Регулятор вращения электродвигателя 220 вольт с обратной связью
Наконец, начали «доходить» руки до самодельного точильного станка. В наличии был универсальный коллекторный электродвигатель УВ 051-Ц. Скорость его 7000 об/мин, что в двое больше, чем нужно для электроточила. Вдобавок, хотелось иметь регулировку оборотов (желательно с обратной связью). Пришлось собирать схему, которая отвечала всем запросам.
Итак, как я пришел к тому, что скорость нужно снизить вдвое. На точильных камнях, обычно, есть надпись на какой максимальной скорости они могут работать. Чаще всего – это 25-30 м/с. Чтобы рассчитать необходимое количество оборотов электродвигателя для точильного станка – есть формула. Количество оборотов = (допустимые обороты на камне / диаметр точильного круга (в метрах) *3,14 )*60 секунд. Итого, максимальное количество оборотов электродвигателя для камня, который я приобрел = (25/0.15+3.14)*60, что приблизительно равно 3185 об/мин. Вывод: скорость 7000 об/мин электродвигателя УВ 051-Ц нужно снизить вдвое.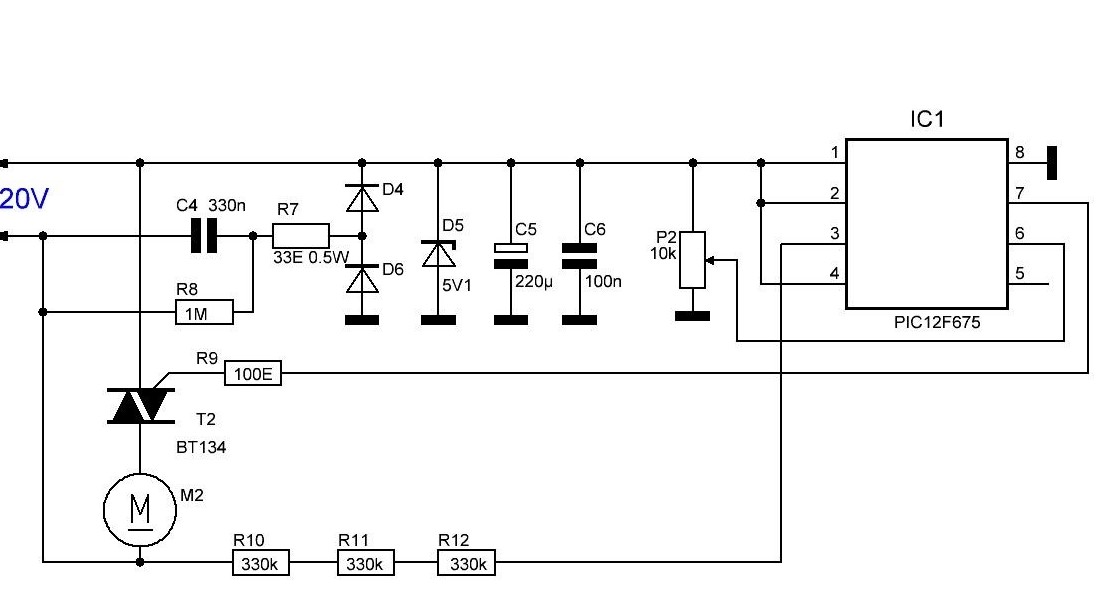
В результате поисков, наткнулся на простую схему регулятора оборотов коллекторного электродвигателя 220 вольт с обратной связью. Информации по ней было не много, т.к., возможно, мало кто ее собирал, сомневаясь в ее работоспособности, видя насколько она примитивна. Я же ее собрал на кусочке монтажной платы, произвел отладку, убедился в работоспособности.
Теперь пересказ принципа действия схемы регулятора оборотов коллекторного электродвигателя с обратной связью. R1+R2+C1 – формирует опорное напряжение, задающее скорость вращения двигателя. В момент приложения нагрузки, скорость вращения падает, снижается крутящий момент. Возникающая в двигателе и приложенная между управляющим контактом и катодом тиристора противо-ЭДС уменьшается. Пропорционально уменьшению противо-ЭДС увеличивается напряжение на управляющем контакте тиристора. Такое увеличение напряжение заставляет тиристор срабатывать при меньшем фазовом угле, и в следствии, подавать на двигатель больший ток.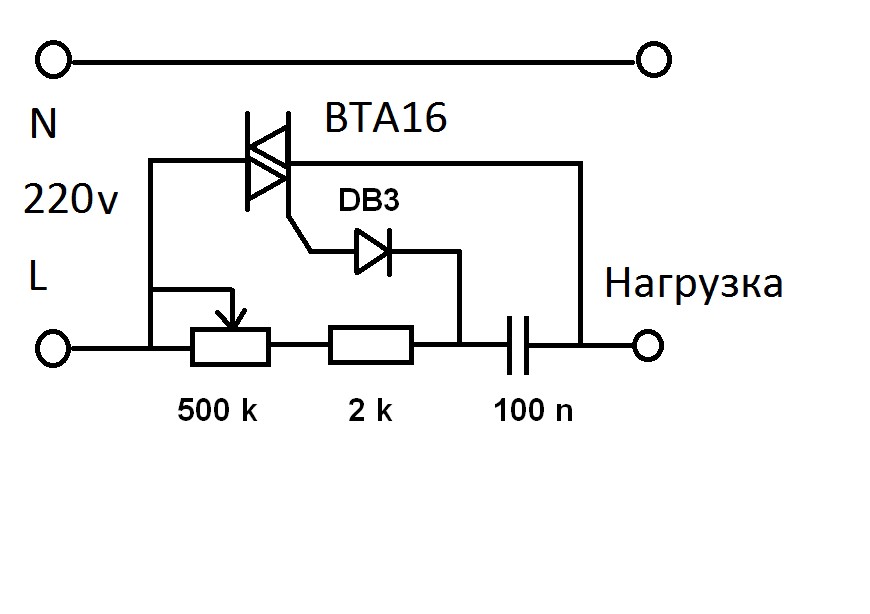
Тиристор нужно подбирать в зависимости от мощности электродвигателя. Мне хватило MCR100-8, в оригинальной схеме – КУ202Н. Под тиристор подбирается сопротивление резистора R3. Если тиристор КУ202Н – R3 можно не ставить. Диоды можно заменить на любые с аналогичными параметрами Д226, 1N4007 и т.д. С1 может быть в пределах 0,1-2uF, им устраняются рывки двигателя на малых оборотах. Конденсаторы с рабочим напряжением 250 вольт.
Регулятор оборотов с обратной связью по скорости , токовой отсечкой и плавным запуском для универсального коллекторного двигателя. — Электропривод
Привет всем.В этой теме я расскажу про регулятор оборотов с обратной связью по скорости , токовой отсечкой и плавным запуском для универсального коллекторного двигателя или двигателя постоянного тока.Получилось подобие сервопривода.Схема подойдет не только для доработки мини-дрели , но и как блок управления коллекторным двигателем для небольших китайских станков, вместо штатной платы.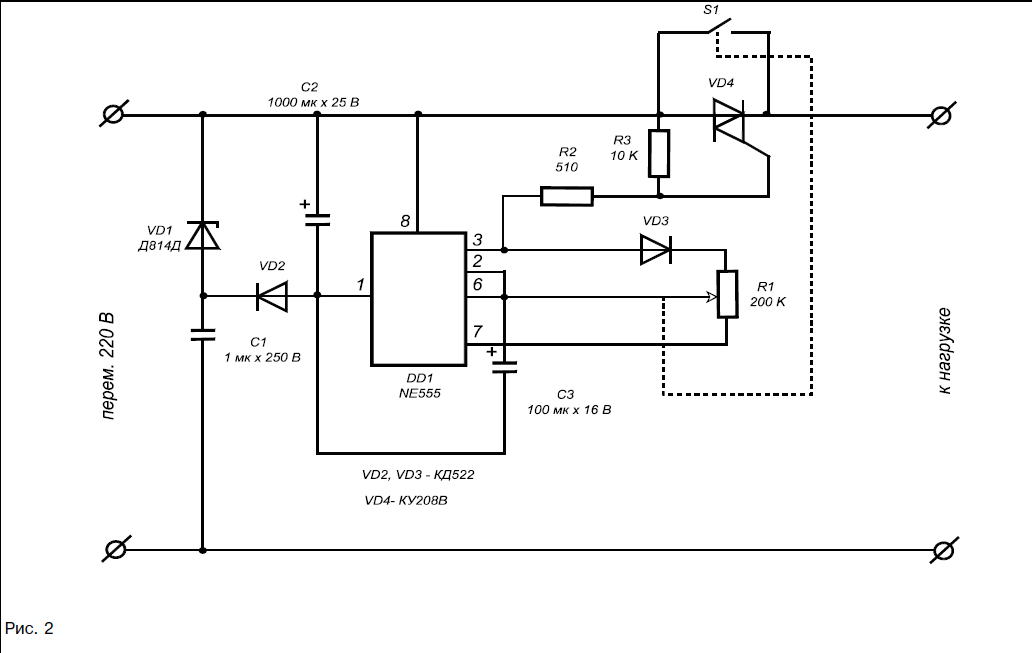
У меня была тема в законченных проэктах про сверлильное приспособление для часового токарного станка Т-28 на основе китайской мини-дрели Hilda.
Все отлично работало,насверлил кучу отверстий сверлами 1.2 мм и меньше.Но вот срочно понадобилось сверлить сверлами диаметром 3-4 мм.И здесь штатный регулятор оборотов перестал справляться со своей задачей.Я решил собрать нормальный регулятор.
Пару лет назад я за несколько дней придумал и собрал для постоянного клиента блок управления крупным универсальным коллекторным двигателем, который крутил шнек на немецком экструдере на производстве пластикового профиля.Родной блок выгорел после залития водой из лопнувшей трубы.Этот блок не только спас клиенту горящий заказ но и оказался надежнее и удобнее родного.Там их уже 4 штуки работает и ничего пока не ломалось.
Я решил для сверлильного приспособления просто выкинуть все лишнее из блока управления движком экструдера-схема вышла удачная, зачем второй раз велосипед изобретать.
Сразу предупреждаю, что блок управления был собран в основном из радиодеталей конца СССР, которых у меня схабарено с забросок в виде разных ЗИП ов просто огромное колличество.И оно все растет!Покупать и изобретать что то крутое и современное было некогда-у клиента горел заказ, о чем он был предупрежден само собой.
Этот регулятор оборотов то же на устаревшей элементной базе, но никто не мешает повторить этот принцип на чем угодно , если кто то ненавидит старую элементную базу.Мне иногда наоборот нравится немного онанизма со старыми радиодеталями.
Вот схема:
Немного про то, как оно работает:
То, что обведено пунктиром-находится непосредственно в корпусе мини-дрели.Это оптический датчик оборотов из инфракрасных фототранзистора и светодиода.Вместо диска с отверстиями или темными-светлыми участками используются лопасти вентилятора.Со специальным диском с большим колличеством отверстий было бы лучше -но в данном случае его некуда поставить. VT13-усилитель сигнала фоторанзистора.С самим регулятором он связан экранированным кабелем.
VT13-усилитель сигнала фоторанзистора.С самим регулятором он связан экранированным кабелем.
На элементах TV1,VDS1, DA1 и то что рядом с ними собран стабилизированный источник питания 12 вольт.Выключатель SA2 включает -выключает двигатель сверлилки.Вентилятор работает все время.
На транзисторах VT1-VT2 собран датчик перехода напряжения через ноль.На конденсаторе С6 имеем подобие «пилы».
Транзистор VT3-буферный каскад для «пилы».
Резистором R5 задается минимальная скорость вращения.
Транзистор VT4-каскад сравнения.На базу подается «пила» на эмитер-напряжение пропорциональное скорости вращения.
VT5- ключ, разрешающий работу блокинг-генератора на транзисторе VT6.Он вырабатывает пачки импульсов управления , которые через импульсный трансформатор TV2 поступают на управляющий электрод тиристора.
На диодах VD5-VD6 и элементах рядом с ними собран преобразователь частоты импульсов с датчика скорости в напряжение пропорциональное скорости. Обращаю внимание на конденсатор С13.Его емкость тем меньше, чем больше отверстий в диске-датчике скорости.А чем больше отверстий -тем более линейную регулировку имеем.
