Подключение шагового двигателя к Arduino через драйвер L298
На втором месте рейтинга двигателей для роботов после сервоприводов, которые мы уже рассматривали, стоят шаговые двигатели. Сегодня мы научимся управлять ими при помощи Arduino!
Кроме шагового двигателя (ШД) и Arduino нам потребуется ещё плата драйвера L298, которую можно приобрести у нас в магазине.
Шаговый двигатель позволяет точно спозиционировать вал, поворачивая его на небольшой угол. Один такой поворот зовётся шаг. Соответственно, одной из важных характеристик привода является количество шагов на оборот, то есть «разрешение» поворота.
ШД способен удерживать свою позицию даже в случае внешнего крутящего момента! Шаговые двигатели делятся на униполярные и биполярные. Мы будем использовать униполярный ШД, так как биполярный требует специальный драйвер для управления, тогда как униполярным можно легко управлять даже при помощи сборки транзисторов. Обратите внимание – биполярные ШД имеют 4 провода на выходе, униполярные – не 4 (5 или более).
Количество выводов зависит от количества обмоток в двигателе, чаще всего их 4 –поэтому 5 проводов (4 обмотки и общий). Управление униполярным двигателем, в теории, сводится к перебору обмоток (подачи поочерёдно логической единицы). Задержка между переключением обмотки определяет скорость и ускорение двигателя.
В отличие от приводов постоянного тока, на ШД нельзя вот так вот просто подать напряжение так, чтобы он крутился. Необходимо попеременно подавать напряжение на разные обмотки.
Но, так как ток двигателя явно больше, чем 20мА, которые может дать один пин микроконтроллера, то применяются различные драйверы, как и наш L298.
Для реализации проекта из этой статьи нам потребуются следующие компоненты:
Для управления шаговым двигателем сгодится любой контроллер Arduino, мы же используем Arduino UNO. От шаговика отходят две пары проводов и общий(GND). A, A+ подключаются к MA, MA+, также и B, B+ к MB, MB+.
Питание 12В подаётся на первый контакт разъёма питания, 5В – на второй, GND – на третий (см. фото ниже). Выводы IN1-IN4 подключаются по порядку к цифровым пинам с 8 по 11 – по ним передаются управляющие импульсы.
фото ниже). Выводы IN1-IN4 подключаются по порядку к цифровым пинам с 8 по 11 – по ним передаются управляющие импульсы.
После подключения надо загрузить в контроллер программу-пример stepper_oneRevolution из библиотеки Stepper (включена в комплект поставки). Можете добавить ее либо с этой страницы, либо найти в Файл Примеры Stepper stepper_oneRevolution
Шаговый двигатель для ардуино | Stepmotor
Чтобы организовать работу шагового двигателя или сервопривода по необходимому алгоритму: задать скорость, углы поворота, а также параметры вращения требуется использовать отдельную вычислительную платформу Arduino.
Что такое шаговый двигатель для ардуино
Arduino представляет собой готовую вычислительную платформу, выполненную в виде набора печатных плат и микроконтроллера, которая управляется программно. Скетчи или наброски (программы для Arduino) могут быть созданы на языке программирования C++ и закачаны на устройство через USB, Ethernet или RS232.
На сегодняшний день Arduino выпускается как оригинальной фирмой Arduino, так и фирмами-клонами, поскольку востребованность ардуино в мировом рынке крайне высока. В качестве аналогов выступают производители Microduino, IMUduino, Femtoduino и другие.
Выбираем шаговый двигатель для ардуино
Периферия ардуино поддерживает работы с шаговым или коллекторным двигателем. Диапазон мощностей силовых установок может колебаться до 12В, сила тока – до 2А на один канал. Дополнительная плата расширения позволяет осуществлять двухканальное управление направлением и скоростью вращения, при этом предельное напряжение может достигать 24В. Управлять большой нагрузкой можно при помощи специальных устройств расширения типа Motor Shield.
Сегодня шаговый двигатель для ардуино может быть гибридным, с отрицательным потенциалом, постоянного тока.
Для полноценной работы всей системы потребуется иметь следующий комплект оборудования:
- Силовая установка
- Плата ардуино
- Плата управления силовой установки
- Источник питания
Для начала работы системы необходимо собрать схему, загрузить рабочую программу на микроконтроллер и запустить ее. Важно помнить, что каждый шаговый двигатель для ардуино обладает отличительными техническими характеристиками, и использовать универсальную программу можно, но обязательно убедившись в ее адаптированности для данной силовой установки.
Основные правила подключения
Обращаем ваше внимание, что подключая шаговый двигатель к адуино, нужно обратить внимание базовые правила.
В первую очередь во время подачи питания нельзя отключать или подключать силовую установку. Библиотека для ардуино может быть расширена, это позволяет улучшить качество работы силовой установки: например, повысить КПД возможно путем снижения вибраций. Мощность адаптера имеет ключевое значение в работу системы.
Мощность адаптера имеет ключевое значение в работу системы.
Выбирая систему помните, что стоит заранее оценить требующийся ресурс жизни устройства. выбрав правильное решение, вы сможете сэкономить на покупке или ремонте вышедшего из строя, некорректно подобранного устройства.
Купить Шаговый двигатель для ардуино
Торговый Дом «Степмотор» занимается поставками систем промышленной автоматизации, шаговыми двигателями, мотор-редукторами и другими силовыми системами, а также системами позиционирования. Мы бесплатно подберем шаговый двигатель для ардуино по вашему техническому заданию, порекомендуем надежных производителей и поставим оборудование в срок.
Вы выбираете надежного партнера, с опытом работы в области промышленной автоматизации свыше 10 лет. Мы работаем как с оптовыми, так и с розничными заказами. Кроме того нам доверяют проекты Федерального уровня и государственных масштабов.
