устройство, принцип работы, типы, управление
Эра электродвигателей берёт своё начало с 30-х годов XIX века, когда Фарадей на опытах доказал способность вращения проводника, по которому проходит ток, вокруг постоянного магнита. На этом принципе Томасом Девенпортом был сконструирован и испытан первый электродвигатель постоянного тока. Изобретатель установил своё устройство на действующую модель поезда, доказав тем самым работоспособность электромотора.
Практическое применение ДПТ нашёл Б. С. Якоби, установив его на лодке для вращения лопастей. Источником тока учёному послужили 320 гальванических элементов. Несмотря на громоздкость оборудования, лодка могла плыть против течения, транспортируя 12 пассажиров на борту.
Лишь в конце XIX столетия синхронными электродвигателями начали оснащать промышленные машины. Этому способствовало осознание принципа преобразования электродвигателем постоянного тока механической энергии в электричество. То есть, используя электродвигатель в режиме генератора, удалось получать электроэнергию, производство которой оказалось существенно дешевле от затрат на выпуск гальванических элементов.
Устройство и описание ДПТ
Конструктивно электродвигатель постоянного тока устроен по принципу взаимодействия магнитных полей.
Самый простой ДПТ состоит из следующих основных узлов:
- Двух обмоток с сердечниками, соединенных последовательно. Данная конструкция расположена на валу и образует узел, называемый ротором или якорем.
- Двух постоянных магнитов, повёрнутых разными полюсами к обмоткам. Они выполняют задачу неподвижного статора.
- Коллектора – двух полукруглых, изолированных пластин, расположенных на валу ДПТ.
- Двух неподвижных контактных элементов (щёток), предназначенных для передачи электротока через коллектор до обмоток возбуждения.
Рассмотренный выше пример – это скорее рабочая модель коллекторного электродвигателя. На практике такие устройства не применяются. Дело в том, что у такого моторчика слишком маленькая мощность. Он работает рывками, особенно при подключении механической нагрузки.
На практике такие устройства не применяются. Дело в том, что у такого моторчика слишком маленькая мощность. Он работает рывками, особенно при подключении механической нагрузки.
Статор (индуктор)
В моделях мощных современных двигателях постоянного тока используются статоры, они же индукторы, в виде катушек, намотанных на сердечники. При замыкании электрической цепи происходит образование линий магнитного поля, под действием возникающей электромагнитной индукции.
Для запитывания обмоток индуктора ДПТ могут использоваться различные схемы подключения:
- с независимым возбуждением обмоток;
- соединение параллельно обмоткам якоря;
- варианты с последовательным возбуждением катушек ротора и статора;
- смешанное подсоединение.
Схемы подключения наглядно видно на рисунке 2.
Рисунок 2. Схемы подключения обмоток статора ДПТУ каждого способа есть свои преимущества и недостатки. Часто способ подключения диктуется условиями, в которых предстоит эксплуатация электродвигателя постоянного тока. В частности, если требуется уменьшить искрения коллектора, то применяют параллельное соединение. Для увеличения крутящего момента лучше использовать схемы с последовательным подключением обмоток. Наличие высоких пусковых токов создаёт повышенную электрическую мощность в момент запуска мотора. Данный способ подходит для двигателя постоянного тока, интенсивно работающего в кратковременном режиме, например для стартера. В таком режиме работы детали электродвигателя не успевают перегреться, поэтому износ их незначителен.
В частности, если требуется уменьшить искрения коллектора, то применяют параллельное соединение. Для увеличения крутящего момента лучше использовать схемы с последовательным подключением обмоток. Наличие высоких пусковых токов создаёт повышенную электрическую мощность в момент запуска мотора. Данный способ подходит для двигателя постоянного тока, интенсивно работающего в кратковременном режиме, например для стартера. В таком режиме работы детали электродвигателя не успевают перегреться, поэтому износ их незначителен.
Ротор (якорь)
В рассмотренном выше примере примитивного электромотора ротор состоит из двухзубцового якоря на одной обмотке, с чётко выраженными полюсами. Конструкция обеспечивает вращение вала электромотора.
В описанном устройстве есть существенный недостаток: при остановке вращения якоря, его обмотки занимают устойчивое. Для повторного запуска электродвигателя требуется сообщить валу некий крутящий момент.
Этого серьёзного недостатка лишён якорь с тремя и большим количеством обмоток. На рисунке 3 показано изображение трёхобмоточного ротора, а на рис. 4 – якорь с большим количеством обмоток.
На рисунке 3 показано изображение трёхобмоточного ротора, а на рис. 4 – якорь с большим количеством обмоток.
Подобные роторы довольно часто встречаются в небольших маломощных электродвигателях.
Для построения мощных тяговых электродвигателей и с целью повышения стабильности частоты вращения используют якоря с большим количеством обмоток. Схема такого двигателя показана на рисунке 5.
Коллектор
Если на выводы обмоток ротора подключить источник постоянного тока, якорь сделает пол-оборота и остановится. Для продолжения процесса вращения необходимо поменять полярность подводимого тока. Устройство, выполняющее функции переключения тока с целью изменения полярности на выводах обмоток, называется коллектором.
Самый простой коллектор состоит из двух, изолированных полукруглых пластин. Каждая из них в определённый момент контактирует со щёткой, с которой снимается напряжение.
Одна ламель всегда подсоединена к плюсу, а вторая – к минусу. При повороте вала на 180º пластины коллектора меняются местами, вследствие чего происходит новая коммутация со сменой полярности.
Такой же принцип коммутации питания обмоток используются во всех коллекторах, в т. ч. и в устройствах с большим количеством ламелей (по паре на каждую обмотку). Таким образом, коллектор обеспечивает коммутацию, необходимую для непрерывного вращения ротора.
В современных конструкциях коллектора ламели расположены по кругу таким образом, что каждая пластина соответствующей пары находится на диаметрально противоположной стороне. Цепь якоря коммутируется в результате изменения положения вала.
Принцип работы
Ещё со школьной скамьи мы помним, что на провод под напряжением, расположенный между полюсами магнита, действует выталкивающая сила. Происходит это потому, что вокруг проволоки образуется магнитное поле по всей его длине. В результате взаимодействия магнитных полей возникает результирующая «Амперова» сила:
F=B×I×L, где B означает величину магнитной индукции поля, I – сила тока, L – длина провода.
Вектор «Амперовой» всегда перпендикулярен до линий магнитных потоков между полюсами. Схематически принцип работы изображён на рис. 6.
Если вместо прямого проводника возьмём контурную рамку и подсоединим её к источнику тока, то она повернётся на 180º и остановится в в таком положении, в котором результирующая сила окажется равной 0. Попробуем подтолкнуть рамку. Она возвращается в исходное положение.
Поменяем полярность тока и повторим попытку: рамка сделала ещё пол-оборота. Логично припустить, что необходимо менять направление тока каждый раз, когда соответствующие витки обмоток проходят точки смены полюсов магнитов. Именно для этой цели и создан коллектор.
Схематически можно представить себе каждую якорную обмотку в виде отдельной контурной рамки. Если обмоток несколько, то в каждый момент времени одна из них подходит к магниту статора и оказывается под действием выталкивающей силы. Таким образом, поддерживается непрерывное вращение якоря.
Типы ДПТ
Существующие электродвигатели постоянного тока можно классифицировать по двум основным признакам: по наличию или отсутствию в конструкции мотора щеточно-коллекторного узла и по типу магнитной системы статора.
Рассмотрим основные отличия.
По наличию щеточно-коллекторного узла
Двигатели постоянного тока для коммутации обмоток, которых используются щёточно-коллекторные узлы, называются коллекторными. Они охватывают большой спектр линейки моделей электромоторов. Существуют двигатели, в конструкции которых применяется до 8 щёточно-коллекторных узлов.
Функции ротора может выполнять постоянный магнит, а ток от электрической сети подаётся непосредственно на обмотки статора. В таком варианте отпадает надобность в коллекторе, а проблемы, связанные с коммутацией, решаются с помощью электроники.
В таких бесколлекторных двигателях устранён один из недостатков –искрение, приводящее к интенсивному износу пластин коллектора и щёток.
По виду конструкции магнитной системы статора
В конструкциях синхронных двигателей существуют модели с постоянными магнитами и ДПТ с обмотками возбуждения. Электродвигатели серий, в которых применяются статоры с потоком возбуждения от обмоток, довольно распространены. Они обеспечивают стабильную скорость вращения валов, высокую номинальную механическую мощность.
О способах подключения статорных обмоток шла речь выше. Ещё раз подчеркнём, что от выбора схемы подключения зависят электрические и тяговые характеристики двигателей постоянного тока. Они разные в последовательных обмотках и в катушках с параллельным возбуждением.
Управление
Не трудно понять, что если изменить полярность напряжения, то направление вращения якоря также изменится.
Механическая характеристика
Рассмотрим график зависимости частоты от момента силы на валу. Мы видим прямую с отрицательным наклоном. Эта прямая выражает механическую характеристику электродвигателя постоянного тока. Для её построения выбирают определённое фиксированное напряжение, подведённое для питания обмоток ротора.
Примеры механических характеристик ДПТ независимого возбужденияРегулировочная характеристика
Такая же прямая, но идущая с положительным наклоном, является графиком зависимости частоты вращения якоря от напряжения питания. Это и есть регулировочная характеристика синхронного двигателя.
Построение указанного графика осуществляется при определённом моменте развиваемом ДПТ.
Пример регулировочных характеристик двигателя с якорным управлениемБлагодаря линейности характеристик упрощается управление электродвигателями постоянного тока. Поскольку сила F пропорциональна току, то изменяя его величину, например переменным сопротивлением, можно регулировать параметры работы электродвигателя.
Регулирование частоты вращения ротора легко осуществляется путём изменения напряжения. В коллекторных двигателях с помощью пусковых реостатов добиваются плавности увеличения оборотов, что особенно важно для тяговых двигателей. Это также один из эффективных способов торможения. Мало того, в режиме торможения синхронный электродвигатель вырабатывает электрическую энергию, которую можно возвращать в энергосеть.
Области применения
Перечислять все области применения электродвигателей можно бесконечно долго. Для примера назовём лишь несколько из них:
- бытовые и промышленные электроинструменты;
- автомобилестроение – стеклоподъёмники, вентиляторы и другая автоматика;
- трамваи, троллейбусы, электрокары, подъёмные краны и другие механизмы, для которых важны высокие параметры тяговых характеристик.
Преимущества и недостатки
К достоинствам относится:
- Линейная зависимость характеристик электродвигателей постоянного тока (прямые линии) упрощающие управление;
- Легко регулируемая частота вращения;
- хорошие пусковые характеристики;
- компактные размеры.

У асинхронных электродвигателей, являющихся двигателями переменного тока очень трудно достичь таких характеристик.
Недостатки:
- ограниченный ресурс коллектора и щёток;
- дополнительная трата времени на профилактическое обслуживание, связанное с поддержанием коллекторно-щёточных узлов;
- ввиду того, что мы пользуемся сетями с переменным напряжением, возникает необходимость выпрямления тока;
- дороговизна в изготовлении якорей.
По перечисленным параметрам из недостатков в выигрыше оказываются модели асинхронных двигателей. Однако во многих случаях применение электродвигателя постоянного тока является единственно возможным вариантом, не требующим усложнения электрической схемы.
Видео в дополнение к написанному
Двигатели постоянного тока — Устройство, принцип действия электродвигателя
Электрическая машина постоянного тока состоит из статора, якоря, коллектора, щеткодержателя и подшипниковых щитов (рисунок 1). Статор состоит из станины (корпуса), главных и добавочных полюсов, которые имеют обмотки возбуждения. Эту неподвижную часть машины иногда называют индуктором. Главное его назначение — создание магнитного потока.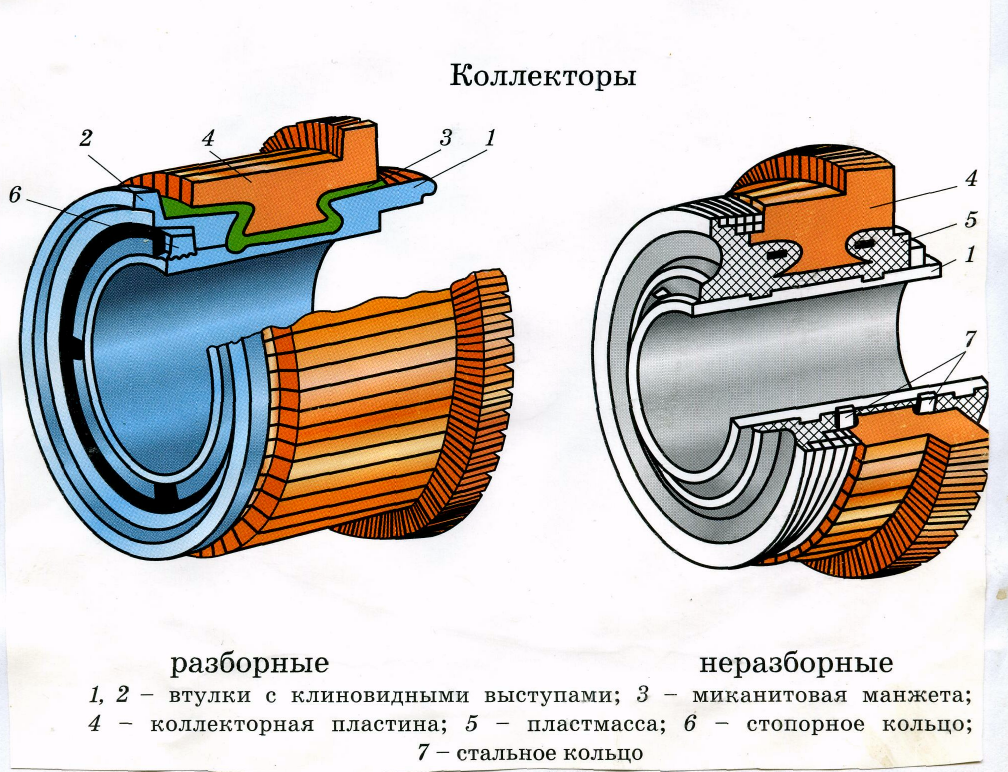 Станина изготавливается из стали, к ней болтами крепятся главные и добавочные полюса, а также подшипниковые щиты. Сверху на станине имеются кольца для транспортирования, снизу — лапы для крепления машины к фундаменту. Главные полюса машины набираются из листов электротехнической стали толщиной 0,5 -1 мм с целью уменьшения потерь, которые возникают из-за пульсаций магнитного поля полюсов в воздушном зазоре под полюсами. Стальные листы сердечника полюса спрессованы и скреплены заклепками.
Станина изготавливается из стали, к ней болтами крепятся главные и добавочные полюса, а также подшипниковые щиты. Сверху на станине имеются кольца для транспортирования, снизу — лапы для крепления машины к фундаменту. Главные полюса машины набираются из листов электротехнической стали толщиной 0,5 -1 мм с целью уменьшения потерь, которые возникают из-за пульсаций магнитного поля полюсов в воздушном зазоре под полюсами. Стальные листы сердечника полюса спрессованы и скреплены заклепками.
Рисунок 1 – Машина постоянного тока:
I — вал; 2 — передний подшипниковый щит; 3 — коллектор; 4 — щеткодержатель; 5 — сердечник якоря с обмоткой; б — сердечник главного полюса; 7 — полюсная катушка; 8 — станина; 9 — задний подшипниковый щит; 10 — вентилятор; 11 — лапы; 12 — подшипник
Рисунок 2 – Полюса машины постоянного тока:
а — главный полюс; б — дополнительный полюс; в — обмотка главного полюса; г — обмотка дополнительного полюса; 1 — полюсный наконечник; 2 — сердечник
В полюсах различают сердечник и наконечник (рисунок 2). На сердечник надевают обмотку возбуждения, по которой проходит ток, создавая магнитный поток. Обмотка возбуждения наматывается на металлический каркас, оклеенный электрокартоном (в больших машинах), или размещается на изолированном электрокартоном сердечнике (малые машины). Для лучшего охлаждения катушку делят на несколько частей, между которыми оставляют вентиляционные каналы. Добавочные полюса устанавливаются между главными. Они служат для улучшения коммутации. Их обмотки включаются последовательно в цепь якоря, поэтому проводники обмотки имеют большое сечение.
На сердечник надевают обмотку возбуждения, по которой проходит ток, создавая магнитный поток. Обмотка возбуждения наматывается на металлический каркас, оклеенный электрокартоном (в больших машинах), или размещается на изолированном электрокартоном сердечнике (малые машины). Для лучшего охлаждения катушку делят на несколько частей, между которыми оставляют вентиляционные каналы. Добавочные полюса устанавливаются между главными. Они служат для улучшения коммутации. Их обмотки включаются последовательно в цепь якоря, поэтому проводники обмотки имеют большое сечение.
