Управление биполярным шаговым двигателем. Часть 1. Теория. Схема с контроллером PIC12F629 и драйвером LB1838
- Часть 1. Теория. Схема с PIC12F629 и драйвером LB1838
- Часть 2. Схема с PIC12F629 и драйвером L293D
Шаговые двигатели интересны тем, что позволяют повернуть вал на определённый угол. Соответственно, с их помощью можно повернуть вал и на определённое число оборотов, потому что N оборотов — это тоже определённый угол, равный 360*N, и, в том числе, на нецелое число оборотов, например на 0.75 оборота, 2.5 оборота, на 3.7 оборота и т.д. Этими возможностями шаговых двигателей определяется и область их применения. В основном они используются для позиционирования различных устройств: считывающих головок в дисководах, печатающих головок в принтерах и плоттерах и т.д.
Естественно такие возможности не могли обойти стороной и радиолюбители. Они с успехом используют шаговики в конструкциях самодельных роботов, самодельных станков с ЧПУ и т.д.
Итак, что нам понадобится для экспериментов. Во-первых, шаговый двигатель. Я брал 5-ти вольтовый китайский биполярный шаговик с загадочным названием, выдранный из старого 3,5″ дисковода, аналог M20SP-GW15. Во-вторых, поскольку обмотки двигателя потребляют значительный ток (в данном случае до 300 мА), то вполне понятно, что подключить шаговик к контроллеру напрямую не удастся, нужен драйвер.
В качестве драйвера для биполярных шаговых двигателей обычно используют схему так называемого H-моста или специальную микросхему (в которой всё равно встроен H-мост). Можно конечно ваять самому, но я взял готовую микруху (LB1838) из того же старого дисковода. Собственно, кроме всего вышеописанного, для наших экспериментов также понадобятся: PIC-контроллер (был взят PIC12F629, как самый дешёвый) и пара кнопок.
Перед тем, как перейти непосредственно к схеме, давайте немного разберёмся с теорией.
Биполярный шаговый двигатель имеет две обмотки и, соответственно, подключается по четырём проводам. Найти концы обмоток можно простой прозвонкой — концы проводов, относящиеся к одной обмотке, будут между собой звониться, а концы, относящиеся к разным обмоткам, — нет. Концы первой обмотки обозначим буквами «a», «b», а концы второй обмотки буквами «c», «d».
На рассматриваемом экземпляре есть цифровая маркировка контактов возле мотора и цветовая маркировка проводов (бог его знает, может это тоже какой-то стандарт): 1 — красный, 2 — голубой — первая обмотка; 3 — жёлтый, 4 — белый — вторая обмотка.
Для того, чтобы биполярный шаговый двигатель вращался, необходимо запитывать обмотки в порядке, указанном в таблице. Если направление обхода таблицы выбрать сверху вниз по кругу, то двигатель будет вращаться вперёд, если снизу вверх по кругу — двигатель будет вращаться назад:
За один полный цикл двигатель делает четыре шага.
Для правильной работы, должна строго соблюдаться указанная в таблице последовательность коммутаций. То есть, например, после второй комбинации (когда мы подали + на вывод «c» и минус на вывод «d») мы можем подать либо третью комбинацию (отключить вторую обмотку, а на первой подать — на «a» и + на «b»), тогда двигатель повернётся на один шаг вперёд, либо первую комбинацию (двигатель повернётся на один шаг назад).
То есть, например, после второй комбинации (когда мы подали + на вывод «c» и минус на вывод «d») мы можем подать либо третью комбинацию (отключить вторую обмотку, а на первой подать — на «a» и + на «b»), тогда двигатель повернётся на один шаг вперёд, либо первую комбинацию (двигатель повернётся на один шаг назад).
То, с какой комбинации нужно начинать вращение, определяется тем, какая последняя комбинация подавалась на двигатель перед его выключением (если конечно его руками потом не крутили) и желаемым направлением вращения.
То есть, допустим мы повернули двигатель на 5 шагов вперёд, подавая на него комбинации 2-3-4-1-2, потом обесточили, а потом захотели повернуть ещё на один шаг вперёд. Для этого на обмотки надо подать комбинацию 3. Пусть после этого мы его опять обесточили, а через какое-то время захотели вернуть его на 2 шага назад, тогда нам нужно подать на двигатель комбинации 2-1. И так далее в таком же духе.
Эта таблица, кроме всего прочего, позволяет оценить, что будет происходить с шаговым двигателем, если мы перепутаем порядок подключения обмоток или концы в обмотках.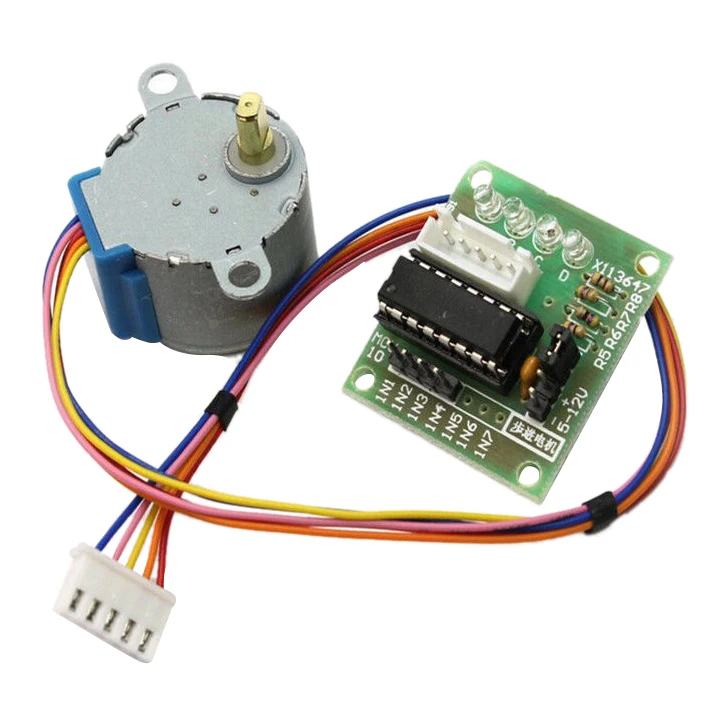
На этом мы закончим с двигателем и перейдём к драйверу LB1838.
У этой микрухи есть четыре управляющие ноги (IN1, IN2, EN1, EN2), на которые мы как раз и будем подавать сигналы с контроллера, и четыре выходных ноги (Out1, Out2, Out3, Out4), к которым подключаются обмотки двигателя. Обмотки подключаются следующим образом: провод «a» подключается к Out1, провод «b» — к Out2, провод «c» — к Out3, провод «d» — к Out4.
Ниже представлена таблица истинности для микросхемы драйвера (состояние выходов в зависимости от состояния входов):
| IN1 | EN1 | Out1 (a) | Out2(b) | IN2 | EN2 | Out3(c) | Out4(d) |
| Low | High | + | — | Low | High | + | — |
| High | High | — | + | High | High | — | + |
| X | Low | откл | откл | X | Low | откл | откл |
Теперь давайте нарисуем на диаграмме, какую форму должны иметь сигналы IN1, EN1, IN2, EN2 для одного полного цикла вращения (4 шага), т.
Если присмотреться к этой диаграмме (слева), то становится очевидно, что сигналы IN1 и IN2 можно сделать абсолютно одинаковыми, то есть на обе этих ноги можно подавать один и тот же сигнал. В этом случае наша диаграмма будет выглядеть так:
Итак, на последней диаграмме нарисовано, какие комбинации уровней сигналов должны быть на управляющих входах драйвера (EN1, EN2, IN1, IN2) для того, чтобы получить соответствующие комбинации подключения обмоток двигателя, а также стрелками указан порядок смены этих комбинаций для обеспечения вращения в нужную сторону.
Вот в общем-то и вся теория. Необходимые комбинации уровней на управляющих входах формируются контроллером (мы будем использовать PIC12F629).
Схема:
Элементы: R1..R2 = 1 кОм. Когда соответствующая кнопка не нажата — резистор подтягивает напряжение на входе контроллера к +5 В (высокий уровень). С1, С2 = 0,1 мкФ — керамические конденсаторы. С3 = 470 мкФ х 16В — электролитический конденсатор. |
Готовый девайс:
Программа управления реализует следующий алгоритм: при нажатии кнопки КН1 двигатель поворачивается на один шаг в одну сторону, а при нажатии кнопки КН2 — на один шаг в другую сторону.
Простейшая программа управления (.asm + .hex)
Скачать плату в формате DipTrace 2.0
Собственно говоря, можно прикрутить сюда программный UART и реализовать управление от компьютера (передавать с компа скорость, количество шагов и направление вращения).
продолжение (для драйвера L293D)…
Домашний CNC. Часть 1. Драйвер шагового двигателя для мини-станка с ЧПУ
При конструировании очередного станка с ЧПУ, а попросту 3-х осевого фрезерного-сверлильного станочка для печатных плат и мелких фрезерных работ, у меня появилось неугомонное желание разложить всё «по полочкам».

Многие скажут, что тема не нова, существует множество проектов, множество технических и программных решений. Но, плавая в этом море информации, я постарался убрать всю «воду» и получить «сухой остаток».
Вот что из этого получилось…
Содержание / Contents
Сразу оговорюсь — все, что здесь далее написано, лишь мои личные выводы и не претендует на абсолютную истину. Истина рождается в споре, так что если уважаемые читатели в чем-то со мной не согласны, давайте это обсудим!Задача построения станка обычно сводится к трем подзадачам — механика, электроника, программное обеспечение. Видимо и статьи придется писать тоже три.
О передаче…
Для фрезерного станка, где есть боковые усилия резания материала, желательно не применять ременные передачи, очень популярные в 3D принтерах.
 Буду применять передачу «винт-гайка». Самая бюджетная передача — обычный стальной винт и безлюфтовая, желательно бронзовая, гайка. Более правильная — винт с трапециевидной резьбой и гайка из капролона. Самая хорошая (и, увы, самая дорогая) шарико-винтовая пара, или ШВП. Об этом подробнее я еще расскажу далее…
Буду применять передачу «винт-гайка». Самая бюджетная передача — обычный стальной винт и безлюфтовая, желательно бронзовая, гайка. Более правильная — винт с трапециевидной резьбой и гайка из капролона. Самая хорошая (и, увы, самая дорогая) шарико-винтовая пара, или ШВП. Об этом подробнее я еще расскажу далее…У каждой передачи есть свой коэффициент, свой шаг — то есть насколько линейно по оси переместится фрезер за один оборот двигателя, например, на 4 мм. В качестве двигателя для привода определил шаговый двигатель (ШД)
Почему шаговый? Что это вообще такое?
Двигатели есть переменного и постоянного тока, коллекторные и бесколлекторные, и так называемые «шаговые». В любом случае нам надо обеспечить какую-то точность позиционирования, например 0,01 мм. Как это сделать? Если двигатель имеет прямой привод — вал двигателя соединяют напрямую с винтом, то для обеспечения такой точности нужно повернуть его на некоторый угол. В данном случае, при шаге передачи 4 мм и желаемой точности перемещения 0,01 мм это… всего 1/400 оборота, или 360/400=0,9 градуса! Ерунда, возьмем обычный моторчик…
С «обычным» моторчиком без обратной связи никак не получится. Не вдаваясь в подробности, схема управления двигателем должна «знать», на какой угол повернулась ось. Можно конечно поставить редуктор — потеряем в скорости, и все равно без гарантии, без обратной связи вообще никак! На ось ставится датчик угла поворота. Такое решение надежное, но дорогое.
Не вдаваясь в подробности, схема управления двигателем должна «знать», на какой угол повернулась ось. Можно конечно поставить редуктор — потеряем в скорости, и все равно без гарантии, без обратной связи вообще никак! На ось ставится датчик угла поворота. Такое решение надежное, но дорогое.
Альтернатива — шаговый двигатель (как он работает, почитайте сами). Можно считать, что за одну «команду» он повернет свою ось на определенный градус, обычно это 1,8 или 0,9 градуса (точность обычно не хуже 5%) — как раз то, что нужно. Недостаток такого решения — при большой нагрузке двигатель будет пропускать команды — «шаги» и может вообще остановиться. Вопрос решается установкой заведомо мощного двигателя. На шаговых двигателях и делается большинство любительских станочков.
2 обмотки, с минимальным током, минимальной индуктивностью и максимальным моментом — то есть максимально мощный и экономичный двигатель.Противоречивые требования. Малый ток — значит большое сопротивление, значит много витков провода обмотки двигателя, значит большая индуктивность.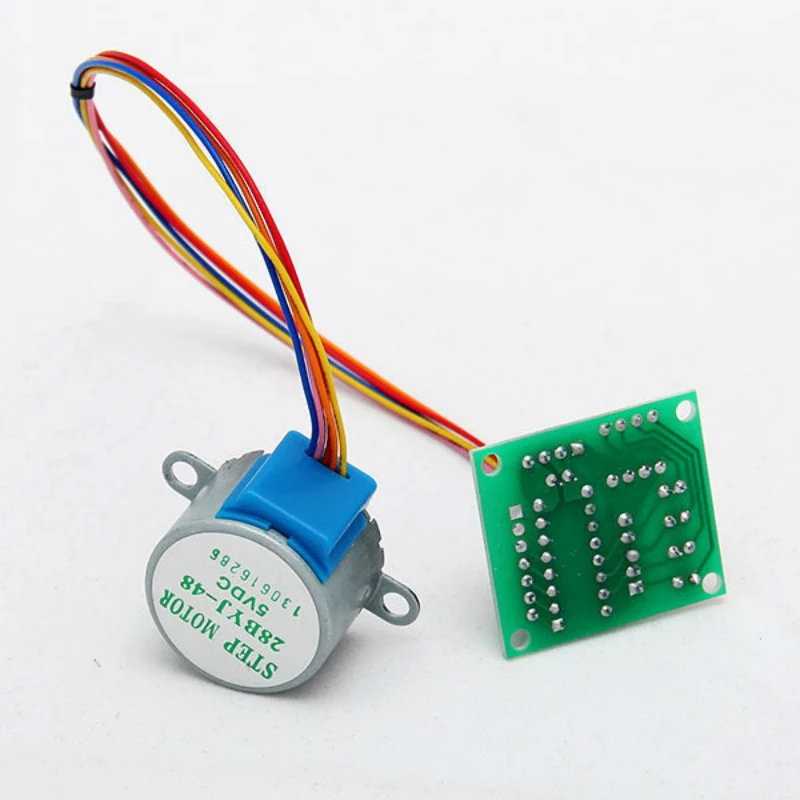 А большой момент — это большой ток и много витков. Выбираем в пользу большего тока и меньшей индуктивности. А момент надо выбирать исходя из нагрузки, но об этом потом.
А большой момент — это большой ток и много витков. Выбираем в пользу большего тока и меньшей индуктивности. А момент надо выбирать исходя из нагрузки, но об этом потом.
Характеристики некоторых двигателей приведены в таблице:
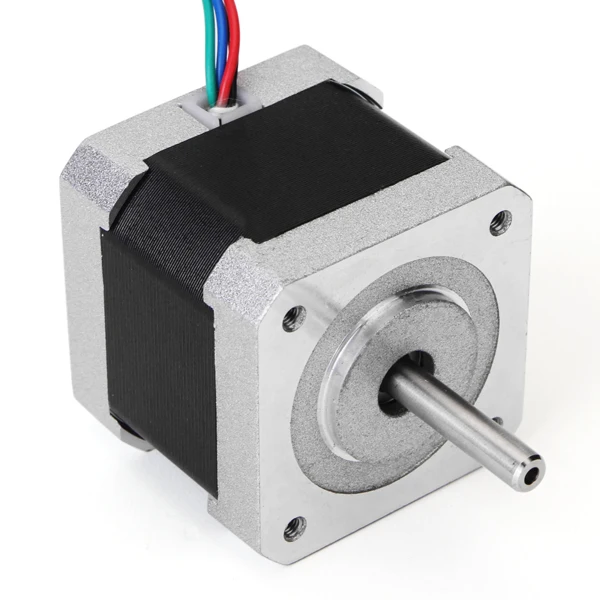
Для небольшого станка с рабочим пространством размером 300×300х100 мм и легким фрезером вполне сгодятся двигатели с крутящим моментом 0,3Нм и выше. Оптимальным является ток от 1,5 до 2,5 Ампер, вполне подойдет FL42STh48-1684 Двигатель есть. Теперь нужен драйвер — переключать напряжение на обмотках двигателя определенным образом, при этом не превышая установленный ток.
