Персональный сайт — AVR446
AVR446
Линейное управление скоростью шагового двигателя
Ключевые моменты:
- Линейное управление скоростью шагового двигателя
— Контроль ускорения, замедления, максимальной скорости и числа шагов перемещения.
- Управление с помощью одного прерывания по таймеру.
- Полно – или полушаговый режим привода.
- Поддерживает все устройства AVR с 16 битным таймером.
- Демонстрационная программа для ATmega48, работающего на частоте 3,68 МГц, с последовательным интерфейсом 19200/8/N/1.
1. Введение
В рекомендациях по применению описывается построение точного линейного контроллера шагового двигателя. Шаговый двигатель – это электромагнитное устройство, которое преобразует дискретные импульсы в механическое вращение вала. Благодаря применению данного типа двигателя достигается множество преимуществ, к числу которых относятся большая простота, т. к. отсутствуют щетки и контакты, низкая стоимость, высокая надежность, высокий крутящий момент на низких скоростях, и высокая точность перемещения. Многие системы с шаговыми двигателями при изменении скорости требуют контроля над ускорением/замедлением. Рекомендации по применению представляют драйвер с демонстрационной программой, способные контролировать как ускорение, так и положение и скорость.
к. отсутствуют щетки и контакты, низкая стоимость, высокая надежность, высокий крутящий момент на низких скоростях, и высокая точность перемещения. Многие системы с шаговыми двигателями при изменении скорости требуют контроля над ускорением/замедлением. Рекомендации по применению представляют драйвер с демонстрационной программой, способные контролировать как ускорение, так и положение и скорость.
Работа предлагаемого линейного контроллера скорости основана на алгоритме, описанном в статье Дэвида Остина (D. Oustin) “Generate stepper-motor speed profiles in real time”, которая была опубликована в журнале “Embedded Systems Programming” в январе 2005 года. Этот алгоритм допускает параметризацию и расчет в реальном времени, используя только простые арифметические операции над числами с фиксированной точкой, без применения таблиц данных.
Рисунок 1-1. Шаговые двигатели
2. Теория
2. 1 Шаговый двигатель
1 Шаговый двигатель
Данные рекомендации по применению охватывают теорию, касающуюся линейного управления изменением скорости шагового двигателя, а также реализации самого контроллера. Подразумевается, что читатель знаком с принципом работы шагового двигателя, тем не менее, будет дано краткое изложение основных моментов. Более подробная информация о шаговых двигателях может быть найдена в книге Джонса (D. W. Jones) “Control of Stepper Motors”.
2.1.1 Сравнение однополярных и биполярных шаговых двигателей
Два широко распространенных типа шаговых двигателей – это биполярные и однополярные двигатели. Они аналогичны друг другу за исключением того, что каждая обмотка однополярного двигателя имеет центральный отвод, показанный на рис. 2-1.
Рисунок 2-1. Биполярный и однополярный шаговый двигатели.
Для биполярного двигателя необходимо чтобы ток через обмотки протекал в обоих направлениях, а для этого, как показано на рис. 2-2, требуется полномостовой драйвер. Центральный вывод однополярного двигателя позволяет применять более простую схему управления, также показанную на рис. 2-2, ограничивая протекание тока только одним направлением. Основным недостатком однополярного двигателя является ограниченная возможность подавать питание на все обмотки одновременно, что приводит к более низкому крутящему моменту по сравнению с биполярным двигателем. При отключении центрального вывода однополярный двигатель может использоваться как биполярный.
2-2, требуется полномостовой драйвер. Центральный вывод однополярного двигателя позволяет применять более простую схему управления, также показанную на рис. 2-2, ограничивая протекание тока только одним направлением. Основным недостатком однополярного двигателя является ограниченная возможность подавать питание на все обмотки одновременно, что приводит к более низкому крутящему моменту по сравнению с биполярным двигателем. При отключении центрального вывода однополярный двигатель может использоваться как биполярный.
Рисунок 2-2. Драйверы биполярного и однополярного двигателей на MOS транзисторах.
2.1.2 Сравнение полношагового и полушагового режимов работы
В шаговых двигателях, используемых в полношаговом режиме, напряжение единовременно подается на одну обмотку. При этом возможны четыре состояния (позиции), показанные в строке “Full-stepping” таблицы 2-1. Путем подачи напряжения на обе обмотки одновременно шаговый двигатель может быть «заперт» между двумя положениями, полученными в полношаговом режиме.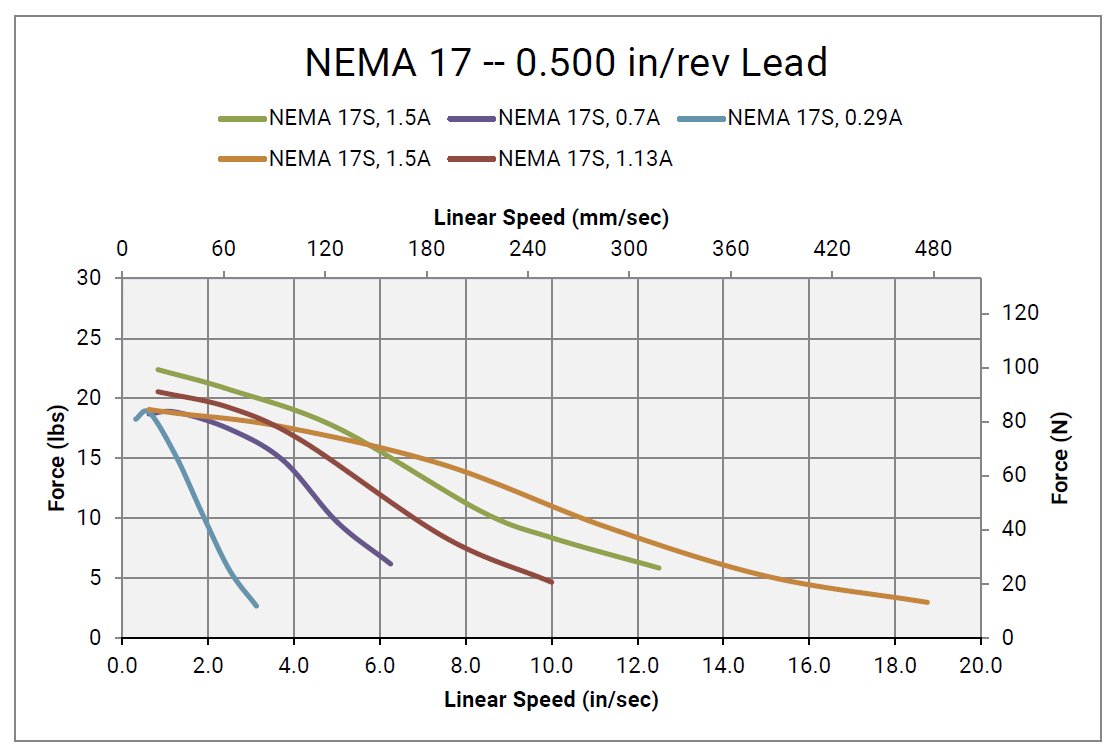 Такой режим известен как полушаговый. Как показано в строке “Half-stepping” таблицы 2-1 он дает восемь положений. При запитывании обеих обмоток одновременно вращающий момент примерно в 1.4 раза выше, чем при запитывании только одной обмотки, правда, ценой двойного увеличения потребляемой мощности. Сегменты электрического цикла в таблице 2-1 представляют собой части одного электрического цикла. Один механический цикл (оборот) обычно состоит из нескольких электрических циклов.
Такой режим известен как полушаговый. Как показано в строке “Half-stepping” таблицы 2-1 он дает восемь положений. При запитывании обеих обмоток одновременно вращающий момент примерно в 1.4 раза выше, чем при запитывании только одной обмотки, правда, ценой двойного увеличения потребляемой мощности. Сегменты электрического цикла в таблице 2-1 представляют собой части одного электрического цикла. Один механический цикл (оборот) обычно состоит из нескольких электрических циклов.
Таблица 2-1. Полношаговый и полушаговый режимы.
Полярность | Обмотка А | + | + |
| — | — | — |
| + |
Обмотка B |
| + | + | + |
| — | — | — | |
Часть электрического цикла | Full-stepping | 1 |
| 2 |
| 3 |
| 4 |
|
Half-stepping | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 |
2. 1.3 Скоростные характеристики
1.3 Скоростные характеристики
Недостатком шагового двигателя является ограниченный вращающий момент на высоких скоростях, так как его величина будет уменьшаться с увеличением скорости вращения. Как показано на рис. 2-3 вращающий момент падает и на резонансной скорости. Резонансная скорость будет зависеть от управляющей схемы и нагрузки.
Рисунок 2-3. Зависимость вращающего момента от скорости
Максимальный вращающий момент достигается на низких скоростях, и это во многих применениях считается преимуществом.
2.2 Основные уравнения шагового двигателя
Для создания вращательного движения в шаговом двигателе должен соблюдаться правильный порядок изменения тока в обмотках. Это достигается использованием драйвера, который при подаче на него импульсного сигнала (‘импульс шагового двигателя) и сигнала направления создает корректную выходную последовательность.
Для вращения шагового двигателя с постоянной скоростью импульсы должны генерироваться с установившейся частотой, как показано на рис. 2-4.
Рисунок 2-4. Импульсы шагового двигателя
Счетчик генерирует эти импульсы, работая на частоте ft [Гц].
Задержка δt , программируемая счетчиком c :
Шаговый угол двигателя α, положение θ и скорость ω задаются уравнениями
где spr – число шагов на один оборот, n – число шагов, а 1 rad/sec = 9,55 оборотов в минуту.
2.3 Линейное изменение скорости
Для мягкого старта и остановки двигателя необходим контроль ускорения и замедления. На рисунке 2-5 показана взаимосвязь между ускорением, скоростью и положением. Использование постоянного ускорения/замедления дает линейный профиль скорости.
Рисунок 2-5. Ускорение (ώ), скорость (ω) и положение (θ)
Временная задержка δt между импульсами шагового двигателя контролирует скорость. Эта задержка должна рассчитываться с целью обеспечить насколько это возможно более близкое следование скорости шагового двигателя заданному линейному изменению скорости.
Эта задержка должна рассчитываться с целью обеспечить насколько это возможно более близкое следование скорости шагового двигателя заданному линейному изменению скорости.
Дискретные шаги контролируют движение шагового двигателя, а разрешение временной задержки между этими шагами задается частотой таймера.
Рисунок 2-6. Зависимость «Профиль скорости – импульсы шагового двигателя/скорость»
2.3.1 Точный расчет задержки между шагами
Первая задержка счетчика c0, а также последующие задержки cn определяются уравнениями (подробную информацию смотрите в приложении):
Вычислительная мощность микроконтроллера ограничена, а расчет двух квадратных корней – трудоемкий процесс. Поэтому рассматривается аппроксимация с меньшей вычислительной сложностью.
Значение счетчика в момент времени n для интервала времени между шагами рассчитывается с использованием аппроксимации рядами Тейлора по формуле:
Это вычисление осуществляется намного быстрее, чем вычисление двух квадратных корней, но при n=1 вносит ошибку величиной 0. 44. Способом компенсации этой ошибки является умножение c0 на 0.676.
44. Способом компенсации этой ошибки является умножение c0 на 0.676.
2.3.2 Изменение (рампа) ускорения
Как показано в приложении ускорение задается значениями c0 и n. Если выполняется изменение в ускорении (или замедлении), должен быть выполнен расчет нового значения n .
Время tn и n как функции от ускорения двигателя, скорости и шагового угла задаются уравнениями
Объединение этих уравнений дает соотношение
Из него видно, что число шагов, необходимое для достижения заданной скорости, обратно пропорционально ускорению: n1ώ1=n2ώ2.
