Управление скоростью вращения однофазных двигателей
Однофазные асинхронные двигатели питаются от обычной сети переменного напряжения 220 В.
Наиболее распространённая конструкция таких двигателей содержит две (или более) обмотки — рабочую и фазосдвигающую. Рабочая питается напрямую, а дополнительная через конденсатор, который сдвигает фазу на 90 градусов, что создаёт вращающееся магнитное поле. Поэтому такие двигатели ещё называют двухфазные или конденсаторные.


Регулировать скорость вращения таких двигателей необходимо, например, для:
- изменения расхода воздуха в системе вентиляции
- регулирования производительности насосов
- изменения скорости движущихся деталей, например в станках, конвеерах
В системах вентиляции это позволяет экономить электроэнергию, снизить уровень акустического шума установки, установить необходимую производительность.
Способы регулирования
Рассматривать механические способы изменения скорости вращения, например редукторы, муфты, шестерёнчатые трансмиссии мы не будем. Также не затронем способ изменения количества полюсов обмоток.
Рассмотрим способы с изменением электрических параметров:
- изменение напряжения питания двигателя
- изменение частоты питающего напряжения
Регулирование напряжением
Регулирование скорости этим способом связано с изменением, так называемого, скольжения двигателя — разностью между скоростью вращения магнитного поля, создаваемого неподвижным статором двигателя и его движущимся ротором:
S=(n1-n2)/n2
n1 — скорость вращения магнитного поля
n2 — скорость вращения ротора
При этом обязательно выделяется энергия скольжения — из-за чего сильнее нагреваются обмотки двигателя.
Данный способ имеет небольшой диапазон регулирования, примерно 2:1, а также может осуществляться только вниз — то есть, снижением питающего напряжения.
При регулировании скорости таким способом необходимо устанавливать двигатели завышенной мощности.
Но несмотря на это, этот способ используется довольно часто для двигателей небольшой мощности с вентиляторной нагрузкой.
На практике для этого применяют различные схемы регуляторов.
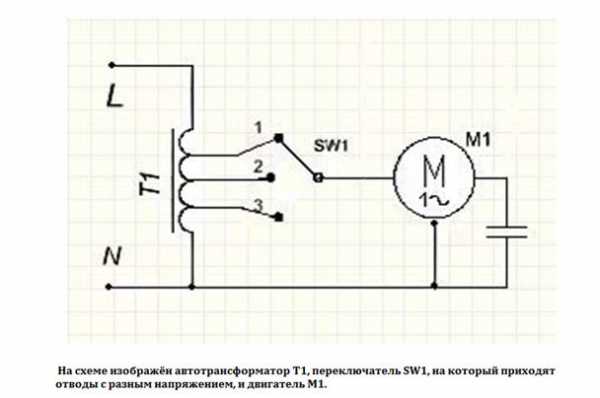
Автотрансформаторное регулирование напряжения
Автотрансформатор — это обычный трансформатор, но с одной обмоткой и с отводами от части витков. При этом нет гальванической развязки от сети, но она в данном случае и не нужна, поэтому получается экономия из-за отсутствия вторичной обмотки.
На схеме изображён автотрансформатор T1, переключатель SW1, на который приходят отводы с разным напряжением, и двигатель
Регулировка получается ступенчатой, обычно используют не более 5 ступеней регулирования.
Преимущества данной схемы:
- неискажённая форма выходного напряжения (чистая синусоида)
- хорошая перегрузочная способность трансформатора
Недостатки:
- большая масса и габариты трансформатора (зависят от мощности нагрузочного мотора)
- все недостатки присущие регулировке напряжением
Тиристорный регулятор оборотов двигателя
В данной схеме используются ключи — два тиристора, включённых встречно-параллельно (напряжение переменное, поэтому каждый тиристор пропускает свою полуволну напряжения) или симистор.
Схема управления регулирует момент открытия и закрытия тиристоров относительно фазового перехода через ноль, соответственно «отрезается» кусок вначале или, реже в конце волны напряжения.
Таким образом изменяется среднеквадратичное значение напряжения.
Данная схема довольно широко используется для регулирования активной нагрузки — ламп накаливания и всевозможных нагревательных приборов (так называемые диммеры).
Ещё один способ регулирования — пропуск полупериодов волны напряжения, но при частоте в сети 50 Гц для двигателя это будет заметно — шумы и рывки при работе.
Для управления двигателями регуляторы модифицируют из-за особенностей индуктивной нагрузки:
- устанавливают защитные LRC-цепи для защиты силового ключа (конденсаторы, резисторы, дроссели)
- добавляют на выходе конденсатор для корректировки формы волны напряжения
- ограничивают минимальную мощность регулирования напряжения — для гарантированного старта двигателя
- используют тиристоры с током в несколько раз превышающим ток электромотора
Достоинства тиристорных регуляторов:
- низкая стоимость
- малая масса и размеры
Недостатки:
- можно использовать для двигателей небольшой мощности
- при работе возможен шум, треск, рывки двигателя
- при использовании симисторов на двигатель попадает постоянное напряжение
- все недостатки регулирования напряжением
Стоит отметить, что в большинстве современных кондиционеров среднего и высшего уровня скорость вентилятора регулируется именно таким способом.
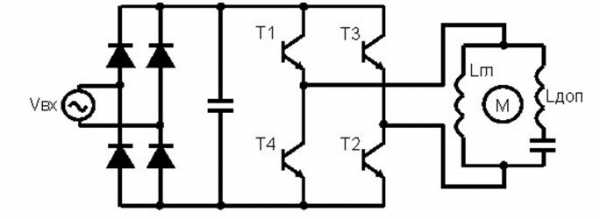
Транзисторный регулятор напряжения
Как называет его сам производитель — электронный автотрансформатор или ШИМ-регулятор.

Изменение напряжения осуществляется по принципу ШИМ (широтно-импульсная модуляция), а в выходном каскаде используются транзисторы — полевые или биполярные с изолированным затвором (IGBT).
Выходные транзисторы коммутируются с высокой частотой (около 50 кГц), если при этом изменить ширину импульсов и пауз между ними, то изменится и результирующее напряжение на нагрузке. Чем короче импульс и длиннее паузы между ними, тем меньше в итоге напряжение и подводимая мощность.
Для двигателя, на частоте в несколько десятков кГц, изменение ширины импульсов равносильно изменению напряжения.
Выходной каскад такой же как и у частотного преобразователя, только для одной фазы — диодный выпрямитель и два транзистора вместо шести, а схема управления изменяет выходное напряжение.
- Небольшие габариты и масса прибора
- Невысокая стоимость
- Чистая, неискажённая форма выходного тока
- Отсутствует гул на низких оборотах
- Управление сигналом 0-10 Вольт
Слабые стороны:
- Расстояние от прибора до двигателя не более 5 метров (этот недостаток устраняется при использовании дистанционного регулятора)
- Все недостатки регулировки напряжением
Частотное регулирование
Ещё совсем недавно (10 лет назад) частотных регуляторов скорости двигателей на рынке было ограниченное количество, и стоили они довольно дорого. Причина — не было дешёвых силовых высоковольтных транзисторов и модулей.
