Схема простого драйвера для униполярного шагового двигателя
Схема драйвера униполярного шагового двигателя, описанная в данной статье, реализует следующие задачи:
• управление 4-фазовым униполярным шаговым двигателем.
• обеспечивает плавную регулировку скорости вращения и изменение направления вращения.
• выполняет функцию остановки двигателя.
Ниже представлена принципиальная схема драйвера шагового двигателя. Драйвер построен с использованием трех микросхем 4000 серии и четырех силовых MOSFET транзисторов.
Схема тактируется генератором прямоугольных импульсов, построенного на логических элементах 2И-НЕ с триггером Шмитта на выходе. Рабочая частота генератора определяется общим сопротивлением PR1 + R2 и емкостью конденсатора С1, и может быть изменена в широком диапазоне с помощью потенциометра PR1.
Фрагмент схемы на элементах EXOR и J-K триггере создает счетчик по модулю 4, с тактами высокого уровня. Переключатель SB1 (JP1) предназначен для изменения направления работы счетчика, а, следовательно, для изменения направления вращения шагового двигателя.
Управление катушками 4-фазного шагового двигателя осуществляется с помощью четырех MOSFET транзисторов (VT1…VT4). Использование в данной схеме транзисторов высокой мощности типа BUZ11 — это решение, гарантирующее надлежащую работу двигателя высокой мощности.
Ниже показаны формы сигналов на разъеме Х2, к которому подключаются обмотки шагового двигателя.
Драйвер собран на печатной плате, рисунок которой приведен ниже. Монтаж следует начать с установки резисторов, панельки под микросхемы и закончить разъемами и силовыми транзисторами.
Разъемы JP1 и JP2 имеют ту же функцию, что и нажатие кнопки SB1 и SB2, так что вы можете подключить к ним кнопки и вынести их за пределы платы.
После сборки необходимо тщательно проверить плату на предмет короткого замыкания дорожек. Драйвер, собранный из исправных деталей не требует настройки и начинает работать сразу.
Следует, упомянуть о способе подключения питания и обмоток двигателя к плате драйвера. В случае питания схемы управления и двигателя тем же напряжением, которое находится в диапазоне от 5…15 В, и ток потребления не превышает 1 А, то необходимо установить перемычку JP3 и питание подать к разъему VDD.
Если параметры питания шагового двигателя не находится в пределах напряжения питания схемы драйвера, то необходимо снять перемычку JP3, и к разъему VDD подвести напряжение питания от 5…15 В, а к разъему X2 подать питание в соответствии с параметрами шагового двигателя.
Рисунок печатной платы (8,5 KiB, скачано: 2 121)
Управление шаговым двигателем через контроллер Canny / Хабр
Наткнулся недавно на статью камрада BosonBeard про новые контроллеры и решил попробовать на зуб что это такое. Недолго думая были раздобыты 3 типа контроллеров: Canny 3 Tiny, Canny 5 Nano, Canny 7.
Рис. 1. Внешний вид упаковки контроллеров Canny 7 (слева), Canny 5 Nano (в центре), Canny 3 Tiny (справа), шариковая ручка для масштаба
Рис. 2. Внешний вид контроллеров Canny 7 (слева), Canny 5 Nano (в центре), Canny 3 Tiny (справа), шариковая ручка для масштаба
На что стоит обратить внимание… сердцем контроллеров являются чипы семейства PIC — PIC18F25K50-I/ML, PIC18F25K80, PIC24HJ128GP506A-I/PT — соответственно. Про возможности каждого чипа можно прочитать из даташитов производителя, так что не будем заострять на этом внимание. Из особенностей могу добавить только, что у модели Canny 5 Nano есть внешний TTL-USB драйвер на чипе CP2102. На счет подключения и впаянных разъемов на моделях Canny 7 и Canny 3 переживать не стоит, т.к. производитель укомплектовывает поставку солидным пучком проводов с запаянными разъемами.
Применение чипов семейства PIC было неожиданностью. Хотя сам я не большой их поклонник, свою нишу они определенно занимают не зря. К слову, система защиты от протечек “аквасторож” тоже построена на чипах PIC.
К слову, система защиты от протечек “аквасторож” тоже построена на чипах PIC.
Схема подключения полностью стандартная, так что двигаемся дальше. Душой контроллера является собственная прошивка, разработанная производителем и целиком совместимая с визуальной средой программирования, которая достаточно подробно была описана BosonBeard, а кому этого было недостаточно, может смело пойти почитать форумы, несмотря на то, что контроллеры не имеют широкого массового применения, комьюнити собралось приличное.
Внимание! Собственный бутлоадер и графическая среда программирования накладывают определенные ограничения — невозможность использования стандартных библиотек. Но когда это нас останавливало?)
Не уверен что использовать подобный контроллер в качестве полноценного драйвера шагового двигателя даже для настольного ЧПУ или 3D принтера рационально, но для простого поворотного столика для создания моделей или съемки думаю реально.
От старого проекта у меня лежал неиспользованный старенький ДШИ-200 и самодельный драйвер к нему.
Рис.3. Мой старый драйвер шагового двигателя, на рисунке можно увидеть 3 канала управления
Это делает задачу немного интересней, так как готовые примеры рассчитаны на использование обычных сейчас 2-х обмоточных двигателей, в то время как ДШИ-200 — четырехобмоточный с двумя выводами с каждой обмотки.
Для сравнения, стандартная программа управления выглядит так:
А то что изобразил я, для управления своим двигателем выглядело так:
Почему такая разница в программах? Во-первых для таймлапса не надо организовывать реверс, т.е. достаточно вращения двигателя в одну сторону. Во-вторых — особенности самого двигателя, который может быть включен как по униполярной, так и по биполярной схеме. Так что нам подойдет униполярная схема:
В качестве платформы для таймлапса я использовал слегка измененный поворотный стол от 3д сканера cyclopus:

По традиции начнем с недостатков:
Закрытый бутлоадер
Отсутствие возможности подключения внешних библиотек
Из достоинств:
Графическая среда программирования — да, это непривычно, но это снижает порог вхождения
Высокая скорость разработки программ
Простота настройки и наладки программ “по месту” в полевых условиях
Развитое сообщество и поддержка разработчиков
Выводы
Не смотря на то, что контроллер достаточно специфичный и относится больше к узкоспециализированному профессиональному классу, производитель позаботился и о простых смертных. Это действительно сопоставимо со временем написания программ на Arduino. Но если взять более сложные программы, Arduino в проигрыше из-за сложности восприятия кода. Всетаки “картинку” мозг воспринимает быстрей чем текст. Кроме того, человеку который не участвовал в изначальной разработке кода проще будет его разобрать по картинке. Конечно визуальная среда разработки добавляет в загружаемый код хлама, но для сложных задач можно выбрать другой контроллер с большим объемом памяти… в общем каждый сам решает что ему важнее.
Уверен что многие вспомнят визуальную среду программирования Arduino — ArduBlock, которая умеет поддерживать библиотеки различных модулей и протоколов. Однако для чипов PIC ничего такого не было. Да и вообще с того момента как массово стали использовать Arduino про аналогичные устройства на PIC большинство из нас забыло. О достойной альтернативе говорить сложно, но это однозначно шаг вперед.
Мне было любопытно что это за контроллеры и что они умеют и я на данный момент удовлетворил свое любопытство. Я не придумал красивое окончание статьи, так что всем прочитавшим — спасибо за внимание.
Самодельный Драйвер Биполярного Шагового Двигателя Микрошаг
Самодельный Драйвер Биполярного Шагового Двигателя Микрошаг 3,7/5 2871reviews
Драйвера Шд Своими Руками Радиоэлектроника для профессионалов. Промышленная электроника. Драйвер Шагового Двигателя Для Чпу Станка.
Сайт для людей с паяльником в руках. РадиоКот: 4-х осевой StepDir контроллер шаговых. Вы здесь ‘ самодельный станок с ЧПУ, отзывы ‘ Схема контроллера, шаговые двигатели ‘ Драйвер для двигателя с 4-ми выводами. В инете есть статья по драйверам ШД, там этот процесс хорошо описан. Управление двигателями робота — SERVODROID.
В инете есть статья по драйверам ШД, там этот процесс хорошо описан. Управление двигателями робота — SERVODROID.
Самодельный Драйвер. Контроллер биполярного шагового двигателя. Полушаг и микрошаг.
Простой драйвер биполярного. Этот драйвер реализует полношаговый режим с одной включенной фазой и способен управлять двигателем с током до 0,5А. Контроллер шагового двигателя своими руками tech Из серии ‘станок с ЧПУ своими руками. Понимаю, конечно, что хочется попробовать. Драйвер ULN2003, подключенный к этим выходам, исправен? Простой драйвер биполярного ШД cadhouse В статье описывается stepdir контроллер униполярных шаговых двигателей.
На практике в программе Mach4 и подобных, драйвер работает на фиксированной частоте Kernel speed 4 ШАГОВЫЙ ДВИГАТЕЛЬ ПРОСТОЙ ДРАЙВЕР — Тест на шумность шаговых двигателей и драйверов для 3D принтера. Своими руками.
Разбираем G-коды реальной программы. Pronterface – управление 3D принтером. Драйвер Для Мтк 6582. Простой в изготовлении контроллер шагового двигателя.
Ниже представлена принципиальная схема драйвера шагового двигателя. Драйвер построен с использованием трех микросхем 4000 серии и четырех силовых MOSFET транзисторов. Драйвер для двигателя с 4-ми выводами Форум. Как настроить LinuxCNC или Мач, или GRBL, чтобы на китайских драйверах шагового двигателя выставить микрошаг. Ходовая гайка для ЧПУ своими руками.
Свежие комментарии. Andrey Kabanov к записи Водородная горелка своими руками. Принципиальная схема Контроллер шагового двигателя Схема драйвера биполярного шагового двигателя и USB контроллера схема длинная и нуждается в прокрутке для: Драйвер шагового двигателя USB на микроконтроллере AVR своими руками. Драйвер Шагового Двигателя Для Чпу Станка Форум forum При конструировании высокоскоростных драйверов шаговых двигателей нужно учитывать, что обмотки двигателя представляют собой индуктивность. Kb — таблицы специализированных микросхем драйверов.
Драйвер биполярного ШД на транзисторах Форум Как уже отмечалось ранее, для управления биполярными двигателями требуются более сложные схемы, такие как H-мосты. Схема простого драйвера для униполярного шагового.
Схема простого драйвера для униполярного шагового.
Смотреть HD Опубликовано: 3. ПРОСТОЙ ДРАЙВЕР ДЛЯ ШАГОВОГО ДВИГАТЕЛЯ СВОИМИ РУКАМИ ССЫЛКА НА СХЕМУ. Как запустить шаговый двигатель без драйвера How to run a stepper motor without a driver.
Драйвер шагового двигателя на основе SLA7024M. Создаем робота своими руками по видео-урокам в статье для начинающих робототехников. Драйверы униполярного и биполярного шагового. Драйвера Шд Своими Руками.
Шагового двигателя — Информация, Преимущества, дом шагового двигателя Контроллер | Lirtex
Теги: Электронный , Embedded , управления двигателем , шаговых двигателей
Шаговые двигатели (также называемые шаговые двигатели) представляют собой электронные двигатели, которые предлагают точный контроль вращения. Шаговые двигатели отличаются высокой точностью (в среднем шаговый двигатель может превратиться в 0,9 до 1,8 градусов в каждую сторону) и в относительно высокой скорости вращения.
Шаговые двигатели могут быть найдены в различных типах аппаратных компонентов: принтеры (головка принтера перемещается влево и вправо с помощью шагового двигателя), сканеры, компьютерные жесткие диски, и так далее.
Демонстрация шагового двигателя
В этом видео вы можете увидеть короткая демонстрация возможностей движение шаговым двигателем. Обратите внимание на точную регулировку скорости и направления — это достигается за счет способности двигатели для перемещения в очень малых шагов.
Характеристики и преимущества шаговых двигателей
Есть несколько характеристик шаговых двигателей, которые сделали их привода выбора в большом числе приложений:
- Устройство может работать как в открытом цикле с точностью позиционирования + -1 шаг. Таким образом, чтобы вращаться в определенном угловом расстоянии, двигатель может быть приказано повернуть определенное количество шагов и механический элемент связан с валом будет двигаться требуемое расстояние.

- Шаговые двигатели обладают высокой крутящий момент на малых угловых скоростей. Это полезно для ускорения полезную нагрузку до скорости.
- Шаговые двигатели имеют высокую удерживающий момент-они имеют свойство быть «самостоятельной блокировки», когда ротор находится на стоянке.
- Шаговые двигатели непосредственно совместим с цифровыми методами контроля, и может быть легко сопряжен с цифровыми Шаг \ Направление контроллер, микропроцессор или компьютер.
- Шаговые двигатели демонстрируют великолепную точность позиционирования, а тем более важно, ошибки не являются кумулятивными.
- Двигатель конструкция проста и надежная. Есть правило, только два подшипника и двигателя в целом имеет длительную необслуживаемые жизни. По этой причине, это экономически эффективным приводом.
Многие из этих преимущества делают двигатель шаговый полезно в некоторых типах роботов или машин. Разница в цене Серводвигатели также дает шаговых двигателей преимущество.
Недостатки шаговых двигателей
Основным недостатком шаговые двигатели разомкнутой операции — отсутствие обратной связи на должность двигателя (сигнал обратной связи) и его скорость (скорость обратной связи). Этот недостаток имеет критическое влияние на способность достигать высокой точности, и это снижает общий «безопасности» системы.
Как шагового двигателя построены?