Это означает, что изменение ускорения от ώ1 до ώ2 осуществляется изменением n. Что и показано на рис. 2-7.
Рисунок 2-7. Изменение скорости вверх/вниз
При перемещении на заданное число шагов для достижения нулевой скорости, замедление необходимо начать на правильном шаге. Следующее уравнение используется для нахождения n1:
Следующее уравнение используется для нахождения n1:
3 Реализация
К рекомендациям по применению приложена работающая программа, написанная на C. Полную документацию по исходному коду и информации по компиляции можно найти, открыв файл ‘readme.html’, находящийся вместе с исходным кодом.
Демо приложение демонстрирует линейное управление скоростью шагового двигателя. Пользователь может контролировать профиль скорости шагового двигателя, подавая через последовательный порт различные команды, а микроконтроллер AVR в соответствии с этими командами будет управлять подключенным к нему шаговым двигателем.
Демонстрационная программа поделена на три основных блока, как показано на блок-схеме, изображенной на рис.3-1. Каждому блоку соответствует один файл. Кроме того, имеется файл подпрограмм UART, используемый основной программой.
Рисунок 3-1. Блок-схема демонстрационной программы
В main. c имеется меню и командный интерфейс, дающие пользователю возможность контролировать шаговый двигатель с помощью терминала, подключенного к последовательной линии связи.
c имеется меню и командный интерфейс, дающие пользователю возможность контролировать шаговый двигатель с помощью терминала, подключенного к последовательной линии связи.
speed_cntr.c вычисляет необходимые данные и генерирует шаговые импульсы для того, чтобы шаговый двигатель повторял заданный профиль скорости.
sm_driver.c подсчитывает шаги и выводит соответствующие сигналы для управления шаговым двигателем.
Для управления шаговым двигателем необходимы четыре параметра, описывающие профиль скорости. Профиль скорости начинается на нулевом значении скорости и ускоряется до заданного значения. Эта скорость поддерживается постоянной до тех пор, пока не начнется замедление. И, наконец, двигатель замедляется до нулевой скорости за заданное число шагов. Профиль скорости показан на рис. 3-2.
Рисунок 3-2. Профиль скорости
Параметры, описывающие профиль скорости:
step – Число шагов для перемещения
accel – Необходимое ускорение
decal – Необходимое замедление
speed – (Максимальная) требуемая скорость.
3.1 Меню и командный интерфейс
Для использования демонстрационной программы пользователь должен подключить к последовательному порту AVR терминал. Настройки последовательного порта должны соответствовать следующим: 19200 бод, 8 бит данных, отсутствие контроля четности, 1 стоповый бит. Должен работать любой программный эмулятор терминала. Используя терминал, пользователь может задавать различные команды управления двигателем и получать ответную информацию от демонстрационной программы.
Подпрограмма обработки прерывания UART RX (находится в uart.c) сохраняет принятые символы в буфере приемника и обрабатывает код возврата на одну позицию (backspace). При получении команды <inter> (ASCII код 13) основная программа читает буфер приемника и выполняет заданную команду.
При старте программы и при задании команды ‘?’ отображается этот экран помощи:
После отображения меню или выполнения команды выводится информационная строка:
Демонстрационная программа выдает текущее положение двигателя, ускорение, замедление, и настройки скорости. А также число шагов, требуемое для перемещения.
А также число шагов, требуемое для перемещения.
Существует три различных способа заставить шаговый двигатель перемещаться:
Шаговый двигатель работает в соответствии с настройками, заданными в приложении.
Шаговый двигатель перемещается на [data] шагов с заданными настройками.
- move [steps][accel][decel][speed]
Двигатель перемещается на [steps] шагов, используя указанные значения[accel][decal][speed].
Когда шаговый двигатель начнет движение, будет отображено ‘Running…’. До тех пор пока двигатель вращается, новые команды блокируются. После его остановки выдается сообщение ‘Ok’ и принимаются новые команды.
3.2 Контроллер скорости
Контроллер скорости рассчитывает и генерирует профиль скорости. Блок-диаграмма контроллера скорости приведена на рис. 3-3. Для запуска шагового двигателя контроллер скорости настраивается путем вызова функции Move().
Рисунок 3-3. Блок-диаграмма контроллера скорости
Функция Move() сначала рассчитывает все необходимые параметры и сохраняет их в структуру данных рампы (изменения) скорости, затем она разрешает прерывания от таймера.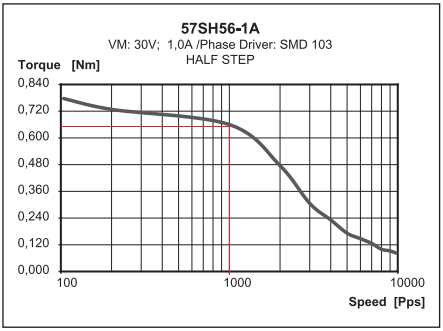 Таймер генерирует прерывания в соответствии с необходимым изменением скорости, и по каждому прерыванию вызывает функцию Step_Counter() для перемещения шагового двигателя.
Таймер генерирует прерывания в соответствии с необходимым изменением скорости, и по каждому прерыванию вызывает функцию Step_Counter() для перемещения шагового двигателя.
3.2.1 Установочные расчеты
В демонстрационной программе параметры профиля скорости рассчитываются для каждой команды. При этом между вызовом команды и началом движения шагового двигателя возникает небольшая задержка. В реальном применении при ограниченном изменении профиля скорости такие расчеты могут быть не нужны. В таком случае параметры можно рассчитать заблаговременно, а установочные расчеты пропустить.
Для создания быстрого кода в программе избегают применения арифметики с плавающей запятой. Поэтому для поддержания точности важно масштабирование переменных. Для упрощения арифметики также используются предварительно рассчитанные константы компилятора, находящиеся в заголовочном файле smdriver.h.
Нахождение скорости:
Нахождение ускорения:
Для расчета профиля скорости существует два различных сценария:
- Ускорение продолжается до тех пор, пока не будет достигнута необходимая скорость, или
- Замедление начинается до того как будет достигнута необходимая скорость.
Сценарий зависит от всех четырех переменных, описывающих профиль скорости.
3.2.2.1 Ускорение продолжается до достижения необходимой скорости
На рис. 3-4 показана рампа скорости, в которой требуемая скорость достигается до начала замедления.
Рисунок 3-4. Изменение скорости ограничено заданным значением скорости.
- max_s_lim – число шагов, необходимое для достижения требуемой скорости.
- accel_lim – число шагов до начала замедления (игнорирование требуемой скорости).
Если max_s_lim < accel_lim , то ускорение ограничено достижением требуемой скорости. Замедление зависит от этого, и, в данном случае, decel_val находится по формуле:
3.2.1.2 Замедление начинается до того как будет достигнута требуемая скорость
На рис. 3-5 показана рампа скорости, где замедление должно начаться до достижения требуемой скорости.
3-5 показана рампа скорости, где замедление должно начаться до достижения требуемой скорости.
Рисунок 3-5. Рампа скорости с замедлением, начинающимся до достижения требуемой скорости.
Если max_s_lim > accel_lim , то ускорение ограничено началом замедления, а decel_val тогда рассчитывается по формуле:
3.2.2 Прерывание от таймера
Прерывание от таймера генерирует ‘шаговые импульсы’(вызывает функцию StepCounter()) и работает только при движении шагового двигателя. В соответствии с профилем скорости, показанном на рис.3-6, прерывание от таймера будет работать в четырех различных состояниях.
Рисунок 3-6. Рабочие состояния для различных участков профиля скорости
Такое протекание процесса реализуется конечным автоматом в прерывании от таймера, показанном на рис. 3-7.
Рисунок 3-7. Конечный автомат для прерывания от таймера
Во время запуска программы или при остановленном шаговом двигателе конечный автомат остается в состоянии STOP. При выполнении установочных расчетов задается новое состояние, и разрешаются прерывания от таймера. При перемещении шагового двигателя более чем на один шаг конечный автомат переходит в состояние ACCEL. Если выполняется только один шаг, состояние изменяется на DECEL.
При выполнении установочных расчетов задается новое состояние, и разрешаются прерывания от таймера. При перемещении шагового двигателя более чем на один шаг конечный автомат переходит в состояние ACCEL. Если выполняется только один шаг, состояние изменяется на DECEL.
После изменения состояния на ACCEL программа ускоряет шаговый двигатель пока:
либо не будет достигнута требуемая скорость и состояние изменится на RUN, либо
должно стартовать замедление, изменяя состояние на DECEL.
При состоянии установленном в RUN шаговый двигатель будет работать на постоянной скорости, пока не стартует замедление. После этого состояние изменится на DECEL.
Оно будет оставаться в DECEL и замедлять двигатель до тех пор, пока скорость за требуемое число шагов не достигнет нулевого значения. Затем состояние изменится на STOP.
3.2.2.1 Вычисления и счетчики
Во время ускорения и замедления для каждого шага должно вычисляться новое время задержки. Вычисление включает в себя деление с остатком.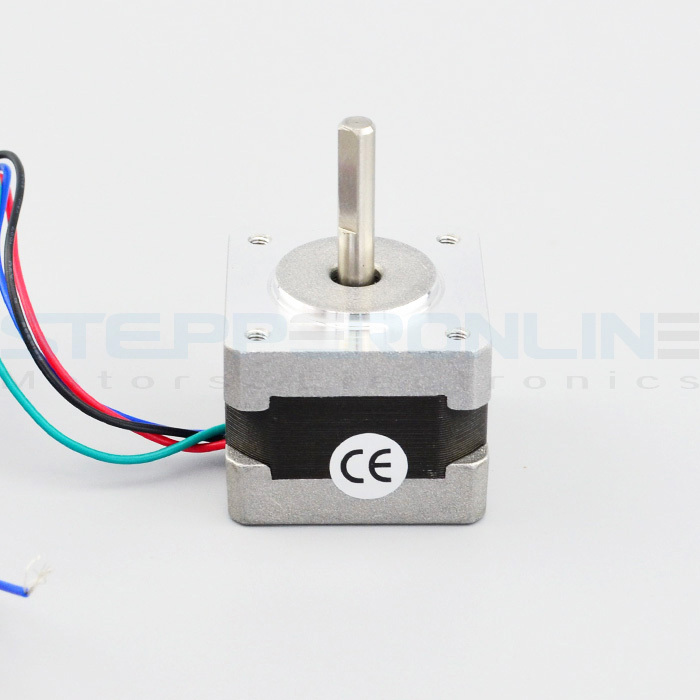 Для улучшения точности этот остаток сохраняется и участвует в следующем вычислении.
Для улучшения точности этот остаток сохраняется и участвует в следующем вычислении.
Для отслеживания положения и при изменении состояния необходимы некоторые переменные-счетчики. Рис. 3-8 иллюстрирует их использование.
Рисунок 3-8. Расчетные величины во временной задержке
- step_count подсчитывает шаги, начиная с нуля при старте ACCEL. После завершения DECEL ее значение равно числу шагов, заданному в команде.
- accel_count используется для управления ускорением/замедлением. Стартует с нуля в состоянии ACCEL и увеличивается за один шаг на единицу, пока не завершится состояние ACCEL. Во время старта DECEL принимает значение decel_val, являющееся отрицательным, и инкрементируется на каждом шаге. При достижении нулевого значения движение прекращается, состояние переходит в STOP.
- decel_start сообщает о том, когда начнется замедление. В тот момент, когда step_count становится равным decal_start, состояние переходит в DECEL.

3.3 Драйвер шагового двигателя
Драйвер шагового двигателя генерирует соответствующую последовательность сигналов для перемещения двигателя в заданном командой направлении. Блок-схема драйвера шагового двигателя показана на рис.3-9.