Самое простое решение — источник заданного тока и две пары транзисторных ключей на каждую обмотку. И четыре защитных диода. И логическая схема чтобы менять направление. И… Такое решение обычно делают на микросхеме ULN2003A для двигателей с малым током, имеет много недостатков, не буду на них останавливаться.
Альтернатива — специализированные микросхемы «всё в одном» — с логикой, транзисторами и диодами защиты внутри (или снаружи). А еще такие микросхемы контролируют ток обмоток и регулируют его с помощью ШИМ-а, а так же могут реализовывать режим «полушаг», а некоторые режимы 1/4 шага, и 1/8 шага и т. д. Эти режимы позволяют повысить точность позиционирования, повысить плавность движения и снизить резонанс. Обычно достаточно режима «полушаг», что позволит повысить теоретическую точность линейного позиционирования (в моем примере до 0,005 мм).
А еще такие микросхемы контролируют ток обмоток и регулируют его с помощью ШИМ-а, а так же могут реализовывать режим «полушаг», а некоторые режимы 1/4 шага, и 1/8 шага и т. д. Эти режимы позволяют повысить точность позиционирования, повысить плавность движения и снизить резонанс. Обычно достаточно режима «полушаг», что позволит повысить теоретическую точность линейного позиционирования (в моем примере до 0,005 мм).
Что внутри микросхемы драйвера шагового двигателя? Блок логики и управления, источники питания, ШИМ со схемами формирования момента и времени коммутации обмоток, выходные ключи на полевых транзисторах, компараторы обратной связи — ток контролируется по падению напряжения на резисторах (Rs) в цепи питания обмоток. Ток двигателя задается опорным напряжением.
Для реализации этих функций существуют и другие схемные решения, например, с использованием микроконтроллеров PIC или ATMEGA (опять же с внешними транзисторами и защитными диодами). На мой взгляд, они не обладают значительным преимуществом перед «готовыми» микросхемами и я их в данном проекте использовать не буду.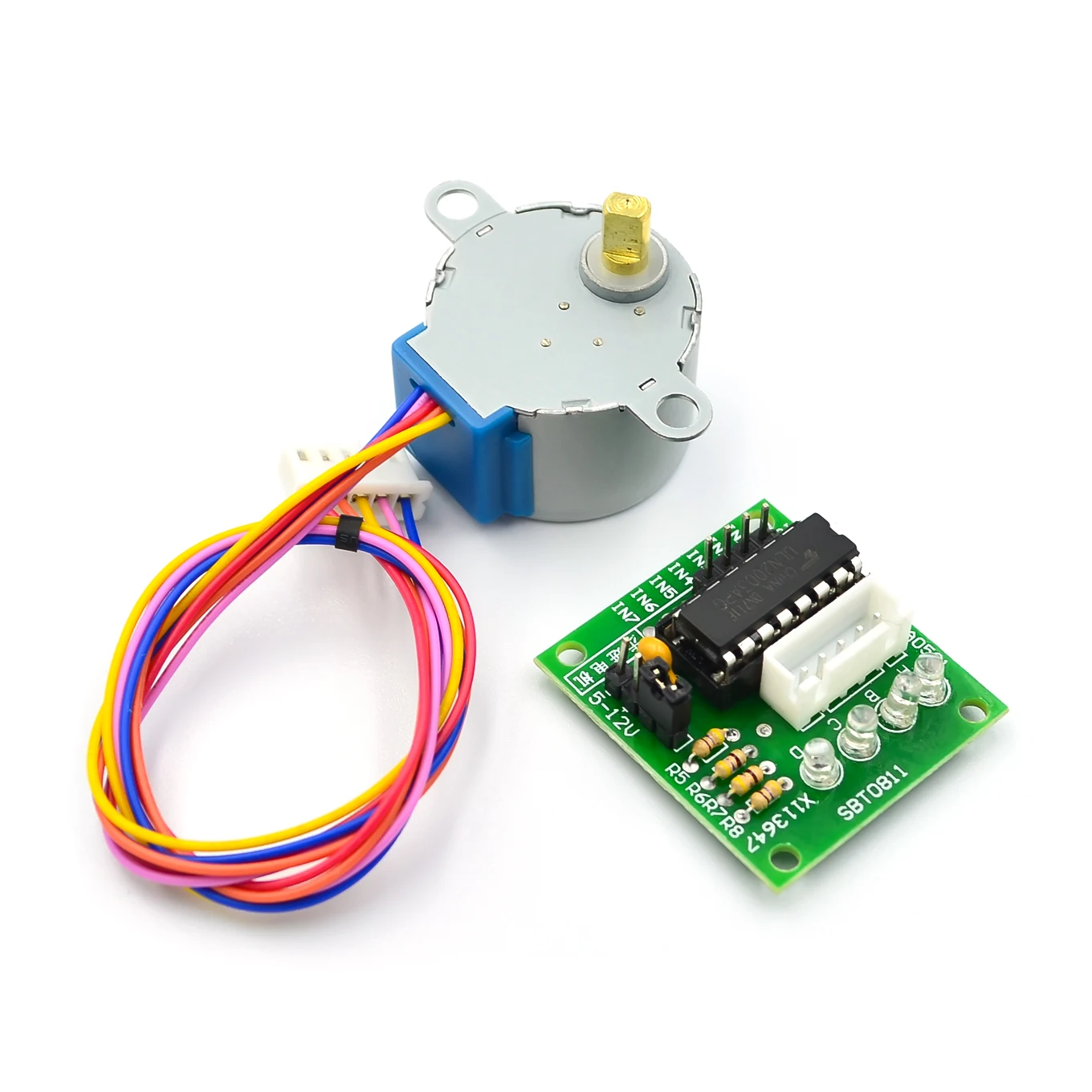
Из готовых — наиболее распространённые и недорогие драйверы на микросхемах Allegro A4988 (до 2А), Texas Instruments DRV8825 (до 2,5А).
Поскольку модули изначально разрабатывались для использования в 3D принтерах типа Rep-rap проекта Arduino, они не являются законченными модулями (например, им нужно еще питание логики (+5V), которое подается с так называемой рампы (Ramp).
Еще есть решения на DRV8811 (до 1,9 А), A3982 (до 2 А), A3977 (до 2,5 А), DRV8818 (до 2,5 А) DRV8825 (до 2,5 А), Toshiba TB6560 (до 3 А) и другие.
Поскольку мне интересно что-то сделать самому, плюс появилась возможность «попробовать на вкус» микросхемы Allegro A3982 и A3977, решил сделать пару драйверов самостоятельно.
Готовые решения на A4988 не понравились, прежде всего, из-за миниатюризации размеров печатной платы в ущерб хорошему охлаждению.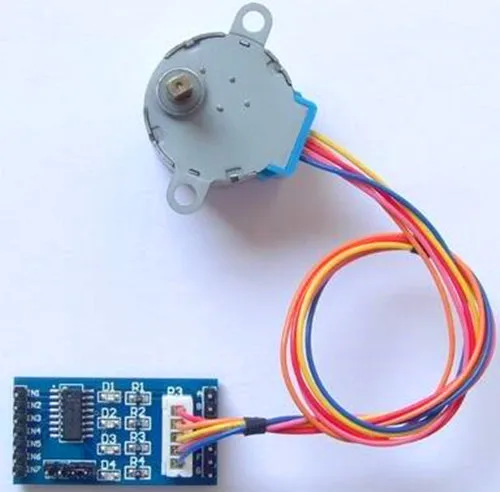 Типовое сопротивление открытых транзисторов у A4388 при токе 1,5А 0,32+0,43 Ом, плюс 0,1-0,22 Ома «измерительный» резистор — получается около 0,85 Ом. А таких каналов два, и хотя и работают они импульсно, но 2-3 Ватта тепла надо рассеивать. Ну не верю я в многослойную плату и малюсенький радиатор охлаждения — в даташите нарисована плата гораздо больших размеров.
Типовое сопротивление открытых транзисторов у A4388 при токе 1,5А 0,32+0,43 Ом, плюс 0,1-0,22 Ома «измерительный» резистор — получается около 0,85 Ом. А таких каналов два, и хотя и работают они импульсно, но 2-3 Ватта тепла надо рассеивать. Ну не верю я в многослойную плату и малюсенький радиатор охлаждения — в даташите нарисована плата гораздо больших размеров.
Провода мотора нужно сделать короткими, драйвер устанавливать рядом с двигателем. Существует 2 технических решения в звукотехнике: длинный сигнальный кабель к усилителю + короткие провода к акустической системе, или короткий сигнальный кабель к усилителю + длинные провода, а акустической системе. Оба решения имеют свои плюсы и минусы. С моторами — так же. Я выбрал длинные провода управления и короткие провода к мотору.
Управляющие сигналы — «шаг» (step), «направление» (dir), «включение» (enable), индикация состояния сигналов управления. Некоторые схемы не используют сигнал «Enable», но это приводит в режиме простоя к ненужному нагреву и микросхемы и двигателя.
Одно питание 12-24 вольта, источник питания логики (+5B) — на плате. Размеры платы — достаточные для хорошего охлаждения, двухсторонняя печать с большой областью «меди», возможность приклеить на микросхему радиатор (применяемой для охлаждения памяти видеокарт).
Основные характеристики и блок-схема:Напряжение питание силовое: 8…35 В Напряжение питание логики: 3,3…5 В Выходной ток (максимальный, зависит от режима и охлаждения): ±2 А Типовое сопротивление открытых транзисторов (при токе 1,5А): 0,33+0,37 ОмОсновные характеристики и блок-схема:
Напряжение питание силовое: 8…35 В Напряжение питание логики: 3,3…5 В Выходной ток (максимальный, зависит от режима и охлаждения): ±2,5 А Типовое сопротивление открытых транзисторов (при токе 2,5А): 0,33+0,45 Ом
Проектировал в среде DipTrace. Драйвер A3982 включен по схеме из документации производителя. Включен режим «полушаг». Дополнительно для надежной работы сигналов управления и индикации применил микросхему логики 74НС14 (с триггерами Шмитта).
 Можно было сделать гальвано-развязку на оптронах, но для маленького станка я решил ее не делать. Схема на A3977 отличается только дополнительными джамперами режима шага и более мощным разъемом питания, пока в «железе» не реализована.Процесс изготовления — ЛУТ, двухсторонняя. Габариты 37×37 мм, крепеж — как у двигателей, 31×31 мм.
Можно было сделать гальвано-развязку на оптронах, но для маленького станка я решил ее не делать. Схема на A3977 отличается только дополнительными джамперами режима шага и более мощным разъемом питания, пока в «железе» не реализована.Процесс изготовления — ЛУТ, двухсторонняя. Габариты 37×37 мм, крепеж — как у двигателей, 31×31 мм. Для сравнения — слева мое творчество, справа драйвер на A4988.
Все заработало сразу, наладки не требовалось.
Температуру корпуса микросхемы мерил пирометром — без радиатора она достигала 90-95 градусов (при токе обмоток 1,6А) — мне это не понравилось. С радиатором — 55-60 градусов — куда лучше! Вообще плата вся теплая — около 35 градусов.
Спасибо за внимание!
Продолжение следует…
▼ Файловый сервис недоступен. Зарегистрируйтесь или авторизуйтесь на сайте.
Даташит на микросхему Allegro A3982
▼ Файловый сервис недоступен. Зарегистрируйтесь или авторизуйтесь на сайте.
Что такое шаговый двигатель, его принцип работы и зачем он нужен?
Что такое шаговый двигатель?
Содержание статьи
Шаговый двигатель — это бесщёточный синхронный электродвигатель преобразующий электрическую энергию в механическую. Основное отличие шаговых электродвигателей от обычных, заключается в способе вращения «шагами», из-за чего и происходит данное название электродвигателя.На сегодняшнее время шаговые двигатели широко используются в различной оргтехнике, автоматическом электроинструменте, в машиностроении и т. д., там, где требуется достаточно высокая точность позиционирования. Не меньшей популярностью пользуются шаговые двигатели и для изготовления самодельных ветрогенераторов.
О том, что такое шаговый двигатель и зачем он нужен, будет рассказано в данной статье строительного журнала samastroyka.ru.
Что такое шаговый двигатель?
Шаговый двигатель — это электромеханическое устройство способное преобразовывать электрический ток в дискретные (состоящие из отдельных частей) угловые перемещения ротора. Благодаря наличию в конструкции шаговых двигателей постоянного магнита, обмотка последнего способна к самовозбуждению, что позволяет использовать шаговый двигатель в качестве основного элемента ветрогенератора, который производит постоянный электрический ток от вращения лопастей под воздействием силы ветра.
Благодаря наличию в конструкции шаговых двигателей постоянного магнита, обмотка последнего способна к самовозбуждению, что позволяет использовать шаговый двигатель в качестве основного элемента ветрогенератора, который производит постоянный электрический ток от вращения лопастей под воздействием силы ветра.
Однако основное применение шаговые двигатели получили в машиностроении и в различной оргтехнике. Благодаря высокой точности и простой интеграции с посторонними приложениями цифрового управления, шаговые электродвигатели позволяют легко автоматизировать работу отдельных систем и узлов сложного устройства. Ну а отсутствие таких элементов в конструкции шагового двигателя как щетки, для передачи электроэнергии, сказывается в первую очередь на длительном сроке службы и его довольно продолжительном ресурсе.
Принцип работы шаговых двигателей
Конструкция шаговых двигателей устроена таким образом, что на статоре устройства расположено определенное количество обмоток управления, на которые последовательно подаётся напряжение. Такой подход в работе шаговых электродвигателей позволяет обеспечить дискретное изменение электрического поля внутри шагового электродвигателя и задать нужный угол перемещения оси ротора.
Такой подход в работе шаговых электродвигателей позволяет обеспечить дискретное изменение электрического поля внутри шагового электродвигателя и задать нужный угол перемещения оси ротора.
Существуют различные виды шаговых двигателей: однофазные, многофазные и двухфазные, с пассивным либо активным ротором. Для управления шаговым двигателем используется специальный электронный блок управления, который обеспечивает поступление на обмотки электродвигателя определенную последовательность импульсов в зависимости от фазности электродвигателя.
Преимущества и недостатки шаговых электродвигателей
Главным преимуществом шаговых двигателей, является высокая точность поворота ротора на заданный угол. Достичь такого показателя при использовании обычных щёточных электродвигателей попросту невозможно. Как следствие этому, шаговый двигатель — хорошая альтернатива сервоприводу, стоимость которого в разы выше.
Кроме того, неоспоримым преимуществом шаговых двигателей, является и их довольно продолжительный ресурс работы. Целесообразно заметить, что даже за внушительный срок эксплуатации, точность шагового двигателя падает совсем незначительно.
Целесообразно заметить, что даже за внушительный срок эксплуатации, точность шагового двигателя падает совсем незначительно.
Что же касается недостатков шаговых двигателей, то связаны они, прежде всего с так называемым «проскальзыванием ротора» вследствие значительных нагрузок на вал электродвигателя. В большинстве случаев, избежать подобной проблемы помогает увеличение мощности шагового двигателя или установка специального датчика на своевременное обнаружение подобной проблемы.
Оценить статью и поделиться ссылкой:AVR Урок 18. Подключаем шаговый двигатель. Часть 1 |
 
 
 
Урок 18
Часть 1
Сегодня мы попробуем к микроконтроллеру Atmega8a подключить шаговый двигатель.
Шаговые двигатели – это такие двигатели, которые посредством подачи напряжения на определённую обмотку переводят свой ротор в определённое место, тем самым достигается более точное управление угловой скоростью. Можно также, в принципе, управлять и положением ротора, но это уже как-то больше сервоприводы, с которыми, мы, возможно, тоже, когда-то столкнёмся.
Можно также, в принципе, управлять и положением ротора, но это уже как-то больше сервоприводы, с которыми, мы, возможно, тоже, когда-то столкнёмся.
Шаговые двигатели в наше время приобретают всё больший интерес, так как в наш век точной электроники люди что-то мастерят движущееся, наподобие роботов и каких-то умных машин, также доходит дело до определённых летательных аппаратов и прочих устройств.
Поэтому я также не обошел этот вопрос стороной и решил также что-то об этом рассказать и подключить шаговый двигатель к контроллеру и попробовать им поуправлять. Как только мне это удалось, я решил этим поделиться и с вами.
Мне в руки попался именно вот такой вот шаговый двигатель 28-BJ48 компании Kiatronics
Питается данный двигатель от 5 вольт, питание подается попеременно на различные обмотки, которых 4, и если питание снимается с одной обмотки и подается на другую, то ротор. соответственно. устраемляется к ней.
