Электротехника: Драйвер двигателей своими руками.
Для непосредственного управления маломощными электродвигателями можно использовать готовые микросхемы драйверы такие как например L293D. Однако мощность интегральных микросхем ограничена и во многих случаях бывает целесообразно применять драйвер на транзисторах например:Схема 1 — Драйвер электродвигателей
Этот драйвер представляет собой набор полумостов с усилителями напряжения и обратными диодами. Через такой драйвер можно управлять двумя маломощными коллекторными электродвигателями постоянного тока, одним подходящим маломощным асинхронными электродвигателем или одним подходящим четырёхвыводным маломощными шаговым электродвигателем а также этому драйверу можно найти много других применений (например для передачи напряжений на динамик, для преобразования напряжений и т.д. для чего применяются мосты). В общем полезная вещь для использования совместно с микроконтроллером. Рассмотрим пример подключения к этому драйверу маломощных коллекторных электродвигателей постоянного тока:
Схема 2 — Пример подключения коллекторных двигателей
Можно подключать так но в принципе не обязательно, можно и по другому.
 Пример подключения драйвера к микроконтроллеру ATtiny2313:
Пример подключения драйвера к микроконтроллеру ATtiny2313:Рисунок 3 — Подключение драйвера к микроконтроллеру
Для изготовления платы драйвера можно использовать двусторонний фольгированный стеклотекстолит и надфиль (надфиль используется как инструмент для вырезания дорожек на фольгированном стеклотекстолите).
Для силовых транзисторов сверлятся отверстия:
Широкие медные площадки способствует отводу тепла. Термопасту использовать не надо т.к. нужен ещё и хороший электрический контакт между корпусом силового транзистора (который соединён с коллектором) и площадкой. На обратной стороне площадка разделяется вдоль (одна-земля (GND), другая»+» питания):
Металлические части корпуса транзисторов немного очищаются для лучшего электрического и теплового контактов и прикручиваются к плате (КТ817 на площадку с «+»ом, КТ816 на площадку с землёй (GND)):
Далее к плате припаиваются остальные детали:
Можно испытать драйвер с микроконтроллером с прошивкой из предыдущей статьи, как это будет работать можно посмотреть на видео:
КАРТА БЛОГА (содержание)
Драйвер для трехфазного двигателя своими руками
Трёхфазные двигатели постоянного тока довольно часто применяются в быту и промышленности. Для их управления требуется техническое средство, преобразующее сигналы малой мощности в токи, способные управлять моторами.
Для этой цели существуют схемы различной степени сложности. Все они отличаются друг от друга либо мощностью, либо элементной базой, на основе которой они изготовлены.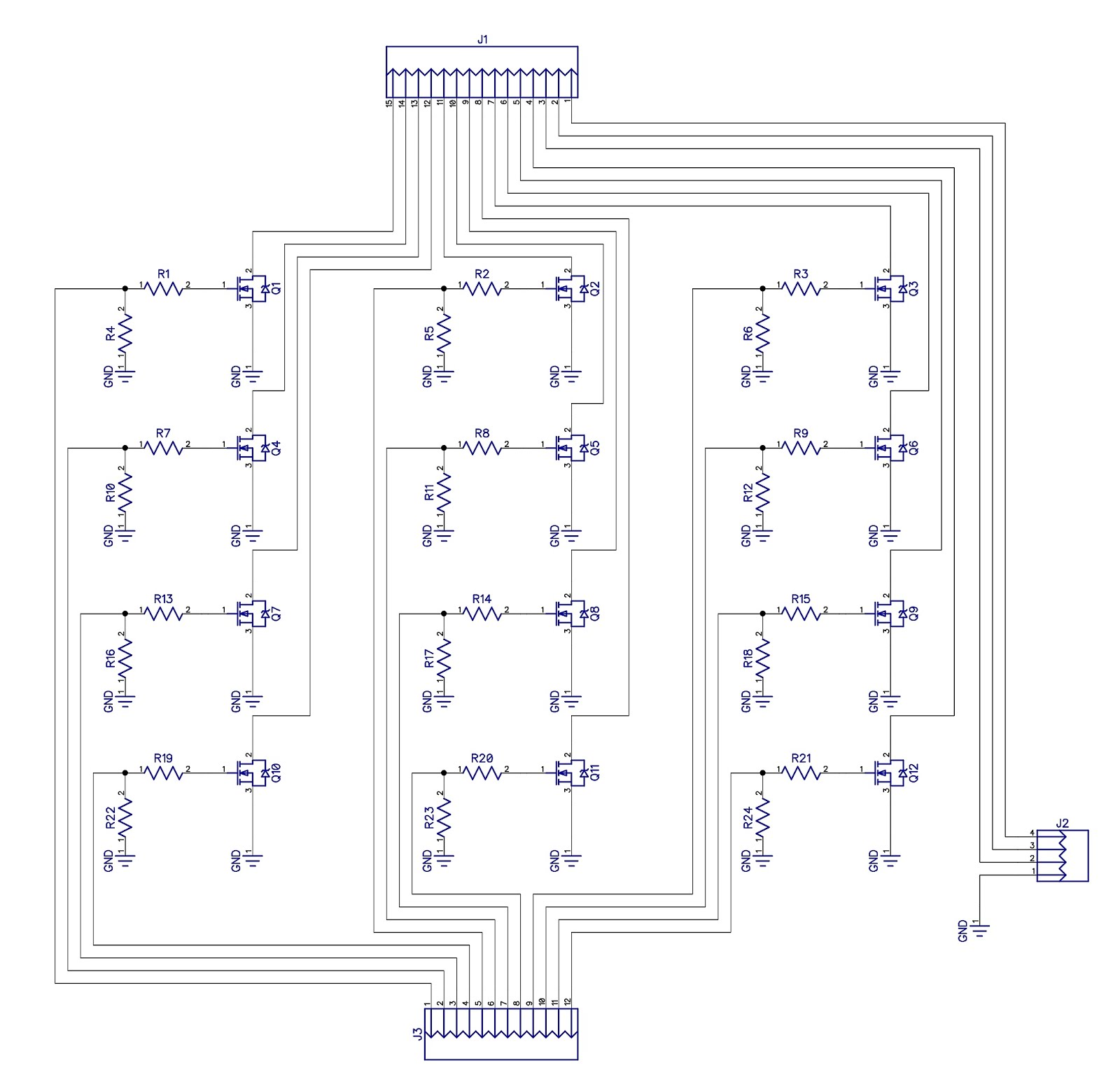 Рассмотрим для начала простейшие схемы.
Рассмотрим для начала простейшие схемы.
Транзистор
Начинающему электрику приходится задаться вопросом подключения мотора к микроконтроллеру. Самым простым и мощным посредником для этого станет транзистор. Подойдут и полевые, и биполярные транзисторы. Самая элементарная схема управления двигателем постоянного тока показана на рисунке.
По существу, это наипростейший драйвер двигателя постоянного тока, предназначенный выполнить свою функцию. Диод, подключенный параллельно обмоткам мотора, защитит от возгорания элементов микросхемы в момент остановки электродвигателя, когда ЭДС самоиндукции создаст на обмотках резкий скачок напряжения. Транзистор КТ315 позволит:
- регулировать ток I< 1 А и напряжение U< 40 В;
- включать/отключать двигатель в одном направлении.
Для двухстороннего управления необходимо более сложное устройство.
Н-мост
Составление электроэлементов соответствующим образом (по типу Н-моста) позволит управлять мотором в обе стороны.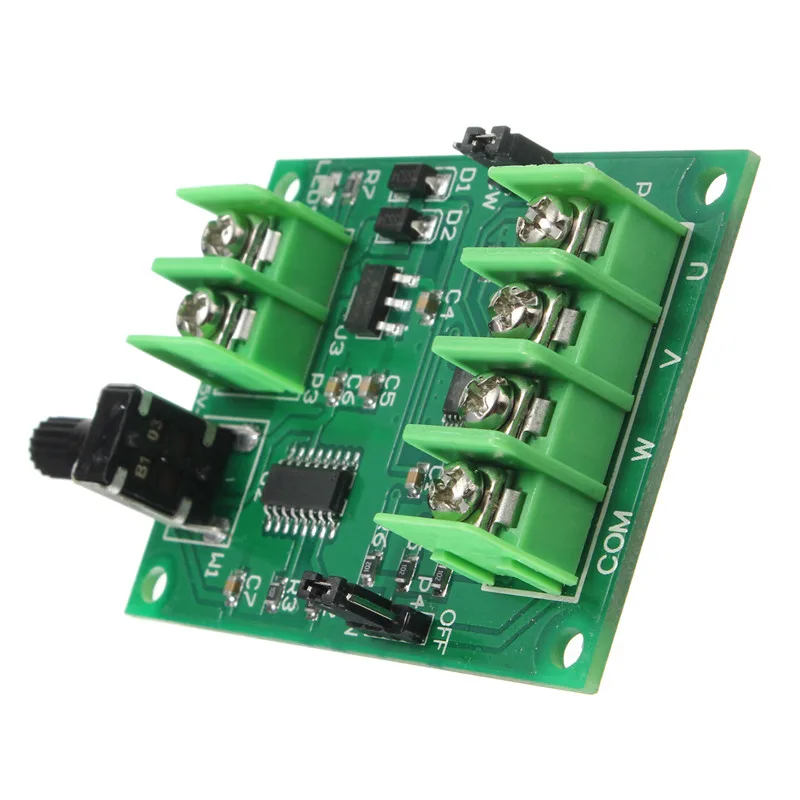 H-мост представлен на чертеже:
H-мост представлен на чертеже:
Где INA, INB — входные сигналы управления;
VCC — электропитание моторов, в несколько раз превышающее напряжения управляющего сигнала;
GND — общая земля.
При подаче положительного сигнала на один из входов, электродвигатель будет вращаться в ту или иную сторону. Обычно, схема драйвера кроме H-моста, дополняется защитными диодами, фильтрами, опторазвязками и другими улучшениями. Самым популярным чипом драйвером является IR2110.
Рабочая схема Н-моста с IR2110
H-мост предназначается для управления моторами тогда, когда потребляемая мощность превышает 300 Вт. Если детали на рисунке слишком мелкие, то кликните по этой картинке — она увеличится.
В подобных схемах используются МОП-транзисторы. Система управления создаётся на основе микроконтроллеров. Результатом будет сформированная чистая синусоида на выходе.
Рекомендации
Использование в бытовых условиях трёхфазных двигателей постоянного тока не вызывает никаких затруднений тогда, когда управление ими осуществляется посредством специальных драйверов, например:
- одного реверсируемого двигателя постоянного тока;
- двух двигателей постоянного тока;
- двигателя постоянного тока с регулятором скорости.