Рисунок 3-9. Блок-схема драйвера шагового двигателя
Счетчик шагов инкрементируется или декрементируется при каждом вызове функции Step_Counter(). При использовании полношагового режима значение счетчика изменяется от 0 до 3, в полушаговом режиме работы двигателя счетчик принимает значения от 0 до 7. Это значение соответствует различным положениям шагового двигателя в одном электрическом цикле. Значение счетчика шагов используется в качестве индекса для таблицы шагов. Благодаря этому на драйвер шагового двигателя подаются корректные сигналы.
3.3 Скорость и размер кода
Полный демо код занимает 4к памяти программ, из которых 1.5к используют контроллер скорости и драйвер шагового двигателя. Исключение установочных расчетов и применение предварительно рассчитанных параметров еще больше сократит размер кода.
Исключение установочных расчетов и применение предварительно рассчитанных параметров еще больше сократит размер кода.
Во время вызова Move() перед стартом прерываний от таймера выполняются установочные расчеты. Это вносит задержку между вызовом функции и запуском шагового двигателя, составляющую приблизительно 1.5 mS. По прерыванию от таймера осуществляются расчеты во время ускорения и замедления. Обработка каждого прерывания требует примерно 200 uS. При работе с постоянной скоростью для обработки прерывания оказывается достаточным около 35 uS. Из сказанного выше видно, что максимальная выходная скорость ограничивается вычислениями для ускорения/замедления. Для шагового двигателя с 400 шагами на один оборот максимальная выходная скорость:
При реализации данного кода в других применениях необходимо учитывать существование других прерываний. Если прерывание от таймера для шагового двигателя блокируется подпрограммой обработки другого прерывания, это приведет к колебаниям скорости (переменное ускорение). В данном применении это может быть не критично, однако создание насколько это возможно надежного и детерминированного кода – всегда неплохая вещь.
В данном применении это может быть не критично, однако создание насколько это возможно надежного и детерминированного кода – всегда неплохая вещь.
4 Литературные ссылки
D.Austin, Generate stepper-motor speed profiles in real time, статья в ‘Embedded Systems Programming’, январь 2005
http://www.embedded.com//showArticle.jhtml?articleID=56800129
D.W.Jones, Control of Stepper Motors, sections 5.2.10, 10.8, 10.9 and 10.10 книги
Handbook of Small Electric Motors под редакцией W.H.Yeadon и A.W.Yeadon
McGraw-Hill, 2001. http://www.cs.uiowa.edu/~jones/step/
5 Приложение
5.1 Задержка счетчика
Скорость в данный момент времени:
Положение задается:
n-й шаговый импульс при угле поворота вала θ = nα :
а временная задержка между двумя шагами:
И наконец, выражение для задержки счетчика:
Это ведет к выражениям для первой и n-й задержкам счетчика:
5. 2 Задержка между шагами
2 Задержка между шагами
Использование аппроксимации рядами Тейлора
ведет к
В итоге, выражение для задержки счетчика может быть аппроксимировано как:
Исходный код демонстрационной программы находится в AVR446.zip
Два «горба». На каких оборотах мотор машины максимально эффективен? | Практические советы | Авто
Характеристики мотора зависят от числа оборотов, до которых раскручивается коленвал. Если сразу после старта, когда скорость не превышает еще 20 км/ч, включить третью передачу механической коробки и давить на педаль, то машина начнет разгоняться вяло, без эмоционального подхвата. Обороты мотора при этом не превышают 1500. Как же правильно ездить, чтобы мотор всегда был на пике силы?
Пик мощности
Дело в том, что бензиновый атмосферный мотор выходит на пик мощности только в узком диапазоне оборотов. Как правило, это 5-6 тысяч. Если посмотреть на тахометр, то соответствующий максимальной отдаче мотора сектор на шкале прибора помечен желтой краской, переходящей в красную зону, которая продолжается от 5 до 7 тысяч. На этих оборотах мотор испытывает экстремальные нагрузки, в том числе и температурные. Долго удерживать в нем стрелку тахометра не рекомендуется.
На этих оборотах мотор испытывает экстремальные нагрузки, в том числе и температурные. Долго удерживать в нем стрелку тахометра не рекомендуется.
Ранее у карбюраторных моторов передачи подбирались таким образом, чтобы трудиться в этом сравнительно узком диапазоне. Сейчас конструкция системы подачи топлива и зажигания изменились, появился впрыск, и процесс смесеобразования осуществляется многоступенчато и контролируется электроникой. Тем самым оптимальная смесь топлива с воздухом готовится даже для очень низких температур. Эта особенность электронного впрыска позволяет повысить другую характеристику мотора, а именно крутящий момент.
Пик тяги
Крутящим моментом является сила, которая умножена на плечо ее приложения. Крутящий момент всегда измеряется в ньютонах, а величина рычага — в метрах. Тем самым это сила, с которой 1 килограмм давит на конец рычага (поршень) мотора с длиной в 1 метр. Роль рычага в силовой установке всегда играет кривошип коленвала.
Крутящий момент ощущается в автомобиле как тяга и усилие при ускорении.
Электроника меняет фазы газораспределения, позволяя расширить планку крутящего момента, что делает мотор более эластичным. У него появляется способность хорошо тянуть даже на низких оборотах, несмотря на то, что мощность мотора невысока.
Пик крутящего момента у атмосферных моторов приходится на 3500 оборотов, а у турбированных с непосредственным впрыском топлива можно наблюдать более интересные характеристики.
Современные системы впрыска и фазораспределения делают силовой агрегат необычайно сильным на низах. Почти от оборотов холостого хода турбированный мотор уже обладает достаточной тягой, чтобы хорошо стартовать. Пик крутящего момента начинается от 1500 оборотов и продолжается до 4-5 тысяч. В этом диапазоне оборотов силовой агрегат придает транспортному средству наивысшую динамичность.
Зона эффективности
Если посмотреть на графики характеристик мотора, то можно увидеть две кривые с двумя пиками или «горбами». Одна показывает нарастание мощности, а другая — крутящего момента.
Одна показывает нарастание мощности, а другая — крутящего момента.
Максимальная эффективность и отдача мотора достигается между двумя этими пиками, а именно между максимумом крутящего момента и максимумом мощности.
Тем самым атмосферные моторы хорошо тянут в пределах 3500-6000 оборотов. Поэтому для ускорения во время обгонов лучше подбирать такую передачу, чтобы мотор попадал в этот диапазон. Тогда он сможет быстро разогнать автомобиль.
Турбированные двигатели с непосредственным впрыском будут хорошо ехать от 1500 до 6000 оборотов. Они обладают хорошей эластичностью и всегда имеют запас тяги для рывка. В этом их главное преимущество.
Введение в устройство шаговых двигателей
Если вы когда-либо имели удовольствие демонтировать старый принтер, чтобы сохранить электронные компоненты, то можете столкнуться с множеством цилиндрических загадочных моторов с 4 или более проводами, выступающими из сторон. Возможно, вы слышали характерное жужжание настольного 3D-принтера или глючную электромеханическую симфонию дисков в CD приводе? Если так, то вы столкнулись с шаговым двигателем!
Возможно, вы слышали характерное жужжание настольного 3D-принтера или глючную электромеханическую симфонию дисков в CD приводе? Если так, то вы столкнулись с шаговым двигателем!Шаговые двигатели заставляют электромеханический мир вращаться ( с более высоким крутящим моментом!), но в отличие от обычного двигателя постоянного тока, управление шаговым двигателем требует чуть больше, чем ток через два провода. В этой статье будет рассказано о теории проектирования и эксплуатации шагового двигателя. Как только рассмотрим основы, автор данного руководства покажет, как построить простые схемы для управления шаговыми двигателями, а затем как использовать специальные микросхемы драйверов.
Шаг 1: Что делает мотор шаговым двигателем?
Кому может понадобиться более двух проводов и Н-мост? Зачем? Ну, в отличие от обычных щеточных двигателей постоянного тока, построенных для максимального числа оборотов (или кВ для RC), шаговые двигатели представляют собой бесщеточные двигатели, рассчитанные на высокий крутящий момент (впоследствии меньшую скорость) и более точное вращательное движение. В то время как типичный двигатель постоянного тока отлично подходит для вращения гребного винта на высокой скорости для достижения максимальной тяги, шаговый двигатель лучше подходит для прокатки листа бумаги синхронно со струйным механизмом внутри принтера или для осторожного вращения вала линейного рельса в мельнице с ЧПУ.
В то время как типичный двигатель постоянного тока отлично подходит для вращения гребного винта на высокой скорости для достижения максимальной тяги, шаговый двигатель лучше подходит для прокатки листа бумаги синхронно со струйным механизмом внутри принтера или для осторожного вращения вала линейного рельса в мельнице с ЧПУ.
Внутри шаговые двигатели являются более сложными, чем простой двигатель постоянного тока, с несколькими катушками вокруг сердечника с постоянными магнитами, но с этой дополнительной сложностью обеспечивается больший контроль. Благодаря тщательному расположению катушек, встроенных в статор, ротор шагового двигателя может вращаться с заданным шагом, изменяя полярность между катушками и переключая их полярность в соответствии с установленной схемой зажигания. Шаговые двигатели не все сделаны одинаковыми, и для их внутреннего исполнения требуются уникальные (но базовые) схемы. Обсудим наиболее распространенные типы шаговых двигателей на следующем шаге.
Шаг 2: Типы шаговых двигателей
Есть несколько различных конструкций шаговых двигателей. К ним относятся однополярное, биполярное, универсальное и переменное сопротивление. Мы будем обсуждать конструкцию и работу биполярных и однополярных двигателей, так как это наиболее распространенный тип двигателя.
К ним относятся однополярное, биполярное, универсальное и переменное сопротивление. Мы будем обсуждать конструкцию и работу биполярных и однополярных двигателей, так как это наиболее распространенный тип двигателя.
Однополярный двигатель
У однополярных двигателей обычно есть пять, шесть или восемь проводных выводов, идущих от основания, и одна катушка на фазу. В случае пятипроводного двигателя пятый провод представляет собой соединенные центральные отводы пар катушек. В шестипроводном двигателе каждая пара катушек имеет собственный центральный отвод. В двигателе с восемью проводами каждая пара катушек полностью отделена от других, что позволяет подключать ее в различных конфигурациях. Эти дополнительные провода позволяют приводить в действие однополярные двигатели непосредственно от внешнего контроллера с простыми транзисторами, чтобы управлять каждой катушкой отдельно. Схема зажигания, в которой приводится в действие каждая катушка, определяет направление вращения вала двигателя.
Биполярный двигатель
Биполярные двигатели, как правило, имеют четыре провода и являются более прочными, чем однополярный двигатель сравнительного размера, но поскольку у нас есть только одна катушка на фазу, нам нужно повернуть ток через катушки, чтобы перейти на один шаг. Наша потребность изменить ток означает, что мы больше не сможем управлять катушками напрямую с помощью одного транзистора, вместо этого — полная цепь h-моста. Построение правильного h-моста утомительно (не говоря уже о двух!), Поэтому мы будем использовать выделенный драйвер биполярного двигателя (см.