Данные обмотки своими сердечниками в статоре находятся не в 4 местах, а намного чаще, а именно каждая повторяется 2048 раз, поэтому когда мы подаем напряжение на соседнюю обмотку, ротор поворачивается на очень малый угол. А если напряжение подавать ещё и на 2 соседние обмотки, то ротор можно расположить между ними, и количество положений при этом вообще удваивается. А есть вообще микрошаговый режим, когда мы на одну обмотку подаём меньшее напряжение, а на другую большее, то и вообще можно потеряться в количестве шагов и вообще крутить данный шаговый двигатель очень плавно.
А если напряжение подавать ещё и на 2 соседние обмотки, то ротор можно расположить между ними, и количество положений при этом вообще удваивается. А есть вообще микрошаговый режим, когда мы на одну обмотку подаём меньшее напряжение, а на другую большее, то и вообще можно потеряться в количестве шагов и вообще крутить данный шаговый двигатель очень плавно.
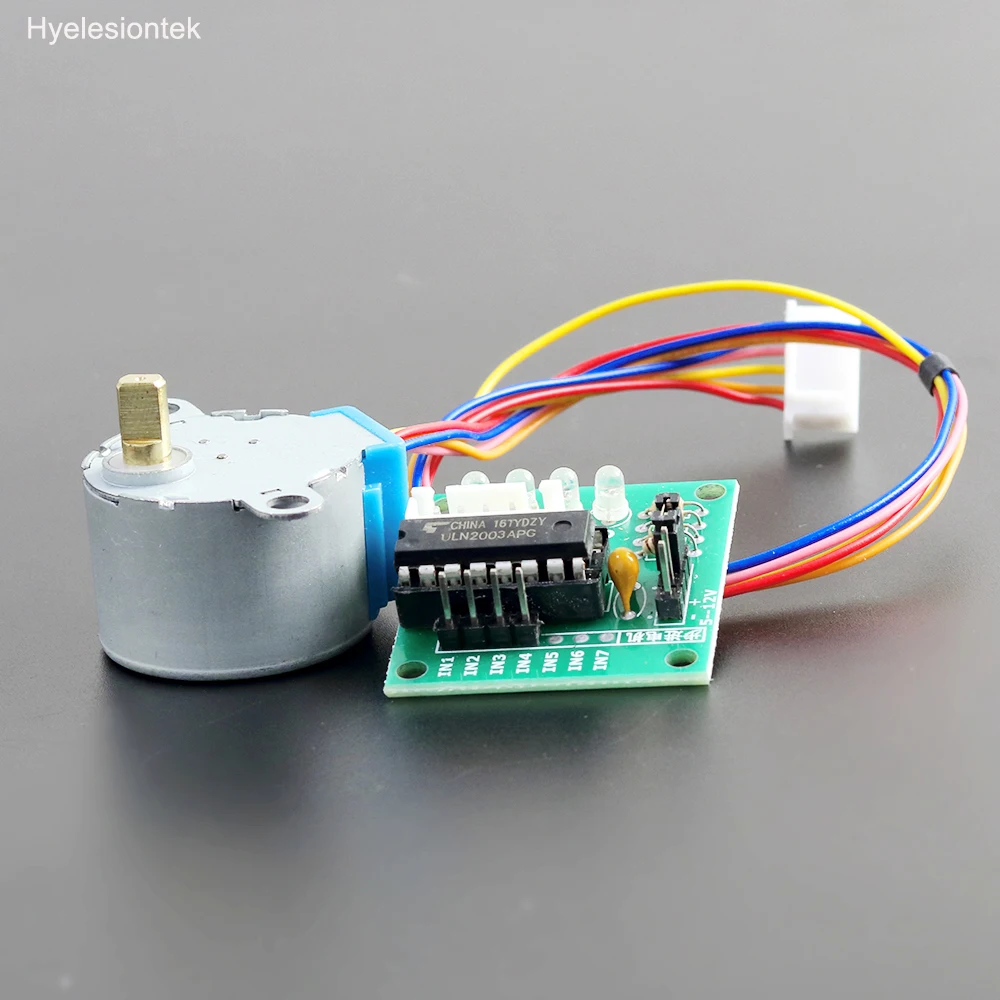
Питать двигатель лучше не от ножек контроллера, а лучше через какую-нибудь развязку. Можно использовать мощные транзисторы, но существует специальная микросхема-драйвер для шаговых двигателей. Как правило, выпускается данный драйвер в виде готовых модулей, выглядящих приблизительно вот так вместе с подключенным шаговым двигателем
Данный модуль представляем собой микросхему ULN2003. Можно использовать ее не только для двигателей. Но мы будем использовать здесь 4 входа и 4 выхода, так как у нашего двигателя 4 провода. каждый из которых подключен к определённой обмотке, а пятый провод является общим. Подключенный таким образом мотор уже не влияет на ножки портов, у которых ограничен максимальный ток и можно уже ничего не бояться на этот счёт. При подключении к ножкам контроллера мы используем входы модуля IN1, IN2, IN3 и IN4, а разъём двигателя просто соединим с разъёмом модуля.
Подключенный таким образом мотор уже не влияет на ножки портов, у которых ограничен максимальный ток и можно уже ничего не бояться на этот счёт. При подключении к ножкам контроллера мы используем входы модуля IN1, IN2, IN3 и IN4, а разъём двигателя просто соединим с разъёмом модуля.
Нарисуем вот такую схему, чтобы лучше понять принцип работы двигателя (чтобы увидеть процесс рисования, смотрите видеоверсию урока, ссылка на которую внизу страницы)
Здесь мы видим 4 катушки, одним выводом которые соединены к общему проводу, а на другие выводы каждой катушки мы будем подавать логические уровни, например на рисунке поданы 1000.
Данные обмотки потом по кругу так циклически и повторяются.
Теперь рассмотрим возможные режимы управления с помощью логических уровней.
1 режим – этот простейший режим, при котором мы по очереди подаём логические единицы или высокие логические уровни на каждую обмотку. Называется он также полношаговый режим или One Phase Step Mode.
Называется он также полношаговый режим или One Phase Step Mode.
Схематично данный режим можно изобразить таким образом
Существует также ещё один интересный режим – это режим когда ротор будет шагать между обмотками, то есть мы единички будем подавать на 2 соседние обмотки
Вот так.
А также есть ещё и третий решим – это полушаговый режим, когда мы уже чередуем комбинации, сначала ротор будет находиться у обмотки, потом наполовину переместится к соседней обмотке, потом совсем к соседней обмотке и т.д. Это полушаговый режим или one and two-phase-on
Вот таких вот три режима существуют. мы остановимся на 3 режиме, так как он будет самый плавный и самый интересный.
На следующем занятии мы соберём всю нашу схему с шаговым двигателем и начнём уже писать какой-то исходный код.
Предыдущий урок Программирование МК AVR Следующая часть
Техническая документация на шаговый двигатель
Программатор и шаговый двигатель 28YBJ-48 с драйвером ULN2003 можно приобрести здесь:
Программатор (продавец надёжный) USBASP USBISP 2.0
Шаговый двигатель 28YBJ-48 с драйвером ULN2003
Смотреть ВИДЕОУРОК (нажмите на картинку)
Post Views: 11 049
Основы шагового двигателя
Каждый двигатель преобразует мощность. Электродвигатели преобразуют электричество в движение. Шаговые двигатели преобразуют электричество во вращение. Шаговый двигатель не только преобразует электрическую энергию во вращение, но и может очень точно регулировать, насколько далеко он будет вращаться и насколько быстро.
Шаговые двигатели названы так потому, что каждый импульс электричества поворачивает двигатель на один шаг.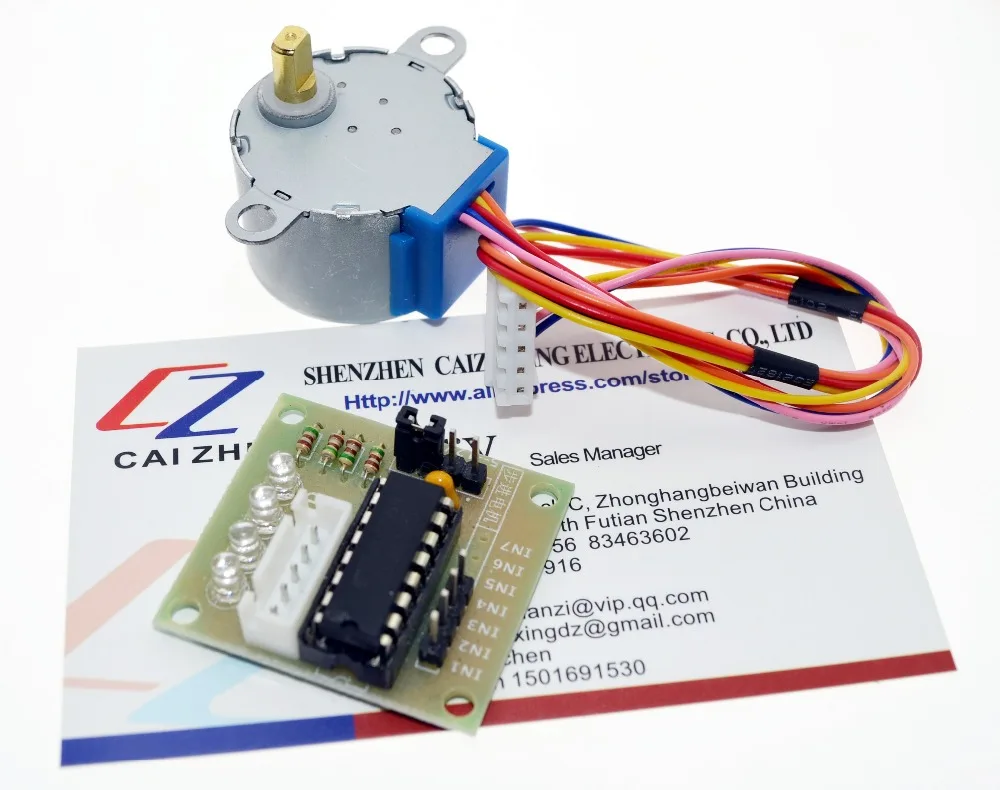 Шаговые двигатели управляются драйвером, который посылает в двигатель импульсы, заставляя его вращаться.Количество импульсов, которые вращает двигатель, равно количеству импульсов, подаваемых на драйвер. Двигатель будет вращаться со скоростью, равной частоте тех же импульсов.
Шаговые двигатели управляются драйвером, который посылает в двигатель импульсы, заставляя его вращаться.Количество импульсов, которые вращает двигатель, равно количеству импульсов, подаваемых на драйвер. Двигатель будет вращаться со скоростью, равной частоте тех же импульсов.
Шаговые двигатели очень просты в управлении. Большинство драйверов ищут импульсы 5 вольт, которые как раз и являются уровнем напряжения большинства интегральных схем. Вам просто нужно разработать схему для вывода импульсов или использовать один из генераторов импульсов ORIENTAL MOTOR.
Одной из самых замечательных особенностей шаговых двигателей является их способность очень точно позиционироваться.Это будет подробно рассмотрено позже. Шаговые двигатели не идеальны, всегда есть небольшие неточности. Стандартные шаговые двигатели ORIENTAL MOTOR имеют точность ± 3 угловых минуты (0,05 °). Однако замечательной особенностью шаговых двигателей является то, что эта ошибка не накапливается от шага к шагу. Когда стандартный шаговый двигатель перемещается на один шаг, он будет перемещаться на 1,8 ° ± 0,05 °. Если один и тот же двигатель совершит один миллион шагов, он переместится на 1800000 ° ± 0,05 °. Ошибка не накапливается.
Когда стандартный шаговый двигатель перемещается на один шаг, он будет перемещаться на 1,8 ° ± 0,05 °. Если один и тот же двигатель совершит один миллион шагов, он переместится на 1800000 ° ± 0,05 °. Ошибка не накапливается.
Шаговые двигатели могут быстро реагировать и ускоряться.У них низкая инерция ротора, что позволяет быстро набирать обороты. По этой причине шаговые двигатели идеально подходят для коротких быстрых перемещений.
Система шагового двигателя
На схеме ниже показана типичная система на основе шагового двигателя. Все эти части должны присутствовать в той или иной форме. Производительность каждого компонента будет влиять на другие.
Первый компонент — это компьютер или ПЛК. Это мозг системы. Компьютер не только управляет системой шагового двигателя, но и остальной частью машины.Он может поднять лифт или продвинуть конвейер. Он может быть сложным, как ПК или ПЛК, или простым, как кнопка оператора.
Вторая часть — это индексатор или карта ПЛК. Это говорит шаговому двигателю, что делать. Он будет выдавать правильное количество импульсов, которыми будет двигаться двигатель, и изменяет частоту, поэтому двигатель будет ускоряться, работать со скоростью, а затем замедляться.
Это говорит шаговому двигателю, что делать. Он будет выдавать правильное количество импульсов, которыми будет двигаться двигатель, и изменяет частоту, поэтому двигатель будет ускоряться, работать со скоростью, а затем замедляться.
Это может быть отдельный компонент, такой как индексатор ORIENTAL MOTOR SG8030 или карта генератора импульсов, которая вставляется в ПЛК.Форма несущественна, но она должна присутствовать, чтобы двигатель мог двигаться.
Следующие четыре блока составляют драйвер двигателя. Логика управления фазой принимает импульсы от индексатора и определяет, какая фаза двигателя должна быть запитана. Фазы должны быть запитаны в определенной последовательности, и логика управления фазами позаботится об этом. Источник питания логики — это источник низкого уровня, который питает ИС в драйвере. Это зависит от набора микросхем или конструкции приложения, но большинство логических источников находятся в диапазоне 5 В.Источник питания двигателя — это напряжение питания для питания двигателя. Этот уровень напряжения обычно находится в диапазоне 24 В постоянного тока, но может быть намного выше. Наконец, усилитель мощности — это набор транзисторов, который позволяет току питать фазы. Они постоянно включаются и выключаются, чтобы двигатель двигался в правильной последовательности.
Этот уровень напряжения обычно находится в диапазоне 24 В постоянного тока, но может быть намного выше. Наконец, усилитель мощности — это набор транзисторов, который позволяет току питать фазы. Они постоянно включаются и выключаются, чтобы двигатель двигался в правильной последовательности.
Все эти компоненты дадут команду двигателю переместить нагрузку. Груз может быть ходовым винтом, диском или конвейером.
Типы шаговых двигателей
В настоящее время существует три основных типа шаговых двигателей.
- Переменное сопротивление (VR)
- Постоянный магнит (PM)
- Гибрид
ORIENTAL MOTOR производит только гибридные шаговые двигатели.
Шаговые двигатели с регулируемым сопротивлением имеют зубцы на роторе и статоре, но не имеют магнита. Следовательно, у него нет фиксирующего момента. У постоянного магнита есть магнит для ротора, но нет зубцов. Обычно магнит с постоянными магнитами имеет грубые углы ступеней, но зато есть фиксирующий момент.
Гибридные шаговые двигатели сочетают в себе магнит постоянного магнита и зубцы двигателей с регулируемым сопротивлением.Магнит намагничен в осевом направлении, что означает, что на диаграмме справа верхняя половина является северным полюсом, а нижняя половина — южным. На магните две зубчатые чашки ротора с 50 зубьями. Две чашки смещены на 3,6 °, так что, если мы посмотрим вниз на ротор между двумя зубцами чашки северного полюса, мы увидим один зуб на чашке южного полюса прямо посередине.
Эти двигатели имеют двухфазную конструкцию, с 4 полюсами на фазу. Полюса, разнесенные на 90 ° друг от друга, составляют каждую фазу.Каждая фаза намотана так, что полюс 180 ° имеет одинаковую полярность, а те, что разнесены на 90 °, имеют противоположную полярность. Если бы ток в этой фазе поменял местами, изменилась бы и полярность. Это означает, что мы можем сделать любой полюс статора либо северным, либо южным полюсом.
Предположим, что на диаграмме полюса на 12 и 6 часах являются северными полюсами, а полюса на 3 и 9 часах — южными. Когда мы включаем фазу A, 12 и 6 притягивают южный полюс магнитного ротора, а 3 и 9 притягивают северный полюс ротора.Если посмотреть с одного конца, мы увидим, что зубья ротора совпадают с зубцами 12 и 6, а зубцы 3 и 9 будут прямо посередине. Если мы посмотрим с противоположного конца, зубцы ротора северного полюса будут точно выровнены с 3 и 9, а зубцы на 12 и 6 будут прямо посередине. В зависимости от того, в каком направлении мы хотим двигаться, мы будем активировать либо полюса 2 и 7 как северные полюсы, либо полюса 11 и 5 как северные полюса. Вот где драйвер необходим для определения чередования фаз.(Щелкните изображение, чтобы начать анимацию).