Якорь машины постоянного тока состоит из вала, сердечника, обмотки и коллектора. Сердечник якоря собирается из штампованных листов электротехнической стали толщиной 0,5 мм и спрессовывается с обеих сторон с помощью нажимных шайб. В машинах с радиальной системой вентиляции листы сердечника собираются в отдельные пакеты толщиной 6-8 см, между которыми делают вентиляционные каналы шириной 1 см. При осевой вентиляции в сердечнике выполняют отверстие для прохождения воздуха вдоль вала. На внешней поверхности якоря имеются пазы для обмотки.
На внешней поверхности якоря имеются пазы для обмотки.
Рисунок 3 – Расположение секции обмотки якоря в пазах сердечника
Обмотка якоря изготавливается из медных проводов круглого или прямоугольного сечения в виде заранее выполненных секций (рисунок 3). Они укладываются в пазы, где тщательно изолируются. Обмотку делают двухслойной: размещают в каждом пазу две стороны разных якорных катушек — одну над другой. Обмотку закрепляют в пазах клиньями (деревянными, гетинаксовыми или текстолитовыми), а лобовые части крепят специальным проволочным бандажом. В некоторых конструкциях клинья не применяют, а обмотку крепят бандажом. Бандаж изготовляют из немагнитной стальной проволоки, которая наматывается с предварительным натяжением. В современных машинах для бандажировки якорей используют стеклянную ленту.
Коллектор машины постоянного тока собирается из клиноподобных пластин холоднокатаной меди. Пластины изолируют одну от другой прокладками из коллекторного миканита толщиной 0,5 — 1 мм. Нижние (узкие) края пластин имеют вырезы в виде ‘ласточкина хвоста’, которые служат для крепления медных пластин и миканитовой изоляции. Коллекторы крепят нажимными конусами двумя способами: при одном из них усилие от зажима передается только на внутреннюю поверхность ‘ласточкина хвоста’, при втором — на ‘ласточкин хвост’ и конец пластины.
Нижние (узкие) края пластин имеют вырезы в виде ‘ласточкина хвоста’, которые служат для крепления медных пластин и миканитовой изоляции. Коллекторы крепят нажимными конусами двумя способами: при одном из них усилие от зажима передается только на внутреннюю поверхность ‘ласточкина хвоста’, при втором — на ‘ласточкин хвост’ и конец пластины.
Коллекторы с первым способом крепления называют арочными, со вторым — клиновыми. Наиболее распространены арочные коллекторы.
В коллекторных пластинах со стороны якоря при небольшой разнице в диаметрах коллектора и якоря делают выступы, в которых фрезеруют прорези (шлицы). В них укладывают концы обмотки якоря и припаивают оловянистым припоем. При большой разнице в диаметрах припайка к коллектору делается с помощью медных полосок, которые называются ‘петушками’.
В быстроходных машинах большой мощности для предотвращения выпучивания пластин под действием центробежных сил применяют внешние изолированные бандажные кольца.
Щеточный аппарат состоит из траверсы, щеточных пальцев (болтов), щеткодержателей и щеток. Траверса предназначена для крепления на ней щеточных пальцев щеткодержателей, образующих электрическую цепь.
Траверса предназначена для крепления на ней щеточных пальцев щеткодержателей, образующих электрическую цепь.
Щеткодержатель состоит из обоймы, в которую помещается щетка, рычага для прижима щетки к коллектору и пружины. Давление на щетку составляет 0,02 — 0,04 МПа.
Для соединения щетки с электрической цепью имеется гибкий медный тросик.
В машинах малой мощности применяют трубчатые щеткодержатели, которые крепят в подшипниковом щите. Все щеткодержатели одной полярности соединяются между собой сборными шинами, которые подключаются к выводам машины.
Щетки (рисунок 4) в зависимости от состава порошка, способа изготовления и физических свойств разделяют на шесть основных групп: угольно-графитовые, графитовые, электрографитовые, медно-графитовые, бронзографитовые и серебряно-графитовые.
Подшипниковые щиты электрической машины служат в качестве соединительных деталей между станиной и якорем, а также опорной конструкцией для якоря, вал которого вращается в подшипниках, установленных в щитах.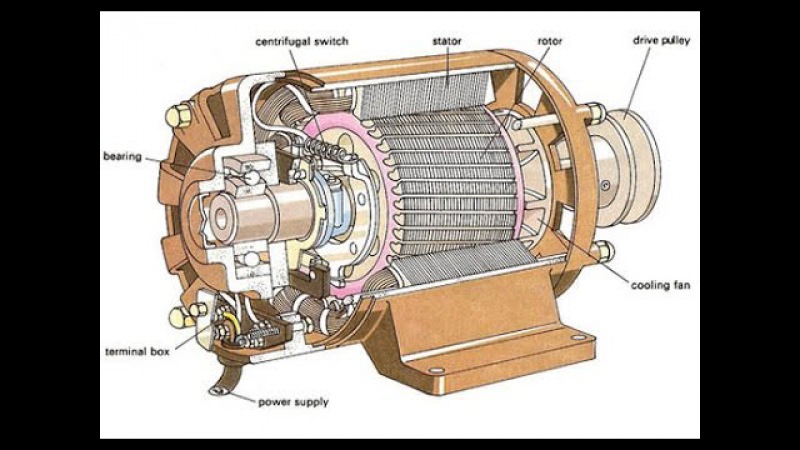
Рисунок 4 – Щетки:
а — для машин малой и средней мощности; б — для машин большой мощности; 1 — щеточный канатик; 2 — наконечник
Различают обычные и фланцевые подшипниковые щиты.
Подшипниковые щиты изготовляют из стали (реже из чугуна или алюминиевых сплавов) методом литья, а также сварки или штамповки. В центре щита делается расточка под подшипник качения: шариковый или роликовый. В машинах большой мощности в ряде случаев используют подшипники скольжения.
В последние годы статор двигателей постоянного тока собирают из отдельных листов электротехнической стали. В листе одновременно штампуются ярмо, пазы, главные и добавочные полюса.
Двигатель постоянного тока
Двигатели постоянного тока предназначены для превращения энергии постоянного тока в механическую работу.
Электродвигатели постоянного тока, намного меньше распространены, нежели двигатели переменного тока. Это связано в первую очередь со сравнительной дороговизной, более сложным устройством, сложностями в обеспечении питания. Но, несмотря на все эти недостатки, ДПТ имеют немало плюсов. Например, двигатели переменного тока, сложно регулировать, ДПТ же отлично регулируются массой способов. Кроме того ДПТ имеют более жесткие механические характеристики и позволяют обеспечить большой пусковой момент.
Но, несмотря на все эти недостатки, ДПТ имеют немало плюсов. Например, двигатели переменного тока, сложно регулировать, ДПТ же отлично регулируются массой способов. Кроме того ДПТ имеют более жесткие механические характеристики и позволяют обеспечить большой пусковой момент.
Электродвигатели постоянного тока применяются в качестве тяговых двигателей, в электротранспорте, в качестве различных исполнительных устройств.
Устройство двигателей постоянного тока
Конструкция двигателя постоянного тока аналогична двигателю переменного тока, но все же имеются существенные различия. На станине 7, которая изготавливается из стали, установлена обмотка возбуждения в виде катушек 6. Между основными полюсами, могут устанавливаться дополнительные полюса 5, для улучшения свойств ДПТ. Внутри устанавливается якорь 4, который состоит из сердечника и коллектора 2, и устанавливается с помощью подшипников 1 в корпус двигателя. Коллектор является существенным отличием от двигателей переменного тока.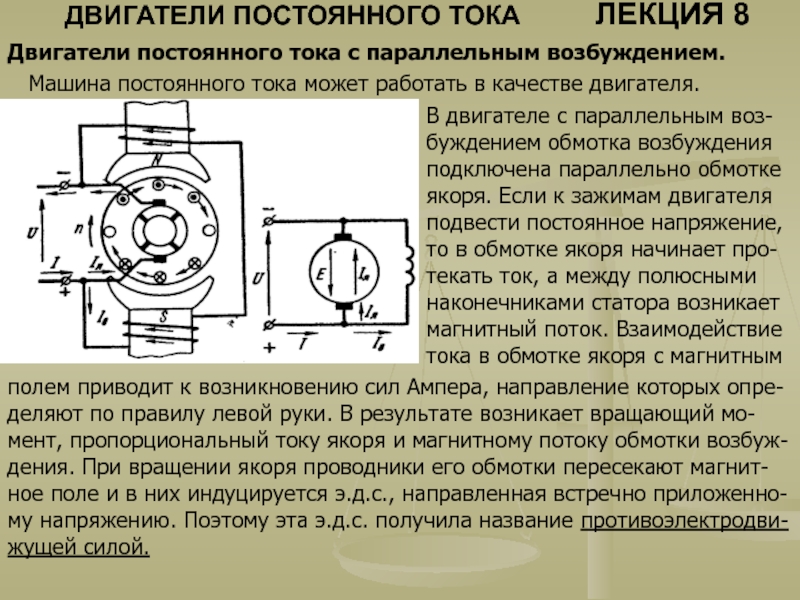 Он соединяется с щетками 3, что позволяет подавать или в генераторах, наоборот снимать напряжение с якорной цепи.
Он соединяется с щетками 3, что позволяет подавать или в генераторах, наоборот снимать напряжение с якорной цепи.
Принцип действия
Принцип действия ДПТ основан на взаимодействии магнитных полей обмотки возбуждения и якоря. Можно представить, что вместо якоря у нас рамка, через которую протекает ток, а вместо обмотки возбуждения постоянный магнит с полюсами N и S. При протекании постоянного тока через рамку, на нее начинает действовать магнитное поле постоянного магнита, то есть рамка начинает вращаться, причем, так как направление тока не меняется, то и направление вращения рамки остается прежним.
При подаче напряжения на зажимы двигателя начинает протекать ток в обмотке якоря, на него, как мы уже знаем, начинает действовать магнитное поле машины, при этом якорь начинает вращаться, а так как якорь вращается в магнитном поле, начинает образовываться ЭДС. Эта ЭДС направлена против тока, в связи с этим её называют противоЭДС. Её можно найти по формуле
Где Ф – магнитный поток возбуждения, n – частота вращения, а Cе это конструктивный момент машины, который остается для нее постоянным.
Напряжение на зажимах больше чем противоЭДС на величину падения напряжение в якорной цепи.
А если домножить это выражение на ток, то получим уравнение баланса мощностей.
Левая часть уравнения UIя представляет собой мощность подаваемая электродвигателю, в правой части первое слагаемое EIя представляет собой электромагнитную мощность, а второе IяRя мощность потерь в цепи якоря.
Рекомендуем прочесть статью — пуск двигателя постоянного тока.
Устройство электродвигателя постоянного тока
Электрический двигатель – это электрическая машина, предназначенная для преобразования электрической энергии, поступающей от источника тока в механическую энергию. Часть потребляемой электроэнергии расходуется на перемагничивание ферромагнетиков, преодоление электрического сопротивления и силы трения, что сопровождается образованием тепла.
Электродвигатель, работающий от источника постоянного тока, называют двигателем постоянного тока. В зависимости от особенностей конструкции электрические двигатели постоянного тока подразделяются на коллекторные и бесколлекторные. Рассмотрим устройство двигателя постоянного тока на примере изделия коллекторной конструкции. Основные элементы электродвигателя постоянного тока: статор, ротор, коллектор и токопроводящие щетки.
Статор, он же индуктор, – неподвижная часть машины, в большинстве вариантов исполнения – внешняя. Статор состоит из станины и магнитных полюсов. В зависимости от конструкции двигателя на статоре могут устанавливаться постоянные магниты, электромагниты с обмотками возбуждения или короткозамкнутые обмотки. Кроме основных магнитных полюсов на статоре могут устанавливаться дополнительные полюса. Статор необходим для создания магнитного потока в системе.
Подвижная вращающаяся часть машины, как правило, внутренняя – ротор или якорь. Ротор электродвигателя постоянного тока состоит из многочисленных катушек с токопроводящими обмотками, по которым проходит электрический ток. Количество катушек в конструкции ротора может достигать нескольких десятков. Таким образом частично устраняется неравномерность крутящего момента, уменьшается коммутируемый ток, обеспечивается оптимальное взаимодействие магнитных полей статора и ротора.
Щеточно-коллекторный узел представляет собой связующее звено между ротором и статором. В коллекторе объединены выводы всех катушек ротора. Этот узел служит переключателем тока со скользящими контактами и дополнительно выполняет функции датчика углового положения ротора.
Щетки – неподвижные контакты, подводящие ток к ротору. Чаще всего в двигателях применяются медно-графитовые и графитовые щетки. При вращении ротора происходит замыкание и размыкание контактов коллектора. При этом в обмотках ротора происходят переходные процессы, приводящие к искрению. Искрение и трение при работе двигателя постоянного тока приводят к тому, что щеточно-коллекторный узел является самым уязвимым элементом конструкции. Для уменьшения искрения чаще всего используется установка дополнительных полюсов. Порядка 25% поломок электродвигателей происходит по причине неисправности щеточно-коллекторного узла. В некоторых областях применения электродвигателей постоянного тока поломки по причине износа щеточно-коллекторного узла составляют свыше 60% от общего количества.
При подаче тока на ротор, помещенный в магнитное поле статора, в системе возникает момент силы, под действием которого ротор начинает вращаться. Направление вращения ротора зависит от направления тока. Чтобы ротор вращался в одном и том же направлении, направление тока в нем должно оставаться постоянным. Это условие выполняется с помощью коллекторного узла. Механическая энергия вращения ротора передается другим механизмам посредством присоединенного к ротору шкива и ременной передачи.
Электродвигатель постоянного тока. Принцип действия и устройство. – www.motors33.ru
На рис. 1-1 представлена простейший электродвигатель постоянного тока, а на рис. 1-2 дано его схематическое изображение в осевом направлении. Неподвижная часть двигателя, называемая индуктор, состоит из полюсов и круглого стального ярма, к которому прикрепляются полюсы. Назначением индуктора является создание в электродвигателе основного магнитного потока. Индуктор изображенной на рис. 1-1 имеет два полюса 1 (ярмо индуктора на рис. 1-1 не показано).
Вращающаяся часть электродвигателя состоит из укрепленных на валу цилиндрического якоря 2 и коллектора. 3. Якорь состоит из сердечника, набранного из листов электротехнической стали, и обмотки, укрепленной на сердечнике якоря. Обмотка якоря в показанном на рис. 1-1 и 1-2 простейшем электродвигателе имеет один виток. Концы витка соединены с изолированными от вала медными пластинами коллектора, число которых в рассматриваемом случае равно двум. На коллектор налегают две неподвижные щетки 4, с помощью которых обмотка якоря соединяется с внешней цепью.
Основной магнитный поток в нормальных электродвигателях постоянного тока создается обмоткой возбуждения, которая расположена на сердечниках полюсов и питается постоянным током. Магнитный поток проходит от северного полюса N через якорь к южному полюсу S и от него через ярмо снова к северному полюсу. Сердечники полюсов и ярмо также изготовляются из ферромагнитных материалов.
Рис. 1-1. Простейший электродвигатель постоянного тока
Рис. 1-2. Работа простейшего электродвигателя постоянного тока в режиме генератора (а) и двигателя (б).
Генератор постоянного тока.
Рассмотрим сначала работу электродвигателя в режиме генератора.
Предположим, что якорь электродвигателя (рис. 1-1 и 1-2, а) приводится во вращение по часовой стрелке. Тогда в проводниках обмотки якоря индуктируется Э. Д. С., направление которой может быть определено по «правилу правой руки» и показано на рис. 1-1 и 1-2, а. Поскольку поток полюсов предполагается неизменным, то эта Э. Д. С. индуктируется только вследствие вращения якоря и называется Э. Д. С. вращения. В обоих проводниках вследствие симметрии индуктируются одинаковые Э. Д. С., которые по контуру витка складываются. Частота Э. Д. С. f в двухполюсном электродвигателе равна скорости вращения якоря n, выраженной в оборотах в секунду:
f = n,
а в общем случае, когда машина имеет р пар полюсов с чередующейся полярностью:
f = pn
Таким образом, в генераторе коллектор является механическим выпрямителем, который преобразовывает переменный ток обмотки якоря в постоянный ток во внешней цепи.
Двигатель постоянного тока.
Рассматриваемая простейшая машина может работать также двигателем, если к обмотке ее якоря подвести постоянный ток от внешнего источника. При этом на проводники обмотки якоря будут действовать электромагнитные силы и возникнет электромагнитный момент. Величины силы и момента определяются как и для генератора. При достаточной величине Мэм якорь электродвигателя придет во вращение и будет развивать механическую мощность. Момент Мэм при этом является движущим и действует в направлении вращения.