Но разработки в области твердотельной электроники позволили вывести на рынок силовые IGBT-модули. Как следствие — массовое появление на рынке инверторных кондиционеров, сварочных инверторов, преобразователей частоты.
На данный момент частотное преобразование — основной способ регулирования мощности, производительности, скорости всех устройств и механизмов приводом в которых является электродвигатель.
Однако, преобразователи частоты предназначены для управления трёхфазными электродвигателями.
Однофазные двигатели могут управляться:
- специализированными однофазными ПЧ
- трёхфазными ПЧ с исключением конденсатора
Преобразователи для однофазных двигателей
В настоящее время только один производитель заявляет о серийном выпуске специализированного ПЧ для конденсаторных двигателей — INVERTEK DRIVES.
Это модель Optidrive E2
Для стабильного запуска и работы двигателя используются специальные алгоритмы.
При этом регулировка частоты возможна и вверх, но в ограниченном диапазоне частот, этому мешает конденсатор установленный в цепи фазосдвигающей обмотки, так как его сопротивление напрямую зависит от частоты тока:
Xc=1/2πfC
f — частота тока
С — ёмкость конденсатора
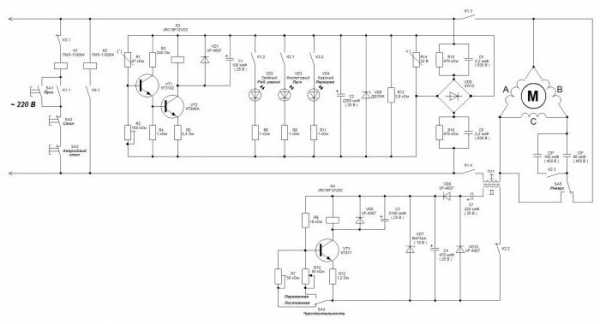
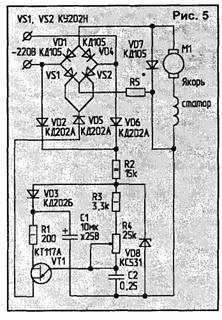
В выходном каскаде используется мостовая схема с четырьмя выходными IGBT транзисторами:
Optidrive E2 позволяет управлять двигателем без исключения из схемы конденсатора, то есть без изменения конструкции двигателя — в некоторых моделях это сделать довольно сложно.
Преимущества специализированного частотного преобразователя:
- интеллектуальное управление двигателем
- стабильно устойчивая работа двигателя
- огромные возможности современных ПЧ:
- возможность управлять работой двигателя для поддержания определённых характеристик (давления воды, расхода воздуха, скорости при изменяющейся нагрузке)
- многочисленные защиты (двигателя и самого прибора)
- входы для датчиков (цифровые и аналоговые)
- различные выходы
- коммуникационный интерфейс (для управления, мониторинга)
- предустановленные скорости
- ПИД-регулятор
Минусы использования однофазного ПЧ:
- ограниченное управление частотой
- высокая стоимость
Использование ЧП для трёхфазных двигателей
Стандартный частотник имеет на выходе трёхфазное напряжение. При подключении к ему однофазного двигателя из него извлекают конденсатор и соединяют по приведённой ниже схеме:
Геометрическое расположение обмоток друг относительно друга в статоре асинхронного двигателя составляет 90°:
Фазовый сдвиг трёхфазного напряжения -120°, как следствие этого — магнитное поле будет не круговое , а пульсирующее и его уровень будет меньше чем при питании со сдвигом в 90°.
В некоторых конденсаторных двигателях дополнительная обмотка выполняется более тонким проводом и соответственно имеет более высокое сопротивление.
При работе без конденсатора это приведёт к:
- более сильному нагреву обмотки (срок службы сокращается, возможны кз и межвитковые замыкания)
- разному току в обмотках
Многие ПЧ имеют защиту от асимметрии токов в обмотках, при невозможности отключить эту функцию в приборе работа по данной схеме будет невозможна
Преимущества:
- более низкая стоимость по сравнению со специализированными ПЧ
- огромный выбор по мощности и производителям
- более широкий диапазон регулирования частоты
- все преимущества ПЧ (входы/выходы, интеллектуальные алгоритмы работы, коммуникационные интерфейсы)
Недостатки метода:
- необходимость предварительного подбора ПЧ и двигателя для совместной работы
- пульсирующий и пониженный момент
- повышенный нагрев
- отсутствие гарантии при выходе из строя, т.к. трёхфазные ПЧ не предназначены для работы с однофазными двигателями
masterxoloda.ru
Cпособы регулирования скорости асинхронного двигателя
Асинхронные двигатели переменного тока являются самыми применяемыми электродвигателями абсолютно во всех хозяйственных сферах. В их преимуществах отмечается конструктивная простота и небольшая цена. При этом немаловажное значение имеет регулирование скорости асинхронного двигателя. Существующие способы показаны ниже.
Согласно структурной схеме скоростью электродвигателя можно управлять в двух направлениях, то есть изменением величин:
- скорость электромагнитного поля статора;
- скольжение двигателя.

Первый вариант коррекции, используемый для моделей с короткозамкнутым ротором, осуществляется за счет изменения:
- частоты,
- количества полюсных пар,
- напряжения.
В основе второго варианта, применяемого для модификации с фазным ротором, лежат:
- изменение напряжения питания;
- присоединение элемента сопротивления в цепь ротора;
- использование вентильного каскада;
- применение двойного питания.
Вследствие развития силовой преобразовательной техники на текущий момент в широком масштабе изготовляются всевозможные виды частотников, что определило активное применение частотно-регулируемого привода. Рассмотрим наиболее распространённые методы.
Частотное регулирование
Всего десять лет назад в торговой сети регуляторов частоты вращения скорости ЭД было небольшое количество. Причиной тому служило то, что тогда ещё не производились дешёвые силовые высоковольтные транзисторы и модули.
На сегодня частотное преобразование – самый распространённый способ регулирования скорости двигателей. Трёхфазные преобразователи частоты создаются для управления 3-фазными электродвигателями.
Однофазные же двигатели управляются:
- специальными однофазными преобразователями частоты;
- 3-фазными преобразователями частоты с устранением конденсатора.
Схемы регуляторов оборотов асинхронного двигателя
Для двигателей повседневного предназначения легко можно выполнить необходимые расчеты, и своими руками произвести сборку устройства на полупроводниковой микросхеме. Пример схемы регулятора электродвигателя приведён ниже. Такая схема позволяет добиться контроля параметров приводной системы, затрат на техническое обслуживание, снижения потребления электричества наполовину.

Принципиальная схема регулятора оборотов вращения ЭД для повседневных нужд значительно упрощается, если применить так называемый симистор.
