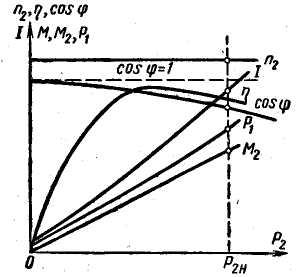
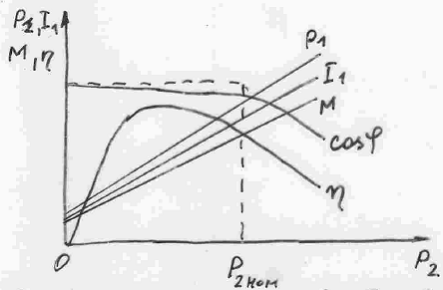
Работа синхронного двигателя характеризуется рабочими характеристиками (рис. 42), которые представляют собой зависимость частоты вращения ротора n2 , потребляемой мощности P1 , полезного момента M2 , коэффициента мощности cos φ, КПД η и тока в обмотке статора I1 от полезной мощности двигателя P2 при f = const (рис. 33). Частота вращения ротора n2 всегда равна синхронной частоте n2, поэтому график n2 = f(P2) имеет вид прямой параллельной оси абсцисс. Потребляемая мощность P1 = P2 + ∑P, где ∑P — мощность потерь, поэтому с увеличением потерь она растёт быстрее полезной мощности P2 и график P1 = f(P2) имеет несколько криволинейный вид. Т. к. полезный момент M2 = P2/2πf, а рабочие характеристики снимаются при условии f = const, то график M2 = f(P2) имеет вид прямой, выходящей из начала координат. Вид графика cos φ = f(P2) зависит от вида настройки тока возбуждения. Обычно синхронные двигатели рассчитывают на работу при номинальной нагрузке с опережающим током и cos φ ≈ 0,8, что приводит к повышению номинальной мощности сети. Вид графика η
Рис. 42. Рабочие характеристики синхронного двигателя.
Достоинства синхронных двигателей:
а) возможность работы при cos φ = 1, что приводит к улучшению cos φ энергосистемы;
б) постоянство частоты вращения независимо от механической нагрузки на валу;
в) малая чувствительность к колебаниям напряжения в сети.
Недостатки синхронных двигателей:
а) сложность конструкции и высокая стоимость;
б) сравнительная сложность пуска;
в) трудности с регулированием частоты вращения.
Опыт показывает, что синхронные двигатели наиболее целесообразно применять при мощности 200 кВт и выше.
3.3.4. Синхронные компенсаторы
Синхронные компенсаторы (СК) – это электрические машины большой мощности (10000÷160000) кВт, предназначенные для генерирования реактивной мощности и работающие без нагрузки (P2 = 0), т. е. в режиме х. х. СК включают в электрические системы с целью повышения коэффициента мощности, обычно до cos φ = (0,92÷0,95) (рис 43). Они вырабатывают реактивную мощность Qск, необходимую для работы потребителей Z, например группы синхронных двигателей. Благодаря этому реактивная мощность в СГ и в ЛЭП доведена до некоторого минимального значения Qmin, что способствует повышению технико-экономических показателей всей системы. СК применяют также для стабилизации напряжения в сети при передаче электроэнергии по линиям большой протяжённости. При больших индуктивностях (при больших нагрузках) напряжение в конце линии (у потребителей) оказывается намного меньше, чем в начале, а при малых нагрузках – наоборот, под влиянием ёмкостных сопротивлений линии напряжение в конце линии может повышаться по сравнению с напряжением в начале. Включенный же в конце линии (у потребителей) СК, работающий при больших нагрузках с перевозбуждением (ток сети опережает напряжение), а при малых нагрузках – с недовозбуждением, позволяет поддерживать напряжение в конце линии практически неизменным.
Рис. 43. Схема включения синхронного компенсатора (СК) в электрическую систему.
Выполняют СК обычно с горизонтальным расположением вала на напряжение (6,6÷16) кВ с числом полюсов 2p = 6 или 2p = 8, что соответствует частоте вращения ротора 1000 об/мин или 750 об/мин.
Синхронные
двигатели обладают рядом особенностей,
о которых лучше
всего судить по их рабочим характеристикам
(рис. 7.5). Эти
характеристики показывают зависимость
I, п,
М, М2, P1 и
и  от
мощности Р2 при
U=const
и f=const.
Скорость вращения ротора п2 всегда
равна синхронной скорости
n2=n1=f160/p и
не зависит от нагрузки, поэтому она
имеет
вид прямой, параллельной оси абсцисс.
от
мощности Р2 при
U=const
и f=const.
Скорость вращения ротора п2 всегда
равна синхронной скорости
n2=n1=f160/p и
не зависит от нагрузки, поэтому она
имеет
вид прямой, параллельной оси абсцисс.
Момент
двигателя М=М0+М2, где Мо— момент
холостого хода, М2—
полезный тормозной момент. Так как
M0=const,
а М2=P2/
 Кратковременная
перегрузочная способность синхронного
двигателя,
так же как и синхронного генератора,
зависит от величины угла
Кратковременная
перегрузочная способность синхронного
двигателя,
так же как и синхронного генератора,
зависит от величины угла  .
При работе двигателя с номинальной
нагрузкой и номинальным
током возбуждения угол
.
При работе двигателя с номинальной
нагрузкой и номинальным
током возбуждения угол  обычно не превышает 25-30°.
обычно не превышает 25-30°.
При этих значениях кратковременная перегрузочная способность синхронного двигателя (см. рис. 7.2)
Рис. 7.5. Рабочие характеристики синхронного двигателя
Подведенная к двигателю мощность P1 включает в себя потери (Р1=P2+ Pпот).
Pпот).Поэтому увеличение потребляемой мощности Р1 происходит несколько в большей мере, чем полезной мощности Р2 и характеристика Р1=f(Р2) имеет некоторую кривизну в сторону оси абсцисс. Ток пропорционален вращающему моменту и он будет выражаться той же прямой, что и момент М. При изменении нагрузки от 0 до 1/2 Pн кривая к. п. д. быстро возрастает, а затем ее рост прекращается, и к. п. д. машины даже понижается.
Изменение  зависит от характера возбуждения
двигателя. Если
обеспечить номинальное постоянное
возбуждение машины при
ее работе на холостом ходу, при котором
зависит от характера возбуждения
двигателя. Если
обеспечить номинальное постоянное
возбуждение машины при
ее работе на холостом ходу, при котором  =1,
то
с увеличением
нагрузки получится недовозбужденный
режим работы двигателя.
При этом возникнут реактивные токи,
отстающие от напряжения
на угол
=1,
то
с увеличением
нагрузки получится недовозбужденный
режим работы двигателя.
При этом возникнут реактивные токи,
отстающие от напряжения
на угол  .
Наоборот, если установить номинальное
постоянное
возбуждение двигателя при номинальной
нагрузке, то
при уменьшении нагрузки двигатель
начнет забирать из сети реактивные
опережающие токи, а при перегрузке-реактивные
отстающие
токи. Кривая
.
Наоборот, если установить номинальное
постоянное
возбуждение двигателя при номинальной
нагрузке, то
при уменьшении нагрузки двигатель
начнет забирать из сети реактивные
опережающие токи, а при перегрузке-реактивные
отстающие
токи. Кривая  =f(P2
=f(P2
Синхронные двигатели применяются главным образом для привода механизмов значительной мощности (свыше 100 кет), требующих постоянства числа оборотов.
В судовых условиях они используются в основном на судах технического флота (земснарядах), в электрических приводах компрессоров, центробежных насосов, лебедок, а также в системах генератор-двигатель.
§ 7.4. Пуск синхронных двигателей
Рис. 7.6. Схема пуска синхронного двигателя
Пуск синхронных двигателей осложняется тем, что при включении двигателя в сеть трехфазного переменного тока в обмотке его. статора возникает вращающееся магнитное поле, сразу приобретающее синхронную скорость п1= 60f/p, в то время как поле полюсов неподвижно. Вследствие этого каждые полпериода перед полюсом ротора проходят то северный, то южный полюса вращающегося поля статора и возникающий в результате взаимодействия полей электромагнитный момент в течение периода дважды меняет свое направление. Ротор остается неподвижным, так как он обладает значительной инерцией и в течение полупериода ему не может быть сообщена синхронная скорость, при которой электромагнитный вращающий момент будет иметь строго определенное постоянное направление. Поэтому, чтобы осуществить пуск синхронного двигателя, необходимо сначала сообщить ему с помощью небольшого постороннего двигателя скорость вращения, близкую к синхронной. Такой способ пуска синхронных двигателей, во-первых, требует дополнительной электрической машины, а, во-вторых, возможен лишь при незначительной нагрузке на валу двигателя. В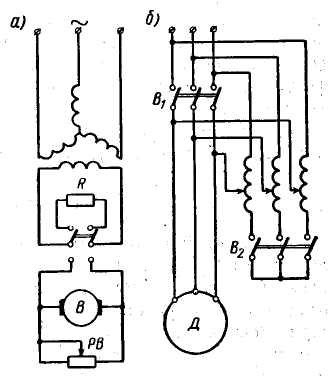 настоящее время чаще всего
применяется так называемый
асинхронный
пуск синхронных двигателей (рис. 7.6, а),
для чегo
в
пазы полюсных наконечников ротора
закладывается специальная л пусковая
обмотка в виде стержней, соединенных
между собой по торцам
так, что образуется короткозамкнутая
клетка. При включении
двигателя в сеть трехфазного тока в его
статорной обмотке создается
вращающееся магнитное поле, которое,
пересекая короткозамкнутые
стержни пусковой обмотки, наводит в ней
ток. Магнитное
поле пусковой обмотки, взаимодействуя
с вращающимся магнитным
полем статора, создает вращающий момент
и быстро развивает
скорость, близкую к синхронной. После
этого включают питание обмотки
возбуждения (от возбудителя В), и
двигатель втягивается
в синхронизм. Во время разгона обмотка
возбуждения двигателя
должна быть замкнута на сопротивление R, так
как иначе в
ней наводилась бы большая э. д. с, опасная
для состояния изоляции
обмотки.