Если мы желаем, чтобы при той же полярности полюсов направления вращения генератора (рис. 1-2, а) и двигателя (рис. 1-2, б) были одинаковы, то направление действия а следовательно, и направление тока у двигателя должны быть обратными по сравнению с генератором (рис. 1-2, б).
В режиме двигателя коллектор превращает потребляемый из внешней цепи постоянный ток в переменный ток в обмотке якоря и работает, таким образом, в качестве механического инвертора тока.
Принцип обратимости. Из изложенного выше следует, что каждый электродвигателя постоянного тока может работать как в режиме генератора, так и в режиме двигателя. Такое свойство присуще всем типам вращающихся электрических машин и называется обратимостью.
Для перехода машины постоянного тока из режима генератора в режим двигателя и обратно, при неизменной полярности полюсов и щеток и при неизменном направлении вращения требуется только изменение направления тока в обмотке якоря.
Поэтому такой переход может осуществляться весьма просто и в определенных условиях даже автоматически.
Аналогичным образом может происходить изменение режима работы также в электродвигателях переменного тока.
Электродвигатель постоянного тока — устройство, принцип работы, управление двигателем и его пуск
Исторически первый электродвигатель работал именно на постоянном токе, так как во времена его изобретения в 1834 году Борисом Якоби единственным источником тока были гальванические батареи.
Принцип работы электродвигателя постоянного тока прост: в простейшем случае он имеет по одной паре полюсов на статоре и роторе, при этом направление тока в обмотке ротора дважды за оборот изменяется при помощи специального устройства – коллектора, представляющего собой набор пластин, соответствующий числу роторных обмоток.
При вращении ротора различные участки обмотки последовательно соединяются через щетки с внешним источником постоянного тока.
Так как электродвигатель с двухполюсным ротором имеет две мертвые точки, где запуск без внешнего импульса невозможен (полюса ротора находятся точно напротив полюсов статора, и равнодействующая сил отталкивания равна нулю), на практике используются только многополюсные роторы.
Кроме того, увеличение числа полюсов увеличивает равномерность вращения ротора.
Подключение обмотки якоря может быть различным:
- Независимое.
- Обмотка ротора не имеет прямого соединения со статором, такое подключение используется в схемах с регулировкой оборотов.
- Сериесное.
- Обмотка якоря включена последовательно со статором. При увеличении нагрузки на сериесный электродвигатель его обороты резко падают (но возрастает крутящий момент), при уменьшении нагрузки возможен разнос. По этой причине сериесное возбуждение не используется там, где возможен холостой ход электродвигателя. Классический пример сериесного мотора – автомобильный электростартер.
- Шунтовое.
- Якорь подключается параллельно статору. При перегрузке крутящий момент на роторе не изменяется, при отсутствии нагрузки не возникает разнос.
- Смешанное.
- Якорь имеет две обмотки, подключенных последовательно статору и параллельно с ним. По своим электромеханическим характеристикам компаундные электромоторы находятся между сериесными и шунтовыми – они способны поднимать крутящий момент при увеличении нагрузки и вместе с тем не склонны к разносу на холостом ходу.
Компаундное возбуждение часто используется в электроинструменте, где необходимо и ограничение максимальных оборотов, и устойчивость к росту нагрузок.
В зависимости от взаимного направления магнитных потоков обеих обмоток различают прямое и обратное компаундное включение: при обратном включении и правильном конструировании ротора возможно поддержание стабильных оборотов при изменении нагрузки, но такая схема склонна к периодическим колебаниям частоты вращения.
Магнитное поле статора является постоянным, поэтому статор может выполняться из мощных магнитов, не имея обмотки. Благодаря этому снижаются затраты меди на производство электродвигателя и уменьшается его стоимость.
Сфера применения электродвигателей постоянного тока – это в первую очередь устройства и системы с батарейным питанием: от микромоторов карманных плейеров до мощных автомобильных электростартеров, тяговые двигатели легких электромобилей и электрокаров, аккумуляторный электроинструмент.
При всех своих достоинствах (простота устройства, высокий КПД, легкость реверса) электродвигатели постоянного тока имеют ряд серьезных недостатков:
- При вращении ротора в питающей цепи возникают импульсные помехи в момент перехода ламелей коллектора мимо щеток, к которым добавляются радиопомехи из-за искрения на коллекторе.
- Сам коллектор и токопроводящие щетки неизбежно изнашиваются. Неравномерный износ ламелей коллектора и изолятора между ними может приводить к нарушению контакта щеток и коллектора, снижению мощности и обгоранию ламелей.
- В ряде случаев искрение щеток усиливается настолько, что возникает так называемое «кольцевое пламя» — сплошная область ионизированного воздуха, окружающая коллектор с разрушительными последствиями. Для противодействия этому чаще всего используется принудительная вентиляция области коллектора, выносящая ионизированный воздух наружу.
УПРАВЛЕНИЕ ЭЛЕКТРОДВИГАТЕЛЕМ ПОСТОЯННОГО ТОКА
Наиболее очевидный способ управления оборотами электродвигателя постоянного тока – это изменение тока в его обмотках и, следовательно, магнитного потока. Изначально в цепь питания ротора включался мощный реостат, однако этот способ управления имел явные недостатки:
Сложность автоматического поддержания оборотов.
Движок реостата приводился либо вручную, либо присоединялся к центробежному регулятору. В любом случае резкое увеличение нагрузки не могло быть быстро скомпенсировано.
Высокие потери мощности.
На мощных электродвигателях реостат значительно нагревался, снижая КПД двигательной установки и требуя введения дополнительного охлаждения.
Применение линейного стабилизатора для управления электродвигателем – это, по сути, замена механического реостата электронным: изменяя мощность, рассеиваемую линейным стабилизатором, изменяют ток в обмотках электродвигателя.
Главное преимущество такой схемы – возможность создания устройств для поддержания оборотов с высокой скоростью реакции. Как известно, при вращении коллектора возникают броски тока в момент подключения очередной секции обмотки ротора.
Частота этих импульсов строго пропорциональна оборотам двигателя, что широко используется в устройствах правления коллекторными двигателями.
Например, автомобильный доводчик стеклоподъемников автоматически отключает питание мотора, перестав фиксировать пульсацию тока в цепи питания стеклоподъемника (обнаружение момента остановки электродвигателя).
Совершенствование силовой электроники и в частности создание ключей с низким собственным падением напряжения в открытом состоянии (IGBT, MOSFET) позволило создать системы электронного управления широтно-импульсной модуляцией.
Суть широтно-импульсной модуляции (сокращенно ШИМ) состоит в изменении длительности импульсов тока при сохранении их постоянной частоты.
Такой метод регулировки имеет значительно больший КПД, так как отсутствует элемент, на котором рассеивается излишняя мощность, как это было бы в случае использования реостата или линейного стабилизатора напряжения.
Основной проблемой схем с широтно-импульсной является индуктивность обмоток электродвигателя. Она делает невозможным моментальное нарастание и падение тока, искажая форму прямоугольного сигнала, подаваемого на электродвигатель. В свою очередь, при неправильном проектировании силового каскада ШИМ-контроллера это способно привести к перегреву силовых ключей и резкому падению КПД.
ПУСК ЭЛЕКТРОДВИГАТЕЛЯ ПОСТОЯННОГО ТОКА
В момент включения электродвигателя постоянного тока в питающую сеть возникает значительный бросок тока, так как пусковой ток электродвигателя в несколько раз (при мощностях, измеряемых киловаттами – до 20) превосходит номинальный. По этой причине прямой пуск электродвигателей используется только при небольших мощностях.
Распространенный способ снижения нагрузки на сеть при пуске электродвигателей высокой мощности – это реостатный запуск. В данном случае в момент включения мотора цепь ротора питается через мощный резистор или набор резисторов, по мере набора оборотов закорачиваемых специальными контакторами.Осциллограмма тока якоря при этом становится близкой к пилообразной, а амплитуда пульсаций зависит от числа ступеней пускового реостата.
В тех случаях, когда нагрузка на электродвигатель находится в определенном заданном диапазоне, реостатный пуск производится в автоматическом режиме с помощью реле времени. Эта схема используется на ряде электропоездов, однако распространены и ручные контроллеры, управляемые машинистами.
Недостаток реостатного пуска – большие потери на нагрев реостатов, из-за чего они должны иметь высокую мощность и в ряде случаев искусственное охлаждение.
Этого лишен пуск изменением питающего напряжения, применяемый в тех случаях, когда возможно управление источником тока, например, в электро трансмиссиях постоянного тока: в момент пуска приводящий генератор двигатель работает на минимальных оборотах, плавно набирая их по мере разгона.
Также могут применяться управляемые выпрямители, но этот способ более применим для электродвигателей низкой мощности.
© 2012-2020 г. Все права защищены.
Представленные на сайте материалы имеют информационный характер и не могут быть использованы в качестве руководящих и нормативных документов
Устройство электродвигателя постоянного тока — советы электрика
Устройство и принцип работы электродвигателя
Электродвигатель – это электротехническое устройство для преобразования электрической энергии в механическую. Сегодня повсеместно применяются электромоторы в промышленности для привода различных станков и механизмов.
В домашнем хозяйстве они установлены в стиральной машине, холодильнике, соковыжималке, кухонном комбайне, вентиляторах, электробритвах и т. п. Электродвигатели приводят в движение, подключенные к ней устройства и механизмы.
В этой статье Я расскажу о самых распространенных видах и принципах работы электрических двигателей переменного тока, широко используемых в гараже, в домашнем хозяйстве или мастерской.
Как работает электродвигатель
Двигатель работает на основе эффекта, обнаруженного Майклом Фарадеем еще в 1821 году. Он сделал открытие, что при взаимодействии электрического тока в проводнике и магнита может возникнуть непрерывное вращение.
Если в однородном магнитном поле расположить в вертикальном положении рамку и пропустить по ней ток, тогда вокруг проводника возникнет электромагнитное поле, которое будет взаимодействовать с полюсами магнитов. От одного рамка будет отталкиваться, а к другому притягиваться.
В результате рамка повернется в горизонтальное положения, в котором будет нулевым воздействие магнитного поля на проводник. Для того что бы вращение продолжилось необходимо добавить еще одну рамку под углом или изменить направление тока в рамке в подходящий момент.
На рисунке это делается при помощи двух полуколец, к которым примыкают контактные пластины от батарейки. В результате после совершения полуоборота меняется полярность и вращение продолжается.
В современных электродвигателях вместо постоянных магнитов для создания магнитного поля используются катушки индуктивности или электромагниты. Если разобрать любой мотор, то Вы увидите намотанные витки проволоки, покрытой изоляционным лаком. Эти витки и есть электромагнит или как их еще называют обмотка возбуждения.
В быту же постоянные магниты используются в детских игрушках на батарейках.
В других же более мощных двигателях используются только электромагниты или обмотки. Вращающаяся часть с ними называется ротор, а неподвижная- статор.
Виды электродвигателей
Сегодня существуют довольно много электродвигателей разных конструкций и типов. Их можно разделить по типу электропитания:
- Переменного тока, работающие напрямую от электросети.
- Постоянного тока, которые работают от батареек, АКБ, блоков питания или других источников постоянного тока.
По принципу работы:
- Синхронные, в которых есть обмотки на роторе и щеточный механизм для подачи на них электрического тока.
- Асинхронные, самый простой и распространенный вид мотора. В них нет щеток и обмоток на роторе.
Синхронный мотор вращается синхронно с магнитным полем, которое его вращает, а у асинхронного ротор вращается медленнее вращающегося магнитного поля в статоре .
Принцип работы и устройство асинхронного электродвигателя
В корпусе асинхронного двигателя укладываются обмотки статора (для 380 Вольт их будет 3), которые создают вращающееся магнитное поле. Концы их для подключения выводятся на специальную клеммную колодку. Охлаждаются обмотки, благодаря вентилятору, установленному на вале в торце электродвигателя.
Ротор, являющиеся одним целым с валом, изготавливается из металлических стержней, которые замыкаются между собой с обоих сторон, поэтому он и называется короткозамкнутым.
Благодаря такой конструкции отпадает необходимость в частом периодическом обслуживании и замене токоподающих щеток, многократно увеличивается надежность, долговечность и безотказность.
Как правило, основной причиной поломки асинхронного мотора является износ подшипников, в которых вращается вал.
Принцип работы. Для того что бы работал асинхронный двигатель необходимо, что бы ротор вращался медленнее электромагнитного поля статора, в результате чего наводится ЭДС (возникает электроток) в роторе.
Здесь важное условие, если бы ротор вращался с такой же скоростью как и магнитное поле, то в нем по закону электромагнитной индукции не наводилось бы ЭДС и, следовательно не было бы вращения.
Обратите внимание
Но в реальности, из-за трения подшипников или нагрузки на вал, ротор всегда будет вращаться медленнее.
Магнитные полюса постоянно вращаются в обмотках мотора, и постоянно меняется направление тока в роторе. В один момент времени, например направление токов в обмотках статора и ротора изображено схематично в виде крестиков (ток течет от нас) и точек (ток на нас). Вращающееся магнитное поле изображено изображено пунктиром.
Например, как работает циркулярная пила. Наибольшие обороты у нее без нагрузки. Но как только мы начинаем резать доску, скорость вращения уменьшается и одновременно с этим ротор начинает медленнее вращаться относительно электромагнитного поля и в нем по законам электротехники начинает наводится еще большей величины ЭДС.
Вырастает потребляемый ток мотором и он начинает работать на полной мощности. Если же нагрузка на вал будет столь велика, что его застопорит, то может возникнуть повреждение короткозамкнутого ротора из-за максимальной величины наводимой в нем ЭДС. Вот почему важно подбирать двигатель, подходящей мощности.
Если же взять большей, то неоправданными будут энергозатраты.
Скорость вращения ротора зависит от количества полюсов. При 2 полюсах скорость вращения будет равна скорости вращения магнитного поля, равного максимум 3000 оборотов в секунду при частоте сети 50 Гц. Что бы понизить скорость вдвое, необходимо увеличить количество полюсов в статоре до четырех.
Весомым недостатком асинхронных двигателей является то, что они подаются регулировке скорости вращения вала только при помощи изменения частоты электрического тока. А так не возможно добиться постоянной частоты вращения вала.
Принцип работы и устройство синхронного электродвигателя переменного тока
Данный вид электродвигателя используется в быту там, где необходима постоянная скорость вращения, возможность ее регулировки, а так же если необходима скорость вращения более 3000 оборотов в минуту (это максимум для асинхронных).
Синхронные моторы устанавливаются в электроинструменте, пылесосе, стиральной машине и т. д.
В корпусе синхронного двигателя переменного тока расположены обмотки (3 на рисунке), которые также намотаны и на ротор или якорь (1). Их выводы припаяны к секторам токосъемного кольца или коллектора (5), на которые при помощи графитовых щеток (4) подается напряжение. При чем выводы расположены так, что щетки всегда подают напряжение только на одну пару.
Наиболее частыми поломками коллекторных двигателей является:
- Износ щетокили их плохой их контакт из-за ослабления прижимной пружины.
- Загрязнение коллектора.Чистите либо спиртом или нулевой наждачной бумагой.
- Износ подшипников.
Принцип работы. Вращающий момент в электромоторе создается в результате взаимодействия между током тока якоря и магнитным потоком в обмотке возбуждения. С изменением направления переменного тока будет меняться и направление магнитного потока одновременно в корпусе и якоре, благодаря чему вращение всегда будет в одну сторону.
Регулировка скорости вращения меняется методом изменения величины подаваемого напряжения. В дрелях и пылесосах для этого используется реостат или переменное сопротивление.
Изменение направления вращения происходит также как и у двигателей постоянного тока, о которых Я расскажу в следующей статье.
Источник: http://elektro-enot.ru/ustrojstvo-i-princip-raboty-elektrodvigatelya/
Электродвигатели постоянного тока. Устройство и работа. Виды
Электрические двигатели, приводящиеся в движение путем воздействия постоянного тока, применяются значительно реже, по сравнению с двигателями, работающими от переменного тока.
В бытовых условиях электродвигатели постоянного тока используются в детских игрушках, с питанием от обычных батареек с постоянным током. На производстве электродвигатели постоянного тока приводят в действие различные агрегаты и оборудование.
Питание для них подводится от мощных батарей аккумуляторов.
Устройство и принцип работыЭлектродвигатели постоянного тока по конструкции подобны синхронным двигателям переменного тока, с разницей в типе тока.
В простых демонстрационных моделях двигателя применяли один магнит и рамку с проходящим по ней током. Такое устройство рассматривалось в качестве простого примера.
Современные двигатели являются совершенными сложными устройствами, способными развивать большую мощность.
Главной обмоткой двигателя служит якорь, на который подается питание через коллектор и щеточный механизм. Он совершает вращательное движение в магнитном поле, образованном полюсами статора (корпуса двигателя). Якорь изготавливается из нескольких обмоток, уложенных в его пазах, и закрепленных там специальным эпоксидным составом.
