Гидравлическая система синхронного хода нескольких гидроцилиндров
Одним из распространенных способов синхронизации хода гидравлических цилиндров является так называемый «гидравлический боуденовский трос». Правда, применение боуденовского троса в гидравлических системах связано с определенными затратами.
Два гидроцилиндра одинаковых размеров со сплошными поршневыми штоками последовательно подключаются друг к другу. Благодаря этому второй цилиндр повторяет движение первого цилиндра, на который подается давление насоса. Поскольку обе последовательно включенные полости цилиндров столб жидкости только перемещают, ход цилиндров вследствие внутренних, а возможно и внешних утечек, без подпитки может измениться.
Во избежание нежелательных последствий такого изменения хода поршней полость «боуденовского троса» с помощью расположенного справа 4/3-распределителя 2 через каждый ход соединяется кратковременно с магистралью подачи насоса или бака.
Неравномерный ход поршня имеет следующие причины:
а) левый цилиндр первым возвращается в верхнее конечное положение и включает концевой выключатель 3.
Причина: недостаток жидкости между цилиндрами.
Способ устранения: с помощью левого концевика 3 включить магнит а гидравлического распределителя 2. Рабочая жидкость будет поступать в магистраль управления до тех пор, пока правый цилиндр также не включит концевой выключатель. Магнит а снова отключается.
б) Правый цилиндр первым возвращается в верхнее конечное положение и включает концевой выключатель 4.
Причина: избыток жидкости между цилиндрами.
Способ устранения: с помощью правого концевика 4 включить магнит b распределителя 2.
Этим открывается гидравлически деблокируемый обратный клапан 5 и жидкость стекает до тех пор, пока левый цилиндр также не займет конечное положение.
С помощью левого концевого выключателя 3 магнит b отключается. В этом случае синхронность хода поршня зависит не только от количества жидкости между цилиндрами, но и от точности исполнения обоих цилиндров.
Общеизвестен тот факт, что в технике невозможно изготовить две абсолютно одинаковые детали.
Поскольку подпиточный распределитель 2, как правило, имеет золотниковую конструкцию, возникает определенная утечка.
Поэтому необходимым условием надежной работы всей системы является установка седельного обратного клапана 5.
Регулирование синхронного ходе по принципу дозирования
На принципиальной схеме изображена система регулирования синхронного хода одного из валиков трехвалкового гибочного пресса. На схеме изображены два нижних валка, регулируемых в горизонтальном направлении. Верхний валик регулируется вертикально.
Регулирование синхронного хода осуществляется в обоих направлениях и обеспечивается за счет соединения клапана синхронного хода с подающим трубопроводом перед гидравлическими распределителями 8 и 9. а также путем соединения точек подключения А распределителей со сторонами поршневых штоков соответствующих цилиндров и точек подключения В со сторонами поршней других цилиндров. Обратные дроссельные клапаны 6 и 7 служат для декомпрессии рабочей жидкости при переключении из прессования на обратный ход.
Обратные дроссельные клапаны 6 и 7 служат для декомпрессии рабочей жидкости при переключении из прессования на обратный ход.
Синхронный ход цилиндров в этой системе обеспечивается за счет того, что рабочая жидкость из опережающего цилиндра поступает во второй цилиндр определенными дозами.
Подача рабочей жидкости в цилиндры 12 и 13 осуществляется отдельно насосами 1 и 2. Таким образом, с самого начала обеспечивается некоторая предварительная дозировка.
Кроме того, в этом случае цилиндры не мешают друг другу.
Дозировка рабочей жидкости происходит через регулирующий клапан 14.
Регулирующий клапан компенсирует разность рабочей жидкости, которая может возникнуть:
- из-за неодинаковой подачи насосов,
- в результате сжатия рабочей жидкости,
- вследствие неодинаковой утечки в приборах,
- в результате люфтов подшипников машины.
Направление движения цилиндров определяется распределителями 8 и 9. Напорные клапаны 10 и 11 при выдвижении цилиндров выполняют функции клапанов противодавления.
Напорные клапаны 10 и 11 при выдвижении цилиндров выполняют функции клапанов противодавления.
Качество работы клапана синхронного хода в основном зависит от работы системы обнаружения ошибок.
Регулирующий клапан, как изображено на принципиальной схеме, включается с помощью балансира 15.
Типы гидравлических систем и их принципиальные схемы
На принципиальной схеме изображена конструкция гидравлической системы.
Отдельные гидроприборы обозначены условными знаками согласно ГОСТу-2.782 и соединены друг с другом.
Соединения отдельных магистралей обозначены на принципиальных схемах линиями.
С помощью принципиальной схемы можно разобраться в режиме работы гидросистемы.
К подробным функциональным схемам, как правило, прилагается еще и диаграмма работы гидросистемы, позволяющая точно воспроизвести последовательность включения отдельных установок или машин.
Анализируя принципиальные схемы, можно сказать, что элементы схем повторяются в различных гидросистемах.
Простая (открытая) гидросистема
На рисунке изображена простая гидравлическая система. Насос 1 с нерегулируемой подачей всасывает рабочую жидкость из резервуара и подает ее в гидравлическую систему. Распределитель с ручным управлением 4 находится в нейтральном положении. Рабочая жидкость циркулирует из насоса в бак 2 почти без напора. Распределитель удерживается в нейтральном положении с помощью двух пружин (центрирующие пружины). При включении распределителя 4 (левое положение, обозначенное параллельными стрелками) рабочая жидкость поступает в полость поршня гидроцилиндра 5. Шток поршня выдвигается. Скорость выдвижения зависит от подачи насоса и размера гидроцилиндра (площади поршня). Усилие, возникающее на штоке поршня, зависит от площади поршня и максимального давления в гидросистеме. Величина давления в гидросистеме определяется преодолеваемым сопротивлением потребителя и измеряется манометром 6. |
 Максимальное давление в гидросистеме и, следовательно, нагрузка гидросистемы регулируется с помощью клапана ограничения давления 3.
Максимальное давление в гидросистеме и, следовательно, нагрузка гидросистемы регулируется с помощью клапана ограничения давления 3.Гидросистема с распределителями последовательного включения
Если удлинить магистраль слива первого гидравлического распределителя простой гидросистемы, установив на ней один или несколько распределителей, то мы получим так называемое последовательное включение.
При последовательном включении необходимо, чтобы сила и скорость включаемых одновременно потребителей регулировалась.
Точнее говоря, дело обстоит следующим образом. Чтобы привести в движение гидроцилиндр 2, необходимо давление, соответствующее силе подъема и площади поршня. Это давление действует на кольцевую поверхность поршня цилиндра 1. Действующее на цилиндр 1 давление складывается из внешнего усилия, действующего на шток поршня, и давления, состоящего из давления, действующего на цилиндр 2, и площади кольцовой поверхности поршня цилиндра 1.
Если давление, действующее на цилиндр 1, больше суммы действующих сил, то оба гидроцилиндра выдвигаются. Отношение скоростей движения гидроцилиндров 1 и 2 пропорционально отношению плошади поршня цилиндра 2 к кольцевой поверхности цилиндра 1.
Циркулирующая гидравлическая жидкость через фильтр сливается в бак.
