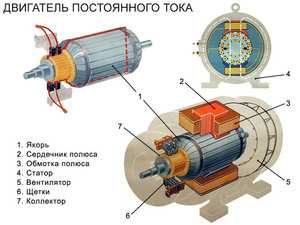
Двигатель постоянного тока: описание принципа работы, типы
В данной статье мы подробно рассмотрим двигатели постоянного тока. Детально разберем типы и принцип работы данных двигателей. Расскажем как происходит переключение и контролирование двигателя, контролирования скорости и регулировка скорости импульса, а так же опишем как изменить направление вращения двигателя постоянного тока разными методами.
Описание и принцип работы
Электрические двигатели постоянного тока — это непрерывные приводы, которые преобразуют электрическую энергию в механическую. Двигатель постоянного тока достигает этого, создавая непрерывное угловое вращение, которое можно использовать для вращения насосов, вентиляторов, компрессоров, колес и т.д.
Наряду с обычными роторными двигателями постоянного тока имеются также линейные двигатели, способные производить непрерывное движение вкладыша. Существуют в основном три типа обычных электрических двигателей: двигатели переменного тока, двигатели постоянного тока и шаговые двигатели.
Двигатели переменного тока, как правило, используются в однофазных или многофазных промышленных мощных установках, в которых постоянный крутящий момент и скорость требуются для управления большими нагрузками, такими как вентиляторы или насосы.

В этом уроке по электродвигателям мы рассмотрим только простые двигатели постоянного тока и шаговые двигатели, которые используются во многих различных типах электронных схем, систем позиционного управления, микропроцессоров, PIC и роботизированных схем.
Типы двигателей постоянного тока
Двигатель постоянного тока, является наиболее часто используемым приводом для создания непрерывного движения, скорость вращения которого легко регулируется, что делает их идеальными для использования в устройствах, таких как регулирование скорости, управление сервоприводом и / или требуется позиционирование. Двигатель постоянного тока состоит из двух частей: «Статор», который является неподвижной частью, и «Ротор», который является вращающейся частью. В результате доступно три типа двигателей постоянного тока.
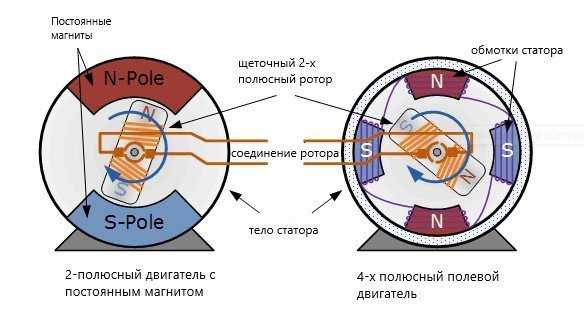
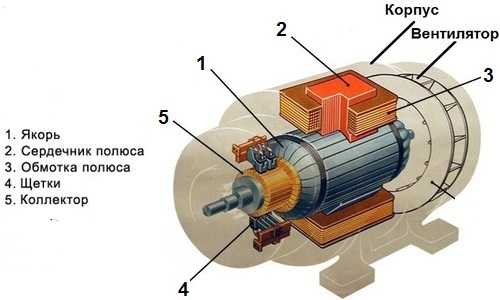
- Коллекторный двигатель — этот тип двигателя создает магнитное поле в намотанном роторе (вращающаяся деталь), пропуская электрический ток через узел коммутатора и угольной щетки, отсюда и термин «щеточный». Магнитное поле статоров (неподвижная часть) создается с помощью обмотки статора или постоянных магнитов. Обычно моторы с щеткой постоянного тока дешевые, маленькие и легко управляемые.
- Бесколлекторный двигатель — этот тип двигателя создает магнитное поле в роторе, используя постоянные магниты, прикрепленные к нему, и коммутация достигается с помощью электроники. Они, как правило, меньше, но дороже, чем обычные двигатели постоянного тока щеточного типа, потому что они используют переключатели «эффекта Холла» в статоре для получения требуемой последовательности вращения поля статора, но они имеют лучшие характеристики крутящего момента / скорости, более эффективны и имеют более длительный срок эксплуатации. чем эквивалентные коллекторные типы.
- Серводвигатель — этот тип двигателя в основном представляет собой коллекторный двигатель постоянного тока с некоторой формой управления позиционной обратной связью, подключенной к валу ротора. Они подключены к контроллеру типа ШИМ и управляются им, и в основном используются в системах позиционного управления и радиоуправляемых моделях.
Обычные двигатели постоянного тока имеют почти линейные характеристики, скорость вращения которых определяется приложенным напряжением постоянного тока, а их выходной крутящий момент определяется током, протекающим через обмотки двигателя. Скорость вращения любого двигателя постоянного тока может варьироваться от нескольких оборотов в минуту (об / мин) до многих тысяч оборотов в минуту, что делает их пригодными для применения в электронике, автомобилестроении или робототехнике. При подключении их к коробкам передач или зубчатым передачам их выходная скорость может быть уменьшена, в то же время увеличивая крутящий момент двигателя на высокой скорости.
Коллекторный двигатель постоянного тока
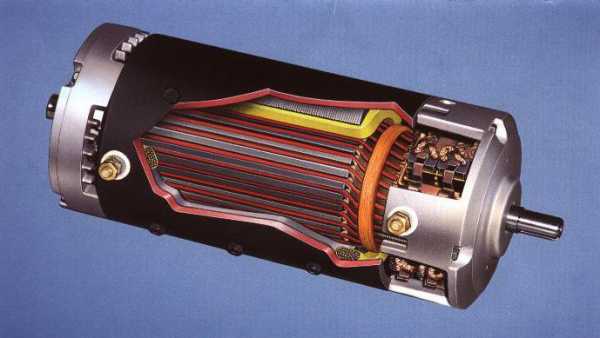
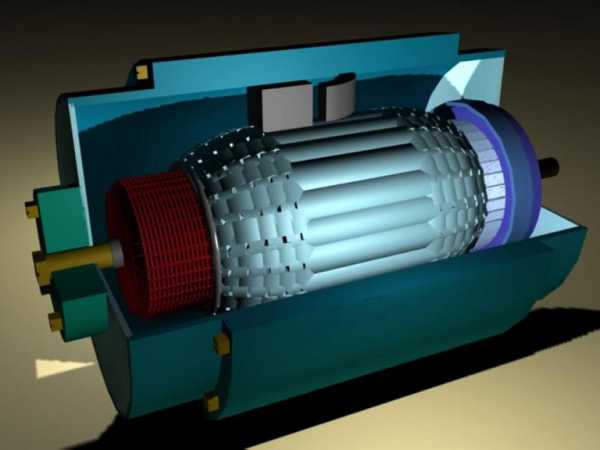
Стандартный коллекторный двигатель постоянного тока состоит в основном из двух частей: неподвижного корпуса двигателя, называемого статором, и внутренней части, которая вращается, создавая движение, называемое ротором или «арматурой» для машин постоянного тока.
Обмотка статора двигателя представляет собой электромагнитную цепь, которая состоит из электрических катушек, соединенных вместе в круговую конфигурацию для создания необходимого северного полюса, затем южного полюса, затем северного полюса и т.д., типа стационарной системы магнитного поля для вращения, в отличие от машин переменного тока, чье поле статора постоянно вращается с приложенной частотой. Ток, который течет в этих полевых катушках, известен как ток поля двигателя.
Эти электромагнитные катушки, которые формируют поле статора, могут быть электрически соединены последовательно, параллельно или вместе с ротором двигателя. Последовательно намотанный двигатель постоянного тока имеет обмотки статора, соединенные последовательно с ротором. Аналогично, двигатель постоянного тока с шунтирующим витком имеет свои обмотки возбуждения статора, соединенные параллельно с ротором, как показано ниже.
Ротор постоянного тока состоит из токонесущих проводников, соединенных вместе на одном конце с электрически изолированными медными сегментами, называемыми коммутатором. Коммутатор позволяет осуществлять электрическое подключение через угольные щетки (отсюда и название «щеточный» двигатель) к внешнему источнику питания при вращении ротора.
Установленное ротором магнитное поле пытается выровнять себя с полем статора, заставляя ротор вращаться вокруг своей оси, но не может выровняться из-за задержек коммутации. Скорость вращения двигателя зависит от силы магнитного поля роторов, и чем больше напряжение подается на двигатель, тем быстрее вращается ротор. Изменяя это приложенное постоянное напряжение, можно также изменять частоту вращения двигателя.
Двигатель постоянного тока с щеточным постоянным магнитом (PMDC), как правило, намного меньше и дешевле, чем его эквивалентные родственники двигателя постоянного тока с обмоткой статора, поскольку они не имеют обмотки возбуждения. В двигателях с постоянными магнитами постоянного тока (PMDC) эти полевые катушки заменяются сильными магнитами типа редкоземельных элементов (например, самарий-коболт или неодим-железо-бор), которые имеют очень сильные магнитные энергетические поля.
Использование постоянных магнитов дает двигателю постоянного тока намного лучшую линейную характеристику скорости / крутящего момента, чем эквивалентные намотанные двигатели из-за постоянного и иногда очень сильного магнитного поля, что делает их более подходящими для использования в моделях, робототехнике и сервоприводах.
Хотя щеточные электродвигатели постоянного тока очень эффективны и дешевы, проблемы, связанные с щеточным электродвигателем постоянного тока, заключаются в том, что искрение возникает в условиях большой нагрузки между двумя поверхностями коммутатора и угольных щеток, что приводит к самогенерированию тепла, короткому сроку службы и электрическому шуму из-за искрения, что может повредить любое полупроводниковое коммутационное устройство, такое как МОП-транзистор или транзистор. Чтобы преодолеть эти недостатки, были разработаны бесщеточные или бесколлекторные двигатели постоянного тока.
Бесколлекторный двигатель постоянного тока
Бесщеточный (бесколлекторный) двигатель постоянного тока (BDCM) очень похож на двигатель постоянного тока с постоянными магнитами, но не имеет щеток для замены или износа из-за искрения коммутатора. Поэтому в роторе выделяется мало тепла, что увеличивает срок службы двигателей. Конструкция бесщеточного двигателя устраняет необходимость в щетках благодаря более сложной схеме привода, в которой магнитное поле ротора является постоянным магнитом, который всегда синхронизирован с полем статора, что позволяет более точно контролировать скорость и крутящий момент.
