Схема подключения электродвигателя с фазным ротором — Moy-Instrument.Ru
Пуск двигателя с фазным ротором
Пусковые свойства асинхронного двигателя зависят от особенностей его конструкции, в частности от устройства ротора.
Пуск асинхронного двигателя сопровождается переходным процессом машины, связанным с переходом ротора из состояния покоя в состояние равномерного вращения, при котором момент двигателя уравновешивает момент сил сопротивления на валу машины.
При пуске асинхронного двигателя имеет место повышенное потребление электрической энергии из питающей сети, затрачиваемое не только на преодоление приложенного к валу тормозного момента и покрытие потерь в самой асинхронном двигателе, но и на сообщение движущимся звеньям производственного агрегата определенной кинетической энергии. Поэтому при пуске асинхронный двигатель должен развить повышенный вращающий момент.
Для асинхронного двигателя с фазным ротором начальный пусковой момент, соответствующий скольжению s п= 1, зависит от активных сопротивлений регулируемых резисторов, введенных в цепь ротора.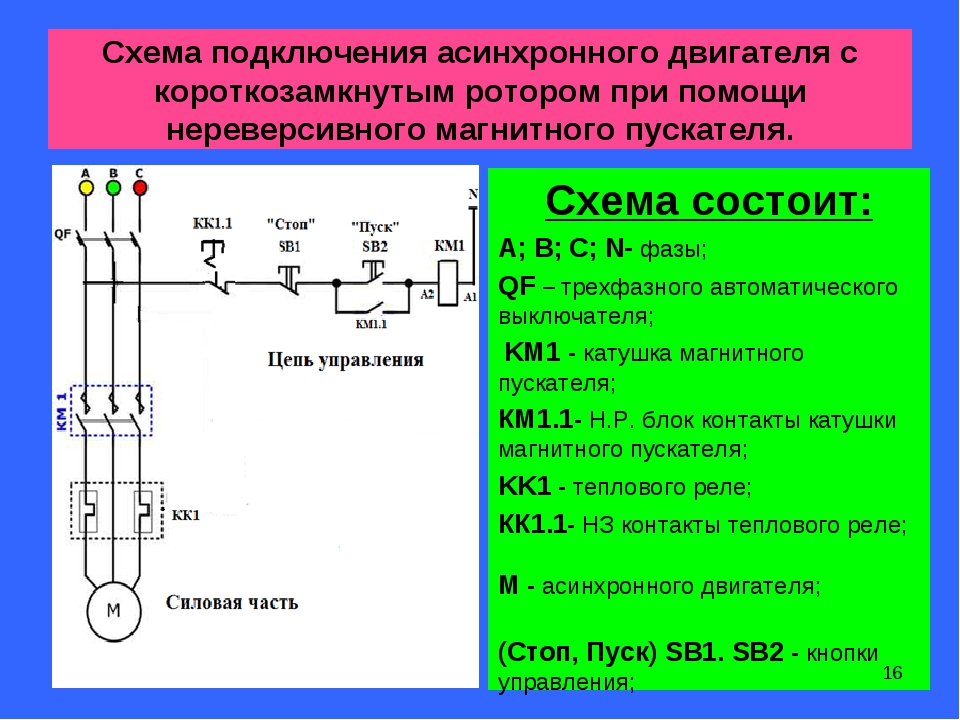
Рис. 1. Пуск трехфазного асинхронного двигателя с фазным ротором: а — графики зависимости вращающего момента двигателя с фазным ротором от скольжения при различных активных сопротивлениях резисторов в цепи ротора, б — схема включения резисторов и замыкающих контактов ускорения в цепь ротора.
Так, при замкнутых контактах ускорения У1, У2, т. е. при пуске асинхронного двигателя с замкнутыми накоротко контактными кольцами, начальный пусковой момент Мп1 = (0,5 -1,0) Мном, а начальный пусковой ток I п = (4,5 — 7) I ном и более.
Малый начальный пусковой момент асинхронного электродвигателя с фазным ротором может оказаться недостаточным для приведения в действие производственного агрегата и последующего его ускорения, а значительный пусковой ток вызовет повышенный нагрев обмоток двигателя, что ограничивает частоту его включений, а в маломощных сетях приводит к нежелательному для работы других приемников временному понижению напряжения. Эти обстоятельства могут явиться причиной, исключающей использование асинхронных двигателей с фазным ротором с большим пусковым током для привода рабочих механизмов.
Введение в цепь ротора двигателя регулируемых резисторов, называемых пусковыми, не только снижает начальный пусковой ток, но одновременно увеличивает начальный пусковой момент, который может достигнуть максимального момента Mmax (рис. 1 , а, кривая 3), если критическое скольжение двигателя с фазным ротором
s кр = ( R2′ + R д ‘) / ( Х1 + Х2 ‘) = 1 ,
где R д ‘ — активное сопротивление резистора, находящегося в фазе обмотки ротора двигателя, приведенное к фазе обмотки статора. Дальнейшее увеличение активного сопротивления пускового резистора нецелесообразно, так как оно приводит к ослаблению начального пускового момента и выходу точки максимального момента в область скольжения s > 1, что исключает возможность разгона ротора.
Необходимое активное сопротивление резисторов для пуска двигателя с фазным ротором определяют, исходя из требований пуска, который может быть легким, когда Мп = (0,1 — 0,4) M ном, нормальным, если Мп — (0,5 — 0,75) Мном, и тяжелым при Мп ≥ Мном.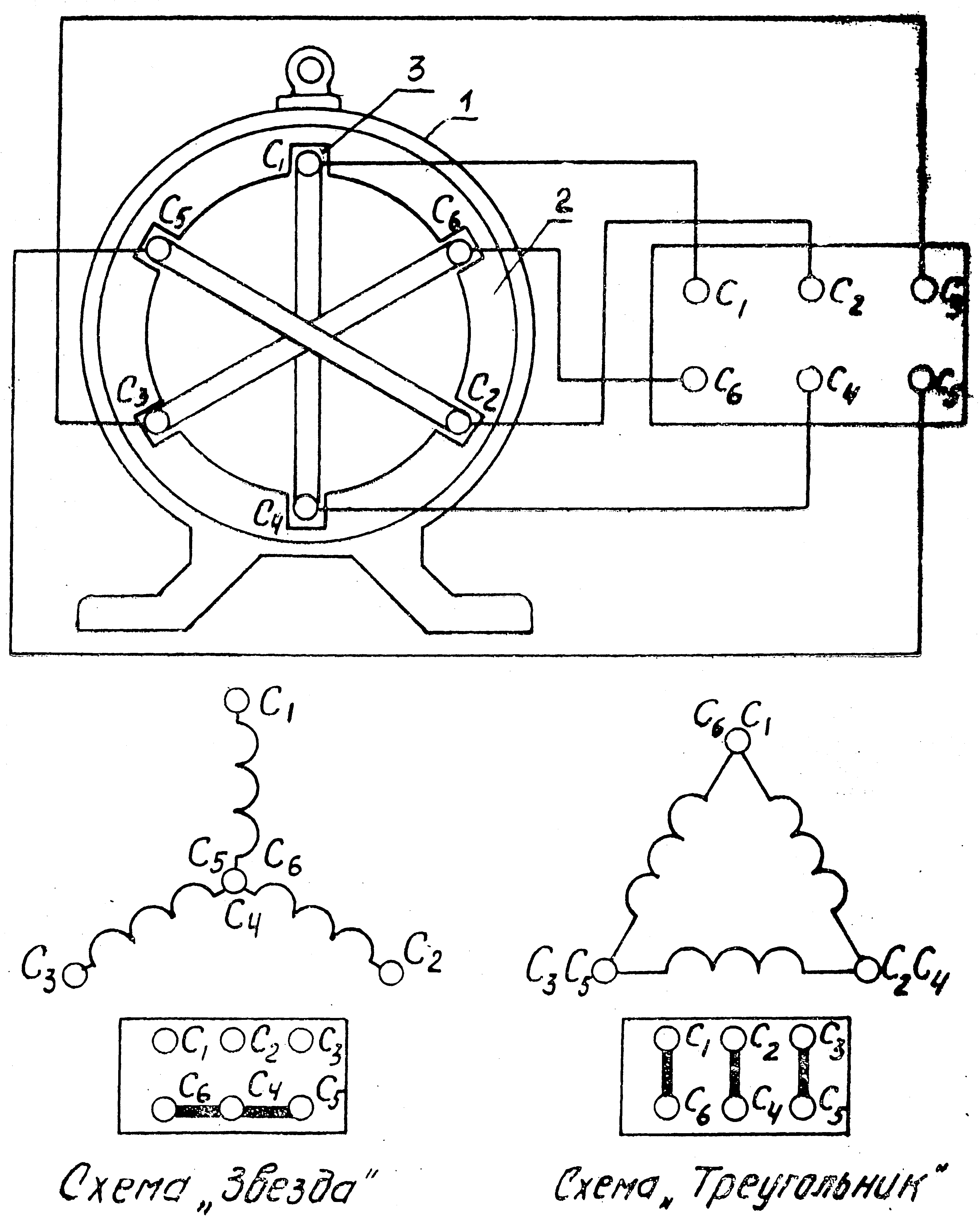
Для поддержания достаточно большого вращающего момента двигателем с фазным ротором в процессе разгона производственного агрегата с целью сокращения длительности переходного процесса и снижения нагрева двигателя необходимо постепенно уменьшать активное сопротивление пусковых резисторов. Допустимое изменение момента в процессе разгона M(t) определяется электрическими и механическими условиями, лимитирующими пиковый предел момента М > 0,85 Ммах, момент переключения М2 > > Мс (рис. 2), а также ускорение.
Переключение пусковых резисторов обеспечено поочередным включением контакторов ускорения Y1, Y2 соответственно в моменты времени t1 , t2 отсчитываемые с момента пуска двигателя, когда в процессе разгона вращающий момент М становится равным моменту переключения М2. Благодаря этому на протяжении всего пуска все пиковые моменты получаются одинаковыми и все моменты переключения равны между собой.
Поскольку вращающий момент и ток асинхронного двигателя с фазным ротором взаимно связаны, то можно при разгоне ротора установить пиковый предел тока I1 = (1,5 — 2,5) I ном и ток переключения I 2, который должен обеспечить момент переключения М 2 > М c .
Отключение асинхронных двигателей с фазным ротором от питающей сети всегда выполняют при цепи ротора, замкнутой накоротко, во избежание появления перенапряжений в фазах обмотки статора, которые могут превысить номинальное напряжение этих фаз в 3 — 4 раза, если цепь ротора в момент отключения двигателя окажется разомкнутой.
Рис. 3. Схема соединения обмоток двигателя с фазным ротором: а — к питающей сети, б — ротора, в — на доске зажимов.
