в ногу со временем / Статьи
Напомним, что изначально одним из основных направлений деятельности японской компании Макита был ремонт и продажа электродвигателей. Правда, тогда о компании еще не было и речи — все производство размещалось в небольшом гараже. Со временем мастерская развернулась и превратилась в транснациональную корпорацию, но при этом не утратила свою направленность. Как и прежде «макитовцы» уделяют огромное внимание электродвигателям и их совершенствованию, что вполне закономерно, потому что сегодня Makita является крупнейшим поставщиком качественных ручных электроинструментов на мировой рынок. А, как известно, эффективность подобного инструмента во многом предопределена именно характеристиками двигателя.
Если на заре становления в качестве объекта приложения созидательных усилий «макитовцев» были детали вышедшей из строя импортной техники, то все составляющие современных двигателей и их сборка производятся на собственных предприятиях концерна.
Кстати, знакомство России с продукцией компании Макита началось именно с электродвигателей и электрогенераторов, которые стали завозиться к нам еще в 1935 году, а лидерство по данному производству на азиатском рынке утвердилось за компанией уже к 30-м годам.
Современный ручной электроинструмент, поставляемый «макитовцами» во все уголки мира, характеризуется высокой производительностью, особой надежностью, легкостью и компактностью. Все это в значительной степени стало возможным благодаря совершенным электродвигателям от «Макита».
Последние две характеристики не так маловажны, как может показаться на первый взгляд, поскольку подобный инструмент в процессе работы приходится длительное время либо держать на весу, либо продвигать вручную, хоть и с минимальным, но с усилием.
Что же такое двигатели Makita сегодня? В чем причина их превосходства над аналогами от других производителей? Конечно же, в первую очередь, стоит отметить высококачественные материалы повышенной прочности, используемые при создании этого чуда технической и инженерной мысли.
В частности движущиеся части электродвигателя изготавливаются из высокопрочной стали класса «премиум». Для изготовления пластин ротора тоже используется сталь премиум-класса, но с несколько иными характеристиками — обеспечивающая максимальный магнитный поток при незначительном нагреве ротора.
В результате научных изысканий и опытных экспериментов «макитовцы» привнесли новшество и в обмотки статора: для их изготовления сегодня используется проволока, на 97% состоящая из меди и специальных добавок. Именно этот фактор позволил снизить вес двигателя и обеспечить повышенную мощность и впечатляющий крутящий момент, а кроме того существенно уменьшить нагрев обмоток, что наилучшим образом отразилось на рабочих характеристиках электроинструмента в целом.
Помимо качества и электротехнических особенностей материалов, используемых при изготовлении деталей электродвигателей Макита, нельзя обойти вниманием и пресловутую японскую точность сборки с превосходной балансировкой.
У Makita нет универсальных двигателей – каждый из них разрабатывается для определенного вида инструментов с учетом мощностных потребностей и особенностей эксплуатации. Наглядный пример тому — пылезащищенные двигатели для угловых шлифовальных машин Макита, перфораторов Makita и других инструментов, которым приходится трудиться в условиях повышенной запыленности. Защита двигателя обеспечивается нанесением на обмотки эпоксидного покрытия, что предотвращает оседание пыли на жизненно важных элементах во время охлаждения. Это позволяет избежать перегрева двигателя, короткого замыкания между витками обмоток и их перегорания, подвисания щеток и прочих неприятностей, которые, в конце концов, приводят механизм в полную негодность. В дополнение к пылезащищенному мотору такой инструмент, как правило, оснащается системой лабиринтного уплотнения и герметизированными кнопками управления, что в разы повышает его надежность.
Наглядный пример тому — пылезащищенные двигатели для угловых шлифовальных машин Макита, перфораторов Makita и других инструментов, которым приходится трудиться в условиях повышенной запыленности. Защита двигателя обеспечивается нанесением на обмотки эпоксидного покрытия, что предотвращает оседание пыли на жизненно важных элементах во время охлаждения. Это позволяет избежать перегрева двигателя, короткого замыкания между витками обмоток и их перегорания, подвисания щеток и прочих неприятностей, которые, в конце концов, приводят механизм в полную негодность. В дополнение к пылезащищенному мотору такой инструмент, как правило, оснащается системой лабиринтного уплотнения и герметизированными кнопками управления, что в разы повышает его надежность.
Еще одна инновационная разработка технологов компании Макита – высокоэффективный четырехполюсный двигатель, предназначенный для аккумуляторных инструментов, в частности работающих от Li-Ion батарей. Генерация энергии таким двигателем осуществляется в два раза чаще — через каждые 90º против прежних 180º, что свойственно стандартным двухполюсным двигателям. Это обеспечивает четырехкратное увеличение мощности при прежних габаритах. Четырехполюсный двигатель потребляет меньше электроэнергии, что существенно увеличивает время работы инструмента на одном заряде батареи. Эти двигатели стали неотъемлемой составляющей аккумуляторных инструментов серии LXT (Li-Ion eXtreme Technologie).
Это обеспечивает четырехкратное увеличение мощности при прежних габаритах. Четырехполюсный двигатель потребляет меньше электроэнергии, что существенно увеличивает время работы инструмента на одном заряде батареи. Эти двигатели стали неотъемлемой составляющей аккумуляторных инструментов серии LXT (Li-Ion eXtreme Technologie).
В основу технологии Makita Xtra Torque (MXT), запатентованной «макитовскими» разработчиками, лег совершенно новый двигатель, в котором в качестве одной из индукционных катушек использован магнит из редкоземельных металлов. Благодаря этому новшеству аккумуляторные дрели-шуруповерты Макита и другие инструменты с маркировкой MXT заметно прибавили в скорости и приобрели большую мощность (прирост составил почти 60%). Еще один «плюс» новой конструктивной особенности данного вида двигателей – повышенная надежность. Это объясняется довольно просто, ведь именно катушки, а именно их перегрев и возникновение межвиткового замыкания на обмотках, зачастую становятся причиной выхода инструмента из строя.
Как видим, эволюция электродвигателей, разрабатываемых и создаваемых концерном Makita, налицо. К этому стоит также добавить, что дорожа честью марки «макитовцы» ведут строжайший контроль на производстве. Сам двигатель проходит 19 специальных тестов, а собранный инструмент проверяется на работоспособность в течение 3-х минут при максимальной нагрузке.
2-полюсные моторы против 4-полюсных моторов — Технология
Содержание:
В качестве двигателей используют электрическую энергию и преобразуют ее в механическую энергию. 2-полюсные и 4-полюсные двигатели отличаются друг от друга. Для 2-полюсного электрического угол равен механическому углу, тогда как в 4-полюсном электрический угол в два раза больше, чем механический угол.
Количество полюсов обратно пропорционально скорости, поэтому, когда скорость увеличивается, полюса уменьшаются, а увеличение полюсов снижает скорость. Похожую моду можно увидеть двухполюсный мотор и четырехполюсный мотор. Полюса — это набор трехсторонних электромагнитных обмоток, которыми обладает мотор. В простейшем трехфазном двигателе вы обнаружите три независимых электромагнита, созданных с помощью единого набора трехходовых обмоток. Следовательно, существует множество сформированных электромагнитных полюсов Север-Юг. Этот тип двигателя, как утверждается, имеет «2 полюса»
Полюса — это набор трехсторонних электромагнитных обмоток, которыми обладает мотор. В простейшем трехфазном двигателе вы обнаружите три независимых электромагнита, созданных с помощью единого набора трехходовых обмоток. Следовательно, существует множество сформированных электромагнитных полюсов Север-Юг. Этот тип двигателя, как утверждается, имеет «2 полюса»
Содержание: Разница между 2-полюсными и 4-полюсными двигателями
- Что такое 2-полюсный мотор?
- Что такое 4-полюсный мотор?
- Ключевые отличия
- Видео Объяснение
Что такое 2-полюсный мотор?
Электродвигатель — это электрическая машина, которая превращает электроэнергию непосредственно в механическую энергию. В типичной двигательной функции большинство электродвигателей с электроприводом работают с соединением между магнитным полем электродвигателя, а также токами обмотки для создания мощности внутри двигателя. Двухполюсный мотор обладает двумя электромагнитами, которые находятся на севере и юге.
Что такое 4-полюсный мотор?
Огромные электродвигатели (обычно мощностью более 7 МВт) доступны как в 4-полюсных, так и в 2-полюсных моделях. 4-полюсные синхронные электродвигатели и генераторы имеют мощные роторы с выступающими полюсами, в то время как 4-полюсные асинхронные двигатели, а также генераторы имеют короткозамкнутые роторы. I. 4-полюсные двигатели и генераторы легче и меньше по сравнению с их конкретными 2-полюсными аналогами, которые могут стать ключевыми точками программ именно там, где область ограничена, как морское поле.
Ключевые отличия
- Двухполюсный двигатель имеет два электромагнита, 1 север, 1 юг. тогда как на четырех полюсах есть четыре электромагнита, 2 на север, 2 на юг
- два полюса имеют конфигурацию север-юг, тогда как четырехполюсные двигатели имеют конфигурацию север-юг-север-юг.
- Двухполюсный двигатель эффективнее четырехполюсного
- 2-полюсный двигатель лучше двигателя, чем 4-полюсный
- Для более высокой мощности 4 полюса лучше, чем 2 полюса
- Для высоких скоростей двухполюсный двигатель лучше четырехполюсного
- В четырехполюсном двигателе коробка передач часто требуется, но в двухполюсном двигателе коробка передач всегда нужна ниже 3000 об / мин.
- 2-полюсный двигатель имеет более высокий NPSHR по сравнению с 4-полюсным двигателем.
- 2-полюсные двигатели являются цилиндрическими, тогда как 4-полюсные двигатели не являются
- В двухполюсном двигателе доступ к охлаждающему воздуху меньше, а в четырехполюсном двигателе симметричное охлаждение с надлежащим контролем горячих точек благодаря его конструкции.
