Частотный преобразователь своими руками — с асинхронным приводом
Частотный преобразователь своими руками
Частотный преобразователь своими руками — представляю вам небольшую статью о асинхронном двигателе и частотном преобразователе, который мне ранее приходилось делать. Вот и теперь потребовался хороший привод для циркулярной пилы. Конечно можно было бы взять в магазине фирменный частотник, но все-таки вариант самостоятельного изготовления оказался для меня наиболее приемлемым.
К тому же, качество регулировки скорости привода пилорамы не требовало абсолютной точности. Однако с нагрузками ударного типа и длительными перегрузками он должен справляться. К тому же хотелось сделать управление наиболее простым, без всяких там параметров, а просто установить пару кнопок.
Главные преимущества привода с регулировкой частоты:
- Создаем из однофазного напряжения 220v полновесные три фазы 220v, сдвиг у которых будет 120°, при этом получаем абсолютный вращательный момент с мощностью на валу
- Повышенный момент старта с плавным запуском без максимального пускового тока
- Нет сильного замагничивания и излишнего перегрева мотора, как это бывает когда применяются конденсаторы
- При необходимости можно свободно управлять скоростью вращения и менять направление
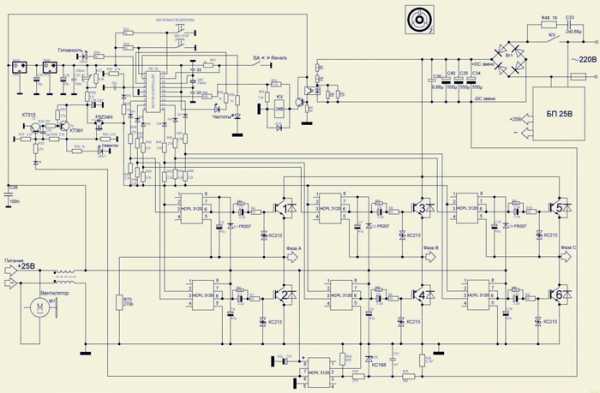
Ниже показана принципиальная схема устройства:

Трехфазный мост выполнен на гибридных IGBT транзисторах c диодами обратной проводимости. В целом это представляет собой бустрепное управление микроконтроллером PIC16F628A, осуществляемое с помощью специализированных оптодрайверов HCPL-3120. Во входном тракте установлен конденсатор гашения напряжения, выполняющего функцию мягкой зарядки электролитических конденсаторов в цепи постоянного напряжения.
Быстродействующая защита
Далее по схеме он зашунтирован электромагнитным реле, при этом на PIC16F628A подается цифровой логический уровень готовности. В схеме предусмотрена быстродействующая защита по току от короткого замыкания и критической перегрузке мотора, выполненная по триггерной схеме. Все это управляется при помощи двух кнопок и одного переключателя, который изменяет направление вращения вала.
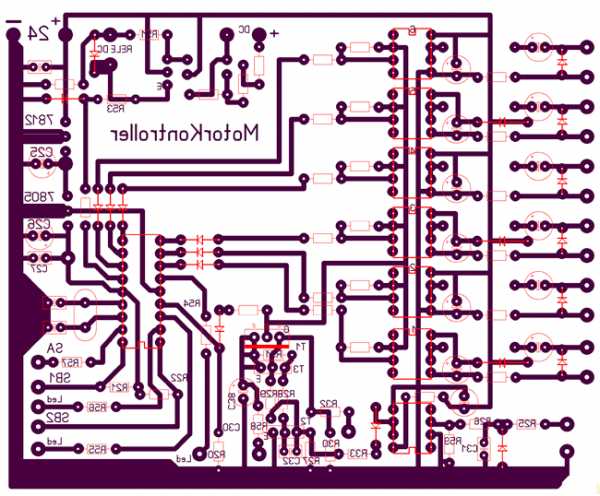
Частотный преобразователь своими руками, в частности участок силовых напряжений был собран методом навесного монтажа, а контроллер размещен на печатной плате, которая показана ниже:
Постоянные резисторы с номиналом 270к, шунтирующие конденсаторы установленные в цепи затвора IGBT, запаял со стороны дорожек, так как упустил из виду сделать для них площадки. Их конечно можно заменить на smd.
Здесь показано фото печатной платы контроллера после распайки компонентов:
А это с противоположной стороны
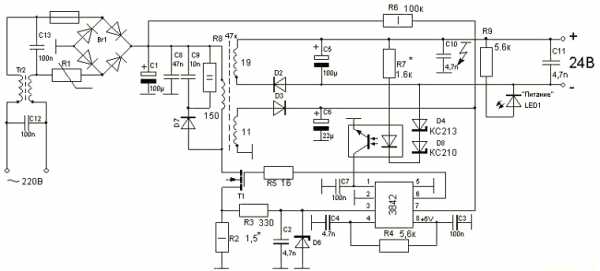
Для подачи напряжения питания в модуль управления был изготовлен стандартный обратноходовой импульсный источник питания.
Принципиальная схема блока питания:
Чтобы изготовить частотный преобразователь своими руками в принципе можно использовать практически любой источник питания с выходным напряжением 24v. Однако, этот блок питания должен быть стабилизированный и с задержкой напряжения на выходе с момента исчезновения напряжения сети, хотябы в пределах 3-х секунд. Это обусловлено тем, что двигатель смог отключится в случае возникновения ошибки по DC. Достигается подбором электролитического конденсатора С1 с большим значением емкости.
Ну, а теперь нужно подробнее разобраться в самом важном компоненте данного устройства — в программе микроконтроллера. В интернете подходящей для меня информации по этому вопросу я не нашел, хотя были предложения установить специальные фирменные контроллеры. Но как я уже говорил, мне принципиально нужно было установить, что-то собственной разработки. Приступил во всех подробностях анализировать ШИМ модуляцию, в какое время и каким способом открыть определенный транзистор…
Программа формирования задержек
Выяснились некоторые закономерности и получился образец несложной программы формирования задержек. При ее использовании получается произвести достаточно хорошую синусоидальную ШИМ с возможностью изменять напряжение. Естественно контроллер делать какие либо вычисления не успевал, задержки не давали того эффекта, который был нужен. Следовательно, такой вариант обсчитывания ШИМ на микроконтроллере PIC16F628A я забраковал сразу.
В результате образовалась констант матрица, а ее уже отрабатывал PIC16F628A. Они формировали и диапазон частоты и напряжение питания. Конечно эта работа по созданию данного устройства несколько затянулась. Циркуляркой уже полным ходом пилили на конденсаторах, когда появился необходимый вариант прошивки. Первоначально тестировал схему на моторе от вентилятора, мощностью 180 Вт. Вот фото прибора на стадии экспериментальных работ:
Тестирование устройства
Чуть позже, в процессе испытания программа подвергалась усовершенствованию, а после запуска двигателя мощностью на 4 кВт я практически был удовлетворен итогом своей работы. Защита от короткого замыкания прекрасно срабатывает, полутора-киловаттный мотор на 1440об/мин с диском 300мм свободно справлялся с приличными брусками. Шкивы были установлены одинаковые, что на двигатель, что на вал циркулярки. При попадании пилы на сучок сетевое напряжение немного падало, хотя двигатель продолжал работать.
