Урок 36 (дополнительный материал). Принцип действия электродвигателя. Электроизмерительные приборы
Принцип действия электродвигателя.
Электродвигатель – это просто устройство для эффективного преобразования электрической энергии в механическую.
В основе этого преобразования лежит магнетизм. В электродвигателях используются постоянные магниты и электромагниты, кроме того, используются магнитные свойства различных материалов, чтобы создавать эти удивительные устройства.
Существует несколько типов электродвигателей. Отметим два главных класса: AC и DC.
Электродвигатели класса AC (Alternating Current) требуют для работы источник переменного тока или напряжения (такой источник Вы можете найти в любой электрической розетке в доме).
Электродвигатели класса DC (Direct Current) требуют для работы источник постоянного тока или напряжения (такой источник Вы можете найти в любой батарейке).
Универсальные двигатели могут работать от источника любого типа.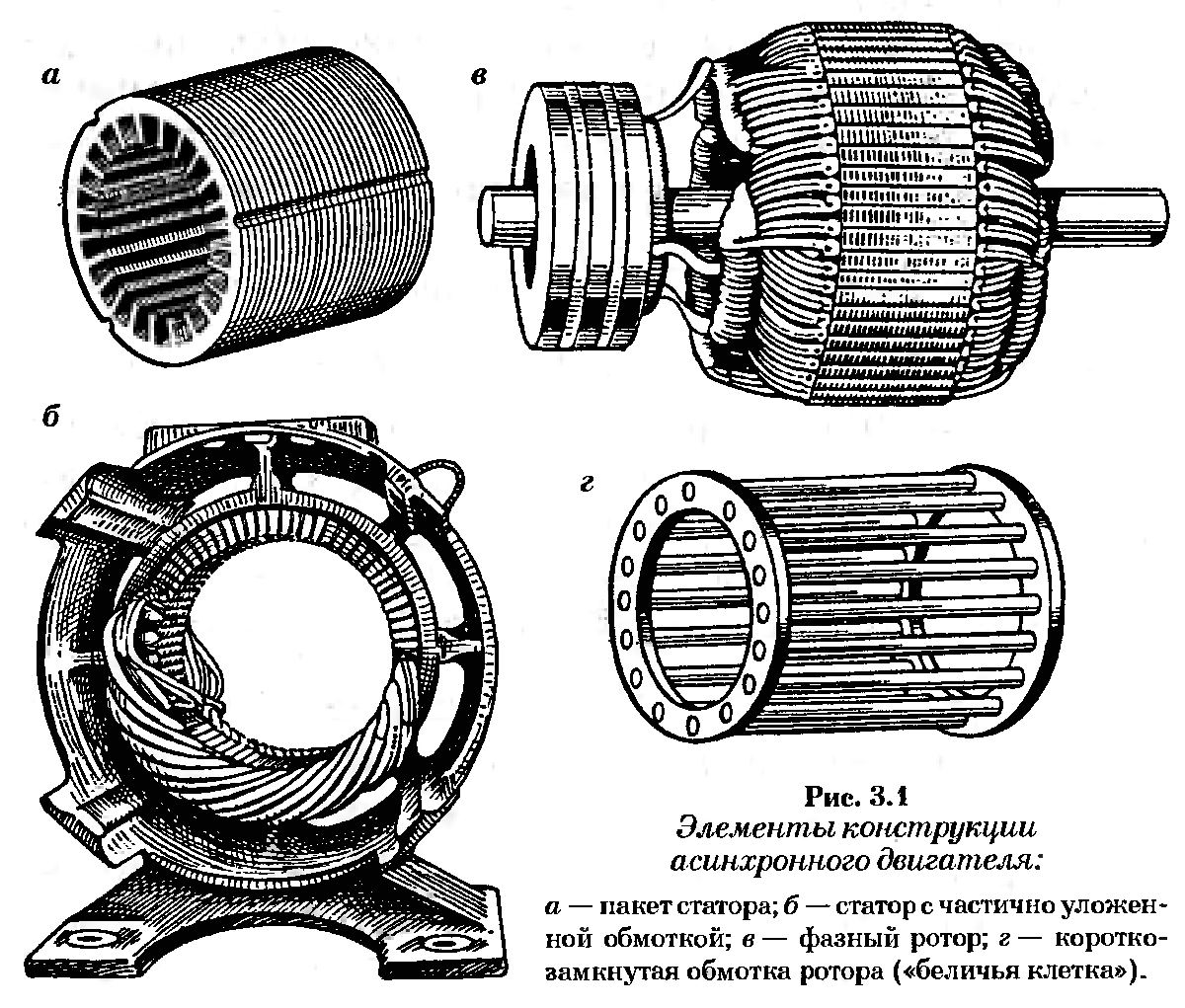
Не только конструкция двигателей различна, различны способы контроля скорости и вращающего момента, хотя принцип преобразования энергии одинаков для всех типов.
Устройство и принцип работы простейшего электродвигателя.
В основе конструкции электрического двигателя лежит эффект, обнаруженный Майклом Фарадеем в 1821 году: что взаимодействие электрического тока и магнита может вызывать непрерывное вращение. Один из первых двигателей, нашедших практическое применение, был двигатель Бориса Семеновича Якоби (1801 –1874), приводивший в движение катер с 12 пассажирами на борту. Однако для широкого использования электродвигателя необходим был источник дешевой электроэнергии — электромагнитный генератор.
Принцип работы электродвигателя очень прост: вращение вызывается силами магнитного притяжения и отталкивания, действующими между полюсами подвижного электромагнита (ротора) и соответствующими полюсами внешнего магнитного поля, создаваемого неподвижным электромагнитом (или постоянным магнитом) — статором.
Вращающаяся часть электрической машины называется ротором (или якорем), а неподвижная — статором. В простом электродвигателе постоянного тока блок катушки служит ротором, а постоянный магнит — статором.
Сложность заключается в том, чтобы добиться непрерывного вращения двигателя. А для этого надо сделать так, чтобы полюс подвижного электромагнита, притянувшись к противоположному полюсу статора, автоматически менялся на противоположный — тогда ротор не замрет на месте, а повернется дальше — по инерции и под действием возникшего в этот момент отталкивания.
Для автоматического переключения полюсов ротора служит коллектор. Он представляет собой пару закрепленных на валу ротора пластин, к которым подключены обмотки ротора. Ток на эти пластины подается через токоснимающие контакты (щетки). При повороте ротора на 180° пластины меняются местами — это автоматически меняет направление тока и, следовательно, полюсы подвижного электромагнита. Так как одноименные полюсы взаимно отталкиваются, катушка продолжает вращаться, а ее полюсы притягиваются к соответствующим полюсам на другой стороне магнита.
Простейший электродвигатель
Простейший электродвигатель работает только на постоянном токе (от батарейки). Ток проходит по рамке, расположенной между полюсами постоянного магнита. Взаимодействие магнитных полей рамки с током и магнита заставляет рамку поворачиваться. После каждого полуоборота коллектор переключает контакты рамки, подходящие к батарейке, и поэтому рамка вращается.
В некоторых двигателях для создания магнитного поля вместо постоянного магнита служит электромагнит. Витки проволоки такого электромагнита называются обмоткой возбуждения.
Электродвигатели используются повсюду. Даже дома вы можете обнаружить огромное количество электродвигателей. Электродвигатели используются в часах, в вентиляторе микроволновой печи, в стиральной машине, в компьютерных вентиляторах, в кондиционере, в соковыжималке и т. д. и т. п. Ну а электродвигатели, применяемые в промышленности, можно перечислять бесконечно. Диапазон физических размеров – от размера со спичечную головку до размера локомотивного двигателя.
Показанный ниже промышленный электродвигатель работает и на постоянном, и на переменном токе. Его статор – это электромагнит, создающий магнитное поле. Обмотки двигателя поочередно подключаются через щетки к источнику питания. Одна за другой они поворачивают ротор на небольшой угол, и ротор непрерывно вращается.
Промышленный электродвигатель
Электроизмерительные приборы.
Электроизмерительные приборы — класс устройств, применяемых для измерения различных электрических величин.
Группа электромагнитных приборов является наиболее распространенной. Принцип их действия, использованный впервые еще Ф. Кольраушем в 1884 году, основан на перемещении подвижной железной части под влиянием магнитного потока, создаваемого катушкой, по которой пропускается ток. Практическое осуществление этого принципа отличается разнообразием.
Ориентирующее действие магнитного поля на контур с током используют в электроизмерительных приборах магнитоэлектрической системы – амперметрах, вольтметрах и др.
Устройство прибора магнитоэлектрической системы
Измерительный прибор магнитоэлектрической системы устроен следующим образом.
Берут лёгкую алюминиевую рамку 2 прямоугольной формы, наматывают на неё катушку из тонкого провода. Рамку крепят на двух полуосях О и О’, к которым прикреплена также стрелка прибора 4. Ось удерживается двумя тонкими спиральными пружинами 3. Силы упругости пружин, возвращающие рамку к положению равновесия в отсутствие тока, подобраны такими, чтобы были пропорциональными углу отклонения стрелки от положения равновесия. Катушку помещают между полюсами постоянного магнита М с наконечниками формы полого цилиндра. Внутри катушки располагают цилиндр 1 из мягкого железа. Такая конструкция обеспечивает радиальное направление линий магнитной индукции в области нахождения витков катушки (см рисунок).
В результате при любом положении катушки силы, действующие на нее со стороны магнитного поля, максимальны и при неизменной силе тока постоянны. Векторы F и –F изображают силы, действующие на катушку со стороны магнитного поля и поворачивающие ее. Катушка с током поворачивается до тех пор, пока силы упругости со стороны пружины не уравновесят силы, действующие на рамку со стороны магнитного поля. Увеличивая силу тока в рамке в 2 раза, рамка повернётся на угол, вдвое больший. Это происходит потому, что F
Силы, действующие на рамку с током прямо пропорциональны силе тока, то есть можно, проградуировав прибор, измерять силу тока в рамке.
Точно так же можно прибор настроить на измерение напряжения в цепи, если проградуировать шкалу в вольтах, причём сопротивление рамки с током должно быть выбрано очень большим по сравнению с сопротивлением участка цепи, на котором измеряем напряжение.
Дополнительные материалы.
1. Видео-ролик «Принцип работы электродвигателя»
2. Презентация «Электроизмерительные приборы» скачать с Яндекса
Медиа-материалы из Единой коллекции Цифровых Образовательных Ресурсов:
Рисунок «Вольтметр» 8_140
Рисунок-плакат «Электродвигатель» 8_224
Слайд-шоу «Работа электродвигателя» 8_225
Рисунок-плакат «Электроизмерительный прибор электродинамической системы» 8_227
Рисунок-плакат «Электроизмерительный прибор» 8_228
Слайд-шоу «Работа амперметра» 8_229
Слайд-шоу «Работа электроизмерительного прибора» 8_230
Принцип действия электродвигателей
Принцип действия
Асинхронный двигатель с короткозамкнутым ротором
Обмотка ротора состоит из медных или алюминиевых стержней, замкнутых накоротко с торцов двумя кольцами (беличья клетка). Обмотка статора (обмотка возбуждения) питается от сети переменным током – образуется вращающееся магнитное поле, которое индуцирует в обмотках ротора ток. На проводники с током обмотки ротора со стороны магнитного поля обмотки возбуждения действуют электромагнитные силы — образуется вращающий момент, увлекающий ротор за магнитным полем. Частота вращения ротора не может достигнуть частоты вращения магнитного поля статора (поэтому электродвигатель и называется асинхронным), в противном случае угловая скорость вращения магнитного поля относительно обмотки ротора станет равной нулю и магнитное поле перестанет индуцировать в обмотке ротора ЭДС и создавать крутящий момент.
Асинхронный двигатель с фазным ротором
Обмотки ротора выводятся на контактные кольца, вращающиеся вместе с валом машины. С помощью металлографитовых щёток,
скользящих по этим кольцам, в цепь обмотки ротора включается пускорегулирующий реостат. Увеличивая сопротивление реостата
в момент пуска, можно увеличить пусковой момент и снизить пусковой ток.
С помощью металлографитовых щёток,
скользящих по этим кольцам, в цепь обмотки ротора включается пускорегулирующий реостат. Увеличивая сопротивление реостата
в момент пуска, можно увеличить пусковой момент и снизить пусковой ток.
Синхронные электродвигатели
Обмотка статора (якорная обмотка) питается от сети переменным током – образуется вращающееся магнитное поле. На роторе находится индукторная обмотка, выведенная на контактные кольца. При пуске обмотки ротора закорачиваются накоротко или через реостат, и двигатель разгоняется в асинхронном режиме. После выхода на скорость, близкую к номинальной, индуктор запитывается постоянным током — создаётся постоянное магнитное поле, которое сцепляется с магнитным полем статора и начинает вращаться с ним синхронно (двигатель входит в синхронизм).
Режимы работы асинхронного двигателя
- Двигательный
- Генераторный
- Электромагнитного тормоза
Электродвигатель преобразует электрическую энергию, потребляемую из сети, в механическую.
Асинхронный двигатель переходит в генераторный режим, если ротор начинает вращаться быстрее магнитного поля – на валу появляется тормозной момент. В этом режиме электродвигатель преобразовывает механическую энергию в электрическую и отдаёт её в сеть.
Асинхронный двигатель переходит в режим электромагнитного тормоза, если ротор и магнитное поле статора вращаются в разные стороны — на валу появляется тормозной момент, но двигатель при этом продолжает потреблять электроэнергию из сети — вся потребляемая энергия идёт на нагрев двигателя.
Способы регулирования скорости вращения асинхронного двигателя
- Реостатное
- Изменением числа пар полюсов
В многоскоростных двигателях, по-разному коммутируя обмотки статора, можно менять число пар полюсов, а значит и скорость вращения вала, т.к. скорость вращения магнитного поля пропорциональна числу пар полюсов. При этом способе сохраняется КПД и жёсткость механических характеристик, но снижается перегрузочная способность (которую можно сохранить, изменяя напряжение).
Недостатки: ступенчатое регулирование, высокая цена, большие габариты. - Частотное
В цепь ротора (двигателя с фазным ротором) вводятся добавочные сопротивления — механическая характеристика двигателя
становится мягче (ухудшается устойчивость работы, увеличивается скольжение), скорость снижается, при этом увеличивается
пусковой момент и сохраняется перегрузочная способность.
Недостатки: большие потери на реостате, скорость меняется скачками.
Для этого способа регулирования применяются преобразователи частоты.
Если при изменении частоты сохранять неизменным магнитный поток (а для этого мы должны поддерживать постоянным
соотношение U/f), то мы получаем семейство механических характеристик с одинаковой жёсткостью и перегрузочной способностью.
Преимущества: плавность регулирования, отличные экономические характеристики, возможность увеличивать частоту выше 50 Гц
(частоты сети).
Как выбрать электродвигатель
Обмотка ротора
- Короткозамкнутый ротор (беличья клетка)
- Фазный ротор: обмотка ротора выведена на контактные кольца, вращающиеся с валом двигателя. С помощью металлографитовых щёток в цепь ротора включается пуско-регулирующий реостат. С помощью этого реостата можно уменьшить пусковой ток и регулировать скорость вращения вала двигателя.
Обмотка статора, напряжение питания
Обмотка статора может быть соединена по схеме «звезда» или «треугольник».
Если на шильдике двигателя написано: 220/380, D/Y, то это значит, что двигатель можно включать в сеть с Uл = 220 В по схеме «треугольник»,
а с Uл = 380 В — по схеме «звезда».
Для IEC двигателей стандартное напряжение — 230/400 В, а для отечественных — 220/380 В.
Типоразмер
Типоразмер или габарит (Frame size) — это расстояние в миллиметрах «от пола» до оси вала двигателя. Типоразмеры отечественных двигателей (ГОСТ)
и импортных (IEC, NEMA) в общем случае не совпадают: наши двигатели ниже, чем импортные той же мощности.
Типоразмеры отечественных двигателей (ГОСТ)
и импортных (IEC, NEMA) в общем случае не совпадают: наши двигатели ниже, чем импортные той же мощности.
Материал корпуса (станины)
- Алюминий (Aluminium)
- Чугун (Cast Iron).
Коэффициент полезного действия (Efficiency)
КПД η равен отношению механической мощности на валу двигателя P2 к потребляемой из сети электрической мощности P1.
P1 = √3 х U х I х cos φ
P2 = M х n / 9,55
η = P2 / P1
Выходная мощность меньше входной на величину потерь.
Класс энергоэффективности
- EFF1 (High Efficiency motors)
- EFF2 (Improved Efficiency motors)
- EFF3 (Conventional Efficiency motors).
Монтажное исполнение
- Лапы (Foot) литые с корпусом или прикручиваемые
- Фланцы (Flange) с врезными отверстиями (малые фланцы) или со сквозными (большие фланцы)
- Комбинированные — лапы и фланец.

Конструктивное исполнение по способу монтажа электродвигателей
Класс защиты корпуса двигателя IP
Стандартная степень защиты электродвигателей — IP55.
Подробнее о расшифровке кодов IP
Скорость вращения
Скорость вращения магнитного поля двигателя (синхронная скорость):
n1 = 60f / p [об/мин],
где p — число пар полюсов двигателя,
f — частота сети (50 Гц).
- 2 полюса — 3000 об/мин
- 4 полюса — 1500 об/мин (стандарт)
- 6 полюсов — 1000 об/мин
- 8 полюсов — 750 об/мин
- 10 полюсов — 600 об/мин
- 12 полюсов — 500 об/мин.
Скорость вращения ротора асинхронного двигателя меньше скорости вращения магнитного поля:
n2 = n1(1 — s),
где s — скольжение.
Многоскоростные электродвигатели — это двигатели, у которых ступенчатое изменение скорости
реализовано с помощью переключения числа пар полюсов.
Температура окружающей среды и высота над уровнем моря
При установке двигателя выше 1000 метров над уровнем моря и при эксплуатации при повышенной температуре окружающей среды необходимо учитывать снижение (Derating) мощности двигателя (для этого есть специальные таблицы).
Класс нагревостойкости изоляции
- B — 130° С
- F — 150° С (достаточно для работы от преобразователя частоты)
- H — 180° С
Номинальные характеристики двигателя для всех классов изоляции указываются для температуры охлаждающей среды +40°С.
Подробнее о классах нагревостойкости изоляции
Режим нагрузки (Duty)
- S1 — продолжительный: двигатель работает при установившейся температуре
- S2 — кратковременный: двигатель не успевает нагреться до установившейся температуры, но во время остановки успевает полностью охладиться
- S3 — повторно-кратковременный: работа с постоянной нагрузкой чередуется с выключениями, при этом двигатель не успевает ни нагреться, ни охладиться до установившейся температуры
- S4 — повторно-кратковременный с длительными пусками: двигатель не успевает ни нагреться, ни охладиться до установившейся температуры
- S5 — повторно-кратковременный с длительными пусками и электрическим торможением: двигатель не успевает ни нагреться, ни охладиться до установившейся температуры
- S6 — перемежающийся: работа с постоянной нагрузкой чередуется с работой на холостом ходу, при этом двигатель не успевает ни нагреться, ни охладиться до установившейся температуры
- S7 — перемежающийся с длительными пусками и торможениями: двигатель не успевает ни нагреться, ни охладиться до установившейся температуры
- S8 — перемежающийся с периодическим изменением скорости вращения: двигатель не успевает ни нагреться, ни охладиться до установившейся температуры
Тепловая защита двигателя
- PTC-термисторы — это резисторы, сопротивление которых мгновенно возрастает при достижении заданной температуры.
 От 1 до 3 термисторов соединяются последовательно для сигнализации температуры отключения (Trip), например, 155°C.
Ещё одна цепочка термисторов может быть настроена на сигнал предупреждения (Alarm), например, 145°C.
От 1 до 3 термисторов соединяются последовательно для сигнализации температуры отключения (Trip), например, 155°C.
Ещё одна цепочка термисторов может быть настроена на сигнал предупреждения (Alarm), например, 145°C. - PT100 — платиновые датчики температуры обладают высокой стойкостью к окислению и большой точностью измерения.
PT100 подключаются по 2-х, 3-х или 4-х проводной схеме (чем больше проводов — тем меньше влияние помех).
От 3 до 6 датчиков PT100 могут устанавливаться в обмотку статора.
Для измерения температуры подшипников могут быть использованы ещё 2 датчика PT100. - KTY — кремниевые термодатчики с положительным коэффициентом сопротивления, характеризуются высокой линейностью характеристики, высоким быстродействием, надёжной твёрдотельной конструкцией и небольшой стоимостью.
Сервис-фактор
Двигатель с сервис-фактором 1.1 может постоянно работать с перегрузкой 10% от номинального выходного момента.
Класс по моменту (Torque class)
Класс по моменту показывает кратность пускового момента (при прямом пуске от сети) при пониженном на 5% напряжении:
- Класс 16 — 160%
- Класс 13 — 130%
- Класс 10 — 100%
- Класс 7 — 70%
- Класс 5 — 50%
Коэффициент мощности cos φ
Коэффициент мощности (cos φ) равен отношению потребляемой двигателем активной мощности к полной мощности.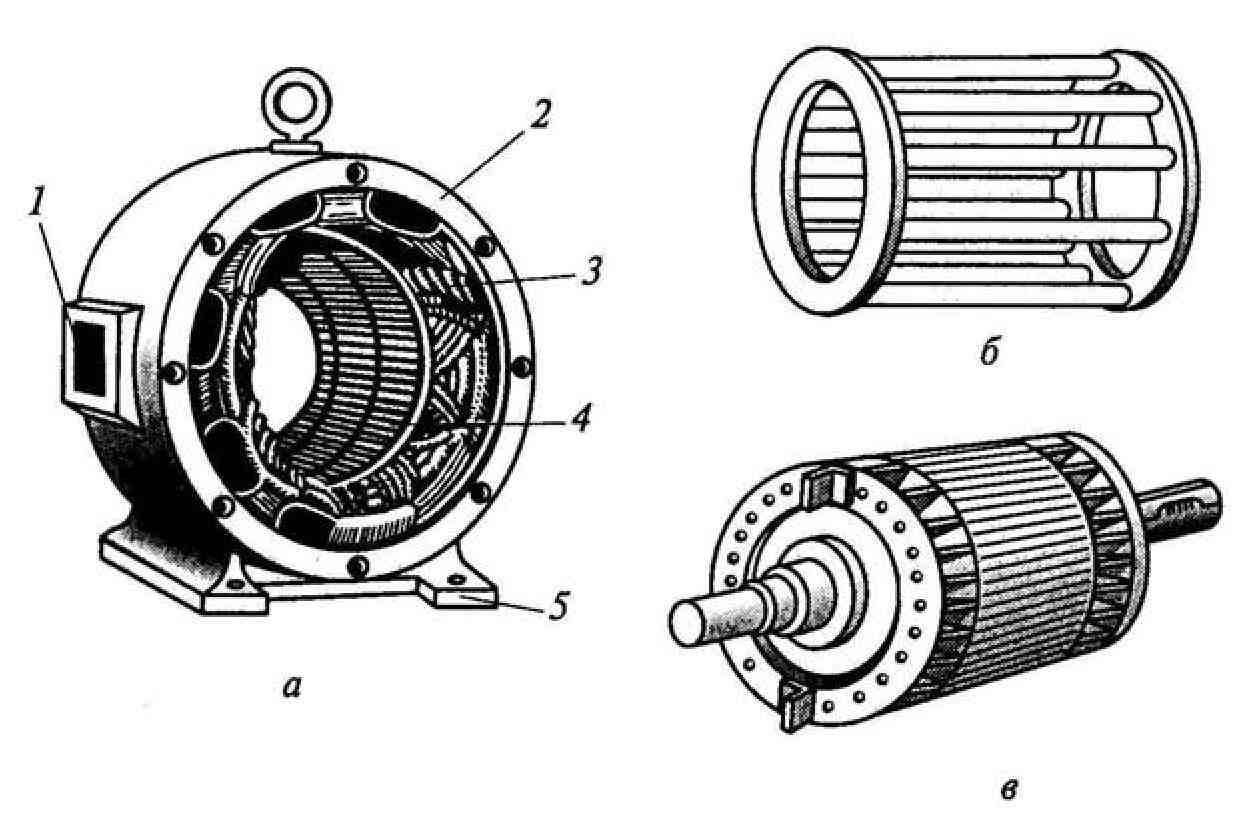
Активная мощность расходуется на совершение полезной работы.
Полная мощность равна геометрической сумме активной и реактивной мощности.
Реактивная мощность расходуется на намагничивание двигателя.
Антиконденсационный нагрев
Для того, чтобы перед пуском двигателя в сыром помещении просушить обмотки есть два способа:
- Использовать двигатель со специальным встроенным нагревателем
- Подать на одну обмотку статора напряжение от 4 до 10% номинального (чтобы пропустить ток от 20 до 30% от номинального), что достаточно для испарения конденсата (применимо не для всех двигателей). Некоторые преобразователи частоты умеют это делать.
Охлаждение
- Поверхностное охлаждение (Non-ventilated: вентилятора нет)
- Самовентиляция (Self-ventilated: вентилятор на валу двигателя)
- Принудительное охлаждение (Forced cooling: независимый вентилятор или жидкостное охлаждение водой или маслом)
Для турбомеханизмов (вентиляторы и насосы, для которых момент на валу пропорционален квадрату скорости),
как правило, достаточно самовентиляции.
Двигатели, которые работают от преобразователей частоты с постоянным моментом длительное время на низких скоростях,
необходимо или переразмеривать, или обеспечить принудительным охлаждением.
Вентилятор
- Пластиковый
- Металлический
- Металлический с увеличенным моментом инерции
Требования к двигателю при работе от преобразователя частоты
- Температурный класс изоляции не ниже F
- Возможно принудительная вентиляция (см. выше)
- Изолированный подшипник с нерабочей стороны вала (рекомендуется для типоразмеров 225 и выше)
Подшипники
При работе от преобразователя частоты на частотах выше 50 Гц срок службы подшипников уменьшается.
У одних двигателей с рабочей стороны вала установлен плавающий подшипник (Floating bearing),
а с нерабочей стороны подшипник зафиксирован (Located bearing). У других — наоборот (для сочленения с редуктором, например).
У других — наоборот (для сочленения с редуктором, например).
В стандартном исполнении подшипники подпружинены в аксиальном направлении (вдоль вала) для обеспечения равномерной работы двигателя. У двигателей с радиально-упорными подшипниками такой пружины нет, поэтому радиальное усилие (перпендикулярно валу — от ремня, например) должно быть приложено постоянно, иначе подшипник быстро выйдет из строя.
Смазка
Как правило, для двигателей с типоразмерами до 250, работающих в номинальном режиме,
смазка рассчитана на весь срок службы подшипников.
Для пополнения смазки у двигателя должен быть предусмотрен специальный ниппель.
Вал двигателя
У двигателя может быть выведен второй конец вала двигателя, который может передавать как номинальный, так и меньший момент.
Второй конец вала несовместим с такими опциями как: датчик скорости и вентилятор принудительного охлаждения, а, возможно, и с тормозом.
Тормоз
При выборе тормоза необходимо учесть:
- Тип:
- статический (удерживающий тормоз срабатывает только при неподвижном вале)
- динамический (можно регулировать момент торможения, меньше изнашивается в случае аварийного торможения)
- Максимальную скорость, при которой возможно аварийное торможение
- Момент нагрузки
- Момент инерции
- Число пусков
- Напряжение питания: переменное (~220В) или постоянное (=24В)
- Скорость срабатывания: тормоз с выключением на DC-стороне срабатывает быстрее (для подъёмника, например), чем тормоз с выключением на AC-стороне (для конвейера)
Датчик скорости
Датчик скорости может находится герметично внутри корпуса (Incapsulated) или снаружи под защитной крышкой.
Сервопривод
Устройства плавного пуска
Принцип действия и устройство электродвигателя
Любой электрический двигатель предназначен для совершения механической работы за счет расхода приложенной к нему электроэнергии, которая преобразуется, как правило, во вращательное движение. Хотя в технике встречаются модели, которые сразу создают поступательное движение рабочего органа. Их называют линейными двигателями.
В промышленных установках электромоторы приводят в действие различные станки и механические устройства, участвующие в технологическом производственном процессе.
Внутри бытовых приборов электродвигатели работают в стиральных машинах, пылесосах, компьютерах, фенах, детских игрушках, часах и многих других устройствах.
Основные физические процессы и принцип действия
На движущиеся внутри магнитного поля электрические заряды, которые называют электрическим током, всегда действует механическая сила, стремящаяся отклонить их направление в плоскости, расположенной перпендикулярно ориентации магнитных силовых линий. Когда электрический ток проходит по металлическому проводнику или выполненной из него катушке, то эта сила стремится подвинуть/повернуть каждый проводник с током и всю обмотку в целом.