Обращаю внимание на конденсатор С13.Его емкость тем меньше, чем больше отверстий в диске-датчике скорости.А чем больше отверстий -тем более линейную регулировку имеем.
VT7-буферный каскад , на его выходе резистор R16-регулятор скорости.
Транзистор VT8 обеспечивает плавный разгон двигателя.Время разгона можно корректировать емкостью конденсатора С15.Диоды VD7-VD8 для его быстрой разрядки при отключении питания и повторном запуске.
Трансформатор тока TA1- датчик тока.Напряжение с него подается на R25 , которым регулируется чувствительность защиты по току.Потом напряжение выпрямляется VD10 и поступает на тригер на транзисторах VT10-VT11.При заклинивании или перегрузке тригер переключается, загорается светодиод HL3 -«авария» и ключевой транзистор VT9 , блокирует импульсы управления на тиристор.Перезапуск -выключением питания SA2.Конденсатор С17 определяет небольшую задержку на срабатывание токовой отсечки.
Трансформатор TV1-любой малогабаритный на 12 вольт.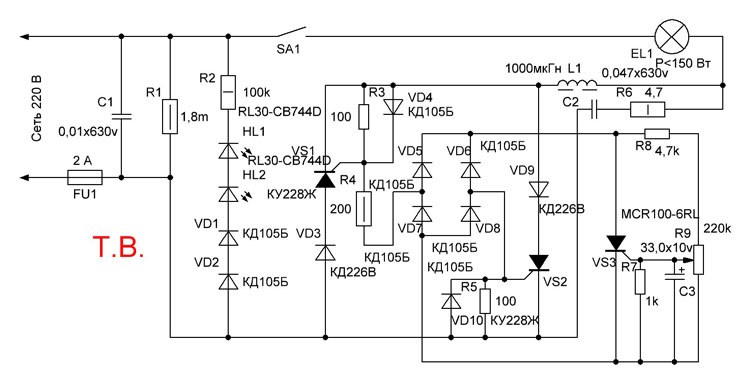 Трансформатор TA1-трансформатор тока самодельный.Можно использовать что угодно с готовой вторичной обмоткой , добавив первичную.
Трансформатор TA1-трансформатор тока самодельный.Можно использовать что угодно с готовой вторичной обмоткой , добавив первичную.
Импульсный трансформатор самодельный или любой промышленный из плат с тиристорами.
Дроссель L1 для подавления помех, самодельный или подходящий по току от импульсных блоков питания.
Силовая часть схемы не содержит ничего интересного.Элементы взяты с запасом по току.Варистор VDR1 и C11-R11 гасят выбросы напряжения в переходных режимах работы электродвигателя.
Колличество транзисторов и вспомоготельных элементов завышено.Но зато схема начинает работать сразу, после сборки.Не надо подбирать режимы, чем грешило большинство схем из «Радио».
Транзисторы-любые маломощные , не принципиально.На месте VT6-средней мощности.
А теперь немного фоток, как я запихал оптопару в мини дрель.
Вот мини дрель в разборе
А вот оптопара от какой то оргтехники
Пилим ее пополам и немного обточим напильником
В корпусе мини-дрели вырезаем два окна для крепления оптопары
Части оптопары сажаем на кусочек макетной платы
Вставляем ротор на место и потом оптопару , теперь она смотрит через вентилятор
Закрываем крышечкой
Делаем крепление для вентилятора
Собираем на кусочке макетной платы усилитель оптопары
И собираем все-понятно из фоток
А вот разводить плату мне было лень!Если кто то это сделает и выложит-да еще возможно на СМД шках-тому респект!Я как в радиолюбительской юности быстро нарезал площадки на куске стеклотекстолита и собран аккуратно навесным монтажем
Корпус по быстрому согнул из оцинковки-а то уже сверлить пора
Корпус без вентиляции-там почти ничего не греется, а попадание стружки не входит в наши планы.
И вот оно в готовом виде.
А вот так оно теперь выглядит на станке
Результат меня полностью устроил.Отлично сверлит , скорость не проседает, при изменении нагрузки.Учитывая что это мини-дрель и часовой станок -сверло 5мм по стали в легкую.Если сверло все же заклинило-срабатывает токовая отсечка.За счет компьютерного вентилятора, который работает и в паузах между сверлениями, двигатель не перегревается.А уж плавный запуск-это просто приятно.Скорость регулируется визуально от оборотов 300- для мелких сверл меньше не надо.Можно бы сделать почти от нуля, но тогда в качестве датчика уже не пойдут лопасти вентилятора-будет нужен диск с отверстиями или прорезями с несколькими десятками отверстий.Подойдет и готовый узел от например принтера.
Если у этого регулятора усилить силовую часть схемы-он вполне справится и с гораздо более крупными электромоторами типа стиралочного и крупнее.Возможен вариант и без диодного моста в силовой части -с двумя встречно включенными тиристорами.
При небольшой доработке схема будет работать вместо оптического датчика с тахогенератором.
Заранее приношу извинения, если где то в описании перепутал обозначения деталей.Но на самой схеме все точно-проверял многократно.
Микроконтроллерный регулятор мощности на Atmega16
На фото представлен действующий макет регулятора мощности, схема которого (с небольшими доработками) используется в реальной действующей установке. Цель публикации ознакомить коллег с практической реализацией принципов регулирования мощности в замкнутом контуре регулирования (т.е. регулирование с обратной связью по току, по напряжению, или скорости), с микроконтроллером Atmega16 в качестве регулятора. В нижней части фото расположен стандартный шунт 75ШСМ-10-0.5. На программное обеспечение возложена задача, передавать напряжение ЦАП, контролировать его при помощи АЦП, а также после несложной доработки программы — поддерживать величину выходного напряжения в заданных пределах.
На программное обеспечение возложена задача, передавать напряжение ЦАП, контролировать его при помощи АЦП, а также после несложной доработки программы — поддерживать величину выходного напряжения в заданных пределах.Я постарался максимально упростить программу и сделать ее доступной для понимания даже начинающих радиолюбителей желающих познакомиться с AVR микроконтроллерами.
Содержание / Contents
Внимание! Если у Вас нет LCD дисплея, просто закомментируйте строки, относящиеся к дисплею, и схема будет работать. Контроль можно осуществлять и по приборам.Работу начинаем с подачи напряжения на питание схемы управления и выдержав паузу 10 – 15 секунд подаем силовое напряжение. Выключение схемы производим в обратном порядке. При подаче напряжения питания, на дисплее на короткое время на дисплее появляется сообщение о наименовании регулятора и через 2000 mS. регулятор переходит в режим ожидания начала работы, а на дисплей выводится сообщение “press PUSK”, при этом обнуляются регистры управления Таймера_1 и импульсы не вырабатывается. При нажатии кнопки “Пуск” происходит инициализация Таймера_1 (см. программу) и ШИМ начинает выдавать импульсы для управления силовым транзистором. Выходные импульсы с вывода OCR1B MK поступает на драйвер. Для упрощения схемы драйвера выход OCR1B инвертирован с 1-м уровнем.
При нажатии кнопки “Пуск” происходит инициализация Таймера_1 (см. программу) и ШИМ начинает выдавать импульсы для управления силовым транзистором. Выходные импульсы с вывода OCR1B MK поступает на драйвер. Для упрощения схемы драйвера выход OCR1B инвертирован с 1-м уровнем. Драйвер предназначен для согласования уровней сигналов МК и мощного полевого транзистора. В данной схеме драйвер включен как драйвер нижнего плеча. Драйвер представляет собой электронный ключ и собран из доступных деталей. Для безопасности работы и защиты схемы управления, силовая часть и схема управления разделены оптронной развязкой VU1. При инициализации МК на вход оптрона подается уровень 1. Оптрон открывается и шунтирует базы транзисторных ключей на землю. Так как транзисторы разной проводимости один транзистор будет открыт, а другой закрыт. При нуле на базах транзисторов открывается транзистор VT2 и замыкает затвор полевого транзистора на землю – транзистор закрыт. При поступлении на оптрон импульсов управления поочередно открывается то один, то другой транзистор, подавая на затвор мощного КМОП-транзистора или +15в или 0.

Данная схема настраивалась на напряжении 30 Вольт, поэтому номиналы деталей драйвера даны конкретно для данного напряжения (хотя схема устойчиво работала и при 18 вольтах). Так как Вам, вероятно, предстоит работать с другими напряжениями вплоть до1000 Вольт, придется, пересчитать сопротивление и мощность балластного резистора R17, а также заменить диод VD2 на более высоковольтный. Так как у меня в схеме применен полевой транзистор 17N80C3: ток 17 Ампер, напряжения 800 Вольт я склонен считать, что данный драйвер будет работать с любым мощным полевым транзистором. Можно так же использовать уже готовый драйвер типа IR, которых на рынке радиодеталей достаточно широкий ассортимент. Данный драйвер может работать как драйвер нижнего плеча так и верхнего. Но лучшие результаты он показал при включении драйвером нижнего плеча.
Для получения высокой точности преобразования АЦП входной сигнал должен быть отфильтрован от помех. Для подавления помех в схеме применен ФНЧ собранный на ОУ DA1. Хорошие результаты показал и фильтр Чебышева четвертого порядка, но он несколько сложнее и поэтому выбор был сделан в пользу данного фильтра. Недостатком данного ФНЧ является его инерционность. При деталях указанных на схеме номиналах, фильтр подавляет помехи, начиная с частоты порядка 10-12 Hz. Отфильтрованный сигнал поступает на вход масштабирующего усилителя DA2. Для более качественной обработки входного сигнала в схему желательно ввести дополнительный каскад усиления с Кус.= 2, при этом пересчитать коэффициент усиления DA2 и уменьшить номинал резистора R10 до 1.2к. При помощи RP1 масштабирующего усилителя производится окончательная подгонка параметров измерительной системы АЦП.
Для подавления помех в схеме применен ФНЧ собранный на ОУ DA1. Хорошие результаты показал и фильтр Чебышева четвертого порядка, но он несколько сложнее и поэтому выбор был сделан в пользу данного фильтра. Недостатком данного ФНЧ является его инерционность. При деталях указанных на схеме номиналах, фильтр подавляет помехи, начиная с частоты порядка 10-12 Hz. Отфильтрованный сигнал поступает на вход масштабирующего усилителя DA2. Для более качественной обработки входного сигнала в схему желательно ввести дополнительный каскад усиления с Кус.= 2, при этом пересчитать коэффициент усиления DA2 и уменьшить номинал резистора R10 до 1.2к. При помощи RP1 масштабирующего усилителя производится окончательная подгонка параметров измерительной системы АЦП.
 АЦП в данной разработке 10 разрядное, т.е. представить его можно как 210 = 3FFh = 1023 дискрет (единиц).
АЦП в данной разработке 10 разрядное, т.е. представить его можно как 210 = 3FFh = 1023 дискрет (единиц).Калибровку производим в следующей последовательности:
1. Включаем устройство и нажимаем на кнопку ПУСК. На 40 выводе ATmega16 замеряем напряжение и резистором RP2 балансируем (т.е. добиваемся нулевого напряжения входного сигнала) контролируя показания и по верхней шкале LCD дисплея и по прибору (ориентируемся по прибору). Получив 0 на выходе усилителя, переходим к следующему этапу.
2. Рассчитываем коэффициент усиления масштабирующего усилителя. Исходим из того, что стандартные шунты имеют выходное напряжение Umax. = 75mv, а АЦП входное напряжение Umax =5000mv – вычисляем коэффициент усиления масштабирующего усилителя, считая, что сопротивление резистора RP1 = 0. Коэффициент усиления рассчитываем по формуле Кус= Uвых /Uвх = 5000/75 ≈ 66.6. Резистор R12 выбираем произвольно равным 2к (3, 4, 5к – для нас это не суть важно) и рассчитываем сопротивление резистора R11 по формуле: R11= R12 (Кус-1) ≈ 130к, а окончательную настройку производим резистором RP1. При токе 10 Ампер на входе АЦП (40 ножка ATmega16) напряжение должно быть равно 5 Вольт.
При токе 10 Ампер на входе АЦП (40 ножка ATmega16) напряжение должно быть равно 5 Вольт.
3. Масштабируем шкалу измерений АЦП. Стандартные шунты, как правило, имеют выходное напряжение 75мВ. Настроив масштабирующий усилитель на выходное напряжение 5в, мы можем, меняя шунты измерять токи в широких пределах, не подстраивая входную часть схемы. Расчеты произведены для 10 амперного шунта. Так как у нас АЦП 10 разрядное, в десятичном виде = 1023. Коэффициент рассчитываем по формуле: К = Iшунта / 1023 = 10a / 1023 ≈ 0.009775. Полученный результат вставляем в строку 28 программы.
