостатком в том случае, когда необходимо в процессе работы менять скорость вращения. Для решения данной проблемы были разработаны многоскоростные асинхронные двигатели, у которых имеется возможность переключения обмоток.
Кроме того, в современном оборудовании управление скоростью реализуется за счет преобразователей частоты.
Скольжение. Эффект скольжения проявляется в том, что частота вращения ротора всегда будет меньше частоты вращения поля внутри статора. Это заложено в принцип работы асинхронного двигателя и отражено в его названии. Скольжение также зависит от механической нагрузки на валу.
При необходимости скольжение можно скомпенсировать, а скорость вращения сделать независимой от нагрузки при помощи преобразователя частоты.
Величина напряжения питания. В сырых и влажных помещениях, где действуют повышенные требования к электробезопасности, применение асинхронного электродвигателя может быть невозможным. Дело в том, что из-за конструктивных особенностей такие двигатели практически не производятся на напряжение питания менее 220 В. В таких случаях применяют приводы постоянного тока, рассчитанные на напряжение 48 В и менее, либо используют гидравлические или пневматические приводы.
Чувствительность к напряжению питания. При отклонении напряжения питания более чем на 5% параметры двигателя могут отличаться от номинальных, а сам агрегат может перегреваться. Кроме того, при понижении напряжения падает момент электродвигателя, который квадратически зависит от напряжения.
При использовании преобразователя частоты скорость вращения меняется путем изменения величины и частоты питающего напряжения. Принципиально, что отношение напряжения к частоте должно быть константой.
Пусковой ток. Большой пусковой ток – проблема асинхронных двигателей мощностью более 10 кВт. При пуске ток может превышать номинальный в 5-8 раз и длиться несколько секунд. Из-за этого негативного эффекта мощные двигатели нежелательно подключать напрямую.
Чаще всего для понижения пускового тока применяют схему «Звезда-Треугольник», устройства плавного пуска и преобразователи частоты. Также можно использовать асинхронные двигатели с фазным ротором.
Пусковой момент. В силу электрических и механических переходных процессов в момент пуска двигатель обладает крайне низким КПД и большой реактивностью. Из-за низкого пускового момента привод может не справиться с началом вращения тяжелых механизмов. Этот же недостаток приводит к нагреву двигателя при пуске. Отсюда возникает другая проблема – ограничение количества пусков в единицу времени.
При использовании частотного преобразователя момент при пуске и на низких частотах может быть увеличен за счет повышения напряжения.
Вывод
Плюсы асинхронных двигателей значительно перевешивают минусы. В большинстве случаев недостатки компенсируются путем применения преобразователей частоты и других устройств пуска.
Другие полезные материалы:
Способы защиты электродвигателей
Когда не нужен плавный пуск
Когда нецелесообразно ремонтировать двигатель
Устройство и принцип действия асинхронного двигателя
Главная » Разное » Устройство и принцип действия асинхронного двигателяАсинхронный электродвигатель с короткозамкнутым и фазным ротором: устройство и принцип действия
Наука в области электричества в XIX и XX веках стремительно развивалась, что привело к созданию электрических асинхронных двигателей. С помощью таких устройств развитие промышленной индустрии шагнуло далеко вперед и теперь невозможно представить заводы и фабрики без силовых машин с использованием асинхронных электродвигателей.
История появления
История создания асинхронного электродвигателя начинается в 1888 году, когда Никола Тесла запатентовал схему электродвигателя, в этом же году другой ученый в области электротехники Галлилео Феррарис опубликовал статью о теоретических аспектах работы асинхронной машины.
В 1889 году российский физик Михаил Осипович Доливо-Добровольский получил в Германии патент на асинхронный трехфазный электрический двигатель.
Все эти изобретения позволили усовершенствовать электрические машины и привели к тому, что в промышленность стали массово применяться электрические машины, которые значительно ускорили все технологические процессы на производстве, повысили эффективность работы и снизили её трудоемкость.
В настоящий момент самый распространенный электродвигатель, эксплуатируемый в промышленности, является прототипом электрической машины, созданной Доливо-Добровольским.
Устройство и принцип действия асинхронного двигателя
Главными компонентами асинхронного электродвигателя являются статор и ротор, которые отделены друг от друга воздушным зазором. Активную работу в двигателе выполняют обмотки и сердечник ротора.
Под асинхронностью двигателя понимают отличие частоты вращения ротора от частоты вращения электромагнитного поля.
Статор – это неподвижная часть двигателя, сердечник которой выполняется из электротехнической стали и монтируется в станину. Станина выполняется литым способом из материала, который не магнитится (чугун, алюминий). Обмотки статора являются трехфазной системой, в которой провода уложены в пазы с углом отклонения 120 градусов. Фазы обмоток стандартно подключают к сети по схемам «звезда» или «треугольник».
Ротор – это подвижная часть двигателя. Роторы асинхронных электродвигателей бывают двух видов: с короткозамкнутым и фазным роторами. Данные виды отличаются между собой конструкциями обмотки ротора.
Асинхронный двигатель с короткозамкнутым ротором
Такой тип электрической машины был впервые запатентован М.О. Доливо-Добровольским и в народе называется «беличье колесо» из-за внешнего вида конструкции. Короткозамкнутая обмотка ротора состоит из накоротко замкнутых с помощью колец стержней из меди (алюминия, латуни) и вставленные в пазы обмотки сердечника ротора. Такой тип ротора не имеет подвижных контактов, поэтому такие двигатели очень надежны и долговечны при эксплуатации.
Асинхронный двигатель с фазным ротором
Такое устройство позволяет регулировать скорость работы в широком диапазоне. Фазный ротор представляет собой трехфазную обмотку, которая соединяется по схемам «звезда» или треугольник. В таких электродвигателях в конструкции имеются специальные щетки, с помощью которых можно регулировать скорость движения ротора. Если в механизм такого двигателя добавить специальный реостат, то при пуске двигателя уменьшится активное сопротивление и тем самым уменьшатся пусковые токи, которые пагубно влияют на электрическую сеть и само устройство.
Принцип действия
При подаче электрического тока на обмотки статора возникает магнитный поток. Так как фазы смещены относительно друг друга на 120 градусов, то из-за этого поток в обмотках вращается. Если ротор короткозамкнутый, то при таком вращении в роторе появляется ток, который создает электромагнитное поле. Взаимодействуя друг с другом, магнитные поля ротора и статора заставляют ротор электродвигателя вращаться. В случае, если ротор фазный, то напряжение подается на статор и ротор одновременно, в каждом механизме появляется магнитное поле, они взаимодействуют друг с другом и вращают ротор.
Достоинства асинхронных электродвигателей
| С короткозамкнутым ротором | С фазным ротором |
|---|---|
| 1. Простое устройство и схема запуска | 1. Небольшой пусковой ток |
| 2. Низкая цена изготовления | 2. Возможность регулировать скорость вращения |
| 3. С увеличением нагрузки скорость вала не меняется | 3. Работа с небольшими перегрузками без изменения частоты вращения |
| 4. Способен переносить перегрузки краткие по времени | 4. Можно применять автоматический пуск |
| 5. Надежен и долговечен в эксплуатации | 5. Имеет большой вращающий момент |
| 6. Подходит для любых условий работы | |
| 7. Имеет высокий коэффициент полезного действия |
Недостатки асинхронных электродвигателей
| С короткозамкнутым ротором | С фазным ротором |
|---|---|
| 1. Не регулируется скорость вращения ротора | 1. Большие габариты |
| 2. Маленький пусковой момент | 2. Коэффициент полезного действия ниже |
| 3. Высокий пусковой ток | 3. Частое обслуживание из-за износа щеток |
| 4. Некоторая сложность конструкции и наличие движущихся контактов |
Асинхронные электродвигатели являются очень эффективными устройствами с отличными механическими характеристиками, и благодаря этому они являются лидерами по частоте применения.
Режимы работы
Электродвигатель асинхронного типа универсальный механизм и по продолжительности работы имеет несколько режимов:
- Продолжительный;
- Кратковременный;
- Периодический;
- Повторно-кратковременный;
- Особый.
Продолжительный режим — основной режим работы асинхронных устройств, который характеризуется постоянной работой электродвигателя без отключений с неизменной нагрузкой. Такой режим работы самый распространенный, используется на промышленных предприятиях повсеместно.
Кратковременный режим – работает до достижения постоянной нагрузки определенное время (от 10 до 90 минут), не успевая максимально разогреться. После этого отключается. Такой режим используют при подаче рабочих веществ (воду, нефть, газ) и прочих ситуациях.
Периодический режим – продолжительность работы имеет определенное значение и по завершении цикла работ отключается. Режим работы пуск-работа-остановка. При этом он может отключаться на время, за которое не успевает остыть до внешних температур и включаться заново.
Повторно-кратковременный режим – двигатель не нагревается максимально, но и не успевает остыть до внешней температуры. Применяется в лифтах, эскалаторах и прочих устройствах.
Особый режим – продолжительность и период включения произвольный.
В электротехнике существует принцип обратимости электрических машин — это означает, что устройство может, как преобразовывать электрическую энергию в механическую, так и совершать обратные действия.
Асинхронные электродвигатели тоже соответствуют этому принципу и имеют двигательный и генераторный режим работы.
Двигательный режим – основной режим работы асинхронного электродвигателя. При подаче напряжения на обмотки возникает электромагнитный вращающий момент, увлекающий за собой ротор с валом и, таким образом, вал начинает вращаться, двигатель выходит на постоянную частоту вращения, совершая полезную работу.
Генераторный режим – основан на принципе возбуждения электрического тока в обмотках двигателя при вращении ротора. Если вращать ротор двигателя механическим способом, то на обмотках статора образуется электродвижущая сила, при наличии конденсатора в обмотках возникает емкостный ток. Если емкость конденсатора будет определенного значения, зависящего от характеристик двигателя, то произойдет самовозбуждение генератора и возникнет трехфазная система напряжений. Таким образом короткозамкнутый электродвигатель будет работать как генератор.
Регулирование частоты вращения асинхронных двигателей
Для регулирования частоты вращения асинхронных электродвигателей и управления режимами их работы существуют следующие способы:
- Частотный – при изменении частоты тока в электрической сети изменяется частота вращения электрического двигателя. Для такого способа применяют устройство, которое называется частотный преобразователь;
- Реостатный – при изменении сопротивления реостата в роторе, изменяется частота вращения. Такой способ увеличивает пусковой момент и критическое скольжение;
- Импульсный – способ управления, при котором на двигатель подается напряжение специального вида.
- Переключение обмоток по время работы электрического двигателя со схемы «звезда» на схему «треугольник», что снижает пусковые токи;
- Управление с изменения пар полюсов для короткозамкнутых роторов;
- Подключение индуктивного сопротивления для двигателей с фазным ротором.
С развитием электронных систем, управление различными электродвигателями асинхронного типа становится все более эффективным и точным. Такие двигатели используются в мире повсеместно, разнообразие задач, выполняемых такими механизмами, с каждым днем растет, и потребность в них не уменьшается.
odinelectric.ru
Асинхронный двигатель — принцип работы и устройство
8 марта 1889 года величайший русский учёный и инженер Михаил Осипович Доливо-Добровольский изобрёл трёхфазный асинхронный двигатель с короткозамкнутым ротором.
Современные трёхфазные асинхронные двигатели являются преобразователями электрической энергии в механическую. Благодаря своей простоте, низкой стоимости и высокой надёжности асинхронные двигатели получили широкое применение. Они присутствуют повсюду, это самый распространённый тип двигателей, их выпускается 90% от общего числа двигателей в мире. Асинхронный электродвигатель поистине совершил технический переворот во всей мировой промышленности.
Огромная популярность асинхронных двигателей связана с простотой их эксплуатации, дешивизной и надежностью.
Асинхронный двигатель — это асинхронная машина, предназначенная для преобразования электрической энергии переменного тока в механическую энергию. Само слово “асинхронный” означает не одновременный. При этом имеется ввиду, что у асинхронных двигателей частота вращения магнитного поля статора всегда больше частоты вращения ротора. Работают асинхронные двигатели, как понятно из определения, от сети переменного тока.
Устройство
На рисунке: 1 — вал, 2,6 — подшипники, 3,8 — подшипниковые щиты, 4 — лапы, 5 — кожух вентилятора, 7 — крыльчатка вентилятора, 9 — короткозамкнутый ротор, 10 — статор, 11 — коробка выводов.
Основными частями асинхронного двигателя являются статор (10) и ротор (9).
Статор имеет цилиндрическую форму, и собирается из листов стали. В пазах сердечника статора уложены обмотки статора, которые выполнены из обмоточного провода. Оси обмоток сдвинуты в пространстве относительно друг друга на угол 120°. В зависимости от подаваемого напряжения концы обмоток соединяются треугольником или звездой.
Роторы асинхронного двигателя бывают двух видов: короткозамкнутый и фазный ротор.
Короткозамкнутый ротор представляет собой сердечник, набранный из листов стали. В пазы этого сердечника заливается расплавленный алюминий, в результате чего образуются стержни, которые замыкаются накоротко торцевыми кольцами. Эта конструкция называется «беличьей клеткой«. В двигателях большой мощности вместо алюминия может применяться медь. Беличья клетка представляет собой короткозамкнутую обмотку ротора, откуда собственно название.
Фазный ротор имеет трёхфазную обмотку, которая практически не отличается от обмотки статора. В большинстве случаев концы обмоток фазного ротора соединяются в звезду, а свободные концы подводятся к контактным кольцам. С помощью щёток, которые подключены к кольцам, в цепь обмотки ротора можно вводить добавочный резистор. Это нужно для того, чтобы можно было изменять активное сопротивление в цепи ротора, потому что это способствует уменьшению больших пусковых токов. Подробнее о фазном роторе можно прочитать в статье — асинхронный двигатель с фазным ротором.
Принцип работы
При подаче к обмотке статора напряжения, в каждой фазе создаётся магнитный поток, который изменяется с частотой подаваемого напряжения. Эти магнитные потоки сдвинуты относительно друг друга на 120°, как во времени, так и в пространстве. Результирующий магнитный поток оказывается при этом вращающимся.
Результирующий магнитный поток статора вращается и тем самым создаёт в проводниках ротора ЭДС. Так как обмотка ротора, имеет замкнутую электрическую цепь, в ней возникает ток, который в свою очередь взаимодействуя с магнитным потоком статора, создаёт пусковой момент двигателя, стремящийся повернуть ротор в направлении вращения магнитного поля статора. Когда он достигает значения, тормозного момента ротора, а затем превышает его, ротор начинает вращаться. При этом возникает так называемое скольжение.
Скольжение s — это величина, которая показывает, насколько синхронная частота n1 магнитного поля статора больше, чем частота вращения ротора n2, в процентном соотношении.
Скольжение это крайне важная величина. В начальный момент времени она равна единице, но по мере возрастания частоты вращения n2 ротора относительная разность частот n1-n2 становится меньше, вследствие чего уменьшаются ЭДС и ток в проводниках ротора, что влечёт за собой уменьшение вращающего момента. В режиме холостого хода, когда двигатель работает без нагрузки на валу, скольжение минимально, но с увеличением статического момента, оно возрастает до величины sкр — критического скольжения. Если двигатель превысит это значение, то может произойти так называемое опрокидывание двигателя, и привести в последствии к его нестабильной работе. Значения скольжения лежит в диапазоне от 0 до 1, для асинхронных двигателей общего назначения оно составляет в номинальном режиме — 1 — 8 %.
Как только наступит равновесие между электромагнитным моментом, вызывающим вращение ротора и тормозным моментом создаваемым нагрузкой на валу двигателя процессы изменения величин прекратятся.
Выходит, что принцип работы асинхронного двигателя заключается во взаимодействии вращающегося магнитного поля статора и токов, которые наводятся этим магнитным полем в роторе. Причём вращающий момент может возникнуть только в том случае, если существует разность частот вращения магнитных полей.
Рекомендуем к прочтению — однофазный асинхронный двигатель.
electroandi.ru
Устройство и принцип действия асинхронных электродвигателей
Всем привет. Рад вас видеть у себя на сайте. Тема сегодняшней статьи: устройство и принцип действия асинхронных электродвигателей. Так же я бы хотел немного сказать о способах регулировки их частоты вращения, и перечислить их основные преимущества и недостатки.
Раньше, я уже писал статьи, касающиеся асинхронных электродвигателей. Если кому интересно, то можете почитать. Вот список:
Схема пуска асинхронного двигателя.
Расчёт тока электродвигателя.
Реверсивное управление асинхронным электродвигателем с короткозамкнутым ротором.
Ну а теперь давайте перейдём к теме сегодняшней статьи.
В нынешнее время, очень трудно представить, как бы существовали все промышленные предприятия, если бы не было асинхронных машин. Эти двигателя установлены практически везде. Даже дома у каждого человека есть такой двигатель. Он может стоять на вашей стиральной машинке, на вентиляторе, на насосной станции, в вытяжке и так далее.
Вообще асинхронный электродвигатель – это колоссальный прорыв в мировой промышленности. Во всём мире их выпускают более 90 процентов от количества всех выпускаемых двигателей.
Асинхронный электродвигатель – это электрическая машина, которая преобразовывает электрическую энергию в механическую. То есть потребляет электрический ток, а взамен дают крутящий момент, с помощью которого можно вращать многие агрегаты.
А само слово «асинхронный» — означает неодновременных или не совпадающий по времени. Потому что у таких двигателей частота вращения ротора немного отстаёт от частоты вращения электромагнитного поля статора. Ещё это отставанием называют – скольжением.
Обозначается это скольжение буквой: S
А вычисляется скольжение по такой формуле: S = ( n1 — n2 )/ n1 — 100%
Где, n1 – это синхронная частота магнитного поля статора;
n2 – это частота вращения вала.
Устройство асинхронного электродвигателя.
Двигатель состоит из таких частей:
1. Статор с обмотками. Или станина внутри которой находится статор с обмотками.
2. Ротор. Это если короткозамкнутый. А если фазный, то можно сказать, что это якорь или даже коллектор. Я думаю, ошибки не будет.
3. Подшипниковые щиты. На мощных двигателях ещё спереди стоят подшипниковые крышки с уплотнителями.
4. Подшипники. Могут стоять скольжения или качения, в зависимости от исполнения.
5. Вентилятор охлаждения. Изготавливается из пластмассы или металла.
6. Кожух вентилятора. Имеет прорези для подачи воздуха.
7. Борно или клеммная коробка. Для подключения кабелей.
Это все его основные детали, но в зависимости от вида, типа и исполнения может немного изменяться.
Асинхронные электродвигателя в основном выпускают двух видов: трёхфазные и однофазные. В свою очередь трёхфазные ещё подразделяются на подвиды: с короткозамкнутым ротором или фазным ротором.
Самые распространённые – это трёхфазные с короткозамкнутым ротор.
Статор имеет круглую форму и набирается с листов специальной стали, которые изолированы между собой, и эта собранная конструкция образует сердечник с пазами. В пазы сердечника укладываются обмотки, со специального обмоточного, изолированного лаком провода. Провод это отливают в основном из меди, но также есть и с алюминия. Если двигатель очень мощный, то обмотки делаю шиной. Обмотки укладывают так, чтобы они были сдвинуты относительно друг друга на 120 градусов. Соединяются обмотки статора в звезду или в треугольник.
Ротор, как выше я уже писал выше, бывает короткозамкнутый или фазный.
Короткозамкнутый представляет собой вал, на который надеваются листы, из тоже специальной, стали. Эти наборные листы образую сердечник, в пазы которого заливают расплавленный алюминий. Этот алюминий равномерно растекается по пазам и образует стержни. А по краям эти стержни замыкают алюминиевыми кольцами. Получается своего рода «беличья клетка».
Фазный ротор представляет собой вал с сердечником и тремя обмотками. Одни концы, которых обычно соединяют в звезду, а вторые три конца присоединяют к токосъемным кольцам. А на эти кольца, с помощью щёток подают электрический ток.
