Условия возникновения резонанса в электрической цепи
В идеальном колебательном контуре могут существовать свободные электромагнитные колебания, собственная частота которых определяется по формуле Томсона.
Соединим колебательную систему с источником переменного напряжения — генератором. ЭДС генератора будет создавать в контуре переменный электрический ток, частота которого будет совпадать с частотой смены ЭДС, т.е. в контуре возникнут вынуждены электромагнитные колебания.
Если изменять емкость конденсатора или индуктивность катушки, изменяя тем самым собственную частоту колебаний контура, то можно заметить, что:
1) при приближении собственной частоты контура к частоте изменения внешней ЭДС амплитуда вынужденных колебаний силы тока будет увеличиваться;
2) чем больше сопротивление контура, тем слабее выражен всплеск амплитуды колебаний силы тока.
Характер зависимости силы тока от частоты постоянного значения напряжения U можно предположить на основе анализа закона Ома для цепи переменного тока.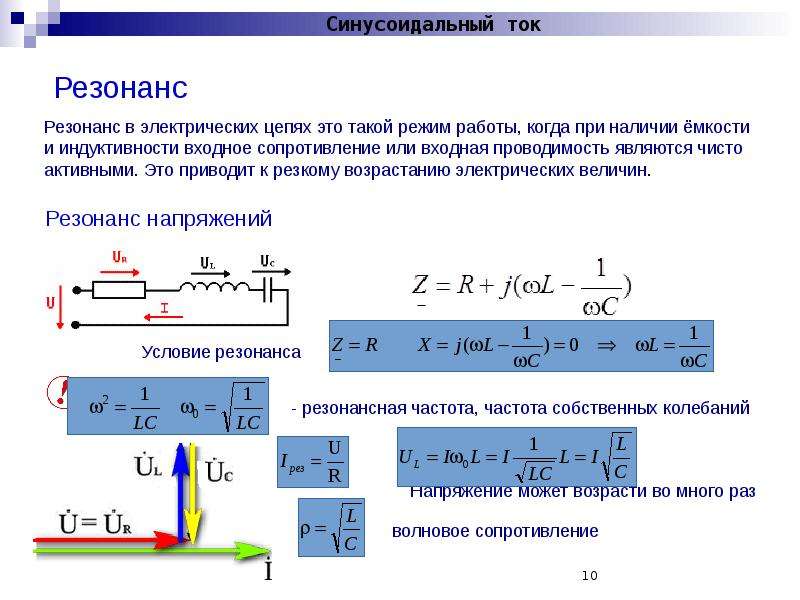
Амплитуда силы тока будет максимальной при минимальном полного сопротивления. Сопротивление R не зависит от частоты, а минимальное значение квадрата разности ?L и 1/?C равна нулю. Поэтому максимальная амплитуда силы тока возникает.
Это равенство справедливо, если частота вынужденных колебаний совпадает с частотой собственных колебаний в контуре.
Резонанс напряжений заключается в резком увеличении амплитудного значения силы тока Imax при условии, что частота v0 переменного напряжения совпадает с частотой v0 собственных колебаний в контуре из катушки и конденсатора.
На рисунке показана зависимость Imax (v) при различных значениях активного сопротивления цепи. Резонанс является «острым» (то есть график функции Imax (v) имеет узкий высокий максимум) при малых значений активного сопротивления. А когда активное сопротивление очень большой, то резонанс вообще не наблюдают.
категория: ФизикаOn Developing the Theory of Resonant Processes in Power Transformer Windings.
 Part 2. Frequency Responses of a Circuit with Four PI Sections (In Russian)
Part 2. Frequency Responses of a Circuit with Four PI Sections (In Russian)«ЭЛЕКТРИЧЕСТВО» № 11/2021 33
К развитию теории резонансных процессов в обмотках силовых трансформаторов
Частотные зависимости активной составляющей
входной проводимости и тока нейтрали имеют боль-
шую информационную ценность, чем зависимости мо-
дуля входной проводимости и тока нейтрали. По этой
причине целесобразно расширить их применение в ди-
агностической технике, реализующей метод частотных
характеристик, и дополнить перечень анализируемых
кривых активной составляющей тока нейтрали.
Знание о критических частотах может быть исполь-
зовано при проектировании силовых трансформато-
ров, стойких к воздействию высокочастотных перена-
пряжений. Например, путем изменения конструкции
обмоток можно добиться того, чтобы критическая
частота была ниже возможных в эксплуатации частот
колебаний напряжения в сети, и тем самым исключить
возможность развития опасного резонанса напряжения
в обмотках при эксплуатационных воздействиях.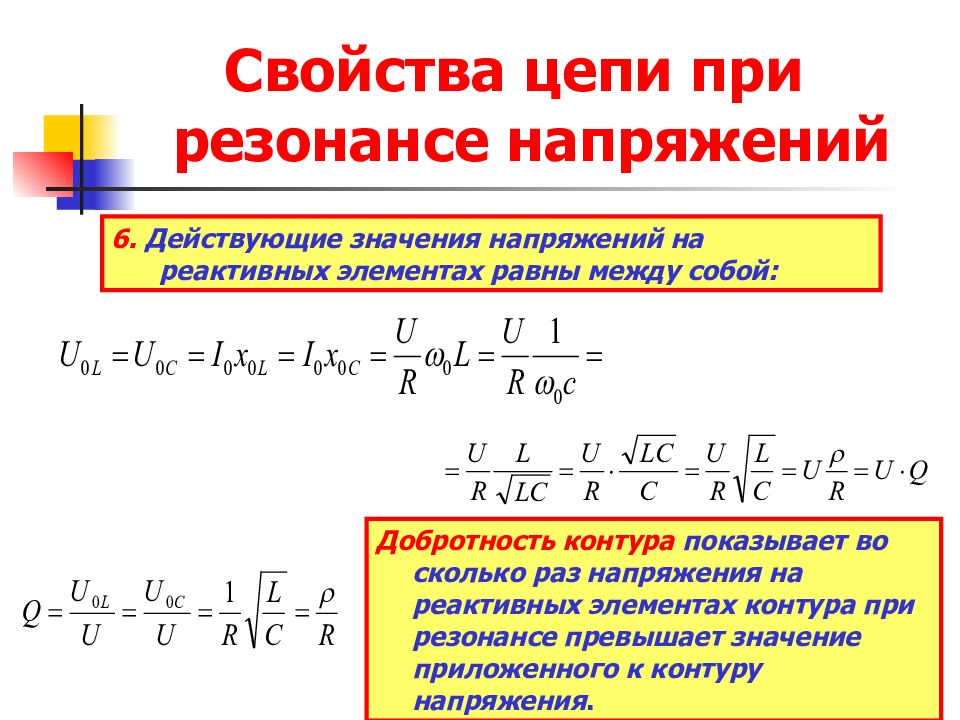
Автор выражает благодарность Д.А. Матвееву
за ценные замечания при обсуждении результатов и
выводов, представленных в первой и второй частях
данной статьи.
СПИСОК ЛИТЕРАТУРЫ
1. Ларин В.С. К развитию теории резонансных процессов
в обмотках силовых трансформаторов. Ч. 1. Частотные характе-
ристики схемы с двумя П-звеньями. – Электричество, 2021, № 8,
с. 49–55.
2. Геллер Б., Веверка А. Импульсные процессы в электриче-
ских машинах. М.: Энергия, 1973, 440 с.
3. Белецкий З.М., Бунин А.Г., Горбунцов А.Ф., Конторо-
вич Л.Н. Расчет импульсных воздействий в обмотках трансформа-
торов с применением ЭВМ. М.: Информэлектро, 1978, 79 с.
4. Лизунов С.Д., Лоханин А.К. Силовые трансформаторы.
Справочная книга. М.: Энергоиздат, 2004, 616 с.
5. Karsai K., Kernyi D., Kiss L.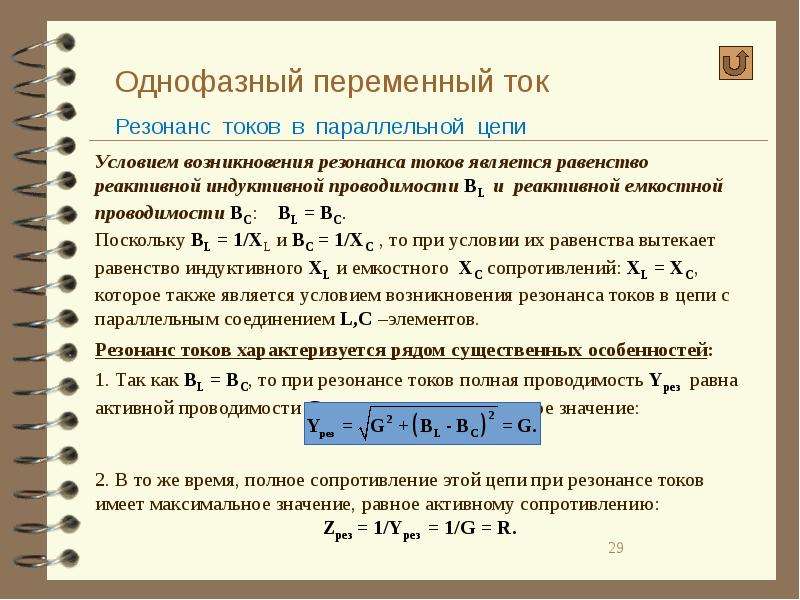 Large power transformers.
Large power transformers.
Amsterdam: Elsevier, 1987, 614 p.
6. Ларин В.С., Матвеев Д.А. Аппроксимация переходных ре-
зонансных напряжений и токов в обмотках силовых трансформато-
ров для определения собственных частот колебаний и коэффициен-
тов затухания. – Электричество, 2020, №12, с. 44–54.
7. Ларин В.С., Матвеев Д.А. Определение коэффициентов
затухания по измеренным частотным характеристикам обмоток си-
ловых трансформаторов. Ч. 1. Теоретическое обоснование. – Элек-
тричество, 2021, №1, с. 13–22.
8. Del Vecchio R.M., Poulin B., Ahuja R. Calculation and
measurement of winding disk capacitances with wound-in-shields. –
IEEE Transactions on Power Delivery, 1998, vol. 13, No. 2, pp. 503–509.
9. Del Vecchio R.M., et al. Transformer Design Principles.
Boca Raton: CRC Press, 2017, 612 p, DOI: https://doi.org/10.1201/
9781315155920.
10. Bagheri M., Phung B. T., Naderi M.S. Impulse voltage
T., Naderi M.S. Impulse voltage
distribution and frequency response of intershield windings. – IEEE
Electrical Insulation Magazine, 2016, vol. 32, No. 5, pp. 32–40,
DOI: 10.1109/MEI.2016.7552374.
11. Niasar M.G., Zhao W. Impulse voltage distribution on
disk winding: calculation of disk series capacitance using analytical
method. – 2020 IEEE International Conference on High Voltage
Engineering and Application (ICHVE), 2020, DOI: 10.1109/
ICHVE49031.2020.9279969.
12. Sriyono, U. Khayam and Suwarno. Evaluating the Inter-
Resonance Characteristics of Various Power Transformer Winding
Designs. – IEEE Access, 2021, vol. 9, pp. 54649–54656, DOI: 10.1109/
ACCESS.2021.3070595.
13. Larin V., Matveev D., Maximov B.K. Resonant overvoltages
inside power transformer windings and the measures improving their
ability to withstand high-frequency stresses. – 48th CIGRE Session,
– 48th CIGRE Session,
report A2-203, Paris, France, 2020.
14. Soloot A.H., Høidalen H.K., Gustavsen B. Upon the
improvement of the winding design of wind turbine transformers for
safer performance within resonant overvoltages. – CIGRE SC A2 & C4
JOINT COLLOQUIUM, Zurich, Switzerland, 2013,
15. Soloot A.H., Høidalen H.K., Gustavsen B. Inuence of
the Winding Design of Wind Turbine Transformers for Resonant
Overvoltage Vulnerability. – IEEE Transactions on Dielectrics and
Electrical Insulation, 2015, vol. 22, No. 2, pp. 1250–1257.
16. Soloot A.H. Resonant Overvoltages in Oshore Wind Farms:
Analysis, modeling and measurement. Theses for Ph.D, Norwegian
University of Science and Technology, 2017, DOI:10.13140/
RG.2.2.28215.11682.
[25.05.2021]
Автор: Ларин Василий Сера-
фимович – кандидат техн. наук,
начальник отдела трансформато-
ров Всероссийского электротехни-
ческого института (ВЭИ) – филиа-
ла ФГУП «Российский Федеральный
Ядерный Центр – Всероссийский
научно-исследовательский инсти-
тут технической физики им. академ.
академ.
Е.И. Забабахина» (РФЯЦ-ВНИИТФ).
Elektrichestvo, 2021, No. 11, pp. 28–3 4 DOI:10.24 160/0013-5380-2021-11-28-34
On Developing the Theory of Resonant Processes
in Power Transformer Windings.
Part 2. Frequency Responses of a Circuit
with Four PI Sections
LARIN Vasily S. (All-Russian Electrotechnical Institute – Branch of FSUE ”RFNC – VNIITF named after academ.
E.I. Zababakhin”, Moscow, Russia) – Head of the Transformer Dept., Cand. Sci. (Eng.).
Резонанс напряжений
Практическое использование резонанса токов
Резонанс токов широко используется на практике. В случае изменения величины емкости конденсатора или индуктивности контура, становится возможной регулировка частоты свободных колебаний. Таким образом, контур может быть настроен на определенную частоту.
Природа свободных электрических колебаний, возникающих в контуре, всегда затухающая.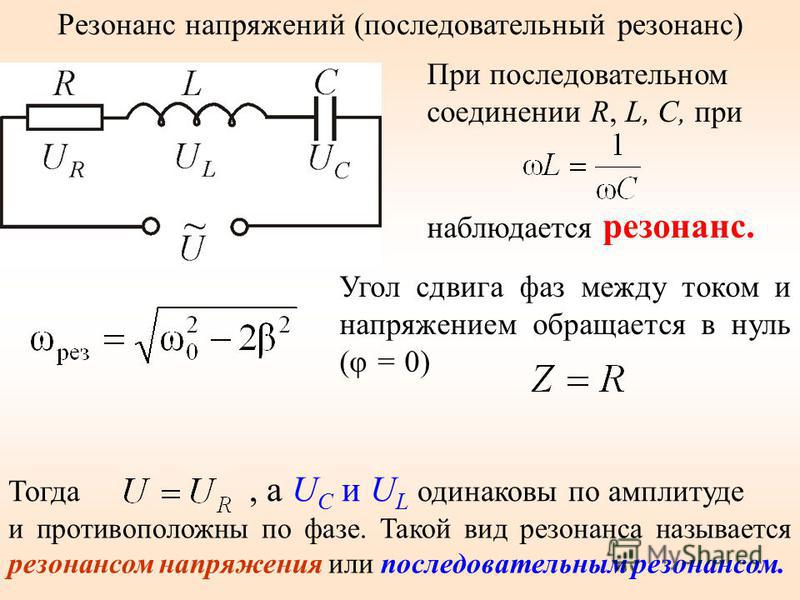 Колебания затухают постепенно под влиянием сопротивления, которым обладают соединительные провода. Кроме того, энергия затрачивается на нагрев провода катушки индуктивности при прохождении в контуре электрического тока. Потери энергии приводят к постепенному снижению амплитуды колебаний и их окончательное затухание. Сопротивление контура оказывает непосредственное влияние на скорость затухания колебаний, связанную с потерями энергии.
Колебания затухают постепенно под влиянием сопротивления, которым обладают соединительные провода. Кроме того, энергия затрачивается на нагрев провода катушки индуктивности при прохождении в контуре электрического тока. Потери энергии приводят к постепенному снижению амплитуды колебаний и их окончательное затухание. Сопротивление контура оказывает непосредственное влияние на скорость затухания колебаний, связанную с потерями энергии.
В результате, частота вынужденных колебаний не будет зависеть от емкости и индуктивности контура, а будет находится в зависимости от частоты переменного тока, вырабатываемого генератором.