Рис. 4. Пуск двигателя с фазным ротором: а — схема включения, б — механические характеристики
Устройство, принцип работы и схема подключения асинхронного двигателя с фазным ротором
Асинхронный двигатель с фазным ротором имеет очень обширную область обслуживания. АД (асинхронный двигатель) чаще применяется в управлении двигателями большой мощности. Обслуживание и управление приводов мельниц, станков, насосов, кранов, дымососа, дробилок. Асинхронный двигатель с массивным ротором даёт возможность подключения множества технических механизмов.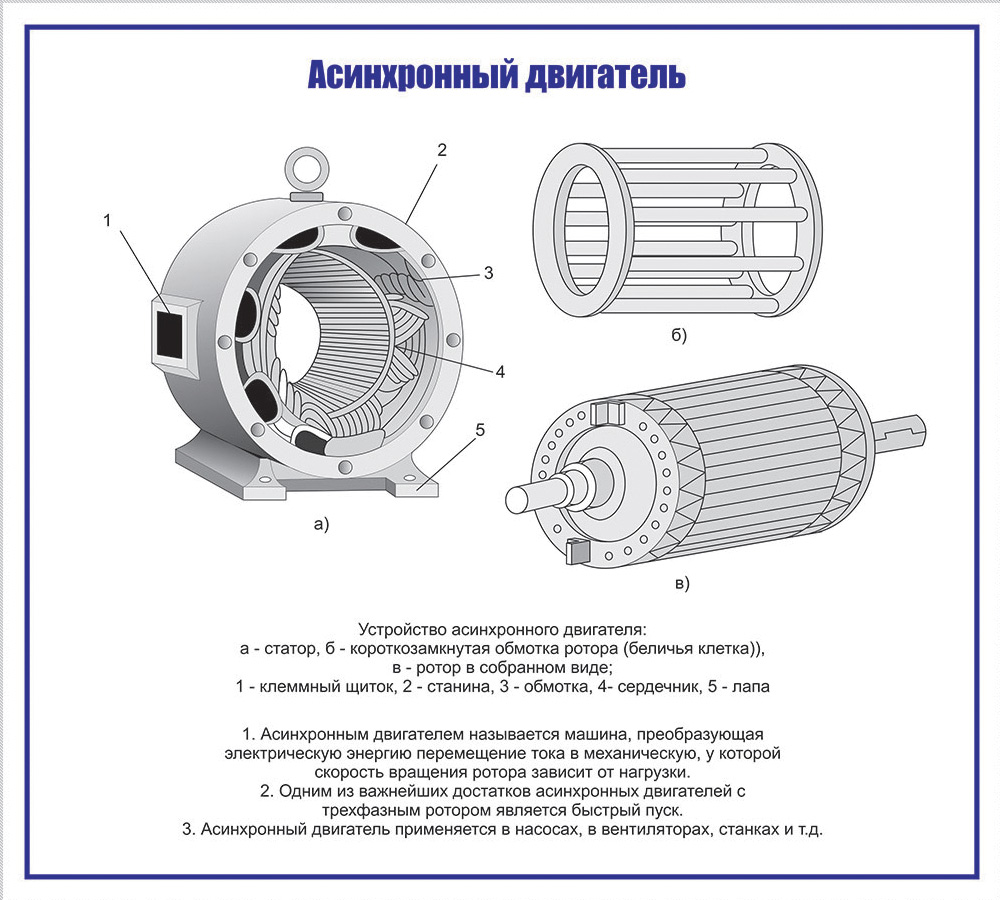
- Характеристика асинхронного двигателя
- Схема подключения
- Устройство двигателя
- Принцип работы
- Расчёт числа повторений
- Реостатный пуск
- Ремонт и характеристики неисправностей
Характеристика асинхронного двигателя
Преимущества использования:
- Запуск двигателя с нагрузкой, подключение к валу благодаря созданию большого момента вращения. Это обеспечивает обслуживание асинхронных двигателей с фазовым элементом любой мощности.
- Возможность постоянной скорости вращения большой или маленькой нагрузки
- Регулирование автоматического пуска.
- Работа даже при перегрузке тока напряжения.
- Простота использования.
- Невысокая стоимость.
- Надёжность применения.
- Использование резисторов увеличивается стоимость, а работа двигателя усложняется;
- Большие размеры;
- Значение КПД меньше, чем короткозамкнутых роторов;
- Трудное управление скоростью вращения;
- Регулярный капитальный ремонт .

Схема подключения
При подключении к току начинают работать реле времени. Контакты размыкаются. При нажатии тумблера происходит пуск.
Чтобы подключить АД нужно правильно обозначить концы и начала обмоток фазы.
Устройство двигателя
Главными постоянными являются статор и ротор. Статор представляет собой цилиндр, состав –листы электротехнической стали, в цилиндр уложена трёхфазная обмотка. Она состоит из обмоточной проволоки. Которые соединены между собой в виде звезды или треугольника в зависимости от напряжения.
Ротор – основная вращающаяся часть двигателей. Он в зависимости от расположения может быть внешним, внутренним. Данный элемент состоит из стальных листов. Пазы сердечника наполнены алюминием, который имеет стержни, содержащие торцевые кольца. Они могут быть латунными или стальными, каждое из них изолировано слоем лака. Между трёхфазным статором и ротором образуется зазор. Регулирование размер зазора от 0,30 –0,34 мм в устройствах с небольшим напряжением, 1,0–1,6 мм в устройствах с большим постоянным электрическим напряжением.
Существует добавочный резистор в цепи обмотки вращающей части машины, крепится с помощью металлографитных щеток. Щетки обычно используются две, расположены на щеткодержателе. В приводах кранах и центрифугах для регулирования роботы применяется конический подвижный ротор. Асинхронные двигатели с фазным ротором незаменимы при технических требованиях мощного пускового момента. Это могут быть такие механизмы, как кран, мельница, лифт.
Схема переключения электрической цепи со звезды на треугольник
Принцип работы
В основе АД лежит вращение поля магнитов. В область обмотки трёхфазного статора поступает ток, а в фазах возникает поток магнитов, изменяемый в зависимости от скорости и частоты постоянной электрической мощности. При статорном вращении возникает электродвижущая сила.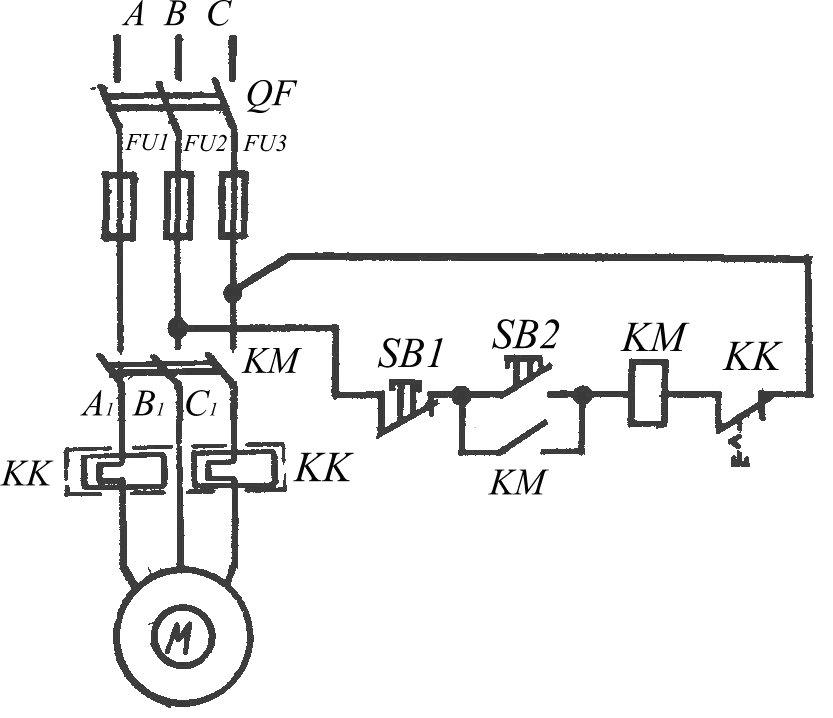
В роторную обмотку подходит напряжение, которое совместно с постоянным магнитным потоком статора образует пуск. Он стремится направить ротор по магнитному вращению статора и при достижении превышения момента торможения, приводит к скольжению. Оно выражает отношение между частотами статорного силового поля магнитов и скоростью роторного вращения.
Чертеж режима кз
При балансе между моментами электромагнита и торможения, перемена значений остановится. Особенность эксплуатации АД – сольватация кругового движения силового поля статора и им наводящих токов в роторе. Момент вращения возникает лишь при разнице частот круговых движений магнитных полей.
Машины различают синхронные, асинхронные. Разница механизмов в их обмотке. Она образует магнитное поле.
Неподвижность ротора и замыкание обмотки приводит к короткому замыканию (кз).
Расчёт числа повторений
Возьмём m1 – процесс повторения постоянного поля магнитов и ротора. Система фазы переменного тока образуют вращение поля магнитов.
Данные расчета считаются по формуле:
f1– частота электричества$
p – количество полюсных пар каждой обмотки статора.
m2 – процесс повторения вращения ротора. Имея различное количество одновременных повторений, данная скорость частоты будет асинхронной. Определение расчёта частоты проводится по соотношению между данными:
Асинхронный электродвигатель работает только при асинхронной частоте.
Данные причины – это далеко не полный список поломок.
Асинхронный двигатель – незаменимый и важный механизм, применяемый для обслуживания быта и различных отраслей промышленности. Для практического действия АД с фазным ротором необходимо знать техническую характеристику управления, использовать его по назначению и регулярно проводить ремонт при технических осмотрах. Тогда асинхронный двигатель станет практически вечной эксплуатации.
Крановые электродвигатели — технические характеристики
Для работы подъемных механизмом необходимо использование специального редуктора. Предлагаем рассмотреть, как работают асинхронные крановые электродвигатели с фазным ротором для частотного регулирования, их обмоточные данные и технические характеристики.
Предлагаем рассмотреть, как работают асинхронные крановые электродвигатели с фазным ротором для частотного регулирования, их обмоточные данные и технические характеристики.
Особенности двигателей
Все тяговые электродвигатели ГОСТ 18374 делятся на две группы:
- работающие с фазным ротором;
- работающие с короткозамкнутым ротором.
Обе эти группы имеют высокий КПД, но у них несколько разный принцип работы. Данные моторы используются во всех видах кранов: тельферах, талях, башенных, козловых и портальных установках. Главным преимуществом работы обоих типов является то, что помимо динамического способа работы, когда определенное количество времени поднимается груз с некоторым весом, они могут работать статично, когда груз некоторое время висит на кране неподвижно. Рассмотрим подробнее их принцип работы.
Фото — Общий вид фазного двигателя
У данных устройств есть щеткодержатели для крановых электродвигателей, которые применяются для обеспечения лучшего контакта коллектора и контактного кольца. У них очень простая конструкция: щеточный механизм, держатель, также они оснащены встроенным механизмом нажатия, который служит не только ля их запуска, но и предотвращения движения в случае ЧП на производстве. Благодаря такой конструкции, щеткодержатель является гарантом безопасности при эксплуатации электрического асинхронного кранового двигателя, а также своеобразным тормозом.
У них очень простая конструкция: щеточный механизм, держатель, также они оснащены встроенным механизмом нажатия, который служит не только ля их запуска, но и предотвращения движения в случае ЧП на производстве. Благодаря такой конструкции, щеткодержатель является гарантом безопасности при эксплуатации электрического асинхронного кранового двигателя, а также своеобразным тормозом.
