Наиболее распространены магнитоэлектрические двигатели, которые по типу потребляемой энергии подразделяется на две большие группы — на двигатели постоянного тока и двигатели переменного тока (также существуют универсальные двигатели, которые могут питаться обоими видами тока).
Двигатель постоянного тока — электрический двигатель, питание которого осуществляется постоянным током. Данная группа двигателей в свою очередь по наличию щёточно-коллекторного узла подразделяется на:
- коллекторные двигатели;
- бесколлекторные двигатели.
Щёточно-коллекторный узел обеспечивает электрическое соединение цепей вращающейся и неподвижной части машины и является наиболее ненадежным и сложным в обслуживании конструктивным элементом.
По типу возбуждения коллекторные двигатели можно разделить на:
- двигатели с независимым возбуждением от электромагнитов и постоянных магнитов;
- двигатели с самовозбуждением .
Двигатели с самовозбуждением делятся на:
- Двигатели с параллельным возбуждением;(обмотка якоря включается параллельно обмотке возбуждения)
- Двигатели последовательного возбуждения;(обмотка якоря включается последовательно обмотке возбуждения)
- Двигатели смешанного возбуждения.(обмотка возбуждения включается частично последовательно частично параллельно обмотке якоря)
Бесколлекторные двигатели (вентильные двигатели) — электродвигатели, выполненные в виде замкнутой системы с использованием датчика положения ротора, системы управления (преобразователя координат) и силового полупроводникового преобразователя (инвертора). Принцип работы данных двигателей аналогичен принципу работы синхронных двигателей.
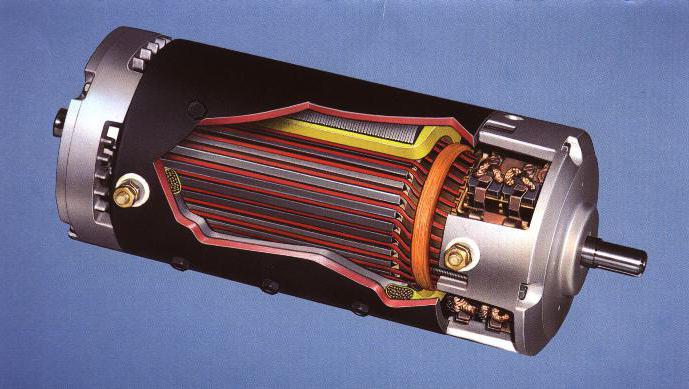
Двигатель постоянного тока в разрезе. Справа расположен коллектор с щётками
Двигатели переменного тока
Двигатель переменного тока — электрический двигатель, питание которого осущест
Электрика » Электрооборудование » Электродвигатели