- 2-полюсный двигатель имеет лучшие шумовые характеристики по сравнению с 4-полюсным двигателем.
четырёхполюсный — это… Что такое четырёхполюсный?
- четырёхполюсный
четырёхпо/люсный (4-по/люсный)
Слитно. Раздельно. Через дефис.. Б. З. Букчина.
- четырёхполосный
- четырёхпрограммный
Смотреть что такое «четырёхполюсный» в других словарях:
Коллекторный электродвигатель — Коллекторный электродвигатель синхронная[1] электрическая машина, в которой датчиком положения ротора и переключателем тока в обмотках является одно и то же устройство щёточно коллекторный узел … Википедия
Электродвигатель постоянного тока — Рис.
1 Устройство простейшего коллекторного двигателя постоянного тока с двухполюсным статором и с двухполюсным ротором Двигатель постоянного тока электрическая машина, ма … Википедия
ДПТ — Рис. 1 Устройство простейшего коллекторного двигателя постоянного тока с двухполюсным статором и с двухполюсным ротором Двигатель постоянного тока электрическая машина, машина постоянного тока, преобразующая электрическую энергию постоянного тока … Википедия
Двигатель постоянного тока — Рис. 1 Устройство простейшего коллекторного двигателя постоянного тока с двухполюсным статором и с двухполюсным ротором Двигатель постоянного тока электрическая машина, машина постоянного тока, преобразующая электрическую энергию постоянного тока … Википедия
Динистор — Обозначение на схемах Тиристор полупроводниковый прибор, выполненный на основе монокристалла полупроводника с четырёхслойной структурой р n p n типа, обладающий в прямом направлении двумя устойчивыми состояниями состоянием низкой проводимости… … Википедия
Постоянного тока электродвигатель — Рис.
 1 Устройство простейшего коллекторного двигателя постоянного тока с двухполюсным статором и с двухполюсным ротором Двигатель постоянного тока электрическая машина, машина постоянного тока, преобразующая электрическую энергию постоянного тока … Википедия
1 Устройство простейшего коллекторного двигателя постоянного тока с двухполюсным статором и с двухполюсным ротором Двигатель постоянного тока электрическая машина, машина постоянного тока, преобразующая электрическую энергию постоянного тока … ВикипедияЭВС1/ЭВС2 — (Siemens Velaro RUS) Сапсан в пути … Википедия
75×46 мм Ламинирование ротора статора для двигателя вентилятора (модель с экономичной медной обмоткой) | Больше | Ламинирование ротора статора 80×46 мм для двигателя вентилятора (модель с экономичной медной обмоткой) | Больше | 74×44 мм Ламинирование ротора статора для двигателя вентилятора | ID #: TG7544
Размер: 75 x 44
Статор: 75
Ротор: 44
Слоты статора: 16 зуб. | Больше | 74×46 мм Ламинирование ротора статора для двигателя вентилятора | ID #: TG7546 Размер: 75 x 46 Статор: 75 Ротор: 46 Слоты статора: 16 зуб. Слоты ротора: 22 зуб. Отверстие вала: 8/10 Ширина материала: 75 Вт Напряжение: 110 В / 220 В Частота: 50/60 Гц Полюс: 4P Фаза: 1Φ Л.с.: | Больше | 82×44 мм Ламинирование ротора статора для двигателя вентилятора | ID #: TG8244
Размер: 82 x 44
Статор: 82
Ротор: 44
Слоты статора: 16 зуб.
Слоты ротора: 22 зуб.
Отверстие вала: 8/10
Ширина материала: 75 Вт
Напряжение: 110 В / 220 В
Частота: 50 Гц / 60 Гц
Полюс: 4P
Фаза: 1Ф / 3Ф
Л. | Больше | 82×46 мм Ламинирование ротора статора для двигателя вентилятора | ID #: TG8246 Размер: 82 x 46 Статор: 82 Ротор: 46 Слоты статора: 16 зуб. Слоты ротора: 22 зуб. Отверстие вала: 8/10 Ширина материала: 75 Вт Напряжение: 110 В / 220 В Частота: 50 Гц / 60 Гц Полюс: 4P Фаза: 1Φ Л.с.: | Больше | Ламинирование ротора статора 90×46 мм для двигателя вентилятора | ID #: TG9046 Размер: 90 x 46 Статор: 90 Ротор: 46 Слоты статора: 16 зуб. Слоты ротора: 22 зуб. Отверстие вала: 8/9/10 Ширина материала: 78 Вт Напряжение: 110 В / 220 В Частота: 50 Гц / 60 Гц Полюс: 4P Фаза: 1Φ Л.с.: | Больше | Пластина ротора статора 98×48 мм для двигателя вентилятора | ID #: TG9048B
Размер: 90 х 48
Статор: 90
Ротор: 48
Слоты статора: 24 зуб. | Больше | Ламинирование ротора статора 94×55 мм для двигателя вентилятора | ID #: TG9455 Размер: 94 x 55 Статор: 94 Ротор: 55 Слоты статора: 24 зуб. Слоты ротора: 34 зуб. Отверстие вала: 8/10 Ширина материала: 92 Вт Напряжение: 110 В / 220 В Частота: 50 Гц / 60 Гц Полюс: 4P Фаза: 1Φ Л.с.: | Больше | Пластина ротора статора 110×65 мм для четырехполюсного двигателя | ID #: TG11065A
Размер: 110 х 65
Статор: 110
Ротор: 65
Слоты статора: 24 зуб.
Слоты ротора: 34 зуб.
Отверстие вала: 10/12/14/16
Ширина материала: 100 Вт
Напряжение: 110 В / 220 В
Частота: 50 Гц / 60 Гц
Полюс: 4P
Фаза: 1Φ
Л. | Больше | Пластина ротора статора 110×65 мм для четырехполюсного двигателя | ID #: TG11065B Размер: 110 х 65 Статор: 110 Ротор: 65 Слоты статора: 24 зуб. Слоты ротора: 34 зуб. Отверстие вала: 10/12/14/16 Ширина материала: 100 Вт Напряжение: 110 В / 220 В Частота: 50 Гц / 60 Гц Полюс: 4P Фаза: 1Φ Л.с.: | Больше | Ламинирование ротора статора 140×80 мм для четырехполюсного двигателя | ID #: TG14080 Размер: 140 x 80 Статор: 140 Ротор: 80 Слоты статора: 36 зуб. Слоты ротора: 44 зуб. Отверстие вала: 15/17/20/22/25 Ширина материала: 135 Вт Напряжение: 110 В / 220 В / 380 В Частота: 50 Гц / 60 Гц Полюс: 4P Фаза: 1Ф / 3Ф Применение: вентилятор, кран, промышленный двигатель | Больше | Ламинирование ротора статора 140×85 мм для четырехполюсного и шестиполюсного двигателя | ID #: TG14085A
Размер: 140 x 85A
Статор: 140
Ротор: 85
Слоты статора: 36 зуб. | Больше | 140×85 мм пластина ротора статора для четырехполюсного и шестиполюсного двигателя с высоким КПД | ID #: TG14085C Размер: 140 x 85 Статор: 140 Ротор: 85 Слоты статора: 36 зуб. Слоты ротора: 28T / 44T Отверстие вала: 15/17/20/22/26 Ширина материала: 135 Вт Эффективность: IE3 Напряжение: 110 В / 220 В / 380 В Частота: 50 Гц / 60 Гц Полюс: 4P / 6P Фаза: 3Φ Л.с.: | Больше | Ламинирование ротора статора 60×31,5 мм для двигателя вентилятора | ID #: CD60315
Размер: 60 x 31,5
Статор: 60
Ротор: 31,5
Слоты статора: 8T
Слоты ротора: 11 зуб. | Больше | Ламинирование ротора статора 60×35 мм для двигателя вентилятора | ID #: CD6035E Размер: 60 х 35 Статор: 60 Ротор: 35 Слоты статора: 8T Слоты ротора: 15 зуб. Отверстие вала: 6 Полюс: 4P Фаза: 1Φ Л.с.: | Больше | 108×70 мм Ламинирование ротора статора для двухполюсного и четырехполюсного двигателя | ID #: TG10870 Размер: 108 x 70 Статор: 108 Ротор: 70 Слоты статора: 24 зуб. Слоты ротора: 34 зуб. Отверстие вала: 12 / 12,7 Ширина материала: 108 Вт Напряжение: 110 В / 220 В / 380 В Частота: 50 Гц / 60 Гц Полюс: 2P / 4P Фаза: 1Ф / 3Ф Л.с.: | Больше | Ламинирование ротора статора 110×70 мм для четырехполюсного и шестиполюсного двигателя | ID #: TG11070
Размер: 110 х 70
Статор: 110
Ротор: 70
Слоты статора: 36 зуб. | Больше | Ламинирование ротора статора 114×56 мм для двухполюсного высокоэффективного двигателя | ID #: TG11456 Размер: 114 x 56 Статор: 114 Ротор: 56 Слоты статора: 24 зуб. Слоты ротора: 29 зуб. Отверстие вала: 12/15/17/20 Ширина материала: 114 Вт Эффективность: IE3 Напряжение: 110 В / 220 В / 380 В Частота: 50 Гц / 60 Гц Полюс: 2P Фаза: 1Ф / 3Ф Л.с.: | Больше | 125×75 мм Ламинирование ротора статора для четырехполюсного двигателя | ID #: TG12575B
Размер: 125 x 75
Статор: 125
Ротор: 75
Слоты статора: 32 зуб. | Больше | 125×75 мм пластина ротора статора для четырехполюсного и шестиполюсного двигателя | ID #: TG12575D Размер: 125 x 75 Статор: 125 Ротор: 75 Слоты статора: 36 зуб. Слоты ротора: 44 зуб. Отверстие вала: 16/18/20/22 Ширина материала: 123 Вт Напряжение: 110 В / 220 В / 380 В Частота: 50 Гц / 60 Гц Полюс: 4P / 6P Фаза: 3Φ Л.с.: | Больше | Ламинирование ротора статора 140×70 мм для двухполюсного и шестиполюсного двигателя | ID #: TG14070
Размер: 140 x 70
Статор: 140
Ротор: 70
Слоты статора: 24 зуб. | Больше | Пластина ротора статора 140×75 мм для двухполюсного и шестиполюсного двигателя с высоким КПД | ID #: TG14075 Размер: 140 x 75 Статор: 140 Ротор: 75 Слоты статора: 24 зуб. Слоты ротора: 18T / 33T Отверстие вала: 17/20/22/25/26/28/35 Ширина материала: 138 Вт Эффективность: IE4 Напряжение: 110 В / 220 В / 380 В Частота: 50 Гц / 60 Гц Полюс: 2P / 6P Фаза: 3Φ Применение: насос, воздуходувка, лесопилка | Больше | Пластина ротора статора 140×85 мм для четырехполюсного двигателя | ID #: TG14085B
Размер: 140 x 85
Статор: 140
Ротор: 85
Слоты статора: 32 зуб. | Больше |
 Слоты ротора: 22 зуб.
