Как увеличить мощность электродвигателя — ООО «СЗЭМО Электродвигатель»
Бывает, что мощности электродвигателя недостаточно для обеспечения запуска и работы какого-либо устройства. Как увеличить мощность электродвигателя? Прежде всего, следует знать причину: почему не хватает мощности — а она кроется в параметрах тока, протекающего по обмоткам агрегата. Следовательно, нужно увеличить его значение, либо включив двигатель в сеть большей частоты (если это устройство переменного тока), либо внеся некоторые конструктивные изменения (при включении в бытовую сеть). Ниже мы рассмотрим последний случай.
Как повысить мощность электродвигателя в домашних условиях
Итак, для проведения работ вам следует «вооружиться»:
- набором проводов разного сечения;
- тестером;
- частотным преобразователем;
- источником тока с изменяемой ЭДС.
Сначала необходимо подключить электродвигатель к имеющемуся у вас источнику тока и изменяемой ЭДС и увеличить ее значение.
Для расчета увеличения мощности двигателя определите значение увеличения напряжения и возведите эту цифру в квадрат. Например, если напряжение на обмотках выросло в два раза (со 110В до 220В), мощность двигателя увеличилась в четыре раза.
Иногда самый рациональный способ повысить мощность электродвигателя – перемотать обмотку. Во многих моделях это медный проводник. Вам следует взять провод из того же материала и той же длины, но большего сечения. Мощность двигателя (и ток в проводе) увеличатся во столько же раз, во сколько снизится сопротивление обмотки. Следите за тем, чтобы напряжение на обмотках оставалось неизменным.
Расчет в этом случае тоже достаточно прост. Разделите большую цифру сечения провода на меньшую. Если провод сечением 0.5 мм заменен проводом сечением 0.75 мм, показатель мощности вырастает в 1.
Если вы включаете асинхронный трехфазный двигатель в однофазную бытовую сеть, на первую обмотку подается фаза, на второй фаза сдвигается конденсатором, на третьей сдвиг фаз отсутствует. Именно последняя обмотка создает момент вращения в противоположном направлении (тормозящий момент). Увеличить полезную мощность двигателя в этом случае можно путем отключения третьей обмотки. Это приведет к исчезновению тормозящего момента, генерируемого при работе всех обмоток, и, соответственно, повышению мощности. Данный метод удобен в том случае, когда одна обмотка у двигателя уже сгорела – двух оставшихся вам вполне хватит для подключения и обеспечения работы агрегата.
Еще лучшего результата вы достигнете, поменяв местами выводы третьей обмотки и создав таким образом момент вращения в правильном направлении. В этом случае двигатель «выдаст» более 50% мощности от номинала. Эту обмотку рекомендуется подключать через конденсатор с правильно подобранной емкостью.
У асинхронного двигателя переменного тока мощность можно увеличить, присоединив к нему частотный преобразователь, который повысит частоту переменного тока в обмотках. Значение мощности в этом случае фиксируется с помощью тестера, поставленного на режим ваттметра. Существует два вида преобразователей частоты, отличающиеся принципом работы и устройством:
Значение мощности в этом случае фиксируется с помощью тестера, поставленного на режим ваттметра. Существует два вида преобразователей частоты, отличающиеся принципом работы и устройством:
- Приборы с непосредственной связью (выпрямители). Они не подходят для мощного оборудования, но с небольшим двигателем, использующимся в быту, способны «справиться». С помощью такого устройства осуществляется подключение обмотки к сети. Выходное напряжение, образованное им, имеет частоту от 0 до 30 Гц. При этом управлять скоростью вращения привода можно только в ограниченном диапазоне.
- Приборы с промежуточным звеном постоянного тока. Они производят двухступенчатое преобразование энергии – выпрямление входного напряжения, его фильтрацию и сглаживание и последующую трансформацию в напряжение с требуемой частотой и амплитудой при помощи инвертора. В процессе преобразования КПД оборудования может быть несколько снижен. Благодаря возможности обеспечивать плавную регулировку оборотов и выдавать на выходе напряжение с достаточно высокой частотой, преобразователи данного типа более востребованы и широко применяются в быту и на производстве.
Произведя необходимые расчеты и выбрав наиболее эффективный в вашем случае способ, вы сможете заставить двигатель работать с нужной вам мощностью. Не забывайте о мерах предосторожности.
Увеличение оборотов электродвигателя
Увеличение оборотов электродвигателя также ведет к повышению его мощности. При выборе способа увеличения оборотов учитывайте тип агрегата, особенности модели и область ее применения.
Для повышения частоты вращения коллекторного двигателя следует или уменьшить нагрузку на вал, или увеличить напряжение питания. Обратите внимание на следующие нюансы:
- Мощность двигателя должна держаться в рамках номинала.
- Работа коллекторного двигателя с последовательным возбуждением без нагрузки, если не снижено питание, чревата его выходом из строя, так как он может разогнаться до слишком большой скорости.
- Увеличение оборотов с помощью шунтирования обмотки возбуждения часто приводит к сильному перегреву мотора.

Вышеуказанный способ подходит и для электродвигателей с электронным управлением обмотками (в них используется обратная связь), поскольку их свойства очень схожи с коллекторными моделями (главное различие – невозможность осуществления реверса путем переполюсовки). Все перечисленные ограничения должны соблюдаться при работе с двигателями данного типа.
В асинхронном двигателе, подключаемом непосредственно к сети, частоту вращения регулируют, изменяя напряжение питания. Этот способ не слишком эффективен, поскольку коэффициент полезного действия сильно меняется из-за нелинейного характера зависимости скорости от напряжения. К синхронному двигателю данный метод применять нельзя.
Трехфазный инвертор позволяет регулировать обороты электродвигателей обоих типов (синхронного и асинхронного). Прибор должен обеспечивать уменьшение напряжения при снижении частоты.
Зная, как сделать мощнее электродвигатель, вы сможете заставить оборудование, к которому он подключен, работать с гораздо большей эффективностью и КПД. Естественно, перед началом работ следует четко представлять себе номинальную мощность двигателя. Данные можно найти в паспорте или на табличке, прикрепленной к корпусу агрегата. Если они отсутствуют (или не читаемы), воспользуйтесь одним из способов определения мощности, описанных в предыдущих статьях.
Естественно, перед началом работ следует четко представлять себе номинальную мощность двигателя. Данные можно найти в паспорте или на табличке, прикрепленной к корпусу агрегата. Если они отсутствуют (или не читаемы), воспользуйтесь одним из способов определения мощности, описанных в предыдущих статьях.
Работая с электродвигателем, соблюдайте правила техники безопасности. Не допускайте его перегрева и следите, чтобы он эксплуатировался в подходящих условиях. При поломке агрегата или первых признаках неисправности проведите технический осмотр и устраните неполадки. Если проблема слишком серьезная, и вы не можете справиться с ней самостоятельно, обратитесь к специалисту. Срок службы двигателя зависит от множества факторов, но в ваших силах свести к минимуму возможность поломки и сделать так, чтобы устройство работало долго и эффективно.
Повышение мощности электродвигателя в Москве и Санкт-Петербурге: как поднять мощность двигателя
От мощностных характеристик электродвигателя напрямую зависит его КПД. Если мощности двигателя недостаточно для выполнения каких-то конкретных задач, крутящий момент можно увеличить, используя разные способы. Компания ООО «ПО «Электромашина» готова предложить свои услуги по увеличению мощности электродвигателя, благодаря чему может значительно вырасти эффективность его работы.
Если мощности двигателя недостаточно для выполнения каких-то конкретных задач, крутящий момент можно увеличить, используя разные способы. Компания ООО «ПО «Электромашина» готова предложить свои услуги по увеличению мощности электродвигателя, благодаря чему может значительно вырасти эффективность его работы.
Способы увеличения мощностных показателей
Одним из главных факторов, влияющих на показатели мощности, является разновидность электротока. Если двигатель работает от постоянного тока, достаточно увеличить значение этого параметра. Если от переменного – меняют частоту питающего напряжения. Еще один способ связан с внесением изменений в конструкцию электродвигателя, когда повышения мощности добиваются перематыванием его обмоток. Чаще всего для этого используется проводник такой же длины, как и у старой обмотки, но большего сечения. Если оставить питающее напряжение на прежнем уровне, то сопротивление нового контура уменьшится, а крутящий момент увеличится во столько же раз. Например, замена провода сечением 0,5 мм на 0,75 мм уменьшает сопротивление и увеличивает мощность в 1,5 раза. Наконец, еще одним способом поднятия мощности является увеличение оборотов электродвигателя. При этом нужно учитывать тип двигателя, параметры конкретной модели и область ее применения.
Например, замена провода сечением 0,5 мм на 0,75 мм уменьшает сопротивление и увеличивает мощность в 1,5 раза. Наконец, еще одним способом поднятия мощности является увеличение оборотов электродвигателя. При этом нужно учитывать тип двигателя, параметры конкретной модели и область ее применения.
Изменение характеристик в рамках продукта «Новая жизнь»
Нашей компанией был разработан продукт «Новая жизнь», в рамках которого Вы можете избежать сложных ремонтных работ и получить обновленный, более мощный электродвигатель в старом корпусе. Кроме того, его характеристики могут быть приведены к современным требованиям к электрооборудованию. В результате проведенной работы мощность двигателя может быть увеличена, а заказчик избежит значительных трудностей, например необходимости закупки новой крупной электрической машины. Часто этот процесс может продолжаться несколько месяцев. Прежде чем приступить к работе, мы проведем полную диагностику электромашины и предоставим Вам полную информацию о ней.
Для того чтобы поднять мощность электродвигателя, обратитесь в ООО «ПО «Электромашина». Уточнить любую интересующую информацию или оформить заявку на услугу Вы можете по телефону или оставив свои контактные данные для обратной связи.
Наши преимущества
Снижение затрат за счет сокращения времени простоя оборудования Опыт работы со сложными, специализированными и крупногабаритными электродвигателями Ответственный подход к диагностике и ремонту в реальные сроки и за разумную стоимость Разработка и расчет Проектирование ключевых узлов электродвигателяFAQ по электродвигателям | Техпривод
Какие электродвигатели применяются чаще всего?
Какие способы управления электродвигателями используются?
Как прозвонить электродвигатель и определить его сопротивление?
Как определить мощность электродвигателя?
Как рассчитать ток и мощность электродвигателя?
Как увеличить мощность электродвигателя?
Каковы потери мощности при подключении трехфазного двигателя к однофазной сети?
Какие исполнения двигателей бывают?
Зачем электродвигателю тормоз?
Как двигатель обозначается на электрических схемах?
Почему греется электродвигатель?
Типичные неисправности электродвигателей
1. Какие электродвигатели применяются чаще всего?
Какие электродвигатели применяются чаще всего?
Наиболее распространены асинхронные электродвигатели с короткозамкнутым ротором. Они имеют сравнительно простую конструкцию и относительно недороги.
Для работы асинхронного двигателя требуется трехфазное напряжение, создающее на обмотках статора вращающееся магнитное поле. Это поле приводит в движение ротор двигателя, который передает крутящий момент на нагрузку, например, на пропеллер вентилятора или редуктор конвейера. Изменяя конфигурацию обмоток статора, можно менять основные характеристики привода – частоту оборотов и мощность на валу. В случае работы асинхронного электродвигателя в однофазной сети применяют фазосдвигающие и пусковые конденсаторы.
Также в настоящее время находят применение двигатели постоянного тока. Данные приводы имеют щетки, подверженные износу и искрению. Кроме того, необходима обмотка подмагничивания (возбуждения), на которую подается постоянное напряжение. Несмотря на эти недостатки, электродвигатели постоянного тока используются там, где необходимо быстрое изменение скорости вращения и контроль момента, а также при мощностях более 100 кВт.
Несмотря на эти недостатки, электродвигатели постоянного тока используются там, где необходимо быстрое изменение скорости вращения и контроль момента, а также при мощностях более 100 кВт.
В быту также применяют коллекторные (щеточные) электродвигатели переменного тока, которые имеют низкую надежность по сравнению с асинхронными.
2. Какие способы управления электродвигателями используются на практике?
Управление электродвигателем подразумевает возможность изменения его скорости и мощности. Так, если на асинхронный двигатель подать напряжение заданной величины и частоты, он будет вращаться с номинальной скоростью и сможет обеспечить мощность на валу не более номинала. Если же нужно понизить или повысить скорость электродвигателя, используют преобразователи частоты. ПЧ может обеспечить нужный режим разгона и торможения, а также позволит оперативно управлять частотой работы.
Для обеспечения требуемого разгона и торможения без изменения рабочей частоты применяют устройство плавного пуска (УПП). Если нужно управлять только разгоном двигателя, используют схему включения «звезда-треугольник».
Если нужно управлять только разгоном двигателя, используют схему включения «звезда-треугольник».
Для запуска двигателей без ПЧ и УПП широко применяются контакторы, которые позволяют дистанционно управлять пуском, остановом и реверсом.
3. Как прозвонить электродвигатель и определить его сопротивление?
Асинхронный электродвигатель, как правило, имеет три обмотки. У каждой обмотки есть по два вывода, которые должны быть обозначены в клеммной коробке двигателя. Если выводы обмоток известны, то можно легко прозвонить каждую из них и сравнить величину сопротивления с остальными обмотками. Если величины сопротивлений отличаются не более, чем на 1%, то скорее всего, обмотки исправны.
Сопротивление обмоток электродвигателя измеряется с помощью омметра, как и сопротивление обмоток трансформатора. Чем больше мощность двигателя, тем меньше сопротивление его обмоток, и наоборот.
4. Как определить мощность электродвигателя?
Проще всего определить номинальную мощность электродвигателя по шильдику. На нем указана механическая мощность (мощность на валу), значение которой всегда меньше потребляемой мощности за счет потерь на трение и нагрев. Однако, если шильдик на корпусе двигателя отсутствует, можно очень приблизительно оценить характеристики привода по его габаритам. При одинаковой мощности двигатель с бо́льшим диаметром вала будет иметь более высокую мощность на валу и меньшую частоту оборотов.