Статор может состоять из обмоток возбуждения или из постоянных магнитов. В маломощных двигателях используют постоянные магниты, а в двигателях с повышенной мощностью статор снабжен обмотками возбуждения.
Статор с торцов закрыт крышками со встроенными в них подшипниками, служащими для вращения вала якоря.
На одном конце этого вала закреплен охлаждающий вентилятор, который создает напор воздуха и прогоняет его по внутренней части двигателя во время работы.
Важно
Принцип действия такого двигателя основывается на законе Ампера. При размещении проволочной рамки в магнитном поле, она будет вращаться.
Проходящий по ней ток создает вокруг себя магнитное поле, взаимодействующее с внешним магнитным полем, что приводит к вращению рамки. В современной конструкции мотора роль рамки играет якорь с обмотками.
На них подается ток, в результате вокруг якоря создается магнитное поле, которое приводит его во вращательное движение.
Для поочередной подачи тока на обмотки якоря применяются специальные щетки из сплава графита и меди
Выводы обмоток якоря объединены в один узел, называемый коллектором, выполненным в виде кольца из ламелей, закрепленных на валу якоря. При вращении вала щетки по очереди подают питание на обмотки якоря через ламели коллектора. В результате вал двигателя вращается с равномерной скоростью. Чем больше обмоток имеет якорь, тем равномернее будет работать двигатель.
Щеточный узел является наиболее уязвимым механизмом в конструкции двигателя. Во время работы медно-графитовые щетки притираются к коллектору, повторяя его форму, и с постоянным усилием прижимаются к нему.
В процессе эксплуатации щетки изнашиваются, а токопроводящая пыль, являющаяся продуктом этого износа, оседает на деталях двигателя. Эту пыль необходимо периодически удалять.
Обычно удаление пыли выполняют воздухом под большим давлением.
Щетки требуют периодического их перемещения в пазах и продувки воздухом, так как от накопившейся пыли они могут застрять в направляющих пазах. Это приведет к зависанию щеток над коллектором и нарушению работы двигателя. Щетки периодически требуют замены из-за их износа.
В месте контакта коллектора со щетками также происходит износ коллектора. Поэтому при износе якорь снимают и на токарном станке протачивают коллектор.
После проточки коллектора изоляция, находящаяся между ламелями коллектора стачивается на небольшую глубину, чтобы она не разрушала щетки, так как ее прочность значительно превышает прочность щеток.
ВидыЭлектродвигатели постоянного тока разделяют по характеру возбуждения
Независимое возбуждениеПри таком характере возбуждения обмотка подключается к внешнему источнику питания. При этом параметры двигателя аналогичны двигателю на постоянных магнитах.
Обороты вращения настраиваются сопротивлением обмоток якоря. Скорость регулируют специальным регулировочным реостатом, включенным в цепь обмоток возбуждения.
При значительном снижении сопротивления или при обрыве цепи ток якоря повышается до опасных величин.
Электродвигатели с независимым возбуждением запрещается запускать без нагрузки или с небольшой нагрузкой, так как его скорость резко возрастет, и двигатель выйдет из строя.
Параллельное возбуждениеОбмотки возбуждения и ротора соединяются параллельно с одним источником тока. При такой схеме ток обмотки возбуждения значительно ниже тока ротора. Параметры двигателей становятся слишком жесткими, их можно применять для привода вентиляторов и станков.
Регулировка оборотов двигателя обеспечивается реостатом в последовательной цепи с обмотками возбуждения или в цепи ротора.
Последовательное возбуждениеВ этом случае возбуждающая обмотка подключается последовательно с якорем, в результате чего по этим обмоткам проходит одинаковый ток. Обороты вращения такого мотора зависят от его нагрузки. Двигатель нельзя запускать на холостом ходу без нагрузки. Однако такой двигатель обладает приличными пусковыми параметрами, поэтому подобная схема используется в работе тяжелого электротранспорта.
Смешанное возбуждение
Такая схема предусматривает применение двух обмоток возбуждения, находящихся парами на каждом полюсе двигателя. Эти обмотки можно соединять двумя способами: с суммированием потоков, либо с их вычитанием. В итоге электродвигатель может обладать такими же характеристиками, как у двигателей с параллельным или последовательным возбуждением.
Чтобы заставить двигатель вращаться в другую сторону, на одной из обмоток изменяют полярность. Для управления скоростью вращения мотора и его запуском используют ступенчатое переключение разных резисторов.
Особенности эксплуатацииЭлектродвигатели постоянного тока отличаются экологичностью и надежностью. Их главным отличием от двигателей переменного тока является возможность регулировки оборотов вращения в большом диапазоне.
Такие электродвигатели постоянного тока можно также применять в качестве генератора. Изменив направление тока в обмотке возбуждения или в якоре, можно изменять направление вращения двигателя.
Регулировка оборотов вала двигателя осуществляется с помощью переменного резистора.
Совет
В двигателях с последовательной схемой возбуждения это сопротивление расположено в цепи якоря и позволяет уменьшить скорость вращения в 2-3 раза.
Этот вариант подходит для механизмов с длительным временем простоя, так как при работе реостат сильно нагревается. Повышение оборотов создается путем включения в цепь возбуждающей обмотки реостата.
Для моторов с параллельной схемой возбуждения в цепи якоря также применяются реостаты для уменьшения оборотов в два раза. Если в цепь обмотки возбуждения подключить сопротивление, то это позволит повышать обороты до 4 раз.
Применение реостата связано с выделением тепла. Поэтому в современных конструкциях двигателей реостаты заменяют электронными элементами, управляющими скоростью без сильного нагревания.
На коэффициент полезного действия мотора, работающего на постоянном токе, влияет его мощность. Слабые электродвигатели постоянного тока обладают малой эффективностью, и их КПД около 40%, в то время, как электродвигатели мощностью 1 МВт могут обладать коэффициентом полезного действия до 96%.
Преимущества электродвигателей постоянного тока- Небольшие габаритные размеры.
- Легкое управление.
- Простая конструкция.
- Возможность применения в качестве генераторов тока.
- Быстрый запуск, особенно характерный для моторов с последовательной схемой возбуждения.
- Возможность плавной регулировки скорости вращения вала.
- Для подключения и эксплуатации необходимо приобретать специальный блок питания постоянного тока.
- Высокая стоимость.
- Наличие расходных элементов в виде медно-графитных быстроизнашивающихся щеток, изнашивающегося коллектора, что значительно снижает срок эксплуатации, и требует периодического технического обслуживания.
Широко популярными двигатели постоянного тока стали в электрическом транспорте. Такие двигатели обычно входят в конструкции:
- Электромобилей.
- Электровозов.
- Трамваев.
- Электричек.
- Троллейбусов.
- Подъемно-транспортных механизмов.
- Детских игрушек.
- Промышленного оборудования с необходимостью управлением скорости вращения в большом диапазоне.
Источник: https://electrosam.ru/glavnaja/jelektrooborudovanie/ustrojstva/elektrodvigateli-postoiannogo-toka/
Принципиальное устройство электродвигателя
Электродвигатель — это прибор для преобразования электроэнергии в механическую.
Устройство электродвигателя несложное, а принцип его работы основывается на обнаруженном Фарадеем в 1921 году эффекте электромагнетизма, успешно применяемом и в настоящее время.
Его принцип гласит: взаимодействие электротока в проводнике с постоянным магнитным полем приводит к непрерывному вращению проводника.
Основные разновидности электродвигателей
Основными компонентами электродвигателя, обеспечивающими его вращение, являются магниты и электромагниты. В роли последних выступают катушки из намотанного проводника.
Все виды электродвигателей можно разделить на 3 основных группы:
- двигатели класса AC. Они работают за счёт напряжения переменного тока, и для подключения могут требовать как одну, так и три фазы;
- электродвигатели DC. Их работа осуществляется за счёт напряжения постоянного тока;
- универсальные электродвигатели. Они работают вне зависимости от типа подаваемого на них напряжения. Единственное условие — обеспечение номинальной мощности и вольтажа подаваемой электроэнергии.
Несмотря на одинаковое использование моторами принципов преобразования энергии, они могут существенно различаться между собой. Причём как конструктивно, так и по способу контроля скорости, регулированию момента вращения.
Использование электродвигателей чрезвычайно широко как в быту, так и на производстве. Дома можно обнаружить немалое число бытовой техники, в которой они служат основными узлами: вентиляторы, кондиционеры, стиральные машины, соковыжималки. Не являются исключением и компьютеры.
Электродвигатели также применяются для работы секционных ворот и шлагбаумов, в качестве основного силового агрегата в тепловозах и электровозах. В последнее время стало широко популярно их применение в автомобилестроении — в качестве оснащения гибридных авто и электромобилей.
По принципу работы электромоторы разделяются на 2 группы:
- Синхронные. Их конструкция предусматривает наличие обмотки на роторе. Для подачи на неё напряжения используются щётки из токопроводящего материала. Скорость вращения моторов равна скорости движения магнитного поля.
- Асинхронные. Они характеризуются отсутствием обмоток ротора и щёток, что существенно упрощает их конструкцию и делает её надёжнее. В асинхронных электромоторах обороты ротора меньше скорости вращения магнитного поля.
Постараемся разобрать подробнее устройство электродвигателей обоих типов.
Как устроен синхронный электромотор
Двигатели этого типа получили широкое распространение в быту. Во многом благодаря возможности регулировки и поддержания заданной скорости вращения. Кроме этого, в отличие от асинхронных электромоторов, синхронные двигатели могут раскручиваться свыше 3000 оборотов в минуту. Они применяются в электроинструменте, бытовой технике, климатических системах и пр.
Их конструкция следующая: в корпусе установлены обмотки, и они же присутствуют на роторе или якоре. Выводы обмоток ведут к коллектору или площадкам токопроводящего кольца. Подачи напряжения на них осуществляется щетками (обычно на основе графита). Схема установки щёток такова, что они воздействуют только на пару обмоток, и воздействие при вращении мотора чередуются.
Распространёнными неисправностями синхронных двигателей являются:
- Износ, разрушение щёток или снижение качества контакта.
- Попадание грязи на коллектор.
- Выход из строя подшипников.
- Обрыв или перегорание обмотки.
Для создания вращающего момента используется взаимодействие токов якоря и создаваемого обмоткой магнитного поля. Для регулировки оборотов нужно изменять величину подаваемого на обмотки электромотора напряжения, что осуществляется при помощи реостатов.
Устройство асинхронного двигателя
Преимуществом моторов асинхронного типа является возрастание мощности пропорционально нагрузке. К примеру, при холостом ходе мотора он работает на максимальных оборотах, но при этом потребляет минимум энергии. При увеличении нагрузки, приводящей к снижению оборотов, крутящий момент увеличивается, и тем самым электромотор выходит на номинальную мощность.
Однако устройство электродвигателя этого типа имеет и определённые недостатки:
- При работе в трехфазных сетях переменного тока скорость вращения не может превышать 3000 оборотов.
- При подаче нагрузки, превышающей мощность мотора, произойдёт его стопорение, в результате чего обмотки или сам ротор выйдут из строя.
- При выборе электродвигателя необходимо учитывать его производительность. Установка мотора меньшей мощности приведёт к выходу его из строя, большей — к неоправданно высоким энергозатратам.
Асинхронный двигатель представляет собой корпус, в котором уложены обмотки статора. При использовании трехфазной сети количество обмоток будет равно 3. При подаче на них напряжения возникает магнитное поле, приводящее вал электромотора в движение. Охлаждение осуществляется за счёт установленного на конце вала вентилятора.
Скорость вращения ротора асинхронного мотора зависима от числа полюсов в статоре. При их кратном увеличении происходит снижение оборотов двигателя, но при этом возрастает его мощность.
Ещё одним существенным недостатком является невозможность осуществлять регулировку оборотов. Проблема в том, что она зависит непосредственно от частоты тока, а использование высокоточных модификаторов синуса нецелесообразно.
Обратите внимание
Основное их применение — механизмы и оборудование, работа которых не требует регулировки и большой скорости вращения, при этом на максимальную мощность они должны выходить только при нагрузке.
К примеру — циркулярные пилы и прочее столярное оборудование.
Источник: https://uelektrika.ru/sovety-elektrika/ustroystvo-yelektrodvigatelya/
Двигатель постоянного тока: схемы включения
Электродвигатели, работающие на постоянном токе, используются не так часто, как двигатели переменного тока. Ниже приведем их достоинства и недостатки.
| Достоинства | Недостатки |
| частота вращения легко регулируется | высокая стоимость |
| мягкий пуск и плавный разгон | сложность конструкции |
| получение частоты вращения выше 3000 об/мин | сложность в эксплуатации |
В быту двигатели постоянного тока нашли применение в детских игрушках, так как источниками для их питания служат батарейки. Используются они на транспорте: в метрополитене, трамваях и троллейбусах, автомобилях. На промышленных предприятиях электродвигатели постоянного тока применяются в приводах агрегатов, для бесперебойного электроснабжения которых используются аккумуляторные батареи.
Конструкция и обслуживание двигателя постоянного тока
Основной обмоткой двигателя постоянного тока является якорь, подключающийся к источнику питания через щеточный аппарат.
Якорь вращается в магнитном поле, создаваемом полюсами статора (обмотками возбуждения). Торцевые части статора закрыты щитами с подшипниками, в которых вращается вал якоря двигателя.
С одной стороны на этом же валу установлен вентилятор охлаждения, прогоняющий поток воздуха через внутренние полости двигателя при его работе.
Схема двигателя постоянного тока
Щеточный аппарат – уязвимый элемент в конструкции двигателя. Щетки притираются к коллектору, чтобы как можно точнее повторять его форму, прижимаются к нему с постоянным усилием.
В процессе работы щетки истираются, токопроводящая пыль от них оседает на неподвижных частях, ее периодически нужно удалять. Сами щетки нужно иногда перемещать в пазах, иначе они застревают в них под действием той же пыли и «зависают» над коллектором.
Характеристики двигателя зависит еще и от положения щеток в пространстве в плоскости вращения якоря.
Со временем щетки изнашиваются и заменяются. Коллектор в местах контакта со щетками тоже истирается. Периодически якорь демонтируют и протачивают коллектор на токарном станке. После протачивания изоляция между ламелями коллектора срезается на некоторую глубину, так как она прочнее материала коллектора и при дальнейшей выработке будет разрушать щетки.
Схемы включения двигателя постоянного тока
Наличие обмоток возбуждения – отличительная особенность машин постоянного тока. От способов их подключения к сети зависят электрические и механические свойства электродвигателя.
Независимое возбуждение
Обмотка возбуждения подключается к независимому источнику. Характеристики двигателя получаются такие же, как у двигателя с постоянными магнитами. Скорость вращения регулируется сопротивлением в цепи якоря.
Регулируют ее и реостатом (регулировочным сопротивлением) в цепи обмотки возбуждения, но при чрезмерном уменьшении его величины или при обрыве ток якоря возрастает до опасных значений.
Двигатели с независимым возбуждением нельзя запускать на холостом ходу или с малой нагрузкой на валу. Скорость вращения резко увеличится, и двигатель будет поврежден.
Схема независимого возбуждения
Остальные схемы называют схемами с самовозбуждением.
Параллельное возбуждение
Обмотки ротора и возбуждения подключаются параллельно к одному источнику питания. При таком включении ток через обмотку возбуждения в несколько раз меньше, чем через ротор. Характеристики электродвигателей получаются жесткими, позволяющие использовать их для привода станков, вентиляторов.
Регулировка скорости вращения обеспечивается включением реостатов в цепь ротора или последовательно с обмоткой возбуждения.
Схема параллельного возбуждения
Последовательное возбуждение
Обмотка возбуждения включается последовательно с якорной, по ним течет один и тот же ток. Скорость такого двигателя зависит от его нагрузки, его нельзя включать на холостом ходу. Но он обладает хорошими пусковыми характеристиками, поэтому схема с последовательным возбуждением применяется на электрифицированном транспорте.
Схема последовательного возбуждения
Смешанное возбуждение
При этой схеме используются две обмотки возбуждения, расположенные попарно на каждом из полюсов электродвигателя. Их можно подключить так, чтобы потоки их либо складывались, либо вычитались. В результате двигатель может иметь характеристики как у схемы последовательного или параллельного возбуждения.
Схема смешанного возбуждения
Для изменения направления вращения изменяют полярность одной из обмоток возбуждения. Для управления пуском электродвигателя и скоростью его вращения применяют ступенчатое переключение сопротивлений.
Источник: http://electric-tolk.ru/dvigateli-postoyannogo-toka-i-sxemy-ix-vklyucheniya/
Устройство электродвигателя постоянного тока
Электродвигатель неизменного тока — электромеханическое устройство, модифицирующее электронную энергию неизменного тока в механическую энергию.