Отверстие вала: 8 / 8.07 / 10
Ширина материала: 75 Вт
Напряжение: 110 В / 220 В
Частота: 50 Гц / 60 Гц
Полюс: 4P
Фаза: 1Φ
Л.с.:
Слоты ротора: 22 зуб.
Отверстие вала: 8 / 8.07 / 10
Ширина материала: 75 Вт
Напряжение: 110 В / 220 В
Частота: 50 Гц / 60 Гц
Полюс: 4P
Фаза: 1Φ
Л.с.: с.:
с.: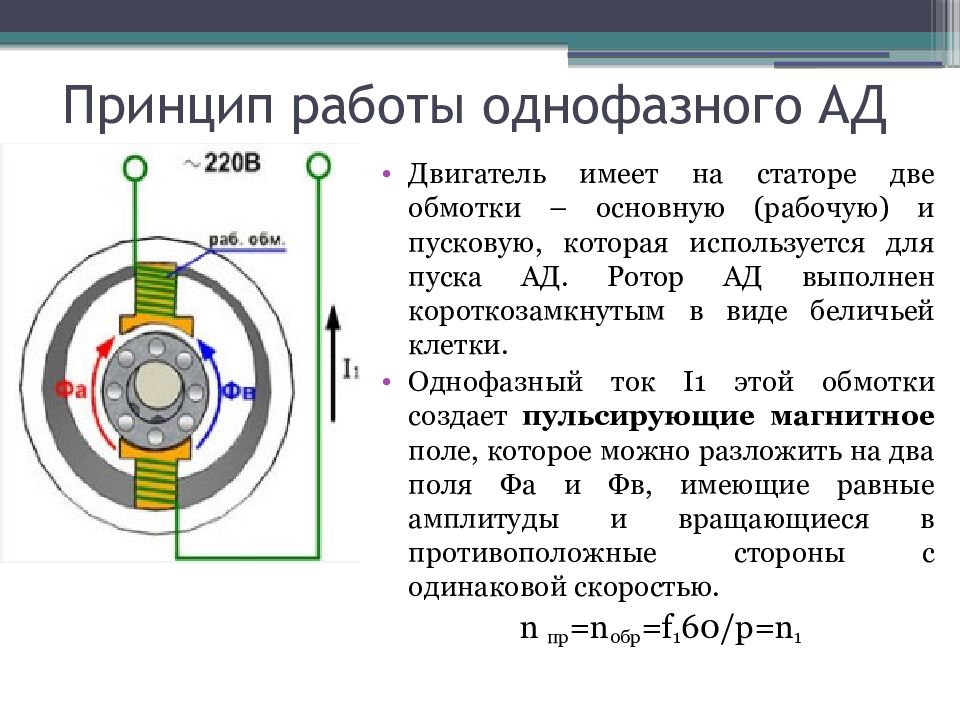 Слоты ротора: 17 зуб.
Отверстие вала: 10 / 11,5 / 12,7
Ширина материала: 84 Вт
Напряжение: 110 В / 220 В
Частота: 50 Гц / 60 Гц
Полюс: 4P
Фаза: 1Φ
Л.с.:
Слоты ротора: 17 зуб.
Отверстие вала: 10 / 11,5 / 12,7
Ширина материала: 84 Вт
Напряжение: 110 В / 220 В
Частота: 50 Гц / 60 Гц
Полюс: 4P
Фаза: 1Φ
Л.с.: с.:
с.: Слоты ротора: 44 зуб.
Отверстие вала: 17/20/22/25
Ширина материала: 130 Вт
Напряжение: 110 В / 220 В / 380 В
Частота: 50 Гц / 60 Гц
Полюс: 4P / 6P
Фаза: 1Ф / 3Ф
Л.с.:
Слоты ротора: 44 зуб.
Отверстие вала: 17/20/22/25
Ширина материала: 130 Вт
Напряжение: 110 В / 220 В / 380 В
Частота: 50 Гц / 60 Гц
Полюс: 4P / 6P
Фаза: 1Ф / 3Ф
Л.с.: Отверстие вала: 4/5/6
Полюс: 4P
Фаза: 1Φ
Л.с.:
Отверстие вала: 4/5/6
Полюс: 4P
Фаза: 1Φ
Л.с.: Слоты ротора: 44 зуб.
Отверстие вала: 14/16/18
Ширина материала: 107 Вт
Напряжение: 110 В / 220 В / 380 В
Частота: 50 Гц / 60 Гц
Полюс: 4P / 6P
Фаза: 1Ф / 3Ф
Л.с.:
Слоты ротора: 44 зуб.
Отверстие вала: 14/16/18
Ширина материала: 107 Вт
Напряжение: 110 В / 220 В / 380 В
Частота: 50 Гц / 60 Гц
Полюс: 4P / 6P
Фаза: 1Ф / 3Ф
Л.с.: Слоты ротора: 44 зуб.
Отверстие вала: 18/20
Ширина материала: 120 Вт
Напряжение: 110 В / 220 В
Частота: 50 Гц / 60 Гц
Полюс: 4P
Фаза: 1Φ
Л.с.:
Слоты ротора: 44 зуб.
Отверстие вала: 18/20
Ширина материала: 120 Вт
Напряжение: 110 В / 220 В
Частота: 50 Гц / 60 Гц
Полюс: 4P
Фаза: 1Φ
Л.с.: Слоты ротора: 34 зуб.
Отверстие вала: 18/20/22/25/27
Ширина материала: 130 Вт
Напряжение: 110 В / 220 В / 380 В
Частота: 50 Гц / 60 Гц
Полюс: 2P / 6P
Фаза: 1Ф / 3Ф
Л.с.: 2 л.с.
Применение: компрессор, промышленный двигатель
Слоты ротора: 34 зуб.
Отверстие вала: 18/20/22/25/27
Ширина материала: 130 Вт
Напряжение: 110 В / 220 В / 380 В
Частота: 50 Гц / 60 Гц
Полюс: 2P / 6P
Фаза: 1Ф / 3Ф
Л.с.: 2 л.с.
Применение: компрессор, промышленный двигатель Слоты ротора: 44 зуб.
Отверстие вала: 17/20/22
Ширина материала: 130 Вт
Напряжение: 110 В / 220 В / 380 В
Частота: 50 Гц / 60 Гц
Полюс: 4P / 6P
Фаза: 1Φ
Л.с.: 2 л.с.
Применение: вентилятор, промышленный двигатель
Слоты ротора: 44 зуб.
Отверстие вала: 17/20/22
Ширина материала: 130 Вт
Напряжение: 110 В / 220 В / 380 В
Частота: 50 Гц / 60 Гц
Полюс: 4P / 6P
Фаза: 1Φ
Л.с.: 2 л.с.
Применение: вентилятор, промышленный двигательРАЗНИЦА МЕЖДУ ДВУХПОЛЮСНЫМИ И ЧЕТЫРЕХПОЛЮСНЫМИ ДВИГАТЕЛЯМИ | СРАВНИТЕ РАЗНИЦУ МЕЖДУ ПОХОЖИМИ ТЕРМИНАМИ — ТЕХНОЛОГИЯ
2-полюсные и 4-полюсные двигатели Двигатель — это электрическое устройство, которое преобразует электрическую энергию в механическую, в частности, в форме крутящего момента, передаваемого через вал.
2-полюсные и 4-полюсные двигатели
Двигатель — это электрическое устройство, которое преобразует электрическую энергию в механическую, в частности, в форме крутящего момента, передаваемого через вал. Двигатели работают по принципу электромагнитной индукции, описанному Майклом Фарадеем.
2-полюсный мотор
Двигатель, который содержит два полюса (или одну пару магнитных полюсов северный и южный), называется двухполюсным двигателем. Часто обмотки статора имеют северный и южный полюса. Количество обмоток статора может давать любое разумное число полюсов от 2 до 12. Доступны двигатели с более чем 12 полюсами, но они не используются повсеместно.
Часто обмотки статора имеют северный и южный полюса. Количество обмоток статора может давать любое разумное число полюсов от 2 до 12. Доступны двигатели с более чем 12 полюсами, но они не используются повсеместно.
Синхронные скорости двигателей напрямую зависят от количества полюсов, как указано в следующем выражении
Синхронная скорость двигателя = (120 × частота) / (количество полюсов)
Следовательно, скорость 2-полюсного двигателя, подключенного к основному источнику питания, имеет синхронную скорость 3000 об / мин. При номинальной нагрузке рабочие скорости могут снизиться примерно до 2900 об / мин из-за скольжения и нагрузки.
