Все чаще на просторах интернет-магазинов можно найти инструменты с двумя типами двигателей. Инструменты и садовая техника WORX также не отстают от современных трендов при производстве техники, так что на нашем сайте вы тоже можете найти специальную характеристику двигателя — щеточный или бесщеточный. Так что же это за характеристика, на что она влияет и в чем принципиальные отличия инструментов с тем или иным двигателем? Давайте разбираться.
Устройство и принцип действия щеточного двигателя
Щеточный двигатель по-другому еще называется коллекторным. Состоит двигатель из нескольких важных частей.
Ротор — по-другому, якорь. Как раз он вращается внутри и преобразует электрическую энергию в механическую. Якорь обмотан медной проволокой (обмоткой) с разных сторон ротора. За счет прохождения тока через проволоку создается магнитное поле, которое в свою очередь и создает вращение элемента.
На обмотке в бесщеточном двигателе установлен коммутатор, который используется для переключения с одной обмотки на другую, что позволяет менять направление вращения ротора. Этот коммутатор и есть коллектор, от которого взял свое название двигатель.
Чтобы напряжение передалось на обмотки, а ток прошел через коллектор в двигатель устанавливаются специальные щетки. Щетки обычно состоят из графита; они всегда контактируют с коммутатором и обеспечивают подачу энергии к катушкам с обмоткой. Есть две щетки, и каждая из них подключается к противоположному полюсу батареи. Это гарантирует, что при вращении ротора ток, протекающий к катушкам, постоянно меняет направление. Это приводит к необходимому изменению магнитного поля, которое позволяет ротору продолжать вращаться.
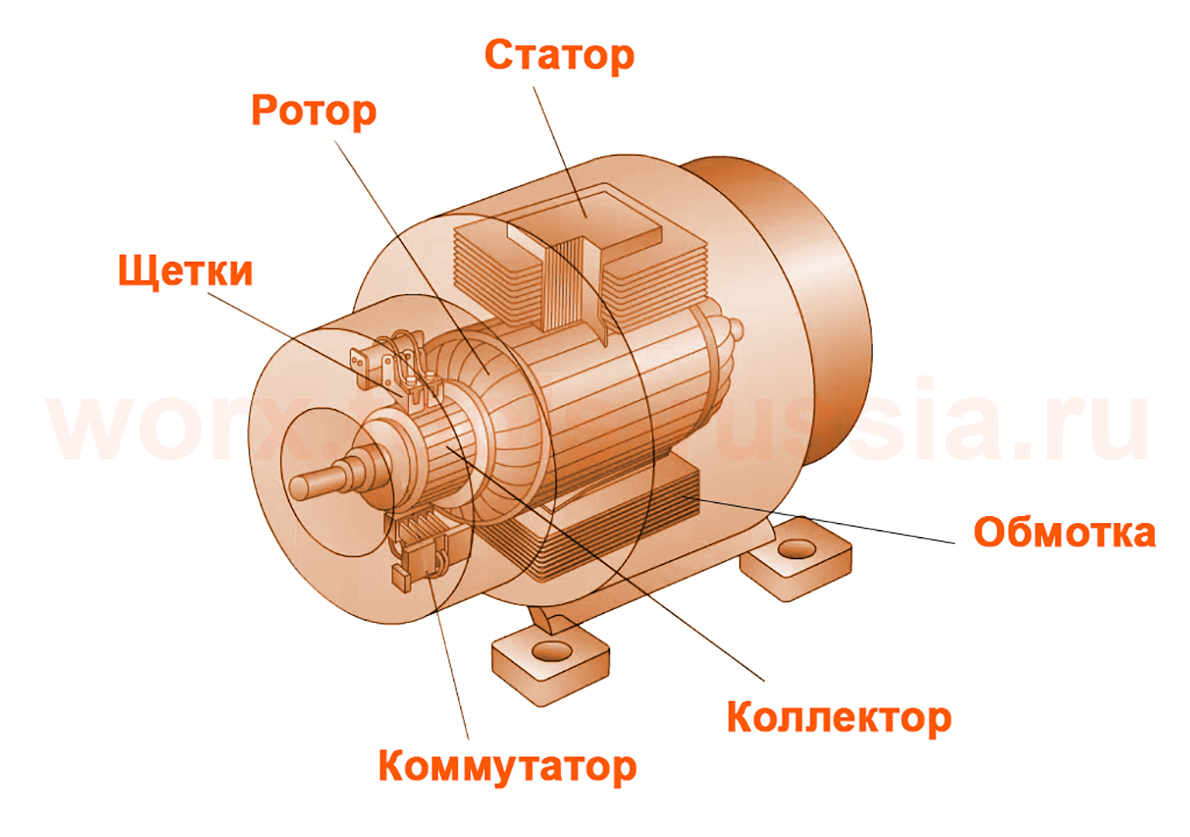
Все вышеописанные элементы установлены в статор. Статор — неподвижных элемент двигателя, в котором могут быть либо еще одна катушка с проволокой, либо постоянный магнит. За счет того или другого элемента и создается магнитное поле обратной полярности ротору, из-за чего тот вращается.
Коллекторные двигатели могут работать от переменного напряжения, так как при смене полярности ток в обмотках возбуждения и якоря также меняет направление, в результате чего вращательный момент не меняет своего направления.
Плюсы и минусы щеточного двигателя
Плюсы

- Первым плюсом инструментов со щеточными двигателями стоит отметить более низкую стоимость в отличие бесщеточных. Это связано с технологиями производства и более бюджетными материалами.
- Вторым плюсом специалисты отмечают упрощенную конструкцию двигателя, что влияет на стоимость ремонта. Проще поменять щетки, чем весь мотор в целом.
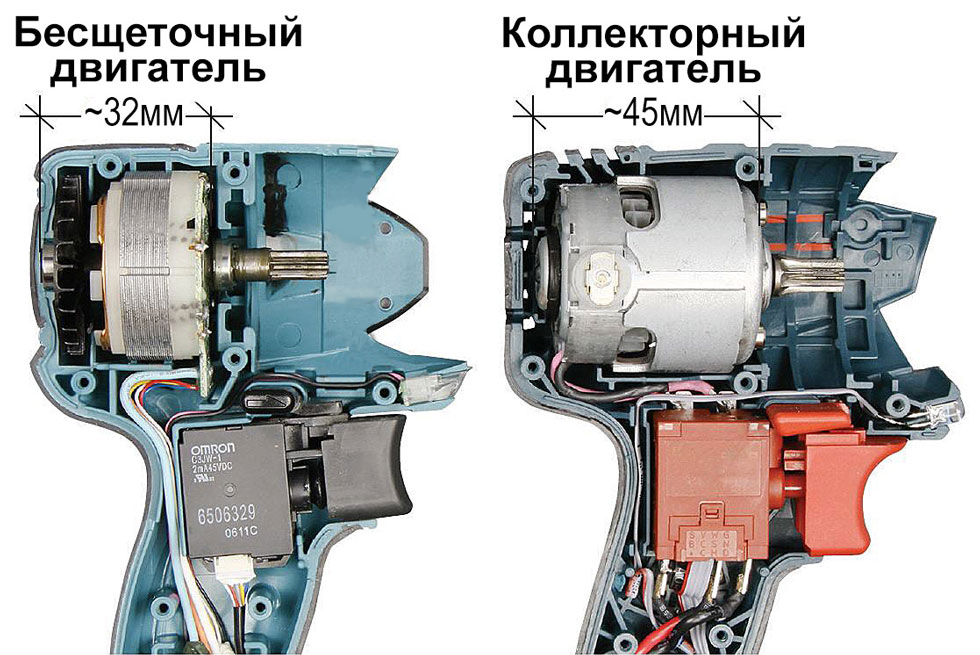
- Также к плюсам можно отнести относительно малый вес и размер инструментов.
Минусы

- На высоких оборотах увеличивается трение щёток. Отсюда вытекает проблема их быстрого износа. Помимо износа самих щеток, в процессе работы они стираются. Стертый графит может засорить коллектор и привести в полную негодность инструмент.
- Также к минусам можно отнести более низкую мощность щеточных инструментов, в отличие от бесщеточных моделей. Это связано с тем, что щеточные двигатели физически не могут выдавать мощность выше 3 000 об./мин. Но такой мощности вполне достаточно для домашнего обихода.
- Еще одним минусом щеточных двигателей мы можем отметить наличие искрения во время работ. Обратите внимание, что при запуске инструмента щетки трутся о коллектор и создают видимые искры. Это значит, что работать щеточными инструментами нужно более аккуратно — убирать на расстояние все возможные легковоспламеняющиеся вещества и предметы, а также периодически делать перерывы в работе, во избежание перегрева двигателя.
- Последним минусом отметим не очень высокий КПД инструментов с коллекторным двигателем — всего 60%. Это значит, что инструменты несколько хуже справляются с прочными материалами (например, с металлом) и выполняют меньший объем работы за то же время, что бесщеточный инструмент.