Электродвигатель неизменного тока состоит из недвижной части — станины и вращающейся части — якоря.
Станина — полый металлической цилиндр, на внутренней поверхности которого укреплено четное число выступающих основных полюсов электродвигателя неизменного тока.
Эти полюсы собраны из тонких изолированных друг от друга лаком листов электротехнической стали и завершаются расширенной частью — полюсными наконечниками для рассредотачивания магнитной индукции в воздушном зазоре по закону, близкому к трапецеидальному.
Электродвигатели неизменного тока
Полосы, проходящие через середины полюсов и центр вала электродвигателя неизменного тока, именуют ее продольными магнитными осями.
На полюсах размещены одна либо несколько обмоток возбуждения неизменного тока, которые соединены меж собой так, чтоб получить чередующуюся полярность полюсов, возбуждающих основное недвижное магнитное поле машины.
Обмотки возбуждения с огромным числом витков узкого провода и значимым сопротивлением имеют выводы к зажимам с обозначениями Ш1 и Ш2, а обмотки возбуждения с малым числом витков толстого провода и малым сопротивлением — выводы к зажимам с обозначениями С1 и С2.
Важно
Меж главными полюсами электродвигателя неизменного тока размещены дополнительные полюсы, которые меньше основных и сделаны громоздкими из стали.
Обычно число дополнительных полюсов равно числу основных и исключительно в электродвигателях номинальной мощностью до 2 — 2,5 кВт число их уменьшено в два раза.
На этих полюсах расположена обмотка дополнительных полюсов с маленьким числом витков толстого провода, малого сопротивления с выводами к зажимам с обозначениями Д1 и Д2.
В электродвигателях неизменного тока, созданных для томного режима работы, полюсные наконечники имеют пазы, параллельные оси вала, где находится компенсационная обмотка с маленьким числом витков толстого провода и малым сопротивлением с выводами к зажимам с обозначениями К1 и К2.
Учебная модель электродвигателя неизменного тока
Обмотки возбуждения, обмотка дополнительных полюсов и компенсационная обмотка выполнены изолированным медным проводом. При проводах значимого сечения обмотку дополнительных полюсов делают неизолированной медной шиной, навитой спиралью на узенькое ребро, с прокладкой изоляции как меж витками, так и меж ними и самим полюсом.
Мощность на возбуждение магнитного поля электродвигателя неизменного тока зависимо от ее размеров составляет от 0,5 до 5 % ее номинальной мощности.
Меж поверхностями полюсных наконечников и магнитопроводом якоря имеется зазор, круговой размер которого зависимо от номинальной мощности электродвигателя и его быстроходности меняется обычно от нескольких толикой мм до 10 мм.
Устройство электродвигателя неизменного тока: 1 — станина, 2 — главный полюс, 3 — обмотка возбуждения, 4 — полюсный наконечник, 5 — дополнительный полюс, 6 — обмотка дополнительного полюса, 7 — проводники компенсационной обмотки, 8 — зазор, 9 — магнитопровод якоря, 10 — проводники обмотки якоря, 11 — щетка, 12 — вал, 13 — коллектор, 14 — лапа.
Якорь барабанного типа — зубчатый цилиндр, укрепленный на валу электродвигателя неизменного тока, собранный из пакетов, составленных из тонких изолированных друг от друга лаком листов электротехнической стали с пазами на внешней поверхности. Меж пакетами находятся круговые каналы вентиляции, а пазы якоря заполнены изолированными медными проводниками, которые по торцам соединены меж собой в секции, входящие в обмотку якоря.
Секция — основной элемент обмотки якоря из 1-го либо нескольких поочередно соединенных витков, начало и конец которых припаяны к двум коллекторным пластинам, в итоге чего конец одной секции и начало последующей присоединены к одной коллекторной пластинке.
Одно и двухвитковые обмотки якоря электродвигателей неизменного тока: а — петлевой, б — волновой
Совет
Соединение секций обмоток якоря электродвигателей неизменного тока: а — петлевой, б — волновой
Коллектор — полый цилиндр из маленьких пластинок твердотянутой меди трапецеидального сечения, изолированных миканитовыми прокладками и манжетами друг от друга и от вала.
Из технологических суждений обмотку якоря делают двухслойной, располагая в каждом пазу его магнитопровода по две стороны разных секций: в верхнем слое 1-го паза — одну сторону секции, показанную сплошной линией, а в нижнем слое другого паза, находящегося под обратным основным полюсом, — другую сторону этой же секции, изображенную пунктирной линией. Пазы, где находятся обе стороны одной и той же секции, сдвинуты относительно друг дружку на величину, близкую либо равную полюсному делению τ — расстоянию по окружности якоря меж осями примыкающих основных полюсов.
Независимо от типа обмотки якоря — петлевой либо волновой — она образует замкнутую цепь, разбитую группами недвижных графитных, угольно-графитных, медно-графитных либо бронзово-графитных щеток, прижимаемых пружинами к коллектору, на четное число схожих параллельных веток по отношению к зажимам обмотки якоря с обозначениями Я1 и Я2. При петлевой, либо параллельной, обмотке число параллельных веток равно числу основных полюсов электродвигателя, а при волновой, либо поочередной, обмотке оно всегда равно двум.
Группы щеток, укрепленных в щеткодержателях, устанавливают умеренно по окружности коллектора перед серединой основных полюсов с тем, чтоб они присоединялись к тем секциям обмотки якоря, которые на этот момент находятся на геометрических нейтралях якоря — недвижных линиях, проходящих через центр вала машины по осям дополнительных полюсов. Геометрические нейтрали размещены по нормалям к магнитным линиям основного поля машины, а число их равно числу пар основных полюсов.
При расположении щеток на коллекторных пластинках, отвечающих секциям обмотки якоря, находящимся на геометрических нейтралях, и холостом ходе электродвигателя, э. д.
с, индуктируемые в передвигающихся проводниках в границах каждой параллельной ветки обмотки якоря, ориентированы согласно, а э. д. с. меж щетками различной полярности добивается большего значения. При сдвиге щеток по окружности коллектора в любом направлении эта э. д. с.
миниатюризируется, так как в параллельно соединенных ветвях обмотки якоря возникают проводники со встречно направленными э. д. с.
Обратите внимание
Щеткодержатели укреплены на пальцах поворотной щеточной траверсы, от которой они электрически изолированы. При помощи траверсы может быть смещать щетки в маленьких границах по окружности коллектора относительно полюсов при настройке работы щеточного аппарата. Совокупа коллектора и щеток делает скользящий контакт с вращающейся обмоткой якоря.
Число групп щеток с чередующейся полярностью обычно равно числу основных полюсов электродвигателя неизменного тока.
Для образования выводов обмотки якоря Я1 и Я2 щетки схожих полярностей, находящихся перед серединой соответственных одноименных основных полюсов, соединяют меж собой и от их выводят проводники огромного сечения либо шины к зажимам с обозначениями Я1 и Я2, которые употребляют для присоединения к другим обмоткам машины либо ко наружной цепи.
На валу электродвигателя неизменного тока со стороны, обратной коллектору, укреплен вентилятор центробежного типа, который обеспечивает наилучшее остывание машины. Вал лежит в подшипниках, расположенных в подшипниковых щитах электродвигателя.
Источник: http://elektrica.info/ustrojstvo-e-lektrodvigatelya-postoyannogo-toka/
Разбираемся в принципах работы электродвигателей: преимущества и недостатки разных видов
Электродвигатели – это устройства, в которых электрическая энергия превращается в механическую. В основе принципа их действия лежит явление электромагнитной индукции.
Однако способы взаимодействия магнитных полей, заставляющих вращаться ротор двигателя, существенно различаются в зависимости от типа питающего напряжения – переменного или постоянного.
Устройство и принцип действия электродвигателя постоянного тока
В основе принципа работы электродвигателя постоянного тока лежит эффект отталкивания одноименных полюсов постоянных магнитов и притягивания разноименных. Приоритет ее изобретения принадлежит русскому инженеру Б. С. Якоби. Первая промышленная модель двигателя постоянного тока была создана в 1838 году. С тех пор его конструкция не претерпела кардинальных изменений.
В двигателях постоянного тока небольшой мощности один из магнитов является физически существующим. Он закреплен непосредственно на корпусе машины. Второй создается в обмотке якоря после подключения к ней источника постоянного тока. Для этого используется специальное устройство – коллекторно-щеточный узел. Сам коллектор – это токопроводящее кольцо, закрепленное на валу двигателя.
К нему подключены концы обмотки якоря.
Чтобы возник вращающий момент, необходимо непрерывно менять местами полюса постоянного магнита якоря. Происходить это должно в момент пересечения полюсом так называемой магнитной нейтрали. Конструктивно такая задача решается разделением кольца коллектора на секторы, разделенные диэлектрическими пластинами.
Концы обмоток якоря присоединяются к ним поочередно.
Чтобы соединить коллектор с питающей сетью используются так называемые щетки – графитовые стержни, имеющие высокую электрическую проводимость и малый коэффициент трения скольжения.
В двигателях большой мощности физически существующих магнитов не используют из-за их большого веса. Для создания постоянного магнитного поля статора используется несколько металлических стержней, каждый из которых имеет собственную обмотку из проводника, подключенного к плюсовой или минусовой питающей шине. Одноименные полюса включаются последовательно друг другу.
Количество пар полюсов на корпусе двигателя может быть равно одной или четырем. Число токосъемных щеток на коллекторе якоря должно ему соответствовать.
Электродвигатели большой мощности имеют ряд конструктивных хитростей. Например, после запуска двигателя и с изменением нагрузки на него, узел токосъемных щеток сдвигается на определенный угол против вращения вала. Так компенсируется эффект «реакции якоря», ведущий к торможению вала и снижению эффективности электрической машины.
Также существует три схемы подключения двигателя постоянного тока:
- с параллельным возбуждением;
- последовательным;
- смешанным.
Параллельное возбуждение – это когда параллельно обмотке якоря включается еще одна независимая, обычно регулируемая (реостат).
Такой способ подключения позволяет очень плавно регулировать скорость вращения и достигать ее максимальной стабильности. Его используют для питания электродвигателей станков и кранового оборудования.
Важно
Последовательная – в цепь питания якоря дополнительная обмотка включена последовательно. Такой тип подключения используется для того, чтобы в нужный момент резко нарастить вращающее усилие двигателя. Например, при трогании с места железнодорожных составов.
Двигатели постоянного тока имеют возможность плавной регулировки частоты вращения, поэтому их применяют в качестве тяговых на электротранспорте и грузоподъемном оборудовании.
Двигатели переменного тока — в чем отличие?
Устройство и принцип работы электродвигателя переменного тока для создания крутящего момента предусматривают использование вращающегося магнитного поля. Их изобретателем считается русский инженер М. О. Доливо-Добровольский, создавший в 1890 году первый промышленный образец двигателя и являющийся основоположником теории и техники трехфазного переменного тока.
Вращающееся магнитное поле возникает в трех обмотках статора двигателя сразу, как только они подключаются к цепи питающего напряжения. Ротор такого электромотора в традиционном исполнении не имеет никаких обмоток и представляет собой, грубо говоря, кусок железа, чем-то напоминающий беличье колесо.
Магнитное поле статора провоцирует возникновение в роторе тока, причем очень большого, ведь это короткозамкнутая конструкция. Этот ток вызывает возникновение собственного поля якоря, которое «сцепляется» с вихревым магнитным потом статора и заставляет вращаться вал двигателя в том же направлении.
Магнитное поле якоря имеет ту же скорость, что и статора, но отстает от него по фазе примерно на 8–100. Именно поэтому двигатели переменного тока называются асинхронными.
Принцип действия электродвигателя переменного тока с традиционным, короткозамкнутым ротором, имеет очень большие пусковые токи. Вероятно, многие из вас это замечали – при пуске двигателей лампы накаливания меняют яркость свечения. Поэтому в электрических машинах большой мощности применяется фазный ротор – на нем уложены три обмотки, соединенные «звездой».
Обмотки якоря не подключены к питающей сети, а посредством коллекторно-щеточного узла соединены с пусковым реостатом. Процесс включения такого двигателя состоит из соединения с питающей сетью и постепенного уменьшения до нуля активного сопротивления в цепи якоря. Электромотор включается плавно и без перегрузок.
Особенности использования асинхронных двигателей в однофазной цепи
Несмотря на то, что вращающееся магнитное поле статора проще всего получить от трехфазного напряжения, принцип действия асинхронного электродвигателя позволяет ему работать и от однофазной, бытовой сети, если в их конструкцию будут внесены некоторые изменения.
Для этого на статоре должно быть две обмотки, одна из которой является «пусковой». Ток в ней сдвигается по фазе на 90° за счет включения в цепь реактивной нагрузки. Чаще всего для этого используется конденсатор.
Запитать от бытовой розетки можно и промышленный трехфазный двигатель. Для этого в его клеммной коробке две обмотки соединяются в одну, и в эту цепь включается конденсатор. Исходя из принципа работы асинхронных электродвигателей, запитанных от однофазной цепи, следует указать, что они имеют меньший КПД и очень чувствительны к перегрузкам.
Электродвигатели этого типа легко запускаются, но частоту их вращения практически невозможно регулировать.
Они чувствительны к перепадам напряжения, а при «недогрузе» снижают коэффициент полезного действия, становясь источником непропорционально больших затрат электроэнергии. При этом существуют методы использования асинхронного двигателя как генератор.
Универсальные коллекторные двигатели — принцип работы и характеристики
В бытовых электроинструментах малой мощности, от которых требуются малые пусковые токи, большой вращающий момент, высокая частота вращения и возможность ее плавной регулировки, используются так называемые универсальные коллекторные двигатели. По своей конструкции они аналогичны двигателям постоянного тока с последовательным возбуждением.
В таких двигателях магнитное поле статора создается за счет питающего напряжения. Только немного изменена конструкция магнитопроводов – она не литая, а наборная, что позволяет уменьшать перемагничивание и нагрев токами Фуко. Последовательно включенная в цепь якоря индуктивность дает возможность менять направление магнитного поля статора и якоря в одном направлении и в той же фазе.
Практически полная синхронность магнитных полей позволяет двигателю набирать обороты даже при значительных нагрузках на валу, что и требуется для работы дрелей, перфораторов, пылесосов, «болгарок» или полотерных машин.
Если в питающую цепь такого двигателя включен регулируемый трансформатор, то частоту его вращения можно плавно менять. А вот направление, при питании от цепи переменного тока, изменить не удастся никогда.
Совет
Такие электромоторы способны развивать очень высокие обороты, компактны и имеют больший вращающий момент. Однако наличие коллекторно-щеточного узла снижает их моторесурс – графитовые щетки достаточно быстро истираются на высоких оборотах, особенно если коллектор имеет механические повреждения.
Электродвигатели имеют самый большой КПД (более 80 %) из всех устройств, созданных человеком. Их изобретение в конце XIX века вполне можно считать качественным цивилизационным скачком, ведь без них невозможно представить жизнь современного общества, основанного на высоких технологиях, а чего-либо более эффективного пока еще не придумано.
Синхронный принцип работы электродвигателя на видео
Источник: http://elektrik24.net/elektrooborudovanie/elektrodvigateli/princip-raboty-3.html
Электродвигатель постоянного тока
УПРАВЛЕНИЕ ДВИГАТЕЛЕМ – ПУСК
Исторически первый электродвигатель работал именно на постоянном токе, так как во времена его изобретения в 1834 году Борисом Якоби единственным источником тока были гальванические батареи.
Принцип работы электродвигателя постоянного тока прост: в простейшем случае он имеет по одной паре полюсов на статоре и роторе, при этом направление тока в обмотке ротора дважды за оборот изменяется при помощи специального устройства – коллектора, представляющего собой набор пластин, соответствующий числу роторных обмоток.
При вращении ротора различные участки обмотки последовательно соединяются через щетки с внешним источником постоянного тока.
Так как электродвигатель с двухполюсным ротором имеет две мертвые точки, где запуск без внешнего импульса невозможен (полюса ротора находятся точно напротив полюсов статора, и равнодействующая сил отталкивания равна нулю), на практике используются только многополюсные роторы. Кроме того, увеличение числа полюсов увеличивает равномерность вращения ротора.
Подключение обмотки якоря может быть различным:
Независимое.Обмотка ротора не имеет прямого соединения со статором, такое подключение используется в схемах с регулировкой оборотов.Сериесное.Обмотка якоря включена последовательно со статором. При увеличении нагрузки на сериесный электродвигатель его обороты резко падают (но возрастает крутящий момент), при уменьшении нагрузки возможен разнос.
По этой причине сериесное возбуждение не используется там, где возможен холостой ход электродвигателя. Классический пример сериесного мотора – автомобильный электростартер.Шунтовое.Якорь подключается параллельно статору. При перегрузке крутящий момент на роторе не изменяется, при отсутствии нагрузки не возникает разнос.Смешанное.