Обороты вращения ЭД регулируются с помощью потенциометра, определяющего фазу входного импульсного сигнала, открывающего симистор. На изображении видно, что в качестве ключей применяются два тиристора, подключённых встречно-параллельно. Тиристорный регулятор оборотов ЭД 220 В достаточно часто применяется для регулирования такой нагрузки, как диммеры, вентиляторы и нагревательная техника. От оборотов вращения асинхронного ЭД зависят технические показатели и эффективность работы двигательного оборудования.
Заключение
На технорынке сегодня предлагаются в большом ассортименте регуляторы и частотные преобразователи для асинхронных электродвигателей переменного тока.
Управление способом варьирования частоты на данный момент – самый оптимальный способ, т. к. он позволяет плавно регулировать скорость асинхронного ЭД в широчайшем диапазоне, без значительных потерь и снижения перегрузочных способностей.
Тем не менее, на основе расчёта, можно самостоятельно собрать простое и эффективное устройство с регулированием оборотов вращения однофазных электродвигателей с помощью тиристоров.
electricdoma.ru
Регулирование скорости асинхронного двигателя
Долгое время в промышленности использовались нерегулируемые электроприводы на базе АД, но, в последнее время возникла надобность в регулировании скорости асинхронных двигателей.
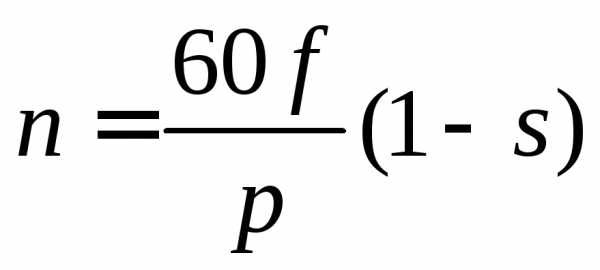
Частота вращения ротора равна
При этом, синхронная частота вращения зависит от частоты напряжения и числа пар полюсов
Исходя из этого, можно сделать вывод, что регулировать скорость АД можно с помощью изменения скольжения, частоты и числа пар полюсов.
Рассмотрим основные способы регулировки.
Регулирование скорости с помощью изменения активного сопротивления в цепи ротора
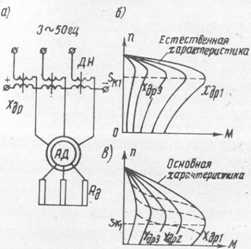
Этот способ регулирования скорости применим в двигателях с фазным ротором. При этом в цепь обмотки ротора включается реостат, которым можно плавно увеличивать сопротивление. С увеличением сопротивления, скольжение двигателя растёт, а скорость падает. Таким образом, обеспечивается регулировка скорости вниз от естественной характеристики.
Недостатком данного способа является его неэкономичность, так как при увеличении скольжения, потери в цепи ротора растут, следовательно, КПД двигателя падает. Плюс к этому, механическая характеристика двигателя становится более пологой и мягкой, из-за чего небольшое изменение момента нагрузки на валу, вызывает большое изменение частоты вращения.
Регулирование скорости данным способом не эффективно, но, несмотря на это применяется в двигателях с фазным ротором.
Регулирование скорости двигателя с помощью изменения напряжения питания
Данный способ регулирования можно осуществить, если включить в цепь автотрансформатор, перед статором, после питающих проводов. При этом, если снижать напряжение на выходе автотрансформатора, то двигатель будет работать на пониженном напряжении. Это приведёт к снижению частоты вращения двигателя, при постоянном моменте нагрузки, а также к снижению перегрузочной способности двигателя. Это связано с тем, что при уменьшении напряжения питания, максимальный момент двигателя уменьшается в квадрат раз. Кроме того, этот момент уменьшается быстрее, чем ток в цепи ротора, а значит, растут и потери, с последующим нагревом двигателя.
Способ регулирования изменением напряжения, возможен только вниз от естественной характеристики, так как увеличивать напряжение выше номинального нельзя, потому что это может привести к большим потерям в двигателе, перегреву и выходу его из строя.
Кроме автотрансформатора, можно использовать тиристорный регулятор напряжения.
Регулирование скорости с помощью изменения частоты питания

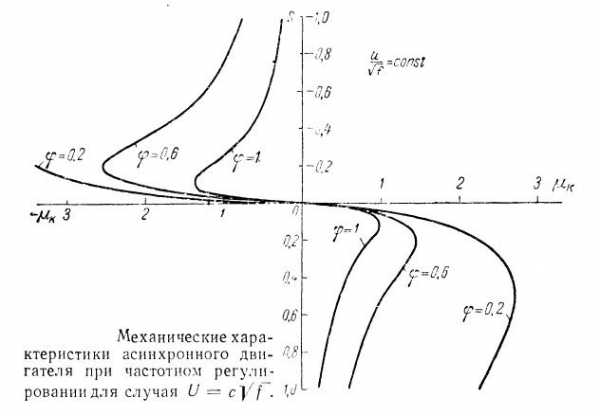
При данном способе регулирования, к двигателю подключается преобразователь частоты (ПЧ). Чаще всего это тиристорный преобразователь частоты. Регулирование скорости осуществляется изменением частоты напряжения f, так как она в данном случае влияет на синхронную скорость вращения двигателя.
При снижении частоты напряжения, перегрузочная способность двигателя будет падать, чтобы этого не допустить, требуется повысить величину напряжения U1. Значение на которое нужно повысить, зависит от того какой привод. Если регулирование производится с постоянным моментом нагрузки на валу, то напряжение нужно изменять пропорционально изменению частоты (при снижении скорости). При увеличении скорости этого делать не следует, напряжение должно оставаться на номинальном значении, иначе это может причинить вред двигателю.
Если регулирование скорости производится с постоянной мощностью двигателя (например, в металлорежущих станках), то изменение напряжения U1 необходимо производить пропорционально квадратному корню изменения частоты f1.
При регулировании установок с вентиляторной характеристикой, необходимо изменять подводимое напряжение U1 пропорционально квадрату изменения частоты f1.
Регулирование с помощью изменения частоты, является наиболее приемлемым вариантом для асинхронных двигателей, так как при нем обеспечивается регулирование скорости в широком диапазоне, без значительных потерь и снижения перегрузочных способностей двигателя.
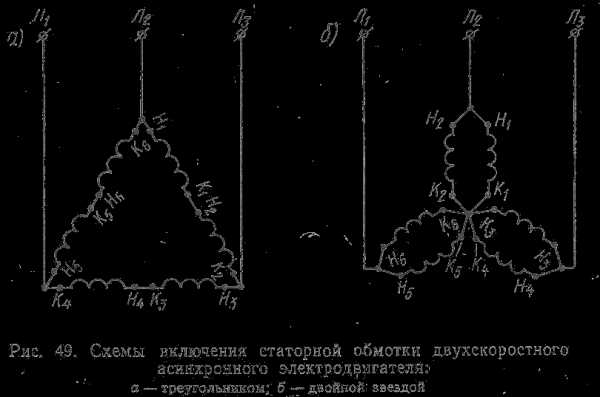
Регулирование скорости АД изменением числа пар полюсов
Такой способ регулирования возможен только в многоскоростных асинхронных двигателях с короткозамкнутым ротором, так как число полюсов этого ротора, всегда равно количеству полюсов статора.