Позвоните нам или напишите на электронную почту [email protected], и мы проконсультируем вас по интересующей вас продукции в течение 15 минут (по рабочим дням).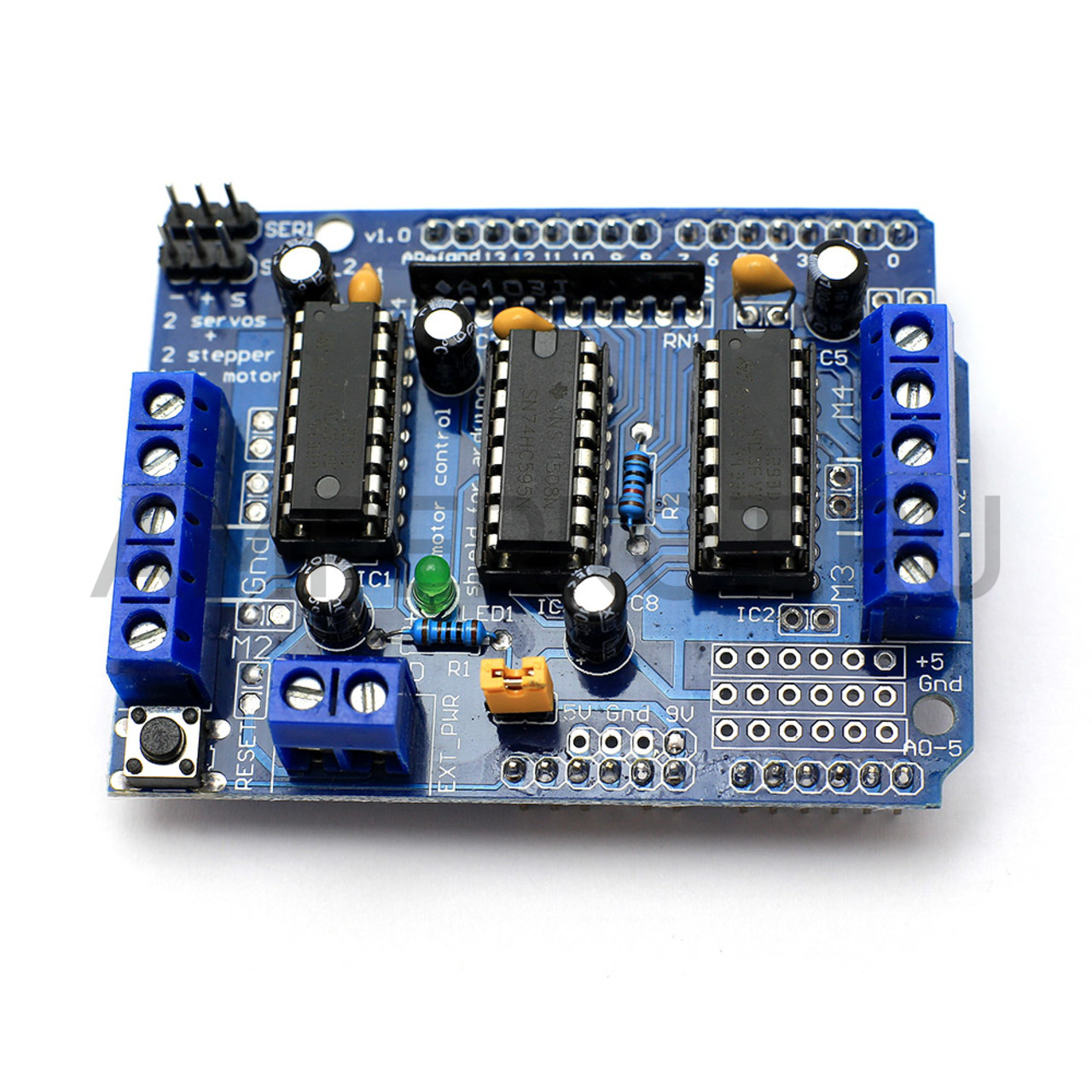
Неисправности частотного преобразователя. Ошибки частотника
Частотный преобразователь предназначен для плавного изменения скорости и момента, а также он помогает избавиться от пусковых токов. В процессе преобразования постоянного тока в переменный инвертор создает волны переменного тока (синусоидальной, квадратной или любой другой формы). Как всякий стабильный источник питания он должен оставаться способным поставлять достаточно тока для поддержания мощности системы.
Все производители стремятся уменьшить размеры приводов, а потому размещение компонентов и плат в устройстве всё более уплотняется. Это не остаётся бесследным и приводит в какой-то степени к отказам силового оборудования. Необходимо отметить, что ремонт частотников (Р4,0-7,5 кВт) практически нецелесообразен при выходе из строя управляющей части системы. Построение аппарата (свыше 100 кВт) по модульному принципу сильно упрощает функциональную схемуи увеличивает срок службы.
Главный фактор, определяющий срок службы частотника и его бесперебойную эксплуатацию, заключается в своевременных проверках иправильном обслуживании. Кроме всего прочего электронное устройство само по себе является достаточно сложным, поэтому при эксплуатации силового оборудования с ним возникают потенциальные проблемы.
Кроме всего прочего электронное устройство само по себе является достаточно сложным, поэтому при эксплуатации силового оборудования с ним возникают потенциальные проблемы.
Частотники являются очень чувствительной аппаратурой за счет высокого уровня исполнительских компонентов (если даже не вдаваться в технические детали). Наиболее распространенная проблема преобразовательных устройств — это программное обеспечение. Чем больше добавленных возможностей, тем вполне вероятнее могут возникнуть потенциальные проблемы.
Обычно, починка таких устройств для пользователя обходится довольно дорого. Поэтому некоторые неисправности можно устранить самостоятельно. На самом деле, нет ничего проще, чем взять в руки инструкцию «Коды ошибок преобразователей частоты OMRON» (название взято для примера), и расшифровать сигнализирующие записи с помощью таблицы предупреждений и ошибок. Рассмотрим наиболее распространенные из них.
Неполадки и пути их исправления
Система охлаждения на моделях особенно чувствительна. Можно сказать, это одна из болевых точек механизма. Для того, чтобы максимально увеличить срок эксплуатации частотника следует хотя бы один раз в месяц делать продувание(сжатым воздухом) радиатора охлаждения, расположенного сзади корпуса. Лучше будет, если продуть корпус целиком, ведьвнутри инвертора скапливается всегда очень много пыли.
Можно сказать, это одна из болевых точек механизма. Для того, чтобы максимально увеличить срок эксплуатации частотника следует хотя бы один раз в месяц делать продувание(сжатым воздухом) радиатора охлаждения, расположенного сзади корпуса. Лучше будет, если продуть корпус целиком, ведьвнутри инвертора скапливается всегда очень много пыли.
Продувание радиатора требуется, поскольку на нём крепится IGBT-ключ, через который осуществляется управление электрическим мотором. С выделением тепла радиатор капитально нагревается. Поломка может повлечь за собой перегорание полупроводникового прибора.
Часто на корпусе и радиаторе устанавливаются воздушные вентиляторы с принудительным охлаждением. Периодически их нужно проверять на работоспособность. В случае необходимой замены их несложно найти в продаже. В настоящее время ассортимент этой техники довольно широк и разнообразен.
Частый заряд и разряд, а также повышенная температура со временем приводят к старению электролитических конденсаторов частотника, что уменьшает их номинальную емкость или способствует возникновению внутренних межполюсных пробоев. В результате возможно вздутие или разрушение конденсаторов.
В результате возможно вздутие или разрушение конденсаторов.