Аналогичным образом можно рассчитать значение коэффициента любого в том числе и самодельного шунта на любой ток .
— Программа написана на языке С и откомпилирована CVAVR 1.25.9— Описание работы регулятора по принципиальной схеме и принципиальная схема регулятора.
▼ Файловый сервис недоступен. Зарегистрируйтесь или авторизуйтесь на сайте.
Камрад, рассмотри датагорские рекомендации
🌻 Купон до 1000₽ для новичка на Aliexpress
Никогда не затаривался у китайцев? Пришло время начать!
Камрад, регистрируйся на Али по нашей ссылке.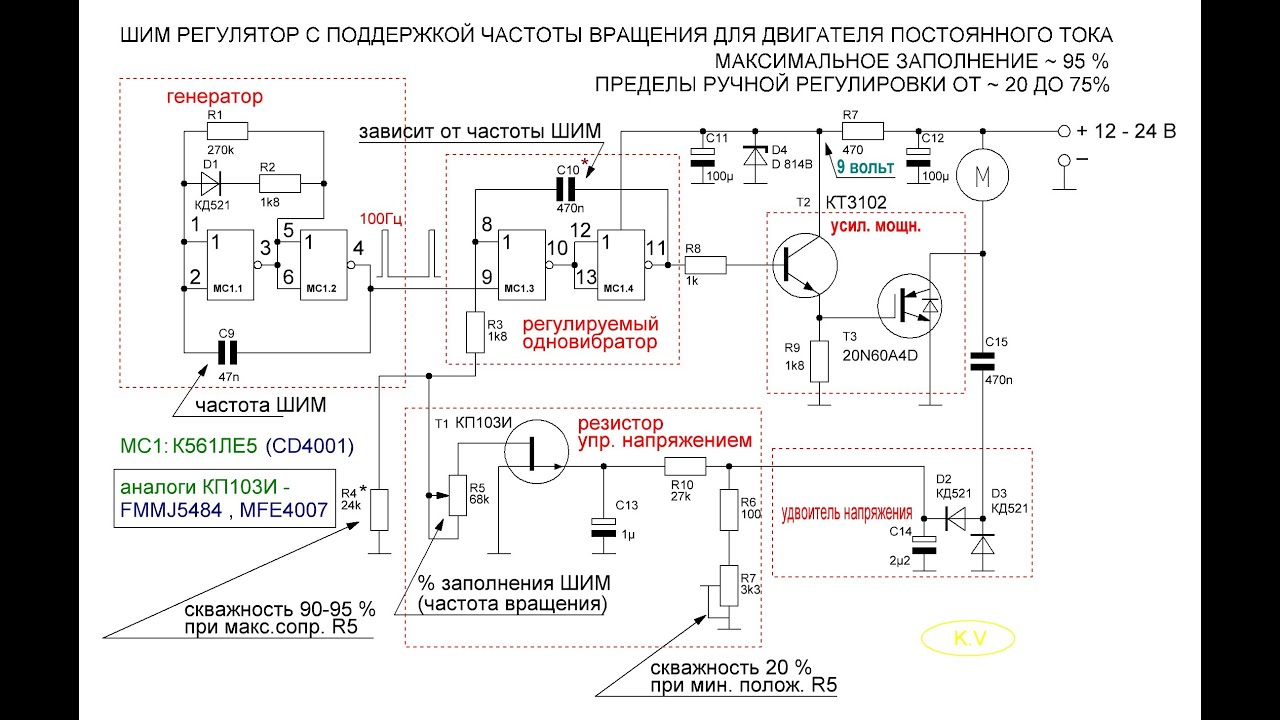 Ты получишь скидочный купон на первый заказ. Не тяни, условия акции меняются.
Ты получишь скидочный купон на первый заказ. Не тяни, условия акции меняются.
🌼 Полезные и проверенные железяки, можно брать
Куплено и опробовано читателями или в лаборатории редакции.
11.09.09 изменил Datagor. Добавлена схема в виде картинки gif.
РЕГУЛЯТОР ОБОРОТОВ ДЛЯ ЭЛЕКТРОИНСТРУМЕНТА
электроника для дома
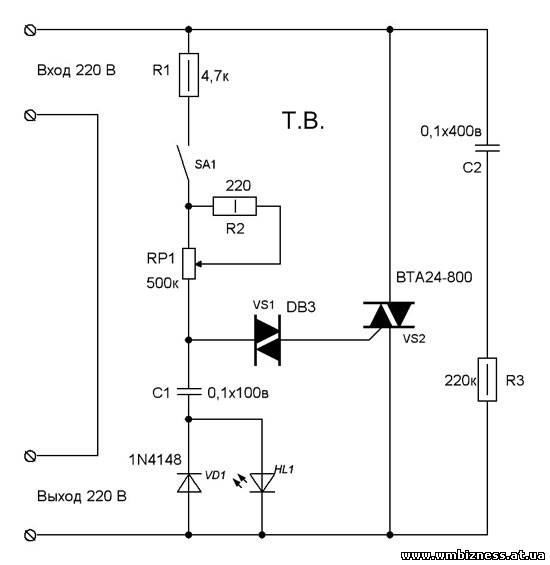
При работе с электроинструментом (электродрелью шлифовальным устройством и пр ) желательно иметь возможность плавно изменять его обороты. Но простое уменьшение питающего напряжения приводит к снижению развиваемой инструментом мощности В предлагаемой схеме (рис.1) используется регулирование с обратной связью по току двигателя, в результате чего при увеличении нагрузки соответственно увеличивается и крутящий момент
на валу. Резистивно-емкостная цепочка R1-R2-C1 формирует регулируемое опорное напряжение, которое с движка R2 поступает в цепь управляющего электрода тиристора VS1 и компенсирует остаточную противо-ЭДС двигателя М1 Если скорость вращения двигателя падает из-за возрастания нагрузки, уменьшается и его противо-ЭДС. Благодаря этому в очередном полупериоде сетевого напряжения тиристор за счет опорного напряжения открывается раньше. Соответствующее повышение напряжения на двигателе приводит к увеличению мощности на валу двигателя. При увеличении оборотов в случае снижения нагрузки описанный процесс происходит наоборот
Благодаря этому в очередном полупериоде сетевого напряжения тиристор за счет опорного напряжения открывается раньше. Соответствующее повышение напряжения на двигателе приводит к увеличению мощности на валу двигателя. При увеличении оборотов в случае снижения нагрузки описанный процесс происходит наоборот
Настройка устройства сводится практически к подбору сопротивления R1, чтобы при минимальных оборотах двигатель вращался ровно, без рывков, и, в то же время, обеспечивался полный диапазон изменения оборотов. Возможно, к нижнему по схеме выводу R2 придется подключить небольшой резистор, ограничивающий минимальные обороты двигателя. Если тиристор VS1 будет сильно греться, его нужно установить на теплоотвод.
Упрощенный вариант регулятора показан на рис.2. Если в патрон электродрели зажать насадку-отвертку, с помощью этой приставки можно закручивать винты и шурупы (саморезы).
Литература
1 И.Семенов. Регулятор мощности с обратной связью. — Радиолюбитель, 1997, N12, С.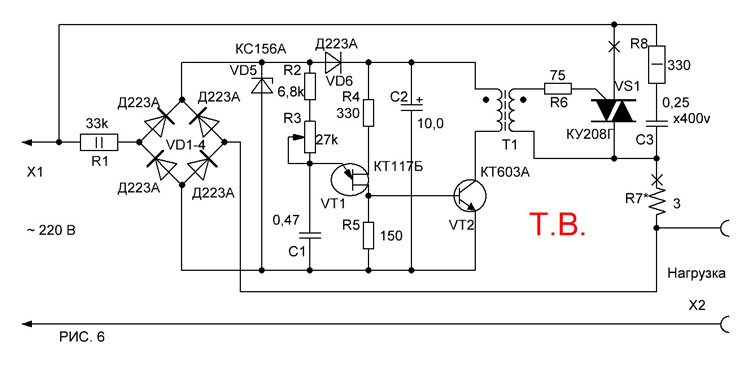 21.
21.
2 Р.Граф. Электронные схемы 1300 примеров — М Мир, 1989, С 395.
3. В Щербатюк Заворачиваем шурупы электродрелью. — Радиолюбитель, 1999 N9, С 23
Cмотрите также: Регулятор мощности на MOSFETах
|
С вопросом регулировки оборотов приходится сталкиваться при работе с электроинструментом, приводом швейных машин и прочих приборов в быту и на производстве Регулировать обороты, просто понижая питающее напряжение, не имеет смысла — электродвигатель резко уменьшает обороты, теряет мощность и останавливается Оптимальным вариантом регулировки оборотов является регулирование напряжения с обратной связью по току нагрузки двигателя
В большинстве случаев в электроинструменте и других приборах применены универсальные коллекторные электродвигатели с последовательным возбуждением. Они хорошо работают как на переменном, так и на постоянном токе. Рассмотрим процессы, протекающие в режиме регулирования с ОС, на примере универсальной схемы (рис 1). Резистивно-емкостная цепь R2-R3-C2 обеспечивает формирование опорного напряжения, определяющего скорость вращения электродвигателя.
При увеличении нагрузки скорость вращения электродвигателя падает, снижается и его крутящий момент. Противо-ЭДС, возникающая на электродвигателе и приложенная между катодом тиристора VS1 и его управляющим электродом, уменьшается.
Литература И.СЕМЕНОВ |
 Особенностью работы коллекторного электродвигателя является то, что при коммутации обмоток якоря на ламелях коллектора во время размыкания возникают импульсы противо-ЭДС самоиндукции. Они равны питающим по амплитуде, но противоположны им по фазе. Угол смещения противо-ЭДС определяется внешними характеристиками электродвигателя, его нагрузкой и другими факторами. Вредное влияние противо-ЭДС выражается в искрении на коллекторе, потере мощности двигателя, дополнительном нагреве обмоток. Некоторая часть противо-ЭДС гасится конденсаторами, шунтирующими щеточный узел.
Особенностью работы коллекторного электродвигателя является то, что при коммутации обмоток якоря на ламелях коллектора во время размыкания возникают импульсы противо-ЭДС самоиндукции. Они равны питающим по амплитуде, но противоположны им по фазе. Угол смещения противо-ЭДС определяется внешними характеристиками электродвигателя, его нагрузкой и другими факторами. Вредное влияние противо-ЭДС выражается в искрении на коллекторе, потере мощности двигателя, дополнительном нагреве обмоток. Некоторая часть противо-ЭДС гасится конденсаторами, шунтирующими щеточный узел.
 Вследствие этого напряжение на управляющем электроде тиристора возрастает пропорционально уменьшению противо-ЭДС. Дополнительное напряжение на управляющем электроде тиристора заставляет его включаться при меньшем фазовом угле (угле отсечки) и пропускать на электродвигатель больший ток, компенсируя тем самым снижение скорости вращения под нагрузкой. Существует как бы баланс импульсного напряжения на управляющем электроде тиристора, составленного из напряжения питания и напряжения самоиндукции двигателя. Переключатель SA1 позволяет при необходимости перейти на питание полным напряжением, без регулировки Особое внимание следует уделить подбору тиристора по минимальному току включения, что обеспечит лучшую стабилизацию скорости вращения электродвигателя
Вследствие этого напряжение на управляющем электроде тиристора возрастает пропорционально уменьшению противо-ЭДС. Дополнительное напряжение на управляющем электроде тиристора заставляет его включаться при меньшем фазовом угле (угле отсечки) и пропускать на электродвигатель больший ток, компенсируя тем самым снижение скорости вращения под нагрузкой. Существует как бы баланс импульсного напряжения на управляющем электроде тиристора, составленного из напряжения питания и напряжения самоиндукции двигателя. Переключатель SA1 позволяет при необходимости перейти на питание полным напряжением, без регулировки Особое внимание следует уделить подбору тиристора по минимальному току включения, что обеспечит лучшую стабилизацию скорости вращения электродвигателя


РЕГУЛЯТОР ОБОРОТОВ ДВИГАТЕЛЯ 12 В
Во многих электронных схемах используются системы активного охлаждения с вентиляторами. Чаще всего их моторы управляются микроконтроллером или другой специализированной микросхемой, а скорость вращения регулируется с помощью ШИМ. Такое решение характеризуется не слишком хорошей плавностью работы, может привести к нестабильной работе вентилятора, а кроме того, создает много помех.