Замена кранового двигателя
Основные технические характеристики
Двигатели с фазным ротором
Стандартные габариты и основные размеры мощностей двигателей:
Фото — Короткозамкнутые двигатели
Роторный мотор – это асинхронный двигатель, где ротор обмотки соединен через контактные кольца для внешнего сопротивления с рабочей и передаточной частью. Регулировка сопротивления позволяет контролировать частоты вращения крутящего момента двигателя. Роторный движок может быть запущен при помощи низкого пускового тока, а также путем использования высокого сопротивления в цепи ротора; при разгоне двигателя, сопротивление может быть уменьшено.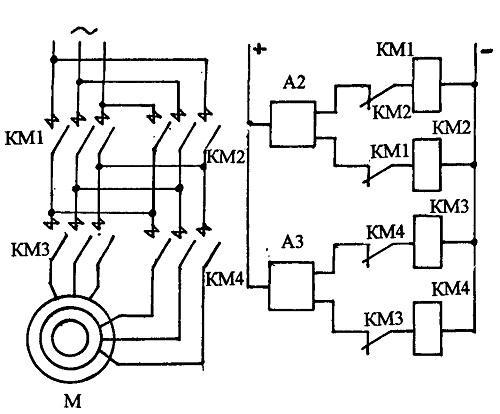
По сравнению с короткозамкнутым ротором, фазный двигатель роторного типа имеет больше витков обмотки; наведенное напряжение увеличивается, и имеющееся ниже, чем для короткозамкнутого ротора. При запуске типичного ротора используются 3 полюса, связанные с контактными кольцами. Каждый полюс соединен последовательно с переменной мощностью резистора. Во время запуска резисторов можно снизить напряженность поля статора. Как результат, пусковой ток сокращается. Еще одним важным преимуществом по сравнению с короткозамкнутым ротором является высокий стартовый крутящий момент.
Фото — Управление торможением фазного двигателя
Фазный роторный двигатель (сибэлектромотор), может быть использован в нескольких формах регулируемой скоростью вращения диска. Определенные типы вариаторов могут восстановить частоту скольжения и мощность от цепи ротора и питать его обратно в сеть, позволяя охватывать широкий диапазон скоростей с высокой энергетической эффективностью. Двойное питание электрических машин использует контактные кольца для внешнего питания в цепи ротора, что позволяет увеличить диапазон регулирования скорости вращения. Но сейчас такие механизмы редко используются, в основном они заменены на асинхронные двигатели с частотно-регулируемым приводом.
Но сейчас такие механизмы редко используются, в основном они заменены на асинхронные двигатели с частотно-регулируемым приводом.
Фото — Конструкция фазного кранового электродвигателя
Короткозамкнутые роторы
Электродвигатели с короткозамкнутым ротором – это асинхронные крановые двигатели, которые состоят из стального цилиндра с алюминиевыми или медными жилами, внедренными в их поверхность и вращающейся части — ротора.
Эта модель двигателя представляет собой цилиндр, закрепленный на валу. Внутренне он содержит продольные проводящие бары (обычно изготавливается из алюминия или меди), установленные в пазы и присоединенные с обоих концов путем замыкания кольца, образующих каркасообразную форму. Название происходит от схожести между кольцами обмотки и баров с короткозамкнутым ротором.
Твердый сердечник ротора состоит из соединений легированной стали. Ротор имеет меньшее количество слотов, чем статор и не может быть кратен числу его пазов, для того чтобы предотвращать магнитные блокировки зубов ротора и статора первоначальный крутящий момент.
Описание принципа работы короткозамкнутого ротора: поля обмотки статора асинхронного электродвигателя переменного тока настраиваются на вращающееся магнитное поле через ротор. Благодаря движению, устройство начинает индуцировать ток и передавать его в обмотку и на бары. В свою очередь эти продольные токи в проводниках взаимодействуют с магнитным полем для производства моторной силы, выступая на касательный ортогональный ротор, в результате чего крутящий момент проворачивает вал. Также ротор вращается от магнитного поля, но на более низкой скорости. Разница в скорости называется скольжением и увеличивается с ростом нагрузки.
Схема работы изображена ниже:
Фото — Схема работы короткозамкнутых приводов
Проводники часто слегка наклонены по длине ротора, что снижает шум и сглаживает колебания крутящего момента, это может привести к увеличению скорости из-за взаимодействия с полюсными наконечниками статора. Количество баров на короткозамкнутом роторе определяет, в какой степени индуцированные токи возвращаются на обмотки статора и, следовательно, ток через них. Конструкция также может работать в качестве реверсивного механизма.
Конструкция также может работать в качестве реверсивного механизма.
Железный якорь используется для того, чтобы проводить магнитное поле через проводники ротора. Дело в том, что МП ротора взаимодействует с МП якоря, и несмотря на то, что конструкция аналогичная трансформатору, это является причиной снижения и потери энергии. Якорь сделан из тонких пластин, разделенных лаковой изоляцией, чтобы уменьшить вихревые токи, циркулирующие в нем. Материал отличается низким уровнем выбросов углекислого газа, высоким кремния. Основа из чистого железа значительно снижает потери на вихревые токи, низкая коэрцитивная сила уменьшает малые потери на гистерезис.
Эта базовая конструкция используется как для однофазных, так и для трехфазных двигателей в широком диапазоне размеров. Роторы для трехфазных двигателей будут иметь вариации в глубину и форму баров. Как правило, бруски с большей толщиной могут иметь хороший крутящий момент и являются более эффективными в борьбе со скольжением, поскольку они представляют меньшую устойчивость к ЭМП.
Фото — Конструкция трехфазного двигателя
Трехфазные двигатели с короткозамкнутым ротором широко используются для:
- Крановых механизмов;
- Тяговых машин;
- Комбайнов;
- Грузовых автомобилей и кораблей.
Говоря про варианты установки двигателей, они бывают вертикально-фланцевые, горизонтальные, горизонтально-фланцевые.
Марки двигателей и обзор цен
На данный момент, в России и Украине осуществляется производство таких крановых электродвигателей:
Фазных – MTF, MTKF, MTM, MTН, MEZ FRENSTAT, KMR, DMTF, (завод Leroy Somer), WASI, FLSLB, SMH;
Короткозамкнутых – Sew-Eurodrive, двигатели от Bularia, Siemens, VEM, HORS, МТВ, МТИ, МТК, МТКМ, МТКН, МТМ, МТН, МТФ;
Для некоторых видов крановых механизмов (к примеру, металлургические подъемники), используются серии АИР (двухскоростные двигатели постоянного тока).
Купить крановые электродвигатели можно в любом городе СНГ, цена товара напрямую зависит от его мощности, фирмы-производителя и города, де он покупается. Возможен наличный и безналичный расчет. Из открытых источников мы собрали прайс-лист, предлагаем с ним ознакомиться (цены приблизительные, при покупке кранового электродвигателя обязательно просмотрите дополнительно каталог производителя, возможны изменения цен):
Возможен наличный и безналичный расчет. Из открытых источников мы собрали прайс-лист, предлагаем с ним ознакомиться (цены приблизительные, при покупке кранового электродвигателя обязательно просмотрите дополнительно каталог производителя, возможны изменения цен):
Устройство, виды и принцип действия асинхронных электродвигателей
Наука в области электричества в XIX и XX веках стремительно развивалась, что привело к созданию электрических асинхронных двигателей. С помощью таких устройств развитие промышленной индустрии шагнуло далеко вперед и теперь невозможно представить заводы и фабрики без силовых машин с использованием асинхронных электродвигателей.
История появления
История создания асинхронного электродвигателя начинается в 1888 году, когда Никола Тесла запатентовал схему электродвигателя, в этом же году другой ученый в области электротехники Галлилео Феррарис опубликовал статью о теоретических аспектах работы асинхронной машины.
В 1889 году российский физик Михаил Осипович Доливо-Добровольский получил в Германии патент на асинхронный трехфазный электрический двигатель.
Все эти изобретения позволили усовершенствовать электрические машины и привели к тому, что в промышленность стали массово применяться электрические машины, которые значительно ускорили все технологические процессы на производстве, повысили эффективность работы и снизили её трудоемкость.
В настоящий момент самый распространенный электродвигатель, эксплуатируемый в промышленности, является прототипом электрической машины, созданной Доливо-Добровольским.
Устройство и принцип действия асинхронного двигателя
Главными компонентами асинхронного электродвигателя являются статор и ротор, которые отделены друг от друга воздушным зазором. Активную работу в двигателе выполняют обмотки и сердечник ротора.
Под асинхронностью двигателя понимают отличие частоты вращения ротора от частоты вращения электромагнитного поля.
Статор – это неподвижная часть двигателя, сердечник которой выполняется из электротехнической стали и монтируется в станину. Станина выполняется литым способом из материала, который не магнитится (чугун, алюминий). Обмотки статора являются трехфазной системой, в которой провода уложены в пазы с углом отклонения 120 градусов. Фазы обмоток стандартно подключают к сети по схемам «звезда» или «треугольник».
Ротор – это подвижная часть двигателя. Роторы асинхронных электродвигателей бывают двух видов: с короткозамкнутым и фазным роторами. Данные виды отличаются между собой конструкциями обмотки ротора.
Асинхронный двигатель с короткозамкнутым ротором
Такой тип электрической машины был впервые запатентован М.О. Доливо-Добровольским и в народе называется «беличье колесо» из-за внешнего вида конструкции. Короткозамкнутая обмотка ротора состоит из накоротко замкнутых с помощью колец стержней из меди (алюминия, латуни) и вставленные в пазы обмотки сердечника ротора. Такой тип ротора не имеет подвижных контактов, поэтому такие двигатели очень надежны и долговечны при эксплуатации.
Такой тип ротора не имеет подвижных контактов, поэтому такие двигатели очень надежны и долговечны при эксплуатации.
Асинхронный двигатель с фазным ротором
Такое устройство позволяет регулировать скорость работы в широком диапазоне. Фазный ротор представляет собой трехфазную обмотку, которая соединяется по схемам «звезда» или треугольник. В таких электродвигателях в конструкции имеются специальные щетки, с помощью которых можно регулировать скорость движения ротора. Если в механизм такого двигателя добавить специальный реостат, то при пуске двигателя уменьшится активное сопротивление и тем самым уменьшатся пусковые токи, которые пагубно влияют на электрическую сеть и само устройство.
Принцип действия
При подаче электрического тока на обмотки статора возникает магнитный поток. Так как фазы смещены относительно друг друга на 120 градусов, то из-за этого поток в обмотках вращается. Если ротор короткозамкнутый, то при таком вращении в роторе появляется ток, который создает электромагнитное поле.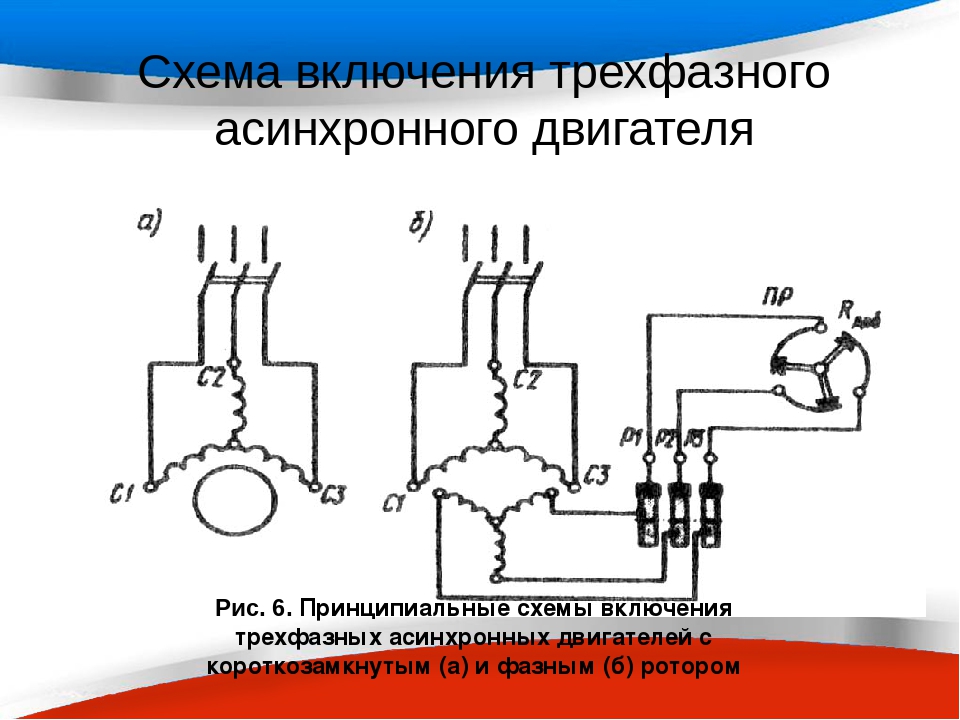 Взаимодействуя друг с другом, магнитные поля ротора и статора заставляют ротор электродвигателя вращаться. В случае, если ротор фазный, то напряжение подается на статор и ротор одновременно, в каждом механизме появляется магнитное поле, они взаимодействуют друг с другом и вращают ротор.