В соответствии с формулой, которая рассматривалась выше, скорость двигателя можно регулировать изменением числа пар полюсов. Причём, изменение скорости происходит ступенчато, так как количество полюсов принимают только определённые значения – 1,2,3,4,5.
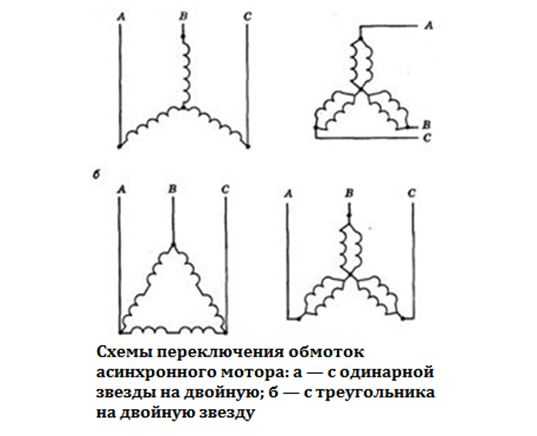
Изменение количества полюсов достигается переключением катушечных групп статорной обмотки. При этом катушки соединяются различными схемами соединения, например “звезда — звезда” или “звезда – двойная звезда”. Первая схема соединения даёт изменение количества полюсов в соотношении 2:1. При этом обеспечивается постоянная мощность двигателя при переключении. Вторая схема изменяет количество полюсов в таком же соотношении, но при этом обеспечивает постоянный момент двигателя.
Применение данного способа регулирования оправдано сохранением КПД и коэффициента мощности при переключении. Минусом же является более сложная и увеличенная конструкция двигателя, а также увеличение его стоимости.
Читайте также — Торможение асинхронного двигателя
electroandi.ru
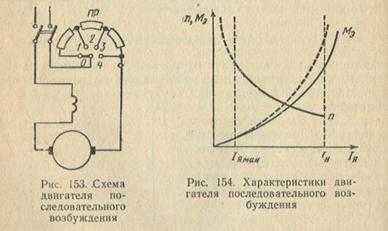
Регулирование скорости вращения электродвигателя
Основным преимуществом электродвигателей с параллельным возбуждением является возможность широкого и плавного регулирования их скорости вращения.
Уравнения, выведенные в особенностях электродвигателей постоянного тока, показывают, что искусственная регулировка скорости вращения может производиться тремя способами: изменением сопротивления якорной цепи, изменением магнитного потока и изменением напряжения, подводимого к якорю.
Регулирование скорости вращения изменением сопротивления якорной цепи. Для регулирования скорости вращения электродвигателя в цепь якоря последовательно включают дополнительные сопротивления (см. рис. 10). Уравнение (30) показывает, что каждому новому значению дополнительного сопротивления соответствует своя искусственная механическая характеристика. То же самое относится и к скоростным характеристикам. Анализ этого уравнения показывает, что между сопротивлением якорной цепи и скоростью вращения существует линейная зависимость, т. е. при любом значении R характеристики электродвигателя остаются прямолинейными и при холостом ходе проходят через точку п = п0. Очевидно, чем выше величина дополнительного сопротивления, тем мягче искусственная характеристика электродвигателя (рис. 12). Это означает, что при одной и той же нагрузке скорость электродвигателя тем ниже, чем выше величина дополнительного сопротивления, включенного в якорную цепь. Уменьшение скорости объясняется дополнительным падением напряжения в добавочном сопротивлении.
Процесс перехода от одной скорости к другой происходит следующим образом. Допустим, электродвигатель, развивая момент М = Мс, работает устойчиво на естественной характеристике а в точке 1 (контакты 1У, 2У и 3У на рис. 10 замкнуты). Если необходимо снизить скорость вращения электродвигателя, размыкают контакт 1У и тем самым в цепь якоря вводят дополнительное сопротивление R1. Согласно уравнению (30) электродвигатель должен перейти на характеристику b, соответствующую новому значению сопротивления якорной цепи. Электродвигатель обладает значительной инерцией и при переключении сопротивлений скорость его вращения мгновенно измениться не может. Поэтому в первый момент электродвигатель переходит на работу в соответствующей точке 2 на характеристике b. При этом ток якоря и вращающий момент уменьшаются, нарушается равновесие моментов (М<Мc) и скорость электродвигателя начинает снижаться до тех пор, пока снова не восстановится равновесие моментов (М = Мс). Следовательно, устойчивая работа электродвигателя будет теперь в точке 3 на характеристике b.
Аналогичным образом происходит переход на характеристики с и d при включении сопротивлений R2 и R3.
Для увеличения скорости вращения электродвигателя необходимо отключить часть дополнительного сопротивления. Например, если электродвигатель устойчиво работает в точке 7 на характеристике d, то при отключении сопротивления R3 (при замыкании контактов 3У) происходит переход на работу по характеристике с. При этом первоначально (в точке 8) резко увеличивается ток и момент электродвигателя и скорость начинает возрастать. В точке 5 восстанавливается равновесие моментов и увеличение скорости прекращается. При последовательном отключении остальных ступеней регулировочного реостата происходит постепенное возрастание скорости вращения до величины n1.
Данный способ регулирования скорости вращения отличается простотой электрической схемы и применяется сравнительно часто для электродвигателей крановых механизмов. Однако ему присущи и некоторые существенные недостатки. В частности, регулирование скорости рассмотренным способом сопровождается большими .потерями мощности в реостате. Поэтому стараются применять его лишь в тех случаях, когда мощность электродвигателя невелика или снижение скорости вращения должно быть кратковременным. Большим недостатком является также громоздкость и высокая стоимость регулировочного реостата, который должен быть рассчитан на номинальный ток электродвигателя. Это заставляет уменьшать число ступеней реостата и предусматривать специальные меры для его охлаждения.
Регулирование скорости вращения изменением магнитного потока. Если в цепь обмотки возбуждения включить последовательно реостат (см. рис. 10), то скорость вращения электродвигателя с параллельным возбуждением можно регулировать изменением магнитного потока. Для этого необходимо изменять величину сопротивления цепи возбуждения. Изменение сопротивления приводит к изменению тока возбуждения и, следовательно, к изменению магнитного потока электродвигателя. Очевидно, при отсутствии дополнительного сопротивления в цепи возбуждения магнитный поток электродвигателя имеет максимальное значение. Ему соответствуют естественные скоростная и механическая характеристики.
При введении же дополнительного сопротивления в цепь возбуждения магнитный поток уменьшается, а скорость увеличивается, причем, различным значениям магнитного потока соответствуют различные искусственные скоростная и механическая характеристики (рис. 13). Уравнения этих характеристик н.ичем не отличаются от уравнений (25) и (29).