Когда электрический ток проходит по металлическому проводнику или выполненной из него катушке, то эта сила стремится подвинуть/повернуть каждый проводник с током и всю обмотку в целом.
На картинке ниже показана металлическая рамка, по которой течет ток. Приложенное к ней магнитное поле создает для каждой ветви рамки силу F, создающую вращательное движение.
Это свойство взаимодействия электрической и магнитной энергии на основе создания электродвижущей силы в замкнутом токопроводящем контуре положено в работу любого электродвигателя. В его конструкцию входят:
обмотка, по которой протекает электрический ток. Ее располагают на специальном сердечнике-якоре и закрепляют в подшипниках вращения для уменьшения противодействия сил трения. Эту конструкцию называют ротором;
статор, создающий магнитное поле, которое своими силовыми линиями пронизывает проходящие по виткам обмотки ротора электрические заряды;
корпус для размещения статора. Внутри корпуса сделаны специальные посадочные гнезда, внутри которых вмонтированы внешние обоймы подшипников ротора.
Упрощенно конструкцию наиболее простого электродвигателя можно представить картинкой следующего вида.
При вращении ротора создается крутящий момент, мощность которого зависит от общей конструкции устройства, величины приложенной электрической энергии, ее потерь при преобразованиях.
Величина максимально возможной мощности крутящего момента двигателя всегда меньше приложенной к нему электрической энергии. Она характеризуется величиной коэффициента полезного действия.
По виду протекающего по обмоткам тока их подразделяют на двигатели постоянного или переменного тока. Каждая из этих двух групп имеет большое количество модификаций, использующих различные технологические процессы.
Электродвигатели постоянного тока
У них магнитное поле статора создается стационарно закрепленными постоянными магнитами либо специальными электромагнитами с обмотками возбуждения. Обмотка якоря жестко вмонтирована в вал, который закреплен в подшипниках и может свободно вращаться вокруг собственной оси.
Принципиальное устройство такого двигателя показано на рисунке.
На сердечнике якоря из ферромагнитных материалов расположена обмотка, состоящая из двух последовательно соединенных частей, которые одним концом подключены к токопроводящим коллекторным пластинам, а другим скоммутированы между собой. Две щетки из графита расположены на диаметрально противоположных концах якоря и прижимаются к контактным площадкам коллекторных пластин.
На нижнюю щетку рисунка подводится положительный потенциал постоянного источника тока, а на верхнюю — отрицательный. Направление протекающего по обмотке тока показано пунктирной красной стрелкой.
Ток вызывает в нижней левой части якоря магнитное поле северного полюса, а в правой верхней — южного (правило буравчика). Это приводит к отталкиванию полюсов ротора от одноименных стационарных и притяжению к разноименным полюсам на статоре. В результате приложенной силы возникает вращательное движение, направление которого указывает коричневая стрелка.
При дальнейшем вращении якоря по инерции полюса переходят на другие коллекторные пластины. Направление тока в них изменяется на противоположное. Ротор продолжает дальнейшее вращение.
Простая конструкция подобного коллекторного устройства приводит к большим потерям электрической энергии. Подобные двигатели работают в приборах простой конструкции или игрушках для детей.
Электродвигатели постоянного тока, участвующие в производственном процессе, имеют более сложную конструкцию:
- обмотка секционирована не на две, а на большее количество частей;
- каждая секция обмотки смонтирована на своем полюсе;
- коллекторное устройство выполнено определенным количеством контактных площадок по числу секций обмоток.
В результате этого создается плавное подключение каждого полюса через свои контактные пластины к щеткам и источнику тока, снижаются потери электроэнергии.
Устройство подобного якоря показано на картинке.
У электрических двигателей постоянного тока можно реверсировать направление вращения ротора.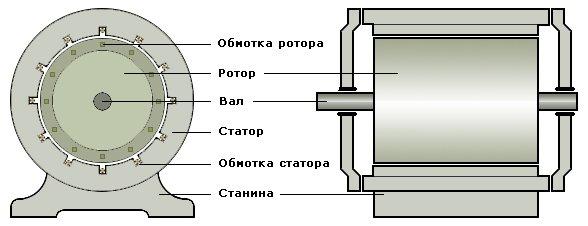 Для этого достаточно изменить движение тока в обмотке на противоположное сменой полярности на источнике.
Для этого достаточно изменить движение тока в обмотке на противоположное сменой полярности на источнике.
Электродвигатели переменного тока
Они отличаются от предыдущих конструкций тем, что электрический ток, протекающий в их обмотке, описывается по синусоидальному гармоническому закону. периодически изменяющему свое направление (знак). Для их питания напряжение подается от генераторов со знакопеременной величиной.
Статор таких двигателей выполняется магнитопроводом. Его делают из ферромагнитных пластин с пазами, в которые помещают витки обмотки с конфигурацией рамки (катушки).
На картинке ниже показан принцип работы однофазного двигателя переменного тока с синхронным вращением электромагнитных полей ротора и статора.
В пазах статорного магнитопровода по диаметрально противоположным концам размещены проводники обмотки, схематично показанные в виде рамки, по которой протекает переменный ток.
Рассмотрим случай для момента времени, соответствующего прохождению положительной части его полуволны.
В обоймах подшипника свободно вращается ротор с вмонтированным постоянным магнитом, у которого ярко выражены северный «N рот» и южный «S рот» полюса. При протекании положительной полуволны тока по обмотке статора в ней создается магнитное поле с полюсами «S ст» и «N ст».
Между магнитными полями ротора и статора возникают силы взаимодействия (одноименные полюса отталкиваются, а разноименные — притягиваются), которые стремятся повернуть якорь электродвигателя из произвольного положения в окончательное, когда осуществляется максимально близкое расположение противоположных полюсов относительно друг друга.
Если рассматривать этот же случай, но для момента времени, когда по рамочному проводнику протекает обратная — отрицательная полуволна тока, то вращение якоря будет происходить в противоположную сторону.
Для придания непрерывного движения ротору в статоре делают не одну обмотку-рамку, а определенное их количество с таким учетом, чтобы каждая их них питалась от отдельного источника тока.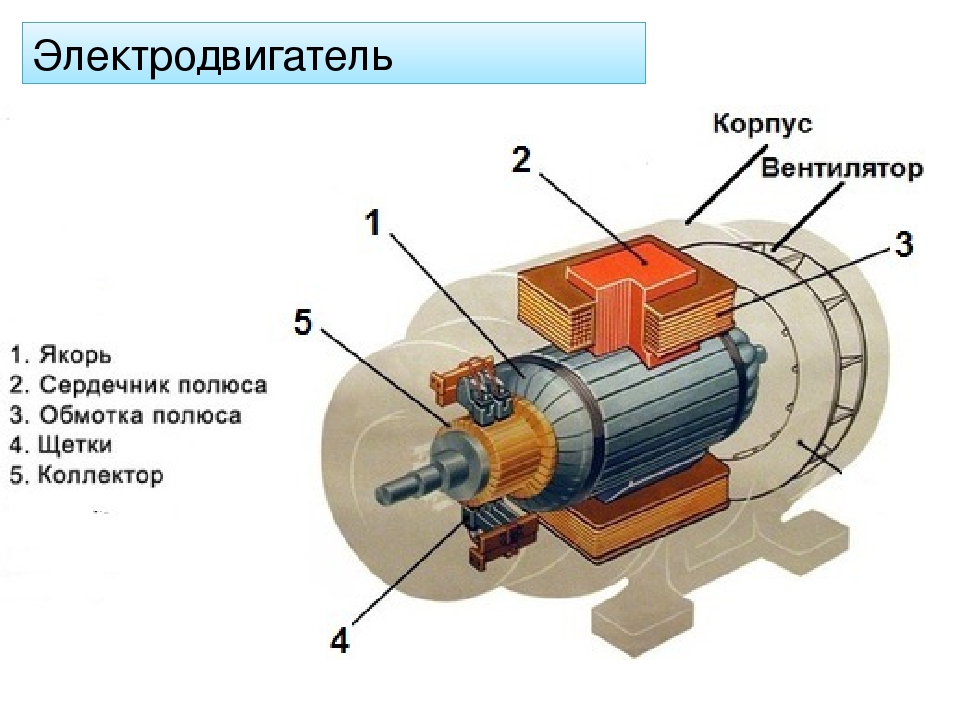
Принцип работы трехфазного двигателя переменного тока с синхронным вращением электромагнитных полей ротора и статора показан на следующей картинке.
В этой конструкции внутри магнитопровода статора смонтированы три обмотки А, В и С, смещенные на углы 120 градусов между собой. Обмотка А выделена желтым цветом, В — зеленым, а С — красным. Каждая обмотка выполнена такими же рамками, как и в предыдущем случае.
На картинке для каждого случая ток проходит только по одной обмотке в прямом или обратном направлении, которое показано значками «+» и «·».
При прохождении положительной полуволны по фазе А в прямом направлении ось поля ротора занимает горизонтальное положение потому, что магнитные полюса статора формируются в этой плоскости и притягивают подвижный якорь. Разноименные полюса ротора стремятся приблизиться к полюсам статора.
Когда положительная полуволна пойдет по фазе С, то якорь повернется на 60 градусов по ходу часовой стрелки. После подачи тока в фазу В произойдет аналогичный поворот якоря.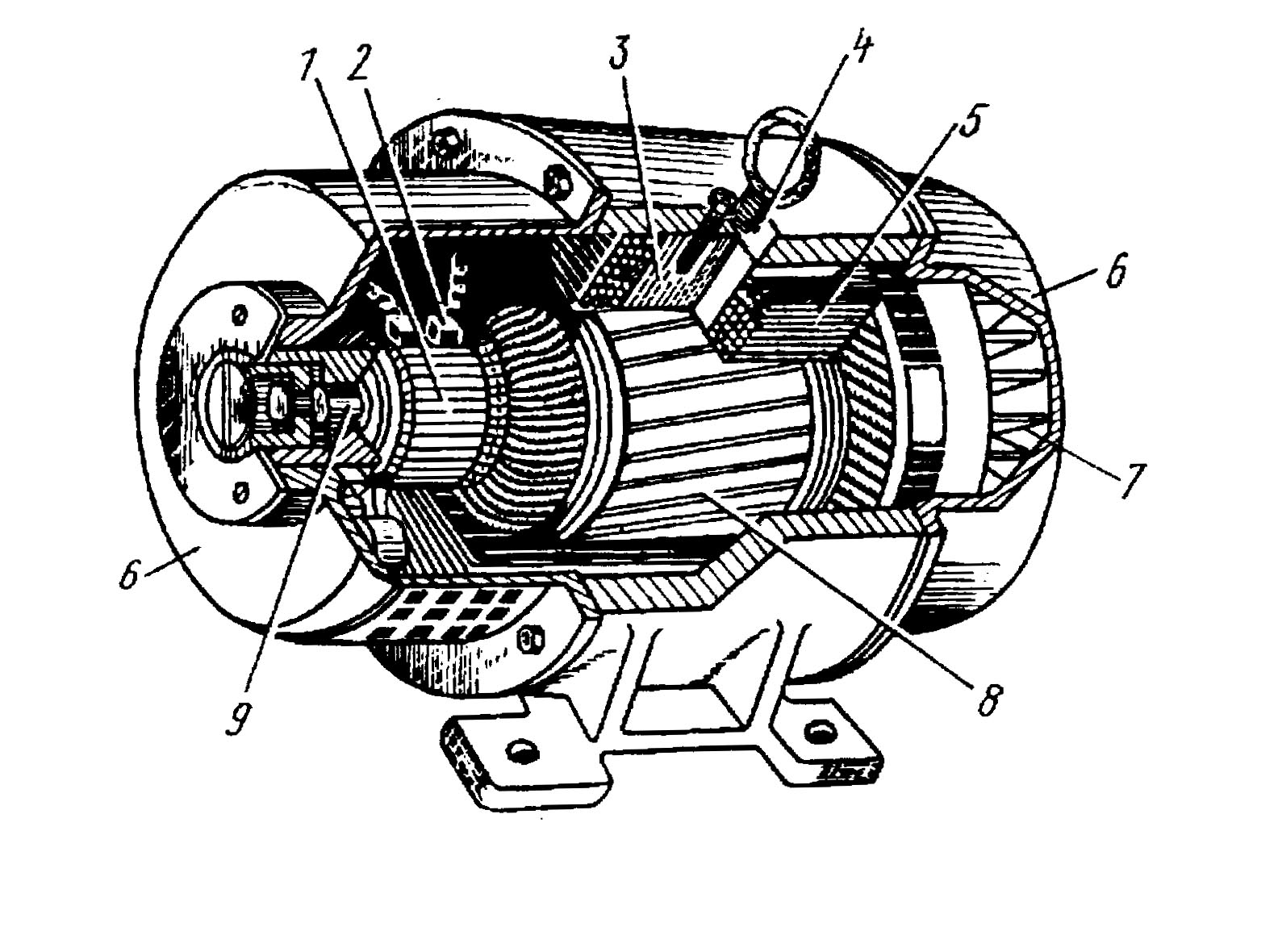 Каждое очередное протекание тока в очередной фазе следующей обмотки будет вращать ротор.
Каждое очередное протекание тока в очередной фазе следующей обмотки будет вращать ротор.
Если к каждой обмотке подвести сдвинутое по углу 120 градусов напряжение трехфазной сети, то в них будут циркулировать переменные токи, которые раскрутят якорь и создадут его синхронное вращение с подведенным электромагнитным полем.
Эта же механическая конструкция успешно применяется в трехфазном шаговом двигателе. Только в каждую обмотку с помощью управления специальным контроллером (драйвером шагового двигателя) подаются и снимаются импульсы постоянного тока по описанному выше алгоритму.
Их запуск начинает вращательное движение, а прекращение в определенный момент времени обеспечивает дозированный поворот вала и остановку на запрограммированный угол для выполнения определенных технологических операций.
В обеих описанных трехфазных системах возможно изменение направления вращения якоря. Для этого надо просто поменять чередование фаз «А»-«В»-«С» на другое, например, «А»-«С»-«В».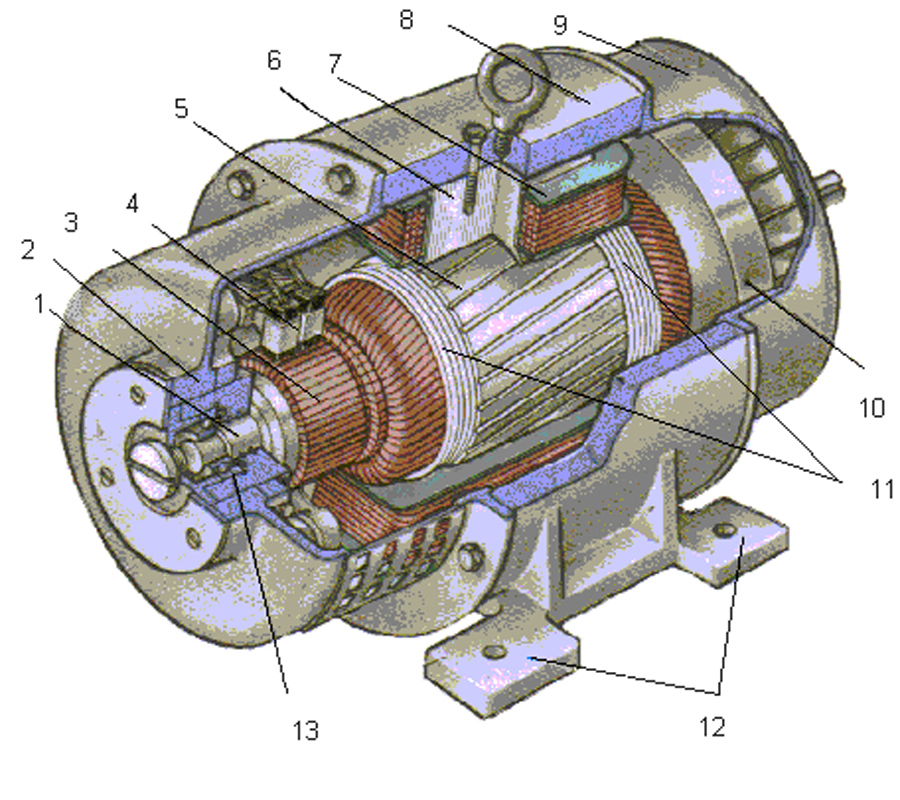
Скорость вращения ротора регулируется продолжительностью периода Т. Его сокращение приводит к ускорению вращения. Величина амплитуды тока в фазе зависит от внутреннего сопротивления обмотки и значения приложенного к ней напряжения. Она определяет величину крутящего момента и мощности электрического двигателя.
Эти конструкции двигателей имеют такой же статорный магнитопровод с обмотками, как и в ранее рассмотренных однофазных и трехфазных моделях. Они получили свое название из-за несинхронного вращения электромагнитных полей якоря и статора. Сделано это за счет усовершенствования конфигурации ротора.
Его сердечник набран из пластин электротехнических марок стали с пазами. В них вмонтированы алюминиевые либо медные тоководы, которые по концам якоря замкнуты токопроводящими кольцами.
Когда к обмоткам статора подводится напряжение, то в обмотке ротора электродвижущей силой наводится электрический ток и создается магнитное поле якоря. При взаимодействии этих электромагнитных полей начинается вращение вала двигателя.
У этой конструкции движение ротора возможно только после того, как возникло вращающееся электромагнитное поле в статоре и оно продолжается в несинхронном режиме работы с ним.
Асинхронные двигатели проще в конструктивном исполнении. Поэтому они дешевле и массово применяются в промышленных установках и бытовой домашней технике.
Взрывозащищенный электродвигатель ABB
Многие рабочие органы промышленных механизмов выполняют возвратно-поступательное или поступательное движение в одной плоскости, необходимое для работы металлообрабатывающих станков, транспортных средств, ударов молота при забивании свай …
Перемещение такого рабочего органа с помощью редукторов, шариковинтовых, ременных передач и подобных механических устройств от вращательного электродвигателя усложняет конструкцию. Современное техническое решение этой проблемы — работа линейного электрического двигателя.
У него статор и ротор вытянуты в виде полос, а не свернуты кольцами, как у вращательных электродвигателей.
Принцип работы заключается в придании возвратно-поступательного линейного перемещения бегуну-ротору за счет передачи электромагнитной энергии от неподвижного статора с незамкнутым магнитопроводом определенной длины. Внутри него поочередным включением тока создается бегущее магнитное поле.
Оно воздействует на обмотку якоря с коллектором. Возникающие в таком двигателе силы перемещают ротор только в линейном направлении по направляющим элементам.
Линейные двигатели конструируются для работы на постоянном или переменном токе, могут работать в синхронном либо асинхронном режиме.
Недостатками линейных двигателей являются:
низкие энергетические показатели.
Основные понятия
Наиболее характерное магнитное явление — притяжение магнитом кусков железа — известно со времен глубокой древности. Ещё одной очень важной особенностью магнитов является наличие у них полюсов: северного (отрицательного) и южного (положительного). Противоположные полюса притягиваются, а одинаковые — отталкиваются друг от друга.
Магнитное поле можно условно изобразить линиями в виде магнитного потока, движущегося от северного полюса к южному. В некоторых случаях определить, где северный, а где южный полюс, достаточно сложно.
Вокруг проводника, при пропускании по нему электрического тока, создаётся магнитное поле. Это явление называется электромагнетизмом. Физические законы одинаковы для магнетизма и электромагнетизма.
Магнитное поле вокруг проводников можно усилить, если намотать их на катушку со стальным сердечником. Когда проводник намотан на катушку, все линии магнитного потока, образуемого каждым витком, сливаются и создают единое магнитное поле вокруг катушки.
Чем больше витков на катушке, тем сильнее магнитное поле. Это поле имеет такие же характеристики, что и естественное магнитное поле, а, следовательно, у него тоже есть северный и южный полюса.
Вращение вала электродвигателя обусловлено действием магнитного поля. Основные части электродвигателя: статор и ротор.
Подвижная часть электродвигателя, которая вращается с валом электродвигателя, двигаясь вместе с магнитным полем статора.
Неподвижный компонент электродвигателя. Он включает в себя несколько обмоток, полярность которых меняется при прохождении через них переменного тока (AC). Таким образом, создаётся комбинированное магнитное поле статора.
Вращение под действием магнитного поля
Преимуществом магнитных полей, которые создаются токопроводящими катушками, является возможность менять местами полюса магнита посредством изменения направления тока. Именно эта возможность смены полюсов и используется для преобразования электрической энергии в механическую.
Одинаковые полюса магнитов отталкиваются друг от друга, противоположные полюса — притягиваются. Можно сказать, что это свойство используется для создания непрерывного движения ротора с помощью постоянной смены полярности статора. Ротором здесь, является магнит, который может вращаться.
Чередование полюсов с помощью переменного тока
Полярность постоянно меняется с помощью переменного тока (AC). Далее мы увидим, как ротор заменяется магнитом, который вращается под действием индукции. Здесь важную роль играет переменный ток, поэтому будет полезно привести здесь краткую информацию о нём:
Под переменным током понимается электрический ток, периодически изменяющий свое направление в цепи так, что среднее значение силы тока за период равно нулю. Вращающееся магнитное поле можно создать с помощью трёхфазного питания. Это означает, что статор подсоединяется к источнику переменного тока с тремя фазами. Полный цикл определяется как цикл в 360 градусов. Это значит, что каждая фаза расположена по отношению к другой под углом в 120 градусов. Фазы изображаются в виде синусоидальных кривых, как представлено на рисунке.
Трёхфазный переменный ток
Трёхфазное питание — это непрерывный ряд перекрывающихся напряжений переменного тока (AC).
На следующих страницах объясняется, как взаимодействуют ротор и статор, заставляя электродвигатель вращаться.
Для наглядности мы заменили ротор вращающимся магнитом, а статор — катушками. В правой части страницы приведено изображение двухполюсного трёхфазного электродвигателя. Фазы соединены парами: 1-й фазе соответствуют катушки A1 и A2, 2-й фазе — B1 и B2. а 3-й соответствуют C1 и C2. При подаче тока на катушки статора одна из них становится северным полюсом, другая — южным. Таким образом, если A1 — северный полюс, то A2 — южный.
Питание в сети переменного тока
Обмотки фаз A, B и C расположены по отношению друг к другу под углом в 120 градусов.
Количество полюсов электродвигателя определяется количеством пересечений поля обмотки полем ротора. В данном случае каждая обмотка пересекается дважды, что означает, что перед нами двухполюсный статор. Таким образом, если бы каждая обмотка появлялась четыре раза, это был бы четырехполюсный статор и т. д.
д.
Когда на обмотки фаз подаётся электрический ток, вал электродвигателя начинает вращаться со скоростью, обусловленной числом полюсов (чем меньше полюсов, тем ниже скорость)
Ниже рассказывается о физическом принципе работы электродвигателя (как ротор вращается внутри статора). Для наглядности, заменим ротор магнитом. Все изменения в магнитном поле происходят очень быстро, поэтому нам необходимо разбить весь процесс на этапы. При прохождении трёхфазного переменного тока по обмоткам статора в нем создается магнитное поле, в результате чего возникают механические усилия, заставляющие ротор вращаться в сторону вращения магнитного поля.
Начав вращение, магнит будет следовать за меняющимся магнитным полем статора. Поле статора меняется таким образом, чтобы поддерживалось вращение в одном направлении.
Ранее мы установили, как обыкновенный магнит вращается в статоре. В электродвигателях переменного тока AC установлены роторы, а не магниты. Наша модель очень схожа с настоящим ротором, за исключением того, что под действием магнитного поля ротор поляризуется.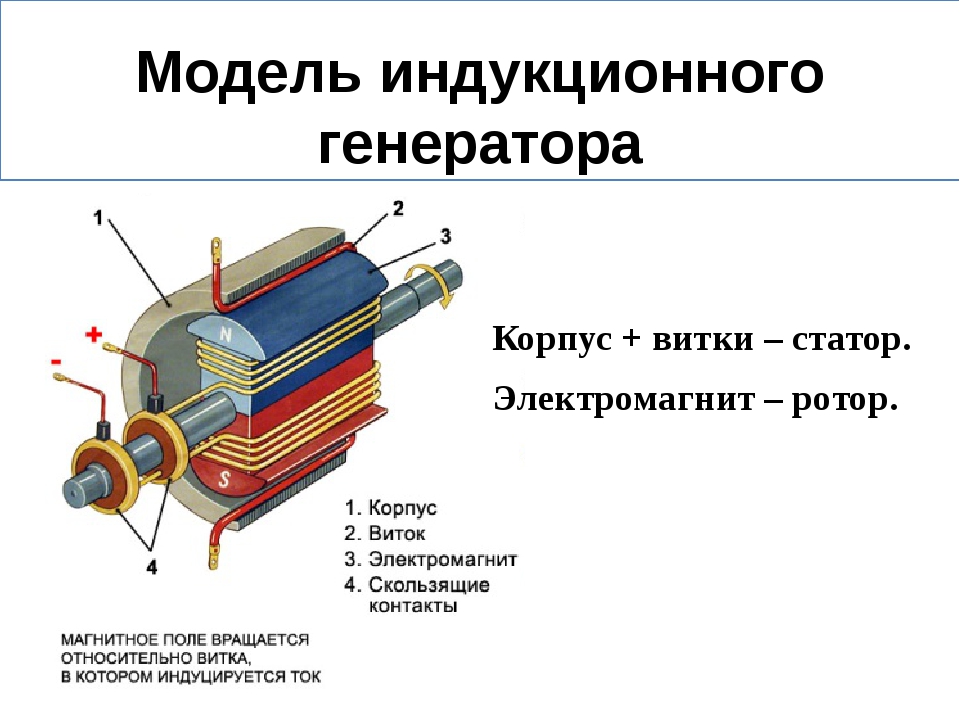 Это вызвано магнитной индукцией, благодаря которой в проводниках ротора наводится электрический ток.
Это вызвано магнитной индукцией, благодаря которой в проводниках ротора наводится электрический ток.
В основном ротор работает так же, как магнит. Когда электродвигатель включен, ток проходит по обмотке статора и создаёт электромагнитное поле, которое вращается в направлении, перпендикулярном обмоткам ротора. Таким образом, в обмотках ротора индуцируется ток, который затем создаёт вокруг ротора электромагнитное поле и поляризацию ротора.
В предыдущем разделе, чтобы было проще объяснить принцип действия ротора, заменив его для наглядности магнитом. Теперь заменим магнитом статор. Индукция — это явление, которое наблюдается при перемещении проводника в магнитном поле. Относительное движение проводника в магнитном поле приводит к появлению в проводнике так называемого индуцированного электрического тока. Этот индуцированный ток создаёт магнитное поле вокруг каждой обмотки проводника ротора. Так как трёхфазное AC питание заставляет магнитное поле статора вращаться, индуцированное магнитное поле ротора будет следовать за этим вращением. Таким образом вал электродвигателя будет вращаться. Электродвигатели переменного тока часто называют индукционными электродвигателями переменного тока, или ИЭ (индукционными электродвигателями).
Таким образом вал электродвигателя будет вращаться. Электродвигатели переменного тока часто называют индукционными электродвигателями переменного тока, или ИЭ (индукционными электродвигателями).
Принцип действия
Индукционные электродвигатели состоят из ротора и статора.
Токи в обмотках статора создаются фазовым напряжением, которое приводит в движение индукционный электродвигатель. Эти токи создают вращающееся магнитное поле, которое также называется полем статора. Вращающееся магнитное поле статора определяется токами в обмотках и количеством фазных обмоток.
Вращающееся магнитное поле формирует магнитный поток. Вращающееся магнитное поле пропорционально электрическому напряжению, а магнитный поток пропорционален электрическому току.
Вращающееся магнитное поле статора движется быстрее ротора, что способствует индукции токов в обмотках проводников роторов, в результате чего образуется магнитное поле ротора. Магнитные поля статора и ротора формируют свои потоки, эти потоки будут притягиваться друг к другу и создавать вращающий момент, который заставляет ротор вращаться. Принципы действия индукционного электродвигателя представлены на иллюстрациях справа.
Принципы действия индукционного электродвигателя представлены на иллюстрациях справа.
Таким образом, ротор и статор являются наиболее важными составляющими индукционного электродвигателя переменного тока. Они проектируются с помощью САПР (системы автоматизированного проектирования). Далее мы подробнее поговорим о конструкции ротора и статора.
Статор электродвигателя
Статор — это неподвижный электрический компонент электродвигателя. Он включает в себя несколько обмоток, полярность которых всё время меняется при прохождении через них переменного тока (AC). Таким образом, создаётся комбинированное магнитное поле статора.