Для потребностей высококачественной аудиотехники разработан аналоговый регулятор оборотов вентилятора. Схема пригодится при строительстве усилителей НЧ с активной системой охлаждения и позволяет выполнить плавную регулировку оборотов вентиляторов в зависимости от температуры. Производительность и мощность зависит в основном от выходного транзистора, тесты проводились с выходными токами до 2 А, что позволяет подключить даже несколько больших вентиляторов на 12 В. Естественно можно применить это устройство и для управления обычными моторами постоянного тока, при необходимости повысив питающее напряжение. Хотя для совсем уже мощных двигателей придётся задействовать системы плавного пуска tehprivod.su/katalog/ustroystva-plavnogo-puska
Принципиальная схема регулятора оборотов мотора
Схема состоит из двух частей: дифференциального усилителя и стабилизатора напряжения. Первая часть занимается измерением температуры и обеспечивает напряжение, пропорциональное температуре, когда она превышает установленный порог. Это напряжение является управляющим для стабилизатора напряжения, выход которого контролирует питание вентиляторов.
Схема регулятора оборотов электродвигателя постоянного тока приведена на рисунке. Основа — компаратор U2 (LM393), работающий в этой конфигурации как обычный операционный усилитель. Первая его часть U2A работает как усилитель дифференциальный, чьи условия работы определяют резисторы R4-R5 (47k) и R6-R7 (220k). Конденсатор C10 (22pF) улучшает стабильность усилителя, а R12 (10k) подтягивает выход компаратора к плюсу питания.
На один из входов дифференциального усилителя подается напряжение, которое образуется через делитель, состоящий из R2 (6,8k), R3 (680 Ом) и PR1 (500 Ом), и фильтруется с помощью C4 (100nF). На второй вход этого усилителя поступает напряжение с датчика температуры, который в данном случае один из разъемов транзистора T1 (BD139), поляризованный небольшим током с помощью R1 (6,8k).
Конденсатор C2 (100nF) был добавлен, чтобы фильтровать напряжение с датчика температуры. Полярность датчика и делителя опорного напряжения задает стабилизатор U1 (78L05) вместе с конденсаторами C1 (1000uF/16V), C3 (100nF) и C5 (47uF/25V), предоставляя стабилизированное напряжение 5 В.
Компаратор U2B работает как классический усилитель ошибки. Он сравнивает напряжение с выхода дифференциального усилителя с выходным напряжением с помощью цепочки R10 (3,3k), R11 (47 Ом) и PR2 (200 Ом). Исполнительным элементом стабилизатора является транзистор T2 (IRF5305), база которого управляется делителем R8 (10k) и R9 (5,1k).
Конденсатор C6 (1uF) и C7 (22pF) и C9 (10nF) улучшают стабильность петли обратной связи. Конденсатор C8 (1000uF/16V) фильтрует выходное напряжение, он имеет значительное влияние на стабильность системы. Разъемом выхода — AR2 (TB2), а разъем питания — AR1 (TB2).
Благодаря применению выходного транзистора с низким сопротивлением в открытом состоянии, схема обладает очень малым падением напряжения — порядка 50 мВ при выходном токе 1 А, что не требует блока питания с более высоким напряжением для управления вентиляторами, работающие на 12 В.
В большинстве случаев в роли U2 можно применить популярный операционный усилитель LM358, правда несколько ухудшив выходные параметры.
Сборка регулятора
Монтаж следует начинать с установки двух перемычек, затем должны быть установлены все резисторы и мелкие керамические конденсаторы.
Далее устанавливаем переменные резисторы, стабилизатор и все разъемы, заканчивая большими электролитическими конденсаторами. Транзисторы T1 и T2 оставляем на самый конец.
В большинстве случаев оба эти элемента будут установлены снизу платы на ножках, изогнутых под углом 90 градусов. Такая укладка позволит их прикрутить непосредственно к радиатору (обязательно использовать изоляционные прокладки).
Форум
Форум по обсуждению материала РЕГУЛЯТОР ОБОРОТОВ ДВИГАТЕЛЯ 12 В
Регулятор оборотов ШИМ для мотора 220в с обратной связью
Описание Регулятор оборотов ШИМ для мотора 220в с обратной связью
Этот регулятор скорости вращения двигателя подходит для моторов AC220V 50/60 HZ от стиральной машины и других с датчиком обратной связи.
Диапазон регулировки скорости составляет 90-14 000 об/мин 50 Гц, 90-17 000 об/мин 60 Гц
Применяется в оборудовании для упаковки, печати, продуктов питания, электроники, КИПиА, медицинского оборудования, производства одежды для устройств управления скоростью
Контроллер использует электронные схемы высокого качества и интегрированные компоненты для долговечности.
Он имеет небольшой размер, высокую точность, широкий диапазон контроля скорости и длительный срок службы.
Технические характеристики:
Мощность питания:AC220V50/60 hz
Номинальная мощность 100-300 Вт
Температура окружающей среды:-10 ~ + 50 ℃;
Относительная влажность:
Диапазон регулировки скорости: 90-14 000 об/мин 50 Гц, 90-17 000 об/мин 60 Гц.
Внимательно!!! при длительной работе на мощности ниже 75% требуется дополнительный вентилятор охлаждения двигателя.
Вес: 295 г
Метод подключения:
Черный провод-двигатель. Основной Провод, красный и белый-это вспомогательные провода конденсатора, а 2 синих провода-это отзывы контроля скорости, зеленый провод-это провод заземления.
1. Выключите питание, подключите его в соответствии с схемой проводки и убедитесь, что соединение корректно.
2. Хорошо Зафиксируйте контроллер и установите скорость до самого низкого «0», чтобы избежать внезапного большого тока и постоянного повреждения при запуске источника питания;
3. Затем включите питание и отрегулируйте ручку скорости в нужное положение. Пожалуйста, выключите питание, когда не требуется;
4. Губернатор подключен к двигателю. Если крутящий момент или скорость не соответствуют требованиям, пожалуйста, Отрегулируйте потенциометр тонкой настройки на стороне продукта
5. Чтобы изменить направление движения двигателя, просто замените перемычки «CCW» и «CW» на задней панели контроллера.
6. Выберите COM и CW короткое соединение, затем двигатель будет вращаться по часовой стрелке.
7. Выберите COM и CCW короткое соединение, затем двигатель делает вращение против часовой стрелки.
(При изменении направления не меняйте направление, пока двигатель не прекратит работать полностью.)
Особенности:
Этот регулятор скорости вращения двигателя
Электроника 102 — Урок 5
На предыдущем уроке мы разработали простой регулятор напряжения, смоделировали его и продемонстрировали производительность с использованием SPICE. Изученная нами схема представляет собой реальную схему, которую можно было бы найдено на схеме коммерческого электронного оборудования.Мы также обнаружили, что, несмотря на простоту и эффективность, регулирование нагрузки оставляет желать лучшего. Выходное напряжение может изменяться примерно на 200 мВ при изменении тока нагрузки с 5 мА до 100 мА.Температурная стабильность была хорошей, но не превосходной, с разбросом примерно 80 мВ между 25 и 75 градусов С.
Бывают случаи, когда необходимо более жестко контролировать выходное напряжение.
В этом уроке мы собираемся разработать улучшенный стабилизатор напряжения со значительно улучшенными характеристиками. характеристики регулирования температуры и нагрузки.
Системы с обратной связью
Так же, как мы улучшили работу усилителя с помощью обратной связи, мы можем улучшить работу регулятора напряжения через обратную связь.
Однако на этот раз это будет немного сложнее, чем просто добавить резистор.
Общая идея обратной связи состоит в том, чтобы подавать часть выходного сигнала обратно на вход, с правильной фазой и амплитудой.
Например, вы можете сравнить систему с открытым контуром с вождением автомобиля с завязанными глазами (не рекомендуется, но только представьте ….) Возможно, вы знаете по опыту, что определенное давление на акселератор будет двигать машину с определенной скоростью.
Однако, если автомобиль буксирует лодку или автомобиль поднимается в гору, такое же давление не даст результата. такая же скорость. Если вы снимете повязку, посмотрите на спидометр и увидите, как падает скорость, вы увеличиваете давление на акселератор. Это обратная связь.
Общая идея обратной связи — попытаться сохранить что-то постоянным, несмотря на меняющиеся условия.
Для нашего регулятора напряжения мы собираемся использовать технику, называемую «замкнутым контуром», чтобы более точно контролировать выходное напряжение.Это будет иметь ряд преимуществ.
Система с обратной связью сравнивает выход системы (в общем смысле) с ссылка и управляет входом управления системы вверх или вниз, когда они не совпадают.
Хорошо известным примером системы с замкнутым контуром является термостат. Он сравнивает фактическую температуру с уставкой, и, если температура слишком низкая, он включает обогреватель, а если он слишком высокий, включает кондиционер (или просто выключает обогреватель, если наружная температура не выше заданного значения.)
Другой пример замкнутой системы — мать, которая наблюдает за тем, как ее ребенок исследует новые территории и вмешивается только тогда, когда ребенок выходит за пределы того, что мать считает безопасным.
Противоположностью замкнутой системы будет система разомкнутого цикла, которая чаще используется с подростками: родители дают им ключ от машины и говорят «не превышайте скорость» и надеяться на лучшее, потому что, к лучшему или к худшему, подросткам нужна некоторая свобода научиться самоконтролю, и в конечном итоге было бы контрпродуктивно не давать им эту возможность.
Однако, возвращаясь к регуляторам, я предпочитаю, чтобы мои регуляторы жестко контролировались, и мы собираюсь посмотреть, как мы можем сделать это с помощью замкнутой системы.
Вот из чего состоит базовая замкнутая система:
- Источник питания
- A ссылку
- Усилитель ошибки, который сравнивает эталонный сигнал с сигналом обратной связи, полученным на выходе.
- Регулятор мощности
- Цепь обратной связи (которая производит выборку выходного сигнала и подает его на усилитель ошибки)
Обратите внимание, что хотя я использовал программное обеспечение для захвата электрических схем для создания На схеме замкнутой системы выше, элементы системы могут, но не иметь быть блоками электронной схемы.
Если мы сравним схему замкнутой системы со схемой нашего регулятора, мы можем легко идентифицировать источник питания (это будет источник напряжения V1), контроллер питания (это был бы транзистор Q1) и опорный (D1), но это не так понятно, что такое ошибка усилителя (это база = эмиттерный переход транзистора), цепь обратной связи (это простое подключение, потому что один вход усилителя ошибки, эмиттер привязан к выходу, а другой, базовый, привязан к эталону).
По сравнению с другой системой с обратной связью, круиз-контролем на вашем автомобиле, вот элементы:
- Источник питания: двигатель
- Ссылка: скорость, которую вы указали в круиз-контроле, нажав кнопку «круиз».
- Усилитель ошибок: аппаратное обеспечение круиз-контроля
- Регулятор мощности: небольшой серводвигатель (иногда электродвигатель, иногда управляемый вакуумом от двигателя), который приводит в действие ускоритель
- Цепь обратной связи: спидометр, преобразующий скорость в электрическую сигнал, идущий на оборудование круиз-контроля.
Когда ток нагрузки увеличивается, он стремится опустить эмиттер транзистора Q1 вниз (ближе к земле).
Поскольку на базе поддерживается фиксированное напряжение с помощью стабилитрона, это увеличивает напряжение между базой и эмиттером, что влечет больше тока в базу, что заставляет транзистор подавать больший ток к своему эмиттеру, пока он не подаст нужную величину.
Причина, по которой эта схема имеет то, что мы называем «слабым» регулированием, заключается в том, что элемент который сравнивает вывод со ссылкой, также является элементом управления, тем и только транзистор в схеме.
У одиночного транзистора недостаточно усиления для выполнения обеих задач.
Лучший регулятор
Первым шагом к созданию лучшего регулятора напряжения является разделение функции усилителя ошибок и регулятора мощности.
<Регулятор-5-1.png >>
Обратите внимание на использование нового компонента: I1 — это нагрузка (выберите Components-> Load). Это другой тип источника тока, и для всех практических целей он взаимозаменяемый с источником тока.