Шаг 3: Понимание спецификаций шагового двигателя
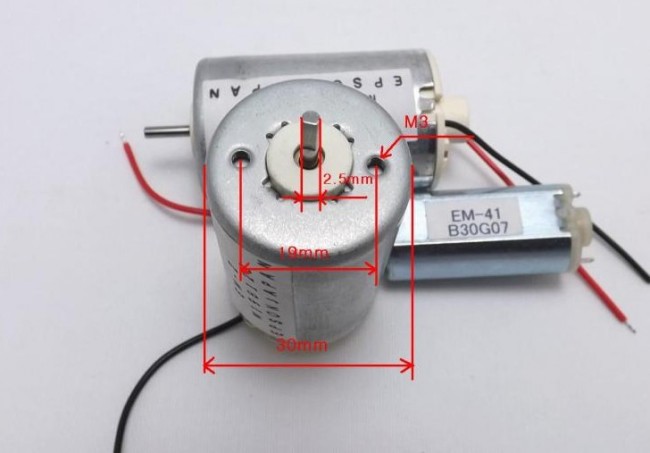
Давайте поговорим о том, как определить технические характеристики двигателя. Если вы встречали двигатель квадратного сечения с определенной сборкой из трех частей (см. Рисунок три), скорее всего, это двигатель NEMA. Национальная ассоциация производителей электрооборудования имеет определенный стандарт для спецификаций двигателя, использующий простой буквенный код для определения диаметра лицевой панели двигателя, типа крепления, длины, фазного тока, рабочей температуры, фазного напряжения, шагов на оборот и проводки.
Чтение паспорта двигателя
Для следующего шага будет использован этот однополярный мотор. Выше приложена таблица данных. И хотя она краткая, она предоставляет нам все, что нам нужно для правильной работы. Давайте разберем, что в списке:
Фаза: это четырехфазный однополярный мотор. Внутренне двигатель может иметь любое количество реальных катушек, но в этом случае они сгруппированы в четыре фазы, которые могут управляться независимо.
Шаг угла: При приблизительном разрешении 1,8 градусов на шаг мы получим 200 шагов на оборот. Хотя это является механическим разрешением, с помощью микроперехода мы можем увеличить это разрешение без каких-либо изменений двигателя (подробнее об этом в шаге 5).
Напряжение: номинальное напряжение этого двигателя составляет 3 вольта. Это функция тока и номинальных сопротивлений двигателя (закон Ома V = IR, следовательно, 3V = 2A * 1,5Ω)
Ток: сколько тока нужно этому двигателю? Два ампера на фазу! Эта цифра будет важна при выборе наших силовых транзисторов для базовой схемы управления.
Сопротивление: 1,5 Ом на фазу ограничит то, какой ток мы можем подать на каждую фазу.
Удерживающий момент: это то, сколько фактической силы мы можем создать, когда на шаговый двигатель подано напряжение.
Момент удержания: это то, какой момент удержания мы можем ожидать от двигателя, когда он не находится под напряжением.
Класс изоляции: класс B является частью стандарта NEMA и дает нам рейтинг в 130 градусов Цельсия. Шаговые двигатели не очень эффективны, и постоянное потребление максимального тока означает, что они будут сильно нагреваться при нормальной работе.
Показатели обмотки: диаметр провода 0,644 мм., количество витков в диаметре 15,5, сечение 0,326 мм2
Определение пар катушек
Хотя сопротивление обмоток катушки может варьироваться от двигателя к двигателю, если у вас есть мультиметр, вы можете измерить сопротивление на любых двух проводах, если сопротивление
Шаг 4: Непосредственное управление шаговыми двигателями
Благодаря расположению проводов в однополярном двигателе мы можем последовательно включать катушки, используя только простые силовые полевые МОП-транзисторы. На рисунке выше показана простая схема с МОП-транзистором. Такое расположение позволяет просто контролировать уровень логики с помощью внешнего микроконтроллера. В этом случае легче всего использовать плату Intel Edison с коммутационной платой в стиле Arduino, чтобы получить легкий доступ к GPIO (однако подойдет любой микро с четырьмя GPIO).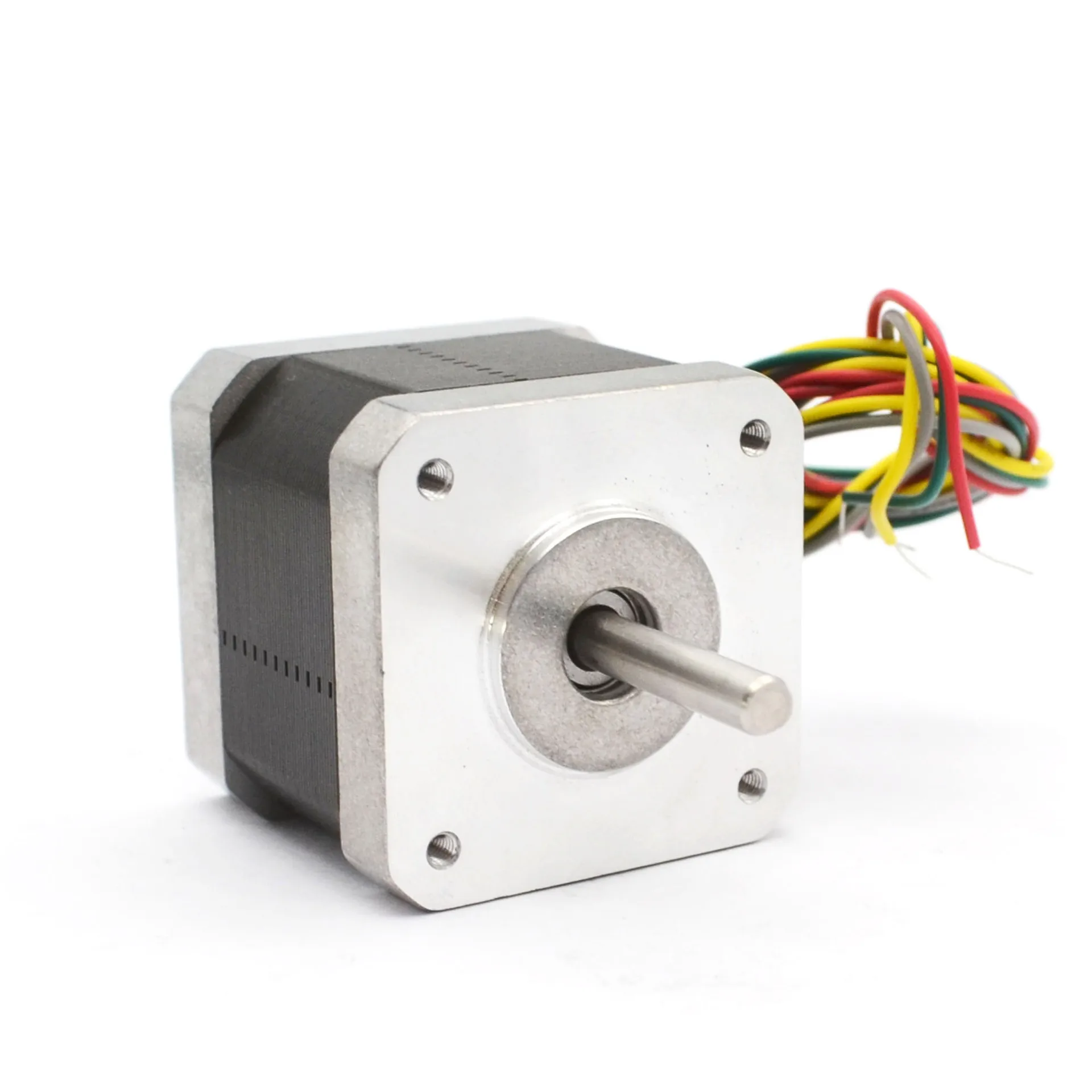 Для этой схемы используется транзистор IRF510 N-канальный мощный MOSFET. IRF510, способный потреблять до 5,6 ампер, будет иметь достаточно свободной мощности, чтобы удовлетворить потребности двигателя в 2 амперах. Светодиоды не нужны, но они дадут вам хорошее визуальное подтверждение последовательности работы. Важно отметить, что IRF510 должен иметь логический уровень не менее 5 В, чтобы он мог потреблять достаточный ток для двигателя. Мощность двигателя в этой цепи будет 3 В.
Для этой схемы используется транзистор IRF510 N-канальный мощный MOSFET. IRF510, способный потреблять до 5,6 ампер, будет иметь достаточно свободной мощности, чтобы удовлетворить потребности двигателя в 2 амперах. Светодиоды не нужны, но они дадут вам хорошее визуальное подтверждение последовательности работы. Важно отметить, что IRF510 должен иметь логический уровень не менее 5 В, чтобы он мог потреблять достаточный ток для двигателя. Мощность двигателя в этой цепи будет 3 В.
Последовательность работы
Полное управление однополярным двигателем с помощью этой настройки очень простое. Для того, чтобы вращать двигатель, нам нужно включить фазы в заданном режиме, чтобы он вращался правильно. Чтобы вращать двигатель по часовой стрелке, мы будем управлять фазами следующим образом: A1, B1, A2, B2. Чтобы вращать против часовой стрелки, мы просто изменим направление последовательности на B2, A2, B1, A1. Это хорошо для базового контроля, но что, если вы хотите большей точности и меньше работы? Давайте поговорим об использовании выделенного драйвера, чтобы сделать всё намного проще!
Шаг 5: Платы драйверов шаговых двигателей
Если вы хотите приступить к управлению биполярными двигателями (или однополярными двигателями в биполярной конфигурации), вам нужно взять специальную плату управления драйвером. На фото выше изображен драйвер Big Easy Driver и плата-носитель драйвера шагового двигателя A4988. Обе эти платы являются печатными платами для микрошагового двухполюсного драйвера шагового двигателя Allegro A4988, который на сегодняшний день является одним из наиболее распространенных чипов для привода небольших шаговых двигателей. Помимо наличия необходимых двойных h-мостов для управления биполярным двигателем, эти платы дают много возможностей для крошечной недорогой упаковки.
На фото выше изображен драйвер Big Easy Driver и плата-носитель драйвера шагового двигателя A4988. Обе эти платы являются печатными платами для микрошагового двухполюсного драйвера шагового двигателя Allegro A4988, который на сегодняшний день является одним из наиболее распространенных чипов для привода небольших шаговых двигателей. Помимо наличия необходимых двойных h-мостов для управления биполярным двигателем, эти платы дают много возможностей для крошечной недорогой упаковки.
Монтаж
Эти универсальные платы имеют удивительно низкое соединение. Вы можете начать управлять двигателем, используя только три соединения (только два GPIO) с вашим главным контроллером: общее заземление, шаг и направление. Ступенчатый шаг и его направление остаются плавающими, так что нужно привязать их к опорному напряжению с нагрузочным резистором. Импульс, посылаемый на вывод STEP, будет перемещать двигатель на один шаг с разрешением в соответствии с эталонными выводами микрошага. Логический уровень на выводе DIR определяет, будет ли двигатель вращаться по часовой стрелке или против часовой стрелки.

Микрошагование двигателя
В зависимости от того, как установлены выводы M1, M2 и M3, вы можете добиться увеличения разрешения двигателя с помощью микрошагования. Микрошаг включает в себя посылку разнообразных импульсов, чтобы тянуть двигатель между электромагнитным разрешением физических магнитов в роторе, обеспечивая очень точное управление. A4988 может перейти от полного шага до разрешения шестнадцатого шага. С нашим двигателем 1,8 градуса это обеспечит до 3200 шагов за оборот. Поговорим о мелких деталях!
Коды / Библиотеки
Подключение двигателей может быть легким, но как насчет управления ими? Посмотрите эти готовые библиотеки кода для управления шаговыми двигателями:
Stepper — классика, встроенная в Arduino IDE, позволяет выполнять базовый шаг и управление скоростью вращения.
AccelStepper — гораздо более полнофункциональная библиотека, которая позволяет лучше управлять несколькими двигателями и обеспечивает правильное ускорение и замедление двигателя.
Intel C ++ MRAA Stepper — библиотека более низкого уровня для тех, кто хочет углубиться в управление необработанным шаговым двигателем C ++ с помощью Intel Edison.
Этих знаний должно быть достаточно, чтобы вы поняли как работать с шаговыми двигателями в электромеханическом мире, но это только начало.