Якорь имеет две обмотки, подключенных последовательно статору и параллельно с ним. По своим электромеханическим характеристикам компаундные электромоторы находятся между сериесными и шунтовыми – они способны поднимать крутящий момент при увеличении нагрузки и вместе с тем не склонны к разносу на холостом ходу.
Компаундное возбуждение часто используется в электроинструменте, где необходимо и ограничение максимальных оборотов, и устойчивость к росту нагрузок.
В зависимости от взаимного направления магнитных потоков обеих обмоток различают прямое и обратное компаундное включение: при обратном включении и правильном конструировании ротора возможно поддержание стабильных оборотов при изменении нагрузки, но такая схема склонна к периодическим колебаниям частоты вращения.
Магнитное поле статора является постоянным, поэтому статор может выполняться из мощных магнитов, не имея обмотки. Благодаря этому снижаются затраты меди на производство электродвигателя и уменьшается его стоимость.
Сфера применения электродвигателей постоянного тока – это в первую очередь устройства и системы с батарейным питанием: от микромоторов карманных плейеров до мощных автомобильных электростартеров, тяговые двигатели легких электромобилей и электрокаров, аккумуляторный электроинструмент.
При всех своих достоинствах (простота устройства, высокий КПД, легкость реверса) электродвигатели постоянного тока имеют ряд серьезных недостатков:
- При вращении ротора в питающей цепи возникают импульсные помехи в момент перехода ламелей коллектора мимо щеток, к которым добавляются радиопомехи из-за искрения на коллекторе.
- Сам коллектор и токопроводящие щетки неизбежно изнашиваются. Неравномерный износ ламелей коллектора и изолятора между ними может приводить к нарушению контакта щеток и коллектора, снижению мощности и обгоранию ламелей.
- В ряде случаев искрение щеток усиливается настолько, что возникает так называемое «кольцевое пламя» – сплошная область ионизированного воздуха, окружающая коллектор с разрушительными последствиями. Для противодействия этому чаще всего используется принудительная вентиляция области коллектора, выносящая ионизированный воздух наружу.
Управление электродвигателем постоянного тока
Наиболее очевидный способ управления оборотами электродвигателя постоянного тока – это изменение тока в его обмотках и, следовательно, магнитного потока. Изначально в цепь питания ротора включался мощный реостат, однако этот способ управления имел явные недостатки:
Сложность автоматического поддержания оборотов.
Движок реостата приводился либо вручную, либо присоединялся к центробежному регулятору. В любом случае резкое увеличение нагрузки не могло быть быстро скомпенсировано.
Высокие потери мощности.
На мощных электродвигателях реостат значительно нагревался, снижая КПД двигательной установки и требуя введения дополнительного охлаждения.
Обратите внимание
Применение линейного стабилизатора для управления электродвигателем – это, по сути, замена механического реостата электронным: изменяя мощность, рассеиваемую линейным стабилизатором, изменяют ток в обмотках электродвигателя.
Главное преимущество такой схемы – возможность создания устройств для поддержания оборотов с высокой скоростью реакции. Как известно, при вращении коллектора возникают броски тока в момент подключения очередной секции обмотки ротора.
Частота этих импульсов строго пропорциональна оборотам двигателя, что широко используется в устройствах правления коллекторными двигателями. Например, автомобильный доводчик стеклоподъемников автоматически отключает питание мотора, перестав фиксировать пульсацию тока в цепи питания стеклоподъемника (обнаружение момента остановки электродвигателя).
Совершенствование силовой электроники и в частности создание ключей с низким собственным падением напряжения в открытом состоянии (IGBT, MOSFET) позволило создать системы электронного управления широтно-импульсной модуляцией. Суть широтно-импульсной модуляции (сокращенно ШИМ) состоит в изменении длительности импульсов тока при сохранении их постоянной частоты.
Такой метод регулировки имеет значительно больший КПД, так как отсутствует элемент, на котором рассеивается излишняя мощность, как это было бы в случае использования реостата или линейного стабилизатора напряжения.
Основной проблемой схем с широтно-импульсной является индуктивность обмоток электродвигателя. Она делает невозможным моментальное нарастание и падение тока, искажая форму прямоугольного сигнала, подаваемого на электродвигатель.
В свою очередь, при неправильном проектировании силового каскада ШИМ-контроллера это способно привести к перегреву силовых ключей и резкому падению КПД.
В начало
Пуск электродвигателя постоянного тока
В момент включения электродвигателя постоянного тока в питающую сеть возникает значительный бросок тока, так как пусковой ток электродвигателя в несколько раз (при мощностях, измеряемых киловаттами – до 20) превосходит номинальный. По этой причине прямой пуск электродвигателей используется только при небольших мощностях.
Распространенный способ снижения нагрузки на сеть при пуске электродвигателей высокой мощности – это реостатный запуск.
В данном случае в момент включения мотора цепь ротора питается через мощный резистор или набор резисторов, по мере набора оборотов закорачиваемых специальными контакторами.
Важно
Осциллограмма тока якоря при этом становится близкой к пилообразной, а амплитуда пульсаций зависит от числа ступеней пускового реостата.
В тех случаях, когда нагрузка на электродвигатель находится в определенном заданном диапазоне, реостатный пуск производится в автоматическом режиме с помощью реле времени. Эта схема используется на ряде электропоездов, однако распространены и ручные контроллеры, управляемые машинистами.
Недостаток реостатного пуска – большие потери на нагрев реостатов, из-за чего они должны иметь высокую мощность и в ряде случаев искусственное охлаждение.
Этого лишен пуск изменением питающего напряжения, применяемый в тех случаях, когда возможно управление источником тока, например, в электро трансмиссиях постоянного тока: в момент пуска приводящий генератор двигатель работает на минимальных оборотах, плавно набирая их по мере разгона.
Также могут применяться управляемые выпрямители, но этот способ более применим для электродвигателей низкой мощности.
В начало
© 2012-2019 г. Все права защищены.
Все представленные на этом сайте материалы имеют исключительно информационный характер и не могут быть использованы в качестве руководящих и нормативных документов
Источник: https://eltechbook.ru/jelektrodvigateli_postoyannogo_toka.html
Все о контроллерах двигателей постоянного тока
Двигатели постоянного тока по-прежнему актуальны в современной промышленности, даже несмотря на то, что они являются одними из старейших конструкций электродвигателей. Как они выдержали испытание временем, особенно против всех удивительных новых машин 21 века?
Есть много потенциальных ответов на этот вопрос, но их хорошая управляемость является основной причиной того, что двигатели постоянного тока сохранились. Эта простая машина преобразует постоянный ток в механическое вращение, которым можно управлять, просто изменяя входное напряжение или меняя местами его провода.Элегантность двигателей постоянного тока привела к производству многих контроллеров двигателей постоянного тока, которые часто имеют простую конструкцию и обеспечивают адекватную производительность при их стоимости. В этой статье мы рассмотрим некоторые распространенные контроллеры двигателей постоянного тока, как они работают, и обсудим, какие приложения наиболее популярны для этих систем.
Что такое контроллеры двигателей постоянного тока?
Проще говоря, контроллер двигателя постоянного тока — это любое устройство, которое может управлять положением, скоростью или крутящим моментом двигателя постоянного тока.Существуют контроллеры для щеточных двигателей постоянного тока, бесщеточных двигателей постоянного тока, а также универсальных двигателей, и все они позволяют операторам устанавливать желаемое поведение двигателя, даже если их механизмы для этого различаются.
Наши статьи о параллельных двигателях постоянного тока, двигателях постоянного тока с последовательной обмоткой и бесщеточных двигателях постоянного тока содержат подробные объяснения того, как работают машины постоянного тока. Подводя итог, можно сказать, что кривая скорость / крутящий момент двигателей постоянного тока обратно линейна, что означает, что их крутящий момент пропорционально уменьшается с увеличением числа оборотов двигателя.Это позволяет упростить управление, так как снижение скорости приведет к увеличению крутящего момента, и наоборот. Кроме того, в отличие от некоторых двигателей переменного тока, двигатели постоянного тока легко реверсируются путем простого переключения их проводов, так что постоянный ток течет в противоположном направлении. Контроллеры двигателей постоянного тока используют эти характеристики уникальным образом, и в этой статье будут рассмотрены наиболее популярные методы.
Типы контроллеров двигателей постоянного тока
Ниже приведены некоторые распространенные методы управления двигателем постоянного тока. Обратите внимание, что эти методы не являются исчерпывающими и что двигателями постоянного тока можно управлять разными способами, включая контроллеры серводвигателей (подробнее см. В нашей статье о контроллерах серводвигателей):
Контроллер направления: H-мост
Н-мостовая схема — один из простейших методов управления двигателем постоянного тока.На рисунке 1 ниже показана упрощенная принципиальная схема H-моста:
Рисунок 1: Н-мостовая схема для управления направлением двигателя постоянного тока.
Четыре переключателя управляются парами (1 и 4, 2 и 3), и когда любая из этих пар замыкается, они замыкают цепь и приводят двигатель в действие. Следовательно, четырехквадрантный двигатель может быть создан путем соединения определенных переключателей вместе, при этом изменение полярности будет по-разному влиять на двигатель. По сути, эта схема переключает выводы двигателя постоянного тока, который по команде меняет направление вращения на обратное.Они легко продаются в виде микросхем и могут быть найдены в большинстве контроллеров на базе микропроцессоров, поскольку H-мост может быть уменьшен с помощью транзисторов до очень малых размеров.
Н-мосты не только могут изменять направление вращения двигателя, но также могут использоваться для регулирования скорости. Если требуется только направленное управление, тогда H-мост будет использоваться в качестве так называемого безрегенеративного привода постоянного тока. Однако создание рекуперативных приводов постоянного тока может быть усложнено. На рисунке 2 показан график, показывающий, как работают рекуперативные приводы:
Рисунок 2: графики, представляющие направление скорости и крутящего момента при изменении полярности двигателя постоянного тока.Обратите внимание, как создается движение, когда они работают в одном направлении, и как достигается разрыв, когда они находятся в оппозиции.
Большинство двигателей постоянного тока замедляются за счет отключения питания двигателя; Рекуперативные приводы включают возможность торможения, когда переключение полярностей во время работы двигателя вызывает замедление. Квадранты 1 и 3 считаются «автомобильными» квадрантами, где двигатель обеспечивает ускорение в любом направлении, и это то, что контролируют нерегенеративные приводы.Квадранты 2 и 4 считаются «тормозными» квадрантами, в которых двигатель замедляется, и от этого выигрывают рекуперативные приводы. Когда скорость двигателя противодействует крутящему моменту двигателя, двигатель становится генератором, в котором его механическая энергия направляет ток обратно к источнику питания (известное как «рекуперативное торможение»). Эта функция снижает потери энергии и может подзаряжать источник питания, эффективно увеличивая КПД двигателя. На рисунке 3 показана упрощенная принципиальная схема для каждого квадранта и показано, как квадранты 2 и 4 отправляют ток обратно в источник для регенерации энергии:
Рисунок 3: Принципиальные схемы для каждого квадранта, показывающие величины напряжения двигателя и напряжения питания.Обратите внимание, как направление тока (I
a ) перемещается от двигателя к источнику питания в квадрантах 2 и 4.Когда двигатель замедляется, E a (напряжение, создаваемое / используемое двигателем) больше, чем напряжение питания (V a ), и ток будет течь обратно в источник питания. В настоящее время изучается регенеративное торможение в электромобилях и других приложениях, требующих максимальной эффективности. Этот метод не только обеспечивает управление двигателем постоянного тока, но также обеспечивает разумный способ снижения энергопотребления.
Регулятор скорости: широтно-импульсная модуляция (ШИМ)
PWM может использоваться во многих типах двигателей, как показано в нашей статье о контроллерах двигателей переменного тока. По сути, схемы ШИМ изменяют скорость двигателя, моделируя уменьшение / увеличение напряжения питания. Контроллеры привода с регулируемой скоростью отправляют на двигатель периодические импульсы, которые в сочетании с эффектом сглаживания, вызванным индуктивностью катушки, заставляют двигатель работать так, как если бы он питался от более низкого / более высокого напряжения. Например, если на двигатель 12 В подается сигнал ШИМ, высокий (12 В) в течение двух третей каждого периода и низкий (0 В) в оставшееся время, двигатель будет эффективно работать при двух третях полного напряжения, или 8 В.Следовательно, процент снижения напряжения или «рабочий цикл» ШИМ изменяет скорость двигателя. ШИМ легко и недорого реализовать, и можно выбрать практически любой рабочий цикл, что позволяет практически непрерывно контролировать скорость двигателя. ШИМ часто сочетается с Н-мостами, чтобы обеспечить управление скоростью, направлением и торможением.
Контроллер якоря: переменное сопротивление
Другой способ повлиять на скорость двигателя постоянного тока — это изменение тока, подаваемого через катушку возбуждения или через якорь.Скорость выходного вала изменится при изменении тока через эти катушки, так как его скорость пропорциональна силе магнитного поля якоря (продиктованного током). Переменные резисторы или реостаты, включенные последовательно с этими катушками, могут использоваться для изменения тока и, следовательно, скорости. Пользователи могут увеличивать сопротивление катушки якоря, чтобы уменьшить скорость, или увеличивать сопротивление статора, чтобы увеличить его, и все это путем регулирования сопротивления. Обратите внимание, что этот метод приводит к неэффективности двигателя, поскольку увеличение сопротивления означает потерю большего количества энергии на тепло, и именно поэтому ШИМ является предпочтительным типом контроллера двигателя постоянного тока.
Заявки и критерии отбора
При рассмотрении вопроса о покупке контроллера двигателя постоянного тока есть несколько ключевых вопросов, на которые следует ответить либо вашему исследованию, либо поставщику. Контроллеры двигателей постоянного тока может быть сложно указать из-за их разнообразия, поэтому список вопросов ниже будет надежным инструментом при выборе контроллера для вашего проекта. Обязательно найдите самую последнюю информацию о новейших доступных технологиях, связавшись с вашим поставщиком, и используйте эти вопросы, чтобы сделать осознанный выбор:
- Каков номинальный диапазон напряжения используемого двигателя и какие части этого диапазона он будет использовать?
- Какой тип управления желателен (скорость, крутящий момент, направление или все три)?
- Какой тип двигателя контролируется?
- Какой длительный ток может подавать контроллер, и соответствует ли он длительному потреблению тока двигателем под нагрузкой?
- Есть ли в системе встроенная максимальная токовая / тепловая защита?
- Какой будет метод управления при использовании микропроцессорных приводов (ШИМ, ПДУ, аналоговое напряжение и т. Д.))? Программное обеспечение необходимо?
- Вам нужен контроллер с двумя двигателями (один контроллер для двух независимых двигателей)?
Контроллеров двигателей постоянного тока доступно столько же, сколько самих двигателей постоянного тока; их изменчивость — одно из их самых сильных преимуществ. Их приложения также многочисленны, поскольку большинство разработчиков извлекают выгоду из какого-либо пользовательского ввода в их двигатель постоянного тока. В сферах робототехники, производства, военных приложений, автомобилей и многих других используются контроллеры двигателей постоянного тока с отличными результатами.В зависимости от того, как они используются, контроллеры двигателей постоянного тока могут предоставлять простые средства управления с хорошей точностью по приемлемой цене.
Сводка
В этой статье представлено понимание того, что такое контроллеры двигателей постоянного тока и как они работают. Для получения дополнительной информации о сопутствующих продуктах обратитесь к другим нашим руководствам или посетите платформу Thomas Supplier Discovery Platform, чтобы найти потенциальные источники поставок или просмотреть подробную информацию о конкретных продуктах.
Источники:
- http: // srjcstaff.santarosa.edu/~lwillia2/2B/2Bch30.pdf
- https://itp.nyu.edu/physcomp/lessons/dc-motors/dc-motors-the-basics/
- https://www.ece.uvic.ca
- https://www.tigoe.com/pcomp/code/circuits/motors/controlling-dc-motors/
- https://www.elprocus.com/what-are-the-best-ways-to-control-the-speed-of-dc-motor/
- https://www.robotshop.com/community/tutorials/show/how-to-make-a-robot-lesson-5-choosing-a-motor-controller
Прочие изделия для двигателей
Больше от Instruments & Controls
Детали двигателя постоянного тока, конструкция, конструкция и преимущества
В этой статье, после очень краткого описания двигателей постоянного тока, вы узнаете об их различных типах конструкции, а затем об их частях, компонентах и конструкциях.Затем мы переходим к объяснению использования и применения двигателя постоянного тока в различных масштабах. Последнее, что мы обсудим, это их преимущества и недостатки, чтобы помочь вам сделать лучший выбор. Итак, давайте узнаем о конструкции двигателя постоянного тока и его частей с помощью Linquip. Но сначала о двигателе :
Что такое двигатель постоянного тока?