настоящее время чаще всего
применяется так называемый
асинхронный
пуск синхронных двигателей (рис. 7.6, а),
для чегo
в
пазы полюсных наконечников ротора
закладывается специальная л пусковая
обмотка в виде стержней, соединенных
между собой по торцам
так, что образуется короткозамкнутая
клетка. При включении
двигателя в сеть трехфазного тока в его
статорной обмотке создается
вращающееся магнитное поле, которое,
пересекая короткозамкнутые
стержни пусковой обмотки, наводит в ней
ток. Магнитное
поле пусковой обмотки, взаимодействуя
с вращающимся магнитным
полем статора, создает вращающий момент
и быстро развивает
скорость, близкую к синхронной. После
этого включают питание обмотки
возбуждения (от возбудителя В), и
двигатель втягивается
в синхронизм. Во время разгона обмотка
возбуждения двигателя
должна быть замкнута на сопротивление R, так
как иначе в
ней наводилась бы большая э. д. с, опасная
для состояния изоляции
обмотки.
Непосредственный пуск синхронных двигателей возможен лишь при достаточно мощных электрических сетях, так как пусковой ток двигателей равен 5—6-кратной величине номинального тока. Для снижения пускового тока применяют пуск с переключением обмотки статора со звезды на треугольник, что дает снижение линейного тока в 3 раза. Однако чаще пуск синхронных двигателей производят при пониженном напряжении, для чего используется автотрансформатор или реактор.
Автотрансформаторный пуск (рис. 7.6, б) производится тремя ступенями. Вначале к двигателю подводится напряжение U= =40—60% UH. Когда двигатель разовьет соответствующее число оборотов, размыкается выключатель В2 у автотрансформатора, и он используется как реактивная катушка. При этом к двигателю подводится напряжение U=70—80% UH. Наконец, замыкается выключатель В1 и к двигателю подается номинальное напряжение UH а к его обмотке возбуждения — постоянный ток. При автотрансформаторном пуске пусковой ток в сети (ток первичной обмотки трансформатора) пропорционален квадрату напряжения.
Реактивный пуск синхронных двигателей проще и дешевле, но при нем пусковые токи в сети имеют большую величину.
Рабочие характеристики синхронного двигателя
⇐ ПредыдущаяСтр 3 из 7Следующая ⇒Это зависимости  . Их примерный вид изображен на рис.3.32.
. Их примерный вид изображен на рис.3.32.
 СД может работать с
СД может работать с  . Обычно СД рассчитывают для работы с опережающим
. Обычно СД рассчитывают для работы с опережающим  . При этом СД не потребляет, а отдает реактивную мощность в сеть. На холостом ходу СД потребляет в основном реактивный опережающий ток и его
. При этом СД не потребляет, а отдает реактивную мощность в сеть. На холостом ходу СД потребляет в основном реактивный опережающий ток и его  весьма мал. При этом может существенно улучшается сети, на которую работают асинхронные двигатели, так как их реактивная мощность уменьшается ввиду ее компенсации СД.
весьма мал. При этом может существенно улучшается сети, на которую работают асинхронные двигатели, так как их реактивная мощность уменьшается ввиду ее компенсации СД.
3.6.5. Пуск в ход синхронного двигателя
СД не имеет начального пускового момента, так как в течение одного полупериода его ротор, в силу значительной инерции, не может разогнаться до частоты вращения поля  . Поэтому не возникает электромагнитного взаимодействия между ротором и полем. Чтобы это взаимодействие возникло, необходимо ротор разогнать до частоты близкой к синхронной частоте вращения.
. Поэтому не возникает электромагнитного взаимодействия между ротором и полем. Чтобы это взаимодействие возникло, необходимо ротор разогнать до частоты близкой к синхронной частоте вращения.
 Наиболее широко применяется асинхронный пуск СД. С этой целью на роторе СД помещается короткозамкнутая обмотка, выполненная по типу беличьей клетки (рис. 3.33). Стержни этой обмотки размещаются в полюсных наконечниках и замыкаются с торцов кольцами.
Наиболее широко применяется асинхронный пуск СД. С этой целью на роторе СД помещается короткозамкнутая обмотка, выполненная по типу беличьей клетки (рис. 3.33). Стержни этой обмотки размещаются в полюсных наконечниках и замыкаются с торцов кольцами.
При асинхронном пуске обмотка статора включается в сеть. Вращающиеся поле наводит в стержнях короткозамкнутой обмотки ЭДС и токи. В результате взаимодействия последних с магнитным полем возникает момент и ротор разгоняется до подсинхронной скорости.
При асинхронном пуске возможно применение двух схем (рис. 3.34).
При пуске по схеме (рис. 3.34,а) после включения обмотки статора СД приходит во вращение. В процессе разбега обмотка возбуждения СД замыкается на активное сопротивление  . Это делается с целью предотвращения пробоя обмотки возбуждения под действием значительной ЭДС индуктируемой в данной обмотке вращающимся полем. При подходе к подсинхронной скорости вращения сопротивление
. Это делается с целью предотвращения пробоя обмотки возбуждения под действием значительной ЭДС индуктируемой в данной обмотке вращающимся полем. При подходе к подсинхронной скорости вращения сопротивление  отключается и обмотка возбуждения (ОВ) подключается к зажимам возбудителя (В). Возбудителем является генератор постоянного тока параллельного возбуждения. В обмотке возбуждения (ОВ) появляется ток возбуждения
отключается и обмотка возбуждения (ОВ) подключается к зажимам возбудителя (В). Возбудителем является генератор постоянного тока параллельного возбуждения. В обмотке возбуждения (ОВ) появляется ток возбуждения  и СД под действием синхронизирующего момента входит в синхронизм.
и СД под действием синхронизирующего момента входит в синхронизм.
При асинхронном пуске по схеме (рис. 3.34,б), обмотка возбуждения СД в процессе разбега наглухо подключена к зажимам возбудителя (В). Так как сопротивление обмотки якоря возбудителя мало, то обмотка возбуждения СД оказывается примерно замкнутой накоротко. В процессе разбега, при частоте вращения  , начинает возбуждаться возбудитель, находящийся на одном валу с ротором СД. В обмотке возбуждения (ОВ) появляется ток возбуждения , который увеличивается по мере приближения частоты вращения
, начинает возбуждаться возбудитель, находящийся на одном валу с ротором СД. В обмотке возбуждения (ОВ) появляется ток возбуждения , который увеличивается по мере приближения частоты вращения  к подсинхронной. Далее СД автоматически втягивается в синхронизм.
к подсинхронной. Далее СД автоматически втягивается в синхронизм.
Пуск по схеме (рис. 3.34,б) имеет существенные недостатки.
1. В процессе разбега возбудитель возбуждается слишком рано, и возникающий ток вызывает дополнительный тормозной момент;
2. Приходится считаться с возможностью возникновения одноосного включения.
Этот эффект был рассмотрен выше при изучении работы АД с не симметричным сопротивлением ротора. В рассматриваемом случае вращающееся поле статора наводит в однофазной обмотке возбуждения СД переменную ЭДС частоты  . Под действием этой ЭДС в однофазной обмотке возбуждения возникает переменный ток той же частоты, который создает пульсирующее поле. Как известно, пульсирующее поле можно представить двумя вращающимися в противоположные стороны полями с частотой вращения
. Под действием этой ЭДС в однофазной обмотке возбуждения возникает переменный ток той же частоты, который создает пульсирующее поле. Как известно, пульсирующее поле можно представить двумя вращающимися в противоположные стороны полями с частотой вращения  . Прямое поле ротора вращается с частотой вращения
. Прямое поле ротора вращается с частотой вращения  , где – частота вращения ротора. Таким образом, прямое поле ротора вращается с той же частотой и в ту же сторону, что и поле статора. Другими словами, эти поля неподвижны относительно друг друга и обуславливают асинхронный момент, как в обычных АД (Рис.3.35, кривая 1). Что касается обратного поля ротора, то оно вращается с частотой
, где – частота вращения ротора. Таким образом, прямое поле ротора вращается с той же частотой и в ту же сторону, что и поле статора. Другими словами, эти поля неподвижны относительно друг друга и обуславливают асинхронный момент, как в обычных АД (Рис.3.35, кривая 1). Что касается обратного поля ротора, то оно вращается с частотой  . При
. При  это поле вращается в сторону противоположную вращению ротора, а при
это поле вращается в сторону противоположную вращению ротора, а при  – в ту же сторону. При
– в ту же сторону. При  поле неподвижно.
поле неподвижно.
 Обратное поле обуславливает знакопеременный момент (см. рис. 3.35, кривая 2). Результирующий момент (кривая 3) будет иметь провал при или при
Обратное поле обуславливает знакопеременный момент (см. рис. 3.35, кривая 2). Результирующий момент (кривая 3) будет иметь провал при или при  . Наличие этого провала может вызвать затруднение пуска.
. Наличие этого провала может вызвать затруднение пуска.
С целью увеличения начального пускового момента, активное сопротивление короткозамкнутой обмотки следует выбирать по возможности максимальным. Но при этом уменьшается момент входа в синхронизм, то есть наибольший нагрузочный момент при котором СД, доведенный до подсинхронной частоты вращения, способен еще войти в синхронизм.
Достоинства СД.
1. СД способен работать при . Перевозбужденный СД потребляет из сети опережающий ток, что способствует улучшению коэффициента мощности сети.
2. На СД оказывает меньшее влияние колебания напряжения сети, чем на АД. Действительно, у СД  , а у АД
, а у АД  .
.
3. Строго постоянная частота вращения независимо от режима работы.
Недостатки СД.
1. Более сложна конструкция. Необходимость в источнике постоянного тока для возбуждения.
2. Относительная сложность пуска СД.
3. Трудность регулирования частоты вращения.
Тем не менее, при мощностях более 200…300 кВт СД более предпочтителен, если не требуется регулировка частоты вращения.
3.6.6. Синхронный компенсатор
Синхронным компенсатором (СК) называют СД, работающий без нагрузки на валу, т.е. в режиме холостого хода. СК применяются для улучшения сети и для поддержания нормального уровня напряжения сети в местах подключения потребителей.
Нормальный режим СК – режим перевозбуждения, используемый для улучшения коэффициента мощности сети. СК потребляет из сети опережающий ток, т.е. он вырабатывает реактивную мощность, отдавая ее в сеть. Его нередко называют генераторами реактивной мощности.
Поясним принцип улучшения коэффициента мощности сети с помощью перевозбужденного СК. Пусть такой СК включен в сеть, где работают два асинхронных двигателя (АД1 и АД2) (рис. 3.36).
 Активная составляющая тока СК
Активная составляющая тока СК  очень мала, так как потребляемая активная мощность идет только на покрытие потерь холостого хода.
очень мала, так как потребляемая активная мощность идет только на покрытие потерь холостого хода.