Устройство и принцип действия бесщеточного двигателя
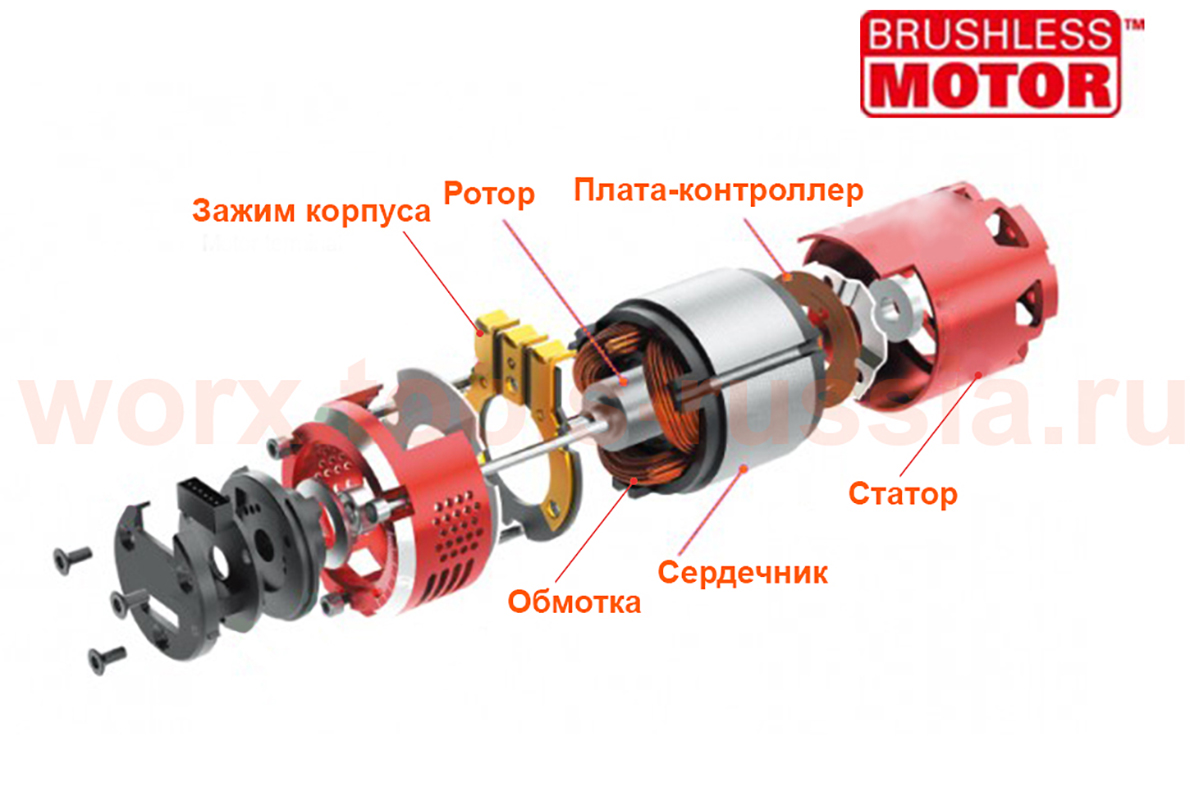
Теперь давайте разберем принцип работы бесщеточного двигателя. Как понятно из названия, его принципиальное отличие в отсутствии щеток. Но как же он тогда работает? Как нужная энергия поступает в двигатель?
В устройстве бесщеточного двигателя также присутствует ротор и статор — основные элементы любого мотора. Но при этом отсутствует коллектор, соответственно и двигатель по-другому называется бесколлекторным. Если у щеточного двигателя работа происходит за счет электро-механической смены полярности, то в бесщеточном двигателе все работает благодаря электромагнитной индукции. Также отличается местоположение обмотки — здесь она располагается на статоре, в отличие от предыдущего вида двигателя.
Вместо щеток и коллектора в бесщеточном двигателе установлены датчики Холла и контроллер, который контролирует подачу напряжения на катушки для создания индуктивности, а также положение ротора и скорость его вращения.
Когда плата подает на обмотку ток, создается тоже противоположное магнитное поле, и магниты на роторе начинают вращаться.
Еще одной особенностью бесщеточных двигателей нужно назвать их типы. Двигатели бывают двух типов — синхронный и асинхронный. В
Плюсы и минусы бесщеточного двигателя
Если с устройством бесщеточного двигателя мы разобрались, то теперь давайте рассмотрим положительные и отрицательные стороны инструментов с бесщеточными моторами.
Плюсы:
- У инструментов с бесщеточным двигателем отсутствуют многие проблемы, которые встречаются у щеточных моделей. Так, первым плюсом специалисты отмечают бо́льшую износостойкость инструментов. Ввиду отсутствия щеток не создается трение внутри двигателя, соответственно нет внутренних загрязнений. Также отсутствие щеток снижает пожароопасность инструмента — при работе нет искрения, а значит можно работать практически в любых условиях.
- Вторым плюсом стоит отметить упрощенную регулировку крутящего момента — в отличие от щеточных моделей, у бесколлекторных инструментов достаточно просто нажать соответствующую кнопку на инструменте. Причем регулировка может иметь до 15 уровней и переключаться в одно мгновение.
-
Одним из ключевых преимуществ бесщеточных моделей нужно отметить экономию расходуемой энергии. Этот пункт особенно актуален для аккумуляторных инструментов. Благодаря экономии инструменты работают до 50% дольше, чем модели со щеточным двигателем. Также КПД бесколлекторных инструментов намного выше — инструмент выполняет 90% поставленных задач, против 60% у коллекторных моделей. Это значит, что бесщеточными инструментами
- Помимо вышеуказанных преимуществ инструментов с бесщеточным двигателем, они еще могут разгоняться до максимальных показателей и имеют быстрый запуск сразу с больших скоростей, чем не могут похвастаться щеточные инструменты.
Минусы:
Но не бывает все настолько радужно. Даже у инструментов с бесщеточными двигателями есть и свои недостатки. Так сказать, ложка дегтя в бочке меда.
- К минусам, в первую очередь стоит отнести стоимость инструментов. Техника с бесщеточным мотором в цене дороже, чем упрощенные модели со щеточным двигателем.
- Вторым недостатком бесколлекторных инструментов может быть сложное и дорогое техническое обслуживание. Бесщеточный двигатель — технологичное устройство, для работы с которым нужны знания в микроэлектронике. К счастью, в сотрудники наших сервисных центров знают и умеют обслуживать бесколлекторные двигатели.
Итоги сравнения щеточного и бесщеточного двигателей
Если сравнивать инструменты с разными видами двигателей, то можно смело сказать, что техника с бесщеточным двигателем надежнее и мощнее. Но нужно учитывать тот факт, что ориентирована такая техника больше на профессиональные работы. В быту же и инструменты со щеточным двигателем отлично справятся со своими задачами. Потому перед покупкой инструмента заранее определите цели, для которых вы будете использовать инструменты.
В ассортименте компании WORX есть инструменты и со щеточными и с бесщеточными двигателями. Чтобы определить какой именно тип двигателя установлен в инструменте, обратите внимание на иллюстрацию в карточке товара — в бесщеточных моделях есть специальная пометка «BRUSHLESS MOTOR».
Как устроен бесщеточный двигатель
Работа бесщеточного электродвигателя основывается на электрических приводах, создающих магнитное вращающееся поле. В настоящее время существует несколько типов устройств, имеющих различные характеристики. С развитием технологий и использованием новых материалов, отличающихся высокой коэрцитивной силой и достаточным уровнем магнитного насыщения, стало возможным получение сильного магнитного поля и, как следствие, вентильных конструкций нового вида, в которых отсутствует обмотка на роторных элементах или стартере. Обширное распространение переключателей полупроводникового типа с высокой мощностью и приемлемой стоимостью ускорило создание подобных конструкций, облегчило исполнение и избавило от множества сложностей с коммутацией.

Принцип работы
Увеличение надежности, уменьшение цены и более простое изготовление обеспечивается отсутствием механических коммутационных элементов, обмотки ротора и постоянных магнитов. При этом повышение результативности возможно благодаря уменьшению потерь трения в коллекторной системе. Бесщеточный двигатель может функционировать на переменном либо непрерывном токе. Последний вариант отличается заметным сходством с коллекторными двигателями. Его характерной особенностью является формирование магнитного вращающегося поля и применение импульсного тока. В его основе присутствует электронный коммутатор, из-за чего повышается сложность конструкции.
Вычисление положения
Генерирование импульсов происходит в управляющей системе после сигнала, отражающего положение ротора. От стремительности вращения мотора напрямую зависит степень напряжения и подачи. Датчик в стартере определяет положение ротора и подает электрический сигнал. Вместе с магнитными полюсами, проходящими рядом с датчиком, меняется амплитуда сигнала. Также существуют бездатчиковые методики установления положения, к их числу относятся точки прохождения тока и преобразователи. ШИМ на входящих зажимах обеспечивают сохранение переменного уровня напряжения и управление мощностью.
Для ротора с неизменными магнитами подведение тока необязательно, благодаря чему отсутствуют потери в обмотке ротора. Бесщеточный двигатель для шуруповерта отличается низким уровнем инерции, обеспечиваемым отсутствием обмоток и механизированного коллектора. Таким образом появилась возможность использования на высоких скоростях без искрения и электромагнитного шума. Высокие значения тока и упрощение рассеивания тепла достигаются размещением нагревающих цепей на статоре. Стоит также отметить наличие электронного встроенного блока на некоторых моделях.

Магнитные элементы
Расположение магнитов может быть различным в соответствии с размерами двигателя, к примеру, на полюсах или по всему ротору. Создание качественных магнитов с большей мощностью возможно благодаря использованию неодима в сочетании с бором и железом. Несмотря на высокие показатели эксплуатации, бесщеточный двигатель для шуруповерта с постоянными магнитами обладает некоторыми недостатками, в их числе утрата магнитных характеристик при высоких температурах. Но они отличаются большей эффективностью и отсутствием потерь по сравнению с машинами, в конструкции которых имеются обмотки.
Импульсы инвертора определяют скорость вращения механизма. При неизменной питающей частоте работа двигателя осуществляется с постоянной скоростью в разомкнутой системе. Соответственно, скорость вращения меняется в зависимости от уровня питающей частоты.