Замена резистора
Регулирование преобразователем частоты может осуществляться как посредством контроллера, так и вручную. Зачастую в неисправное состояние приходит потенциометр (или по-другому резистор). Управлениепроисходит двумя способами:
- с внешнего потенциометра;
- с выносной панельки инвертора.
Для смены неисправного внешнего нужно переключить в настроечном меню частотного преобразователя на опцию регулировки с выносной панельки. Также возможно самому поменять резистор. Параметры резистора и все необходимые операции подробно описываются в инструкции к аппарату.
Сигнализация ошибок
Зачастую возникают предупреждения и ошибки на дисплее устройства при запуске, хотя до остановки их не было. Как правило, после проверки кабелей и протяжек клемм сигнализация об ошибках исчезает. На большинстве моделях это расшифровывается как ошибка при перегрузке. Если один раз в три месяца делать протяжку всех клеммных соединений, такие неприятные ситуации могут вообще не возникать.
Еще одним распространенным слабым местом является то, что при регулировке частотным преобразователем с внешней выносной панельки пропадает управление. Вопреки возникающему ощущению о неисправностивсего аппарата, если просто проверить присоединение кабеля и винтов штекера в разъеме, проблема устраняется.
Электродвигатель не трогается с места
Наиболее серьезная неисправность, требующая замены либо починки частотного преобразователя. При выдаче ошибки о том, что двигатель не трогается с места, могут быть две причины:
- выход из строя электромотора;
- повреждение системы управления. Здесь не обойтись без разборки инвертора и замены электронной платы.
Если самому это сделать сложно, необходимо проконсультироваться с авторизованным сервисным центром для лучшего результата (официального поставщика компании, в нашем случае, OMRON). Иногда бывает проще приобрести новый преобразователь частоты.
При любой неисправности, прежде всего, следует проверить работоспособность электрического мотора, целостность кабельной проводки и клеммных зажимов.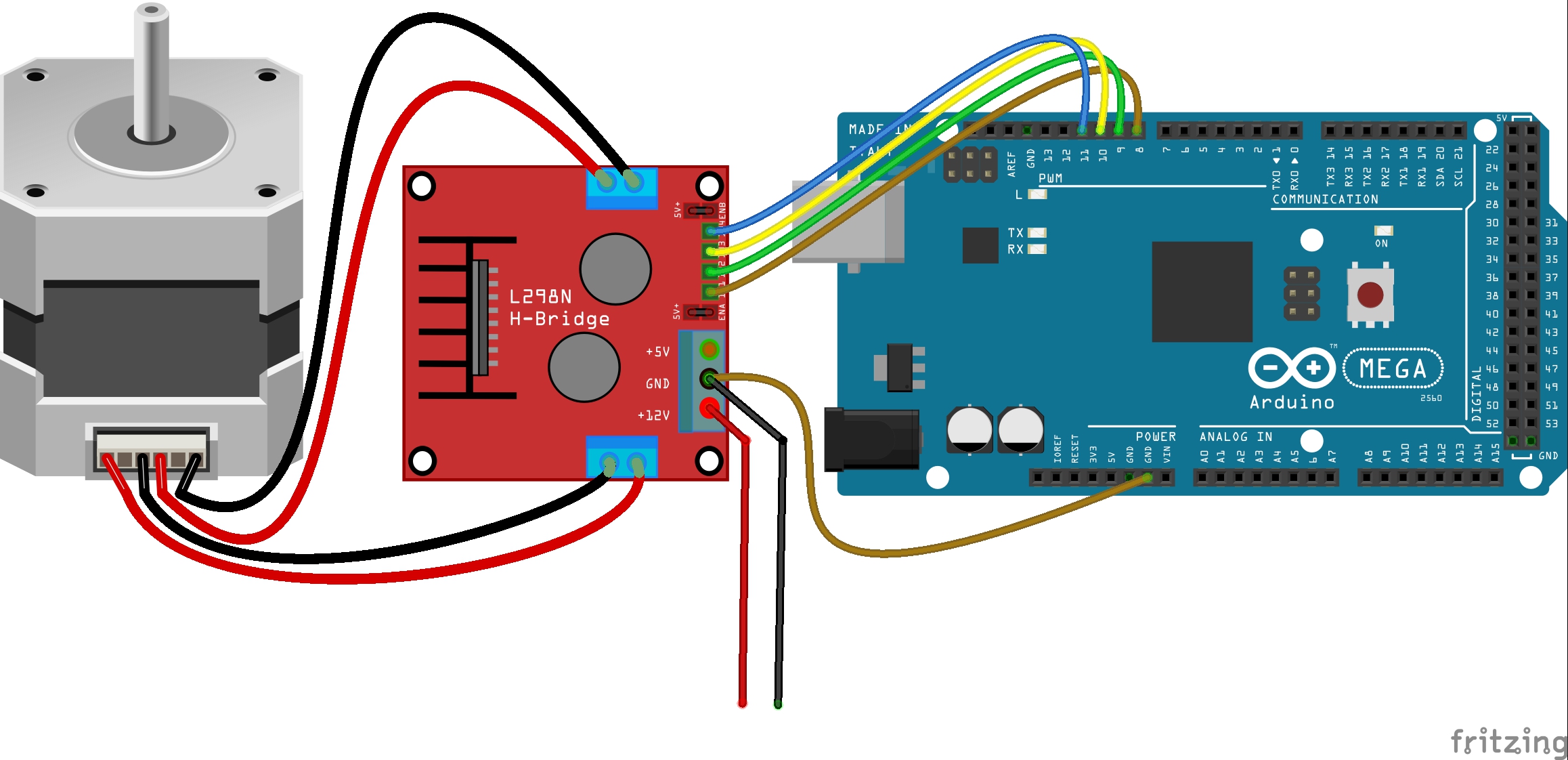 А уже после этого разбираться в самом устройстве. А также следует неукоснительно придерживаться правил техники безопасности и всегда помнить про профилактические работына протяжении всей жизнедеятельности аппарата.
А уже после этого разбираться в самом устройстве. А также следует неукоснительно придерживаться правил техники безопасности и всегда помнить про профилактические работына протяжении всей жизнедеятельности аппарата.
Ремонт частотных преобразователей – алгоритм мероприятий
Наладка преобразовательного устройства осуществляется с помощью применения высокочастотных осциллографов. Работу частотника проверяютв трёх возможных режимах, это:
- в номинальном режиме;
- на холостом ходу;
- при максимально допустимой перегрузке.
Невключение тиристоров (транзисторов) частника либо разрыв в силовой цепи определяется по форме выходного напряжения преобразователя. После чего в тиристорном блоке устанавливается выбранный по нужным параметрам тиристор на смену вышедшего из строя.