СК может использоваться и в режиме недовозбуждения. В этом режиме он используется для поддержания напряжения сети в период отключения нагрузок потребителей. Напряжение сети стремится, в это время, возрасти. Включенный в это время недовозбужденный СК уменьшает напряжение сети до нормального уровня, так как недовозбужденный СК эквивалентен индуктивности и потребляет отстающий ток.
Номинальная мощность СК является его мощность в перевозбужденном режиме  .
.
Синхронный электродвигатель – это устройство, преобразующее электрическую энергию в механическую. Его также можно использовать в качестве генератора. Чаще всего он применяется в компрессорах, прокатных станках, поршневых насосах и другом подобном оборудовании. Рассмотрим принцип действия синхронного электродвигателя, его характеристики и свойства.
Устройство синхронного электродвигателя
Строение агрегата данного вида типично. Двигатель состоит из:
- Неподвижной части (якорь или статор).
- Подвижной части (ротор или индуктор).
- Вентилятора.
- Контактных колец.
- Щеток.
- Возбудителя.
Статор представляет собой сердечник, состоящий из обмоток, который заключен в корпус. Индуктор комплектуется электромагнитами постоянного тока (полюсами). Конструкция индуктора может быть двух видов – явнополюсная и неявнополюсная. В статоре и роторе расположены ферромагнитные сердечники, изготовленные из специальной электротехнической стали. Они необходимы для уменьшения магнитного сопротивления и улучшения прохождения магнитного потока.
Частота вращения ротора в синхронном двигателе равна частоте вращения магнитного поля. Независимо от подключаемой нагрузки частота ротора неизменна, так как число пар полюсов магнитного поля и ротора совпадают. Их взаимодействие обеспечивает постоянную угловую скорость, не зависящую от момента, приложенного к валу.
Принцип работы синхронного электродвигателя
Самые распространенные типы такого рода агрегатов – однофазный и трехфазный. Принцип работы синхронного электродвигателя в обоих случаях примерно одинаков. После подключения обмотки якоря к сети ротор остается неподвижным, в то время как постоянный ток поступает в обмотку возбуждения. Направление электромагнитного момента меняется дважды за время одного изменения напряжения. При значении среднего момента равном нулю, ротор под влиянием внешнего момента (механического воздействия) разгоняется до частоты, близкой по значению частоте вращения магнитного поля в зазоре, после чего двигатель переходит в синхронный режим.
В трехфазном устройстве проводники расположены под определенным углом относительно друг друга. В них возбуждается вращающееся с синхронной скоростью электромагнитное поле.
Разгон двигателя может осуществляться в двух режимах:
- Асинхронный. Обмотки индуктора замыкаются с помощью реостата. Вращающееся магнитное поле, возникающее при включении напряжения, пересекает короткозамкнутую обмотку, установленную на роторе. В ней индуцируются токи, взаимодействующие с вращающимся полем статора. По достижении синхронной скорости крутящий момент начинает уменьшаться и сводится к нулю после замыкания магнитного поля.
- С помощью вспомогательного двигателя. Для этого синхронный двигатель механически соединяется со вспомогательным (двигателем постоянного тока либо трехфазным индукционным двигателем). Постоянный ток подается только после того, как вращение двигателя достигает скорости, близкой к синхронной. Магнитное поле замыкается, и связь со вспомогательным двигателем прекращается.
Характеристики синхронного электродвигателя
Хотя асинхронные двигатели считаются более надежными и дешевыми, их синхронные «собратья» имеют некоторые преимущества и широко применяются в различных областях промышленности. К отличительным характеристикам синхронного электродвигателя можно отнести:
- Работу при высоком значении коэффициента мощности.
- Высокий КПД по сравнению с асинхронным устройством той же мощности.
- Сохранение нагрузочной способности даже при снижении напряжения в сети.
- Неизменность частоты вращения независимо от механической нагрузки на валу.
- Экономичность.
Синхронным двигателям также присущи некоторые недостатки:
- Достаточно сложная конструкция, делающая их производство дороже.
- Необходимость источника постоянного тока (возбудителя или выпрямителя).
- Сложность пуска.
- Необходимость корректировать угловую частоту вращения путем изменения частоты питающего напряжения.
Однако в некоторых случаях использование синхронных двигателей предпочтительнее:
- Для улучшения коэффициента мощности.
- В длительных технологических процессах, где нет необходимости в частых запусках и остановках.
Таким образом, «плюсы» двигателей такого типа значительно превосходят «минусы», поэтому на данный момент они высоко востребованы.
Изучив синхронный двигатель, устройство и принцип его действия и учтя условия, в которых он будет эксплуатироваться, вы сможете быстро и с легкостью подобрать оптимально подходящий для ваших целей тип агрегата (защищенный, закрытый, открытый) и использовать его с максимальной эффективностью.
Синхронный двигатель
Принцип действия синхронного двигателя. Так как синхронная машина обладает свойством обратимости, конструкция двигателя практически не отличается от конструкции синхронного генератора. Однако взаимодействие элементов теперь отвечает принципу действия двигателя. Электрическая активная мощность Р потребляется из сети, в результате чего по обмоткам статора протекает ток . Ток, как и в генераторе, создаёт МДС Fст, а она – потоки Фd и Фр,я, наводящие в обмотке статора ЭДС
. Ток, как и в генераторе, создаёт МДС Fст, а она – потоки Фd и Фр,я, наводящие в обмотке статора ЭДС  и
и  .
.
По обмотке ротора протекает ток возбуждения Iв, её МДС Fв создаёт магнитный поток ротора Ф0. Вращаясь вместе с ротором, поток Ф0 в соответствии с законом электромагнитной индукции (ЭМИ) индуцирует в обмотке статора ЭДС  , которая направлена против напряжения сети
, которая направлена против напряжения сети  . Сумма ЭДС
. Сумма ЭДС  с учётом падения напряжения на активном сопротивлении обмотки статора
с учётом падения напряжения на активном сопротивлении обмотки статора  уравновешивает напряжение сети . Магнитные потоки Ф0, Фd и Фр,я образуют результирующий магнитный поток двигателя Фрез.
уравновешивает напряжение сети . Магнитные потоки Ф0, Фd и Фр,я образуют результирующий магнитный поток двигателя Фрез.

Вал двигателя сцеплён с валом рабочей машины РМ (например, со шпинделем металлорежущего станка), потребляющей механическую энергию и создающей момент сопротивления Мс. В результате действия тормозящего момента Мс полюсы ротора отстают от полюсов результирующего поля статора (см. рис. 4.6). В двигательном режиме результирующий магнитный поток двигателя Фрез является ведущим; вращаясь, он увлекает за собой ротор, создавая вращающий момент М двигателя, преодолевающий тормозной момент Мс механической нагрузки.
Уравнение второго закона Кирхгофа для обмотки статора. В двигательном режиме синхронная машина потребляет из сети ток, который направлен навстречу ЭДС (рис.4.14,а).
Уравнение, записанное по второму закону Кирхгофа для фазы обмотки статора
 , (4.4)
, (4.4)
показывает, что противо-ЭДС и индуктивное падение напряжения jXсин уравновешивают напряжение сети (предполагается, что=0).
Векторная диаграмма синхронного двигателя. Векторная диаграмма построена по уравнению (4.4) на рис. 4.14, б. В результате действия механической нагрузки Мс ось магнитного потока ротора Ф0 отстает на угол  от оси результирующего магнитного потока Фрез. Поэтому в двигательном режиме вектор ЭДС отстает по фазе на угол от вектора напряжения сети . Сопоставление векторных диаграмм синхронного двигателя (рис. 4.14,б) и синхронного генератора (см. рис. 4.13) показывает, что угол меняет свой знак. При построении векторной диаграммы двигателя вектор принимается за исходный.
от оси результирующего магнитного потока Фрез. Поэтому в двигательном режиме вектор ЭДС отстает по фазе на угол от вектора напряжения сети . Сопоставление векторных диаграмм синхронного двигателя (рис. 4.14,б) и синхронного генератора (см. рис. 4.13) показывает, что угол меняет свой знак. При построении векторной диаграммы двигателя вектор принимается за исходный.
Вектор тока отстает по фазе на 90° от вектора jXсин.
Мощность и вращающий момент синхронного двигателя. Активная мощность, потребляемая трехфазным синхронным двигателем из сети, равна утроенной фазной мощности .
.
Если пренебречь потерями, которые относительно малы, то активная потребляемая мощность равна электромагнитной мощности, т. е. мощности, передаваемой магнитным полем из статора в ротор , где
, где  — угол сдвига фаз между током и ЭДС.
— угол сдвига фаз между током и ЭДС.
Из треугольников Оса и асb векторной диаграммы на рис. 14.14, б следует, что отрезок  , где
, где  —масштабный коэффициент. Подставляя значение IcosΨ в выражение для Рэм, получаем для механической мощности на валу двигателя
—масштабный коэффициент. Подставляя значение IcosΨ в выражение для Рэм, получаем для механической мощности на валу двигателя .
.
Механический момент на валу двигателя ,
,
(4.5)
где  — угловая скорость ротора; Мтах =
— угловая скорость ротора; Мтах =  — максимальный момент, развиваемый двигателем. При постоянном напряжении сети Uc максимальный момент двигателя зависит только от ЭДС Е0, т.е. от тока возбуждения ротора Iв.
— максимальный момент, развиваемый двигателем. При постоянном напряжении сети Uc максимальный момент двигателя зависит только от ЭДС Е0, т.е. от тока возбуждения ротора Iв.
Угловая и механическая характеристики. Зависимость момента синхронной машины от угла нагрузки при Uc = const называется угловой характеристикой машины. Угловая характеристика (рис. 4.15) в соответствии с (4.5) имеет вид синусоиды. В двигательном режиме угол положительный, поэтому на графике двигательному режиму соответствует положительная полуволна синусоиды. В генераторном режиме угол отрицательный, ему соответствует отрицательная полуволна синусоиды. В диапазоне угла нагрузки -90°<<+90° (ветвь синусоиды показана сплошной линией) работа машины, как в двигательном, так и в генераторном режиме устойчива, а на участках кривой, изображённых штриховой линией, – неустойчива.
На устойчивом участке характеристики машина обладает свойством саморегулирования, т.е. при изменении момента нагрузки автоматически изменяется в том же направлении момент машины, причём так, что в новом установившемся режиме между ними достигается равновесное устойчивое состояние. Так, в двигательном режиме при увеличении механической нагрузки Мс ротор притормаживается, угол нагрузки увеличивается и в соответствии с угловой характеристикой увеличивается вращающий момент двигателя М. При равенстве М= Мс наступит новый установившийся режим, причём частота вращения ротора останется неизменной и равной частоте вращения магнитного поля статора; только при этом равенстве существует электромагнитное взаимодействие полюсов ротора и статора, обусловливающее момент М машины.