Тогда конструкция бесщеточного двигателя постоянного тока очень похожа на двигатель переменного тока, что делает его истинным синхронным двигателем, но одним недостатком является то, что он дороже, чем аналогичная конструкция «щеточного» двигателя.
Управление бесщеточными двигателями постоянного тока очень отличается от обычного щеточного двигателя постоянного тока тем, что этот тип двигателя включает в себя некоторые средства для определения углового положения роторов (или магнитных полюсов), необходимые для получения сигналов обратной связи, необходимых для управления переключением полупроводников. Самым распространенным датчиком положения / полюса является «Датчик Холла», но некоторые двигатели также используют оптические датчики.
При использовании датчиков с эффектом Холла полярность электромагнитов переключается с помощью схемы управления двигателем. Тогда двигатель можно легко синхронизировать с цифровым тактовым сигналом, обеспечивая точное управление скоростью. Бесщеточные двигатели постоянного тока могут быть сконструированы так, чтобы иметь внешний ротор с постоянными магнитами и внутренний статор электромагнита или внутренний ротор с постоянными магнитами и внешний статор электромагнита.
Преимущества бесщеточного двигателя постоянного тока по сравнению с его «щеточным» кузеном заключаются в более высокой эффективности, высокой надежности, низком электрическом шуме, хорошем контроле скорости и, что более важно, отсутствии износа щеток или коммутатора, что обеспечивает значительно более высокую скорость. Однако их недостатком является то, что они более дороги и сложнее в управлении.
Серводвигатель постоянного тока
Серводвигатели постоянного тока используются в системах с замкнутым контуром, в которых положение выходного вала двигателя возвращается обратно в цепь управления двигателем. Типичные позиционные устройства «обратной связи» включают в себя резольверы, энкодеры и потенциометры, используемые в моделях радиоуправления, таких как самолеты, лодки и т.д.
Серводвигатель, как правило, включает в себя встроенную коробку передач для снижения скорости и способен напрямую выдавать высокие крутящие моменты. Выходной вал серводвигателя не вращается свободно, как валы двигателей постоянного тока из-за присоединения редуктора и устройств обратной связи.
Блок-схема серводвигателя постоянного тока
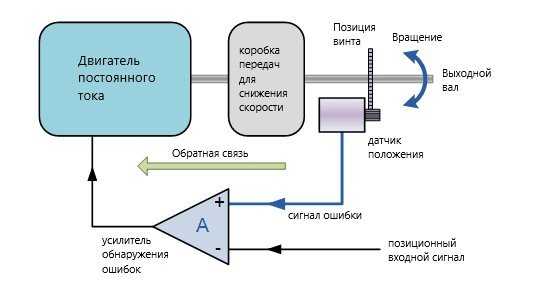
Серводвигатель состоит из двигателя постоянного тока, редуктора, устройства позиционной обратной связи и некоторой формы коррекции ошибок. Скорость или положение контролируется по отношению к позиционному сигналу входного сигнала или опорного приложенному к устройству.
Усилитель обнаружения ошибок просматривает этот входной сигнал и сравнивает его с сигналом обратной связи с выходного вала двигателя и определяет, находится ли выходной вал двигателя в состоянии ошибки, и, если это так, контроллер вносит соответствующие исправления, либо ускоряя двигатель, либо замедляя его вниз. Эта реакция на устройство позиционной обратной связи означает, что серводвигатель работает в «замкнутой системе».
Наряду с крупными промышленными применениями серводвигатели также используются в небольших моделях с дистанционным управлением и робототехнике, причем большинство серводвигателей способны вращаться примерно на 180 градусов в обоих направлениях, что делает их идеальными для точного углового позиционирования. Тем не менее, эти сервоприводы типа RC не могут непрерывно вращаться на высокой скорости, как обычные двигатели постоянного тока, если специально не модифицированы.
Серводвигатель состоит из нескольких устройств в одном корпусе, двигателя, коробки передач, устройства обратной связи и коррекции ошибок для контроля положения, направления или скорости. Они широко используются в робототехнике и небольших моделях, так как ими легко управлять, используя всего три провода: питание , заземление и управление сигналами.
Переключение и контроль двигателя постоянного тока
Небольшие двигатели постоянного тока могут быть включены «Вкл» или выключены «Выкл» с помощью переключателей, реле, транзисторов или МОП-транзисторов, причем простейшей формой управления двигателем является «линейное» управление. Схема этого типа использует биполярный транзистор в качестве переключателя (транзистор Дарлингтона также может использоваться, если требуется более высокий номинальный ток) для управления двигателем от одного источника питания.
Изменяя величину тока базы, протекающего в транзистор, можно управлять скоростью двигателя, например, если транзистор включен наполовину, тогда только половина напряжения питания поступает на двигатель. Если транзистор включен полностью (насыщен), то все напряжение питания поступает на двигатель и вращается быстрее. Затем для этого линейного типа управления мощность постоянно подается на двигатель, как показано ниже.
Контроль скорости двигателя
Простая схема переключения, приведенная выше, показывает схему для однонаправленной (только в одном направлении) цепи управления скоростью двигателя. Поскольку скорость вращения двигателя постоянного тока пропорциональна напряжению на его клеммах, мы можем регулировать это напряжение на клеммах с помощью транзистора.
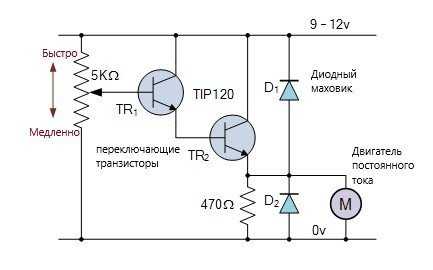
Два транзистора соединены в виде пары Дарлингтона для управления током основного ротора двигателя. 5 кОм потенциометр используется для регулирования количества базового привода на первый пилот — транзистора TR 1 , который, в свою очередь, контролирует главный коммутационный транзистор TR 2 , позволяя изменять напряжение постоянного тока двигателя от нуля до Vcc, в этом примере от 9 до 12 вольт.
Опциональные диоды маховика подключены к переключающему транзистору TR 2 и клеммам двигателя для защиты от любой обратной ЭДС, создаваемой двигателем при его вращении. Регулируемый потенциометр может быть заменен непрерывным логическим «1» или логическим «0» сигналом, подаваемым непосредственно на вход цепи, чтобы переключить двигатель «полностью включено» (насыщение) или «полностью выключено» (отключение) соответственно из порта микроконтроллера или ПОС.
Наряду с этим базовым контролем скорости, та же схема также может использоваться для управления скоростью вращения двигателей. Путем многократного переключения тока двигателя «ВКЛ» и «ВЫКЛ» на достаточно высокой частоте, скорость двигателя можно варьировать от состояния покоя (0 об / мин) до полной скорости (100%), изменяя отношение бестокового пространства к его запасу. Это достигается путем изменения соотношения времени включения (t ON ) и времени выключения (t OFF ), и это может быть достигнуто с помощью процесса, известного как широтно-импульсная модуляция (ШИМ).
Регулировка скорости импульса
Ранее мы говорили, что скорость вращения двигателя постоянного тока прямо пропорциональна среднему значению напряжения на его клеммах, и чем выше это значение, вплоть до максимально допустимого напряжения двигателя, тем быстрее будет вращаться двигатель. Другими словами, больше напряжения, больше скорости. Изменяя соотношение между временем «ВКЛ» (t ВКЛ ) и временем «ВЫКЛ» (t ВЫКЛ ), которое называется «Коэффициент заполнения», или «Рабочий цикл», среднее значение напряжения двигателя и, следовательно, его скорость вращения может варьироваться. Для простых униполярных приводов коэффициент заполнения β задается как:
и среднее выходное напряжение постоянного тока, подаваемое на двигатель, определяется как: Vmean = β x Vsupply. Затем, изменяя ширину импульса а, можно управлять напряжением двигателя и, следовательно, мощностью, подаваемой на двигатель, и этот тип управления называется широтно-импульсной модуляцией или ШИМ.
Другим способом управления частотой вращения двигателя является изменение частоты (и, следовательно, периода времени управляющего напряжения), в то время как времена коэффициента включения «ВКЛ» и «ВЫКЛ» поддерживаются постоянными. Этот тип управления называется частотно-импульсной модуляцией или PFM .
При частотно-импульсной модуляции напряжение двигателя регулируется путем подачи импульсов переменной частоты, например, на низкой частоте или с очень небольшим количеством импульсов, среднее напряжение, подаваемое на двигатель, является низким, и, следовательно, скорость двигателя является низкой. При более высокой частоте или множестве импульсов среднее напряжение на клеммах двигателя увеличивается, и скорость двигателя также увеличивается.
Затем транзисторы можно использовать для управления количеством энергии, подаваемой на двигатель постоянного тока с режимом работы: «линейная» (изменение напряжения двигателя), «широтно-импульсная модуляция» (изменение ширины импульса) или «частотно — импульсная модуляция»(изменение частоты импульса).
Изменение направления движения двигателя постоянного тока
Хотя управление скоростью двигателя постоянного тока с помощью одного транзистора имеет много преимуществ, оно также имеет один главный недостаток: направление вращения всегда одинаковое, это «однонаправленная» схема. Во многих случаях нам необходимо управлять двигателем в обоих направлениях вперед и назад.
Для управления направлением двигателя постоянного тока необходимо поменять полярность питания постоянного тока, подаваемого на соединения двигателя, чтобы его вал вращался в противоположном направлении. Один очень простой и дешевый способ управления направлением вращения двигателя постоянного тока состоит в использовании различных переключателей, расположенных следующим образом:
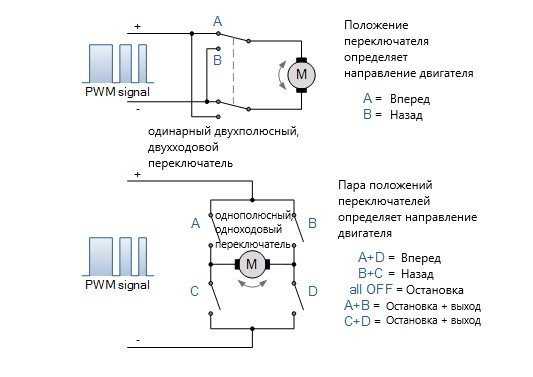
В первом контуре используется одинарный двухполюсный, двухходовый переключатель (DPDT) для контроля полярности соединений двигателей. При переключении контактов подача на клеммы двигателя изменяется, и двигатель меняет направление. Второй контур немного сложнее и использует четыре однополюсных, одноходовых (SPST) переключателя, расположенных в «H» -конфигурации.