Ремонт
Наладка системы управления частотником выполняется путём подачи на него питающего напряжения без силового напряжения. Осциллограф позволяет проверить соответствие длительности импульсов, подаваемых на инвертор, указанной в паспорте. В случае искажения сигналов соответствующие элементы системы подвергаются снятию и замене.
В случае искажения сигналов соответствующие элементы системы подвергаются снятию и замене.
Для функционирования современных частотных преобразователей используются интегральные микросхемы. При ремонте и наладке систем помимо осциллографов и тестеров применяется специальная аппаратура.
После капитального ремонта аппарат следует включить в работу на холостом ходу. Затем, если все нормально, запустить инвертор с электродвигателем на холостом ходу, но без его нагрузки. В работе по такому режиму важно проверить отсутствие перегрева элементов привода. Завершающий контроль работы привода проводится при номинальном значении нагрузки двигателя.
После наладки техники иногда требуется прийти к определённому соотношению величин напряжения и частоты. При этом номинал частоты должен соответствовать номиналу напряжения. Для правильной настройки ЭДС следует выполнить такие операции как:
- измерение коэффициента трансформации трансформатора напряжения и активного сопротивления статора электродвигателя;
- расчёт падения напряжения, равного произведению величин активного сопротивления статора на номинальный ток двигателя, разделённому на коэффициент трансформации.
- в итоге, напряжение, снимаемое с отвода резистора, подсоединённого параллельно вторичной обмотке трансформатора, должно быть равным вычисленному значению.
Неисправность в силовой схеме может возникать в результате резких колебаний в системе инвертор—двигатель. Устранение подобных колебаний достигается регулированием резистора блока управления.
Ремонтировать самостоятельно или обратиться в сервис?
Периодическая проверка и техническое обслуживание помогут предотвратить ряд проблем, но, тем не менее преобразователи частоты выходят из строя, и этого нельзя избежать полностью. При серьёзной поломке требуется диагностика техники. Самым ответственным мероприятием считается поиск повреждённых деталей. Ведь случается, приходится искать плавающую неисправность, когда она возникает периодически при определенных условиях или просто хаотично.
В мастерской вам проведут квалифицированную диагностику, включающую в себя главным образом: считывание кодов ошибок, определение вышедших из строя узлов. Будьте готовы заплатить за ремонт.
Будьте готовы заплатить за ремонт.
Ремонт в мастерской – отличное решение, специалисты быстро определят слабые места, и дорогостоящий аппарат еще послужит вам не один год. Ведь бывают случаи, когда пользовательское вмешательство в устройство ухудшало состояние прибора и приводило к окончательной поломке.Если неприятность произошла в период гарантийного обслуживания, то однозначно за помощью лучше обратиться в сервис.
Управление двигателем на основе Arduino (топливо и зажигание): arduino
Итак, какое-то время я разрабатывал проект самостоятельной системы управления двигателем (EMS), призванной помочь людям понять концепции этих «черных ящиков». Это произошло потому, что я, казалось, разговаривал со многими людьми, которые интересовались электроникой, и многими людьми, которые интересовались электроникой, которые интересовались автомобилями / двигателями, но лишь немногие из них совпадали.
Основная цель заключалась в том, чтобы везде быть как можно проще. Никаких странных сред сборки, никаких знаний о сборке, предпочтение простоте над производительностью там, где это возможно, и минимальный барьер для входа, насколько это возможно. С этой целью я основываю это на мега-версии Arduino, которая является дешевой и очень доступной, но на самом деле имеет ограниченные технические характеристики. Это не настолько ограничено, что это невозможно, но это означает использование всего, что может предложить оборудование.
Никаких странных сред сборки, никаких знаний о сборке, предпочтение простоте над производительностью там, где это возможно, и минимальный барьер для входа, насколько это возможно. С этой целью я основываю это на мега-версии Arduino, которая является дешевой и очень доступной, но на самом деле имеет ограниченные технические характеристики. Это не настолько ограничено, что это невозможно, но это означает использование всего, что может предложить оборудование.
Некоторые из планируемых в настоящее время функций:
100% компилируемость и установка из Arduino IDE
Небольшая сборка или ее отсутствие и определенно отсутствует в основных алгоритмах
Полностью программируемая MAP (плотность скорости) или Впрыск и зажигание на основе TPS (alpha-n)
Карты 8×8 для вышеуказанного с интерполяцией
Пакетная поддержка до 8 цилиндров, полная последовательная до 4 цилиндров
Настройка на всех платформах с помощью Tuner Studio или Mega Tune.
 Это включает в себя вещи, предоставляемые этими пакетами, такие как «автонастройка» и т. Д.
Это включает в себя вещи, предоставляемые этими пакетами, такие как «автонастройка» и т. Д.
Программное обеспечение все еще находится в стадии разработки (вероятно, всегда будет), и только что напечатаны первые печатные платы экрана. Он достаточно полный, чтобы запустить двигатель, если кто-то заинтересован в его испытании и уже работал с парой одноцилиндровых двигателей. Я надеюсь в ближайшее время запустить и запустить 4-цилиндровый двигатель.
Если кто-то захочет это проверить, код, схема и герберы доступны по адресу: https: // github.com / noisymime / Kartduino Конечно, я более чем счастлив ответить на вопросы об EMS в целом или об этом в частности. 🙂
Этот энтузиаст гонок построил свой собственный, вдохновленный Koenigsegg, управляемый Arduino двигатель Freevalve
Двигатель внутреннего сгорания вашего автомобиля использует крошечные взрывы, толкающие поршни, которые вращают коленчатый вал. Бензин, дизельное топливо или другие экзотические виды топлива воспламеняются от свечей зажигания, а клапаны открываются и закрываются, чтобы впустить воздух / топливо в цилиндры и выйти наружу. Практически во всех конструкциях двигателей эти клапаны открываются и закрываются вращающимся кулачковым валом, покрытым смещенными выступами, которые приводят в действие клапаны в нужное время.Но это время не может быть отрегулировано без модификации распредвала. Вот почему производитель гиперкаров Koenigsegg разработал систему Freevalve, которая приводит в действие клапаны пневматически. В качестве доказательства практичности этой системы Уэсли Каган оснастил двигатель системой пневматического срабатывания Freevalve.
Каган работал над полностью кастомным гоночным автомобилем под открытым небом, используя многие донорские детали от Porsche Boxster, включая двигатель. Он не стал добавлять эту систему Freevalve к этому двигателю, потому что она слишком экспериментальная, чтобы испытывать ее на дорогом двигателе Boxster.Вместо этого он выполнил эту модификацию на дешевом двигателе мощностью 6,5 лошадиных сил от Harbour Freight. После того, как он исправит неполадки, не исключено, что он может сделать аналогичную модификацию двигателя Porsche. Преимущество системы Freevalve заключается в том, что каждый клапан может управляться полностью независимо, поэтому время газораспределения не определено заранее и не зависит от распределительного вала, который можно изменять только между гонками. Клапаны с пневматическим приводом управляются компьютером, что означает, что время можно запрограммировать для регулировки на лету в соответствии с текущими условиями.