Максимальный момент Мmax машины является и критическим. Если нагрузить двигатель так, что Мс> Мmax , то угол нагрузки станет больше 90°, рабочая точка перейдёт на неустойчивый участок угловой характеристики. Вращающий момент двигателя М начнёт уменьшаться, ротор тормозиться, двигатель выйдет из синхронизма и может остановиться. Аналогичные явления происходят и в генераторном режиме. Выход («выпадение») машины из синхронизма – явление недопустимое, оно может привести к тяжёлой тобы в номинальном режиме угол нагрузки и запас по моменту и активной маварии в электрической сети. Поэтому синхронные машины проектируются так, чощности составлял не менее 1,65.
и запас по моменту и активной маварии в электрической сети. Поэтому синхронные машины проектируются так, чощности составлял не менее 1,65.
Механической характеристикой синхронного двигателя называется зависимость частоты вращения от момента двигателя. В синхронном двигателе частота вращения ротора постоянна и от нагрузки не зависит. Поэтому механическая характеристика n(M) (рис. 4.18) – прямая, параллельная оси абсцисс.
Регулирование коэффициента мощности синхронного двигателя. Синхронный двигатель в отличие от асинхронного обладает ценным для электроэнергетики свойством – он позволяет регулировать реактивную мощность, потребляемую из сети. Когда двигатель работает при неизменной механической нагрузке на валу, т.е. Мс= const при Uc = const, то активная мощность Р, потребляемая двигателем из сети, постоянна:
Если в этих условиях изменять ток возбуждения, ЭДС обмоток статораи изменяются так, что активная составляющая тока Icosφ и составляющая ЭДС  остаются неизменными (рис. 14.17).
остаются неизменными (рис. 14.17).
При изменении тока возбуждения векторскользит вдоль прямой ab, изменяются положение вектора jXсин и угол φ сдвига фаз между токоми напряжением сети , а, вследствие того, что , конец вектора токаскользит по прямой cd.
, конец вектора токаскользит по прямой cd.
Когда ток возбуждения двигателя мал (недовозбуждение), = , ток
, ток  отстаёт по фазе
отстаёт по фазе  от и двигатель потребляет реактивную мощность. При некотором, относительно большом токе возбуждения =
от и двигатель потребляет реактивную мощность. При некотором, относительно большом токе возбуждения =
 и ток
и ток  является чисто активным.
является чисто активным.
Наоборот, при перевозбуждении  и вектор тока
и вектор тока  опережает по фазе вектор напряжения ,
опережает по фазе вектор напряжения ,  , ток, потребляемый двигателем из сети, имеет ёмкостную составляющую. Последнее весьма ценно, поскольку ёмкостный ток компенсирует индуктивные токи, потребляемые из сети другими потребителями (асинхронными двигателями, различного рода катушками и т.п.), и тем самым улучшается cosφ всей сети. Обычно синхронные двигатели работают с перевозбуждением при
, ток, потребляемый двигателем из сети, имеет ёмкостную составляющую. Последнее весьма ценно, поскольку ёмкостный ток компенсирует индуктивные токи, потребляемые из сети другими потребителями (асинхронными двигателями, различного рода катушками и т.п.), и тем самым улучшается cosφ всей сети. Обычно синхронные двигатели работают с перевозбуждением при  .
.
U – образные характеристики. Зависимости I(Iв) при Uc = const и Р= const называются U – образными характеристиками. На рис. 4.18 изображены три такие характеристики для случаев Р=0 (режим холостого хода), некоторой мощности P1>0 P2> P1. Минимум тока на характеристиках соответствует активному току, потребляемому двигателем  , левые ветви – перевозбуждённому двигателю и ёмкостному току.
, левые ветви – перевозбуждённому двигателю и ёмкостному току.
При уменьшении тока возбуждения Iв уменьшается ЭДС Е0 и угол увеличивается  (рис.4.17).
(рис.4.17).
Штриховая кривая АВ на рис. 4.18 представляет собой границу устойчивости, на которой =90°.
Наиболее экономичным для самого синхронного двигателя является режим работы с  , так как двигатель развивает заданную механическую мощность при наименьшем, чисто активном токе статора.
, так как двигатель развивает заданную механическую мощность при наименьшем, чисто активном токе статора.

Обычно в эксплуатации синхронный двигатель перевозбуждают с целью улучшения cosφ сети. Режим перевозбуждения выгоден и тем, что уменьшается угол и возрастает перегрузочная способность двигателя. Вместе с этим следует учитывать, что обмотки статора двигателя рассчитаны на определённый ток  с точки зрения нагрева. Поэтому, чем больше загрузка двигателя активным током Ia (определяющим механическую мощность и момент на валу), тем меньше возможности использования двигателя в качестве генератора реактивной (ёмкостной) мощности за счёт реактивной составляющей тока Ip.
с точки зрения нагрева. Поэтому, чем больше загрузка двигателя активным током Ia (определяющим механическую мощность и момент на валу), тем меньше возможности использования двигателя в качестве генератора реактивной (ёмкостной) мощности за счёт реактивной составляющей тока Ip.
Синхронные компенсаторы. Синхронные компенсаторы – это синхронные машины, специально предназначенные для улучшения коэффициента мощности (cosφ) электрической сети. Они работают без механической нагрузки на валу (ток Ia мал) в перевозбуждённом режиме (правая ветвь U – образной характеристики Р=0 на рис. 4.20). Поскольку синхронные компенсаторы работают вхолостую и загружены только реактивным током Ip, они имеют облегчённую механическую конструкцию и, следовательно, меньшие размеры и массу.
Пуск синхронного двигателя. Пуск синхронного двигателя сопряжён с трудностями. Если статорную обмотку включить в трёхфазную сеть, а обмотку возбуждения питать от источника постоянного напряжения Uв (рис. 4.19), то ротор не сдвинется с места – из-за инерционности ротора вращающееся поле статора не успевает сцепиться с неподвижным полем ротора.
Распространение получил так называемый асинхронный пуск синхронного двигателя. Для осуществления асинхронного пуска ротор синхронного двигателя снабжается специальной пусковой короткозамкнутой обмоткой из медных или алюминиевых стержней типа беличьей клетки асинхронного короткозамкнутого двигателя. Пуск двигателя осуществляют следующим образом (рис. 4.19).
 Вначале обмотка возбуждения синхронного двигателя замыкается на пусковой реостат Rп, сопротивление которого в 8 – 10 раз больше, чем сопротивление обмотки возбуждения (если оставить обмотку возбуждения разомкнутой, то в ней при пуске вращающимся полем статора будет наводиться значительная ЭДС, опасная для изоляции). При включении обмотки статора на трёхфазное напряжение двигатель за счёт короткозамкнутой обмотки начинает работать как асинхронный. Когда частота вращения ротора двигателя достигает примерно 95% синхронной частоты вращения поля статора n0, пусковой реостат Rп отключают, а обмотку возбуждения ротора включают на постоянное напряжение Uв. Так как теперь частота вращения поля статора отличается незначительно от частоты поля вращающегося ротора, полюсы полей статора и ротора вступают во взаимодействие, двигатель втягивается в синхронизм и начинает работать как синхронный. В рабочем, т.е. в синхронном, режиме токи в пусковой короткозамкнутой обмотке не возникают и она в работе машины не участвует. Однако при кратковременных толчках механической нагрузки на валу в пусковой обмотке токи наводятся и создают момент, демпфирующий колебания ротора.
Вначале обмотка возбуждения синхронного двигателя замыкается на пусковой реостат Rп, сопротивление которого в 8 – 10 раз больше, чем сопротивление обмотки возбуждения (если оставить обмотку возбуждения разомкнутой, то в ней при пуске вращающимся полем статора будет наводиться значительная ЭДС, опасная для изоляции). При включении обмотки статора на трёхфазное напряжение двигатель за счёт короткозамкнутой обмотки начинает работать как асинхронный. Когда частота вращения ротора двигателя достигает примерно 95% синхронной частоты вращения поля статора n0, пусковой реостат Rп отключают, а обмотку возбуждения ротора включают на постоянное напряжение Uв. Так как теперь частота вращения поля статора отличается незначительно от частоты поля вращающегося ротора, полюсы полей статора и ротора вступают во взаимодействие, двигатель втягивается в синхронизм и начинает работать как синхронный. В рабочем, т.е. в синхронном, режиме токи в пусковой короткозамкнутой обмотке не возникают и она в работе машины не участвует. Однако при кратковременных толчках механической нагрузки на валу в пусковой обмотке токи наводятся и создают момент, демпфирующий колебания ротора.
Преимущества, недостатки и применение синхронных двигателей. Преимущество синхронных двигателей перед асинхронными состоит в том, что благодаря возбуждению от независимого источника постоянного тока они работают при высоком коэффициенте мощности (до ) и даже с опережающим током. Это обстоятельство позволяет увеличивать cosφ всей сети. Кроме того, работа двигателя с высоким cosφ обеспечивает уменьшение потребляемого тока и потерь в синхронном двигателе по сравнению с асинхронным той же мощности и, следовательно, более высокий КПД.
Наконец, вращающий момент синхронного двигателя пропорционален напряжению сети Uc . Поэтому при понижении напряжения в сети синхронный двигатель сохраняет большую перегрузочную способность, чем асинхронный, и, следовательно, обладает большей надёжностью.
Вместе с тем синхронный двигатель сложнее по конструкции, чем асинхронный той же мощности, и поэтому дороже. Синхронные двигатели должны иметь источник постоянного тока (специальный возбудитель или выпрямитель), пуск у них протекает сложнее, чем у асинхронных. Частотное регулирование является единственным способом регулирования угловой частоты вращения ротора синхронного двигателя.
Тем не менее, преимущества синхронных двигателей настолько велики, что при мощностях свыше 100 кВт их целесообразно применять всюду, где не требуется часто останавливать и пускать механизмы или регулировать их скорость. В настоящее время они применяются для привода преобразовательных агрегатов, компрессоров, насосов, вентиляторов, мельниц, дробилок, нерегулируемых прокатных станов и т.п.
Отечественная промышленность выпускает трёхфазные синхронные двигатели мощностью от 20 кВт до нескольких десятков тысяч киловатт при частотах вращения от 100 до 1000 об/мин в явнополюсном исполнении и при 1500, 3000 об/мин – в неявнополюсном, с различным исполнением по способу защиты от внешних воздействий (открытое, защищённое, закрытое и т.д.), с различным рабочим положением вала (горизонтальные, вертикальные) и с различными системами возбуждения: от генератора постоянного тока, расположенного на одном валу с двигателем, от тиристорных выпрямителей и т.д.