У этой схемы есть еще одна особенность из-за того, что усилитель ошибки и контроллер питания — это отдельные устройства: мы можем реализовать настоящую цепь обратной связи, состоящая из R1 и R2.Реальная стоимость схема обратной связи здесь заключается в том, что она позволяет установить выходное напряжение на что-то, что может отличаться (в данном случае всегда выше), чем стабилитрон Напряжение.
Вот как работает схема:
При включении выходное напряжение составляет 0 В, а напряжение источника нарастает. Напряжение в точке обратной связи — это выходное напряжение, деленное на два. (поскольку R1 и R2 равны), значит, это тоже будет 0 В.В то время напряжение на эмиттере Q1 не имеет значения, потому что при 0 В на базе Q1 будет отключен (выключен), поэтому он не будет рисовать ток коллектора, поэтому весь ток, доступный от R3, пойдет на базу Q2, включаю его.
Когда Q2 включается, выходное напряжение повышается. Когда выходное напряжение достигает 13,6 В, напряжение в точке обратной связи будет 13,6 / 2 = 6,8 В, поэтому Q1 будет есть 0,6 В между базой и эмиттером, и он начнет включаться.
Когда Q1 включится, он начнет пропускать ток через свой коллектор, уменьшая ток, доступный для управления базой Q2.
В конце концов, схема стабилизируется примерно до 0,7 В на базе эмиттера Q1. переход, который должен соответствовать выходному напряжению 13,8 В.
Давайте запустим моделирование, чтобы увидеть, как далеко мы находимся. На графике ниже показан результат напряжение как функция тока нагрузки:
<Регулятор-5-2.png >>
Построим график базового напряжения вместе с выходным напряжением:
<Регулятор-5-3.png >>
Посмотрим, что такое температурная стабильность. Добавьте следующую директиву Spice:
.СПИСОК ТЕМП. ШАГОВ 25 50 75
и снова запустите моделирование.Вот результат:
<Регулятор-5-4.png >>
ВАЖНОЕ ПРИМЕЧАНИЕ: модификации схемы, необходимые для этого примера делает сравнение с предыдущей схемой регулятора более похожим на яблоки на апельсины, так как эта схема генерирует номинальное выходное напряжение 14 В. напряжение, и поэтому он должен работать от более высокого напряжения, чем предыдущий схема.
Подавление пульсации
Щелкните правой кнопкой мыши V1 в поле Small Signal AC Analysis , введите «1» в поле Амплитуда переменного тока коробка. Это указывает SPICE использовать этот источник для анализа переменного тока. Нажмите OK , затем нажмите Simulate-> Edit Simulation Cmd и щелкните вкладку AC Analysis .
Введите следующие значения:
- Тип развертки: октава
- Количество точек на октаву: 50
- Начальная частота: 10k
- Конечная частота: 100 мегабайт
Щелкните значок «Выполнить» и выберите V (вывод).
<Регулятор-5-6.png >>
Обратите внимание, что пунктирная линия на графике анализа переменного тока представляет собой фазовую характеристику схема. Мы изучим это позже.
Упражнения
- Обсуждая эту схему, я заметил, что теперь выходное напряжение
функция не только напряжения стабилитрона, но и цепи обратной связи.
Попробуйте изменить цепь обратной связи, чтобы получить номинальное выходное напряжение 9 В. без замены стабилитрона.
Совет: вам нужно изменить только одно значение резистора. - Резистор R5 был резистором предварительной нагрузки, оставшимся от предыдущей схемы.
Это нужно в этой схеме?
Попробуйте удалить его и посмотрите, заметно ли это на выходе регулирование. Почему? - Сравните результаты анализа пульсаций с отклонением пульсаций Схема урока 4.
Выводы этого урока
- Добавив каскад усиления, мы улучшили регулировку нагрузки.
- Используя отдельный усилитель ошибки, мы можем регулировать выходное напряжение изменяя номиналы резисторов.
На следующих уроках мы узнаем, как улучшить температурную стабильность.
Ссылки
- .
- .
Контроллер реактивной мощности с обратной связью для стабильности напряжения энергосистемы
Аннотация
Любой дисбаланс между подачей реактивной мощности и потребляемой мощностью нарушает нормальную работу энергосистемы. Нештатные ситуации в энергосистеме иногда вызывают чрезмерный дисбаланс реактивной мощности, даже приводя к полному выходу системы из строя. Проблема обычно усугубляется, когда система сильно загружена. Перегрузка генератора из-за чрезмерной выработки реактивной мощности — одна из наиболее распространенных и серьезных причин нестабильности напряжения.Низкое напряжение на шинах нагрузки — еще одна причина, которая может привести к проблемам со стабильностью напряжения. Тщательно контролируя выработку реактивной мощности и напряжения нагрузки, можно избежать таких серьезных помех. Контроллер с обратной связью может перевести систему в более безопасное состояние, перепланировав выработку реактивной мощности от генераторов и SVC с помощью регуляторов уставки напряжения в реальном времени.
Разработан контроллер с обратной связью, который динамически переводит систему в более безопасное состояние при нарушении заданных рабочих условий генерации реактивной мощности и напряжений шины нагрузки.Во время нормальной работы контроллер минимизирует потери при передаче активной мощности из-за передачи реактивной мощности. Принцип контроллера основан на концепции управления несколькими переменными. Контроллер с обратной связью синтезирован для динамического управления системой до приемлемого состояния, при этом удовлетворяя условиям оптимальности Куна-Таккера в установившемся состоянии. Предлагаемый контроллер реактивной мощности с обратной связью, который выдает управляющие сигналы уставки на АРН и SVC во вторичном режиме управления, можно рассматривать как параллельный АРУ для управления активной мощностью / частотой.Контроллер выполняет эту задачу в реальном времени, используя измерения SCADA. Контроллер также выдает команды сброса нагрузки в случае необходимости. Контроллер испытывается как в нормальном, так и в аварийном режиме. Подробные сведения о контроллере с обратной связью и его эффективности в предотвращении поломки системы из-за нарушения реактивной мощности демонстрируются на примерах.
Ключевые слова
он-лайн управление
аварийное управление
управление по замкнутому контуру
управление реактивной мощностью
стабильность напряжения
многопараметрическое управление
Рекомендуемые статьи Цитирующие статьи (0)
Полный текстCopyright © 1997 Published by Elsevier ООО
Рекомендуемые статьи
Цитирующие статьи
Управление по замкнутому контуру — обзор
Пневматические контроллеры
Управление по замкнутому циклу, кратко обсуждавшееся ранее, требует контроллера, который принимает желаемый (заданное значение) сигнал и фактический (параметр процесса) сигнал , вычисляет ошибку, а затем настраивает выходной сигнал на привод, чтобы фактическое значение было равным желаемому.
Простейший пневматический контроллер называется только пропорциональным контроллером, схематично он показан на рисунке 7.7. Выходной сигнал здесь — это просто сигнал ошибки, умноженный на коэффициент усиления:
Рисунок 7.7. Только пропорциональный регулятор
(7.1) OP = K × ошибка = K × (SP-PV)
где K — коэффициент усиления.
Сравнение контроллера на рис. 7.7 с датчиком баланса сил на рис. 7.6 показывает, что измерение перепада давления (P 1 — P 2 ) выполняет ту же функцию, что и вычитание ошибок (SP — PV). Таким образом, мы можем построить простой пропорциональный контроллер с пневматической схемой, показанной на рисунке 7.6. Усиление можно установить, перемещая положение поворота.
Выход пропорционального регулятора — это просто ошибка K ×, поэтому для получения любого выходного сигнала должен существовать сигнал ошибки. Эта ошибка, называемая смещением, обычно мала, и ее можно уменьшить, используя большое усиление. Однако во многих приложениях слишком большое усиление приводит к нестабильности системы.
В этих обстоятельствах используется модификация базового контроллера. Интеграл по времени ошибки добавляется, чтобы получить:
(7.2) OP = K (error + 1Ti∫error dt)
Контроллеры, следующие за выражением 7.2, называются пропорционально-интегральными (P + I) контроллерами, как показано на рисунке 7.8. Константа T i , называемая временем интегрирования, устанавливается пользователем. Часто настройка задается в единицах 1 / T i (когда используется повторение описания в минуту). Контроллер, следующий за выражением 7.2, имеет блок-схему, показанную на рисунке 7.8a, и реагирует на ступенчатую реакцию, как показано на рисунке 7.8b. Пока существует ошибка, выходной сигнал контроллера постепенно увеличивается или уменьшается до скорости, определяемой T i .Только при отсутствии ошибки выходная мощность контроллера остается постоянной. Включение интегрального члена в выражение 7.2 устраняет ошибку смещения.
Рисунок 7.8. Пропорционально-интегральный (P + I) контроллер
Пневматический контроллер P + I может быть сконструирован, как показано на рисунке 7.8c. Встроенный сильфон противостоит действию сильфона обратной связи, при этом скорость изменения давления ограничивается регулирующим клапаном T i . Контроллер уравновешивает правильный зазор между заслонкой и соплом, чтобы получить нулевую ошибку, с PV = SP и равными усилиями от встроенного сильфона и сильфона обратной связи.
Другой вариант контроллера, называемый трехчленным или P + I + D-регулятором, использует уравнение:
(7.3) OP = K (error + 1Ti∫error dt + 1Tdd errordt)
, где T d — настраиваемый пользователем элемент управления, называемый производной времени. Добавление производного члена позволяет быстро изменять управляющий выход при быстром изменении SP или PV, а также может служить для повышения стабильности системы.
Пневматическое трехступенчатое управление может быть достигнуто с помощью устройства, показанного на Рисунке 7.9, где действие сильфона обратной связи было задержано. Три настраиваемых пользователем члена в выражении 7.3 (коэффициент усиления K, время интегрирования T i , время производной T d ) устанавливаются точкой поворота луча и двумя спускными клапанами для обеспечения наилучшего отклика установки. Однако эти элементы управления до некоторой степени взаимодействуют, что не характерно для электронных контроллеров.
Рисунок 7.9. Трехконтактный (P + I + D) контроллер
На рисунке 7.10 представлена типичная передняя панель контроллера.Отображаются значения SP, PV и выхода контроллера, и оператор может выбирать между автоматическим и ручным режимом работы. Требуемое значение (SP) можно настроить в автоматическом режиме или установить выход контроллера непосредственно в ручном режиме. Оператор не имеет доступа к элементам управления настройками K, T i , T d ; они регулируются техником по обслуживанию.
Рисунок 7.10. Передняя панель типичного контроллера
Внутреннее устройство контроллера показано на Рисунке 7.11. Установленное значение и ручное управление выходным давлением представляют собой регуляторы давления, а автоматический / ручной переключатель просто выбирает между контроллером и ручным выходным давлением.Однако, если выбор просто переключился между P c и P m , на выходе контроллера был бы шаг. Регуляторы давления спроектированы таким образом, что их выход Y отслеживает вход X, а не ручную настройку, когда сигнал давления подается на B. Таким образом, связанный переключатель S 2 заставляет заданное значение отслеживать переменную процесса в ручном режиме, в то время как ручной выход P m отслеживает выход контроллера в автоматическом режиме. Таким образом, можно добиться «плавного» переключения между автоматическим и ручным режимом.
Рисунок 7.11. Внутреннее устройство, обеспечивающее плавную передачу
Коэффициент усиления контура и его влияние на аналоговые системы управления
В этой статье собраны воедино идеи усиления разомкнутого контура, усиления замкнутого контура, усиления и запаса по фазе, стабильности минимального усиления и показано, как эти параметры взаимосвязаны в системе обратной связи. В нем исследуется усиление контура с точки зрения теоретической системы управления, а также практических электронных схем, включая линейные регуляторы.
В статье Боба Добкина 2014 «Новые линейные регуляторы решают старые проблемы», в которой описывается революционный линейный стабилизатор LT3081 с малым падением напряжения, предполагается, что его постоянный коэффициент усиления контура улучшает переходные характеристики и абсолютную точность выходного напряжения по сравнению с другими решениями LDO.Это утверждение, хотя и впечатляющее и правдивое, делает важное предположение о понимании инженерами петлевого усиления и о том, что существует четкая связь между постоянным контурным усилением и преимуществами LT3081. К сожалению, усиление контура не так широко признано, как усиление замкнутого или разомкнутого контура.