Шаговые двигатели имеют много катушки помещены в круг форму. Когда ток проходит через одну из катушек, она становится магнитных (электромагнитных принцип) и, следовательно, перемещает вал двигателя, чтобы это направление. Например анимации:
Типы шаговых двигателей
Существуют два основных вида шаговых двигателей: униполярный и биполярный. Разница между двумя видами заключается в способе электромагнитов связаны между собой. Преимущество однополярного двигатели их упрощенному контролю, но, с другой стороны, их крутящего момента (силы) меньше, чем у биполярного motors. The преимущество биполярных двигателей больше крутящего момента для того же размера двигателя, но с другой стороны более сложные схемы управления необходимо, тот, который может изменить направление тока в каждом шаге.
Существуют гибридные двигатели, которые могут работать как в униполярных и биполярных режимов, с помощью проводов двигателя по-разному.
Управление шагового двигателя
В отличие от регулярных двигатели постоянного тока, управления шаговых двигателей является гораздо более сложным. Здесь Есть не два провода, которые должны быть подключены к источнику питания для того, чтобы спина двигателя. Для того чтобы перейти двигателя в определенном направлении, Stepping последовательности должен быть сформирован. Степпинг последовательность управляемой коммутации обмоток двигателей. Когда катушка, ток течет через катушки провода, и это становится электромагнита. Затем глава двигателя в настоящее время намагниченных до катушки, и движение будет создан.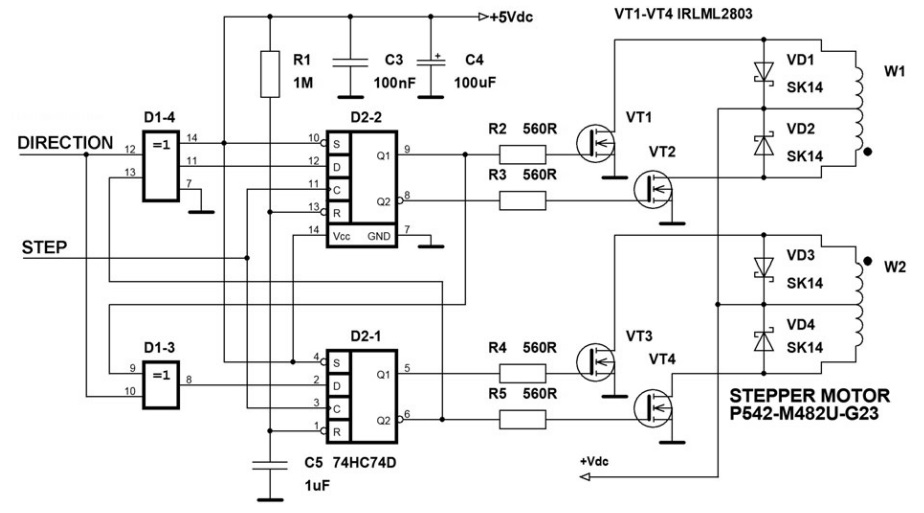
Пошаговое Последовательности
Есть 4 вида активизации последовательности: Полный Stepping (также называемый пошагового, Double Stepping, Half степпинг, и Micro степпинг.
Управление шагового двигателя с помощью «пошаговое» степпинг метод
Это самый основной метод — включение одного электромагнита каждый раз.
| Шаг номер | Катушка 1 | Катушка 2 | Катушка 3 | Катушка 4 |
| 1 | На | От | От | От |
| 2 | От | На | От | От |
| 3 | От | От | На | От |
| 4 | От | От | От | На |
анимации:
Эта последовательность требует наименьшего количества энергии и генерирует гладкую движения.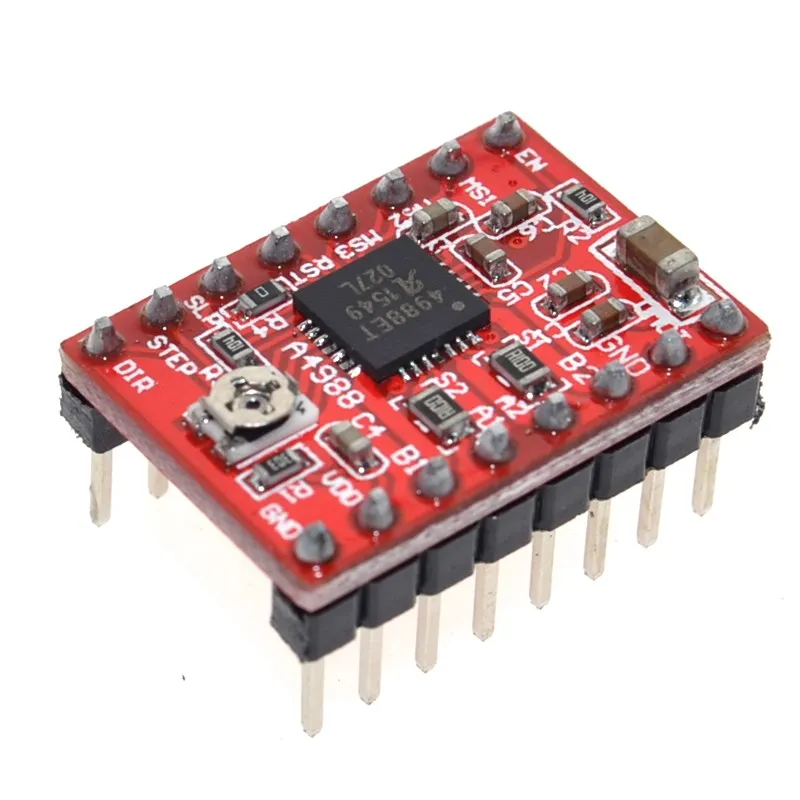
Управление шаговым двигателем с помощью «Дважды Шаг» степпинг метод
В этом методе две катушки включены одновременно.
| מספר צעד | Катушка 1 | Катушка 2 | Катушка 3 | Катушка 4 |
| 1 | На | На | От | От |
| 2 | От | На | На | От |
| 3 | От | От | На | На |
| 4 | На | От | От | На |
анимации:
Этот метод не создает плавное движение, как и предыдущий метод, и он требует удвоить текущий, но и как вернуть его порождает двойные крутящего момента.
Управление шаговым двигателем с помощью «Half-Шаг» степпинг метод
| מספר צעד | Катушка 1 | Катушка 2 | Катушка 3 | Катушка 4 |
| 1 | На | От | От | От |
| 2 | На | На | От | От |
| 3 | От | На | От | От |
| 4 | От | На | На | От |
| 5 | От | От | На | От |
| 6 | От | От | На | На |
| 7 | От | От | От | На |
| 8 | На | От | От | На |
Анимация:
Этот метод двойников Основная погрешность (в градусах) двигатель может двигаться.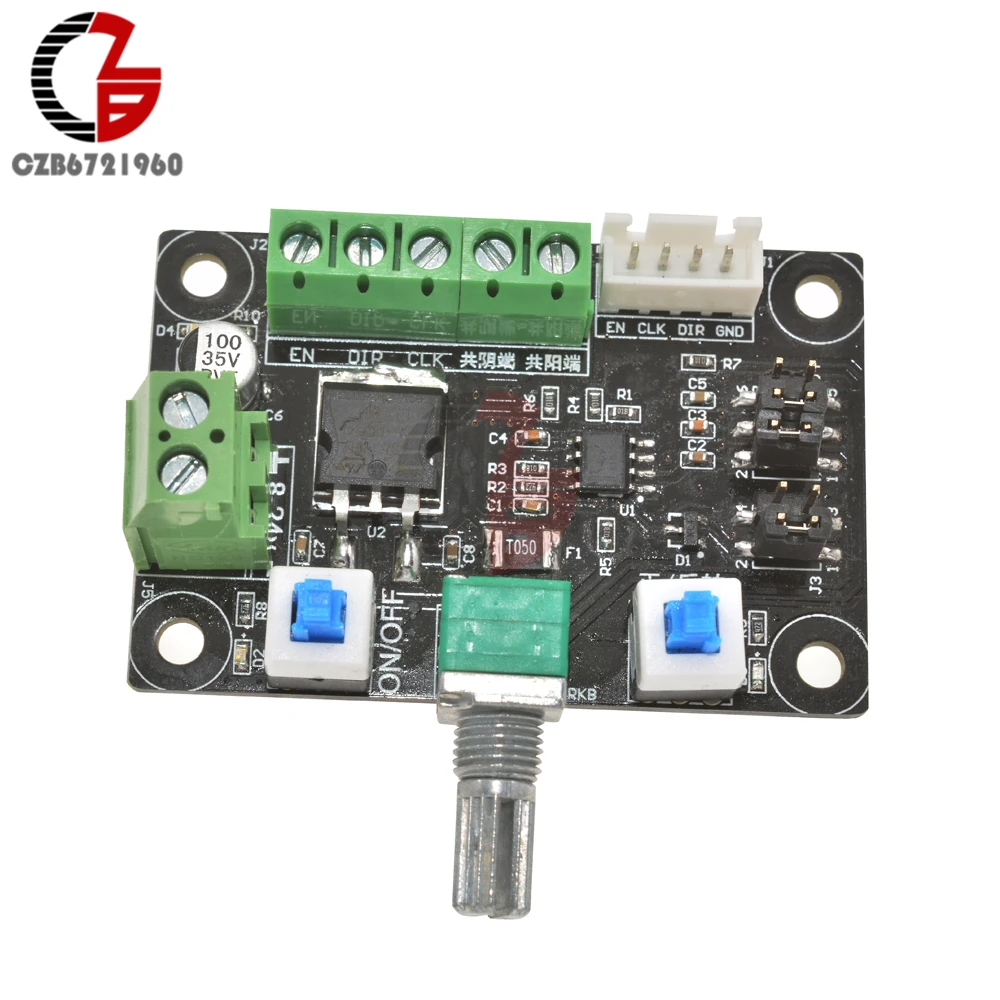 Например, является ли двигатель может двигаться в 1,8 градуса за каждый шаг, чем при использовании Half-Stepping можно двигать мотор в 0,9 градуса / шаг. Недостатком в этом способе управления является то, что в половине последовательности, дважды тока требуется (когда две катушки находятся на вместо одной).
Например, является ли двигатель может двигаться в 1,8 градуса за каждый шаг, чем при использовании Half-Stepping можно двигать мотор в 0,9 градуса / шаг. Недостатком в этом способе управления является то, что в половине последовательности, дважды тока требуется (когда две катушки находятся на вместо одной).
Строительство шагового двигателя Контроллер цепи
Самый простой способ для управления шаговым двигателем использует Шаг / Направление контроллера. Такой контроллер получает только два входа — нужное направление вращения (1 = по часовой стрелке, 0 = против часовой стрелки), а также указание о том, чтобы шаг или остаться в текущей позиции (шаг = 1, шаг = 0, соответственно). Сам контроллер генерирует активизации последовательности, как описано в предыдущем разделе.
Контроллер использует мощные транзисторы MOSFET для переключения тока в катушках.
Контроллер имеет 5 входов и 6 выходов:
- 2 входа для логики источник напряжения (5 В, земля)
- 2 входа для источника напряжения двигателей (до 50V 10ampere, земля)
- 2 входа для контроля шага и направления
- 5 выходов для подключения шаговых двигателей
Электронная схема Схема для шагового двигателя Контроллер цепи
CAD-модель
Здесь вы можете увидеть простой компьютер CAD модель контроллера — для этого используется простой микроконтроллер, который генерирует последовательность активизации и 4 мощных транзисторов MOSTFET.
Связи
Подписаться через RSS и никогда не пропустите сообщение!
Опубликовано в робототехнике от Лиор Чен
Как «крутить» шаговый двигатель без микроконтроллера
Шаговые двигатели полезны при управлении ими программируемым устройством но тем не менее могут возникать случаи когда в сложном управлении шаговым двигателем нет необходимости и нужен, всего лишь, большой крутящий момент и/или низкие обороты. Схема простого контроллера шагового двигателя приведена на рисунке:Рисунок 1 — Контроллер шагового двигателя
Контроллер состоит из мультивибратора на таймере 555, микросхемы десятичного счётчика 4022 (CD4022, HEF4022 и т.д.) и необязательных светодиодов с резистором для визуализации и наглядности, резистор один т.к. больше одного светодиода в данной схеме светиться не может. Счётчик десятичный т.е. при подаче на его тактовый вход (CLOCK (вывод 14)) импульсов напряжения на выводе соответствующему выходу номер которого совпадает с количеством поданных импульсов, после сброса, появляется напряжение уровня логической единицы, на всех остальных выводах выходов, при этом, устанавливаются напряжения уровня логического нуля.
 Вывод «11» соединён с выводом «15» для того чтобы ограничить счёт данного счётчика. Когда на тактовый вход приходит четвёртый импульс, после сброса, на выводе «11» (выход out4) появляется напряжение уровня логической единицы которое подаётся на вывод «15» (RESET) — вывод сброса, от этого счётчик происходит сброс счётчика в исходное состояние когда напряжение уровня логической единицы будет на выводе «2» который соответствует выходу out0 (т.е. 0 импульсов пришло на тактовый вход). Если вывод «15» соединить с «землёй» (GND, минус ноль питания) а «14» при этом никуда не соединять то счётчик будет считать 7 импульсов, 8ой импульс произведёт сброс и счёт пойдёт заново (так можно сделать мигалку с 8 светодиодами). Если убрать мультивибратор и светодиоды то останется только микросхема 4022 и её можно использовать с программируемым устройством для управления шаговым двигателем подавая на тактовый вход этой микросхемы импульсы с программируемого устройства. Вместе с этим контроллером можно использовать например драйвер на эмиттерных повторителях на транзисторах такая схема универсальная, безопасная при неправильном управлении но у неё есть недостатки, можно также использовать микросхему драйвер если она подходит.