Характеристики
Вентильный электродвигатель работает в установленных режимах и имеет функционал щеточного аналога, скорость которого зависит от приложенного напряжения. Механизм обладает множеством достоинств:
- отсутствие изменений при намагничивании и утечке тока;
- соответствие скорости вращения и самого вращающего момента;
- скорость не ограничивается центробежной силой, влияющей на коллектор и роторную электрообмотку;
- нет необходимости в коммутаторе и обмотке возбуждения;
- используемые магниты отличаются небольшим весом и компактными размерами;
- высокий момент силы;
- энергонасыщенность и эффективность.
Использование
Бесщеточный двигатель постоянного тока с постоянными магнитами встречается в основном в устройствах с мощностью в пределах 5 кВт. В более мощной аппаратуре их применение нерационально. Также стоит отметить, что магниты в двигателях данного типа отличаются особой чувствительностью к высоким температурам и сильным полям. Индукционные и щеточные варианты лишены таких недостатков. Двигатели активно используются в электрических мотоциклах, автомобильных приводах благодаря отсутствию трения в коллекторе. Среди особенностей нужно выделить равномерность вращающего момента и тока, что обеспечивает снижение акустического шума.
Сегодня в эпоху ежедневных открытий и инноваций, в производстве электротехники все чаще используются бесщеточные двигатели. Одним из главных преимуществ этих моторов – это наивысший коэффициент мощности к весу, быстрый ход, и электронное управление.
Широко применяется в периферийные устройствах компьютера (принтер, дисковод), ручных электроинструментах (шуруповерты, дрели, мультиинструменты, угловые шлифовальные машины, цепные пилы…), в беспилотных летательных машинах, электромобилях и в автомобилестроении и т.п.
В ближайшие годы можно ожидать большое количество производителей, адаптирующих эту технологию. По мере того как технология развивается, и в условиях достаточного спроса на бесщеточные технологии можно увидеть еще более широкий спектр их использования.
Сама технология, данного вида моторов не нова, и впервые в коммерческом производстве нашла свое применение еще в конце 60-х годов прошлого века.
Давайте начнем с самого начала. Думаю, что практически весь электроинструмент в Вашей линейке домашних инструментов, почти на 90% состоит из двигателей с угольными щетками. Давайте быстро посмотрим на традиционный электрический двигатель (коллекторный мотор), он будет содержать несколько основных компонентов: ротор (или якорь), коммутатор, щетки, статор (полевой магнит).
Электрический ток подается к графитовым щеткам, которые физически прикасаются к коммутатору на якоре, создается электромагнитное поле и якорь (ротор) начинает двигаться в статоре. Основной принцип заключается в том, что чем больше тока поступает через щетки на якорь, тем сильнее создаётся магнитное поле, и соответственно более быстрое вращение.
Обычные коллекторные моторы просты и недороги в изготовлении, но имеют несколько факторов по которым уступают безщеточным (блочным) моторам.
Недостатки:
– Трение, вызванное механическим контактом щеток с коммутатором, приводит к потере электроэнергии, контактному износу щеток и образованию тепла, а это значительно снижает производительность двигателя, а также снижает его долговечность.
– После нагрева мотор долго остывает, это вызвано расположением электромагнита внутри, на якоре мотора.
– Электрографитовые щетки требуют постоянного контроля и своевременного обслуживания или замены.
– В процессе электромагнитного взаимодействие образуется электрическая дуга на щетках (искрение) и образование электропомех (для более взрослого поколения, всем знакомый искаженный сигнал радиоприемника или телевизора во время работы электробритвы соседа).
Бесщеточные двигатели (бесколлекторные моторы)более эффективны в преобразовании электрической энергии в механическую. У них нет необходимости в электрографитовых щетках, соответственно нет и коммутатора якоря, но это не единственные различия. В коллекторном моторе, постоянный магнит установлен на вращающемся якоре ( роторе ). Якорь в свою очередь находится между двумя электромагнитами, установленными в статоре. Когда ток подается к электромагниту создается магнитное поле и якорь начинает движение в статоре. Скорость вращения регулируется через внешний электронный регулятор скорости (по сути электронная плата) а не через щетки, как в щеточном двигателе.
Бесщеточные двигатели все чаще заменяют привычные двигатели из-за их высокой эффективности, высокому показателями крутящего момента, долговечностью и высокой скоростью работы. Их применение в прошлом было сильно ограничено из-за высокой стоимости, в основном за счет дороговизны электронной системы управления двигателя, сегодня эта технология доступна практически во всех сферах электротехнического оборудования и инструментов.
Обширное применение, обусловлено низким показателем потраченной энергии необходимой для работы устройств. Так, беспроводные инструменты (дрели, болгарки) с питанием от аккумуляторный батарей используют бесщеточные двигатели для повышения эффективности привода, и увеличения срока службы батарей.
В пылесосах нового поколения с точной регулировкой силы всасывания воздуха, задействован этот вид двигателя, он обеспечивает высокий крутящий момент, а также низкий уровень шума и имеет малый вес.
Мелкая бытовая техника, как правило, производится в очень больших объемах. Поэтому одним из важнейших требований является экономичность, возможность тонкой регулировки скорости и надежности изделий. Поэтому в жестких дисках, насосах, вентиляторах, кофе машинах, фенах для волос, миксерах и блендерах, проигрывателях CD/DVD дисков применимы эти универсальные помощники.
-Отсутствие щеток обеспечивает низкое трение во время работы и приводит к уменьшению выделяемого тепла от мотора, увеличивая время беспрерывной работы.
-Высокая эффективность агрегата помогает увеличивать время работы батарей до 50%.
-При работе мотора не выделяются искры (как в обычном электромоторе с щетками)
-КПД преобразования электрической энергии во вращательную достигает 85-90%, в щеточных двигателях этот показатель 75-80%.
-Высокая перегрузочная способность, большой срок службы.
Please follow and like us:
Бытовая и медицинская техника, авиамоделирование, трубозапорные приводы газо- и нефтепроводов – это далеко не полный перечень областей применения бесколлекторных двигателей (БД) постоянного тока. Давайте рассмотрим устройство и принцип действия этих электромеханических приводов, чтобы лучше понять их достоинства и недостатки.
Общие сведения, устройство, сфера применения
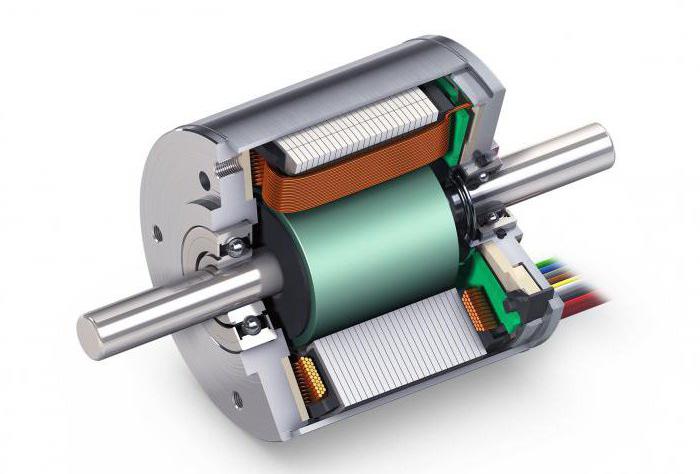
Одна из причин проявления интереса к БД — это возросшая потребность в высокооборотных микродвигателях, обладающих точным позиционированием. Внутренне устройство таких приводов продемонстрировано на рисунке 2.
 Рис. 2. Устройство бесколлекторного двигателя
Рис. 2. Устройство бесколлекторного двигателяКак видите, конструкция представляет собой ротор (якорь) и статор, на первом имеется постоянный магнит (или несколько магнитов, расположенных в определенном порядке), а второй оборудован катушками (В) для создания магнитного поля.
Примечательно, что эти электромагнитные механизмы могут быть как с внутренним якорем (именно такой тип конструкции можно увидеть на рисунке 2), так и внешним (см. рис. 3).
 Рис. 3. Конструкция с внешним якорем (outrunner)
Рис. 3. Конструкция с внешним якорем (outrunner)Соответственно, каждая из конструкций имеет определенную сферу применения. Устройства с внутренним якорем обладают высокой скоростью вращения, поэтому используются в системах охлаждения, в качестве силовых установок дронов и т.д. Приводы с внешним ротором используются там, где требуется точное позиционирование и устойчивость к перегрузкам по моменту (робототехника, медицинское оборудование, станки ЧПУ и т.д.).
 Бесколлекторный двигатель в компьютерном дисководе
Бесколлекторный двигатель в компьютерном дисководеПринцип работы
В отличие от других приводов, например, асинхронной машины переменного тока, для работы БД необходим специальный контроллер, который включает обмотки таким образом, чтобы векторы магнитных полей якоря и статора были ортогональны друг к другу. То есть, по сути, устройство-драйвер регулирует вращающий момент, действующий на якорь БД. Наглядно этот процесс продемонстрирован на рисунке 4.
 Фазы работы бесколлекторного привода
Фазы работы бесколлекторного приводаКак видим, для каждого перемещения якоря необходимо выполнять определенную коммутацию в обмотке статора двигателя бесколлекторного типа. Такой принцип работы не позволяет плавно управлять вращением, но дает возможность быстро набрать обороты.
Отличия коллекторного и бесколлекторного двигателя
Привод коллекторного типа отличается от БД как конструктивными особенностями (см. рис 5.), так и принципом работы.