Необходимо соблюдать условия, когда токи в емкости и индуктивности имели бы одинаковое значение
Это важное свойство дает возможность регулировок на любых участках электронных схем
Принцип резонанса токов
Токовый резонанс наблюдается внутри электроцепи, обладающей параллельным катушечным, резисторным и конденсаторным подсоединением.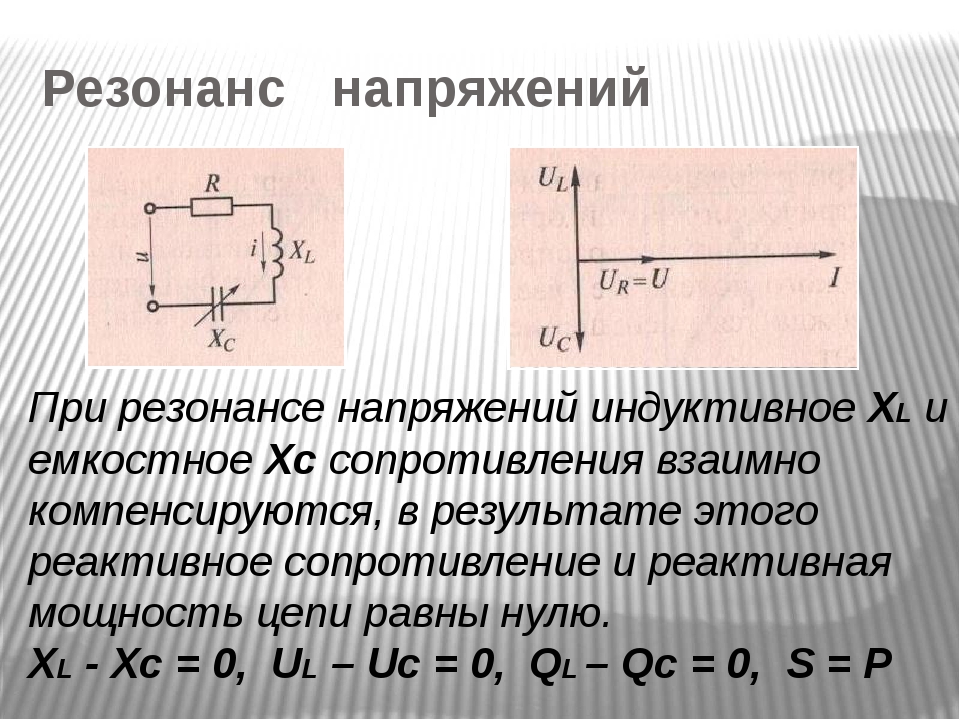 Основной принцип работы стандартного резонанса токов не слишком сложен для понимания простого обывателя:
Основной принцип работы стандартного резонанса токов не слишком сложен для понимания простого обывателя:
- включение электропитания сопровождается накоплением заряда внутри конденсатора до номинальных показателей напряжения источника;
- отключение питающего источника с последующим замыканием цепи в контур сопровождается процессом переноса разряда на катушечную часть прибора;
- токовые показатели, проходящие по катушке, вызывают генерирование магнитного поля и создание электродвижущей силы самоиндукции, в направлении, встречном току;
- максимальное значение токовых показателей достигается на стадии полного конденсаторного разряда;
- весь объем накопленной энергетической емкости легко преобразуется в магнитное индукционное поле;
- катушечная самоиндукция не провоцирует остановку заряженных частиц, а повторный этап зарядки с другим типом полярности обусловлен отсутствием конденсаторного противотока.
Резонанс в параллельной цепи (резонанс токов)
Итогом данного цикла является повторяющееся преобразование всего катушечного поля в конденсаторный заряд.
Присутствующая внутренняя активная составляющая R вызывает постепенное угасание колебательного процесса, чем и обуславливается токовый резонанс.
Принцип действия резонансных токов
Наглядное представление о резонансе токов дает колебательный контур, применяемый в электронных схемах. В его состав входит конденсатор с емкостью С и катушка с индуктивностью L, включенные параллельно. В процессе передачи энергии из электрического поля емкости в магнитное поле индуктивности возникают самозатухающие колебания с определенной частотой. Возникновение колебаний происходит благодаря активному сопротивлению R, препятствующему свободному прохождению тока.
Явление резонанса токов появляется в цепи, куда параллельно включены конденсатор и катушка. Их номиналы подобраны с таким расчетом, чтобы токи, протекающие по С и L, были равны. Поэтому в контуре С-L ток будет выше, чем его значение на остальных участках цепи.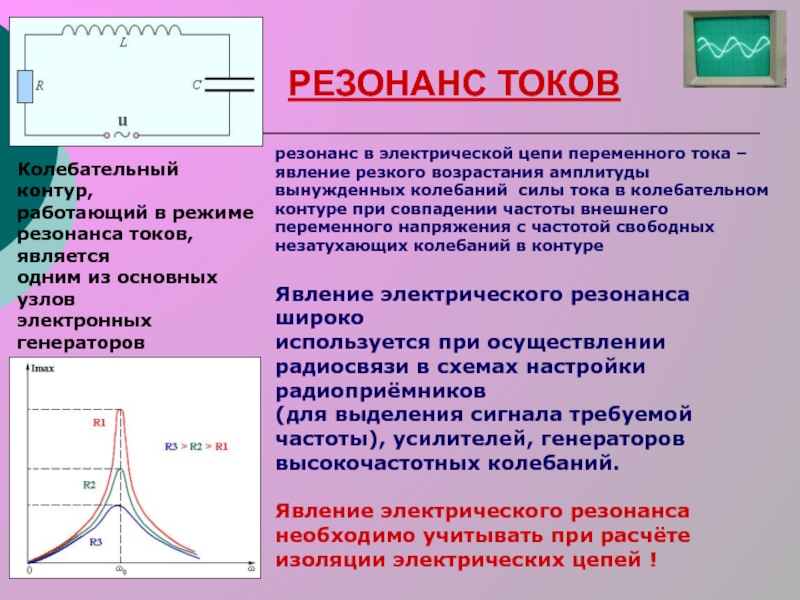
Максимальное значение магнитного поля достигается при полном разряде конденсатора. Таким образом, вся энергия, накопленная конденсатором, преображается в магнитное поле индуктивности. Заряженные частицы продолжают двигаться, благодаря самоиндукции катушки.
Поскольку противоток от разряженного конденсатора уже отсутствует, он подвергается повторной зарядке, но уже с изменившейся полярностью. Это приводит к преобразованию поля катушки в заряд конденсатора и повторению всего процесса. Активная составляющая R приводит к постепенному угасанию колебаний. В этом и заключается основная суть резонанса.
Общие сведения
Электрическим сопротивлением проводника является свойство проводить электрический ток. Для построения и расчета колебательного контура необходимо знать способы нахождения активного и реактивного сопротивлений. Сопротивление для цепей, питающихся от переменного тока (ЦПТ), бывает следующих видов: активное, реактивное и полное.
Активным сопротивлением является обыкновенный резистор. Реактивное состоит из следующих типов нагрузки: индуктивное и емкостное. Индуктивное (Xl) — сопротивление катушки индуктивности в цепи переменного тока, а емкостное (Xc) определяется наличием емкости в цепи (конденсатора).
Реактивное состоит из следующих типов нагрузки: индуктивное и емкостное. Индуктивное (Xl) — сопротивление катушки индуктивности в цепи переменного тока, а емкостное (Xc) определяется наличием емкости в цепи (конденсатора).
Активное сопротивление
Активным сопротивлением в ЦПТ называется наличие любой нереактивной нагрузки. Его можно рассчитать следующими способами: при помощи измерения величины сопротивления и расчетным методом. Для измерения R применяется прибор, который называется омметром. Омметр входит в состав комбинированных приборов измерения электрических величин, которые называются мультиметрами. Он подключается параллельно нагрузке, причем для проведения измерений следует выключить электрическую цепь, поскольку наличие тока приведет прибор к выходу из строя.
Существует еще один способ, который является расчетным, однако он требует знаний в области физики. При вычислении величины R следует произвести измерения силы тока и напряжения, а точнее, их амплитудных значений (Uм и Iм соответственно).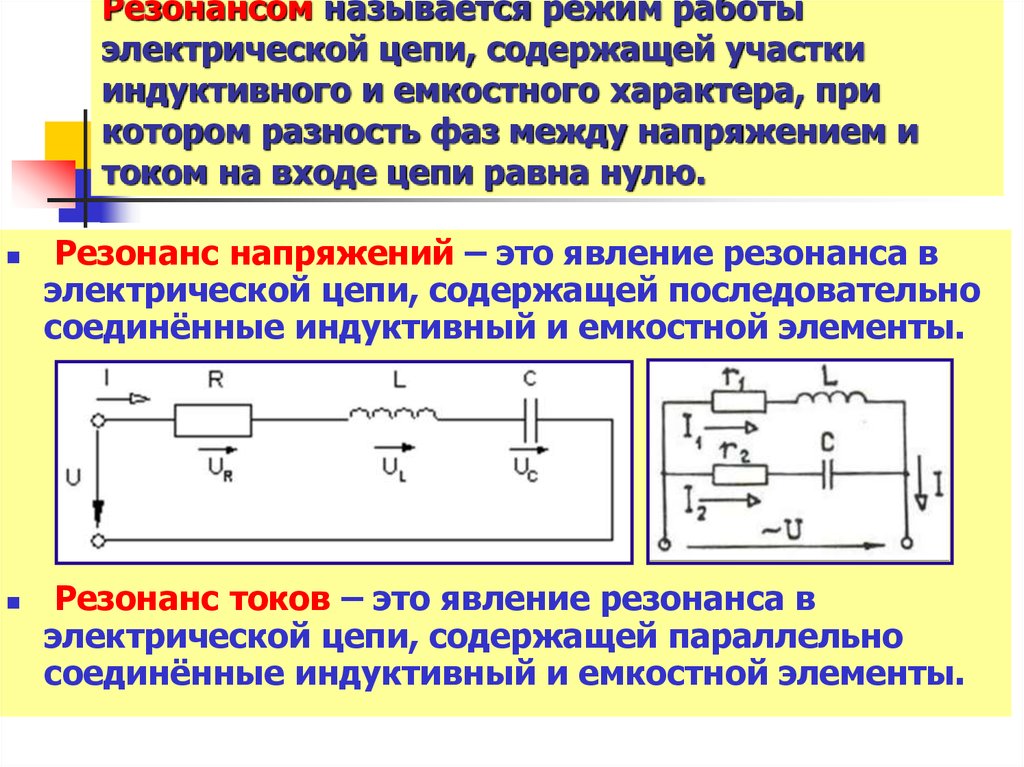 Это возможно сделать при помощи соответствующих приборов.
Это возможно сделать при помощи соответствующих приборов.
Для измерения величины напряжения применяется вольтметр, а силу тока можно измерить при помощи амперметра. Кроме того, эти приборы измеряют только действующие значения напряжения (Uд) и силы тока (Iд). Для расчета амплитудных значений следует воспользоваться следующими формулами:
- Uм = Uд * sqrt (2).
- Iм = Iд * sqrt (2).
Для расчета R, которое можно найти, используя закон Ома для участка цепи (Iм = Uм / R): R = Uм / Iм. Воспользовавшись соотношениями зависимостей амплитудных значений от действующих, возможно рассчитать R: R = Uд * sqrt (2) / Iд * sqrt (2) = Uд / Iд. На практике применяют способ измерения сопротивления омметром.
Другие виды нагрузок
При наличии в ЦПТ катушки индуктивности возникает Xl, которую необходимо только рассчитывать. Индуктивное сопротивление рассчитывается по формуле, для которой необходимы циклическая частота (w) и индуктивность катушки (L): Xl = w * L.
Циклическая частота рассчитывается по следующей формуле, для которой необходимо только знать частоту переменного тока (f) и число ПИ (3,1416): w = 2 * 3,1416 * f. Индуктивность катушки рассчитывается, исходя из значений диаметра катушки (D в мм), числа витков (n) и длины намотки (l): L = (sqr (D/10) * sqr (n)) / (4,5 * D + 10 * l). Если подставить в формулу расчета индуктивного сопротивления все соотношения, то получается: Xl = 2 * 3,1416 * f * (sqr (D/10) * sqr (n)) / (4,5 * D + 10 * l).
Если в ЦПТ присутствует конденсатор с емкостью C, то добавляется еще и емкостное сопротивление — Xl, которое рассчитывается по следующей формуле: Xc = 1 / (w * C) = 1 / (2 * 3,1416 * f * C). Полное сопротивление в ЦПТ обозначается литерой Z и рассчитывается по формуле: Z = sqrt . Если подставить в формулу полного сопротивления соотношения, по которым находятся R, Xl и Xc, то получается следующая формула: Z = sqrt [sqr (Uд / Iд) +sqr ((1 / (2 * 3,1416 * f * C)) — (2 * 3,1416 * f * (sqr (D/10) * sqr (n)) / (4,5 * D + 10 * l))]. Для упрощения вычисления можно рассчитать отдельно значения R, Xc и Xl.
Расчет резонансного контура
Необходимо помнить, что явление, представленное токовым резонансом, нуждается в очень грамотном и тщательном расчете резонансного контура
Особенно важно выполнить правильный и точный расчет при наличии параллельного соединения, что позволит предотвратить развитие помех внутри системы. Чтобы расчет был правильным, требуется определиться с показателями мощности электрической сети
Среднюю стандартную мощность, которая рассеивается в условиях резонансного контура, можно выразить среднеквадратичными показателями тока и напряжения.
В условиях резонанса стандартный коэффициент мощности составляет единицу, а формула расчета имеет вид:
Формула расчета
С целью правильного определения нулевого импеданса в условиях резонанса потребуется использовать стандартную формулу:
Резонансные кривые
Резонанс колебательной частоты аппроксимируется по следующей формуле:
Резонанс колебательного контура
Чтобы получить максимально точные данныепо формулам, все получаемые в процессе расчетов значения рекомендуется не подвергать округлению. Некоторыми физиками расчеты значений резонансного контура осуществляются в соответствии с методом векторной диаграммы активных токовых величин. В таком случае грамотный расчет и правильная настройка приборов гарантирует достойную экономию при условии переменного тока.
Резонансные цепи применяются преимущественно для выделения сигнала на нужных частотах в результате фильтрования других сигналов, поэтому самостоятельные расчеты контура должны быть предельно точными.
Применение токового резонанса
Основная область активного применения широко востребованных резонансных токов сегодня представлена:
- некоторыми видами фильтрующих систем, в которых току с определенными частотными параметрами оказываются значительные показатели сопротивления;
- радиотехникой в виде приемников, выделяющих сигналы, предназначенные для конкретных точек радиостанций. Оказание значительного сопротивления току сопровождается снижением показателей контурного напряжения при максимальной частоте;
- асинхронного типа двигателями, в особенности функционирующими в условиях неполной нагрузки;
- установками высокоточной электрической сварки;
- колебательными контурами внутри узлов генераторов электронного типа;
- приборами, отличающимися высокочастотной закалкой;
- снижением показателей генераторной нагрузки. При таких условиях в приемном трансформаторе с первичной обмоткой делается колебательный контур.
Схема цепи
Особенно часто колебательные контуры или токовые резонансы применяются в производстве современного промышленного индукционного котлового оборудования, что позволяет в значительной степени улучшить стартовые показатели коэффициента полезного действия.
Стандартные колебательные контуры, функционирующие в условиях режима токового резонанса, массово применяются в качестве одного из наиболее важных узлов в современных электронных генераторах.
Польза и вред
Резонанс часто используют с пользой. Один из ярких бытовых примеров — починка радиоприемника. Электрика устройства настраивается таким образом, чтобы возник резонанс. Благодаря этому напряжение на катушке повышается и превосходит значение в цепи, созданной антенной. Это необходимо для нормальной работы приемника.
Но иногда действие резонанса сказывается на технике исключительно пагубно. Рост напряжения на некоторых участках может привести к их порче. Из-за того, что локальные значения не соответствуют генератору, отдельные детали или измерительные приборы могут выйти из строя.
Реактивные сопротивления индуктивности и емкости
Индуктивностью называется способность тела накапливать энергию в магнитном поле. Для нее характерно отставание тока от напряжения по фазе. Характерные индуктивные элементы — дросселя, катушки, трансформаторы, электродвигатели.
Емкостью называются элементы, которые накапливают энергию с помощью электрического поля. Для емкостных элементов характерно отставание по фазе напряжения от тока. Емкостные элементы: конденсаторы, варикапы.
Приведены их основные свойства, нюансы в пределах этой статьи во внимание не берутся. Кроме перечисленных элементов другие также имеют определенную индуктивность и емкость, например в электрических кабелях распределенные по его длине
Кроме перечисленных элементов другие также имеют определенную индуктивность и емкость, например в электрических кабелях распределенные по его длине.
Волновое или характеристическое сопротивление последовательного контура
Отношение напряжения на индуктивности или емкости к напряжению на входе в режиме резонанса называется добротностью контура:
Добротность контура представляет собой коэффициент усиления по напряжению и в катушках индуктивности может достигать сотен единиц:
При напряжение на индуктивности (или емкости) может быть гораздо больше напряжения на входе, что широко используется в радиотехнике. В промышленных сетях резонанс напряжений является аварийным режимом, так как увеличение напряжения на конденсаторе может привести к его пробою, а рост тока — к нагреву проводов и изоляции.
Резонанс токов
При параллельном соединении конденсатора и соленоида (смотри рисунок), так же как и при последовательном, сила тока в цепи зависит от значений емкости и индуктивности. При изменении емкости и индуктивности при определенном их соотношении сила тока в неразветвленном участке цепи оказывается минимальной (практически близкой к нулю).
В этом случае:
Понятие резонанса
При описанной ситуации действующие напряжения на катушке и конденсаторе сравняются, а также достигнут максимального значения. Если активное сопротивление в этой цепи минимальное, то локальные показатели будут в несколько раз превышать общее напряжение. Такое явление принято называть резонансом напряжений.
Важно понимать, что местные сопротивления напрямую зависят от показателей тока. Если частоту тока уменьшить, то индуктивное значение снизится, а емкостное — возрастет
Помимо активного сопротивления, в сети также возникнет реактивное, из-за чего резонанс сойдет на нет. Это случится и в том случае, если изменить значения индуктивности или емкости.