Механические переключатели расположены в виде пары переключений и должны работать в определенной комбинации для работы или остановки двигателя постоянного тока. Например, комбинация переключателей A + D управляет вращением вперед, в то время как переключатели B + C управляют вращением назад, как показано на рисунке. Комбинации переключателей A + B или C + D замыкают клеммы двигателя, вызывая его быстрое торможение. Тем не менее, использование переключателей таким образом имеет свои опасности, так как рабочие переключатели A + C или B + D вместе отключат источник питания.
В то время как две вышеупомянутые схемы будут очень хорошо работать для большинства небольших двигателей постоянного тока, мы действительно хотим использовать различные комбинации механических переключателей только для изменения направления вращения двигателя, НЕТ! Мы могли бы изменить ручные переключатели для набора электромеханических реле и иметь одну кнопку прямого или обратного хода или даже использовать твердотельный четырехпозиционный двусторонний переключатель CMOS 4066B.
Но еще один очень хороший способ достижения двунаправленного управления двигателем (а также его скоростью) состоит в том, чтобы подключить двигатель к схеме транзисторного типа H-моста, как показано ниже.
H-мостовая схема двигателя
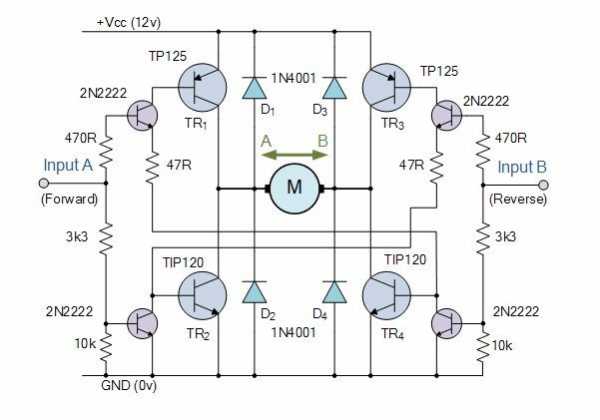
Схема H-моста, приведенная выше, названа так потому, что базовая конфигурация четырех переключателей, либо электромеханических реле, либо транзисторов, напоминает букву «H» с двигателем, расположенным на центральной шине. Транзистор или МОП-транзистор является, вероятно, одним из наиболее часто используемых типов двунаправленных цепей управления двигателем постоянного тока. Он использует «комплементарные пары транзисторов» как NPN, так и PNP в каждой ветви, причем транзисторы попарно объединяются для управления двигателем.
Управляющий вход A управляет двигателем в одном направлении, т.е. вращением вперед, в то время как вход B управляет двигателем в другом направлении, т.е. обратным вращением. Затем переключение транзисторов «ВКЛ» или «ВЫКЛ» в их «диагональных парах» приводит к направленному управлению двигателем.
Например, когда транзистор TR1 включен, а транзистор TR2 выключен, точка A подключена к напряжению питания (+ Vcc), а если транзистор TR3 выключен, а транзистор TR4 включен, точка B подключена к 0 вольт (GND). Затем двигатель будет вращаться в одном направлении, соответствующем положению клеммы А двигателя и положительной клемме В двигателя.
Если состояния переключения меняются местами так, что TR1 — «ВЫКЛ», TR2 — «ВКЛ», TR3 — «ВКЛ» и TR4 — «ВЫКЛ», ток двигателя будет течь в противоположном направлении, вызывая вращение двигателя в противоположном направлении.
Затем, применяя противоположные логические уровни «1» или «0» к входам A и B, направление вращения двигателя можно регулировать следующим образом.
Таблица истинности H-моста
| Вход А | Вход B | Функция двигателя |
| TR1 и TR4 | TR2 и TR3 | |
| 0 | 0 | Двигатель остановлен (OFF) |
| 1 | 0 | Мотор вращается вперед |
| 0 | 1 | Мотор вращается задним ходом |
| 1 | 1 | НЕ ПОЛОЖЕНО |
Важно, чтобы никакая другая комбинация входов не допускалась, так как это может привести к короткому замыканию источника питания, то есть оба транзистора, TR1 и TR2, были включены в одно и то же время (предохранитель = взрыв!).
Как и в случае однонаправленного управления двигателем постоянного тока, как показано выше, скорость вращения двигателя также можно регулировать с помощью широтно-импульсной модуляции или ШИМ. Затем, комбинируя переключение Н-моста с ШИМ-управлением, можно точно контролировать направление и скорость двигателя.
Имеющиеся в продаже готовые ИС- декодеры, такие как четырехполупроводниковая ИС H-моста SN754410 или L298N с двумя H-мостами, доступны со всей необходимой встроенной логикой управления и безопасности, специально разработанные для двунаправленных цепей управления двигателем H-моста.
meanders.ru
типы агрегатов, назначение асинхронного и синхронного оборудования
 Электродвигатели представляют собой универсальные в использовании агрегаты, способные преобразовывать электричество в механическую энергию. Сегодня существуют различные типы и классификации электродвигателей, применяемых в бытовых и промышленных установках. Такая техника может различаться своим принципом работы, питанием от постоянного или переменного тока, мощностью и назначением.
Электродвигатели представляют собой универсальные в использовании агрегаты, способные преобразовывать электричество в механическую энергию. Сегодня существуют различные типы и классификации электродвигателей, применяемых в бытовых и промышленных установках. Такая техника может различаться своим принципом работы, питанием от постоянного или переменного тока, мощностью и назначением.
Принцип действия и особенности конструкции
Устройство электродвигателя стандартно, что позволяет существенно упростить эксплуатацию и ремонт техники. Статор и ротор, которые являются основными элементами техники, находятся внутри проточки цилиндрической формы. При подаче напряжения на неподвижную обмотку статора возбуждается магнитное поле, что и приводит в движение ротор и вал электродвигателя.
Корпус электрического двигателя может быть изготовлен из алюминиевого сплава или чугуна. В каждом конкретном случае выбор материала корпуса осуществляется исходя из сферы использования техники и ее необходимых параметров по весу.
Все двигатели изготавливаются с однотипными установочными размерами, что позволяет существенно упростить их монтаж и последующую эксплуатацию.
Сфера использования
Назначение электродвигателя чрезвычайно широко. Такие агрегаты используются для усиления мощности электросигналов, они способны преобразовывать постоянный ток в переменный, могут применяться в различных типах электромашин. Принято различать агрегаты, предназначенные для использования в промышленном оборудовании, машиностроении, на различных грузоподъёмных машинах и спецтехнике. Также большой популярностью пользуются маломощные электрические двигатели, которые с успехом применяются в различных бытовых инструментах и кухонной технике.

Классификация оборудования
На сегодняшний день существуют различные классификации электрических двигателей, которые отличаются по разным критериям и характеристикам. В зависимости от особенностей техники ее принято классифицировать:
 По специфике вращающего момента различают магнитоэлектрические и гистерезисные агрегаты.
По специфике вращающего момента различают магнитоэлектрические и гистерезисные агрегаты.- По классу защиты от воздействия внешней среды различают защищенные, закрытые и взрывонепроницаемые.
В модификации гистерезисного типа вращение вала основывается на перемагничивании ротора. Такие двигатели были популярны в прошлом, однако сегодня их конструкция устарела, поэтому они практически не встречаются. Наибольшее распространение получили магнитоэлектрические агрегаты, способные работать от переменного или постоянного тока, а также модели универсального типа, которые одновременно питаются переменным и постоянным током.
Магнитоэлектрические установки
Использование магнитоэлектрических модификаций двигателей, работающих на постоянном токе, позволяет получить отличные динамические и эксплуатационные характеристики. В зависимости от своей конструкции такой тип двигателей делится на две основные категории:
- с постоянными магнитами;
- с электромагнитами.
В последние годы наибольшей популярностью стали пользоваться модификации с электромагнитами, которые обладают большей мощностью, отличаются экономичностью в работе и позволяют быстро изменять параметры работы оборудования.
В коллекторных электродвигателях используется щеточный узел, обеспечивающий соединение вращающихся и неподвижных частей мотора. Такие агрегаты могут выполняться с независимым возбуждением и применением постоянных магнитов, но есть и такие, что имеют самовозбуждающийся тип со смешанным, последовательным или параллельным соединением. Коллекторные модификации отличаются посредственными показателями надежности. Они требуют грамотного и своевременного обслуживания.
Бесколлекторные вентильные агрегаты имеют замкнутую систему, которая работает по принципу синхронных устройств. Высококачественные бесколлекторные электродвигатели оснащаются датчиком считывания положения ротора, имеют преобразователь координат, на основании данных с которого и осуществляется работа устройства.
Вентильные типы двигателей могут иметь различные размеры и мощность. Такие агрегаты используются в промышленном оборудовании. Также ими оснащаются аккумуляторные инструменты, различные игрушки и мобильные телефоны.
Синхронные электродвигатели
К синхронным электродвигателям переменного тока относятся модификации, у которых ротор вращается синхронно с генерируемым магнитным полем. Особенностью таких агрегатов является их высокая мощность, которая может достигать сотен киловатт. Основной сферой использования синхронного оборудования являются мощные промышленные установки, ветряные генераторы и гидроэлектростанции.

Принято различать несколько модификаций синхронных электродвигателей:
- шаговые;
- реактивные;
- с постоянными магнитами;
- реактивно гистерезисные;
- вентильные реактивные;
- с обмотками возбуждения;
- гибридные синхронные.