Если в цепь фазных обмоток добавить нагрузочный реостат, и при пуске двигателя увеличивать активное сопротивление, то таким способ можно уменьшить большие пусковые токи.
Принцип действия.
Когда на обмотки статора подаются электрический ток, то в этих обмотках возникает электрический поток. Как вы помните, из выше написанных слов, фазы у нас смещены относительно друг друга на 120 градусов. И вот этот поток в обмотках начинает вращаться.
И при вращении магнитного потока статора, в обмотках ротора появляется электрический ток, и своё магнитное поле. Два этих магнитных поля начинают взаимодействовать и заставляют вращаться ротор электродвигателя. Это если ротор короткозамкнутый.
По принципу роботы вот посмотрите видео ролик.
Ну а с фазным ротором, по сути, принцип тот же. Напряжение подаётся на статор и на ротор. Появляются два магнитных поля, которые начинают взаимодействовать и вращать ротор.
Достоинства и недостатки асинхронных двигателей.
Основные достоинства асинхронного электродвигателя с короткозамкнутым ротором:
1. Очень простое устройство, что позволяет сократить затраты на его изготовление.
2. Цена намного меньше по сравнению с другими двигателями.
3. Очень простая схема запуска.
4. Скорость вращения вала практически не меняется с увеличением нагрузки.
5. Хорошо переносит кратковременные перегрузы.
6. Возможность подключения трёхфазных двигателей в однофазную сеть.
7. Надёжность и возможность эксплуатировать практически в любых условиях.
8. Имеет очень высокий показатель КПД и cos φ.
Недостатки:
1. Не возможности контролировать частоту вращения ротора без потери мощности.
2. Если увеличить нагрузку, то уменьшается момент.
3. Пусковой момент очень мал по сравнению с другими машинами.
4. При недогрузе увеличивается показатель cos φ
5. Высокие показатели пусковых токов.
Достоинства двигателей с фазным ротором:
1. По сравнению с короткозамкнутыми двигателями, имеет достаточно большой вращающий момент. Что позволяет его запускать под нагрузкой.
2. Может работать с небольшим перегрузом, и при этом частота вращения вала практически не меняется.
3. Небольшой пусковой ток.
4. Можно применять автоматические пусковые устройства.
Недостатки:
1. Большие габариты.
2. Показатели КПД и cos φ меньше, чем у двигателей с короткозамкнутым ротором. И при недогрузе эти показатели имеют минимальное значение
3. Нужно обслуживать щёточный механизм.
На этом буду заканчивать свою статью. Если она была вам полезной, то поделитесь нею со своими друзьями в социальных сетях. Если есть вопросы, то задавайте их в комментариях и подписывайтесь на обновления. Пока.
С уважением Александр!
Читайте также статьи:
fazanet.ru
Принцип действия асинхронного двигателя — Asutpp
Электродвигатель предназначен для преобразования, с малыми потерями, электрическую энергию в механическую.
Предлагаем рассмотреть принцип действия асинхронного электродвигателя с короткозамкнутым ротором, трехфазного и однофазного типа, а также его конструкцию и схемы подключения.
Строение двигателя
Основные элементы электродвигателя это – статор, ротор, их обмотки и магнитопровод.
Преобразование электрической энергии в механическую происходит во вращающейся части мотора — роторе.
У двигателя переменного тока, ротор получает энергию не только за счет магнитного поля, но и при помощи индукции. Таким образом, они называются асинхронными двигателями. Это можно сравнить с вторичной обмоткой трансформатора. Эти асинхронные двигатели еще называют вращающимися трансформаторами. Чаще всего используется модели рассчитанные на трех фазное включение.
Конструкция асинхронного двигателяНаправление вращения электродвигателя задается правилом левой руки буравчика: оно демонстрирует связь между магнитным полем и проводником.
Второй очень важный закон – Фарадея:
- ЭДС наводиться в обмотке, но электромагнитный поток меняется во временем.
- Величина наведенной ЭДС прямо пропорциональна скорости изменения электрического потока.
- Направление ЭДС противодействует току.
Принцип действия
При подаче напряжения на неподвижные обмотки статора, оно создает магнитное в статора. Если подается напряжение переменного тока, то магнитный поток, созданный им, изменяется. Так статор производит изменение магнитного поля, и ротор получает магнитные потоки.
Таким образом, ротор электродвигателя принимает эти поток статора и, следовательно, вращается. Это основной принцип работы и скольжения в асинхронных машинах. Из вышеизложенного следует отметить, что магнитный поток статора (и его напряжение) должно быть равно переменному току для вращения ротора, так что асинхронная машина может работать только от сети переменного тока.
Принцип работы асинхронного двигателяКогда такие двигатели действуют в качестве генератора, они будет генерировать непосредственно переменный ток. В случае такой работы, ротор вращается с помощью внешних средств скажем, турбины. Если ротор имеет некоторый остаточный магнетизм, то есть некоторые магнитные свойства, которые сохраняет по типу магнита внутри материала, то ротор создает переменный поток в стационарной обмотке статора. Так что это обмотки статора будут получать наведенное напряжение по принципу индукции.
Индукционные генераторы используются в небольших магазинах и домашних хозяйствах, чтобы обеспечить дополнительную поддержку питания и являются наименее дорогостоящими из-за легкого монтажа. В последнее время они широко используется людьми в тех странах, где электрические машины теряют мощность из-за постоянных перепадов напряжения в питающей электросети. Большую часть времени, ротор вращается при помощи небольшого дизельного двигателя соединенного с асинхронным генератором переменного напряжения.
Как вращается ротор
Вращающийся магнитный поток проходит через воздушный зазор между статором, ротором и обмоткой неподвижных проводников в роторе. Этот вращающийся поток, создает напряжение в проводниках ротора, тем самым заставляя наводиться в них ЭДС. В соответствии с законом Фарадея электромагнитной индукции, именно это относительное движение между вращающимся магнитным потоком и неподвижными обмотками ротора, которые возбуждает ЭДС, и является основой вращения.
Двигатель с короткозамкнутым ротором, в котором проводники ротора образовывают замкнутую цепь, в следствии чего возникает ЭДС наводящая ток в нем, направление задается законом Ленса, и является таким, чтобы противодействовать причине его возникновения. Относительное движение ротора между вращающимся магнитным потоком и неподвижным проводником и является его действием к вращению. Таким образом, чтобы уменьшить относительную скорость, ротор начинает вращаться в том же направлении, что и вращающийся поток на обмотках статора, пытаясь поймать его. Частота наведенной на него ЭДС такая же, как частота питания.
Гребневые асинхронные двигатели
Когда напряжение питания низкое, возбуждение обмоток короткозамкнутого ротора не происходит. Это обусловлено тем что, когда число зубцов статора и число зубьев ротора равное, таким образом вызывая магнитную фиксацию между статором и ротором. Этот физический контакт иначе называется зубо-блокировкой или магнитной блокировкой. Данная проблема может быть преодолена путем увеличения количества пазов ротора или статора.
Подключение
Асинхронный двигатель можно остановить, просто поменяв местами любые два из выводов статора. Это используется во время чрезвычайных ситуаций. После он изменяет направление вращающегося потока, который производит вращающий момент, тем самым вызывая разрыв питания на роторе. Это называется противофазным торможением.
Видео: Как работает асинхронный двигатель
Для того чтобы этого не происходило в однофазном асинхронном двигателе, необходимо использование конденсаторного устройства.
Его нужно подключить к пусковой обмотке, но предварительно обязательно проводится его расчет. Формула
QC = Uс I2 = U2 I2 / sin2
Схема: Подключение асинхронного двигателяИз которой следует, что электрические машины переменного тока двухфазного или однофазного типа, должны снабжаться конденсаторами с мощностью, равной самой мощности двигателя.
Аналогия с муфтой
Рассматривая принцип действия асинхронного электродвигателя, используемого в промышленных машинах, и его технические характеристики, нужно сказать про вращающуюся муфту механического сцепления . Крутящий момент на валу привода должен равняться крутящему моменту на ведомом валу. Кроме того, следует подчеркнуть, что эти два момента являются одним и тем же, поскольку крутящий момент линейного преобразователя вызывается трением между дисков внутри самой муфты.
Электромагнитная муфта сцепленияПохожий принцип действия и у тягового двигателя с фазным ротором. Система такого мотора состоит из восьми полюсов (из которых 4 – основные, а 4 – добавочные), и остовы. На основных полюсах расположены медные катушки. Вращение такого механизма обязано зубчатой передаче, которая получает крутящий момент от вала якоря, так же называемого сердечником. Включение в сеть, производится четырьмя гибкими кабелями. Основное назначение многополюсного электродвигателя – приведение в движение тяжелой техники: тепловозы, тракторы, комбайны и в некоторых случаях, станки.
Достоинства и недостатки
Устройство асинхронного двигателя является практически универсальным, но так же, у данного механизма есть свои плюсы и минусы.
Преимущества асинхронных двигателей переменного тока:
- Конструкция простой формы.
- Низкая стоимость производства.
- Надежная и практичная в обращении конструкция.
- Не прихотлив в эксплуатации.
- Простая схема управления
Эффективность этих двигателей очень высока, так как нет потерь на трение, и относительно высокий коэффициент мощности.
Недостатки асинхронных двигателей переменного тока:
- Не возможен контроль скорости без потерь мощности.
- Если увеличивается нагрузка – уменьшается момент.
- Относительно небольшой пусковой момент.
www.asutpp.ru
Асинхронный электродвигатель: устройство и принцип работы
Самым эффективным устройством, превращающим электрическую энергию в механическую, является асинхронный двигатель, изобретенный инженером Доливо-Добровольским в конце 19 века. Учитывая возрастающий интерес современников к разработке и сборке станков, самодвижущихся аппаратов и прочих механизмов, мы постараемся объяснить, как работает асинхронный электродвигатель, чтобы вы могли понять принцип его действия и результативно его использовать.
Устройство асинхронного электродвигателя
В его конструкцию входят следующие элементы:
- Статор цилиндрической формы, собранный из стальных листов. Сердечник статора имеет пазы, в которые уложены обмотки. Их оси сдвинуты на 120 градусов по отношению друг к другу.
- Ротор (короткозамкнутый или фазный). Первый вариант представляет собой сердечник с алюминиевыми стержнями, накоротко замкнутыми торцевыми кольцами (беличья клетка). Второй вариант состоит из трехфазной обмотки, чаще всего соединенной «звездой».
- Конструктивные детали – вал, подшипники, лапы, подшипниковые щиты, крыльчатка и кожух вентилятора, коробка выводов — обеспечивающие вращение, охлаждение и защиту механизма.
Схему асинхронного двигателя с указанием его деталей легко найти в интернете или в пособиях.
Принцип работы асинхронного двигателя
Принцип действия асинхронного электродвигателя заложен в его названии (не синхронный). То есть статор и ротор при включении создают вращающиеся с разной частотой магнитные поля. При этом частота вращения магнитного поля ротора всегда меньше частоты вращения магнитного поля статора.
Чтобы более наглядно представить себе этот процесс, возьмите постоянный магнит и покрутите его вокруг своей оси возле медного диска. Диск с небольшим отставанием начнет вращаться вслед за магнитом. Дело в том, что при вращении магнита в структуре диска возбуждаются токи Фуко (индукционные токи), движущиеся по замкнутому кругу. По сути они являются токами короткого замыкания, разогревающими металл. В диске «зарождается» собственное магнитное поле, в дальнейшем взаимодействующее с полем магнита.
В асинхронном двигателе для получения вращающегося поля используются обмотки статора. Магнитный поток, образованный ими, создает ЭДС в проводниках ротора. При взаимодействии магнитного поля статора и индуцируемого тока в обмотке ротора создается электромагнитная сила, приводящая во вращение вал электродвигателя.
Пошагово процесс выглядит следующим образом:
- При запуске двигателя магнитное поле статора пересекается с контуром ротора и индуцирует электродвижущую силу.
- В накоротко замкнутом роторе возникает переменный ток.
- Два магнитных поля (статора и ротора) создают крутящий момент.
- Крутящийся ротор пытается «догнать» поле статора.
- В тот момент, когда частоты вращения магнитного поля статора и ротора совпадут, электромагнитные процессы в роторе затухают и крутящий момент становится равным нулю.
- Магнитное поле статора возбуждает контур ротора, который к этому моменту снова отстает.
То есть ротор всегда медленнее магнитного поля статора, что и обеспечивает асинхронность.
Поскольку ток в роторе индуцируется бесконтактно, отпадает необходимость установки скользящих контактов, что делает асинхронные двигатели более надежными и эффективными. Изменяя направление тока в одной из обмоток (для этого нужно поменять фазы на клеммах), вы можете «заставить» мотор вращаться в ту или другую сторону.
Направление электромагнитной силы легко определить, вспомнив школьный курс физики и воспользовавшись «правилом левой руки».
На частоту вращения магнитного поля статора влияет частота питающей сети и число пар полюсов. Поскольку число пар полюсов зависит от типа двигателя и остается неизменным, то, если вы хотите изменить частоту вращения поля, необходимо изменить частоту питающей сети с помощью преобразователя.
Преимущества асинхронных двигателей
Благодаря тому, что устройство и принцип работы асинхронного электродвигателя достаточно просты, он обладает массой преимуществ и широко применяется во всех сферах народного хозяйства и в быту. Двигатели этого типа характеризуются:
- Надежностью и долговечностью. Отсутствие контакта между подвижными и неподвижными деталями сводит к минимуму возможность износа и поломок.
- Низкой стоимостью. Они доступны (не зря 90% от всех выпускающихся в мире двигателей именно асинхронные).
- Простотой эксплуатации. Для того чтобы использовать их, не обязательно иметь специальные знания и навыки.
- Универсальностью. Их можно установить практически на любое оборудование.
Изобретение асинхронного электродвигателя было значимым вкладом в развитие науки, промышленности и сельского хозяйства. С ним наша жизнь стала более комфортной.
www.szemo.ru
Асинхронный электродвигатель — устройство, принцип работы, виды асинхронных двигателей
Данный двигатель зачастую используется в промышленности. Он простой в использовании, долговечный, недорогой.
Асинхронный двигатель
Асинхронный двигатель превращает электрическую энергию в механическую. Его работа основана на принципе вращающегося магнитного поля. Сам принцип действия аппарата можно описать несколькими пунктами поэтапно:
- Во время запуска самого двигателя происходит пересечение магнитного поля с контуром ротора, после чего происходит индицирование электродвижущей силы.
- В замкнутом роторе происходит возникновение переменного тока.
- Магнитные поля: статора и ротора также воссоздают непосредственно так называемый крутящий момент.
- Ротор «догоняет» поле самого статора.
- Когда частоты вращения самого магнитного поля статора/ротора имеют совпадения, электромагнитные процессы, образованные в месте ротора затухают. После чего крутящий момент приравнивается к «0».
- Статор, а вернее его образованное магнитное поле возбуждает контур ротора, который в этот момент вновь позади.
Где применяются?
Как уже уточнялось выше в статье, применяется данный двигатель промышленности (лебедки общепромышленного назначения, краны) и бытовой технике (асинхронные двигатели с небольшой мощностью).
Теперь остановим ваше внимание на электродвигателе непосредственно с короткозамкнутым ротором. Они применяются в самих электроприводах различных типов станков, а если говорить точнее: металлообрабатывающих, а также часто встречающихся на сегодня грузоподъемных и ткацких, в том числе деревообрабатывающих), а также в вентиляторах, лифтах, различных насосах, бытовых приборах.
Если говорить об асинхронном электродвигателе с короткозамкнутым ротором, то благодаря его применению можно добиться существенного снижения энергопотребления оборудования, которое в свою очередь, обеспечивает высокий уровень надежности аппарата. Данные характеристики оказывают положительный эффект на модернизацию производства в целом.
Что такое «скольжение»?
Пришло время поговорить о таком понятии как «скольжение» асинхронного двигателя.
Это, по сути, относительная разность скоростей самого вращения «ротора», это ни что иное, как изменение, так называемого переменного магнитного тока. «Скольжение» измеряется в относительных единицах, а также можно измерять в процентном соотношении.
Устройство асинхронного двигателя
Основные части двигателя: статор и ротор. Три обмотки находятся на полюсах железного сердечника кольцевой формы, сети так называемого трехфазного тока 0 располагаются одна относительно другой строго под углом 120 градусов.
Также отметим, что внутри самого сердечника закреплен на той же оси цилиндр из высококачественного металла. Он называется – ротор.
Из чего состоит асинхронный электродвигатель
Статор
Статор это неподвижная часть, которая формирует вращающееся магнитное поле. Именно это поле непосредственно соприкасается с электромагнитным полем самой подвижной части, именуемой ротором, тем самым происходит полноценное вращение ротора.
Двигатели статора имеют фазные и короткозамкнутые роторы.
Устройство статора
- Первое это корпус, изготовленный из чугуна, но часто встречаются корпуса из алюминия.
- Далее идет сердечник из пластин, которые изготовлены из электротехнической стали в толщину 0,5 миллиметров. Пластины сердечника скреплены скобками или же швами, покрыты изоляционным лаком, закреплены в станине при помощи стопорных болтов.
- Ну и последнее в устройстве статора– обмотки, сдвинутые друг к другу на 120 градусов, как правило, в устройстве их не более трех, они вложены в пазы на внутренней стороне самого сердечника, изготовлены из изолированного медного, алюминиевого провода круглого/квадратного сечения.
Сердечник статора
Выполняется с посадкой на вал, без наличия промежуточной втулки. Посадка сердечников используется в двигателях с высотой непосредственно оси в 250 миллиметров без шпонки.
В больших двигателях сердечники закреплены на вал с применением шпонки. В случае, если ротор в диаметре 990 миллиметров, сердечник шихтуют из разных сегментов.
Обмотка статора и количество оборотов электродвигателя
Определить количество оборотов электродвигателя можно лишь при помощи обмотки. В этом нет ничего сложного и достаточно просто следовать инструкции и все получится. Для этого нужно:
- Снять крышку с двигателя.
- Найти одну из секций и посмотреть, сколько места она занимает по окружности самого круга. Например, если катушка заняла половину круга – это 180 градусов, то двигатель идет на 3000 оборотов в минуту.
- Если в окружности вмещается три секции на 120 градусов, то это двигатель на 1500 оборотов в минуту.
- Если в катушке вмещается 4 секции на 90 градусов, то двигатель на 3000 оборотов в минуту.
Ротор
Вращается внутри самого статора (выше описывали, что он представляет собой). Ротор – элемент электрического двигателя. Его вал соединен с деталями агрегаторов. Если говорить о массивном роторе – это цельный стальной цилиндр, который помещается во внутрь статора с не присоединенным к его поверхности сердечником (также выше описывали что такое сердечник).
Также бывают еще разновидности ротора:
- фазный (уложен в пазы сердечника обмоткой и соединен по схеме «звезда»),
- короткозамкнутый (залитый в поверхность сердечника, замкнут с торцов при помощи двух высокопроводящих медных колец).
Устройство короткозамкнутого ротора
Такая обмотка зачастую называется у профессионалов «беличьим колесом» по причине того, что его внешняя конструкция достаточно схожа с ним. Состоит из аллюминевых стержней, торцов с двумя кольцами замкнутых накоротко. Такие стержни вставлены, как правило, в пазы сердечника самого ротора.
Как сделан фазный ротор
Фазный ротор представляет собой двигатель, который поддается регулировке при помощи добавления в цепь ротора так называемых добавочных сопротивлений. Используются такого плана двигатели во время пуска с нагрузкой на валу. В свою очередь, увеличение сопротивления в цепи ротора предоставляет возможность увеличить пусковой момент.
Что лучше короткозамкнутый или фазный: совместная работа ротора и статора
Здесь стоит отметить, что особенных преимуществ нет ни у одного ротора, каждый хорош по-своему. Более подробно на них останавливаться не будем, так как вся необходимая информация по этим двум разновидностям ротора уже была дана выше в статье. остановим внимание на том, как регулируется частота вращения ротора. Это можно сделать при помощи изменения так называемого дополнительного сопротивления самой цепи ротора.