Если в цепи возникает резонанс, то энергия источника расходуется исключительно на нагрев проводов, то есть преодоление активного сопротивления, так как катушка перекидывает ток на конденсатор и обратно без усилий генератора. Ведь в цепи с одним из элементов ток колеблется, периодически переходя от истока в магнитное поле. Это касается катушки. В случае с конденсатором наблюдается аналогичная ситуация, только участвует электрическое поле. Если эти два элемента объединены, а также наблюдается резонанс, то энергия циклично движется от катушки к конденсатору и обратно. При этом она тратится в большей степени только из-за сопротивления проводника.
При нарушении резонанса количество энергии, требуемой первому и второму элементу, не совпадает. Возникнет избыток, который будет покрываться усилиями генератора. Этот процесс можно сравнить с механизмом часов с маятником. Если бы силы трения не было, он мог колебаться без использования дополнительного груза или пружины в механизме. Но эти элементы, когда необходимо, передают часть своей энергии маятнику, из-за чего тот преодолевает силу трения и движется непрерывно. При резонансе в электроцепи количество энергии, которую необходимо сообщить для поддержания колебаний, минимально.
Цепь считается колебательным контуром, если соблюдено несколько условий. Во-первых, ток должен быть переменным. Во-вторых, в систему должны входить генератор, конденсатор и катушка индуктивности. В-третьих, элементы должны быть соединены последовательно. В-четвертых, показатели внутренних сопротивлений должны быть равны.
Но резонанс невозможен, если частота генератора, емкость и индуктивность цепи не будут соответствовать значениям, зависящим от других параметров цепи. Все они вычисляются по специальным несложным формулам.
https://youtube.com/watch?v=eK1poS3goME
ВНИМАНИЕ! САЙТ ЛЕКЦИИ.ОРГ проводит недельный опрос. ПРИМИТЕ УЧАСТИЕ. ВСЕГО 1 МИНУТА!!!
⇐ Предыдущая4Следующая ⇒
Резонанс напряжений возможен на участке цепи с последовательным соединением индуктивного и емкостного элемента.
Угол сдвига фаз при резонансе равен нулю. Такой угол сдвига фаз можно получить тремя способами: изменением частоты напряжения питания, изменением индуктивности или емкости . Из треугольника сопротивлений следует, что: , следовательно при . Выражение называют условием резонанса напряжений. Из этого выражения следует, что и , где — резонансная частота. Полное сопротивление при резонансе равно активному сопротивлению и минимально при заданном . Ток максимален. Напряжения на участках контура с реактивными элементами равны ( ). Напряжение на участке с активным элементом равно напряжению питания на выводах контура и совпадает с ним по фазе: .
Если , то , т.е. напряжение на участках с реактивными элементами больше, чем напряжение питания. Это свойство – усиление напряжения – является важнейшей особенностью резонанса напряжений и широко используется в технике. Коэффициент усиления напряжения равен добротности контура — Q:
Величина называется характеристическим или волновым сопротивлением цепи. Активная мощность при резонансе максимальна ( , а ток максимален ) и равна полной мощности . Реактивная мощность равна нулю: .
Из векторной диаграммы видно, что при резонансе, несмотря на наличие в цепи индуктивности и емкости, ток совпадает по фазе с напряжением, т.е. индуктивное и емкостное напряжения компенсируют друг друга.
График зависимости силы тока от частоты называют амплитудно-частотной характеристикой. На резонансной частоте величина тока максимальна. На графике амплитудно-частотной характеристики различают три области: до резонанса ( ), резонанса ( ) и после резонанса ( ).
В до резонансе электрическая цепь имеет емкостной характер т.к.
(рис.а)
а) в) с)
В резонансе электрическая цепь имеет активный характер, т.к. (рис .в).
В после резонансе электрическая цепь имеет индуктивный характер, т.к. (рис. с)
Резонанс напряжений в промышленных электрических установках — нежелательное и опасное явление, т.к. может привести к аварии вследствие недопустимого перегрева отдельных элементов электрической цепи или к пробою изоляции кабелей и конденсаторов при возможном перенапряжении на отдельных участках цепи. В то же время резонанс напряжений в электрических цепях переменного тока широко используется в радиотехнике и электронике в приборах и устройствах, основанных на резонансном явлении.
⇐ Предыдущая4Следующая ⇒
Дата добавления: 2016-11-22; просмотров: 743 | Нарушение авторских прав | Изречения для студентов
Резонанс напряжений
Если последовательно с генератором соединить конденсатор и катушку индуктивности, то, при условии равенства их реактивных сопротивлений, возникнет резонанс напряжений. При этом активная часть Z должно быть как можно меньшей.
Стоит отметить, что индуктивность и емкость обладает только реактивными качествами лишь в идеализированных примерах. В реальных же цепях и элементах всегда присутствует активное сопротивление проводников, хоть оно и крайне мало.
При резонансе происходит обмен энергией между дросселем и конденсатором. В идеальных примерах при первоначальном подключении источника энергии (генератора) энергия накапливается в конденсаторе (или дросселе) и после его отключения происходят незатухающие колебания за счет этого обмена.
Напряжения на индуктивности и емкости примерно одинаковы, согласно закону Ома:
U=I/X
Где X — это Xc емкостное или XL индуктивное сопротивление соответственно.
Цепь, состоящую из индуктивности и емкости, называют колебательным контуром. Его частота вычисляется по формуле:
Период колебаний определяется по формуле Томпсона:
Так как реактивное сопротивление зависит от частоты, то сопротивление индуктивности с ростом частоты увеличивается, а у ёмкости падает. Когда сопротивления равны, то общее сопротивление сильно снижается, что отражено на графике:
Основными характеристиками контура являются добротность (Q) и частота. Если рассмотреть контур в качестве четырехполюсника, то его коэффициент передачи после несложных вычислений сводится к добротности:
K=Q
А напряжение на выводах цепи увеличивается пропорционально коэффициенту передачи (добротности) контура.
Uк=Uвх*Q
При резонансе напряжений, чем выше добротность, тем больше напряжение на элементах контура будет превышать напряжение подключенного генератора. Напряжение может повышаться в десятки и сотни раз. Это отображено на графике:
Потери мощности в контуре обусловлены только наличием активного сопротивления. Энергия из источника питания берется только для поддержания колебаний.
Коэффициент мощности будет равен:
cosФ=1
Эта формула показывает, что потери происходят за счет активной мощности:
S=P/Cosф
Замечания
Колебательный контур, работающий в режиме резонанса напряжений, сам по себе не является усилителем мощности. Повышенные напряжения на его элементах возникают за счёт увеличения тока в цепи и следовательно потребляемой мощности от источника переменного напряжения.
Явление резонанса напряжений необходимо учитывать при разработке аппаратуры. Повышенное напряжение может повредить не рассчитанные на него элементы.
Если нужно повысить напряжение до безопасного уровня путем резонанса, то следует использовать комбинированный или параллельно-последовательный резонанс (описание в статье Резонанс токов).
Что такое резонанс?
мощность
Данный вариант является характерным преимущественно для схем с переменными показателями токовых величин и обладает не только положительными свойствами, но и некоторыми совершенно нежелательными качествами, которые в обязательном порядке учитываются еще в процессе проектирования.
Положительное резонансное действие — явление из области радиотехники, автоматики и проволочной телефонии. Резонанс напряжений относится к категории нежелательных явлений, обусловленных перенапряжениями. При этом добротным электрическим контуром принято считать величину:
Достижение токового резонанса осуществляется подбором необходимого индуктивного или емкостного значения, а также показателей частотности питающих сетей.(1/2)
- Как устранить явление?
Увеличив активное сопротивление в цепи или изменив частоту.
Теперь вы знаете, что такое резонанс токов и напряжений, каковы условия его возникновения и варианты применения на практике. Для закрепления материала рекомендуем просмотреть полезное видео по теме:
Материалы по теме:
- Причины потерь электроэнергии на больших расстояниях
- Измерение частоты переменного тока
- Как рассчитать сопротивление провода
Заключение
Резонанс токовых величин в физике — это естественное явление, сопровождающееся резким возрастанием амплитуды колебания внутри системы, что обусловлено совпадением показателей собственных и внешних возмущающих частот.
Подобный вариант явлений характеризует электрические схемы с наличием элементов, представленных нагрузками активного, индуктивного и емкостного типа. Таким образом, токовый резонанс — один из наиважнейших параметров, широко используемых в настоящее время в целом ряде современных отраслей, включая промышленное электрическое снабжение и радиосвязь.
Поставщики и ресурсы беспроводной связи RF
О компании RF Wireless World
Веб-сайт RF Wireless World является домом для поставщиков и ресурсов радиочастотной и беспроводной связи. На сайте представлены статьи, руководства, поставщики, терминология, исходный код (VHDL, Verilog, MATLAB, Labview), тестирование и измерения, калькуляторы, новости, книги, загрузки и многое другое.
Сайт RF Wireless World охватывает ресурсы по различным темам, таким как RF, беспроводная связь, vsat, спутник, радар, волоконная оптика, микроволновая печь, wimax, wlan, zigbee, LTE, 5G NR, GSM, GPRS, GPS, WCDMA, UMTS, TDSCDMA, bluetooth, Lightwave RF, z-wave, Интернет вещей (IoT), M2M, Ethernet и т. Д.Эти ресурсы основаны на стандартах IEEE и 3GPP. В нем также есть академический раздел, который охватывает колледжи и университеты по инженерным дисциплинам и MBA.
Статьи о системах на основе Интернета вещей
Система обнаружения падений для пожилых людей на основе Интернета вещей : В статье рассматривается архитектура системы обнаружения падений, используемой для пожилых людей.
В нем упоминаются преимущества или преимущества системы обнаружения падений Интернета вещей.
Читать дальше➤
Также обратитесь к другим статьям о системах на основе Интернета вещей следующим образом:
• Система очистки туалетов самолета.
• Система измерения столкновений
• Система отслеживания скоропортящихся продуктов и овощей
• Система помощи водителю
• Система умной торговли
• Система мониторинга качества воды.
• Система Smart Grid
• Система умного освещения на базе Zigbee
• Интеллектуальная система парковки на базе Zigbee.
• Система умной парковки на основе LoRaWAN
RF Статьи о беспроводной связи
В этом разделе статей представлены статьи о физическом уровне (PHY), уровне MAC, стеке протоколов и сетевой архитектуре на основе WLAN, WiMAX, zigbee, GSM, GPRS, TD-SCDMA, LTE, 5G NR, VSAT, Gigabit Ethernet на основе IEEE / 3GPP и т. Д. .стандарты. Он также охватывает статьи, относящиеся к испытаниям и измерениям, по тестированию на соответствие, используемым для испытаний устройств на соответствие RF / PHY. УКАЗАТЕЛЬ СТАТЬИ ДЛЯ ССЫЛКИ >>.
Физический уровень 5G NR : Обработка физического уровня для канала 5G NR PDSCH и канала 5G NR PUSCH рассмотрена поэтапно. Это описание физического уровня 5G соответствует спецификациям физического уровня 3GPP. Читать дальше➤
Основы повторителей и типы повторителей : В нем объясняются функции различных типов ретрансляторов, используемых в беспроводных технологиях.Читать дальше➤
Основы и типы замирания : В этой статье описаны мелкомасштабные замирания, крупномасштабные замирания, медленные, быстрые и т. Д., Используемые в беспроводной связи. Читать дальше➤
Архитектура сотового телефона 5G : В этой статье рассматривается структурная схема сотового телефона 5G с внутренними модулями 5G. Архитектура сотового телефона. Читать дальше➤
Основы помех и типы помех: В этой статье рассматриваются помехи в соседнем канале, помехи в совмещенном канале, Электромагнитные помехи, ICI, ISI, световые помехи, звуковые помехи и т. Д.Читать дальше➤
5G NR Раздел
В этом разделе рассматриваются функции 5G NR (New Radio), нумерология, диапазоны, архитектура, развертывание, стек протоколов (PHY, MAC, RLC, PDCP, RRC) и т. Д.
5G NR Краткий указатель ссылок >>
• Мини-слот 5G NR
• Часть полосы пропускания 5G NR
• 5G NR CORESET
• Форматы DCI 5G NR
• 5G NR UCI
• Форматы слотов 5G NR
• IE 5G NR RRC
• 5G NR SSB, SS, PBCH
• 5G NR PRACH
• 5G NR PDCCH
• 5G NR PUCCH
• Эталонные сигналы 5G NR
• 5G NR m-последовательность
• Золотая последовательность 5G NR
• 5G NR Zadoff Chu Sequence
• Физический уровень 5G NR
• Уровень MAC 5G NR
• Уровень 5G NR RLC
• Уровень 5G NR PDCP
Учебные пособия по беспроводным технологиям
В этом разделе рассматриваются учебные пособия по радиочастотам и беспроводной связи.Он охватывает учебные пособия по таким темам, как сотовая связь, WLAN (11ac, 11ad), wimax, bluetooth, zigbee, zwave, LTE, DSP, GSM, GPRS, GPS, UMTS, CDMA, UWB, RFID, радар, VSAT, спутник, WLAN, волновод, антенна, фемтосота, тестирование и измерения, IoT и т. Д. См. УКАЗАТЕЛЬ >>
Учебное пособие по 5G — В этом учебном пособии по 5G также рассматриваются следующие подтемы по технологии 5G:
Учебное пособие по основам 5G.
Частотные диапазоны
руководство по миллиметровым волнам
Волновая рама 5G мм
Зондирование волнового канала 5G мм
4G против 5G
Испытательное оборудование 5G
Сетевая архитектура 5G
Сетевые интерфейсы 5G NR
канальное зондирование
Типы каналов
5G FDD против TDD
Разделение сети 5G NR
Что такое 5G NR
Режимы развертывания 5G NR
Что такое 5G TF
В этом учебном пособии GSM рассматриваются основы GSM, сетевая архитектура, сетевые элементы, системные спецификации, приложения,
Типы пакетов GSM, структура кадра GSM или иерархия кадров, логические каналы, физические каналы,
Физический уровень GSM или обработка речи, вход в сеть мобильного телефона GSM, установка вызова или процедура включения питания,
MO-вызов, MT-вызов, VAMOS, AMR, MSK, модуляция GMSK, физический уровень, стек протоколов, основы работы с мобильным телефоном,
Планирование RF, нисходящая линия связи PS-вызова и восходящая линия связи PS.
➤Подробнее.
LTE Tutorial , охватывающий архитектуру системы LTE, охватывающий основы LTE EUTRAN и LTE Evolved Packet Core (EPC). Он обеспечивает связь с обзором системы LTE, радиоинтерфейсом LTE, терминологией LTE, категориями LTE UE, структурой кадра LTE, физическим уровнем LTE, Стек протоколов LTE, каналы LTE (логические, транспортные, физические), пропускная способность LTE, агрегация несущих LTE, передача голоса по LTE, расширенный LTE, Поставщики LTE и LTE vs LTE продвинутые.➤Подробнее.
RF Technology Stuff
На этой странице мира беспроводной радиосвязи описывается пошаговое проектирование преобразователя частоты RF на примере преобразователя RF UP от 70 МГц до диапазона C.
для микрополосковой платы с использованием дискретных радиочастотных компонентов, а именно. Смесители, гетеродин, MMIC, синтезатор, опорный генератор OCXO,
колодки аттенюатора. ➤Подробнее.
➤Проектирование и разработка радиочастотного трансивера
➤Конструкция RF-фильтра
➤VSAT Система
➤Типы и основы микрополосковой печати
➤Основы работы с волноводом
Секция испытаний и измерений
В этом разделе рассматриваются контрольно-измерительные ресурсы, испытательное и измерительное оборудование для тестирования DUT на основе
Стандарты WLAN, WiMAX, Zigbee, Bluetooth, GSM, UMTS, LTE.ИНДЕКС испытаний и измерений >>
➤Система PXI для T&M.
➤ Генерация и анализ сигналов
➤Измерения слоя PHY
➤Тест устройства на соответствие WiMAX
➤ Тест на соответствие Zigbee
➤Тест на соответствие LTE UE
➤Тест на соответствие TD-SCDMA
Волоконно-оптическая технология
Оптоволоконный компонент , основы, включая детектор, оптический соединитель, изолятор, циркулятор, переключатели, усилитель,
фильтр, эквалайзер, мультиплексор, разъемы, демультиплексор и т. д.Эти компоненты используются в оптоволоконной связи.
Оптические компоненты INDEX >>
➤Учебник по оптоволоконной связи
➤APS в SDH
➤SONET основы
➤SDH Каркасная конструкция
➤SONET против SDH
Поставщики и производители беспроводных радиочастотных устройств
Сайт RF Wireless World охватывает производителей и поставщиков различных радиочастотных компонентов, систем и подсистем для ярких приложений, см. ИНДЕКС поставщиков >>.
Поставщики радиочастотных компонентов, включая радиочастотный изолятор, радиочастотный циркулятор, радиочастотный смеситель, радиочастотный усилитель, радиочастотный адаптер, радиочастотный разъем, радиочастотный модулятор, радиочастотный приемопередатчик, PLL, VCO, синтезатор, антенну, генератор, делитель мощности, сумматор мощности, фильтр, аттенюатор, диплексер, дуплексер, чип-резистор, чип-конденсатор, чип-индуктор, ответвитель, оборудование EMC, программное обеспечение для проектирования RF, диэлектрический материал, диод и т. д.Производители RF компонентов >>
➤Базовая станция LTE
➤RF Циркулятор
➤RF Изолятор
➤Кристаллический осциллятор
MATLAB, Labview, встроенные исходные коды
Раздел исходного кода RF Wireless World охватывает коды, связанные с языками программирования MATLAB, VHDL, VERILOG и LABVIEW.