В двухполюсных двигателях ротор вращается на 1800 за половину цикла. Следовательно, за один цикл источника ротор делает один цикл. Количество потребляемой энергии в двухполюсных двигателях относительно невелико, и передаваемый крутящий момент также невелик.
4-полюсный мотор
Двигатель, имеющий четыре полюса статора (или две пары магнитных полюсов) в чередующемся порядке; N> S> N> S. Синхронная скорость четырехполюсного двигателя, подключенного к сети, составляет 1500 об / мин, что вдвое меньше скорости двухполюсного двигателя. При номинальной нагрузке рабочие скорости могут снизиться до значения около 1450 об / мин.
Синхронная скорость четырехполюсного двигателя, подключенного к сети, составляет 1500 об / мин, что вдвое меньше скорости двухполюсного двигателя. При номинальной нагрузке рабочие скорости могут снизиться до значения около 1450 об / мин.
В четырехполюсных двигателях ротор вращается на 900 за каждый полупериод. Следовательно, ротор совершает 1 цикл на каждые два цикла источника. Следовательно, количество потребляемой энергии в два раза больше, чем у двухполюсного двигателя, и теоретически обеспечивает вдвое больший крутящий момент.
В чем разница между 2-полюсным двигателем и 4-полюсным электродвигателем?
2-полюсный двигатель имеет два полюса (или одну пару магнитных полюсов), тогда как 4-полюсные двигатели имеют четыре магнитных полюса в чередующемся порядке.
2-полюсные двигатели имеют в два раза большую скорость, чем 4-полюсные.
Ротор двухполюсного двигателя выполняет один цикл для каждого цикла источника, в то время как ротор четырехполюсного двигателя выполняет только половину цикла для каждого отдельного цикла источника.
Следовательно, 4-полюсные двигатели потребляют вдвое больше энергии, чем 2-полюсные.
Теоретически 4-полюсные двигатели обеспечивают вдвое большую рабочую мощность, чем 2-полюсные двигатели.
Электродвигатели постоянного тока 119, 120 — Пуск
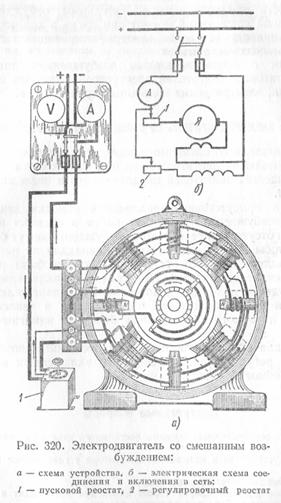
Пуск и реверс электродвигателей постоянного тока. Пуск двигате-л я. При неподвижном [c.385]Разбор различных схем управления асинхронными, синхронными электродвигателями и электродвигателями постоянного тока (пуск, реверсирование, торможение, регулировка скорости и т. д.). Сведения о станциях управления. [c.327]
Сериесные электродвигатели постоянного тока с пуско-регулировочными якорными сопротивлениями Краны различных типов грузоподъёмные и судовые лебёдки [c.841]
Компаундные и шунтовые электродвигатели постоянного тока с пуско-регулировочными якорными сопротивлениями Механизмы передвижения грузоподъёмных машин (в случаях, когда возможно резкое снижение загрузки электродвигателя) машины непрерывного транспорта [c.841]Электродвигатель переменного тока однофазный трехфазный с пуском через автотрансформатор или с переключением со звезды на треугольник электродвигатель постоянного тока шунтовой паровая машина или двигатель внутреннего сгорания с четырьмя и более цилиндрами турбина [c.515]
Пуск масляной системы производится включением насоса смазки, снабженного электродвигателем переменного тока. После его пуска нужно проверить, что насос создает необходимое давление, электродвигатель не перегружается и масло нормально циркулирует через все подшипники, обязательно осмотреть систему и убедиться в отсутствии пропусков масла, опробовать аварийный насос смазки с электродвигателем постоянного тока. Если он работает нормально, остановить его. [c.137]
Вращение от электродвигателя постоянного тока 12 через клиноременную передачу передается гидронасосу 11. Скорость перемещения датчика регулируется изменением подачи масла в гидросистему через число оборотов электродвигателя и эксцентриситет гидронасоса. Гидронасос имеет реверс, что позволяет менять направление перемещения. Масляная магистраль от насоса через кран переключения рода работы 13 подводится к золотнику управления двигателями 8. Золотник перемещается электромагнитами 1 я 2, снабженными микровыключателями 9. Пуск двигателя (схема пуска на рисунке не показана) сблокирован с включением электромагнита 1. При этом золотник 8 перемещается в верхнее положение. [c.244]
Пуски электродвигателей постоянного тока и короткозамкнутого асинхронного электродвигателя трехфазного переменного тока. Пуск асинхронного электродвигателя с фазным ротором. [c.311]
Прямой, реверсивный, с переключением со звезды на треугольник пуски синхронных электродвигателей. Пуск электродвигателя с фазным ротором. Пуск электродвигателей постоянного тока с параллельным и последовательным возбуждением. Схемы пусков. Реверсирование и торможение электродвигателей постоянного тока. Их схемы. [c.327]
Электродвигатели постоянного тока типа серии ПБС и 2П, имеющие уменьшенный момент инерции ротора, повышенную перегрузочную способность и улучшенную коммутацию, применяют в приводах подач станков с ЧПУ. В цепях подач применяют малоинерционные электродвигатели с дисковым ротором и печатной обмоткой и с гладким цилиндрическим ротором, длина которого превосходит его диаметр. Так, двигатели с гладким ротором серии ПГ допускают 8—10-кратные пусковые токи (примерно в 4 раза больше, чем у обычных). Развиваемый двигателем при этом момент в 6— 7 раз превышает номинальный момент и в 2,5—3 раза — допустимый момент двигателей с обычным ротором. Быстродействие двигателя с гладким ротором в несколько раз превышает быстродействие двигателя с обычным ротором. Время пуска двигателя мощностью 9 кВт с гладким ротором составляет максимум 0,04 с, для двигателя той же мощности и частоты вращения с обычным ротором — 0,6 с. [c.59]
Приборы пуска, освещения, сигнализации. Стартеры, применяемые для пуска двигателей, представляют собой электродвигатели постоянного тока последовательного возбуждения, питающиеся от аккумуляторных батарей. Для получения большого крутящего момента з корпус стартера устанавливается четыре полюсных сердечника. [c.152]
Система пуска служит для начального вращения коленчатого вала двигателя и состоит из стартера, аккумуляторной батареи и стартерной цепи. Особенностью системы пуска автомобильных двигателей является то, что мощности аккумуляторной батареи и стартера близки. Поэтому при пуске двигателя напряжение аккумуляторной батареи значительно изменяется в зависимости от тока, потребляемого стартером. В легковых автомобилях в качестве стартера (табл. 24) обычно применяют электродвигатель постоянного тока со смешанным возбуждением. [c.105]
Стартер современного автомобиля (рис. 8.1) состоит из электродвигателя постоянного тока 10, механизмов привода и управления. Конструкция электродвигателей почти одинакова у всех стартеров. Они изготовляются четырехполюсными. Наиболее часто применяются электродвигатели последовательного возбуждения. Именно при последовательном возбуждении обеспечивается характеристика электродвигателя, наиболее благоприятная для обеспечения пуска. Недостатком этих двигателей является значительная частота вращения якоря в режиме холостого хода. При этом возрастают центробежные силы, действующие на якорь, [c.134]
Стартер (рис. 58) представляет собой электродвигатель постоянного тока, рассчитанный на кратковременный режим работы от аккумуляторных батарей. Он состоит из электродвигателя 1, механизма привода 7 и электромагнитного тягового реле 4. Шестерня 8 привода стартера вводится в зацепление с венцом маховика двигателя электромагнитом 5 тягового реле, смонтированным на корпусе стартера с помощью нажимного рычага 6, а выводится из зацепления автоматически после пуска двигателя. [c.87]
Электродвигатель переменного тока короткозамкнутый с прямым пуском электродвигатель постоянного тока сериесный двигатель внутреннего сгорания одноцилиндровый [c.192]
Стартер (рис. 57) служит для пуска двигателя и представляет собой четырехполюсный электродвигатель постоянного тока со смешанным включением обмотки возбуждения. Обмотки возбуждения двух полюсов включены в цепь последовательно с обмоткой якоря, а двух других — параллельно. Включение стартера — электромагнитное дистанционное при помощи тягового реле, установленного на корпусе стартера. [c.91]
Электрические стартеры представляют собой специальные электродвигатели постоянного тока и применяются для пуска автомобильных, тракторных двигателей и дизелей с высокой частотой вращения и большой мощности. Системы пуска электростартером карбюраторных и дизельных двигателей не имеют принципиальных различий, но мощность электростартеров для дизелей выше. [c.223]
Электростартер представляет собой малогабаритный электродвигатель постоянного тока, используемый для прокручивания коленчатого вала при пуске двигателя и снабженный специальным устройст- [c.223]
Нередко бывает известна не зависимость силы тока нагрузки, а зависимость вращающего момента от времени. Тогда используют метод эквивалентного момента. Если электродвигатель постоянного тока с параллельным или независимым возбуждением работает при постоянном потоке возбуждения или асинхронный электродвигатель с контактными кольцами или короткозамкнутым ротором имеет редкие пуски, то можно принять, что вращающий момент двигателя пропорционален силе тока, т. е. [c.71]
Рс. 58. Схема управления пуском электродвигателя постоянного тока с последовательным возбуждением в функции времени [c.121]
Схема управления пуском электродвигателя постоянного тока с последовательным возбуждением в функции времени (рис. 58). Схема работает следующим образом. Включается рубильник Р, в результате чего напряжение подается в главную и вспомогательную цепи. При этом сразу включается катушка реле времени РВ1 и мгновенно размыкается его контакт РВ1. При нажатии кнопки Пуск включается катушка контактора К. Одновременно получают питание катушки реле времени РВ2 и РВЗ, размыкающие контакты которых мгновенно размыкаются. Замыкающий контакт контактора К шунтирует катушку реле времени РВ1, а его размыкающий контакт РВ1 в цепи катушки У1 замыкается с выдержкой времени, соответствующей времени спада пусковой силы тока [c.121]