По ходу работы потребовалось немного натянуть ремень, поскольку при увеличении нагрузки он начинал скользить на шкиве. В дальнейшем применили двойную передачу. Но на этом решил не останавливаться, поэтому сейчас начал усовершенствовать программу, в итоге она будет значительно эффективней. Принцип работы ШИМ-контролера немного усложняется, появится больше режимов, появится ресурс раскручивания выше номинального значения.
В конце статьи файлы для того самого простого варианта устройства, которое прекрасно работает с циркулярной пилой уже больше года.
Характеристики:
- Частота на выходе: 2,5-50Гц, шаг 1,25Гц; Частота ШИМ-контроллера синхронная, с возможностью изменения. Диапазон частот в пределах 1750-3350Гц.; Скалярное управление частотным преобразователем, мощность мотора около 4кВт. Самая меньшая частота работы при разовом нажатии кнопки «Пуск» — составляет 10Гц.
- Во время удержании кнопки нажатой появляется разгоняющий момент, а когда кнопка отпускается, то частота буде той, до какой смог разогнаться. Частота по максимуму — 50Гц информирует светодиодный индикатор. Номинальное время разгоняющего момента составляет 2 секунды.
- Индикатор «Готов» сообщает о готовности устройства к старту двигателя.
Файлы:
Программа ШИММ1.0r для PIC16F628(A)
Плата управления в SPLANe
usilitelstabo.ru
РадиоКот :: Частотный преобразователь
РадиоКот >Схемы >Цифровые устройства >Защита и контроль >Частотный преобразователь
Всем здравствуйте. Вот решил написать статейку про асинхронный привод и преобразователь частоты, который я изготавливал. Моему товарищу надо было крутить пилораму, и крутить хорошо. А сам я занимался импульсной электроникой и сразу предложил ему частотник. Да, можно было купить фирмовый преобразователь, и мне приходилось с ними сталкиваться, параметрировать, но захотелось своего, САМОДЕЛАШНОГО! Да и привод циркулярки к качеству регулирования скорости не критичен, только вот к ударным нагрузкам и к работе в перегрузе должен быть готов. Также максимально-простое управление с помощью пары кнопок и никаких там параметров.
Основные достоинства частотнорегулируемого привода (может для кого-то повторюсь):
Формируем из одной фазы 220В полноценные 3 фазы 220В со сдвигом 120 град., и имеем полный вращающий момент и мощность на валу.
Увеличенный пусковой момент и плавный пуск без большого пускового тока
Отсутствует замагничивание и лишний нагрев двигателя, как при использовании конденсаторов.
Возможность легко регулировать скорость и направление, если необходимо.
Вот какая схемка собралась:
3-фазный мост на IGBT транзисторах c обратными диодами (использовал имеющиеся G4PH50UD) управляется через оптодрайвера HCPL 3120 (бутстрепная схема запитки) микроконтроллером PIC16F628A. На входе гасящий конденсатор для плавного заряда электролитов DC звена. Затем его шунтирует реле и на микроконтроллер одновременно приходит логический уровень готовности. Также имеется триггер токовой защиты от к.з. и сильной перегрузки двигателя. Управление осуществляют 2 кнопки и тумблер изменения направления вращения.
Силовая часть мною была собрана навесным монтажом. Плата контроллера отутюжина вот в таком виде:
Параллельные резисторы по 270к на проходных затворных конденсаторах (забыл под них места нарисовать) припаял сзади платы, потом хотел заменить на смд но так и оставил.
Есть внешний вид этой платы, когда уже спаивал:
С другой стороны
Для питания управления был собран типовой импульсный обратноходовой (FLAYBACK) блок питания.
Его схема:
Можно использовать любой блок питания на 24В, но стабилизированный и с запаздыванием пропадания выходного напряжения от момента пропажи сетевого на пару тройку секунд. Это необходимо чтобы привод успел отключиться по ошибке DC. Добивался установкой электролита С1 большей ёмкости.
Теперь о самом главном…о програме микроконтроллера. Программирование простых моргалок для меня сложности не представляло, но тут надо было поднатужить мозги. Порыскав в нете, я не нашёл на то время подходящей информации. Мне предлагали поставить и специализированные контроллеры, например контроллер фирмы MOTOROLA MC3PHAC. Но хотелось, повторюсь, своего. Принялся детально разбираться с ШИМ модуляцией, как и когда нужно открыть какой транзистор… Открылись некие закономерности и вышел шаблон самой простой программы отработки задержек, с помощью которой можно выдать удовлетворительно синусовую ШИМ и регулировать напряжение. Считать ничего контроллер конечно не успевал, прерывания не давали что надо и поэтому я идею крутого обсчёта ШИМ на PIC16F628A сразу отбросил. В итоге получилась матрица констант, которую отрабатывал контроллер. Они задавали и частоту и напряжение. Возился честно скажу, долго. Пилорама уже во всю пилила конденсаторами, когда вышла первая версия прошивки. Проверял всю схему сначала на 180 ватном движке вентиляторе. Вот как выглядела «экспериментальная установка»:
Первые эксперименты показали, что у этого проекта точно есть будущее.
Программа дорабатывалась и в итоге после раскрутки 4кВТ-ного движка её можно было собирать и идти на лесопилку.
Товарищ был приятно удивлён, хоть и с самого начала относился скептически. Я тоже был удивлён, т.к. проверилась защита от к.з. (случайно произошло в борно двигателя). Всё осталось живо. Двигатель на 1,5кВт 1440об/мин легко грыз брусы диском на 300мм. Шкивы один к одному. При ударах и сучках свет слегка пригасал, но двигатель не останавливался. Ещё пришлось сильно подтягивать ремень, т.к. скользил при сильной нагрузке. Потом поставили двойную передачу.
Сейчас ещё дорабатываю программу она станет еще лучше, алгоритм работы шим чуть сложнее, режимов больше, возможность раскручиваться выше номинала…а тут снизу та самая простая версия которая работает на пиле уже около года.
Её характеристики:
Выходная Частота: 2,5-50Гц, шаг 1,25Гц; Частота ШИМ синхронная, изменяющаяся. Диапазон примерно 1700-3300Гц.; Скалярный режим управления U/F, мощность двигателя до 4кВт.
Минимальная рабочая частота после однократного нажатия на кнопку ПУСК(RUN) — 10Гц.
При удержании кнопки RUN происходит разгон, при отпускании частота остаётся та, до которой успел разогнаться. Максимальная 50Гц- сигнализируется светодиодом. Время разгона около 2с.
Светодиод «готовность» сигнализирует о готовности к запуску привода.
Реверс опрашивается в состоянии готовности.
Режимов торможения и регулирования частоты вниз нет, но они в данном случае и не нужны.
При нажатии Стоп или СБРОС происходит остановка выбегом.
На этом пока всё. Спасибо, кто дочитал до конца.
Файлы:
Программа ШИММ1.0r для PIC16F628(A)
Плата управления в SPLANe
Все вопросы в Форум.
Как вам эта статья? | Заработало ли это устройство у вас? |
www.radiokot.ru
Разрабатываем частотник. Часть первая, силовая часть.