Одним из основных стимулов к широкой электрификации, начавшейся в XX веке, стала возможность легкого преобразования энергии электрического тока в механическую — к тому времени уже был известен коллекторный электродвигатель, изобретенный Якоби еще в первой половине XIX века.
Изобретение асинхронного двигателя переменного тока стало еще большим шагом вперед.
Электромотор лишился механически трущихся и искрящих узлов (щеток и коллектора), превзойдя по бесшумности и ресурсу любой другой существовавший в то время тип привода.
Независимо от конструкции, любой электродвигатель устроен одинаково: внутри цилиндрической проточки в неподвижной обмотке (статоре) вращается ротор, в котором возбуждается магнитное поле, приводящее к отталкиванию его полюсов от статора.
Поддержание постоянного отталкивания требует:
- перекоммутации обмоток ротора, как это делается на коллекторных электродвигателях;
- создания вращающегося магнитного поля в самом статоре (классический пример – асинхронный трехфазный двигатель).
Достоинства электродвигателей переоценить трудно. Это:
- Крайняя простота.
- Электродвигатель состоит из минимального количества узлов, поэтому ломаться в нем практически нечему.
- Самостоятельный запуск.
- Электродвигателю не нужен пусковой импульс, он начинает вращаться сам при включении питания (исключение – однофазные электродвигатели с пусковой обмоткой, но они практически вышли из употребления). Это позволяет отказаться от холостого хода, включая электромотор только при необходимости.
- Отсутствие вибраций.
- Так как в электродвигателях энергия магнитного поля непосредственно преобразуется во вращение, при должной балансировке ротора они полностью бесшумны и не создают вибрации.
- Легкость управления оборотами и крутящим моментом.
- Несмотря на то, что на разных типах электродвигателей это достигается разными способами, управление ими в любом случае достаточно просто и надежно.
- Возможность реверса.
- На коллекторном двигателе достаточно поменять местами полюса якоря, на трехфазном электромоторе – изменить порядок включения фаз.
- Обратимость.
- Коллекторные электродвигатели при внешнем приводе начинают работать как электрогенераторы, что позволяет использовать их для рекуперации энергии при торможении электротранспорта.
ЭЛЕКТРОДВИГАТЕЛИ ПЕРЕМЕННОГО ТОКА
Благодаря удобству передачи на большие расстояния и легкости преобразования переменный ток успешно стал стандартом электроснабжения.
В сфере же производства электродвигателей его способность возбуждать переменное магнитное поле в статоре и соответственно индуцировать ток в короткозамкнутой обмотке ротора позволила создать асинхронные электродвигатели. В этом типе двигателей единственным испытывающим трение узлом остаются коренные подшипники якоря.
Ротор такого электродвигателя – это металлический цилиндр, в пазы которого под углом к оси вращения запрессованы или залиты токопроводящие жилы, на торцах ротора объединенные кольцами в одно целое. Переменное магнитное поле статора возбуждает в роторе, напоминающем беличье колесо, противоток и, соответственно, отталкивающее его от статора магнитное поле.
В зависимости от числа обмоток статора асинхронный двигатель может быть:
Однофазным – в этом случае главным недостатком двигателя становится невозможность самостоятельного запуска, так как вектор силы отталкивания проходит строго через ось вращения.
Для начала работы двигателю необходим или стартовый толчок, или включение отдельной пусковой обмотки, создающей дополнительный момент силы, смещающий их суммарный вектор относительно оси якоря.
Двухфазный электродвигатель имеет две обмотки, в которых фазы смещены на угол, соответствующий геометрическому углу между обмотками. В этом случае в электродвигателе создается так называемое вращающееся магнитное поле (спад напряженности поля в полюсах одной обмотки происходит синхронно с нарастанием его в другой).
Такой двигатель становится способным к самостоятельному запуску, однако имеет трудности с реверсом. Поскольку в современном электроснабжении не используются двухфазные сети, фактически электродвигатели этого рода применяются в однофазных сетях с включением второй фазы через фазовращающий элемент (обычно – конденсатор).
Трехфазный асинхронный электродвигатель – наиболее совершенный тип асинхронного мотора, так как в нем появляется возможность легкого реверса – изменение порядка включения фазных обмоток изменяет направление вращения магнитного поля, а соответственно и ротора.
Коллекторные двигатели переменного тока используются в тех случаях, когда требуется получение высоких частот вращения (асинхронные электродвигатели не могут превышать скорость вращения магнитного потока в статоре – для промышленной сети 50 Гц это 3000 об/мин).Кроме того, они выигрывают в пусковом крутящем моменте (здесь он пропорционален току, а не оборотам) и имеют меньший пусковой ток, меньше перегружая электросеть при запуске. Также они позволяют легко управлять своими оборотами.
Обратной стороной этих достоинств становится дороговизна (требуется изготовление ротора с наборным сердечником, несколькими обмотками и коллектором, который к тому же сложнее балансировать) и меньший ресурс. Помимо необходимости в регулярной замене стирающихся щеток, со временем изнашивается и сам коллектор.
Синхронный электродвигатель имеет ту особенность, что магнитное поле ротора индуцируется не магнитным полем статора, а собственной намоткой, подключенной к отдельному источнику постоянного тока.
Благодаря этому частота его вращения равна частоте вращения магнитного поля статора, откуда и происходит сам термин «синхронный».
Как и двигатель постоянного тока, синхронный двигатель переменного тока является обратимым:
- при подаче напряжения на статор он работает как электродвигатель;
- при вращении от внешнего источника он сам начинает возбуждать в фазных обмотках переменный ток.
Основная область использования синхронных электродвигателей – высокомощные приводы. Здесь увеличение КПД относительно асинхронных электромоторов означает значительное снижение потерь электроэнергии.
Также синхронные двигатели используются в электротранспорте. Однако, для управления скоростью в этом случае требуются мощные частотные преобразователи, зато при торможении возможен возврат энергии в сеть.
ЭЛЕКТРОДВИГАТЕЛИ ПОСТОЯННОГО ТОКА
Так как постоянный ток не способен создать изменяющееся магнитное поле, обеспечение непрерывного вращения ротора требует принудительной перекоммутации обмоток, или дискретного изменения направления магнитного поля.
Старейший из известных способов – это использование электромеханического коллектора. В этом случае якорь электродвигателя имеет несколько разнонаправленных обмоток, соединенных с находящимися в соответствующем положении относительно щеток ламелями коллектора.
В момент включения питания возникает импульс в обмотке, соединенной со щетками, после чего ротор проворачивается, и в том же месте относительно полюсов статора включается новая обмотка.
Так как намагниченность статора во время работы коллекторного электродвигателя постоянного тока не изменяется, вместо сердечника с обмотками могут использоваться мощные постоянные магниты, что сделает мотор компактнее и легче.
Коллекторный двигатель не лишен ряда недостатков. Это:
- высокий уровень помех, как передаваемых в питающую сеть при переключении обмоток якоря, так и возбуждаемых искрением щеток;
- неизбежный износ коллектора и щеток;
- повышенная шумность при работе.
Современная силовая электроника позволила избавиться от этих недостатков, применяя так называемый шаговый двигатель – в нем ротор имеет постоянную намагниченность, а внешнее устройство последовательно меняет направление тока в нескольких обмотках статора.
Фактически за единичный импульс тока ротор проворачивается на фиксированный угол (шаг), откуда и пошло название электромоторов такого типа.
Шаговые электродвигатели бесшумны, а также позволяют в широчайших пределах регулировать как крутящий момент (амплитудой импульсов), так и обороты (частотой), а также легко реверсируются изменением порядка следования сигналов.
По этой причине они широко используются в сервоприводах и автоматике, однако их максимальная мощность определяется возможностями силовой управляющей схемы, без которой шаговые двигатели неработоспособны.
© 2012-2020 г. Все права защищены.
Представленные на сайте материалы имеют информационный характер и не могут быть использованы в качестве руководящих и нормативных документов
Электрический двигатель
Электродвигатель представляет собой электрическую машину, которая преобразовывает электроэнергию в энергию вращения вала с незначительными тепловыми потерями. Главный принцип работы любого электродвигателя заключается в использовании электромагнитной индукции в качестве основной движущей силы. Для этого конструкция электродвигателя включает:
- Неподвижную часть (статор или индуктор).
- Подвижную часть (ротор или якорь).
В зависимости от предназначения, применяемого рода тока и конструктивных особенностей электрические двигатели имеют большое количество разновидностей.
Двигатели постоянного тока
Электродвигатели постоянного тока объединяют широкий ассортимент устройств, обеспечивающих высокий КПД при трансформации электрической энергии в механическую. Для надежного соединения электрической цепи подвижной и неподвижной части электропривода постоянного тока используют щеточно-коллекторный узел. В зависимости от конструктивных особенностей щеточно-коллекторного узла, все электрические машины постоянного тока подразделяют на следующие группы:
- Коллекторные.
- Бесколлекторные.
В свою очередь коллекторные электродвигатели условно разделяют на следующие виды:
- Самовозбуждающиеся.
- С возбуждением от электромагнитов постоянного действия.
Устройства с независимым возбуждением характеризуются низкой мощностью, поэтому данные электроприводы используют для не ответственных операций с низкой нагрузкой. Машины с самовозбуждением подразделяют на:
- Устройства с последовательным возбуждением, где якорь подключается последовательно обмотке возбуждения.
- Электродвигатели с параллельным возбуждением, где якорь включается параллельно обмотке возбуждения.
- Электропривод смешанного возбуждения, который характеризуется наличием параллельных и последовательных соединений.
Двигатели переменного тока
Электродвигатели переменного тока представлены широкой номенклатурой устройств, которые различают по многочисленным конструктивным и эксплуатационным характеристикам. В зависимости от скорости вращения ротора выделяют электрические машины синхронного и асинхронного типа.
Синхронные двигатели характеризуются одинаковой скоростью вращения ротора и магнитного поля питающего напряжения. Подобный тип электрических двигателей используют для изготовления устройств с высокой мощностью. Кроме этого существует еще одна разновидность синхронного привода — шаговые двигатели. Они имеют строго заданное в пространстве положение ротора, которое фиксируется подачей питания на обмотку статора. При этом переход из одного положения в другое осуществляется посредством подачи напряжения на требуемую обмотку.
Асинхронный электрический двигатель имеет частоту вращения ротора отличную от частоты вращения магнитного поля питающего напряжения. В настоящее время этот тип электродвигателей получил самое широкое распространение как на производстве, так и в быту.
В зависимости от количества фаз питающего напряжения электропривод принадлежит к одной из групп:
- 1-нофазные;
- 2-хфазные;
- 3-хфазные;
- многофазные.
Категория размещения и климатическое исполнение
Все электродвигатели производят с учетом воздействия во время эксплуатации определенных факторов окружающей среды. По этой причине все электрические машины подразделяют на следующие категории размещения:
- Для помещений с высоким уровнем влажности.
- Для помещений закрытого типа с вентиляцией естественного типа без искусственного регулирования климатических параметров. При этом ограничено воздействие пыли, влаги и УФ- излучения.
- В условиях открытого пространства.
- Для помещений закрытого типа с искусственным регулированием климатических параметров. При этом ограничено воздействие пыли, влаги и УФ-излучения.
- Для помещений с изменением влажности и температуры, которые не отличаются от изменений на улице.
В зависимости от климатического исполнения в соответствии с требованиями ГОСТ 15150 — 69 все электрические двигатели подразделяют на следующие типы исполнения:
- Все возможные макроклиматические районы (В).
- Холодный (ХЛ).
- Все морские районы (ОМ).
- Сухой тропический (ТС).
- Общий (О).
- Умеренный (У).
- Умеренный морской (М).
- Влажный тропический (ТВ).
Категория размещения и климатическое исполнение указывают в условном обозначении электродвигателя на его бирке и в паспорте.
Степень защиты корпуса
Для условного обозначения степени защиты корпуса электрической машины от воздействия вредных факторов окружающей среды используют аббревиатуру IP. При этом на корпусе электропривода указывают следующую информацию:
- Высокий уровень защиты от пыли — IP65, IP66.
- Защищенные — не ниже IP21, IP22.
- С защитой от влаги — IP55, IP5.
- С защитой от брызг и капель — IP23, IP24.
- Закрытое исполнение — IP44 — IP54.
- Герметичные — IP67, IP68.
При подборе электрического двигателя для эксплуатации в условиях воздействия определенных вредных факторов, необходимо тщательно подходить к выбору степени защиты его корпуса.
Общие требования безопасности при монтаже и эксплуатации
При монтаже электрического двигателя необходимо придерживаться следующих требований:
- Перед подключением проверить соответствие частоты и напряжения питающей сети с информацией на паспорте электрического двигателя.
- Перед установкой электрической машины обязательно проводят измерение сопротивления электрической изоляции обмотки статора относительно корпуса. При неудовлетворительных значениях проводят просушивание изоляции до достижения требуемого значения.
- При сопряжении валов необходимо точно соблюдать соосность с допустимым отклонением не более 0,2 мм.
- Для заземления корпуса электродвигателя используют только специальные заземляющие устройства, предусмотренные инструкцией завода производителя.
- Строго запрещен монтаж электропривода под напряжением.
В процессе эксплуатации электрических машин следует придерживаться следующих основных правил:
- Регулярный осмотр состояния электродвигателя является залогом своевременного определения неисправностей.
- Регулярно на протяжении всего срока эксплуатации проводят проверку исправности токовой и тепловой защиты, чистку и смазку, проверку контактных соединений и надежности заземления.
- При наличии повышенного шума или стука, проводят вибродиагностику с целью определения состояния подшипников и других вращающихся деталей.
- Следует исключить длительную работу однофазного электродвигателя в режиме холостого хода, что негативно влияет на срок его службы.
- Запрещается эксплуатация электрического двигателя с неисправной защитой от перегрева, перегрузки или завышенным значением сопротивления контура заземления.
Крановые электродвигатели
Крановые электродвигатели представляют собой асинхронные устройства переменного тока или двигатели постоянного тока с параллельным или последовательным возбуждением.
В отличие от других категорий электродвигателей, крановые электроприводы имеют следующие особенности:
- Большинство крановых электрических двигателей имеет закрытое исполнение корпуса.
- Момент инерции на роторе составляет минимально возможное значение, что обеспечивает минимальные потери энергии во время переходных процессов.
- Кратковременная перегрузка по моменту для крановых двигателей постоянного тока составляет 2,0 — 5,0, а для электромоторов переменного тока 2,3 — 3,5.
- Класс нагревостойкости изоляционных материалов не менее F.
- У кранового электропривода переменного тока в номинальном режиме ПВ составляет не менее 80 минут.
- С целью получения большой перегрузочной способности по моменту добиваются высоких значений магнитного потока.
- Отношение максимально допустимой частоты вращения к номинальному значению для электродвигателей постоянного тока составляет 3,5 — 4,9, а для машин переменного тока 2,5.
Эксплуатация кранового привода характеризуется следующими условиями эксплуатации:
- Частые пуски, реверсы и торможения.
- Регулирование частоты вращения в широком диапазоне значений.
- Повышенная вибрация и тряски.
- Повторно-кратковременный режим работы.
- Воздействие высокой температуры, газа, пыли и пара.
- Значительная перегрузка во время работы.
Общепромышленные электрические двигатели
Электродвигатели общепромышленного исполнения применяют для привода механизмов, которые не предъявляют особых требований к показателям КПД, энергосбережения, скольжению и пусковым характеристикам. Они характеризуются повторно-кратковременным режимом работы и изоляцией с классом нагревостойкости класса F. Наиболее популярными в этой категории являются асинхронные электрические двигатели марки АИР с короткозамкнутым ротором. Благодаря многочисленным достоинствам, этот тип электропривода с успехом применяется на всех производственных предприятиях. От продукции других торговых марок его отличает:
- Простая конструкция с отсутствием подвижных контактов.
- Низкая стоимость в сравнении с электрическими машинами других типов.
- Высокая ремонтопригодность всех главных узлов и рабочих элементов.
- Использование напряжения сети 380 В без дополнительных регуляторов или фильтров.
- Монтаж двигателя осуществляется на лапах или фланцах, поэтому происходит в минимально короткий срок.
Электрические машины общепромышленного исполнения находят применение в сферах деятельности, где нет необходимости в высоких эксплуатационных параметрах: вентиляционные системы, насосные станции, станочное оборудование, компрессорные установки и др. Эксплуатация общепромышленных электродвигателей осуществляется в двух основных режимах: генераторный и двигательный. При этом в генераторном режиме электрические двигатели являются источником электроэнергии за счет преобразования механической энергии вращения вала. В двигательном режиме привод общепромышленного исполнения потребляет электроэнергию и превращает её в механическую энергию вращения вала.
Электрические двигатели с электромагнитным тормозом
Электрический привод с электромагнитным тормозом предназначен для эксплуатации в повторно-кратковременном или кратковременном режиме. Он разработан специально для механизмов, которые требуют форсированной остановки в строго регламентированное время. К таким механизмам относят: электрические тали, автоматизированные складские системы, обрабатывающие станки и др. Тормозной механизм, как правило, располагают со стороны противоположной валу двигателя. Он обеспечивает быстрое торможение электрического привода при отключении питания, а при повторной подаче напряжения растормаживает его.
Электрические машины со встроенным электромагнитным тормозом работают по следующему принципу:
- Электромагнитную катушку тормоза подключают последовательно к одной из фазных обмоток электродвигателя.
- Катушка получает постоянное напряжение посредством выпрямляющего устройства, которое располагают возле коробки с выводами или переменное напряжение непосредственно с обмотки электродвигателя.
- При отсутствии фазного напряжения катушка обесточивается, и якорь прочно зажимает блокировочный механизм.
- После восстановления электрического питания катушка подтягивает якорь, что позволяет валу двигателя свободно перемещаться.
В зависимости от способа монтажа электромоторы со встроенным электромагнитным тормозом изготавливают в следующих исполнениях:
- С горизонтальным валом.
- С вертикальным валом.
Благодаря своим преимуществам по времени остановки вала электродвигателя, этот тип электропривода обеспечивает надежную и безопасную эксплуатацию устройств с высокими требованиями к позиционированию или аварийной остановке.
Источник: Технический отдел ЗАО «КранЭлектроМаш»
СОДЕРЖАНИЕ:
Нельзя сказать, что вечный двигатель уже изобретен упорными Кулибиными, но вот варианты электрических двигателей существуют с момента открытия явления электромагнитной индукции Майклом Фарадеем. А случилось это в девятнадцатом веке. И вот с тех пор, невозможность существования без всякого рода машин – очевидна. Электрические двигатели в разных вариантах прочно вошли в нашу жизнь, быт и окружили нас комфортным существованием, а, порой, и становятся для нас ангелами-хранителями нашего здоровья и жизней.

Независимо от конструкции, алгоритм устройства электрических двигателей одинаков – цилиндрическая проточка вмещает в себя вращающийся ротор, который заключен неподвижную обмотку или, как еще называют специалисты, — статоре. При вращении, ротор создает магнитное поле, которое приводит к отталкивание разнополярных плюсов от статора.
Для того, чтобы отталкивание происходило постоянно, необходима периодичная перекоммутация ротора (по этому принципу работают коллекторные электродвигатели), либо следует создать условия для вращающегося магнитного поля в самом статоре (принцип асинхронного трехфазного двигателя).
Матрица работы электрических двигателей – напряжение, оно то и определяет конструкцию двигателя в зависимости от собственных свойств: переменное напряжение или постоянное напряжение. В зависимости от категории напряжения, разделяют основные виды электродвигателей. О них мы сейчас и поговорим.