У шаговых синхронных двигателей с дискретным угловым движением вала положение ротора будет фиксироваться путём подачи напряжения на обмотки контура. Переход в другое положение вала осуществляется за счёт снятия питания с одних обмоток и последующей подачи напряжения на другие обмотки трансформатора.
Также широкое распространение получил вентильный реактивный электродвигатель, у которого обмотка выполнена из полупроводниковых элементов. Вентильные реактивные агрегаты отличаются увеличенной мощностью, при этом они могут полностью управляться электроникой, что позволяет как поддерживать минимальные обороты, так и быстро выходить на полную мощность с максимальной частотой оборотов.
- стабильную скорость вращения;
- низкую чувствительность к перепадам напряжения в сети;
- возможность использования в качестве генератора мощности;
- минимальное потребление электроэнергии.
Однако и недостатки у синхронных устройств всё же имеются. К ним относятся сложности с запуском, трудности с обслуживанием, а также проблемы с регулировкой частоты вращения вала. Основное назначение таких устройств — это мощное промышленное оборудование, где ценится производительность агрегатов и их надежность.
Асинхронные модификации
У асинхронных двигателей переменного тока частота вращения ротора будет отличаться от показателей магнитного поля. Такие агрегаты называют также индукционными, что объясняется принципом генерации магнитного поля, которое возникает за счёт перемещения статора. Асинхронные модификации получили наибольшее распространение, что объясняется простотой их конструкции, надежностью, долговечностью, а также возможностью выполнения как сверхмощных промышленных установок, так и небольших электродвигателей, предназначенных для использования в бытовых инструментах.

В зависимости от типа электротока, с которым работают такие агрегаты, их принято разделять на три категории:
- однофазные;
- двухфазные;
- трехфазные.
 Наибольшее распространение сегодня получили однофазные асинхронные двигатели, которые способны работать от бытовой электросети. Особенностью однофазных двигателей является наличие на статоре только одной рабочей обмотки и короткозамкнутого ротора. На обмотку статора подается переменный однофазный ток, приводящий во вращение ротор и вал двигателя. Сам ротор имеет цилиндрический сердечник с залитыми алюминием ячейками и открытыми вентиляционными лопастями. Однофазные двигатели с короткозамкнутым ротором используются в небольших по своей мощности устройствах, водяных насосах и комнатных вентиляторах.
Наибольшее распространение сегодня получили однофазные асинхронные двигатели, которые способны работать от бытовой электросети. Особенностью однофазных двигателей является наличие на статоре только одной рабочей обмотки и короткозамкнутого ротора. На обмотку статора подается переменный однофазный ток, приводящий во вращение ротор и вал двигателя. Сам ротор имеет цилиндрический сердечник с залитыми алюминием ячейками и открытыми вентиляционными лопастями. Однофазные двигатели с короткозамкнутым ротором используются в небольших по своей мощности устройствах, водяных насосах и комнатных вентиляторах.
Двухфазные асинхронные двигатели предназначены для использования в однофазной сети с переменным током. Их особенностью является наличие на статоре двух рабочих обмоток, расположенных перпендикулярно друг к другу. Во время работы агрегата на одну обмотку напрямую подаётся переменный ток, а на вторую — через соответствующий фазосдвигающий конденсатор. На выходе образуется крутящееся магнитное поле, которое упрощает запуск электромотора и в последующем поддерживает стабильно высокие обороты.

Трехфазные двигатели могут иметь короткозамкнутый и фазный ротор. Агрегаты оснащены тремя рабочими обмотками, расположенными на статоре параллельно друг другу. При включении двигателя в трехфазную сеть магнитное поле имеет сдвиг в пространстве относительно обмотки на 120 градусов. Наличие короткозамкнутого поля позволяет упростить запуск в работу устройства, при этом в последующем поддерживаются стабильные обороты. Модификации двигателей с фазным ротором отличаются увеличенной мощностью и используются преимущественно в промышленном оборудовании.
Преимуществами асинхронных электромоторов являются их устойчивость к скачкам напряжения и универсальность использования. Благодаря простоте конструкции существенно упрощается их последующее обслуживание, а сама техника чрезвычайно надежна и в процессе эксплуатации не доставляет каких-либо хлопот. В зависимости от своей модификации установки могут работать как от мощного источника электричества в трехфазной сети, так и от бытовой электросети, что позволяет применять их в различной бытовой технике и всевозможных электроприборах.
Электродвигатели представляют собой простейшие и чрезвычайно надёжные устройства, которые широко используются в промышленности и быту. Существующие в настоящее время типы электродвигателей позволяют подобрать агрегат, который будет полностью соответствовать особенностям своей эксплуатации. С помощью таких моторов могут приводиться в движение мощные станки и оборудование, производительные насосы. Без их использования не обходится ни один бытовой электроприбор.
220v.guru
Виды и типы электродвигателей / Статьи и обзоры / Элек.ру
Электрический двигатель
Электродвигатель представляет собой электрическую машину, которая преобразовывает электроэнергию в энергию вращения вала с незначительными тепловыми потерями. Главный принцип работы любого электродвигателя заключается в использовании электромагнитной индукции в качестве основной движущей силы. Для этого конструкция электродвигателя включает:
- Неподвижную часть (статор или индуктор).
- Подвижную часть (ротор или якорь).
В зависимости от предназначения, применяемого рода тока и конструктивных особенностей электрические двигатели имеют большое количество разновидностей.
Двигатели постоянного тока
Электродвигатели постоянного тока объединяют широкий ассортимент устройств, обеспечивающих высокий КПД при трансформации электрической энергии в механическую. Для надежного соединения электрической цепи подвижной и неподвижной части электропривода постоянного тока используют щеточно-коллекторный узел. В зависимости от конструктивных особенностей щеточно-коллекторного узла, все электрические машины постоянного тока подразделяют на следующие группы:
- Коллекторные.
- Бесколлекторные.
В свою очередь коллекторные электродвигатели условно разделяют на следующие виды:
- Самовозбуждающиеся.
- С возбуждением от электромагнитов постоянного действия.
Устройства с независимым возбуждением характеризуются низкой мощностью, поэтому данные электроприводы используют для не ответственных операций с низкой нагрузкой. Машины с самовозбуждением подразделяют на:
- Устройства с последовательным возбуждением, где якорь подключается последовательно обмотке возбуждения.
- Электродвигатели с параллельным возбуждением, где якорь включается параллельно обмотке возбуждения.
- Электропривод смешанного возбуждения, который характеризуется наличием параллельных и последовательных соединений.
Двигатели переменного тока
Электродвигатели переменного тока представлены широкой номенклатурой устройств, которые различают по многочисленным конструктивным и эксплуатационным характеристикам. В зависимости от скорости вращения ротора выделяют электрические машины синхронного и асинхронного типа.
Синхронные двигатели характеризуются одинаковой скоростью вращения ротора и магнитного поля питающего напряжения. Подобный тип электрических двигателей используют для изготовления устройств с высокой мощностью. Кроме этого существует еще одна разновидность синхронного привода — шаговые двигатели. Они имеют строго заданное в пространстве положение ротора, которое фиксируется подачей питания на обмотку статора. При этом переход из одного положения в другое осуществляется посредством подачи напряжения на требуемую обмотку.
Асинхронный электрический двигатель имеет частоту вращения ротора отличную от частоты вращения магнитного поля питающего напряжения. В настоящее время этот тип электродвигателей получил самое широкое распространение как на производстве, так и в быту.
В зависимости от количества фаз питающего напряжения электропривод принадлежит к одной из групп:
- 1-нофазные;
- 2-хфазные;
- 3-хфазные;
- многофазные.
Категория размещения и климатическое исполнение
Все электродвигатели производят с учетом воздействия во время эксплуатации определенных факторов окружающей среды. По этой причине все электрические машины подразделяют на следующие категории размещения:
- Для помещений с высоким уровнем влажности.
- Для помещений закрытого типа с вентиляцией естественного типа без искусственного регулирования климатических параметров. При этом ограничено воздействие пыли, влаги и УФ- излучения.
- В условиях открытого пространства.
- Для помещений закрытого типа с искусственным регулированием климатических параметров. При этом ограничено воздействие пыли, влаги и УФ-излучения.
- Для помещений с изменением влажности и температуры, которые не отличаются от изменений на улице.
В зависимости от климатического исполнения в соответствии с требованиями ГОСТ 15150 — 69 все электрические двигатели подразделяют на следующие типы исполнения:
- Все возможные макроклиматические районы (В).
- Холодный (ХЛ).
- Все морские районы (ОМ).
- Сухой тропический (ТС).
- Общий (О).
- Умеренный (У).
- Умеренный морской (М).
- Влажный тропический (ТВ).
Категория размещения и климатическое исполнение указывают в условном обозначении электродвигателя на его бирке и в паспорте.
Степень защиты корпуса
Для условного обозначения степени защиты корпуса электрической машины от воздействия вредных факторов окружающей среды используют аббревиатуру IP. При этом на корпусе электропривода указывают следующую информацию:
- Высокий уровень защиты от пыли — IP65, IP66.
- Защищенные — не ниже IP21, IP22.
- С защитой от влаги — IP55, IP5.
- С защитой от брызг и капель — IP23, IP24.
- Закрытое исполнение — IP44 — IP54.
- Герметичные — IP67, IP68.
При подборе электрического двигателя для эксплуатации в условиях воздействия определенных вредных факторов, необходимо тщательно подходить к выбору степени защиты его корпуса.
Общие требования безопасности при монтаже и эксплуатации
При монтаже электрического двигателя необходимо придерживаться следующих требований:
- Перед подключением проверить соответствие частоты и напряжения питающей сети с информацией на паспорте электрического двигателя.
- Перед установкой электрической машины обязательно проводят измерение сопротивления электрической изоляции обмотки статора относительно корпуса. При неудовлетворительных значениях проводят просушивание изоляции до достижения требуемого значения.
- При сопряжении валов необходимо точно соблюдать соосность с допустимым отклонением не более 0,2 мм.
- Для заземления корпуса электродвигателя используют только специальные заземляющие устройства, предусмотренные инструкцией завода производителя.
- Строго запрещен монтаж электропривода под напряжением.
В процессе эксплуатации электрических машин следует придерживаться следующих основных правил:
- Регулярный осмотр состояния электродвигателя является залогом своевременного определения неисправностей.