Вооружившись технологией и желанием собрать устройство своими руками можно смело браться за дело. При работе драйверов требуется учитывать конструктивные особенности и некоторые рекомендации по подключению:
- проверка уровня заряда аккумуляторов, напряжение должно быть не менее 12 В;
- не допускать высоких токовых значений на выходе моста, чтобы не сгорели транзисторы;
- если продолжительное включение драйвера приводит к перегреву корпуса транзистора, то понадобится установка радиатора решетчатого типа на сток транзистора;
- двигатель с источником питания по шине +12 В выполнять многожильным медным кабелем, рассчитанным на большой ток.
Заключение
Трёхфазные электродвигатели широко применяются на разнообразном оборудовании, их постоянно совершенствуют, благодаря развитию полупроводниковой техники. Предлагаются универсальные решения создания устройств, работающих в широком диапазоне рабочих параметров, обеспечивающих надежную и удобную эксплуатацию агрегатов.
При желании можно самим собрать драйвер, и с помощью него вращать трёхфазный двигатель. По стоимости покупка отдельных компонентов схем и выполнение сборки собственноручно обходится дешевле, чем приобретение готового устройства.
Ещё по теме:
— Схемы подключения асинхронного и синхронного однофазных двигателей
— Схемы подключения электродвигателя через конденсаторы
— Реверсивная схема подключения электродвигателя
— Плавный пуск электродвигателя своими руками
—В чем разница асинхронного и синхронного двигателей
— Реверсивное подключение однофазного асинхронного двигателя своими руками
— Как проверить электродвигатель
— Ремонт электродвигателей
Драйверы двигателя L298N, L293D и Arduino Motor Shield
Драйвер двигателя выполняет крайне важную роль в проектах ардуино, использующих двигатели постоянного тока или шаговые двигатели. C помощью микросхемы драйвера или готового шилда motor shield можно создавать мобильных роботов, автономные автомобили на ардуино и другие устройства с механическими модулями. В этой статье мы рассмотрим подключение к ардуино популярных драйверов двигателей на базе микросхем L298N и L293D.
C помощью микросхемы драйвера или готового шилда motor shield можно создавать мобильных роботов, автономные автомобили на ардуино и другие устройства с механическими модулями. В этой статье мы рассмотрим подключение к ардуино популярных драйверов двигателей на базе микросхем L298N и L293D.
Драйвер двигателя в проектах ардуино
Для чего нужен драйвер двигателя?
Как известно, плата ардуино имеет существенные ограничения по силе тока присоединенной к ней нагрузки. Для платы это 800 mA, а для каждого отдельного вывода – и того меньше, 40mA. Мы не можем подключить напрямую к Arduino Uno, Mega или Nano даже самый маленький двигатель постоянного тока. Любой из этих двигателей в момент запуска или остановки создаст пиковые броски тока, превышающие этот предел.
Как же тогда подключить двигатель к ардуино? Есть несколько вариантов действий:
Использовать реле. Мы включаем двигатель в отдельную электрическую сеть, никак не связанную с платой Arduino. Реле по команде ардуино замыкает или размыкает контакты, тем самым включает или выключает ток. Соответственно, двигатель включается или выключается. Главным преимуществом этой схемы является ее простота и возможность использовать Главным недостатком данной схемы является то, что мы не можем управлять скоростью и направлением вращения.
Реле по команде ардуино замыкает или размыкает контакты, тем самым включает или выключает ток. Соответственно, двигатель включается или выключается. Главным преимуществом этой схемы является ее простота и возможность использовать Главным недостатком данной схемы является то, что мы не можем управлять скоростью и направлением вращения.
Использовать силовой транзистор. В данном случае мы можем управлять током, проходящим через двигатель, а значит, можем управлять скоростью вращения шпинделя. Но для смены направления вращения этот способ не подойдет.
Использовать специальную схему подключения, называемую H-мостом, с помощью которой мы можем изменять направление движения шпинделя двигателя. Сегодня можно без проблем найти как микросхемы, содержащие два или больше H-моста, так и отдельные модули и платы расширения, построенные на этих микросхемах.
В этой статье мы рассмотрим последний, третий вариант, как наиболее гибкий и удобный для создания первых роботов на ардуино.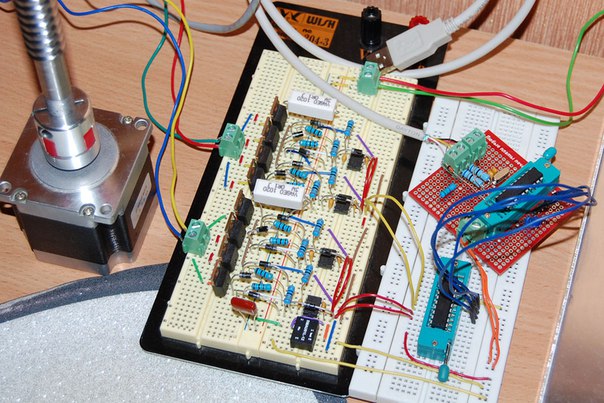
Микросхема или плата расширения Motor Shield
Motor Shield – плата расширения для Ардуино, которая обеспечивает работу двигателей постоянного тока и шаговых двигателей. Самыми популярными платами Motor Shield являются схемы на базе чипов L298N и L293D, которые могут управлять несколькими двигателями. На плате установлен комплект сквозных колодок Ардуино Rev3, позволяющие устанавливать другие платы расширения. Также на плате имеется возможность выбора источника напряжения – Motor Shield может питаться как от Ардуино, так и от внешнего источника. На плате имеется светодиод, который показывает, работает ли устройство. Все это делает использование драйвера очень простым и надежным – не нужно самим изобретать велосипеды и решать уже кем-то решенные проблемы. В этой статье мы будем говорить именно о шилдах.
Принцип действия H-моста
Принцип работы драйвера двигателя основан на принципе работы H-моста. H-мост является электронной схемой, которая состоит из четырех ключей с нагрузкой. Название моста появилось из напоминающей букву H конфигурации схемы.
Название моста появилось из напоминающей букву H конфигурации схемы.
Схема моста изображена на рисунке. Q1…Q4 0 полевые, биполярные или IGBT транзисторы. Последние используются в высоковольтных сетях. Биполярные транзисторы практически не используются, они могут присутствовать в маломощных схемах. Для больших токов берут полевые транзисторы с изолированным затвором. Ключи не должны быть замкнуты вместе одновременно, чтобы не произошло короткого замыкания источника. Диоды D1…D4 ограничительные, обычно используются диоды Шоттки.
С помощью изменения состояния ключей на H-мосте можно регулировать направление движения и тормозить моторы. В таблице приведены основные состояния и соответствующие им комбинации на пинах.
| Q1 | Q2 | Q3 | Q4 | Состояние |
| 1 | 0 | 0 | 1 | Поворот мотора вправо |
| 0 | 1 | 1 | 0 | Поворот мотора влево |
| 0 | 0 | 0 | 0 | Свободное вращение |
| 0 | 1 | 0 | 1 | Торможение |
| 1 | 0 | 1 | 0 | Торможение |
| 1 | 1 | 0 | 0 | Короткое замыкание |
| 0 | 0 | 1 | 1 | Короткое замыкание |
Драйвер двигателя L298N
Модуль используется для управления шаговыми двигателями с напряжением от 5 до 35 В. При помощи одной платы L298N можно управлять сразу двумя двигателями. Наибольшая нагрузка, которую обеспечивает микросхема, достигает 2 А на каждый двигатель. Если подключить двигатели параллельно, это значение можно увеличить до 4 А.
При помощи одной платы L298N можно управлять сразу двумя двигателями. Наибольшая нагрузка, которую обеспечивает микросхема, достигает 2 А на каждый двигатель. Если подключить двигатели параллельно, это значение можно увеличить до 4 А.
Плата выглядит следующим образом:
Распиновка микросхемы L298N:
- Vcc – используется для подключения внешнего питания;
- 5В;
- Земля GND;
- IN1, IN2, IN3, IN4 – используется для плавного управления скоростью вращения мотора;
- OUT1, OUT2 – используется для выхода с первого двигателя;
- OUT3, OUT4 – используется для выхода со второго двигателя;
- S1 – переключает питание схемы: от внешнего источника или от внутреннего преобразователя;
- ENABLE A, B – требуются для раздельного управления каналами. Используются в двух режимах – активный, при котором каналами управляет микроконтроллер и имеется возможность изменения скорости вращения, и пассивный, в котором невозможно управлять скоростью двигателей (установлено максимальное значение).

При подключении двух двигателей, нужно проверить, чтобы у них была одинаковая полярность. Если полярность разная, то при задании направления движения они будут вращаться в противоположные стороны.
Драйвер двигателя L293D
L293D – является самой простой микросхемой для работы с двигателями. L293D обладает двумя H-моста, которые позволяют управлять двумя двигателями. Рабочее напряжение микросхемы – 36 В, рабочий ток достигает 600 мА. На двигатель L293D может подавать максимальный ток в 1,2 А.
В схеме имеется 16 выходов. Распиновка:
- +V – питание на 5 В;
- +Vmotor – напряжение питания для мотором до 36 В;
- 0V – земля;
- En1, En2 –включают и выключают H-мосты;
- In1, In2 – управляют первым H-мостом;
- Out1, Out2 – подключение первого H-моста;
- In3, In4 – управляют вторым H-мостом;
- Out3, Out4 – подключение второго H-моста.
Для подключения к микроконтроллеру Arduino Uno нужно соединить выходы In1 на L293D и 7 пин на Ардуино, In2 – 8, In3 – 2, In4 – 3, En1 – 6, En2 – 5, V – 5V, Vmotor – 5 V, 0V – GND. Пример подключения одного двигателя к Ардуино показан на рисунке.
Пример подключения одного двигателя к Ардуино показан на рисунке.
Драйвер двигателя на микросхеме HG7881
HG7881 – двухканальный драйвер, к которому можно подключить 2 двигателя или четырехпроводной двухфазный шаговый двигатель. Устройство часто используется из-за своей невысокой стоимости. Драйвер используется только для изменения направления вращения, менять скорость он не может.
Плата содержит 2 схемы L9110S, работающие как H-мост.
Характеристики драйвера HG7881:
- 4-контактное подключение;
- Питание для двигателей от 2,5 В до 12 В;
- Потребляемый ток менее 800 мА;
- Малые габариты, небольшой вес.