Параллельное включение элементов распределителейКаждый распределитель соединен с каналом Р, все потребители управляются одновременно. Распределение рабочей жидкости производится в соответствии с сопротивлением в гидросистемах потребителей. Параллельное включение элементов распределителейКаждый распределитель соединен с каналом Р, все потребители управляются одновременно. Распределение рабочей жидкости производится в соответствии с сопротивлением в гидросистемах потребителей.
Сдвоенная схемаПодача рабочей жидкости производится только через циркуляционный канал. Потребители включаются не одновременно. Эта схема применяется в качестве предохранительной схемы.
Последовательное включениеИспользуется слив рабочей жидкости. Рабочая жидкость от потребителя 1 сливается в распределитель 2. Таким образом, потребитель 2 имеет принудительное управление, т.е. скорости потребителей зависят от подачи рабочей жидкости, а рабочие давления суммируются.
Гидравлическая система с параллельным включением нескольких распределителей
Насос 1, подача которого регулируется с помощью регулирующего двигателя 2, всасывает отфильтрованную жидкость и подает ее в соседнюю гидросистему. Через магистральные ответвления и гидравлические распределители 5, 6 и 7 рабочая жидкость поступает в гидроцилиндры 8, 9 и 10. Распределители и, следовательно, потребители, расположены параллельно. На схеме распределители 5 и 6 в нейтральном положении перекрывают точки подключения Р, А, В и Т. Когда распределитель 7 находится в правом положении, точка подключения Р закрыта. Клапан ограничения давления 3 регулирует давление в гидросистеме перед распределителями, которого величина снимается нажатием клавиши 3/2-распределителя 4 на манометру. В качестве потребителей на схеме изображены телескопический гидроцилиндр двустороннего действия 8, дифференциальный гидроцилиндр 9 с постоянным демпфированием поршня и гидроцилиндр одностороннего действия и возвратной пружиной 10. При параллельном включении нескольких цилиндров могут двигаться одновременно лишь в том случае, если имеется достаточное количество рабочей жидкости, с помощью которой можно поддержать необходимое рабочее давление. В противном случае давление устанавливается по минимальному сопротивлению, то есть вначале выдвигается цилиндр с минимальным давлением. Когда первый цилиндр достиг конечного положения, давление нарастает, достигая величины, требуемой для выдвижения следующего цилиндра.
|

:format(png)/06a9259bd1bfb91.s.siteapi.org/img/8d709599a1220d1892b70b75ed80529ee6fdf3bd.jpg)
Гидравлическая система с трехкаскадным дистанционным ограничителем давления
Если в гидравлической установке возникает необходимость применить трехкаскадное управление давлением, то это делается путем подключения двух дополнительных клапанов ограничения давления или двух клапанов предварительного управления.
На принципиальной схеме изображен клапан ограничения давления 1 с предварительным управлением, который с помощью распределителя 2 соединяется с одним из двух клапанов предварительного управления 3 или 4.
Когда гидравлический распределитель 2 находится в нейтральном положении, клапаны 3 и 4 соединяются с баком. Давление в гидросистеме устанавливается на клапане ограничения давления 1. Когда к распределителю 2 подключается напорный клапан 3 или 4 (в данном случае клапаны предварительного управления), то давление подается одновременно на клапан 1 и 3 или 4.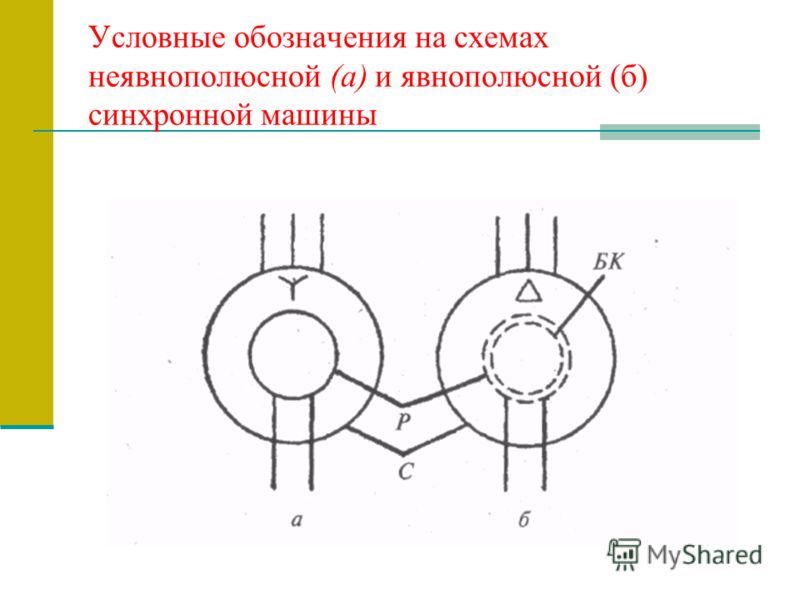 Это означает, что на клапане 1 устанавливается максимальное рабочее давление. а в подключенном напорном клапане 3 или 4 более низкое давление. Эта схема может применяться и в качестве дистанционного управления гидроцилиндрами.
Это означает, что на клапане 1 устанавливается максимальное рабочее давление. а в подключенном напорном клапане 3 или 4 более низкое давление. Эта схема может применяться и в качестве дистанционного управления гидроцилиндрами.
Гидравлическая система с дифференциальным включением цилиндра
Широко распространена так называемая дифференциальная схема. Особенность этой схемы является то, что в полости штока 1 гидроцилиндра постоянно находится сжатая рабочая жидкость, а полость поршня 2 через трехходовой распределитель 3 нагружается или разгружается в направлении бака. Отношение действующих на шток поршня сил соответствует отношению площадей сторон поршня и штока. Отсюда и название «дифференциальная схема». Эта схема применяется в гидравлических зажимах с малогабаритными насосами. При выдвижении штока поршня рабочая жидкость 4 вытесняется из полости штока и вместе с рабочей жидкостью насоса 5 подается на противоположную сторону в полость поршня. Разумеется, при применении подобной схемы следует помнить, что усилие штока поршня соответствует разности площадей поверхности поршня и кольцевой поверхности поршня, иными словами, это усилие соответствует площади штока поршня. Если выбранное нами отношение площадей кольцевой поверхности поршня и поверхности поршня составляет 1:2, то скорость выдвижения и скорость возврата штока поршня дифференциального цилиндра одинаковы. В этом состоит преимущество данной схемы.
|

Гидравлическая система с двойной блокировкой гидроцилиндра
В этой гидросистеме, если необходимо зажать гидроцилиндр в обоих направлениях движения, зафиксировав его в нужном положении, применяется сдвоенный обратный клапан 1 с деблокировкой в обоих направлениях. Когда распределитель находится в положении, изображенном на схеме, цилиндр невозможно сдвинуть с места усилием извне. В зависимости от направления приложения силы левый или правых обратный клапан герметически перекрывает отток рабочей жидкости. Для выдвижения или возврата гидроцилиндра из подводящей стороны включается расположенный в магистрали слива обратный клапан. Когда гидравлический распределитель занял нейтральное положение, следует обратить внимание на то, чтобы обе точки подключения деблокируемых обратных клапанов были разгружены в направлении магистрали бака. Только тогда можно обеспечить быстрое и точное закрытие конуса клапанов и герметичность перекрытий. |
Гидравлическая система c клапаном наполнения и обратным клапаном с гидравлическим управлением
Когда на рабочий гидроцилиндр в гидравлической системе постоянно действует нагрузка (например, суппорт протяжного станка), то гидроцилиндр необходимо предохранить от опускания из-за утечки в гидравлическом распределителе. Это достигается с помощью установленного в сливной магистрали обратного клапана 1 с деблокировкой. Кроме того, необходимо установить клапан противодавления (клапан подключения давления 2). Давление открытия этого клапана примерно на 10% выше веса удерживаемого груза.