Типы электродвигателей
Наиболее распространены в нашей жизни следующие типы электродвигателей:
- Электродвигатели постоянного тока, имеющие якорь на постоянных магнитах.
- Электродвигатели постоянного тока, но уже имеющие якорь с обмоткой возбуждения.
- Двигатели переменного тока синхронного типа.
- Асинхронные двигатели переменного тока.
- Линейные асинхронные двигатели.
- Серводвигатели.
- Ролики с внутренними электродвигателями, совмещенные с редукторами – мотор-ролики.
- Вентильные двигатели.
Еще один вид электрических двигателей переменного тока – асинхронные. Частота вращения ротера здесь противоположна частоте вращения магнитного поля, созданного обмоткой статора. Асинхронные двигатели, в свою очередь, делятся на двигатели с короткозамкнутым ротором и фазным ротором, а статор, имеющий одинаковую конструкцию в обоих вариантах, может иметь различия в обмотке.
Асинхронные двигатели переменного тока – основополагающие преобразователи электроэнергии в механическую. В свою очередь, асинхронные двигатели делятся на однофазные, двухфазные и трехфазные. Чаще всего – с короткозамкнутым ротером.
Однофазный асинхронный электродвигатель, как уже понятно из названия, имеет в наличии только одну фазу – обмотку. Недостаток этого двигателя – он не может запуститься в работу самостоятельно. Однофазным двигателям для начала процесса нужен стартовый толчок или включение дополнительной спусковой обмотки. Соответственно, что принцип двухфазных и трехфазных двигателей – это две-три обмотки – фазы на статоре.

Двухфазные электродвигатели самодостаточны при запуске начала работы, однако имеют проблемы с реверсом.
Трехфазный – практически самый совершенный двигатель на сегодняшний день.
Коллекторные двигатели переменного тока, мощностью от двух килоВатт, применяют как для переменного, так и для постоянного тока, что является неоспоримым преимуществом для электрического двигателя всех типов. Используют такие двигатели в тех случаях, когда требуется высокая частота вращения. Они заметно выйгрышны на фоне остальных электродвигателей при пусковом моменте, который, в этом случае, пропорционален току, а не оборотам, что позволяет уменьшить нагрузку на электросеть при запуске и контролировать обороты.
Высокая скорость ротора, скоростной реверс, возможности генератора и тяги дает расширяет возможности использования коллекторных двигателей. Мало того, — простота установки или возможность устранения поломки, при наличии чертежей, — неоспоримый плюс для бытового использования.
Но все, как и медали, имеет две стороны. Вторая сторона панегириков работы коллекторных двигателей – их дороговизна и повышенный шум при работах.
Ликбез электрических двигателей постоянного тока. Еще в недалеком прошлом, этот тип двигателей был фаворитом, однако время идет, а наука не стоит на месте. И на сегодняшний день, двигатели такого типа практически полностью вытеснены электродвигателями асинхронного типа.
Причины банально просты – экономические затраты применения нижеупомянутого типа двигателей значительно ниже, чем электродвигателей постоянного тока.
Типы электродвигателей с постоянным током работают по принципу постоянного переключения обмоток ротора коллектором. Каждая обмотка – своего рода рамка с током, вращающаяся в магнитном поле. В электродвигателе находится несколько таких рамок, к каждой из которых, прилагается пластина в коллекторе по нему же и передается ток.
Устройство такого типа электродвигателя дает возможность работать от постоянного либо переменного напряжения.
Сфера применения видов электрических двигателей постоянного тока достаточно широка – они регулируют электроприводы с высокими динамическими и эксплуатационными показателями, а именно: равномерность вращения и высокие перезагрузочные способности. Самый простой пример бытового использования таких электродвигателей – электротранспорт.
Про коллекторные двигатели мы писали выше, но еще раз повторим, что коллекторные двигатели можно использовать и при переменном токе и постоянном, что очень удобно и практично, но не всегда бюджетно.
Что касается униполярных и биполярных электродвигателей постоянного тока… Униполярный двигатель подарил миру Питер Барлоу в 1824 году. Нашим современникам он больше известен как «колесо Барлоу». Представляет собой такой двигатель два зубчатых колеса, расположенных на одной оси, которые вращаются благодаря взаимодействию тока с магнитным током постоянных магнитов. Направление вращения может изменяться при изменении контактов и расположения магнитных полюсов. Работает такой вид электродвигателя на преобразование электрических импульсов в механические, носящие дискретный характер.
С таким видом электрических двигателей мы чаще всего сталкиваемся в канцелярской и офисной технике. Мал да удал – именно так можно сказать об униполярных электрических двигателях. Они действительно не очень большого размера, но достаточно продуктивны.
По своему устройству, униполярный отделено напоминает однофазный двигатель – их связывает одиночная обмотка в каждой фазе, а различие – наличие отвода от середины отводки. Именно это и позволяет менять направления вращения. Конструкция униполярного электродвигателя постоянного тока работает без коллектора в своей конструкции.
Где необходимы более высокие, мощные и быстрые характеристики, используют серводвигатели. Они предназначены для широкого спектра скоростей, гарантируют плавность хода, минимальную вибрацию и децибелы шума. Управляются серводвигатели при помощи преобразователя частоты – инвертора.
Вид серводвигателей высокотехнологичен и работает по принципу обратной связи. Это мощный электродвигатель со способностью набора очень большой скорости вращения вала, которая регулируется при помощи ПО. Серводвигатели – идеальные рабочие лошадки в поточном промышленном оборудовании и станках.