Распиновка:
- GND – земля;
- Vcc – напряжение питания 2,5В – 12В;
- A-IA – вход A(IA) для двигателя A;
- A-IB – вход B (IB) для двигателя A;
- B-IA – вход A(IA) для двигателя B;
- B-IB – вход B (IB) для двигателя B.
В зависимости от поданного сигнала на выходах IA и IB будет разное состояние для двигателей.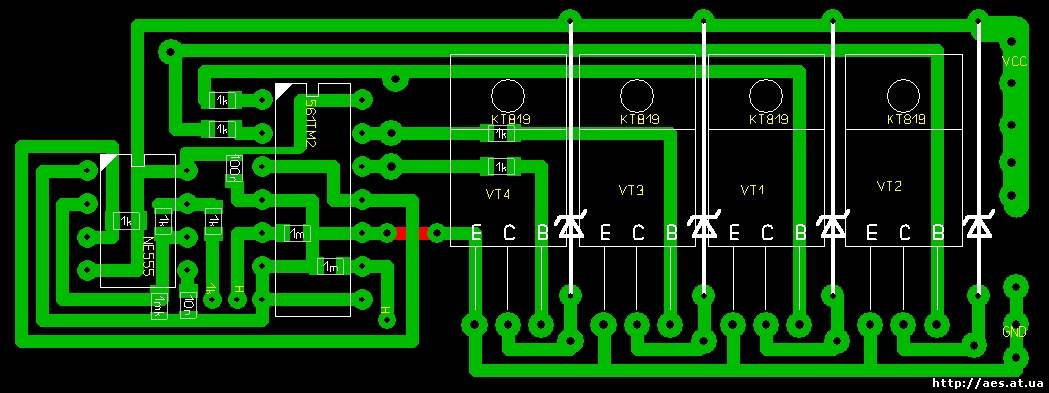 Возможные варианты для одного из моторов приведены в таблице.
Возможные варианты для одного из моторов приведены в таблице.
| IA | IB | Состояние мотора |
| 0 | 0 | Остановка |
| 1 | 0 | Двигается вперед |
| 0 | 1 | Двигается назад |
| 1 | 1 | Отключение |
Подключение одного двигателя к Ардуино изображено на рисунке.
Сравнение модулей
Модуль L293D подает максимальный ток в 1,2А, в то время как на L298N можно добиться максимального тока в 4 А. Также L293D обладает меньшим КПД и быстро греется во время работы. При этом L293D является самой распространенной платой и стоит недорого. Плата HG7881 отличается от L293D и L298N тем, что с ее помощью можно управлять только направлением вращения, скорость менять она не может. HG7881 – самый дешевый и самый малогабаритный модуль.
Подключение L298N к Arduino
Как уже упоминалось, в первую очередь нужно проверить полярность подключенных двигателей. Двигатели, вращающиеся в различных направлениях, неудобно программировать.
Двигатели, вращающиеся в различных направлениях, неудобно программировать.
Нужно присоединить источник питания. + подключается к пину 4 на плате L298N, минус (GND) – к 5 пину. Затем нужно соединить выходы с L298N и пины на Ардуино, причем некоторые из них должны поддерживать ШИМ-модуляцию. На плате Ардуино они обозначены ~. Выходы с L298N IN1, IN2, IN3 и IN4 подключить к D7, D6, D5 и D4 на Ардуино соответственно. Подключение всех остальных контактов представлено на схеме.
Направление вращения задается с помощью сигналов HIGH и LOW на каждый канал. Двигатели начнут вращаться, только когда на 7 пине для первого мотора и на 12 пине для второго на L298N будет сигнал HIGH. Подача LOW останавливает вращение. Чтобы управлять скоростью, используются ШИМ-сигналы.
Для управления шаговым двигателем в Arduino IDE существует стандартная библиотека Stepper library. Чтобы проверить работоспособность собранной схемы, можно загрузить тестовый пример stepper_oneRevolution. При правильной сборке вал двигателя начнет вращаться.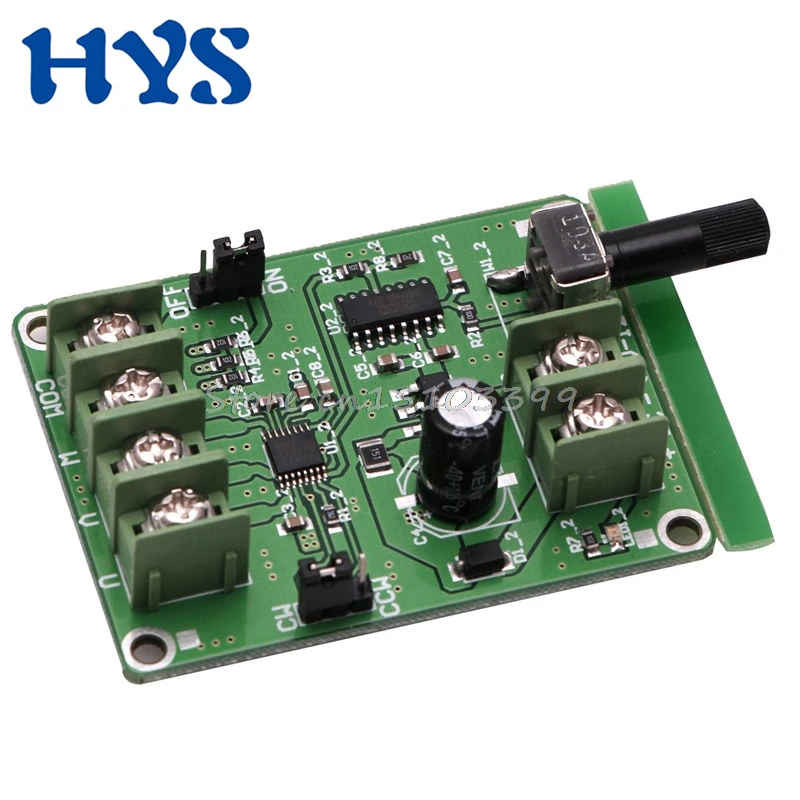
При работе с моторами Ардуино может периодически перезагружаться. Это возникает из-за того, что двигателям требуются большие токи при старте и в момент торможения. Для решения этой проблемы в плату встроены конденсаторы, диоды и другие схемы. Также для этих целей на шидле имеется раздельное питание.
Драйвер коллекторного двигателя / DIYtimes
Микросхема L293D используется для управления коллекторными двигателями. Обеспечивает реверс и торможение. Имеет два канала управления и по тому можно использовать одну микросхему для двух двигателей.
На принципиальной схеме L293 видно, что каждый канал управления состоит из пары транзисторов. Для защиты от индукционных токов есть диодная защита, но только на микросхемах с индексом «D».
Для управления током на двигателе допускается подавать на микросхему ШИМ сигнал. Это позволяет делать плавный старт или регулировать скорость вращения двигателя.
Одновременное управление четырьмя двигателями
Каждый из четырех транзисторов способен управлять отдельным двигателем, но увы без реверса и торможения.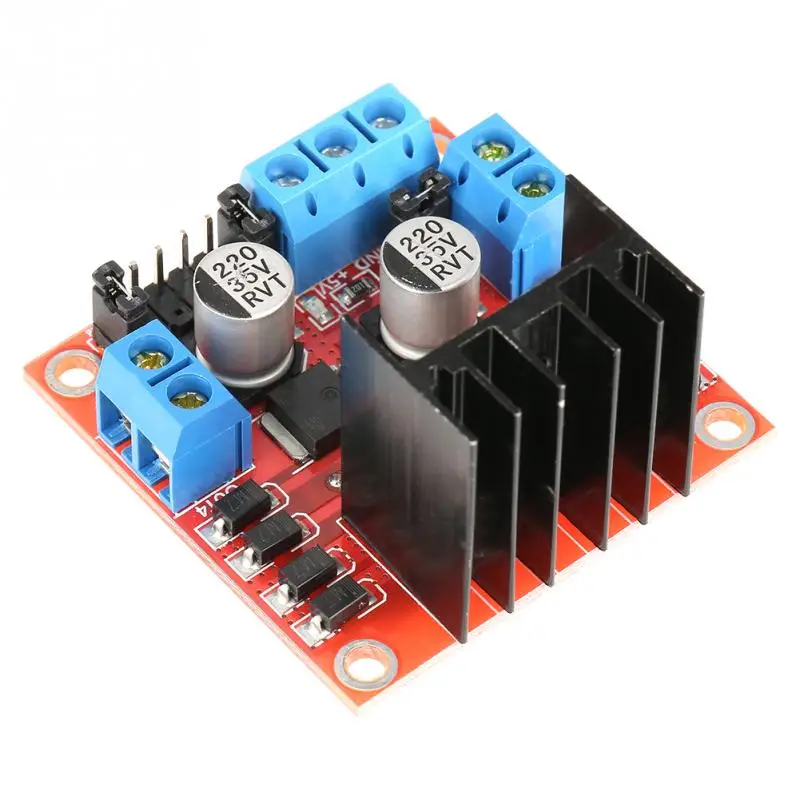 Схема подключения:
Схема подключения:
Режим торможения двигателя
Если на оба транзистора (два управляющих входа для каждого канала) подать логическую единицу, то выходы канала будут коротко замкнуты между собой. ЭДС, что вырабатывается двигателем во время вращения, будет тормозить двигатель. Инерционное вращение будет минимальным, что обеспечивает мгновенное торможение.
Подобный принцип можно наблюдать в шуруповертах. Если резко отпустить курок — вал мгновенно прекратит вращение.
Если на вращающем двигателе к управляющим входам подать логический ноль, то мотор будет останавливаться как обычно при отключении питания — уменьшая вращение до полного останова.
Реверс двигателя
На один из транзисторов канала подаем логическую единицу, а на другой ноль — вращение в одну сторону. Инвертируем аналогично и получаем реверс.
Теплоотвод
У микросхемы L293D есть один существенный недостаток. В ней используются биполярные транзисторы, которые в отличии от полевых имеют значительное сопротивление в открытом состоянии, что вызывает нагрев и потерю напряжения на выходе. Если использовать мощный электромотор, то микросхема будет интенсивно греться и ей потребуется теплоотвод.
Если использовать мощный электромотор, то микросхема будет интенсивно греться и ей потребуется теплоотвод.
Если вы управляете одним мощным двигателем, то имеет смысл подключить оба канала параллельно и тогда микросхема сможет выдавать ток в два раза больше, чем один канал.