Двигатели постоянного тока— это устройства, предназначенные для преобразования электрической энергии постоянного тока в механическую! Это вращающееся электрическое устройство бывает разных типов, все они содержат либо внутренний электронный механизм, либо внутренний электромеханический механизм, отвечающий за изменение направления тока в двигателе.
Различные типы двигателей постоянного тока
Некоторые из наиболее популярных конструкций для двигателей постоянного тока — это постоянный магнит, бесщеточный, шунтирующий, последовательный и составной намотанный или стабилизированный шунт. Детали двигателя постоянного тока обычно одинаковы в этих различных конструкциях, и общая работа аналогична. Принцип его работы заключается в том, что проводник, по которому проходит ток, имплантируется в магнитное поле, а мощность, передаваемая через проводники, позволяет вращать двигатель. Генерация электромагнитных полей и их место, будь то в роторе или статоре, является причиной, по которой эти конструкции отличаются друг от друга.Поскольку знакомство с различными типами двигателей постоянного тока и их понимание поможет вам понять, как они используются для различных приложений и какой из них больше подходит для вашего приложения, ниже мы подробно рассмотрим функции некоторых из этих типов.
- Двигатели с постоянным магнитом
Двигатели с постоянным магнитом (также известные как двигатель с постоянным магнитным постоянным током) используют постоянный магнит для создания магнитного поля. Этот тип двигателей постоянного тока создает отличный пусковой крутящий момент с хорошей регулировкой скорости.Имея ограниченный крутящий момент, тип постоянного магнита обычно используется в приложениях с низкой мощностью. - Двигатели параллельные
поле параллельного типа подключено параллельно обмоткам якоря. Поскольку шунтирующее поле может возбуждаться отдельно от обмоток якоря, этот тип двигателей обеспечивает прекрасное регулирование скорости. Кроме того, параллельные двигатели также предлагают упрощенное управление реверсированием. - Двигатели серии
Двигатели постоянного тока серии состоят из полевой обмотки с несколькими витками провода, по которому проходит ток якоря.Как и постоянные двигатели, серийные двигатели создают большой пусковой момент. По сравнению с постоянными двигателями, серийный тип не может регулировать скорость. Кроме того, если серийные двигатели работают без нагрузки, они могут выйти из строя. Эти ограничения делают серийные двигатели непригодными для применения в приводах с регулируемой скоростью. - Составные двигатели
Как и параллельные двигатели постоянного тока, составные двигатели обладают шунтирующим полем, которое возбуждается отдельно. Так же, как постоянные и серийные двигатели, составные двигатели обладают хорошим пусковым моментом с некоторыми проблемами в регулировании скорости в приводах с регулируемой скоростью.
Эти четыре основных типа двигателей постоянного тока имеют множество потенциальных применений. Каждый тип этих двигателей имеет свои сильные и слабые стороны. Как упоминалось в начале этого раздела, знакомство с различными типами может помочь вам выяснить, какой тип больше подходит для ваших приложений.
Что такое детали двигателя постоянного тока и как они работают?
Двигатель постоянного тока состоит из разных частей, понимание каждой из которых может помочь понять, как эти части взаимодействуют друг с другом и, в конце концов, как работают DC.Этими компонентами являются: статор, ротор, ярмо, полюса, обмотки якоря, обмотки возбуждения, коммутатор и щетки. Многие его части такие же, как и у электродвигателя переменного тока, но с небольшими изменениями.
Статор
Статор — это одна из частей двигателя постоянного тока, которая, как следует из названия, представляет собой статический блок, содержащий обмотки возбуждения. Статор — это часть двигателя постоянного тока, на которую подается питание.
Ротор
Динамическая часть двигателя постоянного тока — это ротор, который создает механическое вращение агрегата.
Хомут
Еще одна единица частей двигателя постоянного тока — ярмо. Ярмо — это магнитная рамка из чугуна, а иногда и из стали, которая работает как предохранитель. Эта защитная крышка сохраняет внутренние части двигателя в целости и сохранности, а также поддерживает якорь. Ярмо также содержит магнитные полюса и обмотки возбуждения двигателя постоянного тока, помогающие поддерживать систему возбуждения.
Поляки
Электродвигатель постоянного токаимеет магнитные полюса, которые вставляются во внутреннюю стенку ярма с помощью винтов для их закрепления.Поляки состоят из двух частей: полюса и башмака. Эти две части скреплены гидравлическим давлением и прикреплены к вилке. У каждой части поляков есть конкретная задача, основанная на ее конструкции. Сердечник удерживает полюсный башмак над ярмом, в то время как полюсный башмак сконструирован так, чтобы нести прорези для обмотки возбуждения и распределять поток, создаваемый обмотками возбуждения, в воздушный зазор между ротором и статором. Это помогает уменьшить потери, вызванные сопротивлением.
Обмотки возбуждения
Изготовленные из медной проволоки (катушки возбуждения), полевые обмотки вращаются вокруг пазов полюсных башмаков.Обмотки возбуждения образуют электромагнит, способный создавать магнитный поток. Якорь ротора вращается внутри магнитного поля, что приводит к эффективному отсечению магнитного потока.
Подробнее о Linquip
Детали генератора постоянного тока: объяснение деталей, работа, типы, преимущества и недостаткиОбмотки якоря
Еще одна деталь двигателя постоянного тока — обмотка якоря. Обмотка якоря двигателя постоянного тока имеет две конструкции: круговая обмотка и волновая обмотка. Их разница в количестве параллельных путей.Обмотка якоря прикреплена к ротору и изменяет магнитное поле на пути его вращения. Результатом этой процедуры являются магнитные потери. Разработчики стараются уменьшить магнитные потери, сделав сердечник якоря слоистым слоем кремнистой стали с низким гистерезисом. Затем листы из многослойной стали складываются вместе, образуя цилиндрическую структуру сердечника якоря. Внутри сердечника якоря имеются прорези из того же материала.
Коммутатор двигателя постоянного тока
Коммутатор представляет собой разрезное кольцо, состоящее из медных сегментов, коммутатор — еще одна часть двигателя постоянного тока.Операционная система постоянного тока основана на взаимодействии двух магнитных полей вращающегося якоря и неподвижного статора. Поскольку северный полюс якоря притягивается к южному полюсу статора, а южный полюс якоря притягивается к северному полюсу статора, на якорь создается сила, которая заставляет его вращаться. Процесс, при котором поле в обмотках якоря переключается для создания постоянного крутящего момента в одном направлении, называется коммутацией. Коммутатор — это устройство, подключенное к якорю, позволяющее переключать ток.Различные сегменты его цилиндрической конструкции изолированы друг от друга слюдой. Коммутатор предназначен для коммутации питающего тока обмотки якоря от сети. Коммутатор проходит через щетки двигателя постоянного тока.
Основная цель коммутации — удостовериться, что крутящий момент, действующий на якорь, всегда в одном и том же направлении. Естественно, что генерируемое в якоре напряжение переменное, коммутатор преобразует его в постоянный ток. Чтобы контролировать направление электромагнитных полей, коммутатор включает и выключает катушки.С одной стороны катушки электричество всегда должно уходить, а с другой стороны, электричество всегда должно течь навстречу. Это гарантирует, что крутящий момент всегда создается в одном и том же направлении.
Кисти
Последний пункт в списке деталей двигателя постоянного тока — это щетки, изготовленные из углеродных или графитовых структур. Щетки с коммутатором работают как мост для подключения статической электрической цепи к ротору. Щетки контактируют с коммутатором и передают вырабатываемый ток на коммутатор от внешней цепи.Затем ток проходит в обмотку якоря.
Применение двигателей постоянного тока
В связи с тем, что существует 4 основных типа двигателей постоянного тока, для двигателей постоянного тока определен широкий спектр различных применений. В предыдущих разделах были рассмотрены некоторые из различных частей и типов контроллеров домена. В этом разделе мы собираемся представить различные приложения и обстоятельства, в которых используются двигатели постоянного тока.
Как правило, из-за определенных преимуществ каждого типа двигателей постоянного тока их можно использовать по-разному.В домашних условиях мелкие используются в инструментах, игрушках и многих бытовых приборах. Некоторые другие применения DC включают конвейеры и поворотные столы, а в промышленности огромные области применения DC состоят из приложений торможения и реверсирования. Мы постарались привести несколько конкретных примеров в качестве приложений ДЦ:
Насосы
Гидравлические насосы как важный промышленный инструмент используются почти во всех отраслях промышленности, таких как строительство, горнодобывающая промышленность, производство и металлургия. Двигатели постоянного тока из-за их регулирования скорости, а также отличного пускового момента используются для усиления этих типов насосов.В большинстве случаев в насосах используются более дешевые бесщеточные преобразователи постоянного тока, которые значительно упрощают обслуживание в таких крупных промышленных масштабах.
Игрушки
Благодаря тому, что небольшие двигатели постоянного тока просты в использовании и обладают значительной прочностью, они являются лучшим выбором производителей и любителей для детских игрушек, таких как автомобили и поезда с дистанционным управлением. Игрушки, требующие различного диапазона скорости и типов движений, нуждаются в двигателе с большим разнообразием напряжений. Производители находят все эти спецификации в контроллерах домена.
Электромобили
Еще одно применение DC — электромобили. Двигатели постоянного тока из-за их энергоэффективности и долговечности являются одним из самых любимых вариантов электромобилей. Более того, многие любители используют DC из-за их большого и более высокого пускового момента, особенно двигателей с последовательным возбуждением, и их регулируемых скоростей с входным напряжением.
Роботы
Для многих любителей и инженеров роботы — это любые электромеханические устройства, предназначенные для выполнения одной или нескольких конкретных задач.Двигатели постоянного тока — один из наиболее доступных и разумных вариантов с меньшими затратами для активации таких вещей, как гусеницы, манипулятор или камеры. Такие особенности, как высокий крутящий момент и долговечность, а также эффективность, делают DC идеально подходящими для робототехники.
Двигатель постоянного тока Преимущества и недостатки
Из деталей двигателя постоянного тока разного размера будут созданы разные двигатели постоянного тока, подходящие для разных нужд. Как упоминалось ранее, маленькие можно использовать в игрушках, инструментах и бытовой технике, а более крупные — в лифтах, подъемниках и двигателях электромобилей.Хотя двигатели переменного тока снизили продажи двигателей постоянного тока из-за простой генерации и передачи с меньшими потерями на большие расстояния, необходимости меньшего обслуживания и возможности эксплуатации во взрывоопасных средах, двигатели постоянного тока все еще используются там, где переменного тока не могут удовлетворить потребности. У двигателей постоянного тока есть свои уникальные особенности и важность в отраслях, которые компенсируют множество других преимуществ перед двигателями переменного тока.
Двигатели постоянного токаподходят для низкоскоростного крутящего момента или при необходимости регулируемой скорости и постоянной.Другими словами, с двигателями постоянного тока можно регулировать скорость в широком диапазоне, что означает, что они предлагают широкий диапазон управления скоростью как ниже, так и выше номинальной. Эта особенность двигателей постоянного тока может быть реализована в шунтирующих типах. Благодаря управлению якорем и полевым управлением вы можете воспользоваться этим уникальным преимуществом двигателей постоянного тока перед двигателями переменного тока. Кроме того, DC имеют очень высокий и сильный пусковой крутящий момент по сравнению с нормальным рабочим крутящим моментом. Поэтому DC используются в электропоездах и кранах, которые в начальных условиях создают огромную нагрузку.В дополнение к вышеупомянутым преимуществам двигатели постоянного тока имеют преобразователи и приводы меньшего размера, а также более высокую удельную мощность двигателя. Не говоря уже о том, что у них полный крутящий момент при нулевой скорости!
Находясь на рынке более 140 лет, двигатели постоянного тока часто более доступны по цене, чем двигатели переменного тока, и имеют более простую и эффективную конструкцию. Кроме того, их обслуживание простое и не требует времени. Если вы перепроектируете свою текущую установку для использования двигателя переменного тока, это будет стоить намного дороже, чем простая замена двигателя постоянного тока внутри установки.Таким образом, вы не только ремонтируете свою систему, устанавливая внутри новый блок, но и экономите много денег. Излишне говорить, что такая небольшая замена также экономит время и происходит быстро, не теряя вашего времени. Вам нужно больше преимуществ, чтобы полюбить детали и конструкцию двигателя постоянного тока?
Теперь, когда вы здесь, вы знаете детали и функции двигателя постоянного тока на основе информации, которую Linquip предоставила вам в этой статье. Поделитесь с нами своими комментариями в разделе комментариев и поделитесь своими мыслями и вопросами при чтении этой статьи.Вам нужно быстро найти ответ на свои вопросы и устранить неполадки в части двигателя постоянного тока? Зарегистрируйтесь на нашем сайте, и эксперт будет рядом с вами.
Что такое двигатель постоянного тока? — Kinmore Motor
Что касается двигателя постоянного тока, то никто не знает его лучше, чем двигатель Kinmore, который всегда стремится разрабатывать, проектировать и производить прецизионные микродвигатели постоянного тока. Вот подробное введение в то, что такое двигатель постоянного тока.
Определение двигателя постоянного тока
Двигатель постоянного тока (DC) — это тип электрической машины, которая преобразует электрическую энергию в механическую.Двигатели постоянного тока получают электрическую энергию через постоянный ток и преобразуют эту энергию в механическое вращение.
Двигатели постоянного токаиспользуют магнитные поля, которые возникают из-за генерируемых электрических токов, которые приводят в движение ротор, закрепленный на выходном валу. Выходной крутящий момент и скорость зависят как от входной электрической мощности, так и от конструкции двигателя.
Характеристики двигателя постоянного тока
- Работает от источника постоянного или переменного тока с выпрямителем
- Рабочие скорости от 1000 до 5000 об / мин
- КПД 60-75%
- Высокий пусковой момент
- Низкий холостой ход скорости
Типы двигателей постоянного тока
Катушка магнитного поля и якорь параллельны в двигателе с шунтирующей обмоткой, также известном как шунтирующий, в результате чего ток магнитного поля пропорционален нагрузке на двигатель.
В двигателе с последовательной обмоткой катушка возбуждения и якорь включены последовательно, и ток протекает только через катушку возбуждения.
Двигатель с комбинированной обмоткой — это гибридный двигатель с параллельной обмоткой и последовательной обмоткой, имеющий две конструкции. Область двигателей с постоянными магнитами разрешена названием, созданным постоянными магнитами.
Электродвигатель постоянного токаПрименение электродвигателя постоянного тока
Благодаря различным типам доступных электродвигателей постоянного тока существует множество вариантов применения электродвигателей постоянного тока.Kinmore Motor всегда предлагает серию двигателей постоянного тока с настраиваемыми параметрами от 8 мм до 80 мм.
Хотя каждый тип имеет свои преимущества, в целом двигатель постоянного тока может использоваться по-разному. В домашних условиях малые двигатели постоянного тока используются в инструментах, игрушках и различной бытовой технике. В розничной торговле электродвигатели постоянного тока применяются в конвейерах и поворотных столах, в то время как в промышленных условиях крупные электродвигатели постоянного тока также используются для торможения и реверсирования. Все заявки могут быть удовлетворены в Kinmore Motor.
В некоторых отраслях промышленности двигатели постоянного тока могут эффективно работать с идеальной скоростью, чтобы соответствовать требованиям приложения. Если вы ищете решение, обеспечивающее высокий крутящий момент с шестернями, двигатель постоянного тока, поддерживаемый Kinmore Motor, будет разумным выбором.
Поскольку на проектирование и производство двигателей постоянного тока уходит очень много, следует рассматривать только уважаемый и надежный источник, такой как Kinmore Motor. Наличие высококвалифицированных инженеров, создающих ваш двигатель специально для вашего приложения, обеспечивает безупречную и надежную работу.
Индивидуальные серии двигателей постоянного тока доступны по адресу: https://kinmoremotor.com/product/dc-motor/
Двигатель постоянного тока — обзор
25.1 Физика двигателя
Двигатели постоянного тока используют закон силы Лоренца ,
(25.1) F = ℓI × B,
, где F , I и B — трехвекторные, B описывает магнитное поле, создаваемое постоянными магнитами, I — ток вектор (включая величину и направление тока, протекающего через проводник), ℓ — длина проводника в магнитном поле, а F — сила, действующая на проводник.В случае тока, перпендикулярного магнитному полю, силу легко понять, используя правило правой руки для перекрестных произведений: правой рукой укажите указательным пальцем вдоль направления тока, а средним пальцем — вдоль потока магнитного поля. линий. Ваш большой палец будет указывать в направлении силы (см. Рисунок 25.1).
Рисунок 25.1. Два магнита создают магнитное поле B , и ток I вдоль проводника вызывает силу F на проводнике.