Все статоры устанавливаются в раму или корпус. Корпус статора электродвигателей Grundfos для электродвигателей мощностью до 22 кВт чаще всего изготавливается из алюминия, а для электродвигателей с большей мощностью — из чугуна. Сам статор устанавливается в кожухе статора. Он состоит из тонких пластин электротехнической стали, обмотанных изолированным проводом. Сердечник состоит из сотен таких пластин. При подаче питания переменный ток проходит по обмоткам, создавая электромагнитное поле, перпендикулярное проводникам ротора. Переменный ток (AC) вызывает вращение магнитного поля.
Сердечник состоит из сотен таких пластин. При подаче питания переменный ток проходит по обмоткам, создавая электромагнитное поле, перпендикулярное проводникам ротора. Переменный ток (AC) вызывает вращение магнитного поля.
Изоляция статора должна соответствовать требованиям IEC 62114, где приведены различные классы защиты (по уровням температуры) и изменения температуры (AT). Электродвигатели Grundfos имеют класс защиты F, а при увеличении температуры — класс B. Grundfos производит 2-полюсные электродвигатели мощностью до 11 кВт и 4-полюсные электродвигатели мощностью до 5,5 кВт. Более мощные электродвигатели Grundfos закупает у других компаний, уровень качества продукции которых соответствует принятым в Grundfos стандартам. Для насосов, в основном, используются статоры с двумя, четырьмя и шестью полюсами, так как частота вращения вала электродвигателя определяет давление и расход насоса. Можно изготовить статор для работы с различными напряжениями, частотами и мощностями на выходе, а также для переменного количества полюсов.
Ротор электродвигателя
В электродвигателях используются так называемые «беличьи колеса» (короткозамкнутые роторы), конструкция которых напоминает барабаны для белок.
При вращении статора магнитное поле движется перпендикулярно обмоткам проводников ротора; появляется ток. Этот ток циркулирует по обмоткам проводников и создаёт магнитные поля вокруг каждого проводника ротора. Так как магнитное поле в статоре постоянно меняется, меняется и поле в роторе. Это взаимодействие и вызывает движение ротора. Как и статор, ротор изготовлен из пластин электротехнической стали. Но, в отличие от статора, с обмотками из медной проволоки, обмотки ротора выполнены из литого алюминия или силумина, которые выполняют роль проводников.
Асинхронные электродвигатели
В предыдущих разделах мы разобрали, почему электродвигатели переменного тока называют также индукционными электродвигателями, или электродвигателями типа «беличье колесо». Далее объясним, почему их ещё называют асинхронными электродвигателями. В данном случае во внимание принимается соотношение между количеством полюсов и числом оборотов, сделанных ротором электродвигателя.
Далее объясним, почему их ещё называют асинхронными электродвигателями. В данном случае во внимание принимается соотношение между количеством полюсов и числом оборотов, сделанных ротором электродвигателя.
Частоту вращения магнитного поля принято считать синхронной частотой вращения (Ns). Синхронную частоту вращения можно рассчитать следующим образом: частота сети (F), умноженная на 120 и разделенная на число полюсов (P).
Если, например, частота сети 50 Гц, то синхронная частота вращения для 2-полюсного электродвигателя равна 3000 мин-1.
Синхронная частота вращения уменьшается с увеличением числа полюсов. В таблице, приведенной ниже, показана синхронная частота вращения для различного количества полюсов.
Синхронная частота вращения для различного количества полюсов
Принцип действия электродвигателя
Электродвигателем называется устройство, принцип действия которого преобразование электрической энергии в механическую. Такое преобразование используется для запуска в работу всевозможных видов техники, начиная от самого простого рабочего оборудования и заканчивая автомобилями. Однако при всей полезности и продуктивности такого преобразования энергий, в данном свойстве есть небольшой побочный эффект, который проявляется в повышенном выделении тепла. Именно поэтому электрические двигатели оснащаются дополнительным оборудованием, которое способно охладить его и позволить работать в бесперебойном режиме.
Такое преобразование используется для запуска в работу всевозможных видов техники, начиная от самого простого рабочего оборудования и заканчивая автомобилями. Однако при всей полезности и продуктивности такого преобразования энергий, в данном свойстве есть небольшой побочный эффект, который проявляется в повышенном выделении тепла. Именно поэтому электрические двигатели оснащаются дополнительным оборудованием, которое способно охладить его и позволить работать в бесперебойном режиме.
Основные функциональные элементы
Любой электрический двигатель состоит из двух основных элементов, один из которых является неподвижным, такой элемент называется статором. Второй элемент является подвижным, эта часть двигателя называется ротором. Ротор электрического двигателя может быть выполнен в двух вариантах, а именно может быть короткозамкнутым и с обмоткой. Хотя последний тип на сегодняшний день является достаточно большой редкостью, поскольку сейчас повсеместно используются такие устройства, как частотные преобразователи .
Принцип действия электродвигателя основана на выполнении следующих этапов работы. Во время включения в сеть, в статоре начинает осуществлять вращение возникшее поле магнитного типа. Оно действует на обмотку статора, в которой при этом возникает ток индукционного типа. Согласно закону Ампера, ток начинает действовать на ротор, который под этим действием начинает свое вращение. Непосредственно частота вращения ротора напрямую зависит от того, какой силы действия возникает ток, а так же от того, какое количество полюсов при этом возникает.
Разновидности и типы
На сегодняшний день наиболее распространенными считаются двигатели, которые имеют магнитоэлектрический тип. Есть еще тип электродвигателей, которые называют гистерезисные, однако они не являются распространенными. Первый тип электродвигателей, магнитоэлектрического вида, могут подразделяться еще на два подтипа, а именно электродвигатели постоянного тока и двигатели переменного тока.
Первый вид двигателей осуществляет свою работу от постоянного тока, эти типы электродвигателей используются тогда, когда возникает необходимость регулировки скоростей. Данные регулировки осуществляются посредством изменений напряжения в якоре. Однако сейчас существует большой выбор всевозможных преобразователей частот, поэтому такие двигатели стали применяться все реже и реже.
Данные регулировки осуществляются посредством изменений напряжения в якоре. Однако сейчас существует большой выбор всевозможных преобразователей частот, поэтому такие двигатели стали применяться все реже и реже.
Двигатели переменного тока соответственно работают посредством действия тока переменного типа. Здесь так же имеется своя классификация, и двигатели делятся на синхронные и асинхронные. Их основным различием становится разница во вращении необходимых элементов, в синхронном движущая гармоника магнитов движется с той же скоростью, что и ротор. В асинхронных двигателях наоборот, ток возникает за счет разницы в скоростях движения магнитных элементов и ротора.
Благодаря своим уникальным характеристикам и принципам действия электродвигатели на сегодняшний день распространенны гораздо больше, чем скажем двигатели внутреннего сгорания, поскольку они обладают рядом преимуществ перед ними. Так коэффициент полезного действия электродвигателей является очень высоким, и может достигать почти 98%. Так же электродвигатели отличаются высоким качеством и очень долгим рабочим ресурсом, они не издают много шума, и во время работы практически не вибрируют. Большим преимуществом такого типа двигателей является то, что они не нуждаются в топливе, и как результат не выделяют в атмосферу никаких загрязняющих веществ. К тому их использование является намного более экономичным, по сравнению с двигателями внутреннего сгорания.
Так же электродвигатели отличаются высоким качеством и очень долгим рабочим ресурсом, они не издают много шума, и во время работы практически не вибрируют. Большим преимуществом такого типа двигателей является то, что они не нуждаются в топливе, и как результат не выделяют в атмосферу никаких загрязняющих веществ. К тому их использование является намного более экономичным, по сравнению с двигателями внутреннего сгорания.
Появление электродвигателей переменного тока — Control Engineering Russia
АЛЕКСАНДР МИКЕРОВ, д. т. н., проф. каф. систем автоматического управления СПбГЭТУ «ЛЭТИ»
В предыдущих статьях [1, 2] описывались первые электрические двигатели с питанием от гальванических батарей. Однако во второй половине XIX века в связи с развитием электрического освещения и дальней передачи электроэнергии появились сети однофазного переменного тока [3]. Это и дало толчок к изобретению электродвигателей переменного тока.
Рис. 1. Двигатель Уитстона
Первый однофазный двигатель был предложен в 1841 г. английским физиком Чарльзом Уитстоном (Charles Wheatstone), известным также своими изобретениями в области электрогенераторов и измерительной техники. Такой двигатель подключается к источнику переменного тока и содержит (рис. 1) статор с шестью электромагнитами (1) и ротор (2) в виде медного диска с тремя подковообразными магнитами (3) полярностью N и S.
английским физиком Чарльзом Уитстоном (Charles Wheatstone), известным также своими изобретениями в области электрогенераторов и измерительной техники. Такой двигатель подключается к источнику переменного тока и содержит (рис. 1) статор с шестью электромагнитами (1) и ротор (2) в виде медного диска с тремя подковообразными магнитами (3) полярностью N и S.
Все электромагниты включены последовательно так, что при любой полярности питающего напряжения в промежутках между ними формируются магнитные потоки или полюса чередующейся полярности n и s, показанные на рис. 1 в начальный момент времени t1 для положительного полупериода питающего напряжения. Предположим, что ротор вращается против часовой стрелки, и рассмотрим силы, действующие на верхний магнит ротора (аналогично работают и остальные магниты). Поскольку разноименные полюса магнитов притягиваются, а одноименные отталкиваются, вращающий момент ротора будет направлен против часовой стрелки, поддерживая его вращение. Если ротор двигателя успеет за полупериод напряжения повернуться на 60°, то в следующий полупериод все полюса статора поменяют полярность и ротор повернется еще на 60°. Таким образом, ротор будет поворачиваться синхронно с частотой перемагничивания электромагнитов (частотой сети), отчего подобные двигатели по предложению Чарльза Штейнмеца и получили название синхронных.
Если ротор двигателя успеет за полупериод напряжения повернуться на 60°, то в следующий полупериод все полюса статора поменяют полярность и ротор повернется еще на 60°. Таким образом, ротор будет поворачиваться синхронно с частотой перемагничивания электромагнитов (частотой сети), отчего подобные двигатели по предложению Чарльза Штейнмеца и получили название синхронных.
Рис. 2. Векторная диаграмма двигателя
Магнитное поле статора такого двигателя можно изобразить в виде вектора (рис. 2), где Ф1, Ф2,… Ф6 — магнитные потоки статора, взаимодействующие с ротором в последовательные моменты времени t1, t2, … t6, когда питающее напряжение меняет свой знак. Получается, что вектор магнитного потока статора шагает по окружности синхронно с ротором, поэтому такое магнитное поле можно назвать шагающим.
При реальных частотах сети 50–60 Гц такой двигатель, конечно, запуститься не сможет, но если его ротор раскрутить, например, вручную или другим двигателем до синхронной скорости, то он будет устойчиво работать с частотой вращения, пропорциональной частоте сети. При электрификации Лондона посредством однофазного напряжения в 1889 г. в качестве такого «раскруточного» двигателя применили так называемый универсальный двигатель (рис. 3) с обмотками якоря (1) и возбуждения (2). Его конструкция была разработана в 1884–85 гг. независимо друг от друга Вернером Сименсом и соавторами трансформатора, венгерскими инженерами Микша Дери и Отто Блати [4–6].
При электрификации Лондона посредством однофазного напряжения в 1889 г. в качестве такого «раскруточного» двигателя применили так называемый универсальный двигатель (рис. 3) с обмотками якоря (1) и возбуждения (2). Его конструкция была разработана в 1884–85 гг. независимо друг от друга Вернером Сименсом и соавторами трансформатора, венгерскими инженерами Микша Дери и Отто Блати [4–6].
Рис. 3. Универсальный двигатель
Универсальные двигатели до сих пор широко применяются при мощности до нескольких киловатт, особенно в бытовой технике. Они привлекают производителей легкостью изменения скорости с помощью регулирования напряжения, как в обычном двигателе постоянного тока. Однако для мощных приводов такое регулирование было в то время затруднительным. Поэтому для электрической тяги на железных дорогах и в лифтах с питанием от сети переменного тока стали применять так называемый репульсионный двигатель, изобретенный в 1885 г. знаменитым американским электротехником Илайю Томсоном (Elihu Thomson) и усовершенствованный позднее Микша Дери [3, 5, 6].
Рис. 4. Репульсионный двигатель
Илайю Томсон (1853–1937), родом из Англии, соединял в себе таланты блестящего университетского профессора, крупного инженера, плодовитого изобретателя (696 патентов) и успешного предпринимателя [7]. Он разработал различные системы электрического освещения, высокочастотные генератор и трансформатор, самопишущий ваттметр, один из способов электросварки, а также, например, улучшил рентгеновские трубки. Томсон основал электротехнические компании в Англии, Франции и США. В 1892 г. его компания Thomson–Houston слилась с компанией Эдисона, образовав крупнейшую электротехническую компанию мира — General Electric.
По конструкции репульсионный двигатель, схема которого показана на рис. 4, похож на универсальный двигатель с якорем (1) и возбуждением в виде электромагнита (2). Отличие состоит в том, что щетки двигателя (3) закорочены и могут вручную поворачиваться [8]. При питании переменным напряжением в закороченной обмотке якоря наводится ЭДС и идет ток, направление которого, в соответствии с законом Ленца, таково, что создаваемый им поток противодействует магнитному потоку статора.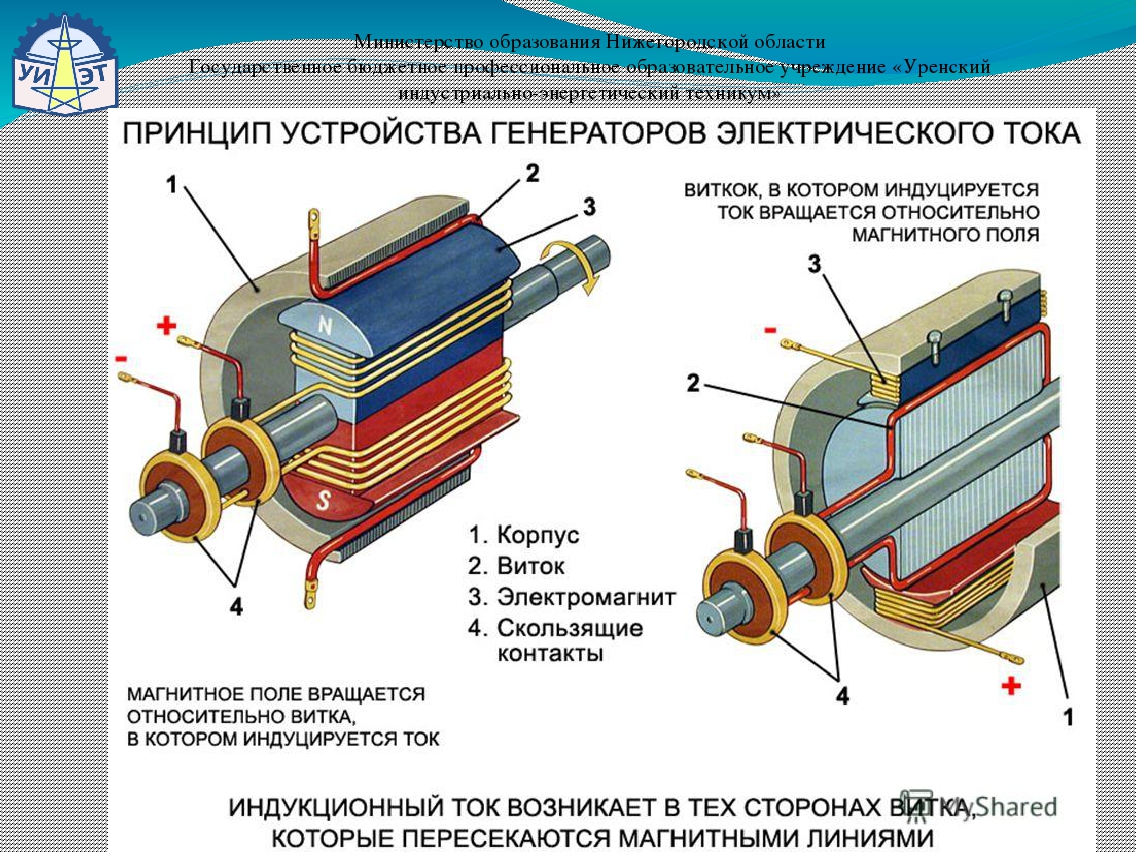
Тогда, если в некоторый полупериод питающего напряжения электромагнит (2) имеет полюс N внизу, то якорь (1) — такой же полюс наверху, как показано на рис. 4, что приведет к их взаимному отталкиванию и вращению ротора по часовой стрелке. Это и объясняет название двигателя, которое в дословном переводе означает «отталкивающийся». При этом величина наводимой ЭДС, а значит, и вращающего момента определяются положением щеток. Когда они горизонтальны, ЭДС и момент максимальны (режим пуска). Далее при повороте щеток против часовой стрелки момент будет падать, а скорость нарастать. Таким образом, пуск и скорость репульсионного двигателя легко регулируются разворотом щеток без изменения напряжения питания.
Тем не менее проблемы всех коллекторных двигателей, связанные с искрением, помехами и быстрым износом, были решены лишь после создания асинхронного двигателя. По своему устройству он гораздо проще любого двигателя постоянного тока, поэтому удивительно, что он был изобретен почти на полстолетия позже, несмотря на то, что, как отмечал Илайю Томсон: «Трудно составить такую комбинацию из магнитов переменного тока и кусков меди, которая не имела бы тенденции к вращению» [5].
Рис. 5. Галилео Феррарис (1847–1897)
Асинхронный двигатель базируется на концепции вращающегося магнитного поля, выдвинутой практически одновременно в середине 1880-х гг. двумя выдающимися учеными — Николой Теслой [3] и итальянским профессором физики Галилео Феррарисом (Galileo Ferraris) (рис. 5). Последний родился на севере Италии в семье фармацевта и после окончания Туринского университета стал профессором Музея индустрии, где изучал трансформаторы, многофазные цепи, линии передачи переменного тока, а также оптические приборы. Он прожил короткую жизнь, но успел заслужить в Европе звание «отца трехфазного тока» [5, 9, 10].
Если вернуться к концепции, то во вращающемся магнитном поле вектор магнитного потока статора постоянен по величине, но, в отличие от шагающего поля (рис. 2), непрерывно (равномерно) вращается с синхронной скоростью. Тогда очевидно, что ротор в виде магнита, помещенный внутри такого поля, будет вовлекаться им в синхронное вращение, что и происходит в рассмотренном выше двигателе Уитстона. Однако выяснилось, что аналогично будет вращаться и немагнитный ротор из любого проводящего металла. Еще в 1824 г. известный французский физик академик Доминик Араго (Dominique Arago) продемонстрировал опыт, названный им «магнетизмом вращения» [5] и показанный на рис. 6.
Однако выяснилось, что аналогично будет вращаться и немагнитный ротор из любого проводящего металла. Еще в 1824 г. известный французский физик академик Доминик Араго (Dominique Arago) продемонстрировал опыт, названный им «магнетизмом вращения» [5] и показанный на рис. 6.
Рис. 6. Опыт Араго
Диск (1) из меди или стали на стеклянной пластине (2) вращался в том же направлении, что и вращающийся магнит (3). Объяснение этому загадочному явлению нашел Майкл Фарадей в 1831 г. после открытия закона электромагнитной индукции (закона Фарадея). Согласно ему, вращающееся магнитное поле магнита индуцирует в диске вихревые токи, создающие собственное магнитное поле, взаимодействующее с вращающимся.
Рис. 7. Опыт Бейли
Этот принцип и лежит в основе современных асинхронных двигателей (в английской литературе — индукционных), имеющих металлический ротор и отличающихся только тем, что в них вращающееся магнитное поле образуется неподвижной обмоткой статора.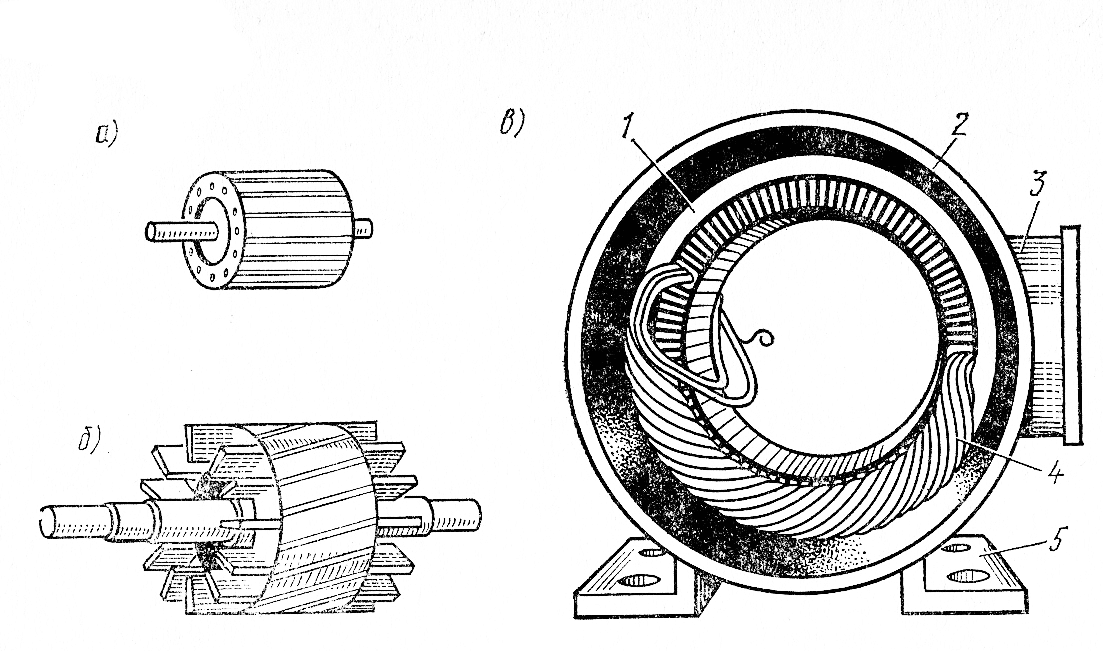 Первый шаг к созданию такого двигателя был сделан английским физиком Уолтером Бейли (Walter Bailey) в 1879 г., заменившим в опыте Араго вращающийся магнит на четыре электромагнита (2–5), токи в которых переключались последовательно вручную (рис. 7) [5, 10]. Но такое устройство создавало шагающее через 90o магнитное поле. А как получить непрерывно (равномерно) вращающееся магнитное поле?
Первый шаг к созданию такого двигателя был сделан английским физиком Уолтером Бейли (Walter Bailey) в 1879 г., заменившим в опыте Араго вращающийся магнит на четыре электромагнита (2–5), токи в которых переключались последовательно вручную (рис. 7) [5, 10]. Но такое устройство создавало шагающее через 90o магнитное поле. А как получить непрерывно (равномерно) вращающееся магнитное поле?
На этот вопрос ответил вышеупомянутый Феррарис в 1888 г. в докладе Туринской академии наук, математически сформулировав два условия [5, 10]:
- Обмотка двигателя должна содержать две независимые части (называемые теперь фазами), магнитные потоки которых геометрически взаимно перпендикулярны.
- Фазы должны быть запитаны двумя гармоническими напряжениями, сдвинутыми на четверть периода (синус и косинус).
Позднее Михаил Осипович Доливо-Добровольский предложил называть такую систему токов Drehstrom, что в дословном переводе с немецкого означает «вращательный ток» [6].
Рис. 8. Двухфазный двигатель Феррариса
Свою теорию Феррарис блестяще подтвердил макетом двигателя мощностью 3 Вт (рис. 8), имеющего ротор (1) в виде полого медного стаканчика и статор (2) с фазами A и B. Фазы разделены на две секции с разным числом витков, намотанных проводом разного диаметра так, чтобы создавать индуктивный сдвиг фаз токов в 90° при питании от однофазной сети.
В 1890 г. французские инженеры Морис Хитин (Maurice Hutin) и Морис Леблан (Maurice Leblanc) предложили использовать для сдвига фаз токов конденсатор [6]. В таком виде двухфазный двигатель дожил до наших дней под названием конденсаторного двигателя. При этом габариты конденсатора соизмеримы с размерами самого двигателя, поэтому данное техническое решение пригодно только для маломощных двигателей.
Сам Феррарис также заявлял, что «…аппарат, основанный на исследованном нами принципе, не может иметь никакого промышленного значения как двигатель» [10]. Поэтому он его не запатентовал (как, впрочем, и остальные свои открытия) и отклонил, в отличие от Теслы, предложение Вестингауза о сотрудничестве. Тем не менее его работы дали впоследствии повод оспаривать патенты Теслы в некоторых из 25 судебных процессов компании Вестингауза [5, 9]. Пессимистический вывод о перспективах своего двигателя Феррарис сделал, оценив величину его КПД в точке максимума мощности на валу — ниже 50%. Однако в данной точке это справедливо и для двигателей постоянного тока. Поэтому в дальнейшем рабочие точки стали выбирать ближе к скорости холостого хода, где в идеале КПД любого электродвигателя стремится к 100%.
Тем не менее его работы дали впоследствии повод оспаривать патенты Теслы в некоторых из 25 судебных процессов компании Вестингауза [5, 9]. Пессимистический вывод о перспективах своего двигателя Феррарис сделал, оценив величину его КПД в точке максимума мощности на валу — ниже 50%. Однако в данной точке это справедливо и для двигателей постоянного тока. Поэтому в дальнейшем рабочие точки стали выбирать ближе к скорости холостого хода, где в идеале КПД любого электродвигателя стремится к 100%.
Рис. 9. Двигатель Теслы
Совершенно по другому пути пошел Тесла, предложив в 1887 г. многофазные системы, где сдвинутые напряжения питания фаз вырабатывались питающим генератором, как показано, например, на рис. 9, где: 1 — генератор, 2 — двухфазный двигатель, 3 — контактные кольца генератора, 4 — обмотка ротора (кольца двигателя не показаны) [5, 10].
При положении переключателя ON ротор запитывается постоянным напряжением, и это двухфазный синхронный двигатель с электромагнитным возбуждением. В положении OFF обмотка ротора закорачивается, и получается асинхронный двигатель, названный Теслой индукционным. Эксперт патентного ведомства поначалу не поверил в работоспособность такого странного двигателя, пока Тесла не продемонстрировал ему действующий макет (рис. 10).
В положении OFF обмотка ротора закорачивается, и получается асинхронный двигатель, названный Теслой индукционным. Эксперт патентного ведомства поначалу не поверил в работоспособность такого странного двигателя, пока Тесла не продемонстрировал ему действующий макет (рис. 10).
Рис. 10. Макет двигателя Теслы
Двигатели Теслы и Феррариса легко запускались от питающей сети, однако с увеличением нагрузки их скорость падала, что подтверждается принципиальным отличием асинхронного двигателя от синхронного. Действительно, асинхронный двигатель развивает вращающий момент лишь при наличии тока, а следовательно, и ЭДС, индуцируемой в роторе. А, по закону Фарадея, это возможно лишь тогда, когда ротор пересекает силовые линии поля статора, т. е. когда скорости их вращения не одинаковы (не синхронны).