Пример подключения коллекторного двигателя к arduino:
ДРАЙВЕР МОТОРА
Схемы для управления электрическими моторами, используемые в разных конструкциях (машинах, роботах), различаются как мощностью, так и радиоэлементами, на основе которых они выполнены. Естественно в последнее время предпочтение стали отдавать драйверам управления выполненных на специализированных микросхемах. Одна из наиболее распространённых — микросхема L293D, что содержит сразу два драйвера для управления электродвигателями небольшой мощности (четыре независимых канала, объединенных в две пары). Она имеет две пары входов для управляющих сигналов и две пары выходов для подключения электромоторов. Кроме того, у L293D есть два входа для включения каждого из драйверов.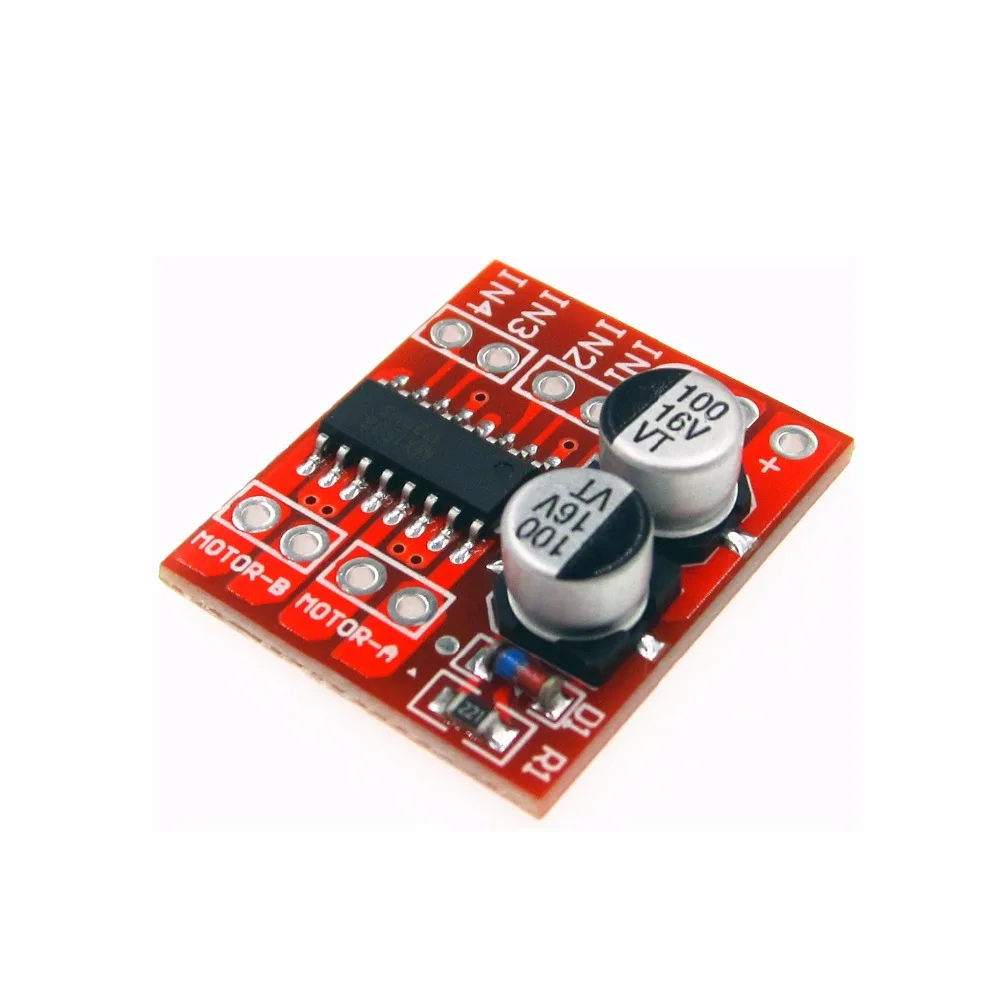 Эти входы используются для управления скоростью вращения электромоторов с помощью ШИМ. Даташит можно посмотреть по ссылке.
Эти входы используются для управления скоростью вращения электромоторов с помощью ШИМ. Даташит можно посмотреть по ссылке.
Характеристики микросхемы L293D
- напряжение питания двигателей (Vs) — 4,5…36 В
- напряжение питания микросхемы (Vss) — 5 В
- допустимый ток нагрузки — 600 мА (на каждый канал)
- максимальный ток на выходе — 1,2 A (на каждый канал)
- логический «0» входного напряжения — до 1,5 В
- логическая «1» входного напряжения — 2,3…7 В
- скорость переключений до 5 кГц.
- встроенная защита от перегрева
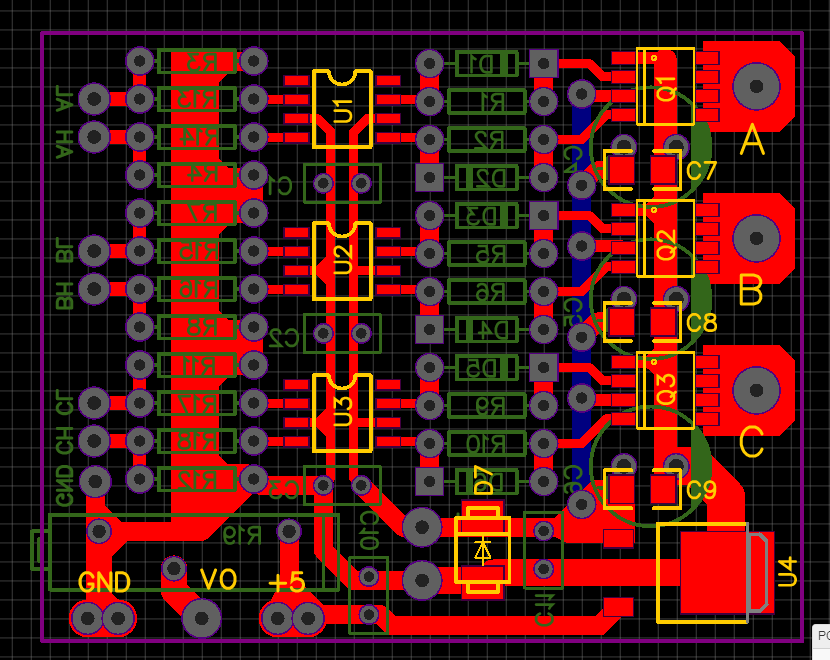
Схема сборки драйвера мотора
Схема управления двигателем постоянного тока подходит для моторов малой и средней мощности. Она позволяет контролировать до 6 двигателей. Контроллер может обеспечить ток до 600 мА на канал, а мост на транзисторах может обеспечить и более ампера на каждый канал.
Печатная плата для схемы
Принцип работы драйвера двигателя можно понять, рассмотрев таблицу.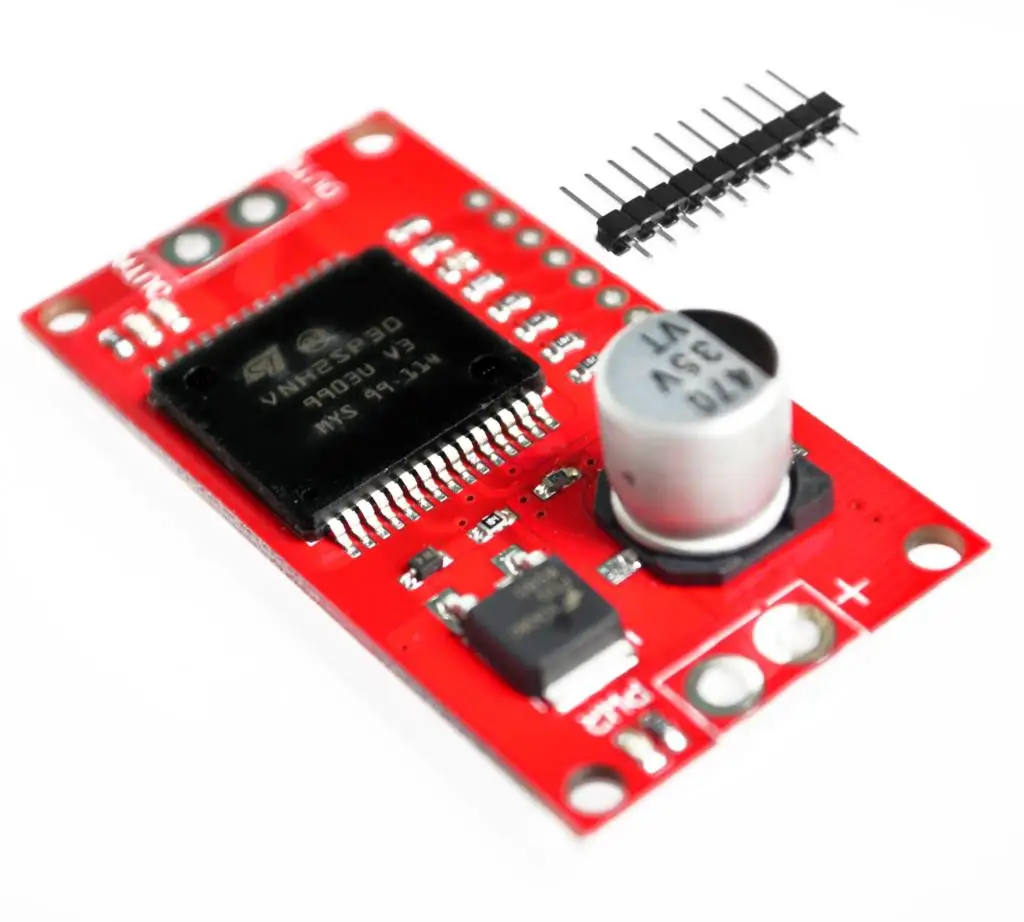
Контроллер имеет следующие разъемы:
- INPUT (A, B, C, D ,E, F). Прием аналоговых или дискретных сигналов, которые могут быть отправлены, например, от микроконтроллера.
- ENABLE (E1-2, E3-4). Активация входов от L293D. Напряжение не может быть выше, чем 7В.
- OUTPUT (+M1, -М1 +М2, М2, +М3, м3). Контакты, где двигатели должны быть подключены к схеме.
- ПИТАНИЕ +9-12В. Напряжении питания двигателей. Этот вход по вольтажу должен быть максимум 36V.
- ПИТАНИЕ +5V. Это напряжение питания для L293D. Вы можете сюда подключить питающее напряжение выше, чем 5V, потому что он подключен к регулятору напряжения LM7805.
Создание бюджетного Н-моста
В этой статье будет рассмотрено создание бюджетного Н-моста для подключения коллекторного двигателя. Область применения, ну скажем для само балансирующих роботов с эл.
 двигателями 36 В и выше. Возможно эта схема уже существует, но я не встречал.