- Регулярно на протяжении всего срока эксплуатации проводят проверку исправности токовой и тепловой защиты, чистку и смазку, проверку контактных соединений и надежности заземления.
- При наличии повышенного шума или стука, проводят вибродиагностику с целью определения состояния подшипников и других вращающихся деталей.
- Следует исключить длительную работу однофазного электродвигателя в режиме холостого хода, что негативно влияет на срок его службы.
- Запрещается эксплуатация электрического двигателя с неисправной защитой от перегрева, перегрузки или завышенным значением сопротивления контура заземления.
Крановые электродвигатели
Крановые электродвигатели представляют собой асинхронные устройства переменного тока или двигатели постоянного тока с параллельным или последовательным возбуждением.
В отличие от других категорий электродвигателей, крановые электроприводы имеют следующие особенности:
- Большинство крановых электрических двигателей имеет закрытое исполнение корпуса.
- Момент инерции на роторе составляет минимально возможное значение, что обеспечивает минимальные потери энергии во время переходных процессов.
- Кратковременная перегрузка по моменту для крановых двигателей постоянного тока составляет 2,0 — 5,0, а для электромоторов переменного тока 2,3 — 3,5.
- Класс нагревостойкости изоляционных материалов не менее F.
- У кранового электропривода переменного тока в номинальном режиме ПВ составляет не менее 80 минут.
- С целью получения большой перегрузочной способности по моменту добиваются высоких значений магнитного потока.
- Отношение максимально допустимой частоты вращения к номинальному значению для электродвигателей постоянного тока составляет 3,5 — 4,9, а для машин переменного тока 2,5.
Эксплуатация кранового привода характеризуется следующими условиями эксплуатации:
- Частые пуски, реверсы и торможения.
- Регулирование частоты вращения в широком диапазоне значений.
- Повышенная вибрация и тряски.
- Повторно-кратковременный режим работы.
- Воздействие высокой температуры, газа, пыли и пара.
- Значительная перегрузка во время работы.
Общепромышленные электрические двигатели
Электродвигатели общепромышленного исполнения применяют для привода механизмов, которые не предъявляют особых требований к показателям КПД, энергосбережения, скольжению и пусковым характеристикам. Они характеризуются повторно-кратковременным режимом работы и изоляцией с классом нагревостойкости класса F. Наиболее популярными в этой категории являются асинхронные электрические двигатели марки АИР с короткозамкнутым ротором. Благодаря многочисленным достоинствам, этот тип электропривода с успехом применяется на всех производственных предприятиях. От продукции других торговых марок его отличает:
- Простая конструкция с отсутствием подвижных контактов.
- Низкая стоимость в сравнении с электрическими машинами других типов.
- Высокая ремонтопригодность всех главных узлов и рабочих элементов.
- Использование напряжения сети 380 В без дополнительных регуляторов или фильтров.
- Монтаж двигателя осуществляется на лапах или фланцах, поэтому происходит в минимально короткий срок.
Электрические машины общепромышленного исполнения находят применение в сферах деятельности, где нет необходимости в высоких эксплуатационных параметрах: вентиляционные системы, насосные станции, станочное оборудование, компрессорные установки и др. Эксплуатация общепромышленных электродвигателей осуществляется в двух основных режимах: генераторный и двигательный. При этом в генераторном режиме электрические двигатели являются источником электроэнергии за счет преобразования механической энергии вращения вала. В двигательном режиме привод общепромышленного исполнения потребляет электроэнергию и превращает её в механическую энергию вращения вала.
Электрические двигатели с электромагнитным тормозом
Электрический привод с электромагнитным тормозом предназначен для эксплуатации в повторно-кратковременном или кратковременном режиме. Он разработан специально для механизмов, которые требуют форсированной остановки в строго регламентированное время. К таким механизмам относят: электрические тали, автоматизированные складские системы, обрабатывающие станки и др. Тормозной механизм, как правило, располагают со стороны противоположной валу двигателя. Он обеспечивает быстрое торможение электрического привода при отключении питания, а при повторной подаче напряжения растормаживает его.
Электрические машины со встроенным электромагнитным тормозом работают по следующему принципу:
- Электромагнитную катушку тормоза подключают последовательно к одной из фазных обмоток электродвигателя.
- Катушка получает постоянное напряжение посредством выпрямляющего устройства, которое располагают возле коробки с выводами или переменное напряжение непосредственно с обмотки электродвигателя.
- При отсутствии фазного напряжения катушка обесточивается, и якорь прочно зажимает блокировочный механизм.
- После восстановления электрического питания катушка подтягивает якорь, что позволяет валу двигателя свободно перемещаться.
В зависимости от способа монтажа электромоторы со встроенным электромагнитным тормозом изготавливают в следующих исполнениях:
- С горизонтальным валом.
- С вертикальным валом.
Благодаря своим преимуществам по времени остановки вала электродвигателя, этот тип электропривода обеспечивает надежную и безопасную эксплуатацию устройств с высокими требованиями к позиционированию или аварийной остановке.
Источник: Технический отдел ЗАО «КранЭлектроМаш»
www.elec.ru
Типы электродвигателей и их применение — Статьи — Стройка.ру
 СОДЕРЖАНИЕ:
СОДЕРЖАНИЕ:
Нельзя сказать, что вечный двигатель уже изобретен упорными Кулибиными, но вот варианты электрических двигателей существуют с момента открытия явления электромагнитной индукции Майклом Фарадеем. А случилось это в девятнадцатом веке. И вот с тех пор, невозможность существования без всякого рода машин – очевидна. Электрические двигатели в разных вариантах прочно вошли в нашу жизнь, быт и окружили нас комфортным существованием, а, порой, и становятся для нас ангелами-хранителями нашего здоровья и жизней.

Независимо от конструкции, алгоритм устройства электрических двигателей одинаков – цилиндрическая проточка вмещает в себя вращающийся ротор, который заключен неподвижную обмотку или, как еще называют специалисты, — статоре. При вращении, ротор создает магнитное поле, которое приводит к отталкивание разнополярных плюсов от статора.
Для того, чтобы отталкивание происходило постоянно, необходима периодичная перекоммутация ротора (по этому принципу работают коллекторные электродвигатели), либо следует создать условия для вращающегося магнитного поля в самом статоре (принцип асинхронного трехфазного двигателя).
Матрица работы электрических двигателей – напряжение, оно то и определяет конструкцию двигателя в зависимости от собственных свойств: переменное напряжение или постоянное напряжение. В зависимости от категории напряжения, разделяют основные виды электродвигателей. О них мы сейчас и поговорим.

Типы электродвигателей
Наиболее распространены в нашей жизни следующие типы электродвигателей:
- Электродвигатели постоянного тока, имеющие якорь на постоянных магнитах.
- Электродвигатели постоянного тока, но уже имеющие якорь с обмоткой возбуждения.
- Двигатели переменного тока синхронного типа.
- Асинхронные двигатели переменного тока.
- Линейные асинхронные двигатели.
- Серводвигатели.
- Ролики с внутренними электродвигателями, совмещенные с редукторами – мотор-ролики.
- Вентильные двигатели.
Еще один вид электрических двигателей переменного тока – асинхронные. Частота вращения ротера здесь противоположна частоте вращения магнитного поля, созданного обмоткой статора. Асинхронные двигатели, в свою очередь, делятся на двигатели с короткозамкнутым ротором и фазным ротором, а статор, имеющий одинаковую конструкцию в обоих вариантах, может иметь различия в обмотке.

Асинхронные двигатели переменного тока – основополагающие преобразователи электроэнергии в механическую. В свою очередь, асинхронные двигатели делятся на однофазные, двухфазные и трехфазные. Чаще всего – с короткозамкнутым ротером.
Однофазный асинхронный электродвигатель, как уже понятно из названия, имеет в наличии только одну фазу – обмотку. Недостаток этого двигателя – он не может запуститься в работу самостоятельно. Однофазным двигателям для начала процесса нужен стартовый толчок или включение дополнительной спусковой обмотки. Соответственно, что принцип двухфазных и трехфазных двигателей – это две-три обмотки – фазы на статоре.

Двухфазные электродвигатели самодостаточны при запуске начала работы, однако имеют проблемы с реверсом.
Трехфазный – практически самый совершенный двигатель на сегодняшний день.
Коллекторные двигатели переменного тока, мощностью от двух килоВатт, применяют как для переменного, так и для постоянного тока, что является неоспоримым преимуществом для электрического двигателя всех типов. Используют такие двигатели в тех случаях, когда требуется высокая частота вращения. Они заметно выйгрышны на фоне остальных электродвигателей при пусковом моменте, который, в этом случае, пропорционален току, а не оборотам, что позволяет уменьшить нагрузку на электросеть при запуске и контролировать обороты.
Высокая скорость ротора, скоростной реверс, возможности генератора и тяги дает расширяет возможности использования коллекторных двигателей. Мало того, — простота установки или возможность устранения поломки, при наличии чертежей, — неоспоримый плюс для бытового использования.
Но все, как и медали, имеет две стороны. Вторая сторона панегириков работы коллекторных двигателей – их дороговизна и повышенный шум при работах.
Ликбез электрических двигателей постоянного тока. Еще в недалеком прошлом, этот тип двигателей был фаворитом, однако время идет, а наука не стоит на месте. И на сегодняшний день, двигатели такого типа практически полностью вытеснены электродвигателями асинхронного типа.
Причины банально просты – экономические затраты применения нижеупомянутого типа двигателей значительно ниже, чем электродвигателей постоянного тока.
Типы электродвигателей с постоянным током работают по принципу постоянного переключения обмоток ротора коллектором. Каждая обмотка – своего рода рамка с током, вращающаяся в магнитном поле. В электродвигателе находится несколько таких рамок, к каждой из которых, прилагается пластина в коллекторе по нему же и передается ток.
Устройство такого типа электродвигателя дает возможность работать от постоянного либо переменного напряжения.
Сфера применения видов электрических двигателей постоянного тока достаточно широка – они регулируют электроприводы с высокими динамическими и эксплуатационными показателями, а именно: равномерность вращения и высокие перезагрузочные способности. Самый простой пример бытового использования таких электродвигателей – электротранспорт.