 Рис. 5. А – коллекторный двигатель, В – бесколлекторный
Рис. 5. А – коллекторный двигатель, В – бесколлекторныйРассмотрим конструктивные отличия. Из рисунка 5 видно, что ротор (1 на рис. 5) двигателя коллекторного типа, в отличие от бесколлекторного, имеет катушки, у которых простая схема намотки, а постоянные магниты (как правило, два) установлены на статоре (2 на рис. 5). Помимо этого на валу установлен коллектор, к которому подключаются щетки, подающие напряжение на обмотки якоря.
Кратко расскажем о принципе работы коллекторных машин. Когда на одну из катушек подается напряжение, происходит ее возбуждение, и образуется магнитное поле. Оно вступает во взаимодействие с постоянными магнитами, это заставляет проворачиваться якорь и размещенный на нем коллектор. В результате питание подается на другую обмотку и цикл повторяется.
Частота вращения якоря такой конструкции напрямую зависит от интенсивности магнитного поля, которое, в свою очередь, прямо пропорционально напряжению. То есть, чтобы увеличить или уменьшить обороты, достаточно повысить или снизить уровень питания. А для реверса необходимо переключить полярность. Такой способ управления не требует специального контролера, поскольку регулятор хода можно сделать на базе переменного резистора, а обычный переключатель будет работать как инвертор.
Конструктивные особенности двигателей бесколлекторного типа мы рассматривали в предыдущем разделе. Как вы помните, их подключение требует наличия специального контролера, без которого они просто не будут работать. По этой же причине эти двигатели не могут использоваться как генератор.
Стоит также отметить, что в некоторых приводах данного типа для более эффективного управления отслеживаются положения ротора при помощи датчиков Холла. Это существенно улучшает характеристики бесколлекторных двигателей, но приводит к удорожанию и так недешевой конструкции.
Как запустить бесколлекторный двигатель?
Чтобы заставить работать приводы данного типа, потребуется специальный контроллер (см. рис. 6). Без него запуск невозможен.
 Рис. 6. Контроллеры бесколлекторных двигателей для моделизма
Рис. 6. Контроллеры бесколлекторных двигателей для моделизмаСобирать самому такое устройство нет смысла, дешевле и надежней будет приобрести готовый. Подобрать его можно по следующим характеристикам, свойственным драйверам шим каналов:
- Максимально допустимая сила тока, эта характеристика приводится для штатного режима работы устройства. Довольно часто производители указывают такой параметр в названии модели (например, Phoenix-18). В некоторых случаях приводится значение для пикового режима, который контролер может поддерживать несколько секунд.
- Максимальная величина штатного напряжения для продолжительной работы.
- Сопротивление внутренних цепей контроллера.
- Допустимое число оборотов, указывается в rpm. Сверх этого значения контроллер не позволит увеличить вращение (ограничение реализовано на программном уровне). Следует обратить внимание, что частота вращения всегда приводится для двухполюсных приводов. Если пар полюсов больше, следует разделить значение на их количество. Например, указано число 60000 rpm, следовательно, для 6-и магнитного двигателя частота вращения составит 60000/3=20000 prm.
- Частота генерируемых импульсов, у большинства контролеров этот параметр лежит в пределах от 7 до 8 кГц, более дорогие модели позволяют перепрограммировать параметр, увеличив его до 16 или 32 кГц.
Обратим внимание, что первые три характеристики определяют мощность БД.
Управление бесколлекторным двигателем
Как уже указывалось выше, управление коммутацией обмоток привода осуществляется электроникой. Чтобы определить, когда производить переключения, драйвер отслеживает положение якоря при помощи датчиков Холла. Если привод не снабжен такими детекторами, то в расчет берется обратная ЭДС, которая возникает в неподключенных катушках статора. Контроллер, который, по сути, является аппаратно-программным комплексом, отслеживает эти изменения и задает порядок коммутации.
Трёхфазный бесколлекторный электродвигатель постоянного тока
Большинство БД выполняются в трехфазном исполнении. Для управления таким приводом в контролере имеется преобразователь постоянного напряжения в трехфазное импульсное (см. рис.7).
 Рисунок 7. Диаграммы напряжений БД
Рисунок 7. Диаграммы напряжений БДЧтобы объяснить, как работает такой вентильный двигатель, следует вместе с рисунком 7 рассматривать рисунок 4, где поочередно изображены все этапы работы привода. Распишем их:
- На катушки «А» подается положительный импульс, в то время как на «В» — отрицательный, в результате якорь сдвинется. Датчиками зафиксируется его движение и подастся сигнал для следующей коммутации.
- Катушки «А» отключается, и положительный импульс идет на «С» («В» остается без изменения), далее подается сигнал на следующий набор импульсов.
- На «С» — положительный, «А» — отрицательный.
- Работает пара «В» и «А», на которые поступают положительный и отрицательный импульсы.
- Положительный импульс повторно подается на «В», и отрицательный на «С».
- Включаются катушки «А» (подается +) и повторяется отрицательный импульс на «С». Далее цикл повторяется.
В кажущейся простоте управления есть масса сложностей. Нужно не только отслеживать положение якоря, чтобы произвести следующую серию импульсов, а и управлять частотой вращения, регулируя ток в катушках. Помимо этого следует выбрать наиболее оптимальные параметры для разгона и торможения. Стоит также не забывать, что контроллер должен быть оснащен блоком, позволяющим управлять его работой. Внешний вид такого многофункционального устройства можно увидеть на рисунке 8.
 Рис. 8. Многофункциональный контроллер управления бесколлекторным двигателем
Рис. 8. Многофункциональный контроллер управления бесколлекторным двигателемПреимущества и недостатки
Электрический бесколлекторный двигатель имеет много достоинств, а именно:
- Срок службы значительно дольше, чем у обычных коллекторных аналогов.
- Высокий КПД.
- Быстрый набор максимальной скорости вращения.
- Он более мощный, чем КД.
- Отсутствие искр при работе позволяет использовать привод в пожароопасных условиях.
- Не требуется дополнительное охлаждение.
- Простая эксплуатация.
Теперь рассмотрим минусы. Существенный недостаток, который ограничивает использование БД – их относительно высокая стоимость (с учетом цены драйвера). К числу неудобств следует отнести невозможность использования БД без драйвера, даже для краткосрочного включения, например, чтобы проверить работоспособность. Проблемный ремонт, особенно если требуется перемотка.
Бесщеточный двигатель vs щеточного двигателя
Уже несколько лет мы наблюдаем, как бесщеточный двигатель доминирует в индустрии передовых электродвигателей. Действительно ли имеет значение использовать бесщеточный мотор? Да, конечно. Между ними есть существенная разница.
Давайте посмотрим на основы двигателя постоянного тока. Двигатель постоянного тока — все о магнитах и электромагнетизме.
Противоположно заряженные магниты притягивают друг друга. Основная идея двигателя постоянного тока заключается в том, чтобы удерживать противоположный заряд вращающегося компонента, притянутого к неподвижным магнитам (статору) перед ним, чтобы он генерировал постоянное притяжение. Это движение тяги вперед вызвано физическим поведением электромагнетизма.

 Принцип работы мотора
Принцип работы мотора
Он основан на том принципе, что, когда токопроводящий проводник помещается в магнитное поле, он испытывает механическую силу, направление которой задается правилом левой руки Флеминга, а его величина определяется
силой, F = BI l ньютон
Где B — магнитное поле / м2.
I — ток в амперах, а
l — длина катушки в метрах.
Сила, ток и магнитное поле находятся в разных направлениях.
Различия в конструкции щеточного и безщеточного двигателя
Щетки внутри электродвигателей используются для подачи тока на обмотки двигателя через контакты коммутатора. Бесщеточный мотор не имеет токоведущих коммутаторов. Поле внутри бесщеточного двигателя переключается через усилитель, запускаемый коммутирующим устройством, таким как оптический датчик.


В щеточном двигателе постоянного тока используется конфигурация витых проволочных катушек, якоря, действующего как двухполюсный электромагнит. Направленность тока меняется дважды за цикл с помощью коммутатора, механического поворотного переключателя. Это облегчает протекание тока через якорь; таким образом, полюса электромагнита тянут и давят на постоянные магниты вдоль внешней стороны двигателя. Затем коммутатор меняет полярность электромагнита якоря, когда его полюса пересекают полюса постоянных магнитов.
В отличие от бесщеточного двигателя, в качестве внешнего ротора используется постоянный магнит. Кроме того, он использует три фазы катушек и специальный датчик, который отслеживает положение ротора. Когда датчик отслеживает положение ротора, он отправляет опорные сигналы на контроллер. Контроллер, в свою очередь, активирует катушки структурированным образом — одна фаза за другой.
Бесщеточный мотор преимущества и недостатки
Бесщеточный мотор гарантирует более длительный срок службы, поскольку на самом деле нет щетки, чтобы его изнашивать. Они могут работать более 1000 часов. Безщеточные моторы более энергоэффективны, чем щеточные.
Однако они изначально стоят дороже, чем щеточные моторы. Вам также необходимо коммутировать устройства, такие как кодировщики и контроллеры.
Щеточный двигатель сильно шумит, тогда как их бесщеточные аналоги менее шумные. Бесщеточный двигатель также предлагает более высокое отношение крутящего момента к весу. Что еще? Нет необходимости иметь дело с ионизирующими искрами от коммутатора и электромагнитными помехами.
Вентильный двигатель — Brushless DC electric motor
 Двигатель от дисковод 3.5″ . Катушки, расположенных в радиальном направлении, выполнены из медной проволоки, покрытой синей изоляции. Сбалансированный ротор (верхний правый) был удален и перевернуть вверх дном. Серое кольцо внутри своей чашки является постоянный магнит.