Взаимодействуя друг с другом, магнитные поля ротора и статора заставляют ротор электродвигателя вращаться. В случае, если ротор фазный, то напряжение подается на статор и ротор одновременно, в каждом механизме появляется магнитное поле, они взаимодействуют друг с другом и вращают ротор.
Достоинства асинхронных электродвигателей
Недостатки асинхронных электродвигателей
Асинхронные электродвигатели являются очень эффективными устройствами с отличными механическими характеристиками, и благодаря этому они являются лидерами по частоте применения.
Режимы работы
Электродвигатель асинхронного типа универсальный механизм и по продолжительности работы имеет несколько режимов:
- Продолжительный;
- Кратковременный;
- Периодический;
- Повторно-кратковременный;
- Особый.
Продолжительный режим – основной режим работы асинхронных устройств, который характеризуется постоянной работой электродвигателя без отключений с неизменной нагрузкой.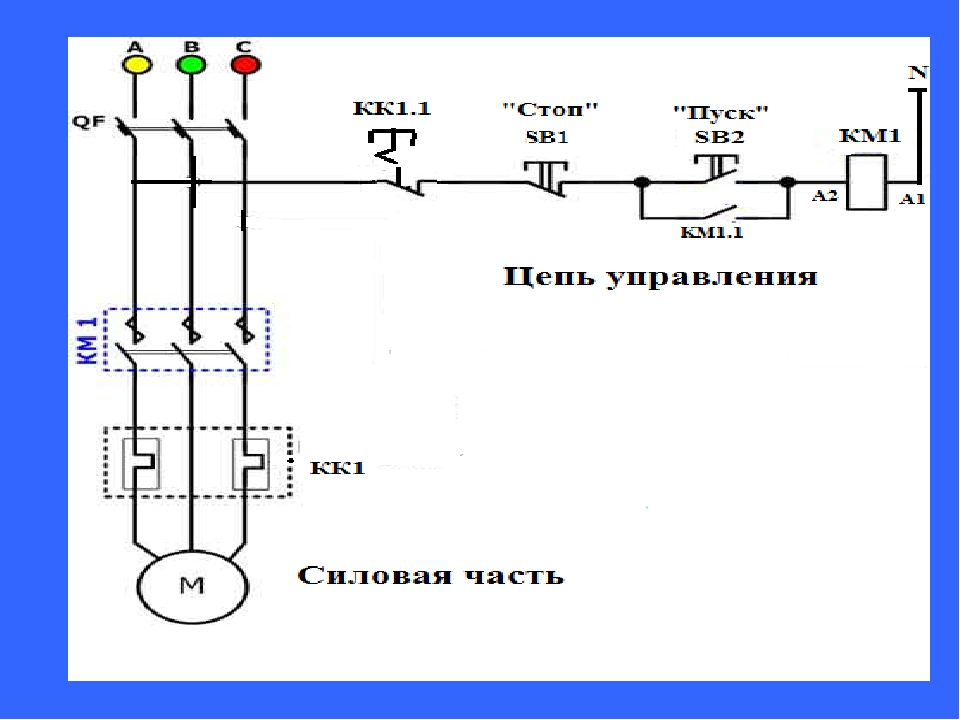 Такой режим работы самый распространенный, используется на промышленных предприятиях повсеместно.
Такой режим работы самый распространенный, используется на промышленных предприятиях повсеместно.
Кратковременный режим – работает до достижения постоянной нагрузки определенное время (от 10 до 90 минут), не успевая максимально разогреться. После этого отключается. Такой режим используют при подаче рабочих веществ (воду, нефть, газ) и прочих ситуациях.
Периодический режим – продолжительность работы имеет определенное значение и по завершении цикла работ отключается. Режим работы пуск-работа-остановка. При этом он может отключаться на время, за которое не успевает остыть до внешних температур и включаться заново.
Повторно-кратковременный режим – двигатель не нагревается максимально, но и не успевает остыть до внешней температуры. Применяется в лифтах, эскалаторах и прочих устройствах.
Особый режим – продолжительность и период включения произвольный.
В электротехнике существует принцип обратимости электрических машин — это означает, что устройство может, как преобразовывать электрическую энергию в механическую, так и совершать обратные действия.
Асинхронные электродвигатели тоже соответствуют этому принципу и имеют двигательный и генераторный режим работы.
Двигательный режим – основной режим работы асинхронного электродвигателя. При подаче напряжения на обмотки возникает электромагнитный вращающий момент, увлекающий за собой ротор с валом и, таким образом, вал начинает вращаться, двигатель выходит на постоянную частоту вращения, совершая полезную работу.
Генераторный режим – основан на принципе возбуждения электрического тока в обмотках двигателя при вращении ротора. Если вращать ротор двигателя механическим способом, то на обмотках статора образуется электродвижущая сила, при наличии конденсатора в обмотках возникает емкостный ток. Если емкость конденсатора будет определенного значения, зависящего от характеристик двигателя, то произойдет самовозбуждение генератора и возникнет трехфазная система напряжений. Таким образом короткозамкнутый электродвигатель будет работать как генератор.
Регулирование частоты вращения асинхронных двигателей
Для регулирования частоты вращения асинхронных электродвигателей и управления режимами их работы существуют следующие способы:
- Частотный – при изменении частоты тока в электрической сети изменяется частота вращения электрического двигателя. Для такого способа применяют устройство, которое называется частотный преобразователь;
- Реостатный – при изменении сопротивления реостата в роторе, изменяется частота вращения. Такой способ увеличивает пусковой момент и критическое скольжение;
- Импульсный – способ управления, при котором на двигатель подается напряжение специального вида.
- Переключение обмоток по время работы электрического двигателя со схемы «звезда» на схему «треугольник», что снижает пусковые токи;
- Управление с изменения пар полюсов для короткозамкнутых роторов;
- Подключение индуктивного сопротивления для двигателей с фазным ротором.

С развитием электронных систем, управление различными электродвигателями асинхронного типа становится все более эффективным и точным. Такие двигатели используются в мире повсеместно, разнообразие задач, выполняемых такими механизмами, с каждым днем растет, и потребность в них не уменьшается.
Фазный ротор электродвигателя
Широкое распространение асинхронного электродвигателя (АД) вызвано его надежностью и простотой конструкции. Статор такого двигателя стандартный, представляет собой изготовленный из пластин электростатической стали полый цилиндр с трехфазной обмоткой. Ротор же может быть короткозамкнутым и фазным. Последний вариант получил более широкое распространение по ряду причин, хотя его конструкция намного сложнее, чем у короткозамкнутого ротора.
Конструкция фазного ротора
Фазный ротор АД конструктивно напоминает его статор. Основа ротора набирается из пластин электростатической стали, которые насаживаются на вал. Конструкция имеет продольные пазы, в которые укладываются витки катушек фазной обмотки. Количество фаз ротора строго соответствует количеству фаз статора. Для подключения обмотки ротора к цепи, на валу последнего устанавливаются 3 контактных кольца, к которым подведены концы обмотки, находящиеся в соприкосновении с токопроводящими щетками. В свою очередь щетки имеют выходы в коробку корпуса, что позволят подключать внешнее дополнительное сопротивление.
Количество фаз ротора строго соответствует количеству фаз статора. Для подключения обмотки ротора к цепи, на валу последнего устанавливаются 3 контактных кольца, к которым подведены концы обмотки, находящиеся в соприкосновении с токопроводящими щетками. В свою очередь щетки имеют выходы в коробку корпуса, что позволят подключать внешнее дополнительное сопротивление.
В зависимости от напряжения сети, фазы обмотки соединяются “треугольником” или “звездой”. Оси катушек двухполюсного электродвигателя смещены на 120 градусов относительно друг друга.
Контактные кольца изготавливаются из латуни или стали. На вал они посажены с обязательной изоляцией между собой. Щетки расположены на щеткодержатле, изготовлены из металлографита, к кольцам прижимаются посредством пружин.
Зачем нужно добавочное сопротивление?
Добавочное сопротивление служит для запуска двигателя с нагрузкой на его валу. Как только достигаются номинальные обороты вала, сопротивление отключается за ненадобность, а кольца закорачиваются. В противном случае работа электродвигателя будет нестабильной, возникнут потери КПД.
В противном случае работа электродвигателя будет нестабильной, возникнут потери КПД.
Роль добавочного внешнего сопротивления, как правило, выполняет ступенчатый реостат. В этом случае двигатель будет разгонятся тоже ступенчато. Часто используются устройства, способные поднять КПД двигателя, при этом избавляя щетки от излишнего трения о кольца. После разгона устройство поднимает щетки и замыкает кольца.
Для реализации автоматического пуска электродвигателя используется подключенная индуктивность к обмотке ротора. Дело в том, что в тот момент, когда осуществляется пуск, в роторе показатели индуктивности и частоты тока максимальны. При разгоне двигателя эти показатели падают, а в конечном итоге двигатель выходит на нормальный рабочий режим.
Отличие короткозамкнутого ротора от фазного
В короткозамкнутом роторе электродвигателя, в отличие от фазного варианта, нет обмоток. Их заменяют замкнутые с торцов между собой кольцами стержни, изготовленные из алюминия или меди. Визуально конструкция такого ротора напоминает беличье колесо, от чего он и получил свое название — “беличья клетка”.
Визуально конструкция такого ротора напоминает беличье колесо, от чего он и получил свое название — “беличья клетка”.
Короткозамкнутый ротор приводится во вращение за счет наведения тока магнитным полем статора. Чтобы исключить пульсирование магнитного поля в роторе, стержни “беличьей клетки” располагаются параллельно между собой, но под наклоном относительно оси вращения. АД с короткозамкнутым ротором обладают высокой надежностью за счет отсутствия щеток, которые со временем перетираются. Кроме того, их стоимость меньше, чем у вариантов с фазным ротором.
Преимущества и недостатки электродвигателя с фазным ротором
Широкое распространение АД с фазным ротором получил за счет ряда серьезных преимуществ перед другими машинами подобного рода. Среди них следует отметить большой вращающий момент при запуске, а также относительно постоянную скорость вращения даже при высоких нагрузках. Такие электродвигатели для запуска требуют меньший пусковой ток, а конструкция позволяет использовать автоматические пусковые устройства. Кроме того, эти электрические машины хорошо переносят продолжительные перегрузки.