Как описано в статье [3], Тесла вместе с Вестингаузом начали активно внедрять асинхронные двигатели в жизнь, однако они были доведены до совершенства и приняли современный вид лишь благодаря трудам нашего соотечественника Михаила Осиповича Доливо-Добровольского, которые будут рассмотрены в следующих статьях.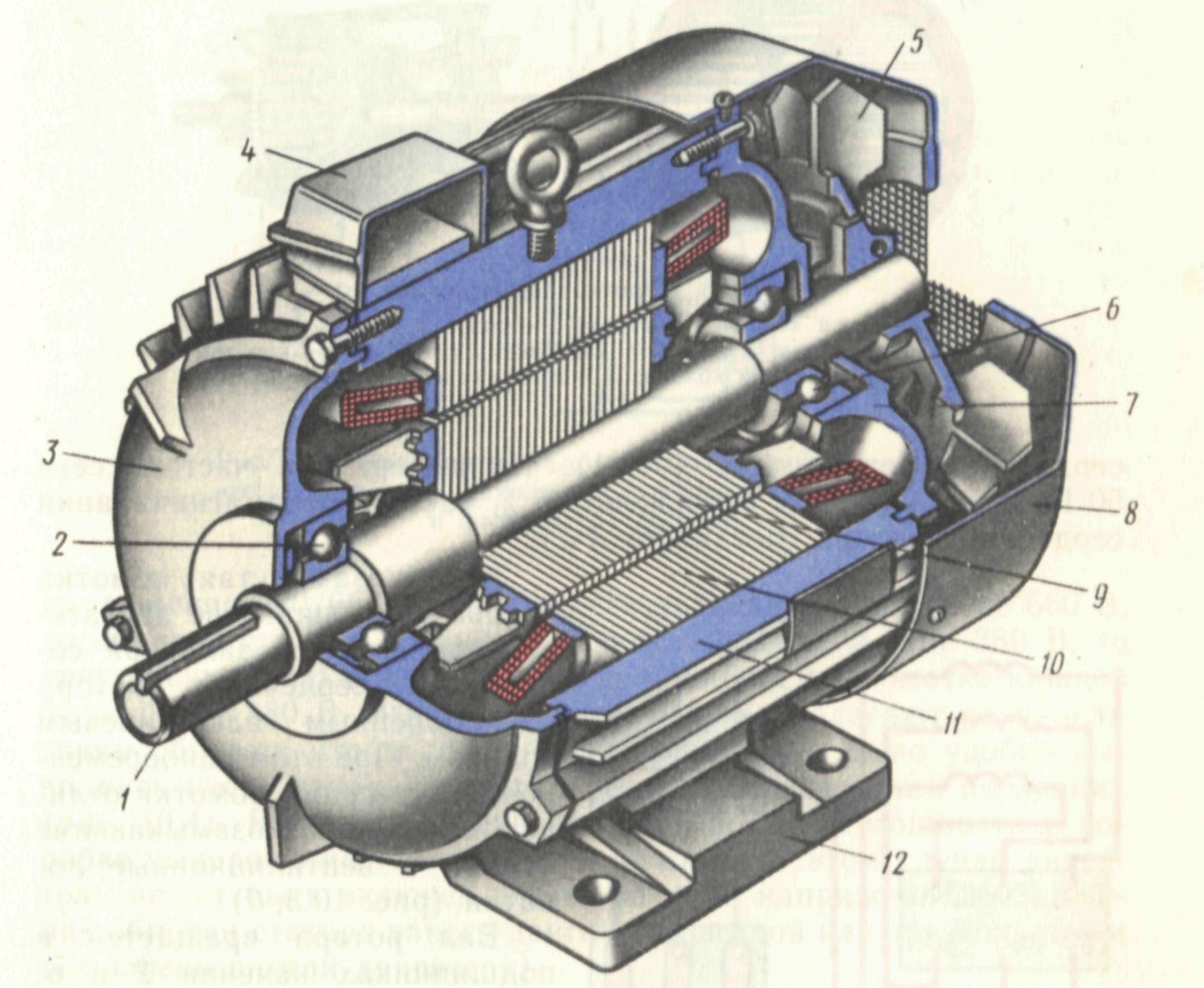
Что касается многофазных синхронных двигателей, то они нашли широкое применение там, где требуется стабильная скорость вращения, например в компрессорах, приводах генераторов и т. д. Синхронные двигатели с постоянными магнитами входят в состав современных вентильных двигателей, создающих все большую конкуренцию пока еще наиболее распространенным электродвигателям постоянного тока.
Потребность в двигателях переменного тока возникла при внедрении однофазных осветительных сетей. Первым стал синхронный двигатель Уитстона с постоянными магнитами (1841 г.).
Однако такие двигатели не имели пускового момента, поэтому на практике применялись универсальные двигатели Сименса и репульсионные двигатели Томсона (1884-5 гг).
Достаточно мощные двигатели для промышленности были созданы только в середине 1880-х гг., после того как концепция вращающегося магнитного поля была математически сформулирована Феррарисом и реализована в многофазных синхронных и асинхронных двигателях Теслы, запущенных в производство на заводах Вестингауза.

Вконтакте
Google+
Электродвигатель — Electric motor — qaz.wiki
Машина приводится в действие электричеством, которое преобразует электрическую энергию в механическую энергию (вращение)
Анимация, показывающая работу щеточного электродвигателя постоянного тока. Электродвигатель является электрической машиной , которая преобразует электрическую энергию в механическую энергию . Большинство электродвигателей работают за счет взаимодействия между магнитным полем двигателя и электрическим током в обмотке провода для создания силы в виде крутящего момента, приложенного к валу двигателя. Электродвигатели могут питаться от источников постоянного тока (DC), таких как батареи, автомобили или выпрямители, или от источников переменного тока (AC), таких как электросеть, инверторы или электрические генераторы. Электрический генератор механически идентичен электрический двигатель, но работает с обратным потоком мощности, преобразование механической энергии в электрическую энергию.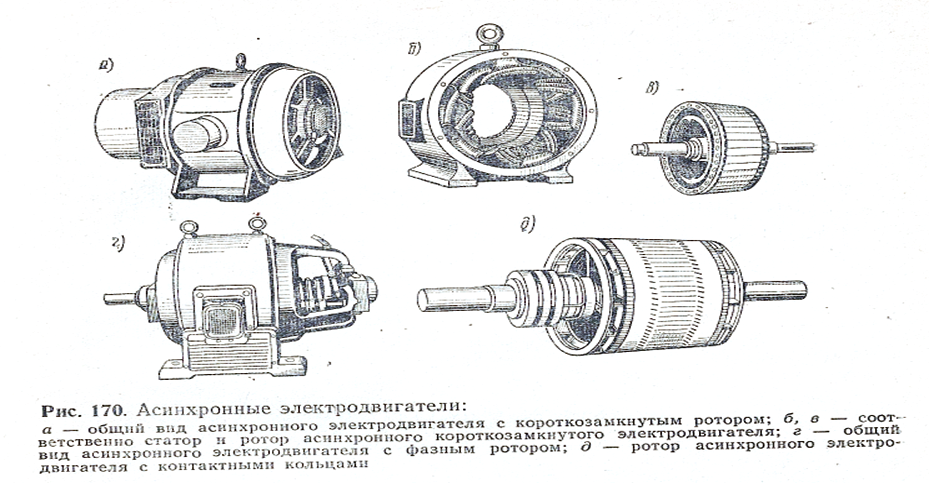
Электродвигатели можно классифицировать по таким критериям, как тип источника питания, внутренняя конструкция, применение и тип выходного движения. В дополнение к типам переменного и постоянного тока двигатели могут быть щеточными или бесщеточными , могут иметь различную фазу (см. Однофазные , двухфазные или трехфазные ) и могут иметь воздушное или жидкостное охлаждение. Двигатели общего назначения стандартных размеров и характеристик обеспечивают удобную механическую мощность для промышленного использования. Самые большие электродвигатели используются для движения судов, сжатия трубопроводов и гидроаккумулирующих устройств с номинальной мощностью до 100 мегаватт. Электродвигатели используются в промышленных вентиляторах, нагнетателях и насосах, станках, бытовых приборах, электроинструментах и дисководах. Маленькие моторы можно найти в электрических часах.
В некоторых приложениях, например, при рекуперативном торможении с помощью тяговых двигателей , электродвигатели могут использоваться в обратном направлении в качестве генераторов для восстановления энергии, которая в противном случае могла бы быть потеряна в виде тепла и трения.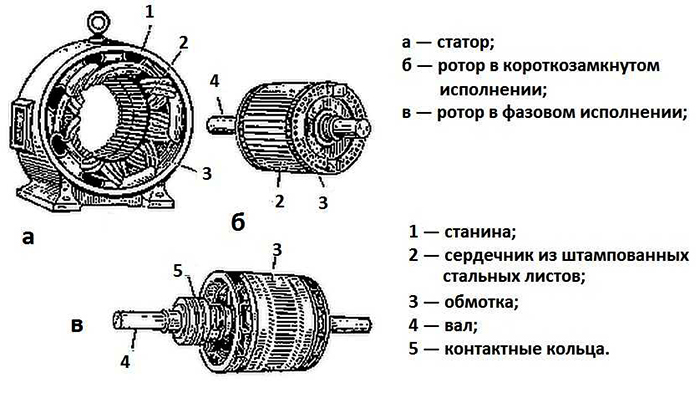
Электродвигатели создают линейную или вращательную силу ( крутящий момент ), предназначенную для приведения в движение какого-либо внешнего механизма, такого как вентилятор или лифт. Электродвигатель обычно предназначен для непрерывного вращения или для линейного перемещения на значительное расстояние по сравнению с его размером. Магнитные соленоиды создают значительную механическую силу, но на рабочем расстоянии, сопоставимом с их размером. Преобразователи, такие как громкоговорители и микрофоны, преобразуют электрический ток и механическую силу для воспроизведения таких сигналов, как речь. По сравнению с обычными двигателями внутреннего сгорания (ДВС) электродвигатели легче, физически меньше, обеспечивают большую выходную мощность, механически проще и дешевле в сборке, обеспечивая при этом мгновенный и постоянный крутящий момент на любой скорости, с большей отзывчивостью, более высокой общей эффективностью и меньшее тепловыделение. Однако электродвигатели не так удобны или распространены, как ДВС в мобильных приложениях (например, в автомобилях и автобусах), поскольку для них требуется большая и дорогая батарея, в то время как ДВС требуют относительно небольшого топливного бака.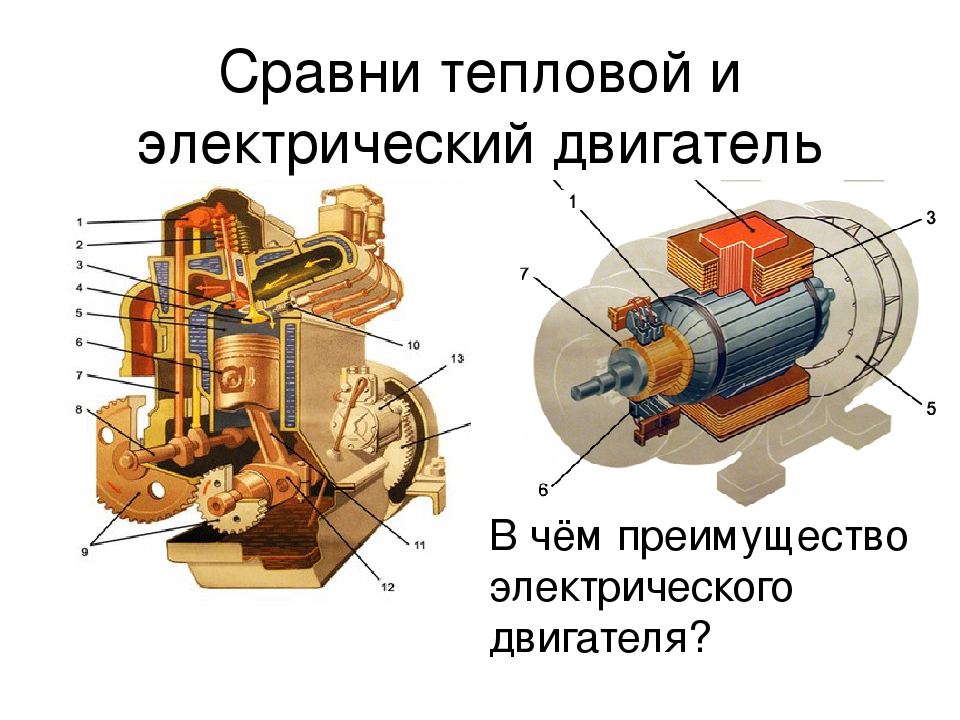
История
Ранние моторы
Электромагнитный эксперимент Фарадея, 1821 г. Первые электродвигатели были простыми электростатическими устройствами, описанными в экспериментах шотландского монаха Эндрю Гордона и американского экспериментатора Бенджамина Франклина в 1740-х годах. Теоретический принцип, лежащий в их основе, закон Кулона , был открыт, но не опубликован Генри Кавендишем в 1771 году. Этот закон был независимо открыт Шарлем-Огюстеном де Кулоном в 1785 году, который опубликовал его, и теперь он известен под его именем. Изобретение электрохимической батареи Алессандро Вольта в 1799 году сделало возможным производство постоянных электрических токов. После открытия взаимодействия такого тока и магнитного поля, а именно электромагнитное взаимодействия по Эрстедам в 1820 году значительного прогресса в ближайшее время было сделано. Андре-Мари Амперу потребовалось всего несколько недель, чтобы разработать первую формулировку электромагнитного взаимодействия и представить силовой закон Ампера , описывающий возникновение механической силы при взаимодействии электрического тока и магнитного поля. Первую демонстрацию эффекта с вращательным движением дал Майкл Фарадей в 1821 году. Свободно висящий провод был погружен в бассейн с ртутью, на который был помещен постоянный магнит (ПМ) . Когда через провод пропускался ток, он вращался вокруг магнита, показывая, что ток вызывает близкое круговое магнитное поле вокруг провода. Этот двигатель часто демонстрируется в физических экспериментах, заменяя (токсичную) ртуть рассолом . Колесо Барлоу было ранним усовершенствованием этой демонстрации Фарадея, хотя эти и подобные униполярные двигатели оставались непригодными для практического применения до конца века.
Первую демонстрацию эффекта с вращательным движением дал Майкл Фарадей в 1821 году. Свободно висящий провод был погружен в бассейн с ртутью, на который был помещен постоянный магнит (ПМ) . Когда через провод пропускался ток, он вращался вокруг магнита, показывая, что ток вызывает близкое круговое магнитное поле вокруг провода. Этот двигатель часто демонстрируется в физических экспериментах, заменяя (токсичную) ртуть рассолом . Колесо Барлоу было ранним усовершенствованием этой демонстрации Фарадея, хотя эти и подобные униполярные двигатели оставались непригодными для практического применения до конца века.
В 1827 году венгерский физик Аньош Едлик начал эксперименты с электромагнитными катушками . После того, как Джедлик решил технические проблемы непрерывного вращения с изобретением коммутатора , он назвал свои первые устройства «электромагнитными самовращающимися роторами». Хотя они использовались только для обучения, в 1828 году Джедлик продемонстрировал первое устройство, содержащее три основных компонента практических двигателей постоянного тока: статор , ротор и коммутатор. В устройстве не использовались постоянные магниты, так как магнитные поля как стационарных, так и вращающихся компонентов создавались исключительно токами, протекающими через их обмотки.
Хотя они использовались только для обучения, в 1828 году Джедлик продемонстрировал первое устройство, содержащее три основных компонента практических двигателей постоянного тока: статор , ротор и коммутатор. В устройстве не использовались постоянные магниты, так как магнитные поля как стационарных, так и вращающихся компонентов создавались исключительно токами, протекающими через их обмотки.
Двигатели постоянного тока
Первый коммутаторный электродвигатель постоянного тока, способный вращать механизмы, был изобретен британским ученым Уильямом Стердженом в 1832 году. Следуя работе Стерджена, американский изобретатель Томас Дэвенпорт построил электродвигатель постоянного тока коммутаторного типа , который он запатентовал в 1837 году. со скоростью до 600 оборотов в минуту, а также механизированные станки и печатный станок. Из-за высокой стоимости энергии первичной батареи двигатели не имели коммерческого успеха и обанкротили Davenport. Несколько изобретателей последовали за Sturgeon в разработке двигателей постоянного тока, но все столкнулись с одними и теми же проблемами стоимости батарей. Поскольку в то время не было системы распределения электроэнергии, для этих двигателей не существовало практического коммерческого рынка.
Несколько изобретателей последовали за Sturgeon в разработке двигателей постоянного тока, но все столкнулись с одними и теми же проблемами стоимости батарей. Поскольку в то время не было системы распределения электроэнергии, для этих двигателей не существовало практического коммерческого рынка.
После многих других более или менее успешных попыток с относительно слабым вращающимся и возвратно-поступательным устройством прусско-русский Мориц фон Якоби создал в мае 1834 года первый настоящий вращающийся электродвигатель. Он развил замечательную механическую выходную мощность. Его мотор установил мировой рекорд, который Якоби улучшил четыре года спустя, в сентябре 1838 года. Его второй мотор был достаточно мощным, чтобы переправить лодку с 14 людьми через широкую реку. Также в 1839/40 году другим разработчикам удалось создать двигатели с аналогичными, а затем и более высокими характеристиками.
В 1855 году Джедлик построил устройство, основанное на принципах, аналогичных тем, которые использовались в его электромагнитных роторных двигателях, которое было способно выполнять полезную работу.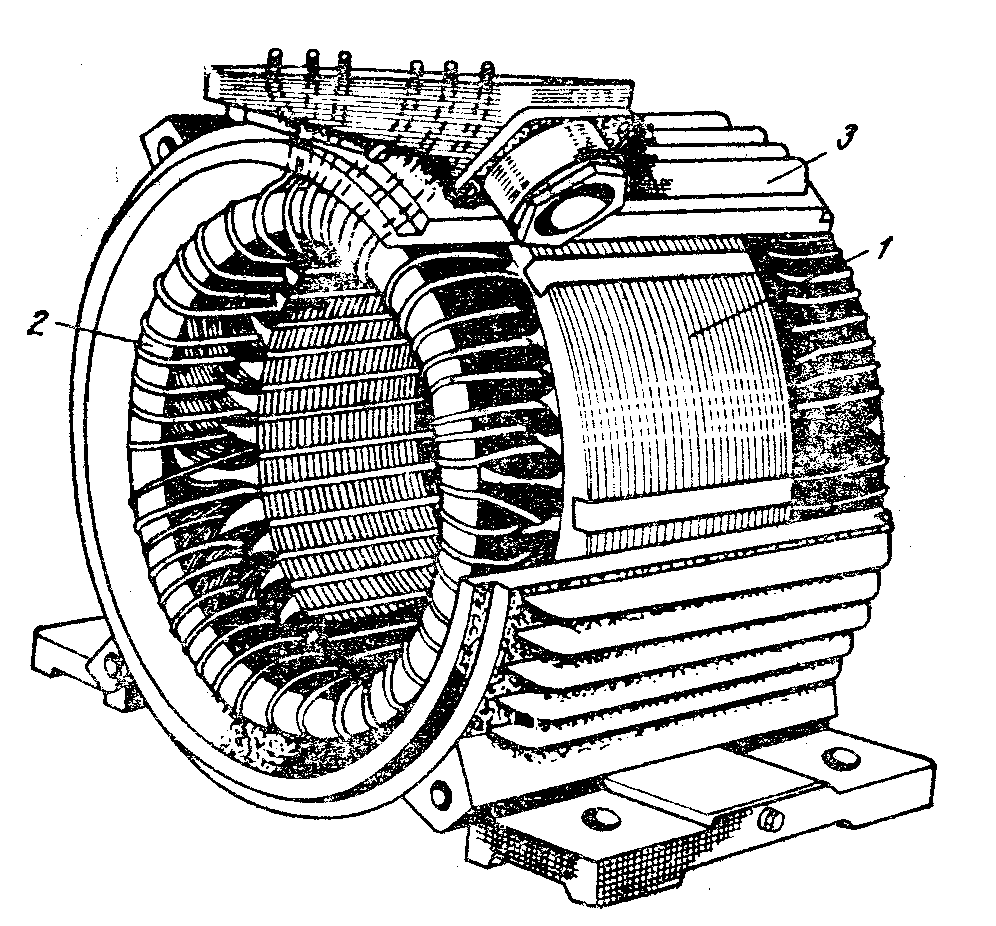 В том же году он построил модель электромобиля .
В том же году он построил модель электромобиля .
Главный поворотный момент наступил в 1864 году, когда Антонио Пачинотти впервые описал кольцевой якорь (хотя изначально он был задуман как генератор постоянного тока, то есть динамо-машина). Он имел симметрично сгруппированные катушки, замкнутые друг на друга и подключенные к шинам коммутатора, щетки которого подавали практически не флуктуирующий ток. Первые коммерчески успешные двигатели постоянного тока последовали за разработками Зеноба Грамма, который в 1871 году заново изобрел конструкцию Пачинотти и принял некоторые решения от Вернера Сименса .
Выгода для машин постоянного тока появилась благодаря открытию обратимости электрической машины, о которой Сименс объявил в 1867 году и которую наблюдал Пачинотти в 1869 году. Грамм случайно продемонстрировал это на Всемирной выставке в Вене 1873 года , когда он соединил два таких Устройства постоянного тока на расстоянии до 2 км друг от друга, используя одно из них как генератор, а другое как двигатель.
Барабанный ротор был представлен Фридрихом фон Хефнер-Альтенеком из Siemens & Halske для замены кольцевой арматуры Пачинотти в 1872 году, что повысило эффективность машины. В следующем году компания Siemens & Halske представила многослойный ротор, благодаря чему удалось снизить потери в стали и повысить наведенные напряжения. В 1880 году Йонас Венстрём снабдил ротор пазами для размещения обмотки, что еще больше повысило эффективность.
В 1886 году Фрэнк Джулиан Спраг изобрел первый практический двигатель постоянного тока, неискрящее устройство, которое поддерживало относительно постоянную скорость при переменных нагрузках. Другие электрические изобретения Sprague примерно в это время значительно улучшили распределение электроэнергии в сети (предыдущая работа была проделана, когда использовалась Томасом Эдисоном ), позволили вернуть энергию от электродвигателей в электрическую сеть, обеспечив ее распределение между тележками через воздушные провода и опору троллейбуса. и предоставил системы управления электрическими операциями. Это позволило Спрэгу использовать электродвигатели для изобретения первой системы электрических тележек в 1887–88 годах в Ричмонде, штат Вирджиния , электрического лифта и системы управления в 1892 году, а также электрического метро с вагонами с независимым приводом и централизованным управлением. Последние были впервые установлены в 1892 году в Чикаго на южной стороне надземной железной дороги , где они стали широко известны как « L ». Двигатель Спрэга и связанные с ним изобретения вызвали взрыв интереса к электродвигателям в промышленности. Разработка электродвигателей приемлемого КПД была отложена на несколько десятилетий из-за непонимания чрезвычайной важности воздушного зазора между ротором и статором. Эффективные конструкции имеют сравнительно небольшой воздушный зазор. Мотор Сент-Луиса, долгое время использовавшийся в классах для иллюстрации принципов работы двигателя, крайне неэффективен по той же причине, а также не похож на современный мотор.
и предоставил системы управления электрическими операциями. Это позволило Спрэгу использовать электродвигатели для изобретения первой системы электрических тележек в 1887–88 годах в Ричмонде, штат Вирджиния , электрического лифта и системы управления в 1892 году, а также электрического метро с вагонами с независимым приводом и централизованным управлением. Последние были впервые установлены в 1892 году в Чикаго на южной стороне надземной железной дороги , где они стали широко известны как « L ». Двигатель Спрэга и связанные с ним изобретения вызвали взрыв интереса к электродвигателям в промышленности. Разработка электродвигателей приемлемого КПД была отложена на несколько десятилетий из-за непонимания чрезвычайной важности воздушного зазора между ротором и статором. Эффективные конструкции имеют сравнительно небольшой воздушный зазор. Мотор Сент-Луиса, долгое время использовавшийся в классах для иллюстрации принципов работы двигателя, крайне неэффективен по той же причине, а также не похож на современный мотор.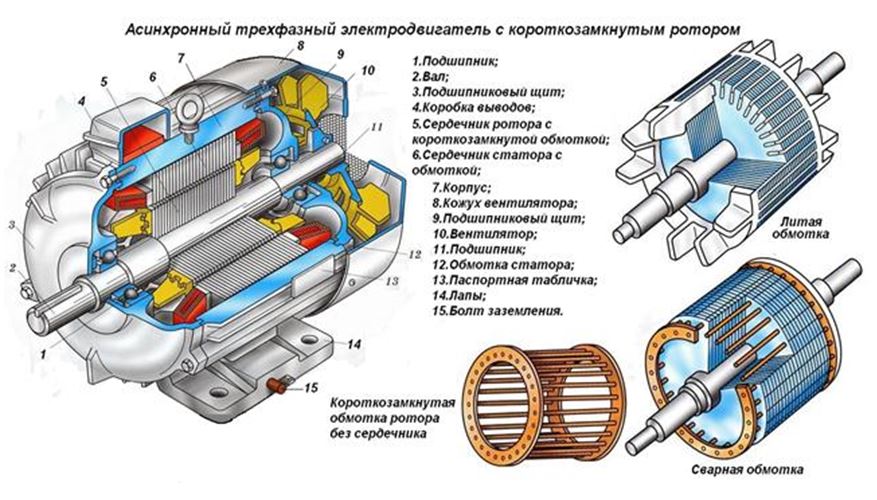
Электродвигатели произвели революцию в отрасли. Промышленные процессы больше не ограничивались передачей энергии с использованием линейных валов, ремней, сжатого воздуха или гидравлического давления. Вместо этого каждая машина может быть оснащена собственным источником питания, обеспечивающим простое управление в месте использования и повышающим эффективность передачи энергии. Электродвигатели, применяемые в сельском хозяйстве, лишили силы мускулов человека и животных из таких задач, как обработка зерна или перекачка воды. Использование электродвигателей в быту (например, в стиральных машинах, посудомоечных машинах, вентиляторах, кондиционерах и холодильниках (замена ледяных ящиков )) сократило объем тяжелого домашнего труда и сделало возможными более высокие стандарты удобства, комфорта и безопасности. Сегодня электродвигатели потребляют более половины электроэнергии, производимой в США.
Двигатели переменного тока
В 1824 году французский физик Франсуа Араго сформулировал существование вращающихся магнитных полей , названных вращениями Араго , которые, вручную включая и выключая переключатели, Вальтер Бейли продемонстрировал в 1879 году как фактически первый примитивный асинхронный двигатель . В 1880-х годах многие изобретатели пытались разработать работоспособные двигатели переменного тока, потому что преимущества переменного тока в передаче высокого напряжения на большие расстояния были компенсированы невозможностью работы двигателей от переменного тока.
В 1880-х годах многие изобретатели пытались разработать работоспособные двигатели переменного тока, потому что преимущества переменного тока в передаче высокого напряжения на большие расстояния были компенсированы невозможностью работы двигателей от переменного тока.
Первый асинхронный двигатель переменного тока без коммутатора был изобретен Галилео Феррарисом в 1885 году. Феррарис смог улучшить свою первую конструкцию, выпустив более совершенные установки в 1886 году. В 1888 году Королевская академия наук Турина опубликовала исследование Феррариса, в котором подробно описывались основы двигателя. операции, при этом заключив в то время, что «устройство, основанное на этом принципе, не может иметь никакого коммерческого значения в качестве двигателя».
Возможное промышленное развитие было предвидено Никола Тесла , который независимо изобрел свой асинхронный двигатель в 1887 году и получил патент в мае 1888 года. В том же году Тесла представил AIEE свою статью «Новая система для двигателей и трансформаторов переменного тока», в которой были описаны три запатентованных Типы двухфазных четырехполюсных двигателей: один с четырехполюсным ротором, образующим несамозапускаемый реактивный двигатель , другой с фазным ротором, образующим самозапускающийся асинхронный двигатель , а третий — истинный синхронный двигатель с отдельным подача возбужденного постоянного тока на обмотку ротора. Однако в одном из патентов, поданных Теслой в 1887 году, также был описан асинхронный двигатель с короткозамкнутым ротором. Джордж Вестингауз , который уже приобрел права у Ferrari (1000 долларов США), быстро купил патенты Tesla (60 000 долларов США плюс 2,50 доллара США за проданную мощность до 1897 года), нанял Tesla для разработки своих двигателей и поручил CF Скотту помогать Tesla; однако в 1889 году Тесла ушел для других занятий. Было обнаружено, что асинхронный двигатель переменного тока с постоянной скоростью не подходит для уличных автомобилей, но инженеры Westinghouse успешно адаптировали его для работы на горнодобывающих предприятиях в Теллуриде, штат Колорадо, в 1891 году. Westinghouse впервые применил индукционный двигатель. в 1892 году и разработал линейку многофазных асинхронных двигателей с частотой 60 Гц в 1893 году, но эти ранние двигатели Westinghouse были двухфазными двигателями с намотанными роторами. Позднее компания BG Lamme разработала ротор с вращающимся стержнем.
Однако в одном из патентов, поданных Теслой в 1887 году, также был описан асинхронный двигатель с короткозамкнутым ротором. Джордж Вестингауз , который уже приобрел права у Ferrari (1000 долларов США), быстро купил патенты Tesla (60 000 долларов США плюс 2,50 доллара США за проданную мощность до 1897 года), нанял Tesla для разработки своих двигателей и поручил CF Скотту помогать Tesla; однако в 1889 году Тесла ушел для других занятий. Было обнаружено, что асинхронный двигатель переменного тока с постоянной скоростью не подходит для уличных автомобилей, но инженеры Westinghouse успешно адаптировали его для работы на горнодобывающих предприятиях в Теллуриде, штат Колорадо, в 1891 году. Westinghouse впервые применил индукционный двигатель. в 1892 году и разработал линейку многофазных асинхронных двигателей с частотой 60 Гц в 1893 году, но эти ранние двигатели Westinghouse были двухфазными двигателями с намотанными роторами. Позднее компания BG Lamme разработала ротор с вращающимся стержнем.