Привод осуществляется электродвигателем постоянного тока 110 в. Выпрямление переменного тока производится селеновыми выпрямителями 2ВС и ЗВС. Регулирование числа оборотов электродвигателя осуществляется регулятором напряжения PH. Включение электродвигателя производится кнопкой 1КУ Пуск . [c.126]
Индивидуальная система маслоснабжения (рис. 25) предназначена для смазки подшипников газоперекачивающего агрегата и создания герметичных уплотнений нагнетателя, а также для смазки систем гидравлического уплотнения и регулирования установки [11]. Масляная система состоит из маслобака, пускового 3 и резервного 4 масляных насосов, инжекторных насосов 5, 6. Подачу масла к деталям обеспечивает главный масляный насос /, во время пуска и остановки — пусковой масляный насос 3. Через сдвоенный обратный клапан 2 часть масла поступает к инжекторному насосу 5 для создания подпора во всасывающем патрубке главного масляного насоса и обеспечения его надежной работы, а часть масла — к инжекторному насосу 6 для подачи масла под давлением 0,02—0,08 МПа на смазку подшипников агрегата и зацепления редуктора. Масло после насосов подается в гидродинамическую систему регулирования агрегата, давление в которой поддерживает регулятор 9. Часть масла после регулятора, пройдя три маслоохладителя 10, подается на смазку ради ьно-упорного подшипника нагнетателя. При аварийном снижении давления в системе смазки установлены два резервных насоса 4 и 7 с электродвигателями постоянного тока. Причем насос 4 подключен к маслопроводу смазки турбин, компрессора и редуктора, а насос 7 — к линии смазки радиально-упорного подшипника. В системе маслоснабжения имеется специальный центробежный насос — импеллер 12, служащий для выдачи импульсов гидродинамическому регулятору скорости при изменении частоты вращения вала турбины низкого давления. Частота вращения импел- [c.114]
Переменного тока короткозамкнутый с прямым пуском и с двойной беличьей клеткой электродвигатель постоянного тока сериесный одноцилгш-дровый двигатель внутреннего сгорания [c.500]
Резервный возбудитель генераторов паровой и газовой турбин при пуске установки используется как генератор постоянного тока для разгонного электродвигателя газовой турбины. Нормально разгонный двигатель газовой турбины работает как основной возбудитель генератора. Трехмашинный агрегат состоит из генератора постоянного тока компаундного типа, питающего цепь напряжения 220 в, и электродвигателя переменного тока напряжением 0,380 кв, который приводит во вращение генератор постоянного тока. На этом же валу установлен электродвигатель постоянного тока ПО в, питающийся от стационарной аккумуляторной батареи. В случае исчезновения напряжения 0,380 кв автоматически включается двигатель постоянного тока ПО в, благодаря чему питание цепей постоянного тока 220 в не прекращается. [c.80]
Для пуска двигателя необходимо провернуть его коленчатый вал, чтобы обеспечить вспышку рабочей смеси в одном из цилиндров. На л овременных автомобилях для провертывания коленчатого вала двигателя при пуске используют электродвигатели постоянного тока — стартеры. Особенность стартера по сравнению с генератором состоит в том, что его обмотка возбуждения соединена последовательно с об- [c.120]
Стартер служит для пуска двигателя. Он представляет собой электродвигатель постоянного тока с последовательным возбуждением. На автобусах ЛиАЗ-677, ЛАЗ-695Е и ЛАЗ-695М устанавливают стартеры марки СТ 130 мощностью 1,5 л.5. Стартерная установка состоит йз трех частей стартера, дистанционного привода и привода включения стартера с венцом маховика. [c.74]
На рис. 32 изображен стартер СТЮЗ, применяемый для пуска четырехтактных дизельных двигателей ЯМЗ. Как и все стартеры, он состоит из электродвигателя постоянного тока и сцепляющего механизма. [c.115]
Стартеры. Для стартеров применяют четырехполюсные электродвигатели постоянного тока с последовательн ым возбуждением, так как при полном торможении они развивают большой крутящий момент, необходимый для пуска двигателя. Конструкция электродвигателя стартера имеет много общего с генератором, но в связи с большим потребляемым током обмотки стартера и пластины его коллектора делаются толще, чем у генератора, а щетки имеют более высокое содержание меди. [c.123]
Указанным требованиям наиболее полно удовлетворяет система электростартерного пуска, которая применяется на всех отечественных автомобилях. Эта система компактна, надежна в работе и обеспечивает возможность автоматизации процесса пуска двигателя с помощью электротехнических и электронных устройств. Источником энергии в системах электростартерного пуска является аккумуляторная батарея, поэтому в электростартерах используют электродвигатели постоянного тока. Характеристики стартерного электропривода постоянного тока хорошо согласуются со сложным характером нагрузки, создаваемой поршневым двигателем при пуске. [c.52]
Пусковые и пускорегулировочные реостаты серии РП предназначены для пуска и регулирования частоты вращения электродвигателей постоянного тока с параллельным и смешанным возбуждением. Их изготовляют в нормальном и в морском исполнениях. [c.106]
Управление в функции силы тока основано на изменении силы тока при пуске электродвигателей. Узел схемы управления автоматическим пуском электродвигателя постоянного тока последовательного возбуждения в функции тока показан на рис. 51. В схеме применено токовое реле РУ с размыкающими контактами. При включении линейного контактора Л ток проходит по якорной обмотке, обмотке возбунедения ОВ, по катушке токового реле РУ и по резистору Я1. Ввиду того, что сила тока уставки реле РУ меньше пусковой силы тока, реле срабатывает и размыкает свои размыкающие контакты реле РУ в цепи катушки контактора У. Одновременно с включением контактора Л возбуждается катуш- [c.112]
Электродвигатель — линейные асинхронные двигатели
Линейный асинхронный двигатель обеспечивает линейную силу и движение, а не вращающий момент . Форму и работу линейного асинхронного двигателя можно визуализировать, как показано на рисунке , сделав радиальный разрез во вращающейся асинхронной машине и расплющив его. В результате получается плоский «статор» или верхняя часть из металлических пластин, несущих трехфазную многополюсную обмотку с проводниками, перпендикулярными направлению движения. «Ротор» или нижняя секция может состоять из пластин железа и обмотки с короткозамкнутым ротором, но чаще всего состоит из непрерывного медного или алюминиевого листа, размещенного на твердой или ламинированной железной основе.
Эволюция линейного асинхронного двигателя Четырехполюсный асинхронный двигатель показан (вверху) как открытый и (внизу) сплющенный (см. Текст).
Британская энциклопедия, Inc.Одно применение линейных двигателей находится в скоростной транспорт для общественного транспорта . «Статор» находится на нижней стороне транспортного средства, а «ротор» расположен между рельсами на рельсах. Преимущество этого типа силовой установки заключается в том, что высокое ускорение и торможение могут быть получены независимо от сцепления стальных колес со стальными рельсами при наличии дождя, льда или крутых склонов.
Электроэнергия подается в такое скоростное транспортное средство через скользящие соединения с рельсом под напряжением или воздушным проводом. Для обеспечения контроля скорости и торможения электронный преобразователь мощности на борту транспортного средства выдает трехфазный выходной сигнал с желаемым напряжением и частотой.
В альтернативном устройстве для приведения в движение транспортного средства медные и железные листы фигуры могут быть размещены на нижней стороне транспортного средства, а секции статора могут быть размещены с интервалами вдоль пути. Это имеет то преимущество, что не требуется подавать электроэнергию на само транспортное средство.
Линейные асинхронные двигатели также используются для привода конвейеров, раздвижных дверей, текстильных челноков и станков. Их преимущество в том, что не требуется никакого физического контакта, что сводит к минимуму износ и техническое обслуживание. В другом варианте линейные двигатели используются в качестве электромагнитных насосов, в которых ротор состоит из проводящей жидкости, такой как жидкий металл (например, ртуть или натрий-калиевый сплав).
Эффективность линейных двигателей несколько меньше , чем у вращающихся двигателей из — за конечные эффекты. Его «ротор» должен быть намагничен, поскольку он находится под «статором». Это снижает эффективность первых одно- или двухполюсных пролетов. Входной ток также относительно высок, поскольку воздушный зазор обычно больше, чем во вращающихся машинах, и для создания магнитного поля через него требуется больший ток .
Асинхронные двигатели для регулирования скорости и положения
При питании с постоянной частотой асинхронный двигатель по сути является приводом с почти постоянной скоростью. Однако асинхронные двигатели могут использоваться для обеспечения точного управления скоростью и положением в любом направлении вращения за счет использования трехфазного источника питания с регулируемым напряжением и регулируемой частотой. Это производится с помощью электронногоинвертор. С помощью полупроводниковых переключателей электроснабжение преобразуется в набор из трех почти синусоидальных входов контролируемого напряжения и частоты для обмоток статора. Тогда скорость двигателя приблизится к синхронному значению 120 f / p оборотов в минуту при контролируемой частоте f циклов в секунду. Изменение чередования фаз с a b c на a c b меняет направление крутящего момента. Для точного контроля скорости или положения скорость вала можно контролировать с помощью тахометра.или датчик положения и сравнивается с сигналом, представляющим желаемое значение. Затем разница используется для управления частотой инвертора. Как правило, напряжение напрямую зависит от частоты, чтобы величина магнитного поля оставалась постоянной.