Когда мы включаем фазу A, 12 и 6 притягивают южный полюс магнитного ротора, а 3 и 9 притягивают северный полюс ротора.Если посмотреть с одного конца, мы увидим, что зубья ротора совпадают с зубцами 12 и 6, а зубцы 3 и 9 будут прямо посередине. Если мы посмотрим с противоположного конца, зубцы ротора северного полюса будут точно выровнены с 3 и 9, а зубцы на 12 и 6 будут прямо посередине. В зависимости от того, в каком направлении мы хотим двигаться, мы будем активировать либо полюса 2 и 7 как северные полюсы, либо полюса 11 и 5 как северные полюса. Вот где драйвер необходим для определения чередования фаз.(Щелкните изображение, чтобы начать анимацию).
На роторе 50 зубьев. Шаг между зубьями 7,2 °. При движении двигателя некоторые зубья ротора не совмещены с зубьями статора на 3/4 шага зуба, 1/2 шага зуба и 1/4 шага зуба. Когда мотор делает шаг, он выбирает самый простой путь, поскольку 1/4 от 7,2 ° составляет 1,8 °, мотор перемещается на 1,8 ° каждый шаг.
Наконец, крутящий момент и точность зависят от числа полюсов (зубцов). Чем больше полюса, тем лучше крутящий момент и точность.ORIENTAL MOTOR предлагает шаговые двигатели «высокого разрешения». Эти двигатели имеют половину шага зубьев нашего стандартного двигателя. Ротор имеет 100 зубцов, поэтому угол между зубьями составляет 3,6 °. Когда двигатель перемещается на 1/4 шага зуба, он перемещается на 0,9 °. Разрешение наших моделей с «высоким разрешением» вдвое больше, чем у стандартных моделей: 400 шагов на оборот по сравнению с 200 шагами на оборот.
Чем больше полюса, тем лучше крутящий момент и точность.ORIENTAL MOTOR предлагает шаговые двигатели «высокого разрешения». Эти двигатели имеют половину шага зубьев нашего стандартного двигателя. Ротор имеет 100 зубцов, поэтому угол между зубьями составляет 3,6 °. Когда двигатель перемещается на 1/4 шага зуба, он перемещается на 0,9 °. Разрешение наших моделей с «высоким разрешением» вдвое больше, чем у стандартных моделей: 400 шагов на оборот по сравнению с 200 шагами на оборот.
Меньшие углы шага означают меньшую вибрацию, поскольку мы не уходим так далеко с каждым шагом.
Строение
На рисунке ниже показано поперечное сечение 5-фазного шагового двигателя.Шаговый двигатель состоит в основном из двух частей: статора и ротора. Ротор, в свою очередь, состоит из трех компонентов: чашки 1 ротора, чашки 2 и постоянного магнита. Ротор намагничен в осевом направлении, так что, например, если чашка 1 ротора поляризована на север, чашка 2 ротора будет поляризована на юг.
Статор имеет 10 магнитных полюсов с небольшими зубцами, каждый из которых имеет обмотку.
Каждая обмотка подключена к обмотке противоположного полюса, так что оба полюса намагничиваются с одинаковой полярностью, когда ток проходит через пару обмоток.(Пропускание тока через данную обмотку намагничивает противоположную пару полюсов с одинаковой полярностью, то есть на север или юг.)
Противоположная пара полюсов составляет одну фазу. Поскольку имеется 10 магнитных полюсов или пять фаз, в этом конкретном двигателе называется 5-фазный шаговый двигатель.
На внешнем периметре каждого ротора имеется 50 зубьев, причем зубья чашки 1 и 2 чашки ротора механически смещены друг относительно друга на половину шага зубьев.
Скорость-Крутящий момент
Очень важно, чтобы вы знали, как читать кривую скорость-крутящий момент, поскольку она говорит нам, что двигатель может, а что нет.Кривые скорость-крутящий момент представляют данный двигатель и данный драйвер. Когда двигатель работает, его крутящий момент зависит от типа привода и напряжения. Один и тот же двигатель может иметь совершенно другую кривую скорость-крутящий момент при использовании с другим приводом.
Когда двигатель работает, его крутящий момент зависит от типа привода и напряжения. Один и тот же двигатель может иметь совершенно другую кривую скорость-крутящий момент при использовании с другим приводом.
ORIENTAL MOTOR дает кривые скорость-крутящий момент для справки. Если двигатель используется с аналогичным приводом, с аналогичным напряжением и аналогичным током, вы должны получить аналогичную производительность. См. Интерактивную кривую «скорость-крутящий момент» ниже:
Считывание кривой скорость-крутящий момент
- Удерживающий момент
Величина крутящего момента, который двигатель создает в состоянии покоя, когда через его обмотки протекает номинальный ток. - Область пуска / останова
Значения, при которых двигатель может немедленно запускаться, останавливаться или реверсировать. - Вращающий момент
Значения крутящего момента и скорости, которые двигатель может запускать, останавливать или реверсировать синхронно с входными импульсами.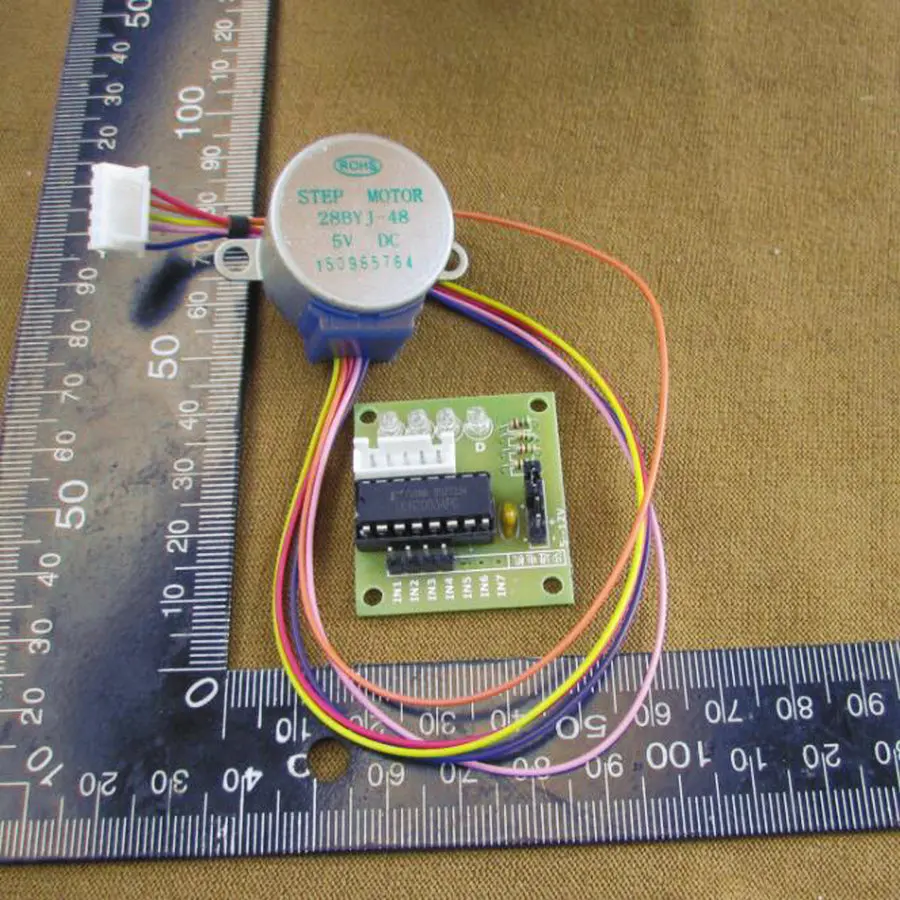
- Момент отрыва
Значения крутящего момента и скорости, которые двигатель может работать синхронно с входными фазами. Максимальные значения, которые двигатель может обеспечить без остановки. - Максимальная пусковая скорость
Максимальная скорость, с которой двигатель может запускаться, измеренная без нагрузки. - Максимальная рабочая скорость
Максимальная скорость, на которой будет работать двигатель, измеренная без нагрузки.
Для работы в зоне между втягиванием и вытягиванием двигатель должен сначала запуститься в зоне пуска / останова.Затем частота импульсов увеличивается до тех пор, пока не будет достигнута желаемая скорость. Для остановки скорость двигателя снижается до тех пор, пока она не станет ниже кривой крутящего момента втягивания.
Для остановки скорость двигателя снижается до тех пор, пока она не станет ниже кривой крутящего момента втягивания.
Крутящий момент пропорционален току и количеству витков провода. Если мы хотим увеличить крутящий момент на 20%, мы должны увеличить ток примерно на 20%. Точно так же, если мы хотим уменьшить крутящий момент на 50%, уменьшите ток на 50%.
Из-за магнитного насыщения нет никаких преимуществ в увеличении тока более чем в 2 раза от номинального.В этот момент увеличение тока не приведет к увеличению крутящего момента. При токе, примерно в 10 раз превышающем номинальный, вы рискуете размагнитить ротор.
Все наши двигатели имеют изоляцию класса B и могут выдерживать температуру 130 ° C до того, как изоляция ухудшится. Если мы допускаем разницу температур 30 ° внутри и снаружи, корпус не должен превышать 100 ° C.
Индуктивность влияет на крутящий момент на высокой скорости. Индуктивность — это причина, по которой двигатели не имеют высокого крутящего момента до бесконечности. Каждая обмотка двигателя имеет определенное значение индуктивности и сопротивления. Индуктивность в генри, разделенная на сопротивление в омах, дает нам значение в секундах. Это количество секунд (постоянная времени) — время, необходимое катушке для зарядки до 63% от номинального значения. Если двигатель рассчитан на 1 ампер, через 1 постоянную времени катушка будет на 0,63 ампера. Примерно через 4 или 5 постоянных времени катушка будет иметь ток до 1 ампер. Поскольку крутящий момент пропорционален току, если ток заряжается только до 63%, двигатель будет иметь только около 63% своего крутящего момента после 1 постоянной времени.
Каждая обмотка двигателя имеет определенное значение индуктивности и сопротивления. Индуктивность в генри, разделенная на сопротивление в омах, дает нам значение в секундах. Это количество секунд (постоянная времени) — время, необходимое катушке для зарядки до 63% от номинального значения. Если двигатель рассчитан на 1 ампер, через 1 постоянную времени катушка будет на 0,63 ампера. Примерно через 4 или 5 постоянных времени катушка будет иметь ток до 1 ампер. Поскольку крутящий момент пропорционален току, если ток заряжается только до 63%, двигатель будет иметь только около 63% своего крутящего момента после 1 постоянной времени.
На малых оборотах это не проблема. Ток может входить и выходить из катушек достаточно быстро, поэтому двигатель имеет номинальный крутящий момент. Однако на высоких скоростях ток не может пройти достаточно быстро, пока не переключится следующая фаза. Крутящий момент снижен.
Напряжение драйвера играет большую роль в быстродействии. Чем выше отношение напряжения привода к напряжению двигателя, тем лучше быстродействие. Высокое напряжение заставляет ток течь в обмотки быстрее, чем упомянутые выше 63%.
Чем выше отношение напряжения привода к напряжению двигателя, тем лучше быстродействие. Высокое напряжение заставляет ток течь в обмотки быстрее, чем упомянутые выше 63%.
Вибрация
Когда шаговый двигатель делает переход от одного шага к другому, ротор не останавливается немедленно. ротор фактически проходит конечное положение, отводится назад, проходит конечное положение в противоположном направлении и продолжает двигаться вперед и назад, пока, наконец, не остановится (см. интерактивную диаграмму ниже). Мы называем это «звонком», и он происходит при каждом шаге двигателя. Подобно банджи-шнуру, импульс переносит ротор за точку остановки, затем он «подпрыгивает» назад и вперед, пока, наконец, не остановится.Однако в большинстве случаев двигатель получает команду перейти к следующему этапу, прежде чем он перейдет в режим покоя.
На графиках ниже показан звон при различных условиях нагрузки. Без нагрузки мотор издает сильный звон. Сильный звонок означает сильную вибрацию.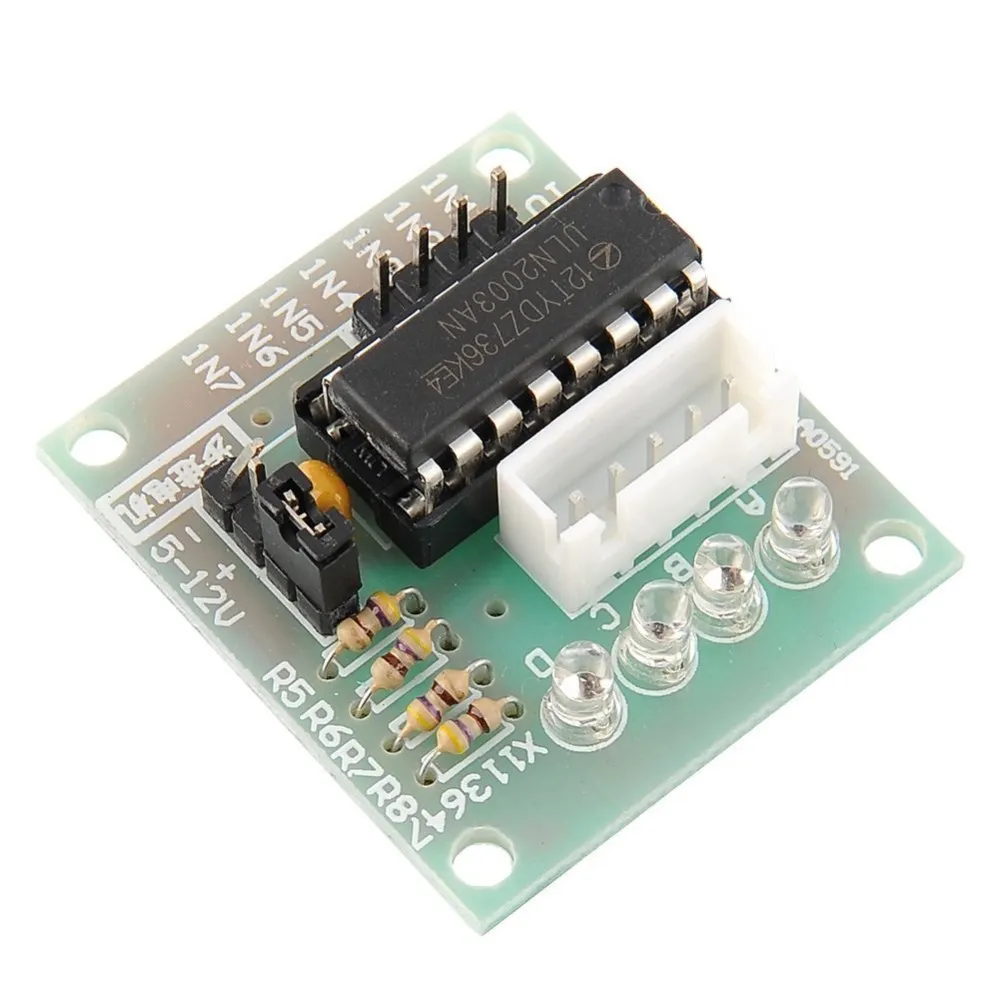 Двигатель часто останавливается, если он не нагружен или слегка нагружен, потому что вибрация настолько велика, что теряется синхронность. При тестировании шагового двигателя обязательно добавляйте нагрузку.
Двигатель часто останавливается, если он не нагружен или слегка нагружен, потому что вибрация настолько велика, что теряется синхронность. При тестировании шагового двигателя обязательно добавляйте нагрузку.
Два других графика показывают двигатель с нагрузкой.Правильная загрузка двигателя сгладит его работу. Нагрузка должна требовать от 30% до 70% крутящего момента, который может создать двигатель, а отношение инерции нагрузки к инерции ротора должно быть от 1: 1 до 10: 1. Для более коротких и быстрых ходов соотношение должно быть от 1: 1 до 3: 1.
Специалист по применениюORIENTAL MOTOR и инженеры помогут подобрать подходящий размер.
Двигатель будет демонстрировать более сильные вибрации, когда частота входных импульсов совпадает с собственной частотой двигателя.Это называется резонансом и обычно возникает около 200 Гц. В резонансе перерегулирование и занижение становятся намного больше, и вероятность пропуска шагов намного выше. Резонанс меняется в зависимости от инерции нагрузки, но обычно он составляет около 200 Гц.
могут пропускать шаги только в группах по четыре. Если вы пропускаете шаги, кратные четырем, это значит, что вибрация вызывает потерю синхронизма или нагрузка слишком велика. Если количество пропущенных шагов не кратно четырем, велика вероятность, что неправильное количество импульсов или электрические помехи вызывают проблемы.