Источник (Source) Управление шаговым двигателем
с модулем драйвера A4988 и Arduino
Если вы планируете построить свой собственный 3D-принтер или станок с ЧПУ, вам нужно будет управлять несколькими шаговыми двигателями. И если один Arduino контролирует все они, то все они могут занять много обработки и не оставить много места для чего-либо еще; если вы не используете отдельный драйвер шагового двигателя — A4988 .
Он может управлять скоростью и направлением вращения биполярного шагового двигателя, такого как NEMA 17, с помощью всего двух штифтов.Как это круто!
Вы знаете, как работают шаговые двигатели?
В шаговых двигателях используется зубчатое колесо и электромагниты для вращения колеса на один «шаг» за раз.BR961KwyCg~~60_1.JPG)
Каждый отправленный ВЫСОКИЙ импульс возбуждает катушку, притягивает ближайшие зубья зубчатого колеса и приводит двигатель в движение на один шаг.
То, как вы подаете импульсы на эти катушки, сильно влияет на поведение двигателя.
- Последовательность импульсов определяет направление вращения двигателя.
- Частота импульсов определяет скорость двигателя.
- Количество импульсов определяет, как далеко будет вращаться двигатель.
A4988 Микросхема драйвера шагового двигателя
В основе модуля лежит микрошаговый драйвер от Allegro — A4988. Он невелик по размеру (всего 0,8 ″ × 0,6 ″), но все же обладает мощью.
Драйвер шагового двигателя A4988 имеет выходную мощность привода до 35 В и ± 2 А и позволяет управлять одним биполярным шаговым двигателем с выходным током до 2 А на катушку, как NEMA 17.
Драйвер имеет встроенный переводчик для удобства работы. Это уменьшает количество контрольных штифтов до двух, один для управления ступенями, а другой для управления направлением вращения.
Драйвер предлагает 5 различных разрешений шага, а именно. полный шаг, полушаг, четверть шага, восьмой шаг и шестнадцатый шаг.
A4988 Распиновка драйвера двигателя
Драйвер A4988 имеет всего 16 контактов, которые связывают его с внешним миром. Соединения следующие:
Давайте познакомимся со всеми контактами по очереди.
Контакты подключения питания
Для A4988 фактически требуется два подключения источника питания.
VDD и GND используются для управления внутренней логической схемой, которая может составлять от 3 до 5,5 В.
Принимая во внимание, что
VMOT и GND обеспечивают питание двигателя, которое может составлять от 8 до 35 В.
В соответствии с таблицей данных, Для питания двигателя требуется соответствующий разделительный конденсатор рядом с платой, способный выдерживать ток 4 А.
Предупреждение:
Этот драйвер имеет керамические конденсаторы с низким ESR на плате, что делает его уязвимым для скачков напряжения.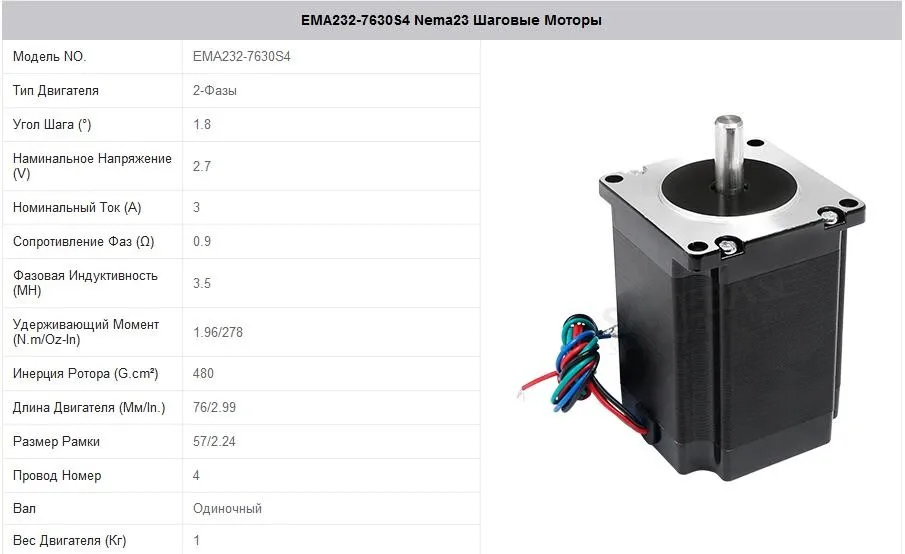 В некоторых случаях эти выбросы могут превышать 35 В (максимальное номинальное напряжение A4988), потенциально необратимо повреждая плату и даже двигатель.
В некоторых случаях эти выбросы могут превышать 35 В (максимальное номинальное напряжение A4988), потенциально необратимо повреждая плату и даже двигатель.
Один из способов защитить драйвер от таких всплесков — установить большой электролитический конденсатор 100 мкФ (минимум 47 мкФ) на контакты источника питания двигателя.
Штыри выбора микрошага
Драйвер A4988 позволяет микрошагу, разрешая промежуточные положения шага. Это достигается за счет подачи питания на катушки с промежуточными уровнями тока.
Например, если вы выбираете привод NEMA 17 с шагом 1,8 ° или 200 шагов на оборот в четвертьшаговом режиме, двигатель будет выдавать 800 микрошагов на оборот.
Драйвер A4988 имеет три входа для выбора размера шага (разрешения), а именно. MS1, MS2 и MS3. Установив соответствующие логические уровни для этих выводов, мы можем установить двигатели на одно из пяти шагов разрешения.
Эти три контакта выбора микрошага подтягиваются к НИЗКОМУ внутренним резисторам, поэтому, если мы оставим их отключенными, двигатель будет работать в режиме полного шага.
Входные контакты управления
A4988 имеет два входа управления, а именно. ШАГ и НАПР.
Вход STEP управляет микрошагами двигателя. Каждый HIGH-импульс, отправляемый на этот вывод, приводит двигатель в действие на количество микрошагов, заданное контактами Microstep Selection. Чем быстрее импульсы, тем быстрее будет вращаться двигатель.
Вход DIR управляет направлением вращения двигателя. Вытягивая его ВЫСОКОЕ, двигатель вращается по часовой стрелке, а НИЗКОЕ — против часовой стрелки.
Если вы просто хотите, чтобы двигатель вращался в одном направлении, вы можете связать DIR непосредственно с VCC или GND соответственно.
Контакты STEP и DIR не подтягиваются к какому-либо определенному напряжению внутри, поэтому вы не должны оставлять их плавающими в вашем приложении.
Контакты для управления состояниями питания
A4988 имеет три разных входа для управления состояниями питания, а именно. EN, RST и SLP.
EN Вывод является активным низким входом, при нажатии на НИЗКИЙ уровень (логический 0) активируется драйвер A4988.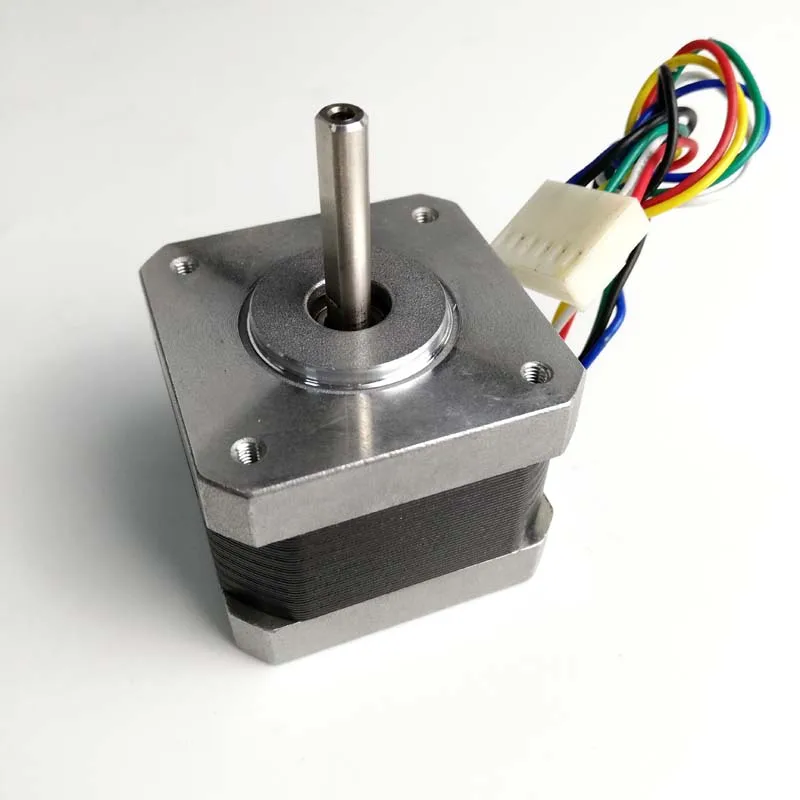 По умолчанию этот вывод установлен на низкий уровень, поэтому драйвер всегда включен, если вы не потянете его на ВЫСОКИЙ уровень.
По умолчанию этот вывод установлен на низкий уровень, поэтому драйвер всегда включен, если вы не потянете его на ВЫСОКИЙ уровень.
Вывод SLP — активный низкий вход.Это означает, что нажатие на этот контакт LOW переводит драйвер в спящий режим, минимизируя потребление энергии. Вы можете вызвать это, особенно когда двигатель не используется для экономии энергии.
RST также является активным низким входом. При нажатии на НИЗКИЙ уровень все входы ШАГА игнорируются, пока вы не потянете ВЫСОКИЙ уровень. Он также сбрасывает драйвер, устанавливая внутренний переводчик в предопределенное состояние Home. Исходное состояние — это в основном начальное положение, с которого запускается двигатель, и оно различается в зависимости от разрешения микрошага.
TIP
Вывод RST плавающий. Если вы не используете контакт, вы можете подключить его к соседнему контакту SLP / SLEEP, чтобы поднять его на высокий уровень и включить драйвер.
Выходные контакты
Выходные каналы драйвера двигателя A4988 разделены на край модуля контактами 1B, 1A, 2A и 2B.
К этим контактам можно подключить любой биполярный шаговый двигатель с напряжением от 8 до 35 В.
Каждый выходной контакт модуля может подавать на двигатель ток до 2 А.Однако величина тока, подаваемого на двигатель, зависит от источника питания системы, системы охлаждения и настройки ограничения тока.
Система охлаждения — радиатор
Чрезмерное рассеивание мощности микросхемы драйвера A4988 приводит к повышению температуры, которая может выйти за пределы возможностей микросхемы, что может привести к ее повреждению.
Даже если микросхема драйвера A4988 имеет максимальный номинальный ток 2 А на катушку, микросхема может подавать только приблизительно 1 А на катушку без перегрева.
Для достижения более 1 А на катушку требуется радиатор или другой метод охлаждения.
Драйвер A4988 обычно поставляется с радиатором. Желательно установить его перед использованием драйвера.
Ограничение тока
Перед использованием двигателя нам необходимо сделать небольшую регулировку.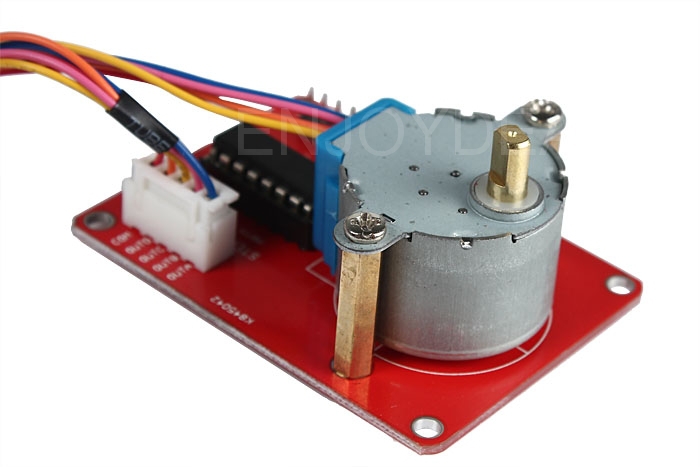 Нам необходимо ограничить максимальное количество тока, протекающего через катушки шагового двигателя, и предотвратить превышение номинального тока двигателя.