Кроме того, эти электрические машины хорошо переносят продолжительные перегрузки.
Как и любой электрический механизм, электродвигатели с фазным ротором имеют ряд недостатков:
- Чувствительность к перепадам напряжения;
- Большие габаритные размеры
- Высокая стоимость;;
- Более сложная конструкция за счет цепи ротора с добавочным сопротивлением;
- Меньшие показатели коэффициента мощности и КПД (относительно АД с короткозамкнутым ротором).
Область применения электродвигателей с фазным ротором
Ад с фазным ротором, за счет высокого крутящего момента, низких пусковых токов и способности долговременно работать при повышенных нагрузках, используются там, где необходима большая мощность электродвигателя, но нет необходимости плавно регулировать скорость вращения в широких диапазонах. Кроме того, эти машины отлично приспособлены под пуск с нагрузкой на валу.
За счет высокой производительности, наиболее часто АД с фазным ротором используются на различном серьезном, тяжелом силовом оборудовании, например, подъемных кранах, лифтовых приводах, станках, различных подъемниках. Иными словами, эти двигатели используются там, где есть необходимость запуска под нагрузкой, а не на холостом ходу.
Иными словами, эти двигатели используются там, где есть необходимость запуска под нагрузкой, а не на холостом ходу.
Проверка электродвигателя с фазным ротором
Для проверки обмоток статора трехфазного АД на целостность, необходимо добраться до клемм их подключения. Затем нужно произвести замеры сопротивлений между фазными клеммами по отдельности, предварительно сняв перемычки. Если сопротивление какой-либо обмотки меньше, чем у других, это свидетельствует о замыкании между ее витками. В этом случае двигатель отдается на перемотку.
Для проверки обмоток ротора, необходимо отыскать выводы от контактных колец. Затем нужно убедиться, что сопротивления обмоток совпадают. Если конструкция электродвигателя предусматривает наличие системы отключения обмоток ротора, отсутствие контакта может быть обусловлено именно поломкой данного механизма, а не обрывом витков.
О наличие какой-либо неисправности АД могут свидетельствовать следующие факторы:
- Снижение скорости вращения при нагрузке.
 Характерно для высокого сопротивления в цепи ротора, слабого контакта в его обмотке, низкого напряжения электросети
Характерно для высокого сопротивления в цепи ротора, слабого контакта в его обмотке, низкого напряжения электросети - Разворачивание АД, когда цепь ротора разомкнута – КЗ в обмотке ротора
- Чрезмерное равномерное повышение температуры двигателя – длительная перегрузка АД или его недостаточное охлаждение
- Нагрев статорной обмотки местного характера – двойное замыкание катушек статора на корпус или между фазами, КЗ между витками, неверное подключение катушек в фазе между собой
- Нагрев стали статора местного характера – нарушение изоляции между листами стали, их оплавление и выгорание, замыкание
- Посторонний шум при работе АД. Может быть вызван как выходом из строя подшипников, так и недостаточной запрессовкой активной стали. Определяется на слух по характеру постороннего шума
- Перегорание в обмотке якоря предохранителей, отсутствие контакта в подводящей проводке, выход из строя реостата
Для самостоятельной диагностики и исправления неисправностей электродвигателя необходимыми являются хотя-бы минимальные познания в устройстве АД и электрических цепях в целом. Все же крайне не рекомендуется самостоятельно заниматься ремонтом электродвигателя с фазным ротором, так как это может привести к поражению электрическим током.
Все же крайне не рекомендуется самостоятельно заниматься ремонтом электродвигателя с фазным ротором, так как это может привести к поражению электрическим током.
Крановые электродвигатели — технические характеристики
Для работы подъемных механизмом необходимо использование специального редуктора. Предлагаем рассмотреть, как работают асинхронные крановые электродвигатели с фазным ротором для частотного регулирования, их обмоточные данные и технические характеристики.
Особенности двигателей
Все тяговые электродвигатели ГОСТ 18374 делятся на две группы:
- работающие с фазным ротором;
- работающие с короткозамкнутым ротором.
Обе эти группы имеют высокий КПД, но у них несколько разный принцип работы. Данные моторы используются во всех видах кранов: тельферах, талях, башенных, козловых и портальных установках. Главным преимуществом работы обоих типов является то, что помимо динамического способа работы, когда определенное количество времени поднимается груз с некоторым весом, они могут работать статично, когда груз некоторое время висит на кране неподвижно. Рассмотрим подробнее их принцип работы.
Рассмотрим подробнее их принцип работы.
Фото — Общий вид фазного двигателя
У данных устройств есть щеткодержатели для крановых электродвигателей, которые применяются для обеспечения лучшего контакта коллектора и контактного кольца. У них очень простая конструкция: щеточный механизм, держатель, также они оснащены встроенным механизмом нажатия, который служит не только ля их запуска, но и предотвращения движения в случае ЧП на производстве. Благодаря такой конструкции, щеткодержатель является гарантом безопасности при эксплуатации электрического асинхронного кранового двигателя, а также своеобразным тормозом.
Замена кранового двигателя
Основные технические характеристики
Двигатели с фазным ротором
Стандартные габариты и основные размеры мощностей двигателей:
Фото — Короткозамкнутые двигатели
Роторный мотор – это асинхронный двигатель, где ротор обмотки соединен через контактные кольца для внешнего сопротивления с рабочей и передаточной частью. Регулировка сопротивления позволяет контролировать частоты вращения крутящего момента двигателя. Роторный движок может быть запущен при помощи низкого пускового тока, а также путем использования высокого сопротивления в цепи ротора; при разгоне двигателя, сопротивление может быть уменьшено.
Регулировка сопротивления позволяет контролировать частоты вращения крутящего момента двигателя. Роторный движок может быть запущен при помощи низкого пускового тока, а также путем использования высокого сопротивления в цепи ротора; при разгоне двигателя, сопротивление может быть уменьшено.
По сравнению с короткозамкнутым ротором, фазный двигатель роторного типа имеет больше витков обмотки; наведенное напряжение увеличивается, и имеющееся ниже, чем для короткозамкнутого ротора. При запуске типичного ротора используются 3 полюса, связанные с контактными кольцами. Каждый полюс соединен последовательно с переменной мощностью резистора. Во время запуска резисторов можно снизить напряженность поля статора. Как результат, пусковой ток сокращается. Еще одним важным преимуществом по сравнению с короткозамкнутым ротором является высокий стартовый крутящий момент.
Фото — Управление торможением фазного двигателя
Фазный роторный двигатель (сибэлектромотор), может быть использован в нескольких формах регулируемой скоростью вращения диска. Определенные типы вариаторов могут восстановить частоту скольжения и мощность от цепи ротора и питать его обратно в сеть, позволяя охватывать широкий диапазон скоростей с высокой энергетической эффективностью. Двойное питание электрических машин использует контактные кольца для внешнего питания в цепи ротора, что позволяет увеличить диапазон регулирования скорости вращения. Но сейчас такие механизмы редко используются, в основном они заменены на асинхронные двигатели с частотно-регулируемым приводом.
Определенные типы вариаторов могут восстановить частоту скольжения и мощность от цепи ротора и питать его обратно в сеть, позволяя охватывать широкий диапазон скоростей с высокой энергетической эффективностью. Двойное питание электрических машин использует контактные кольца для внешнего питания в цепи ротора, что позволяет увеличить диапазон регулирования скорости вращения. Но сейчас такие механизмы редко используются, в основном они заменены на асинхронные двигатели с частотно-регулируемым приводом.
Фото — Конструкция фазного кранового электродвигателя
Короткозамкнутые роторы
Электродвигатели с короткозамкнутым ротором – это асинхронные крановые двигатели, которые состоят из стального цилиндра с алюминиевыми или медными жилами, внедренными в их поверхность и вращающейся части — ротора.
Эта модель двигателя представляет собой цилиндр, закрепленный на валу. Внутренне он содержит продольные проводящие бары (обычно изготавливается из алюминия или меди), установленные в пазы и присоединенные с обоих концов путем замыкания кольца, образующих каркасообразную форму. Название происходит от схожести между кольцами обмотки и баров с короткозамкнутым ротором.
Название происходит от схожести между кольцами обмотки и баров с короткозамкнутым ротором.
Твердый сердечник ротора состоит из соединений легированной стали. Ротор имеет меньшее количество слотов, чем статор и не может быть кратен числу его пазов, для того чтобы предотвращать магнитные блокировки зубов ротора и статора первоначальный крутящий момент.
Описание принципа работы короткозамкнутого ротора: поля обмотки статора асинхронного электродвигателя переменного тока настраиваются на вращающееся магнитное поле через ротор. Благодаря движению, устройство начинает индуцировать ток и передавать его в обмотку и на бары. В свою очередь эти продольные токи в проводниках взаимодействуют с магнитным полем для производства моторной силы, выступая на касательный ортогональный ротор, в результате чего крутящий момент проворачивает вал. Также ротор вращается от магнитного поля, но на более низкой скорости. Разница в скорости называется скольжением и увеличивается с ростом нагрузки.
Схема работы изображена ниже:
Фото — Схема работы короткозамкнутых приводов
Проводники часто слегка наклонены по длине ротора, что снижает шум и сглаживает колебания крутящего момента, это может привести к увеличению скорости из-за взаимодействия с полюсными наконечниками статора. Количество баров на короткозамкнутом роторе определяет, в какой степени индуцированные токи возвращаются на обмотки статора и, следовательно, ток через них. Конструкция также может работать в качестве реверсивного механизма.
Железный якорь используется для того, чтобы проводить магнитное поле через проводники ротора. Дело в том, что МП ротора взаимодействует с МП якоря, и несмотря на то, что конструкция аналогичная трансформатору, это является причиной снижения и потери энергии. Якорь сделан из тонких пластин, разделенных лаковой изоляцией, чтобы уменьшить вихревые токи, циркулирующие в нем. Материал отличается низким уровнем выбросов углекислого газа, высоким кремния. Основа из чистого железа значительно снижает потери на вихревые токи, низкая коэрцитивная сила уменьшает малые потери на гистерезис.
Основа из чистого железа значительно снижает потери на вихревые токи, низкая коэрцитивная сила уменьшает малые потери на гистерезис.
Эта базовая конструкция используется как для однофазных, так и для трехфазных двигателей в широком диапазоне размеров. Роторы для трехфазных двигателей будут иметь вариации в глубину и форму баров. Как правило, бруски с большей толщиной могут иметь хороший крутящий момент и являются более эффективными в борьбе со скольжением, поскольку они представляют меньшую устойчивость к ЭМП.
Фото — Конструкция трехфазного двигателя
Трехфазные двигатели с короткозамкнутым ротором широко используются для:
- Крановых механизмов;
- Тяговых машин;
- Комбайнов;
- Грузовых автомобилей и кораблей.
Говоря про варианты установки двигателей, они бывают вертикально-фланцевые, горизонтальные, горизонтально-фланцевые.
Марки двигателей и обзор цен
На данный момент, в России и Украине осуществляется производство таких крановых электродвигателей:
Фазных – MTF, MTKF, MTM, MTН, MEZ FRENSTAT, KMR, DMTF, (завод Leroy Somer), WASI, FLSLB, SMH;
Короткозамкнутых – Sew-Eurodrive, двигатели от Bularia, Siemens, VEM, HORS, МТВ, МТИ, МТК, МТКМ, МТКН, МТМ, МТН, МТФ;
Для некоторых видов крановых механизмов (к примеру, металлургические подъемники), используются серии АИР (двухскоростные двигатели постоянного тока).