Вывод «11» соединён с выводом «15» для того чтобы ограничить счёт данного счётчика. Когда на тактовый вход приходит четвёртый импульс, после сброса, на выводе «11» (выход out4) появляется напряжение уровня логической единицы которое подаётся на вывод «15» (RESET) — вывод сброса, от этого счётчик происходит сброс счётчика в исходное состояние когда напряжение уровня логической единицы будет на выводе «2» который соответствует выходу out0 (т.е. 0 импульсов пришло на тактовый вход). Если вывод «15» соединить с «землёй» (GND, минус ноль питания) а «14» при этом никуда не соединять то счётчик будет считать 7 импульсов, 8ой импульс произведёт сброс и счёт пойдёт заново (так можно сделать мигалку с 8 светодиодами). Если убрать мультивибратор и светодиоды то останется только микросхема 4022 и её можно использовать с программируемым устройством для управления шаговым двигателем подавая на тактовый вход этой микросхемы импульсы с программируемого устройства. Вместе с этим контроллером можно использовать например драйвер на эмиттерных повторителях на транзисторах такая схема универсальная, безопасная при неправильном управлении но у неё есть недостатки, можно также использовать микросхему драйвер если она подходит.
Рисунок 2 — Драйвер на транзисторах
Шаговый двигатель подключается к драйверу
Рисунок 3 — Шаговый двигатель
Для возможности реверса двигателя можно поставить переключатели (или переключатель) так чтобы при переключении менялись местами выводы output1 с output4 и output2 с output3 например:
Рисунок 4 — Реверс шагового двигателя
Просто контроллер:
Весь привод:
Купить микросхему счётчик CD4022 dip корпус (как на видео выше) 5шт.
Таймер NE555 dip корпус 5шт.
КАРТА БЛОГА (содержание)
Простое и бюджетное позиционирование | Festo Russia
Каждый из специалистов в области электрического привода хотя бы раз задавался вопросом «А действительно ли нужен сложный и мощный сервопривод для такой простой задачи позиционирования?» Приходилось ли Вам испытывать трудности с вводом сложного оборудования в эксплуатацию в условиях катастрофической нехватки времени? Тогда наша серия оптимизированных электроприводов «Optimized motion series» будет Вам интересна!
Предлагаемая серия, которая включает новый электроцилиндр EPCO и контроллер шаговых двигателей CMMO-ST, снижает сложность настройки и ввод оборудования в эксплуатацию до уровня детской игры.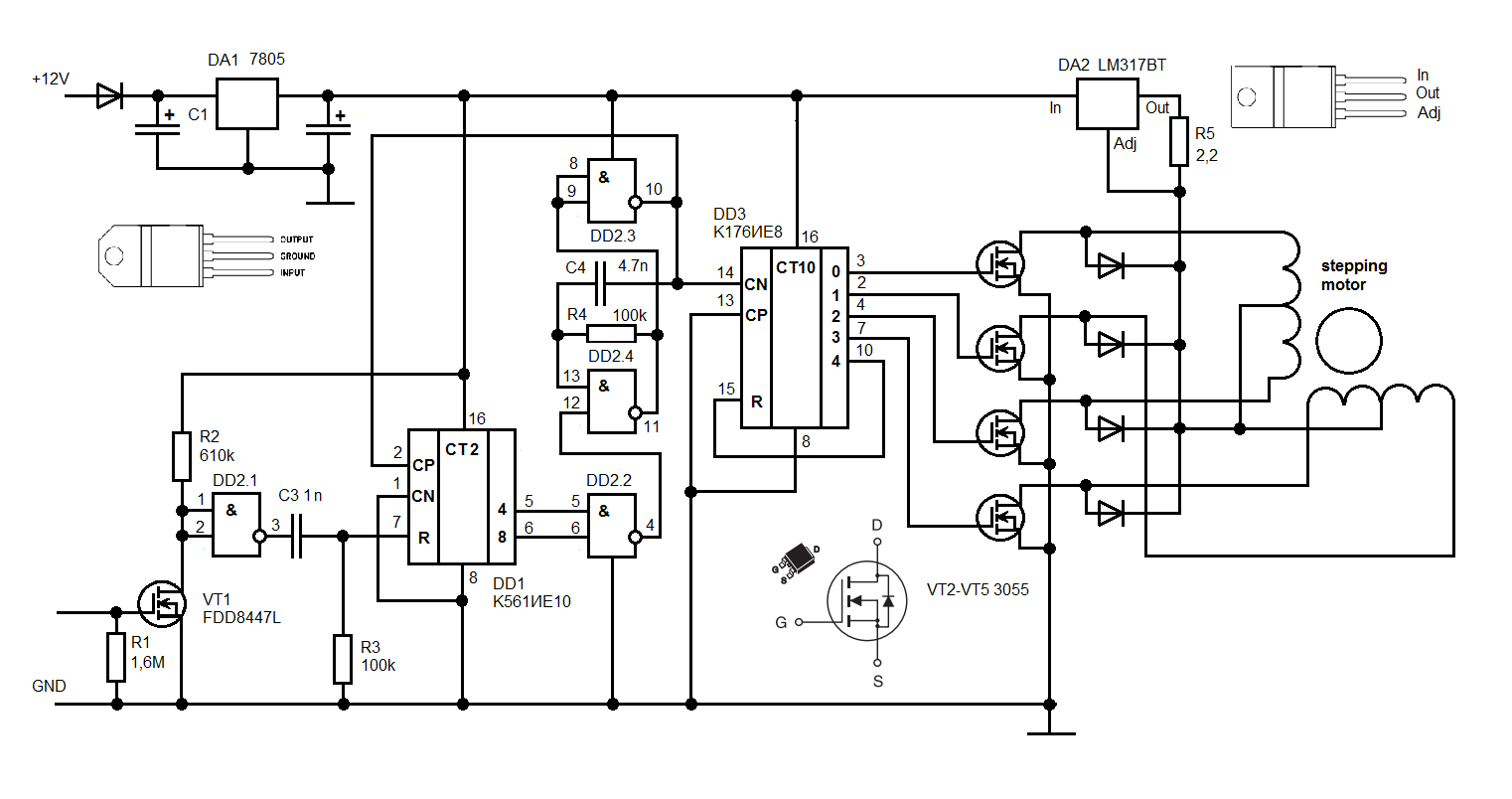 Благодаря Веб-интерфейсу «WebConfig» и гибкому программному обеспечению «FCT» ввод в эксплуатацию электропривода требует лишь доступа к Интернету и браузера. В итоге Вы получаете привлекательный по стоимости электромеханический привод, с которым работать также просто, как и с пневмоцилиндром.
Благодаря Веб-интерфейсу «WebConfig» и гибкому программному обеспечению «FCT» ввод в эксплуатацию электропривода требует лишь доступа к Интернету и браузера. В итоге Вы получаете привлекательный по стоимости электромеханический привод, с которым работать также просто, как и с пневмоцилиндром.
Электроцилиндр ЕРСО: оптимальное соотношение стоимости и функциональности
Электроцилиндр с неповоротным штоком и с подшипником скольжения, доступен в трех типоразмерах, с уже закрепленным, оптимально подобранным электродвигателем. Рабочий ход до 400 мм и большое количество монтажных аксессуаров позволяют применять его в широком спектре лабораторных и промышленных применений. Демпфирование в конечных положениях снижает шум при достижении крайних точек и энергию удара во время выхода в «нулевую» позицию. Данный электроцилиндр имеет длительный срок службы, а благодаря инновационному дизайну CleanLook он легко очищается.
Электроцилиндр EPCO с шарико-винтовым приводом
Загрузить PDF
Контроллер шагового двигателя CMMO-ST: все под контролем
Сервоконтроллер с обратной связью (ServoLite), для управления позиционированием приводов с шаговыми двигателями, например EPCO. Управление позиционированием никогда не было таким простым: семь свободно настраиваемых позиций, через напрямую назначенные дискретные входы/выходы или используя Ethernet. В то же время можно позиционировать этот же привод в 31 гибко назначаемую позицию, в пределах рабочего хода, используя программное обеспечение Festo Configuration Tool (FCT).
Дополнительные преимущества CMMO-ST говорят сами за себя: тихая работа двигателя, отсутствие пропуска шагов, низкий нагрев и опция Безопасного Отключения Момента (STO) для Уровня Производительности «е» (PLe).
Контроллер для шаговых моторов CMMO-ST
WebConfig: Настройка контроллера из «облака»
Главной особенностью новой системы позиционирования является простое и быстрое ввод ее в эксплуатацию, благодаря настройке и конфигурированию через Веб-интерфейс, используя «Облако параметров» — готовый набор параметров, который легко загружается из Интернета.
Как это работает? Оптимизированные и протестированные наборы элементов электропривода могут быть получены в каталоге на сайте или в программе Positioning Drives. Используя тип и заказной номер изделия, Вы можете загрузить соответствующий набор параметров и без задержки настроить до 7-ми свободно определяемых позиций для перемещения непосредственно на Вашем компьютере.
Программное обеспечение для расчета электропривода Positioning Drives
Festo Configuration Tool (FCT): максимальная гибкость
Тем, кому необходима большая функциональность и гибкость, могут использовать специализированное программное обеспечение FCT для настройки контроллера шагового двигателя CMMO-ST. Данная программа обеспечивает до 31-й свободно настраиваемой точки перемещения, также предлагая пользователю множество дополнительных опций диагностики. FCT очень просто преобразовывает «Оптимизированный электропривод» в многофункциональную систему позиционирования.
Скачать программное обеспечение FCT для контроллера CMMO-ST
УПРАВЛЕНИЕ ШАГОВЫМИ ДВИГАТЕЛЯМИ
Двигатели постоянного тока нашли множество применений, но непрерывное и плавное вращение ротора не всегда требуется. Естественная особенность двигателя BLDC, заключающаяся в том, что для его вращения необходимо постоянно переключать напряжения между обмотками, способствовала развитию шаговых двигателей. Их ротор может вращаться с определенными приращениями и оставаться стабильным в этих состояниях даже если управление прерывается. Возобновление подачи напряжения на катушки вызывает продолжение вращения.
Шаговые двигатели не имеют коммутаторов и щеток. Это синхронные двигатели постоянного тока с электронно-коммутируемым магнитным полем, вызывающим вращение якоря (его магнитов). Можно считать, что шаговые двигатели управляются цифровыми импульсами, и в шаговом двигателе полный угол поворота ротора разделен на дискретное количество шагов. Количество этих ступеней (фаз) равно количеству магнитов, расположенных вокруг центрального сердечника.
Конструкция шагового двигателя
Теория работы шаговых двигателей. В отличие от двигателей постоянного или переменного тока, для шаговых двигателей требуется последовательное питание, то есть они должны получать фиксированную последовательность импульсов для отдельных катушек. Также бывают биполярные и униполярные двигатели. Униполярный шаговый двигатель отличается от биполярного тем, что имеет дополнительный отвод обмотки, который разделяет обмотку на две части. Обычно биполярный шаговый двигатель имеет 4 или 8 контактов, а униполярный — 5 или 6 контактов.
Схема униполярных и биполярных шаговых двигателей
Вначале рассмотрим униполярный шаговый двигатель, ввиду простоты управления. В таком моторе ток в обмотке всегда течет в одном направлении. Это упрощает метод управления, в отличие от биполярного, где управление должно обеспечивать изменение полярности катушек шагового двигателя путем изменения направления тока через обмотку на противоположное.
Двух переключателей достаточно, чтобы построить простейший драйвер шагового двигателя, как показано на рисунке. Здесь используем 6-проводный униполярный двигатель. Также можно сказать, что двигатель в этом случае управляется однополярно, за счет использования средней обмотки катушки и постоянного напряжения питания на нее.
Переключая данные переключатели в последовательности S1, S2, S1, S2, S1, S2… заметим, что двигатель вращается. Рисунок выше иллюстрирует важный принцип управления: обе обмотки не могут питаться от одной пары одновременно. Каждое изменение переключателя поворачивает ротор на один шаг. Чем быстрее начнем переключать переключатели в последовательности S1, S2, S1, S2…, тем быстрее начнет вращаться ротор.
Подключение переключателей к катушкам шагового двигателя
Скорость шагового двигателя зависит не от величины напряжения, а от скорости подключения питания к отдельным обмоткам. Чтобы добиться полного вращения ротора с 200-шаговым двигателем, надо изменить положение каждого переключателя 100 раз, то есть выполнить до 200 последовательностей для двух переключателей. Это уже говорит о том, что шаговые двигатели не могут работать на высокой скорости. Из этого следует, что шаговые двигатели можно назвать «цифровыми двигателями», поскольку для вращения ротора необходимо переключать переключатели в соответствующей последовательности.
В нашем случае последовательность переключений также определяет направление вращения шагового двигателя. Когда меняем последовательность включения переключателей, то меняем и направление вращения, например S2, S1, S2, S1, S2, S1… влево, S1, S2, S1, S2, S1, S2… вправо. В этом примере есть двухпозиционные переключатели, которые всегда обеспечивают питание двух из четырех обмоток шагового двигателя в данный момент. Но использование трехпозиционных переключателей дает гораздо больше возможностей.
Опять же, обе обмотки никогда не питаются от одной пары, что является обязательным принципом управления шаговым двигателем. Благодаря трехпозиционным переключателям можно реализовать, например, полушаговое управление, благодаря разнообразию переключений. Одновременно могут быть под напряжением две, одна или ни одной из обмоток.
На практике вместо переключателей используются биполярные транзисторы, чаще можно встретить драйверы на основе полевых МОП-транзисторов, благодаря возможности пропускания большего тока, а также возможности их перегрузки. Транзистор здесь действует как переключатель, он либо закрыт, либо полностью открыт.
Упрощенная схема управления униполярным шаговым двигателем
Чтобы управлять таким мотором, надо обеспечить соответствующую последовательность импульсов. Например, только одна из четырех обмоток шагового двигателя находится под напряжением одновременно (это своего рода волновое управление). На каждый цикл двигателя подается питание на одну из четырех катушек униполярного шагового двигателя. Вращение его будет выглядеть так:
Вращение униполярного шагового двигателя в последовательных тактах цикла управления волной
Управляющая последовательность A +, B +, A-, B- повторяется каждые четыре импульса тактового генератора. Этот тип управления называется однофазным или волновым. Это полный шаг управления, потому что двигатель выполняет один полный ход (шаг) с одним импульсом генератора.