Теперь давайте заменим проводник петлей из проволоки и заставим эту петлю вращаться вокруг своего центра. См. Рисунки 25.2 и 25.3. В одной половине цикла ток течет в страницу, а в другой половине цикла ток вытекает из страницы. Это создает силы противоположного направления на петле. Ссылаясь на рисунок 25.3, пусть величина силы, действующей на каждую половину петли, составляет f , и пусть d будет расстоянием от половин петли до центра петли.Тогда суммарный крутящий момент, действующий на контур вокруг его центра, можно записать в виде
Рисунок 25.2. Токоведущая петля из проволоки в магнитном поле.
Рисунок 25.3. Проволочная петля в магнитном поле, если смотреть с конца. Ток течет в страницу с одной стороны петли и выходит из страницы с другой, создавая силы противоположного направления на двух половинах петли. Эти противоположные силы создают крутящий момент на петле вокруг ее центра при большинстве углов θ петли.
τ = 2dfcosθ,
где θ — угол петли.Крутящий момент изменяется в зависимости от θ . Для — 90 ° < θ <90 °, крутящий момент положительный, и он максимален при θ = 0. График зависимости крутящего момента на контуре от θ показан на рисунке 25.4 (a ). Крутящий момент равен нулю при θ = -90 ° и 90 °, и из этих двух θ = 90 ° является устойчивым равновесием, а θ = -90 ° является неустойчивым равновесием. Следовательно, если мы пропустим через контур постоянный ток, он, скорее всего, остановится при θ = 90 °.
Рисунок 25.4. (а) Крутящий момент на контуре на рисунке 25.3 как функция его угла для постоянного тока. (b) Если мы изменим направление тока на противоположное под углами θ = -90 ° и θ = 90 °, мы сможем сделать крутящий момент неотрицательным при всех θ . (c) Если мы используем несколько петель, смещенных друг относительно друга, сумма их крутящих моментов (жирная кривая) становится более постоянной как функция угла. Оставшаяся вариация способствует пульсации крутящего момента.
Чтобы сделать двигатель более полезным, мы можем изменить направление тока на θ = −90 ° и θ = 90 °, что делает крутящий момент неотрицательным при всех углах (Рисунок 25.4 (б)). Однако крутящий момент все еще равен нулю при θ = -90 ° и θ = 90 °, и он претерпевает большие изменения в зависимости от θ . Чтобы сделать крутящий момент более постоянным в зависимости от θ , мы можем ввести больше витков проволоки, каждая из которых смещена относительно других по углу, и каждая меняет свое текущее направление на соответствующие углы. На рисунке 25.4 (c) показан пример с тремя петли проволоки смещены друг от друга на 120 °. Их составляющие крутящие моменты суммируются, чтобы получить более постоянный крутящий момент как функцию угла.Оставшееся изменение крутящего момента способствует зависящей от угла пульсации крутящего момента .
Наконец, чтобы увеличить создаваемый крутящий момент, каждая петля из проволоки заменяется катушкой из проволоки (также называемой обмоткой), которая многократно проходит вперед и назад через магнитное поле. Если катушка состоит из 100 контуров, она генерирует в 100 раз больший крутящий момент, чем одиночный контур для того же тока. Проволока, используемая для создания катушек в двигателях, например, магнитная проволока, очень тонкая, поэтому сопротивление от одного конца катушки к другому обычно составляет от долей до сотен Ом.
Как указывалось ранее, ток в катушках должен переключать направление под соответствующим углом, чтобы поддерживать неотрицательный крутящий момент. На рисунке 25.5 показано, как щеточные электродвигатели постоянного тока выполняют это реверсирование тока. Две входные клеммы подключены к щеткам , обычно сделанным из мягкого проводящего материала, такого как графит, которые подпружинены и прижимаются к коммутатору , который соединен с катушками двигателя. При вращении двигателя щетки скользят по коммутатору и переключаются между сегментами коммутатора , каждый из которых электрически соединен с концом одной или нескольких катушек.Это переключение изменяет направление тока через катушки. Этот процесс переключения тока через катушки в зависимости от угла поворота двигателя называется коммутацией . На рисунке 25.5 показана схема минимальной конструкции двигателя с тремя сегментами коммутатора и катушкой между каждой парой сегментов. Большинство высококачественных двигателей имеют больше сегментов коммутатора и катушек.
Рисунок 25.5. (Слева) схематический вид с торца на простой двигатель постоянного тока. Две щетки прижимаются к коммутатору пластинчатыми пружинами, которые электрически соединены с внешними клеммами двигателя.Этот коммутатор состоит из трех сегментов, и между каждой парой сегментов есть катушки. Магниты статора покрыты эпоксидной смолой внутри корпуса двигателя. (Справа) Этот двигатель Питтмана в разобранном виде имеет семь коллекторных сегментов. Две щетки прикреплены к корпусу двигателя, который в противном случае был бы удален. Внутри корпуса виден один из двух постоянных магнитов. Катушки намотаны вокруг ферромагнитного сердечника для увеличения магнитной проницаемости. Этот двигатель имеет редуктор на выходе.
В отличие от упрощенного примера на рисунке 25.4, геометрия щеточно-коммутатора означает, что каждая катушка в реальном щеточном двигателе запитывается только при подмножестве углов двигателя. Помимо того, что это является следствием геометрии, это имеет дополнительное преимущество, заключающееся в предотвращении потерь мощности, когда ток через катушку будет обеспечивать небольшой крутящий момент. Рисунок 25.6 является более реалистичной версией рисунка 25.4 (c).
Рисунок 25.6. На рисунке 25.4 (c) показана сумма крутящих моментов трех катушек, смещенных на 120 °, если все они находятся под напряжением одновременно. Однако геометрия щеток и коммутатора гарантирует, что не все катушки запитываются одновременно.На этом рисунке показан зависящий от угла крутящий момент трехкатушечного щеточного двигателя, у которого одновременно запитана только одна катушка, что примерно соответствует тому, что происходит, если щетки на рисунке 25.5 маленькие. Катушка под напряжением находится под лучшим углом для создания крутящего момента. Результатом является крутящий момент двигателя, показанный жирной кривой; более тонкие кривые — это крутящие моменты, которые были бы обеспечены другими катушками, если бы они были под напряжением. Сравнение этого рисунка с рисунком 25.4 (c) показывает, что этот более реалистичный двигатель производит половину крутящего момента, но использует только одну треть электроэнергии, поскольку только одна из трех катушек находится под напряжением.Энергия не тратится впустую, пропуская ток через катушки, которые генерируют небольшой крутящий момент.
Стационарная часть двигателя, прикрепленная к корпусу, называется статором, а вращающаяся часть двигателя называется ротором.
На рис. 25.7 показан разрез щеточного двигателя Maxon, обнажающий щетки, коммутатор, магниты и обмотки. На рисунке также показаны другие элементы типичного двигателя: энкодер, прикрепленный к одному концу вала двигателя для обеспечения обратной связи по углу, и редуктор, прикрепленный к другому концу вала двигателя.Выходной вал редуктора обеспечивает более низкую скорость, но более высокий крутящий момент, чем выходной вал двигателя.
Рисунок 25.7. Разрез щеточного двигателя Maxon с энкодером и планетарным редуктором. Щетки подпружинены напротив коллектора. Схема внизу слева представляет собой упрощенное поперечное сечение, показывающее неподвижные части двигателя (статор) темно-серым цветом, а вращающиеся части двигателя (ротор) светло-серым. В этой геометрии двигателя без сердечника обмотки вращаются в зазоре между постоянными магнитами и корпусом.
(Изображение в разрезе любезно предоставлено Maxon Precision Motors, Inc., maxonmotorusa.com.)Бесщеточные двигатели представляют собой вариант, в котором используется электронная коммутация, а не щеточная коммутация. Подробнее о бесщеточных двигателях постоянного тока см. В главе 29.5.
Как работает двигатель постоянного тока?
Теоретически одна и та же машина постоянного тока может использоваться в качестве двигателя или генератора. Следовательно, конструкция двигателя постоянного тока такая же, как и у генератора постоянного тока.
Принцип работы двигателя постоянного тока
Электродвигатель — это электрическая машина, преобразующая электрическую энергию в механическую.Основной принцип работы двигателя постоянного тока : « всякий раз, когда проводник с током помещается в магнитное поле, он испытывает механическую силу». Направление этой силы определяется правилом левой руки Флеминга, а ее величина определяется как F = BIL. Где B = плотность магнитного потока, I = ток и L = длина проводника в магнитном поле.
Правило левой руки Флеминга : Если мы вытянем первый, второй и большой пальцы левой руки перпендикулярно друг другу, а направление магнитного поля будет представлено первым пальцем, направление тока будет представлено как второй палец, затем большой палец представляет направление силы, действующей на проводник с током.
| Анимация: Работа двигателя постоянного тока (предоставлено Lookang) |
Анимация, приведенная выше, помогает понять принцип работы двигателя постоянного тока . Когда обмотки якоря подключены к источнику постоянного тока, в обмотке возникает электрический ток. Магнитное поле может создаваться обмоткой возбуждения (электромагнетизм) или постоянными магнитами. В этом случае проводники якоря с током испытывают силу магнитного поля в соответствии с принципом, изложенным выше.
Коммутаторвыполнен сегментированным для достижения однонаправленного крутящего момента. В противном случае направление силы менялось бы каждый раз, когда направление движения проводника менялось на противоположное в магнитном поле. Вот как работает двигатель постоянного тока !
Задняя ЭДССогласно фундаментальным законам природы, преобразование энергии невозможно, пока есть что-то, что препятствует преобразованию. В случае генераторов это противодействие обеспечивается магнитным сопротивлением, а в случае двигателей постоянного тока — , противоэдс .
Когда якорь двигателя вращается, проводники также разрезают линии магнитного потока и, следовательно, согласно закону электромагнитной индукции Фарадея, в проводниках якоря индуцируется ЭДС. Направление этой наведенной ЭДС таково, что она противодействует току якоря (I a ). На схеме ниже показано направление обратной ЭДС и тока якоря. Величина обратной ЭДС может быть задана уравнением ЭДС генератора постоянного тока.
Значение обратной ЭДС:
Величина обратной ЭДС прямо пропорциональна скорости двигателя. Представьте, что нагрузка на двигатель постоянного тока внезапно уменьшилась. В этом случае требуемый крутящий момент будет мал по сравнению с текущим крутящим моментом. Скорость двигателя начнет увеличиваться из-за превышения крутящего момента. Следовательно, величина обратной ЭДС пропорциональна скорости. С увеличением обратной ЭДС ток якоря начнет уменьшаться. Поскольку крутящий момент пропорционален току якоря, он также будет уменьшаться, пока не станет достаточным для нагрузки.Таким образом, скорость мотора будет регулироваться.
С другой стороны, если двигатель постоянного тока внезапно нагружается, эта нагрузка вызовет снижение скорости. Из-за уменьшения скорости обратная ЭДС также уменьшится, что приведет к увеличению тока якоря. Повышенный ток якоря увеличит крутящий момент, чтобы удовлетворить требованиям нагрузки. Следовательно, наличие обратной ЭДС делает двигатель постоянного тока «саморегулирующимся» .
Типы двигателей постоянного тока
Двигатели постоянного тока обычно классифицируются в зависимости от конфигурации возбуждения:- С отдельным возбуждением (обмотка возбуждения питается от внешнего источника)
- Самовозбуждение —
- Последовательная обмотка (обмотка возбуждения включена последовательно с якорем)
- Шунтирующая обмотка (обмотка возбуждения включена параллельно якорю)
- Сложная рана —
См. Схему классификации машин постоянного тока здесь.
Двигатели постоянного тока с щеткой
|
Двигатель постоянного тока и мотор-редуктор постоянного тока: основные сведения
Что такое двигатель постоянного тока?
Двигатель постоянного тока (DC) — это вращающееся электрическое устройство, которое преобразует постоянный ток электрической энергии в механическую энергию. Индуктор (катушка) внутри двигателя постоянного тока создает магнитное поле, которое создает вращательное движение, когда на его клемму подается напряжение постоянного тока. Внутри двигателя находится железный вал, обмотанный катушкой с проволокой. Этот вал содержит два неподвижных магнита, северный и южный, с обеих сторон, которые создают как силу отталкивания, так и силу притяжения, в свою очередь, создавая крутящий момент.ISL Products разрабатывает и производит как щеточные двигатели постоянного тока, так и бесщеточные двигатели постоянного тока. Мы адаптируем наши двигатели постоянного тока к размерам и характеристикам в соответствии с вашими желаемыми характеристиками.
Что такое мотор-редуктор постоянного тока?
Редукторный двигатель — это комплексная комбинация двигателя и коробки передач. Добавление зубчатой передачи к двигателю снижает скорость при одновременном увеличении выходного крутящего момента. Наиболее важными параметрами редукторных двигателей являются скорость (об / мин), крутящий момент (фунт-дюйм) и КПД (%). Чтобы выбрать наиболее подходящий мотор-редуктор для вашего приложения, вы должны сначала вычислить требования к нагрузке, скорости и крутящему моменту для вашего приложения.ISL Products предлагает широкий выбор цилиндрических мотор-редукторов, планетарных мотор-редукторов и червячных мотор-редукторов, отвечающих всем требованиям. Большинство наших двигателей постоянного тока можно дополнить одной из наших уникальных редукторов, что обеспечит вам высокоэффективный мотор-редуктор.
Процесс выбора двигателя
Нужна помощь в выборе двигателя, подходящего для вашего применения? Ознакомьтесь с нашим Руководством по выбору двигателя.
Процесс выбора двигателя на этапе концептуального проектирования может быть сложной задачей, но наши инженеры всегда готовы помочь.Мы обеспечиваем консьерж-сервис для всех наших проектов двигателей постоянного тока и мотор-редукторов. Наша команда инженеров работает с вами, чтобы предоставить оптимальное компонентное решение. Следующие ключевые моменты могут помочь вам определить и выбрать наиболее подходящий двигатель или мотор-редуктор для нашего применения.
- Требования к дизайну — Этап оценки проекта, на котором изучаются требования к разработке продукта, параметры дизайна, функциональность устройства и оптимизация продукта.
- Расчет конструкции — Расчеты, используемые для определения двигателя, который будет лучшим решением для вашего приложения. Конструктивные расчеты определяют передаточное число, крутящий момент, вращающуюся массу, коэффициент эксплуатации, радиальную нагрузку и анализ испытаний.
- Типы двигателей постоянного тока / мотор-редукторы — Наиболее распространенные электродвигатели преобразуют электрическую энергию в механическую. Эти типы двигателей питаются от постоянного тока (DC).
- Технические характеристики двигателя — После выполнения расчетных расчетов и определения параметров приложения вы можете использовать эти данные, чтобы определить, какой двигатель или мотор-редуктор лучше всего подходит для вашего приложения.Вот некоторые из наиболее распространенных характеристик, которые следует учитывать при выборе двигателя или мотор-редуктора:
- Напряжение
- Текущий
- Мощность
- Момент
- об / мин
- Ожидаемый срок службы / рабочий цикл
- Вращение (по часовой или против часовой стрелки)
- Диаметр и длина вала
- Ограничения корпуса
Кривые рабочих характеристик редукторного двигателя
Характеристики двигателейA и коробки передач объединены в один график с отображением трех конкретных параметров.Этими тремя параметрами являются скорость, крутящий момент и эффективность. Эти характеристики важны при выборе мотор-редуктора для вашего приложения.
- Скорость / обороты (Н) — ( единица: об / мин) обозначена прямой линией, которая показывает соотношение между крутящим моментом мотор-редуктора и скоростью. Эта линия будет сдвигаться в сторону в зависимости от увеличения или уменьшения напряжения.
- КПД (η) — ( единица:%) вычисляется по входным и выходным значениям, представленным пунктирной линией.Чтобы максимизировать потенциал мотор-редукторов, его следует использовать с максимальной эффективностью.
- Крутящий момент (T) — ( единица измерения: гс-см) это нагрузка на вал двигателя, представленная на оси X.
- Ток (I) — ( единица: A) обозначен прямой линией, от холостого хода до полной блокировки двигателя. Это показывает соотношение между силой тока и крутящим моментом.
- Мощность (P) — (единица измерения: Вт) — это количество механической энергии, которую передает мотор-редуктор.
Например, давайте рассмотрим кривую производительности ниже (рис. 5) для мотор-редуктора постоянного тока.
- Максимальный рабочий КПД (70%) для этого двигателя достигается при 3,75 фунт-дюйм / 2100 об / мин.
- По мере увеличения крутящего момента скорость и КПД снижаются. Результатом повышенного крутящего момента является плохая выходная мощность, и устройство в конечном итоге перестанет работать, когда двигатель достигнет крутящего момента при остановке (18 фунт-дюймов).
являются полезным инструментом при выборе двигателя для вашей области применения.Чтобы получить максимальную отдачу от кривых производительности, важно досконально понимать требования приложений.