На нем указана механическая мощность (мощность на валу), значение которой всегда меньше потребляемой мощности за счет потерь на трение и нагрев. Однако, если шильдик на корпусе двигателя отсутствует, можно очень приблизительно оценить характеристики привода по его габаритам. При одинаковой мощности двигатель с бо́льшим диаметром вала будет иметь более высокую мощность на валу и меньшую частоту оборотов.
Также мощность можно определить по нагрузке и по настройкам защитных устройств, через которые питается двигатель (мотор-автомат, тепловое реле).
Еще один способ – включаем двигатель на номинальную мощность, обеспечив нужную нагрузку на валу. После этого измеряем токоизмерительными клещами ток, который должен быть одинаков по всем обмоткам. Для приблизительной оценки мощности асинхронного двигателя, подключенного по схеме «звезда», нужно разделить номинальный измеренный ток на 2.
5. Как увеличить или уменьшить обороты электродвигателя?
Управление скоростью вращения двигателя необходимо в трех режимах работы – при разгоне, торможении, и в рабочем режиме.
Наиболее универсальный способ управления оборотами — использование частотного преобразователя. Настройками ПЧ можно добиться любой частоты вращения в пределах технической возможности. При этом можно управлять и другими параметрами электродвигателя, а также следить за его состоянием во время работы. Частоту можно менять и плавно, и ступенчато.
Управление оборотами двигателя в режиме разгона и торможения возможно при использовании УПП. Это устройство позволяет значительно снизить пусковой ток за счет плавного разгона с медленным увеличением оборотов.
6. Как рассчитать ток и мощность электродвигателя?
Бывает так, что известен ток асинхронного двигателя (по измерениям в номинальном режиме или по шильдику), но неизвестна его мощность. Как в таком случае рассчитать мощность? Обычно используют следующую формулу:
Р = I (1,73·U·cosφ·η)
где:
Р – номинальная полезная мощность на валу двигателя в Вт (указывается на шильдике),
I – ток двигателя, А,
U – напряжение питания обмоток (380 В при подключении в «звезду», 220 В при подключении в «треугольник»),
cosφ, η – коэффициенты мощности и полезного действия для учета потерь (обычно 0,7…0,8).
Для расчета тока по известной мощности пользуются обратной формулой:
I = P/(1,73·U·cosφ·η)
Для двигателей мощностью 1,5 кВт и более, обмотки которых подключены в «звезду» (это подключение используется чаще всего), существует простое эмпирическое правило – чтобы приблизительно оценить ток двигателя, нужно умножить его мощность на 2.
7. Как увеличить мощность электродвигателя?
Номинальная мощность на валу, которая указывается на шильдике двигателя, обычно ограничивается допустимым током, а значит – нагревом корпуса привода. Поэтому при увеличении мощности необходимо предпринять дополнительные меры по охлаждению электродвигателя, установив отдельный вентилятор.
При использовании преобразователя частоты для повышения мощности можно изменить несущую частоту ШИМ, однако следует избегать перегрева ПЧ. Мощность также можно увеличить с помощью редуктора или ременной передачи, пожертвовав количеством оборотов, если это допустимо.
Если приведенные советы неприменимы – придётся менять двигатель на более мощный.
8. Каковы потери мощности при подключении трехфазного двигателя к однофазной сети (380 на 220)?
При таком подключении используются пусковой и рабочий фазосдвигающие конденсаторы. Номинальную мощность на валу в данном случае получить не удастся, и потери мощности составят 20-30% от номинала. Это происходит из-за невозможности обеспечить отсутствие перекоса по фазам при изменении нагрузки.
9. Какие исполнения двигателей бывают?
В зависимости от исполнения электродвигатели классифицируются по способу монтажа, классу защиты, климатическому исполнению. Существует два основных способа монтажа асинхронных электродвигателей – на лапах и через фланец. Оба варианта исполнения в различных комбинациях показаны в таблице ниже.
Виды климатического исполнения предполагают использование двигателя в определенных климатических зонах: умеренный климат (У), холодный климат (ХЛ), умеренно-холодный климат (УХЛ), тропический климат (Т), общеклиматическое исполнение (О), общеклиматическое морское исполнение (ОМ), всеклиматическое исполнение (В). Также различают категории размещения (на открытом воздухе, под навесом или в помещении и т.д.).
Также различают категории размещения (на открытом воздухе, под навесом или в помещении и т.д.).
Класс защиты обозначает характер защиты двигателя от попадания пыли и влаги. Наиболее часто встречаются приводы с классами IP55 и IP55.
10. Зачем электродвигателю тормоз?
В некоторых устройствах (лифтах, электроталях, лебедках) при остановке двигателя необходимо зафиксировать его вал в неподвижном состоянии. Для этого применяют электромагнитный механический тормоз, который входит в конструкцию двигателя и располагается в его задней части. Управление тормозом осуществляется с помощью частотного преобразователя или схемы на контакторах.
11. Как двигатель обозначается на электрических схемах?
Электродвигатель обозначается на схемах с помощью буквы «М», вписанной в круг. Также на схемах могут быть указаны порядковый номер двигателя, количество фаз (1 или 3), род тока (переменный или постоянный), способ включения обмоток ( «звезда» или «треугольник»), мощность. Примеры обозначений показаны ниже.
Примеры обозначений показаны ниже.
12. Почему греется электродвигатель?
Двигатель может нагреваться по одной из следующих причин:
- износ подшипников и повышенное механическое трение
- увеличение нагрузки на валу
- перекос напряжения питания
- пропадание фазы
- замыкание в обмотке
- проблема с обдувом (охлаждением)
Нагрев двигателя резко снижает его ресурс и КПД, а также может приводить к поломке привода.
13. Типичные неисправности электродвигателей
Выделяют два вида неисправностей электродвигателей: электрические и механические.
К электрическим относятся неисправности, связанные с обмоткой:
- межвитковое замыкание
- замыкание обмотки на корпус
- обрыв обмотки
Для устранения этих неисправностей требуется перемотка двигателя.
Механические неисправности:
- износ и трение в подшипниках
- проворачивание ротора на валу
- повреждение корпуса двигателя
- проворачивание или повреждение крыльчатки обдува
Замена подшипников должна производиться регулярно с учетом их износа и срока службы. Крыльчатка также меняется в случае повреждения. Остальные неисправности устранению практически не подлежат, и единственный выход — замена двигателя.
Если у вас есть вопросы, ответы на которые вы не нашли в данной статье, напишите нам. Будем рады помочь!
Другие полезные материалы:
Выбор электродвигателя
Использование тормозных резисторов с преобразователями частоты
7.3: Электромоторы постоянного тока
Приводы — это механизмы, которые используются для воздействия на окружающую среду, обычно для перемещения механизмов или систем и управления ими. Приводы заставляют двигаться все элементы соревновательного робота, которые могут двигаться. Наиболее распространенным типом привода является электромотор, в частности, в роботах VEX используются электромоторы постоянного тока.
Наиболее распространенным типом привода является электромотор, в частности, в роботах VEX используются электромоторы постоянного тока.
Электромоторы преобразуют электрическую энергию в механическую энергию путем использования электромагнитных полей и вращающихся проволочных катушек. При вводе напряжения в электромотор, последний выводит установленное количество механической мощности. Механическая мощность рассматривается как выход электромотора (обычно это ось, разъем или передача), вращающегося с определенной скоростью и при определенном крутящем моментe.
Нагружение электромотора
Электромоторы выводят крутящий момент только в ответ на нагружение. При отсутствии нагружения на выходе, электромотор будет вращаться очень быстро при нулевом крутящем моменте. Этого никогда не происходит в реальной жизни, так как в системе электромотора всегда присутствует трение, выполняющее роль нагрузки и заставляющее электромотор выводить крутящий момент для его преодоления. Чем больше нагрузка на электромотор, тем больше он «сопротивляется» с помощью противодействующего крутящего момента. Тем не менее, так как электромотор выводит заданное количество мощности, чем больше крутящий момент, выводимый электромотором, тем меньше его вращательная скорость. Чем больше работы должен произвести электромотор, тем медленнее он вращается. Если нагрузка на электромотор будет продолжать увеличиваться, в результате она превысит возможности электромотора и последний перестанет вращаться. Это называется «остановом».
Чем больше нагрузка на электромотор, тем больше он «сопротивляется» с помощью противодействующего крутящего момента. Тем не менее, так как электромотор выводит заданное количество мощности, чем больше крутящий момент, выводимый электромотором, тем меньше его вращательная скорость. Чем больше работы должен произвести электромотор, тем медленнее он вращается. Если нагрузка на электромотор будет продолжать увеличиваться, в результате она превысит возможности электромотора и последний перестанет вращаться. Это называется «остановом».
Потребление электроэнергии
Электромотор потребляет определенное количество электрического тока (выражаемого в Амперах), которое зависит от количества приложенной к нему нагрузки. При повышении нагрузки на электромотор, потребление электроэнергии электромотором увеличивается пропорционально повышению производимого им крутящего момента.
Как показано на графике выше, ток прямо пропорционален нагружающему моменту (крутящий момент нагрузки). Чем больше нагружающий момент, тем больше потребление электроэнергии, при этом ток частота вращения обратно пропорциональны друг другу. Чем быстрее вращается электромотор, тем меньше электроэнергии он потребляет.
Чем больше нагружающий момент, тем больше потребление электроэнергии, при этом ток частота вращения обратно пропорциональны друг другу. Чем быстрее вращается электромотор, тем меньше электроэнергии он потребляет.
Ключевые характеристики электромотора
Электромоторы отличаются друг от друга и обладают различными свойствами, в зависимости от типа, конфигурации и способа производства. Существуют четыре основные характеристики, которыми обладают все электромоторы постоянного тока, используемые в соревновательной робототехнике.
Заданный крутящий момент (Н-м) — количество нагрузки, при приложении которого к электромотору последний перестанет двигаться.
Свободная скорость (об/мин) — максимальная частота вращения электромотора, работающего без нагрузки.
Ток заторможенного электромотора (Ампер) — количество электрического тока, потребляемого остановленным электромотором.
Свободный ток (Ампер) — количество электрического тока, потребляемого электромотором, работающим без нагрузки.
На этих взаимосвязях основывается концепция мощности. При заданном нагружении, электромотор может вращаться только с определенной скоростью.
Линейная и пропорциональная природа представленных выше взаимосвязей позволяет легко составлять графики «крутящий момент — скорость» и «крутящий момент — ток» для любого электромотора путем экспериментального определения двух точек на каждом графике.
Изменение мощности за счет напряжения
Выходная мощность электромотора постоянного тока зависит от входного напряжения. Это означает, что чем больше входное напряжение, тем больше мощности производится и тем быстрее может работать электромотор.
Если электромотор имеет заданное нагружение, что будет происходить при повышении напряжения (в результате увеличения мощности)? Электромотор будет вращаться быстрее! Для выполнения того же объема работы доступно большее количество мощности.
Это означает, что характеристики электромотора, приведенные выше, изменяются в зависимости от входного напряжения электромотора, поэтому их значения необходимо устанавливать при заданном напряжении (при испытаниях с напряжением 12 В). Эти четыре характеристики изменяются пропорционально входному напряжению. Например, если свободная скорость электромотора составляет 50 об/мин при напряжении 6 В, при удваивании напряжения до 12 В свободная скорость также удваивается и принимает значение 100 об/мин.
Эти четыре характеристики изменяются пропорционально входному напряжению. Например, если свободная скорость электромотора составляет 50 об/мин при напряжении 6 В, при удваивании напряжения до 12 В свободная скорость также удваивается и принимает значение 100 об/мин.
Значения этих характеристик при определенном напряжении могут быть рассчитаны в том случае, если известны их значения при другом напряжении, путем умножения известного значения на коэффициент значений напряжения. Этот подход не применим к определению свободного тока электромотора, так как его значение остается постоянным при любом напряжении.
Новое значение = Определенное значение х (Новое значение/Определенное значение)
Из примера выше видно, что свободная скорость электромотора составляет 50 об/мин при напряжении 6 В. Проектировщик планирует использовать электромотор при напряжении 8 В. Какова будет свободная скорость электромотора при этом напряжении?
Свободная скорость @ 8 В = Свободная скорость @ 6 В x (8 В / 6 В) = 50 об/мин x (8/6) = 66,66 об/мин
Как можно использовать изменение напряжения в управлении роботом? Электромоторы робота представляют собой не просто устройства, работающие по системе «вкл/откл». Проектировщик робота может изменять напряжение электромотора, работающего при нагрузке, для получения различных значений мощности и скорости. Для этого используются моторные контроллеры, регулирующие напряжение, поступающее к электромоторам.
Проектировщик робота может изменять напряжение электромотора, работающего при нагрузке, для получения различных значений мощности и скорости. Для этого используются моторные контроллеры, регулирующие напряжение, поступающее к электромоторам.
Предельные значения и расчеты для электромотора
Означает ли это, что проектировщик может продолжать увеличивать напряжение электромотора до тех пор, пока последний не сможет выводить количество мощности, достаточное для выполнения задачи? Не совсем так. Электромоторы имеют ограничения. С одной стороны, приобретенная мощность будет слишком большой для электрических обмоток (как правило, обмотка начнет гореть, выделяя белый дым). К счастью, электромоторы VEX лишены подобных проблем, так как снабжены встроенными тепловыми реле, блокирующими поступление электрического тока в электромотор в случае его перегрева. Такое решение является очень удачным, так как электромотор не может перегореть, но при этом возникает новое условие для проектировщиков, выраженное в необходимости предотвращения срабатывания предохранителей электромотора.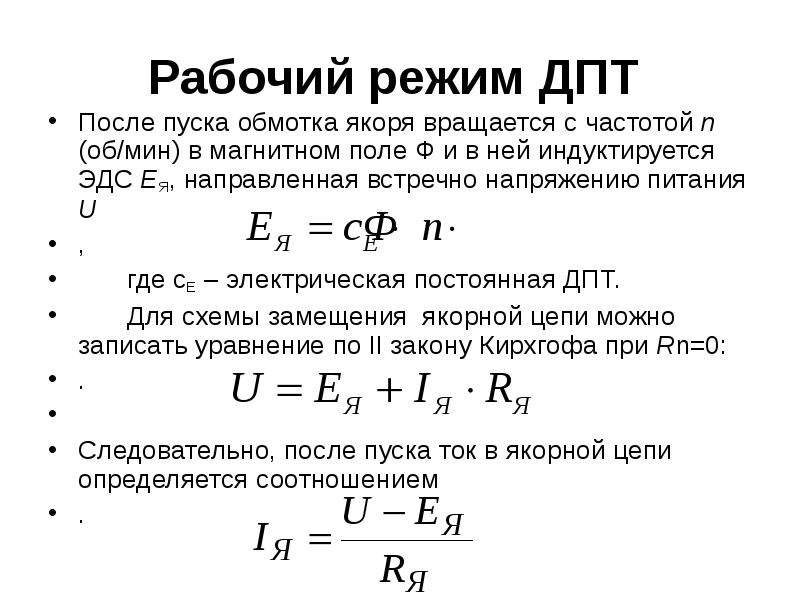 Как это сделать? Путем проектирования системы таким образом, чтобы исключить превышение установленного потребления тока электромотором за счет ограничения количества нагрузки на него.