Преимущество системы Freevalve заключается в том, что каждый клапан может управляться полностью независимо, поэтому время газораспределения не определено заранее и не зависит от распределительного вала, который можно изменять только между гонками. Клапаны с пневматическим приводом управляются компьютером, что означает, что время можно запрограммировать для регулировки на лету в соответствии с текущими условиями.
Двигатель, используемый в этом проекте, представляет собой небольшую газовую одноцилиндровую модель от Harbour Freight с системой верхних клапанов. Он имеет два клапана — один для топливовоздушной смеси и один для выхлопа, которые приводятся в действие толкателем. Толкатели и коромысла были полностью удалены и заменены пневмоприводами. Они были выбраны специально из-за их быстрой скорости рабочего цикла, потому что клапаны необходимо открывать и закрывать примерно 75 раз в секунду (при 4500 об / мин). Соленоиды управляются платой Arduino Uno, которая отслеживает вращение двигателя с помощью датчика Холла.
Использование Arduino позволяет Кагану устанавливать точное время открытия клапанов. Если бы он захотел, он мог бы запрограммировать его на регулировку времени, чтобы реагировать на внешние условия, такие как температура двигателя или давление турбонаддува (при наличии турбонагнетателя). Пневматические приводы были установлены в головке с использованием комбинации деталей, напечатанных на 3D-принтере и обработанных на станке. Датчик эффекта Холла установлен рядом с напечатанным на 3D-принтере диском, прикрепленным к коленчатому валу, который содержит магнитные зубцы, с одним отсутствующим зубом, указывающим на верхнюю мертвую точку.Результат — передовая технология гиперкара в одном из самых дешевых двигателей. Надеюсь, Каган сможет использовать уроки, извлеченные из этого проекта, для улучшения характеристик своего гоночного автомобиля.
Основы электроники Arduino: управление двигателем
Эта статья была переведена на английский язык и изначально была опубликована для deviceplus.
На Device Plus было представлено большое количество приложений для Arduino и примеров компонентов, но знание основ особенно важно, когда вы что-то создаете.Поэтому в сегодняшней статье мы рассмотрим ключевые основы Arduino. Этому нас сегодня научит эксперт и автор книги «Введение в основы электронных ремесел Arduino!» Казухиро Фукуда.
В этой статье я хотел бы осветить способы управления двигателями с большими электрическими токами.
Двигатели используются для управления широким спектром машин, таких как дроны и автомобили. Подключение двигателей к источнику питания позволяет электронным компонентам генерировать вращательное движение.Прикрепление шин или пропеллеров к двигателю также увеличивает скорость вращения и движения операций.
На Arduino можно управлять двигателем. Как и в случае со светодиодом, вы можете управлять вращением или остановкой двигателя, включая и выключая питание, подаваемое на двигатель. В сочетании с другими датчиками можно настроить автоматическое управление, например, остановку двигателя при приближении препятствия.
Двигатель вращается в противоположном направлении, когда направление подключенного источника питания меняется на противоположное.Также можно изменить скорость вращения, отрегулировав количество протекающего тока. В результате это позволяет вращаться с высокой скоростью, когда двигатель движется, или медленно останавливаться в желаемом положении, постепенно замедляясь при остановке. Даже если снаряд попадает в вентиляторы, двигатель может двигаться назад и двигаться в других направлениях. При этом сегодня мы рассмотрим способы управления двигателем на Arduino.
[Содержание]
・ Для работы двигателя требуется драйвер
・ Подключение двигателя к Arduino
・ Управление двигателем по программе
・ Изменение скорости вращения двигателя
Для работы двигателя требуется драйвер
На цифровом выходе Arduino вы можете переключаться между High и Low для управления световыми вспышками светодиода.Используя эту функцию, вы сможете подавать электричество на двигатель. Однако даже если вы действительно подключите двигатель напрямую к Arduino, он не будет работать.
Для приведения в движение двигателя необходим большой электрический ток. Например, для сегодняшнего RE-280RA вам потребуется более 1 А электрического тока для его движения. Однако цифровой выходной разъем Arduino может протекать только до 20 мА. Пропуск любого электрического тока через это может потенциально повредить Arduino.Для этого нам нужно подключить двигатель к выходному разъему Arduino и управлять им.
Здесь будет использоваться «Драйвер двигателя». Драйвер двигателя — это электрический компонент, используемый для управления двигателем. Подготовьте цепь, которая соединяет двигатель с источником питания для работы двигателя, и вставьте драйвер двигателя внутрь. Драйвер двигателя может подключать и отключать рабочую цепь двигателя с помощью внешнего сигнала, а также может управлять вращением и остановкой двигателя. Поскольку в управляющий сигнал почти не поступает ток, даже если Arduino подключен, можно будет управлять двигателем без каких-либо проблем.
В зависимости от привода двигателя направление вращения можно переключать с помощью управляющего сигнала. Оснащен двумя разъемами управления, когда для одной стороны установлено значение High, она будет вращаться нормально, а другая сторона, для которой установлено значение High, будет вращаться в обратном направлении. Это позволяет управлять движением вперед, назад и стоп.
Подключение двигателя к Arduino
Теперь попробуем управлять двигателем от Arduino. Для этой части будет использоваться следующая электроника, поэтому убедитесь, что она у вас подготовлена.
Двигатель постоянного тока
Это корпус мотора. Эти типы двигателей, в которых используются сухие батареи, называются «двигателями постоянного тока». В этой статье мы будем использовать «RE-280RA». Аккумулятор RE-280RA может поддерживать электрическое напряжение до 4,5 В.
Драйвер мотора
Мы будем использовать это для управления двигателем. Следуя сигналам от Arduino, вы можете контролировать подачу электричества на двигатель и направление вращения. Мы будем использовать BA6956AN 」производства ROHM.Начиная с коннектора с вырезами (левая сторона на рисунке), они считаются коннектором 1 и коннектором 2.
Конденсатор 0,1 мкФ
Конденсатор — это электрический компонент, который может накапливать небольшое количество электроэнергии. Когда он работает от мотора, он начинает шуметь. Этот шум потенциально отрицательно влияет на другие работающие электрические части. Поэтому подключите конденсатор к обоим разъемам, чтобы уменьшить шум.