Из уравнений вытекает, что характеристики при различных значениях магнитного потока остаются прямолинейными, причем меньшим значениям магнитного потока соответствуют большие значения скорости холостого хода. По мере снижения магнитного потока возбуждения жесткость характеристик электродвигателя несколько уменьшается, что объясняется влиянием реакции якоря.
Как было показано, в случае регулирования скорости изменением сопротивления в цепи якоря переход с одной характеристики на другую осуществляется практически при постоянной скорости. Это объясняется малой индуктивностью якоря, благодаря чему ток якоря изменяется практически мгновенно.
Обмотка же возбуждения электродвигателя .параллельного возбуждения обладает значительной индуктивностью. Поэтому в случае регулирования скорости изменением сопротивления цепи возбуждения переход с одной характеристики на другую осуществляется по так называемым динамическим характеристикам, которые могут быть построены в результате расчета переходных процессов. На рис. 13 динамические характеристики показаны пунктирной линией.

Регулирование скорости вращения электродвигателей с параллельным возбуждением изменением магнитного потока сопровождается незначительными потерями мощности в регулировочном реостате и является экономичным. Незначительные потери дают возможность использовать реостат небольших габаритов и веса, с большим числом регулировочных ступеней, что позволяет получить плавное, практически бесступенчатое регулирование скорости.
Недостатком данного способа регулирования скорости является ухудшение коммутации и снижение перегрузочной способности электродвигателя при повышенных скоростях. Скорость же при этом способе регулирования может изменяться только лишь в сторону увеличения по сравнению с номинальной, что сильно ограничивает применение данного способа. При больших нагрузках данный способ регулирования скорости вообще неприменим, так как снижение магнитного потока уменьшает вращающий момент и при переходе к высшей скорости может возникнуть недопустимо большой ток.
Регулирование скорости вращения изменением напряжения на зажимах якоря (система генератор—двигатель). В целях широкого и плавного регулирования скорости иногда применяют так называемую систему генератор—двигатель (сокращенно система Г—Д), которая позволяет использовать метод регулирования скорости изменением напряжения, подводимого к якорю электродвигателя. При питании электродвигателя от сети такой метод совершенно неприменим. Его применение возможно лишь при питании электродвигателя от отдельного генератора.

Обычно система Г—Д состоит из приводного двигателя ПД, генератора Г с возбудителем В и исполнительного электродвигателя ИД (рис. 14). Приводной электродвигатель питается от сети и служит для приведения во вращение генератора. Чаще всего в качестве приводного электродвигателя используется асинхронный короткозамкнутый электродвигатель, получающий питание от сети трехфазного тока. Он имеет постоянное направление вращения и вращается с постоянной скоростью. Исполнительный электродвигатель получает питание от генератора Г и приводит в действие механизм.
Генератор и исполнительный электродвигатель имеют независимое возбуждение. Их обмотки возбуждения ОВГ и ОВД питаются от возбудителя В, небольшого генератора постоянного тока, сидящего на одном валу с приводным электродвигателем ПД и генератором Г. Если в цепь обмотки ОВГ включить регулировочный реостат, то, изменяя величину его сопротивления, можно изменять скорость вращения исполнительного электродвигателя, так как при этом будет меняться величина напряжения генератора. Действительно, для цепи генератор—двигатель по II закону Кирхгофа можно составить следующее уравнение:
где Ег и Ед — соответственно э.д.с. генератора и электродвигателя;
Rг и Rд — соответственно сопротивление якорей генератора
и электродвигателя. Заменив э. д. с. электродвигателя, согласно выражению (7),. получим
Выражение (41) является уравнением скоростной характеристики исполнительного электродвигателя в системе Г—Д. Заменив в нем ток якоря выражением (28), получим уравнение механической характеристики
Уравнения (41) и (42) показывают, что путем изменения Ег можно изменять скорость вращения исполнительного электродвигателя. Следовательно, при уменьшении сопротивления регулировочного реостата Rp скорость исполнительного электродвигателя будет возрастать, а при увеличении сопротивления—уменьшаться, так как э. д. с. генератора Ег зависит от величины тока в обмотке ОВГ.
Нетрудно заметить, что механические и скоростные характеристики электродвигателя в системе Г—Д представляют собой прямые линии. Скорость холостого хода определяется первым членом правой части уравнения (41) или (42) и не остается постоянной величиной при различных значениях сопротивления Rр, т. е. каждому значению сопротивления Rр соответствует своя скоростная и механическая характеристики (рис. 15). Эти характеристики являются достаточно жесткими, что позволяет при применении специальных регулируемых электродвигателей получить широкий диапазон скоростей в пределах 1 : 100 и более, что является одним из основных положительных качеств системы Г—Д.
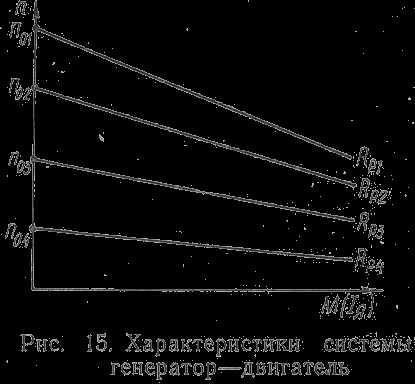
Иногда регулировочный реостат включают не только в цепь обмотки ОВГ, но в цепь обмотки возбуждения ИД, что дает возможность регулировать скорость вверх от номинальной.
Регулирование скорости по системе Г—Д является весьма экономичным, так как все переключения происходят в цепях обмоток возбуждения, где токи сравнительно невелики. Относительно небольшие мощности и габариты регулировочных реостатов позволяют получить большое число регулировочных ступеней и, следовательно, достаточно плавное регулирование скорости. Возможно также применение реостатов со скользящими контактами, что позволяет получить бесступенчатое регулирование скорости.
Система Г—Д очень удобна не только в отношении широты и плавности регулирования скорости. Она позволяет также очень просто производить реверс и торможение исполнительного электродвигателя. Так, для осуществления реверса необходимо, как известно, изменить полярность на зажимах якоря электродвигателя. Для этого достаточно изменить направление тока в обмотке ОВГ (или в обмотке ОВД). Для осуществления торможения достаточно отключить от возбудителя обмотку ОВГ. Небольшие размеры регулировочных реостатов позволяют широко использовать дистанционное управление системой Г—Д, что также является большим ее преимуществом.
Основной недостаток системы генератор—двигатель — большое количество электрических машин, высокая стоимость и относительно низкий к. п. д. установки, что, естественно, ограничивает область применения дайной системы.
vdvizhke.ru
Регулятор скорости вращения асинхронного электродвигателя (видео, схема)
На современном этапе развития промышленности возникла необходимость для создания управления темпом вращения различными методами и устройствами. Для этого используется регулятор скорости вращения асинхронного электродвигателя.