Как это сделать? Путем проектирования системы таким образом, чтобы исключить превышение установленного потребления тока электромотором за счет ограничения количества нагрузки на него.
Расчет нагрузки на руку
В примере, представленном выше, известный электромотор управляет движением руки робота при известном напряжении. В данном сценарии, какую максимальную массу может стабильно удерживать робот?
Чтобы решить эту задачу, проектировщик должен понимать, что максимальная масса, которую робот может удерживать стабильно, возникает при предельном перегрузочном моменте электромотора. Если электромотор находится в остановленном состоянии, он прикладывает к руке робота длиной 0,25 метра крутящий момент, равный 1 Н. Крутящий момент = Сила * Расстояние
Сила = Крутящий момент/Расстояние = 1 ньютон-метр/0,25 метра = 4 ньютона
Рука может удерживать до 4 ньютонов при остановленном электромоторе. При любом превышении, рука опрокинется.
Расчет крутящей нагрузки из предельного тока:
Это просто, но ситуация усложняется, когда необходимо учесть предельный ток. Например, в электромоторе из примера, представленного выше, установлен выключатель предельного тока, который сработает при потреблении свыше 2 ампер. Какова максимальная масса, которую робот может удерживать без срабатывания выключателя?
Теперь, электромотор не работает при предельном перегрузочном моменте — в режиме останова электромотор будет потреблять ток заторможенного электромотора, равный 3 амперам, что вызовет срабатывание предохранителя. Проектировщик должен выяснить, какую крутящую нагрузку должен испытывать электромотор, чтобы его потребление тока не достигало 2 ампер. Как это реализовать?
Глядя на график выше и помня о том, что взаимосвязи линейны, крутящая нагрузка при любом заданном потреблении тока может быть рассчитана с помощью уравнения.
Уравнение для линии: y = mx + b, где y — это значение по оси y, x — это значение по оси x, m — это уклон линии, и b — это место пересечения линии с осью y (точка пересечения с осью y).
Уклон линии может быть выражен как: m = (изменение по Y / изменение по X) = (ток заторможенного электромотора — свободный ток) / предельный перегрузочный момент
Точка пересечения с осью Y обозначает свободный ток.
Значение Y — это ток в заданной точке линии, и значение X — это крутящая нагрузка в этой точке.
Уравнение может быть представлено следующим образом:
Ток = ((ток заторможенного электромотора — свободны ток) / предельный перегрузочный момент) х крутящая нагрузка + свободный ток
Для крутящей нагрузки это же уравнение выглядит следующим образом:
Крутящая нагрузка = (ток — свободный ток) х предельный перегрузочный момент / (ток заторможенного электромотора — свободный ток)
С помощью параметров из примера выше может быть установлена крутящая нагрузка, при которой значение потребления тока будет равно 2 амперам.
Крутящая нагрузка = (2 ампера — 1 ампер) х 1 Н-м / (3 ампера — 1 ампер)
Крутящая нагрузка = (1,9 ампер) х 10 Н-м / (2,9 ампер)
Крутящая нагрузка = 0,655 Н-м
На основании данного расчета проектировщик может сделать вывод, что если значение крутящего момента электромотора превышает 0,655 Н-м, его потребление электричества превысит 2 ампера, при этом предохранитель сработает. Остается рассчитать количество силы, которой должна обладать рука.
Сила = Крутящий момент/Расстояние = 0,655 Н-м / 0,25 м = 2,62 Н
Если рука робота подбирает объект, масса которого превышает 2,62 Н, это спровоцирует срабатывание предохранителя.
Расчет скорости электромотора из крутящей нагрузки
В примере, представленном выше, какова скорость электромотора при предельном токе? На основании расчетов, выполненных на предыдущем этапе, проектировщик должен определить скорость электромотора при нагрузке 0,655 Н-м.
Глядя на график, изображенный выше, скорость электромотора при любой крутящей нагрузке может быть рассчитана с помощью уравнения, аналогичного уравнению для расчета потребления тока (предыдущий пример).
В этом случае, уклон линии выражается как m = (изменение по Y) / (изменение по X) = (свободная скорость) / (предельный перегрузочный момент).
Примечание: уклон имеет отрицательное значение.
Точка пересечения с осью Y обозначает свободную скорость.
Значение Y — это скорость в заданной точке линии, и значение X — это крутящая нагрузка в этой точке.
Уравнение выглядит следующим образом:
Скорость = (свободная скорость / предельный перегрузочный момент) х крутящая нагрузка + свободная скорость
С помощью параметров из примера выше может быть установлена скорость электромотора при крутящей нагрузке, равной 6,55 фунто-дюймов:
Скорость = -(100 об/мин / 1 Н-м) x 0,655 Н-м + 100 об/мин
Скорость = -(100 об/мин/Н-м) x 0,655 Н-м + 100 об/мин
Скорость = 65,5 об/мин + 100 об/мин = 34,5 об/мин
При потреблении 2 ампер тока и подъеме объекта массой 2,62 Н, электромотор будет вращаться со скоростью 34,5 об/мин при крутящей нагрузке 0,655 Н-м.
Несколько электромоторов
Если для выполнения задачи требуется больше мощности, чем может обеспечить один электромотор, у проектировщика есть три варианта действий:
- 1. Изменить проектные требования таким образом, чтобы для выполнения задачи было достаточно меньшей мощности.
2. Перейти на использование более мощного электромотора.
3. Увеличить количество электромоторов.
Что произойдет при использовании в проекте нескольких электромоторов? Очень просто — крутящая нагрузка будет распределена между ними. При крутящем моменте 2 Н-м, каждый электромотор будет иметь крутящую нагрузку 1 Н-м и реагировать соответственно.
Это можно представить так, что электромоторы принимают на себя характеристики супер-мотора, при этом характеристики отдельных электромоторов суммируются. Суммируются значения предельного перегрузочного момента, тока заторможенного электромотора, свободного тока, при этом свободная скорость остается неизменной.
В таблице выше представлены спецификации 2-проводного электромотора VEX 393, а также спецификации при комбинировании двух электромоторов для выполнения одной задачи.
В примере выше, сколько электромоторов VEX 393 необходимо для стабильного удерживания объекта?
Крутящая нагрузка на электромоторы рассчитывается следующим образом:
Крутящая нагрузка = сила х расстояние = 22 Н х 0,25 м = 5,5 Н-м
Данную крутящую нагрузку можно сравнить с предельным перегрузочным моментом электромотора VEX 393 и определить требуемое количество.
5,5 Н-м / 1,67 Н-м = 3,29 электромоторов
Таким образом, для удержания руки в поднятом положении (пример выше) необходимо 4 электромотора.
Как повысить эффективность электродвигателя — Fluidbusiness
Большинство насосов приводятся в действие с помощью асинхронных электродвигателей, это означает, что двигатели вносят вклад в общую эффективность насосной системы.Данная статья посвящена исследованию ключевых аспектов эффективности электродвигателя, которые находятся под контролем пользователя. 2/3 всей вырабатываемой электроэнергии, потребляются электродвигателями, которые используются в различном оборудовании на промышленных площадках всего мира.
Электродвигатели развиваются на протяжении последних 150 лет. Не смотря на то, что существует большой выбор из различных конструкций двигателей (например синхронные, асинхронные или постоянного тока), наиболее используемым в промышленности на сегодняшний день является асинхронный электродвигатель переменного тока, т.к. является более надежным. Также асинхронный электродвигатель предпочтительнее при использовании частотного преобразователя. Достаточно высокая эффективность в сочетании с простотой изготовления, высокой надежностью и низкой ценой делает его самым широко-применяемым типом двигателя по всему миру.
Рисунок 1: Асинхронный электродвигатель с короткозамкнутым ротором
На рисунке 1 показана обычная компоновка асинхронного электродвигателя с тремя обмотками статора, которые расположены вокруг сердечника. Обмотка ротора состоит из медных или алюминиевых стержней, торцы которых накоротко замкнуты кольцами. Кольца изолированы от ротора. В подшипниковом узле, как правило, используются шарикоподшипники с консистентной смазкой, за исключением очень больших двигателей. Смазка масляным туманом может значительно увеличить срок службы подшипников. Во всех асинхронных электродвигателях используется трехфазный ток, за исключением самых маленьких промышленных процессов (ниже 2 л.с.). Для запуска фазных двигателей необходимы другие средства, такие как щетки или конденсаторный пуск (использование конденсатора во время пуска).
Проблема эффективности двигателя
При использовании электродвигателя в качестве привода насоса потери энергии и падение давления в результате неэффективности насоса обычно гораздо больше, чем потери энергии связанные с неэффективностью электродвигателя, но они не являются незначительными. Оптимизация эффективности электродвигателя насоса может обеспечить реальную экономию стоимости рабочего цикла на протяжении всего срока службы насоса/электродвигателя. Ключевыми факторами, которые влияют на эффективность асинхронного двигателя являются:
- относительная нагрузка двигателя (негабаритные двигатели находящиеся под нагрузкой)
- скорость вращения (число полюсов)
- размер двигателя (номинальная мощность)
- класс двигателя: обычный КПД в сравнении с энергоэффективностью в с равнении с высоким КПД
Эффективность электродвигателя при частичной загрузке
Как показано на рисунке 2, эффективность асинхронного электродвигателя изменяется вместе с
относительной нагрузкой на электродвигатель по сравнению с номинальной характеристикой. Вплоть до нагрузки в 50% эффективность большинства электродвигателей остается линейной и для некоторых электродвигателей достигает пика у отметки 75%. Электродвигатели могут работать при нагрузке меньше 50% только в течение короткого промежутка времени и не могут эксплуатироваться при нагрузках меньше 20% от номинальных. Таким образом, когда отрегулированные рабочие колеса или насосы возвращаются к своим кривым «напор-подача», необходимо оценить воздействие относительной нагрузки на электродвигатель.
Рисунок 2: Эффективность электродвигателя для 100-сильных моторов — Обычные кривые характеристик при нормальном диапазоне нагрузок электродвигателя
Скорость вращения
На рисунке 2 также показано влияние скорости вращения на максимально-достижимую эффективность. 4-х полюсный электродвигатель при номинальных 1800 об/мин выходит на самый высокий КДП, а 2-х полюсный при номинальных 3600 об/мин дает низкую эффективность. Таким образом, хотя насосы с номинальной частотой вращения 3600 об/мин могут быть более эффективными (и иметь низкую закупочную стоимость), чем насосы со скоростью вращения 1800 об/мин, электродвигатели последних могут быть более эффективными, плюс эти насосы, как правило, имеют более низкий NPSHR и энергию всасывания, не говоря уже о более длительном сроке службы. Также следует отметить, что номинальная мощность электродвигателя влияет на его эффективность, большие электродвигатели имеют большую эффективность, чем малые.
Скорость вращения асинхронного электродвигателя
Синхронная скорость вращения асинхронного электродвигателя рассчитывается по следующей формуле:
n = 120*f/p
где:
n = скорость вращения в об/мин
f = частота питающей сети (Гц)
p = количество полюсов (min = 2)
Для регулирования частоты вращения электродвигателя без использования внешних механических устройств необходимо регулировать напряжение и частоту подаваемого тока. Некоторые электродвигатели могут быть изготовлены с несколькими обмотками (количество полюсов) для достижения двух или более различных скоростей вращения.
Асинхронные электродвигатели вращаются со скоростью, которая меньше скорости вращения магнитного поля (на 1-3% при полной нагрузке). Разница между фактической и синхронной частотой вращения называется скольжением. Для новых более энергоэффективных электродвигателей скольжение имеет тенденцию уменьшаться в отличие от старых электродвигателей с обычным КПД. Это означает, что при заданной нагрузке энергоэффективные электродвигатели работают немного быстрее.
Рисунок 3. Эффективность при полной и частичной загрузке двигателя с низким и высоким КПД
Электродвигатели с высоким КПД
На рисунке 3 изображен пример возможного повышения эффективности, когда старый электродвигатель с обычной эффективностью заменяется новым, имеющим более высокий КПД. Как упоминалось ранее, электродвигатели с высоким КПД работают с меньшим скольжением, что дает некоторое увеличение скорости вращения, а следовательно напор насоса и производительность становятся несколько больше.
Однако, использование электродвигателей с высоким КПД в некоторых (с изменением подачи) процессах будет не оправданно, из-за большей скорости вращения (и напора насоса), до тех пор пока существующие электродвигатели по-прежнему слабо загружены (работающие с низким КПД). Т.к. входная мощность на валу насоса пропорциональна скорости в кубе, простая замена старого электродвигателя новым с высоким КПД не обязательно приведет к снижению потребления энергии.
С другой стороны, если немного большая подача и напор для насоса — это хорошо, замена старого
электродвигателя с обычным КПД на новый с высоким КПД может быть оправдана.
Коэффициент мощности электродвигателя
Другая проблема, которая входит в игру с характеристиками асинхронного электродвигателя (которая имеет косвенное влияние на энергопотребление) называется «Коэффициент Мощности«. Некоторые
коммунальные предприятия обязывают клиентов платить дополнительные сборы за низкие значения
коэффициентов мощности. Потери в сети происходят за счет того, что при меньшем коэффициенте
мощности требуется большее количество тока, что приводит к серьезным потерям энергии. Как и КПД,
коэффициент мощности электродвигателя также снижается с уменьшением нагрузки на него практически по линейному закону приблизительно до 50% нагрузки.