Последовательность импульсов A +, B +, A -, B — вращает двигатель в одном направлении. Смена полюсов статора (N, S) заключается в питании соответствующей катушки (A + или A -).
Самый простой способ изменить направление — поменять местами одну пару проводов катушки (поменять местами, например, B + с B — и B — с B +), затем дадим последовательность A +, B -, A -, B + импульсы, он вращает двигатель в противоположном направлении. Так управление направлением реализовано в некоторых контроллерах шаговых двигателей. Самый простой способ изменить последовательность импульсов — использовать, например, реле.
Форма волны (однофазная) импульсная последовательность драйвера
Упрощенная схема однофазного (волнового) регулятора с изменением направления вращения
Несомненное преимущество униполярных шаговых двигателей — простота управления. Но это связано с волновым управлением, с использованием только половины обмотки за раз, одна из них всегда не используется. Используется только 1/4 всех обмоток шагового двигателя, что значительно снижает максимальную производительность.
Двухфазное управление шаговым мотором
Гораздо лучшей альтернативой однофазному управлению будет двухфазное, при котором работают две из четырех обмоток шагового двигателя. В таком управлении используем 1/2 всех обмоток. Тогда мотор станет более эффективен.
Вращение двигателя при двухфазном полноступенчатом управлении
Две катушки шагового двигателя всегда находятся под напряжением. Опять же, мы никогда не питаем две катушки из одной пары одновременно. С каждым импульсом от генератора переключается только одна катушка из отдельных пар (последовательно). В первом цикле катушки A и B находятся под напряжением, во втором катушка A все еще находится под напряжением, в то время как катушка B переключается на B +, в третьем цикле катушка B + находится под напряжением из второго цикла, и катушка A переключается на A + и так далее.
Двухфазная последовательность управляющих импульсов
Формы сигналов A + и B + сдвинуты друг к другу (две из четырех обмоток всегда работают в заданном цикле), а сигналы A + и B- инвертируются с сигналами A + и B +. Такие формы сигналов (смещенные относительно друг друга) легко генерируются, например, благодаря интегральной микросхеме 4013, которая имеет два D-триггера. Также можно использовать микроконтроллер. Изменение направления вращения в таком контроллере, как и при однофазном (волновом) управлении, может быть реализовано путем изменения направления проводов одной пары концов катушки (изменение с A + на A — и A — на A +). Чаще всего изменение скорости основано на изменении логики последовательности управляющих импульсов. Мы можем сделать это, например, используя логические элементы XOR, которые будут отрицать сигналы (инвертировать их).
Упрощенная схема двухфазного контроллера с изменением направления вращения, D-триггерами для создания смещенных сигналов и логическими вентилями XOR
Оба типа управления представленные выше: однофазный (волновой) и двухфазный (инвертированные сигналы, управляющие транзисторами), в просторечии, являются униполярными типами управления, потому что используем униполярные шаговые двигатели с дополнительными ответвлениями обмотки. Также в биполярных шаговых двигателях, где работает вся обмотка, мы встречаемся с однофазным и двухфазным управлением, там идея работы аналогична.
Также стоит упомянуть моторы VR (реактивного сопротивления). Двигатели VR обычно имеют три обмотки. Чтобы управлять таким двигателем, нам нужно подавать отдельные обмотки одну за другой в последовательности A, B, C, A, B, C… это заставит двигатель вращаться в одном направлении, в то время как последовательность питания обмотки A, C, B, A, C, B… заставит его вращаться в противоположном направлении. Самый простой способ изменить направление — поменять местами концы двух обмоток шагового двигателя VR, и проще всего это сделать с помощью реле.
Упрощенная схема драйвера резистивного шагового двигателя
Последовательность импульсов управления шаговым двигателем
Последовательность импульсов драйвера реактивного шагового двигателя очень похожа на волновое управление.
Биполярное управление обеспечивает более эффективное использование шагового двигателя, при котором всегда работает вся обмотка шагового двигателя, что дает гораздо лучшую производительность на низких и средних скоростях. А крутящий момент примерно на 30 — 40% больше. Но для этого требуется изменить полярность питания катушки, изменив направление тока в обмотках (например поменяв местами концы катушек). Для этого используются два транзисторных моста H (название происходит от сходства с буквой H на схеме), которые состоят из двух ветвей, а каждая ветвь состоит из двух транзисторов. Чаще всего для построения такого моста используются биполярные транзисторы NPN или MOSFET N.
Биполярный драйвер требует более сложного управления из-за того, что нужно управлять каждым из восьми транзисторов индивидуально. Взамен получаем все возможности шагового двигателя, хотя реализация такого типа управления не самая простая.
Принцип работы такого моста основан на том, что если верхний транзистор проводит в одной ветви, а нижний транзистор в другой, и наоборот, то через катушку шагового двигателя будет протекать ток. Если два верхних или два нижних транзистора проводят одновременно в двух ветвях одного моста, то ток через катушку не будет протекать. Путем соответствующего управления транзисторами получаем изменение направления тока, протекающего через катушку, и, таким образом, изменение полярности катушки.
Также в биполярных контроллерах имеем дело с однофазным (волновым) и двухфазным управлением. Оба элемента управления являются полношаговыми. При однофазном управлении, как и в униполярных шаговых двигателях, в следующем цикле запитывается только одна катушка,
Вращение биполярного шагового двигателя в последовательных тактах однофазного (волнового) цикла управления
Вращение биполярного шагового двигателя в последовательных тактах двухфазного цикла управления
Упрощенная схема драйвера для биполярных двигателей с транзисторными Н-мостами
Последовательность импульсов для питания катушек идентична униполярному двигателю, но в этом случае нет четырех сигналов на транзисторы, только восемь сигналов на восемь транзисторов. Каждым из них нужно управлять индивидуально, переключая соответствующие транзисторы в нужный момент. Ток протекает через катушку, когда один верхний транзистор и один нижний транзистор включены «крест-накрест», то есть 1 и 3 на схеме, другие 2 и 4 в катушке A шагового двигателя закрыты. Но когда выключаем 1 и 3 и включаем 2 и 4, то меняем направление тока в катушке.
Включаем транзисторы «крестом» в катушке A и B. Напряжение питания катушки задается как в униполярном управлении, в то время как «массовый» транзистор подключается крест-накрест к присоединенному верхнему силовому транзистору. Можем если надо изменить скорость, изменив управление двумя концами одной катушки, что приведет к другой последовательности импульсов. Самый простой способ — использовать реле, как при униполярном управлении, также можно реверсировать сигналы, управляющие транзисторами.
Ход управления катушками в биполярном шаговом двигателе волнового управления
Чтобы понять идею, можно сказать что на схеме показано питание проводов биполярного шагового двигателя, т.е. высокое состояние означает напряжение на конкретном проводе (A +, B +, A -, B -), а низкое состояние — появление заземления на отдельных проводах в заданном цикле. Здесь меняем направление тока в катушках, в первом импульсе (в первом цикле) генератор A + земля A — питается от генератора, а в третьем A — земля A + подается, меняя «полярность» источника питания так, чтобы меняли полярность катушек, например N на S.
Фактически, форма сигналов управления транзисторами в H-мосте будет выглядеть как на схеме ниже. Это биполярное однофазное (волновое) управление.
Ход транзисторной последовательности управления в биполярном волновом контроллере
Идея управления катушками двухфазного биполярного двигателя аналогична управлению двухфазным униполярным шаговым мотором. Здесь также нужно управлять каждым транзистором отдельно, как в случае управления биполярной волной. Можем изменить скорость на реле, как при управлении волнами, или использовать логические вентили, меняющие сигналы.
Ход управления катушками в биполярном двигателе двухфазного управления
Эта схема, что касается управления биполярной волной, показывает соответствующий источник питания проводов биполярного шагового двигателя. Низкое состояние означает основное высокое напряжение питания катушки. В первом цикле проводники A — и B — земли A + и B + находятся под напряжением, во втором цикле проводники A — и B + земли A + и B- находятся под напряжением и так далее.
Последовательность импульсов управления транзистором будет выглядеть примерно так:
Последовательность управления транзистором в двухфазном биполярном контроллере
Как правило, биполярные шаговые двигатели требуют сложной схемы управления. Эта проблема была решена с появлением специализированных интегральных схем (A3977, A4988, L297), которые используются для генерации соответствующей последовательности импульсов для управления транзисторами в H-мосте.
Также можем использовать логические элементы или D-триггеры для генерации этой последовательности, но чаще существуют драйверы, построенные на микроконтроллерах или специализированных интегральных схемах.
Самым большим преимуществом управления биполярным шаговым двигателем является хорошо используемый крутящий момент, благодаря тому что вся обмотка находится в текущем состоянии после получения импульса (в течение одного цикла).
Двигатели PM (с постоянным магнитом) и HB (гибридные), несмотря на их различную конструкцию, управляются одинаково. Каждый двигатель с 4 контактами может управляться только биполярно, в то время как униполярный шаговый двигатель с 6 контактами может работать как биполярный, так и униполярный.
Двигатели с 8 выводами дают гораздо больше возможностей, они могут работать как однополярные, так и биполярные. Кроме того, шаговый двигатель можно подключить последовательно, где нужно подавать на него более высокое напряжение, но в то же время он будет потреблять меньше тока, что приведет к снижению мощности на более высоких скоростях.
Также можем подключить его параллельно и запитать от более низкого напряжения, но с более высоким током. Это даст меньше потерь мощности на более высоких скоростях. На низких скоростях, как при последовательном, так и при параллельном подключении, двигатель будет иметь одинаковый крутящий момент (мощность).
Схема последовательного и параллельного подключения 8-проводного шагового двигателя
Идея последовательного и параллельного подключения также может быть использована с 6-проводным униполярным двигателем.
Схема последовательного и параллельного подключения 6-проводного шагового двигателя
Следует отметить, что при управлении шаговым двигателем мы переключаем обмотки, имеющие некоторую индуктивность. Когда ток прерывается в индуктивности, генерируется напряжение самоиндукции, которое может быть большим и повредить транзистор. Чтобы исключить это явление, необходимо правильно обеспечить протекание тока в катушке даже после выключения транзистора. Наиболее распространены быстродействующие диоды, которые срезают всплески, возникающие при открытии транзистора. Также можете найти драйверы с конденсаторами вместо диодов.
Схема подключения диодов к униполярному драйверу на биполярных транзисторах
Верхние диоды на схеме отсекают положительные импульсы, образовавшиеся в результате отключения тока от катушек шагового двигателя. С другой стороны, нижние диоды тоже нужны, потому что две обмотки одной пары образуют автотрансформатор. Когда в одной катушке есть положительное перенапряжение, отсекаемое верхним диодом, в другой катушке той же пары происходит отсечение отрицательного перенапряжения нижним диодом.
Иная ситуация с использованием MOSFET-транзисторов, потому что транзистор уже имеет в своей структуре переход сток-исток, который в данном случае действует как диод. При использовании небольших двигателей верхние диоды можно не устанавливать. Положительная энергия вывода не очень велика и может быть поглощена транзистором, который кратковременно работает в разрешенном режиме лавинного пробоя и действует как стабилитрон.
Схема униполярного шагового двигателя с MOSFET транзисторами
Также используем тот же принцип для биполярного управления. При использовании MOSFET-транзисторов можем использовать встроенные «диоды» в транзисторе.
Схема использования диодов в биполярных драйверах
Схема биполярного шагового двигателя с MOSFET транзисторами
Ещё стоит упомянуть инерцию обмоток, ограничивающую скорость нарастания тока. Каждая из катушек шагового двигателя имеет определенную индуктивность L и сопротивление R. После подачи напряжения на катушку ток I определяется напряжением питания катушки (VCC) и ее сопротивлением, то есть I = VCC / R. Он не сразу достигает значения, определяемого L iR. Ток постепенно увеличивается, а постоянная времени нарастания составляет T = L / R. Обычно это 10 мс, поэтому период прямоугольной волны должен составлять 20 мс или 50 Гц, чтобы обеспечить 10 мс высокого состояния длительности импульса для катушки для достижения полного тока.
На низких частотах (скоростях) это значения не имеет, а на более высоких частотах ток не успеет увеличиться до нужного значения. Следовательно, двигатель будет значительно терять крутящий момент при увеличении оборотов, из-за того что ток не успевает увеличиться до номинального тока мотора.
Лучшее решение этой проблемы — подать на двигатель напряжение, намного превышающее номинальное напряжение его работы. Из-за более высокого напряжения ток нарастает быстрее. Правда для этого требуется специальная схема, ограничивающая ток протекающий по обмоткам.
Среди других решений — использование резистора, который выбирается так, чтобы ток в установившемся режиме был равен номинальному току двигателя. Недостатком такой системы являются большие потери мощности на резисторе.
Схема использования резистора для ограничения тока в обмотках шагового двигателя
Иное решение — заменить резисторы на источник тока, который будет поддерживать заданное значение. Сначала на катушку подается высокое напряжение, которое ускоряет нарастание тока, затем источник будет поддерживать заданное значение тока катушки. Правда потери мощности по-прежнему являются большим недостатком, на этот раз на транзисторах, из-за высокого напряжения питания.
Схема использования источника тока для ограничения тока в обмотках шагового двигателя
Другой способ — работать от двух источников питания. В первые моменты импульса катушка питается от более высокого напряжения, которое ускоряет рост тока, затем она переключается на второй источник с номинальным напряжением питания шагового двигателя.
Недостатком такого решения является необходимость использования двух источников, что связано с дополнительными преобразователями. На схеме ниже переключатели используются для иллюстрации идеи переключения источников напряжения.
Упрощенная схема использования двух источников питания для регулирования тока в обмотках шагового двигателя
Самый эффективный метод — чопперский. Он заключается в подаче на катушку двигателя не одиночных импульсов, а серии импульсов по форме напоминающих сигнал ШИМ. В первый момент импульса от генератора прикладывается более высокое напряжение, которое ускоряет нарастание тока, позже оно ограничивается циклической работой транзистора.