Рабочие характеристики синхронного двигателя
Скорость ротора n2, скольжение s, ток статора I1, потребляемая мощность, КПД двигателя, коэффициент мощности cos и момента от мощности(полезной) на валу.
При этом неизменными являются параметры сети, при которых происходит построение характеристик (U=const, f=const)
А)Скоростная характеристика
n2=f(P2)
При неизменной частоте, скорость при изменении нагрузки на валу в пределах допустимой остается постоянной.
Б)cosγ=f(P2)
При постоянном токе возбуждения увеличение нагрузки на валу вызывает уменьшение cosγ, что объясняется увеличением реактивного падения напряжения при возрастании потребляемого из сети тока
В) P1=f(P2) – потребляемая от полезной
П
τуст
отребляемая мощность P1 растет быстрее чем полезная мощность Р2 так как при увеличении нагрузки на валу сказывается увеличение электрических потерь двигателя, которые пропорциональны квадрату тока.Г) КПД от нагрузки: η=f(P2)
КПД с увеличением нагрузки резко увеличивается, достигая максимума тогда, когда независящие от нагрузки механические потери и потери в стали становятся равными, зависящим от нагрузки потерям в меди отмотках
Д) Момента на валу Mэм=f(P2)
Так как характеристики снимаются при условии постоянства частоты источника питания, следовательно угловая скорость w2 будет постоянной при значениях нагрузки в пределах допустимой. Так как момент прямо пропорционален полезной мощности и обратно пропорционален угловой скорости, то зависимость будет иметь вид прямой, выходящей из начала координат.
Е) Зависимость тока статора от мощности I1=f(P2)
При увеличении нагрузки при постоянном токе возбуждения происходит уменьшение cosφ
7) Асинхронный пуск синхронного двигателя.
Для осуществления этого пуска в полюсных наконечниках ротора вкладывается дополнительно короткозамкнутая обмотка, т.к во время пуска в обмотке возбуждения двигателя наводится большая ЭДС, то по соображениям безопасности короткозамкнутая обмотка замыкается рубильником LM на разрядное сопротивление. При включении трехфазной цепи в обмотку статора трехфазного двигателя возникает вращающееся магнитное поле, которое пересекает короткозамкнутую обмотку и индуктирует в ней токи. Эти токи взаимодействуя с вращающимся полем статора приводят ротор во вращение, при достижении ротором максимальной скорости вращения (асинхронной при номинальном скольжении – 95-97% от синхронной скорости) рубильник переключают так, чтобы обмотку ротора включить в сеть постоянного напряжения.
14) Расчет мощности и выбор электродвигателя для электропривода
Выбор электродвигателя предполагает:
Выбор рода тока (переменный постоянный) и номинального напряжения исходя из экономических соображений с учетом того, что самыми простыми дешевыми и надежными являются асинхронные двигатели , а самыми дорогими и сложными – двигатели постоянного тока.
Выбор номинальной частоты вращения
Выбор конструктивного исполнения двигателя, при этом учитываются три фактора:
Защита от воздействия окружающей среды
Способ и обеспечение охлаждения
Способ монтажа.
Расчет мощностей электродвигателей для длительного режима работы
Основным условием является: Мн >= Мс
Для мощности: Рн > Рс
При постоянной нагрузке определяется мощность Рс или момент Мс механизма, приведенный к валу двигателя и по каталогу выбирается двигатель, имеющий номинальную мощность равную, либо большую, чем Рс. Для тяжелых условий пуска осуществляется проверка величины пускового момента двигателя так, чтобы он превышал момент сопротивления механизма. Мп=Мн*λ2
Мн =Рн/w1
λ2 — кратность пускового момента двигателя, выбираемая по каталогу
При длительной переменной нагрузке оопределение номинальной мощности двигателя производят по методу средних потерь либо по методу эквивалентных величин (моменту, току или мощности).
Расчет номинальной мощности двигателя по методу средних потерь
Метод основан на предположении, что при равенстве номинальных потерь двигателя ΔРн и средних потерь ΔРср, определяемых по нагрузочной диаграмме, температура двигателя не будет превышать допустимую. Τд=ΔPн/А= ΔPср/А
Метод расчета номинальной мощности двигателя по методу эквивалентных величин
Метод основан на понятии среднеквадратичного или эквивалентного тока ( мощности и момента). Переменные потери в двигателе пропорциональны квадрат тока нагрузки. Эквивалентным или неизменным по величине током называют ток, создающий в двигателе такие же потери, как и изменяющийся со временем фактический ток нагрузки
Определим величину эквивалентного тока:
Iэ=sqrt((I12t1+ I22t2+… In2tn)/(t1+t2…+tn))
По каталогу выбирается двигатель, ток которого больше либо равен эквивалентному току
Двигатель проверяют по перегрузочной способности (отношение критического момента к номинальному) λ, это значение не должно превышать допустимого значения в каталогах или эквивалентного момента
Мэкв=sqrt((М12t1+ М22t2+… Мn2tn)/(t1+t2…+tn))
Если мощность и вращающий момент двигателя пропорциональны величине тока, то для расчетов можно воспользоваться выражением для эквивалентной мощности
Рэкв=sqrt((Р12t1+ Р22t2+… Рn2tn)/(t1+t2…+tn))
Синхронные машины, как и другие электрические машины, обратимы, т.е. они могут работать как в двигательном, так и генераторном режимах. Однако электропромышленность выпускает синхронные машины, предназначенные для работы только в генераторном или только в двигательном режиме, так как особенности работы машины в том или ином режиме предъявляют различные требования к конструкции машины [6, с. 431].
Синхронные двигатели чаще работают в пусковых режимах и должны развивать больший пусковой момент, чем генераторы. Это накладывает определенные условия на конструкцию ротора: демпферную (пусковую) обмотку синхронных двигателей рассчитывают на большие токи и более длительный режим.
Для возбуждения синхронных двигателей используется электромашинная система возбуждения или тиристорная система возбуждения. В электромашинных системах возбуждения якорь возбудителя — генератора постоянного тока — соединяется с валом синхронного двигателя жестко или в тихоходных машинах — через клиноременную передачу, которая обеспечивает увеличение частоты вращения возбудителя и снижение его массы. Системы возбуждения синхронных двигателей принципиально не отличаются от систем возбуждения генераторов.
Уравнения синхронного двигателя отличаются от уравнений синхронного генератора лишь тем, что в них изменяется знак момента сопротивления.
Чтобы из генераторного режима перейти в двигательный, надо изменить знак момента сопротивления, приложенного к валу синхронной машины. Тогда изменится знак угла θ и направление активной мощности; машина начнет потреблять мощность из сети.
На угловой характеристике (рис. 6) область двигательного режима находится в зоне отрицательных углов θ. Устойчивой частью угловой характеристики в двигательном режиме является область от 0 до — 90°. Номинальный момент, соответствующий θ ном, находится в области 20-30°. Двигатель с неявнополюсным ротором имеет максимум момента при θ = — 90°:
3
Максимальный момент зависит от размера воздушного зазора двигателя. Чем больше зазор, тем меньше xd и больше М эм мах . Однако при большом зазоре растут габариты машины. Предел статической устойчивости
4
Рис. 6 Угловая характеристика синхронной машины
Удельный синхронизирующий момент, как и в генераторном режиме, максимален при θ = 0 и равен нулю при θ = 90° .
Для явно полюсного двигателя зависимость Мс , Мэм = f (0) имеет такой же вид, как и для генератора, но располагается в зоне отрицательных углов θ. [6, с. 432]
U-образные характеристики синхронных двигателей имеют тот же вид, что и для генераторов. При перевозбуждении синхронный двигатель по отношению к сети является емкостью, недовозбужденный двигатель потребляет из сети реактивную мощность, являясь по отношению к сети индуктивностью. При недовозбуждении реакция якоря в синхронном двигателе — подмагничивающая, при перевозбуждении — размагничивающая. Важное значение для исследования процессов преобразования энергии в синхронных двигателях имеют рабочие характеристики (рис. 7).
Рис. 7. Рабочие характеристики синхронного двигателя
С ростом нагрузки на валу двигателя увеличивается момент и ток в якоре, сначала по линейному закону, а затем из-за изменения параметров — по нелинейному закону. Если не изменяется If , cos φ может падать, расти или иметь максимум. Это зависит от значения If и может быть прослежено по U-образным характеристикам: при увеличении Р2 — переходе с одной U-образной характеристики на другую cos φ изменяется, так как из-за внутреннего падения напряжения кривая cos φ = 1 смещается в область больших нагрузок. При изменении If можно получить постоянное значение cos φ при разных Р2 (рис. 8). Кривая 1 на рис. 8 соответствует работе синхронного двигателя с постоянным током возбуждения в зоне недовозбуждения на U-образных характеристиках, кривая 2 – работе синхронного двигателя с перевозбуждением; кривая 3 возможна при регулировании тока возбуждения.
Рис. 8. Зависимости cos φ синхронного двигателя от нагрузки
Зависимость КПД от нагрузки такая же, как и для всех электрических машин.
Характерным отличием синхронных двигателей является постоянство частоты вращения при изменении нагрузки. Синхронные двигатели имеют предельно жесткие механические характеристики [6, с. 432].
Одним из основных недостатков синхронных двигателей являются плохие пусковые свойства, которые ограничивают их применение. Пуск синхронных двигателей может быть частотным, при помощи разгонного двигателя или синхронные двигатели могут включаться на полное напряжение сети (асинхронный пуск). Наиболее распространенным является асинхронный пуск. Вследствие наличия короткозамкнутых контуров на роторе (демпферной обмотки, массивных полюсных наконечников) ротор разгоняется до частоты вращения, близкой к синхронной. Обмотка возбуждения при асинхронном пуске закорачивается на активное сопротивление. После подхода ротора к частоте вращения, близкой к синхронной ( s ≈ 0,05), обмотка возбуждения подключается к возбудителю и осуществляется грубая синхронизация машины.
Применяется также пуск с наглухо присоединенным возбудителем. В этом случае при частоте вращения, равной (0,5 ÷ 0,7) n ном , в обмотке возбуждения синхронного двигателя начинает протекать постоянный ток и машина втягивается в синхронизм. Пуск двигателя с наглухо присоединенным возбудителем сопровождается большими бросками токов и может осуществляться, если нагрузка не превышает (0,4-0,5) М ном . Однако схема пуска с наглухо присоединенным возбудителем более простая и находит все большее применение.