Про коллекторные двигатели мы писали выше, но еще раз повторим, что коллекторные двигатели можно использовать и при переменном токе и постоянном, что очень удобно и практично, но не всегда бюджетно.
Что касается униполярных и биполярных электродвигателей постоянного тока… Униполярный двигатель подарил миру Питер Барлоу в 1824 году. Нашим современникам он больше известен как «колесо Барлоу». Представляет собой такой двигатель два зубчатых колеса, расположенных на одной оси, которые вращаются благодаря взаимодействию тока с магнитным током постоянных магнитов. Направление вращения может изменяться при изменении контактов и расположения магнитных полюсов. Работает такой вид электродвигателя на преобразование электрических импульсов в механические, носящие дискретный характер.
С таким видом электрических двигателей мы чаще всего сталкиваемся в канцелярской и офисной технике. Мал да удал – именно так можно сказать об униполярных электрических двигателях. Они действительно не очень большого размера, но достаточно продуктивны.
По своему устройству, униполярный отделено напоминает однофазный двигатель – их связывает одиночная обмотка в каждой фазе, а различие – наличие отвода от середины отводки. Именно это и позволяет менять направления вращения. Конструкция униполярного электродвигателя постоянного тока работает без коллектора в своей конструкции.
Где необходимы более высокие, мощные и быстрые характеристики, используют серводвигатели. Они предназначены для широкого спектра скоростей, гарантируют плавность хода, минимальную вибрацию и децибелы шума. Управляются серводвигатели при помощи преобразователя частоты – инвертора.
Вид серводвигателей высокотехнологичен и работает по принципу обратной связи. Это мощный электродвигатель со способностью набора очень большой скорости вращения вала, которая регулируется при помощи ПО. Серводвигатели – идеальные рабочие лошадки в поточном промышленном оборудовании и станках.

Помимо вышеописанных видов электрических двигателей, существуют линейные электродвигатели, работающие по принципу прямолинейного движения ротора и статора относительно друг друга. Такой электродвигатель исключает механическую передачу.
Синхронные электродвигатели – частота вращения ротера идентична частоте вращения магнитного поля в воздушной дельте. Такие двигатели входят в комплектацию вентиляторов, насосов и генераторов. Работают синхронные двигатели с постоянной скоростью.
Асинхронные электродвигатели имеют различные частоты вращений ротера и магнитного тока, создаваемого обмоткой сатора. При одинаковой конструкции сатора, асинхронные двигатели разделяют на два вида – с короткозамкнутымротором и фазным ротором.
Алгоритм устройства любого электрического двигателя идентичен и он не зависит от конструкции и технических характеристик агрегата: сатор (неподвижная обмотка), вращающийся ротор, продуцирующий магнитное поле и отталкивающийся своими полюсами от статора.
Виды взрывозащищенных электродвигателей
Взрывозащищенные электродвигатели составляют комплектующую деталь оборудования, которое используют при работе во взрывоопасных и легковоспламеняющихся условиях. Как правило, это область нефтепереработки, газовая и химическая промышленность.
Производят такие двигатели из максимально прочных материалов и оснащают взрывонепроницаемой оболочкой, которая надежно защищает электрические двигатели от механических, термических и прочих повреждений. Ремонт электродвигателей должен производиться в надежных сервисных центрах.

Самыми безопасными из такой категории электродвигателей считаются двигатели серии ВА, имеющие маркировочный индекс 1 ExdIIBT4х по ГОСТР 51330.0.
Маркировка буквой «d», характеризуются взрывозащищенные двигатели, оснащенные взрывозащитной оболочкой.
Маркировка «х» означает необходимость дополнительных мер при монтаже электродвигателя, которые уберегут агрегат от растягивания, скручивания и выпадения кабелей и вводов.
Прочтений: 4576 Распечатать Поделиться:Мой мир
Вконтакте
Одноклассники
stroyka.ru
обзор видов и принцип работы
Разновидности электромоторов
Явление электромагнитной индукции стало основой возникновения и развития всех электрических машин. Первооткрывателем этого явления в конце 19 века был Майкл Фарадей, английский учёный — экспериментатор. Он провёл опыты с первыми электрическими машинами. Сейчас без них невозможно представить нашу жизнь. Электродвигатели стали одними из самых распространённых электрических машин.
Для работы электромотора необходимо напряжение, свойства которого определяют его конструкцию. На переменном напряжении и токе работают такие электродвигатели:
на постоянном напряжении и токе работают:
- коллекторные;
- униполярные;
- шаговые.
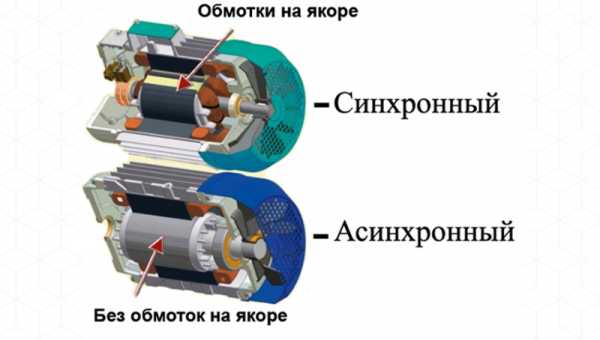
Синхронные и асинхронные электродвигатели
Синхронные и асинхронные электромоторы имеют общие условия для своей работы. Для этого необходимо магнитное поле, максимальная величина которого перемещается в пространстве. Такое поле может быть создано двумя или большим числом обмоток. Обычные конструкции синхронных и асинхронных электромоторов содержат две или три обмотки.
Они размещаются на массивных ферримагнитных сердечниках, усиливающих магнитное поле. Для трёх обмоток применяется трёхфазное напряжение, для двух обмоток – двухфазное или одна фаза с фазосдвигающим конденсатором. Но с таким конденсатором к однофазной сети можно подключить и трёхфазные двигатели.
Если ротор электромотора создаёт постоянное магнитное поле, либо от постоянных магнитов, либо от встроенного в ротор источника питания постоянного тока, либо от внешнего источника питания постоянного тока через кольца со щётками такой двигатель является синхронным. В нём частота оборотов и частота напряжения источника питания одинаковы. В асинхронных двигателях используется немагнитный ротор без явно выраженных полюсов, колец со щётками, встроенных выпрямителей и комбинированных деталей из различных материалов. Исключением является синхронный гистерезисный двигатель.
Ротор асинхронного двигателя работает как вторичная обмотка трансформатора, которая замкнута накоротко. Но ток в его роторе может возникнуть только при более медленном вращении в сравнении с магнитным полем статора. Такое различие скоростей называется скольжением. Простота конструкции и соответствующая надёжность делают асинхронный электромотор наиболее широко используемым.
Коллекторные машины
Однако у синхронных и асинхронных электромоторов есть один непреодолимый недостаток – частота питающего напряжения. Она определяет скорость вращения магнитного поля и вала в этих двигателях. Никакими конструктивными изменениями в них при заданной частоте питающего напряжения невозможно получить частоту вращения вала большую, чем частота питающего напряжения. При необходимости большего числа оборотов используются коллекторные электромоторы.
В этих двигателях происходит постоянное переключение обмоток ротора коллектором. Каждая обмотка по сути это рамка с током, которая, как известно из опытов Фарадея, поворачивается в магнитном поле. Но одна рамка повернётся и остановится. Поэтому рамок — обмоток сделано несколько и каждой из них соответствует пара пластин в коллекторе. Ток подаётся через щётки, скользящие по коллектору.
Конструкция такого электромотора позволяет работать от источника либо постоянного, либо переменного напряжения, который обеспечивает ток и в статоре и в роторе. При переменном напряжении направление тока в статоре и роторе изменяется одновременно и поэтому направление действия силы вращающей ротор сохраняется. Частота питающего напряжения никак не влияет на частоту вращения ротора. Она зависит только от величины напряжения, питающего электромотор. Скользящий контакт щётки с коллектором ограничивает возможности этих электродвигателей по сроку службы и месту применения, поскольку искрение в щётках довольно быстро разрушает скользящий контакт и недопустимо в условиях повышенной взрывоопасности.
Униполярные и шаговые варианты
Однако есть такие конструкции электромоторов постоянного тока, в которых коллектора нет. Это униполярные электромоторы.
В этих электродвигателях ротор выполнен в виде диска, расположенного между полюсами постоянных магнитов. Щётки расположенные диаметрально противоположно питают током диск – ротор. Под воздействием силы Лоренца диск вращается. Несмотря на привлекательную простоту конструкции, такой электромотор не имеет широкого практического использования, поскольку требует слишком больших значений тока и магнитного поля. Тем не менее, существуют уникальные лабораторные разработки униполярных электромоторов со щётками из жидкого металла, которые развивают обороты немыслимые для иных конструкций двигателей.
Шаговый двигатель это ещё одна конструкция, работающая на постоянном токе.
В целом этот двигатель подобен синхронному электромотору с ротором из постоянных магнитов. Отличие в том, что число обмоток здесь больше, и они управляются ключами, которые подают на каждую обмотку питающее напряжение. В результате ротор меняет своё положение, притягиваясь к подключенной обмотке. Число обмоток определяет минимальный угол поворота ротора, а коммутаторы – скорость вращения ротора. В шаговом двигателе ротор может вращаться почти как угодно, поскольку ключи связаны с электронной схемой управления.
Рассмотренные конструкции электромоторов являются базовыми. На их основе для решения определённых задач создано много специальных разновидностей электромоторов. Но это уже совсем другая история…
podvi.ru
Устройство и принцип работы электродвигателя переменного тока
Электродвигатель – это электротехническое устройство для преобразования электрической энергии в механическую. Сегодня повсеместно применяются электромоторы в промышленности для привода различных станков и механизмов. В домашнем хозяйстве они установлены в стиральной машине, холодильнике, соковыжималке, кухонном комбайне, вентиляторах, электробритвах и т. п. Электродвигатели приводят в движение, подключенные к ней устройства и механизмы.
В этой статье Я расскажу о самых распространенных видах и принципах работы электрических двигателей переменного тока, широко используемых в гараже, в домашнем хозяйстве или мастерской.