Эти коды полезны для новичков в этих языках.
ИНДЕКС ИСХОДНОГО КОДА >>
➤3-8 декодер кода VHDL
➤Код MATLAB для дескремблера
➤32-битный код ALU Verilog
➤T, D, JK, SR триггеры labview коды
* Общая информация о здоровье населения *
Выполните эти пять простых действий, чтобы остановить коронавирус (COVID-19).
СДЕЛАЙТЕ ПЯТЬ
1. РУКИ: часто мойте их.
2. КОЛЕНО: Откашляйтесь.
3. ЛИЦО: не трогайте его
4. НОГИ: держитесь на расстоянии более 3 футов (1 м) друг от друга.
5. ЧУВСТВОВАТЬ: Болен? Оставайся дома
Используйте технологию отслеживания контактов >>, соблюдайте >> рекомендации по социальному дистанцированию и установить систему видеонаблюдения >> чтобы спасти сотни жизней. Использование концепции телемедицины стало очень популярным в таким странам, как США и Китай, остановить распространение COVID-19, поскольку это заразное заболевание.
RF Калькуляторы и преобразователи беспроводной связи
Раздел «Калькуляторы и преобразователи» охватывает ВЧ-калькуляторы, беспроводные калькуляторы, а также преобразователи единиц.
Сюда входят такие беспроводные технологии, как GSM, UMTS, LTE, 5G NR и т. Д.
СПРАВОЧНЫЕ КАЛЬКУЛЯТОРЫ Указатель >>.
➤ Калькулятор пропускной способности 5G NR
➤5G NR ARFCN против преобразования частоты
➤Калькулятор скорости передачи данных LoRa
➤LTE EARFCN для преобразования частоты
➤Калькулятор антенн Яги
➤ Калькулятор времени выборки 5G NR
IoT-Интернет вещей Беспроводные технологии
Раздел IoT охватывает беспроводные технологии Интернета вещей, такие как WLAN, WiMAX, Zigbee, Z-wave, UMTS, LTE, GSM, GPRS, THREAD, EnOcean, LoRa, SIGFOX, WHDI, Ethernet,
6LoWPAN, RF4CE, Bluetooth, Bluetooth Low Power (BLE), NFC, RFID, INSTEON, X10, KNX, ANT +, Wavenis, Dash7, HomePlug и другие.Он также охватывает датчики Интернета вещей, компоненты Интернета вещей и компании Интернета вещей.
См. Главную страницу IoT >> и следующие ссылки.
➤ НИТЬ
➤EnOcean
➤Учебник по LoRa
➤Учебник по SIGFOX
➤WHDI
➤6LoWPAN
➤Zigbee RF4CE
➤NFC
➤Lonworks
➤CEBus
➤UPB
СВЯЗАННЫЕ ЗАПИСИ
RF Wireless Учебники
Различные типы датчиков
Поделиться страницей
Перевести
Резонанс серии
- Опишите резонансные цепи серии LCR.
- • Опишите условия последовательного резонанса.
- • Выполните расчеты последовательных цепей LCR, включая реактивное сопротивление, полное сопротивление, напряжения и ток в цепи.
возникает, когда реактивные сопротивления равны.
Индуктивное реактивное сопротивление (X L ) с точки зрения частоты и индуктивности определяется по формуле:
, а емкостное реактивное сопротивление (X C ) определяется выражением:
Рис 9.2.1 Электрические свойства последовательной цепи LCR при резонансе.
Индуктивное реактивное сопротивление прямо пропорционально частоте, и его график в зависимости от частоты (ƒ) представляет собой прямую линию.
Емкостное реактивное сопротивление обратно пропорционально частоте, и его график, построенный против ƒ, представляет собой кривую. Эти две величины показаны вместе с R в зависимости от ƒ на рис. 9.2.1. Из этой диаграммы видно, что там, где пересекаются X C и X L , они равны, и поэтому график (X L — X C ) в этой точке на оси частоты должен быть равен нулю.
Электрические свойства последовательной резонансной цепи LCR (рис. 9.2.1)
На рис. 9.2.1a показана последовательная схема LCR, а на рис. 9.2.1b показано, что происходит с реактивными сопротивлениями (X C и X L ), сопротивлением (R) и импедансом (Z) в качестве источника питания (V S ). ) изменяется по частоте от 0 Гц и выше. Сначала цепь ведет себя как конденсатор, полное сопротивление цепи (Z) падает по кривой, очень похожей на X L — X C .
Рис 9.2.1c иллюстрирует отношения между напряжениями отдельных компонентов, импедансом цепи (Z) и током питания (I S ) (который является общим для всех последовательных компонентов).
При определенной частоте ƒ r можно увидеть, что X L — X C упало до нуля, и только сопротивление цепи R остается на линии питания. Следовательно, ток, протекающий по цепи в этой точке, будет максимальным. Теперь V C и V L равны по величине и противоположны по фазе, поэтому полностью компенсируют друг друга.Реактивное сопротивление фактически равно нулю, а цепь полностью резистивна, с Z, равным R. минимум.
По мере того, как частота увеличивается выше этой резонансной частоты ( r ), импеданс увеличивается, и, поскольку X L теперь является большим из двух реактивных сопротивлений, кривая импеданса начинает следовать за возрастающим значением, больше похожим на линейный график X Л. .
На частотах ниже резонанса схема ведет себя как конденсатор, при резонансе как резистор, а выше ƒ r схема ведет себя все больше и больше как индуктор, и график X L — X C вскоре становится почти прямая линия.
Такое поведение последовательной цепи LCR позволяет сформулировать ряд полезных фактов о последовательной цепи, которые относятся к ее резонансной частоте ƒ r .
6 Что нужно знать о схемах серии LCR.
- 1. НА РЕЗОНАНСЕ (ƒ r ) V C равно, но противофазно по отношению к V L
- 2 .; ПРИ РЕЗОНАНСЕ ( r ) Импеданс (Z) минимален и равен СОПРОТИВЛЕНИЮ (R)
- 3. ПРИ РЕЗОНАНСЕ (ƒ r ) Ток цепи (I S ) максимально.
- 4. НА РЕЗОНАНСЕ (ƒ r ) Цепь полностью резистивная.
- 5. НИЖЕ РЕЗОНАНСА (ƒ r ) Цепь емкостная.
- 6. ВЫШЕ РЕЗОНАНСА (ƒ r ) Цепь индуктивная.
Две формулы для последовательного резонанса.
Тот факт, что резонанс возникает, когда X L = X C , позволяет построить формулу, которая позволяет вычислить резонансную частоту (ƒ r ) цепи только на основе значений L и C.Наиболее часто используемая в электронике формула для резонансной частоты последовательного контура LCR:
Рис. 9.2.2 Вывод формулы резонанса
Обратите внимание, что в этой формуле нет ссылки на сопротивление (R). Хотя любая цепь, содержащая L, должна иметь хотя бы некоторое сопротивление, наличие небольшого сопротивления в цепи не сильно влияет на частоту , на которой цепь резонирует. Резонансные цепи, разработанные для высоких частот, подвержены влиянию паразитных магнитных полей, индуктивности и емкости в окружающей их среде, поэтому большинство высокочастотных LC-резонансных цепей будут иметь как экранирование, чтобы максимально изолировать их от внешних воздействий, так и регулировку в пределах небольшого диапазон частот, чтобы их можно было точно отрегулировать после сборки в цепи.
Однако, хотя эта формула широко используется на радиочастотах, она часто недостаточно точна на низких частотах, где используются большие индукторы со значительным внутренним сопротивлением. В таком случае необходима более сложная формула, учитывающая также сопротивление. Приведенную ниже формулу можно использовать для расчетов на низких частотах (большое внутреннее сопротивление).
Необходимость тщательной регулировки после сборки схемы часто является решающим фактором для прекращения использования чистых LC-схем во многих приложениях.Во многих случаях они были заменены твердотельными керамическими фильтрами и резонансными кристаллами, не нуждающимися в настройке. Однако иногда может возникнуть проблема с множеством резонансных частот на гармониках (кратных) требуемой частоты с твердотельными фильтрами. Затем может быть включена одна регулируемая настроенная LC-схема, чтобы решить эту проблему.
Расчеты цепей серии.
В последовательной цепи LCR, особенно при резонансе, происходит много всего, и, следовательно, расчеты часто бывают многоступенчатыми.Формулы для многих общих вычислений были описаны в предыдущих модулях этой серии, разница теперь заключается в том, что задача получения соответствующей информации о состоянии цепи зависит от выбора подходящих формул и их использования в подходящей последовательности.
Например, в приведенной ниже задаче элементы в значениях, показанных красным, являются обязательными, но обратите внимание, что V C и V L не могут быть вычислены в первую очередь, как значение для ƒ r (и другое формула) требуется для расчета реактивного сопротивления.Однако иногда задача упрощается, если вспомнить 6 полезных фактов о последовательном резонансе из серой панели выше. В примере 9.2.2 ниже нет необходимости вычислять V L , потому что при резонансе X C и X L равны, и поэтому на них будут развиваться равные напряжения. Обратите внимание, однако, что V L не то же самое, что полное напряжение, измеренное на L. Напряжение на внутреннем сопротивлении (под углом 90 ° к V L ) должно быть включено, и из-за разницы фаз между V L и напряжение внутреннего сопротивления (VR L ), полное измеряемое напряжение индуктора V L TOT будет векторной суммой V L и VR L
Пример 9.2.2 Расчеты последовательной цепи LCR.
Разработайте каждую из этих формул (карандашом, бумагой и калькулятором), не забывая сначала вычислить части формулы в квадратных скобках, а затем проверьте свои ответы в Модуле 9.3.
Такая работа во время учебы — хороший способ понять, как работают математические вычисления. В сети, конечно, довольно много калькуляторов LCR, но послушайте совет: СНАЧАЛА ПОРАБОТАЙТЕ ЭТО, а затем попробуйте веб-калькулятор (или несколько, поскольку некоторые умнее других), чтобы проверить свой ответ.
Гармонический резонанс в энергосистемах — нарушение напряжения
Гармонические токи, создаваемые нелинейными электронными нагрузками, являются вводится в сеть энергосистемы. Эффект от инъекции большой величины гармонического тока в сеть зависит от реакции электросети на различные вводимые гармонические частоты. В зависимости от ответа сети, подаваемый ток может просто безвредно течь в сеть или создавать резонанс системы электропитания, приводящий к повреждению от перенапряжения или условия перегрузки по току.Характеристики системы, определяющие реакция сети на гармоники энергосистемы:
* Полное сопротивление системы каждой гармонической частоте
* Наличие конденсаторных батарей
* Количество резистивных нагрузок
Повреждение конденсатора из-за резонансаЕсть некоторые ключевые идеи, которые следует понять, пытаясь углубиться в понимание электрических Гармонический резонанс энергосистемы. Их:
Нелинейный нагрузки производят гармонический ток, который затем вводится в электросеть.
Текущий поступление к источнику (сети) вызывает падение напряжения, пропорциональное импеданс, предлагаемый этой конкретной гармонической частотной составляющей.
Если индуктивность и емкость источника образуют последовательный или параллельный резонансный контур, тогда введенный ток может вызвать очень сильные искажения тока и напряжения.
Каждая система с конденсаторами будет иметь параллельную резонансную точку. Важно определить, близка ли эта резонансная точка к одной из гармонических частот вводится системой нагрузок.
Симптомы и характеристика гармонического резонансаСамокорректирующийся : Большинство проблем гармонического резонанса обычно самокорректируются, что означает, что резонансное состояние вызовет достаточно ток / напряжение в системе, которые могут либо перегореть предохранители, либо выйти из строя конденсатор (выходящий из резонанса) или другое повреждение системы, которое вызывает система больше не резонансная. Обратите внимание, что резонанс системы низкого уровня может по-прежнему остаются незамеченными в течение долгого времени, и многие из них не вызывают сбоев, которые внимание к проблеме немедленно.
Перегорел предохранитель конденсатора : Обычно возникает резонансное состояние при больших токах конденсаторов и срабатывании предохранителей.
Неисправность конденсатора : Конденсатор также может быть поврежден из-за к перегреву или повреждению изоляционных слоев внутри банка напряжением.
Искажение напряжения : При резонансном состоянии искажение будет происходить из-за одного или двух близко расположенных гармонических порядков. Анализируя ток и напряжение на анализаторе качества электроэнергии, порядок гармоник Причина резонанса обычно может быть идентифицирована.
Отказ оборудования : Возможен низкий резонанс незамеченным долгое время. Обычно симптомы проявляются необъяснимой недостаточностью чувствительные источники питания, электронные нагрузки, перегрев трансформатора и т. д.
Состояние устойчивого состояния: Гармонический резонанс считается явление устойчивого состояния. Хотя переключение индуцированного переходного резонанса возможно, это решается с помощью программы моделирования переходных процессов и обычно требует различные методы смягчения.
11-й гармонический резонансИндуктивное сопротивление
Система питания сопротивление в основном индуктивное при номинальной частоте (50/60 Гц).В сопротивление меняется в зависимости от частоты гармоники. Для индуктивности «L» полное сопротивление Z на частоте f равно
.Емкостное сопротивление
Система питания конденсаторы могут быть конденсаторами коррекции коэффициента мощности, емкостью кабеля, емкость выключателя и т. д. Полное сопротивление изменяется обратно пропорционально в зависимости от гармоники. частота. Для конденсатора «C» полное сопротивление Z на частоте f равно
.Импеданс индуктивность обратно пропорциональна частоте.Для гармоник более высокого порядка (большая f), импеданс будет пропорционально ниже.
Когда система индуктивное сопротивление и емкостное реактивное сопротивление становятся равными, резонансное состояние может развиваться. Это может быть:
Параллельный резонанс
Резонанс серии
Параллельный резонанс в энергосистемеНиже представлена система, которая может дрейфовать до параллельного резонанса. Этот может ли крупный промышленный объект, где несколько низковольтных подстанций вводить гармонический ток в шине установки среднего напряжения.Потенциальная параллель резонансное состояние может возникнуть между средним или низким напряжением мощности объекта коэффициент конденсаторной батареи и индуктивность источника X с .
Цепь с потенциалом для состояния параллельного резонансаРезонансный частота определяется по формуле:
При параллельном резонансе частота, эффективное сопротивление цепи станет очень высоким. Примечание что при резонансе Xs = Xc. Для показанной схемы
Q известен как добротность и определяет резкость частотная характеристика.Для системы распределения Q может быть 5 и может быть 30 на вторичной обмотке большого распределительного трансформатора. Значение Q отличается для последовательного резонансного и параллельного резонансного контуров.
Напряжение на конденсатор
При параллельном резонансе очень высокое напряжение на конденсаторе, выданном.
Поскольку значения QX s очень высокие, небольшая гармоника ток (Ip) может вызвать падение большого напряжения на конденсаторе.
Ток через конденсатор
В условиях параллельного резонанса ток, протекающий в конденсатора и трансформатора, увеличивается в Q раз гармонического тока инъекционный (Ip).
Текущий увеличение может вызвать выход из строя конденсатора, нагрев трансформатора, перегорание предохранителя. Размер шунтирующей конденсаторной батареи относительно источника MVA определяет параллельную резонансную точку настройки . Параллельная резонансная частота для системы с шунтирующими батареями конденсаторов на вторичной обмотке силового трансформатора выдает:
Где
h p — порядок параллельной резонансной частоты
MVA 3øsc — трехфазное короткое замыкание MVA
X s — реактивное сопротивление короткого замыкания системы
X c — реактивное сопротивление звезды, эквивалентное конденсаторная батарея
Q cap — размер конденсаторной батареи в МВАр
.MVA 3øsc — эффективный MVA короткого замыкания в интересующей точке.Для большинства приложений быстрая оценка MVA 3øsc может быть сделана путем определения входящего трансформатора в кВА и% импеданса. Это связано с тем, что полное сопротивление трансформатора преобладает над полным сопротивлением системы и, следовательно, имеет наибольшее влияние на эффективное значение MVA короткого замыкания. Обратите внимание, что включение импеданса сетевого источника, если оно доступно, приведет к более точным результатам.
Чтение: Расчет импеданса источника в энергосистеме
Сканирование гармонического импеданса с батареей конденсаторов и без нееПример : Рассмотрим систему, питающуюся от трансформатора 1000 кВА с % импеданс 5.65. Конденсаторная батарея, подключенная к низковольтной стороне трансформатор 350 кВАр или 0,350 МВАр. Доминирующие гармоники, генерируемые в объекта 5 -й и 7 -й . Определить параллельную систему резонансной частоты и определите, существует ли какая-либо потенциальная проблема.
Ответ : С трансформатором 1000 кВА и импедансом 5,65% эффективное короткое замыкание источника MVA может быть приблизительно равно 1000 / 0,0565 = 17,7MVA 3øsc.