Двигатель от дисковод 3.5″ . Катушки, расположенных в радиальном направлении, выполнены из медной проволоки, покрытой синей изоляции. Сбалансированный ротор (верхний правый) был удален и перевернуть вверх дном. Серое кольцо внутри своей чашки является постоянный магнит.Бесщеточный электродвигатель ( BLDC двигатели , BL двигатели ) , также известный как в электронном коммутируемые двигатели (ECMS, двигатели EC) или синхронные электродвигатели постоянного тока , являются синхронные двигатели питается от постоянного электричества через инвертор или импульсный источник питания , который производит переменного электрического тока к привод каждой фазы двигателя через замкнутый контур контроллер . Контроллер обеспечивает импульсы тока на моторные обмотки , которые контролируют скорость и крутящий момент двигателя.
Построение системы бесщеточный двигатель , как правило , похож на постоянного магнита синхронного двигателя (PMSM), но также может быть ВРД , или (асинхронный) двигатель индукции .
Преимущества бесщеточный двигатель над щеточных моторов высокой мощности к весу, высокой скорости и электронным управлением. Бесщеточные двигатели находят применение в таких местах, как компьютерные периферийные устройства (дисководы, принтеры), ручные электроинструменты, а также транспортные средства, начиная от моделей самолетов до автомобилей.
Бесщеточный против матового двигателей
Матовый двигатели постоянного тока были изобретены в 19 — м веке и являются общими. Бесщеточные двигатели постоянного тока стали возможными благодаря развитию твердотельной электроники в 1960 — х годах.
Электрический двигатель развивает крутящий момент чередования полярности вращающихся электромагнитов , прикрепленные к ротору , вращающейся части машины, и стационарным магнитам на статоре , который окружает ротор. Один или оба набора магнитов электромагнитов , изготовленные из катушки проволоки , намотанной вокруг железного сердечника. DC проходит через провод обмотки создает магнитное поле , обеспечивая мощность , которая запускает двигатель. Тем не менее, каждый раз , когда ротор вращается на 180 ° (пол-оборота), позиции северный и южный полюса на ротор меняются местами. Если магнитное поле полюсов остались теми же, это приведет к реверсирование вращающего момента на роторе каждого полуоборота, и таким образом, средний крутящий момент будет равен нулю , и ротор не будет поворачиваться. Таким образом, в двигателе постоянного тока, с тем чтобы создать крутящий момент в одном направлении, то направление электрического тока через обмотку должно быть отменено с каждым 180 ° поворотом ротора (или выключено в течение времени , что он находится в неправильном направлении) , Это изменяет направление магнитного поля , как вращение ротора, так что крутящий момент на роторе всегда находится в том же направлении.
коммутатор
В щеточных двигателей, изобретенных в 19 — м веке, это делается с помощью поворотного переключателя на валу двигателя называется коммутатором . Она состоит из вращающегося цилиндра , разделенной на несколько сегментов металлического контакта на роторе. Эти сегменты соединены с проволокой обмотки электромагнита на роторе. Два или более неподвижные контактов называемых «щеткой», изготовленные из мягкого проводника , как графитовый пресс по отношению к коллектору, делая скольжения электрического контакта с последовательными сегментами , как ротор вращается, обеспечивая электрический ток на обмотки. Каждый раз , когда ротор вращается на 180 ° коммутатора меняет направление электрического тока , приложенный к заданной обмотке, так что магнитное поле создает вращающий момент в одном направлении.
Недостатки коммутатора
Коммутатор имеет множество инженерных недостатков, что привело к снижению использования щеточных двигателей. Эти недостатки:
- Трение щеток скольжения вдоль вращающихся сегментов коллекторных вызывает потерю мощности , которые могут быть существенными в двигателе малой мощности.
- Мягкая кисть материал изнашивается из — за трения, создавая пыль, и в конце концов щетки должны быть заменены. Это делает коммутируемые двигатели непригодны для низких частиц или закрытых приложений , таких как жесткие дисков двигатели.
- Сопротивление скользящего контакта щетки вызывает падение напряжения в цепи двигателя называемой капле щетки , которая потребляет энергию.
- Повторили резкое переключение тока через индуктивность обмоток вызывает искры в коллекторных контактах. Они представляют собой опасность возгорания во взрывоопасной среде, а также создавать электронный шум , который может вызвать электромагнитные помехи в соседних микроэлектронных схемах.
В течение последних ста лет высокой мощности DC щетки моторов, как только оплот промышленности, были заменены переменным ток (AC) синхронные двигатели . Сегодня матовые двигатели используются только в маломощных приложениях или где только DC доступно, но вышеперечисленные недостатки ограничивают их использование даже в этих приложениях. Бесщеточные двигатели были изобретены , чтобы решить эти проблемы.
решение Бесщеточного
Развитие полупроводниковой электроники в 1970 — х годах позволило коммутатор и щетки должны быть устранены в двигателях постоянного тока. В бесщеточных двигателей постоянного тока, электронная следящая система заменяет механические коллекторных контакты. Электронный датчик определяет угол ротора, и контролирует полупроводниковые переключатели , такие как транзисторы , которые переключают тока через обмотку, либо изменение направления тока, или в некоторых двигателях его выключении, в правильное время каждого вращение 180 ° вала так электромагниты создают крутящий момент в одном направлении. Устранение скользящего контакта позволяет бесщеточные двигатели имеют меньшее трение и более длительный срок службы; их рабочая жизнь ограничена только временем жизни их подшипников .
Матовые двигатели постоянного тока развивать максимальный крутящий момент при неподвижном, линейно уменьшаются по мере увеличения скорости. Некоторые ограничения щеточных двигателей могут быть преодолены с помощью бесщеточных двигателей; они включают в себя более высокую эффективность и более низкую чувствительность к механическому износу. Эти преимущества достигаются за счет потенциально менее прочной, более сложной и более дорогой электроники управления.
Типичный бесщеточный двигатель имеет постоянные магниты , которые вращаются вокруг неподвижной арматуры , устраняя проблемы , связанные с подключением тока к подвижной арматуре. Электронный контроллер заменяет кисть / коммутационную сборку коллекторного мотора постоянного тока, который постоянно переключает фазы в обмотки , чтобы держать поворот двигателя. Контроллер выполняет аналогичное распределение мощности по времени с использованием твердотельных схемы , а не системы кисти / коммутатора.
Бесщеточные электродвигатели имеют ряд преимуществ по сравнению с щеточных двигателей постоянного тока, в том числе с высоким крутящим моментом в массовом соотношении, больший крутящий момент на ватт (повышенная эффективность), повышение надежности, снижение уровня шума, более длительный срок службы (без щетки и коллектора эрозии), устранение ионизирующих искры от коммутатора, и общее снижение электромагнитных помех (EMI). При отсутствии обмоток на роторе, они не подвергаются центробежных сил, а также потому , что витки поддерживаются корпусом, они могут быть охлаждены за счет теплопроводности, не требуя воздушного потока внутри двигателя для охлаждения. Это , в свою очередь , означает , что внутренности двигателя могут быть полностью закрыты и защищены от грязи или других посторонних веществ.
Бесщеточный двигатель коммутация может быть реализована в программном обеспечении с использованием микроконтроллером или микропроцессором компьютера, или в качестве альтернативы может быть реализована в аналоговом оборудовании, или в цифровом прошивке с использованием FPGA . Коммутация с электроникой вместо щеток обеспечивает большую гибкость и возможности не доступны с рифлеными двигателями постоянного тока, в том числе , ограничение скорости, «микро активизировали» операцию для медленного и / или точного управления движением, а удерживающий момент в неподвижном состоянии . Программное обеспечение контроллера может быть настроено для конкретного двигателя используется в применении, что приводит к повышению эффективности коммутации.
Максимальная мощность , которая может быть применена к бесщеточному двигателю ограничивается почти исключительно под воздействием тепла; слишком много тепла ослабляет магниты и может привести к повреждению изоляции обмотки х.
При преобразовании электроэнергии в механическую энергию, бесщеточные двигатели являются более эффективными, чем шлифованными двигатели. Это улучшение в значительной степени из-за частоты, при которой электроэнергия коммутируемой определяется обратной связи датчика положения. Дополнительные выгоды обусловлены отсутствием щеток, что снижает механические потери энергии из-за трения. Повышение эффективности является наибольшим в отсутствии нагрузки и при низкой нагрузке области кривой производительности двигателя. При высоких механических нагрузках, бесщеточные двигатели и высококачественных щеточных двигателей сравнимы по эффективности.
Среды и требование, в которых производители используют двигатели Бесщеточных типа постоянного тока включают необслуживаемые работу, высокую скорость и работу, где искрообразование является опасными (например, взрывоопасными средами) или может повлиять на электронный чувствительное оборудование.
Конструкция бесщеточный мотор может напоминать , что из шагового двигателя . В отличие от шаговых, бесщеточный двигатель, как правило , предназначен для получения непрерывного вращения. Шаговые двигатели как правило , не включают в себя датчик положения вала для внутренней обратной связи положения ротора. Вместо того, чтобы контроллер шагового будет опираться на датчик для определения положения ведомого устройства. Они часто останавливались с ротором в заданном угловом положении , в то же время получения крутящего момента. Хорошо разработанная система бесщеточного двигателя также может быть проведена при нулевых оборотах в минуте и конечный крутящий момента.
реализации контроллера
Поскольку контроллер реализует функциональные возможности обычных щеток она должна ориентации / положения ротора (относительно статора катушек). Это происходит автоматически в щеточном электродвигателе из — за фиксированную геометрию вала ротора и щеток. Некоторые конструкции используют датчики Холла или энкодер непосредственно измерить положение ротора. Другие измерения противо-ЭДС в невозбужденных катушках , чтобы вывести положение ротора, что исключает необходимость в отдельных датчики эффекта Холла, и поэтому часто называются Sensorless контроллеров.