Как работает электродвигатель
Двигатель работает на основе эффекта, обнаруженного Майклом Фарадеем еще в 1821 году. Он сделал открытие, что при взаимодействии электрического тока в проводнике и магнита может возникнуть непрерывное вращение.
Если в однородном магнитном поле расположить в вертикальном положении рамку и пропустить по ней ток, тогда вокруг проводника возникнет электромагнитное поле, которое будет взаимодействовать с полюсами магнитов. От одного рамка будет отталкиваться, а к другому притягиваться. В результате рамка повернется в горизонтальное положения, в котором будет нулевым воздействие магнитного поля на проводник. Для того что бы вращение продолжилось необходимо добавить еще одну рамку под углом или изменить направление тока в рамке в подходящий момент. На рисунке это делается при помощи двух полуколец, к которым примыкают контактные пластины от батарейки. В результате после совершения полуоборота меняется полярность и вращение продолжается.
В современных электродвигателях вместо постоянных магнитов для создания магнитного поля используются катушки индуктивности или электромагниты. Если разобрать любой мотор, то Вы увидите намотанные витки проволоки, покрытой изоляционным лаком. Эти витки и есть электромагнит или как их еще называют обмотка возбуждения.
В быту же постоянные магниты используются в детских игрушках на батарейках.
В других же более мощных двигателях используются только электромагниты или обмотки. Вращающаяся часть с ними называется ротор, а неподвижная- статор.
Виды электродвигателей
Сегодня существуют довольно много электродвигателей разных конструкций и типов. Их можно разделить по типу электропитания:
- Переменного тока, работающие напрямую от электросети.
- Постоянного тока, которые работают от батареек, АКБ, блоков питания или других источников постоянного тока.
По принципу работы:
- Синхронные, в которых есть обмотки на роторе и щеточный механизм для подачи на них электрического тока.
- Асинхронные, самый простой и распространенный вид мотора. В них нет щеток и обмоток на роторе.
Синхронный мотор вращается синхронно с магнитным полем, которое его вращает, а у асинхронного ротор вращается медленнее вращающегося магнитного поля в статоре .
Принцип работы и устройство асинхронного электродвигателя
В корпусе асинхронного двигателя укладываются обмотки статора (для 380 Вольт их будет 3), которые создают вращающееся магнитное поле. Концы их для подключения выводятся на специальную клеммную колодку. Охлаждаются обмотки, благодаря вентилятору, установленному на вале в торце электродвигателя.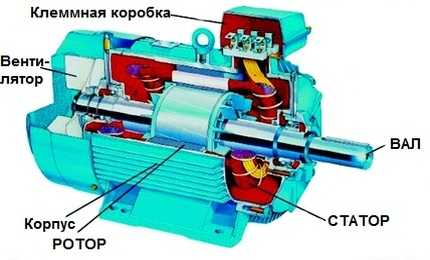
Ротор, являющиеся одним целым с валом, изготавливается из металлических стержней, которые замыкаются между собой с обоих сторон, поэтому он и называется короткозамкнутым.
Благодаря такой конструкции отпадает необходимость в частом периодическом обслуживании и замене токоподающих щеток, многократно увеличивается надежность, долговечность и безотказность.
Как правило, основной причиной поломки асинхронного мотора является износ подшипников, в которых вращается вал.
Принцип работы. Для того что бы работал асинхронный двигатель необходимо, что бы ротор вращался медленнее электромагнитного поля статора, в результате чего наводится ЭДС (возникает электроток) в роторе. Здесь важное условие, если бы ротор вращался с такой же скоростью как и магнитное поле, то в нем по закону электромагнитной индукции не наводилось бы ЭДС и, следовательно не было бы вращения. Но в реальности, из-за трения подшипников или нагрузки на вал, ротор всегда будет вращаться медленнее.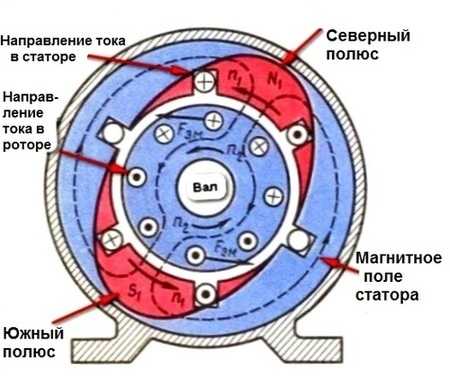
Магнитные полюса постоянно вращаются в обмотках мотора, и постоянно меняется направление тока в роторе. В один момент времени, например направление токов в обмотках статора и ротора изображено схематично в виде крестиков (ток течет от нас) и точек (ток на нас). Вращающееся магнитное поле изображено изображено пунктиром.
Например, как работает циркулярная пила. Наибольшие обороты у нее без нагрузки. Но как только мы начинаем резать доску, скорость вращения уменьшается и одновременно с этим ротор начинает медленнее вращаться относительно электромагнитного поля и в нем по законам электротехники начинает наводится еще большей величины ЭДС. Вырастает потребляемый ток мотором и он начинает работать на полной мощности. Если же нагрузка на вал будет столь велика, что его застопорит, то может возникнуть повреждение короткозамкнутого ротора из-за максимальной величины наводимой в нем ЭДС. Вот почему важно подбирать двигатель, подходящей мощности. Если же взять большей, то неоправданными будут энергозатраты.
Скорость вращения ротора зависит от количества полюсов. При 2 полюсах скорость вращения будет равна скорости вращения магнитного поля, равного максимум 3000 оборотов в секунду при частоте сети 50 Гц. Что бы понизить скорость вдвое, необходимо увеличить количество полюсов в статоре до четырех.
Весомым недостатком асинхронных двигателей является то, что они подаются регулировке скорости вращения вала только при помощи изменения частоты электрического тока. А так не возможно добиться постоянной частоты вращения вала.
Принцип работы и устройство синхронного электродвигателя переменного тока
Данный вид электродвигателя используется в быту там, где необходима постоянная скорость вращения, возможность ее регулировки, а так же если необходима скорость вращения более 3000 оборотов в минуту (это максимум для асинхронных).
Синхронные моторы устанавливаются в электроинструменте, пылесосе, стиральной машине и т. д.
 В корпусе синхронного двигателя переменного тока расположены обмотки (3 на рисунке), которые также намотаны и на ротор или якорь (1). Их выводы припаяны к секторам токосъемного кольца или коллектора (5), на которые при помощи графитовых щеток (4) подается напряжение. При чем выводы расположены так, что щетки всегда подают напряжение только на одну пару.
В корпусе синхронного двигателя переменного тока расположены обмотки (3 на рисунке), которые также намотаны и на ротор или якорь (1). Их выводы припаяны к секторам токосъемного кольца или коллектора (5), на которые при помощи графитовых щеток (4) подается напряжение. При чем выводы расположены так, что щетки всегда подают напряжение только на одну пару.
Наиболее частыми поломками коллекторных двигателей является:
- Износ щеток или их плохой их контакт из-за ослабления прижимной пружины.
- Загрязнение коллектора. Чистите либо спиртом или нулевой наждачной бумагой.
- Износ подшипников.
Принцип работы. Вращающий момент в электромоторе создается в результате взаимодействия между током тока якоря и магнитным потоком в обмотке возбуждения. С изменением направления переменного тока будет меняться и направление магнитного потока одновременно в корпусе и якоре, благодаря чему вращение всегда будет в одну сторону.
Регулировка скорости вращения меняется методом изменения величины подаваемого напряжения. В дрелях и пылесосах для этого используется реостат или переменное сопротивление.
Изменение направления вращения происходит также как и у двигателей постоянного тока, о которых Я расскажу в следующей статье.
Самое главное о синхронных двигателях Я постарался изложить, более подробно Вы можете прочитать на них на Википедии.
Режимы работы электродвигателя в следующей статье.
jelektro.ru
Принцип работы электродвигателя переменного тока, устройство электромотора.
Электрические двигатели – это силовые машины, применяющиеся для превращения электрической энергии в механическую. Общая классификация разделяет их по типу питающего тока на двигатели постоянного и переменного тока. В статье ниже рассматриваются электрические двигатели со спецификацией под переменный ток, их виды, отличительные характеристики и преимущества.
Для общей информации, рекомендуем прочитать нашу отдельную статью о принципах работы электродвигателей.
Содержание:

Электродвигатель переменного тока промышленного типа
Принцип преобразования энергии
Среди электрических двигателей, применяемых во всех отраслях промышленности и бытовых электроприборах, наибольшее распространение имеют двигатели переменного тока. Они встречаются практически в каждой сфере жизнедеятельности – от детских игрушек и стиральных машин до автомобилей и мощных производственных станков.
Принцип работы всех электрических двигателей основывается на законе электромагнитной индукции Фарадея и законе Ампера. Первый из них описывает ситуацию, когда на замкнутом проводнике, находящемся в изменяющемся магнитном поле, генерируется электродвижущая сила. В двигателях это поле создается через обмотки статора, по которым протекает переменный ток. Внутри статора (представляющего собой корпус устройства) находится подвижный элемент двигателя – ротор. На нем и возникает ток.
Вращение ротора объясняется законом Ампера, который утверждает, что на электрические заряды, протекающие по проводнику, находящемуся внутри магнитного поля, действует сила, движущая их в плоскости, перпендикулярной силовым линиям этого поля. Проще говоря, проводник, которым в конструкции двигателя является ротор, начинает вращаться вокруг своей оси, а закрепляется он на валу, к которому подключаются рабочие механизмы оборудования.
Виды двигателей и их устройство
Электрические двигатели переменного тока имеют различное устройство, благодаря которому можно создавать машины с одинаковой частотой вращения ротора относительно магнитного поля статора, и такие машины, где ротор «отстает» от вращающегося поля. По данному принципу эти двигатели разделяют на соответствующие типы: синхронные и асинхронные.
Асинхронные
Основу конструкции асинхронного электродвигателя составляет пара важнейших функциональных частей:
- Статор – блок цилиндрической формы, сделанный из листов стали с пазанми для укладки токопроводящих обмоток, оси которых располагаются под углом 120˚ относительно друг друга. Полюса обмоток уходят на клеммную коробку, где подключаются разными способами, в зависимости от необходимых параметров работы электродвигателя.