Стойкий в своем продвижении трехфазной разработки, Михаил Доливо-Добровольский в 1889 году изобрел трехфазный асинхронный двигатель обоих типов с клетчатым ротором и ротором с пусковым реостатом, а также трехлепестковый трансформатор в 1890 году. между AEG и Maschinenfabrik Oerlikon Доливо-Добровольски и Чарльз Юджин Ланселот Браун разработали более крупные модели, а именно беличью клетку мощностью 20 л.с. и ротор с фазовой головкой 100 л.с. с пусковым реостатом. Это были первые трехфазные асинхронные двигатели, пригодные для практической эксплуатации. С 1889 года Венстрём начал аналогичные разработки трехфазных машин. На Международной электротехнической выставке во Франкфурте 1891 года была успешно представлена первая трехфазная система для больших расстояний. Он был рассчитан на напряжение 15 кВ и простирался на 175 км от водопада Лауффен на реке Неккар. Электростанция Lauffen включала генератор переменного тока мощностью 240 кВт, 86 В, 40 Гц и повышающий трансформатор, а на выставке понижающий трансформатор питал трехфазный асинхронный двигатель мощностью 100 л.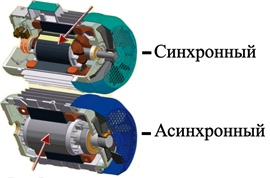 с., который приводил в действие искусственный водопад, что представляет собой передачу оригинала. источник питания. Трехфазная индукция сейчас используется в подавляющем большинстве коммерческих приложений. Михаил Доливо-Добровольский утверждал, что двигатель Теслы был непрактичным из-за двухфазных пульсаций, которые побудили его продолжать свою трехфазную работу.
с., который приводил в действие искусственный водопад, что представляет собой передачу оригинала. источник питания. Трехфазная индукция сейчас используется в подавляющем большинстве коммерческих приложений. Михаил Доливо-Добровольский утверждал, что двигатель Теслы был непрактичным из-за двухфазных пульсаций, которые побудили его продолжать свою трехфазную работу.
Компания General Electric начала разработку трехфазных асинхронных двигателей в 1891 году. К 1896 году General Electric и Westinghouse подписали соглашение о взаимном лицензировании на конструкцию ротора со стержневой обмоткой, позже названного ротором с короткозамкнутым ротором . Усовершенствования асинхронного двигателя, вытекающие из этих изобретений и инноваций, были таковы, что асинхронный двигатель мощностью 100 лошадиных сил в настоящее время имеет те же установочные размеры, что и двигатель мощностью 7,5 лошадиных сил в 1897 году.
Составные части
Ротор электродвигателя (слева) и статор (справа)Ротор
В электродвигателе движущейся частью является ротор, который вращает вал для передачи механической энергии.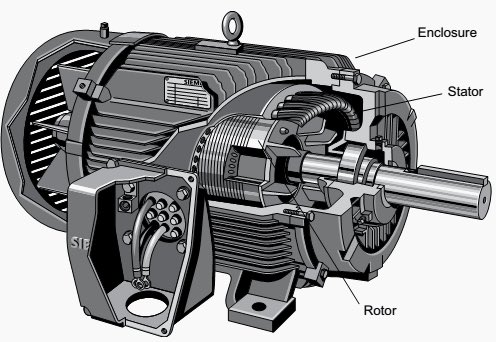 В ротор обычно проложены проводники, по которым проходят токи, которые взаимодействуют с магнитным полем статора, создавая силы, вращающие вал. В качестве альтернативы некоторые роторы несут постоянные магниты, а статор удерживает проводники.
В ротор обычно проложены проводники, по которым проходят токи, которые взаимодействуют с магнитным полем статора, создавая силы, вращающие вал. В качестве альтернативы некоторые роторы несут постоянные магниты, а статор удерживает проводники.
Подшипники
Ротор поддерживается подшипниками , которые позволяют ротору вращаться вокруг своей оси. Подшипники, в свою очередь, поддерживаются корпусом двигателя. Вал двигателя проходит через подшипники за пределы двигателя, где действует нагрузка. Поскольку силы нагрузки действуют за пределы самого внешнего подшипника, говорят, что нагрузка является выступающей .
Статора
Статор — это неподвижная часть электромагнитной цепи двигателя и обычно состоит из обмоток или постоянных магнитов. Сердечник статора состоит из множества тонких металлических листов, называемых пластинами. Ламинирование используется для уменьшения потерь энергии, которые могут возникнуть при использовании твердого сердечника. Двигатели со смолой, используемые в стиральных машинах и кондиционерах, используют демпфирующие свойства смолы (пластика) для снижения шума и вибрации. Эти двигатели полностью покрывают статор пластиком .
Воздушный зазор
Расстояние между ротором и статором называется воздушным зазором. Воздушный зазор имеет важное значение и, как правило, минимально возможный, поскольку большой зазор оказывает сильное отрицательное влияние на производительность. Это основной источник низкого коэффициента мощности, с которым работают двигатели. Ток намагничивания увеличивается с увеличением воздушного зазора. По этой причине воздушный зазор должен быть минимальным. Очень маленькие зазоры могут создавать механические проблемы в дополнение к шуму и потерям.
Явнополюсный роторОбмотки
Обмотки — это провода, уложенные в катушки , обычно намотанные вокруг многослойного магнитного сердечника из мягкого железа, чтобы образовывать магнитные полюса при подаче тока.
Электромашины бывают двух основных конфигураций полюсов магнитного поля: явнополюсных и несимметричных . В явнополюсной машине магнитное поле полюса создается обмоткой, намотанной вокруг полюса под лицевой стороной полюса. В машине с несоциальными полюсами , с распределенным полем или с круглым ротором обмотка распределена в пазах на торцах полюсов . Затененной-полюсный двигатель имеет обмотку вокруг части полюса , что задержки фазы магнитного поля для этого полюса.
У некоторых двигателей есть проводники, которые состоят из более толстого металла, такого как стержни или листы металла, обычно меди , или алюминия . Обычно они питаются от электромагнитной индукции .
Коммутатор
Маленький двигатель постоянного тока игрушки с его коммутаторомКоммутатор представляет собой механизм , используемый для переключения на вход большинства машин постоянного тока и переменного тока некоторых машин. Он состоит из сегментов контактных колец, изолированных друг от друга и от вала. Ток якоря двигателя подается через неподвижные щетки, находящиеся в контакте с вращающимся коммутатором, что вызывает требуемое изменение направления тока и подает мощность на машину оптимальным образом, когда ротор вращается от полюса к полюсу. В отсутствие такого реверсирования тока двигатель остановился бы. В свете усовершенствованных технологий в области электронного контроллера, бессенсорного управления, асинхронного двигателя и двигателя с постоянными магнитами, индукционные двигатели с внешней коммутацией и двигатели с постоянными магнитами вытесняют двигатели с электромеханической коммутацией.
Электропитание и управление двигателем
Питание двигателя
Электродвигатель постоянного тока обычно получает питание через контактный коллектор, как описано выше. Коммутация двигателей переменного тока может быть достигнута с использованием контактного кольца или внешней коммутации, может быть с фиксированной или регулируемой скоростью, а также может быть синхронной или асинхронной. Универсальные двигатели могут работать как от переменного, так и от постоянного тока.
Блок управления двигателем
Двигатели постоянного тока могут работать с переменной скоростью, регулируя напряжение постоянного тока, подаваемое на клеммы, или используя широтно-импульсную модуляцию (ШИМ).
Электродвигатели переменного тока, работающие с фиксированной скоростью, обычно получают питание непосредственно от сети или через устройства плавного пуска двигателя .
Электродвигатели переменного тока, работающие с регулируемой скоростью, питаются от различных
PPT — Теория мостов на практике Презентация PowerPoint, скачать бесплатно
Теория мостов на практике Перенос технических знаний в практические приложения
Введение в управление двигателем
Введение в управление двигателем
Введение в управление двигателем Целевая аудитория: • Лица, заинтересованные в изучении электродвигателей и способов их управления • Предполагается простое понимание магнетизма. Темы: • Что такое электродвигатель? • Какие бывают распространенные типы электродвигателей? • Как работают эти электродвигатели? • Как эти двигатели управляются.Ожидаемое время: • Примерно 90 минут
Повестка дня Введение в электромагниты и электродвигатели Что такое управление двигателем? Какие бывают распространенные типы двигателей? Двигатели постоянного тока с постоянными магнитами Шаговые двигатели Бесщеточные двигатели постоянного тока Краткое описание двигателей и цепей управления двигателями
Программа • Введение в электромагниты и электродвигатели • Что такое управление двигателем? • Какие бывают распространенные типы двигателей? • Двигатели постоянного тока с постоянным магнитом • Шаговые двигатели • Бесщеточные двигатели постоянного тока • Обзор двигателей и цепей управления двигателями
Что такое постоянный магнит? Кусок железа или стали, создающий магнитное поле. Встречается в природе как магниты из магнетита (Fe3O4). Магнитное поле заставляет постоянный магнит притягивать железо и некоторые другие материалы. Два конца постоянного магнита обычно обозначают северный и южный. и подобные концы магнита отталкиваются
Что такое электромагнит? Электромагниты ведут себя как постоянные магниты … … но их магнитное поле не является постоянным Магнитное поле временно индуцируется электрическим током
Как сделать электромагнит? Начните с железного стержня
Как сделать электромагнит? Начните с железного стержня Оберните проволоку вокруг железного стержня
Как сделать электромагнит? Старт с железным стержнем Оберните проволоку вокруг железного стержня. Подключение батареи вызывает прохождение тока в проводе — + Ток
Как сделать электромагнит? Старт с железным стержнем Оберните проволоку вокруг железного стержня. Подключение батареи вызывает прохождение тока в проводе. Ток индуцирует магнитное поле, создающее электромагнит — + ЮЖНО-СЕВЕРНЫЙ ток
Как сделать электромагнит? Изменение направления тока на противоположное, изменение полярности — + СЕВЕР-ЮЖНЫЙ ток
— + Ток Как сделать электромагнит? • Изменение направления тока на противоположное, меняет полярность • Если ток прекращается, индуцированное магнитное поле спадает до 0 СЕВЕР-ЮГ
Электромагниты и электрические двигатели Мы можем использовать электромагниты в электродвигателях для преобразования электрической энергии в механическую работу… Электрические Мотор • Электродвигатели используются для выполнения механических задач с использованием электричества • Откройте люк на крыше • Поднимите силовую антенну • Управляйте стеклоочистителями Electric Energy + — 12 В
Что такое электродвигатель? Электродвигатель состоит из двух основных частей: Стационарная часть называется статором.Вращающаяся часть электродвигателя называется ротором. СТАТОР РОТОРА
РОТОР Что такое электродвигатель? • Электрическая энергия создает вращающееся магнитное поле внутри двигателя, заставляя ротор вращаться, создавая механическое движение STATOR
Где используются электродвигатели? Электродвигатели используются во многих различных автомобильных приложениях: Люк на крыше Тормоза Усилитель руля Топливный насос Водяной насос Гибридные и электрические транспортные средства Круиз-контроль Управление дроссельной заслонкой Вентиляционные отверстия Прочее Электростеклоподъемники Электрические сиденья Электрические зеркала Вентиляторы Стеклоочистители Насосы омывателя ветрового стекла Стартер Электроантенна Дверные замки Информационные приборы
Повестка дня • Введение в электромагниты и электродвигатели • Что такое управление двигателем? • Какие бывают распространенные типы двигателей? • Двигатели постоянного тока с постоянными магнитами • Шаговые двигатели • Бесщеточные двигатели постоянного тока • Обзор двигателей и цепей управления двигателями
Что такое управление двигателем? • Контролируемое приложение электрической энергии к двигателю для достижения желаемой механической реакции • Пуск / останов • Скорость • Крутящий момент • Положение • Для управления работой некоторых электродвигателей может потребоваться значительное количество электроники
Управление Electromagnetics Большая часть физической конструкции электродвигателя и его системы управления связана с переключением электромагнитного поля. Существует механическая сила, которая действует на токоведущий провод в магнитном поле. Механическая сила перпендикулярна проводу и магнитное поле Относительные магнитные поля между ротором и статором расположены так, что создается крутящий момент, заставляющий ротор вращаться вокруг своей оси
Agenda • Введение в электромагниты и электродвигатели • Что такое управление двигателем? • Какие бывают распространенные типы двигателей? • Двигатели постоянного тока с постоянными магнитами • Шаговые двигатели • Бесщеточные двигатели постоянного тока • Сводка двигателей и цепей управления двигателями
Типы электродвигателей • Существует множество различных типов и классификаций электродвигателей: Двигатель постоянного тока с постоянным магнитом Шаговый двигатель Бесщеточный двигатель постоянного тока электродвигатель Электродвигатель возбуждения Универсальные электродвигатели Трехфазный асинхронный электродвигатель Трехфазные синхронные электродвигатели переменного тока Двухфазные серводвигатели переменного тока Моментные электродвигатели Двигатель с расщепленными полюсами Асинхронный двигатель с расщепленными фазами конденсаторный пусковой двигатель Двигатель с постоянным разделенным конденсатором (PSC) Двигатель с отталкивающим пуском, индукционный (RS-IR) Двигатель Отталкивающий двигатель Линейный двигатель Реактивный двигатель с переменным сопротивлением Униполярный шаговый двигатель Биполярный шаговый двигатель Полный шаговый двигатель Полушаговый шаговый двигатель Микро шаговый двигатель Импульсный реактивный двигатель Синхронный двигатель с расщепленными полюсами Асинхронный двигатель Двигатель постоянного тока без сердечника Другое……
Двигатель постоянного тока с постоянным магнитом Конструкция аналогична вводному примеру. Металлические контакты (щетки) используются для передачи электроэнергии Скорость вращения пропорциональна приложенному напряжению Крутящий момент пропорционален току, протекающему через двигатель Преимущества : Низкая стоимость (потребность в больших объемах) Простое управление Недостатки: Средняя эффективность Низкая надежность (износ щеток, коллектора) Сильный потенциальный источник электромагнитных помех
Шаговый двигатель Полное вращение электродвигателя, разделенное на несколько «шагов» Например, 200 шагов дают 1.Угол шага 8o Контроллер шагового двигателя может перемещать электродвигатель на один шаг (в любом направлении), подавая импульс напряжения Скорость вращения регулируется путем изменения частоты импульсов напряжения Преимущества: Недорогое управление положением (измерительные приборы) Простота удержания положения Недостатки: Низкая эффективность Требуется цифровой интерфейс управления Высокая стоимость двигателя
Бесщеточный двигатель постоянного тока Подобен двигателю постоянного тока с постоянным магнитом Ротор всегда является постоянным магнитом (внутренним или внешним). Конструкция устраняет необходимость в щетках за счет использования более сложного привода. Преимущества схемы: Высокая эффективность Высокая надежность Низкие EMI Хорошее регулирование скорости Недостатки: Может быть дороже, чем «щеточные» двигатели постоянного тока Более сложная и дорогая схема привода, чем «щеточные» двигатели постоянного тока
Программа • Введение в электромагниты и электродвигатели • Что такое управление двигателем? • Какие бывают распространенные типы двигателей? • Двигатели постоянного тока с постоянными магнитами • Шаговые двигатели • Бесщеточные двигатели постоянного тока • Сводка двигателей и схем управления двигателями
Как работает двигатель постоянного тока с постоянными магнитами? «Двигатели постоянного тока» используют магниты для создания движения. Постоянные магниты СЕВЕР-ЮГ
СЕВЕР ЮГ Как работает двигатель постоянного тока с постоянными магнитами? • «Двигатели постоянного тока» используют магниты для создания движения • Постоянные магниты • Якорь электромагнита
СЕВЕР ЮЖНЫЙ Вращающийся якорь двигателя постоянного тока с постоянным магнитом • Якорь электромагнита установлен на оси так, что он может вращаться
СЕВЕР
СЕВЕР ЮЖНЫЙ Коммутатор двигателя постоянного тока с постоянным магнитом и щетки • Якорь электромагнита установлен на оси так, чтобы он мог вращаться • Коммутатор создает электрический контакт со щетками двигателя
Конструкция коммутатора двигателя постоянного тока с постоянным магнитом Коммутатор состоит из двух «почти» полукольца
Конструкция коммутатора двигателя постоянного тока с постоянным магнитом • Коммутатор состоит из двух «почти половинок» кольца • Устанавливается на оси якоря для вращения с ротором Якорь
Постоянный Конструкция магнитного коммутатора двигателя постоянного тока • Обмотки якоря подключены к коммутатору 9000 6
Коммутатор двигателя постоянного тока с постоянным магнитом и щетки • Обмотки якоря подключены к коммутатору • Щетки подключают коммутатор к батарее
NORTH SOUTH — + Постоянный магнит двигателя постоянного тока Поляризация электромагнита • Ток течет через обмотки якоря, которые поляризуют электромагнит
СЕВЕР ЮГ — + Постоянный магнит Вращение двигателя постоянного тока • Подобные магниты (СЕВЕР-СЕВЕР и ЮГ-ЮГ) отталкиваются • При отталкивании одинаковых магнитов якорь вращается, создавая механическое движение
СЕВЕР ЮГ — + Направление вращения двигателя постоянного тока с постоянным магнитом? • В каком направлении будет вращаться якорь? • По часовой стрелке? Против часовой стрелки? Против часовой стрелки ? По часовой стрелке?
Чтобы определить направление вращения двигателя, нам нужно , чтобы использовать «Правило левой руки» Постоянный магнит Постоянный магнит Направление вращения двигателя? Сила тока магнитного поля
Правило левой руки Начните с двух противоположных концов магнита ЮГ-СЕВЕР
B Правило левой руки: магнитное поле • Магнитное поле (B) идет от СЕВЕРНОГО полюса до напротив ЮЖНОГО полюса • Указательный палец следует за B на экран ЮЖНО-СЕВЕРНЫЙ
Правило левой руки: ток • Ток течет по проводу через магнитное поле слева направо • Средний палец следует I1 вправо или I2 влево ЮГ I1 I2 СЕВЕР
Правило левой руки: Сила • Сила F, действующая на каждый провод, направлена в направлении большого пальца • Провод с I1 проталкивается вверх, I2 вниз F1 ЮГ I1 I2 СЕВЕР F2
Правило левой руки: Сила • Величина F определяется по формуле: | F | = | Я | * * | B | где — длина провода в B F1 ЮГ I1 I2 СЕВЕР F2
Правило левой руки: токовая петля • Если ток течет в петле, сила (и) заставит петлю вращаться F ЮГ И СЕВЕР F
СЕВЕР ЮГ — + Вращение двигателя постоянного тока с постоянным магнитом • Магнитное поле направлено справа налево • Представьте, что ток выходит из экрана в этом поперечном сечении
СЕВЕР ЮГ — + Постоянно Магнитное вращение двигателя постоянного тока • Магнитное поле направлено справа налево • Представьте, что ток выходит из экрана в этом поперечном сечении • Сила заставляет якорь вращаться по часовой стрелке
СЕВЕР ЮГ — + Вращение двигателя постоянного тока с постоянным магнитом • В какой-то момент половинки коммутатора будут вращаться в сторону от щеток • Импульс поддерживает вращение электромагнита и кольца коммутатора
СЕВЕР ЮГ — + Вращение двигателя постоянного тока с постоянным магнитом • Когда Половинки коммутатора повторно соединяются с другой щеткой, ток в обмотках меняется на противоположный
СЕВЕР ЮГ — — + + Вращение двигателя постоянного тока с постоянным магнитом • Когда половинки коммутатора повторно соединяются с другой щеткой, ток в обмотках меняется на противоположный. • Полярность меняется на противоположную, и якорь продолжает вращаться.
Что такое вращающаяся электрическая машина
Вращающаяся электрическая машина состоит из статора, ротора и воздушного зазора между ними. Статор и ротор имеют обмотки. Ротор устанавливается в шток, и шток соединяется с двигателем и любыми другими нагрузками. Обмотки предназначены для передачи электрического тока, который создает магнитные поля для электрической нагрузки. Там могут быть созданы замкнутые контуры напряжений.
Рисунок 1. Упрощенная схема вращающейся электрической машиныМожно различать типы обмоток.Ток может действовать во вращающейся машине для создания магнитного поля — этот ток называется намагничиванием . Этот тип обмотки называется обмоткой возбуждения .
Это постоянный ток малой мощности, и обмотки также могут нести ток нагрузки и будут называться A rmature. В машинах постоянного и переменного тока обмотки, несущие ток намагничивания и ток нагрузки, различны. Однако в некоторых машинах одни и те же обмотки могут нести нагрузку и токи намагничивания — это происходит в асинхронных двигателях.Эта обмотка называется первичной. Выходная обмотка — вторичная обмотка.
Если говорить о преобразовании энергии, электрические машины можно классифицировать следующим образом:
- Генератор — машина, вырабатывающая электрическую энергию из механической;
- Мотор — машина, преобразующая электрическую энергию в механическую.
Классификация вращающихся машин следующая:
- Машины постоянного тока: машины постоянного тока;
- Синхронные машины: здесь постоянный ток проходит через одну обмотку, а переменный ток — через другую;
- Индукционная машина: здесь переменный ток проходит через обе
Чтобы вращающаяся машина могла вращаться и генерировать электрические токи, используются постоянные магниты, а также входные токи переменного и постоянного тока.Магнитное поле создает крутящий момент в электродвигателе, а законы электромагнитного поля помогают генератору создавать электрический ток в магнитном поле.
Рассмотрим физику электрических машин. Во всех электрических машинах сила на проводе f = iw [I, B], где iw — ток через провод, а B — магнитное поле. Минимальный крутящий момент на катушке равен T = KBiwsinα, здесь K — коэффициент, зависящий от геометрии катушек, α — угол между магнитным полем B и током.Генерируются два поля — в статоре и роторе. Магнитное поле статора создает магнитное поле, которое описывается следующей формулой: B = μNi2πR.
Вращающиеся машины — это машины для преобразования энергии, которые отличаются эффективностью и потерями энергии. Генератор и ротор могут характеризоваться различными типами потерь при прохождении постоянного тока. Потери во вращающихся машинах:
- Электрические потери
- Потери в сердечнике
- Механические потери
Потери генератора и двигателя можно классифицировать следующим образом:
- Потери вращения
- Потери вращения без нагрузки
- Остаточные потери нагрузки
- Потери в медной цепи якоря
- Потери якоря
- Потери в щетке
- Полевые потери в меди
- Последовательные потери поля
- Потери на шунтирующем поле
- Потери вращения
Однако они имеют разное распределение и разную стоимость для структуры потерь генератора и двигателя.Электрические потери обычно возникают из-за сопротивления постоянному току. Механические потери обычно возникают из-за трения или ветра. Потери также могут возникать во вращающихся машинах в целях охлаждения. Потери в сердечнике холостого хода состоят из гистерезисных и вихретоковых потерь.
Эффективность ротационной машины обычно выражается картой эффективности. Карта эффективности состоит из характеристик крутящего момента . Характеристики крутящего момента варьируются для разных вращающихся машин и зависят от скорости вращения машины.Моментно-частотные характеристики напоминают вольт-амперные характеристики источника питания схемы.
Характеристики крутящего момента и скорости определяют фактическую скорость двигателя, подключенного к нагрузке. Важным фактом является то, что двигатель может производить ненулевую скорость вращения. Это потому, что двигатель подключен к источнику электроэнергии. И этот электрический источник может быть причиной некоторого крутящего момента двигателя. Это называется пусковым моментом .
Важно учитывать типичные рабочие параметры, указанные на двигателе.На паспортной табличке указаны тип устройства, производитель, номинальное напряжение и частота, номинальный ток и вольт-амперы, номинальная скорость и мощность. В этом случае номинальное напряжение сообщает нам значение напряжения, необходимое для создания необходимого магнитного потока. Работа на высоких частотах увеличивает потери магнитного сердечника.
Номинальный ток и номинальные вольт-амперы — это ток и мощность, необходимые для стабильной работы и для предотвращения перегрева двигателя во время работы. Пиковая мощность может превышать мощность двигателя, крутящий момент и другие характеристики, но в конечном итоге это приведет к перегреву двигателя и сбоям в работе.
Еще одним важным фактором, который следует учитывать, является регулирование напряжения и скорости электрических машин. Регулировка создает возможность поддерживать постоянное напряжение или скорость во время работы с изменяющейся нагрузкой на двигатель. Как рассчитать важные характеристики вращающихся машин: SR = S0 – SLSL и VR = V0 – VLVL.
Возобновляя работу вращающихся машин, мы видим, что магнитное притяжение и отталкивание помогает генерировать механический крутящий момент вращающейся машины.Магнитное поле может также генерировать напряжение и ток в обмотках вращающейся машины.
В случае нашей вращающейся машины, когда ток течет через проводники в магнитном поле, он создает определенный крутящий момент, и вращающаяся структура вращается с определенной скоростью. В этом случае провода, идущие к вращающейся машине, тоже вращаются, создавая противодействующую электродвижущую силу. Если вращающаяся машина подключена к некоторому механическому источнику воздействия, вращение создает электродвижущую силу, которая перемещается в магнитном поле, которое генерирует электрические токи через проводники.
Вращающиеся машины имеют магнитных полюсов. А крутящий момент создается набором магнитных сил притяжения и отталкивания между магнитными полюсами статора и ротора.
Схема вращающихся машин, на которой показаны магниты ротора и статора. Магнит статора неподвижен, магнит ротора движется. Символы электродвигателей— электродвигатели переменного / постоянного тока, однофазные / трехфазные двигатели
Обозначения электродвигателей переменного / постоянного тока, однофазные и трехфазные электродвигатели
Список всех символов электродвигателей на одном изображении приведен ниже в качестве ссылки на конец этого поста.
Обмотка / катушка электродвигателя
Этот символ представляет обмотку или катушку электродвигателя. Обмотка внутри двигателя создает необходимое магнитное поле при возбуждении электрическим током.
Обмотка серии
Обмотка возбуждения, подключенная последовательно к обмотке якоря двигателя, называется последовательной обмоткой. Ток, потребляемый в таком двигателе, огромен, так как он включен последовательно и производит довольно большой крутящий момент.
Шунтирующая обмотка
Обмотка возбуждения, подключенная параллельно обмотке якоря двигателя, называется шунтирующей обмоткой. Сопротивление шунтирующей обмотки обычно велико, чтобы предотвратить протекание сильного тока.
Угольная щетка
Это компонент внутри электродвигателя, который передает электрический ток между статором (неподвижная часть) и ротором (вращающаяся часть). Обычно он сделан из графита, и его можно заменить во время технического обслуживания после износа.
Стандартный двигатель
Это обозначение стандартного электродвигателя, используемого в электрических схемах. Двигатель преобразует электрическую энергию в механическую.
Двухскоростной двигатель
Этот символ представляет двухскоростной двигатель. Такие двигатели имеют две отдельные обмотки для разного передаточного числа. Каждая обмотка одновременно обеспечивает разную скорость и крутящий момент.
Двигатель переменного тока
Этот символ представляет двигатель переменного тока.Этот тип двигателя работает только от переменного тока. Он преобразует электрическую энергию переменного тока в механическую.
Двигатель постоянного тока
Этот символ используется для обозначения двигателя постоянного тока на любой электрической схеме. Он преобразует электрическую энергию постоянного тока в механическую. Работает только на постоянном токе.
Линейный двигатель
Это общий символ, используемый для обозначения линейного двигателя. Линейный двигатель имеет развернутый статор, что приводит к созданию линейной силы вместо вращающего момента.
Шаговый двигатель
Шаговый двигатель или шаговый двигатель — это тип бесщеточного двигателя постоянного тока, полное вращение которого делится на количество равных шагов. Он вращается пошагово, а не непрерывно. Они используются для точного позиционирования с помощью управляющего сигнала.
Электрическая машина
Этот тип символа используется для таких машин, которые могут использоваться как двигатель, так и генератор. Двигатель преобразует электрическую энергию в механическую, а генератор — наоборот.
Двигатель постоянного тока с постоянными магнитами
В бесщеточных двигателях постоянного тока такого типа для создания полюсов вместо обмоток возбуждения используется постоянный магнит. Символ выше представляет двигатель постоянного тока со значком магнита, обозначающим тип постоянного магнита.
Однофазный двигатель переменного тока
Этот символ обозначает однофазный двигатель переменного тока. Он работает от однофазного источника переменного тока, и его обмотка возбуждения включена последовательно с обмоткой якоря.Он также известен как модифицированный двигатель постоянного тока.
Двигатель постоянного тока
Двигатель постоянного тока, обмотка возбуждения которого соединена последовательно с обмоткой якоря, называется двигателем постоянного тока, и на схематических изображениях он представлен этим символом.