Кроме того, необходимо установить клапан противодавления (клапан подключения давления 2). Давление открытия этого клапана примерно на 10% выше веса удерживаемого груза.
При этом возникает эффект гидравлической противодействующей силы.
И только после подачи давления на сторону поршня (А) это «предварительное напряжение» удается преодолеть. В результате поршень опускается.
Скорость опускания регулируется с помощью регулятора потока 3.
Подключенный параллельно к регулятору потока обратный клапан позволяет осуществлять быстрый подъем груза.
Гидравлическая система с регулированием давления в первом гидроцилиндре и подключением второго цилиндра для выдвижения и возврата
Перед нами упрощенная гидросистема зажимного устройства с подачей сверла. На ней представлен принцип гидравлического последовательного включения в зависимости от давления.
На практике необходимо следить за тем, чтобы проводился контроль положения гидроцилиндра и давления с целью, получения очередного сигнала, в зависимости от выше указанных контролируемых величин. Это на схеме не показано.
Это на схеме не показано.
4/2-распределитель 1, приводимый в движение педалью, удерживается в исходном положении с помощью пружины. Оба цилиндра (подача сверла и гидравлический зажим) втянуты.
При включении распределителя 1 точка подключения Р соединяется с точкой подключения 8, а точка подключения А с точкой подключения Т.
Рабочая жидкость через открытый в исходном положении клапан регулирования давления 2 поступает в цилиндр гидравлического зажима. Цилиндр выдвигается. Канал, соединяющий цилиндр подачи сверла, перекрыт клапаном подключения давления 3.
После того, как цилиндр зажимного устройства занял заданное положение, давление нарастает. В цилиндре зажимного устройства устанавливается регулируемое клапаном 2 давление. В линии насос-клапан регулирования давления давление возрастает до тех пор, пока не достигнет величины, установленной на клапане подключения давления 3.
Когда заданное давление достигнуто, клапан 3 открывается и цилиндр подачи сверла выдвигается со скоростью, установленной на регуляторе потока 5. Возврат цилиндров производится в обратном порядке. Цилиндр зажимного устройства отпускает заготовку только после того, как цилиндр механизма подачи сверла вернулся в исходное положение.
Возврат цилиндров производится в обратном порядке. Цилиндр зажимного устройства отпускает заготовку только после того, как цилиндр механизма подачи сверла вернулся в исходное положение.
Такая последовательность возврата определяется клапаном подключения давления 4. После того, как пружина вернула распределитель 1 в исходное положение, начинается возврат цилиндров. Рабочая жидкость вначале поступает в цилиндр механизма подачи сверла.
В этот момент канал, ведущий к цилиндру зажимного механизма, перекрыт клапаном подключения давления 4.
Когда цилиндр подачи сверла достиг конечного положения, давление продолжает нарастать. Как только достигается давление, установленное на клапане 4, этот клапан открывает канал цилиндра зажимного механизма и цилиндр начинает возвратное движение.
В гидросистеме применяется саморегулирующий насос с компенсацией давления и регулируемой подачей (например, лопастной насос тип V3). Таким образом, максимальное рабочее давление устанавливается непосредственно на насосе.
Гидравлическая система пресса с клапаном наполнения и цилиндром ускоренного хода
Как правило, гидравлические прессы обладают большой мощностью. Поэтому в гидравлических системах для прессов применяются гидравлические цилиндры большого объема.
Для обеспечения ускоренного хода поршня вместо дорогостоящих насосов больших объемов применяют так называемые наполнительные клапаны, которые по существу являются крупногабаритными обратными клапанами с гидроуправлением.
Эти клапаны имеют следующий принцип действия:
Предположим, что ползун пресса находится в верхнем (исходном) положении, а движение вниз управляется 4/3-распределителем 6 (положением скрещенных стрелок ), который подает давление на оба цилиндра ускоренного хода 1.
Рабочая жидкость, необходимая для привода ползуна пресса 2, поступает из бака над ползуном 3 через открываемый обратный клапан 4.
После того, как плита пресса прижата к заготовке, сопротивление повышается и давление в гидросистеме нарастает. Открывается регулируемый клапан подключения давления 5 и рабочая жидкость подается в полость цилиндра ползуна пресса. На все три поверхности поршня подается максимальное давление.
Открывается регулируемый клапан подключения давления 5 и рабочая жидкость подается в полость цилиндра ползуна пресса. На все три поверхности поршня подается максимальное давление.
Наполнительный клапан перекрывает магистраль бака над ползуном 3. При возврате полости поршня (А) цилиндров ускоренного хода разгружаются, а в полости штоков (В) под давлением подается рабочая жидкость.
Одновременно через магистраль управления давление подается в точку подключения X наполнительного клапана. С помощью цилиндра управления открывается основной конус и рабочая жидкость стекает в бак над ползуном.
Гидравлическая система синхронного хода нескольких гидроцилиндров
Одним из распространенных способов синхронизации хода гидравлических цилиндров является так называемый «гидравлический боуденовский трос». Правда, применение боуденовского троса в гидравлических системах связано с определенными затратами.
Два гидроцилиндра одинаковых размеров со сплошными поршневыми штоками последовательно подключаются друг к другу. Благодаря этому второй цилиндр повторяет движение первого цилиндра, на который подается давление насоса. Поскольку обе последовательно включенные полости цилиндров столб жидкости только перемещают, ход цилиндров вследствие внутренних, а возможно и внешних утечек, без подпитки может измениться.
Благодаря этому второй цилиндр повторяет движение первого цилиндра, на который подается давление насоса. Поскольку обе последовательно включенные полости цилиндров столб жидкости только перемещают, ход цилиндров вследствие внутренних, а возможно и внешних утечек, без подпитки может измениться.
Во избежание нежелательных последствий такого изменения хода поршней полость «боуденовского троса» с помощью расположенного справа 4/3-распределителя 2 через каждый ход соединяется кратковременно с магистралью подачи насоса или бака.
Неравномерный ход поршня имеет следующие причины:
а) левый цилиндр первым возвращается в верхнее конечное положение и включает концевой выключатель 3.
Причина: недостаток жидкости между цилиндрами.
Способ устранения: с помощью левого концевика 3 включить магнит «а» гидравлического распределителя 2. Рабочая жидкость будет поступать в магистраль управления до тех пор, пока правый цилиндр также не включит концевой выключатель. Магнит «а» снова отключается.
б) Правый цилиндр первым возвращается в верхнее конечное положение и включает концевой выключатель 4.
Причина: избыток жидкости между цилиндрами.
Способ устранения: с помощью правого концевика 4 включить магнит «b» распределителя 2.
Этим открывается гидравлически деблокируемый обратный клапан 5 и жидкость стекает до тех пор, пока левый цилиндр также не займет конечное положение.
С помощью левого концевого выключателя 3 магнит «b» отключается. В этом случае синхронность хода поршня зависит не только от количества жидкости между цилиндрами, но и от точности исполнения обоих цилиндров.