- Ротор. В конструкции асинхронных электродвигателей используются роторы двух видов:
- Короткозамкнутый. Называется так, потому что изготавливается из нескольких алюминиевых или медных стержней, накоротко замкнутых с помощью торцевых колец. Эта конструкция, представляющая собой токоповодящую обмотку ротора, называется в электромеханике «беличьей клеткой».
- Фазный. На роторах данного типа устанавливается трехфазная обмотка, похожая на обмотку статора. Чаще всего концы её проводников идут в клеммную площадку, где соединяются «звездой», а свободные концы подключаются к контактным кольцам. Фазный ротор позволяет с помощью щеток добавить в цепь обмотки добавочный резистор, позволяющий изменять сопротивление для уменьшения пусковых токов.
Помимо описанных ключевых элементов асинхронного электродвигателя, в его конструкцию также входит вентилятор для охлаждения обмоток, клеммная коробка и вал, передающий генерируемое вращение на рабочие механизмы оборудования, работа которого обеспечивается данным двигателем.
Работа асинхронных электрических двигателей основывается на законе электромагнитной индукции, утверждающем, что электродвижущая сила может возникнуть лишь в условиях разности скоростей вращения ротора и магнитного поля статора. Таким образом, если бы эти скорости были равны, ЭДС не могла бы появиться, но воздействие на вал таких «тормозящих» факторов, как нагрузка и трение подшипников, всегда создает достаточные для работы условия.
Синхронные
Конструкция синхронных электродвигателей переменного тока несколько отлична от устройства асинхронных аналогов. В этих машинах ротор крутится вокруг своей оси со скоростью, равной скорости вращения магнитного поля статора. Ротор или якорь этих устройств тоже оснащается обмотками, которые одними концами подключены друг к другу, а другими – к вращающемуся коллектору. Контактные площадки на коллекторе смонтированы так, что в определенный момент времени возможна подача питания через графитовые щетки лишь на два противоположных контакта.
Принцип работы синхронных электродвигателей:
- При взаимодействии магнитного потока в обмотке статора с током ротора возникает вращающий момент.
- Направление движения магнитного потока изменяется одновременно с направлением переменного тока, благодаря чему сохраняется вращение выходного вала в одну сторону.
- Настройка нужной частоты вращения осуществляется регулировкой входящего напряжения. Чаще всего, в быстроходном оборудовании, например, перфораторах и пылесосах, эту функцию выполняет реостат.
Чаще всего причинами выхода синхронных электродвигателей из строя является:
- износ графитовых щеток или ослабление прижимной пружины;
- износ подшипников вала;
- загрязнение коллектора (чистится наждачной бумагой или спиртом).
Трехфазный генератор переменного тока
История изобретения
Изобретение простейшего способа преобразования энергии из электрической в механическую принадлежит Майклу Фарадею. В 1821 году этот великий английский ученый провел эксперимент с проводником, опущенным в сосуд с ртутью, на дне которого лежал постоянный магнит. После подачи электричества на проводник он приходил в движение, вращаясь соответственно силовым линиями магнитного поля. В наши дни этот опыт часто проводят на уроках физики, заменяя ртуть рассолом.
Дальнейшее изучение вопроса привело к созданию Питером Барлоу в 1824 году униполярного двигателя, названного колесом Барлоу. В его конструкцию входят два зубчатых колеса из меди, расположенных на одной оси между постоянными магнитами. После подачи тока на колеса, в результате его взаимодействия с магнитными полями, колеса начинают вращаться. Во время опытов ученый установил, что направление вращения можно изменить, поменяв полярность (перестановкой магнитов или контактов). Практического применения «колесо Барлоу», но сыграло важную роль в изучении взаимодействия магнитных полей и заряженных проводников.
Первый рабочий образец устройства, ставшего прародителем современных двигателей, был создан русским физиком Борисом Семеновичем Якоби в 1834 году. Принцип использования вращающегося ротора в магнитном поле, продемонстрированный в этом изобретении, практически в неизменном виде применяется современных двигателях постоянного тока.
А вот создание первого двигателя с асинхронным принципом работы принадлежит сразу двум ученым – Николе Тесла и Галилео Феррарис, по удачному стечению обстоятельств продемонстрировавшим свои изобретения в один год (1888). Через несколько лет двухфазный бесколлекторный двигатель переменного тока, созданный Николой Тесла уже использовался на нескольких электростанциях. В 1889 году русский электротехник Михаил Осипович Доливо-Добровольский усовершенствовал изобретение Теслы для работы в трехфазной сети, благодаря чему смог создать первый асинхронный двигатель переменного тока мощностью более 100 Вт. Ему же принадлежит изобретение используемых сегодня способов подключения фаз в трехфазных электродвигателях: «звезда» и «треугольник», пусковых реостатов и трехфазных трансформаторов.
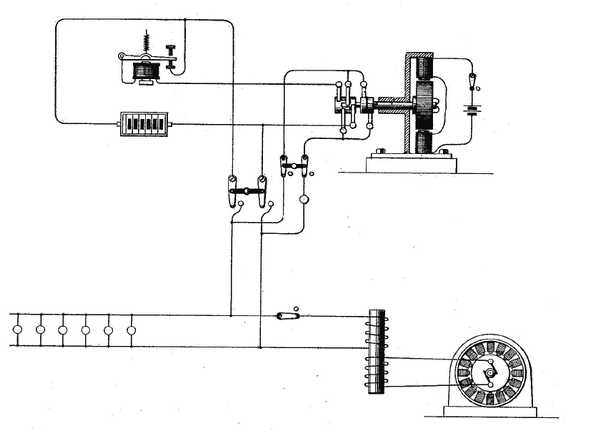
Система переменного тока, предложенная Вестингаузом
Подключение к однофазным и трехфазным источникам питания
По типу питающей сети электродвигатели переменного тока классифицируют на одно- и трехфазные.
Подключение асинхронных однофазных двигателей осуществляет очень легко – для этого достаточно подвести к двум выходам на корпусе фазный и нулевой провод однофазной 220В сети. Синхронные двигатели тоже можно запитывать от сети данного типа, однако подключение немного сложнее – необходимо соединить обмотки ротора и статора так, чтобы их контакты однополюсного намагничивания были расположены напротив друг друга.
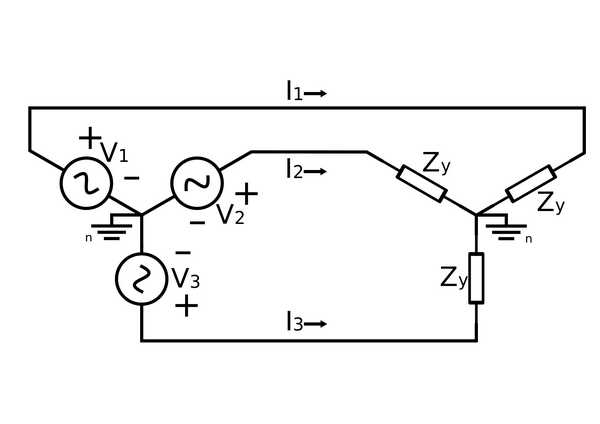
Подключение к трехфазной сети представляется несколько более сложным. В первую очередь, следует обратить внимание, что клеммная коробка содержит 6 выводов – по паре на каждую из трех обмоток. Во-вторых, это дает возможность использовать один из двух способов подключения («звезда» и «треугольник»). Неправильное подключение может привести в поломке двигатель от расплавления обмоток статора.
Главное функциональное отличие «звезды» и «треугольника» заключается в различном потреблении мощности, что сделано для возможности включения машины в трехфазные сети с различным линейным напряжением — 380В или 660В. В первом случае следует соединять обмотки по схеме «треугольник», а во втором – «звездой». Такое правило включения позволяет в обоих случаях иметь напряжение 380В на обмотках каждой фазы.
На панели подключения выводы обмоток располагаются таким образом, чтобы перемычки, используемых для включения, не перекрещивались между собой. Если коробка выводов двигателя содержит только три зажима, значит, он рассчитан для работы от одного напряжения, которое указано в технической документации, а обмотки соединены между собой внутри устройства.
Преимущества и недостатки электрических двигателей переменного тока
В наши дни среди всех электродвигателей устройства для переменного тока занимают лидирующую позицию по объему использования в силовых установках. Они обладают низкой себестоимостью, простой в обслуживании конструкцией и КПД не менее 90%. Кроме того, их устройство позволяет плавно изменять скорость вращения, не прибегая к помощи дополнительного оборудования вроде коробок передач.
Главным недостатком двигателей переменного тока с асинхронным принципом работы является тот факт, что регулировать их частоту вращения вала можно только изменяя входную частоту тока. Это не позволяет добиться постоянной скорости вращения, а также снижает мощность. Для асинхронных электродвигателей характерны высокие пусковые токи, но низкий пусковой момент. Для исправления этих недостатков применяется частотный привод, однако его цена противоречит одному из главных достоинств этих двигателей – низкой себестоимости.
Слабым местом синхронного двигателя является его сложная конструкция. Графитовые щетки довольно быстро выходят из строя под нагрузкой, а также теряют плотный контакт с коллектором из-за ослабления прижимной пружины. Кроме того, эти двигатели, как и асинхронные аналоги, не защищены от износа подшипников вала. К недостаткам также относится более сложный пуск, необходимость наличия источника постоянного тока и исключительно частотная регулировка частоты вращения.
Применение
На сегодняшний день электродвигатели со спецификацией на переменный ток распространены во всех сферах промышленности и жизнедеятельности. На электростанциях они устанавливаются в качестве генераторов, используются в производственном оборудовании, автомобилестроении и даже бытовой технике. Сегодня в каждом доме можно встретить как минимум одно устройство с электрическим двигателем переменного тока, например, стиральную машину. Причины столь большой популярности заключаются в универсальности, долговечности и легкости обслуживания.
Среди асинхронных электрических машин наибольшее распространение получили устройства с трехфазной спецификацией. Они являются наилучшим вариантом для использования во многих силовых агрегатах, генераторах и высокомощных установках, работа которых связана с необходимостью контроля скорости вращения вала.
Это может быть интересно:tokidet.ru