При тяжелых условиях пуска мощных синхронных двигателей применяется реакторный или автотрансформаторный пуск по схемам, рассмотренным для асинхронных двигателей.
При пуске синхронного двигателя с помощью разгонного двигателя синхронный двигатель доводится до почти синхронной частоты вращения. В качестве разгонного двигателя может использоваться асинхронный двигатель, имеющий большую, чем синхронный, синхронную частоту вращения или двигатель постоянного тока, если есть сеть постоянного тока. Пуск с помощью разгонного двигателя применяется редко, так как разгонный двигатель используется только при пуске [6, с. 432].
При частотном пуске обмотка статора синхронного двигателя подключается к преобразователю частоты, который изменяет частоту от нескольких герц до номинальной частоты. При частотном пуске синхронный двигатель входит в синхронизм при малых частотах. Частотный пуск удобно использовать, если преобразователь частоты можно применять для пуска нескольких двигателей.
Сравнивая синхронные двигатели с асинхронными, следует отметить основное преимущество синхронных двигателей — возможность работать с cos φ = 1, а при перевозбуждении — и с опережающим cos φ.
Максимальный момент синхронного двигателя пропорционален U, а асинхронного – U2 . Поэтому синхронные двигатели менее чувствительны к изменению напряжения сети и имеют большую перегрузочную способность. Регулирование потока возбуждения путем изменения тока возбуждения обеспечивает регулирование реактивной мощности при падении напряжения и уменьшении частоты сети.
Недостатком синхронных двигателей является их более сложная конструкция, необходимость в источнике постоянного тока и худшие по сравнению с асинхронными пусковые свойства.
При мощности двигателей от нескольких киловатт до 100 кВт проявляется еще один недостаток синхронных двигателей — склонность к качаниям. При определенном соотношении параметров синхронных двигателей ротор покачивается около синхронной частоты вращения.
Синхронные двигатели при условии легких пусков целесообразно применять при мощности свыше 200 кВт. Области применения синхронных двигателей непрерывно расширяются, и их мощности возрастают до 50 МВт.
Синхронные двигатели мощностью до 1-2 кВт выполняются с явнополюсным ротором без обмотки возбуждения. За счет различия проводимости по продольной и поперечной осям машины в таких машинах возникает реактивный момент, а асинхронный пуск обеспечивается демпферной обмоткой [6, с. 433].
На рис. 9 показаны две наиболее распространенные конструкции роторов синхронных реактивных двигателей. Четырехполюсная конструкция ротора (рис. 9, а) имеет стальной шихтованный явнополюсный магнитопровод 1 и демпферную обмотку 2. Двухполюсный шихтованный ротор, залитый алюминием, дан на рис. 9, б. Сердечник ротора 3 заливается алюминием 4, который скрепляет сердечник и образует демпферную обмотку.
Рис. 9. Конструкции роторов синхронных реактивных двигателей
Реактивные двигатели имеют низкие cos φ и КПД (η = 0,3÷0,4), их масса больше, чем у обычных трехфазных асинхронных двигателей.
Вместо электромагнитного возбуждения можно применять постоянные магниты. Серии двигателей с постоянными магнитами выпускаются на мощности от десятков ватт до нескольких киловатт. Они имеют лучшие энергетические показатели по сравнению с реактивными.
Для обеспечения пускового момента двигатели с постоянными магнитами имеют пусковую обмотку в виде беличьей клетки, залитой алюминием. Ротор из магнитотвердого материала изготовляется путем литья из специальных сплавов. Этот процесс трудоемкий, поэтому ротор имеет.
Определение: Двигатель, который работает с синхронной скоростью, известен как синхронный двигатель. Синхронная скорость — это постоянная скорость, с которой двигатель генерирует электродвижущую силу. Синхронный двигатель используется для преобразования электрической энергии в механическую энергию.
Строительство синхронного двигателя
Статор и ротор являются двумя основными частями синхронного двигателя.Статор становится неподвижным и несет обмотку якоря двигателя. Обмотка якоря является основной обмоткой, из-за которой в двигателе возникает ЭДС. Вращатели несут обмотки поля. Основной поток поля индуцируется в роторе. Ротор сконструирован двумя способами: ротор с заметным полюсом и ротор с не выступающим полюсом.
Синхронный двигатель использует несущий полюсный ротор. Слово выступающий означает полюса ротора, спроецированные на обмотки якоря .Ротор синхронного двигателя выполнен из пластин из стали. Расслоения уменьшают потери на вихревые токи, возникающие на обмотке трансформатора. Выдвижной ротор в основном используется для проектирования средне- и тихоходного двигателя. Для получения высокоскоростного цилиндрического ротора в двигателе используется.
Синхронный двигатель работает
Статор и ротор являются двумя основными частями синхронного двигателя. Статор — это неподвижная часть, а ротор — вращающаяся часть машины.Трехфазное питание подается на статор двигателя.
Статор и ротор оба возбуждены отдельно. Возбуждение — это процесс создания магнитного поля на деталях двигателя с помощью электрического тока.
Когда на статор подается трехфазное питание, между статором и зазором ротора возникает вращающееся магнитное поле. Поле с движущейся полярностью известно как вращающееся магнитное поле. Вращающееся магнитное поле развивается только в многофазной системе.Из-за вращающегося магнитного поля на статоре развиваются северный и южный полюсы.
Ротор возбуждается источником постоянного тока. Источник постоянного тока наводит северный и южный полюсы ротора. Поскольку подача постоянного тока остается постоянной, индуктивность потока на роторе остается неизменной. Таким образом, поток имеет фиксированную полярность. Северный полюс развивается на одном конце ротора, а южный полюс развивается на другом конце.
AC является синусоидальным. Полярность волны меняется в каждом полупериоде, т.е.волна остается положительной в первой половине цикла и становится отрицательной во второй половине цикла. Положительный и отрицательный полупериод волны развивают север и южный полюс статора соответственно.
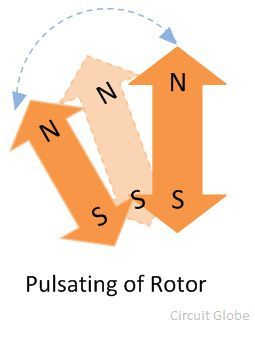
Когда ротор и статор имеют одинаковый полюс на одной стороне, они отталкиваются друг от друга. Если они имеют противоположные полюса, они притягивают друг друга. Это легко понять с помощью рисунка, показанного ниже. 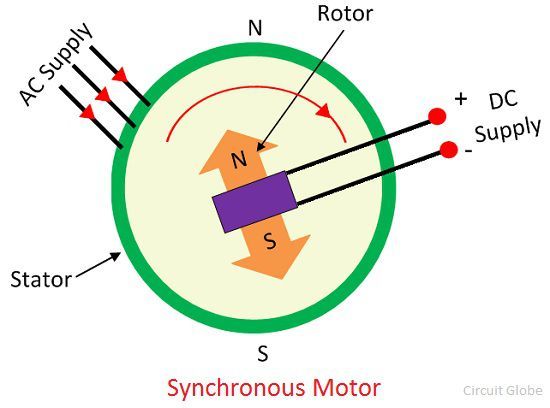 Ротор притягивается к полюсу статора для первой половины цикла подачи и отталкивания для второй половины цикла.Таким образом, ротор пульсирует только в одном месте. Это причина, по которой синхронный двигатель не запускается самостоятельно.
Ротор притягивается к полюсу статора для первой половины цикла подачи и отталкивания для второй половины цикла.Таким образом, ротор пульсирует только в одном месте. Это причина, по которой синхронный двигатель не запускается самостоятельно.
 Первичный двигатель используется для вращения двигателя. Первичный двигатель вращает ротор с их синхронной скоростью. Синхронная скорость — это постоянная скорость машины, значение которой зависит от частоты и числа полюсов машины.
Первичный двигатель используется для вращения двигателя. Первичный двигатель вращает ротор с их синхронной скоростью. Синхронная скорость — это постоянная скорость машины, значение которой зависит от частоты и числа полюсов машины.
Когда ротор начинает вращаться со своей синхронной скоростью, первичный двигатель отключается от двигателя.И постоянный ток подается к ротору, из-за чего северный и южный полюс развивается на своих концах
Северный и южный полюса ротора и статора сцепляются друг с другом. Таким образом, ротор начинает вращаться со скоростью вращающегося магнитного поля. И мотор работает на синхронной скорости. Скорость двигателя может быть изменена только путем изменения частоты питания.
Основные характеристики синхронного двигателя
- Скорость синхронного двигателя не зависит от нагрузки, т.е.изменение нагрузки не влияет на скорость двигателя.
- Синхронный двигатель не запускается самостоятельно. Первичный двигатель используется для вращения двигателя на их синхронной скорости.
- Синхронный двигатель работает как с опережающим, так и с запаздывающим коэффициентом мощности.
Синхронный двигатель также можно запустить с помощью обмоток демпфера.
,Электродвигатель | Британика
Самый простой тип асинхронного двигателя показан в поперечном сечении на рисунке. Трехфазный набор обмоток статора вставлен в пазы утюга статора. Эти обмотки могут быть подключены либо в конфигурации «вай», обычно без внешнего подключения к нейтральной точке, либо в конфигурации «треугольник». Ротор состоит из цилиндрического железного сердечника с проводниками, размещенными в пазах вокруг поверхности. В наиболее обычной форме эти проводники ротора соединены вместе на каждом конце ротора проводящим торцевым кольцом.
Поперечное сечение трехфазного асинхронного двигателя. Encyclopædia Britannica, Inc.Основу работы асинхронного двигателя можно разработать, предположив сначала, что обмотки статора подключены к трехфазному источнику электропитания и что набор из трех синусоидальных токов формы, показанной на рисунке, течет в обмотках статора. На этом рисунке показано влияние этих токов на создание магнитного поля через воздушный зазор машины в течение шести мгновений в цикле.Для простоты показана только центральная петля проводника для каждой фазовой обмотки. В момент времени t 1 на рисунке ток в фазе a является максимально положительным, в то время как в фазах b и c половина этого значения отрицательна. В результате создается магнитное поле с приблизительно синусоидальным распределением вокруг воздушного зазора с максимальным наружным значением вверху и максимальным внутренним значением внизу. В момент времени т 2 на рисунке (т.е.то есть, одна шестая часть цикла позже), ток в фазе c является максимально отрицательным, в то время как в фазе b и фазе a является половинным положительным значением. Результат, как показано для t 2 на рисунке, снова представляет собой синусоидально распределенное магнитное поле, но повернутое на 60 ° против часовой стрелки. Изучение распределения тока для т 3 , т 4 , т 5 и т 6 показывает, что магнитное поле продолжает вращаться с течением времени.Поле совершает один оборот за один цикл токов статора. Таким образом, объединенный эффект трех равных синусоидальных токов, равномерно смещенных во времени и протекающих в трех обмотках статора, равномерно смещенных в угловом положении, заключается в создании вращающегося магнитного поля с постоянной величиной и механической угловой скоростью, которая зависит от частоты электроснабжение.