Фрагмент схемы биполярного контроллера с технологией чоппера
Форма сигнала прерывателя для управления транзистором
Напоминаем, что в первые моменты управляющего импульса продлеваем включение транзистора, что позволяет быстрее увеличить ток, благодаря гораздо более высокому напряжению VCC, чем номинальное напряжение мотора. В следующие моменты импульса значительно сокращаем время транзистора, он работает циклически и тем самым ограничивает напряжение до номинального рабочего напряжения шагового двигателя. Компаратор, который будет сравнивать напряжения решает, когда сигнал управления транзистора должен быть переключен с постоянного на прерывистый. Благодаря этому есть возможность регулировать ток, подаваемый на катушку шагового двигателя.
Схема использования компаратора в биполярном контроллере
Эта схема очень эффективна и позволяет регулировать ток катушки независимо от напряжения питания, изменяя напряжение Vs.
Напряжение питания катушки VCC намного выше, чем рабочее напряжение обмотки, а это означает что после включения транзистора ток достигает своего рабочего значения намного быстрее, за гораздо более короткое время чем постоянная времени L / R. После достижения порогового значения (установленного Vs) компаратор сравнивает падение напряжения на управляющем резисторе Rs с напряжением Vs. Если ток двигателя и, следовательно, падение напряжения на Rs увеличиваются выше напряжения Vs, компаратор запускает моностабильный триггер, который излучает один импульс и на короткое время отключает напряжение питания катушки, что снижает ток, а затем цикл повторяется с начала.
В результате компаратор и триггер циклически открывают и закрывают транзистор, что предотвращает повышение напряжения катушки до напряжения питания VCC. За счет циклической работы транзистора ограничивается напряжение питания катушки шагового двигателя. Тогда течение имеет пилообразную волну. Ниже представлена диаграмма тока в обмотке прерывателя.
График импульсов тока в обмотке
Этот управляющий сигнал с прерывистой катушкой позволяет увеличить крутящий момент шагового двигателя, особенно при более высоких скоростях вращения. Конечно потребуется еще более интеллектуальная система управления (эта проблема была решена с появлением встроенных драйверов шаговых двигателей и микроконтроллеров), но она позволяет ускорить процесс увеличения тока благодаря подаче гораздо более высокого напряжения на более высокие частоты от генератора, без значительных потерь энергии или использования двух разных источников питания. Тут понадобится только один блок питания с относительно высоким напряжением.
Очень хорошая альтернатива, особенно в тех случаях когда драйвер не нуждается в специальных функциях, — использовать готовые интегральные микросхемы драйверов шаговых двигателей. Многие производители предлагают широкий спектр специализированных чипов, разработанных специально для управления шаговыми двигателями.
Обмотки шаговых двигателей чаще всего управляются формой сигнала ШИМ через H-мосты, по одному на обмотку. Угол поворота пропорционален количеству импульсов, а скорость вращения — их частоте. При работе с полными ступенями довольно много шума и вибрации. К сожалению, также могут быть случаи пропуска ступеней («выход») и, как следствие, потеря контроля над положением ротора. Эта проблема решается за счет использования микрошагов, таким образом питая обмотки так, что ротор проходит через промежуточные положения за один полный шаг.
Если для быстрой остановки двигателя требуется еще несколько шагов, важно правильно определить состояние перехода и остановки. В этом случае желательно управление с обратной связью в отличие от абсолютного позиционирования с обратной связью, основанного на подсчете шагов. Существует адаптивное управление скоростью шагового двигателя, позволяющее остановить его как можно скорее, несмотря на возможное увеличение нагрузки на этом этапе.
Это возможно на основании наблюдения увеличения BENF и соответствующего увеличения частоты импульсов, питающих двигатель. Вышеописанный алгоритм реализован в интегрированном однокристальном контроллере AMIS-30624. Он настроен для работы с различными типами шаговых двигателей, диапазонами позиционирования и такими параметрами, как скорость, ускорение и замедление.
Схема контроллера AMIS-30624
Он имеет встроенный бессенсорный детектор потери шага, который предотвращает потерю шагов позиционером и быстро останавливает двигатель при его остановке. Это обеспечивает тихую, но точную калибровку во время эталонного прогона и позволяет работать с полузамкнутым контуром. AMIS-30624 включает в себя как аналоговые цепи высокого напряжения, так и цифровые блоки управления. Чип разработан для применений в автомобильной, промышленной и строительной отраслях.
Форум
Форум по обсуждению материала УПРАВЛЕНИЕ ШАГОВЫМИ ДВИГАТЕЛЯМИ
Плата контроллера импульсного драйвера шагового двигателя с регулируемой скоростьюи пультом дистанционного управления: Amazon.com: Industrial & Scientific
В настоящее время недоступен.
Мы не знаем, когда и появится ли этот товар в наличии.
- Убедитесь, что это подходит введя номер вашей модели.
- Скорость платы контроллера драйвера шагового двигателя регулируется с помощью пульта дистанционного управления
- Входное напряжение: DC4 ~ 6 В / 300 ~ 500 мА (поэтому мы можем вводить либо аккумулятор, либо источник питания USB)
- Тип приводимого двигателя: 2-фазный 4-проводной (3-24 В шагового двигателя могут управлять вращением, но с другим крутящим моментом)
- Индикатор скорости: 9 уровней Можно регулировать скорость кнопкой на борту или с помощью пульта дистанционного управления
- 1 x Плата с регулируемой скоростью контроллера драйвера шагового двигателя 1 x Пульт дистанционного управления 1 x 2-полюсный провод питания 1 x 4-полюсный провод для подключения
Характеристики этого продукта
| Фирменное наименование | Balance World Inc |
|---|---|
| Тип контроллера | дистанционное управление |
| Номер детали | Регулируемая скорость шагового двигателя Pulse Dri |
| Код UNSPSC | 26101200 |
Контроллер шагового двигателя | LabJack
Обзор
Шаговые двигатели
Шаговые двигатели— это тип бесщеточного электродвигателя постоянного тока, который делит полный оборот на несколько дискретных «шагов» или положений, в которые может перемещаться двигатель.Это позволяет осуществлять позиционное управление двигателем, передавая ему команду на перемещение на определенное количество шагов. Чем больше шагов во вращении двигателя, тем больше определяется его разрешающая способность и то, насколько точно его движение можно контролировать. Природа шаговых двигателей позволяет использовать их в системах, где обратная связь от энкодера невозможна. Если количество шагов в одном обороте известно, двигатель можно переместить на любое желаемое расстояние, вычислив, сколько оборотов, а затем сколько шагов соответствует этому расстоянию.После выполнения такого количества шагов двигатель должен переместиться в точное правильное положение.
Шаговые двигатели обычно состоят из шестерни, которая соединена с валом двигателя и окружена множеством электромагнитов. Эти электромагниты разделены на группы, которые называются «фазами». Эти фазы чередуются по кругу вокруг шестерни. Каждый электромагнит в фазе получает питание одновременно и притягивает к себе ближайший зуб шестерни. Как только шестерня переместилась для магнитного совмещения с электромагнитами в фазе под напряжением, она фактически переместилась на один «шаг».Чтобы перейти на следующий шаг, эта фаза отключается и включается следующая фаза в последовательности. Это снова подтянет зубья шестерни к следующей фазе и повернет двигатель еще на один шаг. Поскольку каждая из этих фаз находится под напряжением независимо от других фаз, обычно каждая фаза требует своего собственного набора выводов. Программы и схемы контроллера шагового двигателя интерпретируют команду пользователя, определяющую, на сколько шагов двигатель должен переместиться, и определяют, когда подавать питание на каждую фазу соответственно.
| Обычно ссылаются на электрическую схему шагового двигателя. | Базовая схема шагового двигателя, вращающегося из-за активации одной катушки. |
Униполярный Vs. Биполярные шаговые двигатели
Обычно существует два типа шаговых двигателей: униполярные и биполярные.
Самый простой тип шагового двигателя — это двухфазный униполярный шаговый двигатель. У них есть только две фазы A и B, которые чередуются вокруг металлической шестерни. Каждая фаза состоит из одной катушки и «центрального отвода» или «общего провода». Два конца катушки и центральный отвод образуют по три вывода для каждой фазы, всего шесть выводов для двух фаз.Такое расположение позволяет переключать направление магнитного полюса каждой катушки с помощью одного переключателя или двух транзисторов на катушку, чтобы определить, на каком конце катушки будет проходить ток. Это позволяет изменять направление магнитного полюса каждой катушки без необходимости менять направление тока на противоположное. Функцию переключения можно упростить с помощью нашей платы переключения мощности PS12DC или нашего драйвера реле LJTick, который будет полезен только для униполярных двигателей, поскольку для биполярных шаговых двигателей требуется более сложная схема.
Биполярные шаговые двигатели также имеют по одной катушке на фазу, но у них нет центрального отвода. Отсутствие центрального отвода приводит к тому, что биполярные шаговые катушки могут менять направление своих магнитных полюсов только путем изменения направления тока в катушке. Обычно это делается с помощью одной цепи H-моста на катушку. Включая одновременно два из четырех транзисторов в H-мосте, пользователь может программно изменить направление тока и, соответственно, магнитный полюс каждой катушки.
Основы управления шаговым двигателем
Существует множество способов управления шаговыми двигателями, и передовые методы управления продолжают развиваться. Некоторые из существующих:
Если требуется более высокая точность или крутящий момент, также существуют расширенные возможности управления, включающие процессоры цифровых сигналов (DSP). Существуют также системы шаговых двигателей с замкнутым контуром управления, которые используют угловые энкодеры в качестве механизмов обратной связи, которые обеспечивают более точное управление вращением или алгоритмы «удержания» вращающегося вала.Дополнительные объяснения того, как управляются шаговые двигатели, можно найти по ссылкам в разделе для дальнейшего чтения.
В этом примечании к приложению подчеркивается, что устройства LabJack могут управлять шаговыми двигателями, используя однофазный режим полного шага (волновой привод) и полушаговый режим работы с помощью сценария Lua. Эти сценарии доступны в разделе примеров сценариев Lua на нашем веб-сайте или в Kipling и имеют названия unipolar_full_step.lua и unipolar_half_step.lua.
Оборудование
Для успешного подключения и эксплуатации шагового двигателя с помощью LabJack вам потребуются следующие материалы:
- Компьютер с USB, Ethernet или WiFi
- LabJack T4 или T7
- PS12DC — плата переключения питания
- Униполярный шаговый двигатель
- PS12DC может обрабатывать 750 мА на канал до 28 В, поэтому подойдет большинство униполярных шаговых двигателей NEMA17. Всегда сверяйте характеристики двигателя с таблицей данных PS12DC.
- Биполярные двигатели не будут работать, так как для них требуется 2 комплекта H-мостов, а PS12DC — это только коммутационное устройство верхнего плеча, поскольку в нем используются полевые МОП-транзисторы с P-каналом.
- Источник питания
- Здесь мы будем использовать 12 В постоянного тока, но все, что не превышает номинальных значений PS12, будет работать
- Монтажные провода
Основные подключения
Сначала подключите PS12DC к LabJack, как описано в таблице данных PS12DC. Как обсуждалось выше, средний двухфазный униполярный шаговый двигатель должен иметь в общей сложности шесть выводов, с двумя концами катушки и центральным отводом для каждой фазы. Подключите два конца катушки одной из фаз к S0 и S1 на PS12DC и подключите центральный отвод катушки к GND1.Аналогичным образом подключите два конца катушки другой фазы к S2 и S3 и подключите центральный отвод второй фазы GND2. Затем подключите VS1 к VS2 и подключите GND1 к GND2. Наконец, подключите VS1 к положительной клемме источника питания 12 В и подключите GND1 к отрицательной клемме источника питания 12 В.
ПРИМЕЧАНИЕ: Можно использовать любую пару S каналов, которые находятся в одном блоке PS12DC, и выполнять одну и ту же операцию. Скрипты LUA по умолчанию unipolar_full_step.lua и unipolar_half_step.lua использует S0 + S1 и S4 + S5 в качестве каналов ввода-вывода, поэтому обязательно обновите сценарий LUA с помощью S-каналов вашего приложения перед его загрузкой и использованием.
Каждый из S каналов PS12DC соответствует цифровой линии ввода / вывода LabJack. Установив на соответствующей линии ввода-вывода данного S-канала высокий уровень, 12 В от источника питания будут направляться через этот S-канал. Таким образом, пользователь может программно выбрать, когда полностью подавать питание на каждый конец катушки, путем простого переключения линий ввода / вывода.S0: S7 соответствует EIO0: EIO7, а S8: S11 соответствует CIO0: CIO3.
Другой вариант схемы коммутации переключения мощности — это наш LJTick-RelayDriver. LJTRD может быть подключен к LabJack с его терминалами INA / INB, подключенными к любым линиям цифрового ввода / вывода, как показано в таблице данных драйвера LJTick-Relay. Затем питание и заземление источника питания можно подключить к клеммам VR и GNDR LJTRD. Теперь, как и в случае с PS12DC, для линий цифрового ввода / вывода можно установить высокий уровень, чтобы замкнуть твердотельный переключатель в LJTRD и направить напряжение от источника питания на соответствующую клемму RA / RB.Если концы катушки фазы подключены к этим клеммам RA и RB, LJTRD позволит пользователю решить, когда полностью включить каждую фазу. Также можно использовать любое другое твердотельное реле или транзистор с аналогичными функциями и номиналами.
Определение потенциальных клиентов
Мультиметр можно использовать для определения выводов каждой фазы как конца катушки или центрального отвода. Один из способов сделать это — измерить сопротивление между разными парами проводов.Сопротивление между двумя концевыми выводами катушки должно быть вдвое больше, чем сопротивление между концевым выводом катушки и центральным выводом. Проверив сопротивление между несколькими парами проводов, вы сможете определить, какие из них являются центральными отводами, а какие — концами катушки, и сможете соединить их в конфигурации, описанной выше.