Параллельная резонансная частота определяется выражением:
Система имеет параллельную резонансную точку 7.1, который опасно близка к доминирующей гармонике 7 -й , генерируемой в средство. Одним из решений здесь будет уменьшение размера конденсатора для перемещения резонансная точка. Если мы выберем банк 250 кВАр, новая резонансная точка будет 8,4. что достаточно далеко от заказа 7 -го . Другое решение было бы быть использовать отстроенную батарею конденсаторов.
Резонанс серии
в энергосистеме Резонанс серииможет возникнуть, когда последовательная комбинация индуктивность трансформатора объекта и батарея шунтирующих конденсаторов на объекте резонирует на гармонической частоте, которая вводится из распределения система. В этом сценарии объект сам по себе не может быть значительным генератором гармонических токов, но все же может испытать гармонические эффекты резонанса из-за последовательной комбинации LC «Отвод» значительного гармонического тока из вышестоящей распределительной системы. Ниже приведен пример системы, которая потенциально может быть включена в серию резонанс.
Цепь с потенциалом для условия последовательного резонансаНапряжение на конденсаторе увеличивается и искажается и можно представить как:
Где V h — гармоническое напряжение, присутствующее в системе.R — внутреннее последовательное сопротивление указанной выше цепи и не показано на рисунке. Обратите внимание, что при резонансе значения Xt и Xc будут равны и противоположны по величине, следовательно, компенсируют друг друга.
серии
и параллельный резонанс в практическом применении энергосистемПрактически говоря, резонансное состояние серии также будет имеют состояние параллельного резонанса из-за топологии цепи. На рисунке ниже, X t — реактивное сопротивление трансформатора объекта, а X c — реактивное сопротивление конденсаторной батареи объекта.Реактивное сопротивление источника равно X s .
Гармонический резонанс энергосистемыПоказанная система имеют свою первую резонансную точку серии, определяемую Xc и Xt, и первую параллельную резонансная точка, определяемая Xc, Xt и Xs.
Из уравнения последовательного и параллельного резонанса можно заметил, что параллельный резонансный точка всегда ниже, чем точка последовательного резонанса в практической мощности установка системы.
Последовательный и параллельный резонанс в энергосистемеРазница между Последовательный и параллельный резонанс в энергосистеме — это серия резонанс создает низкий импеданс (потребляет максимальный ток в системе) тогда как параллельный резонанс создает большой импеданс , который даже при небольшом токе может создать большое падение гармонического напряжения и, как следствие, повреждения, связанные с напряжением.
Калькулятор, приведенный ниже, можно использовать для определения последовательной и параллельной резонансной частоты для простой системы.
Фильтр гармоник РезонансВажное наблюдение можно увидеть, наблюдая за графиком выше. То, что обсуждается о последовательном и параллельном резонансе, также может быть применено. к шунтирующему фильтру гармоник. Если размер фильтра соответствует приложения, точка последовательного резонанса будет гармоническим порядком, который требует фильтрация, в то время как параллельная резонансная точка будет в точке, удаленной от любого система генерирует гармонические частоты.Теперь предположим, что некоторые из конденсаторов в фильтр не работает. Потеря емкости (увеличение Xc) приводит к перемещению серии и параллельная резонансная точка, которая до отказа находилась в «безопасных» местах но, возможно, переместился в более проблемные области после отказа конденсатора. В результирующий фильтр может потреблять чрезмерный гармонический ток (последовательный резонанс) и выходят из строя или создают искажения высокого напряжения (параллельный резонанс).
Влияние цепи сопротивление при подавлении резонансаДемпфирование, создаваемое сопротивлениями в энергосистеме, составляет помогает снизить катастрофические последствия резонанса энергосистемы. Резистивная нагрузка 10% может иметь значительное положительное влияние на пиковое сопротивление. Обратите внимание, что сопротивление цепи не удаляет гармоники, а только уменьшает (смягчает) разрушительные последствия, вызванные резонанс. Коммунальные предприятия в этом отношении имеют преимущество, поскольку могут физически изменить расположение фильтров гармоник, конденсаторных батарей на место, обеспечивающее дополнительное последовательное линейное сопротивление. Промышленные установки делают не имеют этой роскоши и обычно имеют ограниченные возможности при установке конденсаторные батареи или фильтры.
Резистивная нагрузка и ее влияние на пик параллельного резонансаКонденсаторные батареи бытовые обычно устанавливается на шине подстанции низкого напряжения сразу после подстанции трансформатор. Отношение X / R в таком месте имеет тенденцию быть высоким или в другом месте. словами сопротивление в этом месте относительно меньше и, следовательно, параллельно резонансный пик будет очень резким и высоким. Применение конденсаторных батарей при такое расположение необходимо пересмотреть, чтобы определить, где находится точка резонанса (используйте вышеуказанный калькулятор в качестве предварительной проверки перед использованием инженерных программное обеспечение для моделирования).Если резонансная точка системы лежит близко к одной из доминирующие гармоники, производимые на объекте (скажем, 5 -я , 7 -я и т. д.) то у нас возникла проблема. решением будет либо изменить размер банка, либо использовать «отстроенный» конденсаторная батарея.
Малогабаритные двигатели HP немного помогают с системой демпфирования резонанс, поскольку их кажущееся отношение X / R низкое. С другой стороны, больший HP двигатели имеют высокое отношение X / R и могут делать наоборот. Очень большие двигатели также имеют тенденцию влиять на частотную характеристику системы и может сместить систему резонансная точка.В инженерный анализ необходимо включить такие большие (> 500 л.с.) нагрузки двигателя.
Вывод: Гармонический резонанс — это мощность проблема качества, которую трудно визуализировать, так как ущерб, причиненный из-за резонанс вывел бы систему из резонанса (самокоррекции) время, когда инженер выполняет измерение или анализ. Отсюда важное Шаги в диагностике гармонического резонанса заключаются в том, чтобы сначала определить, конфигурация может перейти в состояние последовательного или параллельного резонанса, как подробно в этой статье.Подробный компьютерный гармонический анализ может обычно определяют состояние резонанса.
Другие статьи по теме: Калькулятор коэффициента мощности, Калькулятор резонанса, Калькулятор фильтра гармоник, Соединение конденсаторов по схеме «звезда» и «треугольник», Расчет КВАр-Ампер
Параллельный резонанс — обзор
Для наблюдения за влиянием нелинейной нагрузки предполагается, что источник гармонического напряжения (представляющий искаженное напряжение электросети) закорочен. Гармонический ток, вводимый в конденсатор из-за нелинейной нагрузки, составляет
(E5.3-3) I ~ C, hdueNL = Zsys, hZsys, h + ZC, hI ~ NL, h.
Параллельный резонанс возникает, когда знаменатель приближается к нулю. Частота параллельного резонанса
(E5.3-4) fparallel = 12πLsysC = 12π0.11m⋅1300μ≈420Гц.
Это условие приведет к подаче большого гармонического тока в конденсаторную батарею. Величина вводимого гармонического тока может в несколько раз превышать номинальный ток конденсатора, что может привести к возникновению значительных гармонических напряжений на конденсаторе. Следовательно, параллельный резонанс может привести к разрушению конденсатора из-за перенапряжения или перегрузки по току.
Чтобы исследовать влияние искаженного сетевого напряжения на конденсатор, предполагается, что источник гармонического тока (аппроксимирующий нелинейную нагрузку) идеален, то есть его полное сопротивление стремится к бесконечности и ведет себя как разомкнутая цепь. Гармонический ток, вводимый в конденсатор из-за искаженного сетевого источника, составляет
(E5.3-5) I ~ C, hduesys = 1Zsys, h + ZC, hV ~ sys, h.
Последовательный резонанс возникает, когда знаменатель приближается к нулю. Следовательно, для этой системы частоты последовательного и параллельного резонансов идентичны:
(E5.3-6) fseries = fparallel = 12πLsysC≈420 Гц.
Ввод гармонического тока в силовой конденсатор будет увеличиваться, если напряжение сети содержит гармонические составляющие вблизи резонансных частот.
Полный гармонический ток, вводимый в силовой конденсатор, составляет
(E5.3-7) I ~ C, h = I ~ C, hdueNL + I ~ C, hduesys = Zsys, hZsys, h + ZC, hI ~ NL , h + 1Zsys, h + ZC, hV ~ sys, h.
Следовательно, 5-я гармоническая составляющая тока, введенного в конденсатор, равна
I ~ C, 5 = I ~ C, 5dueNL + I ~ C, 5duesys, I ~ C, 5dueNL = Zsys, 5Zsys, 5 + ZC, 5I ~ NL, 5, = 0.06 + j52π⋅60⋅0.11⋅10−3I ~ NL, 50.06 + j52π⋅60⋅0.11⋅10−3] — [j / 52π⋅60⋅1300⋅10−6, = 0,06 + j0.20740.06 + j0.2074 −j0.408I ~ NL, 5, = 0,06 + j0.20740.06 − j0.2I ~ NL, 5 = 0,2159∠73,87 ° 0,2∠ − 73,3 ° I ~ NL, 5, = 1,08∠147,17 ° I ~ NL, 5, = 1,08∠147,17 °) 20,3∠0 ° A, = 20,324∠147,17 ° A.
(E5.3-8) I ~ C, 5duesys = 1Xsys, 5 + ZC, 5V ~ sys, 5 = 10,2∠ − 73,3 ° V ~ sys, 5, = 5∠73,3 ° V ~ sys, 5 = 5 73,3 ° 23∠0 ° A, = 215∠73,3 ° A, ⇒⇒I ~ C, 5 = I ~ C, 5dueNL + I ~ C, 5duesys, = 20,324∠147,17 ° + (215∠73,3 ° A, = 24,04 + j14,54 = 215,1∠74,47 ° A.
Составляющая 7-й гармоники вводимого в силовой конденсатор тока составляет
(E5.3-9) I ~ C, 7 = I ~ C, 7dueNL + I ~ C, 7duesys, I ~ C, 7dueNL = Zsys, 7Zsys, 7 + ZC, 7I ~ NL, 7, = 0,06 + j72π⋅60⋅0,11 ⋅10−3I ~ NL, 70.06 + j72π⋅60⋅0.11⋅10−3 − j / 72π⋅60⋅1300⋅10−6, = 0,06 + j7⋅0.041470.06 + j7⋅0.04141 − j2.040 / 7I ~ NL, 7, = 0,06 + j0,2,06 − j0,0011I ~ NL, 7 = 0,2964∠78,32 ° 0,06∠ − 1,05 ° I ~ NL, 7, = 4,964∠79,37 ° I ~ NL, 7, = 4,964∠79,37 ° 20,2∠0 ° A, = 20,993∠79,39 ° AI ~ C, 7duesys = 1Zsys, 7 + ZC, 7V ~ sys, 7 = 10,06∠ − 1,05 ° V ~ sys, 7, = 16,7∠1,05 ° V ~ sys, 7 , = 16,7∠1,05 ° 52∠0 ° A, = 233,4∠1,05 ° A, ⇒⇒I ~ C, 7 = I ~ C, 7dueNL + I ~ C, 7duesys, = 20,993∠79,37 ° + 233,4∠1,05 ° A , = 233,58 + 1,59 А, = 233,62 2,7 ° А.
Факторы комплексности шумовых проблем | Базовый курс по шумоподавлению
3-1.Введение
В главе 2 описан механизм возникновения электромагнитного шума и, среди прочего, подробно описан шум, который генерируется цифровыми схемами.
Чтобы справиться с шумовыми помехами для электронных устройств, вам необходимо понимать не только источник шума, но и характеристики линий передачи и антенн. В этой главе конкретно описываются линии передачи среди них.
До сих пор возникновение шума объяснялось относительно простыми выражениями (за исключением гармоник).Однако, чтобы объяснить механизм передачи и излучения шума, вам потребуются термины, которые используются в теории передачи, электромагнетизма и теории антенн, как показано на рис. 3-1-1. Без понимания этих терминов вы не сможете справиться с проблемами шума.
Таким образом, в этой главе будут объяснены эти термины (постарайтесь использовать как можно меньшее количество формул), а также представлены важные темы, касающиеся шума, такие как резонанс и затухание, проводимость и отражение шума, а также сопротивление источника.
3-2. Резонанс и затухание
Резонанс является одним из важных факторов при возникновении шума или индукции шума. Если цепь содержит непредусмотренный резонансный контур, он генерирует очень большой ток или напряжение на резонансной частоте, что повышает вероятность возникновения шумовых помех. Важно максимально исключить резонанс в цепи. Для подавления резонанса используются демпфирующие резисторы.В этом разделе описываются резонансные и демпфирующие резисторы.
3-2-1. Параллельный резонанс и последовательный резонанс
(1) LC резонансный контур
Резонанс означает, что индуктивное реактивное сопротивление и емкостное реактивное сопротивление в цепи взаимно компенсируются на определенной частоте, и конкретная частота называется «резонансной частотой». Хотя типичные части, которые могут генерировать реактивное сопротивление (мнимую составляющую импеданса), включают катушки индуктивности (катушки) и конденсаторы, любые другие части (даже простой провод) могут быть элементом резонанса, поскольку они все еще содержат очень маленькое реактивное сопротивление.(Хотя резонанс в связи с ЭМС может быть вызван антенной, параллельными пластинами, линией передачи и т. Д., Помимо вышеупомянутого, мы сосредоточимся только на ЖК-резонансе катушки индуктивности и конденсатора).
(2) Импеданс резонансного контура
Как показано на рис. 3-2-1, существует два типа резонансного контура: последовательный резонанс и параллельный резонанс. Как показано в примере расчета на рис. 3-2-2, последовательный резонанс делает импеданс минимальным (в идеале нулевым), в то время как параллельный резонанс делает его максимальным (в идеале ∞ ).
(3) Реактивность отменена до нуля
Как показано на рис. 3-2-3, понятно, что величины реактивного сопротивления катушки индуктивности и реактивного сопротивления конденсатора становятся одинаковыми на резонансной частоте, компенсируя друг друга и, таким образом, сводя их к нулю.
Хотя рис. 3-2-3 объясняет случай последовательного резонанса, реактивное сопротивление заменяется проводимостью (мнимая составляющая полной проводимости) в случае параллельного резонанса, что приводит к уменьшению восприимчивости до нуля на резонансной частоте.Поэтому легко понять, что импеданс становится максимальным.
(4) Резонансная частота
Резонансная частота ƒ 0 можно оценить по приведенной ниже формуле как для последовательного, так и для параллельного резонанса. В примере на рис. 3-2-2, ƒ 0 составляет ок. 50 МГц.
(Формула 3-2-1)
(5) Резонанс Q
Сила этого резонанса выражается показателем Q (добротность).Более высокая добротность указывает на более сильный резонанс. Индекс Q также используется как индекс для представления характеристик конденсатора и катушки индуктивности. Существует связь, когда вы используете конденсатор или катушку индуктивности с большой добротностью, вы можете создать резонансный контур с большой добротностью. Как оценить добротность, будет объяснено в разделе 3-2-5.
(6) Собственный резонанс конденсатора и катушки индуктивности
Когда конденсатор или катушка индуктивности используются в высокочастотном диапазоне, сама деталь вызывает резонанс на определенной частоте из-за паразитных компонентов, присущих этой детали.Это называется саморезонансом. Саморезонанс будет более подробно описан в главе 6.
3-2-2. Вопросы обеспечения электромагнитной совместимости резонансного контура
(1) Резонансный контур усиливает напряжение
Если в электрической цепи возникает непреднамеренный резонанс, импеданс значительно изменяется на резонансной частоте, что приводит к большому току или напряжению, которые могут быть причиной шумовых помех.
Скажем, например, переменный входной сигнал подается извне на последовательный резонансный контур, который был рассчитан на рис.3-2-2 (а). Как показано на рис. 3-2-4, когда генератор сигналов с выходным сопротивлением 50 Ом используется для подачи сигнала с постоянным напряжением (величина 0,5 В), возникает напряжение, которое в несколько раз превышает входной сигнал. на конденсаторе на резонансной частоте 50 МГц. В этом случае напряжение, возникающее на конденсаторе или катушке индуктивности, достигает входного напряжения, умноженного на Q. Как оценить Q, будет объяснено в Разделе 3-2-5. Условия на рис. 3-2-4 указывают Q = 6.3.
(2) Резонансный контур может возникать непреднамеренно
Тестовая схема на рис.3-2-4 содержит конденсатор и катушку индуктивности, где используемые константы являются значениями, которые обычно встречаются в цифровых схемах. Например, входная клемма цифровой ИС имеет плавающую электростатическую емкость в несколько пФ. И проводка имеет индуктивность около 1 мкГн на метр. Следовательно, если кабель длиной около 1 м подключен к входной клемме цифровой ИС (например, для подключения его к внешнему датчику), будет создан резонансный контур, подобный показанному здесь.
Если проводник неправильно подсоединен к этой точке, это может стать причиной появления шума.
(3) Внутреннее напряжение становится высоким даже при небольшом входном напряжении.
Как показано на Рис. 3-2-2 (a), полное сопротивление последовательного резонансного контура становится минимальным на резонансной частоте. Таким образом, вы можете просто предположить, что напряжение становится меньше. Почему напряжение на самом деле становится выше?