Без понимания коэффициента усиления контура и его влияния на электронную схему нельзя по-настоящему оценить преимущества LT3081. Эта статья предназначена для инженеров по источникам питания, исследуя влияние коэффициента усиления контура на коэффициент усиления и запас по фазе и связывая их с теоретической системой управления и реальными аналоговыми цепями обратной связи.
Классическим аналоговым строительным блоком является операционный усилитель, и его поведение можно применить к большинству систем управления с обратной связью. Фактически, производительность многих устройств можно упростить, смоделировав их как операционные усилители. Мы можем применить теорию операционных усилителей, скажем, к линейным регуляторам с малым падением напряжения (LDO) и импульсным стабилизаторам, чтобы предсказать стабильность части. На рисунке 1 показана упрощенная схема операционного усилителя.
Рисунок 1. Упрощенная схема операционного усилителя
Входное напряжение подается на усилитель ошибки, который вычитает долю (β) выходного напряжения из V IN для получения сигнала ошибки.Таким образом, ошибка
Этот сигнал ошибки подвергается усилению без обратной связи усилителя (A0) для получения выходного напряжения:
Это преобразовано, чтобы найти коэффициент усиления усилителя с обратной связью:
В большинстве схем операционных усилителей коэффициент усиления разомкнутого контура очень велик, то есть намного больше, чем «1» в знаменателе, что позволяет использовать приближение коэффициента усиления замкнутого контура:
На рисунке 2 показана традиционная схема операционного усилителя, предсказуемая работа которой зависит от этого приближения усиления.
Рисунок 2. Схема традиционного ОУ
Для любого заданного напряжения на выходе, если коэффициент усиления разомкнутого контура бесконечен, разность напряжений между двумя входными контактами (V DIFF ) равна нулю, и операционный усилитель регулирует, чтобы поддерживать оба своих входных контакта при одинаковом напряжении. Здесь выход подается обратно на вход через резистивный делитель R1-R2, поэтому доля обратной связи (β) составляет 0,1 (1 кОм / 10 кОм). Из приведенных выше уравнений, если коэффициент усиления разомкнутого контура высокий, усиление замкнутого контура схемы приближается к обратной величине доли обратной связи, поэтому схема имеет усиление замкнутого контура 10.
Эта упрощенная теория операционного усилителя полезна при моделировании множества схем, справедливо для низкочастотных входов, но эта простая модель теряет силу для высокочастотных входов.
Операционный усилитель LT1012 отличается классической зависимостью коэффициента усиления разомкнутого контура от частотной характеристики, показанной на рисунке 3.
Рисунок 3. Коэффициент усиления ОУ LT1012 в разомкнутом и замкнутом контурах в зависимости от частоты
На рисунке 3 вы можете видеть, что усиление разомкнутого контура велико до входной частоты 0,3 Гц, а затем уменьшается со скоростью 20 дБ за декаду.Хотя коэффициент усиления остается очень высоким в широком диапазоне входных частот, наступает момент, когда коэффициент усиления без обратной связи нельзя считать относительно бесконечным. То есть, когда коэффициент усиления разомкнутого контура приближается к усилению замкнутого контура, идеальная модель операционного усилителя, описанная выше, и соответствующие предположения, которые мы сделали относительно его характеристик, начинают терять доверие.
Рассмотрим влияние конечного коэффициента усиления разомкнутого контура на усиление замкнутого контура схемы на Рисунке 2. Доля обратной связи (β) составляет 1/10, поэтому в идеальной модели операционного усилителя усиление замкнутого контура обратно пропорционально этому , или 10.Если наш операционный усилитель имеет коэффициент усиления без обратной связи 100, расчетное усиление с обратной связью составляет
.Расчетное усиление замкнутого контура
Прирост по-прежнему составляет примерно 10, но с ошибкой 9%.
Теперь рассмотрите возможность использования того же усилителя, но с обратной связью с единичным усилением. Доля обратной связи (β) равна 1, поэтому идеальное усиление замкнутого контура операционного усилителя должно быть обратным этому, или 1. Если наш операционный усилитель имеет коэффициент усиления разомкнутого контура, равный 100, это приводит к усилению замкнутого контура
Хотя коэффициенты усиления разомкнутого контура этих двух схем одинаковы, ошибка в усилении снижается до 1% просто за счет уменьшения усиления замкнутого контура.
Приведенные выше уравнения показывают, что ошибка является функцией того, насколько велик βA 0 по отношению к члену «1» в знаменателе. Обратите внимание, что одно только усиление разомкнутого контура не всегда определяет ошибку, но важно произведение коэффициента усиления разомкнутого контура (A 0 ) и доли обратной связи (β). Для больших βA 0 член «1» теряет значение; для βA 0 , близкого к единице, «1» становится значимой, увеличивая ошибку.
Так что же такое βA 0 ? На рисунке 3 разница между кривой замкнутого контура (приблизительно 1 / β) и кривой разомкнутого контура (A 0 ) в логарифмической шкале составляет
.Таким образом, зазор между кривой усиления без обратной связи и кривой усиления с обратной связью составляет βA 0 (около 105 дБ при постоянном токе).Ссылаясь на рисунок 1, мы видим, что A 0 • β — это усиление, проходящее через усилитель и контур обратной связи, поэтому βA 0 — это усиление контура и представляет собой избыточное усиление, доступное в системе. Хотя часто считается, что коэффициент усиления разомкнутого контура усилителя должен быть высоким, чтобы коэффициент усиления ОУ был точным, мы можем видеть, что это не обязательно усиление разомкнутого контура, а усиление контура, которое должно быть высоким. Другими словами, усиление разомкнутого контура должно быть большим по сравнению с усилением замкнутого контура, чтобы получить точный коэффициент усиления схемы.
Итак, какое влияние оказывает конечное усиление разомкнутого контура на схему операционного усилителя? Базовая теория операционного усилителя утверждает, что два входных напряжения регулируются до одного и того же напряжения, подходящее предположение при очень высоких коэффициентах усиления разомкнутого контура, но что происходит, когда усиление разомкнутого контура уменьшается с увеличением частоты сигнала?
Рассмотрим схему на Рисунке 2: поскольку коэффициент усиления разомкнутого контура усилителя уменьшается с увеличением входной частоты, мы видим возрастающее напряжение переменного тока между двумя входными контактами, равное выходному напряжению, деленному на усиление разомкнутого контура.Это не входное напряжение смещения, а небольшое переменное напряжение (V DIFF ), которое равно выходному напряжению, деленному на коэффициент усиления разомкнутого контура усилителя. Если коэффициент усиления разомкнутого контура равен одному миллиону, и у нас есть 1 В на выходе, тогда V DIFF составляет 1 мкВ на двух входных контактах. По мере увеличения входной частоты и уменьшения коэффициента усиления разомкнутого контура V DIFF увеличивается. В крайнем случае, когда коэффициент усиления разомкнутого контура упал до 10, наш V DIFF становится значительным 100 мВ.
Это то место, где многие неправильно понимают работу операционного усилителя на более высоких частотах переменного тока, когда два входных контакта больше не регулируются на одно и то же напряжение. Напряжение между двумя входными контактами состоит из входного напряжения смещения постоянного тока (которое для простоты мы здесь игнорируем) и V DIFF . V DIFF обычно можно игнорировать, но не на высоких частотах.
Мы знаем, что коэффициент усиления разомкнутого контура представлен как
, и мы знаем, что β представлен
, где V — — напряжение на инвертирующем входе, поэтому коэффициент усиления контура определяется как
.Коэффициент усиления контура сравнивает V — (который должен быть равен входному сигналу) с V DIFF .
Также существует фазовый сдвиг, связанный с V DIFF . Кривая усиления без обратной связи на рисунке 3 идентична характеристикам фильтра нижних частот. Частота прерывания составляет 0,3 Гц, после чего усиление снижается до 20 дБ за декаду, а затем — 1 МГц, после чего усиление снижается до 40 дБ за декаду. На рисунке 4 показан фильтр нижних частот с такими же частотами излома.
Рисунок 4. Фильтр нижних частот с частотной характеристикой, которая соответствует кривой усиления разомкнутого контура на рисунке 2
Передаточная функция фильтра нижних частот одинарного порядка (состоящего из R1 и C1) равна
Как показывает опыт, для фильтра нижних частот одинарного порядка на одной десятой частоты излома фазовый сдвиг примерно равен нулю.На каждой частоте обрыва фаза сдвигается на –45 ° (фазовое отставание), а при десятикратной частоте обрыва фазовый сдвиг составляет примерно –90 °, оставаясь на этом уровне. Если вторая частота прерывания составляет 1 МГц, то при 100 кГц общий фазовый сдвиг фильтра составляет примерно –90 °, на 1 МГц общий фазовый сдвиг составляет –135 °, а на 10 МГц общий фазовый сдвиг составляет примерно –180 °.
Поскольку коэффициент усиления без обратной связи усилителя ведет себя одинаково, хотя входное и выходное напряжения на Рисунке 2 синфазны, существует фазовый сдвиг между V DIFF и V OUT , связанный с фазовым сдвигом коэффициент усиления разомкнутого контура усилителя.Опять же, поскольку V DIFF обычно мало, мы можем игнорировать его, но по мере увеличения входной частоты увеличение V DIFF , не совпадающее по фазе с входным напряжением, может привести к проблемам со стабильностью. Кривая усиления разомкнутого контура на Рисунке 3 не представляет проблем со стабильностью, но легко представить, что если бы частота второго разрыва была на гораздо более низкой частоте, чем 1 МГц, наша схема теперь имела бы увеличивающийся V DIFF , который может быть на 180 ° не совмещенным по фазе с входным напряжением, что, безусловно, повлияет на стабильность.
LTspice — полезный инструмент для анализа эффектов фазового сдвига на различных частотах. На рис. 5а показано отставание выходного напряжения V DIFF на 90 ° на частоте 1 кГц.
Рисунок 5а. V OUT Отставание по фазе V DIFF на 90 ° при 1 кГц
Если входная частота увеличивается с 1 кГц до 10 кГц, V DIFF увеличивается в 10 раз, но фазовая задержка остается 90 °, что указывает на то, что мы еще далеко не приблизились ко второй частоте прерывания коэффициента усиления разомкнутого контура.Это показано на рисунке 5b. Когда входная частота приближается к 1 МГц, фазовая задержка начинает увеличиваться выше 90 °, и V DIFF соответственно увеличивается.
Рисунок 5б. V OUT Отставание по фазе V DIFF на 90 ° при 10 кГц
Таким образом, можно видеть, что V DIFF может достигнуть значения, сравнимого с входным напряжением и сдвинутым на 180 ° по фазе с входным напряжением — для того, чтобы цепь колебалась, коэффициент усиления вокруг контура должен быть равен единице и фазовый сдвиг вокруг контура должен составлять 180 °.Если V DIFF подвергается усилению разомкнутого контура усилителя (A 0 ), затем ослаблению цепи обратной связи (β), мы можем видеть, что это усиление контура (βA 0 ) и его фазы, которые определяют устойчивость системы.
Рассматривая схему на рисунке 2, операционный усилитель усиливает напряжение между своими входами (V DIFF ), и это подвергается усилению βA 0 , создавая напряжение на уровне V –. Если коэффициент усиления контура равен 1, это означает, что напряжение на V — такое же, как V DIFF , таким образом, амплитуда V DIFF не изменилась при прохождении через контур.Если он претерпел фазовый сдвиг на 180 ° и V DIFF не изменился по амплитуде, цепь будет колебаться. Пуристы могут возразить, что фазовый сдвиг должен составлять 360 °, и эти дополнительные 180 ° обеспечиваются инвертирующим входным контактом.
Кстати, если схема на Рисунке 2 имеет высокий коэффициент усиления, это означает, что резисторы обратной связи значительно ослабляют выходное напряжение. Большая часть фазового сдвига происходит в усилителе (поскольку резисторы обратной связи не имеют реактивных компонентов и, следовательно, не имеют фазового сдвига), поэтому чем ниже коэффициент усиления, тем большее «сдвинутое по фазе» выходное напряжение появляется на инвертирующем входе, что увеличивает вероятность нестабильности.Вот почему некоторые усилители имеют минимальную стабильность усиления. Если вы уменьшите коэффициент усиления ниже определенной точки, на инвертирующем выводе появится больше сдвинутого по фазе выходного напряжения, поэтому схема будет более подвержена колебаниям.
Стоит рассмотреть работу схемы на Рисунке 2 для различных коэффициентов усиления контура и фазовых сдвигов.