Есть несколько способов обойти резонанс. Самый простой способ — вообще избежать этой скорости. 200 Гц не очень быстрая скорость для двухфазного двигателя 60 об / мин. Большинство двигателей имеют максимальную пусковую скорость около 1000 pps или около того. Таким образом, в большинстве случаев вы можете запускать двигатель на более высокой скорости, чем резонансная скорость.
Если вам необходимо начать движение со скоростью ниже резонансной скорости, быстро разгонитесь в резонансном диапазоне.
Еще одно решение — уменьшить угол шага.При больших углах шага двигатель всегда будет перескакивать и недотягивать. Если двигателю не нужно двигаться далеко, он не создаст достаточной силы (крутящего момента) для значительного перерегулирования. Каждый раз, когда угол шага уменьшается, двигатель не будет так сильно вибрировать. Вот почему полушаговые и микрошаговые системы так эффективны для снижения вибрации.
Если двигателю не нужно двигаться далеко, он не создаст достаточной силы (крутящего момента) для значительного перерегулирования. Каждый раз, когда угол шага уменьшается, двигатель не будет так сильно вибрировать. Вот почему полушаговые и микрошаговые системы так эффективны для снижения вибрации.
Убедитесь, что размер двигателя соответствует нагрузке. Выбрав подходящий двигатель, вы можете повысить производительность.
Также доступны амортизаторы.Демпферы устанавливаются на задний вал двигателя и поглощают часть энергии колебаний. Часто они недорого сгладят вибрацию двигателя.
5-фазные шаговые двигатели
Относительно новая технология в шаговых двигателях — 5-фазные. Наиболее очевидная разница между 2-фазным и 5-фазным режимами (см. Интерактивную диаграмму ниже) — это количество полюсов статора. В то время как двухфазные двигатели имеют 8 полюсов, по 4 на фазу, 5-фазный двигатель имеет 10 полюсов, по 2 на фазу. Ротор такой же, как у двухфазного двигателя.
В то время как двухфазный двигатель перемещается на 1/4 шага зуба каждой фазы. 5-фазный, благодаря своей конструкции, перемещается на 1/10 шага зуба. Поскольку шаг по-прежнему составляет 7,2 °, угол шага составляет 0,72 °. Простая конструкция позволяет разрешить 5-фазную схему с 500 шагами на оборот по сравнению с 2-фазной частотой с 200 шагами на оборот. 5-фазный обеспечивает разрешение в 2,5 раза лучше, чем 2-фазный.
Чем выше разрешение, тем меньше угол шага, что, в свою очередь, снижает вибрацию.Так как угол шага 5-фазной в 2,5 раза меньше, чем 2-фазных, то звон, вибрации намного меньше. И в 2-фазном, и в 5-фазном режиме ротор должен отклоняться или отклоняться более чем на 3,6 °, чтобы пропустить ступеньки. Поскольку угол шага 5-фазной схемы составляет всего 0,72 °, для двигателя почти невозможно отклониться или отклониться от нормы на 3,6 °. Шансы на потерю синхронизма с 5-фазным шаговым двигателем очень низкие.
Способы привода
Существует четыре различных метода привода шаговых двигателей:
- Волновой привод (полный шаг)
- 2 фазы включены (полный шаг)
- 1-2 фазы включены (полушаг)
- Микрошаг
Волновой привод
На диаграмме ниже метод волнового привода был упрощен, чтобы лучше проиллюстрировать теорию. На рисунке каждый поворот на 90 ° соответствует 1,8 ° вращения ротора в реальном двигателе.
На рисунке каждый поворот на 90 ° соответствует 1,8 ° вращения ротора в реальном двигателе.
В методе волнового управления (также называемом методом однофазного включения) одновременно включается только одна фаза. Когда мы запитываем фазу А и южный полюс, она притягивает северный полюс ротора. Выключаем A и включаем B, ротор вращается на 90 ° (1,8 °) и так далее. Каждый раз запитывается только одна фаза.
Волновой привод имеет четырехступенчатую электрическую последовательность для вращения двигателя.
2 фазы на
В методе «2 фазы включены» всегда находятся под напряжением две фазы.
Еще раз на иллюстрации ниже каждые 90 ° соответствуют повороту на 1,8 °. Если обе фазы A и B запитаны как южные полюса, северный полюс ротора будет одинаково притягиваться к обоим полюсам и выровняться прямо посередине. Последовательно по мере подачи напряжения на фазы ротор будет вращаться, чтобы выровняться между двумя полюсами, находящимися под напряжением.
Метод «2-фазное включение» имеет четырехступенчатую электрическую последовательность для вращения двигателя.
Стандартные двухфазные и двухфазные двигатели типа MORIENTAL MOTOR используют метод «2-фазного включения».
Какое преимущество имеет метод «2 фазы включения» перед методом «1 фаза включения»? Ответ — крутящий момент. В методе «1 фаза включена» одновременно включается только одна фаза, поэтому на ротор действует одна единица крутящего момента. В методе «2 фазы во включенном состоянии» у нас есть две единицы крутящего момента, действующие на ротор: 1 в положении «12 часов» и 1 в положении «3 часа». Если мы сложим эти два вектора крутящего момента вместе, мы получим результат при 45 °, а величина будет на 41,4% больше.Используя метод «2 фазы включен», мы можем получить тот же угол шага, что и метод «1 фаза», но с крутящим моментом на 41% больше.
Пятифазные двигатели немного отличаются. Вместо использования метода «два этапа включения» мы используем метод «четыре этапа включения». Каждый раз включаем 4 фазы и мотор делает шаг.
Каждый раз включаем 4 фазы и мотор делает шаг.
Пятифазный двигатель проходит через 10-ступенчатую электрическую последовательность.
1-2 фазы включены (полушаг)
Метод «1-2 фазы включения» или полушаговый режим объединяют два предыдущих метода.В этом случае мы запитываем фазу A. Ротор выравнивается. На этом этапе мы оставляем фазу A включенной и включаем фазу B. Теперь ротор одинаково притягивается к обеим линиям посередине. Ротор повернулся на 45 ° (0,9 °). Выключаем фазу A, но оставляем на фазе B. Двигатель делает еще один шаг. И так далее. Чередуя включение одной фазы и двух включенных фаз, мы вдвое уменьшили угол ступени. Помните, что с меньшим углом шага уменьшается вибрация.
(Для 5-фазного двигателя мы чередуем 4 фазы и 5 фаз.)
Полушаговый режим имеет восьмиступенчатую электрическую последовательность. Для пятифазного двигателя в режиме «4-5 фаз» двигатель проходит через 20-ступенчатую электрическую последовательность.
Microstep
Microstepping — это способ сделать маленькие шаги еще меньше. Чем меньше шаг, тем выше разрешение и лучше характеристики вибрации. В микрошаге фаза не полностью или полностью выключена. Он частично включен. Синусоидальные волны применяются как к фазе A, так и к фазе B, разнесенной на 90 ° (0.9 ° в пятифазном шаговом двигателе).
Когда максимальная мощность находится в фазе A, фаза B равна нулю. Ротор выровняется с фазой A. По мере того, как ток в фазе A уменьшается, он увеличивается до фазы B. Ротор будет делать крошечные шаги к фазе B, пока фаза B не достигнет своего максимума, а фаза A не станет равной нулю. Процесс продолжается вокруг других фаз, и у нас есть микрошаг.
Есть некоторые проблемы, связанные с микрошагом, в основном с точностью и крутящим моментом. Поскольку фазы являются только фазами, которые только частично запитаны, крутящий момент двигателя уменьшается, обычно примерно на 30%.Кроме того, из-за того, что разница крутящего момента между ступенями настолько мала, двигатель иногда не может преодолеть нагрузку.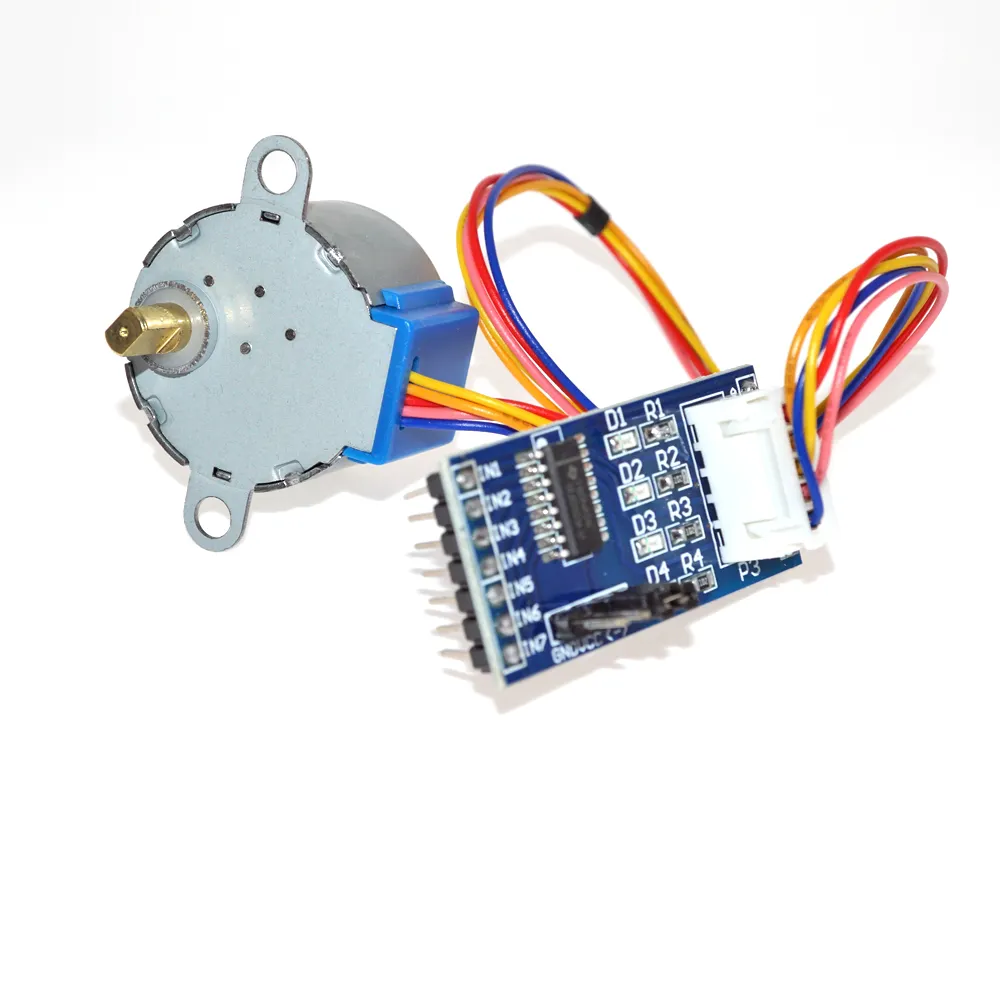 В этих случаях двигателю может быть дана команда сделать 10 шагов, прежде чем он действительно начнет двигаться. Во многих случаях необходимо замкнуть цикл с помощью кодировщиков, которые увеличивают цену.
В этих случаях двигателю может быть дана команда сделать 10 шагов, прежде чем он действительно начнет двигаться. Во многих случаях необходимо замкнуть цикл с помощью кодировщиков, которые увеличивают цену.
Системы шаговых двигателей
- Системы открытого цикла
- Системы с замкнутым контуром
- Сервосистемы
Открытый контур
Шаговые двигатели спроектированы как система с разомкнутым контуром.Генератор импульсов посылает импульсы в схему чередования фаз. Секвенсор фаз определяет, какие фазы необходимо выключить или включить, как описано в информации о полном шаге и полушаге. Секвенсор управляет мощными полевыми транзисторами, которые затем вращают двигатель.
Однако в системе с разомкнутым контуром нет проверки положения и способа узнать, сделал ли двигатель свое управляемое движение.
Замкнутый контур
Самый популярный метод замыкания контура — это добавление энкодера на задний вал двигателя с двумя валами. Энкодер состоит из тонкого диска с линиями на нем. Диск проходит между передатчиком и приемником. Каждый раз, когда между ними появляется линия, на сигнальные линии выводится импульс. Эти импульсы возвращаются контроллеру, который ведет их счет. Обычно в конце хода контроллер сравнивает количество импульсов, отправленных драйверу, с количеством отправленных обратно импульсов энкодера. Обычно пишут, что если два числа разные, то разница компенсируется.Если числа совпадают, ошибки не произошло и движение продолжается.
Энкодер состоит из тонкого диска с линиями на нем. Диск проходит между передатчиком и приемником. Каждый раз, когда между ними появляется линия, на сигнальные линии выводится импульс. Эти импульсы возвращаются контроллеру, который ведет их счет. Обычно в конце хода контроллер сравнивает количество импульсов, отправленных драйверу, с количеством отправленных обратно импульсов энкодера. Обычно пишут, что если два числа разные, то разница компенсируется.Если числа совпадают, ошибки не произошло и движение продолжается.
У этого метода есть два недостатка: стоимость (и сложность) и время отклика. Дополнительная стоимость энкодера, наряду с увеличением сложности контроллера, увеличивает стоимость системы. Кроме того, поскольку коррекция (если таковая имеется) выполняется в конце хода, в систему можно добавить дополнительное время.
Сервосистема
Другой вариант — сервосистема.Сервосистема обычно представляет собой двигатель с малым числом полюсов, который обеспечивает высокую скорость, но не имеет встроенной способности позиционирования. Чтобы сделать его устройством положения, требуется обратная связь, обычно энкодер или резольвер, а также контуры управления. Сервопривод по существу включается и выключается, пока счетчик резольвера не достигнет определенной точки. Следовательно, сервопривод работает по ошибке. Например, сервопривод получает команду двигаться на 100 оборотов. Счетчик резольвера показывает ноль, и двигатель запускается. Когда счетчик резольвера достигает 100 оборотов, двигатель выключается.Если положение отклоняется, двигатель снова включается, чтобы вернуть его в исходное положение. Как сервопривод реагирует на ошибку, зависит от настройки усиления. Если установлен высокий коэффициент усиления, двигатель очень быстро отреагирует на любые изменения ошибки. Если настройка усиления низкая, двигатель не будет так быстро реагировать на изменения ошибки. Тем не менее, когда задействованы настройки усиления по времени, в систему управления движением вводятся временные задержки.
Чтобы сделать его устройством положения, требуется обратная связь, обычно энкодер или резольвер, а также контуры управления. Сервопривод по существу включается и выключается, пока счетчик резольвера не достигнет определенной точки. Следовательно, сервопривод работает по ошибке. Например, сервопривод получает команду двигаться на 100 оборотов. Счетчик резольвера показывает ноль, и двигатель запускается. Когда счетчик резольвера достигает 100 оборотов, двигатель выключается.Если положение отклоняется, двигатель снова включается, чтобы вернуть его в исходное положение. Как сервопривод реагирует на ошибку, зависит от настройки усиления. Если установлен высокий коэффициент усиления, двигатель очень быстро отреагирует на любые изменения ошибки. Если настройка усиления низкая, двигатель не будет так быстро реагировать на изменения ошибки. Тем не менее, когда задействованы настройки усиления по времени, в систему управления движением вводятся временные задержки.
Системы шаговых двигателей AlphaStep с замкнутым контуром
AlphaStep — это революционный шаговый двигатель компании Oriental Motor.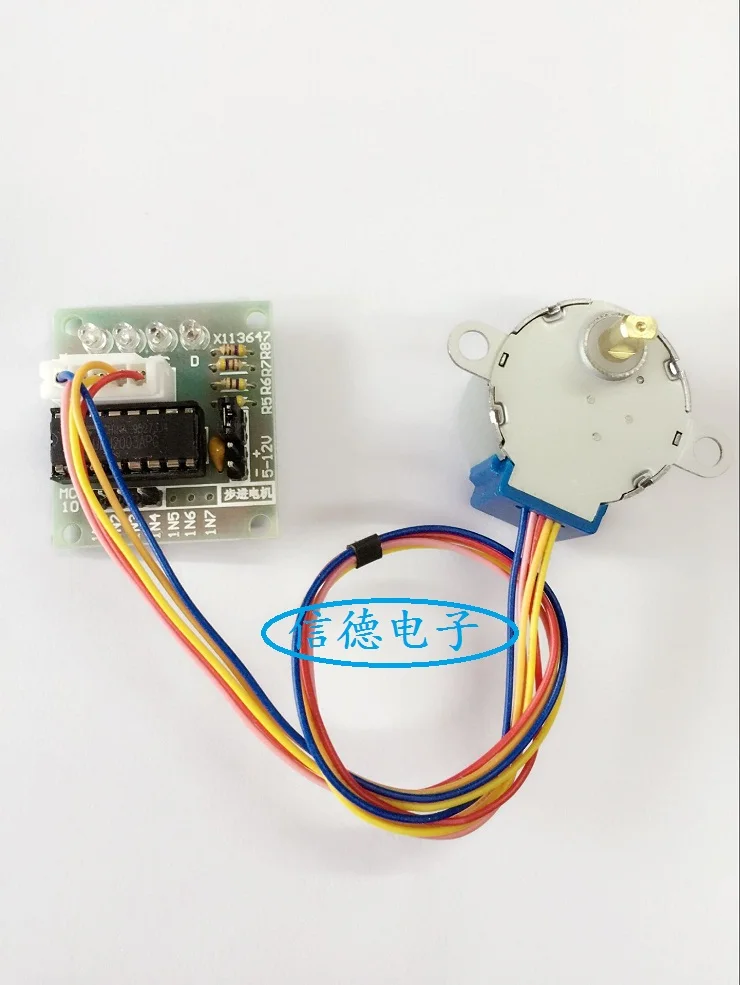 AlphaStep имеет встроенный преобразователь, обеспечивающий обратную связь по положению. В любой момент времени мы знаем, где находится ротор.