Также можно регулировать частоту вращения ротора, изменив напряжение статора, который подведен к обмотке.
Можно также изменить частоту питающего напряжения или же переключить число пар полюсов, ввести резисторы в цепь ротора.
Классификация по типу ротора
Классификация по типу ротора следующая: однофазный асинхронный двигатель с короткозамкнутым ротором, а также есть такая разновидность ротора, как двухфазный асинхронный двигатель короткозамкнутый.
Плюс ко всему сегодня часто пользуется спросом и асинхронный двигатель с короткозамкнутым ротором с тремя фазами, а также асинхронный двигатель с фазным ротором, также с тремя фазами. Именно так и делится классификация ротора по числу фаз.
Линейные моторы
В линейных двигателях перемещение рабочего органа РО (коротких подач) происходит от самого двигателя через ременную передачу строго на винт (ходовой).
Шариковая гайка скреплена с короткой передачей пружинных механизмов защиты от соударений, именно через нее происходит вращение винта и происходит трансформация в продольное перемещение РО.
Подключение двигателя к питанию
Кнопки “Стоп” должны быть подключены в последовательности друг с другом, а в свою очередь кнопки “Пуск” должны строго настрого быть подключены в параллели между собой в цепи управления.
Во время нажатия на “Пуск” цепь катушки будет замкнута, а сама катушка начинает втягиваться, а во время размыкания кнопки, напряжение питающее катушку, пойдет через блок-контакт КМ. Прервать цепь управления можно при помощи нажатия на одну из кнопок “Стоп”.
Достоинства и недостатки асинхронных двигателей
Какие недостатки и достоинства у асинхронных электродвигателей
Достоинства:
- прежде всего, их легко использовать и никаких сложностей при эксплуатации не возникает
- конструкция двигателей очень простая и это еще одно их преимущество, а также нельзя не отметить их низкую себестоимость (порой это имеет большое значение для покупателей, так что это еще один плюс таких двигателей)
- надежность
Недостатки:
- модели оснащены маленьким пусковым механизмом
- выдают высокой спусковой ток
- очень сильно чувствительны к возможной смене параметров в сети
- для плавного регулирования скорости нужен преобразователь вероятных частот
Несмотря на то, что есть свои недостатки эти асинхронные двигатели, пользуются огромной популярностью. Так что все-таки они заслуживают должного уважения и не зря их часто используют в промышленности.
Заключение
Надеемся, теперь вам полностью понятен принцип работы асинхронного двигателя. Если хотите регулярно узнавать новую информацию по этой теме, а также по теме металлоискателей, подписывайтесь на нашу группу в социальной сети «Вконтакте». Для этого вам необходимо будет перейти по следующей ссылке https://vk.com/electroinfonet. Там можно не только узнавать различного рода полезную информацию, но еще и задавать вопросы и получать на них подробные ответы.
СледующаяЭлектрические машиныМалоизвестные факты о двигателях постоянного тока
electroinfo.net
принцип работы и устройство :: SYL.ru
Из всего спектра выпускаемых в настоящее время электрических моторов наибольшее распространение получил двигатель асинхронный трёхфазный. Практически половина производимой в мире электроэнергии используется именно этими машинами. Они широко применяются в металлообрабатывающей и деревообрабатывающей промышленности. Асинхронный двигатель незаменим на фабриках и насосных станциях. Без таких машин не обойтись и в быту, где они используются и в другой домашней технике, и в ручном электроинструменте.
Область применения этих электрических машин расширяется с каждым днём, так как совершенствуются и сами модели, и используемые для их изготовления материалы.
Каковы же основные части этой машины
Разобрав двигатель асинхронный трехфазный, можно наблюдать два главных элемента.
1. Статор.
2. Ротор.
Одна из важнейших деталей — статор. На фото сверху эта часть двигателя расположена слева. Он состоит из следующих основных элементов:
1. Корпус. Он необходим для соединения всех деталей машины. Если двигатель небольшой, то корпус изготавливают цельнолитым. В качестве материала используют чугун. Применяются также сталь или сплавы алюминия. Иногда корпус малых двигателей совмещает функции сердечника. Если же двигатель имеет большие размеры и мощность, то корпус сваривают из отдельных частей.
2. Сердечник. Этот элемент двигателя запрессовывается в корпус. Служит он для улучшения качеств магнитной индукции. Выполняется сердечник из пластин электрической стали. Для того чтобы снизить потери, неизбежные при появлении вихревых токов, каждая пластина покрывается слоем специального лака.
3. Обмотка. Она размещается в пазах сердечника. Состоит из витков медной проволоки, которые собираются в секции. Соединённые в определённой последовательности, они образуют три катушки, которые в совокупности являются обмоткой статора. Подключается она непосредственно к сети, поэтому называется первичной.
Ротор — это подвижная часть двигателя. На фото он находится справа. Служит он для преобразования силы магнитных полей в механическую энергию. Состоит ротор асинхронного двигателя из следующих деталей:
1. Вал. На хвостовиках его закреплены подшипники. Они запрессовываются в щиты, крепящиеся болтами к торцовым стенкам коробки статора.
2. Сердечник, который собирается на валу. Состоит из пластин специальной стали, обладающей таким ценным свойством, как низкое сопротивление магнитным полям. Сердечник, обладая формой цилиндра, и является основой для укладки обмотки якоря. Роторная, или, как её ещё называют, вторичная обмотка получает энергию благодаря магнитному полю, которое появилось вокруг катушек статора при прохождении по ним электрического тока.
Двигатели по типу изготовления подвижной части
Различают двигатели:
1. Имеющие короткозамкнутую обмотку ротора. Один из вариантов исполнения этой детали показан на рисунке.
Асинхронный двигатель с короткозамкнутым ротором имеет обмотку, сделанную из алюминиевых стержней, которые располагаются в пазах сердечника. В торцевой части они замкнуты кольцами накоротко.
2. Электродвигатели, имеющие ротор, изготовленный с контактными кольцами.
У обоих типов асинхронных двигателей конструкция статора одинаковая. Различаются они только исполнением якоря.
Каков же принцип работы
Якорь трёхфазного асинхронного двигателя, исполненный подобным образом, приводится во вращение благодаря эффекту возникновения переменного магнитного поля в статорных катушках. Чтобы понять, каким образом это происходит, необходимо вспомнить физический закон самоиндукции. Он гласит, что вокруг проводника, по которому проходит поток заряженных частиц, возникает магнитное поле. Величина его будет прямо пропорциональна индуктивности провода и интенсивности протекающего в нём потока заряженных частиц. Кроме того, это магнитное поле формирует силу с определённой направленностью. Именно она нас и интересует, так как является причиной вращения ротора. Для эффективной работы двигателя необходимо иметь мощный магнитный поток. Создаётся он благодаря специальному способу монтажа первичной обмотки.
Известно, что источник питания имеет переменное напряжение. Следовательно, магнитное поле вокруг статора будет иметь такую же характеристику, напрямую зависящую от изменения тока в подающей сети. Примечательно то, что каждая фаза смещена одна относительно другой на 120˚.
Что происходит в обмотке статора
Каждая фаза сети питания подключается к соответствующей катушке статора, поэтому возникающее вокруг них магнитное поле будет смещено на 120˚. Источник питания имеет переменное напряжение, следовательно, вокруг катушек статора, которыми располагает асинхронный двигатель, будет возникать переменное магнитное поле. Схема асинхронного двигателя собирается так, чтобы магнитное поле, возникающее вокруг катушек статора, постепенно изменялось и последовательно переходило от одной обмотки к другой. Таким образом создаётся эффект вращающегося магнитного поля. Можно вычислить его частоту вращения. Измеряться она будет в оборотах за минуту. Определяется по формуле: n=60f/p, где f — это частота переменного тока в подключенной сети (Гц), p — соответствует числу пар полюсов, смонтированных на статоре.
Как работает ротор
Теперь необходимо рассмотреть, какие процессы возникают во вторичной обмотке. Асинхронный двигатель с короткозамкнутым ротором имеет конструкционную особенность. Дело в том, что к его якорной обмотке напряжение не подводится. Оно там возникает благодаря магнитоиндукционной связи с первичной обмоткой. Поэтому и происходит процесс, обратный тому, что наблюдался в статоре, в соответствии с законом, который гласит, что при пересечении проводника, а в нашем случае это короткозамкнутая обмотка ротора, магнитным потоком в нём возникает электрический ток. Откуда берётся магнитное поле? Оно возникло вокруг первичной катушки при подключении трёхфазного источника питания.
Соединим статор и ротор. Что получится?
Таким образом, имеем асинхронный короткозамкнутый двигатель с ротором, в обмотке которого проходит электрический ток. Он и будет причиной возникновения магнитного поля вокруг якорной обмотки. Однако полярность этого потока будет отличаться от созданного статором. Соответственно, и сила, образуемая им, будет вступать в противодействие с той, которая вызвана магнитным полем первичной обмотки. Это и приведёт в движение ротор, так как на нём собрана вторичная катушка, и хвостовики вала якоря закреплены в корпусе двигателя на подшипниках.
Рассмотрим ситуацию взаимодействия сил, возникающих от магнитных полей статора и ротора, с течением времени. Знаем, что магнитное поле первичной обмотки вращается и обладает определённой частотой. Созданная им сила будет перемещаться, имея аналогичную скорость. Это заставит асинхронный двигатель заработать. И его ротор будет свободно вращаться вокруг оси.
Эффект скольжения
Ситуация, когда силовые потоки ротора как бы отталкиваются от вращающегося магнитного поля статора, получила название скольжения. Следует отметить, что частота асинхронного двигателя (n1) всегда меньше той, с которой перемещается магнитное поле статора. Объяснить это можно так. Чтобы в роторной обмотке возник ток, она должна быть пересечена магнитным потоком с определённой угловой скоростью. И поэтому справедливо утверждение, что скорость вращения вала больше либо равна нулю, но меньше интенсивности перемещения магнитного поля статора. Ротор имеет частоту вращения, зависящую от силы трения в подшипниках, а также от величины отбора мощности с вала ротора. Поэтому он как бы отстаёт от магнитного поля статора. Именно из-за этого частота называется асинхронной.
Таким образом, электроэнергия питающего источника преобразовалась в кинетическую энергию вращающегося вала. Скорость его вращения прямо пропорциональна частоте тока питающей сети и количеству пар полюсов статора. Для увеличения частоты вращения якоря можно использовать частотные преобразователи. Однако работа этих устройств должна быть согласована с количеством пар полюсов.
Как подключить двигатель к источнику питания
Чтобы осуществить пуск асинхронного двигателя, его необходимо подключить к сети трёхфазного тока. Схема асинхронного двигателя собирается двумя способами. На рисунке показана схема соединения выводов двигателя, в которой статорные обмотки собраны способом «звезда».
На этом рисунке изображён другой способ соединения, именуемый «треугольник». Собираются схемы в клеммной коробке, закреплённой на корпусе.
Следует знать, что начала каждой из трёх катушек, их ещё называют обмотками фаз, именуются С1, С2, С3 соответственно. Аналогично подписываются концы, которые имеют названия С4, С5, С6. Если в клеммной коробке нет маркировки выводов, то начала и концы придётся определить самостоятельно.
Как сделать реверс
При возникновении потребности осуществить пуск асинхронного двигателя, изменив направление вращения якоря, надо просто поменять местами два провода подключаемого источника трехфазного напряжения.
Однофазный асинхронных двигателей
В быту проблематично использовать трёхфазные двигатели из-за отсутствия требуемого источника напряжения. Поэтому существует однофазный асинхронный двигатель. Он также имеет статор, но с существенным конструкционным отличием. Оно заключается в количестве и способе расположения обмоток. Это определяет и схему запуска машины.
Если однофазный асинхронный двигатель имеет статор с двумя обмотками, то расположены они будут со смещением по окружности под углом в 90˚. Катушки называются пусковой и рабочей. Соединяются они параллельно, но, чтобы создать условия для появления вращающееся магнитного поля, дополнительно вводится активное сопротивление или конденсатор. Это создаёт сдвиг фаз токов обмоток, близкий к 90˚, благодаря чему создаётся условие для образования вращающегося магнитного поля.
Если статор имеет только одну катушку, то подключённый к ней однофазный источник питания будет причиной пульсирующего магнитного поля. В замкнутой накоротко обмотке ротора появится переменный ток. Он станет причиной возникновения своего магнитного потока. Результирующая двух образовавшихся сил будет равна нулю. Поэтому для запуска двигателя, имеющего такую конструкцию, требуется дополнительный толчок. Создать его можно, подключив конденсаторную схему пуска.
Подключить двигатель к однофазной цепи
Изготовленный для работы от трёхфазного источника питания электромотор может работать и от домашней однофазной сети, но при этом существенно снизятся его характеристики, такие как КПД, коэффициент мощности. Кроме того, снизятся мощность и пусковые показатели.
Если же без подключения не обойтись, то требуется из трёх обмоток статора собрать схему, где их будет только две. Одна рабочая, а другая пусковая. Например, есть три катушки с началами С1, С2, С3 и концами С4, С5, С6 соответственно. Для создания первой (рабочей) обмотки двигателя объединяем концы С5 и С6, а их начала С3 и С2 подключаем к источнику однофазного тока, например, бытовой сети 220 вольт. Роль второй, пусковой обмотки, будет выполнять оставшаяся незадействованная катушка стартера. Она подключается к источнику питания через конденсатор, соединённый с ней последовательно.
Параметры асинхронного двигателя
При подборе таких машин, а также при дальнейшей их эксплуатации необходимо учитывать характеристики асинхронного двигателя. Они бывают энергетические — это коэффициент полезного действия, коэффициент мощности. Важно учитывать и механические показатели. Основным из них считается зависимость между скоростью вращения вала и рабочим усилием, прикладываемым к нему. Существуют ещё пусковые характеристики. Они определяют пусковой, минимальный и максимальный моменты и их соотношение. Важно также знать, каков пусковой ток асинхронного двигателя. Для наиболее эффективного использования двигателя необходимо учитывать все эти параметры.
Нельзя оставить без внимания вопрос энергосбережения. В последнее время он рассматривается не только с позиции уменьшения эксплуатационных затрат. Экономичность электродвигателей снижает уровень экологических проблем, связанных с производством электроэнергии.
Перед производителями постоянно ставятся задачи разработки и выпуска энергосберегающих двигателей, повышения эксплуатационного ресурса, уменьшения шумового уровня.
Улучшить энергосберегающие показатели можно путём снижения потерь при эксплуатации. А они напрямую зависят от рабочей температуры машины. Кроме того, совершенствование этой характеристики неизбежно приведёт к увеличению срока эксплуатации двигателя.
Снизить температуру обмоток можно, применяя вентилятор наружного обдува, закреплённый на хвостовике вала ротора. Но это приводит к неизбежному повышению шума, производимого двигателем при работе. Особенно ощутим этот показатель при высокой скорости вращения ротора.
Таким образом, видно, что асинхронный двигатель имеет один существенный недостаток. Он не способен поддерживать постоянную частоту вращения вала при возрастающих нагрузках. Зато такой двигатель имеет множество преимуществ по сравнению с образцами электродвигателей других конструкций.
Во-первых, он имеет надёжную конструкцию. Работа асинхронного двигателя не вызывает никаких сложностей при его использовании.
Во-вторых, асинхронный двигатель экономичен в производстве и эксплуатации.
В-третьих, эта машина универсальна. Имеется возможность её использования в любых устройствах, которые не требуют точного поддержания частоты вращения вала якоря.
В-четвёртых, двигатель с асинхронным принципом действия востребован и в быту, получая питание только от одной фазы.
www.syl.ru
Асинхронный двигатель: устройство, виды, принцип работы
Немало техники — бытовой, строительной, производственной имеют двигатели. Если задаться целью и проверить тип мотора, в 90% окажется, что стоит асинхронный двигатель. Это обусловлено простотой конструкции, высоким КПД, отсутствием электрического контакта с движущейся частью (в моделях с короткозамкнутым ротором). В общем, причин достаточно.
Содержание статьи
Что такое асинхронный двигатель и принцип его действия
Любой электродвигатель — устройство для преобразования электрической энергии в механическую. Электрический двигатель состоит из неподвижной (статор) и подвижной части (ротор). Строение статора таково, что он имеет вид полого цилиндра, внутри которого имеется обмотка. В это цилиндрическое отверстие вставляется подвижная часть — ротор. Он также имеет вид цилиндра, но меньшего размера. Между статором и ротором имеется воздушный зазор, позволяющий ротору свободно вращаться. Ротор вращается из-за наводимых магнитным полем статора токов. По способу вращения двигатели делят на синхронные и асинхронные.
Так выглядит разобранный асинхронный двигатель с короткозамкнутым ротором
Асинхронный электродвигатель отличается тем, что частота вращения ротора и магнитного поля, создаваемого статором, у него неравны. То есть, ротор вращается несинхронно с полем, что и дало название этому типу машин. Характерно, в рабочем режиме скорость его вращения меньше. Второе название этого типа двигателей — индукционные. Это название связано с тем, что движение происходит за счёт наводимых на нём токов индукции.
Асинхронный двигатель в разобранном виде: основные узлы и части
Коротко описать принцип работы асинхронного двигателя можно так. При включении мотора на обмотки статора подаётся ток, из-за чего возникает переменное магнитное поле. В область действия силовых линий этого попадает ротор, который начинает вращаться вслед за переменным полем статора.
Статор
Статор асинхронного двигателя состоит из трёх частей: корпуса, сердечника и обмотки. Корпус статора служит в качестве опоры для электродвигателя. Изготавливают его из стали или чугуна, сваркой или литьём. К прочности корпуса предъявляются высокие требования, так как при работе возникают вибрации в результате которых может сместиться ротор, что приведёт к заклиниванию мотора и выходу его из строя.
Статор асинхронного двигателя
Есть и ещё одно требование — геометрия корпуса должна быть идеальной. Между обмоткой статора и ротором зазор делают в несколько миллиметров, так что малейшие отклонения могут быть критичны.
Сердечник статора
Сердечник статора асинхронного электродвигателя изготавливают из наборных металлических пластин. Так как сердечник является магнитопроводом, металл используется магнитная электротехническая сталь. Для уменьшения потерь из-за вихревых потоков сердечник набирается из пластин, покрытых слоем диэлектрика (лак).
Сердечник статора набирается из тонких металлических изолированных пластин
Толщина одной пластины — 0,35-0,5 мм. Они собираются в единый пакет, так чтобы пазы всех пластин совпадали. В эти пазы затем укладываются витки обмотки.
Обмотка статора и количество оборотов электродвигателя
Статор асинхронного электромотора чаще всего имеет трёхфазную обмотку возбуждения. Она называется так, потому что является причиной движения ротора. Обмотка статора состоит из катушек, навитых из медной проволоки которые укладываются в пазы сердечника. Каждая обмотка может состоять из нескольких витков проволоки или из одного витка. Провод используется специальный, с лаковым покрытием, которое изолирует витки друг от друга и от стенок сердечника.
Как уже говорили, чаще всего обмотка статора асинхронного двигателя имеет три фазы. В этом случае оси катушек расположены со сдвигом 120°. При таком строении магнитное поле имеет два полюса и делает один полный оборот за один цикл трёхфазного питания. При частоте в электросети равной 50 Гц, скорость вращения поля (и ротора) 50 об/сек или 3000 об/мин.
Укладка катушек обмотки статора асинхронного двигателя
Для уменьшения скорости вращения ротора в асинхронном двигателе обмотку делают с большим количеством полюсов. Так с четырехполюсным стартером скорость вращения будет вдвое меньше — 1500 об/мин. Обмотка с шестью полюсами статора даёт втрое меньшую скорость — 1000 об/мин. С восемью полюсами — в четыре раза меньше, т. е. 750 об/мин. Ещё более «медленные» электромоторы делают очень редко.