Помимо вышеописанных видов электрических двигателей, существуют линейные электродвигатели, работающие по принципу прямолинейного движения ротора и статора относительно друг друга. Такой электродвигатель исключает механическую передачу.
Синхронные электродвигатели – частота вращения ротера идентична частоте вращения магнитного поля в воздушной дельте. Такие двигатели входят в комплектацию вентиляторов, насосов и генераторов. Работают синхронные двигатели с постоянной скоростью.
Асинхронные электродвигатели имеют различные частоты вращений ротера и магнитного тока, создаваемого обмоткой сатора. При одинаковой конструкции сатора, асинхронные двигатели разделяют на два вида – с короткозамкнутымротором и фазным ротором.
Алгоритм устройства любого электрического двигателя идентичен и он не зависит от конструкции и технических характеристик агрегата: сатор (неподвижная обмотка), вращающийся ротор, продуцирующий магнитное поле и отталкивающийся своими полюсами от статора.
Виды взрывозащищенных электродвигателей
Взрывозащищенные электродвигатели составляют комплектующую деталь оборудования, которое используют при работе во взрывоопасных и легковоспламеняющихся условиях. Как правило, это область нефтепереработки, газовая и химическая промышленность.
Производят такие двигатели из максимально прочных материалов и оснащают взрывонепроницаемой оболочкой, которая надежно защищает электрические двигатели от механических, термических и прочих повреждений. Ремонт электродвигателей должен производиться в надежных сервисных центрах.
Самыми безопасными из такой категории электродвигателей считаются двигатели серии ВА, имеющие маркировочный индекс 1 ExdIIBT4х по ГОСТР 51330.0.
Маркировка буквой «d», характеризуются взрывозащищенные двигатели, оснащенные взрывозащитной оболочкой.
Маркировка «х» означает необходимость дополнительных мер при монтаже электродвигателя, которые уберегут агрегат от растягивания, скручивания и выпадения кабелей и вводов.
Прочтений: 6065 Распечатать Поделиться:Мой мир
Вконтакте
Одноклассники
Электродвигатель представляет электромашину, перестраивающую электрическую энергию в механическую. Обычно электрическая машина реализует механическую работу благодаря потреблению приложенной к ней электроэнергии, преобразовывающейся во вращательное движение. Ещё в технике есть линейные двигатели, способные создавать сразу поступательное движение рабочего органа.
Особенности конструкции и принцип действия
Не важно какое конструктивное исполнение, но устройство любых электродвигателей однотипное. Ротор и статор находятся внутри цилиндрической проточки. Вращение ротора возбуждают магнитное поле, отталкивающее его полюса от статора (неподвижной обмотки). Сохранять постоянное отталкивание можно путём перекоммутации обмоток ротора, или образовав вращающееся магнитное поле непосредственно в статоре. Первый способ присущий коллекторным электродвигателям, а второй — асинхронным трехфазным.
Корпус любых электродвигателей обычно чугунный или выполнен из сплава алюминия. Однотипные двигатели, не смотря на конструкцию корпуса производятся с одинаковыми установочными размерами и электрическими параметрами.
Работа электродвигателя базируется на принципах электромагнитной индукции. Магнитная и электрическая энергия создают электродвижущуюся силу в замкнутом контуре, проводящем ток. Это свойство заложено в работу любой электромашины.
На движущийся электроток в середине магнитного поля постоянно воздействует механическая сила, стремительно пытающаяся отклонить направление зарядов в перпендикулярной силовым магнитным линиям плоскости. Во время прохождения электротока по металлическому проводнику либо катушке, механическая сила норовит подвинуть или развернуть всю обмотку и каждый проводник тока.
Назначение и применение электродвигателей
Электрические машины имеют много функций, они способны усиливать мощность электрических сигналов, преобразовывать величины напряжения либо переменный ток в постоянный и др. Для выполнения таких разных действий существуют многообразные типы электромашин. Двигатель представлят тип электрических машин, рассчитанных для преобразования энергии. А именно, этот вид устройств превращает электроэнергию в двигательную силу или механическую работу.
Он пользуется большим спросом во многих отраслях. Их широко используется в промышленности, на станках различного предназначения и в других установках. В машиностроении, к примеру, землеройных, грузоподъёмных машинах. Также они распространены в сферах народного хозяйства и бытовых приборах.
Классификация электродвигателей
Электродвигатель, является разновидностью электромашин по:
- Специфике, создающегося вращательного момента:
— гистерезисные;
— магнитоэлектрические. - Строению крепления:
— с горизонтальным расположением вала;
— с вертикальным размещением вала. - Защите от действий внешней среды:
— защищённые;
— закрытые;
— взрывонепроницаемые.
В гистерезисных устройствах вращающий момент образуется путём перемагничивания ротора или гистерезиса (насыщения). Эти двигатели мало эксплуатируются в промышленности и не считаются традиционными. Востребованными являются магнитоэлектрические двигатели. Существует много модификаций этих двигателей.
Их разделяют на большие группы по типу протекающего тока:
- Постоянного тока.
- Переменного тока.
- Универсальные двигатели (работают на постоянном переменном токе).
Особенности магнитоэлектрических двигателей постоянного тока
С помощью двигателей постоянного тока создают регулируемые электрические приводы с высокими эксплуатационными и динамическими показателями.
Типы электродвигателей:
- С электромагнитами.
- С постоянными магнитами.
Группа электродвигателей, питание которых выполняется постоянным током, подразделяется на подвиды:
- Коллекторные. В этих электроприборах присутствует щёточно-коллекторный узел, обеспечивающий электрическое соединение неподвижной и вращающейся части двигателя. Устройства бывают с самовозбуждением и независимым возбуждением от постоянных магнитов и электромагнитов.
- Выделяют следующие виды самовозбуждения двигателей:
— параллельное;
— последовательное;
— смешанное. - Коллекторные устройства имеют несколько минусов:
— низкая надёжность приборов;
— щёточно-коллекторный узел довольно сложная в обслуживании составляющая часть магнитоэлектрического двигателя. - Безколлекторные (вентильные). Это двигатели с замкнутой системой, работающие по аналогичному принципу работы синхронных устройств. Оснащены датчиком положения ротора, преобразователем координат, а также инвертором силовым полупроводниковым преобразователем.
Эти машины выпускаются различных размеров от самых маленьких низковольтных до громадных размеров (в основном до мегаватта). Миниатюрными электродвигателями оснащены компьютеры, телефоны, игрушки, аккумуляторные электроинструменты и т.п.
Применение, плюсы и минусы электродвигателей постоянного тока
Электромашины постоянного тока применяют в разных областях. Ими комплектуют подъёмно-транспортные, красочно-отделочные производственные машины, а также полимерное, бумажное производственное оборудование и т.д. Часто электрический двигатель этого типа встраивают в буровые установки, вспомогательные агрегаты экскаваторов и другие виды электротранспорта.
Преимущества электрических двигателей:
- Лёгкость в управлении и регулировании частоты вращения.
- Простота конструкции.
- Отменные пусковые свойства.
- Компактность.
- Возможность эксплуатации в разных режимах (двигательном и генераторном).
Минусы двигателей:
- Коллекторные двигатели требуют трудное профилактическое обслуживание щёточно-коллекторных узлов.
- Дороговизна производства.
- Коллекторные устройства имеют не большой срок службы из-за изнашивания самого коллектора.
Электродвигатель переменного тока
В электродвигателях переменного тока электроток описывается по синусоидальному гармоническому закону, периодично меняющему свой знак (направление).
Статор этих устройств изготавливают из ферромагнитных пластинок, имеющих пазы для помещения в них витков обмотки с конфигурацией катушки.
Электродвигатели по принципу работы бывают синхронными и асинхронными. Главным их отличием является то, что скорость магнитодвижущей силы статора в синхронных приборах равна скорости вращения ротора, а в асинхронных двигателях эти скорости не совпадают, обычно ротор вращается медленнее поля.
Синхронный электродвигатель
Из-за одинакового (синхронного) вращения ротора с магнитным полем, аппараты именуют синхронными электродвигателями. Их подразделяют на подвиды:
- Реактивный.
- Шаговый.
- Реактивно-гистерезисный.
- С постоянными магнитами.
- С обмотками возбуждения.
- Вентильный реактивный.
- Гибридно-реактивный синхронный двигатель.
Большая часть компьютерной техники оснащена шаговыми электродвигателями. Преобразование энергии в этих устройствах основано на дискретно угловом передвижении ротора. Шаговый электродвигатель имеет высокую продуктивность, независящую от их мизерных размеров.
Достоинства синхронных двигателей:
- Стабильность частоты вращения, что не зависит от механических нагрузок на валу.
- Низкая чувствительность к скачкам напряжения.
- Могут выступать в роли генератора мощности.
- Снижают потребление мощности, предоставляемой электростанциями.
Недостатки в синхронных устройствах:
- Сложности с запуском.
- Сложность конструкции.
- Затруднения в регулировки частоты вращения.
Недостатки синхронного двигателя, делают более выгодным для использования электродвигатель асинхронного типа. Тем не менее, большинство синхронных двигателей из-за их работы с постоянной скоростью востребованы для установок в компрессоры, генераторы, насосы, а также крупные вентиляторы и пр. оборудование.
Асинхронный электродвигатель
Статор асинхронных двигателей представляет распределённую двухфазную, трехфазную, реже многофазную обмотку. Ротор выполняют в виде цилиндра, используя медь, алюминий либо металл. В его пазы залиты либо запрессованные токопроводящие жилы к оси вращения под определённым углом. Они соединяются в одно целое на торцах ротора. Противоток возбуждается в роторе от переменного магнитного поля статора.
По конструктивным особенностям выделяют два вида асинхронных двигателей:
- С фазным ротором.
- С короткозамкнутым ротором.
В остальном конструкция приборов не имеет отличий, статор у них абсолютно одинаковый. По числу обмоток выделяют такие электродвигатели:
- Однофазные. Этот тип двигателей самостоятельно не запускается, ему требуется стартовый толчок. Для этого применяется пусковая обмотка либо фазосдвигающая цепь. Также приборы запускаются вручную.
- Двухфазные. В этих устройствах присутствуют две обмотки со смещёнными на угол фазами. В приборе возникает вращающееся магнитное поле, напряженность которого в полюсах одной обмотки нарастает и синхронно спадает в другой.
Двухфазный электродвигатель может самостоятельно запускаться, но с реверсом присутствуют сложности. Часто этот тип устройств подключают к однофазным сетям, включая вторую фазу через конденсатор. - Трехфазные. Достоинством этих типов электродвигателей является легкий реверс. Основные части двигателя – это статор с тремя обмотками и ротор. Позволяет плавно регулировать скорость ротора. Эти приборы довольно востребованы в промышленности и технике.
- Многофазные. Состоят эти устройства из встроенной многофазной обмотки в пазах статора на его внутренней поверхности. Эти двигатели гарантируют высокую надёжность при эксплуатации и считаются усовершенствованными моделями двигателей.
Асинхронные электрические двигатели значительно облегчают работу людей, поэтому они незаменимы во многих сферах.
Достоинствами этих приборов, которые сыграли роль в их популярности, являются следующие моменты:
- Простота производства.
- Высокая надёжность.
- Не нуждаются в преобразователях для включения в сеть.
- Небольшие расходы при эксплуатации.
Ко всему этому, можно добавить относительную стоимость асинхронных приборов. Но они также имеют и недостатки:
- Невысокий коэффициент мощности.
- Трудность в точной регулировке скорости.
- Маленький пусковой момент.
- Зависимость от напряжения сети.
Но благодаря питанию электродвигателя с помощью частотного преобразователя, некоторые недостатки устройств устраняются. Поэтому потребность асинхронных моторов не падает. Их применяют в приводах разных станков в областях металлообработки, деревообработки и пр. В них нуждаются ткацкие, швейные, землеройные, грузоподъёмные и другие виды машин, а также вентиляторы, насосы, центрифуги, разные электроинструменты и бытовые приборы.
Похожие темы:
Виды электродвигателей и их особенности
Экономичность и надежность оборудования напрямую зависят от электродвигателя, поэтому его выбор требует серьезного подхода.
Посредством электродвигателя электрическая энергия преобразуется в механическую. Мощность, количество оборотов в минуту, напряжение и тип питания являются основными показателями электродвигателей. Также, большое значение имеют массогабаритные и энергетические показатели.
Электродвигатели обладают большими преимуществами. Так, по сравнению с тепловыми двигателями сопоставимой мощности, по размеру электрические двигатели намного компактнее. Они прекрасно подходят для установки на небольших площадках, например в оборудовании трамваев, электровозов и на станках различного назначения.
При их использовании не выделяется пар и продукты распада, что обеспечивает экологическую чистоту. Электродвигатели делятся на двигатели постоянного и переменного тока, шаговые электродвигатели, серводвигатели и линейные.
Электродвигатели переменного тока, в свою очередь, подразделяются на синхронные и асинхронные.
Электродвигатели постоянного тока
Используются для создания регулируемых электроприводов с высокими динамическими и эксплуатационными показателями. К таким показателям относятся высокая равномерность вращения и перезагрузочная способность. Их используют для комплектации бумагоделательных, красильно-отделочных и подъемно-транспортных машин, для полимерного оборудования, буровых станков и вспомогательных агрегатов экскаваторов. Часто они применяются для оснащения всех видов электротранспорта.
Электродвигатели переменного тока
Пользуются более высоким спросом, чем двигатели постоянного тока. Их часто используют в быту и в промышленности. Их производство намного дешевле, конструкция проще и надежнее, а эксплуатация достаточно проста. Практически вся домашняя бытовая техника оборудована электродвигателями переменного тока. Их используют в стиральных машинах, кухонных вытяжных устройствах и т.д. В крупной промышленности с их помощью приводится в движение станковое оборудование, лебедки для перемещения тяжелого груза, компрессоры, гидравлические и пневматические насосы и промышленные вентиляторы.
Шаговые электродвигатели
Действуют по принципу преобразования электрических импульсов в механическое перемещение дискретного характера. Большинство офисной и компьютерной техники оборудовано ими. Такие двигатели очень малы, но высокопродуктивны. Иногда и востребованы в отдельных отраслях промышленности.
Серводвигатели
Относятся к двигателям постоянного тока. Они высокотехнологичны. Их работа осуществляется посредством использования отрицательной обратной связи. Такой двигатель отличается особой мощностью и способен развивать высокую скорость вращения вала, регулировка которого осуществляется с помощью компьютерного обеспечения. Такая функция делает его востребованным при оборудовании поточных линий и в современных промышленных станках.
Линейные электродвигатели
Обладают уникальной способностью прямолинейного перемещения ротора и статора относительно друг друга. Такие двигатели незаменимы для работы механизмов, действие которых основано на поступательном и возвратно-поступательном движении рабочих органов. Использование линейного электродвигателя способно повысить надежность и экономичность механизма благодаря тому, что значительно упрощает его деятельность и почти полностью исключает механическую передачу.
Синхронные двигатели
Являются разновидностью электродвигателей переменного тока. Частота вращения их ротора равняется частоте вращения магнитного поля в воздушном зазоре. Их используют для компрессоров, крупных вентиляторов, насосов и генераторов постоянного тока, так как они работают с постоянной скоростью.
Асинхронные двигатели
Также, относятся к категории электродвигателей переменного тока. Частота вращения их ротора отличается от частоты вращения магнитного поля, которое создается током обмотки статора. Асинхронные двигатели разделяются на два типа, в зависимости от конструкции ротора: с короткозамкнутым ротором и фазным ротором. Конструкция статора в обоих видах одинакова, различие только в обмотке.
Электродвигатели незаменимы в современном мире. Благодаря им значительно облегчается работа людей. Их использование помогает снизить затрату человеческих сил и сделать повседневную жизнь намного комфортнее.
В данной статье мы подробно рассмотрим двигатели постоянного тока. Детально разберем типы и принцип работы данных двигателей. Расскажем как происходит переключение и контролирование двигателя, контролирования скорости и регулировка скорости импульса, а так же опишем как изменить направление вращения двигателя постоянного тока разными методами.
Описание и принцип работы
Электрические двигатели постоянного тока — это непрерывные приводы, которые преобразуют электрическую энергию в механическую. Двигатель постоянного тока достигает этого, создавая непрерывное угловое вращение, которое можно использовать для вращения насосов, вентиляторов, компрессоров, колес и т.д. Купить двигатель постоянного тока вы можете на Алиэкспресс:

Наряду с обычными роторными двигателями постоянного тока имеются также линейные двигатели, способные производить непрерывное движение вкладыша. Существуют в основном три типа обычных электрических двигателей: двигатели переменного тока, двигатели постоянного тока и шаговые двигатели.
Двигатели переменного тока, как правило, используются в однофазных или многофазных промышленных мощных установках, в которых постоянный крутящий момент и скорость требуются для управления большими нагрузками, такими как вентиляторы или насосы.