AlphaStep имеет встроенный преобразователь, обеспечивающий обратную связь по положению. В любой момент времени мы знаем, где находится ротор.
Драйвер AlphaStep имеет счетчик ввода. Подсчитываются все импульсы, поступающие на привод. Обратная связь резольвера поступает на счетчик положения ротора. Любое отклонение присутствует на счетчике отклонений. Обычно двигатель работает без обратной связи. Делаем векторы крутящего момента и мотор следует. Если счетчик отклонения показывает значение, превышающее ± 1,8 °, секвенсор фаз включает вектор крутящего момента в верхней части кривой смещения крутящего момента, генерируя максимальный крутящий момент, чтобы вернуть ротор в синхронизм.Если двигатель отключается на несколько шагов, секвенсор активирует несколько векторов крутящего момента на верхней части кривой смещения крутящего момента. Водитель может выдержать перегрузку до 5 секунд. Если он не может вернуть двигатель в синхронизм в течение 5 секунд, водитель выдаст ошибку и отправит сигнал тревоги.
Замечательной особенностью AlphaStep является то, что он на лету исправляет пропущенные шаги. Он не дожидается конца хода, чтобы внести исправления. Как только ротор вернется в 1.8 °, драйвер возвращается в режим разомкнутого контура и подает необходимые фазные напряжения.
На приведенном ниже графике показана кривая изменения крутящего момента и когда блок находится в режиме разомкнутого или замкнутого контура. Кривая смещения крутящего момента — это крутящий момент, создаваемый одной фазой. Максимальный крутящий момент достигается при смещении зубьев ротора на 1,8 °. Двигатель может пропустить шаг только в том случае, если он разгоняется более чем на 3,6 °. Поскольку водитель берет на себя управление вектором крутящего момента, когда он промахивается на 1,8 °, двигатель не может пропустить шаги, кроме случаев, когда он перегружен более 5 секунд.
Многие думают, что точность шага AlphaStep составляет ± 1,8 °. Точность шага AlphaStep составляет 5 угловых минут (0,083 °). Водитель управляет векторами крутящего момента за пределами 1,8 °. Оказавшись внутри 1,8 °, зубья ротора будут совпадать с вектором крутящего момента, который создается. AlphaStep обеспечивает совпадение правильного зуба с вектором крутящего момента.
Водитель управляет векторами крутящего момента за пределами 1,8 °. Оказавшись внутри 1,8 °, зубья ротора будут совпадать с вектором крутящего момента, который создается. AlphaStep обеспечивает совпадение правильного зуба с вектором крутящего момента.
AlphaStep доступен во многих версиях. ORIENTAL MOTOR предлагает версии с круглым валом и редуктором с несколькими передаточными числами для увеличения разрешения и крутящего момента или для уменьшения отраженной инерции.Почти все версии могут быть оснащены отказоустойчивым магнитным тормозом. ORIENTAL MOTOR также имеет версию на 24 В постоянного тока, называемую серией ASC.
Заключение
Таким образом, шаговые двигатели отлично подходят для позиционирования. Шаговыми двигателями можно точно управлять как по расстоянию, так и по скорости, просто изменяя количество импульсов и их частоту. Большое количество полюсов дает им точность и в то же время разомкнутый контур. Шаговый двигатель, если его размер соответствует области применения, никогда не пропустит шага. И поскольку им не нужна позиционная обратная связь, они очень рентабельны.
И поскольку им не нужна позиционная обратная связь, они очень рентабельны.
Шаговые двигатели, драйверы шаговых двигателей, контроллеры шаговых двигателей и шаговые двигатели с регулировкой скорости
Шаговые двигателиобеспечивают легкое точное позиционирование. Они используются в различных типах оборудования для точного контроля угла поворота и скорости с помощью импульсных сигналов. Шаговые двигатели создают высокий крутящий момент благодаря компактному корпусу и идеально подходят для быстрого ускорения и отклика. Шаговые двигатели также сохраняют свое положение при остановке благодаря своей механической конструкции.Решения с шаговыми двигателями состоят из драйвера (принимает импульсные сигналы и преобразует их в движение двигателя) и шагового двигателя.
Oriental Motor предлагает множество решений для широкого спектра применений:
- Шаговые двигатели AlphaStep с замкнутым контуром, 2-фазные шаговые двигатели, 5-фазные шаговые двигатели
- Опции редуктора, энкодера и электромагнитного тормоза
- Драйверы шаговых двигателей переменного или постоянного тока
- Размеры рамы от 0,79 дюйма (20 мм) до 3.
 54 дюйма (90 мм)
54 дюйма (90 мм)
Подробнее …
Шаговые двигатели (только двигатели)
Oriental Motor предлагает широкий ассортимент шаговых двигателей, включая: Шаговые двигатели AlphaStep с обратной связью, 2-фазные шаговые двигатели и 5-фазные шаговые двигатели доступны в размерах от 0,79 дюйма (20 мм) до 3,54 дюйма (90 мм). Предлагаются пять вариантов шаговых двигателей редукторного типа, опции энкодера и тормоза, а также различные обмотки двигателя.
- 0.79 ~ 3,54 дюйма (20 ~ 90 мм) Шаговые двигатели NEMA 8 ~ NEMA 34 типоразмера
- Доступны цилиндрические шестерни без люфта, с низким люфтом и цилиндрические шестерни
- Шаговые двигатели AlphaStep с замкнутым контуром, 2-фазные шаговые двигатели и 5-фазные шаговые двигатели
- Опции энкодера и электромагнитного тормоза
Драйверы шагового двигателя
Драйверы шагового двигателя преобразуют импульсные сигналы от контроллера в движение двигателя для достижения точного позиционирования.
- Вход переменного или постоянного тока
- Драйверы шаговых двигателей AlphaStep с замкнутым контуром, 2-фазных шаговых двигателей или 5-фазных шаговых двигателей
- Импульсный вход, встроенный контроллер или версии, совместимые с EtherNet / IP ™ и EtherCAT
- Доска или коробка Тип
EtherNet / IP ™ является товарным знаком ODVA
Шаговые двигатели и драйверы с регулировкой скорости
Система управления скоростью SC серии CVK предлагает простую конфигурацию, состоящую из шагового двигателя, драйвера и программируемого контроллера.Рабочую скорость, время ускорения и замедления, рабочий ток можно установить с помощью переключателей привода, и простое переключение входа FWD (RVS) в положение ON или OFF позволяет легко управлять.
- Генератор импульсов не требуется
- Возможны 2 настройки скорости
- Компактный шаговый двигатель с высоким крутящим моментом
Контроллеры / Сетевые шлюзы
Контроллеры и сетевые шлюзы для использования с системами управления движением.
- Контроллеры для использования с драйверами импульсного ввода
- Сетевые преобразователи / шлюзы (связь RS-485)
- EtherCat
- CC-Link
- MECHATROLINK
Шаговые двигатели и драйверы
Шаговый двигатель используется для достижения точного позиционирования с помощью цифрового управления.Двигатель работает за счет точной синхронизации с выходным импульсным сигналом от контроллера к приводу. Шаговые двигатели, с их способностью создавать высокий крутящий момент на низкой скорости при минимальной вибрации, идеально подходят для приложений, требующих быстрого позиционирования на короткое расстояние.
Точное позиционирование за шаг
Шаговый двигатель вращается с фиксированным углом шага, как секундная стрелка часов. Этот угол называется «углом основного шага». Oriental Motor предлагает шаговые двигатели с базовым углом шага 0.36 °, 0,72 °, 0,9 ° и 1,8 °. 5-фазные шаговые двигатели имеют угол поворота 0,36 ° и 0,72 °, а 2-фазные шаговые двигатели — 0,9 ° и 1,8 °.
Oriental Motor предлагает шаговые двигатели с базовым углом шага 0.36 °, 0,72 °, 0,9 ° и 1,8 °. 5-фазные шаговые двигатели имеют угол поворота 0,36 ° и 0,72 °, а 2-фазные шаговые двигатели — 0,9 ° и 1,8 °.
Используя технологию гибридного шагового двигателя
Гибридный шаговый двигатель представляет собой комбинацию двигателей с переменным сопротивлением и двигателей с постоянными магнитами. Ротор гибридного шагового двигателя намагничен в осевом направлении, как шаговый двигатель с постоянным магнитом, а на статор подается электромагнитное питание, как у шагового двигателя с переменным магнитным сопротивлением.И статор, и ротор имеют несколько зубьев.
Гибридный шаговый двигатель имеет намагниченный в осевом направлении ротор, то есть один конец намагничен как северный полюс, а другой конец — как южный полюс. Чашечки зубчатого ротора размещены на каждом конце магнита, и чашки смещены на половину шага зубьев.
Простое управление с импульсными сигналами
Конфигурация системы для высокоточного позиционирования показана ниже. Угол поворота и скорость шагового двигателя можно контролировать с высокой точностью с помощью импульсных сигналов от контроллера.
Угол поворота и скорость шагового двигателя можно контролировать с высокой точностью с помощью импульсных сигналов от контроллера.
Что такое импульсный сигнал?
Импульсный сигнал — это электрический сигнал, уровень напряжения которого многократно меняется между ВКЛ и ВЫКЛ. Каждый цикл включения / выключения считается как один импульс. Команда с одним импульсом заставляет выходной вал двигателя поворачиваться на один шаг. Уровни сигнала, соответствующие состояниям включения и выключения напряжения, обозначаются как «H» и «L» соответственно.
Величина вращения пропорциональна количеству импульсов
Величина вращения шагового двигателя пропорциональна количеству импульсных сигналов (количеству импульсов), передаваемых драйверу.Взаимосвязь вращения шагового двигателя (угла поворота выходного вала двигателя) и количества импульсов выражается следующим образом:
Скорость пропорциональна скорости импульса
Скорость шагового двигателя пропорциональна скорости импульсных сигналов (частоты импульсов), подаваемых водителю.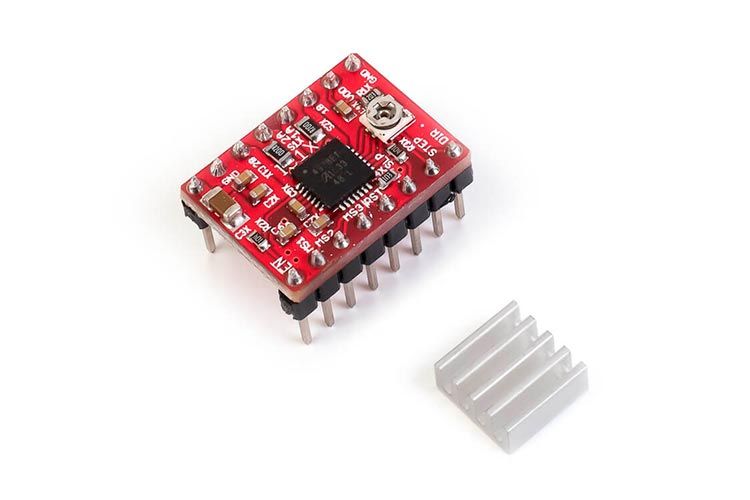 Соотношение скорости импульса [Гц] и скорости двигателя [об / мин] выражается следующим образом:
Соотношение скорости импульса [Гц] и скорости двигателя [об / мин] выражается следующим образом:
Создание высокого крутящего момента с помощью компактного корпуса
Шаговые двигатели создают высокий крутящий момент в компактном корпусе.Эти особенности обеспечивают им отличное ускорение и реакцию, что, в свою очередь, делает эти двигатели хорошо подходящими для приложений с высокими требованиями к крутящему моменту, когда двигатель должен часто запускаться и останавливаться. Чтобы удовлетворить потребность в увеличении крутящего момента на низкой скорости, Oriental Motor также предлагает мотор-редукторы, сочетающие компактную конструкцию и высокий крутящий момент.
Двигатель удерживается в остановленном положении
Шаговые двигатели продолжают создавать удерживающий момент даже в состоянии покоя.Это означает, что двигатель можно удерживать в остановленном положении без использования механического тормоза.
После отключения питания крутящий момент двигателя теряется, и двигатель больше не может удерживаться в остановленном положении при вертикальных операциях или при приложении внешней силы. В подъемниках и подобных устройствах используйте тормоз электромагнитного типа.
Шаговые двигатели с замкнутым контуром и драйверы — AlphaStep
AlphaStep состоит из шагового двигателя и драйверов, разработанных для раскрытия максимальных характеристик шагового двигателя.Эти продукты обычно работают синхронно с импульсными командами, но когда происходит внезапное ускорение или изменение нагрузки, уникальный режим управления поддерживает операцию позиционирования. Модели AlphaStep также могут выводить сигналы завершения позиционирования и аварийные сигналы, что повышает надежность оборудования, с которым они работают.
Типы операционных систем
Каждый шаговый двигатель и драйвер объединяют в себе шаговый двигатель, выбранный из различных типов, со специальным драйвером. Доступны драйверы, работающие в режиме импульсного ввода и в режиме встроенного контроллера. Вы можете выбрать желаемую комбинацию в соответствии с требуемой операционной системой.
Доступны драйверы, работающие в режиме импульсного ввода и в режиме встроенного контроллера. Вы можете выбрать желаемую комбинацию в соответствии с требуемой операционной системой.
Драйвер импульсного входа
Двигателем можно управлять с помощью генератора импульсов, предоставленного пользователем. Рабочие данные заранее вводятся в генератор импульсов. Затем пользователь выбирает данные операции на главном программируемом контроллере, а затем вводит команду операции.
Драйвер встроенного контроллера
Встроенная функция генерации импульсов позволяет управлять двигателем через подключенный напрямую персональный компьютер или программируемый контроллер.Поскольку отдельный генератор импульсов не требуется, драйверы этого типа экономят место и упрощают электромонтаж.
Разница между характеристиками входа переменного и постоянного тока
Шаговый двигатель приводится в действие напряжением постоянного тока, подаваемым через драйвер. В двигателях и драйверах Oriental Motor на 24 В постоянного тока на двигатель подается 24 В постоянного тока. В двигателях и драйверах на 100–115 В переменного тока на входе выпрямляется постоянный ток, а затем на двигатель подается примерно 140 В постоянного тока (исключение составляют некоторые изделия.)
В двигателях и драйверах Oriental Motor на 24 В постоянного тока на двигатель подается 24 В постоянного тока. В двигателях и драйверах на 100–115 В переменного тока на входе выпрямляется постоянный ток, а затем на двигатель подается примерно 140 В постоянного тока (исключение составляют некоторые изделия.)
Эта разница в напряжении, подаваемом на двигатели, проявляется как разница в характеристиках крутящего момента на высоких скоростях. Это связано с тем, что чем выше приложенное напряжение, тем быстрее будет нарастание тока через обмотки двигателя, что облегчает приложение номинального тока на более высоких скоростях. Таким образом, входной двигатель переменного тока и система привода имеют превосходные характеристики крутящего момента в широком диапазоне скоростей, от низких до высоких, обеспечивая большое передаточное отношение.
Рекомендуется, чтобы для вашего приложения были рассмотрены системы двигателя и привода переменного тока, которые совместимы в более широком диапазоне рабочих условий, чем системы ввода постоянного тока.
шаговый двигатель с управлением — MATLAB и Simulink
Эта модель показывает, как использовать драйвер шагового двигателя и блоки шагового двигателя вместе для реализации управляемого шагового двигателя с постоянными магнитами. Модель предоставляет два варианта контроллера: один для управления положением и один для управления скоростью. Чтобы изменить тип контроллера, щелкните правой кнопкой мыши блок Controller, выберите Variant-> Override using-> и выберите Position или Speed.