Для управления шаговыми двигателями состояния линий цифрового ввода / вывода должны переключаться по определенной схеме из одного из указанных выше режимов привода на высоких скоростях. Хотя эти формы сигналов могут быть созданы путем установки линий ввода / вывода непосредственно с компьютера, более эффективно использовать возможности Lua Scripting LabJack и создать гибридное приложение, в котором некоторая логика находится на главном компьютере и имеет код управления шаговым двигателем. выполняется непосредственно на устройстве серии T.Следующая функциональная блок-схема дает обзор того, как LabJack можно использовать для управления шаговыми двигателями:
После понимания на высоком уровне того, что необходимо выполнить, можно выполнить основной рабочий процесс: подключение к устройству, настройку устройства и управление устройством.
Подключение к LabJack
Первым шагом в большинстве приложений LabJack является открытие соединения с устройством, использующим библиотеку LJM.Это делается с помощью функции LJM_Open, которой можно передать тип устройства, идентификатор, представляющий серийный номер или IP-адрес устройства, и тип соединения для открытия определенного устройства. Функцию open также можно вызвать с помощью LJM_Open (LJM_dtANY, LJM_ctANY, LJM_idANY, …), и она откроет любое подключенное устройство. После открытия соединения с устройством функция open вернет дескриптор, который затем можно использовать для чтения или записи на устройство LabJack для тела приложения.После завершения работы над телом приложения рекомендуется закрыть соединение с устройством с помощью функции LJM_Close. Подробнее о подключении к устройству LabJack см. LJM — Открытие и закрытие.
Настройка LabJack для управления шаговым двигателем
Чтобы настроить LabJack в качестве контроллера униполярного шагового двигателя, сначала загрузите и запустите один из сценариев LUA, unipolar_full_step.lua или unipolar_half_step.lua (исходный код можно найти в разделе примеров сценариев Lua на нашем веб-сайте) на LabJack и сохраните его. скрипт по умолчанию при включении.Для руководства по загрузке и сохранению сценария LUA в LabJack см. Учебное пособие по автономному сценарию Lua. Сценарии также могут быть загружены через внешнюю программу, как можно увидеть в примере Python, найденном здесь, и в примерах LabVIEW, обсуждаемых ниже. Эти сценарии lua объявляют каналы FIO из приведенного выше руководства по подключению, а затем определяют массивы, которые определяют порядок, в котором концевые выводы катушки должны быть запитаны, чтобы успешно переместить двигатель на желаемое количество шагов в режиме полного или полушагового режима.Затем сценарий LUA объявляет следующие регистры USER_RAM, которые могут быть изменены внешними программами для управления двигателем:
- USER_RAM1_I32 (46080): целевая позиция (шаги)
- USER_RAM2_I32 (46082): Текущая позиция (шаги)
- USER_RAM0_U16 (46180): включить (1 = включить, 0 = выключить)
- USER_RAM1_U16 (46181): eStop (1 = eStop, 0 = запустить)
- USER_RAM2_U16 (46182): положение удержания (1 = заблокировать положение двигателя, 0 = разблокировать двигатель после текущего перемещения)
- USER_RAM3_U16 (46183): Установить исходное положение (1 = устанавливает текущую позицию как позицию нулевого шага)
После понимания основных сценариев можно разработать расширенные сценарии, реализующие более сложные приложения, такие как:
- При использовании ротационного двигателя можно отслеживать положение по градусам.
- Если шаговый двигатель управляет линейным суппортом, положение можно отследить по расстоянию.
- Переместите двигатель на полную скорость в одном направлении.
Псевдокод управления шаговым двигателем
После того, как шаговый двигатель правильно подключен и один из сценариев LUA конфигурации был загружен в LabJack, приложение внешнего управления может читать и писать из регистров USER_RAM, чтобы отслеживать и управлять работой. Псевдокод для базового управления двигателем для перемещения на 200 шагов можно увидеть ниже:
ручка = ljm.openS («ЛЮБОЙ,» ЛЮБОЙ «,» ЛЮБОЙ «)
target_position = 200
ljm.eWriteAddress (handle, 46183,0,1) // Сигнал для установки дома
ljm.eWriteAddress (handle, 46182,0,0) // Не держите двигатель для стендовых испытаний, так как он выделяет много тепла
ljm.eWriteAddress (handle, 46080,2, target_position) // Записываем новую целевую позицию
ljm.eWriteAddress (handle, 46180,0,1) // Включение движения двигателя
// Дождитесь, пока двигатель достигнет пункта назначения (включение автоматически выключится в пункте назначения)
wait = true
во время ожидания:
wait = ljm.eReadAddress (дескриптор, 46180,0) == 1
Чтобы упростить начало работы с шаговыми двигателями, мы разработали приложение LabVIEW, которое загружает правильный сценарий .lua в устройство серии T после редактирования требуемых строк ввода-вывода, которые необходимо контролировать, и выбора между сценарием полного шага а также скрипт полушага. Приложение доступно в формате «.exe» (ссылка на него находится внизу страницы и здесь) и будет запускаться после загрузки и установки нашей библиотеки Windows LJM и предоставления ей возможности установить LabVIEW 7.1 рабочий движок. Если требуется кросс-платформенный пример, у нас также есть пример Python, который можно загрузить и использовать, который опубликован в разделе «Примеры сценариев Lua» на нашем веб-сайте.
Подключение к устройству и настройка устройства:
Загрузить и запустить последовательность шагов
Примеры LabVIEW Уведомление:
Этот пример представляет собой .exe нашего «приложения-контроллера шагового двигателя», доступного для загрузки на нашей веб-странице LabVIEW для LJM и использующего шаблон проектирования производитель-потребитель.Более простой пример «StepperController.vi», а также более исчерпывающий пример «stepper-controller-with-reads.vi» можно найти в папке:
LabVIEW_LJM / Примеры / Подробнее / Примечания по приложениям / Stepper-motor-control
Большинство функций устройств серии T можно использовать с помощью «Write Read Loop with Config.vi». Предполагая, что один из сценариев конфигурации LUA уже загружен в LabJack, базовое управление двигателем может быть выполнено в этом примере с использованием регистров, указанных выше в разделе «Настройка LabJack для управления шаговым двигателем».Этот пример может находиться в папке:
LabVIEW_LJM / Примеры / Основы
WiFi Контроллер шагового двигателя | Мастерская DroneBot
Введение
Я получил запрос от одного из моих зрителей, который создал продукт, контроллер шагового двигателя Wi-Fi, который он продвигает с помощью краудфандинга. После просмотра страницы краудфандинга я с готовностью согласился протестировать и просмотреть ее. Следующая статья и сопровождающее ее видео являются результатами моей оценки.
WiFi Степпер
Wifi Stepper был разработан Эндрю Клофасом из Good Robotics.В настоящее время он финансируется на платформе сбора средств Crowd Supply.
Wifi Stepper имеет несколько впечатляющих характеристик:
- Поддерживает биполярные шаговые двигатели, рассчитанные на напряжение до 85 вольт при 10 ампер.
- Полный беспроводной контроль над WiFi.
- Имеет полнофункциональный пользовательский веб-интерфейс.
- Имеет JSON API, позволяющий управлять с помощью сценария на удаленном компьютере.
- Несколько функций безопасности для защиты вашей установки.
- Поддерживает контроль тока и напряжения.
- Позволяет шаговому двигателю имитировать серводвигатель.
- Может использовать внешний источник пошаговой синхронизации.
- Поддерживает внешний переключатель останова и реверса.
- Последовательный порт UART.
- Подключение шины I2C.
- 10-битный вход аналого-цифрового преобразователя.
Этот модуль идеально подходит для Интернета вещей, робототехники, домашней автоматизации и других проектов, где выполнение управляющих подключений к контроллеру шагового двигателя было бы непрактично.Веб-интерфейс упрощает как управление шаговым двигателем, так и написание сценариев Bash и Python.
Внутренние компоненты
WiFi Stepper состоит из четырех основных компонентов:
- ESP8266 WiFi-контроллер. Драйвер шагового двигателя
- powerSTEP01.
- Модуль крипто-аутентификации Microchip ATECC508A.
- Высокоэффективный стабилизатор напряжения Maxim MAX15062.
Рассмотрим эти компоненты подробнее.
ESP8266 WiFi-контроллер
Для многих из вас ESP8266 не требует представления. Этот чип был популярным компонентом во многих проектах DIY-электроники, а также используется во многих коммерческих проектах.
Изготовленный Espressif Systems, ESP8266 сочетает в себе интерфейс WiFi и микроконтроллер. Низкая стоимость и возможность программирования с использованием популярной IDE Arduino сделали его любимым компонентом производителей и хакеров.
WiFi Stepper использует корпус ESP-WROOM-02 малого форм-фактора ESP8266 в своей конструкции.Плата выводит несколько подключений ESP8266 к штекерному разъему, позволяя экспериментаторам в дальнейшем использовать возможности чипа WiFi.
powerSTEP01 Драйвер шагового двигателя
powerSTEP01 — это микросхема драйвера шагового двигателя, в которой используются 8 N-канальных силовых полевых МОП-транзисторов, позволяющих управлять катушками двигателя с напряжением до 85 вольт и током 10 ампер. Он оснащен защитой от перегрузки по току и перегрева, а также защиты двигателя от остановки двигателя.
В WiFi Stepper этот чип снабжен радиатором для охлаждения.
PowerSTEP01 имеет собственный встроенный контроллер, который обеспечивает полный контроль скорости и положения шаговых двигателей. Он обменивается данными с помощью шины SPI на 5 Мбит.
PowerSTEP01 может обеспечивать тактовые режимы до 1/128 микрошага.
Microchip ATECC508A Модуль крипто-аутентификации
Модуль крипто-аутентификации Microchip ATECC508A поддерживает соглашение о ключах ECDH (Elliptic Curve Diffie – Hellman), что позволяет ему обеспечивать аутентификацию без необходимости безопасного хранения.Это устройство популярно в приложениях для промышленной автоматизации, домашней автоматизации, медицины и Интернета вещей.
ATECC508A может хранить до 16 ключей и обменивается данными по шине I2C.
Maxim MAX15062 Высокоэффективный стабилизатор напряжения
Maxim MAX15062 — это высоковольтный синхронный понижающий стабилизатор в очень компактном корпусе. Он обеспечивает рабочее напряжение для логической схемы WiFi Stepper.
Это устройство полностью автономно и работает с очень широким диапазоном входных напряжений.
Подключения
Компоненты WiFi Stepper установлены на печатной плате размером 78 мм x 57 мм (3,07 x 2,25 дюйма). Плата выглядит очень качественной.
На плате установлены следующие разъемы:
Клеммная колодка
Эта 6-винтовая клеммная колодка предназначена для следующих соединений:
- GND — заземление
- VIN — Положительный вход постоянного напряжения, максимум 85 В
- A- — Катушка шагового двигателя A.
- A + — Катушка A шагового двигателя
- B + — Катушка шагового двигателя B
- B- — Катушка шагового двигателя B
Разъем питания
WiFi Stepper имеет цилиндрический разъем 2,1 мм. Его можно использовать для подачи питания до 50 вольт постоянного тока.
powerSTEP01 Разветвители
В верхней части платы имеется 6-контактный штекерный разъем, который можно использовать для прямого подключения к драйверу шагового двигателя powerSTEP01.
- 3V3 — Выход 3,3 В для управления внешней логической схемой
- GND — A Заземление.
- SW — Вход для внешнего переключателя. Он принимает сигнал логического уровня 3,3 В и имеет внутренний подтягивающий резистор.
- STEP — Вход для внешнего тактового сигнала шагового двигателя. Это логический сигнал 3,3 В.
- FLAG — сигнал ошибки с активным низким уровнем. Он также подключен к внутреннему красному светодиоду FLAG.
- BUSY — Активный низкий сигнал занятости. Он низкий, когда драйвер шагового двигателя выполняет команду.
ESP8266 Прорывы
9-контактный штекер в нижней части платы обеспечивает подключение к модулю контроллера ESP8266 WiFi.
- 3V3 — Выход питания 3,3 В для питания внешних логических схем.
- GND — A Заземление.
- SCK — Подключение часов I2C.
- SDA — соединение для передачи данных eI2C.
- RST — Пин сброса ESP8266. Отправка этого минимума отключит ESP8266.
- ADC — 10-битный вход аналого-цифрового преобразователя.
- BOOT — Булавка BOOT ESP8266. Заземлите это, чтобы войти в загрузчик ESP8266.
- RX — прием ESP8266 UART.
- TX — Передача UART ESP8266.
Светодиоды состояния
На плате также есть три светодиода состояния.
- POWER — Указывает, что питание включено.
- FLAG — указывает, что был поднят флаг ошибки.
- WIFI — Светодиод активности WiFi
Кроме того, на плате WiFi Stepper есть переключатель сброса. Нажатие и удерживание этой кнопки вернет устройство к исходной заводской конфигурации.
Контактные площадки под пайку
Внизу платы WiFi Stepper есть две длинные контактные площадки.
Эти контактные площадки подключаются к некоторым недорогим силовым резисторам в верхней части платы.Силовые резисторы используются для измерения силы тока, подаваемого на катушки двигателя, когда WiFi Stepper находится в режиме контроля тока.
Когда WiFi Stepper используется в режиме управления напряжением, резисторы не требуются, поскольку они включены последовательно с катушками двигателя. Они немного уменьшают ток, подаваемый на шаговый двигатель.
Если вы планируете запускать устройство только в режиме управления напряжением, вы можете использовать эти контактные площадки, чтобы припаять перемычку или мост и эффективно закоротить силовые резисторы.Это немного увеличит доступный крутящий момент в режиме управления напряжением.
В своих тестах я не использовал эти пэды, так как хотел поэкспериментировать с обоими режимами.