Общеизвестен тот факт, что в технике невозможно изготовить две абсолютно одинаковые детали.
Поскольку подпиточный распределитель 2, как правило, имеет золотниковую конструкцию, возникает определенная утечка.
Поэтому необходимым условием надежной работы всей системы является установка седельного обратного клапана 5.
Закрытая гидравлическая система
Под закрытой гидросистемой следует понимать гидросистему в которой используется насос 1, а вместо гидроцилиндра — гидродвигатель 2.
Рабочая жидкость в такой гидросистеме поступает из насоса в гидродвигатель, а оттуда снова во всасывающую магистраль насоса.
Как правило, в закрытой гидросистеме применяется гидронасос с регулируемой подачей в обоих направлениях.
Для практического использования закрытой гидросистемы необходимо следующее дополнительное оборудование.
Ограничители давления
Оба регулируемых предохранительных клапана 3 и 4 ограничают давление на стороне высокого давления и защищают гидросистему от перегрузок. Рабочая жидкость стекает на сторону низкого давления. Клапаны ограничения давления одновременно служат для торможения гидродвигателя при нулевой подаче насоса.
Промывочный клапан и подпиточный контур
Промывочный клапан 5 является распределителем с гидравлическим управлением. Когда подача насоса 1 равна нулю, подпиточный насос б через промывочный клапан 5, находящийся в среднем положении, предохранительный клапан 7 и радиатор охлаждения 8 сливает жидкость в бак.
С помощью предохранительного клапана 7 устанавливается подпиточное давление (низкое давление). Оно составляет, как правило, 8 — 15 бар.
Когда насос осуществляет подачу рабочей жидкости, то есть когда в гидродвигатель поступает жидкость, на стороне высокого давления (рабочее давление) включается промывочный клапан, открывающий канал, который соединяет сторону низкого давления с предохранительным клапаном 7.
Например, если слева расположена сторона высокого давления (гидродвигатель 2 вращается вправо), то в этом случае промывочный клапан 5 через левую магистраль управления включается в правом направлении. Благодаря этому сторона низкого давления (справа) соединяется с предохранительным клапаном 7, которым управляет подпиточный насос.
Из стороны низкого давления жидкость через промывочный клапан 5 и предохранительный клапан 7 поступает в бак. Одновременно подпиточный насос б через обратный клапан 9 подает рабочую жидкость на сторону низкого давления. Обратный клапан 10 со стороны высокого давления закрыт.
При смене направления подачи регулируемого насоса давление на промывочный клапан подается с другой стороны. И весь цикл соответственно повторяется.
Благодаря применению промывочного клапана в замкнутой системе осуществляются подача тепла и обмен рабочей жидкости.
Кроме того, расмотрим в качестве примера:
Гидравлическая система вилочного погрузчика
Гидросистема вильчатого погрузчика выполнена в виде блока управления.
Блок состоит из трех управляемых золотниками распределителей, включенных параллельно:
- Распределитель 1 цилиндра хода;
- Распределитель 2 цилиндра наклона;
- Распределитель 3 дополнительного гидрооборудования.
Когда элементы управления (шестиходовые распределители) находятся в исходном положении, рабочая жидкость в гидросистеме циркулирует из точки подключения насоса Р в точку подключения бака Т без напора.
Включая отдельные элементы управления (1, 2 и 3), мы управляем потребителями.
В канале Р дополнительно устанавливается разделитель потока. Независимо от нагрузки он осуществляет дозировку потока в направлении клапанов 2 (наклонных цилиндров) и 3 (дополнительное гидравлическое оборудование) по заданной величине.
Гидравлическая система для установок с меняющейся нагрузкой
Нагрузки в приводах опрокидывающих устройств, шанторных ворот шлюзов, подъемных мостов, шлагбаумов и т.д. часто меняются.
То есть в процессе движения меняется направление действия груза. Для того, чтобы заданная скорость потребителя под действием нагрузки не увеличивалась, применяются тормозные клапаны (8 и 9), изображенные на рисунке.
Два нерегулируемых насоса 1 и 2 осуществляют подачу рабочей жидкости через обратные клапаны 5 и 6 и магистраль насоса в распределитель 7.
С помощью предохранительных клапанов с предварительным управлением 3 и 4, посредством на них установленных сверху распределителей для разгрузки давления, насосы могут переключаться на безнапорную циркуляцию.
При выдвижении цилиндра 12 подача жидкости осуществляется через тормозной клапан 8. Тозмозной клапан 9 включается со стороны подачи жидкости. Если после изменения нагрузки скорость движения гидроцилиндра выше заданной, давление управления понижается, то есть тормозной клапан закрывается. Таким образом, скорость движения цилиндра регулируется независимо от нагрузки.
Предохранительные клапаны 10 и 11 служат для вторичного предохранения.
Компания Гидро-Максимум занимается проектированием и сборкой маслостанций и других гидравлических систем мобильной техники и стационарного оборудования. У нас вы можете заказать построение и сборку любых конфигураций гидравлических систем.
Синхронный двигатель: понятие, принцип работы, виды
Синхронный двигатель имеет постоянную частоту вращения при разнообразных нагрузках. Часто такие приборы применяют для приводов машин, которые работают с постоянной неизменной скоростью, например, компрессоры, вентиляторы, насосы и пр.
Особенности синхронных двигателей:
- Высокий коэффициент мощности cosФ=0,9
- Возможность использования синхронных двигателей на предприятиях для увеличения общего коэффициента мощности
Высокий КПД: он больше чем у асинхронного двигателя на (0,5-3%) это достигается за счёт уменьшения потерь в меди и большого CosФ.
- Обладает большой прочностью обусловленной увеличенным воздушным зазором.
- Вращающий момент синхронного двигателя прямо пропорционален напряжению в первой степени. Т.е синхронный двигатель будет менее чувствителен к изменению величины напряжения сети.
- Сложность пусковой аппаратуры и большая стоимость.
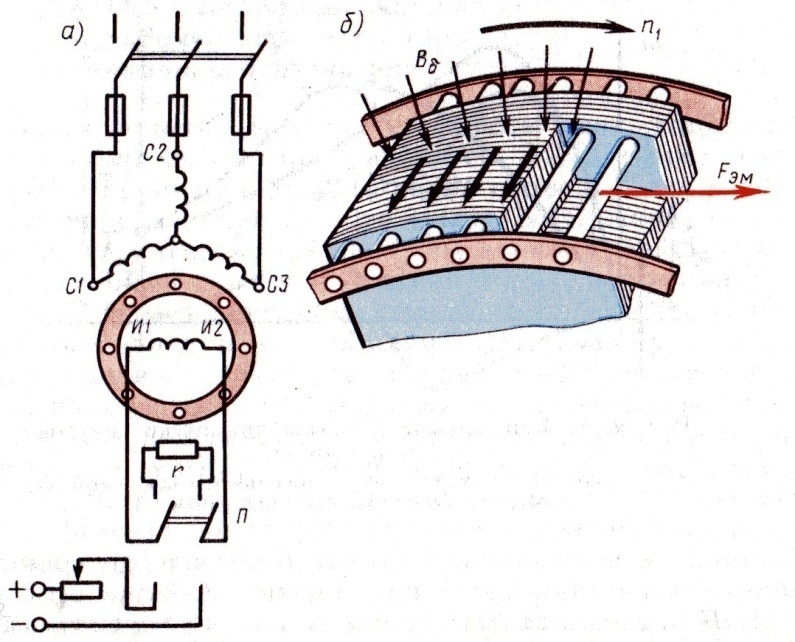
Устройство и принцип работы синхронного двигателя
В статоре синхронного двигателя имеется обмотка, которая подключается к сетям трехфазного тока. Она образует собой магнитное поле, которое вращается. Ротор у такой электроэнергетической машины, как синхронный двигатель, состоит из сердечника и обмотки возбуждения. Обмотка подключается через специальные контактные кольца к источнику (обычно это источник постоянного тока или же иногда используют выпрямленный переменный ток). Электрический ток, который протекает через обмотки возбуждения, создает намагничивающее ротор магнитное поле.