Шаговый двигатель имеет полный размер шага 1.8 градусов. В модели управления положением вход Ref — это желаемое количество шагов. В режиме управления скоростью вход Ref представляет собой желаемое количество шагов в секунду.
Эта модель является моделью системного уровня, подходящей для изучения динамики шагового двигателя и определения того, будет ли угол шага уменьшаться при движении с заданной нагрузкой. Его также можно использовать для настройки шагового контроллера для повышения производительности шагового режима.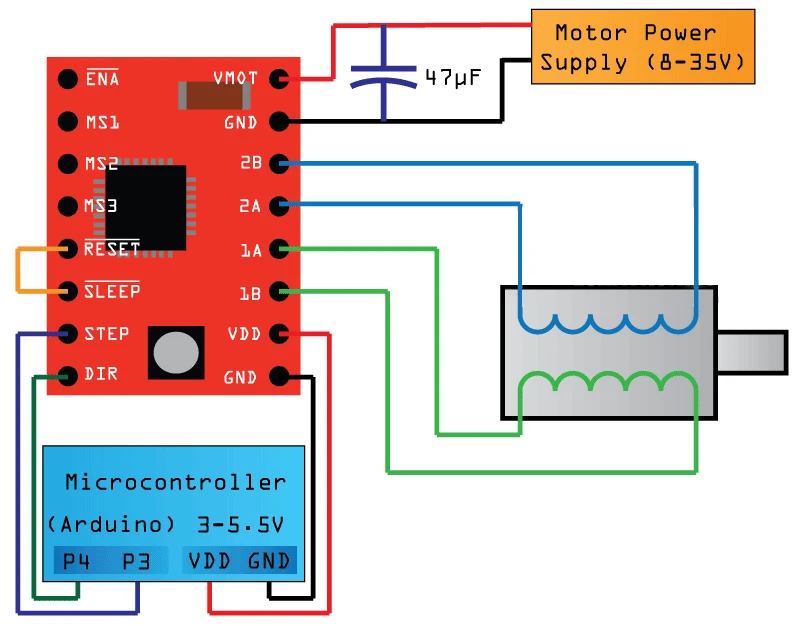 Часто контроллер частично или полностью реализован в стандартном модуле шагового контроллера.
Часто контроллер частично или полностью реализован в стандартном модуле шагового контроллера.
Альтернатива реализации алгоритма на микропроцессоре (таком как PIC) дает большую гибкость, и микропроцессор также может использоваться для управления другими частями всей системы. В этом случае части блока драйвера шагового двигателя также могут быть реализованы в микропроцессоре, оставив только каскад усилителя мощности в аналоговой электронике.
Модель
Результаты моделирования от Simscape Logging
Тест управления положением
Угол вала двигателя по сравнению с сигналом запроса.Алгоритм управления положением принимает команду положения как ряд шагов и преобразует ее в последовательность импульсов, которая управляет драйвером шагового двигателя. Скачки на графике угловой скорости возникают, когда вал устанавливается в заданное положение.
Тест управления скоростью
На графиках ниже показан угол вала двигателя по сравнению с сигналом запроса. Алгоритм управления скоростью принимает команду скорости как количество шагов в секунду и преобразует ее в последовательность импульсов, которая управляет драйвером шагового двигателя.Скачки на графике угловой скорости возникают, когда вал переходит в текущую ступеньку.
Алгоритм управления скоростью принимает команду скорости как количество шагов в секунду и преобразует ее в последовательность импульсов, которая управляет драйвером шагового двигателя.Скачки на графике угловой скорости возникают, когда вал переходит в текущую ступеньку.
На графике ниже показано, как состояние контактов на шаговом драйвере влияет на движение шагового двигателя. Драйвер инициирует шаг каждый раз, когда сигнал ENA поднимается выше порогового напряжения включения.
Как шаговые двигатели обеспечивают точное управление
Шаговые двигатели используются в различных приложениях, чтобы обеспечить средства для жестко контролируемого движения.Но что такое шаговый двигатель и как он работает? В этой статье мы подробно обсудим биполярные двигатели, объясним, что они из себя представляют и как работают, а также предоставим примеры того, как они используются с различными типами пропорциональных клапанов для обеспечения точного управления.
Шаговые двигатели — это бесщеточные двигатели постоянного тока, которые вращаются по ступеням, электронно задаваемым контроллером или приводом, который обеспечивает необходимый ток через электромагниты, расположенные в кольце как часть узла статора (неподвижная часть двигателя).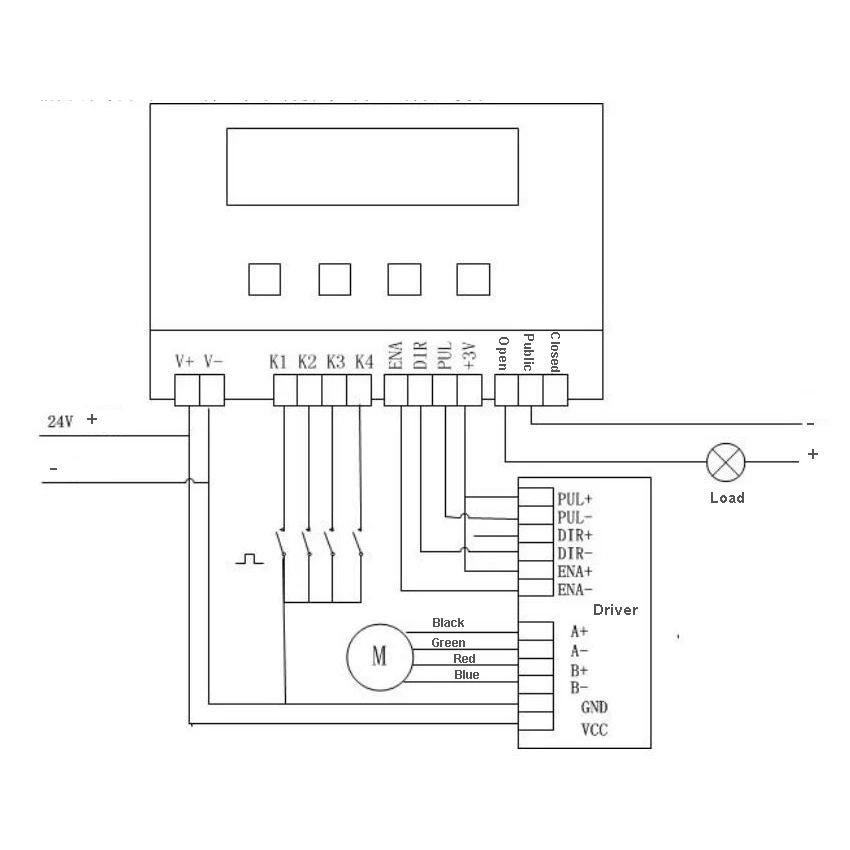 Шаговые двигатели идеально подходят для приложений, требующих управления скоростью и положением, особенно на низких скоростях, таких как автоматизация, системы управления движением и 3D-принтеры. Благодаря своей внутренней конструкции, которая сводит к минимуму механические и электрические «задержки», которые возникают в других двигателях, шаговые двигатели обладают замечательной точностью остановки и быстродействием. Часто это делает шаговые двигатели идеальным выбором для синхронных и высокоточных операций.
Шаговые двигатели идеально подходят для приложений, требующих управления скоростью и положением, особенно на низких скоростях, таких как автоматизация, системы управления движением и 3D-принтеры. Благодаря своей внутренней конструкции, которая сводит к минимуму механические и электрические «задержки», которые возникают в других двигателях, шаговые двигатели обладают замечательной точностью остановки и быстродействием. Часто это делает шаговые двигатели идеальным выбором для синхронных и высокоточных операций.
Как работают шаговые двигатели?
Рисунок 1. Схема шагового двигателя
В основе шагового двигателя лежит постоянный магнит и вал, расположенный по центру двух или более зубчатых роторов. Эти роторы имеют разную полярность из-за заключенного в них магнита и смещены друг относительно друга, чтобы позволить им лучше притягиваться к намагниченным зубьям, которые покрывают внутреннюю поверхность статора. У статора меньше зубцов, чем у каждого ротора, поэтому полное выравнивание может происходить только в секциях (пластинах статора) вдоль пар катушек. Включение и выключение поочередных пар катушек заставляет вал совершать полный шаг из-за притяжения и отталкивания намагниченных зубцов.
Включение и выключение поочередных пар катушек заставляет вал совершать полный шаг из-за притяжения и отталкивания намагниченных зубцов.
Как рассчитать количество шагов шагового двигателя
Рис. 2. Расчет угла шага
Угол шага — это угол поворота, проходимый за один шаг. Это можно вычислить одним из двух способов — либо разделив полные 360 градусов двигателя на количество шагов, которые двигатель делает для совершения одного оборота, либо разделив полные 360 градусов двигателя на два раза количество зубьев ротора, умноженное на количество фазы статора (рис.2).
Микрошаговый
Одновременное управление токами через несколько пар катушек уменьшает общее перемещение / вращение, притягивая зубцы в двух направлениях, а не только в одном, создавая новые переходы на половину, четверть, восьмой или один-шестнадцатый ступеньки, известные как микрошаги. Микрошаговый режим обеспечивает лучшее разрешение и снижает резонанс / вибрацию, но также снижает крутящий момент и может нанести ущерб чистой точности.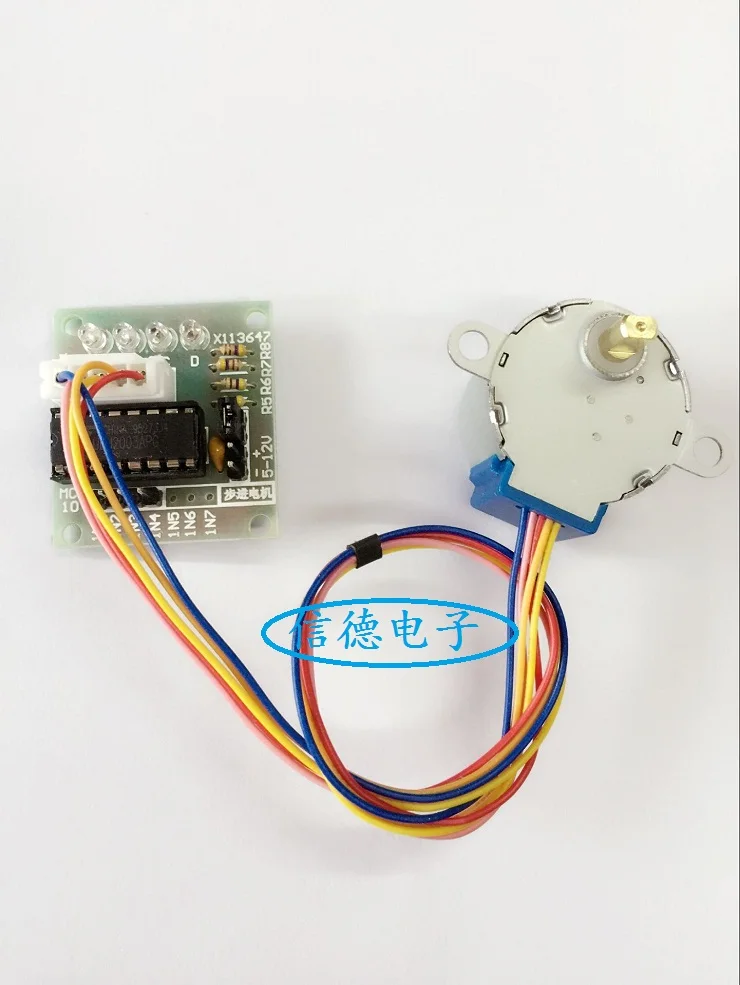
Приводы и управление шаговыми двигателями
Активизация катушек шагового двигателя в правильной последовательности для достижения одного шага — сложная задача.Таким образом, фактическое управление обмотками двигателя обычно достигается с помощью драйвера. Существует два типа приводов шаговых двигателей — постоянного напряжения (левый / правый привод) и постоянного тока (привод с прерывателем). Приводы L / R в первую очередь ограничены низкоскоростными приложениями, поэтому мы сосредоточимся на приводах чоппера. Если вам интересно узнать больше, в этой статье представлен хороший обзор разницы между приводом L / R и приводом измельчителя.
Рисунок 3. Зависимость между нарастанием тока и индуктивностью
Драйверы упрощают работу шагового двигателя, интерпретируя цифровой сигнал шага и направления от контроллера и соответственно запитывая катушки двигателя.Вся электроника подчиняется закону Ома и соотношению между нарастанием тока и индуктивностью (рис.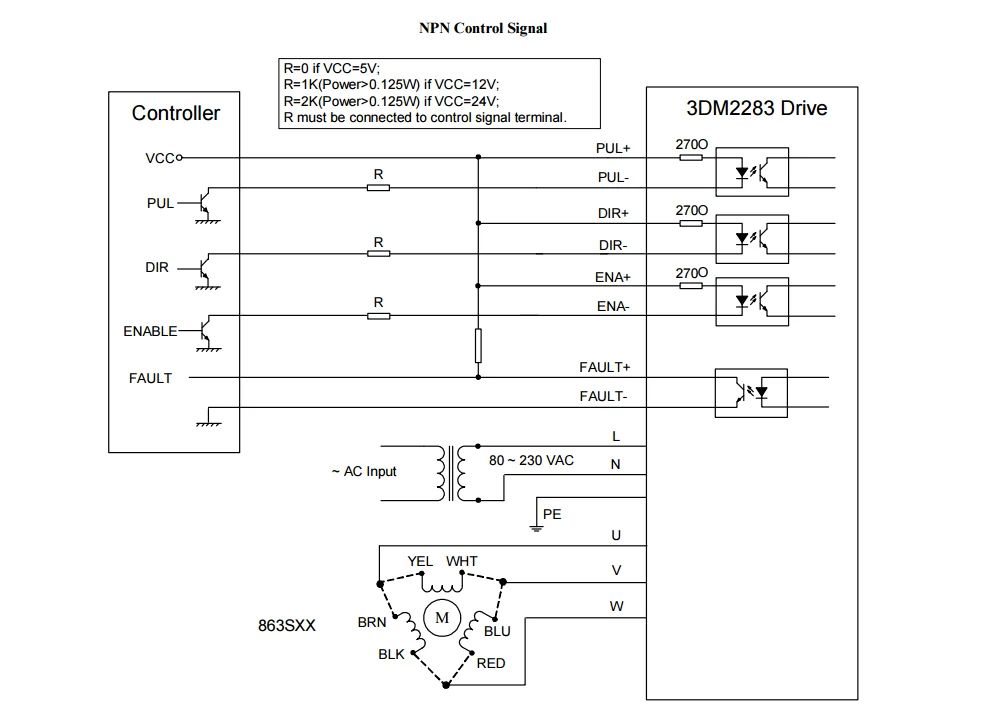 3). В шаговых двигателях конструкция двигателя (в отношении его катушек) предотвращает быстрое увеличение тока во время импульсов (командных сигналов), что означает, что ток никогда не может достичь своего пикового значения без очень высокого напряжения. Это проблема, потому что без достаточного тока крутящий момент будет низким, особенно при высоких скоростях двигателя. Чтобы бороться с этим, приводы прерывателя выполняют так называемую широтно-импульсную модуляцию (ШИМ).
3). В шаговых двигателях конструкция двигателя (в отношении его катушек) предотвращает быстрое увеличение тока во время импульсов (командных сигналов), что означает, что ток никогда не может достичь своего пикового значения без очень высокого напряжения. Это проблема, потому что без достаточного тока крутящий момент будет низким, особенно при высоких скоростях двигателя. Чтобы бороться с этим, приводы прерывателя выполняют так называемую широтно-импульсную модуляцию (ШИМ).
Рисунок 4. Напряжение и ток привода прерывателя
Широтно-импульсная модуляция (ШИМ)
Широтно-импульсная модуляция (ШИМ) включает в себя очень быстрое включение и выключение выходного напряжения двигателя на каждом этапе. Это обеспечивает очень высокое напряжение на катушках двигателя (обычно в 8 раз больше, чем номинальное напряжение двигателя), что приводит к быстрому нарастанию тока и более высокому значению, чем было бы в противном случае. Это включение и выключение обычно происходит при частоте 20 кГц или выше, но «время включения» напряжения зависит от импеданса катушки и скорости двигателя — таким образом, на более высоких скоростях напряжение сохраняется дольше (большая ширина импульса). для получения среднего тока на правильном уровне (рис.3).