Типичный контроллер содержит 3 двунаправленных выходы (то есть, с регулировкой частоты выходных три фазы), которые управляются с помощью логической схемы. Простые контроллеры используют компараторы , чтобы определить , когда выходная фаза должна быть передвинута, в то время как более продвинутые контроллеры используют микроконтроллер для управления разгоном, скорости управления и эффективностью тонкой настройки.
Контроллеры, которые воспринимающие положение ротора, основываясь на противо-ЭДС имеют дополнительные проблемы в инициировании движение, потому что не противо-ЭДС не производится, когда ротор находится в неподвижном состоянии. Это, как правило, осуществляется начиная вращение от произвольной фазы, а затем переходя к правильной фазе, если оно установлено неправильно. Это может привести к двигателю работать на короткое время назад, добавляя еще больше сложности в последовательности запуска. Другие контроллеры без датчиков способны измерять обмотки насыщения, вызванное положением магнитов, чтобы вывести положение ротора.
Два ключевых параметров производительности бесщеточных двигателей постоянного тока являются двигателем константы К Т (постоянный крутящий момент) и К е ( противо-ЭДС константа также известна как скорость постоянной К V = 1 / К е ).
В системе единиц СИ К Т и К V такие же , константа:
КTзнак равноНьютонметрамперзнак равноКилограммметр2ампервторой2{\ Displaystyle K_ {т} = {\ гидроразрыва {{\ текст {Newton}} {\ текст {счетчик}}} {\ текст {Amp}}} = {\ гидроразрыва {{\ текст {Килограмм}} {\ текст {Meter}} ^ {2}} {{\ текст {ампера}} {\ текст {Второй}} ^ {2}}}}
Кезнак равновольтвторойрадианзнак равноКилограммметр2ампервторой2{\ Displaystyle K_ {е} = {\ гидроразрыва {{\ текст {Volt}} {\ текст {Второй}}} {\ текст {Радиан}}} = {\ гидроразрыва {{\ текст {Килограмм}} {\ текст {Meter}} ^ {2}} {{\ текст {ампера}} {\ текст {Второй}} ^ {2}}}}
Изменения в конструкции
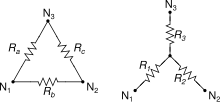 Схема для дельты и извилистые стилей соединена звездой. (Это изображение не иллюстрирует индуктивные и генератор-подобные свойства двигателя)
Схема для дельты и извилистые стилей соединена звездой. (Это изображение не иллюстрирует индуктивные и генератор-подобные свойства двигателя)Бесщеточные двигатели могут быть изготовлены в нескольких различных физических конфигурациях: В «обычном» (также известных как Inrunner ) конфигурация, постоянные магниты являются частью ротора. Три обмотки статора окружает ротор. В Outrunner (или с внешним ротором) конфигурации, радиально-связь между катушками и магнитами восстанавливается; катушки статора образуют центр (ядро) двигателя, в то время как постоянные магниты вращаются внутри нависающего ротора , который окружает сердцевину. Плоский или осевой тип потока, используется там , где есть пространство или форма ограничение, использует статор и ротор пластину, установленное лицо к лицу. OutRunners обычно имеют более полюсов, созданная в триплетов , чтобы поддерживать три группы обмоток, и имеют более высокий крутящий момент на низких оборотах. Во всех бесщеточных двигателей, катушки неподвижны.
Есть два общих электрические обмотки конфигурации; конфигурация дельта соединяет три обмотки друг к другу ( цепей серии ) в треугольной схеме , как и подается питание на каждом из соединений. Уай ( Y конфигурации -образные), которую иногда называют звездой обмотки, соединяет все обмотки к центральной точке ( параллельные цепей ) и подается питание к оставшемуся концу каждой обмотки.
Двигатель с обмотками в дельта-конфигурации дает низкий крутящий момент при низкой скорости, но может дать более высокую максимальную скорость. Конфигурация Уай дает высокий крутящий момент при низкой скорости, но не столь высокую максимальную скорость.
Хотя эффективность в значительной степени зависит от конструкции двигателя, Уай обмотки обычно более эффективно. В дельте соединенных обмоток, половина подается напряжение обмоток, примыкающих к ведомому свинцу (по сравнению с извилистыми непосредственно между ведомыми проводами), увеличивая потери сопротивления. Кроме того, обмотка может позволить высокочастотные паразитные электрические токи циркулировать полностью внутри двигателя. Уай-Обмотка, соединенная не содержит замкнутый контур, в котором паразитные токи могут течь, предотвращая такие потери.
С точки зрения контроллера, два стиля обмоток обрабатываются точно так же.
Приложения
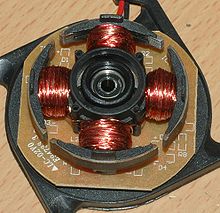 Четыре полюса на статоре бесщеточного двигателя двухфазного. Это часть компьютерного охлаждения вентилятора ; ротор был удален.
Четыре полюса на статоре бесщеточного двигателя двухфазного. Это часть компьютерного охлаждения вентилятора ; ротор был удален.Бесщеточные двигатели выполняют множество функций , первоначально выполняемые щеточных двигателей постоянного тока, но стоимость и сложность управления предотвращает бесщеточные двигатели от замены матового двигателей полностью в областях наименьшей стоимости. Тем не менее, бесщеточные двигатели стали доминировать много применений, в частности устройств , таких как компьютерные жесткие диски и CD / DVD — проигрыватель. Малые вентиляторы в электронном оборудовании работают исключительно бесщеточные двигатели. Их можно найти в беспроводных электроинструментов , где увеличение КПД двигателя приводит к более длительные периоды использования , прежде чем необходимо зарядить аккумулятор. Низкая скорость, бесщеточные электродвигатели малой мощности используется в прямоприводных вертушках для грампластинок .
Транспорт
Бесщеточные двигатели находятся в электрических транспортных средств , гибридных транспортных средств и личных транспортеров . Большинство электрических велосипеды используют бесщеточные двигатели, которые иногда встроены в самой ступицу, причем статор фиксируется прочно к оси и магниты прикреплены к и вращаются вместе с колесом. Большинство электрического привода модель RC использовать бесщеточные двигатели из — за их высокую эффективность.
Аккумуляторные инструменты
Бесщеточные двигатели во многих современных беспроводных инструментов, в частности сорняков whackers, листьев нагнетатели , а некоторые Аккумуляторные дрели / водителей.
Отопление и вентиляция
Существует тенденция в ОВК и холодильной промышленности использовать бесщеточные двигатели вместо различных типов двигателей переменного тока . Наиболее важная причина , чтобы переключиться на бесщеточный двигатель является резким снижением мощности , необходимым для работы их в зависимости от типичного двигателя переменного тока. В то время как затененные-полюсный и постоянные разделительный конденсатор двигатели когда — то доминировали как двигатель вентилятора, многие фанаты теперь выполняются с помощью бесщеточного двигателя. Некоторые любители используют бесщеточные двигатели также с целью повышения общей эффективности системы.
В дополнение к более высокой эффективности бесщеточного двигателя, HVAC системы (особенно те , отличая с регулируемой скоростью и / или модуляции нагрузки) используют бесщеточные двигатели , поскольку встроенный микропроцессор позволяет программируемости, контроль за потоком воздуха, и последовательной связи. Некоторые потолочные вентиляторы и портативные вентиляторы также отличая этот двигатель. Они рекламируют двигатель является очень низким энергопотреблением и тише , чем большинство поклонников.
Промышленная инженерия
Применение бесщеточных двигателей постоянного тока в промышленном строительстве в основном сосредоточена на технологии машиностроения и промышленной автоматизации проектирования. В обрабатывающей промышленности, бесщеточные двигатели в основном используются для управления движением , позиционирования или приведения в действие систем.
Бесщеточные двигатели идеально подходят для изготовления применений из — за их высокой плотности мощности, хорошие характеристики скорости крутящего момента, высокая эффективность, широких диапазонах скоростей и низкие эксплуатационные расходы. Наиболее распространенные виды использования бесщеточных двигателей постоянного тока в промышленном строительстве являются линейными двигателями, серводвигатели , приводы для промышленных роботов, Экструдер приводных двигателей и приводов подачи для станков с ЧПУ.
Системы управления движением
Бесщеточные двигатели обычно используются в качестве насосов, вентиляторов и шпинделей дисков в регулируемых или переменных скоростей вращения , поскольку они способны развивать высокий крутящий момент с хорошей реакцией скорости. Кроме того, они могут быть легко автоматизированы для дистанционного управления. Благодаря своей конструкции, они имеют хорошие тепловые характеристики и высокую энергетическую эффективность. Для получения переменной скорости реакции, бесщеточные двигатели работают в электромеханической системе , которая включает в себя электронный контроллер двигателя и датчик обратной связи о положении ротора.
Бесщеточные двигатели постоянного тока широко используются в качестве серводвигателей для станочных сервоприводов. Серводвигатели используются для механического перемещения, позиционирования или управления движением точности. DC Шаговые двигатели также могут быть использованы в качестве серводвигателей; Однако, так как они работают с управлением без обратной связи , они обычно демонстрируют крутящий момент пульсации. Бесщеточные двигатели постоянного тока являются более подходящими в качестве серводвигателей , поскольку их точное движение на основе замкнутой системы управления с обратной связью , которая обеспечивает жестко контролируемую и стабильную работу.