Резистор 10кОм (1/4 Вт)
Чтобы предотвратить поломку электронных компонентов из-за внезапного протекания большого электрического тока, ток можно подавить с помощью резистора.На этот раз, чтобы указать напряжение, подаваемое на двигатель, разъем Arduino 3.3V подключен к драйверу двигателя. Обычно ток почти не протекает, но в некоторых случаях может протекать большой ток, поэтому подключите резистор 10 кОм, чтобы предотвратить протекание больших токов. На резисторе 10 кОм нанесена маркировка «Коричневый, черный, оранжевый, золотой» вместе с цветовым кодом.
Аккумулятор
Защелка аккумулятора
Аккумуляторы используются в качестве источника энергии для вращения двигателя.Здесь будет использоваться 006P, который может подавать напряжение до 9 В. Он также использует защелки для батарей для подключения батарей к макетной плате.
Электрические зажимы Перемычки
Для двигателя необходима разводка разъемов до макетной платы. Обычно проводник припаивается к разъему. Однако, если вы используете перемычку с электрическим зажимом, вы можете просто подключить его, вставив зажим в разъем двигателя, что избавляет от необходимости пайки.
После того, как вы подготовили каждый из компонентов, подключите его, как показано ниже.
Подключите двигатель к разъемам 2 и 4 привода двигателя, защемив разъем электрическим зажимом. Помните, что во время работы двигателя может возникать шум, который может повлиять на другие устройства. Следовательно, подключение конденсаторов к обоим разъемам двигателя снизит уровень шума.
Электродвигатель может питаться от отдельно подготовленной аккумуляторной батареи.Следовательно, питание может подаваться от батареи, подключив батарею к пятому и третьему разъемам привода двигателя.
Кроме того, используемый на этот раз двигатель имеет диапазон питания до 4,5 В. По этой причине напряжение батареи 9 В может быть слишком высоким, поэтому существует вероятность повреждения двигателя. Поэтому укажите максимальное напряжение выхода, идущего в двигатель, на разъеме 1 драйвера двигателя. На этот раз мы сможем поставить до 3 штук.3В к мотору. Подключите блок питания Arduino 3.3V к разъему 1 и укажите максимальное напряжение. Вращением двигателя можно управлять с помощью седьмого и девятого разъемов привода двигателя. Это означает, что подключение к разъемам 5 и 6 Arduino позволяет управлять двигателем через выход Arduino.
Управление двигателем по программе
После подключения давайте попробуем управлять двигателем с помощью программного кода. Вращением двигателя можно управлять с помощью выходов разъемов Arduino 5 и 6.Вращением, остановкой и направлением вращения можно управлять, изменяя значение High или Low на этих двух разъемах. В случае с BA6956AN им можно управлять следующим образом.
Для нормального вращения выход разъема 5 установлен на высокий, а выход разъема 6 — на низкий. Запись приведенного ниже программного кода в Arduino должна запустить нормальное вращение двигателей.
В десятой строке выход должен быть установлен на высокий, а на разъеме 6 на шестой строке выход должен быть установлен на низкий.
Если вы хотите, чтобы двигатель вращался в противоположном направлении, выход разъема 5 должен быть установлен на низкий уровень, а выход разъема 6 должен быть установлен на высокий уровень.
Программный код должен выглядеть следующим образом:
На десятой строке выход разъема 5 должен быть установлен на низкий уровень, а на одиннадцатой строке разъем 6 должен быть установлен на высокий уровень. Когда вы хотите остановить двигатель, оба выхода для разъемов 5 и 6 должны быть установлены на низкий уровень.
Программный код должен выглядеть следующим образом:
Кроме того, установка обоих выходов на High приведет к включению автоматического выключателя.Установка любого из них на Низкое приведет к остановке через короткое время.
Изменение скорости вращения двигателя
В прошлый раз мы смогли изменить яркость с помощью метода вывода светодиодов под названием PWM. Даже на двигателе скорость вращения можно изменить, управляя двигателем с помощью ШИМ. Переключаясь между высоким и низким за короткий промежуток времени, двигатель поочередно переключается между вращением и остановом, при этом скорость вращения фактически ниже, чем обычно.Чем дольше время High, тем выше будет скорость вращения, и наоборот.
Для двигателя выведите управляющий разъем в том направлении, в котором вы хотите вращать ШИМ, и всегда держите другой разъем на низком уровне. Для нормального вращения выведите на коннектор 5 ШИМ и держите коннектор 6 на низком уровне. Для обратного вращения выведите разъем 6 на ШИМ и держите разъем 5 на низком уровне. Программный код для управления скоростью нормального вращения приведен ниже.
Для программного кода установите выходной коннектор 5 в строке 10 на половину коэффициента ШИМ (самый большой на 255) и оставьте коннектор 6 в строке 11 на низком уровне.Если вы измените число в строке 10, скорость также изменится. Однако двигатель не будет вращаться, если High меньше определенного процента. Если двигатель не вращается с малым значением, попробуйте указать большее значение. Вы можете постепенно изменять скорость, постепенно увеличивая или уменьшая значение, выводимое из разъема 5. В следующей программе скорость вращения будет постепенно увеличиваться из состояния остановки, и как только она достигнет максимума, скорость будет постепенно уменьшаться и останавливаться.
На сегодняшний день мы рассмотрели различные способы управления электронными компонентами на Arduino, такими как светодиоды или двигатели.В следующий раз мы поговорим о том, как узнать состояние переключателей на Arduino.
Блокировка двигателя с датчиком алкоголя на базе Arduino и GPS
Скачать проектный документ / резюмеВождение в нетрезвом виде — одна из основных причин дорожно-транспортных происшествий во всем мире. Во всех случаях дорожно-транспортных происшествий во всем мире было замечено, что водители имеют повышенное содержание алкоголя в крови. Итак, мы здесь разрабатываем интеллектуальную систему обнаружения алкоголя с использованием Arduino в сочетании с GSM и GPS для передачи данных о местоположении.
Система позволяет автоматически определять содержание алкоголя в выдыхаемом воздухе. Мы также используем мотор для демонстрации в качестве транспортного средства. Мы также используем модуль GPS с GSM для отправки SMS-сообщения заинтересованному лицу в случае обнаружения алкоголя и остановки двигателя транспортного средства.
Система состоит из платы Arduino Uno, датчика алкоголя Mq-3 для обнаружения и модуля GSM / GPS для уведомления. В случае трезвого водителя, то есть алкоголь ниже допустимых пределов, автомобиль обычно будет, на что указывает вращение двигателя, но в случае пьяного водителя содержание алкоголя будет выше допустимого предела, который определяется датчик алкоголя и контроллер Arduino, который останавливает двигатель, чтобы можно было избежать вождения в нетрезвом виде, а также отправляет SMS-уведомление властям или членам семьи вместе с местонахождением автомобиля, чтобы можно было оказать помощь.В проекте также есть ЖК-дисплей для отображения параметров.