Самостоятельная разработка частотника для трехфазного электродвигателя, дело достаточно затратное и хлопотное. Но если есть желание и интерес к данной теме огромен, то можно попробовать. Данный пост непретендует на оригинальность и писатель из меня честно говоря плохой. Итак обо всем по порядку.
Начнем с общей структурной схемы.
Данная структурная схема построена по так называемой схеме двойного преобразования. Трехфазное напряжение 380В частотой 50 Гц поступает на вход неуправляемого выпрямителя. На выходе выпрямителя напряжение составляет около 540 В. Это и есть первый этап преобразования. На втором этапе напряжение при помощи инвертора преобразуется в широтно-модулированные импульсы, которые и поступают на обмотки электродвигателя. Статорные обмотки имеют активно-индуктивный характер сопротивления и являются фильтрами, сглаживающими ток. Среднее значение тока будет зависеть от среднего значения приложенного напряжения, то есть от соотношения длительностей внутри периода ШИМ. Блок управления реализует основные алгоритмы управления инвертором. Обеспечивает диагностику силового модуля, а также выполняет функции противоаварийной защиты. Блок питания предназначен для питания цепей управления.
Выпрямитель.
Схема выпрямителя предельно проста.
На вход силового блока поступает трехфазное напряжение сети амплитудой 380 В, и частотой 50 Гц. Для защиты от перенапряжения в схеме используются варисторы VR1- VR3. Далее входное напряжение поступает на выпрямитель с промежуточным звеном постоянного тока. Выпрямитель 36МТ160 представляет собой трехфазную мостовую схему (т.н схема Ларионова) конструктивно выполненную в одном модуле.
Во время зарядки конденсатора промежуточного контура протекает очень большой кратковременный ток. Это может вывести из строя выпрямитель. Ток зарядки ограничивается включением балластного резистора R4 последовательно с конденсаторами DC-звена, который активизируется только при включении преобразователя. После зарядки конденсаторов резистор шунтируется, контактными реле К1. Большая емкость конденсаторов требуется для сглаживания напряжения промежуточного звена. После выключения инвертора из сети, конденсаторы сохраняют высокое напряжение в течение определенного времени.
Вот что получилось в итоге.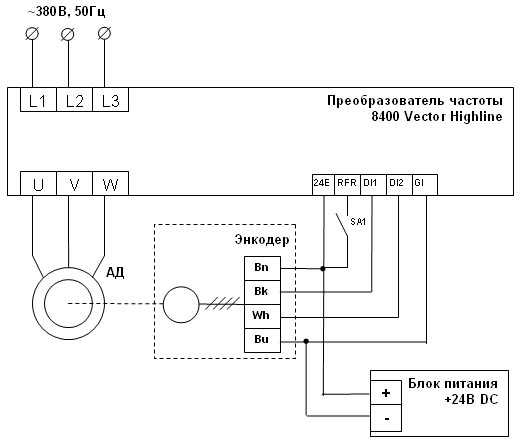
Блок питания.
Собран на микросхеме UC3843. Вообще, что касается блока питания, то вовсе не важно какой будет использован.
Хоть самодельный хоть купленный. Главное, на мой взгляд, по возможности питание драйвера IGBT и питания блока управления было от отдельных обмоток трансформатора.
Схема.
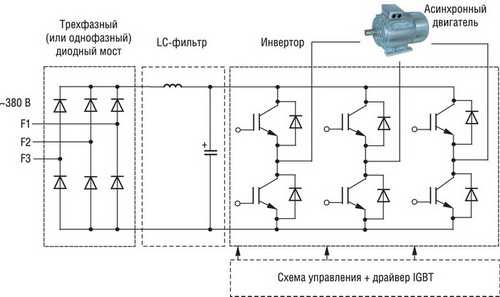
Фото.

Инвертор.
Схема инвертора.
IGBT-драйвер собран на транзисторах FGA25N120 и связке оптопары TLP250 и микросхемы TC4420. Что касается микросхемы TC4420 то ее мне посоветовал использовать один мой друг который занимается усилителями «класса D».
Готовый инвертор.

Подопытный кролик Электродвигатель.
Двигатель взял для начала малой мощности. Закрепил на нем инкрементальный энкодер «RO6345» фирмы «IFM».

Все это протестировано, проверено и ждет изготовления блока управления. Будем надеется что у меня хватит терпения, времени и сил довести этот проект до работающего прототипа.
Продолжение следует…
we.easyelectronics.ru
Простой преобразователь частоты для асинхронного электродвигателя.
РадиоКот >Схемы >Питание >Преобразователи и UPS >Простой преобразователь частоты для асинхронного электродвигателя.
Итак коль уж асинхронный двигатель так распространён и трехфазная система напряжения созданная М. О. Доливо-Добровольским так удобна. А современная элементная база так хороша. То сделать преобразователь частоты –это лишь вопрос личного желания и некоторых финансовых возможностей. Возможно кто то скажет « Ну, зачем мне инвертор , я поставлю фазосдвигающий конденсатор и все решено» . Но при этом обороты не покрутишь и в мощности потеряешь и потом это не интересно.
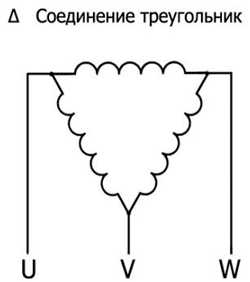
Возьмём за основу – в быту есть однофазная сеть 220в, народный размер двигателя до 1 кВт. Значить соединяем обмотки двигателя треугольником. Дальше –проще, понадобится драйвер трехфазного моста IR2135(IR2133) выбираем такой потому, что он применяется в промышленной технике имеет вывод SD и удобное расположение выводов. Подойдёт и IR2132 , но у неё dead time больше и выхода SD нет. В качестве генератора PWM выберем микроконтроллер AT90SPWM3B — доступен, всем понятен, имеет массу возможностей и недорого стоит, есть простой программатор -https://real.kiev.ua/avreal/. Силовые транзисторы 6 штук IRG4BC30W выберем с некоторым запасом по току — пусковые токи АД могут превышать номинальные в 5-6 раз. И пока не ставим «тормозной» ключ и резистор, будем тормозить и намагничивать перед пуском ротор постоянным током, но об этом позже …. Весь процесс работы отображается на 2-х строчном ЖКИ индикаторе. Для управления достаточно 6 кнопок (частота +, частота -, пуск, стоп, реверс, меню).
Получилась вот такая схема.
Я вовсе не претендую на законченность конструкции и предлагаю брать данную конструкцию за некую основу для энтузиастов домашнего электропривода. Приведённые здесь платы были сделаны под имеющиеся в моём распоряжении детали.
Конструктивно инвертор выполнен на двух платах – силовая часть ( блок питания , драйвер и транзисторы моста , силовые клеммы) и цифровая часть (микроконтроллер + индикатор ). Электрически платы соединены гибким шлейфом. Такая конструкция выбрана для перехода в будущем на контроллер TMS320 или STM32 или STM8.
Блок питания собран по классической схеме и в комментариях не нуждается. Микросхема IL300 линейная опто развязка для управления током 4-20Ма. Оптроны ОС2-4 просто дублируют кнопки «старт, стоп, реверс» для гальванически развязанного управления. Выход оптрона ОС-1 «функция пользователя» (сигнализация и пр.)