На низких частотах, когда усилитель имеет большое усиление контура, V DIFF невелик и имеет фазовый сдвиг –90 ° по сравнению с напряжением на инвертирующем входе (V — ).В этой ситуации напряжение на инвертирующем входе падает до V DIFF , поэтому V DIFF можно игнорировать. Однако, если фазовый сдвиг V DIFF составляет –180 ° по отношению к V — , и есть усиление в контуре, мы можем видеть, что любое напряжение на V DIFF усиливается при перемещении по контуру. и инвертированный, затем усиленный и инвертированный, поэтому цепь колеблется. Для поддержания колебаний в схеме должно быть только единичное усиление контура. Насколько близко V DIFF приближается к –180 °, когда схема имеет единичный коэффициент усиления контура, является мерой запаса по фазе схемы и говорит нам, насколько близка к точке нестабильности фаза схемы.Схема с фазовым сдвигом –120 ° имеет запас по фазе 60 °.
Аналогичным образом, если V DIFF имеет фазовый сдвиг -180 ° по отношению к V –, но испытывает затухание при прохождении через контур, напряжение, возвращающееся к V –, будет меньше, поэтому любые потенциальные колебания останавливаются из-за отсутствия усиления контура. Степень затухания, которую испытывает V DIFF при прохождении через контур (когда фазовый сдвиг составляет –180 °), является мерой запаса по усилению схемы и говорит нам, насколько ниже единицы коэффициент усиления контура схемы, когда фаза сдвиг –180 °.Схема с затуханием в контуре 10 дБ, когда V DIFF составляет –180 °, имеет запас усиления 10 дБ.
Все вышеперечисленное можно связать с теорией управления и блок-схемой на рисунке 1. Мы знаем, что коэффициент усиления замкнутой системы обратной связи равен
., где βA 0 — контурное усиление системы. Если βA 0 имеет фазовый сдвиг –180 ° и единичное усиление, знаменатель становится равным нулю на одной определенной частоте, и схема колеблется на этой частоте.Если βA 0 велико, но не имеет фазового сдвига -180 °, знаменатель не равен нулю и цепь не колеблется — у нас есть достаточный запас по фазе. Точно так же, если βA 0 меньше единицы, но имеет фазовый сдвиг -180 °, схема не колеблется — у нас есть достаточный запас по усилению.
Итак, теперь мы можем видеть, что мы связали усиление разомкнутого контура, усиление замкнутого контура, усиление контура, запас усиления и запас по фазе, а также объяснили это в области теории управления и теории цепей.
Так как это относится к цепям питания? Большинство систем питания можно смоделировать как схему операционного усилителя. На рисунке 6 показан линейный регулятор LT1086. Мы можем видеть, что в схеме есть два резистора обратной связи, которые обеспечивают часть выходного напряжения на выводе ADJ (который является инвертирующим входом внутреннего операционного усилителя). Неинвертирующий терминал привязан к внутреннему опорному напряжению.
Рисунок 6. Традиционный линейный регулятор (LT1086)
Как обсуждалось выше, точность усиления усилителя определяется контурным усилением усилителя: чем больше контурное усиление в усилителе, тем выше точность усиления.
Увеличение выходного напряжения LT1086 идентично увеличению коэффициента усиления с обратной связью операционного усилителя. На рисунке 7 показан эффект увеличения коэффициента усиления с обратной связью с 20 дБ до 80 дБ. Если усиление контура представлено разностью между кривой усиления разомкнутого контура и кривой усиления замкнутого контура, увеличение выходного напряжения LT1086 уменьшает усиление контура, снижая абсолютную точность выходного напряжения. Еще одним недостатком увеличения выходного напряжения является уменьшение частотной характеристики схемы (в данном случае от 100 кГц до 100 Гц), поэтому страдает переходная характеристика нагрузки.
Рисунок 7. Зависимость усиления напряжения от частоты
Семейство линейных регуляторов LT308x заменяет традиционную архитектуру LDO на ту, что показана на рисунке 8.
Рис. 8. Линейный регулятор LT3080 использует нетрадиционную архитектуру для повышения точности и переходного отклика
LT3080 использует внутренний источник тока для создания напряжения на внешнем резисторе R SET . Затем это напряжение подается на буфер с единичным усилением для создания выходного напряжения.Это имеет ряд последствий.
Внутренний операционный усилитель работает с постоянным единичным коэффициентом усиления с обратной связью, с выходным напряжением, установленным значением резистора R SET на «входе» операционного усилителя.
Сравните LT3080, показанный на рисунке 7, с традиционной схемой операционного усилителя, показанной на рисунке 6. Выходное напряжение LT1086 на рисунке 6 изменяется путем изменения резисторов обратной связи (и, следовательно, коэффициента усиления с обратной связью) LT1086. Сравните это с LT3080, работающим с постоянным коэффициентом усиления замкнутого контура, где «входное» напряжение усилителя изменяется, задаваемое напряжением на R SET .Если коэффициент усиления замкнутого контура остается неизменным, коэффициент усиления контура остается неизменным, поэтому схема обеспечивает хорошую абсолютную точность даже при высоких выходных напряжениях. Кстати, именно поэтому компоненты компенсации контура в преобразователе постоянного / постоянного тока всегда имеют последовательную емкость. Выход усилителя ошибки является источником тока, а последовательная емкость на постоянном токе имеет высокий импеданс, что обеспечивает высокий коэффициент усиления на постоянном токе в компенсационном контуре.
Еще одним следствием сохранения неизменного коэффициента усиления контура является то, что частотная характеристика остается неизменной и не приносится в жертву при высоких выходных напряжениях, поэтому компонент может быстро реагировать на переходные процессы нагрузки.
Еще одно преимущество, представляющее особый интерес в свете постоянно уменьшающегося напряжения питания, заключается в том, что части LT308x могут выдавать выходное напряжение до 0 В. Традиционные LDO-стабилизаторы не могут устанавливать выходное напряжение ниже внутреннего опорного напряжения, тогда как путем замыкания RSET на части LT308x выходное напряжение может быть установлено на уровне 0 В.
Семейство LDO LT308x, благодаря их постоянному высокому коэффициенту усиления контура, отличается более высокой точностью выходного напряжения и переходной характеристикой, чем традиционные LDO.Их также можно использовать способами, недоступными для традиционных LDO, например, для установки выхода на 0 В или их параллельного подключения для работы с более высоким током.
Основы систем и компонентов контуров управления
Промышленные системы управления спроектированы и предназначены для обеспечения контроля, мониторинга процессов и функций на производственных объектах. Системы контуров управления реализованы в промышленных системах управления, чтобы гарантировать достижение желаемых процессов и функций.Состоящие из множества компонентов, системы контуров управления используют программируемое программное обеспечение для управления многими переменными во всех производственных процессах, чтобы обеспечить производительность производства. Каждый компонент в системе контура управления работает совместно для управления производственным процессом.
Что такое контур управления?
Системы контуров управления контролируют и регулируют устройства, контрольно-измерительные приборы и машины, используемые в промышленных или производственных процессах. Система управляет аппаратными компонентами и функциями программного управления, необходимыми для измерения и корректировки переменных, влияющих на каждый процесс.Рассматривайте системы контуров управления как инструмент управления процессом, предназначенный для поддержания переменной процесса на желаемой уставке на каждом этапе пути. Переменные процесса — это набор программируемых параметров, которые отслеживают и управляют процессом, чтобы гарантировать, что выходные данные поддерживаются в пределах заданного предела или количества. Компоненты контура управления и приборы сначала измеряют переменную, реагируют на нее, а затем управляют переменной, чтобы поддерживать ее в установленных пределах.
Системы контуров управления
В промышленных процессах используются две общие системы контуров управления.Это система с разомкнутым контуром и система с замкнутым контуром. Системы различаются по управляющим воздействиям.
Разомкнутые системы
В системе управления без обратной связи управляющие воздействия не зависят от желаемого выхода, что означает, что выходной сигнал не измеряется и не возвращается на вход для сравнения. Как только входная команда подана на контроллер, он выдает управляющий сигнал. Этот управляющий сигнал подается на вход процесса, которым необходимо управлять, и, таким образом, дает желаемый результат.По сути, без системы обратной связи системы без обратной связи работают без каких-либо сдержек и противовесов и, как ожидается, будут следовать своей входной команде независимо от конечного результата.
В разомкнутой системе управления натяжением есть три основных элемента: контроллер, устройство крутящего момента (тормоз, сцепление или привод) и датчик обратной связи. Датчик обратной связи обычно ориентирован на обеспечение обратной связи по диаметру, и процесс контролируется пропорционально сигналу диаметра (в отличие от непрерывного измерения, основанного на прямой обратной связи по полотну, как в системах с замкнутым контуром).Поскольку датчик измеряет изменения диаметра и передает этот сигнал контроллеру, контроллер пропорционально регулирует крутящий момент тормоза, сцепления или привода для поддержания натяжения.
Системы с замкнутым контуром
В системе управления с обратной связью управляющее действие контроллера полностью зависит от желаемого выхода. Он подается обратно на вход для управления действием желаемого выхода.
Системы с обратной связью измеряют, отслеживают и управляют процессом с помощью обратной связи для сравнения фактического выхода с желаемым выходом.При этом значительно сокращается количество ошибок и достигается желаемый результат или ответ.
В замкнутой системе управления натяжением есть четыре основных элемента: контроллер, устройство крутящего момента (тормоз, сцепление или привод), устройство измерения натяжения и измерительный сигнал. Контроллер получает прямую обратную связь об измерении материала от датчика веса или балансира. При изменении натяжения он вырабатывает электрический сигнал, который контроллер интерпретирует в зависимости от установленного натяжения.Затем контроллер регулирует крутящий момент устройства вывода крутящего момента для поддержания желаемой уставки.
Компоненты контура управления
Первичный датчик
В зависимости от процесса, первичные датчики являются основным компонентом процессов контура управления. Датчики подают сигналы, пропорциональные параметрам процесса, таким как диаметр, положение балансира, скорость и т. Д., И измеряют любые изменения, необходимые для контура управления. Эта информация возвращается в контроллер, чтобы обеспечить более точный контроль.
Датчики контроля натяжения полотна
Тензодатчик
Весоизмерительные ячейки, используемые с движущимися полотнами, представляют собой устройства, которые измеряют силу, прилагаемую материалом в результате микроизгибов натяжного ролика, к которому они прикреплены, вызванного натяжением или ослаблением при движении материала по технологическому процессу. Это измерение представляет собой электрический сигнал (часто милливольт), который отправляется контроллеру для интерпретации и использования при регулировании крутящего момента для поддержания заданного натяжения.
Тензодатчики для натяжения полотна
Преобразователь
Преобразователи— это электромеханические устройства, используемые для преобразования электрической энергии контроллера в энергию, необходимую для управления крутящим моментом. Они могут использоваться для преобразования электрической энергии в пневматический выходной сигнал, такой как преобразователь IP, или электрическую энергию в напряжение постоянного тока для управления двигателями и устройствами крутящего момента с магнитными частицами, такими как преобразователь E / V.
IP-преобразователи и преобразователи напряжения
Показатель
Индикаторы — это устройства, обеспечивающие читаемую индикацию сигнала прибора в системах автоматизации и промышленных контрольно-измерительных приборах.
Индикаторы контроля натяжения
Регистратор
Регистраторы— это устройства, которые регистрируют сбор данных. Они используются для записи данных измерений за определенный период времени. При интеграции в промышленные системы управления устройство измеряет историю процессов и может быть отправлено для регулирующего надзора или мониторинга.
Контроллер
Контроллерыявляются неотъемлемыми компонентами систем управления технологическими процессами. Устройство отвечает за производительность и функцию системы управления, которая работает для поддержания значения переменной процесса на заданном уровне.
Контроллеры веб-натяжения
Привод
Привод — это компонент машины, который является частью корректирующего элемента, отвечающего за перемещение и управление механизмом или системой при получении управляющего сигнала. Привод преобразует энергию сигнала в механическое движение, такое как открытие клапана.
Система с замкнутым контуром
Иногда для достижения согласованности и стабильности системы и получения желаемого результата системы управления мы используем контур обратной связи.Обратная связь — это не что иное, как часть выходного сигнала. Эта концепция наиболее часто используется и важна в системах управления для достижения стабильности выхода. По обратной связи системы управления подразделяются на два типа. Это система управления с открытым контуром и система управления с обратной связью.