Определение коэффициента мощности:
Фазовый сдвиг (задержка) синусоидальной волны тока от синусоиды напряжения, который выбарабывает меньшее количество полезной мощности.
Сдвиг, вызванный необходимым током намагничивания двигателя
PF = Pi/KVA
Где:
KVA = VxIx(3)0.5/1,000
Нижняя формула показывает, как коэффициент мощности влияет на входную мощность трехфазного
электродвигателя (кВт). Обратите внимание, что чем ниже коэффициент мощности (больший сдвиг фазы ток-напряжение VA), тем меньше входная мощность при данном входном токе и напряжении.
Где:
Pi = VxIxPF(3)0.5/1,000
Pi= трехфазный вход кВт
V= среднеквадратичное напряжение (среднее от 3 фаз)
I= среднеквадратичное значение силы тока в амперах (берется от 3 фаз)
PF= коэффициент мощности в виде дроби
Хотя коэффициент мощности не влияет напрямую на КПД электродвигателя, он оказывает влияние на потери в сети, как это упоминалось выше. Однако, есть способы увеличения PF (коэффициента мощности), а именно:
- покупка электродвигателей с изначально высоким PF
- не покупайте слишком большие электродвигатели (коэффициент мощности падает вместе с уменьшением
- нагрузки на электродвигатель)
- установка компенсирующих конденсаторов параллельно с обмотками электродвигателя
- увеличить полную загрузку коэффициента мощности до 95% (Max)
- преобразование в привод с частотным регулированием
Пусковые конденсаторы электродвигателей являются одним из наиболее поппулярных способов увеличения коэффициента мощности и имеют следующий список преимуществ:
- увеличение PF
- меньшение реактивного тока от электрооборудования через кабели и пускатели электродвигателейменьшее тепловыделение и потери мощности кВт
- По мере уменьшения нагрузки на электродвигатель растет возможность экономии, а PF
- падает ниже 60%-70%. (возможная экономия 10%)
- Уменьшение сборов за коэффициент мощности
- Увеличение общей производительности системы
- Интеллектуальная система управления электродвигателем
- Частотно-регулируемый электропривод
Более высокое напряжение
Другим способом повышения КПД электродвигателя является повышение рабочего напряжения. Чем выше напряжение, тем ниже ток и, тем самым будут ниже потери в сети. Однако, высокое напряжение приведет к увеличению цены частотно-регулируемого привода и сделает работу более опасной.
Выводы
Таким образом, когда вы пытаетесь сократить энергопотребление насосных систем не забывайте о
КДП электродвигателя и факторах, перечисленных выше, которые на него влияют.
OZON.ru
Москва
- Ozon для бизнеса
- Мобильное приложение
- Реферальная программа
- Зарабатывай с Ozon
- Подарочные сертификаты
- Помощь
- Пункты выдачи
Каталог
ЭлектроникаОдеждаОбувьДом и садДетские товарыКрасота и здоровьеБытовая техникаСпорт и отдыхСтроительство и ремонтПродукты питанияАптекаТовары для животныхКнигиТуризм, рыбалка, охотаАвтотоварыМебельХобби и творчествоЮвелирные украшенияАксессуарыИгры и консолиКанцелярские товарыТовары для взрослыхАнтиквариат и коллекционированиеЦифровые товарыБытовая химия и гигиенаOzon ExpressМузыка и видеоАлкогольная продукцияАвтомобили и мототехникаOzon УслугиЭлектронные сигареты и товары для куренияOzon PremiumOzon GlobalТовары в РассрочкуПодарочные сертификатыУцененные товарыOzon CardСтрахование ОСАГОРеферальная программаOzon TravelРегулярная доставкаОzon ЗОЖДля меняDисконтOzon MerchTV героиПредложения от брендовOzon для бизнесаOzon КлубOzon LiveМамам и малышамТовары OzonOzon ЗаботаЭкотоварыOzon Job 0Войти 0Заказы 0Избранное- TOP Fashion
- Premium
- Ozon Travel
- Ozon Express
- Ozon Card
- LIVE
- Акции
- Бренды
- Магазины
- Электроника
- Одежда и обувь
- Детские товары
- Дом и сад
- Dисконт
Такой страницы не существует
Вернуться на главную Зарабатывайте с OzonВаши товары на OzonРеферальная программаУстановите постамат Ozon BoxОткройте пункт выдачи OzonСтать Поставщиком OzonЧто продавать на OzonEcommerce Online SchoolSelling on OzonО компанииОб Ozon / About OzonВакансииКонтакты для прессыРеквизитыАрт-проект Ozon BallonБренд OzonГорячая линия комплаенсУстойчивое развитиеOzon ЗаботаПомощьКак сделать заказДоставкаОплатаКонтактыБезопасностьOzon для бизнесаДобавить компаниюМои компанииПодарочные сертификаты © 1998 – 2021 ООО «Интернет Решения». Все права защищены. OzonИнтернет-магазинOzon ВакансииРабота в OzonOZON TravelАвиабилетыRoute 256Бесплатные IT курсыLITRES.ruЭлектронные книгиВыбор электродвигателя и расчет его рабочих параметров
Правильность подбора электродвигателя, учитывающая специфику приводного механизма, условия работы и окружающей среды, определяет длительность безаварийной работы и надежность системы «двигатель – нагрузка».
Далее приведены рекомендации по выбору электродвигателя (последовательность, в которой они представлены, не является обязательной).
На первом этапе необходимо определиться с типом электрического двигателя. Ниже даны краткое описание, преимущества и недостатки, сферы предпочтительного применения основных типов двигателей.
Типы электрических двигателей- Двигатели постоянного тока
Основным преимуществом данных двигателей, которое определяло повсеместное их использование на этапе развития электрических приводов, является легкость плавного регулирования скорости в широких пределах. Поэтому с развитием полупроводниковой промышленности и появлением относительно недорогих преобразователей частоты процент их использования постоянно уменьшается. Там, где это возможно двигатели постоянного тока заменяются приводами на основе асинхронных двигателей с короткозамкнутым ротором.
Основные недостатки двигателя постоянного тока (невысокая надежность, сложность обслуживания и эксплуатации) обусловлены наличием коллекторного узла. Кроме того, для питания двигателя необходим источник постоянного тока или тиристорный преобразователь переменного напряжения в постоянное. При всех своих недостатках двигатели постоянного тока обладают высоким пусковым моментом и большой перегрузочной способностью. Что определило их использование в металлургической промышленности, станкостроении и на электротранспорте.
- Синхронные двигатели
Основным преимуществом данных двигателей является то, что они могут работать с коэффициентом мощности cosφ=1, а в режиме перевозбуждения даже отдавать реактивную мощность в сеть, что благоприятно сказывается на характеристиках сети: увеличивается ее коэффициент мощности, уменьшаются потери и падение напряжения. Кроме того, синхронные двигатели устойчивы к колебаниям сети. Максимальный момент синхронного двигателя пропорционален напряжению, при этом момент асинхронного двигателя пропорционален квадрату напряжения. Следовательно, при снижении напряжения синхронный двигатель сохраняет большую перегрузочную способность, а возможность форсировки возбуждения увеличивает надежность их работы при аварийных понижениях напряжения. Больший воздушный зазор по сравнению с асинхронным двигателем и применение постоянных магнитов делает КПД синхронных двигателей выше. Их особенностью также является постоянство скорости вращения при изменении момента нагрузки на валу.
При всех достоинствах синхронного двигателя основными недостатками, ограничивающими их применение являются сложность конструкции, наличие возбудителя, высокая цена, сложность пуска. Поэтому синхронные двигатели преимущественно используются при мощностях свыше 100 кВт.
Основное применение – насосы, компрессоры, вентиляторы, двигатель-генераторные установки.
- Асинхронные двигатели
По конструктивному принципу асинхронные двигатели подразделяются на двигатели с короткозамкнутым и фазным ротором. При этом большинство используемых электродвигателей являются асинхронными с короткозамкнутым ротором. Столь широкое применение обусловлено простотой их конструкции, обслуживания и эксплуатации, высокой надежностью, относительно низкой стоимостью. Недостатками таких двигателей являются большой пусковой ток, относительно малый пусковой момент, чувствительность к изменениям параметров сети, а для плавного регулирования скорости необходим преобразователь частоты. Кроме того, асинхронные двигатели потребляют реактивную мощность из сети. Предел применения асинхронных электродвигателей с короткозамкнутым ротором определяется мощностью системы электроснабжения конкретного предприятия, так как большие пусковые токи при малой мощности системы создают большие понижения напряжения.
Использование асинхронных двигателей с фазным ротором помогает снизить пусковой ток и существенно увеличить пусковой момент, благодаря введению в цепь ротора пусковых реостатов. Однако, ввиду усложнения их конструкции, и как следствие, увеличения стоимости их применение ограничено. Основное применение – приводы механизмов с особо тяжелыми условиями пуска. Для уменьшения пусковых токов асинхронного двигателя с короткозамкнутым ротором может быть использовано устройство плавного пуска или преобразователь частоты.
В системах, где необходимо ступенчатое изменение скорости (например, лифты) используют многоскоростные асинхронные двигатели. В механизмах, требующих остановки за определенное время и фиксации вала при исчезновении напряжения питания, применяются асинхронные двигатели с электромагнитным тормозом (металлообрабатывающие станки, лебедки). Существуют также асинхронные двигатели с повышенным скольжением, которые предназначены для работы в повторно-кратковременных режимах, а также режимах с пульсирующей нагрузкой.
После того, как определен тип электродвигателя, полностью учитывающий специфику рабочего механизма и условия работы, необходимо определиться с рабочими параметрами двигателя: мощностью, номинальным и пусковым моментами, номинальными напряжением и током, режимом работы, коэффициентом мощности, классом энергоэффективности.
Мощность и моментыВ общем случае для квалифицированного подбора электродвигателя должна быть известна нагрузочная диаграмма механизма. Однако, в случае постоянной или слабо меняющейся нагрузки без регулирования скорости достаточно рассчитать требуемую мощность по теоретическим или эмпирическим формулам, зная рабочие параметры нагрузки. Ниже приведены формулы для расчета мощности двигателя P2 [кВт] некоторых механизмов.
- Вентилятор
где Q [м3/с] – производительность вентилятора,
Н [Па] – давление на выходе вентилятора,
ηвент, ηпер – КПД вентилятора и передаточного механизма соответственно,
kз – коэффициент запаса.
- Насос
где Q [м3/с] – производительность насоса,
g=9,8 м/с2 – ускорение свободного падения,
H [м] – расчетная высота подъема,
ρ [кг/м3] – плотность перекачиваемой жидкости,
ηнас, ηпер – КПД насоса и передаточного механизма соответственно,
kз – коэффициент запаса.
- Поршневой компрессор
где Q [м3/с] – производительность компрессора,
А [Дж/м3] – работа изотермического и адиабатического сжатия атмосферного воздуха объемом 1 м3 давлением 1,1·105 Па до требуемого давления,
ηкомпр, ηпер – КПД компрессора и передаточного механизма соответственно,
kз – коэффициент запаса.
Кроме того, необходимо сопоставить пусковой момент двигателя (особенно в случае асинхронного с короткозамкнутым ротором) и рабочего механизма, так как некоторые механизмы имеют повышенное сопротивление в момент трогания. Следует иметь в виду и то обстоятельство, что при замене трехфазного асинхронного двигателя на однофазный пусковой момент последнего почти в три раза меньше и механизм, успешно функционировавший ранее, может не тронуться с места.
Развиваемый электродвигателем момент M [Нм] и полезная мощность на валу Р2 [кВт] связаны следующим соотношением
Полная мощность, потребляемая из сети:
для двигателей постоянного тока (она же активная)
для двигателей переменного тока
при этом потребляемые активная и реактивная мощности соответственно
В случае синхронного двигателя значение Q1 может получиться отрицательным, это означает, что двигатель отдает реактивную мощность в сеть.
Важно отметить следующее. Не следует выбирать двигатель с большим запасом по мощности, так как это приведет к снижению его КПД, а в случае двигателя переменного тока также к снижению коэффициента мощности.
Напряжение и ток
При выборе напряжения электродвигателя необходимо учитывать возможности системы энергоснабжения предприятия. При этом нецелесообразно при больших мощностях выбирать двигатель с низким напряжением, так как это приведет к неоправданному удорожанию не только двигателя, но и питающих проводов и коммутационной аппаратуры вследствие увеличения расхода меди.
Если при трогании момент сопротивления нагрузки невелик и для уменьшения пусковых токов асинхронного двигателя с короткозамкнутым ротором может быть применен способ пуска с переключением со «звезды» на «треугольник», необходимо предусмотреть вывод в клеммную коробку всех шести зажимов обмотки статора. В общем случае применение схемы соединения «звезда» является предпочтительным, так как в схеме «треугольник» имеется контур для протекания токов нулевой последовательности, которые приводят к нагреву обмотки и снижению КПД двигателя, в соединении «звезда» такой контур отсутствует.
Режим работы
Нагрузка электродвигателя в процессе работы может изменяться различным образом. ГОСТом предусмотрены восемь режимов работы.
- Продолжительный S1 – режим работы при постоянной нагрузке в течение времени, за которое температура двигателя достигает установившегося значения. Мощность двигателя, работающего в данном режиме, рассчитывается исходя из потребляемой механизмом мощности. Формулы расчета мощности некоторых механизмов (насос, вентилятор, компрессор) приведены выше.
- Кратковременный S2 – режим, при котором за время включения на постоянную нагрузку температура двигателя не успевает достичь установившегося значения, а за время отключения двигатель охлаждается до температуры окружающей среды. В случае использования двигателя S1 для работы в режиме S2 необходимо проверить его только по перегрузочной способности, так как температура не успевает достичь допустимого значения.