Обмотка подключается через специальные контактные кольца к источнику (обычно это источник постоянного тока или же иногда используют выпрямленный переменный ток). Электрический ток, который протекает через обмотки возбуждения, создает намагничивающее ротор магнитное поле.
Магнитное поле статора, которое вращается, намагничивает ротор. Синхронный двигатель с постоянными магнитами имеет разное электромагнитное сопротивление по поперечной и продольной осям полюсов. Силовые линии у магнитного поля обмотки статора начнут изгибаться, потому что они будут как бы стремиться найти пути с наименьшим сопротивлением. Вследствии специфических свойств силовых магнитных линий поля, в свою очередь, такая деформация его вызовет реактивный момент. Именно поэтому ротор будет вращаться синхронно вместе с магнитным полем статора.
Виды синхронных двигателей
В основном все отличия в конструктивном исполнении такого устройства — это модификации вращающейся детали. Ротор синхронной машины может быть с явно выраженными полюсами (т.н. «явнополюсный»), и с неявно выраженными полюсами (т.н.«неявнополюсный»).
- Явнополюсный ротор обычно имеет ярко выраженные, выступающие полюса, на которых размещаются катушки возбуждения.
- Неявнополюсный ротор обычно представляет собой цилиндр из ферромагнитного сплава, на поверхности которого фрезеруют пазы в осевом направлении. Впоследствии именно в эти пазы укладывают обмотки возбуждения.
Принцип работы синхронного двигателя
Принцип работы синхронного двигателя
В целом, электрический двигатель представляет собой электромеханическое устройство, которое преобразовывает электрическую энергию в механическую.
По типу подключения двигатели бывают однофазные и 3-х фазные. Среди 3-х фазных двигателей наиболее распространенными являются индукционные (асинхронные) и синхронные электродвигатели.
Когда в 3-х фазном двигателе электрические проводники располагаются в определенном геометрическом положении (под определенным углом относительно друг друга), возникает электрическое поле. Образованное электромагнитное поле вращается с определенной скоростью, которая называется синхронной скоростью.
Если в этом вращающемся магнитном поле присутствует электромагнит, он магнетически замыкается с этим вращающимся полем и вращается со скоростью этого поля. Фактически, это нерегулируемый двигатель, поскольку он имеет всего одну скорость, которая является синхронной, и никаких промежуточных скоростей там быть не может. Другими словами, он работает синхронно с частотой сети.
Ниже дана формула синхронной скорости:
Ns = 120F/p
Строение синхронного двигателя
Его строение практически аналогично 3-фазному асинхронному двигателю, за исключением того факта, что на ротор подается источник постоянного тока.
На рисунке показано устройство этого типа двигателя. На статор подается 3-х фазное напряжение, а на ротор – источник постоянного тока.
Строение синхронного двигателя
Основные свойства синхронных двигателей:
- Синхронные электродвигатели не являются самозапускающимся механизмом. Они требуют определенного внешнего воздействия, чтобы выработать определенную синхронную скорость.
- Двигатель работает синхронно с частотой электрической сети. Поэтому при обеспечении бесперебойного снабжения частоты он ведет себя так, как двигатель с постоянной скоростью.
- Этот двигатель имеет уникальные характеристики, функционируя под любым коэффициентом мощности. Поэтому они используются для увеличения фактора силы.
Видео: Строение и принцип работы синхронного двигателя
//www.youtube.com/embed/5k3sXBMBKEw?feature=player_detailpage
Принципы работы синхронного двигателя
Электронно-магнитное поле синхронного двигателя обеспечивается двумя электрическими вводами. Это обмотка статора, которая состоит из 3-х фаз и предусматривает 3 фазы источника питания и ротор, на который подается постоянный ток.
3 фазы обмотки статора обеспечивают вращение магнитного потока. Ротор принимает постоянный ток и производит постоянный поток. При частоте 50 Гц 3-х фазный поток вращается около 3000 оборотов в 1 минуту или 50 оборотов в 1 секунду. В определенный момент полюса ротора и статора могут быть одной полярности (++ или – – ), что вызывает отталкивания ротора. После этого полярность сразу же меняется (+–), что вызывает притягивание.
Но ротор по причине своей инерции не в состоянии вращаться в любом направлении из-за силы притяжения или силы отталкивания и не может оставаться в состоянии простоя. Он не самозапускающийся.
Чтобы преодолеть инерцию силы, необходимо определенное механическое воздействие, которое вращает ротор в том же направлении, что и магнитное поле, обеспечивая необходимую синхронную скорость. Через некоторое время происходит замыкание магнитного поля, и синхронный двигатель вращается с определенной скоростью.
Способы запуска
- Пуск синхронного двигателя при помощи вспомогательного двигателя. Синхронный двигатель механически соединяется с другим двигателем. Это может быть либо 3-х фазный индукционный двигатель, либо двигатель постоянного тока. Постоянный ток изначально не подается. Двигатель начинает вращаться со скоростью, близкой к синхронной скорости, после чего подается постоянный ток. После того, как магнитное поле замыкается, связь со вспомогательного двигателя прекращается.
- Асинхронный пуск. В полюсных наконечниках полюсов ротора устанавливается дополнительная короткозамкнутая обмотка. При включении напряжения в обмотку статора возникает вращающееся магнитное поле. Пересекая короткозамкнутую обмотку, которая заложена в полюсных наконечниках ротора, это вращающееся магнитное поле индуцирует в ней токи, который взаимодействуя с вращающимся полем статора, приводят ротор во вращение. Когда достигнута синхронная скорость, ЭДС и крутящийся момент уменьшается. И наконец, когда магнитное поле замыкается, крутящий момент также сводится к нулю. Таким образом, синхронность вначале запускается индукционным двигателем с использованием дополнительной обмотки.
Применение
- Синхронный двигатель используется для улучшения коэффициента мощности. Синхронные двигатели широко применяются в энергосистеме, поскольку они работают при любом коэффициенте мощности и имеют экономичные эксплуатационные показатели.
- Синхронные двигатели находят свое применение там, где рабочая скорость не превышает 500 об / мин и требуется увеличить мощность. Для энергетической потребности от 35 кВт до 2500 кВт, стоимость, размер, вес и соответствующего индукционного двигателя будет довольно высоким. Такие двигатели часто используются для работы поршневых насосов, компрессоров, прокатных станков и другого оборудования.
Устройство и принцип действия синхронного двигателя
Отличие от асинхронного мотора
Главное отличие синхронной машины заключается в том, что скорость вращения якоря такая же, как и аналогичная характеристика магнитного потока.
И если в асинхронных моторах используется короткозамкнутый ротор, то в синхронных имеется на нем проволочная обмотка, к которой подводится переменное напряжение.