двигателями 36 В и выше. Возможно эта схема уже существует, но я не встречал.В моём проекте надо было заставить коллекторный двигатель работать в реверсивном режиме для поддержания само баланса при напряжении 36 вольт. В интернете можно найти огромное количество схем на эту тему.
Но при повторении их лично я спалил не один десяток полевых транзисторов, причем одни выгорали сразу при включении питания, другие после подключения нагрузки. Пробовал мосфеты и только N-P-N и в сочетании с P-N-P, как то не шло.
Дошло дело до того, что стал подумывать о замене двигателя на 24 В. Есть в продаже драйвера способные управлять мощной нагрузкой и не надо голову ломать заплати и твори …даже прикупил драйвер двигателя BTS7960 43 А
Но решение пришло как то само собой. Я почему то решил заменить мосфеты верхнего плеча P-N-P на тиристоры. Тиристор после включения не отключится пока не разорвешь питание, это может делать мосфет когда управляющее напряжении переходит в 0
Для построения Н-моста мне понадобилось:
1- два тиристора ( я взял ку-202 н) 400 В, 10 А
2- мосфеты N-P-N 2 шт- irfp-240 (200 В 20 А) 2 шт- irfs-740 (400 В 10 А)
3- сопротивления 100 ом -8 шт , 10 к- 8 шт
4- два кремниевых транзистора N-P-N КТ-815 и два P-N-P КТ-816
5- два диода д- 226Б
Выходы А и В управляются ардуино, Положительный сигнал «А» поступает на мосфет irfp-240 который управляет напряжением и на кремниевые транзисторы КТ-815 и КТ-816 которые полностью открывают мосфет и тиристор тем самым запуская электромотор.
Диод нужен для того, чтобы отключить тиристор, он прерывает запитку мосфета irfs-740 при отключении сигнала с ардуино и цепь разрывается, без него тиристор подпитывает мосфет даже когда сигнал «А» с ардуино отсутствует.
Мосфеты, управляющие оборотами электродвигателя, я поставил два, хотя можно было поставить и один отсечь сигнал диодами, но с ардуино напряжение ШИМ небольшое, а усилитель при потерях не хотелось строить.
Если положительный сигнал будет на «В» вращение будет противоположное.
В итоге задача была решена, коллекторный электродвигатель работает в реверсном режиме и имеет регулятор оборотов, конечно крупный получился драйвер, но в будущем планирую применить на более высокое напряжение.
При нагрузке больше 5-7 А, тиристоры и мосфеты нужно подобрать соответствующей мощности.
Шлифовальная машинка из HDD с регулировкой оборотов своими руками
Наверняка, у большинства людей, в закромах без дела лежат старые жесткие диски. Из него можно сделать нужную и полезную вещь для заточки ножей, скальпелей и других предметов — миниатюрную шлифовальную машинку с регулятором оборотов вращения круга.
Понадобится
Также понадобятся провода, кембрики для изоляции и ещё несколько мелочей.
Три основные составляющие это:
Жесткий диск в любом состоянии. Двигатель в нем трудно спалить, поэтому он на 100% подойдет. А плата с драйвером управления у нас будет покупная.
Мотор в HDD трехфазный, бесщеточный и очень мощный. Просто так работать от постоянного тока он не будет и чтобы его запустить понадобится контроллер или драйвер управления трехфазным двигателем.
Для управления контроллером нужен регулятор скорости, выглядит он так:
Собираем шлифовальную машинку из жесткого диска
Итак, вскрываем жесткий диск. Тут у вас возникнет проблема — понадобятся специализированные отвертки, так как болты и винты там нестандартные. Советую не мучиться и купить, или взять в аренду, набор с такими отвертками.
В общем раскручиваем все: и сверху и снизу, так как ничего кроме установленного мотора не понадобится.
Удаляем плату, оставляя только контакты подключения к мотору. Теперь смотрите: моторы в жестких дисках могут иметь как три вывода, так и четыре.
Все зависть от метода включения обмоток. Где-то они включаются по схеме «звезда», а где-то по схеме «треугольник». Нам подойдут оба варианта.
За исключение того, что у трехвыводного HDD все ясно с фазами — «АВС», а у четырехвыводного придется выискивать фазы с помощью тестера. Средний или общий провод нам не понадобится — он будет не задействован.
Подключаем провода к двигателю от контроллера, изолируем и фиксируем металлической перемычкой (вырезать ее можно из консервной банки).
Такой же перемычкой фиксируем сам контроллер со стороны вращающегося диска.
Чтобы вырезать круг из наждачной бумаги снимем сам диск с мотора HDD. Приложим его к наждачной бумаге, обведем карандашом с обратной стороны и вырежем обычными ножницами.
Пришло время приклеить вырезанный круг на металлический диск. Клеится это все на двухсторонний скотч. Ваш круг никуда не денется, а менять при износе его будет просто.
Привинчиваем диск.
Из крышки делаем защитный кожух для контроллера. Выпиливаем полукруг дремелем.
И из куска жестянки делаем защитный кожух, чтобы продукты износа не летели на контроллер.
Жестяная полоска припаивается паяльником к крышке жесткого диска.
Все собираем. Подключаем регулятор скорости. Подключение производится при помощи штыревого разъема. Эти два модуля специально созданы друг для друга и активно применяются в моделировании.
Подключаем питание 12 В. Ручкой регулятора регулируем скорость вращения диска. Все должно работать без настройки.
С помощью ШИМ регулятора скорость регулируется очень плавно и в больших пределах.
Теперь вы можете точить хоть метал, хоть пластик. Такая полезная конструкция обязательно найдет применение у вас дома.
Спасибо за внимание!
Смотрите видео работы шлифовальной машинки
Original article in English
Описание драйвера шагового двигателя
Программное обеспечение контроллера шагового двигателя
| |||||||||
Драйвер бесщеточного двигателя постоянного тока | Двигатель BLDC
Растет использование бесщеточных двигателей постоянного тока (BLDC).Но для их управления обычно требуется информация о положении ротора для выбора подходящего угла коммутации. Обычно датчик Холла используется для определения положения ротора. Но в приложениях, чувствительных к стоимости, часто желательна схема коммутации без датчиков. Схема драйвера бесщеточного двигателя постоянного тока, описанная здесь, использует микросхему драйвера DRV10866 для управления небольшим вентилятором BLDC без использования каких-либо датчиков положения. Скорость вентилятора BLDC можно плавно изменять без обычных шагов, связанных с обычным вентилятором переменного тока.
Схема привода бесщеточного двигателя постоянного тока
На рис. 1 показана схема бездатчикового драйвера двигателя BLDC. Схема построена на NE555 (IC1), DRV10866 (IC2) и нескольких других компонентах.
Рис. 1: Схема драйвера бесщеточного двигателя постоянного токаИС драйвера DRV10866 от Texas Instruments используется для привода небольшого трехфазного двигателя BLDC (M1). Схема представляет собой трехфазный драйвер двигателя без датчика со встроенными силовыми полевыми МОП-транзисторами, обеспечивающими максимальный ток возбуждения до 680 мА в пике.DRV10866 специально разработан для приводов с низким уровнем шума и малым количеством компонентов. Схема без датчика обратной ЭДС 150 ° используется для управления трехфазным двигателем.
Подтягивающий резистор 100 кОм (R2) используется на выводе 1 IC2. Контакты 2, 4, 7 и 6 IC2 подключены к общей фазе A, фазе B и фазе C двигателя BLDC соответственно. Контакт 10 IC2 подключен к контакту 7 IC1 для получения сигнала с широтно-импульсной модуляцией (PWM) от IC1 для управления скоростью двигателя BLDC.
Выходной сигнал (ШИМ) доступен на выводе 7 (DIS) микросхемы IC1, а не на обычном выводе 3 микросхемы.Рабочий цикл сигнала ШИМ 25 кГц (приблизительно) можно регулировать от 5% до 95% с помощью потенциометра VR1. Скорость двигателя BLDC можно контролировать, изменяя рабочий цикл сигнала PWM. Поворот VR1 против часовой стрелки снижает рабочий цикл, что, в свою очередь, снижает скорость двигателя, и наоборот.
Строительство и испытания
Односторонняя печатная плата для драйвера бесщеточного двигателя постоянного тока показана на рис. 2, а схема ее компонентов — на рис. 3. Соберите схему на рекомендованной печатной плате, чтобы минимизировать ошибки сборки.IC2 должен быть установлен на стороне пайки печатной платы.
Рис. 2: Односторонняя печатная плата драйвера бесщеточного двигателя постоянного тока 3: Компоновка компонентов для печатной платы Загрузите компоновку печатной платы и компонентов в формате PDF: нажмите здесьПосле сборки компонентов подключите источник постоянного тока 5 В к разъему CON1. Чтобы проверить правильность работы схемы драйвера бесщеточного двигателя постоянного тока, проверьте правильность подачи 5 В для цепи на TP1 по отношению к TP0. Поверните VR1 по часовой стрелке или против часовой стрелки, чтобы увеличить или уменьшить скорость двигателя.
Для более интересных схемных проектов: нажмите здесь
Автор — бакалавр технических наук (электроника и связь) из GGSIPU, New Delhi
Эта статья была впервые опубликована 6 февраля 2017 г. и обновлена 15 декабря 2020 г.
Контроллер шагового двигателя | Hackaday
Если вам нужно простое и легкое введение в работу с шаговыми двигателями, посмотрите короткое видео [IMSAI Guy], где он проектирует очень простой контроллер шагового двигателя и по ходу дела извлекает из него множество быстрых уроков.(Выложено ниже.)
Он сначала рассматривает основы шагового двигателя в практическом, практическом подходе, а также показывает нам, как прозвонить соединения, если распиновка неизвестна. Затем он демонстрирует шаговый двигатель вручную, а затем создает простую схему драйвера полевого транзистора. Когда вы ожидаете появления небольшого микроконтроллера, [IMSAI Guy] вместо этого копается глубоко в своем ящике для мусора и объясняет, как управлять двигателем с помощью 22V10 GAL (электрически стираемого PAL) и модуля таймера 555.Основываясь на четко объясненной логической таблице для управления катушками, хитрый способ представить карты Карно, он приступает к написанию выходных уравнений в WinCUPL.