- Повторно-кратковременный S3 – режим с периодическим отключением двигателя, при котором за время включения температура не успевает достичь установившегося значения, а за время отключения – температуры окружающей среды. Расчет мощности электродвигателя обычного исполнения для работы в режиме S3 производится по методам эквивалентных величин с учетом пауз и потерь в переходных режимах. Кроме того, двигатель необходимо проверить на допустимое число включений в час. В случае большого числа включений в час рекомендуется использовать двигатели с повышенным скольжением. Данные электродвигатели обладают повышенным сопротивлением обмотки ротора, а, следовательно, меньшими пусковыми и тормозными потерями.
- Повторно-кратковременный с частыми пусками S4 и повторно-кратковременный с частыми пусками и электрическим торможением S5. Данные режимы рассматриваются аналогично режиму S3.
- Перемежающийся S6 – режим, при котором работа двигателя под нагрузкой, периодически заменяется работой на холостом ходу. Большинство двигателей, работающих в продолжительном режиме, имеют меняющийся график нагрузки.
При этом для обоснованного выбора двигателя с целью оптимального его использования рекомендуется применять методы эквивалентных величин.
Класс энергоэффективностиВ настоящее время вопросам энергоэффективности уделяется огромное внимание. При этом под энергоэффективностью понимается рациональное использование энергетических ресурсов, с помощью которого достигается уменьшение потребления энергии при том же уровне мощности нагрузки. Основным показателем энергоэффективности двигателя является его коэффициент полезного действия
где Р2 – полезная мощность на валу, Р1 – потребляемая активная мощность из сети.
Стандартом IEC 60034-30 для асинхронных электродвигателей с короткозамкнутым ротором были установлены три класса энергоэффективности: IE1, IE2, IE3.
Рис. 1. Классы энергоэффективности
Так, например, использование двигателя мощностью 55 кВт повышенного класса энергоэффективности позволяет сэкономить около 8000 кВт в год от одного двигателя.
Степень защиты IP, виды климатических условий и категорий размещенияГОСТ Р МЭК 60034-5 – 2007 устанавливает классификацию степеней защиты, обеспечиваемых оболочками машин.
Обозначение степени защиты состоит из букв латинского алфавита IP и последующих двух цифр (например, IP55).
Большинство электродвигателей, выпускаемых в настоящее время, имеют степени защиты IP54 и IP55.
Категория размещения обозначается цифрой:
1 – на открытом воздухе;
2 – под навесом при отсутствии прямого солнечного воздействия и атмосферных осадков;
3 – в закрытых помещениях без искусственного регулирования климатических условий;
4 – в закрытых помещениях с искусственно регулируемыми климатическими условиями.
Климатические условия:
У – умеренный климат;
УХЛ – умеренно холодный климат;
ХЛ – холодный климат;
Т – тропический климат.
Таким образом, при выборе электродвигателя необходимо учитывать условия окружающей среды (температура, влажность), а также необходимость защиты двигателя от воздействия инородных предметов и воды.
Например, использование электродвигателя с типом климатического исполнения и категорией размещения У3 на открытом воздухе является недопустимым.
Усилия, действующие на вал двигателя со стороны нагрузки
Наиболее нагруженными в двигателе являются подшипниковые узлы. Поэтому при выборе двигателя должны быть учтены радиальные и осевые усилия, действующие на рабочий конец вала двигателя со стороны нагрузки. Превышения допустимых значений сил приводит к ускоренному выходу из строя не только подшипников, но и всего двигателя (например, задевание ротора о статор).
Обычно допустимые значения сил для каждого подшипника приведены в каталогах. Рекомендуется в случае повышенных радиальных усилий (ременная передача) на рабочий конец вала установить роликовый подшипник, при этом предпочтительным является двигатель с чугунными подшипниковыми щитами.
Особенности конструкции двигателя при работе от преобразователя частоты
В настоящее время все большее распространение приобретает использование частотно-регулируемого привода (ЧРП), выполненного на основе асинхронного электродвигателя с короткозамкнутым ротором.
При использовании частотно-регулируемого привода достигается:
1. экономия электроэнергии;
2. плавность пуска и снижение пусковых токов;
3. увеличение срока службы двигателя.
В общем случае стандартный электродвигатель нельзя использовать в составе частотно-регулируемого привода, так как при уменьшении скорости вращения снижается эффективность охлаждения. При регулировании скорости вверх от номинальной резко увеличивается нагрузка от собственного вентилятора. В обоих случаях уменьшается нагрузочная способность двигателя. Кроме того, в случае использования двигателя в системах точного регулирования необходим датчик положения ротора двигателя.
При работе электродвигателя от преобразователя частоты в контуре вал – фундаментная плита могут протекать токи. При этом возникает точечная эрозия на шариках и роликах, на беговых кольцах подшипников качения, а также на баббитовой поверхности подшипников скольжения. От электролиза смазка чернеет, подшипники греются. Для разрыва контура прохождения подшипниковых токов на неприводной конец вала устанавливается изолированный подшипник. При этом по условиям безопасности установка изолированных подшипников с двух сторон двигателя не допустима.
Величина подшипниковых токов становится опасной для безаварийной работы двигателя при напряжении между противоположными концами вала более 0,5 В. Поэтому установка изолированного подшипника обычно требуется для электродвигателей с высотой оси вращения более 280 мм.
Примечание
Необходимо отметить, что в случае отклонения условий эксплуатации двигателя (например, температуры окружающей среды или высоты над уровнем моря), мощность нагрузки должна быть изменена. Кроме того, при снижении мощности нагрузки в определенные моменты времени для рационального использования двигателя может быть изменена схема соединения обмотки, а, следовательно, и фазное напряжение.
Популярные товары
Шины медные плетеные
Шины изолированные гибкие и твердые
Шинодержатели
Изоляторы
Индикаторы наличия напряжения
Как улучшить крутящий момент и частоту вращения двигателя постоянного тока?
Я предполагаю, что у этого 6-летнего ребенка есть хотя бы небольшое образование в области физики. Я собираюсь начать с ответа, почему каждый результат будет происходить с большим количеством математики, чтобы описать физику, стоящую за всем этим. Затем я отвечу на каждый случай индивидуально с математическим обоснованием каждого результата. В заключение отвечу на ваш «общий» вопрос.
Почему?
Ответ на все ваши «Почему?» вопросы есть: Физика! В частности, закон Лоренца и закон Фарадея.Отсюда:
Крутящий момент двигателя определяется по уравнению:
$$ \ tau = K_t \ cdot I ~~~~~~~~~~ (N \ cdot m) $$
Где:
\ $ \ tau = \ text {крутящий момент} \ $
\ $ K_t = \ text {постоянная крутящего момента} \ $
\ $ I = \ text {ток двигателя} \ $
Постоянная крутящего момента, \ $ K_t \ $, является одним из основных параметров двигателя, которые описывают конкретный двигатель на основе различных параметров его конструкции, таких как магнитная сила, количество витков провода, длина якоря и т. Д.как вы упомянули. Его значение указывается в крутящем моменте на ампер и рассчитывается как:
.$$ K_t = 2 \ cdot B \ cdot N \ cdot l \ cdot r ~~~~~~~~~~ (N \ cdot m / A) $$
Где:
\ $ B = \ text {сила магнитного поля в теслах} \ $
\ $ N = \ text {количество витков провода в магнитном поле} \ $
\ $ l = \ text {длина действующего магнитного поля на проводе} \ $
\ $ r = \ text {радиус якоря двигателя} \ $
Напряжение обратной ЭДС определяется по:
$$ V = K_e \ cdot \ omega ~~~~~~~~~~ (вольт) $$
Где:
\ $ V = \ text {Напряжение обратной ЭДС} \ $
\ $ K_e = \ text {постоянная напряжения} \ $
\ $ \ omega = \ text {угловая скорость} \ $
Угловая скорость — это скорость двигателя в радианах в секунду (рад / сек), которая может быть преобразована из об / мин:
$$ \ text {рад / сек} = \ text {RPM} \ times \ dfrac {\ pi} {30} $$
\ $ K_e \ $ — второй главный параметр двигателя.Как ни странно, \ $ K_e \ $ вычисляется по той же формуле, что и \ $ K_t \ $, но дается в других единицах:
$$ K_e = 2 \ cdot B \ cdot N \ cdot l \ cdot r ~~~~~~~~~~ (вольт / рад / сек) $$
Почему \ $ K_e = K_t \ $? Из-за физического закона сохранения энергии. Это в основном гласит, что электрическая мощность, подаваемая в двигатель, должна равняться механической мощности, отдаваемой двигателем. При 100% эффективности:
\ $ P_ {in} = P_ {out} \ $
\ $ V \ cdot I = \ tau \ cdot \ omega \ $
Подставляя уравнения сверху, получаем:
\ $ (K_e \ cdot \ omega) \ cdot I = (K_t \ cdot I) \ cdot \ omega \ $
\ $ K_e = K_t \ $
Ящики
Я предполагаю, что каждый параметр изменяется отдельно.
Случай 1: Напряженность магнитного поля прямо пропорциональна постоянной крутящего момента \ $ K_t \ $. Таким образом, когда напряженность магнитного поля увеличивается или уменьшается, крутящий момент \ $ \ tau \ $ будет увеличиваться или уменьшаться пропорционально. Это имеет смысл, потому что чем сильнее магнитное поле, тем сильнее «толчок» якоря.
Напряженность магнитного поля прямо пропорциональна постоянной напряжения \ $ K_e \ $. Однако \ $ K_e \ $ обратно пропорционально угловой скорости:
$$ \ omega = \ dfrac {V} {K_e} $$
Итак, по мере увеличения магнитного поля скорость будет уменьшаться.Это снова имеет смысл, потому что чем сильнее магнитное поле, тем сильнее «толчок» якоря, поэтому он будет сопротивляться изменению скорости.
Поскольку выходная мощность равна крутящему моменту, умноженному на угловую скорость, а входная мощность равна выходной мощности (опять же, предполагая 100% КПД), мы получаем:
$$ P_ {in} = \ tau \ cdot \ omega $$
Таким образом, любое изменение крутящего момента или скорости будет прямо пропорционально мощности, необходимой для привода двигателя.
Случай 2: (Здесь немного больше математики, которую я явно не использовал выше) Возвращаясь к закону Лоренца, мы видим, что:
$$ \ tau = 2 \ cdot F \ cdot r = 2 (I \ cdot B \ cdot N \ cdot l) r $$
Следовательно:
$$ F = I \ cdot B \ cdot N \ cdot l $$
Благодаря Ньютону у нас:
$$ F = m \ cdot g $$
Итак…
$$ \ tau = 2 \ cdot m \ cdot g \ cdot r $$
Если оставить длину провода такой же, но увеличить его калибр, масса увеличится. Как видно выше, масса прямо пропорциональна крутящему моменту, как и напряженность магнитного поля, поэтому применим тот же результат.
Случай 3: Радиус якоря \ $ r \ $ в приведенных выше уравнениях снова прямо пропорционален постоянным двигателям. Итак, опять же, мы получаем те же результаты, когда мы увеличиваем и уменьшаем его длину.
Начинаете видеть здесь закономерность?
Случай 4: Число витков нашего провода, \ $ N \ $ в приведенных выше уравнениях, также прямо пропорционально константам двигателя. Итак, как обычно, мы получаем те же результаты, когда увеличиваем и уменьшаем количество витков.
В целом
Если это еще не очевидно, крутящий момент и скорость обратно пропорциональны:
Необходимо найти компромисс между потребляемой мощностью двигателя (напряжение и ток) и выходной мощностью двигателя (крутящий момент и скорость):
$$ V \ cdot I = \ tau \ cdot \ omega $$
Если вы хотите поддерживать постоянное напряжение, вы можете только увеличить ток.Увеличение тока только увеличит крутящий момент (и общую мощность, подаваемую в систему):
$$ \ tau = K_t \ cdot I $$
Для увеличения скорости необходимо увеличить напряжение:
$$ \ omega = \ dfrac {V} {K_e} $$
Если вы хотите сохранить постоянную входную мощность, вам необходимо изменить один из физических параметров двигателя, чтобы изменить константы двигателя.
Одно из объяснений состоит в том, чтобы учесть, что мощность \ $ P \ $ — это произведение тока \ $ I \ $ и напряжения \ $ E \ $:
\ $ P = IE \
$Мощность измеряется в ваттах и представляет собой норму потребления энергии.Энергия измеряется в джоулях, а ватт обычно определяется как один джоуль в секунду.
Применение двигателя, как правило, состоит в том, чтобы приложить силу к вещи для ее перемещения. В физике это называется работой, которая равна произведению силы \ $ F \ $ и расстояния \ $ d \ $:
.\ $ W = Fd \
$Вы спрашивали про увеличение крутящего момента и оборотов в минуту. Крутящий момент — это просто сила вращения, а число оборотов в минуту — это просто скорость вращения. Итак, определение работы — это половина того, что вы просили (в нем есть крутящий момент), а скорость и расстояние, очевидно, связаны.Похоже, мы действительно близки. Вы не хотите просто больше работать с мотором, вы хотите делать работу быстрее . Вы хотите увеличить силу и скорость, а не силу и расстояние. Есть ли физический термин для этого в механической системе?
Да! Это еще называют мощностью. В механической системе мощность — это произведение силы и скорости:
.\ $ P = Fv \ $
Или, если использовать эквивалентные термины для вращательной системы, мощность — это произведение крутящего момента и угловой скорости:
\ $ P = \ тау \ омега \
$Это именно то, о чем вы просили.Вы хотите, чтобы двигатель создавал больший крутящий момент и вращался быстрее. Вы хотите увеличить мощность. Вы хотите быстрее расходовать энергию.
Закон сохранения энергии говорит нам, что если мы хотим увеличить механическую мощность, мы должны также увеличить электрическую мощность. В конце концов, мы не можем заставить мотор вращаться с помощью магии. Если электрическая мощность является продуктом напряжения и тока, то увеличение напряжения или тока, если другое остается постоянным, увеличит электрическую мощность.
Когда вы изменяете силу магнитов, добавляете или удаляете витки провода, вы не можете увеличить мощность.Вы можете обменивать напряжение на ток или ток на напряжение, точно так же, как механическая трансмиссия может обменивать обороты и крутящий момент. Закон Ленца и другие законы электромагнитной индукции объясняют, почему это так, но они не являются необходимыми для ответа на ваш вопрос, если вы просто принимаете закон сохранения энергии.