Купить крановые электродвигатели можно в любом городе СНГ, цена товара напрямую зависит от его мощности, фирмы-производителя и города, де он покупается. Возможен наличный и безналичный расчет. Из открытых источников мы собрали прайс-лист, предлагаем с ним ознакомиться (цены приблизительные, при покупке кранового электродвигателя обязательно просмотрите дополнительно каталог производителя, возможны изменения цен):
Устройства и способы пуска асинхронного электродвигателя — прямой, звезда-треугольник, плавный и через частотный преобразователь
Асинхронные электрические двигатели с короткозамкнутым ротором благодаря своей крайней простоте получили широкое распространение, особенно в трехфазных сетях, где им не требуются дополнительные пусковые или смещенные по фазе обмотки.
При правильной эксплуатации асинхронный электродвигатель становится практически вечным – единственное, что в нем может потребовать замены, это подшипники ротора.
Однако ряд особенностей асинхронных двигателей определяет специфику их пускового режима: отсутствие обмотки якоря означает отсутствие противоЭДС индукции в момент включения обмоток статора, а следовательно – высокий пусковой ток.
Если для маломощных электрических двигателей это не критично, то в промышленных электродвигателях пусковые токи могут достигать очень высоких значений, что приводит к просадкам напряжения в сети, перегрузкам подстанций и электропроводки.
ПРЯМОЙ ПУСК АСИНХРОННОГО ЭЛЕКТРОДВИГАТЕЛЯ
Как уже было сказано выше, прямое включение обмотки асинхронного двигателя может применяться только при низкой мощности. В этом случае пусковой ток превышает номинальный в 5-7 раз, что не является проблемой для коммутационного оборудования и электропроводки.
Основной проблемой прямого пуска становится подключение нескольких электродвигателей к маломощной подстанции или генератору.
Включение в сеть нового электродвигателя может вызвать настолько сильную просадку напряжения, что уже работающие двигатели остановятся, а новому мотору не хватит пускового момента, чтобы стронуться с места.
Пусковой ток асинхронного двигателя достигает максимального значения в момент включения и плавно снижается до номинального по мере раскрутки ротора.
Следовательно, для уменьшения времени перегрузки сети асинхронный двигатель должен включаться с минимальной нагрузкой, если это возможно.
Мощные токарные станки, гильотины для рубки металла не имеют фрикционных муфт, и все их вращающиеся механизмы раскручиваются в момент включения электродвигателя.
В этом случае длительные просадки напряжения приходится прямо закладывать в проектируемое для них электроснабжение.
ПЛАВНЫЙ ПУСК АСИНХРОННОГО ЭЛЕКТРОДВИГАТЕЛЯ
Логичным способом снижения пускового тока стало снижение напряжения, подаваемого на статор в момент запуска, с его постепенным увеличением при разгоне двигателя.
Простейший и наиболее старый способ плавного пуска – реостатный пуск электродвигателя: в цепь статора последовательно включается несколько мощных резисторов, последовательно закорачиваемых контакторами.
Также могут использоваться и дроссели высокой индуктивности (реакторы), а также автотрансформаторы.
Подобный способ плавного пуска имеет очевидные недостатки:
Проблематичность автоматизации.
Работа контакторов не привязывается к реальному значению тока, они либо переключаются вручную, либо перебираются с помощью реле времени автоматически.
Усложнение пуска под нагрузкой.
Так как крутящий момент асинхронного двигателя пропорционален квадрату напряжения питания, снижение напряжения в момент пуска в 2 раза приведет к снижению крутящего момента в 4 раза. Применение плавного пуска с электродвигателями, напрямую подключенными к нагрузке, значительно увеличивает время выхода на рабочие обороты.
Совершенствование силовой электроники позволило создать компактные автоматические устройства плавного пуска (также называемые софтстартерами от английского soft start – «мягкий пуск») для асинхронных электродвигателей, устанавливаемые на стандартную монтажную рейку электрощитов.
Они обеспечивают не только плавный разгон, но и торможение двигателя, позволяя регулировать параметры токов пуска и остановки в различных режимах:
- Постоянное токоограничение.

- В момент запуска ток ограничивается на заданном превышении номинального и удерживается на этой величине все время разгона двигателя. Обычно используется ограничение на уровне 200-300% номинального тока. Перегрузка становится малозначительной, хотя ее длительность возрастает.
- Формирование тока.
- В данном случае токовая кривая в момент включения двигателя имеет больший наклон, после чего софтстартер переходит в режим токоограничения.
Такой метод плавного пуска применяется при подключении к маломощным подстанциям или генераторам для снижения стартовой нагрузки, однако пусковой момент электродвигателя в данном случае минимален. Для устройств, лишенных холостого хода электродвигателя, использовать формирование тока с пологой стартовой кривой невозможно.
- Ускоренный пуск (кик-старт).
- Применяется с двигателями, напрямую приводящими нагрузку, так как иначе их пусковой крутящий момент может оказаться недостаточным для страгивания ротора.
В этом случае устройство плавного пуска допускает кратковременное превышение пускового тока в несколько раз (фактически осуществляется прямая коммутация), по истечении заданного времени ток снижается до двух-трехкратного превышения номинала.

- Останов на выбеге.
- При отключении двигателя напряжение с него снимается полностью, вращение якоря продолжается по инерции. Наиболее простой способ коммутации, применимый при небольших мощностях и малой инерции привода.
Однако в момент разрыва цепи происходит сильный индуктивный выброс, приводящий к сильному искрению в контакторах. На мощных электродвигателях, а также при высоких рабочих напряжениях данный способ отключения неприемлем.
- Линейное снижение напряжения.
- Применяется для более плавной остановки двигателя. Нужно помнить, что крутящий момент двигателя при этом снижается нелинейно из-за квадратичной зависимости момента от напряжения, то есть снижение момента происходит наиболее резко в начале кривой.
Отключение питания происходит при минимальном токе в обмотке, соответственно коммутирующие выключатели практически не изнашиваются образованием искры между контактами.
Для снижения нагрузок при остановке применяется управляемое снижение напряжения:
- вначале ток снижается минимально;
- затем кривая начинает снижаться круче.

Снижение крутящего момента электродвигателя при этом близко к линейному. Этот способ управления остановом электродвигателя применяется в устройствах с высокой инерционностью привода.
При использовании такого рода устройств плавного пуска пусконаладочные работы заключаются в настройке нужного типа кривой пускового тока и, в случае использования режимов формирования тока или ускоренного старта, настройке длительности временного интервала начального участка кривой.
Применение устройств плавного пуска позволяет автоматизировать пусковой режим, но его главный минус остается – либо приходится закладывать в устройство возможность холостого хода электродвигателя, либо допускать кратковременные перегрузки сети, раскручивая мотор и нагрузку с кик-стартом.
ПУСК ПО СХЕМЕ ЗВЕЗДА-ТРЕУГОЛЬНИК
Другим способом запуска, использующимся на трехфазных двигателях, является перекоммутация обмоток: в момент пуска обмотки соединяются звездой, по мере разгона ротора обмотки переводятся в нормальное включение треугольником.
Такой метод пуска фактически является частным случаем способа пуска асинхронного электродвигателя на пониженном напряжении, так как напряжение на обмотках при этом снижаетсяпримерно в 1,73 раза.
Подобный способ пуска может быть легко реализован с помощью набора контакторов с ручным управлением или с приводом от реле времени, поэтому достаточно дешев и распространен. Основные недостатки этого способа:
- При отказе одного из контакторов произойдет нарушение коммутации, в результате чего либо станет невозможным пуск, либо значительно снизится мощность двигателя.
- Снижение напряжения и тока является фиксированным.
- Крутящий момент двигателя при включении обмоток звездой уменьшается, поэтому запуск желательно также производить без нагрузки.
ПУСК ЭЛЕКТРОДВИГАТЕЛЯ ЧЕРЕЗ ЧАСТОТНЫЙ ПРЕОБРАЗОВАТЕЛЬ
Наиболее гибкий способ управления не только режимом пуска, но и рабочими характеристиками асинхронного электродвигателя – это применение частотного преобразователя. По своей сути частотный преобразователь представляет собой узкоспециализированный инвертор:
По своей сути частотный преобразователь представляет собой узкоспециализированный инвертор:
- входное напряжение в нем выпрямляется;
- затем заново преобразуется в переменное, но уже с заданной частотой и амплитудой.
Это происходит благодаря работе генератора широтно-импульсной модуляции (ШИМ), который создает серию прямоугольных импульсов заданной частоты и скважности (отношения длительности импульса к его периоду). Генерируемые импульсы управляют силовыми ключами, коммутирующими выпрямленное напряжение питания на обмотки выходного трансформатора.
Как осуществляется плавный пуск через частотный преобразователь?
В данном случае становится возможным плавное изменение не только напряжения, но и частоты питающего электродвигатель напряжения. Благодаря тому, что ШИМ-генератор частотного преобразователя легко может управляться с обратной связью по потребляемому току, становится возможным пусковой режим, в котором ток не превышает номинальный – таким образом перегрузка питающей сети фактически отсутствует.
Однако такой пусковой режим требует значительного усложнения частотного преобразователя, поэтому для управления асинхронными электродвигателями обычно используется комбинация с отдельным устройством плавного пуска (УПП).
© 2012-2020 г. Все права защищены.
Представленные на сайте материалы имеют информационный характер и не могут быть использованы в качестве руководящих и нормативных документов
Асинхронный двигатель- Принцип работы и устройство… Motoran.ru
В какой бы сфере не участвовал человек, повсюду применяются электрические моторы. Сегодня изделия задействованы как в промышленности, так и в быту. Механизмы несут массу положительных качеств: простота, надёжность, долговечность, экологическая чистота. Характеристики дают моторам охватывать большее количество незанятых ниш, изделия уже вплотную используются в автомобилестроении.
Среди разновидностей, по количеству произведённых электрических машин, асинхронный двигатель занимает первое место. Относительная дешевизна и универсальность мотора при эксплуатации стали решающим фактором, повлиявшим на массовость выпуска. Перспективы развития агрегатов увеличиваются, поскольку сегодня нет, чище способа получить механическую работу, чем использовать электричество. В реалиях, целесообразность экологических аспектов растёт с каждым годом в геометрической прогрессии, поэтому рассмотрим установку детально.
Относительная дешевизна и универсальность мотора при эксплуатации стали решающим фактором, повлиявшим на массовость выпуска. Перспективы развития агрегатов увеличиваются, поскольку сегодня нет, чище способа получить механическую работу, чем использовать электричество. В реалиях, целесообразность экологических аспектов растёт с каждым годом в геометрической прогрессии, поэтому рассмотрим установку детально.