В этом уроке по электродвигателям мы рассмотрим только простые двигатели постоянного тока и шаговые двигатели, которые используются во многих различных типах электронных схем, систем позиционного управления, микропроцессоров, PIC и роботизированных схем.
Типы двигателей постоянного тока
Двигатель постоянного тока, является наиболее часто используемым приводом для создания непрерывного движения, скорость вращения которого легко регулируется, что делает их идеальными для использования в устройствах, таких как регулирование скорости, управление сервоприводом и / или требуется позиционирование. Двигатель постоянного тока состоит из двух частей: «Статор», который является неподвижной частью, и «Ротор», который является вращающейся частью. В результате доступно три типа двигателей постоянного тока.
- Коллекторный двигатель — этот тип двигателя создает магнитное поле в намотанном роторе (вращающаяся деталь), пропуская электрический ток через узел коммутатора и угольной щетки, отсюда и термин «щеточный». Магнитное поле статоров (неподвижная часть) создается с помощью обмотки статора или постоянных магнитов. Обычно моторы с щеткой постоянного тока дешевые, маленькие и легко управляемые.
- Бесколлекторный двигатель — этот тип двигателя создает магнитное поле в роторе, используя постоянные магниты, прикрепленные к нему, и коммутация достигается с помощью электроники. Они, как правило, меньше, но дороже, чем обычные двигатели постоянного тока щеточного типа, потому что они используют переключатели «эффекта Холла» в статоре для получения требуемой последовательности вращения поля статора, но они имеют лучшие характеристики крутящего момента / скорости, более эффективны и имеют более длительный срок эксплуатации. чем эквивалентные коллекторные типы.
- Серводвигатель — этот тип двигателя в основном представляет собой коллекторный двигатель постоянного тока с некоторой формой управления позиционной обратной связью, подключенной к валу ротора. Они подключены к контроллеру типа ШИМ и управляются им, и в основном используются в системах позиционного управления и радиоуправляемых моделях.
Обычные двигатели постоянного тока имеют почти линейные характеристики, скорость вращения которых определяется приложенным напряжением постоянного тока, а их выходной крутящий момент определяется током, протекающим через обмотки двигателя. Скорость вращения любого двигателя постоянного тока может варьироваться от нескольких оборотов в минуту (об / мин) до многих тысяч оборотов в минуту, что делает их пригодными для применения в электронике, автомобилестроении или робототехнике. При подключении их к коробкам передач или зубчатым передачам их выходная скорость может быть уменьшена, в то же время увеличивая крутящий момент двигателя на высокой скорости.
Коллекторный двигатель постоянного тока
Стандартный коллекторный двигатель постоянного тока состоит в основном из двух частей: неподвижного корпуса двигателя, называемого статором, и внутренней части, которая вращается, создавая движение, называемое ротором или «арматурой» для машин постоянного тока.
Обмотка статора двигателя представляет собой электромагнитную цепь, которая состоит из электрических катушек, соединенных вместе в круговую конфигурацию для создания необходимого северного полюса, затем южного полюса, затем северного полюса и т.д., типа стационарной системы магнитного поля для вращения, в отличие от машин переменного тока, чье поле статора постоянно вращается с приложенной частотой. Ток, который течет в этих полевых катушках, известен как ток поля двигателя.
Эти электромагнитные катушки, которые формируют поле статора, могут быть электрически соединены последовательно, параллельно или вместе с ротором двигателя. Последовательно намотанный двигатель постоянного тока имеет обмотки статора, соединенные последовательно с ротором. Аналогично, двигатель постоянного тока с шунтирующим витком имеет свои обмотки возбуждения статора, соединенные параллельно с ротором, как показано ниже.

Ротор постоянного тока состоит из токонесущих проводников, соединенных вместе на одном конце с электрически изолированными медными сегментами, называемыми коммутатором. Коммутатор позволяет осуществлять электрическое подключение через угольные щетки (отсюда и название «щеточный» двигатель) к внешнему источнику питания при вращении ротора.
Установленное ротором магнитное поле пытается выровнять себя с полем статора, заставляя ротор вращаться вокруг своей оси, но не может выровняться из-за задержек коммутации. Скорость вращения двигателя зависит от силы магнитного поля роторов, и чем больше напряжение подается на двигатель, тем быстрее вращается ротор. Изменяя это приложенное постоянное напряжение, можно также изменять частоту вращения двигателя.

Двигатель постоянного тока с щеточным постоянным магнитом (PMDC), как правило, намного меньше и дешевле, чем его эквивалентные родственники двигателя постоянного тока с обмоткой статора, поскольку они не имеют обмотки возбуждения. В двигателях с постоянными магнитами постоянного тока (PMDC) эти полевые катушки заменяются сильными магнитами типа редкоземельных элементов (например, самарий-коболт или неодим-железо-бор), которые имеют очень сильные магнитные энергетические поля.
Использование постоянных магнитов дает двигателю постоянного тока намного лучшую линейную характеристику скорости / крутящего момента, чем эквивалентные намотанные двигатели из-за постоянного и иногда очень сильного магнитного поля, что делает их более подходящими для использования в моделях, робототехнике и сервоприводах.
Хотя щеточные электродвигатели постоянного тока очень эффективны и дешевы, проблемы, связанные с щеточным электродвигателем постоянного тока, заключаются в том, что искрение возникает в условиях большой нагрузки между двумя поверхностями коммутатора и угольных щеток, что приводит к самогенерированию тепла, короткому сроку службы и электрическому шуму из-за искрения, что может повредить любое полупроводниковое коммутационное устройство, такое как МОП-транзистор или транзистор. Чтобы преодолеть эти недостатки, были разработаны бесщеточные или бесколлекторные двигатели постоянного тока.
Бесколлекторный двигатель постоянного тока
Бесщеточный (бесколлекторный) двигатель постоянного тока (BDCM) очень похож на двигатель постоянного тока с постоянными магнитами, но не имеет щеток для замены или износа из-за искрения коммутатора. Поэтому в роторе выделяется мало тепла, что увеличивает срок службы двигателей. Конструкция бесщеточного двигателя устраняет необходимость в щетках благодаря более сложной схеме привода, в которой магнитное поле ротора является постоянным магнитом, который всегда синхронизирован с полем статора, что позволяет более точно контролировать скорость и крутящий момент.
Тогда конструкция бесщеточного двигателя постоянного тока очень похожа на двигатель переменного тока, что делает его истинным синхронным двигателем, но одним недостатком является то, что он дороже, чем аналогичная конструкция «щеточного» двигателя.
Управление бесщеточными двигателями постоянного тока очень отличается от обычного щеточного двигателя постоянного тока тем, что этот тип двигателя включает в себя некоторые средства для определения углового положения роторов (или магнитных полюсов), необходимые для получения сигналов обратной связи, необходимых для управления переключением полупроводников. Самым распространенным датчиком положения / полюса является «Датчик Холла», но некоторые двигатели также используют оптические датчики.
При использовании датчиков с эффектом Холла полярность электромагнитов переключается с помощью схемы управления двигателем. Тогда двигатель можно легко синхронизировать с цифровым тактовым сигналом, обеспечивая точное управление скоростью. Бесщеточные двигатели постоянного тока могут быть сконструированы так, чтобы иметь внешний ротор с постоянными магнитами и внутренний статор электромагнита или внутренний ротор с постоянными магнитами и внешний статор электромагнита.
Преимущества бесщеточного двигателя постоянного тока по сравнению с его «щеточным» кузеном заключаются в более высокой эффективности, высокой надежности, низком электрическом шуме, хорошем контроле скорости и, что более важно, отсутствии износа щеток или коммутатора, что обеспечивает значительно более высокую скорость. Однако их недостатком является то, что они более дороги и сложнее в управлении.
Серводвигатель постоянного тока
Серводвигатели постоянного тока используются в системах с замкнутым контуром, в которых положение выходного вала двигателя возвращается обратно в цепь управления двигателем. Типичные позиционные устройства «обратной связи» включают в себя резольверы, энкодеры и потенциометры, используемые в моделях радиоуправления, таких как самолеты, лодки и т.д.
Серводвигатель, как правило, включает в себя встроенную коробку передач для снижения скорости и способен напрямую выдавать высокие крутящие моменты. Выходной вал серводвигателя не вращается свободно, как валы двигателей постоянного тока из-за присоединения редуктора и устройств обратной связи.
Блок-схема серводвигателя постоянного тока

Серводвигатель состоит из двигателя постоянного тока, редуктора, устройства позиционной обратной связи и некоторой формы коррекции ошибок. Скорость или положение контролируется по отношению к позиционному сигналу входного сигнала или опорного приложенному к устройству.

Усилитель обнаружения ошибок просматривает этот входной сигнал и сравнивает его с сигналом обратной связи с выходного вала двигателя и определяет, находится ли выходной вал двигателя в состоянии ошибки, и, если это так, контроллер вносит соответствующие исправления, либо ускоряя двигатель, либо замедляя его вниз. Эта реакция на устройство позиционной обратной связи означает, что серводвигатель работает в «замкнутой системе».
Наряду с крупными промышленными применениями серводвигатели также используются в небольших моделях с дистанционным управлением и робототехнике, причем большинство серводвигателей способны вращаться примерно на 180 градусов в обоих направлениях, что делает их идеальными для точного углового позиционирования. Тем не менее, эти сервоприводы типа RC не могут непрерывно вращаться на высокой скорости, как обычные двигатели постоянного тока, если специально не модифицированы.
Серводвигатель состоит из нескольких устройств в одном корпусе, двигателя, коробки передач, устройства обратной связи и коррекции ошибок для контроля положения, направления или скорости. Они широко используются в робототехнике и небольших моделях, так как ими легко управлять, используя всего три провода: питание , заземление и управление сигналами.
Переключение и контроль двигателя постоянного тока
Небольшие двигатели постоянного тока могут быть включены «Вкл» или выключены «Выкл» с помощью переключателей, реле, транзисторов или МОП-транзисторов, причем простейшей формой управления двигателем является «линейное» управление. Схема этого типа использует биполярный транзистор в качестве переключателя (транзистор Дарлингтона также может использоваться, если требуется более высокий номинальный ток) для управления двигателем от одного источника питания.
Изменяя величину тока базы, протекающего в транзистор, можно управлять скоростью двигателя, например, если транзистор включен наполовину, тогда только половина напряжения питания поступает на двигатель. Если транзистор включен полностью (насыщен), то все напряжение питания поступает на двигатель и вращается быстрее. Затем для этого линейного типа управления мощность постоянно подается на двигатель, как показано ниже.
Контроль скорости двигателя