Зрелые читатели вспомнят символ «Happy PAL».WinCUPL — это современная версия CUPL (компилятора универсальной программируемой логики), изначально написанная компанией Assisted Technology, ныне принадлежащей Altium. CUPL и его коллеги, такие как PALASM от Monolithic Memories, Inc. (MMI) и ABEL от Data I / O Corporation, были базовыми языками описания оборудования, специально разработанными для PAL, GAL и CPLD.PAL были небольшими массивами логических вентилей с плавкими соединениями, и ваша конструкция «выжжена» на плавких предохранителях так же, как (EE) PROM. При проектировании с помощью PAL вы могли четко визуализировать в уме связи, что с тех пор было исправлено с появлением современных FPGA.
Увы, он вырезает ту часть, где компилируется исходный код и программируется 22V10, и сразу переходит к тестированию схемы на макетной плате. Предупреждение о спойлере — это действительно работает. Изящный макетный модуль таймера 555, на который он указывает, называется TP353, который вы можете найти у своего любимого онлайн-поставщика.
В этом руководстве есть чему поучиться, и [IMSAI Guy] отлично справляется с тем, чтобы сделать предмет доступным для любителей и новичков. Пару недель назад мы также рассмотрели еще один из его уроков по датчикам изображения. Спасибо [itsevilbert] за подсказку.
Читать далее «Шаговые двигатели — быстро и просто» →
Цепь драйвера двигателя моста H
Направленное управление двигателем постоянного тока — это преднамеренное изменение определенных коэффициентов привода двигателя постоянного тока, которые определяют направление вращения вала двигателя постоянного тока.Имея дело с практической электроникой в промышленных или академических учреждениях, есть много случаев, когда требуется направленное управление двигателем постоянного тока. Примером может служить конвейерная лента сборочного конвейера, обычно используемая для контроля почти во всех производственных отраслях. Такие конвейерные системы требуют двунаправленного управления двигателем, чтобы проводить проверки с максимальной точностью. В сегодняшнем руководстве мы рассмотрим пошаговую процедуру создания схемы драйвера двигателя с H-мостом с использованием транзисторов NPN и PNP.
Драйвер мотора моста H
Схема драйвера двигателя с H-мостом позволяет подавать напряжение на нагрузку в любом направлении. Он изготовлен с использованием четырех переключающих устройств (транзисторов / полевых МОП-транзисторов). Н-мостовые схемы часто используются в робототехнике и многих других приложениях, чтобы двигатели постоянного тока могли работать вперед и назад. Цепи контроллера двигателя H Bridge также используются в различных преобразователях, таких как преобразователи постоянного тока в постоянный, постоянного тока в переменный, переменного тока в переменный ток
PCBWay — китайский производитель печатных плат и сборщик печатных плат.Шэньчжэнь на протяжении десятилетий был мировым центром исследований, разработок и производства электроники. Обладая более чем десятилетним опытом в области прототипов и изготовления печатных плат, PCBWay обязуется удовлетворять потребности своих клиентов. Из разных отраслей с точки зрения качества, доставки, рентабельности и любых других требовательных запросов. Как один из самых опытных производителей печатных плат в Китае. Они гордятся тем, что являются вашими лучшими деловыми партнерами, а также хорошими друзьями во всех аспектах ваших потребностей в печатных платах.
Аппаратные компоненты
Для сборки этого проекта вам потребуются следующие детали.
Полезные шаги
Тщательно выполняйте все шаги из видеоурока, приведенного выше (рекомендуется)
1) Припаиваем все транзисторы2) Припаять все резисторы
3) Паяльник керамический конденсатор
4) Кнопки для пайки
5) Разъем питания под пайку
6) Пайка входных проводов двигателя постоянного тока
7) Давайте включим цепь
СхемаПринципиальная схема
Рабочее объяснение
Схема H-моста работает следующим образом: резисторы с R1 по R4 ограничивают базовый ток соответствующих транзисторов.После завершения схемы и нажатия кнопки SW1 транзисторы Q3 и Q4 будут включены, и ток пройдет через двигатель слева направо, и двигатель начнет вращаться в соответствующем направлении.
При нажатии кнопки SW2 включаются транзисторы Q5 и Q2, и ток проходит через двигатель справа направо, заставляя двигатель вращаться в противоположном направлении. Никогда не нажимайте оба переключателя одновременно. Это создаст путь с очень низким коротким сопротивлением между источником питания и заземлением, что приведет к короткому замыканию источника питания.Это состояние называется «прострелить» и является верным способом быстро разрушить ваш Н-мост.
Приложения
- Обычно используется в таких устройствах, как серводвигатели, драйверы двигателей, двигатели переменного / постоянного тока и т. Д.
- Также используется в таких устройствах, как роботы, сервоприводы, конвейеры и т. Д.
- Также используется для управления различными дронами, используемыми в таких приложениях, как наблюдение за недвижимостью и навигация по местности.
См. Также: Проект светофора с использованием микросхемы счетчика декады CD4017 | Как сделать многоуровневый датчик приближения с использованием микросхемы операционного усилителя LM358 | Усилитель звука беспроводного динамика с использованием силового транзистора 2SC2625
Шаговый контроллерDIY — Введение | PyroElectro
Информация о проектеАвтор: Крис
Сложность: Средняя
Затраченное время: 3 часа
Предпосылки:
Взгляните на вышеупомянутый
уроки перед продолжением
прочитать этот учебник.
Шаговый двигатель — это очень точный и простой в использовании двигатель, который отлично подходит как для начинающих, так и для начинающих. продвинутые любители. Точность, которую обеспечивают шаговые двигатели за счет уникального «шагового» метода движения, позволяет нам всегда знать, где находится двигатель, без какой-либо обратной связи или схема кодирования.
Понимание того, как построить правильную схему управления для шагового двигателя, имеет жизненно важное значение.Зная, сколько тока будет потребляться двигателем, и запланированное напряжение системы имеет важное значение. На протяжении всего этого руководства напряжение моей системы будет составлять 12 В для двигателей, а потребляемый ток не будет. превышают 300 мА. Шаговые двигатели могут потреблять большой ток, поэтому проверьте спецификации того, что вы используете. Полная плата контроллера шагового двигателя DIY
Демонстрационная установка
Цель и обзор этого проекта
Целью этого проекта является создание платы, специально предназначенной для управления шаговым двигателем с двумя катушками.Доска должен иметь 4 порта клеммной колодки для 4 проводов шагового двигателя и 4 входных порта для контроллера L297.
Плата должна надежно контролировать шаги, которые выполняет двигатель. Каждый тактовый импульс в цепи выполнит ровно 1 тактный цикл двигателя.
DIY Raspberry Pi Motor Driver HAT
Raspberry Pi HAT — это дополнительная плата для Raspberry Pi с теми же размерами, что и Pi.Он может быть установлен непосредственно на Raspberry Pi и не требует дополнительных подключений. На рынке доступно множество шляп Raspberry Pi. В этом руководстве мы собираемся создать драйвер двигателя Raspberry Pi HAT для управления двигателями постоянного тока и шаговыми двигателями. Этот драйвер двигателя HAT состоит из микросхемы драйвера двигателя L293D, модуля ЖК-дисплея 16 * 2, четырех кнопок и дополнительных контактов для модуля SIM800 с регулятором 3,3 В. Эта Raspberry Pi HAT пригодится при создании роботизированного проекта.
Здесь мы использовали PCBWay, чтобы предоставить печатные платы для этого проекта. В следующих разделах статьи мы рассмотрели полную процедуру проектирования, заказа и сборки печатных плат для Raspberry pi Motor Driver HAT. Мы также создали Raspberry Pi Hat для ЖК-дисплея 16×2 и Raspberry Pi LoRa HAT в наших предыдущих проектах.
Компоненты, необходимые для драйвера двигателя Raspberry Pi HAT- Raspberry Pi
- L293D IC
- 4 × кнопки
- Резисторы SMD (1 × 10 кОм, 12 × 1 кОм)
- Потенциометр 1 × 10K
- 4 × SMD светодиода
- Регулятор напряжения LM317
- 2 × винтовые клеммы
- 16 * 2 ЖК-модуль
L293D — это популярный 16-контактный драйвер двигателя.Как следует из названия, он используется для управления однополярными, биполярными шаговыми двигателями, двигателями постоянного тока или даже серводвигателями. Одна ИС L293D может одновременно управлять двумя двигателями постоянного тока. Кроме того, скорость и направление этих двух двигателей можно контролировать независимо. Эта ИС имеет два входа питания, то есть «Vcc1» и «Vcc2». Vcc1 используется для питания внутренней логической схемы, которая должна быть 5 В, а вывод Vcc2 предназначен для питания двигателей, который может быть от 4,5 В до 36 В.
L293D Технические характеристики:
- Напряжение двигателя Vcc2 (Vs): 4.От 5 В до 36 В
- Максимальный пиковый ток двигателя: 1,2 А
- Максимальный непрерывный ток двигателя: 600 мА
- Напряжение питания на Vcc1 (VSS): от 4,5 В до 7 В
- Время перехода: 300 нс (при 5 В и 24 В)
- Доступно автоматическое тепловое отключение
Полная принципиальная схема драйвера двигателя L293D с Raspberry Pi показана на изображении, приведенном ниже. Схема была нарисована с помощью EasyEDA.
Этот головной убор состоит из микросхемы драйвера двигателя L293D, модуля ЖК-дисплея 16 * 2 и четырех кнопок. Мы также предоставили контакты для модуля SIM800 с регулятором 3,3 В, разработанным с использованием регулятора переменной LM317 для будущих проектов. Raspberry Pi Motor Driver HAT будет располагаться непосредственно поверх Raspberry Pi, что упрощает управление роботами с помощью Raspberry Pi.
Изготовление печатной платы для шляпы драйвера двигателя Raspberry PiКак только схема будет готова, мы можем приступить к разводке печатной платы.Вы можете спроектировать печатную плату с помощью любого программного обеспечения для печатных плат по вашему выбору. Мы использовали EasyEDA для изготовления печатной платы для этого проекта. Вы можете просмотреть любой слой (верхний, нижний, верхний, нижний, шелковый и т. Д.) Печатной платы, выбрав его в окне «Слои». Кроме того, предоставляется трехмерная модель печатной платы, показывающая, как она будет выглядеть после изготовления. Ниже представлены виды 3D-модели верхнего и нижнего слоев печатной платы Pi Motor Driver HAT.
Макет печатной платы для указанной выше схемы также доступен для загрузки как Gerber по приведенной ниже ссылке:
Заказ печатной платы в PCBWayПосле завершения проектирования можно переходить к заказу печатной платы:
Шаг 1: Зайдите на https: // www.pcbway.com/, зарегистрируйтесь, если это ваш первый раз. Затем на вкладке «Прототип печатной платы» введите размеры печатной платы, количество слоев и количество требуемых печатных плат.