Концы обмоток статора выводятся на клеммную коробку корпуса. Тут они могут соединяться по принципу «звезда» или «треугольник» в зависимости от типа подаваемого питания (220 В или 380 В).
Ротор
Ротор асинхронного электродвигателя бывает двух видов: короткозамкнутым и фазным. Чаще всего встречаются машины с короткозамкнутым ротором. Их преимущество в простоте конструкция и несложной технологии изготовления. Что еще важно, в таких моторах отсутствует контакт с динамической конструкцией. Это повышает долговечность, делает обслуживание более редким и простым.
Асинхронный двигатель может быть с короткозамкнутым и фазным
Асинхронные электромоторы с фазным ротором имеют более сложную конструкцию. Но они позволяют плавно регулировать скорость без дополнительных устройств, со старта имеют высокий крутящий момент. Так что приходится выбирать: более простая конструкция или возможность регулировки скорости вращения.
Устройство короткозамкнутого ротора
Ротор состоит из вала и цилиндрической конструкции из короткозамкнутых стержней. Внешне эта конструкция очень напоминает беличье колесо, поэтому так часто называют короткозамкнутую обмотку ротора.
Устройство короткозамкнутого ротора
Изначально и стержни, и замыкающие кольца изготавливались из меди. Роторы современных асинхронных двигателей мощностью до 100 кВт делают из алюминиевых стержней, с алюминиевыми же замыкающими дисками. Расстояние между стержнями заливается снова-таки алюминиевым сплавом. Получается короткозамкнутый ротор, но уже со сплошным покрытием.
Так как при работе выделяется значительное количество тепла, для охлаждения перемычки «беличьего колеса» делают с дополнительными вентиляционными лопатками. Так во время работы происходит самоохлаждение. Оно работает тем эффективнее, чем выше скорость вращения.
Как устроен асинхронный двигатель: устройство и компоновка деталей
Ротор устанавливается в статор, концы вала фиксируются при помощи крышек с вмонтированными подшипниками. Это двигатель без щеток (безщеточный). Никаких дополнительных контактов и электрических соединений. Подвижная часть мотора начинает вращаться при наличии магнитного поля на статоре. Оно возникает после подачи питания. Это поле вращается, заставляя вращаться и предметы, которые находятся в его поле. Простая и надёжная конструкция, которая обусловила популярность электрических двигателей этого типа.
Как сделан фазный ротор
Устройство фазного ротора мало чем отличается от обмотки статора. Те же наборные кольца с пазами под укладку медных катушек. Количество обмоток ротора три, соединены они обычно «звездой».
Так выглядит фазный ротор асинхронного двигателя
Концы роторных обмоток крепят к контактным кольцам из меди. Эти кольца жёстко закреплены на валу. Кроме того, они обязательно изолированы между собой, не имеют электрического контакта со стальным валом (крепятся к стержню через диэлектрические прокладки). Так как наличие колец отличительная черта этого типа движков, иногда их называют кольцевыми.
Асинхронный двигатель с фазным ротором
Для фиксации ротора к корпусу статора делают две крышки с подшипниками. На одной из крышек закрепляются щетки, которые прижимаются к кольцам на валу, за счёт чего имеют с ними хороший контакт. Для регулировки скорости вращения щетки соединены с реостатом. Изменяя его сопротивление, меняем напряжение, а с ним и скорость вращения.
Что лучше короткозамкнутый или фазный?
Несмотря на то что двигатели с фазовым ротором лучше стартуют, позволяют в процессе работы плавно менять скорость при помощи обычного реостата, чаще применяется моторы короткозамкнутого типа. В этой конструкции отсутствуют щетки, которые выходят из строя первыми. Кроме того, более простое устройство подвижной части снижает стоимость двигателя, агрегат служит дольше, уход и техобслуживание проще.
Какой лучше: короткозамкнутый ротор или фазный
Тем не менее стоит более подробно ознакомиться с достоинствами и недостатками обоих типов асинхронных двигателей. Итак, достоинства короткозамкнутого асинхронного двигателя:
- Простая конструкция.
- Лёгкое обслуживание.
- Более высокий КПД.
- Нет искрообразования.
Недостатки:
Из-за высокого пускового тока прямое включение допускается для двигателей мощностью до 200 кВт. Более мощные требуют пускорегулирующей аппаратуры. Обычно используют частотный преобразователь, который плавно увеличивает ток, обеспечивая плавный старт без перегрузок.
Преимущество асинхронного фазного двигателя:
- Быстрый и беспроблемный старт.
- Позволяет менять скорость в процессе работы.
- Прямое подключение возможно, практически без ограничения мощности.
Недостатки тоже есть: наличие щёток, возможность искрения, сложное и частое обслуживание.
Как регулируется частота вращения
Как уже писали, частота вращения ротора зависит от количества полюсов статора. Чем больше количество полюсов, тем меньше скорость. Но это не только так можно регулировать скорость вращения. Она еще зависит от напряжения и частоты питания.
Способы регулирования частоты асинхронного двигателя
Напряжение можно регулировать, установив потенциометр на входе. Частоту регулируют поставив частотный преобразователь. Частотник — более выгодное решение, так как он ещё и снижает стартовые токи и может быть программируемым.
Однофазный асинхронный двигатель
Выше рассматривался трехфазный асинхронный двигатель, в однофазном асинхронном двигателе их две. Одна рабочая, вторая вспомогательная. Вспомогательная нужна для того, чтобы придать первоначальное вращение ротору. Потому может называться ещё пусковой или стартовой.
Однофазный асинхронный двигатель имеет две обмотки: рабочую и вспомогательную (стартовую или пусковую)
Когда в статоре включена одна обмотка, она создаёт два равных магнитных поля, вращающихся в разные стороны. Если ввести в это поле ротор, который уже имеет какое-то начальное вращение, магнитное поле будет поддерживать это вращение. Но как запустить ротор на старте? Как придать ему вращение, ведь от одной обмотки возникают два равноценных магнитных поля, направленные в разные стороны. Так что с их помощью заставить вращаться ротор невозможно. В простейшем варианте вращение задаётся вручную — механически. Затем вращение подхватывает поле.
Чтобы автоматизировать запуск однофазного асинхронного двигателя и сделана вспомогательная обмотка. Она сконструирована так, что подавляет одну из составляющих магнитного поля основной обмотки и усиливает вторую. Соответственно, одна из составляющих перевешивает, задавая вращение ротора. Затем стартовая обмотка отключается, вращение поддерживает основная.
elektroznatok.ru
Асинхронный двигатель с короткозамкнутым ротором: конструкция, принцип работы
Учитывая то, что электроснабжение традиционно осуществляется путём доставки потребителям переменного тока, понятно стремление к созданию электромашин, работающих на поставляемой электроэнергии. В частности, переменный ток активно используется в асинхронных электродвигателях, нашедших широкое применение во многих областях деятельности человека. Особого внимания заслуживает асинхронный двигатель с короткозамкнутым ротором, который в силу ряда причин занял прочные позиции в применении.
Секрет такой популярности состоит, прежде всего, в простоте конструкции и дешевизне его изготовления. У электромоторов на короткозамкнутых роторах есть и другие преимущества, о которых вы узнаете из данной статьи. А для начала рассмотрим конструктивные особенности этого типа электрических двигателей.
Конструкция
В каждом электромоторе есть две важных рабочих детали: ротор и статор. Они заключены в защитный кожух. Для охлаждения проводников обмотки на валу ротора установлен вентилятор. Это общий принцип строения всех типов электродвигателей.
Конструкции статоров рассматриваемых электродвигателей ничем не отличаются от строения этих деталей в других типах электромоторов, работающих в сетях переменного тока. Сердечники статора, предназначенного для работы при трехфазном напряжении, располагаются по кругу под углом 120º. На них устанавливаются обмотки из изолированной медной проволоки определённого сечения, которые соединяются треугольником или звездой. Конструкция магнитопровода статора жёстко крепится на стенках цилиндрического корпуса.
Строение электродвигателя понятно из рисунка 1. Обратите внимание на конструкцию обмоток без сердечника в короткозамкнутом роторе.
Рис. 1. Строение асинхронного двигателя с КЗ РоторомНемного по-другому устроен ротор. Конструкция его обмотки очень похожа на беличью клетку. Она состоит из алюминиевых стержней, концы которых замыкают короткозамыкающие кольца. В двигателях большой мощности в качестве короткозамкнутых обмоток ротора можно увидеть применение медных стержней. У этого металла низкое удельное сопротивление, но он дороже алюминия. К тому же медь быстрее плавится, а это не желательно, так как вихревые токи могут сильно нагревать сердечник.
Конструктивно стержни расположены поверх сердечников ротора, которые состоят из трансформаторной стали. При изготовлении роторов сердечники монтируют на валу, а проводники обмотки впрессовывают (заливают) в пазы магнитопровода. При этом нет необходимости в изоляции пазов сердечника. На рисунке 2 показано фото ротора с КЗ обмотками.
Рис. 2. Ротор асинхронного двигателя с КЗ обмоткамиПластины магнитопроводов таких роторов не требуют лаковой изоляции поверхностей. Они очень просты в изготовлении, что удешевляет себестоимость асинхронных электродвигателей, доля которых составляет до 90% от общего числа электромоторов.
Ротор асинхронно вращается внутри статора. Между этими деталями устанавливаются минимальные расстояния в виде воздушных зазоров. Оптимальный зазор находится в пределах от 0,5 мм до 2 мм.
В зависимости от количества используемых фаз асинхронные электродвигатели можно разделить на три типа:
Они отличаются количеством и расположением обмоток статора. Модели с трехфазными обмотками отличаются высокой стабильностью работы при номинальной нагрузке. У них лучшие пусковые характеристики. Зачастую такие электродвигатели используют простую схему пуска.
Двухфазные двигатели имеют две перпендикулярно расположенных обмотки статора, на каждую из которых поступает переменный ток. Их часто используют в однофазных сетях – одну обмотку подключают напрямую к фазе, а для питания второй применяют фазосдвигающий конденсатор. Без этой детали вращение вала асинхронного электродвигателя самостоятельно не начнётся. В связи с тем, что конденсатор является неотъемлемой частью двухфазного электромотора, такие двигатели ещё называют конденсаторными.
В конструкции однофазного электродвигателя используют только одну рабочую обмотку. Для запуска вращения ротора применяют пусковую катушку индуктивности, которую через конденсатор кратковременно подключают к сети, либо замыкают накоротко. Эти маломощные моторчики используются в качестве электрических приводов некоторых бытовых приборов.
Принцип работы
Функционирование асинхронного двигателя осуществляется на основе свойства трёхфазного тока, способного создавать в обмотках статора вращающее магнитное поле. В рассматриваемых электродвигателях синхронная частота вращения электромагнитного поля связана прямо пропорциональной зависимостью с собственной частотой переменного тока.
Существует обратно пропорциональная зависимость частоты вращения от количества пар полюсов в обмотках статора. Учитывая то, что сдвиг фаз составляет 60º, зависимость частоты вращения ротора (в об/мин.) можно выразить формулой:
n1 = (f1*60) / p, где n1 – синхронная частота, f1 – частота переменного тока, а p – количество пар полюсов.
В результате действия магнитной индукции на сердечник ротора, в нём возникнет ЭДС, которая, в свою очередь, вызывает появление электрического тока в замкнутом проводнике. Возникнет сила Ампера, под действием которой замкнутый контур начнёт вращение вдогонку за магнитным полем. В номинальном режиме работы частота вращения ротора немного отстаёт от скорости вращения создаваемого в статоре магнитного поля. При совпадении частот происходит прекращение магнитного потока, ток исчезает в обмотках ротора, вследствие чего прекращается действие силы. Как только скорость вращения вала отстанет, переменными токами магнитных полей, возобновляется действие амперовой силы.
Разницу частот вращения магнитных полей называют частотой скольжения: ns=n1–n2, а относительную величину s, характеризующую отставание, называют скольжением.
s = 100% * ( ns / n1) = 100% * (n1 — n2) / n1 , где ns – частота скольжения; n1, n2 – частоты вращений статорных и роторных магнитных полей соответственно.
С целью уменьшения гармоник ЭДС и сглаживания пульсаций момента силы, стержни короткозамкнутых витков немного скашивают. Взгляните ещё раз на рис. 2 и обратите внимание на расположение стержней, выполняющих роль обмоток ротора, относительно оси вращения.
Скольжение зависит от того, какую механическую нагрузку приложено к валу двигателя. В асинхронных электромоторах изменение параметров скольжения происходит в диапазоне от 0 до 1. Причём в режиме холостого хода набравший обороты ротор почти не испытывает активного сопротивления. S приближается к нулю.
Увеличение нагрузки способствует увеличению скольжения, которое может достигнуть единицы, в момент остановки двигателя из-за перегрузки. Такое состояние равносильно режиму короткого замыкания и может вывести устройство из строя.
Относительная величина отставания соответствующая номинальной нагрузке электрической машины называется номинальным скольжением. Для маломощных электромоторов и двигателей средней мощности этот показатель изменяется в небольших пределах – от 8% до 2%. При неподвижности ротора электродвигателя скольжение стремится к 0, а при работе на холостом ходу оно приближается к 100%.
Во время запуска электромотора его обмотки испытывают нагрузку, что приводит к резкому увеличению пусковых токов. При достижении номинальных мощностей электрические двигатели с короткозамкнутыми витками самостоятельно восстанавливают номинальную частоту ротора.
Обратите внимание на кривую крутящего момента скольжения, изображённую на рис. 3.
Рис. 3. Кривая крутящего момента скольженияПри увеличении крутящего момента коэффициент s изменяется от 1 до 0 (см. отрезок «моторная область»). Возрастает также скорость вращения вала. Если скорость вращения вала превысит номинальную частоту, то крутящий момент станет отрицательным, а двигатель перейдёт в режим генерации (отрезок «генерирующая область»). В таком режиме ротор будет испытывать магнитное сопротивление, что приведёт к торможению мотора. Колебательный процесс будет повторяться, пока не стабилизируется крутящий момент, а скольжение не приблизится к номинальному значению.
Преимущества и недостатки
Повсеместное использование асинхронных двигателей с короткозамкнутыми роторами обусловлено их неоспоримыми преимуществами:
- стабильностью работы на оптимальных нагрузках;
- высокой надёжностью в эксплуатации;
- низкие эксплуатационные затраты;
- долговечностью функционирования без обслуживания;
- сравнительно высокими показателями КПД;
- невысокой стоимостью, по сравнению с моделями на основе фазных роторов и с другими типами электромоторов.
Из недостатков можно отметить:
- высокие пусковые токи;
- чувствительность к перепадам напряжений;
- низкие коэффициенты скольжений;
- необходимость в применении устройств, таких как преобразователи частоты, пусковые реостаты и др., для улучшения характеристик электромотора;
- ЭД с короткозамкнутым ротором нуждаются в дополнительных коммутационных управляющих устройствах, в случаях, когда возникает необходимость регулировать скорость.
Электродвигатели данного типа имеют приличную механическую характеристику. Несмотря на недостатки, они лидируют по показателям их применения.
Основные технические характеристики
В зависимости от класса электродвигателя, его технические характеристики меняются. В рамках данной статьи не ставится задача приведения параметров всех существующих классов двигателей. Мы остановимся на описании основных технических характеристик для электромоторов классов 56 А2 – 80 В2.
В этом небольшом промежутке на линейке моделей эелектромоторов с короткозамкнутыми роторами можно отметить следующее:
Мощность составляет от 0,18 кВт (класс 56 А2) до 2,2 кВт (класс 80 В2).
Ток при максимальном напряжении – от 0,55 А до 5А.
КПД от 66% до 83%.
Частота вращения вала для всех моделей из указанного промежутка составляет 3000 об./мин.
Технические характеристики конкретного двигателя указаны в его паспорте.
Подключение
Статорные обмотки трёхфазного АДКР можно подключать по схеме «треугольник» либо «звезда». При этом для звёздочки требуется напряжение выше, чем для треугольника.
Обратите внимание на то, что электродвигатель, подключенный разными способами к одной и той же сети, потребляет разную мощность. Поэтому нельзя подключать электромотор, рассчитанный на схему «звезда» по принципу треугольника. Но с целью уменьшения пусковых токов можно коммутировать на время пуска контакты звезды в треугольник, но тогда уменьшится и пусковой момент.
Схемы включения понятны из рисунка 4.
Рис. 4. Схемы подключенияДля подключения трёхфазного электрического двигателя к однофазному току применяют фазосдвигающие элементы: конденсаторы, резисторы. Примеры таких подключений смотрите на рисунке 5. Можно использовать как звезду, так и треугольник.
Рис. 5. Примеры схем подключений в однофазную сетьС целью управления работой двигателя в электрическую цепь статора подключаются дополнительные устройства.
www.asutpp.ru
Принцип работы электродвигателя. Простыми словами о сложном
Принцип работы электродвигателя основывается на эффекте обнаруженном Майклом Фарадеем еще в 1821 году. Он сделал открытие, что при взаимодействии электрического тока в проводнике и магнита, может возникнуть непрерывное вращение.
Принцип работы электродвигателя постоянного тока
Если в однородном магнитном поле расположить в вертикальном положении рамку и пропустить по ней ток, тогда вокруг проводника возникнет электромагнитное поле, которое будет взаимодействовать с полюсами магнитов. От одного рамка будет отталкиваться, а к другому притягиваться. В результате рамка повернется в горизонтальное положение, в котором будет нулевым воздействие магнитного поля на проводник. Для того что бы вращение продолжилось необходимо добавить еще одну рамку под углом или изменить направление тока в рамке в подходящий момент. На рисунке выше это делается при помощи двух полуколец, к которым примыкают контактные пластины от батарейки. В результате после совершения полуоборота меняется полярность и вращение продолжается.
В современных электродвигателях вместо постоянных магнитов для создания магнитного поля используются катушки индуктивности или электромагниты. Если разобрать любой мотор, то Вы увидите намотанные витки проволоки, покрытой изоляционным лаком. Эти витки и есть электромагнит или как их еще называют обмотка возбуждения.
Простыми словами о сложном
На самом деле там векторное произведение, дифференциалы и т.п. но это детали, а у нас упрощённый случай. И так…
Рис. 1 Основа работы электрического двигателя
Направление силы ампера определяется правилом левой руки.
Рис. 2 Правило левой руки
Мысленно ставим левую ладонь на верхний рисунок и получаем направление сил Ампера. Она типа растягивают рамку с током в том положении как нарисовано на рис.1. И никуда вертеться тут ничего не будет, рамка в равновесии, устойчивом.
А если рамка с током повернута по-другому, то вот что будет:
Рис. 3 Рамка
Здесь уже равновесия нет, сила Ампера разворачивает противоположные стенки так, что рамка начинает вращаться. Появляется механическое вращение. Это основа электрического двигателя, самая суть, дальше только детали.
Далее.
Теперь что будет делать рамка с током на рис.3?. Если система идеальная, без трения, то очевидно будут колебания. Если трение присутствует, то колебания постепенно затухнут, рамка с током стабилизируется и станет как на рис.1.
Но нам нужно постоянное вращение и достичь его можно двумя принципиально разными способами и отсюда и возникает разница между двигателями постоянного и переменного трёхфазного тока.
Принцип работы электродвигателя постоянного тока
Способ 1. Смена направления тока в рамке.
Этот способ используется в двигателях постоянного тока и его потомках.
Наблюдаем за картинками. Пусть наш двигатель обесточен и рамка с током ориентирована как-то хаотично, вот так например:
Рис. 4.1 Случайно расположенная рамка
На случайно расположенную рамку действует сила Ампера и она начинает вращаться.
Рис. 4.2
В процессе движения рамка достигает угла 90°. Момент (момент пары сил или вращательный момент) максимальный.