Силовые транзисторы и диодный мост закреплены на общий радиатор. Шунт 4 витка манганинового провода диаметром 0.5мм на оправке 3 мм.
Сразу замечу некоторые узлы и элементы вовсе не обязательны. Для того что бы просто крутить двигатель , не нужно внешнее управление током 4-20 Ма. Нет необходимости в трансформаторе тока, для оценочного измерения подойдёт и токовый шунт. Не нужна внешняя сигнализация. При мощности двигателя 400 Вт и площади радиатора 100см2 нет нужды в термодатчике.
ВАЖНО! – имеющиеся на плате кнопки управления изолированы от сети питания только пластмассовыми толкателями. Для безопасного управления необходимо использовать опторазвязку.
Возможные изменения в схеме в зависимости от микропрограммы.
Усилитель DA-1 можно подключать к трансформатору тока или к шунту. Усилитель DA-1-2 может быть использован для измерения напряжения сети или для измерения сопротивления терморезистора если не используется термодатчик PD-1.
В случае длинных соединительных проводов необходимо на каждый провод хотя бы надеть помехоподавляющие кольцо. Имеют место помехи. Так например –пока я этого не сделал у меня «мышь» зависала.
Так же считаю важным отметить проверку надёжности изоляции АД –т.к. при коммутации силовых транзисторов выбросы напряжение на обмотках могут достигать значений 1,3 Uпит.
Общий вид.
Немного про управление.
Начитавшись книжек с длинными формулами в основном описывающих как делать синусоиду при помощи PWM. И как стабилизировать скорость вращения вала двигателя посредством таходатчика и ПИД регулятора. Я пришёл к выводу –АД имеет достаточно жёсткую характеристику во всём диапазоне допустимых нагрузок на валу.
Поэтому для личных нужд вполне подойдет управление описанное законом Костенко М.П. или как его ещё называют скаляроное. Достаточное для большинства практических случаев применения частотно регулируемого электропривода с диапазоном регулирования частоты вращения двигателя до 1:40. Т.е. грубо говоря мы в самом простом случае делаем обычную 3-х фазную розетку с переменной частотой и напряжением меняющимися в прямой зависимости. С небольшими «но» на начальных участках характеристики необходимо выполнять IR компенсацию т.е. на малых частотах нужно фиксированное напряжение . Втрое «но» в питающие двигатель напряжение замешать 3 гармонику. Всё остальное сделают за нас физические принципы АД. Более подробно про это можно прочесть в документе AVR494.PDF
Основываясь на моих личных наблюдениях и скромном опыте именно эти методы без особых изысков чаще всего применяются в приводах мощностью до 15 кВт.
Далее не буду углубляться в теорию и описание мат моделей АД. Это и без меня достаточно хорошо изложили профессора ещё в 60-х.
Но ни в коем случае не стоит недооценивать сложности управления АД. Все мои упрощения оправданны только некоммерческим применением инвертора.
Плата силовых элементов.
В программе V-1.0 для AT90SPWM3B реализовано
1- Частотное управление АД .Форма напряжения синусоида с 3 гармоникой.
2- Частота задания 5 Гц -50 Гц с шагом 1 Гц. Частота ШИМ 4 кГц.
3- Фиксированное время разгона –торможения
4- Реверс (только через кнопку СТОП)
5- Разгон до заданной частоты с шагом 1 Гц
6 – Индикация показаний канала АЦП 6 (разрядность 8 бит., оконный фильтр апертура 4 бита)
я использую этот канал для замера тока шунта.
7 – Индикация режима работы START,STOP,RUN,RAMP, и Частота в Гц.
8- Обработка сигнала авария от мс IR2135
Торможение двигателя принудительное – без выбега. При этом нужно помнить – если на валу будет висеть огромный вентилятор или маховик то напряжение на звене постоянного тока может достичь опасных значений. Но я думаю вертолёты с приводом от АД строить никто не будет
Функции микропрограммы в будущих версиях
1 -намагничивание ротора перед пуском
2- торможение постоянным током
3 –прямой реверс
4 – частота задания 1 -400 Гц.
5 – ограничение, контроль тока двигателя.
6 — переключаемые зависимости U/F
7 – контроль звена постоянного тока.
8 – некоторые макросы управления –это вообще в далёких планах.
Испытания.
Данная конструкции была проверена с двигателем 0.18кВт и 0.4 кВт и 0.8 кВт. Все двигатели остались довольны.
Только при малых оборотах и долговременной работе необходимо принудительное охлаждение АД.
Строка для программатора
av_28r4.exe -aft2232 -az +90pwm3b -e -w -v -fckdiv=1,psc2rb=0,psc1rb=0,psc0rb=0,pscrv=0,bodlevel=5 -c01.hex
Небольшое «вечернее» видео испытаний
Файлы:
плата микроконтроллера -layout5.0
силовой модуль -layout5.0
Программа для МК
Схема
схема S_plan7 -архив rar
Все вопросы в Форум.
Как вам эта статья? | Заработало ли это устройство у вас? |
www.radiokot.ru
частотный преобразователь своими руками, как сделать
Сегодня асинхронные двигатели являются основными тяговыми приводами для станков, конвейеров, и прочих промышленных агрегатов.
Для того чтобы моторы могли нормально функционировать, им нужен частотный преобразователь. Он позволяет оптимизировать работу агрегата и продлить срок его службы. Покупать устройство необязательно — частотник для трехфазного электродвигателя можно сделать своими руками.
Назначение частотного преобразователя
 Асинхронный электродвигатель может работать и без частотника, но в этом случае у него будет постоянная скорость без возможности регулировки. К тому же отсутствие частотного преобразователя приведет к возрастанию пускового тока в 5−7 раз от номинального, что вызовет увеличение ударных нагрузок, повысит потери электроэнергии и приведет к существенному сокращению срока службы агрегата.
Асинхронный электродвигатель может работать и без частотника, но в этом случае у него будет постоянная скорость без возможности регулировки. К тому же отсутствие частотного преобразователя приведет к возрастанию пускового тока в 5−7 раз от номинального, что вызовет увеличение ударных нагрузок, повысит потери электроэнергии и приведет к существенному сокращению срока службы агрегата.
Для нивелирования всех вышеперечисленных негативных факторов были изобретены преобразователи частоты для асинхронных двигателей трехфазного и однофазного тока.
Частотник дает возможность в широких пределах регулировать скорость электродвигателя, обеспечивает плавный пуск, позволяет регулировать как скорость запуска, так и скорость торможения, подключать трехфазный мотор к однофазной сети и многое другое. Все эти функции зависят от микроконтроллера, на котором он построен, и могут отличаться у разных моделей.
Принцип работы устройства
Переменный ток поступает из сети на диодный мост, где он выпрямляется и попадает на батарею сглаживающих конденсаторов, где окончательно превращается в постоянный ток, который поступает на стоки мощных IGBT транзисторов, управляемых главным контроллером. Истоки транзисторов, в свою очередь, подключены к двигателю.