Учитывая все это, ваш вопрос был «Как улучшить крутящий момент и частоту вращения двигателя постоянного тока». Вы можете улучшить его, придав ему больше энергии, или сделать его более эффективным.Некоторые источники потерь:
- трение в подшипниках
- сопротивление в обмотках
- Магнитное сопротивление в сердечниках обмоток
- электромагнитное излучение от коммутаторов
- потери в проводах, батареях, транзисторах и других устройствах, снабжающих электродвигатель электрической энергией
Все это делает двигатель менее чем на 100% эффективным преобразователем электрической и механической энергии. Уменьшение любого из них обычно увеличивает что-то еще нежелательное, часто стоимость или размер.
Интересная мысль: именно поэтому гибридные электромобили могут увеличить пробег в городе. Остановка на красный свет преобразует всю энергию движущегося автомобиля в тепло тормозных колодок, что бесполезно. Поскольку двигатель представляет собой преобразователь между электрической и механической энергией, гибридный автомобиль может преобразовывать эту энергию не в тепло, а в электрическую, хранить ее в батарее, а затем преобразовывать обратно в механическую энергию, когда светится зеленый свет. Для дальнейшего чтения попробуйте Как реализовать рекуперативное торможение двигателя постоянного тока?
Двигатели постоянного тока — соотношение тока, напряжения, скорости, мощности, потерь и крутящего момента
Главная »Учебники» Двигатели постоянного тока и приводы »Двигатели постоянного тока — соотношение тока, напряжения, скорости, мощности, потерь и крутящего момента
В этой статье представлены основные физические размеры двигателя постоянного тока с постоянным магнитом на статоре.Этот тип двигателя очень подходит для управления автономными роботами. Основным источником питания робота является аккумулятор (постоянное напряжение), а также мощность этих двигателей. В этой статье в качестве примера использовался двигатель RE 35 с редуктором GP 32 C с передаточным отношением 1:14 и 1:33, разработанный и изготовленный MAXON.
Изображение 1. Соотношение между крутящим моментом и током якоря для MAXON RE35
На рисунке 1. показана зависимость тока якоря от крутящего момента двигателя для MAXON RE35 при напряжении обмотки якоря 12 В.Увеличение крутящего момента на валу двигателя приводит к линейному увеличению тока якоря. Это также показано в уравнении (8) из предыдущего урока. Функция тока I, в зависимости от крутящего момента M, показывает, что больший ток, протекающий через двигатель, создает более высокий крутящий момент. Часть диаграммы, окрашенная в желтый цвет, — это область, в которой двигателю не разрешается работать в течение длительного времени (кратковременная работа).
Изображение 2. Взаимосвязь между скоростью и крутящим моментом для MAXON RE35
Для каждого двигателя постоянного тока можно построить график зависимости скорости n от крутящего момента M (механических характеристик двигателя).На рисунке 2 показана зависимость скорости n от крутящего момента M при постоянном напряжении 12 В. Можно отметить, что скорость линейно уменьшается с увеличением крутящего момента.
Для построения кривой используются две конечные точки. Первая точка — это когда крутящий момент равен нулю. Второй момент — когда скорость равна нулю. На изображении видно, что скорость якоря составляет 405 об / мин (оборотов в минуту) при нулевом крутящем моменте. Крутящий момент составляет 7050 мНм при нулевой скорости. Это не показано на рисунке 2. Если напряжение двигателя якоря изменяется, скорость и крутящий момент также изменяются пропорционально.Связь между скоростью без нагрузки (n0) и напряжением якоря (U) дается в следующем уравнении:
Механическая мощность на выходе получается из входной электрической мощности и потерь мощности (потерь в Джоулях) в двигателе в соответствии с уравнением (12). Если мы воспользуемся уравнениями (8) (9) из нашего предыдущего руководства и (11), мы сможем рассчитать выходную механическую мощность с помощью уравнения (12).
Обозначения:
Pel — входная электрическая мощность
Pj — потери мощности в двигателе
Pmeh — выходная механическая мощность
n — скорость
R — сопротивление якоря
I — ток якоря
Используя уравнение (8) и интегрируя значения входной электрической мощности и потерь мощности в уравнение (12), мы получаем скорость, выраженную через крутящий момент:
Механическая выходная мощность рассчитывается по скорости n и крутящему моменту M в соответствии со следующим уравнением (14):
На рис. 3 показано, как механическая выходная мощность зависит от крутящего момента двигателя постоянного тока MAXON RE35.Кривая построена при поданном напряжении 12 В и температуре окружающей среды 25 градусов Цельсия.
Рис. 3. Соотношение между механической выходной мощностью и крутящим моментом для MAXON RE35
Коэффициент полезного действия описывает соотношение между механической мощностью, полученной на выходе, и электрической мощностью, подаваемой на входные соединения двигателя. Зависимость КПД от крутящего момента для MAXON RE35 приведена на рисунке 4.
Рисунок 4.Связь между КПД и крутящим моментом для MAXON RE35
Выражение для коэффициента полезного действия дается следующей формулой (15):
Рисунок 5. Соотношение между сопротивлением якоря и крутящим моментом для MAXON RE35
Зависимость сопротивления якоря от крутящего момента для двигателя постоянного тока MAXON RE35 приведена на рисунке 5.
Рисунок 6. Зависимость между температурой катушки и крутящим моментом для MAXON RE35
Зависимость температуры обмотки якоря от крутящего момента для MAXON RE35 приведена на рисунке 6.
Обычно энкодер используется для измерения скорости и положения вала двигателя. Подробнее об основном принципе работы энкодера вы можете прочитать в нашем руководстве «Оптический цифровой инкрементальный энкодер».
Руководства в категории: Двигатели и драйверы постоянного тока
Как повысить эффективность электродвигателей
Первый промышленный электродвигатель, вероятно, считался прорывом в свое время, даже несмотря на то, что было много возможностей для улучшения.По мере развития технологий производители двигателей разработали более совершенные двигатели, которые потребляют меньше энергии и требуют меньших затрат. Хотя для производителей вполне естественно использовать новейшие технологии при создании электродвигателей, возможности для дальнейшего совершенствования методов производства сыграли важную роль в повышении эффективности этих двигателей.
Рассмотрим следующую статистику:
- В 2015 году мировой рынок электротехники оценивался в более чем 70 миллиардов долларов, и ожидается, что он будет расти со среднегодовыми темпами роста (CAGR) в 4 раза.2 процента с 2017 по 2025 год.
- По оценкам, к 2035 году мировое потребление электроэнергии достигнет 35 триллионов киловатт-часов, и почти 28 процентов будут использоваться электродвигателями.
- Девяносто процентов установленных двигателей работают непрерывно на полной скорости и используют механические системы для регулирования мощности.
Будущее определенно выглядит многообещающим!
Прежде чем перейти к изучению эффективности электродвигателей, важно больше узнать об общих двигателях, используемых в промышленности.
Простой двигатель постоянного тока преобразует электрическую энергию постоянного тока в механическую. Обычно он оснащен большим количеством катушек, что делает его эффективным. Тем не менее, это может привести к большим потерям энергии из-за трения между коллектором и щетками, а также потери крутящего момента при определенных углах. Кроме того, если двигатель застрянет при попытке поднять тяжелый груз, катушки ротора могут легко перегреться и расплавиться. Вот почему в ряде промышленных и тяжелых бытовых приборов используются электродвигатели.
Как производители могут экономить электроэнергию с помощью электродвигателей
Конструкция электродвигателя и способ его использования являются двумя определяющими факторами, которые помогают экономить электроэнергию. Давайте сначала посмотрим на аспект дизайна.
Использование медных обмоток в обмотках статора
Что касается проводимости двигателя, всегда лучше использовать медные катушки, чем устаревшие алюминиевые. Это связано с тем, что проводимость алюминия ниже, чем у меди.Чтобы не отставать от медных катушек, алюминиевые магнитные провода могут нуждаться в большем поперечном сечении, чтобы они могли обеспечивать такой же уровень проводимости. Обмотки, намотанные алюминиевой проволокой, могут иметь больший объем по сравнению с двигателем того же размера с медной проволокой.
Если вы все еще используете алюминиевые обмотки, убедитесь, что концы алюминиевого магнитного провода правильно подключены. Алюминий окисляется намного быстрее, чем другие металлы, и если алюминиевый порошок подвергается воздействию воздуха, он полностью окисляется всего за несколько дней и оставляет после себя тонкий белый порошок.
Для правильного соединения, обеспечивающего хорошую проводимость, оксидный слой алюминиевого магнита необходимо проткнуть, чтобы предотвратить дальнейший контакт алюминия с воздухом.
Конечно, достижение КПД двигателя — это больше, чем просто выбор между алюминиевой и медной обмотками. Некоторые производители разработали обжимные соединители с прокалкой под высоким давлением для повышения эффективности. Это было сделано для того, чтобы алюминиевые обмотки не отставали от своих медных аналогов.Хотя двигатели с алюминиевыми обмотками могут сравниться по мощности с медными, это требует времени и денег. Алюминий также требует большего количества витков и провода большего диаметра, что не всегда может быть экономичным.
Если двигатель должен работать время от времени или в течение короткого времени, а эффективность и объем не имеют значения, использование алюминиевых магнитных проводов может иметь смысл. В противном случае всегда следует отдавать предпочтение медным обмоткам.
Использование медных стержней в роторе
Когда дело доходит до роторов, медь также дает преимущество в эффективности.Медные роторы предпочтительны для энергоэффективных производств в развитых и развивающихся странах, где электричество часто бывает дефицитным и дорогостоящим. Медные роторы — лучший выбор по сравнению с алюминиевыми с точки зрения качества двигателя, надежности, стоимости, эффективности и срока службы.
Прецизионная обработка движущихся деталей
Обработка влечет за собой удаление материала из секционного блока до очень переносимого вещества. Прецизионное оборудование необходимо для достижения высочайшего допуска при наименьшей измеримой степени.Будь то резка металла или добыча угля, прецизионное оборудование может обеспечить точность, необходимую для производства материалов в желаемых количествах. Движущиеся части машины требуют своевременного обслуживания для достижения максимальной производительности и эффективности. Техническое обслуживание должно выполняться только специалистами, при этом должен требоваться осмотр всех частей.
Использование высококачественной стали для роторов и статоров
Высокотехнологичная электротехническая сталь необходима для производства экономичных статоров и роторов, используемых во множестве электродвигателей.Этот тип стали обеспечивает высокую магнитную проницаемость и низкие потери мощности для первоклассных характеристик. Однако потери мощности в электротехнической стали все же могут возникать. Вихревые токи, также называемые токами Фуко, вступают в игру, когда магнитное поле изменяется. Прокатка стали до более тонкой толщины контролирует эти вихревые токи и снижает потери тока. Это особенно верно для прикладных частот, превышающих стандартные 50 или 60 герц.
Сохранение ротора и статора как можно ближе друг к другу
Благодаря высокоточному производству производители могут удерживать ротор и статор как можно ближе друг к другу, не касаясь друг друга.Когда скорость вращения достигает нескольких тысяч оборотов в минуту, электротехническая сталь в роторе может испытывать огромные нагрузки. Высокое напряжение особенно ощущается в областях рядом с пазами для магнитов, где узкое оборудование удерживает магниты на месте.
В асинхронных двигателях передача энергии происходит через воздушный зазор между статором и двигателем. Воздушный зазор необходим для минимизации сопротивления. Небольшой воздушный зазор приведет к меньшим потерям энергии и повышению эффективности.Общая магнитная связь между статором и ротором увеличивается по мере уменьшения воздушного зазора. Более высокая потокосцепление приводит к уменьшению потерь энергии и повышению эффективности. Меньший зазор также помогает избежать шума.
Больше катушек делают двигатели более эффективными
Провода в фазных обмотках двигателей малой мощности тоньше. Однако количество витков катушки должно быть большим, чтобы увеличить магнитодвижущую силу или плотность тока. Сопротивление фазных обмоток и плотность потерь мощности также выше, чем у двигателей большой мощности.Следовательно, маломощные двигатели с высокими скоростями потребуют большей магнитодвижущей силы. Это означает, что потребуется больше катушек и большее количество витков с тонким проводом, который обеспечивает более высокую плотность тока.
Использование частотно-регулируемых приводов
Приводы с регулируемой скоростью (VSD) или приводы с регулируемой скоростью представляют собой тяжелые промышленные электродвигатели. Их скорость можно регулировать с помощью внешнего контроллера. Эти приводы используются для управления технологическим процессом, поскольку они помогают экономить энергию на предприятиях, где используется множество электродвигателей.
VSD обычно используются в качестве энергосберегающих насосов и вентиляторов, поскольку они улучшают технологические операции, особенно там, где необходимо регулирование потока. Они также обеспечивают возможность плавного пуска, что снижает электрические напряжения и провалы напряжения в сети, которые обычно наблюдаются при пусках двигателей под напряжением, особенно при работе с высокоинерционными нагрузками.
Как пользователи электродвигателей могут обеспечить эффективность
Как упоминалось ранее, то, как электродвигатели используются производителями, промышленными предприятиями и домовладельцами, будет определять их эффективность.Ниже приведены некоторые конкретные шаги, которые пользователи могут предпринять для обеспечения эффективности и долговечности двигателя:
Использование интеллектуальных двигателей с соответствующим пускателем / контроллером двигателя
Хотя интеллектуальные двигатели широко используются и доступны, крайне важно выбрать наиболее подходящий вариант, чтобы свести к минимуму время простоя, повысить эффективность и снизить затраты. Инженеры-производственники знают, какое бремя потребления электроэнергии двигателями может сказаться на их эксплуатационных расходах. Чтобы смягчить это, они часто используют технологии управления двигателями, которые используют только необходимое количество энергии для запуска двигателей, выявления диагностических данных и сокращения времени простоя.По мере того как пускатели двигателей становятся все более популярными, технология пускателей двигателей также приобретает все большее значение.
Ниже приведены несколько важных вопросов, которые необходимо рассмотреть, прежде чем принимать решение о потенциальных областях применения электродвигателей:
Будет ли приложение требовать управления скоростью, даже если двигатель работает на определенной скорости?