12 Разница между двухполюсными двигателями и четырехполюсными двигателями
Электродвигатель — это электрическая машина, преобразующая электрическая энергия в механическую энергию. Большинство электродвигателей работают через взаимодействие между магнитным полем двигателя и электрическим током в обмотка проволоки для создания силы в виде вращения вала. Электродвигатели можно классифицировать по такие соображения, как тип источника питания, внутренняя конструкция, применение и тип вывода движения.
Число полюсов — это фактор, определяющий синхронная скорость асинхронного двигателя. 4-полюсный двигатель в 4 магнитных полюсов на роторе и количество связанных электромагнитных обмоток (схемы).
4-полюсный двигатель имеет крутящий момент примерно 3,0 фунт-сила-футов на каждую лошадиную силу. тогда как двухполюсный двигатель имеет крутящий момент 1,5 фунт-сила-футов. При 60 Гц 4-полюсный двигатель около 1800 об / мин, где 2-полюсный двигатель — 3600 об / мин. Таким образом, 4-полюсный двигатель обеспечивает более высокий КПД и крутящий момент на единицу объема и веса.
Двухполюсные двигатели
Двухполюсный двигатель — это двигатель с двумя магнитными полюсами. или пара магнитных полюсов с конфигурацией север-юг. 2-полюсный двигатель потребляет меньше энергии, имеет больше оборотов в минуту, хорошие шумовые характеристики и меньшая производительность труда. Этот тип двигателя неэффективен для большой мощности. Приложения.
Что вам нужно Знайте о 2-полюсном двигателе
- 2-полюсный двигатель — это двигатель с двумя магнитные полюса или пара магнитных полюсов.
- Ротор двухполюсного двигателя совершает один цикл для каждого цикла источника.
- Двухполюсный двигатель показывает направление север-юг. конфигурация.
- 2-полюсный двигатель имеет высокую скорость из-за меньшего количества полюсов.
- 2-полюсный двигатель требует меньше времени для тренировки по сравнению с 4-х полюсный двигатель.
- 2-полюсный двигатель имеет хорошие шумовые характеристики.
- 2-полюсный двигатель цилиндрической формы.
- Двухполюсный двигатель имеет большее количество оборотов в минуту.
- Коробка передач ниже 3000 об / мин всегда требуется для 2 полюсный двигатель.
- Двухполюсный двигатель имеет более высокое значение NPSHR.
- 2-полюсный двигатель не подходит для большой мощности.
- 2-полюсный двигатель более эффективен.
4-полюсные двигатели
4-полюсный двигатель — это двигатель с 4 или двумя магнитными полюсами. пары магнитных полюсов с конфигурацией север-юг-север-юг. 4 полюса двигатель потребляет больше энергии, имеет меньше оборотов в минуту и выдает больше крутящий момент на лошадиную силу и мощность работы. Этот тип двигателя подходит для приложений большой мощности.
Что нужно знать о 4-полюсном двигателе
- 4-полюсный двигатель — это двигатель с 4-мя магнитными полюса или две пары магнитных полюсов.
- 4-полюсный двигатель выполняет только половину цикла для каждый цикл источника.
- 4-х полюсный мотор показывает север-юг-север-юг конфигурация.
- 4-полюсный двигатель имеет низкую скорость из-за большего количества полюсов.
- 4-полюсный двигатель имеет двойную рабочую мощность, чем 2-х полюсный двигатель.
- 4-полюсный двигатель не обладает хорошими шумовыми характеристиками.
- 4-полюсный двигатель не цилиндрический.
- У 4-полюсного двигателя меньше оборотов в минуту.
- Обычно нет необходимости в коробке передач в 4 полюсный двигатель.
- 4-полюсный двигатель имеет низкое значение NPSHR.
- 4-х полюсный двигатель подходит для большой мощности.
- 4-полюсный двигатель менее эффективен.
Также читайте: Разница между шаговым двигателем и серводвигателем
Разница Между двухполюсными двигателями и четырехполюсными двигателями в табличной форме
| ОСНОВА СРАВНЕНИЯ | 2-ПОЛЮСНЫЙ ДВИГАТЕЛЬ | 4-ПОЛЮСНЫЙ ДВИГАТЕЛЬ |
| Описание | 2-полюсный двигатель — это тип двигателя, который имеет два магнитных полюса или пару магнитного полюса. | 4-полюсный двигатель — это двигатель с 4 магнитными полюсами или двумя парами магнитных полюсов. магнитные полюса. |
| Количество циклов для каждого Цикл ресурса | Ротор двухполюсного двигателя совершает один цикл за каждый цикл источник. | 4-полюсный двигатель выполняет только половину цикла за каждый цикл источник. |
| Конфигурация | Двухполюсный двигатель показывает конфигурацию север-юг. | 4-полюсный двигатель показывает конфигурацию север-юг-север-юг. |
| Скорость | 2-полюсный двигатель имеет высокую скорость из-за меньшего количества полюсов. | 4-полюсный двигатель имеет низкую скорость из-за большего количества полюсов. |
| Производительность | 2-полюсный двигатель требует меньше усилий по сравнению с 4-полюсным двигателем. | 4-полюсный двигатель имеет двойную рабочую мощность, чем 2-полюсный двигатель. |
| Шумовые характеристики | 2-полюсный двигатель имеет хорошие шумовые характеристики. | 4-полюсный двигатель не обладает хорошими шумовыми характеристиками. |
| Форма | Двухполюсный двигатель имеет цилиндрическую форму. | 4-полюсный двигатель не цилиндрический. |
| об / мин | У 2-полюсного двигателя больше оборотов в минуту. | У 4-полюсного двигателя меньше оборотов в минуту. |
| Коробка передач | Для 2-полюсного двигателя всегда требуется редуктор со скоростью ниже 3000 об / мин. | Как правило, в 4-полюсном двигателе нет необходимости в редукторе. |
| НПШР | Двухполюсный двигатель имеет более высокое значение NPSHR. | 4-полюсный двигатель имеет низкое значение NPSHR. |
| Пригодность | Двухполюсный двигатель не подходит для большой мощности. | 4-полюсный двигатель подходит для большой мощности. |
| КПД | 2-полюсный двигатель более эффективен. | 4-полюсный двигатель менее эффективен. |
— разница Wiki
РЕКЛАМА
ПРОДОЛЖИТЬ ЧТЕНИЕ НИЖЕ
Основная разница между
Двухполюсные двигатели и 4-полюсные двигатели — это то, что двухполюсные двигатели имеют одну пару магнитных полюсов, тогда как четырехполюсные двигатели имеют две пары магнитных полюсов.
2-полюсные двигатели v
s. 4-полюсные двигателиДвигатель — это устройство, которое преобразует электрическую энергию в механическую в виде крутящего момента, передаваемого через вал. Он работает по принципу электромагнитной индукции, определенному Майклом Фарадеем. Существуют различные типы двигателей, например, двухполюсные двигатели, четырехполюсные двигатели и т. Д.
Двухполюсный двигатель — это тип двигателя, который имеет два магнитных полюса или пару магнитных полюсов, то есть северный и южный. С другой стороны, 4-полюсный двигатель — это двигатель с двумя парами магнитных полюсов, расположенных в чередующемся порядке, т.е.е. север-юг-север-юг.
РЕКЛАМА
ПРОДОЛЖАЙТЕ ЧТЕНИЕ НИЖЕ
Число полюсов обратно пропорционально скорости, т.е. чем больше число полюсов, тем меньше скорость двигателя. Таким образом, 2-полюсный двигатель имеет большую скорость, чем 4-полюсный. Но для большой мощности 4-полюсный двигатель лучше, чем 2-полюсный. Для 2-полюсного двигателя всегда требуется редуктор со скоростью ниже 3000 об / мин. С другой стороны, как правило, в 4-полюсном двигателе нет необходимости в редукторе.
Четырехполюсный двигатель имеет двойную рабочую мощность, чем двухполюсный двигатель.Ротор двухполюсного двигателя выполняет один цикл для каждого цикла источника. С другой стороны, ротор 4-полюсного двигателя завершает только половину цикла для каждого отдельного цикла источника.
Сравнительная таблица
| Двухполюсные двигатели | Четырехполюсные двигатели |
| Тип двигателя, который имеет два магнитных полюса или пару магнитных полюсов, известен как двухполюсный двигатель. | Тип двигателя с 4 магнитными полюсами или двумя парами магнитных полюсов известен как 4-полюсный электродвигатель. |
| Конфигурация | |
| Двухполюсный двигатель показывает конфигурацию север-юг. | 4-полюсный двигатель с конфигурацией север-юг-север-юг. |
| Скорость | |
| Двухполюсный двигатель имеет высокую скорость из-за меньшего количества полюсов. | 4-полюсный двигатель имеет низкую скорость из-за большего количества полюсов. |
| КПД | |
| Двухполюсный двигатель более эффективен. | 4-х полюсный двигатель менее эффективен. |
| Оборотов в минуту (об / мин) | |
| 2-полюсный двигатель имеет большее значение частоты вращения. | У 4-х полюсного двигателя меньше оборотов в минуту. |
| Для большой мощности | |
| Двухполюсный двигатель не подходит для большой мощности. | Для большой мощности лучше всего подходит 4-полюсный двигатель. |
| Коробка передач | |
| Коробка передач ниже 3000 об / мин всегда требуется для 2-полюсного двигателя. | Как правило, в 4-полюсном двигателе нет необходимости в редукторе. |
| Завершение цикла | |
| Ротор двухполюсного двигателя завершает один цикл для каждого цикла источника. | Ротор 4-полюсного двигателя завершает только половину цикла для каждого отдельного цикла источника. |
| Производительность | |
| Двухполюсный двигатель имеет меньшую производительность. | Четырехполюсный двигатель имеет двойную рабочую мощность, чем двухполюсный двигатель. |
| NPSHR | |
| Двухполюсный двигатель имеет более высокое значение NPSHR. | 4-полюсный двигатель имеет низкое значение NPSHR. |
| Энергопотребление | |
| Двухполюсный двигатель потребляет меньше энергии. | 4-полюсный двигатель потребляет вдвое больше энергии, чем 2-полюсный. |
| Форма | |
| 2-полюсный двигатель цилиндрической формы. | 4-полюсный двигатель не цилиндрический. |
| Крутящий момент | |
| 2-полюсные двигатели имеют крутящий момент 1,5 фунт-фут на каждую лошадиную силу. | 4-полюсные двигатели имеют крутящий момент 3,0 фунт-сила-футов на каждую лошадиную силу. |
| Шумовые характеристики | |
| 2-полюсный двигатель имеет хорошие шумовые характеристики. | 4-полюсный двигатель не очень шумит. |
Что такое двухполюсные двигатели
?Двухполюсный двигатель — это двигатель с двумя магнитными полюсами или парой магнитных полюсов.Он показывает конфигурацию север-юг. Двухполюсный двигатель более эффективен с высокой скоростью и большим числом оборотов в минуту. При 60 Гц двухполюсный двигатель имеет 3600 об / мин. Но он обеспечивает низкий крутящий момент, то есть 1,5 фунт-фут крутящего момента на каждую лошадиную силу. Кроме того, он потребляет меньше энергии и снижает производительность. Этот тип двигателя не подходит для большой мощности.