ОГЛАВЛЕНИЕ
- Для чего нужна регулировка вращающей скорости?
- Изменение частоты рабочего тока
- Регулирование скорости числом пар полюсов
- Регулировка с автотрансформатором
- Электропреобразователи для однофазных АД
- Регулирование на основе тиристора
- Управление методом пропуска полупериодов волны напряжения
- Электронный трансформатор
Для чего нужна регулировка вращающей скорости?
- для изменения расхода воздуха вентиляционной системы;
- управление производительностью насосов;
- регулирование скоростью отдельных движущих деталей устройства;
- экономия электроэнергии;
- позволяет уменьшить степень шума;
- для уровня нужной производительности.
Регулирование скорости асинхронного двигателя может происходить несколькими способами. Самыми популярными являются:
Изменение частоты рабочего тока
График изменения частоты рабочего тока
Скорость вращения АД возможно настраивать методом изменения частоты переменного тока.
Регулятор осуществляет изменения скорости вращения. Частотное регулирование происходит с помощью полупроводниковых преобразователей. Принцип действия основывается на частоте, которая зависит от частоты питания.
Определить скорость можно по формуле: n1 = 60 f/p , где n1 – значение частоты вращения, p – пары полюсов статора, f – частота питания, 60 – показатель вычисления мерности.
Для работы двигателя без потерь происходит изменения частоты, напряжения. Последнее зависит от моментов нагрузки. При непрерывной нагрузке, соразмерными становятся напряжение и частота. Частотный регулятор повышает и понижает электрообороты большим масштабом. Благодаря этому, они довольно часто применяются в оборудовании. Например, многоконтактные станки. Скорость вращения электродвигателя приводит в движении намоточный вал, который регулируется полупроводниковым преобразователем.
Принцип действия заключается в двойном преобразовании. В механизм входит выпрямитель, импульсный инвертор, система управления. Синусоидальный поток становится постоянным и поступает на инвертор. Инвертор состоит из переключателей, из них напряжение идёт на статор. Постоянный ток становится переменным необходимой частоты. Параметры устанавливаются модулем управления.
Регулирование скорости числом пар полюсов
Один из популярных методов управления асинхронными двигателями с короткозамкнутыми роторами. Способ действия: уложить в пазы дополнительные обмотки, уменьшив сечение провода. Что ведёт к уменьшению номинального напряжения. Усложняются коммутация и энергетические характеристики.
Высокоскоростные двигатели имеют от 2 до 4 скоростей. Они оборудуют лифты, станки, насосы, вентиляторы.
Регулировка с автотрансформатором
В основе данного способа представлен обыкновенный трансформатор, с отводками от витков и одной электрообмоткой. Экономность происходит по причине неимения повторной обмотки.
загрузка…
Регулятор имеет до 6 стадий. Выходное напряжение будет не искажённым. Трансформатор выдерживает перегрузки. При этом занимает большие размеры.
Электропреобразователи для однофазных АД
Регулятор частоты для однофазного устройства
Частотное регулирование является основным методом регулирования мощности асинхронных электродвигателей. Предназначается для трёхфазных АД.
Для однофазных механизмов применяются специальные однофазные преобразователи. Их производит фирма INVERTEK DRIVES.
Специализированный частотный электропреобразователь обеспечивает высокоинтеллектуальное управление. Характеристика функций: поддержка водяного напора, расходование воздуха, регулировка скоростью, сбережение двигателя и удобный интерфейс. Однако стоимость преобразователя дорогая.
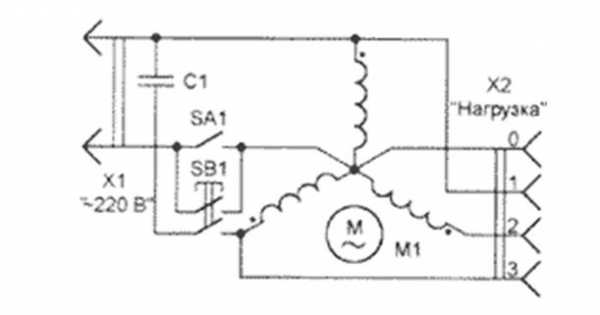
Схема электропреобразователя
Для однофазного двигателя можно взять трёхфазный прибор с удалением из него конденсатора. Но при этом длительность работы уменьшиться из-за нагревания обмоток и допустимых замыканий. Преимущества применения очень большой выбор приборов, их низкая стоимость.
Регулирование на основе тиристора
Используется два тиристора или симистр. Тиристоры включены одновременно, каждый из них проводит полуволну.
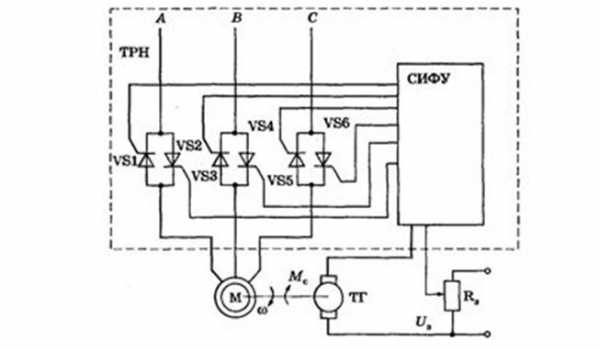
Схема управления скоростью тиристорным регулятором напряжения
В основе системы лежат моменты открытия и закрытия тиристоров. Вначале волны напряжения убирается часть, значение тока имеет изменения. Такая схема применяется в лампах накаливания, димерах.
Управление методом пропуска полупериодов волны напряжения
Устанавливается защитная цепь LRC для защиты ключа силы, для которого используется дроссели, конденсаторы и резисторы. При введении резистора в цепь, мощность теряется. Жёсткость механических характеристик снижается с уменьшением частоты вращения. На выходе добавляется конденсатор, который корректирует форму волны и ограничит мощность напряжения. Тиристоры лучше использовать с большей мощностью для обеспечения беспроблемного старта.
Преимуществом использования тиристоров является их недорогая цена и маленькие размер, вес. К недостаткам можно отнести предпочтительнее применение для маломощных двигателей, возникновение рывков, шума и треска в процессе работы.
Электронный трансформатор
ШИМ-регулятор работает по принципу широтной импульсной модуляции. Каскадом на выходе применяются полевые или биполярные транзисторы.
Механические характеристики управления ШИМ-регулятором
Транзисторы на выходе коммутируются с высокой частотой, при смене ширины импульса и времени между ними, изменения касаются напряжения на нагрузке в результате. При коротком импульсе и длинной паузе, напряжение уменьшается и мощность тоже.
Электронный трансформатор занимает меньшее пространство, обладает небольшим весом, стоит недорого. Ток выходит в чистой, неискаженной форме. На низком обороте отсутствует гул. Но прибор должен находиться на расстоянии до 5 метров или можно установить дистанционный регулятор. Можно сделать регулятор своими руками, ничем не хуже промышленного механизма. Его использовать в основе схемы, по которой собрать готовый регулятор.