Шаг 2: Продолжите, нажав кнопку «Цитировать сейчас». Вы попадете на страницу, где можно установить несколько дополнительных параметров, таких как Тип платы, Слои, Материал для печатной платы, Толщина и многое другое. Большинство из них выбраны по умолчанию, но если вы выбираете какие-либо конкретные параметры, вы можете выбрать их здесь.
Шаг 3: Последний шаг — загрузить файл Gerber и продолжить оплату. Чтобы убедиться, что процесс проходит гладко, PCBWAY проверяет, действителен ли ваш файл Gerber, прежде чем продолжить оплату. Таким образом, вы можете быть уверены, что ваша печатная плата удобна для изготовления и будет доставлена вам, как только вы это сделаете.
Сборка Raspberry Pi Motor Driver HAT PCBЧерез несколько дней мы получили нашу печатную плату в аккуратной упаковке, качество печатной платы как всегда было хорошим.Верхний и нижний слои платы показаны ниже:
Убедившись, что следы и следы правильные. Я приступил к сборке печатной платы. На изображении здесь показано, как выглядит полностью распаянная плата.
Настройка Raspberry PiПеред программированием Raspberry Pi мы должны установить необходимые библиотеки. Для этого сначала обновите ОС Raspberry Pi, используя следующие команды:
Sudo apt-get update Sudo apt-get upgrade
Теперь установите библиотеку Adafruit_CharLCD для ЖК-модуля.Эта библиотека предназначена для ЖК-плат Adafruit, но она также работает и с ЖК-платами других производителей.
sudo pip3 install Adafruit-CharLCDRaspberry Pi Motor Driver Код Описание
В этом проекте мы программируем Raspberry Pi для управления двумя двигателями постоянного тока в прямом, обратном, левом и правом направлениях одновременно с двухсекундным интервалом. Направление двигателей будет отображаться на ЖК-дисплее. Полный код приведен в конце документа.Здесь мы объясняем некоторые важные части кода.
Как обычно, запустите код с импорта всех необходимых библиотек. Модуль RPi.GPIO используется для доступа к контактам GPIO с помощью Python. Модуль времени используется для приостановки программы на заранее определенное время.
импортировать RPi.GPIO как GPIO время импорта импортная доска import Adafruit_CharLCD as LCD
После этого назначьте контакты GPIO для ИС драйвера двигателя L293D и ЖК-дисплея.
lcd_rs = 0 lcd_en = 5 lcd_d4 = 6 Двигатель1A = 4 Motor1B = 17 Motor1E = 12
Теперь установите 6 контактов двигателя в качестве выходных контактов.Следующие четыре являются выходными контактами, из которых первые два используются для управления правым двигателем, а следующие два — для левого двигателя. Следующие два контакта — это контакты включения для правого и левого двигателей.
GPIO.setup (Motor1A, GPIO.OUT) GPIO.setup (Motor1B, GPIO.OUT) GPIO.setup (Motor1E, GPIO.OUT) GPIO.setup (Motor2A, GPIO.OUT) GPIO.setup (Motor2B, GPIO.OUT) GPIO.setup (Motor2E, GPIO.OUT)
Внутри цикла while переместите два двигателя постоянного тока в прямом, обратном, левом и правом направлениях одновременно с двухсекундным интервалом.
GPIO.output (Motor1A, 0)
GPIO.output (Motor1B, 0)
GPIO.output (Motor2A, 1)
GPIO.output (Motor2B, 0)
lcd.message ('Влево')
print ("Влево")
сон (2)
#Вперед
GPIO.output (Motor1A, 1)
GPIO.output (Motor1B, 0)
GPIO.output (Motor2A, 1)
GPIO.output (Motor2B, 0)
lcd.message ('Вперед')
print ("Вперед")
…………………………………… Тестирование драйвера двигателя Raspberry Pi HAT Как только вы закончите сборку печатной платы, установите драйвер двигателя HAT на Raspberry Pi и запустите код.Если все пойдет нормально, двигатели постоянного тока, подключенные к Raspberry Pi, будут двигаться влево, вперед, вправо и назад одновременно каждые две секунды, а направление двигателя будет отображаться на ЖК-дисплее.
Вот как вы можете создать свой собственный L293D Raspberry Pi Motor Driver HAT. Полный код и рабочее видео проекта приведены ниже. Надеюсь, вам понравился проект, и вам было интересно создать свой собственный. Если у вас есть какие-либо вопросы, оставьте их в разделе комментариев ниже.
Драйверы двигателей | Идеи схем I Электронные проекты DIY I Робототехника
Цепь драйвера 5-фазного шагового двигателя
Компактный проект 5-фазного шагового драйвера может работать с двигателем до 3,5 ампер с питанием от 12 до 30 В постоянного тока, драйвер имеет возможность устанавливать ток нагрузки, драйвер обеспечивает половинный и полный шаг, а также легко управлять с помощью шагового и направленного импульса, триммер потенциометр, предназначенный для установки тока, SI-7510 — это ИС предварительного драйвера для управления 5-фазными шаговыми двигателями, намотанными в конфигурации New Pentagon (конструкция схемы драйвера запатентована Oriental Motor Co., ООО). Прямое внешнее управление функциями привода двигателя — синхронизируется встроенным секвенсором по приложенному входному тактовому сигналу (CL). Привод SI-7510 снабжен настраиваемым пользователем выходным каскадом, состоящим из двух N-канальных силовых полевых МОП-транзисторов. Это приводит к более низкому тепловому сопротивлению и большей эффективности.
Регулятор скорости двигателя постоянного тока с 2-значным дисплеем (отображение рабочего цикла)
Проект универсального контроллера скорости двигателя постоянного тока основан на микроконтроллере PIC16F1825, он генерирует импульс ШИМ, а также отображает значение на 2-значном 7-сегментном дисплее, рабочий цикл регулируется от 0 до 99%, частота 1 кГц, скорость двигателя возможна с помощью два тактильных переключателя.Плата только генерирует и отображает ШИМ, проект требует Mosfet на выходе для управления двигателем. Проверьте принципиальную схему цепи Mosfet.
Как управлять бесщеточным двигателем с помощью генератора сигналов ESC и RC
Операционный усилитель мощности 3 А с использованием lm675
Плата управления питанием может управлять сильноточной нагрузкой до 3 А, плата полезна для привода двигателя постоянного тока, соленоида, лампы, светодиода и промышленного применения.Проект построен на силовом операционном усилителе LM675 от Texas Instruments. Все резисторы 1%. См. Техническое описание LM675 для получения дополнительной информации.
Сильноточный полумостовой драйвер двигателя постоянного тока со встроенным драйвером IFX007
Проект драйвера сильноточного двигателя постоянного тока был разработан с использованием IFX007T IC от Infineon, проект может управлять щеточным двигателем постоянного тока большого размера, регулирование скорости легко с помощью ШИМ, плата также имеет несколько функций, таких как защита от короткого замыкания, перегрева и Защита от перегрузки по току, обратная связь по току может быть подключена к Arduino, raspberry pai.Подключение двигателя и вход питания постоянного тока возможны с помощью винтовых клемм, все входы могут питаться с помощью 5-контактного штыревого разъема, встроенного светодиода питания. IFX007T представляет собой интегрированный полумост с высоким током для приложений с приводом двигателя. Он является частью семейства Industrial & Multi-Purpose Nova lithic ™, содержащего один p-канальный полевой МОП-транзистор верхнего плеча и один n-канальный полевой МОП-транзистор нижнего уровня со встроенной ИС драйвера в одном корпусе. Благодаря переключателю верхнего плеча p-канала необходимость в подкачивающем насосе устраняется, что сводит к минимуму электромагнитные помехи.Взаимодействие с микроконтроллером упрощается за счет встроенного драйвера IC, который имеет входы логического уровня, диагностику с измерением тока, регулировку скорости нарастания, создание мертвого времени и защиту от перегрева, пониженного напряжения, перегрузки по току и короткого замыкания. IFX007T представляет собой оптимизированное по стоимости решение для защищенных сильноточных приводов с ШИМ-двигателями с очень низким потреблением места на плате. Скачать схему в формате PDF.
Драйвер двигателя постоянного тока с Н-мостом, 20 А с обратной связью по току и неисправности с использованием IR2104-IR2101 IRFP4468
Н-мост был разработан на основе микросхемы IR2104 от международного выпрямителя, плата была сделана в основном для приложения драйвера двигателя постоянного тока , драйвер выдерживает нагрузку до 20 ампер, я тестировал эту плату с питанием от источника постоянного тока 90 В.В схеме используются полевые МОП-транзисторы IRFP4468 N Channel от международного выпрямителя. MOSFET требовал радиатора большого размера. Плата имеет шунтирующий резистор и схемы формирования сигнала для обеспечения напряжения, пропорционального току, протекающему через нагрузку. Компаратор обеспечивает выход неисправности, обычно выход неисправности высокий, становится низким, когда он обнаруживает превышение тока, проходящего через выход.
Цепь инфракрасного моторизованного стерео регулятора громкости с дистанционным управлением
Миниатюрный контроллер скорости и направления двигателя постоянного тока для низковольтных двигателей с использованием таймера L293D и 555
Проектбыл разработан на основе L293 H-Bridge для работы с двунаправленным двигателем и микросхемы таймера 555, которая использовалась в качестве генератора ШИМ для управления скоростью.L293 способен поддерживать постоянный выходной ток 600 мА. Рабочее напряжение 5 В постоянного тока. Специально разработан для мини-двигателей низкого напряжения. Отличный контроль скорости с помощью встроенных предустановок, в то время как направление контролируется изменением настроек перемычек. Рабочий цикл ШИМ составляет от 20% до 90%. Отличный комплект можно использовать в научных проектах, игрушках, мини-контроллерах скорости двигателя, робототехнике, создании моделей.
10-ступенчатая схема управления скоростью двигателя переменного тока и ВКЛ / ВЫКЛ для современных альянсов LS7315, LS7311
1.Драйвер безщеточного двигателя мощностью 6 кВт с использованием IPM STK554U362
Компактная силовая плата моторного привода основана на модуле IPM STK554U362A от компании on Semiconductor. Он представляет собой доступное и простое в использовании решение для привода мощных бесщеточных сервоприводов, двигателей переменного тока и бесщеточных двигателей постоянного тока в широком спектре приложений, таких как электрическая бытовая техника, кондиционирование воздуха, компрессоры, электрические вентиляторы, высококачественные электроинструменты. и трехфазные инверторы для моторных приводов в целом.
Сам IPM состоит из защищенных от короткого замыкания IGBT и широкого набора функций, таких как блокировка при пониженном напряжении, интеллектуальное отключение, встроенный датчик температуры и NTC, а также защита от перегрузки по току.