Система обратной связи с обратной связью
Система управления с обратной связью называется «системой управления с обратной связью». Другими словами, система управления, которая использует свой сигнал обратной связи для генерации выходных данных, называется «системой управления с обратной связью».В этих системах управления входом управляет сигнал обратной связи с входа, так что он может исправить возникшие ошибки. Системы управления с обратной связью — это системы с двусторонним сигнальным потоком.
Обратная связь означает, что некоторая часть выхода берется и подключается к входу системы для поддержания стабильности системы управления. Обеспечивая контур обратной связи, мы можем преобразовать любую систему управления без обратной связи в систему с обратной связью. Контур обратной связи обеспечивает автоматическую коррекцию входного сигнала в зависимости от требований к выходу.
Путем сравнения сгенерированного выхода с фактическим состоянием, система с обратной связью поддерживает и достигает желаемого выхода. Если полученный выход отклоняется от решенного (фактического) выхода, система управления с обратной связью генерирует сигнал ошибки, и сигнал ошибки подается на вход сигнала.
Таким образом, добавляя сигнал ошибки ко входу, сгенерированный выход следующего цикла будет исправлен. Так что они также называются системами автоматического управления. Системы с замкнутым контуром менее подвержены внешним помехам.
Блок-схема замкнутой системы показана ниже.
Поскольку эти системы содержат контур обратной связи, системы управления с обратной связью также называются «системами управления с обратной связью». Предоставляя обратную связь входному сигналу, мы можем точно контролировать выход системы управления. Система управления с обратной связью может иметь более одного контура обратной связи.
Примеры
Мы используем системы управления с обратной связью во многих приложениях нашей повседневной жизни.Некоторые из систем, разработанных на основе концепции систем управления без обратной связи, приведены ниже.
- Автоматический утюг — В зависимости от температуры утюга нагревательные элементы регулируются автоматически.
- Серво стабилизатор напряжения — Стабилизация напряжения достигается подачей выходного напряжения обратно в систему.
- Контроллер уровня воды — Уровень воды в резервуарах определяет количество воды, поступающей в него.
- Кондиционер — кондиционер автоматически регулирует свою температуру в зависимости от температуры в помещении.
- В регуляторе скорости двигателя, использующем тахометр и / или датчик тока, датчик определяет скорость и отправляет сигнал обратной связи в систему для регулирования ее скорости.
Практический пример системы обратной связи
На рынке мы видим несколько автоматических сушилок для ткани. Кто-нибудь знает, что они являются примером системы управления с обратной связью? В автоматической системе управления или системе обратной связи с обратной связью мы используем датчик на входе системы, чтобы постоянно контролировать температуру одежды внутри сушилки.Блок-схема электрического сушилки для ткани представлена ниже.
Датчик температуры будет контролировать состояние одежды, сухая она или влажная, и сравнивать его с представленным входным эталоном. Если состояние одежды и желаемый результат не совпадают (не похожи), тогда система генерирует сигнал ошибки и отправляет его обратно на вход.
Усилитель выдает усиленный выходной сигнал на контроллер, чтобы он мог регулировать нагревательные элементы до желаемого уровня выходного сигнала.Поэтому, если одежда скоро высохнет, контроллер регулирует и понижает температуру или останавливает процесс нагрева нагревательных элементов до такой степени, чтобы не сжечь одежду в машине.
Система с обратной связью способна обрабатывать внешние шумовые помехи (которые приводят к снижению эффективности системы) с помощью сигнала обратной связи. Например, если мы откроем сушилку, некоторое количество температуры будет потеряно, и внутренняя температура системы снизится.
Затем датчик обратной связи рассчитает температуру одежды и отправит сигнал об ошибке контроллеру. Чтобы контроллер выставлял в системе необходимую температуру. Это будет процесс обработки появления ошибки в сушилке для одежды.
Сигнал ошибки означает разницу между фактическим выходом и произведенным выходом, и этот сигнал ошибки предоставляется в качестве входа в контроллер для регулирования выхода системы. Если сигнал ошибки равен нулю, то только желаемый входной сигнал равен произведенному выходному сигналу.
Типы систем обратной связи
В зависимости от характера сигнала обратной связи системы управления с обратной связью делятся на 2 типа. Это
- Сигнал положительной обратной связи
- Сигнал отрицательной обратной связи
Замкнутая система с положительным сигналом обратной связи, подключенным к ее входу, называется «Система положительной обратной связи». Блок-схема системы положительной обратной связи представлена ниже. Положительная обратная связь также известна как «регенеративная обратная связь».
Пример
Лучшим примером петли положительной обратной связи в электронике является «операционный усилитель». Мы можем создать контур положительной обратной связи, подключив некоторую часть выходного напряжения к неинвертирующему входу с помощью контура обратной связи через резистор.
Если мы подключим положительный сигнал входного напряжения к неинвертирующему порту операционного усилителя, он усилит входной сигнал, и выходной сигнал станет более положительным. Таким образом, некоторая часть выхода подключается обратно ко входу с помощью контура обратной связи для получения даже высокого выходного напряжения.По мере того, как контур обратной связи подключается к входу, выход становится все более и более положительным. В какой-то момент выход операционного усилителя станет насыщенным.
Аналогично, если мы подадим отрицательный сигнал входного напряжения Vin на операционный усилитель, то выход станет отрицательным. Петля обратной связи, подключенная к входу, усилит усиленный сигнал, чтобы он стал более отрицательным. Это означает, что сигнал обратной связи в системах с положительной обратной связью усиливает характер выходного сигнала.
Передаточная функция системы получения положительного контура будет A¬V = G / (1-GH).Если GH = 1, то коэффициент усиления системы будет бесконечным, поэтому система будет автоматически колебаться, даже если к ней не подключен вход. В этом состоянии система будет действовать как осциллятор.
Системы положительной обратной связи используются для получения быстрого отклика переключения на условный входной сигнал. Еще один пример использования контура положительной обратной связи — эффект гистерезиса. Гистерезис означает остаточное состояние системы, даже если на нее не поступают никакие входные данные. Мы наблюдаем такое поведение в некоторых бистабильных логических вентилях.
Положительная обратная связь широко используется в схемах синхронизации и генераторах.
2) Сигнал отрицательной обратной связи
Система с обратной связью с отрицательной обратной связью, подключенной к ее входу, называется «системой отрицательной обратной связи». Блок-схема системы отрицательной обратной связи представлена ниже. Отрицательная обратная связь также известна как «дегенеративная обратная связь».
Системы отрицательной обратной связи более стабильны и улучшают стабильность. Мы обсудим системы отрицательной обратной связи и их применение в следующих уроках.
Приложения
Системы управления с обратной связью используются для управления электронными машинами, такими как генераторы напряжения и тока. Кроме того, они также могут контролировать скорость машины и другие параметры системы. Системы управления с обратной связью используются для нижеприведенных требований.
- Повышение скорости реакции
- Защита устройств
- Для повышения точности
Контроль крутящего момента с обратной связью
Техника управления крутящим моментом будет использоваться в транспортных средствах с батарейным питанием, таких как велосипеды и автомобили.Когда водитель нажимает на педаль акселератора, водитель устанавливает контрольный крутящий момент T. Если крутящий момент, управляемый водителем, равен T *, то фактический крутящий момент T будет соответствовать управляемому крутящему моменту.
Датчик крутящего момента, установленный на нагрузке, отправляет информацию о скорости двигателя и помогает поддерживать требуемую скорость.
Контроль предельного тока
В электронных устройствах будет протекать большой ток из-за сбоев системы и ошибок подключения. Если мы не будем контролировать ток и не предпримем каких-либо мер предосторожности, электронное устройство выйдет из строя и приведет к убыткам в экономическом и промышленном плане.
Итак, чтобы ограничить ток и контролировать его, мы создаем экземпляр контроллера ограничения тока в электронном устройстве или системе. Датчик тока будет постоянно контролировать ток, подаваемый на двигатель.
Когда ток в двигателе превышает требуемый безопасный уровень, датчик активирует контур обратной связи, и некоторая величина тока отрицательно возвращается в контроллер, чтобы установить ток обратно на предельное значение.
Когда ток снова достигает безопасного предела, контур обратной связи деактивируется.
Регулирование скорости с обратной связью
Это наиболее часто используемый контур обратной связи для драйверов. Обратите внимание на схему ниже, на которой датчик тока и датчик скорости используются для ограничения скорости двигателя.
На этой схеме двигателя с регулировкой скорости мы видим 2 контура обратной связи, одна предназначена для контроля и управления током, а другая — для управления скоростью. Внутренний цикл предназначен для управления потоком тока с помощью датчика тока. Он ограничивает ток или крутящий момент двигателя до безопасного уровня.Внешний контур, датчик управления скоростью, контролирует скорость двигателя и отправляет обратную связь контроллеру, а также контролирует скорость, превышающую предварительно определенный уровень.
Преимущества системы управления без обратной связи
- Поскольку системы управления с обратной связью имеют сигнал обратной связи для управления выходом, они очень точны и менее подвержены ошибкам.
- Они могут автоматически исправлять ошибки с помощью сигнала обратной связи.
- Замкнутые системы очень точны.
- Ширина диапазона разомкнутой системы намного больше, чем замкнутой системы.
- Они могут поддерживать автоматизацию.
- Поскольку они имеют очень высокий запас по шуму, они меньше подвержены шуму.
Недостатки замкнутой системы управления
- Они очень сложны и сложны в проектировании.
- Экономически они намного дороже.
- Требуется серьезное обслуживание.
- Иногда сигнал обратной связи заставляет систему колебаться, что дает колебательный отклик.
- Требуется больше времени и усилий для разработки стабильной замкнутой системы.
Обзор системы обратной связи
- Система — это совокупность блоков, которые соединены вместе для выполнения процесса.
- Система управления определяется как группа устройств, которые используются для управления или регулирования функционирования другой системы.
- Система управления, которая использует свой сигнал обратной связи для генерации выходных данных, называется «системой управления с обратной связью». Примеры: электрический утюг, кондиционер и т. Д.
- Системы с замкнутым контуром могут автоматически исправлять ошибки, возникшие на выходе, с помощью контура обратной связи.
- Они более стабильны, чем системы с открытым контуром, но имеют сложную конструкцию.
- В зависимости от характера сигнала обратной связи системы управления с обратной связью делятся на 2 типа. Это
- Положительный сигнал обратной связи
- Отрицательный сигнал обратной связи
- Замкнутая система с положительным сигналом обратной связи, подключенным к ее входу, называется «Система положительной обратной связи».Пример: операционный усилитель с входом, подключенным к положительному входному контакту.
- Замкнутая система с отрицательной обратной связью, подключенной к ее входу, называется «системой отрицательной обратной связи». Пример: операционный усилитель с входом, подключенным к положительному входному контакту.
- Используется система обратной связи или система управления без обратной связи
- Повышение скорости реакции
- В Защита устройств
- Для повышения точности
Что такое система управления с обратной связью?
ОтСистема управления с обратной связью — это набор механических или электронных устройств, которые автоматически регулируют переменную процесса до желаемого состояния или заданного значения без вмешательства человека.Системы управления с обратной связью контрастируют с системами управления без обратной связи, которые требуют ручного ввода.
Контур управления — это система аппаратных компонентов и программных функций управления, участвующих в измерении и настройке переменной, которая управляет отдельным процессом. Системы управления с обратной связью широко используются в промышленности, включая сельское хозяйство, химические заводы, контроль качества, атомные электростанции, водоочистные сооружения и контроль окружающей среды. Системы управления с обратной связью обеспечивают автоматизацию в ряде промышленных и экологических настроек и регулируют процессы в промышленных системах управления (ICS), таких как диспетчерский контроль и сбор данных (SCADA) и распределенные системы управления (DCS).
Системы управления с обратной связьюшироко используются в различных отраслях промышленности, включая сельское хозяйство, химические заводы, контроль качества, атомные электростанции, водоочистные сооружения и контроль окружающей среды.
В отличие от систем управления с разомкнутым контуром или переключаемых контуров управления, замкнутые контуры не принимают ввод от человека-оператора. Это означает, что кроме регулировки с помощью систем управления, они работают автоматически и независимо. При управлении с обратной связью действие полностью зависит от переменной процесса.Что касается системы отопления, например, замкнутый контур может поддерживать температуру в качестве заданного значения, автоматически включаясь, когда температура ниже заданного значения.