Однофазный асинхронный двигательпеременного тока с выведенными выводами обмотки
Он также известен как асинхронный двигатель с расщепленной фазой. Этот тип однофазного двигателя переменного тока имеет доступную отдельную обмотку, известную как пусковая обмотка, имеющая высокое сопротивление.Пусковая обмотка используется для запуска двигателя.
Однофазный отталкивающий двигатель
Это однофазный электродвигатель переменного тока, работающий по принципу отталкивания магнитного поля статора и ротора. Магнитное поле ротора создается индуцированным током и может вращаться, вращая щетки вдоль своей оси. Это вращающееся магнитное поле используется для изменения направления двигателя.
Параллельный двигатель постоянного тока
Это символ, используемый для параллельного двигателя постоянного тока, обмотка возбуждения которого подключена параллельно обмотке якоря.Обе обмотки подключены к общему источнику постоянного тока.
Однофазный синхронный двигатель
Этот символ обозначает однофазный синхронный двигатель переменного тока. Синхронные двигатели изначально запускаются как асинхронные, но позже достигают синхронной скорости, которая зависит только от входной частоты питания.
Двигатель постоянного тока с комбинированным возбуждением
Этот тип двигателя постоянного тока имеет как последовательную обмотку возбуждения, так и шунтирующую (или параллельную) обмотку возбуждения.Обмотка шунтирующего поля усиливает магнитное поле, создаваемое последовательной обмоткой. он имеет преимущества как двигателей постоянного тока с последовательной обмоткой, так и двигателей постоянного тока с параллельной обмоткой, то есть высокий пусковой крутящий момент и регулирование скорости.
Трехфазный двигатель переменного тока
Это общий символ, используемый для трехфазного двигателя переменного тока. Трехфазный источник переменного тока создает вращающееся магнитное поле, которое реагирует с магнитным полем, создаваемым ротором, таким образом вращая ротор.
Трехфазный двигатель в форме звезды
Это трехфазный двигатель, обмотки которого соединены вместе по схеме звезды или звезды.этот символ также обозначает функцию автоматического запуска двигателя.
Трехфазный двигатель с фазным ротором
Этот символ обозначает трехфазный двигатель с фазным ротором. Это тип трехфазного двигателя переменного тока, ротор которого связан с внешним сопротивлением через контактные кольца. Преимущество двигателя с фазным ротором заключается в том, что он генерирует высокий пусковой момент при меньшем токе.
Трехфазный линейный двигатель
Этот символ представляет линейный двигатель, работающий от трехфазного источника питания переменного тока.Статор такого двигателя раскручивается для создания линейной силы вместо вращающего момента.
На следующем изображении показаны все символы электрических двигателей.
Соответствующие электрические / электронные символы:
Эксперименты с электродвигателями для планов уроков и проектов научной ярмарки
Определение
Электродвигатель — это устройство, использующее электрическую энергию для производства механической энергии посредством взаимодействия магнитных полей и проводников с током.
Основы См. Также:
Униполярный двигатель
Шаговый двигатель
Электродвигатель использует электрическую энергию для производства механической энергии. Обратный процесс — использование механической энергии для производства электрической энергии — осуществляется генератором или динамо-машиной. Тяговые двигатели, используемые на локомотивах, часто выполняют обе задачи, если локомотив оснащен динамическими тормозами. Электродвигатели используются в бытовых приборах, таких как вентиляторы, холодильники, стиральные машины, насосы для бассейнов, напольные пылесосы и духовки с принудительной вентиляцией.
Большинство электродвигателей работают за счет электромагнетизма, но также существуют двигатели, основанные на других электромеханических явлениях, таких как электростатические силы, пьезоэлектрический эффект и тепловые двигатели. Фундаментальный принцип, на котором основаны электромагнитные двигатели, заключается в том, что на любой токоведущий провод, находящийся внутри магнитного поля, действует механическая сила. Сила описывается законом силы Лоренца и перпендикулярна как проводу, так и магнитному полю. Большинство магнитных двигателей являются вращающимися, но существуют и линейные двигатели.В роторном двигателе вращающаяся часть (обычно внутри) называется ротором, а неподвижная часть — статором. Ротор вращается, потому что провода и магнитное поле расположены так, что вокруг оси ротора создается крутящий момент. Двигатель содержит электромагниты, намотанные на раму. Хотя эту раму часто называют арматурой, этот термин часто используют ошибочно. Правильно, якорь — это та часть двигателя, на которую подается входное напряжение. В зависимости от конструкции машины якорь может служить как ротор, так и статор.
Электродвигатели используются в самых разных областях, таких как промышленные вентиляторы, нагнетатели и насосы, станки, бытовые приборы, электроинструменты и дисководы. Они могут питаться от постоянного тока (например, портативного устройства с батарейным питанием или автомобиля) или от переменного тока от центральной распределительной сети. Самые маленькие моторы можно найти в электрических наручных часах. Двигатели среднего размера с строго стандартизованными размерами и характеристиками обеспечивают удобную механическую мощность для промышленного использования.Самые большие электродвигатели используются для приведения в движение больших кораблей и для таких целей, как трубопроводные компрессоры, с мощностью в миллионы ватт. Электродвигатели можно классифицировать по источнику электроэнергии, внутренней конструкции и применению.
История и развитие
Принцип преобразования электрической энергии в механическую с помощью электромагнитных средств был продемонстрирован британским ученым Майклом Фарадеем в 1821 году и состоял из свободно висящего провода, погруженного в бассейн с ртутью.Постоянный магнит был помещен в середину ртутной ванны. Когда через провод пропускали ток, он вращался вокруг магнита, показывая, что ток порождал круговое магнитное поле вокруг провода. Этот двигатель часто демонстрируется на школьных уроках физики, но иногда вместо токсичной ртути используется рассол (соленая вода). Это простейшая форма класса электродвигателей, называемых униполярными двигателями. Более поздняя доработка — колесо Барлоу. Это были демонстрационные устройства, непригодные для практического применения из-за ограниченной мощности.
Первый электродвигатель постоянного тока коммутаторного типа, пригодный для практического применения, был изобретен британским ученым Уильямом Стердженом в 1832 году. Следуя работе Стерджена, компания создала электродвигатель постоянного тока коммутаторного типа, предназначенный для коммерческого использования. американец Томас Давенпорт и запатентован в 1837 году. Хотя некоторые из этих двигателей были построены и использовались для работы оборудования, такого как печатный станок, из-за высокой стоимости энергии первичной батареи двигатели не имели коммерческого успеха, и Давенпорт обанкротился.Несколько изобретателей последовали за Sturgeon в разработке двигателей постоянного тока, но все столкнулись с одними и теми же проблемами стоимости с питанием от первичной батареи. В то время не было развито распределение электроэнергии. Как и в случае с двигателем Стерджена, эти двигатели не имели практического коммерческого рынка.
Современный двигатель постоянного тока был изобретен случайно в 1873 году, когда Зеноб Грамм соединил изобретенную им динамо-машину со вторым аналогичным устройством, управляя им как двигателем. Машина Gramme была первым электродвигателем, получившим успех в отрасли.
В 1888 году Никола Тесла изобрел первый реально работающий двигатель переменного тока, а вместе с ним и многофазную систему передачи энергии. Тесла продолжил свою работу над двигателем переменного тока в последующие годы в компании Westinghouse.
Классификация электродвигателей
Классическое разделение электродвигателей на типы постоянного и переменного тока. Это скорее фактическое соглашение, чем жесткое различие. Например, многие классические двигатели постоянного тока успешно работают от сети переменного тока.
Продолжающаяся тенденция к электронному управлению еще больше усложняет различие, поскольку современные драйверы вынесли коммутатор из корпуса двигателя.Для этого нового поколения двигателей схемы драйверов используются для генерации синусоидальных приводных токов переменного тока или некоторого их приближения. Два лучших примера: бесщеточный двигатель постоянного тока и шаговый двигатель, оба являются многофазными двигателями переменного тока, требующими внешнего электронного управления.
Более четкое различие между синхронными и асинхронными типами. В синхронных типах ротор вращается синхронно с колеблющимся полем или током (например, двигатели с постоянными магнитами). Напротив, асинхронный двигатель предназначен для скольжения; наиболее распространенным примером является обычный асинхронный двигатель переменного тока, который должен проскальзывать для создания крутящего момента.
Двигатели постоянного тока
Двигатель постоянного тока предназначен для работы от постоянного тока. Двумя примерами чистых конструкций постоянного тока являются униполярный двигатель Майкла Фарадея (что необычно) и двигатель на шариковых подшипниках, который (пока) является новинкой. Безусловно, наиболее распространенными типами двигателей постоянного тока являются щеточные и бесщеточные типы, которые используют внутреннюю и внешнюю коммутацию соответственно для создания колеблющегося переменного тока от источника постоянного тока, поэтому они не являются чисто двигателями постоянного тока в строгом смысле.
Щеточные двигатели постоянного тока: Классическая конструкция двигателя постоянного тока генерирует колебательный ток в заведенном роторе с помощью коммутатора с разъемным кольцом и статора с намотанным или постоянным магнитом.Ротор состоит из катушки, намотанной вокруг ротора, который затем питается от батареи любого типа. Для этого типа двигателя постоянного тока нужны щетки, которые прижимаются к коммутатору для вращения.
Бесщеточные двигатели постоянного тока: Многие ограничения классического коллекторного двигателя постоянного тока связаны с необходимостью прижимания щеток к коммутатору. Это создает трение. На более высоких скоростях щеткам становится все труднее поддерживать контакт. Щетки могут отскакивать от неровностей поверхности коллектора, создавая искры.Это ограничивает максимальную скорость машины. Плотность тока на единицу площади щеток ограничивает мощность двигателя. Неидеальный электрический контакт также вызывает электрические помехи. Щетки со временем изнашиваются и требуют замены, а сам коллектор подлежит износу и обслуживанию. Сборка коммутатора на большой машине — дорогостоящий элемент, требующий точной сборки многих деталей. Эти проблемы устранены в бесщеточном двигателе. В этом двигателе механический «вращающийся переключатель» или узел коммутатора / щеточного устройства заменен внешним электронным переключателем, синхронизированным с положением ротора.Бесщеточные двигатели обычно имеют КПД 85-90%, тогда как двигатели постоянного тока с щеткой обычно имеют КПД 75-80%.
Бесщеточные двигатели постоянного тока обычно используются там, где требуется точное управление скоростью, в дисководах компьютеров или в видеомагнитофонах, шпинделях в приводах компакт-дисков, компакт-дисков (и т. Д.), А также в механизмах офисных товаров, таких как вентиляторы, лазерные принтеры и т. Д. копировальные аппараты.
Современные бесщеточные двигатели постоянного тока серии мощностью от долей ватта до многих киловатт.В электромобилях используются более мощные бесщеточные двигатели мощностью до 100 кВт. Они также находят значительное применение в высокопроизводительных электрических моделях самолетов.
Двигатели постоянного тока без сердечника: Ничто в конструкции любого из описанных выше двигателей не требует, чтобы железные (стальные) части ротора действительно вращались; крутящий момент действует только на обмотки электромагнитов. Преимущество этого факта заключается в бесщеточном двигателе постоянного тока, специализированной форме щеточного или бесщеточного двигателя постоянного тока.Эти двигатели, оптимизированные для быстрого разгона, имеют ротор без железного сердечника. Ротор может иметь форму заполненного обмоткой цилиндра внутри магнитов статора, корзины, окружающей магниты статора, или плоского блина (возможно, сформированного на печатной монтажной плате), проходящего между верхним и нижним магнитами статора. Обмотки обычно стабилизируются путем пропитки эпоксидной смолой.
Двигатели переменного тока
Типичный двигатель переменного тока состоит из двух частей:
- Внешний неподвижный статор с катушками, на которые подается переменный ток для создания вращающегося магнитного поля, и;
- Внутренний ротор, прикрепленный к выходному валу, которому крутящий момент создается вращающимся полем.
Моментные двигатели: Моментные двигатели — это особая разновидность асинхронных двигателей, которые способны работать неограниченное время при остановке (с заблокированным от вращения ротором) без повреждений. В этом режиме двигатель будет прикладывать к нагрузке постоянный крутящий момент (отсюда и название). Обычное применение моментного двигателя — это двигатели подающей и приемной катушек в ленточном накопителе. В этом приложении, приводимые в действие низким напряжением, характеристики этих двигателей позволяют приложить относительно постоянное легкое натяжение к ленте, независимо от того, протягивает ли ведущая лента мимо головок ленты.Управляемые более высоким напряжением (и, следовательно, обеспечивающие более высокий крутящий момент), моментные двигатели также могут работать в режиме быстрой перемотки вперед и назад, не требуя каких-либо дополнительных механизмов, таких как шестерни или муфты. В компьютерном мире моментные двигатели используются с рулевыми колесами с обратной связью по усилию.
Контактное кольцо или двигатель с фазным ротором представляет собой асинхронную машину, в которой ротор содержит набор катушек, оканчивающихся контактными кольцами, к которым могут быть подключены внешние сопротивления. Статор такой же, как у стандартного двигателя с короткозамкнутым ротором.Изменяя импеданс, подключенный к цепи ротора, можно изменять кривые скорость / ток и скорость / крутящий момент.
Шаговый двигатель (или шаговый двигатель) — это бесщеточный синхронный электродвигатель, который может разделять полный оборот на большое количество шагов. Положение двигателя можно точно контролировать без какого-либо механизма обратной связи (см. «Контроллер с разомкнутым контуром»), если двигатель точно подобран для конкретного применения. Шаговые двигатели аналогичны вентильным реактивным двигателям (которые представляют собой очень большие шаговые двигатели с уменьшенным числом полюсов и обычно коммутируются с обратной связью.)
Линейный двигатель или линейный асинхронный двигатель — это электродвигатель переменного тока (AC), статор которого «раскручен», так что вместо создания крутящего момента (вращения) он создает линейную силу по всей своей длине. Наиболее распространенный режим работы — это привод типа Лоренца, в котором приложенная сила линейно пропорциональна току и магнитному полю (F = qv × B).
Универсальные двигатели
Вариантом электродвигателя постоянного тока с возбужденным полем является универсальный электродвигатель.Название происходит от того факта, что он может использовать переменный или постоянный ток питания, хотя на практике они почти всегда используются с источниками переменного тока. Принцип состоит в том, что в двигателе постоянного тока с обмоткой поля ток в поле и в якоре (и, следовательно, в результирующих магнитных полях) будет чередоваться (обратная полярность) в одно и то же время, и, следовательно, генерируемая механическая сила всегда в одном направлении. . На практике двигатель должен быть специально спроектирован для работы с переменным током (необходимо учитывать импеданс, а также пульсирующую силу), и полученный двигатель обычно менее эффективен, чем эквивалентный чистый двигатель постоянного тока.При работе на нормальных частотах линии электропередачи максимальная мощность универсальных двигателей ограничена, а двигатели мощностью более одного киловатта встречаются редко. Но универсальные двигатели также составляют основу традиционного железнодорожного тягового двигателя в электрических железных дорогах. В этом приложении для поддержания высокого электрического КПД они работали от источников переменного тока с очень низкой частотой, обычно с частотой 25 Гц и 16 2/3 Гц. Поскольку они являются универсальными двигателями, локомотивы, использующие эту конструкцию, также обычно могут работать от третьего рельса с питанием от постоянного тока.
Источник: Википедия (Весь текст доступен в соответствии с условиями лицензии GNU Free Documentation License и Creative Commons Attribution-ShareAlike License.)
Электродвигатель
Электродвигатель преобразует электрическую энергию в механическую энергию .
Большинство электродвигателей работают за счет взаимодействия магнитных полей и проводников с током для создания силы. Обратный процесс, производящий электрическую энергию из механической энергии, осуществляется генераторами, такими как генератор переменного тока или динамо-машина; некоторые электродвигатели могут также использоваться в качестве генераторов, например, тяговый двигатель на транспортном средстве может выполнять обе задачи.Электродвигатели и генераторы обычно называют электрическими машинами.
Электродвигатели используются в самых разных областях, таких как промышленные вентиляторы, нагнетатели и насосы, станки, бытовые приборы, электроинструменты и дисководы. Они могут питаться от постоянного тока, например, . , портативное устройство или автомобиль с батарейным питанием, или переменным током от центральной распределительной сети или инвертора. Самые маленькие моторы можно найти в электрических наручных часах.Двигатели среднего размера с строго стандартизованными размерами и характеристиками обеспечивают удобную механическую мощность для промышленного использования. Самые большие электродвигатели используются для приведения в движение судов, трубопроводных компрессоров и водяных насосов мощностью в миллионы ватт. Электродвигатели можно классифицировать по источнику электроэнергии, по их внутренней конструкции, по их применению или по типу движения, которое они создают.
Физический принцип производства механической силы за счет взаимодействия электрического тока и магнитного поля был известен еще в 1821 году.Электродвигатели с повышенным КПД строились на протяжении всего XIX века, но коммерческое использование электродвигателей в больших масштабах требовало эффективных электрических генераторов и электрических распределительных сетей.
Некоторые устройства преобразуют электричество в движение, но не генерируют полезную механическую энергию в качестве основной цели и поэтому обычно не называются электродвигателями. Например, магнитные соленоиды и громкоговорители обычно описываются как приводы и преобразователи, [1] соответственно, а не двигатели.Некоторые электродвигатели используются для создания крутящего момента или силы. [2]
История и развитие
определение electric_motor и синонимов electric_motor (английский)
Электродвигатель — это электромеханическое устройство, преобразующее электрическую энергию в механическую.
Большинство электродвигателей работают за счет взаимодействия магнитных полей и проводников с током для создания силы. Обратный процесс, производящий электрическую энергию из механической энергии, осуществляется генераторами, такими как генератор переменного тока или динамо-машина; некоторые электродвигатели могут также использоваться в качестве генераторов, например, тяговый двигатель на транспортном средстве может выполнять обе задачи.Электродвигатели и генераторы обычно называют электрическими машинами.
Электродвигатели используются в самых разных областях, таких как промышленные вентиляторы, нагнетатели и насосы, станки, бытовые приборы, электроинструменты и дисководы. Они могут питаться от постоянного тока, например, . , портативное устройство или автомобиль с батарейным питанием, или переменным током от центральной распределительной сети или инвертора. Самые маленькие моторы можно найти в электрических наручных часах.Двигатели среднего размера с строго стандартизованными размерами и характеристиками обеспечивают удобную механическую мощность для промышленного использования. Самые большие электродвигатели используются для приведения в движение судов, трубопроводных компрессоров и водяных насосов мощностью в миллионы ватт. Электродвигатели можно классифицировать по источнику электроэнергии, по их внутренней конструкции, по их применению или по типу движения, которое они создают.
Физический принцип создания механической силы при взаимодействии электрического тока и магнитного поля, закон индукции Фарадея, был открыт Майклом Фарадеем в 1831 году.Электродвигатели с повышенным КПД строились с 1821 года до конца 19 века, но коммерческое использование электродвигателей в больших масштабах требовало эффективных электрических генераторов и электрических распределительных сетей. Первые коммерчески успешные двигатели были произведены примерно в 1873 году.
Некоторые устройства преобразуют электричество в движение, но не генерируют полезную механическую энергию в качестве основной цели, и поэтому обычно не называются электродвигателями. Например, магнитные соленоиды и громкоговорители обычно описываются как приводы и преобразователи, [1] соответственно, а не двигатели.Некоторые электродвигатели используются для создания крутящего момента или силы. [2]
История и развитие
Электромагнитный эксперимент Фарадея, 1821 [3]Преобразование электрической энергии в механическую с помощью электромагнитных средств было продемонстрировано британским ученым Майклом Фарадеем в 1821 году. Свободно висящий провод был погружен в ванну с ртутью, на которую был помещен постоянный магнит. Когда через провод пропускали ток, он вращался вокруг магнита, показывая, что ток вызывает близкое круговое магнитное поле вокруг провода. [4] Этот двигатель часто демонстрируется на школьных уроках физики, но вместо токсичной ртути иногда используется рассол (соленая вода). Это простейшая форма класса устройств, называемых униполярными двигателями. Более поздняя доработка — колесо Барлоу. Это были только демонстрационные устройства, непригодные для практического применения из-за своей примитивной конструкции. [ необходима ссылка ]
«Электромагнитный самовращающийся двигатель» Едлика, 1827 г. (Музей прикладного искусства, Будапешт.Исторический мотор отлично работает и сегодня. [5] )В 1827 году венгерский физик Аньош Едлик начал экспериментировать с устройствами, которые он назвал «электромагнитными самовращающимися роторами». Хотя они использовались только в учебных целях, в 1828 году Джедлик продемонстрировал первое устройство, содержащее три основных компонента практических двигателей постоянного тока: статор, ротор и коммутатор. В устройстве не использовались постоянные магниты, так как магнитные поля как неподвижных, так и вращающихся компонентов создавались исключительно токами, протекающими через их обмотки. [6] [7] [8] [9] [10] [11]
Первые электродвигатели
Первый электродвигатель постоянного тока коммутаторного типа, способный вращать механизмы, был изобретен британским ученым Уильямом Стердженом в 1832 году. [12] Следуя работе Стерджена, электродвигатель постоянного тока коммутаторного типа был создан с намерением коммерческого использования был построен американцами Эмили и Томасом Давенпортами и запатентован в 1837 году.Их двигатели работали со скоростью до 600 оборотов в минуту, они приводили в действие станки и печатный станок. [13] Из-за высокой стоимости цинковых электродов, необходимых для питания первичной батареи, двигатели были коммерчески неудачными, и компания Davenports обанкротилась. Несколько изобретателей последовали за Sturgeon в разработке двигателей постоянного тока, но все столкнулись с одними и теми же проблемами стоимости с питанием от первичной батареи. В то время не было развито распределение электроэнергии. Как и в случае с двигателем Стерджена, эти двигатели не имели практического коммерческого рынка. [ необходима ссылка ]
В 1855 году Джедлик построил устройство, основанное на принципах, аналогичных тем, которые использовались в его электромагнитных самовращателях, которое было способно выполнять полезную работу. [6] [8] В том же году он построил модель автомобиля с электродвигателем. [14]
Современный двигатель постоянного тока был изобретен случайно в 1873 году, когда Зеноб Грамм соединил изобретенную им динамо-машину со вторым аналогичным устройством, управляя им как двигателем. Машина Gramme была первым электродвигателем, получившим успех в отрасли. [ необходима ссылка ]
В 1886 году Франк Джулиан Спраг изобрел первый практический двигатель постоянного тока, неискрящий двигатель, способный работать с постоянной скоростью при переменных нагрузках. Другие электрические изобретения Sprague примерно в это время значительно улучшили распределение электроэнергии в сети (предыдущая работа была проделана, когда использовалась Томасом Эдисоном), позволили вернуть энергию от электродвигателей в электрическую сеть, обеспечив ее распределение между тележками через воздушные провода и опору троллейбуса. и предоставил системы управления для электрических операций.Это позволило Спрэгу использовать электродвигатели для изобретения первой системы электрических тележек в 1887–88 годах в Ричмонде, штат Вирджиния, электрического лифта и системы управления в 1892 году, а также электрического метро с вагонами с автономным приводом и централизованным управлением, которое было впервые установлено в 1892 году в Чикаго. около южной стороны надземной железной дороги, где он стал широко известен как «L». Двигатель Спрэга и связанные с ним изобретения привели к взрывному росту интереса к электродвигателям и их использованию в промышленности, в то время как почти одновременно другой великий изобретатель разрабатывал своего основного конкурента, который стал бы гораздо более распространенным.Прототип асинхронного двигателя был продемонстрирован в Европе в 1885 году Галилео Феррарисом. [15] [16] [17] [18] Феррарис опубликовал свои выводы в 1888 году.
В 1888 году Никола Тесла запатентовал первый реально работающий двигатель переменного тока, а вместе с ним и многофазную систему передачи энергии. Тесла продолжил свою работу над двигателем переменного тока в последующие годы в компании Westinghouse.
Разработка электродвигателей приемлемого КПД была отложена на несколько десятилетий из-за непонимания чрезвычайной важности относительно небольшого воздушного зазора между ротором и статором.Эффективные конструкции имеют сравнительно небольшой воздушный зазор. [19]
Двигатель St. Louis, долгое время использовавшийся в классах для демонстрации принципов работы двигателя, крайне неэффективен по той же причине, а также совершенно не похож на современный двигатель. Фотография традиционной формы двигателя St. Louis: [20]
Применение электродвигателей произвело революцию в отрасли. Промышленные процессы больше не ограничивались передачей энергии с использованием линейных валов, ремней, сжатого воздуха или гидравлического давления.Вместо этого каждая машина может быть оснащена собственным электродвигателем, обеспечивающим простое управление в месте использования и повышающим эффективность передачи энергии. Электродвигатели, применяемые в сельском хозяйстве, лишили силы мускулов человека и животных из таких задач, как обработка зерна или перекачка воды. Использование электродвигателей в домашних условиях сократило объем тяжелого домашнего труда и сделало возможными более высокие стандарты удобства, комфорта и безопасности. Сегодня электродвигатели потребляют более половины всей производимой электроэнергии. [21] [22]
Терминология
В электродвигателе подвижная часть называется ротором , а неподвижная часть называется статором . Магнитные поля создаются на полюсах , и это могут быть выступающих полюса , где они возбуждаются обмотками электрического провода. Двигатель с экранированными полюсами имеет обмотку вокруг части полюса, которая задерживает фазу магнитного поля для этого полюса.
Коммутатор переключает ток на обмотки ротора в зависимости от угла ротора.
Двигатель постоянного тока питается от постоянного тока, хотя почти всегда есть внутренний механизм (например, коммутатор), преобразующий постоянный ток в переменный для части двигателя. Электродвигатель переменного тока питается переменным током, что часто позволяет избежать использования коммутатора. Синхронный двигатель — это двигатель переменного тока, который работает на скорости, фиксированной на долю частоты источника питания, а асинхронный двигатель — это двигатель переменного тока, обычно асинхронный двигатель, скорость которого снижается с увеличением крутящего момента до немного меньше, чем синхронная скорость. Универсальные двигатели могут работать как от переменного, так и от постоянного тока, хотя максимальная частота переменного тока может быть ограничена.
Принцип действия
Для изготовления электродвигателей используются как минимум 3 различных принципа работы: магнитный, электростатический и пьезоэлектрический. Безусловно, наиболее распространенным является магнитный.
Магнитный
Практически все электродвигатели основаны на магнетизме (исключения включают пьезоэлектрические двигатели и ультразвуковые двигатели). В этих двигателях магнитные поля образуются как в роторе, так и в статоре.Продукт между этими двумя полями вызывает силу и, следовательно, крутящий момент на валу двигателя. Одно или оба из этих полей должны изменяться при вращении двигателя. Это делается путем включения и выключения шестов в нужное время или изменения силы шеста.
Категоризация
Основными типами двигателей являются двигатели постоянного и переменного тока, хотя продолжающаяся тенденция к электронному управлению несколько смягчает различие, [ необходима ссылка ] [ сомнительно — обсудить ] , поскольку современные драйверы переместили коммутатор из кожух двигателя для некоторых типов двигателей постоянного тока.
Учитывая, что все вращающиеся (или линейные) электродвигатели требуют синхронизма между движущимся магнитным полем и движущимся токовым слоем для создания среднего крутящего момента, существует четкое различие между асинхронным двигателем и синхронным типом. Асинхронный двигатель требует скольжения — относительного движения между магнитным полем (создаваемым статором) и набором обмоток (ротор) для индукции тока в роторе за счет взаимной индуктивности. Самый распространенный пример асинхронных двигателей — это обычный асинхронный двигатель переменного тока, который должен проскальзывать для создания крутящего момента.
В синхронных типах индукция (или скольжение) не является обязательным условием для создания магнитного поля или тока (например, двигатели с постоянными магнитами, синхронные бесщеточные электрические машины с двойным питанием ротора).
Номинальная выходная мощность также используется для классификации двигателей. Например, двигатели мощностью менее 746 Вт часто называют двигателями с дробной мощностью (FHP) в соответствии со старыми имперскими измерениями.
Примечания:
- Универсальные двигатели могут также работать с частотой сети переменного тока (вращение не зависит от частоты переменного напряжения)
- Вращение синхронно с частотой переменного напряжения
- Вращение всегда медленнее, чем синхронное.
Двигатели постоянного тока
Двигатель постоянного тока предназначен для работы от постоянного тока. Двумя примерами чистых конструкций постоянного тока являются униполярный двигатель Майкла Фарадея (что необычно) и двигатель на шариковых подшипниках, который (пока) является новинкой. Безусловно, наиболее распространенными типами двигателей постоянного тока являются щеточные и бесщеточные двигатели, в которых используется внутренняя и внешняя коммутация соответственно для реверсирования тока в обмотках синхронно с вращением.