Основные характеристики этого проекта — небольшой размер, минимальная спецификация и высокая эффективность. Он состоит из интерфейсной схемы (разъемы BUS и Vcc), конденсаторов начальной загрузки, аппаратной защиты от короткого замыкания, сигнала неисправности и контроля температуры. Он предназначен для работы в конфигурации с одним или тремя шунтами и с двумя вариантами измерения тока: с использованием трех специальных встроенных операционных усилителей
Благодаря этим расширенным характеристикам система может обеспечить быстрое и точное согласование обратной связи по току, необходимое для полевого управления (FOC).
- Входное напряжение: от 125 до 400 В переменного тока
- Номинальная мощность: до 1600 Вт
- Номинальный ток: до 10 А
Драйвер двигателя с полным Н-мостом для шагового двигателя и двигателя постоянного тока с использованием схемы LMD18245 и схемы печатной платы (схема соединения и расположение печатной платы)
Регулятор скорости и направления двигателя постоянного тока 5A с использованием MC33035
Контроллер скорости и направления двигателя постоянного тока5 А с использованием микросхемы MC33035 на полупроводнике, хотя MC33035 был разработан для управления бесщеточным двигателем постоянного тока, его также можно использовать для управления двигателями постоянного тока щеточного типа.MC33035 управляет H-мостом на основе Mosfets, обеспечивающим минимальное количество деталей для работы двигателя щеточного типа. Встроенный потенциометр для управления скоростью, ползунковый переключатель для управления направлением и торможения, встроенная перемычка для включения микросхемы.
Step-Dir. сигнал для двойного привода преобразователя импульсов CW / CWW для ЧПУ , управления движением и сервопривода переменного тока Простая схема преобразует Step / Dir. сигнал на двойной привод CW / CWW Pulse, Mach4 и несколько программ Hobby CNC обеспечивают вывод импульсов шага / направления для управления драйверами шаговых двигателей.Различные сервоприводы переменного тока работают с двойным импульсом CW / CCW. Эта схема является решением для сопряжения такого импульсного драйвера переменного тока CW / CCW с Mach4 или другим программным обеспечением ЧПУ. Схема разработана на основе микросхем 7408 и 7404, плата поддерживает питание 5 В или 24 В
Модуль драйвера двигателя постоянного тока с H-мостом 4.5A с использованием TB6549HQ
Модуль драйвера двигателя H-Bridge, основанный на TB6549HQ IC от Toshiba, представляет собой интегральную схему драйвера полного моста для двигателей постоянного тока, в которой используется структура LDMOS для выходных транзисторов.Высокоэффективный привод возможен за счет использования процесса MOS с низким сопротивлением в открытом состоянии и системы привода PWM. Четыре режима, CW, CCW, короткий тормоз и останов, могут быть выбраны с помощью IN1 и IN2. Вход питания от 12 В до 30 В постоянного тока и максимальная нагрузка 4,5 А.
Драйвер двухмостового ШИМ-двигателя с тормозом с использованием A3968
A3968 двунаправленно управляет двумя двигателями постоянного тока. Устройство включает в себя два полных моста, способных обеспечивать непрерывный выходной ток до ± 650 мА и рабочее напряжение до 30 В.Ток в обмотке двигателя можно контролировать с помощью внутренней схемы управления током с фиксированной частотой и широтно-импульсной модуляцией (ШИМ).
Драйвер двигателя постоянного тока с полномостовым ШИМ 3A с использованием A3959
Разработанный для управления током с широтно-импульсной модуляцией (ШИМ) двигателей постоянного тока, A3959 способен выдавать токи на выходе до ± 3 А и рабочие напряжения до 50 В. Схему синхронизации ШИМ с фиксированным временем отключения можно настроить с помощью управляющих входов для работы в медленном, быстром и смешанном режимах затухания тока.Входные клеммы PHASE и ENABLE предназначены для использования при управлении скоростью и направлением двигателя постоянного тока с помощью внешних управляющих сигналов PWM.
Драйвер двигателя постоянного тока 1,5 А с использованием A4973
Схема основана на микросхеме A4973, предназначенной для двунаправленного управления током с широтно-импульсной модуляцией (ШИМ) индуктивных нагрузок, A4973 поддерживает непрерывный выходной ток до ± 1,5 А и рабочее напряжение до 12
TB6600 На основе 4.Схема драйвера биполярного шагового двигателя 5A
Описанная здесь плата биполярного шагового приводабыла разработана на основе микросхемы TB6600HG. TB6600HG — это однокристальный биполярный синусоидальный микрошаговый драйвер с ШИМ-прерывателем. Максимальная нагрузка 4,5 А, питание от 10 до 42 В постоянного тока.
Dual Motor L298 H-Bridge Control Project может управлять двумя двигателями постоянного тока, подключенными к нему. Схема была разработана на основе популярного двойного H-моста L298 от ST. В этой схеме есть резисторы для измерения тока для обоих H-мостов, обеспечивающие напряжение, которое позволяет использовать эту плату в приложениях с шаговыми двигателями.
H-Bridge был разработан на основе IR2104 IC от International Rectifier. Плата предназначена в основном для двигателей постоянного тока. Драйвер может выдерживать нагрузку до 8-10 Ампер. Я тестировал эту плату с источником постоянного тока 36 В. В схеме используются полевые МОП-транзисторы IR540 с N каналом от международного выпрямителя. IR540 требовал большого радиатора для нагрузки 10 ампер. Плата имеет шунтирующий резистор для обеспечения напряжения, пропорционального току, протекающему через нагрузку. Это можно букву усилить и подключить к микроконтроллеру.
Драйвер двигателя постоянного тока 3 А H-мост
Модуль был разработан на базе LMD18200 от Texas Instruments. LMD18200 — это H-мост 3A, разработанный для приложений управления движением. Устройство построено с использованием многотехнологического процесса, который объединяет биполярные схемы и схемы управления CMOS с устройствами питания DMOS в одной монолитной структуре. Идеально подходит для управления двигателями постоянного тока и шаговыми двигателями; LMD18200 выдерживает пиковые выходные токи до 6 А. Была реализована инновационная схема, которая обеспечивает измерение выходного тока с малыми потерями.
L293 Двойной драйвер двигателя постоянного тока
Проект разработан на базе микросхемы L293D. Устройство L293D представляет собой четверной сильноточный полувысокий драйвер. Модель 293D предназначена для обеспечения двунаправленного управляющего тока до 600 мА и напряжения от 5 до 36 В. Плату адаптера L293D можно использовать в качестве драйвера двойного двигателя постоянного тока или драйвера биполярного шагового двигателя. Полезно в робототехнике, контроллере двунаправленного двигателя постоянного тока и драйвере шагового двигателя. Отдельное питание логики для уменьшения рассеивания.L293D включает выходные ограничивающие диоды для защиты.
Биполярный шаговый двигатель 4 А с использованием LV8727 IC
Проект основан на микросхеме LV8727E от ON Semiconductor. LV8727 — это драйвер микрошагового биполярного шагового двигателя с ШИМ-управлением по току. Этот драйвер может обеспечить восемь способов микрошагового разрешения 1/2, 1/8, 1/16, 1/32, 1/64, 1/128, 1/10, 1/20 и может управлять просто пошагово. Вход. Этот биполярный драйвер работает с входом питания от 9 В до 36 В (замените L317 на L317HVT для входа питания до 45 В постоянного тока).Ток нагрузки до 4А.
Драйвер двигателя переменного тока (твердотельное реле для индуктивной нагрузки)
Полупроводниковое реле переменного токадля индуктивной нагрузки обеспечивает простое переключение типа включения / выключения с входным сигналом, совместимым с TTL.
Генератор импульсов для драйвера шагового двигателя с использованием 555 IC CMOS или TTL
ШИМ-регулятор скорости двигателя постоянного тока с использованием таймера 555
Светочувствительный переключатель с OP-AMP и твердотельным реле на основе трака для индуктивных и резистивных нагрузок
Цифровой тумблер с твердотельным реле
Цифровой тумблер
с выходом твердотельного реле на основе МОП-транзистора
Контроллер направления двигателя постоянного тока с использованием реле и цифрового тумблера
Твердотельное реле переменного тока для электродвигателей переменного тока Вкл. / Выкл.
Двигатель переменного тока или регулятор скорости вентилятора с использованием Traic
L293B Модуль H-образного моста двигателя постоянного тока
Сервопривод
RC с потенциометром микроконтроллера PIC12F675 и входом 0-5 В
Драйвер униполярного шагового двигателя с использованием транзисторов драйвера и L297
Драйвер биполярного шагового двигателя на основе L298 и L297
ШИМ-контроллер скорости и направления двигателя постоянного тока с использованием L298 и SG3525
ULN2803 8-канальный модуль для ламп Электромагнитные реле Клапаны
Драйвер униполярного шагового двигателя 3А с использованием SLA7078 с опцией половинного тока, микрошаговым и преобразователем постоянного тока в постоянный
Крошечный униполярный драйвер шагового двигателя с использованием микроконтроллера PIC16F72 и ULN2003
Регулятор скорости двигателя переменного тока с использованием обратной связи по току U2008
Схема модуля драйвера двигателя постоянного тока Dual L293D для драйвера двигателя робота
Контроллер скорости и направления двигателя постоянного тока для двигателей низкого напряжения с использованием таймера L293D и 555
Контроллер скорости двигателя постоянного тока с сильноточной нагрузкой с использованием SG3525 и MOSFET с использованием PWM
4-канальный сервопривод RC с использованием микроконтроллера PIC с предустановками платы OB
Аналоговый серводвигатель с замкнутым контуром на базе двигателя постоянного тока с использованием TLE4209
Оптически изолированная плата параллельного порта LPT для ЧПУ и маршрутизаторов с поддержкой программного обеспечения ЧПУ Mach4
3A Крошечный униполярный драйвер шагового двигателя с использованием SLA7078 с микрошаговой регулировкой и регулировкой тока
Низкопрофильный высококачественный модуль L298 для двух- и однодвигательного привода с бортовым регулятором 5 В для роботов
Плата для параллельного порта LPT для ЧПУ / маршрутизатора с использованием микросхем 74HC245 в качестве буфера
Электромагнит с ШИМ, клапан, реле, привод, драйвер двигателя постоянного тока с использованием DRV103
Сильноточный полумостовой драйвер с драйвером затвора IR2101 / IR2104
Полумост
с использованием компонентов SMD Драйвер затвора IR2104 и полевой МОП-транзистор DPAK
2.