На рис. 3-2-5 показан пробой напряжения. Напряжение на входе (средняя точка между резистором и индуктором) резонансного контура резко снижается до очень небольшого напряжения.Однако ток был увеличен из-за пониженного импеданса. Следовательно, внутри резонансного контура возникает напряжение, превышающее приложенное.
Почему напряжение на входе в резонансный контур пропадает, несмотря на то, что конденсатор получает какое-то напряжение? В этот момент на катушку индуктивности подается точно такое же напряжение, как и на конденсатор. Поскольку направление этого напряжения противоположно конденсатору, вы вряд ли увидите какое-либо напряжение на входе в резонансный контур.
(4) Резонансный контур имеет совершенно разное напряжение в зависимости от точки
Когда цепь резонирует, напряжение существенно различается в зависимости от точки. Даже если кажется, что измерение напряжения в какой-то точке указывает на то, что шум уменьшился, измерение общего шумового излучения может быть неизменным или даже увеличиваться. Так что нужно проявлять осторожность.
Приведенный выше пример касается случая последовательного резонансного контура.В случае параллельного резонансного контура ток, протекающий через конденсатор и катушку индуктивности, становится больше, чем входной сигнал. Поскольку этот ток также может быть причиной шума, следует соблюдать осторожность и в случае параллельного резонансного контура.
3-2-3. Когда цифровая цепь подключена к резонансной цепи
(1) Вероятность появления шума на резонансной частоте
. Как описано выше, если проводник, который может работать как антенна, был подключен к резонансному контуру, он улавливает высокое напряжение резонансной частоты и генерирует сильное излучение, вызывая, таким образом, шум.Кроме того, с точки зрения устойчивости, шум можно легко уловить на резонансной частоте.
Если такой резонансный контур с присоединенной антенной подключен к сигналу, который содержит широкий диапазон частот, например к цифровому сигналу, гармоники на частотах, близких к резонансной частоте, будут иметь сильное излучение. На рисунках 3-2-6 и 3-2-7 показаны примеры измерения изменений формы импульса и излучения, когда описанная выше последовательная резонансная цепь 50 МГц подключена к тактовому сигналу 10 МГц.В качестве примера подавления шума здесь также показаны форма волны и излучение с прикрепленным ферритовым шариком.
(2) Когда цифровой сигнал подключен к резонансному контуру
На рис. 3-2-6 показаны испытательная схема и результаты измерения формы волны напряжения. 74AC00 использовался для цифрового идентификатора, который работает как источник шума. Выход этой ИС подключен к последовательному резонансному контуру с резонансной частотой 50 МГц.Вы можете видеть, что наблюдаемая форма волны указывает на сильный звон в цифровом импульсе 10 МГц, что серьезно искажает форму волны. Считается, что это связано с тем, что среди гармоник, содержащихся в сигнале 10 МГц, была выделена только гармоника 5-го порядка (50 МГц). (Наблюдалась частота звонка 50МГц)
(3) Демпфирование с использованием ферритовых шариков
Как описано ниже, демпфирующие резисторы и ферритовые шарики эффективны для подавления этого типа резонанса.На рис. 3-2-6 показана форма волны после прикрепления ферритового буртика. Вы можете видеть, что резонанс был подавлен, и сигнал вернулся к исходной форме импульса.
(4) Резонанс подтверждается шумом
На рис. 3-2-7 показаны результаты по шумовому излучению. Напряженность электрического поля измерялась трехметровым методом. Для справки, на рисунке также показан результат измерения без антенны, и было подтверждено, что практически отсутствует шумовое излучение, когда оно состоит только из цифровой ИС и резонансного контура, как указано выше.Линия в нижней части рисунка показывает уровень темнового шума анализатора спектра.
(5) ЖК-резонанс и резонанс антенны
На рис. 3-2-7 (a) показан случай, когда резонансный контур подключен с помощью 15-сантиметрового провода в качестве антенны для излучения шума. Сильное излучение наблюдалось на резонансной частоте 50 МГц для резонансного контура LC. Помимо частоты, шум также наблюдался на частоте 500 МГц. На этой частоте 15-сантиметровый провод, подключенный как антенна, работает как антенна с длиной волны 1/4.Следовательно, вы можете наблюдать резонансный эффект антенны в дополнение к LC-резонансу на рис. 3-2-7 (a). Резонанс антенны будет описан в следующем разделе.
Рис. 3-2-7 (c) показывает результат измерения с прикрепленным ферритовым валиком. Вы можете видеть, что шумовое излучение было эффективно подавлено.
3-2-4. Пример возникновения резонанса без катушки индуктивности или конденсатора
(1) Резонансная цепь, создаваемая цифровой сигнальной линией
Чтобы провести измерение с акцентом на эффект резонанса на рис.3-2-6 и 3-2-7, эксперимент проводился путем создания LC-резонансного контура с конденсатором и катушкой индуктивности. Однако резонанс может возникнуть в реальной цепи без таких частей.
Например, в случае проводки цифрового сигнала, показанной на рис. 3-2-8, провод, соединяющий драйвер и приемник, имеет индуктивность. Кроме того, входной разъем приемника, принимающего сигнал, обладает электростатической емкостью. Считается, что цифровая схема, описанная в разделе 2-4-7, образует резонансный контур с этими факторами.
(2) Проблема становится очевидной, когда резонансная частота становится ниже.
Когда цифровая сигнальная проводка очень короткая, резонансная частота из-за этих факторов становится очень высокой (несколько 100 МГц), и, таким образом, влияние незначительно. Однако, если используется двусторонняя плата, или если индуктивность увеличивается за счет удлинения проводки, или если электростатическая емкость увеличивается за счет подключения нескольких приемников, эффекты (искажение формы импульса или повышенное излучение шума и т. Д.) от пониженной резонансной частоты больше не будет незначительным.
В рамках подготовки к вышеупомянутым случаям часть вывода сигнала может быть снабжена контактами, позволяющими использовать компонент подавления резонанса, такой как ферритовый шарик, так что меры по подавлению шума могут быть легко реализованы, как описано в разделе 3-2-6.
(3) Кабель питания и печатная плата могут быть факторами резонанса.
Помимо цифровых сигналов, различные факторы, составляющие схему, могут действовать как конденсатор или катушка индуктивности, которые не были описаны в принципиальной схеме, и вызывать резонанс.Так что нужно проявлять осторожность. На рис. 3-2-9 показан пример.
3-2-5. Демпфирование резистором или ферритовым валиком
(1) Демпфирование последовательного резонансного контура
Резонанс можно подавить, добавив резистор в резонансный контур. Этот резистор называется демпфирующим резистором. На рис. 3-2-10 показан пример добавления демпфирующего резистора (обозначенного как R на рисунке).
Когда демпфирующий резистор используется последовательно с последовательным резонансом, как показано на рис.3-2-10 (a), добротность резонатора определяется следующим образом: [Ссылка 1] .
(Формула 3-2-2)
Например, мы можем включить в эту формулу частичные константы, которые использовались в тесте на рис. 3-2-4. Если выходное сопротивление источника сигнала 50 Ом используется для резистора R , Q = 6.3, что указывает на сильный резонанс. Если резистор R больше, Q становится меньше, тем самым ослабляя резонанс.Таким образом, вы можете видеть, что добавление резистора более 50 Ом к этой точке позволяет ослабить резонанс.
Обычно для подавления резонанса резистор выбирается так, чтобы Q был установлен на 1 или меньше.
(2) Условия отсутствия колебаний последовательного резонансного контура
Чтобы исключить перерегулирование, недорегулирование или звенящий сигнал из импульсной формы волны, такой как цифровой сигнал, используется резистор, который соответствует следующей формуле, чтобы удовлетворить условиям отсутствия колебаний последовательного резонансного контура LCR.
(Формула 3-2-3)
Формула (2) приводит к тому, что Q составляет 0,5 или меньше.
(3) Демпфирование параллельного резонансного контура
Напротив, когда демпфирующий резистор используется параллельно с параллельным резонансом, как показано на рис. 3-2-10 (b), добротность резонатора определяется следующим образом:
(Формула 3-2-4)
В этом случае, чем меньше резистор, тем слабее становится резонанс.
3-2-6. Демпфирование цифрового сигнала
(1) Демпфирующий резистор и резистор согласования полного сопротивления
При использовании демпфирующего резистора для предотвращения вызванного резонансом проводки цифровой схемы, показанной на рис. 3-2-8, он обычно используется последовательно с проводкой, как показано на рис. 3-2-11. При этом, чем больше резистор, тем выше становится эффект подавления резонанса. Однако, если демпфирование будет чрезмерным, это вызовет побочные эффекты, такие как затухание сигнала и медленное нарастание формы импульса.Следовательно, соответствующий резистор следует выбирать, исходя из баланса между подавлением шума и работой схемы. Если электропроводку можно рассматривать как линию передачи, эту операцию можно выполнить разумно, используя концепцию согласования импеданса, описанную в следующем разделе.
(2) Демпфирование ферритовым валиком
Поскольку примеры показаны в Разделе 2.4.7, Рис. 3-2-6 и Рис. 3-2-7, ферритовые бусины часто используются для демпфирования при измерениях ЭМС.В этом случае деталь следует выбирать так, чтобы сопротивление ( R ) компонент ферритового валика может удовлетворять формуле (2) на резонансной частоте. Поскольку ферритовый шарик имеет частотные характеристики импеданса, резонанс можно подавить, минимизируя влияние на форму сигнала. Кроме того, он может потреблять больший постоянный ток, чем резистор.
«3-2. Резонанс и затухание »- Ключевые моменты
- Резонанс может быть последовательным или параллельным
- Последовательный резонанс делает импеданс минимальным (в идеале нулевым) на резонансной частоте.
- Параллельный резонанс делает полное сопротивление максимальным (в идеале ∞ ) на резонансной частоте
- На резонансной частоте шум может вызвать проблему из-за его максимального напряжения или тока.
- Демпфирующие резисторы или ферритовые шарики используются для подавления резонанса.
Алгоритмы управления резонансным перенапряжением в преобразователе частоты с длинным кабелем на основе дискретной математики
1 Введение
В системе электропривода металлургической, нефтехимической, бумажной, текстильной и других отраслей в некоторых областях применения расстояние между преобразователем частоты и асинхронным двигателем может достигать сотен метров или даже тысяч метров, в настоящее время оно должно быть соединены длинным кабелем [1].Нарушение изоляции длинных проводов и кабелей представляет большую угрозу для надежной работы системы, что не только влияет на производство, но и увеличивает расходы на техническое обслуживание, что приводит к неоправданным экономическим потерям [2]. Из-за распределенной индуктивности и емкости самого кабеля импеданс кабеля не соответствует импедансу двигателя, в результате чего d u / d / d t двигателя, повреждая обмотку и кабель изоляционный материал двигателя, сокращающий срок службы двигателя и усиливающий электромагнитные помехи [3].Чтобы подавить эффект перенапряжения на стороне двигателя, выходной дроссель с падением напряжения 5% от выходного фазного напряжения часто добавляется на выходе преобразователя. Этот метод прост по конструкции и отличается высокой надежностью, особенно при большой мощности. Система широко используется, но стоимость реакторного метода высока, а возможность сдерживания перенапряжения ограничена. Поэтому в связи с проблемой защиты от перенапряжения в отечественной и зарубежной литературе было проведено множество исследований.В ссылке [4] предлагается выходной LC-фильтр, который подходит для системы преобразователя с высокой частотой переключения; в [5] предлагается добавить RC-фильтр на стороне двигателя; в ссылке [6] фильтр RLC предъявляет высокие требования к согласованию полного сопротивления параметров, что трудно применить на практике. В зависимости от уровня напряжения, мощности, длины кабеля и условий применения преобразователя выбираются различные оптимальные методы подавления перенапряжения.Моделирование и симуляция — самый эффективный и дешевый метод.
Под действием источника переменного тока синусоидальной формы, когда собственная частота системы равна или близка к резонансной частоте системы, система будет иметь резонанс [7]. Поскольку резонанс вызван высшей гармоникой системы, до тех пор, пока гармоника системы устранена, резонанса системы можно избежать. Первый метод — отфильтровать гармонические колебания системы путем установки фильтра [8].Этот метод позволяет не только отфильтровать гармоники, но и ограничить отражение волн. Однако установка фильтра повлечет за собой проблемы с расходами, установкой и обслуживанием. Неправильная установка параметров фильтра приведет к новому резонансу между длинным кабелем и фильтром, что усилит резонансный эффект системы [9]. Второй метод заключается в использовании высокопроизводительного инвертора для уменьшения содержания гармоник в системе. Исследования показывают, что система может в значительной степени уменьшить гармоники системы без установки фильтра.Однако высокопроизводительные преобразователи дороги и составляют значительную часть инвестиций в систему. Как только режим подключения системы определен, можно определить электрические параметры в системе, а резонансную частоту можно получить путем расчета и анализа [10]. Следовательно, необходим новый метод подавления резонансного перенапряжения в системе привода с регулируемым длинным кабелем.
2 Алгоритмические определения
2.1 Система привода с преобразованием частоты для длинного кабеля
Из-за большой протяженности длинного кабеля нельзя игнорировать влияние параметров распределения. Предполагая, что напряжение на приемнике (х = 0) является Vm и ток Я , определены граничные условия.Для напряжения и тока на расстоянии x от приемного конца общее решение приведенного выше уравнения выглядит следующим образом:
(1) Vx = Vm + ZbIm2eγx + Vm − ZbIm2e − γx
(2) Ix = Vm / Zb + Im2eγx + Vm / Zb − Im2e − γx
В уравнениях (1) и (2), когда х = 1 используется, рассчитываются напряжение и сила тока на конце кабеля.
(3) VC = Vmcosh (γl) + ZbImsinh (γl)
(4) IC = Imcosh (γl) + VmZbsinh (γl)
Однако для анализа связи между кабелем и другими компонентами системы эквивалентная схема [11], которая может отображать характеристики линии передачи, выбирается только с конца.
Согласно уравнениям (3) и (4), a π -образная эквивалентная схема с сосредоточенными параметрами. В π -образная эквивалентная схема длинного кабеля показана на рисунке 1.
Рисунок 1
π -образная схема замещения длинного кабеля.
Из них:
(5) Z1 (jw) = Zbsinh (γl)
(6) Z2 (jw) = Zbsinh (γl) ch (γl) −1
В приведенных выше уравнениях г = г + jωL обозначает последовательный импеданс / фазу на единицу длины; у = g + jωC обозначает параллельную полную проводимость / фазу на единицу длины; Zb обозначает характеристическое сопротивление кабеля; Zb = z / y обозначает коэффициент передачи кабеля; а также γ = z × y , л обозначает длину кабеля.
Для системы частотно-регулируемого привода на большие расстояния из-за различий в расстоянии от источника питания режим подключения системы также отличается. Исследования показывают, что система электропитания от нескольких километров до более чем десяти километров может гарантировать потерю напряжения в пределах диапазона, необходимого для двигателя из-за небольшого расстояния. Следовательно, принят режим соединения системы преобразователь – кабель – двигатель (ICM), то есть режим соединения системы ICM.Он может соответствовать требованиям.
Поскольку резонанс системы в основном вызван высшими гармониками системы и относительно высокочастотных компонентов системы, полное сопротивление двигателя очень велико, что эквивалентно разомкнутой цепи в конце кабель [12]. Анализ показывает, что влияние сквозной разомкнутой цепи на результаты анализа в целом не очевидно. Согласно рисунку 1 эквивалентное сопротивление ZC уравнение кабеля выглядит следующим образом:
(7) ZC = Zb1tanh (γl)
Тогда отношение Gv напряжения на конце кабеля Гм к напряжению на конце кабеля Uc это:
(8) Gv = 1cosh (λl)
Однако для длинных кабелей, особенно на высоких частотах, необходимо учитывать скин-эффект.Скин-эффект возникает из-за накопления тока на поверхности жилы кабеля, «уменьшения» поперечного сечения жилы и увеличения сопротивления жилы переменному току. Следовательно, скин-эффект оказывает определенное тормозящее действие на перенапряжение на клеммах двигателя [13]. Обычно интенсивность скин-эффекта можно рассчитать с помощью функции Бесселя, но, учитывая сложность вычисления функции Бесселя, мы применяем метод гиперболической аппроксимации для расчета. Параметры жилы кабеля с учетом скин-эффекта следующие:
(9) Rhyp = 12πrσδsinh3rδ + sin2rδcosh3rδ − cos2rδΩm
(10) Lhyp = 3μδ32πrsinh3rδ − sin2rδcosh3rδ − cos2rδHm
(11) Zb ′ = Rhyp + jw [Lhyp + (Le − Lhyp (f0))] G + jwC
(12) r ′ = {Rhyp + jw [Lhyp + (Le − Lhyp (f0))]} (G + jwC)
Zb ′ а также γ ′ — характеристический импеданс и коэффициент распространения кабеля с учетом скин-эффекта.Из их, ω — угловая частота системы, Le — взаимная индуктивность между проводниками, а f0 — частота колебаний кабеля. σ — проводимость проводника (для меди σ = 5.75 × 107 Ом · м − 1 ). мкм — проницаемость среды. Уравнение глубины скин-слоя δ выглядит следующим образом:
(13) δ = 2σμω [м]
Подставляя уравнение (11) и уравнение (12) в уравнения (7) и (8), мы можем получить:
(14) ZC = Zb′1tanh (γ′l)
(15) GV = 1cosh (γ′l)
Из приведенного выше вывода можно найти, что GV является функцией частоты.Согласно уравнению (15) может быть получено перенапряжение на клеммах двигателя на разных частотах. Из-за скин-эффекта перенапряжение на клеммах двигателя в определенной степени сохраняется. Более того, с увеличением частоты скин-эффект становится все более очевидным, а амплитуда электрического экстремального перенапряжения постепенно уменьшается [14]. Поэтому мы рассматриваем только резонансную частоту ближайшей основной частоты, то есть резонансную частоту, которая имеет наибольшее влияние на систему.