В некоторых конструкциях используются постоянные магниты. Но это делает двигатель дороже.
Если увеличивать нагрузку, подключаемую к ротору, частота вращения его не изменится. Это одна из ключевых особенностей такого типа машин. Обязательное условие – у движущегося магнитного поля должно быть столько же пар полюсов, сколько у электромагнита на роторе. Именно это гарантирует постоянную угловую скорость вращения этого элемента двигателя. И она не будет зависеть от момента, приложенного к нему.
Конструкция мотора
Устройство и принцип действия синхронных двигателей несложны.
Конструкция включает в себя такие элементы:
- Неподвижная часть – статор. На ней находится три обмотки, которые соединяются по схеме «звезда» или «треугольник». Статор собран из пластин электротехнической стали с высокой степенью проводимости.
- Подвижная часть – ротор. На нем тоже имеется обмотка. При работе на нее подается напряжение.
Между ротором и статором имеется прослойка воздуха. Она обеспечивает нормальное функционирование двигателя и позволяет магнитному полю беспрепятственно воздействовать на элементы агрегата. В конструкции присутствуют подшипники, в которых вращается ротор, а также клеммная коробка, расположенная в верхней части мотора.
Как работает двигатель
Если кратко, принцип действия синхронного двигателя, как и любого другого, заключается в преобразовании одного вида энергии в другой. А конкретно – электрической в механическую. Работает мотор таким образом:
- На статорные обмотки подается переменное напряжение. Оно создает магнитное поле.
- На обмотки ротора также подается переменное напряжение, создающее поле. Если используются постоянные магниты, то это поле уже по умолчанию имеется.
- Два магнитных поля взаимопересекаются, противодействуют друг другу – одно толкает другое. Из-за этого двигается ротор. Именно он установлен на шарикоподшипниках и способен свободно вращаться, дать ему нужно только толчок.
Вот и все. Теперь остается только использовать полученную механическую энергию в нужных целях. Но требуется знать, как правильно вывести в нормальный режим синхронный двигатель. Принцип работы у него отличается от асинхронного. Поэтому требуется придерживаться определенных правил.
Для этого электродвигатель подключают к оборудованию, которое необходимо привести в движение. Обычно это механизмы, которые должны работать практически без остановок – вытяжки, насосы и прочее.
Синхронные генераторы
Обратная конструкция – синхронные генераторы. В них процессы протекают немного иначе. Принцип действия синхронного генератора и синхронного двигателя отличаются, но не существенно:
- На обмотку статора не подается напряжение. С нее оно снимается.
- На обмотку ротора подается переменное напряжение, которое необходимо для создания магнитного поля. Потребление электроэнергии крайне маленькое.
- Ротор электрогенератора раскручивается при помощи дизельного или бензинового двигателя либо же силой воды, ветра.
- Вокруг ротора имеется магнитное поле, которое двигается. Поэтому в обмотке статора индуцируется ЭДС, а на концах появляется разность потенциалов.
Но в любом случае требуется стабилизировать напряжение на выходе генераторной установки. Для этого достаточно запитать роторную обмотку от источника, напряжение которого постоянно и не изменяется при колебаниях частоты вращения.
Полюсы обмоток двигателя
В конструкции ротора имеются постоянные или электрические магниты. Их обычно называют полюсами. На синхронных машинах (двигателях и генераторах) индукторы могут быть двух типов:
- Явнополюсными.
- Неявнополюсными.
Они различаются между собой только взаимным расположением полюсов. Для уменьшения сопротивления со стороны магнитного поля, а также улучшения условий для проникновения потока, используются сердечники, изготовленные из ферромагнетиков.
Эти элементы располагаются как в роторе, так и в статоре. Для изготовления используются только сорта электротехнической стали. В ней очень много кремния. Это отличительная особенность такого вида металла. Это позволяет существенно уменьшить вихревые токи, повысить электрическое сопротивление сердечника.
Воздействие полюсов
В основе конструкции и принципа действия синхронных двигателей лежит обеспечение влияния пар полюсов ротора и статора друг на друга. Для обеспечения работы нужно разогнать индуктор до определенной скорости. Она равна той, с которой вращается магнитное поле статора. Именно это позволяет обеспечить нормальную работу в синхронном режиме. В момент, когда происходит запуск, магнитные поля статора и ротора взаимно пересекаются. Это называется «вход в синхронизацию». Ротор начинает вращаться со скоростью, как у магнитного поля статора.
Запуск электродвигателей синхронного типа
Самое сложное в работе синхронного мотора – это его запуск.
Именно поэтому его используют крайне редко. В
едь конструкция усложняется за счет системы запуска.
На протяжении долгого времени работа синхронного двигателя зависела от разгонного асинхронника, механически соединенным с ним.
Что это значит? Второй тип двигателя (асинхронный) позволял разогнать ротор синхронной машины до подсинхронной частоты.
Обычные асинхронники не требуют специальных устройств для запуска, достаточно только подать рабочее напряжение на обмотки статора.
После того, как будет достигнута требуемая скорость, происходит отключение разгонного двигателя. Магнитные поля, которые взаимодействуют в электрическом моторе, сами выводят его на работу в синхронном режиме. Для разгона потребуется другой двигатель. Его мощность должна составлять примерно 10-15 % от аналогичной характеристики синхронной машины. Если нужно вывести в режим электродвигатель 1 кВт, для него потребуется разгонный мотор мощностью 100 Вт. Этого вполне достаточно, чтобы машина смогла работать как в режиме холостого хода, так и с незначительной нагрузкой на валу.
Более современный способ разгона
Стоимость такой машины оказывалась намного выше. Поэтому проще использовать обычный асинхронный мотор, пусть и много у него недостатков. Но именно его принцип работы и был использован для уменьшения габаритов и стоимости всей установки. При помощи реостата производится замыкание обмоток на роторе. В итоге двигатель становится асинхронным. А запустить его оказывается намного проще – просто подается напряжение на обмотки статора.
Во время выхода на подсинхронную скорость возможно раскачивание ротора. Но это не происходит за счет работы его обмотки. Напротив, она выступает в качестве успокоителя. Как только частота вращения будет достаточной, производится подача постоянного напряжения на обмотку индуктора. Двигатель выводится в синхронный режим. Но такой способ можно воплотить только в том случае, если используются моторы с обмоткой на роторе. Если там применяется постоянный магнит, придется устанавливать дополнительный разгонный электродвигатель.
Преимущества и недостатки синхронных моторов
Основное преимущество (если сравнивать с асинхронными машинами) – за счет независимого питания роторной обмотки агрегаты могут работать и при высоком коэффициенте мощности. Также можно выделить такие достоинства, как:
- Снижается ток, потребляемый электродвигателем, увеличивается КПД. Если сравнивать с асинхронным мотором, то эти характеристики у синхронной машины оказываются лучше.
- Момент вращения прямо пропорционален напряжению питания. Поэтому даже если снижается напряжение в сети, нагрузочная способность оказывается намного выше, нежели у асинхронных машин. Надежность устройств такого типа существенно выше.
Но вот имеется один большой недостаток – сложная конструкция. Поэтому при производстве и последующих ремонтах затраты окажутся выше. Кроме того, для питания обмотки ротора обязательно требуется наличие источника постоянного тока. А регулировать частоту вращения ротора можно только с помощью преобразователей – стоимость их очень высокая. Поэтому синхронные моторы используются там, где нет необходимости часто включать и отключать агрегат.