Двигатели с постоянными магнитами
Основная статья: Электродвигатель с постоянным магнитомДвигатель с постоянными магнитами не имеет обмотки возбуждения на раме статора, а вместо этого полагается на постоянные магниты, которые создают магнитное поле, с которым поле ротора взаимодействует для создания крутящего момента.Компенсирующие обмотки, включенные последовательно с якорем, могут использоваться на больших двигателях для улучшения коммутации под нагрузкой. Поскольку это поле является фиксированным, его нельзя настроить для управления скоростью. Поля с постоянными магнитами (статоры) удобны в миниатюрных двигателях, поскольку они исключают потребление энергии обмоткой возбуждения. Большинство более крупных двигателей постоянного тока относятся к типу «динамо», которые имеют обмотки статора. Исторически сложилось так, что постоянные магниты нельзя было заставить сохранять высокий магнитный поток, если бы они были разобраны; обмотки возбуждения были более практичными для получения необходимого количества магнитного потока.Однако большие постоянные магниты дороги, опасны и сложны в сборке; это благоприятствует намотанным полям для больших машин.
Для минимизации общего веса и размера в миниатюрных двигателях с постоянными магнитами могут использоваться высокоэнергетические магниты, сделанные из неодима или других стратегических элементов; большинство из них — сплав неодим-железо-бор. Благодаря своей более высокой плотности потока электрические машины с высокоэнергетическими постоянными магнитами, по крайней мере, конкурентоспособны со всеми оптимально сконструированными синхронными и индукционными электрическими машинами с однополярным питанием.Миниатюрные двигатели напоминают структуру на иллюстрации, за исключением того, что у них есть по крайней мере три полюса ротора (для обеспечения запуска, независимо от положения ротора), а их внешний корпус представляет собой стальную трубку, которая магнитно связывает внешние части изогнутых магнитов поля.
Двигатели постоянного тока с щетками
Основная статья: Матовый электродвигатель постоянного токаРабота щеточного электродвигателя с двухполюсным ротором и статором на постоянных магнитах. («N» и «S» обозначают полярности на внутренних сторонах магнитов; внешние грани имеют противоположные полярности.)
Щеточный двигатель постоянного тока имеет набор вращающихся обмоток, намотанных на якорь, установленный на вращающемся валу. Вал также несет на коммутаторе долговечный поворотный электрический переключатель, который периодически меняет направление тока в обмотках ротора по мере вращения вала. Таким образом, через вращающиеся обмотки каждого щеточного двигателя постоянного тока протекает переменный ток. Ток протекает через одну или несколько пар щеток, установленных на коммутаторе; щетки подключают внешний источник электроэнергии к вращающемуся якорю.
Вращающийся якорь состоит из одной или нескольких катушек проволоки, намотанных на ламинированный магнитно «мягкий» ферромагнитный сердечник. Ток от щеток проходит через коммутатор и одну обмотку якоря, превращая его в временный магнит (электромагнит). Поле магнитов, создаваемое якорем, взаимодействует со стационарным магнитным полем, создаваемым либо постоянными магнитами, либо другой обмоткой катушки возбуждения, как части корпуса двигателя. Сила между двумя магнитными полями приводит к вращению вала двигателя.Коммутатор переключает питание на катушки по мере вращения ротора, предотвращая полное совпадение магнитных полюсов ротора с магнитными полюсами поля статора, так что ротор никогда не останавливается (как это делает стрелка компаса), а скорее продолжает вращаться. пока подано питание.
Многие ограничения классического коллекторного двигателя постоянного тока связаны с необходимостью прижимания щеток к коммутатору. Это создает трение. Искры создаются щетками, замыкая и размыкая цепи через катушки ротора, когда щетки пересекают изолирующие промежутки между секциями коллектора.В зависимости от конструкции коммутатора, это может включать в себя замыкание щеток между соседними секциями — и, следовательно, концами катушки — на мгновение при пересечении зазоров. Кроме того, индуктивность катушек ротора заставляет напряжение на каждой из них повышаться при размыкании цепи, увеличивая искрение щеток. Это искрение ограничивает максимальную скорость машины, так как слишком быстрое искрение приведет к перегреву, разрушению или даже расплавлению коллектора. Плотность тока на единицу площади щеток в сочетании с их удельным сопротивлением ограничивает мощность двигателя.Замыкание и размыкание электрического контакта также вызывает электрический шум; искрение порождает радиопомехи. Щетки со временем изнашиваются и требуют замены, а сам коллектор подлежит износу и техническому обслуживанию (на более крупных двигателях) или замене (на небольших двигателях). Сборка коммутатора на большом двигателе — дорогостоящий элемент, требующий точной сборки многих деталей. В небольших двигателях коммутатор обычно постоянно встроен в ротор, поэтому его замена обычно требует замены всего ротора.
Хотя большинство коммутаторов имеют цилиндрическую форму, некоторые из них представляют собой плоские диски, состоящие из нескольких сегментов (обычно не менее трех), установленных на изоляторе.
Большие щетки желательны для большей площади контакта щеток, чтобы максимизировать мощность двигателя, но маленькие щетки желательны для малой массы, чтобы максимизировать скорость, с которой двигатель может работать без чрезмерного подпрыгивания щеток и искрения (сравнимо с проблемой «смещения клапана» «в двигателях внутреннего сгорания). (Маленькие кисти также желательны по более низкой цене.Более жесткие пружины щеток также можно использовать для того, чтобы заставить щетки заданной массы работать с большей скоростью, но за счет больших потерь на трение (более низкой эффективности) и ускоренного износа щеток и коллектора. Следовательно, конструкция щетки двигателя постоянного тока предполагает компромисс между выходной мощностью, скоростью и эффективностью / износом.
- Терминологические пояснения
- Первыми практическими электродвигателями, использовавшимися для уличных железных дорог, были электродвигатели постоянного тока с коммутаторами. Электроэнергия подавалась на коммутаторы (сделанные из меди) с помощью медных щеток, но разница напряжений между соседними шинами коллектора, отличная проводимость медных щеток и искрение вызвали значительный ущерб после довольно короткого периода работы.Инженер-электрик понял, что замена медных щеток электрически резистивными твердыми угольными блоками продлит срок службы. Хотя этот термин больше не является описательным, угольные блоки продолжают называть «щетками» и по сей день.
- Скульпторы, работающие с глиной, нуждаются в опорных конструкциях, называемых арматурами, чтобы предотвратить проседание больших изделий под действием силы тяжести. Магнитные пластинки в роторе с обмотками также поддерживают катушки из изолированной медной проволоки.По аналогии, намотанные роторы стали называть «якорями». [ необходима ссылка ]
- Коммутаторы, по крайней мере среди некоторых людей, которые работают с ними ежедневно, стали настолько привычными, что некоторые даже не осознают, что они представляют собой лишь особую разновидность поворотных электрических переключателей. Учитывая, как часто возникают и разрываются связи, у них очень долгий срок службы.
A: шунт B: серия C: составной f = катушка возбуждения
Есть пять типов щеточных двигателей постоянного тока:
- Двигатель постоянного тока с параллельной обмоткой
- Двигатель постоянного тока с последовательной обмоткой Составной двигатель постоянного тока
- (две конфигурации):
- Суммарное соединение
- Дифференциально сложный
- Двигатель постоянного тока с постоянными магнитами (не показан)
- Отдельно возбужденный (не показан)
Бесщеточные двигатели постоянного тока
Основная статья: Бесщеточный электродвигатель постоянного токаНекоторые проблемы щеточного двигателя постоянного тока устранены в бесщеточной конструкции.В этом двигателе механический «вращающийся переключатель» или узел коммутатора / щеточного устройства заменен внешним электронным переключателем, синхронизированным с положением ротора. Бесщеточные двигатели обычно имеют КПД 85–90% или более, КПД бесщеточного электродвигателя достигает 96,5%, как сообщалось [23] , тогда как двигатели постоянного тока с щеточной передачей обычно имеют КПД 75–80%.
На полпути между обычными двигателями постоянного тока и шаговыми двигателями лежит область бесщеточных двигателей постоянного тока. Построенные по принципу, очень похожему на шаговые двигатели, они часто используют внешний ротор с постоянным магнитом, три фазы управляющих катушек, могут использовать датчики эффекта Холла для определения положения ротора и связанную с ним электронику привода.Катушки активируются, одна фаза за другой, управляющей электроникой в соответствии с сигналами либо от датчиков эффекта Холла, либо от обратной ЭДС (электродвижущей силы) неприведенных катушек. Фактически, они действуют как трехфазные синхронные двигатели, содержащие собственную электронику частотно-регулируемого привода. В специализированном классе контроллеров бесщеточных двигателей постоянного тока для определения положения и скорости используется обратная связь по ЭДС через соединения основных фаз вместо датчиков Холла. Эти двигатели широко используются в электрических радиоуправляемых транспортных средствах.Когда они сконфигурированы с магнитами снаружи, разработчики моделей называют их двигателями внешнего хода.
Бесщеточные двигатели постоянного токаобычно используются там, где необходимо точное регулирование скорости, например, в дисководах компьютеров или кассетных видеомагнитофонах, в шпинделях приводов компакт-дисков, компакт-дисков (и т. Д.), А также в механизмах офисных изделий, таких как вентиляторы, лазерные принтеры. и копировальные аппараты. Они имеют ряд преимуществ перед обычными двигателями:
- По сравнению с вентиляторами переменного тока, использующими двигатели с экранированными полюсами, они очень эффективны и работают намного холоднее, чем эквивалентные двигатели переменного тока.Эта холодная операция приводит к значительному увеличению срока службы подшипников вентилятора.
- Без изнашиваемого коммутатора срок службы бесщеточного двигателя постоянного тока может быть значительно больше по сравнению с двигателем постоянного тока, использующим щетки и коммутатор. Коммутация также имеет тенденцию вызывать большое количество электрических и радиочастотных помех; Без коммутатора или щеток бесщеточный двигатель может использоваться в электрически чувствительных устройствах, таких как аудиооборудование или компьютеры.
- Те же датчики на эффекте Холла, которые обеспечивают коммутацию, также могут обеспечивать удобный сигнал тахометра для приложений с замкнутым контуром (сервоуправлением).В вентиляторах сигнал тахометра может использоваться для получения сигнала «вентилятор исправен», а также для обеспечения обратной связи по скорости вращения.
- Двигатель можно легко синхронизировать с внутренними или внешними часами, что позволяет точно регулировать скорость.
- Бесщеточные двигатели не имеют шансов искрообразования, в отличие от щеточных двигателей, что делает их более подходящими для сред с летучими химическими веществами и топливом. Кроме того, искрение генерирует озон, который может накапливаться в плохо вентилируемых зданиях, опасаясь причинения вреда здоровью людей.
- Бесщеточные двигатели обычно используются в небольшом оборудовании, таком как компьютеры, и обычно используются в вентиляторах, чтобы избавиться от нежелательного тепла.
- Это также очень тихие двигатели с акустической точки зрения, что является преимуществом при использовании в оборудовании, подверженном вибрации.
Современные бесщеточные двигатели постоянного тока имеют мощность от долей ватта до многих киловатт. В электромобилях используются более мощные бесщеточные двигатели мощностью до 100 кВт. Они также находят значительное применение в высокопроизводительных электрических моделях самолетов.
Реактивные реактивные двигатели
6/4 полюсный реактивный электродвигатель
Основная статья: Импульсный реактивный двигательИмпульсный реактивный электродвигатель (SRM) не имеет щеток или постоянных магнитов, а в роторе нет электрических токов. Вместо этого крутящий момент возникает из-за небольшого несовпадения полюсов ротора с полюсами статора. Ротор выравнивается с магнитным полем статора, в то время как обмотки статора поля статора последовательно возбуждаются для вращения поля статора.
Магнитный поток, создаваемый обмотками возбуждения, следует по пути наименьшего магнитного сопротивления, что означает, что магнитный поток будет проходить через полюса ротора, которые находятся ближе всего к находящимся под напряжением полюсам статора, тем самым увеличивая эти полюса ротора и создавая крутящий момент. Когда ротор вращается, различные обмотки будут запитаны, поддерживая вращение ротора.
Импульсные реактивные электродвигатели теперь используются в некоторых устройствах. [24]
Двигатели постоянного тока без сердечника или железа
Миниатюрный двигатель без сердечника
Ни один из описанных выше двигателей в принципе не требует, чтобы железные (стальные) части ротора действительно вращались.Если магнитомягкий материал ротора выполнен в виде цилиндра, то (за исключением эффекта гистерезиса) крутящий момент действует только на обмотки электромагнитов. Этим фактом пользуется двигатель постоянного тока без сердечника или железа , специализированная форма щеточного или бесщеточного двигателя постоянного тока. Эти двигатели, оптимизированные для быстрого разгона, имеют ротор без железного сердечника. Ротор может иметь форму цилиндра, заполненного обмоткой, или самонесущей конструкции, содержащей только магнитный провод и связующий материал.Ротор может помещаться внутри магнитов статора; магнитомягкий неподвижный цилиндр внутри ротора обеспечивает обратный путь для магнитного потока статора. Во второй конструкции корзина обмотки ротора окружает магниты статора. В этой конструкции ротор помещается внутри магнитомягкого цилиндра, который может служить корпусом для двигателя, а также обеспечивает обратный путь для магнитного потока.
Поскольку ротор намного легче по весу (массе), чем обычный ротор, сформированный из медных обмоток на стальных пластинах, ротор может ускоряться намного быстрее, часто достигая механической постоянной времени менее 1 мс.Это особенно верно, если в обмотках используется алюминий, а не более тяжелая медь. Но поскольку в роторе нет металлической массы, которая могла бы служить радиатором, даже небольшие двигатели без сердечника часто должны охлаждаться принудительным воздухом. Перегрев может быть проблемой для двигателей постоянного тока без сердечника.
Среди этих типов есть типы дискового ротора, более подробно описанные в следующем разделе.
Вибрационные двигатели для сотовых телефонов иногда представляют собой крошечные цилиндрические типы с постоянным магнитным полем, но есть также дискообразные типы, которые имеют тонкий многополярный дисковый магнит поля и намеренно несбалансированную структуру ротора из формованного пластика с двумя связанными без сердечника катушками.Металлические щетки и плоский коммутатор переключают питание на катушки ротора.
Соответствующие приводы с ограниченным ходом не имеют сердечника и катушки, размещенной между полюсами тонких постоянных магнитов с высокой магнитной индукцией. Это быстрые позиционеры головки для жестких дисков («жестких дисков»). Хотя современный дизайн значительно отличается от громкоговорителей, он все еще свободно (и неправильно) называется структурой «звуковой катушки», потому что некоторые более ранние головки жестких дисков двигались по прямым линиям и имели структуру привода, очень похожую на это громкоговоритель.
Электродвигатели постоянного тока с печатным рисунком якоря или блинчика
Основная статья: блин (игровая машина)Двигатель довольно необычной конструкции, якорь с печатным рисунком, или двигатель-блинчик, имеет обмотки в форме диска, движущиеся между массивами магнитов с большим магнитным потоком. Магниты расположены по кругу, обращенному к ротору, с промежутком между ними, образуя осевой воздушный зазор. Эта конструкция широко известна как мотор-блинчик из-за ее чрезвычайно плоского профиля, хотя с момента ее создания у технологии было много торговых марок, таких как ServoDisc.
Якорь с печатным рисунком (первоначально сформированный на печатной плате) в двигателе с печатным рисунком якоря изготовлен из перфорированных медных листов, которые ламинированы вместе с использованием современных композитных материалов, чтобы сформировать тонкий жесткий диск. Печатный якорь имеет уникальную конструкцию в мире щеточных двигателей, поскольку в нем нет отдельного кольцевого коммутатора. Щетки движутся непосредственно по поверхности якоря, что делает всю конструкцию очень компактной.
Альтернативный метод производства заключается в использовании намотанного медного провода, уложенного плоско с центральным обычным коммутатором, в форме цветка и лепестка.Обмотки обычно стабилизируются путем пропитки систем электролитической эпоксидной заливки. Это эпоксидные смолы с наполнителем, которые имеют умеренную смешанную вязкость и длительное время гелеобразования. Они отличаются низкой усадкой и низким экзотермическим эффектом и, как правило, признаны UL 1446 в качестве заливочного компаунда для использования при температуре до 180 ° C (класс H) (файл UL № E 210549).
Уникальное преимущество двигателей постоянного тока без железа заключается в том, что они не имеют зубцов (изменения крутящего момента, вызванные изменением притяжения между железом и магнитами).Паразитные вихревые токи не могут образовываться в роторе, поскольку он полностью не содержит железа, хотя роторы из железа являются слоистыми. Это может значительно повысить эффективность, но контроллеры с регулируемой скоростью должны использовать более высокую частоту переключения (> 40 кГц) или постоянный ток из-за уменьшения электромагнитной индукции.
Эти двигатели были первоначально изобретены для привода приводов магнитных лентопротяжных устройств в развивающейся компьютерной индустрии, где минимальное время для достижения рабочей скорости и минимальный тормозной путь были критически важны.Блинные двигатели по-прежнему широко используются в высокопроизводительных сервоуправляемых системах, роботизированных системах гуманоидов, промышленной автоматизации и медицинских устройствах. Из-за разнообразия конструкций, доступных в настоящее время, технология используется в приложениях от высокотемпературных военных до недорогих насосов и основных сервоприводов.
Универсальные двигатели
Современный недорогой универсальный мотор от пылесоса. Обмотки возбуждения окрашены в темно-медный цвет по направлению к задней части с обеих сторон. Ламинированный сердечник ротора серый металлик с темными пазами для намотки катушек.Коммутатор (частично скрыт) потемнел от использования; это впереди. Большая коричневая деталь из формованного пластика на переднем плане поддерживает направляющие и щетки (с обеих сторон), а также передний подшипник двигателя.Двигатель с последовательной обмоткой называется универсальным двигателем , если он был разработан для работы от источника переменного или постоянного тока. Он может хорошо работать на переменном токе, потому что ток как в поле, так и в якоре (и, следовательно, результирующие магнитные поля) будут чередоваться (обратная полярность) синхронно, и, следовательно, результирующая механическая сила будет возникать в постоянном направлении вращения.
Универсальные двигатели, работающие на обычных частотах линии электропередачи, часто встречаются в диапазоне мощности, редко превышающем 1000 Вт. Универсальные двигатели также составляют основу традиционного тягового двигателя на электрических железных дорогах. В этом приложении использование переменного тока для питания двигателя, изначально предназначенного для работы на постоянном токе, привело бы к потерям эффективности из-за вихретокового нагрева их магнитных компонентов, особенно полюсных наконечников поля двигателя, которые для постоянного тока использовали бы твердые неламинированный) утюг.Хотя эффекты нагрева уменьшаются за счет использования многослойных полюсных наконечников, используемых для сердечников трансформаторов, и использования пластин из электротехнической стали с высокой проницаемостью, одним из решений, доступных в начале 20-го века, было использование электродвигателей от низкочастотные источники переменного тока, обычно с частотой 25 и 16,7 Гц. Поскольку они использовали универсальные двигатели, локомотивы, использующие эту конструкцию, также обычно могли работать от третьего рельса или воздушного провода с питанием от постоянного тока.Кроме того, учитывая, что паровые двигатели напрямую приводили в действие многие генераторы переменного тока, их относительно низкие частоты вращения благоприятствовали низким частотам, потому что требовалось сравнительно мало полюсов статора.
Преимущество универсального двигателя заключается в том, что источники питания переменного тока могут использоваться на двигателях, которые имеют некоторые характеристики, более общие для двигателей постоянного тока, в частности, высокий пусковой момент и очень компактную конструкцию, если используются высокие скорости вращения. Отрицательный аспект — проблемы с обслуживанием и коротким сроком службы, вызванные коммутатором.Такие двигатели используются в таких устройствах, как миксеры для пищевых продуктов и электроинструменты, которые используются только с перерывами и часто требуют высокого пускового момента. Постоянное управление скоростью универсального двигателя, работающего от переменного тока, легко достигается с помощью тиристорной схемы, в то время как несколько отводов на катушке возбуждения обеспечивают (неточное) ступенчатое управление скоростью. Бытовые блендеры, рекламирующие множество скоростей, часто сочетают в себе катушку возбуждения с несколькими ответвлениями и диод, который можно вставить последовательно с двигателем (в результате чего двигатель работает от полуволнового выпрямленного переменного тока).
В прошлом двигатели с отталкивающим пуском с фазным ротором обеспечивали высокий пусковой момент, но с дополнительной сложностью. Их роторы были похожи на роторы универсальных двигателей, но их щетки были связаны только друг с другом. Трансформатор индуцировал ток в ротор. Положение щетки относительно полюсов поля означало, что пусковой момент создавался отталкиванием ротора от полюсов поля. Центробежный механизм, когда он близок к рабочей скорости, соединил все стержни коллектора вместе, чтобы создать эквивалент ротора с короткозамкнутым ротором.Кроме того, когда скорость была близка к рабочей, более совершенные двигатели поднимали щетки из-под контакта.
Асинхронные двигатели не могут вращать вал быстрее, чем разрешено частотой сети. Напротив, универсальные двигатели обычно работают на высоких скоростях, что делает их полезными для таких приборов, как блендеры, пылесосы и фены, где желательны высокая скорость и легкий вес. Они также обычно используются в портативных электроинструментах, таких как дрели, шлифовальные машины, циркулярные и лобзиковые пилы, где характеристики двигателя хорошо работают.Моторы многих пылесосов и триммеров для сорняков превышают 10 000 об / мин, в то время как многие Dremel и аналогичные миниатюрные шлифовальные машины превышают 30 000 об / мин.
Универсальные двигателитакже подходят для электронного регулирования скорости и, как таковые, являются идеальным выбором для бытовых стиральных машин. Двигатель можно использовать для перемешивания барабана (как вперед, так и назад), переключая обмотку возбуждения относительно якоря. Двигатель также может работать до высоких скоростей, необходимых для цикла отжима.
Двигатель может выйти из строя из-за превышения скорости (работа с частотой вращения, превышающей расчетные пределы), если агрегат работает без значительной нагрузки.На более мощных двигателях следует избегать внезапной потери нагрузки, и возможность такого явления включена в схемы защиты и управления двигателя. В некоторых небольших приложениях лопасть вентилятора, прикрепленная к валу, часто действует как искусственная нагрузка, чтобы ограничить скорость двигателя до безопасного уровня, а также как средство для циркуляции охлаждающего воздуха по якорю и обмоткам возбуждения.
Двигатели переменного тока
В 1882 году Никола Тесла открыл вращающееся магнитное поле и впервые применил вращающееся силовое поле для работы машин.Он использовал этот принцип для разработки уникального двухфазного асинхронного двигателя в 1883 году. В 1885 году Галилео Феррарис независимо исследовал эту концепцию. В 1888 году Феррарис опубликовал свое исследование в докладе Королевской академии наук в Турине.
Тесла предположил, что коммутаторы из машины могут быть удалены, и устройство может работать во вращающемся силовом поле. Его учитель профессор Пошель заявил, что это было бы похоже на создание вечного двигателя. [25] Тесла позже достигнет U.S. Патент 0,416,194, Электродвигатель (декабрь 1889 г.), который напоминает двигатель, изображенный на многих фотографиях Теслы. Этот классический электромагнитный двигатель переменного тока был асинхронным.
Михаил Осипович Доливо-Добровольский позже в 1890 году разработал трехфазный «клеточный ротор». Этот тип двигателя сейчас используется в подавляющем большинстве коммерческих приложений.
Двигатель переменного тока состоит из двух частей: неподвижного статора с катушками, на которые подается переменный ток для создания вращающегося магнитного поля, и ротора, прикрепленного к выходному валу, которому крутящий момент создается вращающимся полем.
Двигатель переменного тока со скользящим ротором
Тормозной двигатель с коническим ротором включает тормоз как неотъемлемую часть конического скользящего ротора. Когда двигатель находится в состоянии покоя, пружина воздействует на скользящий ротор и прижимает тормозное кольцо к тормозной крышке в двигателе, удерживая ротор в неподвижном состоянии. Когда двигатель находится под напряжением, его магнитное поле создает как осевую, так и радиальную составляющую. Осевой компонент преодолевает силу пружины, освобождая тормоз; в то время как радиальный компонент заставляет ротор вращаться.Дополнительного управления тормозом не требуется.
Синхронный электродвигатель
Основная статья: Синхронный двигательСинхронный электродвигатель — это электродвигатель переменного тока, отличающийся тем, что ротор вращается с катушками, пропускающими магниты с той же скоростью, что и переменный ток, и возникающим магнитным полем, которое его приводит в действие. Другими словами, он имеет нулевое скольжение в обычных условиях эксплуатации. Сравните это с асинхронным двигателем, который должен проскальзывать для создания крутящего момента. Один тип синхронного двигателя похож на асинхронный двигатель, за исключением того, что ротор возбуждается полем постоянного тока.Контактные кольца и щетки используются для подачи тока к ротору. Полюса ротора соединяются друг с другом и движутся с одинаковой скоростью, отсюда и название синхронный двигатель. Другой тип, для низкого крутящего момента нагрузки, имеет лыски, притертые к обычному ротору с короткозамкнутым ротором для создания дискретных полюсов. Еще один, например, сделанный Hammond для своих часов до Второй мировой войны, и в более старых органах Hammond, не имеет обмоток ротора и дискретных полюсов. Это не самозапуск. Часы требуют ручного запуска небольшой ручкой на задней панели, в то время как более старые органы Hammond имели вспомогательный пусковой двигатель, подключенный с помощью подпружиненного переключателя с ручным управлением.
Наконец, гистерезисные синхронные двигатели обычно (по существу) двухфазные двигатели с фазосдвигающим конденсатором для одной фазы. Они запускаются как асинхронные двигатели, но когда скорость скольжения значительно уменьшается, ротор (гладкий цилиндр) временно намагничивается. Благодаря распределенным полюсам он действует как синхронный двигатель с постоянным магнитом и ротором. Материал ротора, как и у обычного гвоздя, останется намагниченным, но его также можно размагнитить без особых трудностей. После запуска полюса ротора остаются на месте; они не дрейфуют.
Маломощные синхронные синхронизирующие двигатели (например, для традиционных электрических часов) могут иметь многополюсные внешние чашечные роторы с постоянными магнитами и использовать затеняющие катушки для обеспечения пускового момента. Telechron часовые двигатели имеют заштрихованные полюса для пускового момента и двухспицевый кольцевой ротор, который работает как дискретный двухполюсный ротор.
Асинхронный двигатель
Основная статья: Асинхронный двигательАсинхронный двигатель — это асинхронный двигатель переменного тока, в котором мощность передается на ротор за счет электромагнитной индукции, подобно действию трансформатора.Асинхронный двигатель напоминает вращающийся трансформатор, потому что статор (неподвижная часть) по существу является первичной стороной трансформатора, а ротор (вращающаяся часть) — вторичной стороной. Многофазные асинхронные двигатели широко используются в промышленности.
Асинхронные двигатели можно разделить на двигатели с короткозамкнутым ротором и двигатели с фазным ротором. Двигатели с короткозамкнутым ротором имеют тяжелую обмотку, состоящую из сплошных стержней, обычно из алюминия или меди, соединенных кольцами на концах ротора. Если рассматривать только стержни и кольца в целом, они очень похожи на вращающуюся клетку для упражнений животного, отсюда и название.
Наведенные в эту обмотку токи создают магнитное поле ротора. Форма стержней ротора определяет скоростные характеристики. На низких скоростях ток, индуцируемый в короткозамкнутой клетке, близок к линейной частоте и имеет тенденцию быть во внешних частях клетки ротора. По мере ускорения двигателя частота скольжения становится ниже, и внутри обмотки проходит больший ток. Путем придания стержням формы для изменения сопротивления частей обмотки во внутренней и внешней частях клетки, эффективно вводится переменное сопротивление в цепь ротора.Однако у большинства таких моторов стержни одинаковые.
В двигателе с фазным ротором обмотка ротора состоит из множества витков изолированного провода и соединена с контактными кольцами на валу двигателя. В цепь ротора можно подключить внешний резистор или другие устройства управления. Резисторы позволяют контролировать скорость двигателя, хотя значительная мощность рассеивается на внешнем сопротивлении. Преобразователь может питаться от цепи ротора и возвращать энергию со скользящей частотой, которая иначе была бы потрачена впустую, обратно в систему питания через инвертор или отдельный двигатель-генератор.
Асинхронный двигатель с фазным ротором используется в основном для пуска нагрузки с высоким моментом инерции или нагрузки, которая требует очень высокого пускового момента во всем диапазоне скоростей. При правильном выборе резисторов, используемых во вторичном резисторе или пускателе с контактным кольцом, двигатель может создавать максимальный крутящий момент при относительно низком токе питания от нулевой до полной скорости. Этот тип двигателя также обеспечивает регулируемую скорость.