2.2 Резонансный контроль перенапряжения
2.2.1 Стратегия модуляции для системы ICM
В системах ICM в качестве стратегий модуляции обычно используются ШИМ с фазовым сдвигом несущей (CPS-PWM), пространственно-векторная ШИМ и модуляция ближайшего уровня. Когда количество уровней слишком велико, количество векторов напряжения слишком велико и управление сложным. Следовательно, для систем ICM с большим количеством уровней модуляция фазового сдвига несущей и модуляция приближения уровня почти имеют преимущества [15].В этой статье используется модуляция сдвига фазы несущей, а волна модуляции представляет собой выходное напряжение верхнего и нижнего плеч каждой фазы. Из-за симметрии трехфазных блоков ICM известно, что выходное напряжение верхней и нижней части системы ICM следующее:
(16) upj = −ujO + Udc / 2unj = ujO + Udc / 2
Несущая — треугольная несущая с частотой fc , максимальная амплитуда Udc , минимальная амплитуда 0 и фазовый угол 360 / п по очереди ( п количество подмодулей каждого плеча моста).Триггерные сигналы каждого подмодуля генерируются путем сравнения модулированной волны с треугольной несущей со сдвинутой по фазе.
Когда традиционный метод последовательности используется в управлении балансом емкостного напряжения системы ICM, только в соответствии с направлением тока плеча моста и результатом упорядочения емкостного напряжения субмодулей, соответствующие субмодули выбираются для размещения в или удален [16,17,18], без учета исходного состояния переключения субмодулей, что приводит к частому переключению субмодулей и большим потерям коммутационных устройств.Таким образом, в этой статье используется улучшенный контроль баланса напряжений конденсаторов, то есть на основе традиционного метода упорядочивания, в соответствии с изменением направления тока плеча моста, напряжение конденсатора SM умножается на различные коэффициенты удерживания, а затем упорядочивается [19] . Последовательность управления выравниванием напряжения конденсатора выглядит следующим образом:
- (1)
Введите емкостное напряжение Uci , Текущий яростно модуля верхнего (нижнего) рычага и количества модулей п которые следует поместить в одну руку, полученную методом CPS.
- (2)
Определить, есть ли ток руки яростно больше 0.
- (3)
При токе плеча моста яростно больше 0, емкостное напряжение входного подмодуля умножается на коэффициент удерживания немного меньше 1.Тогда, согласно п , п модули с меньшим емкостным напряжением выбираются традиционным методом секвенирования.
- (4)
Когда ток плеча моста не превышает 0, напряжение емкости входного субмодуля умножается на коэффициент удерживания немного меньше 1, а затем п модули с большим емкостным напряжением выбираются в соответствии с традиционным методом упорядочивания.
- (5)
Амплитуда сигнала запуска п выбранных модулей 1.
- (6)
Выходной импульсный сигнал запуска.
Независимо от того, заряжен или разряжен ток плеча моста, SM, который находится в состоянии отсечки и чье напряжение на конденсаторе отклоняется от номинального значения, умножается на коэффициент удержания, немного превышающий 1, когда применяется управление балансом напряжения конденсатора.Комбинируя условия зарядки и разрядки тока плеча моста, в этой статье напряжение конденсатора SM, которое должно быть введено в действие, умножается на различные удерживающие коэффициенты, а затем на последовательности [20], так что SM, который будет запущен в работу, может сохранить свою первоначальную работу. состояние, эффективно улучшить частое переключение субмодулей в системе ICM, а также снизить частоту переключения и переключение устройств переключения.
2.2.2 Дискретная математическая модель стороны переменного тока
Благодаря стратегии управления балансом емкостных напряжений можно увидеть, что две точки соединения J а также J ′ реактивных сопротивлений верхнего и нижнего плеча моста, связанных с эквивалентным управляемым источником напряжения верхнего и нижнего плеча моста в системе ICM, являются эквипотенциальными точками, поэтому J а также J ′ точки могут быть практически короткозамкнутыми.Со стороны переменного тока системы ICM реактивное сопротивление верхнего и нижнего плеча моста каждой фазы эквивалентно параллельному соединению, а эквивалентное реактивное сопротивление параллельного соединения равно L / 2 . Таким образом, математическая модель стороны переменного тока системы ICM может быть получена следующим образом:
(17) usj − isjRS − LS + L2disjdt = ujO
В уравнении ujo (j = a, b, c) напряжение заземления J точка, которая является выходным напряжением стороны переменного тока системы ICM.
Преобразование Equal Park используется в паре (17). Матрица преобразования:
(18) P = 23cosωtcos (ωt − 120 °) cos (ωt + 120 °) −sinωt − sin (ωt − 120 °) −sin (ωt + 120 °) 1/21/21/2
ω основная частота системы. В системе координат синхронного вращения d — q математическая модель системы ICM со стороны переменного тока выглядит следующим образом:
(19) usd + ωLeiq − RSid − Lediddt = udusq − ωLeid − RSiq − Lediqdt = uq
В уравнении (19), Le = LS + L / 2 ; доллар США , usq , я бы , iq , d и q компоненты оси usj а также isj , соответственно; уд а также uq компоненты оси d и q uJO .
Предполагая, что период выборки системы управления равен TS , в пределах времени выборки tt = kTS к t + TS , текущий дифференциальный член в уравнении (19) может быть получен из уравнения приближения Эйлера.
(20) diddt≈id (t + TS) −id (t) TSdiqdt≈iq (t + TS) −iq (t) TS
Уравнение (20) используется для дискретизации уравнения (19). Математическая модель дискретизации стороны переменного тока системы ICM получена следующим образом:
(21) usd (t + TS) + ωLeiq (t + TS) −RSid (t + TS) −Le [id (t + TS) −id (t)] / TS = ud (t + TS) usd (t + TS) −ωLeid (t + TS) −RSiq (t + TS) −Le [iq (t + TS) −iq (t)] / TS = uq (t + TS)
Учитывая, что частота дискретизации системы управления ICM намного выше, чем основная частота системы переменного тока, а изменение напряжения источника питания в период дискретизации очень мало [21], предполагается, что период дискретизации TS не меняется.
(22) usd (t + TS) = usd (t) usq (t + TS) = usq (t).
Кроме того, в практических системах управления из-за времени вычисления команд управления текущий контроллер внутреннего цикла обычно имеет задержку периода, поэтому мгновенные значения напряжения и тока при t + TS время может быть примерно равным эталонным значениям при т время, то есть:
(23) ud (t + TS) = udref (t) uq (t + TS) = uqref (t) id (t + TS) = idref (t) iq (t + TS) = iqref (t)
В уравнении (23), удреф (т) , uqref (t) , idref (t) , а также iqref (t) являются соответственно эталонными значениями уд , uq , я бы , а также iq в т время, т.е. ожидаемое выходное напряжение и ток, вводимые в систему ICM при t + TS время в d и q синхронных вращающихся координатах.
Подставляя уравнения (22) и (23) в уравнение (21), можно получить, что:
(24) usd (t) + ωLeiq (t) −RSidref (t) −Le [idref (t) −id (t)] / TS = udref (t) usd (t) −ωLeid (t) −RSiqref (t) −Le [iqref (t) −iq (t)] / TS = uqref (t)
Согласно уравнению (24) можно получить внутренний дискретный контроллер токовой петли стороны переменного тока системы ICM, как показано на рисунке 2.
Рисунок 2
Дискретный внутренний регулятор тока системы ICM.
Чтобы сбалансировать мощность, передаваемую в системе постоянного тока, управление внешним контуром системы ICM должно принимать постоянное управление напряжением постоянного тока на одном конце и постоянное управление активной мощностью на другом конце.
Структура контроллера постоянной мощности во внешнем контуре на стороне инвертора и контроллера постоянного напряжения постоянного и переменного тока на стороне выпрямителя показана на рисунке 3.В КП а также Ki на рисунке показаны, соответственно, пропорциональное усиление и интегральное усиление ПИ-регулятора.
Рисунок 3
Контроллер внешнего контура. а) фиксированный контроллер активной мощности; (б) фиксированный регулятор реактивной мощности; (c) регулятор постоянного напряжения постоянного тока. (d) фиксированный регулятор напряжения переменного тока.
На Рисунке 3, P2ref а также Q2ref — командные значения активной мощности и реактивной мощности инвертирующей стороны, соответственно; P2 а также 2 квартал — измеренные значения активной и реактивной мощности инвертирующей стороны; выходы id2ref а также iq2ref регулятора мощности являются опорными значениями составляющих d и q тока системы переменного тока на инвертирующей стороне; Udcref а также Us1ref являются значениями команд напряжения шины постоянного тока и шины переменного тока на стороне выпрямления соответственно.Us1ref а также Us1 — измеренные значения напряжения шины постоянного тока и напряжения шины переменного тока на стороне выпрямителя; выходы id1ref а также iq1ref регулятора напряжения являются эталонными значениями тока d и q компонентов системы переменного тока на стороне выпрямителя.Когда напряжение на стороне переменного тока системы ICM несимметрично или система переменного тока асимметрична, контроллера внешнего контура постоянного напряжения, показанного на рисунке 3, недостаточно для поддержания стабильной работы постоянного напряжения из-за наличия компонентов обратной последовательности. . Особенно, когда асимметричный отказ возникает на стороне фиксированного постоянного напряжения, передача активной мощности с обеих сторон является неравномерной. Следовательно, трудно поддерживать контроль постоянного напряжения. Контроллер активной мощности на Рисунке 3 улучшен путем добавления звена управления напряжением постоянного тока на основе первоначально активного управления мощностью, которое может поддерживать стабильное управление напряжением постоянного тока при выходе из строя системы переменного тока и улучшать помехоустойчивую способность устройства Система ICM [22].Усовершенствованный контроллер постоянной активной мощности состоит из двух частей: коррекции команд постоянного напряжения и управления. Коррекция команды напряжения постоянного тока — это коррекция отклонения между значением команды активной мощности P ref и фактическим значением измерения P активной мощности. Корректировка эталонного значения U постоянного напряжения получается с помощью ПИ-регулирования.
(25) ΔUdcref = Kp + KiS (Pref − P)
Измененное значение команды напряжения постоянного тока:
(26) U′dcref = Udcref + ΔUdcref
Связь управления — это отклонение между измененным значением инструкции напряжения постоянного тока. Удкрефь и значение измерения постоянного напряжения Udc .Эталонное значение тока оси d idref получается регулировкой PI.
(27) idref = [KP + (Ki / S)] (Udcref′ − Udc)
Структура фиксированного контроллера активной мощности, который можно улучшить, показана на рисунке 4.
Рисунок 4
Улучшенный контроллер активной мощности.
Усовершенствованный фиксированный контроллер активной мощности, показанный на рисунке 4, может эффективно контролировать явление перенапряжения в системе привода с преобразованием частоты с длинным кабелем.
3 Результаты
Для проверки того, что алгоритм в этой статье предназначен для управления резонансным перенапряжением привода с длинным кабелем путем преобразования частоты, система привода с длинным кабелем, управляемая алгоритмом, моделируется на основе программного обеспечения моделирования MATLAB.Напряжение питания системы 4 160 В, номинальная мощность 60 Гц [23]. Номинальное напряжение преобразователя среднего напряжения — 41 160 В, номинальный ток — 140 А, номинальная мощность — 1000 К. ВА; кабель 15 км диаметром 150 мм 2 ; номинальное напряжение двигателя 3848 В, номинальный ток 130 А, номинальная мощность 840 л.с. и номинальный крутящий момент 1400 Н · м.
Пусковая частота двигателя в системе частотно-регулируемого привода с длинным кабелем, управляемая этим алгоритмом, показана на рисунке 5.
Рисунок 5
Кривая нарастания пусковой частоты.
В соответствии с частотой запуска двигателя системы частотно-регулируемого привода с длинным кабелем на Рисунке 5 можно увидеть, что начальная частота системы частотно-регулируемого привода с длинным кабелем, управляемая алгоритмом, описанным в этом документе, постепенно увеличивается, переходя к постоянной скорости. примерно через 15 с и, наконец, достигнув 65 Гц. Можно видеть, что алгоритм может эффективно управлять явлением резонансного перенапряжения в системе управления частотой с длинным кабелем с высокой точностью управления и хорошими характеристиками, что может найти широкое применение.
Момент нагрузки является функцией скорости двигателя в системе частотно-регулируемого привода с длинным кабелем. Характеристики момента нагрузки двигателя в системе частотно-регулируемого привода с длинным кабелем показаны на рисунке 6.
Изменение электромагнитного момента двигателя получается из характеристик момента нагрузки двигателя с частотно-регулируемым приводом с длинным кабелем на Рисунке 6, как показано на Рисунке 7.
Рисунок 7
Электромагнитный крутящий момент двигателя изменяется.
Согласно результатам измерения электромагнитного момента двигателя с частотно-регулируемым приводом с длинным кабелем на Рисунке 7, можно увидеть, что с изменением пусковой частоты двигателя электромагнитный момент также изменяется, и колебания велики. Полное изменение тенденции электромагнитного момента двигателя с частотно-регулируемым приводом с длинным кабелем изменяется с изменением момента нагрузки до тех пор, пока не будет достигнут номинальный крутящий момент [24]. Большие колебания крутящего момента двигателя в системе частотно-регулируемого привода с длинным кабелем в основном связаны с искажением синусоидального сигнала управления и скорости на границе изменения частоты.Это связано с тем, что время изменения частоты не обязательно наступает в конце полного цикла сигнала настройки. Перед концом одного цикла управляющего сигнала первый полупериод сигнала в следующем цикле может быть расширен или сужен.
Управляющий сигнал системы преобразователя частоты с длинным кабелем управляется алгоритмом, представленным в этой статье, как показано на Рисунке 8.
После использования этого алгоритма для управления системой привода с преобразованием частоты с длинным кабелем, изменение тока статора двигателя в системе с преобразователем частоты с длинным кабелем показано на рисунке 9.
Рисунок 9
Изменение тока статора двигателя.
Из рисунка 9 видно, что пусковой ток двигателя примерно в 1,5 раза больше номинального тока преобразователя частоты, а продолжительность очень мала в пределах требуемого диапазона преобразователя частоты [25]. С изменением момента нагрузки ток статора имеет ту же тенденцию и, наконец, переходит в состояние номинального тока.
Изменение напряжения статора двигателя системы привода с преобразованием частоты с длинным кабелем показано на рисунке 10 после использования алгоритма для управления системой привода с преобразованием частоты с длинным кабелем.
Рисунок 10
Изменения напряжения статора двигателя.
Из результатов моделирования на рисунке 10 можно увидеть, что напряжение статора двигателя постепенно увеличивается с увеличением частоты системы и, наконец, стабилизируется около номинального напряжения после использования алгоритма для управления системой частотно-регулируемого привода с длинным кабелем. Из приведенных выше экспериментальных результатов можно увидеть, что предложенный алгоритм может управлять системой преобразователя частоты с длинным кабелем, которая может удовлетворить нормальные требования к запуску двигателя и предотвратить возникновение явления перенапряжения.
Для дальнейшей проверки управляющего эффекта предложенного алгоритма используются три алгоритма для управления резонансным перенапряжением в преобразователе частоты с длинным кабелем путем сравнения предложенного алгоритма с алгоритмом широтно-импульсной модуляции и алгоритмом MultiMedia Card (MMC). Результаты сравнения трех алгоритмов показаны в таблице 1.