Разнообразие регуляторов скорости вращения позволяют выбрать подходящий вариант для конкретного устройства. Это обеспечит продуктивность работы высокоскоростного асинхронного электродвигателя.
electricvdele.ru
Регулятор оборотов электродвигателя: принцип действия
Регулятор оборотов электродвигателя необходим для плавного разгона и торможения. Широкое применение получили такие устройства в промышленности. С их помощью изменяют скорость движения лент конвейера, вращения вентиляторов. Двигатели на 12 Вольт используются в системах управления и автомобилях. Все видели переключатели, которыми изменяется скорость вращения вентилятора печки в машинах. Это один из типов регуляторов. Только он не предназначен для плавного запуска. Изменение скорости вращения происходит ступенчато.
Применение частотных преобразователей
В качестве регуляторов оборотов электродвигателей 220В и 380В используются частотные преобразователи. Это высокотехнологичные электронные устройства, которые позволяют кардинально изменить характеристики тока (форму сигнала и частоту). В их основе находятся мощные полупроводниковые транзисторы и широтно-импульсный модулятор. Вся работа прибора управляется блоком на микроконтроллере. Изменение скорости вращения ротора двигателя происходит плавно.
Поэтому частотные преобразователи используются в нагруженных механизмах. Чем медленнее разгон, тем меньшие нагрузки будет испытывать конвейер или редуктор. Все частотники оснащены несколькими степенями защиты – по току, нагрузке, напряжению и прочими. Некоторые модели частотных преобразователей питаются от однофазного напряжения (220 Вольт), делают из него трехфазное. Это позволяет подключать асинхронные моторы дома без использования сложных схем. И не потеряется мощность при работе с таким устройством.
Для каких целей используются регуляторы
В случае с асинхронными двигателями регуляторы оборотов необходимы для:
- Существенной экономии электроэнергии. Ведь не в каждом механизме требуется большая скорость вращения мотора – порой ее можно уменьшить на 20-30%, а это позволит сократить расходы на электроэнергию вдвое.
- Защиты механизмов и электронных цепей. С помощью преобразователей частоты можно осуществлять контроль температуры, давления и многих других параметров. Если двигатель работает в качестве привода насоса, то в емкости, в которую он накачивает воздух или жидкость, нужно установить датчик давления. И при достижении максимального значения мотор просто отключится.
- Совершения плавного пуска. Нет необходимости использовать дополнительные электронные устройства – все можно сделать с помощью изменений настроек частотного преобразователя.
- Снижения расходов на техническое обслуживание. При помощи подобных регуляторов оборотов электродвигателей 220В снижается риск выхода из строя привода и отдельных механизмов.

Схема, по которой построены частотные преобразователи, широко распространена во многих бытовых приборах. Нечто подобное можно встретить в источниках бесперебойного питания, сварочных аппаратах, стабилизаторах напряжения, блоках питания компьютеров, ноутбуков, зарядниках телефонов, блоках розжига ламп подсветки современных ЖК-телевизоров и мониторов.
Как работают регуляторы вращения
Можно сделать своими руками регулятор оборотов электродвигателя, но для этого потребуется изучить все технические моменты. Конструктивно можно выделить несколько основных компонентов, а именно:
- Электродвигатель.
- Микроконтроллерную систему управления и блок преобразователя.
- Привод и механизмы, связанные с ним.
В самом начале работы, после подачи напряжения на обмотки, происходит вращение ротора двигателя с максимальной мощностью. Именно эта особенность отличает асинхронные машины от других. К этому прибавляется нагрузка от механизма, который приводится в движение. В итоге на начальном этапе мощность и потребляемый ток возрастают до максимума.

Выделяется очень много тепла. Перегреваются и обмотки, и провода. Применение частотного преобразователя поможет избавиться от этого. Если установить плавный пуск, то до максимальной скорости (которая также регулируется устройством и может быть не 1500 об./мин, а всего 1000) двигатель будет разгоняться не сразу, а на протяжении 10 секунд (каждую секунду по 100-150 оборотов прибавлять). При этом нагрузка на все механизмы и провода уменьшится в разы.
Самодельный регулятор
Самостоятельно можно сделать регулятор оборотов электродвигателя 12В. Для этого потребуется переключатель на несколько положений и проволочные резисторы. С помощью последних меняется напряжение питания (а вместе с ним и частота вращения). Аналогичные системы можно использовать и для асинхронных двигателей, но они менее эффективны. Много лет назад широко применялись механические регуляторы – на основе шестеренчатых приводов или вариаторов. Но они были не очень надежными. Электронные средства намного лучше себя показывают. Ведь они не такие громоздкие и позволяют более тонко настраивать привод.
Для изготовления регулятора вращения электродвигателя потребуется несколько электронных устройств, которые можно либо приобрести в магазине, либо снять со старых инверторных приборов. Неплохие результаты показывает симистор ВТ138-600 в схемах таких электронных устройств. Чтобы произвести регулировку, потребуется включить в схему переменный резистор. С его помощью изменяется амплитуда входящего на симистор сигнала.
Внедрение системы управления

Чтобы улучшить параметры даже самого простого устройства, потребуется в схему регулятора оборотов электродвигателя включить микроконтроллерное управление. Для этого нужно выбрать процессор с подходящим числом входов и выходов – для подключения датчиков, кнопок, электронных ключей. Для экспериментов можно применить микроконтроллер AtMega128 – самый популярный и простой в использовании. В свободном доступе можно найти множество схем с использованием этого контроллера. Самостоятельно их отыскать и применить на практике не составит труда. Чтобы он правильно работал, потребуется в него записать алгоритм – отклики на определенные действия. Например, при достижении температуры в 60 градусов (замер происходит на радиаторе прибора) должно произойти отключение питания.
В заключение
Если решите не делать самостоятельно устройство, а приобрести готовое, то обратите внимание на основные параметры, такие как мощность, тип системы управления, рабочее напряжение, частоты. Желательно произвести расчет характеристик механизма, в котором планируется использовать регулятор напряжения электродвигателя. И не забудьте сопоставить с параметрами частотного преобразователя.
fb.ru
Частотный регулятор для регулировки скорости вращения асинхронного двигателя
Качественный обмен воздуха в помещении в значительной мере влияет на комфорт жизни в квартире. Чистый воздух, сухие стены, мягкий микроклимат в доме напрямую зависит от наличия системы вентиляции. При этом к самой популярной на сегодняшний день системе обмена воздушных потоков в помещении относится принудительная вентиляция, работающая по приточно-вытяжному принципу.Большинство современных вентиляторов для вытяжных систем снабжаются электродвигателем с регулируемой скоростью вращения. При этом для изменения оборотов вентилятора используют специальные регуляторы, в том числе и частотные системы изменения скорости вращения асинхронного двигателя, который используется как в вытяжных устройствах, так и в различных бытовых приборах в квартире.