Вот упрощенная схема преобразователя частоты для трехфазного асинхронного двигателя.
Теперь рассмотрим, что происходит с транзисторами и как они работают.
Полевой транзистор (он же ключ, мосфет и пр.) — это электронный выключатель, принцип его действия основан на возникновении проводимости между двумя выводами (сток и исток) мосфета, при появлении на управляющем выводе (затворе) напряжения, превышающего напряжение стока.
В отличие от обычных реле, ключи работают на очень высоких частотах (от нескольких герц до сотен килогерц) так что заменить их на реле не получится.
 С помощью этих быстродействующих переключателей микроконтроллер получает возможность управления силовыми цепями.
С помощью этих быстродействующих переключателей микроконтроллер получает возможность управления силовыми цепями.
К контроллеру, кроме мосфетов, также подключены датчики тока, органы управления частотником, и другая периферия.
При работе частотного преобразователя микроконтроллер измеряет потребляемую мощность и, в соответствии с установленными на панели управления параметрами, изменяет длительность и частоту периодов, когда транзистор открыт (включен) или закрыт (выключен), тем самым изменяя или поддерживая скорость вращения электродвигателя.
Самостоятельное изготовление прибора
Несмотря на множество агрегатов заводского производства, люди делают преобразователи частоты самостоятельно, благо на сегодняшний день все его компоненты можно купить в любом радиомагазине или заказать из Китая. Такой частотник обойдется вам значительно дешевле покупного, к тому же вы не будете сомневаться в качестве его сборки и надежности.
Делаем трехфазный преобразователь
Собирать наш преобразователь будем на мосфетах G4PH50UD, которыми будет управлять контроллер PIC16F628A посредством оптодрайверов HCPL3120.
Собранный частотник при подключении в однофазную сеть 220 В будет иметь на выходе три полноценные фазы 220 В, со сдвигом 120°, и мощность 3 КВт.
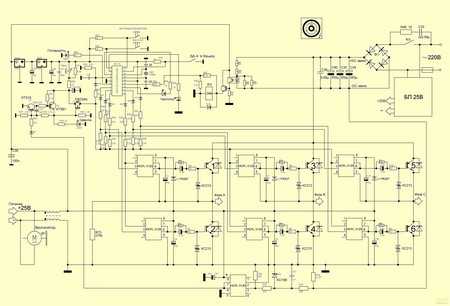
Схема частотника выглядит так:
Так как частотный преобразователь состоит из частей, работающих как на высоком (силовая часть), так и на низком (управление) напряжении, то логично будет разбить его на три платы (основная плата, плата управления, и низковольтный блок питания для неё) для исключения возможности пробоя между дорожками с высоким и низким напряжением и выхода устройства из строя.
Вот так выглядит разводка платы управления:
Для питания платы управления можно использовать любой блок питания на 24 В, с пульсациями не более 1 В в размахе, с задержкой прекращения подачи питания на 2−3 секунды с момента исчезновения питающего напряжения 220 В.
Блок питания можно собрать и самим по этой схеме:
Обратите внимание, что номиналы и названия всех радиокомпонентов на схемах уже подписаны, так что собрать по ним работающее устройство может даже начинающий радиолюбитель.
Перед тем как приступить к сборке преобразователя, убедитесь:
- В наличии у вас всех необходимых компонентов;
- В правильности разводки платы;
- В наличии всех нужных отверстий для установки радиодеталей на плате;
- В том, что не забыли залить в микроконтроллер прошивку из этого архива:
Если вы все сделали правильно и ничего не забыли, можете приступать к сборке.
После сборки у вас получится что-то похожее:
Теперь вам осталось проверить устройство: для этого подключаем двигатель к частотнику и подаем на него напряжение. После того как загорится светодиод, сигнализирующий о готовности, нажмите на кнопку «Пуск». Двигатель должен начать медленно вращаться. При удержании кнопки двигатель начинает разгоняться, при отпускании — поддерживает обороты на том уровне, до которого успел разогнаться. При нажатии кнопки «Сброс» двигатель останавливается с выбегом. Кнопка «Реверс» задействуется только при остановленном двигателе.
Если проверка прошла успешно, то можете начинать изготавливать корпус и собирать в нем частотник. Не забудьте сделать в корпусе отверстия для притока холодного и оттока горячего воздуха от радиатора IGBT транзисторов.
Частотник для однофазного двигателя
Преобразователь частоты для однофазного двигателя отличается от трехфазного тем, что имеет на выходе две фазы (ошибки тут нет, двигатель однофазный, при подключении без частотника рабочая обмотка подключается в сеть напрямую, а пусковая — через конденсатор; но при использовании частотника пусковая обмотка подключается через вторую фазу) и одну нейтраль — в отличие от трех фаз у последнего, так что сделать частотник для однофазного электродвигателя, используя в качестве основы схему от трехфазного, не получится, поэтому придется начинать все сначала.
В качестве мозга этого преобразователя мы будем использовать МК ATmega328 с загрузчиком ардуины. В принципе, это и есть Arduino, только без своей обвязки. Так что, если у вас в закромах завалялась ардуинка с таким микроконтроллером, можете смело выпаивать его и использовать для дела, предварительно залив на него скетч (прошивку) из этого архива:
К атмеге будет подключен драйвер IR2132, а уже к нему — мосфеты IRG4BC30, к которым мы подключим двигатель мощностью до 1 КВт включительно.
Схема частотного преобразователя для однофазного двигателя:
Также для питания ардуины (5в) и для питания силового реле (12в), нам понадобятся 2 стабилизатора. Вот их схемы:
Стабилизатор на 12 вольт.
Стабилизатор на 5 вольт.
 Внимание! Эта схема не из простых. Возможно, придется настраивать и отлаживать прошивку для достижения полной работоспособности устройства, но это несложно, и мануалов по программированию Arduino в интернете — великое множество. К тому же сам скетч содержит довольно подробные комментарии к каждому действию. Но если для вас это слишком сложно, то вы можете попробовать найти такой частотник в магазине. Пусть они и не так распространены, как частотники для трехфазных двигателей, но купить их можно, пусть и не в каждом магазине.
Внимание! Эта схема не из простых. Возможно, придется настраивать и отлаживать прошивку для достижения полной работоспособности устройства, но это несложно, и мануалов по программированию Arduino в интернете — великое множество. К тому же сам скетч содержит довольно подробные комментарии к каждому действию. Но если для вас это слишком сложно, то вы можете попробовать найти такой частотник в магазине. Пусть они и не так распространены, как частотники для трехфазных двигателей, но купить их можно, пусть и не в каждом магазине.
Еще обратите внимание на то, что включать схему без балласта нельзя — сгорят выходные ключи. Балласт нужно подключать через диод, обращенный анодом к силовому фильтрующему конденсатору. Если подключите балласт без диода — опять выйдут из строя ключи.
Если вас все устраивает, можете приступать к изготовлению платы, а затем — к сборке всей схемы. Перед сборкой убедитесь в правильности разводки платы и отсутствии дефектов в ней, а также — в наличии у вас всех указанных на схеме радиодеталей. Также не забудьте установить IGBT-транзисторы на массивный радиатор и изолировать их от него путем использования термопрокладок и изолирующих шайб.