Начало работы
Теперь, когда мы рассмотрели компоненты и соединения на плате контроллера WiFi Stepper, пора его подключить!
Подключение двигателя
Первым шагом является подключение биполярного шагового двигателя к контроллеру. Это делается с помощью клеммных колодок A и B.
Если вы не уверены в правильности подключения своих шаговых двигателей, лучше всего попытаться найти спецификацию, в которой они подробно описаны. Но если это невозможно, вы можете выяснить это с помощью мультиметра.
Измерьте сопротивление в различных комбинациях четырех проводов от шагового двигателя. Две пары проводов должны показывать очень низкое сопротивление, другие комбинации должны показывать бесконечное сопротивление.
Две пары проводов с низким сопротивлением представляют собой две катушки двигателя.Подключите их к разъемам A и B на клеммной колодке.
Конечно, этот метод не дает вам полярность или фазу катушки, однако в веб-интерфейсе пользователя вы можете изменить полярность одной из катушек. Это избавляет от необходимости вручную менять местами провода.
Блок питания
Далее идет блок питания. Вы захотите использовать источник питания с таким же номинальным напряжением, что и катушки вашего шагового двигателя, а также с достаточной токовой нагрузкой. Лицевая панель вашего двигателя может иметь все необходимые детали.
Если ваш источник питания меньше 50 вольт, у вас есть два варианта его подключения.
Вы можете использовать цилиндрический разъем питания 2,1 мм с ответной вилкой, центральный провод — это положительное соединение. Или вы можете использовать оставшиеся две клеммы на клеммной колодке, обращая особое внимание на полярность.
Если ваш источник питания находится в диапазоне от 50 до 85 вольт, вам необходимо использовать клеммные колодки вместо цилиндрического разъема.
Настройка Wi-Fi
Как только вы подадите питание на контроллер WiFi Stepper, он включит ESP8266 и запустит Wi-Fi.Следующим шагом является настройка Wi-Fi-соединения на устройстве, которое вы собираетесь использовать для управления шаговым двигателем.
Вы можете использовать компьютер, планшет или телефон для управления шаговым двигателем, веб-интерфейс является отзывчивым, поэтому он поддерживает все три платформы.
На вашем устройстве откройте свои Wi-Fi-соединения и найдите источник с SSID wsx100-ap . Это подключение к WiFi Stepper.
Изначально соединение wifi wsx100-ap открыто, у него нет пароля.Таким образом, подключение должно быть очень простым. Как только вы войдете в веб-интерфейс, вы можете настроить пароль и изменить SSID, если хотите.
После того, как вы установили Wi-Fi-соединение с платой, вы можете начать использовать веб-интерфейс пользователя для управления своим шаговым двигателем.
Пользовательский веб-интерфейс
Контроллер WiFi Stepper поддерживает полнофункциональный пользовательский веб-интерфейс, который позволяет вам контролировать практически все аспекты работы шагового двигателя.
После подключения к контроллеру WiFi Stepper через Wi-Fi вы можете получить доступ к пользовательскому интерфейсу с помощью веб-браузера.
Откройте браузер и введите http://192.168.4.1 в адресную строку. Вы также можете ввести http: //wsx100.local .
Это должно запустить пользовательский веб-интерфейс. Давайте посмотрим на некоторые особенности этого интерфейса.
Настройки
Экран настроек — это первая страница, которую вы увидите, когда откроете веб-интерфейс пользователя.
Экран Settings позволяет настраивать и изменять параметры подключения WiFi, по сути, это панель управления функциями ESP8266.
Вы можете изменить SSID и добавить пароль, а также скрыть SSID для дополнительной безопасности.
Вы можете настроить API для использования https, опять же для дополнительной безопасности. Это полезно в приложениях, в которых вы будете управлять степпером WiFi с помощью сценария на удаленном компьютере.
Вы также можете восстановить заводские характеристики устройства.
Устранение неполадок и документация
Существуют отдельные страницы для Устранение неполадок и Документация для hWiFi Stepper. Поскольку я тестировал предварительную версию продукта, вероятно, что когда вы будете использовать финальную версию, здесь будут внесены изменения.
На странице «Устранение неполадок » есть несколько советов по устранению неполадок, которые могут быть полезны, если вы испытываете трудности с настройкой правильной работы.
На странице перечислен ряд распространенных проблем, возможных причин и возможных решений. Он охватывает множество проблем, с которыми вы можете столкнуться.
Страница документации содержит, помимо прочего, документацию для WiFi Stepper.
Имеющаяся у меня версия содержит документацию по правильному подключению вашего шагового двигателя, включая советы по определению проводки и технических характеристик вашего двигателя.
Как и в случае со страницей Устранение неполадок , я подозреваю, что в окончательной версии будут дополнительные записи.
Быстрый старт
Страница Quick Start — это страница, которую вы будете использовать чаще всего. Это страница, которая позволяет настраивать шаговый двигатель и управлять им.
Эта страница позволяет вам установить режим, в котором вы хотите использовать шаговый двигатель:
- Контроль скорости — В этом режиме вы можете контролировать скорость и направление двигателя
- Сервоуправление — Этот режим позволяет вам управлять двигателем как с серводвигателем.Вы можете указать положение, в которое хотите переместить вал.
- Внешняя пошаговая синхронизация — Этот режим позволяет вам управлять серводвигателем с помощью внешнего источника синхронизации.
Кроме того, Quick Start также позволяет указать, как вы хотите управлять шаговым двигателем.
- Контроль напряжения — в этом режиме напряжение шагового двигателя поддерживается постоянным.
- Контроль тока — в этом режиме ток двигателя поддерживается на максимальном уровне, при необходимости повышая напряжение.
Вы также можете указать микрошаговый режим для управления напряжением и током.
Страница Quick Start также позволяет вам установить широкий спектр параметров двигателя. Вы можете получить подробную информацию по каждому параметру (и каждому элементу управления в веб-интерфейсе), выделив «вопросительный знак» рядом с каждым элементом управления или именем параметра. Появится диалоговое окно с объяснением функции выбранного элемента.
Наконец, есть раздел «Быстрый код», который позволит вам создать сценарий Bash или Python на основе выбранных вами параметров управления двигателем.
Поскольку страница Quick Start является сердцем веб-интерфейса, сейчас я более подробно объясню ее функции.
Режим контроля скорости
Начнем с режима контроля скорости.
В этом режиме вы можете регулировать скорость шагового двигателя, используя управление током или напряжением.
Имеется анимированная диаграмма вала двигателя, которая всегда точно показывает положение вала. Под ним расположены элементы управления для Вперед , Стоп и Назад .
Рядом с двигателем есть место, где вы можете установить фактическую скорость двигателя в об / мин.
Вы также можете выбрать значение микрошага. Если вы находитесь в элементе управления Current , он будет находиться в диапазоне от 1/1 до 1/16, в элементе управления Voltage вы можете выбрать между 1/1 и 1/128 микрошагов.
Также есть флажок « Stop on Switch ». Когда он включен, двигатель остановится, когда контакт SW на разъеме powerSTEP01 будет заземлен.Это сделало бы идеальную конфигурацию концевого выключателя.
Режим сервоуправления
Servo Contro l Режим позволяет вам указать положение в градусах и заставить вал двигателя перемещаться в это положение. В этом отношении он немного похож на серводвигатель.
Вы можете указать угол, под которым вы хотите расположить вал, двумя способами:
- Перетаскивая «ручку» на анимированной диаграмме вала двигателя. Вал двигателя будет «следовать» за вашими движениями.
- Путем ввода углового значения в текстовое поле Позиция рядом с анимированной диаграммой. Двигатель немедленно переместится в это положение.
Как и в режиме Speed Contro l, вы можете выбрать, хотите ли вы управлять двигателем с помощью управления Current или Voltage . Вы также можете установить значения микрошага.
Этот режим будет очень полезен, если вы хотите всегда возвращать вал двигателя в определенное положение.
Режим внешней пошаговой синхронизации
В режиме External Step Clock вы используете внешний синхросигнал для шага двигателя.Вы по-прежнему можете контролировать положение вала с помощью веб-интерфейса.
Вы подаете тактовый импульс на вывод STEP на коммутационном разъеме powerSTEP01. Тактовый импульс должен быть сигналом логического уровня 3,3 В, который можно получить от микроконтроллера, внешнего генератора или микросхемы таймера.
Вы можете использовать несколько плат WiFi Stepper в тандеме и синхронизировать их с одним и тем же тактовым сигналом.
Как и в предыдущих режимах, вы можете выбрать элемент управления Voltage или Current для своего шагового двигателя, а также можете изменить значение микрошага.Двигатель будет перемещаться на один микрошаг за каждый полученный тактовый импульс.
Увеличение тактовой частоты, конечно, увеличит скорость двигателя.
Имеется управление пуском и остановом двигателя. Как и в других режимах, на анимированной диаграмме отображается текущее положение вала двигателя.
В режиме внешней пошаговой синхронизации есть флажок «Направление по SW». Когда этот флажок установлен, вы можете использовать вход SW на коммутационном разъеме powerSTEP01 для изменения направления двигателя.
Когда вывод SW находится на высоком уровне (3,3 В) или остается неподключенным (у него есть внутренний подтягивающий резистор, удерживающий его на высоком уровне), двигатель вращается вперед. Когда он заземлен (низкий), он будет вращаться в обратном направлении.
Это может стать отличным концевым выключателем для устройства, которому необходимо изменить направление при срабатывании механического или оптического переключателя.
Вот тестовая установка, которую я использовал при оценке контроллера WiFi Stepper в режиме External Step Clock .
В моем тестировании я использовал генератор сигналов для вывода прямоугольной волны 3,3 В. Используя это, я смог управлять двигателем и изменять скорость, изменяя частоту импульсов.
Контроль напряжения и тока
Все вышеперечисленные режимы можно использовать как в режимах управления напряжением, так и в режиме управления током, вот некоторые из различий между ними:
Контроль напряжения
В этом режиме напряжение на катушках двигателя поддерживается на постоянном уровне, равном напряжению источника питания для WiFi Stepper.
Преимущества
- Двигатель потребляет меньше тока, чем в режиме контроля тока.
- Мотор работает тише
- Мотор может быть с микрошагом до 1/128 микрошага.
- Двигатель работает радиатора
Недостатки
- Двигатель имеет меньший крутящий момент.
- Необходимо припаять контактные площадки в нижней части WiFi Stepper для оптимальной производительности (хотя я использовал его, не делая этого, и он работал нормально)
Контроль тока
В режиме управления Current максимальный ток подается на катушки двигателя.Для этого на плате используется насос тока. В результате двигатель часто будет работать при более высоком напряжении катушки, чем номинальное. Контроллер мотора powerSTEP01 управляет током, чтобы предотвратить повреждение катушек. Вы можете установить параметры максимального тока в веб-интерфейсе.
Преимущества
- Двигатель имеет гораздо больший крутящий момент и удерживающую способность.
Недостатки
- Двигатель нагревается сильнее. Возможно, вам понадобится добавить радиатор к корпусу двигателя.
- Мотор намного громче.
- Вы ограничены 1/16 микрошага.
- Двигатель потребляет намного больше тока от источника питания.
Вам нужно будет определить, какой режим лучше подходит для вашего приложения.
Скрипты Bash и Python
Веб-интерфейс — не единственный способ управления WiFi Stepper.
Вы также можете использовать сценарий Bash или Python, работающий на компьютере с Wi-Fi, для управления устройством через его API.WiFi Stepper вернет информацию о статусе в формате JSON.
Предварительная версия WiFi Stepper, которую я тестировал, работала только с функциональностью сценария Bash, поэтому я не смог протестировать ее с помощью Python.
Самый простой способ тестирования сценариев Bash — использовать рабочую станцию Linux или Mac. Операционная система Mac OSX на самом деле является просто оболочкой, работающей в UNIX, поэтому она имеет встроенную поддержку сценариев Bash.
Я использую Raspberry Pi 3B + под управлением Raspbian, основанного на Debian Linux, для тестирования функциональности сценария Bash.
Настройка среды — JQ
Прежде чем вы сможете запускать свои сценарии Bash, вам необходимо установить JQ.
JQ — это процессор JSON командной строки, позволяющий анализировать текст JSON. Это необходимо, поскольку API WiFi Stepper возвращает данные в формате JSON. Вы можете прочитать документацию JQ для получения дополнительной информации, если вам интересно.
На рабочем столе Raspbian вы можете установить JQ из командной строки. Откройте свой терминал и введите следующий текст.
sudo apt-get install jq
Для этого необходимо, чтобы вы были подключены к Интернету, поэтому сделайте это перед подключением к WiFi Stepper, если вы используете Raspberry Pi W или WH.На Raspberry Pi 3B + (или 3B) вы можете использовать кабель Ethernet для подключения к Интернету при одновременном подключении к WiFi Stepper с помощью интерфейса Wi-Fi.
Установка JQ требует времени, так что вам нужно набраться терпения.
После установки JQ вы готовы получить текст для вашего сценария Bash.
Получение сценария
Веб-интерфейс можно использовать для генерации текста для сценария Bash.
Подключите Raspberry Pi (или другой компьютер с Linux или Mac) к WiFi Stepper и перейдите к веб-интерфейсу с помощью веб-браузера.
В моем примере, который вы можете наблюдать на видео, я использовал WiFi Stepper в Servo Mode . Также подойдет любой другой режим.
Затем я использовал веб-интерфейс, чтобы переместить двигатель в положение на 180 градусов.
Переставив мотор, я прокрутил веб-интерфейс до раздела Quick Code . Есть две вкладки: одна для Bash , а другая для Python .
Я использовал кнопку Копировать , чтобы скопировать код Bash.Затем я вставил его в текстовый редактор, на Raspberry Pi я выбрал Geany.
Quick Code — это не полный сценарий, на самом деле, это нечто большее. Это набор примеров фрагментов кода, которые вы можете использовать для создания сценария на основе настроек, выбранных вами в веб-интерфейсе.