Рис. 4.3
И вот рамка достигает положения, когда момента вращения нет. И если сейчас не отключить ток, то сила Ампера будет уже тормозить рамку и в конце полуоборота рамка остановится и начнёт вращение в противоположном направлении. Но нам ведь этого не надо.
Поэтому мы на рис.3 делаем хитрый ход – меняем направление тока в рамке.
Рис. 4.4
И вот после пересечения этого положения, рамка с поменянным направлением тока уже не тормозится, а снова разгоняется.
Рис. 4.5
А когда рамка подходит к следующему положению равновесия, мы меняем ток ещё раз.
Рис. 4.6
И рамка опять продолжает ускоряться куда нам надо.
Вот так и получается постоянное вращение. Красиво? Красиво. Нужно только менять направление тока два раза за оборот и всего делов.
А делает это, т.е. обеспечивает смену тока специальный узел – щёточно-коллекторный узел. Принципиально он устроен так:
Рис. 5
Рисунок понятен и без пояснений. Рамка трётся то об один контакт, то об другой и так вот ток и меняется.
Очень важная особенность щёточно-коллекторного узла – его малый ресурс. Из-за трения. Например, вот движок ДПР-52-Н1 – минимальная наработка 1000 часов. В то же время срок службы современных бесколлекторных двигателей более 10000 часов, а двигателей переменного тока (там тоже нет ЩКУ) более 40000 часов.
Принцип работы электродвигателя переменного тока
Способ 2. Вращается магнитный поток, т.е. магнитное поле.
Вращающееся магнитное поле получают с помощью переменного трёхфазного тока. Вот есть статор.
Рис. 6 Статор электродвигателя
А есть значит 3 фазы переменного тока.
Рис. 7
Между ними как видно на Рис. 7 120 градусов, электрических градусов.
Эти три фазы укладывают в статор специальным образом, чтобы они геометрически были повернуты друг к дружке на 120°.
Рис. 8
И тогда при подаче трёхфазного питания получается само собой за счёт складывания магнитных потоков от трёх обмоток вращающееся магнитное поле.
Рис. 9 Вращающееся магнитное поле
Далее вращающееся магнитное поле влияет силой Ампера на нашу рамку и она вращается.
Но здесь есть тоже различия, два разных способа.
Способ 2а. Рамка запитывается (синхронный двигатель).
Подаём значит на рамку напряжение (постоянное), рамка выставляется по магнитному полю. Помните рис.1 из самого начала? Вот так рамка и становится.
Рис. 10 (Рис.1)
Но поле магнитное у нас тут вращается, а не просто так висит. Рамка чего будет делать? Тоже будет вращаться, следуя за магнитным полем.
Они (рамка и поле) вращаются с одинаковой частотой, или синхронно, поэтому такие двигатели называются синхронными двигателями.
Способ 2б. Рамка не запитывается (асинхронный двигатель).
Фишка в том, что рамка не запитывается, совсем не запитывается. Просто проволока такая замкнутая.
Когда мы начинаем вращать магнитное поле, по законам электромагнетизма в рамке наводится ток. От этого тока и магнитного поля получается сила Ампера. Но сила Ампера будет возникать только если рамка движется относительно магнитного поля (известная история с опытами Ампера и его походами в соседнюю комнату).
Так что рамка всегда будет отставать от магнитного поля. А то, если она его вдруг почему-то догонит, то пропадёт наводка от поля, пропадёт ток, пропадёт сила Ампера и всё вообще пропадёт. То есть, в асинхронном двигателе рамка всегда отстаёт от поля и частота у них значит разная, то есть вращаются они асинхронно, поэтому и двигатель называется асинхронным.
Смотрите также по этой теме:
Как работает электродвигатель. Преимущества и недостатки разных видов.
Асинхронный двигатель. Устройство и принцип работы.
Будем рады, если подпишетесь на наш Блог!
[wysija_form id=»1″]
powercoup.by
Синхронный электродвигатель: характеристики, устройство и принцип действия
Синхронный электродвигатель – это устройство, преобразующее электрическую энергию в механическую. Его также можно использовать в качестве генератора. Чаще всего он применяется в компрессорах, прокатных станках, поршневых насосах и другом подобном оборудовании. Рассмотрим принцип действия синхронного электродвигателя, его характеристики и свойства.
Устройство синхронного электродвигателя
Строение агрегата данного вида типично. Двигатель состоит из:
- Неподвижной части (якорь или статор).
- Подвижной части (ротор или индуктор).
- Вентилятора.
- Контактных колец.
- Щеток.
- Возбудителя.
Статор представляет собой сердечник, состоящий из обмоток, который заключен в корпус. Индуктор комплектуется электромагнитами постоянного тока (полюсами). Конструкция индуктора может быть двух видов – явнополюсная и неявнополюсная. В статоре и роторе расположены ферромагнитные сердечники, изготовленные из специальной электротехнической стали. Они необходимы для уменьшения магнитного сопротивления и улучшения прохождения магнитного потока.
Частота вращения ротора в синхронном двигателе равна частоте вращения магнитного поля. Независимо от подключаемой нагрузки частота ротора неизменна, так как число пар полюсов магнитного поля и ротора совпадают. Их взаимодействие обеспечивает постоянную угловую скорость, не зависящую от момента, приложенного к валу.
Принцип работы синхронного электродвигателя
Самые распространенные типы такого рода агрегатов – однофазный и трехфазный. Принцип работы синхронного электродвигателя в обоих случаях примерно одинаков. После подключения обмотки якоря к сети ротор остается неподвижным, в то время как постоянный ток поступает в обмотку возбуждения. Направление электромагнитного момента меняется дважды за время одного изменения напряжения. При значении среднего момента равном нулю, ротор под влиянием внешнего момента (механического воздействия) разгоняется до частоты, близкой по значению частоте вращения магнитного поля в зазоре, после чего двигатель переходит в синхронный режим.
В трехфазном устройстве проводники расположены под определенным углом относительно друг друга. В них возбуждается вращающееся с синхронной скоростью электромагнитное поле.
Разгон двигателя может осуществляться в двух режимах:
- Асинхронный. Обмотки индуктора замыкаются с помощью реостата. Вращающееся магнитное поле, возникающее при включении напряжения, пересекает короткозамкнутую обмотку, установленную на роторе. В ней индуцируются токи, взаимодействующие с вращающимся полем статора. По достижении синхронной скорости крутящий момент начинает уменьшаться и сводится к нулю после замыкания магнитного поля.
- С помощью вспомогательного двигателя. Для этого синхронный двигатель механически соединяется со вспомогательным (двигателем постоянного тока либо трехфазным индукционным двигателем). Постоянный ток подается только после того, как вращение двигателя достигает скорости, близкой к синхронной. Магнитное поле замыкается, и связь со вспомогательным двигателем прекращается.
Характеристики синхронного электродвигателя
Хотя асинхронные двигатели считаются более надежными и дешевыми, их синхронные «собратья» имеют некоторые преимущества и широко применяются в различных областях промышленности. К отличительным характеристикам синхронного электродвигателя можно отнести:
- Работу при высоком значении коэффициента мощности.
- Высокий КПД по сравнению с асинхронным устройством той же мощности.
- Сохранение нагрузочной способности даже при снижении напряжения в сети.
- Неизменность частоты вращения независимо от механической нагрузки на валу.
- Экономичность.
Синхронным двигателям также присущи некоторые недостатки:
- Достаточно сложная конструкция, делающая их производство дороже.
- Необходимость источника постоянного тока (возбудителя или выпрямителя).
- Сложность пуска.
- Необходимость корректировать угловую частоту вращения путем изменения частоты питающего напряжения.
Однако в некоторых случаях использование синхронных двигателей предпочтительнее:
- Для улучшения коэффициента мощности.
- В длительных технологических процессах, где нет необходимости в частых запусках и остановках.
Таким образом, «плюсы» двигателей такого типа значительно превосходят «минусы», поэтому на данный момент они высоко востребованы.
Изучив синхронный двигатель, устройство и принцип его действия и учтя условия, в которых он будет эксплуатироваться, вы сможете быстро и с легкостью подобрать оптимально подходящий для ваших целей тип агрегата (защищенный, закрытый, открытый) и использовать его с максимальной эффективностью.
www.szemo.ru
Однофазный асинхронный двигатель. Назначение, устройство, принцип действия.
Однофазные асинхронные двигатели — машины небольшой мощности, которые по конструктивному исполнению напоминают аналогичные трехфазные асинхронные электродвигатели с короткозамкнутым ротором.
Назначение, устройство и принцип действия однофазных асинхронных двигателей
Однофазные асинхронные двигатели отличаются от трехфазных двигателей устройством статора, где в пазах магнитопровода находится двухфазная обмотка, состоящая из основной, или рабочей, фазы с фазной зоной 120 эл. град и выводами к зажимам с обозначениями С1 и С2, и вспомогательной, или пусковой, фазы с фазной зоной 60 эл. град и выводами к зажимам с обозначениями В1 и В2 (рис. 1).
Магнитные оси этих фаз обмотки смещены относительно друг друга на угол 0 = 90 эл. град. Одна рабочая фаза, присоединенная к питающей сети переменного напряжения, не может вызвать вращения ротора, так как ток ее возбуждает переменное магнитное поле с неподвижной осью симметрии, характеризуемое гармонически изменяющейся во времени магнитной индукцией.
Схема включения однофазного асинхронного двигателя
Рис. 1
Это поле можно представить двумя составляющими — одинаковыми круговыми магнитными полями прямой и обратной последовательностей, вращающимися с магнитными индукциями, вращающимися в противоположные стороны с одной и той же скоростью. Однако при предварительном разгоне ротора в необходимом направлении он при включенной рабочей фазе продолжает вращаться в том же направлении.
По этой причине пуск однофазного двигателя начинают с разгона ротора путем нажатия пусковой кнопки, вызывающего возбуждение токов в обеих фазах обмотки статора, которые сдвинуты по фазе на величину, зависящую от параметров фазосдвигающего устройства Z, выполненного в виде резистора, индуктивной катушки или конденсатора, и элементов электрических цепей, в которые входят рабочая и пусковая фазы обмотки статора. Эти токи побуждают в машине вращающееся магнитное поле с магнитной индукцией в воздушном зазоре, которая периодически и монотонно изменяется в пределах максимального и минимального значений, а конец ее вектора описывает эллипс.
Это эллиптическое вращающееся магнитное поле находит в проводниках короткозамкнутой обмотки ротора ЭДС и токи, которые, взаимодействуя с этим полем, обеспечивают разгон ротора однофазного двигателя в направлении вращения поля, и он в течение нескольких секунд достигает почти номинальной скорости.
Отпускание пусковой кнопки переводит электродвигатель с двухфазного режима на однофазный, поддерживаемый в дальнейшем соответствующей составляющей переменного магнитного поля, которая при своем вращении несколько опережает вращающийся ротор из-за скольжения.
Своевременное отключение пусковой фазы обмотки статора однофазного асинхронного двигателя от питающей сети необходимо в связи с ее конструктивным исполнением, предусматривающим кратковременный режим работы — обычно до 3 с, что исключает длительное пребывание ее под нагрузкой в связи с недопустимым перегревом, сгоранием изоляции и выходом из строя.
Маркировка зажимов фаз обмотки статора однофазного асинхронного двигателя с короткозамкнутым ротором
Рис. 2: а, в — соединение для правого вращения ротора; б, г — соединение для левого вращения ротора
Повышение надежности эксплуатации однофазных асинхронных двигателей обеспечивают встраиванием в корпус машин центробежного выключателя с размыкающими контактами, присоединенными к зажимам с обозначениями ВЦ и В2, и теплового реле с аналогичными контактами, имеющими выводы с обозначениями РТ и С1 (рис. 2, в, г).
Центробежный выключатель автоматически отключает пусковую фазу обмотки статора, присоединенную к зажимам с обозначениями В1 и В2 при достижении ротором скорости, близкой к номинальной, а тепловое реле — обе фазы обмотки статора от питающей сети, когда нагрев их окажется выше допустимого.
Перемена направления вращения ротора достигается изменением направления тока в одной из фаз обмотки статора при пуске путем переключения пусковой кнопки и перестановки металлической пластины на зажимах электродвигателя (рис. 2, а, б) или только перестановкой двух аналогичных пластин (рис. 2, в, г).
Трехфазный асинхронный электродвигатель
Конструкция асинхронного электродвигателя
Трехфазный асинхронный электродвигатель, как и любой электродвигатель, состоит из двух основных частей — статора и ротора. Статор — неподвижная часть, ротор — вращающаяся часть. Ротор размещается внутри статора. Между ротором и статором имеется небольшое расстояние, называемое воздушным зазором, обычно 0,5-2 мм.
Статор асинхронного двигателя
Ротор асинхронного двигателя
Статор состоит из корпуса и сердечника с обмоткой. Сердечник статора собирается из тонколистовой технической стали толщиной обычно 0,5 мм, покрытой изоляционным лаком. Шихтованная конструкция сердечника способствует значительному снижению вихревых токов, возникающих в процессе перемагничивания сердечника вращающимся магнитным полем. Обмотки статора располагаются в пазах сердечника.
Корпус и сердечник статора асинхронного электродвигателя
Конструкция шихтованного сердечника асинхронного двигателя
Ротор состоит из сердечника с короткозамкнутой обмоткой и вала. Сердечник ротора тоже имеет шихтованную конструкцию. При этом листы ротора не покрыты лаком, так как ток имеет небольшую частоту и оксидной пленки достаточно для ограничения вихревых токов.
Принцип работы. Вращающееся магнитное поле
Принцип действия трехфазного асинхронного электродвигателя основан на способности трехфазной обмотки при включении ее в сеть трехфазного тока создавать вращающееся магнитное поле.
Вращающееся магнитное поле — это основная концепция электрических двигателей и генераторов.
Вращающееся магнитное поле асинхронного электродвигателя
Частота вращения этого поля, или синхронная частота вращения прямо пропорциональна частоте переменного тока f1 и обратно пропорциональна числу пар полюсов р трехфазной обмотки.
- где n1 – частота вращения магнитного поля статора, об/мин,
- f1 – частота переменного тока, Гц,
- p – число пар полюсов
Концепция вращающегося магнитного поля
Чтобы понять феномен вращающегося магнитного поля лучше, рассмотрим упрощенную трехфазную обмотку с тремя витками. Ток текущий по проводнику создает магнитное поле вокруг него. На рисунке ниже показано поле создаваемое трехфазным переменным током в конкретный момент времени
Магнитное поле прямого проводника с постоянным током Магнитное поле создаваемое обмоткойСоставляющие переменного тока будут изменяться со временем, в результате чего будет изменяться создаваемое ими магнитное поле. При этом результирующее магнитное поле трехфазной обмотки будет принимать разную ориентацию, сохраняя при этом одинаковую амплитуду.
Магнитное поле создаваемое трехфазным током в разный момент времени Ток протекающий в витках электродвигателя (сдвиг 60°) Вращающееся магнитное полеДействие вращающегося магнитного поля на замкнутый виток
Теперь разместим замкнутый проводник внутри вращающегося магнитного поля. По закону электромагнитной индукции изменяющееся магнитное поле приведет к возникновению электродвижущей силы (ЭДС) в проводнике. В свою очередь ЭДС вызовет ток в проводнике. Таким образом, в магнитном поле будет находиться замкнутый проводник с током, на который согласно закону Ампера будет действовать сила, в результате чего контур начнет вращаться.
Влияние вращающегося магнитного поля на замкнутый проводник с токомКороткозамкнутый ротор асинхронного двигателя
По этому принципу также работает асинхронный электродвигатель. Вместо рамки с током внутри асинхронного двигателя находится короткозамкнутый ротор по конструкции напоминающий беличье колесо. Короткозамкнутый ротор состоит из стержней накоротко замкнутых с торцов кольцами.
Короткозамкнутый ротор «беличья клетка» наиболее широко используемый в асинхронных электродвигателях (показан без вала и сердечника)Трехфазный переменный ток, проходя по обмоткам статора, создает вращающееся магнитное поле. Таким образом, также как было описано ранее, в стержнях ротора будет индуцироваться ток, в результате чего ротор начнет вращаться. На рисунке ниже Вы можете заметить различие между индуцируемыми токами в стержнях. Это происходит из-за того что величина изменения магнитного поля отличается в разных парах стержней, из-за их разного расположения относительно поля. Изменение тока в стержнях будет изменяться со временем.
Вращающееся магнитное поле пронизывающее короткозамкнутый роторМагнитный момент действующий на роторВы также можете заметить, что стержни ротора наклонены относительно оси вращения. Это делается для того чтобы уменьшить высшие гармоники ЭДС и избавиться от пульсации момента. Если стержни были бы направлены вдоль оси вращения, то в них возникало бы пульсирующее магнитное поле из-за того, что магнитное сопротивление обмотки значительно выше магнитного сопротивления зубцов статора.
Скольжение асинхронного двигателя. Скорость вращения ротора
Отличительный признак асинхронного двигателя состоит в том, что частота вращения ротора n2 меньше синхронной частоты вращения магнитного поля статора n1.
Объясняется это тем, что ЭДС в стержнях обмотки ротора индуцируется только при неравенстве частот вращения n2<n1. Частота вращения поля статора относительно ротора определяется частотой скольжения ns=n1-n2. Отставание ротора от вращающегося поля статора характеризуется относительной величиной s, называемой скольжением:
- где s – скольжение асинхронного электродвигателя,
- n1 – частота вращения магнитного поля статора, об/мин,
- n2 – частота вращения ротора, об/мин,
Рассмотрим случай когда частота вращения ротора будет совпадать с частотой вращения магнитного поля статора. В таком случае относительное магнитное поле ротора будет постоянным, таким образом в стержнях ротора не будет создаваться ЭДС, а следовательно и ток. Это значит что сила действующая на ротор будет равна нулю. Таким образом ротор будет замедляться. После чего на стержни ротора опять будет действовать переменное магнитное поле, таким образом будет расти индуцируемый ток и сила. В реальности же ротор асинхронного электродвигателя никогда не достигнет скорости вращения магнитного поля статора. Ротор будет вращаться с некоторой скоростью которая немного меньше синхронной скорости.
Скольжение асинхронного двигателя может изменяться в диапазоне от 0 до 1, т. е. 0—100%. Если s~0, то это соответствует режиму холостого хода, когда ротор двигателя практически не испытывает противодействующего момента; если s=1 — режиму короткого замыкания, при котором ротор двигателя неподвижен (n2 = 0). Скольжение зависит от механической нагрузки на валу двигателя и с ее ростом увеличивается.
Скольжение, соответствующее номинальной нагрузке двигателя, называется номинальным скольжением. Для асинхронных двигателей малой и средней мощности номинальное скольжение изменяется в пределах от 8% до 2%.
Преобразование энергии
Асинхронный двигатель преобразует электрическую энергию подаваемую на обмотки статора, в механическую (вращение вала ротора). Но входная и выходная мощность не равны друг другу так как во время преобразования происходят потери энергии: на трение, нагрев, вихревые токи и потери на гистерезисе. Это энергия рассеивается как тепло. Поэтому асинхронный электродвигатель имеет вентилятор для охлаждения.
Принцип работы трехфазного асинхронного двигателя с короткозамкнутым ротором
Трехфазный асинхронный двигатель с короткозамкнутым ротором — один из самых популярных типов электродвигателей переменного тока, которые обеспечивают электромеханическое преобразование энергии через статор и ротор с короткозамкнутым ротором за счет электромагнитной индукции.
Вот почему его называют асинхронным двигателем с короткозамкнутым ротором.
Обычно мы используем двигатели в промышленных приводах, потому что они прочные, надежные и экономичные.
Кстати, асинхронный двигатель еще называют асинхронным, потому что он работает со скоростью ниже, чем его синхронная скорость.
В этой статье я сосредоточусь на принципе работы асинхронного двигателя.
Однако еще до того, как я это сделаю, важно знать различные части асинхронного двигателя.