 После сборки частотника можете приступать к его проверке. В идеале у вас должен получиться такой функционал: кнопка «S1» — пуск, каждое последующее нажатие добавляет определенное (изменяется путем редактирования скетча) количество оборотов; «S2» — то же самое, что и «S1», только заставляет двигатель вращаться в противоположном направлении; кнопка «S3» — стоп, при её нажатии двигатель останавливается с выбегом.
После сборки частотника можете приступать к его проверке. В идеале у вас должен получиться такой функционал: кнопка «S1» — пуск, каждое последующее нажатие добавляет определенное (изменяется путем редактирования скетча) количество оборотов; «S2» — то же самое, что и «S1», только заставляет двигатель вращаться в противоположном направлении; кнопка «S3» — стоп, при её нажатии двигатель останавливается с выбегом.
Обратите внимание, что реверс осуществляется через полную остановку двигателя, при попытке сменить направление вращения на работающем двигателе произойдет его мгновенная остановка, а силовые ключи сгорят от перегрузки. Если вам не жаль денег, которые придется потратить на замену мосфетов, то можете использовать эту особенность в качестве аварийного тормоза.
Возможные проблемы при проверке
Если при проверке частотника схема не заработала или заработала неправильно, значит, вы где-то допустили ошибку. Отключите частотник от сети и проверьте правильность установки компонентов, их исправность и отсутствие разрывов/замыканий дорожек там, где их быть не должно. После обнаружения неисправности устраните её и проверьте преобразователь снова. Если с этим все в порядке, приступайте к отладке прошивки.
220v.guru
Схемы самодельных частотных преобразоваелей
- Подробности
- Категория: Источники питания
Одна из первых схем преобразователя для питания трехфазного двигателя была опубликована в журнале «Радио» №11 1999г. Разработчик схемы М. Мухин в то время был учеником 10 класса и занимался в радиокружке.
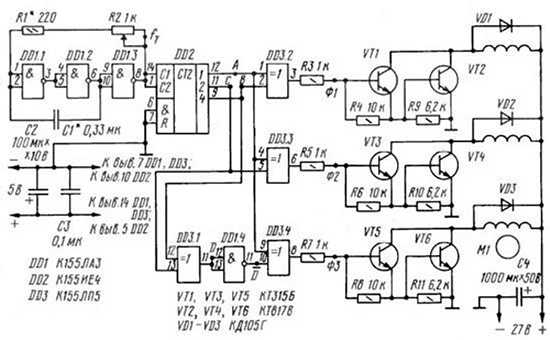
Преобразователь предназначался для питания миниатюрного трехфазного двигателя ДИД-5ТА, который использовался в станке для сверления печатных плат. При этом следует отметить, что рабочая частота этого двигателя 400Гц, а напряжение питания 27В. Кроме того, средняя точка двигателя (при соединении обмоток «звездой») выведена наружу, что позволило предельно упростить схему: понадобилось всего три выходных сигнала, а на каждую фазу потребовался всего один выходной ключ. Схема генератора показана на рисунке 1.
Как видно из схемы преобразователь состоит из трех частей: генератора-формирователя импульсов трехфазной последовательности на микросхемах DD1…DD3, трех ключей на составных транзисторах (VT1…VT6) и собственно электродвигателя M1.
На рисунке 2 показаны временные диаграммы импульсов, сформированных генератором-формирователем. Задающий генератор выполнен на микросхеме DD1. С помощью резистора R2 можно установить требуемую частоту вращения двигателя, а также изменять ее в некоторых пределах. Более подробную информацию о схеме можно узнать в указанном выше журнале. Следует отметить, что по современной терминологии подобные генераторы-формирователи называются контроллерами.
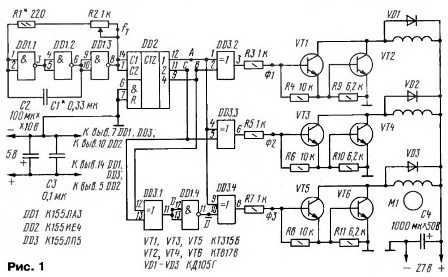
Рисунок 1.
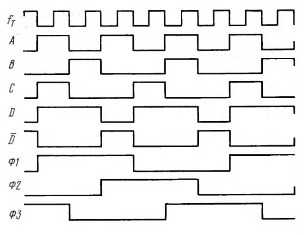
Рисунок 2. Временные диаграммы импульсов генератора.
На базе рассмотренного контроллера А. Дубровским из г. Новополоцка Витебской обл. была разработана конструкция частотно-регулируемого привода для двигателя с питанием от сети переменного тока напряжением 220В. Схема устройства была опубликована в журнале «Радио» 2001г. №4.
В этой схеме, практически без изменений, используется только что рассмотренный контроллер по схеме М. Мухина. Выходные сигналы с элементов DD3.2, DD3.3 и DD3.4 используются для управления выходными ключами A1, A2, и A3, к которым подключается электродвигатель. На схеме полностью показан ключ A1, остальные идентичны. Полностью схема устройства показана на рисунке 3.
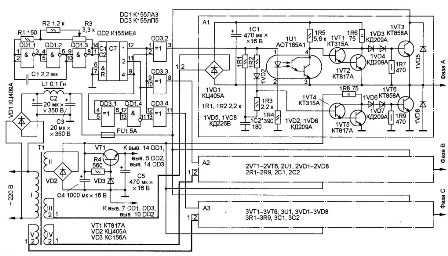
Рисунок 3.
Подключение двигателя к выходу трехфазного инвертора
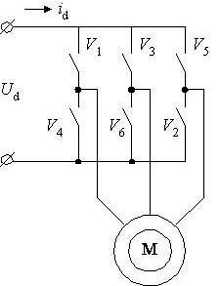
Для ознакомления с подключением двигателя к выходным ключам стоит рассмотреть упрощенную схему, приведенную на рисунке 4.

Рисунок 4.
На рисунке показан электродвигатель M, управляемый ключами V1…V6. Полупроводниковые элементы для упрощения схемы показаны в виде механических контактов. Питание электродвигателя осуществляется постоянным напряжением Ud получаемым от выпрямителя (на рисунке не показан). При этом, ключи V1, V3, V5 называются верхними, а ключи V2, V4, V6 нижними.
Совершенно очевидно, что открытие одновременно верхних и нижних ключей, а именно парами V1&V6, V3&V6, V5&V2 совершенно недопустимо: произойдет короткое замыкание. Поэтому, для нормальной работы такой ключевой схемы, обязательно, чтобы к моменту открытия нижнего ключа верхний ключ уже был закрыт. С этой целью контроллеры управления формируют паузу, часто называемую «мертвой зоной».
Величина этой паузы такова, чтобы обеспечить гарантированное закрытие силовых транзисторов. Если эта пауза будет недостаточна, то возможно кратковременное открытие верхнего и нижнего ключа одновременно. Это вызывает нагрев выходных транзисторов, часто приводящий к выходу их из строя. Такую ситуацию называют сквозными токами.