Скорость двигателя можно изменить, поскольку кривая крутящего момента двигателя эффективно изменяется за счет величины сопротивления, подключенного к цепи ротора.Увеличение значения сопротивления приведет к снижению скорости максимального крутящего момента. Если сопротивление, подключенное к ротору, увеличивается за пределами точки, где максимальный крутящий момент возникает при нулевой скорости, крутящий момент будет еще больше уменьшен.
При использовании с нагрузкой, кривая крутящего момента которой увеличивается с увеличением скорости, двигатель будет работать на скорости, при которой крутящий момент, развиваемый двигателем, равен крутящему моменту нагрузки. Уменьшение нагрузки приведет к ускорению двигателя, а увеличение нагрузки приведет к замедлению двигателя до тех пор, пока нагрузка и крутящий момент двигателя не станут равными.При таком использовании потери скольжения рассеиваются на вторичных резисторах и могут быть очень значительными. Регулировка скорости и полезная эффективность тоже очень плохие.
Различные регулирующие органы во многих странах приняли и внедрили законы, поощряющие производство и использование электродвигателей с более высоким КПД. Существует существующее и готовящееся к разработке законодательство относительно будущего обязательного использования асинхронных двигателей с повышенным КПД в определенном оборудовании. Для получения дополнительной информации см .: Повышенная эффективность и Медь в энергоэффективных двигателях.
Электродвигатель с двойным питанием
Основная статья: Электромашина с двойным питаниемЭлектродвигатели с двойным питанием имеют два независимых многофазных набора обмоток, которые вносят активную (т. Е. Рабочую) мощность в процесс преобразования энергии, при этом, по крайней мере, один из наборов обмоток имеет электронное управление для работы с переменной скоростью. Два независимых набора многофазных обмоток (т. Е. Двойной якорь) — это максимум, предусмотренный в одном корпусе без дублирования топологии. Электродвигатели с двойным питанием — это машины с эффективным диапазоном скорости вращения с постоянным крутящим моментом, который в два раза превышает синхронную скорость для данной частоты возбуждения.Это вдвое больше диапазона скоростей с постоянным крутящим моментом, чем у электрических машин с однополярным питанием, которые имеют только одну активную обмотку.
Двигатель с двойным питанием позволяет использовать электронный преобразователь меньшего размера, но стоимость обмотки ротора и контактных колец может компенсировать экономию на компонентах силовой электроники. Трудности с контролем скорости в приложениях с ограничением синхронной скорости. [26]
Электродвигатель с однополярным питанием
Основная статья: Электромашина с одиночным питаниемБольшинство двигателей переменного тока питаются отдельно.Электродвигатели с однополярным питанием имеют одну многофазную обмотку, подключенную к источнику питания. Электромашины с одиночным питанием могут быть индукционными или синхронными. Комплект активной обмотки может управляться электроникой. Электрические машины с однополярным питанием имеют эффективный диапазон скоростей с постоянным крутящим моментом до синхронной скорости для данной частоты возбуждения.
Моментные двигатели
Моментный двигатель (также известный как двигатель с ограниченным крутящим моментом) — это специализированная разновидность асинхронного двигателя, который способен работать неограниченное время при остановке, то есть с заблокированным от вращения ротором, без повреждения.В этом режиме работы двигатель будет прикладывать постоянный крутящий момент к нагрузке (отсюда и название).
Обычно моментный двигатель применяется для двигателей подающей и приемной катушек в ленточном накопителе. В этом случае, когда эти двигатели работают от низкого напряжения, характеристики этих двигателей позволяют приложить к ленте относительно постоянное легкое натяжение независимо от того, протягивает ли ведущая лента мимо головок ленты. Управляемые более высоким напряжением (и, следовательно, обеспечивающие более высокий крутящий момент), моментные двигатели также могут работать в режиме быстрой перемотки вперед и назад, не требуя каких-либо дополнительных механизмов, таких как шестерни или муфты.В мире компьютерных игр моментные двигатели используются в рулевых колесах с обратной связью по усилию.
Другое распространенное применение — это управление дроссельной заслонкой двигателя внутреннего сгорания в сочетании с электронным регулятором. В этом случае двигатель работает против возвратной пружины для перемещения дроссельной заслонки в соответствии с выходной мощностью регулятора. Последний контролирует частоту вращения двигателя, считая электрические импульсы от системы зажигания или от магнитного датчика [27] , и, в зависимости от скорости, выполняет небольшие корректировки величины тока, подаваемого на двигатель.Если двигатель начинает замедляться относительно желаемой скорости, ток будет увеличиваться, двигатель будет развивать больший крутящий момент, натягиваясь на возвратную пружину и открывая дроссельную заслонку. Если двигатель работает слишком быстро, регулятор снизит ток, подаваемый на двигатель, в результате чего возвратная пружина отодвинется и закроет дроссельную заслонку.
Шаговые двигатели
Основная статья: шаговый двигательПо конструкции тесно связаны с трехфазными синхронными двигателями переменного тока шаговые двигатели, в которых внутренний ротор, содержащий постоянные магниты, или магнитно-мягкий ротор с явными полюсами управляется набором внешних магнитов, которые переключаются электронно.Шаговый двигатель также можно рассматривать как нечто среднее между электродвигателем постоянного тока и вращающимся соленоидом. Поскольку каждая катушка поочередно получает питание, ротор выравнивается с магнитным полем, создаваемым обмоткой возбуждения под напряжением. В отличие от синхронного двигателя, шаговый двигатель не может вращаться непрерывно; вместо этого он «шагает» — запускается, а затем быстро останавливается — от одного положения к другому, по мере того как обмотки возбуждения последовательно включаются и отключаются. В зависимости от последовательности, ротор может вращаться вперед или назад, и он может произвольно менять направление, останавливаться, ускоряться или замедляться в любое время.
Простые драйверы шаговых двигателей полностью включают или полностью обесточивают обмотки возбуждения, приводя ротор к «зубчатой передаче» в ограниченное количество положений; более сложные драйверы могут пропорционально управлять мощностью обмоток возбуждения, позволяя роторам располагаться между точками зубьев и, таким образом, вращаться чрезвычайно плавно. Этот режим работы часто называют микрошагом. Шаговые двигатели с компьютерным управлением — одна из самых универсальных форм систем позиционирования, особенно когда они являются частью цифровой системы с сервоуправлением.
Шаговые двигателиможно легко поворачивать на определенный угол дискретными шагами, поэтому шаговые двигатели используются для позиционирования головки чтения / записи в дисководах компьютерных гибких дисков. Они использовались с той же целью в компьютерных дисковых накопителях до гигабайтной эры, где точность и скорость, которые они предлагали, были достаточными для правильного позиционирования головки чтения / записи жесткого диска. По мере увеличения плотности накопителей ограничения точности и скорости шаговых двигателей сделали их устаревшими для жестких дисков — ограничение точности сделало их непригодными для использования, а ограничение скорости сделало их неконкурентоспособными — таким образом, в новых жестких дисках используются системы привода головки на основе звуковой катушки.(Термин «звуковая катушка» в этой связи является историческим; он относится к структуре в типичном (конусном) громкоговорителе. Эта структура некоторое время использовалась для расположения головок. Современные приводы имеют поворотное крепление катушки; катушка качается вперед и назад, что-то вроде лопасти вращающегося вентилятора. Тем не менее, как и звуковая катушка, современные проводники катушки исполнительного механизма (магнитный провод) движутся перпендикулярно магнитным силовым линиям.)
Шаговые двигателибыли и до сих пор часто используются в компьютерных принтерах, оптических сканерах и цифровых копировальных аппаратах для перемещения оптического сканирующего элемента, каретки печатающей головки (матричных и струйных принтеров) и валика или подающих роликов.Аналогичным образом, многие компьютерные плоттеры (которые с начала 1990-х были заменены широкоформатными струйными и лазерными принтерами) использовали вращающиеся шаговые двигатели для перемещения пера и валика; типичными альтернативами здесь были линейные шаговые двигатели или серводвигатели с аналоговыми системами управления с обратной связью.
Так называемые кварцевые аналоговые наручные часы содержат самые маленькие обычные шаговые двигатели; у них одна катушка, они потребляют очень мало энергии и имеют ротор с постоянными магнитами. Такой же двигатель приводит в действие кварцевые часы с батарейным питанием.Некоторые из этих часов, например хронографы, содержат более одного шагового двигателя.
Шаговые двигатели были модернизированы для использования в электромобилях под термином SRM (Switched Reluctance Motor).
Сравнение
| Тип | Преимущества | Недостатки | Типичное приложение | Типовой привод |
|---|---|---|---|---|
| Многофазная индукционная беличья клетка переменного тока | Низкая стоимость, длительный срок службы, высокий КПД, доступны большие мощности (до 1 МВт и более), большое количество стандартизованных типов | Пусковой пусковой ток может быть высоким, для регулирования скорости требуется источник переменной частоты | Насосы, вентиляторы, нагнетатели, конвейеры, компрессоры | Многофазный переменный ток, переменная частота переменного тока |
| Двигатель с расщепленными полюсами | Низкая стоимость Долгая жизнь | Частота вращения немного ниже синхронной Низкий пусковой крутящий момент Малые характеристики Низкий КПД | Вентиляторы, бытовая техника, проигрыватели | Однофазный переменный ток |
| Индукция переменного тока — Беличья клетка, пуск с двухфазным конденсатором | Высокая мощность Высокий пусковой момент | Скорость немного ниже синхронной Требуется пусковой выключатель или реле | Приборы Стационарные электроинструменты | Однофазный переменный ток |
| Индукция переменного тока — Беличья клетка, работа от двухфазного конденсатора | Умеренная мощность Высокий пусковой крутящий момент Без пускового переключателя Сравнительно долгий срок службы | Частота вращения немного ниже синхронной Немного дороже | Промышленные воздуходувки Промышленное оборудование | Однофазный переменный ток |
| Асинхронный двигатель переменного тока — Двигатель с короткозамкнутым ротором, расщепленная фаза, вспомогательная пусковая обмотка | Средняя мощность Низкий пусковой крутящий момент | Скорость немного ниже синхронной Требуется пусковой выключатель или реле | Приборы Стационарные электроинструменты | Однофазный переменный ток |
| Универсальный двигатель | Высокий пусковой момент, компактность, высокая скорость. | Техническое обслуживание (щетки) Меньший срок службы Обычно вызывает шум Экономичны только небольшие номиналы | Переносные электроинструменты, блендеры, пылесосы, воздуходувки | Однофазный переменный или постоянный ток |
| AC синхронный | Синхронная скорость | Дороже | Промышленные двигатели Часы Проигрыватели виниловых пластинок Ленточные приводы | Одно- или многофазный переменный ток (конденсаторный для однофазного) |
| Шаговый DC | Прецизионное позиционирование Высокий удерживающий момент | Некоторые могут быть дорогими Требуется контроллер | Позиционирование в принтерах и дисководах гибких дисков; промышленные станки [29] | DC |
| Бесщеточный DC | Длительный срок службы Низкие затраты на обслуживание Высокая эффективность | Более высокая начальная стоимость Требуется контроллер | Жесткие («жесткие») дисководы CD / DVD-плееры Электромобили Радиоуправляемые автомобили БПЛА | постоянного тока или ШИМ |
| Реактивный реактивный двигатель | Длительный срок службы Низкие затраты на обслуживание Высокая эффективность Без постоянных магнитов Низкая стоимость Простая конструкция | Требуется контроллер | Приборы Электромобили Текстильные фабрики Применение в самолетах | постоянного тока или ШИМ |
| Матовый DC | Простое регулирование скорости | Техническое обслуживание (щетки) Средний срок службы Дорогой коммутатор и щетки | Сталелитейные заводы Машины для производства бумаги Тренажеры для беговой дорожки Автомобильные аксессуары | Прямой постоянный ток или ШИМ |
| Блинчик DC | Компактная конструкция Простое регулирование скорости | Средняя стоимость Средняя продолжительность жизни | Office Equip Вентиляторы / насосы, быстрые промышленные и военные сервоприводы | Прямой постоянный ток или ШИМ |
Задний ЭДС
Во время работы проводники, составляющие катушки двигателя, будут видеть внешние изменяющиеся магнитные поля либо из-за их собственного движения, либо из-за движения или изменения других магнитов, и они генерируют электрические потенциалы на катушках, называемые «обратной ЭДС», которые находятся в направлении, противоположном источнику питания, и пропорциональны рабочей скорости двигателя или, можно сказать, пропорциональны нагрузке на двигатель.
Обратная ЭДС индуцируется током Ia + Ra, который мы можем обозначить как Ib + Rb (наведенный ток обратной ЭДС плюс резистивные потери обмоток). Таким образом, обратная ЭДС снизит скорость двигателя, так как из-за нагрузки он индуцируется, и входящий ток будет пытаться уравновесить себя с обратной ЭДС. таким образом, мы имеем Ia + Ra = Ib + Rb. Значения этих токов и формула выводятся путем нанесения КВЛ на узлы обмотки. Таким образом, обратная ЭДС используется в качестве механизма управления двигателем.
Это применимо только к машинам постоянного тока.Не машины переменного тока.
Фактор качества
Основная статья: Фактор добротыПрофессор Эрик Лэйтуэйт предложил метрику для определения «качества» электродвигателя: [30]
Где:
- — коэффициент качества (коэффициенты выше 1, вероятно, будут эффективными)
- — поперечные сечения магнитной и электрической цепи
- — длины магнитной и электрической цепей
- — проницаемость керна
- — это угловая частота, на которой приводится двигатель в движение
Из этого он показал, что наиболее эффективные двигатели, вероятно, имеют относительно большие магнитные полюса.Однако это уравнение напрямую относится только к двигателям с непостоянными магнитами.
электростатический
Основная статья: Электростатический двигательПолный размер
Электростатический двигатель основан на притяжении и отталкивании электрического заряда. Обычно электростатические двигатели являются двойными по сравнению с обычными двигателями с катушкой. Обычно для них требуется источник питания высокого напряжения, хотя в очень маленьких двигателях используется более низкое напряжение. Вместо этого обычные электродвигатели используют магнитное притяжение и отталкивание и требуют высокого тока при низких напряжениях.В 1750-х годах Бенджамин Франклин и Эндрю Гордон разработали первые электростатические двигатели. Сегодня электростатический двигатель часто используется в микроэлектромеханических системах (MEMS), где их управляющее напряжение ниже 100 вольт, и где движущиеся заряженные пластины гораздо проще изготовить, чем катушки и железные сердечники. Кроме того, молекулярные механизмы, управляющие живыми клетками, часто основаны на линейных и вращающихся электростатических двигателях.
Наномотор с нанотрубками
Основная статья: наномотор с нанотрубкамиИсследователи из Калифорнийского университета в Беркли недавно разработали подшипники вращения на основе многослойных углеродных нанотрубок.Прикрепив золотую пластину (с размерами порядка 100 нм) к внешней оболочке подвешенной многослойной углеродной нанотрубки (как вложенные углеродные цилиндры), они могут электростатически вращать внешнюю оболочку относительно внутреннего ядра. Эти подшипники очень прочные; устройства колебались тысячи раз без признаков износа. Эти наноэлектромеханические системы (НЭМС) являются следующим шагом в миниатюризации и могут найти свое применение в коммерческих приложениях в будущем.
См. Также:
Пьезоэлектрический
Основная статья: Пьезоэлектрический двигательПьезоэлектрический двигатель или пьезодвигатель — это тип электродвигателя, основанный на изменении формы пьезоэлектрического материала при приложении электрического поля.Пьезоэлектрические двигатели используют обратный пьезоэлектрический эффект, при котором материал производит акустические или ультразвуковые колебания для создания линейного или вращательного движения. В одном механизме удлинение в одной плоскости используется для последовательного растяжения и удержания положения, подобно тому, как движется гусеница.
Использование и стили
Стандартные электродвигатели часто используются во многих современных машинах, но электродвигатели определенных типов предназначены для конкретных применений.
Поворотный
Применяется во вращающихся машинах, таких как вентиляторы, турбины, дрели, колеса электромобилей, локомотивы и конвейерные ленты. Кроме того, во многих вибрирующих или колеблющихся машинах электродвигатель вращает неуравновешенную массу, вызывая вибрацию двигателя (и его монтажной конструкции). Знакомое приложение — это вибросигналы сотового телефона, которые используются, когда пользователь отключил акустический «звонок».
Электродвигатели также популярны в робототехнике. Они вращают колеса автомобильных роботов, а серводвигатели приводят в действие руки промышленных роботов; они также двигают руками и ногами у человекоподобных роботов.В летающих роботах, наряду с вертолетами, двигатель вращает пропеллер или лопасти аэродинамического ротора, чтобы создать управляемую подъемную силу.
Электродвигатели заменяют гидроцилиндры в самолетах и военной технике. [31] [32]
В промышленных и производственных предприятиях электродвигатели вращают пилы и полотна в процессах резки и нарезки; они вращают детали, обрабатываемые на токарных и других станках, и вращают шлифовальные круги. Быстрые и точные серводвигатели позиционируют инструменты и работают на современных станках с ЧПУ.Миксеры с приводом от двигателя очень распространены в пищевой промышленности. Линейные двигатели часто используются для горизонтального выталкивания продуктов в контейнеры.
Во многих кухонных приборах также используются электродвигатели. Кухонные комбайны и кофемолки вращают лезвия, чтобы измельчать и измельчать продукты. Блендеры используют электродвигатели для смешивания жидкостей, а микроволновые печи используют электродвигатели, чтобы поворачивать поднос, на котором стоит еда. В тостерах также используются электродвигатели, которые поворачивают конвейер для перемещения пищи по нагревательным элементам.
Серводвигатель
Основная статья: СерводвигательСерводвигатель — это двигатель, который очень часто продается как готовый модуль, который используется в системе управления положением или скоростью с обратной связью, в основном регулирующих клапанов, таких как регулирующие клапаны с приводом от двигателя.Серводвигатели используются в таких приложениях, как станки, перьевые плоттеры и другие технологические системы. Двигатели, предназначенные для использования в сервомеханизмах, должны иметь хорошо задокументированные характеристики скорости, крутящего момента и мощности. Кривая зависимости скорости от крутящего момента очень важна и является высоким соотношением для серводвигателя. Также важны характеристики динамического отклика, такие как индуктивность обмотки и инерция ротора; эти факторы ограничивают общую производительность контура сервомеханизма. В больших, мощных, но медленно реагирующих сервоконтурах могут использоваться обычные двигатели переменного или постоянного тока и приводные системы с обратной связью по положению или скорости на двигателе.По мере увеличения требований к динамическому отклику используются более специализированные конструкции двигателей, такие как двигатели без сердечника.
Сервосистема отличается от некоторых приложений с шаговыми двигателями тем, что обратная связь по положению является непрерывной, пока двигатель работает; Шаговая система полагается на двигатель, который не «пропускает шаги» для кратковременной точности, хотя шаговая система может включать в себя «исходный» переключатель или другой элемент для обеспечения долговременной стабильности управления. [33] Например, когда запускается типичный компьютерный принтер с точечной матрицей, его контроллер заставляет шаговый двигатель печатающей головки перемещаться в крайнее левое положение, где датчик положения определяет исходное положение и останавливает шаг.Пока питание включено, двунаправленный счетчик в микропроцессоре принтера отслеживает положение печатающей головки.
Линейный двигатель
Основная статья: линейный двигательЛинейный двигатель — это, по сути, любой электродвигатель, который был «раскручен» так, что вместо создания крутящего момента (вращения) он создает прямолинейную силу по всей своей длине.
Линейные двигатели чаще всего представляют собой асинхронные двигатели или шаговые двигатели. Линейные двигатели обычно встречаются во многих американских горках, где быстрое движение безмоторного железнодорожного вагона контролируется рельсом.Они также используются в поездах на магнитной подвеске, где поезд «летает» над землей. В меньшем масштабе перьевой плоттер HP 7225A, выпущенный в 1978 году, использовал два линейных шаговых двигателя для перемещения пера по осям X и Y. [34]
Двигатели космических аппаратов
Основная статья: двигатель космического корабля с электрическим приводомДвижительная система космического корабля с электрическим приводом. Система представляет собой любую из множества форм электродвигателей, которые космический корабль может использовать для получения механической энергии в космическом пространстве.Большинство этих видов движителей космических аппаратов работают за счет электрического питания топлива до высокой скорости, но электродинамические тросы работают, взаимодействуя с магнитосферой планеты. [35]
Генератор
Основная статья: электрический генераторМногие электродвигатели используются в качестве генераторов либо частично (например, с рекуперативным торможением), либо в течение всего срока службы. При механическом приводе магнитные электродвигатели вырабатывают мощность за счет своей обратной ЭДС.
Производительность
Спецификация электродвигателя
При указании типа электродвигателя используется механическая мощность на валу.Это означает, что пользователи могут прогнозировать крутящий момент и скорость двигателя, не зная о механических потерях, связанных с двигателем. Пример: асинхронный двигатель 10 кВт.
Мощность
Выходная мощность роторного электродвигателя:
Где P в лошадиных силах, об / мин — это скорость вала в оборотах в минуту, а T — крутящий момент в фут-фунтах.
А для линейного двигателя:
Где P — мощность в ваттах, F — в ньютонах, а v — скорость в метрах в секунду.
КПД
Для расчета КПД двигателя механическая выходная мощность делится на входную электрическую мощность:, где — эффективность преобразования энергии, — входная электрическая мощность и — механическая выходная мощность.
В простейшем случае, и, где — входное напряжение, — входной ток, — выходной крутящий момент и — выходная угловая скорость. Можно аналитически вывести точку максимальной эффективности. Обычно он составляет менее 1/2 крутящего момента при остановке.
Крутящий момент типов двигателей
При оптимальном проектировании в пределах заданного ограничения насыщения сердечника и для заданного активного тока (т. Е. Тока крутящего момента), напряжения, числа пар полюсов, частоты возбуждения (т. Е. Синхронной скорости) и плотности магнитного потока в воздушном зазоре, все категории электрических двигатели или генераторы будут демонстрировать практически одинаковый максимальный непрерывный крутящий момент на валу (то есть рабочий крутящий момент) в пределах заданной области воздушного зазора с пазами обмотки и глубиной задней части, которая определяет физический размер электромагнитного сердечника.В некоторых приложениях требуются всплески крутящего момента, превышающие максимальный рабочий крутящий момент, например, короткие всплески крутящего момента для ускорения электромобиля с места. Всегда ограниченная насыщением магнитного сердечника или безопасным повышением рабочей температуры и напряжения, способность выдерживать скачки крутящего момента сверх максимального рабочего крутящего момента существенно различается между категориями электродвигателей или генераторов.
Способность к скачкам крутящего момента не следует путать со способностью ослаблять поле, присущей полностью электромагнитным электрическим машинам (электрические машины с постоянным магнитом (PM) исключены).Ослабление поля, недоступное для электрических машин с ПМ, позволяет электрической машине работать за пределами расчетной частоты возбуждения.
Электрические машины без топологии трансформаторной схемы, такие как полевые машины (например, электромагнит) или постоянные магниты (PM). Синхронные электрические машины не могут реализовать всплески крутящего момента выше максимального расчетного крутящего момента без насыщения магнитопровода и увеличения тока. как бесполезный. Кроме того, узел постоянных магнитов синхронных электрических машин с постоянными магнитами может быть непоправимо поврежден, если будут предприняты попытки увеличения крутящего момента, превышающего максимально допустимый рабочий крутящий момент.
Электрические машины с топологией трансформаторной схемы, такие как индукционные (т. Е. Асинхронные) электрические машины, индукционные электрические машины с двойной подачей питания и индукционные или синхронные электрические машины с двойной подачей ротора (WRDF), демонстрируют очень высокие всплески крутящего момента из-за активного Ток (т. е. магнитодвижущая сила или произведение тока и витков обмотки), индуцированный с обеих сторон трансформатора, противостоят друг другу, и в результате активный ток не влияет на плотность потока магнитного сердечника трансформатора, что иначе приведет к насыщению сердечника.
Электрические машины, основанные на принципах индукции или асинхронности, закорачивают один порт цепи трансформатора, и в результате реактивное сопротивление цепи трансформатора становится доминирующим по мере увеличения скольжения, что ограничивает величину активного (т. Е. Реального) тока. Тем не менее, всплески крутящего момента, которые в два-три раза превышают максимальный расчетный крутящий момент, возможны.
Синхронная электрическая машина WRDF — единственная электрическая машина с действительно двухпортовой топологией трансформаторной схемы (т.е., оба порта независимо возбуждаются без короткозамкнутого порта). Топология схемы с двумя портами трансформатора, как известно, нестабильна и требует многофазного узла контактного кольца-щетки для передачи ограниченной мощности на обмотку ротора. Если бы были доступны прецизионные средства для мгновенного управления углом крутящего момента и скольжением для синхронной работы во время движения или генерации, одновременно обеспечивая бесщеточную мощность для набора обмоток ротора (см. Бесщеточная электрическая машина с двойным питанием из обмотки ротора), активный ток синхронного WRDF электрический машина не будет зависеть от реактивного сопротивления цепи трансформатора, и всплески крутящего момента, значительно превышающие максимальный рабочий крутящий момент и намного превосходящие практические возможности любого другого типа электрической машины, будут реализованы.Были рассчитаны всплески крутящего момента, превышающие рабочий крутящий момент в восемь раз.
Постоянная плотность крутящего момента
Постоянная плотность крутящего момента обычных электрических машин определяется размером области воздушного зазора и глубиной задней части, которые определяются номинальной мощностью набора обмоток якоря, скоростью машины и достижимым воздухом. -зазорная магнитная индукция до насыщения активной зоны. Несмотря на высокую коэрцитивную силу постоянных магнитов из неодима или самария-кобальта, постоянная плотность крутящего момента практически одинакова для электрических машин с оптимально спроектированными наборами обмоток якоря.Никогда не следует путать постоянную плотность крутящего момента с пиковой плотностью крутящего момента, которая связана с выбранным производителем методом охлаждения, доступным для всех, или периодом работы до разрушения из-за перегрева обмоток или даже повреждения постоянного магнита.
Постоянная удельная мощность
Постоянная плотность мощности определяется произведением постоянной плотности крутящего момента и диапазона скорости постоянного крутящего момента электрической машины.
Стандарты двигателей
Ниже приведены основные стандарты проектирования и производства электродвигателей:
Ссылки и дополнительная литература
- Ссылки
- ^ Schoenherr, Стивен Ф. [3]
- Общие ссылки
- Дональд Г. Финк и Х. Уэйн Бити, Стандартное руководство для инженеров-электриков , одиннадцатое издание , МакГроу-Хилл, Нью-Йорк, 1978, ISBN 0-07-020974-X.
- Эдвин Дж. Хьюстон и Артур Кеннелли, Последние типы динамо-электрических машин , авторское право American Technical Book Company 1897, опубликовано P.F. Кольер и сыновья Нью-Йорк, 1902 год
- Купхальдт, Тони Р. (2000–2006). «Глава 13 ДВИГАТЕЛИ ПЕРЕМЕННОГО ТОКА». Уроки в электрических цепях — Том II . http://www.ibiblio.org/obp/electricCircuits/AC/AC_13.html. Проверено 11 апреля 2006.
- «А.О. Смит: переменного и постоянного тока электродвигателей» (PDF). http://www.aosmithmotors.com/uploadedFiles/AC-DC%20manual.pdf. Проверено 7 декабря 2009.
- Resenblat & Frienman Оборудование постоянного и переменного тока
- http://www.streetdirectory.com/travel_guide/115541/technology/understanding_electric_motors_and_their_uses.html
- Дополнительная литература
- Шейнфилд Д.J., Промышленная электроника для инженеров, химиков и техников, William Andrew Publishing, Norwich, NY, 2001.
- Fitzgerald / Kingsley / Kusko (Fitzgerald / Kingsley / Umans в более поздние годы), Electric Machinery , классический текст для младших и старших студентов-электриков. Первоначально опубликовано в 1952 г., шестое издание вышло в 2002 г.
- Bedford, B.D .; Hoft, R.G. et al. (1964). Принципы инверторных схем . Нью-Йорк: John Wiley & Sons, Inc.. ISBN 0-471-06134-4. (Для частотно-регулируемого регулирования скорости двигателя используются цепи инвертора)
- Б. Р. Пелли, «Тиристорные преобразователи с фазовым управлением и циклоконвертеры: работа, управление и производительность» (Нью-Йорк: Джон Вили, 1971).
- Джон Н. Чиассон, Моделирование и высокопроизводительное управление электрическими машинами , Wiley-IEEE Press, Нью-Йорк, 2005, ISBN 0-471-68449-X.