- Компоненты
- Arduino Uno
- Датчик алкоголя
- Модуль GSM / GPS
- Двигатель постоянного тока
- Микросхема драйвера двигателя
- ЖК
- Регулятор Vtg IC
- Резисторы
- Конденсаторы
- Кабели и соединители
- Диоды
- Печатная плата
- светодиод
- Трансформатор / адаптер
- Кнопки
- Переключатель
- IC
- Разъемы для микросхем
Блок-схема
Бессенсорное управление двигателем BLDC с помощью Arduino — DIY ESC
/ * Бессенсорное бесщеточное управление двигателем постоянного тока (BLDC) с помощью Arduino UNO (Arduino DIY ESC).
* Это бесплатное программное обеспечение БЕЗ ГАРАНТИЙ.
* https://simple-circuit.com/
* /
#define SPEED_UP A0
#define SPEED_DOWN A1
#define PWM_MAX_DUTY 255
100_DUTY 255 9000_DUTY_definePWM_define
PWM
байт bldc_step = 0, motor_speed;
беззнаковый int i;
void setup () {
DDRD | = 0x38; // Настройте контакты 3, 4 и 5 как выходы
PORTD = 0x00;
DDRB | = 0x0E; // Настройте контакты 9, 10 и 11 как выходы
PORTB = 0x31;
// Настройка модуля Timer1: установите источник синхронизации на clkI / O / 1 (без предварительного масштабирования)
TCCR1A = 0;
TCCR1B = 0x01;
// Настройка модуля Timer2: установите источник синхронизации на clkI / O / 1 (без предварительного масштабирования)
TCCR2A = 0;
TCCR2B = 0x01;
// Настройка аналогового компаратора
ACSR = 0x10; // Отключить и сбросить (флаговый бит) прерывание аналогового компаратора
pinMode (SPEED_UP, INPUT_PULLUP);
pinMode (SPEED_DOWN, INPUT_PULLUP);
}
// Аналоговый компаратор ISR
ISR (ANALOG_COMP_vect) {
// BEMF debounce
for (i = 0; i <10; i ++) {
if (bldc_step & 1) if (
) {
(! (ACSR & 0x20)) i — = 1;
}
else {
if ((ACSR & 0x20)) i — = 1;
}
}
bldc_move ();
bldc_step ++;
bldc_step% = 6;
}
void bldc_move () {// Функция коммутации двигателя BLDC
switch (bldc_step) {
case 0:
AH_BL ();
BEMF_C_RISING ();
перерыв;
case 1:
AH_CL ();
BEMF_B_FALLING ();
перерыв;
case 2:
BH_CL ();
BEMF_A_RISING ();
перерыв;
case 3:
BH_AL ();
BEMF_C_FALLING ();
перерыв;
корпус 4:
CH_AL ();
BEMF_B_RISING ();
перерыв;
корпус 5:
CH_BL ();
BEMF_A_FALLING ();
перерыв;
}
}
void loop () {
SET_PWM_DUTY (PWM_START_DUTY); // Настройка запуска ШИМ с рабочим циклом = PWM_START_DUTY
i = 5000;
// Запуск двигателя
while (i> 100) {
delayMicroseconds (i);
bldc_move ();
bldc_step ++;
bldc_step% = 6;
i = i — 20;
}
motor_speed = PWM_START_DUTY;
ACSR | = 0x08; // Разрешение прерывания аналогового компаратора
while (1) {
while (! (DigitalRead (SPEED_UP)) && motor_speed motor_speed ++; SET_PWM_DUTY (скорость_двигателя); задержка (100); } while (! (DigitalRead (SPEED_DOWN)) && motor_speed> PWM_MIN_DUTY) { motor_speed—; SET_PWM_DUTY (скорость_двигателя); задержка (100); } } } void BEMF_A_RISING () { ADCSRB = (0 << ACME); // Выбираем AIN1 в качестве отрицательного входа компаратора ACSR | = 0x03; // Установить прерывание по нарастающему фронту } void BEMF_A_FALLING () { ADCSRB = (0 << ACME); // Выбираем AIN1 в качестве отрицательного входа компаратора ACSR & = ~ 0x01; // Установить прерывание по заднему фронту } void BEMF_B_RISING () { ADCSRA = (0 << ADEN); // Отключить модуль АЦП ADCSRB = (1 << ACME); ADMUX = 2; // Выбираем аналоговый канал 2 в качестве отрицательного входа компаратора ACSR | = 0x03; } void BEMF_B_FALLING () { ADCSRA = (0 << ADEN); // Отключить модуль АЦП ADCSRB = (1 << ACME); ADMUX = 2; // Выбираем аналоговый канал 2 в качестве отрицательного входа компаратора ACSR & = ~ 0x01; } void BEMF_C_RISING () { ADCSRA = (0 << ADEN); // Отключить модуль АЦП ADCSRB = (1 << ACME); ADMUX = 3; // Выбираем аналоговый канал 3 в качестве отрицательного входа компаратора ACSR | = 0x03; } void BEMF_C_FALLING () { ADCSRA = (0 << ADEN); // Отключить модуль АЦП ADCSRB = (1 << ACME); ADMUX = 3; // Выбираем аналоговый канал 3 в качестве отрицательного входа компаратора ACSR & = ~ 0x01; } void AH_BL () { PORTB = 0x04; PORTD & = ~ 0x18; PORTD | = 0x20; TCCR1A = 0; // Включаем контакт 11 (OC2A) ШИМ (вывод 9 и вывод 10 выключены) TCCR2A = 0x81; // } void AH_CL () { PORTB = 0x02; PORTD & = ~ 0x18; PORTD | = 0x20; TCCR1A = 0; // Включаем контакт 11 (OC2A) ШИМ (вывод 9 и вывод 10 выключены) TCCR2A = 0x81; // } void BH_CL () { PORTB = 0x02; PORTD & = ~ 0x28; PORTD | = 0x10; TCCR2A = 0; // Включаем контакт 10 (OC1B) ШИМ (вывод 9 и вывод 11 выключены) TCCR1A = 0x21; // } void BH_AL () { PORTB = 0x08; PORTD & = ~ 0x28; PORTD | = 0x10; TCCR2A = 0; // Включаем контакт 10 (OC1B) ШИМ (вывод 9 и вывод 11 выключены) TCCR1A = 0x21; // } void CH_AL () { PORTB = 0x08; PORTD & = ~ 0x30; PORTD | = 0x08; TCCR2A = 0; // Включаем вывод 9 (OC1A) ШИМ (вывод 10 и вывод 11 выключены) TCCR1A = 0x81; // } void CH_BL () { PORTB = 0x04; PORTD & = ~ 0x30; PORTD | = 0x08; TCCR2A = 0; // Включаем вывод 9 (OC1A) ШИМ (вывод 10 и вывод 11 выключены) TCCR1A = 0x81; // } void SET_PWM_DUTY (байтовый долг) { if (duty duty = PWM_MIN_DUTY; если (режим> PWM_MAX_DUTY) режим = PWM_MAX_DUTY; OCR1A = дежурный; // Установить рабочий цикл ШИМ вывода 9 OCR1B = duty; // Установить рабочий цикл ШИМ вывода 10 OCR2A = duty; // Установите рабочий цикл ШИМ вывода 11 } © 2014 Autodesk, Inc.