Простая схема переключения, приведенная выше, показывает схему для однонаправленной (только в одном направлении) цепи управления скоростью двигателя. Поскольку скорость вращения двигателя постоянного тока пропорциональна напряжению на его клеммах, мы можем регулировать это напряжение на клеммах с помощью транзистора.
Два транзистора соединены в виде пары Дарлингтона для управления током основного ротора двигателя. 5 кОм потенциометр используется для регулирования количества базового привода на первый пилот — транзистора TR 1 , который, в свою очередь, контролирует главный коммутационный транзистор TR 2 , позволяя изменять напряжение постоянного тока двигателя от нуля до Vcc, в этом примере от 9 до 12 вольт.
Опциональные диоды маховика подключены к переключающему транзистору TR 2 и клеммам двигателя для защиты от любой обратной ЭДС, создаваемой двигателем при его вращении. Регулируемый потенциометр может быть заменен непрерывным логическим «1» или логическим «0» сигналом, подаваемым непосредственно на вход цепи, чтобы переключить двигатель «полностью включено» (насыщение) или «полностью выключено» (отключение) соответственно из порта микроконтроллера или ПОС.
Наряду с этим базовым контролем скорости, та же схема также может использоваться для управления скоростью вращения двигателей. Путем многократного переключения тока двигателя «ВКЛ» и «ВЫКЛ» на достаточно высокой частоте, скорость двигателя можно варьировать от состояния покоя (0 об / мин) до полной скорости (100%), изменяя отношение бестокового пространства к его запасу. Это достигается путем изменения соотношения времени включения (t ON ) и времени выключения (t OFF ), и это может быть достигнуто с помощью процесса, известного как широтно-импульсная модуляция (ШИМ).
Регулировка скорости импульса
Ранее мы говорили, что скорость вращения двигателя постоянного тока прямо пропорциональна среднему значению напряжения на его клеммах, и чем выше это значение, вплоть до максимально допустимого напряжения двигателя, тем быстрее будет вращаться двигатель. Другими словами, больше напряжения, больше скорости. Изменяя соотношение между временем «ВКЛ» (t ВКЛ ) и временем «ВЫКЛ» (t ВЫКЛ ), которое называется «Коэффициент заполнения», или «Рабочий цикл», среднее значение напряжения двигателя и, следовательно, его скорость вращения может варьироваться. Для простых униполярных приводов коэффициент заполнения β задается как:

и среднее выходное напряжение постоянного тока, подаваемое на двигатель, определяется как: Vmean = β x Vsupply. Затем, изменяя ширину импульса а, можно управлять напряжением двигателя и, следовательно, мощностью, подаваемой на двигатель, и этот тип управления называется широтно-импульсной модуляцией или ШИМ.
Другим способом управления частотой вращения двигателя является изменение частоты (и, следовательно, периода времени управляющего напряжения), в то время как времена коэффициента включения «ВКЛ» и «ВЫКЛ» поддерживаются постоянными. Этот тип управления называется частотно-импульсной модуляцией или PFM .
При частотно-импульсной модуляции напряжение двигателя регулируется путем подачи импульсов переменной частоты, например, на низкой частоте или с очень небольшим количеством импульсов, среднее напряжение, подаваемое на двигатель, является низким, и, следовательно, скорость двигателя является низкой. При более высокой частоте или множестве импульсов среднее напряжение на клеммах двигателя увеличивается, и скорость двигателя также увеличивается.
Затем транзисторы можно использовать для управления количеством энергии, подаваемой на двигатель постоянного тока с режимом работы: «линейная» (изменение напряжения двигателя), «широтно-импульсная модуляция» (изменение ширины импульса) или «частотно — импульсная модуляция»(изменение частоты импульса).
Изменение направления движения двигателя постоянного тока
Хотя управление скоростью двигателя постоянного тока с помощью одного транзистора имеет много преимуществ, оно также имеет один главный недостаток: направление вращения всегда одинаковое, это «однонаправленная» схема. Во многих случаях нам необходимо управлять двигателем в обоих направлениях вперед и назад.
Для управления направлением двигателя постоянного тока необходимо поменять полярность питания постоянного тока, подаваемого на соединения двигателя, чтобы его вал вращался в противоположном направлении. Один очень простой и дешевый способ управления направлением вращения двигателя постоянного тока состоит в использовании различных переключателей, расположенных следующим образом:

В первом контуре используется одинарный двухполюсный, двухходовый переключатель (DPDT) для контроля полярности соединений двигателей. При переключении контактов подача на клеммы двигателя изменяется, и двигатель меняет направление. Второй контур немного сложнее и использует четыре однополюсных, одноходовых (SPST) переключателя, расположенных в «H» -конфигурации.
Механические переключатели расположены в виде пары переключений и должны работать в определенной комбинации для работы или остановки двигателя постоянного тока. Например, комбинация переключателей A + D управляет вращением вперед, в то время как переключатели B + C управляют вращением назад, как показано на рисунке. Комбинации переключателей A + B или C + D замыкают клеммы двигателя, вызывая его быстрое торможение. Тем не менее, использование переключателей таким образом имеет свои опасности, так как рабочие переключатели A + C или B + D вместе отключат источник питания.
В то время как две вышеупомянутые схемы будут очень хорошо работать для большинства небольших двигателей постоянного тока, мы действительно хотим использовать различные комбинации механических переключателей только для изменения направления вращения двигателя, НЕТ! Мы могли бы изменить ручные переключатели для набора электромеханических реле и иметь одну кнопку прямого или обратного хода или даже использовать твердотельный четырехпозиционный двусторонний переключатель CMOS 4066B.
Но еще один очень хороший способ достижения двунаправленного управления двигателем (а также его скоростью) состоит в том, чтобы подключить двигатель к схеме транзисторного типа H-моста, как показано ниже.
H-мостовая схема двигателя