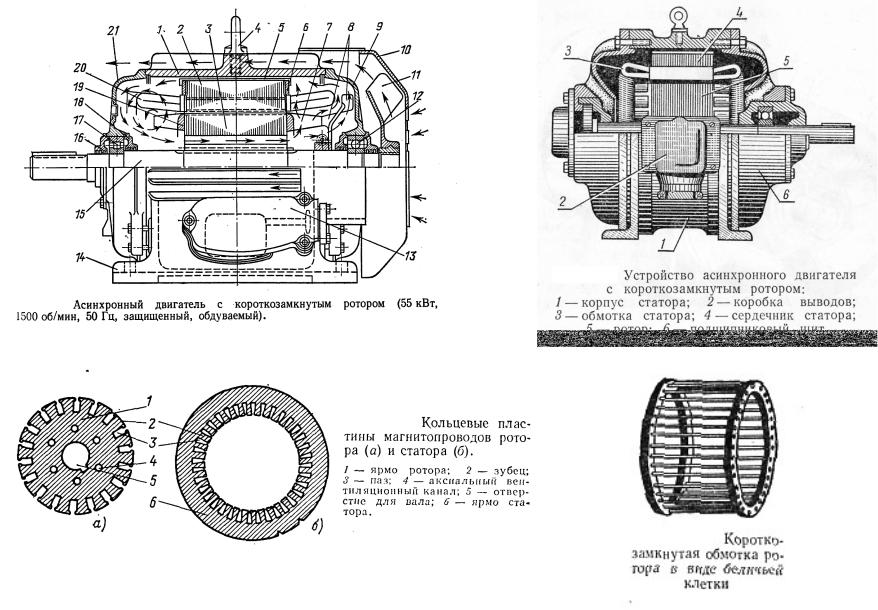
Асинхронный двигатель в разрезе:
История асинхронного двигателя
Начало развития асинхронных двигателей было положено в 88 году девятнадцатого века, когда итальянский электротехник Галилео Феррарис опубликовал в Турине статью о теоретических основах асинхронного электродвигателя. Ошибочные выводы итальянца о небольшом коэффициенте полезного действия асинхронных двигателей вызвало большой интерес среди других инженеров. Силы большинства учёных направлены на усовершенствование изделия.
Итальянский электротехник Галилео Феррарис (1847-1897 года жизни):
После того, как в том же году статью перепечатал английский журнал, её прочитал выпускник Дармштадтского технического училища, М.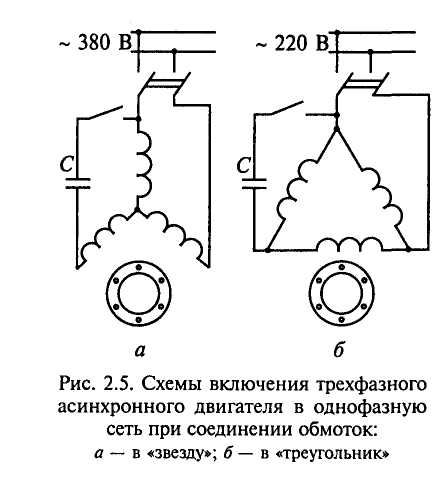 О. Доливо-Добровольский. Через год, талантливый выходец из Российской Империи получил патент на трёхфазный асинхронный двигатель с короткозамкнутым ротором.
О. Доливо-Добровольский. Через год, талантливый выходец из Российской Империи получил патент на трёхфазный асинхронный двигатель с короткозамкнутым ротором.
Русский электротехник Доливо-Добровольский (1862-1919 года жизни):
Труды изобретателя положили начало массовому применению электрических двигателей. Так, в Новороссийске в третьем году двадцатого века, под руководством учёного, построен первый в мире элеватор, использовавший промышленную сеть переменного трёхфазного тока с трёхфазными трансформаторами и синхронными двигателями с фазным ротором. Сегодня, трёхфазный асинхронный двигатель Добровольского, самая распространённая электрическая машина.
Устройство асинхронного двигателя
Назначение асинхронного двигателя, это преобразование энергии электричества в механическую работу. Выполнить эту задачу установке помогают две детали: статор и ротор.
Устройство статора представлено в виде неподвижной части мотора, которая взаимодействует с подвижной частью, ротором. Между ротором и статором воздушный зазор, разделяющий механизмы. Активной частью механизмов является обмотка и детали сердечника, проводящие магнитный поток, возбуждаемый электрическим током, проходящим по обмотке. С целью минимизировать магнитные потери, при перемагничивании сердечника, деталь набирают из пластин, изготовленных из электротехнической стали. Обмотка статора конструктивно равномерно укладывается проводниками в пазы сердечника, угловое расстояние 120°. Схема соединения фаз обмотки статора «треугольник» или «звезда». В целом, статор представляет собой большой электрический магнит, цель которого, создать магнитное поле.
Между ротором и статором воздушный зазор, разделяющий механизмы. Активной частью механизмов является обмотка и детали сердечника, проводящие магнитный поток, возбуждаемый электрическим током, проходящим по обмотке. С целью минимизировать магнитные потери, при перемагничивании сердечника, деталь набирают из пластин, изготовленных из электротехнической стали. Обмотка статора конструктивно равномерно укладывается проводниками в пазы сердечника, угловое расстояние 120°. Схема соединения фаз обмотки статора «треугольник» или «звезда». В целом, статор представляет собой большой электрический магнит, цель которого, создать магнитное поле.
Статор и ротор асинхронного двигателя:
Схема подключения «звезда» или «треугольник» выбирается в зависимости от напряжения питания сети. Существенную роль играют такие понятия:
Фазное напряжение, соответствует разности потенциалов между началом и концом одной фазы, или разница потенциалов между линейным и нейтральным проводом.
Линейное напряжение, разность потенциалов между двумя линейными проводами (фазами)
| Значение символов | Схема «звезда» | Схема «треугольник» |
| Uл, Uф – напряжения (линейные и фазовые), В; Iл, Iф – ток (линейный и фазовый), А; S – мощность, Вт; P – мощность активная, Вт. | ; ; ; . | ; ; ; . |

Важно! Мощность для соединения «звезда» и «треугольник» рассчитывается по одной формуле. Однако, подключение одного и того же асинхронного двигателя разными соединениями в одну и ту же сеть, приведёт к разной потребляемой мощности. Неправильное подключение способно расплавить обмотки статора.
Схемы подключений:
Поскольку асинхронный двигатель широко распространён повсеместно, на его долю приходится потребление от 45% до 50% вырабатываемой электроэнергии. Что бы снизить расход электроэнергии (почти на 50%) и не потерять в мощности и цене двигателя, в конструкции механизма используют применение совмещённых обмоток. Принцип заключается в схеме подключения нагрузки к сети. Совмещение обмоток «звезда» «треугольник» при последующем подключении к трёхфазной сети даёт в итоге систему из шести фаз, угол между магнитными потоками в которой равен 30°. Метод сглаживает кривую магнитного поля между ротором и статором, это положительно сказывается на показателях электродвигателя.
Метод сглаживает кривую магнитного поля между ротором и статором, это положительно сказывается на показателях электродвигателя.
В зависимости от конструкции ротора, асинхронный двигатель условно делят на виды: короткозамкнутый ротор, фазный ротор. Статор обоих механизмов одинаков, отличительная черта, обмотка. Сердечник ротора так же выполнен из электротехнической стали, методом комбинирования прямых и косых стыков пластин.
Составные детали двигателя размещаются в корпусе. Для небольших моторов корпус делают цельнолитым, материал изделия, чугун. Кроме того, применяют сплав алюминия, либо сталь. Некоторые корпуса в маленьких двигателях совмещают функцию сердечника, в мощных двигателях корпус выполняется из составных частей.
Поскольку асинхронный мотор относится к электрической машине, изделие применяется как в режиме двигателя, так и в режиме генератора. Однако, как генератор, асинхронный механизм имеет ряд недостатков, которые не позволили машине использоваться массово в этом качестве.
Тип подвижной части
Как уже упоминалось, в зависимости от того, в каком виде выполнена подвижная часть, асинхронные двигатели делят:
- Асинхронный двигатель с короткозамкнутым ротором.
Такая конструкция носит название «беличья клетка» за внешнюю схожесть. Конструктивно механизм состоит из стержней, которые замкнуты по торцам кольцами. Материал детали, медь или алюминий. В двигателях малой и средней мощности конструкцию выполняют, заливая расплавленный алюминий в пазы сердечника ротора, заодно выполняются кольца и торцевые лопасти. Назначение лопастей, вентилировать мотор. В мощных двигателях стержни клетки делают из меди, торцы стержней приваривают к кольцам.
Наличие зубцов с низким магнитным сопротивлением, в сравнении с сопротивлением обмотки, вызывает пульсацию магнитного потока. Пульсация приводит к росту гармонических токов напряжения электродвижущей силы. Чтобы снизить это явление, а так же уменьшить шум, пазы ротора или статора делают скошенными.
Недостаток короткозамкнутого ротора в том, что пусковой момент двигателя этой конструкции небольшой, наряду со значительным показателем пускового тока. Применение этих моторов целесообразно в случаях, если не требуются большие пусковые моменты. Достоинство: простота изготовления, низкая инерция, нет контакта со статической частью, как следствие, долговечность и приемлемая стоимость обслуживания.
Короткозамкнутый ротор асинхронного двигателя:
- Асинхронный двигатель с фазным ротором.
Чаще конструкция имеет трёхфазную обмотку, иногда многофазную. Как правило, обмотка соединена по схеме «звезда» с выводом на кольца контакта, вращающиеся с валом двигателя. По кольцам контакта скользят щётки, выполненные из металла и графита. С помощью этих щёток, в цепь обмотки ротора встраивают реостат, отвечающий за регулировку пуска. Регулировка возможна, поскольку реостат играет роль добавочного активного сопротивления для каждой фазы.
Фазный ротор асинхронного двигателя:
Фазный ротор двигателя при включении максимально увеличивает момент пуска и уменьшает ток, это возможно из-за применения реостата. Такие характеристики приводят в действие механизмы, для которых характерна большая нагрузка в момент пуска.
Принцип работы
Рассмотрим асинхронный двигатель принцип работы и устройство. Для корректного подключения агрегата к сети, обмотки соединяются по схеме «звезда» или «треугольник». Действие механизма основано на использовании вращающегося магнитного поля статора. Частота вращения многофазной обмотки переменного поля (n1) определяется по формуле:
Здесь:
- f – частота сети в Герцах;
- p – Количество пар полюсов (как правило, 1-4 пары, поскольку чем их больше, тем ниже мощность и КПД, использование полюсов даёт возможность не применять редуктор, при низкой частоте вращения).
Магнитное поле, пронизывающее статор с обмоткой пронизывает и обмотку ротора. За счёт этого индуцируется электродвижущая сила. Электродвижущая сила самоиндукции в обмотке статора (Е1) направлена навстречу приложенному напряжению сети, ограничивая величину тока в статоре. Поскольку обмотка ротора замкнута, или идёт через сопротивление (короткозамкнутый ротор в первом случае, фазный ротор во втором случае), то под действием электродвижущей силы ротора (Е2) в ней образуется ток. Взаимодействие индуцируемого тока в обмотке ротора и магнитного поля статора создаёт электромагнитную силу (Fэл). Направление силы определяется по правилу левой руки.
Согласно правилу: левая рука устанавливается таким образом, что бы магнитно силовые линии входили в ладонь, а вытянутые четыре пальца направлялись вдоль движения тока в обмотке. Тогда отведённый большой палец покажет направление действия электромагнитной силы для конкретного проводника с током.
Совокупность электромагнитных сил двигателя будет равна общему электромагнитному моменту (М), который приводит в действие вал электродвигателя с частотой (n2). Скорость ротора не равна скорости вращения поля, поэтому эта скорость называется асинхронной скоростью. Вращающий момент в асинхронном двигателе развивается только при асинхронной скорости, когда скорость вращения ротора не равна скорости вращения магнитного поля. Важно, что бы при работе двигателя скорость ротора была меньше скорости поля (n2< n1). Для определения величины отставания введён термин «скольжение», показатель определяется по формуле:
Таким образом, частота вращения ротора (обороты) будет равна:
Принцип работы асинхронного электрического двигателя легко объясняется с помощью устройства, называющегося диск Арго – Ленца.