Получите эксклюзивный доступ к контенту из нашего первого издания 1768 года с вашей подпиской. Подпишитесь сегодняВращательное движение магнитного поля относительно проводников ротора вызывает индуцирование напряжения в каждом, пропорциональном величине и скорости поля относительно проводников.Поскольку проводники ротора закорачиваются вместе на каждом конце, эффект будет вызывать токи в этих проводниках. В простейшем режиме работы эти токи будут примерно равны индуцированному напряжению, деленному на сопротивление проводника. Структура токов ротора для момента т 1 на рисунке показана на этом рисунке. Видно, что токи приблизительно синусоидально распределены по периферии ротора и расположены так, чтобы создавать вращающий момент против часовой стрелки (т.е.крутящий момент в том же направлении, что и вращение поля). Этот крутящий момент действует для ускорения ротора и вращения механической нагрузки. Когда скорость вращения ротора увеличивается, его скорость относительно скорости вращающегося поля уменьшается. Таким образом, индуцированное напряжение уменьшается, что приводит к пропорциональному уменьшению тока в проводнике ротора и крутящего момента. Скорость ротора достигает постоянного значения, когда крутящий момент, создаваемый токами ротора, равен крутящему моменту, требуемому на этой скорости нагрузкой, при этом избыточный крутящий момент не доступен для ускорения объединенной инерции нагрузки и двигателя.
Вращающееся поле и токи, возникающие в короткозамкнутых проводниках ротора. Encyclopædia Britannica, Inc.Механическая выходная мощность должна обеспечиваться электрической входной мощностью. Исходные токи статора, показанные на рисунке, достаточны для создания вращающегося магнитного поля. Для поддержания этого вращающегося поля в присутствии токов ротора на фигуре необходимо, чтобы обмотки статора передавали дополнительный компонент синусоидального тока такой величины и фазы, чтобы исключить влияние магнитного поля, которое могло бы возникнуть в противном случае. токами ротора на рисунке.Общий ток статора в каждой фазной обмотке представляет собой сумму синусоидальной составляющей для создания магнитного поля и другой синусоиды, ведущую первую на четверть цикла или на 90 °, чтобы обеспечить требуемую электрическую мощность. Второй или силовой компонент тока находится в фазе с напряжением, приложенным к статору, в то время как первый или намагничивающий компонент отстает от приложенного напряжения на четверть цикла, или на 90 °. При номинальной нагрузке этот намагничивающий компонент обычно находится в диапазоне 0.От 4 до 0,6 величины силовой составляющей.
Большинство трехфазных асинхронных двигателей работают с обмотками статора, подключенными напрямую к трехфазному источнику постоянного напряжения и частоты. Типичные напряжения питания находятся в диапазоне от 230 вольт между линиями для двигателей относительно низкой мощности (например, от 0,5 до 50 кВт) до примерно 15 кВ от линий к линии для двигателей большой мощности до примерно 10 мегаватт.
За исключением небольшого падения напряжения в сопротивлении обмотки статора, напряжение питания соответствует скорости изменения магнитного потока в статоре машины.Таким образом, в источнике постоянного напряжения с постоянной частотой величина вращающегося магнитного поля поддерживается постоянной, а крутящий момент приблизительно пропорционален составляющей мощности тока питания.
При использовании асинхронного двигателя, показанного на предыдущих рисунках, магнитное поле вращается на один оборот за каждый цикл частоты питания. Для источника питания 60 Гц полевая скорость составляет 60 оборотов в секунду, или 3600 в минуту. Скорость ротора меньше скорости поля на величину, достаточную для того, чтобы индуцировать требуемое напряжение в проводниках ротора для создания тока ротора, необходимого для момента нагрузки.При полной нагрузке скорость, как правило, на 0,5–5 процентов ниже скорости поля (часто называемой синхронной скоростью), причем более высокий процент применяется к двигателям меньшего размера. Эта разница в скорости часто называется скольжением.
Другие синхронные скорости можно получить с помощью источника постоянной частоты, построив машину с большим числом пар магнитных полюсов, в отличие от двухполюсной конструкции на рисунке. Возможные значения скорости магнитного поля в оборотах в минуту: 120 f / p , где f — частота в герцах (циклов в секунду), а p — количество полюсов (которое должно быть четное число).Данная железная рама может быть намотана для любого из нескольких возможных чисел пар полюсов с помощью катушек, которые охватывают угол приблизительно (360/ p ) °. Крутящий момент, доступный от рамы машины, останется неизменным, поскольку он пропорционален произведению магнитного поля и допустимому току катушки. Таким образом, номинальная мощность для рамы, являющаяся произведением крутящего момента и скорости, будет примерно обратно пропорциональна числу пар полюсов. Наиболее распространенные синхронные скорости для 60-герцовых двигателей составляют 1800 и 1200 оборотов в минуту.
,Роторно-роторный синхронный двигатель
Дмитрий Левкин
Роторно-роторный синхронный двигатель представляет собой синхронный электродвигатель, ротор которого выполнен с обмоткой возбуждения.Синхронный двигатель с обмоткой ротора, как и любой вращающийся электродвигатель, состоит из ротора и статора. Статор является фиксированной частью. Ротор является вращающейся частью. Статор обычно имеет стандартную трехфазную обмотку, а ротор выполнен с полевой обмоткой.Обмотка возбуждения соединена с контактными кольцами, на которые питание подается через щетки.
Синхронный двигатель с обмоткой ротора (щетки не показаны)
Постоянная скорость синхронного двигателя достигается взаимодействием постоянного и вращающегося магнитного поля. Ротор синхронного двигателя создает постоянное магнитное поле, а статор — вращающееся магнитное поле.
Работа синхронного двигателя основана на взаимодействии вращающегося магнитного поля статора и постоянного магнитного поля ротора
Статор: вращающееся магнитное поле
Трехфазное питание переменного тока подается на обмотки катушек статора.В результате возникает вращающееся магнитное поле, которое вращается со скоростью, пропорциональной частоте напряжения питания. Подробнее о том, как вращающееся магнитное поле генерируется трехфазным напряжением питания, читайте в статье «Трехфазный асинхронный двигатель».
Взаимодействие между вращающимися (статор) и постоянными (ротор) магнитными полями
ротор: постоянное магнитное поле
Обмотка ротора возбуждается источником постоянного тока через контактные кольца. Магнитное поле, создаваемое вокруг ротора, возбужденного постоянным током, показано ниже.Очевидно, что ротор ведет себя как постоянный магнит, поскольку у него одинаковое магнитное поле (в качестве альтернативы вы можете представить, что ротор сделан из постоянных магнитов). Рассмотрим взаимодействие ротора и вращающегося магнитного поля. Предположим, вы даете ротору начальное вращение в том же направлении, что и вращающееся магнитное поле. Противоположные полюса вращающегося магнитного поля и ротора будут притягиваться друг к другу, и они будут заблокированы с помощью магнитных сил. Это означает, что ротор будет вращаться с той же скоростью, что и вращающееся магнитное поле, то есть ротор будет вращаться с синхронной скоростью.
Магнитные поля ротора и статора связаны друг с другом
Скорость, с которой вращается магнитное поле, может быть рассчитана по следующему уравнению:
,
- где N с — частота вращения магнитного поля, об / мин,
- f — частота тока статора, Гц,
- р — количество пар полюсов.
Это означает, что скорость синхронного двигателя можно точно контролировать, изменяя частоту тока питания.Таким образом, эти электродвигатели подходят для высокоточных применений.
Почему синхронные двигатели не запускаются самостоятельно от электрической сети?
Если ротор не имеет начального вращения, ситуация отличается от описанной выше. Северный полюс магнитного поля ротора будет притягиваться к южному полюсу вращающегося магнитного поля и начнет двигаться в том же направлении. Но поскольку ротор имеет определенный момент инерции, его начальная скорость будет очень низкой.В это время южный полюс вращающегося магнитного поля будет заменен северным полюсом. Таким образом, силы отталкивания появятся. В результате ротор начнет вращаться в противоположном направлении и не будет запущен.
Демпферная обмотка — прямой запуск синхронного двигателя от электрической сети
Чтобы реализовать самозапуск синхронного двигателя без системы управления, между концами ротора помещена «короткозамкнутая клетка», которая также называется обмоткой демпфера.При запуске двигателя катушки ротора не возбуждаются. Под действием вращающегося магнитного поля в витках «беличьей клетки» индуцируется ток, и ротор начинает вращаться так же, как запускаются асинхронные двигатели.
Когда ротор достигает максимальной скорости, питание подается на полевую обмотку ротора. В результате полюса ротора сцепляются с полюсами вращающегося магнитного поля, и ротор начинает вращаться с синхронной скоростью. Когда ротор вращается с синхронной скоростью, относительное движение между короткозамкнутым ротором и вращающимся магнитным полем равно нулю.Это означает, что в короткозамкнутых витках нет тока, и, следовательно, «беличья клетка» не влияет на синхронную работу электродвигателя.
Синхронные электродвигатели имеют постоянную скорость, независимую от нагрузки (при условии, что нагрузка не превышает максимально допустимую). Если крутящий момент нагрузки больше, чем крутящий момент, создаваемый самим электродвигателем, он выйдет из синхронизма и остановится. Низкое напряжение питания и низкое напряжение возбуждения также могут быть причиной нарушения синхронизации.
Синхронные двигатели также могут быть использованы для улучшения коэффициента мощности системы. Когда единственной целью использования синхронных двигателей является повышение коэффициента мощности, они называются синхронными компенсаторами. В этом случае вал двигателя не связан с механической нагрузкой и вращается свободно.
Также прочитайте
,Конструкция синхронного двигателя
General
Синхронные двигатели преобразуют электроэнергию в механическую, а синхронные генераторы преобразуют механическую энергию в электрическую; и синхронные конденсаторы подают только реактивную мощность для стабилизации напряжения системы.