Требования к контролю скорости должны быть определены как можно раньше. Некоторые устройства плавного пуска имеют ограниченное управление низкой скоростью между пуском и остановкой.Важно помнить, что рабочая скорость двигателя не может быть изменена, потому что устройство плавного пуска регулирует только напряжение двигателя, а не частоту.
Потребуется ли приложению определенное время запуска и остановки?
Обычно время пуска и останова устройств плавного пуска зависит от нагрузки. Внутренние алгоритмы регулируют напряжение на основе заранее запрограммированного времени, чтобы увеличить ток и крутящий момент для запуска двигателя и / или уменьшить их, чтобы остановить его.Если нагрузка небольшая, двигателю может потребоваться меньше времени для запуска, чем запрограммированное значение. В устройствах плавного пуска нового поколения используются усовершенствованные алгоритмы, позволяющие добиться более точного и менее зависимого от нагрузки времени пуска и останова.
Потребуется ли приложению полный крутящий момент без скорости?
ЧРП могут лучше всего работать с приложениями, требующими полного крутящего момента при нулевой скорости. Они могут создавать номинальный крутящий момент двигателя от нуля до номинальной скорости и даже обеспечивать полный крутящий момент без скорости.С другой стороны, устройства плавного пуска обычно работают в диапазоне частот от 50 до 60 Гц, а полный крутящий момент может быть достигнут только при полном напряжении. Начальный крутящий момент (доступный при нулевой скорости) обычно находится в диапазоне от нуля до 75 процентов и может быть запрограммирован.
Потребуется ли в приложении постоянный крутящий момент?
Устройства плавного пуска изменяют напряжение для управления током и крутящим моментом. Во время запуска ток изменяется в зависимости от напряжения, в то время как крутящий момент двигателя изменяется как квадрат приложенного напряжения.Крутящий момент может не оставаться постоянным при различных приложенных напряжениях, условие, которое может усложняться при изменении нагрузок.
Некоторые устройства плавного пуска работают по алгоритмам управления крутящим моментом, но это не обязательно связано с постоянным крутящим моментом. Однако во время ускорения частотно-регулируемые приводы используют разные частоты двигателя при изменении напряжения. Режим управления VFD определяется с точки зрения постоянного напряжения на герц и обеспечивает постоянный крутящий момент.
Каковы стоимость, размер и тепловые характеристики?
При силе тока менее 40 ампер устройства плавного пуска могут предложить небольшую экономическую выгоду по сравнению с частотно-регулируемыми приводами.По мере увеличения силы тока и мощности стоимость частотно-регулируемых приводов увеличивается быстрее, чем у устройств плавного пуска, и может достигать экстремальных значений при высоких значениях силы тока.
Что касается размера, устройства плавного пуска имеют преимущество перед частотно-регулируемыми приводами при любой силе тока благодаря своей конструкции. По мере увеличения тока и мощности разница может увеличиваться. Когда устройства плавного пуска объединены с внутренним или внешним электромеханическим байпасом, они еще более эффективны и могут выделять меньше тепла. Это связано с тем, что устройства плавного пуска имеют меньше активных компонентов в цепи в режимах запуска, работы и останова.
Что необходимо учитывать при установке и гармониках?
Проблемы, связанные с установкой, можно разделить на следующие категории: стоимость, размер, температура и качество электроэнергии. Установки плавного пуска требуют меньших размеров и меньших затрат, поэтому они не вызывают особого беспокойства.
Кроме того, гармоники устройства плавного пуска меньше, чем у частотно-регулируемых приводов. Длинные кабели для частотно-регулируемых приводов требуют большего внимания, чем для устройств плавного пуска. Кроме того, для устройств плавного пуска могут не потребоваться специальные типы проводов.Электромагнитная совместимость также не может быть учтена.
Прекратите использование двигателей, если в этом нет необходимости
Как бы просто это ни звучало, наиболее эффективный способ экономии энергии — выключать двигатель, когда он не используется. Чаще всего пользователи не решаются выключить двигатель, потому что считают, что его многократный запуск приведет к значительному износу. Один из способов смягчить это — использовать устройства плавного пуска, которые могут снизить износ.Правильно установленное и специально подобранное устройство плавного пуска также может снизить нагрузку на механические и электрические системы.
Снижение износа
Снижение износа двигателя — одна из основных задач пользователей. При запуске электродвигателя происходит значительный износ, так как высокие начальные токи и силы создают давление в механических и электрических системах. Хотя это может быть вредным, повреждающие эффекты можно контролировать с помощью устройств плавного пуска.Вы также можете использовать VSD, но они могут быть менее эффективными и дорогостоящими.
Использование высокоэффективных двигателей
Эффективность двигателя может быть получена из двух факторов: размера двигателя и качества его эффективности. В частности, для двигателей меньшего размера размер является важным фактором, влияющим на эффективность. Для более крупных двигателей большее значение имеют классы эффективности.
Энергоэффективные двигатели потребляют меньше электроэнергии, не так легко нагреваются и служат дольше.Эти типы двигателей отличаются улучшенной конструкцией, что приводит к меньшим тепловым потерям и снижению шума. Использование высококачественных материалов, более жестких допусков и улучшенных технологий производства также помогает снизить потери и повысить эффективность.
Чтобы оценить преимущества высокоэффективных двигателей, вы должны сначала определить «эффективность» электродвигателя. Это можно определить по соотношению механической мощности, выдаваемой двигателем (выход), к электрической мощности, подаваемой на двигатель (вход).Следовательно, КПД = (выходная механическая мощность / потребляемая электрическая мощность) x 100 процентов.
Таким образом, если двигатель эффективен на 80 процентов, он может преобразовывать 80 процентов электрической энергии в механическую. Остальные 20 процентов электроэнергии теряется в виде тепла.
Покупка двигателя подходящего размера
Двигатели, как правило, наиболее эффективны при нагрузке от 60 до 100 процентов от их полной номинальной нагрузки и наиболее неэффективны при нагрузке ниже 50 процентов.Это означает, что простая покупка двигателя правильного размера может в значительной степени повысить эффективность.
Как правило, двигатели увеличенного размера работают с нагрузкой ниже 50% от номинальной, что не только делает их неэффективными, но и более дорогими по сравнению с двигателями нужного размера. Кроме того, они также могут уменьшить подачу электроэнергии на машину, что увеличивает нагрузку на электрическую систему.
Последние мысли
Поскольку «энергоэффективность» становится современной модной фразой, важно, чтобы эта концепция была интегрирована в повседневные бытовые и промышленные применения.Энергоэффективные двигатели могут предложить множество преимуществ. При правильной установке они могут работать меньше, обеспечивать более высокие стандарты обслуживания, дольше служить, обеспечивать лучшую изоляцию и меньше шума и вибрации. Имея такое множество преимуществ, производители двигателей поступят мудро, если будут производить и использовать наиболее энергоэффективные двигатели.
Эта статья ранее появлялась на сайте www.powerjackmotion.com.
Использование двигателя постоянного тока, конструкция и как увеличить эффективность вращения электродвигателя
Двигатель — это устройство, которое преобразует электрическую энергию в механическую. Это зависит от крутящего момента из-за протекания электрического тока в катушке, которая может вращаться в магнитном поле. Электродвигатели подразделяются на две разные категории: Двигатель постоянного тока (DC) и двигатель переменного тока (AC), двигатель постоянного тока — это электродвигатель, который работает от постоянного тока.
- Мягкий железный сердечник из тонких изолированных листов для уменьшения вихревых токов.
- Прямоугольная катушка, состоящая из большого количества витков изолированного медного провода, намотанного на железный сердечник.
- Сердечник и катушка могут вращаться между двумя полюсами сильного подковообразного (U-образного) магнита.
- Два вывода катушки соединены с двумя металлическими половинами разделенного цилиндра (коммутатора), так что разделительная плоскость между половинами цилиндра перпендикулярна плоскости катушки.
- Две половины изолированы друг от друга и могут вращаться вокруг оси катушки.
- Две графитовые щетки каждая соединена с одной половиной металлического цилиндра.
- Аккумулятор, полюса которого подключены к щеткам при работе мотора.
Когда электрический ток проходит в катушке, две силы, равные по величине и противоположные по направлению, воздействуют на две продольные стороны катушки, создавая крутящий момент, который приводит к непрерывному вращению катушки вокруг своей оси в одном и том же направлении.
Таким образом, две металлические половинки цилиндра меняют свое положение относительно двух щеток в каждом полупериоде. В результате электрический ток, проходящий в катушке, меняет направление на обратное один раз в каждом полупериоде.
Двигатель постоянного тока
Объяснение работы двигателя при полном оборотеВ первой половине цикла:
Когда плоскость катушки параллельна линиям магнитного потока, две графитовые щетки касаются двух металлических половин цилиндра, таким образом, электрический ток проходит в катушке, создавая две магнитные силы, которые воздействуют на две стороны катушки ( ab, cd) в двух противоположных направлениях. Две создаваемые силы (пара) образуют крутящий момент, и катушка начинает вращаться.
По мере вращения катушки крутящий момент постепенно уменьшается до тех пор, пока он не исчезает, когда плоскость катушки становится перпендикулярной линиям магнитного потока, а щетки касаются изолятора между двумя половинками цилиндра, но катушка, получив импульс, продолжает вращение из-за инерции, которая, в свою очередь, подталкивает катушку ко второму полупериоду.
Во втором полупериоде:
Плоскость катушки снова становится параллельной магнитному потоку, и две металлические половинки цилиндра меняют свое положение, таким образом, направление электрического тока в катушке меняется на противоположное, что формирует крутящий момент. (максимальное значение), которое помогает сохранить вращение катушки в одном направлении.
По мере вращения катушки крутящий момент постепенно уменьшается до тех пор, пока он не исчезает, когда плоскость катушки становится перпендикулярной линиям магнитного потока, но катушка продолжает свое вращение из-за инерции, пока не завершит полный оборот и не станет параллельной оси снова линии магнитного потока, это повторяется каждый полный оборот.
Обратно-индуцированная ЭДС в электродвигателе: во время вращения катушки электродвигателя и ее перехода к линиям магнитного потока генерируется обратная индуцированная ЭДС, которая генерирует индуцированный ток, противоположный направлению тока батареи, который стабилизирует скорость. вращения катушки.
Как повысить эффективность вращения электродвигателяИспользование группы катушек, разделенных небольшими равными углами, чтобы поддерживать постоянный крутящий момент на максимальном значении, всегда получая катушку, параллельную магнитному потоку и подверженную максимальному крутящему моменту, таким образом, катушки вращаются с более высокой скоростью.
Разделение металлического цилиндра на несколько сегментов удвоит количество витков, так что каждые две противоположные части металлического цилиндра касаются щеток во время вращения, когда они находятся в положении максимального крутящего момента.
Электромагнитная индукция используется в записывающем устройстве и на жестком диске, где электрический сигнал преобразуется в магнитное поле, которое намагничивает магнитную ленту в записывающей головке, и когда она работает, магнитная головка начинает перемещать то, что было ранее записано, и изменять его. снова в электрический сигнал.
Применение, структура, эффективность и принцип работы электрического трансформатора
Свойства переменного тока, использование амперметра для горячей проволоки, минусы и плюсы
4 гениальных способа повысить производительность вашего электродвигателя
Наша повседневная жизнь во многом зависит от электроприборов.От микроволновых печей и холодильников до пылесосов и водонагревателей — жизнь была бы неполной без наших электроприборов.
Электроприборы находят применение не только в домах, но и на промышленных предприятиях и в коммерческих учреждениях. Электродвигатели являются одним из основных компонентов электроприборов, и их эффективность определяет, насколько хорошо прибор будет работать.
Это правда, что электродвигатели потребляют больше электроэнергии, чем любые другие технологии в коммерческих или промышленных приложениях.Но благодаря достижениям в технологии производители электродвигателей разработали энергоэффективные двигатели. Они создали двигатели с повышенным КПД, которые потребляют меньше энергии и снижают затраты на электроэнергию.
Для тех, кто плохо знаком с этой темой, эффективность электродвигателя определяется соотношением между выходной мощностью на валу и входной электрической мощностью. Большинство электродвигателей рассчитаны на работу от 50 до 100 процентов номинальной нагрузки. В идеале максимальный КПД составляет около 75 процентов от номинальной нагрузки.
Это означает, что электродвигатель мощностью 100 л.с. (л.с.) будет иметь допустимый диапазон нагрузки от 50 до 100 л.с. с максимальной эффективностью при 75 л.с. Двигатель имеет тенденцию терять свой КПД при нагрузке ниже 50% или при перегрузке (из-за перегрева).
Вот несколько способов, которыми вы можете улучшить характеристики ваших электродвигателей:
1. Устранение дисбаланса напряжений
Несбалансированность напряжений (любое отклонение формы волны напряжения и тока от идеальной синусоидальной формы с точки зрения величины или фазовый сдвиг называется дисбалансом) между фазами серьезно повлияет на работу электродвигателя.К последствиям несимметрии напряжения относятся:
- Уменьшение заторможенного ротора и крутящих моментов пробоя для данной области применения.
- Снижение скорости полной нагрузки.
- Значительный дисбаланс по току, связанный с конкретной конструкцией двигателя.
- Несимметрия напряжения приведет к значительному увеличению / уменьшению рабочих температур.
Для оптимальной работы электродвигателей важно, чтобы исключил несимметрию напряжений ; это может быть достигнуто следующими способами:
- Однофазные нагрузки должны распределяться по трехфазной системе так, чтобы они давали равную нагрузку на все три фазы.
- Немедленно замените оборудование, создающее помехи (оборудование с несимметричным трехфазным реактивным сопротивлением).
- Установив реактивные или активные фильтры, вы можете уменьшить гармоники, что значительно снизит небаланс.
2. Подключение двигателей к частотно-регулируемым приводам (VFD) для повышения эффективности
VFD — это неиспользованные ресурсы, которые быстро повышают эффективность электродвигателей. Простой и эффективный частотно-регулируемый привод может быстро переключить двигатель до точки, в которой он достигает оптимального КПД.VFD особенно эффективны в приложениях, в которых сопротивление является важным фактором. К ним относятся системы вентиляции, системы кондиционирования, вентиляции и т. Д.