Вернемся к схеме, показанной на рисунке 3. В данном случае верхними ключами являются транзисторы 1VT3, а нижними 1VT6. Нетрудно заметить, что нижние ключи гальванически связаны с управляющим устройством и межу собой. Поэтому управляющий сигнал с выхода 3 элемента DD3.2 через резисторы 1R1 и 1R3 подаются непосредственно на базу составного транзистора 1VT4…1VT5. Этот составной транзистор есть не что иное, как драйвер нижнего ключа. В точности также от элементов DD3, DD4 управляются составные транзисторы драйверов нижнего ключа каналов A2 и A3. Питание всех трех каналов осуществляется от одного и того же выпрямителя на диодном мосте VD2.
Верхние же ключи гальванической связи с общим проводом и управляющим устройством не имеют, поэтому для управления ими кроме драйвера на составном транзисторе 1VT1…1VT2 пришлось в каждый канал установить дополнительный оптрон 1U1. Выходной транзистор оптрона в этой схеме также выполняет функцию дополнительного инвертора: когда на выходе 3 элемента DD3.2 высокий уровень открыт транзистор верхнего ключа 1VT3.
Для питания каждого драйвера верхнего ключа используется отдельный выпрямитель 1VD1, 1C1. Каждый выпрямитель питается от индивидуальной обмотки трансформатора, что можно рассматривать как недостаток схемы.
Конденсатор 1C2 обеспечивает задержку переключения ключей около 100 микросекунд, столько же дает оптрон 1U1, тем самым формируется вышеупомянутая «мертвая зона».
Достаточно ли только регулирования частоты?
С понижением частоты питающего переменного напряжения падает индуктивное сопротивление обмоток двигателя (достаточно вспомнить формулу индуктивного сопротивления), что приводит к увеличению тока через обмотки, и, как следствие, к перегреву обмоток. Также происходит насыщение магнитопровода статора. Чтобы избежать этих негативных последствий, при уменьшении частоты приходится снижать и эффективное значение напряжения на обмотках двигателя.
Одним из способов решения проблемы в любительских частотниках предлагалось это самое эффективное значение регулировать при помощи ЛАТРа, подвижный контакт которого имел механическую связь с переменным резистором регулятора частоты. Такой способ был рекомендован в статье С. Калугина «Доработка регулятора частоты вращения трехфазных асинхронных двигателей». Журнал «Радио» 2002, №3, стр.31.
В любительских условиях механический узел получался в изготовлении сложным, а главное ненадежным. Более простой и надежный способ использования автотрансформатора был предложен Э. Мурадханяном из Еревана в журнале «Радио» №12 2004. Схема этого устройства показана на рисунках 5 и 6.
Напряжение сети 220В подается на автотрансформатор T1, а с его подвижного контакта на выпрямительный мост VD1 с фильтром C1, L1, C2. На выходе фильтра получается изменяемое постоянное напряжение Uрег, используемое собственно для питания двигателя.
Рисунок 5.
Напряжение Uрег через резистор R1 также подается на задающий генератор DA1, выполненный на микросхеме КР1006ВИ1 (импортный вариант NE555). В результате такого подключения обычный генератор прямоугольных импульсов превращается в ГУН (генератор, управляемый напряжением). Поэтому, при увеличении напряжения Uрег увеличивается и частота генератора DA1, что приводит к увеличению частоты вращения двигателя. При снижении напряжения Uрег пропорционально уменьшается и частота задающего генератора, что позволяет избежать перегрев обмоток и перенасыщение магнитопровода статора.
Рисунок 6.
В той же журнальной статье автор предлагает вариант задающего генератора, который позволяет избавиться от использования автотрансформатора. Схема генератора показана на рисунке 7.
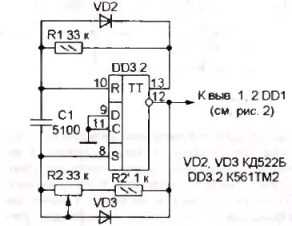
Рисунок 7.
Генератор выполнен на втором триггере микросхемы DD3, на схеме обозначен как DD3.2. Частота задается конденсатором C1, регулировка частоты осуществляется переменным резистором R2. Вместе с регулировкой частоты изменяется и длительность импульса на выходе генератора: при понижении частоты длительность уменьшается, поэтому напряжение на обмотках двигателя падает. Такой принцип управления называется широтно импульсной модуляцией (ШИМ).
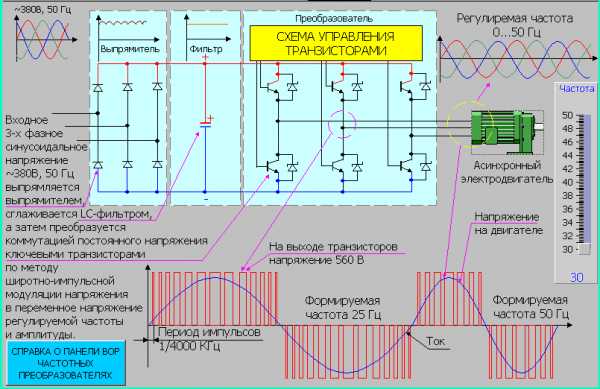
В рассматриваемой любительской схеме мощность двигателя невелика, питание двигателя производится прямоугольными импульсами, поэтому ШИМ достаточно примитивна. В реальных промышленных частотных преобразователях большой мощности ШИМ предназначена для формирования на выходе напряжений практически синусоидальной формы, как показано на рисунке 8, и для реализации работы с различными нагрузками: при постоянном моменте, при постоянной мощности и при вентиляторной нагрузке.
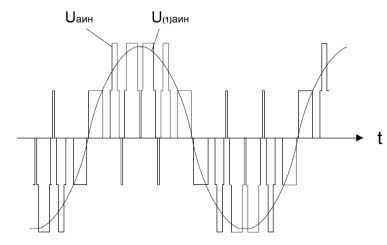
Рисунок 8. Форма выходного напряжения одной фазы трехфазного инвертора с ШИМ.
Силовая часть схемы
Современные фирменные частотники имеют на выходе мощные транзисторы структуры MOSFET или IGBT, специально предназначенные для работы в преобразователях частоты. В ряде случаев эти транзисторы объединены в модули, что в целом улучшает показатели всей конструкции. Управление этими транзисторами производится с помощью специализированных микросхем-драйверов. В некоторых моделях драйверы выпускаются встроенными в транзисторные модули.
Наиболее распространены в настоящее время микросхемы и транзисторы фирмы International Rectifier. В описываемой схеме вполне возможно применить драйверы IR2130 или IR2132. В одном корпусе такой микросхемы содержится сразу шесть драйверов: три для нижнего ключа и три для верхнего, что позволяет легко собрать трехфазный мостовой выходной каскад. Кроме основной функции эти драйверы содержат также несколько дополнительных, например защита от перегрузок и коротких замыканий. Более подробную информацию об этих драйверах можно узнать из технических описаний Data Sheet на соответствующие микросхемы.
При всех достоинствах единственный недостаток этих микросхем их высокая цена, поэтому автор конструкции пошел другим, более простым, дешевым, и в то же время работоспособным путем: специализированные микросхемы-драйверы заменены микросхемами интегрального таймера КР1006ВИ1 (NE555).