Нам необходимо ограничить максимальное количество тока, протекающего через катушки шагового двигателя, и предотвратить превышение номинального тока двигателя.
На драйвере A4988 есть небольшой подстроечный потенциометр, который можно использовать для установки ограничения тока.Вы должны установить предел тока равным или ниже номинального тока двигателя.
Для выполнения этой настройки есть два метода:
Метод 1:
В этом методе мы собираемся установить ограничение тока, измеряя напряжение (Vref) на выводе «ref».
- Ознакомьтесь с таблицей данных на свой шаговый двигатель. Запишите его номинальный ток. В нашем случае мы используем NEMA 17 200 шагов / оборот, 12 В 350 мА.
- Переведите драйвер в полношаговый режим, оставив три контакта выбора микрошага отключенными.
- Удерживайте двигатель в фиксированном положении, не синхронизируя вход STEP.
- Измерьте напряжение (Vref) на самом металлическом потенциометре триммера во время его регулировки.

- Регулировка напряжения Vref, используя формулу
Current Limit = Vref х 2,5
Например, если двигатель рассчитан на 350mA, вы бы регулировать опорное напряжение до 0.14V.
Совет:
Самый простой способ выполнить регулировку — использовать зажим из крокодила на валу металлической отвертки и прикрепить его к мультиметру, чтобы вы могли одновременно измерять и регулировать напряжение с помощью отвертки. .
Метод 2:
В этом методе мы собираемся установить ограничение тока путем измерения тока, протекающего через катушку.
- Ознакомьтесь с таблицей данных на свой шаговый двигатель. Запишите его номинальный ток. В нашем случае мы используем NEMA 17 200 шагов / оборот, 12 В 350 мА.
- Переведите драйвер в полношаговый режим, оставив три контакта выбора микрошага отключенными.
- Удерживайте двигатель в фиксированном положении, не синхронизируя вход STEP. Не оставляйте вход STEP плавающим, подключите его к источнику питания логики (5 В).

- Подключите амперметр последовательно с одной из катушек на шаговом двигателе и измерьте фактический протекающий ток.
- Возьмите небольшую отвертку и отрегулируйте потенциометр ограничения тока, пока не достигнете номинального тока.
Вам нужно будет выполнить эту настройку еще раз, если вы когда-нибудь измените логическое напряжение (VDD)
Подключение драйвера шагового двигателя A4988 к Arduino UNO
Теперь, когда мы знаем все о драйвере, мы подключим его к нашей Arduino.
Подключения довольно простые. Начните с подключения VDD и GND (рядом с VDD) к контактам 5V и заземления на Arduino.Входные контакты DIR и STEP подключены к цифровым выходным контактам №2 и №3 на Arduino соответственно.
подключите шаговый двигатель к контактам 2B, 2A, 1A и 1B. На самом деле A4988 удобно расположен в соответствии с 4-контактным разъемом на нескольких биполярных двигателях, так что это не должно быть проблемой.
Предупреждение:
Подключение или отключение шагового двигателя при подаче питания на драйвер может привести к его повреждению.
Затем подключите вывод RST к соседнему выводу SLP / SLEEP, чтобы драйвер оставался включенным.Также сохраните модель шагового двигателя microst
Implement — Simulink — MathWorks Nordic
Simscape / Electrical / Specialized Power Systems / Fundamental Blocks / Machines
Описание
Блок Stepper Motor (STM) реализует общую модель, которая представляет два самых популярных семейства шаговых двигателей:
Модель шагового двигателя состоит из электрической и механической частей. Электрический сечение представлено схемой замещения, конфигурация которой зависит от двигателя. тип.Эквивалентные схемы предполагают, что магнитная цепь является линейной (без насыщения) и взаимная индуктивность между фазами незначительна. Механическая часть представлена модель в пространстве состояний, основанная на моменте инерции и коэффициенте вязкого трения.
На этом рисунке показана эквивалентная схема для одной фазы в шаговом двигателе с переменным магнитным сопротивлением. мотор.
мотор.
В этой модели R и L a ( θ ), соответственно, представляют сопротивление и индуктивность обмотки фазы А.Индуктивность обмотки изменяется как функция положения ротора:
L a ( θ ) = л 0 + L 1 cos ( N r θ ),
где,
L 0 — средняя индуктивность.
L 1 — максимальное изменение индуктивности.
N r — номер зубьев ротора.
В исходном положении ( θ = 0) зуб ротора полностью совмещен с полюс оси A для достижения максимальной индуктивности обмотки фазы A.
Полный электромагнитный крутящий момент, создаваемый двигателем, складывается из произведенных крутящих моментов. по фазам двигателя:
где,
м — количество фаз.
i x — ток обмотки в фазе х .
L x — функция индуктивности от фазы х обмотка.
На этом рисунке показана эквивалентная схема для одной фазы в постоянном магните (PM) или гибридном шаговый двигатель.
В этой модели R и L a , соответственно, представляют сопротивление и индуктивность обмотки фазы А. Из-за большой величины воздушного зазора, создаваемого магнитами, индуктивность обмотки PM или гибридного шагового двигателя может считаться независимой от положение ротора.Источник напряжения e a ( θ ) представляет двигатель обратно электродвижущая сила (ЭДС), которая является синусоидальной функцией положения ротора:
ea (θ) = — pψmsin (pθ) dθdt,
где,
Обратите внимание, что в исходной позиции ( θ = 0) северный полюс ротора
полностью совмещен с полюсом оси А для достижения нулевого значения противо-ЭДС фазы А.
Электромагнитный момент, создаваемый двухфазным двигателем с постоянными магнитами или гибридным шаговым двигателем, равен сумма крутящего момента, возникающего в результате взаимодействия фазных токов и магнитных потоков создаваемый магнитами и фиксирующим моментом, который возникает из-за выраженности ротор:
T e = — pψ м i a sin ( pθ ) — pψ м i b sin ( pθ — π /2) — T дм sin ( м Nrθ ).
где,
Как получить параметры шагового двигателя
Параметры, используемые в модели шагового двигателя, обычно берутся из данных производителя листы. Если параметры недоступны, вы можете определить их экспериментальным путем. измерения.
Параметры шагового двигателя с переменным сопротивлением
Параметры, указанные в технических паспортах производителя, обычно: количество фаз, время выдержки. крутящий момент, угол шага, напряжение на фазу, ток на фазу, сопротивление обмотки, R a , максимальная индуктивность, L max , средняя индуктивность, L 0 , а инерция ротора Дж .
крутящий момент, угол шага, напряжение на фазу, ток на фазу, сопротивление обмотки, R a , максимальная индуктивность, L max , средняя индуктивность, L 0 , а инерция ротора Дж .
Параметры гибридного шагового двигателя с постоянным магнитом
Параметры, указанные в технических паспортах производителя, обычно:
количество фаз
удерживающий момент
угол шага
напряжение на фазу
ток на фазу
сопротивление обмотки, R
обмотка индуктивность, L a
Инерция ротора, Дж
Максимальный момент фиксации, T дм , не всегда указано.Этот параметр можно принять равным 1-10% от максимального удерживающего момента.
Максимальный потокосцепление, ψ м , не всегда указано. Этот параметр можно получить экспериментально, доведя двигатель до постоянного частота вращения, Н , об / мин, и путем измерения максимального напряжения холостого хода обмотки, E m , в V.
Параметр ψ m затем вычисляется по следующей формуле:
, где p — количество пар полюсов, заданное как p = 360 / (2 m · шаг ).Здесь м = номер фазы, шаг = шаг угол в градусах.
Ссылки
[1] Т. Кенджо, А. Сугавара, Шаговые двигатели и их микропроцессоры Controls , 2-е издание, Oxford University Press, Oxford, 2003.
[2] П. Акарнли, Шаговые двигатели — Руководство по теории и практике , 4-е издание, Институт инженеров-электриков, Лондон, 2002.
Реализация модели шагового двигателя — Simulink — MathWorks Deutschland
Simscape / Electrical / Specialized Power Systems / Fundamental Blocks / Machines
Описание
Блок Stepper Motor (STM) реализует общую модель, которая представляет два самых популярных семейства шаговых двигателей:
Модель шагового двигателя состоит из электрической и механической частей.Электрический сечение представлено схемой замещения, конфигурация которой зависит от двигателя. тип. Эквивалентные схемы предполагают, что магнитная цепь является линейной (без насыщения) и взаимная индуктивность между фазами незначительна. Механическая часть представлена модель в пространстве состояний, основанная на моменте инерции и коэффициенте вязкого трения.
На этом рисунке показана эквивалентная схема для одной фазы в шаговом двигателе с переменным магнитным сопротивлением. мотор.
В этой модели R и L a ( θ ), соответственно, представляют сопротивление и индуктивность обмотки фазы А.Индуктивность обмотки изменяется как функция положения ротора:
L a ( θ ) = л 0 + L 1 cos ( N r θ ),
где,
L 0 — средняя индуктивность.
L 1 — максимальное изменение индуктивности.
N r — номер зубьев ротора.
В исходном положении ( θ = 0) зуб ротора полностью совмещен с полюс оси A для достижения максимальной индуктивности обмотки фазы A.
Полный электромагнитный крутящий момент, создаваемый двигателем, складывается из произведенных крутящих моментов. по фазам двигателя:
где,
м — количество фаз.
i x — ток обмотки в фазе х .
L x — функция индуктивности от фазы х обмотка.
На этом рисунке показана эквивалентная схема для одной фазы в постоянном магните (PM) или гибридном шаговый двигатель.
В этой модели R и L a , соответственно, представляют сопротивление и индуктивность обмотки фазы А. Из-за большой величины воздушного зазора, создаваемого магнитами, индуктивность обмотки PM или гибридного шагового двигателя может считаться независимой от положение ротора.Источник напряжения e a ( θ ) представляет двигатель обратно электродвижущая сила (ЭДС), которая является синусоидальной функцией положения ротора:
ea (θ) = — pψmsin (pθ) dθdt,
где,
Обратите внимание, что в исходной позиции ( θ = 0) северный полюс ротора полностью совмещен с полюсом оси А для достижения нулевого значения противо-ЭДС фазы А.
Электромагнитный момент, создаваемый двухфазным двигателем с постоянными магнитами или гибридным шаговым двигателем, равен сумма крутящего момента, возникающего в результате взаимодействия фазных токов и магнитных потоков создаваемый магнитами и фиксирующим моментом, который возникает из-за выраженности ротор:
T e = — pψ м i a sin ( pθ ) — pψ м i b sin ( pθ — π /2) — T дм sin ( м Nrθ ).
где,
Как получить параметры шагового двигателя
Параметры, используемые в модели шагового двигателя, обычно берутся из данных производителя листы. Если параметры недоступны, вы можете определить их экспериментальным путем. измерения.
Параметры шагового двигателя с переменным сопротивлением
Параметры, указанные в технических паспортах производителя, обычно: количество фаз, время выдержки. крутящий момент, угол шага, напряжение на фазу, ток на фазу, сопротивление обмотки, R a , максимальная индуктивность, L max , средняя индуктивность, L 0 , а инерция ротора Дж .