Приводы прерывателя шагового двигателя
Приводы прерывателя шагового двигателя регулируются резистором, чувствительным к току, установленным последовательно с каждой катушкой. На резисторе возникает напряжение, которое затем контролируется компаратором. Когда это напряжение достигает заданное опорное напряжение, то «рубленый» (выключено), пока не произойдет следующий импульс. Это позволяет среднему току быть стабильным, несмотря на любые изменения напряжения источника питания, и повышает эффективность, обеспечивая минимально возможные интервалы между пиками и спадами тока.
Линейные приводы с шаговым двигателем
Шаговый двигатель может иметь вал с резьбой, прикрепленный к его вращающемуся сердечнику, который затем можно использовать для толкания или натягивания установленной на нем гайки, перемещая ее в осевом направлении. Шаг резьбы определяет, насколько далеко гайка может перемещаться за один шаг, с разрешением / точностью, частично определяемыми углом шага, используемым шаговым двигателем (полный, половина, четверть и т. Д.). Как и большинство линейных систем, линейный привод с шаговым приводом может иметь люфт. Люфт возникает из-за «люфта» или «люфта» между резьбой гайки и резьбой ходового винта.Наличие зазора между резьбой приводит к появлению мертвой зоны при изменении направления движения. При изменении направления движения в линейном приводе не будет, пока не будет устранен зазор между резьбой (резьба снова войдет в контакт). По этой причине рекомендуется, чтобы резьба имела как можно более жесткий допуск. Конструкторы должны работать, чтобы сбалансировать люфт и трение, возникающее при ужесточении допусков.
Пропорциональные клапаны Clippard с шаговым управлением
Clippard предлагает два различных пропорциональных клапана управления потоком с шаговым управлением, пропорциональный игольчатый клапан серии SCPV и новый пропорциональный запорный клапан серии Eclipse.В серии SCPV компании Clippard используется шаговый двигатель для регулирования расстояния между иглой и седлом клапана. Точная пропорциональная подача достигается за счет регулировки положения иглы. Из-за типа линейного привода шагового двигателя, используемого в SCPV, не рекомендуется реализовывать микрошаг более чем на полшага. Рекомендуется полное ступенчатое регулирование, равное 0,001 дюйма линейного хода, что дает разрешение потока 0,7 л / мин воздуха.
В новой серии Eclipse от компании Clippard шаговый двигатель оснащен линейным приводом с мелким шагом, который перемещается всего на 0.00006 дюймов за шаг для перемещения специальной керамической пластины с прорезями. Керамика используется для перекрытия двух отверстий через вторую керамическую пластину под ней. Пропорциональный поток достигается путем регулировки степени перекрытия («затмения») между прорезью и портами. Eclipse спроектирован так, чтобы переходить от закрытого к открытому за примерно одну шестнадцатую дюйма, что соответствует 1125 шагам разрешения. Это число может быть значительно увеличено за счет реализации микрошага — переключение на один шестнадцатый шаг приведет к 18000 шагам разрешения. разрешающая способность.Всего за одну шестнадцатую ступень с этим уникальным пропорциональным запорным клапаном можно отрегулировать расход примерно на 13 микролитров (мкл / мин) воды.
Хотя шаговые двигатели могут показаться сложными по сравнению со стандартными двигателями постоянного тока, как мы показали, их основная работа на самом деле довольно проста. Их уникальная внутренняя конструкция обеспечивает исключительную точность остановки и быстроту реакции, что делает шаговые двигатели идеальным выбором для использования в самых разных областях, требующих точного управления.
Если у вас есть вопросы о шаговых двигателях или вы хотите узнать больше об использовании пропорционального клапана управления потоком с шаговым управлением в вашем приложении, найдите ближайшего к вам дистрибьютора Clippard или свяжитесь с Clippard сегодня.
Джесс Кенигер • Инженер-проектировщик • Clippard
Raspberry Pi Stepper Motor Tutorial
В этом руководстве показано, как управлять биполярными шаговыми двигателями на Raspberry Pi в Python с помощью драйвера шагового двигателя DRV-8825.
Шаговые двигатели
— это бесщеточные двигатели постоянного тока, вращение которых разделено на определенное количество шагов, что обеспечивает очень точное позиционное управление и повторяемость. Это делает их очень популярными для 3D-принтеров, маршрутизаторов с ЧПУ и робототехники.Вот биполярный шаговый двигатель NEMA 23570 унций от фрезерного станка с ЧПУ:
NEMA 23 относится только к размерам лицевой панели (2,3 ″ x 2,3 ″). 570 унций на дюйм указывает удерживающий момент. Этот показатель прочности означает, что стационарный двигатель может выдержать вес 570 унций на шкиве радиусом 1 дюйм. Удерживающий момент предполагает, что двигатель не вращается. Когда двигатель вращается, его крутящий момент уменьшается. Чем быстрее вращается двигатель, тем меньше крутящий момент. В техническом описании шагового двигателя должно быть указано значение крутящего момента по сравнению скривая скорости, которая помогает при выборе двигателя (среди многих других факторов). Вы можете сказать, что двигатель биполярный, потому что у него 4 провода (по 2 на каждую катушку). Биполярные шаговые двигатели называются биполярными, потому что для изменения магнитных полюсов ток должен менять направление через катушки. Это изменение полярности требует более сложной схемы управления. Однако сейчас существует множество недорогих решений, таких как биполярный шаговый драйвер DRV-8825:
Эта недорогая плата от Pololu Robotics может управлять одним двухполюсным шаговым двигателем со скоростью до 2.2 ампера и 45 вольт (1,5 ампера без дополнительного охлаждения). Максимальный выходной ток регулируется, что позволяет использовать напряжения выше номинального напряжения шагового двигателя для достижения более высокой скорости шага. Это часто называют драйвером измельчителя. Он имеет защиту от перегрева, перегрузки по току, пониженного напряжения, короткого замыкания на массу и короткого замыкания нагрузки. Есть 6 шагов разрешения от полного шага до 1/32 шага, и он имеет встроенный регулятор 3,3 В, который упрощает взаимодействие с Raspberry Pi.
Подключить DRV8825 очень просто.Минимальная проводка требует всего 2 контакта GPIO. На самом деле 1, если вас не волнует направление. Контакт шага подключен к GPIO 21, а контакт DIR или направления подключен к GPIO 20. Вы можете использовать любые контакты GPIO, поскольку они будут указаны в коде. Контакт заземления подключен к заземлению на Pi. Подача логического напряжения не требуется, поскольку DRV8255 имеет встроенный регулятор напряжения 3,3 В. Тем не менее, выводы RST (сброс) и SLP (спящий режим) необходимо подтянуть к высокому уровню, подключив их к выводу 3,3 В на Pi, потому что их низкие состояния по умолчанию — сброс и переход в спящий режим.EN или enable pin по умолчанию включены, поэтому его можно оставить отключенным. Дополнительный контакт FLT или неисправности остается отключенным. Он используется для обнаружения событий перегрузки по току или теплового отключения. Для программного управления пошаговым режимом M0, M1 и M2 подключены к GPIO 14, GPIO 15 и GPIO 18 соответственно. Они также могут быть жестко подключены, если вам не нужно менять пошаговый режим, или оставаться отключенными, если вы планируете использовать только полношаговый режим.
Для DRV8825 требуется источник питания двигателя в диапазоне 8.2 и 45 вольт. Я использую настольный блок питания, потому что Pi не может обеспечить достаточное напряжение или ток. Перед подключением убедитесь, что питание отключено. Вывод VMOT или напряжения двигателя подключается к положительной клемме источника питания. Контакт заземления двигателя подключается к отрицательной клемме источника питания. Здесь нет защиты от обратного напряжения, поэтому дважды проверьте свои соединения.
Не позволяйте плюсовому выводу источника питания двигателя касаться чего-либо, кроме вывода VMOT. Это минимум 8.2 вольта, которые разрушили бы ваш Pi.
DRV8825 подвержен разрушительным скачкам напряжения. Чтобы защитить плату, старайтесь, чтобы провода питания двигателя были короткими, и важно установить электролитический конденсатор емкостью не менее 47 мкФ на блоке питания двигателя как можно ближе к DRV8255. Я использую конденсатор на 100 мкФ. Поместите отрицательную клемму колпачков на землю. Отрицательная сторона обозначена вертикальной полосой. Обычно я выбираю крышку с удвоенным номинальным напряжением. Например, для источника питания на 12 вольт я бы использовал конденсатор, рассчитанный как минимум на 24 вольт.
Одна катушка двигателя подключена к A1 и A2, а другая катушка подключена к B1 и B2. При подключении или отключении двигателя убедитесь, что питание двигателя отключено.
Подключение или отключение шагового двигателя при включенном приводе может привести к повреждению или повреждению привода. Также убедитесь, что установили максимальный ток перед присоединением двигателя.
ДРВ-8825 максимальный предел тока (I), равна удвоенной или Vref опорного напряжения.
Vref можно измерить с помощью Vref via или потенциометра Vref.Сначала подключите отрицательный щуп мультиметра к заземлению DRV-8825. Затем с помощью зажима «крокодил» прикрепите положительный зонд расходомера к небольшой металлической отвертке. Теперь вы можете читать Vref при внесении изменений. При установке Vref на 0,429 В максимальный ток двигателя устанавливается на 0,858 А по приведенной выше формуле. Пожалуйста, обратитесь к таблице данных вашего шагового двигателя, чтобы определить предел пикового тока.
В таблице данных DRV8825 указано, что в полношаговом режиме ток ограничен до 71% от установленного максимального тока.Следовательно, вы можете установить максимальный ток выше пикового для дополнительного крутящего момента, пока вы придерживаетесь полношагового режима.
| Mode2 | Mode1 | Mode0 | Step Mode |
|---|---|---|---|
| 0 | 0 | 0 | Полный шаг (2-фазное возбуждение) с током 71% |
| 0 | 0 | 1 | 1/2 ступени (1-2 фазы возбуждения) |
| 0 | 1 | 0 | 1/4 шага (фазовое возбуждение W1-2) |
| 0 | 1 | 1 | 8 микрошагов / шаг |
| 1 | 0 | 0 | 16 микрошагов / шаг |
| 1 | 0 | 1 | 32 микрошага / шаг |
Всегда полезно контролировать температуру шагового двигателя и платы драйвера.Мне нравится использовать правило 5 секунд. Если я могу дотронуться до платы двигателя и драйвера в течение как минимум 5 секунд, не обжигая пальцы, значит, ток в норме. Обратите внимание, что ток также может быть ограничен сопротивлением обмотки двигателя по закону Ома (V = I x R). Например, если сопротивление вашей катушки составляет 30 Ом, а источник питания — 12 В, то ток будет ограничен до 0,4 А (12 В = 0,4 А x 30 Ом)
После установки максимального тока можно подключать шаговый двигатель. Шаговый двигатель может иметь любое количество катушек.Но эти катушки соединены в группы, называемые «фазами». Все катушки в фазе запитываются вместе. 4-проводные двухполюсные шаговые двигатели являются двухфазными и имеют 2 группы катушек. Драйвер меняет полярность катушек для поворота ротора. Другой тип шагового двигателя — однополярный, с центральным отводом для каждой катушки. Однополярный драйвер может запитать любую половину катушки для изменения полярности. Это упрощает схему по сравнению с биполярной, но также снижает крутящий момент, потому что только половина катушки находится под напряжением.6-проводные однополярные двигатели часто могут работать как биполярные, игнорируя центральные отводы. 5-проводный однополярный, с подключенными 2 центральными отводами. Чтобы использовать их как биполярные, соединение между центральными ответвителями должно быть разорвано.
Провода шагового двигателя часто не имеют маркировки. Один простой способ определить, какие провода идут с какой катушкой, — это использовать светодиод. Поместите светодиод на любые 2 провода двигателя. Направление не имеет значения. Прокрутите двигатель вручную, и если светодиод мигает, это означает, что 2 провода представляют собой катушку.Вы также можете использовать мультиметр для проверки целостности катушки, если у вас нет светодиода или если шаговый двигатель слишком мал для питания светодиода.
Вот изображение шагового двигателя привода компакт-дисков, подключенного к DRV-8825:
Перед написанием любого программного обеспечения убедитесь, что ваш Pi обновлен с помощью sudo apt-get update и sudo apt-get upgrade.
sudo apt-get update && sudo apt-get upgrade
Как всегда, я рекомендую вам начать со свежевытертого Pi, используя последнюю версию Raspbian, чтобы убедиться, что у вас есть все необходимое программное обеспечение.
В первом примере Python двигатель с 48 SPR (шагов на оборот) вращается один раз по часовой стрелке, а затем обратно против часовой стрелки с использованием библиотеки RPi.GPIO. Контакты DIR и STEP установлены как выходы. Штифт DIR установлен на высокий уровень по часовой стрелке. Затем цикл for подсчитывает до 48. Каждый цикл переключает высокий уровень на выводе STEP на 0,0208 секунды и низкий уровень на 0,0208 секунды. На выводе DIR устанавливается низкий уровень против часовой стрелки, и цикл for повторяется.
из времени импорта сна
импортировать RPi.GPIO как GPIO
DIR = 20 # Направление вывода GPIO
STEP = 21 # Шаг GPIO Pin
CW = 1 # вращение по часовой стрелке
CCW = 0 # Вращение против часовой стрелки
SPR = 48 # шагов на оборот (360/7.5)
GPIO.setmode (GPIO.BCM)
GPIO.setup (DIR, GPIO.OUT)
GPIO.setup (ШАГ, GPIO.OUT)
GPIO.output (DIR, CW)
step_count = SPR
задержка = 0,0208
для x в диапазоне (step_count):
GPIO.output (ШАГ, GPIO.HIGH)
сон (задержка)
GPIO.output (ШАГ, GPIO.LOW)
сон (задержка)
сон (.5)
GPIO.output (DIR, CCW)
для x в диапазоне (step_count):
GPIO.output (ШАГ, GPIO.HIGH)
сон (задержка)
GPIO.output (ШАГ, GPIO.LOW)
сон (задержка)
GPIO.cleanup ()
Этот код может привести к вибрации двигателя и рывкам, особенно на низких скоростях.Один из способов противостоять этому результату — микрошаг. К приведенному выше коду добавляется следующий фрагмент кода. Контакты режима GPIO установлены как выходы. Dict содержит соответствующие значения для каждого пошагового формата. GPIO.output устанавливает режим 1/32. Обратите внимание, что количество шагов умножается на 32, потому что каждое вращение теперь занимает в 32 раза больше циклов, что приводит к более плавному движению. Задержка делится на 32, чтобы компенсировать лишние шаги.
MODE = (14, 15, 18) # Разрешение микрошага GPIO контактов
GPIO.настройка (MODE, GPIO.OUT)
RESOLUTION = {'Full': (0, 0, 0),
'Половина': (1, 0, 0),
'1/4': (0, 1, 0),
'1/8': (1, 1, 0),
'1/16': (0, 0, 1),
'1/32': (1, 0, 1)}
GPIO.output (РЕЖИМ, РАЗРЕШЕНИЕ ['1/32'])
step_count = SPR * 32
задержка = 0,0208 / 32
Имейте в виду, что у микрошага есть некоторые существенные недостатки. Часто наблюдается значительная потеря крутящего момента, что может привести к потере точности. См. Раздел ресурсов ниже для получения дополнительной информации.
В следующем примере будет добавлен переключатель для изменения направления. Один вывод коммутатора идет на GPIO16. Другой вывод идет на землю.
Одна проблема с последней программой заключается в том, что она полагается на метод сна Python для определения времени, что не очень надежно. В следующем примере я воспользуюсь библиотекой PiGPIO, которая обеспечивает аппаратную синхронизацию PWM.
Перед использованием демон PiGPIO необходимо запустить с терминала с помощью sudo pigpiod.
Первая часть следующего кода аналогична первому примеру.Синтаксис изменен для библиотеки PiGPIO. Метод set_PWM_dutycycle используется для установки рабочего цикла ШИМ. Это процент высокого и низкого пульса. Значение 128 устанавливает его на 50%. Таким образом, включенная и выключенная части цикла равны. Метод set_PWM_frequency устанавливает количество импульсов в секунду. Значение 500 устанавливает частоту 500 Гц. Бесконечный цикл while проверяет переключатель и соответствующим образом переключает направление.
из времени импорта сна импортная свинья DIR = 20 # Направление вывода GPIO STEP = 21 # Шаг GPIO Pin SWITCH = 16 # вывод GPIO переключателя # Подключиться к демону pigpiod пи = свинья.Пи() # Настроить пины как выход pi.set_mode (DIR, pigpio.OUTPUT) pi.set_mode (ШАГ, pigpio.OUTPUT) # Настроить входной переключатель pi.set_mode (ПЕРЕКЛЮЧАТЕЛЬ, pigpio.INPUT) pi.