Схема H-моста, приведенная выше, названа так потому, что базовая конфигурация четырех переключателей, либо электромеханических реле, либо транзисторов, напоминает букву «H» с двигателем, расположенным на центральной шине. Транзистор или МОП-транзистор является, вероятно, одним из наиболее часто используемых типов двунаправленных цепей управления двигателем постоянного тока. Он использует «комплементарные пары транзисторов» как NPN, так и PNP в каждой ветви, причем транзисторы попарно объединяются для управления двигателем.
Управляющий вход A управляет двигателем в одном направлении, т.е. вращением вперед, в то время как вход B управляет двигателем в другом направлении, т.е. обратным вращением. Затем переключение транзисторов «ВКЛ» или «ВЫКЛ» в их «диагональных парах» приводит к направленному управлению двигателем.
Например, когда транзистор TR1 включен, а транзистор TR2 выключен, точка A подключена к напряжению питания (+ Vcc), а если транзистор TR3 выключен, а транзистор TR4 включен, точка B подключена к 0 вольт (GND). Затем двигатель будет вращаться в одном направлении, соответствующем положению клеммы А двигателя и положительной клемме В двигателя.
Если состояния переключения меняются местами так, что TR1 — «ВЫКЛ», TR2 — «ВКЛ», TR3 — «ВКЛ» и TR4 — «ВЫКЛ», ток двигателя будет течь в противоположном направлении, вызывая вращение двигателя в противоположном направлении.
Затем, применяя противоположные логические уровни «1» или «0» к входам A и B, направление вращения двигателя можно регулировать следующим образом.
Таблица истинности H-моста
| Вход А | Вход B | Функция двигателя |
| TR1 и TR4 | TR2 и TR3 | |
| 0 | 0 | Двигатель остановлен (OFF) |
| 1 | 0 | Мотор вращается вперед |
| 0 | 1 | Мотор вращается задним ходом |
| 1 | 1 | НЕ ПОЛОЖЕНО |
Важно, чтобы никакая другая комбинация входов не допускалась, так как это может привести к короткому замыканию источника питания, то есть оба транзистора, TR1 и TR2, были включены в одно и то же время (предохранитель = взрыв!).
Как и в случае однонаправленного управления двигателем постоянного тока, как показано выше, скорость вращения двигателя также можно регулировать с помощью широтно-импульсной модуляции или ШИМ. Затем, комбинируя переключение Н-моста с ШИМ-управлением, можно точно контролировать направление и скорость двигателя.
Имеющиеся в продаже готовые ИС- декодеры, такие как четырехполупроводниковая ИС H-моста SN754410 или L298N с двумя H-мостами, доступны со всей необходимой встроенной логикой управления и безопасности, специально разработанные для двунаправленных цепей управления двигателем H-моста.
характеристики двигателей постоянного тока
Как вы уже знаете, есть два электрических элемента двигателя постоянного тока, обмоток возбуждения и якоря . Обмотки якоря состоят из токонесущих проводников, которые заканчиваются на коммутаторе.
 4 типа двигателей постоянного тока и их характеристики (на фото: коллектор двигателя постоянного тока мощностью 575 кВт; кредит: Pedro Raposo) Постоянное напряжение
4 типа двигателей постоянного тока и их характеристики (на фото: коллектор двигателя постоянного тока мощностью 575 кВт; кредит: Pedro Raposo) Постоянное напряжениеподается на обмотки якоря через угольные щетки, которые движутся на коммутаторе.В небольших двигателях постоянного тока для статора могут использоваться постоянные магниты. Однако в больших двигателях, используемых в промышленности, статор является электромагнитом.
При подаче напряжения на обмотки статора устанавливается электромагнит с северным и южным полюсами. Результирующее магнитное поле является статическим (без вращения).
Для простоты объяснения статор представлен постоянными магнитами на следующем рисунке.
 Электродвигатель постоянного тока
Электродвигатель постоянного токаПоле двигателей постоянного тока может быть:
- Постоянный магнит (Статор с постоянными магнитами),
- Электромагниты, соединенные последовательно (намотанный статор),
- шунт (статор раны) или
- Соединение (Обмотка статора).
Давайте посмотрим основы каждого типа, а также их преимущества и недостатки.
1. Двигатели с постоянными магнитами
 Двигатель с постоянными магнитами
Двигатель с постоянными магнитамиДвигатель с постоянными магнитами использует магнит для подачи потока поля . Двигатели постоянного тока с постоянными магнитами имеют превосходную пусковую мощность с хорошим регулированием скорости. Недостатком двигателей постоянного тока с постоянными магнитами является то, что они ограничены величиной нагрузки, которую они могут вести. Эти двигатели можно найти в приложениях с низкой мощностью.
Другим недостатком является то, что крутящий момент обычно ограничен -150% от номинального крутящего момента , чтобы предотвратить размагничивание постоянных магнитов.
Вернуться к оглавлению №
2. Серия Motors
Двигатель постоянного тока серии
В последовательном двигателе постоянного тока поле соединено последовательно с якорем. Поле намотано с помощью нескольких витков большого провода, потому что он должен нести полный ток якоря.
Характерной особенностью серийных двигателей является то, что двигатель развивает большое количество пускового крутящего момента.Тем не менее, скорость варьируется в широких пределах от отсутствия нагрузки до полной нагрузки. Серийные двигатели нельзя использовать там, где требуется постоянная скорость при различных нагрузках.
Кроме того, скорость последовательного двигателя без нагрузки увеличивается до такой степени, что двигатель может быть поврежден. Некоторая нагрузка всегда должна быть подключена к последовательно соединенному двигателю.
Двигатели с последовательным соединением, как правило, не подходят для использования в большинстве применений с регулируемой скоростью.
Вернуться к оглавлению №
3.Шунт Моторс
 двигатель постоянного тока с шунтом
двигатель постоянного тока с шунтомВ шунтирующем двигателе поле соединено параллельно (шунтирующее) с обмотками якоря. Шунтирующий двигатель обеспечивает хорошее регулирование скорости. Обмотка возбуждения может возбуждаться отдельно или подключаться к тому же источнику, что и якорь.
Преимуществом отдельного возбужденного шунтирующего поля является способность привода с регулируемой скоростью обеспечивать независимый контроль якоря и поля.
Шунтирующий двигатель обеспечивает упрощенное управление задним ходом.Это особенно полезно в регенеративных приводах.
Вернуться к оглавлению №
4. Compound Motors
 Составной двигатель постоянного тока
Составные двигатели
Составной двигатель постоянного тока
Составные двигателиимеют поле, соединенное последовательно с якорем, и отдельное возбужденное шунтирующее поле. Последовательное поле обеспечивает лучший пусковой крутящий момент , а шунтирующее поле обеспечивает лучшее регулирование скорости .
Однако поле серии может вызвать проблемы управления в приложениях с регулируемой скоростью и обычно не используется в четырех квадрантных приводах.
Вернуться к оглавлению №
Двигатель постоянного тока — объяснения (ВИДЕО)
Не можете увидеть это видео? Нажмите здесь, чтобы посмотреть его на Youtube.
Ссылка: Основы приводов постоянного тока — SIEMENS (Загрузить)
,  Существует два типа электродвигателей, электродвигатели переменного тока и электродвигатели постоянного тока. Основное различие между двигателем переменного тока и двигателем постоянного тока состоит в том, что двигатель переменного тока питается от переменного тока, в то время как двигатель постоянного тока включается от постоянного тока. Чтобы подробнее узнать о сравнительной таблице двигателя переменного и постоянного тока, ниже приводится разница между двигателем переменного и постоянного тока.
Существует два типа электродвигателей, электродвигатели переменного тока и электродвигатели постоянного тока. Основное различие между двигателем переменного тока и двигателем постоянного тока состоит в том, что двигатель переменного тока питается от переменного тока, в то время как двигатель постоянного тока включается от постоянного тока. Чтобы подробнее узнать о сравнительной таблице двигателя переменного и постоянного тока, ниже приводится разница между двигателем переменного и постоянного тока.
Различие между двигателем переменного тока и двигателем постоянного тока в табличной форме
Двигатели переменного тока | Двигатели постоянного тока |
| Двигатели переменного тока питаются от переменного тока.Двигатели постоянного тока | питаются от постоянного тока. |
| В двигателях переменного тока преобразование тока не требуется. | В двигателях постоянного тока требуется преобразование тока, например переменного тока в постоянный. |
| Двигатели переменного тока используются там, где мощность требуется в течение длительных периодов времени. | Двигатели постоянного тока используются там, где необходимо контролировать внешнюю скорость двигателя. |
| Двигатели переменного тока могут быть однофазными или трехфазными. | Все двигатели постоянного тока однофазные. |
| В двигателях переменного тока Арматура не вращается, а магнитное поле постоянно вращается. | В двигателях постоянного тока якорь вращается, а магнитное поле вращается. |
| Ремонт двигателей постоянного тока является дорогостоящим. | Ремонт двигателей переменного тока не является дорогостоящим. |
| Двигатель переменного тока не использует щеток. | Двигатель постоянного тока использует щетки. |
| Двигатели переменного тока имеют более длительный срок службы. Двигатели постоянного тока | не имеют большего срока службы. |
| Скорость двигателей переменного тока просто контролируется путем изменения частоты тока. | Скорость двигателей постоянного тока регулируется путем изменения тока обмотки якоря. |
| Для запуска двигателей переменного тока требуется эффективное пусковое оборудование, например конденсатор. | Двигатели постоянного тока не требуют какой-либо внешней помощи для начала работы. |
Предлагаемое видео
Сейчас!
Подробнее о двигателе переменного тока и двигателе постоянного тока.
Что такое двигатель переменного тока?
Статор двигателя переменного тока имеет катушки, которые питаются переменным током и создают вращающееся магнитное поле. Ротор двигателя переменного тока вращается внутри катушек электродвигателя и прикреплен к выходному валу, который создает вращающий момент от вращающегося магнитного поля.
Как работает двигатель переменного тока?
Существует два типа двигателей переменного тока. Синхронные двигатели и асинхронные двигатели.
Синхронный двигатель состоит из ротора, который запитывается от источника постоянного тока.Статор имеет 3-х фазную обмотку, от которой можно подавать питание. Теперь, когда даны эти два источника питания, то есть при определенных напряжениях, ток потребляется, и катушка внутри создает магнитные поля. Когда вращающееся поле переменного тока (хотя статор не вращается, трехфазное поле даст эффект вращения) и поле постоянного тока взаимодействуют, создается крутящий момент, который приводит к вращению.
Асинхронный двигатель или асинхронный двигатель изменяется только в одной части. У него нет отдельного поля постоянного тока.Вместо этого ротор вращается под действием индуктивности или передачи потока. Ротор будет пытаться следовать 3-х фазному потоку в статоре и, следовательно, вращаться. Этот мотор используется в вентиляторах.
Какие типы двигателей переменного тока?
Существует в основном два разных типа двигателей переменного тока, и каждый из них использует свой тип ротора.
- Синхронные двигатели
- Асинхронные двигатели или асинхронные двигатели
Синхронный двигатель может работать с точной частотой питания, поскольку он не реагирует на индукцию.Магнитное поле на синхронном двигателе создается током, подаваемым через контактные кольца. Синхронные двигатели работают быстрее, чем асинхронные, потому что скорость уменьшается из-за скольжения асинхронного двигателя. Асинхронный двигатель использует магнитное поле на роторе асинхронного двигателя, которое создается индуцированным током.
Типы синхронных двигателей
- Простые синхронные двигатели
- Супер синхронные двигатели
Типы асинхронных двигателей
Сколько типов двигателей постоянного тока?
Существует два типа двигателей постоянного тока.
- Моторы постоянного тока с щеткой
- Моторы постоянного тока без щеток
Типы двигателей с щеткой постоянного тока
- Шунтирующая намотка
- Сложная намотка
- Двигатель с постоянным магнитом
- Моторы серии Двигатели постоянного тока
В некоторых случаях двигатели постоянного тока заменяются путем объединения двигателя переменного тока с электронным регулятором скорости.Двигатели постоянного тока заменены двигателем переменного тока и электронным регулятором скорости, потому что это более экономичное и менее дорогое решение.
Двигатели постоянного тока имеют много движущихся частей, которые дорого заменить, а ремонт электрического тока постоянного тока обычно обходится дороже, чем использование нового двигателя переменного тока с электронным контроллером.
Таким образом, что касается технического обслуживания, то двигатели переменного тока используются главным образом, так как легкая доступность переменного тока. Двигатель постоянного тока постоянно сталкивается с проблемой обслуживания.
Похожие темы
.Электродвигатель — это машина, которая преобразует электрическую энергию в механическую энергию. Его действие основано на том принципе, что когда токонесущий проводник помещается в магнитное поле, он испытывает механическую силу, направление которой задается левым правилом Флеминга, а величина — F = BIl Ньютон.
Типы двигателей переменного тока
Классификация на основе принципа работы:
(a) Синхронные двигатели.
- Обычный
- Super
(b) Асинхронные двигатели.
- Асинхронные двигатели:
(a) Белковая клетка
(b) Кольцо скольжения (внешнее сопротивление).
- Двигатели коммутатора:
(a) Серия
(b) Компенсированный
(c) Шунт
(d) Отталкивание
(e) Индукция с отталкивающим запуском
(f) Индукция отталкивания
Классификация на основе типа тока:
- Однофазный
- Трехфазный
Классификация на основании скорости работы:
- Постоянная скорость.
- с переменной скоростью.
- Регулируемая скорость.
Классификация на основе конструктивных особенностей:
- Открытый
- Закрытый
- Полузакрытый
- Вентилируемый
- Вентилируемый трубами
- Склепанный глазок и т. Д.
Типы двигателя постоянного тока
Наиболее распространенные типы двигателей постоянного тока —
1. Двигатели с постоянными магнитами
2. Двигатель постоянного тока с щеткой
- Шунтирующий двигатель постоянного тока
- Двигатель с последовательным намоткой постоянного тока
- Составной двигатель постоянного тока
- Совокупный состав
- Дифференциально Составной
- Двигатель постоянного тока с постоянным магнитом
- Отдельно возбужденный
3.Бесщеточный двигатель постоянного тока
4. Двигатели постоянного тока без сердечника или без железа
5. Двигатели постоянного тока с печатной арматурой или блинчиками
6. Универсальные двигатели
Обзор двигателей переменного тока
1. Синхронные двигатели и их использование: Поскольку их скорость остается постоянным при различных нагрузках, он используется для движения оборудования с постоянной скоростью на постоянной скорости. Эти двигатели имеют ротор (который подключен к нагрузке), вращающийся с той же скоростью, что и скорость вращения тока статора.Другими словами, мы можем сказать, что эти двигатели не имеют скольжения по току статора. Иногда они используются не для управления нагрузкой, а вместо этого действуют как «синхронный конденсатор», чтобы улучшить коэффициент мощности локальной сети, к которой она подключена. Эти типы двигателей используются даже в высокоточных устройствах позиционирования, таких как современные роботы, аммиачные и воздушные компрессоры, мотор-генераторные установки, непрерывные прокатные станы, бумажная и цементная промышленность. Они также могут действовать как шаговые двигатели.
2.Асинхронные двигатели и их использование: Наиболее распространенная форма двигателя, которая используется в повседневной жизни, от перекачивания воды через верхний резервуар до питательных насосов котла электростанции, — это правило для таких двигателей. Эти двигатели очень гибкие в использовании и соответствуют нагрузке практически на все. Наиболее широко используемые асинхронные двигатели очень важны для многих отраслей промышленности благодаря их несущей способности и гибкости. Эти двигатели, в отличие от синхронных двигателей, проскальзывают по сравнению с полем тока статора.Они обычно используются для различных типов насосов, компрессоров и действуют как первичные двигатели для многих типов машин.
3. Однофазные и трехфазные двигатели и их использование: Двигатели A.C. могут найти применение в 2 формах в зависимости от их источника питания. Однофазные двигатели, как правило, находят применение в требованиях с низким энергопотреблением / бытовых приборах, таких как потолочные вентиляторы, смесители, переносные электроинструменты и т. Д. Трехфазные двигатели, как правило, используются для высоких требований к мощности, таких как приводы для компрессоров, гидравлических насосов, систем кондиционирования воздуха. компрессоры, ирригационные насосы и многое другое.
4. Двигатели с постоянной, переменной и регулируемой скоростью: Как уже говорилось, двигатели A.C. очень гибки во многих отношениях, включая управление скоростью. Существуют двигатели, которые должны работать с постоянной скоростью для воздушных компрессоров. Некоторые насосы охлаждающей воды приводятся в действие Двигатели могут работать на двух или трех скоростях, просто переключая количество используемых полюсов. Если количество полюсов изменяется, скорость также изменяется. Они лучше всего подходят для насосов охлаждения морской воды в морских машинных отделениях и на многих электростанциях.Скорость двигателей также может непрерывно изменяться некоторыми электронными устройствами, таким образом, это может подходить для определенных применений, таких как судовой грузовой насос, скорость разгрузки которого должна быть снижена в соответствии с требованием терминалов.
5. Двигатели с изменяемой структурой: Эти типы двигателей имеют различную компоновку внешней клетки, в зависимости от использования или каких-либо специальных промышленных требований. Для двигателей, используемых в газовых и масляных клеммах, корпус должен быть искробезопасным, поэтому он может иметь либо закрытый корпус, либо систему вентиляции труб, чтобы искры, возникающие внутри двигателя, не вызывали возгорания снаружи.Также многие двигатели полностью закрыты, поскольку они могут быть открыты для погодных условий, как те, которые используются на гидроэлектростанциях.
Обзор двигателей постоянного тока
1. Двигатели с постоянными магнитами
Двигатель с постоянными магнитами не имеет обмотки возбуждения на раме статора, вместо этого он полагается на постоянные магниты для создания магнитного поля, против которого поле ротора взаимодействует для создания крутящего момента. Компенсационные обмотки, включенные последовательно с якорем, могут использоваться на больших двигателях для улучшения коммутации под нагрузкой.Поскольку это поле является фиксированным, его нельзя регулировать для управления скоростью. Поля с постоянными магнитами (статоры) удобны в миниатюрных двигателях, чтобы исключить энергопотребление обмотки возбуждения. Большие двигатели постоянного тока имеют тип «динамо», которые имеют обмотки статора. Исторически, постоянные магниты не могли быть сделаны, чтобы сохранить высокий поток, если они были разобраны; обмотки поля были более практичными для получения необходимого количества потока. Однако большие постоянные магниты являются дорогостоящими, а также опасными и сложными в сборке; это благоприятствует раневым полям для больших машин.
Чтобы минимизировать общий вес и размер, миниатюрные двигатели с постоянными магнитами могут использовать магниты высокой энергии, сделанные из неодима или других стратегических элементов; большинство таких сплавов неодим-железо-бор. Благодаря более высокой плотности потока электрические машины с постоянными магнитами высокой энергии, по крайней мере, конкурируют со всеми оптимально спроектированными синхронными и индукционными электрическими машинами с одиночным питанием. Миниатюрные двигатели напоминают конструкцию на иллюстрации, за исключением того, что они имеют по меньшей мере три полюса ротора (для обеспечения запуска независимо от положения ротора), а их внешний корпус представляет собой стальную трубу, которая магнитным образом связывает внешние части изогнутых магнитов поля.
2. Двигатель серии D.C. Поскольку он имеет высокий пусковой момент и переменную скорость, он используется для тяжелых условий эксплуатации, таких как электровозы, стальные прокатные станы, подъемники, подъемники и краны.
3. D.C. Shunt Motor. Имеет средний пусковой момент и почти постоянную скорость. Следовательно, он используется для привода линейных валов с постоянной скоростью, токарных станков, пылесосов, деревообрабатывающих машин, стиральных машин, лифтов, конвейеров, шлифовальных машин и небольших печатных машин и т. Д.
4. Кумулятивный составной двигатель. Это двигатель переменной скорости с высоким пусковым крутящим моментом, который используется для привода компрессоров, центробежных насосов с переменной головкой, роторных прессов, дисковых пил, машин для резки, элеваторов и конвейеров непрерывного действия и т. Д.
5. Бесщеточные двигатели постоянного тока
Некоторые проблемы щеточного двигателя постоянного тока устранены в безщеточной конструкции. В этом двигателе механический «вращающийся переключатель» или узел коммутатора / щетки заменяется внешним электронным переключателем, синхронизированным с положением ротора.Бесщеточные двигатели обычно эффективны на 85–90% или более (более высокие КПД для бесщеточного электродвигателя, вплоть до 96,5%, были сообщены исследователями из Университета Токай в Японии в 2009 г.), тогда как двигатели постоянного тока с щеточным двигателем обычно составляют 75–80. % эффективный.
Современные бесщеточные двигатели постоянного тока имеют мощность от доли ватта до нескольких киловатт. Более крупные бесщеточные двигатели мощностью до 100 кВт используются в электромобилях. Они также находят значительное применение в высокоэффективных электрических моделях самолетов.
Бесщеточные двигатели постоянного тока обычно используются там, где необходимо точное регулирование скорости, например, в компьютерных дисках или в видеомагнитофонах, шпинделях в приводах CD, CD-ROM (и т. Д.), А также в механизмах офисных продуктов, таких как вентиляторы, лазерные принтеры и копировальные аппараты.
типов электродвигателей и их применение
 Электродвигатель — это электромеханическое устройство, которое преобразует электрическую энергию в механическую энергию. В основном, есть три типа электродвигателей: двигатели переменного тока (синхронные и асинхронные двигатели), двигатели постоянного тока (щеточные и бесщеточные) и двигатели специального назначения.
Электродвигатель — это электромеханическое устройство, которое преобразует электрическую энергию в механическую энергию. В основном, есть три типа электродвигателей: двигатели переменного тока (синхронные и асинхронные двигатели), двигатели постоянного тока (щеточные и бесщеточные) и двигатели специального назначения.
Каков принцип работы электродвигателя?
- Когда токопроводящий проводник расположен во внешнем магнитном поле, перпендикулярном к проводнику, на проводник действует сила, перпендикулярная себе и внешнему магнитному полю.
- Правило правой руки для силы на проводнике может использоваться для определения направления силы, действующей на проводник: если большой палец правой руки указывает в направлении тока в проводнике и пальцы силы на проводник направлен наружу от ладони правой руки.
- Аналоговые электрические счетчики (то есть гальванометр, амперметр, вольтметр) работают по принципу двигателя. Электродвигатели являются важным применением принципа двигателя.
Конструкция 
Электродвигатель состоит из постоянного внешнего полевого магнита (статора) и спирального проводящего амперметра (ротора), который может свободно вращаться внутри полевого магнита. Щетки и коммутатор (сконструированные иначе, если на якорь подается ток переменного или постоянного тока) подключаются к якорю к внешнему источнику напряжения. Скорость вращения двигателя зависит от количества тока, протекающего через него, количества катушек на якоре, силы магнитного поля, проницаемости якоря и механической нагрузки, связанной с валом.
Типы двигателей
Как правило, электродвигатели подразделяются на два типа (двигатели переменного тока и двигатели постоянного тока).
сейчас!
Мы подробно узнаем о подтипах двигателей переменного тока и двигателей постоянного тока.
Типы двигателей переменного тока
Синхронные двигатели
Существует два типа синхронных двигателей.
- Обычная
- Супер
асинхронных двигателей
асинхронных двигателей
коллекторных двигателей
- Серия
- компенсированный
- Шунт
- отталкивание
- Repulsionl стартером индукции
- отталкивание индукции
Классификация, основанная на типе тока
Классификация, основанная на скорости работы
- Постоянная скорость.
- Переменная скорость.
- Регулируемая скорость.
Классификация на основе конструктивных особенностей
- Открытый
- Закрытый
- Полузакрытый
- Вентилируемый
- Вентилируемый трубами
- Прямоугольный каркас с проушинами
Типы двигателей постоянного тока Большинство типов двигателей постоянного тока типы —- Двигатели с постоянными магнитами
- Двигатель постоянного тока с щеткой
- Двигатель с шунтирующим током постоянного тока
Двигатель с последовательным намоткой Двигатель с постоянным магнитом- Совокупный состав
- Двигатель с дифференциальным соединением
- Двигатель постоянного тока с постоянным магнитом Отдельно возбужденный
- Бесщеточный двигатель постоянного тока
- Двигатели постоянного тока без сердечника или без железа
- Двигатели постоянного тока с печатной арматурой или блинчиком
- Универсальные двигатели
Двигатель постоянного тока 
В общем, двигатели постоянного тока наиболее желательны в двух ситуациях.Во-первых, когда единственным доступным источником питания является постоянный ток, что происходит в автомобилях и небольших устройствах с питанием от батареи. Другой случай, когда кривая крутящего момента должна быть тщательно выровнена. По мере развития технологий и манипуляций в двигателях переменного тока это становится менее важным аспектом, но исторически двигатель постоянного тока был прост в настройке, что делает его пригодным для применения в сервоприводе и тяге. С высоким током и относительной скоростью низкого напряжения. Вариациями стандартного двигателя постоянного тока являются мощность и бесщеточный двигатель постоянного тока, который является очень сложным устройством по сравнению со стандартным двигателем.Двигатели постоянного тока используются в приложениях, требующих управления скоростью или положением, а также когда требуется высокий пусковой крутящий момент, поскольку двигатели переменного тока испытывают трудности в этой области.
Смотрите также:
Двигатели с постоянными магнитами (PM)
- Двигатель с постоянными магнитами (PM) отличается от двигателя постоянного тока с намотанным полем в одном отношении: двигатель PM получает свое поле от постоянного тока магнит, тогда как в двигателе постоянного тока с обмоткой возбуждения поле создается, когда ток поля течет через катушки возбуждения.
- В двигателе с обмоткой возбуждения поток постоянен только до тех пор, пока ток поля поддерживается постоянным. Но, напротив, в двигателе с постоянными магнитами поток всегда постоянен.
- Мощность, производимая любым двигателем, определяется следующим образом:

где, P ° = выходная мощность (в л.с.)
T = крутящий момент (в фунтах-футах)
N рт = ротор скорость (об / мин)
- Таким образом, выходная мощность пропорциональна произведению крутящего момента и скорости.
Двигатели с постоянными магнитами можно разделить на 3 типа:
- Обычный электродвигатель постоянного тока
- Двигатель с подвижной катушкой
- Бесщеточный электродвигатель постоянного тока
Обычный электродвигатель постоянного тока
Обычные электродвигатели с постоянными магнитами содержат узел ротора с полюсными постоянными магнитами связан с роторной втулкой и содержится внутри немагнитной металлической втулки. Обычные сборки ротора включают немагнитный материал, такой как, например, пластик, между каждым из постоянных магнитов для поддержания желаемой ориентации постоянных магнитов на ступице ротора.Посадка с натягом между металлической втулкой и постоянными магнитами плотно прилегает к ротору.
Ротор с подвижной катушкой
Двигатель с подвижной катушкой (MCM), хотя и является двигателем с постоянными магнитами, отличается от обычного первичного двигателя с постоянным током в якоре. MCM является результатом технического требования, согласно которому двигатели имеют высокий крутящий момент, низкую инерцию ротора и низкую электрическую постоянную времени. Эти требования выполняются в MCM.
Моментный двигатель Можно привести пример, когда все двигатели производили крутящий момент.Поэтому все двигатели можно назвать двигателями с крутящим моментом. Однако моментный двигатель отличается от других двигателей постоянного тока тем, что требуется работать в течение длительных периодов в остановленном состоянии или на низкой скорости. Не все двигатели постоянного тока предназначены для этой операции. Низкий cemf означает, что будет протекать большое количество тока якоря. Большинство обычных двигателей постоянного тока не предназначены для отвода тепла, создаваемого этим большим током. Но моментные двигатели предназначены для работы на низких оборотах или в условиях застоя в течение длительных периодов времени и используются в таких приложениях, как намотка или ленточные накопители.В намоточных устройствах натяжение часто контролируется моментным двигателем.
Шаговый двигатель
- Шаговый двигатель — это действительно цифровой двигатель.
- После того, как ротор делает шаг, он останавливается, пока не получит импульс.
- Шаговый двигатель — это электромеханическое устройство, которое преобразует электрические импульсы в дискретные механические движения.
- Вал или шпиндель шагового двигателя вращаются с дискретным шагом, когда электрические управляющие импульсы подаются на него в правильной последовательности.
- Вращение двигателя имеет несколько прямых связей с этими прикладными входными импульсами.
- Последовательность приложенных импульсов напрямую связана с направлением вращения валов двигателя. Скорость вращения валов двигателя направлена в зависимости от частоты входных импульсов, а длина вращения напрямую связана с количеством приложенных входных импульсов.
Похожие темы
.