Стол 1
Сравнение результатов трех алгоритмов управления
| Количество опытов | Этот алгоритм | Алгоритм широтно-импульсной модуляции | Алгоритм MMC | ||||||
|---|---|---|---|---|---|---|---|---|---|
| Точность регулирования /% | Время управления / с | Прочность /% | Точность управления /% | Время управления / с | Прочность /% | Точность управления /% | Время управления / с | Прочность /% | |
| 1 | 98.51 | 10,52 | 99,05 | 91,52 | 18,62 | 87,18 | 89,62 | 22,61 | 86,51 |
| 2 | 98,47 | 11,52 | 98,12 | 92.64 | 19,64 | 86,54 | 93,64 | 18,64 | 85,46 |
| 3 | 98,62 | 12,64 | 97,18 | 91,36 | 20,18 | 88,19 | 91.54 | 23,61 | 84,71 |
| 4 | 97,58 | 11,85 | 97,48 | 93,64 | 18,64 | 87,49 | 92,07 | 17,42 | 91,62 |
| 5 | 99.05 | 12,47 | 98,15 | 93,05 | 18,61 | 83,36 | 95,17 | 16,84 | 92,67 |
| 6 | 97,65 | 12,96 | 97,05 | 92.14 | 19,62 | 91,58 | 91,26 | 21,54 | 88,64 |
| 7 | 98,05 | 9,64 | 98,17 | 93,64 | 19,89 | 94,36 | 92.64 | 23,64 | 87,49 |
| 8 | 97,58 | 10,11 | 98,47 | 91,47 | 19,99 | 87,62 | 88,47 | 22,08 | 89,65 |
| 9 | 97.36 | 10,63 | 98,05 | 92,61 | 20,47 | 81,62 | 87,64 | 19,64 | 88,29 |
| 10 | 99,15 | 11,47 | 98,34 | 90.74 | 19,68 | 84,62 | 89,05 | 21,47 | 90,54 |
Из экспериментальных результатов в таблице 1 видно, что точность управления предложенным алгоритмом выше 97%, в то время как точность управления алгоритма широтно-импульсной модуляции и алгоритма MMC ниже 96%, а предлагаемый алгоритм является используется для управления резонансным перенапряжением в преобразователе частоты с длинным кабелем.Время контроля явления резонансного перенапряжения составляет около 10 с, а время контроля алгоритма широтно-импульсной модуляции и алгоритма MMC составляет около 20 с [26]. Точность управления и время управления этого алгоритма, очевидно, лучше, чем у двух других алгоритмов, и надежность этого алгоритма для управления явлением резонансного перенапряжения в частотно-регулируемом приводе с длинным кабелем выше. В-третьих, надежность этого алгоритма для управления явлением резонансного перенапряжения в частотно-регулируемом приводе с длинным кабелем выше.Проверена управляемость предложенного алгоритма. Можно видеть, что алгоритм управления резонансным перенапряжением, основанный на дискретной математике, имеет высокую точность управления, короткое время управления и хорошую надежность, что может эффективно контролировать явление резонансного перенапряжения в системе управления частотой с длинным кабелем и может применяться в реальной жизни. .
4 Обсуждения
Резонанс относится к периодическому или квазипериодическому рабочему состоянию колебательной системы, которое характеризуется резким увеличением амплитуды одной или нескольких гармоник.Как правило, последовательный резонанс вызывает перенапряжение в части электросети, подвергая опасности изоляцию электрического оборудования. Он также может вырабатывать электроэнергию и сжигать оборудование. Это также может повлиять на рабочие условия устройств защиты от перенапряжения, например, на условия гашения дуги вентильных разрядников. Резонанс — это своего рода стационарное явление. Резонансное перенапряжение в энергосистеме не только произойдет в переходном процессе операции или аварии, но также будет стабильно существовать в течение длительного времени после переходного процесса, пока не произойдет новая операция и состояние резонанса не будет нарушено.Следовательно, продолжительность резонансного перенапряжения больше, чем продолжительность действия. Чем больше время подачи напряжения, тем больше вреда для изоляции электрооборудования. Перенапряжение обычно имеет серьезные последствия [27]. Опыт эксплуатации показывает, что резонансные перенапряжения будут возникать на всех уровнях напряжения в электросети, особенно при 35 кВ и ниже, что приведет к большему количеству аварий.
При нормальной синхронной работе реактивное сопротивление гидрогенератора будет изменяться через два цикла после каждого цикла.Кроме того, реактивное сопротивление гидрогенератора или турбогенератора периодически изменяется с изменением потока статора во время асинхронной или синхронной работы. Во всех этих случаях, если реактивное сопротивление внешней цепи двигателя соответствует определенным условиям, а сопротивление потерь достаточно мало, можно возбудить особое явление параметрического резонанса в колебательном контуре с периодическими изменениями параметров индуктивности. Во время периодического изменения параметров индуктивности резонанс между индуктивностью и емкостью будет проходить непрерывно.Точка колебания приводит к резкому увеличению напряжения и амплитуды тока на конце синхронного двигателя, а коэффициент перенапряжения самовозбуждения высокий. Это не только угрожает изоляции электрооборудования и повреждает разрядник, но и препятствует параллельной работе двигателя с другими источниками питания.
Электрооборудование, работающее в энергосистеме, по некоторым причинам, таким как смещение напряжения нейтральной точки, неполнофазный выключатель или другие операции, насыщение трансформатора электромагнитного напряжения и т. Д., Легко создают резонансное перенапряжение.Перенапряжение в первую очередь вызывает старение оборудования, а электрооборудование с низким уровнем изоляции повреждается, что в конечном итоге приводит к несчастным случаям. Чтобы избежать таких аварий, насколько это возможно, необходимо максимально предотвратить резонансные перенапряжения. Обычно принимаются следующие меры:
- (1)
Необходимо произвести необходимые расчеты при проектировании и принять необходимые меры в процессе эксплуатации, чтобы избежать нежелательных резонансных цепей.Следует принять дополнительные меры для предотвращения резонанса и уменьшения амплитуды резонансного перенапряжения и сокращения времени его существования.
- (2)
Убедитесь, что трехфазная синхронная работа автоматического выключателя не возникает при работе во всех фазах, во избежание генерации напряжения смещения нейтральной точки. Избегайте возникновения отказа автоматического выключателя, не используйте оборудование с предохранителями.
- (3)
Усилить контроль и техническое обслуживание линии, чтобы избежать поломки линии.
- (4)
Выберите трансформаторы напряжения с лучшими характеристиками возбуждения и емкостные трансформаторы напряжения.
- (5)
К шине добавляется определенная емкость заземления.
- (6)
Регулярно содержите электрооборудование в чистоте.
Конечно, есть много причин перенапряжения, например, грозовое перенапряжение, коммутационное перенапряжение и так далее.Не только резонанс вызывает перенапряжение. Однако резонансное перенапряжение является одной из наиболее частых и вредных причин аварий с оборудованием энергосистемы, которую нельзя решить тщательно.
5 Выводы
Явление резонансного перенапряжения может легко вызвать повреждение силовых устройств или даже крупномасштабное отключение электроэнергии. Чтобы эффективно управлять явлением резонансного перенапряжения в приводе с преобразованием частоты с длинным кабелем, изучается система преобразователя частоты с длинным кабелем с режимом подключения системы ICM, и установлено число дискретизации на стороне переменного тока системы преобразователя частоты с длинным кабелем. .На основе дискретной математической модели разработан усовершенствованный постоянно активный регулятор мощности для эффективного управления резонансным перенапряжением в частотно-регулируемом приводе длинного кабеля. Результаты экспериментов показывают, что предложенный алгоритм обладает высокой эффективностью управления и хорошей надежностью при управлении явлением резонансного перенапряжения в приводе с преобразованием частоты с длинным кабелем и может эффективно обеспечивать безопасность работы привода с преобразованием частоты с длинным кабелем.
В будущих исследованиях, чтобы лучше контролировать явление резонансного перенапряжения в частотно-регулируемом приводе с длинным кабелем, целью будет более точный эффект управления, а алгоритм управления перенапряжением с регулируемой частотой вращения с длинным кабелем, основанный на дискретной математике, будет усовершенствован. оптимизирован.
Работа поддержана Фондом фундаментальных исследований для центральных университетов (№ 3142018049).
Список литературы
[1] Zhang ZJ, Lu JY, Liu HY. Исследование технологии дистанционной передачи данных измерения мощности нелинейной системы электроснабжения в условиях гармонического фона. J China Acad Electron Inf Technol. 2018; 13: 93–9. Поиск в Google Scholar
[2] Цзян Л.Ф., Чжан З.В.Анализ и конструкция полномостового резонансного преобразователя ХНУ с двойными резонансными баками. J Источник питания. 2017; 15: 92–8. Поиск в Google Scholar
[3] Ван Н., Лю Ю.Ф., Пей П.С. Асимптотический анализ влияния относительной влажности на падение напряжения топливного элемента. Чин Дж. Источники энергии. 2017; 41: 1130–2. Поиск в Google Scholar
[4] Фанг Дж. Л., Чжэн Дж. Ф., Се Ю. Исследование и применение оптимальной модели низковольтной схемы управления распределительной сетью. Autom Instrum.2017; 3: 145–8. Поиск в Google Scholar
[5] Дин Н, Сюй Х, Чжэн З. Анализ масштабного эффекта втягивающего напряжения электростатически управляемого микропучка. J Jilin Univ (Sci Ed). 2017; 55: 1146–50. Поиск в Google Scholar
[6] Лю В., Чжан Ю.Б., Лань З.Й. Исследование стратегии управления замкнутой системой трехфазного выпрямителя напряжения с ШИМ. Comp Simul. 2017; 34: 185–8. Поиск в Google Scholar
[7] Яо Ю. Метод прогнозирования скорости асинхронного двигателя с частотно-регулируемым приводом, работающего с неисправностью.J Дискретная математика Sci Cryptograph. 2017; 20 (6–7): 1405–9. Искать в Google Scholar
[8] Лустиг М., Уяник К. Теория Перрона – Фробениуса и частотная сходимость для приводимых замен. Дискрет Cont Dyn Syst — Ser A (DCDS-A). 2017; 37: 355–85. Поиск в Google Scholar
[9] Calastri C, Hess S, Daly A. Моделирование режима контактов и частоты взаимодействий с членами социальных сетей с использованием множественной дискретно-непрерывной модели экстремальных значений. Transp Res Part C Emerg Technol.2017; 76: 16–34. Искать в Google Scholar
[10] Эджевит Ф, Озен Хо. Частотно-адаптированные методы граничных элементов Галеркина для задач выпуклого рассеяния. Numerische Mathematik. 2017; 135: 27–71. Искать в Google Scholar
[11] Ху Y, Чжу ZQ, Odavic M. Мгновенное управление мощностью для подавления напряжения второй гармоники шины постоянного тока в обычных несимметричных рабочих условиях. IEEE Trans Power Electron. 2017; 32: 3998–4006. Поиск в Google Scholar
[12] Дай Й, Ли Дж, Чжан З.Преобразование частоты во время в реальном времени на основе спектрально-дискретной хроматической дисперсии. Opt Express. 2017; 25: 16660. Поиск в Google Scholar
[13] Цюань X, Доу X, Zaijun WU. Алгоритм трехфазной сетевой синхронизации на основе адаптивного дискретного фильтра комплексной переменной. Autom Electr Power Syst. 2017; 41: 158–64. Поиск в Google Scholar
[14] Kuehl JJ. Дискретные и частотно-частотные распределения с конечной полосой пропускания в приложениях нелинейной устойчивости. 2017; 29: 024101. Искать в Google Scholar
[15] Ахду Й., Камилли Ф., Корриас Л.О численном приближении системы переноса Гамильтона-Якоби, возникающей в высокочастотных приближениях. Дискрет Cont Dyn Syst — Ser B (DCDS-B). 2017; 19: 629–50. Искать в Google Scholar
[16] Гу И, Ян Г.Х. Обнаружение неисправностей для липшицевых нелинейных систем с дискретным временем в конечной частотной области. IET Control Theory Appl. 2017; 11: 2177–86. Искать в Google Scholar
[17] Атангана А, Алкахтани RT. Модель опухоли с интрузивной морфологией, прогрессирующей фенотипической гетерогенностью и памятью.Eur Phys J Plus. 2018; 133: 85. Поиск в Google Scholar
[18] Гомес-Агилар Дж. Ф., Атангана А, Эскобар-Хименес РФ. Численные решения закона Фурье с использованием дробных производных с двойным порядком. Sci Iran. 2018; 25 (4): 2175–85. Искать в Google Scholar
[19] Quan X, Dou X, Wu Z. Краткий дискретный адаптивный фильтр для оценки частоты при искаженном трехфазном напряжении. IEEE Trans Power Electron. 2017; 32: 1. Искать в Google Scholar
[20] Мин Й, Сыма В., Ян К.Выделение нелинейных характеристических величин временных рядов феррорезонансных перенапряжений. IET Gener Transm Distrib. 2017; 11: 1427–33. Искать в Google Scholar
[21] Шакиб СМСИ, Мехилеф С. Резонансный преобразователь серии LLC на основе частотно-адаптивного управления фазовой модуляцией для широких применений входного напряжения. IEEE Trans Power Electron. 2017; 32: 8360–70. Поиск в Google Scholar
[22] Lin HC, Hsiao KC. Разработка модели постоянного тока нагрузки с использованием алгоритма резонансного переключения с обратной связью для защиты от перегрузки.IET Circuits Devices Syst. 2017; 11: 656–65. Искать в Google Scholar
[23] Гао В., Ван В.Ф. Пятый геометрическо-арифметический показатель мостового графа и углеродных наноконусов. J Diff Equ Appl. 2017; 23 (1–2SI): 100–9. Искать в Google Scholar
[24] Lakshminarayana G, et al. Перистальтическое скользящее течение жидкости Бингема в наклонном пористом канале с джоулева нагревом. Appl Math Nonlinear Sci. 2018; 3 (1): 41–54. Искать в Google Scholar
[25] Ми Си, Шен Й, Ми В.Дж., Хуан Ю.Ф.Алгоритм идентификации судов на основе трехмерного облака точек для автоматизированных погрузчиков судов. J Coast Res. 2015; 28–34. Искать в Google Scholar
[26] Хеллат Ф, Хормизи МБ. Глобальное решение уравнения реакции-диффузии на ограниченных областях. Appl Math Nonlinear Sci. 2018; 3 (1): 15–22. Искать в Google Scholar
[27] Fernández-Pousa CR. Совершенные последовательности импульсов с фазовой кодировкой, генерируемые эффектом Тальбота. Appl Math Nonlinear Sci. 2018; 3 (1): 23–32. Искать в Google Scholar
Минимальное и максимальное сопротивление
При воздействии переменного электрического поля пьезоэлектрический керамический элемент циклически меняет размеры с частотой смены поля.Частота, на которой керамический элемент наиболее легко вибрирует и наиболее эффективно преобразует подводимую электрическую энергию в механическую, — это резонансная частота .
Образец ответов элемента изображен на Рис. 1.8 . По мере увеличения частоты циклирования колебания элемента сначала приближаются к частоте, при которой полное сопротивление минимально (максимальная проводимость). Эта минимальная частота полного сопротивления , f m , аппроксимирует последовательную резонансную частоту , f s , частоту, при которой полное сопротивление в электрической цепи, описывающей элемент, равно нулю, если сопротивление, вызванное механическими потерями, не учитывается.Минимальная частота импеданса также является резонансной частотой f r . Состав керамического материала, форма и объем элемента определяют резонансную частоту — как правило, более толстый элемент имеет более низкую резонансную частоту, чем более тонкий элемент той же формы.
При дальнейшем увеличении частоты переключения полное сопротивление увеличивается до максимума (минимальная проводимость). Максимальная частота импеданса, f n , аппроксимирует частоту параллельного резонанса , f p , частоту, при которой параллельное сопротивление в эквивалентной электрической цепи бесконечно, если игнорировать сопротивление, вызванное механическими потерями.Частота максимального импеданса также равна антирезонансной частоте , f a . Максимальный отклик элемента будет в точке между f m и f n .
Значения минимальной частоты импеданса, f m , и максимальной частоты импеданса, f n , могут быть определены путем измерения. Рисунок 1.10 показывает систему, предназначенную для определения этих значений, и резюмирует процедуру.
Рисунок 1.8 . Импеданс как функция частоты цикла
Колебания керамического элемента сначала приближаются к минимальной частоте импеданса (f m ) / резонансной частоте (f r ), при которой элемент наиболее легко вибрирует и наиболее эффективно преобразует электрическую энергию. в механическую энергию. При дальнейшем увеличении частоты переключения импеданс увеличивается до максимальной частоты импеданса (f n ) / антирезонансной частоты (f a ).
Рисунок 1.10. Система определения минимального импеданса (резонансной частоты) и максимального импеданса (антирезонансной частоты) пьезоэлектрического керамического элемента
Процедура:
- Установите переключатель в положение A.
- Установите керамический элемент на место.
- Отрегулируйте генератор частоты, чтобы получить максимальное значение напряжения на вольтметре. Это значение является резонансной частотой.
- Установите переключатель в положение B.
- Отрегулируйте R4, чтобы получить значение напряжения на вольтметре, равное значению на шаге 3. Это значение является резонансным сопротивлением (Zr).
- Установите переключатель в положение A.
- Отрегулируйте генератор частоты, чтобы получить минимальное значение напряжения на вольтметре. Это значение и есть частота антирезонанса.
f m и f n могут использоваться для расчета коэффициента электромеханической связи, k. k зависит от режима колебаний и формы керамического элемента.Соотношения между k и f m и f n для керамической пластины, диска (размеры поверхности большие относительно толщины) или стержня составляют:
Фактор связи для пластин / k 31 *
* электрическое поле параллельно направлению поляризации,
индуцированная деформация перпендикулярно направлению поляризации
Фактор связи для дисков / k p **
** электрическое поле параллельно направлению поляризации направление поляризации,
индуцированная деформация в том же направлении
Фактор связи для стержней / к 33 ***
*** электрическое поле, параллельное направлению поляризации,
индуцированная деформация в том же направлении
Есть вопросы о пьезоизделиях APC International? Свяжитесь с нами или позвоните нам по телефону (570)726-6961, чтобы получить дополнительную информацию.