Постоянный магнит закрепляют на оси, которая устанавливается в устройстве, способном обеспечить её вращение. Перед полюсами магнита (N-S) помещают диск, выполненный из меди. Диск так же крепится на оси и свободно вращается вокруг неё.
Если вращать магнит за рукоятку, диск тоже будет вращаться в том же направлении. Эффект объясняется тем, что магнитные линии поля, создаваемые магнитом, замыкаются от северного полюса к южному полюсу, пронизывая диск. Эти линии образуют в диске вихревые токи, которые взаимодействуя с полем, приводят к возникновению силы, вращающей диск. Закон Ленца гласит, что направление всякого индукционного тока противодействует величине, вызвавшей его. Вихревые токи пытаются остановить магнит, но поскольку это не возможно, диск следует за магнитом.
Примечательно, что скорость вращения диска всегда меньше скорости вращения магнита. В асинхронных электродвигателях магнит заменяет вращающееся магнитное поле, созданное токами трёхфазной обмотки статора.
Подключение двигателя
До того, как подключить асинхронный двигатель, ознакомьтесь с его паспортом. Обмотки статора двигателя соединены «звездой» или «треугольником», в зависимости от напряжения сети. Если в паспорте указано, что механизм рассчитан на применение 220/380В, это означает, что при подключении мотора на 220В обмотки соединяют схемой «треугольник», если напряжение сети 380В, обмотки соединяют схемой «звезда».
Маркировка на коробке для клемм:
Сбор схем проводится в коробке для клемм, расположенной на корпусе электродвигателя, перед выполнением работ, коробку разбирают. Начало каждой обмотки именуется U1, V1, W1 соответственно. Концы обмоток подписываются так же U2, V2, W2. При отсутствии в коробке для клемм маркировки выводов, начало и конец обмотки определяют, используя мультиметр.
Процедура выполняется следующим образом:
- Подписываем бирки, которыми будем маркировать выводы обмоток;
- Определяем принадлежность шести выводов к трём обмоткам. Для этого берём мультиметр, переключаем в положение «200 Ом». Один щуп подключаем к любому из шести проводов, второй щуп используем, что бы прозвонить оставшиеся пять выводов. При нахождении искомого провода показания прибора будут отличными от «0».
- Эти два провода — первая обмотка двигателя. Надеть на провода бирки (U1, U2) в произвольном порядке.
- Проделываем аналогичную процедуру со второй и третьей обмоткой. Выводы второй обмотки маркируем (V1, V2), выводы третьей обмотки маркируем (W1, W2).
- Определяем вид подключения обмоток (согласованный или встречный).
Важно! Согласованное подключение создаёт электродвижущую силу, которая будет равна сумме сил обмоток. Встречное подключение даст электродвижущей силе нулевое значение, поскольку силы будут направлены друг навстречу другу.
- Катушку (U1, U2) соединяем с катушкой (V1, V2), после чего на выводы (U1, V2) подаём переменное напряжение 220 вольт.
- На выводах (W1, W2) меряем переменное напряжение. Если значение напряжения равно нулю, то обмотки подключены встречно, если прибор показывает некоторое значение, обмотки (U1, U2) и (V1, V2) подключены согласованно.
- Аналогичным образом определяем правильность подключения третьей обмотки.
- В зависимости от типа двигателя подключаем промаркированные концы проводов схемой «звезда» или «треугольник».
- Подаём питание на двигатель, проверяем работу.
При необходимости обратного вращения асинхронного двигателя, для этого меняют местами два провода подключаемого источника трёхфазного напряжения.
Подключение двигателя на одну фазу
Для бытовых нужд использование трёхфазного мотора проблематично, поскольку отсутствует требуемое напряжение. Решение проблемы, использовать однофазный асинхронный двигатель. Такой мотор оснащен статором, однако конструктивно изделие отличается количеством и расположением обмоток, а так же схемой их запуска.
Схема подключения однофазного двигателя:
Так, однофазный асинхронный двигатель со статором из двух обмоток будет располагать их со смещением по окружности под углом 90°. Соединение катушек будет параллельным, одна — пусковая, вторая — рабочая. Что бы создать вращающееся магнитное поле, дополнительно вводят активное сопротивление, или конденсатор. Сопротивление создаёт сдвиг фаз токов обмотки, близкий к 90°, что помогает создать вращающее магнитное поле.
При использовании статором асинхронного двигателя одной катушки, подключение источника питания в одну фазу создаст пульсирующее магнитное поле. В обмотке ротора появится переменный ток, который создаст магнитный поток, как следствие работа двигателя не произойдёт. Для запуска такого агрегата создают дополнительный толчок, подключив конденсаторную схему пуска.
Асинхронный двигатель, рассчитанный на подключение к трёхфазному источнику питания, работает и от одной фазы. Пользователей интересует вопрос, как подключить асинхронный двигатель на 220В. Помните, что подключение снизит коэффициент полезного действия двигателя, а так же повлияет на мощность и показатели пуска. Для выполнения задачи надо из трёх обмоток статора собрать схему, сделав так, что бы обмоток было две. Одна обмотка будет рабочей, вторая используется для запуска агрегата. Как пример, предположим, что есть три катушки с начальными выходами (U1, V1, W1) и конечными выходами (U2, V2, W2). Создаём первую рабочую обмотку, объединив концы (V2, W2), а начало (V1, W1) подключаем к сети в 220В. Пусковой обмоткой будет оставшаяся катушка, которую подключают к питанию через конденсатор, соединив её с ним последовательно.
Асинхронный двигатель с двумя скоростями
Иногда необходимо изменить скорость асинхронного двигателя. Механизмы с управлением от электронного блока дорогие, поэтому применяют двухскоростной асинхронный двигатель. Принцип такого механизма в том, что обмотку в этом моторе подключают особым образом, по схеме Даландера, что меняет скорость вращения.
Схема подключения Даландера:
Подключая выводы U1, V1, W1 к напряжению в три фазы, двигатель вписывается в схему «треугольник» и работает на пониженной скорости. Если выводы (U1, V1, W1) замкнуть, а питание кинуть на (U2, V2, W2), то получится двухскоростной электродвигатель, работающий по схеме «двойная звезда», увеличивающей скорость в два раза.
Асинхронные двигатели — Руководство по электрическому монтажу
Асинхронный (т.е. асинхронный) двигатель прочен и надежен и очень широко используется. 95% двигателей, установленных по всему миру, являются асинхронными. Следовательно, защита этих двигателей имеет большое значение во многих областях применения.
Введение
Асинхронные двигатели используются в большом количестве приложений. Вот несколько примеров приводных машин:
- кондиционеры,
- чиллеры,
- лифтов,
- вентиляторы и нагнетатели,
- пожарный насос, Центробежные насосы
- , Компрессоры
- ,
- дробилки, Конвейеры
- ,
- подъемники и краны,
- …
Последствия отказа двигателя из-за неправильной защиты или невозможности работы схемы управления могут включать следующее:
- Для лиц:
- Удушье из-за блокировки вентиляции двигателя
- Поражение электрическим током из-за нарушения изоляции двигателя
- Авария из-за того, что двигатель не остановился из-за отказа цепи управления
- Для ведомой машины и процесса:,
- Муфты валов, оси, приводные ремни,… повреждены из-за остановки ротора
- Пострадавшая продукция
- Отложенное производство
- Для самого мотора:
- Прогорание обмоток двигателя из-за остановки ротора
- Стоимость ремонта
- Стоимость замены
Таким образом, безопасность людей и товаров, а также уровень надежности и доступности во многом зависят от выбора средств защиты.
С экономической точки зрения необходимо учитывать общую стоимость отказа. Эта стоимость увеличивается с увеличением размера двигателя и трудностями доступа и замены. Потери производства — еще один, очевидно, важный фактор.
Конкретные характеристики двигателя влияют на цепи питания, необходимые для удовлетворительной работы.
Цепь питания двигателя имеет определенные ограничения, которые обычно не встречаются в других (общих) схемах распределения.Это связано с особыми характеристиками двигателей, напрямую подключенных к линии, таких как:
- Высокий пусковой ток (см. , рис. N74), который в основном является реактивным и поэтому может быть причиной значительного падения напряжения
- Количество и частота пусковых операций в целом высокие
- Высокий пусковой ток означает, что устройства защиты двигателя от перегрузки должны иметь рабочие характеристики, которые предотвращают срабатывание во время периода пуска.
Рис. N74 — Характеристики прямого пускового тока асинхронного двигателя
Системный преобразователь частоты — асинхронный двигатель с положительной обратной связью по току
Системный преобразователь частоты — асинхронный двигатель с положительной обратной связью по току
Основные законы, регулирующие скорость асинхронного двигателя класса при питании от инвертора напряжения рассмотрены в разделе 5. Теоретически и практически доказано, что в классе законов невозможно одновременно обеспечить удовлетворительные механические и силовые характеристики в широкий диапазон скоростей и изменений нагрузки.Основная причина этого — усиление влияния активного сопротивления обмотки статора при снижении частоты питающего напряжения. В асинхронных частотно-регулируемых электроприводах со скалярным управлением, помимо законов регулирования класса, применяются другие регулирующие законы. Схема замены асинхронной машины, пригодная для анализа как установившихся, так и переходных режимов работы при любой частоте питающего напряжения обмотки статора, представлена на рис.6.39.
Рис. 6.39. Схема замены асинхронной машины в установившемся режиме с частотным регулированием
В соответствии со схемой подстановки (рисунок 6.39) можно записать следующие уравнения:
(6,65)
(6,66)
(6,67)
Таким образом, компенсируя падения напряжения на резисторах, можно получить частотные законы, регулирующие скорость классов.
В соответствии с уравнениями математической модели асинхронного двигателя в фиксированной системе координат, условие поддержания постоянной зависимости между ЭДС и частотой напряжения статора в статике также является условием стабилизации потокосцепления статора. Регулировка класса — это регулировка постоянного потока в воздушном зазоре и регулировка регулирования класса с постоянным магнитным потоком ротора.
Если при изменении нагрузки на валу двигателя соответствующие значения ЭДС или поддерживаются постоянными, то механические характеристики асинхронного двигателя приобретут вид, показанный на рис.6.40.
Рис. 6.40. Механические характеристики асинхронного двигателя при различных законах управления:
Анализ механических характеристик, представленных на рис. 6.40. показывает, что для стабилизации скорости при изменении нагрузки на валу двигателя предпочтение следует отдавать способу регулирования с. Однако такое регулирование подразумевает повышение напряжения по сравнению с номиналом для всех значений нагрузки, что в большинстве случаев приводит к насыщению магнитопровода асинхронного двигателя и его перегреву.Поэтому на практике наиболее распространены методы частотного регулирования скорости, например
При регулировке частоты вращения в классе законов необходимо увеличивать фазное напряжение только на величину падения напряжения на активном сопротивлении обмотки статора, а способ регулирования частоты вращения асинхронного двигателя называется частотой управление с компенсацией W.
Управление компенсационным падением напряжения на активном сопротивлении статора возможно как при отклонении, так и при возмущении, со скалярной или векторной IR -компенсацией.
«>