Предназначение и функции регуляторов
Ещё не так давно устройства регулировки скорости вращения асинхронного электродвигателя состояли из простейших ручных выключателей и магнитного реле, благодаря которым можно было только запустить мотор на максимальных оборотах или выполнить полное его отключение.
Любой регулятор оборотов двигателя, в том числе и частотный, предназначен для изменения скорости вращения мотора. При этом основной функцией регулятора скорости является изменение производительности вытяжной системы или другого оборудования. Но помимо этого такие приборы обладают и дополнительными возможностями, о которых не стоит забывать:
- уменьшение износа оборудования в процессе эксплуатации;
- экономия потребляемой электрической энергии;
- снижение шумов на максимальных оборотах.
Большинство приборов, регулирующих скорость вращения электродвигателя, могут быть использованы как отдельный элемент системы, так и являться дополнением электронного блока управления, бытовым прибором, приводящимся в действие мотором.
Варианты регулировки скорости электродвигателя
Для изменения скорости вращения как асинхронного, так и любого другого двигателя, используется несколько вариантов регулировки оборотов:- регулировка подачи напряжения;
- переключение обмоток асинхронных многоскоростных двигателей;
- частотная регулировка показателей тока;
- использование электронного коммутатора.
Изменение напряжения даёт возможность использовать достаточно дешёвые устройства для плавной или многоступенчатой регулировки скорости. Если говорить об асинхронных моторах, которые имеют внешний ротор, то для них лучше использовать регулятор сопротивления якоря для изменения оборотов. При этом частотная регулировка позволяет изменять скоростные показатели в достаточно широком диапазоне.
Разновидности моделей, регуляторов оборотов
Устройства регулировки скорости для однофазных, трёхфазных и асинхронных двигателей различаются по принципиальному изменению оборотов вращения:- регуляторы, собранные на тиристорах;
- симисторные стемы изменения скорости;
- частотные регуляторы;
- регуляторы на основе трансформаторов.
Тиристорные регуляторы скорости используются для однофазных двигателей и позволяют помимо изменения оборотов вращения защищать оборудование от перегрева и перепадов напряжения.
Симисторные устройства могут управлять сразу несколькими электромоторами, работающими как на постоянном, так и переменном токе, но при условии, что параметры мощности не будут превышать предельных значений. Такой способ изменения оборотов один из самых популярных, если необходимо регулировать скорость благодаря изменению показателей напряжения от минимального до номинального значения.
Трёхфазный регулятор, более точный, и снабжается предохранителем, контролирующим, уровень тока. А чтобы снизить шумовые эффекты на низких оборотах устанавливается сглаживающий фильтр, состоящий из конденсатора.
Частотный регулятор скорости для асинхронного двигателя используется при преобразовании входного напряжения в диапазоне от 0 до 480 вольт, а непосредственный контроль оборотов осуществляется благодаря изменению подаваемой электрической энергии. Чаще всего такие регуляторы используются в трёхфазных двигателях, систем кондиционирования и вентиляции достаточно большой мощности.
Также для мощных электромоторов используют регулятор на основе однофазного или трёхфазного трансформатора. Благодаря такому устройству появляется возможность ступенчатой регулировки скорости двигателей. При этом одним трансформатором можно управлять сразу несколькими устройствами в автоматическом режиме.
Частотные регуляторы асинхронных моторов
Ещё нет так давно встретить частотный регулятор скорости для асинхронного двигателя было практически невозможно, а стоимость таких устройств была неоправданно высокой. При этом основной причиной дороговизны таких устройств было отсутствие качественных транзисторов и модулей высокого напряжения. Но благодаря разработкам в сфере твердотельных электронных устройств этот вопрос был решён. Вследствие этого рынок электроники заполонили сварочные инверторы, инверторные кондиционеры и частотные преобразователи.На сегодняшний день, частотные регуляторы – самый распространённый метод регулировки, мощностных характеристик оборотов и уровня производительности большинства механизмов, которые приводятся в действие асинхронным трёхфазным электродвигателем.
При таком методе изменения скоростных показателей в электродвигателе, к нему подключается специальный частотный регулятор. В большинстве случаев это тиристорные преобразователи частоты. При этом сама регулировка оборотов осуществляется посредством изменения частотных показателей напряжения, которые непосредственно влияют на скорость вращения асинхронного электромотора.
Хочется отметить, что во время снижения частотных показателей падает, и перегрузочная способность электродвигателя и поэтому для компенсации мощностных потерь нужно увеличивать напряжение. При этом величина напряжения зависит от конструктивных особенностей привода. Если регулировка выполняется на моторе, работающем с постоянным уровнем нагрузки на валу, то величина напряжения увеличивается пропорционально падению частоты. Но при увеличении оборотов это недопустимо и может привести к выходу из строя двигателя.
В случае, когда частотная регулировка выполняется на электродвигателе постоянной мощности, то увеличение напряжения производится пропорционально корню квадратному падения частоты. При изменении оборотов в вентиляционных установках подаваемое напряжение изменяется пропорционально квадрату снижения частоты.
Частотные регуляторы скорости для асинхронных электродвигателей – единственно правильный способ изменения оборотов мотора. В первую очередь это обусловлено возможностью изменения скорости в максимально широком диапазоне практически без потери мощности и уменьшения перегрузочных характеристик мотора.
Особенности использования регуляторов скорости
В качестве элемента системы, автоматического изменения скорости вращения, вентиляционных устройств частотный регулятор обеспечивает контроль функционирования всего вытяжного механизма. При этом в процессе использования устройства для регулировки оборотов любых, в том числе и асинхронных двигателей, появляются дополнительные шумы, которые можно устранить, только используя трансформаторный регулятор.Также кроме шума во время работы электродвигателя на разных скоростях могут появиться электромагнитные помехи, устранить которые можно за счёт экранированного кабеля. При использовании трёхфазного регулятора с шумом проблем не возникает, но обязательна дополнительная установка сглаживающих фильтров. Но вне зависимости от модели используемого регулятора существуют рекомендации по их эксплуатации.
- Прежде чем включать устройство в сеть переменного тока важно проверить все соединительные элементы и провода на качество заземления.
- Чтобы устранить различные помехи в сети важно устанавливать специальный фильтр.
- Для недопущения перегрева регулятора оборотов мотора, его размещают в месте, куда не попадает солнце. В противном случае из-за повышения температуры устройство будет работать на предельной нагрузке и может перестать реагировать на показатели датчиков.
- Любой регулятор, в том числе и частотный для асинхронного двигателя должен размещаться вертикально, что позволит качественно рассеивать тепло, выделяемое, в процессе работы прибора.
- Не рекомендовано очень часто производить включение или выключение регуляторов, так как в процессе непрерывной работы они функционируют в оптимальных условиях и поэтому реже выходят из строя.
В настоящее время всё чаще используют частотные регуляторы, так как они имеют компактные размеры и невысокую стоимость по сравнению с трансформаторными аналогами. При этом во время работы такие устройства подают номинальное напряжение на электромотор.
elektro.guru