Понравилась статья? Расскажите друзьям: Оцените статью, для нас это очень важно:Проголосовавших: 1 чел.
Средний рейтинг: 5 из 5.
Синхронные электродвигатели. Работа и применение. Особенности
Особенностью работы двигателя является равенство скорости вращения ротора и скорости вращения магнитного потока. Поэтому скорость вала двигателя не зависит и не изменяется от величины подключаемой нагрузки. Это достигается за счет того, что индуктор синхронного электродвигателя является электромагнитом, в некоторых случаях постоянным магнитом.
Количество пар полюсов ротора одинаково с числом пар полюсов у движущегося магнитного поля. Взаимное воздействие этих полюсов дает возможность выравнивания скорости ротора. На валу в этот момент может быть любая по величине нагрузка. Она не влияет на скорость вращения индуктора.
Конструктивные особенности и принцип работы
Основными составными частями синхронного электродвигателя являются: статор, который неподвижен, и ротор, иными словами называемый индуктором. Статор имеет другое название – якорь, но от этого его суть не меняется. Эти части двигателя разделены прослойкой воздуха. Между пазами заложена трехфазная обмотка, которая чаще всего имеет соединение по схеме звезды.
Когда двигатель после запуска начал работать, токи якоря образуют движущееся магнитное поле, его вращение дает пересечение поля индуктора. В итоге такой работы двух полей возникает энергия. Магнитное поле статора по своей сути является полем его реакции. В работе генераторов такую энергию получают с помощью индукторов.
Полюсами являются электромагниты статора, работающие на постоянном токе. Статоры синхронных моторов могут выполняться по различным схемам: неявнополюсной, а также явнополюсной. Они отличаются положением полюсов.
Для снижения магнитного сопротивления и оптимизации условий прохода магнитного поля используют сердечники из ферромагнитного материала. Они находятся в роторе и якоре. Производятся они из электротехнической стали, которая содержит большое количество кремния. Это дает возможность снизить вихревые токи и увеличить электрическое сопротивление стали.
Синхронные электродвигатели имеют в своей основе принцип взаимодействия полюсов индуктора и статора. Во время пуска двигатель ускоряется до скорости вращения магнитного потока. Только при таком условии электродвигатель начинает действовать в синхронном режиме. При таком процессе магнитные поля образуют пересечение, возникает вход в синхронизацию.
Долгое время для разгона мотора применяли отдельный пусковой двигатель. Его соединяли механическим путем с синхронным мотором. При запуске ротор мотора ускорялся и достигал синхронной скорости. Далее мотор самостоятельно втягивался в синхронное движение. При выборе мощности пускового мотора руководствовались 15% мощности от номинала разгоняемого двигателя. Этого резерва мощности было достаточно для запуска синхронного двигателя, даже при наличии небольшой нагрузки.
Такой метод разгона более сложный, значительно повышает стоимость оборудования. В современных конструкциях синхронные электродвигатели не имеют такой схемы разгона. Применяют другую систему разгона. Реостатом замыкают обмотки индуктора по аналогии с асинхронным двигателем. Для запуска на ротор монтируют короткозамкнутую обмотку, являющуюся также и успокоительной обмоткой, которая предотвращает раскачивание ротора при синхронизации.
При достижении ротором номинальной скорости, к индуктору подключают постоянный ток. Однако, для пуска моторов с постоянными магнитами не обойтись без применения пусковых внешних двигателей.
В криогенных синхронных электродвигателях применяется обращенная конструкция. В ней якорь и индуктор размещены наоборот, индуктор находится на статоре, а якорь расположен на роторе. У таких машин возбуждающие обмотки состоят из сверхпроводимых материалов.
Достоинства и недостатки
Синхронные двигатели имеют основное преимущество по сравнению с асинхронными моторами тот факт, что возбуждение от постоянного тока внешнего источника дает возможность работы при значительной величине коэффициента мощности. Эта особенность дает возможность увеличить значение коэффициента мощности для общей сети благодаря включению синхронного мотора.
Синхронные электродвигатели имеют и другие достоинства:
- Электродвигатели синхронного типа работают с повышенным коэффициентом мощности, что создает уменьшение расхода энергии и снижает потери. КПД синхронного мотора выше при той же мощности асинхронного двигателя.
- Синхронные электродвигатели имеют момент вращения, который прямо зависит от напряжения сети. Поэтому он при уменьшении напряжения сохраняет свою мощность больше асинхронного. Это является фактором надежности подобных конструкций моторов.
Недостатками являются следующие отрицательные моменты:
- При проведении сравнительного анализа конструкций двух моторов, можно отметить, что синхронные электродвигатели выполнены по более сложной схеме, поэтому их стоимость будет выше.
- Следующим недостатком для синхронных моторов стала необходимость в источнике тока в виде выпрямителя, либо другого блока питания постоянного тока.
- Запуск двигателя происходит по сложной схеме.
- Регулировка скорости вала двигателя возможна только одним способом, с помощью применения частотного преобразователя.
В итоге можно сказать, что все-таки преимущества синхронных двигателей перекрывают недостатки. Поэтому двигатели такого вида широко применяются в технологических процессах, где идет постоянный непрерывный процесс, и не требуется частая остановка и запуск оборудования: на мельничном производстве, в компрессорах, дробилках, насосах и так далее.
Выбор двигателя
К вопросу приобретения синхронного электродвигателя нужно подходить, основываясь на следующие факторы:
- Условия эксплуатации электродвигателя. По условиям выбирают тип двигателя, который может быть защищенным, открытым или закрытым. А также синхронные электродвигатели отличаются по защите токовых частей от влаги, температуры, агрессивных сред. Для взрывоопасного производства существуют специальные защиты, предотвращающие образование искр в двигателе.
- Особенности выполнения подключения электродвигателя с потребителем.
Синхронные компенсаторы
Они служат для компенсирования коэффициента мощности в электрической сети и стабилизации номинального значения напряжения в местах подключения нагрузок к двигателю. Нормальным режимом синхронного компенсатора является режим перевозбуждения в момент отдачи в электрическую сеть реактивной мощности.
Такие компенсаторы еще называют генераторами реактивной мощности, так как они предназначены для выполнения такой же задачи, как батареи конденсаторов на подстанциях. Когда мощность нагрузок уменьшается, то часто необходимо действие синхронных компенсаторов в невозбужденном режиме при их потреблении реактивной мощности и индуктивного тока, потому что напряжение в сети старается увеличиться, а для его стабилизации на рабочем уровне нужно нагрузить сеть током индуктивности, который вызывает в сети снижение напряжения питания.
Для таких целей синхронные компенсаторы обеспечиваются регулятором автоматического возбуждения. Регулятор изменяет ток возбуждения таким образом, что напряжение на компенсаторе не изменяется.
Сфера применения
Широкое использование электродвигателей асинхронного типа со значительными недогрузками делает работу станций и энергосистем сложнее, так как уменьшается коэффициент мощности системы, это ведет к незапланированным потерям, к их неполному использованию по активной мощности. В связи с этим появилась необходимость в использовании двигателей синхронного типа, особенно для приводов механизмов значительной мощности.