При использовании частотно-регулируемого привода электродвигатель может выполнять ту же задачу, не прилагая обычных усилий, которые потребовались бы при отсутствии частотно-регулируемого привода. Таким образом, они делают электроприборы более энергоэффективными и часто являются частью программ экологического стимулирования, которые побуждают крупные организации, использующие электроприборы, работать без вреда для окружающей среды.
Однако для обеспечения наилучшей производительности вам необходимо понимать конкретные приложения и требования двигателя.
3. Выберите двигатели правильного размера
Для обеспечения максимальной эффективности выбор двигателя правильного размера имеет решающее значение. Это особенно важно для коммерческих и промышленных предприятий, которые используют огромные электроприборы, потребляющие огромное количество энергии.
Необходима правильная оценка, поскольку для разных процессов и приложений требуются разные типы двигателей.В то время как некоторые процессы могут быть выполнены со старым двигателем с полной нагрузкой, для других могут потребоваться двигатели меньшей мощности или медленные. Поэтому определите тип приложений или процессов, которые необходимо выполнить, и соответственно выберите двигатель.
Использование двигателя немного увеличенного размера может быть полезно для любого конкретного применения, так как оно обеспечит дополнительную мощность, когда это необходимо, и продлит срок службы электродвигателя.
Для оптимальной производительности важно обеспечить небольшую разницу между потенциальной нагрузкой двигателя и стандартной рабочей нагрузкой, поскольку это гарантирует, что потенциал двигателя не будет потрачен впустую.Таким образом, вы можете сэкономить деньги и обеспечить оптимальную эффективность на объекте.
4. Правильное обслуживание — необходимость
Правильное обслуживание электродвигателей необходимо для поддержания оптимальной работы оборудования. Программы планового технического обслуживания позволяют техническим специалистам выявлять проблемы с двигателем, как только они возникают, и быстро их устранять. Если не проводить техническое обслуживание, это приведет к дальнейшему повреждению различных внутренних частей электродвигателя, что повлияет на его эффективность.
Кроме того, регулярное техническое обслуживание продлевает срок службы двигателя и гарантирует, что вам не придется нести убытки из-за простоев или дорогостоящего ремонта. Техники могут тщательно осмотреть каждую часть двигателя и убедиться, что они работают оптимально, тем самым улучшая характеристики двигателя.
Заключение
Производительность электродвигателя зависит от его эффективности, поэтому у вас должен быть план повышения общей эффективности двигателя.
Оценка процессов / приложений и использование двигателей правильного типа может обеспечить быстрое и эффективное выполнение задач.Правильное обслуживание двигателей имеет решающее значение для выявления проблем, как только они возникают, поэтому мы проводим ремонт / замену по мере необходимости для обеспечения оптимальной работы двигателя. .
Удержание фазных напряжений равными или близкими к равным хорошо помогает убедиться, что электродвигатель работает с полной эффективностью. Несимметрия напряжения не только влияет на производительность, но и сокращает срок службы двигателя.
Помня о вышеперечисленном, вы можете улучшить характеристики электродвигателя, будь то дома или на работе, и облегчить жизнь.
Изображение предоставлено: regalbeloit.com
Как заставить электродвигатель вращаться быстрее? — MVOrganizing
Как заставить электромотор вращаться быстрее?
Один из простых способов ускорить работу двигателя — это добавить еще один магнит. Держите магнит над двигателем во время его работы. Когда вы переместите магнит ближе к вращающейся катушке, произойдет одно из двух. Либо двигатель остановится, либо он будет работать быстрее.
Какие факторы увеличивают скорость двигателя постоянного тока?
1 Ответ.Скорость вращения катушки в двигателе постоянного тока может быть увеличена: (i) увеличением силы тока, (ii) увеличением количества витков в катушке, (iii) увеличением площади катушки, (iv) посредством увеличение напряженности магнитного поля.
Какие два фактора влияют на скорость двигателя постоянного тока?
Факторы, влияющие на скорость двигателя постоянного тока
- Приложенное напряжение.
- Флюс.
- Напряжение на якоре.
Какие факторы повлияют на вращение электродвигателя?
Скорость вращения электродвигателя зависит от двух факторов: его физической конструкции и частоты (Гц) источника питания.Инженеры-электрики выбирают скорость двигателя в зависимости от потребностей каждого приложения, подобно тому, как механическая нагрузка определяет требуемую мощность.
Почему мотор не работает без коммутатора?
Почему мотор не работает без коммутатора? Без коммутатора он не будет вращаться, а якорь будет колебаться между северным и южным полюсами.
Что произойдет, если увеличить ток в двигателе?
Увеличение тока представляет опасность для двигателя только в том случае, если этот ток превышает номинальный ток двигателя, указанный на паспортной табличке.Когда сила тока превышает номинальное значение, указанное на паспортной табличке, в двигателе начинает накапливаться тепло. Без своевременной коррекции это тепло приведет к повреждению двигателя.
Больше тока означает больший крутящий момент?
Чем выше ток, тем больше крутящий момент. Более высокий крутящий момент противодействует повышенной нагрузке, поддерживая (почти) скорость.
Электродвигатель вращается быстрее, если увеличить ток?
Электродвигатель вращается быстрее, если увеличить ток? По мере того, как через электромагнит двигателя протекает больше тока, сила магнитного поля увеличивается, таким образом, двигатель вращается быстрее.
Какие факторы влияют на мощность электродвигателя?
Факторы, влияющие на работу двигателя
- Напряжение источника питания.
- Тип блока питания.
- Характеристики обмотки.
- Температура окружающей среды.
- Тип магнита.
- Флюсовое ярмо.
- Фаза.
Как увеличить мощность двигателя?
Вот несколько способов улучшить характеристики электродвигателей:
- Устранение несимметрии напряжений.
- Устранение несимметрии напряжений.
- Подключайте двигатели к частотно-регулируемым приводам (ЧРП) для повышения эффективности.
- Подключайте двигатели к частотно-регулируемым приводам (ЧРП) для повышения эффективности.
- Выберите двигатели подходящего размера.
Увеличивают ли крутящий момент большее количество передач?
Соответствующий крутящий момент определяется количественно путем умножения окружной составляющей на радиус; большие шестерни испытывают больший крутящий момент, тогда как меньшие шестерни испытывают меньший крутящий момент.Точно так же передаточное число крутящего момента равно отношению радиусов шестерен.
Как работают моторы и как выбрать мотор для любого проекта
Как работают двигатели и как выбрать правильный двигатель
Моторы можно найти практически везде. Это руководство поможет вам изучить основы электродвигателей, доступные типы и способы выбора правильного электродвигателя. Основные вопросы, на которые нужно ответить при принятии решения о том, какой двигатель наиболее подходит для применения, — это тип, который мне следует выбрать и какие характеристики имеют значение.Как работают моторы?
Электродвигатели работают, преобразуя электрическую энергию в механическую энергию для создания движения. Сила создается внутри двигателя за счет взаимодействия между магнитным полем и переменным (AC) или постоянным (DC) током обмотки. С увеличением силы тока увеличивается и сила магнитного поля. Помните о законе Ома (V = I * R); напряжение должно увеличиваться, чтобы поддерживать тот же ток при увеличении сопротивления. Электродвигатели имеют множество применений.Обычные промышленные применения включают воздуходувки, станки и электроинструменты, вентиляторы и насосы. Любители обычно используют двигатели в небольших приложениях, требующих движения, таких как робототехника или модули с колесами.
Типы двигателей:
Есть много типов двигателей постоянного тока , но наиболее распространены щеточные или бесщеточные. Также существуют вибрационные двигатели, шаговые двигатели и серводвигатели.Щеточные двигатели постоянного тока — одни из самых простых и используются во многих бытовых приборах, игрушках и автомобилях.Они используют контактные щетки, которые подключаются к коммутатору для изменения направления тока. Они недороги в производстве, просты в управлении и обладают отличным крутящим моментом на низких скоростях (измеряется в оборотах в минуту или об / мин). Некоторые недостатки заключаются в том, что они требуют постоянного обслуживания для замены изношенных щеток, имеют ограниченную скорость из-за нагрева щеток и могут создавать электромагнитный шум из-за искрения щеток.
Щеточный двигатель постоянного тока
Бесщеточные двигатели постоянного тока используют постоянные магниты в роторном узле.Они популярны на рынке хобби для применения в самолетах и наземных транспортных средствах. Они более эффективны, требуют меньше обслуживания, производят меньше шума и имеют более высокую удельную мощность, чем щеточные двигатели постоянного тока. Они также могут производиться серийно и напоминать двигатель переменного тока с постоянной частотой вращения, за исключением того, что они питаются от постоянного тока. Однако есть несколько недостатков, в том числе то, что ими трудно управлять без специального регулятора, и они требуют низких пусковых нагрузок и специализированных редукторов в приводных приложениях, что приводит к более высоким капитальным затратам, сложности и экологическим ограничениям.
Бесщеточный двигатель постоянного тока
Вибрационные двигатели используются в приложениях, требующих вибрации, например, в мобильных телефонах или игровых контроллерах. Они генерируются электродвигателем и имеют неуравновешенную массу на приводном валу, которая вызывает вибрацию. Их также можно использовать в неэлектронных зуммерах, которые вибрируют для звуковой сигнализации или для сигналов тревоги или дверных звонков.
Вибрационный двигатель
Когда требуется точное позиционирование, шаговые двигатели — ваш друг.Они используются в принтерах, станках и системах управления технологическими процессами и рассчитаны на высокий удерживающий момент, что дает пользователю возможность переходить от одного шага к другому. У них есть система контроллера, которая определяет положение посредством сигнальных импульсов, отправляемых драйверу, который интерпретирует их и передает пропорциональное напряжение на двигатель. Их относительно просто изготовить и контролировать, но они постоянно потребляют максимальный ток. Расстояние небольшого шага ограничивает максимальную скорость, и шаги можно пропустить при высоких нагрузках.
Шаговый двигатель
Серводвигатели — еще один популярный двигатель на рынке хобби, который используется для неточного управления положением. Их популярные приложения включают приложения дистанционного управления, такие как игрушечные радиоуправляемые автомобили и робототехника. Они состоят из двигателя, потенциометра и схемы управления и в основном управляются с помощью широтно-импульсной модуляции (ШИМ), посредством отправки электрических импульсов на провод управления. Сервоприводы могут быть как переменного, так и постоянного тока. Сервоприводы переменного тока могут справляться с более высокими скачками тока и используются в промышленном оборудовании, тогда как сервоприводы постоянного тока предназначены для небольших любительских приложений.Чтобы узнать больше о сервомоторах, ознакомьтесь с нашей статьей Как работают серводвигатели .
Существует три основных типа двигателей переменного тока: асинхронные, синхронные и промышленные.
Асинхронные двигатели называются асинхронными двигателями, поскольку они не вращаются с одинаковой постоянной скоростью или не медленнее, чем указанная частота. Скольжение , разница между фактической и синхронной скоростью, необходима для создания крутящего момента , крутящего момента, вызывающего вращение, в асинхронных двигателях.Магнитное поле, окружающее ротор этих двигателей, создается индуцированным током.
Ротор синхронных двигателей вращается с постоянной скоростью при подаче переменного тока. Их магнитное поле создается постоянными магнитами. Промышленные двигатели предназначены для трехфазных систем с высокой мощностью, таких как конвейеры или воздуходувки. Двигатели переменного тока также можно найти в бытовой технике и других приложениях, таких как часы, вентиляторы и дисководы.
Что нужно учитывать при покупке мотора:
При выборе двигателя необходимо обратить внимание на несколько характеристик, но наиболее важными являются напряжение, ток, крутящий момент и скорость (об / мин).Ток — это то, что питает двигатель, и слишком большой ток приведет к его повреждению. Для двигателей постоянного тока важны рабочий ток и ток остановки. Рабочий ток — это средняя величина тока, которую двигатель может потреблять при типичном крутящем моменте. Ток останова обеспечивает достаточный крутящий момент для двигателя, чтобы работать со скоростью останова, или 0 об / мин. Это максимальный ток, который двигатель может потреблять, а также максимальная мощность, умноженная на номинальное напряжение. Радиаторы важны, если двигатель постоянно работает или работает с напряжением выше номинального, чтобы катушки не плавились.
Напряжение используется для поддержания протекания чистого тока в одном направлении и для преодоления обратного тока. Чем выше напряжение, тем выше крутящий момент. Номинальное напряжение двигателя постоянного тока указывает на наиболее эффективное напряжение во время работы. Обязательно подайте рекомендованное напряжение. Если вы приложите слишком мало вольт, двигатель не будет работать, тогда как слишком большое напряжение может привести к короткому замыканию обмоток, что приведет к потере мощности или полному разрушению.
Рабочие значения и значения остановки также необходимо учитывать с крутящим моментом.Рабочий крутящий момент — это величина крутящего момента, которую двигатель был спроектирован для передачи, а крутящий момент при остановке — это величина крутящего момента, возникающая при подаче мощности от скорости остановки. Вы всегда должны смотреть на требуемый рабочий крутящий момент, но в некоторых приложениях вам потребуется знать, насколько далеко вы можете толкнуть двигатель. Например, для колесного робота хороший крутящий момент равен хорошему ускорению, но вы должны убедиться, что крутящий момент сваливания достаточно высок, чтобы поднять вес робота. В этом случае крутящий момент важнее скорости.
Скорость или скорость (об / мин) может быть сложной для двигателей. Общее правило состоит в том, что двигатели наиболее эффективно работают на самых высоких скоростях, но это не всегда возможно, если требуется передача. Добавление шестерен снизит эффективность двигателя, поэтому примите во внимание снижение скорости и крутящего момента.
Это основные принципы, которые следует учитывать при выборе двигателя. Подумайте о назначении приложения и о том, какой ток он использует, чтобы выбрать подходящий тип двигателя. Спецификации приложения, такие как напряжение, ток, крутящий момент и скорость, будут определять, какой двигатель наиболее подходит, поэтому обязательно обратите внимание на его требования.