Все права защищены. Использование данного Сервиса регулируется условиями применимых условий обслуживания Autodesk, принятых при доступе к нему. Эта Служба может включать или использовать фоновые компоненты технологии Autodesk. Для получения информации об этих компонентах щелкните здесь: http://www.autodesk.com/cloud-platform-components Товарные знаки Autodesk, логотип Autodesk и Fusion 360 являются зарегистрированными товарными знаками или товарными знаками Autodesk, Inc., и / или его дочерние и / или аффилированные компании. Все остальные торговые марки, названия продуктов или товарные знаки принадлежат их соответствующим владельцам. Авторские права и авторство стороннего программного обеспечения Рубиновые драгоценные камни являются Авторскими правами (c) Чад Фаулер, Рич Килмер, Джим Вейрих и другие. Авторские права на части (c) Engine Yard и Andre Arko bootstrap-select.js — Copyright (C) 2013 bootstrap-select Backbone.js — Copyright (c) Джереми Ашкенас 2010-2013, DocumentCloud Счетчик перекидных крышек в стиле Apple Авторские права (c) 2010 Chris Nanney imagesLoaded © 2013 Дэвид ДеСандро jQuery Авторские права 2013 jQuery Foundation и других участников http: // jquery.com / jQuery timepicker addon — авторские права (c) 2013 Трент Ричардсон jQuery ColorBox — Copyright (c) 2013 Jack Moore jQuery.gritter — Copyright (c) 2013 Jordan Boesch Masonry — Copyright (c) 2013 David DeSandro Underscore — Copyright (c) 2009-2013 Джереми Ашкенас, DocumentCloud и Investigative Репортеры и редакторы underscore_string — Copyright (c) 2011 Esa-Matti Suuronen [email protected] Icanhaz.js — это ICanHaz.js — авторские права (c) Хенрик Йоретег, 2010 (Авторские права на Mustache и Mustache.js (c) Крис Ванстрат (Ruby), 2009 г. (Ruby) и (c) Ян Ленардт (JavaScript), 2010 г.), соответственно) Calendario является авторским правом (c) ) Codrops 2014 by tympanus Все вышеперечисленные программные компоненты находятся под лицензией MIT. Настоящим предоставляется бесплатное разрешение любому лицу, получившему копию этого программного обеспечения и связанных файлов документации («Программное обеспечение»), на использование Программного обеспечения без ограничений, включая, помимо прочего, права на использование, копирование, изменение , объединять, публиковать, распространять, сублицензировать и / или продавать копии Программного обеспечения и разрешать лицам, которым предоставляется Программное обеспечение, делать это при соблюдении следующих условий: Приведенное выше уведомление об авторских правах и это уведомление о разрешении должны быть включены во все копии или существенные части Программного обеспечения. ПРОГРАММНОЕ ОБЕСПЕЧЕНИЕ ПРЕДОСТАВЛЯЕТСЯ «КАК ЕСТЬ», БЕЗ КАКИХ-ЛИБО ГАРАНТИЙ, ЯВНЫХ ИЛИ ПОДРАЗУМЕВАЕМЫХ, ВКЛЮЧАЯ, НО НЕ ОГРАНИЧИВАЯСЬ ГАРАНТИЯМИ КОММЕРЧЕСКОЙ ЦЕННОСТИ, ПРИГОДНОСТИ ДЛЯ ОПРЕДЕЛЕННОЙ ЦЕЛИ И НЕ ЗАЩИЩЕННЫМ. НИ ПРИ КАКИХ ОБСТОЯТЕЛЬСТВАХ АВТОРЫ ИЛИ ВЛАДЕЛЬЦЫ АВТОРСКИХ ПРАВ НЕ НЕСЕТ ОТВЕТСТВЕННОСТИ ЗА ЛЮБЫЕ ПРЕТЕНЗИИ, УБЫТКИ ИЛИ ДРУГИЕ ОТВЕТСТВЕННОСТЬ, БЫЛИ В РЕЗУЛЬТАТЕ ДОГОВОРА, ПРАКТИЧЕСКИХ ПРАВ ИЛИ ИНЫХ СЛУЧАЕВ, ВЫЯВЛЕННЫХ, ВНУТРИ ИЛИ В СВЯЗИ С ПРОГРАММНЫМ ОБЕСПЕЧЕНИЕМ ИЛИ ИСПОЛЬЗОВАНИЕМ ИЛИ ДРУГИМИ ДЕЛАМИ ПРОГРАММНОЕ ОБЕСПЕЧЕНИЕ. На части, относящиеся к лайтбоксу, распространяется лицензия Creative Commons Attribution 2.5 Лицензия (http://creativecommons.org/licenses/by/2.5/). Автором лайтбокса является Локеш Дхакар (lokeshdhakar.com). Если вы покупаете дизельный двигатель без ЭБУ (блок управления двигателем), что бы вы сделали? Если вы такой хакер, как synkooppi, вы можете просто решить спроектировать собственный блок управления двигателем с помощью Arduino, открыть исходный код кода и разместить некоторую документацию на своем сайте. Многие люди уже управляют двигателями с помощью плат Arduino, просто это электродвигатели, а не дизельные. Система работает с дизельными двигателями с насосами Bosch VP37 и успешно используется с 2012 года. ЭБУ основан на плате Arduino Mega с 8-битным микроконтроллером AVR @ 16 МГц. Последний исходный код доступен для загрузки (2013-10-06) и может быть загружен на плату через Arduino IDE. Конфигурация выполняется с помощью текстового интерфейса с использованием последовательного подключения через порт USB. Схемы оборудования еще не опубликованы. Этот ЭБУ с открытым исходным кодом в настоящее время поддерживает следующие функции: Другие функции, которые они будут или могут быть реализованы, — это стабилизация холостого хода на основе ПИД-регулятора, поддержка датчика EGT, карты корректировки топливоподачи для компенсации температуры всасываемого воздуха или температуры топлива, поддержка привода HDK, а также круиз-контроль и контроль тяги. TT Мотор-редуктор для Arduino | Онлайн-галерея Autodesk
ЭБУ с открытым исходным кодом для дизельных двигателей на базе Arduino