Что такое 4-полюсные двигатели
?4-полюсный двигатель — это двигатель с 4 магнитными полюсами или двумя парами магнитных полюсов. Он показывает конфигурацию север-юг-север-юг.4-полюсный двигатель менее эффективен, имеет меньшую скорость и меньшее количество оборотов в минуту. Он показывает 1800 об / мин при 60 Гц. Но он обеспечивает больший крутящий момент, то есть 3,0 фунт-фут крутящего момента на каждую лошадиную силу. Он потребляет больше энергии и работает вдвое больше, чем двухполюсный двигатель. Этот тип двигателя хорош для большой мощности.
Ключевые отличия
- Тип двигателя, который имеет два магнитных полюса или пару магнитных полюсов, известен как двухполюсный двигатель, тогда как тип двигателя с 4 магнитными полюсами или двумя парами магнитных полюсов известен как четырехполюсный двигатель. полюсный двигатель.
- Двухполюсный двигатель с конфигурацией север-юг; с другой стороны, 4-полюсный двигатель показывает конфигурацию север-юг-север-юг.
- Двухполюсный двигатель имеет высокую скорость из-за меньшего количества полюсов. И наоборот, 4-полюсный двигатель имеет низкую скорость из-за большего количества полюсов.
- Двухполюсный двигатель, с другой стороны, более эффективен, а четырехполюсный двигатель менее эффективен.
- 2-полюсный двигатель имеет большее значение частоты вращения; с другой стороны, 4-х полюсный двигатель имеет меньше оборотов в минуту.
- Двухполюсный двигатель не подходит для большой мощности, тогда как для большой мощности лучше всего подходит четырехполюсный двигатель.
- Коробка передач ниже 3000 об / мин всегда требуется для 2-полюсного двигателя; с другой стороны, в 4-полюсном двигателе, как правило, нет необходимости в редукторе.
- Ротор 2-полюсного двигателя завершает один цикл для каждого цикла источника, тогда как ротор 4-полюсного двигателя завершает только полупериод для каждого отдельного цикла источника.
- Двухполюсный двигатель имеет меньшую рабочую мощность, с другой стороны, четырехполюсный двигатель имеет двойную рабочую мощность, чем двухполюсный двигатель.
- 2-полюсный двигатель имеет более высокое значение NPSHR, а 4-полюсный двигатель — низкое значение NPSHR.
- 2-полюсный двигатель потребляет меньше энергии. И наоборот, 4-полюсный двигатель потребляет вдвое больше энергии, чем 2-полюсный.
- Двигатель двухполюсный, цилиндрической формы; с другой стороны, 4-полюсный двигатель не является цилиндрическим.
- 2-полюсные двигатели имеют крутящий момент 1,5 фунт-фут на каждую лошадиную силу, тогда как 4-полюсный двигатель имеет крутящий момент 3,0 фунт-фут на каждую лошадиную силу.
- 2-полюсный двигатель имеет хорошие шумовые характеристики, тогда как 4-полюсный электродвигатель не обладает хорошими шумовыми характеристиками.
Видео для сравнения
Заключение
Вышеупомянутое обсуждение резюмирует, что двухполюсный двигатель является более эффективным и высокоскоростным двигателем с меньшей производительностью.С другой стороны, 4-полюсный двигатель — менее эффективный двигатель с меньшей скоростью, но с большей производительностью.
Pole Motor — обзор
9.4.4 Двигатель с явным полюсом
Моделирование двигателя с явным полюсом основано на эквивалентной схеме, аналогичной схеме для двигателя с гладким ротором на рис. 9.14, с наведенной э.д.с. E из-за возбуждения ротора. Но из-за значимости и, как следствие, реактивного компонента крутящего момента, одиночное синхронное реактивное сопротивление (X s ) должно быть подразделено на реактивное сопротивление прямой оси (X d ) и реактивное сопротивление квадратурной оси (X q ). ).Эти реактивные сопротивления такие же, как мы обсуждали в предыдущем разделе.
Временная векторная диаграмма представляет собой комбинацию диаграмм, показанных на рис. 9.16 и 9.17, и снова сопротивление игнорировалось. Построение диаграммы включает в себя разделение тока на компоненты прямой и квадратурной оси, прежде чем реактивное напряжение упадет, можно будет идентифицировать I d X d и I q X q . Мы не будем вдаваться в подробности, но типичные векторные диаграммы для пере- и недовозбужденных состояний показаны на рис.9.18A и B, соответственно, оба эскиза относятся к одной и той же выходной мощности или крутящему моменту.
Рис. 9.18. Временные векторные диаграммы для роторного двигателя с явнополюсным возбуждением.
В случае перезарядки ток является опережающим, т.е. запаздывающие Vars экспортируются, тогда как в случае недовозбуждения требуются дополнительные запаздывающие Vars, чтобы дополнить возбуждение, обеспечиваемое током ротора.
Мощность и крутящий момент могут быть получены из рис. 9.18 в терминах контролируемых переменных (V, E и крутящий момент нагрузки), но в длительных манипуляциях нет необходимости, и мы просто процитируем хорошо известный результат, что крутящий момент равен задается выражением
T∝EVXdsinδ + V22XdXqXd − Xqsin2δ.
Первый член такой же, как для машины с круглым ротором, которую мы видели ранее, но с X d вместо X, а второй член такой же, как мы нашли для реактивного двигателя. Мы отмечаем, что даже когда возбуждение ротора равно нулю (т.е. E = 0), двигатель с явным полюсом может создавать крутящий момент только за счет действия реактивного сопротивления, но, разумеется, крутящий момент сопротивления зависит от степени выраженности: двигатель с ротором например, на рис. 9.2A, может создавать 5% своего крутящего момента за счет действия сопротивления, тогда как член сопротивления для типа ротора на рис.9.3B легко может внести 30% или более.
В чем разница? — Diffzi
Поскольку двигатели используют электрическую энергию и преобразуют ее в механическую энергию. 2-полюсные и 4-полюсные двигатели различаются между собой. Для 2-полюсного электрического угла равен механическому углу, тогда как для 4-х полюсов электрический угол вдвое больше, чем механический угол.
Реклама — продолжить чтение ниже
Число полюсов обратно пропорционально скорости, поэтому всякий раз, когда скорость увеличивается, количество полюсов уменьшается, а увеличение числа полюсов снижает скорость.Подобным образом можно увидеть двухполюсный двигатель и четырехполюсный двигатель. Полюсы — это набор трехсторонних электромагнитных обмоток, которыми обладает двигатель. В простейшем трехфазном двигателе вы обнаружите три независимых электромагнита, созданных с помощью единого набора трехходовых обмоток. Таким образом, существует набор электромагнитных полюсов Север-Юг. Утверждается, что у этого типа двигателя «2 полюса»
Разница между двухполюсными и четырехполюсными двигателями
Что такое двухполюсный двигатель?
Электродвигатель — это машина с электрическим приводом, которая преобразует электрическую мощность непосредственно в механическую.При типичной работе двигателя большинство двигателей с электрическим приводом работают с соединением между магнитным полем двигателя с электрическим приводом, а также токами обмотки для создания энергии внутри двигателя. Двухполюсный двигатель имеет два электромагнита, которые находятся на севере и юге.
Реклама — продолжить чтение ниже
Что такое 4-полюсный двигатель?
Большие электродвигатели (обычно мощностью более 7 МВт) доступны как в 4-полюсных, так и 2-полюсных моделях.4-полюсные синхронные электродвигатели и генераторы обладают прочными роторами с выступающими полюсами, в то время как 4-полюсные асинхронные электродвигатели и генераторы имеют роторы с короткозамкнутым ротором. I. 4-полюсные двигатели и генераторы легче и меньше по размеру по сравнению с их конкретными 2-полюсными аналогами, что может стать ключевым моментом программ именно там, где область ограничена, например, на море.
Ключевые различия между двухполюсными двигателями и четырехполюсными двигателями
- Двухполюсный двигатель имеет два электромагнита, 1 северный, 1 южный.тогда как в Четырех полюсах есть четыре электромагнита, 2 северных, 2 южных Двухполюсные двигатели
- имеют конфигурацию север-юг, тогда как четырехполюсные двигатели имеют конфигурацию север-юг-север-юг.