Если сравнивать синхронные электродвигатели с асинхронными, то достоинством синхронных стала их работа коэффициентом мощности равном 1, благодаря действию возбуждения постоянным током. При этом они не расходуют реактивную мощность из питающей сети, а если работают с перевозбуждением, то даже отдают некоторую величину реактивной мощности для сети.
В итоге коэффициент мощности сети улучшается, и снижаются потери напряжения, увеличивается коэффициент мощности генераторов электростанций. Наибольший момент синхронного электродвигателя прямо зависит от напряжения, а у синхронного электромотора – от квадрата напряжения.
Поэтому, при уменьшении напряжения синхронный электромотор имеет по-прежнему значительную нагрузочную способность. Также, применение возможности повышения возбуждающего тока синхронных моторов дает возможность повышать их надежность эксплуатации при внезапных снижениях напряжения, и оптимизировать в таких случаях работу всей энергосистемы.
Из-за большой величины воздушного промежутка дополнительные потери в стальных сердечниках и в роторе синхронных моторов меньше, чем у двигателей асинхронного вида. Поэтому КПД синхронных моторов чаще бывает больше.
Однако устройство синхронных моторов намного сложнее, а также необходим возбудитель или другое устройство питания возбуждения. Поэтому синхронные моторы имеют более высокую стоимость по сравнению с асинхронными с короткозамкнутым ротором.
Запуск и регулировка скорости у синхронных электродвигателей имеет свои сложности. Но при больших мощностях их преимущества превосходят недостатки. Поэтому они применяются во многих местах, где не нужны частые пуски, остановки оборудования, а также нет необходимости в регулировки оборотов двигателя с приводом механизмов насосов, компрессоров, мельниц и т.д.
Похожие темы:
Синхронный реактивный двигатель
Дмитрий Левкин
Синхронный реактивный двигатель — синхронный электродвигатель, крутящий момент которого обусловлен неравенством проницаемости (магнитных проводимостей) по квадратурной и прямой осям ротора, не имеющего обмоток возбуждения или постоянных магнитов [1].Статор реактивного двигателя может быть как с распределенной, так и с сосредоточенной обмоткой и состоит из каркаса и сердечника с обмоткой.
Синхронный реактивный двигатель
Статор синхронного реактивного двигателя с распределенной обмоткой
Различают три основных типа ротора реактивного электродвигателя: ротор с выступающими полюсами, ротор с аксиальной пластиной и ротор с поперечной пластиной.
Ротор с выступающими полюсами
Ротор с осевым слоем
Ротор с поперечно-пластинчатым покрытием
Переменный ток, проходящий через обмотки статора, создает вращающееся магнитное поле в воздушном зазоре электродвигателя.Крутящий момент создается, когда ротор пытается установить свою наиболее магнитопроводящую ось (ось d) с приложенным полем, чтобы минимизировать сопротивление (магнитное сопротивление) в магнитной цепи. Амплитуда крутящего момента прямо пропорциональна разнице между прямой L d и квадратурной L q индуктивностями. Следовательно, чем больше разница, тем больше создается крутящий момент.
Силовые линии синхронного реактивного двигателя
Основную идею можно пояснить с помощью рисунка ниже.Объект «a», состоящий из анизотропного материала, имеет разную проводимость вдоль оси d и оси q, в то время как изотропный магнитный материал объекта «b» имеет одинаковую проводимость во всех направлениях. Магнитное поле, приложенное к анизотропному объекту «а», создает крутящий момент, если существует угол между осью d и линиями магнитного поля. Очевидно, что если ось d объекта «a» не совпадает с линиями магнитного поля, объект внесет искажения в магнитное поле.В этом случае направление искаженных магнитных линий будет совпадать с осью q объекта.
Объект с анизотропной геометрией (а) и изотропной геометрией (б) в магнитном поле
Силовые линии магнитного поля вокруг объекта с анизотропной геометрией
В синхронном реактивном двигателе магнитное поле создается синусоидально распределенной обмоткой статора.Поле вращается с синхронной скоростью и может считаться синусоидальным.
В такой ситуации всегда будет крутящий момент, направленный на уменьшение потенциальной энергии всей системы за счет уменьшения искажения поля вдоль оси q (δ → 0). Если угол δ поддерживается постоянным, например, путем управления магнитным полем, тогда электромагнитная энергия будет непрерывно преобразовываться в механическую энергию.
Ток статора отвечает за намагничивание и за создание крутящего момента, который пытается уменьшить искажение поля.Крутящий момент регулируется путем управления текущим углом, то есть углом между вектором тока обмотки статора и осью d ротора во вращающейся системе координат.
- Преимущества:
- Простая и прочная конструкция ротора: :
ротор имеет простую конструкцию, состоящую из листовой электротехнической стали, без магнитов и короткозамкнутой обмотки. - Low heat :
так как в роторе нет токов, он не нагревается во время работы, увеличивая срок службы электродвигателя. - Без магнитов :
окончательная цена электродвигателя снижена, так как редкоземельные металлы не используются в производстве. При отсутствии магнитных сил обслуживание электродвигателя упрощается. - Низкий момент инерции ротора: :
, поскольку на роторе нет обмотки и магнитов, момент инерции ротора ниже, что позволяет электродвигателю ускоряться быстрее и экономить энергию. - Управление скоростью :
В связи с тем, что для работы синхронного реактивного электродвигателя требуется преобразователь частоты, можно управлять скоростью вращения реактивного электродвигателя в широком диапазоне скоростей.
- Недостатки:
- Управление частотой :
для работы требуется частотно-регулируемый привод. - Низкий коэффициент мощности :
за счет того, что магнитный поток создается только за счет реактивного тока. Решено применением частотно-регулируемого привода с коррекцией мощности.
Также читайте
Модель динамики упрощенная трехфазная синхронная станок
Модель динамики упрощенного трехфазного синхронного machine
Library
Simscape / Electrical / Specialized Power Systems / Fundamental Blocks / Machines
Описание
Блок Simplified Synchronous Machine моделирует как электрические и механические характеристики простой синхронной машины.
Электрическая система для каждой фазы состоит из источника напряжения последовательно с импедансом RL, который реализует внутренний импеданс машины. Значение R может быть нулевым, но значение L должно будь позитивным.
Блок Simplified Synchronous Machine реализует механическую система, описанная как
Δω (t) = 12H∫0t (Tm − Te) −KdΔω (t) dtω (t) = Δω (t) + ω0,
, где
Δ ω = изменение скорости
по скорости работы
H =
постоянная инерции
Tm = механическая
крутящий момент
Te = электромагнитный крутящий момент
Kd = коэффициент демпфирования, представляющий
влияние демпферных обмоток
ω ( t )
= механическая частота вращения ротора
ω 0 =
скорость работы (1 шт.ед.)
Хотя параметры можно вводить в единицах СИ или на единицу в диалоговом окне, внутренние расчеты выполняются в на единицу. На следующей блок-схеме показано, как механический часть модели реализована. Модель вычисляет отклонение с относительно скорости работы; не сама абсолютная скорость.
Коэффициент демпфирования Kd имитирует влияние демпферных обмоток обычно используется в синхронных машинах. Когда машина подключена к бесконечной сети (нулевой импеданс), вариация машины дельта угла мощности (δ) в результате изменения механической мощность ( P м ) может быть приблизительно следующей передаточной функцией второго порядка:
δPm = ωs / (2H) s2 + 2ζωns + ωn2,
где