В Geany я отредактировал скрипт, чтобы исключить разделы Stop, Speed и External Clock. Я оставил секцию сервопривода нетронутой.
Я сохранил сценарий с расширением «.sh», я назвал свой stepper180.ш .
Теперь, вернувшись в терминал, я сделал свой скрипт исполняемым, используя следующую команду:
chmod -x stepper180.sh
Конечно, вы должны заменить stepper180.sh именем вашего скрипта!
Теперь осталось только запустить его
Запуск сценария
Запуск сценария Bash из командной строки очень прост. Вы просто ставите перед именем скрипта «./».
Итак, в моем случае я набрал ./stepper180.sh
Когда я сделал это и нажал Enter, я заметил, что мой мотор двигался на 180 градусов, как и указывал сценарий.
Я также наблюдал за информацией о состоянии двигателя, возвращаемой мне в терминале.
Это был очень простой пример, но я уверен, что он дает вам представление о силе, стоящей за этим. Вы можете написать сценарий, который заставит двигатель выполнять заранее определенный набор инструкций. Затем вы можете запустить программу на Raspberry Pi для вызова сценария при выполнении определенного условия.
И, конечно, вы не ограничены одним скриптом, у вас их может быть несколько.
Это позволит вам полностью автоматизировать работу WiFi Stepper.
Заключение
WiFi Stepper — это универсальный контроллер шагового двигателя с множеством функций. Я могу придумать множество вариантов использования этой платы в проектах робототехники, домашней автоматизации и Интернета вещей.
Я хотел бы поблагодарить Andrew Klofas ate Good Robotics за то, что он прислал мне образец платы.Если вы хотите получить ее самостоятельно, посетите его страницу краудфандинга в Crowd Supply, где вы найдете информацию о поддержке и покупке платы WiFi Stepper.
СвязанныеСводка
Название изделия
Контроллер шагового двигателя WiFi
Описание
Шаговый двигатель WiFi является продуктом Good Robotics. Это универсальный контроллер шагового двигателя с контроллером Wi-Fi, который поддерживает двигатели с напряжением до 85 вольт и током 10 ампер.
Автор
Мастерская DroneBot
Имя издателя
Мастерская DroneBot
Логотип издателя
Как управляются шаговые двигатели? — Контроль скорости шаговых двигателей
Шаговые двигатели управляются электрическими импульсами. Вал этих двигателей периодически вращается на фиксированный угол. Теперь, как контролируется их скорость? На этой странице представлено простое объяснение того, как управлять скоростью шаговых двигателей.
Что такое шаговый двигатель
Шаговые двигатели — это двигатели, которые вращаются с фиксированными прерывистыми шагами. Механизм секундной стрелки аналоговых часов — знакомый пример использования этой функции на практике. Угол и скорость вращения шаговых двигателей можно легко и точно контролировать с помощью входных импульсов. Эта возможность используется в широком спектре оборудования и электронных устройств.
Для получения дополнительной информации о шаговых двигателях в целом посетите следующую страницу :
Что такое шаговый двигатель?
Преимущества и недостатки шаговых двигателей
Основные характеристики шаговых двигателей заключаются в следующем.
- Преимущества
- Точное позиционирование может быть достигнуто с помощью управления без обратной связи
- Угол поворота определяется количеством импульсов (цифровой вход), поэтому управление положением просто
- Может вращаться на низких скоростях
- Отличная способность оставаться заблокированным при остановке
Их способность обеспечивать простое и точное позиционирование без необходимости в датчике для определения положения вала является одним из основных преимуществ шаговых двигателей.
- Недостатки
- Склонен к потере синхронизации при неожиданном изменении нагрузки, например, при работе на высокой скорости или при резких изменениях скорости
- Склонен к вибрации и шуму
- Ток продолжает течь при удержании положения (когда ротор заблокирован в этом положении), что приводит к высокому потреблению энергии и выделению тепла
Хотя шаговые двигатели просты в управлении, они плохо справляются с резкими изменениями нагрузки.Их конструкция также делает их подверженными вибрации и шуму. Однако эти недостатки не фатальны и могут быть устранены при соответствующем контроле.
Управление шаговыми двигателями
Шаговые двигатели имеют разомкнутый контур управления. Это означает, что управление осуществляется путем односторонней передачи командных сигналов от контроллера верхнего уровня к двигателю. Это делает управление шаговым двигателем очень простым, устраняя необходимость в датчиках и обратной связи.
При использовании стандартной методики управления последовательностью импульсов шаговый двигатель управляется с помощью программируемого контроллера (генератора импульсов), генерирующего импульсы, которые вводятся в драйвер, который, в свою очередь, подает управляющий ток на двигатель.
Если расширенное управление не требуется, можно также включить функцию контроллера (генерацию импульсов) в драйвер. В этом случае программируемый контроллер с собственным блоком ввода / вывода используется для отправки команд пуска и останова драйверу. Затем драйвер управляет подачей управляющего тока на шаговый двигатель на основе этих команд.
Регулировка скорости шаговых двигателей
Как объяснялось выше, шаговые двигатели управляются вводом электрических импульсов.
Импульсы имеют частоту, при этом количество импульсов в секунду (pps) называется «частотой следования импульсов».
Вращение шагового двигателя пропорционально количеству входных импульсов, что обеспечивает точное позиционирование. Этот поворот двигателя (угол) можно рассчитать следующим образом.
Вращение двигателя (°) = угол шага (° / шаг) × количество импульсов
Точно так же скорость шагового двигателя пропорциональна частоте входных импульсов. Более высокая частота импульсов (более высокая частота импульсов) вызывает пропорциональное увеличение скорости вращения шагового двигателя.Эту скорость двигателя (обороты в минуту, об / мин, об / мин) можно рассчитать следующим образом.
Скорость двигателя (об / мин) = угол шага (° / шаг) ÷ 360 (°) × частота импульсов (Гц) × 60
Эта характеристика вращения двигателя, идеально синхронизированная с частотой следования импульсов, делает шаговые двигатели привлекательными. С другой стороны, потеря синхронизации между входными импульсами и вращением двигателя может произойти из-за перегрузки или внезапных изменений скорости.
Существует два различных режима работы для шаговых двигателей, называемых профилем движения с постоянной скоростью и профилем движения ускорения / замедления.Первый мгновенно изменяет скорость вращения мотора. Этот режим, также называемый прямоугольным профилем движения, ограничен рабочим диапазоном, в котором двигатель может запускаться самостоятельно (немедленно набирать скорость). Если для этого ускорения доступен достаточный крутящий момент, этот режим очень простой с постоянной частотой импульсов.
Однако, если не удается создать достаточный момент ускорения, это приводит к потере синхронизации. В этом случае вместо этого должен использоваться профиль движения ускорения / замедления.Это включает постепенное изменение частоты пульса, чтобы обеспечить время для ускорения и замедления. Этот режим, также называемый трапециевидным профилем движения, расширяет рабочий диапазон, за пределами которого двигатель может запускаться самостоятельно. Однако, поскольку резкое ускорение или замедление чревато потерей синхронизации, необходимо соблюдать осторожность при определении того, как изменить скорость двигателя (частоту импульсов) вверх и вниз.
Профиль движения с постоянной скоростью
(прямоугольный профиль движения)
Профиль ускорения / замедления
(профиль трапециевидного движения)
Скорость шаговых двигателей регулируется входными импульсами
Шаговые двигатели вращаются с фиксированным шагом.Они используют управление без обратной связи и управляются с помощью контроллера, генерирующего импульсы, которые вводятся в драйвер, который, в свою очередь, подает управляющий ток на двигатель. Шаговые двигатели управляются вводом электрических импульсов, так что скорость вращения двигателя пропорциональна частоте входных импульсов. Поскольку управление скоростью этих двигателей является важным фактором, который необходимо учитывать во избежание таких проблем, как потеря синхронизации, важно хорошо понимать, как ими управляют.
Решение ваших проблем с шаговыми двигателями
ASPINA поставляет не только автономные шаговые двигатели, но и системные продукты, которые включают в себя системы привода и управления, а также механическую конструкцию. Они подкреплены всесторонней поддержкой, которая простирается от прототипирования до коммерческого производства и послепродажного обслуживания.
ASPINA может предложить решения, адаптированные к функциям и характеристикам, требуемым для различных отраслей промышленности, приложений и продуктов клиентов, а также для конкретных производственных условий.
ASPINA поддерживает не только клиентов, которые уже знают свои требования или спецификации, но и тех, кто сталкивается с проблемами на ранних этапах разработки.
Вы боретесь со следующими проблемами?
- Выбор двигателя
- У вас еще нет подробных спецификаций или чертежей, но нужна консультация по двигателям?
- У вас нет сотрудников, имеющих опыт работы с двигателями, и вы не можете определить, какой двигатель лучше всего подойдет для вашего нового продукта?
- Разработка двигателей и связанных компонентов
- Хотите сосредоточить свои ресурсы на основных технологиях и передать на аутсорсинг приводные системы и разработку двигателей?
- Хотите сэкономить время и силы, связанные с изменением конструкции существующих механических компонентов при замене двигателя?
- Уникальное требование
- Нужен нестандартный двигатель для вашего продукта, но ваш обычный поставщик отказался от него?
- Не можете найти двигатель, который дает вам необходимый контроль, и вот-вот теряете надежду?
Ищете ответы на эти проблемы? Свяжитесь с ASPINA, мы здесь, чтобы помочь.
Ссылки на глоссарий и страницы часто задаваемых вопросов
Управляйте шаговым двигателем без микроконтроллера!
В одном из моих предыдущих руководств я показал вам, как управлять скоростью шагового двигателя с помощью таймера 555 . Этот проект является обновлением этого проекта, и вы узнаете, как управлять направлением двигателя с помощью еще одной микросхемы таймера 555. Итак, без лишних слов, приступим!
Шаг 1. Получите все необходимое!Вот что вам понадобится:
Драйвер шагового двигателя A4988
2 555 микросхем таймера
Прототип макетной платы
Источник питания 12 В
Источник питания 5 В (И наоборот, вы также можете использовать стабилизатор напряжения с выходом 5 В, например LC805CV)
Резистор 1 кОм
2 резистора 10 кОм
3 светодиода (опционально)
3 резистора 330 Ом (опционально, для светодиодов)
Конденсатор (0.От 3 мкФ до 10 мкФ, попробуйте поэкспериментировать с разными конденсаторами в этом диапазоне. Конденсаторы выше этого диапазона заставят шаговый двигатель двигаться очень медленно, а конденсаторы ниже этого диапазона не позволят двигателю двигаться вообще. Убедитесь, что конденсаторы рассчитаны на напряжение выше 10 В.)
Потенциометр 100 кОм
2 кнопки (нормально разомкнутые)
Множество перемычек «папа-папа»
Шаг 2: Начните с подключения A4988 Драйвер двигателя на макетной платеПосле подключения драйвера двигателя, подключите вывод VDD (или VCC) к + 5vols, GND к, очевидно, GND и VMOT к 12 вольт. Не забудьте соединить контакты SLP и RST вместе! Для этого я использовал небольшой джемпер.
Шаг 3. Получите помощь от принципиальной схемыПожалуйста, переходите к следующему шагу перед тем, как начинать схему.
Шаг 4: Подключите и протестируйте регулятор скоростиУстановите и подключите только регулятор скорости. Подключите вывод DIR драйвера двигателя к GND или +5 вольт во время тестирования. Включите вашу схему и проверьте, правильно ли она работает. Если есть какая-либо проблема, поиск и устранение неисправностей будет проще, чем после подключения контроллера направления.
Шаг 5. Подключите и проверьте контроллер направления Шаг 6: Готово!Надеюсь, вам понравился этот проект. Хотелось бы увидеть, что вы построили. Предложения приветствуются!
Шаговый двигатель с управлением — MATLAB и Simulink
Эта модель показывает, как использовать драйвер шагового двигателя и блоки шагового двигателя вместе для реализации управляемого шагового двигателя с постоянными магнитами. Модель предоставляет два варианта контроллера: один для управления положением и один для управления скоростью.Чтобы изменить тип контроллера, щелкните правой кнопкой мыши блок Controller, выберите Variant-> Override using-> и выберите Position или Speed.
Шаговый двигатель имеет полный шаг 1,8 градуса. В модели управления положением вход Ref — это желаемое количество шагов. В режиме управления скоростью вход Ref представляет собой желаемое количество шагов в секунду.
Эта модель является моделью системного уровня, подходящей для изучения динамики шагового двигателя и определения того, будет ли угол шага уменьшаться при движении с заданной нагрузкой.Его также можно использовать для настройки шагового контроллера для повышения производительности шагового режима. Часто контроллер частично или полностью реализован на стандартном модуле шагового контроллера.
Альтернатива реализации алгоритма на микропроцессоре (таком как PIC) дает большую гибкость, и микропроцессор также может использоваться для управления другими частями всей системы. В этом случае части блока драйвера шагового двигателя также могут быть реализованы на микропроцессоре, оставив только каскад усилителя мощности в аналоговой электронике.
Модель
Результаты моделирования от Simscape Logging
Тест управления положением
Угол вала двигателя по сравнению с сигналом запроса. Алгоритм управления положением принимает команду положения как ряд шагов и преобразует ее в последовательность импульсов, которая управляет драйвером шагового двигателя. Пики на графике угловой скорости возникают, когда вал устанавливается в заданное положение.
Тест управления скоростью
На графиках ниже показан угол вала двигателя по сравнению с сигналом запроса.Алгоритм управления скоростью принимает команду скорости как количество шагов в секунду и преобразует ее в последовательность импульсов, которая управляет драйвером шагового двигателя. Всплески на графике угловой скорости возникают, когда вал переходит в текущую ступеньку.
График ниже показывает, как состояние контактов на шаговом драйвере влияет на движение шагового двигателя. Драйвер инициирует шаг каждый раз, когда сигнал ENA поднимается выше порогового напряжения включения.