Параметры гибридного шагового двигателя с постоянным магнитом
Параметры, указанные в технических паспортах производителя, обычно:
количество фаз
удерживающий момент
угол шага
напряжение на фазу
ток на фазу
сопротивление обмотки, R
обмотка индуктивность, L a
Инерция ротора, Дж
Максимальный момент фиксации, T дм , не всегда указано.Этот параметр можно принять равным 1-10% от максимального удерживающего момента.
Максимальный потокосцепление, ψ м , не всегда указано. Этот параметр можно получить экспериментально, доведя двигатель до постоянного частота вращения, Н , об / мин, и путем измерения максимального напряжения холостого хода обмотки, E m , в V.
Параметр ψ m затем вычисляется по следующей формуле:
, где p — количество пар полюсов, заданное как p = 360 / (2 m · шаг ).Здесь м = номер фазы, шаг = шаг угол в градусах.
Ссылки
[1] Т. Кенджо, А. Сугавара, Шаговые двигатели и их микропроцессоры Controls , 2-е издание, Oxford University Press, Oxford, 2003.
[2] П. Акарнли, Шаговые двигатели — Руководство по теории и практике , 4-е издание, Институт инженеров-электриков, Лондон, 2002.
Шаговые двигатели по сравнению с двигателями постоянного тока
Выбрать правильный электродвигатель для проекта стало все труднее из-за достижений моторных технологий в последние десятилетия.Простой двигатель постоянного тока теперь стал отдельным классом двигателей, каждый из которых уникальным образом преобразует постоянный ток в механическую энергию. Эта статья призвана помочь людям, интересующимся двигателями, понять основные различия между двумя типами двигателей постоянного тока: традиционным двигателем постоянного тока (щеточный двигатель постоянного тока) и новым шаговым двигателем. Хотя оба работают от постоянного тока, их структуры, принципы работы и функции различны. В этой статье будут выделены эти свойства, чтобы помочь дизайнерам выбрать лучший двигатель в соответствии с их характеристиками.Однако, прежде чем продолжить, может быть полезно прочитать наши статьи о шаговых двигателях, двигателях постоянного тока с последовательной обмоткой и шунтирующих двигателях постоянного тока, которые предоставляют дополнительную информацию об этих разнообразных конструкциях.
Двигатели постоянного тока
Двигатели постоянного тока, как следует из их названия, используют постоянный ток (например, от батарей или других источников переменного тока) для генерации выходного вращения. Этот класс двигателей делится на щеточные двигатели постоянного тока и бесщеточные двигатели постоянного тока, но их наиболее распространенная форма типична для щеточной конструкции (чтобы понять, почему, прочитайте наши статьи о бесщеточных и бесщеточных двигателях.щеточные моторы). Обычный двигатель постоянного тока устроен так, как показано на рисунке 1, и показывает, как основные компоненты соединены вместе:
Рис. 1: Принципиальная электрическая схема щеточных двигателей постоянного тока.
Как показано выше, двигатели постоянного тока питаются от источника постоянного тока, подключенного к ротору через угольные щетки. Этот ротор находится внутри статора или стационарного корпуса, который содержит постоянное магнитное поле, создаваемое либо магнитным металлом, либо каким-либо типом электромагнита (показанного на Рисунке 1 как катушка с надписью «поле статора»).Узел ротора содержит якорь или проволочную катушку, изолированную металлическими пластинами, а также коллекторные кольца и выходной вал. Кольца коммутатора соединены с концевыми выводами катушки якоря, но не касаются напрямую щеток или выходного вала при выключенном двигателе. Щетки будут сжимать кольца коммутатора вместе при запуске двигателя, таким образом позволяя мощности постоянного тока проходить через щетки, через кольца коммутатора и в обмотку якоря. Когда ток проходит через якорь, создается магнитное поле, которое противодействует полю статора.Следовательно, узел ротора вращается из-за этого противодействия и заставляет двигатель производить полезную механическую энергию и крутящий момент.
Эти двигатели существуют с 1830-х годов и поэтому используются во множестве приложений. Они относительно дешевы как в приобретении, так и в установке, надежны и управляемы, а также имеют сотни оценок. Есть большая вероятность, что двигатель постоянного тока находится где-то поблизости, поскольку они обычно используются в электроинструментах, кухонной технике, смартфонах, компьютерах и многом другом.Более подробную информацию об обычных двигателях постоянного тока можно найти в наших статьях о двигателях постоянного тока с последовательной обмоткой и параллельных двигателях постоянного тока.)
Шаговые двигатели
Шаговые двигатели, хотя и питаются от постоянного тока, не используют щетки и механические коммутаторы, имеющиеся в типичных двигателях постоянного тока. Вместо этого они представляют собой тип бесщеточного двигателя постоянного тока, в котором их статор содержит множество равномерно расположенных обмоток провода, которые действуют как магнитные полюса при включении, а их ротор состоит из пар постоянных магнитов в форме шестерни.Электронный контроллер двигателя переключает ток на каждую последующую обмотку статора, чтобы магнитным путем вести ротор от одного полюса к другому. Причина, по которой эти двигатели называются «шаговыми» двигателями, заключается в том, что операторы могут контролировать, на какой полюс переходит ротор, что эффективно обеспечивает точные ступенчатые вращательные движения. Поскольку обычно в шаговом двигателе более 40 полюсов, они могут приблизительно соответствовать непрерывному движению с очень небольшими приращениями вращения (360 градусов вращения, разделенные на 40 полюсов = 9 градусов вращения на полюс).Поскольку ротор перемещается от одного полюса к другому, положение шагового двигателя может быть определено в любое время без необходимости корректировки. Хотя шаговые двигатели не являются действительно непрерывными двигателями, они обеспечивают точное позиционирование в сочетании с шаговым контроллером.
Шаговые двигателитакже могут обеспечивать удерживающий момент (положительное значение крутящего момента при нулевой скорости), что отлично подходит для робототехники и других приложений позиционирования. Эти машины, хотя обычно менее эффективны, чем обычный двигатель постоянного тока, обеспечивают отличное повторяемое движение, которое является как обратимым, так и хорошо управляемым.Они обычно используются в жестких дисках, системах управления, принтерах, военной технике и многом другом. Для получения дополнительной информации прочитайте нашу статью о шаговых двигателях.
Сравнение двигателей постоянного тока и шаговых двигателей
И шаговые двигатели, и двигатели постоянного тока работают во многих отраслях промышленности, поэтому их различия могут быть непонятными. В этой статье сравниваются некоторые общие атрибуты двигателей этих двух конструкций, показанные ниже в таблице 1. Далее следует краткое объяснение каждого атрибута, которое подчеркнет преимущество одного двигателя над другим во всех отношениях.
Таблица 1: Сравнение щеточных двигателей и шаговых двигателей.
Характеристики | Двигатели постоянного тока с щетками | Шаговый Двигатели |
Управляющие характеристики | Простой; не требует дополнительных услуг | Простой; микроконтроллер необходим |
Диапазон скоростей | Умеренная (зависит от типа) | Низкая (200-2000 об / мин) |
Надежность | Умеренная | Высокая |
КПД | Среднее | Низкий |
Крутящий момент / частота вращения | Высокий крутящий момент на низких скоростях | Максимальный крутящий момент на низких скоростях |
Стоимость | Низкий | Низкий |
Щеточные двигатели постоянного тока выигрывают у шаговых двигателей, когда дело касается управляемости; Хотя обе машины легко контролировать, двигатели постоянного тока просто требуют входного напряжения на два своих провода.Регулировка входного напряжения изменит скорость двигателя, а изменение направления проводов приведет к тому, что двигатель постоянного тока изменит направление. Шаговые двигатели также очень просты в использовании, но для их синхронизации требуется микроконтроллер, который поможет синхронизировать их ротор от одного полюса к другому.
Диапазон скоростей шаговых двигателей обычно ниже 2000 об / мин, так как их крутящий момент уменьшается с увеличением скорости. Они также не предназначены для непрерывного использования, так как шаговые двигатели имеют тенденцию к перегреву при длительном питании.Двигатели постоянного тока бывают самых разных форм, в результате чего диапазон скоростей гораздо более широкий. Они также могут работать непрерывно без особых проблем, хотя для этого на этих двигателях необходимо проводить постоянное обслуживание щеток.
И шаговый двигатель, и обычный двигатель постоянного тока надежны, но с некоторыми оговорками. Когда шаговые двигатели не работают постоянно, они могут легко достичь 10 000 часов полезного срока службы или почти 5 лет использования. Двигатели постоянного тока также могут работать так долго в зависимости от выбранного типа, но требуют постоянного обслуживания для предотвращения сбоев.
Поскольку двигатели постоянного тока являются зрелой технологией, их КПД был оптимизирован примерно до 85%, что неплохо для такого простого двигателя. Шаговые двигатели потребляют ток при максимальной нагрузке всякий раз, когда на полюса статора подается напряжение, что снижает энергоэффективность и увеличивает потери из-за тепла. Следовательно, шаговые двигатели — не лучшие двигатели, если важна их эффективность.
Шаговые двигателиобеспечивают максимальный крутящий момент на низких скоростях, что делает их особенно полезными в высокоточных системах удержания, таких как робототехника и 3D-принтеры.Некоторые двигатели постоянного тока также генерируют высокий крутящий момент на низких скоростях, но больше подходят для непрерывного использования, так как их крутящий момент постоянен во всем диапазоне скоростей. Основное различие состоит в том, что шаговые двигатели могут работать сильнее в состоянии покоя, а двигатели постоянного тока, как правило, имеют более устойчивую мощность.
Наконец, оба этих типа двигателей недорогие, поэтому цена покупки не имеет большого значения. Двигатели постоянного тока и шаговые двигатели полезны для приложений, в которых необходимо минимизировать цену, поскольку их можно купить менее чем за 100 долларов, а иногда даже и за 10 долларов.Они работают разумно в большинстве диапазонов цен и являются более дешевой альтернативой более дорогим двигателям, таким как бесщеточные двигатели, асинхронные двигатели и т. Д.
Из этого сравнения видно, что оба двигателя служат разным целям. Хотя они дешевы и легко управляются, шаговые двигатели дают большую часть своих преимуществ при использовании в качестве точных машин. Они часто используются в 3D-принтерах, станках с ЧПУ, оборудовании для обработки медицинских изображений, принтерах, камерах безопасности и других точно контролируемых приложениях.Короче говоря, они обеспечивают управление как преимущество перед механической выработкой энергии, и их следует использовать, если точность является первоочередной задачей.
Двигатели постоянного тока, хотя их часто уступают более новым бесщеточным двигателям постоянного тока из-за их улучшенных рабочих характеристик (см. Нашу статью о бесщеточных двигателях и щеточных двигателях), по-прежнему лучше всего использовать в приложениях, требующих постоянного крутящего момента во всем диапазоне скорости двигателя. Сюда входят вибраторы для телефонов, электроинструменты, автомобильные окна, краны, конвейеры и многие другие приложения, в которых приоритет отдается устойчивой выходной мощности и цене.Хотя двигатели постоянного тока далеко не так точны, как шаговые двигатели, они представляют собой испытанную рабочую лошадку отрасли, обладающую мощностью и выносливостью, чтобы по-прежнему конкурировать с современными двигателями.
Сводка
В этой статье представлено краткое сравнение шаговых двигателей и двигателей постоянного тока. Для получения информации о других продуктах ознакомьтесь с нашими дополнительными руководствами или посетите платформу Thomas Supplier Discovery Platform, чтобы найти потенциальные источники поставок или просмотреть подробную информацию о конкретных продуктах.