 Конструкция синхронного двигателя (статор / ротор)
Конструкция синхронного двигателя (статор / ротор)Синхронные двигатели, генераторы и конденсаторы работают аналогично, за исключением тяжелой обмотки клетки на роторе двигателей и конденсаторов для самостоятельного запуска.Ротор имеет физические магнитные полюса, расположенные так, чтобы иметь чередующиеся северный и южный полюсы вокруг диаметра ротора, которые возбуждаются электрическим током, или используют постоянные магниты, имеющие такое же количество полюсов, что и электромагнитные полюса статора.
Число оборотов ротора = 120 x Частота / полюса электрической системы.
Обмотка статора, питаемая от многофазной электрической сети переменного тока, создает вращающиеся электромагнитные полюса. На скорости полюса ротора вращаются синхронно с вращающимися электромагнитными полюсами статора, крутящий момент передается магнитно через угол мощности «воздушного зазора», отстая в генераторах и опережая в двигателях.
Размеры синхронных машин варьируются от дробных ватт, как у серводвигателей, до 1500 МВт, как у крупных генераторов. Напряжения варьируются, до 25000 В статора переменного тока и 1500 В постоянного тока ротора. Устанавливается горизонтально или вертикально на скоростях до 130 000 об / мин, обычно от 40 об / мин (гидротурбины) до 3600 об / мин (турбогенераторы). Частота в основном 60 или 50 Гц, военная 400 Гц; однако синтезированные переменные источники электропитания становятся все более распространенными и обеспечивают переменные скорости двигателя для повышения эффективности процесса.
Описана типичная конструкция и рабочие характеристики синхронных машин; вариации могут существовать на специальных меньших единицах.
Эта техническая статья намеренно носит общий характер. Если читатель хочет получить конкретную информацию о приложении, обратитесь к стандартам: NEMA MG-1; IEEE 115, C50-10 и C50 13; МЭК 600034: 1-11, 14-16, 18, 20, 44, 72 и 136, а также другие применимые спецификации.
Строительство
Статор
Рамка
Внешняя рама из стали, литой или сварной, поддерживает многослойный сердечник статора и имеет опоры или фланцы для крепления к фундаменту.Вибрация рамы от магнитного воздействия на сердечник или дисбаланса ротора сводится к минимуму благодаря упругому креплению сердечника и = или благодаря конструкции, позволяющей избежать резонанса рамы с частотой воздействия. Если используются подшипники кронштейнового типа, рама должна поддерживать подшипники, масляные и газовые уплотнения при охлаждении водородом или газом, отличным от воздуха. Рама также обеспечивает защиту элементов и каналов охлаждающего воздуха или газа от сердечника, обмоток статора и ротора.
Когда агрегат охлаждается газом, содержащимся в раме, тепло от потерь отводится охладителями, в которых вода циркулирует через оребренные трубы теплообменника, установленного внутри рамы.
В тех случаях, когда охлаждающая вода недоступна и наружный воздух не может циркулировать через раму из-за ее грязного или токсичного состояния, используются большие воздухо-воздушные теплообменники, причем наружный воздух нагнетается через охладитель воздуходувкой, установленной снаружи вала.
Сборка сердечника статора
Узел сердечника статора синхронной машины практически идентичен асинхронному двигателю. Основным компонентом узла сердечника статора является сам сердечник, обеспечивающий путь с высокой проницаемостью для магнетизма.Сердечник статора состоит из тонких пластин из кремнистой стали и изолирован поверхностным покрытием, минимизирующим потери на вихревые токи и гистерезис, создаваемые переменным магнетизмом.
Ламинации уложены в виде полных колец или сегментов, с точным выравниванием, либо в фиксаторе, либо в раме статора, при этом вентиляционные прокладки периодически вставляются по длине сердечника. Готовый сердечник сжимается и зажимается в осевом направлении до примерно 10 кг / см 2 с помощью концевых пальцев и тяжелых зажимных пластин.
Нагрев конца сердечника от паразитного магнетизма сводится к минимуму, особенно на более крупных машинах, благодаря использованию немагнитных материалов на конце сердечника или установке флюсового экрана из конусных пластин или медного экрана.
 РИСУНОК 1 — Магнитный каркас (верхняя половина) и конструктивные элементы (нижняя половина) десятиполюсного (720 об / мин при 60 циклах) синхронного двигателя.
РИСУНОК 1 — Магнитный каркас (верхняя половина) и конструктивные элементы (нижняя половина) десятиполюсного (720 об / мин при 60 циклах) синхронного двигателя.Вторым основным компонентом является обмотка статора, состоящая из изолированных катушек, расположенных в осевых пазах внутреннего диаметра сердечника статора.Компоновка, шаг и соединения катушки предназначены для создания вращающихся электромагнитных полюсов статора синхронно с магнитными полюсами ротора.
Катушки статора удерживаются в пазах клиновыми пазами, вбиваемыми в пазы в верхней части пазов статора. Концевые обмотки катушки связаны вместе и опорными кронштейнами.
Если синхронная машина является генератором, магнетизм полюса вращающегося ротора создает напряжение в обмотке статора, которое подает питание на электрическую нагрузку.Если синхронная машина представляет собой двигатель, ее обмотка статора с электрическим приводом генерирует вращающиеся электромагнитные полюса, а притяжение магнитов ротора, работающих синхронно, создает крутящий момент и подачу механической энергии на приводной вал.
Ротор
Роторная сборка
 Синхронные роторы предназначены главным образом для применений, требующих высокоэффективных двигателей. Каждый полюсный узел изготовлен из высокопрочных стальных пластин с обмоткой постоянного тока, охватывающей корпус полюса.Обмотка возбуждения состоит из прямоугольного сечения изолированного медного провода, намотанного непосредственно на корпус изолированного полюса и связанного высокотемпературной, высокопрочной изолирующей эпоксидной смолой, которая при отверждении приводит к тому, что катушка непроницаема для грязи, влаги и других загрязнений.
Синхронные роторы предназначены главным образом для применений, требующих высокоэффективных двигателей. Каждый полюсный узел изготовлен из высокопрочных стальных пластин с обмоткой постоянного тока, охватывающей корпус полюса.Обмотка возбуждения состоит из прямоугольного сечения изолированного медного провода, намотанного непосредственно на корпус изолированного полюса и связанного высокотемпературной, высокопрочной изолирующей эпоксидной смолой, которая при отверждении приводит к тому, что катушка непроницаема для грязи, влаги и других загрязнений.Ротор синхронной машины представляет собой высокотехнологичную унифицированную сборку, способную непрерывно вращаться с синхронной скоростью в соответствии со стандартами или по мере необходимости для применения. Центральным элементом является вал, имеющий цапфы для поддержки узла ротора в подшипниках.
В осевой средней части узла ротора расположен сердечник ротора с магнитными полюсами. Когда ротор закруглен, он называется «не выступающим полюсом», или конструкцией типа турбогенератора, а когда ротор имеет выступающие сборки полюсов, он называется «выступающим полюсом».
Конструкция не характерных полюсов, используемая в основном на турбогенераторах (а также в качестве приводных двигателей вентиляторов аэродинамической трубы), имеет два или четыре магнитных полюса, создаваемых постоянным током в катушках, расположенных в пазах на наружном диаметре ротора.Катушки удерживаются в пазах клиновыми пазами, а на концах удерживающими кольцами на больших высокоскоростных роторах и стекловолоконной лентой на других узлах, где позволяют напряжения. Эта конструкция не подходит для использования на двигателе, требующем самостоятельного пуска, так как поверхность ротора, клинья и стопорные кольца перегреваются и плавятся из-за сильных токов самозапуска.
Иногда на выдающихся полюсных станках используется ковка с одной деталью, обычно с четырьмя или шестью полюсами. Выдающиеся полюса также могут быть неотъемлемой частью ламинирования ротора и могут быть установлены непосредственно на вал или прикреплены к промежуточному крестовине ротора.Каждый отдельный полюс имеет возбуждающую катушку, вокруг которой проходит ток возбуждения, или же он использует постоянные магниты. В генераторе используется умеренная обмотка клетки на поверхности полюсов ротора, обычно с соединениями полюс-полюс, для ослабления крутильных колебаний вала и для подавления гармонических колебаний в магнитной форме волны.
В двигателе требуются тяжелые стержни и концевые соединения на лицевой стороне полюса, чтобы минимизировать и выдержать высокую температуру пускового режима.
Постоянный ток возбуждает обмотки ротора значимых и не значимых полюсных двигателей и генераторов, кроме случаев, когда используются постоянные магниты.Ток возбуждения подается на ротор от внешнего источника постоянного тока через коллекторные кольца или безщеточный возбудитель на валу. Шины или кабели положительной и отрицательной полярности проходят вдоль и через вал, как требуется для подачи тока возбуждения на обмотки полюсов поля.
При подаче через коллекторные кольца постоянный ток может поступать от выходного выпрямленного возбудителя постоянного или переменного тока, от электродвигателя-генератора переменного или постоянного тока или от электростанции. Постоянный ток, подаваемый генератором переменного тока на валу, выпрямляется выпрямительным узлом на валу.
Как генератор, уровень тока возбуждения контролируется регулятором напряжения. В качестве двигателя ток возбуждения либо устанавливается на фиксированное значение, либо регулируется для регулирования коэффициента мощности, тока двигателя или стабильности системы. Кроме того, на роторе также установлены вентиляторы или воздуходувки, установленные на валу, для охлаждения и отвода тепла от агрегата, а также приспособления для внесения поправок и поправок к балансирующему весу.
Подшипники и муфты
Подшипники на синхронных механизмах имеют антифрикционную, консистентную или масляную смазку на небольших машинах, шаровые с масляной смазкой на больших машинах и наклонные колодки на более сложных машинах, особенно там, где динамика ротора является критической.Успешная работа магнитных подшипников, которая оказывается успешной на турбомашинах, может также использоваться для синхронных машин.
Как и в случае подшипников на всех крупных электрических машинах, с синхронными машинами принимаются меры предосторожности для предотвращения повреждения подшипников от паразитных токов электрического вала. Элементарной мерой является нанесение изоляции на подвесной подшипник, если это концевой узел с одним валом, и на подшипник и муфту на одном и том же конце вала для приводных блоков с двумя валами.
Повреждение подшипников может произойти даже при правильно нанесенной изоляции, когда твердотельные контроллеры преобразователей частоты или возбуждения вызывают токи на высоких частотах, проходящие через изоляцию подшипника, как если бы это был конденсатор. Мониторинг заземления вала и напряжения вала и тока заземления может использоваться для прогнозирования и предотвращения возникновения подшипников и других проблем.
ИСТОЧНИК: Синхронное оборудование — Пол I. Nippes Magnetic Products and Services, Inc.
,