Позиционирование и приведения в действие системы
Бесщеточные двигатели используются в промышленных позиционирования и приведения в действие приложений. Для сборки роботов, бесщеточные шаговые или серво двигатели используются для позиционирования части для монтажа или инструмента для производственного процесса, например, сварки или покраски. Бесщеточные двигатели также могут быть использованы для привода линейных приводов.
Двигатели , которые непосредственно производят линейное движение, называются линейными двигателями . Преимущество линейных двигателей является то , что они могут производить линейное движение без необходимости в передаче системы, такие , как ШВП , ШВП , стойки-и-шестерня , кулачок , шестерня или ремни, которые были бы необходимо для поворотных двигателей. Системы передачи , как известно , вводить меньше отзывчивости и снижению точности. Прямой привод, линейные двигатели постоянного тока бесщеточный состоят из выдолбленной статора с магнитными зубов и движущимся приводом, который имеет постоянные магниты и катушки обмотки. Чтобы получить линейное движение, контроллер двигателя возбуждает катушечные обмотки в приводе , вызывающие взаимодействие магнитного полей приводит к линейному движению. Трубчатые линейные двигатели являются другой формой линейной конструкции двигателя управляется аналогичным образом.
авиамоделирование
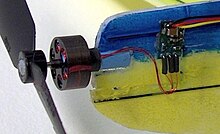 Управляемого микропроцессор БКЭПТ питание микро радиоуправляемого самолета. Этот наружный ротор двигатель весит 5 г и потребляет приблизительно 11 Вт
Управляемого микропроцессор БКЭПТ питание микро радиоуправляемого самолета. Этот наружный ротор двигатель весит 5 г и потребляет приблизительно 11 ВтБесщеточные двигатели стали популярным выбором двигателя для моделей самолетов , включая вертолеты и беспилотные летательные аппараты . Их благоприятные отношения мощности к весу и широкий диапазон доступных размеров, от менее чем 5 грамм до больших двигателей мощности также в киловатте выходного диапазон, революция на рынке модели полета электрического питания, вытесняя практически все матовый электродвигатели, за исключением для маломощных недорогих самолетов класса часто игрушки. Они также стимулируют рост простой, легкий электрической модели самолетов, а по сравнению с предыдущими двигателями внутреннего сгорания , питающих большие и тяжелые модели. Повышенное соотношение мощности к весу современных батарей и бесщеточные двигатели позволяет модели подниматься вертикально, а не подниматься постепенно. Низкий уровень шума и отсутствие массы по сравнению с малыми тлеющего топлива двигателей внутреннего сгорания является еще одной причиной их популярности.
Правовые ограничения на использовании внутреннего сгорание с приводом от двигателя модели самолета в некоторых странах, чаще всего из — за потенциал для шумового загрязнения -Дажи с специально разработаны глушителями для почти всех моделей двигателей будут доступны в течение последних десятилетий, также поддержал переход к высоким -мощность электрических систем.
Радиоуправляемые автомобили
Их популярность также возросла в радиоуправляемые (RC) автомобиля области. Бесщеточные двигатели были легальны в североамериканских RC гоночного автомобиля в соответствии с Ревом с 2006 года Эти двигателей обеспечивают большое количество энергии для RC гонщиков , и, если в пару с соответствующим зацеплением и высоким разрядом Li-Po (литий — полимерный) или LiFePO4 батареей , эти автомобили могут достигать скорости свыше 160 километров в час (99 миль в час).
Бесщеточные двигатели способны производить больший крутящий момент и имеют более быстрого пик скорость вращения по сравнению с нитро- или бензиновыми двигателями. Нитро двигатели пик при приблизительно 46800 об / мин и 2,2 кВт (~ 2,95 л.с.), в то время как меньший бесщеточный двигатель может достигать 50000 об / мин и 3,7 кВт (~ 5 л.с.). Большие RC бесщеточные могут достигать свыше 10 кВт (~ 13,4 л.с.) и 28 000 об / мин до мощности 1 / 5 — й модели масштаба.
Смотрите также
Литература
Рекомендации
внешняя ссылка
 Бесщеточные двигатели постоянного тока
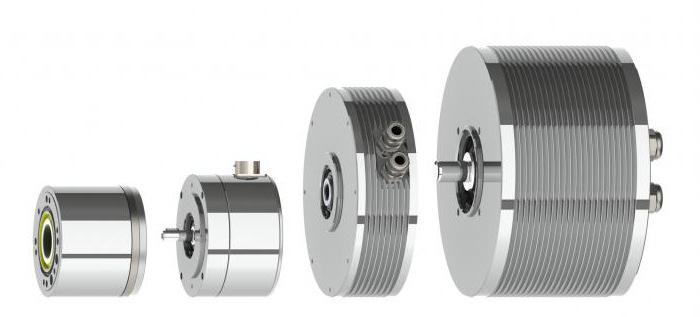
Бесщеточные двигатели постоянного токасочетают в себе компактные, но мощные бесщеточные двигатели постоянного тока и высокопроизводительные драйверы, что обеспечивает отличную экономию энергии и стабильность скорости, а также широкий диапазон регулирования скорости. С бесщеточными двигателями постоянного тока вы можете уменьшить размер вашего приложения, так как двигатели имеют тонкий корпус и обеспечивают высокую мощность благодаря постоянным магнитам, используемым в роторе.
Oriental Motor предлагает широкий ассортимент бесщеточных двигателей постоянного тока с:
- Выходная мощность
- от 15 Вт (1/50 л. С.) До 400 Вт (1/2 л. С.) Варианты зубчатой передачи с параллельным валом, прямоугольным валом и плоским полым валом
- Имеются мотор-редукторы, совместимые с пищевой консистенцией
- h2
- Варианты электромагнитного тормоза
- Драйверы переменного или постоянного тока
Читать дальше…
15 Вт (1/50 л.с.) ~ 100 Вт (1/8 л.с.) Бесщеточные двигатели постоянного тока

Бесщеточные двигатели постоянного тока серии BLH (двигатели BLDC) и мотор-редукторы (вход постоянного тока)
- Компактный драйвер платы (аналоговый, RS-485 или цифровой)
- Управление скоростью с помощью потенциометра, постоянного напряжения или программного обеспечения: 80 — 3000 об / мин (RS-485 или цифровой тип)
- 24 В пост. Тока
- Измерение крутящего момента и контроль (RS-485 или цифровой тип)
- Параллельный вал, плоская шестерня с полым валом или круглый вал (без шестерни)
- Электромагнитный тормоз в наличии
30 Вт (1/25 л.с.) ~ 400 Вт (1/2 л.с.) Бесщеточные двигатели постоянного тока

Бесщеточные двигатели постоянного тока серии BMU (двигатели BLDC) и мотор-редукторы (вход переменного тока)
- Диапазон регулирования скорости: 80 ~ 4000 об / мин
- Простое подключение, простая настройка и простое в использовании устройство управления
- однофазный 100-120 или однофазный / трехфазный 200-240 В переменного тока Параллельный вал
- , прямоугольная шестерня с полым валом, плоская шестерня с полым валом или круглый вал (без шестерни)
- Имеются мотор-редукторы, совместимые с пищевой консистенцией
- h2
- IP66 и IP67 Доступные типы
30 Вт (1/25 л.с.) ~ 400 Вт (1/2 л.с.) Бесщеточные двигатели постоянного тока

Бесщеточные двигатели постоянного тока серии BLE2 (двигатели BLDC) и мотор-редукторы (вход переменного тока)
- Диапазон регулирования скорости: 80 ~ 4000 об / мин
- Улучшенная производительность и функции с простыми в использовании элементами управления
- Функция ограничения крутящего момента
- однофазный 100-120 или однофазный / трехфазный 200-240 В переменного тока Параллельный вал
- , прямоугольная шестерня с полым валом, плоская шестерня с полым валом или круглый вал (без шестерни)
- Имеются мотор-редукторы, совместимые с пищевой консистенцией
- h2
- Тип электромагнитного тормоза В наличии
- IP66 и IP67 Доступные типы
30 Вт (1/25 л.с.) ~ 120 Вт (1/6 л.с.) Бесщеточные двигатели постоянного тока

BLE Series Бесщеточные двигатели постоянного тока (BLDC Motors) и мотор-редукторы (вход переменного тока)
- Диапазон регулирования скорости: 80 ~ 4000 об / мин
- Улучшенная производительность и функции с простыми в использовании элементами управления
- однофазный 100-120, 200-240 или трехфазный 200-240 В переменного тока
- Стандартный или RS-485 Драйвер типа связи
- Функция ограничения крутящего момента
- Параллельный вал, плоская шестерня с полым валом или круглый вал (без шестерни)
- Тип электромагнитного тормоза В наличии
30 Вт (1/25 л.с.) ~ 400 Вт (1/2 л.с.) Бесщеточные двигатели постоянного тока

Бесщеточные двигатели постоянного тока серии BX II (двигатели BLDC) и мотор-редукторы (вход переменного тока)
- Диапазон регулировки скорости: 2 ~ 4000 об / мин, 16 настроек скорости / положения
- Управление скоростью, позиционированием и ограничением крутящего момента
- однофазный 100-120 или однофазный / трехфазный 200-240 В переменного тока
- Параллельный вал, плоская шестерня с полым валом или круглый вал (без шестерни)
- Тип электромагнитного тормоза В наличии
Бесщеточный двигатель постоянного тока (BLDC Motor) Преимущество
Бесщеточные двигатели постоянного токаот Oriental Motor могут достигать крутящего момента до 5159 фунтов в сочетании со стандартной зубчатой передачей.Их компактная конструкция обеспечивает компактное и мощное решение мощностью от 15 до 400 Вт. Их плоские характеристики крутящего момента могут создавать одинаковый номинальный крутящий момент в широком диапазоне скоростей. Бесщеточные двигатели постоянного тока (BLDC Motors) также оснащены широким выбором предварительно собранных редукторных и электромеханических тормозов и доступны с нашим лидером в отрасли и стабильным временем выполнения заказа.