Никола Тесла (10 июля 1856 — 7 января 1943), сербско-американский изобретатель, инженер-механик, инженер-электрик.
Он считается одним из важных сторонников коммерциализации электроэнергии из-за дизайна современных систем переменного тока.
На основе теории электромагнитного поля, открытой Майклом Фарадеем, Тесла изобрел асинхронный двигатель в 1887 году, и его теория электромагнетизма стала краеугольным камнем современной беспроводной связи и радио.
Как работает трехфазный асинхронный двигатель с короткозамкнутым ротором?
На самом деле, когда мы подаем питание переменного тока обмотки статора, ток, протекающий в катушке, будет создавать магнитный поток в катушке.
Теперь установите обмотки ротора на короткое замыкание.
Поток от статора будет разрезать катушки в роторе, а закон электромагнитной индукции Фарадея заставит ток течь в катушке ротора из-за короткого замыкания катушки ротора.
Поток тока статора и ротора создает два потока, один — поток статора, а другой — поток ротора, и поток ротора будет отставать от потока статора.
Таким образом, ротор будет ощущать крутящий момент, который вращает ротор в направлении вращающегося магнитного потока.
Следовательно, скорость ротора будет зависеть от мощности переменного тока, и скорость можно контролировать, изменяя входную мощность.
Собственное скольжение — неравная частота вращения поля статора и ротора
Трехфазный источник питания обеспечивает вращающееся магнитное поле в асинхронном двигателе
Части трехфазного асинхронного двигателя с короткозамкнутым ротором
Ротор состоит из сердечника ротора, обмотки ротора и вращающегося вала.
Сердечник ротора также является частью основной магнитной цепи, обычно толщиной 0.Пакет из кремнистой стали толщиной 5 мм, сердечник закреплен на валу или кронштейне ротора.
Весь ротор цилиндрический. Обмотки ротора делятся на клеточные и обмоточные.
В нормальных условиях скорость ротора асинхронного двигателя всегда немного ниже или немного выше скорости вращающегося магнитного поля (синхронная скорость), поэтому асинхронный двигатель также известен как «асинхронный двигатель».
Когда нагрузка асинхронного двигателя изменяется, скорость ротора и скорость скольжения изменяются, так что проводник ротора в электродвижущей силе, токе и электромагнитном моменте, соответственно, изменяется в соответствии с потребностями нагрузки.
В соответствии с положительным и отрицательным и размером скольжения, асинхронный двигатель с двигателем, генератором и электромагнитным тормозом в трех рабочих условиях.
Что такое ротор с короткозамкнутым ротором?
Ротор с короткозамкнутым ротором — это вращающаяся часть обычного асинхронного двигателя с короткозамкнутым ротором.
Он состоит из цилиндра из стальных пластин с алюминиевыми или медными проводниками, встроенными в его поверхность.
При работе невращающаяся обмотка «статора» подключена к источнику питания переменного тока; переменный ток в статоре создает вращающееся магнитное поле.
Обмотка ротора имеет ток, индуцируемый полем статора, и создает собственное магнитное поле.
Взаимодействие двух источников магнитного поля создает крутящий момент на роторе.
Покомпонентное изображение частей трехфазного асинхронного двигателя переменного тока
Характеристики трехфазного асинхронного двигателя
1, пусковой крутящий момент небольшой, но его структура проста, высокая надежность, высокая эффективность.
2, может работать в непрерывном режиме.
3, номинальная частота вращения двигателя изменяется в зависимости от величины нагрузки.
4, применяется в случае отсутствия необходимости в остановке скорости.
5, есть двухфазный асинхронный двигатель и трехфазный асинхронный двигатель.
6, мощность трехфазного асинхронного двигателя U (200 В, 50/60 Гц), T (220 В, 50/60 Гц), S (380-440 В, 50/60 Гц) и т. Д.
7. Ротор асинхронного двигателя не находится под напряжением
Трехфазный асинхронный двигатель переменного тока, фото Hordu Motor
Преимущества трехфазного асинхронного двигателя с короткозамкнутым ротором
Некоторые из основных преимуществ, почему вы должны это сделать мотор в комплекте:
1) маленький и легкий;
2) эффективность работы с высокой скоростью и низким крутящим моментом;
3) высокий крутящий момент на малых оборотах и широкий диапазон регулирования скорости;
4) высокая надежность
5) низкие затраты на обслуживание;
Короче говоря, принцип работы любых асинхронных двигателей основан на магнитном потоке статора и короткозамкнутого ротора.
Как видите, трехфазный асинхронный двигатель с короткозамкнутым ротором может легко и просто обеспечить электромеханическое преобразование энергии.
В Hordu — 19-летнем производителе асинхронных двигателей, у нас есть ряд трехфазных асинхронных двигателей, которые различаются по конструкции, технологии и производственной мощности.
Для получения дополнительной информации об асинхронных двигателях Hordu свяжитесь с нашей командой.
Дополнительная литература
Асинхронный двигатель — Источник: hordu motor
Асинхронный двигатель — Источник: Википедия
Ротор с короткозамкнутым ротором — Источник: Википедия
Асинхронный двигатель | Принцип работы | Типы асинхронных двигателей — Источник: electric4u.com
Асинхронные двигатели — Крис Вудфорд
ПРИНЦИПЫ РАБОТЫ СИНХРОННЫХ МАШИН — Джефф Клемпнер и Исидор Керсенбаум
| © M. Riaz |
Принцип работы, конструкция и применение — pnpntransistor
здесь вы знаете все основные принципы асинхронного двигателя с короткозамкнутым ротором. Здесь вы познакомитесь с принципом работы асинхронного двигателя с короткозамкнутым ротором , конструкцией, применением и преимуществами асинхронного двигателя с короткозамкнутым ротором .
Введение
Существует два основных типа асинхронных двигателей.Их,
- Асинхронный двигатель с короткозамкнутым ротором
- индукционный электродвигатель с контактным кольцом
Ранее мы видели полную информацию об асинхронном двигателе с контактным кольцом. Здесь мы знаем основные детали, относящиеся к двигателю с короткозамкнутым ротором.
Что такое асинхронный двигатель с короткозамкнутым ротором?
Проще говоря, асинхронный двигатель, в котором используется ротор с короткозамкнутым ротором, называется асинхронным двигателем с короткозамкнутым ротором. Причина названия «беличья клетка» связана с типом ротора, который используется в этих двигателях.В двигателях этого типа ротор имеет самую простую и прочную конструкцию.
Эти двигатели имеют гораздо более высокий КПД, чем асинхронные двигатели с контактным кольцом. Большинство отраслей промышленности предпочитают этот тип двигателей из-за меньших затрат на техническое обслуживание, более высокой эффективности и их легкой конструкции. Давайте посмотрим на конструкцию асинхронного двигателя с короткозамкнутым ротором.
Конструкция асинхронного двигателя с короткозамкнутым ротором
Любой асинхронный двигатель состоит из двух основных частей: статора и ротора. Конструкция статора асинхронного двигателя почти такая же, как и у других двигателей.Но конструкция ротора зависит от типа двигателя. Асинхронный двигатель с контактным кольцом состоит из ротора с обмоткой, а асинхронный двигатель с короткозамкнутым ротором состоит из ротора с короткозамкнутым ротором.
Статор
Статор — это видимый внешний компонент двигателя. Статор находится во всем двигателе, только обмотка статора зависит от типа двигателя.
источник
В асинхронном двигателе с короткозамкнутым ротором на пазах статора имеется трехфазная обмотка.Обмотки расположены так, что электрически и механически они разнесены на 120, o градусов относительно пространства. Эти обмотки соединены звездой или треугольником. Обмотка статора смонтирована таким образом, чтобы обеспечить низкое сопротивление для потока, генерируемого током переменного тока. Изоляция между обмотками обычно покрывается лаком или оксидом.
Теперь перейдем к конструкции ротора с короткозамкнутым ротором.
Беличья клетка Ротор
Почти 90% асинхронных двигателей оснащены ротором с короткозамкнутым ротором из-за его очень простой, прочной и почти удобной конструкции.
источник
В этом типе двигателя ротор представляет собой цилиндрический сердечник, который имеет многослойную конструкцию, чтобы избежать потерь мощности. Ротор с короткозамкнутым ротором состоит из алюминиевых или медных стержней, которые размещены параллельно друг другу, и все стержни (проводники) закорочены концевыми кольцами. Проводники ротора и концевые кольца образуют замкнутую цепь. Здесь сердечник ротора ламинирован, чтобы избежать потерь мощности из-за вихревых токов и гистерезиса.
Для двигателей мощностью до 100 кВт ротор с короткозамкнутым ротором изготовлен из литого алюминия.В этом типе ротора токопроводящие шины и концевые кольца постоянно закорочены, поэтому мы не можем подключить какое-либо внешнее сопротивление в цепи ротора для запуска. Ранее мы видели, что можем добавить внешнее сопротивление в ротор асинхронного двигателя с контактным кольцом.
Другие части двигателя: Вентилятор прикреплен к задней стороне ротора для обеспечения теплообмена и, следовательно, поддерживает температуру двигателя на заданном уровне. Подшипники служат в качестве основы для движения ротора, а подшипники обеспечивают плавное вращение двигателя.
В другом варианте пускатель также снабжен двигателем для ограничения пускового тока. Для эффективного пуска асинхронного двигателя используются разные методы. Проверьте это — методы пуска асинхронного двигателя
.теперь давайте посмотрим, как работает асинхронный двигатель с короткозамкнутым ротором? Давайте посмотрим на принцип работы асинхронного двигателя с короткозамкнутым ротором ниже.
Принцип работы асинхронного двигателя с короткозамкнутым ротором
В двигателях постоянного тока необходимо подавать питание на статор и ротор для возбуждения.Но здесь, в асинхронном двигателе, для работы нам нужно только подать питание на обмотку статора. Собственно, что происходит, посмотрим.
На самом деле, когда мы подаем питание на обмотку статора, тогда в катушке начинает течь ток, что создает магнитный поток в катушке. Теперь здесь обмотки ротора замкнуты накоротко. Наведенный поток от обмотки статора будет разрезать катушки в роторе, и, поскольку закон электромагнитной индукции Фарадея заставит ток течь в катушке ротора из-за короткого замыкания катушки ротора.
Когда ток течет через цепь ротора, он генерирует поток ротора. Итак, здесь есть два потока, один — это поток статора, а другой — поток ротора, и поток ротора будет отставать от потока статора. Таким образом, ротор будет ощущать крутящий момент, который вращает ротор в направлении вращающегося магнитного потока.
Пусковой момент асинхронного двигателя с короткозамкнутым ротором очень низкий. Скорость ротора будет зависеть от мощности переменного тока, и скорость можно контролировать, изменяя входную мощность источника питания.
Некоторые функции
здесь мы знаем некоторые ключевые характеристики, связанные со скоростью, пусковым током, направлением вращения, скольжением и коэффициентом мощности асинхронного двигателя с короткозамкнутым ротором.
Скорость: Асинхронный двигатель с короткозамкнутым ротором обычно работает с постоянной скоростью. Или, можно сказать, в синхронной скорости.
Пусковой ток: Эти двигатели требуют высокого пускового тока и обеспечивают низкий пусковой момент.
Направление вращения: Направление вращения этих двигателей можно изменить, если поменять местами две линии электропередачи из трех.
Скольжение: Скольжение — это мера разницы между скоростью вращающегося магнитного поля и скоростью ротора. Частота тока ротора = скольжение × частота питания
Коэффициент мощности: Коэффициент мощности — это отношение фактической мощности к полной мощности. Выражается в процентах. Коэффициент мощности низкий, когда двигатель работает без нагрузки, и высокий, когда двигатель работает с полной нагрузкой.
Преимущества асинхронного двигателя с короткозамкнутым ротором
Беличья клетка I.M имеет некоторые из основных преимуществ, поэтому почти 90% асинхронных двигателей оснащены ротором с короткозамкнутым ротором. Итак, преимущества беличьей клетки приведены ниже:
Беличья клетка I.M.
- дешево
- Прочный
- Требуется меньше обслуживания
В этом двигателе ротор состоит из алюминиевых или медных стержней, поэтому для изготовления ротора требуется меньше материала. Это также снижает потери меди.
- Высокая эффективность
- Маленький и легкий
- Из-за отсутствия щеток вероятность искры снижена.
- Эти двигатели оснащены вентиляторами, поэтому выделяется меньше тепла.
- Двигатели с короткозамкнутым ротором работают с почти постоянной скоростью, имеют высокую перегрузочную способность и более высокий коэффициент мощности.
Недостатки асинхронного двигателя с короткозамкнутым ротором
Основным недостатком асинхронного двигателя с короткозамкнутым ротором является плохое управление скоростью и низкий пусковой момент. Однако с помощью частотно-регулируемых приводов эти недостатки можно преодолеть.
⇒⇒ Асинхронные двигатели с короткозамкнутым ротором имеют низкий пусковой момент и высокие пусковые токи.Пусковой крутящий момент будет в 1,5–2 раза больше крутящего момента при полной нагрузке, а пусковой ток в 5–9 раз превышает ток полной нагрузки. В асинхронных двигателях с контактным кольцом более высокий пусковой крутящий момент может быть достигнут путем обеспечения внешнего сопротивления в цепях ротора во время периода пуска асинхронного двигателя с контактным кольцом. Такое расположение в асинхронных двигателях с контактным кольцом также снижает высокие пусковые токи во время пуска асинхронного двигателя.
⇒⇒ I.M. с короткозамкнутым ротором более чувствительны к колебаниям напряжения питания.Когда напряжение питания снижается, асинхронный двигатель потребляет больше тока. Во время скачков напряжения увеличение напряжения приводит к насыщению магнитных компонентов асинхронного двигателя с короткозамкнутым ротором.
⇒⇒ Регулировать скорость в этих двигателях непросто. Мы не можем подключить какое-либо внешнее сопротивление в цепи ротора, потому что проводники ротора постоянно закорочены концевыми кольцами.
Асинхронный двигатель с короткозамкнутым ротором Применение
Беличья клетка I.M.более широко используются, чем контактные кольца I.M в промышленности и дома благодаря стоимости обслуживания и более высокой эффективности. Асинхронные двигатели с короткозамкнутым ротором довольно распространены в промышленности. Вы найдете их почти в каждой машине, почти везде на конвейере.
Беличья клетка I.M обычно используется там, где требуется постоянная скорость и не используются приводы с регулировкой скорости.
Эти двигатели используются в
- Вентиляторы и нагнетатели
- Промышленные приводы
- Станки токарные и токарное оборудование
- Насосы
Отличие беличьей клетки I.М и синхронный двигатель
Есть некоторые различия между короткозамкнутым ротором и синхронным двигателем.
Скорость работы:
Для данной частоты асинхронный двигатель всегда работает со скоростью меньше синхронной скорости (Нс).
Для заданной частоты синхронный двигатель всегда работает с постоянной скоростью, называемой синхронной скоростью, независимо от величины нагрузки, которую он может испытывать.
Влияние нагрузки на частоту вращения ротора
Скорость асинхронного двигателя всегда зависит от нагрузки, скорость будет уменьшаться с увеличением нагрузки.
Скорость синхронного двигателя не зависит от нагрузки, поэтому она остается постоянной при любой нагрузке.
Конструкция ротора
В короткозамкнутой клетке I.M используется ротор с короткозамкнутым ротором.
В синхронном двигателе в качестве ротора используется явный, невыразительный или постоянный магнит.
Внешнее питание
Синхронным двигателям требуется дополнительный источник постоянного тока для питания обмотки ротора. Асинхронные двигатели не требуют дополнительного источника питания.
Стоимость
Асинхронные двигатели дешевле синхронных. Синхронные двигатели слишком дороги в производстве, чем асинхронные двигатели аналогичного номинала.
Пуск двигателя
Все асинхронные двигатели являются самозапускающимися. Нам нужно только подать питание на обмотку статора.
В синхронном двигателе нам необходимо подать внешнее питание для вращения ротора, близкого к синхронной скорости.
Пусковой момент
Асинхронные двигатели имеют собственный пусковой момент.Синхронный двигатель не имеет пускового момента, нам нужно предоставить какое-то вспомогательное средство для создания требуемого пускового момента.
Регулятор скорости
Регулирование скорости возможно в случае асинхронного двигателя.
Мы не можем контролировать скорость синхронного двигателя.
Коэффициент мощности
Асинхронные двигатели всегда работают с отстающим коэффициентом мощности. Изменение коэффициента мощности невозможно.
Коэффициент мощности возбуждения постоянного тока может быть изменен с запаздывающего на опережающий в случае синхронного двигателя.
Вопросы и ответы
Что такое асинхронный двигатель с короткозамкнутым ротором?
Проще говоря, асинхронный двигатель, в котором используется ротор с короткозамкнутым ротором, называется асинхронным двигателем с короткозамкнутым ротором. Причина названия «беличья клетка» связана с типом ротора, который используется в этих двигателях. В двигателях этого типа ротор имеет самую простую и прочную конструкцию.
Каковы характеристики асинхронного двигателя с короткозамкнутым ротором?
с короткозамкнутым ротором IM имеет высокий пусковой ток и плохой пусковой момент (пусковой ток может в 5-9 раз превышать ток полной нагрузки; пусковой момент может быть равен 1.В 5-2 раза больше крутящего момента при полной нагрузке)
сколько контактных колец в асинхронном двигателе с короткозамкнутым ротором?
Асинхронный двигатель с короткозамкнутым ротором не имеет контактного кольца .
Короткое замыкание стержней ротора через короткозамкнутую катушку или короткое замыкание обмотки ротора.
почему ротор асинхронного двигателя с короткозамкнутым ротором перекошен?
Беличья клетка IM перекошена, чтобы избежать зубцового эффекта в двигателе. Если ротор и проводники статора параллельны друг другу, существует большая вероятность магнитной блокировки между ротором и статором.Следовательно, пазы ротора имеют перекос на .
как работает асинхронный двигатель с короткозамкнутым ротором?
Ответ на этот вопрос уже был дан в предыдущем разделе, посвященном принципу работы двигателя. пожалуйста, обратитесь к этому.
что такое асинхронный двигатель с двойной беличьей клеткой?
Асинхронный двигатель с двойным короткозамкнутым ротором состоит из ротора, который имеет две независимые обоймы , расположенные одна над другой в одном слоте.
Заключение
Надеюсь, вы знаете все, что связано с асинхронным двигателем с короткозамкнутым ротором.
Мы видели конструкцию асинхронного двигателя с короткозамкнутым ротором. Основное различие между контактным кольцом и асинхронным двигателем с короткозамкнутым ротором заключается в конструкции ротора. Двигатели по конструкции состоят из двух основных частей: статора и ротора. В этих двигателях используется ротор с короткозамкнутым ротором. Этот ротор состоит из параллельных алюминиевых или медных стержней. Токопроводящие шины ротора закорочены двумя концевыми кольцами.
Мы видели принцип работы асинхронного двигателя с короткозамкнутым ротором, который одинаков для всех асинхронных двигателей.Когда мы подаем напряжение переменного тока на обмотку статора, поток, генерируемый в обмотке статора. Из-за этого магнитного потока индуцируется ток ротора, а также создается магнитный поток ротора. Поток ротора отстает от потока статора, поэтому создается крутящий момент, и ротор ощущает силу в направлении движения.
Мы увидели некоторые преимущества и недостатки асинхронного двигателя Squirrel. Эти двигатели имеют простую и прочную конструкцию. Эти двигатели имеют более высокий КПД и низкую стоимость из-за того, что в 90% асинхронных двигателях используется именно этот тип двигателя.
Мы видели применение асинхронного двигателя с короткозамкнутым ротором. Эти двигатели используются там, где требуется постоянная скорость и не требуется регулирование скорости.