Источники:
- http: // srjcstaff.santarosa.edu/~lwillia2/2B/2Bch30.pdf
- https://itp.nyu.edu/physcomp/lessons/dc-motors/dc-motors-the-basics/
- http://www.ece.uah.edu/courses/material/EE410-Wms2/Electric%20motors.pdf
- https://wp.optics.arizona.edu
- https://howtomechatronics.com/how-it-works/electrical-engineering/stepper-motor/
Прочие изделия для двигателей
Другие товары от Машины, инструменты и расходные материалы
Шаговый двигатель со скоростью лучшего качества — Отличные предложения на шаговый двигатель со скоростью от глобального шагового двигателя со скоростью от продавцов
Отличные новости !!! Вы находитесь в нужном месте для шагового двигателя со скоростью.К настоящему времени вы уже знаете, что что бы вы ни искали, вы обязательно найдете это на AliExpress. У нас буквально тысячи отличных продуктов во всех товарных категориях. Ищете ли вы товары высокого класса или дешевые и недорогие оптовые закупки, мы гарантируем, что он есть на AliExpress.
Вы найдете официальные магазины торговых марок наряду с небольшими независимыми продавцами со скидками, каждый из которых предлагает быструю доставку и надежные, а также удобные и безопасные способы оплаты, независимо от того, сколько вы решите потратить.
AliExpress никогда не уступит по выбору, качеству и цене. Каждый день вы будете находить новые онлайн-предложения, скидки в магазинах и возможность сэкономить еще больше, собирая купоны. Но вам, возможно, придется действовать быстро, поскольку этот шаговый двигатель высшего качества со скоростью должен стать одним из самых востребованных бестселлеров в кратчайшие сроки. Подумайте, как вам будут завидовать друзья, когда вы скажете им, что приобрели шаговый двигатель со скоростью на AliExpress.Благодаря самым низким ценам в Интернете, дешевым тарифам на доставку и возможности получения на месте вы можете еще больше сэкономить.
Если вы все еще не уверены в шаговом двигателе со скоростью и думаете о выборе аналогичного товара, AliExpress — отличное место для сравнения цен и продавцов. Мы поможем вам разобраться, стоит ли доплачивать за высококачественную версию или вы получаете столь же выгодную сделку, приобретая более дешевую вещь.А если вы просто хотите побаловать себя и потратиться на самую дорогую версию, AliExpress всегда позаботится о том, чтобы вы могли получить лучшую цену за свои деньги, даже сообщая вам, когда вам будет лучше дождаться начала рекламной акции. и ожидаемая экономия.AliExpress гордится тем, что у вас всегда есть осознанный выбор при покупке в одном из сотен магазинов и продавцов на нашей платформе. Реальные покупатели оценивают качество обслуживания, цену и качество каждого магазина и продавца.Кроме того, вы можете узнать рейтинги магазина или отдельных продавцов, а также сравнить цены, доставку и скидки на один и тот же продукт, прочитав комментарии и отзывы, оставленные пользователями. Каждая покупка имеет звездный рейтинг и часто имеет комментарии, оставленные предыдущими клиентами, описывающими их опыт транзакций, поэтому вы можете покупать с уверенностью каждый раз. Короче говоря, вам не нужно верить нам на слово — просто слушайте миллионы наших довольных клиентов.
А если вы новичок на AliExpress, мы откроем вам секрет.Непосредственно перед тем, как вы нажмете «купить сейчас» в процессе транзакции, найдите время, чтобы проверить купоны — и вы сэкономите еще больше. Вы можете найти купоны магазина, купоны AliExpress или собирать купоны каждый день, играя в игры в приложении AliExpress. Вместе с бесплатной доставкой, которую предлагают большинство продавцов на нашем сайте, вы сможете приобрести stepper motor with speed по самой выгодной цене.
У нас всегда есть новейшие технологии, новейшие тенденции и самые обсуждаемые лейблы.На AliExpress отличное качество, цена и сервис всегда в стандартной комплектации. Начните лучший опыт покупок прямо здесь.
Шаговые двигатели
Шаговый двигатель — это особый тип бесщеточного двигателя постоянного тока. Электромагнитные катушки расположены вокруг двигателя снаружи. В центре двигателя находится железный или магнитный сердечник, прикрепленный к валу.Последовательно регулируя напряжение катушек, можно добиться точного управления вращением при относительно низких затратах. Недостатком является то, что управление обычно является разомкнутым, поэтому система не знает, глохнет ли двигатель или не синхронизируется с контроллером.
Создавая узлы змеевиков зубчатой формы и зубчатые / зубчатые роторы, можно достичь очень большого числа шагов за один оборот от 200 до 400.
Ток и напряжения
Шаговые двигатели имеют номинальное напряжение и ток.Типичный шаговый двигатель, такой как наш NEMA 17, может иметь номинальное напряжение 2,8 В и максимальный ток 1,68 А. Это в основном означает, что если вы подключите его к 2,8 В, он будет потреблять 1,68 А. Если вы попытаетесь запустить его при более высоком напряжении, он будет потреблять больше тока и сильно нагреваться. Большинство людей не подключают двигатели напрямую к источнику напряжения. Они используют драйвер шагового двигателя. Драйверы шагового двигателя регулируют ток. Если вы подключите его, например, к напряжению 12 В, двигатель будет пытаться потреблять больше тока, но драйвер шагового двигателя не допустит этого и использует высокочастотные импульсы для ограничения среднего тока до желаемого максимального значения.
Шаговые двигатели предназначены для работы таким образом, и их можно безопасно использовать при напряжении, в 20 раз превышающем номинальное. Вы действительно получите лучшую производительность, если будете работать при более высоком напряжении, чем номинальное.
Предупреждение
Шаговые двигатели могут безопасно работать в очень горячем состоянии, даже если они работают с правильными параметрами. Это не повредит двигатель, но вы также должны позаботиться о личной безопасности от ожогов или теплового повреждения вашей машины. Проверьте настройки вашего устройства и установите разумное значение тока.Шаговые двигатели потребляют энергию, даже когда они не двигаются, поэтому они, как правило, не очень энергоэффективны. Например, они были бы плохим выбором для игрушечной машинки с батарейным питанием. Двигатели всегда будут потреблять полную мощность и быстро разряжать аккумулятор. Стандартный щеточный двигатель постоянного тока не потребляет энергию, когда он не вращается, и был бы лучшим выбором.
Драйверы шагового двигателя
В большинстве шаговых драйверов есть средства для установки максимального тока. Обычно это делается путем установки напряжения на управляющем контакте или с помощью потенциометра на плате.Максимальный ток шагового драйвера предполагает, что вы достаточно охлаждаете драйвер. Часто бывает сложно, даже с радиаторами, полностью охладить драйверы при максимальном значении тока. Проверяйте свою температуру во время использования машины.
Большинство драйверов имеют функцию тепловой защиты, которая отключает драйвер на короткий период времени, чтобы дать ему остыть. Если вы теряете шаги или слышите тикающий или пульсирующий звук двигателей, это может быть связано с тепловым отключением. Попробуйте снизить ток.
Если ваш драйвер рассчитан на меньший ток, чем двигатель, это нормально. Вы просто не получите полной производительности от мотора. Если драйвер рассчитан на больший ток, чем двигатель, вы должны уменьшить ток до максимального тока двигателя.
Никогда не рекомендуется отсоединять провод шагового двигателя от драйвера при включенной системе. Многие драйверы не защищены от этого и будут безвозвратно уничтожены.
Соединения и проводка двигателя.
Драйверы шаговых двигателей имеют 4-проводные соединения для двигателей, но шаговые двигатели могут иметь 4, 6 и 8-проводные версии. 6- и 8-проводные двигатели могут использоваться с 4-х клеммными драйверами с помощью специальных методов подключения. Эти методы подключения позволяют выбрать методы, которые больше подходят для электрических требований и требований к скорости вашей системы.
4-х проводные двигатели.
4-проводные двигатели подключать проще всего. Вы просто подключаете их 1: 1 к драйверу.
6-проводные двигатели
6-проводные двигатели имеют провод, прикрепленный к центру катушек. Это позволяет использовать всю катушку или только ее половину. На изображении ниже показано, как подключиться в двух режимах.
8-проводные моторы.
8-проводные двигатели имеют по две катушки на фазу. Катушки могут работать в последовательном, параллельном или полуобмоточном режиме.
Если вы не знаете, какие провода к каким катушкам идут, есть несколько быстрых способов выяснить это.Первый способ — измерить сопротивление между проводами. Выберите любые два провода. Используйте измеритель, чтобы определить сопротивление между ними. Сопротивление обычно меньше 10 Ом. Если вы видите сопротивление, близкое к этой величине, эти два провода принадлежат одной катушке. Если сопротивление выше, переставьте один из щупов на новый провод, пока не обнаружите низкое сопротивление.
Если у вас нет счетчика, попробуйте этот трюк. Убедитесь, что два провода не касаются друг друга, и вращайте вал.Мотор должен иметь небольшой фиксирующий момент, но вращаться относительно свободно. Теперь начните касаться пары проводов и проворачивать вал. Если поворачивать становится труднее, эти два провода находятся на одной катушке. Сопротивление возрастает, потому что вы создаете электрический генератор с высокой нагрузкой.
Если ваш двигатель вращается в обратном направлении от ожидаемого, просто поменяйте местами соединения любых двух проводов на одной катушке. Не переключайте провода от обеих катушек. Направление мотора изменится.Большинство программ или прошивок, взаимодействующих с драйверами шагового двигателя, также имеют способы изменить направление. Обычно это проще, чем менять проводку.
Размер шагового двигателя
Большинство используемых в наши дни шаговых двигателей соответствуют размерам NEMA (Национальная ассоциация производителей электротехники). Это в основном определяет размер установочной поверхности двигателя. Ниже представлена таблица самых популярных размеров. Меньшие двигатели имеют резьбовые монтажные отверстия, а большие размеры имеют резьбовые отверстия с пространством за монтажным фланцем для гайки.Валы могут иметь или не иметь плоские поверхности, доступны версии с одним или двумя валами (оба конца). Длина двигателя не покрывается спецификацией NEMA. Лицевая сторона моторов часто имеет круглый выступ. Ваша монтажная поверхность должна быть рассчитана на это. Обязательно сверьтесь с чертежом своего мотора.Номинальный крутящий момент шагового двигателя
Значения крутящего момента шагового двигателя даны как удерживающий момент. Шаговые двигатели имеют самый высокий крутящий момент в состоянии покоя или на низких скоростях, так как при увеличении скорости крутящий момент начинает падать.В первую очередь это связано с индуктивностью катушек. Это действует как сопротивление и ограничивает скорость, при которой катушка достигает полной силы. При высоких скоростях шага катушка не достигнет полной мощности, пока не изменится напряжение. В конце концов мощность упадет настолько, что мотор не сможет даже вращаться. В этом помогают более высокие напряжения, поэтому вы можете получить более высокую скорость с более высокими напряжениями.
Скорость двигателя
Шаговые двигатели не имеют заданной скорости, потому что она очень зависит от приложения.Различия в нагрузке и напряжении влияют на максимальную скорость. Как было сказано выше, крутящий момент будет падать со скоростью, и в конечном итоге вы заглохнете. Водитель не узнает, что двигатель остановился, и будет продолжать увеличивать скорость шага. Вы услышите громкое жужжание, так как двигатель скорее вибрирует, чем вращается. В общем, шаговые двигатели работают со скоростью только сотни оборотов в минуту, а не тысячи оборотов в минуту от обычного двигателя постоянного тока.
Точность / разрешение / микрошаг
Первичная характеристика разрешения двигателя — это количество шагов двигателя на оборот или угловых градусов на шаг.Большинство двигателей имеют угол 1,8 градуса на шаг (200 шагов / оборот) или 0,9 градуса на шаг (400 шагов / оборот).
Драйверы шагового двигателя также могут выполнять микрошаги. Микрошаговый режим позволяет двигателю перемещаться в положение между обычными шагами, подавая частичные токи на каждую катушку.