Бесщеточный двигатель постоянного тока (BLDC Motor) Конструкция
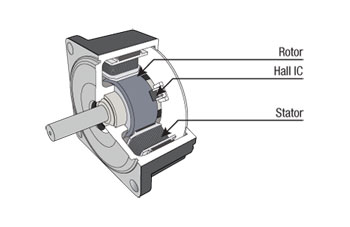
Бесщеточные двигатели постоянного тока используют постоянные магниты в роторе трехфазных двигателей.Кроме того, на внутренней стороне статора имеется встроенная ИС-эффект Холла (магнитный датчик), который обнаруживает изменения магнитного поля с постоянными магнитами. Сигналы обратной связи от ИС-эффекта Холла двигателя сравниваются с заданной скоростью. водителем и скорость двигателя постоянно регулируется.
Бесщеточный двигатель постоянного тока с катушкой имеет звездообразную (Y-образную) проводку с тремя фазами: U, V и W и расположен в статоре, а ротор сделан из магнитов, намагниченных в многополюсной конфигурации, как показано на рис.1.
Внутри статора три ИС Холла расположены в виде магнитных элементов, так что разность фаз выходного сигнала от каждой ИС Холла будет разнесена на 120 градусов при каждом вращении ротора.
Компактный, но мощный
Бесщеточные двигатели постоянного тока(BLDC Motors) очень компактны и в сочетании с зубчатой головкой могут создавать большой крутящий момент.
Превосходная скорость и крутящий момент
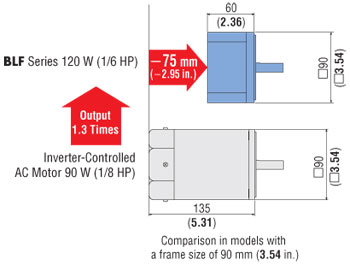
Экономия места
Компактный, но мощный бесщеточный двигатель постоянного тока с постоянными магнитами в роторе двигателя.Сравните с двигателем переменного тока с размером корпуса 3,54 дюйма (90 мм), бесщеточный двигатель постоянного тока с такими же характеристиками на 2,95 дюйма (75 мм) короче и предлагает в 1,3 раза больше мощности.
Компактная конструкция двигателя позволяет уменьшить размеры вашего оборудования.
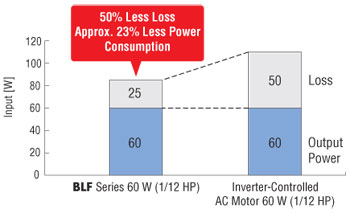
Энергосбережение
Бесщеточные двигатели постоянного тока (BLDC), которые содержат постоянные магниты в роторе, генерируют небольшие вторичные потери от ротора.
Например, при выходной мощности 1/12 л.с. (60 Вт) потребляемая мощность бесщеточного двигателя постоянного тока серии BLF примерно на 23% меньше, чем у двигателя переменного тока с инверторным управлением, что обеспечивает энергосберегающую работу. вашего оборудования.
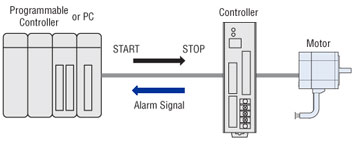
Электронный контроль ввода
Бесщеточные двигатели постоянного тока доступны с электронным управлением ввода. Драйвер может быть подключен непосредственно к программируемому контроллеру. Поскольку двигатель не требует реле мощности, нет необходимости в периодическом обслуживании или замене реле. это делает машину очень надежной. Кроме того, время, необходимое для настройки двигателя, значительно сокращается. Снятие реле устраняет искровой шум при размыкании и замыкании точек контакта реле.
Нет щеток = Нет обслуживания
Бесщеточные двигатели постоянного тока (BLDC Motors) не используют щеток, которые часто требуют замены и / или технического обслуживания, что экономит время и деньги.
Бесщеточный двигатель постоянного тока Сравнение
Серия продуктов | Бесщеточные двигатели постоянного тока серии BLE2 (вход переменного тока) | Бесщеточные двигатели постоянного тока серии BMU (вход переменного тока) | Бесщеточные двигатели постоянного тока серии BX II (вход переменного тока) | Бесщеточные двигатели постоянного тока серии BLE (вход переменного тока) | Бесщеточные двигатели постоянного тока серии BLH (вход постоянного тока) | Бесщеточные двигатели постоянного тока серии BLV (вход постоянного тока) |
| | | | | ||
Особенности | Продвинутая производительность Контроль крутящего момента Цифровой дисплей | Простой в использовании Простая настройка и подключение Цифровой дисплей | Высокая производительность Управление скоростью, позиционированием и ограничением крутящего момента | Стандартные драйверы или драйверы связи типа RS-485 Функция ограничения крутящего момента | Компактный драйвер платы типа | Сетевые коммуникации (I / O или RS-485) |
Выходная мощность | 30 Вт (1/25 л.с.) | 30 Вт (1/25 л.с.) | 30 Вт (1/25 л.с.) | 30 Вт (1/25 л.с.) | 15 Вт (1/50 л.с.) | 200 Вт (1/4 л.с.) |
Блок питания | Однофазный 100-120 В перем. Тока | Однофазный 100-120 В перем. Тока | Однофазный 100-120 В перем. Тока | Однофазный 100-120 В перем. Тока | 24 В пост. Тока | 24 В постоянного тока |
Типы передач | Параллельный вал h2 Продовольственный сорт Параллельный вал (крепление на ногу) Параллельный вал(вал из нержавеющей стали IP66) Прямоугольный полый вал(вал из нержавеющей стали IP66) Плоская шестерня с полым валом Круглый вал (без редуктора) | Параллельный вал h2 Продовольственный сорт Параллельный вал (крепление на ногу) Параллельный вал(вал из нержавеющей стали IP66) Прямоугольный полый вал(вал из нержавеющей стали IP66) Плоская шестерня с полым валом Круглый вал (без редуктора) | Параллельный вал Плоский полый вал Круглый вал (без редуктора) | Параллельный вал Плоский полый вал Круглый вал (без редуктора) | Параллельный вал Плоский полый вал Круглый вал (без редуктора) | Параллельный вал Плоский полый вал Круглый вал (без редуктора) |
Доступные опции | Электромагнитный тормоз IP66 & IP67 Типы | IP66 и IP67 Типы | Электромагнитный тормоз | Электромагнитный тормоз IP65 Тип | Электромагнитный тормоз | Электромагнитный тормоз |
Установка крутящего момента | Да | — | Да | Да | Да † | Да |
Мониторинг | Да | — | Да | Да | Да † | Да |
# настроек скорости | 16 настроек | 4 настройки | 16 настроек | 16 настроек (с модулем управления или вспомогательным программным обеспечением) | 2 настройки 8 настроек | 2 настройки 8 настроек * (с модулем управления) |
Диапазон регулировки скорости | 80 ~ 4000 об / мин | 80 ~ 4000 об / мин | 2 ~ 4000 об / мин | 100 ~ 4000 об / мин 80 ~ 4000 об / мин | 100 ~ 3000 об / мин | 100 ~ 4000 об / мин |
Номинальный крутящий момент | 0.От 85 до 5159 фунтов | от 0,85 до 5159 фунтов | от 0,89 до 970 фунтов | от 0,85 до 600 фунтов | от 0,44 до 600 фунтов | от 5,75 до 970 фунтов |
Узнать больше | Бесщеточные двигатели постоянного тока серии BLE2 (вход переменного тока) | Бесщеточные двигатели постоянного тока серии BMU (вход переменного тока) | Бесщеточные двигатели постоянного тока серии BX II (вход переменного тока) | Бесщеточные двигатели постоянного тока серии BLE (вход переменного тока) | Бесщеточные двигатели постоянного тока серии BLH (вход постоянного тока) | Бесщеточные двигатели постоянного тока серии BLV (вход постоянного тока) |





* с модулем управления (продается отдельно)
† недоступно для драйвера аналогового типа
‡ RS-485 или типа цифрового драйвера
Бесщеточный Моторс
Moog предлагает широкий выбор высокопроизводительных бесщеточных двигателей и серводвигателей, используемых в самых разных областях, включая медицину, автоматизацию делопроизводства, упаковку, промышленность, аэрокосмическую и оборонную промышленность.



Moog расширил свои решения для управления перемещением, добавив линейку высокопрограммируемых встроенных двигателей.
Moog Animatics предоставляет передовую технологию, которая объединяет двигатель, энкодер, усилитель, контроллер, связь RS232 / RS485 и ввод-вывод. SmartMotor теперь оснащен опциональной технологией Combitronic.

Moog расширила свои решения для управления движением, добавив линейку высокопроизводительных бесщеточных нестандартных двигателей.
Moog Aspen Motion Technologies решает проблемы управления движением OEM-производителей, используя свои инженерные возможности для разработки и производства инновационных продуктов, включая бесщеточные двигатели с постоянными магнитами, системы управления DSP и компоненты с добавленной стоимостью.Эти нестандартные решения предлагают конкурентное преимущество как по функциям, так и по затратам для широкого спектра приложений и рынков.
![]()
Нажмите здесь, чтобы перейти на сайт Moog Animatics.
Нажмите здесь, чтобы ознакомиться с расширенными решениями Moog для двигателей.