Продолжить чтение
Конструкция и принцип работы трехфазного асинхронного двигателя Трехфазный асинхронный двигатель: Трехфазные асинхронные двигатели . — наиболее широко используемые электродвигатели в промышленности. Они работают практически с постоянной скоростью от холостого хода до полной нагрузки.Однако скорость зависит от частоты, и, следовательно, эти двигатели нелегко адаптировать для управления скоростью. Обычно мы предпочитаем двигатели постоянного тока, когда требуются большие изменения скорости.Тем не менее, трехфазные асинхронные двигатели просты, надежны, дешевы, просты в обслуживании и могут быть изготовлены с характеристиками, соответствующими большинству промышленных требований. В этом разделе мы обсудим принцип работы трехфазной индукции . моторы .
Как и любой электродвигатель, трехфазный асинхронный электродвигатель имеет статор и ротор.Статор имеет трехфазную обмотку (называемую обмоткой статора), а ротор имеет короткозамкнутую обмотку (называемую обмоткой ротора). Только обмотка статора питается от трехфазного источника питания. Обмотка ротора получает свое напряжение и мощность от обмотки статора, находящейся под внешним напряжением, посредством электромагнитной индукции, отсюда и название.
Асинхронный двигатель можно рассматривать как трансформатор с вращающейся вторичной обмоткой, и поэтому его можно описать как машину переменного тока «трансформаторного типа», в которой электрическая энергия преобразуется в механическую.
Конструкция трехфазного асинхронного двигателя:
На рис. 8.1 показана конструкция трехфазного асинхронного двигателя . Трехфазный асинхронный двигатель состоит из двух основных частей (i) статора и (ii) ротора. Ротор отделен от статора небольшим воздушным зазором, который составляет от 0,4 мм до 4 мм, в зависимости от мощности двигателя. .| РИС.(8.1) |
Трехфазная обмотка статора намотана на определенное количество полюсов в соответствии с требованиями скорости.Чем больше число полюсов, тем меньше скорость двигателя и наоборот. Когда на обмотку статора подается трехфазное питание, создается вращающееся магнитное поле (см. Раздел 8.3) постоянной величины. токи в роторе за счет электромагнитной индукции.
Ротор, установленный на валу, представляет собой полый многослойный сердечник с прорезями на внешней периферии. Обмотка, помещенная в эти прорези (называемая обмоткой ротора), может быть одного из следующих двух типов:
(i) Тип беличьей клетки (ii) Тип раны
(i) Ротор с короткозамкнутым ротором: Он состоит из многослойного цилиндрического сердечника с параллельными прорезями на его внешней периферии.В каждую прорезь помещается по одному медному или алюминиевому стержню. Все эти стержни на каждом конце соединены металлическими кольцами, называемыми концевыми кольцами.Это образует неразрывную короткозамкнутую обмотку. Вся конструкция (стержни и концевые кольца) напоминает беличью клетку, отсюда и название. Ротор не подключен к источнику питания электрически, но в нем есть ток, индуцированный действием трансформатора от статора.
Асинхронные двигатели , в которых используется ротор с короткозамкнутым ротором, называются асинхронными двигателями с короткозамкнутым ротором.В большинстве трехфазных асинхронных двигателей используется ротор с короткозамкнутым ротором, поскольку он имеет удивительно простую и прочную конструкцию, позволяющую работать в самых неблагоприятных условиях.
Однако он страдает недостатком низкого пускового момента, так как стержни ротора постоянно закорочены, и невозможно добавить какое-либо внешнее сопротивление в цепь ротора для получения большого пускового момента.
(ii) Ротор с обмоткой: Он состоит из многослойного цилиндрического сердечника и имеет 3-фазную обмотку , аналогичную обмотке статора [см. Рис.(8.3)]. Обмотка ротора равномерно распределена в пазах и обычно соединена звездой. Открытые концы обмотки ротора выведены и соединены с тремя изолированными контактными кольцами, установленными на валу ротора, с одной щеткой, опирающейся на каждый контакт. звенеть.
Три щетки подключены к трехфазному реостату, соединенному звездой, как показано на рис. (8.4). При запуске в цепь ротора включаются внешние сопротивления, чтобы обеспечить большой пусковой крутящий момент. Эти сопротивления постепенно уменьшаются до нуля. когда двигатель набирает скорость.
Внешние сопротивления используются только во время пуска. Когда двигатель достигает нормальной скорости, три щетки замыкаются накоротко, так что намотанный ротор работает как ротор с короткозамкнутым ротором.
Принцип работы трехфазного асинхронного двигателя:
Скорость вращения магнитного поля:
Скорость вращения вращающегося магнитного поля называется синхронной скоростью (Нс).Ссылаясь на рис. (8.6 (ii)), момент времени 4 представляет собой завершение четверти цикла переменного тока Ix с момента времени 1. В течение этого четверти цикла поле повернулось на 90 °. В момент времени, представленный 13 или одним полным циклом тока Ix от начала координат, поле совершило один оборот.Следовательно, для 2-полюсной обмотки статора поле совершает один оборот за один цикл тока. В 4-полюсной обмотке статора можно показать, что вращающееся поле совершает один оборот за два цикла тока.В общем, если полюса P, вращающееся поле совершает один оборот в P / 2 цикла тока.
Скорость вращающегося магнитного поля такая же, как и скорость генератора переменного тока, который подает мощность на двигатель, если они имеют одинаковое количество полюсов, поэтому считается, что магнитный поток вращается с синхронной скоростью.Трехфазный асинхронный двигатель Преимущества: (i) Он имеет простую и прочную конструкцию.(ii) Это относительно дешево. (iii) Он не требует значительного обслуживания. (iv) Он имеет высокий КПД и достаточно хороший коэффициент мощности.
(v) Он имеет самозапускающийся крутящий момент.
Трехфазный асинхронный двигатель Недостатки:(i) По сути, это двигатель с постоянной скоростью, и его скорость не может быть изменена
(ii) Его пусковой крутящий момент уступает шунтирующему двигателю постоянного тока. Заключение:
Вы узнали о конструкции и принципах работы трехфазного асинхронного двигателя .Если у вас есть какие-либо вопросы, оставьте комментарий ниже.
Асинхронный двигатель
(Эта статья состоит из двух основных частей: принцип работы и характеристики асинхронного двигателя)Асинхронные двигатели или асинхронные двигатели часто называют рабочими лошадками отрасли. Это результат многих преимуществ асинхронного двигателя по сравнению с другими технологиями. Двигатель не требует особого обслуживания. Единственные детали, которые могут изнашиваться, — это подшипники. Если асинхронный двигатель не используется чрезмерно (из-за высокого напряжения, тока или механического воздействия), подшипники определяют жизненный цикл асинхронного двигателя.В отличие от двигателя постоянного тока, нет необходимости в угольных щетках для коммутации тока. Асинхронный двигатель может быть изготовлен легко и при этом его цена довольно низкая по сравнению с другими технологиями. Асинхронный двигатель не использует процесс сгорания для передачи энергии, поэтому нет необходимости (дозаправлять) топливо или воздух. Охлаждение может быть интегрировано, так что асинхронный двигатель может работать в герметичной среде, например, под водой. Асинхронный двигатель имеет высокое отношение мощности к массе. Еще одно преимущество — высокий пусковой крутящий момент, поэтому возможен запуск под нагрузкой.С момента развития частотно-регулируемых приводов и систем векторного управления этот асинхронный двигатель также легко регулируется по скорости и крутящему моменту. Это дало много возможностей для автоматизации процессов. В следующей статье объясняются принцип, характеристики и контроль индукции.
Принцип работы асинхронного двигателя
Принцип асинхронного двигателя заключается в создании вращающегося магнитного поля в статоре и индукции тока в роторе, так что оба элемента вместе дают мощность на ротор, что приводит к круговому движению с определенной скоростью и крутящим моментом.
Статор
Теоретически статор представляет собой трехфазную обмотку, разделенную на цилиндрическую поверхность, так что при приложении трехфазного напряжения индуцируется вращающееся магнитное поле. Обмотки размещены в металлической цилиндрической конструкции для направления силовых линий магнитного поля и предотвращения движения обмоток. Эта конструкция состоит из ламинированных перфорированных пластин. Это предотвращает циркуляцию сильных вихревых токов в статоре. Идеальная ситуация — это синусоидальное магнитное поле, но для объяснения принципов работы статора достаточно одной обмотки на фазу.Это показано на следующем рисунке.
Рисунок 1: Теоретическая конструкция статора с одной обмоткой на фазу
Рисунок 2: Трехфазный ток i s1 , i s2 и i s3 , которые будут подключены к катушкам U, V и W
Здесь три обмотки смещены более чем на 120 °, так что это симметрично. Обмотки часто называют по фазам; U 1 — U 2 , V 1 — V 2 и W 1 — W 2 .На этом рисунке есть два полюса на фазу. Три обмотки могут быть соединены звездой или треугольником. Это часто делается через мостовые соединения вне асинхронного двигателя, потому что в зависимости от конфигурации меняются такие характеристики, как ток, напряжение и направление вращения.
Рисунок 3: Конфигурация звезды и треугольника с мостовидными соединениями
Рисунок 4: Асинхронный двигатель со звездой
На три обмотки подается трехфазное симметричное синусоидальное напряжение.Обмотки имеют определенную проводимость, так что через обмотки протекает трехфазный симметричный синусоидальный ток. Токи создают вокруг себя различные магнитные поля. На рисунке 5 показана эволюция этих магнитных полей за один период.
Рисунок 5: Магнитная ситуация в момент времени с 1 по 7 (Рисунок 2)
Ток положительный, когда он течет со стороны 1 на сторону 2 (U 1 — U 2 , V 1 — V 2 и W 1 — W 2 ).Различные магнитные поля на фазу приводят к общему магнитному полю, показанному на рисунке mkl. Это магнитное поле вращается в этом примере по часовой стрелке. Каждый период синуса напряжения магнитное поле совершает вращение на 360 ° через весь статор. Если разместить больше обмоток на фазу, так что создается 2 * p полюса на фазу, магнитные поля совершают вращение на 360 ° / p за период напряжения. Если частота системы напряжения равна f s , частота магнитного поля f s / p или количество оборотов в минуту составляет
. n s = (60f s ) / pКак упоминалось ранее, ситуация с одной обмоткой на фазу на полюс является упрощенной моделью.Фактическое распределение содержит больше обмоток на прорезь в статоре. По фазе это распределение выполняется как синусоида. Если линия с севера на юг в соответствии с индуцированным магнитным полем от фазы называется опорной линией статора, то оптимальное распределение проводов N s для одной фазной катушки определяется выражением:
n с = (N с /2) sin αИз этого выражения в соответствии с выводом магнитной индукции в воздушном пространстве между статором и ротором получается:
B δs1 (α) = (u 0 N s i s1 cos α) / 2δТакже из нее можно записать следующую формулу для действующего значения магнитного поля в воздушной заслонке:
B δ = (3 N se u 0 I u ) / 4δЧтобы найти поток статора, индуктивность намагничивания и наведенную ЭДС, воспользуйтесь предыдущими формулами и выражением для потока в одной обмотке.Итак, допустим один виток катушки U 1 — U 2 . Этот поворот составляет определенный угол α с опорной линией статора. Пусть статор имеет следующие характеристики: радиус r и осевую длину l. Тогда поток за один виток определяется по следующей формуле:
ф виток = 2 B δ I r sin αИз этого выражения можно найти максимум всего наведенного потока от катушки U 1 — U 2 , интегрировав его по всему распределению обмоток этой фазы:
Индуцированный поток ф с1 пропорционален току намагничивания I u .Это включает в себя то, что поток и ток находятся в фазе. Исходя из этого, индуктивность намагничивания может быть определена как:
Наведенная ЭДС в одной катушке такова:
Ротор
Ротор состоит из разных частей. В основном есть два типа роторов. Асинхронные двигатели с фазным ротором имеют ротор, содержащий обычные трехфазные обмотки из изолированного провода. Другой тип, который будет использоваться далее в этой статье, — это асинхронный двигатель с короткозамкнутым ротором.Он имеет ротор с короткозамкнутым ротором. Кожух ротора обоих типов состоит из перфорированных пластин. Они содержат прорези для трехфазных обмоток или короткозамкнутого ротора. Беличья клетка изготовлена из металлических (обычно медных или алюминиевых) стержней с соединением на обоих концах металлическим кольцом короткого замыкания. Вариации обычны, но принцип остается тем же. Процесс передачи крутящего момента в роторе основан на законе Фарадея и силе Лоренца. Объяснить процесс, происходящий в роторе. Представьте себе токопроводящую лестницу, состоящую из длинных металлических сторон и проводящих ступенек, как на рисунке 6.
Рисунок 6: Лестничный эквивалент ротора
Ступеньки имеют длину l. Перпендикулярно плоскости, образованной ступенями и проводящей стороной, расположен постоянный магнит. Затем магнит перемещается параллельно сторонам по ступеням лестницы, не касаясь их. Магнит имеет определенное магнитное поле B и скорость v согласно лестнице. Если этот воображаемый эксперимент проводится достаточно быстро, можно заметить несколько событий. Согласно закону Фарадея, ЭДС будет индуцирована, что приведет к возникновению напряжения по проводнику прямо под магнитом.
E = B.l.vЭто потому, что проводник отсекает поток. Этот проводник вместе со сторонами лестницы и соседними проводящими ступенями образует замкнутый контур. Из-за напряжения на центральной ступеньке по этой петле будет течь ток. Направление напряжения и тока таково, что противодействует изменению поля магнетита. В этом примере, если магнит движется вправо, а его отрицательный полюс находится над лестницей, ток будет течь в центральном проводнике вперед, а в ближайших ступенях — назад.
I = E / ZГде Z — импеданс, видимый потенциалом над центральным проводником. Поскольку существует магнитное поле B, пересекающее ступеньку, и электрический ток, протекающий через ступеньку, на лестницу будет действовать сила Лоренца.
F = BlI
Рисунок 7: Ротор с короткозамкнутым ротором
Эта сила действует в том же направлении, что и движение магнита, потому что это индуцированная сила, которая противодействует ее источнику !. Если лестница может двигаться свободно, она начнет ускоряться, чтобы уменьшить разницу в скорости между лестницей и магнитом.Когда разница скоростей уменьшается, ЭДС уменьшится, что приведет к снижению тока, силы и ускорения. Если лестница и магнит работают с одинаковой скоростью, сила будет равна нулю. Чтобы сделать шаг к асинхронному двигателю с короткозамкнутым ротором, ротор с короткозамкнутым ротором эквивалентен лестнице, изогнутой к цилиндру, а движущийся магнит воспроизводится вращающимся магнитным полем из-за трех фазных обмоток. Такой цилиндр показан на рисунке 7. На этом примере объясняется принцип работы асинхронного двигателя.Исходя из формулы ЭДС в одной катушке, можно провести аналогию.
E s1 = jw s ф s1 = jw s L 0 I uЕсли пренебречь индуктивным и резистивным падением напряжения на катушке, ЭДС равна установленному напряжению U c1 . Вращающееся поле индуцирует ЭДС E r1-rest в обмотке ротора. Когда асинхронный двигатель не вращается, статор и ротор действуют как первичная и вторичная обмотки трансформатора.Обе частоты равны:
f r = f sОбмотки связаны магнитным потоком, который действует как вращательное поле. Как и в случае с настоящим трансформатором, для асинхронного двигателя можно определить коэффициент трансформации в этом случае, когда он не вращается.
k = E s1 / E r1-остатокОсновное различие между асинхронным двигателем в этой ситуации и реальным трансформатором — это нулевой ток нагрузки.Поскольку сопротивление асинхронного двигателя намного выше из-за воздушной заслонки, ток намагничивания и, следовательно, ток нулевой нагрузки значительно выше. В асинхронном двигателе этот ток составляет 20-50% от тока полной нагрузки, тогда как в реальном трансформаторе он составляет лишь несколько процентов от тока полной нагрузки. Сила Лоренца на роторе создает на валу определенный крутящий момент.
Этот крутящий момент максимален, когда ток ротора находится в фазе с магнитным потоком статора. Ток ротора имеет большое отставание от ЭДС ротора из-за его высокой собственной индуктивности.
tan φ = (wL r ) / R rЭто ситуация, когда ротор стоит, например, когда стоит асинхронный двигатель. Создаваемый крутящий момент на роторе вызовет ускорение. По мере того как скорость ротора увеличивается по направлению к скорости вращения магнитного поля, также называемой синхронной скоростью, ЭДС E r1 уменьшается точно так же, как частота напряжения ротора f r . Если асинхронный двигатель достигнет синхронной скорости, на ротор больше не будет действовать сила, поэтому это невозможно.Вот почему асинхронный двигатель также называют асинхронным двигателем. Когда нагрузка увеличивается, скорость уменьшается, а крутящий момент увеличивается. В нагруженной ситуации, например, когда приложена номинальная нагрузка, скорость асинхронного двигателя обозначается буквой n.
Характеристики асинхронного двигателя
Накладка
Из предыдущей главы ясно, что ротор никогда не может достичь той же скорости вращения, что и вращательное магнитное поле статора.Резюмируя: синхронная скорость потока статора n s зависит от частоты f s приложенного напряжения и количества пар полюсов p:
n s = (60f s ) / pПоскольку ротор никогда не достигает этой скорости, определяется коэффициент, указывающий относительную разницу между обеими скоростями. Этот коэффициент, скольжение g, определяется следующим образом:
г = (п с — п) / п сПроскальзывание часто указывается в процентах.В системе координат скольжение будет иметь направление, противоположное скорости вращения ротора. Проскальзывание будет равно нулю, когда скорость ротора равна синхронной скорости, будет равняться единице, если асинхронный двигатель остановится, будет отрицательным во время генерации и будет больше единицы, когда вращающееся магнитное поле применяется в направлении, противоположном направлению вращения. ротора. Это электрическое торможение.
Характеристики ротора
Частота ротора
Частота ЭДС в роторе зависит от разницы между скоростью вращения ротора и скоростью магнитного поля в статоре:
f r = p (n s — n) / 60 = pn s g / 60 = f s gЭДС ротора
Когда ротор остановился, разница! по скорости ротора и магнитному полю статора равна синхронной скорости.В этой ситуации EMF E r1-rest определяется по:
E = Blv сКогда ротор вращается с определенной скоростью n, ЭДС, зависящая от разницы скоростей, будет ниже:
E = Bl (v s — v r ) = gBlv sТаким образом, при заданном скольжении g ЭДС в роторе определяется по формуле:
E r = gE r1-restСкорость магнитного поля ротора
В роторе течет ток из-за наведенного напряжения.Этот ток дает, следуя закону Гопкинсона, магнитодвижущую силу. Эта сила создает магнитное поле, которое из-за вращающегося характера текущей системы также будет вращаться. Ранее было показано, что частота напряжения системы ротора f r пропорциональна частоте частоты статора f s с коэффициентом скольжения g:
f r = gf sТаким образом, скорость вращения магнитного поля ротора w r определяется следующими формулами:
w r = gw s = 2πf rСам ротор вращается со скоростью
w = (2πn / 60) рад / сТаким образом, w равно
. ш = (1 — г) ш сТаким образом, когда скорость вращения ротора и его поле объединяются, в результате получается магнитное поле ротора, которое вращается с той же синхронной скоростью в соответствии с опорной линией статора.
ш с = ш + ш рМощность и крутящий момент
Активный поток мощности
Чтобы лучше понять электрические процессы в асинхронном двигателе, полезно рассмотреть эквивалентную схему асинхронного двигателя, как показано на рисунке 8. Таким образом, гальванически разделенные процессы статора и ротора объединены в одну электрическую эквивалентную схему одной фазы. Индекс s указывает количество статора, индекс r количество ротора. Акценты используются там, где количество ротора относится к статору.