- 2-полюсный электродвигатель лучше по КПД, чем 4-полюсный электродвигатель
- 2-полюсный двигатель лучше, чем 4-полюсный двигатель
- Для большей мощности 4 полюса лучше, чем 2 полюса
- Для высоких скоростей 2-полюсный электродвигатель лучше, чем 4-полюсный электродвигатель
- В четырехполюсном двигателе редуктор часто требуется, но в двухполюсном двигателе редуктор всегда необходим ниже 3000 об / мин
- 2-полюсный двигатель имеет более высокое значение NPSHR по сравнению с 4-полюсным двигателем. Двухполюсные двигатели
- имеют цилиндрическую форму, тогда как четырехполюсные двигатели — нет.
- В двухполюсном двигателе доступ к охлаждающему воздуху меньше, тогда как в четырехполюсном двигателе симметричное охлаждение с надлежащим контролем горячих точек благодаря его конструкции.
- 2-полюсный двигатель имеет лучшие шумовые характеристики по сравнению с 4-полюсным двигателем.
Реклама — продолжить чтение ниже
Описание видео
Реклама — продолжить чтение ниже
Двухполюсные и четырехполюсные двигатели
Мотор шлифовального станка: 2 полюса vs.4 полюса
Скорость двигателя
Асинхронные двигатели переменного тока предназначены для работы с определенной скоростью. Число полюсов или обмоток двигателя и частота питания, скажем 60 Гц, определяют скорость. Обычные асинхронные двигатели имеют 2, 4 или 6 полюсов. Что касается скорости, больше полюсов — меньше. Чем больше у двигателя полюсов, тем медленнее он работает. Еще один фактор, который напрямую влияет на скорость двигателя, — это частота напряжения, к которому вы его подключаете. Большинство двигателей, изготовленных для Северной Америки, работают на частоте 60 Гц (Гц), в то время как остальной мир работает на частоте 50 Гц и 60 Гц. Формула для определения скорости двигателя:
об / мин = 120 * f / количество полюсов
120 * 60 = 7200
7200/2 = 3600 об / мин
Это называется синхронной скоростью.
Когда двигатель находится под напряжением, он быстро набирает рабочую скорость, которая чуть ниже синхронной скорости. Интересно отметить, что двигатель не может работать с синхронной скоростью, всегда требуется отставание от частоты питания. Это отставание называется проскальзыванием. Двигатель проскальзывает дальше по мере загрузки.Вот почему скорость, указанная на паспортной табличке, составляет 3450 об / мин или 1725 об / мин. Эти номинальные обороты соответствуют полной нагрузке двигателя.
Итак, теперь мы знаем скорость двигателя, давайте посмотрим на скорость ленты,
Скорость ленты Скорость ремня связана с числом оборотов в минуту, но учитывает диаметр колеса (колес), передающего мощность на ремень. Скорость ленты хороша тем, что она является абсолютным ориентиром, независимо от сложности диаметров, соотношений и двигателей.
Чтобы вычислить скорость ленты в футах на поверхности в минуту или SFM, мы возьмем число оборотов в минуту и диаметр ведущего колеса по следующей формуле:
SFM = RPM * pi * диаметр колеса / 12
В нашем примере мы будем использовать нагруженный двухполюсный двигатель (3450 об / мин) и ведущее колесо диаметром 5 дюймов.
SFM = (3450 * 3,141 * 5) / 12
SFM = 54182/12
SFM = 4515
Для преобразования в метры СИ в секунду умножьте SFM на 0,00508.м / сек = 4515 * 0,00508
м / сек = 22,94
Валы промежуточные Один из способов увеличить скорость ремня — добавить промежуточный или промежуточный вал со шкивами (шкивами) и ремень, который увеличит частоту вращения ведущего колеса. Если используются ступенчатые шкивы, как в большинстве сверлильных станков, можно реализовать множество скоростей.Как и во всем, есть компромиссы. Промежуточные валы отводят мощность от ремня и могут вызвать нежелательную вибрацию, если не сбалансированы правильно.
Если требуется регулирование скорости, рекомендуется использовать частотно-регулируемый привод с трехфазным двигателем с прямым приводом колеса.
Скорость ленты и абразивы
Покрытие, которое лента оставляет на стали, меняется в зависимости от скорости ленты. Более быстро движущийся ремень обеспечивает более чистую отделку. Основываясь на данных VSM Abrasives и Klingspor, я составил этот список рекомендуемых скоростей ленты для различных материалов.
Решение Решая, использовать ли более быстрый двухполюсный (3600 об / мин) или более медленный (1800 об / мин) двигатель, спросите себя, не будет ли стоимость ведущего колеса чрезмерной. По мере того, как колеса становятся больше, их цена становится значительно выше.
Обратитесь к таблице ниже, чтобы определить, какой размер ведущего колеса приведет к тому, что скорость вашей ленты будет соответствовать скорости ленты, рекомендованной производителем для материалов, которые вы хотите измельчить.
Разница между 2-х и 4-х полюсными двигателями
Автор: Admin
Двухполюсные и четырехполюсные двигатели
Двигатель — это электрическое устройство, которое преобразует электрическую энергию в механическую, в частности, в форме крутящего момента, передаваемого через вал.Двигатели работают по принципу электромагнитной индукции, описанному Майклом Фарадеем.
2-полюсный электродвигатель
Двигатель, имеющий два полюса (или одну пару магнитных полюсов северный и южный), называется двухполюсным двигателем. Часто обмотки статора имеют северный и южный полюса. Количество обмоток статора может давать любое разумное число полюсов от 2 до 12. Доступны двигатели с более чем 12 полюсами, но они не используются повсеместно.
Синхронные скорости двигателей напрямую зависят от количества полюсов, как указано в следующем выражении
Синхронная скорость двигателя = (120 × частота) / (количество полюсов)
Следовательно, скорость 2-полюсного двигателя, подключенного к основному источнику питания, имеет синхронную скорость 3000 об / мин.При номинальной нагрузке рабочие скорости могут снизиться примерно до 2900 об / мин из-за скольжения и нагрузки.
В двухполюсных двигателях ротор вращается на 1800 за половину цикла. Следовательно, за один цикл источника ротор делает один цикл. Количество потребляемой энергии в двухполюсных двигателях относительно невелико, и передаваемый крутящий момент также невелик.
4-полюсный двигатель
Двигатель, имеющий четыре полюса статора (или две пары магнитных полюсов) в чередующемся порядке; N> S> N> S.Синхронная скорость четырехполюсного двигателя, подключенного к сети, составляет 1500 об / мин, что вдвое меньше скорости двухполюсного двигателя. При номинальной нагрузке рабочие скорости могут снизиться до значения около 1450 об / мин.
В четырехполюсных двигателях ротор вращается на 900 за каждый полупериод. Следовательно, ротор выполняет 1 цикл на каждые два цикла источника. Следовательно, количество потребляемой энергии в два раза больше, чем у двухполюсного двигателя, и теоретически обеспечивает вдвое больший крутящий момент.
В чем разница между 2-полюсным электродвигателем и 4-полюсным электродвигателем?
2-полюсный двигатель имеет два полюса (или одну пару магнитных полюсов), в то время как 4-полюсные двигатели имеют четыре магнитных полюса в чередующемся порядке.
2-полюсные двигателиимеют в два раза большую скорость, чем 4-полюсные.
Ротор 2-полюсного двигателя выполняет один цикл для каждого цикла источника, в то время как ротор 4-полюсного двигателя выполняет только половину цикла для каждого отдельного цикла источника.
Следовательно, 4-полюсные двигатели потребляют в два раза больше энергии, чем 2-полюсные двигатели.
Теоретически 4-полюсные двигатели обеспечивают вдвое большую рабочую мощность, чем 2-полюсные двигатели.
Произошла ошибка
Повторите попытку позже или попробуйте нашу домашнюю страницу еще раз.
Bitte versuchen Sie es später oder schauen Sie ob die Homepage funktioniert.
Ошибка: E1020
Австралия Электронная почта
Максон Мотор Австралия Пти Лтд
Unit 1, 12-14 Beaumont Road
Гора Куринг-Гай Новый Южный Уэльс 2080
Австралия
Benelux Электронная почта
maxon motor benelux B.V.
Josink Kolkweg 38
7545 PR Enschede
Netherlands
China E-Mail
maxon motor (Suzhou) Co., Ltd
江兴东路1128号1号楼5楼
215200 江苏吴江
中国
Germany E-Mail
maxon motor gmbh
Truderinger Str. 210
81825 München
Deutschland
India E-Mail
maxon precision motor India Pvt.Ltd.
Niran Arcade, No. 563/564
New BEL Road,
RMV 2nd Stage
Bangalore – 560 094
India
Italy E-Mail
maxon motor italia S.r.l.
Società Unipersonale
Via Sirtori 35
20017 Rho MI
Italia
Japan E-Mail
マクソンジャパン株式会社
東京都新宿区新宿 5-1-15
〒 160-0022
日本
Korea E-Mail
㈜맥슨모터코리아
서울시 서초구
반포대로 14길 27, 한국 137-876
Portugal E-Mail
maxon motor ibérica s.а
C / Polo Norte № 9
28850 Торрехон-де-Ардос
Испания
Швейцария Электронная почта
максон мотор аг
Брюнигштрассе 220
Постфах 263
6072 Sachseln
Schweiz
Испания Электронная почта
maxon motor ibérica s.a. Испания (Барселона)
C / Polo Norte № 9
28850 Торрехон-де-Ардос
Испания
Тайвань Электронная почта
maxon motor Тайвань
8F.-8 №16, переулок 609 сек. 5
П. 5, Chongxin Rd.
Sanchong Dist.
Нью-Тайбэй 241
臺灣
Великобритания, Ирландия Электронная почта
максон мотор великобритания, лтд
Maxon House, Хогвуд-лейн,
Finchampstead
Беркшир, RG40 4QW
Соединенное Королевство
США (Восточное побережье) Электронная почта
maxon precision motors, inc.