Выходные ключи на интегральных таймерах
Если вернуться к рисунку 6, то можно заметить, что схема имеет для каждой из трех фаз выходные сигналы, обозначенные как «Н» и «В». Наличие этих сигналов позволяет раздельно управлять верхними и нижними ключами. Такое разделение позволяет формировать паузу между переключением верхних и нижних ключей при помощи блока управления, а не самими ключами, как было показано в схеме на рисунке 3.
Схема выходных ключей с применением микросхем КР1006ВИ1 (NE555) показана на рисунке 9. Естественно, что для трехфазного преобразователя понадобится три экземпляра таких ключей.

Рисунок 9.
В качестве драйверов верхних (VT1) и нижних (VT2) ключей используются микросхемы КР1006ВИ1, включенные по схеме триггеров Шмидта. С их помощью возможно получить импульсный ток затвора не менее 200мА, что позволяет получить достаточно надежное и быстрое управление выходными транзисторами.
Микросхемы нижних ключей DA2 имеют гальваническую связь с источником питания +12В и, соответственно, с блоком управления, поэтому их питание осуществляется от этого источника. Микросхемы верхних ключей можно запитать так же, как было показано на рисунке 3 с использованием дополнительных выпрямителей и отдельных обмоток на трансформаторе. Но в данной схеме применяется иной, так называемый, «бустрепный» метод питания, смысл которого в следующем. Микросхема DA1 получает питание от электролитического конденсатора C1, заряд которого происходит по цепи: +12В, VD1, C1, открытый транзистор VT2 (через электроды сток – исток), «общий».
Другими словами заряд конденсатора C1 происходит в то время, когда открыт транзистор нижнего ключа. В этот момент минусовой вывод конденсатора С1 оказывается практически накоротко соединен с общим проводом (сопротивление открытого участка «сток – исток» у мощных полевых транзисторов составляет тысячные доли Ома!), что и обеспечивает возможность его заряда.
При закрытом транзисторе VT2 также закроется и диод VD1, заряд конденсатора C1 прекратится до следующего открытия транзистора VT2. Но заряд конденсатора C1 достаточен для питания микросхемы DA1 на время, пока закрыт транзистор VT2. Естественно, что в этот момент транзистор верхнего ключа находится в закрытом состоянии. Данная схема силовых ключей оказалась настолько хороша, что без изменений применяется и в других любительских конструкциях.
В данной статье рассмотрены лишь самые простые схемы любительских трехфазных инверторов на микросхемах малой и средней степени интеграции, с которых все начиналось, и где можно даже по схеме рассмотреть все «изнутри». Более современные конструкции выполнены с применением микроконтроллеров, чаще всего серии PIC, схемы которых также неоднократно публиковались в журналах «Радио».
Микроконтроллерные блоки управления по схеме более просты, чем на микросхемах средней степени интеграции, имеют такие нужные функции, как плавный пуск двигателя, защита от перегрузок и коротких замыканий и некоторые другие. В этих блоках все реализовано за счет управляющих программ или как их принято называть «прошивок». Именно от этих программ и зависит насколько хорошо или плохо будет работать блок управления трехфазного инвертора.
Достаточно простые схемы контроллеров трехфазного инвертора опубликованы в журнале «Радио» 2008 №12. Статья называется «Задающий генератор для трехфазного инвертора». Автор статьи А. Долгий является также автором цикла статей о микроконтроллерах и многих других конструкций. В статье приведены две простых схемы на микроконтроллерах PIC12F629 и PIC16F628.
Частота вращения в обеих схемах изменяется ступенчато с помощью однополюсных переключателей, что вполне достаточно во многих практических случаях. Там же дается ссылка где можно скачать готовые «прошивки», и, более того, специальную программу, с помощью которой можно изменять параметры «прошивок» по своему усмотрению. Возможна также работа генераторов режиме «демо». В этом режиме частота генератора уменьшена в 32 раза, что позволяет визуально с помощью светодиодов наблюдать работу генераторов. Также даются рекомендации по подключению силовой части.
Но, если не хочется заниматься программированием микроконтроллера фирма Motorola выпустила специализированный интеллектуальный контроллер MC3PHAC, предназначенный для систем управления 3-фазным двигателем. На его базе возможно создание недорогих систем регулируемого трехфазного привода, содержащего все необходимые функции для управления и защиты. Подобные микроконтроллеры находят все более широкое применение в различной бытовой технике, например, в посудомоечных машинах или холодильниках.
В комплекте с контроллером MC3PHAC возможно использование готовых силовых модулей, например IRAMS10UP60A разработанных фирмой International Rectifier. Модули содержат шесть силовых ключей и схему управления. Более подробно с этими элементами можно в их документации Data Sheet, которую достаточно просто найти в интернете.
Борис Аладышкин
Добавить комментарий
radiofanatic.ru
Схема частотного преобразователя для трехфазного мотора
В этом видео канала “Rinat Pak” автор показал свою новую работу. Давно хотел собрать по схеме частотный преобразователь. Использоваться он будет на трехфазном двигателе. Нашел очень хорошую схему. На форуме полностью детально описано, как собрать преобразователь. В архиве на форуме есть все печатные платы, прошивки и подробное описание.
Устройство называется Восьмикрут. Если кто-то не поймет по инструкции или другими словами путеводителя, как собрать частотный преобразователь, читайте форум, там всё подробно расписано. На все вопросы можно найти ответы.
Мастер собирал устройство в течение 3-4 дней. Многие детали он покупал в китайском магазине. Восьмикрут рассчитан на двигатели до 4 киловатт. На Youtube можно найти много обзоров его. Устанавливают на токарные станки, дровоколы, сверлильные станки. Схема отлично показала себя в работе.
Найти схему можно по ссылке radiokot.ru/circuit/digital/security/31/
В показанном случае трехфазный мотор на 600 ватт. Частотный преобразователь изготавливался для сверлильного станка. В мастерской уже было старое устройство, но надоело переключаться с одного станка на другой.
Для тех, кто соображает в электронике, показана схема – простой и бюджетный вариант. Готовые устройства стоят очень дорого. Много денег пришли заплатить за силовые транзисторы. Они установлены на радиаторе. Все остальные радиодетали не такие дорогие. Многие удалось использовать из старых запасов. Всё прекрасно работает, без каких-либо блоков.
Структура. Сборка конденсаторов, dc преобразователь, блок питания на 24 вольта, плата управления, кнопки включения, дисплей, регулятор частоты для управления оборотами трехфазного двигателя.
Работает конструкция от 220 вольт. Схема несложная, но очень много радиодеталей. Надо внимательно собирать.
Установлен микроконтроллер, которой надо прошивать программатором. Также установлена показаметре. Ты на плате управления. Здесь также требуется прошивка.
Включи мы посмотрим, как частотный самодельный преобразователь работает. При включении щелкает реле. Кнопка реверс, пуск, сброс. Есть ли защита от короткого замыкания, от сверхтока. В описании все это есть. Кому интересно, сможете прочитать. Нажимаем кнопку сброса. Пуск. Регулятором можно менять обороты трехфазного мотора. Нажимаем пуск и смотрим, как двигатель крутится. Мастер плавно регулирует скорость обращения с помощью крутилки. Есть функция auto реверса.
izobreteniya.net