Рисунок 8: Эквивалентная схема асинхронного двигателя
Помимо всех электрических параметров асинхронного двигателя, основная цель состоит в том, чтобы передать определенный крутящий момент на вал при определенной угловой скорости. Принимая во внимание электрические характеристики, можно рассмотреть блок-схему, показанную на рисунке 9. Напряжение U, приложенное к обмоткам, известно. В простых, неконтролируемых приложениях это напряжение сети. В процессах с частотным регулированием это напряжение, подаваемое частотно-регулируемым приводом.Асинхронный двигатель требует определенного тока I. Асинхронный двигатель имеет индуктивный характер из-за использования различных катушек. Это означает, что ток и напряжение через обмотки не совпадают по фазе. Хотя важно знать, каково приложенное напряжение, чтобы знать влияние на изоляцию обмоток, напряжение для дальнейших отводов мощности не так важно.
Рисунок 9: Поток мощности в асинхронном двигателе
Рисунок 9 начинается с активной мощности, подаваемой на статор
P e = √3U l I l cos φ = 3U p I p cos φГде φ — угол между вектором напряжения и тока в векторном представлении.Индексы I и p указывают, является ли использованное количество линейным или фазовым количеством. Далее используются количества фаз, поскольку они согласуются с количествами статора. Первая часть активной мощности, поступающей в асинхронный двигатель, теряется в обмотках статора. Эта часть, называемая потерями в меди статора P js , зависит от сопротивления статора и тока:
P js = 3I p 2 R sДругая часть рассеивается в виде тепла в сердечнике статора.Эти потери представляют собой потери в стали из-за вихревых токов в сердечнике:
P f = 3V p 2 / R м ≈ 3V s 2 / R mОставшаяся часть мощности — это мощность зазора P r , которая передается от статора к ротору через воздушный зазор:
P r = 3 (I r ‘) 2 R s ‘ / gОт мощности зазора часть рассеивается в виде тепла в обмотках ротора, что называется потерями в меди в роторе:
P младший = 3 (I r ‘) 2 R s ‘ = gR rТеперь остается механическая мощность двигателя:
P м = (1 — г) P rЧасть механической мощности теряется из-за трения вращающихся и движущихся частей с воздухом и особенно с неподвижными частями двигателя.Эта часть, обозначенная как P v , соответствует мощности без нагрузки:
P v = P без нагрузкиИсходя из всех этих мощностей, общий КПД асинхронного двигателя можно выразить как:
η = P выход / P дюйм = (P m — P v ) / (P m + P f + P js + P fr ) = P нагрузка / P eВ таблице 1 приведены абсолютные и относительные значения нескольких асинхронных двигателей.Малые двигатели имеют мощность менее 11 кВт, большие двигатели — более 1100 кВт.
| Нагрузка | Текущий родственник | Крутящий момент относительный | Скольжение относительное | Абсолютный КПД | Абсолютный коэффициент мощности | |||||
| Размер двигателя | Маленький | Большой | Маленький | Большой | Маленький | Большой | Маленький | Большой | Маленький | Большой |
| Полная нагрузка | 1 | 1 | 1 | 1 | 0.03 | 0,004 | 0,7-0,9 | 0,96-0,98 | 0,8-0,85 | 0,87-0,9 |
| Без нагрузки | 0,5 | 0,3 | 0 | 0 | ~ 0 | ~ 0 | 0 | 0 | 0.2 | 0,05 |
| Ротор с заторможенным ротором | 5-9 | 4-6 | 1,5-3 | 0,5-1 | 1 | 1 | 0 | 0 | 0,4 | 0.1 |
Кривая зависимости крутящего момента от скорости
Когда крутящий момент вычисляется исходя из мощности зазора P r и синхронной угловой скорости w s , могут быть предприняты следующие шаги, чтобы найти общее выражение для крутящего момента в зависимости от скорости:
Где
X r ‘ = w s σ r ‘ L 0— индуктивность рассеяния ротора относительно статора.С этого момента все упомянутые термины … r ‘ заменены терминами … R для сохранения ясности. С
U s1 ≈ E s1 = φ s1 w sКрутящий момент становится:
T = (3pR R / w r ) φ s1 2 / ((R R / w r ) 2 + (σ R L 0 ) 2 )Максимальный крутящий момент достигается при
dT / dw r = 0 (это происходит, когда w r = R R / σ R L 0 )Когда это заполнено в формуле крутящего момента, это дает выражение максимального крутящего момента или крутящего момента пробоя:
T = 3pφ s1 2 / 2σ R L 0График зависимости крутящего момента от скорости хорошо представлен на рисунке 10.
Рисунок 10: Кривая зависимости крутящего момента от скорости асинхронного двигателя
Рисунок 10 также дает выражение для скорости при максимальном крутящем моменте. Как было доказано до пробоя крутящий момент достигается при частоте вращения ротора
w r = R R / σ R L 0Скорость ротора дает разницу между синхронной скоростью и фактической скоростью. Таким образом, пробойный момент достигается при частоте вращения
. w = w s — (1 / p) R R / σ R L 0или указано в оборотах в минуту об / мин:
n b = n s — (30 / πp) R R / σ R L 0Скорость зависит от сопротивления ротора.Сама величина пробивного момента не зависит от сопротивления ротора. Когда скорость ротора в соответствии с опорной линией статора выше, чем синхронная скорость, значение скорости ротора w r становится отрицательным. Поток энергии будет идти от ротора к статору. Это происходит, когда ротор приводится в движение или асинхронная машина работает как генератор вместо двигателя. Следует учитывать, что крутящий момент, заданный предыдущими выражениями, является крутящим моментом на затворе, поэтому потери ротора, потери на трение и вентиляционные потери еще не принимаются во внимание.Теоретически асинхронный двигатель может передавать максимальный крутящий момент на нагрузку. Обычно номинальный крутящий момент в 1,75–3 раза меньше. Это дает несколько эффектов. Номинальный ток будет ниже, рабочая точка, вероятно, будет намного более стабильной, номинальная скорость будет почти синхронной, а асинхронный двигатель поддерживает большой момент ускорения. На рисунке 11 визуализирована концепция ускоряющего момента.
Рисунок 11: Графический пример ускоряющего момента
Из состояния покоя нагрузка с противодействующим моментом T c1 будет ускоряться до точки P, где в каждый момент времени
T — T c1 = T α = J м dw / dtФактическая причина этого последнего выражения будет более подробно объяснена в главе о механике.Если противодействующий момент 01f, нагрузка следует курсу T c2 , асинхронный двигатель не может самостоятельно разогнать нагрузку. Чтобы получить более высокий пусковой и ускоряющий момент без использования завышенного асинхронного двигателя, решение состоит в том, чтобы иметь более высокое сопротивление ротора.
Это может быть сделано вне асинхронного двигателя в случае асинхронного двигателя с фазным ротором или внутри двигателя с использованием двухклеточного асинхронного двигателя или стержней ротора с более высоким сопротивлением. Ротор с обмоткой и принцип стержня ротора с более высоким сопротивлением напрямую влияют на сопротивление ротора.Влияние на кривую зависимости крутящего момента от скорости показано на рисунке 12.
Рис. 12: Крутящий момент в зависимости от скорости для различных значений сопротивления ротора
На пробойный момент не влияет, как было сказано ранее, только когда сопротивление действительно велико. В роторе с обмоткой с зажимами внешнего сопротивления сопротивление можно регулировать, когда асинхронный двигатель работает на более высокой скорости, чтобы уменьшить скольжение. В двухклеточном двигателе концентрически установлены две беличьи клетки. Это показано на рисунке 13.Внутренняя клетка содержит толстые стержни и почти полностью окружена железным сердечником.
Имеет высокую индуктивность и низкое сопротивление. Наружная клетка состоит из более тонких стержней, которые размещаются рядом с воздушным зазором между ротором и статором. Сопротивление выше, чем во внутренней клетке. Поток вокруг внешних стержней частично закрывается в воздушной заслонке. Благодаря этому он имеет более низкую индуктивность. При запуске асинхронного двигателя частота вращения ротора w r максимальна.
Рисунок 5.13: Принцип двухклеточного ротора
Очень важно реактивное сопротивление ротора. Ток ротора будет высоким во внешней клетке и низким во внутренней клетке. Это клетка с более высоким сопротивлением, что означает более высокий момент ускорения. Когда асинхронный двигатель набирает скорость, скорость ротора уменьшается и достигает небольшого значения (f r ~ 1–4 Гц). Реактивное сопротивление больше не так важно, и ток будет в основном течь во внутренней клетке, потому что ее сопротивление намного ниже, чем во внешней клетке.Сопротивление ротора полностью электрическое. В основном есть три возможных ситуации, как показано на рисунке 14. Первая кривая дает асинхронный двигатель с низким сопротивлением ротора, более низким пусковым моментом, но более высокой эффективностью. Вторая кривая иллюстрирует наиболее распространенный асинхронный двигатель с повышенным пусковым моментом. Третья кривая называется седловой кривой и используется, когда требуется действительно высокий пусковой крутящий момент, здесь пусковой крутящий момент может даже быть выше, чем! момент пробоя.
Рисунок 5.14: Уровни крутящего момента ротора с двойной обоймой
Пусковой ток
Когда асинхронный двигатель запускается путем прямого подключения к сети, от сети будет запрашиваться высокий пусковой ток. Кроме того, на нормальный периодический синусоидальный ток будет накладываться сильный выброс тока. Сетевое напряжение передается на статор, когда ротор неподвижен. Это эквивалентно принципу трансформатора с короткозамкнутой вторичной обмоткой. Когда асинхронный двигатель ускоряется, разница между ротором и статором уменьшается, а наведенная ЭДС в роторе (вторичная обмотка эквивалентного трансформатора) уменьшается.Подобно принципу трансформатора, вторичный ток и, следовательно, первичный ток уменьшаются. Соотношение между скачком пускового тока и номинальным током находится где-то между 3 и 7. Это сделано для ограничения воздействия на сеть и упрощения защиты асинхронного двигателя предохранителями.
Движение воздуха Вудса — Основные двигатели — Основные принципы — Асинхронные двигатели переменного тока
Асинхронные двигатели переменного токаТипы двигателей, которые чаще всего используются в вентиляторах Woods Air Movements, — это асинхронные двигатели переменного тока.Они могут работать напрямую от электросети, они надежны, не требуют особого обслуживания и относительно невысоки.
В трехфазном асинхронном двигателе переменного тока катушки изолированного провода находятся в пазах статора, расположенных в корпусе. Эти катушки сконфигурированы для обеспечения набора электромагнитных полюсов для каждой из трех электрических фаз (U, V и W) при включении.
На рисунке 1 показан двигатель, в котором катушки расположены таким образом, чтобы обеспечить пару полюсов для каждой фазы (обозначены как U1 и U2, V1 и V2, W1 и W2).Поскольку у каждой фазы два полюса, это описывается как двухполюсная конфигурация; если бы для каждой фазы было две пары полюсов, это была бы 4-полюсная конфигурация и так далее.
Когда катушки статора подключены к источнику переменного тока, электрический ток будет течь и создавать магнитное поле — катушки намотаны так, что полюса в каждой паре имеют противоположную полярность.
Рисунок 1. Циклическое вращающееся магнитное поле в трехфазном асинхронном двигателе переменного тока
Цикличность формы волны переменного тока приводит к тому, что магнитное поле вращается вокруг центральной оси статора с двумя северными и двумя южными полюсами одновременно.Скорость этого вращения определяется количеством пар полюсов и частотой электросети (50 Гц или 60 Гц — см. «Двигатели, основная часть первая»).
Если имеется одна пара полюсов, магнитное поле вращается один раз за электрический цикл; где есть две пары, магнитное поле вращается один раз за два цикла, а где есть три пары, оно вращается один раз за три цикла.
Основное уравнение для определения синхронной скорости выглядит следующим образом:
Синхронная скорость (об / мин) = 2 x Частота питания (Гц) x 60
Количество полюсов для каждой фазы
Итак, если бы двигатель на Рисунке 1 работал от источника питания 50 Гц, синхронная скорость была бы:
2 x 50 x 60 = 3000 об / мин
2
Таким образом, можно видеть, что чем больше число полюсов, тем медленнее будет синхронная скорость — таким образом, двигатель с 12 полюсами на фазу будет иметь синхронную скорость всего 500 об / мин.
РоторПомимо статора, наиболее важной частью асинхронного двигателя переменного тока является ротор. Он состоит из стержней ротора, обычно изготовленных из алюминия или меди, которые на концах соединены с кольцами из того же материала. Иногда это называют ротором «беличья клетка» (см. Рисунок 2).
Поскольку ротор расположен во вращающемся магнитном поле статора, образующиеся линии магнитного потока будут разрезать стержни ротора и индуцировать напряжение в роторе.Это, в свою очередь, приведет к протеканию электрического тока в стержнях ротора (обозначенных на рисунке 2 красными стрелками), который создаст собственное магнитное поле вокруг стержней ротора. Это магнитное поле взаимодействует с магнитным полем статора, создавая силу на стержнях ротора, заставляя ротор вращаться вокруг своей оси.
Рисунок 2. Ротор типа «беличья клетка»
Поскольку напряжение в стержнях ротора создается магнитным полем в статоре, прорезающим стержни ротора, если ротор вращается с синхронной скоростью, не будет относительного движения между стержнями ротора и магнитным полем статора, что приведет к на стержнях ротора не возникает напряжения.
Если к ротору приложена нагрузка, он начнет замедляться, и, следовательно, он начнет взаимодействовать с магнитным полем статора, и будет создаваться крутящий момент, как показано на рисунке 2. Это будет тот крутящий момент, который приводит в движение приложенную нагрузку. к ротору.
Синхронная скорость является функцией частоты электросети и конфигурации обмотки статора (количества полюсов). Разница между синхронной скоростью и скоростью ротора известна как скольжение; это выражается в процентах от синхронной скорости и может быть рассчитано по формуле:
Скольжение = Синхронная скорость — скорость ротора
Синхронная скорость
Конструкция ротораНа рисунке 3 показана конструкция типичного ротора.Штанги ротора обычно содержатся в пазах стального сердечника для усиления магнитного поля ротора. Стержни ротора обычно перекошены так, что они не совпадают с обмотками статора, что снижает электромагнитный шум и обеспечивает более плавную передачу крутящего момента.
Рисунок 3. Типовая конструкция ротора
Сердечник изготовлен из стальных пластин, уложенных друг на друга, в то время как стержни ротора и концевые кольца обычно создаются путем заливки расплавленного алюминия в матрицу или форму, которая окружает ламинированный пакет ротора.Расплавленный алюминий протекает через прорези в пакете ротора, образуя стержни ротора. Между стержнями ротора и стальным сердечником нет изоляции, так как индуцированное напряжение низкое.
Рисунок 4. Компоненты асинхронного двигателя переменного тока общего назначения
Однофазные асинхронные двигатели переменного токаСтатор, сконфигурированный для однофазного питания, не сможет инициировать вращение неподвижного ротора, потому что его магнитное поле просто переключается между полярностями.В результате требуется дополнительная обмотка для создания прогрессивно вращающегося магнитного поля. Эта вспомогательная обмотка подключена к однофазному источнику питания через конденсатор, так что ее форма напряжения может не совпадать по фазе с формой волны первичной обмотки.
Рисунок 5: Непрерывно вращающееся магнитное поле в однофазном асинхронном двигателе переменного тока, создаваемое вспомогательной обмоткой, подключенной к конденсатору
На рисунке 5 показано, как это создает непрерывно вращающееся магнитное поле, позволяющее индуцировать вращение.
НАЖМИТЕ ЗДЕСЬ, ЧТОБЫ ПРОЧИТАТЬ ЧАСТЬ 3Вращающееся магнитное поле — обзор
6.6.2 Самовозбуждающийся индукционный генератор
В предыдущих разделах мы подчеркивали, что вращающееся магнитное поле или возбуждение обеспечивается током намагничивания, отбираемым от источника питания, поэтому казалось бы очевидным, что Двигатель не мог генерировать, если не был обеспечен источник тока намагничивания.Тем не менее, можно заставить машину «самовозбуждаться», если условия подходящие, и, учитывая надежность двигателя с кожухом, это может сделать его привлекательным предложением, особенно для небольших изолированных установок.
В главе 5 мы видели, что когда асинхронный двигатель работает с нормальной скоростью, вращающееся магнитное поле, которое создает токи и крутящий момент на роторе, также индуцирует сбалансированные трехфазные наведенные ЭДС в обмотках статора, величина ЭДС ненамного меньше напряжения электросети.Итак, чтобы действовать как независимый генератор, мы хотим создать вращающееся магнитное поле без необходимости подключения к активному источнику напряжения.
Мы обсуждали аналогичный вопрос в главе 3 в связи с самовозбуждением шунтирующего постоянного тока. машина. Мы увидели, что если после выключения машины в полюсах поля остается достаточный остаточный магнитный поток, э.д.с. возникающий при вращении вала мог начать подавать ток на обмотку возбуждения, тем самым увеличивая магнитный поток, дополнительно повышая e.м.ф. и инициирование процесса положительной обратной связи (или начальной загрузки), который в конечном итоге стабилизировался характеристикой насыщения железа в магнитной цепи.
К счастью, того же можно добиться с помощью изолированного асинхронного двигателя. Мы стремимся извлечь выгоду из остаточного магнетизма в железе ротора и, поворачивая ротор, генерировать начальное напряжение в статоре, чтобы запустить процесс. Э.д.с. индуцированный должен затем управлять током, чтобы усилить остаточное поле и способствовать положительной обратной связи для создания бегущего поля магнитного потока.В отличие от постоянного тока Однако асинхронный двигатель имеет только одну обмотку, которая обеспечивает функции возбуждения и преобразования энергии, поэтому, учитывая, что мы хотим довести напряжение на клеммах до его номинального уровня, прежде чем подключать любую электрическую нагрузку, которую мы планируем подавать, очевидно, что необходимо обеспечить замкнутый путь для потенциального тока возбуждения. Этот путь должен способствовать нарастанию тока намагничивания и, следовательно, напряжения на клеммах.
«Возбуждение» тока означает обеспечение пути с очень низким импедансом, так что небольшое напряжение вызывает большой ток, и поскольку мы имеем дело с a.c. величин, мы, естественно, стремимся использовать явление резонанса, размещая набор конденсаторов параллельно (индуктивным) обмоткам машины, как показано на рис. 6.17.
Рис. 6.17. Самовозбуждающийся индукционный генератор. Нагрузка подключается только после того, как на статоре нарастает напряжение.
Реактивное сопротивление параллельной цепи, состоящей из чистой индуктивности ( L ) и емкости ( C ) на угловой частоте ω, определяется как X = ωL − 1ωC, поэтому на низких и высоких частотах реактивное сопротивление очень велико, но на так называемой резонансной частоте (ω0 = 1LC) реактивное сопротивление становится равным нулю.Здесь индуктивность — это намагничивающая индуктивность каждой фазы индукционной машины, а C — добавленная емкость, значение выбирается так, чтобы обеспечить резонанс на желаемой частоте генерации. Конечно, схема не идеальна из-за сопротивления в обмотках, но, тем не менее, индуктивное реактивное сопротивление можно «отрегулировать» путем выбора емкости, оставляя контур циркуляции с очень низким сопротивлением. Следовательно, вращая ротор со скоростью, при которой желаемая частота создается остаточным магнетизмом (например,грамм. 1800 об / мин для 4-полюсного двигателя с частотой 60 Гц), начальная скромная ЭДС. производит непропорционально высокий ток, и поток увеличивается до тех пор, пока не будет ограничен нелинейной характеристикой насыщения железной магнитной цепи. Затем мы получаем сбалансированные трехфазные напряжения на клеммах, и нагрузка может быть приложена путем включения переключателя S (рис. 6.17).
Приведенное выше описание дает только общую схему механизма самовозбуждения. Такая схема будет удовлетворительной только для очень ограниченного диапазона приводимых скоростей и нагрузок, и на практике требуются дополнительные функции управления для изменения эффективной емкости (обычно с использованием управления симистором), чтобы поддерживать постоянным напряжение при нагрузке и / или скорость варьируется в широких пределах.